ST_CAP_4.doc
64
CAPITOLUL 4 SENZORI ŞI TRADUCTOARE PENTRU MĂRIMI GEOMETRICE Noţiuni introductive Deplasarea este o mărime ce caracterizează schimbările de poziţie ale unui corp sau ale unui punct caracteristic faţă de un sistem de referinţă. Distanţa reprezintă separarea spaţială (sau planară) dintre două puncte. Poziţia reprezintă localizarea spaţială a unui punct sau a unui corp în raport cu sistemul de referinţă. Proximitatea reprezintă situarea la o mică distanţă a unui corp (punct) faţă de un reper fix. Astfel definită - proximitatea exprimă gradul de apropiere a unui obiect (corp) faţă de un reper fix ce aparţine sistemului de referinţă dat. Traiectoria reprezintă deplasarea simultană (liniară sau circulară) a unui punct pe diferite axe în raport cu un sistem de coordonate. Traiectoriile pot fi – plane sau spaţiale. Unitatea de măsură pentru deplasările liniare este metru [m] cu submultiplii: milimetru [mm] sau micronul []. Pentru deplasări unghiulare se foloseşte gradul sexazecimal [ o ], cu submultiplii: minutul şi secunda. Uneori, se foloseşte radianul [rad]. Deplasările liniare sau unghiulare permit măsurarea indirectă a altor mărimi a căror variaţii se materializează prin modificarea poziţiei unui punct (corp sau suprafaţă) în raport cu un sistem de referinţă. De exemplu, deplasările mici permit
-
Upload
florin-radu -
Category
Documents
-
view
212 -
download
0
Transcript of ST_CAP_4.doc

CAPITOLUL 4
SENZORI ŞI TRADUCTOARE PENTRU MĂRIMI GEOMETRICE
Noţiuni introductive
Deplasarea este o mărime ce caracterizează schimbările de poziţie ale unui corp sau ale unui punct caracteristic faţă de un sistem de referinţă.
Distanţa reprezintă separarea spaţială (sau planară) dintre două puncte.Poziţia reprezintă localizarea spaţială a unui punct sau a unui corp în raport cu
sistemul de referinţă. Proximitatea reprezintă situarea la o mică distanţă a unui corp (punct) faţă de un
reper fix. Astfel definită - proximitatea exprimă gradul de apropiere a unui obiect (corp) faţă de un reper fix ce aparţine sistemului de referinţă dat.
Traiectoria reprezintă deplasarea simultană (liniară sau circulară) a unui punct pe diferite axe în raport cu un sistem de coordonate. Traiectoriile pot fi – plane sau spaţiale.
Unitatea de măsură pentru deplasările liniare este metru [m] cu submultiplii: milimetru [mm] sau micronul []. Pentru deplasări unghiulare se foloseşte gradul sexazecimal [o], cu submultiplii: minutul şi secunda. Uneori, se foloseşte radianul [rad].
Deplasările liniare sau unghiulare permit măsurarea indirectă a altor mărimi a căror variaţii se materializează prin modificarea poziţiei unui punct (corp sau suprafaţă) în raport cu un sistem de referinţă. De exemplu, deplasările mici permit măsurarea presiunilor, forţelor, temperaturilor etc, deoarece variaţiile acestor mărimi sunt caracterizate prin deplasări mici.
Observaţie: Pentru utilizator este foarte importantă alegerea, sau conceperea celor mai bune soluţii de cuplare a traductorului la mărimea de măsurat astfel încât să se asigure precizia de măsurare dorită, dar şi o fiabilitate ridicată. Din acest punct de vedere există următoarele variante de măsurare:
a) măsurarea directă: deplasare liniară prin translaţie şi deplasare unghiulară prin rotaţie.
b) măsurarea indirectă: când deplasarea unghiulară este folosită pentru caracterizarea unei deplasări liniare.
4.1. Senzori pentru deplasări liniare mici
Pentru măsurarea deplasărilor liniare mici se folosesc acei senzori care realizează conversii intermediare ale unor mărimi, a căror variaţii se traduc (prin
Capitolul 4
sisteme mecanice) în deplasări liniare mici.Aceşti senzori acoperă un domeniu de măsurare de ordinul (10-2 …10+2) mm, şi sunt
elemente sensibile de tip parametric: inductive, capacitive sau rezistive.Din punct de vedere constructiv, elementele sensibile inductive ale traductoarelor
pentru deplasări liniare mici sunt de două tipuri: a) cu modificarea inductanţelor proprii sau mutuale (prin deplasarea unui miez
mobil) figura 4.1 - a. b) cu modificarea întrefierului.
4.1.1. Elemente sensibile inductive cu miez mobil
În figura 4.1-a este prezentată forma constructivă (varianta de bază) a unui element sensibil cu modificarea inductivităţii proprii, iar în figura 4.1-b este dată variaţia acestei inductivităţii în raport cu deplasarea miezului feromagnetic M, în interiorul carcasei unei bobine B.
Fig. 4.1. Senzor inductiv cu miez mobil:
a) principiul constructiv; b) caracteristica de conversie a senzorului
Poziţia miezului în interiorul bobinei cilindrice, determinată de mărimea neelectrică ce se măsoară, modifică reluctanţa circuitului magnetic m, deci mărimea neelectrică este convertită în variaţie de inductivitate.
Inductivitatea L a bobinei variază exponenţial în funcţie de deplasarea x a miezului feromagnetic faţă de poziţia de inductivitate maximă Lmax (figura 4.1-b), conform relaţiei (4.1).
Pentru aceşti senzori, se recomandă ca lungimea miezului să reprezinte (0,2 … 0,8) din lungimea bobinei; pentru a avea o bună liniaritate, excursia miezului se limitează la (0,1 … 0,4) din lungimea acestuia.
Element sensibil cu modificarea inductivităţii unei singure bobine
Forma constructivă cel mai des întâlnită în practică o constituie senzorul cu miez mobil în raport cu bobina de formă cilindrică, de lungime . Senzorul este
84

Traductoare pentru mărimi geometrice
alcătuit deci dintr-o bobină, în interiorul căreia se poate deplasa axial un miez feromagnetic de lungime M (figura 4.1-a).
Caracteristica este neliniară, dependentă şi de temperatură. În forma prezentată, senzorul se utilizează mai rar, mai ales la măsurarea unor deplasări relativ mari (0,1…1) m. Liniarizarea caracteristicii de conversie, pentru un interval destul de larg al deplasării x, se realizează prin distribuţia longitudinală neuniformă a spirelor bobinei, caz în care senzorul inductiv cu miez mobil se poate utiliza pentru măsurarea deplasărilor medii (0 …100 mm).
(4.1)
în care:Lmax – inductivitatea maximă a bobinei (cazul în care miezul feromagnetic
este complet introdus în bobină);L0 – inductivitatea minimă a bobinei (cazul în care miezul feromagnetic este
complet scos din bobină);k – constantă ce depinde de raportul M/ .
Punctele de inflexiune ale caracteristicii L=f(x) sunt plasate la deplasările
.Aceşti senzori prezintă o serie de avantaje:
limita superioară a intervalului de măsurare a deplasărilor poate fi de ordinal centimetrilor, până la 1 m; rezoluţie bună şi reproductibilitate simplă; frecări reduse şi insensibilitate la deplasările radiale; posibilitate de protecţie a senzorului la medii corosive, presiuni şi temperaturi ridicate.
Circuitele de măsurare pentru senzorii şi traductoarele inductive pot fi bazate pe metode de măsurare a inductivităţii proprii (inductanţmetre, Q-metre, punţi de curent alternative sau oscilatoare LC).
Element sensibil inductiv cu două bobine în conexiune diferenţială
Senzorul inductiv cu bobine diferenţiale este format din două bobine solenoidale, coaxiale fixe, identice, de aceeaşi lungime , având inductivităţile proprii L1 şi L2. În interiorul acestor bobine, se deplasează, sub acţiunea mărimii neelectrice de măsurat, un miez cilindric feromagnetic (figura 4.2-a).
Denumirea de senzor inductiv cu bobine diferenţiale provine din faptul că prin deplasarea miezului feromagnetic, se modifică în sens invers inductivităţile proprii L1 şi L2 (figura 4.2-b), de asemenea, variază şi inductivitatea mutuală, M, dintre cele două bobine.
85

Capitolul 4
Fig.4.2. Senzor inductiv cu bobine diferenţiale
Spre deosebire de senzorul cu circuit magnetic deschis, la care variază o singură inductivitate, senzorul inductiv cu bobine diferenţiale este mult mai comod de utilizat; în plus, are o caracteristică de conversie liniară în majoritatea aplicaţiilor. Senzorul, format din cele două bobine, de impedanţe Z1 şi Z2, se conectează într-o punte alimentată cu tensiune alternativă, U0. Senzorul se poate utiliza într-o punte de curent alternativ, cum este cea din figura 4.3. Se obţine o tensiune de dezechilibru :
(4.2)
unde: (4.3)
Fig.4.3. Circuit de măsurare în punte pentru senzor inductiv cu bobine diferenţiale
86

Traductoare pentru mărimi geometrice
Observaţie: Neglijând rezistenţa ohmică a bobinelor ce compun traductorul inductiv, ecuaţia (4.2) devine:
(4.4)
în care M reprezintă inductivitatea mutuală între cele două bobine.
Analog relaţiei (4.1), se poate scrie:
(4.5)
(4.6)
Înlocuind relaţiile (4.5) şi (4.6) în relaţia (4.4), se obţine:
(4.7)
Dezvoltând în serie Fourier termenii exponenţiali [pentru x(-/2,/2)] şi reţinând numai termenii de rangul 1, se obţine:
(4.8)
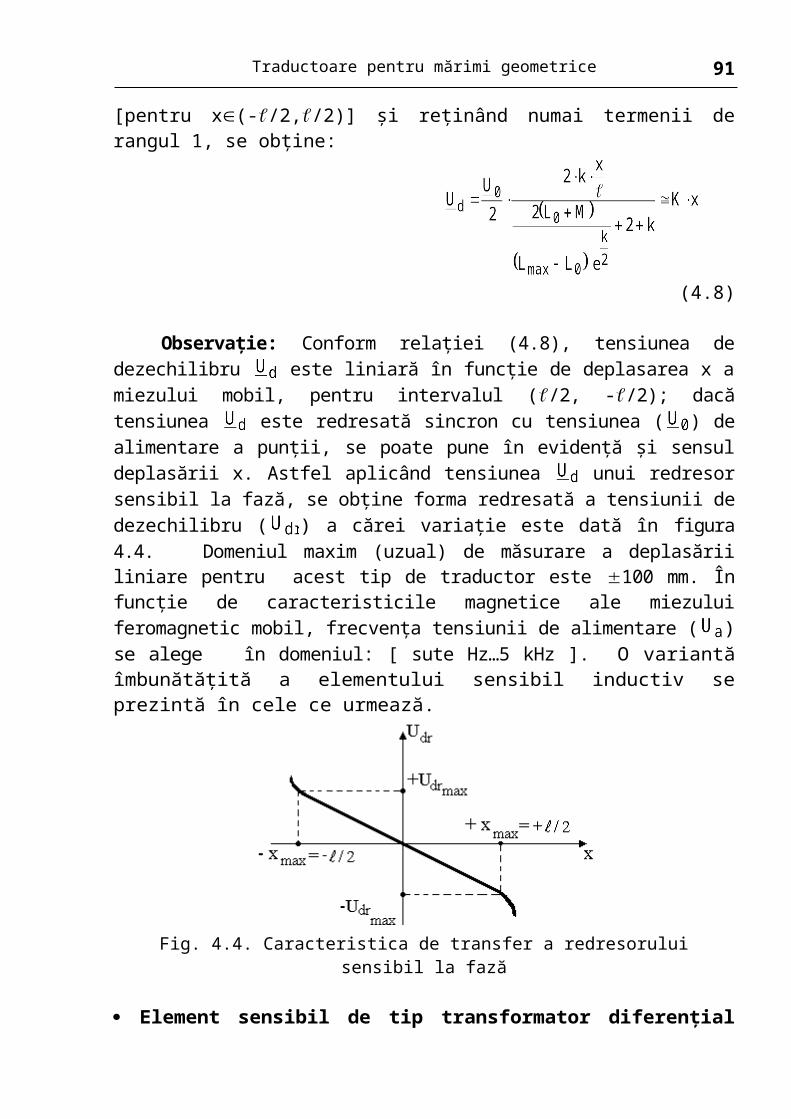
Observaţie: Conform relaţiei (4.8), tensiunea de dezechilibru este liniară în funcţie de deplasarea x a miezului mobil, pentru intervalul (/2, -/2); dacă tensiunea este redresată sincron cu tensiunea ( ) de alimentare a punţii, se poate pune în evidenţă şi sensul deplasării x. Astfel aplicând tensiunea unui redresor sensibil la fază, se obţine forma redresată a tensiunii de dezechilibru ( ) a cărei variaţie este dată în figura 4.4. Domeniul maxim (uzual) de măsurare a deplasării liniare pentru acest tip de traductor este 100 mm. În funcţie de caracteristicile magnetice ale miezului feromagnetic mobil, frecvenţa tensiunii de alimentare ( ) se alege în domeniul: [ sute Hz…5 kHz ]. O variantă îmbunătăţită a elementului sensibil inductiv se prezintă în cele ce urmează.
87

Capitolul 4
Fig. 4.4. Caracteristica de transfer a redresorului sensibil la fază
Element sensibil de tip transformator diferenţial liniar variabil (TDLV)
Circuitul primar, 1, (format din două bobine înseriate) este amplasat simetric faţă de cele două înfăşurări secundare, fiind alimentat cu o tensiune sinusoidală, . Cele două înfăşurări secundare, 2′ şi 2, se montează coaxial cu bobinele primare, de o parte şi de cealaltă a acestora; la bornele înfăşurărilor secundare, se obţin tensiunile electromotoare induse, şi (figura 4.5). Miezul feromagnetic se fixează rigid de piesa a cărei poziţie se determină, putându-se deplasa axial în interiorul bobinelor senzorului.
Mărimea de măsurat produce o deplasare a miezului feromagnetic, modificând astfel inductivităţile mutuale (între înfăşurarea primară şi cea secundară, de la bornele căreia se culege tensiunea ) şi (între înfăşurarea primară şi înfăşurarea secundară, de la bornele căreia se culege tensiunea ), ceea ce determină o modificare a tensiunilor , şi deci a tensiunii , conform relaţiilor (4.9) … (4.13):
a) – Principiu constructiv b)– Dispunerea înfăşurărilor
Fig.4.5. Senzor inductiv de tip transformator diferenţial liniar variabil (4.9)
(4.10)
88

Traductoare pentru mărimi geometrice
(4.11)
(4.12)
Tensiunea secundară va fi: (4.13)
(4.14)
unde reprezintă intensitatea curentului ce străbate înfăşurarea primară.Plasarea miezului feromagnetic simetric faţă de cele două înfăşurări
secundare determină egalitatea inductivităţilor mutuale şi obţinerea unei tensiuni secundare . Deplasarea miezului (de exemplu spre stânga) va duce la creşterea inductivităţii mutuale şi la descreşterea lui , deci va fi diferită de zero.
O detecţie sincronă a tensiunii cu tensiunea are ca scop punerea în evidenţă şi a sensului deplasării miezului feromagnetic.
Traductoarele cu elemente sensibile de tip TDLV folosesc ca adaptor un redresor sensibil la fază, eventual precedat de un amplificator de curent alternativ. Ieşirea din redresorul sensibil la fază se aplică unui amplificator de curent continuu cu impedanţă de ieşire mică, care este prevăzut şi cu un circuit de filtrare (trece-jos) pentru eliminarea armonicelor parazite. În figura 4.6 se prezintă schema de principiu a unui adaptor pentru elementul sensibil de tip TDLV.
Fig. 4.6. Adaptor pentru un element sensibil de tip TDLV
Performanţele acestui tip de traductor sunt:
- lipsa frecărilor la deplasarea miezului şi ca urmare se obţine o robusteţe şi o fiabilitate ridicată;- rezoluţie şi reproductibilitate foarte bune;- insensibilitate la deplasări radiale ale miezului;- posibilitatea protecţiei bobinei la medii corozive sau la temperaturi şi/sau presiuni ridicate;- este realizată separarea galvanică (între intrare şi ieşire);- posibilitatea optimizării factorului de calitate al bobinelor care formează elementul sensibil.
89

Capitolul 4
4.1.2. Senzori inductivi cu întrefier variabil
Varianta constructivă simplă a unui element sensibil cu întrefier variabil este prezentată în figura 4.7.Armătura mobilă se deplasează în raport cu un miez feromagnetic. Corpul, a cărui deplasare se măsoară, va fi solidar cu armătura mobilă (figura 4.7).
Fig. 4.7. Element sensibil inductiv cu întrefier variabil
Pe miezul feromagnetic (realizat din tole) se află plasată o bobină alimentată cu o
tensiune alternativă, Ua. Modificând întrefierul δ, prin deplasarea x (a armăturii mobile) se va modifica reluctanţa circuitului magnetic şi implicit inductanţa L (a bobinei), conform relaţiei:
; (4.15)
în care semnificaţia parametrilor a fost dată în cap. 1.Particularizând relaţia (4.15), senzorului din figura 4.7 se obţine:
; (4.16)
unde: este întrefierul iniţial (când x=0); x - deplasarea (creşterea sau descreşterea) faţă de întrefierul iniţial , indicii Fe şi a se referă la natura circuitului magnetic: fier sau aer.
Din relaţia (4.16) se observă că inductivitatea L variază neliniar cu deplasarea x.Pentru ameliorarea liniarităţii şi pentru creşterea sensibilităţii se utilizează
montajul diferenţial din figura 4.8-a pentru care se observă, în figura 4.8-b, variaţiile inductivităţilor L1 şi L2, cât şi variaţia diferenţei inductivităţilor (L1-L2) în raport cu întrefierurile 1 şi 2, care, la rândul lor, depind de valoarea deplasării x.
90
Traductoare pentru mărimi geometrice
Fig. 4.8. Senzor inductiv - diferenţial cu întrefier variabil: a- schema electrică de montaj; b- caracteristicile statice
Considerând şi , din figura 4.8-a se obţine tensiunea de dezechilibru a punţii:
; (4.17)
în care: - este tensiunea de dezechilibru ; - valoarea efectivă a tensiunii de alimentare (constantă); - pulsaţia (constantă) a tensiunii ;
Din ultima relaţie se observă dependenţa liniară între tensiunea de dezechilibru a punţii şi L, deci se obţine variaţia liniară între Ud şi deplasarea x:
; (4.18) unde: K= K2L, iar L=K’x; Întrucât variaţia în modul a impedanţei este:
; (4.19)
se impune R cât mai mic pentru ca variaţia relativă de inductanţă să determine o variaţie aproximativ egală de impedanţă.
Observaţii: a) Condiţiile de liniaritate şi sensibilitate nu pot fi satisfăcute simultan şi ca urmare se adoptă o soluţie de compromis. Astfel, pentru ΔL / L =(0,1…0,3), se recomandă în [31] o variaţie a întrefierului δ astfel încât:
. (4.20)
b) Pentru creşterea sensibilităţii senzorului trebuie ca factorul de calitate Q, (al bobinelor) să fie cât mai bun (mare), [34].
(4.21)
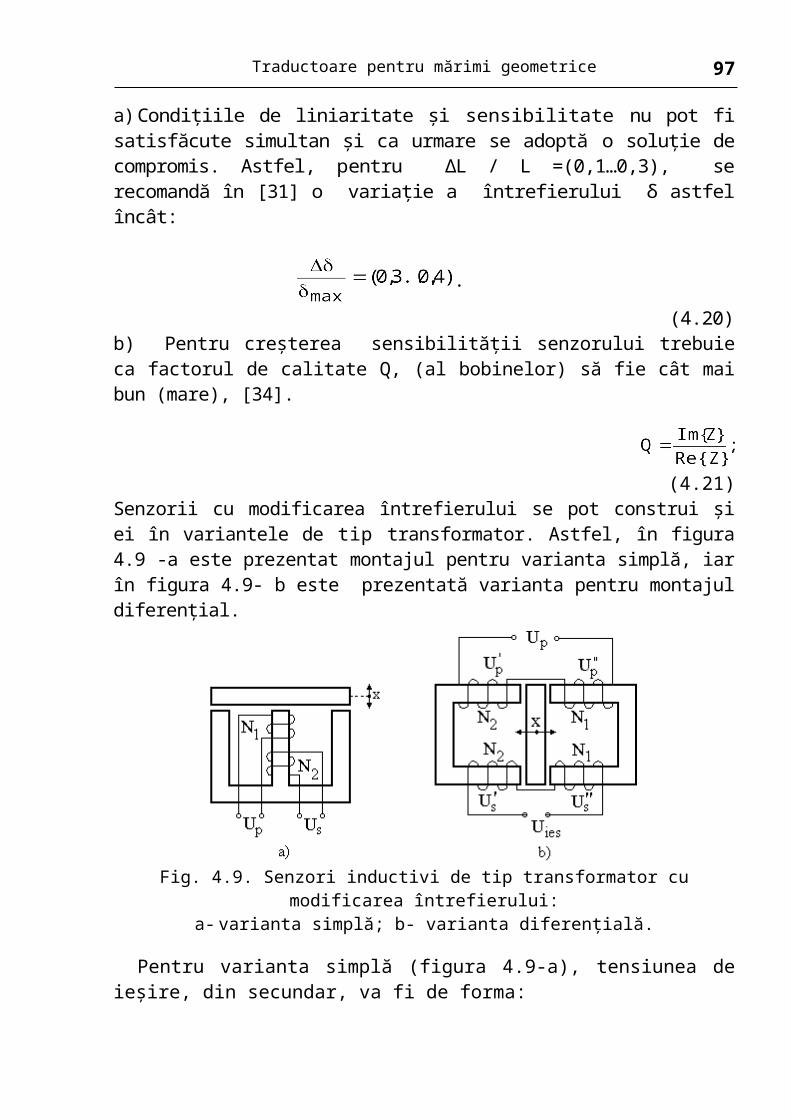
Senzorii cu modificarea întrefierului se pot construi şi ei în variantele de tip transformator. Astfel, în figura 4.9 -a este prezentat montajul pentru varianta simplă, iar în figura 4.9- b este prezentată varianta pentru montajul diferenţial.
91

Capitolul 4
Fig. 4.9. Senzori inductivi de tip transformator cu modificarea întrefierului: a- varianta simplă; b- varianta diferenţială.
Pentru varianta simplă (figura 4.9-a), tensiunea de ieşire, din secundar, va fi de forma:
; (4.22)
unde reprezintă factorul de cuplaj, variabil neliniar cu deplasarea x. Pentru montajul din figura 4.9– b tensiunea de ieşire poate fi exprimată prin
relaţia:
(4.23)
Din ultima relaţie se observă că pentru montajul diferenţial tensiunea de la ieşirea senzorului, are o variaţie liniară cu deplasarea x. Adaptorul care prelucrează tensiunea de ieşire din senzor are în componenţă un amplificator şi un redresor sensibil la fază.
Principala sursă de erori în cazul acestor tipuri de traductoare o constituie modificarea caracteristicilor magnetice ale miezului, datorită fenomenului de oboseală şi/sau îmbătrânire a materialului feromagnetic.
4.1. 3. Senzori capacitivi pentru traductoarele de deplasare
Traductoarele capacitive pentru deplasări liniare folosesc ca senzori, condensatoare plane, la care se pot modifica unul din cei trei parametri ai relaţiei ce exprimă capacitatea:
; (4.24)
a) Senzori capacitivi cu modificarea distanţei dintre armături (δ). În varianta simplă, ES este un condensator plan prevăzut cu o armătură fixă (AF) şi
una mobilă (AM), figura 4.10-a. Armătura mobilă este susţinută între două arcuri şi poate fi deplasată cu valoarea x, modificând distanţa δ, faţă de valoarea de referinţă . Variaţia
92

Traductoare pentru mărimi geometrice
capacităţii în funcţie de parametrul δ este ilustrată în figura 4.10 – b.
Fig. 4.10. Senzor capacitiv cu modificarea distanţei dintre armături: a- soluţie constructivă; b – caracteristica statică
Semnificaţia parametrilor din relaţia 4.24 este următoarea:- permitivitatea mediului ; S - suprafaţa activă a armăturilor ; δ - distanţa dintre armături ;
Deoarece capacitatea C este dată de (4.24) rezultă că variaţia ieşirii (ΔC) raportată la variaţia intrării (Δδ), reprezintă sensibilitatea unui senzor capacitiv exprimată prin relaţia:
(4.25)
Rezultă că valoare sensibilităţii senzorului capacitiv (realizat cu un condensator plan) variază neliniar cu δ.
Se poate exprima sensibilitatea relativă (Sr):
(4.26)
Relaţia (4.26) indică o variaţie neliniară, cu sensibilitate mărită, la variaţii mici (de ordinul micronilor). Creşterea liniarităţii este posibilă dacă senzorul este format din două condensatoare plane în montaj diferenţial având o armătură mobilă comună, ca în figura 4.11.
Alimentate cu tensiune sinusoidală (U~) capacităţile şi se încarcă cu tensiunile U1 şi respectiv U2 (conform teoremei divizorului de tensiune):
şi (4.27)
93

Capitolul 4
Fig. 4.11. Senzor capacitiv în montaj diferenţial.
Scăzând cele două tensiuni se obţine tensiunea diferenţă (Ud) care variază liniar cu deplasarea x:
(4.28)
Fig. 4.12. Traductor de deplasare cu senzor capacitiv.
Realizarea conversiei deplasare (x) - tensiune (Ue) este posibilă conectând capacităţile şi într-o punte Sauty (figura 4.12) care are pe celelalte două laturi două capacităţi fixe şi . Puntea este alimentată cu o tensiune sinusoidală având frecvenţa în domeniul (500 … 5000) Hz, furnizată de un oscilator (OSC).
Tensiunea de dezechilibru (Ud) este preluată de un amplificator A . De la ieşirea acestuia, tensiunea este aplicată unui redresor sensibil la fază (RSF), care
generează tensiunea (Ue) variabilă în domeniul semnalului unificat ( 10 Vcc) şi direct proporţională cu deplasarea x. serveşte la ajustarea sensibilităţii traductorului.
b) Senzor capacitiv cu modificarea suprafeţei active dintre armături.
94

Traductoare pentru mărimi geometrice
Se consideră armăturile unui condensator plan cu dimensiunile a, b şi se notează cu x deplasarea relativă a unei armături faţă de cealaltă, figura 4.13. La acest element sensibil se obţine o dependenţă aproximativ liniară între capacitate şi deplasarea x a unei armături, figura 4.13.
Fig.4.13. Senzor capacitiv cu modificarea suprafeţei.
Sensibilitatea acestui tip de senzor se poate exprima prin relaţia:
; (4.29)
Se observă că pentru şi d constanţi, sensibilitatea (S) va fi cu atât mai mare, cu cât suprafaţa activă (A) dintre armături creşte, iar distanţa (d) dintre acestea se micşorează.
c) Senzor capacitiv cu modificarea dielectriculuiÎn varianta de bază, un astfel de senzor este realizat din doi electrozi cilindrici
ficşi 1 şi 2 (figura 4.14) între care se deplasează un manşon izolator (cu o constantă dielectrică diferită de cea a aerului) alunecând cu frecare minimă. Electrodul fix 2 este plasat echidistant faţă de pereţii electrodului cilindric 1, iar manşonul dielectric (de formă cilindrică) este coaxial electrodului fix.
Fig.4.14. Senzor capacitiv cu modificarea dielectricului
Schimbarea capacităţii, datorată deplasării manşonului dielectric (pe distanţa x) se exprimă prin relaţia:
95

Capitolul 4
; (4.30)
în care: este primitivitatea dielectrică relativă a manşonului ; - primitivitatea aerului .- lungimea electrozilor ficşi 1 şi 2.
Dezavantajul acestui E.S. constă în neliniaritatea caracteristicii (4.30) .
Utilizări :Un astfel de senzor este folosit la traductoarele pentru măsurarea nivelelor unor
lichide dielectrice (sau la măsurarea nivelelor unor pulberi dielectrice). Există senzori capacitivi cu modificarea dielectricului de tip condensator plan (figura 4.15), utilizat frecvent la traductoare pentru măsurarea grosimii unor folii din material izolant (hârtie, carton, materiale plastice etc) .
Acest tip de senzori au dezavantajul unei caracteristici statice pronunţat neliniare, exprimată prin relaţia:
(4.31)
unde: - este permitivitatea foliei dielectrice, a cărei grosime se măsoară; - permitivitatea aerului dintre armăturile condensatorului plan;h şi S – parametri geometrici cunoscuţi.
Fig.4.15. Senzor capacitiv (de tip condensator
plan) cu modificarea dielectricului
Observaţii : Orice schemă pentru conversia capacităţii în semnal util necesită un etaj de amplificare cu impedanţă mare, deoarece pentru modificări relativ mici de capacitate de ordinul (20…200) pF, chiar utilizând frecvenţe ridicate (2…20)kHz, rezultă impedanţe de ieşire de ordinul sutelor de kΩ şi chiar megohmilor. În acest caz etajul de amplificare trebuie să aibă o impedanţă de intrare ( ) de minimum 20 MΩ . Această cerinţă (mai dificil de realizat) limitează sfera utilizării elementelor sensibile capacitive .
4.1.4. Senzori rezistivi pentru deplasări liniare mici
Funcţionarea acestora se bazează pe dependenţa liniarã care există între rezistenţa electrică, R (a rezistorului ) şi lungimea sa ( ) conform relaţiei :
; (4.32)
unde: ρ este rezistivitatea materialului iar S – aria secţiunii conductorului, ambele
96
Traductoare pentru mărimi geometrice
considerându-se constante. Se utilizează frecvent senzori rezistivi cu variaţie cvasicontinuă, realizaţi prin
bobinare cu pas uniform şi mic a unui fir conductor pe un suport de material izolator (ceramică)- figura 4.16:
Fig.4.16. Senzor rezistiv pentru deplasări liniare.
Deoarece principalele surse de erori pentru aceşti senzori sunt contactele imperfecte între cursor şi rezistorul bobinat, cât şi variaţia temperaturii mediului, se impune pentru firul conductor utilizarea unor materiale care au coeficientul de variaţie a lui ρ cu temperatura foarte mic: manganina, constantan, nicron; pentru cursor (lamele sau perii) se foloseşte argint cu grafit, iar pentru carcasă se folosesc materiale ceramice cu bună izolaţie şi stabilitate la variaţia temperaturii.
Senzorii rezistivi de deplasare se pot utiliza în două variante de montaj:
a) Montajul reostatic, figura 4.17-a
Fig. 4.17. Senzor rezistiv în montaj reostatic: a – schema electrică; b – caracteristica statică
Deplasarea (x) se exprimă prin curentul (proporţional cu ), conform relaţiei :
(4.33)
care indică o dependenţă neliniară, (considerând constante mărimile E şi ).
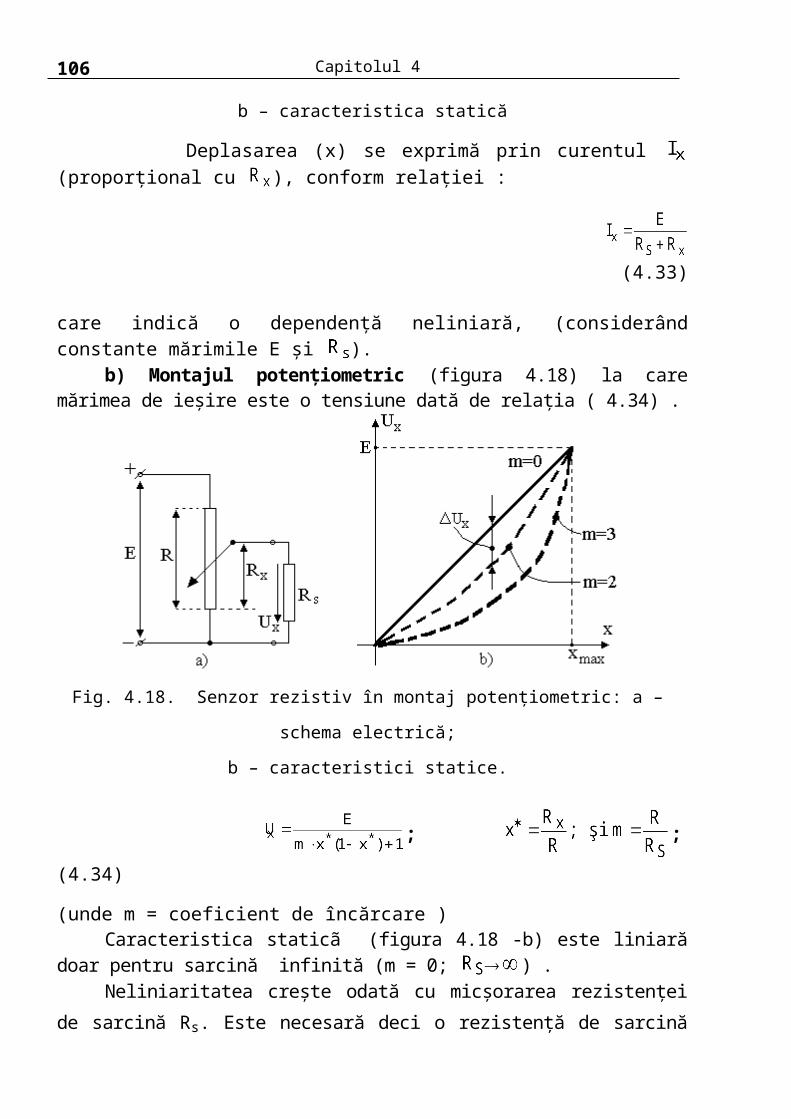
b) Montajul potenţiometric (figura 4.18) la care mărimea de ieşire este o tensiune dată de relaţia ( 4.34) .
97

Capitolul 4
Fig. 4.18. Senzor rezistiv în montaj potenţiometric: a – schema electrică;
b – caracteristici statice.
; ; (4.34)
(unde m = coeficient de încărcare )Caracteristica staticã (figura 4.18 -b) este liniară doar pentru sarcină infinită (m = 0;
) .
Neliniaritatea creşte odată cu micşorarea rezistenţei de sarcină Rs. Este necesară deci o rezistenţă de sarcină cât mai mare. O altă componentă a erorii de neliniaritate este dată de mărimea pasului de bobinare. Ideal, cursorul ar trebui să calce pe o singură spiră. Eroarea
de neliniaritate scade atunci când în circuitul de măsurare (corespunzător lui Rx) sunt cuprinse mai multe spire din R, ceea ce însemnă că rezoluţia nu este constantă. Deşi aceasta poate atinge valoarea de din mărimea de măsurat, uzual se obţine o rezoluţie de 0,01 mm la o deplasare x de 100 mm.
Observaţii:- Teoretic aceşti senzori pot fi utilizaţi pentru măsurarea deplasărilor mari ( de ordinul metrilor), dar aplicaţiile uzuale ale acestor senzori se limitează la măsurarea deplasărilor în domeniul (100…300) mm. - Senzori rezistivi trebuie protejaţi împotriva prafului sau altor impurităţi, prin capsulare.
4.2. Traductoare pentru deplasări liniare mari
Măsurarea deplasărilor liniare mari, de ordinul metrilor sau zecilor de metri este necesară în industria materialelor de construcţii (benzi transportoare) ), în metalurgie (laminoare) sau în construcţia de maşini (maşini unelte cu comandă numerică) .
Deplasările mari se pot măsura direct, cu elemente sensibile (E.S.) liniare (absolute sau incrementale), sau indirect cu ES unghiulare de tip ciclic absolut (selsin) sau numeric absolut (disc codat). Utilizarea ES cu funcţionare ciclică, necesită sisteme
98

Traductoare pentru mărimi geometrice
mecanice adecvate conversiei de tip circular-liniară, cum ar fi: pinion-cremalieră, şurub-piuliţă, bandă rulantă şi cablu-arc (resort). Măsurarea corectă a deplasărilor liniare mari, presupune eliminarea jocurilor în angrenaje şi a histerezisului mecanic.
Traductoarele directe pentru măsurarea deplasărilor liniare mari sunt de tip riglă (dispusă de obicei pe suportul care deplasează organul mobil) sau utilizează tehnici de interferometrie cu laser.
Cele mai răspândite elementele sensibile de tip riglă sunt: inductosinul liniar şi rigla optică tratate în [31].
4.2.1 Inductosinul liniar
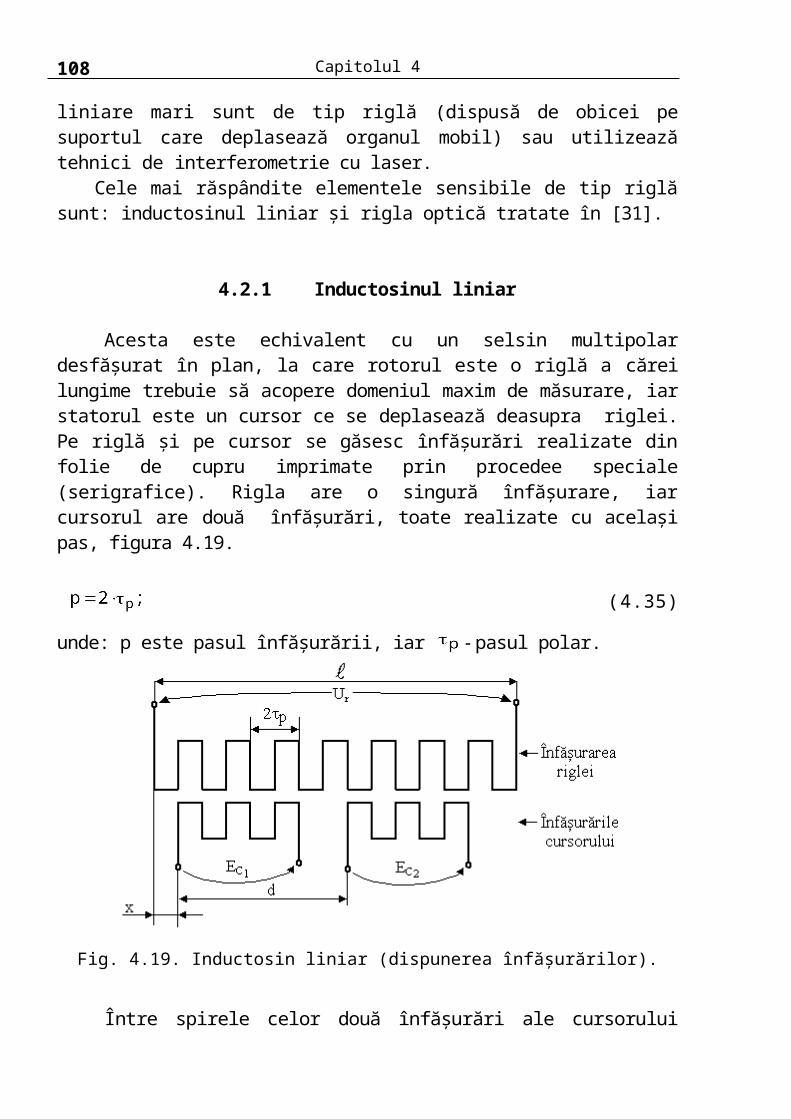
Acesta este echivalent cu un selsin multipolar desfăşurat în plan, la care rotorul este o riglă a cărei lungime trebuie să acopere domeniul maxim de măsurare, iar statorul este un cursor ce se deplasează deasupra riglei. Pe riglă şi pe cursor se găsesc înfăşurări realizate din folie de cupru imprimate prin procedee speciale (serigrafice). Rigla are o singură înfăşurare, iar cursorul are două înfăşurări, toate realizate cu acelaşi pas, figura 4.19.
(4.35)
unde: p este pasul înfăşurării, iar - pasul polar.
Fig. 4.19. Inductosin liniar (dispunerea înfăşurărilor).
Între spirele celor două înfăşurări ale cursorului există un decalaj de 90° electrice (notat cu d). Acest decalaj (între spirele înfăşurării cursorului) se exprimă prin relaţia :
(4.36)
Principalele caracteristici (standardizate internaţional) ale inductosinului liniar sunt:
- lungimea riglei: l =250 mm; 500 mm; 1000mm.
99

Capitolul 4
- pas polar = 2 mm;- rezistenţa înfăşurărilor: pentru riglă = (51); pentru cursor =1,5;- interstiţiul riglă - cursor: (0,05 … 0,25) mm.- grosimea conductoarelor (cupru) : (0,03…0,07) mm- numărul de poli pe rigleta standard : 64…96- frecvenţa tensiunii de alimentare: (2 … 10 kHz)- raportul dintre tensiunea inductoare şi cea indusă: = (150…200) unde este raportul
de transformare al tensiunilor.Inductosinul se poate realiza ca traductor absolut în domeniul unui semipas
(semiperioadă) de 2 mm, dar şi ca traductor ciclic absolut într-o schemă care contorizează numeric numărul de semipaşi (treceri prin zero ale tensiunii proporţionale cu defazajul) şi apoi exprimând numeric sau analogic faza în cadrul unui pas.
Variantele de alimentare ale înfăşurărilor sunt : Alimentare pe riglă, cu prelucrarea a două semnale culese din înfăşurările cursorului ; Alimentare pe cursor, cu două tensiuni şi prelucrând un singur semnal de ieşire (din înfăşurarea riglei). Ultima soluţie este cea mai utilizată şi se practică în două variante :a) Cu modulaţie de fază: În acest caz cursorul fiind alimentat cu tensiunile U sin
ωt, respectiv U cos ωt, se obţine tensiunea de ieşire (de pe înfăşurarea riglei) :
(4.37)unde este raportul de transformare al tensiunilor; x - poziţia relativă între riglă şi cursor în cadrul unui semipas (x = 0, dacă se suprapun înfăşurările riglei cu prima înfăşurare a cursorului). b) Cu modulaţie în amplitudine, situaţie în care se obţine de pe înfăşurarea riglei tensiunea:
(4.38)
unde: este poziţia faţă de care se măsoară deplasarea în cadrul unui semipas.
Observaţii:Când se doreşte măsurarea deplasărilor mari se pot conecta în serie mai multe
rigle, dar se vor respecta următoarele cerinţe: evitarea excentricităţilor; păstrarea constantă a interstiţiilor dintre riglă şi cursor; păstrarea paralelismului faţă de ghidaj şi a planeităţii.
Erorile specifice acestui traductor se datorează dilatării inegale (cu temperatura) a riglei şi suportului, motiv pentru care se impun măsuri speciale de corecţie.
Erorile datorate câmpurilor perturbatoare externe se elimină prin ecranarea părţii active a cursorului, cu o folie de metal legată la masă.
Schema de principiu pentru prelucrarea semnalelor produse de inductosinul liniar, în cazul deplasării pe o axă şi oprire la cotă prescrisă, este dată în [31].
100

Traductoare pentru mărimi geometrice
4.2.2. Rigla optică
Riglele optice sunt elemente sensibile care se realizează şi funcţionează pe principii asemănătoare discurilor fotoelectrice codate. Deci, se pot construi rigle optice absolute sau incrementale.
Riglele absolute pot fi utilizate pentru măsurarea deplasărilor liniare de circa 1 m, cu precizie de 1(un) micron. Acestea sunt cele mai precise E.S. ale traductoarelor pentru deplasări liniare.
Costul ridicat, probleme de liniaritate perfectă şi lipsa impurităţilor fac imposibilă utilizarea acestora pentru domenii mari. Ele nu pot fi capsulate (cum sunt discurile absolute). De aceea, în cazul măsurărilor absolute pentru domenii mari de deplasare se va recurge la măsurări indirecte (cu discuri absolute) sau măsurări directe incrementale. În figura 4.20 se prezintă schema de principiu pentru o riglă incrementală.
Fig. 4.20. Schema de principiu a unei rigle incrementale.
Riglele optice incrementale se utilizează (cu succes) pentru măsurarea deplasărilor de maximum 3m. Pentru lungimi mai mari se utilizează rigle metalice (oţel) - cu procedeu de citire episcopic (tratat în paragraful 4.4.4).
Mărirea preciziei se poate face prin tehnici de multiplicare electronică (interpolare în cadrul unui pas). O altă variantă de E.S. optic , specifică riglelor, apelează la tehnica franjelor Moiré. Franjele Moiré sunt produse de variaţiile poziţiilor relative a două rigle identice, suprapuse dar uşor nealiniate. Fiecare riglă constă dintr-o suprafaţă transparentă formată dintr-un un mare număr de linii echidistante.
La deplasarea unei rigle peste cealaltă, sub un anumit unghi, apar alternanţe de zone luminoase şi întunecate (franje Moiré) care se deplasează cu câte o cuantă la fiecare deplasare a riglei egală cu pasul reţelei de linii.
4.2.3. Traductoare de deplasare cu laser
Tehnica frecvent întâlnită, care utilizează laserul, pentru măsurarea deplasării este
101

Capitolul 4
interferometria. Datorită complexităţii lor, interferometrele laser sunt denumite sisteme de măsurare , dar acestea pot fi încadrate în categoria traductoarelor.
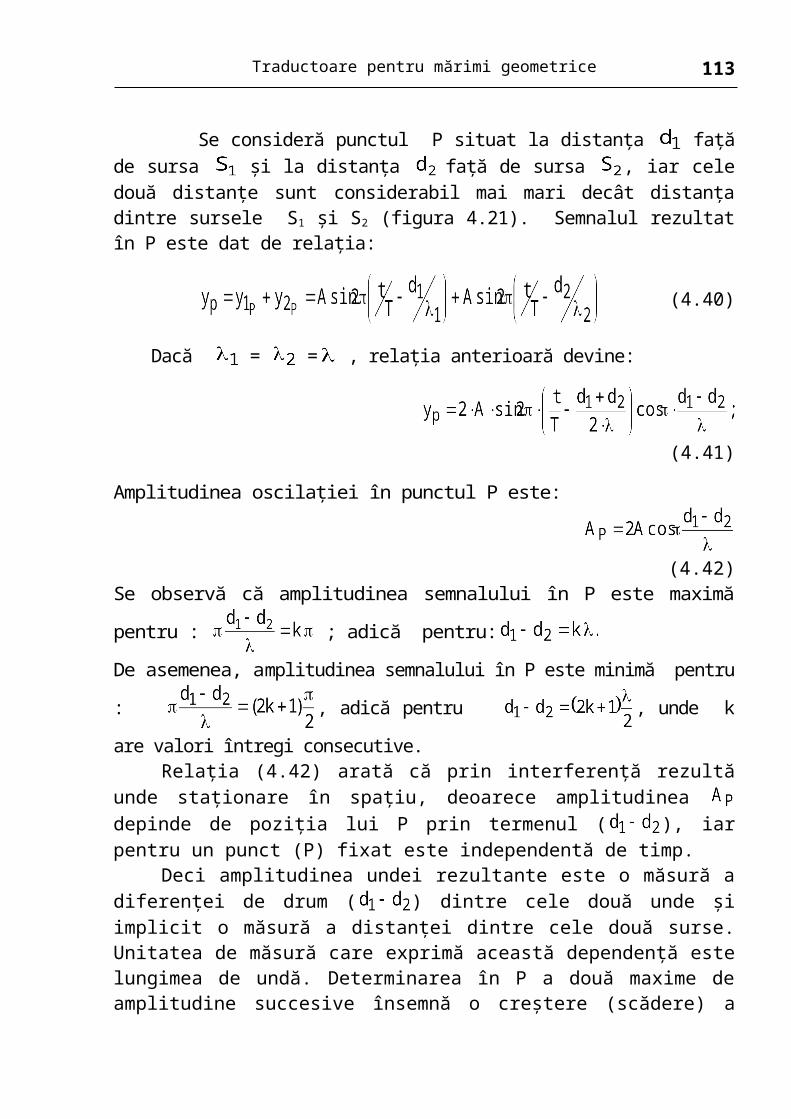
Principiul metodei interferometrice de măsurare a deplasărilor are la bază compararea distanţei de măsurat cu lungimea de undă emisă de o sursă de referinţă şi exprimarea acestei distanţe printr-un număr proporţional cu numărul de franje de interferenţă sesizate într-un anumit punct. În continuare se descrie principiul de măsurare. Se consideră sursele S1 şi (figura 4.21) de oscilaţii armonice într-un mediu omogen şi izotrop, care emit unde de aceeaşi amplitudine, aceeaşi frecvenţă şi cu diferenţă de fază nulă. Se notează expresiile undelor emise de cele două surse prin :
(4.39)
Fig. 4.21. Principiul interferometriei
Se consideră punctul P situat la distanţa faţă de sursa şi la distanţa faţă de sursa , iar cele două distanţe sunt considerabil mai mari decât distanţa dintre sursele S1
şi S2 (figura 4.21). Semnalul rezultat în P este dat de relaţia:
(4.40)
Dacă = = , relaţia anterioară devine:
(4.41)
Amplitudinea oscilaţiei în punctul P este:
(4.42)
Se observă că amplitudinea semnalului în P este maximă pentru : ; adică
pentru:
De asemenea, amplitudinea semnalului în P este minimă pentru : , adică
pentru , unde k are valori întregi consecutive.
Relaţia (4.42) arată că prin interferenţă rezultă unde staţionare în spaţiu, deoarece amplitudinea depinde de poziţia lui P prin termenul ( ), iar pentru un punct (P) fixat este independentă de timp.
Deci amplitudinea undei rezultante este o măsură a diferenţei de drum (
102

Traductoare pentru mărimi geometrice
) dintre cele două unde şi implicit o măsură a distanţei dintre cele două surse. Unitatea de măsură care exprimă această dependenţă este lungimea de undă. Determinarea în P a două maxime de amplitudine succesive însemnă o creştere (scădere) a distanţei cu valoarea dintre sursele S1 şi S2 .
Particularizând natura oscilaţiilor la radiaţia luminoasă şi impunând condiţiile ca fasciculele de lumină care interferează să fie omogene (monocromatice) şi coerente (cu diferenţe de fază constantă), relaţiile anterioare rămân valabile. Zonele de maxim şi minim vor purta în acest caz denumirea de franje de interferenţă (de maxim şi de minim).
Dacă şi S2 sunt două surse de lumină situate pe aceeaşi dreaptă şi P un plan
perpendicular pe dreaptă, imaginea obţinută în planul P va fi o familie de cercuri, concentrice cu centrul la intersecţia dreptei cu planul, luminoase (pentru ), şi
cercuri întunecate pentru [ ]. Această imagine de cercuri se modifică
odată cu variaţia distanţei dintre surse, astfel încât în acelaşi punct P se succed zone de iluminare maximă sau/şi minimă pentru deplasări relative ale unei surse faţă de cealaltă.
Rezultă că metoda ce trebuie aplicată pentru măsurarea distanţei (deplasării) este plasarea în punctul P a unui fotoelement care să sesizeze trecerea succesivă prin zone de iluminare maximă şi implicit, variaţia distanţei cu . Aplicarea principiului de măsurare a deplasării, descrisă anterior, este posibilă dacă se utilizează un aparat numit Interferometrul MICHELSON [45]. Acest interferometru are schema de principiu prezentată în figura 4.22, unde semnificaţiile notaţiilor sunt:
Fig. 4.22. Principiul interferometrului Michelson
L -laser cu heliu – neon; şi - sistem de lentile; S - oglinda semitransparentă; şi - oglinzi reflectoare; S.D - sistem de detecţie a franjelor de interferenţă; şi - lungimi diferite între S şi oglinzile , .
Fasciculul luminos provenit de la laserul L este trecut prin sistemul de lentile , pentru a-i reduce divergenţa, apoi divizat de oglinda semitransparentă S. Cele
două fascicule sunt reflectate de oglinzile şi iar prin suprapunere aceste fascicule dau naştere unui fenomen de interferenţă, materializat printr-un sistem de franje.
Pornind de la relaţia (4.41) care exprimă variaţia armonică a intensităţii
103

Capitolul 4
luminoase într-un punct şi de la faptul că intensităţi luminoase egale se succed la intervale de (echivalente cu deplasări ) rezultă defazajul :
(4.43)
unde 2( ) - este diferenţa de drum parcursă de cele două fascicule.Considerând iniţial şi , o lungime orientată de-a lungul unuia dintre
braţele interferometrului (pe direcţia sau ) va fi măsurată prin deplasarea oglinzii respective ( sau ). În acest caz defazajul care apare este o măsură directă a raportului dintre = ş i lungimea de undă a radiaţiei de referinţă (laser).
Sistemul de franje este sesizat de două fotomultiplicatoare aşezate astfel încât să primească simultan lumină maximă şi respectiv minimă. Acest lucru corespunde unui
defazaj de . Această diferenţă de fază permite determinarea sensului de deplasare al
oglinzii mobile. Un circuit logic, cuplat cu un numărător reversibil, primeşte semnale de la
cele două fotomultiplicatoare, adăugând o unitate pentru o deplasare cu într-un sens
şi scăzând o unitate pentru o deplasare cu în sens contrar. Rezultă o precizie de
măsurare egală cu care poate fi crescută prelucrând numeric defazajul pentru
deplasări mai mici decât , dacă raportul semnal-zgomot creşte la detector. Două
variante constructive de interferometre cu laser sunt prezentate în [45].Performanţe: În comparaţie cu alte tipuri de traductoare pentru deplasare,
interferometrele asigură performanţe superioare:- eroarea riglei interferometrice ;- neliniaritatea indicaţiilor: ;- sensibilitatea curentă: ;- reproductibilitatea mare în limitele 10-8…10 -10 ;- efectuarea măsurărilor fără contact şi în locuri greu accesibile;- fiabilitate metrologică ridicată.
Observaţie: Traductoarele bazate pe tehnica interferometrică sunt utilizate cu succes în măsurarea cotelor, deplasărilor şi avansurilor la maşinile-unelte. Echipamentele industriale realizate pe aceste principii conţin traductoare de înaltă performanţă şi sunt prevăzute cu dispozitive de afişare şi /sau conversie, destinate conducerii automate.
4. 3. Traductoare analogice pentru deplasări unghiulare
Deplasarea unghiulară poate fi măsurată în două moduri :a) măsurarea directă a unghiului în domeniul ( 0…180°) sau (0…360° );b) măsurarea indirectă ( a deplasării liniare ) prin mai multe rotaţii complete
104

Traductoare pentru mărimi geometrice
ale cursorului în domeniul (0…360°) .
În acest subcapitol sunt prezentaţi numai senzorii pentru măsurări unghiulare propriu-zise.
4. 3.1. Senzori rezistivi pentru măsurarea deplasărilor unghiulare
Constructiv, aceştia sunt servopotenţiometre (figura 4.23) care funcţionează pe acelaşi principiu ca şi senzorii rezistivi pentru deplasări liniare.
Fig. 4.23. Senzor rezistiv (potenţiometric) pentru deplasări unghiulare.
Dacă cursorul este rotit cu unghiul faţă de poziţia de referinţă (zero) se obţin la bornele potenţiometrului tensiunile:
; sau (4.44)
unde: Ua este tensiunea de alimentare; - unghiul maxim care de obicei este mai mic decât fiind limitat de spaţiul necesar amplasării contactelor
. Potenţiometrele de acest tip pot fi : - uniturn, dacă - multiturn – pentru domenii ce depăşesc , la care numărul de rotaţii al cursorului este standardizat: rotaţii, adică: . Servopotenţiometrul multiturn are rezistenţa aplicată pe un suport electroizolant elicoidal.
Senzorii de acest tip sunt utilizaţi pentru măsurarea deplasărilor liniare mari (5…10)m dacă cursoarele acestora sunt acţionate prin mecanisme cu minireductoare
105
Capitolul 4
adecvate. Exemplu: Măsurarea nivelului în rezervoare (bazine) .
4.3.2. Senzori capacitivi pentru măsurarea deplasării unghiulare
Schemele de principiu ale acestor senzori sunt prezentate în figurile 4.24-a şi 4.24-b, iar funcţionarea acestora are la bază modificarea suprafeţei comune dintre armăturile condensatorului. Constructiv, acestea se realizează în două variante: a) Sub forma condensatoarelor de acord ( întâlnite în tehnica radio ). Aceste condensatoare au mai multe armături fixe, între care se deplasează armăturile mobile fixate pe un rotor, figura 4.24-a . b) În montaj diferenţial, figura 4.24-b, unde armătura mobilă comună se roteşte cu unghiul (într-un sens sau altul ) faţă de poziţia de referinţă “0”, modificând în sensuri contrare valorile capacităţilor C1 şi C2.
Fig.4.24. Senzori capacitivi pentru deplasări unghiulare:a – montaj simplu; b- montaj diferenţial.
Senzorii capacitivi se pot utiliza pentru măsurarea unghiului, în scheme de
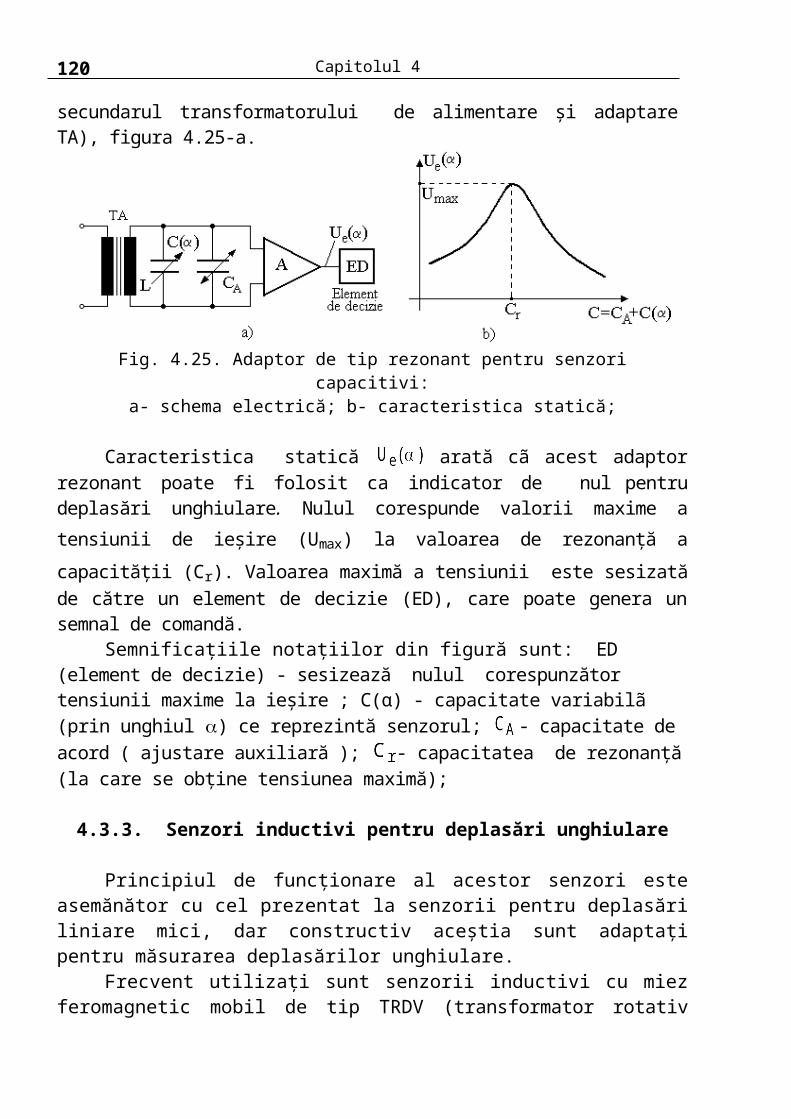
măsurare de tip rezonant, conectaţi în derivaţie cu inductanţa L (care reprezintă secundarul transformatorului de alimentare şi adaptare TA), figura 4.25-a.
Fig. 4.25. Adaptor de tip rezonant pentru senzori capacitivi:a- schema electrică; b- caracteristica statică;
Caracteristica statică arată cã acest adaptor rezonant poate fi folosit ca
106
Traductoare pentru mărimi geometrice
indicator de nul pentru deplasări unghiulare. Nulul corespunde valorii maxime a tensiunii de
ieşire (Umax) la valoarea de rezonanţă a capacităţii (Cr). Valoarea maximă a tensiunii este sesizată de către un element de decizie (ED), care poate genera un semnal de comandă.
Semnificaţiile notaţiilor din figură sunt: ED (element de decizie) - sesizează nulul corespunzător tensiunii maxime la ieşire ; C(α) - capacitate variabilã (prin unghiul ) ce reprezintă senzorul; - capacitate de acord ( ajustare auxiliară ); - capacitatea de rezonanţă (la care se obţine tensiunea maximă);
4.3.3. Senzori inductivi pentru deplasări unghiulare
Principiul de funcţionare al acestor senzori este asemănător cu cel prezentat la senzorii pentru deplasări liniare mici, dar constructiv aceştia sunt adaptaţi pentru măsurarea deplasărilor unghiulare.
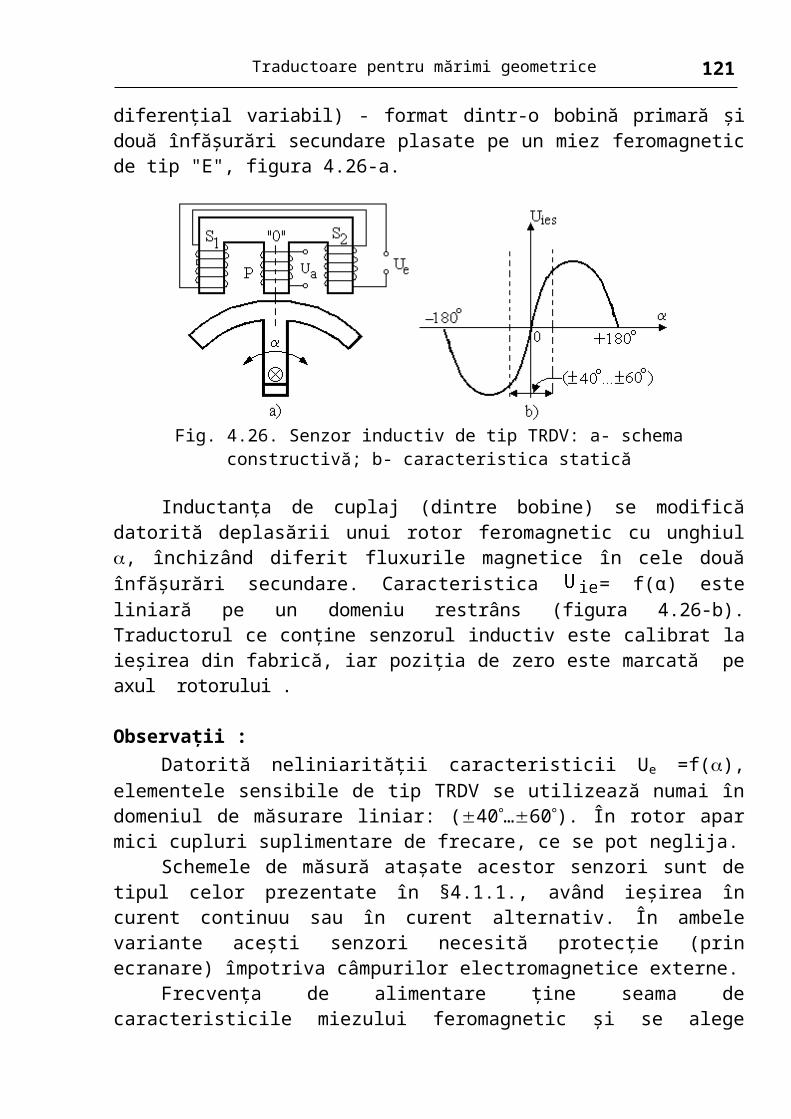
Frecvent utilizaţi sunt senzorii inductivi cu miez feromagnetic mobil de tip TRDV (transformator rotativ diferenţial variabil) - format dintr-o bobină primară şi două înfăşurări secundare plasate pe un miez feromagnetic de tip "E", figura 4.26-a.
Fig. 4.26. Senzor inductiv de tip TRDV: a- schema constructivă; b- caracteristica statică
Inductanţa de cuplaj (dintre bobine) se modifică datorită deplasării unui rotor feromagnetic cu unghiul , închizând diferit fluxurile magnetice în cele două înfăşurări secundare. Caracteristica = f(α) este liniară pe un domeniu restrâns (figura 4.26-b). Traductorul ce conţine senzorul inductiv este calibrat la ieşirea din fabrică, iar poziţia de zero este marcată pe axul rotorului .
Observaţii :Datorită neliniarităţii caracteristicii Ue =f(), elementele sensibile de tip
TRDV se utilizează numai în domeniul de măsurare liniar: (40…60). În rotor apar mici cupluri suplimentare de frecare, ce se pot neglija.
Schemele de măsură ataşate acestor senzori sunt de tipul celor prezentate în §4.1.1., având ieşirea în curent continuu sau în curent alternativ. În ambele variante aceşti senzori necesită protecţie (prin ecranare) împotriva câmpurilor electromagnetice externe.
107
Capitolul 4
Frecvenţa de alimentare ţine seama de caracteristicile miezului feromagnetic şi se alege gama : (400Hz … 2 kHz ).
În practică se folosesc şi alte variante constructive (asemănătoare, din puncte de vedere al tehnologiei de realizare, cu maşinile electrice rotative) care prin modul de funcţionare se înscriu în grupul traductoarelor inductive cu miez mobil de tip transformator.
Astfel, în figura 4.27 –a se prezintă un senzor de tip TRDV, format din două bobine statorice (de inductanţă L1 şi L2) dispuse la un unghi de 90. Rotorul profilat va modifica cuplajul inductiv dintre bobinele L1 şi L2, conectate prin bornele a şi b la o punte de măsurare (punte de impedanţe). Domeniul liniar de măsurare al unghiului este de maximum 30.
Fig. 4.27. Senzori de tip TRDV pentru deplasări unghiulare: a – varianta de bază; b – de tip microsyn.
În figura 4.27-b se prezintă un senzor realizat cu transformator rotativ de tip microsyn compus din 4 poli statorici din oţel laminat pe care se găsesc câte două bobine (primar şi secundar). De remarcat că bobinele primare de pe fiecare pol statoric sunt înseriate. De asemenea, bobinele secundare de pe fiecare pol statoric sunt şi ele înseriate .
Conectarea bobinelor se face astfel încât tensiunea indusă în şi sã fie opusã tensiunii induse în şi . Rotorul (fără înfăşurări) este construit din material feromagnetic . În poziţie neutră (zero) reluctanţa aferentă întrefierului dintre poli statorici şi rotor este aceeaşi pentru cei 4 poli şi ca urmare tensiunea în secundar este nulă ( ). Deplasarea unghiulară (α) a rotorului provoacă o modificare a reluctanţei care produce la ieşire o tensiune a cărei variaţie este asemănătoare celei din figura 4.26-a .
Există şi alte tipuri de senzori de tip TRDV sub forma unui potenţiometru inductiv sau sub forma unui generator de semnal cu spiră în scurtcircuit, descrise în [31], la care domeniul liniar de variaţie a tensiunii de ieşire este asemănător ( 40).
4. 3.4. Senzor pentru deplasări unghiulare cu modulator magnetic
108

Traductoare pentru mărimi geometrice
Modulatoarele magnetice de tip rotativ, prevăzute cu magnet permanent mobil, transformă deplasarea unghiulară (semnalul modulator) în tensiune alternativã modulatã în amplitudine. Traductoarele pentru mărimi mecanice produse de I.E.A.(F.E.A.) Bucureşti conţin astfel de elemente sensibile, pentru măsurarea presiunii sau nivelului .
Modulatorul este format dintr-un stator toroidal construit din tole inelare de permalloy, pe care sunt dispuse douã înfăşurări identice (figura 4.28) notate cu I şi II. În interiorul statorului (coaxial cu acesta) se aflã un magnet permanent sub formă de disc (D), fixat pe axul care transmite deplasarea unghiularã ().
Fig. 4.28. Modulator magnetic rotativ.
Cele două înfăşurări statorice sunt parcurse de trei curenţi:- - curent de excitaţie (alternativ), cu frecvenţa f şi amplitudinea constantã — determinat de tensiunea de excitaţie generată de un oscilator ;- - curent continuu de reacţie, proporţional cu valoarea semnalului unificat furnizat de adaptor ; - - curentul continuu de magnetizare (reglabil) prin care se poate schimba starea de funcţionare al miezului magnetic, deci se poate efectua reglarea finã a punctului de zero .
Miezul magnetic statoric este supus acţiunii simultane a 4 fluxuri magnetice: cele trei fluxuri create de curenţii şi fluxul creat de magnetul permanent. Fluxul rezultant, prin compunerea celor patru fluxuri, face ca miezul magnetic să lucreze în zona de saturaţie .
Cele două înfăşurări statorice sunt plasate într-o punte în care pe celelalte douã laturi (braţe) se află rezistenţele şi . Când puntea este echilibratã, în diagonala de măsurare se anulează semnalul de frecvenţa purtătoarei şi rămâne doar semnalul de armonica a-II-a :
(4.45)
unde : Hm reprezintă intensitatea câmpului magnetic creat de magnetul permanent (D), iar α - unghiul de rotaţie al magnetului permanent .
Pentru poziţia de zero a magnetului permanent rotoric, amplitudinile componentelor de armonica a-II-a pe cele două înfăşurări sunt egale, şi ca urmare tensiunea de ieşire este nulă ( ). Când magnetul permanent se roteşte faţă de poziţia "zero" (numită poziţie de referinţă), pe fiecare înfăşurare statorică apar
109

Capitolul 4
semnale de armonica a-II-a diferite, care dau pe diagonala de măsurare un semnal a cărui amplitudine este proporţională cu valoarea unghiului α ( deoarece pentru α 0°…10, rezultă că sin α α) . Faza tensiunii de ieşire este zero sau π în raport cu sensul de rotaţie [43] .
4. 3. 5. Senzori inductivi de tip selsin
Forma constructivă şi principiul de funcţionare al senzorilor de tip selsin fac posibilă tratarea acestora în două moduri:
a) Selsinul considerat transformator de unghi cu raport de transformare variabil în funcţie de unghiul de rotaţie dintre înfăşurări ;
b) Selsinul considerat maşina electricã specialã, deoarece are inductor şi indus. Principiul de funcţionare poate fi explicat cu ajutorul figurii 4.29. Dacă se
consideră statorul inductor (parcurs de tensiunea ), atunci în rotor se induce tensiunea : , unde θ este unghiul dintre axele electrice ale celor două înfăşurări statorice.
Tensiunea are aceeaşi frecvenţă cu , ambele variază sinusoidal, dar amplitudinea tensiunii se modifică în funcţie de .
Deci la variaţia ciclică a unghiului θ ( de la 0 la 360°) se obţine o tensiune sinusoidală de valoare maximă E2 , care la fiecare trecere prin zero îşi schimbă faza. Acest lucru pune în evidenţă două aspecte importante:
a) Se poate detecta fiecare semirotaţie (prin schimbarea fazei) ;b) Pentru fiecare semirotaţie ( ) amplitudinea tensiunii induse ( ) este dependentă de unghi.
110

Traductoare pentru mărimi geometrice
Fig. 4.29. Principiul de funcţionare al selsinului:a şi b– diagrame de semnal; c – dispunerea înfăşurărilor; d – diagrama fazorială
Selsinul poate fi utilizat direct la măsurarea deplasărilor unghiulare sau indirect la măsurarea deplasărilor liniare, pe principiul ciclic absolut, adică poate acoperi un domeniu de deplasare liniară prin mai multe rotaţii (cicli)- măsurând faza în cadrul fiecărui ciclu .
Senzorii inductivi de tip selsin se realizează în două variante de bază: Senzor de tip resolver; Senzor de tip inductosin .
4. 3. 6. Element sensibil de tip resolver pentru deplasări unghiulare
Resolverul (denumit şi selsin bifazat) conţine douã înfăşurări statorice, decalate electric cu 90° . Rotorul este monofazat . În funcţie de modul de alimentare, inductorul poate fi, după caz, stator sau rotor .
Exemplu : Dacă rotorul este alimentat cu o tensiune: , se obţin în stator douã tensiuni :
; ; (4.46)
unde φ este unghiul pe care îl face rotorul cu axa înfăşurării statorice - figura 4.30-a.
111

Capitolul 4
Fig. 4.30. Resolverul: a – dispunerea înfăşuărilor; b- diagrama fazorială
Valorile maxime şi , ale tensiunilor rotorice, depind de raportul de transformare între înfăşurări (dar sunt proporţionale cu fluxurile, iar defazajele de 90° se conservã numai dacă impedanţa de sarcină, , este infinitã). În cele ce urmează se considerã acest raport egal cu 1, pentru ambele înfăşurări şi ca urmare se obţine:
; (4.47)
Prelucrând tensiunile statorice se obţine o indicaţie asupra unghiului φ . De exemplu
; (4.48)
Întrucât efectuarea raportului între tensiuni nu este avantajos, în practică se preferă alimentarea resolverului pe stator iar rotorul devine indus. În această situaţie se pot evidenţia douã metode distincte de utilizare :
1. Rezolver cu modulaţie în amplitudine ;2. Rezolver cu modulaţie de fază ;
1- Rezolverul cu modulaţie în amplitudine :Pentru a măsura poziţia unghiularã φ a unui ax (care antrenează rotorul) în
raport cu unghiul (poziţia) de referinţă α - se alimentează cele douã înfăşurări statorice cu tensiunile :
(4.49)
unde α este unghiul de referinţã, iar φ - unghiul de măsurat ;Tensiunea indusă în rotor, pentru o poziţie unghiulară (φ) a axei rotorului faţă de axa înfăşurării , va fi:
(4.50) Înlocuind în relaţia (4.50) tensiunile şi din ( 4.49 ) se obţine :
(4.51)
112
Traductoare pentru mărimi geometrice
Semnul (+) sau (-) este determinat de sensul de parcurgere al înfăşurărilor
. Pentru figura 4.30-a, semnul este (-). Dacă se alimentează cele douã înfăşurări invers, cu tensiunile :
, respectiv ; (4.52)
rezultă la bornele rotorului tensiunea : ; (4.53)
Observaţie: Se obţine la ieşire o tensiune modulatã în amplitudine cu sinusul (sau cosinusul) unghiului , care reprezintă abaterea faţă de unghiul de referinţă prescris α .
2- Rezolver cu modulaţie de fazã. La acest resolver se alimentează statorul cu două tensiuni de aceeaşi frecvenţă şi amplitudine, dar decalate cu 90° electrice :
; ; (4.54)
Ţinând seama de (4.50), tensiunea indusă în rotor va fi:
; (4.55)
sau:
Deci tensiunea obţinută are faza proporţională cu unghiul φ ce caracterizează poziţia relativă a rotorului faţă de stator.
4. 3.7. Senzor de tip inductosin circular
Inductosinul circular poate fi echivalent cu un selsin multipolar desfăşurat în plan (ce are un număr mare de poli). Constructiv, acesta constã din douã discuri plane, separate între ele printr-un interstiţiu de aer cu grosimea de mm .
Un disc (rotorul) este mobil, fiind cuplat solidar cu obiectul a cărui deplasare unghiulară se măsoară, iar celălalt disc este fix (statorul) şi asociat cu sistemul de referinţă. Pe discul fix se găsesc douã înfăşurări multipolare plane (realizate în tehnologia circuitelor imprimate ) decalate între ele cu 90° electrice. Rotorul, de regulă, este indusul şi conţine o singură înfăşurare. Pasul înfăşurării rotorice este egal cu pasul înfăşurării statorice, figura 4.31.
113

Capitolul 4
Fig. 4.31. Principiul realizării inductosinului circular:
a- dispunerea înfăşurărilor; b- detalii constructive
Utilizând aceleaşi notaţii (ca la selsin), tensiunile induse în rotor vor fi: a) în cazul modulaţiei de fază:
(4.56) unde γ – este defazajul global.
b) în cazul modulaţiei în amplitudine :
(4.57)
unde: este defazajul global pentru K – număr întreg( 0,1,2,3 );
φ - unghiul de rotaţie dintre stator şi rotor ; α - unghiul de referinţă ; p – numărul perechilor de poli ai înfăşurării rotorice; - pasul de divizare.
Uzual, pasul de divizare (τ) se ia egal cu 2° şi printr-o divizare electronică se pot obţine precizii de cinci secunde (5”) sau chiar o secundă ( l”) .
Avantajul preciziei de măsurare a unghiului, oferit de inductosinul circular este contracarat parţial de câteva cerinţe constructive dintre care cele mai importante sunt :- interstiţiul dintre stator şi rotor perfect paralel şi cu valori în domeniul (0,1…0,3) mm; - cuplajul inductiv armonic ;- uniformitatea pasului înfăşurărilor ; - omogenitatea materialului suport .
114

Traductoare pentru mărimi geometrice
Principalele tipuri de erori, care pot afecta rezultatele măsurării deplasărilor unghiulare sunt:
a) erori datorate armonicilor superioare (de ordinul 3 şi 5) rezultate prin cuplajul mutual dintre stator şi rotor. Aceste armonici nedorite pot fi anulate dacă se impune o lăţime adecvată pentru conductoarele statorice şi rotorice:
( pentru stator ), ( pentru rotor) ;
unde prin şi s-au notat din lăţimea conductorului statoric şi respectiv, din lăţimea conductorului rotoric (figura 4.31-b).
b) erori datorate impreciziei tehnologice a execuţiei :- pas de divizare neegal; lăţime neegală (a) în trasajul conductoarelor; decalaj diferit de
între tensiunile de alimentare a înfăşurărilor rotorice (ce creează tensiuni reziduale
şi atenuează semnalul util); inegalitatea amplitudinilor celor două tensiuni de alimentare a înfăşurărilor statorice – care pot genera, de asemenea, o tensiune reziduală ce atenuează semnalul util; inegalitatea impedanţelor înfăşurărilor statorului; erori de montaj (planeitate imperfectă ) între stator şi rotor .
Majoritatea acestor erori pot fi compensate prin mijloace tehnice relativ simple. Ca urmare, inductosinul circular este frecvent utilizat ca traductor de deplasare unghiularã în echipamentele de conducere numericã a maşinilor unelte .
4.4. Traductoare numerice pentru deplasări unghiulare
Se numesc traductoare numerice şi nu senzori cu funcţionare discretă, deoarece acestea sunt singurele traductoare pur numerice (care nu necesită conversie intermediară). Senzorul propriu - zis îl constituie un disc codat, iar prelucrarea informaţiei numerice este specifică modului de codificare.
Principial există două tipuri de senzori utilizaţi în construcţia traductoarelor numerice de unghi:
a) Discuri codate absolut, la care (în orice moment), dispozitivul de măsurare oferă informaţii asupra poziţiei unghiulare în raport cu un punct de referinţă - exprimată printr-un număr de cuante.
b) Discuri incrementale, care oferă o succesiune de impulsuri, în raport cu ultima poziţie atinsă, fiecare impuls reprezentând un increment (cuantă) de deplasare. Fiecare cuantă de deplasare echivalează cu o variabilă binară şi reprezintă un bit de informaţie (0 sau 1).
4.4.1. Senzorul de tip disc codat absolut
Principiul realizării unui disc codat absolut cu elemente de contact presupune următoarele operaţii: - împărţirea domeniului de măsurare într-un număr de cuante elementare (cuanta
elementară determină rezoluţia);
115

Capitolul 4
- alegerea unui cod de exprimare a valorilor cuantificate;- găsirea unei metode de înscriere a informaţiei pe disc şi implicit citirea acesteia.
În figura 4.32 este prezentată schema de principiu a unui disc codat care acoperă
360 prin 32 de combinaţii, deci rezultă o cuantă elementară de . În figura
menţionată s-a presupus un disc cu 5 piste concentrice, codificate – formând zone
conductoare şi zone izolante.
Suprafeţele conductoare sunt legate electric printr-o perie fixă la un inel colector care formează pista de energizare. Pistele sunt testate de o serie de perii colectoare localizate la diferite distanţe radiale, fiecare perie fiind conectată prin conductor separat.
a) disc codat absolut b) secţiune prin pista unui disc codat
Fig. 4.32. Schema de principiu a discului codat .
În timpul rotirii discului, periile se conectează la tensiunea comună de alimentare, acolo unde au contact cu o zonă metalică conductoare, ceea ce reprezintă "1" logic. Tranziţia de la porţiunea conductoare la cea izolantă trebuie să se facă lin, iar uzura pe suprafaţa discului să fie aceeaşi în orice poziţie. De obicei atât pistele cât şi periile sunt aurite. Periile sunt miniaturale, iar deschiderea unei perii este foarte mică (uneori sub 0,03). Rezoluţia discului este determinată de numărul pistelor, deci precizia traductoarelor se poate mări, dacă numărul de piste creşte. Un disc cu 10 piste are o rezoluţie de 1:1024, iar pentru 5 piste rezoluţia este 1: 512 (scade la jumătate).
Pentru creşterea rezoluţiei se pot utiliza sisteme cu mai multe discuri, cuplate prin reductoare adecvate care pot (de exemplu) acoperi o rotaţie completă cu peste 8000 combinaţii.
Codurile cele mai utilizate la realizarea discurilor (absolute) sunt :1 - Codul binar - natural (specific circuitelor digitale).Dezavantajul acestui cod constă în faptul că informaţia se modifică mai mult de un bit la trecerea discului de la o poziţie la alta.2 - Codul BCZ (binar codificat zecimal) - utilizat în cazul când traductorul este cuplat într-un SRA discret ce lucrează în cod BCZ şi nu sunt necesare blocuri de conversie suplimentară.
116

Traductoare pentru mărimi geometrice
3 - Codul GRAY are avantajul de a fi monostropic (sau monodiferenţial), adică combinaţii binare vecine diferă numai prin modificarea unui singur bit. Această proprietate simplifică sistemul de testare şi decodificare, reducând costul. Codul Gray fiind neponderat, este necesară o logică electronică pentru convertirea semnalului de ieşire în codul dorit, (cod BCZ sau binar natural etc.).
Observaţie: În cazul traductorului rotativ cu disc absolut şi perii de contact (când nu se utilizează codul Gray) există posibilitatea apariţiei unei informaţii false, atunci când pe mai multe piste informaţia binară se modifică simultan. Pentru eliminarea acestei erori există mai multe metode de testare. Frecvent se foloseşte sistemul dublu de perii pentru fiecare pistă, la care se adaugă o logică de control care are rolul de a citi şi reţine ca valoare corectă numai informaţia transmisă de la o perie care nu este într-un regim de tranziţie.
Testarea în ”V” - foloseşte pentru fiecare pistă câte două perii colectoare notate : stânga şi dreapta, dispuse simetric în formă de "V" cu excepţia periei de pe pista exterioară (cea mai puţin semnificativă). Distanţa dintre fiecare pereche de perii colectoare este egală cu lungimea de pistă corespunzătoare unui bit informaţional - măsurată pe pista anterior semnificativă.
Testarea în "U" - foloseşte pentru fiecare pistă câte două perii colectoare decalate cu 1/2 din lungimea de pistă corespunzătoare celui mai puţin semnificativ bit. Informaţia utilă este cea provenită de la un set de perii selectate o singură dată, în funcţie de bitul cel mai puţin semnificativ. Detalii referitoare la tehnicile de testare amintite sunt date în [31].
Eroarea totală a traductorului este determinată de :a) Eroarea de cuantizare, inerentă ori de câte ori o funcţie liniar - variabilă (rotaţia axului) este discretizată într-un număr finit de cuante. Prin această discretizare rezultă o eroare de ± 1/2 din valoarea bitului cel mai puţin semnificativ. Această eroare inevitabilă se poate reduce numai prin mărirea numărului de diviziuni ale discurilor.b) Eroarea de ambiguitate - cauzată de faptul că două comutaţii "izolant – conductor" nu se produc simultan pe mai multe piste. Această eroare se elimină prin tehnicile de testare menţionate anterior.
c) Eroarea de tranziţie, determinată de impreciziile de execuţie a discurilor codificate, a planeităţii, concentricităţii şi a perpendicularităţii acestora, inclusiv de uzura lagărelor, a periilor şi discurilor. d) Zgomotul generat de variaţia rezistenţei de contact (mai evident la trecerea din "0" în "1" în regimurile tranzitorii (perii - disc).
Limitele de funcţionare impuse de caracteristicile electrice sunt: Limite de tensiune (5 10 V) - limita maximă este impusă de elementele de comutaţie statică din logica electronică. Limitele de curent (0,5 2 mA) - impuse de numărul de întreruperi între perii şi piste pentru evitarea eroziunii dată de energia de descărcare electrică (microarcuri
117

Capitolul 4
electrice de contact). Rezistenţa activă de contact care trebuie să evite orice ambiguitate datorate uzurii, acceleraţiei sau vibraţiilor. Se recomandă o rezistenţă de peste 5000Ω (5kΩ) pentru contact deschis şi sub 200Ω - pentru contact închis.
Limitări ale lungimii cablului de legătură şi limitări de viteză - impuse de parametrii electrici.
Exemplu : Dacă tensiunea de alimentare este = 12 V şi curentul la perii este = 1 mA, rezultă rezistenţa de sarcină necesară de 12 kΩ (conform legii lui Ohm).
Utilizând un cablu cu capacitanţă: c = 150 pF/m, se poate calcula întârzierea informaţiei care se transmite printr-un cablu de lungime =100m, folosind relaţia:
;Pentru această întârziere ( = 0,126ms), în [31] se arată că viteza de rotaţie maximă la care se obţine precizia (pentru un disc cu 256 combinaţii) este de 1,56 rot/s.
4.4.2. Senzori de tip disc magnetic absolut
Senzorii de acest tip sunt discuri acoperite cu material magnetic utilizat în echipamentele de înregistrare magnetică.
Astfel, codurile (ce corespund zonelor conductoare şi izolatoare de la discurile absolute cu perii de contact) – sunt înlocuite printr-un model de magnetizare preînregistrat pe disc sub forma unei zone magnetizate - ce corespunde lui "0" logic şi nemagnetizată ce corespunde lui "1" logic.
Capetele de citire sunt mici miezuri magnetice toroidale utilizate la citirea memoriilor magnetice. În jurul acestor miezuri sunt dispuse câte două bobine : una pentru citire şi alta care asigură energia necesară. Semnalul de energizare este de regulă o tensiune sinusoidă cu frecvenţa de 200 kHz şi amplitudine constantă - figura 4.33.
Tensiunea de ieşire este tot o sinusoidă cu frecvenţa de 200 kHz, dar are amplitudinea dependentă de poziţia miezului toroidal în raport cu zonele magnetizate. Dacă zona este magnetizată, circuitul magnetic este saturat, iar tensiunea de ieşire este de nivel redus (nivel " 0 " logic). Când torul se află în dreptul unei zone nemagnetizate, tensiunea indusă în circuitul magnetic nesaturat are nivel ridicat (" 1" logic). Semnalul obţinut este demodulat (Ud) şi apoi formatat (compatibil TTL) într-un circuit de tip trigger Schmitt.
La aceste discuri eliminarea erorii de ambiguitate (când informaţia se modifică simultan mai mult de 1 bit) se face utilizând coduri de tip ciclic (Gray) sau dispunând torurile magnetice de citire pe principiul amintit la citirea (testarea) în " V ".
118

Traductoare pentru mărimi geometrice
Fig. 4.33. Disc absolut magnetic
Observaţie: Discurile magnetice absolute sunt mai precise (şi mai complexe) decât discurile cu elemente de contact, având o durată de viaţă foarte mare, dar nu pot fi utilizate în prezenţa unor câmpuri electromagnetice perturbatoare.
4.4.3. Senzori realizaţi cu discuri optice
Majoritatea traductoarelor numerice absolute se bazează pe principii optice şi conversie fotoelectrică. Discul optic codat este realizat din sticlă specială pe care sunt trasate spaţii (fante) transparente şi opace. Discului i se asociază o sursă de lumină - cuplată cu un sistem optic şi o matrice de fotoelemente dispuse radial, ca în figura 4.34.
Fig. 4.34. Disc optic absolut
Emiţătorul de lumină are în componenţă diode electroluminiscente Galliu – Arseniu (Ga - As) cu durată de viaţă foarte mare (peste 105 ore).
Performanţele măsurării unghiului sunt date de calitatea realizării discului
119
Capitolul 4
prin tehnici de reproducere fotografică de înaltă calitate. La aceste traductoare se utilizează frecvent codul Gray (datorită proprietăţii
sale de monostropicitate) cât şi codurile binar – natural; coduri BCD; coduri care simulează funcţiile sin, cos, log. Astfel se pot obţine rezoluţii de 1: .
În figura 4.35 sunt prezentate două modalităţi de iluminare a discului optic, folosind o lampă cu incandescenţă: În figura 4.35-a, sistemul bec-lentilă iluminează o faţă a discului, iar senzorii (fotoelementele) sunt dispuşi în dreptul unei fante, pe linia de citire. În figura 4.35-b, sistemul optic produce o singură linie luminoasă care se proiectează (prin colimator) pe lina de citire de pe disc.
Durata de viaţă a acestui traductor este dată de numărul orelor de funcţionare a lagărelor (rulmenţilor axului), cât şi de numărul orelor de funcţionare ( ) a sursei de lumină.
Fig. 4.35. Modalităţi de iluminare a discurilor: a) cu fantă; b) prin colimator
Cu filamente speciale, pe un disc cu diametru de 150 mm, se pot citi până la 5000 biţi. Receptorul este totdeauna format din elemente fotosensibile asociate cu circuite de amplificare şi formatoare de impulsuri dreptunghiulare (Trigger Schmitt).
Eroarea specifică acestor sisteme de citire optice este eroarea de histerezis - generată de diferenţa nivelurilor de tensiune la trecerea din zona întunecoasă în zona transparentă faţă de trecerea inversă. Acest fenomen se prezintă grafic în figura 4.36.
120
Traductoare pentru mărimi geometrice
Fig. 4.36. Eroarea de histerezis (δ) la traductoarele incrementale.
Eroarea de histerezis (δ) este considerată uneori un avantaj, fiind utilizată pentru corecţia erorilor ce apar datorită vibraţiilor. Corecţia se realizează prin baleierea discurilor optice, utilizând metode adecvate.
Observaţie: Discurile codate (optice) pot fi folosite şi la măsurarea indirectă a deplasărilor liniare cuplând mai multe discuri prin minireductoare cu raporturi de reducere (a turaţiei) adecvate. Astfel se asigură măsurări cu precizie de 10μm la deplasări pe domenii de (2 …10) m. În acest caz se ţine seama de faptul că pentru o viteză a organului mobil egală cu 10 m/min., măsurarea deplasării cu o precizie de 10 -2 mm, implică o frecvenţă de conversie a informaţiei de cel puţin 20 kHz pe pista cea mai puţin semnificativă.
4.4.4. Traductoare incrementale pentru deplasări unghiulare
Aceste traductoare sunt proiectate şi construite astfel încât să genereze un număr fix de impulsuri pentru fiecare unitate (cuantă) de rotaţie unghiulară (increment unghiular) a discului codat. Procedeul de sesizare şi numărare al incrementelor poate fi magnetic sau optic. Procedeul optic este cel mai răspândit datorită relativei simplităţi constructive şi a unor facilităţi de prelucrare a semnalelor.
Circuitul electronic asociat discului trebuie să conţină un numărător care să ofere o ieşire numerică, într-un anume cod dependent de numărul incrementelor generate în timpul rotirii discului, plecând de la o anumită poziţie. Discul codat conţine o reţea optică de zone active, alternate cu interstiţii de aceeaşi lăţime. Zonele active se disting de interstiţii, fie prin transparenţă (procedeu de măsurare de tip diascopic), fie prin puterea de reflecţie (procedeu de măsurare episcopic).
Citirea este realizată de un cap (palpator) cu o grilă de urmărire (scanare) prevăzută cu ferestre în dreptul fiecărei piste.
a) Procedeul diascopicÎn acest caz reţeaua optică este dispusă pe un disc de sticlă şi constă în zone
transparente alternate cu interstiţii opace. Lumina generată de sursă este dirijată printr-un sistem de lentile optice paralel prin disc spre reticulul palpator - figura 4.37. Când discul se roteşte faţă de capul de citire, intensitatea luminoasă ce acţionează asupra fotoelementelor variază periodic, iar variaţiile de intensitate sunt
121

Capitolul 4
transformate de fotoelemente în semnale electrice.
Figura 4.37. Procedeul diascopic
Fiecare fotoelement baleiază simultan mai mulţi paşi din reţeaua optică . În acest mod fluxul luminos care trebuie exploatat este mai puternic, şi ca urmare micile imperfecţiuni tehnologice sau impurităţi locale nu falsifică rezultatul măsurării.
b) Procedeul episcopicLa acest procedeu reţeaua (optică) de măsură este aplicată pe un disc mobil
realizat din material inoxidabil şi constă din striaţii reflectorizante. Lumina lămpii cade oblic (prin reticulul palpator) pe disc şi este reflectată de acesta, apoi (după ce traversează interstiţiile transparente ale reticulului palpator acţionează asupra fotoelementelor) - figura 4.38. Deplasarea discului în raport cu reticulul palpator produce variaţii luminoase asemănătoare cu cele obţinute prin procedeul diascopic. Maximul de intensitate (luminoasă) se obţine când interstiţiile transparente ale reticulului coincid cu zonele reflectorizante de pe disc.
Fig. 4.38. Procedeul episcopic.
Sistemul care generează şi prelucrează semnalele este acelaşi indiferent de procedeul de măsurare utilizat. Cel mai răspândit sistem de citire utilizează o grilă de scanare având patru ferestre poziţionate astfel încât semnalele de ieşire ale fotoelementelor sunt decalate cu un sfert de perioadă, ceea ce conduce la obţinerea a patru semnale sinusoidale decalate fiecare cu 90 (figura 4.39-b.). Cele patru fotoelemente asociate reticulului palpator sunt cuplate în perechi, utilizând un
122

Traductoare pentru mărimi geometrice
montaj diferenţial, astfel încât de la fiecare pereche de fotoelemente ( ), respectiv ( ), se obţin două semnale cvasisinusoidale şi defazate cu 90° electrice între ele.
Fig. 4.39. Procedeu de scanare multiplă: a) amplasarea fotoelementelor; b) diagrama de semnale.
Suplimentar, se generează un semnal de zero la un număr întreg de diviziuni, utilizat la controlul impulsurilor false sau pentru reproducerea unei poziţii de referinţă. În figura 4.40 se prezintă schema bloc a unui adaptor pentru traductorul optic incremental.
Semnalele furnizate la ieşirea capului de citire sunt aplicate unui bloc electronic de prelucrare a impulsurilor unde sunt amplificate, multiplicate, formatate prin triggere Schmitt şi adaptate pentru logica TTL . Cele patru trenuri de impulsuri ( , şi , ) compatibile TTL, pot fi utilizate în următoarele scopuri [24]:a – sesizarea sensului de deplasare, utilizând semnale obţinute prin derivarea fronturilor pozitive şi negative ale semnalelor şi ;b – exploatarea multiplă a semnalelor, astfel încât pentru acelaşi increment de deplasare (măsurat) se obţin două sau patru impulsuri printr-o logică adecvată, ceea ce conduce la creşterea preciziei de măsurare a traductorului. c – corectarea impulsurilor parazite, care sunt determinate de vibraţiile mecanice la antrenarea discului optic şi reticulului palpator, cât şi de câmpurile electrice şi magnetice exterioare.
Fig. 4.40. Schema de principiu a adaptorului pentru traductorul optic
incremental.
123

Capitolul 4124