Lochuri Part a Doua
119
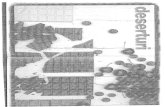
289 9.3. Lochurile magnetohidrodinamice (electromagnetice) 9.3.1. Principiul de funcŃionare Principiul de funcŃionare al lochului magnetohidrodinamic (electromagnetic) se bazează pe legea inducŃiei electromagnetice, conform căreia tensiunea electromotoare e de inducŃie produsă într-un conductor electric, când acesta este străbătut de un variabil, este proporŃională cu viteza de variaŃie a fluxului flux magnetic magnetic luată cu semnul minus. dt d e φ - = (9.71) Magnetohidrodinamica se ocupă cu studiul fenomenelor care apar la interacŃiunea dintre câmpul electromagnetic şi fluidele electroconductoare în mişcare aflate în acest câmp. Fig.9.21 Fenomenul inducŃiei în apa de mare N S B r E r Γ v r
-
Upload
asdqwe123dsa -
Category
Documents
-
view
61 -
download
2
description
Lochuri
Transcript of Lochuri Part a Doua
-
289
9.3. Lochurile magnetohidrodinamice (electromagnetice)
9.3.1. Principiul de funcionare
Principiul de funcionare al lochului magnetohidrodinamic (electromagnetic) se bazeaz pe legea induciei electromagnetice, conform creia tensiunea electromotoare e de inducie produs ntr-un conductor electric, cnd acesta este strbtut de un variabil, este proporional cu viteza de variaie a fluxuluiflux magnetic magnetic luat cu semnul minus.
dtd
e
= (9.71)
Magnetohidrodinamica se ocup cu studiul fenomenelor care apar la interaciunea dintre cmpul electromagnetic i fluidele electroconductoare n micare aflate n acest cmp.
Fig.9.21 Fenomenul induciei n apa de mare
N
S
Br
Er
vr
-
290
n cazul lochurilor fluidul electroconductor este apa de mare care se deplaseaz n cmpul magnetic creat de un electromagnetic dispus n traductor i fixat de nava n micare, apa deplasndu-se n sens contrar.
Considerm un cmp magnetic de inducie Br
n care se deplaseaz fluidul electroconductor-apa de mare, delimitat de suprafaa S nchis de curba , apa de mare fiind considerat ca fiind o infinitate de conductori orientai pe direcia tribord-babord i care se deplaseaz de la prova la pupa, figura 9.21.
Prin circul fluxul magnetic dat de suprafaa S ce se sprijin pe curba nchis relaia:
=
S
SdBrr
(9.72)
Pentru a obine tensiunea electromotoare indus n fluidul electroconductor ce se deplaseaz n cmpul de inducie variabil, este necesar s derivm n raport cu timpul fluxul magnetic care strbate suprafaa, se obine:
====
SSS
SdvBrotSdtBSdB
dtd
dtdldEe
rrrrr
rrrr)(
sau:
+
=
ldBvSdt
Be
S
rrrrr
][ (9.73)
n care termenul:
-
291
tr
S
eSdt
B=
rr
(9.74)
este tensiunea electromotoare indus prin transformare, iar termenul:
misceldBv =
rrr ][ (9.75)
este tensiunea electromotoare indus prin micare.
Dac se consider c inducia Br
este constant, atunci din expresia (9.73) rmne numai termenul al doilea:
== ldBvldEerrrrr ][
(9.76) sau:
BvErrr
= (9.77)
unde: E intensitatea cmpului electric indus n fluidul
electroconductor. n situaia c vectorul vitez este perpendicular pe vectorul
inducie magnetic cuprins ntre dou puncte A i B i se consider un segment din curba relaia (9.76) devine:
vBlldBvBvldEeB
A
B
A
=== rrrrrrr )sin(
(9.78)
-
292
Prin msurarea tensiunii electromotoare ntre cele dou puncte A i B n care se dispun doi electrozi se poate determina viteza navei.
Fig.9.22 Principiul de funcionare al lochului electromagnetic
Aa cum s-a artat dac n punctele A i B se dispun doi electrozi la acetea se culege tensiunea electromotoare indus n apa de mare care se deplaseaz n cmpul magnetic creat de un electromagnet fixat ntr-o carcas din material electroizolant (sticlo-textolit), ce constituie traductorul de vitez fig.(9.22)
n relaia (9.78) inducia magnetic s-a considerat constant i deci tensiunea obinut la cei doi electrozi depinde doar de viteza navei. n acest caz cmpul electric indus n ap are n permanen acelai sens ceea ce produce polarizarea electrozilor ca urmare a formrii n straturile de lng ei a sarcinilor electrice, care iau natere sub aciunea forelor electrostatice.
1
5 4
z
3
Br
Br
Er
Er
vr
vr
y ldr
x 2
-
293
n acest caz n zona dintre electrozi ia natere un cmp electric de polarizaie, care crete proporional cu cantitatea de electricitate care trece prin electrozi i care poate reduce la zero tensiunea util de msur.
Pentru eliminarea acestui fenomen electromagnetul traductorului este alimentat n curent alternativ. Polarizarea electrozilor se produce n acest caz n decursul fiecrei semiperioade a curentului, dar spre deosebire de polariyarea n curent continuu, nu crete cu timpul i cmpul electric de polarizaie devine neglijabil.
Lochul electromagnetic poate fi reprezentat sub forma unei scheme echivalente, fig (9.23)
Fig. 9.23 Schema echivalent a lochului electromagnetic
Rezistena R este rezistena de intrare a schemei de msurare a lochului, iar Ri rezistena interioar a dispozitivului de recepie. Mrimea rezistenei Ri depinde de distana dintre electrozii lochului, aria suprafeei lor, rezistena specific a apei de mare i de rezistena ohmic a stratului de ap datorat polarizrii electrozilor.
Ri
R
e
U
-
294
Deoarece curentul care circul ntre electrozi este acelai cu cel care circul prin schema de msur se poate scrie:
RU
RRe
i
=
+ (9.79)
n acest caz tensiunea U care vine de la traductorul primar de vitez al lochului, fig.(9.23) este dat de expresia:
RRR
eUi +
= (9.80)
Viteza depinde de rezistena interioar Ri a traductorului. Pentru reducerea erorilor datorate variaiei salinitii apei de mare este necesar s se respecte condiia:
Ri
-
295
B = Bmax sint (9.83)
Atunci introducnd expresia (9.83) n expresia (10.3) se obine:
+=S
B
A
tdSBtdlBvu cossin maxmax (9.84)
Notnd primul termen din expresia (9.84) ca fiind tensiunea util:
=B
Au tdlBvu sinmax
(9.85)
iar al doilea termen ca fiind o tensiune n cuadratur deoarece este defazat cu 900 fa de semnalul util i este un semnal parazit avnd n vedere c nu depinde de viteza curentului de ap:
=
Sc tdSBu cosmax
(9.86)
Semnalul ce sen cuadratur se induce n conturul de suprafa S delimitat de curba nchide prin circuitul format din conductorii (4) ce leag electrozii (3) cu schema de msurare (5), fig.(9.22).
n acest fel, n cazul ideal la intrarea schemei de msurare a lochului electromagnetic se aplic semnalul (U) care conine componenta util Uu=f(v) i semnalul parazit de cuadratur, defazat fa de semnalul util cu 900.
-
296
Existena paraziilor de cuadratur duce la erori mari la msurarea vitezei. Din acest motiv la lochurile cu inducie se folosesc scheme speciale care s compenseze aceti parazii.
Din expresia (9.85) se vede c semnalul util depinde de viteza navei prin ap (v) i de caracterul de distribuie a induciei magnetice din jurul dispozitivului de recepie.
Avnd n vedere c distribuia induciei magnetice se supune legilor lui Maxwell din electrotehnic i legilor hidrodinamicii, legi complicate pentru a determina funcionarea sistemului magnetohidrodinamic, determinarea caracteristicilor traductorului lochului electromagnetic se limiteaz la calcule aproximative sau se determin experimental valoarea integralei.
Din determinrile experimentale s-a constatat c valoarea integralei este aproximativ o constant care depinde de caracteristicile fiecrui traductor n parte.
=B
A
tdlBK sinmax (9.87)
Funcia u = f(v) reprezint n cazul ideal ecuaia unei drepte al crui grafic formeaz un unghi oarecare cu axa absciselor fig.(9.24).
n condiii reale de msurare a vitezei sunt posibile abateri ale acestei variaii de la legea liniar, determinate de efectele deplasrii traductorului prin ap, datorate ruliului i tangajului navei i al curenilor turbionari. Din acest motiv caracterul variaiei semnalului dat de traductor, U = f(v), trebuie s se determine concret la bordul navei pentru fiecare loch n parte i n condiii reale de navigaie, operaie care se execut n baza de viteze cunoscut sub denumirea de compensarea lochului.
-
297
Fig.9.24 Variaia semnalului funcie de viteza navei
Deoarece determinarea vitezei navei dup semnalul neliniar este greu de realizat, semnalul real este reprezentat convenional sub forma unui semnal liniar U = f(v) i abtut de la variaia liniar cu mrimea (Ucor t), liniasin ntrerupt din fig.(9.24).
Avnd n vedere consideraiile de mai sus, semnalul (U=f(v)), recepionat de la electrozii de msurare ai traductorului de vitez i care se aplic la schema de msurare a lochului electromagnetic este format din urmtoarele componente: semnalul util care variaz liniar n funcie de viteza navei (U=Kv), abaterile neliniare (Ucorsint), semnalul parazit de cuadratur (Uc) i tensiunea paraziilor determinai de ctre curenii turbionari, etc.
U
v
-
298
9.3.2. Traductoare de lochuri electromagnetice
9.3,2.1 Traductorul de inducie
Avnd n vedere legea induciei electromagnetice scris sub forma:
BvErrr
= (9.88)
Ecuaie care d cmpul electric Er
indus ntr-un conductor
care se deplaseaz cu viteza vr
fa de cmpul magnetic de inducie .
Dac conductorul este apa de mare, curentul de ap dat de deplasarea navei, viteza de circulaie a apei de mare n raport cu cmpul magnetic produs de un electromagnet fixat de nav, poate fi determinat calculnd tensiunea electromotoare e indus de acest cmp pe conturul nchis , ce delimiteaz suprafaa S strbtut de cmpul magnetic, fig.(9.25).
== ldBvldEerrrrr )(
(9.89)
Considernd dou puncte A i B dispuse pe direcia tribord-babord n domeniul considerat se poate scrie expresia tensiunii electrice care apare ntre cele dou puncte i expresia (9.89) devine:
==B
A
B
A
ldBvldEUrrrrr )(
(9.90)
-
299
Fig.9.25 Principiul de funcionare al traductorului de inducie
Avnd n vedere c pentru calculul expresiei (9.90) este necesar s se utilizeze legile electrotehnicii descrise de ecuaiile lui Maxwell i ale hidrodinamicii descrise de ecuaiile lui Euler i Navier-Stokes, care presupun calcule laborioase, viteza vr i inducia B
r se exprim n valori relative:
c
relv
vv
rr
= i
0BBBrel
rr
= (9.91)
unde:
relvr
- viteza relativ local;
relBr
- inducia relativ local; vc viteza de deplasare a curentului de ap, egal i de
semn opus vitezei de deplasare a navei n raport cu cmpul magnetic n afara spaiului limitrof al traductorului, ntr-un punct
Br
A
vr
dl
S Er
B
-
300
dispus pe verticala traductorului, n zona unde curgerea este laminar;
B0 inducia magnetic la suprafaa traductorului de vitez.
nlocuind n expresia (10.20) valorile relative se obine:
ldBvBvUB
Arelrelc
rrr
= )(0 (9.92)
Experimental s-a constatat c integrala nu depinde de viteza de deplasare a navei ci de forma i dimensiunile traductorului i de caracteristicile concrete de deplasare ale navei n condiii reale, deci se poate scrie:
=B
Arelrel KldBv
rrr )( (9.93)
Relaia (9.92) devine:
U =KB0vc (9.94)
Avnd n vedere c nici inducia B0 nu depinde de viteza navei deci este constant, se noteaz produsul KB0 = S , sensibilitatea traductorului i se obine:
U = Sv (9.95)
Relaie pe baza creia se construiest traductoarele de inducie ale lochurilor electromagnetice. Denumirea de inducie provine
-
301
de la faptul c tensiunea care apare la cei doi electrozi se datoreaz induciei tensiunii electromotoare n apa de mare.
Traductoarele de inducie se construiesc n dou variante: un traductor care poate fi scos n afara zonei de turbulen prin fixarea de un dispozitiv numit spad i care permite ridicarea traductorului la bord pentru a fi protejat la oprirea lochului, fig.(9.26) i un traductor de tip pahar care se fixeaz de corpul navei fr a avea posibilitatea de a fi manevrat, fig.(9.27).
n fig.(9.26) sunt reprezentate: 1-corpul traductorului din material electroizolant (rin epoxidic); 2-electromagnetul din tole de oel electrotehnic; 3-nfurare; 4-electrozi din argint; 5-cablu bifilar ecranat pentru alimentarea electromagnetului; 6-cablu bifilar ecranat pentru semnal.
Fig.9.26 Traductor de inducie tip spad
12
3
4
5 6
Axul diametral
-
302
Fig.9.27 Traductor de inducie tip pahar
Semnificaiile din fig.(9.27) sunt aceleai cu cele din fig.(9.26).
9.3.2.2 Traductoare de conductibilitate
Tensiunea electromotoare indus provoac n ap apariia curenilor de circulaie datorit conductibilitii apei de mare,
fig.(9.28) definii prin densitatea de curent kjr
, conform legii lui Ohm:
Ejkrr
= (9.96)
5
4
v
3
2
1 6
-
303
unde: - conductibilitatea electric a apei de mare;
Er
- cmpul electric imprimat conform legii induciei electromagnetice.
Fig.9.28 Principiul de funcionare al traductorului de conductibilitate
Curenii de circulaie produc un cmp magnetic de inducie
secBr
al crui sens se determin cu regula burghiului drept. Se constat c la intrarea lichidului n cmpul magnetic, inducia secundar produs de curenii de circulaie se scade din inducia principal iar la ieire se adun.
Valoarea induciei magnetice a cmpului secundar poate fi exprimat prin relaia:
kjKBrr
2sec = (9.97)
Introducnd n relaia (9.96) rezult:
EKBrr
2sec = (9.98)
Br
secEr
kjr
secBr
secBr
kjr
vr
-
304
Avnd n vedere relaia (9.88) i introducnd n relaia (9.98) se obine:
)(2sec BvKBrrr
= (9.99)
Considernd cei doi vectori perpendiculari se poate scrie:
Bsec = K2 vB (9.100) unde: K2 constant ce depinde de caracteristicile
constructive ele traductorului; - conductibilitatea electric a apei de mare; v viteza curentului de ap egal i de semn contrar cu
viteza navei; B inducia magnetic.
Fig.9.29 Principiul de construcie al traductorului de conductibilitate
N secBr
secBr
secBr
secBr
Br
Br
Er
Er
kjr
kjr
kjr
kjr
vr
N S
S
-
305
La fel ca la traductorul de inducie, inducia principal B este alternativ, ca urmare i inducia secundar Bsec va fi alternativ, fapt ce permite determinarea acesteia prin msurarea tensiunii electromotoare indus ntr-o nfurarePrincipiul de construcie al traductorului de conductibilitate este prezentat n fig.(9.29), unde s-au prezentat dou situaii n care inducia principal are dou sensuri opuse.
Se constat c ntr-o anumit zon exist posibilitatea s se suprapun cele dou inducii secundare, cea ce permite realizarea unui traductor de forma celui prezentat n fig.(9.30).
Pe coloanele laterale ale miezului magnetic sunt dispuse nfurrile de excitaie executate n opoziie i legate n serie, iar pe coloana central este dispus nfurarea de semnal n care se induce tensiunea electromotoare datorat induciei secundare.
Fig.9.30 Traductorul de conductibilitate
Prin coloana central fluxurile principale fiind de semn contrar se anuleaz, astfel c nfurarea de semnal este parcurs
U e
1
2
2
Prova
sec2Br
vr
kjr
Pupa
-
306
de dublul induciei secundare, n nfurare se induce o tensiune electromotoare dat de expresia:
=
S
dAtB
u 2 (9.101)
unde A este aria seciunii coloanei centrale a miezului magnetic.
Dac se consider cmpul magnetic uniform n seciunea coloanei i innd cont de relaiile (9.83) i (9.100) rezult:
=
S
tdABvKu sin2 max2 (9.102)
Experimental s-a constatat c integrala din expresia (9.102) depinde de caracteristicile traductorului i de condiiile reale de navigaie, ea se determin experimental pe timpul activitii de compensare pentru fiecare traductor i se consider constant:
=
S
tdABK sinmax'2 (9.103)
Relaia (9.102) devine:
U = Sv (9.104)
unde s-a notat cu S sensibilitatea traductorului:
2'
22 KKS = (9.105)
-
307
Relaia (9.104) st la baza funcionrii traductoarelor de conductibilitate ale lochurilor electromagnetice.
9.3.2.3 Traductor de loch electromagnetic de for
Curentul electric de circulaie de densitate kjr
indus n apa de mare interacioneaz cu cmpul magnetic de inducie B
r,
producnd fore electromagnetice (Laplace) conform relaiei:
Bjf krrr
= (9.106)
Aceste fore se aplic att apei de mare n care circul curentul kj
r, ct i traductorului care produce cmpul magnetic de
inducie Br
, n apa de mare forele vor avea sensul prezentat n fig. (9.31).
Fig. 9.31 Principiul de funcionare al traductorului de for
Br
kjr
kjr
2 2
3 3
1 fr
fr
vr
Er
1
-
308
Se consider dou linii de curent, aplicnd regula minii
stngi, se constat c n punctele 1 forele elementare fr
se
adun, n punctele 2 i 3 forele elementare sunt de sens contrar i se anuleaz reciproc, pe laturile exterioare nu apar fore deoarece sunt n afara domeniului cmpului magnetic.
Suma forelor electromagnetice elementare kfr
n interiorul domeniului cmpului magnetic dau o for total F
r, care tinde s
antreneze apa n urma magnetului, iar asupra magnetului acioneaz n sensul contrar deplasrii navei.
Avnd n vedere relaiile (9.87), (9.96) i (9.106) se poate scrie relaia teoretic:
F = K3 B2v (9.107)
n care: K3 constant ce depinde de caracteristicile
constructive ale traductorului; - conductibilitatea apei de mare; B inducia magnetic. Notnd produsul, K3B2=S (sensibilitatea traductorului)
relaia (9.107) se poate scrie:
F = Sv (9.108)
Relaia (9.108) st la baza construciei traductorului de for, care ne arat c prin msurarea forei F se poate determina viteza navei.
-
309
9.3.3. Principiul de construcie al lochului derivometru electromagnetic (inductiv)
Avnd n vedere relaiile (10.14) (10.17) trebuie menionat valabilitatea numai n condiiile perpendicularitii induciei magnetice B
r pe vectorul vitezei relative v
r.
Notnd cu unghiul dintre vectorii Br i vr
i acesta este diferit de 900, atunci expresia (10.15) va avea forma:
=l
u tdlBvu sinsin max (9.109)
De aici rezult c dac se folosete, la traductorul de inducie, un electromagnet de tip , fig. (9.32) se creaz cmpul magnetic de inducie B
r perpendicular pe planul diametral al navei i se
dispun electrozii de msur (2) paralel cu Br
.
Dispunnd traductorul perpendicular pe planul diametral al navei, atunci amplitudinea tensiunii electromotoare indus va fi proporional cu proiecia vectorului vitezei relative pe planul diametral al navei i va fi dat de relaia:
==ll
x tdlBvtdlBvu sincossin max1max11 (9.110)
Considernd un al doilea traductor de vitez i rotit cu un unghi de 900 fa de primul, astfel nct s creeze un cmp magnetic perpendicular pe planul transversal al navei, la electrozii acestuia se va culege o tensiune electromotoare
-
310
proporional cu proiecia vitezei pe planul transversal, dat de relaia:
==ll
y tdlBvtdlBvu sinsinsin max2max22 (9.111)
Fig.9.32 Traductorul derivometrului cu electromagnei de tip
vr
Br
Er
2
1
3
xvr
yvr
vr
-
311
Dup nlturarea paraziilor de cuadratur i a celorlalte tensiuni perturbatoare se obine semnalul util din care se poate determina modulul vectorului vitez i unghiul de deriv al navei cu relaiile:
22
21 uuv += i
1
2
u
uarctg=
(9.112) n cazul traductorului de derivometru tip spad pe suprafaa
exterioar se dispun dou perechi de electrozi de msur 1,2 i 3,4; traductorul se instaleaz astfel nct axul su de simetrie s fie paralel cu planul diametral al navei fig.(9.33).
Dac nava se deplaseaz fr deriv (= 0), atunci direcia fluxului de ap va fi paralel cu planul diametral al navei i i cu axul de simetrie al traductorului de recepie.
n acest caz vitezele fluxului de ap care nfoar electrozii 1,2 i 3,4 vor fi egale i ca urmare i diferenele de potenial la electrozii 1,3 i 2,4 vor fi egale mrime i proporionale cu viteza relativ a navei.
Fig.9.33 Dispunerea electrozilor la derivometrul cu traductor tip spad
n condiii de deriv simetria cmpului vitezelor fluxurilor de ap care se preling pe lng dispozitivul de recepie se stric.
vr
1 2
3 4
Planul diametral
-
312
n situaia derivei prezentat n figura (9.33) viteza de scurgere din partea electrozilor 1,2 se mrete, iar din partea electrozilor 3,4 se reduce. n felul acesta, diferenele de potenial la electrozii 1,3 i 2,4 se vor deosebi, diferena va fi cu att mai mare cu ct deriva este mai mare.
Dac se noteaz diferena de potenial dintre electrozii 1,3 cu u1 i dintre electrozii 2,4 cu u2 atunci mrimile acestor poteniale pot fi exprimate cu urmtoarele relaii:
+=
+=
)cossin()cossin(
2
1
BAvuBAvu
(9.113)
Unde A i B constante care depind de caracteristicile dispozitivului de recepie (depind de dimensiune, puterea electromagnetului i de locul de amplasare al electrozilor de msur).
Rezolvnd sistemul (9.113) n raport cu viteza (v) i unghiul de deriv () se obin urmtoarele relaii:
2
12
2
21 )(21)(
21
+
+= uu
Auu
Bv
(9.114)
)()(
21
12
uuAuuB
arctg
= (9.115)
n condiii reale de navigaie fluxul de ap sub chila navei se deformeaz i nu coincide cu direcia de mar a navei, pentru a corecta aceast influien la derivometru exist un corector al
-
313
unghiului de deriv, care introduce automat corecia . Aceast corecie se determin n timpul compensrii lochului - derivometru i se introduce n corectorul unghiului de deriv la reglarea acestuia.
9.3.4 Schema funcional a lochului electromagnetic
Schema funcional a lochului electromagnetic este prezentat n fig. (9.34) n care sunt reprezentate:
TV traductor de vitez; PA preamplificator i adaptor de impedan; DCV dispozitivul de calcul al vitezei; IV indicatorul de vitez; IDP indicatorul de distan parcurs; DI dispozitivul de integrare; C corectorul; DF defazorul; SAT sursa de alimentare a traductorului; BAU bloc de alimentare universal.
PA DCV IV
C DI IDP
SA DF BAU
TV
Reeaua bordului
-
314
Fig.9.34 Schema funcional a lochului electromagnetic 9.3.4.1 Dispozitive de calcul a vitezei ale lochurilor electromagnetice (inductive)
Funcie de construcia aparaturii de calcul a vitezei, lochurile electromagnetice pot fi cu schem de msurare direct i cu schem de msurare prin compensare.
9.3.4.1.1 Lochuri inductive cu schem de msurare prin compensare
La lochurile inductive cu schem de msurare prin compensare, operaia de msurare const n urmtoarele: tensiunea dat de traductorul de vitez se compenseaz cu o tensiune n antifaz i funcie de poziia elementului de reglare a dispozitivului care genereaz tensiunea de compensare, n momentul echilibrului, se msoar tensiunea de compensare, care este egal cu viteza navei.
Pentru acionarea dispozitivului care genereaz tensiunea de compensare se utilizeaz micromotoare electrice. n calitate de surs de tensiune de compensare se folosesc poteniometre sau transformatoare rotative liniare.
Deoarece la intrarea schemei de msurare odat cu semnalul util proporional cu viteza navei, se aplic i tensiunea de cuadratur, se vor compensa ambele semnale.
n compensatorul automat, fig. (9.34) cu ajutorul blocului de compensare a semnalului util (BCSU) i blocului de compensare a tensiunii de cuadratur (BCTC) se obin dou tensiuni de compensare defazate cu 900.
- tensiunea de compensare a semnalului util:
-
315
tUu cucu sin= (9.116)
- tensiunea de compensare a tensiunii parazite n cuadratur:
tUu cpcp cos= (9.117)
Tensiunea dat de traductorul de vitez, care conine cele dou componente: tensiunea util proporional cu viteza navei i tensiunea parazit n cuadratur, relaia (9.36) i tensiunile de compensare date de cele dou blocuri se transmit la blocul de comparaie (C1), la ieirea cruia se obin diferenele de tensiuni:
( ) tUUuuu cuucuuu sin== (9.118) i:
( ) tUUuuu cppcppp cos== (9.119)
Diferenele de tensiuni se transmit la intrarea amplificatorului bifazat (A1), la ieirile cruia sunt conectate dou electromotoare (M1) i (M2).
Motorul (M1) acioneaz blocul de compensare a semnalului util, iar (M2) blocul de compensare a tensiunii parazite n cuadratur. Motoarele se opresc cnd diferenele tensiunilor la intrarea n amplificator devin zero.
-
316
Indicatorul de vitez acionat de electromotorul (M1) se va roti cu un unghi proporional cu semnalul util. Cu ajutorul corectorului (K) se introduc coreciile erorilor sistematice (v).
Fig.9.35 Schema bloc a dispozitivului cu msurare prin compensare
Odat cu acionarea blocului de compensare a semnalului util motorul (M1) rotete i transformatorul rotativ liniar (TRL) care genereaz tensiunea proporional cu viteza i pe care o transmite la dispozitivul de integrare pentru obinerea distanei parcurse fig.(9.36).
Tensiunea [u=f(v)] proporional cu viteza navei se transmite la dispozitivul de integrare la intrarea dispozitivului de corecie a fazei (DCF) i apoi este transmis la comparatorul (C2) unde se compar cu tensiunea dat de dispozitivul tahogeneratoric
M2 A1 M1
K
DM
TRL
BCSU C1 BCTC
TV
IV
Ucpcost Ucusint
Uusint Upcost u=f(v)
v
-
317
(DThG), format dintr-un motor asincron pe acelai ax cu un tahogenerator sincron.
Fig.9.36 Schema bloc a dispozitivului de integrare
Diferena celor dou tensiuni, dat de comparator este amplificat de amlificatorul (A2) i apoi alimenteaz motorul dispozitivului tahogeneratoric.
dtd
uKvKu r
= 21 (9.120) unde: K1 coeficient de proporionalitate; K2 coeficient de transmisie; ur - tensiunea reelei; - unghiul de rotire al rotorului tahogeneratorului. Motorul dispozitivului tahogeneratoric se va roti pn cnd
diferena tensiunilor devine zero:
021 =
dtd
uKvK r (9.121)
sau:
A2 C2 DCF
DThG
u = K1v
CDP
-
318
vuK
Kdtd
r2
1=
de unde rezult:
sKdtvKdtvuK
K t
t
t
tr
=== 2
1
2
12
1 (9.122)
n acest fel unghiul de rotaie al dispozitivului tahogeneratoric () n timpul t = t2 t1 este proporional cu distana parcurs de nav care este nregistrat de contorul de distan parcurs (CDR).
9.3.4.1.2 Lochul-derivometru inductiv cu msurare prin comparaie
La lochul-derivometru cu msurare prin comparaie fig.(9.36) se folosesc dou dispozitive de msurare prin compensare (DMK1) i (DMK2).
n acest caz tensiunile de la ieirile fiecrui dispozitiv de msurare prin compensare au forma:
Auu
uK 212
1
= i B
uuuK 2
122
+=
(9.123)
Aceste tensiuni se transmit la nfurrile statorice ale transformatorului rotativ sinus-cosinus (TRSC). Tensiunea de la nfurarea sinus este amplificat i apoi alimenteaz nfurarea de comand a motorului (M1), care rotete rotorul TRSC pn
-
319
cnd tensiunea la nfurarea sinus devine zero. n acest fel unghiul de rotire a rotorului TRSC este egal cu unghiul de deriv. Pentru corectarea unghiului de deriv este prevzut corectorul K2. Unghiul de deriv () se nsumeaz cu corecia () obinndu-se unghiul de deriv corectat (c).
De la nfurarea cosinus a TRSC se culege tensiunea proporional cu viteza relativ a navei, care apoi se transmite la sistemul de urmrire i prelucrare a vitezei.
Fig.9.37 Schema bloc a lochului-derivometru cu inducie
Diferena tensiunilor de la nfurarea cosinus a TRSC i de la transformatorul rotativ liniar (TRL) este amplificat i
DMK1
DMK2
TRSC
A1 M1
DM1
K2
C
A2 M2 DM2
TRL
IV
K1
I u1=f(v) c
u2=f(vy)
u=f(v)
vN v
v
-
320
alimenteaz nfurarea de comand a motorului (M2) care va roti rotorul TRL cu un unghi proporional cu viteza relativ a navei. Pentru corectarea vitezei se folosete corectorul K2 care introduce o corecie de vitez v.
Sistemul cu msurare prin comparaie se aplic la lochurile de inducie de tip IL-40, IL-50, IL-80.
9.3.4.1.3 Schema bloc a lochului electromagnetic cu msurare direct
Tensiunea de la blocul de alimentare (BA) se transmite la electromagnetul traductorului de vitez (TV) i la blocul de defazare (BD) ce d tensiunea de corecie a tensiunii parazite n cuadratur fig.(9.38).
Fig.9.38 Schema bloc a lochului electromagnetic cu msurare direct
Tensiunea de la electrozii traductorului de vitez (TV) este amplificat n amplificatorul (A) i transmis la detectorul de
TV A D IV CDP
CC DI
BA SGTR INV
-
321
faz (D) unde sunt detectate cele dou componente ale semnalului (componenta util i componenta parazit n cuadratur) prin compararea cu o component tensiune de referin n faz elaborat de schema generatorului de tensiune de referin (GTR) i cu o component defazat cu 900 a semnalului de referin, de ctre blocul invertor (INV), pentru eliminarea componentei parazite a semnalului.
La ieirea blocului de defazare se obine un semnal de tensiune continu de amplitudine proporional cu viteza navei care este transmis la indicatorul de vitez i la dispozitivul de integrare (DI) pentru obinerea distanei parcurse, care este apoi registrat de contorul de distan parcurs (CDP).
Schema generatorului de tensiune de referin fig.(9.39) prelucreaz impulsurile dreptunghiulare n faz cu semnalul util.
Fig.9.39 Schema de funcionare a detectorului de faz
Tensiunea de referin generat de schema generatorului tensiunii de referin se transmite la circuitul poart (CP2) i tot
CP1 F
CP2
SGTR INV
U
0 t
u
0 t
u
0 t Uusint + +Upcost
D
-
322
odat la blocul invertor (INV), dup prelucrare n blocul invertor se transmite la circuitul poart (CP1) locul invertor, de la circuitele poart (CP1) i (CP2) semnalele se transmit la filtrul (F). Ct timp circuitele poart sunt deschise semnalul util i pstreaz semnul, n acelai timp tensiunea parazit n cuadratur i schimb semnul, adic trece prin zero,ceea ce face ca la ieirea filtrului (F) valoarea medie a semnalului n cuadratur (valoarea tensiunii parazite) s fie egal cu zero.
Astfel la ieirea din filtru se va obine o tensiune continu proporional cu viteza relativ a navei, tensiunea de la ieirea din filtru se transmite la indicatorul de vitez, care este un voltmetru gradat n uniti de vitez. n acelai timp tensiunea de la ieirea din filtru se transmite la dispozitivul de integrare (DI) unde se obine semnalul proporional cu distana parcurs, semnal care alimenteaz elementul ce antreneaz contorul de distan parcurs (CDP). Circuitul de corecie (CC) servete pentru introducerea coreciilor liniare i neliniare ale lochului.
Schema de msurare direct se utilizeaz la lochurile de tip IEL-2M, NAVIKNOT, LEM.
9.3.5 Erorile lochurilor inductive
Erorile de msurare a vitezei navei cuprind trei componente: erorile traductorului inductiv de vitez, erorile schemei de msurare a lochului i erori determinate de influena mediului exterior.
9.3.5.1 Erorile traductorului inductiv de vitez
-
323
Sunt determinate de existena unei tensiuni electromotoare proprii electrozilor, influenei curenilor ciclici, de scurgere i inducie. Tensiunea electromotoare proprie electrozilor este datorat polarizrii.
Pentru reducerea acestei tensiuni, la alimentarea nfurrii electromagnetului se folosete tensiunea alternativ, care d natere cmpului magnetic alternativ, iar electrozii se construiesc din materiale speciale (argint, platin) i cu caracteristici identice.
Datorit curenilor turbionari sau gradienilor cmpului magnetic, n fluxul de ap care nfoar fundul navei, iau natere cureni de circulaie (de nivelare) care determin o scdere a tensiunii electromotoare n zona dintre electrozi. Apariia n acest caz a diferenei de potenial depinde de gradientul vitezei curentului de ap, turbulenei, gradientului cmpului magnetic ct i de conductibilitatea electric a apei.
Curenii de scurgere iau natere din cauza defectelor de izolaie a circuitelor de msurare a traductorului de vitez i existenei unei legturi capacitive cu bobina electromagnetului, a electrozilor de msurare. Pentru a nltura curenii de scurgere alimentarea electromagnetului se face printr-un transformator de separaie, iar cablurile de legtur au rezistena de izolaie de valoare foarte mare. nlturarea influenei asupra circuitului de msurare a cmpurilor electrice i magnetice strine se face prin ecranarea corespunztoare a cablurilor i prin mpmntarea tuturor aparatelor lochului.
-
324
9.3.5.2 Erorile schemei de msurare a locului cu inducie
Ultimile tipuri de lochuri cu inducie folosesc o schem de msurare cu compensare, a cror schem bloc este asemntoare cu schema bloc a sistemului automat cu circuit nchis (fig. 9.18), n care: AI amplificator de intrare; DMC dispozitiv de msurare i compensare; AN amplificatorul mrimii necompensate; AF amplificator final de putere; M electromotorul; T.R. traductorul de reacie.
Eroarea schemei de msurare include eroarea static a schemei de msurare st i eroarea dinamic u(t).
Eroarea static depinde de constantele amplificatorului de intrare, traductorului de reacie, de existena pragurilor de sensibilitate a acestora ct i de aciunea fenomenului de inducie i derivei nulului:
indsptrst ++= . (9.124) unde: tr - eroarea determinat de variaia coeficientului de transformare a amplificatorului de intrare;
-
325
- eroarea determinat de variaia coeficientului de transformare () a traductorului de reacie; p.s eroarea determinat de pragul de sensibilitate a circuitelor; ind eroarea determinat de aciunea fenomenului de inducie i derivei nulului la nchiderea circuitului reaciei inverse.
Fig. 9.40. Schema bloc a lochului cu inducie
Cea mai mare eroare dat de pragul de sensibilitate ps o au electromotoarele.
)/( 21 = KKMMU nfrnps (9.125) unde:
Un - tensiunea nominal a motorului; Mfr momentul de frecare a motorului pe axul su; Mn momentul nominal de rotaie al motorului.
Erorile statice caracterizeaz funcionarea dispozitivelor n regimul permanent (stabil) a parametrului msurat.
AI AN AF M
TR
u
Ki DMC K1 K2
-
326
Pentru calculul erorilor care iau natere la msurarea parametrului n condiii reale, este necesar s se cunoasc eroarea dinamic ale sistemului.
Valoarea erorii dinamice, pentru lochurile cu compensare, se calculeaz cu expresia:
.......)( 33
32
2
21 ++++= dtudC
dtudC
dtduCuCtu o
(9.126) unde: Co, C1, C2, - coeficieni care depind de parametrii dispozitivului.
9.3.5.3 Erorile determinate de influena mediului exterior
n aceast categorie intr erorile determinate de tangajul i ruliu navei, iar pentru lochurile cu traductor de vitez, care nu iese n afara bordului , erorile determinate i de variaia pescajului. Asupra preciziei de funcionare a lochului inductiv influeneaz i variaia conductibilitii electrice a apei. Eroarea de msurare a vitezei relative v la deplasarea navei de tonaj mare, cu unghi de tangaj , este dat de relaia:
)cos1( = xv v (9.127)
vx componenta longitudinal a vitezei centrului de greutate a navei.
-
327
La existena componentei verticale a vitezei centrului de greutate a navei n condiiile de tangaj, eroarea de msurare a vitezei:
yzvv yzzxvx += sin)cos1( (9.128) unde: vz componenta vertical a vitezei centrului de greutate al navei. z i y proieciile vitezei unghiulare a centrului de greutate al navei pe axele z i y ; z i y distanele de la centrul de greutate al navei pn la punctul de instalare a traductorului al lochului pe axele z i y. Pentru lochurile cu dou componente, erorile de msurare a componentei transversale a vitezei, vor fi determinate de expresiile similare cu (9.127) i (9.128).
)cos1( = yv v (9.129)
xzvv xzzyv y += sin)cos1( (9.130) unde: - unghiul de ruliu; vy componenta transversal a vitezei relative a navei; z i x proieciile vitezei unghiulare a centrului de greutate al navei pe axele z i x ; z i x distanele de la centrul de greutate al navei pn la punctul de instalare a traductorului al lochului pe axele z i x. Erorile de msurare la balans trebuie calculate concret pentru fiecare nav (sau proiect) lund n considerare particularitile comportrii pe valuri i distana traductorului de
-
328
vitez al lochului fa de centrul de greutate al navei. n acest caz trebuie amintit c rezultatul calculat cu relaiile redate mai sus sunt aproximative i au un caracter informativ. Erorile de msurare a vitezei de ctre lochurile inductive cu traductoare de vitez care se gsesc n interiorul stratului limit (tip pahar) cresc la creterea depunerilor pe opera vie, deoarece n acest caz se schimb caracterul fluxului de ap care nconjoar nava. Calculul orientativ arat c eroarea de vitez, dup un an de navigaie poate varia cu pn la 2,5 %. Eroarea relativ datorat variaiei conductibilitii electrice a apei se poate determina cu urmtoarea expresie:
( )2 i iv R R Rv
= +
(9.131) unde: Ri - variaia rezistenei interioare a traductorului de vitez al lochului la schimbarea conductibilitii electrice a apei de mare; R - rezistena de intrare a dispozitivului de msurare a lochului. Din expresia (9.131) se observ c pentru majoritatea lochurilor inductive care au o rezisten de intrare mare a schemei de msurare, eroarea determinat de variaia conductibilitii electrice a apei n limitele 2 la 35%, este mic.
-
329
9.4. Lochurile Doppler
9.4.1. Efectul Doppler-Fizeau
Fenomenul de modificare a frecvenei, lungimii de und i perioadei undelor cnd sunt recepionate de un observator aflat n micare relativ fa de sursa emitoare. Variaia frecvenei este proporional cu viteza de deplasare a sursei sau observatorului, mediul de propagare a undelor considerndu-se n repaus.
Acest fenomen a fost stabilit de Doppler n anul 1842 i a mai fost studiat i de Buys-Ballot n domeniul acusticii, iar de Fizeau n cazul undelor luminoase. Fenomenul se poate produce n urmtoarele situaii:
- surs mobil i observator fix; - observator mobil i surs fix; - Surs i observator mobile.
9.4.1.1 Surs mobil i observator fix
-
330
Sursa se deplaseaz cu viteza v n sens de apropiere, emite oscilaii cu frecvena fe respectiv de perioad Te. Vom nota frecvena oscilaiilor recepionate de observator cu fr deci de perioad Tr i cu c viteza de propagare a oscilaiilor.
Se consider S0 i S1 poziiile sursei la momentele de timp t0=0 cnd emite prima oscilaie i t1=Te cnd emite a doua oscilaie i O poziia observatorului, (fig(9.41), care la timpul '0t recepioneaz prima oscilaie i la timpul '1t a doua oscilaie.
Fig. 9.41 Efectul Doppler la deplasarea sursei n sens de apropiere
Observatorul recepioneaz prima oscilaie n punctul O (fix) la timpul:
' 00
S Ot
c=
(9.132) Sursa emite a doua oscilaie la timpul t1=Te, cnd se afl n
punctul S1 dup ce a parcurs distana 0 1 eS S v T= . Observatorul recepioneaz a doua oscilaie aflndu-se n
acelai punct, dup timpul:
S0 svr
S
t0 = t1=Te
c
OSTt e 1'
1 +=
c
OSt 0'0 =
O
-
331
' 0 1 01 11 e e e
S O S O S OS O S Ot T T T
c c c c
= + = + = +
rezult:
c
TvtTt ee
+= '0'
1 (9.133)
sau:
c
TvTtt ee
='
0'
1 (9.134)
Se noteaz : rTtt ='
0'
1 perioada oscilaiilor recepionate de observator, rezult:
=
c
vTT er 1 sau
c
vcTT er
= (9.135)
nlocuind perioadele e
e fT1
= i
r
r fT1
= rezult:
vc
cff er
= (9.136)
n cazul deplasrii sursei n sens de deprtare urmnd acelai raionament, rezult:
vc
cff er += (9.137)
-
332
9.4.1.2. Observatorul se deplaseaz, sursa fix
n cazul deplasrii observatorului n sens de apropiere cu viteza v, se consider sursa n punctul fix S i emite prima oscilaie la momentul t0=0, iar a doua oscilaie la timpul t1=Te,(fig.9.42).
Observatorul recepioneaz prima oscilaie cnd se afl n
punctul O0 la timpul ' 00
SOt
c=
, i a doua oscilaie cnd se afl n
punctul O1 la timpul:
' 0 0 111 e e
SO OOSOt T T
c c
= + = + (9.138)
sau:
' 0 0 11 e
SO OOt T
c c= +
(9.139)
Fig.9.42 Efectul Doppler la deplasarea observatorului in sens de apropiere
S O0 O1
rvr
' 00
SOt
c=
' 11 e
SOt T
c= +
t1=Te
t0=0
-
333
nlocuind n relaia (9.139) spaiul parcurs de observator ntre momentele recepionrii celor dou oscilaii 0 1 rOO v T= , rezult:
c
TvtTt re
+= '0'
1 (9.140)
sau:
c
TvTtt re
='
0'
1 (9.141)
Avnd n vedere c rTtt ='
0'
1 rezult:
=
c
vTT re 1 sau
c
vcTT re
= (9.142)
sau:
vc
cTT er
= (9.143)
Avnd n vedere c e
e fT1
= i
r
r fT1
= rezult:
c
vcff er = (9.144)
n situaia c observatorul se deplaseaz n sens de deprtare relaia (9.144) devine:
-
334
c
vcff er += (9.145)
9.4.1.3. Surs i observator mobile
S considerm c sursa se deplaseaz cu viteza vs i observatorul cu viteza vr, sensul de deplasare este de apropiere, (fig.9.43).
Sursa emite prima oscilaie n punctul S0 la timpul t0=0, iar observatorul va recepiona prima oscilaie n punctul O0 la
momentul ' 0 10
S St
c=
.
Fig.9.43 Efectul Doppler cnd sursa i observatorul se deplaseaz
A doua oscilaie este emis de surs n punctul S1, dup ce a parcurs distana 0 1 s eS S v T= , la momentul t1=Te.
S0 svr
S1 O1 Oo
t0=0
eTt =1 c
OSt 00'0 =
' 1 11 e
S Ot T
c= +
rvr
-
335
Observatorul va recepiona a doua oscilaie n punctul O1, dup parcurgerea distanei 0 1 r rOO v T= , la momentul:
( )0 0 0 1 0 1' 1 11 e e
S O S S OOSOt T T
c c
+= + = +
(9.145) sau:
c
Tvc
TvtTt rrese
+= '0'
1 (9.146)
rezult:
c
Tvc
TvTtt rreee
='
0'
1 (9.147)
Avnd n vedere c rTtt ='
0'
1 , relaia (9.147) devine:
c
Tvc
TvTT rreser
= sau
=
+
c
vTc
vT serr 11
de unde rezult:
r
ser
vc
vcTT+
= (9.148)
sau:
s
rer
vc
vcff
+=
(9.149) n situaia c sursa i observatorul se deplaseaz n sens de
deprtare, folosind acelai raionament, rezult:
-
336
s
rer
vc
vcff+
= (9.150)
9.4.2 Principiul de funcionare a lochurilor Doppler
9.4.2.1 Principiul de funcionare a lochului Doppler hidroacustic
Att emitorul ct i receptorul se afl la bordul navei, ca urmare ne gsim n situaia c att sursa ct i receptorul se deplaseaz, n sensul apropierii, (fig. 9.44).
vr
-
337
Fig.9.44 Lochul Doppler hidroacustic cu emisie spre prova
Emitorul care este la bordul navei emite cu frecvena fe spre o suprafa de reflexie care va recepiona oscilaiile la frecvena fr1, dat de relaia:
vc
cff er
=1 (9.151)
Suprafaa de reflexie devine emitor i va emite oscilaii cu frecvena fe1=fr1, oscilaii pe care apoi receptorul aflat la bordul navei va recepiona oscilaiile reflectate cu frecvena:
c
vcfc
vcff rer +=+= 11 (9.152)
nlocuind n relaia (9.152) relaia (9.151) se obine:
vc
c
c
vcff er
+=
(9.153)
Rezult frecvena recepionat de loch dat de relaia:
vc
vcff er
+=
(9.154)
-
338
Relaia (9.154) poate fi scris i sub forma:
+=
c
vc
vff er1
11 (9.155)
Avnd n vedere relaia de dezvoltare a unei funcii de forma
x11
ntr-o serie format din n termeni:
...11
1 32 ++++=
xxxx
Relaia (9.155) poate fi scris sub forma:
+++
+= ...11 3
3
2
2
c
v
c
v
c
vff er
Efectund produsul se obine:
++++= ...
2221 33
2
2
c
v
c
v
c
vff er (9.156)
Avnd n vedere c v
-
339
+=
c
vff er 21 (9.157)
Rezult:
c
vfff eer 2=
Notnd diferena Der fff = , numit frecven Doppler, se obine relaia:
c
vff eD 2= (9.158)
De menionat c suprafaa de reflexie este considerat ca o surs de emisie format dintr-un numr de reflectori elementari independeni.
Lochul Doppler hidroacustic poate s funcioneze normal numai n cazul cnd suprafaa de reflexie este cu asperiti a cror dimensiuni sunt comparabile cu lungimea de und a oscilaiilor emise. n acest caz componenta difuz a semnalului reflectat asigur o funcionare sigur a receptorului. Dac aceast dimensiune este mult mai mare dect lungimea undei, atunci reflexia se produce dup legile opticii (unghiul de inciden egal cu cel de reflexie) i deci nu vor fi emise de ctre suprafa spre receptor.
-
340
n situaia cnd emisia se face spre pupa navei, sau emitorul/receptorul se deplaseaz n sens de ndeprtare fa de suprafaa de reflexie, n acest caz relaia (9.154) devine:
vc
vcff er +
= (9.159)
Relaie care se mai poate scrie sub forma:
c
vc
vff er+
=
1
11 (9.160)
Avnd n vedere relaia de dezvoltare a expresiei x+1
1 ntr-o
serie cu n termeni:
....11
1 432xxxx
x++=
+
relaia (11.30) se poate scrie sub forma:
++
= ...11 3
3
2
2
c
v
c
v
c
v
c
vff er
Dup efectuarea calculelor se obine:
-
341
++= ...
2221 33
2
2
c
v
c
v
c
vff er (9.161)
n relaia (9.161) pot fi neglijai termenii de rang superior i rezult:
=
c
vff er 21 (9.162)
de unde rezult:
c
vff eD 2= (9.163)
Relaiile (9.158) i (9.163) sunt valabile cnd ntre direcia de emisie/recepie i direcia de deplasare a navei unghiul este 00 (1800), situaie ntlnit la lochurile Doppler hidroacustice utilizate ca instalaii de manevr pentru determinarea vitezei cu care nava se apropie de cheu, i a distanei pn la cheu.
Dac se instaleaz traductoare la prova , la pupa i la centru cu ajutorul indicaiilor de vitez i distan furnizate, comandantul poate adopta cele mai bune decizii de manevr a navei sau chiar se poate realiza automatizarea manevrei de acostare a navei.
Practic pentru msurarea vitezei n condiii de navigaie, emisia/recepia se face spre fundul mrii sub un unghi () spre prova fa de direcia de deplasare a navei (fig.9.45).
vcos
v
-
342
Fig.9.45 Principiul lochului Doppler, emisia sub unghi spre prova
n acest caz viteza de deplasare a emitor/receptorului fa de punctul de reflexie este vcos i relaia (9.154) devine:
cos
cos
vc
vcff er
+= (9.164)
Relaie care poate fi scris i sub forma:
+=
c
vc
vff er1
11 (9.165)
Dezvoltnd n serie:
-
343
...
coscoscos1cos1
13
33
2
22
++++=
c
v
c
v
c
v
c
v
relaia (9.165) devine:
++++= ....
cos2cos2cos21 333
2
22
c
v
c
v
c
vff er (9.166)
Neglijnd termenii de ordin superior se poate scrie:
+=
c
vff er cos21
Rezult frecvena Doppler la emisia spre prova:
c
vff eD cos2Pr = (9.168)
Pentru eliminarea erorilor date de modificarea distanei dintre emitor - suprafaa de reflexie i suprafaa de reflexie receptor, introdus de nclinrile traductorului produse de tangajul navei, se emite i spre pupa navei sub acelai unghi , (fig.9.46) se utilizeaz aa numitul sistem Janus (Janus fiind un zeu roman care avea dou fee, putnd s vad att n fa ct i n spate).
-
344
La emisia spre pupa distana dintre emitor/receptor i suprafaa de reflexie crete, astfel c este valabil relaia:
+
=
c
vc
vff er
cos1
1cos1 (9.169)
Dup dezvoltarea n serie a termenului:
...
coscoscos1cos1
13
33
2
22
=+=+ c
v
c
v
c
v
c
v
Relaia (9.169) devine:
++= ...
cos2cos2cos213322
c
v
c
v
c
vff er (9.170)
vcos v
-
345
Fig.9.46 Emisia spre pupa sub unghiul
Dup neglijarea termenilor de ordin superior, rezult frecvena Doppler pentru emisia spre pupa:
c
vff eDPpcos2
= (9.171)
Lochul va msura diferena de frecvene Doppler obinute la emisia spre prova i spre pupa:
==
c
vfc
vffff eeDDD Pp cos2cos2
Pr
de unde rezult:
c
vff eD cos4= (9.172)
Relaia (9.172) st la baza msurrii vitezei longitudinale a navei, dat de relaia:
( )cos4
Pr
e
DDl f
ffcv Pp
= (9.173)
-
346
9.4.2.2 Principiul de funcionare al lochului - derivometru Doppler hidroacustic
Lochurile Doppler hidroacustice msoar viteza absolut a navei atunci cnd suprafaa de reflexie este fundul mrii, acest lucru se poate produce la navigaia n apropierea coastei i cnd adncimile sunt de regul mici.
La navigaia de larg, n zonele n care adncimile sunt mari reflexia undelor acustice se produce de straturile intermediare de ap, viteza msurat n acest caz este viteza relativ (fa de ap) i pentru a determina viteza absolut este necesar s se msoare i viteza lateral a navei, sau componenta transversal a navei.
Pentru msurarea ambelor componente ale vitezei navei (longitudinal i transversal) se folosesc patru fascicule orientate ca n (fig.9.47). Cele dou componente ale vitezei navei se determin n aceast situaie cu relaiile:
- componenta longitudinal a vitezei:
cos4)(
Pr
e
DDL f
ffcv Pp
= (9.174)
Td
Pp Pv Bd
Lvr
Tvr
-
347
Fig.9.47 Emisia n configuraie Janus-dubl
- componenta transversal a vitezei:
=
cos4)(
e
DDT f
ffcv BdTd
(9.175)
Astfel viteza navei este dat de suma vectorial:
TL vvvrrr
+= (9.176)
Modulul vitezei navei se obine cu relaia:
-
348
( ) ( )2222Pr4 PpTdPp DDDDe
TL fffffc
vvv +=+= (9.177)
iar unghiul de deriv cu relaia:
( )( ) == coscos)(Pr Pp
BdTd
DD
DD
L
T
ffff
v
vdertg
(9.178)
rezult:
( )( ) = coscosPr Pp
BdTd
DD
DD
ffff
arctgder
(9.179)
9.4.2.3 Principiul de funcionare al Lochului radio-Doppler
n ultimii ani au cptat o larg rspndire navele cu noi principii de sustentaie: nave pe aripi portante, nave pe pern de aer i ecranoplane. Lipsa contactului cu apa la aceste nave nu permite s se foloseasc la ele lochurile tradiionale (hidrodinamice, inductive, Doppler hidroacustice etc.).
Pe de alt parte, caracterul complicat al fluxurilor de aer la nlimi mici, nu permite s se foloseasc eficace traductoarele folosite n aviaie.
-
349
n afara de aceasta datorit influenei mari a vntului asupra acestor nave, este necesar msurarea nu numai a vitezei, ci i a unghiului de deriv.
Aceste considerente a impus s se construiasc lochurile radiodoppler capabile s msoare viteza navei fa de suprafaa mrii (sau suprafaa pmntului la deplasarea pe uscat). Principiul de funcionare al lochurilor radiodoppler se bazeaz pe variaia doppler a frecvenei semnalului radio emis de la bordul navei, reflectat de suprafaa de susinere i recepionat de sistemul de antene al lochului. Aa cum este cunoscut, efectul Doppler reprezint variaia frecvenei oscilaiilor recepionate n raport cu frecvena oscilaiilor emise. Variaia frecvenei depinde de viteza deplasrii relative a sursei i receptorului oscilaiilor. Antena lochului A (fig.9.48) emite un spot ngust cu limea , orientat, n cazul cel mai simplu, paralel cu planul diametral al navei sub unghiul fa de suprafaa mrii. Suprafaa poate fi considerat, n majoritatea cazurilor, ca o surs de emisie format dintr-un numr de reflectori elementari independeni. La recepia oscilaiilor reflectate, se modific distana dintre antena emisie-recepie a lochului i aceste elemente de reflexie.
i
N vr
ivr
A LRD
X i
-
350
Fig.9.48. Principiul de funcionare al lochului radio-Doppler
Frecvena semnalului elementar recepionat variaz ca urmare a efectului Doppler i se calculeaz cu expresia:
c
vc
v
fvc
vcffi
i
o
i
ior
cos1
cos1
+=
+=
(9.180)
unde: fo, fr frecvenele oscilaiilor emise i recepionate; c viteza de propagare a undelor radio (luminii); vi vcosi proiecia vitezei navei (v) pe direcia i a elementului de reflexie; i - unghiul dintre direcia de micare a navei i direcia elementului de ordinul i de reflexie; Expresia (9.180) poate fi scris sub forma de serie cu n termeni:
-
351
+++= ......
cos2cos2122
0c
v
c
vff iir (9.181)
Considernd c pentru nave totdeauna 1v
c
-
352
ce duce la diferenierea variaiei frecvenelor Doppler ale semnalelor elementelor de reflexie separate. Mrimea variaiei Doppler a fiecrui semnal elementar, la micarea navei, variaz monoton ca urmare a modificrii proieciei vitezei navei pe direcia elementului de reflexie (fig. 9.50 a).
a) b)
Fig. 9.50 Forma semnalului elementar (a) i spectrul semnalului reflectat (b)
Ca rezultat semnalul recepionat de anten - suma semnalelor reflectate elementare independente, se determin nu cu o singur frecven fix, ci de un spectru de frecvene (spectrul Doppler). Poziia acestui spectru pe axa frecvenelor (fig.9.50b) n raport cu frecvena de emisie se caracterizeaz prin frecvena Doppler medie (fDm) determinat ca diferena dintre frecvena central (fc) a spectrului i frecvena de emisie (fo).
u(t) S(t)
fD fDsp=fc-fo
0 t 0 t
f0 fc
-
353
Frecvena central a spectrului corespunde variaiei zero pentru unghiul de nclinare a axului XN al antenei. Limea aproximativ a spectrului Doppler se determin ca diferena frecvenei Doppler a direciilor extreme, care delimiteaz spotul antenei: 1 2D D Df f f =
0 02 2
cos( ) cos( )2 2D
v vf f fc c
= + (9.184)
unde: fD - limea spectrului frecvenelor Doppler la nivelul jumtii de putere; - limea spotului emis de anten la nivelul 0,7. Dup cteva transformri expresia (9.184) devine:
tgff DD = (9.185)
= tgffD
D (9.186)
n felul acesta, semnalul reflectat reprezint un semnal asemntor cu unul cu un zgomot cu spectru relativ ngust. Pentru determinarea vitezei navei este necesar s msurm cu o anumit precizie frecvena Doppler i direcia XN a antenei. Trebuie menionat c lochul radiodoppler poate s funcioneze normal numai n cazul cnd suprafaa de reflexie este
-
354
cu asperiti a cror dimensiuni sunt comparabile cu lungimea de und a emisiei. n acest caz componenta difuz a semnalului reflectat asigur o funcionare sigur a receptorului. Dac aceast dimensiune este mult mai mare dect lungimea de und a oscilaiilor, atunci reflexia oscilaiilor se produce dup legile opticii (unghiul de inciden egal cu cel de reflexie) i deci nu vor fi emisie de ctre suprafa spre receptor. O astfel de suprafa este suprafaa mrii fr valuri. Lochul radio-Doppler msoar componentele vitezei n sistemul de coordonate al navei. Direcia spotului n raport cu axele acestui sistem poate fi redat de unghiurile i care reprezint unghiul de nclinare al razei i unghiul de rotire al razei (spotului) fa de planul diametral al navei, se presupune c lipsete tangajul i ruliul navei, iar deplasarea navei se face strict n planul orizontal. Sistemele cu antene ale lochurilor radiodoppler formeaz de la unu pn la patru spoturi (raze). n acest caz lochul cu un singur spot asigur msurarea numai a unei componente a vectorului vitezei. Pentru determinarea a dou componente se folosesc minim dou spoturi care nu se afl n acelai plan vertical.
Dezavantajul sistemelor cu un singur spot sau cu dou l constituie erorile deosebite care apar la schimbarea orientrii spaiale a spoturilor datorit tangajului i ruliului. n funcie de poziia spoturilor i mrimile unghiurilor i aceste erori pot atinge cteva procente la 1o de nclinare a navei. Eliminarea acestor dezavantaje (compensarea parial a erorilor) se obine prin folosirea a trei sau patru spoturi (schema Janus).
-
355
n acest caz la modificarea unghiului de nclinare, variaia frecvenei Doppler pe un spot se mrete, iar pe altul se micoreaz, iar modificarea variaiei rezultante a frecvenei Doppler este mic
Fig. 9.50 Orientarea diametral-transversal a spoturilor antenei lochului radio-Doppler
La majoritatea lochurilor radiodoppler se folosesc sistemele cu patru fascicole cu dispunerea lor diametral i transversal sau sub form de X (fig. 9.50 i 9.51).
z
x
y
0
z
x
y
O
-
356
Fig. 9.51. Orientarea sub form de X a spoturilor antenei lochului radio-Doppler
La dispunerea diametral transversal a fascicolelor, componentele longitudinal i transversal a vitezei se calculeaz cu expresiile:
cos1
4 031
fffc
vDD
x
= (9.187)
cos1
4 024
fffc
vDD
y
= (9.188)
La dispunerea sub form de X:
+=
sincos1
8 02,43,1
fffc
vDD
x (9.189)
-
357
=
sincos1
8 03,12,4
fffc
vDD
y (9.190)
unde: 313,1 DDD
fff = ; 242,4 DDD fff =
9.4.3 Principiile de construcie ale lochurilor Doppler
9.4.3.1 Construcia lochului Doppler hidroacustic
-
358
Componentele funcionale de baz ale lochului Dopler hidroacustic (fig.9.52) sunt:
AE - traductorul hidroacustic de emisie; AR traductorul hidroacustic de recepie; DER dispozitivul de emisie recepie; DM dispozitivul de msurare; DC dispozitivul de calcul; I VD indicatorul de vitez i distan parcurs; S sincronizatorul; BC blocul de corecie (compensare).
Fig. 9.52 Schema bloc a lochului Doppler hidroacustic Antenele hidroacustice i dispozitivul de emisie/recepie
asigur emisia/recepia oscilaiilor acustice. n dispozitivul de msurare se determin valorile parametrilor de frecven ale semnalelor ecou pe baza crora n dispozitivul de calcul se calculeaz componentele vectorului vitez i distan parcurs.
AE
AR
DER DM DC IVD
S
BC
-
359
Informaia, n form corespunztoare, de la ieirea dispozitivului de calcul este transmis la indicatorii proprii ai lochului i la receptorii externi.
Sincronizatorul asigur sincronizarea tuturor etajelor lochului, asigur comanda i controlul ntregii instalaii, blocul de corecie realizeaz compensarea erorilor provocate de aciunea factorilor perturbatori (modificarea vitezei sunetului n ap, balansul navei, deplasrile pe vertical ale navei etc.).
Unele lochuri sunt prevzute cu dou canale de msurare: unul de frecven nalt (100 300KHz) destinat pentru msurarea vitezei la adncimi mici i altul de frecven joas (10 20KHz) pentru msurarea vitezei la adncimi medii i mari.
9.4.3.1.1 Antenele hidroacustice
Antenele hidroacustice transform energia electromagnetic n energie acustic i invers (la emisia respectiv recepia semnalelor). Antenele formeaz la emisie recepie caracteristica de directivitate multiraze cu o anumit orientare a undelor acustice.
Pe lng modalitatea de orientare a razelor n planurile diametral i transversal prezentat n (fig.9.50) adesea se folosete i orientarea n X a razelor acustice prezentat n (fig.9.51).
Limea spotului acustic este de 2060 iar unghiul de nclinare fa de orizont se alege n plaja 450 700.
-
360
De regul antenele hidroacustice sunt traductori piezoelectrici ceramici din cristale artificiale (titanat de bariu sau titanat de plumb-zinc).
Dup modul de formare a caracteristicilor de directivitate ale antenelor folosite n instalaiile lochurilor Doppler hidroacustice, antenele pot fi liniare (cu faze sincronizate sau faze variabile) i parametrice.
Antenele liniare cu faze sincronizate conin civa traductori plani care, fiecare din ei, formeaz cte un fascicul orientat perpendicular pe suprafaa activ. Orientarea razelor este asigurat prin fixarea traductorilor sub un anumit unghi n corpul antenei, (fig.9.53).
Dimensiunile geometrice ale traductoarelor sunt determinate n principal de lungimea de und i limea necesar caracteristicii de directivitate.
Coeficientul de concentrare al unui astfel de element este dat de urmtoarea expresie determinat experimental:
2sin
442
2 pi
pi
=S
(9.191)
unde S = pir2 este suprafaa elementului de raz r.
a) b) c)
-
361
Anten emisie
Anten recepie
Pp
Td Pr.
Bd
Fig.9.53 Dispunerea traductoarelor n anten a) i obinerea direciei spotului: simetric - b), nesimetric - c)
Una din variantele de fixare a antenelor la bordul navei este prezentat n (fig.9.54).
Fig.9.54 Dispunerea antenelor la nav
Din relaia (9.191) se poate obine raza elementului:
-
362
2sin pi
=r (9.192)
Relaia (9.192) arat legtura dintre creterea semnificativ a dimensiunilor traductorului i mrimea frecvenei de lucru, precum i ngustarea caracteristicii de directivitate.
Pentru creterea randamentului antenelor de dimensiuni mari acestea se execut sub forma unui mozaic din elemente traductoare de dimensiuni mici.
La unele lochuri se folosesc antene cu schimbare de faz realizate sub forma unor reele liniare din elemente plane echidistante. Elementele alturate din reea sunt alimentate cu tensiuni defazate cu un unghi constant.
Maximele principale ale caracteristicilor de directivitate ale unor astfel de antene se formeaz n acele direcii n care se compun oscilaiile aflate n faz ale tuturor elementelor traductoare.
Unghiul dintre planul antenei i direcia maximului principal este dat de urmtoarea relaie determinat experimental:
dpi
2arccos
=
(9.193) unde d este distana dintre elementele traductoare.
Avnd n vedere relaia (9.193) se poate scrie:
-
363
KfcK
d e==
=
pi
2
cos (9.194)
unde dK
pi
2
= este constanta constructiv a antenei.
Introducnd relaia (9.194) n relaia (9.168), pentru calculul frecvenei Doppler, rezult:
kvKfcf
c
vfc
vfD 22cos20
00 === (9.195)
Se constat c la astfel de antene din compunerea lochului, frecvena Doppler nu mai depinde de viteza sunetului n ap i nici de frecvena semnalelor emise.
Modificarea lungimii de und la emisie, determinat de modificarea vitezei sunetului i a frecvenei se compenseaz prin scanarea automat a undei. Din acest motiv aceste tipuri de antene se numesc antene nedependente de frecven .Un exemplu de dispunere i conectare a elementelor antenei pentru = 1200 este artat n fig.9.55.
Pe lng avantajul de compensare a variaiei vitezei sunetului, antena realizat sub form de reea a elementelor n faz, prezint i alte avantaje n comparaie cu alte tipuri de antene, cum ar fi:
posibilitatea obinerii unor fascicule necoplanare de la o singur suprafa activ;
-
364
datorit formei plane poate fi montat fr carcas n corpul navei;
posibilitate mai redus de acumulare a bulelor de aer n aproprierea antenei.
Antenele liniare sunt larg folosite la lochurile destinate pentru lucrul la ape de adncimi mici i medii. Utilizarea lor la lochurile de joas frecven (10KHz) destinate pentru adncimi de pn la 6.000m este problematic ntruct dimensiunile antenei liniare cu o deschidere a caracteristicii de directivitate de 30 ajung la un diametru de aproape 3m.
Fig.11.16 Dispunerea (a) i conectarea (b) traductoarelor din antenele nedependente de frecven
Pentru rezolvarea acestei probleme se folosesc antene parametrice care mbin formarea unei caracteristici de
2400 1200
00
00 120 0 2400
a = 3d d
a) b)
-
365
directivitate nguste cu o frecven joas pentru dimensiuni acceptabile ale antenei.
Principiul de funcionare al antenei parametrice se bazeaz pe efectele neliniare din apa mrii. Pentru formarea unei caracteristici de directivitate de joas frecven se emit dou semnale armonice puternice pe frecvene relativ nalte i apropiate ca valoare f1 i f2.
n aceast situaie, n volumul de ap adiacent antenei, numit zon de interaciune se formeaz unde secundare cu frecvene combinate prin nsumare i scdere. Componentele de frecven nalt se amortizeaz rapid n apa mrii, iar oscilaiile de frecven diferen (joas frecven) se propag la distane mari sub forma unei raze dircctive.
Limea caracteristicii de directivitate (la nivelul 3dB de presiune) pentru frecvena diferen se determin cu urmtoarea relaie:
FKA
2=
(9.196)
unde: A=a1+a2+a3; a1, a2, a3 sunt coeficienii logaritmici de
absorbie n apa de mare a oscilaiilor cu frecvenele f1, f2, f3; KF=2F este numrul de und pentru semnalul de frecven diferen.
Antena poate fi executat sub forma unei reele n faz. Pstrnd avantajele antenei nedependente de frecven, ea mai are un avantaj i anume caracteristica de directivitate nu are loburi laterale.
-
366
Antena parametric folosit la lochul Doppler hidroacustic PADS posed patru traductoare care formeaz undele acustice sub un unghi de 37,50 fa de vertical. Antena este nzestrat cu o lentil acustic care concentreaz semnalele ecou. Puterea acustic emis este de 200W pentru o singur raz la fiecare frecven primar. Dezavantajul unei astfel de anten este randamentul ei mic care nu depete 2%.
9.4.3.1.2 Dispozitivul de emisie-recepie
Dispozitivul de emisie-recepie specific lochurilor cu impulsuri conine un canal de emisie i un alt canal pentru recepie precum i comutatorul de anten (fig.9.56).
Canalul de emisie include oscilatorul pilot (OP) stabilizat n frecven, divizorul de frecven (DF), modulatorul (MOD) i amplificatorul de putere (AP).
Formarea impulsului de emisie se realizeaz la comanda sincronizatorului. La lochurile de joas frecven n canalul de emisie este necesar o schem de reglare automat a puterii de emisie n funcie de adncime.
Canalul de recepie este constituit din etajele de preamplificare i amplificare. Preamplificarea este necesar cnd distana dintre anten i celelalte elemente ale canalului de recepie este mare. Preamplificatorul este dispus n apropierea antenei sau la unele lochuri n corpul antenei. Amplificatorul de baz amplific semnalele ecou pn la valoarea necesar funcionrii normale a celorlalte etaje, frecvent canalul de
-
367
recepie conine o schem de reglare automat a amplificrii (RAA).
Fig.9.56 Dispozitivul de emisie-recepie
La unele variante de lochuri Doppler amplificatorul receptorului este de tipul superheterodin cu una sau mai multe frecvene intermediare.
Prin intermediul comutatorului de anten (CA) traductorii hidroacustici ai antenei pe timpul emisiei se conecteaz la emitor, iar pe timpul recepiei la receptor.
CE
A CA
AP MOD DF OP
AIF MIX
HET
AFI
AJF
DET
RAA
DM
CR
-
368
Totodat comutatorul de anten asigur protecia amplificatoarelor receptorului mpotriva semnalelor puternice emise. La lochurile cu emisie continu care au antene separate pentru emisie i recepie, lipsesc comutatoarele de anten.
La aceste lochuri amplificatorul ndeplinete i rolul de protecie, oprind trecerea semnalului emis direct n canalul de recepie, primele etaje de amplificare fiind selective (avnd n componen filtre).
9.4.3.1.3 Dispozitivul de msurare
Semnalul de la intrarea dispozitivului de msurare este caracterizat de un spectru de frecvene Doppler a crui poziie pe axa frecvenelor este dependent de viteza navei. Sarcina dispozitivului de msurare a frecvenei din lochurile Doppler hidroacustice const n determinarea statistic a semnalelor ecou.
n prezent sunt mai rspndite dou tipuri de dispozitive de msurare: cu msurare direct i cu msurare bazat pe urmrirea spectrului semnalului ecou.
Dispozitivul cu msurare direct
Funcionarea dispozitivului cu msurare direct (fig.11.18) se bazeaz pe faptul c frecvena medie ptratic a semnalului coincide numeric cu numrul mediu de intersectare de ctre semnal a nivelului zero n unitatea de timp. n componena sa intr o schem de formare a impulsurilor (SFI) i numrtorul (N).
-
369
Schema de formare impulsuri (SFI), n momentul intersectrii de ctre semnal a nivelului zero, genereaz un impuls scurt de amplitudine i durat constant. Numrtorul (N) calculeaz numrul de impulsuri pe durata timpului fixat (exemplu 1sec.) care va coincide cu frecvena cutat. Pentru creterea preciziei msurrilor se efectueaz o mediere a valorilor individuale mrind astfel intervalul de observare.
Fig.9.57 Dispozitiv cu msurare direct
Dispozitivele cu msurare direct pot funciona i n regim de msurare a perioadei. n acest caz se msoar durata medie a intervalelor dintre intersectri, iar frecvena se calculeaz ca o mrime invers a perioadei. Asemenea dispozitive trebuie s aib o band mare de trecere determinat de gama posibil de variaie a diferenei Doppler a frecvenelor. Funcionarea normal a dispozitivului de msurare direct se asigur prin raportul semnal/zgomot nu mai mic de 20dB.
Dispozitivul cu msurare prin urmrire
DM
DER SFI N IV
-
370
Dispozitivul cu msurare prin urmrire fig. (9.58) posed o protecie bun mpotriva paraziilor, avnd banda de trecere ngustat pn la limea spectrului Doppler cu ajutorul filtrelor, ceea ce reduce influena zgomotelor.
Filtrele se construiesc pe baza schemelor de autoreglaj de frecven sau de faz care arat poziia spectrului semnalului.
Sistemul de urmrire menine frecvena la ieirea mixerului (MIX) constant i egal cu frecvena principal de acord a filtrului de band ngust (FBI).
La variaia frecvenei semnalului de intrare n discriminatorul de frecven (DSF) se prelucreaz semnalul de dezacord. n funcie de acest semnal dispozitivul de comand (DC) modific frecvena heterodinei de comand (HC) meninnd constant valoarea frecvenei semnalului la ieirea mixerului.
Fig.9.58 Dispozitiv de msurare prin urmrire
Dac se alege frecvena nominal a heterodinei (pentru fD=0) egal cu frecvena principal de acord a filtrului antenei, variaia
DER MIX FBI DSF
DC IV HC DM
-
371
frecvenei heterodinei de comand va corespunde cu frecvena Doppler.
Dispozitivul este prevzut cu regimuri de cutare i recepie a semnalului ct i memorarea valorii msurate a frecvenei n pauzele dintre impulsuri.
La lochurile cu multe raze (fascicule) Doppler se fac msurri pentru fiecare raz separat, iar numrul de canale a dispozitivului de msurare are n vedere tendina de simplificare a lochului i n acelai timp creterea proteciei contra paraziilor.
Important de reinut c filtrele de urmrire, care au stabilitate contra paraziilor au i erori dinamice la msurarea mrimilor care sunt variabile n timp.
9.4.3.1.4 Dispozitivul de calcul
Dispozitivul de calcul stabilete relaia dintre valorile msurate ale frecvenei Doppler i componentele calculate ale vectorului vitez a navei, determin media informaiei, calculeaz coreciile corespunztoare i determin distana parcurs. n unele lochuri, pe baza componentelor longitudinale i transversale ale vectorului vitez, se calculeaz unghiul de deriv al navei, de asemeni se indic adncimea sub chil obinut dup distana nclinat pn la fundul apei.
La lochurile moderne funciile dispozitivului de calcul sunt ndeplinite de microprocesoare la care sosesc semnalele de frecven Doppler i alte informaii necesare.
-
372
9.4.3.1.5 Blocul de corecie
Este destinat pentru micorarea erorilor din indicaiile lochului, erori generate de factori constani sau variabili, ce acioneaz asupra procesului de msurare.
Practic la toate lochurile sunt prevzute corecii ale erorilor sistematice dependente de variaia vitezei sunetului n ap i compensarea influenei balansului navei cu ajutorul emisiei n sistem Janus. Erorile sistematice sunt evideniate n timpul experimentrilor i sunt analizate separat pentru componentele longitudinal i transversal ale vectorului vitez.
n funcie de componenta longitudinal se introduce un coeficient de scar numit coeficientul lochului. Valoarea sa nominal este 1, iar valorile posibile pe care le poate lua sunt n domeniul 0,991,01.
Corecia componentei transversale care ia n considerare deosebirea orientrii reale a razei (fascicolului) n comparaie cu orientarea considerat n calcule, se asigur cu ajutorul coeficientului numit unghi de orientare a antenei acustice. Acest coeficient este introdus de ctre operator cu un comutator special.
Corectarea automat a erorilor datorate variaiei vitezei ultrasunetelor n apa de mare
n relaia (9.173) fe i cos sunt constante, pe cnd viteza sunetelor n apa de mare depinde de temperatura apei t i de salinitate , fiind calculat cu formula empiric (determinat experimental):
-
373
c=1410 + 4,21t - 0,037t2 + 1,14 + 0,0175h
unde: c viteza ultrasunetelor n apa de mare [m/s]; t temperatura apei, [0C]; - salinitatea apei, [o/oo]; h adncimea.
Avnd n vedere c influena salinitii este mic i poate fi neglijat, iar adncimea de instalare a traductorului este fix, este nevoie s se corecteze influena modificrii temperaturii apei care introduce cea mai mare modificare a vitezei c a ultrasunetelor. Pentru aceasta la traductor se instaleaz un termistor a crui rezisten se modific odat cu temperatura, variaie a rezistenei care se introduce la un calculator din compunerea schemei de msur i care introduce automat corecia n msurarea vitezei navei.
Pentru obinerea unei bune directiviti la propagarea ultrasunetelor suprafaa de emisie a traductorului trebuie s aib o anumit mrime care la traductoarele piezoelectrice se obine prin utilizarea mai multor emitoare elementare.
Avnd n vedere c emisia nu se face pe vertical ci sub unghiul =600 este necesar o corecie suplimentar a vitezei ultrasunetelor, corecie care se introduce automat utiliznd principiul prezentat n (fig.9.59).
Pentru simplificare s-au considerat doar patru elemente ale traductorului care sunt alimentate cu tensiuni defazate cu respectiv 00, 1200, 2400, 3600, astfel nct frontul de und s fie
-
374
perpendicular pe direcia de propagare, linia AB, ceea ce face ca undele pe aceast linie s fie n faz.
Avnd n vedere defazajul dintre primul i ultimul element distana AC va fi egal cu lungimea de und , din triunghiul ABC rezult:
a
=cos (9.198)
unde: a distana dintre primul i ultimul element al traductorului;
iar: ef
c=
, nlocuind n relaia (11.45) rezult:
eafc
=cos i eafc =cos (9.199)
1200
a
3600 2400 00
B
A
-
375
Fig.9.59 Configuraia elementelor traductorului
Deoarece fe i a sunt constante, de asemeni raportul c/cos este constant, se poate substitui n relaia (9.173) i se obine:
( ) ( )PpPp DDDD
e
e ffkfffaf
v ==PrPr4 (9.200)
unde: 4ak =
La lochurile cu antene nedependente de frecven, dispozitivele de corecie lipsesc deoarece indicaiile lochului nu depind de viteza sunetului.
La lochurile la care este necesar introducerea coreciilor datorate modificrii vitezei sunetului, viteza sunetului se poate msura indirect sau direct i apoi funcie de aceasta se introduce automat corecia necesar.
La msurarea indirect a vitezei sunetului se iau n calcul rezultatele msurrii temperaturii iar n unele cazuri i salinitatea apei de mare.
S-a constatat experimental c precizia lochului Doppler este influenat de modificarea vitezei sunetului numai n stratul de ap n care se afl antena.
n acest scop este introdus n schema lochului un traductor de temperatur termistor plasat n corpul antenei. Datele de la ieirea termistorului sunt prelucrate automat n dispozitivul de calcul, iar datele despre salinitate vor fi introduse manual.
-
376
La msurarea direct a vitezei sunetului n stratul de ap de la nivelul antenei se folosesc aparate speciale numite vitezometre ciclice. De regul aceste aparate reprezint un inel acustic de sincronizare, nchis prin ap, format din dou traductoare acustice, un amplificator i un generator de impulsuri, care intr n funciune la apariia semnalului la ieirea amplificatorului. Frecvena de repetiie a impulsurilor ntr-un astfel de inel este proporional cu viteza sunetului n ap.
Influena variaiei vitezei sunetului, n acest caz, este compensat prin variaia corespunztoare a frecvenei de emisie a lochului care i menine constant astfel lungimea de und a oscilaiei.
De exemplu la lochul TSM realizat de firma francez Thomson viteza sunetului n stratul de ap din imediata vecintate a traductorului este meninut constant prin meninerea constant a temperaturii traductorului. n acest scop partea inferioar a blocului acustic care conine traductorul este umplut cu ulei i este dotat cu un sistem de stabilizare termic.
Un factor important care influeneaz funcionarea lochului este balansul navei. Micarea de balans duce la pierderea contactului acustic cu fundul mrii i la apariia de erori suplimentare n msurarea vitezei navei chiar i n prezena contactului. Unele componente ale acestor erori sunt compensate prin orientarea tip Janus a razelor acustice.
Pentru asigurarea contactului acustic cu fundul mrii n condiii de balans ale navei, sunt folosite metode cum ar fi:
- lrgirea caracteristicii de directivitate n planul ruliului;
-
377
- razele antenei s aib o configuraie n conformitate cu schema Crucea lui Miels (n X);
- formarea unei caracteristici de directivitate nguste la emisie i mult mai largi la recepie.
9.4.3.2 Construcia lochului radio-Doppler
Schema structural a lochului radiodoppler (fig.9.60) cuprinde: antena de emisie recepie (AER), dispozitivul de emisie-recepie (DER), dispozitivul pentru msurarea frecvenei Doppler (DMF), dispozitivul de calcul (DC) indicatorul de vitez i distan parcurs(IVDP).
Fig. 9.60. Schema bloc a lochului radio-Doppler
der.
AER DER DMF DC IVDP
Pv vx Pp
v vy
Ali abonai
-
378
Antena de emisie-recepie emite i recepioneaz oscilaiile electromagnetice reflectate de suprafaa mrii. Oscilaiile recepionate sosesc n receptor mpreun cu oscilaiile de la emitor (oscilatorul pilot). Oscilaiile de frecven doppler se aplic sub forma unor mrimi analogice sau sub forma unor impulsuri la dispozitivul de calcul, care rezolv expresiile de la paragraful anterior. Semnalele de ieire ale dispozitivului de calcul proporionale cu vectorul vitezei i unghiul de deriv der se transmit la indicator i la abonaii exteriori.
9.4.3.2.1 Antena de emisie-recepie
Lochurile radiodoppler au ca particularitate dispunerea antenei la nlime mic fa de suprafaa de reflexie, ceea ce face s fie exclus posibilitatea emisiei n impulsuri datorit timpului scurt de propagare a semnalului pn la suprafa i napoi. Pe de alt parte nlimea mic nu permite folosirea n emisie continu a antenelor separate de emisie i recepie, deoarece nu permite acoperirea de ctre ecou a antenei de recepie. Din aceste motive lochurile radiodoppler funcioneaz de regul n regim continuu i au antenele suprapuse, de emisie i recepie. Se folosesc dou tipuri de antene: parabolice cu oglind i plane cu ghid de und cu fante. Antenele cu oglind reprezint o oglind parabolic cu dispunerea n punctul de focalizare a emitorului, ele sunt relativ simple constructiv i permit s se dispun fasciculele (razele) diferit n spaiu.
-
379
Ca dezavantaje amintim adncimea antenei i necesitatea finisrii elementelor sale, de asemeni la emisie lungimea de und variaz ceea ce duce la variaia frecvenei Doppler i deci erori n msurare.
Antenele cu ghid de und cu fante, reprezint o combinaie ntre ghidurile simetrice i cu fante nalte, permit formarea a ctorva spoturi i nu necesit finisarea elementelor antenei. Orientarea spoturilor la aceste antene depinde de lungimea de und a emitorului. n acest caz antena poate fi construit astfel nct, legea de nclinare a direciei spoturilor la modificarea n anumite limite a lungimii de und, asigur independena variaiei Doppler a frecvenei fa de aceste modificri. Asemenea antene se numesc independente de frecven i sunt cele mai folosite deoarece asigur o precizie mare n msurare.
9.4.3.2.2 Dispozitivul de emisie-recepie
n calitate de surs pentru oscilaiile de foarte nalt frecven se folosesc klistroane sau generatoare de impulsuri cu semiconductoare. Pentru separarea canalelor de emisie i recepie se folosesc circuite filtre de tip Y care permit trecerea simultan a ecoului i a semnalului direct atenuat la convertorul receptorului. La lochurile radiodoppler se folosesc receptoare superheterodin de dou tipuri: cu transformarea direct a frecvenelor semnalelor recepionate n frecven Doppler
-
380
(receptor cu frecven intermediar nul) i cu transformare dubl a frecvenei (superheterodin).
Emitor-receptor cu frecven intermediar nul La emitorul cu frecven intermediar nul (fig.9.61)
oscilaiile reflectate recepionate de anten (AER) prin circuitul distribuitor (CD) se aplic la convertor (Cv). n calitate de tensiune de heterodin se folosete semnalul direct atenuat dat de oscilatorul pilot (OP).
Fig. 9.61 Schema emitor-receptorului cu frecven intermediar nul
AER CD
Cv A
OP
DMF
DER
f0 f0
f0 fD
f0 fD
2 S(f)
f 0
1
0
f0 f0 fD
2
f
-
381
Fig. 9.62 Poziionarea spectrelor de frecven joas i zgomotelor; 1-zgomote, 2-spectrul
Dezavantajul unei asemenea scheme este c dup heterodinare spectrul Doppler (2) (fig.9.62) se deplaseaz n zona frecvenelor joase, unde nivelul zgomotelor este mare ceea ce duce la erori de msurare.
Emitor-receptor cu dubl schimbare de frecven
La receptoarele cu dubl schimbare de













![Ziua Mondiala a Radioamatorilor[18 aprilie 2011] part 3](https://static.fdocumente.com/doc/165x107/568bdd091a28ab2034b461a0/ziua-mondiala-a-radioamatorilor18-aprilie-2011-part-3.jpg)