Cinematic A Miscarii Relative

of 18
-
Upload
birisan-florin -
Category
Documents
-
view
533 -
download
1
Transcript of Cinematic A Miscarii Relative
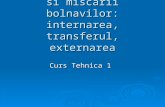
9. Cinematica micrii relative 61 9. CINEMATICA MICRII RELATIVE 9.1. Cinematica micrii relative a punctului 9.1.1. Generaliti npracticsentlnescsituaiicnduncorp,asimilabilcuunpunct material, se afl n micare fa de un sistem de referin care, la rndul lui, este mobil n raport cu un sistem de referin fix. O astfel de micare a punctului se numetemicarerelativ.nacestcazsecerafideterminaiparametrii cinematici ce caracterizeaz micarea punctului fa dereperul fix, atunci cnd secunoscparametriicinematicicecaracterizeazmicareapunctuluinraport cureperulmobiliparametricinematicicecaracterizeazmicareareperului mobil n raport cu cel fix. Se impune definirea urmtoarelor noiuni importante :a) Micareaabsolutestemicareapunctuluimaterialfadereperulfix. Traiectoria,vitezaiacceleraiapunctuluinaceastmicaresenumesc corespunztor absolute. b) Micarearelativestemicareapunctuluinraportcureperulmobil. Traiectoria,vitezaiacceleraiapunctuluinaceastmicaresenumesc corespunztor relative. c) Micarea de transport este micarea n raport cu reperul fix a unui punct solidar cu reperul mobil care n momentul considerat coincide cu punctul a crui micaresestudiaz.Traiectoria,vitezaiacceleraianaceastmicarese numesccorespunztordetransport.Totmicaredetransportsenumetei micarea reperului mobil fa de cel fix. 9.1.2. Problema traiectoriilor Seconsidernfigura3.1unpunctmaterialMaflatnmicarerelativ fa de reperul Oxyz i n micare absolut faa de reperul fix 1 1 1 1z y x O .Presupunndcunoscuteecuaiilemicriirelativeapunctului(ecuaiile parametrice ale traiectoriei relative a punctului): ( )( )( )===t z zt y yt x x(9.1) i ecuaiile de micare ale reperului mobil fa de cel fix: ( ) ( ) ( )( ) ( ) ( )= = = == = =1,2,3, i ; t ; t ; t t z z ; t y y ; t x xi i i i i i10 10 10 10 10 10 (9.2) Cinematica 62 se cere determinarea ecuaiilor parametrice ale traiectoriei punctului n raport cu reperul fix: ( )( )( )===t z zt y yt x x1 11 11 1 (9.3) Fig. 9.1 Este evident relaia vectorial
r r r10 1+ = (9.4) Proiectnd(9.4)peaxelereperuluifix,inndseamadetabloul cosinusurilor directoare,
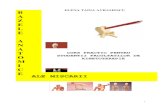
iOx jOy kOz 11 1ix O 1 2 311 1jy O 1 2 311 1kz O 1 2 3 1r ( )1 1 1 , , ( )2 2 2 , , y1x1y x 1OO 0a0vrt ra a +taz aa ra caaCrC( )tCtv( )3 3 3 , , 1zavrvM10r9. Cinematica micrii relative 63 obinemecuaiilemicriiabsoluteapunctuluisauecuaiileparametriceale traiectoriei absolute a punctului: + + + =+ + + =+ + + =z z z z zy y y y yz y x x x3 2 1 10 13 2 1 10 13 2 1 10 1 (9.5) Expresiile (9.5) pentru x =const ,y= const , z= const, devin ecuaiile parametricealetraiectorieidetransportalepunctuluilamomentult(cndse ating aceste coordonate). 9.1.3. Derivata absolut (total) i relativ (local) a unui vector Seconsidernfigura9.2unvectorvariabilu avndproieciile , u , u , uz y x pe axele reperului mobil Oxyz. Cunoscndvitezaunghiulardetransportseceredeterminarea derivatei n raport cu timpul a vectoruluiu . Se poate scrie: k u j u i u uz y x+ + =(9.6) de unde prin derivare obinem:
=dtu d( ) ( ) k u j u i u k u j u i uz y x z y x& & && & & + + + + +(9.7) Fig. 3.2 )`z y x z y xu , u , uu , u , uu1 1 1 Oijk yzx1y1x1z1i1j1kCinematica 64 Primulmembrualacesteiegalitireprezintderivatatotalsau absolut a vectoruluiui se noteaz cu dtu d sauu&. Termenicefigureaznprimaparantezdinmembrulaldoileaal egalitii(9.7),reprezintderivatavectoruluiu presupunndversoriik , j , iconstani. Aceast derivat se numete derivata local sau relativ a vectorului imsoarvitezadevariaieaacestuianregistratdeunobservatorsolidarcu reperul mobil. Derivata local se noteaz tusau k u j u i utuu~z y x& & &&+ + ==(9.8) Lund in considerare formulele lui Poisson: i i =&;j j =&;k k = &; (9.9) cea de a doua parantez devine:
( ) u k u j u i u k u j u i u k u j u i uz y x z y x z y x = + + = + + = + +& & & (9.10) Lundnconsiderare(9.8)i(9.10)expresiaderivateiabsoluteaunui vector, definit n reperul mobil, este u tudtu d +=(9.11) Observaie: pentru u = rezult:
tdt d=(9.12) adicderivata absolut a vectorului este egal cu derivata sa relativ. 9.1.4. Compunerea vitezelor n micarea relativ Se presupun cunoscute: - legea de variaie a vectorului poziie( ) t r r =al punctului M in reperul mobil; - viteza 0vaorigini reperului mobil; - viteza unghiulara instantanee a reperului mobil. Se cere determinarea vitezei absolute a punctului M. 9. Cinematica micrii relative 65 Dacasederiveazrelaia(9.4)nraportcutimpuliseineseamac vectorulk z j y i x r + + = estedefinitprinproieciilesalepeaxeletriedrului mobil, se obine r trr r10 1 ++ = & &(9.13) n (9.13): a 1v r =& este vectorul vitez absolut a punctului rv k z j y i xtr= + + =& & &este viteza relativ a punctului. r v r r0 10 + = +&reprezintvitezaunuipunctsolidarcutriedrulmobil, avnd vectorul de poziier , deci este viteza de transport a punctului. Relaia (9.13) devine: t r av v v + =(9.14) unde: k z j y i xtrvr& & & + + == ;r v v0 t + =(9.15) Formula(9.15)exprimalegeadecompunereavitezelornmicarea relativa a punctului conform creia: viteza absolut a unui punct este egal cu suma vectorialdintre viteza relativ si viteza de transport a punctului. 9.1.5. Compunerea acceleraiilor n micarea relativ a punctului Se presupun cunoscute: -legeadevariaieavectoruluidepoziie( ) t r r = alpunctuluiMnreperul mobil; - acceleraia 0aa origini reperului mobil; - viteza unghiular si acceleraia unghiularale reperului mobil fa de cel fix. Se determin acceleraia absolut a punctului. Pentru aceasta se deriveaz relaia (9.13) n raport cu timpul: ||
\| + + + ++ = r tr r trtrr r2210 1& & & & & (9.16) n relaia (9.16): a 1a r =& & este acceleraia absolut a punctului; 0 10a r =& & este acceleraia originii reperului mobil; Cinematica 66 k z j y i x atrr22& & & & & & + + = = este acceleraia relativa a punctului; =& este acceleraia unghiular a reperului mobil fa de cel fix. Astfel relaia (9.16) devine: ( ) [ ]r 0 r av 2 r r a a a + + + + =(9.17) Termenul din paranteza dreapt reprezint acceleraia unui punct solidar cutriedrulmobil,avndvectoruldepoziier .Aceastacceleraieestedeci acceleraia de transport a punctului M i se noteaz ta . Termenul rv 2tr 2 = senumeteacceleraiecomplementarsau acceleraia lui Coriolis i se noteaz ca . Cu aceste precizri relaia (9.17) devine:
c t r aa a a a + + =(9.18) iexprimlegeacompuneriiacceleraiilornmicarearelativconformcreiaacceleraiaabsolutaunuipunctesteegalcusumavectorialdintre acceleraia relativ, acceleraia de transport i acceleraia lui Coriolis . n (9.18): ( ) = = + + =+ + ==r c0 t22rv 2tr 2 ar r a ak z j y i xtra & & & & & &(.19) Observaii: a)Acceleraia lui Coriolis este nul dac: 0 vr = , caz banal; 0 = , reperul mobil execut o micare de translaie fat de reperul fix; vr = , adic viteza relativ este paralel cu vectorul. De exemplu cazul unui punct ce se deplaseaz pe generatoarea unui cilindru aflat n micare de rotaie n jurul axei sale (fig. 9.3)
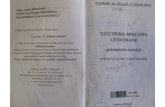
9. Cinematica micrii relative 67 Fig. 9.3 b)n cazul micri relative plane (punctul M se mic ntr-un plan mobil pe un alt plan fix) valoarea acceleraiei lui Coriolis este: 2v ar c = , (9.20) iar direcia i sensul vectorului acceleraie complementar se obin rotind vectorulrvcu o90n sensul dat de viteza unghiular de transport. c)Dac0 a , 0 vr r= = punctulseaflnrepausrelativfaadereperul mobil Oxyz. rv Cinematica 68 9.2. Cinematica micrii relative a rigidului 9.2.1. Studiul geometric Fig. 9.4 nfigura9.4seconsiderunrigid(C)aflatnmicareabsolutfade reperul fix 0 0 0 0z y x O(triedrul 0T ) i n micare relativ fa de reperul mobil 1 1 1 1z y x O (triedrul 1T ),desolidulrigidfiindataatsistemulpropriu 2 2 2 2z y x O . Se cunoate situarea (poziia i orientarea) triedrului 1Tfa de 0Tprin coordonatele absolute:10 10 10z , y , xale originii 1On triedrul 0Ti cosinusurile directoare:' ' ' , ' ' ' , ' ' ' , ' ' , ' ' , ' ' , ' , ' , '10 10 10 10 10 10 10 10 10 aleaxelor triedrului 1Tfa de 0T , precum i situarea triedrului 2T , solidar cu rigidul, fa detriedrul 1T ,princoordonatelerelative: 21 21 21z , y , x aleoriginii 2O i cosinusuriledirectoarealeaxelortriedrului 2T fade 1T : ' ' ' , ' ' ' , ' ' ' , ' ' , ' ' , ' ' , ' , ' , '21 21 21 21 21 21 21 21 21 . Seceredeterminareasituriitriedrului 2T fadetriedrul 0T prin coordonateleabsolute 20 20 20z , y , x aleoriginii 2O saucoordonateleabsolute 0 0 0z , y , x aleunuipunctPalrigiduluiicosinusuriledirectoareabsolute ' ' ' , ' ' ' , ' ' ' , ' ' , ' ' , ' ' , ' , ' , '20 20 20 20 20 20 20 20 20 aleaxelorreperului 2 2 2 2z y x O n triedrul fix 0T . Se pot alctui urmtoarele dou tablouri ale cosinusurilor directoare:
2z P2T 2y
2O 2x2r 1z 1T
1x
1y 1O0r1r(C) 10r
0z 0T
0O
0y
0x9. Cinematica micrii relative 69 1i1j1k
2i2j2k0i'10 ' '10 ' ' '10 1i'21 ' '21 ' ' '21 0j'10 ' '10 ' ' '10 1j'21 ' '21 ' ' '21 0k'10 ' '10 ' ' '10 1k'21 ' '21 ' ' '21 FieunpunctPaparinndcorpului.ntrecoordonatelepunctuluiPn raportcu 0T i 1T irespectivnraportcu 1T i 2T sepotscrierelaiile matriceale :
(((((
1zyx000=(((((
1 0 0 0z ' ' ' ' ' 'y ' ' ' ' ' 'x ' ' ' ' ' '10 10 10 1010 10 10 1010 10 10 10.(((((
1zyx111; (9.21) (((((
1zyx111=(((((
1 0 0 0z ' ' ' ' ' 'y ' ' ' ' ' 'x ' ' ' ' ' '21 21 21 2121 21 21 2121 21 21 21.(((((
1zyx222;(9.22) sau
((((
000zyx=((((
101010zyx+((((
' ' ' ' ' '' ' ' ' ' '' ' ' ' ' '10 10 1010 10 1010 10 10.((((
111zyx; (9.23)
((((
111zyx=((((
212121zyx+((((
' ' ' ' ' '' ' ' ' ' '' ' ' ' ' '21 21 2121 21 2121 21 21.((((
222zyx (9.24) nlocuind (9.22) n (9.21) respectiv (9.24) n (9.23) obinem : Cinematica 70
(((((
1zyx000=(((((
1 0 0 0z ' ' ' ' ' 'y ' ' ' ' ' 'x ' ' ' ' ' '10 10 10 1010 10 10 1010 10 10 10.(((((
1 0 0 0z ' ' ' ' ' 'y ' ' ' ' ' 'x ' ' ' ' ' '21 21 21 2121 21 21 2121 21 21 21.(((((
1zyx222(9.25) sau
((((
000zyx=((((
101010zyx+((((
' ' ' ' ' '' ' ' ' ' '' ' ' ' ' '10 10 1010 10 1010 10 10.((((
111zyx+ + ((((
' ' ' ' ' '' ' ' ' ' '' ' ' ' ' '10 10 1010 10 1010 10 10.((((
' ' ' ' ' '' ' ' ' ' '' ' ' ' ' '21 21 2121 21 2121 21 21.((((
222zyx (9.26)
Relaiile (9.25) i (9.26) permit determinarea coordonatelor absolute ale oricruipunctPaparinndrigidului.Impunndn(9.25)sau(9.26) 2x =0, 2y =0, 2z =0 se obin coordonatele absolute ale originii reperului 2Tn reperul fix 0T:
(((((
1zyx202020=(((((
1 0 0 0z ' ' ' ' ' 'y ' ' ' ' ' 'x ' ' ' ' ' '10 10 10 1010 10 10 1010 10 10 10(((((
1zyx212121 (9.27) sau
((((
202020zyx=((((
101010zyx+((((
' ' ' ' ' '' ' ' ' ' '' ' ' ' ' '10 10 1010 10 1010 10 10((((
212121zyx(9.28) Relaiile (9.25) i (9.26) pot fi scrise i simbolic: {}20P = [ ]10T.[ ]21T. {}22P(9.29) (41)(44)(44) (41)
9. Cinematica micrii relative 71 {}20P = { }10O + [ ]10R.[ ]21O +[ ]10R.[ ]21R.{}22P(9.30)31)(31)(31) (31) (33) (33) (31) Matricele[T](44)senumescmatricedetransformaresaudetrecere iar matricele [R](33) se numesc matrice de rotaie sau matricele cosinusurilor directoare . Lund n considerare (9.28) relaia (9.26) devine :
((((
000zyx=((((
202020zyx+((((
' ' ' ' ' '' ' ' ' ' '' ' ' ' ' '10 10 1010 10 1010 10 10.((((
' ' ' ' ' '' ' ' ' ' '' ' ' ' ' '21 21 2121 21 2121 21 21.((((
222zyx(9.31) Pe de alta parte putem scrie : ((((
000zyx=((((
202020zyx+((((
' ' ' ' ' '' ' ' ' ' '' ' ' ' ' '20 20 2020 20 2020 20 20.((((
222zyx (9.32) Din compararea relaiilor (9.32) i (9.31) rezult orientarea reperului 2Tfa de 0T : ((((
' ' ' ' ' '' ' ' ' ' '' ' ' ' ' '20 20 2020 20 2020 20 20=((((
' ' ' ' ' '' ' ' ' ' '' ' ' ' ' '10 10 1010 10 1010 10 10.((((
' ' ' ' ' '' ' ' ' ' '' ' ' ' ' '21 21 2121 21 2121 21 21(9.33) sau restrns [ ]20R = [ ]10R . [ ]21R (9.34) Putemuorgeneralizancazulanreperemobile,reperulnfiind solidarcurigidul.Coordonateleabsolute 0 0 0z , y , x alepunctuluiPntriedrul 0Tn funcie decoordonatele n n nz , y , xale aceluiai punct in triedrul nT sunt date de relaia: (((((
1zyx000== ((((((
n1 i 1 i , i 1 i , i 1 i , i 1 i , i1 i , i 1 i , i 1 i , i 1 i , i1 i , i 1 i , i 1 i , i 1 i , i1 0 0 0z ' ' ' ' ' 'y ' ' ' ' ' 'x ' ' ' ' ' '.(((((
1zyxnnn, (9.35) Cinematica 72 Putemobinecoordonateleabsolutealeoriginiitriedrului nT iorientarea triedrului nT fa de 0T :
(((((
1zyx0 n0 n0 n== ((((((
1 n1 i 1 i , i 1 i , i 1 i , i 1 i , i1 i , i 1 i , i 1 i , i 1 i , i1 i , i 1 i , i 1 i , i 1 i , i1 0 0 0z ' ' ' ' ' 'y ' ' ' ' ' 'x ' ' ' ' ' '.(((((
1zyx1 n1 n1 n (9.36) ((((
' ' ' ' ' '' ' ' ' ' '' ' ' ' ' '0 n 0 n 0 n0 n 0 n 0 n0 n 0 n 0 n==n1 i ((((
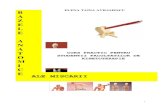
1 i , i 1 i , i 1 i , i1 i , i 1 i , i 1 i , i1 i , i 1 i , i 1 i , i' ' ' ' ' '' ' ' ' ' '' ' ' ' ' ' (9.37) Relaiile (9.35), (9.36) i (9.37) se pot scrie i sub form simbolic : {}n0P = [ ]=n1 ii1 iT . {}nnP = [ ]n0T . {}nnP(9.38) { }n0O = [ ]=1 n1 ii1 iT . { }n1 nO= [ ]1 n0T. { }n1 nO(9.39) [ ]n0R = [ ]=n1 ii1 iR(9.40) n relaiile de mai sus semnificaiile notaiilor sunt urmtoarele: 0 0 0z , y , x -coordonateleabsolutealepunctuluiPnreperulfix 0 0 0 0z y x O ; n n nz , y , x -coordonatelepunctuluiPnreperul n n n nz y x O ,legatderigid; 0 n 0 n 0 nz , y , x -coordonateleabsolutealeoriginii nO areperului n n n nz y x O ; 1 i , i 1 i , i 1 i , iz , y , x -coordonatelerelativealeoriginii iO areperului i i i iz y x On reperul precedent 1 i 1 i 1 i 1 iz y x O ; ' ' ' ,...,0 n 0 n -cosinusurile directoare ale axelor reperului n n n nz y x On reperul fix0 0 0 0z y x O ; 1 i , i 1 i , i' ' ' ,..., -cosinusuriledirectoarealeaxelorreperului i i i iz y x O n reperul precedent 1 i 1 i 1 i 1 iz y x O . 9. Cinematica micrii relative 73 9.2.2. Compunerea vitezelor n micarea relativ a rigidului Fig. 9.7 n figura 9.7 este reprezentat rigidul (C), solidar cu triedrul 2 2 2 2z y x O , aflatnmicarefadetriedrulmobil 1 1 1 1z y x O ifadetriedrulfix 0 0 0 0z y x O . Se presupun cunoscui urmtorii parametrii cinematici: 10v- viteza originii triedrului (1T ) fa de triedrul (0T ) ; 10- viteza unghiular n micarea triedrului (1T ) fa de (0T ); 21v- viteza relativ a originii 2Oa triedrului 2T , fa de triedrul 1T; 21 -vitezaunghiularnmicarearelativacorpuluisolidarcutriedrul 2Tfa de triedrul 1T . Seceredeterminareavitezeiabsolute Pv aunuipunctPoarecareal corpului fa de triedrulfix (0T ) i vitezei unghiulareabsolute 20arigidului (triedrului 2T ) fa de sistemul fix (0T ) . Pentrudeterminareavitezeiabsolute Pv apunctuluiPvomfolosi rezultateleobinutelacompunereavitezelornmicarearelativapunctului. Astfel, se poate considera c punctul P se mic odat cu rigidul fa de triedrul 1T , care se mic la rndul su fa de (0T ).
2z P2T
21v2y 21 2O Q
2x2r
0z 0T
0O
0y
0x 1z 1T
10
1x
10v 2y1O0r1rQvPv(C) P P O1 P O2 PQ 2O Q O2 1O Q O1Q Cinematica 74 RezultcvitezarelativapunctuluiPfade(1T )estevitezaunui punct solidar cu (2T ) fa de (1T ):
2 21 21 rr v v + =(9.41) Viteza de transport a punctului P va fi viteza fa de (0T ) a unuipunct solidar cu (1T ) care n momentul considerat coincide cu P: 1 10 10 tr v v + =(9.42) Viteza absolut a punctului P va fi : 2 21 1 10 21 10 t r Pr r v v v v v + + + = + = (9.43) sau : Pv ==21 i1 i . iv += 21 ii 1 i , ir(9.44) Relaia(9.44)poatefiuorgeneralizatncazulexisteneimaimultor micri de transport (n sisteme de referin mobile):
Pv ==n1 i1 i , iv += n1 ii 1 i , ir(9.45) unde : 1 i . iv - este viteza relativ originii triedrului (iT ) fa de triedrul (1 iT ); 1 i , i - este viteza unghiular relativ n micarea triedrului (iT ) fa de (1 iT ); ir- este vectorul de poziie al punctului P n raport cu originea iOa triedrului (iT ). Pentrudeterminareavitezeiunghiulareabsolute 20 arigidului(2T ) fa de sistemul fix (0T ) se utilizeaz relaia (9.43) pentru dou puncte distincte P i Q:
Pv = P O P O v v2 21 1 10 21 10 + + + (9.46)
Qv = Q O Q O v v2 21 1 10 21 10 + + +(9.47) Sczndu-le obinem : ) P O Q O ( ) P O Q O ( v v2 2 21 1 1 10 P Q + + = (9.48) 9. Cinematica micrii relative 75 Deoarece, Q O1- P O1= Q O2- P O2=PQ, rezult: PQ ) ( v v21 10 P Q + + =(9.49) Pe de alt parte, de la cinematica rigidului se tie c ntre vitezele a dou puncte ale aceluiai rigid aflat n micare general, cu viteza unghiular absolut 20 , exist relaia: PQ v v20 P Q + =(9.50) Din compararea relaiilor (9.49) i (9.50) obinem legea de compunere a vitezelor unghiuare n micarea relativ a rigidului cu dou sisteme de referin mobile : 21 10 20 + = (9.51) Putem uor generaliza n cazul a n sisteme de referin mobile: = = n1 i1 i , i 0 n(9.52) Relaia (9.52) exprim faptul c viteza unghiular absolut este egal cu sumavectorialavitezelorunghiularerelativecorespunztoaremicrilor componente. Relaiile (9.45) i (9.52)rezolv complet problema distribuiei vitezelor pentruunrigidnmicarerelativ:suntdeterminatevitezaunuipunctal rigidului i viteza unghiular absolut. Scriem relaiile (9.52) i (9.45) sub forma: = = n1 i1 i , i 0 n; Pv ==n1 i1 i , iv += n1 i1 i , iiPO (9.53) ilecomparmcurelaiiledinstaticcedauvectorulrezultantimomentul rezultant : R ==n1 iiF ; PM ==n1 iiM +=n1 ii iF PO (9.54) Se precizeaz c forele iFs-au considerat aplicate n punctele iOiar reducerea sistemuluis-afcutnpunctulP.Seobservoanalogieperfectntrerelaiile Cinematica 76 cinematiceicelestatice,numitanalogiecinematico-static.nacesterelaii vectorulvitezunghiular 1 i , i esteanalogvectoruluifor iF ,vectorul 1 i , iveste analog vectorului cuplu iM , vectorul vitez unghiular absolut noesteanalogvectoruluirezultantR ivectorulvitezabsolut Pv esteanalog vectorului rezultant PMn raport cu punctul P. Relaia care leag vitezele a dou puncte ale rigidului 0 n P QQP v v + = (9.55) este analoag formulei din static ce stabilete variaia momentului rezultant la schimbarea polului de reducere: R QP M MP Q + =(9.56 ) Decideterminareavectorilor 0 n i Pv sefacereducndvectorii alunectori 1 i , i i vectorii liberi 1 i , iv n punctul P. 9.2.3. Compunerea acceleraiilor n micarea relativ a rigidului Fig. 9.8 0z
0T
0O0y 0x
1z
10
101T 1O 1x10a 10v 1y
2z P Pa
21 2r2121v 2y
2O 21a Q 2T
Qa 2x(C) 0r1r10r9. Cinematica micrii relative 77 Sepresupuncunoscutemicrilerelativealetriedrelorfadecele precedente prin parametrii cinematici de ordinul 1 i 2: -; , ; v , v21 10 21 10 - 10a- acceleraia originii 1Oa triedrului (1T ) fa de (0T ); - 10- acceleraia unghiular n micarea triedrului (1T ) fa de (0T ); - 21a- acceleraia relativ a originii triedrului (2T ) fa de (1T ); - 21- acceleraia unghiular relativ a triedrului (2T ) fa de (1T ); Se cere determinarea acceleraiei absolute Paa unui punct P aparinnd corpuluiiaacceleraieiunghiulareabsolute 20 atriedrului(2T )nmicarea fa de triedrul fix (0T ). AcceleraiaabsolutaapunctuluiP,avndvectoruldepoziie 1r fade 1O i 2r fade 2O sepoatedeterminapebazalegiidecompunerea acceleraiilor i micarea relativ a punctului material : c t r Pa a a a + + =(9.57) Acceleraia relativ a punctului P provine din micarea general relativ a rigidului (2T ) n raport cu (1T ): ) r ( r a a2 21 21 2 21 21 r + + =(9.58) AcceleraiadetransportapunctuluiPprovinedinmicareagenerala rigidului considerat legat de (1T ) faa de (0T ): ) r ( r a a1 10 10 1 10 10 t + + =(9.59) Acceleraia lui Coriolis a punctului P se va determina pe baza relaiei: ) r v ( 2 v 2 a2 21 21 10 r t c + = =(9.60) Lund n considerare relaiile (3.56) (3.58) rezult: ) r v ( 2) r ( ) r ( r r a a a2 21 21 102 21 21 1 10 10 2 21 1 10 21 10 P + ++ + + + + + =(9.61)
Relaia(9.61)sepoateuorgeneralizapentrunsistemedereferin mobile: Cinematica 78
) r v ( 2) r ( r a ai 1 i , i 1 i , in2 i1 i1 j1 j , ji 1 i , in1 i1 i , i in1 i1 i , in1 i1 i , i P + ++ + + = ===== (9.62) Pentru n=3 avem: )] r v ( ) ( ) r v ( [ 2) r ( ) r ( ) r (r r r a a a a3 32 32 21 10 2 21 21 103 32 32 2 21 21 1 10 103 32 2 21 1 10 32 21 10 P + + + + ++ + + ++ + + + + + =(9.63) Pentru determinarea acceleraiei unghiulare absolute n cazul a 2 sisteme dereferinmobileceamaisimplcaleestedeaderivanraportcutimpul viteza unghiular absolut 20 : 20 =20&=dtd(21 10 + ) = 10&+t21 +10 21 = 21 10 21 10 + + (9.64) n cazul existenei a n sisteme de referin mobile putem generaliza: = 0 n =n1 i1 i , i+==n2 i1 i1 j1 j , j1 i , i (9.65) Aadarpentrudeterminareaacceleraieiunghiulareabsolute 0 n se nsumeazacceleraiileunghiularealemicrilorrelativeiseadaugo acceleraie complementar: c ===n2 i1 i1 j1 j , j1 i , i (9.66) Pentru n = 3 rezult: + + + = 32 21 10 30 32 21 32 10 21 10 + + (9.67)