Forma Canonica Jordan a˘ Matricelor · 2020-01-08 · Prefa¸ta˘ ˆIn aceast a lucrare discut˘...
170
Octavian G. Mustafa Forma Canonic˘ a Jordan a Matricelor Teorie, aplicat ¸ii Publicat ¸iile DAL Craiova Fis ¸ier prelucrat ˆ ın data de [February 6, 2020]
Transcript of Forma Canonica Jordan a˘ Matricelor · 2020-01-08 · Prefa¸ta˘ ˆIn aceast a lucrare discut˘...
Octavian G. Mustafa
Forma Canonica Jordan a
Matricelor
Teorie, aplicatii
Publicatiile DAL
Craiova
Fisier prelucrat ın data de [February 6, 2020]


Avertisment
Acest eseu nu a fost raportat vreunui referent. In consecinta, continutul sau trebuie
considerat “ca atare.”
Autorul va asteapta comentariile la adresa lui de e-mail1 si va multumeste anti-
cipat pentru efortul depus.
Fiecare proiect de la Publicatiile DAL trebuie considerat “santier” daca nu este
declarat altfel. Versiunea sa este cea a datei de pe pagina cu titlul.
Craiova, Mai 18, 2015 O.G.M.
v


Prefata
In aceasta lucrare discutam despre aducerea matricelor patrate, cu elemente (intrari)
reale, la forma canonica Jordan, urmand expunerea din cartea profesorilor Hirsch si
Smale [14].
Scopul prezentarii de fata este acela de a avea la ındemana o justificare riguroasa
pentru metoda fundamentala de calcul a exponentialei unei matrice: Sectiunea 4.3.
Exista mai multe modalitati clasice de aducere a matricelor la forma canonica
Jordan. De exemplu, tehnica descrisa ın [30] — traducerea sa ın romaneste este
[31]; pentru o prezentare schematica, vezi [19, pag. 192 si urm.] — face apel la
polinomul anulator (adica, minimal [8, pag. 89]) al unui operator liniar, la algebra
polinoamelor de o nedeterminata cu coeficienti ın K etc. Nu am urmat aceasta cale
aici, fiind interesat de obtinerea rapida a solutiilor sistemelor diferentiale liniare, cu
coeficienti reali: Sectiunea 4.5.
O investigatie moderna a teoriei functiilor de matrice — radacina patrata, expo-
nentiala, logaritmul unei matrice, etc — constituie subiectul cartii [12]. Exemple de
calcul, detaliate, pot fi citite ın [5].
Anumite detalii ale demonstratiei principale se regasesc si ın restul procedeelor
de aducere la forma canonica Jordan. Un exemplu notabil ıl constituie proprietatea
(H S ), reformulata ın [31, pag. 169, Teorema] cu ajutorul polinomului anulator.
Aplicatiile dezvoltate ın Capitolul 4 au semnificatii de sine statatoare. Astfel,
ın Exercitiul 4.13 se calculeaza solutiile fundamentale ale unei ecuatii diferentiale
ordinare, liniare si omogene, cu ajutorul eigenvectorilor generalizati ai matricei a-
sociate. In Exercitiul 4.40, elementele bazei reciproce a bazei unui hiperplan sunt
exprimate cu ajutorul operatiilor vectoriale din spatiul ambient.
Craiova, [February 6, 2020] O.G.M.
vii


Cuprins
1 Operatori liniari . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1
1.1 Vectori si covectori . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1
1.2 Operatori si matrice . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3
1.3 Invariantii algebrici ai operatorului T . Valori proprii si vectori
proprii. Polinomul caracteristic. Vectori proprii generalizati . . . . . . . 6
1.4 Complexificare, realificare, decomplexificare. Complexificatul
unui operator liniar . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 12
2 Teoreme de descompunere . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 19
2.1 Suma directa de subspatii vectoriale. Suma directa de operatori . . . . 19
2.2 Teorema N +M . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 29
2.3 Teorema de descompunere primara . . . . . . . . . . . . . . . . . . . . . . . . . . . . 32
3 Forma canonica a matricelor patrate cu elemente numerice . . . . . . . . . 47
3.1 Cazul operatorilor nilpotenti . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 47
3.2 Forma canonica Jordan a matricei de reprezentare T . . . . . . . . . . . . . 59
3.3 Cazul K= R . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 61
4 Aplicatii . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 73
4.1 Sumare prin parti. Produsul Cauchy a doua serii. Teorema lui F.
Mertens . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 73
4.2 Exponentiala unei matrice patrate cu elemente numerice . . . . . . . . . . 84
4.3 Calculul exponentialei unei matrice patrate cu elemente complexe . . 87
4.4 Estimarea produsului scalar . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 88
4.5 Exercitii rezolvate . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 92
4.6 Solutii fundamentale ale ecuatiilor diferentiale liniare si omogene . . 107
4.7 Matrice strict pozitiv-definite. Reprezentarea covectorilor folosind
produsul scalar. Produsul vectorial a m− 1 vectori. Produsul
tensorial a doi vectori. Reciproca unei baze. Rezolutia identitatii . . . 121
Referinte Bibliografice . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 159
ix

x Cuprins
Index . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 161

Capitolul 1
Operatori liniari
1.1 Vectori si covectori
Fie E ⊆ Cn — vezi [14, pag. x] — un spatiu liniar peste corpul K, unde n ≥ 1
este un numar natural. Aici, K ∈ {R,C}. Setul de vectori
S1 = {e1, · · · ,em} , m ≤ n,
reprezinta o baza a sa. Atunci, vom scrie ca1
E = SpanK {e1, · · · ,em}={
m
∑j=1
λ j · e j
∣∣∣∣∣λ j ∈K
}.
Fie x ∈ E. Putem folosi formalismul de calcul matriceal vectori pe linie, adica
x =m
∑j=1
λ j · e j =(e1 · · · em
)
λ1
...
λm
, (1.1)
respectiv formalismul vectori pe coloana,
x =m
∑j=1
λ j · e j =(λ1 · · · λm
)
e1
...
em
.
Aici, elementele λi constituie componentele (coordonatele) vectorului x ın baza S1.
In cele ce urmeaza, ıntrebuintam tehnica (1.1).
Daca S2 ={
f 1, · · · , f m
}reprezinta alta baza a spatiului E, atunci exista matricea
nesingulara P ∈ Mm(K) astfel ıncat
1 Fiind data multimea nevida A ⊆ E, prin SpanK(A) ıntelegem multimea combinatiilor liniare cu
numar finit de termeni nenuli si coeficienti din K, [23, pag. 246, Propozitia 1.6].
1
2 1 Operatori liniari
(f 1 · · · f m
)=(e1 · · · em
)·(col(1)P · · · col(m)P
)
=(e1 · · · em
)·P (1.2)
unde col(i)P desemneaza cea de-a i-a coloana a matricei P.
Notam cu (xi)i∈1,m si (yi)i∈1,m componentele vectorului x ın bazele S1, S2.
Atunci,
x =(e1 · · · em
)
x1
...
xm
(1.3)
=(
f 1 · · · f m
)
y1
...
ym
=
[(e1 · · · em
)·P]
y1
...
ym
=(e1 · · · em
)P
y1
...
ym
. (1.4)
Din (1.3), (1.4), tinand seama de liniar independenta peste K a vectorilor din S1,
deducem ca
(e1 · · · em
)
x1
...
xm
−P
y1
...
ym
= 0,
respectiv
y1
...
ym
= P−1
x1
...
xm
. (1.5)
Asadar, legatura nou-vechi pentru vectori si coordonate este data de formulele
(1.2), (1.5) [14, pag. 37].
Componentele (1.3) ne conduc la functionalele liniare (covectorii) xi : E →K cu
formulele
xi(x) = xi
(m
∑j=1
x j · e j
)
=m
∑j=1
x j · xi(e j) =m
∑j=1
x j ·δi j (1.6)
= xi, i ∈ 1,m,
unde δi j = 1− (sign(i− j))2, cu

1.2 Operatori si matrice 3
sign u =
−1, u < 0,
0, u = 0,
1, u > 0,
desemneaza2 simbolul lui L. Kronecker [28, pag. 14]. Setul de covectori
C1 = C1(S1) = {x1, · · · ,xm} (1.7)
alcatuieste o baza3 a spatiului E∗ = L(E,K), adica — [14, pag. 36] —
E∗ = SpanK {x1, · · · ,xm} .
1.2 Operatori si matrice
Operatorul liniar (K-liniar) T : E → E — [14, pag. 30] — este descris de vectorii
T = {T (e1), · · · ,T (em)} , ei ∈ S1, i ∈ 1,m, (1.8)
caci
T (x) = T
(m
∑i=1
xi · ei
)=
m
∑i=1
xi ·T (ei)
=(T (e1) · · · T (em)
)
x1
...
xm
, x ∈ E.
Introducem matricea T ∈ Mm(K) prin relatiile
(T (e1) · · · T (em)
)=(e1 · · · em
)·(col(1)T · · · col(m)T
)
=(e1 · · · em
)·T. (1.9)
Atunci, pentru x ∈ E, avem
2 Se ıntalnesc si denumirile delta (lui) Kronecker [21, pag. 3], respectiv simbolul delta (al lui)
Kronecker [35, pag. 5].3 Numita duala bazei S1 [11, pag. 23, Theorem 2]. Se spune si ca seturile C1 si S1 sunt biortogo-
nale.

4 1 Operatori liniari
T (x) =(T (e1) · · · T (em)
)
x1
...
xm
=(e1 · · · em
)T
x1
...
xm
. (1.10)
Calculele de pana acum au tinut seama doar de faptul ca dimensiunea spatiului E
peste K este finita, spatiul ın sine putand fi orice set de obiecte abstracte4. Acum, via
relatiile (1.3), (1.10), operatorului T i se asociaza matricea (de reprezentare ın S1)
T care desemneaza, la randul sau, un operator T : Cm → Cm. Actiunea (operatia)
acestui operator T asupra spatiului Cm este data de formula [14, pag. 38]
x1
...
xm
7−→ T ·
x1
...
xm
,
x1
...
xm
∈ Cm
.
Putem, asadar, echivala elementele spatiului vectorial L(E,E) peste corpul K cu
matricele din Mm(K) [14, p. 31], respectiv cu vectori din spatiul liniar L(Cm,Cm)peste corpul C.
Plecand de la identitatea
x1
...
xm
= x1 ·
1...
0
+ · · ·+ xm ·
0...
1
,
introducem baza standard5 (canonica6) a spatiului Cm — peste corpul C —
(i1 · · · im
)=(col(1)Im · · · col(m)Im
)=
1 0 · · · 0
0 1 · · · 0...
.... . .
...
0 · · · 0 1
= Im. (1.11)
Reamintesc formula (1.2). Avem relatiile — operatorul T este liniar —
T ( f j) = T((
e1 · · · em
)· col( j)P
)=(T (e1) · · · T (em)
)· col( j)P
=(e1 · · · em
)·[T · col( j)P
], j ∈ 1,m,
respectiv
4 Operatiile cu vectori si scalari sunt cele tipice, vezi relatiile din nota de subsol de la pagina 12.5 Vezi [14, pag. 34].6 Vezi [20, pag. 3, Example 1.4].

1.2 Operatori si matrice 5
(T ( f 1) · · · T ( f m)
)=(e1 · · · em
)TP. (1.12)
De aici, pentru x ∈ E, deducem ca
T (x) = T
(
f 1 · · · f m
)
y1
...
ym
=
(T ( f 1) · · · T ( f m)
)
y1
...
ym
=(e1 · · · em
)(TP)
y1
...
ym
. (1.13)
Notam cu W matricea de reprezentare a operatorului T ın S2. Adica,
(T ( f 1) · · · T ( f m)
)=(
f 1 · · · f m
)W.
Atunci,
T (x) = T
(
f 1 · · · f m
)
y1
...
ym
=
(T ( f 1) · · · T ( f m)
)
y1
...
ym
=(
f 1 · · · f m
)W
y1
...
ym
=
[(e1 · · · em
)P]·
W
y1
...
ym
=(e1 · · · em
)PW
y1
...
ym
. (1.14)
Expresiile (1.13), (1.14) ne conduc la
(e1 · · · em
)(TP−PW)
y1
...
ym
= 0,
respectiv la — vectorii e1, . . . , em sunt liniar independenti peste K —
TP−PW= Om, W= P−1TP, (1.15)
vezi [14, pag. 39]. Aici, Om este matricea-nula m×m.
In (1.12) am folosit doar faptul ca sistemul de vectori S2 = { f 1, · · · , f m} este
legat de S1 = {e1, · · · ,em} prin matricea P din (1.2). Inlocuindu-l pe S2 cu T din
(1.8) si pe P cu T din (1.9), deducem ca
(T 2(e1) · · · T 2(em)
)=(e1 · · · em
)·T2
,

6 1 Operatori liniari
respectiv
(T k(e1) · · · T k(em)
)=(e1 · · · em
)·Tk
, k ∈ N∗. (1.16)
1.3 Invariantii algebrici ai operatorului T . Valori proprii si
vectori proprii. Polinomul caracteristic. Vectori proprii
generalizati
Plecand de la cea de-a doua dintre relatiile (1.15), spunem ca doua matrice
W, T ∈ Mm(K) sunt similare daca exista matricea nesingulara P ∈ Mm(K) ast-
fel ıncat W= P−1TP, conform [14, pag. 39]. Aceasta similaritate defineste o relatie
de echivalenta (∼) ıntre matricele din Mm(K). Intr-adevar, avem reflexivitate,
T∼ T, T= I−1m TIm,
apoi simetrie — det P 6= 0 —,
W∼ T=⇒ T∼W, W= P−1TP =⇒ T=(P−1
)−1W(P−1
), (1.17)
si tranzitivitate — det P, det R 6= 0 —,
W∼ T, T∼ V=⇒W∼ V, W= P−1TP, T= R−1VR ⇒W= (RP)−1V(RP).
De asemeni, daca W ∼ T, adica W = P−1TP, atunci Wk ∼ Tk pentru orice
k ∈ N∗. Intr-adevar, avem
W2 =(P−1TP
)·(P−1TP
)= P−1T
(P ·P−1
)TP
= P−1T2P,
respectiv — prin inductie matematica —
Wk = P−1TkP, k ∈ N∗. (1.18)
Determinantul, urma si rangul (unei matrice) — ca functii de matricele din
Mm(K) — sunt invariante la relatia de similaritate [14, pag. 40, 41]. Putem, din
acest motiv, introduce marimile
Det T = det T, Tr T = tr T, Rank T = rank T,
unde det, tr si rank desemneaza determinantul, urma7, respectiv rangul8 matricei
de reprezentare (ın S1) T. Avem la dispozitie, astfel, determinantul, urma si rangul
unui operator liniar T : E → E — invarianti algebrici —.
7 In limba engleza, trace.8 In limba engleza, rank.

1.3 Invarianti, valori si vectori proprii 7
Lema 1.1. ([20, pag. 16]) Rangul operatorului liniar T : E → E este egal cu dimen-
siunea subspatiului liniar T (E)⊆ E.
Demonstratie. Sa presupunem ca setul de vectori {T (e1), . . . , T (eh)}, unde h ≤ m,
alcatuieste o baza9 a subspatiului T (E). Atunci,
(T (e1) · · · T (eh)
)=(e1 · · · em
)·A,
unde A ∈ Mm,h(K).Fie λ ∈K\{0}. Observam ca
T (E) = SpanK{T (e1), . . . ,T (eh)}= SpanK{T (e1)+λ ·T (e2),T (e2),T (e3). . . ,T (eh)}, (1.19)
respectiv
E = SpanK{e1, . . . ,em}= SpanK{e1 +λ · e2,e2,e3. . . ,em}. (1.20)
Schimbarea de baza (1.19) produce urmatoarea modificare a matricei A,
((T (e1)+λ ·T (e2)) T (e2) T (e3) · · ·T (eh))
=(e1 · · · em
)·((col(1)A+λ · col(2)A) col(2)A col(3)A · · ·col(h)A
).
La randul sau, schimbarea de baza (1.20) modifica matricea A,
(T (e1) · · · T (eh)
)= ((e1 +λ · e2) e2 e3 · · ·em)
×
lin(1)A
lin(2)A−λ · lin(1)Alin(3)A
lin(4)A...
lin(m)A
, (1.21)
unde lin(i)A desemneaza cea de-a i-a linie a matricei A.
Trebuie sa aratam ca rank A = h, adica exista h linii10 ale matricei A care sa fie
liniar independente peste corpul K.
Presupunem ca, prin reducere la absurd, toate seturile de cate h linii ale matricei
A sunt liniar dependente peste corpul K. Aceasta ınseamna ca, ın particular, setul
tuturor liniilor matricei A este liniar dependent, deci exista numerele
{λ1,λ2, . . . ,λp−1,λp+1, . . . ,λm} ⊂K
9 Relatiile y = T (x) =m
∑i=1
λi ·T (ei), unde x =m
∑i=1
λi · ei ∈ E, arata ca familia de vectori {T (e1), . . . ,
T (em)} este un sistem de generatori pentru spatiul T (E).10 Vezi si [23, pag. 307, Teorema 8.2].

8 1 Operatori liniari
astfel ıncat
lin(p)A = λ1 · lin(1)A+ · · ·+λp−1 · lin(p−1)A
+ λp+1 · lin(p+1)A+ · · ·+λm · lin(m)A
pentru un anumit p. Aici, apar doua situatii. In prima dintre ele, lin(p)A contine cel
putin un element nenul, deci
∑1≤i≤m,
i 6=p
|λi|2 > 0. (1.22)
Cea de-a doua situatie, cand matricea A are (macar) o linie nula — formata numai
din elemente nule — va fi discutata ulterior.
Au loc relatiile — via (1.21) —
(T (e1) · · · T (eh)
)
= ((e1 +λ1 · ep) · · ·(ep−1 +λp−1 · ep) ep (ep+1 +λp+1 · ep) · · ·(em +λm · ep))
×B, B =
lin(1)A...
lin(p−1)A(0 · · · 0
)
lin(p+1)A...
lin(m)A
,
respectiv — a p-a linie a matricei B este nula! —
T (e1), . . . , T (eh) ∈ Q = SpanK{ e1 +λ1 · ep, . . . ,ep−1 +λp−1 · ep,
ep+1 +λp+1 · ep, . . . ,em +λm · ep}.
Se observa ca ep 6∈ Q, deci dimensiunea subspatiului Q ⊆ E este mai mica sau
egala cu m−1.
Daca h = m, evident, am ajuns la o contradictie: cei h vectori liniar independenti
din T (E) nu se pot afla ıntr-un spatiu — cel mult — (h−1)-dimensional!
Daca h ≤ m−1, avem relatia
(T (e1) · · · T (eh)
)=(
f 1 f 2 · · · f p−1 f p+1 · · · f m
)·C, (1.23)
unde

1.3 Invarianti, valori si vectori proprii 9
C =
lin(1)A...
lin(p−1)A
lin(p+1)A...
lin(m)A
si f i = ei + λi · ep, i 6= p, iar vectorii { f 1, f 2, . . . , f p−1, f p+1, · · · , f m} sunt liniari
independenti.
Ce se ıntampla ınsa daca lin(p)A este o linie nula a matricei A? Adica, nu are loc
(1.22)! Atunci, relatia (1.23) devine
(T (e1) · · · T (eh)
)= (e1 e2 · · · ep−1 ep+1 · · · em) ·
lin(1)A...
lin(p−1)A
lin(p+1)A...
lin(m)A
.
Reluam discutia anterioara: presupunem ca oricare h din cele m−1 linii ramase
ale matricei A — vezi matricea C — sunt liniar dependente, de unde rezulta ca
setul celor m−1 linii ramase este liniar dependent etc. Aici, “rolul” matricei A va fi
“jucat” de C. Ajungem la alt spatiu, de dimensiune cel mult m−2 peste corpul K.
Procedeul poate fi repetat atata timp cat dimensiunea spatiului Q — egala cu
numarul liniilor din A ramase ın discutie! — este mai mare sau egala cu h. ⊓⊔
Fie11 x ∈ Ker T . Pe baza (1.3), (1.10), avem
0E = T (x) =(e1 · · · em
)T
x1
...
xm
. (1.24)
Liniar independenta vectorilor e1, . . . , em — peste corpul K — ne conduce la siste-
mul algebric
T
x1
...
xm
=
0...
0
(1.25)
cu necunoscutele x1, . . . , xm ∈K.
11 Vezi nota de subsol de la pagina 29: definitia lui Ker.

10 1 Operatori liniari
Daca I : E → E este operatorul-identitate12 din L(E,E) si λ ∈ C, ne intereseaza
multimea13 Ker (T −λ · I). Conform relatiei (1.25), aceasta ınseamna sa rezolvam
ın K sistemul algebric
(T−λ · Im)
x1
...
xm
=
0...
0
. (1.26)
Evident, este posibil ca sistemul sa nu aiba solutii nenule!
Deoarece K⊆ C, daca impunem ca
p(λ ) = det (T−λ · Im) = 0, (1.27)
atunci sistemul algebric (1.26) va avea ıntotdeauna solutii nenule ın C — dar nu
neaparat ın K! —.
Numerele λ ∈K care sunt solutii ale ecuatiei14 algebrice (1.27), deci pentru care
sistemul algebric (1.26) admite solutii nenule ın K, se numesc valori proprii15 sau
eigenvalori16 ale operatorului T . Daca numerele x1, . . . , xm ∈K sunt o solutie nenula
a sistemului (1.26), atunci vectorul
x =m
∑i=1
xi · ei ∈ SpanK {e1, · · · ,em}= E (1.28)
constituie un vector propriu sau un eigenvector17 al operatorului T — corespunzator
eigenvalorii λ —.
Observam ca — via (1.25), (1.26) — operatorul liniar T admite valoarea proprie
λ0 = 0 daca si numai daca KerT 6= {0E}, adica daca T nu este injectiv.
Polinomul p(λ ) — cu termenul dominant (−1)mλ m, unde m este dimensiunea
spatiului E — verifica relatiile, via (1.17),
p(λ ) = det (T−λ · Im) = det(PWP−1 −λ · Im
)
= det(PWP−1 −λ ·PImP−1
)= det
(P(W−λ · Im)P−1
)
= det (W−λ · Im) ,
adica este invariant la relatia de similaritate. Astfel, el poate fi atasat operatorului T ,
p(λ ) = pT (λ ), si se numeste polinomul caracteristic18 al operatorului.
12 Adica, I(x) = x pentru orice x ∈ E.13 Nu insistam acum asupra semnificatiei operatiei λ · I atunci cand λ ∈ C\K.14 Numita ecuatie caracteristica a operatorului T [14, pag. 71].15 In limba engleza, proper value (sing.) [20, pag. 35]. Unii autori folosesc si termenii autovalori,
radacini caracteristice [2, pag. 99, 129], radacini ale ecuatiei caracteristice [10, pag. 174] sau
valori caracteristice [20, ibid.].16 In limba engleza, eigenvalue (sing.), conform [14, pag. 42].17 In limba engleza, eigenvector [14, ibid.].18 In limba engleza, characteristic polynomial [14, pag. 43].

1.3 Invarianti, valori si vectori proprii 11
Sa revenim la ecuatia (1.27). Daca ea admite solutia λ0 ∈ K — adica, λ0 este
eigenvaloare a operatorului T —, atunci au loc, evident, relatiile
0 = [det (T−λ0 · Im)]k = det
((T−λ0 · Im)
k), k ∈ N∗
.
Ceea ce ınseamna ca toate sistemele algebrice
(T−λ0 · Im)k
x1
...
xm
=
0...
0
(1.29)
admit solutii nenule ın K.
Daca familia {x1, . . . ,xm} ⊂K,n
∑i=1
|xi|2 > 0, este solutia sistemului (1.29) pentru
un anumit k ≥ 2, atunci vectorul (1.28) poarta numele de vector propriu (sau eigen-
vector) generalizat19 al operatorului T corespunzand eigenvalorii λ0. Relatia (1.29)
poate fi reorganizata, evident, ca
(T−λ0 · Im)k−1 ·
(T−λ0 · Im)
x1
...
xm
=
0...
0
,
asadar orice vector propriu este si vector propriu generalizat.
Exemplul 1.1. Fie µ ∈K\{0} si matricea
(T=) A =
(µ 1
0 µ
).
Singura eigenvaloare a lui A este λ0 = µ . Sistemul (1.26) devine
(0 1
0 0
)(x1
x2
)=
(0
0
).
Solutiile nenule din K ale acestui sistem sunt x1 = x ∈ K\{0}, x2 = 0, deci x =(1
0
)∈K2 este un eigenvector corespunzand valorii proprii λ0.
Deoarece
(A−λ0 · I2)2 = O2,
sistemul (1.29), unde k = 2, devine
(0 0
0 0
)(x1
x2
)=
(0
0
).
19 In limba engleza, generalized eigenvector [20, pag. 41].

12 1 Operatori liniari
Evident, toti vectorii nenuli din K2 sunt solutii ale sale, deci sunt eigenvectori
generalizati ai matricei20 A. In particular, vectorul y =
(0
1
)este un vector propriu
generalizat corespunzand valorii proprii λ0 care nu este vector propriu al matricei
A.
1.4 Complexificare, realificare, decomplexificare.
Complexificatul unui operator liniar
Fie E ⊆Rn — [14, pag. 64] — un spatiu liniar real m-dimensional. Aici, K=R,
deci
E = SpanR {e1, · · · ,em}={
m
∑j=1
λ j · e j
∣∣∣∣∣λ j ∈ R
}. (1.30)
Multimea
EC = SpanC {e1, · · · ,em}={
m
∑j=1
λ j · e j
∣∣∣∣∣λ j ∈ C
},
dotata cu operatiile cu vectori si scalari tipice21, alcatuieste un spatiu vectorial com-
plex m-dimensional care poarta numele de complexificatul spatiului E22. Reamin-
tindu-ne de baza canonica (1.11), observam ca spatiul complex Cm este complexifi-
catul spatiului real Rm: Cm = (Rm)C.
Nu orice spatiu vectorial complex este complexificatul vreunui spatiu vectorial
real.
Exemplul 1.2. Fie z j = a j + b j · i ∈ C, unde a j, b j ∈ R, j ∈ {1,2}, si e1 =
(z1
z2
)∈
C2. Introducem spatiul23 EC = Ce1 = SpanC {e1} si ne ıntrebam daca exista x =(x1
x2
)∈ R2 astfel ca
20 Prin eigenvectori (generalizati) ai unei matrice patrate ıntelegem coloanele de coordonate ale
eigenvectorilor (generalizati ai) unui operator liniar ın acea baza a spatiului E ın care matricea
reprezinta operatorul.
21 α ·(
m
∑j=1
λ j · e j
)+β ·
(m
∑j=1
µ j · e j
)=
m
∑j=1
(α ·λ j+β ·µ j) ·e j , unde α , β , λ j, µ j ∈C. De asemeni,
1 · e j = e j . In particular, 0 · e j = 0E pentru orice j ∈ 1,m [18, pag. 112].22 La fel ca ın cazul C=R2+(operatii speciale), avem z ·x = (a+b · i)x ≡ (a,b) ·x = (a ·x,b ·x)≡ax+ i(bx), unde z = a+ bi ∈ C. Nu este obligatoriu, aici, ca a · x, b · x, unde x ∈ E, sa ınsemne
ınmultirile cu scalari uzuale — pe componente — din Rn!23 Operatiile cu vectori si scalari sunt cele tipice, din C2, respectiv R2.

1.4 Complexificare, realificare, decomplexificare 13
EC = SpanC {x}={(a+b · i) · x =
((ax1)+ i(bx1)(ax2)+ i(bx2)
)∣∣∣∣a, b ∈ R
}.
Adica, EC este sau nu este complexificatul spatiului E = Rx?
Fie λ = α +β · i ∈ C. Atunci, din egalitatile
EC ∋ λ · e1 =
((αa1 −βb1)+(αb1 +βa1) · i(αa2 −βb2)+(αb2 +βa2) · i
)
=
((ax1)+(bx1) · i(ax2)+(bx2) · i
)∈ SpanC {x} ,
ın care necunoscutele sunt numerele reale a, b, x1 si x2, deducem ca
{αa1 −βb1 = (αa2 −βb2)
x1x2,
αb1 +βa1 = (αb2 +βa2)x1x2,
respectiv
(a1 −a2
x1x2
)·α +
(−b1 +b2
x1x2
)·β = 0,(
b1 −b2x1x2
)·α +
(a1 −a2
x1x2
)·β = 0.
(1.31)
Numerele α si β fiind date — putem, asadar, presupune ca α2+β 2 > 0 —, relatiile
(1.31) pot fi privite ca un sistem algebric, liniar si omogen, ın necunoscutele α , β ,
care admite o solutie nenula. Deci,
∣∣∣∣a1 −a2
x1x2
−b1 +b2x1x2
b1 −b2x1x2
a1 −a2x1x2
∣∣∣∣= 0,
respectiv
(a1 −a2
x1
x2
)2
+
(b1 −b2
x1
x2
)2
= 0. (1.32)
In concluzie, pentru ca spatiul Ce1 sa fie complexificatul unui spatiu liniar real,
este necesar — via egalitatea (1.32) — sa existe q ∈ R astfel ıncat
z1 = q · z2.
(q =
x1
x2
)(1.33)
Fie F ⊆Cn un spatiu liniar complex m-dimensional care este si subspatiu liniar24
[14, pag. 33] al spatiului complex Cn. Atunci, multimea [14, pag. 64]
FR = F ∩Rn,
24 Adica, mosteneste operatiile pe componente ale lui Cn!
14 1 Operatori liniari
dotata cu operatiile cu vectori si scalari tipice — preluate de pe Rn —, constituie un
spatiu liniar real, pe care ıl numim realificatul spatiului F .
Realificarea poate conduce la multimi neinteresante.
Exemplul 1.3. Fie e1 =
(1
i
)∈C2 si F =Ce1, vezi [14, pag. 65, Problem 1]. Atunci,
x = λ · e1 = (a+b · i)(
1
i
)=
(a+b · i−b+a · i
)=
(a
−b
)+ i ·
(b
a
), x ∈ F,
unde a, b ∈ R, respectiv
(b
a
)=
(0
0
), x ∈ F ∩R2
.
De aici, FR = {0R2}. Observam ca vectorul e1 din acest exemplu nu verifica relatia
(1.33).
Lema 1.2. Fie subspatiul liniar E ⊆ Rn. Atunci, realificatul complexificatului sau
— notat ECR — este
(EC)R = E.
Demonstratie. Conform (1.30), introducem vectorii e j =
xj1...
xjn
∈ Rn. Fie, de ase-
meni, x ∈ EC cu formula — m ≤ n —
x =m
∑j=1
λ j · e j =m
∑j=1
(a j +b j · i) · e j =
m
∑j=1
a jxj1
...m
∑j=1
a jxjn
+ i ·
m
∑j=1
b jxj1
...m
∑j=1
b jxjn
=
m
∑j=1
a jxj1
...m
∑j=1
a jxjn
+ i ·
x11 · · · xm
1...
...
x1n · · · xm
n
b1
...
bm
, a j, b j ∈ R.
Daca impunem ca x ∈ EC∩Rn, atunci
(e1 · · · em
)
b1
...
bm
=
x11 · · · xm
1...
...
x1n · · · xm
n
b1
...
bm
=
0...
0
∈ Rn
. (1.34)

1.4 Complexificare, realificare, decomplexificare 15
Dat fiind ca vectorii e1, . . . , em, ale caror componente alcatuiesc coloanele ma-
tricei sistemului algebric (1.34), sunt liniar independenti peste R, rangul matricei va
fi maxim, adica m. In aceste conditii, sistemul (1.34) admite o singura solutie, cea
nula: b j = 0 pentru orice j ∈ 1,m.
Am ajuns la
x =
m
∑j=1
a jxj1
...m
∑j=1
a jxjn
=
x11 · · · xm
1...
...
x1n · · · xm
n
a1
...
am
=
m
∑j=1
a j · e j ∈ SpanR {e1, · · · ,em}= E,
adica x ∈ EC∩Rn ⊆ E. Incluziunea inversa, E ⊆ EC∩Rn, este evidenta. ⊓⊔
Lema 1.3. ([14, pag. 67]) Fie subspatiul liniar E ⊆Rn si F ⊆EC un subspatiu liniar
al spatiului EC. Atunci,
FR = F ∩E
este un subspatiu liniar al spatiului E.
Demonstratie. Plecand de la EC = SpanC {e1, · · · ,em}, unde e j ∈ E, j ∈ 1,m, pre-
supunem ca F ⊆ SpanC {e1, · · · ,ek} cu25 k ≤ m.
La fel ca ın lema anterioara — vezi (1.34) —, ajungem la FR = F ∩Rn ⊆SpanR {e1, · · · ,ek}. Insa SpanR {e1, · · · ,ek} ⊆ SpanR {e1, · · · ,em} = E, de unde
F ∩Rn = (F ∩Rn)∩E = F ∩ (Rn ∩E) = F ∩E. ⊓⊔
Introducem aplicatia σ : Cn → Cn cu formula
σ
z1
...
zn
=
z1
...
zn
, z j ∈ C, j ∈ 1,n,
unde z = a− b · i — conjugare complexa — pentru orice z = a+ b · i ∈ C. Aici, a,
b ∈ R. Au loc urmatoarele proprietati
{σ(α · x+β · y) = α ·σ(x)+β ·σ(y),σ ◦σ = idCn ,
unde α , β ∈ C si x, y ∈ Cn iar idCn este operatorul-identitate din Cn. Adica, σ este
o involutie a spatiului liniar complex Cn [6, pag. 25]. In particular, aplicatia σ este
R-liniara iar σ |Rn : Rn → Rn este operatorul-identitate din Rn.
Lema 1.4. ([14, pag. 64]) Fiind dat subspatiul liniar complex F ⊆ Cn, exista sub-
spatiul liniar real E ⊆ Rn astfel ıncat F = EC daca si numai daca σ(F)⊆ F.
25 Subspatiul SpanC {e1 + e2,e3 + e4}( SpanC {e1,e2,e3,e4} este 2-dimensional dar k = 4.

16 1 Operatori liniari
Demonstratie. Partea “=⇒”. Cum F = SpanC {e1, · · · ,em}, unde sistemul {e1, · · · ,em} constituie o baza a spatiului liniar real E, avem — σ(e j) = e j —
σ( f ) =m
∑j=1
λ j ·σ(e j) =m
∑j=1
λ j · e j ∈ SpanC {e1, · · · ,em} ,
unde f =m
∑j=1
λ j · e j ∈ F .
Partea “⇐=”. Pentru orice f ∈ F , unde f = x+ i · y si x, y ∈ Rn, avem σ( f ) =x+ i · y = x− i · y ∈ F , respectiv
x =1
2· f +
1
2·σ( f ) ∈ F (1.35)
si
y =1
2i· f +
−1
2i·σ( f ) ∈ F. (1.36)
Fie{
f 1, · · · , f m
}⊂ Cn o baza a spatiului liniar F . Atunci, f j = x j + i · y j, unde
x j, y j ∈ Rn si j ∈ 1,m. Conform (1.35), (1.36), x j, y j ∈ F pentru orice j.
Pentru f ∈ F , putem scrie ca — λ j ∈ C —
f =m
∑j=1
λ j · f j =m
∑j=1
λ j · x j +m
∑j=1
(λ j · i) · y j ∈ SpanC {x1, · · · ,xm,y1, · · · ,ym} .
Adica, setul de vectori {x1, · · · ,xm,y1, · · · ,ym}, din Rn, constituie un sistem de ge-
neratori pentru spatiul liniar complex F .
Fie{
t1, · · · , t p
}⊆ {x1, · · · ,xm,y1, · · · ,ym} un sistem maximal de vectori liniar
independenti — peste R —. Atunci, acest sistem va fi baza spatiului F , deci
F = SpanC{
t1, · · · , t p
}= EC,
unde E = SpanR{t1, · · · , t p}. ⊓⊔
Un subspatiu liniar complex F ⊆ Cn este decomplexificabil [14, pag. 64] daca
exista subspatiul liniar real E ⊆ Rn astfel ıncat F = EC.
Lema 1.5. Fie subspatiul decomplexificabil F ⊆Cn. Atunci, complexificatul realifi-
catului sau — notat FRC — este
(FR)C = F.
Demonstratie. Conform Lemei 1.2, cum F = EC, avem FR = ECR = E. De aici,
(FR)C = EC = F . ⊓⊔
Operatia de realificare poate fi aplicata oricarui subspatiu complex F ⊆Cn. Cum
FR ⊆ F , deducem ca

1.4 Complexificare, realificare, decomplexificare 17
FRC = (FR)C = SpanC (FR)
⊆ SpanC (F) = F, (1.37)
vezi [14, pag. 344]. Exemplul 1.3 — via observatia ca SpanC {0R2}= {0R2} — ne
arata ca putem avea si incluziune stricta ın (1.37).
Fie E ⊆Rn un subspatiu liniar real cu baza26 S1 si T : E → E un operator liniar.
Pe baza formulei (1.10), introducem operatorul liniar TC : EC → EC astfel
TC(z) =m
∑j=1
z j ·T (e j) =(e1 · · · em
)T
z1
...
zm
, (1.38)
unde z =m
∑j=1
z j · e j si z j ∈ C pentru orice j. Operatorul TC poarta numele de com-
plexificatul operatorului T [14, pag. 65]. Avand aceeasi matrice de reprezentare,
operatorii T si TC au acelasi polinom caracteristic [14, pag. 66].
Lema 1.6. ([14, pag. 65, Proposition]) Operatorul liniar Q : EC → EC este comple-
xificatul unui operator liniar T : E → E — adica, Q = TC — daca si numai daca
Q◦σ = σ ◦Q, Q = σ ◦Q◦σ−1 = σ ◦Q◦σ .
Demonstratie. Observam ca, aplicatia σ fiind o involutie, avem σ−1 = σ .
Partea “=⇒”. Fie z =m
∑j=1
z j · e j ∈ EC, unde e j ∈ E. Atunci — reamintesc ca
σ(e j) = e j si TC(e j) = T (e j) pentru orice j —,
(σ ◦Q◦σ)(z) = (σ ◦TC ◦σ)(z) = (σ ◦TC)
(m
∑j=1
z j · e j
)= σ
(m
∑j=1
z j ·TC (e j)
)
= σ
(m
∑j=1
z j ·T (e j)
)=
m
∑j=1
z j ·T (e j) =m
∑j=1
z j ·T (e j) = TC(z)
= Q(z).
Partea “⇐=”. Sa aratam ca Q(E)⊆ E. Pentru z=Q(x)∈ EC, unde x ∈ E, avem27
σ(z) = (σ ◦Q)(x) = (Q◦σ)(x) = Q(x) = z,
deci z ∈ EC∩Rn = ECR = E. Am folosit Lema 1.2.
Fie T = Q|E : E → E. Cum EC = SpanC{e1, · · · ,em} si e j ∈ E, putem scrie ca
26 Introdusa la pagina 1.27 σ(e) = e pentru orice e ∈ E.

18 1 Operatori liniari
Q(z) = Q
(m
∑j=1
z j · e j
)=
m
∑j=1
z j ·T (e j) = TC
(m
∑j=1
z j · e j
)
= TC(z), z ∈ EC.
Am obtinut ca
Q = (Q|E)C ,
adica Q este complexificatul restrictiei sale la spatiul liniar E. ⊓⊔
Lema 1.7. Daca operatorii liniari Qk : EC → EC sunt complexificatii operatorilor
liniari (reali) Tk : E → E, unde k ∈ {1,2}, atunci,
Q1 ◦Q2 = (T1 ◦T2)C .
Demonstratie. Conform (1.38), daca Tk ∈ Mm(R) este matricea de reprezentare ın
S1 a operatorulilor Tk si (Tk)C, atunci T = T1 ·T2 este matricea de reprezentare ın
S1 a operatorilor T1 ◦T2 si (T1 ◦T2)C.
Pe de alta parte, matricea de reprezentare Q ın S1 a operatorului Q1 ◦Q2 este
produsul matricelor de reprezentare ale acestor operatori, adica
Q= T1 ·T2.
Concluzia rezulta din (1.38). ⊓⊔

Capitolul 2
Teoreme de descompunere
2.1 Suma directa de subspatii vectoriale. Suma directa de
operatori
Fie E ⊆ Cn un spatiu liniar peste corpul K ∈ {R,C} cu baza S1 — introdusa la
pagina 1 —.
Lema 2.1. Daca V ⊆ E este un K-subspatiu liniar1, atunci exista W ⊆ E alt K-
subspatiu liniar astfel ıncat V ∩W = {0E} si orice element e ∈ E sa se scrie sub
forma
e = v+w, v ∈V, w ∈W. (2.1)
Demonstratie. Renumerotand, eventual, vectorii din S1, putem presupune ca V =SpanK{e1, · · · ,eh}, unde h ≤ m. Atunci, fie — pentru h < m —
W = SpanK{eh+1, · · · ,em}. (2.2)
Daca h = m, adica V = E, luam W = {0E}.
Fie e ∈ E. Au loc relatiile
e =m
∑j=1
k j · e j (k j ∈K pentru orice j)
=
(h
∑j=1
k j · e j +m
∑j=h+1
0 · e j
)+
(h
∑j=1
0 · e j +m
∑j=h+1
k j · e j
)
= v+w.
In particular, daca e ∈V ∩W , putem scrie ca
1 Adica, operatiile cu scalari folosesc numai elemente (scalari) din corpul K.
19

20 2 Teoreme de descompunere
e =h
∑j=1
k j · e j =m
∑j=h+1
k j · e j,
respectiv
h
∑j=1
k j · e j +m
∑j=h+1
(−k j) · e j = 0E .
Vectorii {e1, · · · ,em} fiind liniar independenti, rezulta ca toate coordonatele vecto-
rului e ın baza S1 sunt nule, deci e = 0E .
Descompunerea (2.1) este unica datorita faptului ca V ∩W = {0E}. Intr-adevar,
ın caz contrar am avea
e = v1 +w1 =m
∑j=1
k(1)j · e j
= v2 +w2 =m
∑j=1
k(2)j · e j,
unde k(1)j , k
(2)j ∈K pentru orice j, respectiv
0E = (v1 − v2)+(w1 −w2) (2.3)
=
[h
∑j=1
(k(1)j − k
(2)j
)· e j
]+
[m
∑j=h+1
(k(1)j − k
(2)j
)· e j
]. (2.4)
Concluzia poate fi obtinuta ın doua moduri. Mai ıntai, conform (2.3), deducem
ca
v1 − v2 = w2 −w1 ∈V ∩W,
deci
v1 = v2 si w1 = w2. (2.5)
Aici nu am tinut seama de dimensiunea spatiului ambient E!
Pe de alta parte, via (2.4), liniar independenta vectorilor {e1, · · · ,em} ne conduce
la k(1)j = k
(2)j pentru orice j, adica tot la (2.5). ⊓⊔
Lema 2.2. In contextul Lemei 2.1, daca V este un subspatiu propriu2, atunci spatiul
W nu este unic.
Demonstratie. In demonstratia anterioara am aratat, via formula (2.2), existenta
unui subspatiu W pentru care sa aiba loc descompunerea (2.1).
2 Adica, h < m. Vezi si [14, pag. 33].

2.1 Sume directe 21
Putem construi alt subspatiu, notat W1, cu aceleasi proprietati ca W . Mai precis,
fie — pentru h < m−1 —
W1 = SpanK {eh + eh+1,eh+2,eh+3, · · · ,em} .
Evident, spatiul V ısi pastreaza formula, V = SpanK{e1, · · · ,eh}. Cand h = m− 1,
luam W1 =K(eh + eh+1).Se observa ca
eh + eh+1 ∈W1\W, eh+1 ∈W\W1,
deci subspatiile W si W1 sunt distincte. ⊓⊔
Subspatiul W constituie un complement3 al subspatiului V iar existenta descom-
punerii (2.1) se noteaza cu expresia E =V ⊕W [11, pag. 29, Theorem], numita suma
directa a spatiilor V si W . Prin partitionarea bazei S1, putem scrie ca4
e =s
∑r=1
[hr+1
∑j=hr+1
k(r)j · e j
]=
s
∑r=1
[
∑j≤hr
0 · e j +hr+1
∑j=hr+1
k(r)j · e j + ∑
j≥hr+1+1
0 · e j
],
unde
{1, · · · ,m}= {h1 +1, · · · ,h2}∪{h2 +1, · · · ,h3}∪ · · ·∪{hs +1, · · · ,hs+1}
si h1 = 0 < h2 < h3 < · · ·< hs < hs+1 = m. De unde,
E = V1 ⊕ (V2 ⊕ (· · ·⊕ (Vs−1 ⊕Vs) · · ·)) (2.6)
= V1 ⊕V2 ⊕·· ·Vs.
Lema 2.3. Daca V1,V2, . . . ,Vs ⊆ E, unde s ≥ 2, sunt K-subspatii liniare si orice
egalitate de forma
v1 + v2 + · · ·+ vs = 0E , vi ∈Vi, i ∈ 1,s,
ne conduce la vi = 0E pentru orice 1 ≤ i ≤ s, atunci subspatiile au ın comun, doua
cate doua, numai vectorul nul. Reciproca este adevarata doar pentru s = 2.
Demonstratie. Daca ar exista i 6= j ∈ 1,s astfel ıncat Vi ∩Vj 6= {0E}, atunci, luand
u ∈ (Vi ∩Vj)\{0E}, am putea introduce vectorii vi = u, v j =−u, respectiv vk = 0E
pentru orice k 6= i, j. Evident,s
∑r=1
vr = 0E , ceea ce ar contrazice ipoteza.
Pentru partea a doua, sa presupunem ca s ≥ 3. Subspatiile V1 =K(e1 +e2), V2 =Ke1 si V3 = Ke2 au, doua cate doua, ın comun doar vectorul nul chiar daca are loc
relatia
3 Mai precis, un complement algebric, vezi [9, pag. 45, Definitia 2.1.6].4 Facem conventia ca orice suma cu zero termeni sa fie nula.

22 2 Teoreme de descompunere
s
∑r=1
vr = v1 + v2 + v3 +0E + · · ·+0E
= (e1 + e2)+(−e1)+(−e2)+0E + · · ·+0E
= 0E .
In sfarsit, daca s = 2 si ar exista vi ∈Vi\{0E} cu v1 + v2 = 0E , atunci am ajunge la
u = v1 =−v2 ∈ (Vi ∩Vj)\{0E} ,
ceea ce ar contrazice ipoteza. ⊓⊔
Lema 2.4. Fiind date multimile nevide A, B,C ⊆ E, sunt valabile urmatoarele afir-
matii:
i) daca A ⊆ B, atunci A ⊆ SpanK(A)⊆ SpanK(B);ii) A = SpanK(A) daca si numai daca A este K-subspatiu liniar;
iii) SpanK(A∪B) = SpanK (A∪SpanK(B));iv)5 daca SpanK(A)∩SpanK(B∪C) = {0E} si SpanK(B)∩SpanK(A∪C) = {0E},
atunci SpanK(A∪B)∩SpanK(C) = {0E};
v) daca A∩ SpanK(B) = /0 si SpanK(A)∩B = /0, atunci SpanK(A)∪ SpanK(B) (SpanK (A∪B).
Demonstratie. Partea iii). Este suficient sa aratam ca
SpanK (A∪SpanK(B))⊆ SpanK(A∪B).
Astfel, fie u ∈ SpanK (A∪SpanK(B)). Atunci,
u = ∑a∈A
αa a+ ∑c∈C
αc c = ∑a∈A
αa a+ ∑c∈C
αc
(
∑b∈B
αcb b
)
= ∑a∈A
αa a+ ∑b∈B
(
∑c∈C
αc ·αcb
)b ∈ SpanK(A∪B),
unde6 (αa)a∈A , (αc)c∈C ,(αcb
)b∈B,c∈C
⊂K si C = SpanK(B). Fiecare suma are un
numar finit de termeni nenuli.
Partea iv). Pastrand tehnica de sumare (finita), fie (αa)a∈A ,(αb
)b∈B
, (αc)c∈C ⊂K si vectorii
u = ∑a∈A
αa a, v = ∑b∈B
αb b, w = ∑c∈C
αc c
5 Fie E = R2, K= R, baza canonica S ={
i1, i2}
si multimile A ={
i1 + i2}
, B ={
i1 − i2}
, C ={i2}
. Atunci, SpanK(A)∩SpanK(C) = SpanK(B)∩SpanK(C) = {0E} dar SpanK(C)( SpanK(A∪B) = E. Vezi si Exemplul 3.1.6 In acest tutorial, cand nu este pericol de confuzie, expresia (hi)i∈A ⊂ H reprezinta o prescurtare
a expresiei {hi|i ∈ A} ⊂ H.

2.1 Sume directe 23
pentru care
u+ v = w ∈ SpanK(A∪B)∩SpanK(C).
Observam ca
u = (−v)+w
= ∑b∈B
(−αb)b+ ∑c∈C
αc c ∈ SpanK(A)∩SpanK(B∪C),
de unde u = 0E si
v = w ∈ SpanK(B)∩SpanK(C)⊆ SpanK(B)∩SpanK(A∪C).
Ajungem la v = w = 0E .
Partea v). Folosim argumentul din demonstratia Lemei 2.3. Astfel, fie a ∈ A, b ∈B. Atunci, afirmam ca
a+b ∈ SpanK(A∪B)\(SpanK(A)∪SpanK(B)) .
Intr-adevar, daca am presupune ca a+b ∈ SpanK(A), atunci am ajunge la
b = (a+b)+(−a) ∈ B∩SpanK(A),
adica la o contradictie ⊓⊔
Lema 2.5. ([18, pag. 204, Propozitia 2.2]) Fie V1,V2, . . . ,Vs ⊆ E, unde s ≥ 2, K-sub-
spatii liniare. Atunci, orice egalitate de forma
v1 + v2 + · · ·+ vs = 0E , vi ∈Vi, i ∈ 1,s,
ne va conduce la vi = 0E pentru orice 1 ≤ i ≤ s daca si numai daca7
Vi ∩SpanK
⋃
j∈1,s\{i}Vj
= {0E} (2.7)
pentru orice 1 ≤ i ≤ s.
Demonstratie. Fixam numarul i ∈ 1,s si numerotam elementele multimii 1,s\{i},
{ j1, j2, . . . , js−1}. Construim partitia (Wr)r∈1,s−1 ⊂ P (Mi) a multimii
Mi =⋃
j∈1,s\{i}Vj
7 K-subspatiul SpanK
(⋃
a∈A
Va
)reprezinta suma K-subspatiilor (Va)a∈A, [18, pag. 118]. Aici, A =
1,s\{i}. Se foloseste notatia ∑a∈A
Va, [18, pag. 204].

24 2 Teoreme de descompunere
cu formulele W1 =Vj1 si
Wr =Vjr\
Vjr ∩
⋃
q∈1,r−1
Vjq
, r ∈ 2,s−1.
Fie vi ∈(
Vi ∩SpanK
(⋃
j∈1,s\{i}Vj
))\{0E}. Atunci, exista vectorii
W = {w1, . . . ,wt} ⊂⋃
j∈1,s\{i}Vj, t ≥ 1,
si scalarii(αwq
)q∈1,t
⊂K, nu toti nuli, astfel ıncat8
vi =t
∑q=1
αwq wq = ∑w∈W
αww =s−1
∑r=1
(
∑w∈W ∩Wr
αww
)
=s−1
∑r=1
(−v jr),
unde v jr ∈ SpanK (Wr) ⊆ Vjr — vezi Lema 2.4, partile i), ii) — pentru orice r ∈1,s−1 si cel putin unul dintre acesti vectori este nenul. Pentru a construi familia
(v jr)r∈1,s−1, am adaugat vectorul 0E ori de cate ori W ∩Wr = /0. Apoi, renumerotam
familia, (v j) j∈1,s\{i}.
Am obtinut ca
vi + ∑j∈1,s\{i}
v j = 0E .
Reciproc, daca vi 6= 0E pentru un anumit i, atunci
vi = ∑j∈1,s\{i}
(−v j) ∈ SpanK
⋃
j∈1,s\{i}Vj
,
de unde {vi} ⊂Vi ∩SpanK
(⋃
j∈1,s\{i}Vj
)6= {0E}. ⊓⊔
Lema 2.6. In contextul descompunerii (2.6), fie σ ∈ Ss — [18, pag. 43] — o permu-
tare a multimii M = {1,2, . . . ,s} si partitia {I,J} ⊂ P(M ) a acestei multimi. Au
loc egalitatile
E = Vσ(1)⊕(Vσ(2)⊕
(· · ·⊕
(Vσ(s−1)⊕Vσ(s)
)· · ·))
8 Reamintesc conventia ca orice suma de vectori cu 0 termeni sa aiba valoarea 0E .

2.1 Sume directe 25
si
E =
(⊕
i∈I
Vi
)⊕(⊕
j∈J
Vj
).
Demonstratie. Introducem multimile (Wi)i∈1,s, cu formulele Ws = {0E} si
Wi =Vi+1 ⊕ (Vi+2 ⊕ (· · ·⊕ (Vs−1 ⊕Vs) · · ·)) , i ∈ 1,s−1.
Aici, E =V1 ⊕W1, respectiv Wi−1 =Vi ⊕Wi pentru orice 2 ≤ i ≤ s.
Au loc estimarile Vs−1 ⊕Vs = SpanK (Vs−1 ∪Vs), respectiv, via Lema 2.4, partea
iii),
Vs−2 ⊕ (Vs−1 ⊕Vs) = SpanK (Vs−2 ∪SpanK (Vs−1 ∪Vs))
= SpanK (Vs−2 ∪Vs−1 ∪Vs) .
In mod inductiv, ajungem la Wi = SpanK
(⋃
j≥i+1
Vj
)pentru orice i ∈ 1,s−1. De
unde,
{0E}=Vi ∩Wi =Vi ∩SpanK
(⋃
j≥i+1
Vj
). (2.8)
Afirmam ca are loc conditia (2.7). Intr-adevar, ın caz contrar, va exista vectorul
vi = ∑q 6=i
(−vq) ∈[
Vi ∩SpanK
(⋃
q 6=i
Vq
)]\{0E} ,
cu vq ∈Vq pentru orice q. Din egalitatea (2.8), deducem ca exista cel putin un vector
vq nenul astfel ıncat q < i.
Daca notam cu q0 ∈ 1, i−1 cel mai mic index pentru care termenul −vq0din
suma vi este nenul, deducem ca
vq0= ∑
q≥q0+1
(−vq) ∈Vq0∩SpanK
(⋃
j≥q0+1
Vj
).
Am ajuns la o contradictie, deci afirmatia a fost probata.
Pe baza conditiei (2.7), construim K-subspatiile liniare
Vσ(i+1)⊕(Vσ(i+2)⊕
(· · ·⊕
(Vσ(s−1)⊕Vσ(s)
)· · ·))
= SpanK
(⋃
j≥i+1
Vσ( j)
),
unde i ∈ 1,s−1. In particular,

26 2 Teoreme de descompunere
Vσ(i)∩(Vσ(i+1)⊕
(Vσ(i+2)⊕
(· · ·⊕
(Vσ(s−1)⊕Vσ(s)
)· · ·)))
= {0E} .
Mai departe, fie i0, i1 ∈ I. Tinand seama de conditia (2.7), avem
{0E}=Vi0 ∩SpanK
⋃
q∈J∪{i1}Vq
=Vi1 ∩SpanK
⋃
q∈J∪{i0}Vq
.
Din Lema 2.4, partea iv), unde A =Vi0 , B =Vi1 ,C = SpanK
(⋃
q∈J
Vq
), rezulta ca
SpanK(Vi0 ∪Vi1
)∩SpanK
(⋃
j∈J
Vj
)= {0E} ,
adica
(Vi0 ⊕Vi1
)∩(⊕
j∈J
Vj
)= {0E} .
Stabilim concluzia ın mod inductiv.
La fel ca ın demonstratia Lemei 2.1, nu am tinut seama de dimensiunea spatiului
ambient E. ⊓⊔
Pastrand contextul Lemei 2.1, fie T : V → V un operator liniar cu matricea de
reprezentare TV , unde
(T (e1) · · · T (eh)
)=(e1 · · · eh
)TV , TV ∈ Mh(K).
Operatorul T poate fi prelungit cu zero la ıntregul spatiu E. Mai precis, noul
operator — notat tot cu T — verifica relatia
(T (e1) · · · T (eh) T (eh+1) · · · T (em)
)=(e1 · · · eh eh+1 · · · em
)T,
unde9
T=
(TV Oh,m−h
Om−h,h Om−h
)∈ Mm(K).
Mai departe, fiind dati operatorii liniari T : V → V si P : W → W , cu matricele
TV si PW , deducem ca suma prelungirilor lor cu zero ın spatiul E este un operator
liniar M : E → E a carui matrice de reprezentare ın baza S1 are formula
9 Op,q reprezinta matricea-nula cu p linii si q coloane. Aici, Op = Op,p.

2.1 Sume directe 27
M = T+P=
(TV Oh,m−h
Om−h,h Om−h
)+
(Oh Oh,m−h
Om−h,h PW
)
=
(TV Oh,m−h
Om−h,h PW
).
Daca spatiul E este descompus ın suma directa a spatiilor V1, . . . , Vs — vezi (2.6)
—, atunci, fiind dati operatorii liniari Tr : Vr →Vr de matrice TVr , unde r ∈ 1,s, suma
prelungirilor lor cu zero ın spatiul E este operatorul T : E → E cu matricea
T=
TV10 · · · 0
0 TV2· · · 0
......
. . ....
0 · · · 0 TVs
.
Acesta se noteaza cu expresia T = T1 ⊕·· ·⊕Ts si se numeste suma directa a opera-
torilor (Tr)r∈1,s [14, pag. 41].
Lema 2.7. Fie T : E → E un operator liniar si E = V ⊕W. Daca T (V ) ⊆ V si
T (W )⊆W, atunci exista operatorii K-liniari T1 : V →V si T2 : W →W astfel ıncat
T = T1 ⊕T2.
Demonstratie. Pentru V = SpanK{e1, · · · ,eh}, W = SpanK{eh+1, · · · ,em}, deducem
ca
T (e j) ∈ SpanK{e1, · · · ,eh}, j ∈ 1,h,
si
T (ek) ∈ SpanK{eh+1, · · · ,em}, k ∈ h+1,m,
respectiv matricea de reprezentare a operatorului ın raport cu baza S1 are forma
T=
(A Oh,m−h
Om−h,h B
), A ∈ Mh(K), B ∈ Mm−h(K). (2.9)
Avem T1 = T |V cu matricea TV = A si T2 = T |W cu matricea TW = B. ⊓⊔
Lema 2.8. Fie E =V ⊕W ⊆Cn un spatiu liniar peste corpul K si operatorul liniar
T : E → E astfel ıncat T (V )⊆V si T (W )⊆W. Daca λ ∈K este o valoare proprie a
operatorului T , atunci λ este valoare proprie pentru cel putin unul dintre operatorii
T |V , T |W .
Demonstratie. Fie e = v+w ∈ E, unde v ∈V si w ∈W , un vector propriu corespun-
zator valorii proprii λ .
Din relatiile

28 2 Teoreme de descompunere
T (e) = T (v)+T (w) = T |V (v)+T |W (w)
= λ · e= λ · v+λ ·w
deducem ca
T |V (v)−λ · v = λ ·w−T |W (w) (∈V ∩W )
= 0E ,
respectiv
T |V (v) = λ · v, T |W (w) = λ ·w.
Cum e 6= 0E , cel putin unul dintre vectorii v, w este nenul. Presupunem ca w 6= 0.
Atunci, w este eigenvector pentru valoarea proprie λ a operatorului corespunzator,
adica T |W . ⊓⊔
Exemplul 2.1. In contextul Lemei 2.2, fie T : R6 → R6 operatorul liniar bijectiv dat
de relatiile
T (i1) = i2, T (i2) = i1, T (i3) = i3,
T (i4) = i4, T (i5) = i6, T (i6) = i5,
unde sistemul S1 = {i1, . . . , i6} desemneaza baza canonica (1.11). Avem
T=
0 1 0 0 0 0
1 0 0 0 0 0
0 0 1 0 0 0
0 0 0 1 0 0
0 0 0 0 0 1
0 0 0 0 1 0
, det T= 1.
Introducem subspatiile liniare
V = SpanR{
i1, i2, i3}, W = SpanR
{i4, i5, i6
}, W1 = SpanR
{i3 + i4, i5, i6
}.
Atunci, avem
(E =) R6 =V ⊕W =V ⊕W1
si — T (i3 + i4) = i3 + i4 —
T (V ) =V, T (W ) =W, T (W1) =W1.
Cu alte cuvinte, subspatiul V poate admite mai multe complemente, fiecare dintre
acestea invariat de catre operatorul T !

2.2 Teorema N +M 29
2.2 Teorema N +M
Fie E ⊆Cn un spatiu liniar m-dimensional peste corpul K∈ {R, C} si T : E → E
un operator K-liniar.
Introducem multimile10
Ki (T ) = Ker(T i), Li (T ) = Im
(T i), i ∈ N.
Aici, T 0 = I, unde I este operatorul-identitate din L(E,E), si T i = T ◦T ◦ · · · ◦T —
i factori T —.
Lema 2.9. Pentru orice i ≥ 0, multimile Ki(T ) si Li(T ), ımpreuna cu operatiile
liniare de pe E, sunt spatii liniare peste corpul K.
Demonstratie. Aplicatia T i : E → E fiind un operator liniar, nucleul11 (Ker) si ima-
ginea12 sa (Im) sunt subspatii liniare ale spatiului E. ⊓⊔
Lema 2.10. Multimile
N =⋃
i≥0
Ki(T ), M =⋂
i≥0
Li(T )
sunt subspatii liniare ale spatiului E.
Demonstratie. Fie x ∈ Ki(T ), adica T i(x) = 0. Avem T i+1(x) =(T ◦T i
)(x) =
T(T i(x)
)= T (0E) = 0E , de unde x ∈ Ki+1(T ). De aici,
K0(T ) = Ker I = {0E} ⊆ K1(T )⊆ ·· · ⊆ Ki(T )⊆ Ki+1(T )⊆ ·· · ⊆ E. (2.10)
Fie y∈ Li+1(T ), adica y= T i+1(x) pentru un anumit x∈E. Avem y=(T i ◦T
)(x)
= T i (T (x)) = T i(z), de unde y ∈ Li(T ). De aici,
L0(T ) = Im I = E ⊇ L1(T )⊇ ·· · ⊇ Li(T )⊇ Li+1(T )⊇ ·· · ⊇ {0E} . (2.11)
Facem urmatoarea observatie: daca V ⊂ E este un subspatiu liniar propriu, de
baza S , al spatiului liniar E iar e∈ E\V , atunci vectorii din sistemul B =S ∪{e}sunt liniar independenti peste corpul K. Intr-adevar, cum V = SpanK(S ), daca e ar
fi o combinatie liniara de elemente din S , deci e ∈ SpanK(S ), atunci am ajunge la
e ∈V , adica la o contradictie.
Pe baza observatiei anterioare, deducem ca ın niciunul din sirurile de spatii
(2.10), (2.11) nu putem avea o infinitate de incluziuni stricte. O asemenea situatie
10 Fiind dat operatorul liniar P : E → E, multimile KerP = {e|P(e) = 0E} si ImP = {P(e)|e ∈E} = P(E), dotate cu operatiile spatiului ambient E, sunt spatii liniare peste corpul K [11, pag.
88].11 In limba engleza, kernel [20, pag. 16]. Sau spatiul nul al operatorului T , vezi [20, pag. 16], [11,
ibid.].12 In limba engleza, image [14, pag. 34].

30 2 Teoreme de descompunere
ar conduce fie la o infinitate de vectori xi ∈ Ki+1(T )\Ki(T ) ⊂ E fie la o infinitate
de vectori yi ∈ Li(T )\Li+1(T ) ⊂ E care sa fie liniar independenti peste corpul K.
Numai ca numarul maxim de elemente liniar independente din E este m!
Deductia anterioara poate fi ımbunatatita. Astfel, sa presupunem ca avem Kt(T )=Kt+1(T ) pentru un anumit t ∈N∗. Atunci, Kt+1(T ) = Kt+2(T ). Pentru a proba acest
fapt, fie x ∈ Kt+2(T ). Atunci, 0E = T t+2(x) = T t+1(T (x)), de unde T (x) ∈ Kt+1(T ),respectiv T (x) ∈ Kt(T ). Am ajuns la T t+1(x) = T t(T (x)) = 0E , adica x ∈ Kt+1(T ).In concluzie, Kt+2(T ) ⊆ Kt+1(T ). Incluziunea inversa provine din (2.10). Mai de-
parte, sa presupunem ca avem Lt(T ) = Lt+1(T ) pentru un anumit t ∈ N∗. Atunci,
Lt+1(T ) = Lt+2(T ). Pentru a proba acest fapt, fie x = T t+1(y) ∈ Lt+1(T ). Atunci,
x = T (T t(y)) = T (z), unde z ∈ Lt(T ) = Lt+1(T ). Avem z = T t+1(v), de unde
x = T (z) = T t+2(v). Am ajuns la x ∈ Lt+2(T ). Incluziunea inversa provine din
(2.11).
Asadar, exista numerele naturale p, r pentru care
{Ki(T ) = Ki+1(T ) = Ki+2(T ) = · · · ,L j(T ) = L j+1(T ) = L j+2(T ) = · · · , (2.12)
unde i ≥ p si j ≥ r, si
K0(T )( K1(T )( · · ·( Kp(T ), (2.13)
respectiv
L0(T )) L1(T )) · · ·) Lr(T ).
De aici, N = Kp(T ) si M = Lr(T ). Concluzia rezulta din Lema 2.9. ⊓⊔
Lema 2.11. In contextul Lemei 2.10,
T (N)⊆ N, T (M)⊆ M.
Demonstratie. Fie e ∈ N. Atunci, fixam i ≥ 0 astfel ıncat e ∈ Ki(T ). In cazul i ≥ 1
au loc relatiile
T i(T (e)) = T i+1(e) = T(T i(e)
)= T (0E)
= 0E ,
din care deducem ca T (e) ∈ Ki(T )⊆ N.
Mai departe, fie e ∈ M. Atunci, via (2.12), M = T r(E), deci exista f ∈ E cu
proprietatea ca e = T r( f ). Avem
T (e) = T r+1( f ) ∈ ImT r+1 = ImT r = M,
ceea ce ıncheie demonstratia. ⊓⊔
Lema 2.12. ([14, pag. 333, Theorem]) In contextul Lemei 2.11, fie P : E → E un
operator K-liniar care comuta cu T , adica

2.2 Teorema N +M 31
T ◦P = P◦T.
Atunci,
P(N)⊆ N. (2.14)
Demonstratie. Din T ◦P = P ◦ T rezulta ca T 2 ◦P = T ◦ (T ◦P) = T ◦ (P ◦ T ) =(T ◦P)◦T = (P◦T )◦T = P◦T 2, respectiv
T k ◦P = P◦T k, k ∈ N∗
.
Fie x ∈ N = Kp(T ) — vezi (2.12) —. Au loc relatiile
T p(P(x)) = (T p ◦P)(x) = (P◦T p)(x) = P(0E) = 0E ,
adica P(x) ∈ Kp(T ). ⊓⊔
Teorema 2.1. ([14, pag. 332, Lemma]) Spatiul liniar E admite descompunerea
E = N ⊕M. (2.15)
Demonstratie. Fie T1 = T |M . Conform Lemei 2.11, operatorul T1 : M → M este
bine-definit. Mai mult, tinand seama de (2.12), putem scrie ca
M = T r(E) = T r+1(E) = T (T r(E)) = T (M) = T1(M),
adica T1 este surjectiv. Deoarece spatiul liniar M este finit dimensional iar operatorul
T1 este K-liniar, deducem ca T1 este bijectiv, deci si injectiv13.
Cum operatorul T1 este bijectiv, toate puterile sale sunt bijective, adica Ker(T v1 )=
{0E}, unde v ≥ 0. Asadar, pentru orice e ∈ M\{0E}, sirul (T v1 (e))v≥1
contine doar
vectori nenuli din M. In particular, fie x ∈ N ∩M\{0E}. Atunci, cum x ∈ N, exista
i ≥ 1 astfel ıncat x ∈ Ki(T ), adica T i(x) = 0E . Deoarece x ∈ M\{0E}, relatiile
0E = T i(x) = T i1(x) 6= 0E
ne conduc la o contradictie. Am obtinut ca
N ∩M = {0E} .
Ramane sa stabilim ca are loc descompunerea (2.1). Fie e ∈ E. Atunci, T r(e) ∈M. Cum14 M = T r
1 (M), exista si este unic vectorul w ∈ M cu proprietatea ca
T r(e) = T r1 (w).
Luand v = e−w, observam ca T r(v) = T r(e)− T r(w) = T r(e)− T r1 (w) = 0E ,
adica v ∈ Kr(T )⊆ N. ⊓⊔13 Vezi [14, pag. 35, 327, Proposition 3] sau [11, pag. 62, Theorem 2].14 Operatorul T r
1 este bijectiv!
32 2 Teoreme de descompunere
Lema 2.13. In contextul Teoremei 2.1,
T = T1 ⊕T2, (2.16)
unde T1 = T |N si T2 = T |M . De asemeni, exista p ∈ N∗ astfel ca
TpN = Oh, (2.17)
unde h este dimensiunea K-subspatiului N.
Demonstratie. Conform (2.12), fixam p ≥ 1 pentru care Ki(T ) = Kp(T ) oricare ar
fi i ≥ p. Atunci, N = Kp(T ).Formulele (1.24), (1.25) ne conduc la — reamintesc relatia (1.16) —
0E = T p(v) =(e1 · · · em
)[( TN Oh,m−h
Om−h,h TM
)p]
x1
...
xh
0...
0
,
unde N = SpanK{e1, · · · ,eh}, M = SpanK{eh+1, · · · ,em} si v =h
∑i=1
xi · ei +m
∑i=h+1
0 ·ei ∈ N, respectiv la identitatea dubla
(TN Oh,m−h
Om−h,h TM
)p
x1
...
xh
0...
0
=
(T
pN Oh,m−h
Om−h,h TpM
)
x1
...
xh
0...
0
=
0...
0
, (2.18)
valabila pentru orice x1, . . . ,xh ∈K.
Singura matrice care poate fi pusa ın locul lui TpN ın (2.18) pentru a satisface
identitatea este matricea-nula, Oh. Relatia (1.18) ne arata ca formula (2.17) este
independenta de baza spatiului N. ⊓⊔
Operatorul liniar T1 : N → N din Lema 2.13 este numit nilpotent [14, pag. 109].
2.3 Teorema de descompunere primara
Lema 2.14. Fie E ⊆ Cn un K-spatiu liniar de dimensiune m ≤ n si T : E → E un
operator K-liniar cu valoarea proprie λ0 ∈K.

2.3 Teorema de descompunere primara 33
Presupunem ca T verifica proprietatea (H S ): sau ecuatia caracteristica
pT (λ ) = 0
are toate radacinile reale sau
K= C.
Fie subspatiul liniar15
V =⋃
k≥0
Ker (T −λ0 · I)k
si W un complement al acestuia cu proprietatea ca T (W ) ⊆ W. Atunci, sau W ={0E} sau polinomul caracteristic pT (λ ) al operatorului T admite un zero λ1 6= λ0
ın K.
Demonstratie. Incepem prin a arata ca situatia din ipoteza — existenta subspatiilor
V , W — are loc ıntotdeauna.
Pasul ıntai. Aplicand Teorema 2.1 si Lema 2.11 operatorului liniar T − λ0 · I,
deducem ca V este un subspatiu liniar al spatiului E care este invariat de T −λ0 · I.
De asemeni, subspatiul V admite un complement, si anume
W =⋂
k≥0
Im (T −λ0 · I)k,
care sa fie invariant la actiunea lui T −λ0 · I.
Pasul al doilea. Facem observatia ca, fiind dat µ ∈K, operatorul liniar T −µ · Iinvariaza un subspatiu liniar H ⊆ E daca si numai daca si operatorul T invariaza
subspatiul ın cauza. Intr-adevar, daca (T − µ · I)(e) = T (e)− µ · e ∈ H pentru un
anumit e ∈ H, atunci T (e) = [T (e)− µ · e]+ µ · e ∈ H, adica T (H) ⊆ H. Afirmatia
reciproca este evidenta: (T −µ · I)(H)⊆ H cand T (H)⊆ H.
In consecinta, spatiile V , W , care sunt invariate de T −λ0 · I, vor fi invariate si de
operatorul T , respectiv de toti operatorii (T − µ · I)µ∈K. Am ajuns, asadar, la cele
doua descompuneri (2.15), (2.16) — bazata pe Lema 2.7 —.
Revenind la firul principal al demonstratiei, ipotezele ne situeaza ın contextul
Lemei 2.7. Pentru V = SpanK{e1, · · · ,eh}, W = SpanK{eh+1, · · · ,em}, matricea de
reprezentare a operatorului T ın baza S1 = {e1, . . . ,em} a spatiului E are forma
(2.9). In particular, daca h < m — vezi (2.9) — si λ ∈ K este o eigenvaloare a
operatorului T , atunci matricea de reprezentare a operatorului T −λ · I ın baza S1
are forma
T−λ · Im = T−λ ·(
Ih Oh,m−h
Om−h,h Im−h
)=
(A−λ · Ih Oh,m−h
Om−h,h B−λ · Im−h
), (2.19)
15 Subspatiul V se mai numeste si λ0-eigenspatiul generalizat al operatorului T iar multimea
Ker (T −λ0 · I)⊆V poarta numele de λ0-eigenspatiul operatorului T [14, pag. 110].

34 2 Teoreme de descompunere
de unde
pT (λ ) =∣∣∣∣A−λ · Ih Oh,m−h
Om−h,h B−λ · Im−h
∣∣∣∣= det (A−λ · Ih) ·det (B−λ · Im−h) (2.20)
= 0.
Fie v ∈ V , unde v =h
∑i=1
xi · ei. Conform (2.12), exista numarul p ≥ 1 astfel ıncat
V = Kp(T −λ0 · I).Relatiile (2.18) devin — vezi (2.19) —
((A−λ0 · Ih)
pOh,m−h
Om−h,h (B−λ0 · Im−h)p
)
x1
...
xh
0...
0
=
0...
0
. (2.21)
La fel ca ın demonstratia Lemei 2.13, pentru ca identitatea (2.21) sa aiba loc este
obligatoriu sa avem
(A−λ0 · Ih)p = Oh, (2.22)
ceea ce ne conduce la o formula de reprezentare a matricei A, si anume
A = λ0 · Ih +M, M ∈ Mh(K), M = nilpotenta. (2.23)
Facem urmatoarea observatie: daca T1 : E → E este prelungirea cu zero a opera-
torului T1 : V →V , adica
T1 =
(A Oh,m−h
Om−h,h Om−h
),
si e =m
∑i=1
xi · ei ∈ E este un eigenvector (generalizat) corespunzand valorii proprii
µ 6= 0 — a acestei prelungiri T1 —, atunci sistemul algebric
2.3 Teorema de descompunere primara 35
(T1 −µ · Im)k
x1
...
xh
xh+1
...
xm
=
(A−µ · Ih Oh,m−h
Om−h,h Om−h −µ · Im−h
)k
x1
...
xh
xh+1
...
xm
=
((A−µ · Ih)
kOh,m−h
Om−h,h (−µ · Im−h)k
)
x1
...
xh
xh+1
...
xm
(2.24)
=
0...
0
∈ Rm
, k ∈ N∗,
are drept solutie nenula setul de coordonate ın baza S1 al vectorului e. Prezenta
termenului (−µ · Im−h)k
ın (2.24) ne arata ca sistemul poate avea (asemenea) solutii
nenule daca si numai daca det(A−µ · Ih) = 0 si xh+1 = · · ·= xm = 0. Adica, µ tre-
buie sa fie eigenvaloare pentru operatorul “mic” T1 : V → V si e =h
∑i=1
xi · ei ∈ V
un eigenvector (generalizat) corespunzandu-i lui µ . Cu alte cuvinte, valorile pro-
prii nenule si vectorii proprii (generalizati) ai unui operator T1 : V → V coincid
cu valorile proprii nenule, respectiv cu vectorii proprii (generalizati) ai prelungirii
acestui operator cu zero ın ıntregul spatiu E. Evident, o observatie similara se face
ın privinta operatorului T2 : W →W si a prelungirii sale cu zero, notata tot cu T2, ın
ıntreg spatiul ambient E!
Numarul λ0 ∈K, fiind o valoare proprie a operatorului T : E →E, este o radacina,
de multiplicitate16 m0 ∈ N∗, a polinomului caracteristic pT (λ ). Atunci, avem
pT (λ ) = (λ −λ0)m0 ·q(λ ), (2.25)
unde q este tot un polinom cu coeficienti ın K, avand gradul mai mic decat m —
gradul polinomului pT (λ ) —, care nu se anuleaza pentru λ = λ0.
Formula (2.22) ne arata ca numarul λ0 este valoare proprie a matricei A. In plus,
via (2.20), deducem ca exista 1 ≤ n0 ≤ m0 astfel ıncat (λ −λ0)n0 |det(A−λ · Ih).
Afirmam ca n0 = m0, adica λ0 nu este un zero al polinomului det(B−λ · Im−h).Pentru a proba aceasta, presupunem ca, prin absurd, λ0 este un asemenea zero, adica
o valoare proprie a matricei B. Observatia anterioara, pentru operatorul T2 : W →W
si µ = λ0, ne conduce la sistemul algebric
16 Aceasta cantitate se numeste multiplicitatea algebrica a eigenvalorii λ0, vezi [1, pag. 157].

36 2 Teoreme de descompunere
(−λ0 · Ih Oh,m−h
Om−h,h B−λ0 · Im−h
)
x1
...
xh
xh+1
...
xm
=
0...
0
∈ Rm
. (2.26)
Cum det(B−λ0 · Im−h) = 0, daca luam x1 = · · ·= xh = 0, atunci va exista vectorul
nenul w =m
∑i=h+1
xi · ei ∈ SpanK{eh+1, . . . ,em}=W ale carui componente sa verifice
sistemul algebric (2.26). Astfel, w devine un eigenvector17 al (prelungirii cu zero a)
operatorului T2, de unde, data fiind unicitatea descompunerii (2.1), deducem ca
T (w) = T (0E +w) = T2(w) = λ0 ·w,
respectiv w ∈ Ker(T −λ0 · I)⊆V . Am ajuns, evident, la o contractie: w ∈V ∩W .
Mai facem o afirmatie18: numarul λ0 este singura valoare proprie a matricei
A ∈ Mh(K). La fel ca pana acum, presupunem ca, prin absurd, exista µ 6= λ0 ın K
astfel ıncat det(A−µ · Ih) = 0. Folosind sistemul algebric (2.24), cu k = 1, deducem
existenta19 unui vector nenul v ∈ SpanK{e1, . . . ,eh} = V pentru care este valabila
dubla egalitate T (v) = T1(v) = µ · v.
Cum v ∈V , exista j ≥ 1 cu proprietatea ca v ∈ Ker (T −λ0 · I) j. Adica, (T −λ0 ·I) j(v) = 0E . Insa, remarcam ca
(T −λ0 · I)2(v) = (T −λ0 · I)((T −λ0 · I)(v)) = (T −λ0 · I)(T (v)−λ0 · v)= (T −λ0 · I)((µ −λ0) · v) = (µ −λ0) · (T −λ0 · I)(v)= (µ −λ0)
2 · v,
respectiv — prin inductie matematica —
0E = (T −λ0 · I) j(v) = (µ −λ0)j · v.
Am ajuns, din nou, la o contradictie: v = 0E .
Demonstratia afirmatiei se bazeaza, asadar, pe constructia unui vector v 6= 0E .
Acest vector nu poate fi folosit daca µ ∈ C\K pentru ca am avea
v ∈ SpanC{e1, . . . ,eh}) SpanK{e1, . . . ,eh}=V,
adica este posibil ca v 6∈ V . Ca sa evitam asemenea complicatii, am introdus pro-
prietatea (H S ) [14, pag. 128, Theorem 1].
In concluzie,
17 Daca λ0 = 0, atunci nu este obligatoriu ca x1 = · · · = xh = 0! Putem, ın schimb, impune noi
aceasta restrictie, deoarece suntem interesati de constructia unui anumit vector w.18 Vezi [14, pag. 332, ecuatia (2)].19 Aici, impunem ca xh+1 = · · ·= xm = 0.

2.3 Teorema de descompunere primara 37
det(A−λ · Ih) = (−1)m0 · (λ −λ0)m0 , λ ∈K, (2.27)
deci am obtinut urmatoarea formula pentru polinomul caracteristic al operatorului
T , si anume
pT (λ ) = (−1)m0(λ −λ0)m0 ·det(B−λ · Im−h). (2.28)
Expresia (2.27) ne arata ca gradul polinomului det(A−λ · Ih) — adica, h, dimen-
siunea subspatiului V peste K — este egal cu m0, multiplicitatea algebrica a valorii
proprii λ0. Cu alte cuvinte,
dimK
(⋃
i≥0
Ker (T −λ0 · I)i
)= m0. (2.29)
Vezi [14, pag. 333].
In sfarsit, cum suma dimensiunilor celor doua subspatii, dimKV + dimKW , este
dimensiunea spatiului E, adica m, daca W 6= {0E}, adica dimKW ≥ 1, deducem ca
dimKV = m0 ≤ m− 1. Dat fiind ca gradul polinomului pT (λ ) este m, rezulta ca
factorul det(B−λ · Im−h) din (2.28) este un polinom cu gradul cel putin 1. Numarul
(complex) λ1 cautat este o solutie a ecuatiei algebrice det(B−λ · Im−h) = 0. ⊓⊔
Vom lucra, pana la sfarsitul sectiunii de fata, cu scalari din corpul
K= C (2.30)
si vom aplica ın mod inductiv Lema 2.14.
In contextul Teoremei 2.1, daca am fixat baza S1 a spatiului ambient E, atunci
operatorul T2 : W →W este reprezentat de matricea
TW = B, B ∈ Mm−m0(K),
iar prelungirea cu zero ın E a operatorului T2, pe care o notam cu T 2 : E → E, are
matricea
T2 =
(Om0
Om0,m−m0
Om−m0,m0B
). (2.31)
Polinomul caracteristic pT (λ ) se scrie ın mod unic sub forma20
pT (λ ) = (−1)m · (λ −λ0)m0 · (λ −λ1)
m1 · . . . · (λ −λs)ms , s ∈ N∗
, (2.32)
unde numerele complexe {λ0, . . . ,λs} desemneaza valorile proprii distincte ale ope-
ratorului liniar T iar numerele {m0, . . . ,ms} ⊂ N∗ sunt multiplicitatile algebrice ale
acestor valori proprii. Evident,s
∑i=0
mi = m. Vezi [14, pag. 330].
20 Atentie, ın [14, pag. 110] se foloseste ca polinom caracteristic marimea (−1)m · pT (λ ).

38 2 Teoreme de descompunere
Reprezentarea (2.28) a polinomului pT (λ ) ne conduce la urmatoarea expresie a
polinomului caracteristic pT2(λ ) al operatorului liniar T2 : W →W . Adica,
pT2(λ ) = (−1)m−m0 · (λ −λ1)
m1 · . . . · (λ −λs)ms .
Aplicand Lema 2.14 operatorului21 T2 :W →W , obtinem relatiile omoloage celor
care au caracterizat operatorul T :
W =V1 ⊕W1, T2 = T 12 ⊕T 2
2 ,
unde
V1 =⋃
k≥0
Ker (T2 −λ1 · I)k, W1 =
⋂
k≥0
Im (T2 −λ1 · I)k.
Aici, I : W → W este operatorul-identitate din L(W,W ), respectiv22 T 12 = T2|V1
=T |V1
si T 22 = T2|W1
= T |W1. In plus, daca v1 ∈ E este un eigenvector (generalizat)
corespunzand valorii proprii λ1 a operatorului liniar T : E → E, atunci avem v1 ∈W
— am vazut ca subspatiul V contine doar eigenvectori (generalizati) ai valorii proprii
λ0 —. Ceea ce ınseamna ca [14, pag. 332, ecuatia (1)]
Ker (T −λ1 · I)i = Ker (T2 −λ1 · I)i, i ≥ 1, (2.33)
respectiv
V1 =⋃
k≥0
Ker (T −λ1 · I)k.
Pentru a ne convinge de acest fapt, nu avem decat sa analizam sistemul algebric a-
sociat membrului stang al egalitatii (2.33). Mai precis, fiind data ecuatia matriceala
((A−λ1 · Im0
)i Om0,m−m0
Om−m0,m0(B−λ1 · Im−m0
)i
)
x1
...
xm0
xm0+1
...
xm
=
0...
0
∈ Rm
,
existenta unui set {x1, . . . ,xm0} de numere complexe care sa contina macar un numar
nenul23 va ınsemna ca sistemul algebric omogen
21 Atentie, operatorul T 2 admite ıntotdeauna si valoarea proprie 0, a carei multiplicitate algebrica
este cel putin m0. Cum operatorul T ar putea avea si el valoarea proprie 0, daca i-am aplica Lema
2.14 operatorului T 2, atunci argumentatia s-ar complica excesiv.22 Evident, T2|V1
= (T |W )|V1= T |V1
pentru ca V1 ⊆W .
23 Adica, de exemplu, xm06= 0 si v1 = xm0
· em0+
(m
∑i=m0+1
xi · ei
)∈ Ki(T −λ1 · I)\W .

2.3 Teorema de descompunere primara 39
(A−λ1 · Im0)i
x1
...
xm0
=
0...
0
∈ Rm0
admite solutii nenule. Astfel, ajungem la det(A− λ1 · Im0) = 0. Adica, matricea A
ar trebui sa aiba valoarea proprie λ1 6= λ0, ceea ce contrazice demonstratia Lemei
anterioare!
Mai departe, matricea B are forma
B =
(A1 Oh1,m−m0−h1
Om−m0−h1,h1B1
), (2.34)
unde A1 ∈ Mh1(K), B1 ∈ Mm−m0−h1
(K).Inseram expresia matricei B din (2.34) ın (2.31) si ajungem la matricea de repre-
zentare a (prelungirii cu zero a) operatorului T 12 : E → E, si anume
T12 =
Om0Om0,m−m0
Om−m0,m0
(A1 Oh1,m−m0−h1
Om−m0−h1,h1Om−m0−h1
) .
Este clar ca avem, ın fapt, urmatoarea matrice:
T12 =
Om0Om0,h1
Om0,m−m0−h1
Oh1,m0A1 Oh1,m−m0−h1
Om−m0−h1,m0Om−m0−h1,h1
Om−m0−h1
.
In mod analog,
T22 =
Om0Om0,h1
Om0,m−m0−h1
Oh1,m0Oh1
Oh1,m−m0−h1
Om−m0−h1,m0Om−m0−h1,h1
B1
.
Asadar, am dedus ca24 E =V0 ⊕V1 ⊕W1 si T = T0 ⊕T1 ⊕T2, unde
Vi =⋃
k≥0
Ker (T −λi · I)k, dimKVi = mi, Ti = T |Vi
, i ∈ {0,1},
si
T2 = T |W1.
Teorema 2.2. Fiind date spatiul liniar complex E ⊆ Cn, de dimensiune m ≤ n, si
operatorul C-liniar T : E → E, are loc descompunerea
T = D +N ,
24 Aici, V0 =V .

40 2 Teoreme de descompunere
unde operatorul C-liniar N : E → E este nilpotent iar operatorul C-liniar D : E →E admite o matrice-diagonala25 de reprezentare.
Demonstratie. Ne gasim ın contextul Lemei 2.14 si al cerintei (2.30). Exista, asadar,
subspatiile liniare complexe Vi ⊆ E, unde
Vi =⋃
j≥0
Ker (T −λi · I) j, dimCVi = mi (vezi (2.32))
pentru 0 ≤ i ≤ s, si26 [14, pag. 110, Theorem 1]
E =V0 ⊕V1 ⊕·· ·⊕Vs. (2.35)
Matricea de reprezentare a operatorului liniar T ın baza S1 are forma
T=
A0 · · · Om0,ms
.... . .
...
Oms,m0· · · As
, Ai ∈ Mmi
(C).
Aici, conform (2.23),
Ai = λi · Imi+Mi, Mi ∈ Mmi
(C), (2.36)
si exista numarul pi ∈ N∗ cu proprietatea ca
Mpii = Omi
. (2.37)
Introducem matricele
D=
D0 · · · Om0,ms
.... . .
...
Oms,m0· · · Ds
, Di = λi · Imi
, i ∈ 0,s,
si
N=
M0 · · · Om0,ms
.... . .
...
Oms,m0· · · Ms
.
Il notam cu p pe cel mai mare dintre numerele {p0, . . . , ps} [14, pag. 112].
Atunci,
25 Matricea M = (mvw)v,w ∈ Mq(K) este matrice-diagonala daca singurele elemente (intrari) ne-
nule ale sale se gasesc pe diagonala principala a matricei. Adica, mvw = 0 pentru orice v 6= w ∈ 1,q.
Prin extensie de limbaj, o matrice definita pe blocuri este matrice-diagonala daca numai blocurile
de pe diagonala principala pot fi nenule.26 La ultima aplicare a Lemei 2.14, obtinem W =Ws = {0E}.
2.3 Teorema de descompunere primara 41
Np =
Mp0 · · · Om0,ms
.... . .
...
Oms,m0· · · M
ps
=
Mp00 ·Mp−p0
0 · · · Om0,ms
.... . .
...
Oms,m0· · · M
pss ·Mp−ps
s
=
Om0· · · Om0,ms
.... . .
...
Oms,m0· · · Oms
= Om. (2.38)
Via (1.9), definim operatorul D de matrice D si operatorul N de matrice N. ⊓⊔
Un operator K-liniar D : E → E care admite o matrice-diagonala de reprezentare
este numit diagonalizabil [14, pag. 45] atunci cand K ∈ {R,C} si semi-simplu pen-
tru K = C [14, pag. 63]. In cazul particular cand s = 0, deci D = D0 = λ0 · Im0=
λ0 · Im, operatorul poarta numele de operator diagonal [14, pag. 46]. Tot aici se
observa ca, pentru orice matrice W∼ D, avem W= λ0 · Im = D [14, pag. 111].
Lema 2.15. In contextul Teoremei 2.2, avem
D ◦N = N ◦D .
Demonstratie. La fel ca ın (1.16), operatorul D ◦N este reprezentat de matricea
DN ın baza S1 a spatiului E iar operatorul N ◦D de matricea ND.
Mai departe,
DN =
D0M0 · · · Om0,ms
.... . .
...
Oms,m0· · · DsMs
=
(λ0Im0
)M0 · · · Om0,ms
.... . .
...
Oms,m0· · · (λsIms)Ms
=
M0
(λ0Im0
)· · · Om0,ms
.... . .
...
Oms,m0· · · Ms (λsIms)
=
M0D0 · · · Om0,ms
.... . .
...
Oms,m0· · · MsDs
= ND.
⊓⊔
Lema 2.16. ([14, pag. 120, Problema 8]) In contextul Teoremei 2.2, au loc inegali-
tatile
pi ≤ mi, i ∈ 0,s, (2.39)
unde numerele pi au fost definite ın (2.37). Adica, matricele Mi din (2.36) ındeplinesc
conditiile
Mmii = Omi
pentru orice i. (2.40)
Demonstratie. Stim ca Vi = Kpi(T −λi · I). Incluziunile stricte (2.13), si anume

42 2 Teoreme de descompunere
{0E}( Ker(T −λi · I)( Ker(T −λi · I)2 ( · · ·( Ker(T −λi · I)pi =Vi,
ne permit sa alegem vectorii x1 ∈ Ker(T −λi · I)\{0E}, x2 ∈ Ker(T −λi · I)2\Ker(T − λi · I), . . . , xpi
∈ Ker(T − λi · I)pi\Ker(T − λi · I)pi−1 . Setul {x1, . . . ,xpi} ⊂ Vi
este liniar independent peste K. Cum dimKVi = mi, ajungem la (2.39). In sfarsit,
Mmii = M
pii ·Mmi−pi
i = Omi,
unde 0 ≤ i ≤ s. ⊓⊔
Via (2.35), (2.38), (2.39), remarcam ca
p = max{p0, . . . , ps} ≤ max{m0, . . . ,ms} ≤ m,
respectiv
Nm = Om. (2.41)
Lema 2.17. ([14, pag. 121, problema 17]) In contextul Lemei 2.7, fie Pi : E → E,
unde 1 ≤ i ≤ 3, operatori K-liniari astfel ıncat P1 sa fie diagonalizabil, P2 sa fie
nilpotent si P3 sa fie diagonal. Atunci, daca
Pi(V )⊆V, Pi(W )⊆W pentru orice i,
P1|V este diagonalizabil, P2|V este nilpotent si P3|V este diagonal.
Demonstratie. Daca operatorul K-liniar T : E → E invariaza subspatiile V si W ,
atunci exista baza S1 a spatiului E pentru care V = SpanK{e1, . . . ,eh}, W =SpanK{eh+1, . . . ,em} si matricea de reprezentare are forma
T=
(A Oh,m−h
Om−h,h B
), A ∈ Mh(K), B ∈ Mm−h(K).
De aici, evident,
T j =
(A j Oh,m−h
Om−h,h B j
), j ∈ N∗
.
Matricea A ıl reprezinta pe T |V ın baza (S1)V = {e1, . . . ,eh}.
Daca Tp = Om pentru un anumit p ∈ N∗ — adica, T = P2 —, atunci Ap = Oh.
Daca exista setul de numere {d1, . . . ,dm} ⊂K pentru care
T=
d1 0 0 · · · 0
0 d2 0 · · · 0...
.... . .
...
0 · · · 0 dm−1 0
0 0 · · · 0 dm
,

2.3 Teorema de descompunere primara 43
deci T = P1, atunci
A =
d1 0 0 · · · 0
0 d2 0 · · · 0...
.... . .
...
0 · · · 0 dh−1 0
0 0 · · · 0 dh
. (2.42)
In sfarsit, daca T = P3, exista λ ∈K cu proprietatea ca T = λ ·I, unde I ∈ L(E,E)este operatorul-identitate. Atunci, evident T |V = λ · I|V .
Facem observatia ca
(A C
Om−h,h B
)k
=
(Ak Ck
Om−h,h Bk
), k ∈ N∗
,
unde A ∈ Mh(K), B ∈ Mm−h(K), Ck ∈ Mh,m−h(K), deci conditia Pi(W ) ⊆ W nu
este necesara aici — am introdus-o deoarece ea intervine ın demonstratia Lemei
2.18 —. ⊓⊔
Lema 2.18. ([14, pag. 333, Theorem]) In contextul Teoremei 2.2, exista o singura
descompunere a operatorului T sub forma
T = P1 +P2,
unde P1 : E → E este un operator K-liniar diagonalizabil iar P2 : E → E este un
operator K-liniar nilpotent, astfel ıncat P1 sa comute cu P2.
Demonstratie. Existenta unei asemenea descompuneri este data de Teorema 2.2 si
de Lema 2.15.
Deoarece P1 si P2 comuta, au loc relatiile
P1 ◦T = P1 ◦ (P1 +P2) = P21 +P1 ◦P2 = P2
1 +P2 ◦P1 = (P1 +P2)◦P1 = T ◦P1.
In mod analog, P2 ◦T = T ◦P2, respectiv T ◦D = D ◦T si T ◦N = N ◦T .
Lema 2.12 arata ca fiecare dintre K-subspatiile din descompunerea (2.35) este
invariat de operatorii P1, P2, D , N .
Introducem operatorii
Pi1 = P1|Vi
: Vi →Vi, Pi2 = P2|Vi
: Vi →Vi
si
Di = D |Vi= λi · I : Vi →Vi, Ni = N |Vi
: Vi →Vi, (2.43)
unde 0 ≤ i ≤ s. Evident, operatorii Di, Ni sunt reprezentati — ın submultimea din
baza S1 a spatiului E care este baza ın Vi — de matricele λi ·Imisi Mi, cu M
mii =Omi
,
conform (2.40).

44 2 Teoreme de descompunere
Afirmam ca operatorii Pi2 si Ni comuta. Intr-adevar, conform (2.46),
Pi2 ◦Ni = Pi
2 ◦ (T |Vi−λi · I) = (P2 ◦T )|Vi
−λi ·Pi2
= (T ◦P2)|Vi−λi ·Pi
2 = (T |Vi−λi · I)◦Pi
2
= Ni ◦Pi2, i ∈ 0,s.
Comutarea operatorilor Pi2 si Ni implica, evident, comutarea matricelor lor de
reprezentare, (P2)Visi Mi. Din ipoteza27, exista numerele qi ∈ N∗ astfel ıncat
((P2)Vi)qi = Omi
pentru orice i. Atunci, pentru t = 2 ·max{qi,mi}, avem28 — via
binomul lui Newton —
[(P2)Vi−Mi]
t =t
∑k=0
(−1)t−k
(k
t
)· [(P2)Vi
]k ·Mt−ki . (2.44)
Inegalitatea
max{k, t − k} ≥ k+(t − k)
2=
t
2≥ max{qi,mi}
arata ca fiecare din termenii sumei (2.44) are cel putin unul dintre factorii [(P2)Vi]k,
Mt−ki egal cu Omi
. In consecinta,
[(P2)Vi−Mi]
t = Omi, (2.45)
adica operatorii {Pi2 −Ni|0 ≤ i ≤ s} sunt nilpotenti.
Plecand de la egalitatea dubla
T |Vi= Pi
1 +Pi2 = Di +Ni, (2.46)
deducem ca operatorii(Pi
1 −Di
)0≤i≤s
sunt nilpotenti.
Fixam i ∈ 0,s. Operatorul Pi1 este diagonalizabil29 iar operatorul Di este opera-
tor-diagonal, deci matricea de reprezentare a operatorului Pi1 −Di are forma — vezi
(2.42) —
Fi =
di1 −λi 0 0 · · · 0
0 di2 −λi 0 · · · 0
......
. . ....
0 · · · 0 dimi−1 −λi 0
0 0 · · · 0 dimi−λi
, di
j ∈K.
Conform (2.45),
27 Vezi Lema 2.17, cazul operatorului P2.
28 Vezi pagina 110, nota de subsol, pentru notatia
(k
t
).
29 Vezi Lema 2.17, cazul operatorului P1.

2.3 Teorema de descompunere primara 45
F ti =
(di
1 −λi
)t0 0 · · · 0
0(di
2 −λi
)t0 · · · 0
......
. . ....
0 · · · 0(
dimi−1 −λi
)t
0
0 0 · · · 0(di
mi−λi
)t
= Omi,
de unde dij = λi pentru orice 1 ≤ j ≤ mi, adica Pi
1 = Di.
Din (2.46) rezulta ca Pi2 = Ni, unde i ∈ 0,s. ⊓⊔


Capitolul 3
Forma canonica a matricelor patrate cuelemente numerice
3.1 Cazul operatorilor nilpotenti
Fie E ⊆ Cn un spatiu liniar m-dimensional peste corpul K ∈ {R,C}. Aici, ca si
pana acum, m ≤ n.
Fie e ∈ E\{0E} si operatorul K-liniar T : E → E. Introducem multimea1
Z(e,T ) = SpanK{
T i(e)|i ∈ N}.
Elementele sale sunt combinatii liniare cu numar finit de termeni nenuli ale vectori-
lor din familia {e,T (e),T 2(e), . . .}.
Observam ca
Z(e,T ) =
{h
∑i=0
αi ·T i(e)|αi ∈K, h ∈ N
}.
Intr-adevar, fixand x ∈ Z(e,T ), cu
x =r
∑j=0
αh j·T h j(e), r, h j ∈ N,
introducem numerele αi = αh jpentru i = h j, j ∈ 0,r, respectiv αi = 0 pentru i 6∈
{h1, . . . ,hr} si deducem ca
x =h
∑i=0
αi ·T i(e), h = max{h1, . . . ,hr}. (3.1)
Presupunem ca operatorul T este nilpotent. Astfel, exista k ∈ N pentru care
T k = O, (3.2)
1 Reamintesc ca T 0 = I, operatorul-identitate din L(E,E).
47

48 3 Forma canonica a matricelor
unde O : E → E desemneaza operatorul-nul2.
Lema 3.1. Exista numarul natural h < k — vezi (3.2) — astfel ıncat vectorii din
setul {e,T (e),T 2(e), . . . ,T h(e)} sa fie liniar independenti peste corpul K.
Demonstratie. Cum e 6= 0E , fie h, unde 0 ≤ h ≤ k−1, cel mai mare numar natural3
pentru care niciunul dintre vectorii din familia {e,T (e),T 2(e), . . . ,T h(e)} sa nu fie
nul. Evident, T h+1(e) = 0E , de unde
T q(e) = T q−h−1(T h+1(e)) = T q−h−1(0E) = 0E (3.3)
pentru orice q ≥ h+1.
De asemeni, vectorii din setul {e,T (e),T 2(e), . . . ,T h(e)} sunt diferiti unul de
celalalt. Intr-adevar, daca ar exista numerele p ≥ 0, q ≥ 1 astfel ca p+ q ≤ h si
T p(e) = T p+q(e), atunci
T h+1−q(e) = T h+1−p−q (T p(e)) = T h+1−p−q(T p+q(e)
)
= T h+1(e) = 0E , (3.4)
ceea ce contrazice definitia numarului h.
Afirmam ca vectorii {e,T (e),T 2(e), . . . ,T h(e)} sunt liniari independenti peste
corpul K. Intr-adevar, fiind data relatia
h
∑i=0
αi ·T i(e) = 0E , unde αi ∈K,
h
∑i=0
|αi|2 > 0,
sa presupunem ca αr ∈K este coeficientul nenul cu cel mai mic index. Deci
h
∑i=r
αi ·T i(e) = 0E ,
respectiv, via (3.3),
0E = T h−r
(h
∑i=r
αi ·T i(e)
)= αr ·T h(e).
Am ajuns la o contradictie: αr = 0.
In plus, avem — conform (3.1) —
Z(e,T ) = SpanK
{e, . . . ,T h(e)
},
adica setul
{e, . . . ,T h(e)} (3.5)
2 Adica, T k(e) = 0E pentru orice e ∈ E.3 Conform [14, pag. 334], cantitatea h+1 se noteaza cu nil: nil(e,T ).

3.1 Cazul operatorilor nilpotenti 49
este baza a subspatiului Z(e,T ). ⊓⊔Lema 3.2. In contextul Lemei 3.1, au loc relatiile
T (Z(e,T )) = Z(T (e),T )⊆ Z(e,T ) (3.6)
si
Ker(T∣∣Z(e,T )
)=KT nil(e,T )−1(e). (3.7)
Demonstratie. Fie x =h
∑i=0
αi · T i(e) ∈ Z(e,T ), unde αi ∈ K si 0 ≤ i ≤ h ≤ k − 1.
Atunci,
T (x) =h
∑i=0
αi ·T (T i(e)) =h
∑i=0
αi ·T i(T (e)) ∈ Z(T (e),T ),
adica T (Z(e,T ))⊆ Z(T (e),T ).
Reciproc, fie y =h
∑i=0
αi ·T i(T (e)) ∈ Z(T (e),T ). Observam ca
y =h
∑i=0
αi ·T (T i(e)) = T (x) ∈ T (Z(e,T )).
Fie h = nil(e,T )−1. Pentru a stabili formula (3.7), observam ca relatiile — daca
h ≥ 1 —
0E = T (x) = T
(h
∑i=0
αi ·T i(e)
)
=h−1
∑i=0
αi ·T i+1(e)+αh ·T h+1(e)
=h−1
∑i=0
αi ·T i+1(e), αi ∈K,
implica αi = 0 pentru orice 0 ≤ i ≤ h−1. ⊓⊔Lema 3.3. Fie x, y∈E astfel ıncat {0E}( Z(x,T )∩Z(y,T ). Atunci, exista numerele
r, s ≥ 0 pentru care
{T i(x)|i ≥ r} ⊂ Z(y,T ), {T j(y)| j ≥ s} ⊂ Z(x,T ).
Demonstratie. Introducem numerele h1 = nil(x,T )−1 si h2 = nil(y,T )−1.
Fie u ∈ Z(x,T )∩Z(y,T )\{0E}, adica
u =h1
∑i=0
αi ·T i(x) =h2
∑j=0
β j ·T j(y),

50 3 Forma canonica a matricelor
unde αi, β j ∈K. In plus,
α0 = · · ·= αr−1 = 0, αr 6= 0, β0 = · · ·= βs−1 = 0, βs 6= 0.
Atunci,
T h1−r(u) = αr ·T h1(x)+αr+1 ·T h1+1(x)+ · · ·= αr ·T h1(x)
=h2
∑j=s
β j ·T j+h1−r(y),
de unde rezulta ca T h1(x) =h2
∑j=s
β j
αr·T j+h1−r(y) ∈ Z(y,T ).
Apoi — daca h1 ≥ r+1 —,
T h1−r−1(u) = αr ·T h1−1(x)+αr+1 ·T h1(x)+αr+2 ·T h1+1(x)+ · · ·= αr ·T h1−1(x)+αr+1 ·T h1(x)
=h2
∑j=s
β j ·T j+h1−r−1(y),
respectiv
T h1−1(x) =h2
∑j=s
β j
αr
·T j+h1−r−1(y)− αr+1
αr
·T h1(x) ∈ Z(y,T ).
Ajungem la
T r(x) =h2
∑j=s
β j
αr
·T j(y)−h1
∑i=r+1
αi
αr
·T i(x) ∈ Z(y,T ),
ceea ce ıncheie demonstratia. ⊓⊔
Exemplul 3.1. In contextul Lemei 3.3, observam ca Z(x,T )∩Z(y,T )⊆ Z(y,T ) este
un K-subspatiu liniar al spatiului Z(y,T ). Am stabilit ca acest subspatiu contine cel
putin un element al bazei{
y, . . . ,T h2(y)}
a spatiului ambient Z(y,T ). Afirmam ca,
fiind date K-spatiul liniar E, o baza a sa S si subspatiul propriu V ⊂ E, unde
V 6= {0E}, este posibil ca V ∩S = /0.
Intr-adevar, fie E = R7 — aici, K= R —, baza canonica S = {i1, . . . , i7} si
V = R(i1 + i2
)⊕R
(i3 + i4
).
Atunci,
V ∩S = /0.

3.1 Cazul operatorilor nilpotenti 51
Fie operatorul K-liniar P : E → E. Putem construi o baza a spatiului ın care acest
operator actioneaza, daca se cunosc baze din KerP si ImP, dupa cum urmeaza: fiind
date baza S3 = {y1, . . . ,yt} a spatiului ImP si baza S4 = {x1, . . . ,xs} a spatiului
KerP, selectam familia de vectori S5 = {z1, . . . ,zt} pentru care zi ∈ P−1(yi), unde
i ∈ 1, t. Atunci, setul
S6 = {z1, . . . ,zt ,x1, . . . ,xs} (3.8)
este baza a spatiului ambient E, vezi [14, pag. 327, Proposition 3].
Ca sa ne convingem de acest fapt, aratam ca vectorii din S6 sunt liniar indepen-
denti. Fie scalarii αi, β j ∈K, unde i ∈ 1, t, j ∈ 1,s, pentru care
t
∑i=1
αi · zi +s
∑j=1
β j · x j = 0E . (3.9)
Aplicand operatorul P relatiei (3.9), ajungem la — S4 ⊂ KerP si S3 este liniar
independent —
t
∑i=1
αi ·P(zi) =t
∑i=1
αi · yi = 0E ,
de unde αi = 0 pentru orice 1 ≤ i ≤ t. Relatia (3.9) devine — S4 este liniar inde-
pendent —
s
∑j=1
β j · x j = 0E ,
de unde β j = 0 pentru orice 1 ≤ j ≤ s.
De asemeni, vectorii din S6 alcatuiesc un sistem de generatori ai spatiului am-
bient E. Intr-adevar, fie x ∈ E. Atunci, exista scalarii αi ∈ K, unde i ∈ 1, t, astfel
ıncat
P(x) =t
∑i=1
αi · yi
=t
∑i=1
αi ·P(zi) = P
(t
∑i=1
αi · zi
).
Observam ca u= x−t
∑i=1
αi ·zi ∈KerP. Astfel, exista scalarii β j ∈K, unde j ∈ 1,s,
cu proprietatea ca
u =s
∑j=1
β j · x j,
respectiv

52 3 Forma canonica a matricelor
x =t
∑i=1
αi · zi +s
∑j=1
β j · x j,
ceea ce ıncheie justificarea.
Daca ınlocuim baza S3 a spatiului ImP cu sistemul de vectori liniar indepen-
denti S3 = {y1, . . . ,yt}, unde t ≤ dimKImP, atunci setul S6 din (3.8) este liniar
independent.
Teorema 3.1. ([14, pag. 335, Proposition]) In contextul relatiei (3.2), spatiul liniar
E admite descompunerea
E = Z(e1,T )⊕·· ·⊕Z(eq,T ), (3.10)
unde q ≥ 1.
Demonstratie. Utilizam inductia matematica. Astfel, vom verifica existenta acestui
tip de descompunere atunci cand dimKE ∈ {1,2}, apoi, presupunand ca descompu-
nerea poate fi realizata pentru orice spatiu liniar E cu dimKE ≤ m−1, vom construi
o descompunere ın cazul dimKE = m.
Pasul ıntai: cazul dimKE = 1. Fie S = {e} o baza a spatiului E. Atunci, E =SpanK{e}, de unde rezulta ca T (e) = λ · e ∈ E. Ipoteza (3.2) ne conduce la λ = 0,
astfel ca nil(e,T ) = 1. Avem
Z(e,T ) = SpanK{e}, E = KerT.
Deci E = Z(e,T ).Pasul al doilea: cazul dimKE = 2. Conform (3.2), dimKKerT ≥ 1.
Daca dimKKerT = 2, adica E = KerT , atunci T = O — asadar, k = 1 — si
E =Ke1 ⊕Ke2 = Z(e1,T )⊕Z(e2,T ),
unde S = {e1,e2} constituie o baza a spatiului E.
Daca dimKKerT = 1, deci exista e1 6= 0E astfel ıncat KerT =Ke1, atunci exista
si e2 6= 0E cu T (e2) 6= 0E . Sistemul vectorial S = {e2,T (e2)} ⊂ E este liniar in-
dependent peste corpul K, deci alcatuieste o baza a spatiului E. Am obtinut ca E =Z(e2,T ).
Pasul al treilea: cazul 2 ≤ dimKE ≤ m−1. Presupunem ca se poate realiza des-
compunerea (3.10).
Pasul al patrulea: cazul dimKE =m. Operatorul T fiind nilpotent, dimKKerT ≥1. Cum — vezi (3.8) —
dimKKerT +dimKT (E) = dimKE,
rezulta ca dimKT (E)≤ m−1.
Conform ipotezei de inductie, exista vectorii {y1, . . . ,yr} ⊂ T (E) cu proprietatea
ca
T (E) = Z(y1,T )⊕·· ·⊕Z(yr,T ).

3.1 Cazul operatorilor nilpotenti 53
In particular, sistemul
S3 =r⋃
i=1
Zi, Zi ={
yi,T (yi), . . . ,T hi(yi)},
unde hi = nil(yi,T )−1, este o baza a spatiului liniar T (E).Pentru a construi sistemul S6 din (3.8), avem nevoie de un set S5. Cu acest scop,
introducem vectorii xi ∈ T−1(yi), unde 1 ≤ i ≤ r.
Observam ca T j(xi) ∈ T−1(T j(yi)) pentru orice 0 ≤ j ≤ hi si
Xi = {xi,T (xi), . . . ,T hi(xi)} ⊆ T−1 (Zi) , (3.11)
respectiv nil(xi,T )= nil(yi,T )+1= hi+2. De asemeni, avem T hi+1(xi)= T hi(yi)∈KerT .
Fie K-spatiile liniare
Z(xi,T ) = SpanK{xi,T (xi), . . . ,T hi(xi),Thi+1(xi)}
= SpanK
(Xi ∪
{T hi+1(xi)
}). (3.12)
Atunci,
(Xi ∪
{T hi+1(xi)
})∩(X j ∪
{T h j+1(x j)
})= /0, i 6= j.
Intr-adevar, via (3.11) — Zi ∩Z j = /0, Zi ∩{0E}= /0 —, avem Xi ∩X j = /0 pentru
orice i 6= j. Apoi, cum {T hi+1(xi)}⊆ T−1({0E}), deducem ca {T hi+1(xi)}∩X j = /0.
Este evident ca{
T hi+1(xi)}∩{
T h j+1(x j)}= /0. In caz contrar, am avea T hi+1(xi) =
T h j+1(x j), ceea ce e echivalent cu T hi(yi) = T h j(y j) ∈ Zi ∩Z j, o contradictie.
Mai departe, afirmam ca spatiile (Z(xi,T ))1≤i≤r sunt liniar independente peste
corpul K. Pentru a proba aceasta, fie expresia [14, pag. 335] — vezi si Lema 2.5 —
r
∑i=1
ui = 0E , ui ∈ Z(xi,T ).
Aplicand operatorul T , avem — via (3.6) —
r
∑i=1
vi = 0E , vi = T (ui) ∈ T (Z(xi,T )) = Z(yi,T ).
Deoarece spatiile (Z(yi,T ))1≤i≤r sunt liniar independente peste corpul K, obtinem
ca vi = 0E pentru orice i. Asadar, ui ∈ Ker(T∣∣Z(xi,T )
)si, pe baza expresiei (3.7),
ui ∈KT hi+1(xi) =KT hi(yi)⊆ Z(yi,T ).
Am ajuns la ui = 0E , ceea ce dovedeste afirmatia facuta anterior.
Putem preciza acum setul S5. Mai precis,

54 3 Forma canonica a matricelor
S5 =r⋃
i=1
Xi.
Cum spatiile (Z(xi,T ))1≤i≤r sunt liniar independente, sistemul de vectori
{T h1+1(x1), . . . ,T hr+1(xr)
}⊆ KerT
este liniar independent peste corpul K. Il completam pana la o baza S4 a spatiului
KerT .
S4 ={
T h1+1(x1), . . . ,T hr+1(xr),xr+1, . . . ,xs
}. (3.13)
Am ajuns la — vezi (3.12) —
E = SpanK (S6) =⊕
e∈S6
Ke (3.14)
= Z(x1,T )⊕·· ·⊕Z(xr,T )⊕Kxr+1 ⊕·· ·⊕Kxs
= Z(x1,T )⊕·· ·⊕Z(xr,T )⊕Z(xr+1,T )⊕·· ·⊕Z(xs,T ). (3.15)
Demonstratia s-a ıncheiat. ⊓⊔
Exemplul 3.2. Descompunerea (3.10) nu este, ın general, unica.
Fie E = R8, unde K = R, si baza canonica S = {i1, . . . , i8}. Introducem opera-
torul R-liniar T : E → E prin formulele
T (i j) = i j+1, j ∈ {1,2,5,6}, T (is) = 0E , s ∈ {3,4,7,8}.
Atunci, T 3 = O.
Deducem ca
Z(is,T ) = Ris, s ∈ {3,4,7,8},
si
Z(iw,T ) = SpanR{iw, iw+1, iw+2} ≡ R3, nil(iw,T ) = 3,
unde w ∈ {1,5}, respectiv
Z(i1 + i5,T ) = SpanR{i1 + i5, i2 + i6, i3 + i7} ≡ R3, nil(i1 + i5,T ) = 3.
Au loc egalitatile
E = Z(i1,T )⊕Z(i5,T )⊕Z(i4,T )⊕Z(i8,T )
si
E = Z(i1 + i5,T )⊕Z(i5,T )⊕Z(i3,T )⊕Z(i8,T ).

3.1 Cazul operatorilor nilpotenti 55
Observam ca
Z(i1 + i5,T )∩Z(i j,T ) = {0E}, Z(i j,T )∩Z(iv,T ) = {0E},
unde j 6= v ∈ {1,3,4,5,8}.
Matricea de reprezentare a operatorului T , ın ambele descompuneri, este
T=
0 0 0
1 0 0
0 1 0
O3 O3,1 O3,1
O3
0 0 0
1 0 0
0 1 0
O3,1 O3,1
O1,3 O1,3 (0) O1
O1,3 O1,3 O1 (0)
.
Mai precis,
(T (d1) · · · T (d8)
)=(d1 · · · d8
)·T,
unde
(d1, . . . ,d8) =(i1, i2, i3, i5, i6, i7, i4, i8
),
respectiv
(T (e1) · · · T (e8)
)=(e1 · · · e8
)·T,
unde
(e1, . . . ,e8) =(i1 + i5, i2 + i6, i3 + i7, i5, i6, i7, i3, i8
).
Urmatoarele matrice patrate,
Ak =
0 0 0 0 · · · 0
1 0 0 0 · · · 0
0 1 0 0 · · · 0...
. . .. . .
. . ....
0 · · · 0 1 0 0
0 · · · 0 0 1 0
∈ Mk(K), A3 =
0 0 0
1 0 0
0 1 0
, A2 =
(0 0
1 0
), A1 = (0),
unde k ∈ N∗, poarta numele de matrice (blocuri) nilpotente elementare4.
Ramanand ın cadrul Teoremei 3.1, sa observam ca matricea de reprezentare a
operatorului nilpotent T : E → E ın raport cu baza S6 — (3.8) — este
4 In limba engleza, elementary nilpotent block (sing.). Vezi [14, pag. 122].

56 3 Forma canonica a matricelor
T=
T∣∣Z(e1,T ) 0 0 · · · 0
0 T∣∣Z(e2,T ) 0 · · · 0
......
. . ....
0 · · · 0 T∣∣∣Z(eq−1,T ) 0
0 0 0 · · · T∣∣∣Z(eq,T )
,
unde5 T∣∣Z(ek,T )
= Anil(ek,T )pentru orice 1 ≤ k ≤ q si q = s. De asemeni, matricele
1-dimensionale A1 le corespund spatiilor Z(e,T ) cu e ∈ KerT . In cazul nostru, a-
ceste elemente e sunt — daca r+ 1 ≤ s — elementele {xr+1, . . . ,xs} din setul S4
prezentat ın (3.13).
Formula (3.15) arata ca spatiul liniar E poate fi scris ca suma directa a s subspatii
de tipul Z(e,T ) ın timp ce din definitia (3.13) a setului S4 rezulta ca dimKKerT = s.
Astfel, numarul de blocuri nilpotente elementare ale matricei T este egal cu dimen-
siunea nucleului operatorului T [14, pag. 123, Theorem 2].
Conform formulei (1.9), putem permuta coloane si linii ale matricei T daca per-
mutam vectorii din baza S6 a spatiului E.
De exemplu, lucrand pe blocuri, egalitatea
(T (B1)T (B2)) = (B1 B2)
(A O
O B
)
se rescrie ca
(T (B2)T (B1)) = (B2 B1)
(B O
O A
).
Cu alte cuvinte, blocurile nilpotente elementare pot fi asezate pe diagonala prin-
cipala a matricei T ın ordinea descrescatoare (nestricta) a dimensiunilor lor [14,
pag. 123, Theorem 1]. Aceasta permutare este echivalenta cu permutarea termenilor
din partea dreapta a descompunerii (3.15).
Este valabila egalitatea
T = T∣∣Z(x1,T ) ⊕·· ·⊕T
∣∣Z(xs,T ),
de unde — via Lema 3.2 —
T v = T v∣∣Z(x1,T ) ⊕·· ·⊕T v
∣∣Z(xs,T ), v ∈ N∗
.
La fel ca ın cazul relatiei (3.7), deducem ca — pentru 1 ≤ v ≤ hi +2 —
Ker(T v∣∣Z(xi,T )
)= SpanK
{T hi+2−v(xi), . . . ,T hi+1(xi)
}, i ∈ 1,r,
adica, via (3.4),
5 Reamintesc observatia de la (3.4)!

3.1 Cazul operatorilor nilpotenti 57
dimKKer(T v∣∣Z(xi,T )
)= v.
Fie v = 2. Pe baza (3.14), realizam descompunerea
KerT 2 =⊕
e ∈ {x1, . . . ,xs}nil(e,T )≥ 2
SpanK
{T nil(e,T )−2(e),T nil(e,T )−1(e)
}
⊕⊕
e ∈ {x1, . . . ,xs}nil(e,T ) = 1
KT nil(e,T )−1(e). (=Ke)
Deducem de aici ca, la calculul dimensiunii subspatiului KerT 2 ⊆ E, toate subspa-
tiile Z(e,T ) de dimensiune cel putin 2 contribuie cu cate 2 (dimensiuni) ın timp ce
subspatiile 1-dimensionale contribuie cu cate (evident) 1 dimensiune [14, pag. 124].
Primelor dintre subspatii le corespund blocuri nilpotente elementare Ak, unde k ≥ 2.
Un rationament analog se efectueaza pentru fiecare KerT v ⊆ E.
Fie νi ≥ 0 numarul blocurilor Ai de pe diagonala principala a matricei T. Cum
dimKE = m, este evident ca νi = 0 pentru orice i ≥ m+1. Fie δi = dimK
(KerT i
).
Atunci, analiza anterioara ne conduce la — [14, ibid.] —
δ1 = ν1 + · · ·+νm,
δ2 = ν1 +2 · (ν2 + · · ·+νm),...
δw = ∑1≤i≤w−1
i ·νi +w · ∑w≤i≤m
νi, unde 2 ≤ w ≤ m,
...
δm = ν1 +2 ·ν2 +3 ·ν3 + · · ·+m ·νm.
(3.16)
Evident, ın practica, vom avea νi = 0 pentru multi6 dintre indecsii i.
Scazand doua cate doua — “ecuatia(i)−ecuatia(i+1)” — ecuatiile consecutive
ale sistemului algebric (3.16), ajungem la
6 Conform [14, pag. 120, Problema 8], δm = m, adica Tm = Om. Vezi si estimarile (2.40), bazata
pe (2.13), respectiv (2.41). Pentru a o folosi pe aceasta din urma, sa remarcam ca, daca un operator
R-liniar este nilpotent, atunci si complexificatul sau va fi nilpotent — vezi (1.16), (1.38) —. Apli-
cand Teorema 2.2, realizam descompunerea (unica) TC =D+N = O+N =N , de unde T=N.
Nu vom utiliza, ın cele ce urmeaza, relatia δm = m.

58 3 Forma canonica a matricelor
δ1 = ν1 + · · ·+νm,
−δ1 +δ2 = ν2 +ν3 + · · ·+νm,
...
−δw−1 +δw = ∑w≤i≤m
νi, unde 2 ≤ w ≤ m,
...
−δm−1 +δm = νm.
In sfarsit, scazand doua cate doua — “ecuatia(i)− ecuatia(i+ 1)” — ecuatiile
consecutive ale sistemului algebric anterior, obtinem
ν1 = 2 ·δ1 −δ2,
...
νw =−δw−1 +2 ·δw −δw+1, unde 2 ≤ w ≤ m−1,...
νm =−δm−1 +δm.
(3.17)
Relatiile (2.12) arata ca exista numarul p ≥ 1 astfel ıncat δp = δp+1 = · · · , de unde
νp+1 = νp+2 = · · ·= 0.
Setul de relatii (3.17) arata ca numarul de blocuri nilpotente elementare de o a-
numita dimensiune depinde numai de operatorul T , asadar, scrierea matricei T ca o
matrice-diagonala care are pe diagonala principala blocuri nilpotente elementare
asezate ın ordinea descrescatoare nestricta a dimensiunilor lor este unica, vezi [14,
pag. 125, Theorem 4].
Fie ε > 0 fixat. Fiind date e ∈ E\{0E}, k = nil(e,T ) si operatorul K-liniar U =T∣∣Z(e,T ) : Z(e,T )→ Z(e,T ), relatia (1.9) ne conduce la
(U(e1) · · · U(ek)
)=(e1 · · · ek
)·
0 0 0 0 · · · 0
1 0 0 0 · · · 0
0 1 0 0 · · · 0...
. . .. . .
. . ....
0 · · · 0 1 0 0
0 · · · 0 0 1 0
,
unde — reamintesc formulele bazei (3.5) —
e1 = e, e2 = T (e) =U(e1), . . . , ek = T k−1(e) =U(ek−1).
Introducem alta baza a K-spatiului liniar Z(e,T ) prin relatiile — [14, pag. 148]
—
f 1 = e1, f 2 =1
ε· e2, . . . , f k =
1
εk−1· ek.
Matricea de schimbare de baza este

3.2 Forma canonica Jordan 59
P = Bk(ε) =
1 0 0 0 · · · 0
0 1ε 0 0 · · · 0
0 0 1ε2 0 · · · 0
.... . .
. . .. . .
...
0 · · · 0 0 1εk−2 0
0 · · · 0 0 0 1εk−1
.
Via identitatile7
A2 ·B2(ε) =(
0 0
1 0
)·(
1 0
0 1ε
)=
(0 0
1 0
)=
(1 0
0 1ε
)·(
0 0
ε 0
)= B2(ε) ·A2(ε)
si — aici, k ≥ 3 —
Ak ·Bk(ε) =
0 0 0 0 · · · 0
1 0 0 0 · · · 0
0 1ε 0 0 · · · 0
.... . .
. . .. . .
...
0 · · · 0 1εk−3 0 0
0 · · · 0 0 1εk−2 0
= Bk(ε) ·
0 0 0 0 · · · 0
ε 0 0 0 · · · 0
0 ε 0 0 · · · 0...
. . .. . .
. . ....
0 · · · 0 ε 0 0
0 · · · 0 0 ε 0
= Bk(ε) ·Ak(ε),
deducem ca
(U( f 1) · · · U( f k)
)=(U(e1) · · · U(ek)
)·Bk(ε) =
[(e1 · · · ek
)·Ak
]·Bk(ε)
=[(
e1 · · · ek
)·Bk(ε)
]·Ak(ε)
=(
f 1 · · · f k
)·
0 0 0 0 · · · 0
ε 0 0 0 · · · 0
0 ε 0 0 · · · 0...
. . .. . .
. . ....
0 · · · 0 ε 0 0
0 · · · 0 0 ε 0
. (3.18)
Evident, Ak = Ak(1).
3.2 Forma canonica Jordan a matricei de reprezentare T
In contextul Teoremei 2.2, revenim la expresiile (2.35) – (2.39).
7 Matricele (Ak)k≥1 au fost introduse la pagina 55.

60 3 Forma canonica a matricelor
Fie λ ∈ K. Pe baza discutiei din sectiunea anterioara, introducem urmatoarele
matrice patrate
Jλk =
λ 0 0 0 · · · 0
1 λ 0 0 · · · 0
0 1 λ 0 · · · 0...
. . .. . .
. . ....
0 · · · 0 1 λ 0
0 · · · 0 0 1 λ
∈ Mk(K) (3.19)
si
Jλ3 =
λ 0 0
1 λ 0
0 1 λ
, Jλ
2 =
(λ 0
1 λ
), Jλ
1 = (λ ), (3.20)
unde k ∈ N∗. Ele se numesc matrice Jordan elementare8.
Deoarece operatorul Di din (2.43) este un operator diagonal, putem modifica ba-
za λi-eigenspatiului generalizat Vi astfel ıncat matricea nilpotenta Mi sa fie adusa la
forma sa canonica [14, pag. 123], adica sa fie organizata ca o matrice-diagonala de
blocuri nilpotente elementare, asezate ın ordinea descrescatoare nestricta a dimen-
siunilor lor. Atunci, matricele Ai din (2.36) devin matrice-diagonale formate din
matrice Jordan elementare, asezate ın ordinea descrescatoare nestricta a dimensiu-
nilor lor. La randul sau, matricea de reprezentare T a operatorului liniar T : E → E
— fiind o matrice-diagonala construita cu matricele Ai — devine o matrice-diago-
nala de matrice Jordan elementare. Aceasta scriere a matricei T constituie forma sa
canonica Jordan [14, pag. 127].
Calculul (3.18) arata ca putem ınlocui matricele Jordan elementare cu matricele
Jλk (ε) =
λ 0 0 0 · · · 0
ε λ 0 0 · · · 0
0 ε λ 0 · · · 0...
. . .. . .
. . ....
0 · · · 0 ε λ 0
0 · · · 0 0 ε λ
∈ Mk(K) (3.21)
si
Jλ3 (ε) =
λ 0 0
ε λ 0
0 ε λ
, Jλ
2 (ε) =(
λ 0
ε λ
), (3.22)
unde k ∈ N∗ si ε > 0. Evident, Jλk = Jλ
k (1).
8 In limba engleza, elementary Jordan matrix (sing.). Conform [14, pag. 127].

3.3 Cazul K= R 61
3.3 Cazul K= R
Restrictia (2.30) a fost impusa pentru a putea descompune polinomul caracte-
ristic pT (λ ) ıntr-un produs de puteri de polinoame de gradul ıntai — vezi formula
(2.32) —.
Fie E ⊆ Rn un spatiu liniar real de dimensiune m ≤ n si T : E → E un operator
R-liniar. Complexificatul sau, TC : EC → EC, are aceeasi matrice de reprezentare T
si acelasi polinom caracteristic pT (λ ) ca operatorul T .
Fie λ0 ∈ C\R o eigenvaloare a operatorului TC si eigenvectorul generalizat
e ∈ Ker (TC−λ0 · I)k \{0E} ⊂ EC, k ∈ N∗.
Aici, e = x+ i · y, unde x, y ∈ Rn.
Relatiile (1.35), (1.36) si Lema 1.2 arata ca
x, y ∈ EC∩Rn = ECR = E.
Via Lema 1.6, σ ◦TC = TC ◦σ . Au loc egalitatile
0E = σ(0E) = σ((TC−λ0 · I)k (e)
)
= (σ ◦ (TC−λ0 · I))((TC−λ0 · I)k−1 (e)
)
=((
TC−λ0 · I)◦σ)(
(TC−λ0 · I)k−1 (e))
=(
TC−λ0 · I)(
(σ ◦ (TC−λ0 · I))((TC−λ0 · I)k−2 (e)
))
=(
TC−λ0 · I)2(
(σ ◦ (TC−λ0 · I))((TC−λ0 · I)k−3 (e)
))
...
=(
TC−λ0 · I)k
(σ(e)),
de unde
σ(e) ∈ Ker(
TC−λ0 · I)k
\{0E}. (3.23)
De aici, deducem ca fiecarei valori proprii nereale λ0 a operatorului TC ıi cores-
punde valoarea proprie λ0 [14, pag. 66, Proposition]. Cele doua eigenvalori au
multiplicitati algebrice egale.
Formula (2.32), valabila ın C, se rescrie ın R ca

62 3 Forma canonica a matricelor
pT (λ ) = pTC(λ )
= (−1)m · (λ −λ0)m0 · (λ −λ0)
m0
× (factori generati de restul eigenvalorilor)
= (−1)m ·(λ 2 −2 ·Reλ0 ·λ + |λ0|2
)m0 · (· · ·).
Descompunerea (2.35) a spatiului liniar EC ne permite sa observam ca vectorii
{e,σ(e)}, gasindu-se ın eigenspatii generalizate diferite, sunt liniar independenti
peste corpul C.
Lema 3.4. ([14, pag. 68]) Vectorii {e,σ(e)} sunt liniar independenti peste corpul
C daca si numai daca vectorii {x,y}, unde e = x + i · y si x, y ∈ E, sunt liniar
independenti peste corpul R.
In plus,
SpanC{e,σ(e)}= SpanC{x,y}. (3.24)
Demonstratie. Observam ca e 6= σ(e) daca si numai daca y 6= 0E .
Pentru α = a+b · i ∈C, unde a, b ∈R, cu proprietatea ca σ(e) = α ·e, deducem
ca
{a · x−b · y = x,
b · x+a · y =−y,
ceea ce este echivalent cu
{(a−1) · x = b · y,−b · x = (a+1) · y. (3.25)
Dat fiind ca cel putin unul din vectorii x, y este nenul, din relatiile (3.25) rezulta
ca
a2 +b2 = 1, (3.26)
ceea ce ne permite sa scriem ca a = cosu si b = sinu pentru un anumit u ∈ [0,2π].Ca sa ajungem la (3.26), ınmultim prima ecuatie din (3.25) cu a+ 1, pe cea de-
a doua cu b si apoi le scadem. Am obtinut ca (a2 + b2 − 1) · x = 0E . De asemeni,
ınmultind prima ecuatie cu b, pe a doua cu a− 1 si adunand rezultatele, rezulta
(a2 +b2 −1) · y = 0E .
Introducand noile formule ale marimilor a, b ın relatiile (3.25), ajungem la
sinu
2· x+ cos
u
2· y = 0E ,
adica la concluzia ca liniar dependenta vectorilor {e,σ(e)} implica liniar depen-
denta vectorilor {x,y}.
Reciproc, daca exista c ∈ R astfel ıncat x = c · y, atunci

3.3 Cazul K= R 63
σ(e) = (c− i) · y = c− i
c+ i· [(c+ i) · y] = α · e, α =
c− i
c+ i∈ C,
ceea ce ıncheie demonstratia.
Pentru partea a doua, remarcam ca au loc relatiile
(EC ∋) u = α · e+β ·σ(e)
= (α +β ) · x+ i · (α −β ) · y= γ · x+ ε · y,
unde α, β , γ , ε ∈ C, respectiv
u = γ · x+ ε · y
=1
2· (γ − i · ε) · e+ 1
2· (γ + i · ε) ·σ(e)
= α · e+β ·σ(e).
Am stabilit egalitatea (3.24). ⊓⊔
Daca subspatiile V0, V1 din (2.35) sunt eigenspatiile generalizate ale valorilor
proprii λ0, λ0, atunci ele admit bazele9 — via (3.23) —
B0 = {e1, . . . ,em0} ⊂V0, B1 = {σ(e1), . . . ,σ(em0
)} ⊂V1.
Au loc egalitatile — pe baza Lemei 3.4 —
V0 ⊕V1 =
(⊕
e∈B0
Ce
)⊕
⊕
f∈B1
C f
(3.27)
=m0⊕
j=1
(Ce j ⊕Cσ(e j)) =m0⊕
j=1
SpanC{e j,σ(e j)}
=m0⊕
j=1
SpanC{x j,y j}
= SpanC{x1, . . . ,xm0,y1, . . . ,ym0
},
unde e j = x j + i · y j si x j, y j ∈ E pentru orice j.
Asadar, daca {λ0, . . . ,λv} sunt eigenvalorile reale iar
{λv+1,λv+1, . . . ,λv+w,λv+w}
9 Este suficient sa aratam ca sistemul B1 este liniar independent peste C. In particular, va rezulta
ca vectorii din B1 sunt diferiti, adica numarul lor este m0. Relatiam0
∑i=1
zi ·σ(ei) = 0E ne conduce la
0E = σ(0E) =m0
∑i=1
zi · ei, de unde zi = 0 pentru orice i.

64 3 Forma canonica a matricelor
eigenvalorile nereale (complexe) ale operatorului TC : EC → EC, putem rescrie des-
compunerea (2.35) ca
EC =v⊕
j=0
Vj
⊕v+w⊕
j=v+1
SpanC{xj1, . . . ,x j
m j,y
j1, . . . ,y j
m j},
unde setul
B j ={
ej1, . . . ,e j
m j
}⊂ EC,
cu ejk = x
jk + i · y j
k si xjk, y
jk ∈ E, este baza a eigenspatiului generalizat corespunzand
eigenvalorii λ j pentru orice j ∈ v+1,v+w. De asemeni, exista bazele10 B j ⊂ E
pentru eigenspatiile generalizate Vj ale valorilor proprii reale λ j, j ∈ 0,v.
O baza S ⊂ EC poarta numele de baza invarianta la σ (σ -baza) daca σ(S )⊆S . Cu alte cuvinte, daca e se gaseste ıntr-o σ -baza, atunci fie e ∈ E, fie e ∈ EC\E
si σ(e) ∈ S , adica setul {e,σ(e)} este liniar independent peste corpul C.
Exemplul 3.3. Fie11 EC = C3. Atunci, baza B1 = {e1,e2,e3}, cu vectorii
e1 = i1, e2 = i2, e3 = i · i3 =
0
0
i
,
nu este σ -baza deoarece σ(e3) =−e3 6∈ B1.
In schimb, baza B2 = {e4,e5,e6}, cu vectorii
e4 = i1, e5 =
0
1
i
, e6 =
0
1
−i
,
este σ -baza pentru ca e4 ∈ R3 si σ(e5) = e6.
Teorema 3.2. ([14, pag. 116, Theorem 1]) Exista si sunt unici operatorii R-liniari
D , N : E → E astfel ıncat
T = D +N , D ◦N = N ◦D ,
operatorul N sa fie nilpotent, complexificatul operatorului D , DC : EC → EC, sa
fie diagonalizabil iar baza ın raport cu care operatorul DC admite o matrice-dia-
gonala de reprezentare sa fie o σ -baza.
10 Vezi (1.29).11 Reamintesc faptul ca
(R3)C= C3.

3.3 Cazul K= R 65
Demonstratie. Are loc descompunerea
TC = DC+NC, DC ◦NC = NC ◦DC,
a complexificatului TC pe baza Teoremei 2.2. Aici, operatorul C-liniar DC este dia-
gonalizabil iar operatorul C-liniar NC este nilpotent.
Introducem operatorii C-liniari12
D1 = σ ◦DC ◦σ ∈ L(EC,EC), N1 = σ ◦NC ◦σ ∈ L(EC,EC).
Fie S = {e1, . . . ,em} ⊂ EC o σ -baza ın raport cu care matricea de reprezentare
D a operatorului DC sa fie
D=
z1 0 0 · · · 0
0 z2 0 · · · 0
0 0 z3 · · · 0...
......
. . ....
0 0 · · · 0 zm
, z j ∈ C.
Baza S poate fi renumerotata astfel
S = {e1, . . . ,et}∪{et+1,et+2}∪ · · ·∪{et+2q+1,et+2q+2}, (3.28)
unde e j ∈ E pentru orice j ∈ 1, t, e j ∈ EC\E pentru orice j ∈ t +1, t +2q+2 si
σ(et+2k+1) = et+2k+2 pentru orice 0 ≤ k ≤ q. Aici, m = t +2q+2, q ∈ N.
Avem relatiile
D1(e j) = (σ ◦DC)(σ(e j)) = (σ ◦DC)(e j)
= σ(z j · e j) = z j · e j, j ∈ 1, t, (3.29)
si
D1(et+2 j+1) = (σ ◦DC)(σ(et+2 j+1)) = (σ ◦DC)(et+2 j+2)
= σ(zt+2 j+2 · et+2 j+2) = zt+2 j+2 · et+2 j+1, (3.30)
respectiv
D1(et+2 j+2) = (σ ◦DC)(σ(et+2 j+2)) = (σ ◦DC)(et+2 j+1)
= σ(zt+2 j+1 · et+2 j+1) = zt+2 j+1 · et+2 j+2. (3.31)
Atunci, pentru orice e ∈ EC,
12 Acest fapt va fi probat ın (3.32).

66 3 Forma canonica a matricelor
D1(e) = D1
(m
∑j=1
α j · e j
)= (σ ◦DC)
(m
∑j=1
α j ·σ(e j)
)
= σ
(m
∑j=1
α j · (DC ◦σ)(e j)
)=
m
∑j=1
α j · (σ ◦DC ◦σ)(e j)
=m
∑j=1
α j ·D1(e j), α j ∈ C, (3.32)
deci operatorul D1 : EC → EC este liniar peste corpul C si, via (3.29) – (3.31), este
reprezentat ın σ -baza S de o matrice-diagonala.
Mai departe, avem
N2
1 = (σ ◦NC ◦σ)◦ (σ ◦NC ◦σ) = σ ◦NC ◦σ2 ◦NC ◦σ= σ ◦N
2C ◦σ ,
respectiv
Nk
1 = σ ◦NkC ◦σ , k ∈ N∗
,
deci operatorul N1 : EC → EC este liniar peste corpul C si nilpotent.
In sfarsit, pentru orice e ∈ EC, avem
(D1 ◦N1)(e) = (σ ◦DC ◦NC ◦σ)(e) = (σ ◦NC ◦DC ◦σ)(e)
= (N1 ◦D1)(e),
deci operatorii liniari D1, N1 comuta.
Conform Lemei 1.6,
TC = σ ◦TC ◦σ = σ ◦ (DC+NC)◦σ= σ ◦DC ◦σ +σ ◦NC ◦σ= D1 +N1.
Din Lema 2.18 rezulta ca
DC = D1 = σ ◦DC ◦σ , NC = N1 = σ ◦NC ◦σ ,
adica operatorii liniari complecsi DC, NC sunt complexificatii unor operatori lini-
ari reali, notati cu D , N .
Matricea de reprezentare a operatorului NC este nilpotenta si coincide cu matri-
cea de reprezentare — ın baza din E care genereaza spatiile E, EC — a operatorului
N . Astfel, acesta este nilpotent.
Fie {D2,N2} alta descompunere de acelasi tip, adica
T = D2 +N2, D2 ◦N2 = N2 ◦D2.

3.3 Cazul K= R 67
Atunci, daca B = { f 1, . . . , f m} este o baza a spatiului liniar real E iar D2, N2
sunt matricele de reprezentare ın raport cu aceasta ale operatorilor D2, N2, matricea
de reprezentare T a operatorului T , ın B, are formula
T= D2 +N2.
Via (1.38), putem scrie ca
TC = (D2)C+(N2)C .
De asemeni, conform Lemei 1.7,
(D2)C ◦ (N2)C = (D2 ◦N2)C , (N2)C ◦ (D2)C = (N2 ◦D2)C .
Fie z =m
∑i=1
zi · f i ∈ EC. Egalitatile — Lema 1.2 arata ca (EC)R = E, deci
((D2 ◦N2)C)|E = D2 ◦N2 —
((D2)C ◦ (N2)C)(z) = (D2 ◦N2)C
(m
∑i=1
zi · f i
)(zi ∈ C)
=m
∑i=1
zi · ((D2 ◦N2)C)|E( f i) =m
∑i=1
zi · (D2 ◦N2)( f i)
=m
∑i=1
zi · (N2 ◦D2)( f i) = (N2 ◦D2)C
(m
∑i=1
zi · f i
)
= ((N2)C ◦ (D2)C)(z)
ne conduc la
DC = (D2)C , NC = (N2)C .
Obtinem ca
D = D2, N = N2,
via Lema 1.2. ⊓⊔
Un operator R-liniar al carui complexificat este diagonalizabil se numeste semi-
simplu13.
Revenim la (3.27). Operatorul (DC)∣∣V0⊕V1
are matricea de reprezentare DV0⊕V1
ın raport cu baza B0 ∪B1. Mai precis,
(DC(e1) · · · DC(em0
)DC(σ(e1)) · · · DC(σ(em0)))
=(e1 · · · em0
σ(e1) · · · σ(em0))·DV0⊕V1
13 In limba engleza, semisimple [14, pag. 65].

68 3 Forma canonica a matricelor
si
DV0⊕V1=
λ0 0 0 0 · · · 0...
. . ....
......
0 · · · λ0 0 · · · 0
0 · · · 0 λ0 · · · 0...
......
. . ....
0 · · · 0 0 · · · λ0
∈ M2m0(C).
Introducem numerele reale a0, b0, unde b0 6= 0, pentru care λ0 = a0 +b0 · i. Stim
ca
x1 =1
2· (e1 +σ(e1)) , y1 =
1
2i· (e1 −σ(e1)) ,
conform (1.35), (1.36).
Au loc relatiile
(DC)∣∣V0⊕V1
(e1) = λ0 · e1 (3.33)
= (a0 · x1 −b0 · y1)+ i · (b0 · x1 +a0 · y1),
respectiv
(DC)∣∣V0⊕V1
(σ(e1)) = λ0 ·σ(e1) (3.34)
= (a0 · x1 −b0 · y1)− i · (b0 · x1 +a0 · y1),
de unde
(DC)∣∣V0⊕V1
(x1) =1
2·[(DC)
∣∣V0⊕V1
(e1)+(DC)∣∣V0⊕V1
(σ(e1))]
= a0 · x1 −b0 · y1
si
(DC)∣∣V0⊕V1
(y1) =1
2i·[(DC)
∣∣V0⊕V1
(e1)− (DC)∣∣V0⊕V1
(σ(e1))]
= b0 · x1 +a0 · y1.
Fie baza — ınlocuim setul {e1,σ(e1)} cu setul {x1,y1} ın B0 ∪B1 —
B = {x1,y1}∪{e2, . . . ,em0,σ(e2), . . . ,σ(em0
)} ⊂V0 ⊕V1.
Matricea de reprezentare W1 a operatorului (DC)∣∣V0⊕V1
ın raport cu noua baza
este

3.3 Cazul K= R 69
W1 =
a0 b0 0 · · · 0 0 · · · 0
−b0 a0 0 · · · 0 0 · · · 0
0 0 λ0 · · · 0 0 · · · 0...
......
. . ....
......
0 0 0 · · · λ0 0 · · · 0
0 0 0 · · · 0 λ0 · · · 0...
......
......
. . ....
0 0 0 · · · 0 0 · · · λ0
∈ M2m0(C).
Adica,
(DC(x1)DC(y1)DC(e2) · · · DC(em0
)DC(σ(e2)) · · · DC(σ(em0)))
=(x1 y1 e2 · · · em0
σ(e2) · · · σ(em0))·W1.
Repetand procedeul de ınca m0 −1 ori, deducem ca exista o baza S ⊂ E a spa-
tiului liniar complex EC ın raport cu care operatorul liniar (DC)∣∣V0⊕V1
sa aiba
matricea de reprezentare
Wm0=
(a0 b0
−b0 a0
)· · · O2
.... . .
...
O2 · · ·(
a0 b0
−b0 a0
)
∈ M2m0(R).
Aici,
S = {x1,y1,x2,y2, . . . ,xm0,ym0
}
si V0 ⊕V1 = SpanC(S ).Observam ca
V0 ⊕V1 = (V01)C , unde V01 = SpanR(S ).
Conform Lemei 1.6, restrictia operatorului liniar complex (DC)∣∣V0⊕V1
la14 V01 este
un operator liniar real, notat cu D∣∣V01
, a carui matrice de reprezentare ın raport cu
S este Wm0. Evident, acest operator liniar real este restrictia la V01 a operatorului
D din Teorema 3.2.
Tot pe baza relatiei (3.23)15, deducem ca, daca vectorii {e1, . . . ,eh} — pentru
h ≤ m0 — se scriu sub forma
e1 = e, e2 = (TC−λ0 · I)(e), . . . ,eh = (TC−λ0 · I)h−1 (e),
14 V01 este realificatul spatiului complex V0 ⊕V1.
15 In fapt, via egalitatea (TC−λ0 · I)k = σ ◦(
TC−λ0 · I)k
◦σ , unde k ≥ 1.

70 3 Forma canonica a matricelor
unde h = nil(e,TC−λ0 · I), ceea ce implica faptul ca
SpanC {e1, . . . ,eh}= Z (e,TC−λ0 · I) ,
atunci
nil(e,TC−λ0 · I) = nil(
σ(e),TC−λ0 · I)
si
SpanC {σ(e1), . . . ,σ(eh)}= Z(
σ(e),TC−λ0 · I).
Mai precis chiar, din relatiile
ek = (TC−λ0 · I)k−1 (e)
=
(σ ◦(
TC−λ0 · I)k−1
◦σ)(e)
= σ((
TC−λ0 · I)k−1
(σ(e))
)
rezulta ca
σ(ek) =(
TC−λ0 · I)k−1
(σ(e)), 1 ≤ k ≤ h.
Restrictia la subspatiul liniar complex
Z0 ⊕Z1 ⊆V0 ⊕V1,
unde
Z0 = Z (e,TC−λ0 · I) , Z1 = Z(
σ(e),TC−λ0 · I),
a operatorului TC admite ın baza B2 ∪B3, unde
B2 = {e1, . . . ,eh}, B3 = {σ(e1), . . . ,σ(eh)},
matricea de reprezentare
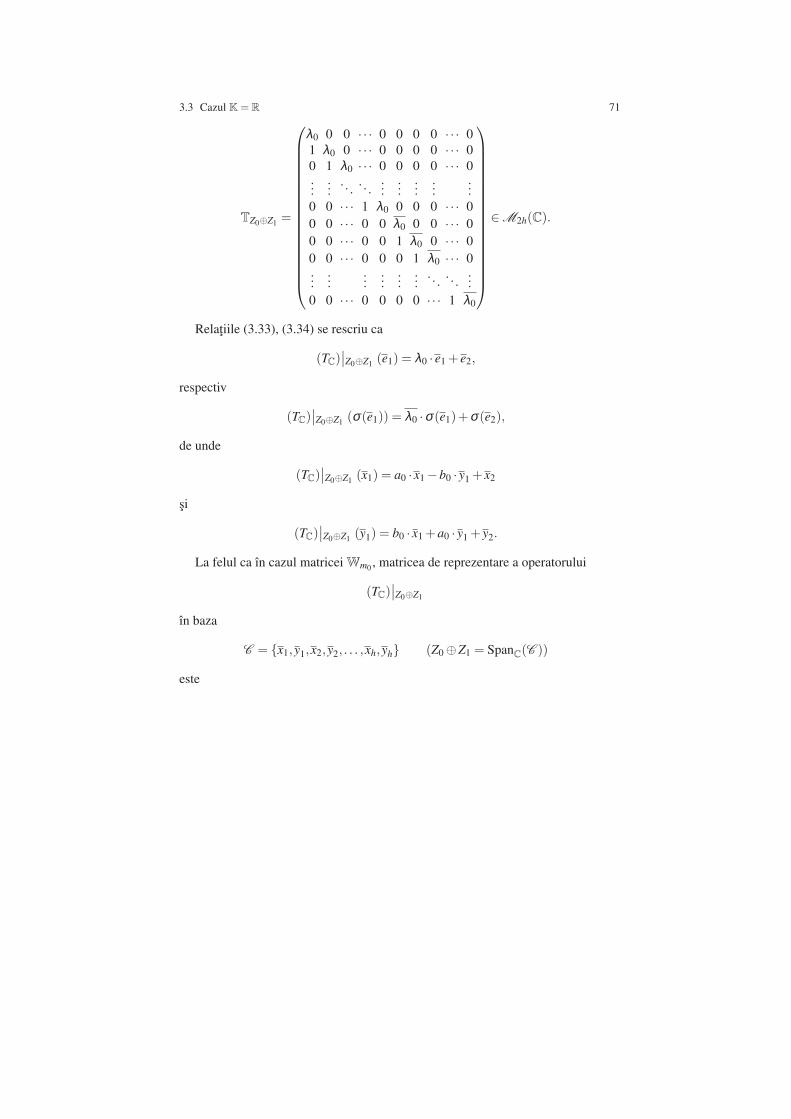
3.3 Cazul K= R 71
TZ0⊕Z1=
λ0 0 0 · · · 0 0 0 0 · · · 0
1 λ0 0 · · · 0 0 0 0 · · · 0
0 1 λ0 · · · 0 0 0 0 · · · 0...
.... . .
. . ....
......
......
0 0 · · · 1 λ0 0 0 0 · · · 0
0 0 · · · 0 0 λ0 0 0 · · · 0
0 0 · · · 0 0 1 λ0 0 · · · 0
0 0 · · · 0 0 0 1 λ0 · · · 0...
......
......
.... . .
. . ....
0 0 · · · 0 0 0 0 · · · 1 λ0
∈ M2h(C).
Relatiile (3.33), (3.34) se rescriu ca
(TC)∣∣Z0⊕Z1
(e1) = λ0 · e1 + e2,
respectiv
(TC)∣∣Z0⊕Z1
(σ(e1)) = λ0 ·σ(e1)+σ(e2),
de unde
(TC)∣∣Z0⊕Z1
(x1) = a0 · x1 −b0 · y1 + x2
si
(TC)∣∣Z0⊕Z1
(y1) = b0 · x1 +a0 · y1 + y2.
La felul ca ın cazul matricei Wm0, matricea de reprezentare a operatorului
(TC)∣∣Z0⊕Z1
ın baza
C = {x1,y1,x2,y2, . . . ,xh,yh} (Z0 ⊕Z1 = SpanC(C ))
este

72 3 Forma canonica a matricelor
J =
(a0 b0
−b0 a0
)O2 O2 · · · O2
(1 0
0 1
) (a0 b0
−b0 a0
)O2 · · · O2
......
O2 · · ·(
1 0
0 1
) (a0 b0
−b0 a0
)O2
O2 · · · O2
(1 0
0 1
) (a0 b0
−b0 a0
)
=
Eλ0O2 · · · O2
I2 Eλ0· · · O2
.... . .
. . ....
O2 · · · I2 Eλ0
∈ M2h(R), (3.35)
unde
Eλ0=
(a0 b0
−b0 a0
).
Asadar, restrictia operatorului liniar complex (TC)∣∣Z0⊕Z1
la realificatul Z01 =SpanR(C ) al spatiului liniar Z0 ⊕Z1 este operatorul liniar real T
∣∣Z01
cu matricea
de reprezentare J ın baza C .
In concluzie, pentru operatorii liniari reali, matricele Jordan elementare Jλk din
(3.19), (3.20) sunt ınlocuite cu matrice (3.35) atunci cand λ ∈ C\R [14, pag. 129,
Theorem 2].
Tehnica descrisa ın (3.18), (3.21), (3.22) ne permite modificarea bazelor B2 ∪B3, respectiv C pentru a ınlocui matricea J cu matricea
J(ε) =
(a0 b0
−b0 a0
)O2 O2 · · · O2
(ε 0
0 ε
) (a0 b0
−b0 a0
)O2 · · · O2
......
O2 · · ·(
ε 0
0 ε
) (a0 b0
−b0 a0
)O2
O2 · · · O2
(ε 0
0 ε
) (a0 b0
−b0 a0
)
=
Eλ0O2 · · · O2
εI2 Eλ0· · · O2
.... . .
. . ....
O2 · · · εI2 Eλ0
, (3.36)
unde ε > 0. Evident, J= J(1).

Capitolul 4
Aplicatii
4.1 Sumare prin parti. Produsul Cauchy a doua serii. Teorema
lui F. Mertens
Fie E ⊆Cn un spatiu liniar m-dimensional peste corpul K∈ {R,C}, unde m≤ n,
cu baza S1 — introdusa la pagina 1 —.
Fie x =m
∑i=1
λi · ei ∈ E. Cantitatea
‖x‖2 =
√m
∑i=1
|λi|2 (4.1)
constituie norma euclidiana1 de index 2 a spatiului liniar E [14, pag. 77]. Dubletul
E = (E,‖⋆‖2) este un spatiu Banach [20, pag. 129].
Lema 4.1. ([13, pag. 109, Theorem 5.1.10]) Fiind dat sirul (ap)p≥0 ⊂ E, conver-
gent2 la elementul a ∈ E, este valabila relatia
limp→+∞
A p = a,
unde A p =1
p+1·
p
∑i=0
ai.
Demonstratie. Cum orice sir convergent este marginit, introducem numarul B > 0
cu proprietatea ca
‖ap‖2 ≤ B, p ∈ N. (4.2)
Fie ε > 0. Exista numarul natural N = N(ε)≥ 1 astfel ıncat
1 Sau l2-norma [1, pag. 48].2 Orice doua norme ın E sunt echivalente [14, pag. 78, Proposition 1], deci putem studia conver-
genta sirurilor ın raport cu o norma convenabila.
73

74 4 Aplicatii
‖ap −a‖2 < ε , p ≥ N. (4.3)
Realizam estimarile
∥∥A p −a∥∥
2=
∥∥∥∥∥1
p+1·
p
∑i=0
(ai −a)
∥∥∥∥∥2
≤ 1
p+1·(
N−1
∑i=0
‖ai −a‖2 +p
∑i=N
‖ai −a‖2
)
(vezi (4.3)) ≤ 1
p+1·[
N−1
∑i=0
(‖ai‖2 +‖a‖2)+p
∑i=N
ε
]
(vezi (4.2)) ≤ 1
p+1·[
N−1
∑i=0
(2 ·B)+p
∑i=N
ε
]
=1
p+1· [2NB+(p−N +1)ε ], p > N,
de unde
limsupp→+∞
∥∥A p −a∥∥
2≤ ε .
Trecem la limita, ın ambii membri ai ultimei inegalitati, ε ց 0. ⊓⊔
Exemplul 4.1. Reciproca Lemei 4.1 nu este valabila. Astfel, ın E =R, sirul3 (ap)p≥0,
unde ap = (−1)p, nu este convergent dar sirul (A p)p≥0 converge la 0.
In contextul Lemei 4.1, sa consideram seria ∑p≥0
ap cu sumele partiale
A−1 = 0E , Ap =p
∑i=0
ai, p ∈ N.
Evident, ap = Ap −Ap−1 pentru orice4 p [13, pag. 102].
Acestei serii ıi asociem mediile Cesaro de ordinul 1,
A1
p =A
1p
p+1=
1
p+1·
p
∑i=0
Ai
=1
p+1·
p
∑i=0
[(p− i+1) ·ai], p ≥ 0. (4.4)
3 Pastram “bara” de la notatia vectorilor pentru uniformitate. In Exemplul 4.3 vom identifica, din
acelasi motiv, numerele complexe cu elementele setului M1(C).4 In particular, convergenta seriei — adica, convergenta sirului (Ap)p≥−1 — implica faptul ca
limp→+∞
ap = 0E .

4.1 Produsul Cauchy a doua serii 75
Seria ∑p≥0
ap se numeste sumabila Cesaro si are suma (Cesaro) S daca — [13, pag.
109] —
limp→+∞
A1
p = S ∈ E.
Cu alte cuvinte, mediile aritmetice ale sumelor partiale consecutive ale seriei ın
discutie converg la S ın norma ‖⋆‖2.
Lema 4.1 ne arata ca orice serie convergenta de elemente din E este si sumabila
Cesaro iar suma seriei coincide cu suma sa Cesaro.
Exemplul 4.2. In cazul sirului (ap)p≥0 din Exemplul 4.1, seria ∑p≥0
ap are sumele
partiale (Ap)p≥0, unde A2p = 1, A2p+1 = 0 pentru orice p, deci nu este convergenta.
Insa, suma sa Cesaro este S = 12
[13, ibid.].
In multimea R2, construim patratul OABC,
[OABC] = {(p,k)|0 ≤ p, k ≤ M}∩N2,
de varfuri O= (0,0), A= (M,0), B= (M,M) si C = (0,M). Aici, M ∈N. Plecand de
la suprafetele plane [OAB], [OAC]⊂R2 marginite de liniile poligonale [OA]∪ [AB]∪[BO] si [OA]∪ [AC]∪ [CO] — dreapta OA este orizontala iar dreapta OC verticala
—, introducem multimile
∆ = [OAB]∩N2, Θ = [OAC]∩N2
.
Evident, ∆ si Θ reprezinta jumatati din patratul [OABC].Multimile ∆ ,Θ sunt partitionate ın doua feluri,
∆ =M⋃
p=0
∆p =M⋃
k=0
∆ k,
unde
∆p = {(p,k) ∈ N2|0 ≤ k ≤ p}, ∆ k = {(p,k) ∈ N2|k ≤ p ≤ M},
si
Θ =M⋃
p=0
Θp =M⋃
k=0
Θ k,
unde
Θp = {(p,k) ∈ N2|0 ≤ k ≤ M− p}, Θ k = {(p,k) ∈ N2|0 ≤ p ≤ M− k}.
Afirm ca alta partitionare a triunghiului Θ se face prin linii paralele cu dreapta
CA,
76 4 Aplicatii
Θ =M⋃
v=0
Ψv, Ψv = {(p,k)|p+ k = v}∩N2.
Intr-adevar, pentru orice (p0,k0) ∈Θ exista exact un element v0 ∈ 0,M astfel ıncat
(p0,k0) ∈Ψv0. Mai precis,
(p0,k0) ∈Ψp0+k0.
Lema 4.2. Fiind dat sirul (apk)(p,k)∈[OABC] ⊂ E, au loc identitatile
M
∑p=0
p
∑k=0
apk =M
∑k=0
M
∑p=k
apk, (4.5)
respectiv
M
∑p=0
M−p
∑k=0
apk =M
∑k=0
M−k
∑p=0
apk (4.6)
si
M
∑p=0
p
∑k=0
ak(p−k) =M
∑p=0
M−p
∑k=0
apk. (4.7)
Demonstratie. Se observa ca
M
∑p=0
p
∑k=0
apk =M
∑p=0
∑(p,k)∈∆p
apk = ∑(p,k)∈∆
apk
=M
∑k=0
∑(p,k)∈∆ k
apk =M
∑k=0
M
∑p=k
apk.
Apoi,
M
∑p=0
M−p
∑k=0
apk =M
∑p=0
∑(p,k)∈Θp
apk = ∑(p,k)∈Θ
apk
=M
∑k=0
∑(p,k)∈Θ k
apk =M
∑k=0
M−k
∑p=0
apk.
In sfarsit,

4.1 Produsul Cauchy a doua serii 77
M
∑p=0
p
∑k=0
ak(p−k) =M
∑p=0
∑(v,w)∈Ψp
avw = ∑(v,w)∈Θ
avw
=M
∑p=0
∑(p,k)∈Θp
apk =M
∑p=0
M−p
∑k=0
apk.
Demonstratia acestor tehnici de sumare prin parti [13, pag. 106] s-a ıncheiat. ⊓⊔
Fie aplicatia (operatia) ⋆ : E2 → E pentru care (i) exista numarul A ≥ 1 astfel
ıncat
‖e⋆ f‖2 ≤ A · ‖e‖2 · ‖ f‖2,
(ii) avem bi-omogenitate, adica
λ · (e⋆ f ) = (λ · e)⋆ f = e⋆ (λ · f ),
si (iii) distributivitate la adunare, adica
e⋆ ( f +g) = (e⋆ f )+(e⋆g), (e+ f )⋆g = (e⋆g)+( f ⋆g),
pentru orice e, f , g ∈ E si λ ∈K.
Exemplul 4.3. Pentru E = C, facand identificarea e = (z)≡ z ∈ C, avem
e⋆ f = (z1)⋆ (z2) = (z1 · z2)≡ z1 · z2, z j ∈ C, j ∈ {1,2}.
Pentru E = Cq2, unde q ∈ N\{0}, putem realiza identificarea — via (1.11) —
e =q2
∑j=1
e j · i j ≡
eq e2q · · · eq2
......
...
e1 eq+1 · · · e(q−1)q+1
∈ Mq(C).
Atunci,
e⋆ f =
eq e2q · · · eq2
......
...
e1 eq+1 · · · e(q−1)q+1
·
fq f2q · · · fq2
......
...
f1 fq+1 · · · f(q−1)q+1
= (arp)1≤r, p≤q,
unde
arp ≡ (arp) =(er er+q · · · er+(q−1)q
)·
fpq
fpq−1
...
f(p−1)q+1
.
78 4 Aplicatii
Se observa ca
‖e⋆ f‖2 =
√√√√q
∑r, p=1
|arp|2
≤
√√√√q
∑r, p=1
(|er|2 + · · ·+ |er+(q−1)q|2
)·(| fpq|2 + · · ·+ | f(p−1)q+1|2
)
= ‖e‖2 · ‖ f‖2,
deci A = 1.
Fie seriile ∑p≥0
ap si ∑p≥0
bp de elemente din spatiul liniar E. Prin produsul lor
Cauchy ıntelegem seria ∑p≥0
cp, unde
cp =p
∑i=0
ai ⋆bp−i, p ∈ N,
vezi [13, pag. 111].
Lema 4.3. ([13, pag. 112, Theorem 5.2.1]) Produsul Cauchy a doua serii conver-
gente, de sume S1 si S2, este sumabil Cesaro si are suma Cesaro
S = S1 ⋆S2. (4.8)
Demonstratie. Introducem numarul B > 0 cu proprietatea ca
‖Ap −S1‖2 ≤ B, ‖Bp −S2‖2 ≤ B, p ∈ N, (4.9)
unde Ap =p
∑i=0
ai si Bp =p
∑i=0
bi.
Fie ε > 0. Exista numarul natural N = N(ε)≥ 1 astfel ıncat
‖Ap −S1‖2 < ε , ‖Bp −S2‖2 < ε , p ≥ N. (4.10)
Au loc egalitatile — vezi (4.4) —

4.1 Produsul Cauchy a doua serii 79
(p+1) ·C 1
p = C1p =
p
∑i=0
Ci =p
∑i=0
i
∑j=0
c j =p
∑i=0
(p− i+1) · ci
=p
∑i=0
i
∑k=0
(p− i+1) · (ak ⋆bi−k) =p
∑i=0
i
∑k=0
ζ ik
(vezi (4.5)) =p
∑k=0
p
∑i=k
ζ ik =p
∑k=0
ak ⋆
p
∑i=k
(p− i+1) ·bi−k
(r = i− k) =p
∑k=0
ak ⋆
p−k
∑r=0
(p− k− r+1) ·br
=p
∑k=0
ak ⋆
p−k
∑r=0
Br =p
∑k=0
p−k
∑r=0
ak ⋆Br =p
∑k=0
p−k
∑r=0
ηkr
(vezi (4.6)) =p
∑r=0
p−r
∑k=0
ηkr =p
∑r=0
p−r
∑k=0
ak ⋆Br
=p
∑r=0
(p−r
∑k=0
ak
)⋆Br =
p
∑r=0
Ap−r ⋆Br.
Pe baza (4.9), (4.10), introducem elementele up, vp ∈ E prin formulele
Ap = S1 +up, Bp = S2 + vp, p ∈ N.
Deducem ca
C1p = (p+1) · (S1 ⋆S2)+S1 ⋆
(p
∑r=0
vr
)+
(p
∑r=0
up−r
)⋆S2 +
p
∑r=0
up−r ⋆ vr
= (p+1) · (S1 ⋆S2)
+[(p+1) ·S1
]⋆
(1
p+1·
p
∑r=0
vr
)+
(1
p+1·
p
∑r=0
up−r
)⋆[(p+1) ·S2
]
+p
∑r=0
up−r ⋆ vr
= (p+1) · (S1 ⋆S2)
+[(p+1) ·S1
]⋆
(1
p+1·
p
∑r=0
vr
)+
(1
p+1·
p
∑r=0
ur
)⋆[(p+1) ·S2
]
+p
∑r=0
up−r ⋆ vr
= (p+1) · (S1 ⋆S2)+[(p+1) ·S1
]⋆V p +U p ⋆
[(p+1) ·S2
]
+p
∑r=0
up−r ⋆ vr.

80 4 Aplicatii
Deoarece limp→+∞
up = limp→+∞
vp = 0E si
‖S1 ⋆V p‖2 ≤ A · ‖S1‖2 · ‖V p‖2, ‖U p ⋆S2‖2 ≤ A · ‖S2‖2 · ‖U p‖2,
Lema 4.1 ne conduce la
limp→+∞
S1 ⋆V p = limp→+∞
U p ⋆S2 = 0E .
Mai departe, pentru p ≥ 2 ·N — [13, pag. 113] —, facem estimarile
∥∥∥∥∥p
∑r=0
up−r ⋆ vr
∥∥∥∥∥2
≤ A ·p
∑r=0
‖up−r‖2 · ‖vr‖2
= A ·(
N−1
∑r=0
+p−N
∑r=N
+p
∑r=p−N+1
)‖up−r‖2 · ‖vr‖2
≤ A ·(
N−1
∑r=0
ε ·B+p−N
∑r=N
ε2 +p
∑r=p−N+1
B · ε)
= A ·(2NB · ε +(p−2N +1) · ε2
),
de unde
limsupp→+∞
1
p+1·∥∥∥∥∥
p
∑r=0
up−r ⋆ vr
∥∥∥∥∥2
≤ A · ε2.
Am ajuns la
limsupp→+∞
‖C 1
p −S1 ⋆S2‖2 ≤ A · ε2.
Trecem la limita, ın ambii membri ai ultimei inegalitati, ε ց 0. ⊓⊔
Exemplul 4.4. Fie seria ∑p≥0
ap, unde ap = (−1)p√
p+1, conform [13, pag. 112]. Atunci,
termenul general al produsului Cauchy al seriilor ∑p≥0
ap si ∑p≥0
bp, unde bp = ap
pentru orice p ∈ N, are forma
cp =p
∑i=0
ai ·ap−i = (−1)p ·p
∑i=0
1√(i+1) · (p− i+1)
.
Via inegalitatea mediilor, obtinem ca

4.1 Produsul Cauchy a doua serii 81
|cp| =p
∑i=0
1√(i+1) · (p− i+1)
≥p
∑i=0
2
p+2=
2(p+1)
p+2
= 2 ·(
1− 1
p+2
), p ∈ N,
respectiv
liminfp→+∞
|cp| ≥ 2,
adica produsul Cauchy ∑p≥0
cp nu convergent ın E = R.
Conform [13, pag. 106, Theorem 5.1.5], seria alternanta ∑p≥0
ap este convergenta.
Cu alte cuvinte, nu orice produs Cauchy de serii convergente este convergent.
Lema 4.4. ([13, pag. 113, Corollary]) Daca produsul Cauchy a doua serii conver-
gente, de sume S1 si S2, este convergent, atunci suma sa are formula (4.8).
Demonstratie. Deoarece produsul Cauchy este convergent, el este sumabil Cesaro
iar suma sa S coincide cu suma Cesaro, vezi Lema 4.1. Pe de alta parte, suma Cesaro
are — via Lema 4.3 — valoarea data ın (4.8). ⊓⊔
Teorema 4.1. ([13, pag. 113, Theorem 5.2.2]) Produsul Cauchy a doua serii absolut
convergente este absolut convergent.
Demonstratie. Daca seriile ∑p≥0
ap si ∑p≥0
bp sunt absolut convergente, atunci seriile
∑p≥0
up, ∑p≥0
vp, unde
up = ‖ap‖2, vp = ‖bp‖2, p ∈ N,
si
‖cp‖2 =
∥∥∥∥∥p
∑i=0
ai ⋆bp−i
∥∥∥∥∥2
≤ A ·p
∑i=0
uivp−i,
sunt convergente. Le notam sumele cu U , respectiv V .
Se observa ca
p
∑i=0
‖ci‖2 ≤ A ·p
∑i=0
i
∑j=0
u jvi− j
(vezi (4.7)) = A ·p
∑i=0
p−i
∑j=0
uiv j = A ·(
p
∑i=0
ui
)·(
p−i
∑j=0
v j
)
≤ A ·(
+∞
∑i=0
ui
)·(
+∞
∑j=0
v j
)= A ·UV, p ≥ 0,

82 4 Aplicatii
de unde+∞∑
i=0
‖ci‖2 ≤ AUV <+∞. ⊓⊔
Teorema 4.2. (F. Mertens, [13, pag. 114, Exercise 6]) Daca cel putin una dintre se-
riile convergente ∑p≥0
ap, ∑p≥0
bp, de sume S1 si S2, este absolut convergenta, atunci
produsul lor Cauchy este convergent si are suma S1 ⋆S2.
Demonstratie. Sa presupunem ca seria ∑p≥0
ap este absolut convergenta.
La fel ca la Lema 4.3, introducem numarul B > 0 cu proprietatea ca
+∞
∑i=0
‖ai‖2 < B, ‖Bp −S2‖2 = ‖vp‖2 < B, p ∈ N.
Fie ε > 0. Exista numarul natural N = N(ε)≥ 1 astfel ıncat
+∞
∑j=N
‖a j‖2 < ε , ‖vp‖2 < ε , p ≥ N.
Atunci, sunt valabile identitatile
Cp =p
∑i=0
ci =p
∑i=0
i
∑k=0
ak ⋆bi−k =p
∑i=0
i
∑k=0
ζ ik =p
∑k=0
p
∑i=k
ζ ik
=p
∑k=0
p
∑i=k
ak ⋆bi−k =p
∑k=0
ak ⋆
(p
∑i=k
bi−k
)=
p
∑k=0
ak ⋆
(p−k
∑r=0
br
)
=p
∑k=0
ak ⋆Bp−k =p
∑k=0
ak ⋆(S2 + vp−k
)=
(p
∑k=0
ak
)⋆S2 +
p
∑k=0
ak ⋆ vp−k
= Ap ⋆S2 +p
∑k=0
ak ⋆ vp−k. (4.11)
Mai departe, deducem ca
‖Ap ⋆S2 −S1 ⋆S2‖2 =∥∥(Ap −S1
)⋆S2
∥∥2
≤ A · ‖S2‖2 · ‖Ap −S1‖2
= A · ‖S2‖2 · ‖up‖2
→ 0 cand p →+∞,
respectiv — pentru p ≥ 2 ·N —

4.1 Produsul Cauchy a doua serii 83
∥∥∥∥∥p
∑k=0
ak ⋆ vp−k
∥∥∥∥∥2
≤ A ·p
∑k=0
‖ak‖2 · ‖vp−k‖2 = A ·(
p−N
∑k=0
+p
∑k=p−N+1
)‖ak‖2 · ‖vp−k‖2
≤ A ·[
p−N
∑k=0
(‖ak‖2 · ε)+(
p
∑k=p−N+1
‖ak‖2
)·B]
≤ A ·[(
+∞
∑i=0
‖ai‖2
)· ε +
(+∞
∑j=N
‖a j‖2
)·B]< A · (B · ε + ε ·B)
= 2AB · ε .
In concluzie,
∥∥Cp −S1 ⋆S2
∥∥2≤ ‖Ap ⋆S2 −S1 ⋆S2‖2 +
∥∥∥∥∥p
∑k=0
ak ⋆ vp−k
∥∥∥∥∥2
,
de unde
limsupp→+∞
∥∥Cp −S1 ⋆S2
∥∥2≤ 2AB · ε .
Trecem la limita, ın ambii membri ai ultimei inegalitati, ε ց 0. Am ajuns la
limp→+∞
Cp = S1 ⋆S2.
Dat fiind ca operatia “⋆” nu este neaparat comutativa, trebuie sa aratam ca seria
∑p≥0
ap nu joaca niciun rol privilegiat ın formula (4.11).
Plecand de la observatia ca
ak ⋆bi−k = ai−(i−k) ⋆b(i−k),
refacem estimarile anterioare. Astfel,
Cp =p
∑i=0
ci =p
∑i=0
i
∑k=0
ak ⋆bi−k =p
∑i=0
i
∑k=0
ai−k ⋆bk
=p
∑i=0
i
∑k=0
ζ ik =p
∑k=0
p
∑i=k
ζ ik =p
∑k=0
p
∑i=k
ai−k ⋆bk
=p
∑k=0
(p
∑i=k
ai−k
)⋆bk =
p
∑k=0
(p−k
∑r=0
ar
)⋆bk
=p
∑k=0
Ap−k ⋆bk =p
∑k=0
(S1 +up−k
)⋆bk = S1 ⋆
(p
∑k=0
bk
)+
p
∑k=0
up−k ⋆bk
= S1 ⋆Bp +p
∑k=0
up−k ⋆bk,

84 4 Aplicatii
ceea ce ıncheie demonstratia. ⊓⊔
Lema 4.5. ([14, pag. 84, Lemma 2]) Fiind date sirurile (Ap)p≥0, (Bp)p≥0
⊂Mm(C)astfel ıncat seriile
∑p≥0
Ap, ∑p≥0
Bp (4.12)
sa fie absolut convergente ın raport cu l2-norma spatiului Mm(C) ≡ Cm2, seria
∑p≥0
Cp, unde
Cp =p
∑k=0
Ak ·Bp−k, p ∈ N,
este absolut convergenta. In plus, suma sa C este produsul sumelor seriilor din
(4.12), adica
C =
(+∞
∑i=0
Ai
)·(
+∞
∑j=0
B j
).
Demonstratie. In contextul Exemplului 4.3, introducem operatia
(Cm2 ∋
)e⋆ f =
col(1)A...
col(m)A
⋆
col(1)B...
col(m)B
≡ A⋆B = A ·B, A, B ∈ Mm(C).
Concluzia rezulta din Teorema 4.1. ⊓⊔
4.2 Exponentiala unei matrice patrate cu elemente numerice
Fie A ∈ Mm(C), unde m ∈ N\{0}. Elementul — A0 = Im —
eA =+∞
∑p=0
1
p!·Ap = lim
p→+∞
p
∑i=0
1
i!·Ai = lim
p→+∞Ap
∈ Mm(C)≡ Cm2
se numeste exponentiala5 matricei A. Aici, Ap =p
∑i=0
ai si ap =1p!·Ap pentru orice
p.
5 In limba engleza, exponential of A, [24, pag. 12].

4.2 Exponentiala unei matrice patrate 85
In contextul Lemei 4.5, au loc relatiile
‖A‖2 =
√m
∑v,w=1
|avw|2, A = (avw)1≤v,w≤m ,
respectiv
‖A2‖2 = ‖A⋆A‖2 ≤ (‖A‖2)2.
Prin inductie matematica, probam ca
‖Ap‖2 ≤ (‖A‖2)p, p ∈ N\{0},
iar de aici, dat fiind ca seria numerica ∑p≥0
1p!· (‖A‖2)
peste convergenta — are suma
es, unde s = ‖A‖2 —, deducem ca seria ∑p≥0
ap este absolut convergenta ın spatiul
liniar E = Mm(C).
Teorema 4.3. ([24, pag. 13]) Fie A, B ∈ Mm(C). Au loc relatiile urmatoare:
(i) daca A ·B = B ·A, atunci
eA+B = eA · eB, eA · eB = eB · eA;
(ii)
eOm = Im,(eA)−1
= e−A;
(iii) daca6 A ∼ B, atunci eA ∼ eB;
(iv) ([14, pag. 89, Problem 12]) daca A ·B = B ·A, atunci
A · eB = eB ·A.
Demonstratie. Partea (i). Sunt valabile egalitatile — folosim binomul lui Newton!
—
eA+B =+∞
∑p=0
1
p!· (A+B)p = lim
p→+∞
p
∑i=0
1
i!· (A+B)i
= limp→+∞
p
∑i=0
1
i!·
i
∑j=0
(j
i
)·A j ·Bi− j = lim
p→+∞
p
∑i=0
i
∑j=0
(1
j!·A j
)·[
1
(i− j)!·Bi− j
]
= limp→+∞
p
∑i=0
Ci, Ci =i
∑j=0
A j ⋆Bi− j,
unde Up =1p!·U p pentru orice U ∈ Mm(C).
6 Relatia de echivalenta “∼” a fost definita la pagina 6.

86 4 Aplicatii
Aplicam Lema 4.5. Astfel,
eA+B =
(+∞
∑j=0
A j
)·(
+∞
∑q=0
Bq
)= eA · eB
.
Cea de-a doua identitate rezulta din egalitatea eA+B = eB+A = eB · eA.
Partea (ii). Concluzia rezulta din relatiile
Im = Im ++∞
∑p=1
1
p!· (Om)
p = eOm = eA+(−A) = e(−A)+A
= eA · e−A = e−A · eA.
Partea (iii). Vom ıntrebuinta identitatea (1.18). Intr-adevar, deoarece
∥∥∥∥∥P−1 ·(
+∞
∑i=0
1
i!·Bi
)·P−P−1 ·
(k
∑i=0
1
i!·Bi
)·P∥∥∥∥∥
2
≤∥∥P−1
∥∥2·∥∥∥∥∥+∞
∑i=0
1
i!·Bi −
k
∑i=0
1
i!·Bi
∥∥∥∥∥2
· ‖P‖2
≤∥∥P−1
∥∥2· ‖P‖2 ·
[+∞
∑j=k
1
j!· (‖B‖2)
j
], k ≥ 0,
deducem ca
limk→+∞
P−1 ·(
k
∑i=0
1
i!·Bi
)·P = P−1 · eB ·P.
Conform (1.18), avem
P−1 · eB ·P = limk→+∞
k
∑i=0
1
i!·(P−1 ·Bi ·P
)= lim
k→+∞
k
∑i=0
1
i!·Ai
= eA.
Partea (iv). Observam ca
A ·B2 = (A ·B) ·B = (B ·A) ·B = B · (A ·B) = B · (B ·A)= B2 ·A.
Mai departe, prin inductie matematica, stabilim egalitatea
A ·Bp = Bp ·A, p ∈ N.
Pentru a trage concluzia, la fel ca anterior, utilizam distributivitatea ınmultirii
matricelor fata de adunarea acestora. ⊓⊔

4.3 Calculul exponentialei 87
4.3 Calculul exponentialei unei matrice patrate cu elemente
complexe
Fie A ∈ Mm(C), unde m ∈N\{0}. Atunci, matricea A poate fi considerata drept
matricea de reprezentare ın baza canonica S1 = BC = {i1, . . . , im} a unui element
T din spatiul liniar complex L(Cm,Cm), si anume — A = T —
z1
...
zm
7−→ A ·
z1
...
zm
,
z1
...
zm
∈ Cm
.
Conform Teoremei 2.2, exista baza S2 a spatiului liniar Cm ın raport cu care
operatorul T sa fie reprezentat de matricea T1 cu formula
T1 = D+N, D ·N= N ·D.
Aici,
D=
d1 · · · 0...
. . ....
0 · · · dm
, unde di ∈ C, i ∈ 1,m, Nm = Om.
Deducem ca
eD =
ed1 · · · 0...
. . ....
0 · · · edm
, eN =
m−1
∑q=0
1
q!·Nq
.
Teorema 4.3 ne conduce la
eT1 = eD · eN =
ed1 · · · 0...
. . ....
0 · · · edm
·(
m−1
∑q=0
1
q!·Nq
).
Relatiile (1.15) arata ca exista matricea nesingulara P ∈ Mm(C) astfel ıncat
A = P ·T1 ·P−1.
Plecand de la concluzia (iii) a Teoremei 4.3, stabilim ca
eA = P · eT1 ·P−1 = P ·
ed1 · · · 0...
. . ....
0 · · · edm
·(
m−1
∑q=0
1
q!·Nq
)·P−1
.

88 4 Aplicatii
In plus, formula (1.2) — de trecere de la BC la S2 — arata ca vectorii bazei S2
sunt chiar coloanele matricei P [14, pag. 113]. Vezi (4.14).
Stim ca numerele (di)i∈1,m de pe diagonala principala a matricei D sunt eigen-
valori — numarate cu multiplicitatile lor algebrice — ale matricei A iar baza S2 se
compune din eigenvectori generalizati ai aceleiasi matrice. Insa este dificil sa cons-
truim acea baza S2 fata de care matricea de reprezentare nilpotenta N sa se afle ın
forma canonica. Deoarece matricea
N0 = P ·N ·P−1 = P · (T1 −D) ·P−1 = A−P ·D ·P−1
ıl reprezinta pe7 N ın baza canonica BC , avem
(N0)m = Om.
In concluzie, ne bazam ın practica pe formula8
eA = eP·D·P−1+N0 = eP·D·P−1 · eN0 = P · eD ·P−1 · eN0
= P · eD ·P−1 · eA−P·D·P−1
= P ·
ed1 · · · 0...
. . ....
0 · · · edm
·P−1 ·
[m−1
∑q=0
1
q!
(A−P ·D ·P−1
)q
], (4.13)
vezi [24, pag. 33, Corollary 1].
4.4 Estimarea produsului scalar
Fie E = Rm, unde m ∈ N\{0}, si operatorul R-liniar T : E → E. Fiind date ba-
zele S1 = BC = {i1, . . . , im} — baza canonica — si S = { f 1, . . . , f m}, notam cu
P matricea de schimbare de baza,
(f 1 · · · f m
)=(i1 · · · im
)·P = Im ·P = P
=(col(1)P · · · col(m)P
). (4.14)
Fie u, v ∈ E cu expresiile
7 T = D +N .8 Fiind date B,C ∈ Mm(C), daca B ·C =C ·B, atunci si
(P ·B ·P−1
)·(P ·C ·P−1
)= P ·BC ·P−1 = P ·CB ·P−1
=(P ·C ·P−1
)·(P ·B ·P−1
).

4.4 Estimarea produsului scalar 89
u =m
∑k=1
uS1k · ik =
m
∑k=1
uSk · f k, u
S1k , uS
k ∈ R,
respectiv
v =m
∑k=1
vS1k · ik =
m
∑k=1
vSk · f k, v
S1k , vS
k ∈ R.
Conform (1.5),
uS1...
uSm
= P−1
uS11...
uS1m
,
vS1...
vSm
= P−1
vS11...
vS1m
.
Renumerotam baza S ca ın (3.28), adica
S ={
f 1, . . . , f t ,xt+1,yt+1,xt+3,yt+3 . . . ,xt+2q+1,yt+2q+1
},
unde vectorii ek = f k sunt eigenvectori generalizati corespunzand valorilor proprii
reale — numarate ımpreuna cu multiplicitatile lor algebrice — λk ale operatorului
TC pentru 1 ≤ k ≤ t iar vectorii et+2k+1 = xt+2k+1 + i · yt+2k+1 sunt eigenvectori
generalizati corespunzand valorilor proprii λt+2k+1 ∈ C\R ale operatorului TC pen-
tru 0 ≤ k ≤ q. De asemeni, λt+2k+2 = λt+2k+1, k ∈ 0,q.
Introducem numerele
vpmin = min{
λk, Re λt+2 j+1|k ∈ 1, t, j ∈ 0,q}
(4.15)
si
vpmax = max{
λk, Re λt+2 j+1|k ∈ 1, t, j ∈ 0,q}. (4.16)
Fie ε > 0. Tinand seama de procedeul (3.18), matricele Jordan elementare u-
tilizate la constructia formei canonice Jordan reale a matricei T de reprezentare a
operatorului T ın baza S se ınlocuiesc cu matricele din (3.21), (3.22), (3.36). In
particular, S = S (ε).Introducem produsul scalar (forma biliniara) BS : E ×E → R via formula
BS (u,v) =m
∑k=1
uSk · vS
k =(uS
1 . . . uSm
)
vS1...
vSm
. (4.17)
Au loc relatiile9
9 Aici, Ht desemneaza transpusa matricei H ∈ Mn(C).

90 4 Aplicatii
BS (u,v) =[(
uS11 . . . u
S1m
)·(P−1
)t]·
P−1
vS11...
vS1m
=(
uS11 . . . u
S1m
)·[(
P−1)t ·P−1
]·
vS11...
vS1m
=(
uS11 . . . u
S1m
)G
vS11...
vS1m
, G ∈ Mn(R). (4.18)
Pentru λ ∈ (λk)k∈1,t eigenvaloare reala a operatorului T , consideram R-subspatiul
liniar
V =⋃
s≥0
Ker (T −λ · I)s = SpanR{
f 1, . . . , f h
}(4.19)
si operatorul R-liniar U = T |V : V → V . Atunci, daca u =h
∑p=1
up · f p ∈ V , unde
up ∈ R, p ∈ 1,h, avem10
U(u) =h
∑p=1
up ·U( f p)
= u1(λ f 1 + ε f 2)+u2(λ f 2 + ε f 3)+ · · ·+uh(λ f h)
= (λu1) f 1 +(εu1 +λu2) f 2 + · · ·+(εuh−1 +λuh) f h,
respectiv
BS (U(u),u) = (λu1) ·u1 +(εu1 +λu2) ·u2 + · · ·+(εuh−1 +λuh) ·uh
= λ
(h
∑p=1
u2p
)+ ε(u1u2 +u2u3 + · · ·+uh−1uh).
Estimarea
|u1u2 +u2u3 + · · ·+uh−1uh| ≤ |u1u2|+ |u2u3|+ · · ·+ |uh−1uh|
≤ u21 +u2
2
2+
u22 +u2
3
2+ · · ·+
u2h−1 +u2
h
2
≤h
∑p=1
u2p = BS (u,u)
10 Pentru simplitate, ne restrangem la un subspatiu Z(e,T ), vezi pagina 58.

4.4 Estimarea produsului scalar 91
ne conduce la dubla inegalitate
(λ − ε) ·BS (u,u)≤ BS (U(u),u)≤ (λ + ε) ·BS (u,u), u ∈V. (4.20)
Pentru λ = a+ bi ∈ (λt+2k+1)k∈0,q, a, b ∈ R, eigenvaloare complexa nereala a
operatorului T , consideram R-subspatiul liniar
V =
{[⋃
s≥0
Ker (TC−λ · I)s
]⊕[⋃
s≥0
Ker(
TC−λ · I)s
]}∩Rm
= SpanR {x1,y1, . . . ,xh,yh} , (4.21)
unde11 ep = xp + i · yp, si operatorul R-liniar U = T |V : V → V . Atunci, daca u =h
∑p=1
(ux
p · xp +uyp · yp
)∈V , unde ux
p, uyp ∈ R, p ∈ 1,h, avem12
U(u) =h
∑p=1
uxp ·U(xp)+uy
p ·U(yp)
= ux1(ax1 −by1 + εx2)+u
y1(bx1 +ay1 + εy2)
+ ux2(ax2 −by2 + εx3)+u
y2(bx2 +ay2 + εy3)
+ · · ·+uxh(axh −byh)+u
yh(bxh +ayh)
= (ux1a+u
y1b)x1 +(−ux
1b+uy1a)y1
+ (ux2a+u
y2b+ εux
1)x2 +(−ux2b+u
y2a+ εu
y1)y2
+ · · ·+(uxha+u
yhb+ εux
h−1)xh +(−uxhb+u
yha+ εu
yh−1)yh,
respectiv
BS (U(u),u) = [(ux1a+u
y1b) ·ux
1 +(−ux1b+u
y1a) ·uy
1]
+ [(ux2a+u
y2b+ εux
1) ·ux2 +(−ux
2b+uy2a+ εu
y1) ·u
y2]
+ · · ·+[(uxha+u
yhb+ εux
h−1) ·uxh +(−ux
hb+uyha+ εu
yh−1) ·u
yh]
= a ·[(ux
1)2 +(u
y1
)2]
+ a ·[(ux
2)2 +(u
y2
)2]+ ε · (ux
1ux2 +u
y1u
y2)
+ · · ·+a ·[(ux
h)2 +(u
yh
)2]+ ε · (ux
h−1uxh +u
yh−1u
yh)
= a ·h
∑p=1
[(ux
p
)2+(uy
p
)2]
+ ε ·[(ux
1ux2 +u
y1u
y2)+ · · ·+(ux
h−1uxh +u
yh−1u
yh)].
11 Atentie, pentru a simplifica scrierea, am renotat vectorii. Mai precis, xp = xt+2(p−1)+1 si yp =yt+2(p−1)+1, unde p ≥ 1.12 Restrangem discutia la subspatiul Z01, vezi pagina 72.

92 4 Aplicatii
La fel ca ın cazul anterior,
∣∣(ux1ux
2 +uy1u
y2)+ · · ·+(ux
h−1uxh +u
yh−1u
yh)∣∣≤
h
∑p=1
[(ux
p
)2+(uy
p
)2]= BS (u,u),
ceea ce ne conduce la dubla inegalitate
(a− ε) ·BS (u,u)≤ BS (U(u),u)≤ (a+ ε) ·BS (u,u), u ∈V. (4.22)
Exista R-subspatiile liniare V0, . . . ,Vs ⊆ E date de formulele (4.19), (4.21) si o-
peratorii R-liniari Uk : Vk →Vk, unde k ∈ 0,s, corespunzatori astfel ıncat
E =s⊕
k=0
Vk, T =s⊕
k=0
Uk.
Fie u =s
∑k=0
uk ∈ E, uk ∈ Vk, 0 ≤ k ≤ s. Atunci, pe baza inegalitatilor (4.15), (4.16),
(4.20), (4.22), obtinem dubla estimare — vezi [14, pag. 145, Lemma] —
(vpmin − ε) ·BS (u,u) = (vpmin − ε) ·s
∑k=0
BS (uk,uk)
≤s
∑k=0
BS (Uk(uk),uk)
= BS (T (u),u)
≤ (vpmax + ε) ·BS (u,u).
4.5 Exercitii rezolvate
Detaliile care urmeaza presupun cunostinte de baza despre teoria sistemelor di-
ferentiale liniare [1, 2].
Exercitiul 4.1. Find dat numarul pozitiv ω , sa se rezolve ecuatia diferentiala ordi-
nara
d2x
dt2+ω2x = 0, t ≥ 0. (4.23)
Solutia exercitiului 4.1. Transformam ecuatia (4.23) ın sistemul diferential de or-
dinul ıntai
(x1
x2
)′= A ·
(x1
x2
),
′ =d
dt,
unde

4.5 Exercitii rezolvate 93
A =
(0 1
−ω2 0
).
Solutia sistemului are formula
(x1(t)x2(t)
)= eAt ·
(c1
c2
), ck ∈ R, k ∈ {1,2}.
Introducem operatorul liniar T : R2 → R2, dat de matricea T= A, si anume
T
((x1
x2
))= A ·
(x1
x2
).
Lui ıi este asociat operatorul complexificat TC : C2 → C2, cu formula
TC
((z1
z2
))= A ·
(z1
z2
).
Pentru a determina valorile proprii ale matricei A, rezolvam ecuatia algebrica
pTC(λ ) = det (A−λ · I2) = λ 2 +ω2 = 0.
Gasim solutiile (simple) λ1 = λ = ω · i si λ2 = λ =−ω · i.In C2, consideram bazele
S1 = BC = {i1, i2}={(
1
0
),
(0
1
)}
si
S2 = { f ,σ( f )}, f = x+ i · y ∈ C2, x, y ∈ R2
,
unde f este vectorul propriu corespunzator valorii proprii λ a matricei A. Ele sunt
folosite pentru aducerea matricei A la forma canonica Jordan (reala si complexa).
Astfel, plecand de la descompunerea
C2 = Ker(TC−λ · I)⊕Ker(TC−λ · I),
avem relatiile
(TC(i1)TC(i2)
)=(i1 i2)·A
si
(TC( f )TC(σ( f ))
)=(
f σ( f ))·W1
=(
f σ( f ))·(
λ 0
0 λ
),
94 4 Aplicatii
respectiv — aici, λ = α +β · i si α, β ∈ R —
(TC(x)TC(y)) = (T (x)T (y))
= (x y) ·W2
= (x y) ·(
α β−β α
)
= (x y) ·(
0 ω−ω 0
).
Introducem matricele
P1 =
(p1 p2
p3 p4
), P2 =
(r1 r2
r3 r4
)
de schimbare a bazelor ın C2, R2, adica
(f σ( f )
)=(i1 i2)·P1 = I2 ·P1 = P1 (4.24)
si
(x y) =(i1 i2)·P2 = P2, (4.25)
de unde
A = P1 ·(
λ 0
0 λ
)·P−1
1 = P2 ·(
α β−β α
)·P−1
2 . (4.26)
Reorganizam egalitatile (4.26) sub forma
P1 ·(
λ 0
0 λ
)= A ·P1, P2 ·
(α β−β α
)= A ·P2
si obtinem doua sisteme algebrice liniare ın necunoscutele pk, rk, unde k ∈ 1,4,
iω · p1 = p3
−iω · p2 = p4
iω · p3 =−ω2 · p1
−iω · p4 =−ω2 · p2,
−ω · r2 = r3
ω · r1 = r4
−ω · r4 =−ω2 · r1
ω · r3 =−ω2 · r2.
(4.27)
Observam ca, la fiecare din sistemele precedente, ultimele doua ecuatii sunt echi-
valente cu primele doua ecuatii. Atunci, sistemelor — cu cate o infinitate de solutii
fiecare —
{iω · p1 = p3
−iω · p2 = p4,
{−ω · r2 = r3
ω · r1 = r4
le alegem solutiile netriviale

4.5 Exercitii rezolvate 95
p1 = p2 = 1, p3 =−p4 = iω, r1 = r2 = 1, r3 =−r4 =−ω.
Am ajuns la
P1 =
(1 1
iω −iω
), P−1
1 =1
2ωi·(
iω 1
iω −1
)(4.28)
si
P2 =
(1 1
−ω ω
), P−1
2 =1
2ω·(
ω −1
ω 1
). (4.29)
Testarea vectorilor proprii. Conform (4.24), vectorul f este dat de prima coloana
a matricei P1,
f =
(1
iω
)= x+ i · y =
(1
0
)+ i ·
(0
ω
)(4.30)
= z1 · i1 + z2 · i2, z1 = 1, z2 = iω.
Deducem ca
(TC−λ · I)( f ) =(i1 i2)· (T−λ · I2) ·
(z1
z2
)
= I2 ·(−iω 1
−ω2 −iω
)(1
iω
)
=
(0
0
)= 0C2 .
Relatiile (4.25) arata ca vectorii x, y din (4.30) alcatuiesc coloanele matricei P2,
ceea ce, la prima vedere, nu pare adevarat. In fapt, cum sistemele algebrice (4.27) au
o infinitate de solutii, vectorii ın discutie alatuiesc coloanele uneia dintre matricele
P2 posibile! Introducand matricea
Pnou2 = (x y) =
(1 0
0 ω
),
stabilim ca
A ·Pnou2 =
(0 1
−ω2 0
)·(
1 0
0 ω
)
=
(0 ω
−ω2 0
)
=
(1 0
0 ω
)·(
0 ω−ω 0
)
= Pnou2 ·
(α β−β α
).

96 4 Aplicatii
De asemeni, plecand de la matricea P2, observam ca vectorul
u = col(1)P2 + i · col(2)P2 =
(1+ i
−ω + iω
)
= z3 · i1 + z4 · i2, z3 = 1+ i, z4 =−ω + iω,
statisface egalitatile
(TC−λ · I)(u) =(i1 i2)· (T−λ · I2) ·
(z3
z4
)
= I2 ·(−iω 1
−ω2 −iω
)·(
1+ i
−ω + iω
)
= 0C2 ,
adica este eigenvector al operatorului TC.
Calculul exponentialei matricei A. Sunt valabile relatiile
et·A = P1 ·(
eλ t 0
0 eλ t
)·P−1
1 (4.31)
si — vezi Exercitiul 4.2 —
et·A = P2 · eαt
(cos(β t) sin(β t)−sin(β t) (cosβ t)
)·P−1
2 . (4.32)
Via (4.28), (4.31), avem egalitatile
etA
=
(1 1
iω −iω
)·(
cos(ωt)+ isin(ωt) 0
0 cos(ωt)− isin(ωt)
)· 1
2ωi
(iω 1
iω −1
)
=1
2ωi
(2iω cos(ωt) 2isin(ωt)
−2iω2 sin(ωt) 2iω cos(ωt)
)=
(cos(ωt) sin(ωt)
ω−ω sin(ωt) cos(ωt)
).
La fel, folosind (4.29), (4.32), deducem ca
etA
=
(1 1
−ω ω
)·(
cos(ωt) sin(ωt)−sin(ωt) cos(ωt)
)· 1
2ω
(ω −1
ω 1
)
=1
2ω
(2ω cos(ωt) 2sin(ωt)
−2ω2 sin(ωt) 2ω cos(ωt)
)=
(cos(ωt) sin(ωt)
ω−ω sin(ωt) cos(ωt)
).
Solutia ecuatiei diferentiale. Am ajuns la

4.5 Exercitii rezolvate 97
x(t) = x1(t) = c1 · cos(ωt)+c2
ω· sin(ωt)
= C1 · cos(ωt)+C2 · sin(ωt), Ck ∈ R, k ∈ {1,2},
si
x′(t) = x2(t) = −c1ω · sin(ωt)+ c2 · cos(ωt)
= −C1ω · sin(ωt)+C2ω · cos(ωt).
Calculul s-a ıncheiat. ⊓⊔
Exercitiul 4.2. Fiind date matricele
A =
(a1 0
0 a2
), B =
(b 0
1 b
), C =
(c1 c2
−c2 c1
),
sa se arate ca sunt valabile formulele
etA =
(ea1t 0
0 ea2t
), etB = ebt ·
(1 0
t 1
), etC = ec1t ·
(cos(c2t) sin(c2t)−sin(c2t) cos(c2t)
),
unde ak, b ∈ C, respectiv ck, t ∈ R, k ∈ {1,2}.
Solutia exercitiului 4.2. Vezi [24, pag. 15]. ⊓⊔
Exercitiul 4.3. Sa se rezolve sistemul diferential liniar
{x′1 =−x1 −3x2
x′2 = 2x2.
Solutia exercitiului 4.3. Incepem cu calculul valorilor proprii ale matricei A a sis-
temului liniar, unde
A =
(−1 −3
0 2
).
Pentru le a determina, rezolvam ecuatia algebrica
det (A−λ · I2) =
∣∣∣∣−1−λ −3
0 2−λ
∣∣∣∣=−(1+λ )(2−λ ) = 0.
Gasim solutiile (simple, reale) λ1 =−1 si λ2 = 2.
Ne aflam ın situatia primei parti a proprietatii (H S ) — vezi Lema 2.14 —,
deci
R2 = Ker(T −λ1 · I)⊕Ker(T −λ2 · I),
unde T= A.
La fel ca ın rezolvarea Exercitiului 4.1, introducem matricea

98 4 Aplicatii
P =
(p1 p2
p3 p4
)∈ M2(R)
astfel ıncat
P ·(
λ1 0
0 λ2
)=
(p1 p2
p3 p4
)(−1 0
0 2
)
=
(−p1 2p2
−p3 2p4
)(4.33)
= A ·P=
(−1 −3
0 2
)(p1 p2
p3 p4
)
=
(−p1 −3p3 −p2 −3p4
2p3 2p4
). (4.34)
Egaland prima linie a matricelor din (4.33), (4.34) — element cu element —,
ajungem la sistemul algebric liniar
{−p1 =−p1 −3p3
2p2 =−p2 −3p4,
de unde rezulta ca p3 = 0 si p2 =−p4. Cea de-a doua linie a matricelor din (4.33),
(4.34) nu ne conduce la nimic nou,
{−p3 = 2p3
2p4 = 2p4.
Pentru p1 = p2 = 1, obtinem
P =
(1 1
0 −1
)= P−1
.
Testarea vectorilor proprii. Au loc egalitatile
(A−λ1 · I2) · col(1)P =
(0 −3
0 3
)(1
0
)=
(0
0
),
respectiv
(A−λ2 · I2) · col(2)P =
(−3 −3
0 0
)(0
−1
)=
(0
0
).
De asemeni,
R2 = Rcol(1)P⊕Rcol(2)P = SpanR{
col(1)P,col(2)P}.

4.5 Exercitii rezolvate 99
Calculul exponentialei matricei A. Sunt valabile relatiile — vezi Exercitiul 4.2
—
et·A = P ·(
eλ1t 0
0 eλ2t
)·P−1
,
de unde
etA =
(1 1
0 −1
)(e−t 0
0 e2t
)(1 1
0 −1
)
=
(e−t e−t − e2t
0 e2t
).
Solutia sistemului diferential. Am ajuns la
(x1(t)x2(t)
)= etA ·
(c1
c2
), ck ∈ R,
=
(e−t e−t − e2t
0 e2t
)(c1
c2
)=
(c1e−t + c2
(e−t − e2t
)
c2e2t
)
=
((c1 + c2)e
−t − c2e2t
c2e2t
)
=
(d1e−t −d2e2t
d2e2t
), dk ∈ R, k ∈ {1,2}.
Calculul s-a ıncheiat. ⊓⊔
Exercitiul 4.4. ([24, pag. 34, Example 1]) Sa se rezolve sistemul diferential liniar
{x′1 = 3x1 + x2
x′2 =−x1 + x2.
Solutia exercitiului 4.4. Incepem cu calculul valorilor proprii ale matricei A a sis-
temului liniar, unde
A =
(3 1
−1 1
).
Pentru le a determina, rezolvam ecuatia algebrica
det (A−λ · I2) =
∣∣∣∣3−λ 1
−1 1−λ
∣∣∣∣= λ 2 −4λ +4 = 0.
Gasim solutia (de multiplicitate algebrica m = 2, reala) λ = 2.
Conform (4.13), exista matricea nesingulara P ∈ M2(C) si matricea nilpotenta
N0 ∈ M2(C) astfel ıncat
A = P ·D ·P−1 +N0, N20 = O2.

100 4 Aplicatii
Aici,
D=
(λ 0
0 λ
)= λ · I2, etD = eλ t · I2
iar coloanele matricei P sunt eigenvectori generalizati, liniar independenti peste C,
ai valorii proprii λ a operatorului liniar TC, unde T= A.
Forma speciala a matricei D — operatorul D , reprezentat de ea, este un operator
diagonal — ne conduce la urmatoarea descompunere a matricei A,
A = D+N0 = λ · I2 +N0,
de unde
N0 = A−2I2 =
(1 1
−1 −1
).
Calculul exponentialei matricei A. Sunt valabile relatiile
et·A = P · etD ·P−1 · (I2 + t ·N0) = etD · (I2 + t ·N0)
= e2tI2 ·(
I2 + t ·(
1 1
−1 −1
))
= e2t
(1+ t t
−t 1− t
).
Solutia sistemului diferential. Am ajuns la
(x1(t)x2(t)
)= etA ·
(c1
c2
), ck ∈ R, k ∈ {1,2},
= e2t
(1+ t t
−t 1− t
)(c1
c2
)= e2t
(c1(1+ t)+ c2t
−c1t + c2(1− t)
)
= e2t
(c1 +(c1 + c2)tc2 − (c1 + c2)t
).
Calculul s-a ıncheiat. ⊓⊔
Exercitiul 4.5. ([24, pag. 35, Example 3]) Sa se rezolve sistemul diferential liniar
x′1 = x1
x′2 =−x1 +2x2
x′3 = x1 + x2 +2x3.
Solutia exercitiului 4.5. Incepem cu calculul valorilor proprii ale matricei A a sis-
temului liniar, unde

4.5 Exercitii rezolvate 101
A =
1 0 0
−1 2 0
1 1 2
.
Pentru le a determina, rezolvam ecuatia algebrica
det (A−λ · I3) =
∣∣∣∣∣∣
1−λ 0 0
−1 2−λ 0
1 1 2−λ
∣∣∣∣∣∣= (1−λ )(2−λ )2 = 0.
Gasim solutiile λ1 = 1 (simpla, reala) si λ2 = 2 (de multiplicitate algebrica m = 2,
reala).
Matricea de reprezentare a operatorului diagonalizabil D , ın baza S1 = BC ={i1, i2, i3} a spatiului liniar R3, este
D0 = P ·D ·P−1 = P ·
λ1 0 0
0 λ2 0
0 0 λ2
·P−1
,
unde P ∈ M3(R).
Constructia matricei P. Coordonatele vectorului propriu u =
u1
u2
u3
∈R3, cores-
punzand valorii proprii λ1 a matricei A, verifica sistemul algebric liniar
(A−λ1 · I3)
u1
u2
u3
=
0 0 0
−1 1 0
1 1 1
u1
u2
u3
=
0
0
0
,
de unde
{−u1 +u2 = 0
u1 +u2 +u3 = 0.
Rezulta ca u2 = u1 si u3 =−2u1. Pentru u1 = 1, obtinem
u =
1
1
−2
.
Coordonatele vectorului propriu v =
v1
v2
v3
∈ R3, corespunzand valorii proprii
λ2 a matricei A, verifica sistemul algebric liniar

102 4 Aplicatii
(A−λ2 · I3)
v1
v2
v3
=
−1 0 0
−1 0 0
1 1 0
v1
v2
v3
=
0
0
0
,
de unde v1 = v2 = 0, adica λ2-eigenspatiul operatorului T , unde T= A, este unidi-
mensional. Alegem vectorul propriu
v =
0
0
1
.
Pentru a putea stabili baza S2 — vectorii sai sunt coloanele matricei P —, trebu-
ie determinat un vector propriu generalizat w =
w1
w2
w3
∈ R3, corespunzand valorii
proprii λ2 a matricei A, care sa fie liniar independent peste R fata de setul {u,v}.
Astfel, sistemul algebric liniar
(A−λ2 · I3)2
w1
w2
w3
=
1 0 0
1 0 0
−2 0 0
w1
w2
w3
=
w1
w1
−2w1
=
0
0
0
ne conduce la w1 = 0. Optam pentru eigenvectorul generalizat
w =
0
1
0
.
Am ajuns la
P =
1 0 0
1 0 1
−2 1 0
, P−1 =
1 0 0
2 0 1
−1 1 0
,
de unde
D0 =
1 0 0
1 0 1
−2 1 0
1 0 0
0 2 0
0 0 2
1 0 0
2 0 1
−1 1 0
=
1 0 0
−1 2 0
2 0 2
si
N0 = A−D0 =
0 0 0
0 0 0
−1 1 0
, N2
0 = O3.
Calculul exponentialei matricei A. Sunt valabile relatiile

4.5 Exercitii rezolvate 103
et·A = et·D0 · (I3 + t ·N0) = P · et·D ·P−1 · (I3 + t ·N0)
=
1 0 0
1 0 1
−2 1 0
et 0 0
0 e2t 0
0 0 e2t
1 0 0
2 0 1
−1 1 0
·
1 0 0
0 1 0
−t t 1
=
et 0 0
et − e2t e2t 0
−2et +(2− t)e2t te2t e2t
.
Solutia sistemului diferential. Am ajuns la
x1(t)x2(t)x3(t)
= etA ·
c1
c2
c3
, ck ∈ R, k ∈ 1,3,
=
et 0 0
et − e2t e2t 0
−2et +(2− t)e2t te2t e2t
c1
c2
c3
=
c1et
c1et +(c2 − c1)e2t
−2c1et +[2c1 + c3 +(c2 − c1)t]e2t
.
Calculul s-a ıncheiat. ⊓⊔
Exercitiul 4.6. ([24, pag. 36, Example 4]) Sa se rezolve sistemul diferential liniar
x′1 =−x2
x′2 = x1
x′3 =−x4
x′4 = 2x1 + x3.
Solutia exercitiului 4.6. Incepem cu calculul valorilor proprii ale matricei A a sis-
temului liniar, unde
A =
0 −1 0 0
1 0 0 0
0 0 0 −1
2 0 1 0
.
Pentru le a determina, rezolvam ecuatia algebrica
det (A−λ · I4) =
∣∣∣∣∣∣∣∣
−λ −1 0 0
1 −λ 0 0
0 0 −λ −1
2 0 1 −λ
∣∣∣∣∣∣∣∣= (1+λ 2)2 = 0.
Gasim solutiile λ1 = λ = i (de multiplicitate algebrica m1 = 2, complexa) si λ2 =λ =−i (de multiplicitate algebrica m2 = 2, complexa).

104 4 Aplicatii
Are loc descompunerea
C4 =
[⋃
k≥0
Ker (TC−λ · I)k
]⊕[⋃
k≥0
Ker(
TC−λ · I)k
]
= SpanC{
u,U}⊕SpanC
{σ(u),σ(U)
}
= SpanC {u,σ(u)}⊕SpanC{
U ,σ(U)}= SpanC {x,y}⊕SpanC
{X ,Y
}
= SpanC{
x,y,X ,Y}, x, y, X , Y ∈ R4
,
unde u = x+ i · y, U = X + i ·Y si σ(u), σ(U) sunt eigenvectori generalizati, co-
respunzand valorilor proprii λ1,2, ai complexificatului TC. Aici, operatorul R-liniar
T este reprezentat ın baza S1 = BC = {i1, i2, i3, i4} a spatiului vectorial R4 de
matricea T= A.
Matricea de reprezentare a operatorului semisimplu D — din T =D +N —, ın
baza S1 a spatiului liniar R4, este
D0 = P ·D ·P−1 = P ·
α β 0 0
−β α 0 0
0 0 α β0 0 −β α
·P−1
,
unde λ = α +β · i si α, β ∈ R, respectiv P ∈ M4(R) si
P =(col(1)P col(2)P col(3)P col(4)P
)=(x y X Y
).
Constructia matricei P. Coordonatele vectorului propriu u =
u1
u2
u3
u4
∈C4, cores-
punzand valorii proprii λ1 a matricei A, verifica sistemul algebric liniar
(A−λ1 · I4)
u1
u2
u3
u4
=
−i −1 0 0
1 −i 0 0
0 0 −i −1
2 0 1 −i
u1
u2
u3
u4
=
0
0
0
0
,
de unde
−iu1 −u2 = 0
u1 − iu2 = 0
−iu3 −u4 = 0
2u1 +u3 − iu4 = 0.
Din primele doua ecuatii rezulta ca u2 = −iu1. Ultimele doua ecuatii ne conduc
la u4 = −iu3 si — inserand formula lui u4 ın ultima ecuatie — u1 = 0. Asadar,
u1 = u2 = 0. Tinand seama de cea de-a treia ecuatie a sistemului algebric, deducem

4.5 Exercitii rezolvate 105
ca
Ker(TC−λ · I) = Cu, u =
0
0
1
−i
=
0
0
1
0
+ i ·
0
0
0
−1
= x+ i · y,
de unde, obligatoriu,
Ker(
TC−λ · I)= Cσ (u) = C
0
0
1
i
iar sistemul de vectori {u,σ(u)} este liniar independent peste C.
Mai departe, trebuie determinat un vector propriu generalizat U =
U1
U2
U3
U4
∈ C4,
corespunzand valorii proprii λ1 a matricei A, astfel ıncat vectorii u, U sa fie liniar
independenti peste C. In particular,
U ∈ Ker(TC−λ1 · I)2 \Ker(TC−λ1 · I) .
Sistemul algebric liniar
(A−λ1 · I4)2
U1
U2
U3
U4
=
−2 2i 0 0
−2i −2 0 0
−2 0 −2 2i
−4i −2 −2i −2
U1
U2
U3
U4
=
0
0
0
0
ne conduce la
−2U1 +2iU2 = 0
−2iU1 −2U2 = 0
−2U1 −2U3 +2iU4 = 0
−4iU1 −2U2 −2iU3 −2U4 = 0.
Primele doua ecuatii sunt echivalente cu U1 = iU2. Inserand aceasta expresie a ne-
cunoscutei U1 ın ultima ecuatie, deducem ca ultimele doua ecuatii ale sistemului
algebric sunt echivalente cu U1 +U3 − iU4 = 0. Asadar,
{U1 = iU2
U1 +U3 − iU4 = 0.
Optam pentru eigenvectorul generalizat
106 4 Aplicatii
U =
U1
U2
U3
U4
=
i
1
0
1
=
0
1
0
1
+ i ·
1
0
0
0
= X + i ·Y .
Am ajuns la
P =
0 0 0 1
0 0 1 0
1 0 0 0
0 −1 1 0
, P−1 =
0 0 1 0
0 1 0 −1
0 1 0 0
1 0 0 0
,
de unde
D0 =
0 0 0 1
0 0 1 0
1 0 0 0
0 −1 1 0
0 1 0 0
−1 0 0 0
0 0 0 1
0 0 −1 0
0 0 1 0
0 1 0 −1
0 1 0 0
1 0 0 0
=
0 −1 0 0
1 0 0 0
0 1 0 −1
1 0 1 0
si
N0 = A−D0 =
0 0 0 0
0 0 0 0
0 −1 0 0
1 0 0 0
, N2
0 = O4.
Calculul exponentialei matricei A. Sunt valabile relatiile
et·A = et·D0 · (I4 + t ·N0) = P · et·D ·P−1 · (I4 + t ·N0)
=
0 0 0 1
0 0 1 0
1 0 0 0
0 −1 1 0
cos t sin t 0 0
−sin t cos t 0 0
0 0 cos t sin t
0 0 −sin t cos t
0 0 1 0
0 1 0 −1
0 1 0 0
1 0 0 0
·
1 0 0 0
0 1 0 0
0 −t 1 0
t 0 0 1
=
cos t −sin t 0 0
sin t cos t 0 0
0 sin t cos t −sin t
sin t 0 sin t cos t
·
1 0 0 0
0 1 0 0
0 −t 1 0
t 0 0 1
=
cos t −sin t 0 0
sin t cos t 0 0
−t sin t sin t − t cos t cos t −sin t
sin t + t cos t −t sin t sin t cos t
.
Solutia sistemului diferential. Obtinem ca

4.6 Solutii fundamentale 107
x1(t)x2(t)x3(t)x4(t)
= etA ·
c1
c2
c3
c4
, ck ∈ R, k ∈ 1,4,
=
c1 cos t − c2 sin t
c1 sin t + c2 cos t
(c2 − c4 − c1t)sin t +(c3 − c2t)cos t
(c1 + c3 − c2t)sin t +(c4 + c1t)cos t
.
Calculul s-a ıncheiat. ⊓⊔
4.6 Solutii fundamentale ale ecuatiilor diferentiale liniare si
omogene
Se considera ecuatia diferentiala ordinara
x(p)+a1x(p−1)+ · · ·+ap−1x′+apx = 0, t ≥ 0, (4.35)
unde ai ∈ R, i ∈ 1, p, si p ≥ 2. Aici, x = x(t), x(k) = dkxdtk pentru orice k ∈ 1, p.
Ecuatia (4.35) se organizeaza ca sistem diferential liniar de ordinul I,
x ′ = Ax, (4.36)
unde13
x =
x1
...
xp
=
x
x′
x′′
...
x(p−2)
x(p−1)
, A =
0 1 0 0 · · · 0
0 0 1 0 · · · 0
0 0 0 1 · · · 0...
.... . .
. . .. . .
...
0 0 0 · · · 0 1
−ap −ap−1 −ap−2 · · · −a2 −a1
. (4.37)
Exercitiul 4.7. Fie numerele λ , bi ∈ C, i ∈ 1, p, unde p ≥ 3, si determinantii
R(b1,b2, · · · ,bp,λ ) =
∣∣∣∣∣∣∣∣∣∣∣∣∣
λ −1 0 0 · · · 0
0 λ −1 0 · · · 0
0 0 λ −1 · · · 0...
.... . .
. . .. . .
...
0 0 0 · · · λ −1
b1 b2 b3 · · · bp−1 bp
∣∣∣∣∣∣∣∣∣∣∣∣∣
,
13 E = Cp,K= C, T= A. Vezi si definitia (4.56).

108 4 Aplicatii
respectiv
P(b1,b2, · · · ,bp,λ ) =
∣∣∣∣∣∣∣∣∣∣∣∣∣
0 −1 0 0 · · · 0
0 λ −1 0 · · · 0
0 0 λ −1 · · · 0...
.... . .
. . .. . .
...
0 0 0 · · · λ −1
b1 b2 b3 · · · bp−1 bp
∣∣∣∣∣∣∣∣∣∣∣∣∣
.
Au loc relatiile
P(b1,b2, · · · ,bp,λ ) = b1.
si
R(b1,b2, · · · ,bp,λ ) = λR(b2,b3, · · · ,bp,λ )+P(b1,b3, · · · ,bp,λ ),
respectiv
R(b1,b2, · · · ,bp,λ ) = bpλ p−1 +bp−1λ p−2 + · · ·+b2λ +b1. (4.38)
Solutia exercitiului 4.7. Se dezvolta determinantii dupa prima linie. ⊓⊔Exercitiul 4.8. Fie matricea A de forma (4.37). Sa se arate ca
det(λ Ip −A) = λ p +a1λ p−1 +a2λ p−2 + · · ·+ap−1λ +ap, λ ∈ C.
Solutia exercitiului 4.8. Observam ca
det(λ Ip −A) = R(ap,ap−1, · · · ,a2,a1 +λ ,λ )
si aplicam formula (4.38). ⊓⊔Exercitiul 4.9. Fie λ ∈C valoare proprie, de multiplicitate algebrica r ≥ 1, a matri-
cei A ∈ Mp(R), unde p ≥ 1. Daca u ∈Cp este eigenvector generalizat al matricei A
corespunzand valorii proprii λ , adica exista k ∈ 1,r cu proprietatea ca
(A−λ Ip)k
u = 0Cp ,
atunci functia z : [0,+∞)→ Cp, unde
z(t) = eλ t ·(
C1 + tC2 + · · ·+ tk−1Ck
), t ≥ 0,
este solutie a sistemului diferential (4.36)14. Aici,
C1 = u, Ci =1
i−1(A−λ Ip)Ci−1 =
1
(i−1)!(A−λ Ip)
i−1u, (4.39)
14 Remarcam faptul ca

4.6 Solutii fundamentale 109
unde i ∈ 2,k.
Solutia exercitiului 4.9. Observam ca
(A−λ Ip)Ck =1
(k−1)!(A−λ Ip)
ku = 0Cp ,
deci Ck este eigenvector al matricei A corespunzand valorii proprii λ .
Au loc relatiile
z ′(t) = λeλ t ·(
C1 + tC2 + · · ·+ tk−1Ck
)
+ eλ t ·(
C2 +2tC3 + · · ·+(k−1)tk−2Ck
)
= eλ t ·{(
λC1 +C2
)+ t(λC2 +2C3
)+ · · ·
+ tk−2[λCk−1 +(k−1)Ck
]+ tk−1λCk
}
= eλ t ·[(
AC1
)+ t(AC2
)+ · · ·+ tk−2
(ACk−1
)+ tk−1
(ACk
)]
= A · z(t), t ≥ 0.
Justificarea s-a ıncheiat. ⊓⊔
Exercitiul 4.10. In contextul exercitiului 4.9, sa se demonstreze ca
(A−λ Ip)k+1−i
Ci = 0Cp , i ∈ 1,k.
Solutia exercitiului 4.10. Tinem seama de ultima parte a formulelor (4.39). ⊓⊔
Exercitiul 4.11. Fie λ ∈ C si sirurile(
c(r)q+1
)q≥0,r≥1
date de formulele
{c(0)q+1 = λ q,
c(r)q+1 = q(q−1) · . . . · (q− r+1)λ q−r · sign(max{q− r+1,0}) .
Sa se arate ca
c(r+1)q+1 =
d
dλ
[c(r)q+1
],
respectiv
d
dλ
[c(r)q+2
]= (r+1)c
(r)q+1 +λ
d
dλ
[c(r)q+1
]. (4.40)
z(t) ∈ K (A−λ · Ip,u) = SpanC
{u,(A−λ · Ip)u, · · · ,(A−λ · Ip)
r−1u}, t ≥ 0.
Adica, solutia ia valori numai ın subspatiul Kralov (ın limba engleza, Krylov subspace) — gene-
rat de matricea A− λ · Ip si de vectorul u — al λ -eigenspatiului generalizat al operatorului TC,⋃s≥0
Ker (TC−λ · I)s. Conform [32, pag. 253].

110 4 Aplicatii
pentru orice q ≥ 0, r ≥ 1.
Solutia exercitiului 4.11. Folosim inductia matematica. ⊓⊔
Exercitiul 4.12. Fie matricea A de forma (4.37) si λ ∈ C valoare proprie, de multi-
plicitate algebrica r ≥ 1, a acesteia. Atunci, sa se arate ca vectorii15
Ck =
1
λλ 2
...
λ p−2
λ p−1
, Ck−i =
(i
k−1
)· di
dλ i
(Ck
), (4.41)
unde i ∈ 1,k−1, pot fi utilizati ın contextul exercitiului 4.9.
Solutia exercitiului 4.12. Introducem numerele(
c(i)j
)i∈0,k−1, j∈1,p
astfel ıncat
Ck =
c(0)1...
c(0)p
, Ck−i =
(k− i)(k− i+1) · . . . · (k−1)
i!·
c(i)1...
c(i)p
.
Trebuie verificate relatiile — vezi (4.39) si exercitiul 4.10 —
(A−λ Ip)Ck = 0Cp , (A−λ Ip)Ck−i−1 = (k− i−1)Ck−i. (4.42)
Au loc egalitatile — conform exercitiului 4.8 —
15 Folosim notatiile
(v
w
)= (w−v+1)·(w−v+2)·...·w
1·2·...·v ,
(0
w
)= 1, unde w ≥ v ≥ 1.
4.6 Solutii fundamentale 111
(A−λ Ip)Ck =
−λ 1 0 0 · · · 0
0 −λ 1 0 · · · 0
0 0 −λ 1 · · · 0...
.... . .
. . .. . .
...
0 0 0 · · · −λ 1
−ap −ap−1 −ap−2 · · · −a2 −(a1 +λ )
1
λλ 2
...
λ p−2
λ p−1
=
0
0
0...
0
−ap −ap−1λ −·· ·−a2λ p−2 − (a1 +λ )λ p−1
=
0
0
0...
0
−det(λ Ip −A)
= 0Cp ,
respectiv
Ck−i−1 =(k− i−1)(k− i) · . . . · (k−1)
(i+1)!· di+1
dλ i+1
(Ck
)=
k− i−1
i+1· d
dλ(Ck−i
),
de unde
c(i+1)j =
k− i−1
i+1· d
dλ
[c(i)j
]. (4.43)
Mai departe, cea de-a doua relatie (4.42) ne conduce la — via (4.43) —
(k− i−1)
c(i)1...
c(i)p
=
−λ 1 0 0 · · · 0
0 −λ 1 0 · · · 0
0 0 −λ 1 · · · 0...
.... . .
. . .. . .
...
0 0 0 · · · −λ 1
−ap −ap−1 −ap−2 · · · −a2 −(a1 +λ )
c(i+1)1
...
c(i+1)p
=k− i−1
i+1·
−λ 1 0 0 · · · 0
0 −λ 1 0 · · · 0
0 0 −λ 1 · · · 0...
.... . .
. . .. . .
...
0 0 0 · · · −λ 1
−ap −ap−1 −ap−2 · · · −a2 −(a1 +λ )
ddλ
[c(i)1
]
...d
dλ
[c(i)p
]
.

112 4 Aplicatii
Primele p−1 linii ale egalitatilor matriceale anterioare se reorganizeaza sub for-
ma expresiilor
d
dλ
[c(i)j+1
]= (i+1)ci
j +λd
dλ
[c(i)j
], j ∈ 1, p−1,
care sunt echivalente cu (4.40).
Ultima linie devine
0 =d
dλ
[apc
(i)1 +ap−1c
(i)2 + . . .+a2c
(i)p−1 +a1c
(i)p
]+
{(i+1)c
(i)p +λ
d
dλ
[c(i)p
]}
=d
dλ
[apc
(i)1 +ap−1c
(i)2 + . . .+a2c
(i)p−1 +a1c
(i)p
]+
d
dλ
[c(i)p+1
], (4.44)
unde c(0)p+1 = λ p. Egalitatea (4.44) rezulta din relatia
0 =di+1
dλ i+1[det(λ Ip −A)] =
di+1
dλ i+1
(ap +ap−1λ + . . .+a2λ p−2 +a1λ p−1 +λ p
).
Calculul s-a ıncheiat. ⊓⊔
Exercitiul 4.13. (Solutii fundamentale I) Daca λ0 ∈ C este o solutie de multiplici-
tate r ≥ 1 a ecuatiei algebrice
λ p +a1λ p−1 +a2λ p−2 + · · ·+ap−1λ +ap = 0,
atunci functiile zi : [0,+∞)→ C, unde i ∈ 1,r, cu formulele16
z1(t) = eλ0t, z2(t) = teλ0t
, · · · , zr(t) = tr−1eλ0t, t ≥ 0,
sunt solutii ale ecuatiei diferentiale (4.35).
Solutia exercitiului 4.13. Fie k ∈ 1,r fixat. Conform exercitiului 4.9, ecuatia (4.35),
reorganizata ca sistem diferential cu p ecuatii de ordinul I, admite solutia
z(t) =
z
z′
z′′
...
z(p−2)
z(p−1)
(t) = eλ0t ·(
C1 + tC2 + · · ·+ tk−1Ck
),
unde vectorii(Ci
)i∈1,k
au formulele (4.41).
16 Pentru alta abordare — o tehnica perturbativa, atribuita lui d’Alembert —, vezi [33, pag. 194].
Metoda operationala de rezolvare a ecuatiilor diferentiale liniare este descrisa ın [19, pag. 206 si
urm.].

4.6 Solutii fundamentale 113
Observam ca primul element al coloanei Ck ∈ Cp este 1 ın timp ce coloanele Ci,
unde i ≤ k−1, au primul element 0. De aici rezulta ca z(t) = eλ0t · tk−1. ⊓⊔
Exercitiul 4.14. Fie λ = α +β · i ∈C\R valoare proprie, de multiplicitate algebrica
r ≥ 1, a matricei A ∈ Mp(R), unde p ≥ 1 si α, β ∈ R.
i) Egalitatile
(A−αIp β Ip
−β Ip A−αIp
)k(v
w
)=
(0Rp
0Rp
)(4.45)
si
(A−λ Ip)k
u = 0Cp , u = v+ i ·w,
unde k ∈ 1,r si v, w ∈ Rp, sunt echivalente.
ii) Daca exista numarul k ∈ 1,r si vectorii v, w ∈ Rp, nu simultan nuli, care satisfac
relatia (4.45), atunci functiile x, y : [0,+∞)→ Rp, unde
x(t) = eαt ·k
∑j=1
t j−1(cosβ t ·D j − sinβ t ·E j
), t ≥ 0,
si
y(t) = eαt ·k
∑j=1
t j−1(sinβ t ·D j + cosβ t ·E j
), t ≥ 0,
sunt solutii ale sistemului diferential (4.36). Aici,
(D1
E1
)=
(v
w
)
si
(Ds
Es
)=
1
s−1
(A−αIp β Ip
−β Ip A−αIp
)(Ds−1
Es−1
)
=1
(s−1)!
(A−αIp β Ip
−β Ip A−αIp
)s−1(v
w
),
unde s ∈ 2,k.
iii) In contextul partii ii), functia z : [0,+∞)→ Cp, cu formula — vezi si [19, pag.
185] —
z(t) = x(t)+ i · y(t) = eλ t ·k
∑j=1
t j−1C j, t ≥ 0,

114 4 Aplicatii
unde C j = D j + i ·E j si j ∈ 1,k, este solutie a sistemului diferential (4.36)17.
Solutia exercitiului 4.14. Partea i). Folosim inductia matematica si un procedeu
iterativ. Astfel, introducem marimile — pentru s ≥ 1 —
(v1
w1
)=
(v
w
),
(vs+1
ws+1
)=
(A−αIp β Ip
−β Ip A−αIp
)s(v
w
)
si
us = vs + i ·ws.
Avem
(0Rp
0Rp
)=
(A−αIp β Ip
−β Ip A−αIp
)k(v
w
)
=
(A−αIp β Ip
−β Ip A−αIp
)·[(
A−αIp β Ip
−β Ip A−αIp
)k−1(v
w
)]
=
(A−αIp β Ip
−β Ip A−αIp
)(vk
wk
)
si
(A−λ Ip)uk = [(A−α · Ip)v+(β Ip)w]+ i · [(−β Ip)v+(A−α · Ip)w]
= 0Cp ,
respectiv — pentru k ≥ 2 —
(vk
wk
)=
(A−αIp β Ip
−β Ip A−αIp
)(vk−1
wk−1
)
si
uk = (A−λ Ip)uk−1, (4.46)
de unde
(A−λ Ip)2
uk−1 = (A−λ Ip)uk = 0Cp .
Partea ii). Remarcam ca
17 In particular, solutiile x si y iau valori numai ın realificatul spatiului liniar
[⋃
s≥0
Ker (TC−λ · I)s
]⊕[⋃
s≥0
Ker(
TC−λ · I)s
].

4.6 Solutii fundamentale 115
(A−αIp β Ip
−β Ip A−αIp
)(Dk
Ek
)=
(0Rp
0Rp
),
deci uk = Dk + i ·Ek este eigenvector al matricei A corespunzand valorii proprii λ .
Au loc relatiile
x ′(t) = eαt ·k−2
∑s=0
{(ts cosβ t)
[αDs+1 +(s+1)Ds+2 −βEs+1
]
+ (ts sinβ t)[−αEs+1 − (s+1)Es+2 −βDs+1
]}
+ eαttk−1 ·[(cosβ t)
(αDk −βEk
)+(sinβ t)
(−αEk −βDk
)]
= eαt ·k−1
∑s=0
[(ts cosβ t)
(ADs+1
)− (ts sinβ t)
(AEs+1
)]
= A · x(t), t ≥ 0,
respectiv
y ′(t) = eαt ·k−2
∑s=0
{(ts cosβ t)
[αEs+1 +(s+1)Es+2 +βDs+1
]
+ (ts sinβ t)[αDs+1 +(s+1)Ds+2 −βEs+1
]}
+ eαttk−1 ·[(cosβ t)
(αEk +βDk
)+(sinβ t)
(αDk −βEk
)]
= eαt ·k−1
∑s=0
[(ts cosβ t)
(AEs+1
)+(ts sinβ t)
(ADs+1
)]
= A · y(t), t ≥ 0.
Partea iii). Via (4.46), stabilim ca vectorii(C j
)j∈1,k
verifica relatiile (4.39). ⊓⊔
Exercitiul 4.15. (Solutii fundamentale II) Daca λ0 = α0 +β0 · i ∈C\R, cu α0, β0 ∈R, este o solutie de multiplicitate r ≥ 1 a ecuatiei algebrice
λ p +a1λ p−1 +a2λ p−2 + · · ·+ap−1λ +ap = 0,
atunci functiile xi, yi : [0,+∞)→ R, unde i ∈ 1,r, cu formulele
x1(t) = eα0tcosβ0t, x2(t) = teα0tcosβ0t, · · · , xr(t) = tr−1eα0tcosβ0t, t ≥ 0,
si
y1(t) = eα0tsinβ0t, y2(t) = teα0tsinβ0t, · · · , yr(t) = tr−1eα0tsinβ0t, t ≥ 0,
sunt solutii ale ecuatiei diferentiale (4.35).
Solutia exercitiului 4.15. Prima solutie. Deoarece coeficientii ecuatiei diferentiale
(4.35) sunt numere reale, partea reala si partea imaginara ale unei solutii sunt, la
randul lor, solutii. Aplicam aceasta observatie solutiilor introduse ın exercitiul 4.13.

116 4 Aplicatii
A doua solutie. Fie k ∈ 1,r fixat. Conform exercitiului 4.14, partea ii), ecuatia
(4.35), reorganizata ca sistem diferential cu p ecuatii de ordinul I, admite solutiile
x(t) =
x
x′
x′′
...
x(p−2)
x(p−1)
(t) = eα0t ·k
∑j=1
t j−1(cosβ0t ·D j − sinβ0t ·E j
), t ≥ 0,
si
y(t) =
y
y′
y′′
...
y(p−2)
y(p−1)
(t) = eα0t ·k
∑j=1
t j−1(sinβ0t ·D j + cosβ0t ·E j
), t ≥ 0,
unde vectorii(C j
)j∈1,k
, cu C j = D j + i ·E j, au formulele (4.41).
Remarcam ca primul element al coloanei Ck ∈Cp este 1 ın timp ce coloanele Ci,
unde i ≤ k− 1, au primul element 0. De aici rezulta ca primul element al coloanei
Dk ∈Rp este 1, primul element al coloanei Ek ∈Rp este 0 iar coloanele Di, E i, unde
i ≤ k−1, au primul element 0. Obtinem ca
x(t) = tk−1eα0tcosβ0t, y(t) = tk−1eα0tsinβ0t, t ≥ 0.
Justificarea s-a ıncheiat. ⊓⊔
Exercitiul 4.16. Fie matricea A ∈ Mp(R), cu valorile proprii distincte (λ j) j∈1,q⊂
C de multiplicitati algebrice (r j) j∈1,q. Aici, p, q ≥ 1 si λ j = α j + β j · i, respectiv
α j, β j ∈ R pentru orice j ∈ 1,q.
Daca functia z : [0,+∞)→ Cp este solutie a sistemului diferential (4.36), atunci
exista si sunt unice solutiile (z j) j∈1,q, cu z j : [0,+∞) → Cp, ale aceluiasi sistem
diferential pentru care
z(t) =q
∑j=1
z j(t), z j(t) ∈Vj, t ≥ 0, (4.47)
unde Vj =⋃
s≥0
Ker (TC−λ j · I)spentru orice j ∈ 1,q. Fiecare solutie z j poate fi re-
prezentata ca ın exercitiul 4.9. In plus, daca λ j ∈ C\R pentru un anumit j ∈ 1,q,
atunci sistemul diferential (4.36) admite solutiile x j, y j : [0,+∞)→ Rp astfel ıncat
z j(t) = x j(t)+ i · y j(t), t ≥ 0. (4.48)

4.6 Solutii fundamentale 117
Aceste solutii pot fi reprezentate ca ın exercitiul 4.14.
Solutia exercitiului 4.16. Existenta. Fie z(0) = z0 ∈Cp. Conform (2.35), z0 se scrie
ın mod unic sub forma
z0 =q
∑j=1
z0 j, z0 j ∈Vj, j ∈ 1,q. (4.49)
Problema Cauchy
(C j)
{ξ′= Aξ , t ≥ 0,
ξ (0) = z0 j
admite solutia (unica) z j ∈C∞ ([0,+∞),Cp), unde j ∈ 1,q. Vezi [1, pag. 153, The-
orem 12.2].
Sistemul diferential (4.36) fiind liniar, orice combinatie liniara cu coeficienti
complecsi — ın particular, suma — a functiilor (z j) j∈1,qıi este solutie. Egalitatea
din (4.47) rezulta din faptul ca atat functia z cat si functiaq
∑j=1
z j verifica problema
Cauchy
(C )
{η ′ = Aη , t ≥ 0,
η(0) = z0.
Cum z0 j ∈Vj, exista k j ∈ 1,r j pentru care
(A−λ j · Ip)k j z0 j = 0Cp .
Pe baza exercitiilor 4.9, 4.10, deducem ca18
z j(t) = eλ jt ·k j
∑s=1
ts−1Cs j, t ≥ 0,(Cs j
)s∈1,k j
⊂Vj, (4.50)
de unde z j(t) ∈Vj, t ≥ 0.
Daca λ j ∈ C\R pentru un anumit j, atunci
(A−α jIp β jIp
−β jIp A−α jIp
)k j(
v j
w j
)=
(0Rp
0Rp
),
unde z0 j = v j + i ·w j. Functia x j din (4.48) verifica problema Cauchy
(Re C j)
{δ ′
= Aδ , t ≥ 0,
δ (0) = v j,
18 Vezi si [1, pag. 159, Theorem 12.7].

118 4 Aplicatii
iar functia y j verifica problema Cauchy
(Im C j)
{ε ′ = Aε , t ≥ 0,
ε(0) = w j.
In virtutea exercitiului 4.14, ele se scriu sub forma
x j(t) = eα jt ·k j
∑s=1
ts−1(cosβ jt ·Ds j − sinβ jt ·Es j
), t ≥ 0, (4.51)
si
y j(t) = eα jt ·k j
∑s=1
ts−1(sinβ t ·Ds j + cosβ t ·Es j
), t ≥ 0. (4.52)
Unicitatea. Presupunand ca ar exista alta reprezentare a functiei z,
z(t) =q
∑j=1
Z j(t), Z j(t) ∈Vj, t ≥ 0,
unicitatea descompunerii din (4.49) ne va conduce la
Z j(0) = z0 j, j ∈ 1,q.
Astfel, pentru fiecare j, problema Cauchy (C j) ar admite solutiile z j si Z j. ⊓⊔
Exercitiul 4.17. (Forma generala19 a proiectiilor (z j) j∈1,q) In contextul exercitiului
4.16, solutia z j : [0,+∞)→ Cp are expresia
z j(t) = eλ jt ·r j
∑s=1
ts−1Fs j,(Fs j
)s∈1,r j
⊂ Cp, t ≥ 0,
ın care vectorii Fs j depind de r j constante complexe,
Fs j = Fs j
(c1 j, · · · ,cr j j
), s ∈ 1,r j,
(ck j
)k∈1,r j
⊂ C.
Daca λ j ∈ C\R, atunci proiectia pe realificatul spatiului liniar complex
[⋃
s≥0
Ker (TC−λ j · I)s
]⊕[⋃
s≥0
Ker(
TC−λ j · I)s
]
19 Conform [33, pag. 186]. Prezentari asemanatoare pot fi citite ın [22, pag. 83], [19, pag. 179].
Aceasta forma se utilizeaza la rezolvarea sistemelor diferentiale liniare prin metoda coeficientilor
nedeterminati [33, pag. 187], [19, pag. 182]. Metoda mai este numita si a lui L. Euler [19, pag.
138], [33, pag. 144].

4.6 Solutii fundamentale 119
a solutiei generale x : [0,+∞)→ Rp a sistemului diferential (4.36) are expresia20
xλ j ,λ j(t) = eα jt ·
r j
∑s=1
ts−1(cosβ jt ·Gs j + sinβ jt ·Hs j
), t ≥ 0,
ın care vectorii(Gs j
)s∈1,r j
,(Hs j
)s∈1,r j
⊂ Rp depind de 2r j constante reale,
{Gs j = Gs j
(c1 j, · · · ,c2r j j
),
Hs j = Hs j
(c1 j, · · · ,c2r j j
),
s ∈ 1,r j,(ck j
)k∈1,2r j
⊂ R.
Solutia exercitiului 4.17. Fie B j ={
e1 j, . . . ,er j j
}o baza a spatiului liniar complex⋃
s≥0
Ker (TC−λ j · I)s. Atunci, solutiile Zτ j : [0,+∞)→ Cp ale problemelor Cauchy
(Cτ j)
{ξ′= Aξ , t ≥ 0,
ξ (0) = eτ j,τ ∈ 1,r j,
sunt liniar independente21 peste C.
Conform (4.49), exista numerele (cτ j)τ∈1,r j⊂ C astfel ıncat
z0 j =r j
∑τ=1
cτ j · eτ j,
de unde deducem ca
z j(t) =r j
∑τ=1
cτ j ·Zτ j(t), t ≥ 0.
Completand — eventual — cu coeficienti nuli expresiile polinomiale din (4.50),
putem rescrie solutiile Zτ j sub forma
Zτ j(t) = eλ jt ·r j
∑γ=1
tγ−1Cγτ j, t ≥ 0,(Cγτ j
)γ∈1,r j
⊂Vj,
ceea ce ne conduce la
Fs j =r j
∑τ=1
cτ j ·Csτ j = Fs j
(c1 j, · · · ,cr j j
), s ∈ 1,r j.
Presupunand ca λ j+1 = λ j ∈ C\R pentru un anumit j, introducem baza
20 Vezi si [26, pag. 468]. In memoriam, prof. univ. dr. ing. Ioan Astefanei.21 Caci, ın caz contrar, orice combinatie liniara nula a lor ne va conduce — calculata ın t = 0 — la
o combinatie liniara nula a vectorilor bazei B j .

120 4 Aplicatii
B j+1 ={
σ(e1 j), . . . ,σ(er j j)}⊂⋃
s≥0
Ker(
TC−λ j · I)s
,
respectiv vectorii (vτ j)τ∈1,r j, (wτ j)τ∈1,r j
⊂ Rp cu
eτ j = vτ j + i ·wτ j, τ ∈ 1,r j.
Via (3.27), stabilim ca
[⋃
s≥0
Ker (TC−λ j · I)s
]⊕[⋃
s≥0
Ker(
TC−λ j · I)s
]
= SpanC{
v1 j, . . . ,vr j j,w1 j, . . . ,wr j j
}.
Pentru z0 j ∈ SpanR{
v1 j, . . . ,vr j j,w1 j, . . . ,wr j j
}exista numerele (cτ j)τ∈1,2r j
⊂R
astfel ıncat
z0 j =r j
∑τ=1
cτ j · vτ j +2r j
∑τ=r j+1
cτ j ·w(τ−r j) j.
Tinand seama de formulele (4.51), (4.52), solutiile Zτ j : [0,+∞)→ Rp ale pro-
blemelor Cauchy
(Re Cτ j)
{δ ′
= Aδ , t ≥ 0,
δ (0) = vτ j,τ ∈ 1,r j,
si solutiile Z(τ+r j) j : [0,+∞)→ Rp ale problemelor Cauchy
(Im Cτ j)
{ε ′ = Aε , t ≥ 0,
ε(0) = wτ j,τ ∈ 1,r j,
pot fi rescrise ca
Zτ j(t) = eα jt ·r j
∑γ=1
tγ−1(cosβ jt ·Dγτ j − sinβ jt ·Eγτ j
), t ≥ 0,
respectiv ca
Z(τ+r j) j(t) = eα jt ·r j
∑γ=1
tγ−1(sinβ t ·Dγτ j + cosβ t ·Eγτ j
), t ≥ 0.
Solutia xλ j ,λ j: [0,+∞)→ Rp, a sistemului diferential (4.36), cu formula
4.7 Operatii cu vectori 121
xλ j ,λ j(t) =
2r j
∑τ=1
cτ j ·Zτ j(t), t ≥ 0,(
aici, xλ j ,λ j(0) = z0 j
)
admite reprezentarea din enunt pentru
Gs j =r j
∑τ=1
cτ j ·Dsτ j +2r j
∑τ=r j+1
cτ j ·Es(τ−r j) j = Gs j
(c1 j, · · · ,c2r j j
)
si
Hs j =−r j
∑τ=1
cτ j ·Esτ j +2r j
∑τ=r j+1
cτ j ·Ds(τ−r j) j = Hs j
(c1 j, · · · ,c2r j j
).
Justificarea s-a ıncheiat. ⊓⊔
4.7 Matrice strict pozitiv-definite. Reprezentarea covectorilor
folosind produsul scalar. Produsul vectorial a m−1 vectori.
Produsul tensorial a doi vectori. Reciproca unei baze.
Rezolutia identitatii
Fie corpul K ∈ {R,C}, bazele S1, S2 introduse la pagina 1 si matricea nesin-
gulara P data de (1.2).
Fie u, v ∈ E cu expresiile
u =m
∑k=1
uS1k · ek =
m
∑k=1
uS2k · f k, u
S1k , u
S2k ∈K,
respectiv
v =m
∑k=1
vS1k · ek =
m
∑k=1
vS2k · f k, v
S1k , v
S2k ∈K.
Conform (1.5),
uS21...
uS2m
= P−1
uS11...
uS1m
,
vS21...
vS2m
= P−1
vS11...
vS1m
. (4.53)
In particular, daca v = f k atunci

122 4 Aplicatii
vS11...
vS1m
= col(k)P, k ∈ 1,m. (4.54)
Folosim scrierea tipica pentru produsul scalar definit de baza canonica S1 —
vezi relatiile22 (4.17) pentru cazul K= R —, si anume
u · v = BS1(u,v) =
(u
S11 · · · u
S1m
)
vS11...
vS1m
. (4.55)
Evident, produsul scalar poate fi reorganizat astfel23:
u · v = (u · v)t =(
vS11 · · · v
S1m
)
uS11...
uS1m
.
Fie A ∈ Mm(K). Atunci, introducem produsul matrice-vector — ın raport cu
baza S1 — via formula24
Au = A⋆S1u = v,
vS11...
vS1m
= A
uS11...
uS1m
. (4.56)
Exercitiul 4.18. (Vectorul v = Au ın baza S2) Este valabila expresia — analoaga
formulelor (1.15) —
vS21...
vS2m
= P−1AP
uS21...
uS2m
.
Solutia exercitiului 4.18. Avem urmatoarele estimari
22 Aici, aplicatia BS1: E ×E → K este liniara ın primul argument si antiliniara [20, pag. 11] ın
cel de-al doilea argument [27, pag. 73]. Referitor la BS1, se folosesc si denumirile forma biliniara
hermitica [18, pag. 316], respectiv forma hermitic simetrica, conjugat biliniara si pozitiv definita
[11, pag. 122].23 Formula utilizata ın fizica.24 Conform relatiilor (1.9), (1.10), exista operatorul T ∈ L(E,E) astfel ıncat T= A, de unde Au =T⋆S1
u = T (u) pentru orice u ∈ E.
4.7 Operatii cu vectori 123
v =(e1 · · · em
)
vS11...
vS1m
=
[(f 1 · · · f m
)P−1
]A
uS11...
uS1m
=(
f 1 · · · f m
)P−1AP
uS21...
uS2m
,
ceea ce ıncheie demonstratia. ⊓⊔
Matricea A este considerata strict pozitiv-definita25 — ın raport cu produsul sca-
lar — daca
u ·Au > 0 (4.57)
pentru orice vector nenul u ∈ E.
Exercitiul 4.19. Fie A ∈ Mm(R) o matrice simetrica si strict pozitiv-definita. A-
tunci, matricea A este
i) inversabila,
ii) are doar valori proprii pozitive (implicit, reale).
iii) ([18, pag. 337, Lema 4.4]) Eigenvectorii corespunzand valorilor proprii distincte
sunt ortogonali doi cate doi.
iv) Orice eigenvector generalizat este eigenvector.
v) ([18, pag. 339, Teorema 4.6]) Exista o baza a spatiului E formata doar din eigen-
vectori ai matricei A.
Solutia exercitiului 4.19. Partea i). Daca matricea A nu ar fi nesingulara, atunci ar
exista numerele (ui)i∈1,m ⊂ R, nu toate nule, astfel ıncat
A
u1
...
um
=
0...
0
.
Mai departe, vectorul u ∈ E, unde
uS11...
uS1m
=
u1
...
um
,
ne-ar conduce la ıncalcarea restrictiei (4.57), caci u ·Au = u ·0E = 0.
25 In literatura, pentru K = C, o matrice hermitica A este numita pozitiv definita daca ındepli-
neste inegalitatea (4.57), vezi [16, pag. 396], ın timp ce o matrice pentru care este valabila varianta
cu semnul ≥ a inegalitatii este considerata pozitiv semidefinita. Am subliniat [3, pag. 1] prezenta
semnului > ın inegalitate prin introducerea cuvantului strict, ca ın [25, pag. 2].

124 4 Aplicatii
Partea ii). Au loc identitatile
u ·Av =(
uS11 · · · u
S1m
)A
vS11...
vS1m
=
[(u
S11 · · · u
S1m
)(At)t]
vS11...
vS1m
=
At
uS11...
uS1m
t
vS11...
vS1m
=
(Atu)· v = (Au) · v, u, v ∈ E. (4.58)
Daca vectorul nenul u este eigenvector al matricei A corespunzand valorii proprii
λ ∈K, atunci — via (1.26) — Au = λu, respectiv
0 = u ·Au− (Au) ·u = u · (λu)− (λu) ·u(conform (4.1)) =
(λ −λ
)‖u‖2
2.
Asadar, eigenvalorile matricei A sunt reale, deci sistemele liniare si omogene (1.26),
(1.29) admit solutii reale nenule. Astfel, eigenvectorii si eigenvectorii generalizati
ai matricei A se gasesc ın SpanR (S1).Pozitivitatea valorilor proprii rezulta din estimarile26
λ · ‖u‖22 = u · (λu) = u ·Au > 0.
Partea iii). Fiind date valorile proprii λ 6= µ si vectorii proprii corespunzatori
u, v, deducem ca
0 = u ·Av− (Au) · v = u · (µv)− (λu) · v= (µ −λ )(u · v) .
Partea iv). Sa presupunem ca exista eigenvectorul generalizat v ∈ E astfel ıncat
(A−λ · Im)k
v = 0E , (A−λ · Im)k−1
v 6= 0E
pentru un anumit 2 ≤ k ≤ m.
Sunt valabile egalitatile
A · (A−λ · Im)p = [A · (A−λ · Im)] · (A−λ · Im)
p−1
= [(A−λ · Im) ·A] · (A−λ · Im)p−1 = . . .
= (A−λ · Im)p ·A, 1 ≤ p ≤ k.
26 Cum u ∈ SpanR (S1), deducem ca afirmatiile acestui exercitiu raman valabile atunci cand ine-
galitatea (4.57) are loc doar ın SpanR (S1).

4.7 Operatii cu vectori 125
Introducand expresia u = (A−λ · Im)k−1
v ın restrictia (4.57), ajungem la o con-
tradictie, — observam ca matricea (A−λ · Im)k−1
este simetrica —
0 < u ·Au
=(
vS11 · · · v
S1m
)[(A−λ · Im)
k−1]t
A(A−λ · Im)k−1
vS11...
vS1m
=(
vS11 · · · v
S1m
)A(A−λ · Im)
2k−2
vS11...
vS1m
=[(
vS11 · · · v
S1m
)A(A−λ · Im)
k−2]·
(A−λ · Im)
k
vS11...
vS1m
=[A(A−λ · Im)
k−2v]·[(A−λ · Im)
kv]
= 0.
Partea v). Folosim partea iv) si descompunerea (2.35). ⊓⊔
Exercitiul 4.20. (Produsul matricelor strict pozitiv definite) Fie α, β , γ , δ , λ ,µ ∈R.
i)27 Expresia
E (A,z1,z2) =(z1 z2
)A
(z1
z2
), unde A = A(α,β ,γ ,δ ) =
(α δγ β
),
este numar real pentru orice z1,2 ∈ C daca si numai daca γ = δ .
ii) Presupunem ca γ = δ . Urmatoarele trei afirmatii sunt echivalente:
1) avem inegalitatea E (A,z1,z2) > 0 pentru orice numere z1,2 ∈ C cu |z1|2 +|z2|2 > 0;
2)28 sunt valabile conditiile:
α, αβ − γ2> 0;
3) inegalitatea E (A,x1,x2)> 0 are loc pentru orice numere reale x1,2 care nu sunt
simultan nule.
iii) Daca α, β , λ , µ > 0 si
(α −β )2 (λ −µ)2> 16 ·αβλ µ ,
atunci exista numerele reale x1,2 astfel ıncat
27 Conform [16, pag. 397, Exercise].28 Vezi [16, pag. 404, Theorem 7.2.5]. Evident, si β > 0.

126 4 Aplicatii
E (AB,x1,x2)< 0,
unde29
A =C−1
(λ 0
0 µ
)C, B =
(α 0
0 β
), C =
1√2
(1 −1
1 1
).
Solutia exercitiului 4.20. Partea i). Folosim identitatea
E (A,z1,z2) = α|z1|2 +2γ Re(z1z2)+β |z2|2 +(δ − γ)z1z2.
Partea iii). Avem relatia
E (AB,x1,x2) =1
2·[α (µ +λ )x2
1 +(α +β )(µ −λ )x1x2 +β (µ +λ )x22
].
Concluzia rezulta din observatia ca discriminantul ecuatiei omogene
E (AB,x1,x2) = 0,
cu formula
∆ =1
4(α −β )2 (λ −µ)2 −4αβλ µ ,
este pozitiv.
De asemeni, C−1 =C t si
E (A,x1,x2) = E
((λ 0
0 µ
),y1,y2
)= λy2
1 +µy22 > 0,
unde
(y1
y2
)=C
(x1
x2
), respectiv
E (B,x1,x2) = αx21 +βx2
2 > 0
pentru orice numere reale x1,2 care nu sunt simultan nule.
Asadar, produsul a doua matrice simetrice si strict pozitiv definite nu este ıntot-
deauna strict pozitiv definit. ⊓⊔
Presupunem ca, pana la sfarsitul sectiunii de fata, avem
29 Matricea AB este asimetrica. Pentru a obtine acest efect (balans), folosim rotatia C de 45◦ la
constructia unei similaritati cu matricea diagonala
A ∼(
λ 0
0 µ
).
Un exemplu de matrice A, B, cu AB asimetrica, al caror produs Hadamard, A◦B = (ai jbi j)i, j∈1,2,
este strict pozitiv definit se gaseste ın [16, pag. 457, Exercise].

4.7 Operatii cu vectori 127
K= R.
Exercitiul 4.21. (Produsul scalar ın baza S2) Au loc identitatile
u · v =(
uS21 · · · u
S2m
)G
vS21...
vS2m
,
unde G = P t ·P, respectiv
G = (gi j)1≤i, j≤m=(
f i · f j
)1≤i, j≤m
.
Solutia exercitiului 4.21. Prima egalitate rezulta din (4.18).
Pentru cea de-a doua, avem estimarile — vezi (4.54) —
f i · f j =(col(i)P
) t · col( j)P = gi j
oricare ar fi 1 ≤ i, j ≤ m. ⊓⊔
Fie30 f ∈ E∗. Plecand de la identitatile
f (u) =(
f (e1) · · · f (em))
uS11...
uS1m
=
(a
S11 · · · a
S1m
)
uS11...
uS1m
, (4.59)
obtinem reprezentarea31 covectorului f drept produs scalar32 ın raport cu baza S1
[11, pag. 130, Theorem], adica33
f (u) = a ·u, u ∈ E,
unde a =m
∑k=1
aS1k · ek ∈ E. In particular, tinand seama de (4.54), avem
f ( f k) =(
aS11 · · · a
S1m
)· col(k)P =
[col(k)P
]t
aS11...
aS1m
, k ∈ 1,m,
30 Reamintesc notatia de la pagina 3, E∗ = L(E,K).31 Unicitatea reprezentarii se probeaza adaptand afirmatia discutata la solutia exercitiului 4.29.32 Acest rezultat este numit frecvent teorema F. Riesz–M. Frechet [18, pag. 331, Teorema 3.1].33 Daca f 6= 0E∗ , atunci — via (4.1) — f (a) = ‖a‖2
2 > 0 si a ∈ (Ker f )⊥ — spatiul ortogonal al
subspatiului Ker f [11, pag. 123], [27, pag. 76] —. Conform [11, pag. 130], a = f(
a‖a‖2
)· a‖a‖2
si
are loc descompunerea u =(
u− f (u)f (a) ·a
)+ f (u)
f (a) · a ∈ (Ker f )⊕ (Ker f )⊥ = E. Vezi, de asemeni,
nota de subsol de la pagina 141.
128 4 Aplicatii
respectiv
f ( f 1)...
f ( f m)
= P t
aS11...
aS1m
. (4.60)
Exercitiul 4.22. (Vectorul a ın baza S2) Este valabila formula
aS21...
aS2m
= G−1
f ( f 1)...
f ( f m)
.
Solutia exercitiului 4.22. Avem urmatoarele estimari
a =(e1 · · · em
)
aS11...
aS1m
=
[(f 1 · · · f m
)P−1
]
aS11...
aS1m
(conform (4.60)) =(
f 1 · · · f m
)P−1
(P t)−1
f ( f 1)...
f ( f m)
=(
f 1 · · · f m
)G−1
f ( f 1)...
f ( f m)
,
ceea ce ıncheie demonstratia. ⊓⊔
Cu ajutorul formulelor (1.6), definim covectorii Fk ∈ E∗ astfel ıncat
Fk( f i) = δki, 1 ≤ i, k ≤ m.
Aici, δki desemneaza simbolul lui Kronecker. De asemeni, via (4.59), introducem
vectorii ak =m
∑i=1
aS1ki · ei ∈ E cu proprietatea ca
Fk(u) = ak ·u =(
aS1k1 · · · a
S1km
)
uS11...
uS1m
, u ∈ E, k ∈ 1,m. (4.61)
Exercitiul 4.23. (Vectorul ak ın baza S2) Este valabila formula

4.7 Operatii cu vectori 129
aS2k1...
aS2km
= col(k)
(G−1
).
Solutia exercitiului 4.23. Utilizam exercitiul 4.22. Astfel,
aS2k1...
aS2km
= G−1
Fk( f 1)...
Fk( f m)
= G−1
δk1
...
δkm
,
unde k ∈ 1,m. ⊓⊔
Exercitiul 4.24. Fie f ∈ E∗. Atunci,
f =m
∑k=1
f ( f k) ·Fk, a =(a1 · · · am
)
f ( f 1)...
f ( f m)
.
Solutia exercitiului 4.24. Prima parte rezulta din egalitatile
f ( f i) =m
∑k=1
f ( f k)δki =
(m
∑k=1
f ( f k) ·Fk
)( f i), i ∈ 1,m.
La partea a doua, folosim exercitiile 4.22, 4.23. Astfel,
a =(
f 1 · · · f m
)
aS21...
aS2m
=
[(f 1 · · · f m
)G−1
]
f ( f 1)...
f ( f m)
,
de unde rezulta concluzia. ⊓⊔
Observam ca au loc relatiile34 — aici, G = P t ·P —
(a1 · · · am
)=(
f 1 · · · f m
)G−1 =
[(e1 · · · em
)P]
G−1
=(e1 · · · em
)(P−1
)t, (4.62)
respectiv este valabila restrictia de biortogonalitate35
ak · f i = Fk( f i) = δki, 1 ≤ i, k ≤ m. (4.63)
34 Cum P reprezinta matricea de schimbare de baza a vectorilor — se trece de la S1 la S2 —,(P−1
)tdesemneaza matricea de schimbare de baza a covectorilor — cand se trece de la duala C1
a bazei S1 la duala C2 a bazei S2 — [20, pag. 13].35 Vezi [15, pag. 66-5].

130 4 Aplicatii
Astfel, setul de vectori
S3 = {a1, · · · ,am}
desemneaza baza reciproca ın E a bazei S2. Vezi [17, pag. 37].
Fie vectorii (bk)k∈1,m−1 ⊂ E, cu expresiile
bk =m
∑i=1
bS1ki · ei, 1 ≤ k ≤ m−1, m ≥ 3.
Introducem covectorul F ∈ E∗ dat de relatia
F(u) = FS1(u) =
∣∣∣∣∣∣∣∣∣∣∣∣
bS111 b
S112 · · · b
S11m
bS121 b
S122 · · · b
S12m
...... · · ·
...
bS1
(m−1)1b
S1
(m−1)2· · · b
S1
(m−1)m
uS11 u
S12 · · · u
S1m
∣∣∣∣∣∣∣∣∣∣∣∣
, u ∈ E. (4.64)
Numarul real F(u), notat cu(b1, · · · ,bm−1,u
), constituie produsul mixt 36 (forma
determinant37) al vectorilor (bk)k∈1,m−1, u. Vezi [17, pag. 31].
Vectorul folosit la reprezentarea38 ın forma de produs scalar a covectorului F ,
notat cum−1
∏k=1
bk, desemneaza produsul vectorial al vectorilor (bk)k∈1,m−1. Au loc
egalitatile
F(u) =(b1, · · · ,bm−1,u
)=
(m−1
∏k=1
bk
)·u, u ∈ E.
Exercitiul 4.25. (Produsul vectorial ca determinant) Avem formula
m−1
∏k=1
bk =
∣∣∣∣∣∣∣∣∣∣∣∣
bS111 b
S112 · · · b
S11m
bS121 b
S122 · · · b
S12m
...... · · ·
...
bS1
(m−1)1b
S1
(m−1)2· · · b
S1
(m−1)m
e1 e2 · · · em
∣∣∣∣∣∣∣∣∣∣∣∣
, (4.65)
cu conventia ca determinantul sa fie dezvoltat dupa ultima linie.
36 In cazul m = 3, se ıntalneste si denumirea triplu produs scalar [35, pag. 10].37 Vezi [7, pag. 70].38 Vezi [7, pag. 92].
4.7 Operatii cu vectori 131
Solutia exercitiului 4.25. Dezvoltam dupa ultima linie determinantul din (4.64).
Astfel, observam ca — aici, DS1i desemneaza cofactorul39 elementului u
S1i [21,
pag. 9] —
F(u) =m
∑i=1
uS1i ·DS1
i =(
DS11 · · · D
S1m
)
uS11...
uS1m
=
(m
∑i=1
DS1i · ei
)·u. (4.66)
Concluzia rezulta din (4.55) pe baza unicitatii reprezentarii ca produs scalar a co-
vectorului F . ⊓⊔
Exercitiul 4.26. (Produsul scalar dintre produsul vectorial si factorii sai) Produsul
vectorial le este ortogonal factorilor sai,
bi ·m−1
∏k=1
bk = 0, i ∈ 1,m−1.
Solutia exercitiului 4.26. Remarcam faptul ca determinantul din (4.64) este nul da-
ca ultima linie a sa este o combinatie liniara a celorlalte linii [18, pag. 132]. Astfel,
SpanR{
b1, · · · ,bm−1
}⊆ Ker F.
De asemeni, daca vectorii (bk)k∈1,m−1 sunt liniar dependenti peste R, atunci Ker F =E. ⊓⊔
Exercitiul 4.27. (Liniar independenta factorilor dintr-un produs vectorial) Vectorii
din setul {b1, · · · ,bm−1} sunt liniar independenti peste R daca si numai daca
m−1
∏k=1
bk 6= 0E .
Solutia exercitiului 4.27. Liniar dependenta acestor vectori este echivalenta cu fap-
tul ca macar una dintre primele m−1 linii ale determinantului (4.65) poate fi repre-
zentata ca o combinatie liniara a celorlalte m−2 linii — dintre primele m−1 linii cu
intrari scalare —. Combinatia liniara se pastreaza ın toti minorii folositi la calculul
numerelor(
DS1i
)i∈1,m
. Deci, daca produsul vectorial este nenul, atunci factorii a-
cestuia sunt liniar independenti.
Daca factorii sunt liniar independenti, atunci putem adapta demonstratia Lemei
1.1 pentru a stabili ca produsul vectorial este nenul. Vezi si [18, pag. 139, Corolarul
2.4]. ⊓⊔39 Se utilizeaza si denumirile de complement [23, pag. 289] ori complementar algebric al elemen-
tului uS1i [18, pag. 133].

132 4 Aplicatii
Exercitiul 4.28. (Produsul mixt dintre produsul vectorial si factorii sai) Are loc i-
dentitatea
(b1,b2, · · · ,bm−1,
m−1
∏k=1
bk
)=
∥∥∥∥∥m−1
∏k=1
bk
∥∥∥∥∥
2
2
.
Solutia exercitiului 4.28. Via (4.66), avem
F
(m−1
∏k=1
bk
)=
m
∑i=1
(D
S1i
)2
=
(m−1
∏k=1
bk
)2
,
ceea ce ıncheie demonstratia. ⊓⊔
Exercitiul 4.29. (Baza reciproca via produsul vectorial si produsul mixt) Daca m ≥3, atunci vectorii (ai)i∈1,m, introdusi ın (4.61), au urmatoarele expresii40
a1 = (−1)m−1 · f 2× f 3×···× f m
( f 1,··· , f m),
ai = (−1)m−i · f 1× f 2×···× f i−1× f i+1× f i+2×···× f m
( f 1,··· , f m), i ∈ 2,m−1,
am =f 1× f 2×···× f m−1
( f 1,··· , f m).
(4.67)
Solutia exercitiului 4.29. Fac urmatoarea afirmatie: fiind dati vectorii ( f i)i∈1,m din
(4.63), care alcatuiesc o baza a spatiului liniar E, exista cel mult o familie (ai)i∈1,m
cu proprietatea ca ak · f i = δki pentru orice i, k.
Intr-adevar, ın caz contrar ar exista seturile de vectori (bi)i∈1,m, (ci)i∈1,m, unde
ci = ai −bi =m
∑j=1
cS1i j · e j, pentru care
bk · f i = δki, ck · f i = 0, 1 ≤ i, k ≤ m,
iar vectorii ci nu ar fi toti nuli. Atunci, sistemul algebric — conform (4.54) —
P t
x1
...
xm
=
0...
0
40 Putem folosi, ca notatie, palaria ⋆ pentru a desemna factorul lipsa:
ai = (−1)m−i ·
f 1 × f 2 ×·· ·× f i−1 ×∧
f i × f i+1 × f i+2 ×·· ·× f m
(f 1, · · · , f m
) , i ∈ 1,m.

4.7 Operatii cu vectori 133
ar admite solutii nenule41, de forma
cS1i1...
cS1im
, ceea ce ar contrazice nesingularitatea
matricei P. Afirmatia este probata.
Mai departe, sa remarcam ca
(f 1, · · · , f m
)= detP, (4.68)
respectiv
(f 1 × f 2 ×·· ·× f i−1 × f i+1 × f i+2 ×·· ·× f m
)·w
=(
f 1, f 2, · · · , f i−1, f i+1, f i+2, · · · , f m,w)
= (−1)m−i ·(
f 1, f 2, · · · , f i−1,w, f i+1, · · · , f m
), w ∈ E. (4.69)
Pentru a proba partea a doua a dublei egalitati anterioare, transformam primul pro-
dus mixt ın cel de-al doilea cu ajutorul a m− i permutari de linii.
In sfarsit, via (4.68), (4.69), vectorii din partea dreapta a egalitatilor (4.67) —
notati bi, unde 1 ≤ i ≤ m — verifica relatiile bk · f i = δki pentru orice i, k, ceea ce
ıncheie demonstratia. ⊓⊔
Exercitiul 4.30. (Baza reciproca a bazei S3) Vectorii bazei S2 admit reprezentarile
— m ≥ 3 —
f 1 = (−1)m−1 · a2×a3×···×am
(a1,··· ,am),
f i = (−1)m−i · a1×a2×···×ai−1×ai+1×ai+2×···×am
(a1,··· ,am), i ∈ 2,m−1,
f m =a1×a2×···×am−1
(a1,··· ,am).
(4.70)
Solutia exercitiului 4.30. Notam cu bi, unde 1 ≤ i ≤ m, vectorii din partea dreapta
a egalitatilor (4.70). Atunci, deducem ca
ck = f k −bk, ck ·ai = 0, 1 ≤ i, k ≤ m.
Aplicam rationamentul de la exercitiul 4.29: vectorii (ck)k∈1,m, fiindu-i ortogo-
nali bazei S3, sunt obligatoriu nuli. ⊓⊔
Exercitiul 4.31. (Produsul mixt ın baza S2) Este valabila identitatea
(b1, · · · ,bm−1,u
)= detP ·
∣∣∣∣∣∣∣∣∣∣∣∣
bS211 b
S212 · · · b
S21m
bS221 b
S222 · · · b
S22m
...... · · ·
...
bS2
(m−1)1b
S2
(m−1)2· · · b
S2
(m−1)m
uS21 u
S22 · · · u
S2m
∣∣∣∣∣∣∣∣∣∣∣∣
.
41 Cu alte cuvinte, ar exista vectori nenuli care sa ıi fie ortogonali unei baze a spatiului E [18, pag.
329, Propozitia 2.10 (ii)].
134 4 Aplicatii
Solutia exercitiului 4.31. Utilizam egalitatile (4.53). ⊓⊔Exercitiul 4.32. (Produsul mixt ca determinant J. Gram) Are loc egalitatea
(b1, · · · ,bm−1,u
)=
1(f 1, · · · , f m
) ·
∣∣∣∣∣∣∣∣∣∣∣
b1 · f 1 b1 · f 2 · · · b1 · f m
b2 · f 1 b2 · f 2 · · · b2 · f m...
... · · ·...
bm−1 · f 1 bm−1 · f 2 · · · bm−1 · f m
u · f 1 u · f 2 · · · u · f m
∣∣∣∣∣∣∣∣∣∣∣
. (4.71)
In particular, — [18, pag. 352, Exercitiul 3 a)] —
(f 1, · · · , f m
)2=
∣∣∣∣∣∣∣∣∣
f 1 · f 1 f 1 · f 2 · · · f 1 · f m
f 2 · f 1 f 2 · f 2 · · · f 2 · f m...
... · · ·...
f m · f 1 f m · f 2 · · · f m · f m
∣∣∣∣∣∣∣∣∣. (4.72)
Solutia exercitiului 4.32. Remarcam ca
bS111 b
S112 · · · b
S11m
bS121 b
S122 · · · b
S12m
...... · · ·
...
bS1
(m−1)1b
S1
(m−1)2· · · b
S1
(m−1)m
uS11 u
S12 · · · u
S1m
·
fS111 f
S112 · · · f
S11m
fS121 f
S122 · · · f
S12m
...... · · ·
...
fS1m1 f
S1m2 · · · f
S1mm
t
=
b1 · f 1 b1 · f 2 · · · b1 · f m
b2 · f 1 b2 · f 2 · · · b2 · f m...
... · · ·...
bm−1 · f 1 bm−1 · f 2 · · · bm−1 · f m
u · f 1 u · f 2 · · · u · f m
,
ceea ce ıncheie demonstratia. ⊓⊔Exercitiul 4.33. (Produsul vectorial via produsul scalar si produsul mixt) Avem re-
latia
m−1
∏k=1
bk =1(
f 1, · · · , f m
) ·
∣∣∣∣∣∣∣∣∣∣∣
b1 · f 1 b1 · f 2 · · · b1 · f m
b2 · f 1 b2 · f 2 · · · b2 · f m...
... · · ·...
bm−1 · f 1 bm−1 · f 2 · · · bm−1 · f m
f 1 f 2 · · · f m
∣∣∣∣∣∣∣∣∣∣∣
, (4.73)
cu conventia ca determinantul sa fie dezvoltat dupa ultima linie.
Solutia exercitiului 4.33. Reorganizam determinantul din (4.71) sub forma

4.7 Operatii cu vectori 135
∣∣∣∣∣∣∣∣∣∣∣
b1 · f 1 b1 · f 2 · · · b1 · f m
b2 · f 1 b2 · f 2 · · · b2 · f m...
... · · ·...
bm−1 · f 1 bm−1 · f 2 · · · bm−1 · f m
u · f 1 u · f 2 · · · u · f m
∣∣∣∣∣∣∣∣∣∣∣
=
∣∣∣∣∣∣∣∣∣∣∣∣∣∣
b1 · f 1 b1 · f 2 · · · b1 · f m
b2 · f 1 b2 · f 2 · · · b2 · f m...
... · · ·...
bm−1 · f 1 bm−1 · f 2 · · · bm−1 · f m(m
∑j=1
uS1j · f
S11 j
) (m
∑j=1
uS1j · f
S12 j
)· · ·(
m
∑j=1
uS1j · f
S1m j
)
∣∣∣∣∣∣∣∣∣∣∣∣∣∣
=m
∑j=1
uS1j ·
∣∣∣∣∣∣∣∣∣∣∣
b1 · f 1 b1 · f 2 · · · b1 · f m
b2 · f 1 b2 · f 2 · · · b2 · f m...
... · · ·...
bm−1 · f 1 bm−1 · f 2 · · · bm−1 · f m
fS11 j f
S12 j · · · f
S1m j
∣∣∣∣∣∣∣∣∣∣∣
=
m
∑j=1
∣∣∣∣∣∣∣∣∣∣∣
b1 · f 1 b1 · f 2 · · · b1 · f m
b2 · f 1 b2 · f 2 · · · b2 · f m...
... · · ·...
bm−1 · f 1 bm−1 · f 2 · · · bm−1 · f m
fS11 j f
S12 j · · · f
S1m j
∣∣∣∣∣∣∣∣∣∣∣
· e j
·u,
de unde
F(u) =(b1, · · · ,bm−1,u
)=
(m
∑j=1
BFS1j · e j
)·u, u ∈ E, (4.74)
pentru
BFS1j =
∣∣∣∣∣∣∣∣∣∣∣
b1 · f 1 b1 · f 2 · · · b1 · f m
b2 · f 1 b2 · f 2 · · · b2 · f m...
... · · ·...
bm−1 · f 1 bm−1 · f 2 · · · bm−1 · f m
fS11 j f
S12 j · · · f
S1m j
∣∣∣∣∣∣∣∣∣∣∣(
f 1, · · · , f m
) , j ∈ 1,m.
Concluzia rezulta din (4.74) pe baza unicitatii reprezentarii ca produs scalar a
covectorului F . ⊓⊔

136 4 Aplicatii
Exercitiul 4.34. (Dublul produs vectorial 42, J. Lagrange, H. Grassmann) Fie m =3. Atunci, are loc identitatea
(a×b
)× c = (a · c)b−
(b · c)
a, a, b, c ∈ E. (4.75)
De asemeni43,
(a×b
)× c =−c×
∧
d ×(a×b
)=
∣∣∣∣∣∣∣∣∣∣
c ·a c ·b∧
d ·a∧
d ·b
a b
∣∣∣∣∣∣∣∣∣∣
, d ∈ E.
Solutia exercitiului 4.34. Vectori liniar dependenti. Daca exista λ ∈R astfel ıncat
a = λ ·b, atunci
a×b = 0E =(a×b
)× c
= λ ·[(
b · c)
b−(b · c)
b]=[(
λb)· c]
b−(b · c)(
λb)
= (a · c)b−(b · c)
a.
Daca c = λ ·a, atunci este suficient sa probam egalitatea
(a×b
)×a =
(a2)
b−(b ·a)
a. (4.76)
Incepem prin a observa ca — vezi exercitiul 4.28 —
(a,b,a×b
)=∥∥a×b
∥∥2
2, a, b ∈ E.
Expresia (4.73) ne conduce la relatia — conform exercitiului 4.27, impunem ca
a×b 6= 0E —
(a×b
)×a =
1∥∥a×b
∥∥2
2
·
∣∣∣∣∣∣
0 0∥∥a×b
∥∥2
2
a2 a ·b 0
a b a×b
∣∣∣∣∣∣.
Ajugem la (4.76) dezvoltand determinantul dupa ultima linie.
Vectori liniar independenti.44 Daca(a,b,c
)6= 0, atunci identitatea (4.73) im-
plica
42 Vezi [17, pag. 33]. Se ıntalneste si denumirea triplu produs vectorial [35, pag. 12] pentru canti-
tatea a×(b× c
).
43 Reorganizarea egalitatii (4.75) ne permite generalizarea sa. Vezi exercitiul 4.42.44 Alta solutie a acestui caz este oferita de exercitiul 4.42: scriem produsul c×
(a×b
)ın baza{
a,b,a×b}
.

4.7 Operatii cu vectori 137
(a×b
)× c =
1(a,b,c
) ·
∣∣∣∣∣∣
0 0(a,b,c
)
c ·a c ·b c2
a b c
∣∣∣∣∣∣,
ceea ce ıncheie demonstratia. ⊓⊔
Exercitiul 4.35. (Dublul produs vectorial, formula A. Cauchy–J. Binet) Fie m = 3.
Atunci, este valabila expresia
(a×b
)·(c×d
)=
∣∣∣∣a · c a ·db · c b ·d
∣∣∣∣ , a, b, c, d ∈ E. (4.77)
In particular, are loc identitatea lui J. Lagrange, si anume
∥∥a×b∥∥2
2=
∣∣∣∣∣a2 a ·b
b ·a b2
∣∣∣∣∣= a2 ·b2 −(a ·b)2. (4.78)
Solutia exercitiului 4.35. Vectori liniar dependenti. Daca exista λ ∈R astfel ıncat
c = λ ·d, atunci c×d = 0E si
(a×b
)·(c×d
)= 0
= λ ·∣∣∣∣a ·d a ·db ·d b ·d
∣∣∣∣
=
∣∣∣∣a ·(λ ·d
)a ·d
b ·(λ ·d
)b ·d
∣∣∣∣ .
Vectori liniar independenti. Daca c× d 6= 0E , atunci — via relatia (4.71) —
avem
(a,b,c×d
)=(a×b
)·(c×d
)
=1(
c,d,c×d) ·
∣∣∣∣∣∣
a · c a ·d a ·(c×d
)
b · c b ·d b ·(c×d
)
0 0(c×d
)2
∣∣∣∣∣∣. (4.79)
Ajugem la (4.77) dezvoltand determinantul din (4.79) dupa ultima linie. ⊓⊔
Exercitiul 4.36. Fie m = 3. In contextul exercitiilor 4.21, 4.23, matricea G−1 este
simetrica si admite reprezentarile45
45 Expresia (4.83) poate fi construita pentru orice m ≥ 3,
[(f i · f j
)i, j∈1,m
]−1
= (ai ·a j)i, j∈1,m, (4.80)
conform [15, pag. 66-6, Fact 7].

138 4 Aplicatii
G−1 =1
(f 1, f 2, f 3
)2
×
(
f 2 × f 3, f 2, f 3
) (f 1, f 2 × f 3, f 3
) (f 1, f 2, f 2 × f 3
)(
f 3 × f 1, f 2, f 3
) (f 1, f 3 × f 1, f 3
) (f 1, f 2, f 3 × f 1
)(
f 1 × f 2, f 2, f 3
) (f 1, f 1 × f 2, f 3
) (f 1, f 2, f 1 × f 2
)
(4.81)
=1(
f 1, f 2, f 3
) ·
(a1, f 2, f 3
) (a2, f 2, f 3
) (a3, f 2, f 3
)(
f 1,a1, f 3
) (f 1,a2, f 3
) (f 1,a3, f 3
)(
f 1, f 2,a1
) (f 1, f 2,a2
) (f 1, f 2,a3
)
(4.82)
= (ai ·a j)i, j∈1,3. (4.83)
Solutia exercitiului 4.36. Formula (4.81). Inversa matricei G = (gi j)i, j∈1,3are ex-
presia
G−1 =1
detG·
G11 G21 G31
G12 G22 G32
G13 G23 G33
,
unde G ji reprezinta cofactorul elementului gi j [18, pag. 136, Propozitia 1.4]. De
asemeni, pe baza formulei (4.72), detG =(
f 1, f 2, f 3
)2.
Prin calcul direct,
G11 = f22 f
23 −(
f 2 · f 3
)2
(conform (4.78)) =∥∥ f 2 × f 3
∥∥2
2
=(
f 2 × f 3, f 2, f 3
).
In mod analog, stabilim valorile intrarilor G22, G33.
Apoi,
G12 = −∣∣∣∣∣f 1 · f 2 f 1 · f 3
f 3 · f 2 f23
∣∣∣∣∣
(conform (4.77)) = −(
f 1 × f 3
)·(
f 2 × f 3
)
=(
f 1, f 2 × f 3, f 2
).
In mod analog, stabilim valorile intrarilor Gi j, unde i 6= j.
Simetria matricei G−1. Avem egalitatile
G21 =(
f 1, f 2 × f 3, f 3
)=[
f 1 ×(
f 2 × f 3
)]· f 3
=(
f 1 · f 3
)(f 2 · f 3
)−(
f 1 · f 2
)f
23
=[(
f 3 · f 2
)f 1 −
(f 1 · f 2
)f 3
]· f 3
=[(
f 3 × f 1
)× f 2
]· f 3 =
(f 3 × f 1, f 2, f 3
)
= G12.

4.7 Operatii cu vectori 139
In mod analog, testam faptul ca Gi j = G ji, unde i 6= j.
Formulele (4.82), (4.83). Aplicam exercitiul 4.29. ⊓⊔
Exercitiul 4.37. (Coordonate ın baza S2. Cazul m = 3) Are loc identitatea
w =
(w, f 2, f 3
)(
f 1, f 2, f 3
) · f 1 +
(f 1,w, f 3
)(
f 1, f 2, f 3
) · f 2 +
(f 1, f 2,w
)(
f 1, f 2, f 3
) · f 3, w ∈ E.
Solutia exercitiului 4.37. Fie (wi)i∈1,3 coordonatele vectorului w ın baza46 S3. De-
ducem ca — via exercitiul 4.23 si reprezentarea (4.82) —
w =3
∑i=1
wi ·ai
= w1 ·[ (
a1, f 2, f 3
)(
f 1, f 2, f 3
) · f 1 +
(f 1,a1, f 3
)(
f 1, f 2, f 3
) · f 2 +
(f 1, f 2,a1
)(
f 1, f 2, f 3
) · f 3
]
+ w2 ·[ (
a2, f 2, f 3
)(
f 1, f 2, f 3
) · f 1 +
(f 1,a2, f 3
)(
f 1, f 2, f 3
) · f 2 +
(f 1, f 2,a2
)(
f 1, f 2, f 3
) · f 3
]
+ w3 ·[ (
a3, f 2, f 3
)(
f 1, f 2, f 3
) · f 1 +
(f 1,a3, f 3
)(
f 1, f 2, f 3
) · f 2 +
(f 1, f 2,a3
)(
f 1, f 2, f 3
) · f 3
]
=
(3
∑i=1
wi ·ai, f 2, f 3
)
(f 1, f 2, f 3
) · f 1 +
(f 1,
3
∑i=1
wi ·ai, f 3
)
(f 1, f 2, f 3
) · f 2 +
(f 1, f 2,
3
∑i=1
wi ·ai
)
(f 1, f 2, f 3
) · f 3,
ceea ce ıncheie demonstratia. ⊓⊔
Exercitiul 4.38. (Coordonate ın bazele S2, S3) Sunt valabile egalitatile
w =m
∑i=1
(w ·ai) · f i =m
∑i=1
(w · f i
)·ai, w ∈ E.
Solutia exercitiului 4.38. Fie (Wi)i∈1,m si (wi)i∈1,m coordonatele vectorului w ın ba-
zele S2, respectiv S3. Pentru a calcula aceste numere, le aplicam produsul scalar
relatiilor
w =m
∑i=1
Wi · f i =m
∑i=1
wi ·ai
si tinem seama de restrictia de biortogonalitate (4.63). ⊓⊔
Exercitiul 4.39. (Regula lui G. Cramer) Fie w ∈ E. In contextul exercitiului 4.38,
avem formulele — m ≥ 3 —
46 Introdusa la pagina 130.
140 4 Aplicatii
w ·a1 =(w, f 2, f 3,··· , f m)( f 1,··· , f m)
,
w ·ai =( f 1,··· , f i−1,w, f i+1,··· , f m)
( f 1,··· , f m),
w ·am =( f 1,··· , f m−1,w)( f 1,··· , f m)
,
respectiv
w · f 1 =(w,a2,a3,··· ,am)
(a1,··· ,am),
w · f i =(a1,··· ,ai−1,w,ai+1,··· ,am)
(a1,··· ,am),
w · f m =(a1,··· ,am−1,w)(a1,··· ,am)
,
unde i ∈ 2,m−1.
Solutia exercitiului 4.39. Prima solutie. Folosim estimarea (4.69).
A doua solutie. Fie (ui)i∈1,m si (Wi)i∈1,m coordonatele vectorului w ın bazele S1,
respectiv S2. Atunci,
w =m
∑i=1
Wi · f i =(
f 1 · · · f m
)
W1
...
Wm
=
(e1 · · · em
)P ·
W1
...
Wm
=(e1 · · · em
)
u1
...
um
.
Avem de rezolvat, asadar, sistemul algebric cramerian
P
W1
...
Wm
=
u1
...
um
. (4.84)
Formula solutiei este data de expresiile [18, pag. 142, Propozitia 3.3]
Wi =detPi
detP, i ∈ 1,m,
unde Pi desemneaza matricea obtinuta din matricea P prin ınlocuirea celei de-a i-a
coloane cu coloana situata ın partea dreapta a ecuatiei (4.84).
Concluzia rezulta din (4.64), (4.68). ⊓⊔Exercitiul 4.40. (Baza reciproca ıntr-un hiperplan) Daca vectorii
(bi
)i∈1,m−1
, unde
m ≥ 3, sunt liniar independenti peste corpul R, atunci
i) setul
{b1, · · · ,bm−1,
m−1
∏k=1
bk
}alcatuieste o baza a spatiului E.
ii) Vectorii(Bi
)i∈1,m−1
, cu formula — [4, pag. 6] —

4.7 Operatii cu vectori 141
Bi = (−1)m−i ·
b1 ×·· ·×bi−1 ×∧
bi ×bi+1 ×·· ·×bm−1 ×(
m−1
∏k=1
bk
)
∥∥∥∥m−1
∏k=1
bk
∥∥∥∥2
2
, (4.85)
unde 1 ≤ i ≤ m−1, se gasesc ın hiperplanul H = SpanR{
b1, · · · ,bm−1
}.
iii) Au loc restrictiile de biortogonalitate
Bi ·bk = δik, 1 ≤ i, k ≤ m−1. (4.86)
iv) Setul{
B1, · · · ,Bm−1
}, dat de (4.85), constituie singura familie de vectori din H
care ındeplineste restrictia de biortogonalitate (4.86).
Solutia exercitiului 4.40. Partea i). Tinand seama de exercitiul 4.27, introducem
vectorul b =m−1
∏k=1
bk 6= 0E .
Formula (4.68) implica, via exercitiul 4.28, faptul ca determinantul matricei de
schimbare de baza — trecerea de la S1 la setul de vectori din enunt — are valoarea
∥∥∥∥∥m−1
∏k=1
bk
∥∥∥∥∥
2
2
> 0.
Partea iii). Folosim estimarile (4.69).
Partea ii).47 Fie subspatiul liniar M = Rb al spatiului E. Introducem subspatiul
liniar M⊥ ={
u ∈ E |u ·b = 0}
. Atunci — [11, pag. 129, Theorem] —,
E = M⊕M⊥ (4.87)
si dimRM⊥ = m−dimRM = m−1.
Pentru a stabili egalitatea (4.87), sa remarcam ca orice vector u ∈ E poate fi des-
compus astfel48:
u =
(u− u ·b
‖b‖22
·b)+
u ·b‖b‖2
2
·b
= v+w, v ∈ M⊥, w = λ ·b ∈ M, λ ∈ R.
Mai departe, exercitiul 4.26 ne conduce la
bi ·b = Bi ·b = 0, i ∈ 1,m−1,
47 Pentru alta abordare, vezi exercitiul 4.42.48 Reprezentarea este unica deoarece M ∩M⊥ = {0E}. Intr-adevar, daca ar exista vectorii p ∈ M
si q ∈ M⊥ astfel ıncat p = q, atunci ar avea loc egalitatile 0 = p ·q = ‖p‖22, de unde p = 0E .

142 4 Aplicatii
de unde deducem ca setul{
b1, · · · ,bm−1
}alcatuieste o baza a spatiului M⊥, res-
pectiv(Bi
)i∈1,m−1
⊂ M⊥. Aici, H = M⊥.
Afirm ca setul{
B1, · · · ,Bm−1
}alcatuieste o baza a spatiului M⊥. Pentru aceasta
este suficient sa aratam ca vectorii din set sunt liniar independenti peste corpul R
[11, pag. 11, Theorem]. Daca, prin absurd, ar exista numerele reale (αi)i∈1,m−1, nu
toate nule, astfel ıncat
m−1
∑i=1
αi ·Bi = 0E ,
atunci, conform (4.86), am ajunge la
0 =
(m−1
∑i=1
αi ·Bi
)·bk = αk ·
(Bk ·bk
)= αk, k ∈ 1,m−1,
adica la o contradictie. Afirmatia a fost probata.
Partea iv). Adaptam tehnica de la solutia exercitiului 4.29. Astfel, daca vectorii
(ci)i∈1,m−1,(di
)i∈1,m−1
desemneaza baze ale subspatiului H cu proprietatea ca
ci ·bk = di ·bk = δik, 1 ≤ i, k ≤ m−1,
atunci seturile
{c1, · · · ,cm−1,
b∥∥b∥∥2
2
},
{d1, · · · ,dm−1,
b∥∥b∥∥2
2
}
sunt baze ale spatiului E care verifica restrictia de biortogonalitate ın raport cu baza
de la partea i). ⊓⊔
Exercitiul 4.41. (Orientarea bazelor reciproce) In contextul exercitiului 4.40,
i) bazele S2, S3 sunt la fel orientate49 ın spatiul liniar E.
ii) Avem identitatea
m−1
∏i=1
Bi =
m−1
∏i=1
bi
∥∥∥∥m−1
∏i=1
bi
∥∥∥∥2
2
. (4.88)
iii)50 Daca familiile B1 =(bi
)i∈1,m−1
si B2 =(Bi
)i∈1,m−1
sunt baze reciproce ın
hiperplanul H , atunci seturile de vectori
49 Vezi [7, pag. 82].50 In particular, formula (4.85) rezulta din (4.67).

4.7 Operatii cu vectori 143
{b1, · · · ,bm−1,
m−1
∏i=1
bi
},
{B1, · · · ,Bm−1,
m−1
∏i=1
Bi
}
sunt baze reciproce ın spatiul liniar E.
iv) Este valabila relatia51
(a1, · · · ,am) =1(
f 1, · · · , f m
) .
Solutia exercitiului 4.41. Partea i). Matricea de schimbare de baza, G=(P t ·P)−1,
are determinantul pozitiv.
Partea ii). Deducem ca — via (4.85), respectiv (4.73) —
m−1
∏i=1
Bi =(−1)m−(m−1)
∥∥∥∥m−1
∏k=1
bk
∥∥∥∥2
2
·B1 ×B2 ×·· ·×Bm−2
×[
b1 ×·· ·×bm−2 ×(
m−1
∏k=1
bk
)]
=−1
∥∥∥∥m−1
∏k=1
bk
∥∥∥∥4
2
·
∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣
1 0 0 · · · 0 0 0
0 1 0 · · · 0 0 0...
... · · ·...
......
...
0 0 · · · 0 1 0 0
0 0 · · · 0 0 −(
b1, · · · ,bm−2,bm−1,m−1
∏k=1
bk
)0
b1 b2 · · · bm−3 bm−2 bm−1
m−1
∏k=1
bk
∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣
.
Partea iii). In virtutea relatiei (4.88), obtinem ca
(m−1
∏i=1
Bi
)·(
m−1
∏j=1
b j
)= 1. (4.89)
Conform exercitiului 4.40, partea iv), vectorii din familia B2 au reprezentarea
(4.85). Concluzia rezulta din (4.86), (4.89).
Partea iv). Pe baza (4.68), (4.62), obtinem ca
(a1, · · · ,am) = det[(
P−1)t]=
1
detP,
ceea ce ıncheie demonstratia. ⊓⊔
51 Via (4.72), aceasta egalitate este ın concordanta cu reprezentarea (4.80) a matricei G−1.

144 4 Aplicatii
Exercitiul 4.42. (Produsul vectorial multiplu: produse vectoriale de produse vecto-
riale) Fiind dati vectorii U = (ui)i∈1,m−1 , V = (vi)i∈1,m−1 ⊂ E, introducem matri-
cea produselor scalare — m ≥ 3 —
GU V =
u1 · v1 u1 · v2 · · · u1 · vm−1
u2 · v1 u2 · v2 · · · u2 · vm−1
...... · · ·
...
um−1 · v1 um−1 · v2 · · · um−1 · vm−1
=
(GU V
i j
)i, j∈1,m−1
si notam cu DU Vi j minorul corespunzator elementului GU V
i j , unde i, j ∈ 1,m−1.
Atunci,
i) daca setul V este liniar dependent peste corpul R, au loc identitatile
m−1
∑k=1
(−1)kDU Vik · vk = 0E , 1 ≤ i ≤ m−1, (4.90)
pentru orice U ⊂ E.
ii) Este valabila dubla egalitate
u1 ×·· ·×ui−1 ×∧
ui ×ui+1 ×·· ·×um−1 ×(
m−1
∏j=1
v j
)
=m−1
∑k=1
(−1)m+kDU Vik · vk =−
∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣
u1 · v1 u1 · v2 · · · u1 · vm−1
u2 · v1 u2 · v2 · · · u2 · vm−1
...... · · ·
...∧
ui · v1
∧
ui · v2 · · ·∧
ui · vm−1
...... · · ·
...
um−1 · v1 um−1 · v2 · · · um−1 · vm−1
v1 v2 · · · vm−1
∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣
(4.91)
pentru orice i ∈ 1,m−1, cu conventia ca determinantul sa fie dezvoltat dupa ultima
linie.
Solutia exercitiului 4.42. Remarcam ca demonstratia partii a doua a egalitatii (4.91)
se reduce la dezvoltarea determinantului din dreapta.
Partea i). Exista p ∈ 1,m−1 si numerele (λr)r∈I ⊂ R, unde I = 1,m−1 \{p},
astfel ıncat
vp = ∑r∈I
λr · vr.
Inmultim cu (−1)m membrul stang al identitatilor (4.90). Rezultatul se reorgani-
zeaza — folosind cea de-a doua egalitate (4.91) — drept
4.7 Operatii cu vectori 145
−
∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣
u1 · v1 · · · u1 · vp−1 u1 ·(
vp − ∑r∈I
λrvr
)u1 · vp+1 · · · u1 · vm−1
u2 · v1 · · · u2 · vp−1 u1 ·(
vp − ∑r∈I
λrvr
)u2 · vp+1 · · · u2 · vm−1
... · · ·...
...... · · ·
...
∧
ui · v1 · · ·∧
ui · vp−1
∧
ui ·(
vp − ∑r∈I
λrvr
) ∧ui · vp+1 · · ·∧
ui · vm−1
... · · ·...
...... · · ·
...
um−1 · v1 · · · um−1 · vp−1 um−1 ·(
vp − ∑r∈I
λrvr
)um−1 · vp+1 · · · um−1 · vm−1
v1 · · · vp−1 vp − ∑r∈I
λrvr vp+1 · · · vm−1
∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣
.
Partea ii). Daca vectorii din setul V sunt liniar dependenti peste corpul R, atunci,
via exercitiul 4.27, produsul lor vectorial este nul. Dubla egalitate (4.91) rezulta, ın
acest caz, din partea i). Este suficient, asadar, sa stabilim egalitatea din enunt atunci
cand vectorii din V sunt liniar independenti.
Pe baza exercitiilor 4.40, partea i), si 4.28, respectiv a reprezentarii (4.73), dedu-
cem ca membrul stang al dublei relatii de demonstrat este egal cu
1∥∥∥∥∥
m−1
∏j=1
v j
∥∥∥∥∥
2
2
·
∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣
u1 · v1 u1 · v2 · · · u1 · vm−1 u1 ·m−1
∏j=1
v j
u2 · v1 u2 · v2 · · · u2 · vm−1 u2 ·m−1
∏j=1
v j
...... · · ·
......
∧
ui · v1
∧
ui · v2 · · ·∧
ui · vm−1
∧
ui ·m−1
∏j=1
v j
...... · · ·
......
um−1 · v1 um−1 · v2 · · · um−1 · vm−1 um−1 ·m−1
∏j=1
v j
0 0 · · · 0
∥∥∥∥∥m−1
∏j=1
v j
∥∥∥∥∥
2
2
v1 v2 · · · vm−1
m−1
∏j=1
v j
∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣
. (4.92)
Dezvoltand determinantul (4.92) dupa ultima linie, obtinem

146 4 Aplicatii
m−1
∑k=1
(−1)m+k
∥∥∥∥∥m−1
∏j=1
v j
∥∥∥∥∥
2
2
·
∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣
u1 · v1 u1 · v2 · · ·∧
u1 · vk · · · u1 · vm−1 u1 ·m−1
∏j=1
v j
u2 · v1 u2 · v2 · · ·∧
u1 · vk · · · u2 · vm−1 u2 ·m−1
∏j=1
v j
...... · · ·
∧
... · · ·...
...
∧
ui · v1
∧
ui · v2 · · ·∧
ui · vk · · ·∧
ui · vm−1
∧
ui ·m−1
∏j=1
v j
...... · · ·
∧
... · · ·...
...
um−1 · v1 um−1 · v2 · · ·∧
um−1 · vk · · · um−1 · vm−1 um−1 ·m−1
∏j=1
v j
0 0 · · ·∧
0 · · · 0
∥∥∥∥∥m−1
∏j=1
v j
∥∥∥∥∥
2
2
∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣
· vk.
Mai departe, determinantii din suma se dezvolta dupa ultima linie. ⊓⊔
Exercitiul 4.43. (Produsul vectorial multiplu: produs scalar de produse vectoriale)
In contextul exercitiului 4.42, avem egalitatea
(m−1
∏i=1
ui
)·(
m−1
∏j=1
v j
)= detGU V
.
Solutia exercitiului 4.43. La fel ca anterior, este suficient sa stabilim egalitatea din
enunt atunci cand vectorii din V sunt liniar independenti.
Membrul stang al egalitatii de demonstrat este egal cu

4.7 Operatii cu vectori 147
(u1, · · · ,um−1,
m−1
∏j=1
v j
)
=1
∥∥∥∥∥m−1
∏j=1
v j
∥∥∥∥∥
2
2
·
∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣
u1 · v1 u1 · v2 · · · u1 · vm−1 u1 ·m−1
∏j=1
v j
u2 · v1 u2 · v2 · · · u2 · vm−1 u2 ·m−1
∏j=1
v j
...... · · ·
......
ui · v1 ui · v2 · · · ui · vm−1 ui ·m−1
∏j=1
v j
...... · · ·
......
um−1 · v1 um−1 · v2 · · · um−1 · vm−1 um−1 ·m−1
∏j=1
v j
0 0 · · · 0
∥∥∥∥∥m−1
∏j=1
v j
∥∥∥∥∥
2
2
∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣
.
Determinantul se dezvolta dupa ultima linie. ⊓⊔
Exercitiul 4.44. (Identitatea lui C. Jacobi 52) Fie m ≥ 3 si setul de vectori F =(f i
)i∈1,m
⊂ E. Atunci,
i) (Cazul m = 3) este valabila identitatea
(a×b
)× c+
(b× c
)×a+(c×a)×b = 0E , a, b, c ∈ E. (4.93)
ii) Introducand marimile
εi jk = sign [(i− j) · ( j− k) · (k− i)] , i, j, k ∈ 1,m,
au loc relatiile
εi jk = sign(k− j)
daca numarul i este sau cel mai mic sau cel mai mare dintre elementele multimii
{i, j,k}, respectiv
εi jk = sign( j− k)
ın caz contrar.
iii) (Cazul m = 3) Fiind data permutarea
σ =
(1 2 3
i j k
),
52 Vezi [35, pag. 14, Problem 1.2.8].
148 4 Aplicatii
avem53
εi jk = ∏1≤α<β≤3
σ(α)−σ(β )α −β
.
iv) Vectorii U =(ui jk
)i < j,
i, j, k ∈ 1,m
, cu formula
ui jk = f 1 ×·· ·× f i−1 ×∧
f i × f i+1 ×·· ·× f j−1 ×∧
f j × f j+1 ×·· ·× f m
×
f 1 ×·· ·× f k−1 ×
∧
f k × f k+1 ×·· ·× f m
, i < j, i, j, k ∈ 1,m,
satisfac identitatea
∑1≤i< j≤m
m
∑k=1
εi jk ·ui jk = 0E .
Solutia exercitiului 4.44. Partea i). Prima solutie. Exprimam termenii sumei din
membrul stang al expresiei (4.93) cu ajutorul dublului produs vectorial (4.75).
A doua solutie. Sa presupunem ca termenul(a×b
)× c este nenul. Atunci, via
exercitiul 4.27, setul{
a,b}⊂ E este liniar independent peste corpul R. Exercitiul
4.26 ne conduce la relatiile — vezi (4.87) —
M = R(a×b
), M⊥ = SpanR
{a,b}
si
(a×b
)× c ∈ M⊥
⊆ SpanR{
a,b,c}. (4.94)
Estimarea (4.94) implica
S =(a×b
)× c+
(b× c
)×a+(c×a)×b
∈ N = SpanR{
a,b,c}⊆ E.
Aceasta relatie ramane valabila si atunci cand setul{
a,b,c}⊂ E este liniar depen-
dent peste corpul R.
Remarcam ca, pentru a dovedi ca S = 0E , este suficient sa probam afirmatia ur-
matoare: vectorul S ıi este ortogonal unei familii de generatori a spatiului R-liniar
N.
53 Aici, numerele εi jk desemneaza simbolul T. Levi-Civita [35, pag. 15]. Se utilizeaza si denumirile
simbol de permutare [21, pag. 9] ori signatura permutarii σ [18, pag. 44].

4.7 Operatii cu vectori 149
Au loc identitatile
S ·a =(a×b,c,a
)+(c×a,b,a
)
=(c,a,a×b
)+(b,a,c×a
)
= (c×a) ·(a×b
)+(b×a
)· (c×a)
= (c×a) ·(a×b
)+[−(a×b
)]· (c×a)
= 0.
Analog, S ·b = S · c = 0.
Partea iv). Folosim tehnica celei de-a doua solutii de la partea i). Astfel,
S = ∑1≤i< j≤m
m
∑k=1
εi jk ·ui jk ∈ N = SpanR{
f 1, f 2, · · · , f m
}⊆ E.
Fie p ∈ 1,m. Vom estima, ın cele ce urmeaza, numerele S · f p.
Cazul p = 1. Deducem ca
S · f 1
=
m
∑j=2
∑k∈2,m\{ j}
ε1 jk ·(u1 jk · f 1
)+
∑
2≤i< j≤m∑
k∈1,m\{i, j}εi jk ·
(ui jk · f 1
)
=
m
∑j=2
∑k∈2,m\{ j}
ε1 jk · (−1)m−1 ·
f 1, f 2, · · · ,
∧
f j, · · · , f m, ∏β∈1,m\{k}
f β
+
∑
2≤i< j≤m∑
k∈1,m\{i, j}εi jk · (−1)m−1
×
f 1, f 1, f 2, · · · ,
∧
f i, · · · ,∧
f j, · · · , f m, ∏β∈1,m\{k}
f β
(4.95)
=
(−1)m−1 · ∑
j, k ∈ 2,m
j 6= k
sign(k− j) ·
∏
α∈1,m\{ j}f α
·
∏
β∈1,m\{k}f β
+0
= (−1)m−1 · ∑2≤ j<k≤m
(−PS jk +PS jk
)(4.96)
= 0,
unde PS jk =
(∏
α∈1,m\{ j}f α
)·(
∏β∈1,m\{k}
f β
).
Cazul p = m. In mod analog,

150 4 Aplicatii
S · f m =m−1
∑i=1
∑k∈1,m−1\{i}
εimk ·(uimk · f m
)
= − ∑i, k ∈ 1,m−1
i 6= k
[−sign(k− i)] ·
∏
α∈1,m\{i}f α
·
∏
β∈1,m\{k}f β
= ∑1≤i<k≤m
(−PS ik +PS ik)
= 0.
Cazul 2 ≤ p ≤ m−1. Avem relatiile54
S · f p
= ∑1≤i< j≤m
m
∑k=1
εi jk ·(ui jk · f p
)
=
[
∑1≤i< j<p
m
∑k=1
εi jk ·(ui jk · f p
)+ ∑
i<p< j
m
∑k=1
εi jk ·(ui jk · f p
)
+ ∑p<i< j≤m
m
∑k=1
εi jk ·(ui jk · f p
)]
+
[
∑1≤i<( j=) p
m
∑k=1
εipk ·(uipk · f p
)]+
[
∑(i=) p< j≤m
m
∑k=1
εp jk ·(up jk · f p
)]
= ( 0 — via metoda din (4.95) — )
+
∑
1≤i<p
∑
k∈1,i
+ ∑k∈i,p
+ ∑
k∈p,m
εipk ·
(uipk · f p
]
+
∑
p< j≤m
∑
k∈1,p
+
∑
k∈p, j
+ ∑k∈ j,m
εp jk ·
(up jk · f p
)
=
{
∑1≤i<p
[( 0 — via metoda din (4.96) — )+ ∑
k∈p,m
]εipk ·
(uipk · f p
)}
+
∑
p< j≤m
∑
k∈1,p
+( 0 — via metoda din (4.96) — )
εp jk ·
(up jk · f p
) .
Asadar,
54 Ca de obicei, sumele cu 0 termeni sunt nule.

4.7 Operatii cu vectori 151
S · f p
= ∑1≤i<p
∑p<k≤m
εipk ·(uipk · f p
)+ ∑
p< j≤m∑
1≤k<p
εp jk ·(up jk · f p
)
=
(
∑1≤i<p
∑p<k≤m
uipk · f p
)+
(
∑p< j≤m
∑1≤k<p
up jk · f p
)
=
∑
1≤i<p∑
p<k≤m
(−1)m−p+1 ·
∏
α∈1,m\{i}f α
·
∏
β∈1,m\{k}f β
+
∑
p< j≤m∑
1≤k<p
(−1)m−p ·
∏
α∈1,m\{ j}f α
·
∏
β∈1,m\{k}f β
= (−1)m−p · ∑1≤v<p
∑p<w≤m
(−PS vw +PS vw)
= 0,
ceea ce ıncheie demonstratia. ⊓⊔
Exercitiul 4.45. Fie m ≥ 3 si u ∈ E\{0E}. Atunci, exista vectorii(bi
)i∈1,m−1
⊂ E
cu proprietatea ca
u =m−1
∏k=1
bk. (4.97)
Vectorii pot fi alesi ıntr-o infinitate de moduri.
Solutia exercitiului 4.45. Construim baza S2 a spatiului E astfel ıncat f 1 = u [11,
pag. 11, Theorem]. Atunci, via exercitiul 4.30, optam pentru
b1 =(−1)m−1
(a1, · · · ,am)·a2, b j = a j+1, j ∈ 2,m−1.
La partea a doua, sa observam ca are loc egalitatea
b1 ×b2 ×b3 ×·· ·×bm−1 = b1 ×(λ ·b1 +b2
)×b3 ×·· ·×bm−1, λ ∈ R,
ceea ce ıncheie demonstratia. ⊓⊔
Exercitiul 4.46. Fie m ≥ 3 si u ∈ E. Daca
(u,v1,v2, · · · ,vm−1) = 0
pentru orice vectori (vi)i∈1,m−1 ⊂ E, atunci u = 0E .
Solutia exercitiului 4.46. Presupunem ca, prin absurd, u 6= 0E . Atunci, conform e-
xercitiului 4.45, exista vectorii(bi
)i∈1,m−1
din (4.97).
Luand vi = bi, unde 1 ≤ i ≤ m−1, ajungem la — via exercitiul 4.28 —
152 4 Aplicatii
0 = (u,v1,v2, · · · ,vm−1) = (−1)m−1
(m−1
∏k=1
bk
)·u = (−1)m−1
∥∥∥∥∥m−1
∏k=1
bk
∥∥∥∥∥
2
2
6= 0,
ceea ce este, evident, o contradictie. ⊓⊔
Introducem produsul tensorial — ın raport cu baza S1 — al vectorilor u, v ∈ E
cu formula — vezi [7, pag. 60] —
u⊗ v = u⊗S1v =
uS11...
uS1m
(
vS11 . . . v
S1m
)∈ Mm(R). (4.98)
Exercitiul 4.47. (Produsul tensorial ın baza S2) Este valabila expresia
u⊗ v = P
uS21...
uS2m
(
vS21 . . . v
S2m
)P t.
Solutia exercitiului 4.47. Utilizam relatiile (4.53). ⊓⊔
Exercitiul 4.48. Fie A, B ∈ Mm(R) si u, v, w, x ∈ E. Au loc egalitatile:
i) (u⊗ v)t = v⊗u.
ii)55 (u⊗ v)w = (v ·w)u.
iii) (u⊗ v)(w⊗ x) = (v ·w)(u⊗ x).iv) u · [(v⊗ v)w] = w · [(v⊗ v)u] = (u · v)(w · v).v) (Au)⊗ (Bv) = A(u⊗ v)B t .
vi) [(u⊗u)v]⊗ [(u⊗u)v] = (u · v)2 (u⊗u).
Solutia exercitiului 4.48. Partea i). Folosim formula (4.98).
Partea ii). Conform (4.56), avem
(u⊗ v)w =(e1 · · · em
)
uS11...
uS1m
·
(
vS11 . . . v
S1m
)
wS11...
wS1m
= (v ·w)
(e1 · · · em
)
uS11...
uS1m
.
Partea iii). Din nou, ıntrebuintam asociativitatea ınmultirii matricelor. Astfel,
55 Produsul tensorial fiind o aplicatie multiliniara, vezi [15, pag. 13-3], este necesar sa avem K=R
pentru ca produsul scalar sa verifice identitatea de demonstrat.

4.7 Operatii cu vectori 153
(u⊗ v)(w⊗ x) =
uS11...
uS1m
(
vS11 . . . v
S1m
)
wS11...
wS1m
(
xS11 · · · x
S1m
).
Partea iv). Prima egalitate rezulta din (4.58), tinand seama de faptul ca matricea
v⊗v este simetrica — via partea i) —. Pentru cea de-a doua egalitate folosim partea
ii).
Partea v). Prin calcul direct, pe baza definitiilor (4.98), (4.56).
Partea vi). Aplicam partea ii). ⊓⊔
Exercitiul 4.49. Fie bazele reciproce S2, S3 ale spatiului liniar E. Atunci,
i) matricele
A =m
∑i=1
ai ⊗ai, B =m
∑i=1
f i ⊗ f i
sunt simetrice si strict pozitiv-definite.
ii) ([4, pag. 7]) Sunt valabile descompunerile — rezolutia identitatii [29, pag. 168]
—
Im =m
∑i=1
f i ⊗ai =m
∑i=1
ai ⊗ f i.
iii) ([4, pag. 12]) B = A−1.
iv) Avem relatiile56
(f i ⊗ai
)2= f i ⊗ai, i ∈ 1,m,
respectiv
(f j ⊗a j
)(f k ⊗ak
)= Om, 1 ≤ j 6= k ≤ m.
v) Vectorii celor doua baze admit reprezentarile
ai = A f i, f i = Bai, i ∈ 1,m.
Solutia exercitiului 4.49. Partea i). Simetria matricelor A, B rezulta din exercitiul
4.48, partea i). Fiind dat vectorul nenul u ∈ E, avem — via acelasi exercitiu, partea
iv) —
u ·Au =m
∑i=1
u · [(ai ⊗ai)u] =m
∑i=1
(u ·ai)2. (4.99)
56 Operatorii Ti ∈ L(E,E), reprezentati ın baza S1 de matricele Ti = f i ⊗ai, sunt idempotenti —
proiectori [11, pag. 73, Theorem 1] — si are loc egalitatea E = Im T1 ⊕·· ·⊕ Im Tm.

154 4 Aplicatii
Cum u 6= 0E , coordonatele sale ın baza S2 — vezi exercitiul 4.38 — nu pot fi toate
nule, deci u ·Au > 057.
Partea ii). Observam ca, pe baza exercitiului 4.30, este suficient58 sa stabilim
prima dintre egalitati.
Fie v ∈ E. Atunci, — apeland, din nou, la exercitiul 4.38 —
(m
∑i=1
f i ⊗ai − Im
)v =
m
∑i=1
(ai · v) f i − v
= v− v = 0E .
Vectorul v fiind arbitrar, demonstratia se ıncheie caci Om este singura matrice pentru
care Omv = 0E indiferent de v.
Partea iii). Deducem ca — exercitiul 4.48, partea iii), si (4.63) —
AB = ∑1≤i, j≤m
(ai ⊗ai)(
f j ⊗ f j
)= ∑
1≤i, j≤m
(ai · f j
)(ai ⊗ f j
)
=m
∑k=1
ak ⊗ f k = Im,
respectiv — matricele A, B sunt simetrice —
Im = (Im)t = (AB)t = BA.
Partea iv). Folosim exercitiul 4.48, partea iii), si restrictia de biortogonalitate
(4.63).
Partea v). La prima egalitate, — via partea i) —,
A f i =m
∑k=1
(ak ⊗ak) f i =m
∑k=1
(ak · f i
)ak =
m
∑k=1
δkiak
= ai, i ∈ 1,m.
La cea de-a doua egalitate, — vezi partea iii) —,
Bai = A−1(A f i
)=(A−1A
)f i
= f i,
unde 1 ≤ i ≤ m. ⊓⊔
Exercitiul 4.50. Fie A∈Mm(R) o matrice simetrica si strict pozitiv-definita. Daca59
57 Matricea A fiind simetrica, valabilitatea relatiei (4.57) ın SpanR (S1) implica strict pozitiv defi-
nirea acesteia, vezi [15, pag. 8-7, Fact 1].58 Alta justificare a celei de-a doua egalitati: ıi aplicam operatia de transpunere primeia dintre
egalitati, conform exercitiului 4.48, partea i).59 Existenta vectorilor
(f i
)i∈1,m
⊂ E este asigurata de teorema lui J. Lagrange [18, pag. 319, Teo-
rema 1.6]. Vezi si exercitiul 4.51.

4.7 Operatii cu vectori 155
f i ·A f j = δi j, i, j ∈ 1,m, (4.100)
atunci
i) setul{
f 1, · · · , f m
}⊂ E este liniar independent peste corpul R.
ii) Sunt valabile identitatile
A =m
∑k=1
(A f k
)⊗(A f k
),
Im =m
∑k=1
(A f k
)⊗ f k =
m
∑k=1
f k ⊗(A f k
),
A−1 =m
∑k=1
f k ⊗ f k.
Solutia exercitiului 4.50. Partea i). Daca ar exista numerele (αi)i∈1,m ⊂R, nu toate
nule, astfel ıncat
m
∑j=1
α j · f j = 0E ,
atunci
0 = f i ·A0E = f i ·A(
m
∑j=1
α j · f j
)=
m
∑j=1
α j ·(
f i ·A f j
)
=m
∑j=1
δi jα j, 1 ≤ i ≤ m,
de unde va rezulta ca toate numerele (αi)i∈1,m ar fi nule.
Partea ii). Conform (4.100), setul
{A f 1, · · · ,A f m
}
verifica restrictia de biortogonalitate ın raport cu baza S2 a spatiului liniar E, deci
coincide cu S3. Concluziile exercitiului de fata vor rezulta din exercitiul 4.49.
Pe de alta parte, adaptand tehnicile de la exercitiile anterioare, putem realiza de-
monstratii independente ale cerintelor din enunt. Astfel, pentru u ∈ E, avem
u =m
∑i=1
(u ·A f i
)f i =
m
∑j=1
(u · f j
)(A f j
).
Apoi, — ın virtutea relatiei (4.58) —

156 4 Aplicatii
[m
∑k=1
(A f k
)⊗(A f k
)−A
]u =
m
∑k=1
[(A f k
)·u](
A f k
)−Au
=m
∑k=1
(f k ·Au
)(A f k
)−Au
= Au−Au = 0E ,
respectiv
[m
∑k=1
(A f k
)⊗ f k − Im
]u =
m
∑k=1
(f k ·u
)(A f k
)− Imu
= u−u = 0E .
Mai departe,
(A
m
∑k=1
f k ⊗ f k − Im
)u =
m
∑k=1
(f k ·u
)(A f k
)− Imu
= u−u = 0E
si
[(m
∑k=1
f k ⊗ f k
)A− Im
]u =
m
∑k=1
(f k ·Au
)f k − Imu
=m
∑k=1
[(A f k
)·u]
f k −u
= u−u = 0E ,
ceea ce ıncheie demonstratia. ⊓⊔
Exercitiul 4.51. Fie A ∈ Mm(R) o matrice simetrica si strict pozitiv-definita. Daca
(λi)i∈1,m sunt valorile proprii, nu neaparat distincte, ale matricei iar (ui)i∈1,m, unde60
ui ·u j = δi j pentru orice i, j ∈ 1,m, sunt eigenvectorii corespunzatori, atunci au loc
egalitatile61
60 Vectorii proprii corespunzand valorilor proprii distincte sunt ortogonali, conform exercitiului
4.19, partea iii). Eigenvectorii corespunzand aceleiasi valori proprii pot fi ortonormati folosind
procedeul J. Gram–E. Schmidt [18, pag. 352, exercitiul 2].61 Adica, reprezentarile spectrale ale operatorilor liniari respectivi, T = ∑
λ∈Σ(T )λ ·Pλ , conform [20,
pag. 260, Theorem 2.10]. In cazul spatiilor Hilbert generale, acest rezultat face parte din teorema
spectrala pentru operatori normali [34, pag. 84, Teorema 2.3.6].

4.7 Operatii cu vectori 157
A =m
∑k=1
λk · (uk ⊗uk) ,
Im =m
∑k=1
uk ⊗uk,
A−1 =m
∑k=1
1λk· (uk ⊗uk) ,
respectiv62
u ·Av =m
∑k=1
λk · (u ·uk)(v ·uk) , u, v ∈ E.
In contextul exercitiului 4.49, partea v), este valabila63 egalitatea
ai = Imui = ui, 1 ≤ i ≤ m.
Solutia exercitiului 4.51. Tinand seama de exercitiul 4.19, partea ii), introducem
vectorii f i =ui√
λi
. Atunci, A f i =√
λi · ui, respectiv f i ·A f j = δi j, unde i, j ∈ 1,m.
Aplicam exercitiul 4.50. ⊓⊔
62 Numerele (u ·ur)r∈1,m ⊂ R, din dezvoltarea u =m
∑r=1
(u ·ur)ur , se mai numesc si coeficienti J.
Fourier ai vectorului u ∈ E ın raport cu baza (ur)r∈1,m [27, pag. 79].
63 Baza reciproca a unei baze ortonormate [11, pag. 122] coincide cu aceasta.


Referinte Bibliografice
1. Amann, H.: Ordinary differential equations, An introduction to nonlinear analysis. Walter de
Gruyter, Berlin (1990)
2. Barbu, V.: Ecuatii diferentiale. Editura Junimea, Iasi (1985)
3. Bhatia, R.: Positive definite matrices. Princeton University Press, Princeton (2007)
4. Boulanger, Ph., Hayes, M.: Bivectors and waves in mechanics and optics. Chapman & Hall,
London (1993)
5. Bronson, R., Costa, G.B.: Matrix methods: Applied linear algebra, Third edition. Elsevier,
Amsterdam (2009)
6. Dinculeanu, N.: Integrarea pe spatii local compacte. Editura Academiei R.P.R., Bucuresti
(1965)
7. Frankel, T.: The geometry of physics, An introduction, Second edition. Cambridge University
Press, Cambridge (2006)
8. Gantmacher, F.R.: The theory of matrices, Volume one. AMS Chelsea Publishing, Providence
(2000)
9. Gaspar, D.: Analiza functionala. Editura Facla, Timisoara (1981)
10. Halanay, A.: Introducere ın teoria calitativa a ecuatiilor diferentiale. Editura Tehnica,
Bucuresti (1956)
11. Halmos, P.R.: Finite-dimensional vector spaces. Springer-Verlag, New York (1987)
12. Higham, N.J.: Functions of matrices, Theory and computation. SIAM, Philadelphia (2008)
13. Hille, E.: Analytic function theory, Volume I. Chelsea Publishing Comp., New York (1982)
14. Hirsch, M.W., Smale, S.: Differential equations, dynamical systems, and linear algebra. Aca-
demic Press, New York (1974)
15. Hogben, L. (ed.): Handbook of linear algebra. Chapman & Hall/CRC, Boca Raton (2007)
16. Horn, R.A., Johnson, C.R.: Matrix analysis. Cambridge University Press, Cambridge (1990)
17. Iacob, C.: Mecanica teoretica, Editia a II-a. Editura Didactica si Pedagogica, Bucuresti (1980)
18. Ion, I.D., Radu, N.: Algebra. Editura Didactica si Pedagogica, Bucuresti (1970)
19. Ionescu, D.V.: Ecuatii diferentiale si integrale, Editia a doua. Editura Didactica si Pedagogica,
Bucuresti (1972)
20. Kato, T.: Perturbation theory for linear operators. Springer-Verlag, Berlin (1995)
21. Kay, D.C.: Theory and problems of tensor calculus. McGraw-Hill, New York (1988)
22. Marinescu, G.: Teoria ecuatiilor diferentiale si integrale. Editura Didactica si Pedagogica,
Bucuresti (1963)
23. Nastasescu, C., Nita, C., Vraciu, C.: Bazele algebrei, Volumul I. Editura Academiei R.P.R.,
Bucuresti (1986)
24. Perko, L.: Differential equations and dynamical systems. Springer-Verlag, New York (1996)
25. Pinkus, A.: Totally positive matrices. Cambridge University Press, Cambridge (2010)
26. Rosculet, M.N.: Manual de analiza matematica, Volumul al II-lea, Calculul integral, Ecuatii
diferentiale. Editura Didactica si Pedagogica, Bucuresti (1966)
159

160 Referinte Bibliografice
27. Rudin, W.: Analiza reala si complexa, Editia a treia. Editura Theta, Bucuresti (1999)
28. Schouten, J.A.: Tensor analysis for physicists. Clarendon Press, Oxford (1951)
29. Schwabl, F.: Quantum mechanics, Fourth edition. Springer-Verlag, Berlin (2007)
30. Shilov, G.E.: Linear algebra. Dover Publications, Inc., New York (1977)
31. Silov, G.E.: Analiza matematica, Spatii finit-dimensionale. Editura Stiintifica si Enciclopedi-
ca, Bucuresti (1983)
32. Trefethen L.N., Bau, D.III: Numerical linear analysis. SIAM, Philadelphia (1997)
33. Valiron, G.: Cours d’analyse mathematique, Tome II, Equations fonctionnelles, Applications.
Masson et Cie, Paris, 1945
34. Vasilescu, F.H.: Initiere ın teoria operatorilor liniari. Editura Tehnica, Bucuresti (1987)
35. Wong, C.W.: Introduction to mathematical physics, Methods & concepts, Second edition.
Oxford University Press, Oxford (2013)
Index
actiunea operatorului, 4
aplicatia σ , 15
baza canonica, 4
baza duala, 3
baza reciproca, 130
baza standard, 4
blocuri nilpotente elementare, 55
coeficienti Fourier, 157
cofactor, 131
complement, 21
complexificat, 12
complexificatul unui operator, 17
componente, 1
comutare, 30
conjugare complexa, 15
covector, 2
decomplexificabil, 16
Det T , 6
diagonalizabil, 41
ecuatie caracteristica, 10
ecuatie diferentiala, 107
eigenvaloare, 10
eigenvector, 10
eigenvector generalizat, 11
exponentiala unei matrice, 84
forma canonica Jordan, 60
forma biliniara, 89, 122
identificare, 77
identitatea lui Jacobi, 147
identitatea lui Lagrange, 137
imagine, 29
intrare, vii
involutie, 15
legatura nou-vechi, 2
l2-norma, 73
matrice de reprezentare, 5
matrice Jordan elementara, 60
matrice similare, 6
matrice strict pozitiv-definita, 123
media Cesaro, 74
multiplicitate algebrica, 35
nil(e,T ), 48
nilpotent, 32
norma euclidiana de index 2, 73
nucleu, 29
operator diagonal, 41
operatia “⊗S1”, 152
operatia “⋆”, 77
operatia “⋆S1”, 122
palaria “ ⋆ ”, 132
polinomul caracteristic, 10
prelungire cu zero, 26
produs Cauchy, 78
produs matrice-vector, 122
produs mixt, 130
produs scalar, 89
produs scalar triplu, 130
produs tensorial, 152
produs vectorial, 130
produs vectorial dublu, 136, 137
produs vectorial multiplu, 144, 146
produs vectorial triplu, 136
proprietatea (H S ), 33
161
162 Index
Rank T , 6
realificat, 14
regula lui Cramer, 139
relatia “∼”, 6
restrictia de biortogonalitate, 129
semi-simplu, 41, 67
seturi biortogonale, 3
σ -baza, 64
sign u, 3
signatura permutarii, 148
simbolul de permutare, 148
simbolul lui Kronecker, 3
simbolul lui Levi-Civita, 148
sistem diferential, 92
solutie fundamentala, 112, 115
spatiu Banach, 73
spatiul ortogonal al unui subspatiu, 127
subspatiu Kralov, 109
suma Cesaro, 75
suma directa, 21
sumabilitate, 75
sumare prin parti, 77
Tr T , 6
valoare proprie, 10
vectori pe coloana, 1
vectori pe linie, 1