Echipamente de Protezare - Curs 1
48
Cursul 1 UNIVERSITATEA “VASILE ALECSANDRI” BACAU FACULTATEA DE STIINTE ALE MISCARII, SPORTULUI SI SANATATII STUDII UNIVERSITARE LICENTA – SPECIALIZAREA KINETOTERAPIE DISCIPLINA: APARATURA SI TEHNICI DE ORTEZARE
-
Upload
dragos-mitrofan -
Category
Documents
-
view
102 -
download
2
description
O introducere in tehnici de ortezare
Transcript of Echipamente de Protezare - Curs 1
Cursul 1
UNIVERSITATEA “VASILE ALECSANDRI” BACAUFACULTATEA DE STIINTE ALE MISCARII, SPORTULUI SI SANATATIISTUDII UNIVERSITARE LICENTA – SPECIALIZAREA KINETOTERAPIE DISCIPLINA: APARATURA SI TEHNICI DE ORTEZARE
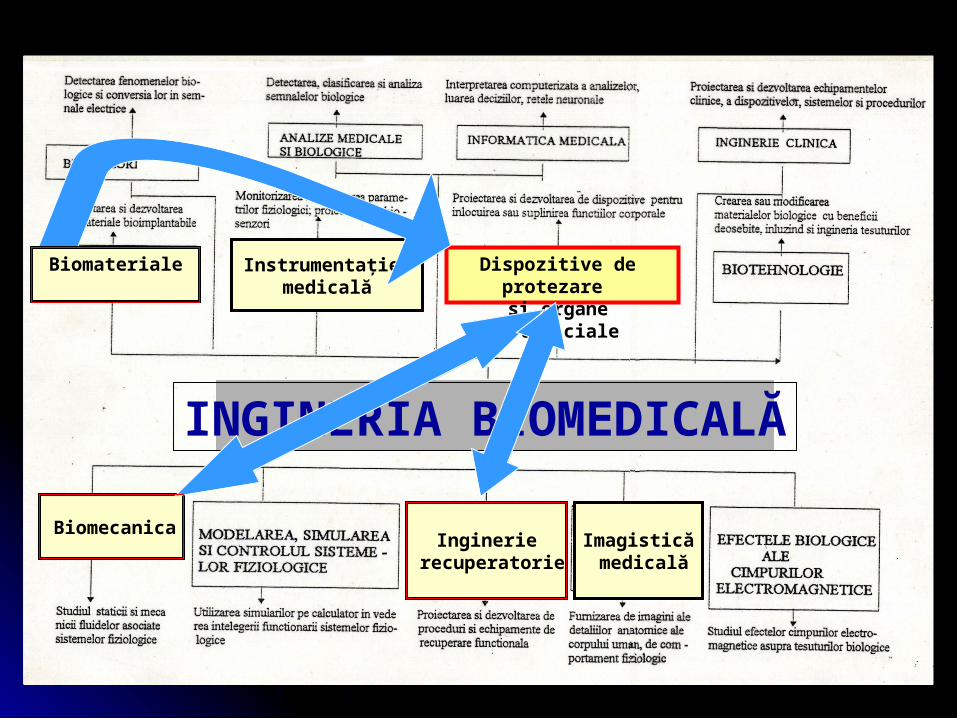
INGINERIA BIOMEDICALĂ
Dispozitive de protezare si organe artificiale
Inginerie recuperatorie
BiomecanicaImagistică medicală
Instrumentaţie medicală
Biomateriale
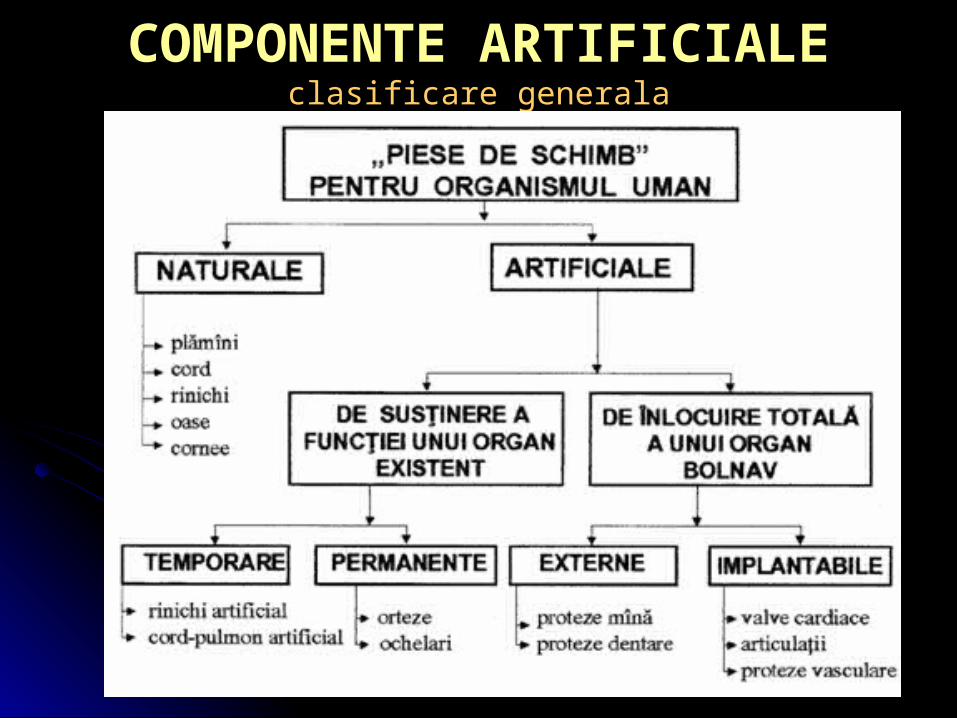
COMPONENTE ARTIFICIALECOMPONENTE ARTIFICIALEclasificare generalaclasificare generala
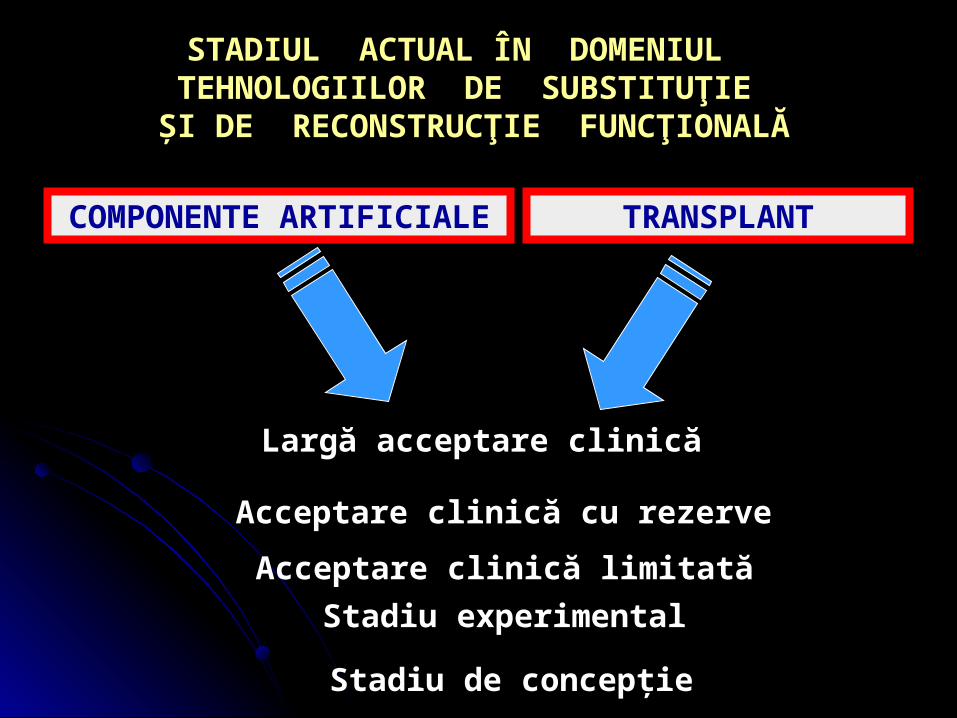
STADIUL ACTUAL ÎN DOMENIUL TEHNOLOGIILOR DE SUBSTITUŢIE
ŞI DE RECONSTRUCŢIE FUNCŢIONALĂ
COMPONENTE ARTIFICIALE TRANSPLANT
Largă acceptare clinică
Acceptare clinică cu rezerve
Acceptare clinică limitată
Stadiu experimental
Stadiu de concepţie
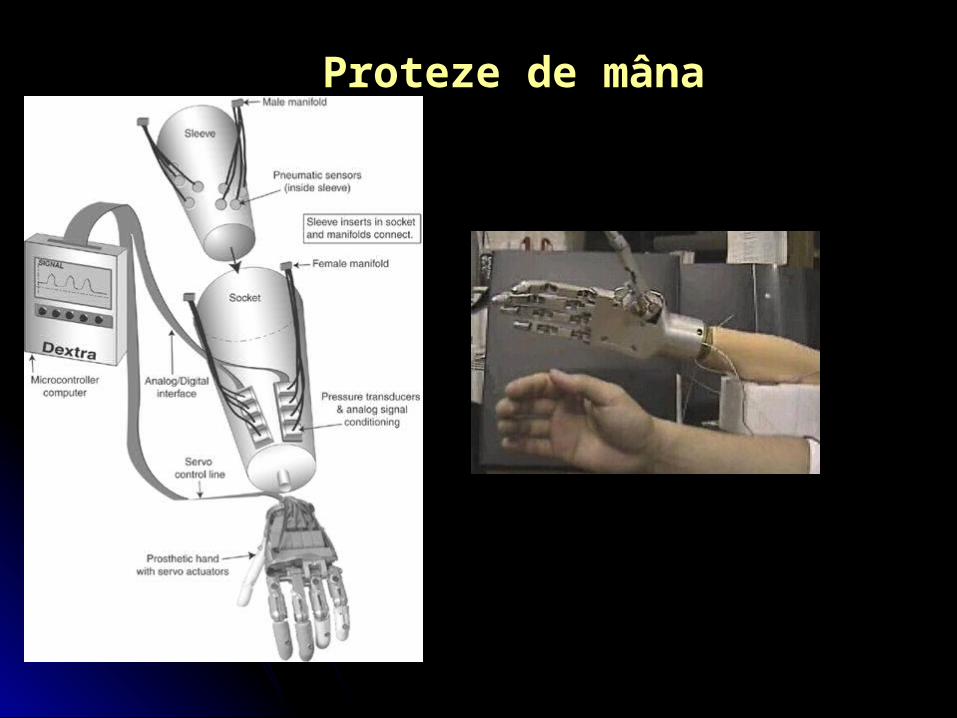
Proteze de mâna
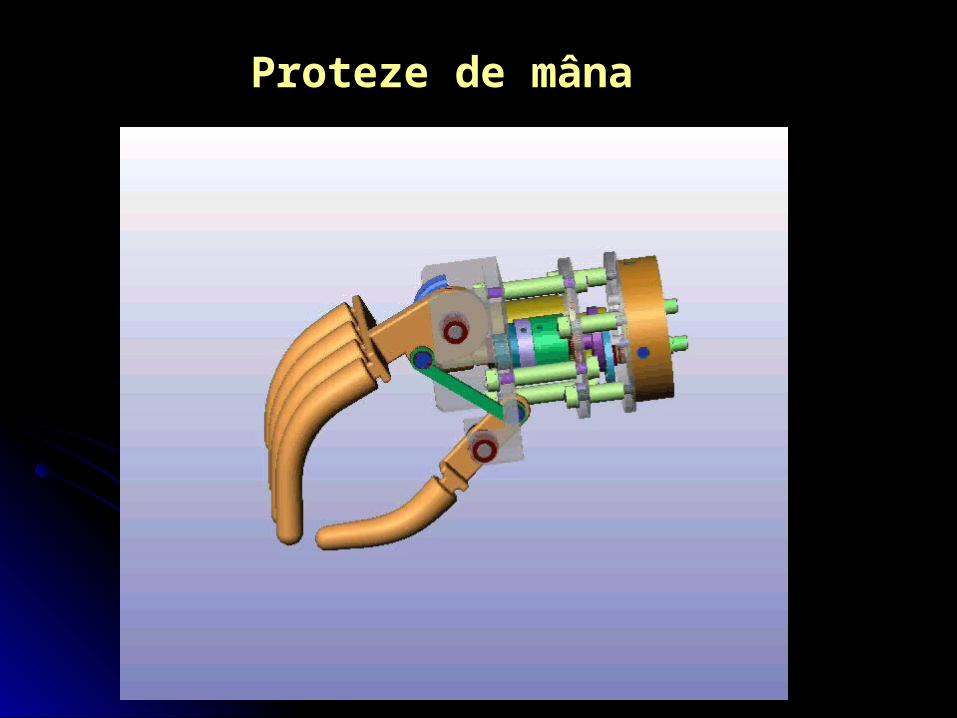
Proteze de mâna
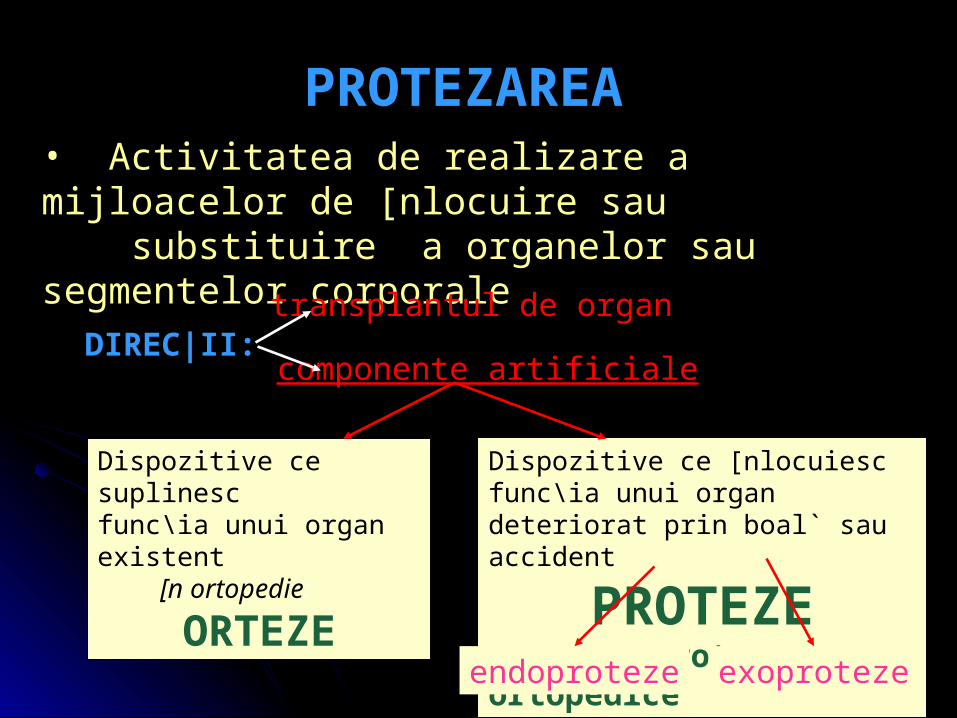
PROTEZAREA • Activitatea de realizare a mijloacelor de [nlocuire sau substituire a organelor sau segmentelor corporale
DIREC|II:transplantul de organ
componente artificiale
Dispozitive ce suplinescfunc\ia unui organ existent
[n ortopedie:
ORTEZE
Dispozitive ce [nlocuiesc func\ia unui organ deteriorat prin boal` sau accident
PROTEZE[n ortopedie: proteze ortopediceendoproteze exoproteze
LIMITELE COMPONENTELOR ARTIFICIALE ACTUALE
Capacitate limitată de reproducere a funcţionalităţii organului înlocuit
Reproducerea funcţionalităţii prin procese nenaturale (mecanice, electrice sau chimice)
Realizarea din materiale sintetice
Absenţa capacităţii de adaptare la procesele de creştere din organismul uman
A doua generaţie: protezele biohibride
A treia generaţie: protezele informatizate sau “ inteligente”
( prima generaţie - proteze convenţionale)
ETAPELE PROIECTETAPELE PROIECTĂĂRII RII ECHIPAMENTELOR ECHIPAMENTELOR ŞŞI DISPOZITIVELOR I DISPOZITIVELOR
DE PROTEZAREDE PROTEZARE
1. stabilirea în termeni cantitativi a parametrilor esenţiali privind funcţia sau funcţiile ce urmează a fi reproduse de componenta artificială;
2. stabilirea restricţiilor impuse de cuplarea produsului cu organismul uman şi evaluarea duratei de utilizare neîntreruptă;
3. evaluarea posibilităţilor de materializare tehnică a produsului (utilizarea tehnicilor de modelare şi simulare pot sprijini substanţial acest proces conducând la reducerea costurilor;
ETAPELE PROIECTETAPELE PROIECTĂĂRII RII ECHIPAMENTELOR ECHIPAMENTELOR ŞŞI DISPOZITIVELOR I DISPOZITIVELOR
DE PROTEZAREDE PROTEZARE
4. realizarea prototipului şi efectuarea corecţiilor necesare;
5. optimizarea produsului în cazul în care acesta corespunde specificaţiilor de proiectare sau reevaluarea lui în caz contrar;
6. validarea produsului optimizat prin testări clinice, adaptate particularităţilor produsului, respectiv testări pe animale (in-vitro, in-vivo) în cazul protezelor implantabile sau pe pacienţi, în cazul celor externe;
ETAPELE PROIECTETAPELE PROIECTĂĂRII RII ECHIPAMENTELOR ECHIPAMENTELOR ŞŞI DISPOZITIVELOR I DISPOZITIVELOR
DE PROTEZAREDE PROTEZARE
7. individualizarea produsului, deci conferirea capacităţii de adaptare la caracteristicile (datele antropometrice) sau nevoile individuale ale pacienţilor ceea ce presupune realizarea produsului într-o gamă de dimensiuni şi de parametrii funcţionali cât mai largă;
8. supravegherea pieţii de desfacere a produsului realizat în vederea analizării gradului de acceptabilitate a produsului. Se impune crearea unei baze de date privind utilizatorii şi menţinerea unei legături cu aceştia, scopul fiind stabilirea deficienţelor structurale şi funcţionale ce nu au putut fi evidenţiate în etapele de evaluare clinică. Se creează astfel premisele unei continue perfecţionări a produsului.
PROTEZAREA APARATULUIPROTEZAREA APARATULUI DE DE
LLOCOMOŢIE ŞI PREHENSIUNEOCOMOŢIE ŞI PREHENSIUNE
PROTEZAREA APARATULUIPROTEZAREA APARATULUI DE DE LOCOMOŢIE ŞI PREHENSIUNELOCOMOŢIE ŞI PREHENSIUNE
LOCOMOŢIELOCOMOŢIE – acţiunea sau capacitatea de deplasare dintr-un loc în altul – acţiunea sau capacitatea de deplasare dintr-un loc în altul
PREHENSIUNEPREHENSIUNE – capacitatea de a apuca, manipula obiecte cu – capacitatea de a apuca, manipula obiecte cu mîna sau alt segment corporalmîna sau alt segment corporal
PROTEZAREA APARATULUIPROTEZAREA APARATULUI DE DE LOCOMOŢIE ŞI PREHENSIUNELOCOMOŢIE ŞI PREHENSIUNE
PROTEZAREA APARATULUIPROTEZAREA APARATULUI DE DE LOCOMOŢIE ŞI PREHENSIUNELOCOMOŢIE ŞI PREHENSIUNE
ISTORIC
- lucrările lui Herodot scrise în jurul anului 484 î.e.n.
- diferite tipuri de proteze se află în prezent expuse în diverse muzee din lume, cea mai veche fiind cea descoperită în anul 1858, într-un mormânt din Capua, Italia, fiind apreciată ca datând din anul 300 î.e.n. Caracteristicile lor principale erau simplitatea - un pilon de sprijin, greutatea relativ mare - fiind realizate din fier sau lemn, şi specializarea corespunzătoare cerinţelor individuale de utilizare ale purtătorilor lor.
- Chirurgii, Ambroise Pare (Franţa, 1529) si Verduin (Olanda,1696) sunt primii care au creat proteze cu articulatii mobile.
MEMBRUL INFERIOR
PROTEZAREA APARATULUIPROTEZAREA APARATULUI DE DE LOCOMOŢIE ŞI PREHENSIUNELOCOMOŢIE ŞI PREHENSIUNE
ISTORIC
-Realizări notabile: englezul James Pots of London fiind primul care a proiectat o proteză cu componente din lemn, cuplate prin articulaţii din oţel (“piciorul Anglesey”)ş
- Preocuparea spre perfecţionarea sistemelor de protezare pentru membrele inferioare a crescut simţitor, în America, după războiul pentru independenţă, şi în întreaga lume, în special în America şi Europa, după cel de-al doilea război mondial.
MEMBRUL INFERIOR
PROTEZAREA APARATULUIPROTEZAREA APARATULUI DE DE LOCOMOŢIE ŞI PREHENSIUNELOCOMOŢIE ŞI PREHENSIUNE
ISTORIC
- o istorie mai puţin cunoscută;- mâna Alt-Rupin, descoperită în Germania în 1863 (pe Rin) şi expusă, alături de alte proteze din secolul XV, la Muzeul Stibbert din Florenţa, se caracteriza printr-o construcţie ingenioasă care, chiar dacă prezenta policele ca rigid, permitea mişcarea în pereche a celorlalte degete precum şi flexia încheieturii mâinii.
Momente semnificative: -introducerea în anul 1812 de către Balif a principiului utilizării mişcă rii relative dintre segmentele corpului;- brevetarea în 1912 de către D.W. Dorrance a primului dispozitiv de tip hook;- introducerea în 1940 a controlului mioelectric de catre Ritter.
Cazuistica medicală, alarmantă, determinată, şi aici, de cel de-al doilea război mondial şi apoi de războiul din Vietnam, a condus la derularea unor ample programe de dezvoltare a domeniului protezării (SUA, Germania, Rusia, Italia).
MEMBRUL SUPERIOR
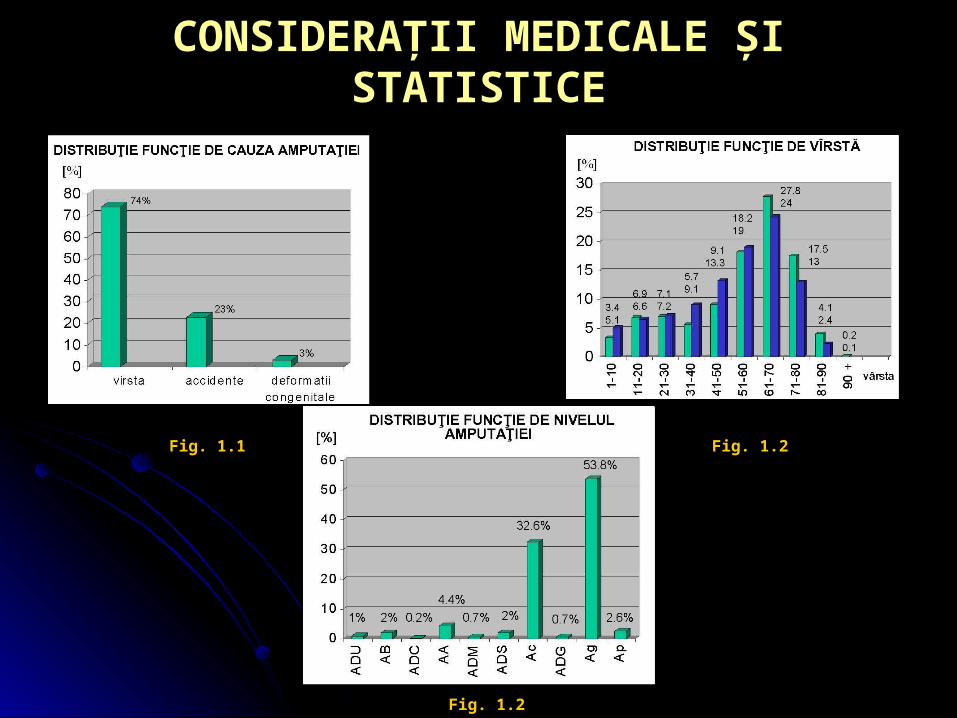
CONSIDERAŢII MEDICALE ŞI CONSIDERAŢII MEDICALE ŞI STATISTICESTATISTICE
Fig. 1.1 Fig. 1.2
Fig. 1.2

NORME GENERALE PRIVIND CONFECTIONAREA PROTEZELOR
Conditiile elementare impuse sistemului de protezare :
1. sa fie cat mai conform cu bontul astfel incat prehensiunea , sprijinul sau deplasarea sa nu produca leziuni.
2. sa permita o circulatie sanguina optima care sa intretina starea de integritate a partilor moi si mai ales a musculaturii bontului.
3. sa fie functionala pentru a permite reabilitarea individului sau reincadrarea lui in viata sociala.
4. sa fie usoare , estetice si nesocante pentru a evita instalarea complexelor de inferioritate.
Principiul de baza in proiectarea protezelor si aparatului ortopedic sa indeplineasca cat mai bine functia memebrului afectat, deci toate conditiile unui mijloc de prehensiune, de sustinere sau locomoţie.
Cursul 2
UNIVERSITATEA “VASILE ALECSANDRI” BACAUFACULTATEA DE STIINTE ALE MISCARII, SPORTULUI SI SANATATIISTUDII UNIVERSITARE LICENTA – SPECIALIZAREA KINETOTERAPIE DISCIPLINA: APARATURA SI TEHNICI DE ORTEZARE
"…proteza ideala ar trebui să se constituie pentru purtătorul ei ca o extensie firească a sistemului său biologic"
(Mann – 1974)
1. stabilirea în termeni cantitativi a parametrilor esenţiali privind funcţia sau funcţiile ce urmează a fi reproduse de componenta artificială;
- studiul anatomiei functionale si a biomecanicii MS - evaluarea activitatilor functionale ale MS (miinii umane)
- evaluarea cinematica
2. stabilirea restricţiilor impuse de cuplarea produsului cu organismul uman şi evaluarea duratei de utilizare neîntreruptă; - interfata om-proteza (manson, sistemul de comanda si control
3. evaluarea posibilităţilor de materializare tehnică a produsului (utilizarea tehnicilor de modelare şi simulare pot sprijini substanţial acest proces conducând la reducerea costurilor; - solutii existente ( de mecanisme de prehensiune si supinopronatie)
ETAPE DE REALIZARE
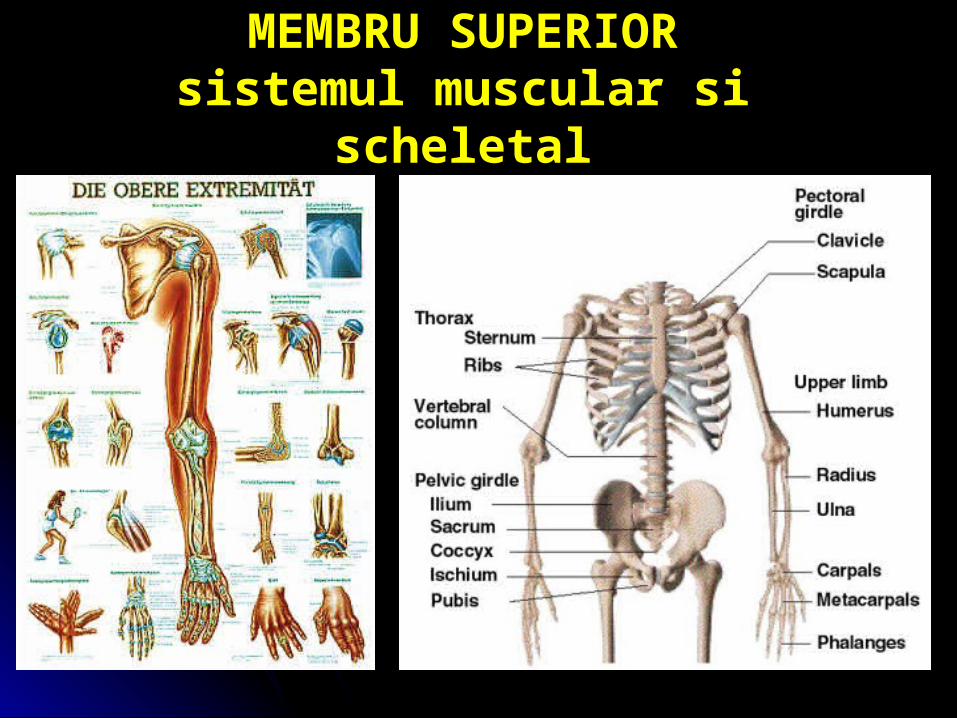
MEMBRU SUPERIORsistemul muscular si scheletal
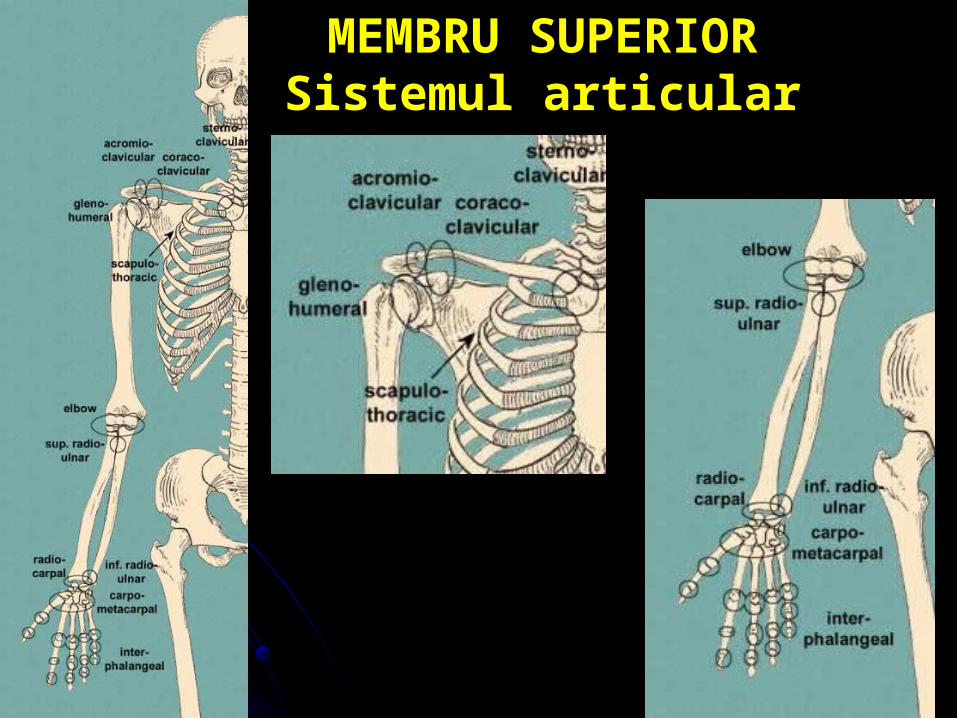
MEMBRU SUPERIORSistemul articular
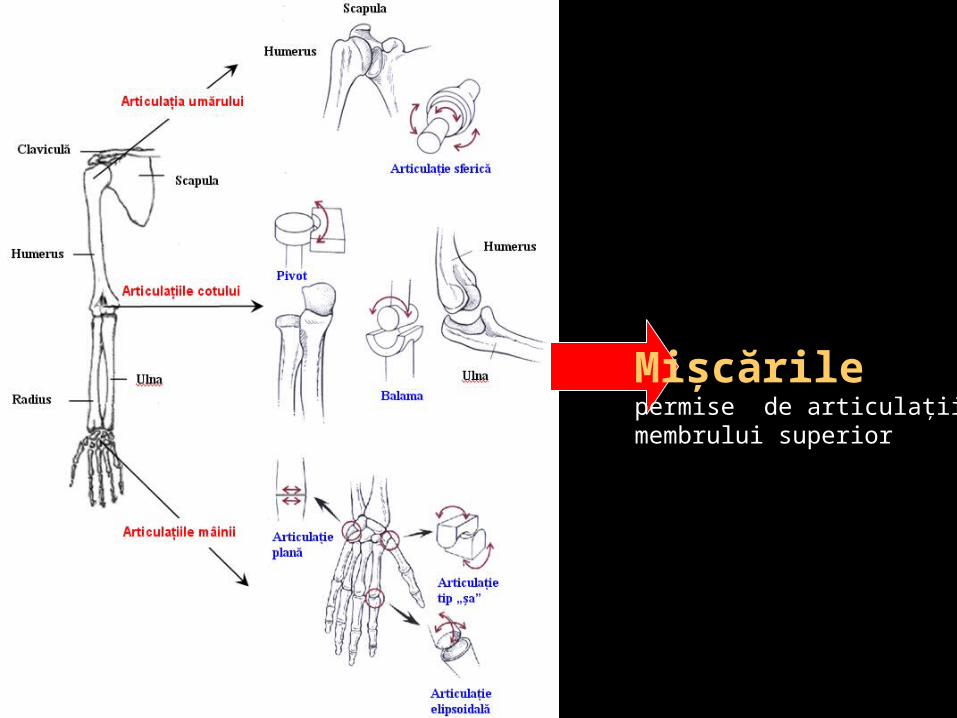
Mişcările permise de articulaţiile membrului superior
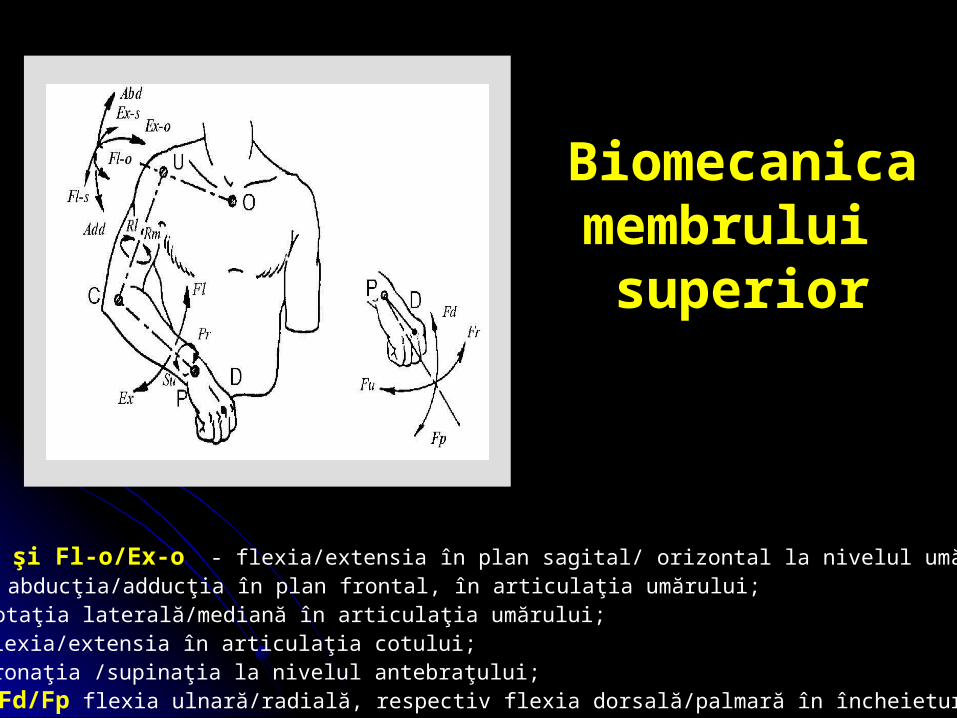
Fl-s/Ex-s şi Fl-o/Ex-o - flexia/extensia în plan sagital/ orizontal la nivelul umărului;Abd/Add – abducţia/adducţia în plan frontal, în articulaţia umărului;Rl/Rm - rotaţia laterală/mediană în articulaţia umărului;Fl/Ex – flexia/extensia în articulaţia cotului;Pr/Su - pronaţia /supinaţia la nivelul antebraţului;Fu/Fv şi Fd/Fp flexia ulnară/radială, respectiv flexia dorsală/palmară în încheietura mâinii.
Biomecanicamembrului
superior

Biomecanica umărului
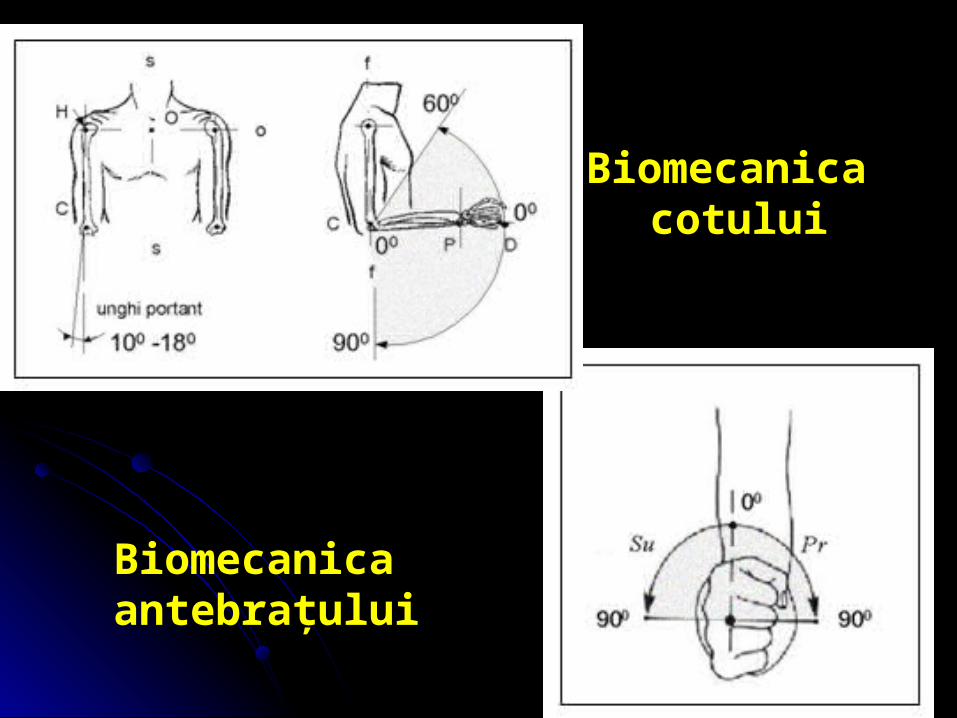
Biomecanica cotului
Biomecanica antebraţului
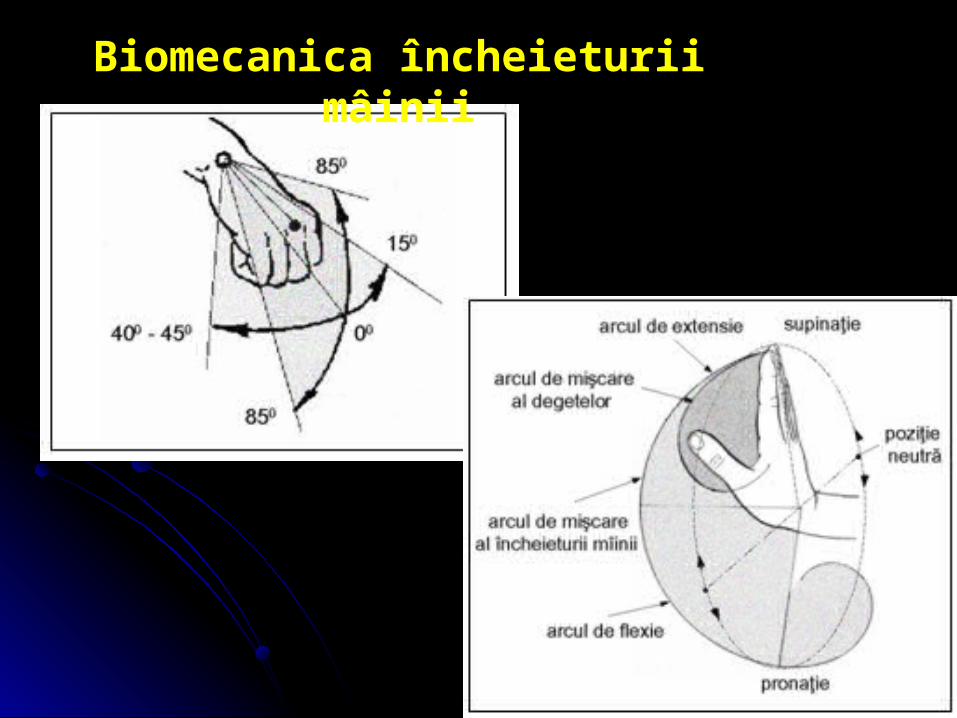
Biomecanica încheieturii mâinii
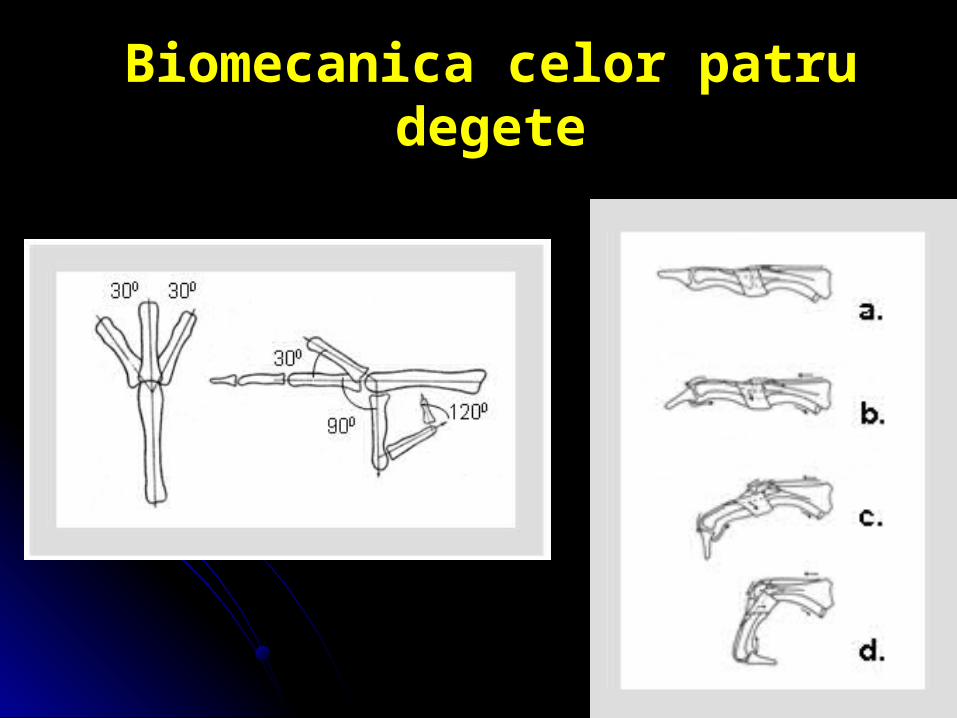
Biomecanica celor patru degete
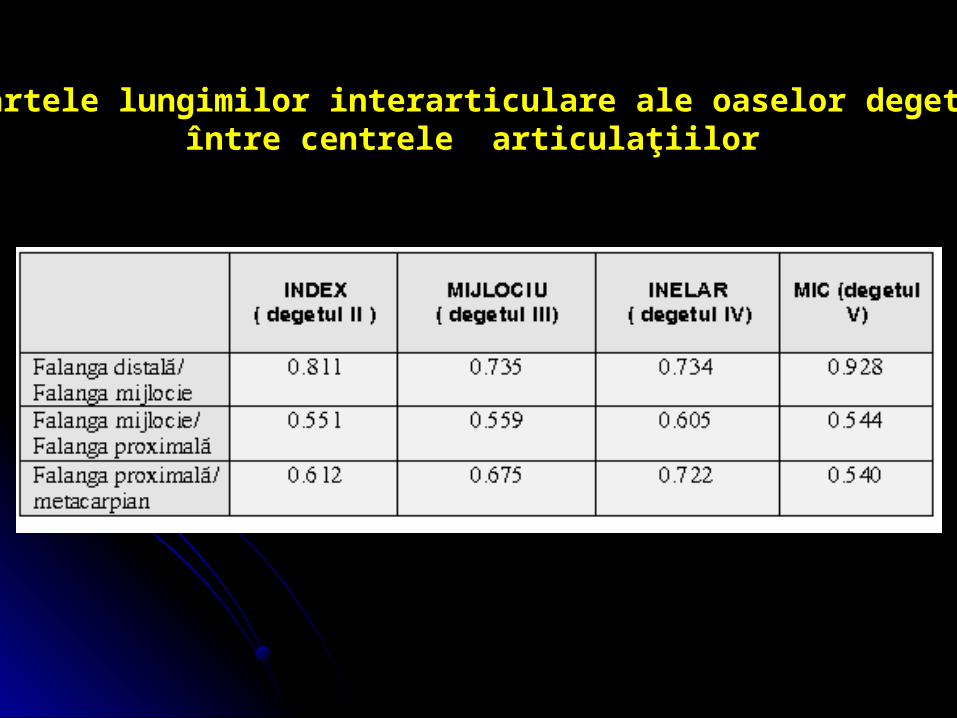
Rapoartele lungimilor interarticulare ale oaselor degetelor între centrele articulaţiilor
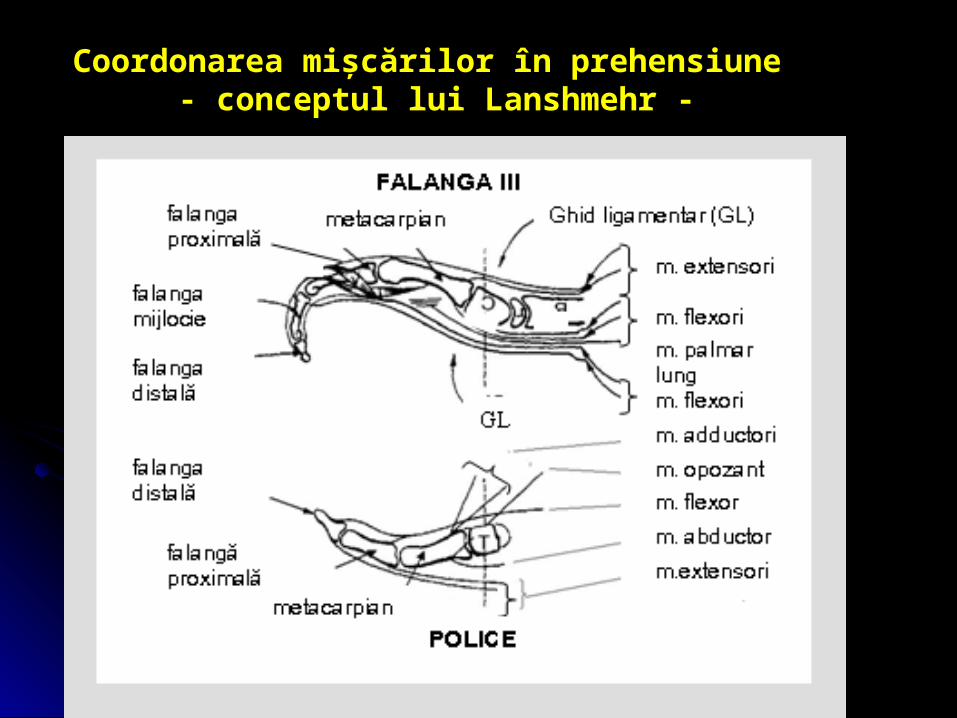
Coordonarea mişcărilor în prehensiune - conceptul lui Lanshmehr -
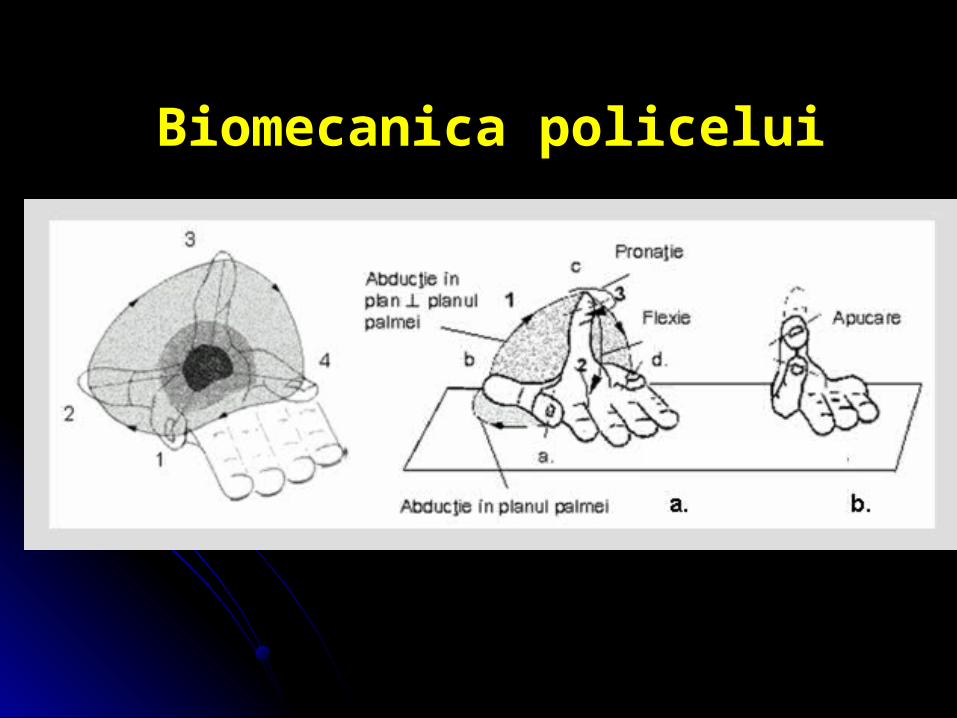
Biomecanica policelui
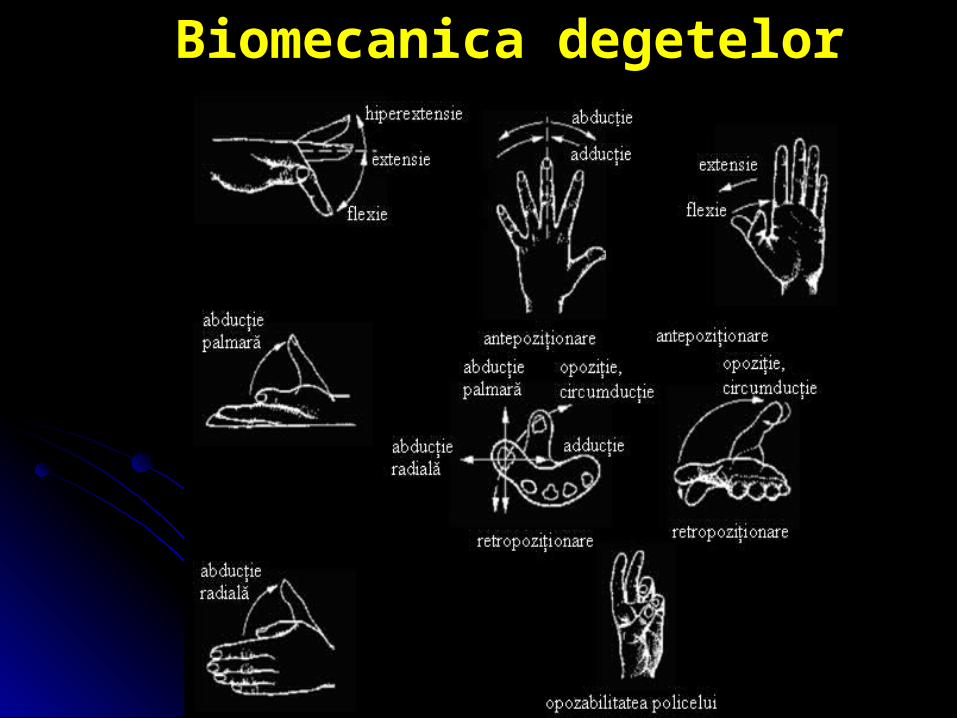
Biomecanica degetelor
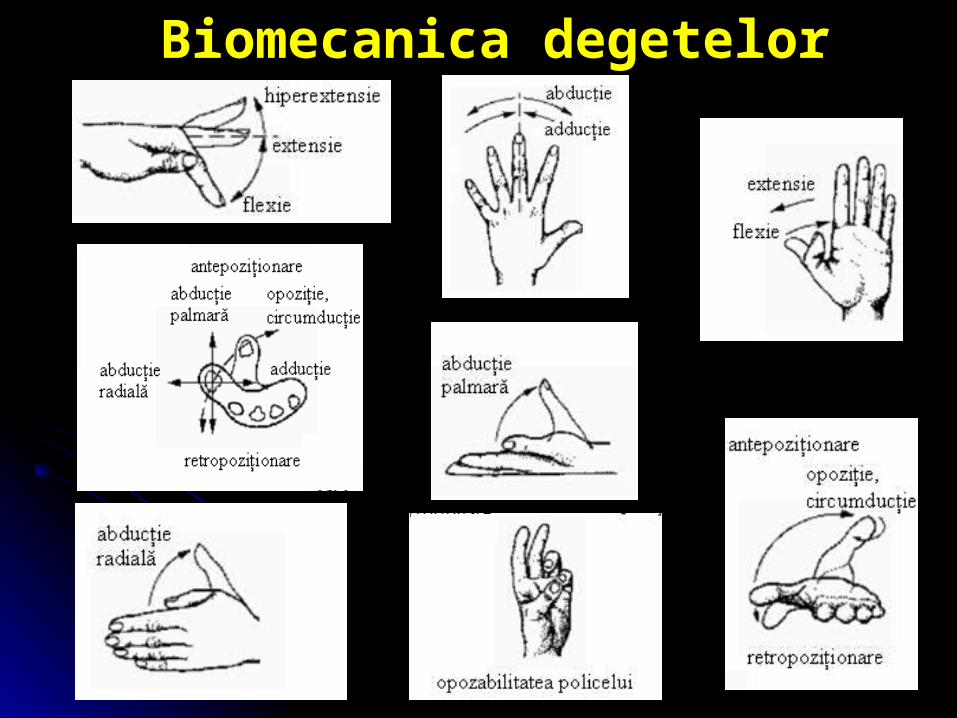
Biomecanica degetelor
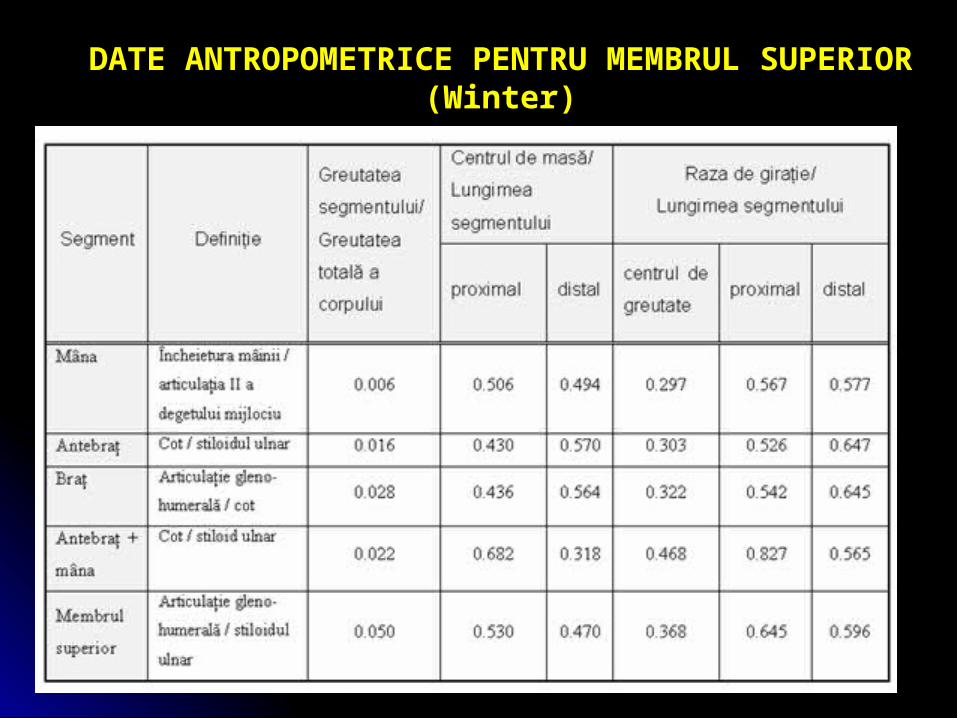
DATE ANTROPOMETRICE PENTRU MEMBRUL SUPERIOR(Winter)
ANALIZA ACTIVITĂŢILOR FUNCŢIONALE ALE MÂINII UMANE
CLASIFICARE:
1. activităţi neprehensive
2. activităţi prehensive
ACTIVITĂŢILE NEPREHENSIVE
Solicită funcţiile senzoriale ale mâinii şi constau în:
• capacitatea de apreciere a formei şi volumului obiectelor (stereognozia);
• capacitatea de apreciere a greutăţii obiectelor (bareognozia);
• capacitatea de apreciere a preciziei mişcărilor (kinestezia).
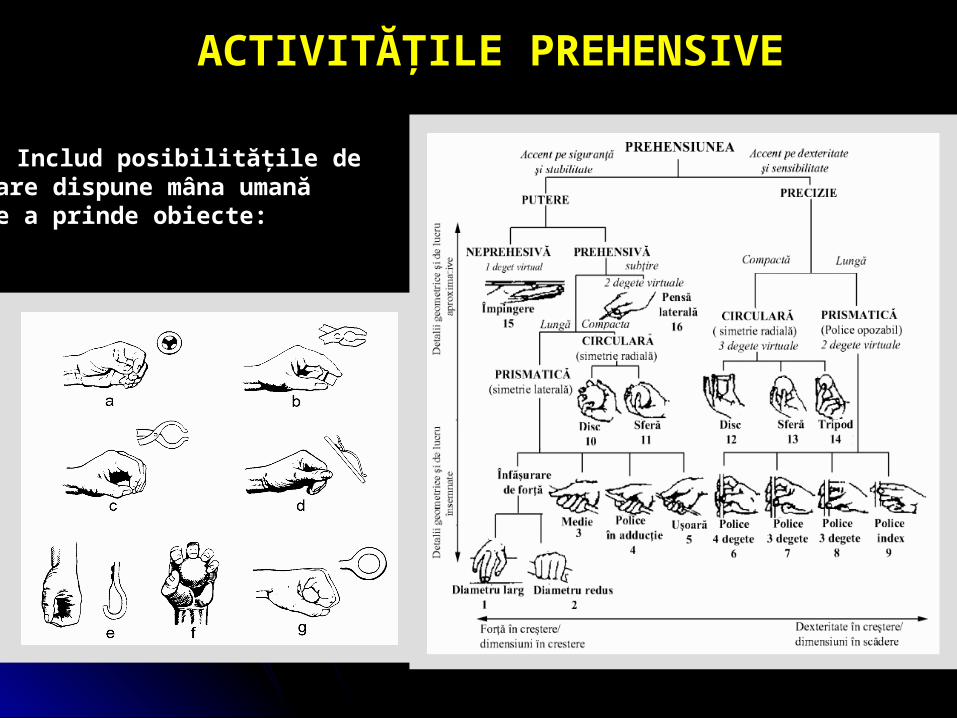
ACTIVITĂŢILE PREHENSIVE
• Includ posibilităţile decare dispune mâna umană de a prinde obiecte:
ACTIVITĂŢILE PREHENSIVE
• prehensiunea între două dintre cele patru degete;
• prehensiunea între cele patru degete, împreună sau izolat, şi podul palmei;
• prehensiunea cea mai completă între „coloana policelui”, pe de o parte, şi restul degetelor şi al palmei pe de altă parte.
Prinderea obiectelor se realizează în funcţie de:
- forma, dimensiunile, volumul şi greutatea obiectelor, - forţa şi precizia impuse de mişcarea ce urmează a fi executată.
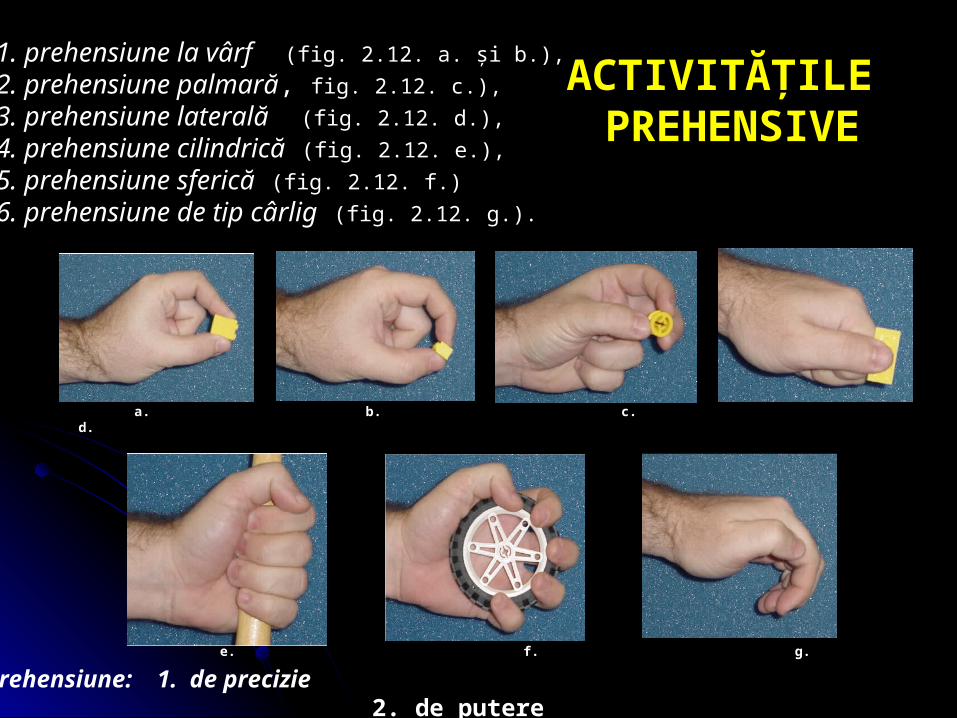
ACTIVITĂŢILE PREHENSIVE
1. prehensiune la vârf (fig. 2.12. a. şi b.), 2. prehensiune palmară, fig. 2.12. c.), 3. prehensiune laterală (fig. 2.12. d.),
4. prehensiune cilindrică (fig. 2.12. e.), 5. prehensiune sferică (fig. 2.12. f.) 6. prehensiune de tip cârlig (fig. 2.12. g.).
a. b. c. d.
e. f. g.
Prehensiune: 1. de precizie 2. de putere
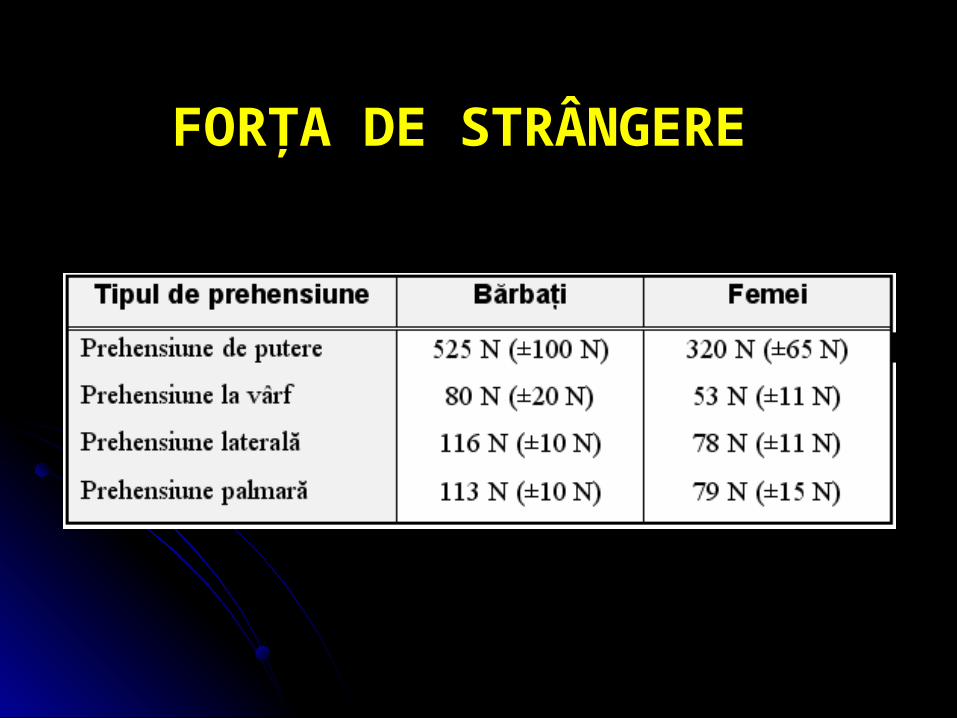
FORŢA DE STRÂNGERE
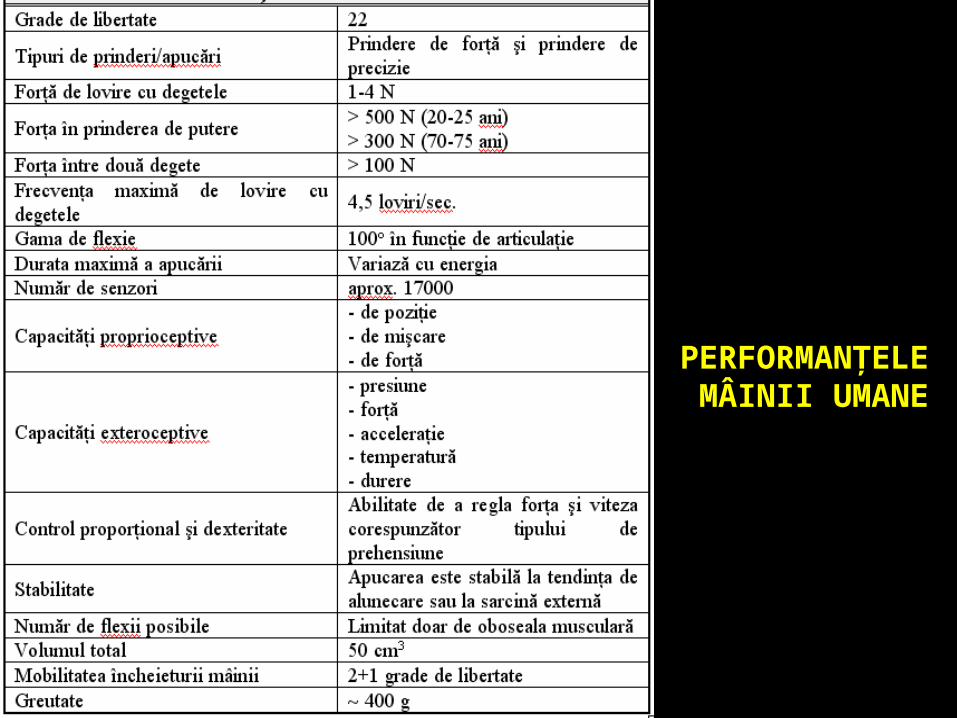
PERFORMANŢELE MÂINII UMANE

MEMBRUL SUPERIOR CA LANŢ CINEMATIC
Principalele functii cinematice ale membrului superior sunt :
- pozitionarea mâinii
- orientarea mâinii
- prehensiunea
Corespunzator celor trei tipuri de functii cinematice in structura biomecanicaa membrului superior se pot deosebi 3 subsisteme si anume:
- biomecanismul de pozitionare
- biomecanismul de orientare
- biomecanismul de prehensiune
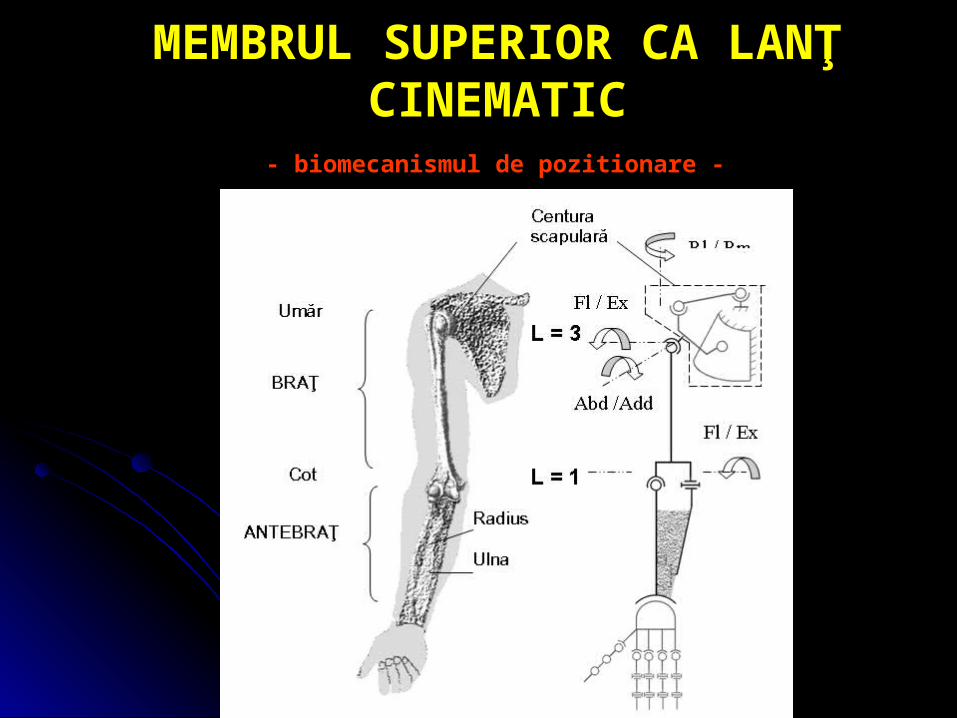
MEMBRUL SUPERIOR CA LANŢ CINEMATIC
- biomecanismul de pozitionare -
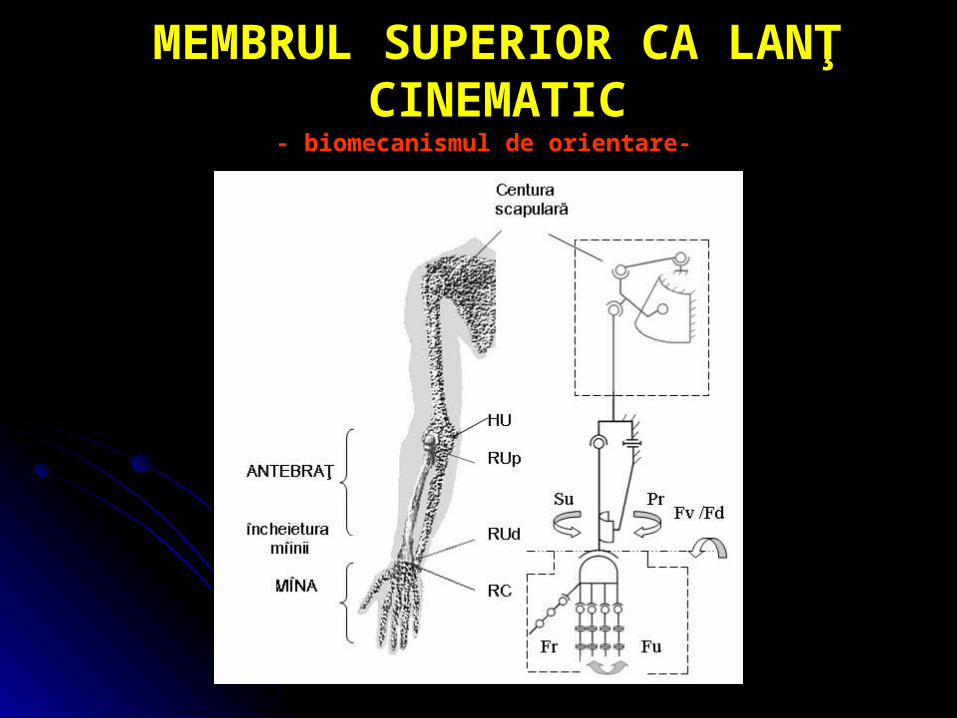
MEMBRUL SUPERIOR CA LANŢ CINEMATIC
- biomecanismul de orientare-
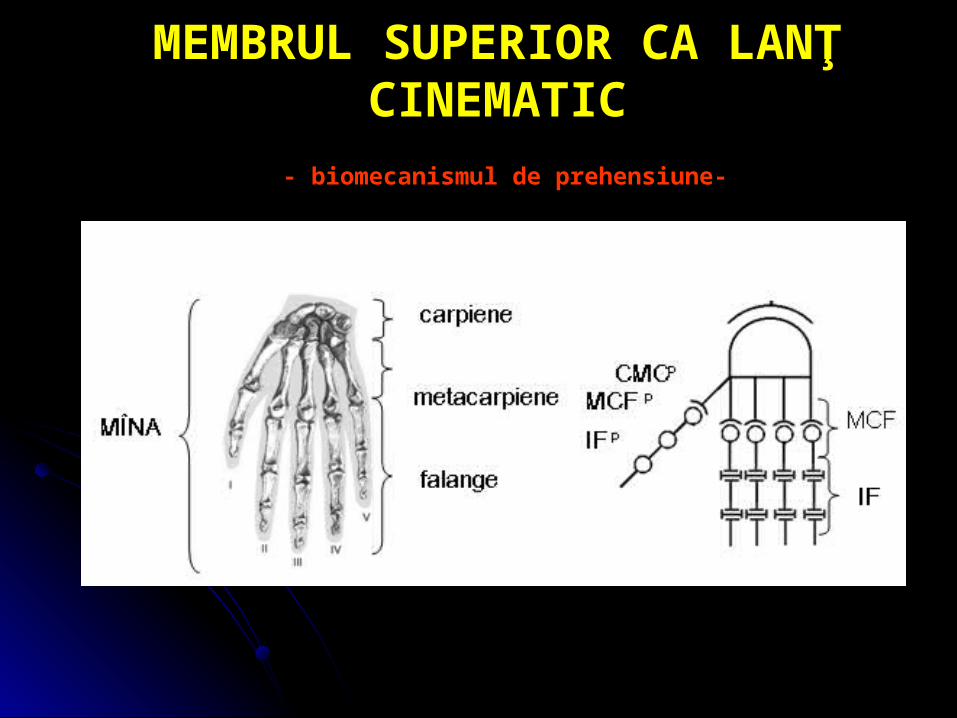
MEMBRUL SUPERIOR CA LANŢ CINEMATIC
- biomecanismul de prehensiune-
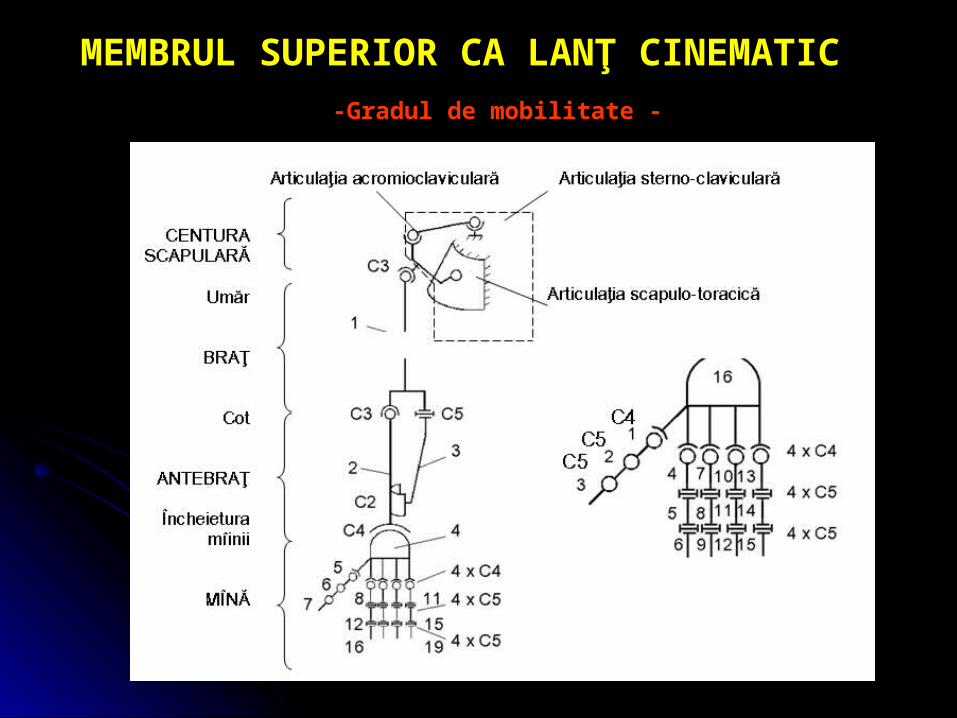
MEMBRUL SUPERIOR CA LANŢ CINEMATIC
-Gradul de mobilitate -
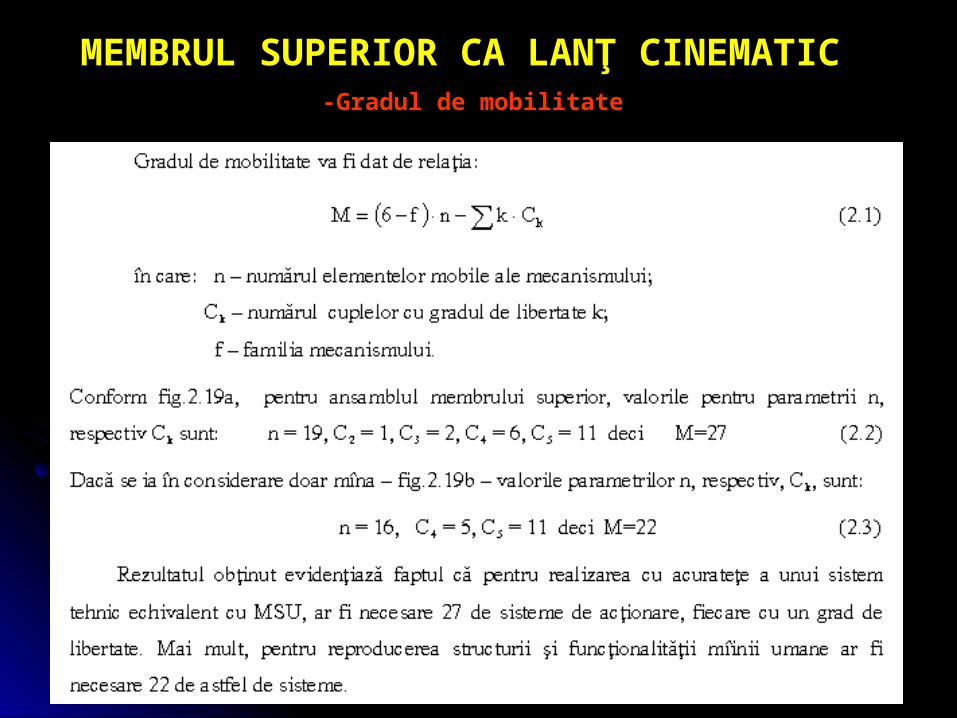
MEMBRUL SUPERIOR CA LANŢ CINEMATIC-Gradul de mobilitate