
MODULUL 2N: (T) SISTEME DINAMICE NELINIARE. ANALIZA …...Metoda, este in principiu, eficienta si...
37
1 MODULUL 2N: (T) SISTEME DINAMICE NELINIARE. ANALIZA PRIN SIMULARE. ANALIZA CALITATIVA PE BAZA SISTEMULUI LINIARIZAT. METODA PLANULUI FAZELOR. SISTEME DINAMICE NELINIARE ANALIZA PRIN SIMULARE LINIARIZAREA SISTEMELOR DINAMICE NELINIARE ANALIZA CALITATIVA PE BAZA SISTEMULUI LINIARIZAT METODE DE ANALIZA CALITATIVA A SISTEMELOR NELINIARE (PLANUL STARILOR / TRAIECTORILE DE STARE)
Transcript of MODULUL 2N: (T) SISTEME DINAMICE NELINIARE. ANALIZA …...Metoda, este in principiu, eficienta si...
1
MODULUL 2N: (T)
SISTEME DINAMICE NELINIARE.
ANALIZA PRIN SIMULARE.
ANALIZA CALITATIVA PE BAZA SISTEMULUI
LINIARIZAT. METODA PLANULUI FAZELOR.
SISTEME DINAMICE NELINIARE
ANALIZA PRIN SIMULARE
LINIARIZAREA SISTEMELOR DINAMICE NELINIARE
ANALIZA CALITATIVA PE BAZA SISTEMULUI
LINIARIZAT
METODE DE ANALIZA CALITATIVA A SISTEMELOR
NELINIARE (PLANUL STARILOR / TRAIECTORILE DE
STARE)
2
SISTEME DINAMICE NELINIARE
Un sistem neliniar poate fi descris intr-o forma generala prin:
( ) ( )
( ) ( )
( ), ( )
( ), ( )
t t t
t t t
=
=
x f x u
y g x u
x - vector de stare;
u - vector de comanda;
y - vectorul marimii de iesire;
f - functia vector a sistemului;
g - functia vectorului de iesire.
pentru sistemele continuale ( ) ( )
( ) ( )
1 ( ), ( ),
1 ( ),
k k k k
k k k
+ =
+ =
x f x u
y g x
si k Z in cazul sistemelor discrete
u y( )
( )
,
,
=
=
x f x u
y g x u
u y( ) ( ) ( )( )
( ) ( )( )
1 , ,
1 ,
k k k k
k k k
+ =
+ =
x f x u
y g x
a) b)
Fig. 1 - Schema bloc pentru un system neliniar: a) continuu; b) discret
Uneori, in special pentru sisteme SISO, descrierea se face printr-o ecuatie diferentiala
de ordin superior: ( ) ( )( )1
, , , ,n n
y h y y y u−
=
Dar definind variabilele de stare:
( ) ( )
( ) ( )
( ) ( )
1
2
1n
n
x t y t
x t y t
x t y−
=
=
=
si transcriind ecuatia diferentiala ordinara se obtine:
( ) ( )
( )
2
3
1
1 2
( ), ( )
, , ,
n
x
x
t x t u t
x
h x x u
−
= =
x f

3
O problema central a TS/TRA pentru sisteme neliniare este de a duce starea
unui proces in pozitia de repaus/stare sau pozitia nominala / punct de echilibru / punct fix /
punct stationar / punct critic si ea, starea, sa se mentina.
De fapt, in operatia de sinteza/proiectare prima problema care trebuie
rezolvata este de a se afla, a gasi, de la inceput acest punct de echilibru !!!
Determinarea / descoperirea pozitiei de repaus la un sistem neliniar.
Fiind dat sistemul
( ) ( ) ( )( )
( ) ( ) ( )( )
,
,
t t t
t t t
=
=
x f x u
y g x u
vom defini punctul *x ca punct de repaus/punct critic daca
( ) ( )*, 0 0t = =x f x
Un punct x pentru care ( ) 0f x reprezinta un punct ordinar sau punct regulat.
Punct critic simplu este punctul critic in care sistemul obtinut prin liniarizarea in
jurul acestui punct face ca A sa nu aiba valori proprii nule, deci det 0A .
Un punct critic simplu este hiperbolic daca multimea valorilor proprii ale sistemului
liniarizat in jurul acestui punct nu are parte reala nula.
In definitia
( )*,= =x f x 0 0
s-a facut ipoteza =u O
Se poate considera desigur ca
cu const.=u k k =
Deci
( ),= = =x f x u k 0
In acest caz definitia data este acoperita daca se face transformarea =u u + k
Daca sistemului
( ),=x f x u
i se cauta punctul de repaus
( )*,= =
x f x 0 0
u = 0 u = k
Determinarea acestui punct critic la sistemele neliniare de cele mai multe cazuri nu
este simpla.
Este de rezolvat o ecuatie implicita

4
( )*,= =x f x 0 0
dupa *x
Sunt de cercetat patru cazuri:
f
x*
x
f
x
*
1x *
3x*
2x
O solutie Mai multe solutii
f
x
f
x
Solutie continua Fara solutii
Fig. 2 - Reprezentare solutii
Pentru determinarea concreta a punctului *x exista urmatoarele situatii:
1. Ecuatia implicita
( )*, =f x 0 0
este rezolvabila prin explicitarea lui
( )* 1−=x f 0
2. Ecuatia implicita este transcendenta. Se apeleaza la un procedeu numeric
multidimensional Newton. De obicei se determina mai multe puncte critice.
3. Pentru sisteme tehnice se poate obtine un punct critic, fie prin intuitie, fie prin
cunoasterea sistemului. Prin introducerea acestui punct in ecuatiile sistemului
se poate verifica acceptanta acestui punct.
Pentru sisteme liniare avem un caz special a carui forma generala este urmatoarea:
( )
( )
,
,
A
C
= =
= =
x f x u x x + Bu
y g x u y x + Du
Punctul critic se determina simplu din:
( )*A=x x = 0 u = 0
Vom avea urmatoarele situatii:
i) Daca det A 0 atunci exista un singur punct critic * =x 0
ii) Daca det A = 0 atunci exista valori proprii nule si exista un subspatiu linear
a vectorului *x pentru care
*Ax = 0
5
Exista un continuu de puncte critice.
Exemplu
2x
1
s
1
s
0u = 1x
Fig. 3 - Exemplu
Avem
*
0 1 0
0 0 1
,0
aa
=
=
x x + u
x R
1x
2x
Fig. 4 – Exemplu de solutii continuu
Pentru u = k si det A = 0 putem sa nu avem nici un punct critic. Adica daca
Ax = -Bk avem un sistem de ecuatii supradeterminat.
Fie un sistem liniar
Abordand problema stabilitatii deosebim urmatoarele situatii:
i) Toate valorile proprii ale matricii A sunt in semiplanul negative
0 1,e iR i n =
Deci traiectorile sistemului tind asimptotic spre punctul de echilibru
* =x 0
Se spune ca sistemul este asimptotic stabil

6
1x
2x
Fig. 5 – Traiectoria de faza pentru un sistem asimptotic stabil
ii) Exista valori proprii cu partea reala pozitiva
0e iR
Exista traiectorii, care in inprejurimea mica a punctului de echilibru pot sa porneasca
din * =x 0
catre infinit.
Se spune ca sistemul este instabil
1x
2x
Fig. 6 – Traiectoria de faza pentru un sistem instabil
iii) Exista valori proprii cu partea reala nula:
0
lim 0
e i
i
R
=
=
Exista doua cazuri:

7
1x
2x
1,2 j =
1x
2x
1
2
0
0
=
Fig. 7 – Sistem cu Re 0 = , respectiv 1 0 = si 2 0
Abordarea stabilitatii la sistemele neliniare, precum si evolutia traiectorilor de stare.
Fie, spre exemplificare, sistemul:
( )
( )
1 1 2
2 2 1
1
1
x x x
x x x
= −
= −
Exista doua puncte de echilibru izolate:
* *
1 2
0 1,
0 1
= =
x x
La sistemele liniare nu e posibil acest lucru: ori un singur punct de eccilibru * =x 0
sau un punct de echilibru continuu.
Performanta stabilitatii la sistemele neliniare e diferita de a sistemelor liniare. In
situatia in care traiectorile fiind spre punctual de echilibru * =x 0 , un astfel de punct este
desemnat ca stabil.
In situatia in care dintr-un punct de echilibru *
1
1
=
x traiectorile tind spre infinit, acel
punct de echilibru este instabil.

8
ANALIZA PRIN SIMULARE. EXEMPLE.
Metoda, este in principiu, eficienta si relevant pentru aprecierea dinamicii unui system
neliniar dar constructia unui model de simulare poate fi foarte diferita.
Nu vom insista asupra unor multiple aspect legate de procedura de simulare dar vom
da un exemplu mai simplu, cu o interpretare a rezultatelor.
α) Vom considera un prim exemplu de analiza prin simulare pe un sistem caracterizat
de ecuatia Van der Pol (modelul a rezultat pe baza analizei unui oscilator cu dioda tunel).
• Ecuatia Van der Pol 2(1 ) 0y y y y− − + =
• Modelul de stare se obtine simplu notand 1 2,x y x y= = si pentru care
1 2
2
2 1 1 2(1 )
x x
x x x x
=
= − + −
• Modelul de simulare (Simulink) este prezentat in figura 6.
• Sistemul admite un singur punct critic
0)1(
0
2
2
11
2
=−+−
=
xxx
x
deci )0,0( 21 == xx poate constitui un punct de echilibru.
Consideram cazul 1m = pentru o initializare
Fig. 8 – Schema de simulare a ecuatiei Van der Pol
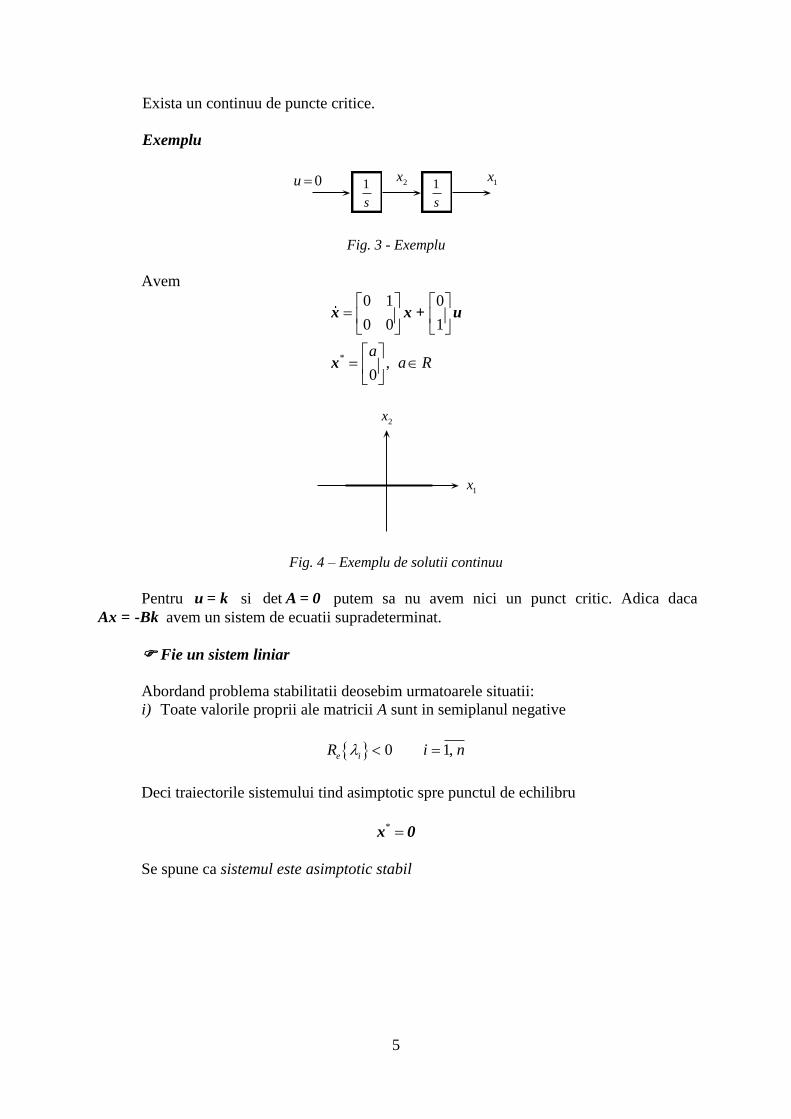
• Prin simulare obtinem o evolutie oscilant intretinuta atat pe iesire cat si pe
derivata acesteia (figura 9).
9
Fig. 9 – Raspunsul sistemului pentru ( )( )1, 0 0,5,0m x= =
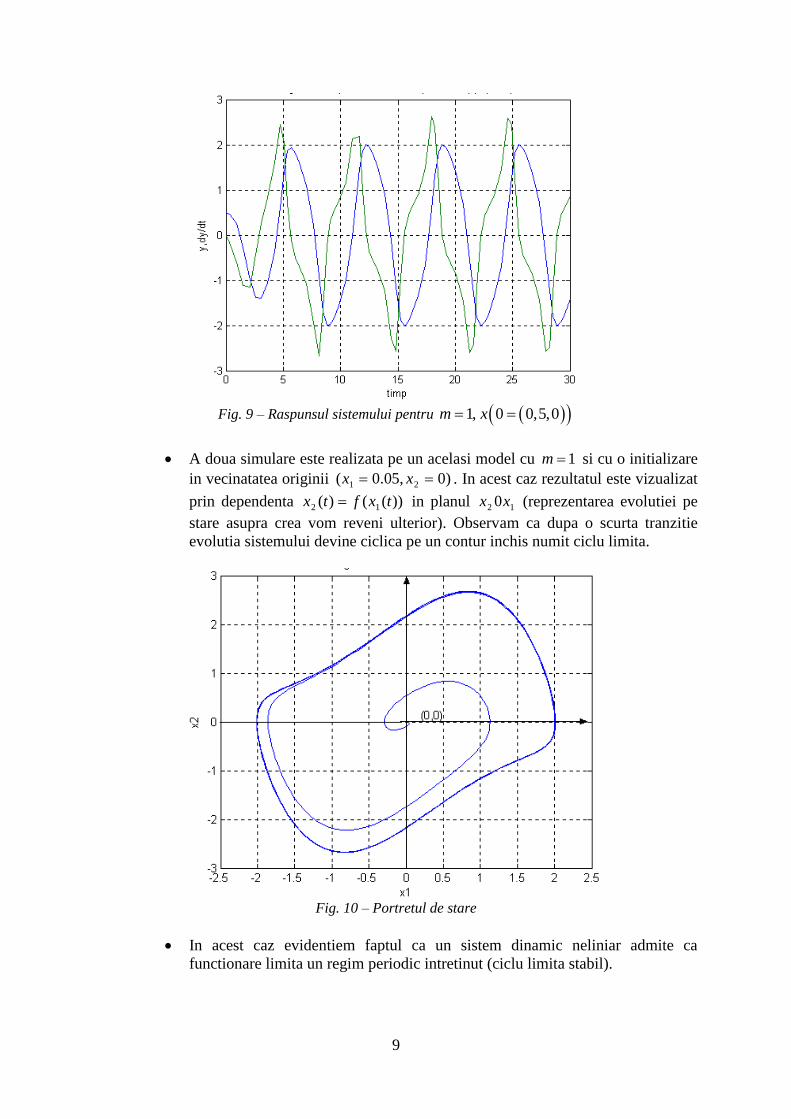
• A doua simulare este realizata pe un acelasi model cu 1m = si cu o initializare
in vecinatatea originii )0,05.0( 21 == xx . In acest caz rezultatul este vizualizat
prin dependenta ))(()( 12 txftx = in planul 12 0xx (reprezentarea evolutiei pe
stare asupra crea vom reveni ulterior). Observam ca dupa o scurta tranzitie
evolutia sistemului devine ciclica pe un contur inchis numit ciclu limita.
Fig. 10 – Portretul de stare
• In acest caz evidentiem faptul ca un sistem dinamic neliniar admite ca
functionare limita un regim periodic intretinut (ciclu limita stabil).

10
• Daca ne propunem sa efectuam analiza prin liniarizare in jurul originii, partea
dreapta a sistemului va fi:
−+−=
=
2
2
11
2
212
211
)1(,(
,()(
xxx
x
xxf
xxfxf
Matricea coeficientilor pentru sistemul liniarizat va fi:
−=
−−−=
= 1
10
21
10
)0.0(
2
121
)0,0(2
2
1
2
2
1
1
1
xxx
x
f
x
f
x
f
x
f
A
Ecuatia caracteristica pentru sistemul liniarizat va fi:
1)det()( 2 +−=−= AIS
Pentru 1= 2)1()( −= S
Deci sistemul este instabil.
β) Exemplu de simulare a unui sistem neliniar bistabil.
Consideram in continuare cazul unui sistem dinamic neliniar (exemplu este generat de
analiza prin simulare a unui circuit bistabil) caracterizat la nivel de stare.
• Modelul este de forma:
1 2
22 3
2 1 1 222
x x
bx x c x a x
=
= − −
• Schema de simulare este prezentata in figura 9.
Fig. 11 – Schema de simulare a circuitului bistabil
11
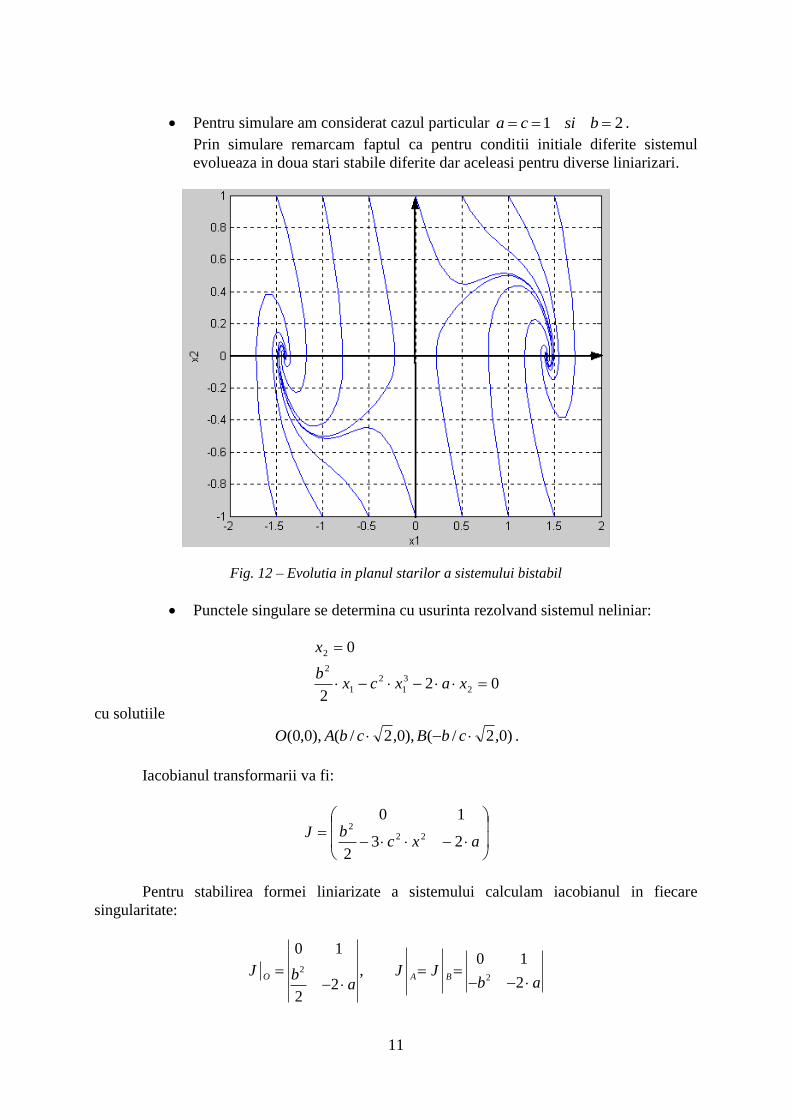
• Pentru simulare am considerat cazul particular 1 2a c si b= = = .
Prin simulare remarcam faptul ca pentru conditii initiale diferite sistemul
evolueaza in doua stari stabile diferite dar aceleasi pentru diverse liniarizari.
Fig. 12 – Evolutia in planul starilor a sistemului bistabil
• Punctele singulare se determina cu usurinta rezolvand sistemul neliniar:
02
2
0
2
3
1
2
1
2
2
=−−
=
xaxcxb
x
cu solutiile
)0,2/(),0,2/(),0,0( − cbBcbAO .
Iacobianul transformarii va fi:
−−=
axcbJ
232
10
222
Pentru stabilirea formei liniarizate a sistemului calculam iacobianul in fiecare
singularitate:
22
0 10 1
,22
2
O A BJ J Jbb aa
= = =− − −

12
Valorile proprii ale matricei coeficientilor pentru primul caz:
20
22)det(
22
2,1
22
0
baa
baJI +−==−+=−
Prin urmare originea este de tip sa si deci instabil.
Valorile proprii ale matricei coeficientilor pentru ultimele doua cazuri vor fi:
22
2,1
22 0
22)det( baa
baJI A −−==++=−
In acest caz, in ipoteza 0 ab (caz considerat) singularitatea este de tip nod stabil*.
Teorema de existenta si unicitate
O prima problema, fundamentala in teoria ecuatiilor diferentiale este de a stabili daca exista si in
ipoteza existentei solutiilor , sa precizam cate solutii admite o ecuatie diferentiala data.
De fapt putem aprecia cu usurinta faptul ca o ecuatie diferentiala data poate admite un numar infinit de
solutii.
Ceea ce ne intereseaza nu este numarul de solutii ci posibilitatea de a caracteriza acest ansamblu de
solutii.
In cazul sistemelor continuale, forma generala de caracterizare va fi:
( ) ( , )x t f t x=
unde nxR reprezinta vectorul de stare iar f o functie vectoriala de n componente.
Teorema 1
Fie sistemul de ecuatii diferentiale (1).
Vom considera ca functiunile
( ), , 1,if t x i n
sunt definite pe o multime deschisa nx R R
si ca pe aceasta multime
( )( ),
, , , 1,i
i
j
f t xf t x i j n
x
sunt functiuni continue.
In aceste conditii:
a) pentru fiecare punct ( )0 0,t x exista o solutie a sistemului (1)
( ) ( )0,x t t x= ;
b) daca doua solutii ale sistemului (1)
)()(),()( ttxttx ==
coincid cel putin pentru
0 0 0( ) ( )t t deci t t = =
atunci cele doua solutii coincid pentru oricare moment de timp pentru care solutiile sunt simultan diferite.
Legat de ultima parte a teoremei prezentate sunt necesare cateva precizari.
Pentru sistemul (1) poate exista solutia
( ) ( )x t t=

13
definita pe
( )3 4,t t t
pentru o aceeasi initializare ( )0 0,t x .
Teorema prezentata afirma ca pentru
( ) ( )1 2 3 4, ,t t t t t
(daca exista)
( ) ( )t t = ,
egalitate care nu se mentine pentru oricare valoare de timp.
Daca
( ) ( )3 4 1 2, ,t t t t
cele doua functii coincid pe intervalul ( )3 4,t t .
Spunem ca solutia
( ) ( )x t t=
constituie o prelungire a functiei
( ) ( )x t t= .
Daca pentru o solutie, nu exista posibilitatea constructiei unei prelungiri nici la dreapta si nici la
stanga spunem ca solutia este neprelungibila.
Se poate demonstra ca o solutie poate fi prelungita pana la o solutie neprelungibila si aceasta intr-un
mod unic.
• In baza teoremei prezentate, cu precizarile anterioare obtinem o interpretare remarcabila ca va fi
mult utilizata in dezvoltarile ulterioare: prin oricare punct ( )0 0,t x a deschisului trece o singura
curba integrala a sistemului (1).
• In cazul caracterizarii proceselor dinamice discontinue modelul matematic asociat va fi de forma:
( ) ( )( )1x k g x k+ = (2)
in care am propus cazul mai putin general al proceselor ce caracterizeaza o invarianta temporala (functia
( )g , nu dispune explicit de tactul de lucru).
Teorema 2
Considerand sistemul (2) pentru care
a) ( ) :g x este o aplicatie de clasa r
.
b) ( )g x este inversabila (exista inversa ( )1g x− de clasa
r), solutia sistemului (2) exista si
este unica. (Existenta si unicitatea solutiei este asigurata de conditia ca ( )g x sa constituie
un difeomorfism).

14
LINIARIZAREA SISTEMELOR DINAMICE NELINIARE
Analiza si mai ales sinteza este mult mai complexa decat in liniar. Acolo unde
problema permite se cauta o forma liniara echivalenta care sa permita o cat mai buna
aproximare a solutiei sistemului initial neliniar. O astfel de operatie poarta numele de
liniarizare.
Consideram cazul unui sistem dinamic neliniar, invariant temporal caracterizat in
forma initiala prin
( ) ( ( ), ( ))
( ) ( ( ))
x t f x t u t
y t g x k
=
=
pentru care ,, 00 ux constituie o solutie particulara si deci
)(
),(0
00
00
xgy
uxf
=
=
Dezvoltam in serie Taylor functiile gf , , in jurul solutiei de echilibru oyx ,0
0 0 0 0
0 0
0 0 0 ( . ) 0 ( , ) 0 0
0 ( , ) 0 0
( ( ) ) ( , ) ( , ) ( ( ) ) ( , ) ( ( ) ) ( )
( ) ( ( )) ( ( ) ) ( )
x u x u
x u
dx t x f x u f x u x t x f x u u t u y t y
dt x u
g x g x t x t x g xx
− = + − + − + + − =
= + − + −
Introducem urmatoarele notatii:
0 0 0 0 0 0
0 0 0
( , ) ( , ) ( , )
( ) ( ) , ( ) ( ) , ( ) ( )
( , ) , ( , ) , ( )x u x u x u
t x t x t y t y t u t u
A f x u B f x u C g xx u x
= − = − = −
= = =
Neglijand infinitii mici de ordin superior obtinem urmatorul sistem dinamic liniar ce
constituie o prima aproximare a sistemului dinamic initial:
( ) ( ) ( )
( ) ( )
t A t B t
t C t
= +
=
Asupra modului de constructie efectiva cat si in privinta eficientei unei astfel de
proceduri vom reveni in cadrul urmatoarelor prelegeri.

15
ANALIZA CALITATIVA PE BAZA SISTEMULUI
LINIARIZAT
Teorema de liniarizare (teorema Hartman-Grobman)
Fie un sistem dinamic neliniar ( )x f x= cu un punct critic simplu, hiperbolic x
(considerat pentru simplitate in origine).
In aceste conditii intr-o vecinatate U a lui nxR portretul de stare a sistemului
neliniar este echivalent cu portretul de stare al sistemului liniarizat.
Teorema prezentata este dificil de demonstrat (pentru cei interesati demonstratia poate
fi gasita in oricare tratat de teoria calitativa a ecuatiilor diferentiale).
Pe cat de dificila este demonstratia pe atat de simpla si intuitiva este aplicarea acesteia.
In esenta teorema afirma ca pentru cazul punctelor singulare care nu se afla pe axa
imaginara sistemul neliniar si sistemul liniarizat sunt echivalente: comportarea ca nod, punct
sa sau focar pentru cazul liniar raman nod, punct sa sau focar si pentru sistemul neliniar
initial.
Pentru o mai buna intelegere vom prezenta in continuare un exemplu simplu de
aplicare a acestei teoreme.
Exemplu
Se considera sistemul dinamic neliniar caracterizat prin:
2
2
2
2
x x y x
y x y x y
= − + +
= − +
Punctele singulare rezulta din solutionarea sistemului
2
2
20
20
yxyx
xyx
+−=
++−=
Prin rezolvarea sistemului obtinem o unica solutie x=0,y=0. Iacobianul sistemului in
punctul critic va fi:
−
−=
+−+
+−=
21
12
221
122)0,0(2)0,0(
yxy
xJ
Ecuatia caracteristica
03421
12)det()( 2 =++=
+−
−+=−=
JIS
pune in evidenta radacinile 3.1 21 −=−= reale si simple si deci punctul critic este un punct
hiperbolic.

16
Cum ambele radacini sunt reale si negative rezulta ca singularitatea este de tip nod
stabil.
Fig. 13 – Schema de simulare a sistemului neliniar
Rezultatele obtinute prin simulare permit trasarea traiectoriilor de stare pentru sistemul
neliniar considerat, rezultate prezentate in figura 13. Totodata sunt prezentate traiectoriile de
stare pentru sistemul liniarizat.
Apare evident faptul ca intr-o vecinatate a originii comportarea celor doua sisteme este
aproape identica
Fig. 14 – Portretul de stare al sistemului neliniar
17
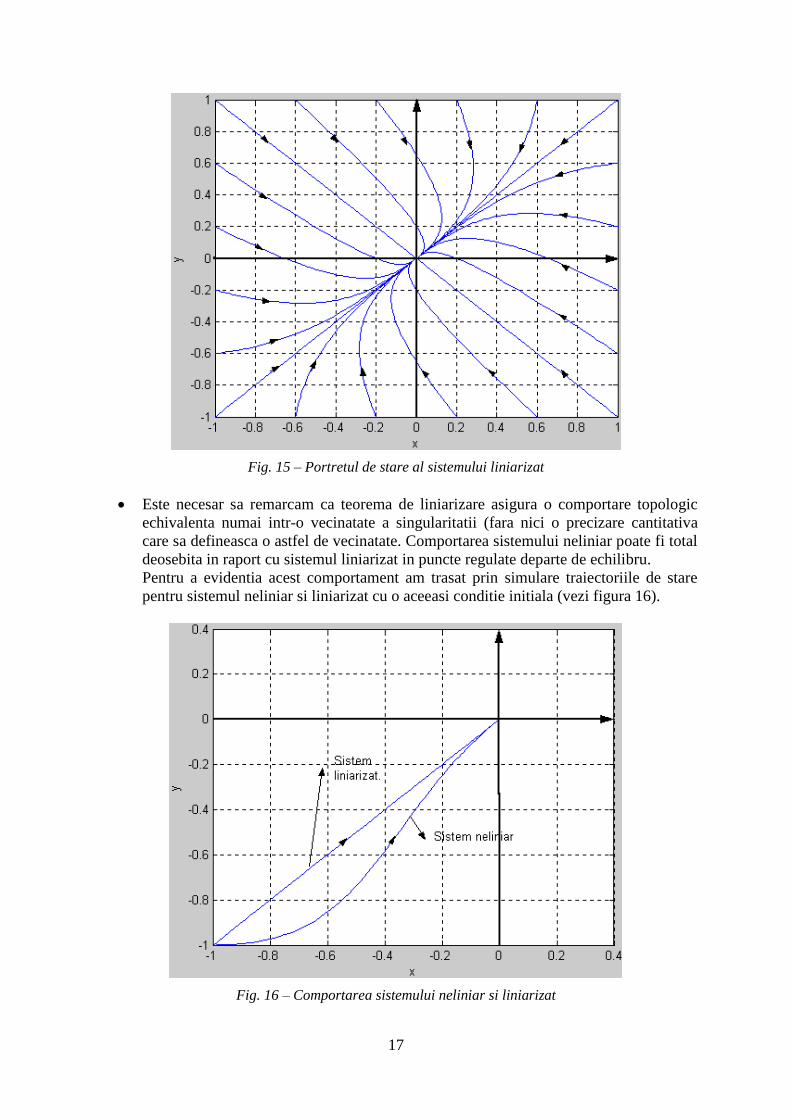
Fig. 15 – Portretul de stare al sistemului liniarizat
• Este necesar sa remarcam ca teorema de liniarizare asigura o comportare topologic
echivalenta numai intr-o vecinatate a singularitatii (fara nici o precizare cantitativa
care sa defineasca o astfel de vecinatate. Comportarea sistemului neliniar poate fi total
deosebita in raport cu sistemul liniarizat in puncte regulate departe de echilibru.
Pentru a evidentia acest comportament am trasat prin simulare traiectoriile de stare
pentru sistemul neliniar si liniarizat cu o aceeasi conditie initiala (vezi figura 16).
Fig. 16 – Comportarea sistemului neliniar si liniarizat

18
Desi convergenta catre origine este similara observam ca in puncte departe de
echilibru evolutia este total diferita.
Aceasta observatie reprezinta limitarea majora a teoremei prezentate si anume ca
putem aprecia exclusiv calitativ comportarea sistemului numai intr-o vecinatate a
singularitatilor de tip hiperbolic. Nu pot sa ma pronunt daca traiectoria este convergenta catre
o astfel de vecinatate.
In cazul considerat sistemul dinamic a fost caracterizat printr-o unica singularitate
fixata in origine. Pentru cazul in care exista mai multe puncte singulare analiza este mult mai
complexa.
Exemplu
Dinamica pendulului simplu este caracterizata de ecuatia diferentiala 2 sin( ) 0m l c m g l + + =
in care m reprezinta masa pendulului, l lungimea tijei de sustinere, c coeficientul de frecare
vascoasa, unghiul facut de tija cu verticala locului, g acceleratia gravitationala.
Daca notam =1x si 2x = caracterizarea sistemului la nivel de stare va fi de forma:
1 2
2 1 22sin( )
x x
g cx x x
l m l
=
= − −
Punctele critice ale sistemului neliniar se obtin solutionand sistemul algebric neliniar
0)sin(
0
221
2
=
−−
=
xlm
cx
l
g
x
Obtinem o infinitate de solutii de forma:
0
,
2
1
=
=
x
Zkkx
Iacobianul sistemului va fi:
−−
=21 )cos(
10
lm
cx
l
gJ
Pentru k par iacobianul devine:
−−
=2
10
lm
c
l
gJ par iar pentru k impar
−+
=2
10
lm
c
l
gJ impar
Ecuatia caracteristica pentru k par va fi:
( ) 2
20A par
c g
m l l = + + =
iar pentru k impar:
( ) 2
20A impar
c g
m l l = + − =
19
Pentru k impar radacinile ecuatiei caracteristice vor fi:
l
g
lm
c
lm
c +
−=
442
2
22,1
Radacinile ecuatiei sunt reale si de semne contrare. Prin urmare singularitatile de
forma )0,)12(( + p sunt puncte sa.
Pentru k par radacinile sunt de forma:
l
g
lm
c
lm
c−
−= 4
2
1
2
142
2
22,1
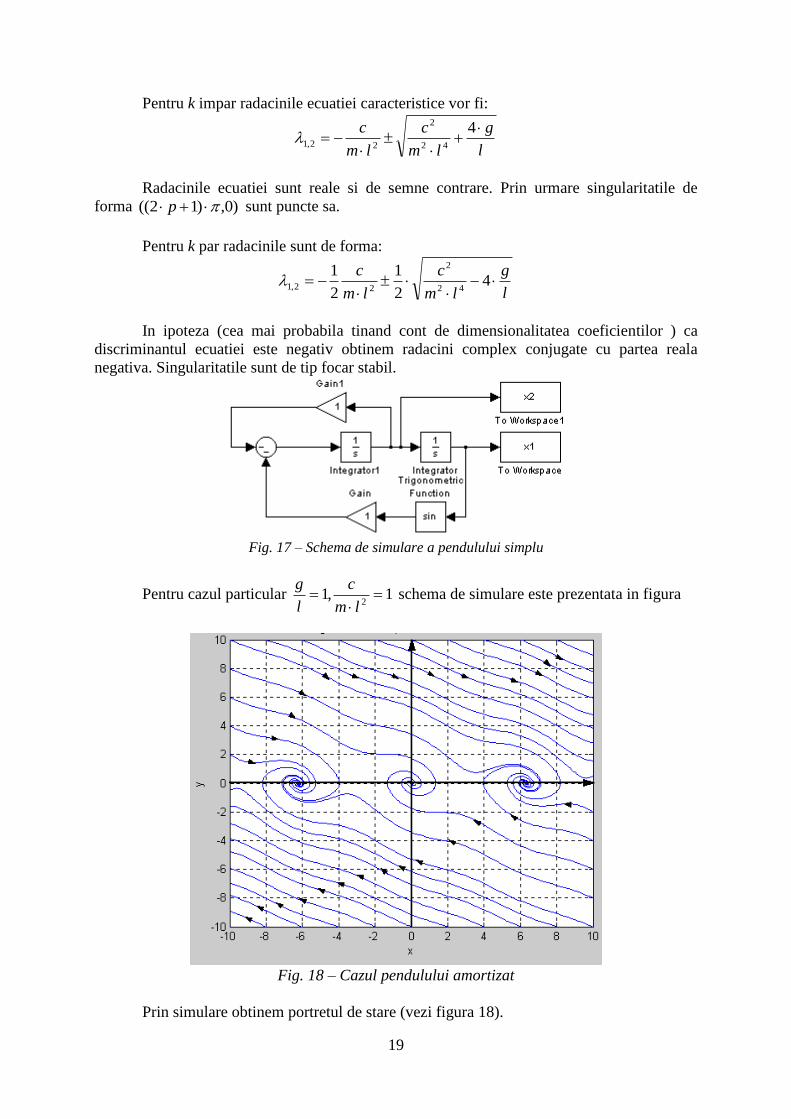
In ipoteza (cea mai probabila tinand cont de dimensionalitatea coeficientilor ) ca
discriminantul ecuatiei este negativ obtinem radacini complex conjugate cu partea reala
negativa. Singularitatile sunt de tip focar stabil.
Fig. 17 – Schema de simulare a pendulului simplu
Pentru cazul particular 1,12=
=
lm
c
l
g schema de simulare este prezentata in figura
Fig. 18 – Cazul pendulului amortizat
Prin simulare obtinem portretul de stare (vezi figura 18).
20
METODE DE ANALIZA CALITATIVA A SISTEMELOR
NELINIARE (PLANUL STARILOR / TRAIECTORILE DE
STARE)
Metode de trasare a traiectorilor de stare
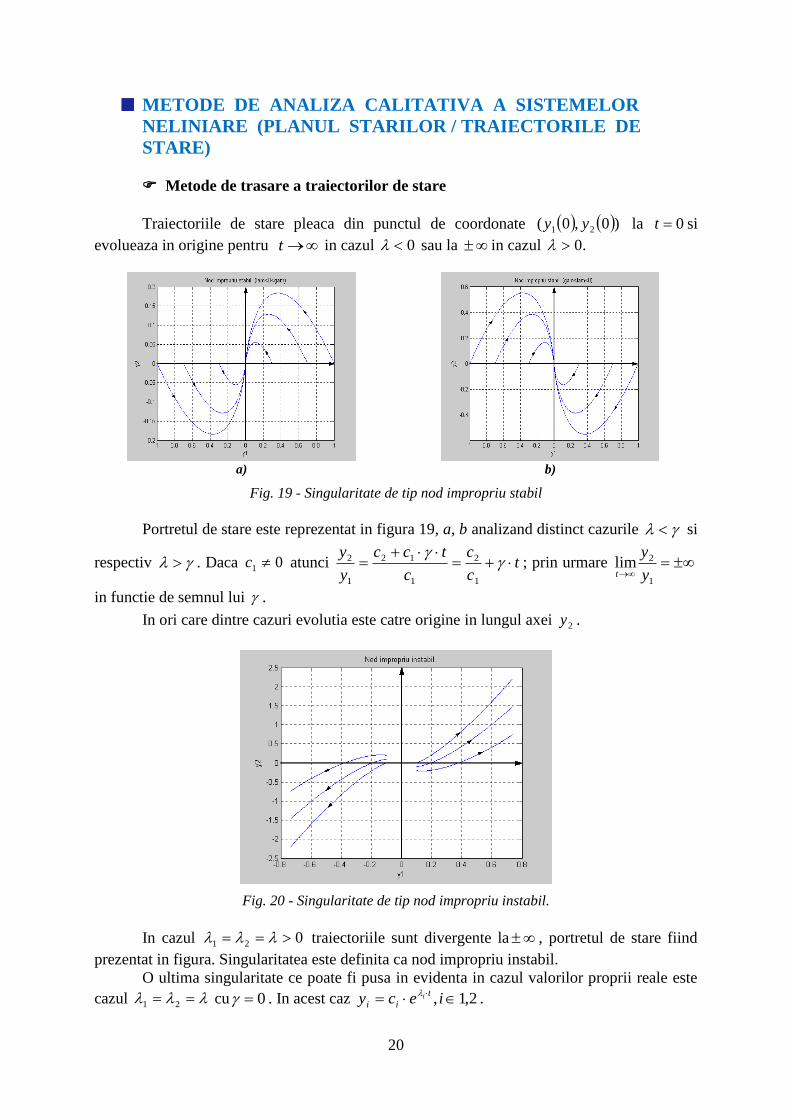
Traiectoriile de stare pleaca din punctul de coordonate ( ) ( ))0,0( 21 yy la 0t = si
evolueaza in origine pentru →t in cazul 0 sau la in cazul .0
a) b)
Fig. 19 - Singularitate de tip nod impropriu stabil
Portretul de stare este reprezentat in figura 19, a, b analizand distinct cazurile si
respectiv . Daca 01 c atunci tc
c
c
tcc
y
y+=
+=
1
2
1
12
1
2 ; prin urmare =→
1
2limy
y
t
in functie de semnul lui .
In ori care dintre cazuri evolutia este catre origine in lungul axei 2y .
Fig. 20 - Singularitate de tip nod impropriu instabil.
In cazul 021 == traiectoriile sunt divergente la , portretul de stare fiind
prezentat in figura. Singularitatea este definita ca nod impropriu instabil.
O ultima singularitate ce poate fi pusa in evidenta in cazul valorilor proprii reale este
cazul == 21 cu 0= . In acest caz 2,1, =
iecyt
iii .
21
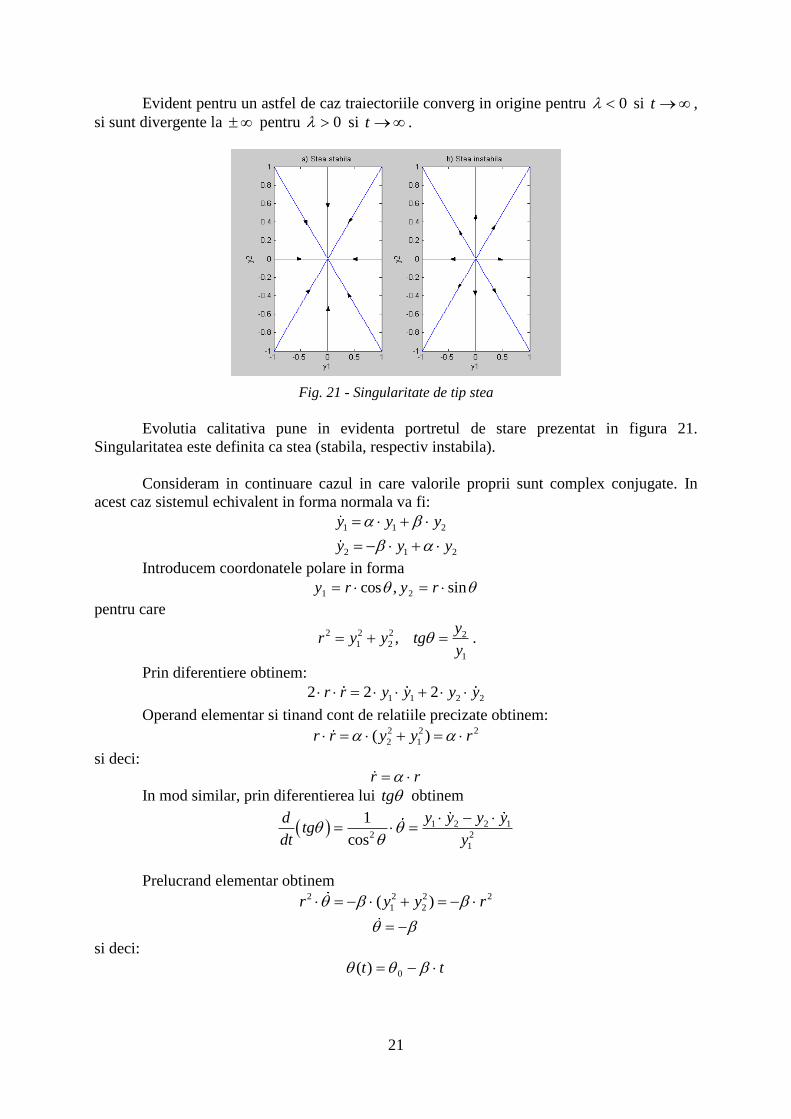
Evident pentru un astfel de caz traiectoriile converg in origine pentru 0 si →t ,
si sunt divergente la pentru 0 si →t .
Fig. 21 - Singularitate de tip stea
Evolutia calitativa pune in evidenta portretul de stare prezentat in figura 21.
Singularitatea este definita ca stea (stabila, respectiv instabila).
Consideram in continuare cazul in care valorile proprii sunt complex conjugate. In
acest caz sistemul echivalent in forma normala va fi:
1 1 2
2 1 2
y y y
y y y
= +
= − +
Introducem coordonatele polare in forma
sin,cos 21 == ryry
pentru care
2 2 2 21 2
1
,y
r y y tgy
= + = .
Prin diferentiere obtinem:
1 1 2 22 2 2r r y y y y = +
Operand elementar si tinand cont de relatiile precizate obtinem: 2 2 2
2 1( )r r y y r = + =
si deci: rr =
In mod similar, prin diferentierea lui tg obtinem
( ) 1 2 2 1
2 2
1
1
cos
d y y y ytg
dt y
− = =
Prelucrand elementar obtinem 2 2 2 2
1 2( )r y y r = − + = −
= −
si deci:
tt −= 0)(
22
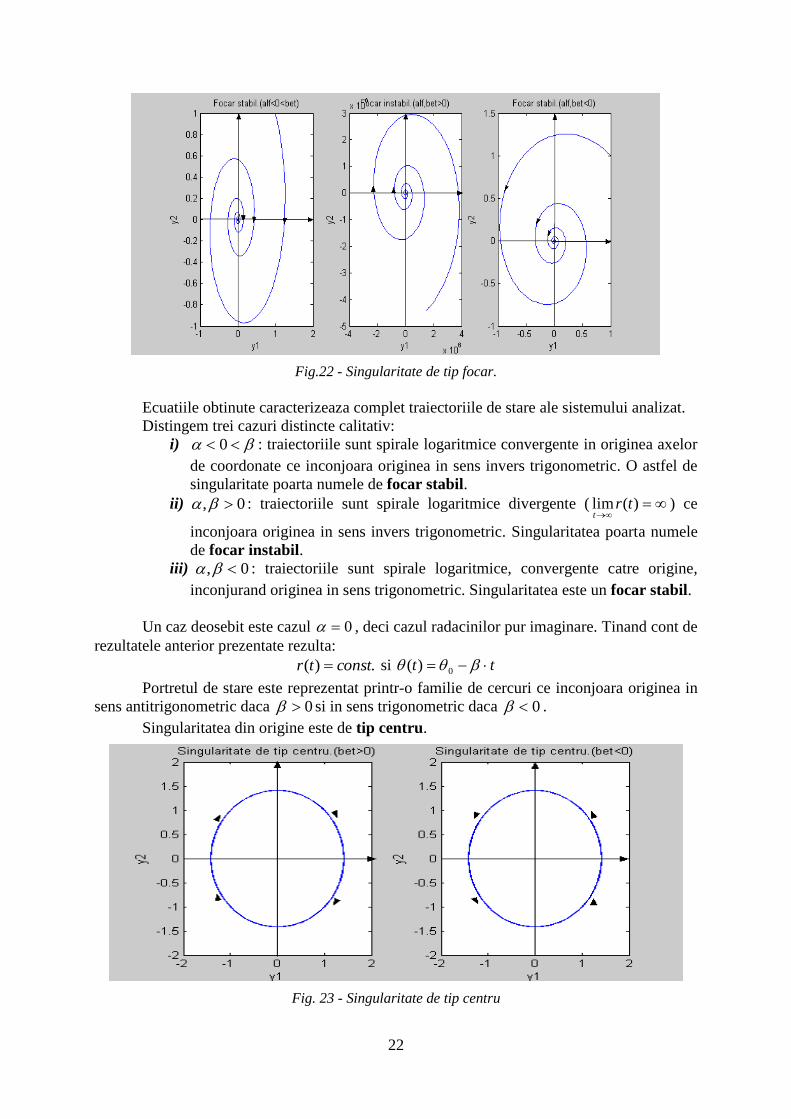
Fig.22 - Singularitate de tip focar.
Ecuatiile obtinute caracterizeaza complet traiectoriile de stare ale sistemului analizat.
Distingem trei cazuri distincte calitativ:
i) 0 : traiectoriile sunt spirale logaritmice convergente in originea axelor
de coordonate ce inconjoara originea in sens invers trigonometric. O astfel de
singularitate poarta numele de focar stabil.
ii) 0, : traiectoriile sunt spirale logaritmice divergente ( =→
)(lim trt
) ce
inconjoara originea in sens invers trigonometric. Singularitatea poarta numele
de focar instabil.
iii) 0, : traiectoriile sunt spirale logaritmice, convergente catre origine,
inconjurand originea in sens trigonometric. Singularitatea este un focar stabil.
Un caz deosebit este cazul 0= , deci cazul radacinilor pur imaginare. Tinand cont de
rezultatele anterior prezentate rezulta:
.)( consttr = si tt −= 0)(
Portretul de stare este reprezentat printr-o familie de cercuri ce inconjoara originea in
sens antitrigonometric daca 0 si in sens trigonometric daca 0 .
Singularitatea din origine este de tip centru.
Fig. 23 - Singularitate de tip centru

23
Metode de trasarea traiectoriilor de stare.
Distingem doua categorii de metode care permit evaluarea traiectoriilor de stare.
Metode analitice si metode grafo-analitice.
1. Metodele analitice presupun caeste posibila solutionaraea sistemului de ecuatii
diferentiale
( ) ( )( )txftx =
cu solutiile
( ) ( ) ( ) ( )( )txtxtxtx n,,, 21 = .
Prin eliminarea timpului obtinem forma carteziana a traiectoriilor.
Pentru un sistem de ordinul doi cu solutiile:
( ) ( )txxtxx 2211 , ==
eliminarea timpului conduce la forma carteziana
( ) 0,, 21 =Cxxg .
Exemplu
Consideram sistemul dinamic neliniar caracterizat la nivel de stare :
12
21
=
=
x
xx
cu conditii initiale 2010 , xx pentru 00 =t .
Din cea de a doua ecuatie
( ) txtxdtdx =−= 2022 .
Pe de alta parte
101
2
20
2
2122
22xx
xxdxdxx −=−=
Traiectoriile de stare sunt parabole cu ecuatia
Cxx
+= 1
2
2
2 unde 10
2
20
2x
xC −=
In cazuri cu totul particulare putem aplica urmatoarea procedura:
- considerand sistemul neliniar in forma:
( )
( )
( )
=
=
=
xfx
xfx
xfx
nn
22
11
considerand ( ) 01 xf
( )( )
( )( )
=
=
xf
xf
dx
dx
xf
xf
dx
dx
nn
11
1
2
1
2
- rezolvam cele ( )1−n ecuatii si eliminand timpul obtinem traiectoriile de
stare.

24
Exemplu
Consideram sistemul caracterizat prin ecuatia .0=+ xx Introducem variabilele de
stare
xxxx == 21 ,
pentru care modelul la nivel de stare va fi :
−=
=
12
21
xx
xx
Rezulta cu usurinta
1
2
2
1
x
x
dx
dx−=
si imediat
2211 dxxdxx −= .
Prin integrare directa obtinem ecuatia traiectoriilor de stare
.2
1
2
1 2
2
2
1 Cxx =+
Traiectoriile de stare sunt reprezentate printr-o familie de cercuri cu centrul in
originea axelor de coordonate.
2. Metodele grafo-analitice permit evaluarea unor elemente de baza in reprezentarea
portretului de stare pe baza carora putem trasa aproximativ portretul de stare.
Daca consideram un sistem de ordinul doi in forma generala:
( )
( )
=
=
2122
2111
,
,
xxfx
xxfx
stabilim panta traiectoriilor de stare in forma :
( )( )
==211
212
1
2
,
,
xxf
xxf
dx
dx
Pentru trasarea izoclinelor procedam in felul urmator:
• pentru o valoare fixata , trasam graficul dependentei ( )( )
=211
212
,
,
xxf
xxf.
• in lungul acestor curbe trasam izoclinele de panta ( )( )211
212
,
,
xxf
xxfarctg=
• traiectoriile se aproximeaza prin interpolarea punctelor de pe curbele
( )( )
=211
212
,
,
xxf
xxfprin curbe tangente la izocline.
Exemplu
Consideram un sistem dinamic caracteriuatla nivel de stare :
−=
=
12
21
xx
xx

25
Impunem si obtinem 021
2
1
1
2 =+=−= xxx
x
dx
dx ( o familie de drepte ce trec
prin origine se panta
1− ).
2x
1x
Trasarea izoclinelor
In continuare trasam izoclinele care sunt drepte perpendiculare pe dreptele anterior
stabilite (vezi figura de mai sus).
Trasarea traiectoriilor de stare consta in interpolarea punctelor de pe dreptele de
ecuatie
021 =+ xx
prin curbe tangente izoclinelor.
Traiectoriile astfel trasate au un grad de aproximare ridicat si in general sunt utilizate
pentru o analiza calitativa.
Prezentam in continuare un al doilea exemplu in care modelul sistemului este mult mai
complex (ecuatia van der Pol).
Exemplu
Consideram un sistem dinamic caracterizat de ecuatia diferentiala neliniara:
( ) 2.0,012 ==+−+ xxxx .
Introducem variabilele de stare
xxxx == 21 ,
obtinand modelul la nivel de stare :
( )
−−−=
=
12
2
12
21
12.0 xxxx
xx
Pentru o valoare impusa:
( )=
−−−=
2
12
2
1
1
2 12.0
x
xxx
dx
dx
Ecuatia generala a izoclinelor va fi :
( ) 012.0 212
2
1 =++− xxxx
sau
( )12.0 2
1
12
−+−=
x
xx
.

26
Trasarea traiectoriilor de stare pentru sisteme liniare de ordinul doi.
Trasarea traiectoriilor de stare pentru sistemele liniare de ordinul doi este o problema
specifica cadrului liniar.
Cum cadrul liniar dispune de proceduri puternice de analiza cantitativa in general
analiza in plan de stare este neglijata si uneori chiar abandonata.
Din acest motiv consideram necesara o scurta prezentare a problematicii trasarii
traiectoriilor de stare pentru sisteme de ordinul doi.
Cazul sistemelor continuale.
Pentru un sistem dinamic x A x= unde 22 RA exista o matrice nesingulara P astfel
ca JAPP =−1 unde J corespunde la trei clase distincte de matrici dupa cum valorile proprii
ale matricei A sunt reale si distincte, reale confundate sau complex conjugate.
1.
=
2
1
0
0
J si solutia sistemului y J y= va fi de forma
002
1
0
0)( y
e
eyety
t
t
tJ
==
2.
=
0
1J si solutia sistemului y J y= va fi de forma:
0010
1)( y
teyety ttJ
==
3.
−=
J si solutia sistemului y J y= va fi de forma
−
=
)cos()sin(
)sin()cos()(
tt
ttety t
Daca consideram ecuatia caracteristica de forma
( ) ( ) 2det 0A A I = − = − + =
aceasta va avea:
1. doua radacini reale si diferite R 21 daca 042 −
2. doua radacini reale si confundate 2
21
=== daca 042 =−
3. doua radacini complex conjugate = j2,1 unde
242,2/ −== iar ( )Atr= si ( )Adet=
Este evident ca unicul punct critic obtinut prin solutionarea sistemului 0= xA este
originea sistemului de coordonate ( )0,0O .
In continuare vom dezvolta o analiza calitativa a proprietatilor punctului de echilibru
pentru sistemul in forma normala, pe baza portretului de stare.
Facem observatia ca sistemul original si sistemul in forma normala sunt topologic
echivalente dar abordarea este mult mai simpla in cazul formei normale.
27
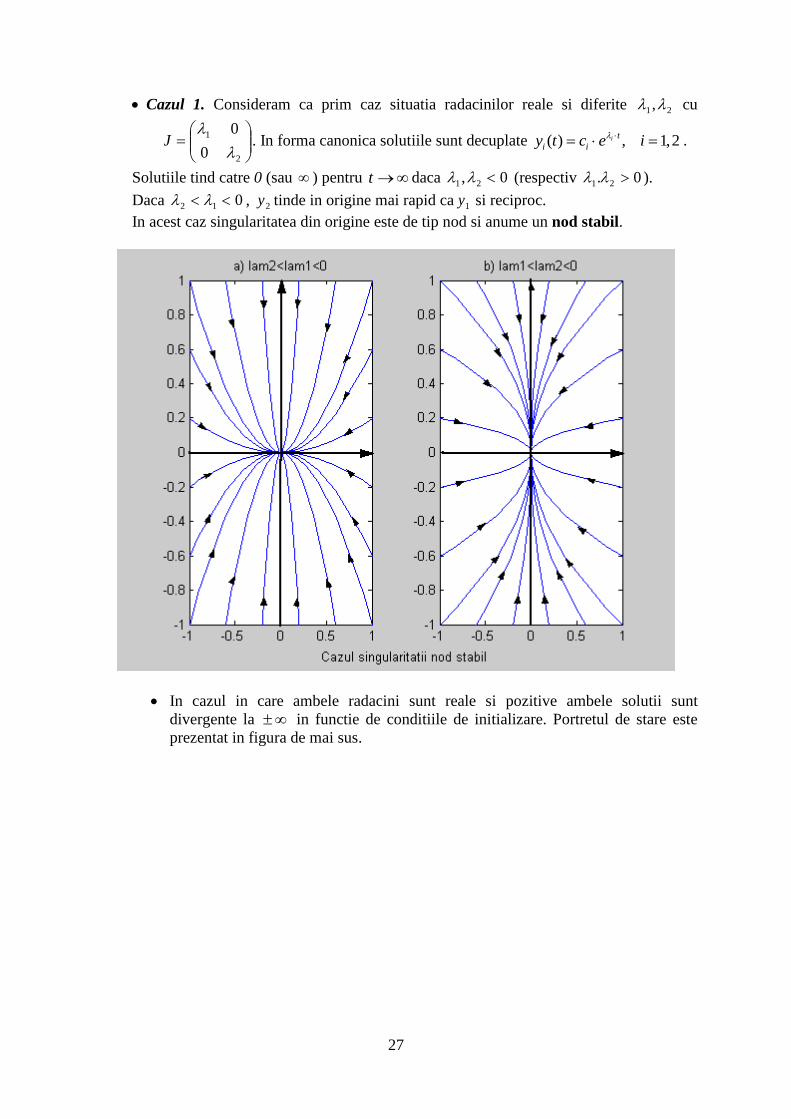
• Cazul 1. Consideram ca prim caz situatia radacinilor reale si diferite 21 , cu
=
2
1
0
0
J . In forma canonica solutiile sunt decuplate ( ) , 1,2i t
i iy t c e i
= = .
Solutiile tind catre 0 (sau ) pentru →t daca 0, 21 (respectiv 0. 21 ).
Daca 012 , 2y tinde in origine mai rapid ca 1y si reciproc.
In acest caz singularitatea din origine este de tip nod si anume un nod stabil.
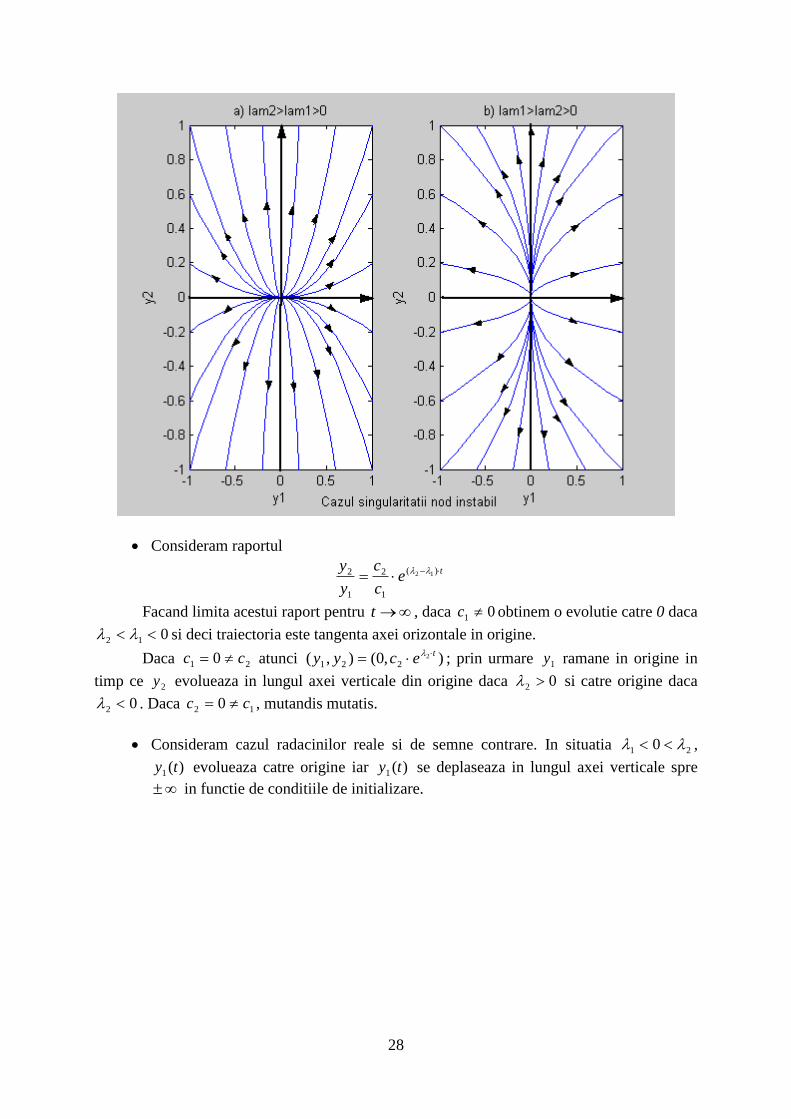
• In cazul in care ambele radacini sunt reale si pozitive ambele solutii sunt
divergente la in functie de conditiile de initializare. Portretul de stare este
prezentat in figura de mai sus.
28
• Consideram raportul
te
c
c
y
y −=
)(
1
2
1
2 12
Facand limita acestui raport pentru →t , daca 01 c obtinem o evolutie catre 0 daca
012 si deci traiectoria este tangenta axei orizontale in origine.
Daca 21 0 cc = atunci ),0(),( 2
221
tecyy
=
; prin urmare 1y ramane in origine in
timp ce 2y evolueaza in lungul axei verticale din origine daca 02 si catre origine daca
02 . Daca 12 0 cc = , mutandis mutatis.
• Consideram cazul radacinilor reale si de semne contrare. In situatia 21 0 ,
)(1 ty evolueaza catre origine iar )(1 ty se deplaseaza in lungul axei verticale spre
in functie de conditiile de initializare.
29
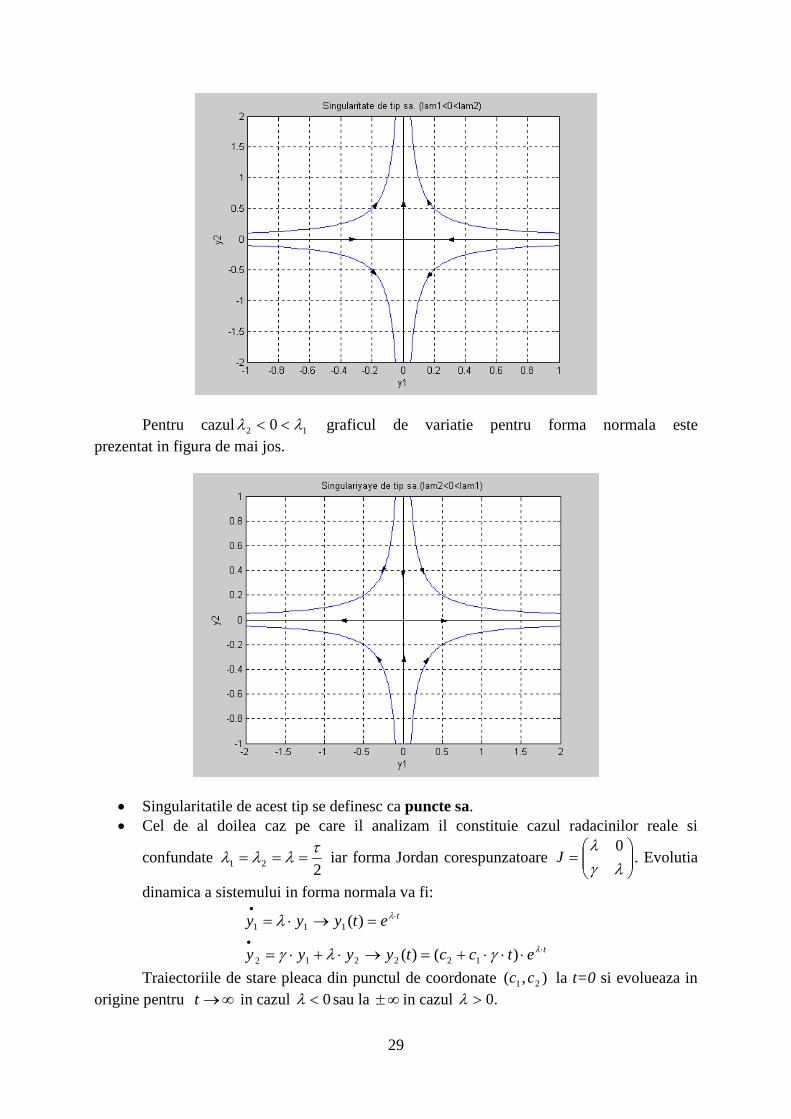
Pentru cazul 12 0 graficul de variatie pentru forma normala este
prezentat in figura de mai jos.
• Singularitatile de acest tip se definesc ca puncte sa.
• Cel de al doilea caz pe care il analizam il constituie cazul radacinilor reale si
confundate 2
21
=== iar forma Jordan corespunzatoare
=
0J . Evolutia
dinamica a sistemului in forma normala va fi:
t
t
etcctyyyy
etyyy
•
•
+=→+=
=→=
)()(
)(
122212
111
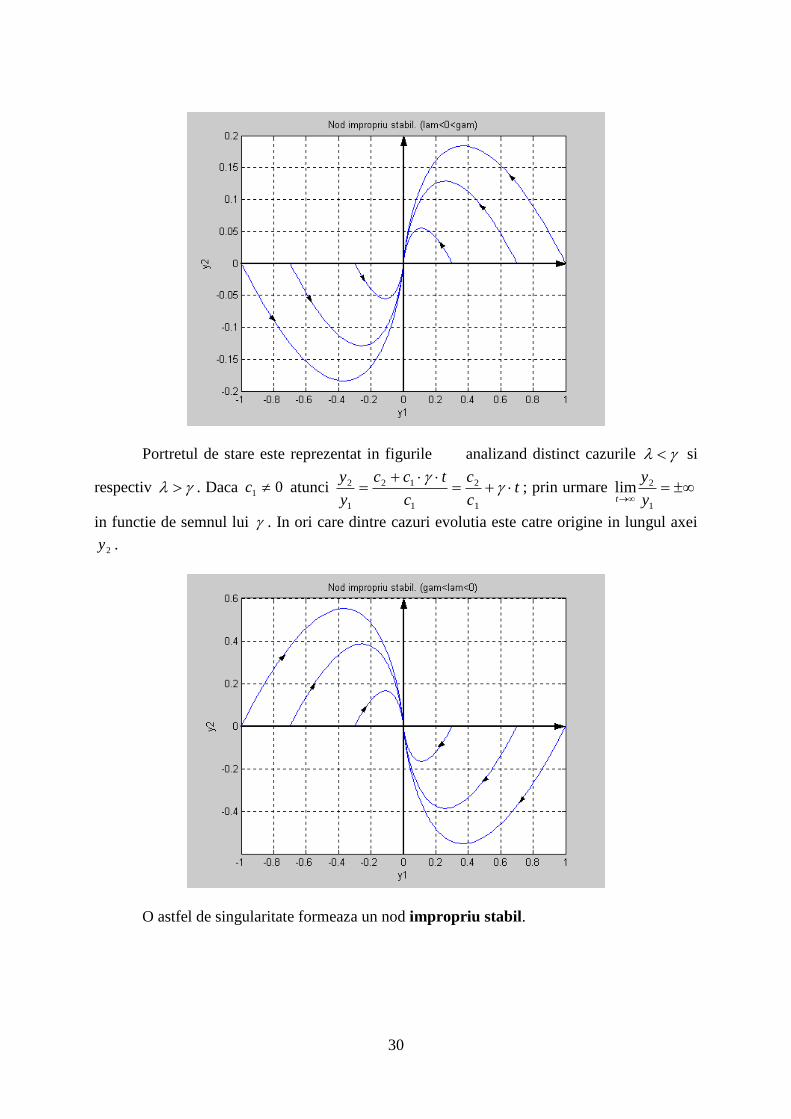
Traiectoriile de stare pleaca din punctul de coordonate ),( 21 cc la t=0 si evolueaza in
origine pentru →t in cazul 0 sau la in cazul .0
30
Portretul de stare este reprezentat in figurile analizand distinct cazurile si
respectiv . Daca 01 c atunci tc
c
c
tcc
y
y+=
+=
1
2
1
12
1
2 ; prin urmare =→
1
2limy
y
t
in functie de semnul lui . In ori care dintre cazuri evolutia este catre origine in lungul axei
2y .
O astfel de singularitate formeaza un nod impropriu stabil.
31
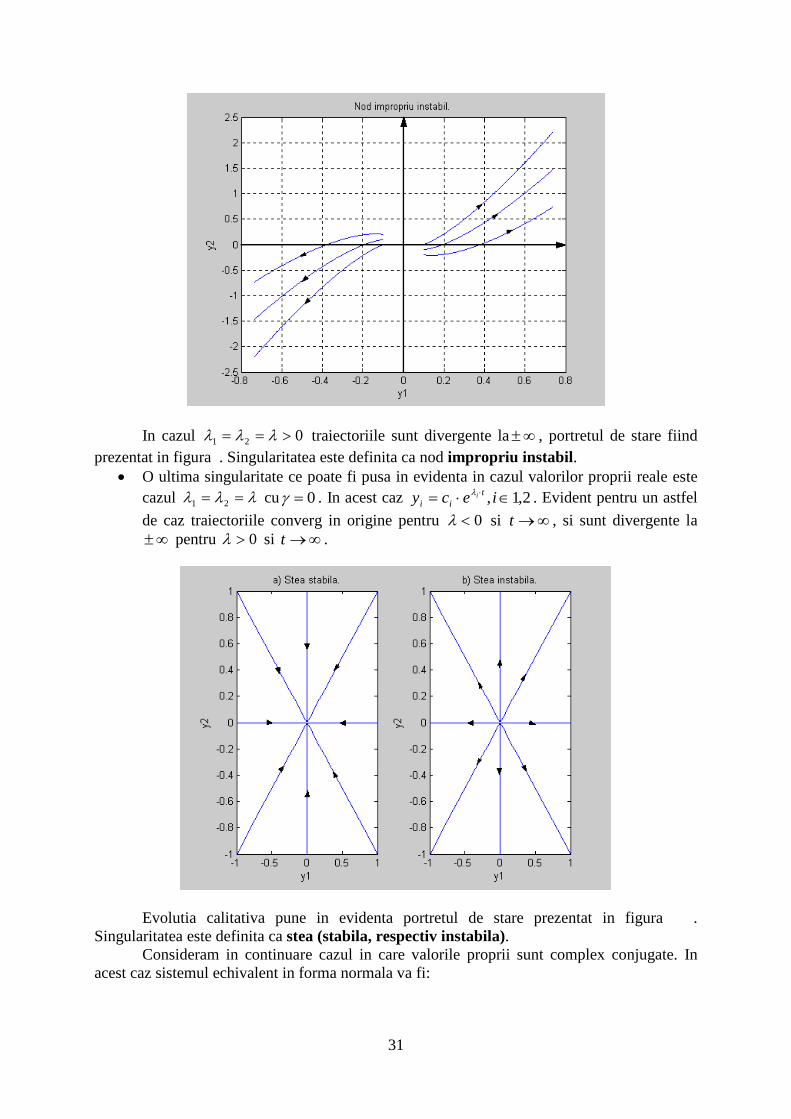
In cazul 021 == traiectoriile sunt divergente la , portretul de stare fiind
prezentat in figura . Singularitatea este definita ca nod impropriu instabil.
• O ultima singularitate ce poate fi pusa in evidenta in cazul valorilor proprii reale este
cazul == 21 cu 0= . In acest caz 2,1, =
iecyt
iii . Evident pentru un astfel
de caz traiectoriile converg in origine pentru 0 si →t , si sunt divergente la
pentru 0 si →t .
Evolutia calitativa pune in evidenta portretul de stare prezentat in figura .
Singularitatea este definita ca stea (stabila, respectiv instabila).
Consideram in continuare cazul in care valorile proprii sunt complex conjugate. In
acest caz sistemul echivalent in forma normala va fi:
32
1 1 2
2 1 2
y y y
y y y
= +
= − +
Introducem coordonatele polare in forma
sin,cos 21 == ryry
pentru care
1
22
2
2
1
2 ,y
ytgyyr =+= .
Prin diferentiere obtinem:
1 1 2 22 2 2r r y y y y = +
Operand elementar si tinand cont de relatiile precizate obtinem: 2 2 2
2 1( )r r y y r = + =
si deci r r=
In mod similar, prin diferentierea lui tg obtinem
( ) 1 2 2 1
2 2
1
1
cos
d y y y ytg
dt y
− = =
Prelucrand elementar obtinem 2 2 2 2
1 2( )r y y r = − + = −
= −
si deci:
tt −= 0)(
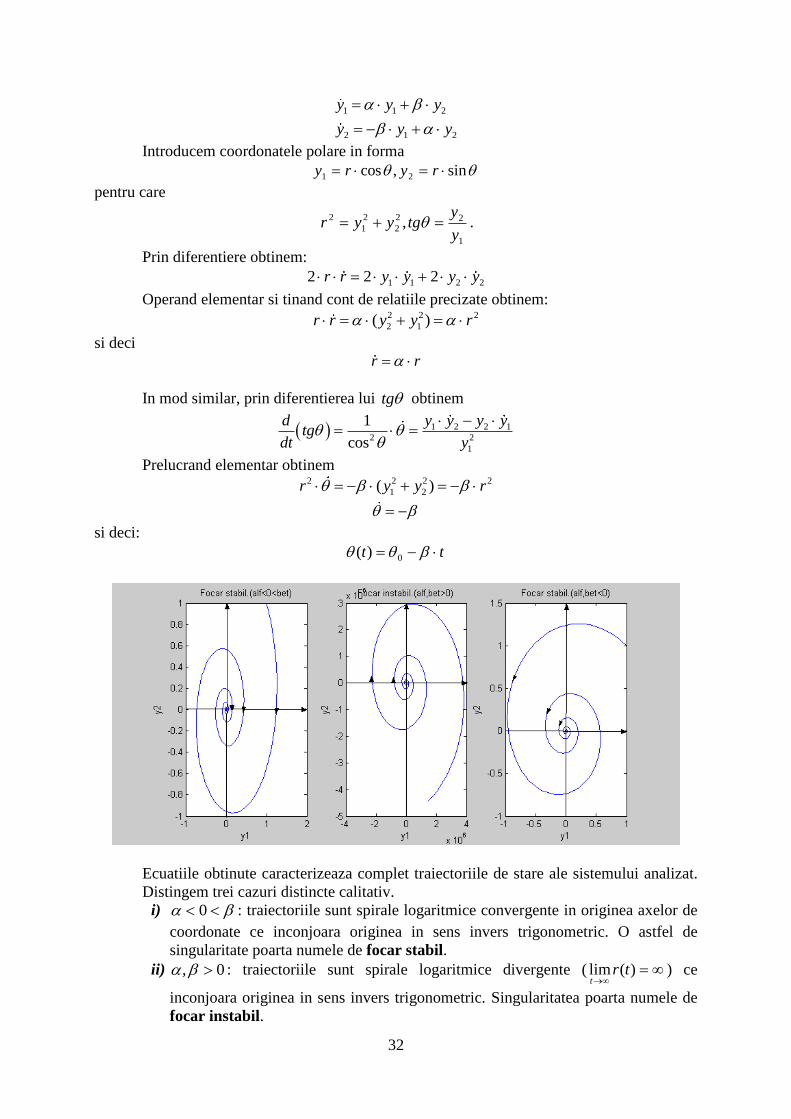
Ecuatiile obtinute caracterizeaza complet traiectoriile de stare ale sistemului analizat.
Distingem trei cazuri distincte calitativ.
i) 0 : traiectoriile sunt spirale logaritmice convergente in originea axelor de
coordonate ce inconjoara originea in sens invers trigonometric. O astfel de
singularitate poarta numele de focar stabil.
ii) 0, : traiectoriile sunt spirale logaritmice divergente ( =→
)(lim trt
) ce
inconjoara originea in sens invers trigonometric. Singularitatea poarta numele de
focar instabil.

33
iii) 0, : traiectoriile sunt spirale logaritmice, convergente catre origine,
inconjurand originea in sens trigonometric. Singularitatea este un focar stabil.
Un caz deosebit este cazul 0= , deci cazul radacinilor pur imaginare. Tinand cont de
rezultatele anterior prezentate rezulta
.)( consttr = si tt −= 0)(
Portretul de stare este reprezentat printr-o familie de cercuri ce inconjoara originea in
sens antitrigonometric daca 0 si in sens trigonometric daca 0 . Singularitatea din
origine este de tip centru.
Cazul sistemelor liniare discrete.
Sistemele liniare discrete de ordinul doi vor fi caracterizate prin sistemul cu diferente finite de forma:
NkkxAkx =+ ),()1(
unde 2)( Rkx reprezinta vectorul de stare la tactul curent, iar
22 RA matricea coeficientilor.
Pentru o initializare )0(x impusa evolutia libera a sistemului va fi:
)0()( xAkx k =
O schimbare a coordonatelor pastreaza topologia unicei singularitati fixate in centrul axelor de
coordonate.
Prin urmare vom efectua analiza pe un sistem topologic echivalent:
)()1( kyJky =+
in care 2RJ reprezinta forma Jordan asociata matricei initiale.
Ecuatia caracteristica corespunzatoare sistemului va fi:
0)det()( 2 =+−=−= AIS
si are radacinile :
222,1
=
unde
−= 42.
In functie de semnul discriminantului distingem trei cazuri distincte ce vor fi analizate separat in cele ce
urmeaza:
34
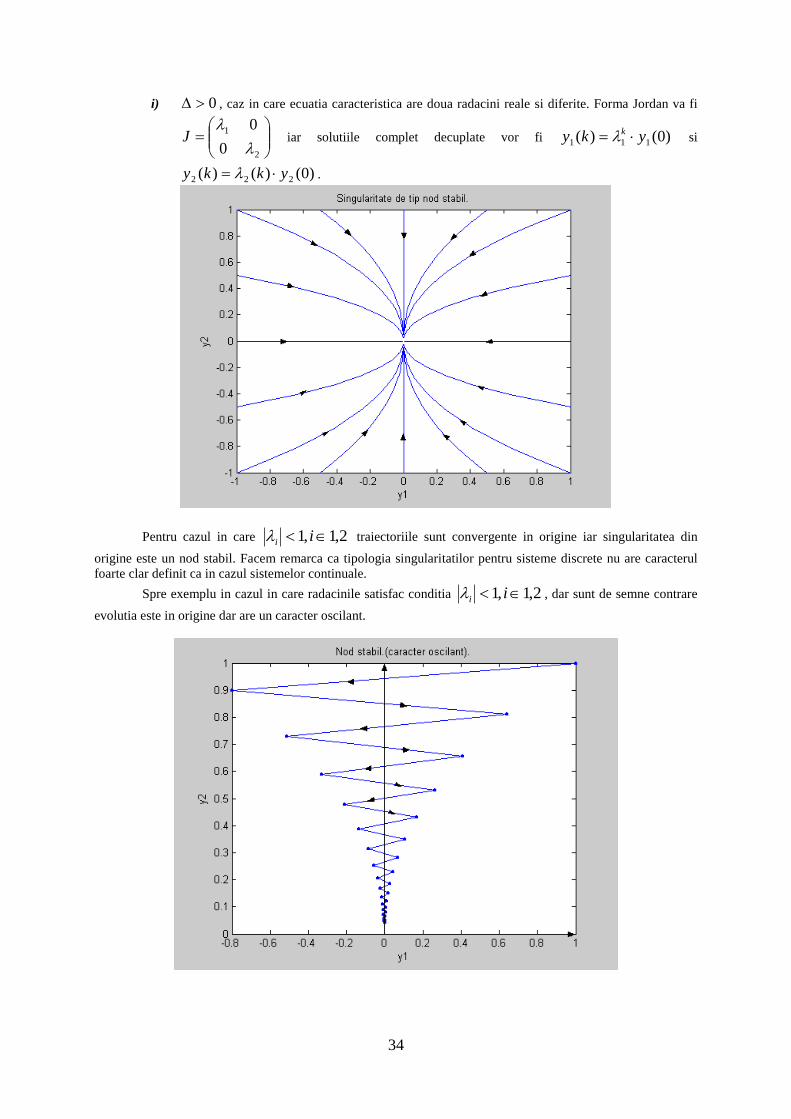
i) 0 , caz in care ecuatia caracteristica are doua radacini reale si diferite. Forma Jordan va fi
=
2
1
0
0
J iar solutiile complet decuplate vor fi )0()( 111 yky k = si
)0()()( 222 ykky = .
Pentru cazul in care 2,1,1 ii traiectoriile sunt convergente in origine iar singularitatea din
origine este un nod stabil. Facem remarca ca tipologia singularitatilor pentru sisteme discrete nu are caracterul
foarte clar definit ca in cazul sistemelor continuale.
Spre exemplu in cazul in care radacinile satisfac conditia 2,1,1 ii , dar sunt de semne contrare
evolutia este in origine dar are un caracter oscilant.
35
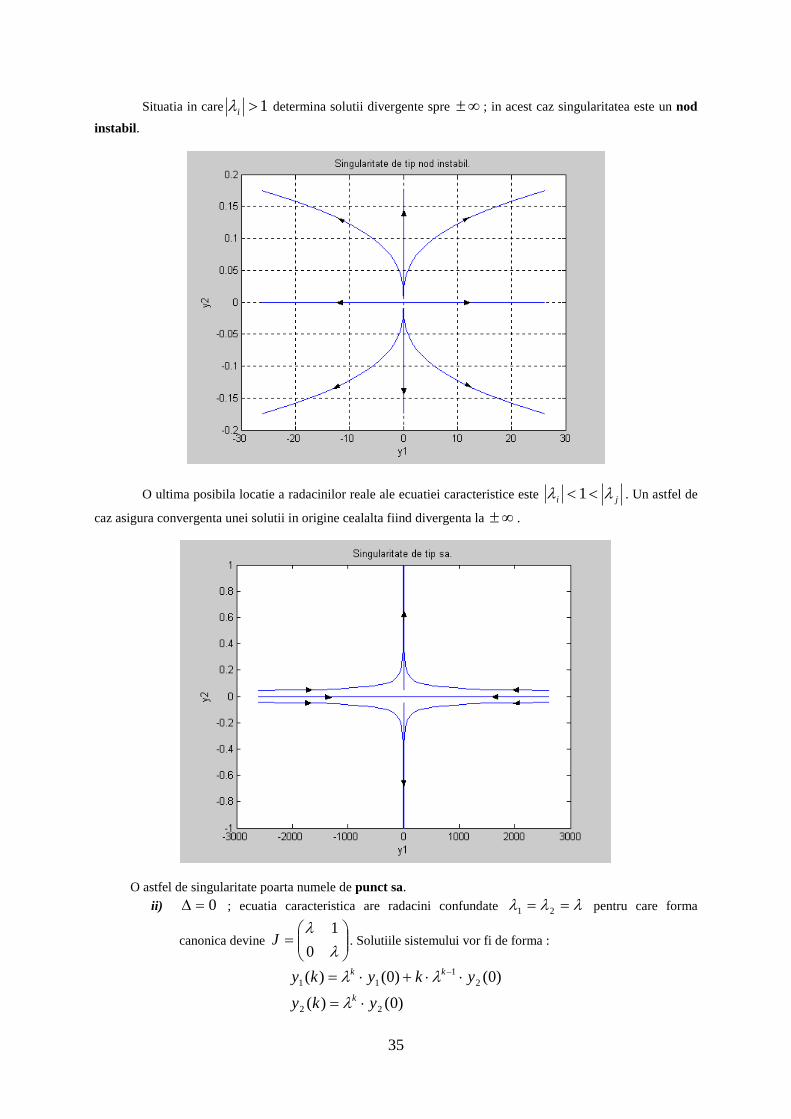
Situatia in care 1i determina solutii divergente spre ; in acest caz singularitatea este un nod
instabil.
O ultima posibila locatie a radacinilor reale ale ecuatiei caracteristice este ji 1 . Un astfel de
caz asigura convergenta unei solutii in origine cealalta fiind divergenta la .
O astfel de singularitate poarta numele de punct sa.
ii) 0= ; ecuatia caracteristica are radacini confundate == 21 pentru care forma
canonica devine
=
0
1J . Solutiile sistemului vor fi de forma :
)0()(
)0()0()(
22
2
1
11
yky
ykyky
k
kk
=
+= −
36
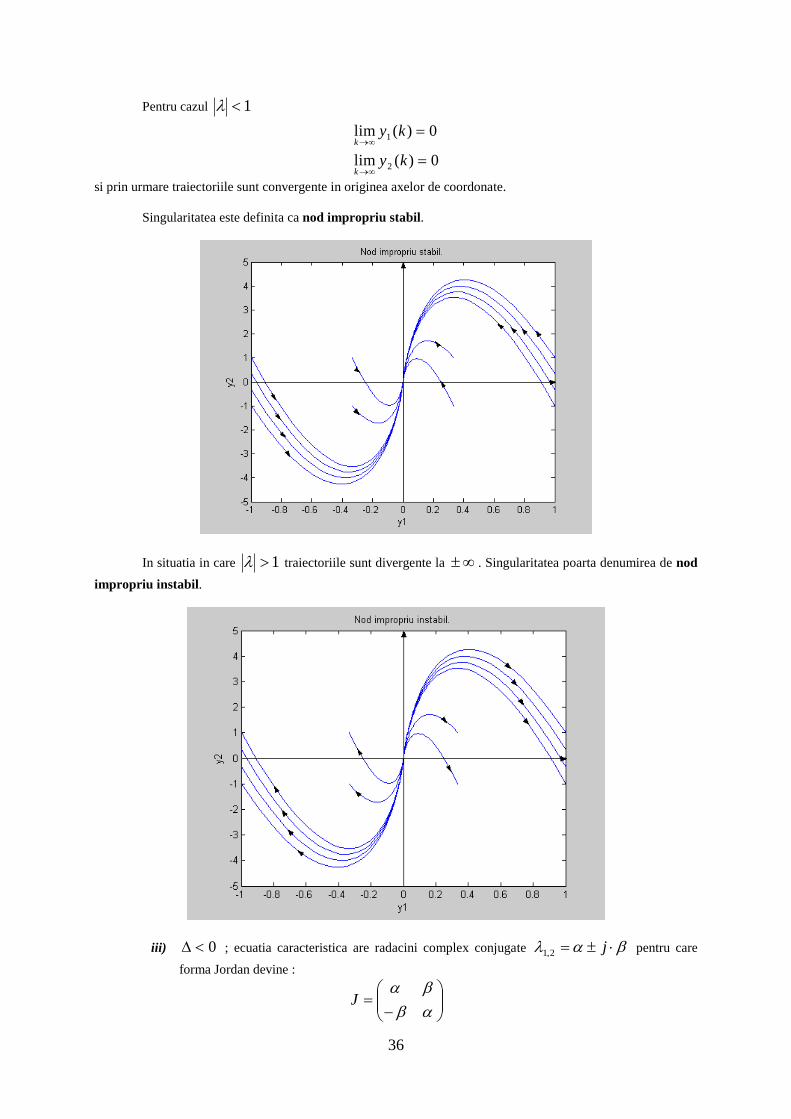
Pentru cazul 1
0)(lim
0)(lim
2
1
=
=
→
→
ky
ky
k
k
si prin urmare traiectoriile sunt convergente in originea axelor de coordonate.
Singularitatea este definita ca nod impropriu stabil.
In situatia in care 1 traiectoriile sunt divergente la . Singularitatea poarta denumirea de nod
impropriu instabil.
iii) 0 ; ecuatia caracteristica are radacini complex conjugate = j2,1 pentru care
forma Jordan devine :
−=
J
37
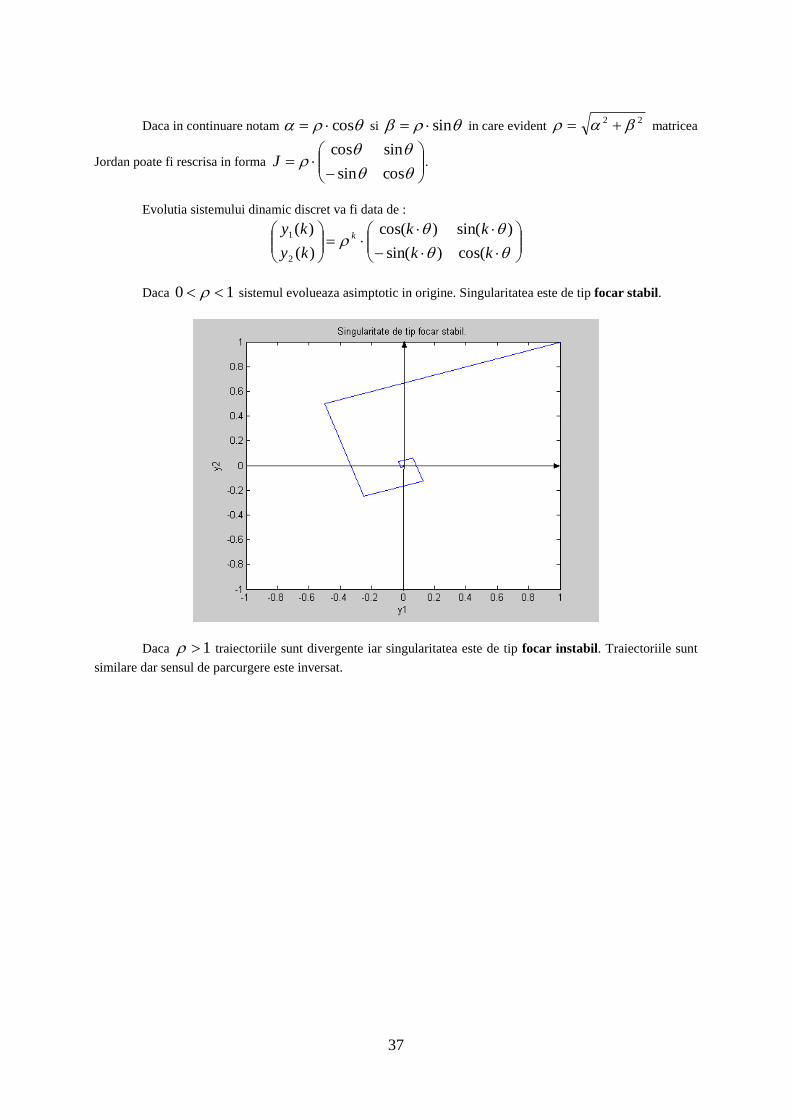
Daca in continuare notam cos= si sin= in care evident 22 += matricea
Jordan poate fi rescrisa in forma
−=
cossin
sincosJ .
Evolutia sistemului dinamic discret va fi data de :
−
=
kk
kk
ky
kyk
cos()sin(
)sin()cos(
)(
)(
2
1
Daca 10 sistemul evolueaza asimptotic in origine. Singularitatea este de tip focar stabil.
Daca 1 traiectoriile sunt divergente iar singularitatea este de tip focar instabil. Traiectoriile sunt
similare dar sensul de parcurgere este inversat.


















