PRINCIPIUL DE FUNCŢIONARE, ECUAŢII, DIAGRAME ALE MAŞINII DE INDUCŢIE (ASINCRONĂ )
102
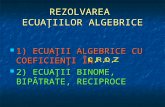
5.2. PRINCIPIUL DE FUNCŢIONARE, ECUAŢII, DIAGRAME ALE MAŞINII DE INDUCŢIE (ASINCRONĂ ) 5.2.1 Principiul de funcţionare al motorului trifazat Se presupune o maşină asincronă în construcţie directă având pe stator o înfăşurare trifazată, alimentată de la un sistem trifazat simetric de tensiuni sau curenţi. 1 Fig. 5. 7 Principiul de funcţionare a motorului asincron trifazat Φ Ω Φ st Φ rot I ro t Ω2 Ω1 Ω1 stat or rot or
-
Upload
claudiunicola -
Category
Documents
-
view
476 -
download
2
Transcript of PRINCIPIUL DE FUNCŢIONARE, ECUAŢII, DIAGRAME ALE MAŞINII DE INDUCŢIE (ASINCRONĂ )

5.2. PRINCIPIUL DE FUNCŢIONARE, ECUAŢII, DIAGRAME ALE MAŞINII DE INDUCŢIE
(ASINCRONĂ )
5.2.1 Principiul de funcţionare al motorului trifazat
Se presupune o maşină asincronă în construcţie directă având pe stator o înfăşurare trifazată, alimentată de la un sistem trifazat simetric de tensiuni sau curenţi.
Se ştie că această înfăşurare creează un câmp magnetic învârtitor care se poate caracteriza prin fundamentala inducţiei magnetice sau prin fluxul magnetic polar Φst, fig. 5.7, rotitor în sens direct cu viteza unghiulară Ω1, unde:
(5.1)
1
Fig. 5. 7 Principiul de funcţionare a motorului asincron trifazat
Φ
Ω
Φst
Φrot
Irot
Ω2Ω1
Ω1
stator
rotor

Acest câmp inductor intersectează atât conductoarele statorice fixe cât şi conductoarele rotorice, presupuse iniţial imobile (la pornire), inducând în acestea, tensiuni. Tensiunile induse în înfăşurarea rotorică trifazată, întreţin curenţi prin conductoare, dacă circuitul rotoric este închis. Închiderea circuitului rotoric se realizează prin reostatul de pornire (sau de reglare a vitezei) la maşinile cu rotor bobinat şi prin inelele de scurtcircuitare a barelor rotorice în cazul maşinilor în colivie. Se poate aprecia că în rotor apare o „pătură de curent“ indus, care prin interacţiune cu câmpul magnetic inductor, creează forţe tangenţiale între armături la nivelul întrefierului, ce se manifestă sub forma unui cuplu electromagnetic. Statorul, prin fixarea sa pe tălpi de exemplu, echilibrează acest cuplu, în schimb rotorul va fi antrenat în mişcare de rotaţie cu o anumită viteză unghiulară Ω, în sensul de rotire a câmpului inductor. Sensul de rotire a rotorului este astfel încât să fie eliminată cauza care produce „discontinuitatea“ energiei magnetice în întrefier, deci apariţia curentului rotoric, adică a variaţiei câmpului magnetic prin rotor. Dacă rotorul s-ar roti cu viteza unghiulară de sincronism (a câmpului) Ω1, atunci nu mai există variaţia fluxului inductor prin circuitul rotoric, nu există nici curent rotoric, iar cuplul ar deveni nul. Rotorul se va roti cu o viteză 0< Ω < Ω 1, astfel încât se poate defini o mărime numită alunecare, s, definită astfel:
(5.2)
Diferenţa dintre viteze : (5.3)
este viteza unghiulară dintre câmpul învârtitor statoric şi rotor (viteza relativă).Tensiunile induse, deci şi curenţii rotorici vor avea frecvenţa dictată de
această viteză relativă, adică, similar cu (5.1) (întrucât este pozitivă):
(5.4)
Întrucât înfăşurarea rotorică este trifazată-simetrică, în cele trei faze se vor induce curenţi de frecvenţă f2, defazaţi la câte 2π/3[rad], care vor crea un câmp magnetic rotoric, caracterizat prin fluxul polar rotoric Φrot, rotitor faţă de rotor cu viteza unghiulară dedusă similar cu (5.1), adică :
(5.5)
Acest flux rotoric se va roti faţă de stator cu viteza compusă:
2

(5.6)adică se roteşte tot cu viteza de sincronism Ω1.
În concluzie, atât Φst cât şi Φrot se rotesc faţă de stator cu aceeaşi viteză de sincronism Ω1, compunându-se într-un flux rezultant Φ, după regula paralelogramului (fig. 5.7), rotitor faţă de stator cu Ω1. Evident, acest flux rezultant va intersecta conductoarele statorice cu viteza Ω1, iar conductoarele rotorice cu Ω2 = s Ω1 , frecvenţa curenţilor în stator este f1, iar în rotor este f2=s f1.
5.2.2 Ecuaţiile de funcţionare a maşinii asincrone trifazate
În fig.5.8 este reprezentată o maşină asincronă trifazată, cu rotor bobinat. Cele trei faze statorice, conectate în stea sunt alimentate de la un sistem trifazat simetric de tensiuni. O fază statorică având spire efective este caracterizată prin rezistenţa R1 şi inductanţa de scăpări Ls1.
Înfăşurările rotorice sunt conectate în stea cu capetele accesibile, racordate la reostatul trifazat de pornire Rp. Cele trei faze rotorice au câte kw2W2 spire efective şi sunt caracterizate de rezistenţa R2 şi inductanţa de scăpări Ls2.
5.2.2.1 Funcţionarea maşinii asincrone cu rotor imobil la gol
3
câmpulstatoric
Fig. 5. 8 Schema electrică a maşinii asincrone trifazate
L1
a
L2 L3
i1
f1
A
C
B
b
c
rotor
Ω1
Rp
x
N
X
Y
Z
e1 R1,Ls1
Φ
ΩΩ2
e2s
R2,Ls2
i2
u2s
u1

Se consideră rotorul fix, iar circuitul rotoric este deschis (Rp este infinit). Statorul este conectat la reţeaua trifazată, curenţii absorbiţi pe cele trei faze constituie un sistem trifazat simetric, solenaţiile, inducţiile şi fluxurile polare fiind unde învârtitoare, rotitoare cu viteza de sincronism. Se poate considera că maşina este în regim de transformator trifazat cu secundarul în gol, fluxul variabil fiind datorat undei învârtitoare statorice; adică pentru oricare din spirele înfăşurărilor „fixe“, rotirea câmpului, în raport cu acestea, conduce la obţinerea unor tensiuni induse, de frecvenţă impusă de viteza de rotire a câmpului, f1 – în cazul de faţă. Faţă de un transformator trifazat, diferenţa esenţială constă în faptul că există întrefierul stator – rotor între primar şi secundar. O consecinţă a acestui fapt este valoarea ridicată a curentului absorbit de înfăşurarea primară (statorică) chiar la mers în gol. Dacă la transformatoarele trifazate de zeci de kVA, I10-curentul de mers în gol se situa la 1-2% din valoarea celui nominal, la maşina asincronă acesta ajunge frecvent la 20-30% şi chiar mai mult (80% din I1N la motoarele de câteva sute de waţi).Pentru acest caz, al funcţionării în gol, se vor distinge mărimile corespunzătoare prin indicele 0. Aplicând teorema a II-a a lui Kirchhoff pentru ochiul primar corespunzător fazei A – X, se obţine ecuaţia similară cu (2.81) [6], adică :
(5.7)
unde: W1ef = kw1·W1 este numărul efectiv de spire înseriate în faza respectivă, iar :
(5.8)
este tensiunea indusă într-o spiră, prin variaţia fluxului ; Φm este valoarea maximă a fluxului magnetic fascicular pe un pol (polar) (pe ansamblu, în maşină acţionează fluxul rotitor creat de solenaţiile celor trei faze, sau fluxul corespunzător solenaţiei rezultante). Valoarea efectivă a tensiunii induse pe fază, e1 este dată de:
(5.9)
Ecuaţia (5.7) se poate trece la reprezentarea în complex simplificat, anume: (5.10)
unde s-a introdus reactanţa de scăpări a înfăşurării primare: Xs1=ω1Ls1, iar fluxul polar fascicular Φ a fost considerat ca origine de fază. S-a ţinut seama de faptul că derivatei unei mărimi îi corespunde la reprezentarea în complex înmulţirea cu jω1, unde ω1 este pulsaţia mărimii respective.
4

În ceea ce priveşte rotorul, pentru faza a – x, lucrând în gol, se poate scrie: (5.11)
unde:
(5.12)
relaţie similară cu (5.9). Se menţionează că rotorul este imobil.
5.2.2.2 Funcţionarea maşinii asincrone trifazate cu rotor în circuit închis în mişcare de rotaţie
Se consideră rotorul în mişcare cu viteză unghiulară ω = ct. (ca motor, 0<Ω<Ω1), cu fazele conectate pe o rezistenţă, fig. 5.8. Între câmpul rotitor şi conductoarele înfăşurării rotorice există o alunecare s , dată de (5.2).
În ceea ce priveşte statorul, fenomenele rămân aproximativ aceleaşi ca la gol, doar valoarea curentului creşte şi unghiul de defazaj faţă de flux, adică în loc de I10 se va scrie I1 (unde I1>I10), iar ecuaţia (5.10) în complex simplificat devine:
(5.13)Referitor la rotor, acesta funcţionează ca un transformator în sarcină. Prin
faza a-x şi rezistenţa Rp circulă curentul i2, care va crea un flux de reacţie a rotorului. Într-o primă instanţă, facem presupunerea că fluxul rezultant în maşină rămâne acelaşi cu cel de la gol. Ecuaţia care caracterizează o fază rotorică este similară cu (5.7) sau (5.13), în care intră mărimile rotorice induse, având frecvenţa: f2=sf1 , sau pulsaţia ω2=sω1, adică:
(5.14)
Dacă se face trecerea în complex şi se împarte prin s, se obţine:
(5.15)
Mărimile cu indice s ale rotorului: u2s şi e2s
semnifică faptul că acestea au o frecvenţă dependentă de s .Tensiunea indusă în faza rotorică se deduce din (5.12), adică:
(5.16)unde:
5

(5.17)este tensiunea indusă în faza rotorică, când acesta este imobil, iar frecvenţa este egală cu a statorului (s=1).
De cele mai multe ori reostatul de pornire se aduce pe poziţia de scurtcircuit la puţin timp după conectarea la reţea a statorului. Acesta este regimul normal de funcţionare a maşinii. La motoarele cu rotor în colivie, în permanenţă rotorul funcţionează în scurtcircuit. Ecuaţia unei faze a rotorului (5.15) se poate aduce, ţinând seama de (5.16), la forma:
(5.18)
Se obţine I2 în complex, precum şi modulul său, astfel:
(5.19)
Pentru a ajunge la relaţia dintre solenaţii se pot utiliza rezultatele cunoscute de la Transformatorul el. [vol. 1] sau [vol. 2- Maşina sincronă, cap.3]. Dacă se foloseşte relaţia (5.13), în condiţiile când curentul absorbit I1<I1N, ultimii doi termeni din membrul drept sunt neglijabili în raport cu ceilalţi şi se obţine:
(5.20)Deoarece U1 şi f1 sunt constante, acestea fiind dictate de sistemul de
alimentare, rezultă: (5.21)
Mărimea Φm (şi implicit Φ) este impusă de solenaţie, iar dacă se consideră caracteristica magnetică a maşinii-liniară (se neglijează saturaţia circuitului magnetic), atunci, la mersul în gol, se scrie fazorul fluxului:
(5.22)unde kф este o constantă, în care intră elemente geometrice şi numerele de spire.
La funcţionarea în sarcină, fluxul Φm (considerat egal cu cel de la gol, deşi în realitate diferă cu câteva procente) este determinat de rezultanta solenaţiilor statorului şi rotorului, adică:
(5.23)
Din (5.22) şi (5.23) se obţine relaţia dintre curenţi la maşina cu rotor bobinat: (5.24)
Prin împărţirea cu kw1W1, se ajunge la relaţia:
6

(5.25)
unde: ki este raportul dintre numerele efective de spire din fazele: statorică, respectiv rotorică.
Observaţia 1: Se anticipează faptul că dacă numerele de faze ale armăturilor sunt diferite, adică , intervine şi în expresia lui ki.
Aşadar, funcţionarea în sarcină a maşinii asincrone trifazate este descrisă de sistemul de ecuaţii, în complex simplificat, (5.13), (5.18), (5.25):
(5.26)
în care intervine alunecarea s.
5.2.2.3 Ecuaţiile maşinii asincrone trifazate în mărimi raportate
În mod similar ca la „transformatorul raportat“ se pot obţine ecuaţiile maşinii asincrone trifazate în mărimi raportate la stator. Prin raportarea mărimilor rotorice (secundare) la cele ale statorului (primar), se va aduce înfăşurarea rotorică la un număr efectiv de spire pe fază egal cu numărul efectiv de spire pe faza statorică. În sistemul (5.26) se înmulţeşte ecuaţia a doua cu ki, dat de (5.25), astfel încât se obţine:
(5.27)
unde modulul primei mărimi din membrul drept este :
(5.28)Prin analogie cu prima ecuaţie din (5.26), se poate scrie (5.27) sub forma :
(5.29)
unde s-au introdus mărimile rotorice raportate la stator :
7

(5.30)
obţinute după regulile cunoscute de la § 2.2.1.2 [6], adică :- tensiunile secundare se raportează prin înmulţire cu ki ,- curenţii secundari se raportează prin împărţirea la ki ,- rezistenţele, reactanţele (în general impedanţele), se raportează prin
înmulţirea cu ki2.
Observaţia 2: Când numărul de faze ale armăturilor sunt diferite: , relaţiile de raportare a mărimilor rotorice devin:
Justificarea se obţine cu raţionamentele expuse în §5.4.3.Ecuaţiile maşinii asincrone trifazate în mărimi raportate, sunt:
(5.31)deci similare cu ale unui transformator în scurt circuit, în care intră alunecarea.
5.2.3 Scheme electrice echivalente ale m. a. trifazate5.2.3.1 Scheme echivalente ale maşinii asincrone trifazate cu
pierderi în fier neglijabile
În condiţiile neglijării pierderilor în fier şi dacă , curentul de mers în gol ideal I10 (rotorul - rotit la sincronism) este în fază cu fluxul pe care îl produce.
Dacă se au în vedere ecuaţiile (5.31), se poate desena o schemă electrică echivalentă, având n – 1 = 1, deci n = 2 noduri şi o = 2 ochiuri independente. În această schemă se evidenţiază o impedanţă (mai concret o reactanţă, Xm) de magnetizare, străbătută de I10 care întreţine fluxul în maşină.
8
Fig. 5. 9 Scheme echivalente pe fază a maşinii asincrone trifazate
I10
I1
X's2
R'2/s
a)
Xs1
U1 Xm
R1 I2'
N
E1 E'2 I II
I1
X's2
R'2
b)
Xs1
U1
I10 Xm
R1 I2'
N
E1 E'2 I II
R'2(1-s)/s
U'2

La bornele acesteia se obţine tensiunea indusă (fig.5.9 a).Este valabilă relaţia următoare:
(5.32)În ochiul circuitului secundar II se află o rezistenţă variabilă cu alunecarea, . Ţinând seama de identitatea :
(5.33)
schema echivalentă din fig. 5.9 a) devine una similară cu cea a unui transformator fără pierderi în fier, având o rezistenţă de sarcină dependentă de alunecarea s (fig. 5.9 b). Tensiunea secundară raportată, la bornele rezistenţei variabile cu s, este:
(5.34)
Dacă s = 1, rezultă , adică la n = 0, (în momentul pornirii) puterea vehiculată cu exteriorul de secundar este nulă. Pentru s = 0, rezistenţa de sarcină tinde la infinit, deci curentul este nul, puterea în secundar este nulă; fapt justificat prin aceea că rotorul fiind în sincronism nu este viteză relativă între acesta şi câmp, deci nu există interacţiune câmp statoric – curent indus rotoric. Se menţionează faptul că tensiunile, curenţii, rezistenţele şi reactanţele din schemele echivalente prezentate corespund unei faze a maşinii analizate.
5.2.3.2 Scheme echivalente ale maşinii asincrone trifazate cu considerarea pierderilor în fier
Pierderile în fier pentru maşina funcţionând la s = sN, se manifestă în circuitul magnetic statoric, unde frecvenţa este f1. Întrucât aceste pierderi sunt dependente de frecvenţă (mai exact de , α fiind între 1 şi 2), valorile lor sunt reduse la frecvenţe mici. Cum în rotor frecvenţa tensiunilor induse este mică (1–2 Hz), pierderile în fier vor fi neglijabile. Utilizând raţionamentul de la transformator, § 2.2.3 [6], în schema electrică echivalentă din fig. 5.9 a) se
9

introduce o rezistenţă în paralel cu reactanţa de magnetizare, încât schema devine cea prezentată în fig. 5.10 a) (numită în Π).
Mărimea rezistenţei Rmp, se poate deduce cu oarecare exactitate astfel: se face încercarea în gol la viteza de sincronism; se măsoară puterea activă absorbită p10; se calculează pierderile prin efect electrocaloric la mers în gol 3·R1·I10
2; se determină: pFe = p10 - 3·R1·I10
2; se calculează Rmp din egalitatea aproximativă:
(5.35)
Componentele: activă şi reactivă ale curentului, I10 se deduc imediat :
; (5.36)
Cunoscând I10r şi U1 ≈ E1, se poate deduce reactanţa de magnetizare sau utilă: (5.37)
Cele două elemente de circuit (Rmp, Xmp) conectate în paralel în schema din fig.5.10 a), pot fi substituite prin elemente conectate în serie.
Impedanţa echivalentă Zm se determină astfel :
(5.38)
În formă concentrată, schema electrică echivalentă în T a maşinii asincrone, pe o fază, este redată în fig. 5.10 b), unde intervin trei impedanţe :
(5.39)
În schema prezentată în fig.5.10 b), se aplică teoremele lui Kirchhoff, considerând: ca necunoscute şi se obţin sistemul în forma:
10
Fig. 5. 10 Scheme echivalente cu considerarea pierderilor în fier
I1
X's2
R'2
a)
Xs1
U1
I10
Xmp
R1 I2'
N
E1 R'2(1-s)/s
U'2 I10a
I10r Rmp
I1
b)
U1 I10 Zm=Rm+jXm
I2'
Z1=R1+jXs1
Z'2=R'2/s+jX's2

(5.40)
Se rezolvă sistemul (5.40) şi se deduce curentul adică:
(5.41)
unde Zm = jXm; deci se neglijează pierderile în fier (Rmp→∞, Rm=0), iar R1<<Xs1.
5.2.3.3 Diagrama fazorială a maşinii asincrone trifazate
Se va considera fluxul Φ – rezultant (util) ca origine de fază, fig.5.11, adică: (5.42)
Curentul de mers în gol ideal, I10 , va fi defazat cu un unghi α0, în avans faţă de flux datorită prezenţei componentei active, corespunzătoare pierderilor în fier.Tensiunile induse sunt, conform (5.31), defazate cu π/2 în avans faţă de flux:
11
U'2
Φ I10
jXs1I1
U1
jX's2I2'
R1I1
E1=E'2
O
A
B
C
D E
α1
α0
I2'
I1
I10r I2'
R'2I2'
R'2I2'(1-s)/s
ψ2
φ1
α2
φ2=π
I10=I10r+jI10a
Fig. 5. 11 Diagrama fazorială a maşinii asincrone trifazate

,
(5.43)Curentul I1 este în avans cu un unghi α1 > α0 faţă de flux, întrucât la
funcţionarea în sarcină creşte componenta activă faţă de funcţionarea în gol (statorul este un circuit activ-inductiv):
(5.44)
Curentul secundar satisface ecuaţia a treia din setul (5.31). Fazorii:
sunt: coliniar cu I1, respectiv perpendicular pe I1 , iar reprezintă tensiunea primară de fază U1. Pentru circuitul secundar, este
valabilă ecuaţia a doua din (5.31) iar în plan se obţine configuraţia OADE unde : (5.45)
Având în vedere faptul că U'2 şi I'2 sunt în opoziţie, unghiul secundar φ2 =π, puterea activă din secundar: U'2·I'2·cos φ2 este negativă, adică maşina cedează prin rotor o putere activă care se regăseşte ca putere mecanică cedată maşinii de lucru – cuplată pe arbore.
Se mai face precizarea că din această putere mecanică, o parte (câteva procente) este necesară acoperirii unor frecări în lagăre sau cu aerul, constituind „pierderile mecanice şi prin ventilaţie“, pmec, la care se mai adaugă şi altele suplimentare, iar cea mai mare parte o constituie puterea mecanică utilă, P2 – transmisă maşinii de lucru.
5.3. BILANŢUL DE PUTERI, CARACTERISTICA M=f(s) A MAŞINII ASINCRONE TRIFAZATE
5.3.1 Bilanţul puterilor la maşina asincronă trifazată
5.3.1.1 Bilanţul puterilor active
Se folosesc ecuaţiile (5.31) în mărimi raportate şi se ţine seama de reprezentarea în complex a mărimilor (luând Φ ca origine de fază). Se aplică conjugata complexă primelor două ecuaţii din (5.31) :
12

(5.46)Prima ecuaţie din (5.46) se înmulţeşte cu I1, iar cea de a doua cu I'2, se ţine
seama de cea de a treia, obţinându-se prin însumare relaţia:
(5.47)Se introduc în (5.47) expresiile mărimilor complexe deduse din diagramă
(fig.5.11):
(5.48)şi se obţine egalitatea:
(5.49)
Prin separarea părţilor reale, ordonarea convenabilă şi înmulţirea cu 3, obţinem:
(5.50)Acesta este bilanţul puterilor active în maşina asincronă trifazată. Pentru regimul de motor, bilanţul puterilor active se reprezintă sugestiv
printr-o diagramă Sankey în fig. 5.12.
13
Fig. 5. 12 Explicativă la bilanţul puterilor active în maşina asincronă
I1 X's2 R'
2 Xs1
U1
I10
Xmp
R1 I2'
E1
R'2(1-s)/s
U'2 Rmp
P1 P =MΩ1 PMec=MΩ P2=M2Ω
pj1 pFe1 pj2 pmec+v
I1
U1
φ1
Mr
Ω

Această diagramă arată că puterea electrică activă absorbită de maşină prin stator (pozitivă în cazul de faţă), este:
(5.51)şi cuprinde:
- o componentă mică „consumată“ prin efect electrocaloric în înfăşurări :, (5.52)
- o altă componentă „consumată“ prin încălzirea fierului statoric datorită histerezisului magnetic şi curenţilor turbionari (pierderi în fierul statoric):
, (5.53)
- o a treia componentă, importantă ca valoare, al cărei modul este :, (5.54)
numită şi putere electromagnetică, care este de fapt puterea transmisă de stator, prin întrefier, rotorului maşinii asincrone. Această putere este exprimată ca produs dintre cuplul manifestat asupra rotorului şi viteza unghiulară a câmpului. M este numit cuplu electromagnetic şi este egal şi de semn contrar cu cuplul ce se manifestă dinspre rotor spre stator.
Din puterea electromagnetică primită de rotor, prin câmp, o parte se consumă prin efect electrocaloric în înfăşurarea rotorică:
, (5.52')
iar o altă parte, însemnată, constituie puterea mecanică transferată rotorului, al cărei modul este:
, (5.55)Această putere mecanică se manifestă prin cuplul de reacţie a rotorului, egal
cu M, la viteza unghiulară a rotorului Ω.Din puterea mecanică PMec, o mică parte este cea corespunzătoare pierderilor
mecanice prin frecări sau prin ventilaţie, la care se adaugă unele pierderi suplimentare [12;16], iar o parte însemnată o constituie puterea mecanică utilă la arbore, furnizată maşinii de lucru, P2, care se poate exprima şi prin relaţia:
, (5.56)unde M2 este cuplul util al motorului asincron trifazat.
Privind maşina ca un sistem, dacă P1 – de natură electrică este pozitivă, adică intră în sistem, PMec – de natură mecanică iese din sistem deci este negativă.
14

Din ecuaţia (5.50) se poate deduce expresia puterii mecanice, adică :
,
(5.57)al cărei modul este :
, (5.58)
iar , la care se mai adaugă şi unele pierderi suplimentare, constituie pierderile mecanice şi prin ventilaţie. Relaţia (5.50) se poate scrie şi în formele:
(5.59)unde:
(5.60)Precizări :-În ecuaţia (5.50) toate mărimile care se referă la puteri şi pierderi de putere
sunt aduse în membrul stâng al ecuaţiei. Suma algebrică a acestor puteri este nulă, arată faptul că o „maşină electrică considerată ca un sistem izolat, în repaus faţă de exterior, se supune legii conservării energiei (puterii)“. În situaţiile concrete, pierderile prin efect electrocaloric în stator şi în rotor intră cu semnul „ – “ întrucât fizic acestea ies din sistem. La fel şi pierderile în fier, care în fapt se manifestă prin încălzirea materialului feromagnetic şi transferul căldurii spre exterior. În ceea ce priveşte pierderile mecanice şi prin ventilaţie, acestea sunt sesizabile tot prin încălziri ale lagărelor, aerului etc. Puterile: P1 – de natură electrică, P1 = 3U1I1 cosφ1 , respectiv P2 ≈ – 3R'2 I'2(1–s)/s – de natură mecanică, (s-au neglijat pierderile pmec+v) pot fi cu semne pozitive sau negative în funcţie de situaţia reală concretă în care se află maşina; mai exact după regimul de funcţionare al acesteia.
-În regimul de motor, puterea P2 – de natură mecanică este negativă întrucât aceasta se manifestă prin învingerea unui cuplu „rezistent“ al unei maşini de lucru Mr , cuplu care se opune rotirii, fiind de semn contrar vitezei Ω . Se poate scrie P2
= Mr Ω < 0. Altfel spus, prin cuplajul mecanic cu sarcina, maşina asincronă „primeşte“ de la aceasta o putere Mr Ω -„negativă“ ceea ce este echivalent cu transmiterea sau generarea unei puteri mecanice către sarcină. Este evidentă egalitatea: | Mr | = M2.
-Pentru o scriere mai compactă a relaţiei (5.50), ţinând seama şi de (5.57 ÷ 5.60) se vor trece pierderile de putere în membrul drept, adică:
15

(5.61)În modul acesta se obţine o egalitate între mărimi pozitive, adică suma
algebrică a puterilor active care acced (de natură electrică şi/sau mecanică) într-o maşină asincronă este pozitivă şi egală cu suma pierderilor (de natură termică, mecanică sau chiar electrică).
-Este utilă prezentarea bilanţului de puteri în unele cazuri particulare.
În fig. 5.13 a) şi b) sunt prezentate bilanţurile în cazul funcţionării maşinii asincrone ca motor în gol s ≈ 0, respectiv în scurtcircuit (la pornire), s = 1.
În ambele situaţii puterea utilă P2 este nulă iar puterea P1 – electrică este absorbită de la reţea, deci este pozitivă.
Această putere este egală în modul cu suma pierderilor respective, exemplificate pe desene.
În cazul funcţionării la sincronism, rotorul maşinii trebuie să fie antrenat din exterior la n = n1 , iar bilanţul de puteri este prezentat în fig. 5.14 a).
16
Fig. 5. 13 Bilanţul puterilor active în cazuri particulare: a) la gol, b) în scurtcircuit
P10
P2=0
pj10
pFe1
pj2≈0
pmec+v
P
a) s≈0 (motor)
P1
pj1sc
pFe
pj2sc
pmec+v=0
P2=0 P
b) s=1 (pornire)
Fig. 5. 14 Bilanţul puterilor active: a) la gol ideal, b) în regim de generator
P1 P2
pj10pFe1 pj2≈0
pmec+v
P=0
a) s=0 (sincronism)
P1 =Pel
pj1 pFe1 pj2 pmec+v
Pmec=P2 P
b) s<0 (generator)

Din punct de vedere analitic, rămâne valabilă relaţia generală (5.61), adică : , (5.62)
dar din punct de vedere al sensurilor, cele două puteri de natură electrică şi mecanică sunt pozitive. În continuare dacă va creşte P2 – de natură mecanică, pozitivă, se va ajunge la situaţia limită (nefigurată), când:
, (5.63)adică, prin stator nu se absoarbe dar nici nu se generează putere activă, toate pierderile în maşină fiind preluate din puterea mecanică ce se manifestă în rotor (luată de la motorul de antrenare). Crescând în continuare P2 (fapt ce se realizează prin tendinţa de creştere a vitezei de antrenare a rotorului) se ajunge la regimul de generator asincron, la care diagrama de puteri este dată în fig. 5.14 b). Din nou este valabilă relaţia (5.61), adică :
(5.61')De data aceasta modulul puterii P2 – de natură mecanică, este mai mare
decât al puterii P1.Este de remarcat faptul că în jurul valorii s ≈ 0 este un domeniu de alunecări
în care maşina nu are un regim de funcţionare precis, de generator sau de motor. Situaţiile acestea se pot analiza dacă se foloseşte diagrama din fig. 5.14 a) şi se modifică puterile de la: şi , la şi , pe acest domeniu atât P1 cât şi P2 fiind pozitive.
-Pentru regimul de motor şi de generator se poate defini randamentul maşinii ca raport între puterea utilă – furnizată, luată în modul şi puterea consumată – absorbită. Adică:
pentru regimul de motor :
(5.64)
unde |P2| este modulul puterii mecanice, iar P1 este puterea electrică activă absorbită.
pentru regimul de generator :
, (5.64')
unde |P1| este modulul puterii electrice furnizate, iar P2 este puterea mecanică absorbită.
17

În general, se foloseşte indicele 1 pentru puterea absorbită, care este de natură electrică în regim de motor şi de natură mecanică în regim de generator, iar indicele 2 se utilizează pentru puterea furnizată – de natură mecanică în regim de motor şi de natură electrică în regim de generator. Dacă se adoptă această notaţie, atunci se obţine expresia randamentului, în cazul general, respectiv în cele două regimuri:
(5.64")Aşadar, randamentul – o mărime tehnică pozitivă, poate fi exprimat prin
raportul dintre puterea de ieşire (în modul) şi puterea de intrare, având sens numai dacă cele două puteri au semne algebrice diferite. Se face precizarea referitoare la semnele celor două puteri, tocmai pentru a nu se ajunge la valori ale randamentului „supraunitare“, fapt posibil când cele două puteri P1 şi P2 au semne algebrice pozitive. Un asemenea regim, cu ambele puteri pozitive se întâlneşte la funcţionarea maşinii ca frână, când nu are sens definirea randamentului.
Introducând indicii „el“ , şi „mec“ pentru puteri, relaţia (5.61) a bilanţului de puteri, se scrie:
, (5.61")valabilă pentru orice regim de funcţionare a maşinii, adică :
Motor: ; ; , (5.65-1)
Generator: ; ; , (5.65-2)
Frână: ; ; (5.65-3)
5.3.2 Caracteristica cuplului în funcţie de alunecare
5.3.2.1 Funcţionarea maşinii asincrone la tensiune şi frecvenţă constante
În cele mai întâlnite situaţii, statorul maşinii asincrone trifazate este conectat la reţeaua industrială de frecvenţă constantă, f1 = 50 Hz în Europa sau f1 = 60 Hz în America. Totodată, excluzând situaţiile particulare, când între maşină şi reţea sunt intercalate sisteme de reglare a tensiunii, mărimea tensiunii statorice U1 este
18

presupusă constantă. De altfel, extinderea utilizării maşinilor asincrone în cele mai diverse aplicaţii practice, este şi o consecinţă a absenţei unor echipamente costisitoare intermediare, maşina fiind racordată la reţea doar prin întrerupătoare sau contactoare. Este importantă, pentru caracterizarea funcţionării maşinii asincrone, dependenţa cuplului electromagnetic M, mai ales de alunecarea s, în condiţiile când se impune tensiunea aplicată statorului U1 – pe fază şi frecvenţa acesteia f1 (sau pulsaţia ω1 ) (când U1=const şi f1=const).
În condiţiile neglijării pierderilor în fier, se poate folosi schema echivalentă din fig. 5.9 b), de unde se deduce expresia puterii mecanice (corespunzătoare puterii electrice din rezistenţa rotorică variabilă cu s ):
, (5.69)
unde este obţinut din (5.41), adică:
, (5.70)
Interesează modulul cuplului electromagnetic. Se apelează la (5.55), de unde se obţine:
. (5.71)
Notă. În relaţia cu o maşină de lucru, acţionată de un motor asincron, cuplul furnizat de motor este orientat în sensul vitezei de rotaţie a arborelui, deci este pozitiv, adică puterea vehiculată este pozitivă (deci şi cuplul) „intrând“ în maşina de lucru. Pe scurt spus, folosim convenţia conform căreia în regim de motor, maşina asincronă este caracterizată de un cuplu electromagnetic pozitiv, convenţie utilizată în cvasitotalitatea publicaţiilor de specialitate.
În relaţia (5.71) s-au utilizat (5.1) şi (5.2).Se constată că aceeaşi relaţie se obţine şi dacă se folosesc (5.54) şi (5.55),
adică:
. (5.71')
Din (5.70) şi (5.71) se obţine:
19

. (5.72)
Această expresie se aduce la forme mai compacte:
, (5.73)
unde s-au introdus notaţiile:
(5.74)Funcţia M=M(s), va fi studiată pentru domeniul , inclusiv
pentru câteva valori particulare ale lui s.Se constată că :
şi , (5.75)
ceea ce înseamnă că: pentru s- pozitiv, când , funcţia analizată trece prin origine, (la s=0→M=0 ) şi tinde tot spre 0 când s tinde la +∞. Aşadar, M(s) admite un maxim pozitiv în domeniul .
Pentru s- negativ, analog, se constată trecerea lui M printr-un minim negativ. Pentru a afla extremele funcţiei M(s) se aplică, într-o primă variantă, principiul cunoscut din „Analiza matematică“, anume: egalarea derivatei funcţiei cu zero. Adică, revenind la (5.73), se obţine:
. (5.76)
Se ajunge imediat la valorile alunecărilor corespunzătoare extremelor funcţiei, numite alunecări critice:
(5.77)
Valoarea pozitivă a alunecării critice:
, (5.78)
corespunde regimului de motor, iar valoarea cuplului critic în acest caz este:
20

. (5.79)
Valoarea negativă a alunecării critice corespunde regimului de generator, iar cuplul critic este, în acest caz:
. (5.80)
Valoarea în modul a cuplului critic în regim de generator este mai mare decât a cuplului critic în regim de motor, aşa cum se vede din comparaţia expresiei (5.80) cu (5.79). Având în vedere aceste elemente se poate reprezenta dependenţa M = f(s), în fig. 5.15.
Regimurile de funcţionare ale m. a. trifazate sunt înscrise pe fig. 5.15, :-pentru maşina funcţionează ca motor, cuplul fiind pozitiv;-pentru maşina lucrează ca generator, cuplul fiind negativ;-pentru maşina este în regim de frână, cuplul fiind pozitiv.
21
4
Fig. 5. 15 Caracteristica cuplu-alunecare, M=f(s), a maşinii asincrone trifazate
sNscr1scr2
generator motor frână
s
Q1Mcr1
M
MNN
1
S
S'N'3
2
5 MP
Mr=ct
P
O
Mcr2Q2
s=1
s=-1
(d)
|Mcr2|> Mcr1

La s = 1 rezultă n = 0 adică rotorul este imobil. Pentru a deduce valorile alunecărilor critice se poate folosi şi un alt raţionament. Se constată că expresia (5.73) a cuplului, cuprinde la numitor suma:
, (5.81)
adică o constantă B, la care se adaugă doi termeni variabili cu s: şi .
Produsul acestor termeni: este constant. Se aplică o teoremă
cunoscută din algebră, anume: suma a două mărimi variabile, al căror produs este constant, devine maximă când cele două mărimi sunt agale, ceea ce înseamnă :
. (5.82)
S-a ajuns la relaţia (5.77), aşa cum era de aşteptat.Pentru regimul de motor, domeniul cuprins între s=0 şi s=scr1 caracterizează
zona de funcţionare stabilă, când rotorul este cuplat mecanic pe o sarcină, care se manifestă printr-un cuplu rezistent constant. Mai exact, dacă maşina asincronă este cuplată la o maşină de lucru, ecuaţia de echilibru rezultată din legea fundamentală a dinamicii, se scrie:
(echivalentă cu ), (5.83)
unde ΣM este suma cuplurilor ce se aplică ansamblului rotor – maşină de lucru, J – momentul de inerţie al rotorului maşinii asincrone împreună cu cel al maşinii de lucru. Pe arborele comun acţionează un cuplu activ produs de maşina asincronă (aproximativ egal cu cuplul electromagnetic) şi un cuplu rezistent creat de maşina de lucru (la care se poate adăuga şi cuplul corespunzător frecărilor, ventilaţiei etc., în general pierderilor mecanice şi suplimentare). Cele două categorii de cupluri acţionează în sensuri contrare, iar dacă viteza Ω este constantă, aceste cupluri îşi fac echilibrul, adică:
(5.84)Dacă cuplul rezistent este egal cu cel nominal, adică:
Mr = MN = ct. (5.85)atunci maşina asincronă funcţionează în punctul N – nominal (fig. 5.15), caracterizat prin egalitatea (5.84), M = Mr, iar curbele 1 şi 2 se intersectează la o alunecare , când turaţia, respectiv viteza unghiulară sunt date de:
22

. (5.2')Dacă dintr-un motiv oarecare datorat sarcinii, creşte cuplul rezistent ca
modul (dreapta 3), atunci:, (5.86)
adică rotorul decelerează, viteza Ω scade, deci s – creşte, iar punctul de funcţionare (p.f.) se mişcă din N în N' , ceea ce înseamnă că M creşte până egalează noul cuplu rezistent, ecuaţia (5.84) este satisfăcută la o valoare crescută a alunecării, respectiv o valoare crescută a cuplului. Dacă acest cuplu perturbator încetează, Mr revine la valoarea iniţială, rotorul se va accelera, alunecarea scade, p.f. va reveni din N' în N. Această proprietate a maşinii asincrone de a reveni la vechea situaţie după încetarea perturbaţiei de cuplu, este numită stabilitate în funcţionare (sau maşina are funcţionare stabilă).
Punctul Q1 este punctul limită de funcţionare stabilă, întrucât dacă Mr creşte peste valoarea Mcr1, alunecarea are tendinţa de creştere peste scr1, iar cuplul activ M, conform curbei 1, scade M < Mcr1 . Nemaiputându-se realiza condiţia de egalitate a celor două cupluri, rotorul îşi încetineşte viteza, alunecarea creşte continuu, ajungându-se în punctul P când: s = 1, Ω = 0, adică rotorul se blochează (calează).
Se spune că maşina decroşează sau se desprinde dacă Mr > Mcr1, iar porţiunea Q1P este domeniul de funcţionare instabilă a motorului asincron. Se poate analiza stabilitatea maşinii considerând un punct S pe domeniul instabil. Dacă Mr creşte, atunci există tendinţa încetinirii vitezei, deci a creşterii alunecării. Întrucât la alunecări mai mari M devine mai mic decât cel corespunzător lui S, nu se poate restabili egalitatea M = Mr , ceea ce provoacă o creştere în continuare a lui s, în final aceasta ajungând la 1 când rotorul se blochează, iar Ω = 0.
Punctul P corespunde situaţiei de pornire, când s = 1 iar M = Mp , numit cuplu de pornire. Pentru ca un motor să pornească, este nevoie ca M = Mp > Mr , întrucât, în acest caz, din ecuaţia (5.84) dΩ/dt > 0, adică viteza creşte în timp. Odată cu creşterea vitezei din 0 spre n1, cuplul va creşte faţă de Mp, iar condiţia M > Mr , este îndeplinită cu atât mai mult, ceea ce înseamnă o nouă accelerare, p.f. se va deplasa din P spre Q1, după care M va scădea faţă de Mcr1 , accelerarea având loc până când M devine egal cu Mr, moment în care procesul de pornire s-a încheiat iar p.f. se stabileşte pe porţiunea OQ1 a caracteristicii. Din analiza caracteristicilor cuplului rezistent se deduc următoarele:
-dacă cuplul rezistent este mai mare decât cuplul de pornire, conform dreptelor 2 şi 3, atunci motorul nu poate porni;
23

-dacă cuplul rezistent este mai mic decât Mp , dreapta 4 , atunci motorul poate porni.
Se menţionează faptul că în raţionamentele de mai sus a fost considerat un cuplu rezistent constant, reprezentat pe domeniul prin drepte paralele cu axa absciselor. În realitate, cuplul rezistent are o componentă constantă peste care se suprapun alte componente dependente de viteză (liniar şi/sau parabolic ).
De exemplu, dacă variaţia cuplului rezistent Mr(s) este curba 5, atunci maşina poate porni, iar punctul de funcţionare se stabileşte în N – la sN şi MN.
Punctul O de pe caracteristica M(s) este caracterizat prin: s = 0 , M = 0, iar Ω = Ω1(1 – 0 ) = Ω1, adică maşina funcţionează la sincronism. Acest punct se obţine pentru cazul ideal când Mr = 0, numit punct de funcţionare în gol ideal. Practic, se obţine această situaţie dacă rotorul este antrenat din exterior cu un motor care preia pierderile mecanice şi prin ventilaţie (fig. 5.14 a).
Expresia simplificată a caracteristicii M = f(s) – formula lui KlossPentru calcule aproximative ale sistemelor de acţionare cu motoare asincrone
se recurge frecvent la o expresie mai simplă a dependenţei M =f(s). Pentru regimul de motor se împarte relaţia (5.73) a cuplului M(s) la valoarea critică Mcr1, dată de (5.79), şi se simplifică forţat prin , adică:
, (5.87)
unde: Mcr = Mcr1 , iar .Pentru un caz concret de motor asincron – MA1: la 2p = 6; U1 = 380 V – stea
şi frecvenţa de 50 Hz, cu parametrii: R1 = 0,05 Ω; R'2 = 0,04 Ω; Xs1 = 0,1 Ω; X's2=0,15 Ω; Xm = 10 Ω, având pierderile în fier neglijabile, se obţin :
Relaţia (5.87) se poate scrie în forma :
, (5.88)
24

unde s-a neglijat termenul , în raport cu ceilalţi; relaţie întâlnită sub denumirea de formula lui Kloss.
Întrucât pentru alunecări mici primul termen de la numitor este mic comparativ cu al doilea, expresia M=M(s) se poate aproxima prin relaţia liniară (o dreaptă prin origine):
. (5.89-1)
Pentru alunecări mari, (apropiate de s = 1), cel de al doilea termen de la numitor este neglijabil comparativ cu primul, expresia M=M(s) se poate aproxima prin funcţia hiperbolică :
. (5.89-2)
Ţinând seama de aceste aspecte se poate trasa dependenţa aproximativă M=f(s), reunind cele două expresii (5.89-1) şi (5.89-2), în fig. 5.16.
Curbele (C), (D), (H) sunt descrise de ecuaţiile (5.88), (5.89-1), (5.89-2), iar curba (E) este dată de relaţia precisă (5.87), unde nu se neglijează raportul
.Din analiza acestui exemplu se pot trage unele concluzii:-cele două curbe (E), (C) au un mare grad de coincidenţă pentru alunecări de
la s = 0 la s ≈ 5% (deci până la valoarea nominală ),-curbele (H), (C) sunt destul de apropiate pentru alunecări situate în
vecinătatea lui 1 (la pornire), relaţia exactă furnizează o valoare mai mare decât
25
s
2Mcr1M
Os=1
(E)
(H)
(D)
(C)
scr1 sN
Mcr1
MN
Fig. 5. 16 Caracteristica M=f(s), după formula lui Kloss
MP

valorile aproximative pentru cuplul de pornire, ceea ce este acoperitor pentru cele mai multe aplicaţii,
-în zona alunecării critice se poate utiliza cu destulă precizie relaţia aproximativă (5.88), curba (C) fiind suprapusă peste curba exactă (E).
În practică valorile parametrilor maşinii se modifică cu alunecarea, încât şi expresia ce descrie curba (E) rămâne, totuşi, aproximativă.
Expresia cuplului în funcţie de puterea activă rotoricăSe foloseşte expresia (5.71) a cuplului. Ţinând seama de diagrama din
fig.5.11, referitor la configuraţia OADEO, se deduce :
(5.90)
Dar, din triunghiul dreptunghic OAD se obţine:
. (5.91)
Înmulţind relaţiile (5.90), (5.91) şi amplificând cu , se ajunge la:
. (5.92)
Din (5.71) rezultă :
. (5.93)
Aşadar, cuplul electromagnetic este proporţional cu puterea activă transmisă rotorului maşinii, mai exact este egal cu raportul dintre această putere şi viteza unghiulară de sincronism, Ω1.
Notă: În cele expuse mai sus s-a considerat numai cuplul corespunzător fundamentalei, toate mărimile electrice: tensiuni de fază, tensiuni induse, curenţi, s-au considerat armonice, de pulsaţie ω1.
De remarcat este faptul că valoarea cuplului critic nu depinde de rezistenţa rotorică , în schimb alunecarea critică depinde, în sensul că valoarea sa creşte
odată cu rezistenţa rotorică. Pentru o valoare crescută a lui , dependenţa M(s) îşi schimbă valoarea pantei în origine, în consecinţă, punctul Q se deplasează spre dreapta, pe orizontala (d).
Este interesant şi faptul că la = 0, pierderile Joule în rotor sunt nule, deci
cuplul este nul! Totodată pentru →+∞ rezultă M = 0, ceea ce înseamnă că
26

rezistenţa rotorică are o mare influenţă asupra alurii caracteristicii M = M (s) sau a caracteristicii mecanice, n=f(M). La motoarele cu rotor bobinat şi inele este posibilă modificarea rezistenţei echivalente a rotorului, prin înserierea unui reostat trifazat, cu fazele rotorice.
5.5.REGIMUL DE MOTOR AL MAŞINII DE INDUCŢIE
5 5.1. Definiţii, alunecare
Regimul de motor al maşinii de inducţie este caracterizat prin faptul că statorul, cu înfăşurare trifazată, absoarbe de la o sursă de putere activă pe care o transformă în putere mecanică, furnizată pe la arborele unei maşini de lucru.
În ceea ce priveşte alunecarea, în situaţia când rotorul este imobil, n=0,
rezultă . După conectarea statorului la reţeaua trifazată de frecvenţă
f1, câmpul învârtitor inductor statoric cu turaţie n1 induce tensiuni în rotor. Apar curenţi induşi (se consideră circuitul rotoric închis) care interacţionează cu câmpul inductor, asupra rotorului. Se manifestă un cuplu având tendinţa rotirii sale cu turaţia n în sensul câmpului. În timp, turaţia va creşte, alunecarea ajungând la o valoare de câteva procente, dictată de sarcina mecanică la arbore. Valoarea acestei alunecări este apropiată de 0 dacă maşina funcţionează în gol. Regimul de motor corespunde aşadar, domeniului de alunecări de la s=0 (când rotorul se roteşte la sincronism, adică n=n1) la s=1 (când rotorul este blocat-calat,
27

situaţie ce caracterizează pornirea, n=0). Regimurile de funcţionare ale maşinii asincrone, în funcţie de valoarea alunecării, sunt prezentate în tabelul 5.1.
Tabelul 5.1. Regimurile maşinii asincrone ( de inducţie)s - ∞ - - 0 + + 1 + + + ∞n +∞ + + n1 + + 0 - - - ∞
Regim Generator Motor FrânăValorile nominale ale alunecării depind de tipul de construcţie, mai ales a
rotorului (bobinat, cu colivie din bare rotunde fără refularea curentului, cu bare înalte etc. ) de numărul de perechi de poli, de puterea nominală etc.
De exemplu, la motoarele de construcţie închisă cu colivie normală produse de BBC, valorile alunecării nominale sunt prezentate în tabelul 5.2.
Tabelul 5.2. Alunecările nominale la motoare cu colivie normalăp 1 2 3 4
PN[kW] 0,18 – 18,5 0,12 – 18,5 0,06 – 18,5 0,09 – 18,5sN[%] 6 – 3 7,3 – 2,7 10 – 3 6,7 – 2,7
PN[kW] 22 – 355 22 – 315 22 – 200 22 – 160sN[%] 2,7 – 0,6 2,7 – 1 3 – 1 2,7 – 1,3
Pentru motoarele cu bare înalte se dau alunecările nominale în tabelul 5.3.
Tabelul 5.3. Alunecările nominale la motoare asincrone cu bare înaltep 1 2 3
PN[kW] 355 – 1250 400 – 2500 280 – 1600sN[%] 0,9 – 0,6 1 – 0,5 1 – 0,6
5.5.2. Pornirea motoarelor asincrone trifazate
5.5.2.1. Generalităţi
Pornirea motoarelor asincrone este un proces tranzitoriu care se petrece atunci când viteza rotorului creşte de la valoarea 0 până la o valoare apropiată de sincronism (sau valoarea nominală). În ceea ce priveşte alunecarea, aceasta variază de la 1 până în apropierea lui 0. În timpul pornirii, mărimile de natură electrică, magnetică şi mecanică au anumite variaţii în timp, expresiile lor
28

analitice fiind date de sistemul de ecuaţii diferenţiale ce caracterizează ansamblul maşină electrică – maşină de lucru.
În mod deosebit se pun probleme legate de mărimea cuplului de pornire şi de valoarea curentului absorbit de la sursă pe timpul pornirii.
De cele mai multe ori se impune condiţia ca pe timpul pornirii cuplul electromagnetic al maşinii să fie cât mai mare, oricum mai mare decât cuplul rezistent, fiind astfel posibilă accelerarea rotorului şi a părţii mobile a maşinii de lucru. Sunt situaţii în practică unde se cere ca pe timpul pornirii cuplul să se menţină la valori apropiate sau chiar egale cu cuplul maxim pe care îl furnizează motorul (la unele compresoare, mori pentru minereuri, cereale etc.). Există şi situaţii, cum sunt anumite maşini textile, unde un cuplu ridicat de pornire provoacă accelerări importante ale lanţului cinematic, fapt care conduce la ruperea firelor textile, de exemplu, defecţiune care necesită repornirea motorului.
În ceea ce priveşte valoarea curentului de pornire, aceasta trebuie să fie cât mai mică pentru a nu produce căderi ale tensiunii care pot deranja consumatorii racordaţi la aceeaşi reţea de la care se alimentează şi motorul asincron pornit. Cu cât reţeaua este mai puternică în raport cu motorul cu atât mai puţin este sesizabil şocul curentului de pornire, de către consumatorii învecinaţi.
Raportul dintre curentul de pornire şi curentul nominal se poate deduce din relaţiile (5.102) şi (5.105), unde se înlocuieşte s cu 1, respectiv sN cu 0,025 adică:
(5.172)
Pentru maşina MA1, la care: ; ;
; ; se obţine raportul modulelor:
(5.173)
În general, la motoarele de construcţie normală în colivie raportul se situează în domeniul de valori de la 4 la 7.
Raportul curentului de pornire, se poate deduce şi prin metoda grafică dacă se dispune de diagrama cercului. Motorul asincron cu colivie prezintă unele avantaje în raport cu motorul cu rotorul bobinat, anume: construcţie mai robustă, preţ mai mic (mai ales la puteri unitare reduse), funcţionare mai sigură (fiabilitate crescută). În ceea ce priveşte caracteristicile de pornire, motorul cu rotorul în colivie este inferior, în mod deosebit datorită
29

faptului că are cuplu redus, pentru un anumit curent absorbit de la reţea; în schimb la pornirea motorului cu rotor bobinat este necesar un reostat suplimentar, ceea ce înseamnă, de cele mai multe ori, o investiţie însemnată. Dacă puterea reţelei este mare comparativ cu a motorului pornit, şocul de curent la pornire nu este resimţit de consumatorii învecinaţi, iar motorul cu rotor în colivie porneşte fără a fi necesară vreo instalaţie suplimentară. Când reţeaua impune o limită a curentului de pornire atunci se diminuează tensiunea corespunzătoare aplicată statorului, cu preţul micşorării şi a cuplului de pornire. Pentru porniri în sarcină mare se folosesc tipuri speciale de motoare în scurtcircuit: cu bare înalte sau cu colivie dublă.
5.5.2.2. Pornirea motoarelor asincrone cu colivie (cu rotor în scurt circuit)
a) Pornirea directă Se foloseşte schema din figura 5.26 a)
Pornirea constă în închiderea comutatorului tripolar K. În locul acestuia se poate utiliza un contactor cu autoreţinere şi acţionare prin buton de la distanţă.
În figura 5.26 b) se prezintă caracteristica M=f(s) a unui motor asincron cu colivie din bare rotunde fără refularea curentului. Se constată că Mp – cuplul de pornire este mai mic decât cel nominal MN. Aceste motoare se pornesc în sarcini reduse sau la gol. În ceea ce priveşte curentul de pornire, valoarea acestuia este de 4 – 7 ori mai mare ca a curentului nominal şi este egală cu:
(5.174)
30
a)
M3~
L1
L2
L3
K
Fig. 5. 26 Pornirea directă a motoarelor asincrone trifazate
s
Mp
N
scr
1
P
MN
M Mcr
0
b)
I1/I1N
1
2
3
4
5
M/MN
1
2
I1
M
6 a
b
c d
n/n1 1
0
0,5 c)

unde Zsc este impedanţa de scurtcircuit pe fază, iar U1N este tensiunea de linie nominală. Se consideră motorul cu înfăşurare statorică conectată în stea.
În ceea ce priveşte cuplurile de pornire şi curenţii de pornire, aceste mărimi depind esenţial de tipul rotorului. În figura 5.26 c) se prezintă caracteristicile cuplurilor de pornire relative M/MN pentru două tipuri de rotoare: cu colivie din conductoare rotunde – curba a şi cu colivie dublă – curba b. Pe abscisă s-a luat viteza relativă n/n1. Pentru motorul cu rotor având colivie dublă, cuplul de pornire este de valoare ridicată apropiată de cea critică. În legătură cu curenţii de pornire aceştia sunt de 4 I1N la rotorul cu colivie dublă şi de 6,2 I1N la rotorul cu colivie din conductoare rotunde. Variaţiile acestor curenţi de la n=0 la sunt date prin curbele c, respectiv d. Pornirea directă a motoarelor asincrone conduce la curenţi mari prin înfăşurări, care provoacă supraîncălziri ale acestora. Dacă frecvenţa pornirilor este redusă aceste fenomene termice nu sunt periculoase pentru maşină.
b) Pornirea cu tensiune redusă b1) Pornirea cu comutator stea – triunghi (Y-D)Schema este prezentată în figura 5.27 a), unde cele trei înfăşurări au toate
capetele accesibile. Această metodă se aplică la motoarele a căror tensiune nominală de fază este egală cu tensiunea de linie a reţelei. Pentru reţeaua de 400V este necesar ca pe plăcuţa indicatoare a motorului să fie înscrisă semnificaţia: ∆/400V, (ceea ce înseamnă Y/690V). În ultimul timp se manifestă tot mai frecvent tendinţa constructorilor de a produce motoare pentru funcţionarea la tensiunea de 690V (chiar 700V), valoare care se va adopta pentru reţelele de distribuţie de joasă tensiune, probabil în anii 2015-2020.
31
Fig. 5. 27 Pornirea cu comutator stea-triunghi a motoarelor asincrone trifazate
a)
M3~
L3L2L1
K
Inv
II(D)
I(Y)
Rotor
Stator
u1 v1 w1
u2 v2 w2
Il
Y
s
MpY
N
sr 1
6
T
c)
R
Q
S
0
N'
D
1
2
M/MN
I1/I1N
5 4 3
1 1
(MY)
2(IY)
3(MD)
4(ID)
2
0
P
b1)
b2)
b)
IlY IfY
UlUf
Zf
IlD
IfDUl=Uf
Zf

Operaţia de pornire decurge astfel: cu inversorul Inv cuplat în poziţia I se închide întrerupătorul K, înfăşurarea statorică fiind conectată în stea, apoi după un timp dictat de tipul maşinii de lucru, se trece Inv pe poziţia II pentru care înfăşurarea este conectată în triunghi, acesta fiind regimul normal de lucru al motorului. Este posibilă folosirea în locul Inv, a unor contactoare sau a unui controler adecvat.
În prima etapă a pornirii, conform figurii 5.27. b1, curentul de linie este egal cu cel de fază al motorului:
(5.182)
unde Zf este impedanţa unei faze (la scurtcircuit) a motorului.În etapa a doua, la conexiunea triunghi a fazelor, curentul de linie este de
ori mai mare decât cel de fază, adică:
, (5.183)
ceea ce înseamnă –de trei ori mai mare decât curentul din cazul anterior. În concluzie, dacă motorul este conectat în triunghi, curentul de linie de pornire este de aproximativ 6 I1N, iar dacă porneşte cu conexiunea în stea acest curent este de 2 I1N. În figura 5.27. c) s-au prezentat, prin curbele 2 şi 4, dependenţele curenţilor relativi I1/I1N în funcţie de alunecare pentru conexiunea Y, respectiv ∆.
În legătură cu cuplurile corespunzătoare celor două conexiuni, se ţine seama de faptul că acestea sunt proporţionale cu pătratele tensiunilor de fază, adică:
.
(5.184)Aşadar, la pornirea în stea cuplul de pornire MpY este de trei ori mai mic
decât Mp∆ când se porneşte direct în triunghi. Acest fapt trebuie avut în vedere încât metoda se utilizează la porniri uşoare, chiar la gol. Dependenţele cuplurilor relative de alunecare, pentru cele două conexiuni: stea sau triunghi sunt date prin curbele 1 şi 3 figura 5.27 c). Dacă pentru conexiunea normală – în triunghi, cuplul critic este 2,4 MN, pentru conexiunea în stea valoarea acestuia este 0,8 MN.
Procesul pornirii cu comutator Y-∆ este prezentat prin săgeţi în figura 5.27 c). Iniţial punctul de funcţionare (p.f.) este P pe curba 1(la s=1). În continuare p.f. se deplasează pe curba 1 urmând traseul P-Q-R. În R la alunecarea sr = se trece Inv pe poziţia II iar p.f. trece brusc din R în S pe curba 3 corespunzătoare
32

conexiunii ∆. Motorul accelerează, s scade, n creşte iar p.f. ajunge în T, cuplul furnizat de motor fiind sub valoarea nominală (aproximativ 0,3-0,4 MN). Se poate acum încărca motorul, iar p.f. se va deplasa din T în N corespunzător sarcinii nominale. Dacă sarcina este redusă, apropiată de mers în gol se poate trece pe conexiunea în Y a înfăşurării, dependenţa M=f(s) fiind curba 1. În această situaţie se poate obţine un randament mai bun întrucât se reduc de aproximativ trei ori pierderile în fier. (Se ştie că pierderile în fier sunt proporţionale cu pătratul inducţiei, deci cu pătratul tensiunii aplicate înfăşurării). Din cauza reducerii inducţiei de ori se reduce şi curentul de magnetizare, fapt care conduce şi la îmbunătăţirea factorului de putere. În anumite aplicaţii se pot folosi strategii adecvate de conectare ∆-Y după alunecare încât funcţionarea motorului să fie avantajoasă economic, dar la sarcini mici.
b2) Pornirea cu autotransformator sau/şi bobină înseriatăÎntre reţeaua de alimentare şi motor se intercalează un autotransformator
care diminuează tensiunea aplicată motorului (aproximativ la jumătate din valoarea reţelei) deci şi curentul de pornire. O schemă în care se întâlneşte şi situaţia intermediară a înserierii unor bobine pe circuitul de alimentare a statorului este prezentată în figura 5.28 a).
- În prima etapă se închide K1 şi apoi K2. Tensiunea de linie aplicată motorului este mai mică decât a reţelei, adică:
, (5.185)
Faptul acesta determină un curent mai mic absorbit de motor, faţă de situaţia de la pornirea directă (de 2 ori). Motorul accelerează, cuplul său fiind:
, adică un sfert din cuplul de pornire
nominal. Este preferabilă o pornire în gol sau la sarcină redusă.
33
Fig. 5. 28 Pornirea motoarelor asincrone cu autotransformator şi reactanţă înseriată
kp 1
b)
0
1
2
M P/MN 1,5
0,5
0
1
2
3
4
5
N
a)
L3L2L1
K2 ATIl
M3~Y
u1 v1 w1
K3
K1
W1
W2
1 2 3
1' 2' 3'
IlM
IlA
S
UR

- În următoarea etapă, când turaţia ajunge la (60-70)% din n1, se deschide K1; în serie cu fazele motorului: (conectate în stea) se intercalează porţiunile 1-1'; 2-2'; 3-3' ale bobinelor AT, caracterizate prin impedanţele . Dacă ZB
este aproximativ o treime din impedanţa ZM a unei faze a motorului la o turaţie de % din n1, atunci tensiunea corespunzătoare la bornele u1, v1, w1 devine:
(5.186)
Creşterea tensiunii duce la un şoc de curent care însoţeşte această comutare, (dar neînsemnat ca valoare faţă de şocul de la pornirea directă) precum şi la o creştere a cuplului, acesta fiind de 0,56 MpN. Sub acţiunea acestui cuplu motorul accelerează.
- În cea de a treia etapă, când , se închide K3, sunt şuntate porţiunile din bobinele AT – de impedanţe ZB, tensiunea aplicată motorului devine:
(5.187)adică egală cu valoarea nominală, în general. Această comutare este însoţită de un şoc de curent, neimportant ca mărime şi de o creştere a cuplului la valoarea sa nominală. Urmează o nouă accelerare a rotorului şi după încetarea regimului tranzitoriu pornirea este terminată.
Dacă se utilizează separatoare, în poziţia S pe schemă, se poate folosi AT la pornirea altor motoare. Deoarece investiţia în AT, întrerupătoare, separatoare etc. este consistentă (depăşind uneori costul unui motor) este indicată această metodă dacă se cere pornirea mai multor motoare aproximativ identice.
În unele aplicaţii se poate adopta pornirea numai cu reactanţe înseriate, în modul acesta reducându-se curentul absorbit în momentul pornirii la o valoare dictată de limita pe care o impune reţeaua (sursa). Dacă acest curent de pornire este:
(5.188)unde I1N este curentul nominal al motorului, iar kp este factorul de multiplicare a curentului de pornire, se poate exprima cuplul de pornire din relaţiile (5.92) şi (5.93), când s=1, adică:
34

(5.189)
unde s-a introdus relaţia (5.71). Această relaţie se mai scrie astfel:
(5.190)
Pentru un motor cu colivie, cu parametrii daţi la care MP/MN (la U1N) este 1,5 iar IP/I1N=5, dependenţa MPR/MN=f(kP) este curba 1 din figura 5.28 b). Această curbă a fost trasată pentru sN=0,06. Se observă că pentru kP=3, raportul MP/MN
este puţin peste 0,5 (mai exact 0,54).În cazul folosirii AT se poate urma un raţionament similar, cuplul de pornire
fiind:
(5.191)unde s-a notat prin I1M curentul prin motor, iar kA este raportul de transformare a AT, egal cu W1/W2 (supraunitar), adică:
(5.192)
Curentul de pornire pe o fază a motorului cu alimentare prin AT este:
. (5.193)
unde , kPN fiind raportul curentului de pornire nominal, înscris de obicei printre valorile nominale ale maşinii, iar UfM, UfR sunt tensiuni de fază ale motorului, respectiv reţelei de alimentare.
Introducând (5.193) în (5.192) se obţine:
(5.194)
iar relaţia (5.191) devine, prin folosirea relaţiei (5.194):
(5.195)
35

adică, la pornirea prin AT raportul cuplului de pornire la cel nominal depinde liniar de kP. Dependenţa (5.195) este dreapta 2 trasată în figura 5.28 b).
Se observă că dacă în cele două situaţii se face pornirea directă atunci: kP=kPN=5, iar MpA=MpR=1,5MN, fapt ce justifică trecerea celor două dependenţe (date de curba 1 şi de dreapta 2) prin punctul N.
Pentru kP=3, la pornirea cu AT se obţine un cuplu de pornire de 0,9MN, mult mai mare decât în cazul folosirii la pornire a unei reactanţe înseriate.
b3) Pornirea cu soft-startereAceste dispozitive electronice cuprind tiristoare sau triacuri prin a căror
comandă se realizează modificarea tensiunii aplicate statorului. O schemă tipică de soft-starter este prezentată în figura 5.29. Pe fiecare fază se înseriază câte un dispozitiv electronic cu conducţie bidirecţională (triac sau 2 tiristoare în paralel) care înlocuiesc şi contactorul principal.
Există scheme la care o fază este conectată direct la reţea iar pe celelalte două sunt înseriate câte un triac sau tiristoare în antiparalel comandate. Prin modificarea unghiului de aprindere se poate modifica de fapt valoarea efectivă a tensiunii aplicate motorului.
În figura 5.29. b) este prezentată dependenţa de timp a tensiunii aplicate statorului pentru a realiza o pornire cu timp ta ajustabil, în funcţie de aplicaţie. Prin schema folosită, aceste echipamente efectuează o pornire lină, eliminând variaţiile bruşte ale vitezei (deci fără "paşi de pornire") întâlnite în cazurile expuse anterior. Este evident că în general aceste porniri se realizează la cupluri rezistente reduse, apropiate de mersul în gol.
36
a)
L3L2L1
M3~Y
u1 v1 w1
T1 T2 T3
Fig. 5. 29 Pornirea motoarelor asincrone cu soft-startere
0
t [s]
U/UN [%]
100 a
b
ta= var.
b)
0
t [s]
U/UN [%]
100 2
4
c)
1
3
5
6

Există o gamă ASTAT de soft-startere care furnizează curenţi nominali între 14 şi 1180 A, tensiuni între 220 şi 480 V, deci puteri până la 850 kW (această limită evoluând în timp).
În figura 5.29. c) este prezentată o altă aplicaţie, numită pornire cu rampă de tensiune. În prima parte a pornirii, tensiunea aplicată timp de aproximativ 5 perioade ale tensiunii reţelei are o variaţie liniară - rampa iniţială 1, după care se furnizează motorului un impuls de curent de circa 4,5 I1N un timp de până la 1s – reglabil, astfel încât cuplul de pornire creşte mult (kick start – zona 2). În continuare, se creşte în rampă tensiunea până ajunge la valoarea nominală (3), procesul de pornire fiind terminat – 4. Există şi opţiunea de decelerare a tensiunii aplicate – 6 sau cu frânare dinamică un timp reglabil.
Aceste echipamente pot fi prevăzute cu microprocesor adecvat care sesizează perioadele de sarcină redusă şi micşorează corespunzător tensiunea aplicată şi implicit curentul prin maşină. În modul acesta se reduc pierderile prin efect electrocaloric în înfăşurări, deci creşte randamentul şi se ameliorează factorul de putere. În general aceste echipamente creează regimuri deformante în reţele.
b4) Alte modalităţi de pornire cu tensiune redusă În aplicaţii mai puţin pretenţioase este posibilă pornirea cu rezistenţe
înseriate pe circuitul de alimentare statoric. Evident randamentul în acest caz scade întrucât apar disipaţii ale puterii active pe rezistenţele utilizate. În general costurile sunt mai mici decât la folosirea de reactanţe înseriate.
Există unele construcţii speciale de motoare cu două statoare la care cele 2 statoare se pot roti unul în raport cu celălalt. Rotorul este comun având bare scurtcircuitate la capetele frontale. La partea mediană a rotorului, la mijloc există un alt inel de scurtcircuitare a barelor, dar de rezistenţă echivalentă mai mare. Curenţii induşi în bare depind de situarea coliviei în raport cu statorul, deci a câmpurilor învârtitoare. Prin modificarea poziţiei unui stator în raport cu celălalt se modifică curenţii echivalenţi induşi în colivie deci – cuplul şi viteza.
O sinteză privind pornirea motoarelor asincrone cu rotor în scurtcircuit este prezentată în tabelul 5.4.
Tabelul 5.4. Sinteză a pornirii motoarelor asincrone cu colivieTipul pornirii Di-
rectăCu AT sau/şi
react. înser.
Cu rez. în-
seriate
Cu com.Y-
∆
Cu soft-startere
Procent din I1N % 58 – 33% Dependent de
37

la pornirea directă (în reţea)
100% sau 64% 70% reglaje <90%
Procent din cuplul la pornirea directă
100% % sau 64%
33 – 49%
33% Depend. de reglaje <80%
Nr. de paşi la pornire (modif. bruşte de vit.)
1 4,3 sau 2 3 sau 2 2 Continuu, fără paşi
Nr de conexiuni la motor
3 3 3 6 3
Supra curentul în reţea (aprox.)
5I1N , sau 3,2 I1N
1,65I1N Depend. de regl. < 5I1N
5.5.2.3. Pornirea motoarelor asincrone cu rotor bobinatÎn ultimul timp motoarele asincrone cu rotor bobinat se utilizează în general
la puteri mari în acţionări cu viteză reglabilă în gama: .Pornirea motoarelor asincrone cu rotor bobinat (MAB) se efectuează folosind
rezistenţe reglabile în circuitul rotoric. Prezenţa acestor rezistenţe creează posibilitatea diminuării curentului absorbit de motor la pornire şi menţinerea sa la o valoare acceptabilă din punct de vedere al reţelei.
Pentru a justifica această afirmaţie se calculează raportul dintre curenţii I1, după relaţia (5.102) pentru s=1 (I1P) şi pentru sN=0,025 (I1N), în situaţia naturală când rotorul are numai rezistenţa sa proprie şi se obţine:
(5.196)În situaţia pornirii, când se înseriază pe circuitul rotoric o rezistenţă raportată
de , acelaşi raport devine:
(5.197)
38Fig. 5. 30 Pornirea motoarelor asincrone cu rotor bobinat
21
a)
L3L2L1
MAB3~
K
Rp1
Rp2Rp3
C
0
3 0
s
M/MN
2
b)
1,5
1
0,5
PRTV
QSUN 0
1
2
3
sN sU sS sQ
C pe plot 0 C pe 1 C pe 2 C pe plot 3
1
MPmax

Aşadar, prin înserierea de rezistenţe în circuitul rotoric, curentul de pornire devine <70% din valoarea curentului de la pornirea directă. În relaţiile de mai sus s-au considerat:
În ceea ce priveşte cuplul de pornire MP se poate dovedi că valoarea sa este mai mare decât MN pentru un anumit domeniu de valori ale lui . Se poate justifica această afirmaţie dacă se porneşte de la expresia (5.72) şi se înlocuieşte s cu 1 (pornire), adică:
(5.198)
Se analizează funcţia , care pleacă din 0 pentru şi tinde spre
0 pentru tinzând la infinit. MP are valori pozitive pentru , deci admite
un maxim pentru , care se obţine din egalarea cu zero a derivatei,
adică dacă , rezultă:
(5.199)
Aşadar, rezistenţa totală raportată, la pornire, trebuie să fie de aproximativ , sau rezistenţa exterioară înseriată pe o fază rotorică trebuie să fie de
(la care se va adăuga rezistenţa proprie a fazei rotorice).Din comparaţia acestei relaţii cu cea a alunecării critice (5.78) se constată că:
(5.200)
39

Rezultă că rezistenţa rotorică raportată trebuie să fie astfel calculată încât, la pornire, alunecarea critică să fie 1, ceea ce înseamnă că la s=scr1=1 maşina să aibă cuplul electromagnetic egal cu Mcr1, pornirea având loc cu cuplul maxim pe care îl poate furniza motorul.
În figura 5.30 b) este prezentată o familie de caracteristici M=f(s), (în mărimi relative, M/MN), la un motor al cărui cuplu critic este Mcr=2MN, pentru diverse valori ale rezistenţei rotorice.
Iniţial cursorul C al reostatului din figura 5.30 a) este în contact cu ploturile notate cu 3, rezistenţa înseriată fiind Rp3, care sumată cu R2 şi raportată la stator îndeplineşte condiţia (5.200), adică:
(5.201)
Punctul de funcţionare (p.f.) se află în P, motorul posedă cuplul maxim Mpmax
sub acţiunea căruia rotorul accelerează, turaţia creşte iar s scade, p.f. se deplasează pe curba 3, din P spre Q. Când s devine sQ se trece cursorul C pe ploturile 2, p.f. trece brusc din Q în R pe noua caracteristică M=f(s), notată cu 2 – corespunzătoare rezistenţei rotorice Rp2 (sau celei totale raportate ) ; motorul accelerează în continuare, p.f. descrie porţiunea RS a curbei 2. Când s=sS
se efectuează o trecere a cursorului C de pe plotul 2 pe plotul 1, p.f. trece din S în T, apoi parcurge porţiunea TU şi în sfârşit când s=sU se efectuează o trecere a lui C de pe plotul 1 pe 0 iar p.f. va descrie porţiunea VN a caracteristicii naturale 0, stabilindu-se în N când cuplul rezistent este egal cu cel nominal. Din analiza figurii 5.30 b) se constată că pe intervalul pornirii, cuplul maşinii s-a menţinut între 2 valori prescrise , unde 2MN este egal chiar cu Mcr. Este necesară urmărirea în permanenţă a alunecării sau a turaţiei astfel încât să se facă trecerile succesive ale cursorului C pe ploturile respective respectându-se condiţia ca Mmin să nu fie mai mic decât cel impus: 1,5MN. Cazul analizat este particular, întrucât valoarea maximă a cuplului pe timpul pornirii este chiar Mcr. Se poate ca pe timpul pornirii să se menţină Mmax la o valoare ridicată dar mai mică decât Mcr.
Dacă se revine la expresiile curenţilor (5.102) şi (5.103) se observă că aceştia depind şi de reactanţa, , anume: se poate diminua curentul I1 dacă se înseriază în rotor reactanţe. Practic această soluţie nu se aplică întrucât cuplul scade, aşa cum se poate deduce din (5.198), unde intră la numitor.
5.5.2.4. Deconectarea de la reţea, inversarea sensului de rotaţieDeconectarea motoarelor asincrone trifazate cu colivie de la reţeaua de
alimentare se realizează în general prin întreruperea circuitului reţea – înfăşurare
40

statorică cu ajutorul contactoarelor sau întrerupătoarelor prevăzute în acest scop. Se semnalează faptul că o asemenea manevră este necesar să fie făcută, pe cât posibil, după descărcarea de sarcină a motorului sau diminuarea consistentă a sarcinii. Aceasta conduce la întreruperea unor curenţi reduşi, de ordinul celor de mers în gol (20 – 30%I1N), crescând durata de lucru al echipamentului de comutare.
La motoarele asincrone cu rotor bobinat este indicată întreruperea alimentării statorului numai când rotorul este conectat în scurtcircuit. În cazul când rotorul este conectat pe o rezistenţă mare sau circuitul său este întrerupt, la deconectarea statorului se declanşează un regim tranzitoriu, caracterizat prin variaţia rapidă a fluxului şi apariţia unor tensiuni de valori însemnate, care pot provoca străpungeri ale izolaţiei înfăşurării statorice. Dacă rotorul este conectat pe o rezistenţă mare, fenomenele de apariţie a unor supratensiuni se manifestă, dar la valori mai mici.
Inversarea sensului de rotaţie la motoarele asincrone trifazate se realizează prin inversarea legăturilor la reţea a două din fazele acestuia. În această situaţie se inversează ordinea de succesiune a fazelor, deci sensul de rotaţie a câmpului magnetic învârtitor statoric. Această operaţie se efectuează prin utilizarea a două contactoare cu interblocare, unul pentru sensul "dreapta" şi altul pentru sensul "stânga", sau prin folosirea unui comutator adecvat. Este posibilă şi folosirea unui inversor de sens tip controler. Dacă trecerea de la un sens la celălalt se face în scurt timp, intervine un regim de frânare în contraconectare caracterizat prin curenţi deosebit de mari, mai mari decât la pornire (de peste 7 ori I1N), care pot duce la acţionarea protecţiei urmată de deconectarea de la reţea a motorului.
Prin convenţie, sensul de rotaţie la stânga se referă la cazul când privind dinspre exterior pe direcţia axului spre capătul de ax al motorului acesta se roteşte în sens trigonometric pozitiv (antiorar). Dacă rotirea este în sens orar se spune că motorul are sensul de rotaţie la dreapta. Aceasta este situaţia maşinilor cu un singur capăt de ax. În cazul maşinilor cu două capete de ax convenţia de mai sus se referă la capătul de ax de diametru mai mare.
5.5.3. Reglajul turaţiei motoarelor asincrone trifazate5.5.3.1. Caracteristica mecanică a motorului asincron
Expresia turaţiei maşinii asincrone, dedusă din (5.2):
, (5.206)
sugerează care sunt modalităţile de modificare a acesteia, anume:-prin variaţia alunecării s,-prin modificarea numărului de perechi de poli p,
41

-prin schimbarea frecvenţei de alimentare, f1.Caracteristica mecanică a motorului asincron, definită ca dependenţă
n=f(M), în condiţii de alimentare impuse, se deduce din funcţia M=f(s), trasată în figura 5.15.
Corespondenţa punctelor P, Q, N şi O se realizează prin relaţia (5.206). De exemplu, pentru s=0, rezultă n=n1 iar cuplul M este nul. Porţiunea trasată cu linie plină este zona de funcţionare stabilă. Pentru maşinile de lucru întâlnite frecvent în practică, caracteristicile mecanice au o alură apropiată de curba 2, adică la creşterea vitezei cuplul creşte datorită suprapunerii peste cel rezistent - constant a unui termen variabil, crescător cu viteza. Cele două curbe definesc p.f., considerat chiar cel nominal, N. Pentru aceste tipuri de acţionări, condiţia de funcţionare stabilă se exprimă matematic astfel:
<0. (5.207)
Explicaţia este următoarea, din considerente fizice: dacă cuplul rezistent creşte dintr-o cauză oarecare, atunci motorul decelerează, adică dn<0, stabilizarea la o funcţionare în noile condiţii are loc numai dacă M va creşte la o valoare M+dM, astfel încât noul cuplu electromagnetic al motorului să egaleze cuplul rezistent mărit, adică dM>0. Problema se pune în mod similar şi dacă cuplul rezistent scade. Atunci dn<0, iar M va ajunge la o valoare M+dM mai mică, deci dM<0. Ambele situaţii sunt descrise de condiţia (5.207).
42
Fig. 5. 33 a) Caracteristica M=f(s); b) Caracteristica mecanică n=f(M).
0
n
P
Q
NnN
nQ
MP
b)Mcr
O
MN
n1
M
S
I
1
2
3
4
=
O
0
s
M
P
Q
N
sN scr 1
MP
a)
Mcr
MN
=

Dacă maşina de lucru posedă cuplu rezistent variabil după curba 3, p.f. I nu este stabil, întrucât la o creştere a lui Mr viteza diminuându-se, cuplul M scade mărind şi mai mult diferenţa între Mr şi M, fapt ce atrage o nouă diminuare a vitezei ş.a.m.d., până când p.f. ajunge în P – motorul se opreşte. Pe această porţiune a caracteristicii, de funcţionare instabilă este valabilă relaţia:
>0, (5.208)
Pentru aceeaşi maşină de lucru, cu caracteristica 3, p.f. notat cu S este stabil întrucât comportarea maşinii este similară cu cea corespunzătoare punctului N.
Aşadar, pentru acţionarea maşinilor de lucru cu cuplu rezistent aproximativ constant (sau variabil în limite reduse cu turaţia), motorul asincron funcţionează stabil pe porţiunea ONQ a caracteristicii mecanice (c.m.) şi are funcţionare instabilă (doar pe timpul pornirii sau al opririi cu blocare a rotorului) pe porţiunea QIP (figura 5.33 b). Dacă pe arbore este cuplată o maşină de lucru cu caracteristica 3, atunci motorul asincron nu porneşte. Dacă a funcţionat în punctul N şi ulterior a fost încărcat cu o sarcină având caracteristica 3, p.f. se deplasează în S, motorul lucrează în suprasarcină un anumit timp, existând un oarecare pericol de supraîncălzire. Dacă motorul funcţionează în N şi maşina de lucru are caracteristica 4 atunci motorul decroşează, p.f. descrie curba NSQIP, se calează şi doar intervenţia protecţiei îl salvează de la o supraîncălzire exagerată, ajungând până la distrugerea termică a izolaţiei înfăşurărilor, cu urmări grave.
Deoarece alunecarea nominală este mică, nN este apropiată de n1, caracteristica mecanică este rigidă, sau dură.
Datorită caracteristicii mecanice dure pe care o posedă, motorul asincron trifazat este preferabil pentru acţionări la viteze aproximativ constante.
5.5.3.2. Reglarea turaţiei prin modificarea alunecăriia) Motorul asincron cu rotor bobinat . La acest tip de motor se poate
modifica alunecarea dacă se intervine în circuitul rotoric.
43
Fig. 5. 34 Reglarea vitezei prin înserierea de rezistenţe în circuitul rotoric
C1C2
a)
L1L2L3
MAB3~
G1
Rr1
Rr2
Rr3
G2
C0
C30
M
n1
b)
N"'
0 1 2 3
caract.naturală
nN"'
N""
N'N
nN"
nN
nN'
n
R'2
R'2+R'r2
R'2+R'r1
R'2+R'r3
R'r creşte
caract.artificiale
MN

a1) O primă modalitate constă în înserierea de rezistenţe în circuitul rotoric (figura 5.34 a). Se poate folosi câte o pereche de contactoare pentru fiecare din treptele de rezistenţe de reglare a vitezei.
Se au în vedere expresiile alunecării şi cuplului critic (5.78) şi (5.79):
,
(5.209)Alunecarea critică este proporţională cu rezistenţa rotorică, ceea ce înseamnă
că panta caracteristicii n=f(M) pe porţiunea stabilă se modifică o dată cu variaţia rezistenţei raportate . Cuplul critic nu depinde de rezistenţa rotorică, fapt care determină deplasarea punctului critic Q pe o dreaptă verticală (D) în fig. 5.34 b). Pentru o anumită valoare a cuplului, MN se obţin diverse puncte de funcţionare la care corespund turaţii cu atât mai mici cu cât rezistenţa rotorică înseriată este mai mare: Caracteristica 0 se numeşte c.m. naturală iar celelalte, notate cu 1, 2, 3 sunt c.m. artificiale. P.f. nominal N se obţine când contactoarele C0 sunt închise, rezistenţele de reglaj fiind scurtcircuitate. Dacă se închid contactoarele C1 şi se deschid C0, p.f. trece pe caracteristica artificială 1, din N în N', viteza scade la acelaşi cuplu MN.
Dacă se admite că porţiunile stabile ale c.m. sunt drepte se pot scrie relaţii de forma (5.209-1):
; (5.210)
unde scr0 este alunecarea critică naturală a motorului, în general cunoscută, iar k este raportul dintre alunecarea critică şi alunecarea nominală (de asemenea – cunoscută). Pentru a obţine o anumită turaţie nj=n1(1-sj) se poate afla valoarea rezistenţei înseriate raportate, R'rj dacă se impune condiţia:
44

. (5.211)
Metoda are cel puţin două inconveniente: - nu poate fi considerată o metodă veritabilă de reglare întrucât la sarcini
reduse, în apropierea vitezei de sincronism reglajul este ca şi inexistent, fiind mai aproape de adevăr formularea: procedeu de variaţie a scăderii vitezei în sarcină;
- prin creşterea alunecării, pierderile Joule în înfăşurări cresc şi se diminuează randamentul (se ştie că pj2=sP, din relaţia 5.71). De reţinut este faptul că aceste pierderi sunt disipate preponderent pe rezistenţele înseriate – situate în exteriorul rotorului. Nu trebuie trecut cu vederea şi faptul că această metodă se aplică doar la motoarele cu rotor bobinat care au costuri ridicate şi fiabilitate redusă.
Pentru a obţine un "reglaj continuu" al vitezei se poate prevedea pe circuitul de alimentare statoric un "gradator" de tensiune alternativă G1 compus din 3 triacuri (câte unul pe fiecare fază) la puteri mici sau 3 grupe de câte 2 tiristoare conectate în antiparalel (figura 5.29 a), la puteri mari. Prin comanda adecvată a acestor dispozitive se modifică tensiunea aplicată înfăşurării, deci se modifică în limite reduse alunecarea sau turaţia. Mai eficientă pentru turaţii joase şi poziţionări precise este folosirea unui gradator în circuitul secundar, unde se formează neutrul înfăşurării rotorice, G2. Când ventilele din G2 sunt deschise, rezistenţa echivalentă rotorică tinde la infinit iar când sunt în conducţie rezistenţa are valoarea . Prin modificarea duratei relative a intervalelor de trecere în stare de conducţie a semiconductoarelor pe timpul fiecărei semiperioade este posibilă variaţia rezistenţei rotorice raportate, de la ∞ la
. Dacă funcţionarea se stabileşte la situaţia când rezistenţa rotorică este
se poate scurtcircuita, cu contactoarele C3, intrarea la G2.a2) O altă modalitate de reglare a turaţiei MAB este prezentată în figura
5.35.
45
Fig. 5. 35 Reglarea vitezei MAB cu o rezistenţă în rotor
L1L2L3
MAB3~ Th
K
Rr
BF
L MRedr.
Id X
Y
I2

Prin această schemă se elimină contactoarele şi se obţine o variaţie continuă a vitezei între valoarea corespunzătoare pornirii cu Rr înseriată (echivalentă raportată) în rotor şi viteza nominală (când rezistenţa înseriată în rotor este nulă). Tensiunea rotorică este redresată de puntea formată din cele 6 diode. Curentul continuu obţinut este filtrat de bobina BF şi este condus prin rezistenţa Rr sau prin tiristorul comandat Th. Când Th este deschis, rezistenţa prin care circulă Id
este chiar Rr, iar când Th este în conducţie rezistenţa dintre punctele X şi Y este nulă. Dacă se notează cu α durata relativă de conducţie a lui Th din fiecare perioadă de funcţionare, rezistenţa aparentă Rre între bornele X şi Y este:
(5.212)Se ştie că la o punte redresoare cu 6 diode, curentul redresat Id se exprimă în
funcţie de valoarea efectivă a curentului alternativ, I2 – de la intrare prin: (5.213)
Rezistenţa adiţională pe fază, Rra se deduce din echivalarea puterilor disipate, adică:
sau: (5.214)
Evident, această rezistenţă este variabilă între 0, când α=1 şi Rr/2, când α=0.a3) În sfârşit, se poate folosi în circuitul rotoric un sistem redresor – invertor
comandat, cu ieşire pe frecvenţa reţelei, f1 astfel încât puterea din circuitul secundar să fie recuperată la reţea, nu disipată pe rezistenţa Rr. Schema este prezentată în figura 5.32 şi rezolvă atât problema pornirii cât şi a reglajului de viteză, cu pierderi reduse. Rămâne de luat decizia adoptării unei soluţii în dauna alteia şi după evaluarea costurilor.
b) Motorul asincron cu rotor în scurtcircuit (colivie)Se poate modifica alunecarea dacă se variază tensiunea de alimentare.
Schema adoptată tot mai frecvent în ultimul timp este prezentată în figura 5.36a).
46
Fig. 5. 36 Reglarea vitezei motoarelor în colivie prin modificarea alunecării
a)
L1L2L3
M3~Y
u1 v1 w1
T1 T2 T3G
0
M
n1
b)
0(1UN)
caract.naturală
N
nN
n
U1 scadeMN
1(0,9UN)
2(0,8)
3(0,7)
4(0,6)UN
A(Mr1=ct)
BMr1=f(n)
n'N

Dacă se ţine seama de expresia alunecării critice scr, (5.209-1), aceasta nu depinde de tensiunea de alimentare, de aceea familia de caracteristici la U1= variabil are punctul critic la aceeaşi valoare a turaţiei (figura 5.36 b): n=n1(1-scr). Din (5.209-2) se constată că valoarea cuplului critic este dependentă de pătratul lui U1. Prin comanda ventilelor bidirecţionale din figura 5.36 a) se obţin tensiuni ale căror valori efective se modifică într-o relaţie dependentă de unghiul de comandă. Pentru o maşină de lucru la care cuplul rezistent este constant (dreapta A) se observă că p.f. se deplasează spre viteze mai mici atunci când tensiunea U1
scade. Variaţia de viteză este relativ restrânsă întrucât la scăderea lui U1 sub o anumită valoare motorul decroşează. Se poate efectua un reglaj al turaţiei de la nN=n1(1-sN) la n'N=n1(1-scr), dar cu pericol de decroşare crescut (capacitate de suprasarcină redusă) la tensiuni mici.
Acest procedeu este aplicabil cu succes la situaţiile practice unde cuplul rezistent este dependent de viteză, de exemplu după curba B. În această situaţie se pot obţine puncte de funcţionare stabile chiar şi pe porţiunea numită mai sus
instabilă a caracteristicii mecanice. Pentru aceste puncte este de valori
ridicate, încât:
<0 (5.215)
chiar dacă >0. Relaţia (5.215) este condiţia de stabilitate valabilă în cazul
general (oricare ar fi tipul de cuplu rezistent).Un mare avantaj al acestei metode constă în faptul că schema de alimentare
este deosebit de simplă, folosind doar 3 triacuri sau 6 tiristoare – câte 2 montate antiparalel, ale căror scheme de comandă nu pun probleme deosebite
Metoda este aplicabilă cu oarecare precauţie, întrucât sarcina trebuie să aibă la viteze reduse cuplu mic, dar care este necesar să crească mult cu viteza. Se
47

utilizează cu succes la antrenarea de pompe sau ventilatoare ale căror cupluri variază cu pătratul turaţiei.
Se pot semnala şi unele inconveniente ale metodei:- Micşorarea vitezei se face în detrimentul randamentului întrucât se
măreşte alunecarea. Dacă motorul are o alunecare de 50%, numai pierderile Joule rotorice reprezintă 50% din puterea care trece prin întrefier la rotor, ceea ce înseamnă că randamentul este sensibil inferior valorii de 50%.
- Creşterea pierderilor Joule rotorice cu reducerea tensiunii U1 implică unele probleme de încălzire. Cum de obicei motoarele au autoventilaţie, la scăderea vitezei eficacitatea acesteia scade şi din acest motiv trebuie identificate soluţii de evacuare a căldurii degajate, sau trebuie folosite motoare agabaritice (din clasa de putere superioară).
- Sursa electronică – gradatorul este un convertor extrem de poluant pentru reţea. Conţinutul în armonici superioare ale curenţilor este important; acestea perturbă reţeaua şi diminuează performanţele motorului.
Procedeul acesta este utilizat preponderent la acţionări de puteri reduse.
5.5.3.3. Reglarea turaţiei prin modificarea numărului de perechi de poli
După cum se observă şi din relaţia (5.206) modificarea lui p duce la modificarea în trepte a vitezei de sincronism n1. De obicei se modifică valorile turaţiilor în raportul 2:1, iar motoarele respective se numesc cu două viteze. Abordând un principiu similar se pot obţine motoare cu 3 sau 4 viteze (mai corect ar trebui specificat "de sincronism").
Se întâlnesc în practică următoarele trei variante de obţinere a două sau mai multe viteze de sincronism:
- prin folosirea unei singure înfăşurări care permite, prin conectări convenabile ale bobinelor componente, să se realizeze două numere de perechi de poli în raportul 1:2, (în general, dar pot fi 2:3; 3:4 ş.a.).
- prin utilizarea a două înfăşurări distincte introduse în crestăturile maşinii, realizate pentru 2 numere de perechi de poli diferite, raportul dintre aceste numere ajungând chiar la 1:6;
- prin adoptarea a două înfăşurări distincte cu numere de poli diferite, fiecare dintre acestea având posibilitatea de comutare la câte două viteze; se obţin astfel patru viteze în raporturile 1:2:3:4.
48

În cele ce urmează va fi analizată prima variantă, celelalte două fiind consecinţe ale acesteia şi având performanţe mai slabe în ceea ce priveşte utilizarea maşinii.
Schimbarea numărului de poli ai înfăşurării statorice la maşina asincronă cu rotor bobinat trebuie însoţită de schimbarea corespunzătoare a numărului de poli ai înfăşurării rotorice. Această soluţie este aproape impracticabilă întrucât sunt necesare multe inele şi respectiv perii care complică mult maşina.
La maşina cu rotor în colivie se face schimbarea conexiunilor doar la înfăşurarea statorică, rotorul preluând automat numărul de poli ai statorului. Capetele bobinelor statorice sunt conectate la un controler special sau la contactoare, încât prin comutări corespunzătoare se pot obţine numere de poli diferite.
Principial, se arată această posibilitate de comutare a numerelor de poli, în figura 5.37, unde se are în vedere numai o fază a maşinii constituită din 2 bobine.
În figura 5.37 a) şi b) se consideră cele două bobine A1-X1 şi A2-X2 conectate în serie, având pasul diametral y=τ" unde τ" este pasul polar corespunzător maşinii tetrapolare: p=2.
În figura 5.37 c) şi d) se prezintă aceeaşi armătură la care cele două bobine sunt legate în paralel. Din analiza modului de închidere a câmpului magnetic se observă formarea a doi poli pe aceeaşi periferie de armătură, bobinele având pasul mult scurtat, adică y=τ'/2.
În cazurile practice nu se adoptă înfăşurări într-un singur strat, aşa cum sunt prezentate în figura 5.37 ci înfăşurări în două straturi. La aceste înfăşurări pasul bobinei este intermediar, adică τ"<y<τ', ceea ce înseamnă că este alungit pentru numărul mare de poli şi scurtat pentru numărul mic de poli. În modul acesta se pot obţine performanţe convenabile la ambele numere de poli, sau la ambele turaţii ale maşinii.
49Fig. 5. 37. Comutarea numărului de poli: a) vedere armătură statorică pentru p=2; b) armătură desfăşurată în plan cu p=2; c) vedere armătură statorică cu conexiuni pentru p=1; d) armătură desfăşurată în plan cu p=1; e) conexiune în serie inversată pentru p=1.
A1
X2
A2
Zona de secţionare
a)
X1
b)
τ"
τ"
τ"
τ"
y
L1
A1
X1
A2
X2 L2
d)
τ'/2
y
A1
X11
A2
X2
τ'
τ'/2
A1
X11
A2
X2 L1
L2
e)
L
N
A1
X2
A2
Zona de secţionare
c)
X1x L N

O situaţie echivalentă cu cea din figura 5.37 c) şi d), din punctul de vedere al numărului de perechi de poli (p=1), se obţine dacă cele două bobine se conectează în serie, cea de-a doua bobină A2-X2 fiind însă "inversată" faţă de figura 5.37 a) şi b), aşa cum se observă din modul de conectare a capetelor de bobine, prezentat în figura 5.37 e), unde X1 este legat galvanic cu X2.
b) Modificarea numărului perechilor de poli în raport diferit de 1/2, dar mai apropiat de 1, se realizează dacă se "divizează fazele" încât trecerea la un alt număr de perechi de poli să aibă loc prin modificarea distribuţiei unor bobine sau grupuri de bobine în cadrul celor 3 faze.
c) Utilizarea înfăşurărilor toroidale (în inel). O soluţie care poate fi luată în consideraţie, de schimbare a numărului de perechi de poli în limite deosebit de largi este cea a utilizării înfăşurării în inel cu capete scoase de la fiecare bobină. Un exemplu tratat în [vol II] se referă la o armătură cu 18 crestături, la care se obţin performanţele comparabile la p1=1; p2=2; p3=3, deci la trei viteze sincrone. Numărul posibilităţilor creşte dacă Z=36, unde se pot realiza p=1; 2; 3; 4; 6.
5.5.3.4. Reglarea turaţiei prin modificarea frecvenţei de alimentare
50

a) Generalităţi, scheme de convertoarePrin modificarea frecvenţei tensiunii de alimentare a maşinii asincrone se
poate obţine o variaţie a turaţiei de sincronism şi, în funcţie de cuplul rezistent, se modifică turaţia rotorului în scurtcircuit. Acest procedeu, al cărui domeniu de aplicaţie se lărgeşte în ultimul timp, foloseşte un motor cu construcţie simplă de preţ redus şi robust, dar necesită un convertor şi o comandă adecvată. Performanţele convertoarelor statice de frecvenţă depind de caracteristicile semiconductoarelor pe care le folosesc. Componentele electronice existente pe piaţă răspund aproape în totalitate nevoilor industriale atât din punct de vedere tehnic cât şi din punct de vedere economic. Progresele înregistrate în domeniul microprocesoarelor permit implementarea unor comenzi performante cu costuri reduse.
În raport cu alte soluţii tehnice, procedeul variaţiei vitezei motoarelor asincrone cu rotor în colivie asociate cu convertoare de frecvenţă, prezintă printre altele şi avantajele: - ameliorarea exploatării proceselor industriale prin creşterea supleţei comenzii motorului de acţionare, - optimizarea consumului de energie electrică, - creşterea securităţii şi siguranţei acţionării.
Pentru obţinerea unor tensiuni de valori efective şi frecvenţe variabile aplicate motorului, pornind de la tensiuni de valori efective şi frecvenţe constante, furnizate de reţeaua industrială de 50Hz se utilizează fie un convertor direct (sau cicloconvertizor), fie un convertor indirect sub forma unei cascade redresor – invertor. Convertoarele indirecte pot fi invertoare de tensiune sau invertoare de curent. Invertorul sau ondulorul este un dispozitiv electronic care transformă curentul continuu în curent alternativ de frecvenţă variabilă. Alegerea unei soluţii dintre cele trei enumerate mai sus este dictată de: puterea motorului, plaja de frecvenţe ce se cere a fi obţinută şi existenţa unor condiţii specifice privind reversibilitatea funcţionării.
Ondulorul (invertorul) de tensiune este indicat pentru asocierea cu motorul asincron, datorită faptului că inductanţa motorului se comportă ca un filtru trece – jos, iar curenţii au un conţinut de armonici inferior celui al tensiunilor furnizate. Cel mai des folosit invertor de tensiune este cel cu modulaţie în lăţime a impulsurilor, MLI, sau PWM (Pulse Width Modulation) care permite modificarea atât a valorii tensiunii cât şi a frecvenţei de ieşire. Schema de principiu este prezentată în figura 5.46. Se cunosc mai multe procedee de MLI, dintre care se enumeră: modulaţia sinus – triunghi, modulaţia vectorială, modulaţia în delta.
Folosirea invertorului de tensiune pune frecvent şi problema reversibilităţii; dacă motorul asincron funcţionează în regim de generator, curentul activ de la
51

intrarea în invertor se inversează, iar circuitul plasat la intrarea în invertor trebuie să fie capabil să permită această circulaţie inversă.
În cazul când ondulorul este alimentat de la o reţea de c.c., constituită din acumulatoare, care funcţionează reversibil în ceea ce priveşte curentul, problema este rezolvată. Dacă, de exemplu reţeaua de c.c. este de tip urban – substaţie pentru alimentarea unor motoare de tracţiune, recuperarea energiei furnizate de una sau mai multe maşini, care ajung în regim de generator, se realizează cu celelalte maşini conectate la aceeaşi substaţie. Când invertorul este alimentat, pornind de la reţeaua industrială conectată pe un redresor fix (necomandat) nereversibil în curent, recuperarea nu este posibilă figura 5.46 a). Pentru a elimina acest neajuns, se adoptă diverse soluţii: - alimentarea ondulorului de tensiune prin două redresoare cu tiristoare montate în antiparalel şi care se deblochează la inversarea rolurilor (figura 5.46 b), - utilizarea unui singur redresor şi plasarea la ieşirea sa a unui inversor compus din două perechi de tiristoare comandate care asigură circulaţia curentului în ambele sensuri, -
52
Fig. 5. 46 Invertoare de tensiune: a) ireversibil; b) reversibil
L1L2L3
Lf Cf
Ud
MA
id
Inv
Filtru
Redr
a)
Lf Cf
L1L2L3
id
Ondulor de tensiune (invertor)
Redr.1
Filtru
Redr.2
b)
CfLf
Ud

utilizarea unui redresor cu modulaţie a lăţimii impulsurilor ce alimentează ondulorul de tensiune, tot cu MLI, acestea putându-şi schimba între ele rolurile când maşina funcţionează în regim de generator asincron.
Invertorul de curent are schema de principiu din figura 5.47 şi prezintă avantajul de a fi alimentat printr-un simplu redresor clasic. Din cauza inductanţei sale, motorul asincron nu este facil de alimentat prin invertor de curent, întrucât la aplicarea de impulsuri ale curenţilor apar supratensiuni pronunţate pe aceste inductanţe.
Limitarea supratensiunilor se poate realiza, într-o variantă, prin utilizarea de una sau mai multe capacităţi care se opun variaţiei bruşte a tensiunii la borne.
Când se folosesc tiristoare convenţionale comandate pe poartă, pentru amorsare sunt necesare circuite auxiliare de comutaţie (de stingere). Acestea conţin condensatoare cu dublul rol: de comutare a curentului de pe o fază pe alta a maşinii şi de stingere a tiristoarelor prin evacuarea purtătorilor minoritari.
În ultimul timp, în acţionările de putere cu motoare asincrone şi invertoare de curent se folosesc dispozitive semiconductoare tip GTO şi mai ales tranzistoare IGBT a căror amorsare şi blocare se realizează prin comenzi adecvate aplicate pe electrozii lor. Pentru eliminarea unor "asimetrii" ale acestor dispozitive semiconductoare este necesară înserierea lor cu diode.
O soluţie de compensare a caracterului inductiv al motorului constă în montarea de condensatoare, C, în paralel direct la bornele motorului (figura 5.47). Pentru a folosi condensatoare de valoare mai mică este indicată tehnica MLI pentru comanda invertorului Inv. Este posibilă apariţia unor armonici de curenţi de la Inv, care ar putea creşte mult dacă se îndeplinesc condiţiile de rezonanţă.
53
1
1'
3
2' 3'
2
Ud'Ud
Lf
L3L2,L1,Redr.
Filtru activ
C
M.A.
Inv.
id
Fig. 5. 47 Schemă de alimentare a motorului asincron cu invertor de curent
+
-

Pentru a preîntâmpina asemenea fenomene este indicată utilizarea unor filtre active, motorul funcţionând astfel în condiţii apropiate de cele cu tensiuni şi curenţi sinusoidali.
b) Reglajul vitezei în condiţiile menţinerii constante a fluxului în întrefierSe va considera maşina asincronă cu rotor în colivie alimentată în stator cu
tensiuni şi curenţi sinusoidali, de frecvenţă variabilă. Se consideră maşina simetrică, cu parametrii constanţi în regim permanent sinusoidal, armonicile superioare de timp ale curenţilor şi tensiunilor de frecvenţă variabilă, furnizate la ieşire de convertoarele electronice fiind neglijate. Dispozitivele care realizează condiţiile impuse, privitoare la tensiuni, frecvenţe, curenţi pot fi invertoarele de tensiune prezentate în figura 5.46 la care s-a reprezentat numai partea de forţă. Partea de comandă cuprinde dispozitivele de comandă pe poartă (grilă), traductoarele de mărimi, circuitele de formare a impulsurilor, modulele de calcul etc. Prin menţinerea fluxului constant (în întrefier) se evită saturaţia circuitului magnetic şi se asigură funcţionarea la parametri normali din punctul de vedere al utilizării materialului feromagnetic al maşinii.
Pentru plasarea în condiţiile de flux rezultant (în întrefier) constant se va apela la schema electrică echivalentă din figura 5.9 a) şi se vor utiliza ecuaţiile (5.31), unde se observă că s-au neglijat pierderile în fier.
Se introduce fluxul total util (rezultant), din (5.31), adică:
(5.218)
Menţinerea lui Ψm constantă este echivalentă cu păstrarea constantă a curentului I10 – de magnetizare, deci problema se transferă la controlul curentului de mers în gol şi menţinerea constantă a acestuia.Se va exprima cuplul în funcţie de acest curent, sau de flux. Se foloseşte (5.71):
54
Fig. 5. 48 Scheme electrice echivalente – a) ; b) variante
I2'R2'/s
U1
I1 I10
b)
jXs2'jXs1R1
E1 jXm (jω1Lm)
I2'
R2'/sU1
I1I10
jω1Ls2'jω1Ls1 Ls1
R1
jω1ψm= E1
a)

(5.219)Se deduce astfel că M depinde de pătratul fluxului util (principal) şi de
ω2=sω1, adică de pulsaţia curenţilor rotorici. Se poate trasa variaţia acestui cuplu în funcţie de alunecare sau de ω2, constatând că: pentru ; pentru
şi pentru . Este necesară determinarea valorilor critice, atât pentru alunecare (sau frecvenţa rotorică ω2) cât şi pentru cupluri. Numitorul expresiei (5.219) este dependent de sω1=ω2 prin cei doi termeni care se sumează. Deoarece produsul celor doi termeni, dependenţi de ω2, este constant =1, maximul sumei lor se obţine când termenii sunt egali, adică:
(5.220)
Valorile cuplurilor critice se obţin introducând (5.220) în (5.219) şi rezultă:
(5.221)
Pentru a compara aceste valori (5.220) şi (5.221) cu cele corespunzătoare alimentării la U1N şi f1N (ω1=ct.), se va observa că din relaţiile (5.78), (5.79):
;
(5.222)adică la flux rezultant constant atât alunecarea critică cât şi cuplul critic sunt de aproximativ două ori mai mari decât valorile corespunzătoare regimului nominal la U1N şi f1N. Se poate exprima dependenţa M=f(ω2) printr-o relaţie de tip Kloss, dacă se împarte (5.221) la (5.219) obţinându-se:
(5.223)
Familia de caracteristici M=f(ω2) pentru regimul de lucru la Ψm=ct. se reprezintă în figura 5.49 a) (s-au considerat 2 valori pentru fluxul rezultant).
55
M/McrN
B
A
Mcr1
ω2
1
0,5
ΨmN 0,71ΨmN
Mcr2
ω1
ω2cr
(sω1)
a) Fig. 5. 49. Caracteristici la flux rezultant constant: a) M=f(ω2), b) n=f(m)
n n1=60f1/p f1N
A
B
O (M/McrN)
f1 scade 1
m MN
b)

Dacă se consideră numai porţiunea stabilă (liniară) a caracteristicii: m=f(ω2), unde m=M/McrN este cuplul relativ corespunzător fluxului rezultant nominal ΨmN, se poate aprecia o variaţie de forma:
unde: . (5.224)
Se poate scrie şi o relaţie inversă, adică:
. (5.225)
Aşadar, caracteristica mecanică n=f(m) reprezintă, pe porţiunea stabilă, o familie de drepte care au aceeaşi pantă k'1 iar tăietura este variabilă, dependentă de frecvenţă, f1, întrucât n1=60f1/p. Pentru o anumită valoare a fluxului Ψm=ΨmN
se obţine familia de drepte A din figura 5.49. Pentru o valoare mai mică a lui Ψm
se obţine familia de caracteristici notată cu B, cu pantă mai mare (mai căzătoare, mai suple). Justificarea este simplă: dacă se are în vedere relaţia lui k1 din (5.224) se observă că la scăderea fluxului panta dreptelor date de (5.225) creşte, de asemenea scade şi cuplul critic.
Pentru a obţine condiţia de Ψm=ct., în practică este necesară modificarea tensiunii aplicate statorului după o lege care se poate deduce cu unele aproximaţii acceptate. Se porneşte de la schema din figura 5.48 b) şi se exprimă U1, adică:
56

(5.226)unde Lm>>L's2, iar: (pentru alunecări în jurul valorii critice). Ecuaţia (5.226) conduce la relaţia dintre module:
(5.227)
Pentru funcţionarea la tensiunea şi pulsaţia nominală, relaţia (5.227) devine:
(5.227')
Împărţind cele două relaţii (5.227) şi (5.227') se obţine:
(5.228)
Dacă se introduce notaţia: (5.229)
a cărei valoare este între 0,07 şi 0,25 la maşinile de construcţie normală în colivie, pentru gama de puteri de la ordinul 1kW la 500kW, se ajunge la relaţia:
(5.230)
În cazul particular, când se neglijează R1, din (5.229), cu (5.230) rezultă:
(5.231)
57Fig. 5. 50. Dependenţele: a) tensiunii, b) curentului statoric, de frecvenţă, la Ψm=ct.
1
O
U10/U1N
a)
2
3
N
A
U1/U1N
U1/U1N
f1/f1N 1
U1i/U1N
λ=1
O
f1/f1N
1
b)
1
2
3
4
0,5
0,25
I1/I'2sc
I1/I1N
λ=21
λ=41

Pentru f1=0, din (5.230), rezultă U10/U1N=0,2 pentru q=0,07 şi U10/U1N=0,05 pentru q=0,25. Mărimea U10/U1N defineşte valoarea tensiunii relative ce trebuie aplicată în domeniul frecvenţelor joase, tinzând spre 0, pentru ca motorul să poată dezvolta un cuplu apropiat de cel critic. În figura 5.50 a) este prezentată dependenţa U1=f(f1) în mărimi relative, conform relaţiei (5.230), prin curba 1. Dependenţa idealizată, când R1=0, dată de relaţia (5.231) este o dreaptă ce trece prin origine, notată cu 2 în figura 5. 50 a). Pentru unele aplicaţii mai puţin pretenţioase se poate aproxima curba 1 printr-o dreaptă, 3, care trece prin punctele A şi N:
. (5.232)
În cazul când se urmăreşte o funcţionare la alunecare mai mică decât cea critică, adică:
; (5.233)
rezultă:
. (5.234)
Pentru λ=4 şi q=0,07 se obţine U10/U1N=0,02, adică tensiunea aplicată care trebuie să compenseze căderea pe impedanţa primară este de câteva procente din cea nominală. Întrucât la frecvenţă nulă impedanţa statorului se reduce la rezistenţa R1, tensiunea U10 este chiar:
(5.235)
58

Această valoare se mai numeşte tensiune de "compensare a I x R" şi reprezintă unul dintre parametrii care trebuie introduşi în memoria convertorului static de frecvenţă, de către utilizator, funcţie de motorul acţionat.
Deoarece valorile date de expresia (5.234) nu diferă mult de U1i dat de (5.231) se poate considera că maşina funcţionează la U1/f1=constant.
În anumite cazuri practice interesează în mod deosebit curentul furnizat de convertor, egal cu I1. Se foloseşte schema echivalentă din figura 5.48:
; (5.236)
Modulul acestui curent este:
(5.237)
unde s-a introdus I'2sc -curentul rotoric raportat, în condiţia ideală a neglijării rezistenţei rotorice (componenta reactivă de scurtcircuit). Acest curent poate fi asimilat cu I1scN adică valoarea curentului de scurtcircuit a motorului, sau de pornire la tensiunea nominală aplicată statorului, care este de (5 – 7)I1N. În cazul considerat, când pe timpul modificării frecvenţei f1, alunecarea se păstrează constantă, rezultă că I1 se menţine constant. Valoarea acestui curent depinde de λ (figura 5.50 b).
Pentru frecvenţe mai mari decât f1N, menţinerea constantă a fluxului Ψm se poate realiza numai dacă se aplică statorului o tensiune U1>U1N. Acest fapt nu este admis cel puţin din două motive: depăşirea tensiunii nominale pune în pericol înfăşurările maşinii întrucât se poate depăşi tensiunea de străpungere a izolaţiei dintre spire; la valori ridicate ale tensiunii sunt puse în pericol componentele electronice ale schemei de alimentare (convertorul). Aşadar, peste f1>f1N, tensiunea se menţine la valoarea sa nominală U1N iar frecvenţa va creşte, ceea ce înseamnă o scădere a raportului U1/f1, o diminuare a fluxului Ψm, o micşorare a cuplului critic (deci a cuplului la care poate fi exploatat motorul în condiţii acceptabile).
În figura 5.51 a) se prezintă familia de caracteristici mecanice n=f(M) în mărimi relative, în condiţiile variaţiei frecvenţei. Caracteristicile s-au trasat pe cât posibil pe porţiunile lor stabile. Pentru f1<f1N s-au trasat curbele A, B, C şi D în condiţiile U/f=ct., ceea ce implică Ψm=ct., şi Mcr=ct. -la cuplu constant.
59

Punctele corespunzătoare cuplului nominal arată că turaţia se poate modifica din apropierea lui 0 până la n1N, aşa cum se petrece şi la motorul de c.c. cu excitaţie separată (derivaţie). Capacitatea de suprasarcină a motorului este menţinută la aceeaşi valoare, întrucât Mcr/MN=ct. Pentru tensiunea U1, cuplul M şi puterea activă P se prezintă dependenţele lor de f1, în figura 5.51 b), - porţiunea de abscise cuprinse între 0 şi 1.
Pentru f1>f1N se menţine U1=ct. şi se creşte frecvenţa peste f1N. Se obţin caracteristicile mecanice E, F, G, H, ale căror valori de cupluri maxime se diminuează o dată cu creşterea frecvenţei. Justificarea a fost dată în figura 5.49 şi utilizează proprietatea: Mcr este proporţional cu Ψm, care prin creşterea frecvenţei se micşorează.
Se poate apela la relaţiile (5.209), adică:
(5.238)
60
Fig.5. 51 Caracteristicile motoarelor asincrone la comanda în frecvenţă
0
U1/f1=ct U1 =ct
M =ct
U1
P
1 2 f1/ f1N
P =ct P =var.
M
b)
M,U1,P
M =var.
F
I
C0 E
M/MN
1
0
2
2,5
1
2
G
H
J
naturală
f1/f1N=
2,5 2,25 2,0 1,75 1,5 1,25
1,0
C1
C2
U1=ct,P=ct
a)
n/n1
A
C
B
D
U1/f1=ct,
Mcr=ct
0,75 0,5 0,25

Se observă că scr se micşorează cu creşterea lui f1 (cvasihiperbolic) la fel şi cuplul critic, dar variaţia sa este mai pronunţată; curba C0 prezintă o variaţie a lui Mcr după relaţia:
(C0): (5.239)
Motorul poate funcţiona în puncte situate pe o curbă (C1) care îndeplineşte condiţia:
(C1): , (5.240)
de putere constantă.
În zona de frecvenţe >1 (până în jurul valorii 2) motorul lucrează pe
(C1), la putere constantă, cuplul este descrescător conform relaţiei (5.240), iar coeficientul de suprasarcină este, de asemenea, descrescător.
Cele două curbe (C0) şi (C1) (ale lui Mcr şi Mv) se întâlnesc într-un punct care corespunde situaţiei particulare când cuplul maşinii devine egal cu cel critic, deci motorul funcţionează în situaţia de cuplu limită critic (cu unele precauţii este posibilă menţinerea funcţionării stabile).
Dacă în continuare se creşte frecvenţa f1, este posibilă menţinerea funcţionării numai în punctele limită, de pe curba (C0), unde:
(5.241)
adică puterea scade cu frecvenţa după relaţia (5.241) iar cuplul scade cu frecvenţa după relaţia (5.239).
Dependenţele cuplului şi puterii, de frecvenţă, sunt date în figura 5.51 b), unde s-au introdus unele ipoteze simplificatoare (randament constant, cosφ=ct. etc.).
ProblemeP. 1 Un motor asincron trifazat cu UN=400 V, 2p=4 furnizează o putere de
P2=PN=75 kW unei maşini de lucru, cu un factor de putere cosφ=0,9. Frecvenţa de alimentare este 50 Hz, iar alunecarea este de 4%. Pierderile totale de putere sunt de 6,6 kW, distribuite astfel încât pFe1+pCu1= 3,3 kW. Să se afle: a) turaţia rotorului, b) randamentul motorului, c) cuplul electromagnetic, d) curentul pe
61

fază al statorului, dacă este conectat în triunghi, e) curentul de linie absorbit de stator, la pornire dacă este mai mare de 6 ori decât cel nominal, f) la ce tensiune de linie a reţelei poate funcţiona dacă se conectează fazele în stea, g) care este turaţia motorului dacă este conectat la o reţea de 60 Hz şi funcţionează cu aceeaşi alunecare ca la pct. a. h) Să se determine cuplul util nominal al motorului la alimentarea la 50 Hz respectiv 60 Hz, când furnizează puterea nominală maşinii de lucru (la aceeaşi alunecare) i) care vor fi valorile vitezelor dacă puterea utilă scade la 50% din valoarea nominală (caracteristicile M(s) se presupun liniare).
R. 1 a) Se porneşte de la definiţia alunecării: , de unde se obţine:
Rezultă:
b) Se utilizează bilanţul de puteri prezentat în fig. R.1. Puterea absorbită prin primar este P1=|P2|+Σp=75+6,6=81,6 kW. Randamentul este η=|P2|/(|P2|+Σp)=75/81,6=0,92. Se cunosc pierderile în stator.
c) Puterea electromagnetică este , unde P=P1-(pFe1+pCu1)=78300W iar cuplul electromagnetic
. d) Se ştie
că P1= , relaţie dintre mărimi de linie. Rezultă
62
Fig. R.1 Explicativă la bilanţul puterilor active în maşina asincronă
I1 X's2 R'2 Xs1
U1
I10
Xmp
R1 I2'
E1
R'2(1-s)/s
U'2 Rmp
P1 P =MΩ1 PMec=MΩ P2=M2Ω
pj1 pFe1 pj2 pmec+v
I1
U1
φ1
Mr
Ω

Il=81600/(1,73·400·0,9)=130A . Curentul de fază va fi de ori mai mic, adică If=130/1,73=75 A. e) Curentul de pornire de linie va fi de 6 ori mai mare decât cel nominal, adică Ilp=130·6=780A, f) Tensiunea nominală de fază la conexiunea în triunghi este egală cu tensiunea de linie a reţelei , adică 400 V. La conectarea fazelor în stea tensiunea de linie este de 1,73 ori mai mare ca cea de fază, adică 400·1,73=692 V. g) Se aplică relaţia:
adică n=1728 rot/min. h) M2(50) =P2/Ω =
75000/(2π·1440/60)=498 Nm, respectiv M2(60) =P2/Ω = 75000/ (2π·1728/60)= 415 Nm. i) Caracteristicile M(s) fiind liniare la scăderea sarcinii la jumătate alunecările vor scădea la jumătate , adică s=0,02. Turaţiile rotorului la cele 2 frecvenţe vor deveni: n=1500(1-0,02)=1470 rot/min, respectiv: n=1800(1-0,02)=1764 rot/min.
63