
LECŢII DE ALGEBRĂ LINIARĂmath.etc.tuiasi.ro/apletea/cursuri/Lectii_de_algebra.pdfCapitolul 1...
224
Ariadna Lucia Pletea Adrian Corduneanu Mircea Lupan LECŢII DE ALGEBRĂ LINIARĂ IASI, 2005
Transcript of LECŢII DE ALGEBRĂ LINIARĂmath.etc.tuiasi.ro/apletea/cursuri/Lectii_de_algebra.pdfCapitolul 1...
Ariadna Lucia Pletea Adrian Corduneanu Mircea Lupan
LECŢII DE ALGEBRĂ LINIARĂ
IASI, 2005
1
Cuprins
Capitolul 1
1.1. Matrice si determinanti...................................................................51.1.1. Determinantul unei matrice patratice.........................................81.1.2. Matricea inversa.......................................................................121.1.3. Rangul unei matrice. Linii principale si coloane principale........14
1.2 Spatiul vectorial real.......................................................................181.2.1. Schimbarea coordonatelor vectorului la schimbarea bazei........22
1.3. Transformare liniara ın Vn............................................................231.3.1. Polinom caracteristic. Vectori proprii si valori proprii..............271.3.2. Teorema de reprezentare spectrala...........................................291.3.3. Diagonalizarea unei matrice......................................................311.3.4. Algoritmul de diagonalizare a unei matrice..............................351.3.5. Forma canonica Jordan............................................................351.3.6. Algoritmul de aducere la forma Jordan....................................361.3.7. Autovalorile unor matrice reale simetrice.................................38
1.4. Spatiul vectorial normat...............................................................411.4.1. Norme pe Rn(n ≥ 2).................................................................42
1.5. Spatiul euclidian............................................................................ 501.6. Forme liniare, biliniare si patratice........................................... 621.7. Spatiul liniar al vectorilor liberi..................................................78
1.7.1. Structura algebrica a spatiului vectorilor liber.........................781.7.2. Spatiul liniar V3.......................................................................85
1.8. Repere..............................................................................................891.8.1. Aplicatii la studiul conicelor si cuadricelor................................97
2
Capitolul 2
2.1. Numere complexe.........................................................................1132.2. Transformari elementare.............................................................1172.3. Matrice bloc...................................................................................1272.4. Transformari liniare.....................................................................1302.5. Spatii euclidiene............................................................................1372.6. Exponentiala de argument matriceal.........................................1572.7. Conice pe ecuatii reduse.............................................................165
2.7.1. Cercul.....................................................................................1652.7.2. Elipsa......................................................................................1662.7.3. Hiperbola................................................................................1682.7.4. Parabola.................................................................................170
2.8. Cuadrice pe ecuatii reduse...........................................................1712.8.1. Sfera........................................................................................1712.8.2. Elipsoidul................................................................................1722.8.3. Hiperboloidul cu o panza........................................................1732.8.4. Hiperboloidul cu doua panze..................................................1752.8.5. Paraboloidul eliptic................................................................1762.8.6. Paraboloidul hiperbolic..........................................................176
2.9. Generari de suprafete..................................................................1772.9.1. Generarea suprafetelor cilindrice............................................1772.9.2. Generarea suprafetelor conice.................................................1792.9.3. Generarea suprafetelor de rotatie............................................1812.9.4. Generaratoarele rectilinii ale cuadricelor.................................182
2.10. Probleme propuse.......................................................................184
Capitolul 3
Mathematica ın algebra.....................................................................201
Capitolul 1
Notiuni teoretice
1.1 Matrice si determinati
Definitia 1.1 Omatrice de tipul m×n este o multime de mn numere aij,reale sau complexe, i = 1,m, j = 1, n, asezate ıntr-un tabel dreptunghiulardupa regula primul indice arata linia, iar al doilea arata coloana ın care seafla elementul respectiv.
Notam multimea matricelor de ordin m× n ale caror elemente sunt nu-mere reale cuMm×n(R). Daca scriemA = (aij)i=1,m,j=1,n aceasta reprezintamatricea A ∈Mm×n(R), de forma
A =
⎛⎜⎜⎜⎝a11 a12 a13 · · · a1na21 a22 a23 · · · a2n...
......
......
am1 am2 am3 · · · amn
⎞⎟⎟⎟⎠ .
Daca m = n, adica numarul liniilor este egal cu numarul coloanelor,matricea se numeste patrata. Notam multimea matricelor cu elemente realede ordin n× n cuMn(R).Daca matricele sunt de acelasi tip m× n, ele se pot aduna dupa regula
”element cu element”. Aceasta ınseamna ca daca A = (aij) si B = (bij),atunci A+B = (aij + bij)i=1,m,j=1,n. Daca α ∈ R (se foloseste si denumireade ”scalar”), definim matricea αA, produsul dintre un scalar si o matrice,dupa regula
αA = (αaij)i=1,m,j=1,n .
5

6 CAPITOLUL 1. NOTIUNI TEORETICE
Matricele se noteaza cu litere mari ıngrosate (bold), iar scalarii se noteazacu litere mici obisnuite. Daca adunarea matricelor si ınmultirea cu scalari amatricelor sunt operatii simple si par foarte naturale, ınmultirea matricelorpare artificiala, cel putin la prima vedere. In cele ce urmeaza, vom aratacum se ajunge la ınmultirea lor, care dupa cum se stie, se face dupa regula”linie cu coloana”. Presupunem ca avem n variabile independente x1, x2,. . . , xn, iar variabilele y1,y2, . . . , yp depind de ele prin relatiile liniare
yi =nX
j=1
bijxj, i = 1, p. (1.1)
Este evident ca aici apare ın mod natural matricea B = (bij) de tipulp× n (p linii si n coloane) care face legatura ıntre variabilele y1, y2, . . . , ypsi respectiv x1, x2, . . . , xn. Sa presupunem acum ca variabilele z1, z2, . . . ,zm depind la randul lor dupa regula (transformare liniara)
zi =
pXj=1
aijyj, i = 1,m. (1.2)
Vom considera si matricea A = (aij) de tipul m× p, care face legaturaıntre cele doua randuri de variabile y1, y2, . . . ,yp si respectiv z1, z2, . . . ,zm.Putem reprezenta schematic situatia descrisa aici, astfel
xB→ByA→Az
notand cu B transformarea data de formulele (1.1) si cu A pe cea data deformulele (1.2). Deci, B si A sunt matricele celor doua transformari liniare.Transformarea de la variabilele x la variabilele z este normal sa o notamA ◦B, amintind de notatia functiei compuse din analiza matematica. A ◦Bse va numi produsul celor doua transformari A si B. Acum urmeaza saaflam ın mod concret cum depind variabilele z de variabilele x. Fixam un
indice i din multimea 1,m si scriem zi =pP
j=1
aijyj. Dar yj =nP
k=1
bjkxk,
j = 1, p dupa cum rezulta din (1.1); evident, a trebuit sa folosim un nouindice de sumare, deoarece i a fost fixat ın prima formula, iar j a fost siel fixat cand am reprodus formula (1.1), care ne da valoarea lui yj. Putemdeci scrie
zi =
pXj=1
aijyj =
pXj=1
aij
ÃnX
k=1
bjkxk
!=
pXj=1
nXk=1
aijbjkxk, (1.3)

1.1. MATRICE SI DETERMINATI 7
unde am folosit pentru prima data simbolul sumei duble (adica cu doi indicide sumare)
PP. In suma dubla, cei doi indici de sumare iau independent
unul de altul toate valorile prescrise (j de la 1 la p, k de la 1 la n) si deciputem fixa pe k si da lui j pe rand toate valorile, sumele obtinute depinzandde k si trebuind apoi sa fie sumate, dand lui k toate valorile de la 1 la n.Pe scurt, putem schimba ın (1.3) ordinea de sumare, scriind
zi =nX
k=1
ÃpX
j=1
aijbjk
!xk (1.4)
valabila pentru i = 1, 2, . . . ,m. Daca facem notatia cik =pP
j=1
aijbjk pentru
fiecare i ∈ 1,m si fiecare k ∈ 1, n, putem scrie (1.4) ın forma
zi =nX
k=1
cikxk sau zi =nX
j=1
cijxj, i = 1,m (1.5)
deoarece nu are importanta cum se noteaza indicele de sumare (indice mut).Dar cij este ceea ce se numeste ”produsul liniei i din A cu coloana j din B”.Prin definitie, matricea C = (cij) de tipul m× n se numeste produsul celordoua matrice si se noteaza AB. Daca facem legatura cu produsul A ◦ Bal celor doua transformari de variabile, putem enunta pe scurt: matriceaprodusului este egala cu produsul matricelor. Pentru a putea fi ınmultitedoua matrice, trebuie ca numarul de coloane din prima sa fie egal cu numarulde linii din a doua. Din ınmultirea a doua matrice de tip m× p si respectivp× n, rezulta o matrice de tipul m× n.Se impun cateva observatii: ın cazul matricelor patrate de acelasi tip
n × n (se mai spune ”de ordinul n”) ınmultirea nu este, ın general, co-mutativa. Adica se pot gasi oricand doua matrice A si B, astfel ıncatAB 6= BA, egalitatea avand loc numai ın cazuri particulare. Se poate ınsaarata asociativitatea produsului a trei matrice A, B, C adica egalitatea(AB)C = A (BC), nu numai ın cazul matricelor de acelasi ordin, dar si ıncazul cand aceste produse se pot face, adica atunci cand prima este de tipulm × p, a doua de tipul p × q si a treia de tipul q × n. In cazul matricelorpatrate, se cunoaste existenta matricei unitate, notata I, care este elementneutru la ınmultire. I este matricea care are 1 pe toata diagonala principalasi 0 ın rest. Avem AI = IA = A, ∀A ∈Mn(R).Transpusa unei matriceA = (aij) de tipm×n se noteaza cuAT =
¡a0ij¢,
unde a0ij = aji, ∀i = 1, n, j = 1,m. Liniile transpusei sunt coloanele matriceiA, iar coloanele transpusei sunt liniile matricei A. Matricele A si AT sunt
transpuse una alteia, adica¡AT¢T= A.

8 CAPITOLUL 1. NOTIUNI TEORETICE
Exercitiul 1.1 Daca A ∈Mm×n(R) si B ∈Mn×p(R) (se poate efectua pro-dusul), sa se arate ca (AB)T = BTAT . Altfel spus, transpusa produsuluieste egala cu produsul transpuselor ın ordine inversa.
Un prim avantaj ın folosirea matricelor se poate vedea chiar ın scriereaformulelor (1.1), (1.2) si (1.5). Daca notam prin x, y si zmatricele date prin
x =¡x1 · · · xn
¢T, y =
¡y1 · · · yn
¢Tsi z =
¡z1 · · · zn
¢T, for-
mulele date le putem scrie ın forma prescurtata y = Bx, z = Ay, respectivz = A (Bx)= (AB)x.
In teoria sistemelor diferentiale, scrierea matriceala se foloseste cu suc-ces, caci un sistem diferential liniar omogen cu coeficienti constanti de forma⎧⎪⎪⎨⎪⎪⎩
y1 (t) = a11y1 (t) + a12y2 (t) + · · ·+ a1nyn (t)y2 (t) = a21y1 (t) + a22y2 (t) + · · ·+ a2nyn (t)
. . .yn (t) = an1y1 (t) + an2y2 (t) + · · ·+ annyn (t)
poate fi scris prescurtat ın forma y (t) = Ay (t). Aici A = (aij) estematricea constanta de ordinul n a coeficientilor aij a sistemului diferentialiar y (t) este matricea coloana a functiilor necunoscute yi (t), data prin
y (t) =¡y1(t) · · · yn(t)
¢T, iar y (t) este matricea coloana (de tip n× 1)
data prin y (t) =¡y1(t) · · · yn(t)
¢T, formata cu derivatele functiilor
yi (t), i = 1, n.
1.1.1 Determinantul unei matrice patrate
Fiecarei matrice patrateA, cu elemente reale sau complexe, i se ataseazaun numar, numit determinantul ei, notat det(A). Determinantul unei ma-trice A = (aij) de ordinul n se noteaza si prin simbolul grafic¯
¯¯a11 a12 a13 · · · a1na21 a22 a23 · · · a2n...
......
......
an1 an2 an3 · · · ann
¯¯¯ .
Prin definitie, determinantul unei matrice A de ordinul doi,
A =
µa11 a12a21 a22
¶
1.1. MATRICE SI DETERMINATI 9
este dat de egalitatea det(A) = a11a22− a12a21. In acest caz, se pot verificausor toate proprietatile determinantilor, cunoscute din liceu. Daca A esteo matrice de ordinul trei,
A =
⎛⎝ a11 a12 a13a21 a22 a23a31 a32 a33
⎞⎠atunci det(A) se calculeaza dupa regula
det(A) = a11
¯a22 a23a32 a33
¯− a12
¯a21 a23a31 a33
¯+ a13
¯a21 a22a31 a32
¯,
deci se reduce la calcularea unor determinanti de ordinul doi. Se poatevedea ca determinantii de ordinul doi care apar ın egalitatea precedenta, seobtin din det(A) prin ”taierea” liniei ıntaia si a coloanei corespunzatoareindicelui al doilea al elementelor din linia ıntaia si am putea scrie
det(A) = (−1)1+1 a11¯a22 a23a32 a33
¯+ (−1)1+2 a12
¯a21 a23a31 a33
¯+
+...+ (−1)1+3 a13¯a21 a22a31 a32
¯.
Daca extindem aceasta regula la determinanti de ordinul patru, rezultaca obtinerea lor se reduce la calcularea unor determinanti de ordinul treisi ca ın general, calcularea unor determinanti de ordinul n se reduce lacalcularea unor determinanti de ordinul n − 1. Cu alte cuvinte, putemcalcula determinanti de orice ordin.Daca facem notatiile
A11 = (−1)1+1¯a22 a23a32 a33
¯, A12 = (−1)1+2
¯a21 a23a31 a33
¯,
A13 = (−1)1+3¯a21 a22a31 a32
¯,
putem scrie det(A) = a11A11 + a12A12 + a13A13 si atunci avem dezvoltareadeterminantului dupa elementele primei linii. Numerele A11, A12, A13 senumesc complementii algebrici ai elementelor din prima linie. In terminolo-gia engleza, complementii algebrici se numesc cofactori.In general, daca A = (aij) este o matrice oarecare de ordinul n, pen-
tru orice element aij din det(A), se defineste complementul sau algebricAij = (−1)i+j dij, unde dij este valoarea determinantului de ordinul n− 1,

10 CAPITOLUL 1. NOTIUNI TEORETICE
obtinut prin suprimarea liniei i si coloanei j. Fapt cu totul remarcabil, sepoate demonstra ca det(A), definit asa cum s-a spus, adica folosind dez-voltarea dupa elementele primei sale linii, se poate obtine ın n moduri prindezvoltarea dupa elementele oricarei linii si ın n moduri prin dezvoltareadupa elementele oricarei coloane, adica avem
det(A) =nP
j=1
aijAij, ∀i = 1, n
det(A) =nPi=1
aijAij, ∀j = 1, n.(1.6)
Daca ınlocuim linia k cu linia i (i 6= k), celelalte linii ramanand neschim-bate, se obtine un determinant nul (doua linii identice). Dezvoltand nouldeterminant dupa linia k si tinand seama ca complementii algebrici ai ele-mentelor acestei linii nu s-au schimbat, obtinem ca
nXj=1
aijAkj = 0, daca i 6= k, i, k = 1, n. (1.7)
Altfel spus, daca ınmultim elementele unei linii cu complementii algebriciai elementelor altei linii si sumam, obtinem zero. Aceeasi concluzie are locsi relativ la coloane, adica
nXi=1
aijAik = 0, daca j 6= k, j, k = 1, n. (1.8)
Putem introduce o regula generala de calcul a unui determinant. Pentruaceasta introducem unele notiuni noi. Daca p ≤ n, numim minor de ordinulp al matricei A determinantul de ordinul p format cu elementele situate laintersectia a p linii si p coloane ale matricei A. Daca i1 < i2 < . . . < ipsi j1 < j2 < . . . < jp sunt p linii si respectiv p coloane ale matricei A,atunci minorul de ordin p corespunzator liniilor i1, i2, . . . , ip si coloanelorj1, j2, . . . , jp este
M =
¯¯ ai1j1 ai1j2 . . . ai1jpai2j1 ai2j2 . . . ai2jp. . . . . . . . . . . .aipj1 aipj2 . . . aipjp
¯¯ .
Numim minor complementar al minorului M de ordin p al matricei A,determinantulMc de ordinul n−p al matricei extras din A prin suprimareacelor p linii si p coloane corespunzatoare lui M.

1.1. MATRICE SI DETERMINATI 11
Minorii de ordinul 1 ai matricii A sunt elementele sale, aij. Minoriicomplementari ai acestora sunt determinanti de ordinul n− 1.Numim complement algebric al minorului M al matricei A elementul
definit de C = (−1)sMc, unde s = (i1 + i2 + . . .+ ip)+ (j1 + j2 + . . .+ jp),adica suma indicilor liniilor si coloanelor matricei A utilizate ın M .
Determinantul matricei patratice de ordinul n− 1 care se obtine din Aprin suprimarea liniei i si coloanei j se numeste minorul complementar alelementului aij si se noteaza cu dij. Numarul Aij = (−1)i+jdij este tocmaicomplementul algebric al elementului aij.
Teorema 1.1 (Teorema lui Laplace) Determinantul matriceiA este egalcu suma produselor minorilor de ordinul p ce se pot construi cu elementelea p linii (coloane) fixate ale matricei A prin complementii lor algebrici.
Exercitiul 1.2 Sa se calculeze valoarea determinantului
D=
¯¯ a11 a12 a13 a14a21 a22 a23 a24a31 a32 a33 a34a41 a42 a43 a44
¯¯ .
folosind regula lui Laplace si dezvoltandu-l dupa primele doua linii.
Rezolvare. Folosind teorema lui Laplace obtinem:
D =
¯a11 a12a21 a22
¯· (−1)1+2+1+2
¯a33 a34a43 a44
¯+
¯a11 a13a21 a23
¯·
·(−1)1+2+1+3¯a32 a34a42 a44
¯+
¯a11 a14a21 a24
¯· (−1)1+2+1+4
¯a32 a33a42 a43
¯+
+
¯a12 a13a22 a23
¯· (−1)1+2+2+3
¯a31 a34a41 a44
¯+
¯a12 a14a22 a24
¯·
·(−1)1+2+2+4¯a31 a33a41 a43
¯+
¯a13 a14a23 a24
¯· (−1)1+2+3+4
¯a31 a32a41 a42
¯.¨
Ca aplicatie a regulii lui Laplace sa calculam determinantul produsuluia doua matrice patratice.
Exercitiul 1.3 Fie A, B ∈Mn(R). Sa se arate ca determinantul produsu-lui matricelor A si B este egal cu produsul determinantilor celor doua ma-trice, adica det(AB) = det(A) detB.

12 CAPITOLUL 1. NOTIUNI TEORETICE
Rezolvare Fie A = (aij), B = (bij), C = AB = (cij), cu
cik =nX
j=1
aijbjk, i, k = 1, n. (1.9)
Construim matricea patratica de ordinul 2n
P =
⎛⎜⎜⎜⎜⎜⎜⎜⎜⎜⎜⎝
a11 a12 . . . a1n 0 0 . . . 0a21 a22 . . . a2n 0 0 . . . 0. . . . . . . . . . . . . . . . . . . . . . . .an1 an2 . . . ann 0 0 . . . 0−1 0 . . . 0 b11 b12 . . . b1n0 −1 . . . 0 b21 b22 . . . b2n. . . . . . . . . . . . . . . . . . . . . . . .0 0 . . . −1 bn1 bn2 . . . bnn
⎞⎟⎟⎟⎟⎟⎟⎟⎟⎟⎟⎠=
µA 0−I B
¶.
Dezvoltand determinantul matriceiP, folosind teorema lui Laplace dupaprimele n linii, obtinem detP = det(A) detB.Pe de alta parte, matricea P poate fi transformata, fara a modifica val-
oarea determinantului ei, folosind proprietatile determinantilor astfel ıncatla intersectia ultimelor n linii si n coloane sa obtinem zerouri. Pentru aceastaeste suficient ca la elementele coloanei n + k sa adunam elementele cores-punzatoare ale primelor n coloane ınmultite respectiv cu b1k, b2k, . . . , bnk,pentru k = 1, n. Tinand seama de (1.9), matricea P devine
Q =
⎛⎜⎜⎜⎜⎜⎜⎜⎜⎜⎜⎝
a11 a12 . . . a1n c11 c12 . . . c1na21 a22 . . . a2n c21 c22 . . . c2n. . . . . . . . . . . . . . . . . . . . . . . .an1 an2 . . . ann cn1 cn2 . . . cnn−1 0 . . . 0 0 0 . . . 00 −1 . . . 0 0 0 . . . 0. . . . . . . . . . . . . . . . . . . . . . . .0 0 . . . −1 0 0 . . . 0
⎞⎟⎟⎟⎟⎟⎟⎟⎟⎟⎟⎠=
µA C−I 0
¶.
Dezvoltand determinantul matricei Q, folosind Teorema lui Laplace,dupa ultimele n linii, obtinem detQ = (−1)2n(n+1) detC = detC. CumdetP = detQ, deducem ca det(A)B = det(A) detB.¨
1.1.2 Matricea inversa
Daca A = (aij) este o matrice de ordinul n, notam prin A∗ =¡a∗ij¢
matricea cu elementele a∗ij = Aji, i, j = 1, n, adica A∗ este transpusa ma-
tricei formata cu complementii algebrici ai elementelor din determinantul

1.1. MATRICE SI DETERMINATI 13
matricei A. Tinand seama de relatiile (1.6), (1.7) si (1.8), avem
AA∗ = A∗A = (det(A)) In (1.10)
unde In este matricea unitate de ordinul n. Daca det(A) 6= 0, matricea Ase numeste nesingulara. Notand A−1 =
1
det(A)A∗, din (1.10) rezulta ca
AA−1 = A−1A = In, (1.11)
adica A−1 este elementul invers al lui A (fata de operatia de ınmultirea matricelor) ın multimea matricelor nesingulare de ordinul n, care deciformeaza un grup necomutativ. Cu notatiile introduse, putem scrie
A−1 =1
det(A)
⎛⎜⎜⎜⎝A11 A21 · · · An1
A12 A22 · · · An2...
......
...A1n A2n · · · Ann
⎞⎟⎟⎟⎠ . (1.12)
Exercitiul 1.4 (Regula lui Cramer) Sa consideram sistemul liniar alge-bric (n ecuatii cu n necunoscute)⎧⎪⎪⎨⎪⎪⎩
a11x1 + a12x2 + · · ·+ a1nxn = b1a21x1 + a22x2 + · · ·+ a2nxn = b2
. . .an1x1 + an2x2 + · · ·+ annxn = bn
(1.13)
care poate fi scris ın forma matriceala Ax = b, ın care A = (aij) estematrice de ordinul n, iar x si b sunt matrice-coloana de tip n × 1, dateprin x =
¡x1 x2 · · · xn
¢T, respectiv b =
¡b1 b2 · · · bn
¢T. Daca
presupunem det(A) 6= 0, matricea A este inversabila, inversa ei este A−1,si obtinem
x =¡A−1A
¢x = A−1 (Ax) = A−1b, adica x = A−1b.
(1.14)Pe de alta parte, daca ın ecuatia Ax = b punem x = A−1b
A¡A−1b
¢=¡AA−1
¢b = Inb = b (1.15)
adica x = A−1b este ın adevar solutia unica a ecuatiei date. Din egali-tatea

14 CAPITOLUL 1. NOTIUNI TEORETICE
xi =1
det(A)
¡A1i A2i · · · Ani
¢⎛⎜⎜⎜⎝
b1b2...bn
⎞⎟⎟⎟⎠ , i = 1, n(1.16)
deducem
xi =1
det(A)(b1A1i + b2A2i + · · ·+ bnAni) =
didet(A)
, i = 1, n(1.17)
ın care di este valoarea determinantului care se obtine din det(A), prinınlocuirea coloanei i cu coloana termenilor liberi b1, b2, . . . , bn.¨
1.1.3 Rangul unei matrice. Linii principale si coloaneprincipale
Definitia 1.2 FieA = (aij) o matrice de tipm×n. MatriceaA are rangulr, daca exista un minor de ordinul r construit cu elementele matricei, caresa fie nenul si toti minorii de ordin mai mare decat r, daca exista, sa fienuli.
Daca A are macar un element diferit de zero, rangul sau, notat r (A),satisface inegalitatea 1 ≤ r (A) ≤ min {m,n}. Singura matrice care arerangul zero, este matricea cu toate elementele zero.Daca r (A) = r ≥ 1, alegem un minor de ordinul r, diferit de zero si
liniile sale le vom numi linii principale, iar coloanele sale se vor numi coloaneprincipale. Evident, aceste denumiri depind de minorul ales, care da rangulmatricei. Pentru simplificarea scrierii, fara a micsora generalitatea, putempresupune ca acest minor este cel din coltul de stanga sus al matricei A:
A =
⎛⎜⎜⎜⎜⎜⎜⎜⎜⎜⎜⎜⎜⎝
a11 a12 · · · a1r · · · a1j · · · a1na21 a22 · · · a2r · · · a2j · · · a2n...
......
......
......
...ar1 ar2 · · · arr · · · arj · · · arn...
......
......
......
...ai1 ai2 · · · air · · · aij · · · ain...
......
......
......
...am1 am2 · · · amr · · · amj · · · amn
⎞⎟⎟⎟⎟⎟⎟⎟⎟⎟⎟⎟⎟⎠.
(1.18)
Teorema 1.2 Orice linie a unei matrice este combinatie liniara de liniileprincipale si orice coloana este combinatie liniara de coloanele principale.
1.1. MATRICE SI DETERMINATI 15
Demonstratie. Fixam linia i (i > r) si consideram toti determinantii deforma ¯
¯¯a11 a12 · · · a1r a1ja21 a22 · · · a2r a2j...
......
......
ar1 ar2 · · · arr arjai1 ai2 · · · air aij
¯¯¯ , j = 1, n. (1.19)
Toti acesti n determinanti sunt nuli: daca 1 ≤ j ≤ r, ei au doua coloaneidentice; daca j > r ei sunt minori de ordinul r+1 dinA, deci sunt si ei nuli,deoarece au ordinul mai mare decat r = r (A). Deoarece primele r coloaneraman fixate, complementii algebrici ai elementelor din ultima coloana nudepind de aceasta coloana. Notand acesti complementi algebrici (cofactori)cu α1, α2, . . . , αr, αr+1 si dezvoltand (pentru j fixat) dupa elementele ultimeicoloane, gasim
α1a1j + α2a2j + · · ·+ αrarj + αr+1aij = 0, j = 1, n (1.20)
unde constantele αk nu depind de j (odata ce i a fost fixat) si αr+1 6= 0.
Notand ck = −αk
αr+1, k = 1, r, gasim
aij = c1a1j + c2a2j + · · ·+ crarj,∀j = 1, n. (1.21)
Aceasta ne spune ca linia i (i a fost fixat) este combinatie liniara deprimele r linii (liniile principale ın det(A)). Evident, aceste constante de-pind totusi de linia fixata i.Relativ la coloane: daca ın (1.19) presupunem j fixat si i variabil,
complementii algebrici ai elementelor din ultima linie nu depind de i. Dez-voltand (1.19) dupa ultima linie, avem
β1ai1 + β2ai2 + · · ·+ βrair + βr+1aij = 0, i = 1,m (1.22)
unde βk nu depind de i (j a fost fixat) si βr+1 6= 0. De fapt, βr+1 = αr+1.
Notand λk = −βkβr+1
, k = 1, r, avem
aij = λ1ai1 + λ2ai2 + · · ·+ λrair, ∀i = 1,m (1.23)
adica coloana j (j a fost fixat ın acest rationament) este combinatie liniarade coloanele principale. Evident, constantele λ1, λ2, . . . , λr depind decoloana fixata. In forma matriceala, formulele (1.23) se scriu

16 CAPITOLUL 1. NOTIUNI TEORETICE⎛⎜⎜⎜⎜⎜⎜⎜⎝
a1ja2j...aij...
amj
⎞⎟⎟⎟⎟⎟⎟⎟⎠= λ1
⎛⎜⎜⎜⎜⎜⎜⎜⎝
a11a21...ai1...
am1
⎞⎟⎟⎟⎟⎟⎟⎟⎠+ λ2
⎛⎜⎜⎜⎜⎜⎜⎜⎝
a12a22...ai2...
am2
⎞⎟⎟⎟⎟⎟⎟⎟⎠+ · · ·+ λr
⎛⎜⎜⎜⎜⎜⎜⎜⎝
a1ra2r...air...
amr
⎞⎟⎟⎟⎟⎟⎟⎟⎠.¥(1.24)
Observatia 1.1 Evident, primele linii sunt si ele combinatii de liniile prin-cipale. Enunt asemanator si pentru primele coloane. De exemplu, primacoloana (j = 1) se obtine din (1.23) pentru λ1 = 1, λ2 = λ3 = · · · = λr = 0.Astfel, afirmatia din enuntul teoremei se refera la toate liniile si la toatecoloanele matricei oarecare A.
Teorema 1.3 (Teorema lui Rouche) Compatibilitatea unui sistem alge-bric liniar este echivalenta cu anularea tuturor determinantilor caracteris-tici.
Demonstratie. Sa consideram acum sistemul liniar de m ecuatii cu nnecunoscute ⎧⎪⎪⎨⎪⎪⎩
a11x1 + a12x2 + · · ·+ a1nxn = b1a21x1 + a22x2 + · · ·+ a2nxn = b2
. . .am1x1 + am2x2 + · · ·+ amnxn = bm
(1.25)
care poate fi scris ın forma matriceala Ax = b, unde A = (aij) este omatrice de ordinulm×n, b este o matrice-coloana de tipm×1, definita prinb =
¡b1 b2 · · · bm
¢T, x este o matrice-coloana de tip n× 1, de forma
x =¡x1 x2 · · · xn
¢T. Presupunem r (A) = r (1 ≤ r ≤ min {m,n}) si
presupunem ca minorul de ordin r din coltul de stanga-sus este diferit dezero. Numim determinanti caracteristici ai sistemului, toti determinantii deforma ¯
¯¯a11 a12 · · · a1r b1a21 a22 · · · a2r b2...
......
......
ar1 ar2 · · · arr brai1 ai2 · · · air bi
¯¯¯ , i = r + 1, r + 2, . . . ,m.
(1.26)
Daca toti acesti determinanti sunt egali cu 0, ıi dezvoltam dupa ultimalinie si rezulta: coloana termenilor liberi (matricea b) este combinatie liniara
1.1. MATRICE SI DETERMINATI 17
de primele coloane, adica exista niste constante λ1, λ2, . . . , λr astfel ıncatsa avem⎛⎜⎜⎜⎝
b1b2...bm
⎞⎟⎟⎟⎠ = λ1
⎛⎜⎜⎜⎝a11a21...
am1
⎞⎟⎟⎟⎠+ λ2
⎛⎜⎜⎜⎝a12a22...
am2
⎞⎟⎟⎟⎠+ · · ·+ λr
⎛⎜⎜⎜⎝a1ra2r...
amr
⎞⎟⎟⎟⎠ .(1.27)
Aceasta ınseamna ca punand x1 = λ1, x2 = λ2, . . . , xr = λr, xi = 0pentru i > r, avem o solutie a sistemului (1.25), deci acest sistem estecompatibil. Reciproc, sa presupunem ca sistemul (1.25) este compatibil,adica are cel putin o solutie, pe care sa o notam x01, x
02, . . . , x
0n. Scriind ın
forma matriceala ca aceasta solutie verifica sistemul (1.25), obtinem⎛⎜⎜⎜⎝b1b2...bm
⎞⎟⎟⎟⎠ = x01
⎛⎜⎜⎜⎝a11a21...
am1
⎞⎟⎟⎟⎠+ x02
⎛⎜⎜⎜⎝a12a22...
am2
⎞⎟⎟⎟⎠+ · · ·+ x0n
⎛⎜⎜⎜⎝a1ra2r...
amr
⎞⎟⎟⎟⎠ ,(1.28)
adica coloana b este combinatie liniara de coloanele matricei A, care larandul lor sunt combinatii liniare de coloanele principale (care ın cazulde fata sunt primele r coloane din A). In concluzie, b este o anumitacombinatie de coloanele principale, deci toti determinantii caracteristici(1.26) sunt nuli. ¥
Teorema 1.4 Anularea unui determinant este echivalenta cu faptul ca ıntrecoloanele sale exista o dependenta liniara.
Demonstratie. Dupa cum se stie, daca ıntre coloanele unui determinantexista o combinatie liniara (echivalent, una dintre ele se exprima liniarın functie de celelalte), acest determinant este nul. Insa si reciproca esteadevarata: daca un determinant este nul, atunci ıntre coloanele sale existao dependenta liniara. In adevar, fie det(A) = 0, unde A = (aij) este omatrice de ordinul n. Atunci, avem r (A) < n, deci numarul coloanelorprincipale este mai mic decat n (acest numar este ≤ n − 1). Prin urmare,exista macar o coloana care nu este principala si aceasta se exprima ca ocombinatie liniara de alte coloane. ¥Se mai poate spune si altfel: necesar si suficient ca un determinant sa
fie nul, este ca ıntre coloanele sale sa existe o dependenta liniara. Desigur,propozitii asemanatoare se pot enunta si relativ la liniile unui determinant.

18 CAPITOLUL 1. NOTIUNI TEORETICE
1.2 Spatiul vectorial real
Definitia 1.3 Se numeste spatiu vectorial peste corpul real R, (spatiuliniar real) o multime V de elemente pe care se definesc doua operatii sianume: adunarea elementelor lui V si ınmultirea cu scalari (corpul nu-merelor reale) ale elementelor lui V. Operatia de adunare o vom nota prinsimbolul ”+” (plus). Adunarea este o operatie interna, adica definita peV cu valori ın V, ın timp ce ınmultirea cu scalari este definita pe R × Vcu valori ın V. Elementele lui V se numesc vectori. Adunarea satisfaceurmatoarele axiome:
1◦ este comutativa: x+ y = y+ x, ∀ x,y ∈ V,2◦ este asociativa: x+(y+ z)= (x+ y)+z, ∀ x,y, z ∈ V,3◦ exista element neutru θ ∈ V: x+ θ = x, ∀ x ∈ V,4◦ ∀x ∈ V, exista un element, numit ”opusul” sau si notat cu −x, astfel
ıncat x+ (−x) = θ.
Fata de aceasta operatie, V este un grup aditiv comutativ. Fata deınmultirea cu scalari, V satisface axiomele:5◦ α (x+ y) = αx+ αy, ∀α ∈ R si ∀ x,y ∈ V,6◦ (α+ β)x = αx+ βx, ∀ α, β ∈ R si ∀ x ∈ V,7◦ α (βx) = (αβ)x, ∀ α, β ∈ R si ∀ x ∈ V,8◦ 1 · x = x, ∀ x ∈ V. (Prin 1 · x am ınteles produsul dintre numarul 1
si vectorul x.)
Exemplul 1.1 Spatiul vectorial aritmetic real Rn. Fie Rn = R×R×· · · ×R (produsul cartezian a lui R de n ori). Vom nota prin x un elementoarecare din Rn; acesta este o n-upla ordonata de numere reale si vom scriex =
¡x1 x2 · · · xn
¢, unde xi ∈ R pentru i = 1, n. Adunarea pe Rn se
defineste prin regula x+ y =¡x1 + y1 x2 + y2 · · · xn + yn
¢, ∀ x,y ∈
Rn, iar ınmultirea cu scalari prin regula αx =¡αx1 αx2 · · · αxn
¢, ∀
α ∈ R si ∀x ∈ Rn. Rn are structura de spatiu liniar.
Exemplul 1.2 Spatiul vectorial Rn. Notam cu Rn multimea ale careielemente sunt matrice-coloana de tip n× 1, cu elemente reale. Un elementoarecare (vector) din acest spatiu, se scrie astfel
x =
⎛⎜⎜⎜⎝x1x2...xn
⎞⎟⎟⎟⎠ , cu xi ∈ R pentru i = 1, n.

1.2. SPATIUL VECTORIAL REAL 19
Adunarea si ınmultirea cu scalari se definesc ın mod evident. Vomprefera sa lucram cu acest spatiu ın cele ce urmeaza. Vectorul x ıl vom
preciza prin relatia x =¡x1 x2 · · · xn
¢T, din motive grafice. Analog
se poate introduce spatiul liniar real Cn.
Definitia 1.4 Multimea X ⊂ V se numeste subspatiu al spatiului vectorialV, daca X este un spatiu liniar ın raport cu operatiile de adunare a vectorilorsi ınmultire cu scalari a vectorilor multimii V.
Teorema 1.5 (Teorema de caracterizare a subspatiilor liniare) Con-ditia necesara si suficienta ca X ⊂ V sa fie un subspatiu liniar a spatiuluiV este:
a) ∀ x,y ∈ X : x+ y ∈ X,b) ∀ α ∈ R,x ∈ X : α · x ∈ X.
Demonstratie. Necesitatea. Presupunem ca X este un spatiu liniar. Rezul-ta ca X este ınchis ın raport cu operatiile de adunare a vectorilor si ınmultirecu scalari a acestora.Suficienta. Presupunem a) si b) ındeplinite, ceea ce ınseamna ca X este
ınchis ın raport cu operatiile de adunare a elementelor lui si de ınmultire lastanga cu elemente din corpul de scalari real. Proprietatile de asociativitatesi axiomele 5, 6, 7, 8 sunt satisfacute pe V, deci cu atat mai mult suntsatisfacute pe X ⊂ V. Demonstram ca ∀x ∈ X⇒ −x ∈ X si θ ∈ X. Pentru∀x ∈ X rezulta, considerand ın b) α = −1 rezulta α ·x = −x ∈ X; utilizanda) cu y = −x obtinem x+ (−x) = θ ∈ X.¥
Definitia 1.5 Fie X1,X2 doua subspatii ale spatiului liniar V. Definim
X1\X2 = {v | v ∈ X1 si v ∈ X2}
X1[X2 = {v | v ∈ X1 sau v ∈ X2}
Teorema 1.6 Fie X1,X2 doua subspatii ale spatiului liniar V. IntersectiaX1TX2 este un subspatiu liniar al spatiului liniar V.
Demonstratie. Observam ca X1TX2 6= ∅ deoarece θ ∈ Xi,∀i ∈ {1, 2}
rezulta ca θ ∈ X1TX2. Pentru ∀x,y ∈ X1 ∩ X2, rezulta x+ y ∈ X1 si
x+ y ∈ X2, deci x+ y ∈ X1 ∩ X2. De asemenea ∀α ∈ R si ∀x ∈ X1 ∩ X2⇒ αx ∈ X1 si αx ∈ X2 si deci αx ∈ X1
TX2.Rezulta, conform Teoremei 1.5
de caracterizare a subspatiilor liniare, ca X1TX2 este un subspatiu liniar.¥

20 CAPITOLUL 1. NOTIUNI TEORETICE
Observatia 1.2 Reuniunea unui sistem de subspatii liniare nu este unsubspatiu liniar. Ca exemplu consideram X1 = {(x1, 0) | (x1, 0) ∈ R2} ,X2 = {(0, x2) | (0, x2) ∈ R2} . Daca consideram x = (1, 0) ∈ X1 si y =(0, 1) ∈ X2, x,y ∈ X1 ∪X2, dar x+ y /∈ X1 ∪X2.
Definitia 1.6 Fie X1,X2 doua subspatii ale spatiului liniar V. Se numestesuma subspatiilor X1,X2 multimea definita prin
X = X1 +X2 = {x ∈ V |x = x1 + x2,x1 ∈ X1,x2 ∈ X2} .
Teorema 1.7 Suma subspatiilor X1,X2 ale spatiului liniar V, X = X1+X2,este un subspatiu liniar al lui V.
Demonstratie. Observam ca X 6= ∅ deoarece θ + θ ∈ X. Fie α ∈ R six,y ∈ X astfel ıncat x = x1 + x2, y = y1 + y2,x1,y1 ∈ X1, x2,y2 ∈ X2,atunci α·x+y = α·(x1+x2)+(y1+y2) = (αx1+y1)+(αx2+y2) ∈ X1+X2,deoarece Xi, i = 1, 2 sunt subspatii liniare ¥
Definitia 1.7 Fie X1,X2 doua subspatii ale spatiului liniar V. Daca X =X1+X2 si X1∩X2 = {θ} atunci X se numeste suma directa a subspatiilorX1,X2 si se noteaza V = V1
LVi.
Daca V este un spatiu vectorial oarecare, vom nota prin v, v(1), v(2),. . . vectorii din acest spatiu.
Definitia 1.8 Spunem ca un vector v ∈ X este o combinatie liniara avectorilor
©v(1),v(2), . . . ,v(n)
ªdaca exista c1, c2, . . . , cn ∈ R astfel ıncat
v = c1v(1) + c2v
(2) + . . .+ cnv(n) =
nXi=1
civ(i).
Daca notam B =©v(1),v(2), . . . ,v(n)
ªatunci multimea combinatiilor
liniare a acestor vectori se noteaza [B] . Se demonstreaza ca [B] este subspatiusubspatiu liniar.
Definitia 1.9 Vectorii v(1), v(2), . . . , v(m) se numesc liniar indepen-denti, daca relatia
c1v(1) + c2v
(2) + · · ·+ cmv(m) = θ
este adevarata numai daca c1 = c2 = · · · = cm = 0. In caz contrar, ei senumesc liniar dependenti.
Dependenta liniara este echivalenta cu faptul ca ın sistemul dat de vec-tori, exista macar unul care este combinatie liniara de ceilalti.

1.2. SPATIUL VECTORIAL REAL 21
Definitia 1.10 Daca ın V exista n vectori liniar independenti, dar oricesistem de m vectori cu m > n este liniar dependent, spunem ca V este finitdimensional si are dimensiunea n. In acest caz, se poate scrie Vn ın loc deV.Drept exemple de spatii n-dimensionale sunt Rn si Rn.
Definitia 1.11 Intr-un spatiu Vn, orice sistem de n vectori liniar indepen-denti se numeste baza.
Teorema 1.8 Fie©v(1),v(2), . . . ,v(n)
ªeste o baza ın spatiul vectorial Vn.
Orice vector v ∈ Vn se scrie ın mod unic ca o combinatie liniara de vectoriibazei.
Demonstratie. Fie relatia de forma c1v(1) + c2v
(2)+ · · ·+ cnv(n) + cv = θ
si demonstram ca nu toti coeficientii sunt nuli. Daca c = 0 atunci rezultaca c1v
(1) + c2v(2) + · · · + cnv
(n) = θ si deoarece©v(1),v(2), . . . ,v(n)
ªsunt
vectori liniar independenti, rezulta toti ci = 0, ceea ce ar contrazice faptulca numarul maxim de vectori liniar independenti este n. Deci c 6= 0. Dacanotam αi = −
cic, i = 1, n gasim v = α1v
(1)+α2v(2)+ · · ·+αnv
(n) si aceasta
scriere este unica. In adevar, daca am avea si v = β1v(1)+β2v
(2)+· · ·+βnv(n)ar rezulta (β1 − α1)v
(1) + (β2 − α2)v(2) + · · · + (βn − αn)v
(n) = θ, careimplica βi = αi, i = 1, n.¥Numerele (scalarii) α1, α2, . . . , αn se numesc coordonatele lui v ın raport
cu baza aleasa. Daca se alege o alta baza, coordonatele unui vector se vorschimba (vor fi diferite de cele din prima baza).
Observatia 1.3 In aplicatii demonstam ca n vectori formeaza o baza dacasunt liniar independenti si daca orice vector din spatiu se poate scrie ca ocombinatie liniara a acestor vectori.Daca se cunoaste dimensiunea spatiului dimV = n, atunci pentru a
arata ca n vectori formeaza o baza este suficient sa aratam ca sunt liniarindependenti.
Exemplul 1.3 In spatiul vectorial Rn consideram vectorii {e1, e2, ..., en}unde
e1 =¡1 0 . . . 0
¢, e2 =
¡0 1 0 . . . 0
¢, . . . ,
en =¡0 . . . 0 1
¢(1.29)
Acesti vectori sunt liniar independenti deoarece din orice relatie de formac1e1 + c2e2 + . . .+ cnen = θ rezulta αi = 0,∀i = 1, n.

22 CAPITOLUL 1. NOTIUNI TEORETICE
Pe de alta parte, pentru orice x = (x1, x2, . . . , xn) ∈ Rn avem scriereax = x1
¡1 0 . . . 0
¢+x2
¡0 1 0 . . . 0
¢+. . .+xn
¡0 . . . 0 1
¢=
x1e1+x2e2+ . . .+xnen si aceasta scriere este unica. Vectorii {e1, e2, ..., en}formeaza baza standard (naturala) din Rn.
1.2.1 Schimbarea coordonatelor vectorului la schim-barea bazei
Intr-un spatiu Vn, consideram doua baze B =©v(1),v(2), . . . ,v(n)
ªsi
B0 =©u(1),u(2), . . . ,u(n)
ª. Ele sunt legate prin relatiile
u(1) = c11v(1) + c21v
(2) + · · ·+ cn1v(n)
u(2) = c12v(1) + c22v
(2) + · · ·+ cn2v(n)
. . .u(n) = c1nv
(1) + c2nv(2) + · · ·+ cnnv
(n)
(1.30)
ın care determinantul coeficientilor este diferit de zero (exercitiu). Daca unvector oarecare v se scrie descompus dupa cele doua baze ın forma
v = ξ1v(1) + ξ2v
(2) + · · ·+ ξnv(n),
v = η1u(1) + η2u
(2) + · · ·+ ηnu(n) (1.31)
legatura ıntre coordonatele ξ si coordonatele η este
ξ1 = c11η1 + c12η2 + · · ·+ c1nηnξ2 = c21η1 + c22η2 + · · ·+ c2nηn
. . .ξn = cn1η1 + cn2η2 + · · ·+ cnnηn
⇔ ξi =nX
j=1
cijηj, i = 1, n(1.32)
sau ın forma matriceala⎛⎜⎜⎜⎝ξ1ξ2...ξn
⎞⎟⎟⎟⎠ =
⎛⎜⎜⎜⎝c11 c12 · · · c1nc21 c22 · · · c2n...
......
...cn1 cn2 · · · cnn
⎞⎟⎟⎟⎠⎛⎜⎜⎜⎝
η1η2...ηn
⎞⎟⎟⎟⎠ (1.33)
undeC = (cij), i, j = 1, n se numeste matricea schimbarii de baza de la bazaB la baza B0. S-au exprimat coordonatele vechi, ın functie de cele noi. Prinınmultire cu matricea C−1, putem obtine si coordonatele noi, ın functie decele vechi.
1.3. TRANSFORMARE LINIARA IN VN 23
Exemplul 1.4 In R3 consideram baza canonica
e(1) =
⎛⎝ 100
⎞⎠ , e(2) =
⎛⎝ 010
⎞⎠ , e(3) =
⎛⎝ 001
⎞⎠ (1.34)
si alta baza
u(1) =
⎛⎝ 100
⎞⎠ ,u(2) =
⎛⎝ 110
⎞⎠ ,u(3) =
⎛⎝ 111
⎞⎠ . (1.35)
Un vector oarecare x, dat prin x =¡x1 x2 x3
¢Tse scrie ın prima
baza x = x1e(1) + x2e
(2) + x3e(3), iar ın a doua x = η1u
(1) + η2u(2) +
η3u(3). Legatura ıntre coordonate va fi urmatoarea x1 = η1 + η2 + η3,
x2 = η2+ η3, x3 = η3. Se pot exprima usor si coordonatele noi ın functie decele vechi. Matricea schimbarii de baza de la baza
©e(1), e(2), e(3)
ªla baza©
u(1),u(2),u(3)ªeste⎛⎝ 1 1 1
0 1 10 0 1
⎞⎠iar coordonatele vectorului x ın raport cu baza
©e(1), e(2), e(3)
ªın functie
de coordonatele vectorului ın raport cu baza©u(1),u(2),u(3)
ªsunt date de
relatia⎛⎝ x1x2x3
⎞⎠ =
⎛⎝ 1 1 10 1 10 0 1
⎞⎠⎛⎝ η1η2η3
⎞⎠ ¨
Definitia 1.12 Doua baze B = {e1, e2, ..., en} si B0 = {e01, e02, ..., e0n} dinspatiul vectorial Vn, se numesc baze la fel orientate daca determinantulmatricei schimbarii de baza de la baza B la B0 este pozitiv. Daca acestdeterminant este negativ, cele doua baze se numesc contrar orientate.
1.3 Transformare liniara ın Vn
Definitia 1.13 O transformare (aplicatie) liniara f : Vn → Vn este ofunctie care satisface proprietatile
a) f (x+ y) = f (x) + f (y) , ∀x,y ∈ Vn
b) f (αx) = αf (x) ,∀α ∈ R, ∀x ∈ Vn.(1.36)
Se obtine prin inductie relatia
f
ÃmXi=1
cix(i)
!=
mXi=1
cif¡x(i)¢, ∀ci ∈ R, ∀x(i) ∈ Vn, i = 1,m.
(1.37)

24 CAPITOLUL 1. NOTIUNI TEORETICE
Observatia 1.4 Daca ın Definitia 1.13, a) ınlocuim x = y = θ obtinemf(θ) = f(θ) + f(θ), de unde rezulta ca
f(θ) = θ, (1.38)
Conditia (1.38) este doar o conditie necesara ca o aplicatie sa fie liniara. Deaici rezulta ca daca f(θ) 6= θ atunci f nu este liniara.
Fie baza oarecare©v(1),v(2), . . . ,v(n)
ªın Vn. Pentru a exprima vectorul
f (x), trebuie sa cunoastem imaginile vectorilor bazei. Astfel, se presupuncunoscuti coeficientii (scalari) ın relatiile
f¡v(1)
¢= a11v
(1) + a21v(2) + · · ·+ an1v
(n),f¡v(2)
¢= a12v
(1) + a22v(2) + · · ·+ an2v
(n),. . .
f¡v(n)
¢= a1nv
(1) + a2nv(2) + · · ·+ annv
(n).
(1.39)
Notand x = ξ1v(1)+ξ2v
(2)+ · · ·+ξnv(n) si f (x) = η1v
(1)+η2v(2)+ · · ·+
ηnv(n), vom putea scrie
f (x) = f
ÃnP
j=1
ξjv(j)
!=
nPj=1
ξjf¡v(j)
¢=
nPj=1
ξj
µnPi=1
aijv(i)
¶=
=nP
j=1
nPi=1
aijξjv(i) =
nPi=1
ÃnP
j=1
aijξj
!v(i) =
nPi=1
ηiv(i), (1.40)
schimband ordinea de sumare ın suma dubla ce apare aici. Tinand seamade unicitatea descompunerii unui vector dupa o baza data, rezulta ηi =nP
j=1
aijξj, ∀i = 1, n. Matricea A = (aij) de ordinul n se numeste matricea
transformarii liniare f , relativ la baza aleasa©v(1),v(2), . . . ,v(n)
ª. Legatura
ıntre coordonatele vectorului curent x si ale transformatului sau y = f (x)este data matriceal prin relatia⎛⎜⎜⎜⎝
η1η2...ηn
⎞⎟⎟⎟⎠ =
⎛⎜⎜⎜⎝a11 a12 · · · a1na21 a22 · · · a2n...
......
...an1 an2 · · · ann
⎞⎟⎟⎟⎠⎛⎜⎜⎜⎝
ξ1ξ2...ξn
⎞⎟⎟⎟⎠ . (1.41)
Evident, daca fixam ın V o alta baza©u(1),u(2), . . . ,u(n)
ª, transformarii
f ıi va corespunde acum o alta matrice, notata B. Ne propunem sa aflamlegatura dintre matricele A si B. Pentru aceasta trebuie sa stim legatura

1.3. TRANSFORMARE LINIARA IN VN 25
dintre cele doua baze si vom presupune din nou ca este data de relatiile(1.30). Daca notam cu ξi, i = 1, n coordonatele unui vector oarecare x ınprima baza si cu ξ0i, i = 1, n coordonatele sale ın a doua baza, legaturadintre ele se exprima cu matricea schimbarii de baza C = (cij). La felpentru vectorul y = f (x), coordonatele sale ın prima baza sunt ηi, i = 1, n,iar ın a doua baza le notam cu η0i, i = 1, n. Din relatiile scrise ın formamatriceala ⎛⎜⎜⎜⎝
ξ1ξ2...ξn
⎞⎟⎟⎟⎠ = C
⎛⎜⎜⎜⎝ξ01ξ02...ξ0n
⎞⎟⎟⎟⎠ ,
⎛⎜⎜⎜⎝η1η2...ηn
⎞⎟⎟⎟⎠ = C
⎛⎜⎜⎜⎝η01η02...η0n
⎞⎟⎟⎟⎠ si
⎛⎜⎜⎜⎝η1η2...ηn
⎞⎟⎟⎟⎠ = A
⎛⎜⎜⎜⎝ξ1ξ2...ξn
⎞⎟⎟⎟⎠(1.42)
obtinem imediat ca ⎛⎜⎜⎜⎝η01η02...η0n
⎞⎟⎟⎟⎠ = C−1AC
⎛⎜⎜⎜⎝ξ01ξ02...ξ0n
⎞⎟⎟⎟⎠ , (1.43)
de unde rezulta ca matricea transformarii liniare f ın a doua baza esteB = C−1AC, daca tinem seama ca vectorul x era arbitrar.
Definitia 1.14 Matricele A si C−1AC se numesc matrice asemenea.
Observatia 1.5 Matricele unei transformari liniare relativ la doua bazealese sunt matrice asemenea.
Definitia 1.15 Multimea ker(f) = {u | u ∈ Vn : f(u) = θ} se numeste nu-cleul transformarii liniare f .
Definitia 1.16 Multimea Im(f) = {w | w ∈ Vn : ∃u ∈ Vn : f(u) = w} senumeste imaginea transformarii liniare f .
Teorema 1.9 Nucleul lui f este un subspatiu liniar al spatiului liniar Vn.Imaginea lui f este un subspatiu liniar al spatiului liniar Vn.

26 CAPITOLUL 1. NOTIUNI TEORETICE
Demonstratie. Observam ca ker(f) 6= ∅ deoarece θ ∈ ker(f). Fie α ∈ Rsi u,v ∈ ker(f) astfel ıncat f(u) = θ, f(v) = θ. Atunci f(αu + v) =αf(u) + f(v) = θ si deci αu+ v ∈ ker(f).Observam ca Im(f) 6= ∅ deoarece θ ∈ Im(f). Fie α ∈ R si u,v ∈ Im(f).
Rezulta ca exista w1,w2 ∈ Vn astfel ıncat f(u) = w1, f(v) = w2; αw1 +w2 = αf(u) + f(v) = f(αu+ v) de unde rezulta ca αw1 +w2 ∈ Im(f).¥Definitia 1.17 Dimensiunea spatiului ker(f) se numeste defectul lui f sise noteaza def(f). Dimensiunea spatiului Im(f) se numeste rangul lui f sise noteaza rang(f).
Teorema 1.10 Transformarea liniara f este injectiva daca si numai dacaker(f) = {θ} .Demonstratie. Necesitatea. Presupunem ca transformarea liniara f esteinjectiva si fie u ∈ ker(f) deci f(u) = θ. Dar f(θ) = θ si cum f(u) = f(θ)rezulta ca u = θ, adica ker(f) = {θ} .Suficienta. Presupunem ca ker(f) = {θ} si fie f(u) = f(v). Rezulta
f(u− v) = θ deci u− v ∈ ker(f), adica u = v, deci f injectiva.¥Exercitiul 1.5 Transformarea liniara f este surjectiva daca si numai dacaIm(f) = Vn.
Teorema 1.11 Fie transformarea liniara f : Vn → Vn. Atunci
rang(f) + def(f) = n.
Demonstratie. Fie def(f) = r ≤ n si fie©v(1),v(2), . . . ,v(r)
ªo baza ın
ker(f). Completam sistemul de vectori©v(1),v(2), . . . ,v(r)
ªpana la o baza
ın spatiu Vn,©v(1),v(2), . . . ,v(r),v(r+1),v(r+2), . . . ,v(n)
ª. Vom demonstra
ca sistemul de vectori©f(v(r+1)), . . . , f(v(n))
ªeste o baza ın Im(f).
Fie w ∈ Im(f). Rezulta ca exista v ∈ Vn astfel ıncat f(v) = w. Dar
v =rP
i=1
αiv(i) +
nPi=r+1
αiv(i) de unde rezulta ca
w = f(v) =rX
i=1
αif(v(i)) +
nXi=r+1
αif(v(i)),
deci w =nP
i=r+1
αif(v(i)), deoarece v(i) ∈ ker(f), i = 1, r. Rezulta ca orice
vector din Im(f) se poate scrie ca o combinatie liniara de vectori din sis-temul de vectori
©f(v(r+1)), . . . , f(v(n))
ª. Aratam ca vectorii sistemului©
f(v(r+1)), . . . , f(v(n))ªsunt liniar independenti ın Im(f).
FienP
i=r+1
αif(v(i)) = θ rezulta ca f(
nPi=r+1
αiv(i)) = θ deci
1.3. TRANSFORMARE LINIARA IN VN 27
nPi=r+1
αiv(i) ∈ ker(f)⇒
nPi=r+1
αiv(i) =
rPi=1
βiv(i) ⇒
nPi=r+1
αiv(i)−
rPi=1
βiv(i) = θ.
Deoarece©v(1),v(2), . . . ,v(r),v(r+1),v(r+2), . . . ,v(n)
ªeste un sistem de
vectori liniar independent, rezulta αr+1 = . . . = αn = β1 = . . . = βr = 0,deci vectori
©f(v(r+1)), . . . , f(v(n))
ªsunt liniar independenti.
Rezulta ca vectorii©f(v(r+1)), . . . , f(v(n))
ªformeaza o baza ın Im(f),
deci rang(f) = n− r⇒ rang(f) + def(f) = n.¥Exercitiul 1.6 Fie f o transformare liniara si S =
©v(1),v(2), ...,v(p)
ªun
sistem de vectori din Vn, iar S0 =
©f(v(1)), f(v(2)), ..., f(v(p))
ª. Sa se arate
ca daca f este injectiva si S este un sistem de vectori liniar independent ınVn, atunci sistemul S
0 este si el un sistem liniar independent.
Rezolvare. Relatia α1f(v(1)) + · · · + αpf(v
(p)) = θ este echivalenta cuf(α1v
(1) + · · · + αpv(p)) = θ ⇒ α1v
(1) + · · · + αpv(p) ∈ ker(f). Deoarece f
este injectiva rezulta α1v(1) + · · ·+ αpv
(p) = θ si deoarece S este un sistemliniar independent rezulta α1 = · · · = αp = 0, deci sistemul S
0 este un sistemliniar independent.¨
1.3.1 Polinom caracteristic. Vectori proprii si valoriproprii
Definitia 1.1 Un vector v, diferit de vectorul nul, se numeste vector pro-priu al transformarii liniare f : Vn → Vn, daca exista un scalar λ, astfelıncat f (v) = λv. In acest caz, λ se numeste valoare proprie sau auto-valoare a transformarii f .Daca alegem o baza ın Vn si notam cu ξi, i = 1, n coordonatele lui v
si cu A = (aij) matricea transformarii ın aceasta baza, conditia ca v sa fievector propriu se scrie matriceal ın forma⎛⎜⎜⎜⎝
a11 a12 · · · a1na21 a22 · · · a2n...
......
...an1 an2 · · · ann
⎞⎟⎟⎟⎠⎛⎜⎜⎜⎝
ξ1ξ2...ξn
⎞⎟⎟⎟⎠ = λ
⎛⎜⎜⎜⎝ξ1ξ2...ξn
⎞⎟⎟⎟⎠ (1.44)
sau, ın forma echivalenta,⎛⎜⎜⎜⎝λ− a11 −a12 · · · −a1n−a21 λ− a22 · · · −a2n...
......
...−an1 −an2 · · · λ− ann
⎞⎟⎟⎟⎠⎛⎜⎜⎜⎝
ξ1ξ2...ξn
⎞⎟⎟⎟⎠ =
⎛⎜⎜⎜⎝00...0
⎞⎟⎟⎟⎠ .(1.45)

28 CAPITOLUL 1. NOTIUNI TEORETICE
Pentru ca sistemul sa aiba solutii nebanale, se impune ca determinan-tul coeficientilor sa fie nul, adica det (λI−A) = 0. Se calculeaza ıntaiautovalorile si apoi pentru fiecare dintre ele se gasesc vectorii proprii cores-punzatori. La autovalori reale corespund vectori proprii reali. Daca A esteo matrice reala, s-ar putea sa aiba si autovalori complexe si atunci problemase complica sau, mai bine zis, poate fi pusa ıntr-un cadru mai general.Putem admite ca o matrice A de ordinul n este reala sau complexa.
Vom spune ca un vector-coloana v, dat prin v =¡ξ1 ξ2 · · · ξn
¢Teste
un vector propriu al matricei A, daca este nenul si daca exista o constantaλ, reala sau complexa, astfel ıncat Av = λv.Aflarea autovalorilor se reduce la rezolvarea ecuatiei algebrice P (λ) = 0,
unde P (λ) = det (λI−A) este polinomul caracteristic al luiA, variabilaλ fiind reala sau complexa. Vectorii proprii ai matricei A pot si ei sa fiereali sau complecsi. Se vede usor ca, daca matricea A este de ordinul n,atunci P (λ) este de forma
P (λ) = λn + p1λn−1 + · · ·+ pn−1λ+ pn. (1.46)
Se poate arata ca p1 = − (a11 + a22 + · · ·+ ann) = − trA, unde tr esteurma matricei A, pn = (−1)n det(A), dar ın general, pentru orice k = 1, n
pk = (−1)k σk (1.47)
unde σk este suma minorilor de ordinul k din det(A) (ın numar de Ckn)
a caror diagonala principala este o portiune din diagonala principala a luidet(A).
Exercitiul 1.7 Sa se arate ca daca A = (aij) este o matrice de ordinul 3,atunci
P (λ) = λ3 − (a11 + a22 + a33)λ2+
+
µ¯a11 a12a21 a22
¯+
¯a11 a13a31 a33
¯+
¯a22 a23a32 a33
¯¶λ− det(A).
Exercitiul 1.8 Sa se arate ca doua matrice asemenea au acelasi polinomcaracteristic.
Rezolvare. Fie A,B doua matrice asemenea de ordin n. Atunci existao matrice P de ordin n nesingulara astfel ıncat B = P−1AP. Folosinddefinitia polinomului caracteristic obtinem:
PB(λ) = det(λI−B) = det(λP−1P−P−1AP) = det (P−1(λI−A)P) =det(P−1) det(λI−A) detP = det(λI−A) = PA(λ) deoarece det(P
−1) =1/det(P).¨

1.3. TRANSFORMARE LINIARA IN VN 29
1.3.2 Teorema de reprezentare spectrala
Daca notam autovalorile matriceiA cu λ1, λ2, ..., λn indiferent de faptulca ele sunt reale sau complexe, simple sau multiple, putem scrie P (λ) ınforma
P (λ) = (λ− λ1) (λ− λ2) . . . (λ− λn) . (1.48)
Daca g (λ) = b0λm+b1λ
m−1+ · · ·+bm−1λ+bm cu b0 6= 0 este un polinomcu coeficienti reali sau complecsi, punem prin definitie
g (A) = b0Am + b1A
m−1 + · · ·+ bm−1A+ bmI, (1.49)
unde I este matricea unitate de ordinul n. In acest fel, am definit o nouamatrice g (A), ale carei autovalori vrem sa le aflam. Mai ıntai, vom scrie
g (λ) = b0 (λ− α1) (λ− α2) · · · (λ− αm) , (1.50)
unde αi, i = 1,m sunt radacinile lui g (λ).
Teorema 1.12 Daca A este o matrice de ordinul n, cu autovalorile λi,i = 1, n, iar g (λ) este un polinom oarecare de forma (1.50) atunci
det(g (A)) = g (λ1) g (λ2) · · · g (λn) . (1.51)
Demonstratie. Vom observa ca
g (A) = b0 (A− α1I) (A− α2I) · · · (A− αmI) (1.52)
si cadet g (A) = bn0 det (A− α1I) det (A− α2I) · · · det (A− αmI) .
(1.53)
Deoarecedet (A− αiI) = (−1)n det (αiI−A) =
= (−1)n P (αi) , i = 1,m(1.54)
putem scrie
det g (A) = (−1)mn bn0P (α1)P (α2) · · ·P (αm) . (1.55)
Numerele P (αi) le obtinem din (1.48) Scriem aceste numere unul subaltul, obtinand tabloul cu m linii
(α1 − λ1) (α1 − λ2) · · · (α1 − λn)(α2 − λ1) (α2 − λ2) · · · (α2 − λn)
. . .(αm − λ1) (αm − λ2) · · · (αm − λn)
(1.56)

30 CAPITOLUL 1. NOTIUNI TEORETICE
ın care apar mn paranteze, pe care ar trebui sa le ınmultim ıntre ele.Folosind si factorul (−1)mn, putem schimba semnul parantezelor, obtinandacelasi numar ca mai sus si tabloul
(λ1 − α1) (λ2 − α1) · · · (λn − α1)(λ1 − α2) (λ2 − α2) · · · (λn − α2)
. . .(λ1 − αm) (λ2 − αm) · · · (λn − αm)
. (1.57)
A mai ramas factorul bn0 , pe care ıl folosim ınmutind produsul numerelordin fiecare coloana cu b0 si observand ca
g (λi) = b0 (λi − α1) (λi − α2) · · · (λi − αm) ,∀i = 1, n.¥(1.58)
De aici, rezulta o consecinta importanta si anume:Teorema 1.13 Daca A este o matrice de ordinul n, cu autovalorile λi,i = 1, n, iar g (λ) este un polinom oarecare, autovalorile matricei g (A) suntnumerele g (λi), i = 1, n.Demonstratie. Cu x fixat, consideram polinomul h (λ) = x− g (λ). Con-form teoremei precedente, avem
deth (A) = h (λ1)h (λ2) · · ·h (λn) == (x− g (λ1)) (x− g (λ2)) · · · (x− g (λn)) .
Dar h (A) = xI− g (A), decidet (xI− g (A)) = (x− g (λ1)) (x− g (λ2)) · · · (x− g (λn)) .
(1.59)Inlocuind pe x, care era arbitrar, cu λ variabil, obtinem
det (λI− g (A)) == (λ− g (λ1)) (λ− g (λ2)) · · · (λ− g (λn))
(1.60)
adica polinomul caracteristic al matricei g (A) are radacinile g (λi), i =1, n.¥Daca facem conventia ca simbolul A ∼ λ, λ2, . . . , λn reprezinta faptul ca
A are autovalorile λi, i = 1, n, atunci putem scrie ın forma plastica½A ∼ λ1, λ2, . . . , λn
g (A) ∼ g (λ1) , g (λ2) , . . . , g (λn)(1.61)
oricare ar fi polinomul g (λ), independent de faptul ca autovalorile luiA suntreale sau complexe, simple sau multiple. Teorema precedenta se numesteuneori teorema de reprezentare spectrala (multimea autovalorilor unei ma-trice formeaza ”spectrul” matricei).
Exemplul 1.5 Matricea 2A + 3I are autovalorile 2λi + 3 (cazul g (λ) =2λ+ 3), matricea A2 are autovalorile λ2i (cazul g (λ) = λ2), etc.

1.3. TRANSFORMARE LINIARA IN VN 31
1.3.3 Diagonalizarea unei matrice
Definitia 1.18 Se numeste matrice diagonala, matricea J patratica deforma
J =
⎛⎜⎜⎜⎝d1 0 ... 00 d2 ... 0...
......
...0 0 ... dn
⎞⎟⎟⎟⎠ .
Folosim si scrierea J =diag [d1, d2, ..., dn] .
Definitia 1.19 Se numeste matrice diagonalizabila orice matrice aseme-nea cu o matrice diagonala.
Fie A = (aij) o matrice de ordinul n, cu elemente reale sau complexe.Vectorii proprii si autovalorile ei pot, desigur, sa fie reale sau complexe.Vom considera spatiul vectorial Cn, care consta din multimea matricelor-coloana de tip n× 1, cu operatiile uzuale de adunare si ınmultire cu scalari(care acum pot fi si numere complexe).Fiecarei autovalori ıi corespunde cate un vector propriu, determinat pana
la un factor nenul de proportionalitate, caci daca Av = λv (v 6= θ, θ vecto-rul nul), atunci evident ca si cv cu c 6= 0 satisface conditia A (cv) = λ (cv),deci este si el vector propriu, corespunzator aceleeasi autovalori λ.
Teorema 1.14 O matrice A de ordin n este diagonalizabila daca si numaidaca exista o baza ın Cn formata din vectorii propri ai matricei A.
Demonstratie. Necesitatea. Deoarece A este o matrice diagonalizabila,rezulta ca exista o matrice H de ordin n cu proprietatea ca det (H)6=0,astfel ıncat H−1AH = diag[λ1, λ2, ..., λn].Notam J = diag [λ1, λ2, . . . , λn], adica J este matricea a carei diagonala
principala consta din numerele λi, i = 1, n si toate celelalte elemente suntnule. Se verifica egalitatea AH = HJ. Cum cele doua matrice au acelasipolinom caracteristic, fiind matrice asemenea, rezulta ca A are valorile pro-prii λ1, λ2, ..., λn.Fie H = col [H1, ...,Hn] , unde Hi ∈ Cn, i = 1, n, sunt coloanele ma-
tricei H. Deoarece H este inversabila, rezulta ca rang(H) = n, vectorii{H1, ...,Hn} sunt liniar independenti si formeaza o baza ın Cn. Mai mult,
AH = Hdiag[λ1, ..., λn]⇒A col [H1, ...,Hn] = col [H1, ...,Hn] diag[λ1, ..., λn]⇒
AHi = λiHi, i = 1, n.

32 CAPITOLUL 1. NOTIUNI TEORETICE
Deci baza formata din vectorii proprii este {H1, . . . ,Hn} .Suficienta. Presupunem ca
©v(1),v(2), . . . ,v(n)
ªsunt vectorii proprii
corespunzatori valorilor proprii λ1, λ2..., λn (nu neaparat distincte) si for-meaza o baza ın Cn.Rezulta ca matricea H = col
£v(1),v(2), . . . ,v(n)
¤este inversabila. Deoa-
rece Av(i) = λiv(i), i = 1, n, rezulta ca prima coloana din AH este vectorul
Av(1) = λ1v(1), dar tot λ1v
(1) se afla si pe prima coloana din HJ. A douacoloana din AH este vectorul λ2v
(2), dar tot λ2v(2) se afla si pe a doua
coloana din HJ, etc.
A col£v(1),v(2), . . . ,v(n)
¤= col
£v(1),v(2), . . . ,v(n)
¤diag[λ1, ..., λn]⇒
H−1AH = diag [λ1, ..., λn] ,
rezulta ca A este diagonalizabila.¥Teorema 1.15 Vectorii proprii corespunzatori valorilor proprii distinctesunt liniar independenti.
Demonstratie. Fie matricea A de ordin n cu autovalorile λi distincte,adica λi 6= λj pentru i 6= j. Pentru fiecare λi, fixam cate un vector propriuv(i): Av(i) = λiv
(i), i = 1, n.Vom arata ca sistemul de vectori
©v(1),v(2), . . . ,v(n)
ªeste liniar inde-
pendent, deci formeaza o baza ın spatiul Cn. Mai ıntai, aratam ca v(1)
si v(2) sunt liniar independenti. In adevar, fie c1v(1) + c2v
(2) = θ. DinA¡c1v
(1) + c2v(2)¢= θ ⇒ c1Av
(1)+c2Av(2) = c1λ1v
(1)+c2λ2v(2) = θ. Dar
c1v(1) + c2v
(2) = θ si c1λ1v(1) + c2λ2v
(2) = θ ⇒c1 (λ2 − λ1)v
(1) = θ(1.62)
deci c1 = 0 si atunci rezulta si c2 = 0. Deci cei doi vectori sunt liniarindependenti. Presupunem acum (ipoteza inductiva) ca sistemul de vec-tori
©v(1),v(2), . . . ,v(k)
ªeste liniar independent. Va rezulta ca daca mai
adaugam si vectorul v(k+1), cei k+ 1 vectori vor fi de asemenea liniar inde-pendenti. In adevar, fie
c1v(1) + c2v
(2) + · · ·+ ckv(k) + ck+1v
(k+1) = θ. (1.63)
Inmultind ambii membri ai egalitatii (1.63) cu matricea A, obtinemrelatia
c1λ1v(1) + c2λ2v
(2) + · · ·+ ckλkv(k)+
+ck+1λk+1v(k+1) = θ.
(1.64)
1.3. TRANSFORMARE LINIARA IN VN 33
Inmultind (1.63) cu λk+1 si apoi scazand (1.64), obtinem fara dificultateca
c1 (λk+1 − λ1)v(1) + c2 (λk+1 − λ2)v
(2)+
+ · · ·+ ck (λk+1 − λk)v(k) = θ
(1.65)
care, ın baza ipotezei inductive, implica toti coeficientii din (1.65) nuli, decic1 = c2 = · · · = ck = 0. Dar atunci si ck+1 = 0, adica (1.63) implicatoti coeficientii ci, i = 1, k + 1 sunt nuli, deci cei k + 1 vectori sunt liniarindependenti. In concluzie, cei n vectori proprii sunt liniar independenti,deci matricea H = col
£v(1),v(2), . . . ,v(n)
¤, adica matricea ale carei coloane
sunt cei n vectori proprii ai lui A este nesingulara (detH 6= 0).¥
Observatia 1.6 In cazul autovalorilor simple, putem spune ca ın Rn (sauın Cn) exista o baza formata din vectori proprii ai matricei A.
Au loc egalitatile
J = H−1AH si A = HJH−1. (1.66)
Prima ınsemna ca ”am diagonalizat” matricea A. Mai interesanta este ınsacea de a doua, din care deducem
Ak = HJkH−1, k = 1, 2, 3, . . . , (1.67)
formula care, ın cazul ca autovalorile luiA sunt distincte, se poate folosi pen-tru calcularea puterilor Ak, observand ca Jk se obtine foarte usor, deoarece
Jk = diag£λk1, λ
k2, . . . , λ
kn
¤. (1.68)
Mai general, daca g (λ) este un polinom oarecare, dat prin g (λ) = b0λm+
b1λm−1+ · · ·+ bm−1λ+ bm, iar g (A) este matricea data prin formula (1.49),
din relatiile (1.67) si (1.68) deducem ca
g (A) = Hdiag [g (λ1) , g (λ2) , . . . , g (λn)]H−1. (1.69)
Putem scrie si relatia
diag [g (λ1) , g (λ2) , . . . , g (λn)] = H−1g (A)H, (1.70)
adica matricea H ”diagonalizeaza” si orice matrice g (A), ın care g (λ) esteun polinom oarecare de variabila λ. De altfel g (λi), i = 1, n sunt autovalorilelui g (A), carora le corespund aceeasi vectori proprii v(i) ai matricei A.
Teorema 1.16 (Cayley - Hamilton) Fiecare matrice patrataA (de ordinn) ısi anuleaza polinomul caracteristic, adica P (A) = 0 (0 matricea nula).

34 CAPITOLUL 1. NOTIUNI TEORETICE
Demonstratie. Plecam de la formula
(λI−A)−1 = 1
P (λ)B (λ) (1.71)
adevarata pentru orice λ diferit de autovalori (radacinile lui P (λ)). PrinB (λ) am notat matricea transpusa formata cu complementii algebrici aielementelor matricei λI−A. Elementele matricei B (λ) sunt polinoame deλ, de grad cel mult egal cu n− 1 (cele de pe diagonala principala au efectivgradul n− 1, celelalte au gradul mai mic decat n− 1). Deci putem scrie
B (λ) = B0λn−1 +B1λ
n−2 + · · ·+Bn−2λ+Bn−1 (1.72)
ın care coeficientii sunt matrice constante de ordinul n (B (λ), ca si λI−Asunt matrice de ordinul n). Prin ınmultirea relatiei (1.71) mai ıntai cu P (λ)si apoi cu λI−A (la dreapta) obtinem identitatea
P (λ) I ≡ B (λ) (λI−A) (1.73)
sau pe larg
(λn + p1λn−1 + · · ·+ pn−1λ+ pn) I ≡ (B0λn−1+
+B1λn−2 + · · ·+Bn−2λ+Bn−1) (λI−A) .
(1.74)
Din identificarea coeficientilor matriceali, rezulta
I = B0 An
p1I = B1 −B0A An−1
p2I = B2 −B1A An−2
. . . . . .pn−2I = Bn−2 −Bn−3A A2
pn−1I = Bn−1 −Bn−2A A
pnI = −Bn−1A I
(1.75)
Prin ınmultire la dreapta a acestor egalitati cu puterile descrescatoareale matricei A si sumarea tuturor egalitatilor obtinute se vede ca ın dreaptatoti termenii se reduc, deci se obtine matricea nula, iar ın stanga se obtinetocmai matricea
P (A) = An + p1An−1 + · · ·+ pn−1A+ pnI, (1.76)
de unde rezulta P (A) = 0.¥
1.3. TRANSFORMARE LINIARA IN VN 35
1.3.4 Algoritmul de diagonalizare a unei matrice
Pentru orice valoare proprie λi cu multiplicitatea mi ıncercam sa gasimmi vectori proprii liniar independenti corespunzatori acestei valori propriiλi. Daca acest procedeu reuseste pentru toate valorile proprii, atunci se potobtine n vectori proprii liniar independenti, deci matricea este diagonaliza-bila. Prezentam un algoritm de diagonalizare a unei matrice de ordin n cuelemente reale.Pasul 1. Determinarea valorilor proprii ale matricei A. Calculam poli-
nomul caracteristic P (λ) = det(λI−A) si radacinile acestuia. FieP (λ) = (λ− λ1)
n1(λ− λ2)n2 ...(λ− λp)
np .Pasul 2. Daca exista macar o radacina a polinomului caracteristic care
nu este ın R, algoritmul se opreste. Matricea A nu poate fi adusa la formadiagonala. Daca toate radacinile polinomului caracteristic sunt ın R, trecemla Pasul 3.Pasul 3. Determinarea vectorilor proprii ale matriceiA. Fie λ1, λ2, ..., λp
valorile proprii distincte cu ordinele de multiplicitate algebrica n1, n2, ...,
np,pP
i=1
ni = n.
Pentru fiecare i = 1, p, determinam vectorii proprii corespunzatori valoriiproprii λi. Pentru aceasta rezolvam p sisteme liniare omogene
(A− λiIn)x = θ, i = 1, p.
Toate solutiile liniar independente ale acestor sisteme, ın numar de mi,formeaza vectorii proprii corespunzatori autovalorii λi.Pasul 4. Daca ni = mi, ∀i = 1, p, matricea poate fi adusa la forma
diagonala si trecem la Pasul 5. In caz contrar algoritmul se opreste.Pasul 5. Determinarea formei diagonale. Matricea diagonala are forma
J = diag[λ1, ..., λ1| {z }, λ2, ..., λ2| {z }, ..., λp, ..., λp| {z }]n1 ori n2 ori np ori
iar vectorii proprii sunt reuniunea vectorilor proprii liniar independentideterminati la Pasul 3.Matricea modala H, care este si matricea de asemanare, are coloanele
formate din vectorii proprii. Are loc relatia J = H−1AH.N
1.3.5 Forma canonica Jordan
Dificultatea apare atunci cand acest procedeu nu este posibil, adica nuse poate sa avemmi vectori proprii liniar independenti coresponzator valorii

36 CAPITOLUL 1. NOTIUNI TEORETICE
proprii λi. In acest caz matricea nu este diagonalizabila. In acest caz existatotdeauna o forma relativ simpla, numita forma Jordan, la care poate fiadusa matricea.
Definitia 1.20 Matricea Jp(λ) de ordin p, (p ≥ 1, λ ∈ R)
Jp(λ) =
⎛⎜⎜⎜⎝λ 1 0 ... 0 00 λ 1 ... 0 0......... ...
......
0 0 0 ... 0 λ
⎞⎟⎟⎟⎠ (1.77)
se numeste bloc Jordan (celula Jordan) de ordin p.
Definitia 1.21 O matrice J de ordin n de forma
J = diag [Jn1(λ1),Jn2(λ2), ...,Jnk(λk)] ,
ın care Jni(λi), matrice de ordin ni, i=1, k, n1 + n2 + ... + nk = n, este unbloc Jordan corespunzator valorii proprii λi, se numeste matrice Jordande ordin n.
Definitia 1.22 Fie A o matrice de ordin n. Un sistem de q vectori v(1),v(2), ...,v(q), q ≥ 1, q ∈ N, din Rn care satisface conditiile
v(1) 6= θ, Av(1) = λv(1), Av(2) = λv(2) + v(1),
...,Av(q) = λv(q) + v(q−1).(1.78)
se numeste serie de vector propriu si asociati de lungime q corespunza-toare valorii proprii λ a matricei A, ın care v(1) este vectorul propriu numitcap de serie, iar ceilalti se numesc vectori asociati vectorului propriu.
Se poate demonstra ca vectorii dintr-o serie de vector propriu si asociatisunt liniar independenti; de asemenea daca unei serii de vector propriusi asociati ıi adaugam vectori proprii liniar independenti sau alte serii devectori proprii si asociati, sistemul de vectori obtinut este liniar independent.De aici rezulta ca daca numarul total de vectori proprii si asociati este
egal cu ordinul matricei A, atunci acestia formeaza o baza care se numestebaza Jordan corespunzatoare matricei A.
1.3.6 Algoritmul de aducere la forma Jordan
Prezentam un algoritm de aducere la forma Jordan a unei matrice deordin n cu elemente reale.

1.3. TRANSFORMARE LINIARA IN VN 37
Pasul 1. Determinarea valorilor proprii ale matricei A. Calculam poli-nomul caracteristic
P (λ) = det(λI−A) = (λ− λ1)n1(λ− λ2)
n2...(λ− λp)np,
unde λ1, λ2, ..., λp sunt valorile proprii, iar n1, n2, ..., np ordinele de multi-plicitate ale radacinilor polinomului P (λ).Pasul 2. Daca exista macar un i = 1, p astfel ıncat λi /∈ R algoritmul se
opreste. In caz contrar trecem la Pasul 3.Pasul 3. Determinarea numarului seriilor de vectori proprii si asociati.
Pentru fiecare valoare proprie ın parte λk, k = 1, p calculam
dk = nk − rang(λkI−A)si obtinem numarul de serii de vectori proprii si asociati corespunzatorivalorii proprii λk.Daca dk = 1, avem o singura serie de lungime nk formata dintr-un vector
propriu si asociati si acestei serii ıi corespunde o celula Jordan de ordin nk.Trecem la Pasul 5.Daca dk = nk, atunci exista nk serii de vectori proprii si asociati, core-
spunzatori valorii proprii λk si fiecare din aceste serii este formata dintr-unsingur vector. Trecem la Pasul 5.Daca 1 < dk < mk, trecem la Pasul 4.Pasul 4. Determinarea lungimii seriilor de vectori proprii si asociati.
Sunt dk serii de vectori proprii si asociati de lungimi pe care urmeaza sa ledeterminam. Calculam pentru j ≥ 1,
ϕ(j, λk) = rang(λkI−A)j−1 − 2 rang(λkI−A)j + rang(λkI−A)j+1.
Daca ϕ(j, λk) 6= 0, atunci avem ϕ(j, λk) serii de vectori proprii siasociati de lungime j. (Convenim ca puterea zero a oricarei matrice estematricea unitate a carei rang este egal cu n). Calculul se opreste candXj
j · ϕ(j, λk) = nk.
Pasul 5.Determinarea seriilor de vectori proprii si asociati corespunzatorvalorii proprii λk.Pornim de la seria de lungime maxima. Fie aceasta lungime s. Daca
v(1) ∈ Rn este vector propriu pentru matricea A corespunzatoare valoriiproprii λk, cap de serie pentru seria
©v(1),v(2), . . . ,v(s)
ªatunci
(A− λkIn)v(1) = θ, (A− λkIn)v
(2) = v(1), ...,
(A− λkIn)v(s) = v(s−1).
(1.79)

38 CAPITOLUL 1. NOTIUNI TEORETICE
Inlocuind din aproape ın aproape obtinem:
(A− λkIn)v(s) = v(s−1), (A− λkIn)
2v(s) = v(s−2),
. . . , (A− λkIn)s−1v(s) = v(1), (A− λkIn)
sv(s) = θ. (1.80)Deci ultimul asociat din serie este o solutie nenula a sistemului liniar
omogen (A− λIn)sv(s) = θ. Fie aceasta solutie v(s).
Observam ca (A − λIn)s−1v(s) = v(1) 6= θ. Alegem vectorul solutie a
sistemului (A − λIn)sv(s) = θ a carui imagine prin (A − λIn)
s−1 va fi unvector nenul care nu este altul decat vectorul propriu cap de serie, v(1).Ceilalti vectori din serie se determina utilizand relatiile (1.79).Trecem la seria urmatoare ın ordinea descrescatoare a lungimilor pana
se epuizeaza toate seriile corespunzatoare valorii proprii λk.Fiecarei serii de vectori proprii si asociati ıi corespunde o celula Jordan
egala cu lungimea seriei.Se reia algoritmul de la Pasul 3 pentru urmatoarea valoare proprie pana
se epuizeaza toate valorile proprii.Toate seriile de vectori proprii si asociati formeaza baza Jordan.Pasul 6. Determinarea matricei Jordan si a matricei modale.Matricea Jordan este formata din toate celulele Jordan asociate seriilor
de vectori proprii si asociati.Matricea modala H are pe coloane coordonatele vectorilor proprii si
asociati, avand grija sa le scriem ın ordinea ın care apar ın serie si ın ordineavalorilor proprii.N
1.3.7 Autovalorile unor matrice reale simetrice
Definitia 1.23 Matricea reala A = (aij) de ordinul n se numeste simetri-ca, daca coincide cu transpusa ei, adica daca AT = A.
Simetria este echivalenta cu conditia aij = aji, ∀i, j = 1, n.Teorema 1.17 Autovalorile unei matrice reale simetrice sunt reale.
Demonstratie. Notam cu j =√−1. Fie α + jβ o autovaloare a matricei
A si u + jv vectorul propriu corespunzator ei. Evident, am presupus cavectorii-coloana u si v sunt reali. Din A (u+ jv) = (α+ jβ) (u+ jv),rezulta prin separarea partilor reale si respectiv imaginare,
Au = αu− βv, Av = βu+ αv. (1.81)
Prin ınmultirea primei ecuatii la stanga cu vT si a celei de a doua cuuT , gasim

1.3. TRANSFORMARE LINIARA IN VN 39
vTAu = αvTu− βvTv, uTAv = βuTu+ αuTv. (1.82)
Deoarece vTu este un numar, el este egal cu transpusul sau, astfel ıncat
vTu =¡vTu
¢T= uTv. (1.83)
Analog si vTAu este un numar si tinand seama ca matriceaA este o matricesimetrica, retulta:
vTAu =¡vTAu
¢T= uTATv = uTAv (1.84)
Scazand prima ecuatie (1.82) din cea de a doua, obtine
β¡uTu+ vTv
¢= 0. (1.85)
Observam ca daca u =¡α1 . . . αn
¢Tatunci uTu =
nPi=1
α2i ≥ 0. De
aici rezulta ca uTu + vTv > 0 (vectorul propriu u + jv este prin definitienenul) si din (1.85) obtinem β = 0, deci orice autovaloare a unei matricesimetrice este reala.¥Observatia 1.7 Vectorii proprii sunt de asemenea reali, caci sistemul dincare ei se obtin are toti coeficientii reali. Se poate arata ca oricare ar fimatricea reala simetrica A, ın Rn exista baze formate din vectori proprii ailui A.
Definitia 1.24 Matricea reala A = (aij) de ordinul n se numeste antisi-metrica, daca AT = −A.Antisimetria este echivalenta cu conditia aij = −aji, ∀i, j = 1, n. Se ob-
serva ca elementele de pe diagonala principala sunt nule si ca cele simetricefata de aceasta diagonala sunt opuse (au suma zero).
Teorema 1.18 Autovalorile unei matrice reale antisimetrice sunt de formajβ, cu β numar real.
Demonstratie. Fie α + jβ o autovaloare a matricei A si u+ jv vectorulpropriu asociat ei. Din A (u+ jv) = (α+ jβ) (u+ jv), gasim din nouecuatiile (1.81). Prin ınmultirea la stanga a primei ecuatii cu uT si a celeide a doua cu vT , gasim
uTAu = αuTu− βuTv, vTAv = βvTu+ αvTv. (1.86)
Folosind antisimetria lui A, vom arata ca pentru orice vector x ∈ Rn,avem xTAx = 0.
xTAx =¡xTAx
¢T= xTATx = −xTAx, (1.87)
deci xTAx = 0, ∀x ∈ Rn. Adunand cele doua ecuatii (1.86), obtinem
α¡uTu+ vTv
¢= 0, (1.88)
de unde rezulta α = 0. Deci orice autovaloare este de forma jβ.¥

40 CAPITOLUL 1. NOTIUNI TEORETICE
Observatia 1.8 Cazul β = 0 este posibil. Daca n = impar si A esteantisimetrica, rezulta det(A) = 0 si p (λ) = det (λI−A) are termenul libernul. Deci λ = 0 este radacina a lui P (λ), adica este autovaloare a lui A.
Definitia 1.25 Matricea reala A = (aij) de ordinul n se numeste ortogo-nala, daca AT = A−1 (transpusa egala cu inversa).
Rezulta ca aceasta definitie este echivalenta cu conditia
AAT = ATA = I, (1.89)
unde I este matricea unitate de ordinul n. O prima constatare este cadet
¡AAT
¢= (det(A))2 = 1, deci det (A) = ±1.
P1. Daca det(A) = 1, rezulta ca fiecare element aij este egal cu com-plementul sau algebric, folosind relatia AT = A−1.
P2. Daca det(A) = −1, rezulta ca aij = −Aij, ∀i, j = 1, n, folosindaceeasi relatie.
P3. Din AAT = I rezulta ca suma patratelor elementelor de pe fiecarelinie este egala cu 1, adica
nXj=1
a2ij = 1, ∀i = 1, n. (1.90)
P4. Din AAT = I rezulta ca produsul a doua linii distincte este nul,adica
nXj=1
aijakj = 0, daca i 6= k, i, k = 1, n. (1.91)
P5. Din ATA = I rezulta ca suma patratelor elementelor de pe fiecarecoloana a matricei A este egala cu 1, adica
nXi=1
a2ij = 1, ∀j = 1, n. (1.92)
P6. Produsul a doua coloane distincte este nul, adicanXi=1
aijaik = 0, daca j 6= k, j, k = 1, n. (1.93)
P7. Indeplinirea simultana a proprietatilor P3 si P4 atrage ca A esteortogonala, deoarece AAT = I, deci AT = A−1.
P8. Indeplinirea simultana a proprietatilor P5 si P6 atrage ca A esteortogonala, deoarece ATA = I, deci AT = A−1.
Are loc si echivalenta P3 si P4 ⇔P5 si P6. In ce priveste autovalorileunei matrice ortogonale, putem enunta urmatoarea teorema.
1.4. SPATIUL VECTORIAL NORMAT 41
Teorema 1.19 Orice autovaloare λ a unei matrice ortogonale satisfaceconditia |λ| = 1.Demonstratie. Fie λ autovaloare a matricei ortogonale A si fie v unvector propriu: Av = λv. Daca λ este real, rezulta ca si v este real. Printranspunere, gasim vTAT = λvT (egalitatea a doi vectori - linie). Prinınmultirea celor doua egalitati, obtinem¡
vTAT¢(Av) = λ2
¡vTv
¢⇒
vT¡ATA
¢v = λ2
¡vTv
¢,
(1.94)
adica vTv = λ2¡vTv
¢. Deoarece vTv 6= 0 (este pozitiv), rezulta λ2 = 1,
deci λ = ±1 ın mod obligatoriu. Daca λ este complex, vom gasi
Av = λv, Av = λv, vTAT = λvT (1.95)
folosind conjugarea cantitatilor complexe. Inmultind prima si ultima ecuatiedin (1.95), gasim¡
vTAT¢(Av) = λλ
¡vTv
¢sau vTv = |λ|2
¡vTv
¢. (1.96)
Daca vectorul v, care are elemente complexe, este considerat de forma
v =¡ξ1 ξ2 · · · ξn
¢T, rezulta ca
vTv =¡ξ1 ξ2 · · · ξn
¢⎛⎜⎜⎜⎝
ξ1ξ2...ξn
⎞⎟⎟⎟⎠ =
= |ξ1|2 + |ξ2|2 + · · ·+ |ξn|2 6= 0
(1.97)
si deci din (1.97), rezulta |λ|2 = 1, adica |λ| = 1 sau λ = cosϕ+ j sinϕ.¥
1.4 Spatiul vectorial normat
Definitia 1.26 Vom spune ca un spatiu vectorial real V este normat, dacafiecarui element x ∈ V i se ataseaza un numar real, notat |x| si numitnorma sa, cu satisfacerea urmatoarelor axiome:1◦ |x| ≥ 0, ∀x ∈ V si |x| = 0⇔ x = θ (elementul nul din V),2◦ |αx| = |α| · |x|, ∀α ∈ R si ∀x ∈ V,3◦ |x+ y| ≤ |x|+ |y|, ∀x,y ∈ V.
Exemplul 1.6 Daca ne referim la multimea numerelor reale R, organizataca un spatiu vectorial normat, este evident, ca pentru orice x ∈ R, valoareasa absoluta |x| este o norma pe R.

42 CAPITOLUL 1. NOTIUNI TEORETICE
Exemplul 1.7 Daca notam C [a, b] multimea functiilor reale si continuex = x (t), definite pe intervalul [a, b], organizata ca un spatiu vectorial fatade operatiile obisnuite de adunare a functiilor si ınmultire cu scalari (numerereale), putem defini o norma pe acest spatiu prin formula
|x| = sup |x (t)| , pentru a ≤ t ≤ b. (1.98)
Observatia 1.9 Observam ca C [a, b] este un spatiu infinit dimensional,caci oricare ar fi n natural, se pot gasi n functii continue liniar independente.De exemplu: x1 (t) = 1, x2 (t) = t, . . . , xn (t) = tn−1.
1.4.1 Norme pe Rn (n ≥ 2)Acestea sunt importante, deoarece se folosesc ın unele probleme de
analiza numerica. Norma |·| este o functie: Rn → R+, care satisface celetrei axiome, din definitia 1.26. Pentru a le deosebi, atunci cand vorbimdespre mai multe norme pe acelasi spatiu, putem sa le asociem cate unindice, de exemplu |·|1, |·|2, etc. In unele carti, functia care defineste onorma este notata cu ajutorul unei litere, de exemplu ρ1 (·), ρ2 (·), etc.Adoptam conventia de notare prin bare verticale.Norma |·|1 este data prin |x|1 = maxi |xi|, unde x ∈ Rn este un vector
oarecare, dat prin x =¡x1 x2 ... xn
¢T. Cele trei axiome se verifica
imediat si nu este cazul sa insistam.
Norma |·|2 este data prin |x|2 =nPi=1
|xi|, ∀x ∈ Rn. Sa verificam cele trei
axiome:1◦ |x|2 ≥ 0 si |x|2 = 0 ⇔ x =θ, vectorul nul (coloana formata din
zerouri) este evidenta.
2◦ |αx|2 =nPi=1
|αxi| =nPi=1
|α|·|xi| = |α|nPi=1
|xi| = |α|·|x|2 pentru ∀α ∈ Rsi ∀x ∈ Rn. Deci si axioma a doua este ındeplinita.
3◦ |x+ y| =nPi=1
|xi + yi| ≤nPi=1
(|xi|+ |yi|) =nPi=1
|xi| +nPi=1
|yi| = |x|2 +|y|2, ∀x, y ∈ Rn asa cum cere a treia axioma.
Norma euclidiana pe Rn
Norma euclidiana pe Rn este definita prin formula
kxk =qx21 + x22 + · · ·+ x2n, ∀x ∈ Rn. (1.99)

1.4. SPATIUL VECTORIAL NORMAT 43
Primele doua conditii (axiome) care definesc o norma sunt evident sa-tisfacute si trebuie sa o verificam pe cea de a treia. Inegalitatea kx+ yk ≤kxk + kyk este echivalenta cu cea obtinuta din ea prin ridicarea la patrat.Aceasta din urma se scrie ın forma
nXi=1
(xi + yi)2 ≤
nXi=1
x2i + 2
vuut nXi=1
x2i ·
vuut nXi=1
y2i +nXi=1
y2i(1.100)
care, la randul ei, este echivalenta cu
nXi=1
xiyi ≤
vuut nXi=1
x2i ·
vuut nXi=1
y2i (Cauchy) (1.101)
adevarata oricare ar fi xi si yi, i = 1, n, adica oricare ar fi vectorii x,y ∈ Rn.
Exercitiul 1.9 Cand are loc egalitatea kx+ yk = kxk+ kyk ın Rn ?
Rezolvare. Se stie ca egalitateaÃnXi=1
xiyi
!2=
ÃnXi=1
x2i
!ÃnXi=1
y2i
!(1.102)
ın care xi si yi, i = 1, n sunt numere reale, are loc daca si numai daca
∃α ∈ R, astfel ıncat yi = αxi, i = 1, n. Dar atuncinPi=1
xiyi = αnPi=1
x2i si
deci trebuie ca α > 0 pentru ca (1.101) sa devina egalitate. In concluzie,trebuie sa avem relatia x = αy cu α > 0 ıntre cei doi vectori (ambii aufost presupusi nenuli). Daca unul din vectorii x si y este nul, egalitatea ındiscutie devine banala.¨
Exercitiul 1.10 Orice combinatie liniara de norme, cu coeficienti pozitivi,este o norma pe Rn.
Rezolvare. Fie ρ1 (x), ρ2 (x), . . . , ρm (x) norme definite pe Rn si norma
ρ (x) =mPi=1
ciρi (x), unde coeficientii ci, i = 1,m sunt pozitivi. In mod
evident, avem ρ (x) ≥ 0, ∀x ∈ Rn si ρ (x) = 0 ⇔ x = θ. Apoi, ρ (αx) =mPi=1
ciρi (αx) = |α|mPi=1
ciρi (x) = |α| ρ (x), ∀α ∈ R si ∀x ∈ Rn. In fine,
ρ (x+ y) =mPi=1
ciρi (x+ y) ≤mPi=1
ci (ρi (x) + ρi (y)) =
=mPi=1
ciρi (x) +mPi=1
ciρi (y) = ρ (x) + ρ (y) ,∀x,y ∈ Rn.¨

44 CAPITOLUL 1. NOTIUNI TEORETICE
Exercitiul 1.11 Daca |·| este o norma pe Rn si A = (aij) este o matricereala nesingulara (det(A) 6= 0), atunci ρ (x) = |Ax| pentru ∀x ∈ Rn de-fineste o noua norma pe Rn. (Se verifica usor cele trei axiome).
Prin acest procedeu, putem defini o infinitate de norme pe Rn, deoareceexista o infinitate de matrice nesingulare. De exemplu, daca luam norma|·|1 , matricea
A =
⎛⎝ 1 1 01 0 10 1 1
⎞⎠ (1.103)
si punem
ρ1(x)=max {|x1 + x2|, |x1 + x3|, |x2 + x3|},∀x∈R3(1.104)
avem o noua norma pe R3, daca tinem seama ca
Ax =
⎛⎝ x1 + x2x1 + x3x2 + x3
⎞⎠ , ∀x ∈ R3. (1.105)
Daca luam norma |·|2 si punem
ρ2(x)= |x1+x2|+|x1+x3|+|x2+x3| , ∀x∈R3 (1.106)
obtinem o noua norma. Daca luam norma euclidiana k·k, vom gasi o altanorma si anume
ρ3(x)=
q(x1+x2)
2+(x1+x3)2+(x2+x3)
2, ∀x∈R3.¨(1.107)
Exercitiul 1.12 Daca |·| este o norma pe Rn si A este o matrice de ordinuln, exista un numar M > 0 astfel ıncat |Ax| ≤M |x|, ∀x ∈ Rn.
Rezolvare. Multimea S = {x; x ∈ Rn cu |x| = 1} , sfera de raza 1 este omultime compacta ın Rn (marginita si ınchisa). Orice norma pe Rn este ofunctie continua de cele n variabile independente xi si deci este marginitape S (teorema lui Weierstrass). Deci avem |Ax| ≤M pentru ∀x ∈ S. Dacax ∈ Rn este un vector oarecare diferit de vectorul nul, avem |A (x/ |x|)| ≤Msi deci |Ax| ≤ M |x|. Altfel spus, avem |Ax| / |x| ≤ M pentru orice x 6= θdin Rn.¨

1.4. SPATIUL VECTORIAL NORMAT 45
Generarea normelor pentru matricele patrate
Daca |·| este o norma pe Rn, ea genereaza o anumita norma pe mul-timea Mn (R). Vom nota norma unei matrice A din aceasta multime cusimbolul |A|. Axiomele pe care le satisface o norma pe spatiulMn (R) sunturmatoarele:
1◦ |A| ≥ 0, ∀A ∈Mn (R) si |A| = 0⇔ A = 0 (matricea nula),
2◦ |αA| = |α| · |A|, ∀α ∈ R si ∀A ∈Mn (R) ,3◦ |A+B| ≤ |A|+ |B|, ∀A, B ∈Mn (R) ,4◦ |AB| ≤ |A| · |B|, ∀A, B ∈Mn (R)
Ultima axioma nu are corespondent ın cazul normei definite pe Rn. Dacaplecam de la o anumita norma pe Rn, notata |·| si A este o matrice oarecaredinMn (R), definim
|A| = sup½|Ax||x| ; x 6= θ, x ∈ Rn
¾(1.108)
unde sup (supremum) este notatia uzuala pentru marginea superioara aunei multimi de numere reale. Definitia (1.108) este corecta, deoarece acestsupremum nu poate fi ∞ (conform cu Exercitiul 1.12). Prima axioma esteevident satisfacuta. Pentru cea de a doua, scriem
|αA| = sup½|(αA)x||x| ; x 6= θ
¾=
= sup
½|α| · |Ax||x| ; x 6= θ
¾= |α| sup
½|Ax||x| ; x 6= θ
¾=
= |α| · |A| ,∀α ∈ R si ∀A ∈Mn (R) .(1.109)
Pentru a verifica axioma a treia, vom scrie
|A+B| = sup½|(A+B)x|
|x| ; x 6= θ
¾= sup
½|Ax+Bx|
|x| ; x 6= θ
¾≤
≤ sup½|Ax|+ |Bx|
|x| ; x 6= θ
¾≤ sup
½|Ax||x| ; x 6= θ
¾+
+sup
½|Bx||x| ; x 6= θ
¾= |A|+ |B| , ∀A, B ∈Mn (R) .
(1.110)
Pentru ultima axioma, scriem

46 CAPITOLUL 1. NOTIUNI TEORETICE
|AB| = sup½|(AB)x||x| ; x 6= θ
¾=
= sup
½|A (Bx)||x| ; x 6= θ
¾≤ sup
½|A| · |Bx||x| ; x 6= θ
¾=
= |A| sup½|Bx||x| ; x 6= θ
¾= |A| · |B|
(1.111)
oricare ar fi A,B ∈Mn (R). Am folosit majorarea |Ax| ≤ |A| · |x| pentruorice vector din Rn, care rezulta din definitia (1.108). In rezumat, formula(1.108) defineste ın adevar o norma peMn (R), care ın acest fel devine unspatiu vectorial normat real.
Teorema 1.20 Daca notam
|A|1 = sup½|Ax|1|x|1
; x 6= θ
¾(1.112)
pentru orice matrice A = (aij) dinMn (R), rezulta
|A|1 = maxi
nXj=1
|aij| . (1.113)
Demonstratie. Notam Ax = y si avem |Ax|1 = |y|1 = maxi|yi|. Dar
yi =nP
j=1
aijxj si |xj| ≤ |x|1 deci |yi| ≤ |x|1 ·nP
j=1
|aij|. Pentru moment, notam
M = maxi
nPj=1
|aij| si admitem ca acest maxim se atinge pentru valoarea k
a indicelui de linie i. Din |yi| ≤ M |x|1 , ∀i = 1, n avem |Ax|1 ≤ M |x|1pentru orice x ∈ Rn. Toate rapoartele multimii din (1.112) sunt marginitesuperior de M , care este deci o bariera superioara pentru aceasta multime.Daca gasim un vector ex 6=θ, pentru care raportul |Aex|1 / |ex|1 are valoareaM(echivalent |Aex|1 = M |ex|1), rezulta ca M este chiar marginea superioara(supremum) a multimii de rapoarte. Acest vector este ex, dat prin ex =(sgn ak1, sgn ak2, . . . , sgn akn)
T , are elementul de pe linia k, exk = nPj=1
|akj| =
M si norma |x|1 = 1. Deci el satisface egalitatea |Aex|1 = M |ex|1 si atunciformula (1.112) este demonstrata.¥Norma |A|1 se numeste uneori ”norma pe linii”, deoarece se obtine
sumand valorile absolute ale elementelor de pe fiecare linie si luand apoicea mai mare suma gasita.

1.4. SPATIUL VECTORIAL NORMAT 47
Teorema 1.21 Daca notam|A|2 = sup
½|Ax|2|x|2
; x 6= θ
¾, (1.114)
aceasta norma este data de formula
|A|2 = maxj
nXi=1
|aij| . (1.115)
Demonstratie. Notam Ax = y si avem |Ax|2 = |y|2 =nPi=1
|yi|. Din
yi =nP
j=1
aijxj, rezulta |yi| ≤nP
j=1
|aij| · |xj|, ∀i = 1, n si deci
|Ax|2 ≤nXi=1
ÃnX
j=1
|aij| · |xj|!=
nXj=1
ÃnXi=1
|aij|!|xj| .
(1.116)
Daca notam pentru moment M = maxj
nPi=1
|aij|, putem scrie
|Ax|2 ≤MnX
j=1
|xj| =M |x|2 , ∀x ∈ Rn. (1.117)
Ca si ın cazul precedent, daca gasim un vector ex pentru care |Aex|2 =M |ex|2, va rezulta caM = |A|2 si deci formula (1.115) este adevarata. Acestvector x ıl gasim astfel: daca admitem ca max
j
nPi=1
|aij| se realizeaza pentru
valoarea k a indicelui de coloana j, adica daca presupunem caM =nPi=1
|aik|,consideram vectorul x ale carui elemente sunt egale cu zero, ın afara de celde pe linia k, care este egal cu 1. El are proprietatea ca Aex coincide cucoloana k a matricei A, deci |Aex|2 = M si pe de alta parte |ex|2 = 1. Prinurmare, avem |Aex|2 =M |ex|2 si demonstratia este ıncheiata.¥Observatia 1.10 Nu trebuie sa credem ca toate normele pentru matriceledinMn (R) sunt generate de normele pentru vectorii din Rn, dupa cum seva vedea din urmatorul exemplu.
Norma euclidiana pentru matricele din Mn (R)
Pentru A = (aij) definim norma sa euclidiana, notata kAk, prin for-mula
kAk =
vuut nXi=1
nXj=1
a2ij. (1.118)

48 CAPITOLUL 1. NOTIUNI TEORETICE
Primele doua axiome sunt ın mod evident ındeplinite. Cea de a treiaeste
kA+Bk ≤ kAk+ kBk , ∀A,B ∈Mn (R) . (1.119)
Aceasta inegalitate este echivalenta cu cea obtinuta prin ridicare lapatrat
kA+Bk2 ≤ kAk2 + 2 kAk · kBk+ kBk2 (1.120)
care se scrie pe larg astfelnX
i,j=1
(aij + bij)2 ≤
nXi,j=1
a2ij + 2
vuut nXi,j=1
a2ij ·
vuut nXi,j=1
b2ij +nX
i,j=1
b2ij.(1.121)
Am folosit pentru suma dublanPi=1
nPj=1
notatia prescurtatanP
i,j=1
evident,
din motive de ordin grafic. La randul sau, ultima inegalitate este echivalentacu
nXi,j=1
aijbij ≤
vuut nXi,j=1
a2ij ·
vuut nXi,j=1
b2ij (Cauchy). (1.122)
Ne putem convinge de aceasta, numerotand elementele aij, ıncepand cua11 si terminand cu ann si scriindu-le ın sirul α1, α2, . . . , αN unde N = n2.La fel facem si cu elementele bij, pe care le sriem β1, β2, . . . , βN . Atunciinegalitatea (1.122) se scrie ın forma
NXi=1
αiβi ≤
vuut NXi=1
α2i ·
vuut NXi=1
β2i (1.123)
si este evident adevarata. A mai ramas de verificat ultima axioma:
kABk ≤ kAk · kBk , ∀A,B ∈Mn (R) . (1.124)
Intai vom arata ca avem kAxk ≤ kAk · kxk, ∀x ∈ Rn. In adevar, daca
punem Ax = y, avem yi =nP
j=1
aijxj si deci y2i =
ÃnP
j=1
aijxj
!2, din
y2i ≤Ã
nXj=1
a2ij
!ÃnX
j=1
x2j
!=
ÃnX
j=1
aij
!kxk2 , i =1, n. (1.125)

1.4. SPATIUL VECTORIAL NORMAT 49
si ın continuare
kAxk2 =nPi=1
y2i ≤nPi=1
ÃnP
j=1
a2ij
!kxk2 =
=
ÃnPi=1
nPj=1
a2ij
!kxk2 = kAk2 · kxk2
(1.126)
adica kAxk ≤ kAk · kxk. Daca v(1),v(2), . . . ,v(n) sunt coloanele matriceiB, vectorii Av(1), Av(2), . . . , Av(n) sunt coloanele matricei AB, adica
AB = colhAv(1),Av(2), . . . ,Av(n)
isi
kABk2 =°°°Av(1)°°°2 + °°°Av(2)°°°2 + · · ·+ °°°Av(n)°°°2 ≤
≤ kAk2³°°v(1)°°2 + · · ·+ °°v(n)°°2´ = kAk2 · kBk2 (1.127)
deci (1.124) este adevarata.
Observatia 1.11 Matricea unitate In are norma euclidiana egala cu√n.
Daca ar exista o norma |·| pentru vectori, care sa ne conduca la norma k·kpentru matrice, ar trebui sa avem kInk = sup
|Inx||x| = sup
|x||x| = 1, ceea ce
este evident imposibil.
Exercitiul 1.13 In spatiulMn (R), punem ρ (A) = maxi,j|aij| pentru orice
matrice A. Sa se arate ca aceasta functie nu defineste o norma peMn (R).
Rezolvare. Fie A = B cu aij = bij = 1, ∀i, j = 1, n. Matricea AB aretoate elementele egale cu n. Deci ρ (A) = ρ (B) = 1, iar ρ (AB) = n si nuare loc inegalitatea ρ (AB) ≤ ρ (A) ρ (B).¨
Exercitiul 1.14 Daca punem ρ (A) = n
µmaxi,j|aij|
¶, avem o norma pe
spatiulMn (R).
Rezolvare. Primele trei axiome se verifica imediat. Pentru a o verifica peultima, luam doua matrice oarecareA = (aij), B = (bij) si notam C = AB.
Avem cij =nP
k=1
aikbkj, de unde gasim
50 CAPITOLUL 1. NOTIUNI TEORETICE
|cij| ≤nP
k=1
|aik| · |bkj| ≤
≤µ
nPk=1
|aik|¶(max |bkj|) ≤ (nmax |aik|) (max |bkj|) (1.128)
decin |cij| ≤ (nmax |aik|) (nmax |bkj|) , ∀i, j = 1, n (1.129)
ceea ce implica ρ (AB) ≤ ρ (A) ρ (B).¨
1.5 Spatiul euclidian
Un spatiu euclidian este un spatiu vectorial real, ın care avem o nouaoperatie si anume produsul scalar a doi vectori. Un astfel de spatiu poatefi finit dimensional sau cu o infinitate de dimensiuni. Un spatiu euclidiann-dimensional se noteaza de obicei cu En. Produsul scalar este o functiedefinita pe E × E si cu valori ın R si se noteaza cu simbolul h·, ·i, adicaprin hx,yi ıntelegem produsul scalar (numar real) al celor doi vectori x siy. Uneori, se foloseste si notatia (x,y), dar o preferam pe prima, deoarecea doua poate sa produca confuzie. Axiomele care definesc un produs scalarsunt urmatoarele:1◦ hx,yi ≥ 0, ∀x,y ∈ E si hx,xi = 0⇔ x = θ,2◦ hx,yi = hy,xi, ∀x,y ∈ E,3◦ hαx,yi = α hx,yi, ∀α ∈ R si ∀x,y ∈ E4◦ hx+ y, zi = hx, zi+ hy, zi, ∀x,y, z ∈ EO proprietate a produsului scalar (ın orice spatiu euclidian E) este
Teorema 1.22 (Inegalitatea Schwarz - Cauchy-Buniakovski) In o-rice spatiu euclidian, este adevarata relatia
hx,yi2 ≤ hx,xi · hy,yi ,∀x,y ∈ E. (1.130)
Demonstratie. Daca unul din vectori este nul, inegalitatea este adevaratasi se reduce la 0 ≤ 0. De aceea, putem presupune ca ambii vectori suntnenuli (6=θ ). Avem
htx+ y, tx+ yi = t2 hx,xi+ 2t hx,yi+ hy,yi ≥ 0, ∀t ∈ R(1.131)
si de aici rezulta ca discriminantul trinomului este ≤ 0, deci (1.130) esteadevarata.¥

1.5. SPATIUL EUCLIDIAN 51
Inegalitatea poate fi scrisa si ın forma ehivalenta
|hx,yi| ≤phx,xi ·
phy,yi, ∀x,y ∈ E. (1.132)
Daca punem kxk =phx,xi, definim o norma pe E, caci sunt ındeplinite
toate conditiile normei si anume:1◦ kxk ≥ 0, ∀x ∈ E si kxk = 0⇔ x =θ,2◦ kαxk =
phαx, αxi =
pα2 hx,xi = |α| · kxk, ∀α ∈ R si ∀x ∈ E,
3◦ kx+ yk ≤ kxk+ kyk, ∀x,y ∈ E.Pentru a demonstra conditia 3◦, tinem seama ca este echivalenta cu cea
obtinuta prin ridicare la patrat si anume
hx+ y,x+ yi ≤ hx,xi+ 2 kxk · kyk+ hy,yi (1.133)
care la randul sau este echivalenta cu (1.132), ce poate fi transcrisa ın forma
|hx,yi| ≤ kxk · kyk . (1.134)
Putem sa ne referim la norma k·k, spunand ca este cea generata deprodusul scalar din spatiul euclidian E.Spatiul vectorial real Rn devine spatiu euclidian, daca definim produsul
scalar dupa formula
hx,yi = yTx =nXi=1
xiyi (1.135)
ın care x si y sunt vectori oarecare din Rn, dati prin x =¡x1 x2 . . . xn
¢Tsi respectiv y =
¡y1 y2 . . . yn
¢T. Verificarea celor trei axiome ale
produsului scalar este imediata.De observat ca norma k·k generata pe Rn de produsul scalar, este norma
euclidiana (introdusa anterior) data de formula
kxk =qx21 + x22 + · · ·+ x2n, ∀x ∈ Rn. (1.136)
Definitia 1.27 Daca pentru doi vectori x si y dintr-un spatiu euclidianEn avem hx,yi = 0, se spune ca cei doi vectori sunt ortogonali si se scrieaceasta prin simbolul x ⊥ y. Daca un vector x are norma (uneori se spune”lungimea”) egala cu 1, se spune ca el este normat si se numeste versor.
Definitia 1.28 Spunem ca o baza©v(1),v(2), . . . ,v(n)
ªdin En este orto-
normata, dacav(i),v(j)
®= 0 pentru i 6= j si
v(i),v(i)
®= 1, ∀i = 1, n
(echivalent cuv(i),v(j)
®= δij unde δij =
½0, pentru i 6= j1, pentru i = j
, simbolul lui
Kroneker).

52 CAPITOLUL 1. NOTIUNI TEORETICE
In legatura cu aceasta definitie, are loc urmatoarea teorema.
Teorema 1.23 (Procedeul de ortogonalizare Gram-Schmidt). In o-rice spatiu euclidian En exista baze ortonormate (prescurtat B.O.N).Demonstratie. Fie
©v(1),v(2), . . . ,v(n)
ªo baza oarecare ın En si sa con-
sideram vectorii⎧⎪⎪⎪⎪⎨⎪⎪⎪⎪⎩u(1) = v(1)
u(2) = v(2) + α21u(1)
u(3) = v(3) + α31u(1) + α32u
(2)
. . .u(n) = v(n) + αn1u
(1) + αn2u(2) + · · ·+ αn,n−1u
(n−1)(1.137)
cu proprietatea ca fiecare dintre ei (ın afara de primul) este ortogonal petoti cei care ıl preced. Astfel, avem
u(2),u(1)®= 0⇒
v(2),u(1)
®+ α21
u(1),u(1)
®= 0
⇒ α21 = −v(2),u(1)
®hu(1),u(1)i (1.138)
si am gasit (ın mod unic) constanta α21. In continuare, avemu(3),u(1)
®= 0⇒
v(3),u(1)
®+ α31
u(1),u(1)
®= 0
⇒ α31 = −v(3),u(1)
®hu(1),u(1)i (1.139)
si ınca u(3),u(2)
®= 0⇒
v(3),u(2)
®+ α32
u(2),u(2)
®= 0
⇒ α32 = −v(3),u(2)
®hu(2),u(2)i (1.140)
si am gasit (ın mod unic) si vectorul u(3). Presupunand ca am determinatk − 1 vectori cu proprietatile cerute, aratam ca procedeul poate continua,determinandul si pe cel de al k-lea, adica pe cel imediat urmator. El estede forma
u(k) = v(k) + αk1u(1) + · · ·+ αk,k−1u
(k−1) (1.141)
ın care coeficientul αk1, i = 1, k − 1 se afla din conditiile de ortogonalitatepe cei k − 1 vectori aflati anterior (si care sunt ortogonali ıntre ei). Astfel,avem

1.5. SPATIUL EUCLIDIAN 53⎧⎪⎪⎪⎪⎪⎪⎪⎨⎪⎪⎪⎪⎪⎪⎪⎩
u(k),u(1)
®=v(k),u(1)
®+ αk1
u(1),u(1)
®= 0⇒ αk1 = −
v(k),u(1)
®hu(1),u(1)i
. . .u(k),u(k−1)
®=v(k),u(k−1)
®+ αk,k−1
u(k−1),u(k−1)
®= 0⇒
αk,k−1 = −v(k),u(k−1)
®hu(k−1),u(k−1)i
(1.142)
si ın concluzie, putem determina toti cei n vectori din (1.137), care suntliniar independenti (de ce?) si deci nenuli. Ei sunt ortogonali doi cate doi sidaca ıl ımpartim pe fiecare la lungimea sa, obtinem o baza ortonormata.¥
Exercitiul 1.15 Sa se afle o baza ortonormata ın R3, plecand de la baza
v(1) =
⎛⎝ 122
⎞⎠ ,v(2) =
⎛⎝ −135
⎞⎠ ,v(3) =
⎛⎝ 40−2
⎞⎠ .(1.143)
Rezolvare. Fie u(1) = v(1) si u(2) = v(2) + α21v(1),
u(2),u(1)
®= 0 ⇒
α21 = −v(2),u(1)
®/u(1),u(1)
®= −5/3. Va rezulta ca u(2) este dat prin
u(2) =¡−8/3 −1/3 5/3
¢T.
Apoi, ıl cautam pe u(3) ın forma u(3) = v(3) + α31u(1) + α32u
(2) si
gasim α31 = 0, α32 = 7/5. Va rezulta ca u(3) =
¡4/15 −7/15 5/15
¢T.
Inmultind pe u(2) cu 3 si pe u(3) cu 15, am gasit trei vectori ortogonali sianume ⎛⎝ 1
22
⎞⎠ ,
⎛⎝ −8−15
⎞⎠ ,
⎛⎝ 4−75
⎞⎠ sau
⎛⎝ 132323
⎞⎠ ,
⎛⎜⎝ −8
3√10
− 13√10
53√10
⎞⎟⎠ ,
⎛⎜⎝4
3√10
− 73√10
53√10
⎞⎟⎠(1.144)
ultimii trei formand o baza ortonormata.¨Exercitiul 1.16 Fie
©v(1),v(2), . . . ,v(n)
ªsi©u(1),u(2), . . . ,u(n)
ªdoua baze
ortonormate ın En. Sa se arate ca matricea schimbarii de baza (trecere dela prima la a doua) este ortogonala.
Rezolvare. Daca notam u(i) =nP
k=1
akiv(k), i = 1, n, matricea schimbarii de
baza este A = (aij) si avem

54 CAPITOLUL 1. NOTIUNI TEORETICE
u(i),u(j)
®=
¿nP
k=1
akiv(k),
nPm=1
amjv(m)
À=
=nP
j=1
nPm=1
akiamj
v(k),v(m)
®=
nPk=1
akiakj.(1.145)
Prin urmare, avemnP
k=1
akiakj = 0 pentru i 6= j sinP
k=1
a2ki = 1 pentru
i = 1, n, adica A este matrice ortogonala.¨Exercitiul 1.17 Fie
©v(1),v(2), . . . ,v(n)
ªsi©u(1),u(2), . . . ,u(n)
ªdoua baze
ın En. Daca prima este ortonormata si matricea schimbarii de baza (tre-cere de la prima la a doua) este ortogonala, rezulta ca si a doua baza esteortonormata.
Rezolvare. Folosind notatiile din exercitiul precedent si relatia (1.145),rezulta ca avem
u(i),u(j)
®= 0 pentru i 6= j si
u(i),u(i)
®= 1 pentru
i = 1, n, adica si a doua baza este ortonormata.¨Definitia 1.29 O transformare liniara f : En → En se numeste ortogo-nala daca pastreaza produsul scalar al vectorilor, adica daca
hf (x) , f (y)i = hx,yi , ∀x,y ∈ En.
Teorema 1.24 Matricea unei transformari ortogonale ın orice baza orto-normata dintr-un spatiu euclidian En este o matrice ortogonata.Demonstratie. Fie
©v(1),v(2), . . . ,v(n)
ªo baza ortonormata ın En. Din
egalitateaf¡v(i)¢, f¡v(j)
¢®=v(i),v(j)
®= δij, i, j = 1, n rezulta ca vec-
torii©f(v(1)), f(v(2)), . . . , f(v(n))
ªformeaza si ei o baza ortonormata. Daca
A = (aij) este matricea lui f ın baza aleasa, adica f¡v(i)¢=
nPk=1
akiv(k),
i = 1, n rezultaf¡v(i)¢, f¡v(j)
¢®=
¿nP
k=1
akiv(k),
nPm=1
amjv(m)
À=
=nP
k=1
nPm=1
akiamj
v(k),v(m)
®=
nPk=1
akiakj. (1.146)
Prin urmare, avemnX
k=1
akiakj = 0 daca i 6= j sinX
k=1
a2ki = 1,∀i = 1, n,(1.147)
adica A este o matrice ortogonala.¥Definitia 1.30 Transformarea liniara f : En → En se numeste autoad-juncta, daca hf (x) ,yi = hx, f (y)i , ∀x,y ∈ En.

1.5. SPATIUL EUCLIDIAN 55
Teorema 1.25 In orice baza ortonormata din En, matricea unei trans-formari liniare autoadjuncte este simetrica si reciproc, daca exista o bazaortonormata ın care matricea unei transformari liniare este simetrica atuncitransformarea este autoadjuncta.
Demonstratie. Necesitatea. Daca x =nPi=1
ξiv(i) si y =
nPj=1
ηjv(j), putem
scrie
hf (x) ,yi =*
nXi=1
ξif¡v(i)¢,
nXj=1
ηjv(j)
+=
nXi=1
nXj=1
ξiηjf¡v(i)¢,v(j)
®.
(1.148)
Daca A =(aij) este matricea lui f ın baza aleasa, atuncif¡v(i)¢,v(j)
®=
*nX
k=1
akiv(k),v(j)
+=
nXk=1
akiv(k),v(j)
®= aij,
(1.149)
unde am tinut seama ca vectorii v(i), i = 1, n formeaza o baza ortonormata.Din ultimele doua relatii, rezulta ca
hf (x) ,yi =nXi=1
nXj=1
ajiξiηj, ∀x,y ∈ En. (1.150)
Schimband rolul vectorilor x si y ın formula precedenta, vom gasi ca
hx, f (y)i = hf (y) ,xi =nXi=1
nXj=1
ajiηiξj =nXi=1
nXj=1
aijξiηj;(1.151)
si decinXi=1
nXj=1
(aij − aji) ξiηj = 0. (1.152)
deoarece variabilele ξi si ηj sunt arbitrare, obtinem aij = aji, i, j = 1, n,adica matricea A este simetrica.Suficienta. Daca exista ın En o baza ortonormata, ın care matricea unei
transformari liniare f este simetrica, rezulta ca f este autoadjuncta. Inadevar, din (1.150) si (1.151) se vede ca ın ipoteza aij = aji, i, j = 1, navem hf (x) ,yi = hx, f (y)i, ∀x,y ∈ En.¥
Definitia 1.31 Daca f : Vn → Vn este o transformare liniara, vom spuneca vectorul v 6= θ este un vector propriu pentru f , daca exista un scalarλ, astfel ıncat f (x) = λx. Numarul λ se numeste autovaloare (valoareproprie) a transformarii f .

56 CAPITOLUL 1. NOTIUNI TEORETICE
Daca f are matricea A = (aij) ın o baza©e(1), e(2), . . . , e(n)
ªdin Vn,
iar vectorul propriu ıl cautam ın forma v =nPi=1
ξie(i), relatia f (x) = λx
conduce la rezolvarea sistemului⎧⎪⎪⎨⎪⎪⎩(λ− α11) ξ1 − α12ξ2 − . . . − α1nξn = 0−α21ξ1 + (λ− α22) ξ2 − · · ·− α2nξn = 0
. . .−αn1ξ1 − αn2ξ2 − · · ·+ (λ− αnn) ξn = 0
(1.153)
din care se vede ca autovalorile lui f sunt autovalorile matricei A, iar coor-donatele ξi sunt elementele vectorului propriu din Rn, asa cum au fost eledefinite anterior.
Observatia 1.12 Autovalorile unei transformari liniare nu depind de bazaaleasa ın Vn deoarece matricele unei transformari liniare sunt matrice aseme-nea (observatia 1.5) iar matricele asemenea au acelasi polinom caracteristic(exercitiul 1.8). Autovalorile unei transformari autoadjuncte sunt reale, caciele apar ca autovalori ale unei matrice reale simetrice.
O proprietate importanta a transformarilor liniare autoadjuncte este ceastabilita de urmatoarea teorema:
Teorema 1.26 Fie f : En → En o transformare liniara autoadjuncta.Atunci, exista ın spatiul euclidian En o baza ortonormata, formata din vec-tori proprii ai lui f .
Demonstratie. Stiind ca autovalorile lui f sunt reale, fixam una dintre ele,pe care o notam λ1. Din sistemul (1.153), ın care punem λ = λ1, putemgasi cel putin un vector propriu ın En, pe care ıl normam si ıl notam e(1)
astfel ıncat f¡e(1)¢= λ1e
(1).
Consideram apoi multimea En−1 =©x;x ∈ En,
x, e(1)
®= 0
ª, care con-
sta din toti vectorii x ∈ En, ortogonali pe vectorul propriu e(1). En−1 esteun subspatiu vectorial al lui En, avand proprietatea ca x ∈ En−1 rezultaca f (x) ∈ En−1. In adevar,
f (x) , e(1)
®=x, f
¡e(1)¢®= λ1
x, e(1)
®= 0.
Putem scrie f : En−1 → En−1 si atunci f are macar un vector propriu(normat) e(2) ∈ En−1. Acest vector satisface conditia
e(2), e(1)
®= 0.
Consideram En−2 =©x;x ∈ En,
x, e(1)
®=x, e(2)
®= 0
ªmultimea vec-
torilor ortogonali pe e(1) si e(2). Aceasta este un subspatiu vectorial, dedimensiune n − 2, invariant fata de transformarea f , adica x ∈ En−2 ⇒f (x) ∈ En−2, adica f : En−2 → En−2. Rezulta ca f are un vector propriu

1.5. SPATIUL EUCLIDIAN 57
(normat) e(3) ∈ En−2. Acesta este ortogonal pe precedentii sai e(1) si e(2).Continuand ın acest mod, ajungem sa gasim n−1 vectori proprii (normati)e(1), e(2), . . . , e(n−1), fiecare fiind ortogonal pe toti cei care ıl preced. Vec-torul e(n−1) ∈ E2 =
©x;x ∈ En,
x, e(i)
®= 0, i = 1, n− 2
ª, acest subspatiu
de dimensiune doi fiind de asemenea invariant ın raport cu transformareaf , adica f (E2) ⊂ E2.In fine, definim un alt subspatiu invariant fata de f , notat E1 si dat
prin E1 =©x;x ∈ En,
x, e(i)
®= 0, i = 1, n− 1
ª, ın care gasim un alt vector
propriu e(n), ortogonal pe toti cei care ıl preced si pe care ıl putem consideranormat (de lungime unu).In concluzie, am gasit n vectori proprii normati ai transformarii f si
anume e(1), e(2), . . . , e(n), ortogonali doi cate doi si versori:e(i), e(j)
®= 0
pentru i 6= j sie(i), e(i)
®= 1 pentru i = 1, n. Acesti vectori sunt liniar
independenti. In adevar din c1e(1) + c2e
(2) + · · · + cne(n) = θ, rezulta prin
ınmultirea scalara cu e(i) ca cie(i), e(i)
®= ci = 0, ∀i = 1, n.
Deci ei formeaza baza ortonormata cautata ın En.¥Observatia 1.13 Au loc incluziunile En ⊃ En−1 ⊃ · · · ⊃ Ek ⊃ · · · ⊃ E2 ⊃E1, fiecare Ek fiind un subspatiu de dimensiune k, k = 1, n.
Aplicatie ın cazul spatiului Rn. Baza standard ın Rn este formatadin vectorii
u(1) =
⎛⎜⎜⎜⎜⎜⎝10...00
⎞⎟⎟⎟⎟⎟⎠ ,u(2) =
⎛⎜⎜⎜⎜⎜⎝01...00
⎞⎟⎟⎟⎟⎟⎠ , . . . ,u(n) =
⎛⎜⎜⎜⎜⎜⎝00...01
⎞⎟⎟⎟⎟⎟⎠ (1.154)
si este ortonormata. Coordonatele unui vector oarecare x, exprimat prin
x =¡x1 x2 . . . xn
¢Tsunt chiar numerele xi, i = 1, n deoarece este
evident ca avem x =nPi=1
xie(i).
Fie A = (aij) o matrice de ordinul n, matricea ın baza standard atransformarii liniare f : Rn → Rn, definita prin conditiile
f¡u(i)¢=
nXj=1
ajiu(j), i = 1, n.
Avem

58 CAPITOLUL 1. NOTIUNI TEORETICE
f¡u(1)
¢=
⎛⎜⎜⎜⎝a11a21...
an1
⎞⎟⎟⎟⎠ , . . . , f¡u(i)¢=
⎛⎜⎜⎜⎝a1ia2i...ani
⎞⎟⎟⎟⎠ ,
. . . , f¡u(n)
¢=
⎛⎜⎜⎜⎝a1na2n...
ann
⎞⎟⎟⎟⎠(1.155)
adica acesti vectori sunt coloanele matricei A. Scriind x =nPi=1
xiu(i) si
f (x) =nPi=1
xif¡u(i)¢se vede ca putem exprima aceasta transformare si prin
egalitatea matriceala f (x) = Ax (produs de matrice), ∀x ∈ Rn.Daca ın plus matricea reala A este si simetrica, conform celor spuse,
transformarea liniara f care o admite ca matrice a sa ın baza standard, adica
transformarea definita prin f¡u(i)¢=
nPj=1
ajiu(j), i = 1, n este autoadjuncta,
adica avem hf (x) ,yi = hx, f (y)i, ∀x,y ∈ Rn.
Observatia 1.14 Deoarece atat autovalorile, cat si vectorii proprii ai ma-tricei simetrice A coincid cu autovalorile si vectorii proprii ai transformariiautoadjuncte (sistemul (1.153)), rezulta ca pentru A exista ın Rn o bazaortonormata din vectori proprii ai sai si ca deci orice matrice simetrica poatefi diagonalizata cu ajutorul unei matrice ortogonale!
Observatia 1.15 DacaA (simetrica) are autovalorile λi, i = 1, n distincte,gasim pentru fiecare λi cate un vector propriu (normat), ansamblul lorformand baza ortonormata cautata. Daca o autovaloare are multiplicitateap (2 ≤ p ≤ n), ei ıi corespund p vectori proprii independenti. Daca ei nu suntortogonali doi cate doi, folosim procedeul de ortogonalizare Gram-Schimdt,obtinand pentru autovaloarea respectiva un numar de vectori proprii ortog-onali ıntre ei egal cu multiplicitatea sa (adica p). Trebuie sa tinem seama defaptul ca orice combinatie liniara nenula de vectori proprii corespunzatoriaceleeasi autovalori λ, este de asemenea vector propriu corespunzator cu λ.In adevar, daca avem Av(i) = λv(i), i = 1, p atunci
v=
pXi=1
civ(i)⇒Av=
pXi=1
ciAv(i)=λ
pXi=1
civ(i)=λv.
(1.156)
Vom ilustra cele expuse prin urmatorul exercitiu.

1.5. SPATIUL EUCLIDIAN 59
Exercitiul 1.18 Se considera matricea
A =
⎛⎝ 1 2 −42 −2 −2−4 −2 1
⎞⎠ .
(a) Sa se arate ca ın R3 exista o baza formata din vectori proprii ai lui A.(b) Sa se afle o baza ortonormata formata din vectori proprii ai matricei A.
Rezolvare. (a) Aflam polinomul caracteristic P (λ) = det (λI−A) =(λ+ 3)2 (λ− 6). Avem autovalorile λ1 = λ2 = −3, λ3 = 6. Pentru aflareavectorilor proprii folosim sistemul (1.153), ın cazul n = 3. Pentru λ = −3,vom gasi doi vectori proprii liniar independenti (sistemul se reduce la o
singura ecuatie) si anume v(1) si v(2), dati prin v(1) =¡1 0 1
¢Tsi v(2) =¡
1 −2 0¢T. Pentru λ = 6. gasim un singur vector propriu si anume
v(3), dat prin v(3) =¡2 1 −2
¢T, facand evident abstractie de factorii de
proportionalitate. Acesti trei vectori sunt liniar independenti si dupa cum afost stabilit mai demult, ın cazul general, matricea H = col
£v(1),v(2),v(3)
¤H =
⎛⎝ 1 1 20 −2 11 0 −2
⎞⎠satisface conditia AH = HJ sau J = H−1AH, unde J = diag [−3,−3, 6].(b) Pentru a afla baza ortonormata cautata, aplicam procedeul de or-
togonalizare vectorilor v(1) si v(2), punand e(1) = v(1), e(2) = v(2) + αv(1) sigasind, din ecuatia
v(2) + αe(1), e(1)
®= 0 ca α = −1/2, de unde avem
e(2) =
⎛⎝ 1−20
⎞⎠− 12
⎛⎝ 101
⎞⎠ =
⎛⎝ 12
−2−12
⎞⎠ .Acum avem o baza ın R3, formata din trei vectori ortogonali doi cate
doi ⎛⎝ 101
⎞⎠ ,
⎛⎝ 12
−2−12
⎞⎠ ,
⎛⎝ 21−2
⎞⎠ ,
iar daca ıl normam pe fiecare, gasim baza ortonormata cautata⎛⎜⎝1√2
01√2
⎞⎟⎠ ,
⎛⎜⎝13√2
− 43√2
− 13√2
⎞⎟⎠ ,
⎛⎜⎝2313
−23
⎞⎟⎠ .

60 CAPITOLUL 1. NOTIUNI TEORETICE
Schimband notatiile si numindu-i pe acesti vectori e(1), e(2), e(3) avem oalta matrice H = col
£e(1), e(2), e(3)
¤, care satisface si ea conditia AH = HJ,
unde J a fost definita anterior (notatia J provine de la numele matemati-cianului Jordan). Evident ca avem din nou J = H−1AH, dar acum H fiindo matrice ortogonala, rezulta H−1 = HT si deci putem scrie J = HTAH.Ordinea ın care se numeroteaza autovalorile este arbitrara, de exemplu amfi putut pune λ1 = 6, λ2 = −3, λ3 = −3 si atunci se modifica si matriceaH (se schimba coloanele ıntre ele).¨Observatia 1.16 Chiar daca fixam ordinea autovalorilor (deci si a vecto-rilor proprii), matriceaH (deci si H) nu este unic determinata. In exemplulprecedent, puteam sa fi schimbat primele doua coloane ıntre ele (ambii vec-tori v(1) si v(2) corespund aceleeasi autovalori λ = −3).O consecinta importanta a teoremei care spune ca orice matrice reala
simetrica de ordinul n are n vectori proprii liniar independenti este o metodade aducere a unei forme patratice la forma canonica (suma de patrate). Saconsideram un polinom omogen de gradul doi ın variabilele x1, x2, . . . , xn,notat prescurtat prin f (x) ın loc de f (x1, x2, . . . , xn). Acesta are forma
f (x) =nXi=1
aiix2i +
Xi<j
bijxixj. (1.157)
Daca notam bij = 2aij si punem aji = aij, i, j = 1, n, definim o matricereala simetrica A = (aij) de ordinul n si este evident ca putem scrie
f (x) =nXi=1
nXj=1
aijxixj =nXi=1
xi
ÃnX
j=1
aijxj
!= xTAx
(1.158)
unde x este vectorul din Rn, definit prin x =¡x1 x2 . . . xn
¢T. Daca
ne gandim la cei n vectori proprii liniar independenti ai lui A, notati v(1),v(2), . . . , v(n) care formeaza o baza ortonormata ın Rn si punem H =col£v(1),v(2), . . . ,v(n)
¤, stim ca avem HTAH = J, unde
J = diag [λ1, λ2, . . . , λn] ,
λi cu i = 1, n fiind autovalorile matricei H. Trecerea de la baza standarddin Rn la baza ortonormata formata din vectorii proprii v
(i), i = 1, n se facecu ajutorul matricei H. Daca notam ξ1, ξ2, . . . , ξn coordonatele vectoruluix ın noua baza, aceasta trecere o putem reda prescurtat (matriceal), scriindx = Hξ, unde ξ este vectorul-coloana avand elementele ξi, i = 1, n. Atunci,vom putea scrie

1.5. SPATIUL EUCLIDIAN 61
f (x) = xTAx = (Hξ)T A (Hξ) =
= ξT¡HTAH
¢ξ = ξTJξ =
nPi=1
λiξ2i ,
(1.159)
si vom spune ca am gasit o forma canonica pentru f (suma de patrate alevariabilelor ξi). Putem exemplifica cele spuse aici, folosind matricea A dinexercitiul precedent.
Exercitiul 1.19 Sa se aduca la forma canonica, forma patratica
f (x) = x21 − 2x22 + x23 + 4x1x2 − 8x1x3 − 4x2x3.Rezolvare. Avem a11 = 1, a22 = −2, a33 = 1, a12 = 2, a13 = −4, a23 = −2deci matricea formei patratice f este
A =
⎛⎝ 1 2 −42 −2 −2−4 −2 1
⎞⎠ .
Matricea ortogonala care diagonalizeaza pe A este
H =
⎛⎜⎝1√2
13√2
23
0 − 43√2
13
1√2− 13√2−23
⎞⎟⎠ ,
iar autovalorile lui A sunt λ1 = −3, λ2 = −3, λ3 = 6. Facand substitutia
x = Hξ ⇔
⎧⎪⎪⎪⎪⎪⎪⎨⎪⎪⎪⎪⎪⎪⎩
x1 =1√2ξ1 +
1
3√2ξ2 +
2
3ξ3
x2 = − 4
3√2ξ2 +
1
3ξ3
x3 =1√2ξ1 −
1
3√2ξ2 −
2
3ξ3
obtinem f(x) = −3ξ21 − 3ξ22 + 6ξ23 . Metoda descrisa se numeste aducereaunei forme patratice la forma canonica, printr-o transformare ortogonala decoordonate.¨Succesul acestei metode este conditionat de aflarea autovalorilor matricei
A, care presupune rezolvarea unei ecuatii algebrice de gradul n (ın cazulgeneral). Vom vedea ca exista alte metode de aducere la forma canonica,care nu presupun aflarea autovalorilor. Pana atunci ınsa, sa retinem ca ın Rn
exista o baza canonica ortonormata, ın care forma patratica f(x) = xTAx
sa fie scrisa f(x) =nPi=1
λiξ2i , ın care λi, i = 1, n sunt autovalorile lui A
(simple sau multiple), iar ξi, i = 1, n sunt coordonatele vectorului x ın bazacanonica.

62 CAPITOLUL 1. NOTIUNI TEORETICE
1.6 Forme liniare, biliniare si patratice
Definitia 1.32 O aplicatie (functie) f : V→ R se numeste forma liniara,daca satisface conditiile
f (x+ y) = f (x) + f (y) , ∀x,y ∈ Vf (αx) = αf (x) , ∀α ∈ R si ∀x ∈ V,
unde V spatiu vectorial real.
Spatiul V poate sa fie si infinit dimensional. De exemplu, daca notamcu V = C [a, b] , multimea functiilor reale continue pe [a, b], atunci aplicatiaf , definita prin
f (x) =
Z b
a
x (t) dt, ∀x ∈ C [a, b] (1.160)
este o forma liniara pe C [a, b].Algebra liniara studiaza ınsa cazul spatiilor liniare finit dimensionale
Vn. Daca©v(1),v(2), . . . ,v(n)
ªeste o baza ın Vn si f : Vn → R este o forma
liniara, notam f¡v(1)
¢= a1, f
¡v(2)
¢= a2, . . . , f
¡v(n)
¢= an, pentru
x =nPi=1
ξiv(i), vom gasi
f (x) = f
ÃnXi=1
ξiv(i)
!=
nXi=1
ξif¡v(i)¢=
nXi=1
aiξi, ∀x ∈ Vn.(1.161)
Daca ın Vn luam o alta baza©e(1), e(2), . . . , e(n)
ªcu e(i) =
nPj=1
cjiv(j),
i = 1, n si notam x =nPi=1
ηie(i), gasim
f (x) = f
µnPi=1
ηie(i)
¶=
nPi=1
ηif¡e(i)¢=
=nPi=1
ηif
ÃnP
j=1
cjiv(j)
!=
nPi=1
ηi
ÃnP
j=1
cjiaj
!=
nPi=1
biηi (1.162)
unde am folosit notatia bi =nP
j=1
cjiaj, i = 1, n. Spunem ca ai sunt coeficientii
formei liniare f ın prima baza, iar ηi sunt coeficientii sai ın baza a doua.
Exercitiul 1.20 Daca ın Rn folosim baza standard si notam u(i), i = 1, nvectorii acestei baze, punand f
¡u(i)¢= ai, i = 1, n si considerand vectorul
1.6. FORME LINIARE, BILINIARE SI PATRATICE 63
a ∈ Rn ale carui elemente sunt ai (adica a =¡a1 a2 . . . an
¢T), din
(1.161) rezulta f (x) =nPi=1
aiξi = ha,xi, ∀x ∈ Rn, unde h·, ·i reprezintaprodusul scalar ın Rn. De fapt, de aici rezulta ca orice forma liniara pe Rn
(mai general, ın orice spatiu euclidian En) poate fi scrisa ın forma f (x) =ha,xi, unde a este un vector fixat si x este vectorul curent din Rn.
Din punct de vedere al consecintelor, cazul formelor biliniare pe Vn estemult mai important.
Definitia 1.33 O forma biliniara reala este o aplicatie f : Vn×Vn → R,liniara ın raport cu fiecare dintre cele doua variabile ale sale.
Aceasta ınseamna ca sunt ındeplinite conditiile½f (x+ y, z) = f (x, z) + f (y, z)
f (αx,y) = αf (x,y),½
f (x,y + z) = f (x,y) + f (x, z)f (x, αy) = αf (x,y)
(1.163)
oricare ar fi x,y, z ∈ Vn si oricare ar fi α ∈ R. Daca fixam o baza©v(1),v(2), . . . ,v(n)
ªın Vn si notam f
¡v(i),v(j)
¢= aij, i, j = 1, n avem
f (x,y) = f
ÃnPi=1
ξiv(i),
nPj=1
ηjv(j)
!=
=nPi=1
nPj=1
ξiηjf¡v(i),v(j)
¢=
nPi=1
nPj=1
aijξiηj
(1.164)
pentru valoarea (numarul) f (x,y), ın functie de coordonatele celor doi vec-tori x si y ın baza aleasa. Daca notam A = (aij) si numim aceasta matriceaformei biliniare f ın baza data, putem scrie matriceal formula (1.164) astfel
f (x,y) =¡ξ1 ξ2 · · · ξn
¢A
⎛⎜⎜⎜⎝η1η2...ηn
⎞⎟⎟⎟⎠ . (1.165)
Observatia 1.17 In Rn, daca fixam baza standard©u(i), i = 1, n
ªsi notam
f¡u(i),u(j)
¢= aij, putem scrie
f (x,y) =¡x1 x2 · · · xn
¢A
⎛⎜⎜⎜⎝y1y2...yn
⎞⎟⎟⎟⎠ = xTAy,(1.166)
oricare ar fi vectorii-coloana x si y.

64 CAPITOLUL 1. NOTIUNI TEORETICE
Definitia 1.34 O forma biliniara f : Vn×Vn → R se numeste simetrica,daca f (x,y) = f (y,x), ∀x,y ∈ Vn.
Daca f este simetrica, matricea ei A = (aij) este simetrica ın orice bazadin Vn, caci din f
¡v(i),v(j)
¢= f
¡v(j),v(i)
¢rezulta aij = aji, ∀i, j = 1, n.
Reciproc, daca matricea unei forme biliniare f este simetrica ıntr-o bazadata
©v(1),v(2), . . . ,v(n)
ªdin Vn, adica daca avem aij = aji, ∀i, j = 1, n,
rezulta ca f este simetrica. In adevar, daca x si y sunt doi vectori oarecaredin Vn, avem
f(x,y)=nXi=1
nXj=1
aijξiηj=nX
j=1
nXi=1
ajiηjξi=f(y,x) . (1.167)
Cu alte cuvinte, este suficient ca sa avem f¡v(i),v(j)
¢= f
¡v(j),v(i)
¢pentru toti vectorii unei baze ın Vn, pentru ca sa avem f (x,y) = f (y,x)pentru orice pereche de vectori si deci f sa fie simetrica.
Schimbarea matricei unei forme biliniare la schimbarea bazei
Teorema 1.27 Fie f o forma biliniara pe Vn, avand matricele A = (aij)ın prima baza si B = (bij) ın cea de a doua baza. Daca notam C = (cij)matricea schimbarii de baza, atunci
B = CTAC. (1.168)
Demonstratie. Notand©e(1), e(2), . . . , e(n)
ªsi respectiv
©v(1), . . . ,v(n)
ªcele doua baze, au loc relatiile
v(i) =nX
j=1
cjie(j), aij = f
¡e(i), e(j)
¢, bij = f
¡v(i),v(j)
¢(1.169)
si putem scrie
bij = f
µnP
k=1
ckie(k),
nPp=1
cpje(p)
¶=
=nP
k=1
nPp=1
ckicpjf¡e(k), e(p)
¢=
nPk=1
nPp=1
ckiakpcpj
(1.170)
pentru i, j = 1, n. Sa observam ca sumanP
p=1
akpcpj este egala cu produsul
liniei k din matricea A, cu coloana j din matricea B. Daca pentru moment
notam AC = M = (mij), putem scrie prescurtatnP
p=1
akpcpj = mij. In

1.6. FORME LINIARE, BILINIARE SI PATRATICE 65
fine, daca notam cki = c0ik si observam ca matricea¡c0ij¢= CT , din relatia
bij =nP
k=1
c0ikmkj, bij este egal cu produsul liniei i din CT , cu coloana j din
M care are loc pentru orice i, j = 1, n. Rezulta ca
B = CTM = CT (AC) = CTAC.¥ (1.171)
In legatura cu cele prezentate aici, se pune problema gasirii unei bazevectoriale, ın care o anumita forma biliniara data sa aiba matricea cea maisimpla, adica sa fie o matrice diagonala.
Teorema 1.28 Fie f o forma biliniara simetrica, cu matricea A = (aij)ın o baza data din Vn. Daca toti minorii principali ∆i, i = 1, n sunt nenuli,exista o baza
©v(1),v(2), . . . ,v(n)
ªın Vn, ın care f are forma canonica
f (x,y) =∆0
∆1ξ1η1 +
∆1
∆2ξ2η2 + · · ·+
∆n−1
∆nξnηn,
(1.172)unde am notat ∆0 = 1
Demonstratie. Presupunem ca forma biliniara f : Vn × Vn → R estesimetrica si ca matricea ei A = (aij) ıntr-o baza data
©e(1), e(2), . . . , e(n)
ªare toti minorii principali nenuli. Minorii principali sunt
∆1 = a11, ∆2 =
¯a11 a12a21 a22
¯, . . . , ∆p =
¯¯ a11 a12 · · · a1pa21 a22 · · · a2p· · · · · · · · · · · ·ap1 ap2 · · · app
¯¯ ,
. . . , ∆n =
¯¯ a11 a12 · · · a1na21 a22 · · · a2n· · · · · · · · · · · ·an1 an2 · · · ann
¯¯ . (1.173)
Vom cauta o baza©v(1),v(2), . . . ,v(n)
ªcu proprietatea ca f
¡v(i),v(j)
¢=
0 pentru i 6= j, ceea ce va ınsemna ca matricea B = (bij) a formei f ın nouabaza are elementele bij = 0 pentri i 6= j, adica este o matrice diagonala.Vom cauta vectorii v(i) ın forma⎧⎪⎪⎪⎪⎪⎪⎨⎪⎪⎪⎪⎪⎪⎩
v(1) = α11e(1)
v(2) = α21e(1) + α22e
(2)
. . .v(p) = αp1e
(1) + αp2e(2) + · · ·+ αppe
(p)
. . .v(n) = αn1e
(1) + αn2e(2) + · · ·+ αnne
(n)
. (1.174)

66 CAPITOLUL 1. NOTIUNI TEORETICE
Primul vector ıl aflam din conditia f¡v(1), e(1)
¢= 1, adica α11a11 = 1,
de unde gasim α11 = 1/a11. Deoarece ∆0 = 1, putem scrie ca α11 = ∆0/∆1.Vectorul v(2) ıl aflam din conditiile f
¡v(2), e(1)
¢= 0 si f
¡v(2), e(2)
¢= 1,
care conduce la sistemul½α21a11 + α22a12 = 0α21a21 + α22a22 = 1
, cu ∆2 =
¯a11 a12a21 a22
¯6= 0
(1.175)
care are solutie unica (α21 si α22), ın care α22 = ∆1/∆2. Pe v(3) = α31e
(1)+α32e
(2) + α33e(3) ıl aflam din conditiile f
¡v(3), e(1)
¢= f
¡v(3), e(2)
¢= 0 si
f¡v(3), e(3)
¢= 1, care conduce la sistemul⎧⎨⎩ α31a11 + α32a12 + α33a13 = 0
α31a21 + α32a22 + α33a23 = 0α31a31 + α32a32 + α33a33 = 1
, cu ∆3 =
¯¯ a11 a12 a13a21 a22 a23a31 a32 a33
¯¯ 6= 0.
(1.176)
Sistemul are solutia unica (α31, α32 si α33), ın care α33 = ∆2/∆3.Este clar ca procedeul poate fi continuat, ultimul vector v(n) fiind supusla conditiile
f¡v(n), e(1)
¢= f
¡v(n), e(2)
¢= · · · = f
¡v(n), e(n−1)
¢= 0, f
¡v(n), e(n)
¢= 1.
In plus, vom gasi ca αnn = ∆n−1/∆n. Din conditia facuta, se vede caorice vector v(p) (2 ≤ p ≤ n) satisface conditia f
¡v(p), e(k)
¢= 0 pentru
p > k, adica bpk = 0 pentru p > k. Tinand seama ca f este simetrica,rezulta bpk = 0 si pentru p < k, adica matricea B este de tip diagonal.Elementele ei de pe diagonala principala sunt
bii = f¡v(i), e(i)
¢= f
¡v(i), αiie
(i)¢=
= αiif¡v(i), e(i)
¢= αii =
∆i−1
∆i
(1.177)
oricare ar fi i = 1, n. Toate aceste elemente sunt diferite de 0. Aratam ca©v(1),v(2), . . . ,v(n)
ªformeaza o noua baza, adica sunt liniar independenti.
In adevar, avemnPi=1
civ(i) = θ ⇒
f
µnPi=1
civ(i),v(k)
¶= ckf
¡v(k),v(k)
¢= θ ⇒
ck = 0
(1.178)

1.6. FORME LINIARE, BILINIARE SI PATRATICE 67
oricare ar fi k = 1, n. Prin urmare, daca notam x =nPi=1
ξiv(i), y =
nPj=1
ηjv(j)
si tinem seama de (1.176), putem scrie
f (x,y) =∆0
∆1ξ1η1 +
∆1
∆2ξ2η2 + · · ·+
∆n−1
∆nξnηn.¥
Exercitiul 1.21 Se da forma biliniara simetrica
f (x,y) = x1y1 + 2x2y2 + 5x3y3 + 4 (x1y2 + x2y1)− 2 (x1y3 + x3y1)
ın care variabilele reale xi, yi sunt coordonatele vectorilor x si y, ın bazastandard din R3. Sa se afle o baza canonica si sa se scrie expresia lui f ınaceasta baza.
Rezolvare. Baza initiala este formata din vectorii e(i), i = 1, 3 dati prin
e(1) =¡1 0 0
¢T, e(2) =
¡0 1 0
¢T, e(3) =
¡0 0 1
¢T. Vectorii x si
y sunt dati prin x =¡x1 x2 x3
¢T, respectiv y =
¡y1 y2 y3
¢T. Vom
gasi
f¡e(1), e(1)
¢= 1, f
¡e(2), e(2)
¢= 2, f
¡e(3), e(3)
¢= 5,
f¡e(1), e(2)
¢= 4, f
¡e(1), e(3)
¢= −2, f
¡e(2), e(3)
¢= 0
deci matricea lui f ın baza initiala este
A =
⎛⎝ 1 4 −24 2 0−2 0 5
⎞⎠ .
Rezulta ∆1 = 1, ∆2 = −14, ∆3 = −78. Pentru v(1) = α11e(1) avem
α11 = 1; pentru v(2) = α21e(1) + α22e
(2) avem α21 = 2/7 si α22 = −1/14;pentru v(3) = α31e
(1) + α32e(2) + α33e
(3) avem α31 = −2/39, α32 = 4/39,α33 = 7/39. Deci baza canonica este
v(1) =
⎛⎝ 100
⎞⎠ ,v(2) =
⎛⎜⎝27
− 114
0
⎞⎟⎠ ,v(3) =
⎛⎜⎝ −239439739
⎞⎟⎠ .
Daca notam x =3P
i=1
ξiv(i), y =
3Pi=1
ηiv(i) vom gasi
f (x,y) = ξ1η1 −1
14ξ2η2 +
7
39ξ3η3,
legatura ıntre variabile fiind

68 CAPITOLUL 1. NOTIUNI TEORETICE⎧⎪⎪⎪⎪⎪⎨⎪⎪⎪⎪⎪⎩x1 = ξ1 +
2
7ξ2 −
2
39ξ3
x2 = − 114
ξ2 +4
39ξ3
x3 =7
39ξ3
,
⎧⎪⎪⎪⎪⎪⎨⎪⎪⎪⎪⎪⎩y1 = η1 +
2
7η2 −
2
39η3
y2 = − 114
η2 +4
39η3
y3 =7
39η3
¨.
Cazul formelor patratice este mai important, din punct de vedere alaplicatiilor ın rezolvarea unor probleme, decat cel al formelor biliniare, desieste ın stransa legatura cu acesta.
Definitia 1.35 Daca f : Vn × Vn → R este o forma biliniara simetrica,functia g : Vn → R data prin g (x) = f (x,x), ∀x ∈ Vn se numeste formapatratica reala.
Daca©e(1), e(2), . . . , e(n)
ªeste o baza de vectori ın Vn, x =
nPi=1
ξie(i) este
un vector oarecare si A = (aij) este matricea lui f ın aceasta baza, putemscrie
g (x) = f (x,x) = f
ÃnXi=1
ξie(i),
nXj=1
ξje(j)
!=
nXi=1
nXj=1
aijξiξj,(1.179)
cu observatia ca aij = aji, i, j = 1, n, deoarece matricea A este simetrica.Are loc urmatoarea teorema, care decurge din teorema corespunzatoare des-pre gasirea unei baze canonice pentru formele biliniare simetrice.
Teorema 1.29 (Teorema lui Jacobi) Fie f o forma biliniara simetricasi fie A = (aij) matricea formei biliniare ıntr-o baza data din Vn. Dacatoti minorii sai principali ∆i, i = 1, n sunt nenuli, exista o baza canonica©v(1),v(2), . . . ,v(n)
ªın Vn, ın care forma patratica g (x) = f (x,x) se scrie
g (x) =∆0
∆1ξ21 +
∆1
∆2ξ22 + · · ·+
∆n−1
∆nξ2n (1.180)
ξi, i = 1, n fiind coordonatele vectorului x ın baza canonica.
Exercitiul 1.22 Sa se aduca la forma canonica forma patratica
g (x) = x21 − 2x1x2 − 4x1x3 + 4x22 + x23
ın care xi, i = 1, n sunt coordonatele vectorului x ∈ R3, ın baza standard.

1.6. FORME LINIARE, BILINIARE SI PATRATICE 69
Rezolvare. Matricea formei patratice g (si a formei biliniare f din careprovine) este
A =
⎛⎝ 1 −1 −2−1 4 0−2 0 1
⎞⎠ ,
cu ∆1 = 1, ∆2 = 3, ∆3 = −13. Daca notam e(1), e(2), e(3) vectorii bazeistandard din R3, avem aij = f
¡e(i), e(j)
¢, i, j = 1, 3. Primul vector v(1) al
bazei canonice se cauta ın forma v(1) = α11e(1), cu f
¡v(1), e(1)
¢= 1 si rezulta
α11 = 1. Deci v(1) = e(1). Al doilea vector v(2) = α21e
(1) + α22e(2) satisface
conditiile f¡v(2), e(1)
¢= 0, f
¡v(2), e(2)
¢= 1, care conduc la sistemul(
α21 − α22 = 0
−α21 + 4α22 = 1⇒ α21 =
1
3, α22 =
1
3⇒ v(2) =
⎛⎜⎝1313
0
⎞⎟⎠ .
Ultimul vector ıl cautam ın forma v(3) = α31e(1) + α32e
(2) + α33e(3) si
ıi impunem conditiile f¡v(3), e(1)
¢= 0, f
¡v(3), e(2)
¢= 0, f
¡v(3), e(3)
¢= 1,
care conduc la sistemul⎧⎪⎨⎪⎩α31 − α32 − 2α33 = 0−α31 + 4α32 = 0
−2α31 + α33 = 1
⇒
⎧⎪⎪⎪⎪⎪⎨⎪⎪⎪⎪⎪⎩α31 = −
8
13
α32 = −2
13
α33 = −3
13
⇒ v(3) =
⎛⎜⎝ −813
− 213
− 313
⎞⎟⎠ .
Daca notam ξ1, ξ2, ξ3 coordonatele vectorului x ın baza©v(1),v(2),v(3)
ª,
gasimg (x) = ξ21 +
1
3ξ22 −
3
13ξ23 ,
iar matricea schimbarii de baza este
C =
⎛⎜⎜⎝1 1
3− 813
0 13− 213
0 0 − 313
⎞⎟⎟⎠⇒⎧⎪⎪⎪⎪⎪⎨⎪⎪⎪⎪⎪⎩
x1 = ξ1 +1
3ξ2 −
8
13ξ3
x2 =1
3ξ2 −
2
13ξ3
x3 = − 313
ξ3
¨.
O alta metoda de gasire a unei baze canonice pentru o forma patraticareala se bazeaza pe folosirea transformarii liniare autoadjuncte atasate ei.Daca f = f (x,y) este o forma biliniara simetrica ın En, care are matricea

70 CAPITOLUL 1. NOTIUNI TEORETICE
A = (aij) ın baza ortonormata©e(1), e(2), . . . , e(n)
ª, consideram si transfor-
marea liniara autoadjuncta ϕ : En → En, care are aceeasi matrice A ın bazaaleasa
©e(1), e(2), . . . , e(n)
ª. Vrem sa demonstram ca are loc egalitatea
f (x,y) = hϕ (x) ,yi , ∀x,y ∈ En, (1.181)
unde h·, ·i reprezinta produsul scalar ın En. Observand ca si hϕ (x) ,yi esteo forma biliniara ın En, va fi suficient sa aratam ca matricele celor douaforme biliniare din (1.181) ın baza
©e(1), e(2), . . . , e(n)
ªcoincid, de unde va
rezulta ca cele doua forme biliniare sunt identice. In adevar, daca B estematricea formei hϕ (x) ,yi, avem
bij =ϕ¡e(i)¢, e(j)
®=
=
¿nP
k=1
akie(k), e(j)
À= aji = aij, ∀i, j = 1, n.
(1.182)
Acum, stim ca pentru orice transformare liniara autoadjuncta (ceea ceınseamna ca matricea ei este simetrica ın orice baza) exista o baza formatadin vectori proprii ai sai, ortogonali doi cate doi. Uneori, gasirea acesteibaze presupune aplicarea procedeului de ortogonalizare Gram-Schmidt. Fie©v(1),v(2), . . . ,v(n)
ªaceasta baza, pentru care avem ϕ
¡v(i)¢= λiv
(i), i =
1, n siv(i),v(j)
®= 0 pentru i 6= j. Daca alegem aceasta baza si notam
B =³bij´matricea (comuna) a celor doua transformari, avem
bij =ϕ¡v(i)¢,v(j)
®= λi
v(i),v(j)
®= 0 pentru i 6= j
si bii = λiv(i),v(i)
®, i = 1, n. (1.183)
Folosind notatia x =nPi=1
ξiv(i) pentru vectorul curent din En si g (x) =
f (x,x) pentru forma patratica obtinuta din forma biliniara f (x,y), avem
g (x) = α1ξ21 + α2ξ
22 + · · ·+ αnξ
2n,
cu αi = λiv(i),v(i)
®= λi
°°v(i)°°2 , i = 1, n.(1.184)
Exercitiul 1.23 Sa se aduca la forma canonica
g (x) = x21 + 2x22 + 3x
23 − 4x1x2 − 4x2x3
ın care variabilele xi, i = 1, 3 sunt numere reale.
Rezolvare. x este vectorul curent din R3, ale carui coordonate ın bazastandard sunt x1, x2, x3. Matricea acestei forme patratice patratice (si aformei biliniare din care provine) este

1.6. FORME LINIARE, BILINIARE SI PATRATICE 71
A =
⎛⎝ 1 −2 0−2 2 −20 −2 3
⎞⎠ .
In acelasi timp, A este si matricea transformarii liniare ϕ, care satisfaceg (x) = hϕ (x) ,xi. Cautam valorile proprii si vectorii proprii pentru ϕ:
P (λ) =
¯¯ λ− 1 2 0
2 λ− 2 20 2 λ− 3
¯¯ = λ3 − 6λ2 + 3λ+ 10 = 0
cu radacinile λ1 = 5, λ2 = 2, λ3 = −1 si vectorii proprii v(1) =¡1 −2 2
¢T,
v(2) =¡−2 1 2
¢T, v(3) =
¡2 2 1
¢T, care sunt ortogonali doi cate doi.
Mai avemv(1),v(1)
®= 9,
v(2),v(2)
®= 9,
v(3),v(3)
®= 9. Daca notam
x =3P
i=1
ξiv(i), gasim
g (x) = 45ξ21 + 18ξ22 − 9ξ23 .
Din ıntamplare, vectorii v(i) au aceeasi lungime, ceea ce nu se ıntamplaın cazul general. Daca normam vectorii v(i), adica consideram baza u(1) =¡13−23
23
¢T, u(2) =
¡−23
13
23
¢T, u(3) =
¡23
23
13
¢Tsi notam x =
3Pi=1
ηiu(i), gasim
g (x) = 5η21 + 2η22 − η23,
iar schimbarea corespunzatoare de coordonate este data de formulele⎧⎪⎪⎪⎪⎪⎨⎪⎪⎪⎪⎪⎩x1 =
1
3η1 −
2
3η2 +
2
3η3
x2 = −2
3η1 +
1
3η2 +
2
3η3
x3 =2
3η1 +
2
3η2 +
1
3η3
¨.
Din formula (1.184) rezulta si urmatoarea consecinta importanta:
Teorema 1.30 Fie g : En → R o forma patratica si ϕ : En → En trans-formarea liniara autoadjuncta, care satisface conditia g (x) = hϕ (x) ,xi,∀x ∈ En. Daca
©v(1),v(2), . . . ,v(n)
ªeste o baza ortonormata formata din
vectori proprii ai lui ϕ si notam x =nPi=1
ξiv(i), g (x) se exprima ın aceasta
baza prin formulag (x) = λ1ξ
21 + λ2ξ
22 + · · ·+ λnξ
2n, ∀x ∈ En (1.185)
ın care λi, i = 1, n sunt autovalorile transformarii ϕ.

72 CAPITOLUL 1. NOTIUNI TEORETICE
O teorema asemanatoare cu teorema lui Jacobi se poate formula pentruforme patratice degenerate:
Teorema 1.31 Fie g o forma patratica de rang r < n. Exista o baza ınVn ın care minorii principali ∆i 6= 0, i = 1, r sunt nenuli si ın care formapatratica g are expresia
g (x) =∆0
∆1ξ21 +
∆1
∆2ξ22 + · · ·+
∆r−1
∆rξ2r (1.186)
ξi, i = 1, n fiind coordonatele vectorului x ın baza determinata.
Exercitiul 1.24 Se considera forma patratica
f (x) = 2x21 + 2x22 − 2x23 + 6x1x2 − 2x1x3 + 2x2x3.
Sa se determine forma canonica folosind metoda Jacobi.
Rezolvare. Sa determinam forma canonica folosind metoda lui Jacobi.Matricea lui f este
A =
⎛⎝ 2 3 −13 2 1−1 1 −2
⎞⎠ .
Calculam minorii principali: ∆0 = 1, ∆1 = 2, ∆2 =
¯2 33 2
¯=
−5, ∆3 = detA = 0.Deci, h (x) =1
2y21 −
2
5y22.
Fie B =©e1 =
¡1 0 0
¢, e2 =
¡0 1 0
¢, e3 =
¡0 0 1
¢ªbaza
canonica a spatiului R3. Cautam o baza B0 = {e01, e02, e03} cu vectori deforma e01 = c11e1, e
02 = c21e1 + c22e2, e
03 = c31e1 + c32e2 + c33e3.
Fie g (x,y) polara lui f (x) , g (x,y) = 2x1y1 + 3x1y2 − x1y3 + 3x2y1 +2x2y2 + x2y3 − x3y1 + x3y2 − 2x3y3.Pentru determinarea coeficientilor vomimpune conditiile: g (e01, e1) = 1⇒ 2c11 = 1⇒ c11 =
1
2;½
g (e02, e1) = 0g (e02, e2) = 1
⇒½2c21 + 3c22 = 03c21 + 2c22 = 1
⇒
⎧⎪⎨⎪⎩ c21 =3
5
c22 = −2
5
;
⎧⎨⎩ g (e03, e1) = 0g (e03, e2) = 0g (e03, e3) = 0
⇒
⎧⎨⎩ 2c31 + 3c32 − c33 = 03c31 + 2c32 + c33 = 0−c31 + c32 − 2c33 = 0
⇒
⎧⎨⎩ c31 = αc32 = αc33 = α ∈ R
Deoarece forma patratica este degenerata, vectorul e03 nu se determina
univoc. Deci, e01 =1
2e1, e
02 =
3
5e1−
2
5e2, iar al treilea vector al bazei poate
fi, de exemplu, e03 = e1 + e2 + e3. Astfel schimbarea de coordonate este:
1.6. FORME LINIARE, BILINIARE SI PATRATICE 73
⎛⎝ x1x2x3
⎞⎠ =
⎛⎜⎜⎜⎝1
2
3
51
0 −251
0 0 1
⎞⎟⎟⎟⎠⎛⎝ y1
y2y3
⎞⎠ .
Observam ca ın acest caz am obtinut signatura (1, 1, 1).
Metoda Gauss - Jacobi de aducere la forma canonica.
Fie g (x) =nPi=1
nPj=1
aijxixj cu aij = aji o forma patratica ın Rn. Pre-
supunem ca toti minorii principali ∆i 6= 0, i = 1, n. Cautam ca prin operatiiasupra liniilor matriceiA sa obtinem o matrice care sa aiba toate elementelede sub diagonala principala nule. Aceasta se poate obtine ınmultind lini-ile cu factori convenabili si scazand (adunand) din liniile care ıi urmeaza,cautand sa obtinem zerouri pe coloana. Dupa ce obtinem zerouri pe primacoloana, gasim o matrice de forma⎛⎜⎜⎜⎜⎝
a11 a12 · · · a1n0 b22 · · · b2n0 b32 · · · b3n· · · · · · · · · · · ·0 bn2 · · · bnn
⎞⎟⎟⎟⎟⎠ .
Primele doua linii raman neschimbate si deoarece b22 6= 0 (de fapt b22 =∆2
∆1), ınmultim linia a doua cu factori convenabili si scadem din cele ce ıi
urmeaza, reusind sa obtinem zerouri pe toata coloana a doua, cu exceptiabineınteles a primelor doua elemente ale acestei coloane. Vom gasi acum omatrice de forma⎛⎜⎜⎜⎜⎝
a11 a12 a13 · · · a1n0 b22 b23 · · · b2n0 0 c33 · · · b3n· · · · · · · · · · · · · · ·0 0 cn3 · · · cnn
⎞⎟⎟⎟⎟⎠ , cu c33 =∆3
∆26= 0.
Procedand ın acest fel, ajungem ın final la o matrice pe care, dacaschimbam notatiile, o putem scrie ın forma
G =
⎛⎜⎜⎜⎜⎝g11 g12 g13 · · · g1n0 g22 g23 · · · g2n0 0 g33 · · · g3n· · · · · · · · · · · · · · ·0 0 0 · · · gnn
⎞⎟⎟⎟⎟⎠ , cu gii =∆i
∆i−1, i = 1, n

74 CAPITOLUL 1. NOTIUNI TEORETICE
si o vom numi forma gausiana a matricei simetrice A = (aij). Nu facemdemonstratia, care este relativ complicata, dar din punct de vedere practic,lucrurile sunt simple. Facand notatiile⎧⎪⎪⎨⎪⎪⎩
ξ1 = g11x1 + g12x2 + · · ·+ g1nxnξ2 = g22x2 + · · ·+ g2nxn. . .ξn = gnnxn
se obtine pentru forma patratica considerata
g (x) =1
g11ξ21 +
1
g22ξ22 + · · ·+
1
gnnξ2n, ∀x ∈ Rn.
Exercitiul 1.25 Sa se aduca la forma canonica prin metoda Gauss - Jacobi,forma patratica
g (x) = x21 + 2x22 − x23 − 6x1x2 + 10x1x3 + 16x2x3.
Rezolvare. Vom gasi ∆1 = 1, ∆2 = −7, ∆3 = −347 si vom reda gasireamatricei G prin schema urmatoare
A =
⎛⎝ 1 −3 5−3 2 85 8 −1
⎞⎠→⎛⎝ 1 −3 50 −7 230 23 −26
⎞⎠→⎛⎜⎝ 1 −3 50 −7 23
0 0347
7
⎞⎟⎠ = G.
Punand ⎧⎪⎪⎨⎪⎪⎩ξ1 = x1 − 3x2 + 5x3ξ2 = −7x2 + 23x3ξ3 =
347
7x3
obtinem g (x) = ξ21 −1
7ξ22 +
7
347ξ23 . Se poate verifica rezultatul, prin
ınlocuirea variabilelor ξi cu xi si obtinem pentru g (x) expresia din enunt.¨Mai exista un procedeu, cu totul elementar, datorat lui Gauss, care
se bazeaza pe scrierea formei patratice ca o combinatie de patrate ale unorpolinoame de gradul ıntai ın variabilele date. Vom arata cum se face practicacest lucru, reluand g (x) din exemplul precedent: vom lua ıntai numai

1.6. FORME LINIARE, BILINIARE SI PATRATICE 75
termenii care contin variabila x1, scriind
g (x) =¡x21 − 6x1x2 + 10x1x3
¢+ 2x22 − x23 + 16x2x3 =
=£(x1 − 3x2 + 5x3)2 − 9x22 − 25x23 + 30x2x3
¤+ 2x22 − x23 + 16x2x3 =
= (x1 − 3x2 + 5x3)2 − 7x22 + 46x2x3 − 26x23 =
= (x1 − 3x2 + 5x3)2 − 7µx22 −
46
7x2x3
¶− 26x23 =
= (x1 − 3x2 + 5x3)2 − 7"µ
x2 −23
7x3
¶2− 52949
x23
#− 26x23 =
= (x1 − 3x2 + 5x3)2 − 7µx2 −
23
7x3
¶2+347
7x23.
Acum, daca notam ⎧⎪⎪⎨⎪⎪⎩ξ1 = x1 − 3x2 + 5x3ξ2 = x2 −
23
7x3
ξ3 = x3
gasim g (x) = ξ21 − 7ξ22 +347
7ξ23 , deci alta expresie pentru aceeasi g (x).
Coeficientii formei canonice (suma de patrate ale variabilelor) nu suntunici, dupa cum se poate vedea si din exemplul prezentat. Dar exista cevacomun tuturor formelor canonice ale unei forme patratice date. Anume,ın oricare forma canonica, numarul patratelor cu coeficienti pozitivi esteacelasi. La fel, este invariant si numarul coeficientilor negativi. Are loc oteorema importanta:
Teorema 1.32 (Legea inertiei pentru formele patratice reale). Pen-tru orice forma patratica f : Vn × Vn → R si ın orice baza canonica asa, numarul coeficientilor pozitivi, numarul coeficientilor negativi, deci sinumarul coeficientilor nuli se pastreaza neschimbati.
Demonstratie (schita). Fie©v(1),v(2), . . . ,v(n)
ªsi©u(1),u(2), . . . ,u(n)
ªdoua baze canonice pentru f . Notam x =
nPi=1
ξiv(i) si respectiv x =
nPi=1
ϕiu(i)
pentru un vector oarecare din Vn si fie
f (x) = α1ξ21 + α2ξ
22 + · · ·+ αpξ
2p−
−αp+1ξ2p+1 − αp+2ξ
2p+2 − · · ·− αp+qξ
2p+q,
(1.187)

76 CAPITOLUL 1. NOTIUNI TEORETICE
unde coeficientii αi, i = 1, p+ q sunt pozitivi si evident p + q ≤ n. Dacap + q < n, ınseamna ca exista si coeficenti nuli, care ınsa nu au mai fostscrisi. Presupunem ca ın a doua baza, avem
f (x) = β1η21 + β2η
22 + · · ·+ βrη
2r−
−βr+1η2r+1 − βr+2η2r+2 − · · ·− βr+sη
2r+s,
(1.188)
unde βi sunt pozitivi, i = 1, r + s si r+ s ≤ n. Sa presupunem p > r, adicanumarul coeficientilor pozitivi ın prima baza este mai mare decat ıntr-adoua. Multimea de vectori
©v(1),v(2), . . . ,v(p),v(r+1),v(r+2), . . . ,v(n)
ªeste
liniar dependenta, caci are p+(n− r) = (p− r)+n > n vectori. Deci existao combinatie liniara nula
c1v(1) + c2v
(2) + · · ·+ cpv(p) + c0r+1v
(r+1)++c0r+2v
(r+2) + · · ·+ c0nv(n) = θ,
(1.189)
ın care macar un coeficient este nul. Mai exact, exista macar un ci 6=0, cu 1 ≤ i ≤ p si macar un c0j 6= 0, cu r + 2 ≤ j ≤ n. Schimband
notatiile, putem spune ca exista un vector v 6= θ, v = ξ1v(1) + ξ2v
(2) +· · ·+ ξpv
(p) = ηr+1u(r+1)+ ηr+2u
(r+2)+ · · ·+ ηnu(n), ın care coeficientii sunt
anumite constante precizate si macar un ξi 6= 0. Din (1.187), rezultaf (v) = α1ξ
21 + α2ξ
22 + · · ·+ αpξ
2p > 0 (1.190)
iar din (1.188), obtinem
f (v) = −βr+1η2r+1 − · · ·− βr+sη2r+s ≤ 0. (1.191)
Contradictia obtinuta arata ca ipoteza p > r este falsa. Schimbandrolurile bazelor, rezulta ca si ipoteza r > p este falsa. Prin urmare, p = r.Prin ınmultirea formei f cu (−1), avem o noua forma patratica ın carevariabilele cu coeficient negativ devin variabile cu coeficient pozitiv si deciq = s. Evident ca se pastreaza si numarul total de patrate (cu coeficientnenul) ın forma canonica. Acest numar se numeste rangul formei patraticesi coincide cu rangul matricei sale ın orice baza din Vn.¥Alta notiune foarte importanta relativ la formele patratice este cea de
forma patratica reala pozitiv definita.
Definitia 1.36 Spunem ca forma patratica g : En → R este pozitivdefinita, daca ∀x ∈ En, x 6= θ⇒ g (x) > 0.
Altfel spus, g = g (x) este pozitiv definita daca ia numai valori pozitive,cu exceptia vectorului nul θ, pentru care g (θ) = 0.

1.6. FORME LINIARE, BILINIARE SI PATRATICE 77
Teorema 1.33 Conditia necesara si suficienta ca o forma patraticag : En → R sa fie pozitiv definita este ca toate autovalorile matricei sale safie pozitive.
Demonstratie. Fie A = (aij) matricea formei patratice g ın o baza dataortonormata
©e(1), e(2), . . . , e(n)
ªdin En. Daca ϕ = ϕ (x) este transformarea
liniara atasata formei g, adica transformarea liniara autoadjuncta ce areaceeasi matrice A ın baza data, stim ca g (x) = hϕ (x) ,xi, ∀x ∈ En. Stimde asemenea ca pentru transformarea ϕ, exista o baza ortonormata formatadin vectori proprii ai sai. Notam aceasta baza
©v(1),v(2), . . . ,v(n)
ªsi scriem
x =nPi=1
ξiv(i). Atunci, avem
g (x) = λ1ξ21 + · · ·+ λnξ
2n =
nXi=1
λiξ2i , ∀x ∈ En.
(1.192)
Suficienta. Daca toti λi > 0, este evident ca x 6= θ rezulta g (x) > 0,deoarece exista macar un ξi 6= 0.Necesitatea. Presupunem g (x) este pozitiv definita. Daca ar exista un
λi ≤ 0, pentru orice vector nenul x = ξiv(i) am avea g (x) = λiξ
2i ≤ 0, ceea
ce este imposibil. Deci rezulta λi > 0 pentru i = 1, n.¥Mai importanta este ınsa o alta caracterizare a formei patratice pozi-
tiv definite, care nu face apel la gasirea autovalorilor matricei A, lucru ıngeneral dificil daca n ≥ 3 (trebuie rezolvata o ecuatie algebrica de grad≥ 3).Teorema 1.34 (Sylvester). Fie f : Vn × Vn → R o forma biliniara si-metrica, cu matricea A = (aij) ıntr-o baza data din Vn. Necesar si suficientca forma patratica g (x) = f (x,x) sa fie pozitiv definita, este ca toti minoriiprincipali ai matricei A, sa fie pozitivi
∆1 > 0, ∆2 > 0, . . . , ∆n > 0. (1.193)
Demonstratie. Daca au loc conditiile ∆i 6= 0, i = 1, n stim sa construimo baza canonica, ın care g (x) are forma
g (x)=∆0
∆1ξ21+
∆1
∆2ξ22+. . .+
∆n−1
∆nξ2n, ∀x ∈ En (1.194)
ın care ξi sunt coordonatele vectorului x ın noua baza.Suficienta conditiei (1.193). Daca toti ∆i > 0, ın (1.194) toti coeficientii
sunt pozitivi si atunci este evident ca x 6= θ ⇒ g (x) > 0.

78 CAPITOLUL 1. NOTIUNI TEORETICE
Necesitatea conditiei (1.193). Presupunem ca g (x) este pozitiv definita.Notam
©e(1), e(2), . . . , e(n)
ªbaza data, ın care g (x) are matricea A = (aij).
Daca facem notatia x =nPi=1
ζie(i), avem
g (x) =nXi=1
nXj=1
aijζiζj, cu aij = aji, ∀x ∈ Vn.(1.195)
Luand pe rand x = e(i), gasim g¡e(i)¢= aii > 0, i = 1, n, adica toate
elementele de pe diagonala principala din A sunt pozitive. Presupunemacum ca exista un minor principal
∆i =
¯¯ a11 a12 · · · a1ia21 a22 · · · a2i· · · · · · · · · · · ·ai1 ai2 · · · aii
¯¯ = 0. (1.196)
Consideram sistemul algebric⎧⎪⎪⎨⎪⎪⎩a11ζ1 + a12ζ2 + · · ·+ a1iζi = 0a21ζ1 + a22ζ2 + · · ·+ a2iζi = 0
. . .ai1ζ1 + ai1ζ2 + · · ·+ aiiζi = 0
(1.197)
care admite cel putin o solutie nebanala ζ01 , ζ02 , . . . , ζ
0i (caci∆i = 0). Notam
v = ζ01e(1) + ζ02e
(2) + · · ·+ ζ0i e(i) 6=θ si avem
g (v) =iX
p=1
ζ0p¡ap1ζ
01 + ap2ζ
02 + · · ·+ apiζ
0i
¢= 0 (1.198)
ceea ce este absurd (contrazice ipoteza ca g (x) este pozitiv definita). Prinurmare, toti ∆i 6= 0 si atunci putem construi baza canonica ın care g (x) sescrie ın forma (1.194). Toti coeficientii trebuind sa fie pozitivi, rezulta faradificultate ∆i > 0, i = 1, n.¥
1.7 Spatiul liniar al vectorilor liberi
1.7.1 Structura algebrica a spatiului vectorilor liberi
Fie spatiul liniar Rn =©x | x =
¡x1 x2 · · · xn
¢, xi ∈ R, i = 1, n
ª.
Definitia 1.37 Cuaterna ordonata (a,b, c,d) de vectori din Rn se numesteparalelogram ın Rn daca a− b+ c− d = θ.(Figura 1.1)
1.7. SPATIUL LINIAR AL VECTORILOR LIBERI 79
Figura 1.1.
Definitia 1.38 Perechile ordonate (a,b) , (d, c) de vectori din spatiul Rn
se numesc perechi ordonate echivalente si notam (a,b) ∼ (d, c) dacacuaterna ordonata (a,b, c,d) este paralelogram.
Teorema 1.35 Relatia “perechile ordonate (a,b) , (d, c) de vectoridin Rn sunt perechi ordonate echivalente“ este o relatie de echivalentaın Rn ×Rn.
Demonstratie. Verificam proprietatile relatiei de echivalenta: reflexivi-tatea, simetria si tranzitivitatea.Reflexivitatea: (a,b) ∼ (a,b)⇔ a− b+ a− b = θ evident;Simetria: (a,b) ∼ (d, c)⇒ (d, c) ∼ (a,b)(a,b) ∼ (d, c)⇔ a−b+c−d = θ ⇔ d−c+b−a = θ⇔ (d, c) ∼ (a,b) .Tranzitivitatea (Figura 1.2): (a,b) ∼ (d, c) , (d, c) ∼ (f , e) rezulta ca
(a,b) ∼ (f , e) ; dar(a,b) ∼ (d, c)⇔ a− b+ c− d = θ(d, c) ∼ (f , e)⇔ d− c+ e− f = θ
.
Atunci, adunand relatiile de mai sus obtinem a−b+e−f = θ, echivalentcu (a,b) ∼ (f , e) .¨
Figura 1.2.
Observatia 1.18 Relatia de echivalenta “perechile ordonate (a,b) ,(d, c) de vectori din Rn sunt perechi ordonate echivalente“ ımpartemultimea Rn×Rn ın clase de echivalenta. Clasele de echivalenta poartadenumirea de vectori liberi asociati spatiului Rn. Un vector liber asociatspatiului Rn este o submultime a spatiului Rn × Rn Clasele de echivalentasunt disjuncte.
Fie (a,b) ∈ Rn ×Rn. Notam −→u = {(d, c) ∈ Rn ×Rn | (d, c) ∼ (a,b)} .Notam vectorii liberi cu −→u ,−→v ,−→w , ...Multimea vectorilor liberi asociati spatiului liniar Rn este notata cu Vn.
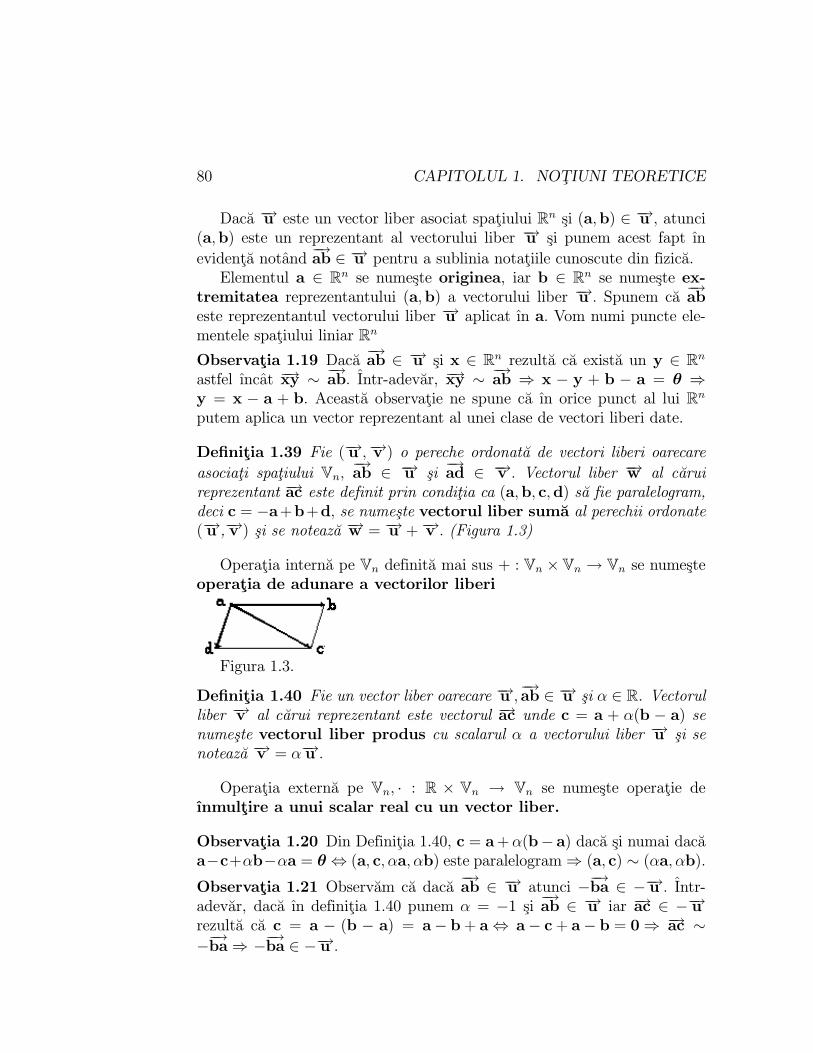
80 CAPITOLUL 1. NOTIUNI TEORETICE
Daca −→u este un vector liber asociat spatiului Rn si (a,b) ∈ −→u , atunci(a,b) este un reprezentant al vectorului liber −→u si punem acest fapt ın
evidenta notand−→ab ∈ −→u pentru a sublinia notatiile cunoscute din fizica.
Elementul a ∈ Rn se numeste originea, iar b ∈ Rn se numeste ex-tremitatea reprezentantului (a,b) a vectorului liber −→u . Spunem ca
−→ab
este reprezentantul vectorului liber −→u aplicat ın a. Vom numi puncte ele-mentele spatiului liniar Rn
Observatia 1.19 Daca−→ab ∈ −→u si x ∈ Rn rezulta ca exista un y ∈ Rn
astfel ıncat −→xy ∼ −→ab. Intr-adevar, −→xy ∼ −→ab ⇒ x − y + b − a = θ ⇒y = x − a + b. Aceasta observatie ne spune ca ın orice punct al lui Rn
putem aplica un vector reprezentant al unei clase de vectori liberi date.
Definitia 1.39 Fie (−→u ,−→v ) o pereche ordonata de vectori liberi oarecareasociati spatiului Vn,
−→ab ∈ −→u si
−→ad ∈ −→v . Vectorul liber −→w al carui
reprezentant −→ac este definit prin conditia ca (a,b, c,d) sa fie paralelogram,deci c = −a+b+d, se numeste vectorul liber suma al perechii ordonate(−→u ,−→v ) si se noteaza −→w = −→u +−→v . (Figura 1.3)
Operatia interna pe Vn definita mai sus + : Vn × Vn → Vn se numesteoperatia de adunare a vectorilor liberi
Figura 1.3.
Definitia 1.40 Fie un vector liber oarecare −→u ,−→ab ∈ −→u si α ∈ R. Vectorul
liber −→v al carui reprezentant este vectorul −→ac unde c = a + α(b − a) senumeste vectorul liber produs cu scalarul α a vectorului liber −→u si senoteaza −→v = α−→u .
Operatia externa pe Vn, · : R × Vn → Vn se numeste operatie deınmultire a unui scalar real cu un vector liber.
Observatia 1.20 Din Definitia 1.40, c = a+α(b− a) daca si numai dacaa−c+αb−αa = θ⇔ (a, c, αa, αb) este paralelogram⇒ (a, c) ∼ (αa, αb).Observatia 1.21 Observam ca daca
−→ab ∈ −→u atunci −−→ba ∈ −−→u . Intr-
adevar, daca ın definitia 1.40 punem α = −1 si −→ab ∈ −→u iar −→ac ∈ −−→urezulta ca c = a − (b − a) = a− b+ a⇔ a− c+ a− b = 0⇒ −→ac ∼−−→ba⇒ −−→ba ∈ −−→u .
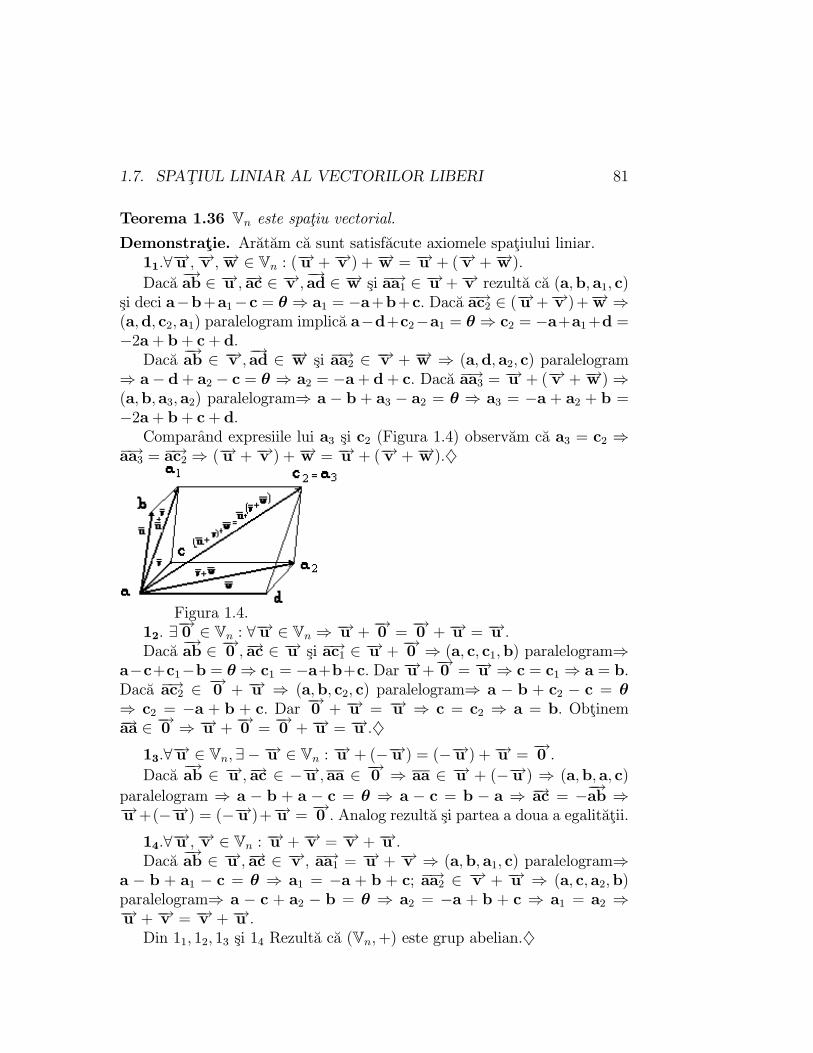
1.7. SPATIUL LINIAR AL VECTORILOR LIBERI 81
Teorema 1.36 Vn este spatiu vectorial.
Demonstratie. Aratam ca sunt satisfacute axiomele spatiului liniar.11.∀−→u ,−→v ,−→w ∈ Vn : (−→u +−→v ) +−→w = −→u + (−→v +−→w ).Daca
−→ab ∈ −→u ,−→ac ∈ −→v ,
−→ad ∈ −→w si −→aa1 ∈ −→u +−→v rezulta ca (a,b,a1, c)
si deci a−b+a1−c = θ ⇒ a1 = −a+b+c. Daca −→ac2 ∈ (−→u +−→v )+−→w ⇒(a,d, c2,a1) paralelogram implica a−d+c2−a1 = θ ⇒ c2 = −a+a1+d =−2a+ b+ c+ d.Daca
−→ab ∈ −→v ,
−→ad ∈ −→w si −→aa2 ∈ −→v + −→w ⇒ (a,d, a2, c) paralelogram
⇒ a− d+ a2 − c = θ ⇒ a2 = −a+ d+ c. Daca −→aa3 = −→u + (−→v +−→w )⇒(a,b,a3,a2) paralelogram⇒ a − b + a3 − a2 = θ ⇒ a3 = −a + a2 + b =−2a+ b+ c+ d.Comparand expresiile lui a3 si c2 (Figura 1.4) observam ca a3 = c2 ⇒−→aa3 = −→ac2 ⇒ (−→u +−→v ) +−→w = −→u + (−→v +−→w ).♦
Figura 1.4.12. ∃−→0 ∈ Vn : ∀−→u ∈ Vn ⇒−→u +−→0 = −→0 +−→u = −→u .Daca
−→ab ∈ −→0 ,−→ac ∈ −→u si −→ac1 ∈ −→u +−→0 ⇒ (a, c, c1,b) paralelogram⇒
a−c+c1−b = θ⇒ c1 = −a+b+c. Dar −→u +−→0 = −→u ⇒ c = c1 ⇒ a = b.Daca −→ac2 ∈ −→0 + −→u ⇒ (a,b, c2, c) paralelogram⇒ a − b + c2 − c = θ⇒ c2 = −a + b + c. Dar −→0 + −→u = −→u ⇒ c = c2 ⇒ a = b. Obtinem−→aa ∈ −→0 ⇒−→u +−→0 = −→0 +−→u = −→u .♦13.∀−→u ∈ Vn,∃ − −→u ∈ Vn : −→u + (−−→u ) = (−−→u ) +−→u =
−→0 .
Daca−→ab ∈ −→u ,−→ac ∈ −−→u , aa ∈ −→0 ⇒ aa ∈ −→u + (−−→u ) ⇒ (a,b,a, c)
paralelogram ⇒ a − b + a − c = θ ⇒ a − c = b − a ⇒ −→ac = −−→ab ⇒−→u +(−−→u ) = (−−→u )+−→u =
−→0 . Analog rezulta si partea a doua a egalitatii.
14.∀−→u ,−→v ∈ Vn : −→u +−→v = −→v +−→u .Daca
−→ab ∈ −→u ,−→ac ∈ −→v , −→aa1 = −→u + −→v ⇒ (a,b, a1, c) paralelogram⇒
a − b + a1 − c = θ ⇒ a1 = −a + b + c; −→aa2 ∈ −→v + −→u ⇒ (a, c,a2,b)paralelogram⇒ a − c + a2 − b = θ ⇒ a2 = −a + b + c ⇒ a1 = a2 ⇒−→u +−→v = −→v +−→u .Din 11, 12, 13 si 14 Rezulta ca (Vn,+) este grup abelian.♦

82 CAPITOLUL 1. NOTIUNI TEORETICE
21. ∀α ∈ R, ∀−→u ,−→v ∈ Vn : α(−→u +−→v ) = α−→u + α−→v .
Daca−→ab ∈ −→u ,−→ac ∈ −→v atunci daca −→aa1 ∈ −→u +−→v rezulta ca (a,b,a1, c)
paralelogram, deci a− b+ a1 − c = θ adica a1 = −a+ b+ c; daca −→aa2 ∈α(−→u +−→v )⇒ a2 = a+ α(a1 − a).Daca −→aa3 ∈ α−→u ⇒ a3 = a+α(b− a); −→aa4 ∈ α−→v ⇒ a4 = a+α(c− a);
daca−→aa5 ∈ α−→u +α−→v ⇒ (a,a3, a5,a4) paralelogram⇒ a−a3+a5−a4 = θ⇒a5 = −a+a3+a4 = −a+a+α(b−a)+a+α(c−a) = a+α(b−a+c−a) =a+ α(a1 − a).Rezulta ca a2 = a5 ⇒ α(−→u +−→v ) = α−→u + α−→v .(Figura 1.5)♦
Figura 1.5.22. ∀α, β ∈ R, ∀−→u ∈ Vn : (α+ β)−→u = α−→u + β−→u .
Daca−→ab ∈ −→u , −→aa1 ∈ (α+ β)−→u ⇒ a1 = a+ (α+ β)(b− a).
Daca −→aa2 ∈ α−→u ⇒ a2 = a+α(b−a), −→aa3 = β−→u ⇒ a3 = a+β(b−a),−→aa4 ∈ α−→u + β−→u ⇒ (a,a2,a4,a3) paralelogram ⇒ a− a2 + a4 − a3 = θ⇒a4 = −a+a2+a3 ⇒ a4 = −a+a+α(b−a)+a+β(b−a) = a+(α+β)(b−a)Rezulta ca a1 = a4 ⇒ (α+ β)−→u = α−→u + β−→u .(Figura 1.6)♦
Figura 1.6.23. ∀α, β ∈ R, ∀−→u ∈ Vn : (αβ)−→u = α(β−→u ).Daca
−→ab ∈ −→u ,−→aa1 ∈ (αβ)−→u ⇒ a1 = a+ (αβ)(b− a).
Daca −→aa2 ∈ β−→u ⇒ a2 = a+β(b−a), −→aa3 ∈ α(β−→u )⇒ a3 = a+α(a2−a)⇒ a3 = a+ α(a+ β(b− a)− a) = a+ αβ(b− a).Rezulta ca a1 = a3 ⇒ (αβ)−→u = α(β−→u ).♦24. ∀−→u ∈ Vn : 1−→u = −→u .Daca
−→ab ∈ −→u ,−→aa1 ∈ 1−→u ⇒ a1 = a+ 1(b− a) = b⇒ 1−→u = −→u .♦
Rezulta ca Vn este spatiu vectorial.¥
Definitia 1.41 Fie a,b ∈ Rn,a 6= b. Multimeanx ∈ Rn : ∃α ∈ R,−→ax = α ·−→ab
o

1.7. SPATIUL LINIAR AL VECTORILOR LIBERI 83
se numeste dreapta din Rn care trece prin punctele distincte a,b.Vectoriiα ·−→ab, α ∈ R, α 6=0 se numesc vectori directori ai dreptei ce trece prinpunctele a,b ∈ Rn. In particular
−→ab 6= −→0 este un vector director al
dreptei care trece prin punctele distincte a,b.
Dreapta este un subspatiu liniar al spatiului vectorilor liberi Vn.
Definitia 1.42 Vectorii liberi −→u ,−→v se numesc vectori liberi coliniaridaca sistemul de vectori {−→u ,−→v } este liniar dependent, adica exista α ∈ Rastfel ıncat −→v = α−→u .
Definitia 1.43 Vectorii liberi −→u ,−→v ,−→w ∈ V3 se numesc vectori libericoplanari daca sistemul de vectori {−→u ,−→v ,−→w} este liniar dependent.Definitia 1.44 Doua drepte din Rn se numesc drepte paralele daca vec-torii lor directori sunt coliniari.
Definitia 1.45 Multimea dreptelor din Rn care sunt paralele cu o dreaptadata se numeste directie ın Rn. Orice dreapta, element al unei directii dinRn, se numeste reprezentant al acelei directii si o determina ın mod unic.
Observatia 1.22 Pentru vectorul liber−→0 nu se defineste notiunea de
directie.
Observatia 1.23 Observam ca daca (a,b, c,d) este paralelogram ın Rn cuvectorii a,b, c,d distincti ıntre ei, atunci a − b + c − d = θ ⇔ a − b =d− c ⇔ −→ab ∼ −→dc 6= −→0 si deci dreptele care trec prin punctele a,b si d, csunt paralele. La fel si cele care trec prin a,d si b, c.
Teorema 1.37 Fie spatiile vectoriale Rn si Vn. Atunci functiaf : Rn → Vn,∀x ∈ Rn : f(x) =
−→θx, unde θ = ( 0 . . . 0 ) ∈ Rn
este o transformare liniara bijectiva (un izomorfism).
Demonstratie. Verificam liniaritatea lui f.
∀x,y ∈ Rn : f(x+ y) =−−−−−→θ(x+ y).
Fie −→aa1 ∼−−−−−→θ(x+ y) ⇒ a1 = a + x + y; f(x) + f(y) =
−→θx +
−→θy, si
−→aa2 ∼−→θx+
−→θy⇒ a2 = a+ x+ y⇒ f(x+ y) = f(x) + f(y).
∀x ∈ Rn,∀α ∈ R : f(αx) = −−−→θ(αx).
Fie −→aa1 =−−−→θ(αx)⇒ a1 = a+ αx− θ si −→aa2 = α
−−→(θx)⇒ a2 = a+ α(x−
θ)⇒ f(αx) = αf(x).Injectivitatea. f(x) = θθ ⇔ x = θ ⇔ ker(f) = {θ} .(se foloseste
Exercitiul 1.10).
Surjectivitatea. ∀−→θx ∈ Vn ∃y ∈ Rn : f(y) =−→θx. Consideram y = x.¥

84 CAPITOLUL 1. NOTIUNI TEORETICE
Teorema 1.38 Fie spatiile vectoriale Rn si Vn si vectorii liberi−→i1 , ...,
−→in
din Vn definiti de relatiile−→i1 =
−→θe1,...,
−→in =
−→θen, unde {e1, ..., en} este
baza standard din Rn, atunci vectorii−→i1 , ...,
−→in formeaza o baza ın Vn.
Demonstratie. Deoarece {e1, ..., en} este baza standard din Rn ea esteun sistem de vectori liniar independenti si deoarece f este o transformareliniara bijectiva (este suficient sa fie injectiva) rezulta, utilizand exercitiul
1.6, ca vectorii−→i1 , ...,
−→in sunt liniar independenti, deci formeaza o baza ın
Vn.¥Definitia 1.46 Daca −→u este un vector liber din Vn, atunci proprietatea lui−→u de a avea ca reprezentanti perechi ordonate de vectori din Rn, se numestesensul vectorului liber −→u .
Observatia 1.24 Pentru vectorul liber−→0 ∈ Vn nu se defineste notiunea
de sens. Daca −→u si −→v sunt vectori liberi coliniari si −→v = α−→u , atunci−→u ,−→v se numesc vectori liberi de acelasi sens daca α > 0 si vectori liberide sensuri opuse daca α < 0.
Definitia 1.47 Spatiul vectorial Vn este un spatiu euclidian ın raport cuprodusul scalar standard real
h−→u ,−→v i = hx,yi
definit pentru orice vectori liberi −→u ,−→v ∈ Vn,θx ∈ −→u ,θy ∈ −→v , ın mem-brul al doilea fiind produsul scalar din Rn. De asemenea rezulta ca k−→u k =ph−→u ,−→u i si se numeste lungimea vectorului −→u .
Definitia 1.48 Fie punctele distincte a,b, c ∈ Rn astfel ıncat vectorii−→ab
si −→ac sa nu fie coliniari. Multimeanx ∈ Rn : ∃(α, β) ∈ R2,−→ax = α ·−→ab+ β ·−→ac
ose numeste plan din Rn care trece prin punctele a,b, c sau planul dinRn determinat de punctele a,b, c.
Planul este un subspatiu liniar al spatiului vectorilor liberi Vn.
Definitia 1.49 Fie planul determinat de punctele distincte a,b, c ∈ Rn
astfel ıncat vectorii−→ab si −→ac sa nu fie coliniari Directia unica determinata
de un vector liber ortogonal simultan pe vectorii−→ab si −→ac (deci pe plan) se
numeste directia normelelor planului care trece prin punctele a,b, c. Odreapta a acestei directii se numeste o normala a planului ce trece prinpunctele a,b, c.

1.7. SPATIUL LINIAR AL VECTORILOR LIBERI 85
Definitia 1.50 Numim unghiul a doi vectori −→u si −→v , notat ^(−→u ,−→v ),unghiul propriu dintre doi reperezentanti ai acestor vectori liberi aplicati ınacelasi punct.
1.7.2 Spatiul liniar V3Produsul scalar a doi vectori liberi
Deoarece ın spatiul V3 al vectorilor liberi sunt definite notiunile delungime a unui vector si de unghi dintre doi vectori, putem defini un produsscalar pe V3 pornind de la aceste notiuni.
Definitia 1.51 Daca −→u ,−→v ∈ V3 atunci produsul scalar al perechii devectori liberi (−→u ,−→v ) este definit prin
h−→u ,−→v i=½k−→u k k−→v k cos^(−→u ,−→v ), daca −→u 6=−→0 si −→v 6=−→0 ,0, daca −→u =−→0 sau −→v =−→0 .
(1.199)
Daca −→u ∈ V3 atunci −→u = x1−→i +x2
−→j +x3
−→k , xi ∈ R, i = 1, 3. Coordo-
natele (x1, x2, x3) ın bazan−→i ,−→j ,−→kose numesc coordonatele euclidiene
ale vectorului −→u , iar expresia −→u = x1−→i +x2
−→j +x3
−→k se numeste expresia
analitica a vectorului −→u . Se mai utilizeaza scrierea −→u = (x1, x2, x3).
Expresia analitica a produsului scalar. Consideram ın spatiului
liniar real V3 baza ortonormata notata prin B=n−→i ,−→j ,−→ko. Observam
ca h−→i ,−→i i = 1, h−→j ,−→j i = 1, h−→k ,−→k i = 1, h−→i ,−→j i = h−→j ,−→i i = 0,
h−→i ,−→k i = h−→k ,−→i i = 0 si h−→j ,−→k i = h−→k ,−→j i = 0. Folosind aceste relatii siınlocuind ın produsul scalar pe −→u = x1
−→i + x2
−→j + x3
−→k si −→v = y1
−→i +
y2−→j + y3
−→k , obtinem
h−→u ,−→v i = hx1−→i +x2
−→j +x3
−→k , y1
−→i +y2
−→j +y3
−→k i = x1y1+x2y2+x3y3,
de unde rezulta expresia analitica a produsului scalar.
Produsul vectorial a doi vectori liberi
Definitia 1.52 Daca −→u ,−→v ∈ V3 atunci produsul vectorial a perechiiordonate de vectori liberi (−→u ,−→v ) este vectorul −→u ×−→v definit prin
−→u ×−→v =
⎧⎪⎪⎪⎨⎪⎪⎪⎩k−→u kk−→v ksin^(−→u ,−→v )e
½ −→u si −→v sunt necoliniari
(−→u 6= −→0 si −→v 6= −→0 )−→0
½ −→u si −→v sunt coliniari−→u =
−→0 sau −→v =
−→0 ,
(1.200)

86 CAPITOLUL 1. NOTIUNI TEORETICE
unde −→e este un versor perpendicular pe −→u si −→v astfel ıncat sistemul de
vectori {−→u,−→v ,−→e} sa fie o baza la fel orientata cu baza B=n−→i ,−→j ,−→ko.
Teorema 1.39 (Expresia analitica a produsului vectorial) Fie baza
ortonormata B=n−→i ,−→j ,−→koın V3 si fie −→u ,−→v ∈ V3. Daca −→u = x1
−→i +
x2−→j + x3
−→k , −→v = y1
−→i + y2
−→j + y3
−→k , xi, yi ∈ R, i = 1, 3 atunci
−→u ×−→v =
¯¯−→i−→j−→k
x1 x2 x3y1 y2 y3
¯¯ . (1.201)
Demonstratie. Tinem seama de tabelul
× −→i
−→j
−→k
−→i
−→0
−→k −−→j
−→j −−→k −→
0−→i
−→k
−→j −−→i −→
0
.
Atunci −→u × −→v =³x1−→i + x2
−→j + x3
−→k´×³y1−→i + y2
−→j + y3
−→k´=
(x2y3 − x3y2)−→i − (x1y3 − x3y1)
−→j + (x1y2 − x2y1)
−→k =
¯¯−→i−→j−→k
x1 x2 x3y1 y2 y3
¯¯ .¥
Teorema 1.40 Vectorul −→u ×−→v definit ın Definitia 1.52 are urmatoareleproprietati:a) −→u ×−→v =
−→0 ⇔ −→u k −→v ;
b) Daca −→u × −→v 6= −→0 , atunci {−→u ,−→v ,−→u ×−→v } , ın aceasta ordine,formeaza o baza orientata pozitiv.c) Daca −→u 6= −→0 si −→v 6= −→0 ⇒ k−→u ×−→v k2 = k−→u k2 k−→v k2 − h−→u ,−→v i2
(identitatea lui Lagrange);d) −→u ×−→v = −−→v ×−→u ;(proprietatea de anticomutativitate)α(−→u ×−→v ) = α−→u ×−→v = −→u × α−→v , α ∈ R;−→u × (−→v +−→w ) = −→u ×−→v +−→u ×−→w ;e) k−→u ×−→v k = A¤, unde A¤ noteaza aria paralelogramului construit
cu vectorii liberi −→u si −→v .
Demonstratie. Fie vectorii −→u = x1−→i + x2
−→j + x3
−→k , xi ∈ R, i = 1, 3,
−→v = y1−→i + y2
−→j + y3
−→k , yi ∈ R, i = 1, 3.

1.7. SPATIUL LINIAR AL VECTORILOR LIBERI 87
a) −→u × −→v =−→0 ⇔
⎧⎨⎩ x2y3 − x3y2 = 0x1y3 − x3y1 = 0x1y2 − x2y1 = 0
⇔ x1y1=
x2y2=
x3y3=1
α(cu
conventia ca anularea unui numitor este echivalenta cu anularea si a numa-ratorului respectiv). Rezulta y1 = αx1, y2 = αx2, y3 = αx3 ⇒ −→v = y1
−→i +
y2−→j + y3
−→k = αx1
−→i +αx2
−→j +αx3
−→k = α(x1
−→i +x2
−→j +x3
−→k ) = α−→u ⇒
vectorii −→u ,−→v sunt coliniari.b) Vectori −→u ,−→v ,−→u ×−→v sunt necoplanari deoarece −→u ∦ −→v si −→u ×−→v ⊥
−→u ,−→u × −→v ⊥ −→v si deci formeaza o baza. Matricea de trecere de la bazan−→i ,−→j ,−→kola baza {−→u ,−→v ,−→u ×−→v } este
A =
⎛⎝ x1 y1 x2y3 − x3y2x2 y2 x1y3 − x3y1x3 y3 x1y2 − x2y1
⎞⎠si det(A) = (x2y3−x3y2)2+(x1y3−x3y1)2+(x1y2−x2y1)2 = k−→u ×−→v k2 > 0.c) k−→u ×−→v k2 = k−→u k2 k−→v k2 sin2^(−→u ,−→v ) =
= k−→u k2 k−→v k2 k−→u k2 k−→v k2 cos2^(−→u ,−→v ) = k−→u k2 k−→v k2 − h−→u ,−→v i2.d) Rezulta utilizand relatia (1.201) si proprietatile determinantilor.e) A¤ = k−→u k k−→v k sin^(−→u ,−→v ) = k−→u ×−→v k .¥
Dublul produs vectorial
Definitia 1.53 Fie sistemul de vectori liberi {−→u ,−→v ,−→w} . Dublul produsvectorial al acestuia se defineste ca fiind vectorul liber −→u × (−→v ×−→w ), ıncare ordinea vectorilor si locul parantezelor este esential.
Teorema 1.41 Fie sistemul de vectori liberi {−→u ,−→v ,−→w} . Atunci−→u × (−→v ×−→w ) = h−→u ,−→w i−→v − h−→u ,−→v i−→w .
Demonstratie. Daca doi din vectorii dati sunt coliniari, afirmatia esteevidenta. Intr-adevar, daca−→v q −→w ⇒−→v ×−→w =
−→0 ⇒ −→u ×(−→v ×−→w ) = −→0 .
Daca −→w = α−→v ⇒ h−→u ,−→w i−→v −h−→u ,−→v i−→w = h−→u , α−→v i−→v −h−→u ,−→v iα−→v =−→0 si analog pentru −→v = α−→u .Fie −→v ∦ −→w si alegem baza
−→i ,−→j ,−→k astfel ıncat⎧⎨⎩
−→u = x1−→i + x2
−→j + x3
−→k
−→v = y1−→i
−→w = z1−→i + z2
−→j
.
Obtinem −→v ×−→w =
¯¯−→i−→j−→k
y1 0 0z1 z2 0
¯¯ = y1z2
−→k .

88 CAPITOLUL 1. NOTIUNI TEORETICE
Calculam −→u × (−→v ×−→w ) =
¯¯−→i−→j−→k
x1 x2 x30 0 y1z2
¯¯ = x2y1z2
−→i − x1y1z2
−→j .
Pe de alta parteh−→u ,−→w i−→v − h−→u ,−→v i−→w = (x1z1 + x2z2)y1
−→i − x1y1(z1
−→i + z2
−→j ) =
x2z2y1−→i − x1y1z2
−→j = −→u × (−→v ×−→w ).¥
Observatia 1.25 Produsul vectorial al vectorilor liberi nu este asociativ.Aceasta rezulta din faptul ca (−→u × −→v ) × −→w = −−→w × (−→u × −→v ) =−h−→w ,−→v i−→u + h−→w ,−→u i−→v este un vector coplanar cu −→u si −→v , iar −→u ×(−→v × −→w ) este coplanar cu −→v si −→w . Deci, ın general, (−→u × −→v ) × −→w 6=−→u × (−→v ×−→w ).
Produsul mixt
Definitia 1.54 Fie sistemul de vectori liberi {−→u ,−→v ,−→w} . Produsul mixtal acestui sistem de vectori este definit prin (−→u ,−→v ,−→w ) = h−→u ,−→v ×−→w i.Teorema 1.42 Fie sistemul de vectori liberi {−→u ,−→v ,−→w} . Sa se arate caa) (−→u ,−→v ,−→w ) = 0 daca si numai daca vectorii sunt coplanari.b) Daca vectorii nu sunt coplanari, modulul produsului mixt al sistemului
de vectori {−→u ,−→v ,−→w} , |(−→u ,−→v ,−→w )| , este volumul paralelipipedului con-struit pe cei trei vectori aplicati ın acelasi punct.c) Daca⎧⎨⎩−→u = x1
−→i + x2
−→j + x3
−→k
−→v = y1−→i + y2
−→j + y3
−→k
−→w = z1−→i + z2
−→j + z3
−→k
atunci
(−→u ,−→v ,−→w ) =
¯¯ x1 x2 x3y1 y2 y3z1 z2 z3
¯¯ . (1.202)
d) (−→u ,−→v ,−→w ) = (−→v ,−→w ,−→u ) = (−→w ,−→u ,−→v ) (produsul mixt este invari-ant la permutari circulare).
Demonstratie. a) (−→u ,−→v ,−→w ) = 0⇔ h−→u ,−→v ×−→w i = 0⇔⎧⎨⎩−→u ⊥ −→v ×−→w sau−→v q −→w sau−→u =
−→0 sau −→v =
−→0 sau −→w =
−→0⇔−→u ,−→v ,−→w sunt coplanari.
b) Fie (−→u ,−→v ,−→w ) 6= 0. Cu notatiile de mai jos, ϕ 6= 900, avemh−→u ,−→v ×−→w i = k−→u k k−→v ×−→wk cosϕ = (aria bazei)(±ınaltimea)⇒

1.8. REPERE 89
|(−→u ,−→v ,−→w )| = (aria bazei)(ınaltimea) = volumul paraleleipipedului con-struit pe cei trei vectori (Figura 1.7).
Figura 1.7.c) (−→u ,−→v ,−→w ) = h−→u ,−→v × −→w i = x1(y2z3 − y3z2) − x2(y1z3 − y3z1) +
x3(y2z1 − y1z2) =
¯¯ x1 x2 x3y1 y2 y3z1 z2 z3
¯¯ .
Din punctul (b) rezulta conditia de coplanaritate a trei vectori si anumeprodusul lor mixt trebuie sa fie egal cu zero.d) Rezulta folosind expresia produsului mixt (1.202) si tinand seama ca
valoarea determinantului nu se schimba daca efectuam permutari circulareasupra liniilor acestuia.¥Vom considera ın cele ce urmeaza spatiile vectoriale ale vectorilor liberi
din plan, V2 sau din spatiu, V3.
1.8 Repere
Definitia 1.55 Un reper ın spatiul vectorial Vn este o perecheR = (O;B),unde O este un punct fixat numit originea reperului, iar B este o baza con-siderata ın spatiul vectorilor liberi Vn.
In mod frecvent se considera B o baza ortonormata. De obicei, se con-sidera toti vectorii bazei B aplicati ın acelasi punct, punctul O.In plan se considera ın mod obisnuit reperul R = (O;−→i ,−→j ) unde O ∈
R2 este un punct din plan fixat, iar B =n−→i ,−→joo baza ortonormata, iar
ın spatiu R = (O;−→i ,−→j ,−→k ) unde O ∈ R3 este un punct din spatiu fixat,iar B =
n−→i ,−→j ,−→koo baza ortonormata. In cazul spatiului s-a convenit ca
axa Ox sa fie determinata de punctul O si sa aiba directia data de vectorul−→i , axa Oy sa fie determinata de punctul O si sa aiba directia data devectorul
−→j , iar axa Oz sa fie determinata de punctul O si sa aiba directia

90 CAPITOLUL 1. NOTIUNI TEORETICE
data de vectorul−→k . Axele Ox,Oy,Oz se numesc axele reperului sau
axe de coordonate. Planul xOy este determinat de punctul O si vectorii−→i ,−→j , planul xOz este determinat de punctul O si vectorii
−→i ,−→k iar planul
zOy este determinat de punctul O si vectorii−→k ,−→j . Planele xOy, yOz, xOz
se numesc planele reperului R sau plane de coordonate.Fie R = (O;B) un reper si punctul M ∈ Rn. Vectorul
−−→OM este numit
vectorul de pozitie al punctului M fata de reperul R. Notam −→r =−−→OM iar daca exista posibilitate de confuzie, notam −→r M =
−−→OM si vom
folosi notatia M(−→r M). Daca M ∈ R2, atunci −→r M = x−→i + y
−→j , x poarta
denumirea de abscisa, iar y ordonata punctului M si vom folosi notatiaM(x, y). DacaM ∈ R3, atunci −→r M = x
−→i +y
−→j +z
−→k , x poarta denumirea
de abscisa, y ordonata si z cota punctuluiM si vom folosi notatiaM(x, y, z)si numim (x, y, z) coordonatele punctului M.
Exercitiul 1.26 Sa se scrie expresia vectorului−−−→M1M2 ın reperul ortonor-
mat R = (O;−→i ,−→j ,−→k ) din V3 daca sunt cunoscute coordonatele punctelorM1 si M2, M1(x1, y1, z1), M2(x2, y2, z2). (Figura 1.8.)
Rezolvare.−−→OM1 +
−−−→M1M2 =
−−→OM2 ⇔
−−−→M1M2 =
−−→OM2 −
−−→OM1,
dar−−→OM1 = x1
−→i + y1
−→j + z1
−→k ,−−→OM2 = x2
−→i + y2
−→j + z2
−→k ⇒ −−−→M1M2 =
(x2 − x1)−→i + (y2 − y1)
−→j + (z2 − z1)
−→k .♦
Figura 1.8.DacaR = (O;−→i ,−→j ,−→k ) este un reper siM1(−→r 1),M2(−→r 2) doua puncte
din R3, atuncidist(M1,M2) = k−→r 2 −−→r 1k . (1.203)
sau, daca M1(x1, y1, z1), M2(x2, y2, z2), atunci
dist(M1,M2) =
q(x2 − x1)
2 + (y2 − y1)2 + (z2 − z1)
2.
DacaM1(−→r 1),M2(−→r 2) sunt doua puncte din R2, M1(x1, y1), M2(x2, y2)atunci
dist(M1,M2) =
q(x2 − x1)
2 + (y2 − y1)2.

1.8. REPERE 91
Schimbarea reperelor ın plan. FieR = (O;−→i , j) un reper siR0= (O0;−→i0 ,−→j0 )
un alt reper. Trecerea de la reperul R la reperul R0 (Figura 1.9) este datade translatia
OO0= x0−→i + y0
−→j
si rotatia ( −→i0 = a11
−→i + a21
−→j
−→j0 = a12
−→i + a22
−→j
(1.204)
Figura 1.9.Aceata schimbare de repere poate fi scrisa matriceal astfel: daca M(−→r )atunci −→r = x1
−→i + y1
−→j ın reperul R = (O;−→i ,−→j ) si M(−→r0 ),−→r0 = x01
−→i0 +
y01−→j0 ın reperul R0= (O0;
−→i0 ,−→j0 ) atunci −→r = −→r0 + −−→OO0 ⇔ x1
−→i + y1
−→j =
x01−→i0 +y01
−→j0 +x0
−→i +y0
−→j (Figura 1.9) si daca ınlocuim
−→i0 si−→j0 cu expresia
lor din relatiile (1.204) si tinem seama de unicitatea descompunerii dupavectorii bazei, obtinem:µ
x1x2
¶=
µa11 a12a21 a22
¶µx01x02
¶+
µx0y0
¶.
Schimbarea reperelor ın spatiu. Fie R = (O;−→i ,−→j ,−→k ) un reperortonormat drept siR0= (O0;
−→i0 ,−→j0 ,−→k0 ) un alt reper. Trecerea de la reperul
R la reperul R0 este data de translatia
OO0= x0−→i + y0
−→j + z0
−→k
si rotatia ⎧⎪⎨⎪⎩−→i0 = a11
−→i + a21
−→j + a31
−→k
−→j0 = a12
−→i + a22
−→j + a32
−→k
−→k0 = a13
−→i + a23
−→j + a33
−→k
(1.205)

92 CAPITOLUL 1. NOTIUNI TEORETICE
unde A =
⎛⎝ a11 a12 a22a21 a22 a23a31 a32 a33
⎞⎠ .
Formula matriceala de schimbare a reperului se obtine printr-un ratio-nament analog ca ın plan:⎛⎝ x1
x2x3
⎞⎠ = A
⎛⎝ x01x02x03
⎞⎠+⎛⎝ x0
y0z0
⎞⎠ (1.206)
Reamintim ca ın cazul bazelor ortonormate matricea A de trecere de lao baza la alta este o matrice ortogonala.
Exercitiul 1.27 Sa se scrie ecuatia planului (π) determinat de un punct side normala la plan.
Rezolvare. Fie punctul M0(−→r 0) si−→N ∈ V3,
−→N 6= 0 normala la plan
(Figura 1.10). Atunci un punct M(−→r ) apartine planului (π) daca si numaidaca
−−−→M0M ⊥
−→N , adica verifica ecuatia:
h−→N ,−→r −−→r 0i = 0. (1.207)
Ecuatia (1.207) se numeste ecuatia vectoriala a planului determinatde un punct si un vector normal la plan.¨
Figura 1.10.
Exercitiul 1.28 Fie un reper ortonormat R = (O;−→i ,−→j ,−→k ) si ın raportcu acesta punctul M0(x0, y0, z0) si
−→N = A
−→i + B
−→j + C
−→k 6= −→0 . Sa se
arate ca punctul M(x, y, z) apartine planului (π) determinat de punctul
M0 si normala−→N la plan daca si numai daca
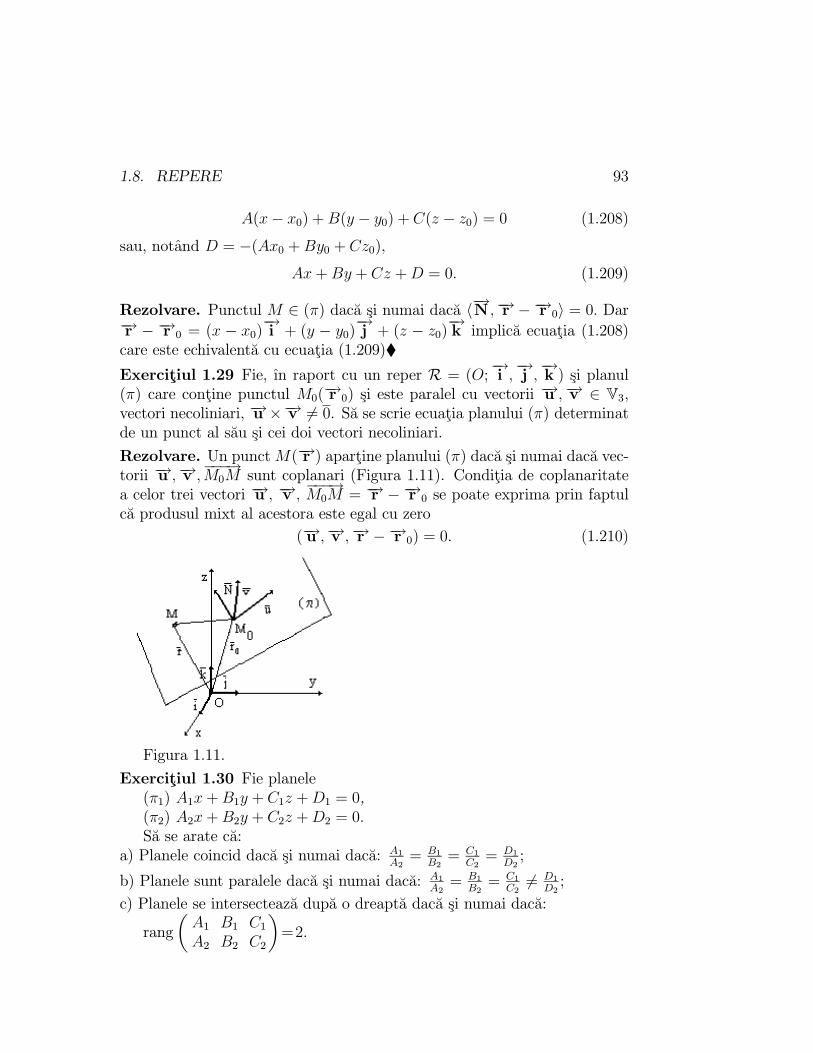
1.8. REPERE 93
A(x− x0) +B(y − y0) + C(z − z0) = 0 (1.208)
sau, notand D = −(Ax0 +By0 + Cz0),
Ax+By + Cz +D = 0. (1.209)
Rezolvare. Punctul M ∈ (π) daca si numai daca h−→N ,−→r −−→r 0i = 0. Dar−→r − −→r 0 = (x − x0)
−→i + (y − y0)
−→j + (z − z0)
−→k implica ecuatia (1.208)
care este echivalenta cu ecuatia (1.209)¨Exercitiul 1.29 Fie, ın raport cu un reper R = (O;
−→i ,−→j ,−→k ) si planul
(π) care contine punctul M0(−→r 0) si este paralel cu vectorii −→u ,−→v ∈ V3,vectori necoliniari, −→u ×−→v 6= 0. Sa se scrie ecuatia planului (π) determinatde un punct al sau si cei doi vectori necoliniari.
Rezolvare. Un punctM(−→r ) apartine planului (π) daca si numai daca vec-torii −→u ,−→v ,
−−−→M0M sunt coplanari (Figura 1.11). Conditia de coplanaritate
a celor trei vectori −→u , −→v ,−−−→M0M = −→r −−→r 0 se poate exprima prin faptul
ca produsul mixt al acestora este egal cu zero
(−→u ,−→v ,−→r −−→r 0) = 0. (1.210)
Figura 1.11.
Exercitiul 1.30 Fie planele(π1) A1x+B1y + C1z +D1 = 0,(π2) A2x+B2y + C2z +D2 = 0.Sa se arate ca:
a) Planele coincid daca si numai daca: A1A2= B1
B2= C1
C2= D1
D2;
b) Planele sunt paralele daca si numai daca: A1A2= B1
B2= C1
C26= D1
D2;
c) Planele se intersecteaza dupa o dreapta daca si numai daca:
rang
µA1 B1 C1A2 B2 C2
¶=2.

94 CAPITOLUL 1. NOTIUNI TEORETICE
Rezolvare. a) Planele coincid daca si numai daca cele doua ecuatii auaceleasi solutii, ceea ce are loc daca si numai daca coeficientii acestora suntproportionali.b) Planele sunt paralele daca si numai daca sistemul format din cele
doua ecuatii este incompatibil, ceea ce se ıntampla daca si numai daca
rang
µA1 B1 C1A2 B2 C2
¶= 1 si rang
µA1 B1 C1 D1
A2 B2 C2 D2
¶= 2.
c) Planele se intersecteaza daca si numai daca sistemul format din celedoua ecuatii este compatibil, cu o infinitate simpla de solutii, ceea ce areloc daca si numai daca
rang
µA1 B1 C1A2 B2 C2
¶= 2.¨
Exercitiul 1.31 (Distanta de la un punct la un plan) Fie planul (π)
h−→N ,−→r −−→r 0i = 0 si M1(−→r 1). Sa se deduca formula distantei de la punctulM1 la planul (π).
dist(M1, (π)) =
¯h−→N ,−→r 1 −−→r 0i
¯°°°−→N°°° . (1.211)
Rezolvare. (Figura 1.12) Daca Punctul M1 ∈ (π) atunci dist(M1, (π)) = 0
si−−−→M0M1 se gaseste ın planul (π) rezulta ca h
−→N ,−→r 1−−→r 0i = 0, adica (1.211)
are loc.
Figura 1.12.DacaM1 /∈ (π), fie−→u ,−→v 6= −→0 doi vectori din (π), necoliniari, −→u ×−→v 6=−→
0 . Atunci
dist(M1, (π)) =volum paralelipiped
aria bazei=
¯(−−−→M0M1,−→u ,−→v )
¯k−→u ×−→v k =
=
¯h−→r 1 −−→r 0,
−→Ni¯
°°°−→N°°° .¨
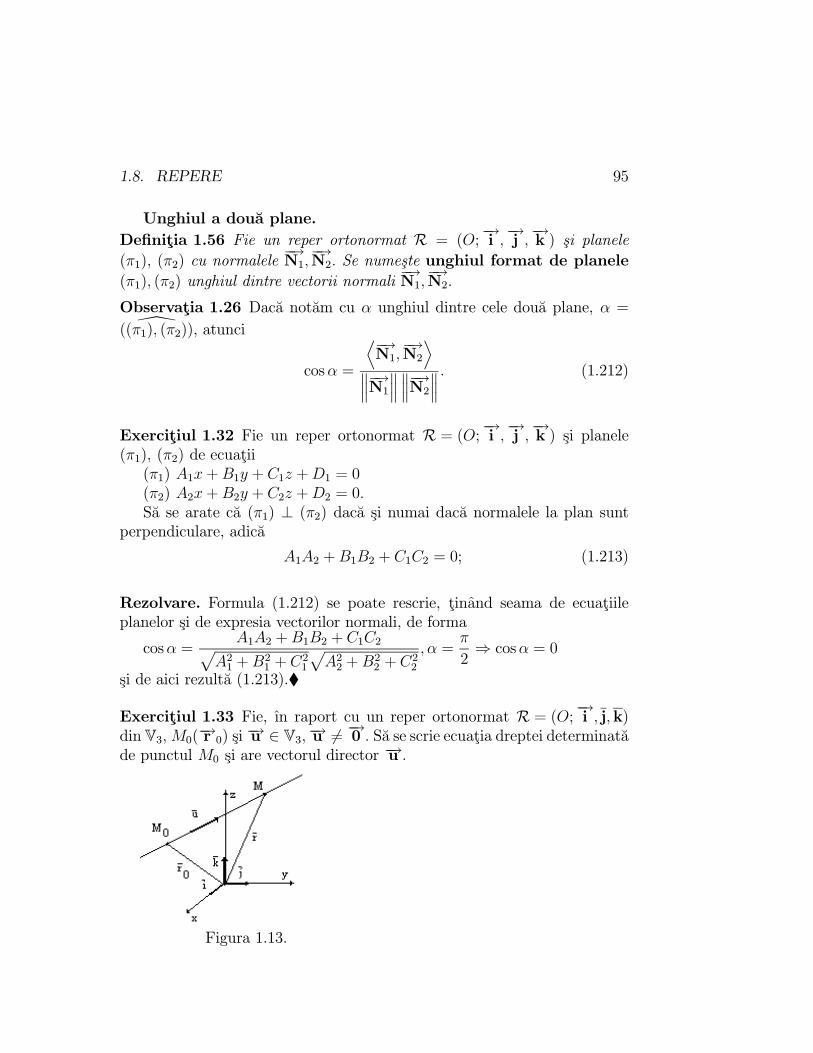
1.8. REPERE 95
Unghiul a doua plane.
Definitia 1.56 Fie un reper ortonormat R = (O;−→i ,−→j ,−→k ) si planele
(π1), (π2) cu normalele−→N1,−→N2. Se numeste unghiul format de planele
(π1), (π2) unghiul dintre vectorii normali−→N1,−→N2.
Observatia 1.26 Daca notam cu α unghiul dintre cele doua plane, α =\((π1), (π2)), atunci
cosα =
D−→N1,−→N2
E°°°−→N1
°°°°°°−→N2
°°° . (1.212)
Exercitiul 1.32 Fie un reper ortonormat R = (O;−→i ,−→j ,−→k ) si planele(π1), (π2) de ecuatii(π1) A1x+B1y + C1z +D1 = 0(π2) A2x+B2y + C2z +D2 = 0.Sa se arate ca (π1) ⊥ (π2) daca si numai daca normalele la plan sunt
perpendiculare, adica
A1A2 +B1B2 + C1C2 = 0; (1.213)
Rezolvare. Formula (1.212) se poate rescrie, tinand seama de ecuatiileplanelor si de expresia vectorilor normali, de forma
cosα =A1A2 +B1B2 + C1C2p
A21 +B21 + C2
1
pA22 +B2
2 + C22
, α =π
2⇒ cosα = 0
si de aici rezulta (1.213).¨
Exercitiul 1.33 Fie, ın raport cu un reper ortonormat R = (O;−→i , j,k)dinV3, M0(−→r 0) si −→u ∈ V3,−→u 6= −→0 . Sa se scrie ecuatia dreptei determinatade punctul M0 si are vectorul director −→u .
Figura 1.13.
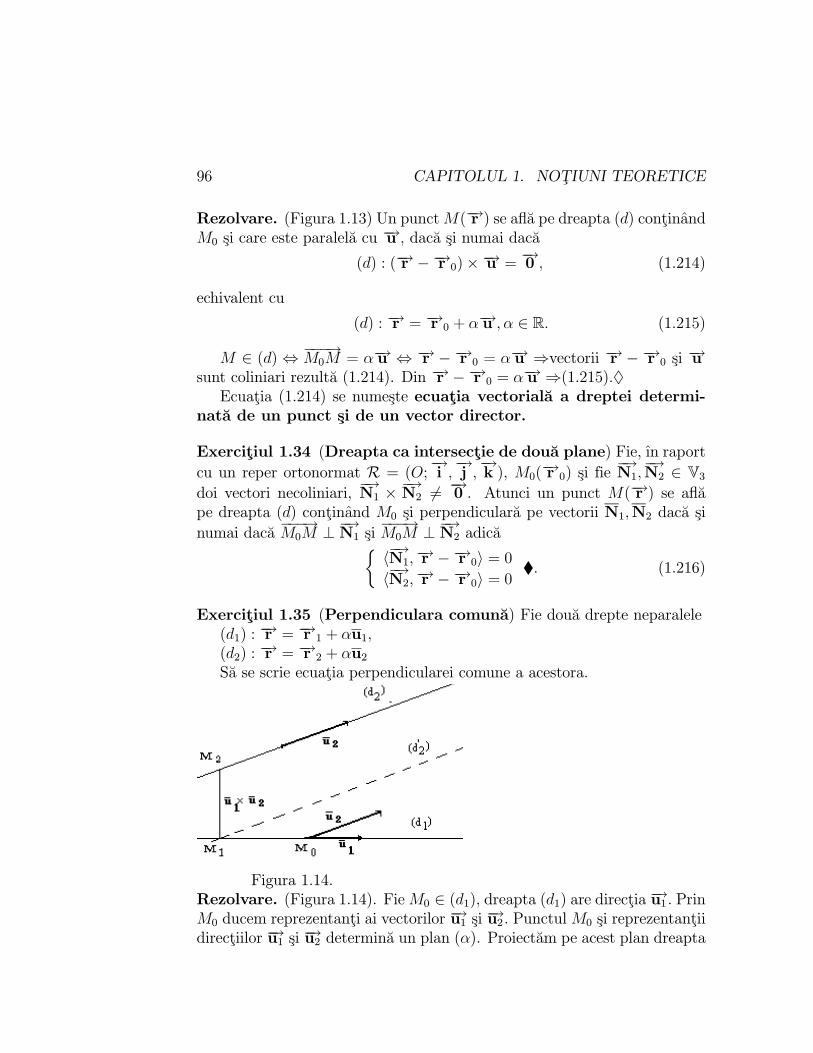
96 CAPITOLUL 1. NOTIUNI TEORETICE
Rezolvare. (Figura 1.13) Un punctM(−→r ) se afla pe dreapta (d) continandM0 si care este paralela cu −→u , daca si numai daca
(d) : (−→r −−→r 0)×−→u =−→0 , (1.214)
echivalent cu
(d) : −→r = −→r 0 + α−→u , α ∈ R. (1.215)
M ∈ (d) ⇔ −−−→M0M = α−→u ⇔ −→r −−→r 0 = α−→u ⇒vectorii −→r −−→r 0 si −→usunt coliniari rezulta (1.214). Din −→r −−→r 0 = α−→u ⇒(1.215).♦Ecuatia (1.214) se numeste ecuatia vectoriala a dreptei determi-
nata de un punct si de un vector director.
Exercitiul 1.34 (Dreapta ca intersectie de doua plane) Fie, ın raport
cu un reper ortonormat R = (O;−→i ,−→j ,−→k ), M0(−→r 0) si fie
−→N1,−→N2 ∈ V3
doi vectori necoliniari,−→N1 ×
−→N2 6= −→0 . Atunci un punct M(−→r ) se afla
pe dreapta (d) continand M0 si perpendiculara pe vectorii N1,N2 daca si
numai daca−−−→M0M ⊥
−→N1 si
−−−→M0M ⊥
−→N2 adica½
h−→N1,−→r −−→r 0i = 0h−→N2,−→r −−→r 0i = 0
¨. (1.216)
Exercitiul 1.35 (Perpendiculara comuna) Fie doua drepte neparalele(d1) : −→r = −→r 1 + αu1,(d2) : −→r = −→r 2 + αu2Sa se scrie ecuatia perpendicularei comune a acestora.
Figura 1.14.Rezolvare. (Figura 1.14). FieM0 ∈ (d1), dreapta (d1) are directia −→u1 . PrinM0 ducem reprezentanti ai vectorilor −→u1 si −→u2 . PunctulM0 si reprezentantiidirectiilor −→u1 si −→u2 determina un plan (α). Proiectam pe acest plan dreapta

1.8. REPERE 97
(d2), fie aceasta proiectie (d02). FieM1 intersectia dintre dreptele (d1) si (d
02).
Ducem prin M1 perpendiculara pe planul (α) care intersecteaza (d2) ın M2
(M1 si (d2) determina un plan perpendicular pe planul (α)). Aceasta va fidreapta (d) a carei directie este data de −→u1 ×−→u2 .Fie−→N1 = −→u1 × (−→u1 × −→u2) (normala planului determinat de
−−−→M1M2 si
(d1)) si−→N2 = −→u2 × (−→u1 × −→u2) (normala planului determinat de
−−−→M1M2 si
(d2)). Atunci dreapta (d) poate fi vazuta ca intersectie a doua plane, planul
determinat de normala−→N1 si care contine dreapta (d1) si punctul M2 si
planul determinat de normala−→N2 si care contine dreapta (d2) si punctul
M1.Ecuatiile dreptei sunt
(d)
½h−→N1, r − r0i = 0h−→N2, r − r3i = 0
. (1.217)
unde r0 este vectorul de pozitie al punctului M0, iar −→r3 este vectorul depozitie al unui punct oarecare de pe dreapta (d2).Vom arata ca (d), dreapta determinata de punctele M1 si M2 este per-
pendiculara pe (d1) si (d2). Un vector director al dreptei (d) este−→N1×
−→N2 =
k−→u 1 ×−→u 2k2 (−→u 1 × −→u 2) si cum −→u 1 × −→u 2 ⊥ −→u 1, −→u 1 × −→u 2 ⊥ −→u 2 ⇒(d) ⊥ (d1), (d) ⊥ (d2).¨Exercitiul 1.36 (Distanta dintre doua drepte) Oricare ar fi doua drep-te neparalele(d1) : −→r = −→r 1 + α−→u 1,(d2) : −→r = −→r 2 + α−→u 2
distanta dintre cele doua drepte este
dist(d1, d2) =
¯h−−−→M1M2,−→u 1 ×−→u 2i
¯k−→u 1 ×−→u 2k
. (1.218)
Rezolvare. Fie dreptele: (d1) determinata de punctul M1 si directia−→u1 si (d2) determinata de punctul M2 si directia −→u2 . Distanta dintre celedoua drepte este lungimea ınaltimii paralelipipedului construit pe vectorii−−−→M1M2,−→u 1,−→u 2. Baza paralelipipedului este formata pe vectorii −→u 1,−→u 2.Utilizam Exercitiul 1.42, b).¨
1.8.1 Aplicatii la studiul conicelor si cudricelor
Conice pe ecuatii generale
Fie reperul R = (O,−→i ,−→j ) ın V2.

98 CAPITOLUL 1. NOTIUNI TEORETICE
Definitia 1.57 Conica este locul geomretric (Γ) al punctelor M din planale caror coordonate (x, y), ın raport cu reperul ortonormat R, satisfacecuatia
(Γ) :¡x y
¢µ a11 a12a12 a22
¶µxy
¶+ 2
¡x y
¢µ a01a02
¶+ a00 = 0,
(1.219)
unde a211 + a212 + a222 6= 0, aij ∈ R, i, j ∈ {0, 1, 2}, i ≤ j.
Ecuatia (1.219) este scrierea matriceala a ecuatiei a11x2+2a12xy+a22y
2+2a01x+2a02y+a00 = 0, ecuatie de gradul doi ın x si y, ın care cel putin unuldintre coeficientii termenilor de gradul al doilea , a11, a12, a22 este diferit dezero.Una din problemele importante rezolvate ale geometriei analitice consta
ın faptul ca a dovedit ca orice conica poate fi adusa, printr-o schimbare con-
venabila de reper la una din ecuatiile: cerc: x2+y2 = R2, elipsa:x2
a2+y2
b2= 1,
hiperbola:x2
a2− y2
b2= 1, parabola: y2 = 2px, doua drepte concurente:
x2
a2− y2
b2= 0, doua drepte paralele: x2 − a2 = 0, doua drepte confundate
x2 = 0, un punct:x2
a2+
y2
b2= 0, multimea vida:
x2
a2+
y2
b2+ 1 = 0.
Utilizand rotatia si translatia realizam o schimbare de reper de la reperulR = (O,−→i ,−→j ) la un reper adecvat la fel orientat cu reperulR, numit repercanonic, fata de care conica (1.219) sa aiba una din ecuatiile de mai sus.Tipul conicei (1.219) este determinat de expresia termenilor de grad doi,
adica de forma patratica
q(−→x ) =¡x y
¢µ a11 a12a12 a22
¶µxy
¶,
unde −→x =x−→i + y−→j .
Problema care ne propunem sa o rezolvam: sa gasim un reper ın raportcu care ecuatia (1.219) sa aiba o forma cat mai simpla. Vom studia maiıntai forma patratica q si o vom aduce la forma canonica.Daca a12 = 0 matricea formei patratice are forma diagonala si se trece
direct la efectuarea translatiei.Daca a12 6= 0 se face mai ıntai o rotatie. Prezentam ın continuare modul
ın care se efectueaza rotatia.
Matricea formei patratice (q)B, ın baza B =n−→i ,−→joeste o matrice
simetrica. Ea este ıntotdeauna diagonalizabila, deci exista o baza orto-normata formata din vectori proprii (conform Observatiei 1.14) ai matricei

1.8. REPERE 99
simetrice. Acesteia ıi atasam ecuatia caracteristica¯a11 − λ a12a12 a22 − λ
¯= 0⇔ λ2 − (a11 + a22)λ+ a11a22 − a212 = 0
ale carei radacini sunt ıntodeauna reale (conform Teoremei 1.17).Facem observatia ca nu putem avea λ1 = λ2 = 0 deoarece aceasta implica
a11 = a12 = a22 = 0, contrar ipotezei.Corespunzator valorilor proprii λ1 si λ2 avem vectorii proprii {−→u1 ,−→u2} .
Fie −→e1 =1
k−→u1k−→u1 ,−→e2 =
1
k−→u2k−→u2 versorii vectorilor proprii astfel ıncat
−→e1 = c11−→i + c21
−→j ,−→e2 = c12
−→i + c22
−→j . Matricea de trecere de la baza B =n−→
i ,−→jola baza B0 = {−→e1 ,−→e2} este matricea C =
µc11 c12c21 c22
¶si aceasta
este ortogonala. Matricea C trebuie sa fie astfel construita ıncat detC =1(avem ın vedere posibilitatea ınlocuirii unuia din versori prin opusul sausau renumerotarea acestora) pentru a fi la fel orientata cu baza B. Versorii{−→e1 ,−→e2} astfel construiti dau directiile noilor axe Ox0 si respectiv Oy0, iarrotatia µ
xy
¶=
µc11 c12c21 c22
¶µx0
y0
¶(1.220)
reduce forma patratica q la forma canonica λ1(x0)2 + λ2(y
0)2.In reperul R0 = (O,−→e1 ,−→e2 ) ecuatia (1.219) va avea forma:
λ1(x0)2 + λ2(y
0)2 + 2a001x
0 + 2a002y0 + a00 = 0. (1.221)
Cazul I: forma patratica q are rangul 2 (λ1λ2 6= 0). Ecuatia (1.221)devine, prin restangerea patratelelor, de forma
λ1(x0 +
a001λ1)2 + λ2(y
0 +a002λ2)2 =
µa001λ1
¶2+
µa002λ2
¶2− a00.
Prin translatia
µx0
y0
¶=
µXY
¶+
⎛⎜⎝ −a010
λ1
−a020
λ2
⎞⎟⎠ si notand
a000 =
µa001λ1
¶2+
µa002λ2
¶2− a00, ecuatia (1.219) va avea ın reperul R00 =
(O0,−→e1 ,−→e2 ) formaλ1X
2 + λ2Y2 = a000. (1.222)
100 CAPITOLUL 1. NOTIUNI TEORETICE
Originea noului reper O0 are coordonatele
µ−a
001
λ1,−a
002
λ2
¶ın reperul
R0 = (O,−→e1 ,−→e2 ) si aplicand relatiile (1.220) obtinem coordonatele ın repe-rul initial. Ecuatia (1.222) arata ca O0X si O0Y sunt axe de simetrie aleconicei, iar O0 este centru de simetrie. Rezulta ca ın acest caz conica arecentru de simetrie.Daca a000 = 0 si λ1λ2 > 0 conica se reduce la un singur punct, centrul
sau O0, iar daca a000 = 0 si λ1λ2 < 0 conica reprezinta doua drepte secantecare trec prin punctul O0.Daca a000 6= 0, ımpartind prin a000 si notand¯
a000λ1
¯= a2,
¯a000λ2
¯= b2, a > 0, b > 0,
ecuatia (1.222) devine:ε1X2
a2+ ε2
Y 2
b2= 1
unde ε1 = ±1, ε2 = ±1. Daca ε1 = ε2 = 1 conica este o elipsa. Dacaε1 = ε2 = −1 conica este multimea vida. Daca ε1ε2 = −1 conica este ohiperbola.Cazul II: forma patratica q are rangul 1 (sau λ1 = 0 sau λ2 = 0).
Presupunem ca λ1 = 0 si λ2 6= 0. Ecuatia (1.219) se poate scrie
λ2(y0 +
a001λ2)2 + 2a
001x
0 + a00 −µa002λ2
¶2= 0. (1.223)
Daca a001 6= 0 conica este o parabola. Ecuatia (1.223) devine
λ2(y0 +
a002λ2)2 + 2a
001
⎛⎜⎜⎜⎝x0 +
a00 −µa002λ2
¶22a
001
⎞⎟⎟⎟⎠ = 0.
Prin translatia
µx0
y0
¶=
µXY
¶+
⎛⎜⎜⎜⎜⎝ −a00 −
µa002λ2
¶22a
001
−a002
λ2
⎞⎟⎟⎟⎟⎠ ecuatia (1.219)va avea forma ın reperul R00 = (O0,−→e1 ,−→e2 )
λ2Y2 + 2a001X = 0. (1.224)

1.8. REPERE 101
Forma ecuatiei (1.224) arata ca, ın cazul ın care una din valorile propriieste nula, conica admite o axa de simetrie, ın acest caz O0X.Daca a001 = 0 ecuatia (1.223) devine
λ2(y0 +
a001λ2)2 + a00 −
µa002λ2
¶2= 0. (1.225)
Daca a00 −µa002λ2
¶2= 0 atunci ecuatia reprezinta doua drepte care co-
incid.
Daca a00 −µa002λ2
¶26= 0 si λ2
Ãa00 −
µa002λ2
¶2!< 0 ecuatia reprezinta
doua drepte paralele. Daca λ2
Ãa00 −
µa002λ2
¶2!> 0 ecuatia reprezinta
multimea vida.
Exercitiul 1.37 Sa se aduca la forma canonica conica5x2 + 8xy + 5y2 − 18x− 18y + 9 = 0
si sa se reprezinte grafic.
Rezolvare. Scriem matriceal ecuatia conicei:¡x y
¢µ 5 44 5
¶µxy
¶+ 2
¡x y
¢µ −9−9
¶+ 9 = 0
Matricea formei patratice este
µ5 44 5
¶. Deoarece rangul matricei for-
mei patratice este 2, conica este cu centru. Ecuatia caracteristica a matriceiformei patratice este λ2 − 10λ+ 9 = 0⇒ λ1 = 1, λ2 = 9.Vectorii proprii sunt u1 =
−→i −−→j , si −→u2 =
−→i +−→j , iar versorii cores-
punzatori sunt −→e1 = 1√2
³−→i −−→j
´si −→e2 = 1√
2
³−→i +−→j´.
Matricea de rotatie este: C =
Ã1√2
1√2
−1√2
1√2
!,detC = 1. Scriem rotatiaµ
xy
¶=
Ã1√2
1√2
−1√2
1√2
!µx0
y0
¶. In urma rotatiei ecuatia conicei devine
¡x0 y0
¢Ã 1√2
−1√2
1√2
1√2
!µ5 44 5
¶Ã 1√2
1√2
−1√2
1√2
!µx0
y0
¶+
+2¡x0 y0
¢Ã 1√2
−1√2
1√2
1√2
!µ−9−9
¶+ 9 = 0⇒

102 CAPITOLUL 1. NOTIUNI TEORETICE
¡x0 y0
¢µ 1 00 9
¶µx0
y0
¶+ 2
¡x0 y0
¢µ 0
−9√2
¶+ 9 = 0
(x0)2 + 9(y0)2 − 18y0√2 + 9 = 0⇔ (x0)2 + 9
¡y0 −√2¢2 − 9 = 0.
Centrul conicei este O0(0,√2), coordonatele sale fiind date ın reperul
R0 = (O;−→e1 ,−→e2 ).
In urma translatiei
µx0
y0
¶=
µXY
¶+
µ0√2
¶, se obtine ecuatia
X2 + 9Y 2 − 9 = 0⇔ X2
9+ Y 2 − 1 = 0
Conica este o elipsa. Coordonatele lui O0 ın raport cu reperul initialsunt:µ
x0y0
¶=
Ã1√2
1√2
−1√2
1√2
!µ0√2
¶=
µ11
¶.
In cele ce urmeaza prezentam rotatia si translatia axelor si desenam ınnoul reper graficul conicei.Rotatia sistemului de axe: reperul R = (O;
−→i ,−→j ) trece ın reperul
R0 = (O;−→e1 ,−→e2 ). Ecuatia dreptei care trece prin origine si are directia −→e1este: x = −y, iar ecuatia dreptei care trece prin origine si are directia −→e2este x = y. Sensul axelor (Ox0, Oy0) este dat de vectorii −→e1 ,−→e2 .Translatia sistemului de axe: reperul R0 = (O,−→e1 ,−→e2 ) trece ın
reperul R00 = (O0,−→e1 ,−→e2 ). Ecuatiile dreptelor care trec prin O0(1, 1) si audirectiile −→e1 respectiv −→e2 sunt: x = −y + 2 si respectiv ⇔ y = x. In acestultim reper trasam graficul elipsei va fi (Figura 1.15):
Figura 1.15.
Exercitiul 1.38 Sa se aduca la forma canonica conica3x2 − 4xy − 2x+ 4y − 3 = 0
si sa se traseze graficul.
Rezolvare. Scriem matriceal ecuatia conicei:¡x y
¢µ 3 −2−2 0
¶µxy
¶+ 2
¡x y
¢µ −12
¶− 3 = 0

1.8. REPERE 103
Matricea formei patratice este
µ3 −2−2 0
¶. Deoarece rangul matricei
formei patratice este 2, conica este cu centru. Ecuatia caracteristica esteλ2−3λ−4 = 0⇒ λ1 = −1, λ2 = 4. Vectorii proprii si versorii corespunzatorisunt: −→u1 =
−→i + 2
−→j ⇒ −→e1 = 1√
5
³−→i + 2
−→j´si −→u2 = −2
−→i +
−→j ⇒
−→e2 = 1√5
³−2−→i +−→j
´.
Matricea de rotatie este: C =
Ã1√5
−2√5
2√5
1√5
!,detC = 1. Scriem rotatiaµ
xy
¶=
Ã1√5
−2√5
2√5
1√5
!µx0
y0
¶. In urma rotatiei si a restrangerii patratelor
ecuatia conicei devine:¡x0 y0
¢Ã 1√5
2√5
− 2√5
1√5
!µ3 −2−2 0
¶Ã 1√5− 2√
52√5
1√5
!µx0
y0
¶+
+2¡x0 y0
¢Ã 1√5
2√5
− 2√5
1√5
!µ−12
¶− 3 = 0
−(x0 − 3√5)2 + 4(y0 +
1√5)2 − 2 = 0.
Centrul conicei este O0( 3√5,− 1√
5), coordonatele sale fiind date ın repe-
rul R0 = (O;−→e1 ,−→e2 ). Facem translatia
µx0
y0
¶=
µXY
¶+
Ã3√5
− 1√5
!si
obtinem −X2 + 4Y 2 − 2 = 0⇔
−X2
2+
Y 2
12
− 1 = 0
Conica este o hiperbola. Coordonatele lui O0 ın raport cu reperul initialsunt:µ
x0y0
¶=
Ã1√5
−2√5
2√5
1√5
!Ã3√5
− 1√5
!=
µ11
¶.
In cele ce urmeaza prezentam rotatia si translatia axelor si desenam ınnoul reper graficul conicei.Rotatia sistemului de axe: reperul R = (O;
−→i ,−→j ) trece ın reperul
R0 = (O,−→e1 ,−→e2 ). Ecuatia dreptei care trece prin origine si are directia −→e1este: 2x = y, iar ecuatia dreptei care trece prin origine si are directia −→e2este x = −2y. Sensul axelor (Ox0, Oy0) este dat de vectorii −→e1 ,−→e2 .

104 CAPITOLUL 1. NOTIUNI TEORETICE
Translatia sistemului de axe: reperul R0 = (O,−→e1 ,−→e2 ) trece ınreperul R00 = (O0,−→e1 ,−→e2 ). Ecuatiile dreptelor care trec prin O0(1, 1) si audirectiile −→e1 respectiv −→e2 sunt: 2x = y+1 si respectiv x = −2y+3. In acestultim reper graficul conicei va fi (figura 1.16):
Figura 1.16.
Exercitiul 1.39 Sa se aduca la forma canonica si sa se deseneze conica:x2 − 4xy + 4y2 − 6x+ 2y + 1 = 0.
Rezolvare. Scriem matriceal ecuatia conicei:¡x y
¢µ 1 −2−2 4
¶µxy
¶+ 2
¡x y
¢µ −31
¶+ 1 = 0
Matricea formei patratice este
µ1 −2−2 4
¶. Deoarece rangul matricei
formei patratice este 1, conica este fara centru. Ecuatia caracteristica esteλ2 − 5λ = 0 ⇒ λ1 = 0, λ2 = 5. Vectorii proprii sunt pentru λ1 = 0,−→u1 =2−→i +−→j cu versorul −→e1 = 1√
5
³2−→i +−→j´, iar pentru λ2 = 5, −→u2 =
−→i −2−→j
cu versorul −→e2 = 1√5
³−→i − 2−→j
´.
Matricea de rotatie C =
Ã2√5
1√5
1√5
−2√5
!se modifica deoarece detC = −1.
Pentru ca detC = 1 schimbam sensul vectorului−→e2 ,−→e2 = 1√5
³−−→i + 2−→j
´,
deci matricea de rotatie va fi C =
Ã2√5
−1√5
1√5
2√5
!. Scriem rotatiaµ
xy
¶=
Ã2√5
−1√5
1√5
2√5
!µx0
y0
¶.
In urma rotatiei si a restrangerii patratelor ecuatia conicei devine 5(y0−1√5)2 − 2x0
√5 = 0. Efectuam translatiatia
µx0
y0
¶=
µXY
¶+
µ01√5
¶si

1.8. REPERE 105
obtinem ecuatia 5Y 2 − 2X√5 = 0⇔ Y 2 = 2√
5X.
Varful parabolei va fi ın punctul O0(0, 1√5), coordonatele sale fiind date
ın reperul R0 = (O;−→e1 ,−→e2 ). Coordonatele lui O0 ın raport cu reperul initial
sunt:
µx0y0
¶=
Ã2√5
−1√5
1√5
2√5
!µ01√5
¶=
µ−1525
¶.
Trasarea graficului:Rotatia sitemului de axe: reperul R = (O;
−→i ,−→j ) trece ın reperul
R0 = (O,−→e1 ,−→e2 ). Ecuatia dreptei care trece prin origine si are directia datade vectorul −→e1 este: x = 2y, iar ecuatia dreptei care trece prin origine siare directia −→e2 este 2x = −y. Sensul axelor (Ox0, Oy0) este dat de vectorii−→e1 ,−→e2 .Translatia sistemului de axe: reperul R0 = (O,−→e1 ,−→e2 ) trece ın repe-
rul R00 = (O0,−→e1 ,−→e2 ), unde O0 va fi varful parabolei.Ecuatiile axelor trans-late vor fi: x− 2y− 1 = 0 si 2x+ y = 0. Cele doua sisteme de axe le trasampe acelasi grafic. In acest ultim reper trasam graficul parabolei (Figura1.17):
Figura 1.17.Exercitiul 1.40 Sa se aduca la forma canonica si sa se deseneze conica:
x2 + 2xy + y2 + 2x+ 2y − 3 = 0.Rezolvare. Scriem matriceal ecuatia conicei:¡
x y¢µ 1 1
1 1
¶µxy
¶+ 2
¡x y
¢µ 11
¶− 3 = 0
Matricea formei patratice este
µ1 11 1
¶.Deoarece rangul matricei formei
patratice este 1, conica este fara centru. Ecuatia caracteristica este λ2 −2λ = 0 ⇒ λ1 = 0, λ2 = 2. Vectorii proprii si versorii corespunzatori sunt:−→u1 =
−→i −−→j ⇒−→e1 = 1√
2
³−→i −−→j
´, −→u2 =
−→i +−→j ⇒−→e2 = 1√
2
³−→i +−→j´.
Matricea de rotatie C =
Ã1√2
1√2
− 1√2
1√2
!are detC = 1. Scriem rotatia

106 CAPITOLUL 1. NOTIUNI TEORETICE
µxy
¶=
Ã1√2
1√2
− 1√2
1√2
!µx0
y0
¶. In urma rotatiei ecuatia conicei devine
2(y0)2 + 2y0√2− 3 = 0⇔ 2
¡y0 + 3
2
√2¢ ¡
y0 − 12
√2¢= 0. Rezulta ca ecuatia
reprezinta doua drepte paralele. Inlocuim y0 din expresia rotatiei, y0 =12x√2 + 1
2y√2 ın ecuatia conicei rotita, obtinem ecuatiile celor doua drepte
x+y+3 = 0, x+y−1 = 0 si le reprezentam grafic ın sistemul initial (Figura1.18):.
Figura 1.18.
Cuadrice pe ecuatii generale
O problema similara se pune pentru suprafete din V3 reprezentate prinecuatii algebrice de gradul al doilea. Fie reperul R = (O,−→i ,−→j ,−→k ) ın V3.
Definitia 1.58 Cudrica este locul geometric al punctelor din spatiu alecaror coordonate (x, y, z) ın raport cu reperul R, satisfac ecuatia
(Σ) :¡x y z
¢⎛⎝ a11 a12 a13a12 a22 a23a13 a23 a33
⎞⎠⎛⎝ xyz
⎞⎠++2¡x y z
¢⎛⎝ a01a02a03
⎞⎠+ a00 = 0,(1.226)
unde a211 + a212 + a213 + a222 + a223 + a233 6= 0, aij ∈ R, i, j ∈ {0, 1, 2, 3}, i ≤ j.
Ecuatia (1.226) este scrierea matriceala a ecuatiei
a11x2+a22y
2+a33z2+2a12xy+2a13xz+2a23yz+2a01x+2a02y+2a03z+a00 = 0,
ecuatie de gradul doi ın x, y si z, ın care cel putin unul dintre coeficientiitermenilor de gradul al doilea a11, a22, a33, a12, a13, a23 este diferit de zero.Problema care ne propunem sa o rezolvam: sa gasim un reper ın raport
cu care ecuatia (1.226) sa aiba o forma cat mai simpla.
1.8. REPERE 107
Vom studia mai ıntai forma patratica q si o vom aduce la forma canonica.Tipul cuadricei (1.226) este determinat de expresia termenilor de grad doi,adica de forma patratica
q(−→x ) =¡x y z
¢⎛⎝ a11 a12 a13a12 a22 a23a13 a23 a33
⎞⎠⎛⎝ xyz
⎞⎠ .
unde −→x =x−→i + y−→j + z
−→k .
Conform celor studiate, exista o baza ortonormata ın V3 formata dinvectori proprii ai matricei formei patratice, care este o matrice simetrica, ınraport cu care forma patratica are forma canonica. Calculam valorile propriiλ1, λ2, λ3 si vectorii proprii corespunzatori, determinam baza ortonormata{−→e 1,−→e 2,−→e 3} formata din vectori proprii. Fie C matricea de trecere de labaza
n−→i ,−→j ,−→kola baza {−→e 1,−→e 2,−→e 3} . Aceasta va fi matricea de rotatie
si o alegem ın asa fel ıncat detC =1. In caz contrar schimbam orientareaunui vector dintre vectorii {−→e 1,−→e 2,−→e 3} . Versorii {−→e 1,−→e 2,−→e 3} vor dadirectiile axelor Ox0, Oy0, Oz0 iar rotatia⎛⎝ x
yz
⎞⎠ = C
⎛⎝ x0
y0
z0
⎞⎠ (1.227)
reduce forma patratica la forma canonica λ1(x0)2 + λ2(y
0)2 + λ3(z0)2. In
reperul R = (O,−→e 1,−→e 2,−→e 3) ecuatia (1.226) va avea formaλ1(x
0)2 + λ2(y0)2 + λ3(z
0)2 + 2a001x0 + 2a002y
0 + 2a003z0 + a00 = 0.
(1.228)Cazul I: forma patratuica q are rangul 3 (λ1λ2λ3 6= 0) . Ecuatia (1.221)
devine, prin restangerea patratelelor:
λ1(x0 +
a001λ1)2 + λ2(y
0 +a002λ2)2 + λ3(z
0 +a003λ3)2 =
=
µa001λ1
¶2+
µa002λ2
¶2+
µa003λ3
¶2− a00. (1.229)
Notam a000 =
µa001λ1
¶2+
µa002λ2
¶2+
µa003λ3
¶2− a00. Prin translatia
⎛⎝ x0
y0
z0
⎞⎠ =
⎛⎝ XYZ
⎞⎠ +
⎛⎜⎜⎜⎜⎜⎝−a
001
λ1
−a002
λ2
−a003
λ3
⎞⎟⎟⎟⎟⎟⎠ ecuatia (1.226) va capata ın reperul
R0= (O0,−→e 1,−→e 2,−→e 3), forma:

108 CAPITOLUL 1. NOTIUNI TEORETICE
λ1X2 + λ2Y
2 + λ3Z2 = a
000 (1.230)
Originea noului reper O0 va avea coordonatele
µ−a
001
λ1,−a
002
λ2,−a
003
λ3
¶ın
reperul R = (O,−→e 1,−→e 2,−→e 3) si aplicand (1.227) obtinem coordonatele luiO0 ın reperul initial.Daca a
000 = 0 si λ1, λ2, λ3 au acelasi semn, cuadrica se reduce la un singur
punct, centrul sau.Daca a
000 = 0 si λ1, λ2, λ3 nu au acelasi semn, cuadrica este un con cu
centrul ın O0.Daca a
000 6= 0 putem ımparti cu a
000 si notam¯
a000λ1
¯= a2,
¯a000λ2
¯= b2,
¯a000λ3
¯= c2, a > 0, b > 0, c > 0.
Ecuatia (1.230) va avea forma
ε1X2
a2+ ε2
Y 2
b2+ ε3
Z2
c2= 1,
cu ε1, ε2, ε3 ∈ {−1, 1} .Daca ε1 = ε2 = ε3 = 1, cudrica este un elipsoid. Daca doi dintre acestia
sunt egali cu 1, de exemplu ε1 = ε2 = 1, iar ε3 = −1, cudrica este unhiperboloid cu o singura panza. Daca doi dintre ei sunt egali cu -1 iarcelalalt este egal cu 1, cuadrica este un hiperboloid cu doua panze. Dacaε1 = ε2 = ε3 = −1, cuadrica este multimea vida.Cazul II: forma patratica q are rangul 2 (una din valorile proprii este
zero). Presupunem ca λ1 6= 0, λ2 6= 0, λ3 = 0. Ecuatia (1.229) poate fi scrisasub forma
λ1(x0 +
a001λ1)2 + λ2(y
0 +a002λ2)2 + 2a
003z =
µa001λ1
¶2+
µa002λ2
¶2− a00.
Notam a000 =
µa001λ1
¶2+
µa002λ2
¶2− a00. Prin translatia
⎛⎝ x0
y0
z0
⎞⎠ =
⎛⎝ XYZ
⎞⎠ +⎛⎜⎜⎜⎝−a
001
λ1
−a002
λ20
⎞⎟⎟⎟⎠ ecuatia (1.226) va capata ın sistemul
R0= (O0,−→e 1,−→e 2,−→e 3), forma:
λ1(x0 +
a001λ1)2 + λ2(y
0 +a002λ2)2 + 2a003z
0 = a000.

1.8. REPERE 109
Originea noului reper O0 va avea coordonatele
µ−a
001
λ1,−a
002
λ2, 0
¶ın repe-
rul R = (O,−→e 1,−→e 2,−→e 3) si aplicand (1.227) obtinem coordonatele lui O0
ın reperul initial.Pentru a003 = 0 ecuatia se reduce la
λ1X2 + λ2Y
2 = a000 (1.231)
Daca a000 = 0 si λ1λ2 > 0, cuadrica se reduce la multimea punctelor axeiO0Z. Daca a000 = 0 si λ1λ2 < 0, cuadrica se reduce la doua plane secante,intersectia lor fiind axa O0Z.Daca a000 6= 0 prin ımpartirea la a000 ecuatia (1.231) se scrie sub forma:
γ1X2 + γ2Y
2 = 1, γ1γ2 6= 0.
Cuadrica este un cilindru (eliptic daca γ1γ2 > 0, hiperbolic daca γ1γ2 <0) cu generatoarele paralele cu axa O0Z.Cazul III: forma patratica q are rangul 1 (doua din valorile proprii sunt
zero). Presupunem ca λ1 6= 0, λ2 = λ3 = 0. Ecuatia (1.229) poate fi scrisasub forma
λ1(x0 +
a001λ1)2 + 2a002y
0 + 2a003z0 =
µa001λ1
¶2− a00.
Notam a000 =
µa001λ1
¶2− a00. Prin translatia⎛⎝ x0
y0
z0
⎞⎠ =
⎛⎝ XYZ
⎞⎠ +⎛⎜⎜⎝ −
a001λ100
⎞⎟⎟⎠ ecuatia (1.226) va capata ın sistemul
R0= (O0,−→e 1,−→e 2,−→e 3), forma:
λ1X2 + 2a002Y + 2a
003Z = a000.
Originea noului reper O0 va avea coordonatele
µ−a
001
λ1, 0, 0
¶ın reperul
R = (O,−→e 1,−→e 2,−→e 3) si aplicand (1.227) obtinem coordonatele lui O0 ınreperul initial.Daca a002 6= 0 sau a003 6= 0 cuadrica este un cilindru cu generatoarele
paralele cu dreapta de ecuatii X = 0, a002Y + a003Z = a000.Daca a002 = 0, a
003 = 0 ecuatia cuadricei se reduce la λ1X
2 = a000. Dacaλ1a
000 > 0 cuadrica este formata din doua plane paralele. Daca λ1a
000 < 0
nu exista puncte reale care sa satisfaca ecuatia. Daca λ1a000 = 0⇒ a000 = 0
ecuatia cuadricei se reduce la ecuatia a doua plane care coincid.

110 CAPITOLUL 1. NOTIUNI TEORETICE
Exercitiul 1.41 Se considera cuadrica care ın reperul R = (O,−→i ,−→j ,−→k )are ecuatia:¡x y z
¢⎛⎝ 7 −2 0−2 6 −20 −2 5
⎞⎠⎛⎝ xyz
⎞⎠+2 ¡ x y z¢⎛⎝ −1114
−4
⎞⎠+36 = 0.Sa se aduca cuadrica la forma canonica si sa se precizeze natura ei.
Rezolvare. Fie A matricea formei patratice
A =
⎛⎝ 7 −2 0−2 6 −20 −2 5
⎞⎠ .
Calculam polinomul caracteristic P (λ) = λ3 − 18λ2 + 99λ − 162. Va-lorile proprii sunt λ1 = 9, λ2 = 6, λ3 = 3. Pentru λ1 = 9 vectorul propriu
este −→u 1 =¡2 −2 1
¢T, pentru λ2 = 6 vectorul propriu este −→u 2 =¡
2 1 −2¢T
, pentru λ3 = 3 vectorul propriu este −→u 3 =¡1 2 2
¢T.
Baza ortonormata formata din vectorii proprii este −→e 1 =¡23
−23
13
¢T,
−→e 2 =¡23
13
−23
¢T, −→e 3 =
¡13
23
23
¢T.
Cu matricea de rotatie C =
⎛⎝ 23
23
13
−23
13
23
13−23
23
⎞⎠ cu detC = 1. efectuam
rotatia⎛⎝ xyz
⎞⎠ =
⎛⎝ 23
23
13
−23
13
23
13−23
23
⎞⎠⎛⎝ x0
y0
z0
⎞⎠si obtinem ecuatia
9(x0)2 + 6(y0)2 + 3(z0)2 − 36x0 + 6z0 + 36 = 0⇔9(x0 − 2)2 + 6y02 + 3(z0 + 1)2 − 3 = 0
Efectuam translatia⎛⎝ x0
y0
z0
⎞⎠ =
⎛⎝ XYZ
⎞⎠+⎛⎝ 2
0−1
⎞⎠si obtinem ecuatia
9X2 + 6Y 2 + 3Z2 − 3 = 0⇔ 3X2 + 2Y 2 + Z2 − 1 = 0
Suprafata este un elipsoid.Centrul elipsoidului ın reperul R = (O,−→u1 ,−→u2 ,−→u3) este O0(2, 0,−1).
Coordonatele centrului cuadricei ın raport cu reperul R sunt:

1.8. REPERE 111⎛⎝ xyz
⎞⎠ =
⎛⎝ 23
23
13
−23
13
23
13−23
23
⎞⎠⎛⎝ 20−1
⎞⎠ =
⎛⎝ 1−20
⎞⎠ .
Exercitiul 1.42 Se considera cuadrica care ın reperul R = (O,−→i ,−→j ,−→k )are ecuatia:¡
x y z¢⎛⎝ 0 1 1
1 0 11 1 0
⎞⎠⎛⎝ xyz
⎞⎠+ 2 ¡ x y z¢⎛⎝ −11−4
⎞⎠+ 6 = 0.Sa se aduca cuadrica la forma canonica si sa se precizeze natura ei.
Rezolvare. Fie A matricea formei patratice
A =
⎛⎝ 0 1 11 0 11 1 0
⎞⎠ .
Calculam polinomul caracteristic P (λ) = λ3 − 3λ − 2. Valorile propriisunt λ1 = λ2 = −1, λ3 = 2. Vectorii proprii sunt: pentru λ1 = −1 vectoriiproprii sunt −→u 1 =
¡1 0 −1
¢Tsi −→u 2 =
¡0 1 −1
¢T, pentru λ3 = 2
vectorul propriu este −→u 3 =¡1 1 1
¢T. Observam ca vectorii proprii
corespunzatori valorii proprii λ1 = −1 nu sunt ortogonali. Ii ortogonalizamaplicand procedeul Gram-Schmidt.−→v 1 =
¡1 0 −1
¢T,−→v 2 = −→u 2 + α21−→v 1, α21 = − h
−→u 2,−→v 1ih−→v 1,−→v 1i = −
12,
−→v 2 =¡0 1 −1
¢T − 12
¡1 0 −1
¢T=¡−121 −1
2
¢TBaza ortonormata formata din vectorii proprii este −→e 1=
³1√20 − 1√
2
´T,
−→e 2 =³− 1√
62√6
−1√6
´T, −→e 3 =
³1√3
1√3
1√3
´T.
Cu matricea de rotatia C =
⎛⎜⎝1√2− 1√
61√3
0 2√6
1√3
− 1√2− 1√
61√3
⎞⎟⎠ cu detC = 1. efectu-
am rotatia⎛⎝ xyz
⎞⎠ =
⎛⎜⎝1√2− 1√
61√3
0 2√6
1√3
− 1√2− 1√
61√3
⎞⎟⎠⎛⎝ x0
y0
z0
⎞⎠si obtinem ecuatia
−(x0)2 − (y0)2 + 2(z0)2 − 2√3x0 + 2z0 − 2
√2z0 + 6 = 0⇔
−(x0 +√3)2 − (y0 + 1)2 + 2(z0 +
√2
2)2 + 6 = 0
112 CAPITOLUL 1. NOTIUNI TEORETICE
Efectuam translatia⎛⎝ x0
y0
z0
⎞⎠ =
⎛⎝ XYZ
⎞⎠+⎛⎝ −√3−1−√22
⎞⎠si obtinem ecuatia
−X2 − Y 2 + 2Z2 + 9 = 0⇔ X2
9+ 2
Y 2
9− Z2
9− 1 = 0
Suprafata este un hiperboloid cu o panza. Centrul elipsoidului ın reperulR = (O,−→u1 ,−→u2 ,−→u3) este O0(−
√3,−1,−
√22). Coordonatele centrului cuadri-
cei ın raport cu reperul R sunt:⎛⎝ xyz
⎞⎠ =
⎛⎜⎝1√2− 1√
61√3
0 2√6
1√3
− 1√2− 1√
61√3
⎞⎟⎠⎛⎝ −√3−1−√22
⎞⎠ . =
⎛⎝ −12√6−12
√6
12
√6
⎞⎠ .
Capitolul 2
Completari si exercitii
2.1 Numere complexe
Numerele complexe se introduc pornind de la multimea numerelor reale.Necesitatea introducerii lor s-a datorat faptului ca unele ecuatii algebrice(chiar dintre cele mai simple) nu au radacini ın multimea numerelor reale,notata R. Exemplu clasic este ecuatia: x2 + 1 = 0. Prin numar complex,notat z, se ıntelege o pereche ordonata de numere reale (a, b) si se scriez = (a, b). Pe multimea numerelor complexe, notata C, se introduc douaoperatii, numite adunare si ınmultire, dupa regulile: daca z1 = (a, b) siz2 = (c, d), suma si produsul lor sunt date de
z1 + z2 = (a+ c, b+ d) , z1z2 = (ac− bd, ad+ bc) .
Se verifica proprietatile acestor operatii, similare cu cele din cazul numerelorreale (comutativitate, asociativitate, element neutru, etc). Operatiile cunumere complexe se simplifica foarte mult, daca folosim asa numita formaalgebrica a lor. Vom observa ca putem scriem (a, b) = (a, 0) + (0, b) si ca(0, b) poate fi scris ın forma (b, 0) · (0, 1). Numarul complex (0, 1) se noteazacu j (unitate ”imaginara”) si se observa ca j2 = j · j = (−1, 0). Daca facemconventia sa notam numarul complex (x, 0) prin x, ∀x ∈ R, atunci putemscrie mai ıntai z = (a, 0) + (b, 0) (0, 1) sau mai simplu z = a+ bj. Aceastaeste forma algebrica a numarului complex z = (a, b). Calculele care folosescforma algebrica se fac dupa aceleasi reguli ca si cum numerele ar fi reale,tinand seama ca j2 este egal cu (−1, 0) si deci se va scrie j2 = −1.Exemplul 2.1 Sa se calculeze catul numerelor complexe z1 = (a, b) si z2 =(c, d) 6= (0, 0).
113

114 CAPITOLUL 2. COMPLETARI SI EXERCITII
Rezolvare. Aceasta ınseamna sa gasim un numar z = (x, y), astfel ıncatz1 = z2 · z. Scriind (c, d) · (x, y) = (a, b), gasim (cx− dy, cy + dx) = (a, b),deci ½
cx− dy = adx+ cy = b
de unde x =ac+ bd
c2 + d2, y =
bc− ad
c2 + d2. Prin urmare, catul z este
z =
µac+ bd
c2 + d2,bc− ad
c2 + d2
¶.
Este ınsa mult mai simplu, sa folosim forma algebrica a numerelor z1 si z2,pentru a afla catul lor:
z =z1z2=
a+ bj
c+ dj=(a+ bj) (c− dj)
c2 + d2=
ac+ bd
c2 + d2+
bc− ad
c2 + d2j .¨
Observatia 2.1 Uneori, se scrie a+jb ın loc de a+bj, ın baza comutativi-tatii produsului a doua numere complexe. Avem jb = bj, aici fiind vorba deegalitatea (0, 1) (b, 0) = (b, 0) (0, 1). De exemplu, nu se scrie cos θ+(sin θ) j,caci este mai simplu sa scriem cos θ + j sin θ.
O problema importanta ın legatura cu numerele complexe este definireaexponentialei ın complex, adica definirea numarului complex ez, unde z =x + jy ∈ C. Daca vrem sa avem ez1+z2 = ez1ez2 (ca ın real), trebuie saimpunem conditia ex+jy = exejy, unde x si y sunt reali. Ne punem problemacum se defineste numarul complex ejy, cu y ∈ R. Plecand de la seria (α ∈ R)
eα = 1 +α
1!+
α2
2!+ · · ·+ αn
n!+ · · ·
si ınlocuind formal α cu jy, obtinem
ejy = 1− y2
2!+
y4
4!− y6
6!+ · · ·+ j
µy − y3
3!+
y5
5!− y7
7!+ · · ·
¶daca tinem seama de egalitatile j2n = (−1)n si j2n+1 = (−1)n j. Sumelecelor doua serii din dezvoltarea lui ejy sunt cos y, respectiv sin y. Deci artrebui sa avem
ejy = cos y + j sin y, ∀y ∈ Rsi prin urmare, vom defini ez prin formula
ex+jy = ex (cos y + j sin y) , ∀z = x+ jy ∈ C.

2.1. NUMERE COMPLEXE 115
Se poate ajunge la aceasta definitie si pe o cale absolut riguroasa si maimult chiar, se poate demonstra ca acesta este singurul mod ın care poate fidefinita functia ez ın plan complex, astfel ıncat sa pastreze cat mai multedin proprietatile functiei de variabila reala f (x) = ex. Astfel, se verificausor ca
ez1ez2 = ez1+z2 ,ez1
ez2= ez1−z2, ∀z1, z2 ∈ C, ez 6= 0, ∀z ∈ C
dar apare o mare deosebire fata de functia f (x) = ex de variabila reala.Anume, ez are perioada 2πj caci e2πj = cos 2π + j sin 2π = 1. Mai general,avem
ez+2kπj = ez, ∀z ∈ C si ∀k ∈ Z.
In schimb, se poate demonstra ca functia complexa de variabila complexaf (z) = ez, are derivata si f 0 (z) = ez ın orice punct z ∈ C. Se vede usor ca
|ez| = ex, ∀z = x+ jy ∈ C
si caarg z = y + 2kπ, ∀z 6= 0, z = x+ jy ∈ C.
Daca f = f (t) este o functie de variabila reala t, cu valori complexe:f (t) = f1 (t) + jf2 (t), definita pe un interval al axei reale, spunem ca feste continua, daca functiile reale f1 (t) si f2 (t) sunt continue. Spunem caf este derivabila, daca f1 (t) si f2 (t) sunt derivabile. Derivata sa, ın raportcu variabila t, este f 0 (t) = f 01 (t) + jf 02 (t).
Exemplul 2.2 Fie f (t) = eαt, cu α = a+ bj numar complex. Avem
f (t) = eat (cos bt+ j sin bt) = eat cos bt+ jeat sin bt,
f 0 (t) = aeat cos bt− beat sin bt+ jaeat sin bt+ jbeat cos bt =
= aeat (cos bt+ j sin bt) + bjeat (cos bt+ j sin bt) =
= (a+ bj) e(a+bj)t,
adica (aαt)0= αeαt, derivarea facandu-se la fel ca si ın cazul cand α este
real.¨
Acest fapt ısi gaseste o aplicatie importanta la aflarea solutiei generalea ecuatiilor diferentiale cu coeficienti constanti.

116 CAPITOLUL 2. COMPLETARI SI EXERCITII
Exemplul 2.3 Sa consideram ecuatia diferentiala
y00 − 4y0 + 5y = 0
ın care y = y (x) este functia necunoscuta. Incercand o solutie particularade forma y = eλx, dupa derivare si ınlocuire ın ecuatie, se ajunge la conditia(λ2 − 4λ+ 5) eλx = 0, care dupa simplificare cu eλx se reduce la λ2−4λ+5 =0. Aceasta are radacinile λ1 = 2 + j si λ2 = 2− j. Astfel, am gasit solutiaparticulara y = e(2+j)x = e2x (cosx+ j sinx) cu valori complexe. Se aratausor ca y1 (x) = e2x cosx si y2 (x) = e2x sinx sunt solutii particulare realesi, asa cum se stie, solutia generala a ecuatiei date se scrie ın forma
y = e2x (C1 cosx+ C2 sinx) , x ∈ (−∞,∞)
unde C1 si C2 sunt constante arbitrare.¨
Observatia 2.2 Tinand seama de modul ın care s-a definit functia f (z) =ez, pare curioasa legatura care se face ıntre functia exponentiala si functiiletrigonometrice cosx si sinx. Dealtfel, se spune ca celebra formula ejπ = −1arata ıntr-o forma concisa legatura dintre aritmetica (prin numarul 1),geometrie (prin numarul π = 3.141592653...), algebra (prin unitatea imagi-nara j) si analiza matematica (prin numarul lui Euler, e = 2.718281828...).
Observatia 2.3 Cu ajutorul exponentialei, putem defini si logaritmul com-plex al oricarui numar z 6= 0. Vom rezolva ecuatia ew = z si vom nota w =log z. Scriind z ın forma trigonometrica z = |z| (cos (arg z) + sin (arg z)) siw ın forma algebrica w = u+ jv, din egalitatea
eu (cos v + j sin v) = |z| (cos (arg z) + j sin (arg z))
obtinem u = log |z| si v = arg z, decilog z = log |z|+ j arg z,∀z 6= 0.
Am folosit notatia log pentru logaritmul natural (logaritmul ın baza e).De exemplu, log (−1) = log 1 + j arg (−1) = j (2k + 1)π, ∀k ∈ Z. Dincauza ca argumentul unui numar z 6= 0 are o infinitate de valori, datorataperiodicitatii functiilor cos si sin, putem fixa una dintre ele, de obicei ceacuprinsa ın intervalul (−π, π], pe care o notam cu θ. Daca folosim si notatia|z| = ρ, putem scrie
z = ρejθ si log z = log ρ+ j (θ + 2kπ) , ∀k ∈ Z.
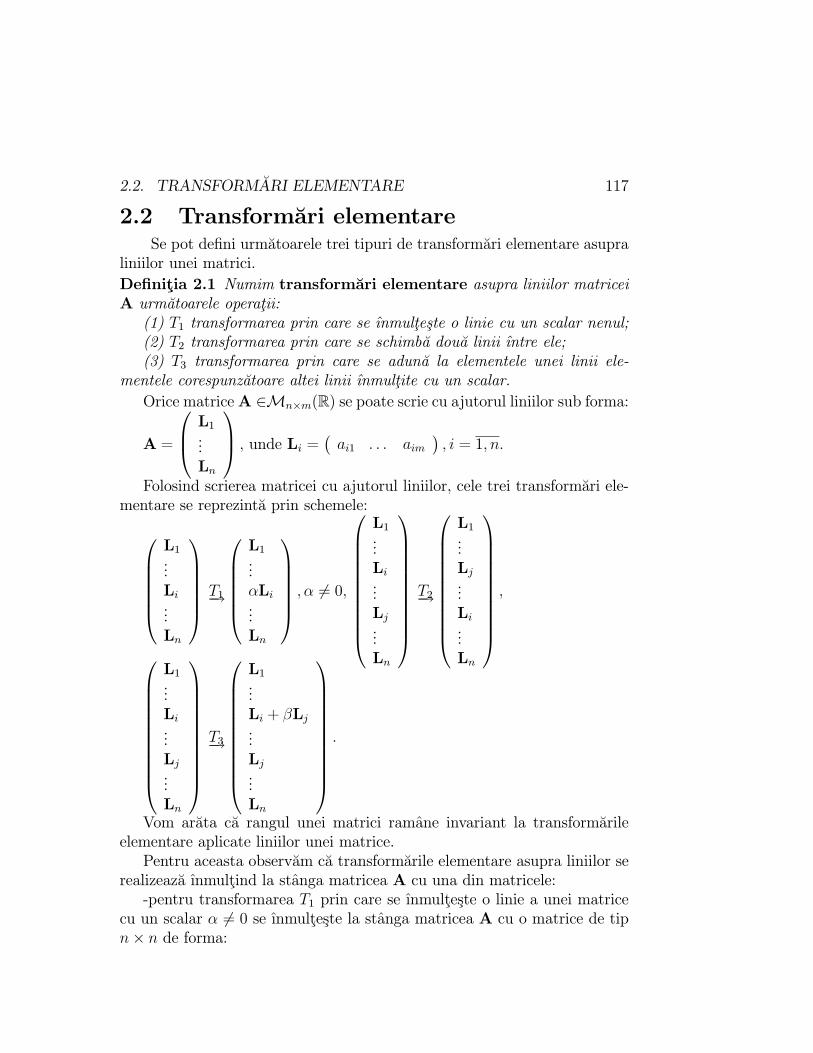
2.2. TRANSFORMARI ELEMENTARE 117
2.2 Transformari elementareSe pot defini urmatoarele trei tipuri de transformari elementare asupra
liniilor unei matrici.
Definitia 2.1 Numim transformari elementare asupra liniilor matriceiA urmatoarele operatii:(1) T1 transformarea prin care se ınmulteste o linie cu un scalar nenul;(2) T2 transformarea prin care se schimba doua linii ıntre ele;(3) T3 transformarea prin care se aduna la elementele unei linii ele-
mentele corespunzatoare altei linii ınmultite cu un scalar.
Orice matriceA ∈Mn×m(R) se poate scrie cu ajutorul liniilor sub forma:
A =
⎛⎜⎝ L1...Ln
⎞⎟⎠ , unde Li =¡ai1 . . . aim
¢, i = 1, n.
Folosind scrierea matricei cu ajutorul liniilor, cele trei transformari ele-mentare se reprezinta prin schemele:⎛⎜⎜⎜⎜⎜⎝
L1...Li...Ln
⎞⎟⎟⎟⎟⎟⎠ T1−→
⎛⎜⎜⎜⎜⎜⎝L1...αLi...Ln
⎞⎟⎟⎟⎟⎟⎠ , α 6= 0,
⎛⎜⎜⎜⎜⎜⎜⎜⎜⎜⎜⎝
L1...Li...Lj...Ln
⎞⎟⎟⎟⎟⎟⎟⎟⎟⎟⎟⎠T2−→
⎛⎜⎜⎜⎜⎜⎜⎜⎜⎜⎜⎝
L1...Lj...Li...Ln
⎞⎟⎟⎟⎟⎟⎟⎟⎟⎟⎟⎠,
⎛⎜⎜⎜⎜⎜⎜⎜⎜⎜⎜⎝
L1...Li...Lj...Ln
⎞⎟⎟⎟⎟⎟⎟⎟⎟⎟⎟⎠T3−→
⎛⎜⎜⎜⎜⎜⎜⎜⎜⎜⎜⎝
L1...Li + βLj...Lj...Ln
⎞⎟⎟⎟⎟⎟⎟⎟⎟⎟⎟⎠.
Vom arata ca rangul unei matrici ramane invariant la transformarileelementare aplicate liniilor unei matrice.Pentru aceasta observam ca transformarile elementare asupra liniilor se
realizeaza ınmultind la stanga matricea A cu una din matricele:-pentru transformarea T1 prin care se ınmulteste o linie a unei matrice
cu un scalar α 6= 0 se ınmulteste la stanga matricea A cu o matrice de tipn× n de forma:
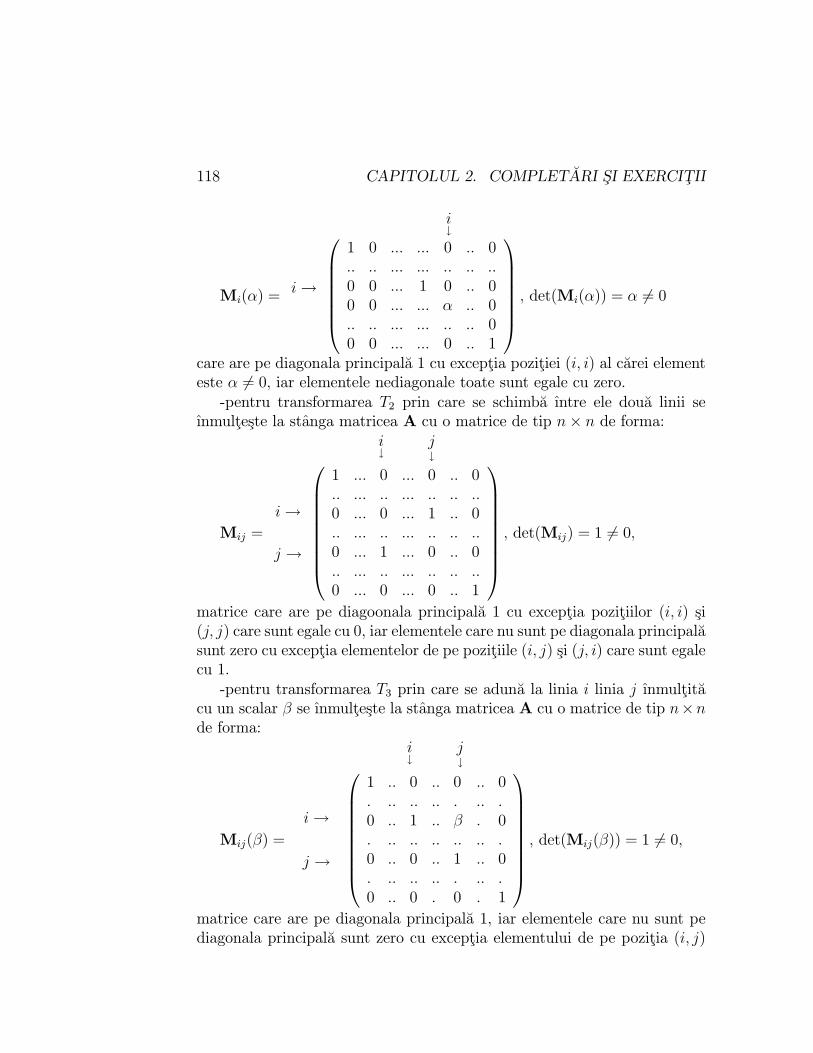
118 CAPITOLUL 2. COMPLETARI SI EXERCITII
i↓
Mi(α) =i→
⎛⎜⎜⎜⎜⎜⎜⎝1 0 ... ... 0 .. 0.. .. ... ... .. .. ..0 0 ... 1 0 .. 00 0 ... ... α .. 0.. .. ... ... .. .. 00 0 ... ... 0 .. 1
⎞⎟⎟⎟⎟⎟⎟⎠ , det(Mi(α)) = α 6= 0
care are pe diagonala principala 1 cu exceptia pozitiei (i, i) al carei elementeste α 6= 0, iar elementele nediagonale toate sunt egale cu zero.-pentru transformarea T2 prin care se schimba ıntre ele doua linii se
ınmulteste la stanga matricea A cu o matrice de tip n× n de forma:i↓
j↓
Mij =
i→
j →
⎛⎜⎜⎜⎜⎜⎜⎜⎜⎝
1 ... 0 ... 0 .. 0.. ... .. ... .. .. ..0 ... 0 ... 1 .. 0.. ... .. ... .. .. ..0 ... 1 ... 0 .. 0.. ... .. ... .. .. ..0 ... 0 ... 0 .. 1
⎞⎟⎟⎟⎟⎟⎟⎟⎟⎠, det(Mij) = 1 6= 0,
matrice care are pe diagoonala principala 1 cu exceptia pozitiilor (i, i) si(j, j) care sunt egale cu 0, iar elementele care nu sunt pe diagonala principalasunt zero cu exceptia elementelor de pe pozitiile (i, j) si (j, i) care sunt egalecu 1.-pentru transformarea T3 prin care se aduna la linia i linia j ınmultita
cu un scalar β se ınmulteste la stanga matricea A cu o matrice de tip n×nde forma:
i↓
j↓
Mij(β) =
i→
j →
⎛⎜⎜⎜⎜⎜⎜⎜⎜⎝
1 .. 0 .. 0 .. 0. .. .. .. . .. .0 .. 1 .. β . 0. .. .. .. .. .. .0 .. 0 .. 1 .. 0. .. .. .. . .. .0 .. 0 . 0 . 1
⎞⎟⎟⎟⎟⎟⎟⎟⎟⎠, det(Mij(β)) = 1 6= 0,
matrice care are pe diagonala principala 1, iar elementele care nu sunt pediagonala principala sunt zero cu exceptia elementului de pe pozitia (i, j)

2.2. TRANSFORMARI ELEMENTARE 119
care este egal cu β.Matricele introduse mai sus Mi(α),Mij,Mij(β) poarta denumirea de
matrice elementare.Demonstram ca daca ınmultim o matrice la stanga cu matricele nesin-
gulareMi(α), Mij, Mij(β) atunci rangul matricei nu se modifica.Daca A ∈Mn×m(R) atunci ea poate fi privita ca o transformare liniara
de la Rm la Rn. Definim nucleul lui A,
ker(A) = {x ∈ Rm : Ax = θ}si imaginea matricei A,
Im(A) = {y ∈ Rn : ∃x ∈ Rm,y = Ax} .ker(A) si Im(A) sunt subspatii liniare ale spatiilor liniare Rm respectiv Rn,conform Teoremei 1.9. Intre dimensiunile acestor subspatii are loc relatiam = def(A) + rang(A), conform Teoremei 1.11.
Exercitiul 2.1 Daca U este o matrice de tip n × n inversabila si A omatrice de tip n × m atunci ker(UA) = ker(A). Sa se deduca de aici carang(UA) = rang(A).
Rezolvare. Pentru a demonstra egalitatea multimilor ker(UA) = ker(A)folosim dubla incluziune: ker(UA) ⊂ ker(A) si ker(A) ⊂ ker(UA). Fiex ∈ ker(UA), rezulta UAx = θ si deoarece matricea U este inversabila,implica U−1(UAx) = U−1θ implica Ax = θ ⇒ x ∈ ker(A). Reciproc, dacax ∈ ker(A) rezulta Ax = θ, UAx = Uθ ⇒ UAx = θ deci x ∈ ker(UA).De aici rezulta ker(UA) = ker(A) ⇒ def(UA) = def(A). Dar n =
def(A) + rang(A) si n = def(UA) + rang(UA). Rezulta rang(UA) =rang(A).¨O aplicatie practica a transformarilor elementare asupra liniilor unei
matrice este calculul rangului matricei.
Exercitiul 2.2 Sa se calculeze rangul matricei
A =
⎛⎜⎜⎝1 1 1 1 13 2 1 1 −30 1 2 2 65 4 3 3 −1
⎞⎟⎟⎠ .
Rezolvare. S-au aplicat matricele M21(−3) si M51(−5) si s-a obtinutcoloana ıntaia a matricei unitate:

120 CAPITOLUL 2. COMPLETARI SI EXERCITII
M51(−5)M21(−3)A =
⎛⎜⎜⎝1 0 0 00 1 0 00 0 1 0−5 0 0 1
⎞⎟⎟⎠⎛⎜⎜⎝
1 0 0 0−3 1 0 00 0 1 00 0 0 1
⎞⎟⎟⎠ ·
·
⎛⎜⎜⎝1 1 1 1 13 2 1 1 −30 1 2 2 65 4 3 3 −1
⎞⎟⎟⎠ =
⎛⎜⎜⎝1 1 1 1 10 −1 −2 −2 −60 1 2 2 60 −1 −2 −2 −6
⎞⎟⎟⎠ .
S-au aplicat matricele M2(−1),M12(−1),M32(−1) si M42(−1) si s-aobtinut coloana a doua a matricei unitate:
M42(−1)M32(−1)M12(−1)M2(−1)A =
⎛⎜⎜⎝1 0 0 00 1 0 00 0 1 00 1 0 1
⎞⎟⎟⎠ ·
·
⎛⎜⎜⎝1 0 0 00 1 0 00 −1 1 00 0 0 1
⎞⎟⎟⎠⎛⎜⎜⎝1 −1 0 00 1 0 00 0 1 00 0 0 1
⎞⎟⎟⎠⎛⎜⎜⎝1 0 0 00 −1 0 00 0 1 00 0 0 1
⎞⎟⎟⎠ ·
·
⎛⎜⎜⎝1 1 1 1 10 −1 −2 −2 −60 1 2 2 60 −1 −2 −2 −6
⎞⎟⎟⎠ =
⎛⎜⎜⎝1 0 −1 −1 −50 1 2 2 60 0 0 0 00 0 0 0 0
⎞⎟⎟⎠ .
Numarul de unu care se pot obtine pe diagonala principala, schimbandeventual coloanele ıntre ele, reprezinta rangul matricei. Rezulta ca rangulmatricei A este 2.¨O alta aplicatie practica a transformarilor elementare asupra liniilor unei
matrice este un procedeu numeric simplu de calculare a inversei unei matrici.Reamintim ca inversa unei matrici nesingulare A de tip n× n este data derelatia
AA−1 = A−1A = I, (2.1)
unde I este matricea unitate.Daca am aplicat matricei A un numar finit de transformari elementare
succesive E1E2...Ek si rezultatul acestor operatii este matricea unitate,putem scrie
E1E2...EkA = I. (2.2)

2.2. TRANSFORMARI ELEMENTARE 121
O comparatie a relatiilor (2.1) si (2.2) conduce la relatia
A−1 = E1E2...Ek.
Exercitiul 2.3 Fie matricea de ordin doi nesingulara A =
µa11 a12a21 a22
¶cu
∆ = a11a22 − a12a21 6= 0. Presupunem ca a11 6= 0. Sa se prezinte etapele decalcul al inversei matricei A utilizand transformarile elementare.
Rezolvare. Scriem matricea identitate alaturi de matricea A
A=
µa11 a12a21 a22
¯1 00 1
¶si executam urmatorii pasi pentru a determina inversa matricei:
1. Se inmulteste matricea A cu matricea M1(1a11) pentru a obtine 1 ın
loc de a11.
M1(1a11)A =
µ1a11
0
0 1
¶µa11 a12a21 a22
¯1 00 1
¶=
µ1 a12
a11
a21 a22
¯1a11
0
0 1
¶.
2. Se inmulteste prima linie cu a21 si se scade din linia a doua.
M21(−a21)A =µ
1 0−a21 1
¶µ1 a12
a11
a21 a22
¯1a11
0
0 1
¶=
=
µ1 a12
a11
0 a22 − 1a11
a12a21
¯1a11
0
− 1a11
a21 1
¶=
µ1 a12
a11
0 ∆a11
¯1a11
0
−a21a11
1
¶.
3. Se ımparte linia a doua prin ∆a11
M2(1a11)A =
µ1 00 a11
∆
¶µ1 a12
a11
0 ∆a11
¯1a11
0
−a21a11
1
¶=
=
µ1 a12
a11
0 1
¯1a11
0
− 1∆a21
1∆a11
¶.
4. Linia a doua se ınmulteste cu − 1a11
a12 si se aduna la linia ıntaia:
M21(−a21)A =µ1 −a12
a11
0 1
¶µ1 a12
a11
a21 a22
¯1a11
0
−a21∆
a11∆
¶=
=
µ1 00 1
¯1∆a22 − 1
∆a12
− 1∆a21
1∆a11
¶.
Rezulta ca A−1 =
µ1∆a22 − 1
∆a12
− 1∆a21
1∆a11
¶.¨

122 CAPITOLUL 2. COMPLETARI SI EXERCITII
Exercitiul 2.4 Folosind metoda transformarilor elementare sa se deter-mine inversa matricei
A =
⎛⎝ 1 −2 13 −5 2−3 −4 5
⎞⎠ .
Rezolvare. Vom forma matricea¡A I
¢. Cu ajutorul transformarilor el-
ementare efectuate asupra liniilor matricii¡A I
¢vom aduce matricea
la forma¡I B
¢. Vom avea A−1 = B.⎛⎝ 1 −2 1 1 0 0
3 −5 2 0 1 0−3 −4 5 0 0 1
⎞⎠L2−3L1→L2L3+3L1→L3−→
⎛⎝ 1 −2 1 1 0 00 1 −1 −3 1 00 −10 8 3 0 1
⎞⎠ L1+2L2→L1L3+10L2→L3−→
⎛⎝ 1 0 −1 −5 2 00 1 −1 −3 1 00 0 −2 −27 10 1
⎞⎠ L1−12L3→L1
L2−12L3→L2−→
− 12L3→L3
⎛⎜⎝ 1 0 0 172−3 −1
2
0 1 0 212−4 −1
2
0 0 1 272−5 −1
2
⎞⎟⎠Deci A−1 =
⎛⎜⎝172−3 −1
2212−4 −1
2272−5 −1
2
⎞⎟⎠.¨Exercitiul 2.5 Sa se calculeze valoarea determinantului
D=
¯¯ 1 1 2 31 1 3 42 5 1 −1−1 −2 2 4
¯¯ .
folosind regula lui Laplace si dezvoltandu-l dupa primele doua linii.
Rezolvare. D =
¯1 11 1
¯· (−1)1+2+1+2
¯1 −12 4
¯+
¯1 21 3
¯·
·(−1)1+3+1+2¯5 −1−2 4
¯+
¯1 31 4
¯· (−1)1+1+2+4
¯5 1−2 2
¯+
+
¯1 21 3
¯· (−1)1+2+2+3
¯2 −1−1 4
¯+
¯1 31 4
¯·
·(−1)2+1+2+4¯2 1−1 2
¯+
¯2 33 4
¯· (−1)1+2+3+4
¯2 5−1 −2
¯= −5.¨
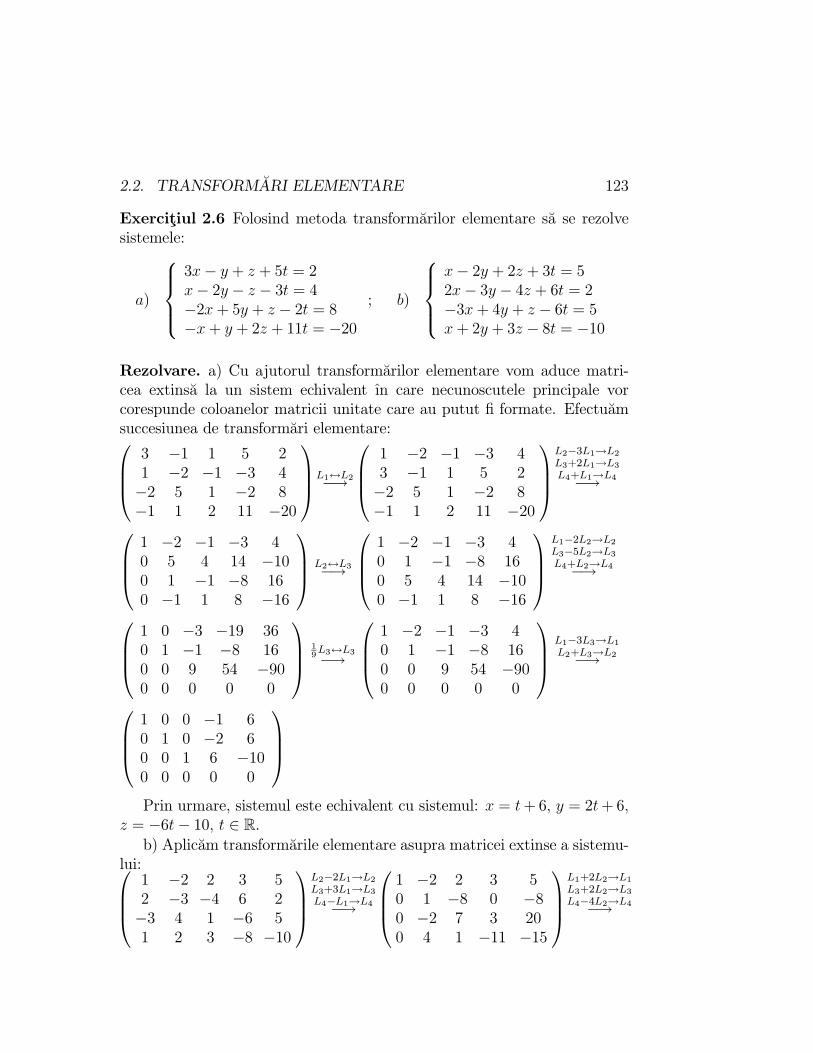
2.2. TRANSFORMARI ELEMENTARE 123
Exercitiul 2.6 Folosind metoda transformarilor elementare sa se rezolvesistemele:
a)
⎧⎪⎪⎨⎪⎪⎩3x− y + z + 5t = 2x− 2y − z − 3t = 4−2x+ 5y + z − 2t = 8−x+ y + 2z + 11t = −20
; b)
⎧⎪⎪⎨⎪⎪⎩x− 2y + 2z + 3t = 52x− 3y − 4z + 6t = 2−3x+ 4y + z − 6t = 5x+ 2y + 3z − 8t = −10
Rezolvare. a) Cu ajutorul transformarilor elementare vom aduce matri-cea extinsa la un sistem echivalent ın care necunoscutele principale vorcorespunde coloanelor matricii unitate care au putut fi formate. Efectuamsuccesiunea de transformari elementare:⎛⎜⎜⎝3 −1 1 5 21 −2 −1 −3 4−2 5 1 −2 8−1 1 2 11 −20
⎞⎟⎟⎠L1↔L2−→
⎛⎜⎜⎝1 −2 −1 −3 43 −1 1 5 2−2 5 1 −2 8−1 1 2 11 −20
⎞⎟⎟⎠L2−3L1→L2L3+2L1→L3L4+L1→L4−→
⎛⎜⎜⎝1 −2 −1 −3 40 5 4 14 −100 1 −1 −8 160 −1 1 8 −16
⎞⎟⎟⎠ L2↔L3−→
⎛⎜⎜⎝1 −2 −1 −3 40 1 −1 −8 160 5 4 14 −100 −1 1 8 −16
⎞⎟⎟⎠L1−2L2→L2L3−5L2→L3L4+L2→L4−→
⎛⎜⎜⎝1 0 −3 −19 360 1 −1 −8 160 0 9 54 −900 0 0 0 0
⎞⎟⎟⎠ 19L3↔L3−→
⎛⎜⎜⎝1 −2 −1 −3 40 1 −1 −8 160 0 9 54 −900 0 0 0 0
⎞⎟⎟⎠ L1−3L3→L1L2+L3→L2−→
⎛⎜⎜⎝1 0 0 −1 60 1 0 −2 60 0 1 6 −100 0 0 0 0
⎞⎟⎟⎠Prin urmare, sistemul este echivalent cu sistemul: x = t+6, y = 2t+6,
z = −6t− 10, t ∈ R.b) Aplicam transformarile elementare asupra matricei extinse a sistemu-
lui:⎛⎜⎜⎝1 −2 2 3 52 −3 −4 6 2−3 4 1 −6 51 2 3 −8 −10
⎞⎟⎟⎠L2−2L1→L2L3+3L1→L3L4−L1→L4−→
⎛⎜⎜⎝1 −2 2 3 50 1 −8 0 −80 −2 7 3 200 4 1 −11 −15
⎞⎟⎟⎠L1+2L2→L1L3+2L2→L3L4−4L2→L4−→

124 CAPITOLUL 2. COMPLETARI SI EXERCITII⎛⎜⎜⎝1 0 −14 3 −110 1 −8 0 −80 0 −9 3 40 0 33 −11 17
⎞⎟⎟⎠ 19L3→L3−→
⎛⎜⎜⎝1 0 −14 3 −110 1 −8 0 −80 0 1 −1
3−49
0 0 33 −11 17
⎞⎟⎟⎠L1+14L3→L1L2+8L3→L2L4−33L3→L4−→
⎛⎜⎜⎝1 0 0 −5
30
0 1 0 −830
0 0 1 −130
0 0 0 0 1
⎞⎟⎟⎠Prin urmare, sistemul este echivalent cu sistemul: x− 5
3t = 0, y− 8
5t = 0,
z − 13t = 0, 0 = 1 care este incompatibil.¨
Exercitiul 2.7 Sa se gaseasca o baza ın subspatiul lui R4, subspatiu definitde solutiile sistemului liniar omogen⎧⎪⎪⎨⎪⎪⎩
x− 3y − z + 2t = 0x− 4y + 3z + 4t = 0x− y − 9z − 2t = 03x− 10y + z + 8t = 0
Rezolvare. Rezolvam sistemul:⎛⎜⎜⎝1 −3 −1 21 −4 3 41 −1 −9 −23 −10 1 8
⎞⎟⎟⎠ L2−L1→L2L3−L1→L3−→L4−3L1→L4
⎛⎜⎜⎝1 −3 −1 20 −1 4 20 2 −8 −40 −1 4 2
⎞⎟⎟⎠L3+2L2→L3−→L4−L2→L4
⎛⎜⎜⎝1 −3 −1 20 −1 4 20 0 0 00 0 0 0
⎞⎟⎟⎠Obtinem sistemul echivalent
½x− 3y − z + 2t = 0−y + 4z + 2t = 0 , care are solutia:
x = 13α+4β, y = 4α+2β, z = α ∈ R, t = β ∈ R. Prin urmare, subspatiuldefinit de solutiile sistemului este:
S =©x ∈ R4 | x =
¡13α+ 4β 4α+ 2β α β
¢, α, β ∈ R
ª.
Observam ca orice vector din S este de forma: x = α¡13 4 1 0
¢+
β¡4 2 0 1
¢≡ αv1+βv2, α, β ∈ R.Vectorii v1 si v2 genereaza subspatiul
S si, deoarece sunt liniar independenti, formeaza o baza a subspatiului S.¨
Exercitiul 2.8 In spatiul R4 se dau sistemele de vectori

2.2. TRANSFORMARI ELEMENTARE 125
S1 = {e01 =¡1 −2 2 1
¢, e02 =
¡2 0 −1 3
¢,
e03 =¡1 −6 7 0
¢, e04 =
¡−3 −2 4 −5
¢},
S2 = {e001 =¡2 −1 1 0
¢, e002 =
¡2 −5 6 −1
¢,
e003 =¡2 −7 −4 1
¢}
Sa se expliciteze subspatiile [S1] ∩ [S2] si [S1] + [S2], unde am notat cu[S] multimea combinatiilor liniare ale vectorilor sistemului S.
Rezolvare. Determinam cate o baza ın cele doua subspatii: S01 ın [S1],respectiv, S02 ın [S2].
rang
⎛⎜⎜⎝1 2 1 −3−2 0 −6 −22 −1 7 41 3 0 −5
⎞⎟⎟⎠ = 2,
¯1 2−2 0
¯6= 0 ⇒ S01 = {e01, e02} ,
rang
⎛⎜⎜⎝2 2 2−1 −5 −71 6 −40 −1 1
⎞⎟⎟⎠ = 2,
¯2 2−1 −5
¯6= 0 ⇒ S02 = {e001, e002} .
Fie x ∈ [S1] ∩ [S2]. Atunci x ∈ [S01] si x ∈ [S02]. Avem½x ∈ [S01]x ∈ [S02]
⇒½x = α1e
01 + α2e
02
x = β1e001 + β2e
002
⇒ α1e01 + α2e
02 = β1e
001 + βe002.
Obtinem sistemul⎧⎪⎪⎨⎪⎪⎩α1 + 2α2 − 2β1 − 2β2 = 0−2α1 − β1 − 5β2 = 02α1 − α2 − β1 − 6β2 = 0
α1 + 3α2 + β2 = 0
⇔
⎧⎪⎪⎨⎪⎪⎩α1 = −2λα2 = λβ1 = λβ2 = −λ
, λ ∈ R .
Deci,
x = −2λe01 + λe02 = λ (−2e01 + e02) = λ¡0 4 −5 1
¢, sau
x = λe001 − λe002 = λ (e001 − e002) = λ¡0 4 −5 1
¢.
Astfel
[S1] ∩ [S2] =©x ∈ R4 | x = λ
¡0 4 −5 1
¢, λ ∈ R
ª.

126 CAPITOLUL 2. COMPLETARI SI EXERCITII
Fie x ∈ [S1] + [S2]. Rezulta ca x = x0 + x00 cu x0 ∈ [S01] si x00 ∈
[S02], adica x ∈ [S01 ∪ S02]. Subspatiul [S1] + [S2] este generat de [S01 ∪ S02].
Sa determinam o baza ın [S01 ∪ S02]. rang
⎛⎜⎜⎝1 2 2 2−2 0 −1 −52 −1 1 61 3 0 −1
⎞⎟⎟⎠ = 3,
¯¯ 1 2 2−2 0 −12 −1 1
¯¯ 6= 0.Deci [S1] + [S2] este generat de e01, e02 si e001:
[S1] + [S2] =©x ∈ R4, x = αe01 + βe02 + γe001, α, β, γ ∈ R
ª.¨
Exercitiul 2.9 Se considera sistemul de vectori:
S =©e1 =
¡1 3 −1 2
¢, e2 =
¡−2 1 0 3
¢ª.
Sa se completeze S pana la o baza ın R4.
Rezolvare. In R4 orice patru vectori liniar independenti formeaza baza.Vom completa sistemul de vectori S cu doi vectori: e3 =
¡a1 a2 a3 a4
¢si e4 =
¡b1 b2 b3 b4
¢astfel ıncat sistemul {e1, e2, e3, e4} sa fie liniar
independent. Din α1e1 + α2e2 + α3e3 + α4e4 = θ rezulta sistemul⎧⎪⎪⎨⎪⎪⎩α1 − 2α2 + a1α3 + b1α4 = 03α1 + α2 + a2α3 + b2α4 = 0−α1 + a3α3 + b3α4 = 0
2α1 + 3α2 + a4α3 + b4α4 = 0
.
Vectorii e1, e2, e3, e4 vor fi liniar independenti daca sistemul va admiteo singura solutie, solutia banala. Deci determinantul sistemului trebuie safie diferit de zero:
∆ =
¯¯ 1 −2 a1 b13 1 a2 b2−1 0 a3 b32 3 a4 b4
¯¯ 6= 0.
Deoarece
¯1 −23 1
¯= 7 6= 0, putem lua a1 = a2 = b1 = b2 = 0 si astfel
∆ =
¯1 −23 1
¯·¯a3 b3a4 b4
¯. Conditia ∆ 6= 0 este echivalenta cu
¯a3 b3a4 b4
¯6= 0. Fie
a3 = a4 = b3 = −b4 = 1. Obtinem

2.3. MATRICE BLOC 127
∆ =
¯1 −23 1
¯·¯1 11 −1
¯= 7 · (−2) = −14 6= 0.
Deci e3 =¡0 0 1 1
¢, e4 =
¡0 0 1 −1
¢.¨
2.3 Matrice bloc
Definitia 2.2 O matrice bloc M este o matrice construita cu ajutorulaltor matrice de ordin mai mic. Aceste matrice mai mici se numesc blocurisau submatrice ale lui M.
De exemplu daca consideram matricele A ∈Mm×n(R) B ∈Mm×p(R),C ∈Mq×n(R) si D ∈Mq×p(R) atunci matricea
M =
µA BC D
¶este o matrice bloc,M ∈M(m+q)×(n+p)(R).
Exercitiul 2.10 Daca doua matrice au aceeasi configuratie si matricele di-agonale sunt matrice patratice atunci cele doua matrice se pot ınmulti dupao regula similara cu regula de ınmultire a matricelor. Astfel daca considerammatricele A1,A2∈Mn×n(R), B1,B2∈Mn×m(R), C1,C2∈Mm×n(R) si D1,D2∈Mm×m(R) atunciµ
A1 B1C1 D1
¶µA2 B2C2 D2
¶=
µA1A2 +B1C2 A1B2 +B1D2
C1A2+D1C2 C1B2+D1D2
¶.¨
Definitia 2.3 Daca A1,A2, ...,Ap sunt matrice patratice (pot fi de dimen-siuni diferite), numim suma directa a matricelor A1A2, ...,Ap matricea
diag£A1A2, ...,Ap
¤=
⎛⎜⎜⎜⎝A1 0 0 00 A2 0 0...
.... . .
...0 0 0 Ap
⎞⎟⎟⎟⎠unde blocurile din afara diagonalei sunt zero.
Exercitiul 2.11 Sa se determine inversa matricei bloc Q de forma:
Q =
µA 00 B
¶stiind ca matricele A si B sunt patratice (pot fi de dimensiuni diferite)inversabile.

128 CAPITOLUL 2. COMPLETARI SI EXERCITII
Rezolvare. Se verifica imediat ca matricea
Q−1=
µA−1 00 B−1
¶verifica relatiile Q−1Q = QQ−1 = I.¨
Exercitiul 2.12 Sa se arate ca inversa matricei bloc P =
µA BC D
¶este
P−1=
µA−1(I+BFCA−1) −A−1BF
−FCA−1 F
¶unde F =
¡D−CA−1B
¢−1.
Rezolvare. Inmultim la stanga matricea P cu o matrice astfel ıncat ma-tricea obtinuta sa aiba zero sub diagonala pricipala:µ
I 0−CA−1 I
¶µA BC D
¶=
µA B0 −CA−1B+D
¶.
Matricea obtinuta o ınmultim la dreapta cu o matrice astfel aleasa ıncatdesupra digonalei principale sa obtinem zero:µ
I 0−CA−1 I
¶µA BC D
¶µI −A−1B0 I
¶=
=
µA B0 −CA−1B+D
¶µI −A−1B0 I
¶=
µA 00 −CA−1B+D
¶.
Plecam de la relatiaµI 0
−CA−1 I
¶µA BC D
¶µI −A−1B0 I
¶=
µA 00 −CA−1B+D
¶inversam ambii membriiµ
I −A−1B0 I
¶−1µA BC D
¶−1µI 0
−CA−1 I
¶−1=
=
µA 00 −CA−1B+D
¶−1. (2.3)
Dar, conform exercitiului 2.11:µA 00 −CA−1B+D
¶−1=
µA−1 0
0¡−CA−1B+D
¢−1 ¶ .
Notam cu F =¡−CA−1B+D
¢−1. Inmultind la stınga si la dreapta
relatia (2.3) cu matriceleµI −A−1B0 I
¶si respectiv
µI 0
−CA−1 I
¶, obtinem:µ
A BC D
¶−1=
µI −A−1B0 I
¶µA−1 00 F
¶µI 0
−CA−1 I
¶,

2.3. MATRICE BLOC 129µA BC D
¶−1=
µA−1 −A−1BF0 F
¶µI 0
−CA−1 I
¶,µ
A BC D
¶−1=
µA−1(I+BFCA−1) −A−1BF
−FCA−1 F
¶.¨
Exercitiul 2.13 Sa se determine determinantul matricei bloc Q de forma:
Q =
µA B0 C
¶.
Rezolvare. Aplicand regula lui Laplace generalizata rezulta ca
det(Q) = det(A) det(C).¨Exercitiul 2.14 Sa se calculeze determinantul matricei bloc P, daca A siD sunt matrici patratice si macar una dintre ele este nesingulara.
P =
µA BC D
¶.
Rezolvare. Daca matricea A este inversabila atunci ınmultim la dreaptamatricea P cu o matrice astfel ıncat matricea obtinuta sa aiba zero deasupradiagonalei principale:µ
A BC D
¶µI −A−1B0 I
¶=
µA 0C D−CA−1B
¶si calculand determinantul ambilor membrii obtinem
det(P) = det(A) det(D−CA−1B). Daca AC = CA obtinem ca
det(P) = det(AD−CB).Daca matricea D este inversabila atunci ınmultim la stanga matricea
P cu o matrice astfel ıncat matricea obtinuta sa aiba zero sub diagonalaprincipala:µ
A BC D
¶µI 0
−D−1C I
¶=
µA−BD−1C B
0 D
¶si calculand determinantul ambilor membrii obtinem
det(P) = det(D) det(A−BD−1C). Daca CD = DC obtinem ca
det(P) = det(AD−CB).¨
Teorema 2.1 Daca A este o matrice de ordin n× n, B este o matrice deordin m× n si
C =
µA 00 B
¶suma directa a matricelor A si B atunci matricea C este diagonalizabiladaca si numai daca A si B sunt diagonalizabile.
130 CAPITOLUL 2. COMPLETARI SI EXERCITII
Demonstratie. Necesitatea. Presupunem ca matricea C este diagonaliz-abila, rezulta ca exista o matrice H nesingulara de ordin n+m astfel ıncatH−1CH =diag [λ1, λ2, ..., λn+m] .
Daca scriem matricea H cu ajutorul coloanelor,
H = col [H1,H2, ...,Hn+m]
unde Hi =¡s1i · · · sni qn+1,i · · · qn+m,i
¢Tatunci CHi = λiHi.
Daca notam Si =¡s1i · · · sni
¢T, Qi =
¡qn+1,i · · · qn+m,i
¢Ta-
tunci ASi = λiSi si BQi = λiQi.
Daca am avea mai putin de n vectori liniar independenti ın multimeade vectori S1, ...,Sn+m atunci rangul matricei col [S1,S2, ...,Sn+m] ar fi maimic decat n. La fel si pentru matricea col [Q1,Q2, ...,Qn+m] . In oricare
din cazuri matricea H =
µS1 S2 · · · Sn+mQ1 Q2 · · · Qn+m
¶ar avea rangul mai mic
decat n+m, fals deoarece matricea H este inversabila. Deci exista exact nvectori proprii liniar independenti ın multimea S1, ...,Sn+m si cum acestiasunt vectori proprii pentru A, rezulta ca A este diagonalizabila. Analog searata ca matricea B este diagonalizabila.
Reciproc. Presupunem ca A si B sunt diagonalizabile, deci exista douamatrici P1, de ordin n, si P2, de ordin m, nesingulare astfel ıncat matriceleP−11 AP1 si P
−12 BP2 sunt matrici diagonale, deci matricea P
−1CP estediagonala unde matricea P este
P =
µP1 00 P2
¶nesingulara (detP = (detP1)(detP2) 6= 0).¥
2.4 Transformari liniare
Exercitiul 2.15 Se dau transormarile liniare:
f : R3 → R4, f (x) = (x1 + x2, 2x1 − x2 + x3,−x1 + 2x3, 3x3) ,g : R4 → R3, g (y)=(y1 + y2 − y3 − y4, 2y2 − 3y4, y1 − y3 + 2y4) .
Sa se calculeze nucleele si imaginile aplicatiilor f si g. Sa se calculezeaplicatiile compuse f◦g si g◦f . Sa se verifice ca matricea aplicatiei compuseeste egala cu produsul matricelor celor doua aplicatii.
Rezolvare. Deoarece ker f = {x ∈ R3, f (x) = θ}, obtinem sistemul
2.4. TRANSFORMARI LINIARE 131⎧⎪⎪⎨⎪⎪⎩x1 + x2 = 0
2x1 − x2 + x3 = 0−x1 + 2x3 = 03x3 = 0
⇔
⎧⎨⎩ x1 = 0x2 = 0x3 = 0
.
Deci ker f = {θ}. Din Im f = {y ∈ R4, ∃x ∈ R3, f (x) = y}, rezultasistemul ⎧⎪⎪⎨⎪⎪⎩
x1 + x2 = y12x1 − x2 + x3 = y2−x1 + 2x3 = y33x3 = y4
.
Cum rangul matricei sistemului este 3, rezulta ca sistemul este compatibildaca ¯
¯ 1 1 0 y12 −1 1 y2−1 0 2 y30 0 3 y4
¯¯ = 0⇔ 3y1 + 3y2 + 9y3 − 7y4 = 0.
Deci Im f =©y =
¡y1 y2 y3 y4
¢∈ R4, 3y1 + 3y2 + 9y3 − 7y4 = 0
ª.
Analog, obtinem ker g =©x ∈ R4,x =
¡α 0 α 0
¢, α ∈ R
ªsi Im g =
R3. Avemrang f = 3, def f = 0,
rang g = 3, def g = 1.
Sa calculam acum aplicatiile compuse.
(f ◦ g) (y) == ( y1+3y2−y3−4y4 3y1−3y3+3y4 y1−y2−y3+5y4 3y1−3y3+6y4 )Analog,
(g ◦ f) (x) == ( 4x1 − 4x3 4x1 − 2x2 − 7x3 2x1 + x2 + 4x3 )
In perechea de baze canonice din cele doua spatii aplicatiile vor aveamatricele:
(f)B1,B2 =
⎛⎜⎜⎝1 1 02 −1 1−1 0 20 0 3
⎞⎟⎟⎠ , (g)B2,B1 =
⎛⎝ 1 1 −1 −10 2 0 −31 0 −1 2
⎞⎠ ,
(f ◦ g)B2 =
⎛⎜⎜⎝1 3 −1 −43 0 −3 31 −1 −1 53 0 −3 6
⎞⎟⎟⎠ , (g ◦ f)B1 =
⎛⎝ 4 0 −44 −2 −72 1 4
⎞⎠ .

132 CAPITOLUL 2. COMPLETARI SI EXERCITII
Observam ca (f ◦ g)B2 = (f)B1,B2 · (g)B2,B1 si (g ◦ f)B1 = (g)B2,B1 ·(f)B1,B2 .¨
Exercitiul 2.16 In R3 se dau bazele
B1 =©u1 =
¡1 2 −2
¢,u2 =
¡0 2 −1
¢,u3 =
¡1 −2 1
¢ª,
B2 =©v1 =
¡1 1 0
¢,v2 =
¡−1 1 −1
¢,v3 =
¡2 0 −1
¢ª.
Sa se determine aplicatia liniara f care duce vectorii bazei B1 ın vectoriibazei B2. Sa se determine matricea aplicatiei ın fiecare din bazele: standard,B1, B2. Sa se determine f (x), unde x = (2, 2, 2) , coordonatele fiind dateın baza standard din R3.Rezolvare. Fie B = {e1, e2, e3} baza standard a spatiului. Avem
f (u1) = v1 ⇔ f (e1) + 2f (e2)− 2f (e3) = e1 + e2,f (u2) = v2 ⇔ 2f (e2)− f (e3) = −e1 + e2 − e3,f (u1) = v3 ⇔ f (e1)− 2f (e2) + f (e3) = 2e1 − e3.
Obtinem astfel un sistem ın care necunoscutele sunt f (e1), f (e2) sif (e3). Solutia sistemului este
f (e1) = e1 + e2 − 2e3,f (e2) = −e1 + e2 − 2e3,f (e3) = −e1 + e2 − 3e3.
Scriind ultimele trei relatii sub forma matriceala⎛⎝ f (e1)f (e2)f (e3)
⎞⎠ =
⎛⎝ 1 1 −2−1 1 −2−1 1 −3
⎞⎠⎛⎝ e1e2e3
⎞⎠ ,
obtinem matricea aplicatiei f ın baza canonica
(f)B =
⎛⎝ 1 −1 −11 1 1−2 −2 −3
⎞⎠ .
Matricele de trecere de la baza canonica la bazele B1, respectiv B2, sunt
C1 =
⎛⎝ 1 0 12 2 −2−2 −1 1
⎞⎠ , C2 =
⎛⎝ 1 −1 21 1 00 −1 −1
⎞⎠ .
Astfel matricele lui f ın bazele B1, respectiv B2, sunt
2.4. TRANSFORMARI LINIARE 133
(f)B1 = C−11 (f)BC1 =
1
2
⎛⎝ 0 −1 −22 3 42 1 2
⎞⎠ (f)BC1 = 1
2
⎛⎝ −1 1 25 −3 03 −3 2
⎞⎠ ,
(f)B2 = C−12 (f)BC2 =
1
4
⎛⎝ 1 3 2−1 1 −21 −1 −2
⎞⎠ (f)BC2 = 1
2
⎛⎝ −1 1 25 −3 03 −3 2
⎞⎠ .
Observam ca aplicatia lliniara f are aceeasi matrice ın bazele B1 si B2.Sa calculam f (x) folosind matricea lui f ın baza canonica.⎛⎝ 1 −1 −1
1 1 1−2 −2 −3
⎞⎠⎛⎝ 222
⎞⎠ =
⎛⎝ −26−14
⎞⎠ .
Deci, f (x) = −2e1 + 6e2 − 14e3 = (−2, 6,−14). Sa calculam f (x)folosind matricea lui f ın baza B1. Pentru aceasta vom calcula coordonatelelui x ın baza B1. Descompunand x dupa vectorii bazei B1, obtinem⎧⎪⎨⎪⎩
α1 + α3 = 2
2α1 + 2α2 − 2α3 = 2−2α1 − α2 + α3 = 2
⇔
⎧⎪⎨⎪⎩α1 = −3α2 = 9
α3 = 5
.
Deci, x = −3u1 + 9u2 + 5u3 = −3u1 + 9u2 + 5u3.
1
2
⎛⎝ −1 1 25 −3 03 −3 2
⎞⎠⎛⎝ −395
⎞⎠ =1
2
⎛⎝ 22−42−26
⎞⎠ =
⎛⎝ 11−21−13
⎞⎠ .
Asadar, f (x) = 11u1− 21u2− 13u3. Pentru verificare, ınlocuim fiecare dinvectorii ui cu descompunerile lor dupa baza canonica si obtinem
f (x) = 11 (e1 + 2e2 − 2e3)− 21 (2e2 − e3)− 13 (e1 − 2e2 + e3) == −2e1 + 6e2 − 14e3 = (−2, 6,−14) .¨
Exercitiul 2.17 Fie matricea
A=
⎛⎝ −3 −7 −52 4 31 2 2
⎞⎠ .
Sa se studieze daca matricea este diagonalizabila si ın caz afirmativ sase determine o matrice diagonala si o matrice modala.

134 CAPITOLUL 2. COMPLETARI SI EXERCITII
Rezolvare. Pentru determinarea valorilor proprii calculam polinomul ca-racteristic: P (λ) = λ3 − δ1λ
2 + δ2λ− δ3, δ1 = −3 + 4 + 2 = 3,
δ2 =
¯−3 −72 4
¯+
¯4 32 2
¯+
¯−3 −51 2
¯= 3, δ3 = detA = 1 rezulta
P (λ) = −(λ− 1)3 ⇒ λ1 = λ2 = λ3 = 1, n1 = 3.
Matricea admite o singura valoare proprie λ = 1 cu multiplicitatea al-gebrica 3. Pentru determinarea vectorilor proprii rezolvam sistemul
(I−A)x = θ ⇒ x1 = −3x3, x2 = x3 ⇒ x = x3¡−3 1 1
¢T. Rezulta
ca nu este posibil sa determinam 3 vectori proprii liniar independenti cores-punzator valorii proprii 1, deci matricea nu este diagonalizabila.¨
Exercitiul 2.18 Fie matricea
A =
⎛⎜⎜⎝1 0 0 10 1 0 00 0 1 −21 0 −2 5
⎞⎟⎟⎠ .
Sa se studieze daca matricea este diagonalizabila si ın caz afirmativ sase determine o matrice diagonala si o matrice modala.
Rezolvare. Pentru determinarea valorilor proprii calculam polinomul ca-racteristic: P (λ) = λ4−8λ3+13λ2−6λ = λ(λ−6)(λ−1)2. Valorile proprii simultiplicitatile lor sunt λ1 = 0, n1 = 1; λ2 = 6, n2 = 1; λ3 = λ4 = 1, n3 = 2.
Pentru λ1 = 0, rezolvam sistemul Ax = θ ⇒ x1 + x4 = 0, x2 = 0,
x3 − 2x4 = 0⇒ x = x4¡−1 0 2 1
¢T, x4 ∈ R.
Pentru λ2 = 6, Ax =6x⇒ x1 − 15x4 = 0, x2 = 0, x3 +
25x4 = 0 ⇒
x = x4¡−150 −2
51¢T
, x4 ∈ R.Pentru λ3 = λ4 = 1,Ax = x⇒x1 − 2x3 = 0, x4 = 0⇒
x = x2¡0 1 0 0
¢T+ x3
¡2 0 1 0
¢T, x2, x3 ∈ R.
Deoarece am determinat 4 vectori proprii liniar independenti rezultaca matricea este diagonalizabila, o matrice diagonala si una modala sunt,respectiv
J =
⎛⎜⎜⎝0 0 0 00 1 0 00 0 1 00 0 0 6
⎞⎟⎟⎠, H =
⎛⎜⎜⎝−1 0 2 −1
5
0 1 0 02 0 1 −2
5
1 0 0 1
⎞⎟⎟⎠ .¨
Exercitiul 2.19 Fie matricea

2.4. TRANSFORMARI LINIARE 135
A =
⎛⎜⎜⎝0 2 0 −11 0 0 00 1 0 00 0 1 0
⎞⎟⎟⎠.Sa se determine o forma canonica Jordan si o baza Jordan.
Rezolvare. Calculam polinomul caracteristic: δ1 = 0, δ2 = −2, δ3 = 0,δ4 = 1; P (λ) = (λ− 1)2(λ+ 1)2. Valorile proprii si multiplicitatile lor suntλ1 = 1, n1 = 2; λ2 = −1, n2 = 2.Calculam pentru λ1 = 1, d1 = 4− rang(I4−A), dar rang(I4−A)= 3⇒
d1 = 1. Deci pentru λ1 = 1 avem o singura serie de vectori proprii siasociati, serie de lungimem1 = 2. Pentru a determina capul de serie cautamsolutiile sistemului (I4 −A)2x=θ,⎛⎜⎜⎝
3 −4 −1 2−2 3 0 −11 −2 1 00 1 −2 1
⎞⎟⎟⎠ L1↔L3→
⎛⎜⎜⎝1 −2 1 0−2 3 0 −13 −4 −1 20 1 −2 1
⎞⎟⎟⎠ L2+2L1→L2L3−3L1→L3−→
⎛⎜⎜⎝1 −2 1 00 −1 2 −10 2 −4 20 1 −2 1
⎞⎟⎟⎠ L2→−L2−→
⎛⎜⎜⎝1 −2 1 00 1 −2 10 2 −4 20 1 −2 1
⎞⎟⎟⎠ L1+2L2→L1L3−3L3→L3−→L4−L2→L4⎛⎜⎜⎝
1 0 −3 20 1 −2 10 0 0 00 0 0 0
⎞⎟⎟⎠ .
Rezulta u =¡3α− 2β 2α− β α β
¢T= α
¡3 2 1 0
¢T+
+β¡−2 −1 0 1
¢T, de unde u
(1)1 =
¡3 2 1 0
¢T,
u(1)2 =
¡−2 −1 0 1
¢T. Calculam
z(1)1 = (I4 −A)u(1)1 =
¡−1 −1 −1 −1
¢T,
z(1)2 = (I4 −A)u(1)2 =
¡1 1 1 1
¢T.
Observam canz(1)1 , z
(1)2
osunt liniar dependenti, de aceea vom considera
unul din cei doi vectori drept cap de serie. Capul de serie va fi, de exemplu,
v(1)1 =
¡1 1 1 1
¢T, iar vectorul propriu asociat va fi v
(1)2 = u
(1)2 sau
u(1)1 . Consideram, de exemplu, v
(1)2 = u
(1)2 (baza Jordan nu este unica)
Concluzie: pentru valoarea proprie 1 avem o serie de un vector propriu
si un asociat,nv(1)1 ,v
(1)2
osi ei ıi corespunde o celula Jordan de ordin 2.

136 CAPITOLUL 2. COMPLETARI SI EXERCITII
Calculam pentru λ2 = −1, d2 = 4 − rang(A + I4). Dar rang(A)= 3,rezulta ca pentru λ2 avem o singura serie de vectori proprii si asociati,serie de lungime 2. Pentru a determina capul de serie determinam solutiile
sistemului (A + I4)2x = θ. Rezulta u =
¡3α+ 2β −2α− β α β
¢T= α
¡3 −2 1 0
¢T+β
¡2 −1 0 1
¢T, de unde
u(2)1 =
¡3 −2 1 0
¢T, u
(2)2 =
¡2 −1 0 1
¢T.
Calculam z(2)1 = (A+ I4)u
(2)1 =
¡−1 1 −1 1
¢T;
z(2)2 = (A+ I4)u
(2)2 =
¡−1 1 −1 1
¢T.
Observam canz(2)1 , z
(2)2
osunt liniar dependenti (identici), de aceea vom
considera unul din cei doi vectori. Capul de serie va fi
v(2)1 =
¡−1 1 −1 1
¢T, iar vectorul propriu asociat va fi, de exemplu,
v(2)2 = u
(2)1 .
Concluzie: pentru valoarea proprie −1 avem o serie de un vector propriusi un asociat,
nv(2)1 ,v
(2)2
osi ei ıi corespunde o celula Jordan de ordin 2.
Matricea Jordan, respectiv matricea modala, vor fi
J =
⎛⎜⎜⎝1 1 0 00 1 0 00 0 −1 10 0 0 −1
⎞⎟⎟⎠ , H =
⎛⎜⎜⎝1 −2 −1 21 −1 1 −11 0 −1 01 1 1 1
⎞⎟⎟⎠ .¨
Exercitiul 2.20 Fie matricea
A =
⎛⎝ 6 6 −151 5 −51 2 −2
⎞⎠ .
Sa se determine forma canonica Jordan si o baza Jordan.
Rezolvare. Calculam polinomul caracteristic: δ1 = 9, δ2 = 27, δ3 = 27;P (λ) = (λ − 3)3, λ1 = 3, n1 = 3. Calculam pentru λ1 = 3, d1 = 3 −rang(3I3 − A) = 2. Rezulta ca pentru λ1 = 3 avem doua serii de vectoriproprii si asociati. Deoarece ordinul de multiplicitate a radacinii λ1 = 3 este3, si avand doua serii, singura posibilitate este de a avea o serie de lungime1 si una de lungime 2.Calculam capii de serie: calculam capul de serie pentru seria de lungime
2. Determinam o baza ın ker(3I − A)2. Deoarece (3I − A)2 = 0 rezultaca vom avea ker(3I−A)2 = R3, deci o baza ın nucleu este baza canonica.Aceasta este u11 = ( 1 0 0 )T , u12 = ( 0 1 0 )T , u13 = ( 0 0 1 )T .

2.5. SPATII EUCLIDIENE 137
Calculam z11 = (3I − A)u11 = ( −3 −1 −1 )T ; z12 = (3I − A)u12 =( −6 −2 −2 )T ; z13 = (3I−A)u13 = ( 15 5 5 )T .Observam ca {z11, z12, z13}sunt liniar dependenti, de aceea vom considera unul din cei trei vectori. Ca-pul de serie va fi v11 = ( −3 −1 −1 )T , iar vectorul propriu asociat va fi:v12 = z11 sau z
12 sau z
13. Consideram, de exemplu, v
12 = z11(baza Jordan nu
este unica).Pentru seria de lungime 1, calculam vectorii proprii rezolvand sistemul
(3I−A)w = θ. Vom obtine: w1 = ( 5 0 1 )T si w2 = ( −2 1 0 )T .Concluzie: pentru valoarea proprie 3 avem o serie de un vector propriu
si un asociat, {v11,v12} si ei ıi corespunde o celula Jordan de ordin 2 si o serieformata numai dintr-un vector propriu. Pe acesta ıl alegem dintre vectoriiw1 sau w2 astfel ıncat cei trei vectori sa fie liniar independenti. Fie astfelvectorul v21 = ( 5 0 1 )T . Acestora le corespunde o celula Jordan de ordindoi si una de ordin ıntai.Matricea Jordan, respectiv matricea modala, sunt:
J =
⎛⎝ 3 1 00 3 00 0 3
⎞⎠ , H =
⎛⎝ −3 1 5−1 0 0−1 0 1
⎞⎠ .¨
2.5 Spatii euclidiene
Exercitiul 2.21 Fie A = (aij) o matrice reala, de ordinul n. Sa se arateca hAx,yi =
x,ATy
®, ∀x,y ∈ Rn.
Rezolvare. Scriind x = (x1, x2, . . . , xn)T si y = (y1, y2, . . . , yn)
T , avem deverificat egalitatea
nXi=1
nXj=1
aijxjyi =nX
j=1
nXi=1
ajixiyj
care este evidenta.¨Fie X un subspatiu din spatiul euclidian En.
Definitia 2.4 Submultimea de vectori Y, definita prin relatiaY = {y; y ∈ En, hy,xi = 0, ∀x ∈ X} .
se numeste complementul ortogonal al subspatiului X si se noteaza cusimbolul X⊥.Se constata imediat ca Y este un subspatiu din En. Daca X = En,
subspatiul Y consta numai din vectorul nul θ, deci acest caz nu este intere-sant.

138 CAPITOLUL 2. COMPLETARI SI EXERCITII
Exercitiul 2.22 Sa se arate ca daca Y = X⊥, atunci Y⊥ = X. Cu altecuvinte, cele doua subspatii X si Y sunt fiecare complementul ortogonal alceluilalt.
Rezolvare. Fie X un susbpatiu din En, cu dimX = m < n. Evident ca ınX exista o baza ortonormata
©e(1), e(2), . . . , e(m)
ª, care poate fi completata
pana la o baza ortonormata din En, prin adaugarea altor vectori e(m+1),e(m+2), . . . , e(n). Fiecare din acesti ultimi n−m vectori face parte din Y =X⊥, caci ei fiind ortogonali pe e(1), e(2), . . . , e(m) sunt ortogonali pe oricevector din X. Este evident si ca orice vector de forma cm+1e(m+1) + cne
(n)
face de asemenea parte din Y. Fie acum y un vector oarecare din Y. El estede forma y = c1e
(1)+c2e(2)+· · ·+cme(m)+cm+1e(m+1)+· · ·+cne(n), ca oricare
vector din En. Tinand seama ca baza©e(i), i = 1, n
ªeste ortonormata, din
conditiiley, e(i)
®= 0 pentru i = 1,m obtinem ci = 0 pentru i = 1,m. In
concluzie, Y coincide cu totalitatea vectorilor de formay = cm+1e
(m+1) + cm+2e(m+2) + · · ·+ cne
(n), ci ∈ R, i = m+ 1, n
adica este subspatiul generat de vectorii e(i), i = m+ 1, n. Schimband rolulsubspatiilor X si Y, deducem ca Y⊥ = X.¨De aici rezulta ca:
Exercitiul 2.23 Daca En este un spatiu spatiul euclidian si X un subspatiual lui En, atunci En= X⊕X⊥.O aplicatie importanta a exercitiului 2.22 va fi obtinuta ın cazul spatiilor
Rn, referitoare la compatibilitatea sistemului liniar Ax = b. Unii au-tori numesc teorema care urmeaza teorema fundamentala a algebreiliniare.
Teorema 2.2 Conditia necesara si suficienta ca sistemul Ax = b sa fiecompatibil este ca vectorul ”liber” b sa fie ortogonal pe toate solutiile sis-temului liniar omogen A⊥y = θ.Demonstratie. Necesitatea. Presupunem ca sistemul este compatibil si fiey o solutie oarecare ATy = θ. Deoarece exista x ∈ Rn astfel ıncat Ax = b,vom avea hb,yi = hAx,yi =
x,ATy
®= hx,θi = 0
adica b este ortogonal pe toate solutiile sistemului ATy = θ.Suficienta. Presupunem ca b este ortogonal pe toate solutiile sistemului
ATy = θ. Multimea vectorilor de forma Ax, cu x ∈ Rn formeaza unsubspatiu liniar ın Rn, pe care ıl notam X. Acest subspatiu consta din tota-litatea combinatiilor liniare de vectori-coloana din A, deoarece daca notamvectorii coloana cu v(i), i = 1, n vectorul Ax poate fi scris ın forma

2.5. SPATII EUCLIDIENE 139
Ax = x1v(1) + x2v
(2) + · · ·+ xnv(n).
Conditia ca un vector y ∈ Rn sa fie ortogonal pe toate elementele dinX este echivalenta cu conditia ca y sa fie ortogonal pe toate coloanele luiA. Aceasta ultima conditie se exprima prin aceea ca y satisface sistemulATy = θ (aceasta este conditia de ortogonalitate pe liniile lui AT , adica pecoloanele lui A). Prin urmare, complementul ortogonal al lui X, pe care ılnotam Y, este
Y = X⊥ =©y; y ∈ Rn, A
Ty = θª.
Dar atunci, avem si Y⊥ = X (conform exercitiului 2.22). Aceastaınseamna ca orice vector b care este ortogonal pe Y, apartine subspatiului Xsi deci exista x ∈ Rn, astfel ıncat Ax = b. Deci sistemul este compatibil.¥Teorema precedenta este interesanta numai ın cazul detA = 0. Daca
detA 6= 0, sistemul Ax = b este compatibil pentru toti b ∈ Rn. In acestcaz, X = Rn si Y consta numai din vectorul nul. Subspatiul X se noteazacu Im (A) imaginea lui A, iar Y se noteaza ker
¡AT¢nucleul lui AT . Cu
noile notatii, putem scrie
(Im (A))⊥ = ker¡AT¢si³ker (A)T
´⊥= Im(A) .
Relativ la compatibilitatea sistemelor liniare, are loc si urmatoarea teo-rema:
Teorema 2.3 Fie A = (aij), i = 1,m, j = 1, n o matrice reala, b ∈ Rm six ∈ Rn. Dintre sistemele liniare
Ax = b si (2.4)
ATu = θ, bTu = c (c 6= 0) (2.5)
unul si numai unul este compatibil.
Demonstratie. In sistemul (2.4), necunoscuta este x ∈ Rn, iar ın (2.5)necunoscuta este u ∈ Rm, θ fiind vectorul nul din Rn.Cazul: sistemul (2.4) este incompatibil. Dupa teorema lui Kronecker -
Capelli, rezulta r (A) < r(A) unde A este matricea (A b), obtinuta din Aprin adaugarea coloanei b. Daca r (A) = r (r ≤ min {m,n}), rezulta car(A) = r + 1. Sistemul (2.5) se scrie pe larg, astfel⎧⎪⎪⎨⎪⎪⎩
a11u1 + a21u2 + · · ·+ am1um = 0.................................a1nu1 + a2nu2 + · · ·+ amnum = 0
b1u1 + b2u2 + · · ·+ bmum = c
. (2.6)

140 CAPITOLUL 2. COMPLETARI SI EXERCITII
Matricea coeficientilor acestui sistem o putem scrie ın forma
µAT
bT
¶T
si
ea are rangul r+1, fiind transpusa matricei A = (A b). Matricea obtinutaprin adaugarea coloanei termenilor liberi (matricea extinsa) o scriem ınforma µ
AT θbT c
¶,θ vectorul nul ın Rn. (2.7)
Evident, ultima ecuatie ın (2.6) nu este o consecinta a primelor n linii,deci matricea (2.7) are rangul mai mare decat r, adica are rangul r + 1.Deci sistemul (2.5) este compatibil.Cazul: sistemul (2.4) este compatibil. Fie x o solutie a sa, adicaAx = b.
Presupunem ca si (2.5) este compatibil si fie u o solutie a sa, adicaATu = θ,bTu = c (c 6= 0). Vom avea
bTu = (Ax)T u = xT¡ATu
¢= xTθ = 0 (2.8)
care vine ın contradictie cu bTu 6= 0. Contradictia obtinuta arata ca daca(2.4) este compatibil, rezulta ca (2.5) este incompatibil.¥Exercitiul 2.24 Matricea reala simetrica, de ordinul n, A = (aij) are au-tovalorile λ1 ≤ λ2 ≤ · · · ≤ λn. Sa se arate ca
λ1 kxk2 ≤ xTAx ≤ λn kxk2 , ∀x ∈ Rn
unde k·k reprezinta norma euclidiana a vectorilor ın Rn.
Rezolvare. Pentru matricea A, exista o baza ortonormata ın Rn, formatadin vectori proprii
©v(i), i = 1, n
ªai sai. Acestia satisfac conditiile Av(i) =
λiv(i), i = 1, n, sunt ortogonali doi cate doi si fiecare are norma egala cu
unitatea. Matricea ortogonala H = col£v(1),v(2), . . . ,v(n)
¤diagonalizeaza
matricea A, adica avem H−1AH = diag [λ1, λ2, . . . , λn] si deoarece H−1 =
HT , putem scrie si HTAH = diag [λ1, λ2, . . . , λn]. Daca facem substitutiax = Hξ, gasim
kxk2 = xTx = (Hξ)T (Hξ) = ξT¡HTH
¢ξ = ξTξ = kξk2
sixTAx = ξT
¡HTAH
¢ξ =
ξT
⎛⎜⎜⎜⎝λ1 0 · · · 00 λ2 · · · 0...
.... . .
...0 0 · · · λn
⎞⎟⎟⎟⎠ ξ = λ1ξ21 + λ2ξ
22 + · · ·+ λnξ
2n.

2.5. SPATII EUCLIDIENE 141
Din ultimele doua relatii, gasim
λ1 kxk2 ≤ xTAx ≤ λn kxk2 , ∀x ∈ Rn.
Mai putem scrie
(minλi) kxk2 ≤ xTAx ≤ (maxλi) kxk2 , ∀x ∈ Rn
unde λi, i = 1, n sunt autovalorile matricei simetrice A.¨Folosind majorarea obtinuta si formula (1.108), putem obtine norma
matriceala peMn×n (R), generata de norma euclidiana a vectorilor ın Rn.
Definitia 2.5 Se numeste norma spectrala a matricei A, norma data deformula
|A|s = sup½kAxkkxk ; x 6= θ, x ∈ Rn
¾ın care k·k este norma euclidiana ın Rn.
Teorema 2.4 Norma spectrala a matricei reale A este data de formula
|A|s =√maxµi,
ın care µi sunt autovalorile matricei reale simetrice B = ATA.
Demonstratie. Mai ıntai, vom observa ca xTBx ≥ 0, ∀x ∈ Rn. In adevar,
xTBx = xT¡ATA
¢x = (Ax)T (Ax) = kAxk2 ≥ 0.
Apoi, stim ca printr-o schimbare de variabile x = Hξ, cu H matriceortogonala, gasim
xTBx = µ1ξ21 + µ2ξ
22 + · · ·+ µnξ
2n ≤ (maxµi) kξk
2 = (maxµi) kxk2
pentru toti x ∈ Rn. Dar avem si µi ≥ 0 pentru i = 1, n, daca tinem seamade conditia xTBx ≥ 0 pentru orice x ∈ Rn. Din inegaligatea kAxk ≤√maxµi kxk, ∀x ∈ Rn deducem
kAxkkxk ≤
√maxµi ⇒ |A|s ≤
√maxµi.
Pentru a termina demonstratia, ramane sa gasim un vector x 6= θ,
pentru carekAvkkvk =
√maxµi. Acest vector va fi vectorul propriu al lui B,
care satisface Bv = µv, unde µ = maxµi. In adevar, avem
vTBv = kAvk2 si vTBv = µvTv = µ kvk2
ceea ce implicakAvkkvk =
√µ.¥

142 CAPITOLUL 2. COMPLETARI SI EXERCITII
Observatia 2.4 De retinut ca norma euclidiana pentru vectori nu generea-za norma euclidiana pentru matrice. Evident, avem |A|s ≤ kAk.Definitia 2.6 Doua norme oarecare |·|1 si |·|2 pe un spatiu vectorial realV se numesc echivalente, daca exista doua constante pozitive α ≤ β, astfelıncat
α |x|2 ≤ |x|1 ≤ β |x|2 , ∀x ∈ V.
Exercitiul 2.25 Doua norme oarecare pe Rn sunt echivalente.
Rezolvare. Notam |·|1 si |·|2 functiile care definesc cele doua norme pe Rn
si consideram multimea S = {x; x ∈ Rn si |x|2 = 1}, care este compacta(marginita si ınchisa ın Rn). Functia reala f (x) = |x|1 este continua peRn. Notam α = inf
x∈Sf (x) si β = sup
x∈Sf (x). Evident α ≤ β si ın plus α > 0,
caci f ısi atinge marginile (α si β) si ia numai valori pozitive pe S (conformteoremei lui Weierstrass). Luand x 6= θ din Rn, avem
x
|x|2∈ S ⇒ α ≤ f
µx
|x|2
¶≤ β ⇒ α |x|2 ≤ |x|1 ≤ β |x|2 ,
inegaliate adevarata pentru ∀x ∈ Rn (inclusiv pentru x = θ).¨Observatia 2.5 Evident, este adevarata si relatia
1
β|x|1 ≤ |x|2 ≤
1
α|x|1 , ∀x ∈ Rn.
Exercitiul 2.26 Formula|A| =
nXi=1
nXj=1
|aij| ,
defineste o norma matriceala pe multimeaMn×n (R) .Rezolvare. Este suficient sa aratam numai ca |AB| ≤ |A| · |B| pentru douamatrice oarecare, de ordinul n. Vom scrie
|AB| =nXi=1
nXj=1
¯¯
nXk=1
aikbkj
¯¯ ≤
nXi=1
nXj=1
ÃnX
k=1
|aik| · |bkj|!
si vom folosi majorarea evidenta |bkj| ≤nP
m=1
|bmj|, adica am majorat fiecare|bkj| cu suma tuturor valorilor absolute ale elementelor din coloana j. Atuncivom obtine canX
k=1
|aik| · |bkj| ≤nX
k=1
|aik|Ã
nXm=1
|bmj|!=
nXk=1
nXm=1
|aik| · |bmj|
si deci|AB| ≤
nPi=1
nPj=1
µnP
k=1
nPm=1
|aik| · |bmj|¶=
=
µnPi=1
nPk=1
|aik|¶Ã
nPj=1
nPm=1
|bmj|!= |A| · |B| .¨

2.5. SPATII EUCLIDIENE 143
Exercitiul 2.27 Fie A o matrice de ordinul n. Daca λ este autovaloarepentru A, rezulta |λ| ≤ |A|, oricare ar fi norma matriceala aleasa.Rezolvare. Fie Ax = λx si X = col [x,x, . . . ,x] matricea cu toatecoloanele x ∈ Rn (s-a presupus x 6= θ). Avem AX = λX, caci fiecarecoloana din AX coincide cu vectorul λx, la fel ca si fiecare coloana dinmatricea λX. Deducem ca |λX| = |AX| sau ınca |λ| · |X| ≤ |A| · |X|.Simplificand cu |X| 6= 0, obtinem |λ| ≤ |A|.¨
Exercitiul 2.28 Fie A = (aij) o matrice de ordinul n. Daca exista onorma matriceala |·| pentru care |A| < 1, rezulta
limk→∞
Ak = 0 = matricea nula.
Rezolvare. Prin definitie, sirul de matrice {Mk} are limita L, daca existao norma astfel ıncat |Mk − L| → 0 pentru k → ∞. Daca notam Mk =³m(k)ij
´, k = 1, 2, 3, . . . si L = (αij), convergenta este echivalenta cu m
(k)ij →
αij pentru k →∞, oricare ar fi perechea fixata de indici (i, j). Aceasta seıntampla deoarece orice orice norma matriceala este echivalenta cu oricaredintre normele cunoscute, pentru care afirmatia se verifica imediat. In cazulde fata, avem ¯
Ak − 0¯=¯Ak¯≤ |A|k → 0 cand k →∞.
Deci, daca notam Ak =³a(k)ij
´, rezulta a
(k)ij → 0 cand k → ∞, oricare
ar fi perechea de indici (i, j).¨Exercitiul 2.29 Fie A = (aij) o matrice de ordinul n, cu elemente realesau complexe. Daca
|aii| >nX
j=1j 6=i
|aij| , i = 1, n
sa se arate ca detA 6= 0.Rezolvare. Presupunem detA = 0, ceea ce ınseamna ca o coloana estecombinatie liniara de celelalte coloane. Avem c1v
(1)+c2v(2)+ · · ·+cnv
(n) =θ, unde v(i) sunt vectorii-coloana ai matricei A si macar un coeficient este6= 0. Fie |ck| ≥ |ci| pentru i = 1, n. Avem
v(k) = −c1ckv(1) − c2
ckv(2) − · · ·− cn
ckv(n),
unde ın dreapta, desigur, lipseste termenul cu v(k). In coloana k, pe linia kse afla termenul akk, pentru care avem

144 CAPITOLUL 2. COMPLETARI SI EXERCITII
akk = −c1ck
ak1 −c2ck
ak2 − · · ·−cnck
akn
de unde rezulta
|akk| ≤¯c1ck
¯· |ak1|+
¯c2ck
¯· |ak2|+ · · ·+
¯cnck
¯· |akn|
adica |akk| ≤ |ak1|+ |ak2|+ · · ·+ |akn|
unde, evident, ın dreapta lipseste termenul |akk|. Aceasta este o contradic-tie, deci detA 6= 0. Elementele matricei A pot fi si numere complexe.¨Exercitiul 2.30 Fie A = (aij) o matrice de ordinul n, cu elemente reale
sau complexe. Notam ρi =nP
j=1j 6=i
|aij|, i = 1, n. Sa se arate ca
σ (A) ⊂n[i=1
{z; |z − aii| ≤ ρi} .
Rezolvare. Prin σ (A) am notat multimea autovalorilor matricei A (spec-trul matricei A). Multimea Di = {z; |z − aii| ≤ ρi} reprezinta un disc dinplanul complex, cu centrul ın aii si de raza ρi. Acestea se numesc discurilelui Gershgorin. Fie λ un numar complex care nu face parte din multimeanSi=1
Di. Aceasta ınseamna ca avem |λ− aii| > ρi pentru toti i = 1, n. Dar
λ − aii este elementul de pe diagonalela principala a determinantului careda valoarea polinomului caracteristic P (λ) = det (λI−A), iar conditiile|λ− aii| > ρi pentru i = 1, n spun ca pe fiecare linie, elementul de pediagonala principala este mai mare ın modul decat suma modulelor celor-lalte elemente din linia sa. Conform exercitiului 2.29, P (λ) 6= 0, deci ın
afara multimiinSi=1
Di nu se afla nici o radacina a polinomului P (λ), adica
σ (A) ⊂nSi=1
Di.¨
Exercitiul 2.31 Fie A o matrice de ordinul n, reala sau complexa. NotamR (λ) = (λI−A)−1, pentru λ diferit de autovalorile matricei A. Sa searate ca
R (λ)−R (µ) = (µ− λ)R (λ)R (µ) .
Rezolvare. Scriem
R (λ) = R (λ) (µI−A)R (µ) = R (λ) [(λI−A) + (µ− λ) I]R (µ) =
= [I+ (µ− λ)R (λ)]R (µ) = R (µ) + (µ− λ)R (λ)R (µ) ,

2.5. SPATII EUCLIDIENE 145
de unde rezulta imediat identitatea ceruta. Scriind
R (µ)−R (λ) = (λ− µ)R (µ)R (λ)
obtinuta prin schimbarea rolurilor lui λ si µ, gasim si relatia
R (λ)−R (µ) = (µ− λ)R (µ)R (λ)
deci ın final vom avea si egalitatea R (λ)R (µ) = R (µ)R (λ), adica celedoua matrice sunt permutabile.¨Exercitiul 2.32 Fie A = (aij) o matrice reala simetrica de ordinul n. Sase arate ca suma patratelor autovalorilor sale este egala cu suma patratelorelementelor sale, adica
nXi=1
λ2i =nXi=1
nXj=1
a2ij.
Rezolvare. Numerele reale λ2i , i = 1, n sunt autovalorile matricei A2.
Daca notam A2 = B, rezultanPi=1
λ2i = trB =nPi=1
bii (am folosit notatiile
B = (bij)). Dar bii =nP
j=1
aijaji =nP
j=1
a2ij, decinPi=1
λ2i =nPi=1
nPj=1
a2ij .¨
Exercitiul 2.33 Fie A = (aij) o matrice reala nesingulara de ordinul n.Sa se exprime valorile proprii si vectorii proprii ai matricei inversei matriceiA ın functie de valorile proprii si vectorii proprii ai matricei A.
Rezolvare. Polinomul caracteristic al matricei A esteP (λ) = det (λI−A) = (λ− λ1) (λ− λ2) · · · (λ− λn) ,
independent de faptul ca autovalorile sunt sau nu sunt simple. Polinomulcaracteristic al matricei A−1 este
Q (λ) = det (λI−A−1) = detA−1 (λA− I) = 1
detAdet (λA− I) =
=(−1)n λnλ1λ2 · · ·λn
det
µ1
λI−A
¶=
(−1)n λnλ1λ2 · · ·λn
µ1
λ− λ1
¶µ1
λ− λ2
¶· · ·µ
1
λ− λn
¶=
µλ− 1
λ1
¶µλ− 1
λ2
¶· · ·µλ− 1
λn
¶,
adica A−1 are autovalorile λ−11 , λ−12 , . . . , λ
−1n . Observam ca daca v(i) este
vector propriu pentru A, corespunzator autovalorii λi, atunci din Av(i) =
λiv(i), gasim A−1v(i) =
1
λiv(i), adica v(i) este vector propriu si pentru A−1,
corespunzator autovalorii1
λi.¨

146 CAPITOLUL 2. COMPLETARI SI EXERCITII
Exercitiul 2.34 Matricea A are autovalorile λi 6= 0, i = 1, n. Sa se arateca
det¡A+A−1
¢=
µλ1 +
1
λ1
¶µλ2 +
1
λ2
¶· · ·µλn +
1
λn
¶.
Rezolvare. A+A−1 = A−1 (A2 + I), deci det (A+A−1) = (detA−1)×det (A2 + I). Vom tine seama ca A2+ I = f (A), unde f (λ) = λ2+1. Deciautovalorile matricei A2 + I sunt λ21 + 1, λ
22 + 1, . . . , λ
2n + 1. In concluzie,
det¡A+A−1
¢=
1
λ1λ2 · · ·λn¡λ21 + 1
¢ ¡λ22 + 1
¢· · ·¡λ2n + 1
¢=
=
µλ1 +
1
λ1
¶µλ2 +
1
λ2
¶· · ·µλn +
1
λn
¶.¨
Exercitiul 2.35 Fie A o matrice de ordinul n, nesingulara si cu autovalo-rile λi, i = 1, n. Sa se afle polinomul caracteristic al matricei adjuncte,adica al transpusei formate cu complementii algebrici ai elementelor din A.
Rezolvare. Notam matricea adjuncta cu B si avem B = (bij), unde bij =(Aij), i, j = 1, n. Putem scrie B = (detA)A−1. Polinomul caracteristic almatricei B este
Q (λ) = det (λI−B) = det (λI− (detA)A−1) =
= (detA)n det
µλ
detAI−A−1
¶=
= (detA)nµ
λ
detA− 1
λ1
¶µλ
detA− 1
λ2
¶· · ·µ
λ
detA− 1
λn
¶=
=
µλ− detA
λ1
¶µλ− detA
λ2
¶· · ·µλ− detA
λn
¶.¨
Exercitiul 2.36 Fie A o matrice reala, de ordinul n. Sa se arate echiva-lenta
xTAx = 0,∀x ∈ Rn ⇔ AT = −A.
Rezolvare. Din xTAx = 0 obtinem prin transpunere ca si xTATx = 0.Asadar, avem xT
¡A+AT
¢x = 0, ∀x ∈ Rn ceea ce atrage ca A+A
T = 0,deci AT = −A. Reciproc, daca plecam de la ipoteza ca AT = −A, adicaA este antisimetrica, obtinem aii = 0 pentru i = 1, n si aij = −aji, pentrui, j = 1, n. Dar atunci,
xTAx =nXi=1
nXj=1
aijxixj =nX
i,j=1i6=j
aijxixj =nX
i,j=1i<j
(aij + aji)xixj = 0, ∀x ∈ Rn.
Echivalenta din enunt a fost dovedita.¨

2.5. SPATII EUCLIDIENE 147
Exercitiul 2.37 Fie A reala, antisimetrica si λ 6= 0 o autovaloare a sa. Sase arate ca(a) λ = βj, cu β = real diferit de zero;(b) daca x = u+ jv este vector propriu corespunzator lui λ = βj, avem
kuk = kvk si hu,vi = 0.Rezolvare. (a) a fost demonstrata cand s-a gasit forma autovalorilor uneimatrice reale antisimetrice.(b) Scriem A (u+ jv) = βj (u+ jv) si gasim Au = −βv, Av = βu.
Din vTAv = 0 = βvTu, rezulta vTu = hu,vi = 0. Apoi, din vTAu =−βvTv si uTAv = βuTu, gasim prin adunare β
¡uTu− vTv
¢= 0, de unde
kuk = kvk. Am folosit relatia vTAu+ uTAv = 0.¨
Exercitiul 2.38 Fie A = (aij) o matrice reala sau complexa, de ordinul n,
avand proprietatea canP
j=1
|aij| < 1 pentru i = 1, n. Sa se arate ca matricele
I+A si I−A sunt inversabile.
Rezolvare. Matricea I+A are elementele 1 + aii pe diagonala principalasi respectiv aij pentru i 6= j. Pentru i = fixat, avem
|aii|+nX
i,j=1j 6=i
|aij| < 1⇒nX
i,j=1j 6=i
|aij| < 1− |aii| ≤ |a+ aii| ,
deci elementul de pe diagonala principala are modulul mai mare decatsuma modulelor celorlalte elemente de pe linia corespunzatoare. Dupa unexercitiul cunoscut, aceasta conditie implica det (I+A) 6= 0. In mod ana-log, gasim det (I−A) 6= 0, deci si det(I−A2) 6= 0.¨
Exercitiul 2.39 Fie A o matrice reala, de ordinul n si satisfacand conditiaxTAx ≥ 0, ∀x ∈ Rn. Daca ε > 0, sa se arate ca A+ εI este inversabila.
Rezolvare. Conditia xTAx ≥ 0 se mai scrie ca hAx,xi ≥ 0, ∀x ∈ Rn. Fieacum (A+ εI)x = θ (vectorul nul din Rn). Avem
h(A+ εI)x, (A+ εI)xi = hAx,Axi+ 2ε hAx,xi+ ε2 hx,xi = 0.
Deoarece cei trei termeni sunt nenegativi si au suma zero, rezulta ca totisunt egali cu zero. Din hx,xi = 0 ⇒ x = θ, asa ıncat sistemul algebric(A+ εI)x = θ are numai solutia banala x = θ (x1 = x2 = · · · = xn = 0),ceea ce implica det (A+ εI) 6= 0, deci matricea A+ εI este inversabila.¨

148 CAPITOLUL 2. COMPLETARI SI EXERCITII
Exercitiul 2.40 Matricea reala A este antisimetrica. Sa se arate ca(a) I+A si I−A sunt inversabile;(b) B = (I−A) (I+A)−1 este ortogonala.
Rezolvare. (a) Autovalorile lui A sunt de forma forma βj, cu β = real.Autovalorile matricelor I ±A sunt de forma 1 ± βj 6= 0, deci I ±A suntinversabile.(b) BT =
¡(I+A)−1
¢(I−A)T = (I−A)−1 (I+A), deci
BTB = (I−A)−1 (I+A) (I−A) (I+A)−1 == (I−A)−1 (I−A) (I+A) (I+A)−1 = I,
adica B este ortogonala. S-a folosit egalitatea(I+A) (I−A) = (I−A) (I+A), ambele produse fiind egale cu I−A2¨.
Exercitiul 2.41 Fie A o matrice reala, de ordinul n, cu proprietatile(a) I+A si I−A sunt inversabile;(b) B = (I−A) (I+A)−1 este ortogonala.
Sa se arate ca A este antisimetrica.
Rezolvare. Fixam un element u ∈ Rn si notam x = (I+A)u, deciu = (I+A)−1 x. Avem Bx = (I−A) (I+A)−1 x = (I−A)u = u−Au.Deoarece B este ortogonala, avem hBx,Bxi = hx,xi, ∀x ∈ Rn. Deci,rezulta hu−Au,u−Aui = hu+Au,u+ aui ,sau echivalent
kuk2 − 2 hAu,ui+ kAuk2 = kuk2 + 2 hAu,ui+ kAuk2 .
In concluzie, hAu,ui = uTAu = 0, ∀u ∈ Rn si matricea A este antisi-metrica (conform exercitiului 2.36).¨
Exercitiul 2.42 Fie A o matrice reala, de ordinul n. Sa se arate echiva-lenta urmatoarelor afirmatii(a) A este ortogonala;(b) hAx,Ayi = hx,yi, ∀x,y ∈ Rn;(c) hAx,Axi = hx,xi, ∀x ∈ Rn.
Rezolvare. Presupunem ca (a) este adevarata si aratam ca (a)⇒ (b):
hAx,Ayi=(Ay)T (Ax)=yT¡ATA
¢x=yT Ix =yTx=hx,yi ,∀x,y∈ Rn.
Presupunem ca (b) este adevarata si aratam ca (b)⇒ (c): luand ın (b),y = x gasim hAx,Axi = hx,xi, ∀x ∈ Rn, deci aceasta implicatie a fost
2.5. SPATII EUCLIDIENE 149
banala. Acum, presupunem ca (c) este adevarata si aratam ca (c) ⇒ (a):egalitatea (c) poate fi scrisa ın forma echivalenta xT
¡ATA− I
¢x = 0,
∀x ∈ Rn, ceea ce atrage ın mod evident ATA− I = matricea nula, adica A
este matrice ortogonala. Echivalenta celor trei afirmatii a fost dovedita.¨
Exercitiul 2.43 Fie AD = DA si D = diag [λ1, λ2, . . . λn] cu λi 6= λjpentru i 6= j. Sa se arate ca A este o matrice diagonala.
Rezolvare. Fie i 6= j o pereche de indici; ın AD pe locul (i, j) avem
elementulnP
k=1
aikdkj = aijdjj = λjaij. In DA, pe locul (i, j) avem elementul
nPk=1
dikakj = diiaij = λiaij. Din (λj − λi) aij = 0 ⇒ aij = 0 pentru i 6= j.
Deci A este o matrice diagonala.¨Exercitiul 2.44 Fie A si B reale simetrice, de acelasi ordin, cel putinuna dintre ele avand autovalorile diferite ıntre ele. Sa se arate echivalentaafirmatiilor(a) AB = BA;(b) exista o matrice ortogonala C, astfel ıncat C−1AC si C−1BC sunt
amandoua matrice diagonale.Rezolvare. Presupunem AB = BA. Stim ca exista C = matrice ortogo-nala, astfel ıncat. C−1AC = diag [λ1, λ2, . . . , λn], ın care λi sunt autovalorilelui A, presupuse diferite ıntre ele (λi 6= λj daca i 6= j). Matricele C−1ACsi C−1BC comuta ıntre ele, caci¡C−1AC
¢ ¡C−1BC
¢= C−1 (AB)C=C−1 (BA)C=
¡C−1BC
¢ ¡C−1AC
¢si prima este o matrice diagonala, cu elemente diferite pe diagonala princi-pala. Rezulta ca si a doua matrice este de tip diagonal (conform exercitiuluiprecedent). Am aratat ca (a) ⇒ (b). Reciproc, daca are loc (b), matriceleC−1AC siC−1BC sunt permutabile, fiind amandoua de tip diagonal. Avem
(C−1AC) (C−1BC) = (C−1BC) (C−1AC)
sau C−1 (AB)C=C−1 (BA)C,
de unde gasim AB = BA. Deci (b) ⇒ (a). Cele doua afirmatii suntechivalente.¨Observatia 2.6 Mai interesanta este implicatia (a)⇒ (b). Aceasta spuneca este suficient sa gasim o baza ortonormata formata din vectori propriiv(i) ai matricei cu autovalori distincte, pentru ca notand x = Cξ, unde amnotat C = col
£v(1),v(2),v(3)
¤sa aducem simultan la forma canonica cele
doua forme patratice f(x) = xTAx si g(x) = xTBx, tinand seama si deconditia C−1 = CT .

150 CAPITOLUL 2. COMPLETARI SI EXERCITII
Exercitiul 2.45 Fie A o matrice de ordinul n, pentru care An = 0, undem este un numar fixat, 1 ≤ m ≤ n. Sa se arate ca det (I+ λA) ≡ 1.Rezolvare. Autovalorile lui Am sunt λm1 , λ
m2 , . . . , λ
mn , iar pe de alta parte
ele sunt toate nule, deoarece matricea nula are polinomul caracteristic egalcu det (λI− 0) = det (λI) = λn, deci toate autovalorile sale sunt nule.Rezulta λ1 = λ2 = · · · = λn = 0 si P (λ) = det (λI−A) ≡ λn. Pentruλ 6= 0, avem
det (I+ λA) = detλ
µ1
λI+A
¶=
= det (−λ)µ−1λI−A
¶= (−λ)n P
µ−1λ
¶= 1.
Daca λ = 0, afirmatia din enunt este de asemenea adevarata.¨
Exercitiul 2.46 Fie A o matrice reala sau complexa, cu autovalori diferiteıntre ele si fie C o matrice care permite diagonalizarea. Sa se arate ca toatesolutiile ecuatiei B2 = A sunt date de formula
B = C diagh±pλ1,±
pλ2, · · · ±
pλniC−1,
ın care λi, i = 1, n sunt autovalorile lui A.
Rezolvare. ScriindA = Cdiag£√
λ1,√λ2, . . . ,
√λn¤C−1, gasim ca pentru
orice B de forma data, avem B2 = Cdiag£√
λ1,√λ2, . . . ,
√λn¤C−1 = A.
Reciproc: daca B2 = A, matricele A si B comuta la ınmultire si atuncicomuta si C−1AC cu C−1BC. Dar C−1AC este o matrice diagonala,cu elementele de pe diagonala principala diferite ıntre ele (λi 6= λj pen-tru i 6= j) si atunci C−1BC este tot o matrice diagonala: C−1BC =diag [µ1, µ2, . . . , µn]. De aici, rezulta B = Cdiag [µ1, µ2, . . . , µn]C
−1 siB2 = Cdiag [µ21, µ
22, . . . , µ
2n]C
−1 = A, de unde µ21 = λ1, µ22 = λ2, . . . ,
µ2n = λn. Prin urmare, ın mod obligator B este de forma enuntata.¨
Observatia 2.7 Daca toti λi ≥ 0, toate ”radacinile” matricei reale A suntreale. Daca toti λi 6= 0, A are 2n ”radacini” de ordinul 2, toate de formaenuntata.
Exercitiul 2.47 Fie A si B doua matrice reale simetrice cu autovalorileλ1 ≤ λ2 ≤ · · · ≤ λn, respectiv µ1 ≤ µ2 ≤ · · · ≤ µn. Notam ρi, i = 1, nautovalorile matricei A+B. Sa se arate ca
λ1 + µ1 ≤ ρi ≤ λn + µm, i = 1, n.

2.5. SPATII EUCLIDIENE 151
Rezolvare. Din inegalitatile λ1 kxk2 ≤ xTAx ≤ λn kxk2 si µ1 kxk2 ≤xTBx ≤ µn kxk2, valabile pentru orice x ∈ Rn, obtinem
(λ1 + µ1) kxk2 ≤ xT (A+B)x ≤ (λn + µn) kxk2 , ∀x ∈ Rn.
Fie v un vector propriu al matricei A+B, corespunzator autovalorii ρ,adica (A+B)v = ρv si v 6= θ. Luam ın inegalitatile precedente x = v,gasim λ1+µ1 ≤ ρ ≤ λn+µn pentru orice autovaloare ρ a matricei A+B.¨
Exercitiul 2.48 Fie A si B doua matrice reale simetrice, de acelasi ordin,avand autovalorile nenegative. Sa se arate ca
det (A+B) ≥ detA+ detB.
Rezolvare. Pastrand notatiile din exercitiul precedent, avem
det (A+B) = ρ1ρ2 · · · ρn ≥ (λ1 + µ1) (λ2 + µ2) · · · (λn + µn) ≥≥ λ1λ2 · · ·λn + µ1µ2 · · ·µn = detA+ detB.
Ipoteza ca autovalorile λi si µi, i = 1, n sunt ≥ 0 a fost esentiala ındeducerea inegalitatii enuntate care, evident ca nu are loc ın cazul matriceloroarecare.¨
Exercitiul 2.49 Fie A si B doua matrice reale, de ordinul n. Notam, ınordine crescatoare cu λi, respectiv µi, i = 1, n autovalorile matricelor realesimetrice ATA sau BTB. Daca ρ este o autovaloare reala a matricei AB,sa se arate ca λ1µ1 ≤ ρ2 ≤ λnµn.
Rezolvare. Forma patratica xT¡ATA
¢x = kAxk2 ≥ 0, deci toate auto-
valorile λi sunt ≥ 0. La fel, toate autovalorile µi sunt ≥ 0. In plus, avem siinegalitatile
λ1 kxk2 ≤ kAxk2 ≤ λn kxk2 , µ1 kxk2 ≤ kBxk2 ≤ µn kxk2 , ∀x ∈ Rn.
Fie v un vector propriu pentru AB, corespunzator autovalorii reale ρ,adica (AB)v = ρv, v 6= θ. Avem
k(AB)vk2 = kA (Bv)k2 ≤ λn kBvk2 ≤ λnµn kvk2
care implica ρ2 kvk2 ≤ λnµn kvk2, deci ρ2 ≤ λnµn. Asemanator, se gasestesi inegalitatea λ1µ1 ≤ ρ2, ceea ce ıncheie demonstratia.¨

152 CAPITOLUL 2. COMPLETARI SI EXERCITII
Consecinta 2.1 Daca A si B sunt doua matrice reale simetrice, de ordinuln, avand autovalorile λi, respectiv µi ın plus AB = BA, atunci rezulta¡
minλ2i¢ ¡minµ2i
¢≤ ρ2j ≤
¡maxλ2i
¢ ¡maxµ2i
¢, j = 1, n
pentru toate autovalorile ρj ale matricei AB. In adevar, ın acest caz ABeste simetrica, deci are toate autovalorile ρj reale, A
TA = A2, BTB = B2,λi = λ2i , µi = µ2i , i = 1, n. Dar λi si µi, i = 1, n nu mai sunt, ın general,numerotate ın ordinea crescatoare. Putem scrie si altfel
(min |λi|) (min |µi|) ≤ |ρj| ≤ (max |λi|) (max |µi|) , j = 1, n.
Exercitiul 2.50 Folosind teorema Cayley-Hamilton, sa se calculeze A−1 siA4 − 4A3 −A2 + 12A− 7I pentru matricea
A =
⎛⎜⎜⎝1 2 −1 12 1 1 21 0 2 32 −1 1 0
⎞⎟⎟⎠ .
Rezolvare. Conform teoremei Cayley-Hamilton P (A) = 0, unde P (λ)este polinomul caracteristic al matricei A. Sa calculam P (λ):
P (λ) = λ4 − p1λ3 + p2λ
2 − p3λ+ p4, unde
p1 = trA = 4,
p2 =
¯1 22 1
¯+
¯1 −11 2
¯+
¯1 12 0
¯+
¯1 10 2
¯+
¯1 2−1 0
¯+
¯2 31 0
¯= −1,
p3 =
¯¯1 2 −12 1 11 0 2
¯¯+
¯¯1 2 12 1 22 −1 0
¯¯+
¯¯1 −1 11 2 32 1 0
¯¯+
¯¯ 1 1 20 2 3−1 1 0
¯¯ = −11,
p4 = detA = −6.
Deci, P (λ) = λ4− 4λ3−λ2+11λ− 6 si A4− 4A3−A2+11A− 6I = 0.Avem
A4 − 4A3 −A2 + 11A = 6I⇔ A (A3 − 4A2 −A+ 11I) = 6I⇔A−1 =
1
6
¡A3 − 4A2 −A+ 11I
¢⇔
A−1 =1
6
⎛⎜⎜⎝2 −1 0 3−6 12 −6 −6−10 14 −6 −66 −9 6 3
⎞⎟⎟⎠

2.5. SPATII EUCLIDIENE 153
Deoarece A4 − 4A3 −A2 + 11A− 6I = 0, rezulta caA4 − 4A3 −A2 + 12A− 7I=
=¡A4 − 4A3 −A2 + 11A− 6I
¢+ (A− I) = A− I=
=
⎛⎜⎜⎝0 2 −1 12 0 1 21 0 1 32 −1 1 −1
⎞⎟⎟⎠ .¨
Exercitiul 2.51 In spatiul euclidian R3, dotat cu produsul scalar standardse considera subspatiul
U =©x ∈ R3 | x1 − x2 = 0
ª.
Sa se determine complementul ortogonal U⊥ si apoi sa se determine proiec-tiile ortogonale ale vectorului x =
¡3 −1 4
¢pe U si U⊥.
Rezolvare. Determinam o baza a subspatiului U . Din x1 − x2 = 0rezulta x1 = x2 = α, x3 = β cu α, β ∈ R. Deci o baza a lui U este©u1 =
¡1 1 0
¢,u2 =
¡0 0 1
¢ª. Complementul ortogonal al lui U
esteU⊥ =
©x ∈ R3 | hx,u1i = hx,u2i = 0
ª,
adicaU⊥ =
©x ∈ R3 | x1 + x2 = 0, x3 = 0
ª.
O baza a lui U⊥ este©u3 =
¡1 −1 0
¢ª.
Sa calculam proiectiile lui x pe cele doua subspatii. Descompunem pex dupa vectorii u1, u2 si u3: x = α1u1 + α2u2 + α3u3. Obtinem sistemul⎧⎨⎩ α1 + α3 = 3
α1 − α3 = −1α2 = 4
⇔
⎧⎨⎩ α1 = 1α2 = 4α3 = 2
.
Deci, x = u1+4u2+2u3. Proiectiile ortogonale ale lui x sunt x0 = u1+4u2 =¡
1 1 4¢∈ U si x00 = 2u3 =
¡2 −2 0
¢∈ U⊥.¨
Exercitiul 2.52 Sa se ortonormeze sistemul de functii t, t2, t3 ın C [0, 1]
ın raport cu produsul scalar hf, gi =1R0
tf (t) g (t) dt.
Rezolvare. Aplicam procedeul de ortogonalizare Gram-Schmidt. Fie f1 =t, f2 = t2, f3 = t3. Consideram g1 = f1, g2 = f2 + α21g1, g3 = f3 +
α31g1+α32g2. Conform procedeului de ortogonalizare avem α21 = −hf2, g1ihg1, g1i
,

154 CAPITOLUL 2. COMPLETARI SI EXERCITII
α31 = −hf3, g1ihg1, g1i
, α32 = −hf3, g2ihg2, g2i
. Astfel obtinem g1 = t, hg1, g1i =R 10t3dt =
1
4, hf2, g1i =
R 10t4dt =
1
5, α21 = −
4
5, g2 = t2 − 4
5t, hg2, g2i =R 1
0t
µt2− 4
5t
¶2dt =
1
150, hf3, g1i =
Z 1
0
t5dt =1
6, g3 = t3−2
3t−107
µt2− 4
5t
¶=
t3− 107t2+
10
21t.¨
Exercitiul 2.53 Sa se determine un produs scalar ın R3 ın raport cu carebaza
B0 =©e01 =
¡1 0 0
¢, e02 =
¡1 1 0
¢, e03 =
¡1 1 1
¢ªeste ortonormata.
Rezolvare. Fie B = {e1 = (1, 0, 0) , e2 = (0, 1, 0) , e3 = (0, 0, 1)} baza stan-dard a spatiului R3. Fie ρ (x,y) produsul scalar cautat. Deoarece B0 esteortonormata, rezulta ca forma biliniara simetrica ρ (x,y) are ın baza B0
matricea (ρ)B0 = I3. Matricea unei forme biliniare la schimbari de baze estedata de (ρ)B0 = C
T (ρ)BC, unde C este matricea de trecere de la B la B0
C =
⎛⎝ 1 1 10 1 10 0 1
⎞⎠ .
Obtinem
(ρ)B =¡CT¢−1
(ρ)B0 C−1 =
¡CT¢−1
I3C−1 =
¡CT¢−1
C−1 =
=
⎛⎝ 1 0 0−1 1 00 −1 1
⎞⎠⎛⎝ 1 0 01 1 01 1 1
⎞⎠ =
⎛⎝ 1 −1 0−1 2 −10 −1 2
⎞⎠ .
Deci, ρ (x,y) = x1y1 − x1y2 − x2y1 + 2x2y2 − x2y3 − x3y2 + 2x3y3.Verificare: ρ (e01, e
01) = 1, ρ (e01, e
02) = 0, ρ (e01, e
03) = 0, ρ (e02, e
01) = 0,
ρ (e02, e02) = 1, ρ (e
02, e
03) = 0, ρ (e
03, e
01) = 0, ρ (e03, e
02) = 0, ρ (e03, e
03) = 1.¨
Exercitiul 2.54 Sa se calculeze valorile proprii si subspatiile proprii pentrumatricea A = (aij), aij = 1, i, j = 1, n.
Rezolvare. Calculam polinomul caracteristic P (λ) .

2.5. SPATII EUCLIDIENE 155
P (λ) = det (λI−A) =
¯¯λ− 1 −1 . . . −1−1 λ− 1 . . . −1. . . . . . . . . . . .−1 −1 . . . λ− 1
¯¯ .
Adunam la prima linie celelalte linii:
P (λ) =
¯¯λ− n λ− n . . . λ− n−1 λ− 1 . . . −1. . . . . . . . . . . .−1 −1 . . . λ− 1
¯¯ = (λ− n)
¯¯ 1 1 . . . 1−1 λ− 1 . . . −1. . . . . . . . . . . .−1 −1 . . . λ− 1
¯¯ .
Scadem prima coloana din celelalte:
P (λ) = (λ− n)
¯¯ 1 0 . . . 0−1 λ . . . 0. . . . . . . . . . . .−1 0 . . . λ
¯¯ = (λ− n)
¯¯ λ 0 . . . 00 λ . . . 0. . . . . . . . . . . .0 0 . . . λ
¯¯ =
λn−1 (λ− n) .Valorile proprii sunt λ1 = 0 de multiplicitate n − 1 si λ2 = n simpla.
Vectorii proprii sunt dati de solutiile sistemului (λI−A)X = 0.Pentru λ = 0 obtinem⎧⎨⎩ −x1 − x2 − · · ·− xn = 0
. . .−x1 − x2 − · · ·− xn = 0
⇔
⎧⎪⎪⎨⎪⎪⎩x1 = α1 ∈ R. . .xn−1 = αn−1 ∈ Rxn = −a1 − · · ·− αn−1
.
Pentru λ = n obtinem⎧⎪⎪⎨⎪⎪⎩(n− 1)x1 − x2 − · · ·− xn = 0−x1 + (n− 1)x2 − · · ·− xn = 0
. . .−x1 − x2 − · · ·+ (n− 1) xn = 0
⇔ x1 = x2 = · · · = xn = α ∈ R.
Subspatiile proprii sunt:Vλ1 =
©x ∈ Rn | x =
¡α1 . . . αn−1 −α1 − · · ·− αn−1
¢, αi ∈ R, i = 1, n− 1
ª,
Vλ2 =©x ∈ Rn | x =
¡α α . . . α
¢, α ∈ R
ª.
O baza ın Vλ1 este {u1 =¡1 0 . . . 0 −1
¢,u2 =
¡0 1 0 . . . 0 −1
¢, . . . ,
un−1 =¡0 . . . 0 1 −1
¢}.
O baza ın Vλ2 este©v =
¡1 1 . . . 1
¢ª.¨
Exercitiul 2.55 Se considera forma patratica
h (x) = 2x21 + 2x22 − 2x23 + 6x1x2 − 2x1x3 + 2x2x3.
Sa se determine forma canonica si baza canonica prin metodele cunoscutesi sa se verifice legea inertiei.

156 CAPITOLUL 2. COMPLETARI SI EXERCITII
Rezolvare. Determinam forma canonica folosind metoda lui Gauss.
h (x) = 2 (x21 + 3x1x2 − x1x3) + 2x22 − 2x23 + 2x2x3 =
= 2
"µx1 +
3
2x2 −
1
2x3
¶2− 94x22 −
1
4x23 +
3
2x2x3
#+ 2x22 − 2x23 + 2x2x3 =
= 2
µx1 +
3
2x2 −
1
2x3
¶2− 52x22 −
5
2x23 + 5x1x3 = 2
µx1 +
3
2x2 −
1
2x3
¶2−
5
2(x2 − x3)
2 .Facem schimbarea de coordonate⎧⎪⎨⎪⎩y1 = x1 +
3
2x2 −
1
2x3
y2 = x2 − x3y3 = x3
, din care deducem
⎧⎪⎨⎪⎩x1 = y1 −
3
2y2 − y3
x2 = y2 + y3x3 = y3
,
adica
⎛⎝ x1x2x3
⎞⎠ =
⎛⎜⎝ 1 −32−1
0 1 10 0 1
⎞⎟⎠⎛⎝ y1
y2y3
⎞⎠ .Matricea schimbarii de baza
⎛⎜⎝ 1 −32−1
0 1 10 0 1
⎞⎟⎠ da baza canonica a formei patratice
B0 =
½e01 =
¡1 0 0
¢, e02 =
µ−321 0
¶, e03 =
¡−1 1 1
¢¾ın care
ea are expresia h (x) = 2y21 −5
2y22.Deci signatura formei patratice este
(1, 1, 1).
Sa determinam forma canonica folosind metoda transformarilor ortogo-nale. Calculam polinomul caracteristic al matricei formei patratice si apoivalorile si vectorii proprii: P (λ) = det (λI−A) = λ3 − 2λ2 − 15λ ⇒λ1 = −3, λ2 = 5, λ3 = 0, v1 =
¡1 −1 2
¢, v2 =
¡1 1 0
¢, v3 =¡
1 −1 −1¢.Deci, forma canonica este h (x) = −3y21+5y22, baza canonica
B0 fiind formata din: e01 =1
kv1kv1 =
1√6
¡1 −1 2
¢, e02 =
1
kv2kv2 =
1√2
¡1 1 0
¢, e03 =
1
kv3kv3 =
1√3
¡1 −1 −1
¢. Transformarea de
coordonate care reduce forma patratica la forma canonica este:
2.6. EXPONENTIALA DE ARGUMENT MATRICEAL 157
⎛⎝ x1x2x3
⎞⎠ =
⎛⎜⎜⎜⎜⎜⎜⎝
1√6
1√2
1√3
− 1√6
1√2− 1√
32√6
0 − 1√3
⎞⎟⎟⎟⎟⎟⎟⎠⎛⎝ y1
y2y3
⎞⎠ .
Observam ca legea inertiei se verifica, deoarece si ın acest caz am obtinutsignatura (1, 1, 1).Prin metoda Jacobi a fost rezolvat la Exercitiul 1.24. ¨
2.6 Exponentiala de argument matriceal
Reamintim ca daca f (λ) este un polinom de variabila λ, f (λ) = b0λm+
b1λm−1 + · · ·+ bm−1λ+ bm si A este o matrice constanta, de ordinul n, am
definit matricea f (A) prin formula
f (A) = b0Am + b1A
m−1 + · · ·+ bm−1A+ bmI,
m si n fiind numere naturale, fara nici o legatura ıntre ele.Ne punem problema cum putem defini functii de matrice si anume cum
putem defini matricea f(A) ın cazul ın care f(x) este o functie indefinitderivabila oarecare. Una din metode este bazata pe dezvoltarea ın serieTaylor a functiei f(x), folosind notiunea, relativ complicata de serie de ma-trice. Daca f(x) = ex, seria Taylor ın jurul punctului x = 0 corespunzatoareeste
ex = 1 +x
1!+
x2
2!+ · · ·+ xn
n!+ · · ·
si prin ınlocuire formala a lui x cu A suntem condusi la expresia:
eA = I +1
1!A+
1
2!A2 + · · ·+ 1
n!An + · · · .
Aceasta este o serie cu elemente matrici si poate fi privita ca un ansamblude n2 serii de numere reale sau complexe.
Propozitia 2.1 Daca A,B ∈Mn(R),AB = BA, atunci eA+B = eAeB.
Demonstratie. Fie eA = I +1
1!A +
1
2!A2 + · · · + 1
n!An + · · · si eB =
I +1
1!B +
1
2!B2 + · · · + 1
n!Bn + · · · . Folosind produsul ın sens Cauchy
a doua serii, obtinem eAeB = (I +1
1!A +
1
2!A2 + · · · + 1
n!An + · · · )(I +

158 CAPITOLUL 2. COMPLETARI SI EXERCITII
1
1!B+
1
2!B2 + · · ·+ 1
n!Bn + · · · ) = I+ 1
1!(A+B) +
1
2!(A2 + 2AB+B2)+
1
3!(A3 + 3A2B+ 3AB2 +B3) + · · · = eA+B.¥
Propozitia 2.2 Daca I ∈Mn(R), matricea unitate, atunci eI = eI.
Demonstratie. eI = I+1
1!I+
1
2!I2+ · · ·+ 1
n!In+ · · · = (1+ 1
1!+1
2!+ · · ·+
1
n!+ · · · )I = eI.¥
Propozitia 2.3 Daca A ∈Mn(R) atunci (eA)−1 = e−A.
Demonstratie. Deoarece A si −A comuta, deducem eAe−A = e−AeA =e0 = I. Deci eA este inversabila si inversa ei este e−A.¥Ne intereseaza calculul efectiv a lui eA. Pentru aceasta consideram ur-
matoarele cazuri:I. Cazul ın care A este matrice diagonala, A = D
D =
⎛⎜⎜⎜⎝λ1 0 · · · 00 λ2 · · · 0
· · · · · · . . . · · ·0 0 · · · λn
⎞⎟⎟⎟⎠ ,Dk =
⎛⎜⎜⎜⎝λk1 0 · · · 00 λk2 · · · 0
· · · · · · . . . · · ·0 0 · · · λkn
⎞⎟⎟⎟⎠eD = I+
1
1!D+
1
2!D2 + · · ·+ 1
n!Dn + · · · =
=
⎛⎜⎜⎜⎝1 + 1
11λ1 + · · · 0 · · · 0
0 1 + 111λ2 +
12!λ22 + · · · · · · 0
......
. . ....
0 0 · · · 1 + 111λn +
12!λ2n + · · ·
⎞⎟⎟⎟⎠=
=
⎛⎜⎜⎜⎝eλ1 0 · · · 00 eλ2 · · · 0
· · · · · · . . . · · ·0 0 · · · eλn
⎞⎟⎟⎟⎠ .
II. Cazul ın care A este celula Jordan de ordin n corespunzatoare valoriiproprii λ
A = Jn =
⎛⎜⎜⎜⎝λ 1 · · · 0
0 λ. . . 0
· · · · · · . . . 10 0 · · · λ
⎞⎟⎟⎟⎠ = λIn +En, unde

2.6. EXPONENTIALA DE ARGUMENT MATRICEAL 159
En =
⎛⎜⎜⎜⎝0 1 · · · 0
0 0. . . 0
· · · · · · . . . 10 0 · · · 0
⎞⎟⎟⎟⎠ ,E2n =
⎛⎜⎜⎜⎜⎜⎝0 0 1 · · · 0
· · · · · · · · · . . . · · ·0 0 0 · · · 10 0 0 · · · 00 0 0 · · · 0
⎞⎟⎟⎟⎟⎟⎠ , · · · ,
Enn = 0.
eJn = eλIn+En = eλIn∙I+
1
1!En +
1
2!E2n + · · ·+
1
(n− 1)!En−1n
¸=
= eλ∙I+
1
1!En + · · ·+
1
(n− 1)!En−1n
¸= eλ
⎛⎜⎜⎜⎜⎜⎝1 1
1!12!
· · · 1(n−1)!
0 1 11!
· · · 1(n−2)!
0 0 1 · · · 1(n−3)!
· · · · · · · · · . . . · · ·0 0 0 · · · 1
⎞⎟⎟⎟⎟⎟⎠ ,
II. Cazul ın care A este o matrice Jordan
J =
⎛⎜⎜⎜⎝J1 0
J2. . .
0 Js
⎞⎟⎟⎟⎠ , atunci eJ =
⎛⎜⎜⎜⎝eJ1 0
eJ2
. . .
0 eJs
⎞⎟⎟⎟⎠ .
Teorema 2.5 Daca A,B ∈Mn(R), A si B sunt matrice asemenea,
B = C−1AC, atunci eB = C−1eAC.
Demonstratie. Stim ca B2 = C−1A2C, . . . ,Bk = C−1AkC (inductie)
eB =∞Xk=0
1
k!Bk =
∞Xk=0
C−1AC = C−1(∞Xk=0
1
k!Ak)C = C−1eAC.¨
Consecinte.
1. Daca A este diagonalizabila, D = P−1AP, atunci eA = PeDP−1.
2. Daca A admite forma Jordan, J = P−1AP, atunci eA = PeJP−1
unde P este matricea modala.
Exercitiul 2.56 Fie matricea:
A=
⎛⎜⎜⎝1 0 0 10 1 0 00 0 1 −21 0 −2 5
⎞⎟⎟⎠ .
Sa se calculeze eA.
160 CAPITOLUL 2. COMPLETARI SI EXERCITII
Rezolvare. Polinomul caracteristic este: P (λ) = λ(λ− 1)2(λ− 6). Pentruλ = 0, vectorul propriu este v1 =
¡−1 0 2 1
¢T; pentru λ = 1,
A− I =
⎛⎜⎜⎝0 0 0 10 0 0 00 0 0 −21 0 −2 4
⎞⎟⎟⎠, iar vectorii proprii sunt:v2 =
¡0 1 0 0
¢T,v3 =
¡2 0 1 0
¢T.
Pentru λ = 6, A − I =
⎛⎜⎜⎝−5 0 0 10 −5 0 00 0 −5 −21 0 −2 −1
⎞⎟⎟⎠, iar vectorul propriu
este: v4 =¡1 0 −2 5
¢T. Obtinem D =
⎛⎜⎜⎝0 0 0 00 1 0 00 0 1 00 0 0 6
⎞⎟⎟⎠ , iar
H =
⎛⎜⎜⎝−1 0 2 10 1 0 02 0 1 −21 0 0 5
⎞⎟⎟⎠ ,H−1 =
⎛⎜⎜⎝−160 1
316
0 1 0 025
0 15
0130
0 − 115
16
⎞⎟⎟⎠ .
eD =
⎛⎜⎜⎝1 0 0 00 e 0 00 0 e 00 0 0 e6
⎞⎟⎟⎠ ,
eA=PeDP−1=
⎛⎜⎜⎝−1 0 2 10 1 0 02 0 1 −21 0 0 5
⎞⎟⎟⎠⎛⎜⎜⎝1 0 0 00 e 0 00 0 e 00 0 0 e6
⎞⎟⎟⎠⎛⎜⎜⎝−160 1
316
0 1 0 025
0 15
0130
0 − 115
16
⎞⎟⎟⎠=
=
⎛⎜⎜⎝45e+ 1
30e6 + 1
60 2
5e− 1
15e6 − 1
316e6 − 1
6
0 e 0 025e− 1
15e6 − 1
30 1
5e+ 2
15e6 + 2
3−13e6 + 1
316e6 − 1
60 −1
3e6 + 1
356e6 + 1
6
⎞⎟⎟⎠ .
Exercitiul 2.57 Fie matricea
A=
⎛⎝ 0 1 0−4 4 0−2 1 2
⎞⎠ .
Sa se calculeze eA.

2.6. EXPONENTIALA DE ARGUMENT MATRICEAL 161
Rezolvare. Polinomul caracteristic este: P (λ) = −(λ − 2)3. Calculamdef(A − 2I), (A − 2I)x = θ implica x =
¡1 2 0
¢T, y =
¡0 0 1
¢Tdeci exista doua serii de vectori proprii si asociati. Cum ın total trebuie safie trei vectori proprii si asociati rezulta ca exista o serie de lungime 1(unvector propriu) si o serie de lungime 2 (un vector propriu si un asociat). Casa dererminam capul de serie; calculam⎛⎝ 0 1 0
−4 4 0−2 1 2
⎞⎠⎛⎝ 010
⎞⎠ =
⎛⎝ 141
⎞⎠⎛⎝ −2 1 0−4 2 0−2 1 0
⎞⎠⎛⎝ 010
⎞⎠ =
⎛⎝ 121
⎞⎠A−2I =
⎛⎝ −2 1 0−4 2 0−2 1 0
⎞⎠ , (A−3I)2 =
⎛⎝ 0 0 00 0 00 0 0
⎞⎠, o baza ın ker(A−3I)2: este
n¡1 0 0
¢T,¡0 1 0
¢T,¡0 0 1
¢To. Calculam⎛⎝ −2 1 0
−4 2 0−2 1 0
⎞⎠⎛⎝ 100
⎞⎠ =
⎛⎝ −2−4−2
⎞⎠ ,
⎛⎝ −2 1 0−4 2 0−2 1 0
⎞⎠⎛⎝ 010
⎞⎠ =
⎛⎝ 121
⎞⎠ ,⎛⎝ −2 1 0−4 2 0−2 1 0
⎞⎠⎛⎝ 001
⎞⎠ =
⎛⎝ 000
⎞⎠ ⇒vectorul propriu (6= θ) cap de serie
pentru seria de lungime 2 va fi, de exemplu, v11 =¡1 2 1
¢T, iar vectorul
asociat este: v12 =¡0 1 0
¢T.
Vectorul propriu din seria de lungime 1,v21, se alege unul din vectorii dinker(A− 3I) astfel ıncat {v11,v12,v21} sa fie liniari independenti. Alegem, de
exemplu, v21 =¡1 2 0
¢T, det
⎛⎝ 1 1 02 2 10 1 0
⎞⎠ = −1.
Matricea Jordan:
J =
⎛⎝ 2 0 00 2 10 0 2
⎞⎠ ; H =
⎛⎝ 1 1 02 2 10 1 0
⎞⎠.eJ1 = (e2) , J2 = 2I+E2, E2 =
µ0 10 0
¶,
E22 =
µ0 00 0
¶⇒ eJ2 = e2(I+
1
1!E2) = e2
µ1 10 1
¶=
µe2 e2
0 e2
¶.

162 CAPITOLUL 2. COMPLETARI SI EXERCITII
eJ =
µeJ1 00 eJ2
¶=
⎛⎝ e2 0 00 e2 e2
0 0 e2
⎞⎠ ,
H =
⎛⎝ 1 0 12 1 21 0 0
⎞⎠ ; H−1 =⎛⎝ 0 0 1−2 1 01 0 −1
⎞⎠eA =
⎛⎝ 1 1 02 2 10 1 0
⎞⎠⎛⎝ e2 0 00 e2 e2
0 0 e2
⎞⎠⎛⎝ 1 0 −10 0 1−2 1 0
⎞⎠ =
=
⎛⎝ −e2 e2 0−4e2 3e2 0−2e2 e2 e2
⎞⎠ .
In teoria ecuatiilor diferentiale, se utilizeaza destul de mult matriceaexp (tA), notata si etA. Mai exact, se defineste o functie F (t) = exp (tA)de variabila reala t ∈ (−∞,∞) si luand valori ın multimea matricelor deordinul n, prin analogie cu functia scalara f (t) = exp (at). Aceasta dinurma satisface ecuatia diferentiala x (t) = ax (t) si conditia initiala x (0) =1. Pentru cazul matriceal, vom considera ecuatia diferentiala liniara
X (t) = AX (t) , cu conditia X (0) = I (2.9)
ın careX (t) este functia-matrice de ordinul n, ale carei elemente sunt functiide variabila independenta t, A este o matrice constanta de acelasi ordin n, Ieste matricea unitate de ordinul n, iar X (t) este functia - matrice obtinutaprin derivarea ın raport cu t a fiecarui element al lui X (t).Daca notam X (t) = col
£x(1) (t) ,x(2) (t) , . . . ,x(n) (t)
¤, se poate arata ca
relatiile (2.9) sunt echivalente cu faptul ca fiecare coloana x(i) (t) a matriceiX (t) satisface sistemul diferential liniar
x (t) = Ax (t) ,¡x(i) (0)
¢=¡0 · · · 0 1 0 · · · 0
¢i
T
(2.10)vectorul initial x(i) (0) fiind al i-lea vector din baza standard din Rn sau, cualte cuvinte, coloana de rand i din matricea unitate I. Rezolvarea acestorn sisteme diferentiale duce la aflarea coloanelor matricei X (t) = exp (tA).Se poate folosi si notatia exp (At). In cazurile n = 2, 3 gasirea matriceiexp (tA) nu duce la calcule foarte complicate. Exista si o alta metoda degasire a matricei exp (tA), care presupune folosirea transformatei Laplace,dar nu o prezentam aici.
Exemplul 2.4 Fie I =
µ1 00 1
¶matricea unitate de ordinul 2. Sa se afle
exp (tI).

2.6. EXPONENTIALA DE ARGUMENT MATRICEAL 163
Rezolvare. Avem de rezolvat (de gasit solutia generala) sistemul
d
dt
µx1(t)x2(t)
¶=
µ1 00 1
¶.
µx1(t)x2(t)
¶.
Solutia sa generala este x1 (t) = c1et, x2 (t) = c2e
t cu c1, c2 = constantearbitrare. Pentru x1 (0) = 1, x2 (0) = 0 avem prima coloana x(1) (t) =¡et 0
¢T, luand c1 = 1, c2 = 0. Pentru x1 (0) = 0, x2 (0) = 1 avem a doua
coloana x(2) (t) =¡0 et
¢T, luand c1 = 0, c2 = 1. In concluzie, rezulta
exp (tI) =
µet 00 et
¶= etI, exp (I) =
µe 00 e
¶= eI.¨
Exemplul 2.5 Fie A =
µa −bb a
¶, cu b 6= 0. Sa se afle exp (tA).
Rezolvare. Sistemul x (t) = Ax (t) se scrie pe larg, astfel(x1 (t) = ax1 − bx2
x2 (t) = bx1 + ax2.
Prin derivarea primei ecuatii si eliminarea variabilei x2, se ajunge laecuatia liniara cu coeficienti constanti
x1 − 2ax1 +¡a2 + b2
¢x1 = 0
a carei solutie generala este x1 = c1eat cos bt+ c2e
at sin bt, unde c1 si c2 suntconstante arbitrare. Folosind din nou prima ecuatie, gasim si cea de a douafunctie a sistemului, x2 = c1e
at sin bt − c2eat cos bt. Luand c1 = 1, c2 = 0
obtinem prima coloana x(1) (t) a matricei exp (tA):
x(1) (t) =
µeat cos bteat sin bt
¶, cu x(1) (0) =
µ10
¶.
Luand apoi c1 = 0, c2 = −1, obtinem a doua coloana x(2) (t):
x(2) (t) =
µ−eat sin bteat cos bt
¶, cu x(2) (0) =
µ01
¶.
Deci, putem scrie
etA =
µeat cos bt −eat sin bteat sin bt eat cos bt
¶= eat
µcos bt − sin btsin bt cos bt
¶.
Pentru t = 1, obtinem matricea exp (A).¨

164 CAPITOLUL 2. COMPLETARI SI EXERCITII
Exemplul 2.6 Se cauta matricele B, pentru care
eB =
µa −bb a
¶,
cu a si b reale, nu ambele nule.
Rezolvare. Cautam B de forma urmatoare
B =
µu −vv u
¶.
Cunoastem exp (B) din exemplul precedent, deci trebuie sa avem
euµcos v − sin vsin v cos v
¶=
µa −bb a
¶= ρ
µcosα − sinαsinα cosα
¶,
unde am notat ρ =√a2 + b2,
a
ρ= cosα si
b
ρ= sinα. Obtinem eu = ρ si
v = α+ 2kπ, ∀k = ıntreg. Deci avem o infinitate de solutii
Bk =
µln ρ −(α+ 2kπ)
α+ 2kπ ln ρ
¶, k = 0,±1,±2, . . .¨
In ce priveste alte proprietati ale functiei exponentiale de argument ma-triceal, asemanatoare celor ale functiei clasice ex, din analiza matematica,prezentam urmatoarea teorema:
Teorema 2.6 Fie A o matrice constanta, de ordinul n. Oricare ar fi nu-merele reale t si τ , are loc egalitatea
etA · eτA = e(t+τ)A.
Demonstratie. Notand ϕ (t) = etA · eτA (τ = constant) avem
ϕ (t) = Aϕ (t) , t ∈ (−∞,∞) si ϕ (0) = eτA,
unde am tinut seama ca etA¯t=0
= I. In mod asemanator, notand ψ (t) =
e(t+τ)A (τ = constant), avem
ψ (t) = Aψ (t) , t ∈ (−∞,∞) si ψ (0) = eτA.
Din teorema de existenta si unictate a solutiei pentru sistemul matricealX (t) = AX (t), rezulta ca doua solutii care coincid ıntr-un punct (ın cazulde fata, t = 0), sunt identice. Deci egalitatea ϕ (t) = ψ (t) are loc pentruorice t = real si proprietatea enuntata a fost demonstrata.¥

2.7. CONICE PE ECUATII REDUSE 165
In teoria ecuatiilor diferentiale, matricea etA se numeste matrice fun-damentala pentru sistemul liniar x (t) = Ax (t) (ın scriere matriceala).Importanta cunoasterii sale consta ın aceea ca solutia generala a acestui sis-tem se scrie ın forma x (t) = etAc, unde c este un vector constant arbitrar,din Rn. Notand det e
tA = W (t), numim acest determinant wronskianulsolutiilor particulare x(1) (t), x(2) (t), . . . , x(n) (t) (coloanele matricei etA).Se arata ca are loc formula lui Liouville
W (t) =W (t0) ett0(trA)dτ ,
oricare ar fi t si t0 reali. In cazul nostru, matricea A este constanta si
trA =nPi=1
aii = constant. Luand t = 1 si t0 = 0, gasim
det eA = etrA = ea11+a22+···+ann .
Pe de alta parte, avemnPi=1
λi = trA, unde λi sunt autovalorile matricei
A. Putem deci sa scriem
det eA = eλ1 · eλ2 · · · eλn,
adica daca luam f (λ) = eλ, avem det f (A) = f (λ1) f (λ2) · · · f (λn), for-mula care am gasit-o prima data ın cazul f (λ) = polinom ın variabila λ.
2.7 Conice pe ecuatii reduse
Fie un plan (π) si un reper ortonormat R = (O;−→i ,−→j ).
2.7.1 Cercul
Definitia 2.7 Cercul este locul geometric al punctelor din plan care auproprietatea ca sunt egal departate, la distanta R, de un punct fix. Punc-tul fix, M0(x0, y0) se numeste centrul cercului iar R se numeste razacercului.
Fie M(x, y) un punct oarecare al cercului. Daca r si r0 sunt vectorii depozitie ai punctelor M respectiv C, atunci kr− r0k = R⇔ (x−x0)
2+(y−y0)
2 = R echivalent cu
(x− x0)2 + (y − y0)
2 = R2. (2.11)
Ecuatia (2.11) se numeste ecuatia carteziana a cercului de centruM0(x0, y0) si de raza R. Pentru cercul cu centrul ın origine, ecuatia estex2 + y2 = R2.

166 CAPITOLUL 2. COMPLETARI SI EXERCITII
Teorema 2.7 O ecuatie de forma
x2 + y2 + 2ax+ 2by + c = 0 cu a2 + b2 − c > 0 (2.12)
reprezinta un cerc cu centrul ın punctul (−a,−b) si de raza R =√a2 + b2 − c.
Demonstratie. Putem scrie (x + a)2 + (y + b)2 + c− a2 − b2 = 0,deci cux0 = −a, y0 = −b, R2 = a2 + b2 − c > 0 obtinem (2.11).¥Deducem ecuatiei tangentei la cerc ıntr-un punct al sau, M1(x1, y1).Daca P (x, y) este un punct oarecare apartinand tangentei, atunci vec-
torul−−→CM1 = (x1 − x0)
−→i + (y1 − y0)
−→j este perpendicular pe vectorul−−→
M1P = (x− x1)−→i + (y − y1)
−→j , adica h−−→CM1,
−−→M1P i = 0⇔
(x1 − x0)(x− x1) + (y1 − y0)(y − y1) = 0⇔(x1 − x0) [(x− x0) + (x0 − x1)] + (y1 − y0) [(y − y0) + (y0 − y1)] = 0⇔(x1 − x0)(x− x0) + (y1 − y0)(y − y0)− [(x1 − x0)
2 + (y1 − y0)2] = 0⇔
(x1 − x0)(x− x0) + (y1 − y0)(y − y0) = R2. (2.13)
Ecuatia (2.13) se numeste ecuatia tangentei la cerc dusa printr-un punctal cercului obtinuta prin dedublare.Ecuatiile parametrice ale cercului:½
x = x0 +R cosϕy = y0 +R sinϕ
,ϕ ∈ [0, 2π) .Daca cercul are centrul ın origine obtinem parametrizarea:½
x = R cosϕy = R sinϕ
,ϕ ∈ [0, 2π) .
2.7.2 ElipsaDefinitia 2.8 Elipsa este locul geometric al punctelor din plan care au pro-prietatea ca suma distantelor la doua puncte fixe, F si F 0 (numite focare),este constanta si egala cu 2a, a ∈ R+.
Figura 2.1.

2.7. CONICE PE ECUATII REDUSE 167
Deducerea ecuatiei elipseiPentru a deduce ecuatia elipsei alegem un reper preferential: (figura 2.1)
originea O a reperului se considera ın mijlocul segmentului FF 0, versorul−→i este versorul vectorului
−→OF iar versorul
−→j se alege perpendicular pe−→
i ın O. Din felul ın care am ales reperul R deducem ca−→OF = c
−→i si−−→
OF 0 = −c−→i , unde c > 0. Deci F (c, 0), F 0(−c, 0) si daca M(x, y) este un
punct al locului geometric, atunci°°°−−→MF
°°°+ °°°−−→MF 0°°° = 2a, a > 0 fixat.
Rezultap(x− c)2 + y2 +
p(x+ c)2 + y2 = 2a⇔p
(x− c)2 + y2 = 2a−p(x+ c)2 + y2
Ridicand la patrat si efectuand simplificarile obtinem:
ap(x+ c)2 + y2 = a2 + xc. (2.14)
Pentru x > −a2
cridicam din nou la patrat si efectuand simplificarile
obtinem: (a2 − c2)x2 + a2y2 − a2(a2 − c2) = 0. Notam a2 − c2 = b2 (a > c
deoarece°°°−−→MF
°°°+ °°°−−→MF 0°°° > °°°−−→FF 0
°°°) si obtinem b2x2 + a2z2 − a2b2 = 0⇔x2
a2+
y2
b2− 1 = 0. (2.15)
Ecuatia (2.15) reprezinta ecuatia elipsei de semiaxe a si b. Din (2.14)
obtinemc
ax + a =
p(x+ c)2 + y2. Notam e =
c
a. e se numeste excentrici-
tatea elipsei si obtinem
e(x+a
e) =
p(x+ c)2 + y2. (2.16)
Observam ca e < 1, ın cazul elipsei. x +a
ereprezinta distanta de la
punctul M(x, y) la dreapta de ecuatie x = −ae, numita directoarea elipsei.
Elipsa are doua drepte directoare de ecuatii x = −aesi x =
a
eiar punctele
elipsei se gasesc ıntre aceste drepte, x ≥ −a > −aesi x ≤ a <
a
e(a
e=
a2
c>
a).Relatia (2.16) ne arata ca raportul distantelor de la M la F 0 si la dreapta
directoare de ecuatie x = −aeeste constanta si egala cu excentricitatea
elipsei.
Observatia 2.8 AxaOx intersecteaza elipsa ın puncteleA0(−a, 0) siA(a, 0)numite varfurile elipsei. Axa Oy intersecteaza elipsa tot ın varfuri, B(0, b),B0(0,−b). Axele Ox si Oy sunt axe de simetrie pentru elipsa. PunctulO(0, 0) numit centrul elipsei este centru de simetrie.

168 CAPITOLUL 2. COMPLETARI SI EXERCITII
Ecuatia (2.17) a tangentei la elipsa dusa printr-un punct (x0, y0) de peelipsa se obtine prin dedublare.
xx0a2
+yy0b2− 1 = 0. (2.17)
Reprezentarea paramertica a elipsei:½x = a cosϕy = b sinϕ
, ϕ ∈ [0, 2π) .
2.7.3 Hiperbola
Definitia 2.9 Hiperbola este locul geometric al punctelor din plan careau proprietatea ca diferenta distantelor la doua puncte fixe, F si F 0 (numitefocare), este constanta si egala cu 2a, a ∈ R+.Deducerea ecuatiei hiperbolei.Pentru a deduce ecuatia hiperbolei alegem un reper preferential la fel ca
si ın cazul elipsei (figura 2.2): originea O a reperului se alege ın mijloculsegmentului FF 0, versorul
−→i este versorul vectorului
−→OF iar versorul
−→j se
alege perpendicular pe−→i ın O.
Figura 2.2.Din felul ın care am ales reperul R deducem ca
−→OF = c
−→i si
−−→OF 0 =
−c−→i , unde c > 0. Deci F (c, 0), F 0(−c, 0) si daca M(x, y) este un punct alhiperbolei, atunci
°°°−−→MF°°°− °°°−−→MF 0
°°° = 2a, a > 0 fixat,°°°−−→MF°°° > °°°−−→MF 0
°°°.Rezulta
p(x− c)2 + y2 −
p(x+ c)2 + y2 = 2a⇔p
(x− c)2 + y2 = 2a+p(x+ c)2 + y2.
Ridicand la patrat si efectuand simplificarile obtinem:
ap(x+ c)2 + y2 = −a2 − xc. (2.18)

2.7. CONICE PE ECUATII REDUSE 169
Pentru x < −a2
cridicam din nou la patrat si efectuand simplificarile
obtinem: (a2 − c2)x2 + a2y2 − a2(a2 − c2) = 0. Notam c2 − a2 = b2(a < c
deoarece°°°−−→MF
°°°− °°°−−→MF 0°°° < °°°−−→FF 0
°°°) si obtinem b2x2 − a2z2 − a2b2 = 0⇔
x2
a2− y2
b2− 1 = 0. (2.19)
Ecuatia (2.19) reprezinta ecuatia hiperbolei de semiaxe a si b.
Din (2.18) obtinem − c
ax − a =
p(x+ c)2 + y2. Notam e =
c
a, numita
excentricitatea hiperbolei si obtinem
−e(x+ a
e) =
p(x+ c)2 + y2. (2.20)
Observam ca e > 1, ın cazul hiperbolei. x +a
ereprezinta distanta de
la punctul M(x, y) la dreapta de ecuatie x = −ae, numita directoarea
hiperbolei. Hiperbola are doua drepte directoare de ecuatii x = −ae
si x =a
eiar punctele hiperbolei se gasesc ın exteriorul acestor drepte,
x ≤ −a < −aesi x ≥ a >
a
e(a
e=
a2
c< a).
Relatia (2.20) ne arata ca raportul distantelor de laM la F 0 si la dreapta
directoare de ecuatie x = −aeeste constanta si egala cu excentricitatea
hiperbolei.
Din ecuatia (2.19) a hiperbolei obtinem: y =b
a
√x2 − a2 sau y =
− b
a
√x2 − a2. Rezulta ca dreptele y = ± b
ax sunt asimptote.
Tangenta la hiperbola
xx0a2− yy0
b2− 1 = 0. (2.21)
Ecuatia (2.21) a tangentei la hiperbola dusa printr-un punct (x0, y0) depe hiperbola se obtine prin dedublare.
Observatia 2.9 Hiperbolax2
a2− y2
b2+ 1 = 0. (2.22)
este numita si hiperbola conjugata (figura 2.3) hiperbolei (2.19). Areaceleasi asimptote, aceleasi axe.
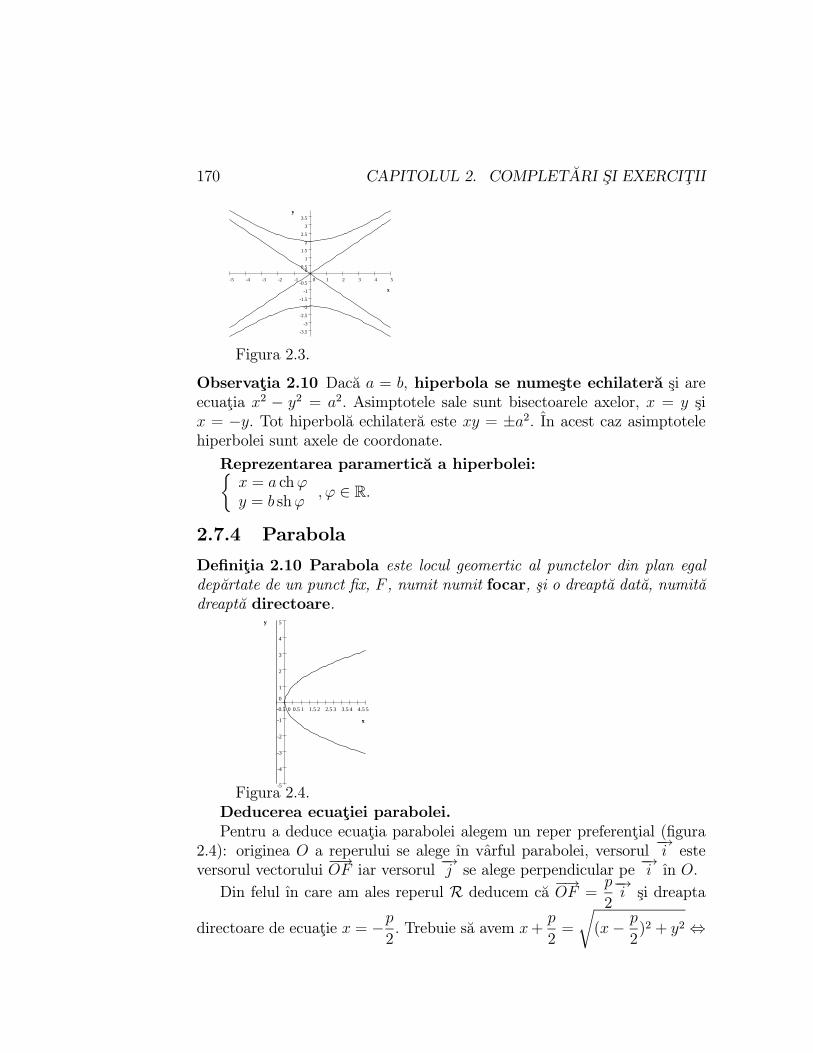
170 CAPITOLUL 2. COMPLETARI SI EXERCITII
543210-1-2-3-4-5
3.5
3
2.5
21.5
1
0.50
-0.5
-1
-1.5-2
-2.5
-3
-3.5
x
y
x
y
Figura 2.3.
Observatia 2.10 Daca a = b, hiperbola se numeste echilatera si areecuatia x2 − y2 = a2. Asimptotele sale sunt bisectoarele axelor, x = y six = −y. Tot hiperbola echilatera este xy = ±a2. In acest caz asimptotelehiperbolei sunt axele de coordonate.
Reprezentarea paramertica a hiperbolei:½x = a chϕy = b shϕ
,ϕ ∈ R.
2.7.4 Parabola
Definitia 2.10 Parabola este locul geomertic al punctelor din plan egaldepartate de un punct fix, F , numit numit focar, si o dreapta data, numitadreapta directoare.
54.543.532.521.510.50-0.5
5
4
3
2
1
0
-1
-2
-3
-4
-5
x
y
x
y
Figura 2.4.Deducerea ecuatiei parabolei.Pentru a deduce ecuatia parabolei alegem un reper preferential (figura
2.4): originea O a reperului se alege ın varful parabolei, versorul−→i este
versorul vectorului−→OF iar versorul
−→j se alege perpendicular pe
−→i ın O.
Din felul ın care am ales reperul R deducem ca−→OF =
p
2−→i si dreapta
directoare de ecuatie x = −p2. Trebuie sa avem x+
p
2=
r(x− p
2)2 + y2 ⇔
2.8. CUDRICE PE ECUATII REDUSE 171
x2 + px+p2
4= x2 − px+
p2
4+ y2 ⇔
y2 = 2px. (2.23)
Tangenta la parabola
yy0 = p(x+ x0). (2.24)
Ecuatia (2.24) a tangentei la parabola dusa printr-un punct (x0, y0) depe parabola se obtine prin dedublare.
Observatia 2.11 Excentricitatea parabolei este e = 1. O reprezentareparametrica a parabolei este y = t, x = t2/(2p).
2.8 Cudrice pe ecuatii reduse
2.8.1 Sfera
Definitia 2.11 Locul geometric al punctelor din spatiu M(x, y, z) cu pro-prietatea ca distanta lor la un punct fix M0(x0, y0, z0) este constanta senumeste sfera (suprafata sferica).
Daca r respectiv r0 sunt vectorii de pozitie ai punctelorM siM0, atuncikr− r0k = R. M0(x0, y0, z0) se numeste centrul sferei, iar r este raza sferei.(Figura 2.5).
Teorema 2.8 Punctul M(x, y, z) apartine sferei de centru C(x0, y0, z0) siraza R daca si numai daca
(x− x0)2 + (y − y0)
2 + (z − z0)2 = R2.
Demonstratie. M apartine sferei⇔ kM0Mk = R⇔ kr− r0k = R⇔p(x− x0)2 + (y − y0)2 + (z − z0)2 = R⇔
(x− x0)2 + (y − y0)
2 + (z − z0)2 = R2.¥
Figura 2.5.Studiem ecuatia x2+ y2+ z2+2ax+2by+2cz+ d = 0 ca sa stabilim ın
ce caz ea reprezinta ecuatia unei sfere. Aceasta ecuatie se mai poate scrie

172 CAPITOLUL 2. COMPLETARI SI EXERCITII
de forma (x+ a)2 + (y+ b)2 + (z + c)2 = a2 + b2 + c2− d. De aici observamca dacaa) a2 + b2 + c2 − d > 0 ecuatia reprezinta o sfera de centru (−a,−b,−c)
si raza R =√a2 + b2 + c2 − d.
b) a2 + b2 + c2 − d = 0 ecuatia reprezinta un punct de coordonate(−a,−b,−c);c) a2 + b2 + c2 − d < 0 ecuatia reprezinta o sfera imaginara.Ecuatia x2 + y2 + z2 + 2ax+ 2by + 2cz + d = 0 cu a2 + b2 + c2 − d > 0
reprezinta ecuatia carteziana generala a sferei. Ecuatia sferei cu centruın origine si de raza R este x2 + y2 + z2 = R2. Observam ca elipsoidul esteo multime marginita si ınchisa, deci compacta.
2.8.2 ElipsoidulDefinitia 2.12 Elipsoidul este cuadrica reprezentata, ıntr-un reper con-venabil, prin ecuatia:
x2
a2+
y2
b2+
z2
c2= 1, a, b, c ∈ R+. (2.25)
Figura 2.6.Se observa ca reperul ın raport cu care este scrisa ecuatia are ori-
ginea, axele si planele de coordonate elemente de simetrie ale cuadricei.In concluzie elipsoidul admite trei plane de simetrie, trei axe de sime-trie si un centru de simetrie. Punctele ın care axele de coordonate inter-secteaza suprafata se numesc varfurile elipsoidului si ele sunt: A(a, 0, 0),A0(−a, 0, 0), B(0, b, 0), B0(0,−b, 0), C(0, 0, c), C 0(0, 0,−c). Numerele a, b, cse numesc semiaxele elipsoidului.Pentru reprezentarea grafica se utilizeaza metoda intersectiei cu planele
de coordonate si cu plane paralele cu planele de coordonate. Pentru z = h,
obtinem curba:x2
a2+y2
b2= 1− h2
c2, z = h. Aceasta intersectie este multimea
vida daca |h| > c, este un punct (dublu) pentru h = c, C(0, 0, c) si pen-tru h = −c, C 0(0, 0,−c). Pentru −c < h < c, prima ecuatie a curbei
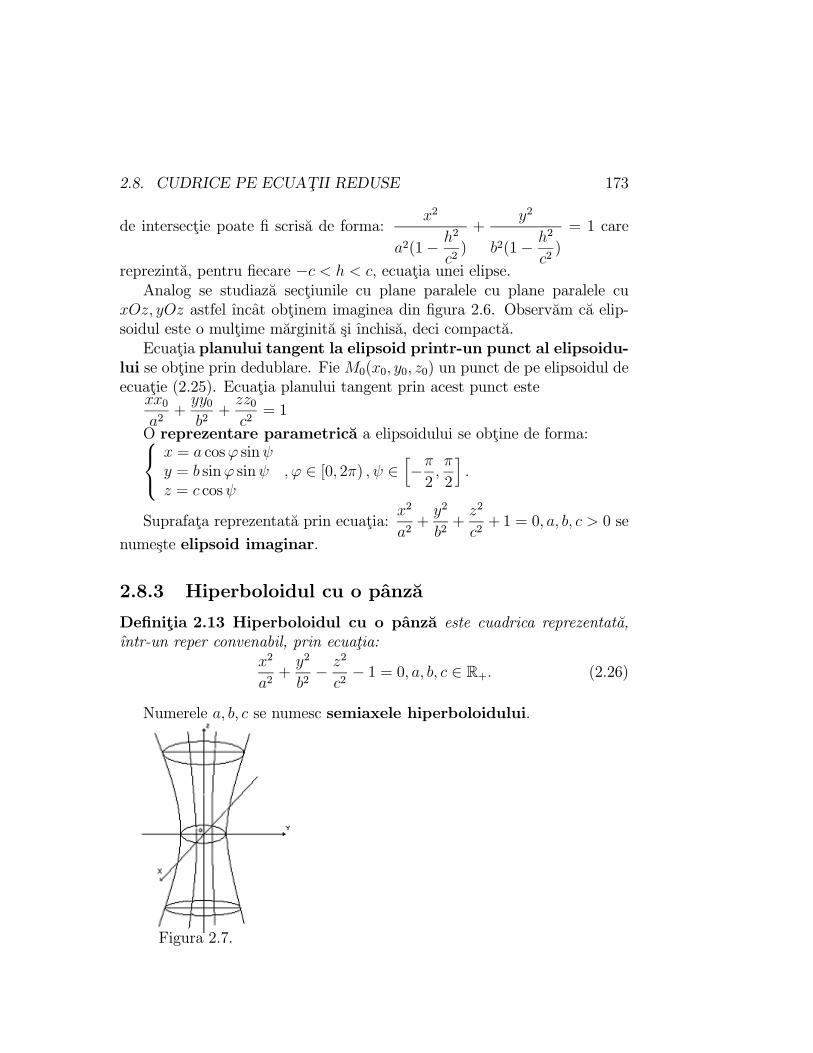
2.8. CUDRICE PE ECUATII REDUSE 173
de intersectie poate fi scrisa de forma:x2
a2(1− h2
c2)
+y2
b2(1− h2
c2)
= 1 care
reprezinta, pentru fiecare −c < h < c, ecuatia unei elipse.Analog se studiaza sectiunile cu plane paralele cu plane paralele cu
xOz, yOz astfel ıncat obtinem imaginea din figura 2.6. Observam ca elip-soidul este o multime marginita si ınchisa, deci compacta.Ecuatia planului tangent la elipsoid printr-un punct al elipsoidu-
lui se obtine prin dedublare. FieM0(x0, y0, z0) un punct de pe elipsoidul deecuatie (2.25). Ecuatia planului tangent prin acest punct este
xx0a2
+yy0b2+
zz0c2= 1
O reprezentare parametrica a elipsoidului se obtine de forma:⎧⎨⎩ x = a cosϕ sinψy = b sinϕ sinψz = c cosψ
,ϕ ∈ [0, 2π) , ψ ∈h−π2,π
2
i.
Suprafata reprezentata prin ecuatia:x2
a2+y2
b2+z2
c2+1 = 0, a, b, c > 0 se
numeste elipsoid imaginar.
2.8.3 Hiperboloidul cu o panza
Definitia 2.13 Hiperboloidul cu o panza este cuadrica reprezentata,ıntr-un reper convenabil, prin ecuatia:
x2
a2+
y2
b2− z2
c2− 1 = 0, a, b, c ∈ R+. (2.26)
Numerele a, b, c se numesc semiaxele hiperboloidului.
Figura 2.7.

174 CAPITOLUL 2. COMPLETARI SI EXERCITII
Reperul ın raport cu care este scrisa ecuatia are originea, axele si planelede coordonate elemente de simetrie ale cuadricei. Acesta are patru varfuri,A(a, 0, 0), A0(−a, 0, 0), B(0, b, 0), B0(0,−b, 0). Prin metoda intersectiei cuplanele de coordonate si cu plane paralele cu acestea se obtine forma cuadri-cei, Figura 2.7..Hiperboloidul cu o panza este o suprafata nemarginita.
Cuadricax2
a2+
y2
b2− z2
c2= 0 se numeste conul asimptotic al hiper-
boloidului cu o panza (Figura 2.8).
Figura 2.8.
Ecuatia planului tangent la hiperboloidul cu o panza printr-unpunct al sau se obtine prin dedublare. Fie M0(x0, y0, z0) un punct de pehiperboloidului cu o panza de ecuatie (2.26). Ecuatia planului tangent prinacest punct este
xx0a2
+yy0b2− zz0
c2= 1.
O reprezentare parametrica a hiperboloidului cu o panza este:⎧⎪⎪⎪⎨⎪⎪⎪⎩x = a
cosϕ
cosψ
y = bsinϕ
cosψz = c tgψ
,ϕ ∈ [0, 2π) , ψ ∈³−π2,π
2
´.
O alta reprezentare parametrica a hiperboloidului cu o panza se obtine,tinınd seama ca 1 + sh2 ψ = ch2 ψ, si luand z = c shψ:⎧⎨⎩ x = a cosϕ chψ
y = b sinϕ chψz = c shψ
,ϕ ∈ [0, 2π) , ψ ∈ R.

2.8. CUDRICE PE ECUATII REDUSE 175
2.8.4 Hiperboloidul cu doua panze
Definitia 2.14 Hiperboloidul cu doua panze este cuadrica data, ıntr-un reper convenabil, prin ecuatia
x2
a2− y2
b2− z2
c2− 1 = 0, a, b, c ∈ R+ (2.27)
Numerele a, b, c se numesc semiaxele hiperboloidului.
Figura 2.9.
Hiperboloidul cu doua panze are aceleasi simetrii ca si elipsoidul. Aredoua varfuri C(0, 0, c), C 0(0, 0, c). Se observa ca intersectiile hiperboloiduluicu doua panze cu planele x = 0 si y = 0 si cu plane paralele cu acestea sunthiperbole. Intersectiile cu plane paralele cu yOz, z = h, |h| > c, sunt elipse.Planele z = h,cu −c < h < c, nu intersecteaza cuadrica (figura 2.9).
Hiperboloidul cu doua panze este o multime nemarginita. Cuadricax2
a2− y2
b2− z2
c2= 0 se numeste conul asimptotic al hiperboloidului cu doua
panze. (figura 2.10).
Ecuatia planului tangent la hiperboloidul cu doua panze printr-un punct al sau se obtine prin dedublare. Fie M0(x0, y0, z0) un punctde pe hiperboloidului cu doua panze de ecuatie (2.27). Ecuatia planuluitangent prin acest punct este
xx0a2− yy0
b2− zz0
c2= 1.
O reprezentare parametrica a hiperboloidului cu doua panze este:⎧⎨⎩ x = a chψy = b cosϕ shψz = c sinϕ shψ
,ϕ ∈ [0, 2π) , ψ ∈ R+.
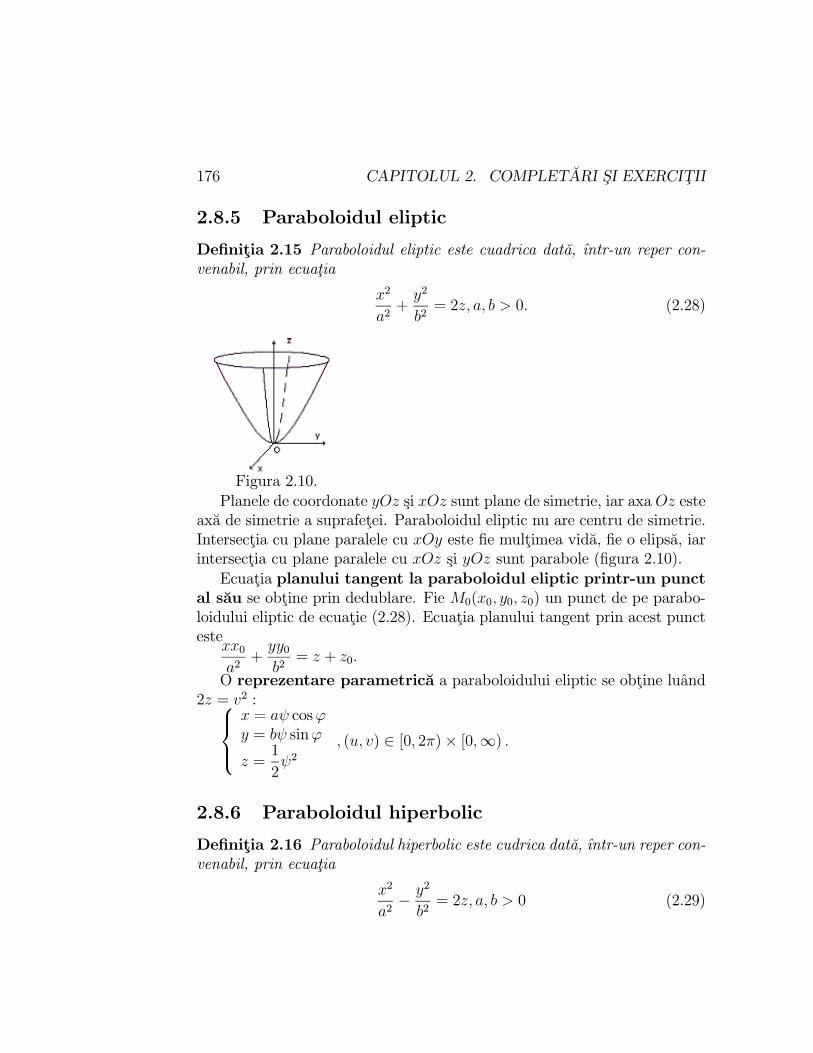
176 CAPITOLUL 2. COMPLETARI SI EXERCITII
2.8.5 Paraboloidul eliptic
Definitia 2.15 Paraboloidul eliptic este cuadrica data, ıntr-un reper con-venabil, prin ecuatia
x2
a2+
y2
b2= 2z, a, b > 0. (2.28)
Figura 2.10.Planele de coordonate yOz si xOz sunt plane de simetrie, iar axa Oz este
axa de simetrie a suprafetei. Paraboloidul eliptic nu are centru de simetrie.Intersectia cu plane paralele cu xOy este fie multimea vida, fie o elipsa, iarintersectia cu plane paralele cu xOz si yOz sunt parabole (figura 2.10).Ecuatia planului tangent la paraboloidul eliptic printr-un punct
al sau se obtine prin dedublare. Fie M0(x0, y0, z0) un punct de pe parabo-loidului eliptic de ecuatie (2.28). Ecuatia planului tangent prin acest puncteste
xx0a2
+yy0b2= z + z0.
O reprezentare parametrica a paraboloidului eliptic se obtine luand2z = v2 :⎧⎪⎨⎪⎩
x = aψ cosϕy = bψ sinϕ
z =1
2ψ2
, (u, v) ∈ [0, 2π)× [0,∞) .
2.8.6 Paraboloidul hiperbolic
Definitia 2.16 Paraboloidul hiperbolic este cudrica data, ıntr-un reper con-venabil, prin ecuatia
x2
a2− y2
b2= 2z, a, b > 0 (2.29)
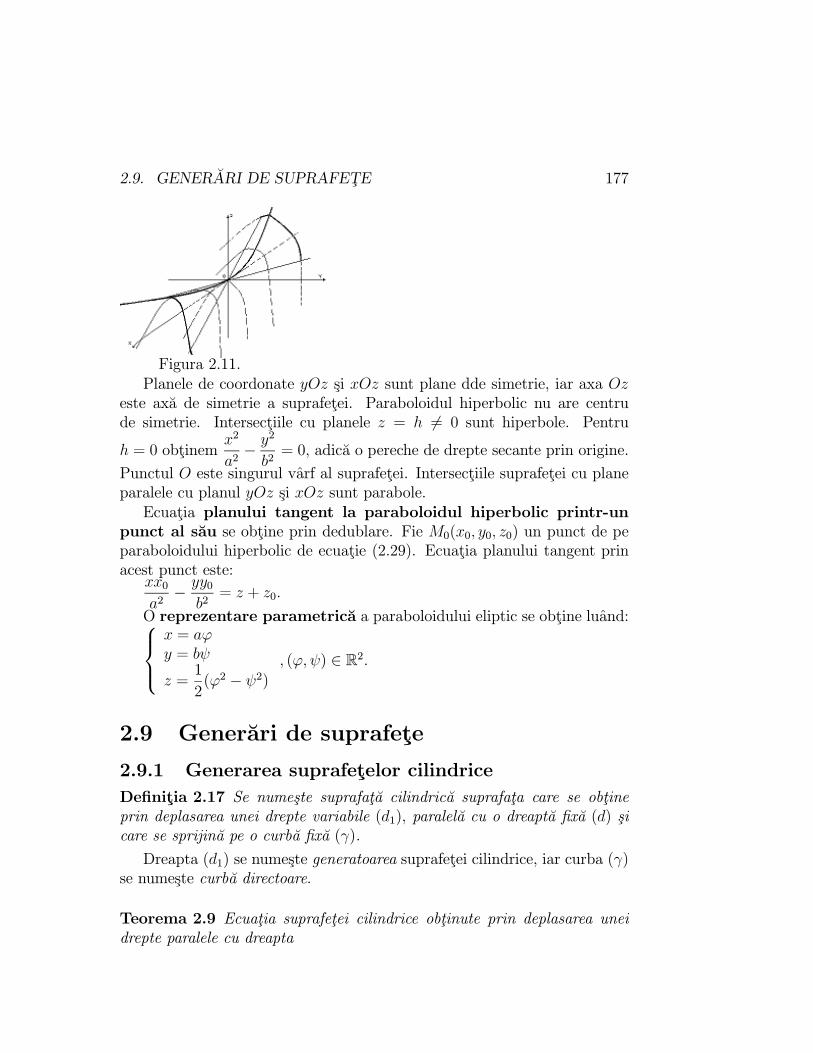
2.9. GENERARI DE SUPRAFETE 177
Figura 2.11.Planele de coordonate yOz si xOz sunt plane dde simetrie, iar axa Oz
este axa de simetrie a suprafetei. Paraboloidul hiperbolic nu are centrude simetrie. Intersectiile cu planele z = h 6= 0 sunt hiperbole. Pentru
h = 0 obtinemx2
a2− y2
b2= 0, adica o pereche de drepte secante prin origine.
Punctul O este singurul varf al suprafetei. Intersectiile suprafetei cu planeparalele cu planul yOz si xOz sunt parabole.Ecuatia planului tangent la paraboloidul hiperbolic printr-un
punct al sau se obtine prin dedublare. Fie M0(x0, y0, z0) un punct de peparaboloidului hiperbolic de ecuatie (2.29). Ecuatia planului tangent prinacest punct este:
xx0a2− yy0
b2= z + z0.
O reprezentare parametrica a paraboloidului eliptic se obtine luand:⎧⎪⎨⎪⎩x = aϕy = bψ
z =1
2(ϕ2 − ψ2)
, (ϕ, ψ) ∈ R2.
2.9 Generari de suprafete
2.9.1 Generarea suprafetelor cilindrice
Definitia 2.17 Se numeste suprafata cilindrica suprafata care se obtineprin deplasarea unei drepte variabile (d1), paralela cu o dreapta fixa (d) sicare se sprijina pe o curba fixa (γ).
Dreapta (d1) se numeste generatoarea suprafetei cilindrice, iar curba (γ)se numeste curba directoare.
Teorema 2.9 Ecuatia suprafetei cilindrice obtinute prin deplasarea uneidrepte paralele cu dreapta

178 CAPITOLUL 2. COMPLETARI SI EXERCITII
(d)
½A1x+B1y + C1z +D1 = 0A2x+B2y + C2z +D2 = 0
, rang
µA1 B1 C1A2 B2 C2
¶= 2,
si care se sprijina pe curba
(γ)
½G1(x, y, z) = 0G2(x, y, z) = 0
este
F (A1x+B1y + C1z +D1, A2x+B2y + C2z +D2) = 0.(2.30)
Demonstratie. Ecuatiile tuturor dreptelor din spatiu paralele cu dreapta(d) sunt de forma½
A1x+B1y + C1z +D1 = λA2x+B2y + C2z +D2 = µ
, λ, µ ∈ R. (2.31)
Din dreptele date de ecuatii (2.31) intersecteaza cele care intersecteazacurba directoare (γ). Aceatea sunt generatoare ale suprafetei cilindrice.Rezulta ca sistemul⎧⎪⎪⎨⎪⎪⎩
A1x+B1y + C1z +D1 = λA2x+B2y + C2z +D2 = µG1(x, y, z) = 0G2(x, y, z) = 0
trebuie sa fie compatibil. Eliminam x, y, z si obtinem o relatie ıntre λ siµ de forma F (λ,µ) = 0, numita conditie de compatibilitate. Inlocuindparametrii λ si µ din ecuatiile (2.31) ın conditia de compatibilitate,obtinemecuatia (2.30).¥Exemplul 2.7 Sa se scrie ecautia suprafetei cilindrice a carei curba direc-
toare este elipsax2
a2+
y2
b2= 1, z = 0 si generatoarele paralele cu axa Oz.
Rezolvare. Axa Oz are ecuatiile x = 0, y = 0, iar dreptele paralele cu axaOz au ecuatiile x = λ, y = µ. rezulta ca sistemul⎧⎪⎪⎪⎨⎪⎪⎪⎩
x = λy = µx2
a2+
y2
b2= 1
z = 0
⇔ λ2
a2+
µ2
b2= 1 (conditia de compatibilitate).
Inlocuind parametrii obtinem ecuatiax2
a2+y2
b2= 1, care ın spatiu repre-
zinta un cilindru eliptic (figura 2.12).

2.9. GENERARI DE SUPRAFETE 179
Figura 2.12.
Observatia 2.12 Ecuatiilex2
a2− y2
b2= 1, y2 = 2px reprezinta ın spatiu
ecuatia unui cilindru hiperbolic respectiv cilindru parabolic.
Exemplul 2.8 Sa se determine proiectia cercului (din spatiu!) de ecuatiix2 + y2 + z2 = 1, y − z = 0 pe planul xOy.
Rezolvare. Proiectia cercului pe planul xOy este intersectia dintre acestplan si cilindrul care are curba directoare data de ecuatiile cercului iar gen-eratoarea paralela cu axa Oz.⎧⎪⎪⎨⎪⎪⎩
x = λy = µx2 + y2 + z2 = 1y − z = 0
⇔
⎧⎪⎪⎨⎪⎪⎩x = λy = µz = µλ2 + 2µ2 = 1
Conditia de compatibilitate este λ2 + 2µ2 = 1. Inlocuind parametrii,obtinem ecuatia x2+2y2 = 4. Proiectia cerculului pe planul xOy este elipsade ecuatii x2 + 2y2 = 4, z = 0.
Observatia 2.13 Cilindrul eliptic, hiperbolic, parabolic sunt cuadrice de-generate.
2.9.2 Generarea suprafetelor coniceDefinitia 2.18 Se numeste suprafata conica suprafata generata de odrepta variabila (d) care trece printr-un punct fix V si care se sprijina pe ocurba fixa (γ).
Dreapta (d) se numeste generatoarea suprafetei conice, punctul fix V senumeste varful conului iar curba (γ) se numeste curba directoare.
Teorema 2.10 Ecuatia suprafetei conice cu varful ın punctul de intersectieal planelor⎧⎨⎩ A1x+B1y + C1z +D1 = 0
A2x+B2y + C2z +D2 = 0A3x+B3y + C3z +D3 = 0
, rang
⎛⎝ A1 B1 C1A2 B2 C2A3 B3 C3
⎞⎠ = 3,

180 CAPITOLUL 2. COMPLETARI SI EXERCITII
si care se sprijina pe curba
(γ)
½G1(x, y, z) = 0G2(x, y, z) = 0
este
F (A1x+B1y + C1z +D1
A3x+B3y + C3z +D3,A2x+B2y + C2z +D2
A3x+B3y + C3z +D3) = 0.
(2.32)
Demonstratie. Ecuatiile tuturor dreptelor din spatiu care trec prin punc-tul V sunt de forma½
A1x+B1y + C1z +D1 = λ(A3x+B3y + C3z +D3)A2x+B2y + C2z +D2 = µ(A3x+B3y + C3z +D3)
, λ, µ ∈ R.(2.33)
Din dreptele date de ecuatiile (2.33) sunt generatoare ale suprafetei co-nice numai cele care intersecteaza curba directoare (γ). Rezulta ca sistemul⎧⎪⎪⎨⎪⎪⎩
A1x+B1y + C1z +D1 = λ(A3x+B3y + C3z +D3)A2x+B2y + C2z +D2 = µ(A3x+B3y + C3z +D3)G1(x, y, z) = 0G2(x, y, z) = 0
trebuie sa fie compatibil. Eliminam x, y, z si obtinem o relatie ıntre λ si µ deforma F (λ,µ) = 0, numita conditie de compatibilitate. Inlocuind parametriiλ si µ ın conditia de compatibilitate, obtinem ecuatia (2.32).¥
Exemplul 2.9 Sa se scrie ecuatia suprafetei conice cu varful ın punctul
P (0, 0, 1) si care contine elipsa de ecuatii: z = 0,x2
a2+
y2
b2= 1.
Rezolvare. Ecuatiile familiei de drepte care trec prin punctul P si nu suntparalele cu planul xOy sunt: x = λ(z − 1), y = µ(z − 1), λ, µ ∈ R. Acestedrepte trebuie sa intersecteze elipsa, adica sistemul⎧⎪⎪⎪⎨⎪⎪⎪⎩
x = λ(z − 1)y = µ(z − 1)z = 0x2
a2+
y2
b2= 1
trebuie sa fie compatibil. Eliminam x, y, z ıntre ecuatiile sistemului si obtinem
conditia de compatibilitate,λ2
a2+µ2
b2= 1. Prin eliminarea parametrilor λ si
µ ıntre aceasta ecuatie si ecuatiile familiei de drepte se obtinex2
a2(z − 1)2 +

2.9. GENERARI DE SUPRAFETE 181
y2
b2(z − 1)2 = 1 ⇔x2
a2+
y2
b2= (z − 1)2 (figura 2.13). O astfel de suprafata
conica se numeste conul patratic. Conul patratic este o cuadrica degenerata.
Figura 2.13.
2.9.3 Generarea suprafetelor de rotatie
Definitia 2.19 Se numeste suprafata de rotatie suprafata generata deo curba (γ) care se roteste, fara alunecare, ın jurul unei drepte fixe (d).
Dreapta (d) se numeste axa de rotatie a suprafetei de rotatie.
Observatia 2.14 In miscarea de rotatie definita, un punct al curbei (γ)descrie un cerc (Γ) cu centrul pe axa de rotatie, iar planul ın care se aflacercul este perpendicular pe axa. Deci suprafata de rotatie poate fi privitaca fiind generata de punctele cercurilor (Γ) cu centrele pe (d), situate ınplane perpendiculare pe (d) si care se sprijina pe curba (γ).
Teorema 2.11 Ecuatia suprafetei de rotatie a carei axa de rotatie areecuatia
(d) :x− x0
l=
y − y0m
=z − z0n
si care se sprijina pe curba
(γ)
½G1(x, y, z) = 0G2(x, y, z) = 0
esteF (p(x− x0)2 + (y − y0)2 + (z − z0)2, lx+my + nz) = 0.
(2.34)
Demonstratie. Cercurile (Γ) se obtin prin intersectia unei sfere cu centrulpe axa de rotatie si raza variabila cu un plan variabil perpendicular pe (d) :½
(x− x0)2 + (y − y0)
2 + (z − z0)2 = λ2
lx+my + nz = µ.

182 CAPITOLUL 2. COMPLETARI SI EXERCITII
Pentru ca cercul sa se sprijine pe curba (γ) sistemul urmator⎧⎪⎪⎨⎪⎪⎩(x− x0)
2 + (y − y0)2 + (z − z0)
2 = λ2
lx+my + nz = µG1(x, y, z) = 0G2(x, y, z) = 0
trebuie sa fie compatibil. Eliminam x, y, z si obtinem o relatie ıntre λ si µ deforma F (λ,µ) = 0, numita conditie de compatibilitate. Inlocuind parametriiλ si µ ın conditia de compatibilitate, obtinem ecuatia (2.34).¥Exemplul 2.10 Sa se determine ecuatia suprafetei obtinuta prin rotatia ınjurul axei Oz a hiperbolei (γ) : x = 0, yz = 1.
Rezolvare. Familia de cercuri care genereaza aceasta suprafata are ecuati-ile z = λ, x2+ y2 = µ., λ ∈ R, µ ∈ R+, cercuri care trebuie sa se intersectezecu una din ramurile hiperbolei (γ) : x = 0, yz = 1.Conditia de compatibilitate a sistemului format din cele patru ecuatii
este1
λ2= µ. Ecuatia suprafetei de rotatie este x2 + y2 =
1
z2. Suprafata are
doua panze de ecuatii, respectiv:1
z=px2 + y2,
1
z= −
px2 + y2.¨
2.9.4 Generatoarele rectilinii ale cuadricelor
Cuadricele degenerate (cilindrul eliptic, hiperbolic, parabolic, conulpatratic), suprafata cilindrica si suprafata conica, au proprietatea ca pot fidescrise de o dreapta ın miscare supusa anumitor conditii. Dintre cuadricelenedegenerate hiperboloidul cu o panza si paraboloidul hiperbolic au aceastaproprietate.Ecuatia (2.26) a hiperboloidului cu o panza se poate scrie:
x2
a2− z2
c2= 1− y2
b2sau (
x
a− z
c)(x
a+
z
c) = (1− y
b)(1 +
y
b),
ecuatie care poate fi considerata ca rezultand prin eliminarea parametrilorλ si µ din ecuatiile
(x
a+
z
c) = λ(1 +
y
b), (
x
a− z
c) =
1
λ(1− y
b), (2.35)
(x
a+
z
c) = µ(1− y
b), (
x
a− z
c) =
1
µ(1 +
y
b). (2.36)
Ecuatiile (2.35) si (2.36) reprezinta doua familii de drepte. Daca (x, y, z)sunt coordonatele unui punct M situat pe una din cele doua drepte, ele vorverifica si ecuatia hiperboloidului, deci punctulM apartine hiperboloidului.

2.9. GENERARI DE SUPRAFETE 183
Deci pentru orice valori ale parametrilor λ si µ aceste drepte apartin cuadri-cei. Cand λ si µ variaza, cele doua familii de drepre genereaza suprafata.Spunem ca dreptele de ecuatii (2.35) si (2.36) formeaza familii de genera-toare rectilinii ale hiperboloidului cu o panza de ecuatie (2.26).
Analog ecuatia (2.29) a paraboloidului hiperbolic se poate scrie
(x
a+
y
b)(x
a− y
b) = 2z,
de unde rezulta ca si aceasta cuadrica poseda doua familii de generatoarerectilinii de ecuatii
(x
a+
y
b) = λ, (
x
a− y
b) =
2z
λsi (
x
a− y
b) = µ, (
x
a+
y
b) =
2z
µ.
Cuadricele care au generatoare rectilinii se mai numesc si cuadrice riglate.
Exercitiul 2.58 Fie paraboloidul hiperbolic dat prin ecuatiax2
9− y2
4= z
si punctul M0(0, 2,−1).a) Sa se scrie ecuatiile generatoarelor rectilinii care trec prin M0.
b) Sa se calculeze cosinusul unghiului dintre aceste generatoare.
Rezolvare. Ecuatiile generatoarelor rectilinii se obtin plecand de la
(x
3− y
2)(x
3+
y
2) = z ⇔ (dλ)
⎧⎪⎨⎪⎩x
3− y
2= λ
x
3+
y
2=1
λz
, (dµ)
⎧⎪⎨⎪⎩x
3+
y
2= µ
x
3− y
2=1
µz
Impunem conditia ca punctul M0(0, 2,−1) sa se gaseasca pe dreapta⎧⎪⎨⎪⎩0
3− 22= λ
0
3+2
2=1
λ(−1)
⇒ λ = −1⇒
⎧⎨⎩x
3− y
2= −1
x
3+
y
2= −z
si ⎧⎪⎨⎪⎩0
3+2
2= µ
0
3− 22=1
µ(−1)
⇒ µ = 1⇒
⎧⎨⎩x
3+
y
2= 1
x
3− y
2= z
Pentru a calcula unghiul dintre cele doua drepte determinam directiilelor
−→u 1 =
¯¯−→i−→j−→k
13−120
13
12
1
¯¯ = −12−→i − 1
3
−→j + 1
6
−→k , −→u 2 = −12
−→i + 1
3
−→j − 1
6
−→k .
cos(−→u 1,−→u 2) =h−→u 1,−→u 2ik−→u 1k k−→u 2k
=14− 1
9− 1
3614+ 1
9+ 1
36
= 27.¨

184 CAPITOLUL 2. COMPLETARI SI EXERCITII
2.10 Exercitii propuse
Exercitiul 2.59 Fie A o matrice patratica de ordinul n sif (λ) = b0λ
m+ b1λm−1+ · · ·+ bm−1λ+ bm un polinom oarecare. Sa se arate
ca orice vector propriu al lui A este vector propriu si pentru matricea
f (A) = b0Am + b1A
m−1 + · · ·+ bm−1A+ bmI.
Exercitiul 2.60 Fie A si B doua matrice patratice de ordinul n asemenea.Sa se arate ca AT si BT sunt asemenea. Daca f(t) = a0t
n + a1tn−1 + ... +
an−1t+ an este un polinom atunci f(A) si f(B) sunt asemenea.
Exercitiul 2.61 Fie A de forma
A =
⎛⎝ α 1 00 α 10 0 α
⎞⎠ ,
ın care α este constant si fie f (x) un polinom oarecare. Sa se arate ca
f (A) =
⎛⎝ f(α) f 0(α) 12f 00(α)
0 f(α) f 0(α)0 0 f 0(α)
⎞⎠ .
Indicatie. Scriem f (x)=f (α) + (x− α) f 0 (α) +1
2(x− α)2 f 00 (α) + · · ·
Exercitiul 2.62 Fie A si B doua matrice de acelasi ordin, astfel ıncatA+B = AB. Sa se arate ca A− I este inversabila.
Indicatie. (A− I) (B− I) = I⇒ det (A− I) 6= 0.
Exercitiul 2.63 Se considera matricea
A =
⎛⎝ 1 0 01 2 01 2 3
⎞⎠ .
Sa se afle un polinom f (x) de grad ≤ 2, astfel ıncat matricea f (A) saaiba autovalorile µ1 = µ2 = 1, µ3 = 0. Sa se scrie f (A).
Indicatie. Cautam f (x) = b0 + b1x + b2x2. Matricea f (A) trebuie sa
aiba autovalorile f (λ1), f (λ2), f (λ3) unde λ1 = 1, λ2 = 2, λ3 = 3 suntautovalorile lui A. Se afla ın mod unic coeficientii b0, b1, b2.

2.10. EXERCITII PROPUSE 185
Exercitiul 2.64 Fie V3 un spatiu vectorial real de dimensiune 3, iar sis-temul de vectori
©e(1), e(2), e(3)
ªo baza a sa; f : V3 → V3 este aplicatia
liniara a carei matrice ın baza data este
A =
⎛⎝ −3 4 −21 0 16 −6 5
⎞⎠ .
Sa se gaseasca o baza©v(1),v(2),v(3)
ª, ın V3, ın care matricea trans-
formarii liniare f sa fie de tip diagonal.
Indicatie. Se cauta vectorii proprii ai transformarii f . Autovalorile suntλ1 = 1, λ2 = 2, λ3 = −1.
Exercitiul 2.65 Se da forma patratica f (x) = 5x21 + 6x22 + 4x
23 − 4x1x2 −
4x1x3, x ∈ R3. Sa se scrie forma biliniara f (x,y) din care provine si sa seafle o baza canonica pentru f (x,y).
Indicatie. Punand f (x,y) = 5x1y1 + 6x2y2 + 4x3y3 − 2 (x1y2 + x2y1) −2 (x1y3 + x3y1), obtinem f (x,x) = 5x21+6x
22+4x
23−4x1x2−4x1x3 = f (x),
∀x ∈ R3. Daca interpretam numerele xi, yi, i = 1, 3 drept coordonatelevectorilor x si y ın baza standard din R3, matricea formei biliniare f (decisi a formei patratice f) ın aceasta baza, este
A =
⎛⎝ 5 −2 −2−2 6 0−2 0 4
⎞⎠si are minorii principali ∆1 = 5, ∆2 = 26, ∆3 = 80. Notand baza standard©e(1), e(2), e(3)
ª, cautam vectorii bazei canonice ın forma⎧⎪⎨⎪⎩
v(1) = α11e(1)
v(2) = α21e(1) + α22e
(2)
v(3) = α31e(1) + α32e
(2) + α33e(3)
si ıi determinam impunand conditiile f¡v(1), e(1)
¢= 1, f
¡v(2), e(1)
¢= 0,
f¡v(2), e(2)
¢= 1, f
¡v(3), e(1)
¢= 0, f
¡v(3), e(2)
¢= 0, f
¡v(3), e(3)
¢= 1.
Se gasesc valorile α11 =1
5, α21 =
1
13, α22 =
5
26, α31 =
3
20, α32 =
1
20si
α33 =13
40. Deci vectorii bazei canonice, pentru care avem f
¡v(i),v(j)
¢= 0
daca i 6= j si f¡v(i),v(i)
¢= αii =
∆i−1
∆i, i = 1, 3 (∆0 = 1) sunt

186 CAPITOLUL 2. COMPLETARI SI EXERCITII
v(1) =
⎛⎝ 15
00
⎞⎠ , v(2) =
⎛⎝ 113526
0
⎞⎠ , v(3) =
⎛⎝ 3201201340
⎞⎠ .
Scriind x =3P
i=1
ξiv(i) si y =
3Pj=1
ηjv(j), avem
f (x,y) =3X
i=1
∆i−1
∆iξiηi =
1
5ξ1η1 +
5
26ξ2η2 +
26
80ξ3η3
si deci
f (x) = f (x,x) =1
5ξ21 +
5
26ξ22 +
26
80ξ23 , ∀x ∈ R3.
Trecerea de la baza standard la baza canonica se face prin schimbareade coordonate ⎧⎪⎪⎪⎪⎪⎨⎪⎪⎪⎪⎪⎩
x1 =1
5ξ1 +
1
13ξ2 +
3
20ξ3
x2 =5
26ξ2 +
1
20ξ2
x3 =13
40ξ3
.
Exercitiul 2.66 Fie A o matrice nesingulara de ordinul doi si
B =
µαA βAγA δA
¶ın care α, β, γ, δ sunt constante si αδ − βγ 6= 0. Sa se arate ca B estenesingulara si sa se expliciteze B−1.Indicatie. Presupunand ca detB 6= 0, cautam B−1 ın forma
C =
µαA−1 βA−1
γA−1 δA−1
¶cu α1, β1, γ1, δ1 constante, ce trebuie determinate. Vom impune conditiaBC = I4 (matricea unitate de ordinul patru) si vom nota cu I2 matriceaunitate de ordinul doi. Conform cu exercitiul precedent, vom gasi
BC =
µ(αα1 + βγ1)I2 (αβ1 + βδ1)I2(γα1 + δγ1)I2 (γδ1 + δδ1)I2
¶,
iar sistemele pentru gasirea necunoscutelor sunt(αα1 + βγ1 = 1
γα1 + δγ1 = 0si
(αβ1 + βδ1 = 0
γβ1 + δδ1 = 1.
Notand d = αδ − βγ 6= 0, vom obtine
α1 =δ
d, β1 = −
γ
d, β1 = −
β
d, δ1 =
α
dsi BC = I4. Deci B
−1 exista si avem
B−1 =1
d
µδA−1 −βA−1−γA−1 αA−1
¶.

2.10. EXERCITII PROPUSE 187
Exercitiul 2.67 Sa se calculeze detB, unde B este matricea - bloc dinproblema precedenta.
Indicatie. Avem de calculat
detB =
¯αA βAγA δA
¯.
Presupunem pentru moment ca α 6= 0 si ınmultim primele doua coloanecu factorul
β
α, pe care le scadem apoi din ultimele doua coloane (prima din
a trei, a doua din a patra). Obtinem
detB =
¯¯ αA 02
γA (δ − βγ
α)A
¯¯ ,
unde 02 este matricea nula de ordinul doi. Apoi, ınmultim primele doua
linii cuγ
αsi le scadem din ultimele doua linii, obtinem
detB =
¯¯ αA 02
02 (δ − βγ
α)A
¯¯ = α2
µδ − βγ
α
¶2 ¯A 0202 A
¯si ın final detB = (αδ − βγ)2 (detA)2. Daca α = 0, formula ramane vala-bila, facand aici α→ 0.
Exercitiul 2.68 Se considera spatiul vectorial V al functiilor f : R → R,de forma
f (t) = a0 + a1 cos t+ b1 sin t+ a2 cos 2t+ b2 sin 2t, a1, a2, b1, b2 ∈ R.
Sa se arate ca {1, cos t, sin t, cos 2t, sin 2t} formeaza o baza ın V si sa seafle matricea aplicatiei liniare ϕ : V → V, ϕ(f) = g, g (t) = f
³t+
π
4
´, ın
aceasta baza.
Indicatie. Cei 5 vectori sunt liniar independenti, caci din
c0 + c1 cos t+ c2 sin t+ c3 cos 2t+ c4 sin 2t ≡ 0
rezulta mai ıntai ci = 0, i = 1, 4. In adevar, ınmultind aceasta identitate
cu cos t si integrand pe [0, 2π], obtinem c12πR0
cos2 t dt = 0, deci c1 = 0.
Inmultind cu sin t si integrand pe [0, 2π], gasim c2 = 0, etc. si ın final avemsi c0 = 0. Dimensiunea spatiului V este 5, caci oricare 6 vectori sunt liniardependenti, deci cei 5 vectori formeaza o baza ın V. Avem

188 CAPITOLUL 2. COMPLETARI SI EXERCITII
ϕ (1) = 1, ϕ (cos t) = cos³t+
π
4
´=
1√2cos t− 1√
2sin t,
ϕ (sin t) = sin³t+
π
4
´=
1√2cos t+
1√2sin t,
ϕ (cos 2t) = cos³2t+
π
2
´= − sin 2t,
ϕ (sin 2t) = sin³2t+
π
2
´= cos 2t,
deci matricea transformarii ϕ, ın baza data, este
A =
⎛⎜⎜⎜⎜⎝1 0 0 0 00 1√
21√2
0 0
0 − 1√2
1√2
0 0
0 0 0 0 10 0 0 −1 0
⎞⎟⎟⎟⎟⎠si se vede ca detA = 1, deci transformarea este nedegenerata.
Exercitiul 2.69 In R4 se iau vectoriiv(1) =
¡3 2 −1 1
¢, v(2) =
¡2 5 0 −1
¢.
Sa se afle, ın baza standard, matricea proiectiei ortogonale pe subspatiulgenerat de v(1) si v(2).
Indicatie. Proiectia ortogonala a unui vector oarecare x ∈ R4 pe subspatiulgenerat de v(1) si v(2) este un vector din acest subspatiu, deci de formac1v
(1) + c2v(2), cu proprietatea ca x −
¡c1v
(1) + c2v(2)¢este ortogonal pe
vectorii v(1) si v(2) (adica pe ıntreg subspatiul generat de acesti doi vectori).Anuland respectivele produse scalare, gasim sistemul(
c1v(1),v(1)
®+ c2
v(1),v(2)
®=x,v(1)
®c1v(1),v(2)
®+ c2
v(2),v(2)
®=x,v(2)
® .
Deoarecev(1),v(1)
®= 15,
v(1),v(2)
®= 15,
v(2),v(2)
®= 30,
x,v(1)®= 3x1 + 2x2 − x3 + x4,
x,v(2)
®= 2x1 + 5x2 − x4,
se gaseste ca
15c1 = 4x1 − x2 − 2x3 + 3x4, 15c2 = −x1 + 3x2 + x3 − 2x4.

2.10. EXERCITII PROPUSE 189
Proiectia ortogonala cautata, notata ϕ (x), este data de vectorul
ϕ (x) = c1v(1) + c2v
(2) =
=1
15
£(4x1 − x2 − 2x3 + 3x4)v(1) + (−x1 + 3x2 + x3 − 2x4)v(2)
¤=
=1
15( 10x1 + 3x2 − 4x3 + 5x4 3x1 + 13x2 + x3 − 4x4−4x1 + x2 + 2x3 − 3x4 5x1 − 4x2 − 3x3 + 5x4 )
Proiectiile vectorilor bazei standard (numite si baza canonica) sunt⎧⎪⎪⎪⎪⎪⎪⎪⎪⎨⎪⎪⎪⎪⎪⎪⎪⎪⎩
ϕ¡e(1)¢=1
15(10, 3,−4, 5) = 2
3e(1) +
1
5e(2) − 4
15e(3) +
1
3e(4)
ϕ¡e(2)¢=1
15(3, 13, 1,−4) = 1
5e(1) +
13
15e(2) +
1
15e(3) − 4
15e(4)
ϕ¡e(3)¢=1
15(−4, 1, 2,−3) = − 4
15e(1) +
1
15e(2) +
2
15e(3) − 1
5e(4)
ϕ¡e(4)¢=1
15(5,−4,−3, 5) = 1
3e(1) − 4
15e(2) − 1
5e(3) +
1
3e(4)
iar matricea transformarii ϕ se poate scrie imediat.
Exercitiul 2.70 Fie©e(1), e(2), e(3)
ªo baza ortonormata ın E3 si sa pre-
supunem ca ın baza formata din vectorii
v(1) = e(1) + 2e(2) + e(3), v(2) = e(1) + e(2) + 2e(3), v(3) = e(1) + e(2)
aplicatia liniara ϕ are matricea
B =
⎛⎝ 1 1 30 5 −12 7 −3
⎞⎠ .
Sa se afle matricea transformarii adjuncte ϕ∗, ın aceeasi baza.
Indicatie. Transformarea adjuncta se defineste prin conditia hϕ (x) ,yi ≡hx, ϕ∗ (y)i, ∀x,y ∈ E3. In baze ortonormate, daca ϕ are matricea A, ad-juncta ϕ∗ are matricea AT .Deci este preferabil sa lucram ın baza
©e(1), e(2), e(3)
ª. Vom avea⎧⎪⎨⎪⎩
ϕ¡v(1)
¢= v(1) + 2v(3) = 3e(1) + 4e(2) + e(3)
ϕ¡v(2)
¢= v(1) + 5v(2) + 7v(3) = 13e(1) + 14e(2) + 11e(3)
ϕ¡v(3)
¢= 3v(1) − v(2) − 3v(3) = −e(1) + 2e(2) + e(3)
.

190 CAPITOLUL 2. COMPLETARI SI EXERCITII
Pe de alta parte, avem⎧⎪⎨⎪⎩ϕ¡v(1)
¢= ϕ
¡e(1)¢+ 2ϕ
¡e(2)¢+ ϕ
¡e(3)¢
ϕ¡v(2)
¢= ϕ
¡e(1)¢+ ϕ
¡e(2)¢+ 2ϕ
¡e(3)¢
ϕ¡v(3)
¢= ϕ
¡e(1)¢+ ϕ
¡e(2)¢ .
Scriind 2ϕ¡e(3)¢= ϕ
¡v(2)
¢− ϕ
¡v(3)
¢, ϕ
¡e(2)¢− ϕ
¡e(3)¢= ϕ
¡v(1)
¢−
ϕ¡v(2)
¢, ϕ¡e(1)¢= ϕ
¡v(3)
¢− ϕ
¡e(2)¢, vom obtine⎧⎪⎨⎪⎩
ϕ¡e(1)¢= 2e(1) + 6e(2) + 6e(3)
ϕ¡e(2)¢= −3e(1) − 4e(2) − 5e(3)
ϕ¡e(3)¢= 7e(1) + 6e(2) + 5e(3)
.
Deci, ın baza©e(1), e(2), e(3)
ª, transformarea ϕ∗ va avea ca matrice transpusa
matricei lui ϕ, adica matricea
A∗ =
⎛⎝ 2 6 6−3 −4 −57 6 6
⎞⎠ .
Trecerea de la baza©e(1), e(2), e(3)
ªla baza
©v(1),v(2),v(3)
ªse face prin
matricea schimbarii de baza
C =
⎛⎝ 1 1 12 1 11 2 0
⎞⎠ ,
prin urmare matricea lui ϕ∗ ın noua baza va fi
B∗ = C−1A∗C.
Exercitiul 2.71 Fie V spatiul functiilor continue pe [0, 2π], cu valori reale.Definim aplicatia T : V→ V, prin conditia
Tf = g ←→ g (x) =
Z 2π
0
(1 + cos (x− t)) f (t) dt.
Sa se afle nucleul aplicatiei T , valorile proprii si vectorii proprii cores-punzatori.
Indicatie. Nucleul aplicatiei consta din toti vectorii f = f (t), pentru careTf = 0 (functia identic nula). Deoarece Tf = 0 este echivalenta cuZ 2π
0
f (t) dt = 0,
Z 2π
0
f (t) cos t dt = 0,
Z 2π
0
f (t) sin t dt = 0

2.10. EXERCITII PROPUSE 191
rezulta ca functiile care satisfac aceste conditii, formeaza nucleul aplicatieiT . Aceste functii, cu exceptia functiei identic nule, sunt ın acelasi timpsi vectorii proprii, corespunzatori autovalorii λ = 0. Un exemplu de astfel
de functii sunt cele de forma f (t) =nP
k=3
(ak cos kt+ bk sin kt) ın care exista
macar un coeficient diferit de 0. Numarul natural n este arbitrar. Dacaλ 6= 0, din conditia Tf = λf deducem ca λf este de forma λf (x) =a0+a1 cosx+a2 sinx, adica f (x) = c0+ c1 cosx+ c2 sinx ın mod obligator,constantele c0, c1, c2 si λ trebuind sa fie determinate. Se ajunge la conditiaechivalenta
2πc0 + πc1 cosx+ πc2 sinx ≡ λ (c0 + c1 cosx+ c2 sinx)
din care rezulta (λ− 2π) c0 = 0, (λ− π) c1 = 0, (λ− π) c2 = 0. Autovaloriiλ = π ıi corespund functiile proprii f (t) = c1 cos t+ c2 sin t (ın care macarun coeficient este diferit de 0). Autovalorii λ = 2π ıi corespund functiileproprii constante f (t) = c0 6= 0.
Exercitiul 2.72 In spatiul vectorial R3 se considera subspatiile liniare S1si S2, date de ecuatiile
S1 : x+ y − z = 0, S2 : 3x− 4y − 2z = 0.
(a) Sa se arate ca aplicatia
f :¡−v u+ v u
¢→¡2u u− v u+ 2v
¢este un izomorfism ıntre S1 si S2.(b) Sa se afle locul geometric al mijloacelor segmentelor care unesc
punctele lui S1, cu imaginile lor prin transformarea f , din S2.(c) Sa se determine acele izomorfisme liniare ϕ : R3 → R3, care coincid
cu f pe subspatiul S1.
Indicatie. (a) Orice punct (vector) din S1 poate fi scris ın mod unic ınforma (−v, u+ v, u) si orice punct din S2 poate fi scris ın mod unic ın forma¡2u u− v u+ 2v
¢. Aplicatia f : S1 → S2 este injectiva si surjectiva.
Daca notam s =¡−v1 u1 + v1 u1
¢si t =
¡−v2 u2 + v2 u2
¢, avem
f (s+ t) = f (s) + f (t), ∀s, t ∈ S1 si f (cs) = cf (s), ∀c ∈ R si ∀s ∈ S1.(b) Coordonatele mijlocului segmentului (ın spatiu) care uneste punctele¡−v u+ v u
¢si¡2u u− v u+ 2v
¢sunt z = u− v
2, y = u, z = u+v
si ele satisfac ecuatia 2x− 3y + z = 0, care este ecuatia unui plan ce treceprin origine. Acesta este locul geometric cautat.

192 CAPITOLUL 2. COMPLETARI SI EXERCITII
(c) Daca ϕ :¡x y z
¢→¡x0 y0 z0
¢este un izomorfism liniar ın
R3, el este de forma ⎧⎪⎨⎪⎩x0 = a1x+ a2y + a3z
y0 = b1x+ b2y + b3z
z0 = c1x+ c2y + c3z
ın care determinantul coeficientilor este 6= 0. Impunand conditia ca ϕ coin-cide cu f pe subspatiul liniar S1, gasim⎧⎪⎨⎪⎩
−a1v + a2 (u+ v) + a3u ≡ 2u−b1v + b2 (u+ v) + b3u ≡ u− v
−c1v + c2 (u+ v) + c3u ≡ u+ 2v
.
Din prima identitate, avem a2 + a3 = 2 si a2 − a1 = 0. Daca notama1 = a, vom avea a2 = a si a3 = 2− a. Din celelalte doua identitati, gasimb1 = b, b2 = b− 1, b3 = 2− b si respectiv c1 = c, c2 = c+ 2, c3 = − (c+ 1).Izomorfismele cautate sunt de forma⎧⎪⎨⎪⎩
x0 = ax+ ay + (2− a) z
y0 = bx+ (b− 1) y + (2− b) z
z0 = cx+ (c+ 2) y − (c+ 1) zın care constantele satisfac conditia −3a+ 4b+ 2c 6= 0.
Exercitiul 2.73 In R3 se considera transformarea liniara (pentru a real,fixat):
fa : (x, y, z)→µx, ax+ y,
a2
2x+ ay + z
¶.
(a) Se cere matricea Ma a lui fa ın baza standard si structura multimii{Ma; a ∈ R}. Sa se studieze convergenta si sa se afle (daca exista) limitasirului {Sn}, ın care
Sn = I+1
1!Ma +
1
2!M2
a + · · ·+1
n!Mn
a .
(b) Sa se afle valorile si vectorii proprii pentru Ma.
Indicatie. (a) Notam e(1) =¡1 0 1
¢, e(2) =
¡0 1 0
¢, e(3) =¡
0 0 1¢si avem⎧⎪⎪⎪⎨⎪⎪⎪⎩fa¡e(1)¢=
µ1 a
a2
2
¶= e(1) + ae(2) +
a2
2e(3)
fa¡e(2)¢=¡0 1 a
¢= e(2) + ae(3)
fa¡e(3)¢=¡0 0 1
¢= e(3)

2.10. EXERCITII PROPUSE 193
de unde rezulta
Ma =
⎛⎝ 1 0 0a 1 0a2
2a 1
⎞⎠ .
Se constata ca MaMb = MbMa = Ma+b, matricea unitate I face partedin multimea considerata (se obtine pentru a = 0), fiecare element Ma areinvers (la operatia de ınmultire a matricelor) si anume M−1
a = M−a. Decimultimea considerata este un grup comutativ fata de operatia interna deınmultire. Se observa ca avem
Mna =
⎛⎝ 1 0 0na 1 0(na)2
2na 1
⎞⎠ , n = 1, 2, 3, . . .
si scriind
Sn =
⎛⎝ un 0 0vn un 0wn vn un
⎞⎠ ,
gasim ⎧⎪⎪⎪⎪⎪⎨⎪⎪⎪⎪⎪⎩un = 1 +
1
1!+1
2!+ · · ·+ 1
n!→ e
vn =a
1!+2a
2!+ · · ·+ na
n!→ ae
wn =a2
2(σn−1 + σn−2)→ a2e
unde σn este suma partiala a seriei 1 +∞Pn=1
1
n!= e. Pentru a gasi expresia
lui wn =nP
k=1
1
k!
(ka)2
2, consideram suma
sn (x) =nX
k=1
1
k!
(kx)2
2
pe care o calculam cu ajutorul derivatei sale
s0n (x) = xnX
k=1
k2
k!= x
nXk=1
k
(k − 1)! = x
∙1 +
2
1!+3
2!+ · · ·+ n
(n− 1)!
¸=
= x
∙1 +
µ1 +
1
1!
¶+
µ1
1!+1
2!
¶+ · · ·+
µ1
(k − 2)! +1
(k − 1)!
¶+
+ · · ·+µ
1
(n− 2)! +1
(n− 1)!
¶¸= x (σn−1 + σn−2) .

194 CAPITOLUL 2. COMPLETARI SI EXERCITII
Rezulta sn (x) =x2
2(σn−1 + σn−2) si wn = sn (a) =
a2
2(σn−1 + σn−2)→
a2e. Am aratat ca
limn→∞
Sn =
⎛⎝ e 0 0ae e 0a2e ae e
⎞⎠ .
(b) Pentru a 6= 0, Ma are polinomul caracteristic (λ− 1)3 si deci sin-gura autovaloare (tripla) este λ = 1, careia ıi corespunde un singur vec-tor propriu, daca facem abstractie de factorul de proportionalitate, anumev =
¡0 0 1
¢. Pentru a = 0, M0 = I = matricea unitate de ordinul trei.
Avem o singura autovaloare, λ = 1 si orice vector nenul din R3 este vectorpropriu pentru I.
Exercitiul 2.74 Fie
M =
µa cos θ − b sin a sin θ + b cos θa sin θ + b cos θ −a cos θ + b sin θ
¶ın care a, b si θ sunt numere reale date.(a) Sa se afle Mn, scriind M = aA+ bB.(b) Sa se afle (daca exista)
limn→∞
2nXk=1
(−1)k−1 Mk
k.
Indicatie. (a) Se verifica imediat ca daca
A =
µcos θ sin θsin θ − cos θ
¶, B =
µ− sin θ cos θcos θ sin θ
¶avem A2 = B2 = I2 si AB + BA = 02. Gasim M2 = (a2 + b2) I2, M
3 =(a2 + b2)M si ın general M2n = (a2 + b2)
nI2, M
2n+1 = (a2 + b2)M , oricarear fi n natural. Putem scrie, folosind notatia a2 + b2 = α2,
2nPk=1
(−1)k−1 Mk
k=
µM +
M3
3+
M5
5+ · · ·+ M2n−1
2n− 1
¶−
−µM2
2+
M4
4+ · · ·+ M2n
2n
¶=
=
µ1 +
α2
3+
α4
5+ · · ·+ α2n−2
2n− 1
¶M−
−µα2
2+
α4
4+ · · ·+ α2n
2n
¶I2.

2.10. EXERCITII PROPUSE 195
Pentru α2 < 1, ambele sume partiale din formula precedenta sunt con-vergente. Daca punem
s =∞Xn=1
α2n−2
2n− 1 , σ =∞Xn=1
α2n
2n
rezulta ca exista
limn→∞
2nXk=1
(−1)k−1 Mk
k= sM − σI2.
Exercitiul 2.75 Daca A este o matrice reala antisimetrica, sa se arate cadetA ≥ 0.
Indicatie. Daca A este de ordin impar, rezulta detA = 0. Daca este deordin par si admite λ = 0 ca autovaloare, detA = 0. Daca A este de ordinpar si are toate autovalorile 6= 0, rezulta ca detA este un produs de factoripozitivi, deci detA > 0.
Definitia 2.20 Daca A este o matrice patrata, cu elemente reale sau com-plexe, matricea A∗ = AT (conjugata si transpusa) se numeste adjunctamatricei A. Daca A = A∗, matricea A se numeste autoadjuncta. Ma-tricele reale simetrice sunt caz particular de matrice autoadjuncte.
Exercitiul 2.76 Sa se arate ca autovalorile unei matrice autoadjuncte suntreale.
Indicatie. Fie Av = λv, cu v 6= θ (elementul nul din Cn, spatiul vectorialal matricelor reale sau complexe, de tipul n×1). Avem evident vTAT = λvsi deci vT AT = λvT , adica vTA = λvT . Din(
vTAv = λvTv
vTAv = λvTv⇒¡λ− λ
¢vTv = 0.
Daca v = (ξ1, ξ2, . . . , ξn)T , rezulta v =
¡ξ1, ξ2, . . . , ξn
¢Tsi deci
vTv = |ξ1|2 + |ξ2|2 + · · ·+ |ξn|2 > 0,
ceea ce va implica λ− λ = 0⇒ λ ∈ R.
Exercitiul 2.77 Daca A este o matrice autoadjuncta si Au = λu, Av =µv cu λ 6= µ, sa se arate ca hu,vi = 0.

196 CAPITOLUL 2. COMPLETARI SI EXERCITII
Indicatie. Au = λu ⇒ vTAu = λvTu. Pe de alta parte, Av = µv ⇒Av = µv ⇒ vT AT = µvT ⇒ vTA = µvT ⇒ vTAu = µvTu. Din(λ− µ)vTu = 0 ⇒ vTu = hu,vi = 0. Daca u si v sunt nenuli, putemspune ca la autovalori diferite corespund vectori proprii ortogonali.
Exercitiul 2.78 Notam det (λI−A) = λn + p1λn−1 + · · ·+ pn−1λ+ pn si
presupunem pn 6= 0. Sa se exprime det (λI−A−1), ın functie de coeficientiipi, i = 1, n.
Indicatie. Avem
det (λI−A−1) = detA−1 (λA− I) = (−1)n
pndet (λA− I) =
=λn
pndet
µ1
λI−A
¶=
λn
pn
∙1
λn+
p1λn−1
+ · · ·+ pn−1λ
+ pn
¸=
= λn +pn−1pn
λn−1 + · · ·+ p1pn
λ+1
pn.
Exercitiul 2.79 In spatiul vectorial R4 se dau vectorii a(1)=¡1 0 2 1
¢,
a(2) =¡2 1 2 3
¢, a(3) =
¡0 1 −2 1
¢. Notand L subspatiul gen-
eral de acesti vectori, sa se afle o baza a complementului ortogonal L⊥.
Indicatie. Cei trei vectori nu sunt liniar independenti, caci a(3) = −2a(1)+a(2). L este subspatiul generat de a(1) si a(3), adica consta din toti vectoriide forma c1a
(1) + c2a(3). Trebuie sa gasim doi vectori liniar independenti
b(1) si b(2), fiecare fiind ortogonal pe a(1) si a(3). Scriind b = (α1, α2, α3, α4),obtinem sistemul (
α1 + 2α3 + α4 = 0
α2 − 2α3 + α4 = 0
pentru care gasim perechea de vectori b(1) =¡−4 0 −1 −2
¢si b(2) =¡
1 1 0 −1¢, care formeaza o baza ın L⊥. Evident, ın L⊥ exista si alte
baze, caci sistemul din care le aflam admite o infinitate de solutii.
Exercitiul 2.80 Intr-un spatiu euclidian E cu 4 dimensiuni, raportat labaza ortonormata
©e(1), e(2), e(3), e(4)
ª, se considera subspatiul L format de
vectorii x, ale caror coordonate satisfac sistemul⎧⎪⎨⎪⎩2ξ1 + ξ2 + 3ξ3 − ξ4 = 0
3ξ1 + 2ξ2 − 2ξ4 = 03ξ1 + ξ2 + 9ξ3 − ξ4 = 0
.
Sa se determine complementul ortogonal L⊥, precum si o baza ın L⊥.

2.10. EXERCITII PROPUSE 197
Indicatie. Daca notam⎧⎪⎨⎪⎩v(1) = 2e(1) + e(2) + 3e(3) − e(4)
v(2) = 3e(1) + 2e(2) − 2e(4)
v(3) = 3e(1) + e(2) + 9e(3) − e(4)
conditiile date pot fi scrise pe scurt ın formav(1),x
®=v(2),x
®=v(3),x
®=
0, ∀x ∈ L. Deoarece v(3) = 3v(1)−v(2), conditiile se reduc la doua si anumev(1),x
®= 0,
v(2),x
®= 0, ∀x ∈ L, cu v(1) si v(2) liniar independenti.
Rezulta ca L⊥ este subspatiul generat de vectorii v(1) si v(2), care constituiechiar o baza
©v(1),v(2)
ª, ın L⊥.
Exercitiul 2.81 Fie u 6= θ un vector fixat ın spatiul euclidian real X sifie f : X → X, f (x) = x − a hx,uiu (a constanta reala) o transformareliniara.
(a) Sa se afle a ∈ R, astfel ıncat f sa fie o transformare ortogonala si sase arate ca pentru valoarea a0 6= 0 gasita, avem
f ◦ f ◦ f · · · ◦ f| {z }n ori
=
½f, n = imparI, n = par
.
Fie X = R3, u = 2e(1) + 2e(2) + e(3), a = a0 si©e(i), i = 1, 3
ªbaza
canonica (standard) ın R3.(b) Sa se scrie matricea transformarii liniare f ın baza standard si sa se
afle autovalorile si vectorii sai proprii.Indicatie. (a) Impunem conditia hf (x) , f (x)i = hx,xi, ∀x ∈ X si gasima hx,ui2 (a hu,ui− 2) = 0⇒ a =
2
hu,ui . Prin urmare, f este data prin
f (x) = x− 2 hx,uihu,ui u, ∀x ∈ X.
Rezulta
(f ◦ f) (x) = f (f (x)) = f
µx− 2 hx,uihu,ui u
¶= f (x)− 2 hx,uihu,ui f (u) =
= x− 2 hx,uihu,ui u−2 hx,uihu,ui
µu− 2 hu,uihu,ui u
¶= x, ∀x ∈ X
ceea ce ınseamna f ◦ f = I = transformarea identica ın X. Este evident caaplicarea de un numar impar de ori a transformarii f coincide cu f si caaplicarea de un numar par de ori coincide cu transformarea identica.

198 CAPITOLUL 2. COMPLETARI SI EXERCITII
(b) Pentru x =¡x1 x2 x3
¢si u =
¡2 2 1
¢, avem hx,ui = 2x1 +
2x2 + x3 si
f (x) = x1e(1) + x2e
(2) + x3e(3) − 2
9(2x1 + 2x2 + x3)
¡2e(1) + 2e(2) + e(3)
¢.
Acum, vom cauta imaginile vectorilor e(1), e(2), e(3) pentru a putea scriematricea lui f ın aceasta baza⎧⎪⎪⎪⎪⎪⎨⎪⎪⎪⎪⎪⎩
f¡e(1)¢=1
9e(1) − 8
9e(2) − 4
9e(3)
f¡e(2)¢= −8
9e(1) +
1
9e(2) − 4
9e(3)
f¡e(3)¢= −4
9e(1) − 4
9e(2) +
7
9e(3)
.
Matricea cautata este
A =1
9
⎛⎝ 1 −8 −4−8 1 −4−4 −4 7
⎞⎠ .
Polinomul caracteristic al matricei 9A este (λ− 9)2 (λ+ 9), deciA are auto-valorile λ1 = λ2 = 1, λ3 = −1. Fiind simetrica, admite o baza ortonormataın R3, formata din vectori proprii.
Exercitiul 2.82 Fie E un spatiu euclidian real, finit dimensional si L unsubspatiu propriu al sau. Sa se arate echivalenta
y = prL x⇔ y ∈ L si kx− yk ≤ kx− zk , ∀z ∈ L.
Indicatie. In fond, avem de demonstrat echivalenta
y ∈ L si hx− y, zi = 0, ∀z ∈ L⇔ y ∈ L si kx− yk ≤ kx− zk , ∀z ∈ L
oricare ar fi x ∈ E. Presupunem ca are loc prima afirmatie. Din egalitatea
x− z = (x− y) + (y− z)⇒ kx− zk2 = k(x− y) + (y− z)k2 == h(x− y) + (y− z) , (x− y) + (y− z)i == hx− y,x− yi+ hy− z,y− zi+ 2 hx− y,y− zi =
= kx− yk2 + ky− zk2 ,

2.10. EXERCITII PROPUSE 199
daca tinem seama ca hx− y,y− zi = 0, deoarece z0 = y − z ∈ L. Deciavem kx− yk ≤ kx− zk, ∀z ∈ L, adica prima afirmatie o implica pe cea dea doua. Reciproc, sa presupunem acum ca este adevarata a doua afirmatiedin enunt. Punand z = y+u ın inegalitatea kx− yk ≤ kx− zk, vom puteascrie
hx− y,x− yi ≤ h(x− y)− u, (x− y)− uidin care rezulta
2 hx− y,ui ≤ hu,ui , ∀u ∈ L.
Punand aici tu ın loc de u (cu u = fixat si t ∈ R), gasim o inegalitatede forma 2βt ≤ αt2 cu α = hu,ui > 0 si β = hx− y,ui = constant.Rezulta cu necesitate β = 0 si deci hx− y,ui = 0, ∀u ∈ L, adica areloc prima afirmatie din enunt. Prin urmare, echivalenta din enunt a fostdemonstrata.
Exercitiul 2.83 Fie ϕ o forma bililiniara simetrica definita ın baza stan-dard din R2 astfel: ϕ
¡e(1), e(1)
¢= ϕ
¡e(2), e(2)
¢= 0, ϕ
¡e(1), e(2)
¢= 1. Fie
F multimea transformarilor liniare f din R2, cu proprietatea
ϕ (f (x) , f (y)) = ϕ (x,y) , ∀x,y ∈ R2.Sa se arate ca F se descompune ın doua clase F1 si F2, astfel ıncat
det f = 1, ∀f ∈ F1 si det f = −1, ∀f ∈ F2.
Indicatie. In orice spatiu vectorial si ın orice baza a sa, determinantul ma-tricei unei transformari liniare f are aceeasi valoare (detC−1AC = detA),astfel ca notatia det f este justificata. Daca notam x = (x1, x2), y = (y1, y2)si A = [aij], i, j = 1, 2 matricea lui f ın baza canonica, avem f (x) =(a11x1 + a12x2, a21x1 + a22x2). Deoarece ϕ (x,y) = x1y2 + x2y1, conditiaceruta se scrie
(a11x1 + a12x2) (a21y1 + a22y2)+(a21x1 + a22x2) (a11y1 + a12y2) ≡ x1y2+x2y1.
Dupa identificarea coeficientilor, se obtin ecuatiile
a11a21 = 0, a12a22 = 0, a11a22 + a21a12 = 1, a12a21 + a22a11 = 1.
Cazul I. Luam a11 = α 6= 0 si α21 = 0. Rezulta a22 =1
αsi a12 = 0.
Elementele f ∈ F1 au matricea de forma
A =
µα 00 1/α
¶, cu detA = 1.

200 CAPITOLUL 2. COMPLETARI SI EXERCITII
Cazul II. Luam a11 = 0 si a21 = β 6= 0. Rezulta a12 =1
βsi a22 = 0.
Elementele f ∈ F2 au matricea de forma
A =
µ0 1/ββ 0
¶, cu detA = −1.
Exercitiul 2.84 Presupunem ca ıntr-o baza oarecare din R3, notata©e(1), e(2), e(3)
ª, produsul scalar este dat de forma biliniara simetrica
f (x,y) = x1y1 + 5x2y2 + 6x3y3 + 2 (x1y3 + x3y1) + 3 (x2y3 + x3y2) ,
oricare ar fi x,y ∈ R3. Aplicatia liniara ϕ are ın aceasta baza matricea
A =
⎛⎝ 0 1 −22 0 −13 −2 0
⎞⎠ .
Sa se afle matricea adjunctei ϕ∗ ın aceeasi baza.
Indicatie. Forma biliniara simetrica f este pozitiv definita, astfel ca punandhx,yi = f (x,y) am definit un produs scalar pe R3. Matricea lui f ın bazadata este
B =
⎛⎝ 1 0 20 5 32 3 6
⎞⎠asa ıncat avem
e(1), e(1)®= 1,
e(1), e(2)
®= 0,
e(1), e(3)
®= 2,
e(2), e(2)®= 5,
e(2), e(3)
®= 3,
e(3), e(3)
®= 1.
De asemenea, avem formulele⎧⎪⎨⎪⎩ϕ¡e(1)¢= 2e(2) + 3e(3)
ϕ¡e(2)¢= e(1) − 2e(3)
ϕ¡e(3)¢= −2e(1) − e(2)
.
In relatia (∗) hϕ (x) ,yi = hx, ϕ∗ (y)i, punem y = e(1) si lui x ıi dam perand valorile e(i), i = 1, 3, obtinand sistemul⎧⎪⎨⎪⎩
ϕ¡e(1)¢, e(1)
®=e(1), ϕ∗
¡e(1)¢®
ϕ¡e(2)¢, e(1)
®=e(2), ϕ∗
¡e(1)¢®
ϕ¡e(3)¢, e(1)
®=e(3), ϕ∗
¡e(1)¢® .
Capitolul 3
Mathematica ın algebra
In acest capitol se ilustreaza modul ın care se poate fi folosit pachetulde programe Mathematica pentru ıntelegerea cursului de algebra liniarasi geometrie prezentat studentilor de la facultatea de automatica si calcu-latoare. Acest capitol poate fi utilizat ca un ghid pentru cei care vor sa seinitieze ın utilizarea softului Mathematica.
Sunt analizate cıteva aspecte care tin de utilizarea acestui soft. Suntprezentate exemple de probleme care pot fi abordate pentru a fi rezolvate di-rect cu ajutorul softului si unele care nu pot fi rezolvate direct, prezentandu-se metode de solutionare a problemei.
Studentii pot folosi softulMathematica pentru rezolvarea problemelorde matematica care apar ın inginerie iar utilizarea softului este o metodacomplementara si nu substitutiva matematicii.
Studiind diagrama utilizatorilor acestui soft prezenta pe situl acestui softse constata ca inginerii si fizicienii reprezinta aproape jumatate din totalulutilizatorilor. Remarcam faptul ca inginerii utilizeaza mai mult acest softdecat matematicienii.
O sesiune de lucru cu Mathematica este un dialog ıntre utilizator sisistemul de calcul. Forma grafica relativ usoara de scriere a instructiunilor,comentarea unor exemple semnificative si combinarea cu reprezentari graficefac mai usoara ıntelegerea cursului. Mathematica poate poate fi utilizatasi pentru preluarea unor calcule numerice sau simbolice greu de efectuat cumana, ceea ce permite o ıntelegere mai profunda a problemelor studiate.
Dupa ce programul a fost instalat, utilizarea lui ıncepe prin tiparireaunei comenzi si apoi evaluarea ei prin utilizarea tastelor Shift+Enter.
Cinci reguli de baza ın sintaxa Mathematicii:
201

202 CAPITOLUL 3. MATHEMATICA IN ALGEBRA
1. numele oricarei comenzi ıncepe cu litera mare; daca numele comenziieste format din doua cuvinte, prima litera din fiecare cuvant este mare sicuvintele sunt legate,2. argumentele functiilor sunt scrise ıntre paranteze patrate [· · · ]; paran-
tezele rotunde (· · · ) sunt folosite pentru gruparea operatiilor; vectorii si ma-tricele sunt scrise ıntre acolade {· · · } ; parantezele patrate duble [[· · · ]] suntfolosite pentru indexarea tabelelor, a matricelor.3. ınmultirea este reprezentata prin spatiu sau *;4. puterea este reprezentata prin ˆ;5. daca nu s-a obtinut nici un rezultat sau un raspuns incorect atunci
s-a introdus sau executat o comanda incorect.Mathematica contine multe functii construite si functii care se gasesc
ın pachete care trebuie ıncarcate separat. Pachetele sunt ıncarcate princomanda <<director‘numelepachetului‘ unde director este locatia nu-melepachetului. Introducand comanda<<director‘Master‘ toate functiilecontinute ın toate pachetele din director pot fi utilizate.
Definirea matricilor. Definim matriceaA =
µa11 a12a21 a22
¶cu ajutorul
comenzii
unde a [1, 1] = a11, a [1, 2] = a12, a [2, 1] = a21, a [2, 2] = a22. Putem realizascrierea clasica matriceala a matricei prin comanda:
O alta modalitate de a genera o matrice este de a utiliza comandaArray,
care produce acelasi rezultat ca mai sus. Matricea identitate de ordin n segenereaza cu comanda IdentityMatrix[n] .
Definim un vector linie (v1, v2, v3) astfel:
203
Mathematica nu face distinctie ıntre un vector linie si un vector coloana.La fel putem defini un vector cu instructiunea Array.
Extragerea elementelor unei matrici. Presupunem ca am generatmatricea
Extragerea liniei a doua din matricea m se face astfel:
iar extragerea elementului (1,2) din matriceam se face cu ajutorul comenzii:
Extragerea unei coloane dintr-o matrice se face cu ajutorul comenziiTranspose[matrice] care transpune matricea dupa care extrage din ma-tricea transpusa linia dorita care reprezinta de fapt coloana matricii. Pentrua extrage coloana a treia a matricei m procedam astfel:
sau, acelasi rezultat, ıl obtinem prin comanda:
Exercitiul 3.1 Sa se realizeze cu ajutorul Mathematicii urmatoarele ope-ratii: a) sa se defineaca matricea mb; b) sa se extraga coloana a treia amatricii; c) sa se extraga elementul (3,2) din matrice; d) sa ae afiseze ınforma clasica matricea.

204 CAPITOLUL 3. MATHEMATICA IN ALGEBRA
Calcule cu matrici si vectori. Mathematica executa toate operatiilecu matrici: adunarea, ınmultirea cu un scalar, ınmultirea matricilor, trans-punerea matricii. Inversarea matricei si calculul determinantului matriciise pot executa daca matricea este patratica. Prezentam mai jos generareaa doua matrice si calculul sumei celor doua matrice si, adaugand comandaTableForm, rezultatul este scris sub forma matriceala obisnuita.
Inversa matricei suma a celor doua matrice se realizeaza cu astfel:
Pachetul de programe LinearAlgebra‘MatrixManipulation‘ poate fifolosit pentru:
-adaugarea coloanelor unei matrice la coloanele altei matrice cu conditiaca cele doua matrice sa aiba acelasi numar de coloane. Se realizeaza folosindinstructiunea AppendColumns[m1,m2] ;

205
-adaugarea liniilor unei matrice la liniile altei matrice cu conditia cacele doua matrice sa aiba acelasi numar de linii. Se realizeaza folosindinstructiunea AppendRows[m1,m2] . Se poate forma astfel o matrice bloccu alaturand liniile si coloanele submatricelor.
Exercitiul 3.2 Se dau matricelem1 =
µ1 −2 50 1 3
¶,m2 =
¡2 −2 1
¢,
m3 =
µ1−2
¶. Sa se formeze a) o matrice prin alaturarea coloanelor ma-
tricelor m1 si m2, b) o matrice prin alaturarea liniilor matricelor m1 sim3, c) matricea bloc formata din matricele m1,m3,m2 si completata cuzerouri.

206 CAPITOLUL 3. MATHEMATICA IN ALGEBRA
Tot cu ajutorul comenzilor acestui pachet pot fi executate si urmatoareleoperatii: extragerea primelor n linii din matrice cu ajutorul comenziiTakeRows[matr, n] , extragerea ulimelor n linii din matricea matr,TakeRows[matr,m, n] extragerea din matricea matr a liniilor cu numerelede ordine de la m la n, m ≤ n. Aceleasi operatii se pot face si asupracoloanelor cu ajutorul comenzii TakeColumns. Se poate extrage dintr-omatrice o submatrice specificand pozitia primului si a al ultimului elementdin submatrice cu ajutorul comenzii TakeMatrix[matr, poz1, poz2] sau cuajutorul comenziiSubmMatrix[matr, poz, dim] ın care se specifica pozitia primului elem-ment si numarul de linii si coloane care trebuie extrase pornind de laacesta (dim.este o pereche de numere naturale ın care primul element areseminficatia numarului de linii care trebuie extrase pornind de la elementulspecificat prin poz, iar al doilea element reprezinta numarul de coloane caretrebuie extrase).
Exercitiul 3.3 Se considera matricea
A =
⎛⎜⎜⎝1 −2 0 3 4 52 1 −2 9 1 30 −1 −2 0 1 00 −1 2 1 3 −2
⎞⎟⎟⎠ .
a) Sa se formeze submatricea care este formata din elementele a12, a13,a14, a15, a22, a23, a24, a25, a32, ..., a35, formata din trei linii si patru coloane.b) Sa se formeze submatricea formata din doua linii si doua coloane si
care are pe prima pozitie elementul a12.c) Sa se stabileasca care din aceste doua matrici sunt patratice.

207
Exercitiul 3.4 Sa se calculeze valoarea determinantului
D=
¯¯ 1 1 2 31 1 3 42 5 1 −1−1 −2 2 4
¯¯ .
Exercitiul 3.5 Sa se realizeze cu ajutorulMathematicii urmatoarele ope-ratii:
a) sa se genereze vectorii u =¡1 2 2 0
¢T, v =
¡1 4 5 0
¢T;
b) sa se calculeze norma euclidiana a lui u, versorul vectorului u;c) sa se calculeze produsul scalar dintre vectorii u si v.

208 CAPITOLUL 3. MATHEMATICA IN ALGEBRA
Determinarea solutiilor sistemelor de ecuatii. Pentru a rezolvasistemul liniar Ax = b, unde A este matricea coeficientilor sistemului, beste vectorul termenilor liberi iar x vectorul necunoscutelor. Daca matriceaA este inversabila, atunci solutia va fi x = A−1b.
Exercitiul 3.6 Sa se rezolve sistemul:⎧⎪⎪⎨⎪⎪⎩3x− y + z + 5t = 2x− 2y − z − 3t = 4−2x+ 5y + z − 2t = 8−x+ y + 2z + 10t = −20
.
Generam matricea sistemului, apoi ınmultim inversa cu termenii liberisi obtinem solutia sistemului.
O alta modalitate de rezolvare este cu ajutorul instructiunii Solve.
Se poate rezolva un sistem liniar si cu instructiunea LinearSolve carerezolva de obicei mai repede sistemul decat Solve.
Rezolvarea sistemului poate fi facuta si folosind pachetul de programe<<LinearAlgebra‘GaussianElimination‘. Sunt folosite comenzile LU-
209
Factor care realizeaza descompunerea LU a matricei sistemului, trecuta ınprima paranteza, iar ın a doua paranteza sunt trecuti pivotii. ComandaLUSolve realizeaza rezolvarea sistemului folosind substitutia inversa.
Substitutia inversa poate fi folosita pentru rezolvarea sistemelor care auaceeasi matrice si se modifica doar termenii liberi.
.Rezolvarea unui sistem liniar se poate face si cu metoda eliminarii Gauss-
Jordan. Cu aceasta metoda pot fi rezolvate si sistemele compatibile nede-terminate si cele incompatibile.
Exercitiul 3.7 Sa se rezolve sistemele:
a)
⎧⎪⎪⎨⎪⎪⎩3x− y + z + 5t = 2x− 2y − z − 3t = 4−2x+ 5y + z − 2t = 8−x+ y + 2z + 11t = −20
,b)
⎧⎪⎪⎨⎪⎪⎩x− 2y + 2z + 3t = 52x− 3y − 4z + 6t = 2−3x+ 4y + z − 6t = 5x+ 2y + 3z − 8t = −10
folosind metoda eliminarii Gauss-Jordan.
In cazul primului sistem

210 CAPITOLUL 3. MATHEMATICA IN ALGEBRA
Solutia sistemului x = t+ 6, y = 2t+ 4, z = −6t− 10.Rezolvam sistemul al doilea
Observam ca sistemul este incompatibil deoarece ultima ecuatie este0x + 0y + 0z + 0t = 1. Sistemele rezolvate sunt cele din Exercitiul 2.6 iarinterpretarea rezultatelor este cea facuta la acel exercitiu.
Exercitiul 3.8 Folosind teorema Cayley-Hamilton, sa se calculeze A−1 sisa se compare rezultatul cu cel obtinut folosind comanda de inversare a uneimatrici pentru matricea
A =
⎛⎜⎜⎝1 2 −1 12 1 1 21 0 2 32 −1 1 0
⎞⎟⎟⎠ .
211
Exercitiul 3.9 Sa se rezolve sistemul omogen (reluarea Exercitiului 2.7):⎧⎪⎪⎨⎪⎪⎩x− 3y − z + 2t = 0x− 4y + 3z + 4t = 0x− y − 9z − 2t = 03x− 10y + z + 8t = 0
.
Rezolvam sistemul cu metoda eliminarii Gauss-Jordan.
De aici observam ca obtinem un sistem echivalent sistemului dat formatdin ecuatiile:½
x = 13z + 4ty = 4z + 2t
deci vectorul solutie va fi¡13z + 4t 4z + 2t z t
¢=¡13 4 1 0
¢z+¡
4 2 0 1¢t :
Exercitiul 3.10 Sa se realizeze cu Mathematica ortonormalizarea sis-temului de vectori (Exercitiul 1.15.):
v(1) =
⎛⎝ 122
⎞⎠ ,v(2) =
⎛⎝ −135
⎞⎠ ,v(3) =
⎛⎝ 40−2
⎞⎠ .

212 CAPITOLUL 3. MATHEMATICA IN ALGEBRA
.Comenzile CharacteristicPolynomial[m, x] calculeaza polinomul car-
acteristic al matricei m, polinom ın necunoscuta x,Eigenvalues[m] calculeaza valorile proprii ale matricei m,Eigenvectors[m] furnizeaza vectorii proprii ai matricei m,Eigensystem[m] furnizeaza o lista a valorilor proprii si a vectorilor
proprii corespunzatori.
Exercitiul 3.11 Fie matricea
A=
⎛⎜⎜⎝1 0 0 10 1 0 00 0 1 −21 0 −2 5
⎞⎟⎟⎠ .

213
Sa se calculeze polinomul caracteristic, vaorile proprii si vectorii propriicorespunzatori.
Exercitiul 3.12 Se considera matricea (Exercitiul 1.18.)
A =
⎛⎝ 1 2 −42 −2 −2−4 −2 1
⎞⎠ .
(a) Sa se arate ca ın R3 exista o baza formata din vectori proprii ai lui A.(b) Sa se afle o baza ortonormata formata din vectori proprii ai matricei A.
a) Calculam valorile proprii si vectorii proprii si verificam daca vectoriiproprii sunt liniar independenti.
Rezultatul comenzii este: prima paranteza contine valorile propriui iarurmatorele paranteze contin vectorii proprii.Verificam daca vectorii proprii sunt liniar independenti, adica daca for-
meaza o baza ınR3. Pentru aceasta folosim comandaRowReduce[matrice]care metoda eliminarii a lui Gauss-Jacobi. Daca matricea este nesingulara

214 CAPITOLUL 3. MATHEMATICA IN ALGEBRA
se obtine matricea unitate, ceea ce indica ca vectorii care formeaza matriceasunt liniar independenti. Daca matricea este dreptunghiulara sau singularaatunci primele l coloane vor fi coloanele matricii unitate care se pot formadin matricea respectiva.
b) Aplicam procedeul de ortonormare Gram-Schmidt vectorilor proprii

215
Ortogonalizarea se poate face mult mai usor folosind pachetul de pro-grame LinearAlgebra‘Orthoogonalization‘. Daca vectorii care trebuieortonormalizati nu sunt liniar independenti rezultatul este imprevizibil.
Daca dorim sa otogonalizam siatemul de vectori fara a-i normaliza sefoloseste comanda GramSchmidt[matrice, Normalized->False]
.
Exercitiul 3.13 Se considera forma patratica
h (x) = 2x21 + 2x22 − 2x23 + 6x1x2 − 2x1x3 + 2x2x3.
Sa se determine forma canonica si baza canonica.
Generam matricea formei patratice, calculam valorile proprii, vectoriiproprii si iı ortonormam.

216 CAPITOLUL 3. MATHEMATICA IN ALGEBRA
Exercitiul 3.14 Sa se ortonormeze sistemul de functii t, t2, t3 ın C [0, 1]
ın raport cu produsul scalar hf, gi =1R0
tf (t) g (t) dt si ın raport cu produsul
scalar hf, gi0 =1R0
f (t) g (t) dt.
S-a realizat numai ortogonalizarea sistemului de vectori. Prin comandade mai jos realizam ortogonalizarea aceluiasi sistem de vectori.
Se realizeaza ortonormalizarea sistemului de vectori ın raport cu pro-dusul scalar h, i0 .
.
Folosind acelasi pachet de programe se poate numai normaliza un vector:
.
Se mai poate calcula proiectia unui vector pe alt vector folosind dinacelati pachet comanda Projection[v1,v2].

217
Pot fi aproximate valorile proprii si vectorii proprii folosind ın comandacare calculeaza valorile proprii si vectorii proprii pentru matricea N[ma].
Exercitiul 3.15 Fie matricea A =
⎛⎝ 3 −5 −4−5 6 3−3 2 −2
⎞⎠ . Sa se aproximeze
valorile proprii si vectorii proprii corespunzatori.
Exercitiul 3.16 Fie matricea
A =
⎛⎜⎜⎝0 2 0 −11 0 0 00 1 0 00 0 1 0
⎞⎟⎟⎠.Sa se determine o forma canonica Jordan si o baza Jordan.
218 CAPITOLUL 3. MATHEMATICA IN ALGEBRA
Exercitiul 3.17 Fie matricea
A =
⎛⎝ 6 6 −151 5 −51 2 −2
⎞⎠ .
Sa se determine forma canonica Jordan si o baza Jordan.
Prezentam exemple de calcul al matricei exponentiale.Reluam Exercitiile 2.56 si 2.57.
Exercitiul 3.18 Fie matricele:

219
A =
⎛⎜⎜⎝1 0 0 10 1 0 00 0 1 −21 0 −2 5
⎞⎟⎟⎠ si A =
⎛⎝ 0 1 0−4 4 0−2 1 2
⎞⎠ .
Sa se calculeze eA.
.Pachetul Calculus‘VectorialAnalysis‘ contie comenzi cu ajutorul ca-
rora se poate calcula produsul scalar, produsul vectorial, produsul mixtpentru vectorii din spatiul tridimensional.
Exercitiul 3.19 Se considera vectorii v1 = (1, 2,−1), v2 = (−1, 2, 0) siv3 = (−2, 0, 3). Sa se calculeze hv1,v2i , v1 × v2 si (v1,v2,v3) .
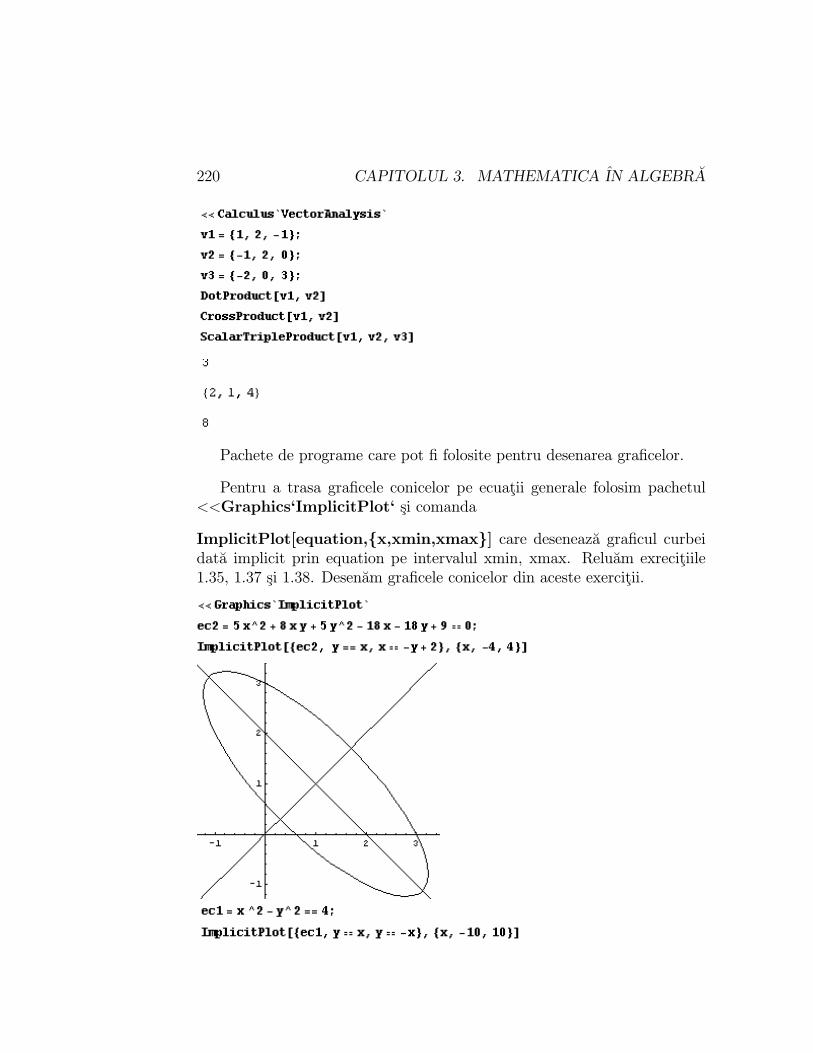
220 CAPITOLUL 3. MATHEMATICA IN ALGEBRA
Pachete de programe care pot fi folosite pentru desenarea graficelor.
Pentru a trasa graficele conicelor pe ecuatii generale folosim pachetul<<Graphics‘ImplicitPlot‘ si comanda
ImplicitPlot[equation,{x,xmin,xmax}] care deseneaza graficul curbeidata implicit prin equation pe intervalul xmin, xmax. Reluam exrecitiile1.35, 1.37 si 1.38. Desenam graficele conicelor din aceste exercitii.
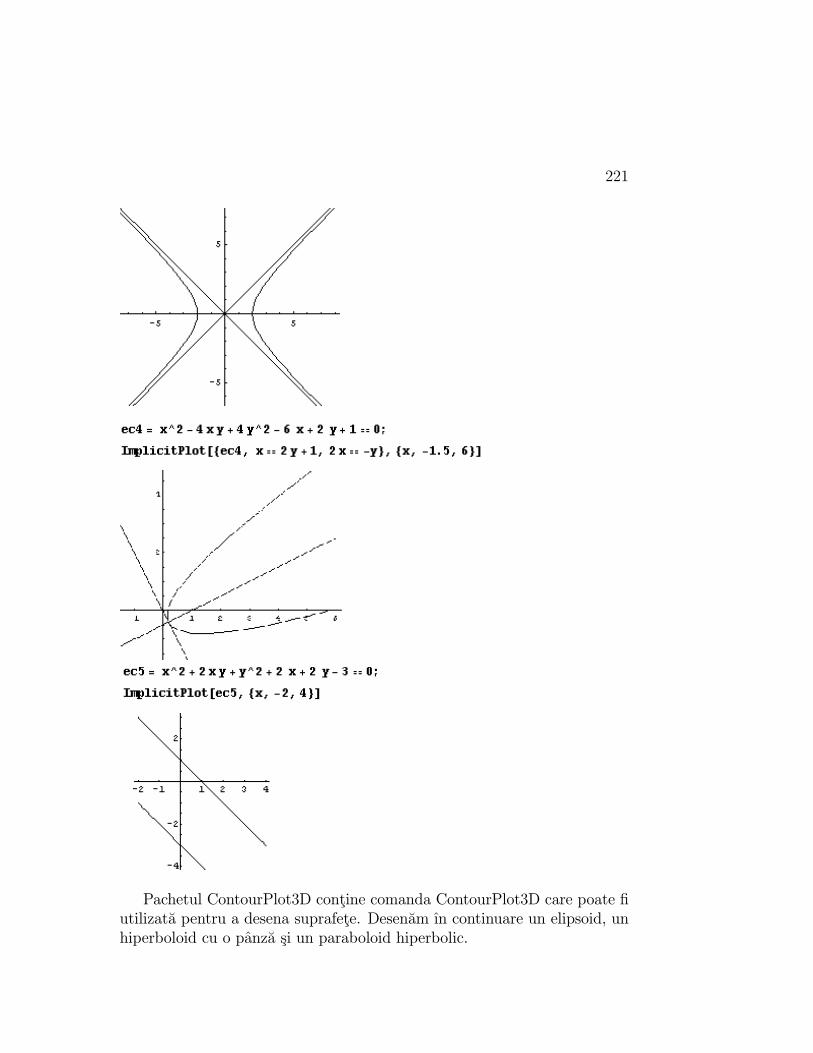
221
Pachetul ContourPlot3D contine comanda ContourPlot3D care poate fiutilizata pentru a desena suprafete. Desenam ın continuare un elipsoid, unhiperboloid cu o panza si un paraboloid hiperbolic.
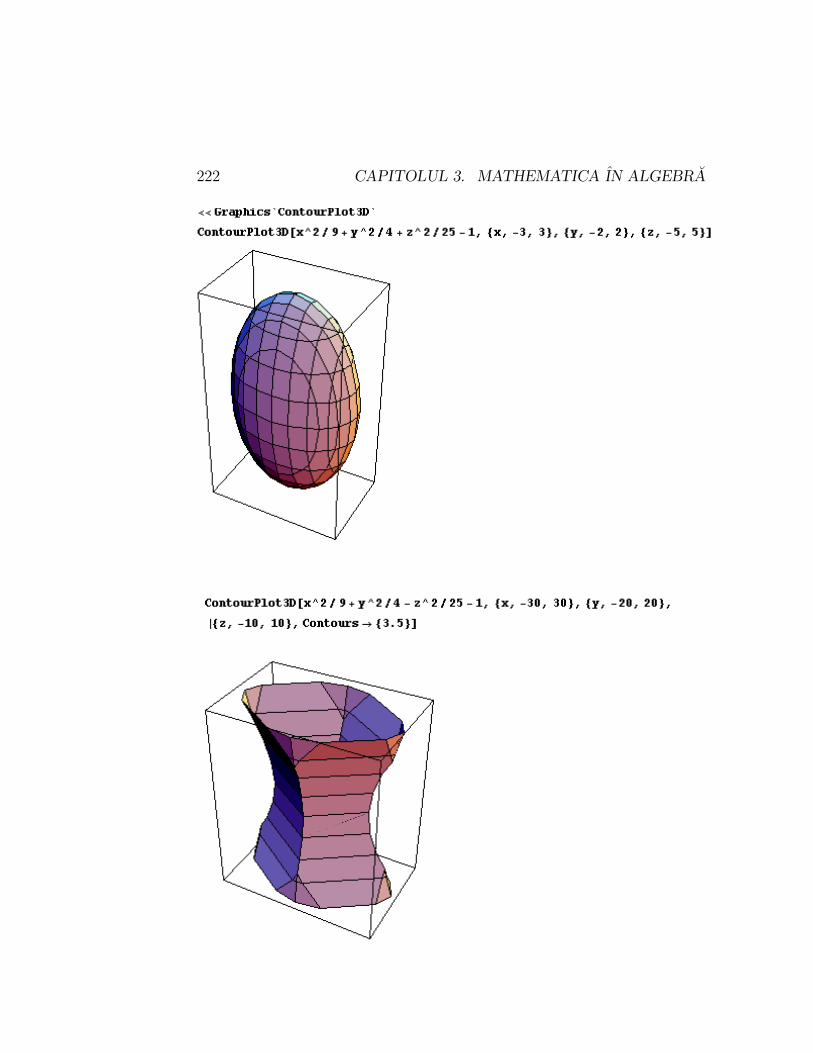
222 CAPITOLUL 3. MATHEMATICA IN ALGEBRA
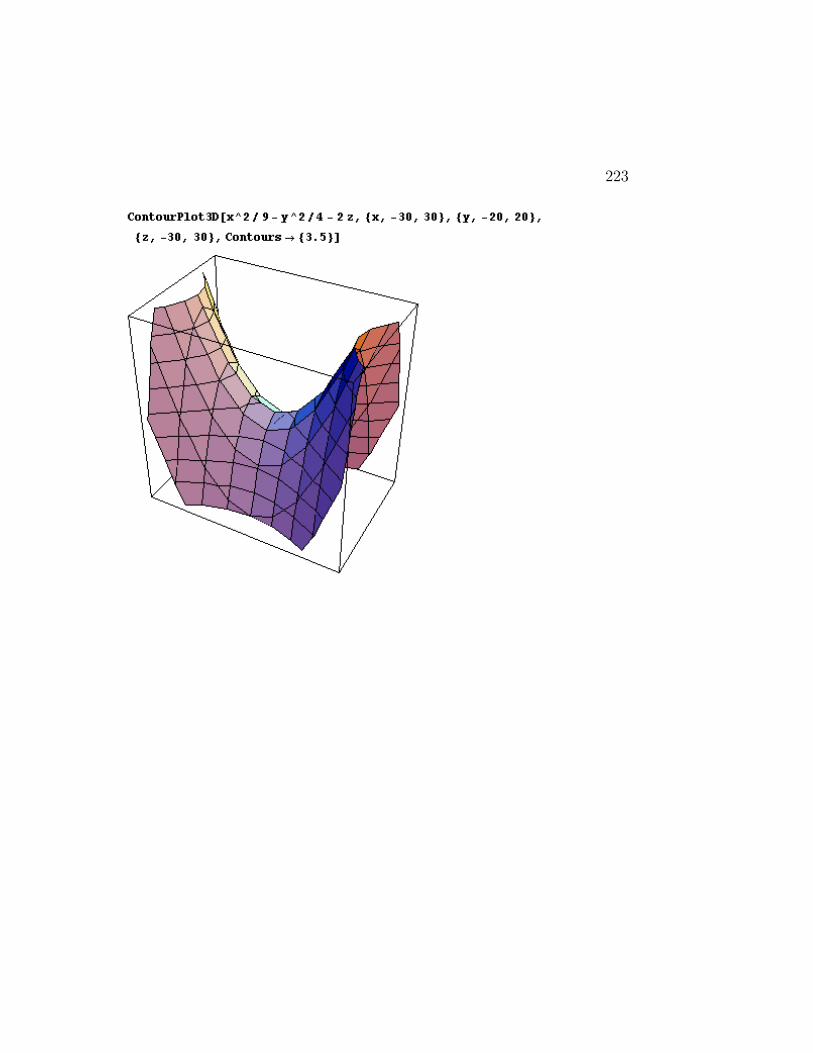
223
1
Bibliografie
[1] Borcea V., Neagu A.- Probleme de algebra si ecuatii diferentiale,Inst. Politehnic, Iasi, 1993.[2] A. Carausu - Linear Algebra. Theory & Applications, Editura
Matrix Rom, Bucuresti, 1999.[3] Chirita S.- Probleme de matematici superioare, EDP, Bucuresti,
1989.[3] Corduneanu A. - Note de curs (teorie, exercitii, completari). (Xe-
rox, Fac. de automatica si calculatoare), 2002.[4] Corduneanu A. - Culegere de probleme. Xerox, Institutul Po-
litehnic Iasi, 1984.[5] Fazlollah Reza- Spatii liniare, EDP, Bucuresti, 1973.[6] Fadeev D. , E. Somincki -Recuiel d’ exercices d’ algebre superieure,
Ed. MIR, Moscova, 1973.[7] Gheorghiu Gh. Th. - Algebra liniara, geometrie analitica si
diferentiala si programare, EDP, Bucuresti, 1977.[8] Gradinaru N. - Curs de algebra liniara si geometrie analitica, Inst.
Politehnic, Iasi, Rotaprint, 1977.[9] Horn R. a:, Johnson C. R. - Analiza matriceala, Editura Theta,
2001[10] Ikramov H. - Recuiel de problemes d’ algebre lineaire, Ed. MIR,
Moscova, 1977.[11]Murgulescu E. (colectiv) -Geometrie analitica ın spatiu si geome-
trie diferentiala, (C.d.p.), EDP, Bucuresti, 1973.[12] Papaghiuc N. , C. Calin - Algebra liniara si geometrie, Editura
Performantica, Iasi, 2003.[13] Pop Ioan, Neagu Gh. -Algebra liniara si geometrie analitica ın
plan si spatiu, Editura Plumb, Bacau, 1996[14] Procopiuc Gh. - Matematica, Univ. Tehnica Iasi, 1999.[15] Rudner V. , C. Nicolaescu - Probleme de matematici speciale,
EDP, Bucuresti, 1982.[16] Gh. I. Sabac - Matematici speciale, EDP, Bucuresti, 1981.
2
[17] R. Trandafir -Matematici superioare, Editura FACLA, Timisoara,1976.[18]R. Trandafir - Probleme de matematici pentru ingineri, Ed. Tehnica,
Bucuresti, 1977.[19] Udriste C. - Probleme de algebra liniara, geometrie analitica si
diferentiala, EDP, Bucuresti, 1976.[20] Udriste C. (colectiv) - Probleme de algebra liniara, geometrie si
ecuatii diferentiale, EDP, Bucuresti, 1981.[21] Udriste C. - Aplicatii de algebra, geometrie si ecuatii diferentiale,
EDP (RA), Bucuresti, 1993.


















