Cap 1
29
Introducere în Robotică 5 Introducere 1.1. Interacţiunea om - mediu Întotdeauna omul şi-a dorit de-a lungul evoluţiei sale să-şi uşureze modul de viaţă şi deci să obţină rezultate maxime cu un consum de energie minim. Acest deziderat s-a realizat treptat de-a lungul timpului, nivelul maxim al productivităţii muncii obţinându-se în momentul în care cea mai mare parte al muncii de execuţie şi control efectuată de operatorul uman (OU) a fost preluată de sisteme robotizate. Astfel, fenomenul “robot” apărut în cea de a doua jumătate a secolului XX, se încadrează în linia de evoluţie a vieţii şi în acest cadru, a omenirii. Dacă se urmăreşte evoluţia interacţiunii dintre OU şi mediu în care el evoluează se pot distinge cinci nivele de interacţiune evoluţia de la un nivel la altul fiind determinată de tendinţa fiinţei vii de a extrage din mediu cât mai mult cu cheltuială de energie cât mai mică, deci de ”creşterea productivităţii” interacţiunii dintre fiinţa vie şi mediu (fig. 1.1).
-
Upload
iringokant -
Category
Documents
-
view
223 -
download
2
description
inginerie
Transcript of Cap 1

Introducere în Robotică 5
CAPITOLUL 1 Introducere
1. Interacţiunea om - mediu
Întotdeauna omul şi-a dorit de-a lungul evoluţiei sale să-şi uşureze modul de viaţă şi deci să obţină rezultate maxime cu un consum de energie minim.
Acest deziderat s-a realizat treptat de-a lungul timpului, nivelul maxim al productivităţii muncii obţinându-se în momentul în care cea mai mare parte al muncii de execuţie şi control efectuată de operatorul uman (OU) a fost preluată de sisteme robotizate. Astfel, fenomenul “robot” apărut în cea de a doua jumătate a secolului XX, se încadrează în linia de evoluţie a vieţii şi în acest cadru, a omenirii.
Dacă se urmăreşte evoluţia interacţiunii dintre OU şi mediu în care el evoluează se pot distinge cinci nivele de interacţiune evoluţia de la un nivel la altul fiind determinată de tendinţa fiinţei vii de a extrage din mediu cât mai mult cu cheltuială de energie cât mai mică, deci de ”creşterea productivităţii” interacţiunii dintre fiinţa vie şi mediu (fig. 1.1).
Fig. 1.1. Interacţiunea fiinţa vie - mediu
Saltul calitativ în evoluţia fiinţei vii apare în momentul în care sunt folosite în mod conştient obiectele care, sunt transformate în “unelte”, a căror perfecţionare, împreună cu cea a abilităţii omului de a le folosi, este principala cale de “creştere a productivităţii” în interacţiunea sa cu mediu (Fig. 1.2).
Fiinţa vie MEDIU

6 Introducere în Robotică
Fig. 1.2. Interacţiunea om-mediu folosind unelte
O nouă etapă în interacţiunea OU cu mediul este aceea în care acesta utilizează în interacţiunea sa cu mediul surse de energie biologice exterioare şi anume energia animalelor, pe care omul le domesticeşte (fig. 1.3).
Fig. 1.3. Interacţiunea om-mediu folosind animale domestice
Un pas înainte îl cunoaşte dezvoltarea societăţii umane, în momentul în care creşterea complexităţii şi volumului interacţiunii cu mediu generează o “foame” de energie, care nu mai poate fi îndestulată numai prin consum de energie biologică. Astfel, acţionarea ”uneltelor” se face utilizând alte surse de energie şi anume energia “artificială”: hidraulică, termică, eoliană. Civilizaţia umană atinge astfel etapa ”maşinismului" (fig. 1.4). Hotărâtor în interacţiunea cu mediul devine tehnica, prin care se înţelege totalitatea mijloacelor materiale, metode şi procedee de lucru, care concură la satisfacerea nevoilor societăţii.
OMUNELTE
MEDIU
SURSĂ DE ENERGIE
BIOLOGICĂ EXTERIOARĂ
OMUNELTE
MEDIU

Introducere în Robotică 7
Fig. 1.4. Interacţiunea om-mediu în etapa "maşinismului"
Etapa “maşinismului" este cea în care tehnica începe tot mai mult să se dezvolte pe baza ştiinţei, deci a cunoştinţelor omenirii despre mediu, având pe lângă aspecte concrete o pondere din ce în ce mai mare de aspecte abstracte. Din motivele de mai sus, etapa “maşinismului" poartă denumirea de prima revoluţie tehnico - ştiinţifică, cea a “mecanizării”. Conţinutul principal al “mecanizării“, din punctul de vedere al interacţiunii cu mediul este înlocuirea - parţială, tinzând spre integrală - a efortului fizic uman în interacţiunea cu mediul, prin acţiunea unor maşini, mecanisme (de aici termenul de “mecanizare”), dispozitive, etc.
Mecanizarea a condus la o accelerată “creştere a productivităţii“, la dezvoltarea societăţii umane, la creşterea bunăstării acesteia, ceea ce a permis la rândul ei dezvoltarea tehnicii. Creşterea accelerată a volumului şi complexităţii interacţiunii om-mediu înseamnă totodată şi creşterea exponenţială a cerinţelor de “acţionare” a omului asupra surselor artificiale de energie şi a “uneltelor” (noţiune în care se include în această fază totalitatea maşinilor, mecanismelor, dispozitivelor, sculelor, deci a mijloacelor materiale luând parte în interacţiunea om-mediu). În acest context, acţionarea înseamnă schimbare de stare, situare, comandă, control, etc.
Chiar dacă în condiţiile mecanizării efortul fizic al omului - reclamat de “acţionare” - este eliminat sau cel puţin redus, efortul intelectual şi psihic - mai ales prin multitudinea,
SURSĂ DE ENERGIE
ARTIFICIALĂ
OMUNELTE
MEDIU

8 Introducere în Roboticăcomplexitatea şi frecvenţa “actelor de acţionare“ - poate să depăşească limitele lui, această stare de fapt devenind o frână în dezvoltarea mai departe a tehnicii. În vederea înlăturării ei, s-a realizat şi se realizează - prin introducerea în interacţiunea om-mediu a unor sisteme automate, care “acţionează” asupra surselor de energie artificială şi a uneltelor - vizând înlocuirea integrală a acţiunii nemijlocite a omului.
Cuvântul “automat” provine de la grecescul “automatom”, având semnificaţia “de la sine”, fără intervenţia omului.
Interacţiunea om - unelte - mediu, conducerea şi controlul uneltelor şi a surselor de energie artificială se realizează cu ajutorul dispozitivelor de conducere şi control
automate (fig. 1.5).Fig. 1.5. Interacţiunea om-mediu în etapa automatizării
Etapa “automatizării” se realizează ca urmare a unui aport crescut al cercetării ştiinţifice în dezvoltarea tehnică, marcând cea de-a doua revoluţie ştiinţifico - tehnică.
Trecerea de la una din etapele descrise anterior la alta, nu s-a petrecut instantaneu, printr-un salt. Trecerile reprezintă procese care se desfăşoară în timp, caracterizate prin creşterea treptată a conţinutului etapei noi şi scăderea ponderii conţinutului etapei vechi.
SURSĂ DE ENERGIE
ARTIFICIALĂ
UNELTE
MEDIUOM
DIS
PO
ZIT
IVE D
E
CO
ND
UC
ER
E Ş
I D
E
CO
NTR
OL
AU
TO
MATE

Introducere în Robotică 9
În acest context, în momentul de faţă, deşi etapa ”automatizării” caracterizează dezvoltarea domeniilor de vârf ale tehnicii - înainte de toate prin pătrunderea masivă a utilizării calculatoarelor - în mod paralel are loc şi etapa “mecanizării” activităţilor umane, mai ales a acelora care nu au fost suficient de afectate de acest proces.
Tabloul devine şi mai complicat dacă ţinem seama de faptul, că evoluţia omenirii se diferenţiază pe zone geografice. Astfel, dacă se poate vorbi de o evoluţie importantă a procesului de automatizare în Japonia, Europa de Vest şi America de Nord, pentru zonele centrale şi de nord ale Africii, Peninsula arabă (parţial), subcontinentul indian, Indochina, părţile îndepărtate de coasta maritimă a Chinei şi Americii de Sud, preponderente sunt activităţile umane care folosesc încă "energia biologică exterioară". Popoarele din restul zonelor geografice ale Pământului trăiesc preponderent etapa ”mecanizării”.
La rândul ei, etapa “automatizării” prezintă două faze distincte, diferenţiate prin natura proceselor asupra cărora se aplică. Se înţelege aici prin “proces” o succesiune de fenomene legate între ele prin cauzalitate (cauză-efect).
Procesele pot fi naturale şi artificiale. Procesele artificiale sunt cauzate de intervenţii ale omului. “Procesele automate” sunt procese artificiale, care nu necesită intervenţia continuă, ci doar periodică a omului.
Procesele artificiale sunt continue sau discontinue (fig. 1. 6) [KOV00].
Fig. 1.6. Procese artificiale continue şi discontinue
Procesele continue se caracterizează prin faptul că odată declanşate se desfăşoară în mod continuu, până când condiţiile de mediu necesare sunt asigurate.
CONTINUE
PROCESEARTIFICIAL
E
DISCONTINUE

10 Introducere în Robotică
Un exemplu industrial de proces continuu este reacţia chimică dintr-un reactor, care odată amorsată, se desfăşoară atât timp cât se asigură menţinerea condiţiilor necesare. Pentru exemplul amintit, condiţiile desfăşurării procesului constau în asigurarea debitului constant al afluării materialelor care întreţin reacţia chimică, a evacuării materialului rezultat, menţinerea între anumite limite a temperaturii şi presiunii în incinta reactorului, etc. În soluţia “clasică” condiţiile sus amintite se asigură prin intervenţia operatorului uman, pe când în soluţia “automatizată”, prin intermediul reglatoarelor de debit, a termostatelor, presostatelor, etc.
Automatizarea mai facilă a proceselor continue explică faptul că istoric, soluţionarea automatizării acestora a precedat pe cea a proceselor discontinue.
Procesele discontinue se caracterizează prin compunerea lor din mai multe secvenţe cu început şi sfârşit, ale căror derulare se intercondiţionează reciproc şi a căror conţinut este de complexitate mai mare decât în cazul proceselor continue. Prin secvenţă se înţelege o parte distinctă din proces, având acţiuni caracteristici proprii.
În soluţia “clasică”, la începerea / încheierea fiecărei secvenţe, cel puţin o parte din acţiunile caracteristice conţinute se efectuează de către om. Exemple industriale de secvenţe de procese discontinue sunt pornirea / oprirea sistemelor tehnice, încărcarea / descărcarea unor dispozitive, depozitarea / extragerea unor obiecte din depozit, schimbarea / manevrarea / reglarea unor scule, dispozitive sau utilaje, măsurarea / controlul pieselor de lucru, întreţinerea / reparaţia unor utilaje, etc.
Deoarece automatizarea proceselor discontinue ridică dificultăţi, acestea s-au realizat / se realizează cu întârziere faţă de cea a proceselor continue.
2. Familia robot
În cadrul automatizării proceselor discontinue au trebuit soluţionate prin mijloace tehnice comportamente specifice operatorului uman. În varianta "clasică" operatorul intervine

Introducere în Robotică 11
în secvenţele procesului discontinuu cu mâna sa, deplasată cu ajutorul braţului, acţiunea de “manipulare” efectuându-se sub supravegherea ochilor, coordonarea mână-ochi realizându-se de către creier. Pentru automatizarea proceselor discontinue a fost necesar să se realizeze sisteme tehnice, care să poată efectua automat operaţii inteligente de manipulare similare omului. Asemenea sisteme sunt roboţii.
Apariţia roboţilor în epoca actuală poate fi justificată şi prin necesitatea adecvării omului la mediu. Prin “a adecva” se înţelege buna adaptare a ceva la scopul său, iar prin “adecvare” se înţelege procesul de atingere a stării de adaptare. În acest context, adecvarea la mediu a omului intră în categoria procesului de creştere a productivităţii interacţiunii, prin diminuarea efortului necesar şi prin creşterea cantităţii şi calităţii a celor obţinute de la mediu [KOV00].
Mediul normal este mai mult sau mai puţin ostil omului normal, prin cerinţa de efort fizic / psihic pe care le solicită interacţiunea om-mediu, respectiv prin perturbaţiile la care este supus omul (vibraţii, efecte luminoase, etc.). Adecvarea omului la mediul normal se realizează la nivelul etapei de automatizare prin intermediul robotului. Robotul poate fi definit [KOV 00] ca o instalaţie pentru automatizarea operaţiilor pe care în condiţii “clasice” le efectuează omul, cu mâna sa, sub supravegherea ochiului, coordonarea ochi-mână realizându-se de către creier. Se înţelege prin “operaţie” o parte a unei secvenţe de proces, caracterizată prin anumite elemente de “acţiune”, spre exemplu mişcări ale unui / unor obiecte.
Pe lângă roboţi, operaţii de manipulare execută şi manipulatoarele.
Deosebirea între robot şi manipulatoare constă în faptul, că primul are o structură mecanică mai complexă (mai multe grade de mobilitate) şi este condus după un program flexibil (deci modificabil cu eforturi minime materiale şi de manoperă) iar cel de-al doilea, o structură mecanică mai simplă (mai puţine grade de mobilitate) şi este condus după un program rigid (greu modificabil). În unele cărţi se înţelege prin manipulator sistemul mecanic al robotului [VOL 83].

12 Introducere în Robotică
Dacă mediul este inaccesibil omului care trebuie să realizeze interacţiunea, adecvarea om-mediu se realizează prin intermediul unei instalaţii de teleoperare (telecherice - “cu mâna îndepărtată”). În cazul acestei instalaţii, operatorul uman se află în partea accesibilă a mediului, comandând de la distanţă acţiunea instalaţiei aflate în partea mediului inaccesibil pentru om, pe baza unor informaţii culese în “timp real” sau aproape de timpul real din zona mediului în care se desfăşoară acţiunea. Prin “timp real” se înţelege coincidenţa dintre momentul în care are loc acţiunea şi momentul în care aceasta este comandată.
Prin deficienţele de care suferă, omul poate fi neadecvat unui mediu normal. Adecvarea lui se poate realiza prin intermediul protezelor, purtate de bolnav, care înlocuiesc membre (superioare sau inferioare lipsă), ortezelor, de asemenea purtate de bolnav, care pun în mişcare prin intermediul unor mecanisme ataşate, membre existente ale bolnavului dar a căror comandă nu se poate realiza prin căi nervoase naturale datorită unor leziuni (spre exemplu secţiune de măduvă) sau manipulatoare medicale, sisteme ataşate unor mobile (spre exemplu mese noptiere), care se pun in mişcare de bolnavii paralizaţi şi efectuează nişte operaţii de servire (spre exemplu aduce un pahar cu apă la buzele bolnavului).
Exoscheletele amplificatoare sunt mecanisme care se ataşează corpului omului sănătos. Elementele lor sunt mişcate relativ de motoare, instalaţia permiţând manipularea unor greutăţi depăşind capacităţile fizice ale omului, sau în condiţiile unei acceleraţii gravitaţionale ce depăşeşte condiţiile pământeşti (spre exemplu pe alte corpuri cereşti).
Roboţii pot fi ficşi - imobili faţă de anumite componente ale mediului în care evoluează - sau mobili. Roboţii mobili se pot deplasa folosind în acest scop roţi / şenile sau prin păşire / târâre.
Vehiculele ghidate automat sunt roboţi mobili, cu deplasare pe roţi / şenile.
Maşinile păşitoare realizează deplasarea pe sol după principiul păşirii, deci a mişcării succesive a unor elemente care modelează mişcarea picioarelor vietăţilor.

Introducere în Robotică 13
Maşinile târâtoare realizează deplasarea pe principiul târârii (după modelul natural al şarpelui, spre exemplu).
Roboţii, manipulatoarele, instalaţiile de teleoperare, protezele, ortezele, manipulatoarele medicale, exoscheletele amplificatoare, vehiculele ghidate automat, maşinile păşitoare şi cele târâtoare se aseamănă structural (au un sistem de conducere, unul de acţionare şi unul mecanic) şi constructiv (au ca bază mecanisme cu cuple cinematice inferioare). Ei fac parte din familia roboţilor.
Schema redată în figura 1.7 defineşte „familia robot” [KOV 00].
Perfecţionarea roboţilor impune în perioada actuală şi probabil cea viitoare perfecţionarea conducerii acestora. Prin “conducere” se înţelege aici emiterea automată de comenzi pentru acţionarea unor mişcări şi controlul îndeplinirii acestora.
Primele aplicaţii ale roboţilor au fost - cum este şi firesc - în producţia de bunuri materiale şi anume în industrie.
Roboţii industriali se încadrează în procesul automatizărilor industriale.

14 Introducere în Robotică
Fig. 1.7. Familia „robot”
3. Robotica în istoria omenirii
Cuvântul “robot” are o origine literară: piesa de teatru “Roboţi universali ai lui Rossum” (RUR) al scriitorului ceh Karel Čapek. În această piesă, nişte automate asemănătoare cu omul, puse în funcţiune de acesta, până la urmă se revoltă împotriva lui. Cuvântul "robot" provine din limba slavă: “robota” înseamnă muncă grea efectuată forţat.
Membru al"familiei robot"
Roboţi mobili
Manipulatorechilibrat
cu comandămanuală
Mod defuncţionar
eautomat ?
Purtatde
om ?
Sistem mecanic cu număr mare
de grade de mobilitate,
reprogramabil ?Cureacţie
?
Ataşat membrelo
r existente
?
Se depla-sează ?
Manipulator
Robot
Instalaţie de teleoperareMa
nipulatoaremedicale
Al unui om
sănătos ? Păşeşte
?
Se deplaseaz
ăcu roţi ?
Exoscheletamplificat
or
Orteză Proteză Maşinătârâtoare
Maşinăpăşitoare Robocar
DaDa DaDa
DaDa
DaDa
DaDa
DaDa
DaDa
DaDa
DaDa

Introducere în Robotică 15
Marele scriitor de “science fiction” canadian, Issac Asimov a scris numeroase cărţi despre roboţi încă pe la mijlocul secolului XX, înaintea apariţiei primului robot real. El a formulat de altfel conceptul de “Robotică”, definit ca ştiinţa care se ocupă de roboţi şi cele "trei legi ale Roboticii” [ASI 50 ], [ASI 85]:
1. Robotul nu poate să pricinuiască vreun rău omului, sau să îngăduie vătămarea acestuia prin neintervenţia lui.
2. Robotul trebuie să execute comenzile omului, cu excepţia când acţiunile rezultate ar contraveni legii 1.
3. Robotul trebuie să-şi protejeze propria existenţă, cu excepţia cazurilor când acţiunile rezultate contravin legilor 1 şi 2. Istoria tehnicii arată că oamenii realizează sisteme
tehnice atunci când practica -evoluţia societăţii - cere rezolvarea unor anumite probleme. Necesitatea automatizării operaţiilor de manipulare a materialelor radioactive a apărut după încheierea celui de-al doilea război mondial. Soluţiile tehnice nu întârzie să apară, folosind din plin realizările ştiinţifice - din alte domenii - apărute ca răspuns la cerinţele industriei militare.
Pe la sfârşitul anilor 1940 - începutul anilor 1950, în laboratoarele nucleare din Franţa şi apoi, în Statele Unite ale Americii se construiesc primele instalaţii de teleoperare, folosite pentru manipularea materialelor radioactive în spaţii expuse radiaţiilor. Tehnica mecanismelor spaţiale articulate din aceste instalaţii este dezvoltată mai departe, prin înlocuirea comenzii şi acţionării de către om, cu utilizarea calculatoarelor şi a acţionării hidraulice.
George Devol proiectează în 1954 un robot programabil, îl brevetează în SUA în 1956 şi îl realizează, împreună cu Joseph Engelberger, creatorul primului robot UNIMATE a firmei UNIMATION (cu acţionare hidraulică). Robotul UNIMATE este instalat în prima sa aplicaţie de către concernul FORD pentru servirea unei maşini de turnat sub presiune în anul 1961. În acelaşi an, corporaţia americană AMF comercializează robotul VERSATRAN, cu acţionare hidraulică, proiectat de Harry Johnson şi Veljko Milenkovič.

16 Introducere în Robotică
Erau primele începuturi, interesul pieţei pentru roboţi fiind la început destul de redus. În acest context, firma UNIMATE devine rentabilă abia în 1973.
În anul 1966, inginerul Ole Molaug proiectează un automat de vopsire pentru fabrica de maşini agricole TRALLFA din Bryne (Norvegia). Proiectul realizat este robotul de vopsire cu numele identic cu cel al firmei, are acţionare hidraulică şi domină de 30 de ani piaţa automatizării operaţiilor de acoperire, fiind fabricat şi comercializat în diferite ţări.
În anul 1968, concernul GENERAL MOTORS instalează prima linie robotizată de sudură în puncte (la uzina din Lordtown, pentru autoturismul “Vega”), echipată cu 32 de roboţi UNIMATE. Linia se dovedeşte de o eficienţă deosebit de ridicată, evenimentul marcând de fapt interpătrunderea robotizării cu industria de automobile. Această interpătrundere a determinat “explozia” productivităţii muncii în industria de automobile: uzinele FIAT din Italia introduc primii roboţi în anul 1971 iar concernul KAWASAKI achiziţionează licenţa UNIMATE în 1971 şi instalează primii roboţi la firma NISSAN MOTOR în 1972; această ultimă dată este începutul conjugat al “exploziei” de dezvoltare atât a industriei de automobile japoneze, cât şi a robotizării în Japonia.
În 1973, Richard Hohn dezvoltă pentru corporaţia Cincinnati Milacron un robot comandat de un minicalculator. Robotul este denumit “The Tomorow Tool” (T3) - “scula zilei de mâine”.
În 1974 firma suedeză ASEA produce primul robot industrial acţionat electric sub denumirea Irb 6, urmat în 1975 de robotul Irb 60. În 1977, roboţii ASEA sunt comandaţi de microcomputere. În 1990, concernul Brown-Bovery Robotics cumpără diviziunea de robotică a lui Cincinnati Milacron, toţi roboţii fabricaţi în continuare fiind denumiţi ABB.
Primele realizări privind construcţia şi utilizarea roboţilor industriali au fost, înainte de toate, rezultate ale activităţii inginereşti.

Introducere în Robotică 17
Cercetările ştiinţifice în domeniul roboticii încep să-şi găsească aplicaţii practice începând din anii 1970. Excepţia face lucrarea [DEN 55], din 1955, care dezvoltă şi modelul geometric care a stat la baza conducerii primului robot industrial şi care model a rămas în Robotică sub denumirea de "convenţia HD".
În 1968, la Institutul Stanford Research se construieşte robotul mobil “Shakey”, înzestrat cu senzori, inclusiv de vedere artificială. La acelaşi institut, în 1971 se construieşte robotul acţionat electric, denumit “Stanford Arm” (Braţ Stanford). Inventatorul lui, profesorul Viktor Scheinman, dezvoltă în 1974 în cadrul companiei VICARM, robotul omonim, comandat de un microcomputer. În 1978, firma UNIMATE construieşte cu ajutorul comparaţiei GENERAL MOTORS, robotul PUMA (“Programable Universal Machine for Assembly”, ”maşină universală programabilă pentru operaţii de asamblare”), versiunea industrială a lui VICARM.
În 1970 se organizează primul Simpozion Internaţional de Roboţi Industriali (I.S.I.R.) la Chicago (cu 125 de participanţi), în 1971 ia fiinţă prima organizaţie profesională: JIRA (Asociaţia Japoneză de Roboţi Industriali), iar în 1975 se fondează Institutul American de Robotică (IRA).
Deceniul anilor '70 se caracterizează prin proliferarea numărului de roboţi pe plan mondial, creşterea ponderii roboţilor acţionaţi electric, pătrunderea tehnicilor senzoriale în robotica industrială şi diversificarea aplicaţiilor. În această ultimă direcţie, se remarcă în mod deosebit înmulţirea aplicaţiilor în operaţii de asamblare, în industria de birotică, cea de componente electronice şi în fabricaţia calculatoarelor. Robotul SYGMA, realizat de firma OLIVETTI în anul 1977 pentru aplicaţii de asamblare, a deschis noi perspective în această direcţie.
Înmulţirea roboţilor este strâns legată de ieftinirea dramatică a componentelor electronice şi a calculatoarelor care intră în componenţa acestora. Astfel, dacă în 1961, 75% din preţul de cost al primului robot Unimate era cauzat de costul componentelor electronice, în prezent, această pondere s-a redus la 25% din preţul de cost al robotului. Între

18 Introducere în Robotică1955 şi 1985, costurile cauzate de componentele electronice s-au redus de 200 de ori.
În deceniul anilor '80 industria roboţilor a ajuns la maturitate. S-a perceput necesitatea integrării fabricaţiei de roboţi cu cea a componentelor sistemelor de fabricaţie robotizate. Astfel, până în 1983 numărul întreprinderilor majore în care s-au fabricat roboţi a scăzut la 25.
Dintre dezvoltările cele mai importante ale roboticii în cursul deceniului anilor '80 se menţionează structura SCARA (“Selective compliance Arm for Robotic Assembly”, “Braţ cu complianţă selectivă pentru asamblare”) conceput de profesorul Makino de la Universitatea Yamanashi din Japonia, cât şi roboţii cu acţionare directă, (“direct drive”) introduse de firma americană ADEPT, cu motoare electrice cu magneţi din pământuri rare, care elimină necesitatea utilizării transmisiilor mecanice în construcţia sistemelor de acţionare.
Deceniul anilor 1980 consacră de altfel preponderenţa acţionărilor electrice în construcţia roboţilor, în detrimentul acţionărilor hidraulice şi pneumatice, care se găsesc în regres evident.
Se dezvoltă noi limbaje de programare dedicate conducerii roboţilor, limbaje din ce în ce mai prietenoase faţă de utilizatori. Sistemele de conducere integrează în tot mai mare măsură informaţii multiple despre mediul în care evoluează robotul, achiziţionate cu ajutorul unor categorii de senzori tot mai diverşi şi performanţi.
Ce-a de-a doua jumătatea a deceniului nouă a însemnat dezvoltarea aplicaţiilor robotice în industrie, punându-se un accent crescând pe aplicaţii, pe integrarea roboţilor în sisteme de fabricaţie flexibile (FMS), cât şi în sisteme CIM (sisteme de producţie integrate prin calculator). Se abordează robotizarea unor procese de mare complexitate, necesitând prelucrarea unor informaţii senzoriale pentru conducerea adaptivă. Dintre acestea se amintesc cele de montaj, de prelucrări prin fascicole laser, prin jet de apă cu înaltă presiune, montajul componentelor deformabile.
În deceniul anilor '90 se remarcă o oarecare stagnare a sporirii aplicaţiilor robotizate - datorită unor circumstanţe economice, mai ales în Japonia - cât şi “saturarea” din punct

Introducere în Robotică 19
de vedere ştiinţific al roboticii industriale, determinată de soluţionarea tehnică, practic a tuturor problemelor specifice posibile. Ca urmare, dezvoltarea Roboticii se prefigurează a se îndrepta în sfere neindustriale.
În anii 1990 - 1996 apar tot mai multe aplicaţii în domeniile serviciilor şi a medicinii recuperatorii. Cercetările ştiinţifice de Robotică abordează la rândul lor noi direcţii, parţial corelate cu diversificarea amintită a aplicaţiilor vertebroizi. Pe baza lor se realizează noi structuri de roboţi paraleli, roboţi mobili păşitori, târâtori, căţărători, săritori. Reţelele neuronale şi programele bazate pe logică ”fuzzy” permit realizarea unor sisteme de conducere a roboţilor, care sunt capabile de autoinstruire.
4. Sisteme robotice în exploatare
În tabelul 1.1 se prezintă numărul de instalări de sisteme robotice realizate în anul 2000, cât şi tendinţele pe anii 2001, 2004, dar şi numărul total de roboţi operaţionali la sfârşitul anului 2000, precum şi tendinţele pentru anii 2001, 2004.
Tab.1.1.Instalări anuale şi stocuri de roboţi la finele anului 2000 şi tendinţe
Instalări anuale Stoc operaţional Tendinţe Tendinţe
Ţara 2000 2001 2004 2000 2001 2004Japonia (toate tipurile de roboţi industriali)
46.300 49.300 57.100 389.400
384.000
447.200
Statele Unite ale Americii 12.986 9.100 11.700 89.900
95.500 116.000
Uniunea Europeană 29.582 32.800 44.400 197.800
220.500
306.000
Germania 12.781 15.100 20.800 91.200 101.600 141.200Italia 5.897 6.500 8.700 39.200 44.000 60.800Franţa 3.793 3.400 4.500 20.700 22.700 31.200Marea Britanie 1.538 1.700 2.300 12.300 13.200 17.600Austria 320 3.000Benelux 540 7.800Danemarca 307 1.400Finlanda 492 2.600Spania 2.941 13.200

20 Introducere în RoboticăSuedia 973 6.300Alte ţari europene 944 1.000 1.300 11.300 11.100 10.500Cehia 150 1.300Ungaria 20 100Norvegia 97 500Polonia 100 500Rusia 250 5.000Slovacia - -Slovenia - -Elveţia 327 3.800Asia/Australia 6.381 7.000 10.200 53.500 59.100 79.700Australia 400 3.000Corea 4.731 38.000Singapore 500 5.600Taiwan, provincie a Chinei
750 6.900
Alte ţari 1.820 1.800 3.100 7.900 9.400 16.100Subtotal,exclusiv Japonia
51.700 51.700 70.700 360.300
395.500
528.400
Total,inclusiv toate tipurile de roboţi industriali din Japonia
98.700 101.000
127.800
749.800
779.500
975.600
– sursa World Robotics 2001 –
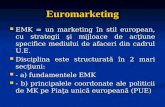
În figura 1.8. se prezintă evoluţia numărului de instalări de roboţi în lume şi tendinţele până în 2004 pentru principalii implementatori de roboţi din lume – Japonia, SUA, UE şi alte ţari, iar în figura 1.9 se prezintă evoluţia numărului de roboţi operaţionali în lume şi tendinţe până în 2004 pentru aceleaşi ţări.

Introducere în Robotică 21
Fig. 1.8. Evoluţia numărului de instalări de roboţi în lume şi tendinţe până în 2004 – sursa World Robotics 2001
Fig. 1.9. Evoluţia numărului de roboţi operaţionali în lume şi tendinţe până în 2004 – sursa World Robotics 2001
Pe lângă informaţia directă, aceste cifre indică gradul de modernitate a industriei în anul / ţara respectivă, permiţând tragerea unor concluzii privind evoluţia automatizării proceselor de fabricaţie.
Cercetând cifrele se remarcă faptul, că există 3 ţări / zone geografice unde robotizarea a cunoscut o dezvoltare explozivă: Japonia, Europa de Vest şi Statele Unite ale Americii. Nu în mod întâmplător aceste ţări / zone geografice
Num
ăr
bucă
ti
Japonia S.U.A. U.E. Alte ţari
Num
ăr
bucă
ti
Japonia S.U.A. U.E. Alte ţari

22 Introducere în Roboticădomină economia mondială din punct de vedere al productivităţii muncii şi a calităţii produselor, ele fiind cele mai puternice din punct de vedere financiar şi asigură cel mai ridicat nivel de trai cetăţenilor lor.
În tabelul 1.2 sunt prezentate numărul de unităţi de roboţi de servicii existente în funcţiune la sfârşitul anului 2000 şi care sunt tendinţele de dezvoltare pe perioada 2001-2004, iar în figura 1.10. se prezintă dinamica sistemelor robotice utilizate în domeniul serviciilor pe plan mondial [WR01].
Fig. 1.10. Dinamica sistemelor robotice utilizate în domeniul serviciilor pe plan mondial
Num
ăr u
nită
ţi Existenţi 2000 Prognoză 2004

Introducere în Robotică 23
Tab. 1.2. Roboţi de servicii implementări şi tendinţeTipuri de roboţi Existenţi
2000Instalări
2001-2004ROBOŢI DE SERVICII PENTRU UZ PROFESIONAL:Roboţi de curăţat
Curăţire pardoseleCurăţire rezervoareCurăţire geamuri, pereţiAltele (curăţire avioane, bărci, etc.)
440 14.150
Roboţi utilizaţi în canalizări (curăţat, inspecţii)
40 100
Roboţi căţărători (curăţat, inspecţii) 5Roboţi de inspecţie (centrale electrice, nucleare, la poduri, etc.)
120 200
Roboţi de demolare 2.300 1.200Roboţi pentru dezafectări nucleare, chimice, militare, sau alte complexe nesigureRoboţi subacvali
InspecţieRoboţi de lucru
3.000 3.000
Roboţi medicaliRoboţi pentru operaţiiRoboţi asistenţi la operaţiiAlţii
1.600 4.800
Roboţi asistenţi la reabilitarea persoanelor
160 140
Roboţi curieri; roboţi de distribuire corespondenţă
60 140
Roboţi mobili (utilizări multiple) 260 230Roboţi de pază, protecţie 60 1.800Roboţi ghizi (e.g. în muzee) 5 10Roboţi pentru reîncărcare cu combustibili
50 1.100
Roboţi pentru stingerea incendiilor, deminare
50 120
Roboţi în construcţiiRoboţi în agricultură şi sivicultură, din care:
Sisteme robotizate de mulgere
600500
1.3001.000
Roboţi în hotel şi restauranteRoboţi de curăţire camereRoboţi de laborator 1.000 320Nanoroboţi, microroboţiRoboţi spaţialiRoboţi in marketing 20 100Alţi roboţi 150 300Număr total de unităţi 10.415 30.015Valoare evaluată în milioane $ 1.750 2.400
ROBOŢI DE SERVICII PENTRU UZ PERSONAL, PRIVAT:Roboţi domestici
AspiratoareRoboţi de tăiat iarbaaltele
12.500 425.000

24 Introducere în RoboticăRoboţi pentru hobby, timp liber, distracţii
100.000 200.000
Număr total de unităţi 112.500 625.000Valoare evaluată în milioane $ 100 550
5. Definiţii
Definirea noţiunii de robot este codificată în mod diferit în diverse standarde sau formulări ale unor instituţii de specialitate.
Normele franceze (Normalisation française, NF) dau definiţiile cele mai explicite şi corelate logic. Astfel, norma E61 - 005 defineşte manipulatorul:
“Structura mecanică constituită dintr-o serie de elemente articulate sau alunecătoare unul faţă de celălalt, utilizat pentru a prinde, deplasa, poziţiona şi orienta obiecte (piese, scule, etc), urmărind în general mai multe grade de libertate. El poate fi comandat de un operator, de un automat programabil electric sau prin orice sistem logic (dispozitiv cu came, logică cablată, logică programată, etc.) independent sau asociat”.
În acelaşi standard, se mai definesc: manipulatorul de sarcini echilibrat, cu comandă manuală, instalaţia de teleoperare şi manipulatorul cu secvenţe fixe. Acesta din urmă “efectuează automat fiecare etapă a unei operaţii date, în conformitate cu o succesiune de mişcări predeterminate, care nu pot fi schimbate fără modificări fizice. Limitarea mişcărilor se face prin opritoare mecanice, electromecanice sau senzori”.
La rândul său , robotul manipulator este un ”manipulator multiacţiune, comandat automat şi reprogramabil, utilizat în aplicaţii de automatizare".
Comanda robotului manipulator prezintă deseori capacitatea de interacţiune cu mediul exterior. Programarea este realizată prin introducerea manuală a datelor prin instruire sau “off line” în mod analitic sau prin definirea obiectului.
Norma franceză NF61-100 dă următoarea definiţie:“Robotul este un mecanism de manipulare automată,
aservit în poziţie, reprogramabil, polivalent, capabil să

Introducere în Robotică 25
poziţioneze şi să orienteze materiale, unelte sau dispozitive specializate, în timpul unor mişcări variabile şi programate, destinate executării unor sarcini variate”.
Standardul german DIN 2801 defineşte:“Roboţii industriali sunt automate mobile cu aplicaţii
universale, cu mai multe axe, ale căror mişcări sunt liber programate pe traiectorii sau unghiuri într-o anumită succesiune a mişcărilor şi în anumite cazuri, comandate prin senzori. Ei sunt echipaţi cu dispozitive de prehensiune, scule sau alte mijloace de fabricaţie şi pot îndeplinii activităţi de manipulare şi de fabricaţie. Robotul industrial poate fi montat fix, într-un anumit loc sau poate fi deplasat ca un ansamblu.
În standarde japoneze se precizează:“Robotul este un sistem mecanic, dotat cu funcţiile
motoare flexibile analoage cu cele ale organismelor vii sau imitaţii ale acestora, cu funcţii inteligente, sisteme care acţionează corespunzător voinţei omului”.
După standarde ruseşti:“Robotul industrial este o maşină automată staţionară
sau deplasabilă, constând din dispozitivul de execuţie, având mai multe grade de libertate şi din dispozitivul reprogramabil de comandă după program pentru îndeplinirea în procesul de producţie a funcţiilor motoare şi de comandă”.
Institutul de Robotică din America (Robot Institute of America, RIA) precizează că:
"Robotul este un manipulator reprogramabil multifuncţional, destinat să deplaseze materiale, piese, scule sau aparate, prin mişcări programate variabil, în scopul îndeplinirii unor sarcini diferite.
Robotul este componenta evoluată de automatizare, care combină electronica de tip calculator cu sisteme avansate de acţionare mecanică, pentru a realiza un echipament independent de mare flexibilitate.
Robotul este un echipament cu funcţionare automată, adaptabil condiţiilor unui mediu complex - în care el evoluează - prin reprogramare, reuşind să prelungească, să amplifice şi să înlocuiască una sau mai multe din funcţiile umane în acţiunile acestuia asupra mediului înconjurător."

26 Introducere în Robotică
După definiţia Asociaţiei Britanice de Robotică (British Robot Association), robotul este un dispozitiv reprogramabil, realizat pentru manipularea pieselor, sculelor şi altor mijloace de producţie, prin mişcări variabile programate, pentru a îndeplinii sarcini specifice de fabricaţie.
Definiţiile citate mai sus circumscriu principalele caracteristici ale robotului.