Metode de Masurare Cu Ajutorul Undelor
12
Ciornă MASURATORI ELECTRONICE DE DISTANTA. Generalitati. Disciplina se bazeaza pe determniarea distantelor geodezice prinm a s u r a t o r i terestre, folosind unde de lumi na in spectrulelectrooptic sau unde radar. Aces te distante rezulta p r i n intermediul timpilor de propagare a acestor unde de la emitator lareceptor. Acesti timpi de propagare se pot determina cu preciziiu n o r 10 (la - 12) secunde, ceea ce conduce la d e t e r m i n a r e a distantelo r cu precizii milimetrice sau submilimetrice. Acest tip demasuratori a generat constructia unui nou tip de retele geodeziced e n u m i t a trilateratie, care presupune determinarea pu nctelorg e o d e z i c e de pe suprafata Pamantului baz ate numai p e masuratori de distante (fata de triangul atie, care p r e s u p u n e masuratori de distante si unghiuri).La baza trilateratiei sta configuratia elementara de tip triunghi cutoate cele 3 laturi masurate. Plecand de la aceasta configuratieelementara se pot dezvolta retele de spri jin ca si in metodaclasica a triangulatiei, cu deosebirea ca unghiurile rezulta p r i n calcule geometrice din laturile masurate.Avantajele acestei metode:- Distantele pot fi masurate in orice conditii de vizibilitate- Nu necesita piramide geodezice de mare rigiditate- Masuratorile sunt putin subiective, nedepinzand de acuitateaoperatoruluiDezavantajele metodei constau in faptul ca ea este conditionataaproape in exclusivitate de distributia parametrilor a tmosferici:presiune, temperatura si umiditate, care influente aza viteza d e propagare a undelor emise de aparat.Principiul metodei. O unitate electromagentica notata cu "G" -generator de unda; montata in capatul A al distantei de masuratemite un fascicul de lumina sau unde radar catre un r e c e p t o r notat cu "R" instalat in punctul B care reprezinta capatul distanteid e masurat. Receptorul are o functie pasiva in c azul undelorelectrooptice in sensul ca doar reflecta inspre generator unda Telemetru laser
Transcript of Metode de Masurare Cu Ajutorul Undelor

Ciornă
MASURATORI ELECTRONICE DE DISTANTA.
Generalitati.
Disciplina se bazeaza pe determniarea distantelor geodezice prinm a s u r a t o r i t e r e s t r e , f o l o s i n d u n d e d e l u m i n a i n s p e c t r u l e l e c t r o o p t i c s a u u n d e r a d a r . A c e s t e d i s t a n t e r e z u l t a p r i n intermediul timpilor de propagare a acestor unde de la emitator lareceptor. Acesti timpi de propagare se pot determina cu preciziiu n o r 1 0 ( l a -1 2 ) s e c u n d e , c e e a c e c o n d u c e l a d e t e r m i n a r e a distantelor cu precizii milimetrice sau submilimetrice. Acest tip demasuratori a generat constructia unui nou tip de retele geodezicedenumi t a t r i l a t e r a t i e , c a r e p r e supune de t e rmina rea punc t e lo r g e o d e z i c e d e p e s u p r a f a t a P a m a n t u l u i b a z a t e n u m a i p e m a s u r a t o r i d e d i st a n t e ( f a t a d e t r i a n g u l a t i e , c a r e p r e s u p u n e masuratori de distante si unghiuri).La baza trilateratiei sta configuratia elementara de tip triunghi cutoa t e c e l e 3 l a t u r i masu ra t e . P l ecand de l a a cea s t a con f igu ra t i e e l e m e n t a r a s e p o t d e z v o l t a r e t e l e d e s p r i j i n c a s i i n m e t o d a c l a s i c a a t r i angu l a t i e i , cu deoseb i r ea c a ungh iu r i l e r e zu l t a p r i n calcule geometrice din laturile masurate.Avantajele acestei metode:- Distantele pot fi masurate in orice conditii de vizibilitate- Nu necesita piramide geodezice de mare rigiditate- Masu ra to r i l e sun t pu t i n sub i ec t i ve , nedep inzand de acu i t a t e a operatoruluiDezavantajele metodei constau in faptul ca ea este conditionataaproape in exclusivitate de distributia parametrilor atmosferici:p r e s iune , t empe ra tu r a s i umid i t a t e , c a r e i n f l uen t eaza v i t e za de propagare a undelor emise de aparat.P r i nc ip iu l me tode i . O un i t a t e e l e c t romagen t i c a no t a t a cu "G" - generator de unda; montata in capatul A al distantei de masurate m i t e u n f a s c i c u l d e l u m i n a s a u u n d e r a d a r c a t r e u n r e c e p t o r notat cu "R" instalat in punctul B care reprezinta capatul distanteid e m a s u r a t . R e c e p t o r u l a r e o f u n c t i e p a s i v a i n c a z u l u n d e l o r e l ec t roop t i c e i n s ensu l c a doa r r e f l e c t a i n sp re gene ra to r unda
Telemetru laser
Telemetrele laser sunt foarte precise și ușor de utilizat. Precizia este cuprinsă între 1 și 2 mm, în funcție de dispozitiv, fiind independentă de lungimea distanței măsurate. În interioare, măsurarea este, de regulă, foarte simplu de efectuat, și asta datorită faptului că puteți, cu ajutorul punctului laser, foarte ușor lua în vizor chiar și suprafețele mici. Cu toate acestea, în condiții de lumină solară, punctul laser nu este întotdeauna vizibil, obiectele staționare situate la distanță putând fi, prin urmare, dificil de luat în vizor. Pentru a remedia acest lucru, existătelemetru laser cu cameră încorporată, care afișează ținta pe display, făcând vizibilă, în același timp, o cruce-țintă în imagine.

Laser masurare distante
Senzorii laser din seriile ELD P si HD P sunt detectori electro-optici ce pot masura distante pe suprafete plane sau obiecte reflectorizante (ex. folie reflectorizanta), folosind un proces fara contact direct. Caracteristicile principale ale senzorilor din seriile ELD P/ HD P sunt designul lor compact si aplicatiile orientate catre tehnologia de masurare, ceea ce le face pefect potrivite in aplicatiile industriale.
Laserele pentru masurarea distantelor au fost concepute pentru uz industrial si se potrivesc intr-o gama larga de aplicatii cum ar fi supraveghere, pozitionare, masurarea adancimilor etc., unde contactul indirect si masurarea exacta la distanta sunt necesare.Alte caracteristici: - Rezolutie de ordinul milimetrilor; rata ridicata de masurare - Configuratie usoara, realizata cu ajutorul functiei terminal cu manual de utilizare - Interfata RS232/RS422 configurabila - Optiunea de a alege formatul datelor ASCII, text sau binar ca valori singulare sau ca valori continue, optional cu schimbarea intervalului - Interfata analogica configurabila 4-20mA - Doua iesiri configurabile E1 si E2 - Pointer laser rosu integrat - Functie de autopornire
Principii fundamentale
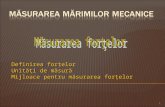
energie transmisă
energie reflectată

Figura 1: principiu radar: măsurarea timpului de deplasare dus-întors al undelor
Principiul de bază privind funcţionarea unui radar primar este simplu de înţeles. Totuşi, teoria poate deveni destul de complexă. Cunoaşterea acestei teorii este esenţială pentru înţelegerea funcţionării şi operarea corectă a oricărui sistem radar. Proiectarea şi punerea în funcţiune a unui sistem radar primar necesită cunoştinţe din discipline cuprinse într-o arie largă de domenii cum ar fi construcţii, mecanică, electronică, electrotehnică, tehnica microundelor, prelucrarea semnalelor şi procesarea datelor. De asemenea, anumite legi ale fizicii sunt foarte importante.
Măsurarea distanţei cu ajutorul radarului este posibilă datorită proprietăţilor energiei electromagnetice.
1. Reflexia undelor electromagnetice Undele electromagnetice sunt reflectate dacă întâlnesc o suprafaţă conductoare electric. Dacă undele reflectate sunt recepţionate în punctul de unde au plecat, aceasta înseamnă că pe direcţia de propagare se află un obstacol.
2. Energia electromagnetică se deplasează prin aer cu viteză constantă, aproximativ egală cu viteza luminii,
300 000 kilometri pe secundă, sau
186 000 mile pe secundă, sau
162 000 mile nautice pe secundă.
3. Energia electromagnetică se deplasează prin spaţiu în linie dreaptă, traiectoria
fiind foarte puţin afectată de condiţiile atmosferice şi meteo. Folosind antene de construcţie specială, această energie poate fi focalizată într-o anumită direcţie dorită. În acest fel se poate determina direcţia obiectelor (în azimut şi elevaţie).
Aceste principii implementate practic într-un sistem radar asigură descoperirea obiectelor şi determinarea distanţei, azimutului şi înălţimii acestora.
(Efectele atmosferei şi condiţiilor meteo asupra undelor electromagnetice vor fi discutate mai târziu; pe moment, aceste efecte vor fi ignorate în explicaţiile privind determinarea distanţei şi a direcţiei.)
RADAR
(radio detection and ranging, adică detectarea prin radio și determinarea distanței) reprezintă o instalație de
radiolocație care radiază microunde electromagnetice și folosește reflexia acestora pe diferite obiecte pentru a
determina existența și distanța lor față de antenă. Se compune, de obicei, dintr-un emițător, un receptor și un
sistem deantene (care, de obicei, se poate roti în plan orizontal și/sau vertical) cu directivitate pronunțată.
Receptorul cuprinde și un indicator al existenței și poziției obiectului (de obicei un tub catodic cu persistență
mărită a imaginii).
Deși principiile radarului au fost enunțate de către Nicolae Tesla la sfârșitul secolului al XIX-lea, primele
implementări fizice au avut loc în Marea Britanie, pe coasta de sud, în 1935 - 1936. Inițial, aparatele erau

destinate navigației maritime, însă ele s-au dovedit foarte utile în timpul celui de-Al Doilea Război Mondial,
pentru detecția din timp abombardierelor inamice.
Cuprins
[arată]
Principiu de funcționare[modificare | modificare sursă]
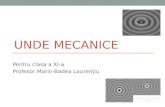
Sistemul de coordonate polare ale radarului, raportat la sistemul cartezian
Principiul de bază al radarului este reprezentat de reflexia microundelor pe suprafețe solide. Receptorul,
analizând diferența de timp dintre emisia și recepția undei reflectate de către un corp detectat, poate aprecia
distanța r a acestuia față de sursa microundelor. Antena de microunde este reciprocă, putând atât emite cât și
recepționa undele electromagnetice. Cele două stări ale antenei funcționează secvențial (pe rând).
Δt=t1+t2=2⋅rc⇒r=c2⋅ΔtPentru obiectele în zbor, poziția este caracterizată de trei coordonate. În practică nu se folosește sistemul
tridimensional (cartezian) ci se lucrează cu coordonate polare (vezi figura din dreapta). Azimutul Θ și unghiul de
înălțare β nu pot fi deduse prin procedeul radar. Ele sunt stabilite la sol, cu ajutorul mecanismului de orientare al
antenei. Poziția curentă a acesteia se compară cu cea de referință: orientarea către nord (Θ = 0) pe o traiectorie
paralelă cu solul (β = 0).
În mediile militare, unghiul Θ nu se exprimă în grade sau radiani, ci în sutimi. Acestea sunt unități fixe,
corespunzătoare principalelor puncte cardinale, în sens antitrigonometric (N = 000 sutimi, E = 100 sutimi, S =
200 sutimi, V = 300 sutimi și iarăși N = 400 sutimi). Spre exemplu, unghiul corespunzător direcției NNE va avea
25 sutimi, iar cel corespunzător direcției SVV — 275 sutimi.
Senzori de masurare a distantei
Senzorii pentru măsurarea distanţei lucrează conform procedurii trecerii timpului Un fascicol de lumină se emite şi se
reflectă printr-un obiect. Se măsoară timpul necesitat de fascicolul de lumină pentru a parcurge calea de la aparat la obiect
şi înapoi de la obiect la aparat. Deoarece viteza luminii este constantă, se poate calcula distanţa din timpul care se scurge.

Generalităţi asupra măsurării distanţelor prin unde
Tehnica măsurătorilor prin unde are la bază tehnica folosirii fenomenelor
electromagnetice din domeniul radio şi domeniul vizibil.
Preciziile care pot fi obţinute sunt de ordinul milimetrilor sau mai mici şi practic
sunt independente de lungimea măsurată. În principiu măsurarea de distanţă constă în
măsurarea timpului de propagare a undelor electromagnetice între reperele considerate.
D v = ⋅τ , unde D- distanţa
τ - timpul măsurat
v - viteza de propagare a undei electromagnetice
Această viteză v, este data de raportul c
v
n
= , unde 8 c m 3 10 /s − = ⋅ n - indicele de refracţie a mediului
În general depinde de o serie de parametri ( temperatură, presiune, umiditatea
aerului, lungimea de undă ), iar cunoaşterea exactă a acestui aspect poate îmbunătăţi
precizia măsurătorilor.
n
Schema de principiu a unui dispozitiv pentru M.E.D.
Un generator G emite unda electromagnetică care se propagă către receptorul R
aflat la capătul distanţei de măsurat.
În cazul folosirii undelor din domeniul vizibil R are un rol pasiv, reflectă unda
fără ai modifica aspectul. În cazul undelor radio, unda suferă anumite transformări înainte
de a fi reflectată. În general informaţia este înglobată într-o undă prin introducerea unei
dependenţe temporale a unei dintre mărimile ce caracterizează unda. Acest proces se
numeşte modulaţie; procesul invers va purta denumirea de demodulaţie.
O undă exprimată printr-o ecuaţie de forma : y A = cos(ωt +ϕ) nu poartă nici
un fel de informaţie. Este necesară modularea ei. Funcţie de tipul mărimii pe care o
facem să varieze în timp, avem următoarele tipuri de modulaţie :
a) modulaţie de amplitudine A= A t( ) - este folosită când se utilizează undele

luminoase
1b) modulaţie de frecvenţă ω =ω(t)- este folosită când se utilizează unde radio
c) modulaţie de fază ϕ =ϕ(t)
Clasificarea instrumentelor M.E.D.
I. după tipul undei purtătoare
a) telemetre electro-optice
b) radiotelemetre
II. după tipul de modulaţie
a) modulaţia amplitudinii
b) modulaţia frecvenţei
III. după metoda de măsurare a distanţelor
a) telemetre în impulsuri – funcţionează pe principiul impuls-ecou; se folosesc
pentru
distanţele foarte mari
b) telemetre fazice – măsurarea diferenţei de faze între unda emisă iniţial şi cea
recptată
după ce a străbătut distanţa de măsurat
IV. după distanţele măsurate
a) distanţe mici – în scopuri topografice
b) măsurători geodezice terestre propriu-zise
c) distanţe cosmice
Propagarea undelor electromagnetice
Descrierea propagării undelor electromagnetice în general se face plecând de la
sistemul de ecuaţii Maxwell :
/
0
H xE rotE
t
E xH rotH j t
E divE
H divH

µ
ε
ρ ε
∂ ∇ = = − ∂
∂ ∇ = = +
∂∇ = =∇ = =
r r r
r r r r
r r
r r
2unde E- intensitatea câmpului electric
r
H
r
- intensitatea câmpului magnetic
ε - permitivitate electrică
j
r
- densitate de curent electric
ρ - densitatea volumică de sarcină electrică
Aceste ecuaţii se completează cu relaţiile de material care au forma:
D E
B H
j E
ε
µ
υ
= ⋅= ⋅

= ⋅r r
r r
r r
Folosind identităţile:
/ ( ) (
( ) ( ) ( )
H
xE rotE x x xE xH)
t t
a b c b a c c a b
µ µ
∂ ∂ ∇ = =− ∇ ⇒∇ ∇ = − ∇∂ ∂
× × = ⋅ − ⋅r r r r
r r r r r r r r r
r
Rezultă
2
0
2
E E
t
εµ
∂ ∆ − = →
∂
ecuaţia diferenţială de propagare a undelor electromagnetice
Viteza de propagare a acestei unde este dată de relaţia 1
v
εµ = .

Această ecuaţie diferenţială admite soluţii de forma:
ecuaţia undei plane 0 E E= − cos(ωt k ⋅r +ϕ ) r r r r 0 →
unde E0
r
- amplitudinea undei
ω - pulsaţie
k - vector de undă
r
ϕ0 - fază iniţială
Pentru simplitatea operaţiilor matematice se foloseşte reprezentarea în complex plecând
de la formula lui Euler : 2 cos sin 1 i e i α = + α α →i = −
0
0
i t ( ) k r
E E e
ω − ⋅ +ϕ = ⋅r r r r .
unde exprimarea derivatei are forma
0
( ) t k r E Ei
ω ϕ
ϕ ϕ
∂ − ⋅ + ∂ = ∂ ∂
r r r r
Clasificarea undelor electromagnetice
3►microunde
- unde milimetrice 1-10 mm
- unde centimetrice 1-10 cm
- unde decimetrice 1-10 dm
►hertziene
- US ultrasunete 1-10 m

- S scurte 10-200 m
- M medii 200-1000 m
- L lungi 1000 – 20 000 m