Cinematic a 03
28
MECANICĂ. CINEMATICĂ 55 CAPITOLUL 3 CINEMATICA RIGIDULUI. MIŞCĂRI PARTICULARE ALE RIGIDULUI 3.1. Mişcarea de translaţie În figurile 3.1 şi 3.2 sunt prezentate două exemple de corpuri care au o mişcare a cărei particularitate va defini mişcarea de translaţie. Definiţie. Un solid are o mişcare de translaţie dacă toate punctele sale descriu traiectorii egale şi paralele. Această definiţie implică după cum se poate vedea în figurile 3.1 şi 3.2 că orice dreaptă a solidului rămâne paralelă cu ea însăşi. Uneori această proprietate este luată ca definiţie a mişcării de translaţie. Proprietate. Mişcarea de translaţie este determinată dacă se cunoaşte mişcarea unui singur punct al sau. Într-adevăr, să presupunem că se ştie traiectoria (C) şi legea de mişcare a unui punct M. Mişcarea fiind de translaţie, orice dreaptă unind două puncte oarecare ale corpului se deplasează paralel cu ea însăşi. a) Traiectoria unui punct oarecare P se deduce din traiectoria (C) printr-o translaţie determinată de vectorul → MP . Fig.3.1 Fig.3.2
-
Upload
roxana-capitanu -
Category
Documents
-
view
43 -
download
1
description
cinematica
Transcript of Cinematic a 03

MECANICĂ. CINEMATICĂ 55
CAPITOLUL 3
CINEMATICA RIGIDULUI. MIŞCĂRI
PARTICULARE ALE RIGIDULUI
3.1. Mişcarea de translaţie
În figurile 3.1 şi 3.2 sunt prezentate două exemple de corpuri care au o mişcare a cărei particularitate va defini mişcarea de translaţie.
Definiţie. Un solid are o mişcare de translaţie dacă toate
punctele sale descriu traiectorii egale şi paralele.
Această definiţie implică după cum se poate vedea în figurile 3.1 şi 3.2 că orice dreaptă a solidului rămâne paralelă cu ea însăşi. Uneori această proprietate este luată ca definiţie a mişcării de translaţie. Proprietate. Mişcarea de translaţie este determinată dacă se cunoaşte mişcarea unui singur punct al sau. Într-adevăr, să presupunem că se ştie traiectoria (C) şi legea de mişcare a unui punct M. Mişcarea fiind de translaţie, orice dreaptă unind două puncte oarecare ale corpului se deplasează paralel cu ea însăşi. a) Traiectoria unui punct oarecare P se deduce din traiectoria (C)
printr-o translaţie determinată de vectorul →
MP .
Fig.3.1 Fig.3.2

56 VLASE SORIN
b) Spaţiul parcurs la timpul t de punctul P este egal cu spaţiul parcurs în acelaşi interval de timp de punctul M. Avem MM1 = PP1
(traiectoriile sunt paralele şi egale). c) Viteza la momentul t a punctului P este echipolentă cu viteza punctului M. Deoarece MM1 = PP1 avem:
t
PP
t
MM
tt ∆=
∆ →∆→∆
1
0
1
0limlim .
d) Aceeaşi proprietate rămâne valabilă şi pentru acceleraţii. Rezultă că toate punctele rigidului au,la un moment dat,aceeaşi viteză şi aceeaşi acceleraţie. Această concluzie poate fi justificată analitic. Din definiţia mişcării de translaţie rezultă că orice dreaptă rămâne tot
timpul paralelă cu ea însăşi, deci în particular şi axele sistemelor de coordonate Ox, Oy, Oz (fig.3.3). Versorii celor trei axe nu-şi vor schimba poziţia în timpul mişcării deci:
0;0;0 === kji&r&r&r ,
rezultând imediat ω = 0. Expresia vitezei punctului curent M devine:
00 vrvvM
rrrrr=×+= ω
iar a acceleraţiei: ( ) 00 arraaM
rrrrrrrr=××+×+= ωωε .
Fig.3.3

MECANICĂ. CINEMATICĂ 57
După traiectoria pe care o descrie un punct al rigidului, translaţiile se împart în: - translaţii rectilinii (fig.3.1) dacă traiectoria unui punct este o dreaptă; - translaţii curbilinii dacă traiectoria unui punct este o curbă oarecare în spaţiu (în particular dacă traiectoria este un cerc avem de-a face cu o translaţie circulară, fig.3.2).
3.2. Mişcarea de rotaţie cu axă fixă 3.2.1. Expresiile vitezei şi acceleraţiei
Definiţie. Un rigid are o mişcare de rotaţie cu axă fixă dacă în tot timpul mişcării, două puncte aparţinând rigidului, rămân
fixe în spaţiu.
Consideraţii generale elementare arată că toate punctele dreptei ce conţin cele două puncte fixe rămân de asemenea fixe. Această dreaptă poartă numele de axă de rotaţie. Alegem sistemul de coordonate fix astfel încât axa de rotaţie să fie axa Oz1 şi în acelaşi timp axa Oz. Matricea de rotaţie care face trecerea de la sistemul de referinţă mobil legat de rigid, la sistemul de referinţă fix, o notăm cu [R]. Dacă avem k
r versorul axei Oz, atunci în
timpul mişcării acesta rămâne neschimbat, deci:
[ ] kk =R Avem de-a face cu o rotaţie plană, în jurul axei Oz, de unghi θ iar matricea de rotaţie va avea aspectul:
[ ]
−
=
100
0cossin
0sincos
θθ
θθ
R
primele două coloane reprezentând componentele vectorilor i şi j .

58 VLASE SORIN
Unghiul θ este unghiul făcut de axele Ox1 şi Ox iar mişcarea rigidului este definită de funcţia ( )tθθ = . Se notează cu M’ proiecţia lui M pe axa Oz1. În timpul rotaţiei, distanţa OM’ rămâne constantă, punctul M se va mişca pe un cerc aflat în plan paralel cu planul Ox1y1. Deci traiectoriile tuturor punctelor sunt cercuri cu centrul pe axa Oz1 (fig.3.4,b). Vectorul de poziţie r
r are expresia:
dOMMMOMrrr
+=+=→→→
'''
unde dr
este vectorul →
MM ' (vectorul distanţă al punctului M la axa Oz). Operatorul viteză unghiulară este:
[ ] [ ][ ]
−
=
−
−
−−
==
100
001
010
100
0cossin
0sincos
100
0sincos
0cossin
θθθ
θθ
θθ
θθ
θω &&TRR
deci vectorul viteză unghiulară este [ ] [ ]T100θω &= adică este un
vector orientat după axa Oz1 ( krr
ωω = ). Prin derivare, se obţine
Fig.3.4

MECANICĂ. CINEMATICĂ 59
vectorul acceleraţie unghiulară [ ]T100θε &&= , deci orientat de
asemenea după axa Oz1 ( kr
&rrεωε == ). Viteza punctului M va fi:
=
+×+=×+=→→→
MMOMvOMvv ''00 ωωrrrrr
dMMOMvrrrrr
×=×+×+=→→
ωωω ''0
deci dvrrr
×= ω şi dv ω= (întrucât drr
⊥ω ). Acceleraţia unui punct M va avea expresia:
=
××+×+=→→
OMOMaa ωωεrrrrr
0
( )=××+
+×+=→→
dMMOMarrrrr
ωωε ''0
( ) dddddrrrrrrrrr 22 ωεωωωε −×=−+×= .
Acceleraţia are două componente, o componentă
tangenţială darrr
×= ετ şi una normală darr 2ων −= . Valoarea
acceleraţiei este dată de:
( ) ( ) ( ) 42422222 ωεωεντ +=⇒+=+= dadaaa .
Se regăsesc formulele obţinute la mişcarea pe cerc a punctului material. 3.2.2. Distribuţia vitezelor şi acceleraţiilor Axa instantanee de rotaţie este data de:
kv
rrr
rrr
ωλωλω
ω=+
×=
20
deci este axa Oz. Axa instantanee de rotaţie este în acest caz o axă permanentă de rotaţie, adică în tot timpul mişcării poziţia ei va rămâne neschimbată. Viteza minimă a punctelor de pe axa instantanee este:
00min ==
ω
ωrr
vv .

60 VLASE SORIN
Relaţia obţinută anterior dvrrr
×= ω ne arată că toate punctele rigidului care au acelaşi vector distanţă d
r faţă de axa de rotaţie, au
acelaşi vector viteză. Dar aceste puncte sunt situate pe o dreaptă paralelă cu axa de rotaţie. Deci putem formula următoarea proprietate:
- mulţimea punctelor situate pe o dreaptă paralelă cu axa de
rotaţie (au acelaşi vector distanţă dr
) au acelaşi vector viteză. Altă proprietate care rezultă din această relaţie este: - vitezele se găsesc într-un plan perpendicular pe axa de
rotaţie.
Relaţia care dă modulul vitezei dv ω= ne permite să formulăm a doua proprietate a câmpului de viteze:
- mulţimea punctelor situate la aceeaşi distanţă d faţă de axă au aceeaşi valoare a vitezei. Sau: toate punctele situate pe un
cilindru circular drept având ca axă axa de rotatie au aceeasi
valoare a vitezei. Altă proprietate care derivă din această relaţie este: - vitezele sunt direct proporţionale cu distanţa la axa de
rotaţie.
Aceste proprietăţi ne permit să vizualizăm distribuţia de viteze ca în fig.3.5.
Fig.3.5. Distribuţia vitezelor în mişcarea de rotaţie cu axă fixă

MECANICĂ. CINEMATICĂ 61
Relaţiile obţinute anterior pentru acceleraţii: ddarrrr 2ωε −×= şi
42 ωε += da ne permit să formulăm, la fel ca în cazul vitezelor, următoarele proprietăţi: - mulţimea punctelor situate pe o dreaptă paralelă cu axa de
rotaţie (au acelaşi vector distanţă dr
) au acelaşi vector acceleraţie.
- mulţimea punctelor situate la aceeaşi distanţă d faţă de axă au
aceeaşi valoare a acceleraţiei; sau: toate punctele situate pe un
cilindru circular drept, având ca axa axa de rotaţie, au aceeaşi valoare a acceleraţiei;
-acceleraţiile sunt direct proporţionale cu distanţa la axa de
rotaţie;
- acceleraţiile se găsesc într-un plan perpendicular pe axa de
rotaţie.
Aceste proprietăţi ne permit să vizualizăm distribuţia de acceleraţii ca în fig.3.6. Unghiul făcut de acceleraţie cu tangenta la traiectorie este dat de relaţia:
2ω
εβ
ν
τ
==a
actg .
Fig.3.6

62 VLASE SORIN
3.3. Mişcarea elicoidală (de rototranslaţie)
3.3.1. Expresiile vitezei şi acceleraţiei
Se pot da ca exemplu de corpuri care efectuează o mişcare pe care o vom denumi elicoidală un burghiu în timpul operaţiei de găurire, un şurub în timpul mişcării (fig.3.7). Definiţie. Un rigid are o mişcare elicoidală dacă o dreaptă solidară cu el păstrează în timpul mişcării suportul fix (fig.3.7,b).
Dreapta respectivă se numeşte axa mişcării elicoidale. Pentru a studia această mişcare se alege sistemul de coordonate astfel încât axa Oz şi Oz1 să coincidă cu axa rotaţiei. Corpul are o mişcare de rotaţie în jurul axei şi în acelaşi timp originea sistemului de referinţă mobil are o translaţie de-a lungul acestei axe după o lege z0 = z0(t). Mişcarea de rotaţie este caracterizată la fel ca în cazul mişcării de rotaţie cu axă fixă prin unghiul de rotaţie ( )tθθ = care exprimă rotaţia axei Ox faţă de axa O1x1.
Prin acelaşi raţionament ca la mişcarea de rotaţie cu axă fixă va rezulta că viteza unghiulară şi acceleraţia unghiulară a corpului vor fi orientate de-a lungul axei O1z1, deci kk
r&
rrθωω == şi kk
r&&
rrθεε == iar
Fig.3.7

MECANICĂ. CINEMATICĂ 63
viteza şi acceleraţia sistemului de referinţă mobil vor fi de asemenea orientate de-a lungul acestei axe:
kakzakvkzvrr
&&rrr
&r
000000 , ==== .
Fig.3.8. Şuruburile execută la montaj o mişcare de rototranslaţie
Fig.3.9. Instrumente care execută o mişcare de rototranslaţie
Rezultă componentele vitezei:
0;; vvxvyvzyx
==−= ωω ,
iar ale acceleraţiei:
022 ;; aayxaxya
zyx=−=−−= ωεωε .

64 VLASE SORIN
Dacă între unghiul de rotaţie θ şi înaintarea corpului z există o relaţie lineară atunci avem de-a face cu un caz particular şi anume mişcarea de şurub, care este deosebit de des întâlnită în tehnică (şuruburi, prese, strunguri).
3.3.2. Distribuţia vitezelor şi acceleraţiilor Formulele scrise pentru viteze şi acceleraţii permit, la fel ca la mişarea de rotatie cu axă fixă, să reprezentăm distribuia vitezelor şi acceleraţiilor în mişcarea elicoidală. Se pot trage următoarele concluzii: - mulţimea punctelor situate pe o dreaptă paralelă cu axa de
rotaţie (au acelaşi vector distanţă dr) au aceeaşi vectori viteză,
respectiv acceleraţie;
- mulţimea punctelor situate la aceeaşi distanţă d faţă de axă au
aceleaşi valori ale vitezei, respectiv acceleraţiei. Sau: toate
punctele situate pe un cilindru circular drept având ca axă axa de
rotaţie au aceiaşi valoare a vitezei, respectiv a acceleraţiei.
Se pot reprezenta astfel distribuţiile vitezelor şi acceleraţiilor în cazul mişcării elicoidale (fig.3.8, fig.3.9). Se observă că nu există puncte de viteză sau acceleraţie nulă. Axa instantanee de rotaţie devine în acest caz tocmai axa mişcării elicoidale.
Fig.3.8 Fig.3.9
MECANICĂ. CINEMATICĂ 65
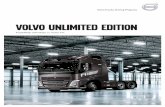
Am menţionat anterior un caz particular al mişcării elicoidale, frecvent întâlnit în practică, cel al mişcării de şurub. În această mişcare, la o rotaţie completă a şurubului, acesta va înainta de-a lungul axei cu o distanţă p numită pasul şurubului. Între unghiul de rotaţie θ şi deplasarea de-a lungul axei z va exista o legătură care în acest caz
este dată de o relaţie liniară: θπ2
pz = (vezi mişcarea pe elice a
punctului material). Prin derivare rezultă imediat: ωπ20
pv = şi
επ20
pa = .
3.4. Mişcarea plan-paralelă 3.4.1. Expresiile vitezei şi acceleraţiei
În figura 3.10 sunt prezentate câteva exemple care vor caracteriza mişcarea plan-paralelă. Definiţie. Un rigid are o mişcare plan-paralelă dacă are trei
puncte necoliniare care sunt conţinute în tot timpul mişcării într-
un plan fix.
Consideraţii geometrice elementare arată că toate punctele rigidului au traiectorii conţinute în plane paralele cu planul fix. Vom arăta că este suficient să studiem mişcarea într-un plan. Să luăm planul fix ca fiind planul de coordonate O1x1y1. Scriind:
Fig.3.10

66 VLASE SORIN
[ ] ρR+= 0rr
şi ţinând seama de definiţia mişcării va rezulta că în tot timpul coordonata z = ct, deci 0=z& . Apoi matricea [R] aplicată versorului k nu-l va modifica, deci:
[R]k=k.
La fel ca la mişcarea de rotaţie cu axă fixă rezultă că matricea [R] are doar cinci componente din care, ţinând seama de relaţiile de ortogonalitate, rămân două independente. Atunci vom putea nota:
θα cos11 = , θα sin21 = , θα sin12 −= , θα cos22 = . Rezultă, conform figurii 3.11:
−
+
=
z
y
x
z
y
x
z
y
x
100
0cossin
0sincos
0
0
0
1
1
1
θθ
θθ
.
Coordonatele z fiind constante în timp, rezultă că parametrii care vor descrie mişcarea vor fi x0, y0 şi θ. Rezultă că rigidul are trei grade de libertate. Traiectoriile vor fi definite de variaţia celor trei mărimi în timp. Ele vor fi curbe plane. Toate punctele situate pe o dreaptă paralelă cu Oz au aceeaşi traiectorie. Rezultă că în mişcarea plan-paralelă este suficient să se studieze mişcarea într-un plan (fig.3.12,b).
Fig.3.11

MECANICĂ. CINEMATICĂ 67
În planul O1x1y1 se alege sistemul de referinţă mobil Oxy care participă la mişcare împreună cu rigidul. Viteza unghiulară a rigidului va fi viteza de variaţie a unghiului θ în raport cu timpul. Relaţia anterioară poate fi scrisă:
−+
=
y
x
y
x
y
x
θθ
θθ
cossin
sincos
0
0
1
1 .
Prin derivare se obţine:
−
+
=
x
y
y
x
y
xθ&
&
&
&
&
0
0
1
1
sau: rvvM
rrrr×+= ω0 cu componentele:
0;; 00 =+=−=
zyyxxvxvvyvv ωω ,
unde jyixrk
rrrrr+== ;ωω .
Pentru determinarea acceleraţiei unui punct al rigidului în mişcare plan-paralelă, se utilizează relaţia obţinută în mişcarea generală a rigidului:
( ) ( ) rrrarraaM
rrrrrrrrrrrrrr 200 ωωωεωωε −+×+=××+×+= .
Ţinând seama de faptul că r
rr⊥ω rezultă kr
r&&rrrr
ωωεω === ,0 , deci:
rraaM
rrrrr 20 ωε −×+= ,
cu componentele: 0;; 2
02
0 =−+=−−=zyyxx
ayxaaxyaa ωεωε .
3.4.2.Baza şi rostogolitoarea Se pune problema axei instantanee de rotaţie şi translaţie pentru mişcarea plan-paralelă. Viteza minimă în punctele aparţinând A.I.R.T. este ( ) 0/0min == ωωvv
rr. În acest caz vorbim de axa instantanee de
rotaţie. Se caută deci punctele de viteză nulă. Din relaţia scrisă pentru

68 VLASE SORIN
componentele vitezei, rezultă că punctul de coordonate ξ, η, ζ cu viteza nulă trebuie să verifice relaţiile:
arbitrarvvyx
==+=− ςξωηω ;0;0 00
de unde:
arbitrarvv
xy ==−= ςω
ηω
ξ ;; 00 .
Rezultă că punctele rigidului de viteză zero se găsesc pe dreapta care are, faţă de sistemul de coordonate mobil, coordonatele determinate cu relaţiile scrise. Dreapta este doar axa instantanee de rotaţie fără a avea translaţie în lungul ei. Rigidul se comportă din punct de vedere al distribuţiei vitezelor ca şi cum s-ar roti instantaneu în jurul acestei axe (exact ca în rotaţia cu axă fixă). Locul geometric al A.I.R. în raport cu sistemul de referinţă fix şi mobil reprezintă cilindri, numiţi axoide (fig.3.12). Punctul de viteză zero din planul de coordonate Oxy se numeşte centru instantaneu de rotaţie (C.I.R.). Dacă facem o translaţie în centrul instantaneu de rotaţie cu relaţiile:
';';' zzyyxx =+=+= ηξ se obţin pentru componentele vitezei expresiile:
0;;' ==−= zyx vxvyv ωω ,
relaţii analoage cu cele din mişcarea de rotaţie cu axă fixă.
Definiţie. Locul geometric al centrului instantaneu de rotaţie în
raport cu sistemul de referinţă mobil poartă numele de centroidă mobilă sau rostogolitoare. Locul geometric al centrului
instantaneu de rotaţie în raport cu sistemul de referinţă fix poartă numele de centroidă fixă sau bază.
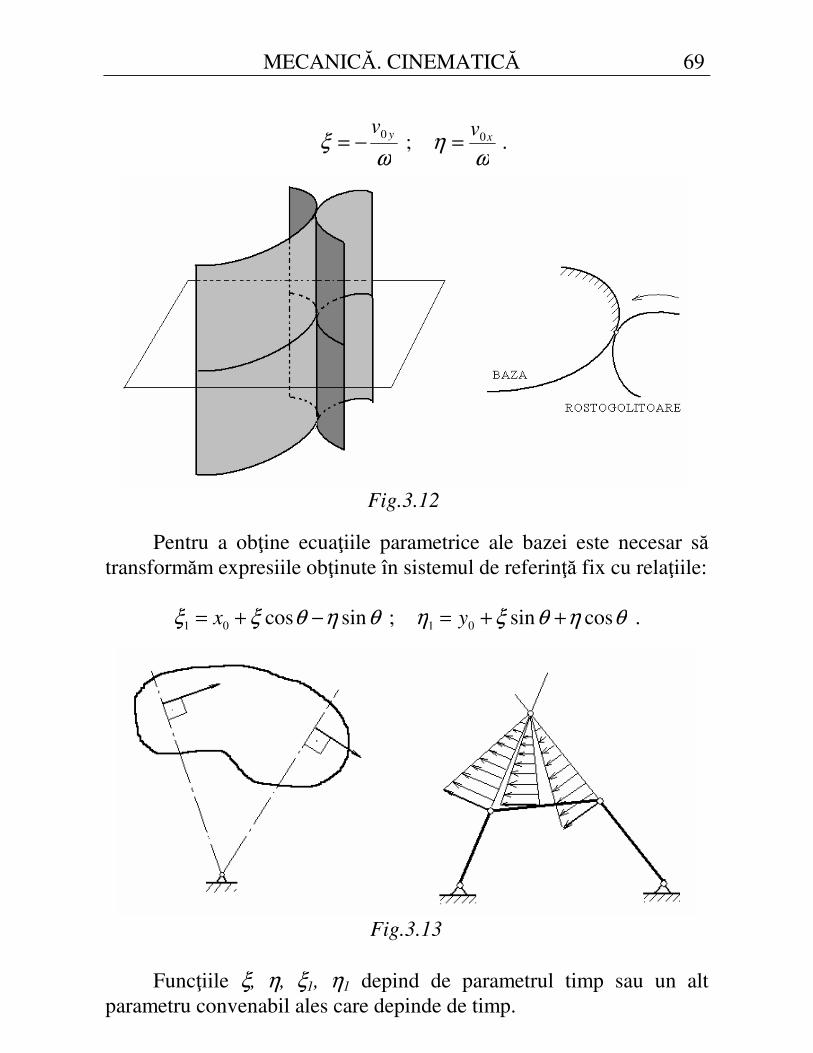
Baza si rostogolitoarea reprezintă deci intersecţia axoidelor (cilindri) cu planul de coordonate. Ecuaţiile parametrice ale rostogolitoarei sunt date de:
MECANICĂ. CINEMATICĂ 69
ωη
ωξ xy vv
00 ; =−= .
Pentru a obţine ecuaţiile parametrice ale bazei este necesar să transformăm expresiile obţinute în sistemul de referinţă fix cu relaţiile:
.cossin;sincos 0101 θηθξηθηθξξ ++=−+= yx
Funcţiile ξ, η, ξ1, η1 depind de parametrul timp sau un alt parametru convenabil ales care depinde de timp.
Fig.3.12
Fig.3.13
70 VLASE SORIN
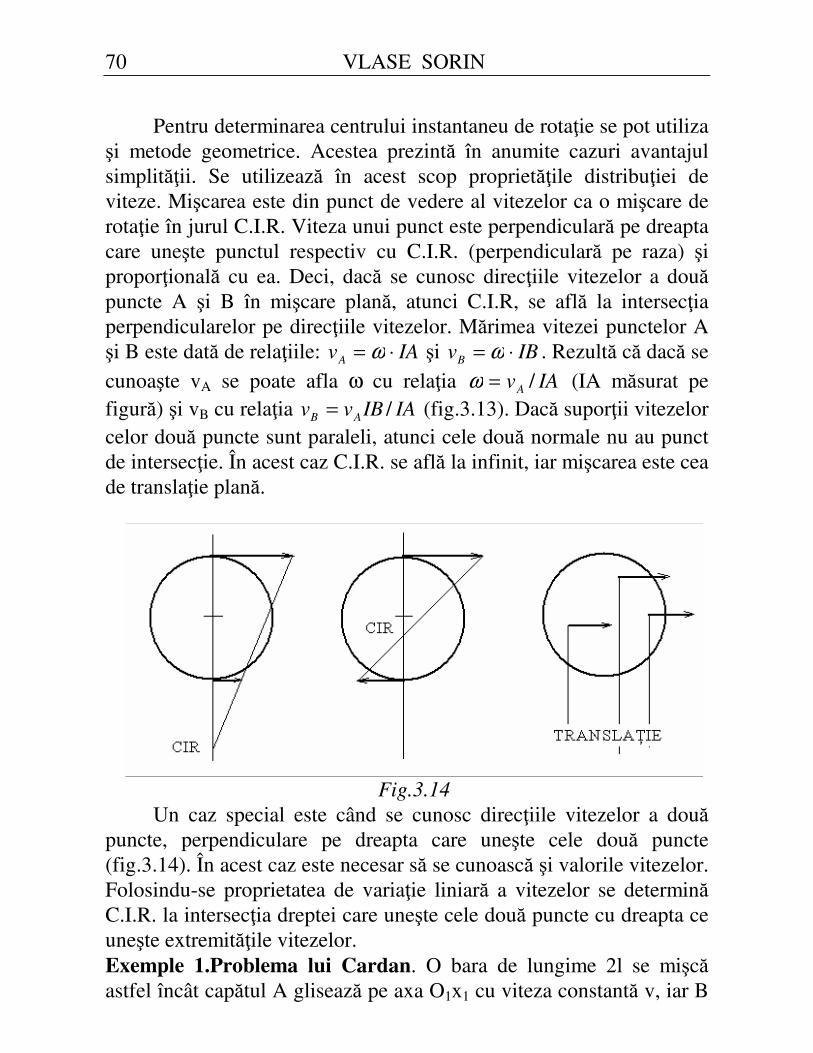
Pentru determinarea centrului instantaneu de rotaţie se pot utiliza şi metode geometrice. Acestea prezintă în anumite cazuri avantajul simplităţii. Se utilizează în acest scop proprietăţile distribuţiei de viteze. Mişcarea este din punct de vedere al vitezelor ca o mişcare de rotaţie în jurul C.I.R. Viteza unui punct este perpendiculară pe dreapta care uneşte punctul respectiv cu C.I.R. (perpendiculară pe raza) şi proporţională cu ea. Deci, dacă se cunosc direcţiile vitezelor a două puncte A şi B în mişcare plană, atunci C.I.R, se află la intersecţia perpendicularelor pe direcţiile vitezelor. Mărimea vitezei punctelor A şi B este dată de relaţiile: IAvA ⋅= ω şi IBvB ⋅= ω . Rezultă că dacă se
cunoaşte vA se poate afla ω cu relaţia IAvA /=ω (IA măsurat pe figură) şi vB cu relaţia IAIBvv AB /= (fig.3.13). Dacă suporţii vitezelor celor două puncte sunt paraleli, atunci cele două normale nu au punct de intersecţie. În acest caz C.I.R. se află la infinit, iar mişcarea este cea de translaţie plană.
Un caz special este când se cunosc direcţiile vitezelor a două puncte, perpendiculare pe dreapta care uneşte cele două puncte (fig.3.14). În acest caz este necesar să se cunoască şi valorile vitezelor. Folosindu-se proprietatea de variaţie liniară a vitezelor se determină C.I.R. la intersecţia dreptei care uneşte cele două puncte cu dreapta ce uneşte extremităţile vitezelor. Exemple 1.Problema lui Cardan. O bara de lungime 2l se mişcă astfel încât capătul A glisează pe axa O1x1 cu viteza constantă v, iar B
Fig.3.14
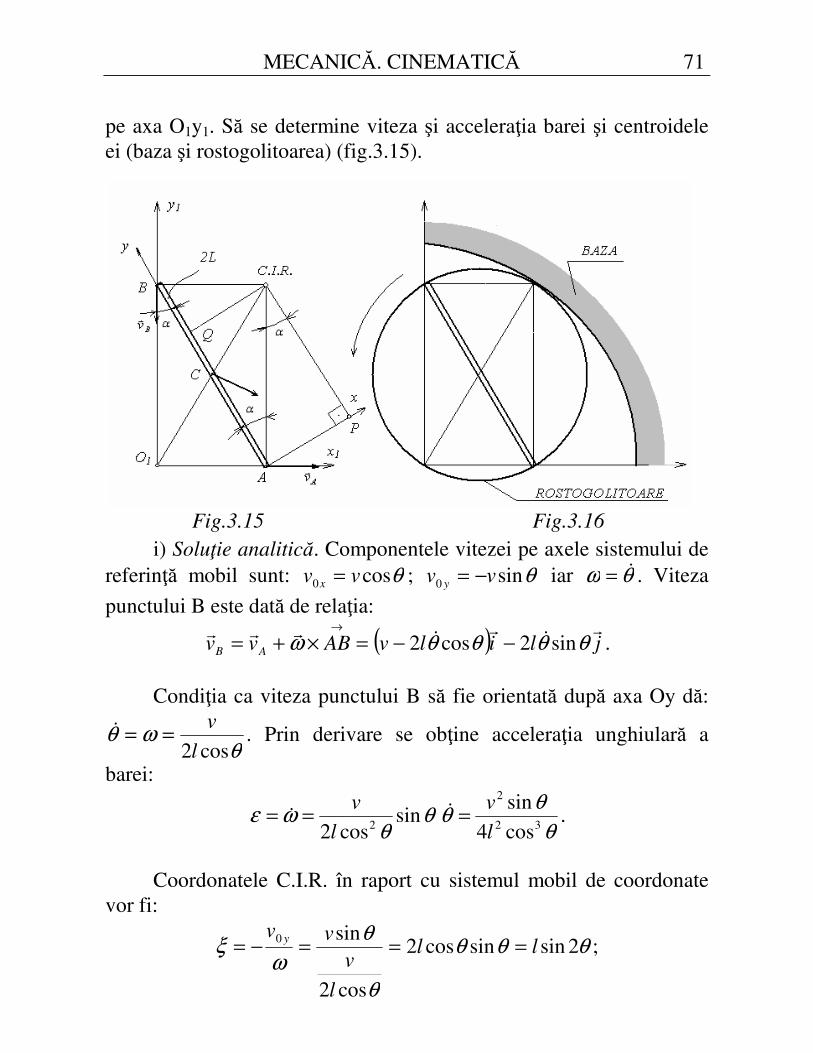
MECANICĂ. CINEMATICĂ 71
pe axa O1y1. Să se determine viteza şi acceleraţia barei şi centroidele ei (baza şi rostogolitoarea) (fig.3.15).
i) Soluţie analitică. Componentele vitezei pe axele sistemului de referinţă mobil sunt: θcos0 vv x = ; θsin0 vv
y−= iar θω &= . Viteza
punctului B este dată de relaţia:
( ) jlilvABvv AB
r&
r&
rrrθθθθω sin2cos2 −−=×+=
→
.
Condiţia ca viteza punctului B să fie orientată după axa Oy dă:
θωθ
cos2l
v==& . Prin derivare se obţine acceleraţia unghiulară a
barei:
θ
θθθ
θωε
32
2
2 cos4
sinsin
cos2 l
v
l
v=== && .
Coordonatele C.I.R. în raport cu sistemul mobil de coordonate vor fi:
;2sinsincos2
cos2
sin0 θθθ
θ
θ
ωξ ll
l
v
vv y===−=
Fig.3.15 Fig.3.16

72 VLASE SORIN
( ).2cos12
cos2
cos2
cos 20 θθ
θ
θ
ωη +====
ll
l
v
vv x
Eliminând parametrul θ între cele două relaţii ţinând seama de expresia: 12sin2cos 22 =+ θθ se obţine ecuaţia rostogolitoarei:
( ) 222ll =−+ ηξ ,
adică ecuaţia unui cerc cu centrul în centrul barei şi cu raza egală cu jumătate din lungimea barei. Coordonatele C.I.R. în raport cu sistemul de referinţă fix vor fi date de:
;sin2sincossin21 θθηθξθξ ll =−+= .cos2cossin1 θθηθξη l=+=
Se elimină θ prin ridicare la pătrat şi adunare şi se obţine ecuaţia bazei sub forma:
,4 221
21 l=+ηξ
adica un cerc de raza 2l şi cu centrul în originea O1. În timpul mişcării cercul mobil se rostogoleşte fără alunecare pe cercul fix (fig.3.16). ii) Soluţie semianalitică. Ducând perpendicularele pe vectorii viteză în punctele A şi B se obţine punctul I. Coordonatele acestuia în sistemul fix de referinţă sunt: θξ sin21 l= ; θη cos21 l= . Dacă se proiectează I pe axele sistemului mobil de coordonate se obţine:
θθθξ cossin2sin' lIAAI === ; θθη 2cos2cos" lIAAI === , adică rezultatele obţinute la punctul i). Ţinând seama că
θωω cos2lIAvvA === se obţine viteza unghiulară ω. iii) Soluţia geometrică. În cazul construcţiei de la punctul ii), figura O1AIB este un dreptunghi. Faţă de bara unghiul I este întotdeauna drept. Punctul I se va afla atunci pe cercul circumscris dreptunghiului de diametru AB = 2l. Distanţa O1I = AB = ct. ca diagonale ale dreptunghiului şi atunci faţă de sistemul de referinţă fix punctul I se mişca pe cercul de rază egală cu O1I = 2l şi cu centrul în O1.

MECANICĂ. CINEMATICĂ 73
2. Biela. Ne propunem să determinăm baza şi rostogolitoarea pentru biela din mecanismul bielă-manivelă (fig. ).
ααβα sin)/(1coscoscos 2
1 lrlrlrxACx C −+=+=== αtgxICy C==1
αcos/CxAI =
rAIBI −=
)sin(;)cos( βαβα +=+= BIyBIx

74 VLASE SORIN
Fig. . Baza şi rostogolitoarea pentru bielă. Scările după cele două
axe sunt diferite. 3.4.3. Polul acceleraţiilor Se pune problema punctelor de acceleraţie nulă. Dacă ξ’, η’ şi ζ sunt coordonatele unui astfel de punct ele vor trebui să îndeplineasca condiţiile:
oarecareaayx
==−−=−− ζηωξεξωηε ;0'';0'' 20
20 .
Rezultă:
oarecareaaaa xyyx =
+
+=
+
−= ζ
εω
εωη
εω
εωξ ;';'
24
002
24
002
.
Mulţimea punctelor de acceleraţie nulă se găseşte pe o dreaptă perpendiculară pe planul director. Punctul din planul sistemului de referinţă mobil de acceleraţie zero şi coordonate ξ’, η’ poartă numele de polul acceleraţiilor (centrul acceleraţiilor). Coordonatele polului acceleraţiilor faţă de sistemul de referinţă fix se obţin ca în cazul C.I.R. în care ξ, η, ξ1, η1 se înlocuiesc cu ξ’, η’, ξ’1, η’1. Distribuţia de

MECANICĂ. CINEMATICĂ 75
acceleraţii va fi identică cu cea din mişcarea de rotaţie cu axă fixă, ca şi când corpul s-ar roti în jurul dreptei perpendiculare pe planul director ce trece prin polul acceleraţiilor. Ca şi în cazul vitezelor, dacă facem translaţia ';';' zzyyxx =+=+= ηξ se obţin componentele acceleraţiei sub forma:
0;'';'' 22 =−=−−=zyx
ayxaxya ωεωε ,
identice cu cele din mişcarea de rotaţie. În figura 3.17 sunt prezentate centrul instantaneu de rotaţie şi polul acceleraţiilor pentru o roată care se rostogoleşte fără alunecare pe planul orizontal. Se observă că cele două puncte nu coincid, în general.
3.4.4. Proprietăţi în mişcarea plan-paralelă (Cercurile lui Bresse)
a) Locul geometric al punctelor pentru care viteza şi acceleraţia sunt doi vectori colineari este un cerc numit cercul inflexiunilor. b) Locul geometric al punctelor pentru care viteza şi acceleraţia sunt doi vectori perpendiculari este un cerc numit cercul de rebrusment. Se demonstrează cele două proprietăţi în felul următor: Expresia vitezei unui punct este:
rvvrrrr
×+= ω0 , iar a acceleraţiei:
rraarrrrr 2
0 ωε −×+= .
Fig.3.17

76 VLASE SORIN
Condiţia ca vectorii viteză şi acceleraţie să fie colineari revine la a pune condiţia: 0=× va
rr, iar condiţia ca cei doi vectori să fie
perpendiculari revine la: 0=⋅ varr
. Efectuând calculele se obţine, în ambele cazuri, ecuaţia unui cerc. 3.5. Mişcarea rigidului cu punct fix
3.5.1. Expresiile vitezei şi acceleraţiei Se consideră un rigid care în timpul mişcării are fixat un punct O (fig.3.18). Originea sistemului de referinţă mobil şi a celui fix se alege
în punctul O. Viteza şi acceleraţia acestui punct sunt zero. Viteza unui punct oarecare al rigidului este dată de relaţia:
rrvvM
rrrrrr×=×+= ωω0 .
Componentele vitezei sunt:
;yzvzyx
ωω −=
;zxvxzy
ωω −=
.xyvyxz
ωω −=
Fig.3.18 Fig.3.19

MECANICĂ. CINEMATICĂ 77
Se caută punctele de viteză nulă. Expresia vectorială a vitezei indică faptul că punctele situate pe dreapta ωλ
rr=r au viteza nulă.
Această dreaptă va fi axă instantanee de rotaţie. Distribuţia de viteze va fi identică cu cea din mişcarea de rotaţie cu axă fixă, ca şi cum rigidul s-ar roti în jurul axei instantanee de rotaţie.
Axa instantanee de rotatie şi translaţie se poate determina şi cu relaţia obţinută în capitolul 2:
ωλω
ω rrr
r+=
20v
r ,
deci o dreaptă care trece prin O. Toate punctele de pe această axă au viteza:
00min ==
ω
ωrr
vv ,
aşadar este o axă de rotaţie fără translaţie. Deoarece în orice moment A.I.R. trece prin punctul O, rezultă: - locul geometric al A.I.R. în raport cu sistemul de referinţă fix este un con cu vârful în O1 numit conul herpolodic; - locul geometric al A.I.R. în raport cu sistemul de referinţă mobil este tot un con cu vârful în O numit conul polodic (fig.3.19). Cele două conuri poartă numele de conurile lui Poinsot. În timpul mişcării conul polodic se rostogoleşte fără alunecare pe conul herpolodic, fix. Cele două conuri sunt tangente. Acceleraţia este dată de relaţia:
( ) ( )rrrraaM
rrrrrrrrrrrr××+×=××+×+= ωωεωωε0 ,
cu componentele:
( ) ( ) ( ) ;22 zyxayzxzyxzyx
εωωεωωωω ++−++−=
( ) ( ) ( )xzyazxyxzyxzy
εωωεωωωω ++−++−= 22 ;
( ) ( ) ( )yxzaxyzyxzyxz
εωωεωωωω ++−++−= 22 .

78 VLASE SORIN
Pentru a determina distribuţia de acceleraţii facem observaţia că dacă în relaţia care exprimă acceleraţia unui punct schimbăm pe r
r cu
rr
λ rezultă:
( ) ( ) ( )[ ] arrrrarrrrrrrrrrrr
λωωελλωωλε =××+×=××+×= .
Rezultă că de-a lungul unei drepte care trece prin origine, vectorul acceleraţie variază linear. Se caută şi alte puncte de acceleraţie nulă în afara punctului fix, astfel punând condiţia 0=a
r se
obţine sistemul:
( ) ( ) ( ) ;0 22 zyxyzxzyxzy
εωωεωωωω ++−++−=
( ) ( ) ( )xzyzxyxzyxz
εωωεωωωω ++−++−= 220 ;
( ) ( ) ( )yxzxyzyxzyx
εωωεωωωω ++−++−= 220 .
care este linear omogen cu determinantul:
( )( )
( )=
+−+−
−+−+
+−+−
22
22
22
yxxyzyxz
xzyxzzxy
yzxzyxzy
ωωεωωεωω
εωωωωεωω
εωωεωωωω
( ) ( ) ( )[ ] ( ) .2222εωεωεωεωεωεωεωrr
×−=−+−+−−=xyyxzxxzyzzy
În general ∆ ≠ 0, deci punctul de acceleraţie zero este originea O, x = y = z = 0. În cazul când ω
r şi ε
r sunt coliniari, atunci ∆ = 0, deci
există o dreapta pe care acceleraţia este zero (spre exemplu, cazul rotaţiei cu axă fixă).
3.5.2. Unghiurile lui Euler Rotaţia sistemului de referinţă mobil faţă de sistemul de referinţă fix este caracterizată de cei nouă cosinuşi directori ai matricei de rotaţie [R] care s-a văzut că sunt legaţi prin şase relaţii. Se pot alege deci trei cosinuşi independenţi care să descrie rotaţia rigidului, ceilalţi şase putând fi exprimaţi funcţie de aceştia. O astfel de modalitate de
MECANICĂ. CINEMATICĂ 79
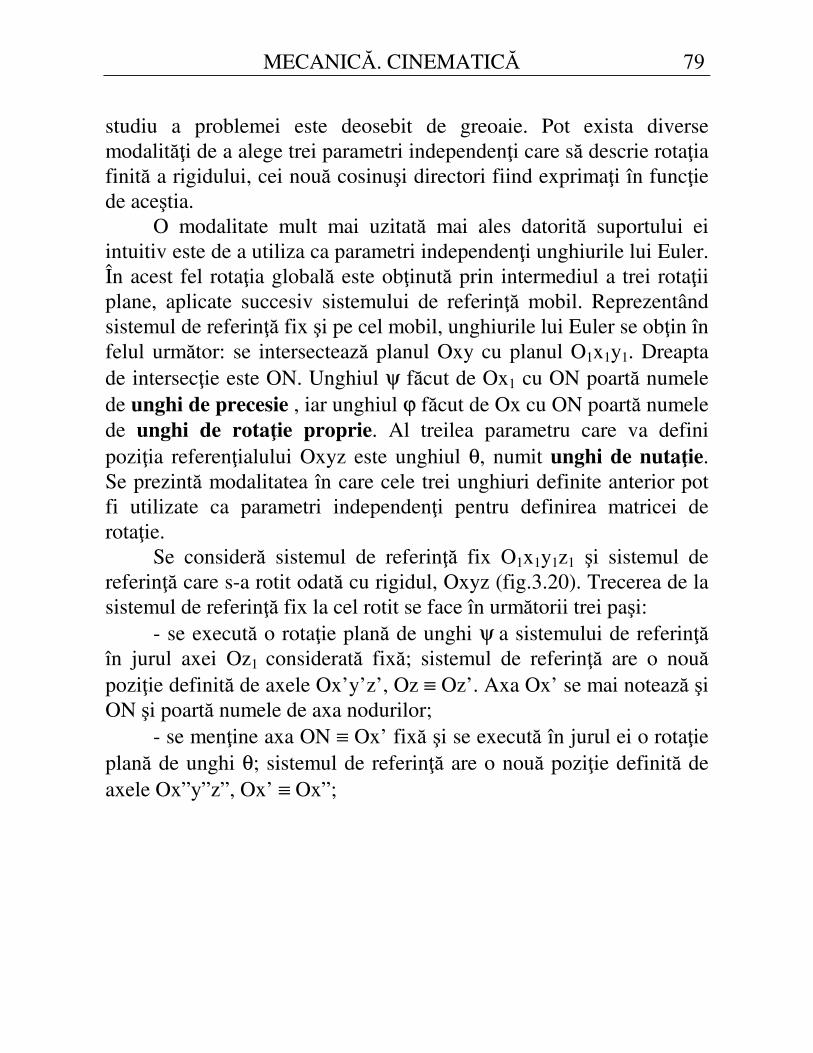
studiu a problemei este deosebit de greoaie. Pot exista diverse modalităţi de a alege trei parametri independenţi care să descrie rotaţia finită a rigidului, cei nouă cosinuşi directori fiind exprimaţi în funcţie de aceştia. O modalitate mult mai uzitată mai ales datorită suportului ei intuitiv este de a utiliza ca parametri independenţi unghiurile lui Euler. În acest fel rotaţia globală este obţinută prin intermediul a trei rotaţii plane, aplicate succesiv sistemului de referinţă mobil. Reprezentând sistemul de referinţă fix şi pe cel mobil, unghiurile lui Euler se obţin în felul următor: se intersectează planul Oxy cu planul O1x1y1. Dreapta de intersecţie este ON. Unghiul ψ făcut de Ox1 cu ON poartă numele de unghi de precesie , iar unghiul ϕ făcut de Ox cu ON poartă numele de unghi de rotaţie proprie. Al treilea parametru care va defini poziţia referenţialului Oxyz este unghiul θ, numit unghi de nutaţie. Se prezintă modalitatea în care cele trei unghiuri definite anterior pot fi utilizate ca parametri independenţi pentru definirea matricei de rotaţie.
Se consideră sistemul de referinţă fix O1x1y1z1 şi sistemul de referinţă care s-a rotit odată cu rigidul, Oxyz (fig.3.20). Trecerea de la sistemul de referinţă fix la cel rotit se face în următorii trei paşi: - se execută o rotaţie plană de unghi ψ a sistemului de referinţă în jurul axei Oz1 considerată fixă; sistemul de referinţă are o nouă poziţie definită de axele Ox’y’z’, Oz ≡ Oz’. Axa Ox’ se mai notează şi ON şi poartă numele de axa nodurilor; - se menţine axa ON ≡ Ox’ fixă şi se execută în jurul ei o rotaţie plană de unghi θ; sistemul de referinţă are o nouă poziţie definită de axele Ox”y”z”, Ox’ ≡ Ox”;

80 VLASE SORIN
- se menţine axa Oz” fixă şi se roteşte în jurul ei sistemul de referinţă cu unghiul ϕ; se obţine sistemul de referinţă care defineşte poziţia finală a rigidului Oxyz, Oz” ≡ Oz. Pentru prima operaţie avem deci o rotaţie plană de unghi ψ care va fi definită de matricea de rotaţie [Rψ]. Legătura între coordonatele unui vector exprimată în cele două sisteme de referinţă O1x1y1z1 si Ox’y’z’ este:
−
=
'
'
'
100
0cossin
0sincos
1
1
1
z
y
x
z
y
x
ψψ
ψψ
sau: [ ] '1 rRr ψ=
A doua rotaţie în jurul axei nodurilor, de unghi θ,este exprimată prin matricea de rotaţie [Rθ], iar legătura între componentele unui vector exprimate în cele două sisteme de coordonate este data de relaţia:
Fig.3.20

MECANICĂ. CINEMATICĂ 81
−=
"
"
"
cossin0
sincos0
001
'
'
'
z
y
x
z
y
x
θθ
θθ sau: [ ] "' rRr θ= .
A treia rotaţie în jurul axei nodurilor, de unghi ϕ,este exprimată prin matricea de rotaţie [Rϕ], iar legătura între componentele unui vector exprimate în cele două sisteme de coordonate este dată de relaţia:
−
=
z
y
x
z
y
x
100
0cossin
0sincos
"
"
"
ϕϕ
ϕϕ
sau [ ] rRr ϕ=" .
În final se poate scrie:
[ ] [ ][ ] [ ][ ][ ] rRRRrRRrRr ϕθψθψψ === "'1 .
Matricea care reprezintă rotaţia este:
[ ] [ ][ ][ ]ϕθψ RRR=R .
Facând calculele se obţine:
[ ]R =
− − −
+ − + −
−
=
cos cos sin sin cos cos sin sin cos cos sin sin
sin cos cos sin cos sin sin cos cos cos sin cos
sin sin sin cos cos
ψ ϕ ψ ϕ θ ψ ϕ ψ ϕ θ ψ θ
ψ ϕ ψ ϕ θ ψ ϕ ψ ϕ θ θ ϕ
θ ψ θ ψ θ
[ ]kji= .
Versorii i, j, k au componentele, exprimate în sistemul fix de coordonate:

82 VLASE SORIN
;
sinsin
cossincoscossin
cossinsincoscos
+
−
=
ψθ
θϕψϕψ
θϕψϕψ
i
−=
−
+−
−−
=
θ
ϕθ
θψ
ψθ
θϕψϕψ
θϕψϕψ
cos
cossin
sinsin
;
cossin
coscoscossinsin
coscossinsincos
kj .
Rezultă de aici componentele versorilor i, j, k definite în sistemul de referinţă fix.
Dacă considerăm că rotaţia finală se obţine prin succesiunea a trei rotaţii de unghiuri ψ, θ, ϕ într-un interval de timp foarte mic ∆t şi dacă se consideră că rapoartele dintre unghiuri şi timp reprezintă vitezele unghiulare de rotaţie în jurul celor trei axe, atunci viteza unghiulară a rigidului poate fi reprezentată ca suma vectorială a celor trei viteze unghiulare:
kek ϕθψω &&& ++= '1 . Ţinând seama că: ψψ sincos' 11 jie += , iar k este definit anterior în cadrul matricei de rotaţie avem componentele vitezei unghiulare în sistemul de referinţă fix:
;cossinsin
;sinsincos
1
1
ψθϕψθω
ψθϕψθω
&&
&&
−=
+=
y
x
.cos1 θϕψω && +=z Bineînţeles că aceste componente se puteau obţine dacă se aplica pentru operatorul viteză unghiulară relaţia definită în capitolul 2. În acest caz ar fi fost însă de efectuat un număr ridicat de calcule. Componentele vitezei unghiulare în sistemul de referinţă local se obţin cu relaţiile:
[ ] ωΩT
R= , de unde:
;sincossin
;cossinsin
ϕθϕθψω
ϕθϕθψω
&&
&&
−=
+=
y
x
.cosθψϕω && +=z