
InstrVI_4sa
17
4 - 1 4. Discretizarea sistemelor continue 4.1. Sisteme de reglare continuale Sistemele automate moderne combină în bucla de reglare dispozitive pur numerice (calculatorul de proces, microcontrollerul) cu dispozitive continuale (care au mărimi de intrare şi de ieşire funcţii continuale, definite la orice moment de timp şi reprezentate prin funcţii analitice f(t)). Un sistem de reglare se numeşte continual dacă toate dispozitivele componente ale sistemului de reglare sunt dispozitive cu funcţionare continuă în timp. Bucla de reglare convenţională este de forma: R(s) r(t) H R (s) H F (s) E(s) e(t) U(s) u(t) Y(s) y(t) P(s) p(t) Fig. 4.1. Schema generală a unui sistem de reglare convenţional Semnificaţiile semnalelor sunt: - r(t) reprezintă semnalul de referinţă pe care trebuie să-l urmărească mărimea de ieşire y(t); - e(t) reprezintă eroarea sistemului, e(t) = r(t) – y(t); - u(t) reprezintă semnalul de comandă furnizat de regulator către partea fixă; - y(t) este semnalul de ieşire din partea fixă sau mărimea care se reglează; - p(t) este semnalul perturbator care tinde să modifice valoarea mărimii de ieşire y(t). Dispozitivele componente sunt: - regulatorul, reprezentat prin funcţia de transfer H R (s); - partea fixă, reprezentată prin funcţia de transfer H F (s) şi care este ansamblul element de execuţie + instalaţie tehnologică + traductor. Toate semnalele de timp care leagă dispozitivele de mai sus sunt semnale cu existenţă continuă în timp, definite deci la orice moment de timp, pe care le vom numi continuale (Obs. Pentru a nu face confuzie cu semnalele continue în sens matematic, semnalele continuale nu sunt neapărat semnale continue în timp, putând avea şi discontinuităţi). Prin procesul de proiectare a unui sistem de reglare se găseşte, în final, o funcţie de transfer pentru regulator. Sistemul în buclă închisă din Fig. 4.1 va avea performanţele dorite de proiectant, performanţe care pot fi analizate prin simularea funcţionării sistemului de reglare pe un anumit interval de timp, în prezenţa diferitelor semnale de test aplicate de obicei pe referinţă. Prin performanţe bune înţelegem un anumit comportament la semnalele de referinţă şi la semnalele perturbatoare. Un sistem de reglare trebuie, în general, să conducă la urmărirea cât mai precisă şi mai rapidă a mărimii de referinţă de către mărimea de ieşire precum şi la o cât mai bună rejectare a influenţelor mărimilor perturbatoare. 4.2. Sisteme de reglare hibride Evoluţia calculatoarelor numerice a permis introducerea acestora în sistemele de reglare automată. Un sistem numeric, care prelucrează secvenţe de intrare numerice oferind la ieşire tot secvenţe numerice, are o serie de avantaje faţă de sistemele continuale. Putem să enumerăm câteva asemenea avantaje: - Un semnal numeric este în mai mică măsură afectat de perturbaţii. Semnalele numerice sunt de obicei reprezentate de două niveluri de informaţie distincte pe care, formal, le denumim
-
Upload
alin-cristian -
Category
Documents
-
view
18 -
download
0
description
Instrumentatie Virtuala
Transcript of InstrVI_4sa
4 - 1
4. Discretizarea sistemelor continue 4.1. Sisteme de reglare continuale
Sistemele automate moderne combină în bucla de reglare dispozitive pur numerice (calculatorul de proces, microcontrollerul) cu dispozitive continuale (care au mărimi de intrare şi de ieşire funcţii continuale, definite la orice moment de timp şi reprezentate prin funcţii analitice f(t)).
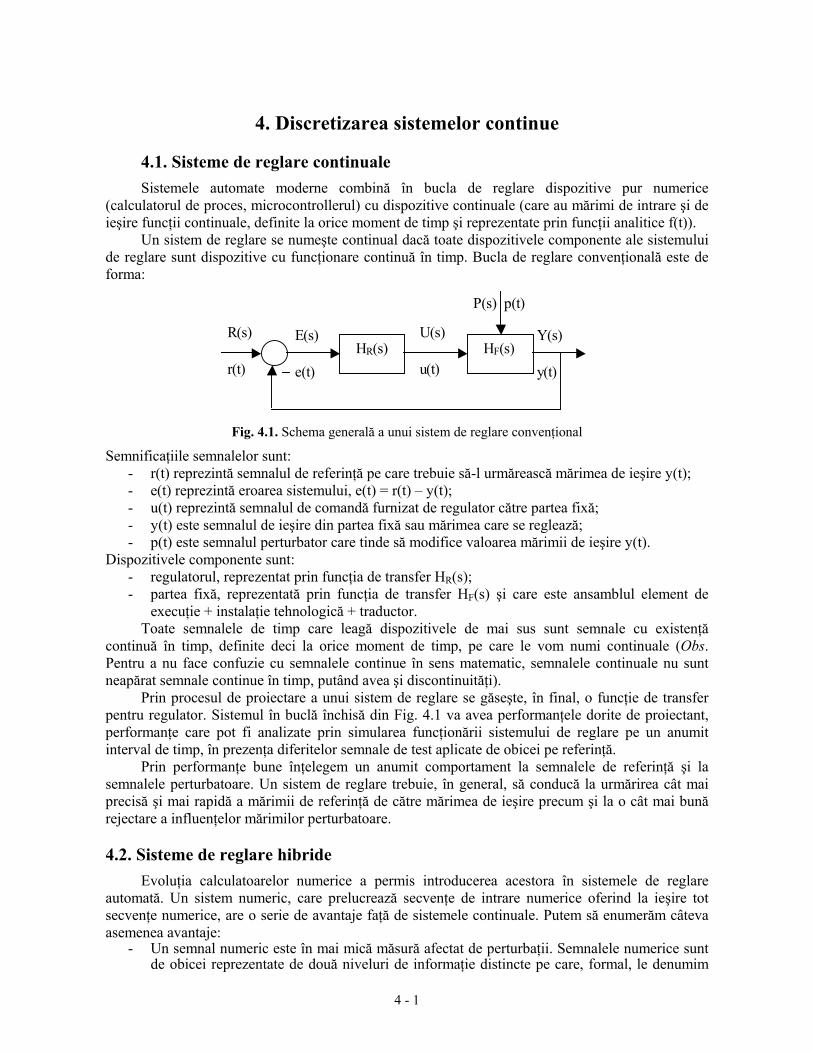
Un sistem de reglare se numeşte continual dacă toate dispozitivele componente ale sistemului de reglare sunt dispozitive cu funcţionare continuă în timp. Bucla de reglare convenţională este de forma:
R(s) r(t)
HR(s) HF(s) E(s) e(t)
U(s) u(t)
Y(s) y(t)
P(s) p(t)
Fig. 4.1. Schema generală a unui sistem de reglare convenţional
Semnificaţiile semnalelor sunt: - r(t) reprezintă semnalul de referinţă pe care trebuie să-l urmărească mărimea de ieşire y(t); - e(t) reprezintă eroarea sistemului, e(t) = r(t) – y(t); - u(t) reprezintă semnalul de comandă furnizat de regulator către partea fixă; - y(t) este semnalul de ieşire din partea fixă sau mărimea care se reglează; - p(t) este semnalul perturbator care tinde să modifice valoarea mărimii de ieşire y(t).
Dispozitivele componente sunt: - regulatorul, reprezentat prin funcţia de transfer HR(s); - partea fixă, reprezentată prin funcţia de transfer HF(s) şi care este ansamblul element de
execuţie + instalaţie tehnologică + traductor. Toate semnalele de timp care leagă dispozitivele de mai sus sunt semnale cu existenţă
continuă în timp, definite deci la orice moment de timp, pe care le vom numi continuale (Obs. Pentru a nu face confuzie cu semnalele continue în sens matematic, semnalele continuale nu sunt neapărat semnale continue în timp, putând avea şi discontinuităţi). Prin procesul de proiectare a unui sistem de reglare se găseşte, în final, o funcţie de transfer pentru regulator. Sistemul în buclă închisă din Fig. 4.1 va avea performanţele dorite de proiectant, performanţe care pot fi analizate prin simularea funcţionării sistemului de reglare pe un anumit interval de timp, în prezenţa diferitelor semnale de test aplicate de obicei pe referinţă.
Prin performanţe bune înţelegem un anumit comportament la semnalele de referinţă şi la semnalele perturbatoare. Un sistem de reglare trebuie, în general, să conducă la urmărirea cât mai precisă şi mai rapidă a mărimii de referinţă de către mărimea de ieşire precum şi la o cât mai bună rejectare a influenţelor mărimilor perturbatoare. 4.2. Sisteme de reglare hibride
Evoluţia calculatoarelor numerice a permis introducerea acestora în sistemele de reglare automată. Un sistem numeric, care prelucrează secvenţe de intrare numerice oferind la ieşire tot secvenţe numerice, are o serie de avantaje faţă de sistemele continuale. Putem să enumerăm câteva asemenea avantaje:
- Un semnal numeric este în mai mică măsură afectat de perturbaţii. Semnalele numerice sunt de obicei reprezentate de două niveluri de informaţie distincte pe care, formal, le denumim

4 - 2
biţi: “0” şi “1”. Suportul fizic al acestor biţi este foarte diferit: niveluri de tensiune TTL (“0” = 0 V, “1” = 5 V), magnetizarea sau nu a unor particule de material magnetic (dischete floppy, hard-disk), încărcarea sau descărcarea unor condensatoare (memoria RAM, flash), reflectarea sau nu a unui fascicol laser (CD-ROM, DVD) sau emiterea sau nu a unui fascicol luminos (transmisia pe fibră optică). Indiferent de suportul fizic, informaţia este una de nivel (“low” sau “high”). În mod normal este mult mai greu de alterat un nivel pentru a-l face de nerecunoscut decât informaţia temporală conţinută de un semnal analogic.
- Un semnal numeric este mult mai uşor de stocat pe diferite suporturi. - Un semnal numeric este mult mai uşor de prelucrat matematic cu ajutorul unui sistem de
calcul. Atât analiza unui semnal numeric cât şi sinteza sa se fac mult mai uşor decât în cazul unui semnal continuu.
- Un semnal numeric este mult mai uşor de transmis la distanţă (cablu electric, fibră optică, unde electromagnetice (wireless)).
- Un semnal numeric este mult mai uşor de reprezentat grafic (pe display, plotter, imprimantă) Este evidentă cauza pentru care se preferă astăzi, aproape în exclusivitate, introducerea
dispozitivelor numerice de conducere. Sistemul de reglare continual din Fig. 4.1 se va transforma în:
R(s) r(t)
HR(z)ARN
HF(s) E(s) e(t)
U(s) u(t)
Y(s) y(t)
P(s) p(t)
C A N
CNA
E(z) {e(kTe)}
U(z) {u(kTe)}
Sistem discret
Fig. 4.2. Sistem hibrid de reglare (combinaţie între un sistem discret şi unul continuu)
unde ARN este algoritmul de reglare numerică.
Problemele care se pun sunt: 1. Ce legătură există între E(s) şi E(z) ? 2. Ce legătură există între HR(s) şi HR(z) ?
4.3. Discretizarea semnalelor continuale
Pentru a stabili legătura dintre transformata Z a semnalului eşantionat şi transformata Laplace a semnalului continual este necesară modelarea fenomenul de eşantionare prin multiplicare cu o serie de impulsuri Dirac, conform proprietăţilor semnalelor de tip distribuţie.
Fie un semnal continuu u(t). Aplicat la intrarea unui CAN, la ieşire vom obţine o secvenţă numerică {u(k)}.
CA N
u(t)U(s)
{uk}={u(kTe)}U(z)
Fig. 4.3. CAN. Discretizarea unui semnal continual
Definim următoarele semnale:
( ) ( )
( ) ( ) ( )
( ) ( )
−⋅−δ=
−⋅=
=⋅=
=⋅=
∑∞
=
DiracimpulsurideSeriaTkttp
esantionatSemnalultptutu
eesantionardeperioadaT,Tkt
tuTkuu
0ke
*
ee
ek
(4.1)
Se observă că primul semnal este un semnal discret, o secvenţă de numere, reprezentat de eşantioanele culese la momente de timp egal distribuite, multiplu al perioadei de eşantionare Te. Al
4 - 3
doilea semnal este de fapt o distribuţie, nu o funcţie în sensul obişnuit. După cum se ştie, multiplicarea unei funcţii cu un impuls Dirac conduce la o distribuţie Dirac multiplicată cu valoarea funcţiei la momentul aplicării impulsului Dirac:
( ) ( )( ) ( )
⋅−δ=⋅−δ⋅δ=⋅δ
)a(fat)t(fat)0(ft)t(ft
(4.2)
Ţinând cont de această proprietate, putem scrie:
( ) ( ) ( ) ( ) ( ) ( ) ( ) ( ) ( )∑∑∑∞
=
∞
=
∞
=
⋅−δ⋅⋅=⋅−δ⋅=⋅−δ⋅=⋅=0k
ee0k
e0k
e* TktTkuTkttuTkttutptutu
Cele două semnale se mai scriu:
{ }
( ) ( )
( ) ( ) ( ) ( ) ( )
( ) ( )
⋅−δ=
⋅−δ⋅⋅=⋅=
⋅==⋅=
∑
∑∞
=
∞
=
∈
0ke
0kee
*
eek
Nkk
Tkttp
TktTkutptutu
TkttuTkuu
u
(4.3)
u(t)
p(t)
1
t
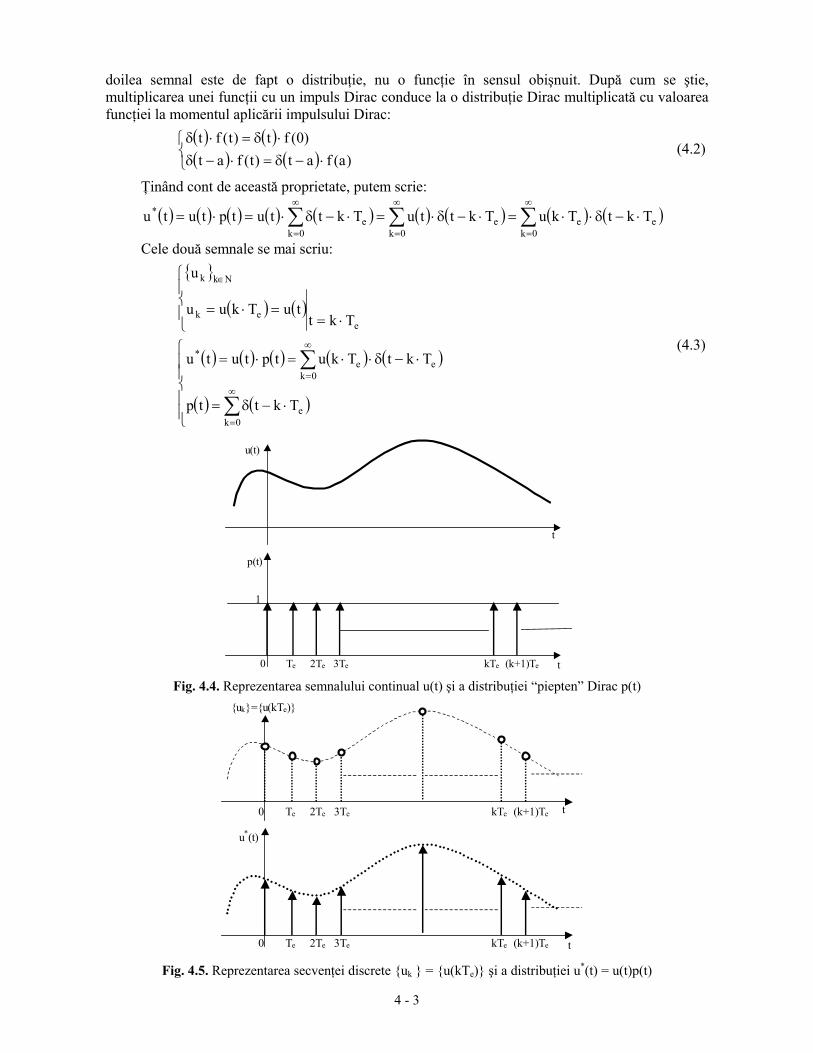
t Te 2Te 3Te kTe (k+1)Te 0 Fig. 4.4. Reprezentarea semnalului continual u(t) şi a distribuţiei “piepten” Dirac p(t)
{uk}={u(kTe)}
u*(t)
t
t Te 2Te 3Te kTe (k+1)Te 0
Te 2Te 3Te kTe (k+1)Te 0
Fig. 4.5. Reprezentarea secvenţei discrete {uk } = {u(kTe)} şi a distribuţiei u*(t) = u(t)p(t)

4 - 4
Primul semnal este o secvenţă numerică la care putem calcula transformata Z. Al doilea semnal este o distribuţie singulară la care putem calcula transformata Laplace. Obţinem:
( ) { }{ } ( )∑∑∞
=
−∞
=
− ⋅⋅=⋅==0k
ke
0k
kkk zTkuzuuZzU (4.4)
( ) ( ){ } ( ) ( ) ( )
( ) [ ]k
0k
sTk
*
0k
sTke
0kee
**
e
e
eusU
eTkuTktTkuLtuLsU
−∞
=
⋅
∞
=
⋅⋅−∞
=
∑
∑∑
⋅=
⋅⋅=
⋅−δ⋅⋅==
(4.5)
Din compararea relaţiei (4.4) cu (4.5), rezultă
( ) ( )esT
*ez
sUzU=
= (4.6)
Relaţia (4.6) este cea care face legătura între transformata Z a unei secvenţe de eşantioane şi transformata Laplace a semnalului continuu din care au provenit eşantioanele.
Prelucrând mai departe relaţia (4.3), obţinem:
( ) ( ) ( ){ } ( ) ( ) ( ) ( ) ξξ−⋅ξπ
==⋅= ∫∞+
∞−
dsPUj2
1sP*sUtptuLsUjc
jc
* , 0c ≥ (4.7)
( ) ( ){ } ( ) ( ) ( )
( ) [ ] 1e,e11
e1
)e(lim1eesP
dteTktdteTktdtetptpLsP
eee
e
ee sTTssT
nsT
nk
0k
Ts
0k
Tks
0k 0
ste
0
st
0ke
0
st
<−
=−
−===
⋅⋅−δ=⋅
⋅−δ=⋅==
−⋅−−
−
∞→∞
=
⋅−∞
=
⋅⋅−
∞
=
∞−
∞−
∞
=
∞−
∑∑
∑∫∫ ∑∫ (4.8)
Introducând (4.8) în relaţia (4.7) obţinem:
( ) ( ) ( ) ( ) ( ) ( ) ξ⋅−
⋅ξπ
=ξ−
⋅ξπ
=ξξ−⋅ξπ
= ∫∫∫∞+
∞−⋅ξ⋅−
∞+
∞−⋅ξ−−
∞+
∞−
dee1
1Uj2
1de1
1Uj2
1dsPUj2
1sUjc
jcTTs
jc
jcTs
jc
jc
*eee
( ) ( ) ( ) ξ⋅−
⋅ξπ
==
= ∫∞+
∞−⋅ξ−
dez1
1Uj2
1ze
sUzUjc
jcT1sT
*ee
(4.9)
Relaţia (4.9) reprezintă legătura între transformata Z a semnalului eşantionat şi transformata Laplace a semnalului continual. 4.4. Discretizarea sistemelor continue
Se pune problema discretizării unui SLIT continuu. Acesta este descris de o funcţie de transfer Hc(s) care, în urma discretizării, se transformă într-o funcţie de transfer Hd(z).
Nu există numai o singură metodă de discretizare a unui sistem continuu, aşa cum este cazul relaţiei (4.9) pentru discretizarea semnalelor continuale. Discretizarea funcţiei de transfer a unui sistem continuu se bazează pe discretizarea răspunsului sistemului la anumite semnale tip sau pe anumite substituţii directe, aşa cum este cazul în transformările biliniare.
4.4.1. Dicretizarea sistemelor prin identitatea răspunsului continuu şi discret la semnale de intrare tip (impuls sau treaptă) sau prin substituţia z = esTe
4.4.1.1. Discretizarea sistemelor prin identitatea răspunsului indicial continuu (la intrare treaptă unitară continuă 1(t)) cu răspunsul indicial discret (la intrare treaptă unitară discretă 1(k))
Un SLIT continuu, caracterizat de funcţia de transfer continuă Hc(s) se poate discretiza astfel încât răspunsul său indicial la momentele de eşantionare să coincidă cu răspunsul indicial discret.

4 - 5
Hc(s)
Hd(z)
u(t)=1(t)
{uk}={1(k)}
Yc(s)yc(t)
Te Y*c(s)
{yc(kTe)}
Yd(z){yd(k)}
Fig. 4.6. Discretizarea sistemului continuu cu metoda identităţii răspunsurilor indiciale continue şi discrete
Condiţia de discretizare se scrie astfel:
( ) ( ){ } ( ) ( ) ξ⋅−
⋅ξπ
==
== ∫∞+
∞−⋅ξ−
dez1
1Yj2
1ez
sYsYZzYjc
jcT1csTc
*cd ee
Utilizând teorema reziduurilor, obţinem:
( ) ( ){ } ( )( )
∑ξ
⋅ξ−
⋅−⋅ξ==
ce
YpoliiT1ccd ez1
1YzResYZzY (4.10)
În cazul nostru, obţinem
( ) ( ) ( ) ( ) ( )
( ) ( ) ( ) ( ) ( )
−⋅=⇒
−=⇒=
⋅=⇒=⇒=
−− 1dd1
cc
z11zHzY
z11zUk1ku
s1sHsY
s1sUt1tu
Relaţia (4.10) se mai scrie:
( ) ( ) ( ){ } ( )
⋅==
−⋅= − s
1sHZsYZz11zHzY cc1dd . Se obţine:
( ) ( ) ( ) ( ) ( )( )
∑ξ
⋅ξ−−−
⋅−⋅
ξ⋅ξ⋅−=
⋅⋅−=
0,HpoliiT1c
1c
1d
ceez1
11HzRez1s1sHZz1zH (4.11)
Relaţia (4.11) stabileşte modul de calcul al funcţiei de transfer a sistemului discretizat Hd(z) pornind de la funcţia de transfer a sistemului continuu Hc(s). Această metodă de discretizare are o aplicabilitate deosebită în sistemele automate deoarece ea se aplică întotdeauna pentru discretizarea părţii fixe a buclei de reglare. Din Fig. 4.2. se observă că putem îngloba partea fixă continuă într-un subsistem discret. Pentru aceasta CAN care are ca intrare eroarea sistemului e(t) = r (t) - yc(t) se poate “distribui” către referinţa r(t) şi către mărimea de ieşire yc(t), obţinându-se sistemul din Fig. 4.7.
R(s) r(t)
HR(z)ARN
HF(s) U(s) u(t)
Yc(s) yc(t)
P(s) p(t)C A N
CNA
Z{E(s)} {e(kTe)}
U(z) {u(kTe)}
Sistem discret
C A N
Z{R(s)} {r(kTe)}
Z{Yc(s)} {yc(kTe)}
Fig. 4.7. SRA hibrid
Sistemul din Fig. 4.7 este echivalent cu sistemul discret din Fig. 4.8.
R(s) r(t)
HR(z)ARN
HdF(z)
Z{P(s)} {p(kTe)}
Z{E(s)} {e(kTe)}
U(z) {u(kTe)}
C A N
Z{R(s)} {r(kTe)}
Z{Yc(s)} {yc(kTe)}
Fig. 4.8. Echivalentul discretizat al SRA continuu
4 - 6
Extrapolatorul de ordinul 0, care transformă secvenţa discretă de intrare într-o mărime analogică continuală, constantă pe porţiuni, este chiar convertorul numeric-analogic CNA. Prin compararea celor două arhitecturi, obţinem:
( ) ( ){ } ( ) ( ){ }sHsHZsHsHZ)z(H EOZFCNAFdF ⋅=⋅= (4.12)
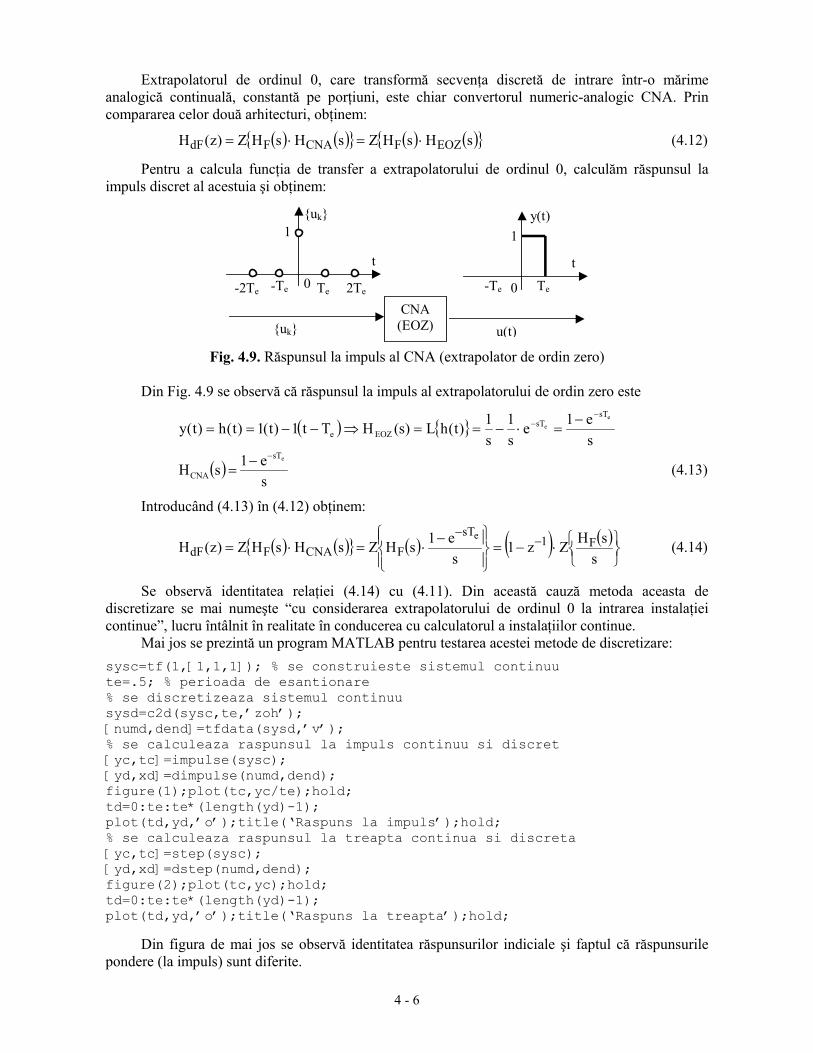
Pentru a calcula funcţia de transfer a extrapolatorului de ordinul 0, calculăm răspunsul la impuls discret al acestuia şi obţinem:
CNA (EOZ)
Te 2Te-Te -2Te Te 0 0
1 1
{uk} y(t)
-Te
{uk} u(t)
t t
Fig. 4.9. Răspunsul la impuls al CNA (extrapolator de ordin zero)
Din Fig. 4.9 se observă că răspunsul la impuls al extrapolatorului de ordin zero este
( ) { }se1e
s1
s1)t(hL)s(HTt1)t(1)t(h)t(y
ee
sTsT
EOZe
−− −
=⋅−==⇒−−==
( )se1sH
esT
CNA
−−= (4.13)
Introducând (4.13) în (4.12) obţinem:
( ) ( ){ } ( ) ( ) ( )
⋅−=
−
⋅=⋅= −−
ssHZz1
se1sHZsHsHZ)z(H F1
sTFCNAFdF
e (4.14)
Se observă identitatea relaţiei (4.14) cu (4.11). Din această cauză metoda aceasta de discretizare se mai numeşte “cu considerarea extrapolatorului de ordinul 0 la intrarea instalaţiei continue”, lucru întâlnit în realitate în conducerea cu calculatorul a instalaţiilor continue.
Mai jos se prezintă un program MATLAB pentru testarea acestei metode de discretizare: sysc=tf(1,[1,1,1]); % se construieste sistemul continuu te=.5; % perioada de esantionare % se discretizeaza sistemul continuu sysd=c2d(sysc,te,’zoh’); [numd,dend]=tfdata(sysd,’v’); % se calculeaza raspunsul la impuls continuu si discret [yc,tc]=impulse(sysc); [yd,xd]=dimpulse(numd,dend); figure(1);plot(tc,yc/te);hold; td=0:te:te*(length(yd)-1); plot(td,yd,’o’);title(‘Raspuns la impuls’);hold; % se calculeaza raspunsul la treapta continua si discreta [yc,tc]=step(sysc); [yd,xd]=dstep(numd,dend); figure(2);plot(tc,yc);hold; td=0:te:te*(length(yd)-1); plot(td,yd,’o’);title(‘Raspuns la treapta’);hold;
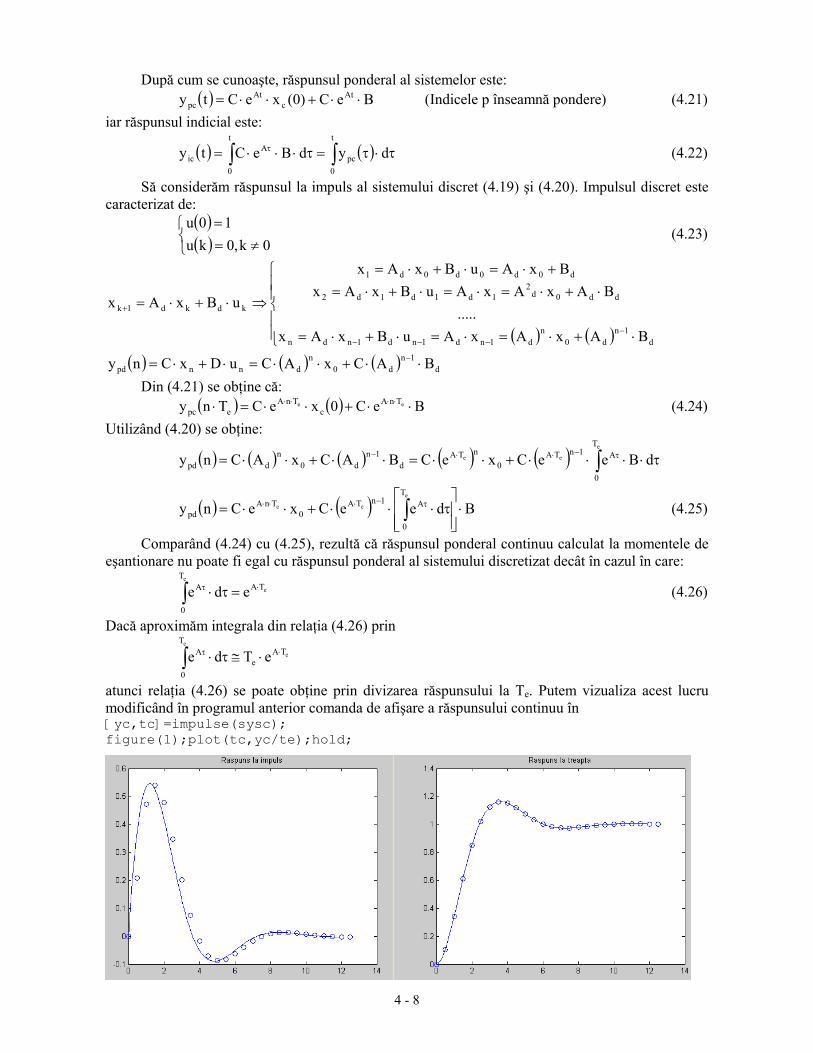
Din figura de mai jos se observă identitatea răspunsurilor indiciale şi faptul că răspunsurile pondere (la impuls) sunt diferite.

4 - 7
Fig. 4.10. Răspunsurile pondere şi indiciale ale sistemului continuu şi a celui discretizat
4.4.1.2. Reprezentarea de stare a sistemului discretizat
Sistemul continuu )s(HF este descris de ecuaţiile de stare forma: ( ) ( ) ( )
( ) ( )
+=+=
tDutCxytButAxtx&
(4.15)
Răspunsul general al sistemului la intrarea u(t) va fi (Obs. Indicele i înseamnă indicial):
( ) ( ) ( ) ( ) ( )
( ) ( ) ( ) ( ) ( )0t
t
tA0c
ttAic
t
t
tA0c
ttAc
tt,)t(uDduBeCtxeCty
duBetxetx
0
0
0
0
≥
⋅+τ⋅τ⋅⋅⋅+⋅⋅=
τ⋅τ⋅⋅+⋅=
∫
∫
τ−−
τ−−
(4.16)
În cazul în care sistemul este comandat de un calculator de proces, atunci u(t) va fi un semnal constant pe porţiuni de forma:
( ) ( ) ( ) eee T1ktTk,Tkutu~ ⋅+<≤⋅⋅= (4.17) În (4.16) considerăm:
( ) ( )( ) ( ) ( )( )( )
[ ) ( )( ) ( ) ( ) ( )∫
∫
α⋅α+⋅⋅⋅+⋅⋅=⋅+⇒
∈αα+⋅=τ
τ⋅τ−⋅+⋅⋅+⋅⋅=⋅+⇒
⋅+=⋅=
α−
⋅+
⋅
τ
e
ee
e
e
e
T
0e
TAec
ATec
e
e
T1k
Tke
Aec
ATec
e
e0
dTku~BeTkxeT1kxT,0Tk
dT1ku~BeTkxeT1kxT1kt
Tkt
( )( ) ( ) ( ) ( )
( ) ( )
⋅⋅+⋅⋅=⋅
⋅⋅
α⋅⋅+⋅⋅=⋅+ ∫ α−
)Tk(uDTkxCTky
TkudBeTkxeT1kx
eeceic
e
T
0
TAec
ATec
e
ee
(4.18)
Sistemul echivalent discret este de forma:
⋅+⋅=⋅+⋅=+
kdkdk
kdkd1k
uDxCyuBxAx
(4.19)
Comparând (4.18) cu (4.19) observăm că modelul discretizat al sistemului continuu este descris de:
==
τ⋅⋅=
=
∫ τ
⋅
DDCC
,dBeB
eA
d
dT
0
Ad
TAd
e
e
(4.20)
4 - 8
După cum se cunoaşte, răspunsul ponderal al sistemelor este: ( ) BeC)0(xeCty At
cAt
pc ⋅⋅+⋅⋅= (Indicele p înseamnă pondere) (4.21) iar răspunsul indicial este:
( ) ( )∫∫ τ⋅τ=τ⋅⋅⋅= τt
0pc
t
0
Aic dydBeCty (4.22)
Să considerăm răspunsul la impuls al sistemului discret (4.19) şi (4.20). Impulsul discret este caracterizat de:
( )( )
≠==
0k,0ku10u
(4.23)
( ) ( )( ) ( ) ( ) d
1nd0
ndnnpd
d1n
d0n
d1nd1nd1ndn
dd0d2
1d1d1d2
d0d0d0d1
kdkd1k
BACxACuDxCny
BAxAxAuBxAx.....
BAxAxAuBxAxBxAuBxAx
uBxAx
⋅⋅+⋅⋅=⋅+⋅=
⋅+⋅=⋅=⋅+⋅=
⋅+⋅=⋅=⋅+⋅=+⋅=⋅+⋅=
⇒⋅+⋅=
−
−−−−
+
Din (4.21) se obţine că: ( ) ( ) BeC0xeCTny ee TnA
cTnA
epc ⋅⋅+⋅⋅=⋅ ⋅⋅⋅⋅ (4.24) Utilizând (4.20) se obţine:
( ) ( ) ( ) ( ) ( ) ∫ τ⋅⋅⋅⋅+⋅⋅=⋅⋅+⋅⋅= τ−⋅⋅−e
ee
T
0
A1nTA0
nTAd
1nd0
ndpd dBeeCxeCBACxACny
( ) ( ) BdeeCxeCnye
ee
T
0
A1nTA0
TnApd ⋅
τ⋅⋅⋅+⋅⋅= ∫ τ−⋅⋅⋅ (4.25)
Comparând (4.24) cu (4.25), rezultă că răspunsul ponderal continuu calculat la momentele de eşantionare nu poate fi egal cu răspunsul ponderal al sistemului discretizat decât în cazul în care:
e
eTA
T
0
A ede ⋅τ =τ⋅∫ (4.26)
Dacă aproximăm integrala din relaţia (4.26) prin
e
eTA
e
T
0
A eTde ⋅τ ⋅≅τ⋅∫
atunci relaţia (4.26) se poate obţine prin divizarea răspunsului la Te. Putem vizualiza acest lucru modificând în programul anterior comanda de afişare a răspunsului continuu în [yc,tc]=impulse(sysc); figure(1);plot(tc,yc/te);hold;
4 - 9
4.4.1.3. Discretizarea sistemelor prin identitatea răspunsului ponderal continuu (la intrare impuls Dirac δ(t)) cu răspunsul ponderal discret (la intrare impuls discret δ (k))
Un SLIT continuu, caracterizat de funcţia de transfer continuă Hc(s) se poate discretiza astfel încât răspunsul său ponderal la momentele de eşantionare să coincidă cu răspunsul ponderal discret:
Hc(s)
Hd(z)
u(t)= δ(t)
{uk}={δ(k)}
Yc(s)yc(t)
Te Y*c(s)
{yc(kTe)}
Yd(z){yd(k)}
Fig. 4.11. Discretizarea sistemului continuu cu metoda identităţii răspunsurilor pondere continue şi discrete
Considerăm semnalele:( ) ( ) ( ) ( ) ( )( ) ( ) ( ) ( ) ( )
=⇒=⇒==⇒=⇒δ=
zHzY1zUk1kusHsY1sUttu
dd
cc
Relaţia (4.10) se mai scrie: ( ) ( ) ( ){ } ( ){ }sHZsYZzHzY ccdd ===
( ) ( ){ } ( )( )
∑
⋅−⋅ξ==
ξ ⋅ξ−c
eHpolii T1ccdez1
1HzResHZzH (4.27)
Relaţia (27) stabileşte modul de calcul al funcţiei de transfer a sistemului discretizat Hd(z) pornind de la funcţia de transfer a sistemului continuu Hc(s) prin metoda răspunsului invariant la impuls.
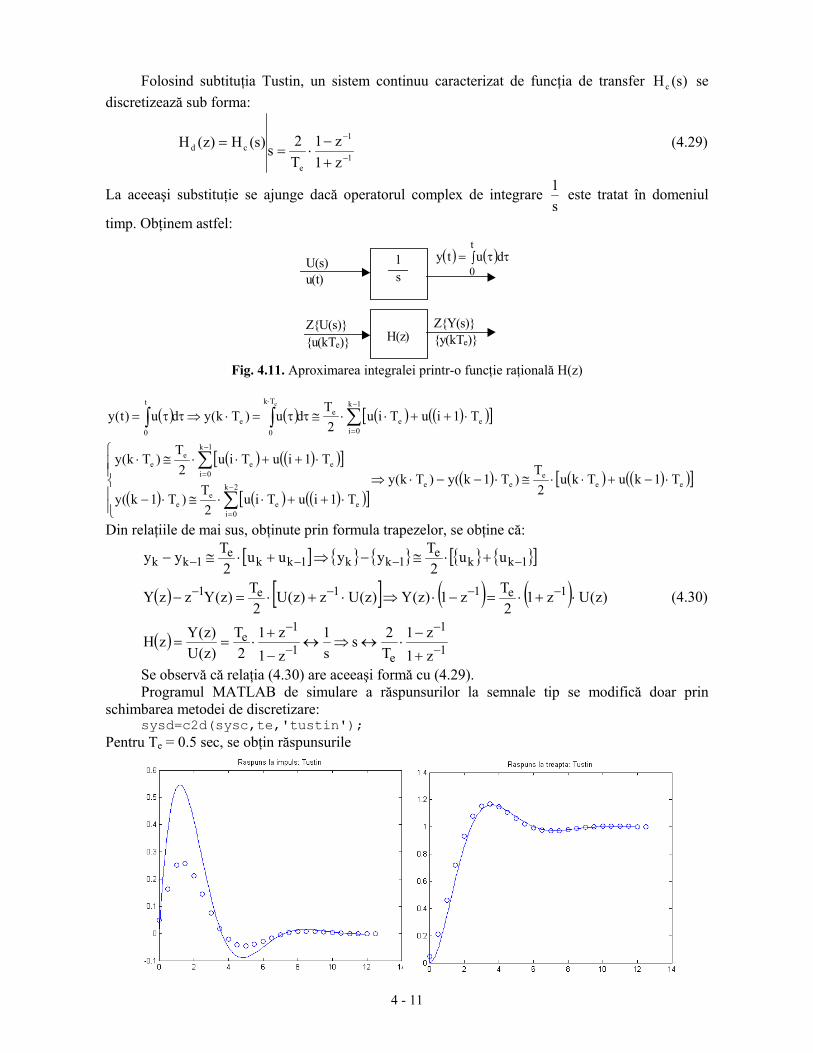
Programul MATLAB anterior va suferi modificarea: sysd=c2d(sysc,te,'imp');
Prin raţionamente asemănătoare cazului anterior, modificăm o comandă în: [yc,tc]=step(sysc); [yd,xd]=dstep(numd,dend); figure(2);plot(tc,yc/te);hold;
Se observă că, de data aceasta, modificarea se face în răspunsul la intrare treaptă. Pe măsură ce perioada de eşantionare scade, răspunsul indicial discret se depărtează de cel continuu.

4 - 10
Printre proprietăţile acestei metode de discretizare enumerăm:
- )z(Hd are acelaşi răspuns la impuls ca )s(Hc ; - Dacă )s(Hc este stabilă, atunci şi )z(Hd este stabilă; - )z(Hd nu păstrează răspunsul în frecvenţă al lui )s(Hc . Concluzionăm că există metode de discretizare care folosesc substituţia esTez = (metoda
răspunsului invariant la impuls sau la treaptă) într-o integrală de forma:
( ) ( ){ } ( )( )
( ) ( )
( ) ( )
ξ⋅ξ=ξ
ξ=ξ
⋅−⋅ξ== ∑
ξ⋅ξ−
treaptalairaspunsulumetoda,1HX
impulslairaspunsulumetoda,HXez1
1XzResHZzH
cc
cc
XpoliiT1ccd
ce
4.4.2. Dicretizarea sistemelor prin substituţii directe (transformări biliniare)
Aceste metode se bazează pe aproximarea esTez = prin forme raţionale. Aceste metode sunt bidirecţionale în sensul că se poate trece de la )s(Hc la )z(Hd dar şi invers. Substituţiile pentru s respectiv z sunt funcţii raţionale în variabila complementară (z respectiv s). 4.4.2.1. Discretizarea sistemelor prin substituţia Tustin (aproximarea integralei cu metoda trapezelor)
Pornim de la substituţia binecunoscută din relaţia (4.6) în care dezvoltăm în serie Taylor exponenţiala şi o aproximăm până la ordinul 1:
1z1z
T2s
1z1z
2T
s
2T
s1
2T
s1z
2T
s1
2T
s1
e
eeeez
e
e
e
e
e
e
2Ts
2Ts
2Ts
2TssT
e
eee
e
+−
⋅≅⇒+−
≅⇒−
+≅
−
+≅=⋅==
−
Substituţia Tustin se scrie sub formele
+−
⋅=
+−
⋅=
−
−
1
1
e
e
z1z1
T2s
1z1z
T2s
(4.28)
4 - 11
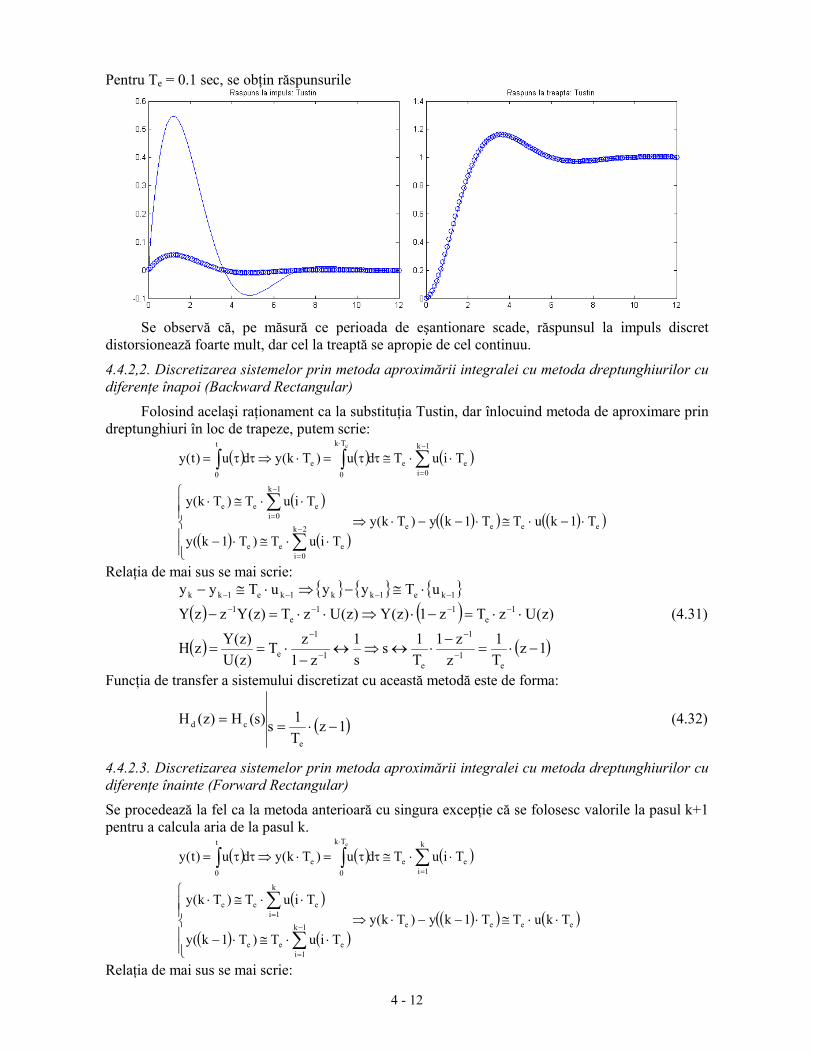
Folosind subtituţia Tustin, un sistem continuu caracterizat de funcţia de transfer )s(Hc se discretizează sub forma:
1
1
e
cd
z1z1
T2s)s(H)z(H
−
−
+−
⋅== (4.29)
La aceeaşi substituţie se ajunge dacă operatorul complex de integrare s1 este tratat în domeniul
timp. Obţinem astfel:
1s
( ) ( )∫ ττ=t
0dutyU(s)
u(t)
H(z) Z{U(s)}{u(kTe)}
Z{Y(s)}{y(kTe)}
Fig. 4.11. Aproximarea integralei printr-o funcţie raţională H(z)
( ) ( ) ( ) ( )( )[ ]
( ) ( )( )[ ]
( ) ( ) ( )( )[ ]( ) ( ) ( )( )[ ]ee
eee2k
0iee
ee
1k
0iee
ee
1k
0iee
eTk
0e
t
0
T1kuTku2
T)T1k(y)Tk(y
T1iuTiu2
T)T1k(y
T1iuTiu2
T)Tk(y
T1iuTiu2
Tdu)Tk(ydu)t(y
e
⋅−+⋅⋅≅⋅−−⋅⇒
⋅++⋅⋅≅⋅−
⋅++⋅⋅≅⋅
⋅++⋅⋅≅ττ=⋅⇒ττ=
∑
∑
∑∫∫
−
=
−
=
−
=
⋅
Din relaţiile de mai sus, obţinute prin formula trapezelor, se obţine că:
[ ] { } { } { } { }[ ]
( ) [ ] ( ) ( )( ) 1
1
e1
1e
1e11e1
1kke
1kk1kke
1kk
z1z1
T2s
s1
z1z1
2T
)z(U)z(YzH
)z(Uz12
Tz1)z(Y)z(Uz)z(U2
T)z(YzzY
uu2
Tyyuu2
Tyy
−
−
−
−
−−−−
−−−−
+
−⋅↔⇒↔
−
+⋅==
⋅+⋅=−⋅⇒⋅+⋅=−
+⋅≅−⇒+⋅≅−
(4.30)
Se observă că relaţia (4.30) are aceeaşi formă cu (4.29). Programul MATLAB de simulare a răspunsurilor la semnale tip se modifică doar prin
schimbarea metodei de discretizare: sysd=c2d(sysc,te,'tustin');
Pentru Te = 0.5 sec, se obţin răspunsurile
4 - 12
Pentru Te = 0.1 sec, se obţin răspunsurile
Se observă că, pe măsură ce perioada de eşantionare scade, răspunsul la impuls discret
distorsionează foarte mult, dar cel la treaptă se apropie de cel continuu.
4.4.2,2. Discretizarea sistemelor prin metoda aproximării integralei cu metoda dreptunghiurilor cu diferenţe înapoi (Backward Rectangular)
Folosind acelaşi raţionament ca la substituţia Tustin, dar înlocuind metoda de aproximare prin dreptunghiuri în loc de trapeze, putem scrie:
( ) ( ) ( )
( )
( ) ( )( )( ) ( )( )eeee2k
0ieee
1k
0ieee
1k
0iee
Tk
0e
t
0
T1kuTT1ky)Tk(yTiuT)T1k(y
TiuT)Tk(y
TiuTdu)Tk(ydu)t(ye
⋅−⋅≅⋅−−⋅⇒
⋅⋅≅⋅−
⋅⋅≅⋅
⋅⋅≅ττ=⋅⇒ττ=
∑
∑
∑∫∫
−
=
−
=
−
=
⋅
Relaţia de mai sus se mai scrie: { } { } { }
( ) ( )( ) ( )1z
T1
zz1
T1s
s1
z1zT
)z(U)z(YzH
)z(UzTz1)z(Y)z(UzT)z(YzzY
uTyyuTyy
e1
1
e1
1
e
1e
11e
11ke1kk1ke1kk
−⋅=−
⋅↔⇒↔−
⋅==
⋅⋅=−⋅⇒⋅⋅=−
⋅≅−⇒⋅≅−
−
−
−
−
−−−−
−−−−
(4.31)
Funcţia de transfer a sistemului discretizat cu această metodă este de forma:
( )1zT1s)s(H)z(H
e
cd −⋅== (4.32)
4.4.2.3. Discretizarea sistemelor prin metoda aproximării integralei cu metoda dreptunghiurilor cu diferenţe înainte (Forward Rectangular)
Se procedează la fel ca la metoda anterioară cu singura excepţie că se folosesc valorile la pasul k+1 pentru a calcula aria de la pasul k.
( ) ( ) ( )
( )
( ) ( )( )( ) ( )eeee1k
1ieee
k
1ieee
k
1iee
Tk
0e
t
0
TkuTT1ky)Tk(yTiuT)T1k(y
TiuT)Tk(y
TiuTdu)Tk(ydu)t(ye
⋅⋅≅⋅−−⋅⇒
⋅⋅≅⋅−
⋅⋅≅⋅
⋅⋅≅ττ=⋅⇒ττ=
∑
∑
∑∫∫
−
=
=
=
⋅
Relaţia de mai sus se mai scrie:
4 - 13
{ } { } { }( ) ( )( ) ( )
z1z
T1z1
T1s
s1
z11T
)z(U)z(YzH
)z(UTz1)z(Y)z(UT)z(YzzY
uTyyuTyy
e
1
e1e
e1
e1
ke1kkke1kk
−⋅=−⋅↔⇒↔
−⋅==
⋅=−⋅⇒⋅=−
⋅≅−⇒⋅≅−
−−
−−−−
(4.33)
Funcţia de transfer a sistemului discretizat cu această metodă este de forma:
z1z
T1s)s(H)z(He
cd −⋅== (4.34)
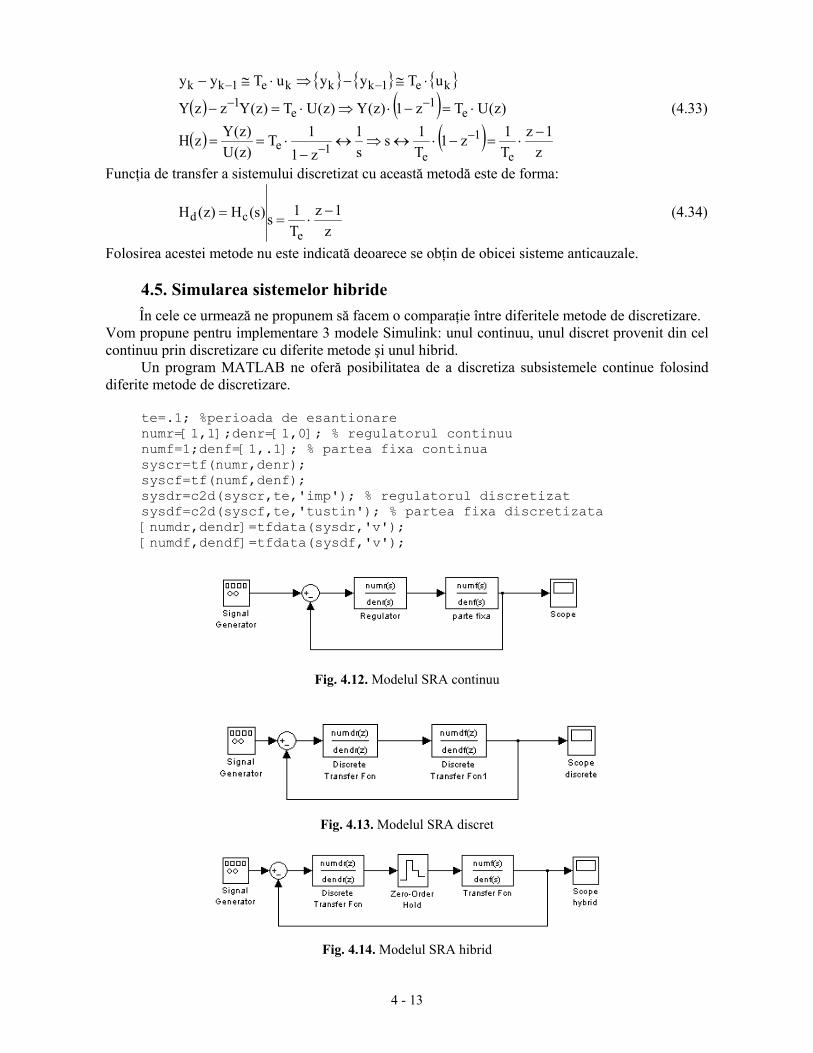
Folosirea acestei metode nu este indicată deoarece se obţin de obicei sisteme anticauzale. 4.5. Simularea sistemelor hibride
În cele ce urmează ne propunem să facem o comparaţie între diferitele metode de discretizare. Vom propune pentru implementare 3 modele Simulink: unul continuu, unul discret provenit din cel continuu prin discretizare cu diferite metode şi unul hibrid.
Un program MATLAB ne oferă posibilitatea de a discretiza subsistemele continue folosind diferite metode de discretizare.
te=.1; %perioada de esantionare numr=[1,1];denr=[1,0]; % regulatorul continuu numf=1;denf=[1,.1]; % partea fixa continua syscr=tf(numr,denr); syscf=tf(numf,denf); sysdr=c2d(syscr,te,'imp'); % regulatorul discretizat sysdf=c2d(syscf,te,'tustin'); % partea fixa discretizata [numdr,dendr]=tfdata(sysdr,'v'); [numdf,dendf]=tfdata(sysdf,'v');
Fig. 4.12. Modelul SRA continuu
Fig. 4.13. Modelul SRA discret
Fig. 4.14. Modelul SRA hibrid
4 - 14
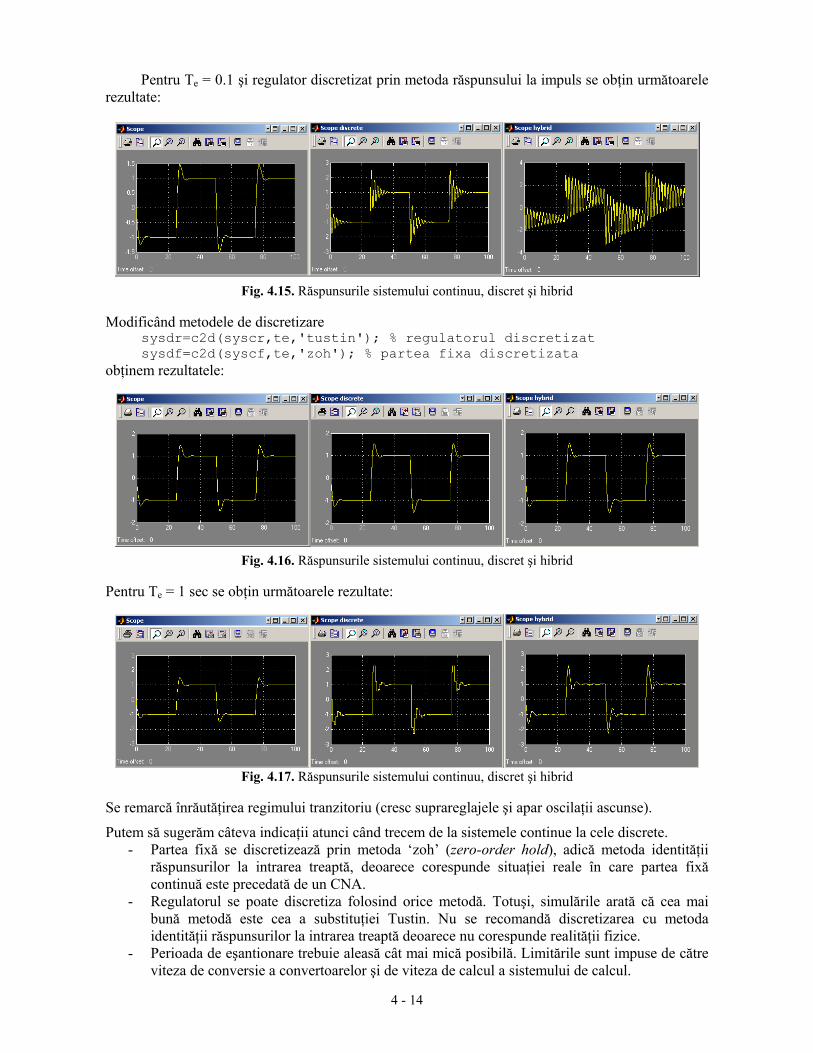
Pentru Te = 0.1 şi regulator discretizat prin metoda răspunsului la impuls se obţin următoarele rezultate:
Fig. 4.15. Răspunsurile sistemului continuu, discret şi hibrid
Modificând metodele de discretizare
sysdr=c2d(syscr,te,'tustin'); % regulatorul discretizat sysdf=c2d(syscf,te,'zoh'); % partea fixa discretizata
obţinem rezultatele:
Fig. 4.16. Răspunsurile sistemului continuu, discret şi hibrid
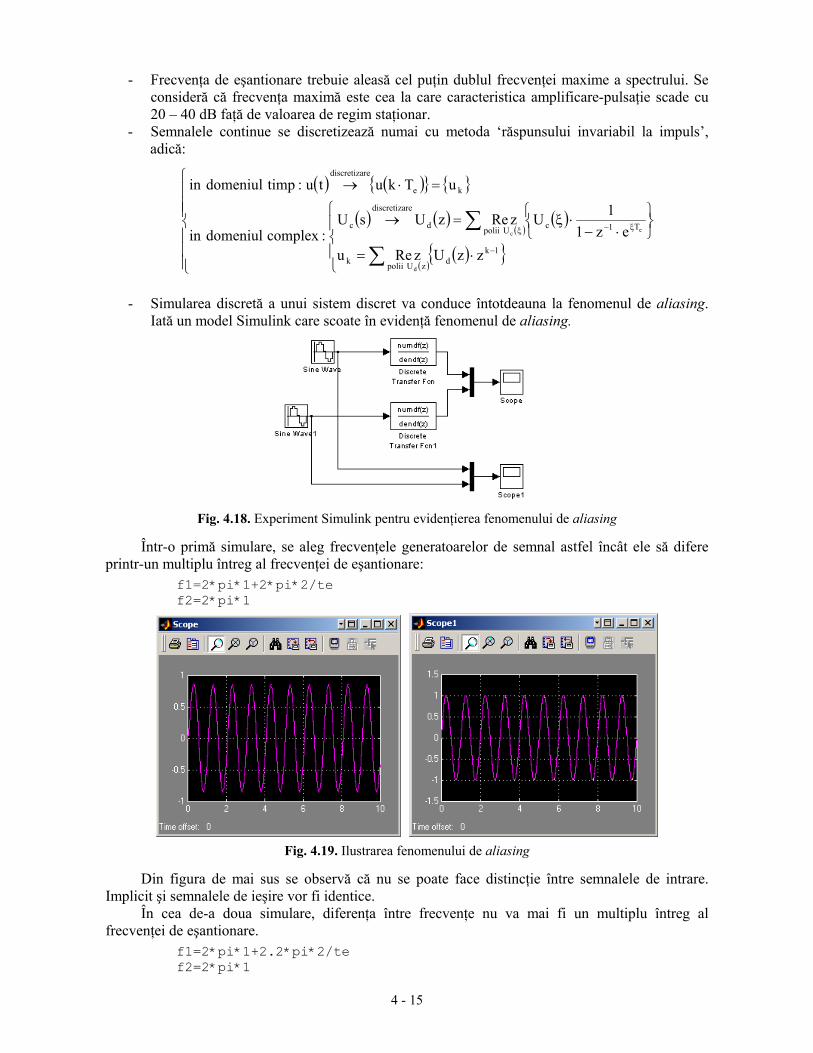
Pentru Te = 1 sec se obţin următoarele rezultate:
Fig. 4.17. Răspunsurile sistemului continuu, discret şi hibrid
Se remarcă înrăutăţirea regimului tranzitoriu (cresc suprareglajele şi apar oscilaţii ascunse).
Putem să sugerăm câteva indicaţii atunci când trecem de la sistemele continue la cele discrete. - Partea fixă se discretizează prin metoda ‘zoh’ (zero-order hold), adică metoda identităţii
răspunsurilor la intrarea treaptă, deoarece corespunde situaţiei reale în care partea fixă continuă este precedată de un CNA.
- Regulatorul se poate discretiza folosind orice metodă. Totuşi, simulările arată că cea mai bună metodă este cea a substituţiei Tustin. Nu se recomandă discretizarea cu metoda identităţii răspunsurilor la intrarea treaptă deoarece nu corespunde realităţii fizice.
- Perioada de eşantionare trebuie aleasă cât mai mică posibilă. Limitările sunt impuse de către viteza de conversie a convertoarelor şi de viteza de calcul a sistemului de calcul.
4 - 15
- Frecvenţa de eşantionare trebuie aleasă cel puţin dublul frecvenţei maxime a spectrului. Se consideră că frecvenţa maximă este cea la care caracteristica amplificare-pulsaţie scade cu 20 – 40 dB faţă de valoarea de regim staţionar.
- Semnalele continue se discretizează numai cu metoda ‘răspunsului invariabil la impuls’, adică:
( ) ( ){ } { }
( ) ( )( )
( )
( )( ){ }
⋅=
⋅−⋅ξ=→
=⋅→
−
ξ−ξ
∑
∑1k
dzUpoliik
T1cUpoliid
rediscretiza
c
ke
rediscretiza
zzUzReuez1
1UzRezUsU:complexdomeniulin
uTkutu:timpdomeniulin
d
ec
- Simularea discretă a unui sistem discret va conduce întotdeauna la fenomenul de aliasing.
Iată un model Simulink care scoate în evidenţă fenomenul de aliasing.
Fig. 4.18. Experiment Simulink pentru evidenţierea fenomenului de aliasing
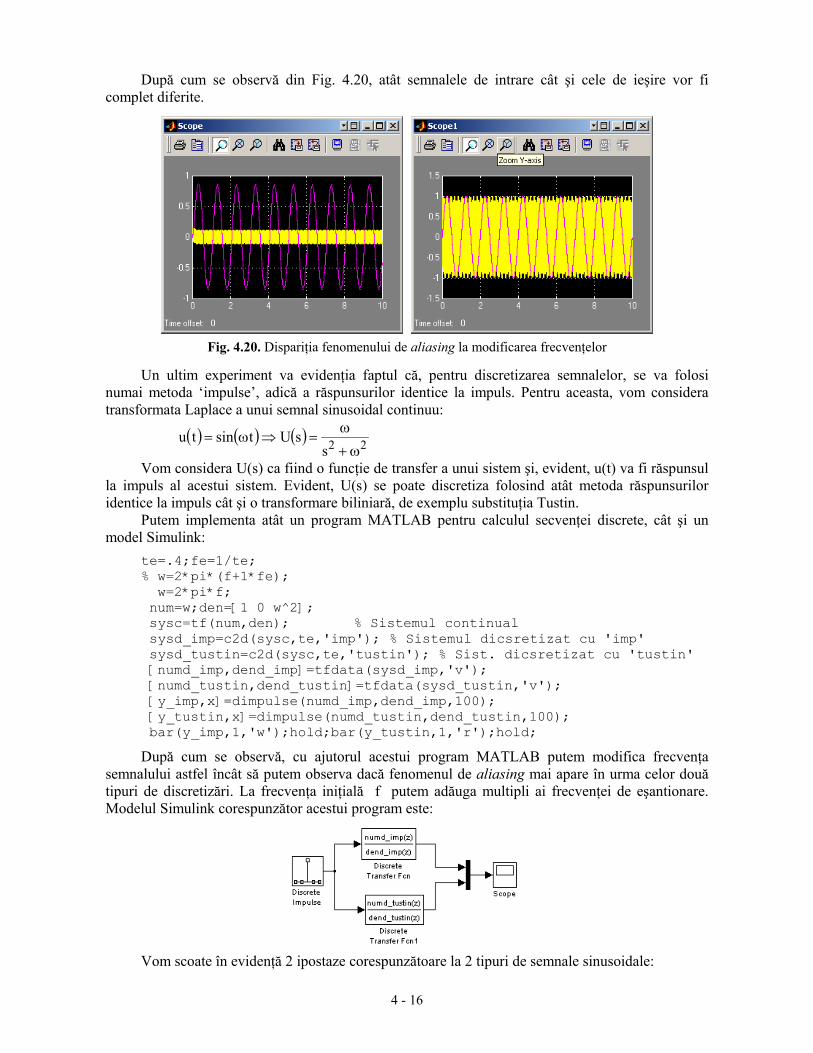
Într-o primă simulare, se aleg frecvenţele generatoarelor de semnal astfel încât ele să difere printr-un multiplu întreg al frecvenţei de eşantionare:
f1=2*pi*1+2*pi*2/te f2=2*pi*1
Fig. 4.19. Ilustrarea fenomenului de aliasing
Din figura de mai sus se observă că nu se poate face distincţie între semnalele de intrare.
Implicit şi semnalele de ieşire vor fi identice. În cea de-a doua simulare, diferenţa între frecvenţe nu va mai fi un multiplu întreg al
frecvenţei de eşantionare. f1=2*pi*1+2.2*pi*2/te f2=2*pi*1
4 - 16
După cum se observă din Fig. 4.20, atât semnalele de intrare cât şi cele de ieşire vor fi complet diferite.
Fig. 4.20. Dispariţia fenomenului de aliasing la modificarea frecvenţelor
Un ultim experiment va evidenţia faptul că, pentru discretizarea semnalelor, se va folosi
numai metoda ‘impulse’, adică a răspunsurilor identice la impuls. Pentru aceasta, vom considera transformata Laplace a unui semnal sinusoidal continuu:
( ) ( ) ( ) 22ssUtsintu
ω+
ω=⇒ω=
Vom considera U(s) ca fiind o funcţie de transfer a unui sistem şi, evident, u(t) va fi răspunsul la impuls al acestui sistem. Evident, U(s) se poate discretiza folosind atât metoda răspunsurilor identice la impuls cât şi o transformare biliniară, de exemplu substituţia Tustin.
Putem implementa atât un program MATLAB pentru calculul secvenţei discrete, cât şi un model Simulink:
te=.4;fe=1/te; % w=2*pi*(f+1*fe); w=2*pi*f; num=w;den=[1 0 w^2]; sysc=tf(num,den); % Sistemul continual sysd_imp=c2d(sysc,te,'imp'); % Sistemul dicsretizat cu 'imp' sysd_tustin=c2d(sysc,te,'tustin'); % Sist. dicsretizat cu 'tustin' [numd_imp,dend_imp]=tfdata(sysd_imp,'v'); [numd_tustin,dend_tustin]=tfdata(sysd_tustin,'v'); [y_imp,x]=dimpulse(numd_imp,dend_imp,100); [y_tustin,x]=dimpulse(numd_tustin,dend_tustin,100); bar(y_imp,1,'w');hold;bar(y_tustin,1,'r');hold;
După cum se observă, cu ajutorul acestui program MATLAB putem modifica frecvenţa semnalului astfel încât să putem observa dacă fenomenul de aliasing mai apare în urma celor două tipuri de discretizări. La frecvenţa iniţială f putem adăuga multipli ai frecvenţei de eşantionare. Modelul Simulink corespunzător acestui program este:
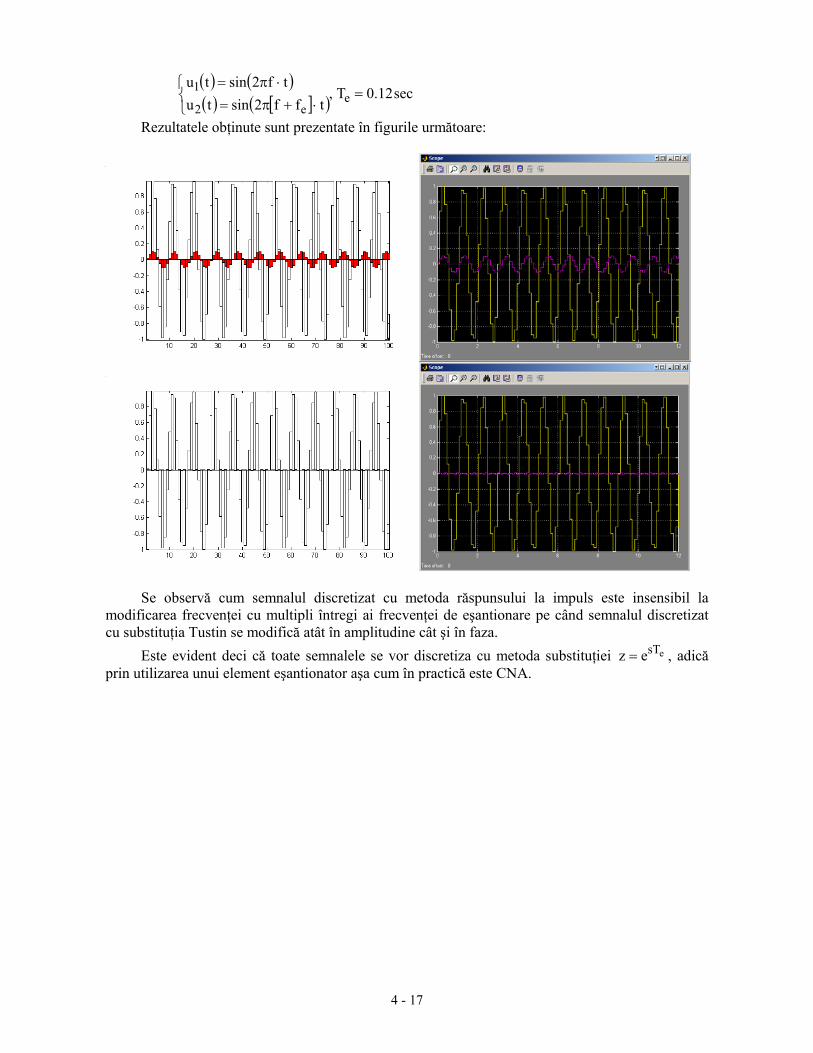
Vom scoate în evidenţă 2 ipostaze corespunzătoare la 2 tipuri de semnale sinusoidale:
4 - 17
( ) ( )( ) [ ]( ) sec12.0T,
tff2sintutf2sintu
ee2
1 =
⋅+π=⋅π=
Rezultatele obţinute sunt prezentate în figurile următoare:
Se observă cum semnalul discretizat cu metoda răspunsului la impuls este insensibil la modificarea frecvenţei cu multipli întregi ai frecvenţei de eşantionare pe când semnalul discretizat cu substituţia Tustin se modifică atât în amplitudine cât şi în faza.
Este evident deci că toate semnalele se vor discretiza cu metoda substituţiei esTez = , adică prin utilizarea unui element eşantionator aşa cum în practică este CNA.


















