Proiect Diploma "Platforma Mobila Robotizata" Facultatea de Utilaj Tehnologic - UTCB

of 88
-
Upload
serban-radu -
Category
Documents
-
view
470 -
download
2
description
Proiect de Diploma - Facultatea de Utilja Tehnologic UTCB. Aveti grija la greselile strecurate intentionat sau nu, atat in partea scrisa cat si la desene!!!!
Transcript of Proiect Diploma "Platforma Mobila Robotizata" Facultatea de Utilaj Tehnologic - UTCB
LUCRARE DE DIPLOMA FACULTATEA DE UTILAJ TEHNOLOGIC PLATFORMA MOBILA ROBOTIZATA Iulie 2011
Abstract Acest proiect de diploma este proprietatea Facultatii de Utila| Tebnologic si se gaseste la arbiva facultatii Pentru a il studia va puteti adresa conducerii facultatii vizualizarea si studierea lui fiind gratuite Tema proiectului consta in realizarea unei platforme mobile robotizate ce se poate deplasa independent in santier si poate transporta materiale pentru constructii cu o sarcina maxima de hg si cu o viteza de hmb Pentru modelul D din SolidWorhs simularile si rezultatele simularilor realizate in acelas program va rog sa va adresati celor de pe grupul Facultatea de utila| Tebnologic de pe Facebooh sau YabooCrups La fel si pentru mai multe informatii U.T.C.B Facultatea de Utilaj Tehnologic Platform mobil utilizat la roboi pentru construciiPag. 2 Cuprins2/82 C U P R I N S 1.Tema de proiect ......................................................................................................................... pag 4 2.Borderoul documentatiei de baza ............................................................................................ pag 5 3.Memoriu tehnic de prezentare ................................................................................................. pag 6 - prezentare generala ........................................................................................................... pag 6 -caracteristici tehnice principale ...................................................................................... pag 7 -modul de functionare ....................................................................................................... pag 7 -caracteristici mecanice ..................................................................................................... pag 8 -caracteristici ale motorului de actionare .........................................................................pag 8 4.Studiu de caz................................................................................................................................pag 9 -Definitie................................................................................................................................pag 9 -Clasificarea robotilor........................................................................................................pag 10 -Parametrii definitorii .......................................................................................................pag 20 -Roboti pentru constructii.................................................................................................pag 25 -Transportarea si distribuirea materialelor ...................................................................pag 33 -Studiul rezistentei prin metoda elementului finit..........................................................pag 34 5.Caiet de sarcini ..........................................................................................................................pag 39 -Verificari curente de intretinere......................................................................................pag 39 -Norme de securitate..........................................................................................................pag 40 -Durata de viata a produsului.......................................................................................... pag 41 -Instructiuni de exploatare si conditii climatice............................................................. pag 42 6.Note de calcul ........................................................................................................................... pag 43 -Calculul mecanic general................................................................................................ pag 43 -calculul puterii necesare mecanismului cu senile ........................................................ pag 49 -Calculul transmisiei cu lant.............................................................................................pag 53 U.T.C.B Facultatea de Utilaj Tehnologic Platform mobil utilizat la roboi pentru construciiPag. 3 Cuprins3/82 -Calculul platbandei ......................................................................................................... pag 57 -Calculul arborelui I ........................................................................................................ pag 60 -Calculul arborelui II ....................................................................................................... pag 64 -Calculul arborelui III ..................................................................................................... pag 67 -Calcului rulmentilor ....................................................................................................... pag 70 -Calculul sistemelor de fixare .......................................................................................... pag 73 7.Schema cinematica.................................................................................................................... pag 76 8.Schemele de calcul ................................................................................................................... pag 77 - schema de calcul pentru platbanda ............................................................................... pag 77 -schema de calcul pentru arborele I ............................................................................... pag 78 -schema de calcul pentru arborele II .............................................................................. pag 79 -schema de calcul pentru arborele III ............................................................................ pag 80 9.BIBLIOGRAFIE ...................................................................................................................... pag 81 0TCB Facultatea ue 0tilaj Tehnologic Platfoim mobil utilizat la iobo(i pentiu constiuc(iiPag TENA BE PR0IECTARE
U.T.C.B Facultatea de Utilaj Tehnologic Platform mobil utilizat la roboi pentru construciiPag. 6 3. Memoriu Tehnic6/82 MEMORIU TEHNIC DE PREZENTARE 1. PREZENTARE GENERALA Inproiectulactualesteprezentataoplatformamobilarobotizatapentrutransportul materialelor de constructii in incinta santierului. Platformapoatetransportamaterialelepentruconstructiiinliniedreaptasauinpantasi poate realiza viraje in functie de traseul pe care il are de strabatut. Deplasarea se realizeaza printr-un sistem cu senile echipat cu doua motoare electrice, fiecare senila dintre cele doua, avand motor independent.Motoarelesuntcomandatedeunsistemelectronicceasiguralucrulinconditii optime. Aceasta solutie constructiva a fost aleasa din motivele: Celedouamotoareoferaavantajuldeaserealizavirajulsieliminasistemeleclasicede virajcuambreajsauarboricardanicicearficontribuitsubstantiallamasaechipamentuluisila costul de productie al acestuia. sistemul poate asigura demaraje rapide, necesare atingerii productivitatii cerute; afostalessistemulcuseniledeoareceacestaoferaoaderentasubstantiala,necesarain cadrul unui santier; senilele sunt galvanizate pentru a nu produce deteriorari ale diverselor pavaje prezente in santier, datorita constructiei lor acestea sunt usoare in comparatie cu cele metalice. fiabilitate mare; gabarit redus in comparatie cu actionarea cu motor termic sau hidraulic. In structura mecanismului se pot distinge urmatoarele componente de baza: cele doua motoare electrice; reductorul planetar; cuplajul elastic prezent in amandoua grupuri motoare; sistemul de transmisie cu lant; rotile dintate ce transmit miscarea senilei.
U.T.C.B Facultatea de Utilaj Tehnologic Platform mobil utilizat la roboi pentru construciiPag. 7 3. Memoriu Tehnic7/82 2. CARACTERISTICI TEHNICE PRINCIPALE - Tipul sistemului de actionare: sistem de actionare electric; - Curentul de alimentare al motoarelor: 24 / 36 V; - Amperajul bateriilor : 160 A; - Motor electric : S28-400; - Reductorul: MP-010; - Masa echipamentului: 400kg; - Masa totala maxim admisibila: 1100kg; - Unitatea de comanda : electronica. 3. MODUL DE FUNCTIONARE In timpul repausulu mailung, robotul sta intr-o zona destinata incarcarii bateriilor. Aceasta varianta este prezenta atunci cand pe santier nu au putut fi prezente alte dispozitive ce pot incarca bateriileintimpulfunctionarii,fieprintr-uncampelectricrealizatdedispozitivedininteriorul caiiderulare,fieprincablu.Robotuluiiiseintroducanumitedatedespremediulincare lucreaza, pentru a realiza transportul din zona de receptie sau depozitul de materiale catre zonele unde este necesara descarcarea materialelor, fie in proximitatea altui robot de constructii ce preia acele materiale pentru a le pune in opera, fie in zona de lucru a personalului calificat.Datoritasistemelorcefaccarobotulsapoataobservadintimpmediulincarelucreaza, deplasarea se va face pe calea cea mai scurta dintre cele doua puncte de incarcare si descarcare, urmarinduntraseuposibilfizicdeparcurs.Robotulvastationainzoneledeincarcaresi descarcare pana cand acest lucru este necesar, plecarea fiind data automat de catre un sistem ce monitorizeazaacestlucru,fiedepersonalulcalificat,fiederobotiicarefacmanevrelede incarcare si descarcare.Limitileleincarepoatefiincarcatvorficlarstabilitedecatrepersonalulcalificat,iarca sistemdesiguranta,robotulesteprevazutcuunsenzorceverificagreutateadeincarcarea echipamentului. In cazul cand greutatea maxima stabilita a fost depasita, robotul va atentionaU.T.C.B Facultatea de Utilaj Tehnologic Platform mobil utilizat la roboi pentru construciiPag. 8 3. Memoriu Tehnic8/82 acestlucru el si nu va mai realiza deplasarea cu supraincarcare. Din punct de vedere al resistentei sasiului, acesta este realizat sa reziste la incarcari mult mai mari decat masa maxima admisibila, insa sistemul de deplasare nu este dimensionat decat pentru incarcarile maxime admisibile. Pentruevitareasupraincarcarilor,serecomandafolosireadematerialestandardizateacaror greutatefiindcunoscuta.Platformarobotuluiesterealizataladimensiunilebazeiunuieuro-palet tocmaipentruaputeatransportacuusurintaeuro-paletichiarsimarfafracsaupulverizantaatat timpcandprizasariciniicurobotulestestandardizataconformdimensiunilorstandardelorISO. Verificarea cea mai importanta in acest caz, este ca sarcina sa nu depaseasca 700kg sau cea stabilita de personalul deservent. Pe aceast robot se pot monta in loc de platforma pentru transportul marfurilor si alte sisteme cumarfiunbratarticulatorialtemecanismeceaunevoiedeunsistemdedeplasare,insaacest lucru se va face cu acordul si autorizatia proiectantului. 4. CARACTERISTICI MECANICE: Viteza maxima: 2 kph; Capacitatea de incarcare: 700kg; Panta maxima de urcare: 30 grade; Presiunea maxima a echipamentului pe sol : 0.021Mpa. 5. CARACTERISTICI ALE MOTORULUI DE ACTIONARE: Motor: S28-400; Moment maxim: 2,6270.00 Nmm; Puterea nominala: 4,000.00 W; Motorul poate fi actionat la 24 V sau la 36V cu un amperaj de 160A, in functie de manevra ce trebuie realizata. Se va folosti 36V doar in momentul unui viraj. 0TCB Facultatea ue 0tilaj Tehnologic Platfoim mobil utilizat la iobo(i pentiu constiuc(iiPag Stuuiu ue caz Robo(ii ue ieii azi sau mine Robotuleste,npractic,unsistemeterogencerealizeazmicriprincareidovedete capacitile sale de a interaciona cu mediul, dar fr a implica o dimensiune moral a abilitii de a luapropriiledecizii,deaceea,acionareaduppropriilesaledorinesauabilitiesteunconcept diferit. Prin conceptul de robot se poate face referire la ambele stri, att cea fizic ct i de cea virtual, prin intermediul unui sistem concret sau unul software. ConformOrganizaieiInternaionaledeStandardizare(ISO)numarul8373:Unsistemcontrolat automat, reprogramabil, cu mai multe scopuri, manipulator programabil n trei sau mai multe axe, care poate fi fix sau mobil pentru folosirea n aplicaii industriale automate. Acest definiie este folositdedoudintrecelemaiimportanteorganismeinternaionaledindomeniu:Federaia InternaionaldeRobotic(IFR)ideReeauaEuropeandeCercetarenRobotic(EURON), acestora alturndu-se structurile naionale i cele din sfere conexe roboticii. Dup cum ,ns,se poate observa, definiia unui robot nu a fost pe deplin conturat, acest fapt dnd natere unor lacune conceptuale ce vizeaz aspecte precum: diferite abiliti sau metode tehnologice implicate n procesul de realizare a acestuia. Pentru a marca veridicitatea afirmaiei de mai sus vom utiliza cuvintele pionierului n roboi industriali Joseph Engelberger: Nu pot defini un robot, dar l recunosc cand l vd.Acesttermenesterelativnouintratnvocabularulomuluimodern,deielaexistatncdin antichitatesubdiferiteforme.Robotapareprimadatn1921npiesascriitoruluicehKarel Capek"Rossum'sUniversalRobots"iprovinedinslav(robota=muncforat),apois-aextins familialexicalaacestuiadectrescriitoruldescience-fictonIsaacAsimovprinadugarea cuvntului robotic ce sugereaz cmpul de lucru. 0TCB Facultatea ue 0tilaj Tehnologic Platfoim mobil utilizat la iobo(i pentiu constiuc(iiPag Stuuiu ue caz La fel ca n antichitate roboii au fost realizai pentru a face munca oamenilor mai uoar i mairapidsaudeomaibunfinee,fiindconcepuisimitmicrileumane,pebazaunui program sau ghidai de un controlor. Primele atestri apar n primul veac I.H. n cartea PneumaticaandAutomatadeHerondinAlexandria,apoidectreAl-Jazarin1206Cartea cunotiinelor despre ingeniozitatea sistemelor mecanice continund cu Leonardo da Vinci n 1495 Cavalerul Mecanic, acesta punnd bazele ingineriei i nu numai. Clasificarearoboilorsefacedupaceleaicriteriicaincazulmultitudiniidedefiniiiaacestui concept. Un model de astfel de clasificare i aparine Institutului American de Robotic (RIA) ce i delimiteaz n patru grupe: sisteme ce manipuleaz obiecte cu control manual, sisteme automate ce manipuleaz obiecte prin cicluri predeterminate, programabili sau servo-controlai cu traiectorii continui point-to-point, roboi ce asimileaz informaii din mediu i acioneaz n urma analizei. Consideraceastclasificarenefiindstohastic,neintroducndtoategamelederoboiexisteni,mai departe fiind prezentat o altfel de clasificare ce nglobeaz toate aceste grupe definite de RIA. Modelulurmtordeclasificarelreprezintcelcearecaicriteriudereferinariadeutilizarea roboilor, astfel: 0TCB Facultatea ue 0tilaj Tehnologic Platfoim mobil utilizat la iobo(i pentiu constiuc(iiPag Stuuiu ue caz Roboiimedicali- cudestinaiesajutemediciilaoperaiifoartedelicate,dinmotivedeontologiceoperaiaeste efectuata de chirurg (Fig.1); - l Roboi militari Deiexistpuinliteraturdespecialitate,sealocfondurifoartemaripentrucercetaresi dezvoltare,peplanmondial.Cmpuldeluptvadeveniicompletrobotizatncelmaiscurttimp posibil.Unexempluesteoperaiuneafurtunaindesertundeaufosttrimiseavioanede recunoatere fr a avea un pilot la bord, acestea fiind controlate din alt parte a globului (Fig.2). Printre roboii ce fac parte acestei grupe se gsesc: - vehicole aeriene i terestre ce sunt dotate cu bra sau nu,- microroboi pentru spionaj,- antroroboipentrumrireaperformanelorumanesauaprareadeatacurimecanice,chimice, biologice, radioactive 0TCB Facultatea ue 0tilaj Tehnologic Platfoim mobil utilizat la iobo(i pentiu constiuc(iiPag Stuuiu ue caz
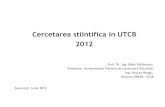
Fig Microroboi Aluatamploarenurmadezvoltriitehniceiamecaniciifine.Microroboticaaluatoamploare foartemare,avnddomeniideutilizareattdevastenctesteieftinsseinvesteascsume extraordinardemaridatoritimpactuluipozitivasupraaltortiine(Fig.3).Printrecategoriilede roboi se afl: - Miniroboi cu dimensiuni ntre 1 si 10 mm. - Microroboi realizai din siliciu ca la microcipuri. - Nanoroboi folosii pentru manipularea ADN-ului. Cercettorii spun c n civa ani acetia vor autoreproduce. - Atomoroboi pentru manipularea atomilor. Acest domeniu este nca unul de domeniul viitorului, dei se fac progrese remarcabile. 0TCB Facultatea ue 0tilaj Tehnologic Platfoim mobil utilizat la iobo(i pentiu constiuc(iiPag Stuuiu ue caz
Fig
Roboi industriali Suntdestinaiautomatizriiflexibileaproceselordeproducie,nlocuiriioperatoruluiumann operaiile ce se desfoar n medii nocive i periculoase , n activiti dificile, obositoare prin0TCB Facultatea ue 0tilaj Tehnologic Platfoim mobil utilizat la iobo(i pentiu constiuc(iiPag Stuuiu ue caz efort, monotone sau n sectoarele de activitate unde exist un deficit de fora de munc specializat i calificat. Managementul Nipon fata de cel Nord American, vede robotul ca un ajutor ce deserveste resursa umana a unei companii sau care realizeaza activitatile unde personalul este insuficient din varii motive. Managementul Nord American, vede in roboti un mijloc de eficientizare a productiei, inlocuind astfel omul, limitat de propria sa conditie, incet si supus greselilor cu roboti rapizi, ce pot lucra non-stop fara a gresi si cu costuri mult mai mici; ajungand sa realizeze produse competitive economic. Robotul industrial este un manipulator reprogramabil i multifuncional, capabil s manevrezescule, piese, materiale i dispozitive speciale n cursul micrii variabile i programate pentruexecutarea unei varieti de operaii. Roboi manipulatori-Manipulatoare simple, cu secvene de lucru limitate de operaii succesive necomplexe avnd 2-3 grade de libertate, posibilitile i flexibilitatea sistemului de comand sunt limitate; - Manipulatoare programabile, ce dispun de 5-6 grade de libertate, comandate de un sistem de comand ce dispune de capacitatea de a memora intern programe de efectuare a unor micri, de regul nsuite n timpul efecturii acestora pentru prima dat de ctre un muncitor (roboi repetitivi) prin formularea explicit a acestora, sub form de comenzii codificate sau prin combinarea acestor dou metode; -Roboii industriali inteligeni, adica dotai cu senzori diveri (tactili, de fora, de prezena, de form, etc.) i cu sisteme de comand capabile de a interpreta semnalele de la senzorii si de a aciona n consecina asupra organelor de execuie n scopul realizrii unui scop stabilit. 0TCB Facultatea ue 0tilaj Tehnologic Platfoim mobil utilizat la iobo(i pentiu constiuc(iiPag Stuuiu ue caz
Manipulatoareleiroboiiauparticularitideosebitenpunctdevederemecanicial sistemelor de comand. Roboiiautoategradeledelibertateactive,ostructurmecanicvariabil(unelelanuricinematice, se pot nchide sau deschide n timpul manipulrii obiectelor care poate fi redundant (multmaimultdeasegradedelibertate).Dinpunctdevederealcomenziimicrii,exist sistememultivariabile, neliniare i puternic cuplate. -Robotpickandplacestructuramecanicdemanipularepetreiaxe,cusistemde comand electromagnetic;(fig.4) -Robotprogramabilrobotcudispozitivdememorie,carepermitemodificareauoara programelor; -Robotcomandatcucalculatorulrobotalcruisistemdecomandesteformatdin microprocesor, micro i mini calculator;(fig.5) -Robotcusistemsenzorialrobotcomandatcucalculatorul,careposedisistem senzorial; -Robotdeasamblarerobotcomandatdecalculator,cusistemsenzorial,folositn aplicaii de asamblare.(fig.6) 0TCB Facultatea ue 0tilaj Tehnologic Platfoim mobil utilizat la iobo(i pentiu constiuc(iiPag Stuuiu ue caz ISO a mprit clasificrile roboilor dup diferite criterii: 1.Sursa principal de putere: (a)Pneumatic (b) Hidraulic (c)Electric 2.Comanda micrilor: (a) Comanda punct cu punct (PTP) cu sau fr comanda de vitez:- continu -discontinu (b)Comanda pe traiectorie continu (cp) Metode de programare: (a)Prin nvaare direct (b)Prin generare de traiectorie (c)Prin telecomand (d)Off-line, etc 0TCB Facultatea ue 0tilaj Tehnologic Platfoim mobil utilizat la iobo(i pentiu constiuc(iiPag Stuuiu ue caz 4.Tipuri de senzori folosii: (a)Detectri de poziie (b)Logica liniar simpl Senzori bazai pe diverse principii avnd semnale proporionale cu abatere etc. Industria constructoare de maini i echipamente, unde se folosesc pentru executarea de activiti denalta precizie. C x?Z u A A l
U.T.C.B Facultatea de Utilaj Tehnologic Platform mobil utilizat la roboi pentru construciiPag. 18 4.Studiu de caz18/82 Fig.4-Robot Pick and Place U.T.C.B Facultatea de Utilaj Tehnologic Platform mobil utilizat la roboi pentru construciiPag. 19 4.Studiu de caz19/82
Fig.5-Robot comandat cu calculatorul Fig.6-Robot pentru asamblare U.T.C.B Facultatea de Utilaj Tehnologic Platform mobil utilizat la roboi pentru construciiPag. 20 4.Studiu de caz20/82 3. Parametrii definitori pentru un robot Numrul de axe dou axe sunt necesare pentru a atinge orice punct din spaiu, trei axe sunt necesare pentru a atinge orice punct din spaiu, iar pentru a controla orientarea la captul braului mai sunt nevoie de nc trei axe; Gradele de libertate sunt n genral date de numrul de axe; Spaiul de funcionare spaiul n care poate funciona i ajunge braul robotului Capacitatea de ridicare greutatea pe care o poate ridica braul Viteza viteza cu care se poate poziiona braul. Poate fi definit ca viteza unghiular sau viteza liniar a fiecrei axe sau ca o sum ale acestora. Acceleraia acceleraia pe o anumit ax. Acest parametru este limitat n cazul roboilor industriali deoarece nu pot atinge viteza specific de micare pe o distan scurt sau pe o traiectorie complex ce necesit schimbri frecvente ale direciei. Precizia Acurateea cu care robotul i poate mica braul. Acurateea poate varia cu viteza de lucru i cu greutatea ridicat, ns roboii pot fi calibrai n funcie de cerine; alt aspect este importana unui mediu de lucru foarte curat, fr existena unor ageni negativi ce pot duce la reparaia frecvent a roboilor Repetabilitatea precizia revenirii la poziia 0.Micarea pentru unele aplicaii de genul ridicarea i fixarea unor piese sau pentru aplicaii mai sofisticate precum sudur, vopsirea, micarea trebuie s fie continu i s urmeze o traiectorie n spaiu ce poate fi controlat dup direcie i vitez. Sursa de putere unii roboi au motoare electrice, altele motoare hidraulice U.T.C.B Facultatea de Utilaj Tehnologic Platform mobil utilizat la roboi pentru construciiPag. 21 4.Studiu de caz21/82 Roboi mobili: Ce este foarte important de reinut, este faptul c roboii mobili nu sunt doar teretrii, ci sunt i aerieni, acvatici sau care se folosesc n misiuni cosmice, toi acetia avnd n comun faptul c sunt autonomi. n completarea modelelor de mai sus, vine o alt clasificare ce are ca specific anumite tipuri de roboi ce au ca destinaie activiti de resort, astfel discutm despre: -roboi fici, -roboi mobili. Fig.7 Robot mobil U.T.C.B Facultatea de Utilaj Tehnologic Platform mobil utilizat la roboi pentru construciiPag. 22 4.Studiu de caz22/82 Dac n cazul industriei constructoare de maini i echipamente, roboii sunt fici i pot realiza micri cu o foarte mare precizie este datorit mediului foarte curat i calitii nalte a pieselor componente, dar care necesit i o inspecie periodic riguroas, astfel toate aceste caliti, implic o alocare de resurse mare.n cazul roboilor folosii n construcii, mediul de utilizare este unul complex fie datorit terenului n care se lucreaz , fie a mrimii spaiului de lucru, fie a agenilor corozivi prezeni n aer sau chiar a prezenei erorii umane cu care robotul are de a face i peste toate acestea trebuie s aibe o fiabilitate nalt. Roboii mobili pot fi: -Cu roi:Suntfolosite pentru terenuri plane sau cu denivelri mici i care nu au un sol moale. Datoritdezvoltrii industriei autovehicolelor, pentru a depii unele obstacole, roboi pot aveasuspensii independente. Aceste roi pot fi:- normale: deplasarea se face cu ajutorul roilor, acetia pot atinge viteze mari. - omnidirecionale: datorit abilitii roii omnidirecionale de a se deplasa dup cum spune i numele, mersul n lateral sau ntoarcerea n loc nu prezint o problem, chiar s-a dovedit o uurin la trecerea peste obstacole fa de roile unidirecionale.-Paitori: Utilizeaz pentru deplasare un numr de picioare sau labe. Ei sunt utilizai pentru realizarea de taskuri pe terenuri foarte accidentate, atunci cnd trebuie urcate scri sau atunci cnd solul este foarte moale. Numrul de picioare sau labe sau pedipulatoare diferind de la model la model ei putnd fi cu un singur picior (sritor) cu doua picioare (biped) sau cu mai multe (Fig.8). U.T.C.B Facultatea de Utilaj Tehnologic Platform mobil utilizat la roboi pentru construciiPag. 23 4.Studiu de caz23/82 Acetia se mai numesc i antropomorfici deoarece imit micrile umane. Roboii insectivori sunt cu 6-8 picioare, ce imit ndeaproape deplasarea natural a insectelor, iar miriapozi imitnd mersul trtoarelor. Fig.8 Robot pasitor
-Cu enile: enilele sunt ca o roat cu diametrul foarte mare, fiind utilizate pentru reducerea presiunii pe sol, pentru o mai bun aderent , acestea au avantajul de a traversa aproape orice tip de teren (Fig9). Dintre deficiene putem enumara: - existena de pierderi energetice importante - posibilitatea ptrunderii unor corpuri strine ntre enile i galetii de susinere - sensibilitatea enilei la forma solului U.T.C.B Facultatea de Utilaj Tehnologic Platform mobil utilizat la roboi pentru construciiPag. 24 4.Studiu de caz24/82
Fig.9 Robot pe enile Alte metode pentru realizarea deplasrii pot fi: -urubul arhimedic pentru deplasarea submarinelor pe fundul mrii -Prin micri peristaltice ( ca un arpe) -enile elastice -Picior cu roi -Picior cu enile -Roata cu picioare -Roata cu roi -enila cu picioare-enila cu roi U.T.C.B Facultatea de Utilaj Tehnologic Platform mobil utilizat la roboi pentru construciiPag. 25 4.Studiu de caz25/82 4.ROBOI PENTRU CONSTRUCII Roboi specializai ce au potenialul de a ridica productivitatea fcnd diverseaplicaii n mod repetat, eficient, mbunttind condiiile de lucru prin aplicaii ce reduc pericolul pentru oameni. Vorbind strict de acest sector al construciilor,gsim caiva roboi specializai pe acest domeniu, dar suntem de abia la nceputul mecanizrii proceselor aici, totul fiind n strns legtura cu domeniul automaticii. Mainile automate sunt, defapt, roboi. Acetia nu fac doar operaii complexe, dar i pot controla i performanele, se pot autocorecta n lucru.
Roboti pentru demolri n deosebi, metoda hidrodemolrii este cea mai des ntlnit, datorit energiei reduse folositepentru dislocarea structurilor din beton sau beton armat. Sursa folosit este apa sub nalt presiune, ceareavantajuldeaacionacaofordarideaestompaniveluldeprafrezultatdindemolare (Fig.10). Aceasta metoda mai are avantajul de a nu polua fonic. Fig.10 Robot pentru demolri U.T.C.B Facultatea de Utilaj Tehnologic Platform mobil utilizat la roboi pentru construciiPag. 26 4.Studiu de caz26/82 Robot pentru finisare Finisarea are un nivel nalt de robotizare. Exist maini ce se pot deplasa dupa o direcie dat, pot turna asfalt, dar i de a l compacta. Centrul European de Cercetare i Proiectare a realizat prinprogramul denumit ESPRIT, unrobot automat de pavare RoadRobot ce prezint caliti nalte pentru pavare i costuri reduse (Fig. 11).Abilitile sale automate sunt:-Recepionarea asfaltului -Transferul asfaltului -Turnarea asfaltului -Controlul direciei cu ajutorul senzorilor i controlul vitezei de turnare - Controlul de pornire/oprire al tuturor funciilor robotului
Fig. 11 U.T.C.B Facultatea de Utilaj Tehnologic Platform mobil utilizat la roboi pentru construciiPag. 27 4.Studiu de caz27/82 Nivelari, finisari suprafetelor Nivelareasifinisareasuprafetelordebetonesteunadintrecelemaisolicitanteactiunidin constructii. In timp ce sta aplecat, finisorul lucreaza cu ciment greu in continuu, adesea lucrand ore intregipentruatinepasulcuturnarea.Muncarobotuluiinaceastaactiune,eliminasupunearea resursei umane la actiuni grele de munca, crescand si eficienta. Topografiere siSupraveghere Robotizarea,laacestcapitol,avenitimpreunacuapartiaGPS-uluicepermiteintimpreal localizarea unor corpuri,in spatiu terestru dar si aerian. Datorita acestei capacitati de monitorizare aunorutilajedeconstructiisaufloteauto,costuriledetransport,mentenantaauscazut considerabil(Fig12).Bazandu-sepeaceeasitehnologiesicuajutorulacelorasroboti,cucateva modificari, se poat realiza topografieri ale zonelor de lucru saucu intindere foarte mara si in zone climatice sau de relief dificile (Fig.13). Fig. 12 Nus-aopritaicitehnoloigiasiastaziavemrobotimobilicepatruleazazoneledelucruin vedereasecurizariiunorperimetre,ceretinimaginisianuntamaidepartedediferitiintrusi, detectarea mediului fiind facuta si de senzori de miscare dar si de senzori de caldura sau olfactivi.U.T.C.B Facultatea de Utilaj Tehnologic Platform mobil utilizat la roboi pentru construciiPag. 28 4.Studiu de caz28/82 Fig. 13 Fig. 14U.T.C.B Facultatea de Utilaj Tehnologic Platform mobil utilizat la roboi pentru construciiPag. 29 4.Studiu de caz29/82
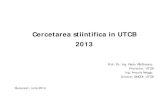
Fig.15 Constructia cladirilor Robotii folositi in constructia cladirilor aucapacitatea de a se mula in functie de necesitatile operatiunii.Inspecial,inaceastazonadelucru,robotiiaupreponderentaceeasistructurasaumai bine zis, au aceeasi solutie constructiva (Fig. 16). Acestia sunt alcatuiti dintr-un modul purtator pe caresevaasezaunbratrobotizat,impreaunaserealizeazaunrobotcearecapacitateadease deplasa si in acelas timp de a actiona asupra mediului inconjurator cu ajutorul bratului (Fig.17).U.T.C.B Facultatea de Utilaj Tehnologic Platform mobil utilizat la roboi pentru construciiPag. 30 4.Studiu de caz30/82 Cea mai importanta caracteristica a acestor sisteme este data degradul de libertate pe care il are, cum am precizat la incepututl studiului, acesta este dat de numarul de axe existent. Acestirobotipoatrealizafoartemulteoperatiuniintr-unsantier,celemaiimportantefiind cele de: -Pozitionarea si sudarea structurilor din otel -Ignifugarea si vopsirea elementelor din cadrul unei constructii -Realizareainspectieisimentenanteicladirilor,aicisepotenumerasistemeledespalarea geamurilor sau de inlocuire a acestora sau a altor dispozitive ce se afla in zone greu accesibile sau necesita o munca de rutina sau cu un volum mare. Fig. 16 U.T.C.B Facultatea de Utilaj Tehnologic Platform mobil utilizat la roboi pentru construciiPag. 31 4.Studiu de caz31/82 Fig. 17 Robotul din RMUC 7 (Fig. 18), este o realizare autohtona, datorita cooperarii dintre doua universitati tehnice si doua institute de cercetare si proiectare. Acesta are7 grade de libertate ce i permit acestuia sa realizeze operatii complexe putand nlocui miscarile umanoide in activitatile de zidarie, montaj si finisaj exterior si interior in constructii. El este gandit sa se deplaseze in plan orizontal si pe pante mici acoperind o inaltime de lucru de 3,5 m, suficienta pentru operatii la nivelul unui etaj. Pentru a lucra la etaje mai inalte, el va fi ridicat cu instalatii de ridicat existente in santier. Pentru a executa lucrarile de finisaj exterioare el va fi dotat cu un echipament suplimentar, interschimbabil cu ajutorul caruia va acoperi inaltimi de 10 m. U.T.C.B Facultatea de Utilaj Tehnologic Platform mobil utilizat la roboi pentru construciiPag. 32 4.Studiu de caz32/82 Fig. 18 Echipamentul este astfel conceput incit mecanismele de actionare si programele de lucru sa ramana aceleasi dar miscarile pe verticala sa fie amplificate cu un coeficient K corespunzator etajului. Acest lucru este posibil prin realizarea mecanismului de pozitionare al robotului sub forma unui mecanism cu bare tip pantograf. Pentru echipamentul suplimentar se modifica doar constructia metalica (lungimile elementelor pentru mecanismul pantograf ). Sarcina utila a robotului este de 60 daN. In timpul deplasarilor necesare pentru executarea operatiilor in zona de lucru robotul este autonom. Avand in vedere ca realizarea de celule flexibile robotizate si, in perspectiva, de linii flexibile pentru constructii este tendinta actuala pe plan mondial, robotul a fost gindit ca piesa de baza a unei celule flexibile in care alaturi de roboti specializati (transport containere, dozat materiale fluide, montaj usi, ferestre, etc.) va construi case tip vila. U.T.C.B Facultatea de Utilaj Tehnologic Platform mobil utilizat la roboi pentru construciiPag. 33 4.Studiu de caz33/82 5. Transportarea si distribuirea materialelor Dupa robotizarea metodelor de constructii, urmatorul proces ce necesita atentia, deoarece era unconsumatorderesursesitimp,afostcelaltransportuluimaterieiprimelarobotuldelucru. Concretizarea acestora a fost o chestiune de timp deoarece tehnologia deja exista insa problemele au inceputsaaparaodatacupunereainfunctiune,primulimpedimentafostvariatiunea terenurilor/suprafetelorpecareacestirobotitransportoritrebuiasafunctioneze,apoigradulridicat deobstacolepecaretrebuiausaleparcurga.Inprezentunastfeldesistemsepoatemontape aproape orice vehicol de la autocamioane monitorizare prin GPS pana la cele mai mici transportoare mobile.Acesteaimpreunacuogamalargadesenzoripottransportamaterialeincelemaibune conditii indiferent de obstacole, acestea pot fi materiale fragile sau care necesita transportarea la un anumit nivel .Incazultransportariitronsoanelordepodseutilizeazaplatformegigantcurotiindividuale care cu ajutorul unor cilindri hidraulici/pneumatici pot traversa diverse denivelari ale traseului fara ainclinaobiectultransportat,pastrandu-siechilibrulfaraapuneinpericolsiguranta.Aceleasi platforme transportoare sunt utilizate si pentru stramutarea unor case, darcare necesita o intarire a structurii de rezistenta. Duparobotizareaproceselor,maisuntdoarcatevaoperatiicetrebuiescindeplinitedecatre muncitori manual:Prepararea: -transportarea pe santier a robotului -planificarea traseului robotului pentru fiecarea etapa a constructiei -aranjarea sistemului de alimentare si a platformei de asteptare acolo unde este cazul U.T.C.B Facultatea de Utilaj Tehnologic Platform mobil utilizat la roboi pentru construciiPag. 34 4.Studiu de caz34/82 Operatii:- finisarea suprafetelor din locurile difici de accesat, coloane aflate langa pereti si alte colturi greu accesibile Mentenanta: - dezmembrarea -curatarea -depozitarea 6.Verificarea rezistentei sasiului cu ajutorul calculatorului prin metoda elementului finit Pentru a se realiza un sasiu competitive din punct de vedere economic, dar foarte rezistent pentru a putea sustine greutatea sarcinii ce s-a cerut de proiectat, s-a ales solutia realizarii unui model 3D cu ajutorul unui software destinat acestui lucru. Dupa constructia virtuala a modelului 3D, s-a trecut la urmatorul pas, simularea incarcarilorcerute, verificarea cadrului mecanic si gasirea si remedierea eventualelor erori de proiectare. In cadrul acestui proces, s-au ales foarte multe variante constructive atat a sasiului cat si a celorlalte elemente. In cele din urma s-a adoptat ultima varianta si solutie constructiva ce a fost supusa aceloras simulari riguroase, rezultantele fiind cele mai bune pana in acest moment si acceptabile de toate necesitatile de proiectare. In cele ce urmeaza, se vor prezenta rezultatele simularilor generate de software, deoarece aceste rezultate sunt pe cat de concludente pe atat de interactive.Acest software este de ultima generatie, fiind folosit la scara globala pentru rezultatele sale foarte exacte in contextul simularilor si este foarte folosit mai ales in domeniul proiectarii mecanice. U.T.C.B Facultatea de Utilaj Tehnologic Platform mobil utilizat la roboi pentru construciiPag. 35 4.Studiu de caz35/82 Incastrarile si incarcarile aplicate In figura alaturata, esteprezentata zonele unde au fost stabilite incastrarile, adica in gaurile unde arborii galetilor for prelua greutatea intregului echipament si sarcina.In partea de sus a figurii, se poate vedea zonele unde au fost stabilite incarcarile si valoarea acestora.Incarcarile sunt uniforme pe intreaga suprafata de contact a fetelor stabilite pentru simulare. Fig. 19 U.T.C.B Facultatea de Utilaj Tehnologic Platform mobil utilizat la roboi pentru construciiPag. 36 4.Studiu de caz36/82 Von Mises Stress (Tensiunea maxima) Von Mises Stress este defapt un termen impropriu ce face referire la teoria Von Mises Criteriu Hencky pentru insuficienta ductil. Intr-un corp elastic ce este supus unor incarcari din 3 directii, tridimensional, se creiaza un sistem complex de actiune a fortelor. Acesta actioneaza in orice punct din acel corp elastic din 3 plane, dar este diferit ca intensitate pentru fiecare punct.Criteriul Von Mises este o formula ce calculeaza daca stresul combinat dintr-un punct anume va cauza sa cedeze materialul. Sunt 3 forte ce actioneaza in fiecare punct al corpului, acestea putant fi calculate, ele actionand pe sistemul de axe x,y,z. Von Mises a descoperit faptul ca desi fiecare forta in parte nu depaseste limita de curgere a materialului, este posibil ca cedarea sa survina in urma combinatiei celor 3 forte. Criteriul Von Mises este defapt o formula ce combina cele 3 forte, intr-un sistem echivalent ce este apoi comparat cu limita de curgere a materialului. Limita de curgere este o proprietate cunoscuta pentru fiecare material standardizat. Daca rezultatul sistemului depaseste limita de curgere, atunci materialul va ceda. Acest sistem echivalent este denumit adeseasi Von Mises Stress ca o descriere la indemana. Formula pentru calculul acesteui sistem este: Unde S1, S2 si S3 sunt fortele ce actioneaza in sistemul de axe x,y,z si Se este forta echivalenta sau Von Mises Stress. 2 2 2 2) 1 3 ( ) 3 2 ( ) 2 1 ( Se * 2 S S S S S S + + =U.T.C.B Facultatea de Utilaj Tehnologic Platform mobil utilizat la roboi pentru construciiPag. 37 4.Studiu de caz37/82 Rezultatul simularii ne arata ca presiunea maxima pentru a nu aparea zone unde materialul cedeaza, este de 275MPa, iar presiunea maxima prezenta punctiform in zonele cu concentratie maxima, pentru o incarcare cu 2tone incarcare cu care s-a realizat simularea, este de 242.8MPa si este prezenta in partea superioaraa cadrului metalic si in zonele de incastrare stabilite pentru simulare. Fig.20 Deplasari Deplasarile ce apar in urma incarcarilor sunt maimici ca un milimetru chiar si pentru o incarcare de 2 tone.U.T.C.B Facultatea de Utilaj Tehnologic Platform mobil utilizat la roboi pentru construciiPag. 38 4.Studiu de caz38/82 Dupa cum se poate observa in rezultatele simularii, deplasarile sunt preponderent gasite in zona superioara, la extremitati. Fig.21 In urma acestori simulari reiese ca sasiul robotului este unul robust ce poate prelua toate incarcarile cerute, chiar avand un grad inalt de siguranta in cazul unei suprasarcini accidentale. 0TCB Facultatea ue 0tilaj Tehnologic Platfoim mobil utilizat la iobo(i pentiu constiuc(iiPag Caiet ue saicini CAIET DE SARCINI VERIFICRI CURENTE DE INTRETINERE I PERFORMAN (Condiii de performan) Preciziadetransportaresilocalizareinlocurilestabiliteadiverselormaterialepentruconstrucii suntdirectinfluenatedecaracteristicileconstructivealemanipulatoruluiautomatizatprecumide performanele tehnico-funcionale ale acestuia. Pentruaficompetitivdinpunctdevederetehnicipentruoexploatarencondiiidesiguran manipulatorul automatizat pentru transportul materialelor pentru constructii in incinta santierului trebuie s ndeplineasc urmtoarele cerine: -Sistemuldeintroducereaparametrilorincaretrebuiesafunctionezetrebuiesasigureo interfatasimplasiintuitiva,darsispatiulincaretrebuiesaisidesfasoareactivitateatrebuiesafiein parametrii constructivi ai acestuia; -Saibsursindependentdeenergiepentruacionareantreguluiansamblu,tinandcontcala punctul de lucru exista un spatiu pentru reincarcarea bateriilor in timpul noptii sau alte sisteme de transfer si incarcare cu energie electrica; -Princoncepieiexecuie,platformamobilatrebuiesseasigureposibilitidetransporti manevrare corespunztoare scopului propus; -Manipulatorulsfieprevzutcusistemedesigurancarespermitinchidereacompletasi oprirea totala a acestuia n cazul unor accidente ( defeciuni la mecanismul de deplasare sau mpotmoliri);
0TCB Facultatea ue 0tilaj Tehnologic Platfoim mobil utilizat la iobo(i pentiu constiuc(iiPag Caiet ue saicini - Starea tehnic a sistemului de deplasare trebuie s asigure deplasarea i stabilitatea platformei mobile inclusiv ntre etaje, aceasta facandu-se in pante de maxim 40 de grade, dar si in zonele ne amenajate (aderen, traciune, presiune contact); - Utilizarea si monitorizarea de personal calificat (instructaj personal exploatare privind modul de utilizare) i ntreinerea echipamentului (curare, reparare). NORME DE SECURITATE (Protecia muncii la exploatarea manipulatorului automatizat pentru transportul materialelor pentru constructii in incinta santierului) - Se vor respecta normele generale de protecia muncii menionate n Legea Proteciei Muncii nr. 90/1996 i normele metodologice de aplicare; - Manipulatorul automatizat pentru transportul materialelor pentru constructii in incinta santierului va fi deservit de personal instruit, care cunoate modul de funcionare i utilizare a acestui echipament; - n apropierea locului de munc nu au voie s ptrund eventuale persoane neautorizate, pentru a nu pune n pericol propria persoan, echipamentului sau mediul nconjurtor; - Asigurai v c antierul unde se desfoar lucrarea este protejat i semnalizat corespunztor, astfel nct s mpiedice accesul persoanelor neautorizate; - Asigurai-v c barierele folosite pentru oprirea accesului vizitatorilor n antier snt la o distan suficient pentru a garanta sigurana eventualilor trectori; 0TCB Facultatea ue 0tilaj Tehnologic Platfoim mobil utilizat la iobo(i pentiu constiuc(iiPag Caiet ue saicini -Esteinterzispornireaechipamentuluinaintedeafiverificatlegturalampmntarea sistemului de alimentare cu energie electric; - Controlaiperiodic izolaia cablurilor electrice i toate prile izolate aleechipamentului i a accesoriilor; trebuie s se in cont de faptul c infiltrarea de impuriti cu un oarecare grad de umiditate,permitecaanumitepri,care,laorigineeraubuneizolatoare,sdevinbune conductoare de electricitate, - Cel puin o dat pe saptaman trebuie efectuat o curare perfect a echipamentului (nu se folosesc solveni, benzin sau substane oxidante), pentru a nu duna prilor izolatoare; - La sfritul lucrului sau n timpul pauzelor, asigurai-v c a fost ntreruptalimentarea cu energie electric; - nainte de repunerea n funciune a echipamentului, asigurai-v c nu s-au produs daune sau omisiuni care s duc la o funcionare defectuoas; - n cazul folosirii echipamentului n zone n care exist pericolul desprinderii i cderii de bucidematerial,trebuiescluatemsuripentruaevitapunereanpericolavieiiisntii operatorilor; -Respectareaintegralareglementrilornaionaleieuropeneprivindproteciavieii,i mediului. DURATA DE VIAT NORMAL A PRODUSULUI Resursa tehnic a produsului, cu o funcionare normal, n condiii specifice de lucru, este de 6 ani, conform HG 964/1988 Hotrrea pentru aprobarea clasificaiei i a duratelor normale de funcionare a mijloacelor fixe. Conservareaidepozitareaechipamentuluisevafacenspaiinchise,uscate,lipsitede ageni corozivi. 0TCB Facultatea ue 0tilaj Tehnologic Platfoim mobil utilizat la iobo(i pentiu constiuc(iiPag Caiet ue saicini INSTRUCTIUNI DE EXPLOATARE SI CONDITII CLIMATICE Sistemulesteconceputinasafelincatsanupunaproblemedeosebitedeexploataresisa functioneze in conditii grele de santier si in conditii climaterice variate. Trebuie respectate urmatoarele norme de exploatare: Lafiecarerepauszilnicsevaverificavizualtoatecomponentelemecanicaexterioare, starea ascestora, se curata si se repara daca este necesar; Lafiecare1000deoredefunctionaresaseverificebateriilesistareaacestora,se inlocuiesc daca este cazul; Se verifica reglajele echipamentului; Lafiecare3000deoredefunctionaresevafaceoverificareatuturorelementelor sistemului; Sistemul este conceput sa lucreze in mediu exterior, cu mult praf, umiditate mare si poate lucra in intervalul de temperatura: -25-45C. Estestrictinterzisapunereainfunctiuneasistemuluiincazulincaretemperaturamediului nu se incadreaza in acest interval!!!
BREVIAR DE CALCUL1. CALCUL MECANIC GENERAL1.1Date iniiale din tema de proiectareSarcina maxima pentru transportat: Q 700kg :=Masa aproximat a manipulatorului: M 400kg :=1.2 Date initiale adoptateDr186.056mm :=Diametrul de divizare al roilor senilei:iL1 := rot 2 :=Raport de transmitere la transmisia cu lant: nm4500rotmin :=Turatia motorului:Raportul de transmitere al reductorului: iR90 :=Puterea motorului: Pm4000W :=Momentul motor : Mm26270N mm :=NOTA: NOTAIA ARBORILOR ESTE FACUT CONFORM SCHEMEI CINEMATICE1.3 Calculul turatiei arborilor nrnmiR:= nr50rotmin=1.3.1 Turatia arborelui motorului si a arborelui 1n1nriL:= n150rotmin=1.3.2 Turatia arborelui InIn1iL:= nI50rotmin=1.4 Adoptarea partialecuplaj1 :=lant0.98 :=rulmenti0.99 :=1.5 Determinarea puterilor la arborii transmisieiPrMmnr := Pr137.549 W =P1Prrulmenti cuplaj := P1136.174 W =PIP1rulmenti lant := PI132.116 W =1.6 Determinarea momentelor de rasucire la arborii transmisiei1.6.1 Arborele motorului MrPrnr:=Mr26.27N m =1.6.2 Arborele 1Mr1P1nr:= Mr126.007 N m =1.6.3 Arborele I MrIPInI:= MrI25.23N m =1.7 Determinarea vitezei maxime a manipulatoruluivmnIDr2 := vm0.487ms= vm29.226mmin= vm1.754kph =1.8 Determinarea momentului maxim la roi determinat din condiia de aderenGreutatea aproximat a manipulatorului: G 400kg :=Distana ntre roti: D 685mm :=Greutatea aproximativa a sarcinii:Q 700 kg =Coeficientul de aderen: 0.9 :=Coeficentul de rezisten la rulare: wr0.1 :=Raza dinamic: rdDr2:= rd93.028 mm =Greutatea totala: GtG Q + ( ) g :=Momentul motor maxim limitat de aderen: Mrmaxrd wr+ ( ) Gt:=Mrmax1.004 103 N m = MrI25.232 N m =Momentul motor maxim este mai mare dect celdisponibil.=> Roile nu vor patina n timpul funcionrii.1.9 Determinarea fortei maxime din conditia de intindere a senileiForta periferica transmisa FpPIvm:= Fp271.233 N =Forta de intindere a senilei Sa1.75 Fp := Sa474.658 N =1.10 Determinarea si alegerea galetilor1.10.1 Date initiale adoptate1.10.2 Coeficienti de calcul Latime senila kb0.2 :=Diametrul rolelor de sprijin kDr0.11 :=1.10.3 Presiunea admisibila Pa2.4Nmm2:=1.10.1 Calculul orientativ de dimensionareLatimea senilei: lskb3G Q + ( ) := ls200mm :=se alege ls380mm :=Lungimea de contact a senilei: LsD := Ls685 mm =Presiunea pe sol:PsGt2 lsLs ( ) := Ps0.021Nmm2=Verificarea relatiei PaPs Relatia se verificaDiametrul galetilor: DgkDr3G Q + ( ) := Dg0.11m :=se alege Dg160mm :=Latimea de contact a galetuluise alegebg52mm :=1.10.2 Calculul sialegerea grosimi galetilor:Greutatea repartizata pe galet PgGt16:= Pg674.207 N =Verificarea relatiei bgDgPgPa 7840 280.9 relatia se verifica1.11 Stabilirea parametrilor celorlalti arbori Arbore II - sustinere rotile de intindere a senilelorSe vor adopra aceleasi date ca al arborelui I deoarece asupra acestora actioneaza aceleasi forte inorizontal si au aceeasi turatie deoarece acestia lucreaza in tandem.Turatia arborelui II nIInI:=Diametrul arborelui II dII25mm :=Arborele III - sustinerea galetilorTuratia arborelui III nIIIvmDg2:= nIII58.143rotmin= se alegenII70rotmin:=Diametrul arborelui III dIII20mm :=2. CALCUL PUTERII NECESARE 2.1Date iniiale din tema de proiectareSarcina maxima pentru transportat: Q 700 kg =2.2 Date initiale adoptateMasa manipulatorului M 400 kg =2.3 Rezistenta la intaintare2.3.1 Rezistenta la rularecoeficientul de rezistenta la rularef 0.1 :=unghiul minim al pantei 3 :=Wrf M Q + ( ) g cos ( ) := Wr1.068 103 N =2.3.2 Rezistenta la pantaunghiul maxim al pantei 45 :=WpM Q + ( ) g sin ( ) := Wp9.179 103 N =2.3.3 Rezistenta dinamicaacceleratia maxima a manipulatorului a 0.5ms2:=coeficient dinamic 1.1 :=*acest coeficient dinamic tine cont de inertia altor elementeWd M Q + ( ) a := Wd605 N =Rezistenta totala WTWrWp+ Wd+ := WT1.085 104 N =2.3.4 Rezistenta la virajcoeficient de rezistenta 0.4 :=lungimea de contactL 0.67m :=MrM Q + ( )g L 8:= Mr361.375 mN =2.4 Determinarea fortelor de tractiuneecartamentul E 0.5m :=T10.5 WT 2MrE + := T16.871 103 N =T20.5 WT 2MrE + := T23.98 103 N =2.5 Calculul puterii necesarerandamentul senilei senila0.6 :=randamentul rolelor role0.8 :=2.5.1Calculul puterii pentru mersul in linie dreaptaviteza primei senile v12kmhr:=viteza celei de a 2-a senile v22kmhr:=Nnec1T1v1 T2v2 +3.6 senila role:= Nnec1929.463 W =deoarece solutia constructiva cuprinde doua motoare, se va calcula puterea necesaraunui singur motorcoeficient de alocare neuniforma a puterii b 1.1 :=N1motorNnec1b 2:= N1motorW =N1motor0.686hp =2.5.2 Calculul puterii pentru mersul in timpul virajuluiviteza primei senile v11kmhr:=viteza celei de a 2-a senile v20kmhr:=NnecT1v1 T2v2 +senilarole:= Nnec3.977 103 W =Nnec5.333hp =Cea mai mare putere necesara trebuie alocata in timpul unui viraj, motorul va fidimensionat in functie de acest criteriu, prin urmare puterea necesara unui viraj trebuiegenerata de un singur motor.Se va alege motorul S80-C400 Magmotor, deoarece acesta, in functie de voltajul siamperajul oferitde catre sistemul de comanda, poate genera pentru periaode mediide timp o putere de pana la 5,87 CP (necesara pentru periaodele scurte de viraj), iarin conditii de eficienta poate genera 3,8 CP ( pentru mersul drept in panta sau farapanta). In ambele cazuri mai mult decat este necesar. Acesti parametrii se vor reglaautomat din sistemul de comanda. 3.CALCULUL TRANSMISIEI CU LANTMetodologia de calcul este conform firmei MADLERde la care se vor achiziionarotile si lanturile3.1 Alegerea transmisiei cu lantPuterea la arborele 1 P1136.174 W =iL1 =Raportul de transmitere dintre arborii 1 i ITuraia la arborele I nI50rotmin=3.1.2 Durata de serviciu a curelelor:Factorul avand in vedere numarul de dinti: k11 :=Factorul avand in vedere transmisia: k21.22 :=Factorul avand in vedere distanta intre centre: k31.3 :=Factorul avand in vedere tipul de incarcare: k42.1 :=Factorul de serviciu total: kTk1k2 k3 k4 := kT3.331 =3.1.3 Calculul puterii de proiectare:PpP1kT := Pp0.454kW =Determinarea fortei maxime din lant:Forta periferica transmisa FplPIvm:= Fpl271.233 N =Forta din lant FL1.75 Fpl := FL474.658 N =3.1.4 Determinarea pasului:Se va alege lantul de tipul 8x3 mm cu pasul de 8mm si latimea interioara de 3mmcu simbolul 05B conform DIN 81923.2 CALCULUL ROTII DE LANT3.2.1 Calculul de dimensionarePasul pe coarda: p 8 := mmNumarul de dinti ai rotii: z 30 :=Diametrul nominal al boltului lantului: d15 := mmCaracteristica geometrica a angrenarii: pd1:= 1.6 = mmDiametrul de divizare: in pasi Dpcscz:= Dp9.567 = pasiin mm Ddp Dp := Dd76.534 = mmDiametrul inscris in poligonul de divizare:in pasi dpcotz:= dp9.514 = pasiin mm ddp dp := dd76.115 = mmInaltimea dintelui lapoligonul de divizare:in pasi kp0.650.5 := kp0.338 = pasiin mm kdp kp := kd2.7 = mmDiametrul de virf: Dedd2 kd + := De81.515 = mmDiametrul de fund: DiDdd1 := Di71.534 = mmDistanta dintre centrele razelorfundului locasului boltului :e 0.005 p := e 0.04 = mmRaza fundului locasuluiboltului:R10.5 d1 := R12.5 = mmJumatatea unghiului flancurilordintilor in grade: 14 := gradeUnghiul de racordare a fundului, (grade): 84 := gradeRaza flancului dintelui: R2p 0.5 d1 ( )cos 180:= R25.337 = mmInaltimea portiunii rectilinii a flancului: hrR2sin 180 := hr1.291 = mmCea mai mare coarda pentru controlulrotilor cu numar impar de dinti:LxDicos2 z := Lx71.436 = mmDiametrul rolei calibru: dcd1:= dc5 = mm3.2.2 Determinarea roilor i lungimea lantuluiRoata conductoare A30Z 05B - 2 - - 30SA25-0NRoata condus A30Z 05B - 2 - - 30SA25-0NStandardul: DIN 81923.2.3 Lungimea Lantului:Llc229mm :=Conform distanelor dintre centre DD76.53mm :=Diametrul de divizare:LL2 Llc DD + := LL698.426 mm =Lungimea lantuluiSe va alege pentru a satisface necesarul de lungime al lantului 88 de zale4. CALCUL PLATBANDEIDeoarece in toate cazurile dintre cele 8 platbande se regaseste aceasi dispunere siaceleasi forte, calculul se va face doar pentru una dintre acestea.Schema de calcul conform figurii cu numele " schema de calcul platbanda".4.1.Data initiale adoptate:grosimea platbandei b 8mm :=inaltimea platbandei h 25mm :=distanta pana la axa centrului de inertie Zg22.5mm :=distanta maximaZmax35mm :=forta care actioneazaFpltGt8:=lungimea intre roti lplt225mm :=rezistenta la rupere pentru OLC45 rOLC45630MPa :=coeficient de siguranta pentru rez la rupere cs2 :=4.2 Calculul rezistentei:Momentul de inertie Iy2 b h Zg( )2b h312+ := Iy2.233 105 mm4=Modulul de rezistenta WelIyZmax:= Wel6.381 103 mm3=Momentul in centrul bareiMFpltlplt4:= M 7.585 104 N mm =Rezistenta la rupere a bareiMWel:= 11.887 MPa =Verificare Rezistenta admisibilaarOLC45cs:= a315 MPa = a< Relatia se verifica4.3 Calculul sagetiimodulul de elasticitateE 210000Nmm2:= E 2.1 105 MPa =sageata admisibila fadmlplt200:= fadm1.125mm =sageata f5 Fplt lplt4384mm E Iy:= f 0.959mm =fadmf > Relatia se verificaNr. Crt.Denumirea parametruluiSimbol U.M.Relaia de calcul sau indicaia de proiectareObs. sau valori adoptate1 Turaia arborelui I nI rot/min Cap.1 502 Momentul de rsucireMrINmm Cap.1 25.232,283Diametrul de divizare al roii senilei (Roata1)Dr mm Cap.1 186,066 Puterea la arborele 1 PI kW Cap.1 0,132117 Vitezaroii 1Vm m/s Cap.1 0,48708Fora normal maxim care acioneaz pe braSa N Cap.1 474,658Nr. Crt.Denumirea parametruluiSimbol U.M.Relaia de calcul sau indicaia de proiectareObs. sau valori adoptate1 Marca oelului - - - 40 Cr 10 XS2 Tratamentul termic- - - C+R3 Rezistena la rupere ZrMPa - 9804 Limita de curgere ZcMPa - 790Zmin 1iMPa 492,5ZoiMPa 738,755Avnd n vedere faptul c arborele este simetric in partea opusa i rspunde la aceleai ncrcri, se va face calculele numai pentru un arbore urmnd ca dimensiunile rezultate prin calcul s fie asimilate i la arborele din partea opusa.5. Calculul de predimensionare al arborelui I5.1 DATE INIIALE 5.2 ALEGEREA MATERIALULUI I STABILIREA CARACTERISTICILOR DE REZISTEN ALE ACESTUIACaracteristici de rezisten la oboseal la ncovoiere504 c r1i min++=1i min oi * 5 . 1 =[min 1rMPa 278,2625[orMPa 528,69875@min1- 0,053Determinarea tensiunilor admisibile 7 Coeficientul de siguran admisibil ca - - 28Coeficientul de concentrare al tensiunilor Ik - - 1,679 Factorul dimensional L - - 0,810 Factorul de calitate al suprafeei N - - 0,9311Tensiunea admisibil la ncovoiere pentru cazul I de solicitareZaiIMPa 39512Tensiunea admisibil la ncovoiere pentru cazul III de solicitareZaiIIIMPa 109,70713Tensiunea admisibil la ncovoiere pentru cazul II de solicitareZaiIIMPa 171,7214Tensiunea admisibil la rsucire pentru cazul II de solicitare[arIIMPa 85,8615Determinarea coeficientului de corecie pentru ipoteza III de rupereHIIIs0,639Nr. Crt.Denumirea parametruluiSimbol U.M.Relaia de calcul sau indicaia de proiectareObs. sau valori adoptate1Distana dintre rulment si roata de senila (Roata 1)l1mm Constructiv 63,52Distana dintre roata de senila (Roata 1) i rulment l2mm Constructiv 126,53Distana dintre rulment roata de senila (Roata 2)l3mm Constructiv 108,54Distana dintre roata de senila (Roata 2) i roata de lant (Roata 3)l4mm Constructiv 57,316Caracteristici de rezisten la oboseal la rsucire5.3 STABILIREA DISTANELOR DE CALCUL1i min 1 min * 565 . 0 =rr or 1 min* 9 . 1 =or1r min* 21 min =acc=aiIk1i minaiIII * 2 * * =III ai I aiIII ai I aiII ai * * 2+=2II aiII ar= II arIII ais III* 2 = Nr. Crt.Denumirea parametruluiSimbol U.M.Relaia de calcul sau indicaia de proiectareObs. sau valori adoptateA) n plan orizontal1Fora tangential din roata de lant (Roata 3)Ft3N 13,563244352Fora tangential din roata de senila (Roata 1)Ft2N 237,3293Fora tangential din roata de senila (Roata 2)Ft4N 237,329B) n plan vertical1 Fora radial a roii de lant (Roata 3) Fr5N 271,2331771Nr. Crt.Denumirea parametruluiSimbol U.M.Relaia de calcul sau indicaia de proiectareObs. sau valori adoptateA) n plan orizontal1 Reaciunea din seciunea 1H1 N 452,17422 Reaciunea din seciunea 3 H3 N 22,48383 Verificare - - Se verific. 04 MiHINmm 25750,1965B) n plan vertical1 Reaciunea din seciunea 1V1 N -236,702 Reaciunea din seciunea 3 V3 N 507,933 Verificare - - Se verific. 04 MiVINmm 44973,175.4.4 STABILIREA NCRCRILOR PE ARBORE5.5 DETERMINAREA DIAGRAMELOR DE EFORTURI1r4r5dM * 2F =14t3VP * 50F =2SFat2=2SFat4=2 14 3 r51l l) l l ( FV++ =2 14 3 2 1 r53l l) l l l l ( FV++ + + =) l (l * F M4 3 r5 iV3+ =3 22 1 t2 3 2 1 t41l l) l l ( F ) l l (l FH++ + + + =2 13 t4 2 t23l ll F l FH+ =3 t4 iHF MIl =Nr. Crt.Denumirea parametruluiSimbol U.M.Relaia de calcul sau indicaia de proiectareObs. sau valori adoptate1Momentele ncovoietoare totale n seciunile caracteristiceMiI Nmm 51823,343372Momentele echivalente n seciunile caracteristiceMeINmm 54273,60144dIc mm 17,03928763dI mm 25Diametrele de calcul n seciunile caracteristice35.6 DETERMINAREA DIAMETRELOR ARBORELUI N SECIUNILE CARACERISTICE2iV2iH iII IM M M + =2s III rI2iI eI) * (M M M + =3III aieIIcM * 10d =Nr. Crt.Denumirea parametruluiSimbol U.M.Relaia de calcul sau indicaia de proiectareObs. sau valori adoptate1 Turaia arborelui II n2 rot/min Cap.1 502Diametrul de divizare al roii de senila (roata intindere)Dr mm Cap.1 186,063 Viteza curelei dinate a roii 1Vm m/s Cap.1 0,48704Fora normal maxim care acioneaz pe braSa N Cap.1 474,658Nr. Crt.Denumirea parametruluiSimbol U.M.Relaia de calcul sau indicaia de proiectareObs. sau valori adoptate1 Marca oelului - - - 40 Cr 10 XS2 Tratamentul termic- - - C+R3 Rezistena la rupere ZrMPa - 9804 Limita de curgere ZcMPa - 790Zmin 1iMPa 492,5ZoiMPa 738,75[min 1rMPa 278,2625[orMPa 528,698756 @min1- 0,053Caracteristici de rezisten la oboseal la rsucire66. Calculul de predimensionare al arborelui IIAvnd n vedere faptul c arborele este simetric in partea opusa i rspunde la aceleai ncrcri, se va face calculele numai pentru un arbore urmnd ca dimensiunile rezultate prin calcul s fie asimilate i la arborele din partea opusa.6.1 DATE INIIALE 6.2 ALEGEREA MATERIALULUI I STABILIREA CARACTERISTICILOR DE REZISTEN ALE ACESTUIA5Caracteristici de rezisten la oboseal la ncovoiere504 c r1i min++=1i min oi * 5 . 1 =1i min 1 min * 565 . 0 =rr or 1 min* 9 . 1 =or1r min* 21 min =Determinarea tensiunilor admisibile 7 Coeficientul de siguran admisibil ca - - 28Coeficientul de concentrare al tensiunilor Ik - - 1,679 Factorul dimensional L - - 0,810 Factorul de calitate al suprafeei N - - 0,9311Tensiunea admisibil la ncovoiere pentru cazul I de solicitareZaiIMPa 39512Tensiunea admisibil la ncovoiere pentru cazul III de solicitareZaiIIIMPa 109,70713Tensiunea admisibil la ncovoiere pentru cazul II de solicitareZaiIIMPa 171,7214Tensiunea admisibil la rsucire pentru cazul II de solicitare[arIIMPa 85,8615Determinarea coeficientului de corecie pentru ipoteza III de rupereHIIIs0,639Nr. Crt.Denumirea parametruluiSimbol U.M.Relaia de calcul sau indicaia de proiectareObs. sau valori adoptate1Distana dintreroata de senila si rulment(Roata 1)l1mm Constructiv 592 Distana dintre rulment i rulmentl2mm Constructiv 1003Distana dintre rulment roata de senila (Roata 2)l3mm Constructiv 59Nr. Crt.Denumirea parametruluiSimbol U.M.Relaia de calcul sau indicaia de proiectareObs. sau valori adoptateA) n plan orizontal1Fora tangential din roata de senila (Roata 1)Ft1N 237,3296.3 STABILIREA DISTANELOR DE CALCUL6.4 STABILIREA NCRCRILOR PE ARBOREacc=aiIk1i minaiIII * 2 * * =III ai I aiIII ai I aiII ai * * 2+=2II aiII ar= II arIII ais III* 2 = 2SFat1=2Fora tangential din roata de senila (Roata 2)Ft4N 237,329Nr. Crt.Denumirea parametruluiSimbol U.M.Relaia de calcul sau indicaia de proiectareObs. sau valori adoptateA) n plan orizontal1 Reaciunea din seciunea 2H2 N 237,3292 Reaciunea din seciunea 3 H3 N 237,3293 Verificare - - Se verific. 04 MiHIINmm 14002,411Nr. Crt.Denumirea parametruluiSimbol U.M.Relaia de calcul sau indicaia de proiectareObs. sau valori adoptate1Momentele ncovoietoare totale n seciunile caracteristiceMiIINmm 14002,4112Momentele echivalente n seciunile caracteristiceMeIINmm 14002,41101dIIc mm 10,84732937dII mm 253Diametrele de calcul n seciunile caracteristice6.5 DETERMINAREA DIAGRAMELOR DE EFORTURI7.6 DETERMINAREA DIAMETRELOR ARBORELUI N SECIUNILE CARACERISTICE22SFat4=23 t4 2 1 t12ll F - ) l (l FH + =23 t1 2 t43ll F )3l l ( FH + =3 t4 iHF M3l =2iV2iH iIIII IIM M M + =2s III rII2iII eII) * (M M M + =3III aieIIIIcM * 10d =Nr. Crt.Denumirea parametruluiSimbol U.M.Relaia de calcul sau indicaia de proiectareObs. sau valori adoptate1 Turaia arborelui III nIII rot/min Cap.1 702 DiametrulroiiDr mm Cap. 160,003 Vitezaroii Vm m/s Cap.4 0,48704Fora normal maxim care acioneaz pe braF1=Pg/8 N Cap.1 1347,5Nr. Crt.Denumirea parametruluiSimbol U.M.Relaia de calcul sau indicaia de proiectareObs. sau valori adoptate1 Marca oelului - - - 40 Cr 10 XS2 Tratamentul termic- - - C+R3 Rezistena la rupere ZrMPa - 9804 Limita de curgere ZcMPa - 790Zmin 1iMPa 492,5ZoiMPa 738,75[min 1rMPa 278,2625[orMPa 528,698756 @min1- 0,053Caracteristici de rezisten la oboseal la rsucire67 Calculul de predimensionare al arborelui IIIAvnd n vedere faptul c arborele este simetric, se va face calculele numai pentru un arbore urmnd ca dimensiunile rezultate prin calcul s fie asimilate i pentru ceilalti arbori7.1 DATE INIIALE 7.2 ALEGEREA MATERIALULUI I STABILIREA CARACTERISTICILOR DE REZISTEN ALE ACESTUIA5Caracteristici de rezisten la oboseal la ncovoiere504 c r1i min++=1i min oi * 5 . 1 =1i min 1 min * 565 . 0 =rr or 1 min* 9 . 1 =or1r min* 21 min =Determinarea tensiunilor admisibile 7 Coeficientul de siguran admisibil ca - - 28Coeficientul de concentrare al tensiunilor Ik - - 1,679 Factorul dimensional L - - 0,810 Factorul de calitate al suprafeei N - - 0,9311Tensiunea admisibil la ncovoiere pentru cazul I de solicitareZaiIMPa 39512Tensiunea admisibil la ncovoiere pentru cazul III de solicitareZaiIIIMPa 109,70713Tensiunea admisibil la ncovoiere pentru cazul II de solicitareZaiIIMPa 171,7214Tensiunea admisibil la rsucire pentru cazul II de solicitare[arIIMPa 85,8615Determinarea coeficientului de corecie pentru ipoteza III de rupereHIIIs0,639Nr. Crt.Denumirea parametruluiSimbol U.M.Relaia de calcul sau indicaia de proiectareObs. sau valori adoptate1Distana dintre rulmentul rotii si platbanda (Galet)l1mm Constructiv 30,52 Distana dintre platbanda 1 si 2 l2mm Constructiv 1783Distana dintre platbanda si rulmentul roatii(Galet)l3mm Constructiv 30,5Nr. Crt.Denumirea parametruluiSimbol U.M.Relaia de calcul sau indicaia de proiectareObs. sau valori adoptateB) n plan vertical1 Fora radial din platbanda 1 Fr2N 673,757.3 STABILIREA DISTANELOR DE CALCUL7.4 STABILIREA NCRCRILOR PE ARBOREacc=aiIk1i minaiIII * 2 * * =III ai I aiIII ai I aiII ai * * 2+=2II aiII ar= II arIII ais III* 2 = 2FF1r2=2 Fora radial din platbanda 2 Fr3N 673,75Nr. Crt.Denumirea parametruluiSimbol U.M.Relaia de calcul sau indicaia de proiectareObs. sau valori adoptateB) n plan vertical1 Reaciunea din seciunea 1V1 N 673,752 Reaciunea din seciunea 3 V4 N 673,753 Verificare - - Se verific. 0,004 MiVIIINmm 20549,38Nr. Crt.Denumirea parametruluiSimbol U.M.Relaia de calcul sau indicaia de proiectareObs. sau valori adoptate1Momentele ncovoietoare totale n seciunile caracteristiceMiIIINmm 20549,3752Momentele echivalente n seciunile caracteristiceMeIIINmm 20549,37501dIIIc mm 12,32692517dIII mm 203Diametrele de calcul n seciunile caracteristice7.5 DETERMINAREA DIAGRAMELOR DE EFORTURI7.6 DETERMINAREA DIAMETRELOR ARBORELUI N SECIUNILE CARACERISTICE22FF1r3=3 2 13 r3 3 2 r21l l ll F ) l l ( FV+ + + + =3 2 11 r2 2 1 r34l l ll F ) l l ( FV+ + + + =3 r3 iVl * F M3=2iV2iH i33 3M M M + =2s III r42i3 e3) * (M M M + =3III aie33cM * 10d =Nr. Crt.Denumirea parametruluiSimbol U.M.Relaia de calcul sau indicaia de proiectareObs. sau valori adoptate1 Turaia arborelui I nI rot/min Cap.1 502 Reaciunea maxim radial V3 N Predimensionare arbore 507,933 Reaciunea maxim axial H1 N Predimensionare arbore 4524Diametrul arborelui n dreptul rulmentuluidImm Predimensionare arbore 25Nr. Crt.Denumirea parametruluiSimbol U.M.Relaia de calcul sau indicaia de proiectareObs. sau valori adoptate1 Durabilitatea necesar Lh ore Adoptat 1000x - 1y - 13 Sarcina dinamic echivalent P N P=x * Fr + y * Fa 960,10828814 Calculul valorii de calcul a raportului - - 1,4425 Capacitatea dinamic necesar: cnecN 1384,4761516 Adoptarea rulmentului 8. CALCULUL RULMENILOR8.1 ARBORELE I - Sustinere roti motoare 8.1.1 DATE INIIALE 8.1.2 STABILIREA SERIEI RULMENTULUI2Coeficientii sarcinii dinamice echivalenteAdoptm pereche de rulmeni in lagare de la firma SKF:SY 25 TFISO 3096+C1:2000p10L n 60c6hPc = cnecPcP c =Nr. Crt.Denumirea parametruluiSimbol U.M.Relaia de calcul sau indicaia de proiectareObs. sau valori adoptate1 Turaia arborelui II nII rot/min Cap.1 50,002 Reaciunea maxim radial H2 N Predimensionare arbore 237,334Diametrul arborelui n dreptul rulmentuluidII mm Predimensionare arbore 25Nr. Crt.Denumirea parametruluiSimbol U.M.Relaia de calcul sau indicaia de proiectareObs. sau valori adoptate1 Durabilitatea necesar Lh ore Adoptat 1000x - 1y - 13 Sarcina dinamic echivalent P N P=x * Fr + y * Fa 237,3294 Calculul valorii de calcul a raportului - - 1,4425 Capacitatea dinamic necesar: cnecN 342,2284186 Adoptarea rulmentului 8.2.1 DATE INIIALE2 8.2.2 STABILIREA SERIEI RULMENTULUI8.2 ARBORELE II - Sustinere roti pentru intindereCoeficientii sarcinii dinamice echivalenteAdoptm pereche de rulmeni in lagare de la firma SKF:SY 25 TFISO 3096+C1:2000p10L n 60c6hPc = cnecPcP c =Nr. Crt.Denumirea parametruluiSimbol U.M.Relaia de calcul sau indicaia de proiectareObs. sau valori adoptate1 Turaia arborelui III nIII rot/min Cap.1 752 Reaciunea maxim radial V1 N Predimensionare arbore 673,754Diametrul arborelui n dreptul rulmentuluidIII mm Predimensionare arbore 20Nr. Crt.Denumirea parametruluiSimbol U.M.Relaia de calcul sau indicaia de proiectareObs. sau valori adoptate1 Durabilitatea necesar Lh ore Adoptat 1000x - 1y - 03 Sarcina dinamic echivalent P N P=x * Fr + y * Fa 673,754 Calculul valorii de calcul a raportului - - 1,6515 Capacitatea dinamic necesar: cnecN 1112,361256 Adoptarea rulmentului 8.3.1 DATE INIIALE8.3 ARBORELE III - Sustinere galeti 8.3.2 STABILIREA SERIEI RULMENTULUI2Coeficientii sarcinii dinamice echivalenteAdoptm pereche de rulmeni de la firma SKF: PF 20 RMp10L n 60c6hPc = cnecPcP c =Nr. Crt.Denumirea parametruluiSimbol U.M.Relaia de calcul sau indicaia de proiectareObs. sau valori adoptate1 Diametrul arboreluidI mm Predimensionare arbore 252 Momentul de rsucireMr2N mm Predimensionare arbore 25.232,283 Forta axiala maxima V N Predimensionare arbore 5084 Diametrul arboreluid mm Adoptat 255 Momentul de rsucireadmisibil Mr adNmm Adoptat 2800006 Tensiunea admisibil la rsucire V N Adoptat 220007Nr. Crt.Denumirea parametruluiSimbol U.M.Relaia de calcul sau indicaia de proiectareObs. sau valori adoptate1 Diametrul arboreluidI mm Predimensionare arbore 252 Momentul de rsucireMr2N mm Predimensionare arbore 25.232,283 Forta axiala maxima V N Predimensionare arbore 508 9.1.2 ALEGEREA SISTEMULUI DE FIXARESe va alege sistemul de pridere si fixare 615625000 MADLER9.2 ARBORELE ISISTEM DE FIXARE 2 9.2.1 DATE INIIALE9. CALCULUL SISTEMELOR DE PRINDERE 9.1 ARBORELE ISISTEM DE FIXARE 1 9.1.1 DATE INIIALE4 Diametrul arboreluid mm Adoptat 255 Momentul de rsucireadmisibil Mr adNmm Adoptat 2800006 Tensiunea admisibil la rsucire V N Adoptat 220007Nr. Crt.Denumirea parametruluiSimbol U.M.Relaia de calcul sau indicaia de proiectareObs. sau valori adoptate1 Diametrul arboreluidII mm Predimensionare arbore 252 Momentul de rsucireMr3N mm Predimensionare arbore 25.230,003 Forta axiala maxima V N Predimensionare arbore 2374 Diametrul arboreluid mm Adoptat 255 Momentul de rsucireadmisibil Mr adNmm Adoptat 2800006 Tensiunea admisibil la rsucire V N Adoptat 220007Se va alege sistemul de pridere si fixare 615625000 MADLER9.3 ARBORELE IISISTEM DE FIXARE 1 9.3.1 DATE INIIALE9.3.2 ALEGEREA SISTEMULUI DE FIXARESe va alege sistemul de pridere si fixare 615625000 MADLER 9.2.2 ALEGEREA SISTEMULUI DE FIXARENr. Crt.Denumirea parametruluiSimbol U.M.Relaia de calcul sau indicaia de proiectareObs. sau valori adoptate1 Diametrul arboreluidII mm Predimensionare arbore 252 Momentul de rsucireMr3N mm Predimensionare arbore 25.230,003 Forta axiala maxima V N Predimensionare arbore 2374 Diametrul arboreluid mm Adoptat 255 Momentul de rsucireadmisibil Mr adNmm Adoptat 2800006 Tensiunea admisibil la rsucire V N Adoptat 220007 9.4.1 DATE INIIALERulmentul este prevazut cu sistem de prindere 9.5 ARBORELE IIISISTEM DE FIXARE 29.5.1 Tipul rulmentului incastrat in roata: PF 20 RMRulmentul este prevazut cu sistem de prindere 9.4 ARBORELE IISISTEM DE FIXARE 2 9.4.2 ALEGEREA SISTEMULUI DE FIXARESe va alege sistemul de pridere si fixare 615625000 MADLER 9.5.1 Tipul rulmentului incastrat in roata: PF 20 RM9.5 ARBORELE IIISISTEM DE FIXARE 10TCB Facultatea ue 0tilaj Tehnologic Platfoim mobil utilizat la iobo(i pentiu constiuc(iiPag Bibliogiafia BIBLIOGRAFIE Mircea Alamoreanu -Masini de ridicat Vol. I Editura Tehnica 1996 Indira Andreescu. -Rezistena MaterialelorNote de CursMircea Rade - Rezistena materialelorEd Printech 2010 Munteanu Olimp - Bazele roboticii Ed UTBDocumentaie de la firmele si conferinte: BioRob, Pisa 2006 ,Conference Digest Italia IAA, Hanovra 2010 Germania Madler Germania SKF Grup Suedia Magmotor U.S.A. RobotCombat U.S.A. Mobile Robotics U.S.A. Renold U.K. DRB Korea Hitachi Japonia 0TCB Facultatea ue 0tilaj Tehnologic Platfoim mobil utilizat la iobo(i pentiu constiuc(iiPag Bibliogiafia Siteuri Web: http://en.wikipedia.org/wiki/Robot#Types_of_robots http://www.euron.org/resources/projects/2009 http://en.wikipedia.org/wiki/Mobile_robot#History http://en.wikipedia.org/wiki/Al-Jazari#cite_note-7 http://www.britannica.com/EBchecked/topic/505818/robot http://www.biorobotics.it/evryon.htmlhttp://www.leonardo3.net/leonardo/books%20I%20robot%20di%20Leonardo%20-%20Taddei%20Mario%20-%20english%20Leonardo%20robots%201.html#1 http://www.rmtrobotics.com/tire_agv.html FACULTATEA DE UTILAJ TEHNOLOGIC - UTCBFACULTATEA DE UTILAJ TEHNOLOGIC - UTCBFACULTATEA DE UTILAJ TEHNOLOGIC - UTCBFACULTATEA DE UTILAJ TEHNOLOGIC - UTCBFACULTATEA DE UTILAJ TEHNOLOGIC - UTCBFACULTATEA DE UTILAJ TEHNOLOGIC - UTCBFACULTATEA DE UTILAJ TEHNOLOGIC - UTCBFACULTATEA DE UTILAJ TEHNOLOGIC - UTCBFACULTATEA DE UTILAJ TEHNOLOGIC - UTCBFACULTATEA DE UTILAJ TEHNOLOGIC - UTCBFACULTATEA DE UTILAJ TEHNOLOGIC - UTCBFACULTATEA DE UTILAJ TEHNOLOGIC - UTCB