Aspecte teoretice și practice privind conducerea ... · Actiune locala si automata prin actiunea...
36
Aspecte teoretice și practice privind conducerea proceselor energetice Prof.dr.ing. Sergiu St. ILIESCU Conf.dr.ing. Ioana FĂGĂRĂŞAN Conf.dr.ing. Ioana FĂGĂRĂŞAN As. drd. ing. Nicoleta ARGHIRA Drd. ing. Iulia DUMITRU Universitatea “POLITEHNICA" București, Facultatea de Automatică și Calculatoare email: {iliescu, ioana, nicoleta, iulia}@shiva.pub.ro
Transcript of Aspecte teoretice și practice privind conducerea ... · Actiune locala si automata prin actiunea...

Aspecte teoretice și practice privind
conducerea proceselor energetice
Prof.dr.ing. Sergiu St. ILIESCU
Conf.dr.ing. Ioana FĂGĂRĂŞANConf.dr.ing. Ioana FĂGĂRĂŞAN
As. drd. ing. Nicoleta ARGHIRA
Drd. ing. Iulia DUMITRU
Universitatea “POLITEHNICA" București, Facultatea de Automatică și Calculatoare
email: {iliescu, ioana, nicoleta, iulia}@shiva.pub.ro
Contextul energetic actual� Directiva europeană “20/20/20”, care impune: eficiență energetică crescută cu
20%, reducere consumului cu 20% și reducere emisii 20%, toate până în 2020.
� Directiva europeană privind siguranța alimentării consumatorilor
� Optimizarea structurii consumului de resurse energetice primare şi creşterea eficienţei energetice
� Limitarea impactului sectorului energetic asupra mediului, la limitele cerute de normele UE din domeniu.de normele UE din domeniu.
� Energie mai ieftină la consumator, inclusiv prin tarife mai mici pentruseriviciile operatorilor de rețea
� Costuri mai reduse de investiții și operare a rețelelor prin reducereapierderilor
Rețea electrică inteligentă(SMART GRID)
2
Smart Grid
Smart Grid înseamnă folosirea senzorilor, a comunicaţiei, a capacităţilor de calcul şi a controlului pentru îmbunătăţireafuncţionalităţii unui sistem energetic.
Concepte:• fiabilitatea absolută a alimentării• creşterea eficienţei energetice a sistemului de producere şi
distribuţie a energieidistribuţie a energiei• monitorizarea tuturor componentelor critice ale sistemului
pentru a permite mentenanţă automată şi prevenireaîntreruperilor
• asigurarea calităţii energiei pentru toţi consumatorii• integrarea surselor de energie distribuită cu ajutorul
comunicațiilor și tehnologiei informaţiei
3

Rețeaua ENTSOE (European Network of
Transmission System Operators for Electricity)
4

Sistemul energetic românesc(1)
www.transelectrica.ro5
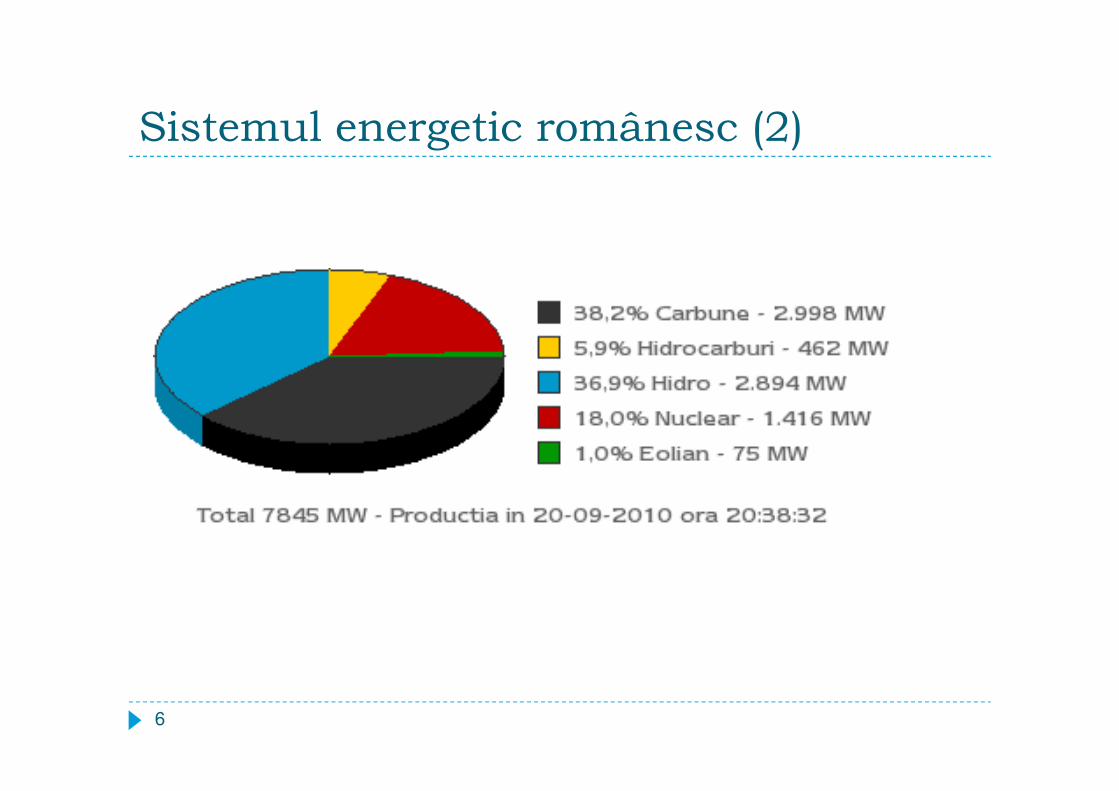
Sistemul energetic românesc (2)
6
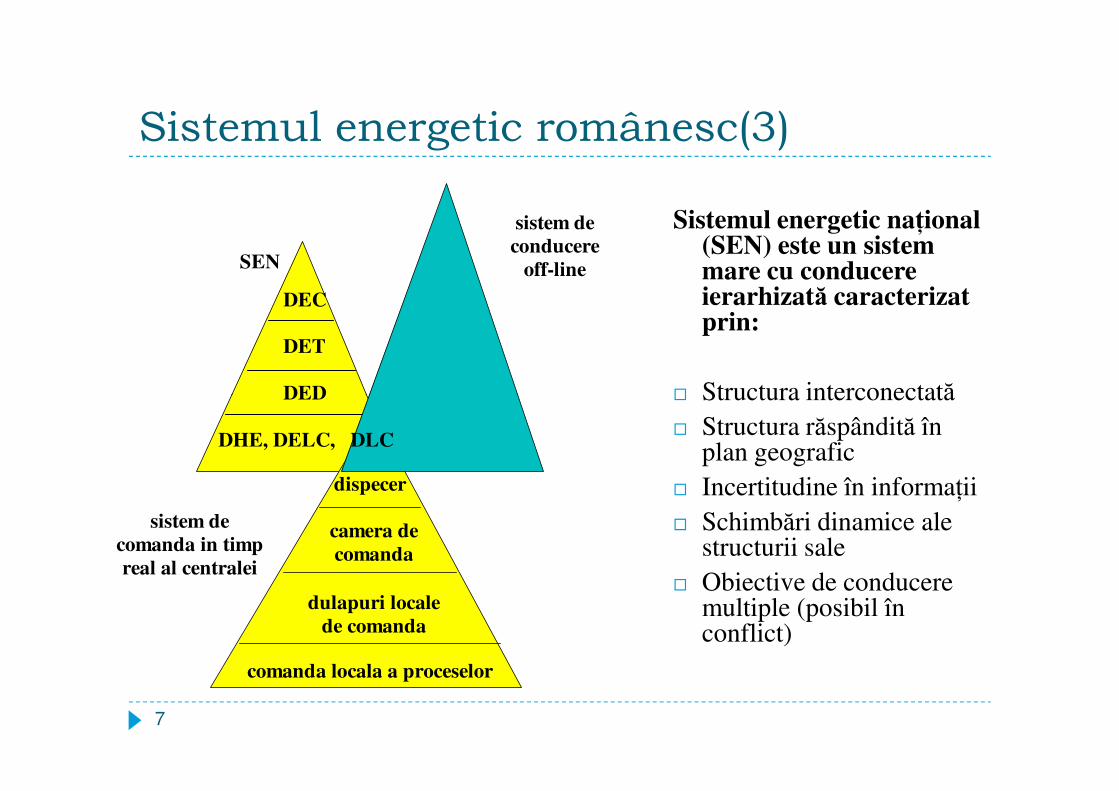
Sistemul energetic românesc(3)
Sistemul energetic național (SEN) este un sistem mare cu conducere ierarhizată caracterizat prin:
� Structura interconectată
DEC
DET
DED
SEN
sistem de
conducere
off-line
� Structura interconectată� Structura răspândită în
plan geografic� Incertitudine în informații� Schimbări dinamice ale
structurii sale� Obiective de conducere
multiple (posibil în conflict)
DED
dispecer
camera de
comanda
dulapuri locale
de comanda
comanda locala a proceselor
sistem de
comanda in timp
real al centralei
DHE, DELC, DLC
7

Sistemul energetic românesc(4)
După rolul pe care-l îndeplinesc, principalele dispozitive şi instalaţii de automatizare din SEN se clasifică în:
• Sisteme de reglare automată a frecvenţei şi puterii active
• Sisteme de reglare automată a tensiunii şi puterii • Sisteme de reglare automată a tensiunii şi puterii reactive
• Sisteme de reglare automată a parametrilor centralelor electrice
• Sisteme de comandă automată inclusiv automatica de sistem și protecții prin relee
8

Reglajul frecvență – putere activă
în sistemul energetic național
• Sistemul EMS/SCADA implementat la Dispecerul Energetic Național include funcția Automatic Generation Control (AGC)
• AGC controlează echilibrul puterilor și distribuie surplusulsau deficitul într-un mod economic între grupurile generatoarereglante
• RAFP nu are o funcționare optimă în noile condiții ale operăriiinterconectate a sistemului energetic românesc la sistemulUCTE (ENTSOE)
• Este necesară realizarea unor modele ale grupurilor reglante șial regulatorului central pentru a studia si optimiza comportareaîntregului sistem
9

Reglajul frecventa- putere activa (RAf-P)Se realizeaza in trepte diferite si succesive:
� Reglajul primar
� Distribuit uniform si se bazeaza pe principiul solidaritatii
� Actiune locala si automata prin actiunea RAV
� Timp de actiune 0 ÷ 30 sec
� Independent de actiunea dispecerilor
� Reglajul secundar
Frecventa
Sistemului
Reglaj Primar
Restabileste valoarea medie
Restabileste valorile nominale
Limiteaza
abaterile
Activare
Elibereazarezervele
Corecteaza
Elibereaza rezervele
dupa o deconectare
� Reglajul secundar
� Distribuit intr-un numar fix de centrale
� Actiune centralizata si automata, actionand numai in zona perturbata
� Timp de actiune 30 sec ÷ 15 min
� Rezerva programata, dispusa de dispecer
� Reglajul tertiar
� Dispus de dispecer din capacitatile programate
� Timp de actiune de la 1 minut la 30 min / 8 ore(lenta)
Reglaj
Secundar
Reglaj Tertiar
Corectia
TimpuluiActivarepe termen lung
Activare daca
este responsabilaPreia dacaeste responsabil
Preia
Elibereaza
rezervele
10
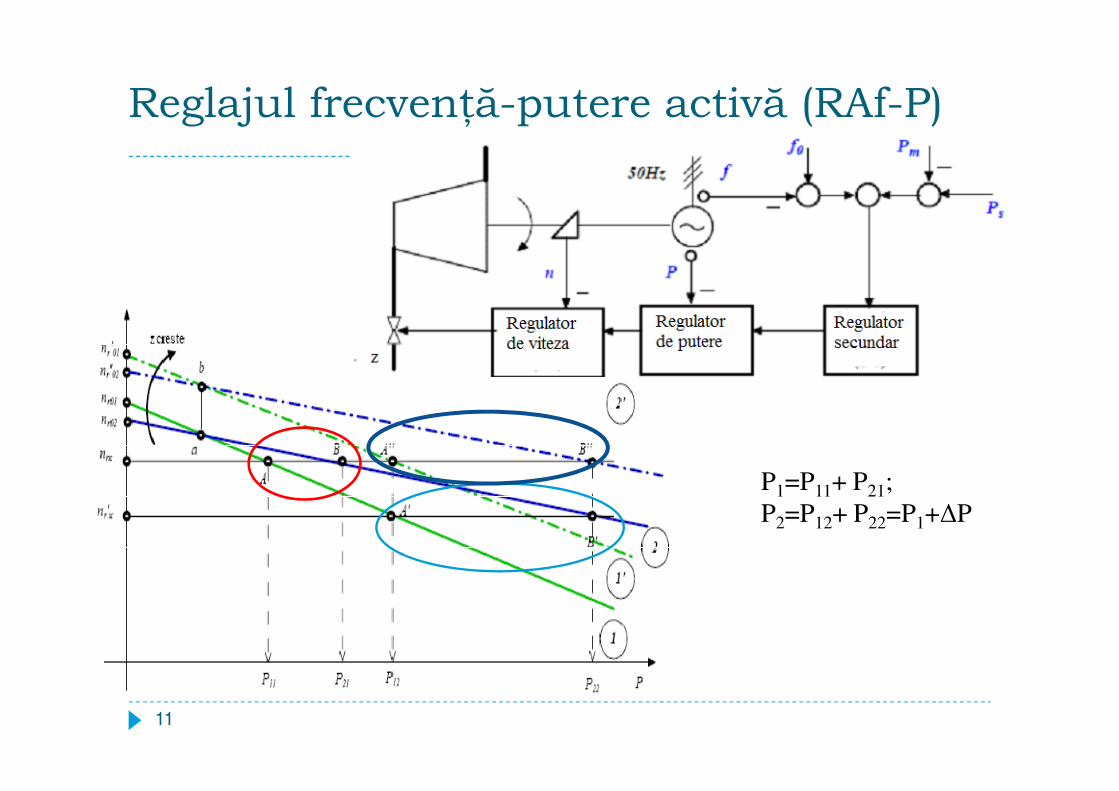
Reglajul frecvenţă-putere activă (RAf-P)
P1=P11+ P21; P2=P12+ P22=P1+∆P
11
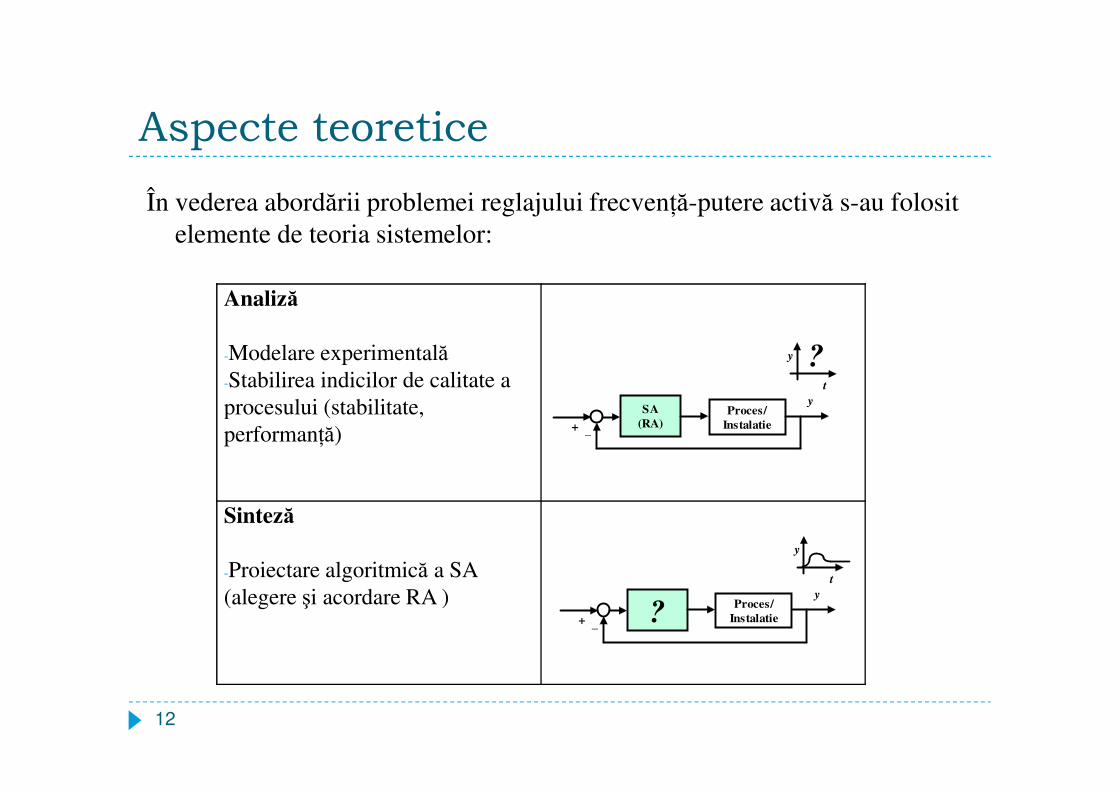
Aspecte teoretice
În vederea abordării problemei reglajului frecvență-putere activă s-au folosit elemente de teoria sistemelor:
Analiză
-Modelare experimentală-Stabilirea indicilor de calitate a procesului (stabilitate,
y
t
?
yprocesului (stabilitate, performanță)
Sinteză
-Proiectare algoritmică a SA (alegere şi acordare RA )
SA
(RA)Proces/
Instalatie+ _
y
Proces/
Instalatie+ _
y
t
?y
12

� Obiectiv
- Determinarea unorparametri fără semnificații fizice, care descriucomportamentul procesuluiin jurul unui anumit punctde funcționare
� Probleme
Analiza experimentalăAnaliza teoretică
Ipoteze simplificatoare Cunoştinte a priori
Structura modelelor
cunoscută | necunoscutăEcuaţii de bază
(1) ecuaţii de bilanţ
(2) ecuaţii de stare fizico-chimice
(3) ecuaţii fenomenologice
(4) ecuaţii de bilanţ ale entropiei
Experiment
Măsurarea semnalelor de I/E
Modelare teoretică
-legi fizice
-date constructive ale instalaţiei tehnologice
Modelare experimentală
-măsurarea semnalelor
-estimare prin metode ale teoriei sistemelor
Identificarea proceselor – experimentală
� Probleme
- necesitatea simulăriicorecte a proceselor
- Validarea modeleloridentificate
� Aplicații
- Simulare procese- Proiectare SRA,etc
13
(4) ecuaţii de bilanţ ale entropiei
Model teoretic
-structura
-parametri
Simplificare
Model simplificat
-structura
-parametri
Procedeu de identificare
Model parametric | Model neparametric
Model experimental
-structura neparametric
-parametri
Comparaţie
Model rezultant
Rezolvarea sistemului de ecuaţii
13

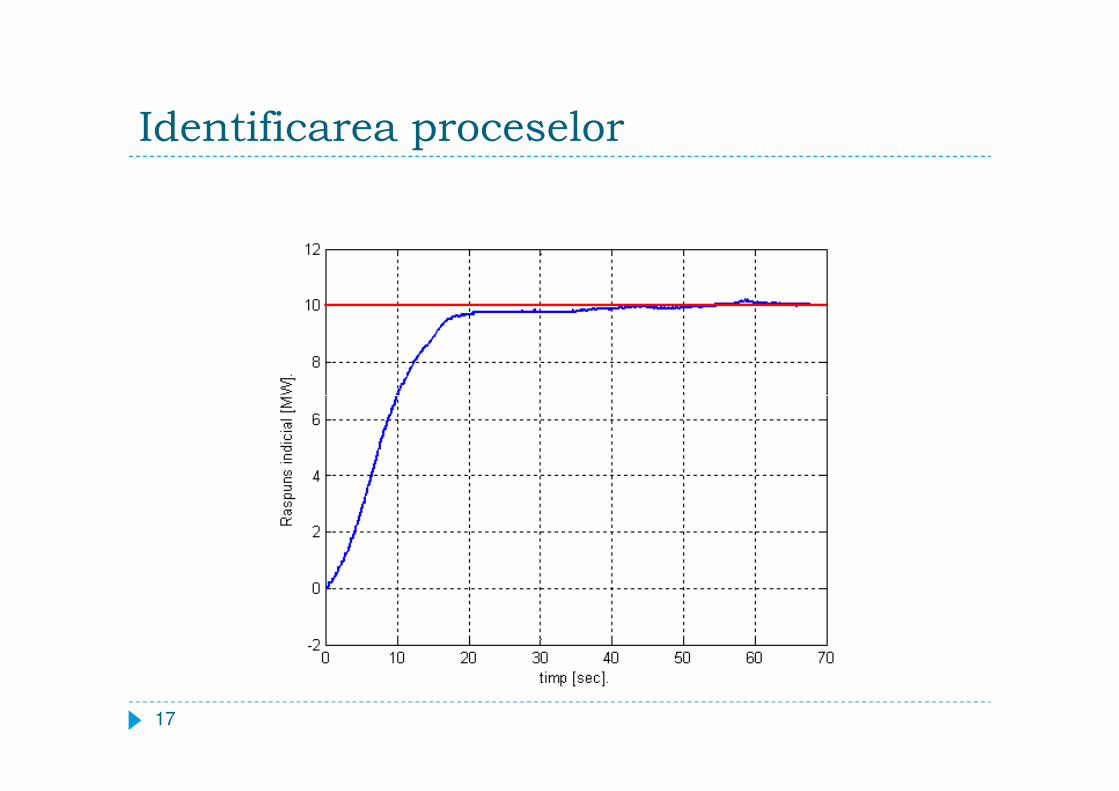
Identificarea proceselor
� Se identificămodelul sistemului doar pe baza comportarii mărimilor de intrare-ieşire.
� Procesele interne ale sistemului nu trebuie neapărat să fie cunoscute.
� Modelul poate fi construit numai pentru un sistem existent în realitate.
� Pentru identificare se pornește de la răspunsurile indiciale al grupurilor reglante din SEN.
� Pe baza formei răspunsului se impune un anumit model al instalației și sefixează parametrii modelului care trebuie stabiliți prin procedura de identificare.
� Această procedură de identificare permite stabilirea unui model pe baza căruia putem stabili suficient de bine comanda.
14

Datele experimentale obținute pentru un
grup reglant
15
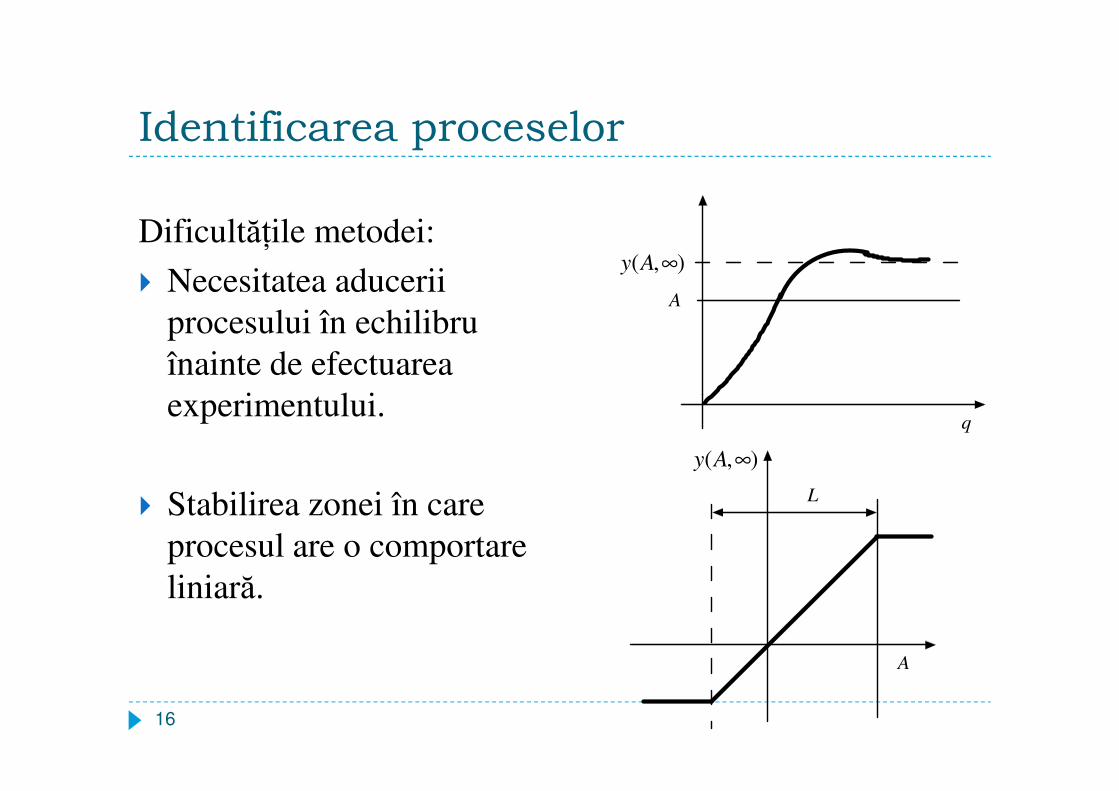
Identificarea proceselor
Dificultățile metodei:
� Necesitatea aducerii procesului în echilibru înainte de efectuarea experimentului.
( , )y A ∞
A
experimentului.
� Stabilirea zonei în care procesul are o comportare liniară.
q
( , )y A ∞
A
L
16
Identificarea proceselor
17

Modelele matematice
Sistem de ordin I Sistem de ordin II
( )1
KH s
Ts=
+( )
2
2 2 2 22 1 2n
n n n n
KKH s
T s T s s s
ω
ξ ξω ω= =
+ ⋅ + + +
( )y t
t
K
T
18

Validarea modelului matematic
( )0.11241( ) 10 1 ty t e
− ⋅= ⋅ −
4
6
8
10
Ras
puns
ind
icia
l [M
W]
Fig 4.2a. Validarea modelului de ordinul 1
y vs. tmodel1
4
6
8
10
Ras
puns
indi
cial
[M
W].
Fig 3a.Validarea modelului de ordin 2.
y vs. tmodel2
0.2576 0.24182( ) 10 178.1 188.1t ty t e e
− ⋅ − ⋅= + ⋅ − ⋅
0 10 20 30 40 50 60
0
2
timp
Ras
puns
0 10 20 30 40 50 60-2
-1.5
-1
-0.5
0
0.5
1Fig 4.2b. Curba erorilor de aproximare.
timp
Ero
ri [M
W]
0 10 20 30 40 50 60
0
2
timp
Ras
puns
indi
cial
[M
W].
0 10 20 30 40 50 60-0.4
-0.2
0
0.2
0.4Fig 3b. Curba erorilor de aproximare.
timp
Ero
ri [M
W].
19

Determinarea modelelor matematice
pentru grupul reglant
Tip de model Răspuns în timp Parametrii
funcţiei de
transfer
Funcţie de
transfer
Model
de ordin 1
K1 = 10T1=8.8968
Model
de ordin 2
K1 = 10
T21 = -0.6356
( )0.1124( ) 10 1 ty t e
− ⋅= ⋅ −
0.2576( ) 10 178.1 ty t e
− ⋅= + ⋅
( )0.1124
0.1124H s
s=
+
( )0.0396 0.0623
H s
s
=
− ⋅ +
Vizualizareraspuns
Treapta pozitiva0-100%
Treaptanegativa100%-0
Intarziere
T21.s+1
T22^2.s +2*T22*zitas+12
Functia de transfer
K1
Amplificarea
de ordin 2T21 = -0.6356
T22 = 4.0064ζ = 1.0008
0.2418188.1 te
− ⋅− ⋅2
0.0396 0.0623
0.4994 0.0623
s
s s
− ⋅ +
+ ⋅ +
Schema de simulare:
20

Comparație între modelele de ordinul I și II
40
42
44
46a. Modelul de ordinul 1
[M
W],
Pap
rox [
MW
]
PconPaproxPmas
40
42
44
46b. Modelul de ordinul 2
[M
W],
Pap
rox [
MW
]
PconP
aproxPmas
0 50 100 150 200 250 300 350 40034
36
38
40
timp [s]
Pco
n [M
W],
Pm
as [
MW
], P
0 50 100 150 200 250 300 350 40034
36
38
40
timp [s]
Pco
n [M
W],
Pm
as [
MW
], P
21

Modelele identificate pentru grupurile
studiate pot fi structurate
Centrala reglantă Model de
ordinul 1 cu
întârziere
Model de
ordinul 2 cu
întârziere
Model integrator
cu întârziere
CHE Lotru X
CHE Mărișelu X
CHE Vidraru XCHE Vidraru X
CHE Gâlceag X
CHE Șugag X
CHE Porțile de Fier I X
CTE Brăila X
CTE Turceni X
CTE Iernut X
22

Comportarea sistemului cu regulator central
In1 Out1
Turceni
In1 Out1Scope
Scheduled
Turceni
SugagPutere de
In1 Out1
Vidraru
Sugag
In2
In1Out1
SecondaryController
ScopeScheduled
LoadSugag
Vidraru
Regulatorulsecundar
Putere de consemn
23

Parametrii centralelor reglante
Turceni Șugag Lotru
BRi[MW] 80 20 150
VIi[MW/min] 4 55 144
24

Curbele de încărcare corepunzătoare
centralelor reglante
50
60
70
80Generation units response
Turceni
SugagLotru
MW
]
0 500 1000 1500 2000 2500 30000
10
20
30
40
time[sec]
Load
[MW
]
Încă
rcar
e [M
W
Timp [sec]
25

Sinteza sistemelor de reglare automată
Sinteza convenţională a unui SRA constă în determinarea unuicompensator (regulator) cu funcția de transfer HR(s), conectatcu procesul în buclă închisă, astfel încât pe lângă satisfacereastabilității sistemului să fie îndeplinite şi următoarele performanțe ale regimului dinamic şi ale celui staţionar:
unde indicele d corespunde unei performanţe dorite (impuse) de beneficiarul instalaţiei respective.
dσσ ≤
dtt tt ,≤
dss ,εε ≤
26
Acordarea regulatorului automat
� Acordarea regulatorului automat - ajustarea parametrilor RA
corespunzător cu cerinţele procesului.
� Acordare optimă - comportare a procesului în funcţie de un anumit criteriu (ex. durată minimă a procesului tranzitoriu, influența minimă a perturbațiilor, etc.). influența minimă a perturbațiilor, etc.).
� Criterii de acordare optimă:
� Criteriul modulului. Varianta Kessler
� Criteriul suprafeţei minime a erorii (Ziegler - Nichols)
27
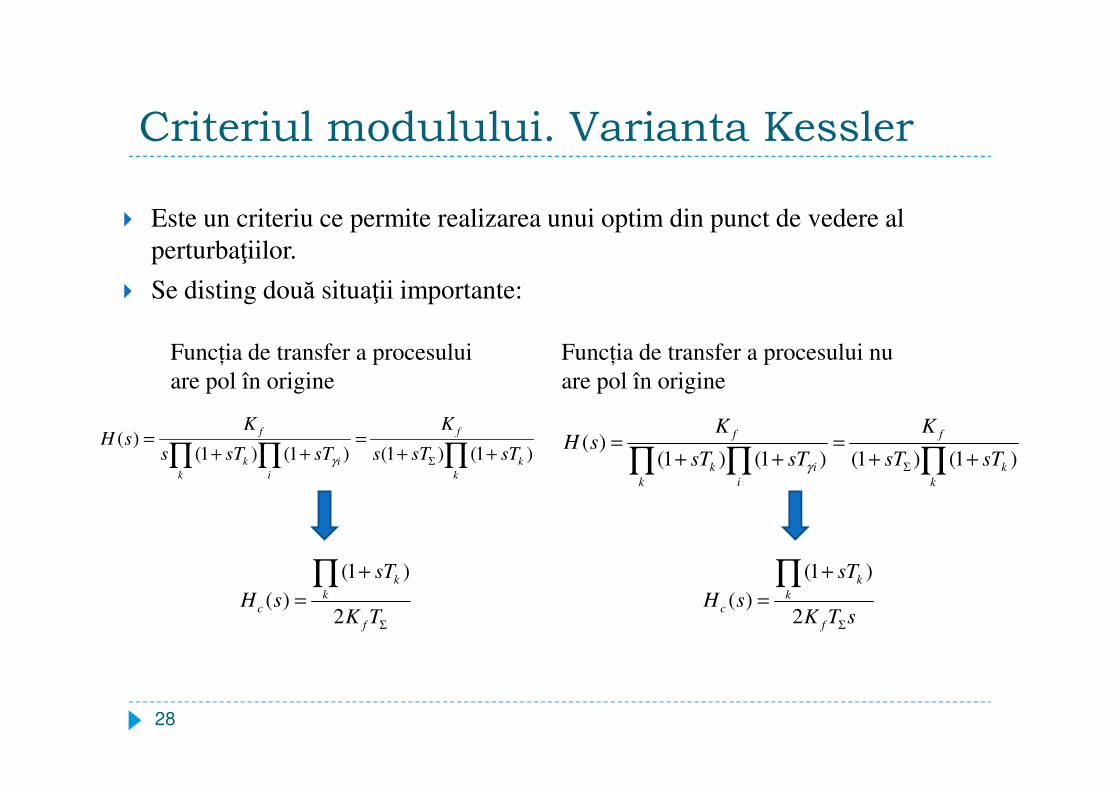
Criteriul modulului. Varianta Kessler
� Este un criteriu ce permite realizarea unui optim din punct de vedere al perturbaţiilor.
� Se disting două situaţii importante:
Funcția de transfer a procesului are pol în origine
Funcția de transfer a procesului nu are pol în origine
( )(1 ) (1 ) (1 ) (1 )
f f
k i k
k i k
K KH s
sT sT sT sTγ Σ
= =+ + + +∏ ∏ ∏
( )(1 ) (1 ) (1 ) (1 )
f f
k i k
k i k
K KH s
s sT sT s sT sTγ Σ
= =+ + + +∏ ∏ ∏
(1 )( )
2
k
kc
f
sT
H sK T sΣ
+
=∏(1 )
( )2
k
kc
f
sT
H sK TΣ
+
=∏
28

Criteriul suprafeţei minime a erorii (Ziegler-
Nichols)
� Este un criteriu de minimizare a erorii dintre răspunsul real şi ideal.Acordarea regulatorului se face astfel:
o se trece regulatorul pe lege de comandă P;
o se măreşte factorul de amplificare a acestuia (se micşorează BP) până când se ajunge la limita de stabilitate. Perioada oscilațiilor cuT şi amplificarea la limita de stabilitate K (BP ).T0 şi amplificarea la limita de stabilitate KR0 (BP0).
Regulator KR TI TD
P 0,5KRO - -
PI 0,45KRO T0/1,2 -
PID 0,6KRO T0/2 T0/8
29

Acordarea regulatorului secundar
Acordarea regulatorul trebuie să țină seama de performanțele de regim staționar și tranzitoriu care sunt necesare reglajului secundar în sistemulEnergetic Național:
� Puterea generată ≥ putere cerută eroare staționară ~ zero.
� Grupurile sau centralele implicate în reglajul secundar să funcționeze în regim normal (fără suprasarcini) suprareglaj nul.
� Reglajul secundar trebuie să se realizeze în 10-15 minutedurata regimului tranzitoriu ~ 15 minute.
30
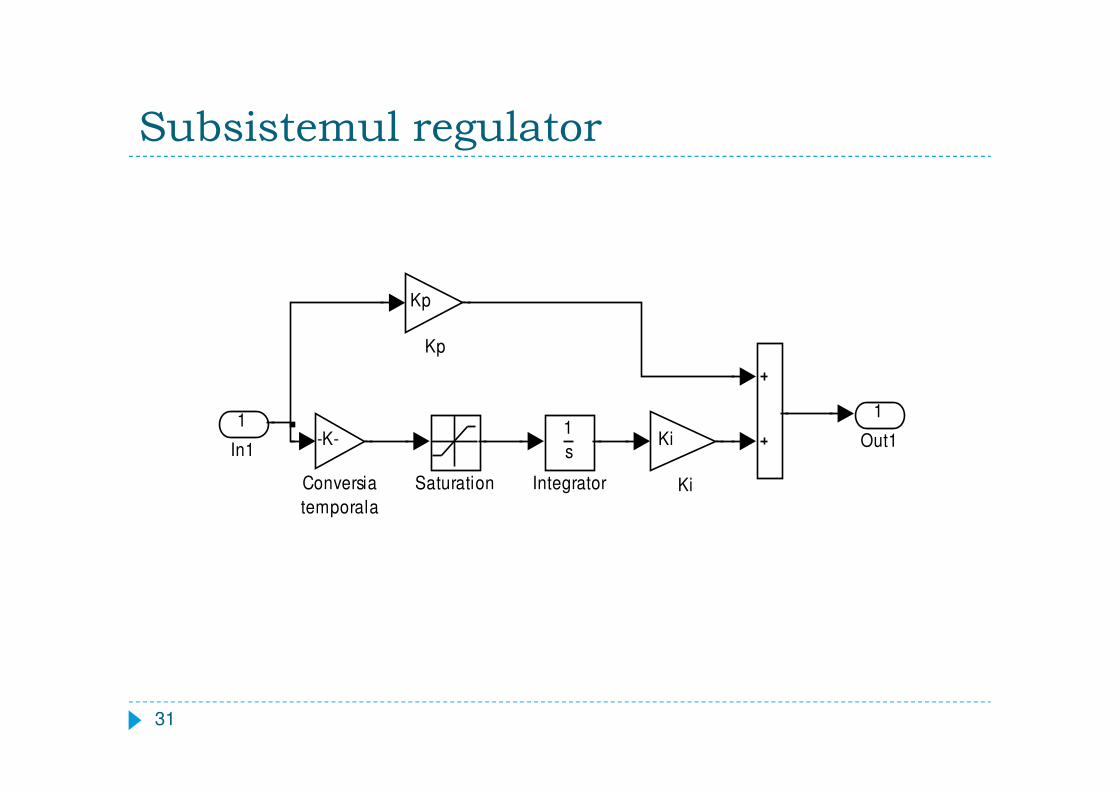
Subsistemul regulator
Kp
Kp
1
Out1
Saturation
1s
Integrator
-K-
Conversiatemporala
Ki
Ki
1
In1
31

Acordarea regulatorului central (1)
100
150In
carc
are[
MW
]
0 1000 2000 3000 4000 5000 6000 7000 8000 9000 100000
50
timp[sec]
Inca
rcar
e[M
W]
32

Acordarea regulatorului central (2)
1
1.5In
carc
are[
-]
0 1000 2000 3000 4000 5000 6000 7000 8000 9000 100000
0.5
timp[sec]
Inca
rcar
e[-]
33

Determinarea parametrilor regulatorului
34

Concluzii
� Analiza şi sinteza actualului sistem RAF-P implementat laDispecerul Energetic Național s-a facut după metoda top-down-bottom-up.
� Utilizarea unei metode de identificare experimentală aproceselor cu semnal de probă determinist – semnal treaptă peintrarea procesului – s-a dovedit utilă şi eficace în aproximareaintrarea procesului – s-a dovedit utilă şi eficace în aproximareamodelului matematic sub formă de funcţie de transfer, în specialla hidroagregate.
� Regulatorul RAF-P este de tip PI și s-a realizat acordareaparametrilor regulatorului prin optimizarea performanțelorrăspunsului sistemului.
35

Vă mulțumesc!Vă mulțumesc!
36