Mecanica Fluidelor
219
5 Cuvˆ ant ˆ ınainte Cartea: Mecanica Fluidelor Numeric˘ a reprezint˘a o etap˘ a supe- rioar˘ a a c˘ art ¸ii ”Complemente de Mecanica Fluidelor ¸ si Tehnici de Solut ¸ionare Numeric˘ a”, autorul fiind Conf. dr. ing. Romeo Resiga. Scopul principal al c˘ art ¸ii a fost, dup˘ a cum afirm˘ a autorul, acela ”de par- curgere la nivel cˆ at mai accesibil, a etapelor specifice simul˘arii numerice: formularea modelului matematic → alegerea unei metode numerice adecvat˘ a ecuat ¸iilor → dezvoltarea unui algoritm de calcul numeric → validarea pro- gramului de calcul ¸ si evaluarea performant ¸elor”. La ˆ ınceput se prezint˘a, sintetic, teoria aproxim˘ arii care st˘ a la baza cal- culelor numerice. Apoi se acord˘a o atent ¸ie special˘ a Metodei Elementului de Frontier˘a (MEFr) dezvoltat˘ a de Brebbia (1978) inclusiv sub forma ei par- ticular˘ a ca Metod˘ a a Reciprocit˘ at ¸ii Duale (MRD). MEFr a fost aplicat˘ a la studiul curgerii ideale peste profilele aerodinamice singulare NACA4412 ¸ si Eppler387. Metoda Elementului Finit (MEF) este amplu dezvoltat˘ a pornind de la formularea variat ¸ional˘ a (slab˘ a) a problemelor cu condit ¸ii la limit˘ a. Sunt prezentate atˆ at fundamentele teoretice ale MEF cˆat¸ si cele ale implement˘arii sale, respectiv aplic˘ arii ei la curgerile ideale mono ¸ si bidimensionale (2D). Deasemenea, sunt redate ¸ si unele programe de calcul simple, performante ¸ si eficiente. MEF a fost validat˘a prin studiul curgerii peste un ¸ sir infinit de cilindri, pentru care se cunoa¸ ste solut ¸ia analitic˘ a exact˘ a. ˆ In vederea familiariz˘ arii cititorului cu scrierea comod˘a a unor programe de calcul performante, autorul prezint˘ aˆ ıntr-un capitol aparte not ¸iunile specifice organiz˘ arii ¸ si manipul˘ arii structurilor de date necesare elabor˘arii de programe de element finit. Cartea se ˆ ıncheie cu prezentarea de programe de calcul numeric, ˆ ıntocmite de c˘atre autor,ˆ ın colaborare, destinate curgerilor prin ret ¸ele plane pe profile specifice turbinelor hidraulice, turbinelor cu gaze ¸ si compresoarelor. Autorul ne convinge c˘ a problemele curgerilor ideale din aero-hidrodinamic˘ a pot fi studiate ¸ si solut ¸ionate, mai elegant, mai precis ¸ si ˆ ıntr-un timp mai scurt cu MEF decˆat prin metodele analitice. Mai mult cartea ”Mecanica Fluidelor Numeric˘a”scris˘ a de Conf. dr. ing. Romeo Resiga sub impulsul marelui s˘ au dasc˘ al Prof. dr. ing. Victor Ancu¸ sa, ne demonstreaz˘aˆ ınmodstr˘alucitc˘a ”O teorie bun˘ a valoreaz˘a cel put ¸inatˆatcˆ at un experiment bine f˘acut”. Nivelul ¸ stiint ¸ific al c˘art ¸ii este ridicat, prezentarea concis˘ a¸ si clar˘ a, acce- sibil˘a cadrelor didactice, cercet˘ atorilor, doctoranzilor, precum ¸ si student ¸ilor de la master, respectiv proiectant ¸ilor din domeniul turboma¸ sinilor hidraulice ¸ si cu gaze. Odat˘ a puse fundamentele studierii curgerilor ideale prin tur- boma¸ sini, apelˆand la MEF, MEFr¸ si la alte tehnici de calcul numeric, sper˘am
-
Upload
diana-scodreanu -
Category
Documents
-
view
130 -
download
6
description
Mecanica Fluidelor
Transcript of Mecanica Fluidelor

5
Cuvant ınainte
Cartea: Mecanica Fluidelor Numeric a reprezinta o etapa supe-rioara a cartii ”Complemente de Mecanica Fluidelor si Tehnici de SolutionareNumerica”, autorul fiind Conf. dr. ing. Romeo Resiga.
Scopul principal al cartii a fost, dupa cum afirma autorul, acela ”de par-curgere la nivel cat mai accesibil, a etapelor specifice simularii numerice:formularea modelului matematic → alegerea unei metode numerice adecvataec u a tiilor → dezvoltarea unui algoritm de calcul numeric → validarea pro-gramului de calcul si evaluarea performantelor”.
La ınceput se prezinta, sintetic, teoria aproximarii care sta la baza cal-culelor numerice. Apoi se acorda o atentie speciala Metodei Elementului deFrontiera (MEFr) dezvoltata de Brebbia (1978) inclusiv sub forma ei par-ticulara ca Metoda a Reciprocitatii Duale (MRD). MEFr a fost aplicata lastudiul curgerii ideale peste profilele aerodinamice singulare NACA4412 siEppler387.
Metoda Elementului Finit (MEF) este amplu dezvoltata pornind de laformularea variationala (slaba) a problemelor cu conditii la limita. Suntprezentate atat fundamentele teoretice ale MEF cat si cele ale implementariisale, respectiv aplicarii ei la curgerile ideale mono si bidimensionale (2D).Deasemenea, sunt redate si unele programe de calcul simple, performante sieficiente. MEF a fost validata prin studiul curgerii peste un sir infinit decilindri, pentru care se cunoaste solutia analitica exacta.
In vederea familiarizarii cititorului cu scrierea comoda a unor programe decalcul performante, autorul prezinta ıntr-un capitol aparte notiunile specificeorganizarii si manipularii structurilor de date necesare elaborarii de programede element finit.
Cartea se ıncheie cu prezentarea de programe de calcul numeric, ıntocmitede catre autor, ın colaborare, destinate curgerilor prin retele plane pe profilespecifice turbinelor hidraulice, turbinelor cu gaze si compresoarelor.
Autorul ne convinge ca problemele curgerilor ideale din aero-hidrodinamicapot fi studiate si solutionate, mai elegant, mai precis si ıntr-un timp mai scurtcu MEF decat prin metodele analitice. Mai mult cartea ”Mecanica FluidelorNumerica” scrisa de Conf. dr. ing. Romeo Resiga sub impulsul marelui saudascal Prof. dr. ing. Victor Ancusa, ne demonstreaza ın mod stralucit ca ”Oteorie buna valoreaza cel putin atat cat un experiment bine facut”.
Nivelul stiintific al cartii este ridicat, prezentarea concisa si clara, acce-sibila cadrelor didactice, cercetatorilor, doctoranzilor, precum si studentilorde la master, respectiv proiectantilor din domeniul turbomasinilor hidraulicesi cu gaze. Odata puse fundamentele studierii curgerilor ideale prin tur-bomasini, apeland la MEF, MEFr si la alte tehnici de calcul numeric, speram

6
ca autorul va face saltul mult asteptat la rezolvarea acestor probleme, dar ıncurenti reali.
Fara a umbri meritul de exceptie al autorului, nu pot sa nu mentionez cala Catedra de Masini Hidraulice de la ”Politehnica” din Timisoara, o partedintre problemele studiate si prezentate ın carte au fost abordate analitic cufoarte bune rezultate de Prof. dr. ing. Octavian Popa. Prof. dr. ing. Iuliu Carte,ın cadrul tezei de doctorat sustinuta ın anul 1987 a studiat cu success, apelandla MEF, profilele radial-axiale destinate turbinelor Francis, iar mai tarziu laretele plane de profile. Deasemenea Conf. dr. ing. Anton Iosif, ın cadrul tezeide doctorat (1998) a studiat curgerea prin rotorul turbinelor–pompa Francis,apeland la MEFr precum si la MRD.
Conf. dr. ing. Romeo Resiga dispune de o pregatire profesionala de exceptieprecum si de conditiile necesare abordarii si studierii curgerilor ideale si realeprin retele de profile plane, circulare si radial-axiale, precum si prin tur-bomasini, atat la regimul optim cat si ın afara acestuia. In primul rand,datorita eforturilor depuse de Domnia Sa, are la dispozitie doua laboratoarede calcul numeric bine dotate, unul fiind de la Universitatea Politehnica dinTimisoara si al doilea la Filiala din Timisoara a Academiei Romane. Maipresus de toate beneficiaza de un colectiv de tineri cu mari valente pro-fesionale, completat zi de zi cu studenti de la master de la Facultatile deMecanica si Calculatoare precum si de la Universitatea de Vest. Faptul cad-l. Conf. dr. ing. Romeo Resiga este din anul 2000 profesor invitat la Uni-versity of Notre Dame, Indiana, U.S.A., iar ın 2003 la Ecole PolytechniqueFederale de Lausanne, reprezinta o ınalta recunoastere a calitatilor sale detanar dascal si cercetator, precum si a rezultatelor valoroase obtinute panaın prezent.
Am convingerea ca nu va trece mult timp pana cand autorul ne va delectacu o noua carte similara celei prezentate, dar care sa ne introduca ın tainelecurgerilor reale prin retele de profile si turbomasini, ın general ın mecanicafluidelor.
Timisoara, 4 Aprilie 2003 Academician Ioan M. Anton

Cuprins
1 Introducere 11
2 Teoria aproximarii 152.1 Formularea problemei de aproximare . . . . . . . . . . . . . . 15
2.1.1 Metoda colocatiei . . . . . . . . . . . . . . . . . . . . . 162.1.2 Metoda Reziduurilor Ponderate (MRP) . . . . . . . . . 162.1.3 Metoda celor mai mici patrate . . . . . . . . . . . . . . 17
2.2 Reprezentarea modala a profilelor aero/hidrodinamice . . . . . 182.3 Metoda Reziduurilor Ponderate cu functii definite pe subdomenii 22
2.3.1 Proprietati generale ale functiilor locale de aproximare 252.3.2 Implementarea elementala . . . . . . . . . . . . . . . . 26
3 Metoda Elementului de Frontiera 293.1 Ecuatia integrala pe frontiera . . . . . . . . . . . . . . . . . . 29
3.1.1 Metoda Reziduurilor Ponderate . . . . . . . . . . . . . 293.1.2 Functia δ a lui Dirac . . . . . . . . . . . . . . . . . . . 333.1.3 Functia Green. Ecuatia integrala . . . . . . . . . . . . 41
3.2 Discretizarea ecuatiei integrale pe frontiera . . . . . . . . . . . 513.2.1 Integrare numerica . . . . . . . . . . . . . . . . . . . . 543.2.2 Calculul numeric al operatorilor integrali . . . . . . . . 60
3.3 Curgerea ın jurul corpurilor izolate . . . . . . . . . . . . . . . 623.3.1 Metoda directa pentru ecuatia integrala pe frontiera.
Eliminarea singularitatilor . . . . . . . . . . . . . . . . 623.3.2 Metoda indirecta. Metoda panourilor . . . . . . . . . . 64
3.4 Software . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 703.5 Aplicatii . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 72
4 Metoda Elementelor Finite - Fundamente 854.1 Formularea clasica (tare) a problemei cu conditii la limita . . . 854.2 Formularea variationala (slaba) a problemei cu conditii la limita 864.3 Echivalenta formularilor tare si slaba . . . . . . . . . . . . . . 87
7

8
4.4 Metoda Galerkin de aproximare a formularii slabe . . . . . . . 90
4.5 Formularea matriceala a metodei Galerkin . . . . . . . . . . . 92
4.6 Aproximarea de tip element finit . . . . . . . . . . . . . . . . . 95
4.7 Proprietatile matricii K . . . . . . . . . . . . . . . . . . . . . 98
4.8 Analiza matematica a MEF ın 1D . . . . . . . . . . . . . . . . 100
4.8.1 Acuratetea solutiei . . . . . . . . . . . . . . . . . . . . 100
4.8.2 Acuratetea derivatelor . . . . . . . . . . . . . . . . . . 103
4.8.3 Concluzii . . . . . . . . . . . . . . . . . . . . . . . . . 106
4.9 Exemplu de aplicare MEF pentru o problema 1D . . . . . . . 106
4.10 Implementarea Metodei Elementului Finit . . . . . . . . . . . 113
4.10.1 Abordarea elementala . . . . . . . . . . . . . . . . . . 113
4.10.2 Calculul matricii si vectorului pentru element . . . . . 116
4.10.3 Asamblarea sistemului de ecuatii . . . . . . . . . . . . 118
5 Metoda Elementului Finit pentru probleme 2D 127
5.1 Introducere . . . . . . . . . . . . . . . . . . . . . . . . . . . . 127
5.2 Formularea tare si formularea slaba a problemei cu conditii lalimita . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 129
5.3 Metoda Galerkin . . . . . . . . . . . . . . . . . . . . . . . . . 132
5.4 Elementul Finit . . . . . . . . . . . . . . . . . . . . . . . . . . 134
5.5 Implementarea Metodei Elementului Finit . . . . . . . . . . . 137
5.6 Calculul valorilor nodale ale gradientului solutiei . . . . . . . . 158
5.7 Calculul derivatei normale a solutiei . . . . . . . . . . . . . . . 164
5.8 Curgerea peste un sir infinit de cilindri . . . . . . . . . . . . . 165
5.8.1 Solutia analitica . . . . . . . . . . . . . . . . . . . . . . 165
5.8.2 Domeniul de analiza. Conditii pe frontiera . . . . . . . 168
5.8.3 Rezultate numerice si comparatie cu solutia analitica . 170
6 Structuri de date si algoritmi 177
6.1 Reprezentarea retelei de discretizare . . . . . . . . . . . . . . . 177
6.2 Structuri de date derivate . . . . . . . . . . . . . . . . . . . . 179
6.2.1 Elementele adiacente unui punct . . . . . . . . . . . . . 179
6.2.2 Punctele adiacente unui punct . . . . . . . . . . . . . . 181
6.2.3 Elementele adiacente unui element . . . . . . . . . . . 182
6.2.4 Laturi . . . . . . . . . . . . . . . . . . . . . . . . . . . 184
6.2.5 Fatete exterioare . . . . . . . . . . . . . . . . . . . . . 185
6.2.6 Laturile unui element . . . . . . . . . . . . . . . . . . . 187
7 Curgerea fluidului perfect ın retele de profile 189
7.1 Problema curgerii ın retele de profile . . . . . . . . . . . . . . 190

9
7.1.1 Conditii la limita pentru campul de viteza la curgereaıntr-o retea de profile . . . . . . . . . . . . . . . . . . . 194
7.2 Formularea problemei utilizand variabile auxiliare . . . . . . . 1957.3 Program de analiza cu elemente finite a curgerii ın retele de
profile . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1997.4 Curgerea ıntr-o retea de turbina cu gaz . . . . . . . . . . . . . 202
7.4.1 Conditii pentru o curgere incompresibila . . . . . . . . 2077.4.2 Date experimentale si comparatie cu rezultate numerice 209
7.5 Curgerea ıntr-o retea de compresor . . . . . . . . . . . . . . . 215

10 Introducere

Capitolul 1
Introducere
Mecanica fluidelor poate fi considerata o stiinta matura judecad dupa res-pectabila varsta de (cel putin) cateva secole de cand a beneficiat din plin deeforturile unui numar impresionant de oameni de stiinta. Aflata la confluentaintuitiei ingineresti cu rigurozitatea matematica, mecanica fluidelor are pri-vilegiul de a dispune de un aparat matematic bine articulat, si de ecuatiiunanim acceptate care descriu curgerea fluidelor. Cu toate acestea, solu-tionarea completa a acestor ecuatii pentru cazul general al curgerii fluidelorreale (vascoase) ramane ınca un deziderat si probabil ca ısi va pastra aceststatut pentru multa vreme. Afirmatia poate parea dezarmanta, dar ea trebuieınteleasa ın sensul ın care Victor Hugo caracteriza stiinta ın general: ”Lascience est l′asymptote de la verite. Elle approche sans cesse, et ne touchejamais”1.
Monografiile clasice de mecanica fluidelor prezinta pe langa deducereaecuatiilor ce transpun ın limbaj matematic principiile fizice de baza ce gu-verneaza curgerea o colectie impresionanta de solutii exacte ale acestora. Dinpacate majoritatea acestor solutii nu raspund unor probleme practice, ci suntsolutii ce au putut fi obtinute utilizand aparatul matematic disponibil la unmoment dat (sau adeseori un aparat matematic adaptat pregatirii cititoru-lui). Pentru restul majoritatii covarsitoare a problemelor practice, curgereaeste tratata cu ajutorul unor ingenioase tehnici care renunta la rigurozitateaexcesiva si fac loc unor consideratii empirice ce permit ın final obtinerea unorinformatii utile. Hidraulica exceleaza prin asemenea abordari care utilizeazao mare cantitate de informatii experimentale ıncorporate ın relatii matema-tice simple. La polul opus, hidrodinamica teoretica ımpinge frontierele com-plexitatii aparatului matematic pana la limita la care solutiile analitice devinextrem de dificil de urmarit si de utilizat. Intre aceste doua extreme aparent
1Stiinta tinde asimptotic spre adevar. Se apropie de acesta fara ıncetare, fara a-l atingeınsa niciodata.
11

12 Introducere
ireconciliabile s–a dezvoltat ın ultima jumatate de secol Mecanica FluidelorNumerica. Scopul ramane acelasi, si anume solutionarea ecuatiilor curgeriipentru aplicatii practice ingineresti, dar metoda de abordare este cu totuldiferita fata de hidraulica sau hidrodinamica clasice. Poate ca punctul devedere de mai sus nu este unanim acceptat, fiind la fel de legitima afirmatiaca hidrodinamica teoretica se apropie de practica, iar hidraulica a castigatın rigurozitate, prin adoptarea tehnicilor numerice de calcul al curgerilor.Oricum, nu o asemenea dezbatere este importanta ci faptul incontestabil caın prezent, si cu atat mai mult ın viitor, tehnicile numerice, respectiv algorit-mii de calcul si programele de calculator care ıi implementeaza constituie in-strumentul de baza al inginerului pentru proiectarea, analiza, si optimizareamasinilor hidraulice si echipamentelor hidromecanice.
Daca inginerul are la dispozitie programe profesionale, ale caror per-formante sunt continuu ımbunatatite, pentru rezolvarea problemelor prac-tice curente, se pune ıntrebarea legitima cine este chemat sa contribuie laperfectionarea acestor instrumente de calcul? Este oare dezvoltarea de algo-ritmi numerici si implementarea lor ın programe performante apanajul uneicomunitati restranse de experti sau este accesibila unui grup mai larg despecialisti? Cartea de fata ısi propune sa demonstreze ca ıntelegerea fun-damentelor matematice ale metodelor numerice, precum si ınsusirea unortehnici de programare performante este accesibila atat cercetatorilor dindomeniul hidrodinamicii, cat si doctoranzilor sau studentilor ce opteaza pen-tru specializari de tip master. Mai mult, modul de abordare adoptat de autorse doreste a fi o invitatie spre dezvoltarea de programe proprii, si inovareacontinua ın directia gasirii unor metode mai performante. Utilizarea unorprograme de calcul ın regim de ”cutie neagra” poate fi justificata ın unelesituatii de necesitatile practice presante, dar ramanerea la acest stadiu poatefi contraproductiva ın multe cazuri. Afirmatia este cu atat mai adevarataın dinamica fluidelor, unde complexitatea fenomenului fizic necesita un gradridicat de expertiza al specialistului care utilizeaza programe comerciale.
Cartea de fata ısi propune sa deschida apetitul cititorului pentru abor-darea numerica a problemelor de mecanica fluidelor. Pentru aceasta, ne-amlimitat la probleme legate de curgerea fluidului perfect, adica a fluiduluiincompresibil si nevascos. Scopul principal a fost parcurgerea, la un nivelcat mai accesibil, a etapelor specifice simularii numerice: formularea mo-delului matematic → alegerea unei metode numerice adecvata ecuatiilor →dezvoltarea unui algoritm de calcul numeric → implementarea algoritmuluiıntr-un program de calcul → validarea programului de calcul si evaluareaperformantelor. Ultima etapa reprezinta ıncununarea ıntregului efort, siurmareste pe de o parte stabilirea corectitudinii programului de calcul, sipe de alta parte evaluarea globala a capacitatii ıntregii metodologii de a

Introducere 13
solutiona anumite categorii de probleme.Al doilea capitol este dedicat unei introduceri ın teoria aproximarii. Con-
ceptele fundamentale prezentate aici stau la baza majoritatii tehnicilor desolutionare numerica aproximativa. O prima aplicatie a notiunilor de apro-ximare a functiilor o constituie reprezentarea modala a profilelor aero/hidro-dinamice. Metoda prezentata este extrem de utila pentru proiectarea si maiales optimizarea paletajelor turbomasinilor.
In cel de-al treilea capitol este abordata Metoda Elementului de Fron-tiera. Mai ıntai sunt trecute ın revista principalele ingrediente matematice,dupa care este descris ın detaliu modul de dezvoltare a metodei numerice.Aplicatiile practice care ıncheie acest capitol vizeaza curgerea peste profileizolate, iar rezultatele numerice sunt validate atat cu solutii obtinute prinalte metode, cat si prin comparatie cu date experimentale.
Urmatoarele doua capitole sunt consacrate Metodei Elementului Finit.Capitolul 4 introduce conceptele fundamentale pentru probleme monodimen-sionale (ecuatii diferentiale), ımpreuna cu programe simple de calcul careexemplifica etapele principale ale implementarii MEF. Aceste notiuni suntapoi extinse si generalizate ın Capitolul 5 pentru probleme bidimensionale.Spre deosebire de multe tratate care prezinta MEF, ın prezenta lucrare esteprezentata ın detaliu dezvoltarea programelor de calcul. Pentru scrierea aces-tor programe s-a optat pentru biblioteci de proceduri extrem de performante,care ıl degreveaza pe programator de majoritatea detaliilor de implementare.Prin urmare accentul este pus pe simplitate si eficienta. Programul prezentateste validat cu o problema test a carei solutie exacta este cunoscuta.
Un capitol special este dedicat notiunilor specifice organizarii si ma-nipularii structurilor de date cu care se opereaza ın programe de elementfinit. Astfel, Capitolul 6 ıl introduce pe cititor ın problematica algoritmilor destocare si structurare a informatiei aferente retelelor de discretizare nestruc-turate. Desi pot parea la prima vedere fara nici o legatura cu mecanicafluidelor, notiunile din acest capitol ıi ofera cititorului instrumente foarteutile pentru scrierea comoda a unor programe performante.
Afirmatia facuta la ınceputul acestei introduceri conform careia parcurge-rea acestei carti ıi va permite cititorului dezvoltarea de programe originale,de ınalta performanta, este sustinuta ın Capitolul 7 prin prezentarea unuiprogram expert, realizat de autor ımpreuna cu colaboratori studenti, pentrusolutionarea curgerii ın retele de profile. Aplicatiile prezentate pentru retelede turbina cu gaze, respectiv pentru turbocompresoare, demonstreaza cuprisosinta performantele programului. Experienta de cativa ani de utilizarea acestui program atat ın cadrul cursului de proiectare asistata de calcula-tor a turbomasinilor, cat si pentru solutionarea unor probleme din cadrullucrarilor de dizertatie sau a tezelor de doctorat arata ca efortul facut se

14 Introducere
justifica pe deplin. Dezvoltarea acestui program pentru a include efectelevascoase, respectiv adaugarea de proceduri pentru optimizarea formei pro-filelor constituie una din preocuparile tinerilor cercetatori care se familiari-zeaza cu problematica simularii numerice a curgerilor.
Prezenta lucrare se ıncadreaza ın optiunea ferma pe care a luat-o ScoalaTimisoreana de Hidrodinamica Turbomasinilor, sub conducerea Academi-cianului Ioan M. Anton, pentru promovarea consecventa a tehnicilor moder-ne de calcul numeric ın proiectarea, analiza si optimizarea turbomasinilor.Infiintarea ın ultimii ani a doua laboratoare de simulare numerica si calculparalel2, la care autorul a adus o contributie importanta, constituie doar unuldin demersurile ın aceasta directie. Mult mai importanta ınsa este formareaunui grup de tineri cercetatori cu o excelenta pregatire ın domeniul simulariinumerice a curgerilor. Ii amintesc aici pe colegii mei Dr. ing. SebastianMuntean, Dr. ing. Sandor Bernad, inf. Teodora Frunza si ing. DanielBalint, care nu numai ca au contribuit la ınchegarea acestei monografii darsunt si un exemplu ca entuziasmul si excelenta pregatire profesionala permitabordarea cu succes a celor mai complexe probleme practice.
Experienta autorului ın domeniul metodelor numerice pentru problemede curgerea fluidelor s–a ımbogatit substantial ın cadrul stagiilor de cerce-tare efectuate mai ıntai ca bursier Fulbright (1996-1997), apoi ca cercetatorstiintific postdoctoral (1998-1999) si ca profesor invitat (2000-2002) la Uni-versity of Notre Dame, Indiana, U.S.A. Colaborarea cu Prof. Hafiz Atassi dela University of Notre Dame, precum si cu Dr. Lois Curfman-McInnes de laArgonne National Laboratory, a fost hotaratoare ın ınsusirea metodelor mo-derne de calcul numeric si de utilizare a tehnicilor performante de dezvoltarea programelor de calcul.
Finalizarea acestei carti ar fi fost incerta fara sprijinul, ıntelegerea si rab-darea pe care mi le-a acordat fara limite sotia mea Dana. Ii multumescpentru toate acestea.
Timisoara, Aprilie 2003 Autorul
2Laboratoarele de simulare numerica si calcul paralel din cadrul Universitatii ”Po-litehnica” din Timisoara, Centrul National pentru Ingineria Sistemelor cu Fluide Com-plexe, respectiv din cadrul Academiei Romane - Filiala Timisoara, Centrul de CercetariTehnice Fundamentale si Avansate, Sectia de Hidrodinamica si Cavitatie

Capitolul 2
Teoria aproximarii
Ideile si conceptele pe care fundamenteaza teoria aproximarii stau la bazaoricarei scheme de discretizare a ecuatiilor cu derivate partiale, fie ca esteMetoda Diferentelor Finite, Metoda Elementelor Finite, Metoda VolumelorFinite, Metode Spectrale, sau Metoda Elementelor de Frontiera [22]. Defiecare data cand solutionam numeric o ecuatie cu derivate partiale solutiaexacta este aproximata utilizand un set de functii cunoscute. Vom prezentaın cele ce urmeaza cateva metode de construire a unor asemenea aproximatii.
2.1 Formularea problemei de aproximare
In cea mai simpla varianta, o problema de aproximare se poate formula astfel:
Pentru o functie u(x) precizata pe domeniul Ω, sa se aproximezeu(x) utilizand functiile de aproximare cunoscute Ni(x) si un setde parametri ai astfel ıncat
u(x) ≈ uh(x) =m∑
j=1
ajNj(x) (2.1)
Exemple de asemenea aproximari sunt des ıntalnite ın practica:
• Seriile Taylor trunchiate
u(x) ≈ uh(x) = a0 + a1x+ a2x2 + . . . amx
m, aj =1
j!
dju
dxj(2.2a)
• Dezvoltarea ın serie Fourier (spre exemplu serii trunchiate sin)
u(x) ≈ uh(x) =∑
j
aj sinjπx
L, aj =
2
L
L∫0
u(x) sinjπx
Ldx (2.2b)
15

16 Teoria Aproximarii
• Polinoame Legendre sau polinoame Hermite, etc.
Problema fundamentala este cum determinam ın general coeficientii aj dinformula de aproximare (2.1).
2.1.1 Metoda colocatiei
O idee simpla este sa alegem un set de puncte xk din domeniu (si eventualde pe frontiera domeniului), k = 1, . . . ,m si sa impunem conditiile
uh(xk) = u(xk), k = 1, 2, . . . ,m . (2.3)
Aceasta este cea mai simpla solutie, dar evident rezultatul poate depinde dealegerea setului de puncte de colocatie. In principiu obtinem un sistem de mecuatii liniare
m∑j=1
ajNj(xk) = u(xk), k = 1, . . . ,m , (2.4)
prin rezolvarea caruia (ın ipoteza ca matricea sistemului nu este singulara)obtinem setul de coeficienti aj, j = 1, . . . ,m.
2.1.2 Metoda Reziduurilor Ponderate (MRP)
Pentru a prezenta aceasta clasa generala de metode de aproximare vom definimai ıntai eroarea
εh = u− uh ,
si vom impune ca ıntr-un anume sens sa avem ε→ 0 pentru x ∈ Ω. Evident,ın cea mai mare parte a domeniului avem ε = 0. Putem ınsa ”anula” eroarea(sau reziduul) aproximatiei ıntr-un sens ponderat. Pentru aceasta vom intro-duce un set de functii de pondere Wi, i = 1, 2, . . . ,m cu care cerinta ε → 0sa fie formulata mai precis sub forma:∫
Ω
Wi εh dΩ = 0, i = 1, 2, . . . ,m . (2.5)
Odata precizate functiile de aproximare si functiile de pondere, ın principiuputem obtine ε → 0 ın orice punct x ∈ Ω la limita cand m → ∞. Inlocuindexpresia lui uh ın ecuatiile de mai sus obtinem din nou un sistem de ecuatii
∫Ω
Wi
(u−
m∑j=1
ajNj
)dΩ = 0, i = 1, 2, . . . ,m. (2.6)

Teoria Aproximarii 17
Sub forma matriciala sistemul (2.6) se poate scrie
K · a = r, unde Kij =
∫Ω
Wi Nj dΩ si ri =
∫Ω
Wi u dΩ .
Tipul metodei de aproximare este definit de alegerea functiilor de pondereWi. Precizam aici doar doua variante:
(a) metoda colocatiei care se obtine alegand
Wi = δ(x− xi), xi ∈ Ω ,
unde δ este functia lui Dirac ale carei proprietati sunt prezentate pe largın Sectiunea 3.1.2. Cu aceasta avem∫
Ω
δ(x− xi) ε(x) dΩ = εh(xi) = 0, i = 1, 2, . . . ,m
saum∑
j=1
ajNj(xi) = u(xi) .
Am obtinut din nou sistemul (2.4).
(b) Metoda Galerkin se obtine alegand
Wi = Ni (2.7)
Cu aceasta alegere formularea reziduurilor ponderate conduce la urmatorulsistem de ecuatii liniare,
m∑j=1
∫
Ω
Ni Nj dΩ
aj =
∫Ω
Ni u dΩ, i = 1, 2, . . . ,m , (2.8)
a carui matrice este simetrica.
2.1.3 Metoda celor mai mici patrate
Metoda celor mai mici patrate se bazeaza pe minimizarea functionalei
E =
∫Ω
(εh)2dΩ =
∫Ω
(u− uh
)dΩ =
∫Ω
[u−
m∑j=1
ajNj
]2
dΩ .

18 Teoria Aproximarii
Minimizarea functionalei de eroare E presupune anularea derivatelor partialeın raport cu parametrii ai, adica
∂E
∂ai
= 0, i = 1, 2, . . . ,m
de unde rezulta
m∑j=1
∫
Ω
Ni Nj dΩ
aj =
∫Ω
Ni u dΩ, i = 1, 2, . . . ,m . (2.9)
Se observa ca am regasit acelasi sistem de ecuatii ca ın cazul metodei Galerkin(2.8). Cu alte cuvinte alegerea functiilor de pondere Wi = Ni este optima ınsensul celor mai mici patrate.
Matricea sistemului de ecuatii este ın principiu o matrice plina. Pe dealta parte, pentru solutionarea comoda si precisa a sistemului ar fi preferabilsa avem o matrice cu cat mai multe zerouri, sau daca este posibil chiar omatrice diagonala care practic poate fi transformata ın matricea unitate.Pentru aceasta trebuie sa alegem functiile Ni astfel ıncat∫
Ω
Ni Nj dΩ =
1 daca i = j
0 daca i = j
Functiile care au aceste proprietati se numesc ortonormate (a doua propri-etate este ortogonalitatea iar prima indica normarea la 1).
2.2 Reprezentarea modala a profilelor aero/hi-
drodinamice
In procesul de optimizare geometrica a aripilor de avion sau paletelor tur-bomasinilor hidraulice forma sectiunilor transversale (profile aero/hidrodina-mice) este perturbata cu o combinatie liniara de functii de forma. Geometriafinala optimizata, precum si eficienta procedurii de optimizare depind esentialde alegerea si numarul functiilor de forma utilizate. Alegerea acestor functiipentru reprezentarea adecvata a profilelor aero/hidrodinamice este una dinproblemele fundamentale de proiectare.
Din punct de vedere matematic orice functie continua poate fi reprezen-tata printr-o serie infinita de moduri normale (functii ortonormate). SeriaFourier de functii sinus este un asemenea exemplu. Pe de alta parte, dinpunct de vedere practic dorim ca seria sa fie rapid convergenta, astfel ıncat

Teoria Aproximarii 19
daca o trunchiem dupa cativa termeni sa obtinem o aproximare foarte buna.Acest deziderat este ındeplinit de setul de functii propus ın [13].
Exista diferite modalitati de definire analitica a profilelor. Spre exemplu,functia de grosime pentru familia NACA cu 4 cifre este data de
y =t
0.2
(0.2969
√x− 0.126x− 0.3516x2 + 0.2843x3 − 0.1015x4
), (2.10)
unde t este grosimea maxima raportata la coarda de lungime unitara. Esteevident ca functia y(x) din (2.10) poate fi scrisa utilizand urmatoarele functiiliniar independente:
g1(x) =√x− x (2.11a)
g2(x) = x(1 − x) (2.11b)
g3(x) = x2(1 − x) (2.11c)
g4(x) = x3(1 − x) (2.11d)
Acest set de functii poate fi extins pentru a reprezenta o diversitate mai marede profile, dupa cum urmeaza:
g5(x) = x4(1 − x) (2.11e)
g6(x) = x5(1 − x) (2.11f)
g7(x) =3√x−√
x (2.11g)
g8(x) =4√x− 3
√x (2.11h)
g9(x) =5√x− 4
√x (2.11i)
g10(x) =6√x− 5
√x (2.11j)
Setul de functii (2.11) poate fi transformat ıntr-un set de functii ortogonalefolosind procedeul recursiv Gramm-Schmidt:
h1(x) = g1(x) ,
h2(x) = g2(x) − α21h1(x) ,
. . .
hm(x) = gm −m−1∑i=1
αmihi(x)dx ,
unde coeficientii αmi sunt
αmi =
1∫0
gm(x)hi(x)dx
1∫0
h2i (x)dx
.

20 Teoria Aproximarii
Fiecare coeficient αmi reprezinta proiectia functiei gm pe directia functiei hi,ın ideea analogiei cu spatiile vectoriale prevazute cu produs scalar, [15] p. 86.Evaluarea numerica a acestor coeficienti presupune calculul unor integraleelementare. Totusi, expresiile analitice ale functiilor devin tot mai complicatesi de aceea calculul efectiv este recomandabil sa fie efectuat cu un programexpert ca de exemplu MAPLE. Cateva valori numerice ale coeficientilor suntprezentate mai jos:
α21 =13
14, α31 =
17
42, α32 =
73
81,
α41 =7
33, α42 =
574
891, α43 =
953
748, etc.
Normarea setului de functii h se face simplu
Ni(x) =hi(x)√
1∫0
h2i (x)dx
,
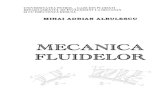
si obtinem setul de functii ortonormate Ni. In cazul seriilor Fourier functiiletrigonometrice sinus sau cosinus ale seriei, care formeaza un set de functiiortonormate, poarta numele de functii modale pentru ca sunt asociate mo-durilor proprii de vibratie ale unei coarde elastice fixata la capete. Prinanalogie, numim si functiile Ni, care au capetele fixate Ni(0) = Ni(1) = 0,functii modale desi nu corespund unor moduri proprii de vibratie a vreunuisistem elastic. Figura 2.1 prezinta primele sase functii modale din setulconstruit mai sus.
Coeficientii a din formula de aproximare (2.1) pot fi acum calculati direct.Practic, sistemul de ecuatii (2.8) sau (2.9) devine pur si simplu
ai =
1∫0
u(x) Ni(x) dx . (2.12)
Daca functia u(x) nu este cunoscuta analitic ci este precizata doar printr-un set de puncte (xp, yp), atunci pentru evaluarea integralelor din (2.12)trebuie sa presupunem evolutia functiei pe fiecare subinterval [xp, xp+1]. Dacaconsideram functia u(x) liniara pe portiuni, atunci avem
xp+1∫xp
u(x) Ni(x) dx = yp
xp+1∫xp
xp+1 − x
xp+1 − xp
Ni(x) dx+yp+1
xp+1∫xp
x− xp
xp+1 − xp
Ni(x) dx

Teoria Aproximarii 21
0 0.2 0.4 0.6 0.8 10
0.5
1
1.5
mod 1
(a)0 0.2 0.4 0.6 0.8 1
−2
−1
0
1
2
mod 2
(b)
0 0.2 0.4 0.6 0.8 1−2
−1
0
1
2
3
mod 3
(c)0 0.2 0.4 0.6 0.8 1
−3
−2
−1
0
1
2
mod 4
(d)
0 0.2 0.4 0.6 0.8 1−2
−1
0
1
2
3
mod 5
(e)0 0.2 0.4 0.6 0.8 1
−3
−2
−1
0
1
2
mod 6
(f)
Figura 2.1: Functii de reprezentare modala a profilelor aero-hidrodinamice.

22 Teoria Aproximarii
Desi functiile Ni au expresii complicate, evaluarea integralelor de mai suseste simplu de efectuat cu programul expert MAPLE.
Figura 2.2(a) prezinta reconstructia modala a profilului E71 utilizandsetul de puncte de pe extrados, respectiv de pe intrados. Se observa caprofilul reconstruit este foarte apropiat (practic identic din punct de vedereingineresc) de punctele de catalog. Unul din avantajele utilizarii functiilorNi definite pe ıntreg domeniul de analiza poate fi observat ın Figura 2.2(b).Aici au fost intentionat modificate ordonatele unor puncte pe pe intrados siextrados. Aceasta perturbare a coordonatelor poate fi accidentala sau poatefi parte a unui algoritm de optimizare. Se observa ca profilul reconstruitcu metoda celor mai mici patrate este doar usor perturbat ın zona celordoua puncte modificate, ramanand aproape de profilul original ın rest. Maimult, netezimea profilului se pastreaza, ceea ce este un foarte important dinpunct de vedere practic. Asemenea tehnici de obtinere a unor noi familiide profile aero-hidrodinamice prin perturbarea unor profile existente suntimperios necesare ın orice proces de proiectare moderna optimizata.
Figura 2.3 prezinta reconstructia a patru sectiuni transversale ale aripiiavionului Boeing 707. Se observa abilitatea reprezentarii modale de a repro-duce corect si forme mai complexe de corpuri profilate.
2.3 Metoda Reziduurilor Ponderate cu functii
definite pe subdomenii
In Sectiunea 2.2 am utilizat functii definite pe ıntreg domeniul de analiza, saufunctii globale. Construirea acestor functii si utilizarea lor nu este totdeaunacomoda sau chiar posibila deoarece:
• In cazul domeniilor 2D sau 3D gasirea unor functii de aproximareglobala este aproape imposibila cu exceptia unor geometrii foarte sim-ple.
• Pentru solutionarea sistemului de ecuatii ın vederea obtinerii coefici-entilor din (2.1) este preferabil ca setul de functii sa fie ortogonalizatprin procedeul Gramm-Schmidt. In caz contrar se obtin matrici prostconditionate ce conduc la o precizie scazuta a solutiei sistemului.
• Coeficientii aj din (2.1) nu au semnificatie fizica imediata.
O modalitate de a evita neajunsurile de mai sus este sa utilizam functiilocale de aproximare ın locul functiilor globale. De data aceasta domeniulde analiza Ω este ımpartit ın subdomenii Ωe, numite elemente. Pe fiecare

Teoria Aproximarii 23
0 0.2 0.4 0.6 0.8 1x
−0.02
0
0.02
0.04
0.06
0.08
y
extrados
intrados
(a) Reconstructia cu setul original de puncte.
0 0.2 0.4 0.6 0.8 1−0.02
0
0.02
0.04
0.06
0.08
0.1
punct perturbatpe intrados
punct perturbatpe extrados
(b) Reconstructia cu setul perturbat de puncte
Figura 2.2: Reconstructia modala a profilului E71 dat prin puncte.

24 Teoria Aproximarii
0 0.2 0.4 0.6 0.8 1−0.08
−0.06
−0.04
−0.02
0
0.02
0.04
0.06
0.08
(a) Profil la 8% din anvergura0 0.2 0.4 0.6 0.8 1
−0.08
−0.06
−0.04
−0.02
0
0.02
0.04
0.06
0.08
(b) Profil la 19% din anvergura
0 0.2 0.4 0.6 0.8 1−0.04
−0.02
0
0.02
0.04
0.06
0.08
(c) Profil la 40% din anvergura0 0.2 0.4 0.6 0.8 1
−0.04
−0.02
0
0.02
0.04
0.06
0.08
(d) Profil la 54% din anvergura
Figura 2.3: Reconstructie modala ale profilor ale aripii de avion Boeing 707.

Teoria Aproximarii 25
subdomeniu se construieste o aproximare locala. Daca forma subdomeniuluieste simpla (triunghiuri sau patrulatere ın 2D si tetraedre sau hexaedre ın3D) atunci si functiile de aproximare sunt simple si pot fi manipulate cuusurinta.
Spre exemplu, pentru probleme 1D putem considera o aproximatie uh
liniara pe fiecare element. Pentru aceasta se prevad noduri la capetele fiecaruielement, si definim functiile de aproximare liniare pe portiuni
Nj =
1 ın nodul j
0 ın celelalte noduri(2.13)
iar Nj este nenula numai ın elementele ınvecinate nodului j. Prin urmareputem scrie aproximarea globala
u ≈ uh =∑
j
Nj(x)u(xj) =∑
j
Nj(x)uj . (2.14)
Observam ca, spre deosebire de aproximarea (2.1) cu functii globale, ın cazulde fata coeficientii uj reprezinta chiar valorile nodale ale aproximatiei. Pentruprobleme 1D aproximatia cu functii liniare pe portiuni este prezentata ınSectiunea 4.10.1, iar pentru probleme 2D ın Sectiunea 5.4.
2.3.1 Proprietati generale ale functiilor locale de apro-ximare
Functiile de aproximare utilizate ın Metoda Elementului Finit au urmatoareleproprietati generale:
(a) Proprietatea de interpolare: Tinand cont ca uh =∑
iNi(x)ui avem
uh(xj)∑
i
Ni(xj)ui = uj =⇒ Ni(xj) =
1 daca i = j
0 daca i = j(2.15)
Cu alte cuvinte, aceasta este definitia (2.13).
(b) Proprietatea de suma constanta: In cel mai simplu caz, un set de functiilocale de aproximare trebuie sa poata reprezenta o functie constanta.Prin urmare,
u = 1 =⇒ uh = 1 =∑
i
Ni(xj)ui . (2.16)

26 Teoria Aproximarii
Dar proprietatea de interpolare implica ui = 1, sau∑i
Ni(x) = 1, ∀x ∈ Ω , (2.17)
adica suma tuturor functiilor locale de aproximare este egala cu unitatea.
(c) Proprietatea de conservare: Tinand cont de proprietatea anterioara,suma derivatelor functiilor de aproximare este
∑i
∂Ni
∂xk
= 0, ∀x ∈ Ωe . (2.18)
Proprietatea este valabila pentru orice punct din interiorul unui element.La frontiera dintre elemente de regula derivatele nu sunt definite (suntdiscontinue).
2.3.2 Implementarea elementala
Sa revenim acum la Metoda Reziduurilor Ponderate formulata cu functiilocale: ∫
Ω
Wi (u−∑
j
Njuj) dΩ = 0 . (2.19)
Ideea de baza este sa descompunem integralele ca o suma pe subdomeniileelementale, ∫
Ω
. . . dΩ =∑
e
∫Ωe
. . . dΩe . (2.20)
Integralele sunt evaluate relativ simplu la nivel elemental pentru ca expre-siile functiilor de aproximare sunt simple. Singura informatie necesara pen-tru evaluarea integralelor o constituie coordonatele nodurilor care apartinelementului. Metodologia generala ce urmeaza a fi aplicata ın capitoleleurmatoare poate fi succint descrisa dupa cum urmeaza:
• identificarea nodurilor elementului si a coordonatelor acestora
• calculul integralelor pentru fiecare element ın parte
• adunarea contributiei fiecarui element la matricea sistemului, respectivla vectorul termenilor liberi.

Teoria Aproximarii 27
Putem exprima matematic procedeul de mai sus astfel:
∑j
Kijuj =∑
j
[∑e
Keij
]uj =
∑e
rei = ri (2.21)
Aceasta este ideea de baza care se regaseste ın Metoda Elementului Finit sauMetoda Volumului Finit aplicate pe retele de discretizare arbitrare.

28 Metoda Elementelor de Frontiera

Capitolul 3
Metoda Elementului deFrontiera
3.1 Ecuatia integrala pe frontiera
3.1.1 Metoda Reziduurilor Ponderate
Formularea matematica a multor probleme din natura conduce la ecuatiicu derivate partiale carora li se ataseaza conditii la limita corespunzatoareformandu-se asa-numitele probleme la limita. Pentru majoritatea aplicatiilorpractice ingineresti este imposibila construirea unor solutii analitice si prinurmare s-au dezvoltat procedee numerice pentru obtinerea unor solutii apro-ximative.
Istoric vorbind, probabil prima tehnica numerica este metoda diferentelorfinite, la care aproximarea ecuatiei date se face utilizand dezvoltari locale aleoperatorilor diferentiali, adica de fapt serii Taylor trunchiate. In general,dezideratul unei tehnici numerice este de a aproxima ecuatiile ce guverneazafenomenul ın interiorul domeniului fizic astfel ıncat sa se reduca numarulinfinit de grade de libertate ale sistemului la o multime finita. Este necesaraprin urmare discretizarea atat a domeniului cat si a frontierei sale, respectivelaborarea unor relatii speciale pentru absorbirea ın ecuatii a conditiilor lalimita date.
Cadrul matematic general ın care se fundamenteaza formularile specificecare conduc la diverse metode numerice este Metoda Reziduurilor Ponderate(MRP). Pentru a preciza ideile de baza ale MRP vom face apel la problemacu conditii la limita (3.1) pentru ecuatia lui Poisson (3.1a), ın asa-numitaformulare tare:
Pentru f : Ω → R, g : Γg → R, si h : Γh → R, sa se gaseasca u : Ω → R
29

30 Metoda Elementelor de Frontiera
astfel ıncat,
∇2u = f ın Ω , (3.1a)
u = g pe Γg , (3.1b)
∂u
∂n= h pe Γh . (3.1c)
Functia u(x) este functia necunoscuta (ın cazul de fata un camp scalar), iarx este vectorul de pozitie al punctului spatial curent. Frontiera domeniuluide analiza este Γ = Γg
⋃Γh. Pe portiunea Γg a frontierei se impun valo-
rile lui u, conditiile de tipul (3.1b) fiind denumite conditii pe frontiera (lalimita) esentiale sau de tip Dirichlet. Pe portiunea Γh a frontierei se im-pun valorile derivatei normale a lui u, adica n · ∇u cu n versorul normaleiexterioare, conditiile de tipul (3.1c) fiind denumite conditii pe frontiera (lalimita) naturale sau de tip Neumann.
Cum solutia numerica este calculata ıntr-un numar finit de puncte, eava fi o aproximatie a solutiei exacte continue. Prin urmare, solutia cautatanu va satisface exact ecuatia (3.1a) si/sau conditiile (3.1b,3.1c), generandasa-numitele reziduuri (sau erori) de tipul
R = ∇2u− f = 0 , Rg = u− g = 0 , Rh =∂u
∂n− h = 0 .
Scopul oricarui procedeu de aproximare este de a face cat mai mici acesteerori. Dupa maniera ın care se transpune ın practica acest deziderat se obtindiferite metode de solutionare numerica. Astfel, considerand o functie depondere w, ın ipoteza ca functia de aproximare u satisface toate conditiile lalimita impuse (deci Rg = 0 si Rh = 0) singura eroare R ar putea fi anulataın medie, ın raport cu functia w,∫
Ω
R w dΩ = 0 .
Acesta este punctul de pornire al metodei reziduurilor ponderate. Evident,daca functia de aproximare u nu satisface conditiile la limita esentiale saupe cele naturale, sau nu le satisface pe amandoua, trebuie impuse cerinteasemanatoare de satisfacere ın medie a conditiilor pe frontiera. Prin urmare,ın locul problemei la limita (3.1) se poate considera urmatoarea ecuatie pon-derata unica∫
Ω
(∇2u− f)w dΩ = −
∫Γg
(u− g)∂w
∂ndΓ +
∫Γh
(∂u
∂n− h
)w dΓ . (3.2)

Metoda Elementelor de Frontiera 31
Integrand prin parti ın membrul stang, obtinem urmatoarea formulare slaba,∫Ω
(∇w) · (∇u) dΩ +
∫Ω
w f dΩ =
∫Γg
w∂u
∂ndΓ +
∫Γh
w h dΓ +
∫Γg
∂w
∂n(u− g) dΓ . (3.3)
Se poate observa ca ın aceasta ecuatie care ınlocuieste problema (3.1) aparexplicit conditiile Dirichlet si Neumann. Daca alegem spatiul functiilor ıncare cautam solutia astfel ıncat (3.1b) sa fie satisfacuta si w = 0 pe Γg,atunci obtinem metoda Galerkin descrisa de ecuatia∫
Ω
(∇w) · (∇u) dΩ =
∫Γh
w h dΓ −∫Ω
w f dΩ . (3.4)
Acesta este punctul de pornire ale Metodei Elementului Finit ın variantaGalerkin.
Daca integram ınca odata prin parti ın membrul stang al ecuatiei (3.3)obtinem asa-numita formulare inversa,∫
Ω
(∇2w) u dΩ −∫Ω
w f dΩ =
−∫Γg
w∂u
∂ndΓ −
∫Γh
w h dΓ +
∫Γh
∂w
∂nu dΓ +
∫Γg
∂w
∂ng dΓ . (3.5)
Aparent nu s-a obtinut nici un avantaj cu aceasta noua formulare. Totusi,daca functia de pondere este aleasa ın mod particular, este posibila eliminareaintegralelor pe domeniul Ω. Aceasta alegere corespunde solutiei fundamentalea ecuatiei Laplace, numita si functia Green a operatorului Laplace. Prinurmare, vom ınlocui functia de pondere w ın (3.5) cu functia G care estesolutia ecuatiei
∇2G(p,x) = −δ(p,x) , (3.6)
unde p este un punct fix din spatiu iar x este punctul curent. In membruldrept avem functia δ a lui Dirac, care prin definitie are proprietatea∫
δ(p,x) u(x) dΩx = u(p) . (3.7)
In sectiunea 3.1.2 vom detalia semnificatia si proprietatile acestui instrumentmatematic. Trebuie remarcat ca functia Green depinde de variabila spatiala

32 Metoda Elementelor de Frontiera
x, dar si de punctul p care este un parametru fixat. Cu aceasta, primultermen din membrul stang al ecuatiei (3.5) se reduce la −u(p).
A doua integrala pe domeniu contine functia cunoscuta f. Cum aceastafunctie este arbitrara, ın general integrala corespunzatoare trebuie evaluatautilizand o triangulatie a domeniului si o tehnica de aproximare a inte-gralei similara cu cea utilizata ın Metoda Elementului Finit. Daca ınsaf ≡ 0 atunci dispare integrala corespunzatoare pe domeniu (avem variantaomogena a ecuatiei 3.1a, adica ecuatia lui Laplace) si (3.5) va contine numaiintegrale pe frontiera.
p
p
n
Ω
Γ
Γd
r=p−qq
0
v
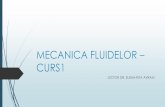
Figura 3.1: Domeniul de analiza cu punctul interior p si punctul curent pefrontiera q.
Daca notam cu q vectorul de pozitie al punctului curent de pe frontieraΓ, Figura 3.1, si cu nq versorul normalei exteriorare ın punctul q, atunci(3.5) devine:
u(p) +
∫Γh
∂G(p, q)
∂nq
u(q) dΓq +
∫Γg
∂G(p, q)
∂nq
g(q) dΓq
=
∫Γg
G(p, q)∂u(q)
∂nq
dΓq +
∫Γh
G(p, q) h(q) dΓq . (3.8)
Ecuatia (3.8) arata ca daca se cunoaste functia Green a operatorului diferen-tial atunci solutia ecuatiei omogene ın orice punct din interiorul domeniuluipoate fi calculata numai functie de valorile functiei u(q) si ale derivatei nor-male ∂u(q)/∂nq pe frontiera domeniului. Mai mult, daca vp este un versoroarecare ın punctul interior p, Figura 3.1, atunci (3.8) poate fi diferentiata

Metoda Elementelor de Frontiera 33
pentru a calcula variatia solutiei u(p) ın directia vp, adica ∂u(p)/∂vp,
∂u(p)
∂vp
= −∫Γh
∂2G(p, q)
∂vp∂nq
u(q) dΓq −∫Γg
∂2G(p, q)
∂vp∂nq
g(q) dΓq
+
∫Γg
∂G(p, q)
∂vp
∂u(q)
∂nq
dΓq +
∫Γh
∂G(p, q)
∂vp
h(q) dΓq . (3.9)
Ce se ıntampla ınsa daca ın (3.8) ınsusi punctul p se gaseste pe fron-tiera domeniului? Aceasta situatie va fi examinata ın detaliu ın sectiunea3.1.3. Ceea ce putem spune deocamdata este ca (3.8) devine o relatie delegatura ıntre valorile functiei u si ale derivatei normale ∂u/∂n numai pefrontiera domeniului. Cum pe portiunea Γg sunt prescrise valorile lui u, iarpe portiunea Γh se cunosc valorile lui ∂u/∂n, din ecuatia pe frontiera sevor putea determina valorile lui u pe Γh, respectiv valorile lui ∂u/∂n pe Γg.Odata acestea calculate, (3.8) poate fi utilizata pentru evaluarea solutiei u(p)ın orice punct din interiorul domeniului.
Este restrictionata (3.8) la ecuatii omogene? Nu, ıncepand cu anii ′80 aufost dezvoltate tehnici aproximative care sa ınlocuiasca integrala pe dome-niu ce contine functia arbitrara f cu o integrala pe frontiera. Amintim aiciMetoda Reciprocitatii Duale (1982) si Metoda Reciprocitatii Multiple (1988),dar prezentarea lor depaseste cadrul acestei carti.
3.1.2 Functia δ a lui Dirac
Functia delta a fost introdusa si utilizata ın fizica de Dirac, cu mult ınainte caacest concept sa devina respectabil ın comunitatea matematicienilor. Cumriguros vorbind nu exista functii care sa posede proprietatile functiei δ, adevenit imperios necesar sa se construiasca o noua teorie matematica care saincluda functia δ. La ınceputul anilor ′50 Laurent Schwarz [27] a formulatteoria distributiilor, dar o denumire mai potrivita pentru acest concept estefunctii generalizate (sugerand ca sunt incluse functiile clasice, dar evitandposibila confuzie cu distributiile din teoria probabilitatilor).
Ideea functiei δ porneste de la exprimarea operatorului identitate subforma de operator integral,
u(x) =
∫δ(x; t)u(t)dt . (3.10)
Daca relatia de mai sus este valabila pentru toate functiile continue u(t),atunci δ(x; t) trebuie sa fie zero daca x = t, deci putem scrie
δ(x; t) = δ(x− t) , (3.11)

34 Metoda Elementelor de Frontiera
sau ın particular δ(x) = 0 daca x = 0. Conform definitiei data de Dirac,functia δ este zero pentru orice valoare a lui x, cu exceptia originii undedevine infinita astfel ıncat
∞∫−∞
δ(x)dx = 1 . (3.12)
Din punct de vedere matematic, aceasta definitie este un non-sens. Daca ofunctie este zero peste tot cu exceptia unui singur punct, integrala ei, in-diferent de definitia integralei, este ın mod necesar zero. Totusi, utilitateafunctiei δ a impulsionat matematicienii sa ıi gaseasca o justificare riguroa-sa. Teoria lui L. Schwarz justifica nu numai utilizarea functiei δ dar si aderivatelor ei de orice ordin. Metodele dezvoltate sunt foarte utile pentru capermit interschimbarea operatiilor de trecere la limita chiar si atunci candaceasta operatie nu este valida pentru functii ordinare, si pentru ca permiteutilizarea unor dezvoltari ın serie care altfel le consideram divergente. In celece urmeaza vom prezenta cateva rezultate importante din teoria functiilorgeneralizate.
Interpretarea functiei δ
Scurta introducere de mai sus ridica ıntrebarea legitima Ce trebuie sa ıntelegemprin functia δ ? Cea mai importanta proprietate a ei, care o face dealtfel utila,este urmatoarea: pentru orice functie continua φ(x) avem,
∞∫−∞
δ(x)φ(x)dx = φ(0) , (3.13)
adica functia δ selecteaza valoarea functiei φ ın origine. Pe de alta parte,orice ecuatie ce implica functia δ trebuie ınteleasa ın sensul urmator: dacaecuatia este multiplicata cu o functie arbitrara continua si integrata de la−∞ la ∞ cu (3.13) folosita pentru evaluarea integralelor ce contin functia δ,rezultatul trebuie sa fie o ecuatie corecta ce implica functii ordinare. Relatia(3.13) ne permite practic sa definim functionala F [φ] (functionala fiind oaplicatie ce asociaza unei functii un numar) astfel ıncat F [φ] = φ(0).
De exemplu xδ(x) = 0 pentru ca daca φ(x) este o functie continua sinotam xδ(x) = ψ(x), atunci∫
xδ(x)φ(x)dx =
∫δ(x)ψ(x)dx = ψ(0) = 0 .

Metoda Elementelor de Frontiera 35
Vom considera ca tehnicile uzuale precum integrarea prin parti pot fiaplicate integralelor ce contin functia δ. Pentru ilustrare, vom arata ca dacaf(x) este o functie monotona care se anuleaza ın x = x0, atunci
δ(f(x)) =δ(x− x0)
|f ′(x0)| , (3.14)
unde simbolul δ(x− x0) ınseamna
∞∫−∞
φ(x)δ(x− x0)dx = φ(x0) .
In integrala∞∫
−∞
δ(f(x))φ(x)dx
facem substitutia y = f(x) si ψ(y) = φ(x)/|f ′(x)|. Cu acestea avem
∞∫−∞
δ(y)ψ(y)dy = ψ(0) =φ(x0)
|f ′(x0)| .
Ca un caz particular al relatiei (3.14) avem
∞∫−∞
δ(ax− b)φ(x)dx = |a|−1φ(ba−1) ,
si δ(x) = δ(−x).Remarcam ca functia δ(x) este tratata exact ca si cand ar fi o functie
ordinara, dar nu ne vom referi niciodata la valorile ei. Vom vorbi numaidespre valorile integralelor ce contin functia delta.
Functii test si functii simbolice
Functia φ(x) utilizata mai sus pentru a testa validitatea relatiei (3.14) este unexemplu de functie test. Pentru a opera cu ecuatii diferentiale este convenabilsa definim functiile test ca fiind acele functii φ(x) care sunt continue, auderivate de orice ordin continue, si se anuleaza ın exteriorul unui intervalfinit. Un exemplu concret de functie test este
φ(x) =
A exp
[− c
(x−a)α
]exp[− d
(−x+b)β
]a < x < b
0 x ≤ a sau x ≥ b

36 Metoda Elementelor de Frontiera
unde A, a, si b sunt numere reale iar α, β, c, si d sunt numere reale pozitive.Evident, intervalul a ≤ x ≤ b ın exteriorul caruia functia se anuleaza nutrebuie sa fie acelasi pentru toate functiile test.
Functionala F definita de (3.13) este liniara pentru ca F [c1φ1 + c2φ2] =c1φ1(0) + c2φ2(0) = c1F [φ1] + c2F [φ2]. Laurent Schwarz numeste distributieorice functionala liniara ın spatiul functiilor test. In principiu am dori saexprimam orice functionala F [φ] sub forma,
F [φ] =
∞∫−∞
s(x)φ(x)dx .
Am vazut ca este posibil sa introducem simbolul δ(x) astfel ıncat
F [φ] = φ(0) =
∞∫−∞
δ(x)φ(x)dx .
Functia δ este un exemplu de functie simbolica. Ne putem propune prinurmare ca pentru orice functionala F [φ] peste spatiul functiilor test sa intro-ducem o functie simbolica s(x) astfel ıncat
∞∫−∞
s(x)φ(x)dx = F [φ] .
O functie simbolica nu trebuie sa aiba valori; ea produce o valoare numericaatunci cand este ınmultita cu o functie test si integrata. Un alt exemplu defunctie simbolica este δ(n)(x), definita ca
∞∫−∞
δ(n)(x)φ(x)dx = (−1)n dnφ
dxn
∣∣∣∣x=0
.
Deoarece membrul drept este o functionala liniara peste spatiul functiilortest, δ(n) este o functie simbolica.
Pe scurt, functiile simbolice se utilizeaza ın acelasi mod ca si functiileordinare. Orice ecuatie ce implica functii simbolice trebuie ınteleasa ın modulurmator: daca ecuatia este ınmultita cu o functie test si integrata de la −∞la +∞, utilizand proprietatile functionale ale functiilor simbolice la evaluareaintegralelor, rezultatul trebuie sa fie o ecuatie corecta ın functii ordinare. Prindefinitie, o functie generalizata este o functionala liniara definita pe spatiulfunctiilor test.

Metoda Elementelor de Frontiera 37
Derivatele functiilor simbolice
Dorim sa definim conceptul de derivata a unei functii simbolice astfel ıncatsa ısi mentina valabilitatea si pentru functiile ordinare.
Deoarece functia simbolica este definita prin intermediul functionalei pecare o produce, trebuie sa utilizam proprietatile de integrare ale functiilorordinare. O asemenea proprietate este integrarea prin parti. Daca f(x) esteo functie cu derivata continua, atunci
∞∫−∞
f ′(x)φ(x)dx = −∞∫
−∞
f(x)φ′(x)dx . (3.15)
Deoarece φ(x) se anuleaza ın exteriorul unui interval finit, termenul evaluatla capetele intervalului de integrare este nul. Putem folosi (3.15) pentru adefini derivata unei functii simbolice s(x), si spunem ca s′(x) este derivatalui s(x) daca
∞∫−∞
s′(x)φ(x)dx = −∞∫
−∞
s(x)φ′(x)dx , (3.16)
pentru orice functie test φ(x). Spre exemplu, δ′(x) este definita de relatia
∞∫−∞
δ′(x)φ(x)dx = −∞∫
−∞
δ(x)φ′(x)dx = −φ′(0) ; (3.17)
ın consecinta, δ′(x) produce functionala ce asociaza valoarea −φ′(0) functieitest φ(x). Analog putem defini derivata de ordinul al doilea δ′′(x) ca fiind
∞∫−∞
δ′′(x)φ(x)dx = −∞∫
−∞
δ′(x)φ′(x)dx = φ′′(0) .
Observam ca functia simbolica δ(n)(x) introdusa ca exemplu ın sectiuneaprecedenta este de fapt derivata de ordin n a functiei δ, adica
δ(n)(x) =dnδ(x)
dxn.
Putem arata ca ınsasi functia δ este derivata functiei H(x) definita de relatia
∞∫−∞
H(x)φ(x)dx =
∞∫0
φ(x)dx . (3.18)

38 Metoda Elementelor de Frontiera
Pentru a vedea aceasta folosim (3.16),
∞∫−∞
H ′(x)φ(x)dx = −∞∫
−∞
H(x)φ′(x)dx = −∞∫
0
φ′(x)dx = φ(0) ,
deoarece φ(∞) = 0. Prin urmare,
H ′(x) = δ(x) . (3.19)
Functia simbolica H(x) definita ın (3.18) este egala cu functia ordinara ceare valorile,
H(x) =
1 x > 00 x < 0
,
si poarta numele de functia unitate a lui Heaviside. Sa notam ca derivatafunctiei H(x) este zero pentru x > 0 si x < 0, si este nedefinita pentru x = 0.
Functia δ multidimensionala
Conceptele prezentate mai sus au fost introduse si utilizate pentru functiide o variabila. Sa examinam ın continuare cazul functiilor de mai multevariabile. Daca δ(x1, x2, . . . , xn) este functia δ n-dimensionala, atunci prinanalogie cu (3.13) vom scrie∫
. . .
∫φ(x1, x2, . . . , xn)δ(x1, x2, . . . , xn)dx1 . . . dxn = φ(0, 0, . . . , 0) .
Cum φ este continua, ordinea ın care se considera limitele partiale pentrucele n coordonate nu conteaza, si rezulta ca functia δ n-dimensionala esteprodusul a n functii δ monodimensionale,∫
. . .
∫φ(x1, x2, . . . , xn)δ(x1)δ(x2) . . . δ(xn)dx1 . . . dxn = φ(0, 0, . . . , 0) ,
sau pe scurt,
δ(x1, x2, . . . , xn) = δ(x1)δ(x2) . . . δ(xn) . (3.20)
Expresia functiei δ devine mai complicata ın coordonate curbilinii. Sa exa-minam pentru ınceput cazul spatiului bidimensional, ın care trecem de lacoordonatele carteziene x1, x2 la coordonatele curbilinii ξ1, ξ2 cu formulele:
x1 = u(ξ1, ξ2), x2 = v(ξ1, ξ2) .

Metoda Elementelor de Frontiera 39
Presupunem ca u si v sunt bijective si derivabile. Sa consideram ca punctulξ1 = β1, ξ2 = β2 corespunde punctului x1 = α1, x2 = α2. In urma schimbariide variabila, ecuatia∫ ∫
δ(x1 − α1)δ(x2 − α2)φ(x1, x2)dx1dx2 = φ(α1, α2) ,
devine∫ ∫δ(u(ξ1, ξ2) − α1)δ(v(ξ1, ξ2) − α2)φ(u, v)|J |dξ1dξ2 = φ(α1, α2) ,
unde J este Jacobianul transformarii dat de formula
J =∂u
∂ξ1
∂v
∂ξ2− ∂u
∂ξ2
∂v
∂ξ1.
Ecuatia (3.20) arata ca functia simbolica
δ(u(ξ1, ξ2) − α1)δ(v(ξ1, ξ2) − α2) |J |asociaza oricarei functii test valoarea functiei respective ın punctul unde u =α1 si v = α2, adica ın punctul unde ξ1 = β1 si ξ2 = β2; prin urmare putemscrie
δ(u(ξ1, ξ2) − α1)δ(v(ξ1, ξ2) − α2) |J | = δ(ξ1 − β1)δ(ξ2 − β2) ,
sau daca J = 0,
δ(x1 − α1)δ(x2 − α2) =δ(ξ1 − β1)δ(ξ2 − β2)
|J | . (3.21)
Ca o ilustrare a acestui rezultat, sa consideram transformarea de la coordo-natele rectangulare x, y la coordonatele polare r, θ, unde x = r cos θ, y =r sin θ. Deoarece J = r, avem
δ(x− x0)δ(y − y0) =δ(r − r0)δ(θ − θ0)
r, (3.22)
daca x0 = r0 cos θ0 si y0 = r0 sin θ0. Ce se ıntampla cu (3.22) daca J = 0pentru ξ1 = β1, ξ2 = β2 ? In acest caz transformarea de la x1, x2 la ξ1, ξ2nu mai este biunivoca. Pentru exemplul de mai sus, Jacobianul devine zeroın origine x = y = 0, unde pentru r = 0 putem avea orice valoare pentruθ. Aceasta situatie este tipica ın cazul general. Vom numi o coordonataprecum θ, care nu are o valoare bine determinata ıntr-un punct singular altransformarii, coordonata ignorabila.

40 Metoda Elementelor de Frontiera
Sa presupunem ca x1 = α1 , x2 = α2 este un punct singular al transfor-marii de coordonate unde ξ2 este o coordonata ignorabila, iar functia testφ(x1, x2) ın spatiul x1, x2 devine φ(ξ1, ξ2) ın spatiul ξ1, ξ2. Cand punctulx1 = α1 , x2 = α2 este singular avem ξ1 = β1, ξ2 este nedeterminat, si functiaφ(ξ1, ξ2) va depinde numai de β1. Notam aceasta valoare cu φ(β1).
Functia simbolica ce corespunde lui δ(x1 −α1)δ(x2 −α2) devine o functiesimbolica numai de ξ1. Vom avea deci,
φ(α1, α2) =
∫ ∫δ(u− α1)δ(v − α2)φ(u, v)|J |dξ1dξ2
=
∫ ∫t(ξ1)φ(ξ1, ξ2)|J |dξ1dξ2 = φ(β1) ,
(3.23)
unde t(ξ1) este o functie simbolica ce depinde de ξ1. Daca notam J1 =∫ |J | dξ2, atunci (3.23) va fi satisfacuta daca t(ξ1) = δ(ξ1 − β1)/ |J1|. Prinurmare, ın cazul ın care J = 0 pentru x1 = α1, x2 = α2, avem
δ(x1 − α1)δ(x2 − α2) =δ(ξ1 − β1)
|J1| .
Spre exemplu, pentru transformarea de la coordonate rectangulare la coor-donate polare θ este coordonata ignorabila ın origine si
∫ 2π
0rdθ = 2πr; deci,
δ(x) δ(y) =δ(r)
2πr. (3.24)
Rationamentul expus mai sus ramane valabil si pentru transformari decoordonate ın spatii n-dimensionale. Fie x1, . . . , xn un sistem de coordonaterectangulare si ξ1, . . . , ξ2 un alt sistem de coordonate nu neaparat ortogonal,cu volumul elementar n-dimensional |J |dξ1 . . . dξn. Daca ın punctul P decoordonate x1 = α1, . . . , xn = αn, respectiv ξ1 = β1, . . . , ξn = βn, Jacobianuleste nenul, atunci
δ(x1 − α1) . . . δ(xn − αn) = |J |−1 δ(ξ1 − β1) . . . δ(ξn − βn) .
Sa consideram acum cazul ın care J = 0 ın P si coordonatele ξ1 = β1, . . . , ξk =βk definesc P , respectiv ξk+1, . . . , ξn sunt ignorabile. Daca notam Jk =∫. . .∫Jdξk+1 . . . dξn, adica Jk este integrala Jacobianului ın raport cu co-
ordonatele ignorabile, atunci
δ(x1 − α1) . . . δ(xn − αn) = |Jk|−1 δ(ξ1 − β1) . . . δ(ξk − βk) . (3.25)
In final sa exemplificam pentru coordonatele sferice r, θ, ψ definite detransformarea x = r sin θ cosψ, y = r sin θ sinψ, z = r cos θ. Jacobianul este

Metoda Elementelor de Frontiera 41
J = r2 sin θ si se anuleaza ın toate punctele de pe axa z unde ψ este coor-donata ignorabila, respectiv ın origine unde atat ψ cat si θ sunt coordonateignorabile. Fie punctul (x′, y′, z′) ın coordonate rectangulare cu coordonatelesferice (r′, θ′, ψ′); daca r′ = 0, θ′ = 0, avem
δ(x− x′) δ(y − y′) δ(z − z′) =δ(r − r′) δ(θ − θ′) δ(ψ − ψ′)
r2 sin θ.
Daca x′ = y′ = 0, atunci θ′ = 0 si unghiul ψ este ignorabil, deci
δ(x) δ(y) δ(z − z′) =δ(r − r′) δ(θ)
2πr2 sin θ.
Daca x′ = y′ = z′ = 0 atunci r′ = 0 si unghiurile θ si ψ sunt ignorabile, deci
δ(x) δ(y) δ(z) =δ(r)
4πr2. (3.26)
3.1.3 Functia Green. Ecuatia integrala
Sa revenim la ecuatia 3.6 care defineste functia Green (solutia fundamentala)pentru ecuatia lui Laplace. Conform relatiilor (3.24, 3.26) care particulari-zeaza functia δ ın doua, respectiv trei, dimensiuni observam ca membruldrept ın (3.6) depinde numai de distanta r ıntre punctul fix (parametrul p)si punctul curent. Prin urmare, si functia G va depinde numai de r.
Rescriind ecuatia (3.6) ın doua dimensiuni, avem
1
r
d
dr
(rdG
dr
)= −δ(r)
2πr.
Folosind (3.19), respectiv faptul ca pentru r > 0 avem H(r) = 1, putemintegra succesiv pentru a obtine
G = − 1
2πln r
(=
1
2πln
1
r
). (3.27)
Sa verificam acum proprietatea de normare a functiei δ, (vezi ecuatia 3.12),∫Ω
∇2G dΩ = −∫Ω
δ dΩ = −1 . (3.28)
Evident, ∇2G = 0 pentru r > 0, mai putin ın punctul fix unde r = 0. Prinurmare, pentru a calcula integrala pe domeniu este suficient sa o evaluam peun disc D de raza mica ε, Figura 3.2. In cazul bidimensional vom avea,

42 Metoda Elementelor de Frontiera
Ω
0
n
D
ε
Figura 3.2: Discul de raza ε din jurul punctului p pe care se face integrareafunctiei ∇2G.
∫D
∇2G dΩ =
∫∂D
∂G
∂ndΓ ∂D este frontiera discului D
=
∫∂D
∂G
∂rdΓ n si r au aceeasi directie
= − 1
2πε(2πε) teorema de medie pe discul D
= −1 adica (3.28) este satisfacuta.
Asadar, coeficientul 12π
provine din faptul ca putem ınconjura punctul p cuun disc elementar inclus ın domeniu.
In spatiul tridimensional utilizam (3.26) si ecuatia (3.6) devine
1
r2
d
dr
(r2 dG
dr
)= − δ(r)
4πr2,
de unde functia Green tridimensionala este
G =1
4πr. (3.29)
Proprietatea (3.28) se verifica si ın acest caz similar cu cazul bidimensional,dar punctul p este inclus ıntr-o sfera de raza ε a carei suprafata are aria 4πε2.
Asa cum spuneam ın finalul sectiunii 3.1.1, ecuatia (3.8) ısi dovedesteutilitatea atunci cand punctul p este pe frontiera, asa cum se prezinta ınFigura 3.3. Pentru a examina aceasta situatie vom largi domeniul Ω la Ω′
ca ın Figura 3.4 astfel ıncat punctul p sa fie interior ın Ω′, dupa care facemε → 0 pentru a reveni la Ω, respectiv p ∈ Γ. Frontiera noului domeniu

Metoda Elementelor de Frontiera 43
p
n
Ω
Γd
0
q r=p−qp n
Γ
Figura 3.3: Punctul curent (de integrare) q si punctul pentru care se scrieecuatia integrala pe frontiera p, ımpreuna cu versorii normalelor exterioare.
p
εγ
Γ ’
n
Figura 3.4: Extinderea domeniului cu un semidisc de raza ε si frontiera γ,centrat ın p.

44 Metoda Elementelor de Frontiera
Ω′ va fi Γ′⋃ γ, unde γ este un semicerc (ın cazul bidimensional) de raza ε.Rescriind (3.8) avem,
u(p) +
∫Γ′
∂G(p, q)
∂nq
u(q) dΓq +
∫γ
∂G(p, q)
∂nq
u(q) dΓq
=
∫Γ′
G(p, q)∂u(q)
∂nq
dΓq +
∫γ
G(p, q)∂u(q)
∂nq
dΓq , (3.30)
unde am subınteles (pentru simplificarea scrierii) ca u si ∂u/∂n iau valorileprescrise de conditiile la limita pe portiunile corespunzatoare ale frontierei.Sa consideram mai ıntai,∫
γ
∂G(p, q)
∂nq
u(q) dΓq =
∫γ
u∂
∂n
(− 1
2πln r
)dΓ functia Green ın 2D
=
∫γ
u∂
∂r
(− 1
2πln r
)dΓ ∂/∂n ≡ ∂/∂r pe γ
= − 1
2π
∫γ
u
rdΓ
= − 1
2π
1
ε
∫γ
u dΓ deoarece r = ε pe γ
= − 1
2π
1
εu(p) πε teorema de medie.
Prin urmare am obtinut
limε0
∫γ
∂G(p, q)
∂nq
u(q) dΓq = −1
2u(p). (3.31)
Printr-un rationament similar obtinem
limε0
∫γ
G(p, q)∂u(q)
∂nq
dΓq = limε0
(− 1
2π
∂u
∂n(p) π ε ln ε
)= 0 . (3.32)
Inlocuind (3.31) si (3.32) ın (3.30), si tinand cont ca limε0
Γ′ = Γ, obtinem
ecuatia integrala pe frontiera:
1
2u(p) +
∫Γ
∂G(p, q)
∂nq
u(q) dΓq =
∫Γ
G(p, q)∂u(q)
∂nq
dΓq , (3.33)

Metoda Elementelor de Frontiera 45
pε
α
Figura 3.5: Extinderea domeniului cu un sector de disc de raza ε si centratın p, pentru un punct unghiular al frontierei.
unde evident vom ınlocui u cu g pe portiunea Γg a frontierei, respectiv ∂u/∂ncu h pe portiunea Γh. Coeficientul 1/2 din ecuatia (3.33) este valabil pen-tru portiunile netede ale frontierei, adica ın p avem tangenta unica. Ce seıntampla daca p este un punct unghiular al frontierei, ca ın Figura 3.5 ?
Refacand rationamentul anterior obtinem ın loc de 1/2 coeficientul α/(2π) ,
unde α este unghiul ıntre tangentele la stanga si la dreapta punctului p.In sinteza, am obtinut ecuatia integrala pe frontiera
c(p) u(p) +
∫Γ
∂G(p, q)
∂nq
u(q) dΓq =
∫Γ
G(p, q)∂u(q)
∂nq
dΓq , (3.34)
unde pentru probleme bidimensionale avem,
G = − 1
2πln r, r = |p − q|
c(p) =
1, p ∈ Ω
1/2, p ∈ Γ si Γ neteda ın punghiul interior
2π, p ∈ Γ si Γ nu este neteda ın p
respectiv pentru probleme tridimensionale,
G =1
4πr, r = |p − q|
c(p) =
1, p ∈ Ω
1/2, p ∈ Γ si Γ neteda ın punghiul solid interior
4π, p ∈ Γ si Γ nu este neteda ın p
Ecuatia (3.34) implica numai distributia pe frontiera a functiei u si a derivateinormale ∂u/∂n, si odata acestea determinate tot (3.34) poate fi utilizatapentru evaluarea solutiei ın orice punct din interiorul domeniului.

46 Metoda Elementelor de Frontiera
Operatori integrali
Ecuatiile (3.8) si (3.9), precum si (3.34) utilizeaza operatori integrali definitipe frontiera domeniului, dupa cum urmeaza:
LµΓ (p) ≡∫Γ
G(p, q) µ(q) dΓq , (3.35a)
MµΓ (p) ≡∫Γ
∂G(p, q)
∂nq
µ(q) dΓq , (3.35b)
Mtµ
Γ(p; vp) ≡
∫Γ
∂G(p, q)
∂vp
µ(q) dΓq , (3.35c)
NµΓ (p; vp) ≡∫Γ
∂2G(p, q)
∂vp∂nq
µ(q) dΓq , (3.35d)
unde µ(q) este o functie oarecare definita pentru q ∈ Γ, iar vp este un ver-sor oarecare ın punctul p. Cunoasterea proprietatilor acestor operatori esteesentiala pentru a construi o aproximatie numerica a lor. In general, pentruorice functie µ, LµΓ (p) si NµΓ (p; vp) sunt continue cand se traverseazafrontiera Γ, indiferent de versorul vp considerat. Operatorii M si Mt auurmatoarele proprietati de salt ın vecinatatea frontierei Γ (cu ε 0):
MµΓ (p+εnp)+1
2µ(p) = MµΓ (p) = MµΓ (p−εnp)−1
2µ(p) , (3.36a)
Mtµ
Γ(p + εnp; np) − 1
2µ(p) =
Mtµ
Γ(p; np)
=Mtµ
Γ(p − εnp; np) +
1
2µ(p) , (3.36b)
unde np este versorul normalei la Γ ın punctul p ∈ Γ. Aceste proprietati desalt se modifica corespunzator daca Γ nu este neteda ın p.
Pentru a completa expresiile operatorilor integrali, mai adaugam ca:
∂G
∂nq
=∂G
∂r
∂r
∂nq
, (3.37a)
∂G
∂vp
=∂G
∂r
∂r
∂vp
, (3.37b)
∂2G
∂vp∂nq
=∂G
∂r
∂2r
∂vp∂nq
+∂2G
∂r2
∂r
∂vp
∂r
∂nq
, (3.37c)

Metoda Elementelor de Frontiera 47
unde
∂r
∂nq
= −r · nq
r, (3.37d)
∂r
∂vp
=r · vp
r, (3.37e)
∂2r
∂vp∂nq
= −1
r
(vp · nq +
∂r
∂vp
∂r
∂nq
)(3.37f)
si
∂G
∂r= − 1
2π
1
r,
∂2G
∂r2=
1
2π
1
r2, ın doua dimensiuni , (3.37g)
∂G
∂r= − 1
4π
1
r2,
∂2G
∂r2=
1
2π
1
r3, ın trei dimensiuni . (3.37h)
Cu acestea obtinem,
∂2G
∂vp∂nq
=1
2πr2
(vp · nq + 2
∂r
∂vp
∂r
∂nq
)ın 2D , (3.37i)
∂2G
∂vp∂nq
=1
4πr3
(vp · nq + 3
∂r
∂vp
∂r
∂nq
)ın 3D . (3.37j)
Avem acum toate ingredientele necesare pentru calculul numeric al operato-rilor integrali, adica pentru p si vp precizate trebuie parcurse urmatoareleetape preliminare:
A: se precizeaza q
B: se determina versorul normalei nq
C: se calculeaza vp · nq
D: se calculeaza r
E: se calculeaza r si r2
F: se calculeaza r3 ın cazul tridimensional
G: se calculeaza ∂r/∂nq cu (3.37d)
H: se calculeaza ∂r/∂vp cu (3.37e)
I: se calculeaza (∂r/∂nq)(∂r/∂vp)
J: se calculeaza ∂2r/∂vp∂nq cu (3.37f)

48 Metoda Elementelor de Frontiera
Scrisa cu operatorii integrali, ecuatia (3.33) devine(M +
1
2I
)u
Γ
(p) =
L∂u
∂n
Γ
(p) , p ∈ Γ . (3.38)
Daca pe frontiera sunt prescrise numai conditii Dirichlet, atunci functianecunoscuta apare numai sub operatorul integral L, adica avem o ecuatie inte-grala Fredholm de speta ıntai. Solutionarea numerica a acestui tip de ecuatiieste dificila (din cauza proprietatilor nefavorabile ale matricii sistemului deecuatii liniare) si ın practica trebuie evitata o asemenea situatie. Pentruaceasta, rescriem (3.9) sub forma
∂u(p)
∂vp
+ NuΓ (p; vp) =
Mt∂u
∂n
Γ
(p; vp) .
Trecand la limita cu p apropiindu-se de frontiera, iar vp → np (versorulnormalei la frontiera ın p ∈ Γ), obtinem,
∂u(p)
∂np
+ NuΓ (p; np) =
Mt ∂u
∂n
Γ
(p; np) +1
2
∂u(p)
∂vp
,
unde ın membrul drept am utilizat relatia (3.36b) de salt pentru operatorulMt. Obtinem prin urmare o alta forma a ecuatiei integrale pe frontiera,convenabila pentru probleme care au numai conditii Dirichlet,
NuΓ (p; np) =
(Mt − 1
2I
)∂u
∂n
Γ
(p; np) , p ∈ Γ . (3.39)
Evident, conform observatiei de mai sus aceasta ecuatie nu mai este conve-nabila pentru problemele Neumann.
O ecuatie acceptabila pentru orice tip de conditii la limita poate fi obtinutaadunand (3.38) si (3.39) pentru a obtine urmatoarea formulare robusta,(
M +1
2I + N
)u
Γ
(p; np) =
(L + Mt − 1
2I
)∂u
∂n
Γ
(p; np) , p ∈ Γ .
(3.40)
Probleme exterioare
Toate formularile anterioare pentru ecuatia integrala pe frontiera au utilizatimplicit ipoteza unei probleme interioare, pentru care domeniul Ω este finit.Exista ınsa o gama larga de probleme pentru care domeniul Ω este infinit

Metoda Elementelor de Frontiera 49
Γn n
a b
ΩΩ
Γ
Figura 3.6: Domeniu interior (a) si exterior (b).
si corespunde exteriorului unei regiuni finite, Figura 3.6. Rationamenteleanterioare pot fi repetate si pentru probleme exterioare, considerand maiıntai un domeniu finit delimitat de Γ la interior si de ΓR (un cerc ın 2D sauo sfera ın 3D, de raza mare R) la exterior. Daca trecem la limita cu R → ∞vom regasi domeniul exterior infinit. Evident, ın acest caz trebuie sa avem,
limR→∞
∫ΓR
(∂G
∂nu−G
∂u
∂n
)dΓ= 0 ,
pentru a ramane doar integralele pe Γ. Aceasta conditie trebuie verifica-ta pentru fiecare problema ın parte, pentru ca satisfacerea ei depinde deconditiile la limita impuse. In general ınsa, pentru problemele exterioarebine formulate conditia la infinit este satisfacuta. Cititorul poate verificausor ca ın 3D solutia trebuie sa scada cel putin ca O(R−1), ın timp ce pentruprobleme 2D solutia nu trebuie sa creasca mai repede ca O(lnR) pentru caintegrala de mai sus sa se anuleze cand R → ∞.
Asa cum se vede din Figura 3.6b, ın cazul problemei exterioare versorulnormalei n este orientat spre interiorul domeniului de analiza, si prin urmareecuatiile (3.38), (3.39) si (3.40) devin,(
M − 1
2I
)u
Γ
(p) =
L∂u
∂n
Γ
(p) , (3.41a)
NuΓ (p; np) =
(Mt +
1
2I
)∂u
∂n
Γ
(p; np) , (3.41b)
(M − 1
2I + N
)u
Γ
(p; np) =
(L + Mt +
1
2I
)∂u
∂n
Γ
(p; np) , (3.41c)

50 Metoda Elementelor de Frontiera
cu punctul p ∈ Γ.
Probleme axial-simetrice
Z
R
Z Zp q
RRp
q
l
l2
1θ
p
qrpR
Γ_
Figura 3.7: Domeniu axial-simetric. Frontiera domeniului este suprafata derevolutie obtinuta prin rotirea curbei Γ ın jurul axei de simetrie OZ.
In cazul ın care domeniul de analiza prezinta simetrie axiala, ecuatiaintegrala pe suprafata ce delimiteaza domeniul poate fi reformulata pentrucurba generatoare a suprafetei de revolutie, notata cu Γ ın Figura 3.7.
Distanta ıntre punctele p si q de pe suprafata poate fi calculata, conformFigurii 3.7 astfel:
r2 = 21 + 22 = R2p +R2
q − 2RpRq cos θ + (Zp − Zq)2 ,
sau r =√a− b cos θ ,
a = R2
p +R2q + (Zp − Zq)
2
b = 2RpRq
In locul functiei Green tridimensionale (3.29) introducem acum solutia fun-damentala axial-simetrica1
G =1
4π
2π∫0
dθ
r=
1
4π
2π∫0
dθ√a− b cos θ
=K(√
2ba+b
)π√a+ b
, (3.42)
unde K este integrala eliptica completa de speta ıntai (cu K(0) = π/2, spre
1A. Gokhman, D. Gokhman, Boundary Element Method for Internal AxisymmetricFlow, Mathematical Problems in Engineering, 1998.

Metoda Elementelor de Frontiera 51
exemplu). Derivata normala a solutiei fundamentale axial-simetrice este
∂G
∂n=
1
π√a+ b
[1
2Rq
R2
p −R2q + (Zp − Zq)
2
a− bE (m) − K (m)
nR(q)
+Zp − Zq
a− bE (m)nZ(q)
], (3.43)
unde E este integrala eliptica completa de speta a doua, iarm =√
2b/(a+ b).Cu acestea putem rescrie (3.34) pentru probleme tridimensionale axial-
simetrice ca o ecuatie integrala pe curba generatoare Γ,
c(p) u(p) +
∫Γ
∂G(p, q)
∂nq
u(q) dΓq =
∫Γ
G(p, q)∂u(q)
∂nq
dΓq , (3.44)
unde q ∈ Γ ın semiplanul meridian considerat. Observam ca ın acest cazsolutia fundamentala nu mai depinde de distanta ıntre punctele p si q ci esteo functie mai complicata de coordonatele ın semiplanul meridian (radiala Rsi axiala Z) ale celor doua puncte prin intermediul expresiilor a si b.
3.2 Discretizarea ecuatiei integrale pe fron-
tiera
In sectiunea 3.1 am prezentat consideratiile matematice care fundamenteazaecuatiile integrale pe frontiera. De fapt avem o singura ecuatie integrala,care a fost particularizata pentru a obtine formulari ımbunatatite functie denatura conditiilor pe frontiera, respectiv functie de particularitatile domeniu-lui ın care se solutioneaza problema. Pentru solutionarea ecuatiei integraleva trebui sa facem apel la tehnici de aproximare numerica, atat pentru apro-ximarea frontierei cat si pentru evaluarea operatorilor integrali (3.35).
In Figura 3.8 se prezinta frontiera Γ si aproximatia ei Γ formata dinsegmente de dreapta Γj. Evident, Γ se apropie de Γ cu cat lungimea seg-mentelor Γj este mai mica. Pe de alta parte, putem ımbunatati aproximatia
lui Γ considerand segmente curbe de frontiera. In cele ce urmeaza ne vomlimita doar la varianta cea mai simpla, conform Figurii 3.8.
Urmatorul pas este sa aproximam functia µ din (3.35). Cea mai simplaaproximatie este sa consideram µ ca fiind constanta pe fiecare segment defrontiera Γj, avand valoarea corespunzatoare µj. Ansamblul aproximatiilorpentru forma geometrica a segmentului de frontiera, respectiv pentru functianecunoscuta definesc elementul de frontiera.

52 Metoda Elementelor de Frontiera
q
p
ΓΓ
r
Γ~~
j
Figura 3.8: Aproximarea frontierei domeniului bidimensional cu o linie poli-gonala.
Odata precizate aproximatiile ce definesc elementul de frontiera, putemevalua operatorii integrali dupa cum urmeaza:
LµΓ (p) ≈ LµΓ (p) ≈n∑
j=1
∫Γj
G(p, q) µj dΓq =n∑
j=1
µj L1jΓj(p) ,
unde n este evident numarul de segmente care aproximeaza frontiera, iar 1j
este functia unitate pe segmentul Γj. Evident, si pentru ceilalti operatoriintegrali putem proceda ın acelasi mod pentru a obtine formele discrete
L 1Γj(p) =
∫Γj
G(p, q)dΓq , (3.45a)
M 1Γj(p) =
∫Γj
∂G(p, q)
∂nq
dΓq , (3.45b)
Mt 1Γj
(p; vp) =
∫Γj
∂G(p, q)
∂vp
dΓq , (3.45c)
N 1Γ (p; vp) =
∫Γj
∂2G(p, q)
∂vp∂nq
dΓq . (3.45d)
Daca p /∈ Γj, integralele (3.45) pot fi evaluate cu formulele standard decuadratura. Aceasta observatie este valabila pentru (3.45b) si (3.45c) chiarsi atunci cand p ∈ Γj (dar nu pe frontiera elementului, adica nu coincidecu capetele segmentului ın 2D). Pe de alta parte, operatorii (3.45a) si (3.45d)necesita o tratare speciala ın cazul p ∈ Γj.

Metoda Elementelor de Frontiera 53
Sa consideram, spre exemplu, ca segmentul Γj are lungimea a + b, siıi atasam coordonata locala x ∈ [−a , b], ca ın Figura 3.9. Punctul p
n n
O−a bp q
p q
xr
Figura 3.9: Element de frontiera ın 2D.
corespunde lui x = 0, iar r = |x|. Prin urmare avem,
L 1Γj(p) =
∫Γj
G(p, q)dΓq = − 1
2π
b∫−a
ln |x| dx
= − 1
2π
b∫
0
lnx dx +
0∫−a
ln(−x) dx
= − 1
2π
b∫
0
lnx dx +
a∫0
lnx dx
=1
2π(a+ b− a ln a− b ln b) , (3.46a)
N 1Γ (p; vp) =
∫Γj
∂2G(p, q)
∂vp∂nq
dΓq =1
2π
b∫−a
dx
x2
= − 1
2π
(1
a+
1
b
). (3.46b)
Ultima integrala exista numai ın sens Cauchy, adica
limε→0
ε∫
−a
dx
x2+
b∫ε
dx
x2
= lim
ε→0
(−1
ε− 1
a− 1
b+
1
ε
)= −(
1
a+
1
b
).
Mai ramane sa precizam locatiile punctelor p. In principiu celor n seg-mente de frontiera le vor corespunde n valori ale functiei necunoscuta si nvalori ale derivatei normale. Din cele 2n necunoscute, n sunt precizate princonditiile la limita, deci sunt necesare n ecuatii si corespunzator n puncte

54 Metoda Elementelor de Frontiera
p, adica un punct pe segment de frontiera. In principiu, punctul pj poate
fi amplasat ın orice pozitie pe segmentul Γj, mai putin la capetele lui. Inpractica, pj este la mijlocul segmentului Γj.
Ecuatia integrala (3.38) poate fi rescrisa acum sub forma discreta,([M] +
1
2[I]
)u = [L]
∂u
∂n
, (3.47)
unde u este vectorul cu valorile functiei necunoscuta pe fiecare segment,iar ∂u/∂n este vectorul valorilor derivatei normale. Matricile [M] si [L] auurmatoarele espresii,
Mij = M 1Γj(pi) , Lij = L 1Γj
(pi) ,
iar [I] este matricea unitate. Pentru fiecare segment de frontiera Γi seprecizeaza fie valoarea functiei ui (conditie Dirichlet), fie valoarea derivateinormale (∂u/∂n)i (conditie Neumann), fie o relatie de legatura ıntre ui si(∂u/∂n)i. Prin urmare sistemul de ecuatii (3.47) va avea doar n necunoscute.
3.2.1 Integrare numerica
Am precizat mai sus ca integralele definite ın (3.45) sunt evaluate numeric,utilizand diverse formule (mai mult sau mai putin standard) de cuadratura.
In principiu, o subrutina de cuadratura implementeaza aproximatia
b∫a
f(x) dx≈N∑
i=1
wj f(xj),
unde abscisele xj, respectiv coeficientii de pondere wj sunt tabulate pentru
j = 1 . . . N . In general, valorile tabulate ale absciselor sunt date pentru uninterval [−1, 1]. Mai mult, ın cazul ın care coeficientii de pondere si absciselesunt simetrice fata de mijocul segmentului, vom avea N/2 valori distinctedin fiecare set.
Spre exemplu, prezentam mai jos o subrutina de cuadratura Gauss cuN = 10.
SUBROUTINE qgaus(func,a,b,ss)
REAL a,b,ss,func
EXTERNAL func
c returneaza ss ca fiind integrala functiei func de la a la b,
c utilizand cuadratura Gauss-Legendre cu 10 puncte;

Metoda Elementelor de Frontiera 55
c functia este evaluata de 10 ori la abscisele din interiorul
c domeniului de integrare
INTEGER j
REAL dx,xm,xr,w(5),x(5) ! coef. de pondere si abscisele
SAVE w,x
DATA w/.2955242247,.2692667193,.2190863625,.1494513491,
*.0666713443/
DATA x/.1488743389,.4333953941,.6794095682,.8650633666,
*.9739065285/
xm=0.5*(b+a)
xr=0.5*(b-a)
ss=0
c rezultatul sumarii va fi dublul valorii medii a functiei
do 11 j=1,5
dx=xr*x(j)
ss=ss+w(j)*(func(xm+dx)+func(xm-dx))
11 continue
ss=xr*ss ! returnarea valorii corecte a integralei
return
END
Exemplul de mai sus arata ca se poate utiliza cuadratura Gauss faraa fi neaparata nevoie sa se ınteleaga teoria care o fundamenteaza: pur sisimplu se iau valorile absciselor si coeficientilor de pondere din tabele si seintroduc ın subrutina de mai sus. Totusi aceasta teorie este este remarcabila,si consideram ca trebuie sa fie parte integranta din cultura generala a celorcare o utilizeaza.
O scurta introducere trebuie sa porneasca de la definirea problemei: pen-tru o functie de pondere data, W (x), si un numar ıntreg N , sa se deter-mine un set de coeficienti de pondere wj si un set de abscise xj, astfel ıncataproximatia
b∫a
W (x)f(x)dx ≈N∑
j=1
wjf(xj) , (3.48)
sa fie exacta daca f(x) este un polinom.
Teoria formulelor de cuadratura Gaussiana a fost fundamentata de Gaussınca din 1814 folosind fractii continue. In 1926 Jacobi reformuleaza teoriautilizand polinoame ortogonale. In fine, tratarea sistematica pentru cazulunor functii de pondere arbitrare, respectiv folosind polinoame ortogonale,este dezvoltata de Christoffel ın 1877.

56 Metoda Elementelor de Frontiera
Pentru a introduce aceste polinoame ortogonale, sa precizam mai ıntaiintervalul de integrare (a, b). Putem defini produsul scalar a doua functii fsi g ın raport cu functia de pondere W ca fiind
〈f |g〉 ≡b∫
a
W (x)f(x)g(x)dx . (3.49)
Produsul scalar este un numar, nu o functie de x. Doua functii sunt ortogo-nale daca produsul scalar este zero. O functie este normata daca produsulscalar al ei cu ea ınsasi este egal cu unitatea. O multime de functii care suntreciproc ortogonale si individual normate formeaza o multime ortonormata.
Putem gasi un set de polinoame care
(i) sa includa un singur polinom de ordin j, numit pj(x), pentru fiecarej = 1, 2, . . . ,
(ii) toate polinoamele sunt reciproc ortogonale ın raport cu functia de pon-dere specificata W (x).
Un procedeu de constructie al unui asemenea set de polinoame este urmatoarearelatie de recurenta:
p−1(x) ≡0
p0(x) ≡1
pj+1(x) =(x− aj)pj(x) − bjpj−1(x), j = 0, 1, 2, . . .
(3.50)
unde
aj =〈xpj|pj〉〈pj|pj〉 j = 0, 1, . . .
bj =〈pj|pj〉
〈pj−1|pj−1〉 j = 1, 2, . . .
(3.51)
Coeficientul b0 este arbitrar, si poate fi luat egal cu zero.Polinoamele definite de (3.50) au coeficientul lui xj (pentru pj(x)) egal
cu unitatea. Daca ımpartim fiecare pj(x) cu constanta [〈pj|pj〉]1/2 obtinemun set de polinoame ortonormale.
Se poate demonstra ca polinomul pj(x) are exact j radacini distincte ınintervalul (a, b). Mai mult, radacinile lui pj(x) sunt plasate ıntre cele j − 1radacini ale lui pj−1(x), adica ıntre exista exact o radacina a lui pj(x) ıntredoua radacini consecutive ale lui pj−1(x). Aceasta observatie este foarte utilaatunci cand trebuie determinate toate radacinile: se porneste cu radacina lui

Metoda Elementelor de Frontiera 57
p1(x), si se identifica intervalele pentru radacinile lui p2(x), s.a.m.d., ceea ceeste avantajos pentru o metoda de tip Newton de gasire a radacinilor.
Si totusi la ce sunt necesare radacinile polinoamelor ortogonale? Ideealui Gauss a fost sa foloseasca ın locul celor N abscise xj din formula (3.48)chiar cele N radacini ale polinomului ortogonal pN(x).
Odata precizate abscisele x1, . . . , xN , trebuie determinate ponderile wj,j = 1, . . . , N . O modalitate este sa rezolvam sistemul de ecuatii liniare
p0(x1) . . . p0(xN)p1(x1) . . . p1(xN)
.... . .
...pN−1(x1) . . . pN−1(xN)
w1
w2...wN
=
∫ b
aW (x)p0(x)dx
0...0
(3.52)
Solutia sistemului (3.52) asigura faptul ca formula (3.48) este exacta pentruprimele N polinoame ortogonale. Zerourile din membrul drept al sistemului(3.52) provin din faptul ca p1(x), . . . , pN−1(x) sunt toate ortogonale pe p0(x)care este o constanta. Se poate demonstra deasemenea ca ponderile astfelcalculate fac relatia (3.48) exacta si pentru urmatoarele N−1 polinoame, deciva vi exacta pentru polinoame de grad cel mult 2N − 1. O alta modalitatede evaluare a ponderilor este data de formula
wj =〈pN−1|pN−1〉
pN−1(xj)p′N(xj), (3.53)
unde p′N(xj) este derivata polinomului ortogonal ın punctul xj.Construirea formulelor de cuadratura Gauss presupune parcurgerea a
doua etape:
(i) generarea polinoamelor ortogonale p0, . . . , pN , si implicit calculul coefi-cientilor aj, bj din (3.50);
(ii) determinarea radacinilor polinomului pN si calculul ponderilor asociate.
Pentru polinoamele ortogonale clasice coeficientii aj, bj sunt cunoscuti expli-cit, si prima etapa de mai sus poate fi omisa. Daca ınsa se doreste construi-rea unei formule de cuadratura pentru alte functii de pondere W (x), atuncigasirea coeficientilor aj si bj, respectiv determinarea setului de polinoameortogonale nu mai este o chestiune simpla. Prezentam ın continuare pentrucateva variante clasice de cuadratura Gauss functiile de pondere, intervalulde integrare, si relatiile de recurenta care genereaza polinoamele ortogonale.Gauss-Legendre :
W (x) = 1 − 1 < x < 1
(j + 1)Pj+1 = (2j + 1)xPj − jPj−1 (3.54a)

58 Metoda Elementelor de Frontiera
Gauss-Cebısev :
W (x) = (1 − x2)−1/2 − 1 < x < 1
Tj+1 = 2xTj − Pj−1 (3.54b)
Gauss-Laguerre :
W (x) = xα exp(−x) 0 < x <∞(j + 1)Lα
j+1 = (−x+ 2j + α+ 1)Lαj − (j + α)Lα
j−1 (3.54c)
Gauss-Hermite :
W (x) = exp(−x2) −∞ < x <∞Hj+1 = 2xHj − 2jHj−1 (3.54d)
Gauss-Jacobi :
W (x) = (1 − x)α(1 + x)β − 1 < x < 1
cjP(α,β)j+1 = (dj + ejx)P
(α,β)j − fjP
(α,β)j−1 (3.54e)
cu coeficientii cj, dj, ej si fj dati de formulele:
cj = 2(j + 1)(j + α+ β + 1)(2j + α+ β)
dj = (2j + α+ β + 1)(α2 − β2)
ej = (2j + α+ β)(2j + α+ β + 1)(2j + α+ β + 1)
fj = 2(j + α)(j + β)(2j + α+ β + 2)
Cuadratura Gauss-Legendre
Pentru calculul operatorilor integrali care intervin ın Metoda Elementuluide Frontiera pentru probleme bidimensionale se utilizeaza cu preponderentaformule de cuadratura de tip Gauss-Legendre. Este evident ca polinoameleortogonale Legendre sunt cazuri particulare ale polinoamelor Jacobi (cu α =β = 0), dar este preferabil sa avem o subrutina speciala pentru calcululabsciselor si ponderilor cuadraturii Gauss-Legendre. Formula (3.53) devineın acest caz
wj =2
(1 − x2j)[P
′N(xj)]2
. (3.55)
Subrutina gauleg [25] prezentata mai jos transforma mai ıntai intervalulde integrare de la (x1, x2) la (−1, 1), dupa care determina abscisele xj sicoeficientii de pondere wj pentru formula de cuadratura
x2∫x1
f(x)dx =N∑
j=1
wjf(xj) . (3.56)

Metoda Elementelor de Frontiera 59
SUBROUTINE gauleg(x1,x2,x,w,n)
INTEGER n
DOUBLE PRECISION x1,x2,x(n),w(n)
DOUBLE PRECISION EPS
PARAMETER (EPS=3.d-14) ! EPS este precizia relativa
c pentru limitele de integrare x1 si x2, respectiv numarul
c de puncte de integrare n, subrutina returneaza sirurile
c x(1:n) si w(1:n) de lungime n continand abscisele si
c ponderile pentru formula de cuadratura Gauss-Legendre
INTEGER i,j,m
DOUBLE PRECISION p1,p2,p3,pp,xl,xm,z,z1
m=(n+1)/2
c radacinile sunt simetrice in interval, deci vom determina
c doar jumatate din ele
xm=0.5d0*(x2+x1)
xl=0.5d0*(x2-x1)
do 12 i=1,m ! bucla pentru cele m radacini cautate
z=cos(3.141592654d0*(i-.25d0)/(n+.5d0))
c pornim cu aproximatia de mai sus pentru radacina i,
c si o imbunatatim cu metoda Newton
1 continue
p1=1.d0
p2=0.d0
do 11 j=1,n
c bucla pentru relatia de recurenta polinoame Legendre
c evaluate in z
p3=p2
p2=p1
p1=((2.d0*j-1.d0)*z*p2-(j-1.d0)*p3)/j
11 continue
c p1 este acum polinomul Legendre dorit;
c in continuare calculam derivata lui
pp=n*(z*p1-p2)/(z*z-1.d0)
z1=z
z=z1-p1/pp ! metoda lui Newton
if(abs(z-z1).gt.EPS)goto 1
c scalam radacinile pentru intervalul dorit,
c si adaugam si radacinile simetrice
x(i)=xm-xl*z
x(n+1-i)=xm+xl*z
c calculam coeficentii de pondere

60 Metoda Elementelor de Frontiera
w(i)=2.d0*xl/((1.d0-z*z)*pp*pp)
c adaugam si ponderile simetrice
w(n+1-i)=w(i)
12 continue
return
END
3.2.2 Calculul numeric al operatorilor integrali
Consideratiile de mai sus pot fi ıncorporate ıntr-un algoritm de calcul a ver-siunii discrete a operatorilor integrali, respectiv a matricilor [L], [M], [Mt],si [N]. Implementarea acestui algoritm ıntr-o procedura FORTRAN este e-xemplificata ın continuare pentru ecuatia Laplace ın doua dimensiuni prinsubrutina L2LC scrisa de S. M. Kirkup2.
Subrutina are forma
SUBROUTINE L2LC(P,VECP,QA,QB,LPONEL,MAXNQ,NQ,AQ,WQ,
* LVALID,EGEOM,EQRULE,LFAIL,LL,LM,LMT,LN,
* DISL,DISM,DISMT,DISN)
cu urmatoarea semnificatie a parametrilor:
2S. M. Kirkup, Boundary Element Method for Laplace Problems,http://www.boundary-element-method.com/bem/bemlap/manual.htm

Metoda Elementelor de Frontiera 61
real P(2) coordonatele carteziene ale punctului p.real VECP(2) componentele carteziene ale versorului normalei np; suma
patratelor componentelor normalei trebuie sa fie egala cuunitatea.
real QA(2) coordonatele carteziene ale primului punct al segmentului.real QB(2) coordonatele carteziene ale celui de-al doilea punct al seg-
mentului.logical LPONEL daca punctul P(2) se afla pe segmentul QA-QB atunci LPONEL
trebuie sa fie .TRUE., ın caz contrar este .FALSE.integer MAXNQ numarul maxim de puncte din formula de cuadratura Gauss-
Legendre; nu trebuie modificat la apelarea succesiva a sub-rutinei, si trebuie sa fie MAXNQ ≥ 1
integer NQ numarul de puncte de cuadratura folosit, 1 ≤ NQ ≤ MAXNQ.real AQ(MAXNQ) abscisele punctelor de cuadratura; valorile trebuie sa fie ın
domeniul [0,1] si sa fie ordonate ın ordine crescatoare (spreexemplu se poate utiliza subrutina gauleg de mai sus, cux1=0 si x2=1)
real WQ(MAXNQ) ponderile punctelor de cuadratura care corespund punctelordin AQ; suma ponderilor trebuie sa fie egala cu unitatea.
logical LVALID activeaza verificarile interne ale parametrilor subrutinei(.TRUE.) sau le dezactiveaza (.FALSE.)
real EGEOM eroarea absoluta maxima pentru parametrii ce descriu ge-ometria; relevant doar daca LVALID=.TRUE.
logical LFAIL relevant doar daca LVALID=.TRUE.; daca LFAIL=.TRUE.atunci datele de intrare sunt considerate nesatisfacatoare, iarparametrii de iesire vor fi returnati cu valoarea zero; mesajelede eroare sunt scrise ın fisierul de diagnostic L2LC.ERR
logical LL daca este .TRUE. activeaza calculul operatorului Llogical LM daca este .TRUE. activeaza calculul operatorului Mlogical LMT daca este .TRUE. activeaza calculul operatorului Mt
logical LN daca este .TRUE. activeaza calculul operatorului Nreal DISL valoarea calculata pentru operatorul Lreal DISM valoarea calculata pentru operatorul Mreal DISMT valoarea calculata pentru operatorul Mt
real DISM valoarea calculata pentru operatorul N

62 Metoda Elementelor de Frontiera
3.3 Curgerea irotationala a fluidului incom-
presibil nevascos peste un obstacol solid
Dezvoltarea aparatelor de zbor mai grele decat aerul (aeronave) a fost sieste strans legata de calculul curgerii ın jurul profilelor aerodinamice. Aeruleste un fluid vascos si compresibil. Daca ınsa viteza fluidului este mult maimica decat viteza sunetului, variatia densitatii produsa de curgerea fluidu-lui ın jurul corpului este suficient de mica astfel ıncat fluidul sa poata ficonsiderat incompresibil. In plus, ın fluide precum aerul sau apa efectelevascozitatii ısi fac simtita prezenta numai ıntr-un strat subtire (stratul limita)din vecinatatea suprafetei solide. In exteriorul acestui strat fluidul poatefi considerat nevascos. Un fluid nevascos si incompresibil poarta numelede fluid perfect. Trebuie mentionat ınsa ca sunt situatii ın care efectulvascozitatii, chiar daca este mic, poate fi semnificativ si provoaca desprin-derea stratului limita pe anumite portiuni ale corpurilor solide. In acestecazuri, aspectul macroscopic al curgerii difera semnificativ fata de predictiilemodelului curgerii nevascoase si incompresibile.
Forta cu care actioneaza fluidul asupra corpului solid nu depinde de vitezaabsoluta a fluidului sau a corpului, ci de viteza relativa fluid–corp. Fortaaerodinamica are doua componente: prima este produsa de presiune (careactioneaza local ın directia normalei la suprafata), iar cea de a doua esteprodusa de tensiunea tangentiala de frecare. Intr-o prima aproximatie, negli-jarea vascozitatii conduce la anularea componentei de frecare. Prin urmare,solutionarea problemei curgerii peste un obstacol solid trebuie sa furnizezerepartitia presiunii pe suprafata corpului. Daca miscarea este consideratairotationala (spre exemplu la distanta mare ın amonte curentul este uni-form), atunci presiunea poate fi calculata folosind ecuatia lui Bernoulli, odatace viteza este cunoscuta. In concluzie, orice metoda folosita pentru calcululcurgerii exterioare irotationale a fluidului incompresibil nevascos trebuie safurnizeze cel putin distributia vitezei tangentiale pe suprafata corpului.
3.3.1 Metoda directa pentru ecuatia integrala pe fron-tiera. Eliminarea singularitatilor
Utilizarea ecuatiei integrale pentru solutionarea curgerii exterioare utilizandpotentialul vitezei a fost dezvoltata ın anii ′70 de Morino [23], rezultandasa–numita metoda directa bazata pe ecuatia (3.34). In general, cuadraturaGauss ofera o precizie buna cu un numar relativ redus de puncte de inte-grare daca punctul singular nu este situat ın interiorul elementului de fron-tiera. Pentru elementul care contine punctul singular, acuratetea integrarii

Metoda Elementelor de Frontiera 63
numerice se depreciaza considerabil si cresterea numarului de puncte de inte-grare nu rezolva problema deoarece integrandul trebuie evaluat ın imediatavecinatate a singularitatii. O metoda eleganta de evitare a acestei dificultatia fost propusa de Hwang si Huang [21], care au eliminat singularitatea prinscaderea si adaugarea unei relatii derivata din teorema lui Gauss.
In cazul curgerii irotationale viteza deriva dintr-un potential scalar Φ,
v = ∇Φ ,
iar conditia de incompresibilitate conduce la ecuatia Laplace pentru potentialulvitezei,
∇2Φ = 0 .
Pe suprafata corpului se impune conditia de impenetrabilitate v ·n = 0, ceeace conduce la
∂Φ
∂n= 0 ,
cu n versorul normalei exterioare, ca ın Figura 3.6.Potentialul Φ poate fi scris ca suprapunerea potentialului curgerii in-
cidente ΦI , respectiv a potentialului ΦS corespunzator perturbarii curgeriiindusa de prezenta corpului, adica Φ = ΦI + ΦS. Prin prelungire analiticaΦI poate fi extins ın regiunea interioara suprafetei S conform reprezentariiintegrale (3.34),
c(p)ΦI(p) =
∫S
G(p, q)
∂ΦI(q)
∂nq
− ∂G(p, q)
∂nq
ΦI(q)
dSq , (3.57a)
unde q este punctul curent pe suprafata S a corpului.Potentialul ΦS este considerat ın domeniul exterior suprafetei S, si prin
urmare avem
[c(p) − 1] ΦS(p) =
∫S
G(p, q)
∂ΦS(q)
∂nq
− ∂G(p, q)
∂nq
ΦS(q)
dSq . (3.57b)
Adunand ultimele doua ecuatii obtinem,
[1 − c(p)] Φ(p) = −∫S
G(p, q)
∂Φ(q)
∂nq
− ∂G(p, q)
∂nq
Φ(q)
dSq + ΦI(p) .
Dupa impunerea conditiei de impenetrabilitate avem
[1 − c(p)] Φ(p) −∫S
∂G(p, q)
∂nq
Φ(q)dSq = ΦI(p) . (3.57c)

64 Metoda Elementelor de Frontiera
Daca consideram ΦI = constant ın (3.57a), atunci∂ΦI
∂n= 0 si rezulta
c(p) = −∫S
∂G(p, q)
∂nq
dSq ,
care ınlocuit ın (3.57c) conduce la
Φ(p) −∫S
[Φ(q) − Φ(p)]∂G(p, q)
∂nq
dSq = ΦI(p) . (3.57d)
Ecuatia (3.57d) este propusa de Hwang si Huang pentru calculul potentialuluivitezei Φ pe suprafata S a corpului. Daca potentialul vitezei este continuu (ın2D) sau daca derivata tangentiala pe suprafata neteda (ın 3D) este continua,integrandul din (3.57d) se anuleaza cand q → p. Acesta este principalulavantaj al ecuatiei (3.57d), care astfel nu mai necesita o tratare speciala asingularitatii. Punctele de colocatie pe suprafata pot fi alese astfel ıncat sacoincida cu punctele de integrare numerica. Ecuatia integrala (3.57d) poatefi discretizata ca o suma finita ın fiecare punct de integrare, obtinandu-se unsistem algebric de ecuatii
N∑j=1
AijΦj = (ΦI)i ,
unde Aij sunt coeficientii de influenta, N este numarul total de puncte decolocatie, Φj este valoarea potentialului vitezei ın nodul j, iar (ΦI)i estevaloarea potentialului vitezei incidente ın nodul i. Coeficientii Aij sunt datide
−(rij · nj)r
−(1+α)ij wj/2απ j = i
1 +N∑
k=1,k =i
(rik · nk)r−(1+α)ik wk/2απ j = i
unde rij este vectorul de la nodul j la nodul i, rij este distanta dintre nodurilei si j, wj este coeficientul de pondere din formula de cuadratura, iar α = 1ın 2D si α = 2 ın 3D.
3.3.2 Metoda indirecta. Metoda panourilor
Aceeasi problema a curgerii ın jurul unui obstacol poate fi solutionata con-siderand o distributie de surse/absorbtii si vartejuri pe suprafata, rezultandmetoda indirecta. Forma discreta rezultata din aceasta formulare se obtine

Metoda Elementelor de Frontiera 65
dupa discretizarea suprafetei, segmentele de frontiera fiind denumite panouride catre Hess si Smith care au dezvoltat ın anii ′60 metoda panourilor laDouglas Aircraft. In metoda lor potentialul vitezei este descompus ın treicomponente:
Φ = Φ∞ + ΦS + ΦV , (3.58)
unde Φ∞ corespunde curentului uniform neperturbat, iar ΦS si ΦV suntpotentialele generate de distributiile de surse, respectiv de vartejuri. Acestedistributii au intensitatile σ(s) si γ(s), unde s este coordonata curbilinie pesuprafata corpului (vom considera ın continuare probleme bidimensionale).Potentialele generate de surse si vartejuri vor fi
ΦS =
∫σ(s)
2πln r ds , (3.59a)
ΦV = −∫γ(s)
2πθ ds . (3.59b)
In (3.59a) si (3.59b) integrarea se face pe toata suprafata profilului aero-dinamic. Folosind tehnica superpozitiei solutiilor, orice distributie de sur-se/absorbtii si vartejuri va satisface ecuatia lui Laplace, dar va trebui sagasim conditiile pentru σ(s) si γ(s) astfel ıncat conditia de impenetrabilita-te, respectiv conditia Kutta-Jukovski sa fie satisfacute.
Conditia Kutta-Jukovski este specifica curgerii peste corpuri profilate, siintroduce ın modelul de curgere nevascoasa efectul global al vascozitatii de-alungul conturului profilului. Conform acestei conditii, presiunea calculata peintrados, respectiv pe extrados, ın vecinatatea bordului de fuga, are aceeasivaloare. Evident, folosind ecuatia lui Bernoulli, conditia se traduce ın egalita-tea vitezelor (tangentiale) pe intrados si extrados ın vecinatatea bordului defuga. Justificarea fizica a acestei conditii provine din observatii experimen-tale, precum si din faptul ca pentru o curgere stationara dara aerodinamicanu suporta variatii ale presiunii ın directie normala pe directia curgerii.
Dupa precizarea formularii si conditiilor pentru metoda indirecta, saanalizam optiunile posibile pentru implementare:
• utilizarea distributiei intensitatii surselor, σ(s), pentru satisfacerea conditieide impenetrabilitate, si a distributiei intensitatii vartejurilor γ(s) pen-tru satisfacerea conditiei Kutta-Jukovski;
• utilizarea unei combinatii arbitrare a distributiilor σ(s) si γ(s) pentrusatisfacerea simultana a ambelor conditii.
Hess si Smith au adoptat o simplificare importanta pentru succesul initial almetodei panourilor : se alege distributie constanta de vartejuri si se foloseste

66 Metoda Elementelor de Frontiera
conditia Kutta-Jukovski pentru a determina valoarea acestei constante, res-pectiv se considera o distributie variabila de surse/absorbtii care ımpreunacu distributia de vartejuriva satiface conditia de impenetrabilitate pe totprofilul. Evident, se pot utiliza si alte variante, conducand la diferite versiuniale metodei panourilor.
Odata definite panourile, putem discretiza ecuatia (3.58) astfel:
Φ = V∞ (x cosα+ y sinα) +N∑
j=1
∫panouj
[σ(s)
2πln r − γ
2πθ
]ds . (3.60)
La fel ca ın discretizarea cu elemente de frontiera, evaluarea integralelor pepanouri necesita parametrizarea variatiei lui σ(s) pe fiecare panou. Distri-butia de vartejuri este caracterizata de constanta γ.
Vom prezenta ın continuare cea mai simpla aproximatie adoptata de Hesssi Smith, considerand distributia surselor constanta pe fiecare panou, adica
σ(s) = σi pe panoul i, i = 1, . . . , N .
Avem prin urmare N + 1 necunoscute: N valori pentru σi si valoarea con-stanta a intensitatii vartejurilor γ. Va trebui sa construim N + 1 ecuatii,corespunzator conditiei de impenetrabilitate pentru fiecare panou, respectivconditiei Kutta-Jukovski. Solutionarea sistemului de ecuatii necesita inver-sarea unei matrici (N + 1) × (N + 1).
Ramane o ultima problema: unde vom impune conditia de impenetrabi-litate? Avem urmatoarele optiuni:
• nodurile de pe frontiera
• punctele de pe suprafata profilului la mijlocul distantei dintre noduriadiacente
• punctele la mijlocul fiecarui panou.
Cum viteza este teoretic infinita ın punctele unghiulare corespunzatoarenodurilor, aceasta optiune nu este preferabila. A doua optiune este rezon-abila, dar implementarea ei este dificila. A treia varianta, adoptata de Hesssi Smith, este cea mai convenabila din punct de vedere al implementarii,dar produce o usoara alterare a geometriei suprafetei. Deasemenea, dacapanourile 1 − 2 si N − 1 au lungimi egale, punctele lor de mijloc vor fi uti-lizate si pentru impunerea conditiei Kutta-Jukovski.

Metoda Elementelor de Frontiera 67
Implementarea metodei panourilor
Sa consideram panoul cu indicele i, marginit de nodurile i si i + 1, a caruiorientare ın raport cu axa x este data de
sin θi =yi+1 − yi
li, cos θi =
xi+1 − xi
li,
unde li este lungimea panoului. Versorii normalei, respectiv tangentei, sunt
ni = − sin θii + cos θij ,
τ i = cos θii + sin θij ,
cu versorul tangentei orientat de la nodul i spre nodul i + 1, ın timp ceversorul normalei este orientat spre fluid. Coordonatele punctului central alpanoului sunt
xi =xi+1 + xi
2, yi =
yi+1 + yi
2,
iar componentele vitezei iu+ jv sunt ui = u(xi, yi), vi = v(xi, yi). Conditiade impenetrabilitate este u · n = 0, sau
−ui sin θi + vi cos θi = 0, pentru i = 1, . . . , N, (3.61a)
iar conditia Kutta-Jukovski este
u1 cos θ1 + v1 sin θ1 = −uN cos θN − vN sin θN . (3.61b)
Semnul minus din membrul drept al (3.61b) provine din faptul ca versorii tan-gentei pentru primul si ultimul panou au semne diferite. Putem evalua acumviteza ın punctul central al fiecarui panou, prin suprapunerea contributiilortuturor surselor si vartejurilor situate ın mijlocul fiecarui panou,
ui = V∞ cosα+N∑
j=1
σj(us)ij + γN∑
j=1
(uv)ij
vi = V∞ sinα+N∑
j=1
σj(vs)ij + γN∑
j=1
(vv)ij
unde (us)ij, (vs)ij sunt componentele vitezei ın centrul panoului i produsede o sursa cu intensitate unitara situata ın centrul panoului j. Interpretareacomponentelor (uv)ij si (vv)ij este similara, ele fiind produse de vartejuri
cu intensitate unitara. In sistemul de coordonate local avem componenteletangentiala u∗ si normala v∗ ale vitezei, definite de
u = u∗ cos θj − v∗ sin θj ,
v = u∗ sin θj + v∗ cos θj .

68 Metoda Elementelor de Frontiera
Cu acestea, componentele vitezei ın centrul panoului i, produsa de o sursaunitara situata pe panoul j sunt
(u∗s)ij =1
2π
lj∫0
x∗ − t
(x∗ − t)2 + (y∗)2dt ,
(v∗s)ij =1
2π
lj∫0
y∗
(x∗ − t)2 + (y∗)2dt ,
unde (x∗, y∗) sunt coordonatele centrului panoului i ın sistemul de coordonateal panoului j. Dupa evaluarea integralelor obtinem
(u∗s)ij =−1
2πln[(x∗ − t)2 + (y∗)2
]1/2∣∣∣t=lj
t=0,
(v∗s)ij =1
2πarctan
y∗
x∗ − t
∣∣∣∣t=lj
t=0
.
Aceste rezultate au o interpretare geometrica simpla:
(u∗s)ij =−1
2πlnri,j+1
rij
, (v∗s)ij =βij
2π,
unde rij este distanta ıntre centrul panoului i si nodul j, iar βij este unghiulsubıntins de panoul j ın centrul panoului i. Se observa ca (u∗s)ii = 0, darvaloarea lui (v∗s)ii = 0 nu este imediata. Cand punctul de interes se apropiede centrul panoului dinspre exteriorul profilului avem βii = π, iar cand seapropie dinspre interior βii = −π. Cum suntem interesati ın curgerea exte-rioara, vom lua βii = π. In mod analog se calculeaza componentele vitezeiın centrul panoului i de catre vartejul unitar atasat panoului j:
(u∗v)ij =−1
2π
lj∫0
y∗
(x∗ − t)2 + (y∗)2dt =
βij
2π,
(v∗v)ij =−1
2π
lj∫0
x∗ − t
(x∗ − t)2 + (y∗)2dt =
1
2πlnri,j+1
rij
.
In sfarsit, conditia de impenetrabilitate devine
N∑j=1
Aijσj + Ai,N+1γ = bi,

Metoda Elementelor de Frontiera 69
unde
Aij = −(us)ij sin θi + (vs)ij cos θi
= (u∗s)ij(cos θj sin θi − sin θj cos θi) + (v∗s)ij(sin θj sin θi + cos θj cos θi)
adica
2πAij = sin(θi − θj) lnri,j+1
rij
+ cos(θi − θj)βij .
In mod analog, pentru intensitatea vartejurilor γ, obtinem coeficientii
2πAi,N+1 =N∑
j=1
cos(θi − θj) − sin(θi − θj)βij .
Membrul drept este
bi = V∞ sin(θi − α) .
Conditiile de impenetrabilitate furnizeaza N ecuatii. Ecuatia suplimentaracorespunde conditiei Kutta-Jukovski, si o vom scrie sub forma
N∑j=1
AN+1,jσj + AN+1,N+1γ = bN+1 ,
unde
2πAN+1,j =∑
k=1,N
sin(θk − θj)βkj − cos(θk − θj) lnri,j+1
rij
,
2πAN+1,N+1 =∑
k=1,N
N∑j=1
sin(θk − θj) lnri,j+1
rij
+ cos(θk − θj)βkj ,
bN+1 = −V∞ cos(θ1 − α) − V∞ cos(θN − α) .
Sistemul de N + 1 ecuatii astfel obtinut poate fi scris sub forma
A11 . . . A1i . . . A1N A1,N+1...
. . ....
. . ....
...Ai1 . . . Aii . . . AiN Ai,N+1...
. . ....
. . ....
...AN1 . . . ANi . . . ANN AN,N+1
AN+1,1 . . . AN+1,i . . . AN+1,N AN+1,N+1
σ1...σi...σN
γ
=
b1...bi...bNbN+1

70 Metoda Elementelor de Frontiera
In final, odata solutionat acest sistem se poate calcula viteza tangentiala ınmijlocul fiecarui panou conform formulei
(Vt)i = V∞ cos(θi − α)
+N∑
j=1
σj
2π
[sin(θi − θj)βij − cos(θi − θj) ln
ri,j+1
rij
]
+γ
2π
N∑j=1
[sin(θi − θj) ln
ri,j+1
rij
+ cos(θi − θj)βij
].
Odata determinata viteza pe profil, putem calcula coeficientul de presiuneutilizand ecuatia lui Bernoulli:
cp(xi, yi) ≡pi − p∞
12ρV 2∞
= 1 − (Vt)2i
V 2∞
Componentele fortei cu care actioneaza fluidul asupra profilului se obtinınsumand contributia fortei normale pe fiecare panou,
F =N∑
j=1
(−pj)ljnj = −N∑
j=1
(pj − p∞)ljnj
F12ρV 2∞L
= −N∑
j=1
pj − p∞12ρV 2∞
ljL
nj = −N∑
j=1
cp(xj, yj)ljL
nj
unde L este lungimea coardei profilului.
3.4 Software
De la ınceputul anilor ′60 Metoda Elementului de Frontiera (MEF) a deve-nit o metoda general acceptata ca o alternativa eficienta pentru MetodaDiferentelor Finite sau pentru Metoda Elementului Finit ın solutionareaproblemelor ingineresti [7, 10]. Fundamentul MEF este prezentat accesi-bil de Brebbia [9], inclusiv teoria elementelor de frontiera liniare si o selectiede programe FORTRAN. Una din restrictiile esentiale ale MEF este necesi-tatea cunoasterii solutiei fundamentale a ecuatiei cu derivate partiale pentrua putea obtine o ecuatie integrala echivalenta. Un alt dezavantaj ıl constituiemembrul drept care este ıncorporat ın formulare prin intermediul unei inte-grale de volum astfel ca MEF ısi pierde caracterul esential de formulare pefrontiera. Metoda Reciprocitatii Duale (MRD) a fost dezvoltata ın ıncercarea

Metoda Elementelor de Frontiera 71
de a solutiona aceasta dificultate [24]. MRD foloseste solutia fundamentalaa unei ecuatii simplificate si ia ın considerare termenii neomogeni din ecuatiaoriginala prin aplicarea principiilor de reciprocitate si utilizarea unor functiispeciale de aproximare. Aceasta metoda a permis solutionarea numericaa problemelor 2D pentru ecuatii Laplace, Poisson, difuzie, convectie–difuziefara modificarea tehnicilor de solutionare MEF creionate ın prezentul capitol.
CFDLab este un software modern, care utilizeaza MEF, conceput pentruscopuri educationale ın domeniul stiintelor ingineresti. Tehnicile moderne deproiectare orientata pe obiecte [18] ıi confera o conceptie moderna si flexibila.Capacitatea de solutionare a problemelor 2D interioare/exterioare pentruecuatiile Laplace, Poisson, difuzie, convectie–difuzie ıl recomanda ca o plat-forma adecvata experimentelor numerice de dinamica fluidelor computationalapentru investigarea comoda a relatiei cauza → efect ıntr-o gama relativ largade probleme.
XFOIL este un pachet de programe (disponibil gratuit) dezvoltat de MarkDrela [16] pentru analiza si proiectarea/optimizarea profilelor aerodinamiceizolate utilizand metoda panourilor. Formularea utilizata de XFOIL pentrucurgerea nevascoasa utilizeaza panouri cu distributie liniara de vartejuri ınvederea obtinerii functiei de curent. Bordul de fuga de grosime finita estemodelat cu un panou tip sursa, si conditia Kutta-Jukovski este utilizatapentru obtinerea circulatiei ın jurul profilului. Calculul curgerii nevascoaseutilizeaza de regula 160 de panouri pentru un profil aerodinamic, iar rezul-tatele sunt obtinute ın mai putin de o secunda. Ulterior, rezultatele pentrualte valori ale unghiului de incidenta (solutionarea sistemului de ecuatii pen-tru diferiti vectori ın membrul drept) se obtin aproape instantaneu. Pentruluarea ın considerare a efectelor compresibilitatii ın curgeri subsonice esteutilizata corectia Karman-Tsien aplicata solutiei incompresibile nevascoase.Pentru proiectarea/optimizarea profilelor aerodinamice este solutionata pro-blema inversa, ın care se precizeaza distributia vitezei pe suprafata profiluluisi se calculeaza coordonatele punctelor pe intrados si extrados. Astfel, ınloc sa se considere intensitatile vartejurilor pe fiecare panou ca necunoscute,coordonatele nodurilor care definesc panourile sunt necunoscutele problemei.Numai o portiune a profilului este modificata la un moment dat. Admitereaunei geometrii variabile a panourilor conduce la o problema neliniara careeste solutionata cu metoda Newton. Pentru a lua ın considerare a efectuluivascozitatii XFOIL utilizeaza teoria stratului limita cuplata cu solutia curgeriinevascoase, detaliile algoritmului fiind prezentate ın [17].

72 Metoda Elementelor de Frontiera
3.5 Aplicatii
Catalogul de profile publicat de Althaus si Wortmann [2] prezinta rezultateexperimentale privind aerodinamica unei game largi de profile, ıncercate ıntunelul aerodinamic la numere Mach sub 0.25 (deci practic ın curgere incom-presibila) si numere Reynolds ıntre 0.25 · 106 si 4.0 · 106. Profilele aerodi-namice din [2] au fost proiectate si optimizate ın special pentru constructiaplanoarelor, dar rezultatele si tehnicile de proiectare sunt utile si pentrualte aplicatii. Cititorul este ıncurajat sa utilizeze programul XFOIL pen-tru a avalua capacitatea simularii numerice de a reproduce corect si exactmasuratorile experimentale efectuate pe profile izolate.
In ceea ce urmeaza ınsa vom analiza rezultatele obtinute cu pentru curge-rea fluidului ideal (incompresibil si nevascos) peste profile izolate XFOIL curezultatele furnizate de programul de calcul al retelelor de profile din Capi-tolul 7. Pentru aceasta, reamintim mai ıntai modul de echivalare a celor douaprobleme.
Curgerea ın jurul profilului izolat presupune ca ın afara acestui obsta-col solid nu exista alte obstacole care sa perturbe curentul incident uniform.La distanta foarte mare de profil (teoretic la infinit) curentul de fluid esteuniform ın orice directie ne-am deplasa radial pornind de la profil. Cu altecuvinte, un profil izolat nu poate modifica directia unui curent de fluid infi-nit, cu doar perturba local campul de viteza. In afirmatia de mai sus localdesemneaza o notiune relativa, dar experienta cotidiana ne arata ca zborulunui avion la altitudine de cateva mii de metri nu se face simtit la nivelulsolului. Orientativ, se poate considera ca amplitudinea perturbatiilor scadeca 1/
√r ın 2D si ca 1/r ın 3D, unde r este distanta de la originea perturbatiei
(ın cazul nostru profilul singular). Spre deosebire de profilul izolat, o retea deprofile realizeaza devierea curentului de fluid incident, modificandu-i directiasi implicit modulul vitezei.
Din punct de vedere geometric, reteaua de profile este definita de formaprofilului, lungimea coardei acestuia, pasul retelei, si unghiul de dispunere aprofilului ın retea. In cazul profilului izolat, ultimii doi parametri geometricinu sunt definiti. Prin urmare, o comparatie ıntre profilul izolat si cel dispus ınretea poate fi facuta ın cazul ın care influenta reciproca a profilelor adiacentedin retea este nesemnificatica. Pentru aceasta, pasul retelei trebuie sa fiesuficient de mare. Unghiul de dispunere a profilului ın retea va fi luat ınconsiderare doar pentru a defini unghiul de atac echivalent ın cazul profiluluisingular. Pentru exemplele prezentate ın cele ce urmeaza s-au consideratretee de profile cu pas relativ (pasul retelei raportat la lungimea coardei) de3.0.
Din punct de vedere cinematic, ın cazul retelei de profile se precizeaza

Metoda Elementelor de Frontiera 73
directia curentului incident (fata de directia frontului retelei), si rezultadirectia curentului ın aval de retea. Pe de alta parte, ın cazul profiluluiizolat se defineste directia curentului (la distanta mare de profil) ın raportcu directia coardei profilului prin intermediul unghiului de atac.
Din punct de vedere dinamic, forta hidrodinamica exercitata asupra pro-filului izolat, de anvergura unitara, ın curent de fluid ideal este data deteorema Kutta-Jukovski,
F = ρv∞ × Γ ,
unde v∞ = iv∞x + jv∞ y este viteza curentului neperturbat de prezentaprofilului, iar Γ = kΓ este vectorul asociat circulatiei vitezei Γ pe contu-rul profilului. Deoarece curgerea este irotationala, valoarea circulatiei vitezeiΓ este aceeasi pe orice curba ınchisa ce ınconjoara profilul. Se poate ob-serva usor ca ın cazul fluidului ideal forta hidrodinamica are doar o com-ponenta normala pe directia curentului neperturbat (rezultatul produsuluivectorial v∞×Γ este un vector ın planul xOy, perpendicular pe v∞) numitaforta portanta. Daca directia lui v∞ ramane constanta, indiferent de unghiulde atac al profilului directia fortei portante nu se modifica; variatia unghi-ului de atac modifica doar valoarea circulatiei Γ, si prin urmare modululfortei portante. Faptul ca forta hidrodinamica nu are componenta ın directiacurentului neperturbat conduce la concluzia ca profilul nu ıntampina nici orezintenta la ınaintare, ın flagranta contradictie cu experimentul. Aceastaeste consecinta directa a ipotezei fluidului ideal. Efectuand produsul vec-torial obtinem v∞ × Γ = −jv∞xΓ + iv∞ yΓ, de unde componentele forteiportante pe axele Ox si Oy sunt:
Fx = ρv∞ yΓ si Fy = −ρv∞xΓ (3.62)
Pentru a evalua forta hidrodinamica exercitata asupra profilului dispus ınretea aplicam teorema impulsului pentru vana de fluid corespunzatoare benziide periodicitate din Figura 3.10. La fel ca si ın cazul profilului izolat vomconsidera anvergura unitara Daca Ox este axa perpendiculara pe frontulretelei (avand aceasi directie cu versorii normalei n ın sectiunile de intrare siiesire) iar Oy este axa paralela cu frontul retelei, atunci conform ecuatiei decontinuitate debitul volumic corespunzator vanei fluide este
Q = vIN x · t = vOUT x · t
deci componenta dupa Ox a vitezei ın amonte, respectiv aval, de retea areaceeasi valoare vx ≡ vIN x = vOUT x. Componentele paralele cu frontul reteleiale vitezei ın amonte, respectiv aval, de retea sunt vIN y si vOUT y. Primaeste impusa, iar cea de-a doua rezulta ın urma calculului curgerii ın retea.

74 Metoda Elementelor de Frontiera
n v
v
n
IN
OUT
t
Figura 3.10: Vana de fluid corespunzatoare benzii de periodicitate la curgereaıntr-o retea de profile.
Directia curentului amonte este precizata de unghiul αIN , respectiv pentrucurentul aval αOUT , definit ca
vIN y
vIN x
= − cotαIN sivOUT y
vOUT x
= − cotαOUT
Circulatia vitezei pe profilul dispus ın retea este egala cu circulatia calculatape conturul fluid ce definiste banda de periodicitate, adica
Γ = (vOUT y − vIN y)t
Evident, sensul pozitiv de parcurgere a conturului este cel trigonometric.Teorema impulsului aplicata vanei de fluid din banda de periodicitate,
F = ρQvIN − ρQvOUT − (pSn)IN − (pSn)OUT
furnizeaza componentele actiunii hidrodinamice asupra profilului ın retea,
Fx = (pIN − pOUT )S si Fy = ρQ(vIN y − vOUT y)
Pentru a echivala profilul ın retea cu profilul izolat va trebui sa exprimamcomponentele fortei sub aceeasi forma ca si ın (3.62). Componenta dupa Oy

Metoda Elementelor de Frontiera 75
este imediata, folosind expresia debitului volumic prin sectiunea de anverguraunitara, respectiv definitia circulatiei,
Fy = −ρvxΓ
Pentru cealalta componenta a fortei utilizam teorema lui Bernoulli aplicataıntre un punct amonte si unul aval de retea,
pIN − pOUT =ρ
2(v2
OUT − v2IN) =
ρ
2(v2
OUT y − v2IN y)
de unde, pentru profilul de anvergura unitara, obtinem
Fx = ρvOUT y + vIN y
2Γ
Este evident acum ca daca definim ın cazul retelei de profile viteza fictiva
v∞ =vIN + vOUT
2
ca media vectoriala a vitezelor amonte si aval de retea, componentele forteipot fi scrise exact sub aceeasi forma (3.62) ca si pentru profilul izolat. Unghiulformat de aceasta viteza fictiva cu frontul retelei este
α∞ = arctan
(−v∞x
v∞ y
)iar unghiul de atac echivalent pentru profilul izolat este
α = α∞ − αs
unde αs este unghiul de instalare al profilului ın retea (unghiul dintre coardaprofilului si frontul retelei).
In fine, pentru a compara repartitia presiunii calculata pe profilul izolatcu cea calculata pe profilul dispus ın retea, vom utiza aceeasi definitie pentrucoeficientul de presiune ın ambele cazuri,
cp ≡ p− p∞12ρv2∞
= 1 −(v
v∞
)2
unde p si v sunt presiunea si modulul vitezei ıntr-un punct pe profil. Cumın programul de calcul al curgerii ın retele de profile viteza este adimension-alizata cu vx, coeficientul de presiune este evaluat astfel:
cp = 1 −(v
vx
)2
sin2 α∞

76 Metoda Elementelor de Frontiera
Concluziile rezultate din comparatia repartitiilor de presiune calculate ıncele doua variante pot fi cuantificate sintetic prin evaluarea coeficientului deportanta calculat ın cele doua cazuri,
cL ≡ F12ρv2∞c
unde c este lungimea coardei profilului (am considerat evident si aici anver-gura unitara).
Exemplul 1: Sa consideram o retea de profile NACA 4412, cu unghide instalare αs = 90 si pas relativ t/c = 3.0. Pentru un unghi de intrareαIN = 95, rezulta un unghi de iesire αOUT = 88.48. Directia vitezei v∞este data de unghiul
α∞ = arctan
(2
cotαIN + cotαOUT
)
= arctan
(2
cot 95 + cot 88.48
)= 91.74
de unde rezulta un unghi de atac echivalent pentru profilul singular α = 1.74.Forta hidrodinamica exercitata asupra profilului din retea are componentele
Fx
12ρv2
xc= −0.020858 si
Fy
12ρv2
xc= 0.684834
Cititorul poate verifica imediat ca directia fortei este perpendiculara pe v∞.Coeficientul de portanta pentru profilul ın retea este
cL =√
0.0208582 + 0.6848342 sin2 91.74 = 0.6845
Figura 3.11(a) prezinta cu linie punctata repartitia de presiune calculatapentru profilul NACA 4412 dispus ın reteaua precizata mai sus. Cu liniecontinua este aratata distributia de presiune calculata cu programul XFOILpe profilul izolat la incidenta de 1.74. Concordanta este acceptabila, darcoeficientul de portanta al profilului izolat este cL = 0.7270, cu aproape 6%mai mare decat valoarea pentru profilul dispus ın retea. Din punct de vederecalitativ rezultatul era previzibil, tinand cont de accelerarea suplimentara afluidului produsa de prezenta profilelor adiacente. Acest fenomen poate fidiminuat prin modificarea unghiului de asezare ın retea. Liniile de curentpentru profilul dispus ın reteaua cu unghi de instalare αs = 90 sunt prezen-tate ın Figura 3.11(b).
Exemplul 2: Sa reluam exemplul de mai sus pentru o retea de profileEppler387, Figura 3.12(a), cu pas relativ 3.0 si unghi de asezare αs = 90.

Metoda Elementelor de Frontiera 77
−0.1 0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1abscisa profilului
−1
−0.8
−0.6
−0.4
−0.2
0
0.2
0.4
0.6
0.8
1
coef
icie
ntul
de
pres
iune
profil izolatprofil in retea
(a) Repartitia de presiune pe profilul izolat NACA 4412 si pe acelasiprofil dispus ın retea.
(b) Linii de curent pentru profilul NACA 4412 dispus ın retea cuunghi de instalare 90 si pas relativ 3.0.
Figura 3.11: Profilul NACA 4412 izolat, respectiv ın retea.

78 Metoda Elementelor de Frontiera
(a) Profilul Eppler387
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1abscisa profilului
−1
−0.8
−0.6
−0.4
−0.2
0
0.2
0.4
0.6
0.8
1
coef
icie
ntul
de
pres
iune
profil izolatprofil in retea
(b) Comparatie ıntre repartitia de presiune calculata pentruprofilul izolat Eppler387, si pentru acelasi profil dispus ınretea.
(c) Linii de curent pentru profilul Eppler387 dispus ın retea cuunghi de instalare 90 si pas relativ 3.0.
Figura 3.12: Profilul Eppler 387 izolat, respectiv ın retea.

Metoda Elementelor de Frontiera 79
Pentru un unghi de intrare αIN = 95, rezulta un unghi de iesire αOUT =89.14. Directia vitezei v∞ este data de unghiul
α∞ = arctan
(2
cotαIN + cotαOUT
)
= arctan
(2
cot 95 + cot 89.14
)= 92.0765
de unde rezulta un unghi de atac echivalent pentru profilul singular α =2.076. Forta hidrodinamica exercitata asupra profilului din retea are com-ponentele
Fx
12ρv2
xc= −0.0223 si
Fy
12ρv2
xc= 0.615
Coeficientul de portanta pentru profilul ın retea este
cL =√
0.02232 + 0.6152 sin2 92.076 = 0.6146
Figura 3.12(b) prezinta cu linie punctata repartitia de presiune calculatapentru profilul Eppler387 dispus ın reteaua precizata mai sus. Cu linie con-tinua este prezentata distributia de presiune calculata cu programul XFOILpe profilul izolat la incidenta de 2.076. Coeficientul de portanta al profiluluiizolat este cL = 0.6583, cu 6.6% mai mare decat valoarea pentru profiluldispus ın retea. Liniile de curent pentru profilul dispus ın reteaua cu unghide instalare αs = 90 sunt prezentate ın Figura 3.12(c).
Exemplul 3: Diferentele ıntre repartitia presiunii calculata pentru pro-filul izolat, respectiv profilul dispus ın retea, sunt datorate influentei reciprocea profilelor ınvecinate ın cazul retelelor. Cele doua exemple de mai sus auutilizat profilele dispuse ın retele unul deasupra celuilalt. Intuitiv, un unghide instalare diferit de 90 ar trebui sa diminueze influenta reciproca a pro-filelor. Sa consideram ın cele ce urmeaza o retea de profile Eppler387 cupas relativ 3.0, dar cu un unghi de instalare αs = 60circ. Pentru un unghide intrare αIN = 75, rezulta un unghi de iesire αOUT = 62.714. Directiavitezei v∞ este data de unghiul
α∞ = arctan
(2
cotαIN + cotαOUT
)
= arctan
(2
cot 75 + cot 62.714
)= 68.60
de unde rezulta un unghi de atac echivalent pentru profilul singular α = 8.6.

80 Metoda Elementelor de Frontiera
−0.1 0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1abscisa profilului
−8
−7
−6
−5
−4
−3
−2
−1
0
1
2
coef
icie
ntul
de
pres
iune
profil izolatprofil in retea
(a) Comparatie ıntre repartitia de presiune calculata pen-tru profilul izolat Eppler387 (unghi de atac 8.6), si pentruacelasi profil dispus ın retea.
(b) Linii de curent pentru profilul Eppler387 dispus ınretea cu unghi de instalare 60 si pas relativ 3.0.
Figura 3.13: Profilul Eppler 387 izolat, respectiv ın retea.

Metoda Elementelor de Frontiera 81
Figura 3.13(a) arata o concordanta excelenta ıntre repartitia de presiunecalculata pe profilul izolat, respectiv ın retea. Forta hidrodinamica exercitataasupra profilului din retea are componentele
Fx
12ρv2
xc= 0.5829 si
Fy
12ρv2
xc= 1.4874
Coeficientul de portanta pentru profilul ın retea este
cL =√
0.58292 + 1.48742 sin6 8.60 = 1.385
Pentru profilul izolat avem coeficientul de portanta cL = 1.415, cu numai2.1% mai mare decat ın cazul profilului ın retea.
Exemplul 4: Ultimul exemplu din acest capitol ısi propune sa exempli-fice utilizarea conceptului de strat limita pentru a lua ın considerare efectulvascozitatii asupra repartitiei de presiune pe corpurile profilate.
Figura 3.14(a) prezinta variatia vitezei curentului de fluid nevascos ınvecinatatea unei suprafete solide. In absenta vascozitatii fluidul aluneca pesuprafata. In plus, prezenta obstacolului solid forteaza accelerarea curentuluiın vecinatatea sa, astfel ıncat fluidul sa ıl poata ocoli.
Cu totul alta este situatia reala, Figura 3.14(b), corespunzatoare fluiduluivascos. In acest caz fluidul adera la perete, si tranzitia de la viteza nula peperete la viteza curentului din jurul corpului se face ıntr-o regiune de grosimerelativ mica, δ, numita strat limita. Efectul franarii fluidului ın vecinatateasuprafetei solide se poate cuantifica prin scaderea debitului volumic printr-o sectiune normala la suprafata corpului. Daca dorim sa luam acest efectın considerare, dar sa mentinem modelul curgerii nevascoase, va trebui samodificam forma corpului.
Figura 3.14(c) arata ca daca dorim sa pastram valoarea corecta a debi-tului volumic de fluid ın vecinatatea suprafetei solide ın conditiile modelariicurgerii nevscoase, atunci suprafata corpului trebuie ”ımpinsa” ın interioruldomeniului ocupat de fluid cu grosimea de deplasare δ. Valoarea lui δ estedeterminata printr-un calcul de strat limita, pe care nu ıl prezentam aici.
Spre exemplu, pentru profilul Eppler 387 dispus sub unghiul de atac de 4,respectiv pentru o curgere cu Re = 105, distributia grosimii de deplasare esteprezentata ın Figura 3.15. Se poate observa ca modificarea formei profiluluieste mai accentuata pe extrados, unde grosimea stratului limita este maimare. In aval, profilul profilul ”vascos” se continua cu dara hidrodinamica.
Luarea ın considerare a stratului limita, respectiv modificarea formei pro-filului prin adaugarea grosimii de deplasare are efecte semnificative asuprarepartitiei presiunii pe profil. Figura 3.16 arata ca luarea ın considerare agrosimii de deplasare conduce la o concordanta excelenta cu masuratorileexperimentale ın special pe extradosul profilului.

82 Metoda Elementelor de Frontiera
U
viteza
dire
ctia
nor
male
i
suprafataprofilului
(a) Profilul vitezei ın cazul fluiduluinevascos.
δ
0.99U
U
viteza
dire
ctia
nor
male
i
suprafataprofilului
(b) Profilul vitezei ın cazul fluiduluivascos.
U
viteza
dire
ctia
nor
male
i
δ
suprafataprofilului real
suprafatamodificataa profilului
*
(c) Grosimea de deplasare.
Figura 3.14: Modificarea formei profilului pentru a lua ın considerare efectulvascozitatii.
Figura 3.15: Profilul Eppler387 modificat cu grosimea de deplasare pentru alua ın considerare efectul vascozitatii.

Metoda Elementelor de Frontiera 83
0 0.2 0.4 0.6 0.8 1abscisa profilului
−1.5
−1
−0.5
0
0.5
1
coef
icie
ntul
de
pres
iune
experiment, Langley (Re=1E5)nevascosvascos, strat limita (Re=1E5, Ncr=11)
intrados
extrados
Figura 3.16: Repartitia coeficientului de presiune pentru profilul Eppler 387
la unghi de atac de 4.0. Punctele corespund masuratorilor efectuate laNASA-Langley pentru Re = 105, iar coeficientul de portanta masurat esteCL = 0.778. Linia ıntrerupta corespunde curgerii nevascoase, cu un coeficientde portanta rezultant CL = 0.883, adica supraestimat cu 12%. Linia continuacorespunde rezultatelor calculate utilizand modelul stratului limita pentru alua ın considerare efectul vascozitatii. Concordanta cu experimentul esteremarcabila, iar coeficientul de portanta CL = 0.787 difera cu putin peste1% fata de valoarea masurata.

84 Metoda Elementelor Finite-Fundamente

Capitolul 4
Metoda Elementelor Finite(MEF). Concepte fundamentale
4.1 Formularea clasica (tare) a problemei cu
conditii la limita
In 3.1.1 am prezentat cadrul general al Metodei Reziduurilor Ponderate(MRP), cu mentiunea ca formularea (3.4) reprezinta punctul de pornire alMetodei Elementelor Finite (MEF). Utilizarea practica a ecuatiei (3.4) pre-supune parcurgerea mai multor etape care sa conduca ın final la un pro-gram de calcul numeric. Ne propunem ın cele ce urmeaza sa parcurgemaceste etape, urmarind prezentarea din excelenta monografie a lui Hughes[20], pentru un exemplu simplu corespunzator variantei monodimensionale aproblemei cu conditii la limita 3.1:
d2u
dx2= f(x) , pentru 0 < x < 1 , (4.1a)
u(1) = g , (4.1b)
−dudx
(0) = h . (4.1c)
In ecuatia (4.1a) functia din membrul drept este precizata pe intervalul uni-tate, f : [0, 1] → R . Desi simpla, problema (4.1) permite trecerea ın re-vista a principalelor ingrediente ale MEF. Detaliile de natura matematicasunt prezentate cat mai simplu, astfel ıncat sa fie accesibile studentilor ıninginerie.
Pentru ınceput vom preciza cateva notatii care ısi gasesc corespondentul
85

86 Metoda Elementelor Finite-Fundamente
si ın cazul multidimensional:
Ω = segmentul deschis 0 < x < 1 ,
Ω = segmentul ınchis 0 ≤ x ≤ 1 .
Desi la prima vedere definitiile de mai sus sugereaza doar pedanterie matem-atica, trebuie facuta distinctia ıntre domeniul Ω (care nu contine frontierace ıl margineste) si Ω (care include si frontiera). Constantele g si h ın (4.1b)si (4.1c) au valori numerice precizate. Cu alte cuvinte, conditiile la limitaimpun solutiei sa ia valoarea g pentru x = 1, respectiv derivata du/dx sa iavaloarea −h la x = 0. Ecuatia diferentiala (4.1a) ımpreuna cu conditiile lacapetele intervalului (adica conitiile pe frontiera lui Ω) formeaza o problemacu conditii la limita. Aceasta este formularea tare sau clasica a problemei.
Evident, ın cazul de fata solutia exacta poate fi scrisa usor sub forma
u(x) = g + (1 − x)h −1∫
x
y∫0
f(z) dz
dy , (4.2)
unde y si z sunt variabile de integrare. In cele ce urmeaza ne intereseazasa dezvoltam tehnici de solutionare aproximativa, numerica, a problemelorcu conditii la limita aplicabile si ın cazurile cand solutia exacta nu poate figasita.
4.2 Formularea variationala (slaba) a proble-
mei cu conditii la limita
Pentru a defini formularea slaba (sau variationala) a problemei (4.1) trebuiesa introducem si sa caracterizam doua multimi de functii.
Prima multime este formata din solutiile candidate, carora le vom ceresa satisfaca u(1) = g. Cealalta conditie la limita nu trebuie neaparat safie satisfacuta de functiile din aceasta multime. In plus, pentru ca anumiteexpresii ce apar ın cele ce urmeaza sa aiba sens vom cere ca solutiile candidatesa aiba patratul derivatelor integrabil, adica,
1∫0
(du
dx
)2
dx <∞ . (4.3)
Functiile care satisfac (4.3) se numesc functii de clasa H1, respectiv scriemu ∈ H1(Ω). In concluzie, multimea de solutii candidate, notata cu S, contine

Metoda Elementelor Finite-Fundamente 87
toate functiile care au derivate integrabile la patrat si care au valoarea gpentru x = 1,
S =u|u ∈ H1, u(1) = g
. (4.4)
Faptul ca S este o multime de obiecte este indicat de acolade. Mai ıntaise precizeaza notatia pentru un element tipic al multimii, dupa care baraverticala |, si apoi se precizeaza proprietatile ce definesc elementele multimii.
A doua multime este formata din functiile de pondere. Aceasta este foarteasematoare cu S, dar de data aceasta vom cere functiilor sa satisfaca conditiiDirichlet omogene,
V =w|w ∈ H1, w(1) = 0
. (4.5)
Cu definitiile de mai sus putem introduce formularea slaba a problemei(4.1):
Sa se gaseasca u ∈ S astfel ıncat oricare ar fi w ∈ V sa avem:
1∫0
dw
dx
du
dxdx = −
1∫0
wf dx+ w(0)h . (4.6)
Ecuatia (4.6) poarta numele de ecuatie variationala. In cazul mecanicii (4.6)este cunoscuta si sub denumirea de ecuatia lucrului mecanic virtual.
4.3 Echivalenta formularilor tare si slaba
Evident ca ıntre (4.1) si (4.6) trebuie sa fie o echivalenta, altfel (4.6) nu ar maiavea rost. Fara pretentia unei demonstratii perfect riguroase, vom justificaın continuare urmatoarele doua propozitii:
Propozitia 1: Fie u o solutie a problemei (4.1). Atunci u estesolutie a problemei (4.6).Propozitia 2: Fie u o solutie a problemei (4.6). Atunci u estesolutie a problemei (4.1).
Prin urmare, daca cele doua propozitii sunt adevarate atunci solutia taresi solutia slaba sunt identice, iar formularile tare (4.1) si slaba (4.6) suntechivalente.
Demonstratie Propozitia 1.Deoarece u este solutie a problemei (4.1) putem scrie
0 = −1∫
0
w
(d2u
dx2− f
)dx ,

88 Metoda Elementelor Finite-Fundamente
pentru orice w ∈ V. Dupa integrarea prin parti avem:
0 =
1∫0
dw
dx
du
dxdx− w
du
dx
∣∣∣∣10
+
1∫0
wf dx .
Cum w(0) = 1 si −(du/dx)(0) = h, obtinem
1∫0
dw
dx
du
dxdx = −
1∫0
wf dx+ w(0)h .
In plus, cum u(1) = g conform (4.1b), evident u ∈ S. Prin urmare, propozitia1 este demonstrata.
Demonstratie Propozitia 2.Sa consideram u ca fiind solutia problemei (4.6). Prin urmare u ∈ S, deciu(1) = g si
1∫0
dw
dx
du
dxdx = −
1∫0
wf dx+ w(0)h ,
pentru orice w ∈ V. Integrand prin parti si utilizand w(1) = 0 obtinem
0 =
1∫0
w
(d2u
dx2− f
)dx+ w(0)
[du
dx(0) + h
]. (4.7)
Este suficient sa aratam ca (4.7) implica1
(ı)d2u
dx2− f = 0 ın Ω,
(ıı)du
dx(0) + h = 0.
Sa demonstram mai ıntai (ı). Pentru aceasta definim w ın (4.7) ca fiind
w = φ
(d2u
dx2− f
)(4.8)
unde, prin definitie, φ > 0 este o functie neteda pentru x ∈ Ω si φ(0) =φ(1) = 0. De exemplu putem lua φ(x) = x(1 − x). Rezulta w(1) = 0, deciw ∈ V. Inlocuind (4.8) ın (4.7) obtinem
0 =
1∫0
φ
(d2u
dx2− f
)2
dx+ 0 .
1Aceste ecuatii poarta numele de ecuatiile Euler-Lagrange ale formularii slabe.

Metoda Elementelor Finite-Fundamente 89
Cum φ > 0 ın Ω, rezulta ca (ı) trebuie sa fie satisfacuta. Aceasta implica din(4.7) ca
0 = w(0)
[du
dx(0) + h
].
Faptul ca w ∈ V nu implica nici o restrictie asupra valorii sale pentru x =0 ınseamna ca ın general w(0) = 0. Rezulta ca si (ıı) este adevarata siPropozitia 2 este demonstrata.
Observatia 1. Conditia la limita (−du/dx)(0) = h nu este mentionataexplicit ın formularea slaba (4.6). Astfel de conditii la limita se numescconditii naturale. Pe de alta parte, solutiilor candidate li se cere explicit sasatisfaca conditia la frontiera u(1) = g. Astfel de conditii la limita se numescconditii esentiale.
Observatia 2. Tehnica utilizata pentru a demonstra Propozitia 2 estecunoscuta ın calculul variational sub forma de lema fundamentala. In esenta,aceasta este metodologia care ne permite sa deducem ecuatiile diferentiale siconditiile la limita pe care le implica formularea slaba. Pentru dezvoltareaformularilor slabe ın cazul problemelor complexe, multidimensionale, esteesentiala ıntelegerea si stapanirea acestei metodologii.
Metoda Elementului Finit este bazata pe formularea slaba a problemelorcu conditii la limita. In principiu, ideea de baza este sa aproximam multimileS si V prin colectii finite de functii convenabil alese. Prin urmare, ecuatiilevariationale vor fi solutionate ıntr-un context finit-dimensional.
Sa introducem ın prealabil urmatoarele notatii care vor simplifica scrierea:
a(w, u) =
1∫0
dw
dx
du
dxdx (4.9)
(w, f) =
1∫0
wf dx (4.10)
Cu (4.9) si (4.10) ecuatia variationala se poate rescrie sub forma
a(w, u) = −(w, f) + w(0)h (4.11)
In aceasta ecuatie a(·, ·) si (·, ·) sunt exemple de forme simetrice si biliniare.Simetria ınseamna ca
a(u,w) = a(w, u) ,
(u,w) = (w, u) ,

90 Metoda Elementelor Finite-Fundamente
iar biliniaritatea ınsemna ca pentru fiecare argument avem,
a(c1u+ c2v, w) = c1a(u,w) + c2a(v, w) ,
(c1u+ c2v, w) = c1(u,w) + c2(v, w) ,
cu c1 si c2 doua constante arbitrare.
Ecuatia (4.11) este foarte concisa si surprinde aspectele matematice esen-tiale pentru o buna ıntelegere a metodelor variationale si a Metodei Elemen-tului Finit. Diverse clase de probleme fizice pot fi scrise practic sub aceeasiforma cu (4.11). Prin urmare ideile si rezultatele prezentate mai sus vor aveao larga aplicabilitate.
4.4 Metoda Galerkin de aproximare a formu-
larii slabe
Vom descrie ın cele ce urmeaza o metoda de obtinere a solutiilor aproximativeale problemelor cu conditii la limita bazata pe formularea slaba. Desi tratareapoate parea la prima vedere abstracta, vom continua cu un exemplu numericconcret care sa elucideze si aspectele practice.
Prima etapa o constituie construirea aproximatiilor finit-dimensionalepentru S si V . Aceste colectii de functii sunt notate Sh si Vh. Indicele supe-rior h se refera la o retea de discretizare a domeniului Ω, parametrizata de olungime caracteristica h. In general se considera ca Sh si Vh sunt submultimiale lui S si V , adica
Sh ⊂ S (daca uh ∈ Sh atunci uh ∈ S) ,
Vh ⊂ V (daca wh ∈ Vh atunci wh ∈ V) .
Prin urmare, pentru uh ∈ Sh si wh ∈ Vh vom avea uh(1) = g si wh(1) = 0.Colectiile S, V , Sh si Vh sunt adesea denumite spatii de functii. Notiuneamatematica de spatiu implica o structura liniara, adica: pentru c1 si c2 douaconstante arbitrare, respectiv u si v din V , combinatia liniara c1u+ c2v estedeasemenea ın V . Evident, atat V cat si Vh au aceasta proprietate. PentruS si Sh, aceasta proprietate nu mai este verificata pentru ca daca u1 ∈ S siu2 ∈ S atunci combinatia liniara c1u1 + c2u2 satisface conditia la limita
c1u1(1) + c2u2(1) = (c1 + c2)g = g .

Metoda Elementelor Finite-Fundamente 91
Metoda Galerkin
Sa presupunem cunoscuta colectia Vh. Pentru orice functie vh ∈ Vh con-struim o functie uh ∈ Sh de forma
uh = vh + gh , (4.12)
unde gh este o functie cunoscuta ce satisface conditia esentiala pe frontieragh = g. Evident ca functia definita de (4.12) satisface conditia la limita(4.1b),
uh(1) = vh(1) + gh(1) = 0 + g ,
deci (4.1b) constituie un procedeu de constructie pentru Sh.
Putem scrie acum ecuatia variationala (4.11) utilizand uh si wh,
a(wh, uh) = −(wh, f) + wh(0)h . (4.13)
Aceasta ecuatie trebuie privita ca o modalitate de a defini solutia (slaba)aproximativa uh. Inlocuind (4.12) ın (4.13) si folosind biliniaritatea formeia(·, ·) obtinem
a(wh, vh) = −(wh, f) + wh(0)h − a(wh, gh) .
Membrul drept contine numai termeni asociati cu functii cunoscute (adica f,g si h). Aceasta ecuatie poate fi folosita pentru a defini vh, partea necunscutaa lui uh.
Formularea Galerkin (aproximativa) a problemei cu conditii la limita este
Pentru f, g si h date, sa se gaseasca uh = vh + gh, cuvh ∈ V, astfel ıncat oricare ar fi wh ∈ V sa avem
a(wh, vh) = −(wh, f) + wh(0)h − a(wh, gh) . (4.14)
Pentru a putea utiliza formularea Galerkin (4.14) trebuie sa precizam concretgh si spatiul Vh.
Sa mentionam ın finalul acestui paragraf ca o clasa importanta de metodede aproximare, numite metode Petrov-Galerkin, utilizeaza functii vh din altemultimi decat Vh. Astfel de metode sau dezvoltat ın special ın contextulmecanicii fluidelor. Metoda denumita mai sus Galerkin este adesea referitaın literatura ca metoda Bubnov-Galerkin. Evident, tehnica de aproximarede mai sus este o varianta a Metodei Reziduurilor Ponderate (MRP).

92 Metoda Elementelor Finite-Fundamente
4.5 Formularea matriceala a metodei Galerkin
Metoda Galerkin conduce la un sistem liniar de ecuatii algebrice. Pentrua ajunge la acesta trebuie sa precizam mai concret structura multimii Vh.Sa consideram ca Vh contine combinatii liniare de functii cunoscute notateNA : Ω → R, unde A = 1, 2, . . . , n. Cu alte cuvinte, pentru wh ∈ Vh existaun set de constante cA, cu A = 1, 2, . . . , n, astfel ıncat
wh(x) =n∑
A=1
cANA(x) = c1N1(x) + c2N2(x) + . . .+ cnNn(x) . (4.15)
Functiile NA se numesc functii de interpolare (sau functii de forma, saufunctii de baza). Evident, fiecare functie NA trebuie sa satisfaca
NA(1) = 0, A = 1, 2, . . . , n ,
de unde wh(1) = 0 conform definitiei lui Vh. Spunem ca Vh are dimensiunean pentru ca orice functie din aceasta multime poate fi scrisa ca o combinatieliniara de n functii de baza.
Pentru a preciza elementele multimii Sh trebuie sa specificam gh. Pentruaceasta introducem o functie suplimentara Nn+1 : Ω → R care are proprieta-tea
Nn+1(1) = 1 .
Evident, Nn+1 /∈ Vh. Cu acesta putem defini hh = gNn+1 si prin urmaregh(1) = g. O functie tipica din Sh va putea fi scrisa sub forma
uh = vh + gh =n∑
A=1
dANA + gNn+1 , (4.16)
unde dA sunt constante. Inlocuind (4.15) si (4.16) ın (4.14) avem
a
(n∑
A=1
cANA,n∑
B=1
dBNB
)= −(
n∑A=1
cANA, f
)+
[n∑
A=1
cANA(0)
]h
− a
(n∑
A=1
cANA, gNn+1
),
de unde folosind biliniaritatea obtinem
0 =n∑
A=1
cAGA ,

Metoda Elementelor Finite-Fundamente 93
unde cu GA am notat expresia
GA =n∑
B=1
a(NA, NB)dB + (NA, f) −NA(0)h + a(NA, Nn+1)g .
Cum ecuatia lui Galerkin trebuie sa fie satisfacuta pentru orice wh ∈ Vh,adica pentru orice valori ale constantelor cA, A = 1, 2, . . . , n, rezulta ca GA
trebuie sa se anuleze,
n∑B=1
a(NA, NB)dB = −(NA, f) +NA(0)h − a(NA, Nn+1)g . (4.17)
In ecuatiile de mai sus singurele necunoscute sunt coeficientii dB. Prin urmareavem n ecuatii (A = 1, 2, . . . , n) cu n necunoscute (B = 1, 2, . . . , n).
Daca definim matricea n× n
KAB = a(NA, NB) , (4.18)
si vectorul termenilor liberi
FA = −(NA, f) +NA(0)h − a(NA, Nn+1)g , (4.19)
sistemul de ecuatii de mai sus poate fi scris pe scurt sub forma
n∑B=1
KABdB = FA, A = 1, 2, . . . , n ,
sau sub forma matricealaKd = F .
Reamintim semnificatia matricilor de mai sus:
K = [KAB] =
K11 K12 . . . K1n
K21 K22 . . . K2n...
.... . .
...Kn1 Kn2 . . . Knn
,
F = FA =
F1
F2...Fn
, d = dB =
d1
d2...dn
.
Functie de problema fizica solutionata, matricea sistemului K, vectorul ne-cunoscutelor d, si vectorul termenilor liberi F au denumiri specifice. Spre

94 Metoda Elementelor Finite-Fundamente
exemplu, pentru probleme de elasticitate (pentru care a fost original dez-voltata Metoda Elementului Finit) K este matricea de rigiditate, F estevectorul fortelor, iar d este vectorul deplasarilor.
Putem acum sa formulam versiunea matriciala a metodei Galerkin:
Cu matricea K si vectorul F precizate, sa se deter-mine d astfel ıncat
Kd = F . (4.20)
Solutia sistemului (4.20) este evident d = K−1F , cu conditia ca inversamatricii K, adica K−1, sa existe. Odata determinati coeficientii d, solutiaaproximativa poate fi evaluata ın orice punct x ∈ Ω conform formulei
uh(x) =n∑
A=1
dANA(x) + gNn+1(x) .
Observatia 1. Matricea K este simetrica. Simetria rezulta imediat dinsimetria formei a(·, ·),
KAB = a(NA, NB) = a(NB, NA) = KBA ,
sau ın notatie matriciala K = KT , unde indicele superior T denota transpusamatricii.
Observatia 2. Sa recapitulam pe scurt etapele parcurse pana acum, etapecare sunt specifice dezvoltarii Metodei Elementului Finit:
Formulareatare (4.1)
⇔ Formulareaslaba (4.6)
≈ FormulareaGalerkin (4.14)
⇔ Formulareamatriciala (4.20)
Singura aproximare facuta pana acum corespunde metodei Galerkin aplicataformularii slabe. In situatii mai complicate numarul aproximarilor creste.Spre exmplu, datele f, g si h pot fi aproximate atat ın interiorul domeniuluiΩ si pe fronriera lui, respectiv integralele pot fi evaluate aproximativ.
Observatia 3. Cateodata este convenabil sa scriem
uh(x) =n∑
A=1
NA(x)dA ,
unde dn+1 = g.

Metoda Elementelor Finite-Fundamente 95
4.6 Aproximarea de tip element finit
Metodologia dezvoltata pana acum precizeaza doar contextul general al va-riantei Galerkin pentru Metoda Reziduurilor Ponderate. Un caz particular ılreprezinta Metoda Elementului Finit, corespunzatoare unei optiuni specialepentru construirea multimilor Vh si Sh.
Vom ıncepe prin a partitiona domeniul Ω = [0, 1] in subintervale. Dacadorim n subintervale alegem mai ıntai o multime de n + 1 puncte xA, A =1, 2, . . . , n, n+ 1, ordonate crescator xA < xA+1, astfel ıncat x1 = 0 sixn+1 = 1. Punctele de abscise xA poarta numele de puncte nodale, sau maipe scurt noduri. Subintervalele [xA, xA+1] poarta numele de elemente finite,sau pe scurt elemente. Mentionam ca lungimile elementelor hA = xA+1 − xA
nu trebuie sa fie egale. Parametrul retelei h este ın acest caz considerat ca fi-ind lungimea maxima h = max
A=1,...,nhA. Cu cat h este mai mic, cu atat reteaua
de discretizare este mai fina. Sa precizam ca prin retea de discretizare seıntelege colectia de noduri si elemente (definitie valabila si pentru cazul mul-tidimensional).
Cea mai simpla versiune a functiilor de interpolare sunt functiile liniarepe portiuni. Pentru nodurile interioare, 2 ≤ A ≤ n definim:
NA(x) =
x−xA−1
hA−1pentru xA−1 ≤ x ≤ xA ,
xA+1−x
hApentru xA ≤ x ≤ xA+1 ,
0 pentru x < xA−1 sau x > xA+1 .
(4.21a)
Pentru nodurile de pe frontiera avem
N1(x) =x2 − x
h1
pentru x1 ≤ x ≤ x2 , (4.21b)
Nn+1(x) =x− xn
hn
pentru xn ≤ x ≤ xn+1 . (4.21c)
Aceste functii sunt ıntalnite ın literatura sub denumirea de functii cort, saucoif, sau acoperis, din motive evidente conform Figurii 4.1. Sa remarcam caNA(xB) = δAB, unde δAB este simbolul lui Kronecker (δAB = 1 daca A = Bsi δAB = 0 daca A = B). Cu alte cuvinte NA este egala cu unitatea ın nodulxA, respectiv este zero ın toate celelalte noduri.
O functie tipica wh ∈ Vh are forma∑n
A=1 cANA, si este prezentata ınFigura 4.2. Observam ca wh(x) este o functie continua (liniara pe portiuni),dar derivata este discontinua (constanta pe portiuni). Deasemenea, se poatevedea ın Figura 4.2 ca wh(1) = 0 conform definitiei spatiului Vh. Evident wh
este identic nula daca toate constantele cA sunt nule, A = 1, 2, . . . , n.

96 Metoda Elementelor Finite-Fundamente
1
x0
x x x x x x x xx
NN N N
1 2 3 A−1 A A+1 n−1 n n+1
A n+11
Figura 4.1: Functiile de baza liniare pe portiuni care formeaza, princombinatii liniare, multimea Sh.
w
cc
cc
c
c
1
2
3
4
5
n
1 2 3
4 5
n−2 n−1 n n+1
x
c
cn−1
n−2
Figura 4.2: O functie tipica wh(x) din spatiul Vh.

Metoda Elementelor Finite-Fundamente 97
O functie tipica din Sh se obtine adunand gh = gNn+1 la o functie tipicadin Vh. Aceasta asigura satisfacerea conditiei uh(1) = g.
Exercitiu.Sa consideram formularea slaba a problemei model (4.1),
1∫0
dw
dx
du
dxdx = −
1∫0
wf dx+ w(0)h , (4.22)
unde w ∈ V si u ∈ S sunt presupuse netede ın interiorul ele-mentelor (adica ın intervalele deschide xA < x < xA+1, A =1, 2, . . . , n), dar pot avea discontinuitati ale derivatei la frontiereleelementelor, adica ın noduri. Un exemplu de asemenea functii ılconstituie functiile liniare pe portiuni descrise mai sus. Din (4.22)si proprietatile de continuitate precizate mai sus, sa se arate ca
0 =n∑
A=1
xA+1∫xA
w
(d2u
dx2− f
)dx+ w(0)
[du
dx(0+) + h
]
+n∑
A=2
w(xA)
[du
dx(x+
A) − du
dx(x−A)
] (4.23)
Folosind tehnica utilizata ın Sectiunea 4.3 se poate concluzionaca ecuatiile Euler-Lagrange pentru (4.23) sunt:
(ı)d2u
dx2− f = 0 pentru xA < x < xA+1, A = 1, 2, . . . , n,
(ıı) −dudx
(0+) = h = 0,
(ııı)du
dx(x−A) =
du
dx(x+
A), unde A = 2, 3, . . . , n.
Observam ca (ı) este ecuatia diferentiala restrictionata la in-teriorul elementelor, iar (ııı) este o conditie de continuitate lainterfata dintre elementele adiacente. Ultima conditie apare supli-mentar fata de cazul prezentat ın Sectiunea 4.3, unde functiile aufost presupuse netede (continuitatea derivatei a permis ınlocuireasumei integralelor pe fiecare element cu integrala pe ıntreg dome-niul).
In formularea Galerkin a Metodei Elementului Finit se obtine osolutie aproximativa a ecuatiilor (ı)-(ııı).

98 Metoda Elementelor Finite-Fundamente
4.7 Proprietatile matricii K
Functiile de forma NA, A = 1, 2, . . . , n + 1, se anuleaza ın afara elementelorınvecinate nodului corespunzator fiecarei functii xA. Aceasta este o particu-laritate extrem de importanta a aproximatiei de tip element finit, si implicatiaimediata este ca matricea K va avea foarte multe zerouri. Aceasta se poate
AA−1 A+1 B
N NA B
Figura 4.3: Daca B > A+ 1, portiunile nenule ale functiilor NA si NB nu semai intersecteaza.
vedea imediat din Figura 4.3. Daca B > A+ 1, atunci
KAB =
1∫0
dNA
dx
dNB
dx︸ ︷︷ ︸0
dx = 0 . (4.24)
Din matricii K rezulta ca (4.24) este valabila si pentru A > B + 1. Sespune ca K este o matrice banda (adica elementele nenule sunt concentrateın vecinatatea diagonalei principale):
K =
K11 K12 0 0 . . . . . . . . . . . . 0K21 K22 K23 0 . . . . . . . . . . . . 00 K32 K33 K34 . . . . . . . . . . . . 0...
......
.... . .
......
......
0 . . . . . . . . . . . . Kn−2,n−3 Kn−2,n−2 Kn−2,n−1 00 . . . . . . . . . . . . 0 Kn−1,n−2 Kn−1,n−1 Kn−1,n
0 . . . . . . . . . . . . 0 0 Kn,n−1 Kn,n
Din punct de vedere al algoritmilor de calcul numeric asemenea matrici suntfoarte avantajoase pentru ca zerourile din exteriorul benzii nu trebuie memo-rate nici procesate.
Definitie. O matrice A, de dimensiune n×n se numeste pozitiv definitadaca:

Metoda Elementelor Finite-Fundamente 99
(ı) cT Ac ≥ 0 pentru orice vector c de dimensiune n,(ıı) cT Ac = 0 implica c = 0.
Observatia 1. O matrice simetrica si pozitiv definita poseda o inversaunica.
Observatia 2. Valorile proprii ale unei matrici pozitiv definita sunt realesi pozitive.
Teorema. Matricea K definita de (4.18) este pozitiv definita.Demonstratie(ı) Fie cA, A = 1, 2, . . . , n componentele unui vector arbitrar c(adica c = cA). Folosim aceste componente pentru a construio functie din Vh, wh =
∑nA=1 cANA, unde NA formeaza baza de
functii pentru V . Vom avea,
cT A c =n∑
A,B=1
cA KAB cB
=n∑
A,B=1
cA a(NA, NB) cB (definitia lui KAB)
= a
(n∑
A=1
cANA,n∑
B=1
cBNB
)(biliniaritatea formei a(·, ·))
= a(wh, wh
)(definitia lui wh)
=1∫0
(dw
dx
)2
︸ ︷︷ ︸≥0
dx conform (4.9)
≥ 0
(ıı) Sa presupunem ca cT A c = 0. Din demonstratia partii (ı)avem
1∫0
(dw
dx
)2
dx = 0
de unde rezulta ca wh trebuie sa fie constanta. Deoarece wh ∈ Vh
avem wh(1) = 0. Prin urmare wh(x) = 0 pentru orice x ∈ [0, 1],ceea ce este posibil numai daca cA = 0 pentru A = 1, 2, . . . , n.Prin urmare c = 0.
Faptul ca matricea K este simetrica, de tip banda, si pozitiv definita conducela algoritmi numerici foarte eficienti pentru acest tip de probleme, adicapentru solutionarea sistemului Kd = F .

100 Metoda Elementelor Finite-Fundamente
4.8 Analiza matematica a MEF ın 1D
4.8.1 Acuratetea solutiei
Un prim obiectiv al acestei sectiuni este sa aratam ca solutia aproximativauh obtinuta cu MEF ın varianta Galerkin este exacta ın noduri. Pentruaceasta vom utiliza functia Green a operatorului diferential. Definitia functieiGreen utilizeaza functia delta a lui Dirac, care a fost definita si descrisa ınSectiunea 3.1.2. Reamintim ca functia lui Dirac nu este o functie ın sensclasic, ci mai degraba un operator definit prin actiunea sa asupra functiilorcontinue. Daca w este o functie continua pe intervalul [0, 1], atunci conform(3.10) si (3.11) avem:
(w, δy) ≡1∫
0
δ(y − x) w(x) dx = w(y) , (4.25)
unde am notat2 δy = δ(y − x). Din (4.25) vedem de ce w trebuie sa fie ofunctie continua: cum δy selecteaza valoarea w(y), aceasta valoare trebuiesa fie unica; o discontinuitate a functiei w ın y ar introduce ambiguitatiın definirea lui w(y). Problema cu conditii la limita pentru functia Greenasociata cu (4.1) este:
d2G
dx2= −δy ın Ω (4.26a)
G(1) = 0 (4.26b)
dG
dx(0) = 0 (4.26c)
Observam ca (4.26) este problema (4.1) la care f este ınlocuita cu −δy iarg si h sunt egale cu zero. Pentru a integra (4.26a) reamintim ca functia luiDirac este derivata functiei unitate a lui Heaviside, conform (3.19), si prinurmare avem
δ(y − x) = − d
dxH(y − x) sau δ(x− y) =
d
dxH(x− y) .
Cum ın cazul de fata am luat ın (4.25) δy(x) = δ(y − x), ecuatia (4.26a)poate fi rescrisa ca,
d2G
dx2=
d
dxH(y − x) ,
2Functia δ este o functie para, deci δ(y − x) = δ(x − y).

Metoda Elementelor Finite-Fundamente 101
1−y
G
y 1
x
0
(a) Functia Green.
x1y
0
−1
dG/dx
(b) Derivata functiei Green.
Figura 4.4: Functia Green pentru problema 4.26.
care integrata conduce la,
dG
dx= c1 +H(y − x) =
1 + c1 daca x < y
c1 daca x > y
unde c1 este constanta de integrare (posibil functie de y). Cum pentru oricey trebuie satisfacuta (4.26c), rezulta c1 = −1 si3
dG
dx=
0 daca x < y
−1 daca x > y(4.27)
Integrand ınca odata, avem
Gy(x) =
c2 daca x < y
c3 − x daca x > y
Constanta c3 rezulta imediat din (4.26b), si anume c3 = 1. Constanta c2 oalegem astfel ıncat functia Green sa fie continua, deci c2 = 1 − y. In finalavem:
Gy(x) =
1 − y daca x ≤ y
1 − x daca x > y(4.28)
Graficul functiei Green este prezentat ın Figura 4.4(a), iar derivata ei esteprezentata ın Figura 4.4(b). Observam ca G este liniara pe portiuni. Prinurmare, daca y este un punct nodal (y = xA) atunci G ∈ Vh.
In continuarea analizei noastre avem nevoie de ecuatia variationala cores-punzatoare problemei (4.26). Aceasta poate fi dedusa din (4.6) ınlocuind u
3Cititorul poate verifica acest rezultat si pentru δy(x) = δ(x − y).

102 Metoda Elementelor Finite-Fundamente
cu G, f cu −δy, respectiv g si h cu 0. Rezulta,
a(w,Gy) =
1∫0
w(x)δ(y − x) = w(y) . (4.29)
Ecuatia (4.29) este valabila pentru toate functiile continue4 w ∈ V.
Teorema. uh(xA) = u(xA), A = 1, 2, . . . , n, n + 1 (adica valorilelui uh coincid cu solutia exacta ın noduri).
Pentru a demonstra teorema avem nevoie de doua rezultate pre-liminare.
(ı) a(u− uh, wh) = 0 pentru orice wh ∈ Vh.Demonstratie. Asa cum am precizat ın Sectiunea 4.4, Vh ⊂ V,deci putem ınlocui w cu wh ın ecuatia variationala (4.11),
a(wh, u) = −(wh, f) + wh(0)h .
Daca scadem din aceasta ecuatie pe (4.13) si folosim biliniaritateaformei a(·, ·) obtinem rezultatul dorit.
(ıı) u(y) − uh(y) = a(u− uh, G), unde G este functia Green.Demonstratie.
u(y) − uh(y) = (u− uh, δy) (din definitia lui δy)= a(u− uh, Gy) (conform ecuatiei 4.29)
A doua egalitate este adevarata deoarece u−uh este o functie dinV .
Demonstratia teoremei. Dupa cum am remarcat mai sus, dacay = xA este un punct nodal, atunci G ∈ Vh. In acest caz vomavea,
u(xA) − uh(xA) = a(u− uh, Gy) (conform (ıı))= 0 (conform (ı))
Teorema este valabila pentru A = 1, 2, . . . , n+ 1.
4Faptul ca patratul derivatei lui w este integrabil implica continuitatea lui w conformunei cunoscute teoreme a lui Sobolev. Acest rezultat este valabil numai pentru cazulmono-dimensional. In cazul bi- si tri-dimensional este necesar ca si derivatele de ordinulal doilea sa aiba patratul integrabil pentru a asigura continuitatea functiei.

Metoda Elementelor Finite-Fundamente 103
Rezultate de acest gen, care demonstreaza proprietati exceptionale de acu-ratete, sunt adesea denumite fenomene de superconvergenta. Totusi, citi-torul poate intui ca ın situatii mai complicate nu va fi posibila garantareaexactitatii valorilor numerice ın noduri. Cu toate acestea, metodele rezidu-urilor ponderate ofera cadrul ın care anumite proprietati optime de preciziea solutiei pot fi adesea garantate.
4.8.2 Acuratetea derivatelor
Al doilea obiectiv al acestei sectiuni este sa examinam proprietatile de conver-genta (catre valorile corecte) ale derivatei solutiei numerice. Pentru aceastavom reaminti mai ıntai cateva notiuni elementare de analiza numerica.
Formula lui Taylor cu rest
Fie functia f : [0, 1] → R of functie care este de k ori derivabila, iar y si zsunt doua puncte din intervalul [0, 1]. Exista un punct c ıntre y si z astfelıncat
f(z) =f(y) + (z − y)df
dx(y) +
(z − y)2
2
d2f
dx2(y)
+(z − y)3
3!
d3f
dx3(y) + . . .+
(z − y)k
k!
dkf
dxk(c)
(4.30)
Formula (4.30) poarta numele de dezvoltarea ın serie Taylor finita.
Teorema de medie
Teorema de medie este un caz special al formulei lui Taylor, care este valabilapentru k ≥ 1:
f(z) = f(y) + (z − y)df
dx(c) . (4.31)
Sa consideram un interval tipic [xA, xA+1]. Am aratat mai sus ca uh esteexacta la capetele acestui interval. Derivata lui uh ın interiorul intervaluluieste constanta,
duh
dx(x) =
uh(xA+1) − uh(xA)
hA
, xA < x < xA+1 (4.32)
Teorema. Sa presupunem ca u este continuu derivabila. Existacel putin un punct ın interiorul intervalului [xA, xA+1] ın care(4.32) este exacta.

104 Metoda Elementelor Finite-Fundamente
Demonstratie. Conform teoremei de medie (4.31) exista un punctc, cu xA < c < xA+1, astfel ıncat
u(xA+1) − u(xA)
hA
=du
dx(c)
Deoarece u(xA) = uh(xA) si u(xA+1) = uh(xA+1) putem rescrierelatia de mai sus sub forma
uh(xA+1) − uh(xA)
hA
=du
dx(c)
Comparand aceasta ultima relatie cu (4.32) obtinem rezultatuldorit.
Evident, daca nu cunoastem apriori solutia exacta (si acesta este cazulın practica), nu putem determina exact punctul ın care derivata este exacta.Rezultatele prezentate ın continuare sunt mai utile ın sensul ca putem afirmasuperioritatea punctelor de mijloc ale intervalului ın sensul preciziei optimea derivatei independent de u.
Fie,
de
dx(α) ≡ duh
dx(α) − du
dx(α) =
uh(xA+1) − uh(xA)
hA
− du
dx(α)
eroarea derivatei ıntr-un punct α ∈ [xA, xA+1]. Pentru a stabili superioritateapunctelor de mijloc ın evaluarea derivatelor, avem nevoie de un rezultat pre-liminar.
Lema. Fie u derivabila de trei ori. Atunci,
de
dx(α) =
(xA+1 + xA
2− α
)d2u
dx2(α)
+1
3!hA
[(xA+1 − α)3d
3u
dx3(c1) − (xA − α)3d
3u
dx3(c2)
](4.33)
unde c1 si c2 sunt ın [xA, xA+1].Demonstratie. Dezvoltam ın serie Taylor pe u(xA+1) si u(xA) ın

Metoda Elementelor Finite-Fundamente 105
jurul punctului α ∈ [xA, xA+1]:
u(xA+1) =u(α) + (xA+1 − α)du
dx(α) +
(xA+1 − α)2
2
d2u
dx2(α)
+(xA+1 − α)3
3!
d3u
dx3(c1), c1 ∈ [α, xA+1]
u(xA) =u(α) + (xA − α)du
dx(α) +
(xA − α)2
2
d2u
dx2(α)
+(xA − α)3
3!
d3u
dx3(c2), c2 ∈ [xA, α]
Scazand cele doua relatii termen cu termen si ımpartind cu hA
obtinem
u(xA+1) − u(xA)
hA
=du
dx(α) +
(xA+1 + xA
2− α
)d2u
dx2(α)
+1
3!hA
[(xA+1 − α)3d
3u
dx3(c1) − (xA − α)3d
3u
dx3(c2)
]
Inlocuind ın membrul stang pe u(xA+1) cu uh(xA+1), respectiv peu(xA) cu uh(xA) obtinem rezultatul dorit.
Pentru a vedea ca (4.33) ne furnizeaza informatii asupra preciziei deri-vatelor, sa ne imaginam ca reteaua de discretizare este rafinata sistematic(adica facem pe hA sa tinda la zero). In aceasta situatie h2
A este mult maimic decat hA. Prin urmare, daca pentru u dat membrul drept din (4.33)este5 O(h2
A) eroarea derivatei este mult mai mica decat daca membrul dreptar fi O(hA). Exponentul lui hA poarta numele de ordin de convergenta sauordin de precizie. Spre exemplu sa presupunem α→ xA. Atunci,
de
dx(xA) =
hA
2
d2u
dx2(xA) +
h2A
3!
d3u
dx3(c1) = O(hA)
Daca hA → 0 primul termen este dominant. Se pune ıntrebarea daca existao valoare pentru α pentru care sa obtinem o precizie de ordin mai ridicat.
Corolar. Fie xA+1/2 ≡ (xA + xA+1)/2 (adica punctul de mijlocal intervalului). Atunci,
de
dx(xA+1/2) =
h2A
24
d3u
dx3(c) = O(h2
A), c ∈ [xA, xA+1].
5Spunem ca o functie f(x) este O(xk) daca f(x)/xk → constanta daca x → 0.

106 Metoda Elementelor Finite-Fundamente
Demonstratie. Conform (4.33) avem
de
dx(xA+1/2) =
h2A
48
[d3u
dx3(c1) +
d3u
dx3(c2)
]
Cum d3u/dx3 este continua, exista cel putin un punct c ıntre c1si c2 astfel ıncat
d3u
dx3(c) =
1
2
[d3u
dx3(c1) +
d3u
dx3(c2)
]
Combinand cele doua relatii obtinem demonstratia dorita.
4.8.3 Concluzii
Analiza matematica a solutiei cu elemente finite de tip Galerkin prezentata ınaceasta sectiune pune ın evidenta urmatoarele proprietati ale solutiei aprox-imative uh pentru problema (4.1):
i. Este exacta ın noduri;
ii. Exista cel putin un punct ın interiorul fiecarui element ın care derivataeste exacta;
iii. Derivata are precizie de ordinul al doilea ın punctul de mijloc al elemen-tului.
4.9 Exemplu de aplicare MEF pentru o pro-
blema 1D
Consideratiile teoretice prezentate ın acest capitol vor fi exemplificate ın celece urmeaza pentru problema (4.1) la care particularizam functia f(x),
f(x) = q2 cos(qx) , (4.34)
unde q este o constanta. Solutia exacta a problemei este data de (4.2),
u(x) = g + (1 − x)h −1∫
x
y∫0
q2 cos(qz) dz
dy ,
= g + (1 − x)h + cos(q) − cos(qx) .
(4.35)

Metoda Elementelor Finite-Fundamente 107
Pentru exemplul numeric prezentat ın continuare alegem:
g = −0.5, h = 2.0, q = 4.0 .
Incepem prin a alege nodurile din domeniu si de pe frontiera:
x1 = 0.0, x2 = 0.15, x3 = 0.4, x4 = 0.7, x5 = 1.0
Se observa ca avem o retea de discretizare neuniforma, cu lungimile ele-mentelor:
h1 = 0.15, h2 = 0.25, h3 = 0.3, h4 = 0.3
In continuare evaluam elementele matricii K conform formulei (4.18) tinandcont de expresiile functiilor de baza (4.21):
K11 =
1∫0
dN1
dx
dN1
dxdx =
x2∫x1
(− 1
h1
)(− 1
h1
)dx =
1
h1
K12 =
1∫0
dN1
dx
dN2
dxdx =
x2∫x1
(− 1
h1
)(1
h1
)dx = − 1
h1
= K21
K22 =
1∫0
dN2
dx
dN2
dxdx =
x2∫x1
(1
h1
)(1
h1
)dx+
x3∫x2
(− 1
h2
)(− 1
h2
)dx
=1
h1
+1
h2
K23 =
1∫0
dN2
dx
dN3
dxdx =
x3∫x2
(− 1
h2
)(1
h2
)dx = − 1
h2
= K32
K33 =
1∫0
dN3
dx
dN3
dxdx =
x3∫x2
(1
h2
)(1
h2
)dx+
x4∫x3
(− 1
h3
)(− 1
h3
)dx
=1
h2
+1
h3
K34 =
1∫0
dN3
dx
dN4
dxdx =
x4∫x3
(− 1
h3
)(1
h3
)dx = − 1
h3
= K43
K44 =
1∫0
dN4
dx
dN4
dxdx =
x4∫x3
(1
h3
)(1
h3
)dx+
x5∫x4
(− 1
h4
)(− 1
h4
)dx
=1
h3
+1
h4

108 Metoda Elementelor Finite-Fundamente
Sa trecem acum la evaluarea termenilor liberi conform (4.19), utilizand dinnou functiile de baza (4.21):
F1 = −1∫
0
N1 f dx+ hN1(0)︸ ︷︷ ︸=1
−g
1∫0
dN1
dx
dN5
dx︸ ︷︷ ︸=0
dx
= −x2∫
x1
x2 − x
h1
q2 cos(qx)dx+ h
=1
h1
[cos(qx2) − cos(qx1)] + q sin(qx1) + h
Ultimul termen din expresia lui F1 este nul conform (4.24), iar N1(0) = 1prin definitia lui N1.
F2 = −1∫
0
N2 f dx+ hN2(0)︸ ︷︷ ︸=0
−g
1∫0
dN2
dx
dN5
dx︸ ︷︷ ︸=0
dx
= −x2∫
x1
x− x1
h1
q2 cos(qx)dx−x3∫
x2
x3 − x
h2
q2 cos(qx)dx
= − 1
h1
[cos(qx2) − cos(qx1)] − q sin(qx2)
+1
h2
[cos(qx3) − cos(qx2)] + q sin(qx2)
= − 1
h1
[cos(qx2) − cos(qx1)] +1
h2
[cos(qx3) − cos(qx2)]
In mod analog rezulta F3,
F3 = −1∫
0
N3 f dx+ hN3(0)︸ ︷︷ ︸=0
−g
1∫0
dN3
dx
dN5
dx︸ ︷︷ ︸=0
dx
= − 1
h2
[cos(qx3) − cos(qx2)] +1
h3
[cos(qx4) − cos(qx3)]

Metoda Elementelor Finite-Fundamente 109
In cazul ultimului termen liber, F4, avem:
F4 = −1∫
0
N4 f dx+ hN4(0)︸ ︷︷ ︸=0
−g
1∫0
dN4
dx
dN5
dxdx
= − 1
h3
[cos(qx4) − cos(qx3)] +1
h4
[cos(qx5) − cos(qx4)]
+ g1
h4
Programul prezentat mai jos calculeaza matricea sistemului K si vectorultermenilor liberi F , dupa care solutioneaza sistemul Kd = F si afiseazasolutia numerica ımpreuna cu solutia exacta data de (4.35). Programul estescris ın limbaj FORTRAN, si are ca scop doar calculul numeric pentru exem-plul de mai sus. Practic au fost traduse formulele de calcul ıntr-un limbaj deprogramare capabil sa le evalueze numeric. Acesta a fost de fapt destinatiaoriginala a limbajului FORTRAN, al carui nume este abrevierea de la FOR-mula TRANSlation. Programul NU exemplifica implementarea practica aMEF, aceasta fiind abordata ın sectiunea urmatoare.
PROGRAM MEF1Danalitic
IMPLICIT NONEINTEGER I,J,NPARAMETER (N=5) ! numarul de noduriREAL*8 XA(N),HA(N-1),K(N-1,N-1),F(N-1),D(N-1)REAL*8 g,h,q ! constantele problemei
PARAMETER (g=-5.0D-1,h=2.0D0,q=4.0D0)DATA XA/0.0,0.15,0.4,0.7,1.0/ ! abscisele nodurilor
DO I=1,N-1HA(I)=XA(I+1)-XA(I) ! lungimile elementelorDO J=1,N-1
K(I,J)=0.0 ! initializare matriceENDDO
ENDDO
C CALCUL MATRICEK(1,1)=1.0D0/HA(1)K(1,2)=-1.0D0/HA(1)K(2,1)=K(1,2)K(2,2)=1.0D0/HA(1)+1.0D0/HA(2)K(2,3)=-1.0D0/HA(2)

110 Metoda Elementelor Finite-Fundamente
K(3,2)=K(2,3)K(3,3)=1.0D0/HA(2)+1.0D0/HA(3)K(3,4)=-1.0D0/HA(3)K(4,3)=K(3,4)K(4,4)=1.0D0/HA(3)+1.0D0/HA(4)DO I=1,N-1
write (*,’(4f12.6)’) (K(I,J),J=1,N-1)ENDDO
C CALCUL TERMENI LIBERIF(1)=(DCOS(q*XA(2))-DCOS(q*XA(1)))/HA(1)+ +q*DSIN(q*XA(1))+hF(2)=-(DCOS(q*XA(2))-DCOS(q*XA(1)))/HA(1)+ +(DCOS(q*XA(3))-DCOS(q*XA(2)))/HA(2)F(3)=-(DCOS(q*XA(3))-DCOS(q*XA(2)))/HA(2)+ +(DCOS(q*XA(4))-DCOS(q*XA(3)))/HA(3)F(4)=-(DCOS(q*XA(4))-DCOS(q*XA(3)))/HA(3)+ +(DCOS(q*XA(5))-DCOS(q*XA(4)))/HA(4)+ +g/HA(4)DO I=1,N-1
write (*,’(f12.6)’) F(I)ENDDO
C REZOLVARE SISTEM DE ECUATIICALL DLSASF(N-1,K,N-1,F,D)
C AFISARE SOLUTIE SI COMPARARE CU SOL. EXACTADO I=1,N-1
write(*,’(2f12.6)’) D(I),& g+(1-XA(I))*h+DCOS(q)-DCOS(q*XA(I))ENDDO
END
Solutionarea sistemului de ecuatii liniare se face cu o subrutina din bibli-oteca IMSL/MATH [1]. Aceasta biblioteca, dezvoltata de Visual Numerics,este o colectie de subrutine si functii FORTRAN utile pentru implementareaalgoritmilor numerici. In particular, subrutina DLSASF (prima litera D indicadubla precizie) solutioneaza sisteme de ecuatii liniare cu matrice reala sisimetrica. Pentru detalii legate de solutionarea sistemelor de ecuatii liniarecititorul poate consulta excelenta monografie a lui Golub si Van Loan [19].
Pentru exemplul numeric considerat, matricea sistemului si vectorul ter-

Metoda Elementelor Finite-Fundamente 111
menilor liberi sunt:
K =
6.666666 −6.666666 0 0−6.666666 10.666666 −4.0 0
0 −4.0 7.333334 −3.3333340 0 −3.333334 6.666667
F =
0.835571−2.253711
0.3747312.338672
Solutia sistemului de patru ecuatii liniare este
d =
−0.153644−0.279879
0.0755560.388579
= dexact
si coincide (cel putin primele sase zecimale) cu solutia exacta evaluata nu-meric din (4.35).
Observatie Faptul ca solutia numerica coincide cu solutia exactaın noduri (asa cum am demonstat anterior) se datoreste si faptuluica integralele din membrul drept au fost evaluate analitic. Incazul unor functii mai complicate aceasta integrare analitica numai este posibila. Mai mult, ın aplicatiile practice functia f esteın general precizata prin valorile ei nodale, si prin urmare trebuieaproximata (prin interpolare) ın interiorul elementelor.
Figura 4.5 prezinta solutia exacta (4.35) a problemei considerata ın acestexemplu, precum si solutia aproximativa liniara pe portiuni. Este evidentca micsorarea elementelor (considerarea unui numar mai mare de noduri)ımbunatateste constant solutia aproximativa tinand cont ca valorile nodalesunt exacte. Pe de alta parte, derivata solutiei cu elemente finite este con-stanta pe fiecare element, asa cum se vede din Figura 4.6(a), si aproximeazagrosier derivata solutiei exacte. Totusi, ın conformitate cu rezultatul demon-strat anterior, valoarea derivatei solutiei aproximative este foarte apropiatade valoarea exacta ın punctele de mijloc ale elementelor. Aceasta observatieeste foarte utila pentru construirea unei aproximatii mai netede, liniara peportiuni (ın loc de constanta), asa cum se arata ın Figura 4.6(b). Valorilederivatei pentru nodurile x1 si x5 sunt obtinute prin extrapolarea liniara avalorilor din interiorul domeniului. In interior, derivata este aproximata prininterpolare liniara ıntre punctele ın care precizia este de ordinul al doilea. In

112 Metoda Elementelor Finite-Fundamente
x1=0 x2=0.15 x3=0.4 x4=0.7 x5=1−0.5
−0.4
−0.3
−0.2
−0.1
0
0.1
0.2
0.3
0.4
0.5
solutia exactasolutia FEM
Figura 4.5: Solutia exacta si solutia aproximativa cu elemente finite liniare.
x1=0 x2=0.15 x3=0.4 x4=0.7 x5=1−6
−4
−2
0
2
derivata solutiei exactederivata solutiei FEMvalori in centrul elementelor
(a) Derivata MEF.
x1=0 x2=0.15 x3=0.4 x4=0.7 x5=1−6
−4
−2
0
2
derivata solutiei exactevalori FEM in centrul elementeloraproximatie liniara pe portiuni
(b) Derivata liniara pe portiuni.
Figura 4.6: Derivata solutiei aproximative MEF.

Metoda Elementelor Finite-Fundamente 113
acest fel obtinem o precizie globala a derivatei de acelasi ordin cu al solutiei.Aceasta tehnica de netezire a derivatei solutiei este utilizata ın practica pen-tru postprocesarea solutiei MEF, si generalizarea ei ın cazul multidimensionalpoarta numele de Superconvergent Patch Recovery. Vom reveni asupra aces-tui subiect ın cazul problemelor bidimensionale. In cazul utilizarii variabilelorauxiliare pentru calculul curgerii, viteza este obtinuta prin calculul gradien-tului solutiei numerice. Tehnica mentionata mai sus este foarte utila pentrucalculul valorilor nodale ale vitezei, care ulterior va putea fi interpolata cuaceleasi functii care au fost utilizate pentru interpolarea variabilelor auxiliare(potentialul vitezei sau functia de curent).
4.10 Implementarea Metodei Elementului Fi-
nit
Din exemplul prezentat ın sectiunea precedenta cititorul poate remarca ime-diat ca una din componentele importante ale MEF este evaluarea integralelorprovenite din formularea slaba a problemelor cu conditii la limita. In cazulproblemei 1D functiile NA sunt ne-nule doar pe elementele adiacente nodu-lui xA si acest fapt este utilizat la calculul integralelor. Se poate observaca majoritatea integralelor sunt calculate prin ınsumarea contributiilor ele-mentelor adiacente nodului curent. Se pune deci ıntrebarea: nu ar fi maicomod sa evaluam integralele necesare pentru fiecare element ın parte si apoisa ınsumam corespunzator contributiile elementale la matricea K, respectivla vectorul F ? Intr-adevar, aceasta sa dovedit a fi varianta cea mai co-moda din punctul de vedere al programarii MEF. Deasemenea, introducereaconditiilor la limita esentiale (impunerea valorilor solutiei pe frontiera) seface diferit de varianta indicata ın (4.17). Aceste modificari algoritmice auun pret, dar ın competitia costperformante s-au impus pentru ca asigurascrierea usoara a programelor.
4.10.1 Abordarea elementala
Pana acum am considerat Metoda Elementului Finit pur si simplu ca uncaz particular al metodei Galerkin aplicata formularii slabe a problemei cuconditii la limita. Faptul ca am construit o metoda de tip element finitse datoreaza alegerii speciale a functiilor de baza: acestea sunt netede peportiuni si au suport local (NA = 0 ın afara unei vecinatati a nodului respec-tiv). Acesta este punctul de vedere al matematicianului; este un punct devedere global prin aceea ca functiile de baza sunt definite pe ıntreg domeniul

114 Metoda Elementelor Finite-Fundamente
problemei. Aceasta abordare globala este utila pentru obtinerea si analizaproprietatilor matematice ale MEF.
Din punct de vedere practic este mai util punctul de vedere local, sauelemental. Aceasta abordare este mai apropiata de originile ingineresti aleMEF si, asa cum mentionam mai sus, este mai utila din punct de vedereal implementarii MEF, respectiv pentru definirea de noi tipuri de elementefinite. Este momentul deci sa ne punem ıntrebarea ce este un element finit?
Elementul finit liniar (descriere globala)
(global 1) Domeniul elemental: [xA, xA+1]
(global 2) Noduri: xA si xA+1
(global 3) Necunoscute (grade de libertate): dA si dA+1
(reamintim ca dA = uh(xA))
(global 4) Functii de forma: NA(x) si NA+1(x)
(global 5) Functia de interpolare: uh(x) = NA(x)dA +NA+1(x)dA+1
Din descrierea de mai sus putem concluziona ca un element finit liniar estedefinit de toate informatiile necesare pentru precizarea restrictiei functieiuh pe domeniul elemental. Informatiile enumerate mai sus sunt precizate ınfunctie de parametri globali, adica coordonate globale, functii de forma globa-le, numerotarea globala a nodurilor (indicii globali i-am notat prin conventiecu litere mari A, B, etc.).
Pentru a simplifica si standardiza procedurile de implementare a MEFeste convenabil sa definim elementul cu cantitati locale, dupa cum urmeaza.
Elementul finit liniar (descriere locala)
(local 1) Domeniul elemental: [ξ1, ξ2]
(local 2) Noduri: ξ1 si ξ2
(local 3) Necunoscute (grade de libertate): d1 si d2
(local 4) Functii de forma: N1(ξ) si N2(ξ)
(local 5) Functia de interpolare: uh(ξ) = N1(ξ)d1 +N2(ξ)d2

Metoda Elementelor Finite-Fundamente 115
Sa remarcam ca ın descrierea locala numerotarea nodurilor ıncepe cu 1 sicontinua pana la numarul de noduri pe element nne.
Domeniul elemental ın descriere locala este ales convenabil pentru a puteaefectua comod toate operatiile de integrare. Pentru elemente 1D se alege deobicei
ξ1 = −1 si ξ2 = +1
Legatura ıntre domeniul local [ξ1, ξ2] ≡ [−1, 1] si domeniul elemental ın des-criere globala se face printr-o transformare geometrica afina
ξ : [xA, xA+1] → [−1, 1], astfel ıncat ξ(xA) = −1 si ξ(xA+1) = +1
In cazul de fata, cele doua conditii la capetele elementului finit pot defini ceidoi coeficienti c1 si c2 ai unui polinom de gradul ıntai,
ξ(x) = c1 + c2x ,
prin solutionarea sistemului de ecuatii−1 = c1 + c2xA ,
+1 = c1 + c2xA+1 .
Transformarea geometrica va avea ın final expresia:
ξ(x) =2x− xA − xA+1
hA
, cu hA = xA+1 − xA (4.36)
iar transformarea inversa este,
x(ξ) =hAξ + xA + xA+1
2. (4.37)
Am obtinut astfel o transformare afina atat x → ξ conform formulei (4.36)cat si ξ → x conform (4.37).
Notatii
In cele ce urmeaza vom conveni sa notam cu litere mici a, b, c, . . .indicii aferenti sistemului de numerotare local. Cu litere mariA,B,C, . . . am notat indicii ın numerotare globala. Pentru anu complica notatiile, functiile de forma vor fi notate cu N , darexpresiile difera functie de indicele ce denota descrierea localasau globala, adica Na si NA. Acolo unde este nevoie vom precizaexplicit si indicele superior aferent elementului curent, e, adica
N ea(ξ) = NA(xe(ξ)) unde xe : [ξ1, ξ2] → [xe
1, xe2] ≡ [xA, xA+1]
Domeniul −1 ≤ ξ ≤ 1 defineste asa-numitul element de referinta.

116 Metoda Elementelor Finite-Fundamente
ξ=−1 ξ=+10
1
N1
ξ=−1 ξ=+10
1
N2
Figura 4.7: Functiile de baza pentru elementul de referinta (descrierea lo-cala).
Exprimate ın coordonata locala ξ, functiile de baza au expresile
Na(ξ) =1
2(1 + ξaξ), a = 1, 2 . (4.38)
Se poate observa usor ca (4.37) poate fi scrisa folosind (4.38) sub forma:
xe(ξ) =2∑
a=1
Na(ξ)xea (4.39)
obtinand o forma similara functiei de interpolare (local 5). Derivatele functiilorde forma sunt
dNa
dξ=ξa2
(4.40)
iar derivata transformarii geometrice este
dxe
dξ=he
2, si
dξ
dxe=
(dxe
dξ
)−1
=2
he(4.41)
unde he ≡ xe2 − xe
1.
4.10.2 Calculul matricii si vectorului pentru element
Odata introdus conceptul de element finit, ne propunem sa ıl utilizam lacalculul matricii sistemului si al termenilor liberi. Calculul integralelor lanivel elemental este mai comod din punct de vedere al programarii.
Ne reamintim ca ın Sectiunea 4.9 am evaluat componentele matricii sis-temului de ecuatii ınsumand contributiile nenule ale fiecarui element:
KAB ≡ a(NA, NB) =
1∫0
∂NA
∂x
∂NB
∂xdx =
nel∑e=1
∫Ωe
∂NA
∂x
∂NB
∂xdx =
nel∑e=1
KeAB

Metoda Elementelor Finite-Fundamente 117
unde Ωe ≡ [xe1, x
e2] este domeniul elementului e.
Daca examinam ınsa elementul e = A, ale carui noduri sunt A si A + 1,deci domeniul elemental este Ωe=A ≡ [xA, xA+1], observam ca integralelecalculate pe acest element contribuie la calculul mai multor componente alematricii: KAA, KA,A+1, KA+1,A si KA+1,A+1. Prin urmare, din punct devedere al implementarii practice (ın special pentru probleme 2D si 3D, curetele de discretizare nestructurate),
este mai convenabil sa calculam pentru fiecare element ınparte integralele care vor contribui la componentele matriciisistemului, decat sa cautam pentru fiecare componenta caresunt elementele care au contributii nenule.
In plus, calculele efectuate pentru fiecare element presupun anumite operatiiauxiliare, care din motive de eficienta este preferabil sa se efectueze o singuradata pentru un element. Prin urmare, vom calcula pentru fiecare elementurmatoarea matrice elementala:
keab ≡
xe2∫
xe1
dN ea
dx
dN eb
dxdx (4.42)
Cu schimbarea de variabila (4.39) putem calcula integrala de mai sus uti-lizand functiile de baza exprimate pe elementul de referinta, (4.38). Tinandcont ca prin schimbarea variabilei avem
d
dx=
d
dξ
dξ
dx=
2
he
d
dξ(4.43a)
dx =dx
dξ=he
2dξ (4.43b)
obtinem:
keab =
ξ=+1∫ξ=−1
(2
he
dN ea
dξ
)(2
he
dN eb
dξ
)he
2dξ =
ξ=+1∫ξ=−1
2
he
dN ea
dξ
dN eb
dξdξ (4.44)
Cum pentru elementele liniare derivata functiilor de forma este simplu datade (4.40), integrala poate fi evaluata imediat si obtinem ke
ab = (ξaξb)/he,
respectiv matricea elementala pentru elementul liniar 1D este
ke =1
he
[1 −1
−1 1
](4.45)

118 Metoda Elementelor Finite-Fundamente
Pentru calculul termenilor liberi vom aplica aceeasi tehnica de calcul e-lemental. Vom ıncepe prin calculul integralei corespunzatoare functiei f(x),pentru care utilizam din nou schimbarea de variabila,
f ea = −
xe2∫
xe1
Na f dx = −ξ=+1∫
ξ=−1
Na(ξ) f(x(ξ))dx
dξdξ (4.46)
Pentru exemplul din Sectiunea 4.9 avem
f ea = −
ξ=+1∫ξ=−1
1 + ξaξ
2q2 cos
[q
(he
2ξ +
xe1 + xe
2
2
)]he
2dξ
= − ξahe
[cos(qxe2) − cos(qxe
1)]
− q
2(1 + ξa) sin(qxe
2) +q
2(1 − ξa) sin(qxe
1)
Cu acestea, vectorul elemental care contine contributia integralei de domeniula vectorul termenilor liberi va fi
f e =
[cos(qxe
2) − cos(qxe1)] /h
e + q sin(qxe1)
− [cos(qxe2) − cos(qxe
1)] /he − q sin(qxe
2)
(4.47)
4.10.3 Asamblarea sistemului de ecuatii
Odata calculate matricea si vectorul termenilor liberi pentru un element tre-buie sa adaugam contributia elementului respectiv la matricea K, respectivla vectorul F . Intr-o prima faza vom face abstractie de conditiile la limita(naturale si esentiale) urmand ca acestea sa fie luate ın considerare ulterior.
Reteaua de discretizare corespunzatoare domeniului de analiza este pre-cizata cel putin prin doua categorii de informatii: tabelul de elemente sitabelul de coordonate. Primul tabel precizeaza legatura ıntre numerotarea lo-cala si numerotarea globala a nodurilor pentru fiecare element finit. Al doileatabel precizeaza coordonatele globale ale nodurilor retelei. Cu acestea putemafla imediat valorile xe
1 si xe2 necesare calculului matricii ke si a vectorului
f e.
In cele ce urmeaza vom parcurge ın detaliu procedura de asamblare asistemului de ecuatii pentru exemplul din Sectiunea 4.9.

Metoda Elementelor Finite-Fundamente 119
Tabelul 4.1: Tabelul de elemente si tabelul de coordonate
element nodul 1 nodul 2
e=1 1 2e=2 2 3e=3 3 4e=4 4 5
nodul coordonata
1 x1 = 0.02 x2 = 0.153 x3 = 0.44 x4 = 0.75 x5 = 1.0
Initial consideram toate componentele matricii K si vectorului F ca fiindnule. Asamblarea primului element e = 1 conduce la urmatoarele modificari:
K =
k
(1)11 k
(1)12 0 0 0
k(1)21 k
(1)22 0 0 0
0 0 0 0 00 0 0 0 00 0 0 0 0
=
1h1
− 1h1
0 0 0
− 1h1
1h1
0 0 0
0 0 0 0 00 0 0 0 00 0 0 0 0
F =
f(1)1
f(1)2
000
=
[cos(qx2) − cos(qx1)] /h1 + q sin(qx1)− [cos(qx2) − cos(qx1)] /h1 − q sin(qx2)
000
Urmeaza asamblarea elementului e = 2,
K =
k
(1)11 k
(1)12 0 0 0
k(1)21 k
(1)22 + k
(2)11 k
(2)12 0 0
0 k(2)21 k
(2)22 0 0
0 0 0 0 00 0 0 0 0
=
1h1
− 1h1
0 0 0
− 1h1
1h1
+ 1h2
− 1h2
0 0
0 − 1h2
1h2
0 0
0 0 0 0 00 0 0 0 0

120 Metoda Elementelor Finite-Fundamente
F =
f(1)1
f(1)2 + f
(2)1
f(2)2
00
=
[cos(qx2) − cos(qx1)] /h1 + q sin(qx1)− [cos(qx2) − cos(qx1)] /h1 + [cos(qx3) − cos(qx2)] /h2
− [cos(qx3) − cos(qx2)] /h2 − q sin(qx3)00
urmata de asamblarea celui de-al treilea element e = 3,
K =
k
(1)11 k
(1)12 0 0 0
k(1)21 k
(1)22 + k
(2)11 k
(2)12 0 0
0 k(2)21 k
(2)22 + k
(3)11 k
(3)12 0
0 0 k(3)21 k
(3)22 0
0 0 0 0 0
=
1h1
− 1h1
0 0 0
− 1h1
1h1
+ 1h2
− 1h2
0 0
0 − 1h2
1h2
+ 1h3
− 1h3
0
0 0 − 1h3
1h3
0
0 0 0 0 0
F =
f(1)1
f(1)2 + f
(2)1
f(2)2 + f
(3)1
f(3)2
0
=
[cos(qx2) − cos(qx1)] /h1 + q sin(qx1)− [cos(qx2) − cos(qx1)] /h1 + [cos(qx3) − cos(qx2)] /h2
− [cos(qx3) − cos(qx2)] /h2 + [cos(qx4) − cos(qx3)] /h3
− [cos(qx4) − cos(qx3)] /h3 − q sin(qx4)0

Metoda Elementelor Finite-Fundamente 121
iar prin asamblarea ultimului element e = 4 obtinem ın final,
K =
k
(1)11 k
(1)12 0 0 0
k(1)21 k
(1)22 + k
(2)11 k
(2)12 0 0
0 k(2)21 k
(2)22 + k
(3)11 k
(3)12 0
0 0 k(3)21 k
(3)22 + k
(4)11 k
(4)12
0 0 0 k(4)21 k
(4)22
=
1h1
− 1h1
0 0 0
− 1h1
1h1
+ 1h2
− 1h2
0 0
0 − 1h2
1h2
+ 1h3
− 1h3
0
0 0 − 1h3
1h3
+ 1h4
− 1h4
0 0 0 − 1h4
1h4
F =
f(1)1
f(1)2 + f
(2)1
f(2)2 + f
(3)1
f(3)2 + f
(4)1
f(4)2
=
[cos(qx2) − cos(qx1)] /h1 + q sin(qx1)− [cos(qx2) − cos(qx1)] /h1 + [cos(qx3) − cos(qx2)] /h2
− [cos(qx3) − cos(qx2)] /h2 + [cos(qx4) − cos(qx3)] /h3
− [cos(qx4) − cos(qx3)] /h3 + [cos(qx5) − cos(qx4)] /h4
− [cos(qx5) − cos(qx4)] /h4 − q sin(qx5)
Prima diferenta notabila fata de calculul efectuat ın Sectiunea 4.9 este camatricea are dimensiunea 5 × 5, iar vectorul are dimensiunea 5.
In cele ce urmeaza vom nota pe scurt operatorul de asamblare A cuajutorul caruia desemnam procedura descrisa mai sus astfel:
K =nel
Ae=1
ke si F =nel
Ae=1
f e (4.48)
Implementarea conditiilor la limita naturale
Pentru a lua ın considerare conditiile la limita naturale este suficient samodificam componenta F1 a vectorului termenilor liberi, prin adaugarea va-

122 Metoda Elementelor Finite-Fundamente
lorii h. Vom avea deci,
F =
f(1)1 + h
f(1)2 + f
(2)1
f(2)2 + f
(3)1
f(3)2 + f
(4)1
f(4)2
=
[cos(qx2) − cos(qx1)] /h1 + q sin(qx1) + h− [cos(qx2) − cos(qx1)] /h1 + [cos(qx3) − cos(qx2)] /h2
− [cos(qx3) − cos(qx2)] /h2 + [cos(qx4) − cos(qx3)] /h3
− [cos(qx4) − cos(qx3)] /h3 + [cos(qx5) − cos(qx4)] /h4
− [cos(qx5) − cos(qx4)] /h4 − q sin(qx5)
Implementarea conditiilor la limita esentiale
Impunerea valorii solutiei ın nodul 5 se poate face ın doua variante. Primaconsta ın eliminarea celei de-a 5-a ecuatie din sistem si adunarea la membruldrept a celei de-a 5-a coloane a matricii ınmultita cu −g. Rezulta sistemulde patru ecuatii cu patru necunoscute din Sectiunea 4.9. Pentru aceastaproblema 1D aceasta este o varianta comoda, dar pentru probleme 2D si 3Dmodificarea structurii matricii prin eliminarea de linii si coloane poate fi ooperatie greoaie si consumatoare de timp. A doua varianta mentine structuramatricii si termenului liber rezultate ın urma asamblarii, dar modifica ultimalinie a matricii, respectiv ultima componenta a vectorului termenilor liberidupa cum urmeaza:
K =
k
(1)11 k
(1)12 0 0 0
k(1)21 k
(1)22 + k
(2)11 k
(2)12 0 0
0 k(2)21 k
(2)22 + k
(3)11 k
(3)12 0
0 0 k(3)21 k
(3)22 + k
(4)11 k
(4)12
0 0 0 0 1
=
1h1
− 1h1
0 0 0
− 1h1
1h1
+ 1h2
− 1h2
0 0
0 − 1h2
1h2
+ 1h3
− 1h3
0
0 0 − 1h3
1h3
+ 1h4
− 1h4
0 0 0 0 1

Metoda Elementelor Finite-Fundamente 123
F =
f(1)1 + h
f(1)2 + f
(2)1
f(2)2 + f
(3)1
f(3)2 + f
(4)1
g
=
[cos(qx2) − cos(qx1)] /h1 + q sin(qx1) + h− [cos(qx2) − cos(qx1)] /h1 + [cos(qx3) − cos(qx2)] /h2
− [cos(qx3) − cos(qx2)] /h2 + [cos(qx4) − cos(qx3)] /h3
− [cos(qx4) − cos(qx3)] /h3 + [cos(qx5) − cos(qx4)] /h4
g
Practic, ultima ecuatie a sistemului devine
d5 = g
ceea ce corespunde conditiei la limita (4.1b). Desi comoda din punct devedere al programarii, aceasta implementare a conditiilor la limita esentialeare dezavantajul ca matricea sistemului nu mai este simetrica, ceea ce nucorespunde simetriei formei a(·, ·). Prin urmare nu mai pot fi folosite schemeeconomice de stocare a unei jumatati din componentele nenule ale matricii,respectiv nu mai pot fi folosite metodele eficiente de factorizare a matricilorsimetrice. Cu toate acestea, tinand cont ca simetria matricii poate fi distrusasi prin alte categorii de conditii la limita, respectiv o clasa relativ restansa deprobleme au operatori simetrici, sa generalizat ın practica programarii MEFcea de-a doua varianta de implementare a conditiilor la limita.
Programul MEF1D prezentat ın continuare exemplifica principalele tehnicide implementare a Metodei Elementului Finit pentru probleme 1D discu-tate ın aceasta sectiune. Deoarece matricea sistemului nu mai este simetrica,pentru solutionare este utilizata o subrutina pentru matrici generale din bi-blioteca IMSL, si anume DLSARG. Solutia numerica obtinuta este identica cucea obtinuta ın exemplul anterior, si coincide cu solutia exacta ın noduri.Matricea elementala este calculata cu subrutina ELMAT, iar vectorul terme-nilor liberi elemental este calculat cu subrutina ELVEC. In ambele cazuri suntutilizate formulele analitice exacte pentru integrale.
PROGRAM MEF1D
IMPLICIT NONEINTEGER I,J,NN,IE,NE,NOD(2)PARAMETER (NN=5) ! numarul de noduriPARAMETER (NE=NN-1) ! numarul de elementeREAL*8 K(NN,NN) ! matricea sistemului

124 Metoda Elementelor Finite-Fundamente
REAL*8 KE(2,2) ! matricea elementuluiREAL*8 F(NN) ! vectorul termenilor liberiREAL*8 FE(2) ! vectorul elementuluiREAL*8 D(NN) ! vectorul necunoscutelorREAL*8 g,h,q ! constantele problemeiPARAMETER (g=-5.0D-1,h=2.0D0,q=4.0D0)REAL*8 X(NN),XN(2) ! coordonatele nodurilorINTEGER ELEM(2*NE) ! tabelul de elementeDATA X/0.0,0.15,0.4,0.7,1.0/ ! abscisele nodurilorDATA ELEM/1,2,2,3,3,4,4,5/
DO I=1,NNF(I)=0.0D0 ! initializare termeni liberiDO J=1,NN
K(I,J)=0.0D0 ! initializare matriceENDDO
ENDDOC asambleaza elementele
DO IE=1,NEDO I=1,2
C indicii globali ai nodurilor elementuluiNOD(I)=ELEM(2*(IE-1)+I)
C coordonatele globale ale nodurilor elementuluiXN(I)=X(NOD(I))
ENDDOC calculeaza matricea elementului
CALL ELMAT(XN,KE)C calculeaza vectorul elementului
CALL ELVEC(XN,q,FE)DO I=1,2
DO J=1,2C asambleaza matricea elementului
K(NOD(I),NOD(J))=K(NOD(I),NOD(J))+ +KE(I,J)
ENDDOC asambleaza vectorul termenilor liberi
F(NOD(I))=F(NOD(I))+FE(I)ENDDO
ENDDOC introduce conditia la limita naturala
F(1)=F(1)+h Cintroduce conditia la limita esentiala
DO I=1,NN

Metoda Elementelor Finite-Fundamente 125
K(NN,I)=0.0D0ENDDOK(NN,NN)=1.0D0F(NN)=g
C rezolvare sistem de ecuatiiCALL DLSARG(NN,K,NN,F,1,D)
C afisare solutieDO I=1,NN
write(*,’(F10.6)’) D(I)ENDDOEND PROGRAM
C subrutina de calcul al matricii elementuluiSUBROUTINE ELMAT(XN,KE)REAL*8 XN(2),KE(2,2),HH=XN(2)-XN(1)KE(1,1)=1.0D0/HKE(1,2)=-KE(1,1)KE(2,1)=KE(1,2)KE(2,2)=KE(1,1)RETURNEND
C subrutina de calcul exact al vectorului elementuluiSUBROUTINE ELVEC(XN,q,FE)REAL*8 XN(2),q,FE(2),HH=XN(2)-XN(1)FE(1)= (DCOS(q*XN(2))-DCOS(q*XN(1)))/H+q*DSIN(q*XN(1))FE(2)=-(DCOS(q*XN(2))-DCOS(q*XN(1)))/H-q*DSIN(q*XN(2))RETURNEND
In aplicatiile practice adesea functia f(x) este mult mai complicata, nuare expresie analitica explicita, si poate fi evaluata doar evaluata numeric.In asemenea cazuri trebuie utilizata o procedura de cuadratura numericade tipul celor prezentate ın Sectiunea 3.2.1. Spre exemplu, prezentam maijos varianta pentru subrutina ELVEC ce utilizeaza cuadratura Gauss-Legendrepentru evaluarea integralei din expresia termenilor liberi. Utilizand o formulade cuadratura cu 8 puncte conduce la o precizie de evaluare a termenilor libericu cel putin 6 zecimale identice ın comparatie cu formula analitica. Prac-tic, solutia numerica este nemodificta prin utilizarea integrarii aproximative.Se poate vedea aici clar de ce este util sa introducem domeniul elementalde referinta [−1, 1], respectiv sa utilzam schimbarea de variabila x → ξ.Punctele de cuadratura XQ si coeficientii de pondere WQ sunt precizate pentruintervalul de integrare [−1, 1].

126 Metoda Elementelor Finite-Fundamente
C subrutina de calcul aprox. al vectorului elementuluiSUBROUTINE ELVEC(XN,q,FE)INTEGER IQREAL*8 XN(2),q,FE(2),H,XMREAL*8 XQ(8),WQ(8)DATA XQ/-.9602898565,-.7966664774,-.5255324099,-.1834346425,&.1834346425,.5255324099,.7966664774,.9602898565/DATA WQ/.1012285363,.2223810345,.3137066459,.3626837834,&.3626837834,.3137066459,.2223810345,.1012285363/H=XN(2)-XN(1)XM=(XN(1)+XN(2))/2.0D0FE(1)=0.0D0FE(2)=0.0D0
C cuadratura Gauss-Legendre cu 8 puncteDO IQ=1,8FE(1)=FE(1)+WQ(IQ)*(1.0D0-XQ(IQ))*DCOS(q*(H/2.0D0*XQ(IQ)+XM))FE(2)=FE(2)+WQ(IQ)*(1.0D0+XQ(IQ))*DCOS(q*(H/2.0D0*XQ(IQ)+XM))ENDDOFE(1)=FE(1)*(-q*q*H/4.0D0)FE(2)=FE(2)*(-q*q*H/4.0D0)write(*,’(2f20.10)’) FE(1),&(DCOS(q*XN(2))-DCOS(q*XN(1)))/H+q*DSIN(q*XN(1))write(*,’(2f20.10)’) FE(2),&-(DCOS(q*XN(2))-DCOS(q*XN(1)))/H-q*DSIN(q*XN(2))RETURNEND

Capitolul 5
Metoda Elementului Finitpentru probleme 2D
5.1 Introducere
In Capitolul 4 am prezentat conceptele fundamentale si ingredientele MetodeiElementelor Finite pentru o problema 1D. Cu alte cuvinte, am solutionato ecuatie diferentiala pentru functia necunoscuta u care depinde numai deo singura variabila spatiala u(x). Problema cu conditii la limita a avutprecizata valoarea solutiei la un capat al intervalului (conditie esentiala) siderivata solutiei la celalalt capat al intervalului (conditie naturala).
Inainte de a solutiona probleme multidimensionale trebuie sa precizam(sau sa reamintim) formularea completa a problemei cu conditii la limitacorespunzatoare. Vom nota cu nds dimensiunea spatiului (nds = 2 pentruprobleme 2D si nds = 3 pentru probleme 3D). Cu Ω vom nota o multimedeschisa Ω ∈ R
nds cu frontiera Γ neteda pe portiuni. Un punct generic ınR
nds va fi notat cu x. Vom identifica x cu vectorul de pozitie cu origineaın originea sistemului de coordonate adoptat pentru R
nds . Versorul normaleiexterioare la frontiera Γ este notat cu n. Reprezentarile adoptate pentru x
127

128 Metoda Elementelor Finite-Implementare
x
nΓ
Ω
n
Figura 5.1: Notatii pentru probleme multidimensionale.
si n ın 2D si 3D sunt:
(nds = 2)x = xi =
x1
x2
=
xy
n = ni =
n1
n2
=
nx
ny
(5.1a)
(nds = 3)
x = xi =
x1
x2
x3
=
xyz
n = ni =
n1
n2
n3
=
nx
ny
nz
(5.1b)
unde xi si ni, 1 ≤ i ≤ nds, sunt componentele vectorilor x si n.Un domeniu pentru problemele 2D ımpreuna cu notatiile adoptate este
prezentat ın Figura 5.1.Admitem ca frontiera Γ poate fi descompusa astfel:
Γ = Γg ∪ Γh, cu Γg ∩ Γh = ∅
unde Γg si Γh sunt multimi deschise din Γ. Reuniunea Γg ∪ Γh reprezintamultimea punctelor continute fie ın Γg sau ın Γh. Intersectia Γg ∩ Γh estevida, deci multimile Γg si Γh sunt disjuncte. Bara deasupra unei multimidenota ınchiderea multimii, adica multimea ımpreuna cu frontiera ei. Prinurmare,
Ω = Ω ∪ Γ .
Vom considera ın cele ce urmeaza ca Γg = ∅, dar putem avea Γh = ∅.

Metoda Elementelor Finite-Implementare 129
Operatorul lui Hamilton (nabla) este
∇u =
∂u/∂x1
∂u/∂x2
∂u/∂x3
=
∂u/∂x∂u/∂y∂u/∂z
,
iar operatorul lui Laplace,
∇2u =∂2u
∂x21
+∂2u
∂x22
+∂2u
∂x23
=∂2u
∂x2+∂2u
∂y2+∂2u
∂z2.
Teorema divergentei
Fie f : Ω → R o functie de clasa C1 (continua, cu derivate continue). Avem
∫Ω
∇f dΩ=
∫Γ
f n dΓ . (5.2)
Integrarea prin parti
Fie f o functie ca mai sus, si g : Ω → R o functie de clasa C1. Avem
∫Ω
(∇f)g dΩ= −∫Ω
f(∇g) dΩ +
∫Γ
fg n dΓ . (5.3)
5.2 Formularea tare si formularea slaba a pro-
blemei cu conditii la limita
In cele ce urmeaza vom aborda solutionarea cu Metoda Elementului Finit aurmatoarei problemei cu conditii la limita (3.1):
Pentru f : Ω → R, g : Γg → R, si h : Γh → R, sa se gaseascau : Ω → R astfel ıncat,
∇2u = f ın Ω , (5.4a)
u = g pe Γg , (5.4b)
∂u
∂n≡ n · ∇u = h pe Γh . (5.4c)

130 Metoda Elementelor Finite-Implementare
Functia necunoscuta u(x) defineste un camp scalar. Pe portiunea Γg a fron-tierei se impun valorile lui u, conditiile de tipul (5.4b) fiind denumite conditiipe frontiera (la limita) esentiale sau de tip Dirichlet. Pe portiunea Γh a fron-tierei se impun valorile derivatei normale a lui u, adica n · ∇u cu n versorulnormalei exterioare, conditiile de tipul (5.4c) fiind denumite conditii pe fron-tiera (la limita) naturale sau de tip Neumann.
In continuare vom construi formularea slaba a problemei, similara celeidin Capitolul 4. Pentru aceasta vom introduce multimea solutiilor candi-date S, respectiv multimea f unctiilor de pondere V . Ambele multimi continfunctii de clasa H1, adica ∫
Ω
(∇u)2dΩ <∞
Vom cere solutiilor candidate sa satisfaca conditiile esentiale (5.4b),
S =u|u ∈ H1, u = g pe Γg
,
iar functiile de pondere vor satisface conditii esentiale omogene,
V =w|w ∈ H1, w = 0 pe Γg
.
Cu acestea, putem introduce formularea slaba a problemei (5.4) dupacum urmeaza:
Pentru f : Ω → R, g : Γg → R, si h : Γh → R date, sa se gaseascau ∈ S astfel ıncat pentru orice w ∈ V
∫Ω
∇w · ∇u dΩ= −∫Ω
wf dΩ +
∫Γh
wh dΓ (5.5)
Cititorul este invitat sa compare aceasta formulare slaba cu echivalentul eiın 1D din (4.6).
Vom demonstra acum echivalenta formularilor tare (5.4) si slaba (5.5).
Sa consideram u ca fiind o solutie a problemei (5.4). Atunci usatisface si formularea slaba (5.5).

Metoda Elementelor Finite-Implementare 131
Demonstratie Cum u satisface conditiile esentiale (5.4b) rezulta ca u ∈ S.Pentru orice w ∈ V vom avea:
0 =
∫Ω
w(∇2u− f︸ ︷︷ ︸0
) dΩ conform ec. (5.4a)
= −∫Ω
∇w · ∇u dΩ −∫Ω
wf dΩ +
∫Γ
w n · ∇u dΓ integrare prin parti
= −∫Ω
∇w · ∇u dΩ −∫Ω
wf dΩ +
∫Γh
w h dΓ cu w = 0 pe Γg si cond. (5.4c)
Sa consideram u ca fiind o solutie a problemei (5.5). Atunci usatisface si formularea tare (5.4).
Demonstratie Cum u ∈ S rezulta ca sunt satisfacute automat conditiileesentiale (5.4b), si pentru orice w ∈ V avem
0 =
∫Ω
∇w · ∇u dΩ +
∫Ω
wf dΩ −∫Γh
w h dΓ ec. (5.5)
= −∫Ω
w (∇2u− f) dΩ +
∫Γh
w
(∂u
∂n− h
)dΓ
Daca notam α = ∇2u− f si β =∂u
∂n− h va trebui sa demonstram ca α = 0
ın Ω si β = 0 pe Γh.Pentru ınceput sa alegem w = αφ, unde (i) φ > 0 ın Ω, (ii) φ = 0 pe Γ,
si (iii) φ este o functie neteda. Aceste conditii asigura w ∈ V. Cu aceastaalegere particulara pentru w ecuatia de mai sus devine
0 =
∫Ω
α2φ dΩ
de unde rezulta α = 0 ın Ω.Sa alegem acum w = βψ, unde (i) ψ > 0 pe Γh, (ii) ψ = 0 pe Γg, si (iii)
ψ este neteda. Si ın acest caz avem w ∈ V. Tinand cont ca α = 0 vom avea
0 =
∫Γh
β2ψ dΓ
de unde rezulta ca β = 0 pe Γh.Prin urmare u satisface si formularea tare a problemei (5.4).Pentru a simplifica scrierea vom introduce urmatoarele notatii:

132 Metoda Elementelor Finite-Implementare
a(w, u) =
∫Ω
∇w · ∇u dΩ (5.6)
(w, f) =
∫Ω
wf dΩ (5.7)
(w, h)Γ =
∫Γh
wh dΓ (5.8)
Cu (5.6), (5.7) si (5.8) ecuatia variationala (5.5) se poate rescrie sub forma
a(w, u) = −(w, f) + (w, h)Γ (5.9)
Cititorul poate observa din nou analogia cu problema monodimensionalatratata ın Capitolul 4, pentru care am obtinut ecuatia variationala (4.11).
5.3 Metoda Galerkin
Fie Sh si Vh aproximatiile finit-dimensionale ale multimilor de functii S si V .Vom considera ca orice functie din Vh se anuleaza (exact sau aproximativ)pe Γg, respectiv orice functie din Sh admite o reprezentare de forma
uh = vh + gh , (5.10)
unde vh ∈ Vh. Functia gh asigura satisfacerea (chiar si aproximativa) aconditiei esentiale u = g pe Γg. Este important sa observam ca, mai putintermenul gh, spatiile Sh si Vh sunt formate din functii cu aceleasi proprietati.Utilizarea acelorasi functii atat pentru construirea solutiei aproximative cat sipentru functia de pondere este particularitatea variantei Galerkin a MetodeiElementului Finit.
Formularea Galerkin a problemei este:
Pentru f : Ω → R, g : Γg → R, si h : Γh → R date, sa se gaseascauh = vh + g ∈ Sh astfel ıncat pentru orice wh ∈ Vh sa avem
a(wh, vh) = −(wh, f) + (wh, h)Γ − a(wh, gh) (5.11)
Pentru prezentarea matematica1 a aplicarii metodei Galerkin utilizandaproximarea de tip element finit vom conveni asupra urmatoarei scheme de
1Aceasta prezentare a metodei Galerkin este comoda si intuitiva din punct de vedere alnotatiilor, dar nu este neaparat si cea mai eficienta din punct de vedere al implementariialgoritmului numeric.

Metoda Elementelor Finite-Implementare 133
numerotare a nodurilor. Fie η = 1, 2, . . . , npn multimea indicilor globaliai nodurilor, unde npn este numarul total de puncte nodale. Prin nod gvom desemna un nod de frontiera ın care este prescrisa valoarea functieiuh = g. Fie ηg ⊂ η multimea nodurilor g ın care se impun conditii esentiale(Dirichlet). Complementul multimii ηg ın η, notat cu η − ηg este multimeanodurilor ın care trebuie calculate valorile nodale ale functiei necunoscutauh. Numarul nodurilor din η − ηg este egal cu numarul ecuatiilor neq
2.O functie tipica din Vh este presupusa de forma
wh(x) =∑
A∈η−ηg
NA(x)cA (5.12)
unde NA este functia de interpolare (denumite si functie de forma sau functiede baza) asociata nodului cu indicele A, iar cA sunt constante. Vom pre-supune ca wh = 0 daca si numai daca cA = 0 pentru fiecare A ∈ η − ηg. Inmod similar
vh(x) =∑
A∈η−ηg
NA(x)dA (5.13)
unde dA sunt necunoscutele nodale (valorile functiei uh ın nodurile xA), res-pectiv
gh(x) =∑A∈ηg
NA(x)gA, gA = g(xA) (5.14)
Din (5.14) observam ca gh este definita ca o functie de interpolare pentruvalorile nodale ale functiei g utilizand functiile de interpolare. Prin urmaregh este doar o aproximare a functiei g care precizeaza conditiile esentiale.Alte surse de erori le reprezinta aproximarea functiei f cu fh, respectiv hcu hh. Inlocuind (5.12,5.13,5.14) ın (5.11), si urmand rationamentul dinSectiunea 4.5 obtinem urmatorul sistem de ecuatii,∑
B∈η−ηg
a(NA, NB)dB = −(NA, f) + (NA, h)Γ −∑B∈ηg
a(NA, NB)gB (5.15)
pentru A ∈ η − ηg.
In forma matriceala, sistemul de ecuatii (5.15) se scrie sub forma
2Aceasta implementare a Metodei Elementului Finit presupune eliminarea ecuatiilorcare corespund nodurilor cu conditii initiale ınainte de solutionarea sistemului. Vom arataca din punct de vedere practic exista metode mai comode si eficiente, ın special pentrusisteme mari de ecuatii, la care nu se elimina ecuatii din sistem ci doar se modifica ecuatiilecorespunzatoare nodurilor g.

134 Metoda Elementelor Finite-Implementare
Kd = F (5.16)
K = [KPQ] , d = dQ , F = FP , 1 ≤ P,Q ≤ neq
KPQ = a(NA, NB), FP = −(NA, f) + (NA, h)Γ −∑B∈ηg
a(NA, NB)gB
Principalele proprietati ale matricii K sunt:
1. K este simetrica.
2. K este pozitiv definita.
Demonstratie 1. Simetria matricii K rezulta imediat din simetria lui a(·, ·),adica
KPQ = a(NA, NB) = a(NB, NA) = KQP
Demonstratie 2. Pentru a arata ca matricea K este pozitiv definita trebuiesa demonstram ca (i) cT Kc ≥ 0 si (ii) cT Kc = 0 implica c = 0.
(i)
cT Kc =
neq∑P,Q=1
cP KPQ cQ
=∑
A,B∈η−ηg
cA a(NA, NB) cB
= a
∑
A∈η−ηg
NAcA,∑
B∈η−ηg
NB cB
= a(wh, wh)
=
∫Ω
(∇wh) · (∇wh)dΩ ≥ 0 .
(ii) Sa presupunem ca cT Kc = 0. Prin urmare, din demonstatia de maisus rezulta ca ∇wh = 0, sau wh =constant. Cum ınsa wh = 0 pe Γg = ∅,rezulta ca valoarea constantei este zero.
5.4 Elementul Finit
Utilizarea practica a Metodei Galerkin prezentata mai sus presupune pre-cizarea functiilor NA(x) pentru noduri din interiorul domeniului si de pe

Metoda Elementelor Finite-Implementare 135
AA
y
x
AN (x,y)
Γ
Figura 5.2: Functii de baza liniare ın 2D.
frontiera lui. Figura 5.2 prezinta asemenea exemple de functii pentru proble-me 2D, acestea fiind generalizarea multidimensionala a functiilor de baza 1Ddin Figura 4.1. In esenta, ideile prezentate ın Sectiunea 4.6 sunt reluate aici,deci vom insista doar asupra notiunilor aditionale introduse ın cazul multi-dimensional. Este evident ca descrierea functiilor de baza din Figura 5.2,
AB
C
AB
C
AB
C
A BCN (x,y) N (x,y) N (x,y)
Figura 5.3: Functii de baza pentru elementul finit triunghiular liniar.
precum si utilizarea lor pentru calculul integralelor din formularea Galerkinse poate face comod doar ın varianta elementala. La fel ca ın Sectiunea 4.10.1vom defini domeniul elemental, cu nodurile corespunzatoare si functiile deforma aferente fiecarui nod ca ın Figura 5.3.
Sa consideram pentru elementul triunghiular din Figura 5.3 o aproximatieliniara ın 2D a functiei necunoscuta, adica
uh(x, y) = αe1 + αe
2x+ αe3y , (5.17)
unde αe1, α
e2 si αe
3 sunt coeficientii polinomului de gradul ıntai care apro-ximeaza solutia pe elementul Ωe. Acesti coeficienti pot fi determinati dinconditiile ca ın nodurile elementului A, B si C sa regasim valorile nodale

136 Metoda Elementelor Finite-Implementare
corespunzatoare uA, uB si uC , adicaαe
1 + αe2xA + αe
3yA = uA
αe1 + αe
2xB + αe3yB = uB
αe1 + αe
2xC + αe3yC = uC
(5.18)
Scris ın forma matriceala, acest sistem de trei ecuatii cu trei necunoscute este1 xA yA
1 xB yB
1 xC yC
αe
1
αe2
αe3
=
uA
uB
uC
Solutia sistemului de ecuatii este
αe1 =
xByC − xCyB
2AeuA +
xCyA − xAyC
2AeuB +
xAyB − xByA
2AeuC
αe2 =
yB − yC
2AeuA +
yC − yA
2AeuB +
yA − yB
2AeuC
αe3 =
xC − xB
2AeuA +
xA − xC
2AeuB +
xB − xA
2AeuC
unde 2Ae =
∣∣∣∣∣∣1 xA yA
1 xB yB
1 xC yC
∣∣∣∣∣∣ este determinantul matricii sistemului
(5.19)
Din punct de vedere geometric 2Ae reprezinta dublul ariei elementului tri-unghiular Ωe. Daca rescriem acum (5.17) sub forma
uh(x, y) =N eA(x, y)uA +N e
B(x, y)uB +N eC(x, y)uC
=
[xByC − xCyB
2A +yB − yC
2A x+xC − xB
2A y
]uA
+
[xCyA − xAyC
2A +yC − yA
2A x+xA − xC
2A y
]uB
+
[xAyB − xByA
2A +yA − yB
2A x+xB − xA
2A y
]uC
putem identifica functiile de baza ca fiind,
N eA(x, y) =
xByC − xCyB
2A +yB − yC
2A x+xC − xB
2A y (5.20a)
N eB(x, y) =
xCyA − xAyC
2A +yC − yA
2A x+xA − xC
2A y (5.20b)
N eC(x, y) =
xAyB − xByA
2A +yA − yB
2A x+xB − xA
2A y (5.20c)

Metoda Elementelor Finite-Implementare 137
Evident, fiecare element Ωe va avea propriul set de functii dependent de co-ordonatele nodurilor elementului. Aceste functii au urmatoarele proprietatiimportante pe care cititorul le poate verifica imediat:
• N eA(x, y) +N e
B(x, y) +N eC(x, y) = 1
• N eA(xA, yA) = 1, N e
A(xB, yB) = 0, N eA(xC , yC) = 0, etc.
Cu alte cuvinte suma functiilor de baza este egala cu unitatea, iar fiecarefunctie este egala cu unitatea ın nodul caruia ıi corespunde si se anuleaza ıntoate celelalte noduri ale elementului.
Calculul componentelor matricii elementale se poate face simplu acum.Spre exemplu,
KeAB =
∫Ωe
(∂NA
∂x
∂NB
∂x+∂NA
∂y
∂NB
∂y
)dΩ
=(yB − yC)(yC − yA) + (xC − xB)(xA − xC)
4Ae
(5.21)
unde am folosit∫
Ωe dΩ = Ae.Sa remarcam ca pentru elementul finit triunghiular liniar calculul inte-
gralelor se face usor pentru ca integrandul este constant. Prin urmare nu ammai utilizat aici descrierea locala a elementului, respectiv definirea elemen-tului de referinta pentru care se definesc regulile de integrare numerica.
5.5 Implementarea Metodei Elementului Finit
In cele ce urmeaza vom prezenta un exemplu simplu de implementare aMetodei Elementului Finit pentru o problema cu conditii la limita aferentaecuatiei Laplace. Desi problema tratata este simpla, programul de calcul uti-lizeaza tehnici foarte performante pentru discretizare, respectiv asamblareasi solutionarea sistemului de ecuatii.
Cititorul care parcurge restul acestui capitol trebuie sa aiba cunostintede baza ın limbajul de programare C pentru a ıntelege sintaxa programului.Utilizarea limbajului C nu este restrictiva, putand fi utilizat la fel de bine lim-bajul FORTRAN. Traditional, FORTRAN a fost limbajul preferat pentruimplementarea algoritmilor numerici datorita maturitatii atinse de compi-latoare, respectiv a eficientei implementarii operatiilor aritmetice. Compi-latoarele C au ajuns acum la aceleasi performante, si ın plus limbajul de

138 Metoda Elementelor Finite-Implementare
programare C ofera unele facilitati suplimentare care usureaza sarcina pro-gramatorului. Oricare ar fi ınsa concluziile unei analize comparative a lim-bajelor de programare, cunoasterea ambelor limbaje C si FORTRAN esteın opinia noastra strict necesara. Motivul este simplu: exista la ora actualanumeroase biblioteci de programe, disponibile la nivel de cod sursa C sauFORTRAN, care pot fi utilizate ın dezvoltarea unei aplicatii. Apelul proce-durilor scrise ıntr-un limbaj dintr-un program scris ın alt limbaj este posibilfara complicatii suplimentare.
Am ales pentru scrierea programelor de element finit biblioteca de pro-ceduri PETSc (Portable Extensible Toolkit for Scientific Computation, [5,4]) dezvoltata la Argonne National Laboratory, U.S.A. special pentru im-plementarea algoritmilor numerici de solutionare a ecuatiilor cu derivatepartiale. Programele prezentate ın aceasta carte sunt exclusiv realizate pen-tru a fi rulate pe calculatoare monoprocesor, dar PETSc are capabilitateade implementare a algoritmilor de calcul paralel pe sisteme cu memorie dis-tribuita. Scopul pe care ni-l propunem ın aceasta carte se limiteaza la fami-liarizarea cititorului cu modul de alcatuire a unui program de element finit,astfel ıncat performantele de calcul sa fie cat mai bune chiar si pentru proble-me mari. In plus, facilitatile oferite de PETSc degreveaza programatorul demulte detalii legate de asamblarea si stocarea eficienta a matricii sistemului,implementarea conditiilor la limita, si solutionarea sistemelor mari de ecuatii.
Generarea triangulatiei domeniului 2D este efectuata cu programulTRIANGLE [28] realizat de Jonathan R. Shewchuk ın cadrul proiectuluiArchimedes derulat la School of Computer Science, Carnegie Mellon Univer-sity.
Evident, nu vom reproduce aici manualele de utilizare pentru PETSc
si TRIANGLE, ele fiind disponibile gratuit (ımpreuna cu codul sursa) laadresele indicate ın bibliografie. Ne vom limita doar la acele informatii caresa permita cititorului ıntelegerea programului, respectiv dezvoltarea progra-mului pentru aplicatii mai complexe. Intelegerea ın detaliu a algoritmuluinumeric, ımpreuna cu utilizarea eficienta a documentatiei software sunt in-gredientele de baza pentru dezvoltarea unor aplicatii ingineresti cu adevaratutile ın practica.
Problema pe care ne propunem sa o solutionam cu metoda elementuluifinit corespunde curgerii 2D a fluidului ideal ıntr-un canal cu sectiune vari-abila de forma celui prezentat ın Figura 5.4. Peretele inferior corespunde seg-mentului 0-1, iar peretele superior este precizat de nodurile 2-3-4-5. Sectiuneade intrare este 0-5, iar sectiunea de iesire corespunde segmentului 1-2. Indomeniul de analiza vom solutiona ecuatia lui Laplace pentru functia decurent ψ,
∇2ψ = 0

Metoda Elementelor Finite-Implementare 139
0 1
3
4
6
8
9
1011
13
0 14
5 7
11
12
1314
10
3
6
2 98
12
7
2
5
Figura 5.4: Retea de discretizare.
cu conditiile la limita
ψ = 0 pe peretele inferior 0-1 ,
ψ = 1 pe peretele superior 2-3-4-5 ,
∂ψ
∂n= 0 pe sectiunea de intrare 0-5 ,
∂ψ
∂n= 0 pe sectiunea de iesire 1-2 .
Vom prezenta mai ıntai codul sursa al programului principal, urmand a ex-plica ın continuare ın detaliu componentele lui.
Program MEF pentru curgeri 2D
static char help[] = "exemplu MEF 2D, PETSc-2.1.3 \n\n";
#include "petscsles.h"#include "triangle.h"
int frontiera(struct triangulateio*);int destPetsc(struct triangulateio);int init(struct triangulateio*);int dest(struct triangulateio);int esup(struct triangulateio,int**,int**);int psup(struct triangulateio,int*,int*,int**,int**);int element(int,struct triangulateio,int*,PetscReal*);int tecplot(struct triangulateio,char*);

140 Metoda Elementelor Finite-Implementare
Tabelul 5.1: Coordonatele nodurilor si tabelul de elemente
nod x y marker
0 0.0 0.0 11 1.3 0.0 12 1.3 0.6 23 1.0 0.6 24 0.5 0.9 25 0.0 0.9 26 0.0 0.4 57 0.65 0.0 18 0.25 0.0 19 0.25 0.65 0
10 0.45 0.325 011 0.7985 0.3154 012 1.3 0.35 413 0.75 0.75 2
elem. nod 1 nod 2 nod 3
0 6 10 91 10 11 132 6 0 83 4 5 94 12 2 35 10 6 86 5 6 97 12 11 18 7 11 109 8 7 1010 11 12 311 4 9 1312 1 11 713 11 3 1314 9 10 13
#undef __FUNCT__#define __FUNCT__ "main"
int main(int argc,char** argv) int i, j, ierr, *nnz, inod[3], nce, *ice, nit;struct triangulateio in, out;char* triswitches = "pzAS8a0.1V";char* filename = "fem2D.dat";int *esup1,*esup2,*psup1,*psup2;PetscReal emat[9], unu=1.0, zero=0.0, *vecval;Mat A; /* matricea sistemului */IS is; /* set de indici */Vec b,x; /* vector termeni liberi si vector solutie */SLES sles;ierr=PetscInitialize(&argc,&argv,(char*)0,help);CHKERRQ(ierr);
/* PREPROCESARE */
/* descrierea frontierei domeniului */frontiera(&in);/* initializare structura de date retea */init(&out);/* genereaza triangulatia domeniului */triangulate(triswitches,&in,&out,(struct triangulateio *)NULL);/* elementele adiacente fiecarui punct */

Metoda Elementelor Finite-Implementare 141
esup(out,&esup1,&esup2);for (i=0;i<out.numberofpoints;i++)
PetscPrintf(PETSC_COMM_SELF,"nodul %d ne %d",
i,esup2[i+1]-esup2[i]);for (j=esup2[i];j<esup2[i+1];j++)PetscPrintf(PETSC_COMM_SELF," e %d",esup1[j]);
PetscPrintf(PETSC_COMM_SELF,"\n");
/* punctele adiacente fiecarui punct */psup(out,esup1,esup2,&psup1,&psup2);for (i=0;i<out.numberofpoints;i++)
PetscPrintf(PETSC_COMM_SELF,"nodul %d np %d",
i,psup2[i+1]-psup2[i]);for (j=psup2[i];j<psup2[i+1];j++)PetscPrintf(PETSC_COMM_SELF," p %d",psup1[j]);
PetscPrintf(PETSC_COMM_SELF,"\n");
/* PROCESARE */
/* calculeaza numarul de componente nenule pe fiecare liniea matricii sistemului */
PetscMalloc(out.numberofpoints*sizeof(int),&nnz);for(i=0;i<out.numberofpoints;i++)
nnz[i]=psup2[i+1]-psup2[i]+1;
/* Creeaza matricea sistemului */MatCreateSeqAIJ(PETSC_COMM_SELF,
out.numberofpoints,out.numberofpoints, 0, nnz, &A);MatZeroEntries(A);/* Asambleaza elementele */for(i=0;i<out.numberoftriangles;i++)
element(i,out,inod,emat);MatSetValues(A,3,inod,3,inod,emat,ADD_VALUES);
MatAssemblyBegin(A,MAT_FINAL_ASSEMBLY);MatAssemblyEnd(A,MAT_FINAL_ASSEMBLY);/* Introduce conditii la limita esentiale */PetscMalloc(out.numberofpoints*sizeof(int),&ice);

142 Metoda Elementelor Finite-Implementare
PetscMalloc(out.numberofpoints*sizeof(PetscReal),&vecval);nce=0;for (i=0;i<out.numberofpoints;i++)
if(out.pointmarkerlist[i]==1)
ice[nce]=i;vecval[nce]=0.0; /* val. perete inf. */nce++;
if(out.pointmarkerlist[i]==2)
ice[nce]=i;vecval[nce]=1.0; /* val. perete sup. */nce++;
ISCreateGeneral(PETSC_COMM_SELF,nce,ice,&is);MatZeroRows(A, is, &unu); /* modificare matrice */ISDestroy(is);MatView(A,PETSC_VIEWER_STDOUT_WORLD);/* creare vectori */VecCreateSeq(PETSC_COMM_SELF,out.numberofpoints,&b);VecDuplicate(b,&x);VecSet(&zero,b);/* modificare vector termeni liberi */VecSetValues(b,nce,ice,vecval,INSERT_VALUES);VecAssemblyBegin(b);VecAssemblyEnd(b);/* Creare context solver sistem ecuatii liniare */ierr=SLESCreate(PETSC_COMM_SELF,&sles);CHKERRQ(ierr);ierr=SLESSetOperators(sles,A,A,DIFFERENT_NONZERO_PATTERN);CHKERRQ(ierr);ierr=SLESSetFromOptions(sles);CHKERRQ(ierr);/* Solutionare sistem de ecuatii */ierr=SLESSolve(sles,b,x,&nit);CHKERRQ(ierr);ierr=PetscPrintf(PETSC_COMM_SELF,
"Numar de iteratii = %d\n\n",nit);CHKERRQ(ierr);SLESDestroy(sles);MatDestroy(A);VecDestroy(b);
/* POSTPROCESARE */
VecGetArray(x,&out.pointattributelist);for(i=0;i<out.numberofpoints;i++)
ierr=PetscPrintf(PETSC_COMM_SELF,"nodul %d valoare %f\n",
i,out.pointattributelist[i]);CHKERRQ(ierr);

Metoda Elementelor Finite-Implementare 143
ierr=tecplot(out,filename);CHKERRQ(ierr);VecRestoreArray(x,&out.pointattributelist);
/* Eliberare memorie si finalizare program */destPetsc(in); dest(out);PetscFree(nnz); PetscFree(ice); PetscFree(vecval);VecDestroy(x);PetscFree(esup1);PetscFree(esup2);PetscFree(psup1);PetscFree(psup2);ierr = PetscFinalize();CHKERRQ(ierr);return 0;
Structura unui program C ce utilizeaza PETSc
static char help[] = "explicatii asupra programului\n\n";
#include "petscsles.h"#undef __FUNCT__#define __FUNCT__ "main"
int main(int argc,char** argv) int ierr;ierr=PetscInitialize(&argc,&argv,(char*)0,help);CHKERRQ(ierr);
.... instructiunile programului ....
ierr = PetscFinalize();CHKERRQ(ierr);return 0;
Variabila help contine un mesaj ce poate fi afisat cand este executatprogramul. Fisierul petscsles contine definitiile si prototipurile functiilorPETSc care sunt utilizate ın program. Specific programelor PETSc suntinstructiunile PetscInitialize si PetscFinalize, care au rolul de initi-alizare si finalizare a proceselor implicate ın calculul paralel. Ele trebuieutilizate chiar daca programul este conceput pentru executie seriala. Toatefunctiile PETSc returneaza o valoare de tip ıntreg (ierr ın exemplul demai sus) care indica posibila aparitie a unei erori ın cazul ın care nu este 0.Verificarea acestui cod de eroare este facuta de CHKERRQ(ierr) care produceun mesaj si ajuta la identificarea cauzei si locului aparitiei erorii. Cititorulfamiliarizat cu limbajul C nu trebuie sa aiba nici o dificultate ın a recunoastestructura de baza a programului.

144 Metoda Elementelor Finite-Implementare
Descrierea frontierei si discretizarea domeniului
Sectiunea programului care contine descrierea frontierei domeniului si gene-rarea retelei de discretizare poarta numele de preprocesare. In aceasta etapaa solutionarii problemei operam practic doar cu notiuni geometrice. Rezul-tatul ıl constituie reteaua de discretizare descrisa de tabloul cu coordonatelenodurilor si tabloul de elemente din Tabelul 5.1.
struct triangulateio in, out;char* triswitches = "pzAS8a0.1V";int *esup1,*esup2,*psup1,*psup2;
.................................
/* PREPROCESARE *//* descrierea frontierei domeniului */frontiera(&in);/* initializare structura de date retea */init(&out);/* genereaza triangulatia domeniului */triangulate(triswitches,&in,&out,(struct triangulateio *)NULL);/* elementele adiacente fiecarui punct */esup(out,&esup1,&esup2);/* punctele adiacente fiecarui punct */psup(out,esup1,esup2,&psup1,&psup2);
In cazul de fata triangulatia domeniului este realizata cu functia triangulatedin pachetul TRIANGLE [28]. Aceasta functie utilizeaza ca argumenteo structura de date denumita triangulateio al carei continut depinde deetapa procesului de triangulare, respectiv de tipul domeniului (simplu saumultiplu conex). Reproducem mai jos definitia structurii triangulateioasa cum este ea inclusa ın fisierul triangle.h.
struct triangulateio double *pointlist; /* In / out */double *pointattributelist; /* In / out */int *pointmarkerlist; /* In / out */int numberofpoints; /* In / out */int numberofpointattributes; /* In / out */
int *trianglelist; /* In / out */double *triangleattributelist; /* In / out */double *trianglearealist; /* In only */int *neighborlist; /* Out only */

Metoda Elementelor Finite-Implementare 145
int numberoftriangles; /* In / out */int numberofcorners; /* In / out */int numberoftriangleattributes; /* In / out */
int *segmentlist; /* In / out */int *segmentmarkerlist; /* In / out */int numberofsegments; /* In / out */
double *holelist; /* In / pointer to array copied out */int numberofholes; /* In / copied out */
double *regionlist; /* In / pointer to array copied out */int numberofregions; /* In / copied out */
int *edgelist; /* Out only */int *edgemarkerlist; /* Not used with Voronoi diagram; out only */double *normlist; /* Used only with Voronoi diagram; out only */int numberofedges; /* Out only */
;
Datele de intrare ale preprocesorului le ofera definirea frontierei domeni-ului sub forma unei linii poligonale. Pentru aceasta, conform specificatiilordin [28], functia frontiera (struct triangulateio* MESH) realizeaza alo-carea memoriei pentru tablourile .pointlist, .pointattributelist,.pointmarkerlist, .segmentlist, .segmentmarkerlist si introducerea in-formatiei necesare. Alocarea memoriei se face cu functia
PetscMalloc(int m,void **rezultat);
unde m este numarul de octeti alocati, iar rezultat este pointerul catre zonade memorie alocata.
Functia frontiera prezentata mai jos nu necesita nici un fel de explicatiisuplimentare. Continutul ei poate fi usor urmarit conform Tabelului 5.1.
int frontiera(struct triangulateio* MESH) struct triangulateio mesh;mesh.numberofpoints=6;mesh.numberofpointattributes=1;PetscMalloc(mesh.numberofpoints*2*sizeof(PetscReal),
&mesh.pointlist);mesh.pointlist[0]=0.0; mesh.pointlist[1]=0.0;mesh.pointlist[2]=1.3; mesh.pointlist[3]=0.0;mesh.pointlist[4]=1.3; mesh.pointlist[5]=0.6;mesh.pointlist[6]=1.0; mesh.pointlist[7]=0.6;

146 Metoda Elementelor Finite-Implementare
mesh.pointlist[8]=0.5; mesh.pointlist[9]=0.9;mesh.pointlist[10]=0.0; mesh.pointlist[11]=0.9;PetscMalloc(mesh.numberofpoints*mesh.numberofpointattributes
*sizeof(PetscReal),&mesh.pointattributelist);mesh.pointattributelist[0] = 0.0;mesh.pointattributelist[1] = 0.0;mesh.pointattributelist[2] = 1.0;mesh.pointattributelist[3] = 1.0;mesh.pointattributelist[4] = 1.0;mesh.pointattributelist[5] = 1.0;PetscMalloc(mesh.numberofpoints*sizeof(int),
&mesh.pointmarkerlist);/* perete inferior : marker 1, perete superior: marker 2 */mesh.pointmarkerlist[0] = 1;mesh.pointmarkerlist[1] = 1;mesh.pointmarkerlist[2] = 2;mesh.pointmarkerlist[3] = 2;mesh.pointmarkerlist[4] = 2;mesh.pointmarkerlist[5] = 2;
mesh.numberofsegments = 6;PetscMalloc(mesh.numberofsegments*2*sizeof(int),
&mesh.segmentlist);mesh.segmentlist[0]=0; mesh.segmentlist[1]=1;mesh.segmentlist[2]=1; mesh.segmentlist[3]=2;mesh.segmentlist[4]=2; mesh.segmentlist[5]=3;mesh.segmentlist[6]=3; mesh.segmentlist[7]=4;mesh.segmentlist[8]=4; mesh.segmentlist[9]=5;mesh.segmentlist[10]=5; mesh.segmentlist[11]=0;PetscMalloc(mesh.numberofsegments*sizeof(int),
&mesh.segmentmarkerlist);mesh.segmentmarkerlist[0]=1;mesh.segmentmarkerlist[1]=4; /* outflow */mesh.segmentmarkerlist[2]=2;mesh.segmentmarkerlist[3]=2;mesh.segmentmarkerlist[4]=2;mesh.segmentmarkerlist[5]=5; /* meshflow */
mesh.numberofholes = 0;
*MESH = mesh;return 0;

Metoda Elementelor Finite-Implementare 147
Structura de date generata mai sus este argumentul de intrare ın rutinatriangulate. Argumentul returnat (al doilea argument) este tot o structurade date, care este initializata cu functia de mai jos. Trebuie remarcat casunt initializate doar tablourile utilizate ın procesul de triangulatie, conformactiunilor specificate ın sirul de caractere triswitches.
int init(struct triangulateio* MESH) struct triangulateio mesh;mesh.pointlist=(PetscReal*)NULL;mesh.pointattributelist=(PetscReal*)NULL;mesh.pointmarkerlist=(int*)NULL;mesh.trianglelist=(int*)NULL;mesh.triangleattributelist=(PetscReal*)NULL;mesh.segmentlist=(int*)NULL;mesh.segmentmarkerlist=(int*)NULL;*MESH = mesh;return 0;
Comanda
triangulate(triswitches,&in,&out,(struct triangulateio
*)NULL);
realizeaza propriu-zis discretizarea domeniului. Ultimul argument, neutilizatın cazul de fata, poate returna diagrama Voronoi asociata triangulatiei.
Cand structurile de date utilizate ın procesul de triangulatie nu maisunt necesare, tablourile alocate anterior trebuie distruse pentru eliberareamemoriei alocate. Pentru tablourile alocate cu PetscMalloc se utilizeazaPetscFree, ca ın rutina destPetsc() de mai jos.
int destPetsc(struct triangulateio mesh) PetscFree(mesh.pointlist);PetscFree(mesh.pointattributelist);PetscFree(mesh.pointmarkerlist);PetscFree(mesh.segmentlist);PetscFree(mesh.segmentmarkerlist);return 0;
Daca memoria a fost alocata cu instructiunea C standard malloc (ın in-teriorul rutinei triangulate), atunci eliberarea memoriei trebuie facuta cufunctia C corespunzatoare free() ca ın functia de mai jos.

148 Metoda Elementelor Finite-Implementare
int dest(struct triangulateio mesh) free(mesh.pointlist);free(mesh.pointattributelist);free(mesh.pointmarkerlist);free(mesh.trianglelist);free(mesh.triangleattributelist);free(mesh.segmentlist);free(mesh.segmentmarkerlist);return 0;
Ultimele doua comenzi asociate preprocesorului genereaza tablorile cecontin elementele adiacente fiecarui punct, esup() si punctele adiacentefiecarui punct psup(). Algoritmii implementati ın aceste doua rutine suntprezentati ın detaliu ın Capitolul 6, ımpreuna cu structura tablourilor aferen-te esup1, esup2 si psup1, psup2. Mentionam aici doar ca tablourile ce pre-cizeaza elementele adiacente unui punct sunt utilizate ın faza de postproce-sare pentru calculul gradientului solutiei ın punct, iar tabloul cu puncteleadiacente unui punct este utilizat pentru alocarea memoriei necesara ma-tricii sistemului de ecuatii.
Optional, preprocesorul poate include si proceduri de vizualizare si veri-ficare a retelei de discretizare, respectiv de rafinare a acesteia atunci candgeometria domeniului, respectiv comportarea estimata a solutiei, o cere.
Asamblarea sistemului de ecuatii si solutionarea lui
Componenta principala a programului ce implementeaza Metoda Elementu-lui Finit o reprezinta crearea si solutionarea sistemului de ecuatii
Ax = b
unde A este matricea sistemului, b este vectorul termenilor liberi, iar x estevectorul ce contine solutia problemei, adica valorile nodale ale solutiei nu-merice. Portiunea programului care realizeaza operatiile de mai sus poartanumele de procesor. De regula utilizatorul interactioneaza cu programelecomerciale ın faza de preprocesare (cand se defineste problema, inclusiv ge-ometria domeniului si discretizarea) si ın faza de postprocesare (cand se anal-izeaza si intepreteaza solutia). De aceea procesorul este adesea tratat ca o”cutie neagra” careia ıi trebuie asigurate suficiente resurse de memorie sitimp de calcul. In principiu acesta este dezideratul pe care ıl pot atinge algo-ritmii ce combina robustetea si eficienta. Putini algoritmi au simultan acestecalitati. In plus, abordarea unor probleme noi, bazate pe o noua formu-lare matematica, necesita dezvoltarea unor noi programe care sa reutilizeze

Metoda Elementelor Finite-Implementare 149
cat mai multe componente deja puse la punct anterior. In acest spirit reco-mandam cititorului sa parcurga si sa aprofundeze portiunea de program demai jos.
int i, j, ierr, *nnz, inod[3], nce, *ice, nit;struct triangulateio out;int *psup1,*psup2;PetscReal emat[9], unu=1.0, zero=0.0, *vecval;Mat A; /* matricea sistemului */IS is; /* set de indici */Vec b,x; /* vector termeni liberi si vector solutie */SLES sles;
.................................................
/* PROCESARE *//* calculeaza numarul de componente nenule pe fiecare linie
a matricii sistemului */PetscMalloc(out.numberofpoints*sizeof(int),&nnz);for(i=0;i<out.numberofpoints;i++)
nnz[i]=psup2[i+1]-psup2[i]+1;
/* Creeaza matricea sistemului */MatCreateSeqAIJ(PETSC_COMM_SELF,
out.numberofpoints,out.numberofpoints,0, nnz, &A);MatZeroEntries(A);/* Asambleaza elementele */for(i=0;i<out.numberoftriangles;i++)
element(i,out,inod,emat);MatSetValues(A,3,inod,3,inod,emat,ADD_VALUES);
MatAssemblyBegin(A,MAT_FINAL_ASSEMBLY);MatAssemblyEnd(A,MAT_FINAL_ASSEMBLY);/* Introduce conditii la limita esentiale */PetscMalloc(out.numberofpoints*sizeof(int),&ice);PetscMalloc(out.numberofpoints*sizeof(PetscReal),&vecval);nce=0;for (i=0;i<out.numberofpoints;i++)
if(out.pointmarkerlist[i]==1)

150 Metoda Elementelor Finite-Implementare
ice[nce]=i;vecval[nce]=0.0; /* val. perete inf. */nce++;
if(out.pointmarkerlist[i]==2)
ice[nce]=i;vecval[nce]=1.0; /* val. perete sup. */nce++;
ISCreateGeneral(PETSC_COMM_SELF,nce,ice,&is);MatZeroRows(A, is, &unu); /* modificare matrice */ISDestroy(is);MatView(A,PETSC_VIEWER_STDOUT_WORLD);/* creare vectori */VecCreateSeq(PETSC_COMM_SELF,out.numberofpoints,&b);VecDuplicate(b,&x);VecSet(&zero,b);/* modificare vector termeni liberi */VecSetValues(b,nce,ice,vecval,INSERT_VALUES);VecAssemblyBegin(b);VecAssemblyEnd(b);
/* Creare context solver sistem ecuatii liniare */ierr=SLESCreate(PETSC_COMM_SELF,&sles);CHKERRQ(ierr);ierr=SLESSetOperators(sles,A,A,DIFFERENT_NONZERO_PATTERN);CHKERRQ(ierr);ierr=SLESSetFromOptions(sles);CHKERRQ(ierr);/* Solutionare sistem de ecuatii */ierr=SLESSolve(sles,b,x,&nit);CHKERRQ(ierr);ierr=PetscPrintf(PETSC_COMM_SELF,
"Numar de iteratii = %d\n\n",nit);CHKERRQ(ierr);SLESDestroy(sles);MatDestroy(A);VecDestroy(b);
Vectorul, declarat ca variabila de tip Vec, este unul dintre cele mai simpleobiecte PETSc. Vectorii se utilizeaza pentru stocarea solutiei, a membru-lui drept al sistemelor de ecuatii, etc. In cazul de fata operam cu vectorisecventiali, care se creaza cu comanda
VecCreateSeq (PETSC−COMM−SELF, int m, Vec* x);

Metoda Elementelor Finite-Implementare 151
unde m este numarul componentelor vectorului. Crearea altor vectori cuacelasi numar de componente se face eficient prin duplicarea unui vectordeja creat,
VecDuplicate (Vec old, Vec* new);
Initializarea tuturor componentelor vectorului cu o valoare scalara val poatefi facuta cu comanda
VecSet (PetscScalar* val, Vec x);
Modificarea unui subset de componente ale vectorului este o operatie ce seefectueaza ın doua etape. Cel mai eficient este sa modificam mai multe com-ponente cu o singura comanda. Pentru aceasta trebuie sa pregatim ın pre-alabil un tablou de indici int* indici si un tablou de valori PetscScalar*valori pentru cele n componente ce urmeaza a fi modificate. Prima etapava fi apelul comenzii
VecSetValues (Vec x, int n, int* indici, PetscScalar* valori,
INSERT−VALUES);
Daca ın locul inserarii noilor valori se doreste adunarea lor la valorile deja ex-istente atunci ultimul argument va fi ADD−VALUES ın loc de INSERT−VALUES.A doua estapa o constituie apelarea rutinelor de asamblare a vectorului dupace toate componentele au fost precizate,
VecAssemblyBegin (Vec x);
VecAssemblyEnd (Vec x);
PETSc ofera mai multe implementari pentru matrici pentru ca nu ex-ista un format universal care sa fie potrivit pentru toate problemele. In cazulMEF, desi dimensiunea matricii sistemului poate atince valori de 103 . . . 107,numarul de componente nenule pe fiecare linie este ∼ 10. Evident ca sto-carea completa a matricii (107 × 107 = 1014 componente) este complet ne-economica, pe cand stocarea numai a componentelor nenule, deci a informatiilorutile, ocupa 10 × 107 = 108 locatii de memorie. Formatul de stocare a ma-tricilor PETSc AIJ este formatul Yale (comprimat pe linii) si utilizeazaurmatoarele tablouri:- tablou monodimensional care stocheaza elementele nenule, linie dupa linie;- tablou monodimensional ce contine indicii coloanelor;- tablou de pointeri care indica ınceputul fiecarei linii ın tablourile de maisus3
3Informatia din ultimele doua tablouri este practic identica, mai putin elementele di-agonale, cu tablourile psup1 si psup2.

152 Metoda Elementelor Finite-Implementare
Pentru a crea o matrice rara Mat A, cu m linii si n coloane, se utilizeazacomanda
MatCreateSeqAIJ (PETSC−COMM−SELF, int m, int n, int nz,
int* nnz, Mat* A);
unde nz si nnz pot fi folosite pentru pre-alocarea memoriei, asa cum searata ın continuare. Utilizatorul poate pune nz=0 si nnz=PETSC−NULL lasandPETSc sa controleze alocarea memoriei.
Procesul de alocare dinamica a memoriei are urmatoarele etape:(ı) se aloca noua regiune de memorie;(ıı) se copiaza continutul din zona veche ın cea noua(ııı) se elibereaza zona veche.Operatia de copiere este foarte costisitoare (ca timp de calcul) si ıncetinestefoarte mult executia programului. Prin urmare pentru asamblarea eficientaa unei matrici AIJ este esentiala pre-alocarea spatiului de memorie al ma-tricii. Utilizatorul are la dispozitie doua optiuni de pre-alocare a memorieiın PETSc. Prima varianta presupune precizarea valorii nz pentru a pre-ciza acelasi numar de componente nenule pe fiecare linie. Aceasta solutieeste utila atunci cand liniile au aproximativ acelasi numar de componente.Daca pentru o linie oarecare nz este o sub-estimare a necesarului de memorie,PETSc va aloca automat mai multa memorie (cu dezavantajul consumuluisuplimentar de timp). A doua varianta, preferabila, presupune indicarea ıntabloul nnz, de lungime m, a numarului de componente pentru fiecare linieın parte:
nnz[i]=psup2[i+1]-psup2[i]+1;
Aici psup2[i+1]-psup2[i] este numarul nodurilor adiacente nodului i, iar1 se adauga pentru componenta de pe diagonala principala. Inainte de aıncepe asamblarea matricilor elementale se initializeaza matricea cu zero princomanda MatZeroEntries(A).
Adaugarea contributiei matricilor elementale se face cu comanda
MatSetValues (Mat A, int m, int* im, int n, int* in,
PetscScalar* valori, ADD−VALUES);
Aceasta rutina aduna o matrice de dimensiune m*n. Tablourile de indici im siin contin indicii globali ai liniilor si coloanelor. MatSetValues() utilizeazaconventia standard C conform careia numerotarea liniilor si coloanelor ıncepecu 0. Tabloul valori contine matricea elementala stocata linie dupa linie.
Dupa terminarea adunarii componentelor elementale, procesarea matriciiın forma finala se face cu instructiunile

Metoda Elementelor Finite-Implementare 153
MatAssemblyBegin (Mat A, MAT−FINAL−ASSEMBLY);MatAssemblyEnd (Mat A,MAT−FINAL−ASSEMBLY);
Matricea A obtinuta prin asamblarea matricilor elementale este singu-lara. Cititorul poate verifica ın cazul discretizarii operatorului Laplace casuma componentelor pe fiecare linie este zero. Matricea A devine nesingularaprin introducerea conditiilor la limita esentiale. Daca valoarea necunoscuteicu indicele i este impusa, atunci aplicand tehnica prezentata ın manualul dealgebra liniara ar trebui sa:(ı) eliminam linia i din matrice (numarul ecuatiilor scade cu 1),(ıı) ınmultim coloana i cu valoarea corespunzatoare si o adunam cu semnschimbat ın membrul drept,(ııı) eliminam coloana i din matrice (numarul coloanelor scade cu 1).In cazul utilizarii formatului de stocare pentru matrici rare operatiile de maisus altereaza structura matricii si necesita relocarea (copierea) unor portiunimari ale matricii. Prin urmare, implementarea metodei de mai sus este ine-ficienta.
O varianta simpla si eficienta este ınlocuirea liniei i cu o linie de matriceunitate. In acest caz sunt anulate toate componentele liniei i, mai putincea de pe diagonala principala care devine egala cu 1. In membrul dreptse pune valoarea variabilei ın pozitia i. Desi avantajoasa, aceasta metodaare dezavantajul pierderii simetriei unei matrici initial simetrice (cum estecazul operatorului Laplace). Comanda cu care se modifica matricea pentruimplementarea conditiilor esentiale (Dirichlet) este
MatZeroRows (Mat A, IS linii, PetscScalar* val−diag);
Aici IS este o variabila de tip ”Index Set” ın care sunt stocati indicii liniilorce urmeaza a fi modificate, iar val−diag este valoarea ce va fi introdusa pediagonala. Un set de indici IS set−indici se creaza cu comanda
ISCreateGeneral (PETSC−COMM−SELF, int n, int* indici, IS*
set−indici);
Aceasta rutina practic copiaza cei n indici din tabloul indici. Prin urmare,tabloul indici poate fi distrus dupa apelul comenzii ISCreateGeneral().
Odata construite matricea A si vectorul b, ajungem ın ultima parte aprocesorului, unde se solutioneaza sistemul de ecuatii liniare A*x=b. ObiectulSLES (Linear Equations Solver) este componenta centrala ın PETSc pentruca permite accesul eficient, ın mod unitar, la toate procedurile de solutionaredirecta sau iterativa a sistemelor de ecuatii. Pentru a utiliza SLES mai ıntaise creaza contextul de solutionare cu comanda

154 Metoda Elementelor Finite-Implementare
SLESCreate (PETSC−COMM−SELF, SLES* context);
In continuare se precizeaza matricile asociate cu sistemul de ecuatii liniare:
SLESSetOperators (SLES context, Mat A, Mat P, MatStructure
flag);
Argumentul de tip matrice A este matricea care defineste sistemul de ecuatiiliniare. Matricea P, care poate fi diferita de A, este folosita la preconditionareasistemului ın vederea accelerarii algoritmului iterativ de solutionare. In cazulde fata am ales tot A pentru preconditionare. Argumentul flag poate fiutilizat pentru eliminarea operatiilor redundante cand se solutioneaza repetatsisteme liniare de aceeasi dimensiune, cu aceasi metoda de preconditionare.cand este solutionat un singur sistem de ecuatii flag este practic ignorat. Incazul de fata am pus DIFFERENT−NONZERO−PATTERN, dar cititorul poate gasiın [5], pag. 62, mai multe precizari.
Probabil cea mai puternica facilitate oferita de utilizarea SLES este posi-bilitatea configurarii solverului utilizand optiuni ın linia de comanda.
SLESSetFromOptions (SLES context);
Pentru a schimba metoda de solutionare si parametrii procesului iterativ,utilizatorul are la dispozitie o paleta larga de optiuni, descrise pe larg ınCapitolul 4 din [5].
In fine, solutionarea propriu-zisa a sistemului de ecuatii se face cu co-manda
SLESSolve (SLES context, Vec b, Vec x, int* iteratii);
unde ultimul argument returneaza numarul de iteratii necesare pentru aatinge precizia dorita.
Cand obiectele utilizate pentru solutionarea sistemului nu mai sunt nece-sare ele pot fi distruse eliberandu-se memoria pe care o ocupa:SLESDestroy(SLES context), MatDestroy(Mat A), VecDestroy(Vec b).
Procedura de calcul al matricii elementale pentru operatorul Laplacesi un element triunghiular liniar este prezentata mai jos. Procedura preiainformatiile geometrice ale elementului curent din retea, si returneaza untablou cu indicii nodurilor ın numerotare globala, respectiv un tablou monodi-mensional ın care este stocata matricea elementala linie dupa linie. Cititorulpoate recunoaste usor relatiile de calcul pentru componentele matricii ele-mentale deduse ın Sectiunea 5.4.
int element(int ie, struct triangulateio mesh,int* inod, PetscReal* emat)

Metoda Elementelor Finite-Implementare 155
/* Calculeaza matricea elementala pentru elementul 2Dtriunghiular liniar, operator Laplace;E(i,j) = - integral (grad N_i * grad N_j)ie : indicele elementului (input)mesh : triangulatia domeniului (input)inod : indicii nodurilor elementului (output)emat : matricea elementala (output)*/
PetscReal x11, x21, x12, x22, x13, x23;PetscReal a1, a2, a3, b1, b2, b3, c1, c2, c3, a4;/* indicii nodurilor elementului */inod[0] = mesh.trianglelist[3*ie+0];inod[1] = mesh.trianglelist[3*ie+1];inod[2] = mesh.trianglelist[3*ie+2];/* coordonatele nodurilor elementului */x11 = mesh.pointlist[2*inod[0]+0];x21 = mesh.pointlist[2*inod[0]+1];x12 = mesh.pointlist[2*inod[1]+0];x22 = mesh.pointlist[2*inod[1]+1];x13 = mesh.pointlist[2*inod[2]+0];x23 = mesh.pointlist[2*inod[2]+1];/* calculeaza coeficienti */a1 = x12*x23 - x13*x22;a2 = x13*x21 - x11*x23;a3 = x11*x22 - x12*x21;b1 = x22 - x23; b2 = x23 - x21; b3 = x21 - x22;c1 = x13 - x12; c2 = x11 - x13; c3 = x12 - x11;a4 = 2.0*(a1+a2+a3); // dublul ariei elementului;if (a4 == 0.0)
PetscPrintf(PETSC_COMM_SELF,"Aria elementului %d este zero !\n",ie);
return 1;
emat[0] = (b1*b1+c1*c1)/a4;emat[1] = (b1*b2+c1*c2)/a4;emat[2] = (b1*b3+c1*c3)/a4;emat[3] = (b2*b1+c2*c1)/a4;emat[4] = (b2*b2+c2*c2)/a4;emat[5] = (b2*b3+c2*c3)/a4;emat[6] = (b3*b1+c3*c1)/a4;emat[7] = (b3*b2+c3*c2)/a4;

156 Metoda Elementelor Finite-Implementare
emat[8] = (b3*b3+c3*c3)/a4;return 0;
Analiza solutiei
Solutia sistemului de ecuatii este obtinuta ın structura de date Vec x. Ac-cesul la componentele vectorului se face prin obtinerea ın prealabil a unuipointer catre un tablou de elemente. Daca am declarat spre exemplu unpointer PetscScalar* array, iar vectorul considerat este Vec v, atunci func-tia
VecGetArray(Vec v, PetscScalar** array)
returneaza pointerul dorit. Este important sa mentionam ca VecGetArray()
nu copiaza componentele vectorului ci asigura doar accesul direct la acestea.Dupa utilizarea tabloului de valori trebuie apelat
VecRestoreArray(Vec v, PetscScalar** array)
Analiza solutiei, si eventuale operatii suplimentare (cum ar fi calculul
gradientilor, etc.) poarta numele de postprocesare. In exemplul de mai jos,solutia este accesata prin intermediul pointerului out.pointattributelist,si afisata la terminal. Acesta este cel mai simplu mod de examinare a solutiei,dar si cel mai ineficient (este suficient sa de imaginam parcurgerea unei listede cateva zeci de mii de valori numerice). Cel mai eficient mod de examinarea solutiei este posprocesarea grafica. Exista la ora actuala o multitudine deprograme pentru analiza masivelor de date numerice, dar vom exemplificamai jos utilizarea programului expert TECPLOT [3].
/* POSTPROCESARE */VecGetArray(x,&out.pointattributelist);for(i=0;i<out.numberofpoints;i++)
ierr=PetscPrintf(PETSC_COMM_SELF,"nodul %d valoare %f\n",
i,out.pointattributelist[i]);CHKERRQ(ierr);
ierr=tecplot(out,filename);CHKERRQ(ierr);VecRestoreArray(x,&out.pointattributelist);
Procedura tecplot() prezentata mai jos genereaza un fisier de date pentruprogramul de postprocesare TECPLOT.
int tecplot(struct triangulateio mesh, char* filename) /* Scrie fisier cu reteaua si solutia pentru TECPLOT */

Metoda Elementelor Finite-Implementare 157
int ierr, i;FILE *fp;ierr=PetscFOpen(PETSC_COMM_SELF,filename,"w",&fp);CHKERRQ(ierr);PetscFPrintf(PETSC_COMM_SELF,fp,"TITLE = \"FEM 2D\"\n");PetscFPrintf(PETSC_COMM_SELF,fp,
"VARIABLES = \"X\" \"Y\" \"PSI\"\n");PetscFPrintf(PETSC_COMM_SELF,fp,
"ZONE N=%d E=%d F=FEPOINT ET=TRIANGLE\n",mesh.numberofpoints,mesh.numberoftriangles);
for(i=0;i<mesh.numberofpoints;i++)
PetscFPrintf(PETSC_COMM_SELF,fp,"%10.6f%10.6f%10.6f\n",mesh.pointlist[2*i+0],mesh.pointlist[2*i+1],mesh.pointattributelist[i]);
for(i=0;i<mesh.numberoftriangles;i++)
PetscFPrintf(PETSC_COMM_SELF,fp,"%5d%5d%5d\n",mesh.trianglelist[3*i+0]+1,mesh.trianglelist[3*i+1]+1,mesh.trianglelist[3*i+2]+1);
ierr=PetscFClose(PETSC_COMM_SELF,fp);CHKERRQ(ierr);return 0;
Fisierul generat contine atat valorile nodale ale solutiei numerice cat si infor-matiile despre reteaua de discretizare utilizata, asa cum este prezentat maijos.
TITLE = "FEM 2D" VARIABLES = "X" "Y" "PSI" ZONE N=14 E=15
F=FEPOINT ET=TRIANGLE
0.000000 0.000000 0.000000
1.300000 0.000000 0.000000
1.300000 0.600000 1.000000
1.000000 0.600000 1.000000
0.500000 0.900000 1.000000
0.000000 0.900000 1.000000
0.000000 0.400000 0.463653
0.650000 0.000000 0.000000
0.250000 0.000000 0.000000
0.250000 0.650000 0.741050
0.450000 0.325000 0.408289
0.798529 0.315441 0.470810
1.300000 0.350000 0.573840
0.750000 0.750000 1.000000
7 11 10
11 12 14
7 1 9
5 6 10
13 3 4

158 Metoda Elementelor Finite-Implementare
11 7 9
6 7 10
13 12 2
8 12 11
9 8 11
12 13 4
5 10 14
2 12 8
12 4 14
10 11 14
Mentionam ca ın programul C a fost utilizata conventia de numerotare anodurilor ıncepand cu 0, ın timp ce fisierul TECPLOT considera implicitnumerotarea ıncepand cu 1.
5.6 Calculul valorilor nodale ale gradientului
solutiei
In cazul utilizarii unei aproximatii liniare pe portiuni a solutiei (elementefinite liniare), componentele gradientului solutiei vor fi constante pe fiecareelement. Chiar daca elementele utilizeaza aproximatii polinomiale de gradsuperior, ele asigura doar continuitatea solutiei numerice nu si continuitateaderivatelor partiale ale acesteia. Se pune deci problema evaluarii valorilornodale ale gradientului, ın conditiile ın care fiecare element adiacent unuinod furnizeaza alta valoare a gradientului.
Ideea de baza a tehnicii ce urmeaza sa o prezentam a fost deja schitataın Figura 4.6(b) pentru problema 1D. La fel ca ın cazul monodimensional, sipentru elementele liniare 2D (triunghiuri cu trei noduri) si 3D (tetraedre cupatru noduri) precizia maxima a derivatelor partiale evaluate numeric esteatinsa ın baricentrul elementului. Sa analizam ın cele ce urmeaza cazul 2D.
baricentru
punct interior
Figura 5.5: Petecul de elemente adiacente unui nod interior.
Pentru elementul triunghiular coordonatele baricentrului sunt media a-ritmetica a coordonatelor nodurilor. In general, un nod din interiorul dome-

Metoda Elementelor Finite-Implementare 159
niului poate avea pana la 10 elemente adiacente. Pentru nodurile de pefrontiera putem avea, ın cazul nodurilor de colt doar un element adiacent.In cele ce urmeaza vom considera mai ıntai cazul cand sunt cel putin treielemente adiacente unui nod, ca ın Figura 5.5. Pentru fiecare element, cu in-dicele e, adiacent nodului P , coordonatele baricentrului le notam cu (xe, ye).Sa notam deasemenea cu fe valoarea unei componente a gradientului solutieievaluat ın baricentrul elementului e (fie derivata partiala ∂/∂x, fie ∂/∂y).
Ideea centrala a metodei de calcul a valorii nodale ın P a gradientuluieste utilizarea unei aproximatii liniare pentru fiecare componenta a gradien-tului obtinuta cu metoda celor mai mici patrate utilizand valorile evaluateın baricentrele elementelor adiacente nodului P , [32]. Cu alte cuvinte, ınvecinatatea nodului P vom presupune
f(x, y) = c1 + c2x+ c3y ,
unde coeficientii c1, c2 si c3 sunt determinati din problema de minimizare asumei patratelor erorilor∑
e
[f(xe, ye) − fe]2 =∑
e
[c1 + c2 xe + c3 ye − fe]2 = min .
Aceasta conduce la urmatorul sistem de trei ecuatii liniare,
c1∑
e
1 + c2∑
e
xe + c3∑
e
ye =∑
e
fe (5.22a)
c1∑
e
xe + c2∑
e
x2e + c
∑e
xeye =∑
e
xefe (5.22b)
c1∑
e
ye + c2∑
e
xeye + c3∑
e
y2e =
∑e
yefe (5.22c)
Evident, ca pentru orice metoda care minimizeaza suma patratelor erorilormatricea sistemului este simetrica, si o notam cu
A1 A2 A3
A2 A4 A5
A3 A5 A6
unde A1 =∑
e 1, A2 =∑
e xe, A3 =∑
e ye, A4 =∑
e x2e, A5 =
∑e xeye, si
A6 =∑
e y2e . Solutia sistemului de ecuatii este
c1c2c3
=
1
D
A4A6 − A2
5 A3A5 − A2A6 A2A5 − A3A4
A3A5 − A2A6 A1A6 − A23 A2A3 − A1A5
A2A5 − A3A4 A2A3 − A1A5 A1A4 − A22
∑e
fe∑e
xefe∑e
yefe

160 Metoda Elementelor Finite-Implementare
unde D = A1A4A6 − 2A2A3A5 − A23A4 − A2
5A1 − A22A6 este determinantul
matricii. Conditia ca D = 0 (deci matricea sa fie nesingulara) necesita celputin trei puncte necoliniare. Odata calculati coeficientii c1, c2, si c3 putemevalua componentele gradientului ın nodul P ,
fP = c1 + c2 xP + c3 yP .
Algoritmul prezentat mai sus pentru determinarea coeficientilor polino-mului de gradul ıntai ın doua coordonate este implementat ın rutina patch()de mai jos.
int patch (int ipatch, struct triangulateio mesh,int* esup1, int* esup2,PetscReal& C1x, PetscReal& C2x, PetscReal& C3x,PetscReal& C1y, PetscReal& C2y, PetscReal& C3y)
/* coeficientii polinomului de regresie pentru petec *//* tehnica SUPERCONVERGENT PATCH RECOVERY pt. triunghiuri liniare *//* valorile nodale ale solutiei sunt in mesh.pointattributelist */
PetscReal xe, ye, dx, dy, val;PetscReal A1,A2,A3,A4,A5,A6,B1x,B2x,B3x,B1y,B2y,B3y,DET;PetscReal x[3],y[3],a[3],b[3],c[3],twoA;int ielem, inode;A1=0.0;A2=0.0;A3=0.0;A4=0.0;A5=0.0;A6=0.0;B1x=0.0;B2x=0.0;B3x=0.0;B1y=0.0;B2y=0.0;B3y=0.0;
for (ielem=esup2[ipatch];ielem<esup2[ipatch+1];ielem++)/* calculeaza coordonatele baricentrice */xe=0.0; ye=0.0;for (inode=0;inode<3;inode++)
x[inode]=mesh.pointlist
[2*mesh.trianglelist[3*esup1[ielem]+inode]];y[inode]=mesh.pointlist
[2*mesh.trianglelist[3*esup1[ielem]+inode]+1];xe += x[inode];ye += y[inode];
xe /= 3.0; ye /= 3.0;/* calculeaza componentele matricii */A1 += 1.0; A2 += xe; A3 += ye;A4 += xe*xe; A5 += xe*ye; A6 += ye*ye;/* calculeaza componentele gradientului */

Metoda Elementelor Finite-Implementare 161
a[0]=x[1]*y[2]-x[2]*y[1];a[1]=x[2]*y[0]-x[0]*y[2];a[2]=x[0]*y[1]-x[1]*y[0];twoA=a[0]+a[1]+a[2];b[0]=y[1]-y[2]; c[0]=x[2]-x[1];b[1]=y[2]-y[0]; c[1]=x[0]-x[2];b[2]=y[0]-y[1]; c[2]=x[1]-x[0];dx =0.0; dy=0.0;for (inode=0;inode<3;inode++)
val=mesh.pointattributelist
[mesh.trianglelist[3*esup1[ielem]+inode]];dx += b[inode]*val;dy += c[inode]*val;
dx /= twoA; dy /= twoA;/* calculeaza componentele termenului liber */B1x += dx; B2x += xe*dx; B3x += ye*dx;B1y += dy; B2y += xe*dy; B3y += ye*dy;
/* calculeaza coeficientii polinomului de regresie */DET = A1*A4*A6+2.0*A2*A3*A5-A3*A3*A4-A5*A5*A1-A2*A2*A6;C1x=((A4*A6-A5*A5)*B1x+(A3*A5-A2*A6)*B2x+(A2*A5-A3*A4)*B3x)/DET;C1y=((A4*A6-A5*A5)*B1y+(A3*A5-A2*A6)*B2y+(A2*A5-A3*A4)*B3y)/DET;C2x=((A3*A5-A2*A6)*B1x+(A1*A6-A3*A3)*B2x+(A2*A3-A1*A5)*B3x)/DET;C2y=((A3*A5-A2*A6)*B1y+(A1*A6-A3*A3)*B2y+(A2*A3-A1*A5)*B3y)/DET;C3x=((A2*A5-A3*A4)*B1x+(A2*A3-A1*A5)*B2x+(A1*A4-A2*A2)*B3x)/DET;C3y=((A2*A5-A3*A4)*B1y+(A2*A3-A1*A5)*B2y+(A1*A4-A2*A2)*B3y)/DET;return 0;
Procedura este aplicabila nodurilor care au cel putin trei elemente triunghiu-lare adiacente, altfel determinatul DET este zero deci matricea este singulara.DET se mai poate anula si daca baricentrele triunghiurilor sunt coliniare.
Evaluarea componentelor gradientului ın nod se face prin simpla evaluarea polinoamelor C1x + xC2x + yC3x, respectiv C1y + xC2y + yC3y. Pentrunodurile de frontiera procedura nu este direct aplicabila, chiar daca nodulare trei elemente adiacente, pentru ca erorile numerice sunt prea mari. Cumalgoritmul de mai sus are precizie maxima pentru nodurile din interioruldomeniului, gradientul ın nodurile de frontiera va fi evaluat prin extrapolareavalorilor obtinute pentru nodurile interioare adiacente nodului de frontiera,Figura 5.6. Pentru ca un nod de frontiera poate avea mai multe noduri adi-acente ın interior, valoarea gradientului va fi evaluata ca media aritmetica avalorilor obtinute din nodurile interioare adiacente, ca cele din Figurile 5.6(a)

162 Metoda Elementelor Finite-Implementare
punct interior
punct pe frontiera
(a)
punct pe frontiera
interiorpunct
(b)
Figura 5.6: Petece de elemente pentru nodurile interioare adiacente unui nodde frontiera.
si 5.6(b). Aceasta regula este implementata ın procedura grad() de mai jos.
int grad(struct triangulateio mesh, int* esup1, int* esup2,int* psup1, int* psup2, PetscReal** GRADx, PetscReal** GRADy)/* calculul gradientului solutiei in noduri */
int ipoin,npatch,ipatch,ipsup;PetscReal *gradx, *grady, xe, ye, dx, dy, val, xpoin, ypoin;PetscReal C1x,C2x,C3x,C1y,C2y,C3y;PetscMalloc(mesh.numberofpoints*sizeof(PetscReal),&gradx);PetscMalloc(mesh.numberofpoints*sizeof(PetscReal),&grady);
for (ipoin=0;ipoin<mesh.numberofpoints;ipoin++)/* coordonatele punctului */xpoin = mesh.pointlist[2*ipoin];ypoin = mesh.pointlist[2*ipoin+1];if (mesh.pointmarkerlist[ipoin]==0) /* nod interior */
patch(ipoin, mesh, esup1, esup2, C1x, C2x, C3x, C1y, C2y, C3y);/* evalueaza polinomul de regresie in punct */gradx[ipoin]=C1x+C2x*xpoin+C3x*ypoin;grady[ipoin]=C1y+C2y*xpoin+C3y*ypoin;
else /* nod de frontiera */
npatch=0; /* initializeaza numarul de petece utilizat */gradx[ipoin]=0.0; /* initializare */grady[ipoin]=0.0; /* initializare */

Metoda Elementelor Finite-Implementare 163
for (ipsup=psup2[ipoin];ipsup<psup2[ipoin+1];ipsup++)
ipatch = psup1[ipsup];if (mesh.pointmarkerlist[ipatch]==0) /* nod interior *//* if ((esup2[ipatch+1]-esup2[ipatch])>2) */
patch(ipatch, mesh, esup1, esup2,C1x, C2x, C3x, C1y, C2y, C3y);
gradx[ipoin]+=C1x+C2x*xpoin+C3x*ypoin;grady[ipoin]+=C1y+C2y*xpoin+C3y*ypoin;npatch++; /* incrementeaza numarul de petece */
if (npatch>0) /* unele noduri nu au noduri interioare adiacente */
gradx[ipoin] /= npatch; /* mediere */grady[ipoin] /= npatch; /* mediere */
*GRADx = gradx;*GRADy = grady;return 0;
punct interior
punct pe frontiera
(a)
punct pe frontiera
(b)
Figura 5.7: Cazuri pentru nodurile de ”colt”.
Pentru nodurile ”de colt” putem avea un singur nod interior ınvecinat, caın Figura 5.7(a), si petecul aferent acestui nod este utilizat pentru evaluareaprin extrapolare a componentelor gradientului. In situatia din Figura 5.7(b)

164 Metoda Elementelor Finite-Implementare
procedura de mai sus nu poate fi aplicata, deci trebuie luate precautii specialeca orice nod de pe frontiera sa aiba cel putin un nod interior ınvecinat.
5.7 Calculul derivatei normale a solutiei
In Sectiunea 5.6 am prezentat o metoda de evaluare a componentelor gradien-tului solutiei ın punctele nodale aplicabila inclusiv punctelor de pe frontiera.Prin urmare, calculul derivatei normale pe frontiera pare a fi o simpla for-malitate. Odata calculata solutia problemei, spre exemplu functia de curentψ, respectiv componentele gradientului ∇ψ, putem evalua
∂ψ
∂n= n · ∇ψ = nx
∂ψ
∂x+ ny
∂ψ
∂y.
Din punct de vedere practic, ∂ψ/∂n reprezinta viteza tangenta la frontieraψ = constant (care materializeaza spre exemplu frontiere impenetrabile pre-cum pereti solizi sau frontiere libere). Exista ınsa o modalitate mai simplasi mai eleganta de evaluare a derivatei normale. Sa presupunem ca amsolutionat problema si am calculat valorile nodale d. Putem acum sa re-scriem ecuatiile (5.15) facand abstractie de conditiile la limita (esentiale saunaturale), (
NA,∂u
∂n
)Γ
=∑B∈η
a(NA, NB)dB + (NA, f) , (5.23)
pentru A ∈ η. Matricea din membrul drept este de fapt matricea rezultatadin asamblarea matricilor elementale. In membrul stang nu avem derivatanormala ın punctul A ci fluxul solutiei asociat nodului A:
FA ≡(NA,
∂u
∂n
)Γ
=
∫Γ
NA∂u
∂ndΓ . (5.24)
Conform Figurii 5.8, ın cazul elementelor liniare derivata normala esteconstanta pe latura unui element. Prin urmare, fluxul asociat nodului A este
FA = AB
2
(∂u
∂n
)AB
+ AC
2
(∂u
∂n
)AC
unde AB si AC sunt segmentele de frontiera (laturile elementelor) adiacentenodului A. Putem acum sa asociem punctului A valoarea derivatei normale(
∂u
∂n
)A
≡ 2
AB + AC
FA (5.25)

Metoda Elementelor Finite-Implementare 165
B A Cs
∂u
∂n (∂u
∂n
)AB
(∂u
∂n
)AC
B A Cs
NA(s)
1
Figura 5.8: Calculul fluxului solutiei ıntr-un punct de pe frontiera.
Cu alte cuvinte, asociem nodului A o valoare a derivatei normale care repre-zinta o medie ponderata a valorilor de la stanga, respectiv dreapta, punctu-lui. Avantajul principal al acestei metode ın constituie evaluarea simpla sicomoda a membrului drept din (5.23).
5.8 Curgerea peste un sir infinit de cilindri
Validarea unui program de calcul si evaluarea preciziei schemei numericeutilizate sunt etape obligatorii ınaintea utilizarii pentru solutionarea unorprobleme ingineresti. In cele ce urmeaza vom parcurge aceste etape pentruo problema test simpla, a carei solutie exacta este cunoscuta. Compara-rea solutiei numerice cu solutia analitica ofera certitudinea implementariicorecte. Problema aleasa ın aceasta sectiune corespunde curgerii fluiduluiperfect peste un sir de cilindri (aproape circulari).
5.8.1 Solutia analitica
Potentialul complex al curgerii generate de un sir infinit de dipoli, fiecaredipol avand axa paralela cu axa x iar centrele dipolilor dispuse cu pasul tpe axa y, este C coth(πz/t), [29], unde C este o constanta. Daca supra-punem peste aceasta curgere un curent uniform cu potentialul complex U∞z,obtinem o curgere cu
Φ + iΨ = U∞z + C coth(πzt
), (5.26)

166 Metoda Elementelor Finite-Implementare
unde Φ este potentialul vitezei iar Ψ este functia de curent. Separand parteareala si cea imaginara din membrul drept obtinem expresiile potentialuluivitezei, respectiv functiei de curent,
Φ(x, y) = U∞x+ Csinh(2πx/t)
cosh(2πx/t) − cos(2πy/t), (5.27a)
Ψ(x, y) = U∞y − Csin(2πy/t)
cosh(2πx/t) − cos(2πy/t). (5.27b)
Ecuatia liniei de curent Ψ = 0 poate fi scrisa sub forma
y
(cosh
2πx
t− cos
2πy
t
)=
C
U∞sin
2πy
t
=C
U∞
[2πy
t− 1
3!
(2πy
t
)3
+ . . .
],
unde ın membrul drept am utilizat exprimarea ın serie a functiei sin. Evidenty = 0 este o linie de curent. Daca scoatem factor comun pe y observam calinia de curent Ψ = 0 este descrisa si de ecuatia
cosh2πx
t− cos
2πy
t=
2πC
tU∞−(
2π
t
)3C
U∞
y2
3!+ . . .
Aceasta este ecuatia unui oval centrat ın origine. Deoarece orice linie decurent ınchisa poate fi ınlocuita cu o frontiera solida, rezulta ca potentialulcomplex (5.26) descrie curgerea ın jurul unui sir de cilindri cu sectiune ovaladispusi cu pasul t de-a lungul axei y. Sa examinam forma acestui oval.
Semi-diametrul de-a lungul axei x este obtinut punand y = 0, de underezulta
cosh2πx
t− 1 =
2πC
aU∞, sau sinh2 πx
a=
πC
tU∞.
Pentru valori mici ale lui πx/t, putem aproxima ecuatia de mai sus astfel:(πxt
)2
≈ πC
tU∞.
In mod similar putem estima semi-diametrul dupa axa y punand x = 0,
1 − cos2πy
t=
C
U∞ysin
2πy
t,
sau utilizand tangenta unghiului πy/t,
y tanπy
t=
C
U∞.

Metoda Elementelor Finite-Implementare 167
Si ın acest caz, pentru valori mici ale lui πy/t avem ın prima aproximatie(πyt
)2
≈ πC
tU∞.
Cu alte cuvinte, daca pasul sirului de cilindri este mult mai mare decat di-mensiunea caracteristica ın sectiune transversala, vom avea cilindri circulari.
Daca punem C = πU∞R2/t , observam ca R este raza cilindrului circular cu
conditia ca πR/t sa fie suficient de mic.Daca luam R ca lungime de referinta, respectiv U∞ ca viteza de referinta,
putem rescrie expresiile pentru Φ si Ψ ın forma adimensionala,
Φ
U∞R=
x
R+πR
a
sinh(2πx/t)
cosh(2πx/a) − cos(2πy/a), (5.28a)
Ψ
U∞R=
y
R− πR
a
sin(2πy/t)
cosh(2πx/a) − cos(2πy/a). (5.28b)
Pentru exemplul numeric pe care ıl vom considera ın cele ce urmeazaalegem un pas relativ t/R = π, deci spectrul hidrodinamic (ansamblul liniilorechipotentiale si de curent) va fi descris de ecuatiile
Φ = x+sinh(2x)
cosh(2x) − cos(2y), (5.29)
Ψ = y − sin(2y)
cosh(2x) − cos(2y). (5.30)
Linia de curent Ψ = 0 este descrisa de ecuatia y [cosh(2x) − cos(2y)] =sin(2y). Pentru y → 0 obtinem cosh(2x) − 1 = 2 de unde semi-diametruldupa axa x rezulta x = 0.5 arccosh(3) = 0.8813736. Pentru x = 0 avemy(1 − cos 2y) = sin 2y sau y tan y = 1. Semi-diametrul dupa axa y va fiy = 0.8603336. Se observa ca cele doua semi-diametre difera cu doar ±1.2%fata de valoarea medie, deci cu buna aproximatie putem spune ca avem uncilindru circular. Cum ınsa πR/t este egal cu unitatea, deci nu suficientde mic pentru ca estimarile de mai sus obtinute prin trunchierea seriilor laprimul termen sa fie aceptabile, R = 1 este o aproximatie grosolana pentrusemi-diametru. Din punct de vedere geometric putem spune mai degraba capasul relativ al sirului de cilindri (pasul raportat la diametrul mediu) este1.8.
Componentele vitezei (U dupa axa x si V dupa axa y) sunt:
U =∂Φ
∂x=∂Ψ
∂y= 1 − 2
cos(2y) cosh(2x) − 1
[cosh(2x) − cos(2y)]2, (5.31a)
V =∂Φ
∂y= −∂Ψ
∂x= −2
sin(2y) sinh(2x)
[cosh(2x) − cos(2y)]2. (5.31b)

168 Metoda Elementelor Finite-Implementare
x
D
E A
yC
B
α
n
n
n
n
n
τ
ττ
τ
τ
Figura 5.9: Domeniului de analiza a curgerii peste un sir de cilindri.
5.8.2 Domeniul de analiza. Conditii pe frontiera
Pentru a construi domeniul de analiza a curgerii trebuie mai ıntai sa precizamforma obstacolului solid, adica forma sectiunii cilindrului. Pentru aceastasolutionam numeric ecuatia liniei de curent Ψ = 0 ın coordonate polare,punand x = r cosα, y = r sinα. Prin urmare, precizand diverse valori pentruunghiul α, solutionam pentru r ecuatia
r sinα [cosh(2r cosα) − cos(2r sinα)] = sin(2r sinα) .
Coordonatele a 10 puncte (cu pas unghiular de 10) ce definesc sfertul cilin-drului din primul cadran sunt prezentate ın Tabelul 5.2.
Tabelul 5.2: Sfertul din primul cadran al ovalului.α x y
0 .88137361 .0000000010 .86747400 .1529590720 .82630161 .3007491930 .75941099 .4384461440 .66930508 .5616136550 .55928532 .6665302860 .43322098 .7503607570 .29525675 .8112112680 .14952939 .8480233190 .00000000 .86033359

Metoda Elementelor Finite-Implementare 169
Simetria campului de viteza ın raport cu axele Ox si Oy, ımpreuna cuconditia de periodicitate ne permite sa reducem domeniul de analiza la celprezentat ın Figura 5.9. Segmentul AB de frontiera corespunde frontiereisolide a cilindrului, pe care se impune conditia de impenetrabilitate
v · n ≡ vn = 0 (5.32)
Conditiile de simetrie ale campului de viteza impun ca segmentele de frontieraEA si DC sa fie linii de curent, care prin definitie satisfac aceeasi conditie deviteza normala nula.
In sectiunea de intrare DE putem impune una din urmatoarele douaconditii:
• liniile de curent sa fie paralele cu axa Ox, adica v · τ ≡ vτ = 0,
• componenta vitezei normala la frontiera (componenta U a vitezei) safie constanta, adica v · n ≡ vn = −1.
Daca sectiunea de intrare este suficient de departe de obstacolul solid, ambeleconditii de mai sus sunt satisfacute de curentul uniform de fluid. In cazulformularii problemei cu ajutorul unei variabile auxiliare, pe fiecare segmental frontierei trebuie precizata o singura conditie. Prin urmare vom alege unadin cele doua optiuni de mai sus functie de variabila auxiliara utilizata.
Pe sectiunea de iesire BC viteza este paralela cu axa Ox, deci componentatangentiala este nula v · τ ≡ vτ = 0.
Triangulatia domeniului de analiza din Figura 5.9 este prezentata ınFigura 5.10.
Figura 5.10: Triangulatia domeniului de analiza a curgerii peste un sir decilindri.

170 Metoda Elementelor Finite-Implementare
5.8.3 Rezultate numerice si comparatie cu solutia ana-litica
Pentru ınceput examinam variatia vitezei tangentiale pe frontiera cilindrului.Tabelul 5.3 prezinta valorile numerice, respectiv exacte, ale vitezei ın puncte
Tabelul 5.3: Viteza pe frontiera cilindrului.α viteza viteza
MEF exact
0 0.000000 0.00000010 0.458355 0.43377120 0.881921 0.85958230 1.305471 1.26927140 1.677391 1.65396550 1.979907 2.00309760 2.292011 2.30320570 2.697476 2.68809480 2.726542 2.72705990 2.730419 2.740174
0 20 40 60 80α
0
1
2
3
vite
za
Figura 5.11: Viteza pe frontiera sfertului de cilindru (segmentul de frontieraAB) din Figura 5.9.
de pe cilindru dispuse cu pas unghiular de 10. Comparatia grafica esteprezentata ın Figura 5.11. Se observa o foarte buna concordata a solutieinumerice cu valorile exacte, chiar daca reteaua de discretizare nu este foartefina.

Metoda Elementelor Finite-Implementare 171
X
Y
-2 -1 00
0.5
1
1.5
(a) Solutia MEF
X
Y
-2 -1 00
0.5
1
1.5
(b) Solutia exacta
Figura 5.12: Campul de viteza pentru curgerea peste o retea de cilindri.

172 Metoda Elementelor Finite-Implementare
Figura 5.12 prezinta campul vectorial al vitezei, reprezentat grafic ınTECPLOT prin segmente orientate corespunzatoare valorilor nodale alevitezei. Desi intuitiva, aceasta reprezentare este pur calitativa, si servestenumai la obtinerea unor informatii generale asupra particularitatilor curgeriiconsiderata. Practic nu se poate distinge nici o diferenta ıntre reprezentareasolutiei numerice, Figura 5.12(a), si a celei exacte, Figura 5.12(b).
O reprezentare cantitativa a campului de presiune este prezentata ınFigura 5.13. Aici au fost reprezentate cu TECPLOT linii de egala pre-siune, iar valoarea coeficientului de presiune este precizata pentru fiecarelinie. In mod normal, liniile din Figura 5.13(a) ar fi trebuit reprezentatesuprapus peste cele din Figura 5.13(b). Concordanta este ınsa atat de bunaıncat diferentele sunt insesizabile pentru grosimea de linie utilizata.
Liniile de curent ale curgerii fluidului perfect pot fi obtinute ın doua mod-uri. Pe de o parte, ele pot fi calculate ca si curbe de ψ = constant, reprezen-tate cu linie ıntrerupta ın Figura 5.14, sau ca si linii de camp pentru campulvectorial al vitezei, reprezentate cu linie continua ın aceeasi figura. Micidiferente ıntre liniile de curent calculate ın cele doua moduri pot fi observatepentru solutia numerica din Figura 5.14(a). Explicarea acestor diferente ia ınconsiderare pe de o parte impunerea conditiei de curent uniform la intrare la odistanta prea mica de cilindru, si pe de alta parte posibilele erori numerice laevaluarea gradientului solutiei MEF. Diferentele care apar ın Figura 5.14(b)sunt datorate exclusiv programului de postprocesare TECPLOT.
In fine, Figurile 5.15 si 5.16 prezinta repartitia vitezei pe doua linii decurent. Ambele metode utilizate pentru evaluarea vitezei pe frontiera dome-niului ofera practic aceeasi precizie ın cazul problemei de fata. Totusi, pentruregiuni cu variatii mari de curbura ale frontierei (cum este cazul zonei bordu-lui de atac al profilelor aero/hidrodinamice), metoda ce utilizeaza evaluareacomponentelor gradientului este superioara pentru ca utilizeaza mai multainformatie din vecinatatea nodului de frontiera.

Metoda Elementelor Finite-Implementare 173
-5
-4
-3.5-3
-2.5
-2.5
-2
-1.5
-1.5
-1
-0.5
-0.5
0
0.5
X
Y
-2 -1 00
0.5
1
1.5
(a) Solutia MEF
-3.5-3
-2.5
-2.5
-2
-1.5
-1
-1
-0.5
-0.5
0
0
0.5
X
Y
-2 -1 00
0.5
1
1.5
(b) Solutia exacta
Figura 5.13: Campul de presiune pentru curgerea peste o retea de cilindri.

174 Metoda Elementelor Finite-Implementare
X
Y
-2 -1 00
0.5
1
1.5
(a) Solutia MEF
X
Y
-2 -1 00
0.5
1
1.5
(b) Solutia exacta
Figura 5.14: Linii de curent pentru curgerea peste o retea de cilindri. Liniileıntrerupte sunt curbe de ψ = constant, iar liniile continue sunt calculate dincampul vectorial al vitezei.

Metoda Elementelor Finite-Implementare 175
−2.5 −2 −1.5 −1 −0.5 0x
0
0.5
1
1.5
2
2.5
3
vite
za
viteza pe linia de curent E−A−Bviteza pe linia de curent D−C
Figura 5.15: Viteza pe liniile de curent E-A-B si D-C din Figura 5.9 evalu-ata cu gradientul solutiei ın nodurile de frontiera. Linia continua reprezintasolutia analitica, iar punctele reprezinta valori numerice obtinute din post-procesarea solutiei cu elemente finite.
−2.5 −2 −1.5 −1 −0.5 0x
0
0.5
1
1.5
2
2.5
3
vite
za
viteza pe linia de curent E−A−Bviteza pe linia de curent D−C
Figura 5.16: Viteza pe liniile de curent E-A-B si D-C din Figura 5.9 evalu-ata cu derivata normala ın nodurile de frontiera. Linia continua reprezintasolutia analitica, iar punctele reprezinta valori numerice obtinute din post-procesarea solutiei cu elemente finite.

176 Structuri de date si algoritmi

Capitolul 6
Structuri de date si algoritmi
Structurile de date joaca un rol extrem de important ın orice program cesolutioneaza probleme de campuri, ın special cand se utilizeaza retele de dis-cretizare nestructurate. In acest caz datele sunt ordonate (indexate) aleator,si trebuie accesate prin intermediul listelor. O buna proiectare a structurilorde date permite accesul rapid la informatie, permitand totodata simplificareaconsiderabila a scrierii programelor precum si diminuarea efortului de calculal procesorului. Acest capitol introduce tehnicile cel mai des utilizate pentrustocarea si manipularea informatiilor aferente retelelor de discretizare, pre-cum si relatiile dintre diferitele categorii de date si reprezentarile lor. Desiacest subiect poate parea la prima vedere total desprins de problematicamecanicii fluidelor sau chiar a metodelor de solutionare numerica a ecuatiilorce guverneaza curgerea, ıntelegerea lui este esentiala pentru cititorul careısi propune sa dezvolte noi algoritmi si programe de calcul. Este relevantın acest sens faptul ca Lohner [22] ıncepe monografia sa dedicata utilizariipractice a tehnicilor numerice ın mecanica fluidelor tocmai cu problematicastructurilor de date. Vom urma ın continuare prezentarea din [22], aceastafiind ın opinia noastra una din cele mai clare si accesibile. O abordare despecialitate a tipurilor de structuri de date si manipularea lor, utila pro-gramatorilor profesionisti si studentilor la specializarea Calculatoare, poatefi gasita ın monografia [14].
6.1 Reprezentarea retelei de discretizare
Solutionarea numerica a ecuatiilor cu derivate partiale presupune divizareadomeniului de analiza ın mici subdomenii, de forma simpla, numite elementefinite. Prin urmare, pentru a dezvolta un program de calcul care sa imple-menteze algoritmii numerici trebuie mai ıntai sa construim o reprezentare a
177

178 Structuri de date si algoritmi
retelei de discretizare a domeniului. Pentru fiecare element trebuie precizataextinderea spatiala. Aceasta necesita precizarea coordonatelor unui numarsuficient de puncte care definesc elementul. De exemplu, pentru un elementtridimensional tetraedral sunt necesare coordonatele a patru puncte nodale.In mod similar, pentru un element hexaedral sunt necesare coordonatele aopt puncte. Pentru elementele care au laturi sau fatete curbe este necesaraprecizarea de puncte suplimentare. Pentru a evita suprapunerea elementelor(sau spatii goale ıntre elemente) aceste puncte trebuie sa fie comune maimultor elemente. Aceasta presupune ca toate elementele care ınconjoara unpunct trebuie sa acceseze univoc informatiile privind coordonatele si altevariabile nodale (necunoscutele problemei). Prin urmare avem doua seturiprincipale de date: primul se refera la puncte, iar al doilea la elemente.Relatia ıntre ele este data de tabloul de conectivitate
inpoel(1:nnode,1:nelem),
unde inpoel este numele tabloului de conectivitate (sau de interdependenta)care precizeaza pentru fiecare element care puncte (noduri) ıi apartin, nnodeeste numarul de noduri per element, iar nelem este numarul de elemente.
Coordonatele nodurilor sunt precizate de tabloul de coordonate
coord(1:ndimn,1:npoin),
unde coord este numele tabloului coordonatelor, ndimn este numarul de di-mensiuni spatiale, iar npoin este numarul de puncte. Cele doua tablouri,inpoel si coord definesc complet discretizarea geometrica domeniului. Inprezentarea de fata se utilizeaza tablouri bidimensionale, iar sintaxa folositacorespunde limbajului FORTRAN. Implementarea ın alte limbaje de progra-mare poate utiliza si alte structuri de date (spre exemplu tablouri monodi-mensionale).
Necunoscutele problemei pot fi asociate fie punctelor (necunoscute nodale)fie elementelor. Spre exemplu, ın cazul problemelor de curgere incompresi-bila valorile vitezei sunt asociate nodurilor, iar valorile presiunii sunt asociateelementelor. Necunoscutele sunt stocate ın tablouri de tipul:
unknp(1:nunkp,1:npoin), unkne(1:nunke,1:nelem),
unde cu unknp, unkne, nunkp si nunke sunt notate tablourile de necunos-cute nodale si elementale, respectiv numarul de necunoscute per nod si perelement.
Informatiile necesare impunerii conditiilor la limita pot fi precizate pentrunodurile de frontiera ıntr-un tablou de tipul
bcond(1:nconi,1:nboup),

Structuri de date si algoritmi 179
unde nboup este numarul punctelor de pe frontiera, iar nconi este numarul devalori precizate pentru impunerea conditiilor ın fiecare punct de frontiera. Intabloul de mai sus bcond(1,iboup) stocheaza indicele punctului de frontiera,iar bcond(2:nconi,iboup) contine informatia necesara impunerii conditiei.
Un exemplu de retea de discretizare 2D cu elemente triunghiulare esteprezentat ın Figura 6.1.
6 5
4
8
15 14
12
11
10
9 8
7
6
5
4
3
21
13
7
14
3
13
2
1211
10
91
Figura 6.1: Retea de discretizare 2D cu elemente triunghiulare.
Pentru reteaua din Figura 6.1 tabloul de conexiuni este prezentat mai jos.
1 2 3 4 5 6 7 8 9 10 11 12 13 14 151 7 11 7 5 13 11 6 13 8 9 12 5 2 12 102 11 12 1 6 3 7 7 12 12 8 13 10 12 4 113 10 14 9 10 4 9 10 2 11 11 4 14 8 14 14
6.2 Structuri de date derivate
In cele mai multe situatii de implementare a algoritmilor numerici, informatiade baza privind elementele si punctele trebuie reprezentata sub o alta formacare sa permita solutionarea rapida a problemei. Subsectiunile urmatoareprezinta cele mai importante structuri de date ce permit accesarea eficientaa informatiilor necesare, precum si tehnicile de construire a acestor structuri.
6.2.1 Elementele adiacente unui punct
Pentru construirea structurilor de date descrise ın continuare este util sainversam tabloul de conectivitate inpoel care contine punctele ce apartinfiecarui element. Aceasta noua structura de date permite accesul rapid latoate elementele adiacente unui punct. Spre deosebire de numarul de puncteal elementului, care este constant ın marea majoritate a aplicatiilor, numarul

180 Structuri de date si algoritmi
de elemente care ınconjoara un nod poate varia ın limite destul de largi.Spre exemplu, pentru o retea 3D cu tetraedre putem avea de la un singurelement ınvecinat nodului pana la 64 de elemente adiacente unui nod. Esteevident deci ca alocarea maximala de memorie pentru toate punctele estene-economica. Cel mai eficient mod de stocare a unor asemenea date suntlistele ınlantuite. Pentru ca ın cele ce urmeaza prezentam algoritmii ın lim-baj FORTRAN, vom utiliza o implementare a listelor cu ajutorul cursorilor.Lista este reprezentata cu doua tablouri monodimensionale, unul pentru sto-carea propriu-zisa a indicilor elementelor, iar al doilea pentru pozitiile curso-rului la ınceputul setului de elemente invecinate fiecarui nod. Pentru listaelementelor adiacente unui punct vom avea deci urmatoarele tablouri,
esup1(1:mesup), esup2(1:npoin+1),
unde esup1 stocheaza indicii elementelor, astfel ıncat elementele adiacentenodului ipoin sunt stocate ın locatiile de la esup2(ipoin)+1 pana laesup2(ipoin+1). Aceste doua tablouri sunt construite ın doua parcurgeri aletabloului de conexiuni si doua parcurgeri ale listei de noduri. In prima trecerese evalueaza necesarul de memorie pentru stocare. In cea de-a doua trecereelementele adiacente fiecarui nod sunt stocate ın esup1. Implementarea al-goritmului este prezentata mai jos.
Initializeaza : esup2(1:npoin+1)=0
Parcurge lista elemente : numara elementele conectate fiecarui punctdo ielem=1,nelem ! pentru toate elementele
do inode=1,nnode ! pentru toate nodurile elementuluiipoi1=inpoel(inode,ielem)+1
esup2(ipoi1)=esup2(ipoi1)+1
enddo
enddo
Stocare/Redistribuire :
do ipoin=2,npoin+1 ! pentru toate puncteleesup2(ipoin)=esup2(ipoin)+esup2(ipoin-1)
enddo
Parcurge lista elemente : stocheaza elementele ın esup1
do ielem=1,nelem ! pentru toate elementeledo inode=1,nnode ! pentru toate nodurile elementului
ipoin=inpoel(inode,ielem)
istor=esup2(ipoin)+1
esup2(ipoin)=istor
esup1(istor)=ielem
enddo

Structuri de date si algoritmi 181
Tabelul 6.1: Elementele adiacente nodurilor din Figura 6.1.Nod elemente adiacente
1 32 8 133 54 5 11 145 4 126 4 77 1 3 6 78 9 10 139 3 6 1010 1 4 7 12 1511 1 2 6 9 10 1512 2 8 9 11 13 1413 5 8 1114 2 12 14 15
enddo
Stocare/Redistribuire :
do ipoin=npoin+1,2,-1 ! parcurge punctele ın ordine inversaesup2(ipoin)=esup2(ipoin-1)
enddo
esup2(1)=0
Rezultatul aplicarii acestui algoritm pentru reteaua din Figura 6.1 esteprezentat ın Tabelul 6.1.
6.2.2 Punctele adiacente unui punct
La fel ca si ın cazul elementelor adiacente, si numarul punctelor adiacenteunui punct poate varia ın limite largi pentru o retea nestructurata. Prinurmare cel mai eficient mod de a stoca si aceasta informatie o reprezintalista ınlantuita . Aceasta lista este definita cu doua tablouri
psup1(1:mpsup), psup2(1:npoin+1),
unde psup1 stocheaza indicii punctelor astfel ıncat pentru nodul ipoin nodu-rile adiacente sunt stocate de la psup2(ipoin)+1 pana la psup2(ipoin+1).Procedura de construire a sirurilor psup1 si psup2 utilizeaza informatiiledespre elementele adiacente fiecarui nod stocate ın esup1 si esup2. Pentrufiecare punct cunoastem elementele adiacente din esup1, esup2. Vom stoca

182 Structuri de date si algoritmi
acum punctele ce apartin acestor elemente. Pentru a evita stocarea repetataa unui punct din elementele adiacente introducem un tablou ajutatorlpoin(1:npoin). Asemenea tablouri ajutatoare joaca un rol esential ın con-struirea structurilor de date auxiliare. Pe masura ce punctele sunt stocateın psup1, psup2, ele vor fi marcate ın tabloul lpoin. Pe masura ce un noupunct candidat apare din esup1, esup2 si inpoel, se consulta lpoin pen-tru a determina daca punctul candidat a fost stocat anterior. Algoritmul deconstruire a tablourilor psup1 si psup2 este prezentat mai jos.
Initializeaza : lpoin(1:npoin+1)=0
Initializeaza : psup2(1)=0
Initializeaza : istor=0
do ipoin=1,npoin ! pentru toate puncteledo iesup=esup2(ipoin)+1,esup(ipoin+1) ! pentru elementele adiacente
ielem=esup1(iesup) ! indicele elementuluido inode=1,nnode ! pentru toate nodurile elementului
jpoin=inpoel(inode,ielem) ! indicele punctuluiif (jpoin.ne.ipoin .and. lpoin(jpoin).ne.ipoin) then
istor=istor+1
psup1(istor)=jpoin
lpoin(jpoin)=ipoin
endif
enddo
enddo
psup2(ipoin+1)=istor
enddo
Rezultatul aplicarii acestui algoritm pentru reteaua din Figura 6.1 esteprezentat ın Tabelul 6.2.
6.2.3 Elementele adiacente unui element
O structura de date utila pentru algoritmi de tip particula ın celula (particle-in-cell), respectiv pentru urmarirea particulelor fluide pe traiectorie ın faza depostprocesare este cea care precizeaza elementele ınvecinate fiecarui element.Aceasta structura de date o vom reprezenta prin tabloul
esuel(1:nfael,1:nelem),
unde nfael este numarul de fete al elementului.Pentru a construi aceasta structura de date trebuie sa identificam punctele
care definesc fateta unui element cu cele care definesc fateta unui element

Structuri de date si algoritmi 183
Tabelul 6.2: Nodurile adiacente fiecarui nod al retelei din Figura 6.1.Nod noduri adiacente
1 7 92 13 12 83 13 44 13 3 12 145 6 10 146 5 10 77 11 10 1 9 68 12 11 9 29 7 1 11 810 7 11 5 6 1411 7 10 12 14 9 812 11 14 13 2 8 413 3 4 12 214 11 12 5 10 4
adiacent. Obtinerea acestei informatii necesita utilizarea structurilor dedate inpoel, esup1, esup2, precum si tablourile ajutatoare lpoin si lhelp.Tabloul esuel se construieste dupa cum urmeaza.
Initializeaza : lpoin(1:npoin)=0
Initializeaza : esuel(1:nfael,1:nelem)=0
do ielem=1,nelem
do ifael=1,nfael
nnofa=lnofa(ifael)
lhelp(1:nnofa)=inpoel(lpofa(1:nnofa,ifael),ielem)
lpoin(lhelp(1:nnofa))=1
ipoin=lhelp(1)
do istor=esup2(ipoin)+1,esup2(ipoin+1)
jelem=esup1(istor)
if (jelem.ne.ielem) then
do jfael=1,nfael
nnofj=lnofa(jfael)
if (nnofj.eq.nnofa) then
icoun=0
do jnofa=1,nnofa
jpoin=inpoel(lpofa(jnofa,jfael),jelem)
icoun=icoun+lpoin(jpoin)
enddo
if (icoun.eq.nnofa) then

184 Structuri de date si algoritmi
1
2
3
4
fata 1
lpofa(1, 1) = 2
lpofa(2, 1) = 3
lpofa(3, 1) = 4
fata 2
lpofa(1, 2) = 3
lpofa(2, 2) = 1
lpofa(3, 2) = 4
fata 3
lpofa(1, 3) = 1
lpofa(2, 3) = 2
lpofa(3, 3) = 4
fata 4
lpofa(1, 4) = 1
lpofa(2, 4) = 3
lpofa(3, 4) = 2
Figura 6.2: Nodurile care definesc fatetele unui element tetraedral.
esuel(ifael,ielem)=jelem
endif
endif
enddo
endif
enddo
lpoin(lhelp(1:nnofa))=0
enddo
enddo
Aici lhelp(1:nnofa) este un mic tablou auxiliar, iar lnofa(1,nfael) silpofa(1:nnofa,1:nfael) contin datele care coreleaza fateta unui elementcu nodurile care o definesc. Figura 6.2 prezinta tabloul lpofa pentru unelement finit de tip tetraedru.
Rezultatul aplicarii acestui algoritm pentru reteaua din Figura 6.1 esteprezentat ın Tabelul 6.3. In tabelul de mai sus, absenta unui element ınvecinateste marcata cu 0. Toate elementele care au ın lista vecinilor cel putin un 0sunt adiacente frontierei domeniului.
6.2.4 Laturi
Reprezentarea retelei de discretizare sub forma de laturi poate fi folosita pen-tru eficientizarea stocarii si solutionarii problemelor de campuri cu elementeliniare (triunghiuri sau tetraedre). Laturile se obtin din graful corespunzator

Structuri de date si algoritmi 185
Tabelul 6.3: Elementele adiacente fiecarui element al retelei din Figura 6.1.Elem elem. adiacente
1 6 15 72 9 14 153 0 0 64 0 7 125 0 0 116 1 3 107 0 1 48 11 13 09 13 2 1010 0 9 611 8 15 1412 4 15 013 8 9 014 11 0 215 1 2 12
punctelor adiacente fiecarui punct in retea. Spre deosebire de psup1 si psup2,laturile sunt stocate sub forma tabloului
inpoed(1:2,1:nedge), cu inpoed(1,iedge) < inpoed(2,iedge).
Pentru elemente liniare (triunghiuri sau tetraedre), laturile corespund exactlaturilor geometrice. Pentru elemente de ordin superior aceasta corespondentanu mai este valabila.
Tabloul laturilor poate fi construita imediat din psup1 si psup2, sau directutilizand algoritmul de mai sus pentru psup1 si psup2. Singurele modificarice trebuie efectuate sunt urmatoarele:
(a) o instructiune if pentru a satisfaceinpoed(1,iedge) < inpoed(2,iedge).
(b) schimbare de notatiiistor → nedge
psup1 → inpoed
psup2 → inpoe1
6.2.5 Fatete exterioare
Fatetele exterioare sunt situate pe frontiera domeniului si sunt utilizate ındiferite scopuri: calculul versorului normalei la suprafata, fluxuri normale, in-

186 Structuri de date si algoritmi
tegrarea componentelor fortei (spre exemplu portanta si rezistenta la ınaintare),etc. Stocarea acestor fatete se poate face ıntr-un tablou de forma
bface(1:nnofa,1:nface),
unde nnofa este numarul de noduri pe fateta, iar nface este numarul defatete. Daca informatia din esuel este disponibila, fatetele exterioare pot fiusor identificate din conditia
esuel(1:nfael,1:nelem)=0.
Aceasta abordare este destul de costisitoare din punct de vedere al memorieipentru ca atat esuel cat si esup1 (folosit pentru a eficientiza obtinerea luiesuel) sunt tablouri de dimensiuni mari. Prin urmare au fost dezvoltatialgoritmi care necesita mult mai putina memorie.
Daca presupunem cunoscute punctele de pe frontiera, algoritmul de maijos este printre cele mai eficiente proceduri.
Pasul 1: Stocheaza fatetele cu noduri pe frontieraInitializeaza: lpoin(1:npoin)=0
lpoin(bconi(1,1:nconi))=1 ! marcheaza punctele de pe frontieraInitializeaza: nface=0
do ielem=1,nelem ! pentru toate elementeledo ifael=1,nfael ! pentru toate fatetele elementului
! obtine nodurile fatetei si le stocheaza ın help
nnofa=lnofa(ifael)
lhelp(1:nnofa)=inpoel(lpofa(1:nnofa,ifael),ielem)
! numara nodurile de pe frontiera help
icoun=0
do inofa=1,nnofa
icoun=icoun+lpoin(lhelp(inofa))
enddo
if (icoun.eq.nnofa) then
nface=nface+1 ! incrementeaza contor fatetebface(1:nnofa,nface)=lhelp(1:nnofa) ! stocheaza fateta
endif
enddo
enddo
Dupa aceasta prima etapa unele fatete pot fi stocate de doua ori. Elim-inarea lor se face ın pasul al doilea. Pentru aceasta se utilizeaza o listaınlatuita care stocheaza toate fatetele adiacente unui nod, si se elimina fateteledublu definite prin cautarea exhaustiva ın aceste liste.

Structuri de date si algoritmi 187
Pasul 2: Elimina fatetele dublu definiteInitializeaza: lface(1:nface)=1
Construieste lista ınlantuita fsup1(1:nfsup), fsup2(npoin+1) care stocheazafatetele adiacente fiecarui punct, folosind aceeasi tehnica utilizata la construirealistei esup1(1:nfsup), esup2(npoin+1)do iboun=1,nboun ! pentru nodurile de pe frontiera
ipoin=bconi(1,iboun) ! indicele punctuluido istor=fsup2(ipoin)+1,fsup2(ipoin+1)
iface=fsup1(istor) ! indicele fateteiif (lface(iface).ne.0) then ! verifica daca fateta a fost marcata
do jstor=istor+1,fsup2(ipoin+1)
jface=fsup1(jstor) ! indicele fateteiif (iface.ne.jface) then
if: Punctele din iface si jface sunt egale, atuncilface(iface)=0 ! elimina fatetalface(jface)=0 ! elimina fateta
endif
endif
enddo
endif
enddo
enddo
6.2.6 Laturile unui element
Informatia privind laturile este necesara ın solverele bazate pe laturi (muchii),precum si pentru unele proceduri de rafinare a retelei de discretizare. Aceastastructura de date este notata cu
inedel(1:nedel,1:nelem),
unde nedel este numarul de laturi pentru un element. Odata cunoscuteinpoel, inpoed, si inpoe1, construirea lui inedel este imediata.
do ielem=1,nelem ! pentru toate elementeledo iedel=1,nedel ! pentru toate laturile elementului
ipoi1=inpoel(lpoed(1,iedel),ielem)
ipoi2=inpoel(lpoed(2,iedel),ielem)
ipmin=min(ipoi1,ipoi2)
ipmax=max(ipoi1,ipoi2)
! pentru laturile ce pornesc din ipmin
do iedge=inpoe1(ipmin)+1,inpoe1(ipmin+1)

188 Structuri de date si algoritmi
1
2
3
1
2
3
4 5
6
4lpoed(1,1)=1
lpoed(1,2)=2
lpoed(1,2)=2
lpoed(2,2)=3
lpoed(1,3)=3
lpoed(2,3)=1
lpoed(1,4)=1
lpoed(2,4)=4
lpoed(1,5)=2
lpoed(2,5)=4
lpoed(1,6)=3
lpoed(2,6)=4
Figura 6.3: Nodurile care definesc laturile (muchiile) unui element tetraedral.
if (inpoed(2,iedge).eq.ipmax) then
inedel(iedel,ielem)=iedge
endif
enddo
enddo
enddo
Tabloul lpoed(1:2,1:nedel) contine nodurile care definesc fiecare latura(muchie) a elementului. Figura 6.3 prezinta un exemplu pentru lpoed ıncazul elementului finit tetraedral.

Capitolul 7
Curgerea fluidului perfect ınretele de profile
Domeniu dublu conex
Domeniu simplu conex
t
t
Figura 7.1: Definirea domeniului de analiza pentru retele plane de profile.
Analiza curgerii ın retele de profile aero/hidrodinamice este una din pro-blemele fundamentale ale proiectarii, optimizarii si evaluarii performantelorturbomasinilor. O retea plana de profile constituie o dispunere regulata deprofile ale caror borduri de atac sunt aliniate fie pe o dreapta (retele drepte)fie pe un cerc (retele circulare). In cele ce urmeaza ne vom limita la retelele
189

190 Retele de Profile
drepte, precum cea din Figura 7.1. Tratarea retelelor circulare este ın bunamasura similara.
Distanta dintre doua puncte omoloage a doua profile ınvecinate poartanumele de pasul retelei, notat ın Figura 7.1 cu t. Pentru ca miscarea serepeta identic cu pasul t, este suficient sa alegem un domeniu de analizacorespunzator unei benzi de periodicitate de latime t. Figura 7.1 prezintadoua variante de alegere a benzii de periodicitate. In primul caz (prezentatın partea de sus) se obtine un domeniu simplu conex pentru care o portiunedin frontiera inferioara contine extradosul profilului si o portiune din frontierasuperioara contine intradosul profilului. Frontierele de intrare si iesire suntparalele cu dreapta directoare (frontul) retelei, si sunt amplasate la o distantasuficient de mare ın amonte fata de bordul de atac, respectiv ın aval debordul de fuga, pentru ca sa putem considera curentul practic uniform. Incazul studierii curgerii fluidului perfect (incompresibil si nevascos) o distantade t/2 amonte si aval de profilul ın retea este suficienta pentru amplasareasectiunilor de intrare/iesire. In al doilea caz (prezentat ın partea de jos)profilul este ınglobat ın banda de periodicitate, rezultand un domeniu deanaliza dublu conex. Aceasta este alegerea ce va fi utilizata ın cele ce urmeazadin considerente de comoditate a implementarii conditiilor la limita pentruMEF. Oricare definitie a domeniului de analiza se alege, campul de viteza sicampul de presiune calculate sunt identice.
Vom prezenta ın acest capitol atat definirea problemei curgerii fluidu-lui perfect ın retele drepte de profile, cat si programul de calcul CFA
1 cesolutioneaza aceasta problema cu Metoda Elementului Finit. Acest pro-gram a fost realizat de autor ın colaborare cu Dr. ing. Sebastian Muntean[30] si inf. Teodora Frunza [31]. Algoritmul de baza a fost prezentat ın[26], ımpreuna cu detalii de implementare pe care nu le vom relua integralaici. Validarea programului a fost facuta ın primul rand prin comparatie curezultate experimentale precum cele din Sectiunile 7.4 si 7.5. Deasemenea, ınSectiunea 3.5 am prezentat comparatia ıntre repartitia de presiune pe profilulsingular obtinuta cu programul XFOIL si cea obtinuta cu programul CFA
ın limita unei retele cu pas foarte mare, obtinand o foarte buna concordantaa celor doua solutii numerice.
7.1 Problema curgerii ın retele de profile
Geometria domeniului de analiza este prezentata ın Figura 7.2. Profilulaero/hidrodinamic F are coarda de lungime L si este dispus ın retea cu pasul
1Cascade Flow Analysis : analiza curgerii ın retele de profile

Retele de Profile 191
t si unghiul de asezare βs. Toate dimensiunile carateristice ale domeniuluivor fi adimensionalizate cu lungimea coardei profilului, deci
L = 1 .
In acest caz t/L poarta numele de pas relativ. Inversul pasului relativ poartanumele de desimea retelei.
Unghiul de asezare βs este definit aici fata de frontul retelei. In literaturase mai defineste unghiul de asezare ın raport cu axa masinii, adica ın raportcu o dreapta perpendiculara pe frontul retelei.
Curba AB este o curba arbitrara, iar A′B′ se obtine translatand AB cupasul retelei t. Pentru comoditate am ales aici curba AB ca fiind formata dinscheletul profilului prelungit ın amonte si ın aval cu segmente perpendicularepe frontul retelei si de lungime t/2.
Curentul de fluid ıntra cu viteza vIN ın sectiunea de intrare AA′. Directiacurentului la intrare este precizata de unghiul βIN masurat fata de frontulretelei. In sectiunea de iesire BB′ viteza curentului de fluid este vOUT , subunghiul βOUT fata de frontul retelei.
Scopul unei retele de profile este de a modifica directia curentului de fluidcare o strabate. Prin urmare, problema fundamentala a retelei de profile, ınipoteza curgerii fluidului perfect, este:
Pentru o retea cu geometrie precizata (forma profilului aero/hi-drodinamic, pasul retelei si unghiul de instalare), si pentru o
x
y
scheletul profilului,translatat cu +t/2 si −t/2 in directia Oy
B’
A’
t/2 t/2sin βs
L=1βs
O
βIN
βOUT
v IN
vOUT
v1IN
v2IN
v2OUT
A
B
F
TE
=1
=1OUT
1v
nn
n
nt
Figura 7.2: Conditii la limita pentru campul de viteza ıntr-o retea planadreapta de profile.

192 Retele de Profile
directie a curentului de intrare impusa prin unghiul βIN sa sedetermine directia curentului la iesire βOUT .
Teorema impulsului aplicata vanei de fluid din banda de periodicitate,
F = ρQvIN − ρQvOUT − (pSn)IN − (pSn)OUT , (7.1)
unde Q este debitul volumic de fluid care trece prin banda de periodicitateiar S este aria sectiunii de intrare, egala evident si cu aria sectiunii de iesire.Ecuatia de continuitate pentru banda de periodicitate este
Q = vINx S = vOUT
x S ,
de unde rezulta egalitatea componentelor vitezei normale la frontul retelei ınsectiunile de intrare si iesire,
vINx = vOUT
x . (7.2)
Componentele actiunii hidrodinamice asupra profilului ın retea sunt
Fx = (pIN − pOUT )S si Fy = ρQ(vINy − vOUT
y ) . (7.3)
Aria sectiunii de intrare (respectiv a sectiunii de iesire) a fluidului din reteaeste
S =t b ,
unde b este anvergura profilului dispus ın retea (lungimea masurata ın directienormala la planul Figurii 7.1).
Pe de alta parte, avand ın vedere ca analizam curgerea fluidului nevascos,diferenta de presiune intrare–iesire poate fi exprimata din teorema lui Bernoulli,
pIN − pOUT =ρ
2
[(vOUT
)2 − (vIN)2]
=ρ
2
[(vOUT
y
)2 − (vINy
)2]. (7.4)
Sub forma adimensionala, componentele fortei hidrodinamice ale profilu-lui dispus ın retea pot fi deci scrise
Fxρ2v2
x L b=
(vOUT
y
vOUTx
)2
−(vIN
y
vINx
)2 t
L, (7.5a)
Fyρ2v2
x L b= 2
(vIN
y
vINx
− vOUTy
vOUTx
)t
L. (7.5b)

Retele de Profile 193
unde ın membrul stang am notat vx = vINx = vOUT
x = Q/S. Cum atat ınsectiunea de intrare, cat si ın cea de iesire, avem vy/vx = − cot β, putemrescrie componentele fortei sub forma
Fxρ2v2
x L b=(cot2 βOUT − cot2 βIN
) tL, (7.6a)
Fyρ2v2
x L b= 2
(cot βOUT − cot βIN
) tL. (7.6b)
Se observa clar din aceste relatii ca daca pentru un unghi de intrare precizatβIN putem calcula directia curentului la iesire βOUT , atunci componentelefortei hidrodinamice pe profil sunt imediat evaluate.
Pe langa evaluarea performatelor globale ale retelei, ın practica inginereascade proiectare si optimizare sunt analizate si detaliile campului de viteza sipresiune ın vecinatarea profilului. Astfel, distributia de viteza a curentuluinevascos pe profil este utilizata pentru calculul stratului limita care ia ın con-siderare efectul vascozitatii la curgerea peste corpuri profilate. Distributiade presiune pe profil este foarte importanta pentru evaluarea comportariicavitationale a turbomasinilor hidraulice.
Campul de presiune este exprimat sub forma adimensionala sub formacoeficientului de presiune,
cp =p− pref
12ρv2
ref
, (7.7a)
unde pref si vref sunt presiunea si modulul vitezei ıntr-un punct consideratde referinta. Cu teorema lui Bernoulli, ın ipoteza neglijarii fortelor masice,putem exprima coeficientul de presiune cu ajutorul vitezei,
cp = 1 −(
v
vref
)2
, (7.7b)
unde v este modulul vitezei ın punctul curent ın care se considera presiunea pdin (7.7a). Pe de alta parte, ın (7.5) am utilizat componenta axiala a vitezeila intrare/iesire, vx = Q/S, pentru adimensionalizare. Prin urmare, putemrescrie (7.7b) sub forma:
cp = 1 −(v
vx
)2(vx
vref
)2
. (7.8)
Spre exemplu, daca punctul de referinta este ales ın aval de retea, avem
cp =p− pIN
12ρ(vIN)2
= 1 −(v
vx
)2(vIN
x
vIN
)2
= 1 −(v
vx
)2
sin2 βIN .

194 Retele de Profile
7.1.1 Conditii la limita pentru campul de viteza lacurgerea ıntr-o retea de profile
Sa precizam acum conditiile pentru viteza pe frontiera domeniului de analizadin Figura 7.2. Asa cum am aratat mai sus, viteza este adimensionalizata cucomponenta axiala din sectiunile de intrare/iesire, adica
vINx = 1 pe AA′, si vOUT
x = 1 pe BB′ . (7.9a)
Componenta vitezei paralela cu frontul retelei pe frontiera de intrare esteprecizata prin unghiul de intrare βIN ,
vINy = − cot βIN , (7.9b)
iar pentru sectiunea de iesire avem,
vOUTy = − cot βOUT , (7.9c)
unde unghiul de iesire βOUT este o necunoscuta a problemei.Pe segmentele de frontiera care delimiteaza banda de periodicitate vom
considera mai ıntai doua puncte omoloage, adica doua puncte P ∈ AB siP ′ ∈ A′B′ cu xP ′ = xP si yP ′ = yP + t. Pentru orice pereche de asemeneapuncte vom avea
vP = vP ′ . (7.9d)
Sa observam ca (7.9d) este o ecuatie vectoriala, careia ıi corespund douaecuatii scalare corespunzatoare conditiilor de egalitate pentru fiecare compo-nenta a vitezei.
Suprafata solida a profilului este o frontiera impenetrabila, si prin urmarecomponenta normala a vitezei este nula,
vn ≡ v · n = 0 pe profilul F . (7.9e)
Din observatiile experimentale se constata ca la curgerea fluidului real (vascos)ın jurul profilelor hidrodinamice curentul nu ocoleste bordul de fuga. In cazulunui bord de fuga ascutit, ın teorie fluidul ideal ar putea sa ıl ocoleasca, darcu pretul obtinerii unei valori infinite a vitezei ın punctul corespunzator, no-tat cu TE ın Figura 7.2. Daca unghiul diedru la bordul de fuga (unghiulformat de tangentele la intrados si extrados ın punctul TE) este zero, atunciobservatia experimentala de mai sus poate fi luata ın considerare pentrumodelul curgerii navascoase prin impunerea conditiei ca viteza sa fie finitala bordul de fuga. Aceasta este conditia Kutta–Jukovski care permite deter-minarea unica a circulatiei vitezei pe profil si ın ultima instanta a directiei

Retele de Profile 195
curentului la iesire din retea, respectiv a fortei hidrodinamice. In acest cazviteza, de modul finit, va fi dirijata de-a lungul tangentei comune la intradossi extrados ın bordul de fuga.
Daca unghiul diedru la bordul de fuga este pozitiv atunci valoarea finitaa vitezei trebuie sa fie zero, adica
vTE = 0 . (7.9f)
Aceasta se explica simplu prin faptul ca ın bordul de fuga vectorul vitezeitrebuie sa aiba o directie unica. Pe de alta parte, vitezele particulelor fluidecare sosesc ın bordul de fuga de pe intrados si extrados au directii diferite.Prin urmare bordul de fuga trebuie sa fie punct de stagnare. Daca bordul defuga este rotunjit, punctul de stagnare aval de pe profil se alege conventionalın punctul geometric de curbura maxima.
Conditiile de mai sus completeaza ecuatiile corespunzatoare conditiei deincompresibilitate
∇ · v = 0 , (7.10a)
respectiv conditiei de irotationalitate,
∇× v = 0 . (7.10b)
Pentru o curgere bidimensionala plana, ecuatiile (7.10) devin
∂vx
∂x+∂vy
∂y= 0 , (7.11a)
∂vy
∂x−∂vx
∂y= 0. (7.11b)
7.2 Formularea problemei utilizand variabile
auxiliare
In principiu ecuatiile (7.11) ımpreuna cu conditiile la limita precizate maisus sunt suficiente pentru determinarea campului de viteza, respectiv pentrucalculul componentelor vitezei vx si vy ın tot domeniul de analiza. Estepreferabil ınsa ca ın loc de doua ecuatii cu doua functii necunoscute sa sesolutioneze o singura ecuatie pentru o singura functie necunoscuta. Acestaeste scopul principal al introducerii variabilelor auxiliare.
Daca exprimam componentele vitezei cu ajutorul functiei de curent ψ,
vx =∂ψ
∂y, si vy = −∂ψ
∂x, (7.12)

196 Retele de Profile
atunci ecuatia (7.11a) este automat satisfacuta si din (7.11b) rezulta ca ψsatisface ecuatia lui Laplace,
∂2ψ
∂x2+∂2ψ
∂y2= 0 , (7.13)
la care trebuie sa adaugam conditiile la limita rezultate din consideratiileanterioare pentru campul de viteza.
Domeniul de analiza pentru formularea ın functie de curent este prezentatın Figura 7.3(a). Profilul aero/hidrodinamic este o frontiera impenetrabila,deci va fi linie de curent. Fara a impune restrictii suplimentare, putemconsidera
ψ = 0 pe profilul F . (7.14a)
Cum bordul de fuga este punct de stagnare, aici va trebui sa avem pe langa(7.14a) si
∂ψ
∂n= 0 ın bordul de fuga TE . (7.14b)
Deoarece ın punctul TE trebuie ındeplinite simultan (7.14a) si (7.14b) rezultaca pe langa valorile nodale ale lui ψ va trebui sa introducem o necunoscutasuplimentara ın problema si aceasta va fi tocmai cotβOUT .
In sectiunea de intrare vom impune componenta vINy a vitezei, deci
∂ψ
∂n= − cot βIN pe AA′ . (7.14c)
In sectiunea de iesire vom impune deasemenea componenta vOUTy a vitezei,
tinand cont ca βOUT este o necunoscuta a problemei:
∂ψ
∂n− cot βIN = 0 pe BB′ . (7.14d)
Trebuie remarcat ca ın sectiunile de intrare si iesire nu am impus conditiade repartitie uniforma a debitului, (7.9a). In schimb, alegem aceste sectiunisuficient de departe ın amonte, respectiv aval, astfel ıncat aceasta conditiesa fie practic satisfacuta automat.
Pe segmentele de frontiera ce delimiteaza banda de periodicitate va tre-bui sa impunem conditia (7.9d), si ın acelasi timp vom specifica si valoareadebitului volumic prin banda de periodicitate. Prin urmare, ın doua puncteP ∈ AB si P ′ ∈ A′B′ ca ın Figura 7.3(a) vom avea
ψP ′ − ψP = t , (7.14e)(∂ψ
∂n
)P ′
+
(∂ψ
∂n
)P
= 0 . (7.14f)

Retele de Profile 197
P
P’A’
B’
P
P’
TEA
n
n
B
n
n
tF
(a) Domeniul de analiza pentru formularea ın functiade curent
P
P’
MM
+-
x
yA’
B’
P
P’Q+Q-
A
B
n
n
F
TE tn
n
(b) Domeniul de analiza pentru formularea ınpotentialul vitezei
Figura 7.3: Domeniul de analiza si frontiera lui pentru analiza curgerii ınretele plane de profile folosind variabile auxiliare.

198 Retele de Profile
Ecuatia (7.13) ımpreuna cu conditiile (7.14) reprezinta problema cu conditiila limita solutionata cu Metoda Elementului Finit solutionata de programulexpert CFA prezentat ın Sectiunea 7.3.
Daca exprimam componentele vitezei cu ajutorul potentialului vitezei φ,
vx =∂φ
∂x, si vy =
∂φ
∂y, (7.15)
atunci ecuatia (7.11b) este automat satisfacuta si din (7.11a) rezulta ca φsatisface ecuatia lui Laplace,
∂2φ
∂x2+∂2φ
∂y2= 0 , (7.16)
la care trebuie sa adaugam conditiile la limita rezultate din consideratiile an-terioare pentru campul de viteza. Domeniul de analiza prezentat ın Figura 7.3(b)este dublu conex, si ın cazul unei ciculatii nenule a vitezei pe profil, Γ = 0, φeste o functie multiforma (poate lua mai multe valori ın acelasi punct spatial).Obtinerea unei solutii uniforme necesita transformarea domeniului intr-undomeniu simplu conex prin practicarea unei taieturi ce uneste frontiera inte-rioara cu frontiera exterioara, Figura 7.3(b). Pe cele doua fete ale taieturiivom avea ın aceasi locatie geometrica doua puncte, Q+ pe fata superioara siQ− pe fata inferioara, astfel ıncat diferenta valorilor corespunzatoare ale luiφ sa fie tocmai valoarea circulatiei vitezei pe profil. Pe de alta parte, vitezatrebuie sa ramana continua la traversarea taieturii, adica atat componentelenormale cat si cele tangentiale calculate ın Q+ si Q− trebuie sa fie aceleasi.Cu acestea, rezulta urmatoarele conditii pentru punctele de taietura:
φQ+ − φQ− − Γ = 0 , (7.17a)(∂φ
∂n
)Q+
+
(∂φ
∂n
)Q−
= 0 . (7.17b)
Pe frontiera de intrare vom impune viteza vINy , adica avem ∂φ/∂s = cot βIN .
Daca consideram, conform Figurii 7.3(b), ca intersectia taieturii cu frontierade intrare este punctul M(−t/2, 0), iar φM− = 0, atunci obtinem,
φ(x = −t/2, y) = −y cot βIN pe AM− , (7.17c)
φ(x = −t/2, y) − Γ = −y cot βIN pe M+A′ . (7.17d)
Pe segmentele de frontiera ce definesc banda de periodicitate, AB si A′B′,ın puncte P si P ′ cu aceeasi abscisa vom avea urmatoarele doua conditii:
φP − φP ′ + Γ = t cot βIN , (7.17e)(∂φ
∂n
)P
+
(∂φ
∂n
)P ′
= 0 . (7.17f)

Retele de Profile 199
Pe frontiera de iesire vom impune conditia de repartitie uniforma a deb-itului, adica
∂φ
∂n= 1 pe BB′ . (7.17g)
Directia curentului la iesire va corespunde circulatiei Γ ce va fi determinataca necunoscuta primara a problemei.
In sfarsit, conditia de impenetrabilitate pe profil este
∂φ
∂n= 1 pe F , (7.17h)
iar conditia ın bordul de fuga se exprima ca
∂φ
∂s= 0 ın bordul de fuga TE . (7.17i)
Ecuatia (7.16) ınpreuna cu conditiile (7.17) formeaza problema cu conditii lalimita pentru potentialul vitezei φ.
Figura 7.4(a) prezinta un exemplu de linii de curent obtinute ın urmasolutionarii problemei ın ψ. Se poate observa usor respectarea conditiei de pe-riodicitate, precum si faptul ca linia de curent ψ = 0 (corespunzatoare profilu-lui) este normala la suprafata profilului ın punctul de stagnare amonte. Lini-ile echipotentiale pentru aceeasi problema sunt prezentate ın Figura 7.4(b).Spre deosebile de liniile de curent, liniile echipotentiale nu au o interpretarefizica imediata pentru probleme de curgere. Se poate observa discontinuitateacorespunzatoare taieturii domeniului, precum si faptul ca liniile echipotentialesunt normale la suprafata profilului. De fapt, liniile de curent si liniileechipotentiale sunt doua familii de linii ortogonale, asa cum se poate ob-serva din Figura 7.5. Ansamblul acestor linii formeaza asa–numitul spectruhidrodinamic.
7.3 Program de analiza cu elemente finite a
curgerii ın retele de profile
Metoda Elementului Finit pentru solutionarea problemei cu conditii la limitapentru functia de curent aferenta curgerii ın retele de profile a fost imple-mentata ıntr-un programul expert CFA [31]. Acest program a fost dezvoltatde autor ımpreuna cu Dr. ing. Sebastian Muntean si inf. Teodora Frunza,pentru a permite o solutionare comoda si rapida a curgerii ın retele de pro-file. Programul este ın prezent folosit atat ın scopuri educationale pentrustudentii la specialitatea Masini Hidraulice, cat pentru proiectarea, analizasi optimizarea turbomasinilor.

200 Retele de Profile
-0.1-0.2-0.3
-0.4
0.1
0.2
0.3
0.4
0.5
0.6
0.0
-1
-0.8
-0.6
-0.4
-0.2
0
0.2
0.4
-0.4 -0.2 0 0.2 0.4 0.6 0.8 1 1.2 1.4
y
x
(a) Linii de curent pentru domeniul de analiza din Figura 7.3(a).
0.1 0.2 0.3 0.4 0.50.6 0.7
1.0
1.4
1.11.2
1.3
0.90.8
1.51.6
1.71.8 2.0 2.11.9
1.51.41.31.21.11.0
0.90.8
0.70.6
0.50.4
0.30.2
0.10.0
-1
-0.8
-0.6
-0.4
-0.2
0
0.2
0.4
-0.4 -0.2 0 0.2 0.4 0.6 0.8 1 1.2 1.4
y
x
-0.1-0.2-0.3-0.4-0.5
(b) Linii echipotentiale pentru domeniul de analiza dinFigura 7.3(b).
Figura 7.4: Linii de curent si linii echipotentiale pentru curgerea ın reteledrepte de profile.

Retele de Profile 201
-1
-0.8
-0.6
-0.4
-0.2
0
0.2
0.4
-0.4 -0.2 0 0.2 0.4 0.6 0.8 1 1.2 1.4
y
x
Figura 7.5: Spectrul hidrodinamic (ansamblul liniilor de curent siechipotentiale) pentru curgerea ın retele plane de profile.
Vom prezenta pe scurt ın cele ce urmeaza utilizarea CFA pentru solutionareacurgerii ıntr-o retea de profile. Interfata grafica prietenoasa permite intro-ducerea simpla si comoda a datelor ce definesc problema, respectiv analizagrafica (dar si analiza cantitativa) a rezultatelor. Etichetele butoanelor, pre-cum si mesajele afisate sunt ın limba engleza pentru a face accesibil programulsi utilizatorilor din strainatate.
Figura 7.6(a) prezinta caseta de dialog pentru introducerea parametrilorgeometrici care definesc reteaua. In exemplul din figura profilul este precizatprin codificarea familiei NACA, dar orice profil poate fi definit prin citirea co-ordonatelor punctelor de pe intrados si extrados dintr-un fisier separat. Totın aceasta caseta se precizeaza pasul relativ al retelei si unghiul de instalare,care caracterizeaza dispunerea profilului ın retea. Finetea de discretizare esteprecizata printr-un parametru sintetic care este numarul de puncte pe profil.Validarea datelor geometrice conduce automat la reprezentarea grafica a pro-filului, Figura 7.6(b), pentru verificarea calitativa a corectitudinii geometriei.
In continuare programul genereaza si afiseaza geometria domeniului deanaliza, Figura 7.7(a), precum si discretizarea nestructurata cu elemente fi-nite triunghiulare, Figura 7.7(b). Verificarea finetei retelei ın zona borduluide atac, respectiv a bordului de fuga, se poate face cu facilitatea de zoom

202 Retele de Profile
a meniului de vizualizare. In cazul ın care profilul este citit dintr-un fisier,programul poate utiliza tehnica reprezentarii modale pentru reconstructiacurbelor de intrados si extrados. In urma discretizarii domeniului este afisatın coltul dreapta jos al ferestrei grafice numarul de noduri si numarul deelemente utilizate.
Definirea conditiilor de operare se face prin precizarea unghiului de in-trare a curentului ın retea, ın caseta de dialog din Figura 7.8(a). Validareaacestei valori numerice initiaza faza de procesare, care consta ın construireasistemului de ecuatii cu conditiile la limita implicite pentru functia de curent,si solutionarea lui pentru obtinerea valorilor nodale ale lui ψ. Solutionareaunui sistem de 104 . . . 105 ecuatii dureaza de la cateva secunde la cateva zecide secunde pe sistemele de calcul Pentium III/IV din generatia actuala, gratieprocedurilor performante oferite de PETSc, [5].
In etapa de postprocesare se pot afisa liniile de curent, Figura 7.8(b),pentru inspectia calitativa a curgerii, respectiv pentru estimarea corectitu-dinii unghiului de intrare ın retea. Procesarea se poate relua, fara a fi nevoiesa se genereze din nou domeniul de analiza, prin precizarea unei alte valoria unghiului de intrare.
Repartitia de presiune pe profil este reprezentata cu ajutorul coeficien-tului de presiune definit cu formula din caseta de dialog din Figura 7.9(a).Reprezentarea grafica din Figura 7.9(b) permite si citirea valorilor numericeale coeficientului de presiune.
Toate rezultatele calculelor pot fi salvate ın fisiere ASCII pentru analizaulterioara, sau pentru reprezentari grafice mai sofisticate.
7.4 Curgerea ıntr-o retea de turbina cu gaz
Curgerea gazelor (aer sau gaze de ardere) ın turbomotoarele de aviatie este unfenomen complex, care pe langa procesele dinamice include si fenomene ter-modinamice. Gazele sunt fluide compresibile, si prin urmare variatii relativmici de presiune pot produce modificari semnificative ale densitatii. Cu atatmai mult variatiile densitatii gazului vehiculat printr-un turbomotor nu suntdeloc de neglijat. Se pune deci ıntrebarea legitima ın ce masura utilizareaunui model de curgere incompresibila poate avea relevanta la turbinele cugaz (unde gazul se destinde, producand lucru mecanic), si ce concluzii se potdesprinde dintr-un asemnenea studiu?

Retele de Profile 203
(a) Precizarea parametrilor care definesc geometria retelei si finetea de dis-cretizare.
(b) Profilul aero/hidrodinamic ce va fi dispus ın retea.
Figura 7.6: Precizarea geometriei retelei si reprezentarea grafica a profiluluice va fi dispus ın retea.

204 Retele de Profile
(a) Domeniul de analiza pentru curgerea ın retea de profile.
(b) Triangulatia domeniului de analiza.
Figura 7.7: Construirea automata a domeniului de analiza si discretizarea cuelemente finite triunghiulare.

Retele de Profile 205
(a) Definirea unghiului de intrare a curentului ın retea
(b) Liniile de curent corespunzatoare unghiului de intrare precizat.
Figura 7.8: Evaluarea coeficientului de presiune pe profilulhidro/aerodinamic dispus ın retea.

206 Retele de Profile
(a) Definirea coeficientului de presiune.
(b) Reprezentarea grafica a coeficientului de presiune.
Figura 7.9: Evaluarea coeficientului de presiune pe profilulhidro/aerodinamic dispus ın retea.

Retele de Profile 207
7.4.1 Conditii pentru o curgere incompresibila
Sa reamintim mai ıntai ca un gaz este numit perfect daca satisface ecuatiade stare
p = ρ R T (7.18)
unde p este presiunea absoluta, ρ este densitatea, T este temperatura abso-luta, iar R este o constanta a carei valoare este specifica fiecarui gaz. Pentruun gaz perfect energia interna e depinde numai de temperatura, adica
e = e(T ) (7.19)
Entropia unitatii de masa de gaz, s, se defineste ca fiind
T δs= δe+ p δ
(1
ρ
)(7.20)
unde δ indica o mica variatie a marimilor de stare. Aplicand (7.20) pentru oparticula materiala ın curgere obtinem ecuatia lui Gibbs:
TDs
Dt=De
Dt− p
ρ2
Dρ
Dt(7.21)
unde cu D/Dt am notat derivata materiala. In cazul ın care curgerea esteadiabatica, iar fluidul este considerat nevascos si conductia termica este negli-jabila, rezulta ca Ds/Dt = 0. Spunem ın acest caz ca avem o curgere izen-tropica.
Daca luam pe ρ si s ca fiind cele doua variabile de stare independente,atunci vom avea o ecuatie de stare de forma p = p(ρ, s). Pentru curgerileizentropice ecuatia de continuitate poate fi scrisa sub forma
1
a2
Dρ
Dt+ ρ ∇ · v= 0 (7.22)
unde am definit viteza sunetului a,
a2 =
(∂p
∂ρ
)s
Indicele s indica faptul ca entropia este mentinuta constanta. Sa notam ca(∂p/∂ρ)s > 0 pentru ca unei cresteri a presiunii p (comprimare) ıi corespundeo crestere a densitatii ρ.
Ecuatia de miscare ın absenta vascozitatii si a fortelor masice este
ρDv
Dt= −∇p (7.23)

208 Retele de Profile
Fie L si U o lungime si o viteza caracteristica pentru curgerea considerata.Curgerea poate fi considerata incompresibila daca densitatea unei particulefluide variaza putin, adica ∣∣∣∣1ρ DρDt
∣∣∣∣ U
L
Folosind ecuatia de stare p = p(ρ, s) putem scrie
1
ρ
Dρ
Dt=
1
ρa2
Dp
Dt− 1
ρa2
(∂p
∂s
)s
Ds
Dt
Se poate arata, vezi [8] ca al doilea termen din membrul drept poate avea ocontributie semnificativa numai ın circumstante putin probabile, spre exem-plu curgerea unui gaz cu LU = 10−1cm2/s si T = 100C. Retinand numaiprimul termen din membrul drept, conditia de incompresibilitate devine∣∣∣∣ 1
ρa2
Dp
Dt
∣∣∣∣ U
L
Presupunem acum o curgere izentropica, pentru ca evident influenta vascozitatiisi a conductiei termice este nesemnificativa asupra ordinului de marime alvariatiilor de presiune. Putem utiliza acum (7.23) pentru a obtine
Dp
Dt=∂p
∂t+ v · ∇p =
∂p
∂t− 1
2ρDv · vDt
Cum ın general nu este nici un motiv ca cei doi termeni sa se compenseze,trebuie ca fiecare sa satisfaca conditiile∣∣∣∣ 1
ρa2
∂p
∂t
∣∣∣∣ U
L(7.24a)∣∣∣∣ 1a2
Dv · vDt
∣∣∣∣ U
L(7.24b)
Fie τ un timp caracteristic al curgerii. Amplitudinea variatiei presiuniieste ρUL/τ , asa cum se poate observa din ecuatia de miscare (7.23), si prinurmare 1
ρa2∂p/∂t este de ordinul UL/(aτ)2, astfel ıncat (7.24a) devine
L2
a2τ 2 1 . (7.25)
In aplicatiile de acustica L este lungimea de unda a undei sonore, adicaL = aτ , si prin urmare (7.25) nu poate fi satisfacuta. Cu alte cuvinte, ınacustica nu putem utiliza ipoteza incompresibilitatii.

Retele de Profile 209
Sa analizam acum (7.24b). Avem D(v ·v)/Dt = ∂(v ·v)/∂t+v ·∇(v ·v).Ordinul de marime al acestor termeni este U2/τ si respectiv U3/L. Prinurmare din (7.24b) rezulta urmatoarele doua conditii:
UL
a2τ 1 , (7.26a)
U2
a2 1 , (7.26b)
Conditia (7.26a) nu este independenta, ci rezulta din (7.25) si (7.26b) (careproduce (UL/a2τ)2 1).
In concluzie, conditiile pentru incompresibilitate pot fi scrise astfel:
1
τ a
L, (7.27)
Ma 1 , (7.28)
unde Ma = U/a este numarul lui Mach. Prima conditie limiteaza frecventafenomenelor nestationare corespunzatoare curgerii; a doua conditie limiteazavaloarea vitezei caracteristice a curgerii. In practica se accepta ca incompre-sibilitatea este o simplificare acceptabila pentru Ma ≤ 0.3 .
7.4.2 Date experimentale si comparatie cu rezultatenumerice
Conditiile precizate mai sus pot fi ındeplinite daca se considera o curgere (me-die) stationara, cu o viteza caracteristica a aerului ce nu depaseste 20 m/s.Asemenea conditii sunt specifice tunelelor aerodinamice pentru ıncercarearetelelor de profile. Figura 7.10 prezinta tunelul aerodinamic de la Universityof Notre Dame [11] construit pentru investigarea experimentala a modeluluiretelei de profile de la treapta de joasa presiune a turbinei unui turbomo-tor Pratt & Whitney. Reteaua de profile montata ın sectiunea de masuraa profilului este prezentata ın Figura 7.11. Profilul din mijlocul retelei esteprevazut cu 30 de prize de presiune pe extrados si 10 prize de presiune pe in-trados. Masuratorile au fost efectuate pentru numarul Reynolds ın intervalulRe = 104 . . . 105 si intensitatea turbulentei u′/U∞ = 0.08% . . . 3%.
Profilul este precizat prin puncte. Pentru analiza numerica cu elementefinite profilul a fost reconstruit utilizand o interpolare cu functii spline pe-riodice. Pasul retelei raportat la proiectia axiala a coardei profilului este0.88558. Unghiul de intrare al curentului de aer ın reteaua de profile esteβIN = 55. In cazul curgerii fluidului nevascos circulatia vitezei pe profilpoate fi calculata doar dupa precizarea conditiei Kutta-Jukovski. In cazul de

210 Retele de Profile
Figura 7.10: Tunelul aerodinamic de la University of Notre Dame pentruinvestigarea treptei de joasa presiune a unei turbine cu gaze [11].

Retele de Profile 211
Figura 7.11: Modelul retelei de profile pentru treapta de joasa presiune a uneiturbine cu gaze, montat ın sectiunea de masurare a tunelului aerodinamic dela University of Notre Dame.
fata profilul are un bord de fuga rotunjit si punctul de stagnare aval a fost alescorespunzator punctului de curbura maxima. Aceasta alegere are un suportfizic (ın sensul ca fluidul nu ocoleste bordul de fuga chiar daca acesta esterotunjit), dar trebuie privita ca ”cea mai buna aproximatie” pentru modelulsimplificat de curgere utilizat.
Liniile de curent pentru curgerea irotationala a fluidului perfect (incom-presibil si nevascos) ın reteaua de profile de turbina cu gaze sunt prezentateın Figura 7.12. Unghiul de iesire a curentului de aer din retea este calculatca fiind βOUT = 149.7. Se poate observa ca unghiul de intrare corespundeincidentei optime pe profil. Caracteristic turbinelor cu gaze este unghiulmare de deviatie a curentului ın retea. In cazul de fata deviatia curentuluieste
βOUT − βIN ≈ 95 .
Repartitia de presiune pe profilul dispus ın retea este reprezentata cu

212 Retele de Profile
OUT
IN
axa masinii
fron
tul r
etel
ei
β
β
Figura 7.12: Linii de curent pentru miscarea relativa ın treapta de joasapresiune a unei turbine cu gaze.

Retele de Profile 213
coeficientul de presiune
cp ≡ p− pIN
12ρ (vIN)2 = 1 −
(v
vINx
)2
sin2 βIN
Repartitia coeficientului de presiune pe profilul treptei de joasa presiune aturbinei cu gaze este prezentata ın Figura 7.13 cu linie continua. Se poateobserva ca ın vecinatatea bordului de fuga rotunjit conditia Kutta-Jukovskiconduce la o accelerare brusca urmata de o decelerare pana la stagnare. E-vident aceasta evolutie nu se regaseste ın realitate, cand bordul de fuga estepractic inclus ın dara. In afara acestui neajuns, modelul curgerii incompre-sibile si nevascoase produce rezultate ın buna concordanta cu experimentul.
Pentru numarul Reynolds Re = 105, Figura 7.13(a), solutia numericaurmareste ındeaproape datele experimentale pentru extrados pe 75% dinlungimea coardei. Decelerarea curentului pe extrados pe ultima portiunede 25% ın vecinatatea bordului de fuga conduce la desprinderea curentu-lui de pe suprafata solida. Cu toate acestea, curentul se reataseaza la 85%din lungimea coardei pentru Re = 105. Pe intrados curgerea este practicnumai accelerata de la bordul de atac spre bordul de fuga, si concordantateorie-experiment este foarte buna asa cum era de asteptat.
In cazul unui numar Reynolds mai mic cu un ordin de marime Re = 105,Figura 7.13(b), efectul mult mai pronuntat al vascozitatii conduce la des-prinderea prematura a curentului de pe extrados practic la 50% din lungimeacoardei. In acest caz curentul nu se mai reataseaza pe profil, si dara aerodi-namica astfel formata conduce la o importanta disipatie vascoasa. Pe intra-dos rezultatul numeric se mentine si ın acest caz ın foarte buna concordantacu experimentul.
Scopul final al studiilor si cercetarilor pentru treapta de joasa presiune aturbinei cu gaz este cresterea ıncarcarii treptei (cresterea deviatiei curentuluiın retea) ın conditiile evitarii desprinderii curentului pe intrados [11]. Inacest scop se investigheaza posibilitatea generarii controlate de vorticitatechiar ınaintea desprinderii curentului pe extrados cu dispozitive cu plasma.

214 Retele de Profile
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1coordonata axiala adimensionalizata
−4
−3
−2
−1
0
1
2
coef
icie
ntul
de
pres
iune
experimental (intrados), Re=1E5experimental (extrados), Re=1E5numeric (solutia MEF)
desprindere
reatasare
(a) Re = 105
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1coordonata axiala adimensionalizata
−4
−3
−2
−1
0
1
2
coef
icie
ntul
de
pres
iune
experimental (intrados), Re=1E4experimental (extrados), Re=1E4numeric (solutia MEF)
desprinderea curentuluireal pe extrados
(b) Re = 104
Figura 7.13: Repartitia de presiune paleta treptei de joasa presiune a uneiturbine cu gaze.

Retele de Profile 215
2
β
βθ
α 2
1
1
w w1
Figura 7.14: Retea de profile NACA 65-410 pentru compresor.
7.5 Curgerea ıntr-o retea de compresor
Validarea modelului curgerii incompresibile nevascoase pentru retele decel-eratoare (pompe, ventilatoare, turbocompresoare) este chiar mai imperiosnecesara decat pentru retele acceleratoare (turbine). In cazul decelerariicurentului ın retea particulele fluide evolueaza ın gradient advers de pre-siune si prin urmare desprinderea curentului de pe extradosul profilului estefavorizata. Vom analiza ın cele ce urmeaza curgerea ıntr-o retea de turbo-compresor formata din profile NACA 65-410 [6]. Pentru astfel de retele aufost efectuate minutioase investigatii experimentale ın anii ′50, iar rezultatelesunt disponibile sub forma de rapoarte tehnice NACA [12].
Notatiile utilizate ın cele ce urmeaza corespund raportului NACA [12] dincare au fost preluate datele experimentale. Figura 7.14 prezinta aceste notatiipentru reteaua de turbocompresor. Viteza curentului ın amonte de retea estew1, iar viteza ın aval este w2. Directia curentului amonte, respectiv aval,este indicata de unghiurile β1 si β2 ın raport cu axa masinii. Deviatia curen-tului ın retea este θ = β1 − β2. Rezultatele experimentale sunt prezentatepentru o directie prestabilita a curentului amonte, β1 = 45, modificandu-seunghiul de instalare a profilului pentru a obtine diferite valori al unghiuluide incidenta α1. Distanta dintre profile este precizata prin raportul dintrecoarda profilului si pasul retelei, σ, care este coeficientul de desime a retelei.
Experimentele au fost efectuate ın tunele aerodinamice de mica viteza,si prin urmare ipoteza incompresibilitatii este justificata. Repartitia de pre-

216 Retele de Profile
siune pe profil este prezentata cu coeficientul de presiune
S =P − p12ρw2
1
,
unde P este presiunea totala (de stagnare) iar p este presiunea statica. Pen-tru o curgere irotationala nevascoasa si incompresibila ecuatia lui Bernoullipermite exprimarea coeficientului de presiune S sub forma
S =
(w
w1
)2
,
unde w este viteza tangentiala pe profil.Figurile 7.15, 7.16 si 7.17 prezinta comparatia rezultatelor numerice obtinute
cu MEF [6] si datele experimentale din [12]. Concordanta este remarcabilapentru ıntreg domeniul de incidente investigat α1 = −3 . . . 22.
Teoretic, profilele NACA 65-410 au fost proiectate pentru pentru o ıncarcareconstanta de la bordul de atac pana la bordul de fuga. O astfel de distributiea ıncarcarii poate fi observata ın Figura 7.16, unde diferenta de presiuneintrados-extrados este practic constanta pe toata lungimea coardei profilu-lui. Incidentele din Figura 7.16 asigura cea mai scazuta valoare maxima avitezei, si prin urmare acceleraile si deceleraile bruste sunt evitate. In cazurilefin Figura 7.15 punctul de stagnare amonte este situat pe extrados. Chiardaca particulele fluide sufera o accelerare importanta cand ocolesc bordul deatac, curentul ramane atasat practic pe toata lungimea profilului. Aceeasiconcluzie rezulta si din Figura 7.17, unde punctul de stagnare amonte estedeplasat pe intradosul profilului.
Figura 7.18 prezinta comparatia ıntre valorile calculate cu MEF si celemasurate pentru deviatia unghiulara a curentului la diferite desimi ale reteleisi diferite incidente. O foarte buna concordanta se obtine pentru o desimemare a retelei (pasul retelei mic ın raport cu coarda profilului). Cu altecuvinte, efectele vascozitatii se fac simtite cu atat mai pronuntat cu catpasul retelei creste, respectiv la incidente mari.

Retele de Profile 217
0.0 0.2 0.4 0.6 0.8 1.0dimensionless chord
0.0
0.8
1.6
2.4
coef
icie
ntul
de
pres
iune
S
curgere nevascoasa (MEF)intrados (experiment)extrados (experiment)
(a) Unghi de atac α1 = −3
0.0 0.2 0.4 0.6 0.8 1.0coarda adimensionala
0.0
0.8
1.6
2.4
coef
icie
ntul
de
pres
iune
S
curgere nevascoasa (MEF)intrados (experiment)extrados (experiment)
(b) Unghi de atac α1 = 3
Figura 7.15: Repartitia de presiune pe profilul NACA 65-410 dispus ın reteacu desimea σ = 1.50 si unghi de intrare β1 = 45.

218 Retele de Profile
0.0 0.2 0.4 0.6 0.8 1.0coarda adimensionalizata
0.0
0.8
1.6
2.4
coef
icie
ntul
de
pres
iune
Scurgere nevascoasa (MEF)intrados (experiment)extrados (experiment)
(a) Unghi de atac α1 = 8
0.0 0.2 0.4 0.6 0.8 1.0coarda adimensionalizata
0.0
0.8
1.6
2.4
coef
icie
ntul
de
pres
iune
S
curgere nevascoasa (MEF)intrados (experiment)extrados (experiment)
(b) Unghi de atac α1 = 10
Figura 7.16: Repartitia de presiune pe profilul NACA 65-410 dispus ın reteacu desimea σ = 1.50 si unghi de intrare β1 = 45.

Retele de Profile 219
0.0 0.2 0.4 0.6 0.8 1.0coarda adimensionala
0.0
0.8
1.6
2.4
3.2
coef
icie
ntul
de
pres
iune
S
curgere nevascoasa (MEF)intrados (experiment)extrados (experiment)
(a) Unghi de atac α1 = 16
0.0 0.2 0.4 0.6 0.8 1.0coarda adimensionala
0.0
0.8
1.6
2.4
3.2
coef
icie
ntul
de
pres
iune
S
curgere nevascoasa (MEF)intrados (experiment)extrados (experiment)
(b) Unghi de atac α1 = 22
Figura 7.17: Repartitia de presiune pe profilul NACA 65-410 dispus ın reteacu desimea σ = 1.50 si unghi de intrare β1 = 45.

220 Retele de Profile
0 4 8 12 16α1
0
4
8
12
16θ=
β1−β
2experimentalnumeric (MEF)
(a) desimea retelei σ = 0.5
0 4 8 12 16 20α1
0
4
8
12
16
20
24
θ=β1
−β2
experimentalnumeric (MEF)
(b) desimea retelei σ = 0.75
0 4 8 12 16 20α1
0
4
8
12
16
20
24
θ=β1
−β2
experimentalnumeric (MEF)
(c) desimea retelei σ = 1.0
0 4 8 12 16 20α1
0
4
8
12
16
20
24θ=
β1−β
2experimentalnumeric (MEF)
(d) desimea retelei σ = 1.25
−4 0 4 8 12 16 20α1
−2
2
6
10
14
18
22
26
θ=β1
−β2
experimentalnumeric (MEF)
(e) desimea retelei σ = 1.5
Figura 7.18: Deviatia curentului de fluid ıntr-o retea de profile NACA 65-410cu unghi de intrare β1 = 45.

Bibliografie
[1] T. J. Aird and B. W. Howell. IMSL technical report 9103. Technicalreport, IMSL, Houston, 1991.
[2] D. Althaus and F. X. Wortmann. Experimental Results from theLaminar Wind Tunnel of the Institut fur Aero- und Gasdynamik derUniversitat Stuttgart. Friedr. Vieweg & Sohn, Braunschweig/Wiesbaden,1981.
[3] Amtec Engineering, Inc., Bellevue, Washington. Tecplot User′s Manual,Version 9.0, 2001.
[4] Satish Balay, William D. Gropp, Lois C. McInnes, and Barry F. Smith.Petsc home page. http://www.mcs.anl.gov/petsc, 2001.
[5] Satish Balay, William D. Gropp, Lois C. McInnes, and Barry F. Smith.Petsc users manual. Technical Report ANL-95/11 - Revision 2.1.3, Ar-gonne National Laboratory, 2002.
[6] D. Balint and R. Resiga. Numerical Investigation of a NACA 65 Se-ries Low Speed Compresor Cascade. Buletinul Stiintific al UniversitatiiPolitehnica din Timisoara, Seria Mecanica, Tom 45(59):7–14, 2000.
[7] P. K. Banerjee. The Boundary Element Method in Engineering.McGraw-Hill, 1994.
[8] G. K. Batchelor. An Introduction to Fluid Dynamics. Cambridge at theUnivesity Press, New York, 1967.
[9] C. A. Brebbia. The Boundary Element Method for Engineers. PentechPress London, 1978.
[10] C. A. Brebbia. Boundary Element Techniques. Springer-Verlag Berlin,1984.
221

222 Bibliografie
[11] Corke T. C. and Thomas F .O. Enhanced Design of Turbo-jet LPT bySeparation Control Using Phased Plasma Actuators. Technical report,University of Notre Dame, Aerospace and Mechanical Engineering De-partment, Hessert Center for Aerospace Research, Notre Dame, Indiana,U.S.A., 2002.
[12] Emery J. C., Herrig L. J., Erwin J. R., and Felix A. R. ExperimentalInvestigation NACA 65 Series Low Speed Compresor Cascade. Technicalreport, NACA No. 1368, Washington D. C., 1957.
[13] I-Chung Chang, Francisco J. Torres, and Chee Tung. Geometric Anal-ysis of Wing Sections. NASA Technical Memorandum 110346, 1995.
[14] V. I. Cretu. Structuri de Date si Algoritmi. Vol.1: Structuri de datefundamentale. Editura Orizonturi Universitare, Timisoara, 2000.
[15] I. Gh. Sabac. Matematici Speciale. Vol.1. Editura Didactica si Peda-gogica, Bucuresti, 1981.
[16] M. Drela. Xfoil: An analysis and design system for low reynolds numberairfoils. In T. J. Mueller, editor, Low Reynolds Number Aerodynamics,number 54 in Lecture Notes in Engineering. Springer Verlag, 1989.
[17] M. Drela and M. B. Giles. Viscous-inviscid analysis of transonic andlow reynolds number airfoils. AIAA Journal, 25(10):1347–1355, 1987.
[18] J. Friedrich. Object-oriented design and implementation of cfdlab: acomputer-assisted learning tool for fluid dynamics using dual reciprocityboundary element methodology. Computers and Geosciences, 27(7):785–800.
[19] G. H. Golub and C. F. Van Loan. Matrix Computations. Johns HopkinsUniversity Press, Baltimore, Maryland, 1983.
[20] T. J. R. Hughes. The Finite Element Method. Linear Static and Dy-namic Finite Element Analysis. Dover Publications, Inc., Mineola, NewYork, 2000.
[21] W. S. Hwang and Y. Y. Huang. Non-singular direct formulation ofboundary integral equations for potential flow. Int. J. Numer. Meth.Fluids, 26:627–635, 1998.
[22] R. Lohner. Applied Computional Fluid Dynamics Techniques. An Intro-duction Based on Finite Element Methods. John Wiley & Sons, Ltd.,New York, 2001.

Bibliografie 223
[23] L. Morino and C. C. Kuo. Subsonic potential aerodynamics for complexconfigurations: a general theory. AIAA Journal, 12:191–197, 1974.
[24] C. A. Partridge, C. A. Brebbia, and L. C. Wrobel. The Dual ReciprocityBoundary Element Method. Elsevier Science Publ., London, 1992.
[25] W. H. Press, S. A. Teukolsky, W. T. Vetterling, and B. P. Flannery. Nu-merical Recipes in Fortran 77: The Art of Scientific Computing. Cam-bridge University Press, New York, 2nd edition, 1996.
[26] R. Resiga. Complemente de Mecanica Fluidelor si Tehnici de SolutionareNumerica. Editura Orizonturi Universitare, Timisoara, 1999.
[27] L. Schwarz. Theorie des distributions. Actualites scientifiques and in-dustrielles, (1091 & 1122), 1950-1951. Herman & Cie, Paris.
[28] J. R. Shewchuk. Triangle home page.http://www.cs.cmu.edu/∼quake/triangle.html, 1996.
[29] V. L. Streeter. Fluid Dynamics. McGraw-Hill Book Co., New York,1948.
[30] R. Susan-Resiga and S. Muntean. Periodic Boundary Conditions Im-plementation for the Finite Element Analysis of the Cascade Flow.Buletinul Stiintific al Universitatii Politehnica din Timisoara, SeriaMecanica, Tom 44(58):151–160, 1999.
[31] Frunza T. and Resiga R. Software development for cascade flow simula-tion. In Anton I., Ancusa V., and Resiga R., editors, Proceedings of theWorkshop on Numerical Simulation for Fluid Mechanics and MagneticLiquids, pages 57–68. Editura Orizonturi Universitare, Timisoara, 2001.
[32] O. C. Zienkiewicz and J. Z. Zhu. The Superconvergent Patch Recoveryand A Posteriori Error Estimates. Part 1: The Recovery Technique.International Journal for Numerical Methods in Engineering, 33:1331–1364, 1992.