Stoian Curs DSM
53
1. PRINCIPII SI LEGI FUNDAMENTALE IN FIZICA r ”, produsul m a r se numeste forta de inertie. Observatorul din sistemul neinertial are senzatia ca asupra corpului actioneaza forta F: r − = Stabileste legatura dintre marimile dinamice si cele cinematice. dt H d dt v d m a m F r r r r = = ⋅ = (1.1.2) Produsul v m H r r = se numeste impulsul punctului material . Produsul se numeste impulsul fortei. t FΔ r 1.1 Legi ale mecanicii punctului material si a corpului solid Legile lui Newton Prima lege a lui Newton (legea inertiei) “Orice corp isi pastreaza starea de repaus relativ sau de miscare rectilinie si uniforma atata timp cat asupra lui nu actioneaza alte corpuri. ” Legea se refera la corpurile libere, adica la acele corpuri care sunt in situatia in care n interactioneaza cu alte corpuri. Proprietatea corpurilor de a-si pastra starea de miscare rectilinie si uniforma sau de repaus se numeste inertie. Legea inertiei nu este valabila fata de orice sisteme de referinta ci numai fata de o clasa aparte de sisteme de referinta care se numesc sisteme de referinta inertiale. Un sistem de referinta este inertial daca este in starea de miscare rectilinie si uniforma sau de repaus fata de pamant. Un sistem de referinta care are o miscare de rotatie sau o miscare accelerata fata de un sistem de referinta inertial se numeste sistem de referinta neinertial. A doua lege a lui Newton Pentru un corp de masa “m” aflat in starea de miscare rectilinie si uniforma sau de repaus fata de un sistem de referinta neinertial care se misca cu acceleratia “ a r F ma (1.1.1) Principiul independentei actiunii fortelor : “O forta F ce actioneaza asupra unui corp de masa m ii imprima acestuia o acceleratie a = F/m, independent de faptul ca asupra corpului mai actioneaza si alte forte sau ca acel corp se afla intr-o stare de miscare rectilinie si uniforma sau de repaus. ” A treia lege a lui Newton “Fortele cu care doua corpuri actioneaza unul asupra celuilalt sunt intotdeauna egale ca marime si de sensuri opuse. ” (1.1.3) 1 2 F F r r =− Legea atractiei universale (Newton). “ Doua corpuri oarecare se atrag reciproc cu o forta ce are directia de-a lung ul liniei ce uneste centrele celor doua corpuri, fiind proportionala cu produsul maselor ambelor corpuri si invers proportionala cu distanta dintre centrele lor .”
-
Upload
ilie-iulian -
Category
Documents
-
view
231 -
download
0
description
dsaas
Transcript of Stoian Curs DSM
-
1. PRINCIPII SI LEGI FUNDAMENTALE IN FIZICA
r , produsul m ar se numeste forta de inertie. Observatorul din sistemul neinertial are senzatia ca asupra corpului actioneaza forta F:
r = Stabileste legatura dintre marimile dinamice si cele cinematice.
dtHd
dtvdmamF
rrrr === (1.1.2) Produsul vmH r
r = se numeste impulsul punctului material. Produsul se numeste impulsul fortei. tFr
1.1 Legi ale mecanicii punctului material si a corpului solid Legile lui Newton Prima lege a lui Newton (legea inertiei) Orice corp isi pastreaza starea de repaus relativ sau de miscare rectilinie si uniforma atata timp cat asupra lui nu actioneaza alte corpuri. Legea se refera la corpurile libere, adica la acele corpuri care sunt in situatia in care n interactioneaza cu alte corpuri. Proprietatea corpurilor de a-si pastra starea de miscare rectilinie si uniforma sau de repaus se numeste inertie. Legea inertiei nu este valabila fata de orice sisteme de referinta ci numai fata de o clasa aparte de sisteme de referinta care se numesc sisteme de referinta inertiale. Un sistem de referinta este inertial daca este in starea de miscare rectilinie si uniforma sau de repaus fata de pamant. Un sistem de referinta care are o miscare de rotatie sau o miscare accelerata fata de un sistem de referinta inertial se numeste sistem de referinta neinertial. A doua lege a lui Newton Pentru un corp de masa m aflat in starea de miscare rectilinie si uniforma sau de repaus fata de un sistem de referinta neinertial care se misca cu acceleratia a
r F ma (1.1.1)
Principiul independentei actiunii fortelor: O forta F ce actioneaza asupra unui corp de masa m ii imprima acestuia o acceleratie a = F/m, independent de faptul ca asupra corpului mai actioneaza si alte forte sau ca acel corp se afla intr-o stare de miscare rectilinie si uniforma sau de repaus. A treia lege a lui Newton Fortele cu care doua corpuri actioneaza unul asupra celuilalt sunt intotdeauna egale ca marime si de sensuri opuse. (1.1.3) 1 2F F
r r=Legea atractiei universale (Newton). Doua corpuri oarecare se atrag reciproc cu o forta ce are directia de-a lungul liniei ce uneste centrele celor doua corpuri, fiind proportionala cu produsul maselor ambelor corpuri si invers proportionala cu distanta dintre centrele lor.
-
(1.1.3) 21 FFrr =
rrmmkF3
21 rr = (1.1.4) unde:
- m1, m2 masele celor 2 corpuri - r distanta dintre centrele lor - k constanta gravitationala sau constanta atractiei universale
k = 6,685 10-11 m3/kg s2
Greutatea corpurilor. Greutatea unui corp reprezinta forta cu care acesta este atras de Pamant. Greutatea unui corp de masa m aflat la inaltimea h fata de suprafata Pamantului va fi egala cu forta de atractie:
nhR
mMkG
2p
ph
rr)( += (1.1.5)
Legea atractiei universale (Newton). Doua corpuri oarecare se atrag reciproc cu o forta ce are directia de-a lungul liniei ce uneste centrele celor doua corpuri, fiind proportionala cu produsul maselor ambelor corpuri si invers proportionala cu distanta dintre centrele lor.
unde - Mp si Rp sunt masa si respectiv raza Pamantului - n este un vector unitate, adimensional, orientat spre centrul Pamantului r
Expresia de mai sus se mai scrie: (1.1.6) h hG mg
rr = Unde reprezinta acceleratia gravitationala la inaltimea h. hg
r
Rezulta: g0 = kMp/Rp2 = 9,807 m/s2 Din relatiile de mai sus putem scrie:
2
p
ph 0 R h
Rg g
+= (1.1.7) Oscilatii si unde Fenomenele oscilatorii se intalnesc in diferite domenii ale fizicii; marimea care oscileaza poate fi o marime mecanica (ex.: oscilatia unui pendul), o marime electrica (ex.: tensiunea electrica intr-un circuit LC) sau temperatura (ex.: variatia diurna a temperaturii solului). Cel mai simplu fenomen oscilatoriu este oscilatia armonica, data de ecuatia: y=Acos(t +) (1.1.8) unde y este elongatia, A este amplitudinea, este pulsatia si este faza initiala.
-
De asemenea, = 2/T = 2 unde T este perioada iar este frecventa. Elongatia variaza in timp si pentru descrierea acestei variatii sunt necesare derivatele de ordinul intai si doi in raport cu timpul. In cazul unei oscilatii mecanice, aceste derivate reprezinta tocmai viteza si, respectiv, acceleratia puctului care oscileaza.
v = )( += tsinAdtdy (1.1.9)
a = ytcosAdt
yd 222
2=+= )(
Oscilatiile locale ale unui mediu elastic (solid, lichid sau gazos) nu pot ramane izolate in locul in care iau nastere. Datorita fenomenului de interactiune dintre particulele mediului, acestea sunt antrenate si incepm sa oscileze cu o intarziere cu atat mai mare, cu cat distanta lor fata de locul de perturbare initial este mai mare. Ansamblul oscilatiilor diferitelor particole ale mediului se numeste unda. O oscilatie armonica da nastere unei unde armonice a carei ecuatie este:
=
vsy A cos t (1.1.10)
unde s este distanta fata de sursa de oscilatii iar v este viteza de propagare. Din punctul de vedere al orientarii perturbatiei fata de directia de propagare se disting unde longitudinate si unde transversale. La cele longitudinale elongatia este fie o marime scalara, fie o marime vectoriala orientata in directia de propagare. Oscilatia este caracterizata printr-o variatie in timp iar unda, printr-o variatie in timp si spatiu. Marimea caracteristica oscilatiei este frecventa ; unda se caracterizeaza prin frecventa si prin lungimea de unda . O oscilatie de o anumita frecventa da nastere unor unde de lungimi de unda diferite, in medii diferite, adica pentru viteze de propagare diferite. Pentru un anumit mediu, relatia dintre lungimea de unda si frecventa este = v (1.1.11) unde v este viteza de propagare in mediul respectiv.
-
Legi de conservare Legea conservarii energiei mecanice totale a unui sistem Este o lege de conservare si exprima uniformitatea timpului. Intr-un sistem izolat de corpuri (deci in lipsa actiunilor din exterior si a frecarilor), energia mecanica se poate transforma dintr-o forma in alta ( Ec Ep ), energia totala ramanand constanta.
(1.1.12)E E const. n
i 1pi
n
i 1ci + =
= = Definitia din mecanica relativista (definitie mai generala) este urmatoarea: Intr-un sistem de referinta inertial, energia totala mecanica a unei particule sau a unui sistem de particule este constanta:
m v E const.21E m c p
20
20= + + = (1.1.13)
unde m0c2 reprezinta energia de repaus, m0v2/2 este energia cinetica si Ep este energia potentiala. Legea conservarii impulsului total al unui sistem Este o lege de conservare si reprezinta omogenitatea spatiului. Impulsul caracterizeaza starea corpurilor din punct de vedere dinamic, in timp ce viteza caracterizeaza starea corpurilor din punct de vedere cinematic. Legea impulsului:
(1.1.14) 0t
tF dt mv mv
0
r rr = Legea conservarii impulsului total al unui sistem: Intr-un sistem izolat suma vectoriala a impulsurilor initiale nu poate fi modificata de interactiuni interne, ci se mentine constanta.
(1.1.15) =
=n
i 1i im v const.
Legea conservarii momentului cinetic total al unui sistem Este o lege de conservare si reprezinta izotropia spatiului. Avem relatia: Mt = i = k (1.1.16) unde:
- M = Fr momentul fortei in raport cu punctul de referinta - Mt impulsul momentului fortei - i = mr2 momentul de inertie al punctului material - k = i momentul cinetic al punctului material - viteza unghiulara
=
=n
i 1
2i iI m r se numeste momentul de inertie total al corpului (sistemului). (1.1.17)
Momentul de inertie al unui corp depinde de axa particulara in jurul caruia se roteste, de forma corpului si de modul in care este distribuita masa sa. K = I se numeste momentul cinetic total al corpului (sistemului). (1.1.18) vr
-
1.2 Legile electromagnetismului
e = 1,60 10-19 C (1.2.1)
- Producerea unui curent electric intr-o spira (numit curent de inductie) de catre un camp magnetic variabil (produs prin miscarea unui magnet sau a unui electromagnet in vecinatatea spirei).
- In urma introducerii unui conductor parcurs de un curent electric intr-un camp magnetic se genereaza o forta ce actioneaza asupra conductorului deplasandu-l. Sensul de deplasare depinde de sensul curentului electric din electromagnet sau al curentilor ipotetici din magnetul permanent.
unde C (simbolul coulombului) reprezinta unitatea de sarcina electrica. Numarul electronilor care orbiteaza in jurul nucleului unui atom este egal cu numarul protonilor din nucleu, ceea ce inseamna ca un atom in asamblu este neutru. De asemenea, un corp care este format dintr-un anumit numar de atomi sau de molecule, este neutrudin punct de vedere electric, in starea sa normala. Se afirma ca: sarcinile electrice de acelasi semn se resping si sarcinile electrice de semn contrar se atrag. In scopul producerii curentului electric, prin diferite mijloace, se procedeaza la separarea sarcinilor electrice. Curentul electric reprezinta miscarea sarcinilor electrice prin corpuri conductoare din punct de vedere electric si prezinta interes, in primul rand, din punct de vedere al efectelor pe care le produce si in al doilea rand, pentru faptul ca permite transportul energiei electrice la distanta. Unul dintre cele mai importate efecte ale curentului electric este urmatorul: Un conductor parcurs de un curent electric produce in vecinatatea sa un camp magnetic. Obiectele care produc campuri magnetice se numesc fie magneti permanenti, fie electro-magneti. Acestia au doi poli: Nord si Sud. Polii de acelasi tip se resping, polii de tipuri diferite se atrag. Polii unui magnet nu se pot separa, spre deosebire de sarcinile electrice. Deoarece spirele conductoare, parcurse de curenti electrici se comporta ca si niste magneti se poate considera ca magnetii permanenti sunt parcursi de un ansamblu de curenti circulari microscopici. Echivalenta dintre curentii circulari si magneti indica legatura dintre electricitate si magnetism. Fenomene fundamentale ale electromagnetismului:
Atomii sunt formati din particule incarcate electric. Nucleul atomului contine particule incarcate pozitiv (protonii), iar in jurul nucleului se misca pe diferite orbite particule incarcate negativ (electronii). Sarcina electrica pozitiva a unui proton este egala in marime cu sarcina electrica negativa a unui electron. Aceasta marime este o constanta universala si are valoarea:
Campul electric. O sarcina electrica fixata pe un conductor plasat in vid, creaza in jurul sau un camp electric E
r.
Legea fortei in campul electric: O sarcina electrica plasata in campul electric generat de o alta sarcina electrica este supusa unei forte F care are directia liniilor de camp si sensul, in functie de semnul sarcinii electrice.
v (1.2.2)F qE
r v=
-
Liniile de camp sunt curbe deschise care pleaca de la sarcina pozitiva si se opresc pe sarcina negativa (conventie). Legea lui Gauss pentru campul electric: Fluxul electric total produs de o sarcina electrica Q in vid este: = = 0QE dA
v r (1.2.3)
unde dA este elementul de arie, un vector orientat normal la aria dA iar r
0 este permitivitatea vidului. 0 = 8,855 10-12 unitati SI Legea lui Gauss permite calculul campului electric E
r pentru diferite distributii ale sarcinilor
electrice. Legea lui Faraday (legea inductiei electromagnetice) Tensiunea electromotoare indusa intr-o spira inchisa care se afla in vid intr-un camp magnetic variabil este:
E = dtdE dl 0 =r v (1.2.4)
unde 0 este permeabilitatea in vid: 0 = 1,256 10-6 unitati SI, iar este fluxul campului magnetic H
vprintr-o suprafata oarecare:
(1.2.5)= H dA r v
- campul electric produs de sarcinile electrice (camp cu sarcini) In acest caz liniile de camp sunt curbe deschise pornind de la sarcinile pozitive si oprindu-se la sarcinile negative. Pentru caracterizarea sa se foloseste fluxul electric total.
- campul electric produs de variatia fluxului magnetic, numit camp electric de inductie sau camp fara sarcini
In acest caz liniile de camp sunt curbe inchise. Pentru caracterizarea sa se foloseste tensiunea electromotoare. Expresia campului electric creat de sarcina Q la distanta r:
Autoinductia Un curent electric constant ce trece printr-un circuit oarecare produce un camp magnetic al carui flux este de asemenea constant. Deci, acest flux nu va produce fenomenul de inductie. Daca insa curentul electric care parcurge circuitul este variabil, atunci si fluxul magnetic produs de el este variabil si in circuit se va induce o tensiune electromotoare de inductie proprie sau de autoinductie. Acest fenomen poarta numele de autoinductie. In concluzie, in natura exista 2 tipuri de campuri electrice:
204 r
QE = (1.2.6) Formula lui Coulomb Se refera la forta existenta intre 2 sarcini electrice aflate la distanta r:
20
1 2
4 rQ QF = (1.2.7)
-
Dupa fenomenul de electrizare apare procesul de transfer al sarcinilor electrice aflate in exces la un alt corp sau in mediul inconjurator, proces denumit relaxare electrica. Tensiunea electrica avand ca efect transferul sarcinii electrice Q intre 2 puncte A si B:
Br1
0
B
AAB A B r1
4QU V V V E dr
A
Unde V este potentialul electric dintr-un anumit punct:
4 r
QV0
1.2.9)
Relatia dintre campul electric si tensiunea electrica:
rVE
1.2.10) Campul magnetic Legea lui Gauss pentru campul magnetic: Fluxul total al campului magnetic printr-o suprafata inchisa este egal cu zero: H dA=0r r (1.2.11) Legea lui Ampere (campul magnetic produs de un curent electric) v v
(1.2.12)
a. Intr-un camp electric de valoare E, o sarcina electrica de valoare q este actionata cu forta
F q Er v= (1.2.13)
b. Intr-un camp magnetic de valoare Hv
, un magnet de moment magnetic mv este actionat de cuplul:
C m H0
vvv = (1.2.14)
v devine paralel si de acelasi sens cu campul magnetic H
v(pozitie de echilibru stabil al magnetului).
c. Asupra unui conductor parcurs de un curent electric ce se afla intr-un camp magnetic actioneaza o forta numita forta lui Laplace sau forta electromagnetica.
v este o marime vectoriala asociata magnetului a carei directie este aceea a
Momentul magnetic mliniei ce uneste polul Sud cu polul Nord, sensul fiind de la polul Sud la polul Nord. Efectul cuplului C este acela de a roti magnetul pana cand momentul magnetic m
Unde H este tensiunea magnetomotoare (t.m.m.), I intensitatea curentului electric, N numarul de spire. Fortele in campul electric si campul magnetic
H = NI = H dl
= (
= (
= = = = (1.2.8)
-
Legea lui Laplace pentru magneti:
liniei ce uneste polul Sud cu polul Nord, sensul fiind de la polul Sud la polul Nord. Efectul cuplului C este acela de a roti magnetul pana cand momentul magnetic mv devine paralel si de acelasi sens cu campul magnetic H
v
Legea lui Laplace pentru magneti: (1.2.15)0unde l este lungimea conductorului prin care trece curentul I, H
v
Fr
HF qv 0rr (1.2.16)
v este o marime vectoriala asociata magnetului a carei directie este aceea a
Momentul magnetic m
(pozitie de echilibru stabil al magnetului).
c. Asupra unui conductor parcurs de un curent electric ce se afla intr-un camp magnetic actioneaza o forta numita forta lui Laplace sau forta electromagnetica.
r r r= F I l H este campul magnetic si 0 este
permeabilitatea vidului. Observatie: forta este perpendiculara pe planul format de cei doi vectori ce intra in produsul vectorial astfel incat sa se formeze un triedru drept. Legea lui Laplace pentru sarcina electrica: Deoarece curentul electric prin conductor este I = q/t iar viteza sarcinii prin conductor este v = l/t rezulta: r =
d. Exista o forta Laplace si intre 2 curenti, deoarece fiecare curent se gaseste in campul magnetic al celuilalt. Doi curenti paraleli de acelasi sens se atrag, iar doi curenti paraleli de sens opus se resping. Fortele care actioneaza asupra celor 2 conductoare sunt egale si de semn contrar, conform principiului actiunii si reactiunii.
Energia campului electromagnetic Energia campului electromagnetic se compune din energia campului electrtic si energia campului magnetic. Calculul acestor energii se poate face in cazuri simple, de exemplu, pentru unn condensator in cazul campului electric si pentru un solenoid in cazul campului magnetic; rezultatele obtinute pot fi generalizate pentru orice situatie unde exista un camp electric sau un camp magnetic. a. Fie un condensator cu armaturi plan paralelede are A cu distanta d intre ele. Daca nu exista un dielectric intre armaturi, capacitatea C a condensatorului este: C =
dA0 (1.2.17)
Energia condensatorului este
202 A d E
21CU
21W= = (1.2.18)
V = Ad volumul spatiului dintre armaturi (ocupat de campul electric) Densitatea de energie w este:
20E21
VWw = (1.2.19)
unde 0 este permitivitatea vidului.
BestTypewritten textd
-
20 HV21W = (1.2.20)
Densitatea de energie w in volumul in care se gaseste campul magnetic este:
20H21
VWw = (1.2.21)
Unde 0 este permeabilitatea vidului si H este valoarea campului magnetic. In punctul in care exista un camp electromagnetic apare o densitate de energie totala, datorita atat campului electric, cat si campului magnetic:
20
20E H2
1 1.2.22)
Legatura intre campul electric si cel magnetic este data de relatia:
(w = + ) (
0
0
1.2.23) = H E (
(1.2.24)
(1.2.25)
R = l/A (1.2.26) unde l este lungimea conductorului, este rezistivitatea lui, A este aria sectiunii acestuia j = dI/dA (1.2.27)
= j Er v 1.2.28) = (r v E j ;
= IR + Ir 1.2.29) (
unde este rezistivitatea materialului iar este conductivitatea lui. b. Legea lui Ohm pentru circuitul intreg Ue
Intensitatea de energie electromagnetica I este:
Legile lui Ohm a. Legea lui Ohm pentru o portiune de circuit
unde Ue este tensiunea electromotoare (generata de sursa), I intensitatea curentului ce strabate circuitul inchis, R rezistenta externa, r rezistenta interna a sursei Teoremele lui Kirchhoff a. Prima teorema a lui Kirchhoff Suma intensitatilor curentilor care concura intr-un nod al unui circuit
este nula.
unde j este densitatea curentului de conductie
Forma locala a legii conductiei electrice este:
unde R este rezistenta portiunii de circuit iar I este intensitatea curentului ce-l strabate
b. A doua teorema a lui Kirchhoff Suma algebrica a t.e.m ale surselor in lungul unui circuit este egala cu suma algebrica a caderilor de tensiune din laturile circuitului. Legea conservarii sarcinii electrice Fiind dat un sistem izolat de corpuri, suma algebrica a sarcinilor electrice repartizate in diferite puncte ale sistemului este constanta.
BestTypewritten textI = E * H
BestTypewritten textU = R * I
-
2. MODELAREA SISTEMELOR MECATRONICE
2.1 INTRODUCERE
- dinamica corpului rigid aplicata componentelor cu caracteristici inertiale, - legile lui Kirchhoff pentru circuitele electrice, - legile circuitului magnetic pentru dispozitivele cu componente magnetice.
Mecatronica descrie integrarea unor elemente mecanice, electrice, electronice, electromagnetice si de calcul in vederea obtinerii unor sistemelor fizice cu un anumit grad de inteligenta pentru monitorizarea si controlul instalatiilor si echipamentelor intalnite in activitatea umana. O caracteristica importanta a sistemelor mecatronice moderne, in raport cu instalatiile si echipamentele automatizate, realizate in ultimii ani, este miniaturizarea componentei de control, uneori insotita si de miniaturizarea restului echipamentului. Intr-o masura din ce in ce mai mare, controlerul, senzorii si elementele de actionare sunt incorporate intr-un singur modul. La sistemele de marime normala, utilizarea materialelor magnetice cu caracteristici superioare si a celor superconductoare a condus la regandirea actionarilor hidraulice si pneumatice, a servo-motoarelor, motoarelor liniare si a actionarilor electromagnetice.
Dezvoltarea micro-actionarilor electrice, piezo-electrice si fero-electrice a condus, in ultimul timp, la o evolutie spectaculoasa a sistemelor micro-electro-mecanice (MEMS). Desi materialele utilizate in sistemele mecatronice si solutile mecanice au evoluat spectaculos, principiile fizicii, dinamicii (Newton, Maxwell etc.) se aplica in continuare. De asemenea, se face uz de teoria elasticitatii si de ecuatiile diferentiale partiale din teoria campului electro-magnetic. Totusi, pentru foarte multe dintre aplicatii, este suficienta o modelare mai putin exacta, bazata pe:
2.2 NOTIUNI DESPRE MODELAREA SISTEMELOR MECATRONICE Ecuatiile fundamentale ale miscarii in cadrul fizicii continuului sunt ecuatii diferentiale partiale (PDE) care descriu comportarea dinamica a corpurilor atat in timp cat si in spatiu. De exemplu, comportamentul in timpul miscarii resoartelor (arcurilor), barelor si discurilor elastice, curgerea fluidelor in jurul corpurilor sau prin acestea, comportamentul campurilor electrice sau magnetice etc. necesita prelucrarea unor informatii, atat de ordin spatial cat si temporal. Aceste ecuatii fac parte din seturile de ecuatii din teoria elasticitatii, elastodinamica, ecuatiile Navier-Stokes, mecanica fluidelor, ecuatiile Maxwell-Faraday din electro-magnetism etc. Multe dispozitive mecatronice practice pot fi modelate cu o anumita aproximatie prin elemente fizice precum masa sau inductanta. Ecuatiile miscarii sunt deci formulari integrale prin ecuatii diferentiale partiale si se regasesc sub forma unor ecuatii diferentiale ordinare (ODE), cuplate intre ele. Acolo unde structurile fizice au distributie spatiala, problema se poate adesea separa in 2 sub-probleme (spatiala, respectiv temporala), procesul fiind cunoscut sub denumirea de separarea de variabile. Descrierea spatiala este reprezentata de un numar finit de configuratii spatiale (moduri proprii), fiecare dintre ele avand o amplitudine modala proprie. Aceasta metoda duce la obtinerea, de asemenea, a unui set de ecuatii diferentiale ordinare. Adesea, aceste relatii cuplate pot fi descrise cu o anumita aproximatie in termeni precum: mase inertiale, circuite electrice si circuite magnetice.
-
2.3 MODELAREA CORPURILOR RIGIDE
2.3.1 Cinematica corpurilor rigide
Prin termenul de cinematica numim descrierea miscarii corpurilor in termenii vectorilor de pozitie r, vitezei liniare v, acceleratiei liniare a, vitezei unghiulare , acceleratiei unghiulare si ai coordonatelor generalizate qk(t) care reprezinta deplasarile liniare sau unghiulare ale componentelor sistemelor mecanice cu geometrie variabila, unele fata de altele (Figura 2.1). La un corp rigid se specifica, de obicei, vectorul de pozitie al unui punct, de exemplu al centrului de masa rc si viteza acestuia, vc. Pozitia unghiulara (orientarea) a unui corp rigid este specificata prin intermediul unui set de unghiuri numite unghiurile Euler. Denumirile cele mai folosite pentru acestea sunt: pitch, roll si yaw si sunt imprumutate din terminologia navala. Vectorul viteza unghiulara al unui corp rigid este notat cu . Viteza unui punct ce apartine corpului rigid, altul decat centrul de masa este: (2.1) vv += cp unde cel de-al 2-lea termen rerezinta un vector dat de un produs vectorial. Vectorul viteza unghiulara este un parametru comun tuturor punctelor componente ale corpului rigid. La modul cel mai general, un corp rigid are 6 grade de libertate, cum ar fi, de exemplu, satelitul. Majoritatea corpurilor rigide ce modeleaza sistemele mecanice obisnuite au constrangeri cinematice care limiteaza numarul gradelor de libertate.
2.3.2 Constrangeri si coordonate generalizate
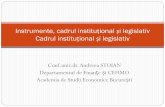
Instalatiile sunt adesea colectii de corpuri rigide care au cate un singur grad de libertate in raport cu fiecare din vecinii sai. De exemplu, bratul robotic prezentat in Figura 2.2 este compus din mai multe segmente rigide care sunt interconectate serial prin cate o articulatie cu un singur grad de libertate, de rotatie.
Figura 2.2
Constrangerile gradelor de libertate provin de la lagare sau rulmenti, dispozitive de ghidare si mecanisme sau angrenaje ce dispun de un singur tip de miscare relativa. In literatura de specialitate s-a convenit ca aceste miscari generalizate sa fie notate cu {qk, k = 1, K} in scopul descrierii comportamentului dinamic. De asemenea, este util sa definim un vector sau o matrice J(qk), numita Jacobian, care face legatura intre vitezele punctelor fizice de pe instalatie si vitezele generalizate { . Daca vectorul de pozitie al unui punct P de pe instalatie este rk }q& p(qk) si este determinat prin intermediul constrangerilor geometrice date de dependentele functionale ale variabilelor qk(t) atunci, viteza acestui punct este data de relatia:
J qr
v & = &= r
r
pp qq
(2.2)
-
Unde suma este efectuata dupa numarul de grade de libertate k. Dimensional, J este o matrice de dimensiune[6 x k], iar q, vectorul fortelor generalizate de dimensiune [k x 1]. Aceasta expresie este utila la calculul energiei cinetice atunci cand se utilizeaza relatia Lagrange. 2.3.3 Lanturi cinematice inchise si deschise
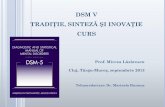
Anumite sisteme mecanice cu structura variabila formeaza lanturi cinematice inchise astfel incat, miscarea unuia dintre elementele sale mobile determina miscarea tuturor celorlalte elemente, asa cum se poate vedea in Figura 2.3.
Figura 2.3 Lant cinematic inchis
La astfel de mecanisme cinematice, proiectantul nu trebuie sa rezolve ecuatii diferentiale ale miscarii putand fi utilizate legile lui Newton pentru determinarea fortelor din articulatii. Problema are caracter cinematic, iar miscarea este determinata numai pe baza costrangerilor de tip geometric. La stucturile mecanice care formeaza lanturi cinematice deschise, cum este cazul bratului robotic din Figura 2.2, miscarea unui element component nu determina dinamica celorlalte componente. Caracterul acestui tip de probleme este, in mod inerent, dinamic si, in acest caz, inginerii trebuie sa utilizeze atat relatiile referitoare la constrangerile cinematice cat si ecuatiile diferentiale Newton-Euler ale miscarii sau variantele echivalente date de relatia lui Lagrange.
2.4 ECUATIILE DE BAZA DIN DINAMICA CORPURILOR RIGIDE In aceasta sectiune vor fi trecute in revista ecuatiile miscarii unui sistem mecatronic sau a unei instalatii ce ar putea fi un brat robotic, un vehicul dotat cu sistem de deplasare bazat pe levitatia magnetica sau o structura flexibila dintr-u accelerometru MEMS. Dinamica unui sistem cu structura flexibila este data de un set de ecuatii cu derivate partiale ce descriu miscarea. Ecuatiile pentru corpurile rigide implica legea lui Newton aplicata centrului de masa si extensia lui Euler la legile lui Newton pentru momentul unghiular al corpului rigid. Aceste ecuatii pot fi formulate in mai multe moduri:
a. Ecuatiile Newton-Euler (metoda vectoriala) b. Ecuatiile lui Lagrange (metoda scalara, energetica) c. Principiul lui DAlembert (metoda lucrului mecanic virtual) d. Ecuatiile Kane sau Principiul lui Jordan (principiul puterii mecanice virtuale)
2.4.1 Ecuatiile Newton-Euler Sa consideram corpul rigid reprezentat in Figura 2.1 al carui centru de masa este raportat la un sistem de referinta considerat fix, universal.Viteza si acceleratia centrului de masa sunt: (2.3) c cr = v& c cv =a& Punctul reprezinta derivata totala in raport cu timpul. Vom nota cu F forta rezultanta prin insumarea vectoriala a tuturor fortelor externe ce actioneaza asupra corpului, atat din surse mecanice cat si din surse electromagnetice. Legea lui Newton aplicata centrului de masa al corpului de masa m este: F = m ac = (2.4) cm v&
-
Daca rp este vectorul de pozitie al unui punct de pe corpul rigid vom defini prin vectorul de pozitie local, raportat la centrul de masa. Avem: rp = rc + . Daca o forta externa Fi actioneaza asupra corpului rigid intr-un punct I de pozitie ri definim prin Mi momentul fortei in jurul originii fixate prin Mi = ri x Fi (2.5) Momentul total al fortelor este obtinut prin insumarea data de totalitatea fortelor aplicate asupra corpului: = = + unde i i c cM r F r F M c i iM = F (2.6) Definim, de asemenea, momentul unghiular al corpului rigid (Hc) produsul dintre matricea momentelor secundare ale masei, numita matricea de inertie Ic (este o matrice simetrica) si viteza unghiulara . H = I (2.7) c c Deoarece Ic este o matrice simetrica, ea poate fi diagonalizata cu momentele de inertie principale (valori proprii) {Ik} stabilite in jurul directiilor principale (vectori proprii) {e1, e2, e3}. Cu aceste coordonate, care sunt asociate corpului rigid, momentul unghiular raportat la centrul de masa devine: Hc = I1c1e1 + I2c2e2 + I3c3e3 (2.8) unde vectorul vitezei unghiulare este reprezentat prin componentele sale asociate cu vectorii proprii principali {e1, e2, e3} atasati corpului rigid. Extensia lui Euler la legea lui Newton pentru un corp rigid este, deci: (2.9) c cH =M& Aceasta relatie indica faptul ca variatia momentului unghiular raportat la centrul de masa este egal cu momentul total al tuturor fortelor din jurul centrului de masa. De asemenea, relatia se poate aplica pentru un punct oarecare cu rol de centru de rotatie care nu este, in mod necesar, centrul de masa asa cum se arata in exemplul pendului compus, prezentat in Figura 2.4. Relatiile (2.4) si (2.9) sunt cunoscute ca ecuatiile Newton-Euler pentru miscare. Fara constrangeri, ele reprezinta 6 ecuatii diferentiale de ordinul 2, cuplate ce descriu pozitia spatiala a centrului de masa si orientarea corpului rigid. 2.4.2 Dinamica sistemelor multi-corp
sunt, fie forte externe Fa, generate de sistemele de actionare, fie forte interne Fc, cu caracter de constrangeri. In general, Fc provin de la fenomenele de frecare, iar daca neglijam frecarea ele se
(2.10) + =ij j ijk j k im q q q Q&& & & Primul termen din parte stanga indica existenta unei matrici simetrice (mij = mji) ai carei termeni
Determinarea relatiilor de dinamica presupune determinarea solutiilor ecuatiilor Newton-Euler pentru fiecare corp tinand cont de constrangerile geometrice si cinematice ce se aplica asupra acestuia. Fortele ce actioneaza asupra fiecaruia dintre corpuri
considera nule. Indiferent de metoda utilizata pentru obtinerea ecuatiilor miscarii, modelul dinamic pentru sistemele multicorp reprezentat in termenii coordonatelor interne generalizate qk(t) are forma:
-
reprezinta mase ale diferitelor componente ale sistemului. Cel de-al 2 lea termen este datorat acceleratiei Coriolis si acceleratiei centripete. In partea dreapta a relatiilor cu simbolul Q am notat fortele aplicate si termenii datorati controlului. Relatia contine neliniaritati de ordinul 2 datorate termenilor patratici ai vitezelor generalizate. In mod uzual, acesti termeni patratici dispar in cazul corpurilor rigide cu o singura axa de rotatie. Termenii neliniari apar in cazul existentei rotatiilor simultane in jurul a doua sau mai multor axe cum e cazul bratului robotic din Figura 3.2, miscarii giroscopului sau miscarii pentru orientarea satelitului.
2.5 MODELE DINAMICE SIMPLE
In cele ce urmeaza sunt prezentate 2 exemple in care se aplica legea momentului unghiular. In primul este vorba de rotatia unui corp rigid in jurul unei singure axe de rotatie, iar in cel de-al 2-lea exemplu exista 2 axe de rotatie.
2.5.1 Pendulul compus
Atunci cand un corp este constrans sa efectueze o miscare cu un singur grad de libertate de rotatie si este actionat de forta gravitationala, asa cum se poate observa in Figura 2.4, ecuatia de miscare are forma: T(t) + (m1L1 + m2L2)g sin = I (2.11) unde T(t) este cuplul aplicat, I = m1L12 + m2L22 este momentul de inertie (numit si momentul secundar al masei), este unghiul facut cu directia verticala.
Figura 2.4 Pendulul compus (dublu)
Ecuatia de mai sus este neliniara datorita functiei sin. In cazul unor miscari foarte mici in jurul valorii = 0, relatia devine o ecuatie diferentiala liniara si se pot gasi solutii de forma
= A cos t, (2.12) caz in care T(t) = 0. In acest caz pendulul executa o miscare sinusoidala cu frecventa naturala = [g(m2L2 - m1L1)/I]1/2 (2.13) Pentru pendulul simplu m1 = 0 vom avea problema clasica a pendulului unde frecventa naturala este invers proportionala cu radacina patrata a lungimii: = (g/L1)1/2 (2.14)
-
2.5.2 Giroscopul Dispozitivele care, in timpul functionarii, dezvolta viteze de rotatie foarte mari precum: motoarele de inalta viteza ale anumitor roboti, turbinele motoarelor navelor aeriene sau rotile volant de la dispozitivele cu miscare bazata pe levitatia magnetica, transmit momente unghiulare exprimate prin vectorul H.
Figura 2.5 Giroscopul
Extensia Euler a legilor lui Newton spune ca o schimbare (variatie) in timp a momentului unghiular conduce la aparitia unui moment al fortei M. (2.15) HM &= Daca problema se refera la o miscare intr-un spatiu tridimensional, momentul unghiular are componente in jurul a 2 axe diferite. Acest lucru conduce la aparitia acceleratiei Coriolis care produce un moment giroscopic chiar atunci cand cele 2 miscari unghiulare sunt regulate, stabile. Sa consideram un motor centrifugal care se rasuceste cu unghiul in jurul unei axe de vector unitate e1 si sa ne imaginam o miscare unghiulara a axei e1 cu unghiul in jurul axei perpendiculare e2 numita axa de precesiune in terminologia fizicienilor (Figura 2.6). Se poate arata ca momentul unghiular este dat de relatia: H = I1 e1 + I2 e2 (2.16) si variatia in timp a momentului unghiular pentru rasucirea constanta si miscarea de precesiune este data de: H=e H (2.17) 2&
Figura 2.6 Motor centrifugal
-
Exista, deci, un moment giroscopic, adesea produs de fortele din lagarele axei (vezi Figura 2.6). Acest moment este perpendicular pe planul format de e1 si e2 si este proportional cu produsul dintre vitezele de rotatie: M = I1 e2 x e1 (2.18) Relatia are aceeasi forma ca (2.10), aici forta generalizata Q fiind identificata prin momentul M, adica momentul este dat de produsul vitezelor generalizate atunci cand termenul acceleratiilor este nul. 2.5.3 Modelarea sistemelor elastice
Structurile elastice se intalnesc sub diferite forme: resorturi, cabluri, grinzi (bare), discuri, cuve, cadre etc. Pentru problemele liniare se poate utiliza metoda modurilor proprii pentru a prezenta modelul dinamic printr-un set finit de amplitudini modale ale gradelor de libertate (variabile interne) generalizate. Aceste moduri proprii sunt considerate ca solutii la ecuatiile cu derivate partiale ale structurilor elastice [Yu, 1996].
2.5.3.1 Bara elastica incastrata in consola Una dintre cele mai simple structuri elastice, exceptand cablurile, este bara (grinda) mono-dimensionala, reprezentata in Figura 2.7.
Figura 2.7 Bara elastica incastrata in consola
Pentru miscari reduse consideram numai deplasarea transversala w(x, t), unde x este coordonata spatiala de-a lungul barei. Integrand eforturile ce actioneaza in sectiunea transversala a barei se obtine vectorul rezultant de forfecare al eforturilor, momentul de indoire (curbura) M si efortul axial T. Bara poate fi solicitata punctual (forte concentrate), forte sau momente de capat, forte distribuite (forte gravitationale, forte fluidice, forte electromagnetice). Pentru o solicitare distribuita f(x, t) ecuatia miscarii este data de:
f (x, t)twA
xwT
xwD 2
2
2
2
4
4=
+
(2.19) unde D este rezistivitatea la indoire, A este aria sectiunii transversale a barei, iar este densitatea materialului.
-
Pentru o bara cu modulul lui Young Y si cu sectiunea transversala cu forma dreptunghiulara de dimensiuni b (latimea) si h (inaltimea), avem D = Ybh3/12.
- capat fixat w = 0, 0xw =
- capat prins in pivot w = 0, 0xw2
2=
(moment egal cu zero)
- capat liber 0xw0
xw
3
3
2
2=
= , (forfecare egala cu zero)
Pentru D = 0 avem cazul unui cablu sau al unei coarde supusa la tensiunea T si ecuatia ia forma ecuatiei uzuale a undelor. Pentru o bara supusa la tensiunea T, frecventele naturale se maresc prin adaugarea celui de-al 2-lea termen in ecuatie. Pentru T = -P, adica o solicitare punctuala in capatul grinzii, termenul asociat curburii duce la descresterea frecventei naturale, odata cu cresterea solicitarii concentrate P. Daca frecventa naturala cea mai scazuta tinde spre zero, odata cu cresterea solicitarii P, structura barei devine instabila sau formeaza o bucla inchisa. Utilizarea lui T (sau P) pentru a rigidiza sa a reveni la starea flexibila a structurii barei poate fi utilizata la proiectarea de senzori. Astfel, poate fi creat un senzor cu rezonanta (vibratie) variabila. Aceasta idee a stat la baza crearii unui accelerometru din domeniul MEMS. O alta trasatura a dinamicii acestei bare este faptul ca spre deosebire de coarda sau cablu, frecventele modurilor naturale nu sunt corespunzatoare datorita prezentei in ecuatie a termenului cu derivata de ordinul 4. Inn problemele de tip unda, acest lucru este cunoscut ca dispersia undei. Aceasta inseamna ca undele de diferite lungimi de unda lucreaza la viteze diferite astfel incat formele pulsului undei isi modifica alura odata cu deplasarea undei prin structura. Pentru a rezolva probleme dinamice la structurile barelor de lungimi finite trebuie specificate conditiile de frontiera de la capete. Cateva exemple de astfel de conditii:
2.6 FORTE ELECTROMAGNETICE Una dintre problemele cheie in modelarea sistemelor mecatronice o constituie identificarea fortelor electrice si magnetice. Fortele electrice actioneaza datorita sarcinilor electrice si polarizarii electrice (dipoli electrici). Fortele magnetice actioneaza datorita curentilor electrici si polarizarii magnetice. Sarcina electrica si curentul pot fi puse sa genereze forte intr-un camp electric uniform sau un camp magnetic uniform, totusi dipolii electrici si magnetici vor produce forte numai in campuri electric, respectiv magnetic, cu structuri de gradient. Fortele electrice si magnetice pot fi calculate utilizand, la fel de bine, atat metoda vectoriala directa cat si principii energetice. Una dintre cele mai populare metode aplicate sistemelor electromecanice este metoda Lagrange. Sistemele electromagnetice pot fi modelate fie ca sisteme cu parametri distribuiti, precum campul electric E sau densitatea de camp magnetic B, fie circuite electrice sau magnetice cu parametri (elemente) concentrati. Forta generata de o sarcina electrica punctuala Q este data de ecuatia vectoriala (Figura 2.9): F = QE (2.22)
-
Cand E este generat de o singura sarcina electrica, forta dintre sarcinile Q1 si Q2 are marimea:
2
0
21
r4QQF = (2.23)
si are directia de-a lungul liniei ce uneste cele 2 sarcini electrice. Sarcinile de acelasi fel se resping, cele diferite se atrag. Forta magnetica pe unitatea de lungime generata de un curent I este data de produsul vectorial: F = I x B (2.24)
Figura 2.9 Sistem electro-magnetic
unde forta magnetica este perpendiculara pe planul format elementul de curent si vectorul campului magnetic. Forta totala, rezultanta, in cazul unui circuit inchis aflat intr-un camp uniform, este zero. Un circuit inchis produce, totusi, o forta datorita unui camp magnetic variabil (gradient de camp) produs de un alt circuit electric sau o alta sursa de camp variabil. Fortele produse prin distributia campului in jurul unui volum ce contine sarcini electrice sau curenti ( E sau B distribuite) pot fi determinate utilizand concepte precum solicitare (efort, eventual unitar) electrica sau solicitare magnetica, dezvoltate de Faraday si Maxwell. Aceste solicitari electromagnetice se obtin prin integrarea pe o suprafata inchisa, marginita, ce cuprinde
distributii de curenti sau sarcini electrice. De exemplu, la un solid continand o distributie de curent electric se poate determina o presiune magnetica, P = Bt2/20, pe o suprafata elementara sau o tensiune magnetica, tn = Bn2/20, unde componentele campului magnetic sunt scrise in termenii unor vectori tangentiali si normali la suprafata. In general, exista 4 metode principale pentru determinarea fortelor electrice si magnetice:
- metoda directa-determinarea vectorilor momentelor si fortelor directe intre intre sarcinile elctrice, curenti si dipoli
- metoda vectorilor de forta camp electric-sarcina electrica si camp magnetic-curent - metoda tensorului electromagnetic-integrarea unei tensiuni electrice sau a unei presiuni
magnetice pe o suprafata a unui corp material - metode energetice bazate pe gradienti ai energiei electrice si ai energiei magnetice. In continuare sunt date exemple cu metoda directa si metoda tensorului solicitarii (efortului).
-
2.6.1 Exemplul 1. Forte sarcina-sarcina Sa presupunem 2 bare elastice intr-un dispozitiv MEMS care au concentrate la varfuri sarcinile electrice de valori Q1 coulombi si, respectiv, Q2 coulombi (Figura 5.7).
Figura 2.10 Dispozitiv MEMS
Forta electrica existenta intre varfurile barelor este data de vectorul:
30
21
r4QQ
=rF (N-newtoni) (2.25)
unde 1/4 0 = 8,99 x 109 Nm2/C2. Daca distanta initiala intre bare era d0, ea se modifica datorita fortei electrice aparute. Pentru simplitate, sa consideram Q1 = -Q2 = Q, unde cele 2 sarcini egale, dar se semn opus genereaza o forta de atractie intre varfurile celor 2 bare. Deflexia celor 2 bare este data de:
Fk1
3YIFL3
Datorita fortei electrice aparute, distanta finala intre varfurile celor 2 bare este d = d0 - 2
( )2002
d 21
4Qk (2.27)
= = (2.26) unde L este lungimea, Y este modulul lui Young, I este momentul secundar al ariei si k este constanta de elasticitate.
= Pentru la primul ordin avem: 0
-
2.6.2 Exemplul 2. Forta magnetica a unui electromagnet
Sa ne imaginam o armatura feromagnetica cu o constrangere elastica data de rigiditatea k, asa cum se poate vedea in Figura 2.11. Sub armatura magnetica usoara amplasam un electromagnet care dispune de o infasurare de curent cu N spire in jurul unui miez feromagnetic usor. Curentul este produs prin conectarea unei surse de tensiune in circuitul infasurarii unde mai este amplasata si o rezistenta R. Forta magnetica va fi calculata utilizand tensorul solicitarii (efortului) magnetice dezeste voltat de Maxwell si Faraday [Moon, 1984, 1994]. In afara corpului feromagnetic, tensorul solicitarii (efortului) este t, iar pe suprafata definita de vectorul normal n are expresia nt =
Figura 2.11 Sistem cu electromagnet
[ ] n t ( n t2t2n0
B B B B2
1 1 =
= , , ) (2.30)
= B dA21 2n0F n (2.31) BBn2/20 reprezinta solicitarea magnetica. Astfel, daca aria pieselor ce constituie polii
electromagnetului este A (neglijand franjurile campului), atunci forta are valoarea: F = Bg2A/0 (2.32) unde Bg este campul in gol (la curent nul). Acest camp este determinat cu ajutorul legii lui Ampere: NI = R) , = BgA (2.33) Unde reluctanta este data aproximativ de relatia:
Pentru o permeabilitate magnetica mare, asa cum este cazul corpului feromagnetic, componenta tangentiala a campului magnetic in afara suprafetei magnetice este aproape zero. Astfel, forta este aproximativ normala la suprafata si este determinata din integrala tensiunii magnetice pe suprafata:
-
( )
Ad2
R0
0
=) (2.34) Echilibrul dintre fortele elastice si magnetice este descris de relatia:
=
== kR
NIA
1A
1F2
0
2
0) (2.35)
sau
( )( ) ,= kAd4NI
020
2 ( ) =
k
d4
AIN2
0
220 (2.36)
Sa retinem ca expresia 0N2I2 are unitati de masura ale fortei (N-newton). Pe masura ce valoarea curentului creste, rigiditatea electrica si elastica tinde la zero.
-
3. MOMENTE DE INERTIE 3.1 Definitii Momentele de inertie au fost introduse pentru descrierea comportamentului dinamic al corpurilor in timpul unei miscari cu componenta de rotatie. Momentul de inertie al unui corp este definit ca suma (integrala) produselor dintre masele elementare ale corpului si patratele distantelor de la elementele de masa la un punct, o dreapta sau un plan.
Figura 3.1
Considerand un corp de volum V, cu distributia continua a masei, raportat la un sistem de referinta cartezian xOyz (Figura 3.1) si vectorul de pozitie r = xi + yj + zk al elementului de masa dm, se pot defini urmatoarele categorii de momente de inertie:
a. Momentul de inertie polar in raport cu originea sistemului de axe: ( )dmzyxJ
V222
O ++= (3.1) b. Momentele de inertie axiale in raport cu axele sistemului de coordonate:
J (y z )dmV
2 2x = +
J (x z )dm
V2 2
y = + (3.2) J (x y )dm
V2 2
z = + c. Momentele de inertie planare in raport cu planele sistemului de coordonate:
=V 2xOyJ z dm
=V 2xOzJ y dm (3.3)
=V 2yOzJ x dm
-
d. Momentele de inertie centrifugale sau produsele de inertie:
= Vxy dmxyJ
= Vxz dmxzJ (3.4)
= Vyz dmyzJ Intre momentele de inertie astfel definite se pot evidentia urmatoarele relatii de legatura: JO = JxOy + JxOz + JyOz JO = Jx + JyOz JO = Jy + JxOz (3.5) JO = Jz + JxOy
2JO = Jx + Jy + Jz care sunt valabile numai cu respectarea conditiilor de ortogonalitate intre axele si respectiv planele fata de care sunt precizate momentele de inertie. In cazul in care corpurile sunt omogene se pot defini momentele de inertie geometrice prin divizarea momentelor masice anterior definite cu valoarea densitatii constante a corpului: I O = JO/ (3.6) Exista aceleasi tipuri de momentele de inertie geometrice ca si cele masice corespunzatoare. Este evident ca valorile momentelor de inertie ale unui corp depind de alegerea sistemului de axe in raport cu care se calculeaza. De aceea schimbarea sistemului de referinta atrage dupa sine necesitatea de a relua calculele. Cum orice sistem de referinta se poate obtine din altulprin translatii si rotatii corespunzatoare este necesar sa se analizeze modul in care variaza momentele de inertie cand li se aplica astfel de transformari. 3.2 Variatia momentelor de inertie in raport cu axele paralele
(3.8) ceea ce scalar inseamna: x1 y1 = y + y1C
= z + z1C deoarece versorii celor 2 sisteme de coordonate sunt identici.
= x + x1C (3.9)
z1
Se considera un corp de masa M si volum V al carui centru de greutate este C (Figura 3.2). Se plaseaza in centrul de greutate un sistem de referinta xCyz in raport cu care se cunosc toate momentele de inertie ale corpului. Se urmareste exprimarea momentelor de inertie in raport cu un sistem oarecare x1O1y1z1, fata de care punctul C are vectorul de pozitie cunoscut: r1C = x1C i + y1C j + z1C k (3.7) Pozitia elementului de masa dm este precizata fata de noul sistem de referinta prin vectorul de pozitie: r1 = r1C + r
-
Figura 3.2
Se observa ca vectorul de pozitie rC al centrului de greutate exprimat fata de sistemul cu originea in acel punct, este:
0V
V
dmdm
c == rr (3.10)
Ceea ce conduce la:
adica: (3.11) =V 0dmr
===
V
V
V
0dmz
0dmy
0dmx
Oricare dintre momentele de inertie fata de noul sistem de coordonate x1O1y1z1 se poate calcula cu ajutorul relatiilor de mai sus rezultand: e. Momentul de inertie polar in raport cu originea sistemului de coordonate x1O1y1z1:
J J r M21CO1 O (3.12)
f. Momentele de inertie axiale in raport cu axele sistemului de coordonate x1O1y1z1:
J J (y z )M21Cx1 x21C
21Cy1 y
21C
21Cz1 z= + +
= + + (3.13) J J (x y )M
21C= + +
J J (x z )M
= +
g. Momentele de inertie planare in raport cu planele sistemului de coordonate x1O1y1z1:
J J z M21Cx1O1y1 = xCy + J J y M21Cx1O1z1 = xCz + (3.3) J J x M21Cy1O1z1 = yCz +
h. Momentele de inertie centrifugale sau produsele de inertie:
-
= Vxy dmxyJ
= Vxz dmxzJ (3.4)
= Vyz dmyzJ
3.3 Variatia momentelor de inertie in raport cu axe concurente Se considera corpul de masa M si volum V raportat la un sistem de referinta xOy, fata de care se cunosc toate momentele de inertie ale corpului (Figura 3.3). Se urmareste determinarea momentului de inertie axial al corpului in raport cu o dreapta () concurenta cu axele sistemului avand directia definita de versorul u = i + j + k. Distanta de la elementul de masa dm la axa () se poate exprima ca modulul produsului dintre vectorul de pozitie curent r si versorul dreptei (), u:
Figura 3.3
= |r u| (3.5) adica: 2 = (y z)2 + (z x)2 + (x y)2 (3.6) Astfel, momentul de inertie al corpului fata de axa () este: J = ( ) ( ) ( ) = + + + + + V2 2 2V V V2 2 2 2 2 2 2dm y z dm x z dm x y dm (3.7) V V V2 xydm 2 xzdm 2 yzdm Tinand seama de relatiile de definitie (3.1) (3.4) expresia (3.7) devine: J = Jx2 + Jy2 + Jz2 2Jxy - 2Jxz - 2Jyz (3.8) OBSERVATII: a. Deseori utilizarea momentelor de inertie impune prezentarea lor sub forma unui operator numit matrice de inertie. Aceasta contine momentele de inertie axiale si cele centrifugale sub forma:
-
J = (3.9)
zyzxzyzyxyxzxyx
JJJJJJJJJ
Pe baza relatiei (3.9) si daca vom considera vectorul cosinusurilor directoare:
A = (3.10)
Atunci relatia (3.8) a momentului de inertie axial se poate scrie: J = ATJA (3.11) Aceasta modalitate de exprimare este de mare utilitate mai cu seama in studiul dinamicii robotilor, unde se intalneste asa-zisa pseudomatrice de inertie ce contine, pe langa momentele astfel definite si masa corpului considerat:
J = (3.12)
MSSSSJJJSJJJSJJJ
zyxzxOyyzxzyyzxOzxyxxzxyyOz
b. In general, pentru corpurile de forma geometrica regulata momentele de inertie sunt calculate si tabelate. Daca este necesara calcularea momentelor de inertie ale unui corp de forma complexa, se va apela la descompunerea corpului respectiv in sub-corpuri pentru care momentele de inertie se cunosc. Se exprima aceste momente cunoscute fata de punctul, axa sau planul in raport cu care trebuie calculat momentul de inertie al corpului complex, prin utilizarea relatiilor de variatie in raport cu axe concurente sau paralele, dupa cum este necesar. In final, se insumeaza algebric momentele de inertie ale tuturor partilor componente astfel calculate, tinand seama de faptul ca pentru portiunile unde corpul prezinta goluri momentele de inertie se considera negative.
-
4. LUCRUL MECANIC
4.1 Deplasari elementare ale corpului Problema deplasarilor elementare ale solidului rigid se pune in mod diferit fata de cea a deplasarilor punctului material. Cand un corp rigid inregistreaza o deplasare elementara, aceasta se poate exprima printr-o variatie elementara de pozitie a sistemului sau atasat in raport cu pozitia detinuta anterior. Pozitia la un moment dat, in spatiul tridimensional, a unui corp, respectiv pozitia sistemului sau de referinta atasat, se exprima printr-o matrice de dimensiuni 4x4 in care primele 3 coloane reprezinta cosinusurile directoare ale versorilor axelor reperului iar cea de-a 4-a coloana, coordonatele originii sale in raport cu sistemul de referinta fix. In studiul robotilor aceasta matrice, numita matrice de transformare generala are o forma specifica in care n, o, a sunt notatiile utilizate pentru versori iar p reprezinta vectorul de pozitie al originii:
T = (4.1)
1000paonpaonpaon
zzzzyyyyxxxx
T (4.2) Astfel, variatia elementara a pozitiei corpului se exprima prin: dT = [TRANS(dx, dy, dz) ROT(, d)
I (4.4)
Daca i se inprima corpului o deplasare elementara, aceasta trebuie sa aiba in mod firesc un caracter general, adica sa fie compus dintr-o translatie elementara si o rotatie elementara. Deci, noua pozitie a corpului reprezentata prin T + dT se va obtine aplicand pozitiei initiale o succesiune de transformari elementare: o translatie cu proiectii elementare si o rotatie de unghi elementar in jurul unei axe oarecare: T + dT = TRANS(dx, dy, dz) ROT(, d)
I]T (4.3) unde I este matricea unitate. Operatorul prin intermediul caruia se realizeaza deplasarea elementara a corpului este reprezentat de expresia continuta intre parantezele drepte si se numeste operatorul : = TRANS(dx, dy, dz) ROT(, d)
dT = T (4.5) Pentru a calcula expresia acestui operator, cea mai simpla cale este de a considera matricea de rotatie elementara in jurul axei oarecare ca rezultat al suprapunerii a 3 rotatii elementare distincte in jurul axelor sistemului de referinta:
ROT(, d) = ROT(Ox, x) ROT(Oy, y) ROT(Oz, z) =
= =
x xx x
x x
x x
cos 0 sin 00 1 0 0
- sin 0 cos 00 0 0 1
1 0 0 00 cos - sin 00 sin cos 00 0 0 1
0 0 1 00 0 0 1
x xx x
cos - sin 0 0sin cos 0 0
-
= =
10000100-100001
xx
1000010-0010001
x
x
1000010000100-1
xx
= (4.6)
1000010101
xyxz
yz
Matricea de rotatie elementara (4.6) s-a obtinut in urma produsului celor 3 matrici de rotatie fundamentale la care s-au facut urmatoarele aproximari: sin i i |i=x, y, z cos i 1 |i=x, y, z (4.7) si dupa care s-au neglijat produsele de 2 sau 3 cantitati elementare. Matricea de translatie elementara este de forma:
TRANS(dx, dy, dz) = (4.8)
1000dz100dy010dx001
Efectuand produsul si diferenta reprezentate in (4.4) se obtine:
= (4.9)
0 0 0 00 dz
0 dy0 dx
y xz x
z y
Este astfel evident ca orice deplasare elementara a unui solid rigid se poate materializa prin aplicarea operatorului matricei ce exprima pozitia sistemului de referinta atasat corpului respectiv, primele 3 coloane ale operatorului exprimand modificarea orientarii axelor sistemului iar ultima coloana, deplasarea originii acestuia. Elementele matricei se pot considera impreuna si sub forma unei matrici coloana (de fapt
vector), numita vectorul elementar al miscarii in care primele 3 elemente reprezinta vectorul de translatie elementara, iar ultimele 3 elemente reprezinta vectorul de rotatie elementara.
D = (4.10)
zyx
dzdydx
-
4.2 Deplasari elementare intr-un sistem de corpuri
Se considera un sistem de corpuri plasat intr-un sistem de referinta fix. Asa cum s-a procedat anterior, pozitia oricaruia dintre corpurile sistemului se exprima fata de reperul fix prin intermediul reperului sau atasat. Matricea T ce exprima pozitia acestuia se poate calcula ca produs al tuturor matricilor ce caracterizeaza pozitiile corpurilor interpuse intre corpul studiat si sistemul de referinta fix. Astfel, raportand fiecare corp la sistemul de referinta atasat precedentului, se obtine, de la sistemul fix la corpul studiat, o succesiune de matrici prin a caror inmultire rezulta matricea T.
Daca structura sistemului de corpuri este complexa atunci, cu siguranta, exista mai multe posibilitati de a exprima pozitia unui corp dat in raport cu sistemul de referinta (Figura 4.1). In acest caz este recomandabil sa se aleaga acea succesiune posibila care conduce la necesitatea de a face un minimum de operatii. Astfel, corpul studiat poate ocupa pozitia n in succesiunea de corpuri notata cu A, pozitia p in succesiunea notata cu B sau pozitia r in succesiunea notta cu C. Matricea ce exprima pozitia sa se poate, deci, calcula prin:
T = n 1nn 2n 1
i 1i
12
01A A A A A
K K = = p 1p
p 2p 1
j 1j
12
01B B B B B
K K = = r 1r
r 2r 1
k 1k
12
01C C C C C
K K (4.11)
Figura 4.1
O pereche de astfel de succesiuni exprimand pe doua cai diferite pozitia aceluiasi corp fata de acelasi sistem de referinta se numeste ecuatie de pozitie, iar matricele continute in succesiunile respective, sunt matrici de transfer. Astfel, pentru corpul ales, una dintre ecuatiile de pozitie posibile este: n 1n
n 2n 1
i 1i
12
01A A A A A
p 1p
p 2p 1
j 1j
12
01B B B B B
Se presupune ca pentru un sistem de corpuri considerat s-a stabilit o ecuatie de pozitie si ca unul dintre corpurile cuprinse intr-unul intr-unul dintre membrii ecuatiei a suferit o deplasare elementara. Este evident ca sub o forma sau alta, aceasta deplasare elementara va afecta pozitiile tuturor corpurilor prezente prin intermediul matricilor lor de transfer in ecuatia de pozitie si ca, in calitate de cauza, ea va produce mai multe deplasari elementare efect. Se pune astfel problema ca, fiind cunoscuta deplasarea elementara inregistrata de unul din corpuri si exprimata in sistemul sau de referinta atasat, sa se determine deplasarea elementara inregistrata de un alt corp din sistem si exprimata in sistemul sau propriu de referinta.
K K (4.12) K K =
-
Sa consideram in mod concret ca in ecuatia de pozitie (4.12) se produce o deplasare elementara a corpului i din succesiunea A pentru care se cunoaste vectorul elementar al miscarii in sistemul de referinta atasat corpului si exprimat fata de precedentul prin matricea de transfer . Se pune problema sa se determine din multimea deplasarilor elementare cauza, pe aceea care este inregistrata de corpul j din succesiunea B, adica exprimata in sistemul de referinta atasat acestuia, precizata fata de precedentul din aceeasi succesiune, prin matricea
. Conform ecuatiei de pozitie, de la corpul i din succesiunea A se poate ajunge la corpul
jdin succesiunea B prin una dintre variantele:
1iiA
1jjB
- considerand in sens direct, spre dreapta, succesiunea de matrici ramase in membrul stang
al ecuatiei pana la semnul egal si continuand cu parcurgerea in sens contrar a membrului drept, incepand de la pana la inclusiv; 1ppB
j1jB +
- considerand in sens contrar, spre stanga, succesiunea de matrici din membrul drept pana
la si continuand in membrul drept, in sensul direct, de la semnul egal la matricea
.
01A
1jjB
Este evident ca matricea de transformare T, prin intermediul careia se determina deplasarea elementara efect din deplasarea elementara cauza, se poate calcula intr-o astfeol de situatie, in doua moduri:
(4.13) 1j
1j11p
p1n
ni
1i BBAAT
++
= KK
sau:
(4.14) ( ) ( ) 1jj0111011ii BBAAT = KK In aplicatii se va alege intotdeauna acea varianta care implica cele mai putine calcule. 4.3 Lucrul mecanic al unei forte
Considerand o forta F aplicata intr-un punct de vector de pozitie r in raport cu un reper fix xOyz, se introduce prin definitie lucrul mecanic elementar al fortei, produsul scalar dintre forta si deplasarea elementara. (Figura 4.2): dL = F dr (4.15)
-
Figura 4.2 Considerand proiectiile fortei si ale deplasarilor elementare pe axele sistemului de referinta, lucrul mecanic este: dL = F dr = Fxdx + Fydy + Fzdz (4.16) Lucrul mecanic finit al fortei variabile F = , intre doua pozitii A si B bine precizate pe traiectorie se va calcula prin integrarea expresiei (4.16):
),rF(r, t&
(4.17) ( ++= BA zyxAB dzFdyFdxFL )
)
Cum expresia (4.16) nu reprezinta intotdeauna o diferentiala totala exacta, calculul integralei din relatia (4.17) presupune cunoasterea functiilor: ( )),,,,,, tzyxzyxFF xx
4.18) ( ),,,,,, tzyxzyxFF yy( )),,,,,, tzyxzyxFF zz
= & & &
= & & & (
= & & & In cazul in care proiectiile fortei sunt derivatele partiale ale unei functii scalare U ce depinde de pozitia punctului, U = U(x, y, z), numita functie de forta:
xUFx
= , yUFy
= , zUFz
= (4.19) Iar conditiile de existenta a functiei de forta sunt:
x
Fy
F yx=
,
xF
zFx z
=
,
yFz
zFy
=
(4.20)
Atunci expresia (4.16) a lucrului mecanic elementar este diferentiala totala dU. In acest caz lucrul mecanic finit (4.17) nu depinde de traiectoria urmata de punct intre cele doua pozitii A si B, fiind egal cu diferenta valorilor functiei de forta in pozitiile respective: LAB = ++
BA
dzzUdy
yUdx
xU = U(xB, yB, zB) - U(xA, yA, zA) (4.21)
O astfel de forta se numeste forta conservativa iar spatiul in care fortele sunt conservative se numeste camp conservativ. PROPRIETATI: Astfel, avand:
(4.22) =
=n
i 1idr dr
Lucrul mecanic elementar al fortei F este:
dL = Fdr = (4.23) = = =
= =n
i 1i
n
i 1i
n
i 1iF dr F dr dL
- daca asupra unui actioneaza un sistem de n forte, atunci lucrul mecanic elementar al rezultantei este suma algebrica a lucrurilor mecanice ale fortelor sistemului.
Reducand sistemul de forte la o rezultanta:
R = (4.24) =
n
i 1iF
-
Lucrul mecanic al acesteia este:
dL = Rdr = (4.25) = ==
==
n
1i
n
1iii
n
1ii dLdrFdrF
OBSERVATII:
- Daca vectorii fortasi deplasare elementarase exprima matricial:
F = (4.26)
zyx
FFF
respectiv:
dr = (4.27)
dzdydx
atunci expresia (4.16) se poate scrie: dL = FTdr (4.28)
- In expresiile (4.24) si (4.25) fortele care intervin nu sunt in mod obligatoriu doar forte exterioare. Daca punctul material este supus la legaturi atunci rezultanta, respectiv lucrul mecanic elementar se calculeaza pentru toate fortele exterioare si de legatura.
4.4 Lucrul mecanic al unui sistem de forte oarecare
4.4.1. Cazul solidului rigid Se considera un solid asupra caruia actioneaza un sistem de forte exterioare si care este supus la legaturi in mai multe puncte ale sale. Din ansamblul fortelor exterioare si de legatura exterioare, punctului Ai al corpului ii corespunde forta Fi. Se presupune ca sub actiunea acestor forte corpul executa o miscare generala in cadrul careia punctul Ai, de vector de pozitie ri fata de reperul atasat xOyz, are viteza vi (Figura 4.3). Respectand distributia de viteze in miscare generala, viteza punctului este:
iOi1
i dtrvdrv +== (4.29)
in care: - v0 reprezinta viteza originii sistemului atasat corpului in raport cu sistemul de referinta fix
x1O1y1z1, adica:
-
Figura 4.3
dt
O1O
drv = (4.30)
avand si semnificatia de componenta de translatie a vitezei punctului in miscare generala; - reprezinta viteza unghiulara de rotatie instantanee definita de versorii variabili in raport
cu timpul ai sistemului de referinta atasat si raportata la acest sistem, astfel ca produsul vectorial are semnificatia de componenta de rotatie a vitezei punctului in miscare generala;
ir - r1i reprezinta vectorul de pozitie al punctului Ai in raport cu sistemul de referinta fix.
Intr-un interval elementar de timp dt deplasarea inregistrata de punctul considerat fata de sistemul fix este: dr1i = vidt = vOdt + ( ri)dt (4.31) Lucrul mecanic elementar al fortei Fi devine astfel, conform relatiei (4.16):
dLi = Fi dr1i = Fi vOdt + (ri Fi)dt (4.32)
t (4.33)
t (4.34)
4.35)
Tinand seama de faptul ca in miscare de translatie, toate punctele corpului rigid au, la acelasi moment de timp, aceeasi viteza, se noteaza: dr1O = vOd si se numeste deplasare elementara in miscare de tranlatie, iar: d = d
Este evident ca in acelasi interval elementar de timp, toate punctele corpului rigid ce se afla intr-o miscare generala sub actiunea unui sistem de forte exterioare si de legatura exterioare, executa aceleasi deplasari elementare de translatie si rotatie. Deci, lucrul mecanic elementar total al sistemului de forte, obtinut prin insumarea algebrica a lucrurilor mecanice (4.35), este:
se numeste deplasare elementara in miscare de rotatie, intr-o astfel de miscare toate punctele rigidului avand, la acelasi moment de timp, aceeasiviteza unghiulara. Daca se mai observa ca produsul ri Fi reprezinta momentul fortei aplicate in Ai fata de punctul O, lucrul mecanic elementar (4.32) devine: dLi = Fi dr1O + MOi d (
-
= = RdMdrF +
=
== =
n
1iOiO1
n
1i
n (4.36)
Vectorii
i i
i 1 dL dL dr1O + MO d
R si MO ce intervin in expresia (4.36) a lucrului mecanic sunt elementele torsorului de reducere in raport cu punctul O al fortelor exterioare si fortelor de legatura exterioare ce actioneaza asupra corpului considerat. Se poate deci, scrie: dLext = Rext dr1O + MOext d (4.37) Este interesant de studiat lucrul mecanic elementar al fortelor de legatura interioare dintre punctele unui solid rigid. Asigurand constanta de forme si dimensiuni a unui rigid, sistemul fortelor de legatura interioare este format din perechi de forte egale si direct opuse. Astfel, intre oricare 2 puncte Ai si Aj se manifesta sistemul fortelor colineare Fij si Fji care satisfac principiul actiunii si reactiunii Fij + Fji = 0 (Figura 4.4). In raport cu un punct exterior O, vectorii de pozitie ai punctelor respective sunt ri si rj, astfel ca suportul celor 2 forte interioare este vectorul AiAj = ri rj . Lucrul mecanic elementar al sistemului celor 2 forte de legatura interioare este:
Figura 4.4
Cum patratul unui vector este acelasi cu patratul modulului sau, se poate scrie:
0 (4.39) deoarece vectorul AjAi are modulul constant unind intre ele doua puncte ale unui solid rigid. Perechea de forte interioare fiind considerata intre 2 puncte oarecare ale rigidului, rezulta ca lucrul mecanic elementar al tuturor fortelor de legatura interioare ale acestuia este nul: dLint = 0 (4.40) OBSERVATII: - In cazul unui sistem de corpuri solide rigide considerat in ansamblul sau, lucrul mecanic elementar (4.37) se calculeaza pentru toate fortele exterioare si fortele de legatura exterioare ale sistemului. Fortele de legatura dintre corpurile sistemului fiind forte de legatura interioare, au lucrul mecanic nul, conform relatiei (4.40). - Daca torsorul fortelor exterioare si fortelor de legatura exterioare se exprima prin matricea coloana ale carei elemente sunt proiectiile pe axele sistemului de referinta ale rezultantei si momentului rezultant:
dLij = (/2) d|AjAi|2 = |AjAi| d|AjAi| =
dLij = Fij dri + Fji drj = Fji (rj - ri) = AjAi d(AjAi) = (/2) d(AjAi)2 (4.38)
-
(4.41)
=
OzOyOxzyx
MMMRRR
iar deplasarile elementare din expresia (4.37) se exprima den asemenea prin matricea coloana denumita vector elementar al miscarii ale carei elemente sunt proiectiile pe axele sistemului de referinta ale vectorilor dr10 si d:
D = (4.42)
zyx
ddddzdydx
Atunci lucrul mecanic elementar din (4.37) se exprima astfel: dLext = TD (4.43)
4.4.2. Cazul solidului deformabil Pentru corpurile deformabile o mare importanta o are sistemul de forte interioare (eforturi) care exprima actiunea unei parti a corpului asupra celeilalte si invers. Torsorul (R, M) al acestor eforturi dintr-o sectiune oarecare a unei parti a corpului este identic cu torsorul fortelor exterioare aplicate partii indepartate din respectivul corp. Rezultat al distributiei eforturilor pe sectiunea considerata, starea de solicitare din interiorul corpului este caracterizata de tensorul tensiunilor care, in unele situatii este de preferat a se exprima matricial sub forma (4.44). Pozitia deformata a unui corp continuu poate fi descrisa printr-un camp de deplasari u = u(x,y,z) cu componentele ux, uy, uz pe directiile spatiului tridimensional. Acest camp de deplasari trebuie sa respecte restrictiile impuse de legaturile exterioare. Starea de deformare este caracterizata de tensorul deformatiilor specifice care, pentru aplicatii este avantajos sa se exprime prin vectorul (4.45). Deformatiile specifice care apar in vectorul (4.45) sunt definite de relatiile (4.46) si (4.47).
-
= (4.44)
zxyzxyzzyyxx
= (4.45)
zxyzxyzzyyxx
222
xx = xu x
, yy = yu y
, zz = zuz
(4.46)
xy = yx =
+
y
ux
u21 xy
xz = zx =
+
z
ux
u21 xz (4.47)
yz = zy =
+
z
uy
u21 yz
Deformatiile specifice definite prin relatiile (4.46) si (4.47) nu sunt independente, intre ele existand 6 identitati, numite conditii de compatibilitate. Daca sunt satisfacute ele formeaza un camp de deformatii specifice geometric admisibile. Daca se calculeaza lucrul mecanic virtual al torsorului fortelor exterioare si al fortelor de legatura exterioare dand corpului deformabil un camp de deplasari virtuale geometric admisibile, acesta se va regasi intr-un lucru mecanic virtual interior sau de deformatie. Acest lucru este valabil pentru cazul in care sistemul fortelor exterioare si al fortelor de legatura exterioare cat si campul continuu de tensiuni formeaza sisteme in echilibru.
-
5. IMPULSUL Fie un corp de volum V si masa M cu distributie continua a masei, aflat in miscare. Sa consideram un sistem de referinta R (XOYZ). Un element oarecare de masa dm va avea viteza v si pozitia fata de acest reper data de vectorul de pozitie r (Figura 5.1).
Figura 5.1 Daca vom considera elementul de masa un punct material, impulsul elementar este definit astfel: dH = v dm (5.1) Pentru intregul corp, impulsul se va calcula prin integrarea impulsului elementar:
H = ===V V VV dmdtddmdtddmd rrvH (5.2) Din definirea momentului static avem:
-
(5.3) =V c Mdm rr Introducand pe (5.3) in (5.2) rezulta;
H = dt
Md cr = MvC (5.4)
In concluzie, impulsul unui corp de masa M se calculeaza ca si cum intreaga masa a corpului ar fi concentrata in centrul sau de greutate si s-ar deplasa cu viteza acestui punct. Expresia (5.4) se modifica in functie de distributia de viteze in miscarea considerata a corpului. Pentru un corp in miscare de translatie, viteza vC a centrului sau de masa este viteza oricarui punct, pentru ca, la un moment dat, toate punctele corpului au aceeasi viteza. Pentru un corp in miscare de rotatie cu viteza unghiulara , care este aceeasi pentru toate punctele corpului, expresia impulsului devine: (5.5) ( CM rH = )
)
Expresia este identica atat pentru miscarea cu axa fixa cat si pentru miscarea cu punct fix, cu observatia ca in prima miscare mentionata viteza unghiulara are modulul variabil si directia fixa a axei de rotatie, iar in cea de-a doua, este un vector integral variabil cu timpul. Pentru un corp in miscare plan-paralela viteza centrului de masa si deci a impulsului corpului, se poate calcula fie utilizand expresia generala a distributiei de viteze, fie tinand seama de existenta centrului instantaneu de rotatie. (5.6) ( C0M rvH +=
-
6. ENERGIA CINETICA SI ENERGIA POTENTIALA 6.1. Energia cinetica 6.1.1. Energia cinetica pentru miscarea de translatie Energia cinetica a unui corp se determina integrand pe intregul volum al corpului energia cinetica elementara exprimata prin relatia de definitie introdusa pentru punctul material. Cea mai simpla modalitate de calcul este de a trata separat miscarile de translatie si de rotatie. Astfel, pentru corpul din Figura 5.1, energia cinetica elementara in miscarea de translatie se va determina cu relatia:
dmv21dE 20ct = (6.1)
Deoarece toate punctele corpului au aceeasi viteza la un moment dat, se va introduce in expresia energiei cinetice viteza centrului de greutate vC, astfel incat, prin integrarea expresiei (6.1) se obtine:
2Cct Mv21E = (6.2)
Ca si in cazul impulsului, energia cinetica in miscarea de rotatie se calculeaza ca si cand intreaga masa a corpului ar fi concentrata in centrul sau de masa si s-ar deplasa cu viteza acestui punct. 6.1.2. Energia cinetica pentru miscarea de rotatie In acest caz, expresia energiei este:
( ) dm21dE 2cr r= (6.3)
Inlocuind in relatia (6.3) expresiile analitice ale vectorilor si r in raport cu sistemul de referinta atasat, efectuand calculele, grupand termenii si integrand, se obtine:
( ) ( ) ( )( +++++= V V V 222z222y222xcr dmyxdmzxdmzy21E ) V V Vzxzyyx xzdm2yzdm2xydm2 (6.4) Tinand seama de relatiile de definitie de la momentele de inertie ale corpului, expresia energiei cinetice in miscare de rotatie devine:
( )zyyzzxxzyxxy2zz2yy2xxcr J2J2J2JJJ21E ++= (6.5)
-
In cazul rotatiei in jurul unui punct fix, cand axele sistemului de coordonate atasat sunt axe principale de inertie in raport cu punctul fix, expresia (6.5) devine:
( 2z32y22x1cr JJJ21E ++= ) (6.6) In cazul miscarii de rotatie cu axa fixa, cand viteza unghiulara are directia axei respective, energia cinetica a corpului are expresia:
2zcr J21E &= (6.7)
6.1.3 Energia cinetica totala a unui sistem mecanic La un corp k ce executa o miscare complexa in spatiul tri-dimensional se poate identifica atat o miscare liniara cu viteza liniara a centrului sau de greutate (sau de masa) vkR3, cat si o miscare circulara in jurul centrului sau de greutate cu viteza unghiulara kR3. Ambele viteze sunt raportate la un sistem atasat bazei, considerat fix. Energia cinetica totala a sistemului mecatronic (compus din mai multe corpuri) va fi:
(=
+= n1k
kkTkkk
TkC m2
1E Dvv)q(q, & ) (6.8) unde, cu mk am notat masa corpului k iar cu Dk am notat matricea de dimensiuni [3x3] ce reprezinta tensorul de inertie al corpului k in jurul centrului de greutate, raportat la reperul fix. In continuare, vom explicita aceasta relatie in functie de marimile interne generalizate q si q . & Deoarece prin variabila q intelegem o deplasare liniara in cazul miscarii de translatie si o deplasare unghiulara in cazul miscarii de rotatie, prin vom nota atat viteze liniare cat si viteze unghiulare, in functie de tipul miscarii. Astfel, expresia (6.8) se va transforma in expresia (6.9) care va descrie energia cinetica totala ca o functie patratica de derivatele coordonatelor generalizate:
q&
( ) ==ji
jiijT
C D21D
21E
,qq(q)q(q)qqq, &&&&& (6.9)
Aici, matricea patratica de dimensiuni [n x n] reprezinta matricea de inertie a sistemului mecatronic si contine atat informatii legate de masele corpurilor cat si despre momentele lor de inertie, marimi ce intra in calcului energiei cinetice totale.
-
6.1. Energia potentiala Energia potentiala este o marime introdusa prin definitie in studiul dinamicii punctelor materiale si a corpurilor pentru a caracteriza efortul necesar pentru ca acestea sa ocupe o anumita pozitie in spatiu. Marimea la care ne referim este egala cu lucrul mecanic consumat pentru atingerea acelei pozitii, pornind de la o pozitie de referinta considerata ca avand energia potentiala egala cu 0. EP = Lmec (6.10) In cazul particular al lucrului mecanic al fortelor conservative, energia potentiala intr-o pozitie oarecare este valoarea functiei de forta in pozitia respectiva. Functia de forta poate fi generata de un camp gravitational, electric, magnetic, mixt. In cele ce urmeaza, vom considera cazul unui sistem mecanic aflat intr-un camp gravitational. Fie un corp i care are un sistem de coordonate atasat. Fata de acesta, centrul sau de greutate (masa) va avea pozitia exprimata de vectorul rCi. Aceasta pozitie, in functie de reperul de referinta fix, va fi exprimata prin vectorul : 0Cir
= T0Cir 0i rCi (6.11)
Daca in raport cu reperul fix, vectorul este:
(6.12)
=
0ggg
z
y
x
g
functia de forte Ui din care provine, prin derivare, forta de greutate a corpului i are forma: Ui = migT T0i rCi = EPi (6.13) Energia potentiala totala a sistemului mecatronic se obtine din insumarea energiilor potentiale ale corpurilor componente:
EP = (6.14) =
n
1iCi
i0
Tim rTg
Daca se tine seama de masele elementelor senzoriale si de actionare, greutatile lor se calculeaza in mod asemanator, cu relatia (4). Suma dintre energia cinetica si energia potentiala a unui corp se numeste energia mecanica.
-
7. MODELAREA DINAMICA PRIN METODA LAGRANGE Metoda Lagrange (intalnita des si sub numele de metoda Euler-Lagrange) este una din metodele standard de obtinere a ecuatiilor miscarii, adica a modelului dinamic pentru sistemele mecatronice. Relatia Lagrange pentru componenta ia fortei generalizate este urmatoarea:
ii
i q),L(
q),L(
dtdt
= qqqq)( &&
& (7.1)
unde este functia Lagrange si se exprima ca diferenta intre energia cinetica totala a sistemului mecatronic si energia potentiala totala a acestuia:
)q(q, &L
= - E)q(q, &L )q(q, &CE P(q) (7.2) Energia cinetica totala este o functie patratica de derivatele coordonatelor generalizate:
( ) ==ji
jiijT
C D21D
21E
,qq(q)q(q)qqq, &&&&& (7.3)
Energia potentiala totala este o functie ce depinde doar de coordonatele generalizate: EP(q). 7.1 Modelul dinamic general al unui sistem mecatronic Dezvoltand relatia lui Lagrange pentru expresia energiei cinetice din (7.3) si pentru intregul vector , se obtine:
( ) (q)q
qD(q)qq
q(q)DqD(q) PT E
21
+
+= &&&&&& (7.4) Fiecare componenta a vectorului , care corespunde unei linii a relatiei vectoriale (7.4), se poate scrie astfel:
( ) =
+
+=
n
1j k
P
ji,jiij
kjkjjkjk q
)(Eqq)(D21
qq)(Dq)(D qqqq &&&&&& (7.5)
-
Ttermenul poate fi scris astfel: (q)kjD&
ikji i
kjkj q)(Dq)(D
tdd)(D && qqq == (7.6)
Tinand seama de acesta expresie rescriem relatia (7.5) astfel:
+
+=j k
P
jijiij
kkj
ijkjk q
)(Eqq)(Dq2
1)(Dq
q)(D qqqq,
&&&& (7.7)
Cel de-al 2-lea termen al partii drepte a relatiei (7.7), tinand cont de proprietatea de simetrie a matricii de inertie, se poate scrie:
+=
ji
jiijk
kij
kji
jiji
ijk
kji
qqDq
Dq
Dq2
1Dq2
1Dq ,,
qq &&&& (7.8)
Definim coeficientii (cunoscuti si sub numele de coeficientii Christoffel):
+ (q)(q)(q)(q) ij
kki
jkj
ikji Dq
Dq
Dq2
1c (7.9)
Prin vectorul h vom defini vectorul derivatei partiale a functiei energie potentiala:
(q)(q) Pk
k Eqh
(7.10) iar prin matricea C acea matrice ale caror elemente sunt:
(7.11) =
n
1iikjikj qcC && (q))q(q,
Introducand aceste 3 notatii in relatia (7.7) obtinem: ++=
jkjkj
jjkjk hqCqD (q))q(q,(q) &&&& (7.12)
-
Intr-o forma vectoriala, relatia (7.12) arata astfel: (7.13) h(q)q)qC(q,qD(q) ++= &&&& Vectorul contine fortele Coriolis si fortele centrifugale. Fortele centrifugale sunt date de termenii de tipul , iar fortele Coriolis sunt date de termenii de tipul cu i j.
q)qC(q, &&2
jq )( & jiqq && In urma comparatiei relatiilor (7.4) si (7.12) rezulta ca expresia vectorului fortelor Coriolis si centrifugale este:
( qD(q)qq
q(q)Dq)qC(q, &&&&&& T21= ) (7.14)
7.2 Modele dinamice pentru pundulul de ordinul 2 7.2.1 Notiuni introductive De-a lungul timpului s-a pus problema controlului unui pentrul de ordin I, att n varianta
normal a pendulului, ct i pentru cazul pendulului invers. Cercetri recente au extins acest domeniu, incluznd i studii referitoare la pendulul de ordin 2 (un pendul aflat n prelungirea altui pendul).
Studiul pendulului de ordin 2 (Figura 7.1) prezint un interes deosebit deoarece dinamica acestuia poate fi asimilat dinamicii membrelor superioare ale fiinelor bipede, dar i dinamicii zonei superioare a corpului (trunchiul) n raport cu zona inferioar a acestuia (membrele inferioare).
Figura 7.1. Implementare a unui pendul de ordin 2
-
Pornind de la aceste considerente, studiul pendulului de ordin 2 s-a scindat n dou direcii principale de cercetare:
- o serie de cercettori au studiat problematica unui pendul de ordin 2. Acesta prezint dou grade de libertate, dar doar una dintre articulaii este acionat, i anume cea dintre primul pendul i suportul de susinere a ntregii configuraii. Dinamica acestui pendul poate fi asociat dinamicii unui membru superior al unei fiine bipede. n literatura de specialitate, aceast configuraie este ntlnit sub numele de Pendubot (Figura 7.2).
Figura 7.2 Structura unui Pendubot
- Un alt grup de cercettori au studiat controlul aceluiai tip de pendul de ordin doi,
diferena constnd n articulaia acionat, i anume articulaia dintre cele 2 brae. Aceast configuraie (Figura 7.3) poate fi asemnat, ca dinamic, cu evoluia unui gimnast la bar (Figura 7.4).
Figura 7.3 Structura unui Acrobot Figura 7.4. Asemnarea dintre Acrobot i
un gimnast evolund la bar
-
7.2.2 Tipuri de micri controlate
Pentru ambele configuraii (att pentru Pendubot, ct i pentru Acrobot) se urmrete controlul i realizarea a dou tipuri de micri: pendularea, respectiv balansarea. n general, s-a preferat realizarea a cte unui controler dedicat pentru fiecare dintre aceste micri, comanda la un anumit moment de timp fiind realizat de regulatorul specific, urmnd ca la modificarea regimului, aceasta s fie transferat celuilalt regulator. n unele situaii, pentru a realiza transferul comenzii fr ocuri, s-a apelat la un al treilea regulator menit s controleze micarea de-a lungul regimului tranzitoriu. Aceste regimuri de funcionare sunt ilustrate n Figura 7.5. Factorul de dificultate n realizarea controlului pentru Pendubot, respectiv Acrobot const n ncercarea de a aduce robotul ntr-o anumit poziie, prin utilizarea unui singur semnal de comand, n timp ce mecanismul prezint 2 articulaii. Rezult un sistem puternic neliniar, care, evident, are un numr de grade de libertate mai mare dect numrul acionrilor.
7.2.3 Modelul dinamic pentru un Acrobot cu o articulaie activ i o articulaie pasiv
Robotul de tip Acrobot este prezentat n figura urmtoare: Fie unghiul legturii i (i = 1, 2), iq [ ]Tqqq 21= , dtdqq =& i 22 dtqdq =&& , atunci
modelul dinamic al acestui robot este dat prin: ( ) ( ) ( ) =++ qGq,qDqqM &&& (1)
-
unde
(2) ( ) ( ) ( )( ) ( )
=qmqmqmqm
qM2221
1211
(3) ( ) ( ) ( )[ Tq,qdq,qdq,qD &&& 21= ]
]]
)
(4) ( ) ( ) ( )[ TqgqgqG 21= (5) [ T20 =
Componentele lui , i ( )qM ( q,qD & ( )qG sunt: ( ) 212221222 2212 1111 2 LmqcosLLmILmILmqm ggg +++++= ( ) ( ) 221222 222112 qcosLLmILmqmqm gg ++==
( ) 22 2222 ILmqm g += ( ) ( ) 222212121 2 qsinqqqcosLLmq,qd g &&&& += ( ) 2212122 qsinqLLmq,qd g && =
-
( ) ( ) ( )2122112111 qqsindLmqsingLmLmqg gg ++= ( ) ( )21222 qqsindLmqg g +=
unde, pentru legtura i (i = 1, 2), este masa, este lungimea, este lungimea distanei de la centru de mas la articulaia i, iar este momentul de inerie n jurul centrului de greutate.
im iL giL
iI
Definind [ ] [ ]TT qqqqxxxxx 21214321 &&== se rescrie ecuaia (1) n spaiul strilor, astfel:
31 xx =& (6)
42 xx =& (7) ( ) ( ) 23 xbxfx +=& (8) ( ) ( ) 24 xbxfx +=& (9)
unde , , i sunt funcii neliniare date de: f b f b ( )
( ) ( )( ) ( )( ) ( )
=
qgq,qdqgq,qd
qMxfxf
22
111
&&
(10)
( )( ) ( )
=
101 qM
xbxb
(11)
Sistemul de ecuaii (6) (9) poate fi scris ca:
( ) ( ) 2xbxfx +=& (12) unde
( ) ( ) ( )[ ]Txfxfxxxf 43= ( ) ( ) ( )[ ]Txbxbxf 00=
-
7.2.4 Modelul dinamic pentru un Acrobot cu dou articulaii active Structura unui Acrobot avnd ambele articulaii active este prezentat n figura de mai jos.
Figura 7.7. Modelul cinematic al Acrobotului cu dou articulaii active n acest caz este avantajoas utilizarea spaiului Hamiltonian, deoarece acesta are ca
reultat un cmp vectorial de control constant, iar aceast structur special justific utilitatea pentru verificarea condiiilor necesare pentru o problem optim de timp. Ecuaiile de micare ale robotului de tip acrobat se definesc pe mulimea configuraiilor utiliznd o formulare Hamiltonian. Spatiul configuraiilor este parametrizat prin unghiurile articulaiilor
, iar momentul generalizat este definit ca
11 SSQ =Q
( 21 q,q ) ( )qqDp &= , unde ( )qD este matricea de inerie definit astfel:
( ) ( ) ( )( )
+
+++=2232
2322321 2cqcoscc
qcosccqcoscccqD (13)
Parametrii de inerie sunt colectai n urmtoarele constante, , i = 1, 2,, 5 astfel:
, , ic
12
122111 Ilmlmc c ++= 22222 Ilmc c += 2123 cllmc = , , . 12114 lmlmc c += 223 clmc =
-
Cu vectorul de stare definit ca ( )( )24132211 2 pz,pz,qz,qzz ===== , sistemul Hamiltonian este dat de ( ) buzfz +=& (14) unde mulimea spaiului strilor este , iar cmpurile vectoriale netede i sunt date de:
211 RSSM = f b
( )[ ]
=
24
3
2
1
43
1
4
31
21
zV
zz
zDzz
zVzz
D
zf , (15)
=
1000
b
cu i ( )21514 zzcosgczcosgcV ++= = 2u , clasa comenzilor admisibile definit ca { 0>= ,u:Ru } (16)
Soluiile de echilibru pentru relaia (1) cu intrarea egal cu zero constituie o clas important de soluii. Setul soluiei de echilibru, , corespunztoarea lui este dat de ez 0=u { }0432211 ==== eeeee zz,kz,kz:Mz , 1021 ,k,k = . (17)
7.2.5 Modelul dinamic al pendulului dublu-invertor aflat pe o platform n micare. Acest sistem este reprezentat n Figura