Metode numerice
28
Metode numerice pentru stabilirea raspunsului seismic . Metode numerice de determinare a raspunsului dinamic la sistemele cu un GLD Introducere Metodele teoretice sunt aplicabile doar la sistemele liniare si nu pot lua in considerare comportarea inelastica a structurilor posibila in timpul cutremurelor severe. In acest caz, singura abordare practica este rezolvarea cu metode pas-cu-pas. Acestea se pot aplica si la sistemele liniare in cazul excitatiilor de forma prea complicate pentru a fi definite analitic si care se descriu numeric. Pentru un sistem cu comportare neliniara ecuatia de miscare este: cu conditiile initiale (1.1) Se presupune ca sistemul are amortizare vascoasa. Forta perturbatoare p(t) poate fi exprimata prin valori discrete la diferiti pasi de timp . 1 Figura 1 Notatii pentru metodele pas- cu-pas
-
Upload
sultansasha -
Category
Documents
-
view
176 -
download
0
Transcript of Metode numerice

Metode numerice pentru stabilirea raspunsului seismic .
Metode numerice de determinare a raspunsului dinamic la sistemele cu un GLD
Introducere
Metodele teoretice sunt aplicabile doar la sistemele liniare si nu pot lua in considerare comportarea inelastica a structurilor posibila in timpul cutremurelor severe. In acest caz, singura abordare practica este rezolvarea cu metode pas-cu-pas. Acestea se pot aplica si la sistemele liniare in cazul excitatiilor de forma prea complicate pentru a fi definite analitic si care se descriu numeric.
Pentru un sistem cu comportare neliniara ecuatia de miscare este:
cu conditiile initiale (1.1)
Se presupune ca sistemul are amortizare vascoasa. Forta perturbatoare p(t) poate fi exprimata prin valori discrete la diferiti pasi de timp .
Intervalul de timp poate fi luat constant desi nu este necesar. Raspunsul dinamic este determinat la momente de timp discrete ti denumite timpi i si este exprimat
in deplasari ui , viteze si acceleratii . Aceste valori presupuse cunoscute trebuie sa
satisfaca ecuatia de miscare la timpul i:
, in care (1.2)
1
Figura 1 Notatii pentru metodele pas-cu-pas

Metode numerice pentru stabilirea raspunsului seismic .
este forta interna de echilibru la timpul i. Pentru un sistem cu comportate elastica liniara , iar in cazul sistemelor cu comportate neliniara depinde de istoria deformatiilor si a vitezelor.
I. Sisteme elastice
In continuare se prezinta doua tipuri de procedee de rezolvare numerica pas-cu-pas a ecuatiei de miscare bazate pe:
- interpolarea functiei de excitatie;- acceptarea unei variatii a acceleratiei.
Procedeele numerice urmaresc determinarea deplasarilor ui+1, vitezelor si
acceleratiilor , la timpul i+1 care trebuie sa satisfaca ecuatia de miscare la timpul i+1:
(1.3)
Rezolvarea numerica incepe de la timpul 0 pentru care se cunosc conditiile initiale
. Trecerea de la timpul i la timpul i+1 nu este in general un procedeu
exact. Metodele numerice trebuie sa indeplineasca trei cerinte:
- convergenta – prin micsorarea pasului de timp, solutia numerica trebuie sa se apropie de solutia exacta;
- stabilitatea – solutia numerica trebuie sa fie stabila in contextul unor erori numerice provenite prin rotunjiri;
- acuratete – erorile de calcul sa fie in limite acceptabile astfel incat solutia sa fie cat mai apropiata de solutia exacta.
1. Metode bazate pe interpolarea excitatiei
Aceste metode sunt eficiente in cazul sistemelor cu comportare liniara. Daca intervalele de timp sunt suficient de mici, interpolarea liniara este suficient de exacta. In Figura 2 se prezinta functia de excitatie pe intervalul :
in care: (1.4)
(1.5) iar variabila de timp se gaseste in intervalul .
2

Metode numerice pentru stabilirea raspunsului seismic .
In cazul in care se neglijeaza amortizarea in sistem, ecuatia diferentiala de rezolvat este
(1.6)
In intervalul , deplasarea se compune din trei parti:
- vibratia libera datorita deplasarii initiale si vitezei initiale
la timpul (solutia ecuatiei omogene); - raspunsul asociat pasului de incarcare pi in conditii initiale nule;
- raspunsul asociat cresterii de incarcare cu conditii initiale nule.
Se obtine:
si (1.7)
(1.8)
Evaluand aceste ecuatii la timpul se obtin deplasarea ui+1 si viteza la timpul
i+1:
(1.9)
3
Figura 2 Notatii pentru functia de excitatie interpolata liniar

Metode numerice pentru stabilirea raspunsului seismic .
(1.10)Ultimele doua ecuatii se pot scrie ca formule de recurenta sub forma de mai jos:
(1.11)
Aceste formule sunt valabile si la sistemele cu amortizare avand expresiile coeficientilor A, B, ..., D’ scrise mai jos, pentru amortizare mai mica decat amortizarea critica.
(1.12)
Coeficientii depind de caracteristicile dinamice ale structurii si de pasul de timp. Intrucat formulele de recurenta deriva din solutia exacta a ecuatiei de miscare, singura restrictie asupra pasului de timp este de a permite o aproximare buna a functiei de excitatie si de a furniza rezultatele la intervale de timp suficient de mici incat sa nu se piarda valorile de varf ale raspunsului.
In cazul miscarii terenului, de exemplu, cand excitatia este definita la intervale de timp mici, interpolarea liniara este practic perfecta. Daca pasul de timp este constant, coeficientii A, B, ..., D’ se calculeaza o singura data. Prin acest procedeu se poate obtine solutia exacta a ecuatiilor de miscare numai in cazul sistemelor cu comportare elastica liniara.
Coeficientii formulelor de recurenta pentru cazul .
(1.13)
(1.14)
(1.15)
(1.16)
4

Metode numerice pentru stabilirea raspunsului seismic .
(1.17)
(1.18)
(1.19)
, unde: (1.20)
2. Metoda Newmark
In 1959 N. M. Newmark a dezvoltat o familie de metode de rezolvare pas cu pas bazate pe urmatoarele ecuatii:
(1.21)
Parametrii β si γ definesc variatia acceleratiei in pasul de timp si determina stabilitatea
si acuratetea metodei. Se recomanda si . Ecuatiile de mai sus, la care se
adauga ecuatia de echilibru (1.3) scrisa la sfarsitul pasului de timp sunt suficiente pentru
calculul ui+1, si , la timpul i+1 pe baza valorilor cunoscute ui si la timpul i.
Intrucat necunoscuta apare in termenii din dreapta ai ec. (1.21) sunt necesare
procedee iterative de calcul.
In cazul sistemelor cu comportare elastica liniara este posibila modificarea formularii originale a lui Newmark astfel incat solutiile ecuatiilor (1.21) si (1.3) sa se obtina fara iteratii. Astfel, metoda acceleratiei medii si metoda acceleratiei liniare sunt cazuri particulare ale metodei Newmark.
5

Metode numerice pentru stabilirea raspunsului seismic .
Prin integrarea ecuatiei (1.22) se obtine ecuatia (1.23) care reprezinta variatia in
pasul de timp. In ecuatia (1.24) se face substitutia pentru viteza la timpul i+1.
Integrarea marimii duce la ecuatia (1.25) care reprezinta variatia deplasarii in
pasul de timp si cu care, inlocuind se obtine deplasarea ui+1 la timpul i+1 din ecuatia (1.26).
Comparand ecuatiile (1.24) si (1.26) cu ecuatia (1.21) se constata ca pentru si
ecuatiile lui Newmark sunt identice cu ecuatiile corespunzatoare din metoda
acceleratiei medii, iar pentru si cu ecuatiile corepunzatoare din metoda
acceleratiei liniare. In vederea evitarii iteratiilor se introduc marimile incrementale:
6
Acceleratie medie Acceleratie liniara
(1.22)
(1.23)
(1.24)
(1.25)
(1.26)
Figura 1.4

Metode numerice pentru stabilirea raspunsului seismic .
(1.27)
Formularea incrementala nu este necesara pentru sistemele cu comportare liniara dar este utila la rezolvarea sistemelor neliniare. Inlocuind (1.27) in ecuatiile lui Newmark rezulta:
(1.28.a)
(1.28.b)
Din ecuatia (1.28.b) se obtine:
(1.29)
Inlocuind ecuatia (1.29) in ecuatia (1.28.a) rezulta:
(1.30)
Prin scaderea ecuatiei (1.2) din ecuatia (1.3), ambele valabile pentru sistemele liniare pentru care si , se obtine ecuatia incrementala de miscare:
(1.31)
Ecuatiile (1.29) si (1.30) se inlocuiesc in (1.31) si rezulta:
in care: (1.32)
(1.33)
(1.34)
Cu marimile si determinate functie de caracteristicile sistemului m, c si k,
parametrii si alesi in functie de algoritmul de rezolvare si marimile si
cunoscute de la inceputul pasului de timp se poate calcula deplasarea incrementala din relatia
(1.35)
7

Metode numerice pentru stabilirea raspunsului seismic .
In continuare se pot determina din ecuatia (1.30) si din ecuatia (1.29), precum si
marimile , si din ecuatia (1.26). Din ecuatia de miscare la timpul ti+1 se poate
obtine acceleratia
(1.36)
Ecuatia (1.36) este necesara la determinarea marimii pentru inceperea calculelor
conform ecuatiei (1.29). In metoda Newmark, solutia la timpul i+1 se determina din ecuatia (1.31), ceea ce este echivalent cu a folosi conditia de echilibru din ecuatia (1.3) la timpul i+1. Astfel de metode se numesc metode implicite.
Metoda Newmark este stabila daca:
(1.37)
Pentru si aceasta conditie devine ceea ce arata ca metoda acceleratiei
medii este stabila pentru orice interval de timp , oricat de mare. Totusi, pentru convergenta solutiei trebuie ales un pas de timp suficient de mic.
Pentru si conditia (1.37) arata ca metoda acceleratiei liniare este stabila daca
. Aceasta restrictie este nesemnificativa, intrucat pentru reprezentarea corecta a
functiei de excitatie si a raspunsului sistemului trebuie ales un pas de timp mult mai mic decat 0.551Tn.
Exemplul 1
Este prezentat in continuare un program MATLAB de determinare a raspunsului seismic utilizand metoda acceleratiei liniare (Newmark). In exemplul prezentat mai jos se vor lua in cosiderare trei accelerograme si anume:
- Loma Prieta, 17 oct.1989 EQ, Capitola H90 record;- Loma Prieta, 17 oct.1989 EQ, Holliste H90 record;
Caracteristicile dinamice ale sistemului sunt: T=0.5 sec; υ=0.1
8

Metode numerice pentru stabilirea raspunsului seismic .
% Determinarea raspunsului dinamic la sistemele dinamice liniare cu un GLD % utilizand Metoda Newmark - Acceleratia liniara pe intervalul de timp dt beta=1/6; gamma=1/2;% Date de intrare
% Caracteristicile dinamice ale sistemului
niu=input('Introduceti fractiunea din amortizarea critica') T=input('Introduceti perioada T (sec)') % Caracteristicile inregistrarii dt=input('Introduceti pasul de timp (sec)') load CapitolaH02000.txt p=CapitolaH02000; n=length(p); accrel=[n,1]; t=[n,1]; accabs=[n,1]; % Conditiile initiale ale miscarii 'Viteza initiala (cm/sec)'; vrel=[n,1]; vrel(1)=0; 'Deplasarea initiala (cm)'; drel=[n,1]; drel(1)=0; % Calcule initiale accrel(1)=-p(1)-2*niu*(2*pi/T)*vrel(1)-((2*pi/T)^2)*drel(1); accabs(1)=accrel(1)+p(1); K=((2*pi/T)^2)+(gamma*2*niu*(2*pi/T))/(beta*dt)+1/(beta*dt^2); a=(1/(beta*dt))+gamma*2*niu*(2*pi/T)/beta; b=1/(2*beta)+dt*2*niu*(2*pi/T)*((gamma/(2*beta))-1); t(1)=0;
% Calcule la fiecare pas de timp
for i=1:n-1 dpi=-p(i+1)+p(i)+a*vrel(i)+b*accrel(i); ddi=dpi/K; dvi=gamma*ddi/(beta*dt)-vrel(i)*(gamma/beta)+dt*(1-gamma/(2*beta))*accrel(i); dai=(ddi/(beta*(dt^2)))-(vrel(i)/(beta*dt))-(accrel(i)/(2*beta)); drel(i+1)=drel(i)+ddi; vrel(i+1)=vrel(i)+dvi; accrel(i+1)=accrel(i)+dai; t(i+1)=t(i)+dt; accabs(i+1)=accrel(i+1)+p(i+1); end Eticheta=' Timpul DeplRel. VitezaRel. AccRel. AccABS.' Matrice=[t.' drel.' vrel.' accrel.' accabs.']; figure(1) plot(t,p),legend('Acceleratia terenului',1), xlabel('Timpul (sec)'),ylabel('Acceleratia (cm/sec/sec)') figure(2) plot(t,drel),legend('Deplasarea Relativa',1) xlabel('Timpul (sec)'),ylabel('Deplasarea Relativa (cm)')
9

Metode numerice pentru stabilirea raspunsului seismic .
figure(3) plot(t,vrel),legend('Viteza Relativa',1) xlabel('Timpul (sec)'),ylabel('Viteza Relativa (cm/sec)') figure(4) plot(t,accabs),legend('Acceleratia Absoluta',1) xlabel('Timpul (sec)'),ylabel('Acceleratia ABS (cm/sec/sec)') figure(5) plot(t,accrel),legend('Acceleratia Relativa',1) xlabel('Timpul (sec)'),ylabel('Acceleratia REL (cm/sec/sec)')
10
0 5 10 15 20 25 30 35 40-500
-400
-300
-200
-100
0
100
200
300
400
500
Timpul (sec)
Acc
eler
atia
(cm
/sec
/sec
)
Acceleratia terenului
0 5 10 15 20 25 30 35 40-4
-3
-2
-1
0
1
2
3
4
Timpul (sec)
Dep
lasa
rea
Rel
ativ
a (c
m)
Deplasarea Relativa
0 5 10 15 20 25 30 35 40-60
-40
-20
0
20
40
60
Timpul (sec)
Vite
za R
elat
iva
(cm
/sec
)
Viteza Relativa
0 5 10 15 20 25 30 35 40-600
-400
-200
0
200
400
600
Timpul (sec)
Acc
eler
atia
AB
S (
cm/s
ec/s
ec)
Acceleratia Absoluta
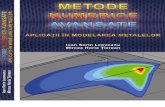
Raspunsul in cazul inregistrarii cutremurului de la Loma Prieta, 17 oct.1989, Capitola H90;

0 10 20 30 40 50 60-200
-150
-100
-50
0
50
100
150
200
Timpul (sec)
Acc
eler
atia
(cm
/sec
/sec
)
Acceleratia terenului
0 10 20 30 40 50 60-3
-2
-1
0
1
2
3
4
Timpul (sec)
Dep
lasa
rea
Rel
ativ
a (c
m)
Deplasarea Relativa
Metode numerice pentru stabilirea raspunsului seismic .
3. Stabilitatea si erori de calcul in rezolvarea ecuatiei de miscare
3.1 Stabilitatea
Acele procedee numerice cu care se obtin solutii limita daca pasul de timp este mai mic decat o valoare limita de stabilitate se numesc procedee conditionat stabile. Procedeele care conduc la solutia limita indiferent de marimea pasului de timp sunt neconditionat stabile. De exemplu, s-a aratat ca metoda acceleratiei medii este neconditionat stabila iar
metoda acceleratiei liniare este stabila pentru . Criteriul de stabilitate nu este
11
0 10 20 30 40 50 60-40
-30
-20
-10
0
10
20
30
40
Timpul (sec)
Vite
za R
elat
iva
(cm
/sec
)
Viteza Relativa
0 10 20 30 40 50 60-600
-400
-200
0
200
400
600
Timpul (sec)
Acc
eler
atia
AB
S (
cm/s
ec/s
ec)
Acceleratia Absoluta
Raspunsul in cazul inregistrarii cutremurului de la Loma Prieta, 17 oct.1989, Holliste H90;

Metode numerice pentru stabilirea raspunsului seismic .
restrictiv, adica nu dicteaza alegerea pasului de timp la sistemele cu un GLD, la care
acuratetea trebuie asigurata de valori mult mai mici ( ). Stabilitatea metodei
numerice este importanta la sistemele cu mai multe GLD, la rezolvarea carora se folosesc adeseori metode neconditionat stabile.
3.2 Erori de calcul
In orice metoda numerica apar erori in rezolvarea ecuatiei de miscare. In afara de aspectul lor matematic, trebuie precizate doua caracteristici importante ale metodelor numerice care ajuta la determinarea naturii erorilor si la controlul acestora. Se considera cazul simplu al unuei vibratii libere neamortizate:
avand conditiile initiale si
pentru care solutia teoretica este: unde si
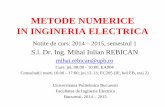
In tabelul si figura de mai jos se prezinta solutiile numerice obtinute pentru prin
patru metode diferite: metoda teoretica, metoda interpolarii liniare a excitatiei, metoda acceleratiei liniare, metoda acceleratiei medii. In cazul unor metode numerice amplitudinea miscarii scade in timp (asa cum se intampla si in cazul metodei numerice Wilson, care nu este descrisa in prezentul subiect) desi sistemul este neamortizat, iar perioada de vibratie este mai mica sau mai mare.
Se observa ca metoda interpolarii liniare a excitatiei, metoda acceleratiei liniare, metoda acceleratiei medii nu duc la diminuarea amplitudinii deplasarii, spre deosebire de metoda Wilson care are ca efect introducerea amortizarii numerice in sistem.
Pentru valori mai mici decat limita sa de stabilitate, metoda acceleratiei liniare da cea
mai mica eroare in aprecierea perioadei. Avand in vedere ca nu produce diminuarea amplitudinii deplasarilor, aceasta metoda este cea mai potrivita dintre metodele prezentate pentru sistemele cu un GLD.
12
Timp Teoretic Met. Interp Excit. Met. Acc. Lin. Met. Acc. Medii0 1.00 1.00 1.00 1.00
0.1 0.90 0.90 0.91 0.910.2 0.46 0.46 0.48 0.500.3 -0.16 -0.16 -0.13 -0.100.4 -0.72 -0.72 -0.68 -0.660.5 -1.00 -1.00 -0.99 -0.980.6 -0.90 -0.90 -0.93 -0.950.7 -0.46 -0.46 -0.52 -0.580.8 0.16 0.16 0.08 0.000.9 0.72 0.72 0.65 0.581 1.00 1.00 0.98 0.95
1.1 0.90 0.90 0.95 0.981.2 0.46 0.46 0.57 0.661.3 -0.16 -0.16 -0.03 0.101.4 -0.72 -0.72 -0.61 -0.501.5 -1.00 -1.00 -0.97 -0.911.6 -0.90 -0.90 -0.96 -1.001.7 -0.46 -0.46 -0.61 -0.731.8 0.16 0.16 -0.02 -0.201.9 0.72 0.72 0.57 0.412 1.00 1.00 0.95 0.86
2.1 0.90 0.90 0.98 1.01
Comparatie intre raspunsul dinamic obtinut prin trei metode numericesi cel teoretic pentru un sistem dinamic fara amortizare avand o
deplasare si o viteza initiala egale cu 1
Comparatie intre raspunsurile dinamice
-1.20
-0.60
0.00
0.60
1.20
0 0.7 1.4 2.1
Timpul (sec)
Dep
lasa
rea (
cm)
Teoretic
M. Interp. Excit
M. Acc. Liniare
M. Acc. Medii
Figura 1.6

Metode numerice pentru stabilirea raspunsului seismic .
II. Sisteme inelastice
13

Metode numerice pentru stabilirea raspunsului seismic .
Metoda Newmark
Metoda prezentata pentru sistemele liniare poate fi extinsa si la sistemele neliniare, pentru care este una din cele mai folosite metode avand o acuratete superioara. Ecuatia incrementala de echilibru este:
(1.38)
Forta interioara de echilibru este: (1.39)
in care este rigiditatea secanta (vezi Figura 1.7). Aceasta nu poate fi determinata pentru ca nu se cunoaste . Daca intervalul de timp este suficient de mic, rigiditatea secanta poate fi aproximata cu rigiditatea tangenta aratata in Figura 1.7. Ecuatia (1.39) poate fi aproximata cu: (1.40)
Renuntand la indicele inferior T din si inlocuind ecuatia (1.40) in ecuatia (1.38) se obtine:
(1.41)
Ecuatia (1.41) este similara cu ecuatia de la sistemele liniare, ceea ce sugereaza ca s-ar putea folosi o formulare neiterativa si in cazul sistemelor cu raspuns neliniar cu conditia inlocuirii lui k – constanta pentru sistemele liniare – cu evaluata la inceputul fiecarui pas de timp.
In cazul folosirii unui pas de timp constant se pot obtine prin acest procedeu rezultate inacceptabile. Erorile de calcul sunt importante si se datoreaza, pe de o parte, faptului ca
14
Figura 1.7 Rigiditatea tangenta si rigiditatea secanta

Metode numerice pentru stabilirea raspunsului seismic .
datorita pasului de timp constant modificarile in relatia forta-deformatie sunt detectate cu intarziere si pe de alta parte, folosirii rigiditatii tangente in loc de rigiditatea secanta.In figura 1.8 se prezinta cele doua surse de erori.
Figura 1.8.a ilustreaza modul de obtinere a erorii datorita folosirii unui pas constant de timp. Punctul a de pe curba forta-deformatie corespunde timpului i de la inceputul
pasului de timp pentru care se cunosc deplasarea ui si viteza pozitiva (adica deplasarea
creste in timp). Cu procedeul descris mai sus se obtin deplasarea ui+1, viteza la timpul
i+1 la sfarsitul pasului de timp (punctul b de pe curba). Daca este negativ, inseamna
ca intr-un punct b’ in interiorul pasului de timp viteza devine zero, schimba semnul, iar deplasarile incep sa scada. Daca prin procedeul numeric nu se identifica punctul b’, calculele continua incepand pasul de timp urmator in punctul b si folosind rigiditatea tangenta asociata ramurii de descarcare de pe curba forta-deplasare se gaseste punctul c la sfarsitul urmatorului pas de timp cu deplasarea corespunzatoare ui+2 si viteza negativa. Daca totusi se poate determina punctul b’, calculele pentru pasul de timp urmator incep pe baza proprietatilor sistemului in acest punct si determina deplasarea si viteza de la sfarsitul pasului de timp corespunzatoare punctului c’ de pe curba. Astfel, neidentificarea punctului b’ are ca efect saltul la b si urmarea unui drum inexact pe curba forta-deplasare. Aceste abateri de la drumul exact apar la fiecare schimbare de semn a vitezei si conduc la erori in rezultatele numerice. Aceste erori pot fi evitate prin localizarea punctului b’, ceea ce se poate obtine prin reluarea integrarii in intervalul de timp de la ti la ti+1 cu un pas de timp mai mic, de exemplu . O alta cale este de a relua procesul iterativ la timpul i cu un pas mai mic decat si cu marime variabila, ajustata astfel incat la sfarsitul unuia din acesti pasi de timp sa se gaseasca viteza apropiata de zero.
15
Figura 1.8 Surse de erori
(a) (b)

Metode numerice pentru stabilirea raspunsului seismic .
In Figura 1.8.b se arata modul de obtinere a erorii asociate folosirii rigiditatii tangente. Punctul a de pe curba forta-deformatie corespunde timpului i la inceputul pasului de timp pentru care se cunoaste deplasarea ui. Folosind rigiditatea tangenta in acest punct, prin integrare numerica de la timpul i la timpul i+1 se obtine deplasarea ui+1
corespunzatoare punctului b si nu punctului b’ care se afla pe curba reala. Diferentele de deplasare acumulate in mai multi pasi de timp pot duce la erori importante care produc discrepante intre solutia exacta si solutia numerica. Aceste erori pot fi minimizate folosind un procedeu iterativ. In metoda Newmark, ecuatia ce trebuie rezolvata in fiecare pas de timp este ecuatia (1.32) modificata pentru sistemele neliniare:
in care: (1.42)
(1.43)
In continuare se renunta la indicele inferior i in termenii si si se inlocuieste cu T
in termenii si , pentru a sugera folosirea rigiditatii tangente. Ecuatiile (1.42) si
(1.43) devin:
in care: (1.44)
(1.45)
Relatia incrementala (1.44) este prezentata grafic in Figura 1.9. Relatia forta-deplasare
este neliniara deoarece depinde de deplasarea u si ca urmare panta nu este
constanta.
In analiza statica a sistemelor neliniare si au aceeasi neliniaritate. In analiza
dinamica prezenta masei si amortizarii in expresia lui micsoreaza neliniaritatea
deoarece pentru valori uzuale ale pasului de timp termenul constant este
mult mai mare decat . Procedeul iterativ este prezentat grafic in Fig. 1.9.a. Primul pas al iteratiei este aplicarea ecuatiei (1.44) din procedeul descris mai sus
16

Metode numerice pentru stabilirea raspunsului seismic .
(1.46)
pentru a determina ce corespunde punctului b din Figura 1.8.b si reprezinta prima aproximatie a deplasarii finale corespunzatoare punctului b’ din Figura 1.8.b. Cresterea de forta asociata cresterii de deplasare este , mai mica decat .
Se poate defini o forta reziduala neechilibrata careia ii corespunde o
crestere suplimentara a deplasarii care se calculeaza din:
17
Figura 1.9 Iteratii in cadrul pasului de timp pentru sisteme neliniare:(a) metoda Newton-Raphson modificata; (b) iteratia Newton-Raphson
(a)
(b)

Metode numerice pentru stabilirea raspunsului seismic .
(1.47)
Cu aceasta deplasare suplimentara se calculeaza noua forta reziduala iar procesul continua pana se atinge convergenta ceruta. Acest procedeu iterativ in cadrul pasului de timp de la ti la ti+1 este cunoscut sub numele de metoda Newton-Raphson modificata. Procedeul se incheie dupa l iteratii cand incrementul deplasarii devine suficient de
mic in raport cu valoarea estimata in stadiul curent pentru , adica .
Atunci deplasarea incrementala in pasul de timp de la ti la ti+1 este data de relatia:
(1.48)
Cu cunoscut se determina si dupa care calculele continua dupa procedeul
descris anterior.
Metoda Newton-Raphson originala ilustrata in figura 1.9.b are convergenta mai rapida intrucat la fiecare iteratie se foloseste rigiditatea tangenta curenta si valoarea
asociata in loc de si . Forta reziduala devine mai mica cu fiecare pas de
iteratie si procesul converge dupa cateva iteratii, asa cum se observa prin compararea Fig. 1.9.a cu Fig. 1.9.b. Totusi, aceasta metoda cere evaluarea rigiditatii tangente la fiecare iteratie, implicand calcule suplimentare care pot fi importante la sistemele cu mai multe GLD.
In rezumat procesul iterativ trebuie sa urmareasca:
- momentul in care sistemul intra in domeniul postelastic de comportare;
- modificarile in semnul vitezelor care indica o descarcare si deci o modificare a relatiei forta-deplasare in sensul ca rigiditatea tangenta este aceeasi cu cea din domeniul elastic de comportare;
- nivelul fortelor neechilibrate si controlul convergentei in deplasari, forte sau energie.
18

Metode numerice pentru stabilirea raspunsului seismic .
19