Dina Mica
82
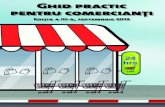
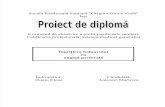
153 4. DINAMICA 4.1. DINAMICA PUNCTULUI MATERIAL 4.1.1. NOŢIUNI FUNDAMENTALE a) Lucrul mecanic a.1) Lucrul mecanic al unei for ţ e constante (ca mărime, direc ţ ie şi sens), al cărei punct de aplica ţ ie parcurge un drum rectiliniu Se consideră o forţă constantă ca măr ime, d irecţie ş i sens, al c ărei punct de aplicaţie parcurge drumul rectiliniu (fig. 4.1). α x y z O ) ( 1 t A ) ( 2 t t A ( ) r t r r F Fig. 4.1 Prin definiţie, lucrul mecanic al forţei este: sau, observând că vectorul deplasare poate fi pus sub forma : lucrul mecanic al forţei se mai poate scrie: (4.2) În concluzie, lucrul mecanic al unei forţe constante (ca mărime, direcţie şi sens), al cărei punct de aplicaţie parcurge un drum rectiliniu, este o mărime scalară
-
Upload
andreea5993 -
Category
Documents
-
view
214 -
download
0
description
545613651634j mv jghv jgvhgvk hkgb jhbliuh636846984654 6451546843659684 jkg uyg ukygug +6526649864+9+946520
Transcript of Dina Mica
-
153
4. DINAMICA
4.1. DINAMICA PUNCTULUI MATERIAL
4.1.1. NOIUNI FUNDAMENTALE
a) Lucrul mecanic a.1) Lucrul mecanic al unei fore constante (ca mrime, direcie i sens), al crei punct de aplicaie parcurge un drum rectiliniu
Se consider o for constant ca mrime, direcie i sens, al crei punct de aplicaie parcurge drumul rectiliniu (fig. 4.1).
x
y
z
O
)(1
tA
)(2
ttA( )r t
rr
F
Fig. 4.1
Prin definiie, lucrul mecanic al forei este:
sau, observnd c vectorul deplasare poate fi pus sub forma:
lucrul mecanic al forei se mai poate scrie:
(4.2)
n concluzie, lucrul mecanic al unei fore constante (ca mrime, direcie i sens), al crei punct de aplicaie parcurge un drum rectiliniu, este o mrime scalar
-
154
egal cu produsul scalar dintre vectorul for i vectorul deplasare. Pe baza relaiei (4.2) se poate face urmtoarea discuie:
dac 0,2
, atunci i se numete lucru mecanic motor;
dac 2
, atunci (lucrul mecanic al unei fore a crei direcie este
perpendicular pe direcia de deplasare, este nul);
dac ,2
, atunci i se numete lucru mecanic rezistent.
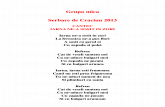
a.2) Lucrul mecanic al unei fore variabile (ca mrime, direcie i sens) al crui punct de aplicaie parcurge o curb.
Se consider o for variabil ca mrime, direcie i sens, al crui punct de aplicaie parcurge o curb, de la A la B (fig. 4.2).
x
y
z
O
)(1
tA
)(2
ttA
( )r t
r
dr
[C]
X
X
A
B
F
Fig. 4.2
Pentru a calcula lucrul mecanic al forei , de la A la B, se determin, mai
nti, lucrul mecanic pe drumul elementar , unde fora se poate considera
constant, iar arcul elementar se poate nlocui cu coarda :
Avnd lucrul mecanic elementar, lucrul mecanic al forei, de la A la B, va fi:
Considernd expresiile vectoriale ale forei i deplasrii elementare:
-
155
relaia (4.4) devine
a.3) Lucrul mecanic al unei fore conservative
O for este conservativ dac deriv dintr-o funcie scalar U(x,y,z), numit funcie de for. Se poate, deci, scrie:
Pentru a putea fi scris sub aceast form, componentele forei trebuie s
ndeplineasc condiiile lui Cauchy:
nlocuind expresia forei dat de relaia (4.7), n relaia (4.3), se obine lucrul mecanic elementar al unei fore conservative:
Lucrul mecanic total, de la A la B, n cazul forei conservative va fi:
Relaia (4.10) arat c lucrul mecanic al forei conservative nu depinde de traiectoria parcurs, ci doar de poziia iniial i poziia final a punctului pe traiectorie. Unitatea de msur pentru lucrul mecanic, n sistemul internaional SI, este Joul-ul.
Aplicaia 4.1 Se consider un punct material avnd greutatea n cmp gravitaional (fig. 4.3). Se cere s se calculeze lucrul mecanic al forei de greutate, dac punctul material se deplaseaz de la A la B. Rezolvare:
Dac se alege sistemul de axe cartezian ca n figur, fora de greutate are expresia:
i ndeplinete condiiile lui Cauchy, deci deriv dintr-o funcie de for:
-
156
x
y
z
O
A
B
o
o
AZ
BZ
hG
Fig. 4.3
Comparnd cele dou relaii, rezult:
din care, prin integrare, rezult expresia funciei de for:
unde C este constanta de integrare.
Aplicnd relaia (4.10) se obine lucrul mecanic al forei de greutate, dac punctul material se deplaseaz de la A la B:
Aplicaia 4.2 Se consider un arc cu lungimea , n stare liber (fig. 4.4). S se calculeze lucrul mecanic al forei elastice dezvoltat la ntinderea arcului ntre punctele A i B.
y
A B P
Ax
Bx
eF
x
x
1O O
Fig. 4.4
-
157
Rezolvare:
Prin ntinderea arcului cu distana x (de la O la P), se dezvolt o for elastic direct proporional cu distana OP i constanta arcului k:
care, avnd n vedere c este o expresie care ndeplinete condiiile lui Cauchy, deriv dintr-o funcie de for:
Din cele dou expresii, prin integrare, rezult funcia de for:
unde C este constanta de integrare.
Aplicnd relaia (4.10) se obine lucrul mecanic al forei elastice dezvoltat la ntinderea arcului ntre punctele A i B:
b) Puterea Puterea este o mrime scalar, se noteaz cu P, i se definete astfel:
b.1) Dac sarcinile (fore i momente) sunt constante n timp:
b.2) Dac sarcinile (fore i momente) sunt variabile n timp:
Unitatea de msur pentru putere este watt-ul, n sistemul SI:
sau calul putere (ca unitate de msur toleret, frecvent utilizat); legtura dintre cele dou uniti de msur este dat de relaia:
c) Randamentul mecanic
Intr-un motor forele motoare produc lucru mecanic motor , iar forele
rezistente produc att lucru mecanic util , ct i lucru mecanic pasiv (pentru
nvingerea frecrilor), fiind evident relaia:
Randamentul mecanic este mrimea adimensional, subunitar, care arat modul de utilizare a lucrului mecanic motor pentru a obine lucru mecanic util:
-
158
Dac se dorete a se pune n eviden pierderile nregistrate prin transformarea energetic, se calculeaz coeficientul de pierderi:
Legtura dintre cele dou mrimi este dat de relaia:
d) Impulsul (cantitatea de micare) Impulsul (cantitatea de micare) pentru un punct material de mas m, care se
deplaseaz cu viteza , este, prin definiie, mrimea vectorial:
e) Momentul cinetic (momentul cantitii de micare) Momentul cinetic (momentul cantitii de micare) calculat ntr-un punct O,
pentru un punct material de mas m, care se deplaseaz cu viteza , este, prin definiie, mrimea vectorial:
n care este vectorul de poziie al punctului material fa de punctul O.
f) Energia mecanic Energia mecanic este suma dintre energia cinetic (exprim micarea
corpului) i energia potenial (exprim poziia corpului):
Prin definiie, energia cinetic a unui punct material de mas m, care se
deplaseaz cu viteza , este mrimea scalar:
Energia potenial se pune n eviden cnd fora care acioneaz asupra punctului, este conservativ. Prin definiie, energia potenial a unui punct material
aflat ntr-o poziie A, fa de o poziie iniial , este mrimea scalar:
Spre exemplu, n cazul punctului material de mas m, aflat n cmp gravitaional (fig. 4.5), energia potenial se calculeaz pornind de la expresia funciei de for n cmp gravitaional (Aplicaia 4.1), la care trebuie schimbat semnul, deoarece s-a schimbat sensul axei Oz:
-
159
z
h m g
P
O
Fig. 4.5
Conform relaiei , energia potenial a punctului material la cota h, este:
4.1.2. TEOREME GENERALE
N DINAMICA PUNCTULUI MATERIAL
a) Teorema impulsului Dac se deriveaz n raport cu timpul relaia (4.18), se obine:
relaie care reprezint teorema impulsului: Derivata n raport cu timpul a impulsului, este egal cu fora rezultant care acioneaz asupra punctului material.
Relaia vectorial proiectat pe cele trei axe ale sistemului cartezian determin relaiile scalare:
Dac fora rezultant care acioneaz asupra punctului material este nul, relaia
devine:
sau, prin integrare:
ceea ce arat c impulsul se conserv atunci cnd fora rezultant care acioneaz asupra punctului material este nul.
-
160
b) Teorema momentului cinetic Derivnd n raport cu timpul relaia (4.19), se obine:
relaie care reprezint teorema momentului cinetic: Derivata n raport cu timpul a momentului cinetic calculat n raport cu un punct O, este egal cu momentul rezultant al forelor exterioare care acioneaz asupra punctului material, calculat n acelai punct O.
Relaia vectorial proiectat pe cele trei axe ale sistemului cartezian determin relaiile scalare:
Dac momentul rezultant al forelor exterioare este nul, atunci , i prin integrare rezult:
relaie care arat c momentul cinetic se conserv. n relaia constanta se determin din condiiile iniiale.
Observaie Cele 2 teoreme (a impulsului i momentului cinetic) pot fi grupate n teorema torsorului: Derivata n raport cu timpul a torsorului impulsului,
calculat n raport cu un punct O, este egal cu torsorul forelor exterioare care acioneaz asupra punctului material, calculat n acelai punct O.
c) Teorema energiei cinetice Dac se difereniaz relaia se obine:
nmulind i mprind membrul drept al relaiei cu dt, se obine:
Relaia exprim teorema energiei cinetice: Variaia energiei cinetice n intervalul de timp dt, este egal cu lucrul mecanic elementar efectuat de fora rezultant care acioneaz asupra punctului material, n acelai interval de timp.
n s-au folosit relaiile cunoscute:
-
161
Dac se integreaz relaia , se obine teorema energiei cinetice sub form finit:
adic: Variaia energiei cinetice a punctului material, ntre dou poziii oarecare, este egal cu lucrul mecanic al forelor care acioneaz asupra punctului material ntre cele dou poziii.
d) Teorema conservrii energiei mecanice Pornind de la teorema energiei cinetice (relaia 4.33), i considernd c
forele sunt conservative, rezult:
Dac se nlocuiete energia potenial:
rezult:
Prin integrarea relaiei rezult teorema conservrii energiei mecanice:
Aplicaia 4.3 Un corp de greutate G alunec pe planul nclinat AB, pornind din punctul A din repaus, i i continu micarea pe planul orizontal pn n punctul
C, unde viteza sa este nul (fig. 4.6). Cunoscnd distana , unghiul de nclinare a planului , i coeficientul de frecare de alunecare pe ambele planuri , se cere s se calculeze viteza n punctul B i distana BC parcurs de corp pe planul orizontal, pn la oprire. Rezolvare:
Problema se poate rezolva aplicnd fie teorema impulsului, fie teorema
energiei cinetice.
a) Aplicnd teorema impulsului, sub form scalar, pe planul nclinat, ntre punctele A i B, i alegnd sistemul de referin Axy cu axa Ax n planul AB, se obin ecuaiile:
sau, nlocuind impulsul pe cele dou direcii, i , rezult:
-
162
Se nlocuiete reaciunea normal N n prima ecuaie i, fcnd simplificrile, se obine ecuaia diferenial de ordinul 2:
y
A
CB
xx
x
1N
G
T
G
1T
N
Fig. 4.6
Integrnd suscesiv, rezult relaiile:
n care constantele de integrare se determin din condiiile iniiale: . Rezult:
n final, legile de micare pe planul nclinat, sunt:
Timpul necesar corpului pentru a se deplasa pe planul nclinat, din A n B, se obine
din prima ecuaie, pentru :
nlocuind n ecuaia vitezei se obine:
Aplicnd teorema impulsului, sub form scalar, pe planul orizontal, ntre punctele B i C, se obin ecuaiile:
-
163
sau, nlocuind impulsul pe cele dou direcii, i , rezult:
Fcnd calculele, se obine ecuaia diferenial de ordinul 2:
din care, prin integrare succesiv, se obine:
Constantele de integrare se determin din condiiile iniiale: . Rezult:
Legile de micare pe planul orizontal vor fi:
nlocuind n legea vitezei, se obine timpul necesar deplasrii corpului pe planul orizontal, pn la oprire:
Cu calculat, din prima ecuaie se obine distana parcurs de corp pe planul orizontal, pn la oprire:
b) Aplicnd teorema energiei cinetice, pe planul nclinat, ntre punctele A i B, avem:
sau, fcnd nlocuirile:
Dup simplificri rezult:
Dac se aplic teorema energiei cinetice, pe planul orizontal, ntre punctele B i C, avem:
-
164
sau, fcnd nlocuirile:
De aici rezult distana parcurs de corp pe planul orizontal, pn la oprire:
4.1.3. DINAMICA PUNCTULUI MATERIAL LIBER
4.1.3.1. Ecuaiile difereniale
ale micrii punctului material liber
Ecuaiile difereniale ale micrii punctului material liber se obin din relaia fundamental a dinamicii:
care se proiecteaz pe axele sistemului de coordonate cu care se lucreaz: - n sistemul cartezian:
- n sistemul polar:
- n sistemul Frenet:
-
165
Sistemele prezentate n relaiile , i reprezint ecuaiile difereniale ale miscrii punctului material liber n sistemul cartezian, polar, respectiv Frenet. Sistemele de ecuaii admit soluie unic, adic sub aciunea unei fore date, micarea punctului material este unic. Rezolvnd sistemele, se obin ecuaiile parametrice ale traiectoriei.
4.1.3.2. Micarea punctului material n vid
Dac se neglijeaz rezistena aerului, micarea punctului material n vid
reprezint un exemplu de micare a punctului material liber. Pentru studiul micrii se consider un punct material de mas m, care este aruncat n plan vertical, n vid, cu
viteza iniial a crei direcie face cu orizontala unghiul (fig. 4.7).
y
O
M B
z
xAgm
v
O
vA
Fig. 4.7
Se scriu relaiile pentru punctul material aflat n poziia M i se obin ecuaiile difereniale ale micrii:
-
166
Se observ c ecuaiile difereniale sunt independente. Prin integrare se obin ecuaiile vitezelor pe cele 3 axe:
Pentru rezult:
i constantele de integrare vor fi:
Ecuaiile difereniale ale vitezelor pe cele 3 axe sunt:
Integrnd, n continuare, relaiile rezult:
n care constantele de integrare sunt: la .
n aceste condiii, ecuaiile difereniale ale deplasrilor (ecuaiile parametrice ale traiectoriei) pe cele 3 axe sunt:
Din ultima ecuaie din relaiile se deduce c traiectoria se afl n planul vertical xOy. Eliminnd parametrul t din primele dou ecuaii, se obine ecuaia traiectoriei:
care este o parabol n planul vertical xOy.
Relaiile , i permit determinarea elementelor caracteristice ale traiectoriei, astfel:
-
167
1) Timpul de micare de la O la A se obine din relaiile , ecuaia a doua, fcnd :
Ecuaia are dou soluii: i
2) Btaia (distana de la O la A) se obine nlocuind n prima ecuaie din relaiile :
Btaia maxim se obine punnd condiia de maxim pentru funcia trigonometric din
relaia . Astfel, pentru rezult .
3) nlimea maxim Se calculeaz, mai nti, timpul de micare de la O la B, punnd condiia ca viteza
s fie nul n punctul B:
Rezult:
nlocuind n ecuaia a doua din relaiile , se obine nlimea maxim:
4) Viteza n punctul A se obine din relaiile , nlocuind :
5) Parabola de siguran este nfurtoarea traiectoriilor, considernd unghiul ca parametru, i meninnd viteza iniial constant n modul (fig. 4.8). Ecuaia
parabolei de siguran se obine eliminnd parametrul din sistemul de ecuaii:
-
168
y
xO 1
2
vO
vO
Parabola de siguranta
Fig. 4.8
Dac se face nlocuirea:
atunci ecuaia traiectoriei poate fi scris sub forma:
Derivnd n raport cu relaia , rezult:
Se egaleaz cu zero relaia i se obine:
care se nlocuiete n relaia , rezultnd ecuaia parabolei de siguran:
4.1.3.3. Micarea punctului material n aer
Dac punctul material se mic n aer, acesta ntmpin o rezisten la naintare direct proporional cu viteza de deplasare, i a crei direcie se afl pe tangenta la traiectorie:
-
169
unde k este un coeficient ce depinde de forma corpului i se determin experimental, iar n este un numr ntreg, se determin tot experimental i depinde de vitez (Tabelul 4.1).
Tabelul 4.1
1.250 250..300 300..375 375..420 420..520
1 2 3 5 3 2
n continuare vom considera cazul micrii punctului material n aer, cu
viteze mai mici de 1 . Pentru studiul micrii se consider un punct material de
mas m, care este aruncat n plan vertical, cu viteza iniial a crei direcie face cu
orizontala unghiul (fig. 4.9).
M D
F
traiectoria
n aer
traiectoria
n vid
vO
gm
R
x
y
OC
vC
Fig. 4.9
Rezistena la naintare ntmpinat de punctul material va fi:
Ecuaiile difereniale ale micrii punctului material n aer sunt:
Prima ecuaie din relaiile este o ecuaie diferenial de ordinul doi, omogen; ecuaia sa caracteristic este de forma:
i are rdcinile i . Soluia ecuaiei este de forma:
-
170
Cea de-a doua ecuaie din relaiile este o ecuaie diferenial de ordinul doi, neomogen. Soluia sa se compune din soluia ecuaiei omogene, avnd aceai form
dat de relaia , i o soluie particular care verific ecuaia diferenial:
Expresiile vitezelor pe cele dou axe se obin prin derivarea relaiilor i . Rezult:
Constantele se determin din condiiile iniiale:
Rezolvnd sistemul de ecuaii, se obin constantele:
Ecuaiile difereniale ale deplasrilor (ecuaiile parametrice ale traiectoriei) pe cele dou axe vor fi:
iar ecuaiile vitezelor pe cele dou axe vor fi:
Ecuaia traiectoriei punctului material n aer se obine eliminnd timpul din ecuaiile
. Rezult ecuaia:
-
171
Elementele caracteristice ale traiectoriei punctului material n aer sunt:
1) Asimptota vertical este dreapta vertical care trece prin punctul F, la care tinde traiectoria punctului material cnd t tinde la infinit. Distana de la origine la
punctul F (btaia), se determin din prima ecuaie din relaiile , pentru t tinznd la infinit:
2) Timpul de micare de la O la D se obine din relaiile , ecuaia a doua, fcnd :
3) Abscisa punctului D se obine introducnd n prima ecuaie din relaiile :
4) nlimea maxim a traiectoriei se obine introducnd n a doua ecuaie din
relaiile :
4.1.3.4. Micarea punctului material sub aciunea forelor centrale
Fora central este fora al crei suport trece tot timpul printr-un punct fix O, numit pol. Exemple: fora gravitaional, fora elastic, etc. Ecuaiile difereniale ale micrii, n coordonate polare sunt:
Se observ c expresia din parantez, din ecuaia a doua din relaiile , poate fi pus sub forma:
care prin integrare d:
-
172
n relaia C se numete constanta ariilor i, innd cont de expresia vitezei areolare, este:
Relaiile i arat c micarea punctului material sub aciunea forelor centrale se face cu vitez areolar constant.
nlocuind viteza unghiular din relaia n prima ecuaie din relaiile , se obine ecuaia diferenial a micrii:
Pentru rezolvarea acestei ecuaii, se face schimbarea de variabil de la t la . Astfel, derivata nti a lui r n raport cu timpul devine:
iar derivata de ordinul doi a lui r n raport cu timpul este:
nlocuind relaiile i n relaia rezult ecuaia diferenial a micrii punctului material sub aciunea forelor centrale, denumit i ecuaia lui Binet:
Aplicaia 4.4 S se studieze micarea punctului material sub aciunea forei de atracie universal. Rezolvare:
Fora de atracie universal dintre dou corpuri cu masele m i M, aflate la distana r, este o for central, i se calculeaz cu relaia lui Newton:
n care f este constanta universal:
nlocuind relaia n ecuaia lui Binet se obine ecuaia diferenial de ordinul doi:
-
173
care are ecuaia caracteristic:
cu rdcinile .
Soluia ecuaiei difereniale este de forma:
n care reprezint soluia ecuaiei omogene:
iar reprezint soluia particular, care trebuie s verifice ecuaia , i este:
Rezult, deci, c soluia ecuaiei difereniale este:
Dac se fac notaiile:
relaia capt forma:
sau:
Legtura dintre noile constante de integrare i constantele iniiale, este dat de relaiile:
Soluia din relaia se mai poate prelucra i aduce sub forma:
-
174
care este ecuaia unei conice n coordonate polare, n care p reprezint parametrul conicei i e reprezint excentricitatea conicei (fig. 4.10).
O
P
P
M
r
0
0
0v
)(
Fig.4.10
Constantele de integrare se determin din condiiile iniiale:
i, fcnd calculele, se obine:
n continuare, folosind relaiile , i se obine ptratul excentricitii:
Relaia permite urmtoarea discuie:
-
175
dac , atunci i traiectoria este o elips;
dac , atunci i traiectoria este o parabol;
dac , atunci i traiectoria este o hiperbol.
Rezult, deci, c natura conicei depinde doar de viteza iniial . Cu rezultatele obinute se pot determina vitezele cosmice (vitezele minime
necesare cu care trebuie lansat un corp de la suprafaa Pmntului, astfel nct acesta s se nscrie pe o anumit traiectorie), astfel (fig. 4.11):
Ox
0r
Iv
IIv
IIIv
elips
parabol
hiperbol
h
Fig. 4.11
1. Viteza I-a cosmic este viteza minim cu care trebuie lansat un corp de pe suprafaa Pmntului, astfel nct s devin satelit artificial al acestuia, adic traiectoria sa s fie un cerc. Ecuaia traiectoriei n acest caz va fi:
n care R este raza Pmntului ( ), iar h este nlimea traiectoriei fa de suprafaa Pmntului. n aceste condiii, ecuaia lui Binet devine:
Dac se consider c lansarea satelitului se face cu unghiul , atunci constanta
C, conform relaiei , este , care, nlocuit n relaia conduce la viteza iniial:
-
176
Din egalitatea dintre fora de greutate a satelitului la suprafaa Pmntului, i fora de atracie universal:
se obine:
care, nlocuit n relaia determin prima vitez cosmic:
2. Viteza a II-a cosmic este viteza minim cu care trebuie lansat un corp de pe suprafaa Pmntului, astfel nct acesta s prseasc zona de atracie a Pmntului, iar traiectoria s devin o parabol:
3. Viteza a III-a cosmic este viteza minim cu care trebuie lansat un corp de pe suprafaa Pmntului, astfel nct acesta s prseasc sistemul solar, iar traiectoria s
devin o hiperbol. Calculele conduc la .
4.1.4. DINAMICA PUNCTULUI MATERIAL SUPUS LA LEGTURI
4.1.4.1. Ecuaiile difereniale ale micrii
Punctul material supus la legturi, aa cum a fost definit la Static, este punctul material cruia i se impun anumite restricii, i anume de a se afla, n permanen, pe o curb, sau pe o suprafa. Se consider punctul material M aflat pe
suprafaa [S], asupra cruia acioneaz un sistem de fore exterioare de rezultant (fig. 4.12). Reaciunea rezultant dat de suprafa este:
n care este reaciunea normal i este fora de frecare. Dac punctul material se
deplaseaz pe suprafaa S, se observ din figura 4.12 c forele i nu mai sunt egale i direct opuse, aa cum se ntmpla la Static, la studiul echilibrului punctului material.
-
177
M
R
F
N
T
S
Fig. 4.12
Ecuaia de micare a punctului material supus la legturi este:
care proiectat n diferite sisteme de coordonate determin relaiile:
n coordonate carteziene:
n coordonate cilindrice:
n coordonate Frenet:
4.1.4.2. Pendulul matematic
Pendulul matematic este un punct material care se deplaseaz pe o traiectorie circular situat ntr-un plan vertical. ntruct punctul material este constrns s se deplaseze pe traiectoria circular, rezult c acesta este un punct material supus la legturi. Pendulul matematic poate fi realizat fie cu legtur bilateral (de exemplu o bil aflat ntr-un tub circular vertical), fie cu legtur unilateral (de exemplu o bil prins cu un fir inextensibil, fixat ntr-un punct fix O).
-
178
1) Ecuaia diferenial a micrii. Se consider un punct material M de mas m, prins cu ajutorul unui fir considerat inextensibil de lungime l, ntr-un punct fix O
(fig. 4.13). Se noteaz cu unghiul fcut de direcia firului cu verticala care trece prin O.
N
gm
n
M
O
Fig. 4.13
Utiliznd primele dou ecuaii din relaiile se obine sistemul:
care, dac se nlocuiete i se simplific masa m, devine:
Prima ecuaie din relaiile reprezint ecuaia diferenial de ordinul doi a
micrii pendulului matematic. Pentru rezolvare, se nmulete cu , dup care se integreaz i se obine:
Punnd condiiile iniiale , rezult constanta de integrare:
care, nlocuit n relaia determin expresia vitezei unghiulare n funcie de unghiul :
-
179
Reaciunea N se obine dac se nlocuiete relaia n ecuaia a doua din
relaiile . Fcnd calculele rezult:
Observaie: Pentru oscilaii mici , funcia trigonometric
poate fi nlocuit cu unghiul , i ecuaia diferenial de ordinul doi a micrii este:
sau, cu notaia:
care reprezint pulsaia micrii, ecuaia diferenial devine:
Pentru rezolvarea ecuaiei, se scrie ecuaia caracteristic a micrii sub forma:
care are rdcinile . Soluia ecuaiei i derivata sa vor fi:
Constantele de integrare i se determin din aceleai condiii iniiale din cazul
marilor oscilaii. Rezult , i legea de micare n cazul pendulului cu
oscilaii mici :
Se observ c micarea este oscilatorie armonic, cu amplitudinea:
i perioada:
2) Studiul calitativ al micrii pendulului. 2.a) Cazul legturilor bilaterale. Ne propunem s determinm amplitudinea micrii
pendulului , adic unghiul pentru care viteza unghiular este nul 0 . Pentru
aceasta se egaleaz cu zero relaia i se obine:
-
180
tiind c funcia trigonometric ia valori cuprinse ntre i , membrul
drept din relaia trebuie s ndeplineasc condiia dubl:
Dac se prelucreaz inegalitile din rezult urmtoarele observaii:
1. , condiie ndeplinit ntotdeauna;
2. , sau , condiie care trebuie ndeplinit, pentru ca
micarea punctului material s fie oscilatorie. Dac atunci
punctul material va descrie o traiectorie circular complet. 2.b) Cazul legturilor unilaterale. Amplitudinea micrii se calculeaz cu aceeai
relaie , utilizat n cazul legturilor bilaterale, fiind valabil aceeai condiie
pentru ca micarea s fie oscilatorie ( ). n cazul legturii unilaterale,
exist posibilitatea desprinderii pendulului de pe traiectorie, situaie n care reaciunea
normal N devine nul. Dac se noteaz cu unghiul de desprindere, egalnd cu
zero relaia se obine:
Fcnd observaia c desprinderea are loc pentru unghiuri de desprindere situate n
cadranul 2 ( ), atunci membrul drept din relaia trebuie s
ndeplineasc condiiile:
care prelucrate, conduc la:
n concluzie, pentru ca s aib loc desprinderea pendulului de pe traiectorie, trebuie
ca viteza iniial a acestuia s ndeplineasc condiiile ; n afara acestor valori, nu are loc desprinderea.
Dac se analizeaz mpreun cele dou fenomene (oprirea i desprinderea), sunt posibile urmtoarele cazuri:
1. , sau , adic:
-
181
relaie care este posibil doar pentru , sau . Viteza
iniial a punctului material, n acest caz, este:
micarea fiind oscilatorie la limit.
2. este micarea oscilatorie a punctului material, situaie n care viteza iniial este:
3. ; n acest caz apar urmtoarele situaii:
3.1. micare cu desprindere a punctului material;
3.2. micare circular a punctului material.
4.1.5. DINAMICA MICRII RELATIVE A PUNCTULUI MATERIAL
4.1.5.1. Ecuaia fundamental a dinamicii
n micarea relativ. Fore complementare
Fa de un sistem de referin fix, ecuaia fundamental a dinamicii este dat
de relaia Pentru a scrie ecuaia fundamental a dinamicii fa de un sistem de referin, care la rndul su se afl n micare, se pornete de la expresia acceleraiei absolute a punctului material:
din care rezult acceleraia relativ:
Dac se nmulete relaia cu masa m a punctului material, se obine ecuaia fundamental a dinamicii fa de un sistem mobil:
n relaia s-au fcut urmtoarele notaii:
rezultanta forelor exterioare i de legtur:
fora complementar (inerial) de transport:
fora complementar (inerial) Coriolis:
-
182
n cazul n care forele complementare de transport i Coriolis sunt nule, adic:
ecuaia fundamental a dinamicii fa de un sistem mobil, se scrie la fel dac se raporteaz la un sistem de referin fix. Un astfel de sistem de referin care
ndeplinete condiiile , adic execut o micare de translaie rectilinie i uniform, se numete sistem inerial.
Aplicaia 4.5 Un cursor de greutate G alunec fr frecare pe bara OA, care
se rotete n plan orizontal cu viteza unghiular (fig. 4.14). tiind c bara are seciune transversal constant pe lungime, este omogen i are lungimea
, iar cursorul ncepe micarea din centrul de greutate al barei, cu viteza iniial zero, s se determine legea micrii relative a cursorului fa de bar, precum i reaciunile barei asupra cursorului.
x
1x
1zz
1y
y
1OO
V
G
H
cF tF
A
Fig. 4.14
Rezolvare:
Se aleg sistemele de referin: sistemul fix i mobil Oxyz, care, la momentul iniial, sunt suprapuse. Axa Ox a sistemului mobil se afl n axa barei. Din analiza cinematic a cursorului rezult urmtoarele componente ale acceleraiei:
acceleraia relativ:
acceleraia de transport, care are doar componenta normal:
-
183
acceleraia Coriolis:
Ecuaia vectorial de micare a cursorului fa de bar, conform relaiei
este:
n care i sunt forele de reaciune date de bar, iar forele complementare au expresiile:
fora complementar de transport:
fora complementar Coriolis:
n aceste condiii, ecuaiile scalare ale micrii cursorului fa de bar sunt:
Prima ecuaie reprezint ecuaia diferenial de ordinul doi a micrii relative a cursorului:
a crei soluie este de forma:
Din condiiile iniiale:
rezult constantele de integrare:
Astfel, legea micrii relative a cursorului fa de bar este:
Reaciunile barei fa de cursor sunt:
-
184
4.1.5.2. Fore complementare la suprafaa Pmntului
Un sistem de referin legat de Pmant nu este un sistem inerial, deci
ecuaia micrii unui punct la suprafaa Pmntului este dat de relaia . n continuare ne propunem s determinm erorile care se fac nelund n seam forele
complementare de transport , respectiv Coriolis .
S
D1 0a
O
P
O
M
ta
N
S
R
thF
tvF
tF
a) b)
Fig. 4.15
Se tie c Pmntul execut, n jurul Soarelui, o micare anual, a crei traiectorie pote fi aproximat cu o traiectorie circular (fig. 4.15 a). Aproximnd
distana de la Pmnt la Soare Km, viteza unghiular de rotaie a Pmntului n jurul Soarelui este:
Acceleraia centrului Pmntului n micarea sa n jurul Soarelui va fi:
i se observ c este mult mai mic dect acceleraia gravitaional, deci poate fi neglijat.
-
185
De asemenea, se tie c Pmntul execut i o micare de rotaie n jurul axei polilor (fig. 4.15 b), n aproximativ 24 ore, cu viteza unghiular constant:
Notnd cu R raza Pmntului ( ), acceleraia de transport pentru un punct de la suprafaa Pmntului se calculeaz cu relaia:
Deoarece viteza unghiular este constant, atunci acceleraia unghiular este zero, i relaia devine:
avnd modulul:
unde este latitudinea punctului M (unghiul fcut de planul ecuatorial cu raza OM). n aceste condiii, fora complementar de transport, exercitat asupra unui punct material M aflat la suprafaa Pmntului, va fi:
cu componentele:
Pe baza acestor relaii, se pot determina efectele produse de fora
complementar de transport:
1) componenta vertical modific acceleraia gravitaional g, prin urmare se modific i fora de greutate a unui punct material la suprafaa Pmntului. Astfel, scriind ecuaia de micare a punctului material M, de latitudine , pe direcia normal la suprafaa Pmntului (fig. 4.16), se obine:
din care rezult acceleraia gravitaional la latitudinea :
Cu relaia rezult urmtoarele valori ale acceleraiilor gravitaionale:
-
186
O
M
gm
tvF
x
gm
Fig. 4.16
2) componenta orizontal face ca firul cu plumb s fie deviat fa de verticala locului nspre ecuator (fig. 4.17).
O
M
thF
x
gm
x
Fig. 4.17
Unghiul de deviere nspre ecuator a punctului material M, se determin cu relaia:
care, dac se face aproximaia , poate fi scris sub forma:
Cu relaia rezult urmtoarele valori ale unghiului de deviere:
Fora complementar Coriolis are, de asemenea, efecte asupra micrii punctului material la suprafaa Pmntului, astfel: dac micarea are loc n emisfera
-
187
nordic, atunci punctul material este deplasat spre dreapta, iar dac se afl n emisfera sudic, deplasarea se face spre stnga. De asemenea, punctul material n cdere liber va fi ntotdeauna deplasat spre est. Pentru a argumenta aceste efecte, considerm un
punct material M aflat la latitudinea la suprafaa Pmntului, i sistemul de axe cartezian Oxyz (fig. 4.18).
Viteza unghiular din micarea de rotaie a Pmntului fa de axa polilor, are, pe sistemul de axe Oxyz, componentele:
N
S
O
M
x
y
z
Fig. 4.18
Considernd viteza relativ de forma:
acceleraia Coriolis va fi:
i fcnd calculele, rezult:
n aceste condiii, fora complementar Coriolis va fi:
-
188
(4.122)
n continuare se vor considera cteva cazuri particulare ale vitezei punctului material:
1. Cderea pe vertical a punctului material. Componentele vitezei, n acest caz, sunt:
i relaia (4.122) devine:
Pe baza relaiei se poate concluzioana c, pentru , ,
asupra punctului material aflat n cdere liber, acioneaz ntotdeauna o for de deviere spre est.
2. Deplasarea n plan orizontal a punctului material. Componentele vitezei, n acest caz, sunt (fig. 4.19):
iar fora Coriolis va avea componentele:
x M
v
cF
y
yv
xv
Fig. 4.19
Se observ c produsul scalar dintre fora Coriolis i vectorul vitez este nul:
ceea ce demonstreaz c cei doi vectori sunt perpendiculari.
n concluzie, la deplasarea n plan orizontal a unui punct material, acesta este
deviat spre dreapta (pentru emisfera nordic) i spre stnga (pentru emisfera sudic). Aceast concluzie se regsete n diferite exemple, astfel:
-
189
a) uzarea inegal a inelor de cale ferat pe care se circul n acelai sens (ina din dreapta este uzat mai mult n emisfera nordic);
b) devierea rurilor care n emisfera nordic erodeaz mai mult malul drept;
c) pendulul Foucault pendulul cu care, n anul 1851, Foucault a demonstrat rotaia Pmntului.
4.2. DINAMICA SISTEMELOR DE PUNCTE MATERIALE I A RIGIDULUI
4.2.1. NOIUNI FUNDAMENTALE
4.2.1.1. Momente de inerie mecanice
Prin definiie, momentul de inerie mecanic, fa de un anumit reper, este: - pentru un sistem de puncte materiale
n care reprezint distana de la punctul material de mas , pn la reperul considerat;
- pentru rigid
n care reprezint distana de la elemetul de mas , pn la reperul considerat. Din relaiile i se observ c momentul de inerie mecanic
este o mrime scalar, avnd unitatea de msur:
Se consider un sistem de n puncte materiale dispuse n spaiu, aflate n
interaciune mecanic (fig. 4.20). Fa de sistemul de coordonate cartezian, punctul
material are coordonatele
-
190
x
z
iy
ixiz
iAir
yO
Fig. 4.20
n funcie de reperul fa de care se calculeaz, se pot defini urmtoarele momente de inerie mecanic: - momente de inerie planare:
pentru sistem de puncte materiale:
pentru rigid:
- momente de inerie axiale:
pentru sistem de puncte materiale:
pentru rigid:
- moment de inerie polar:
pentru sistem de puncte materiale:
pentru rigid:
-
191
- momente de inerie centrifugale:
pentru sistem de puncte materiale:
pentru rigid:
Observaie: Momentul de inerie centrifugal al unui sistem de puncte materiale, sau al unui rigid, este nul dac cel puin una din axele fa de care se calculeaz momentul, este ax de simetrie.
Din relaiile prezentate se observ c, ntre momentele de inerie mecanice n spaiu, exist urmtoarele relaii:
De asemenea, din relaiile i , se observ c momentul de inerie mecanic centrifugal este nul dac cel puin una din cele dou axe fa de care se calculeaz, este ax de simetrie pentru sistemul de puncte materiale, sau pentru rigid.
Dac se consider sistemul de n puncte materiale, sau rigidul, dispuse n plan, atunci momentele de inertie mecanic vor fi: - momente de inerie axiale:
pentru sistem de puncte materiale:
pentru rigid:
- moment de inerie polar:
pentru sistem de puncte materiale:
-
192
pentru rigid:
- moment de inerie centrifugal:
pentru sistem de puncte materiale:
pentru rigid:
ntre momentele de inerie mecanice n plan exist relaia:
La unele discipline precum Rezistena materialelor, Organe de maini, etc. se utilizeaz momentele de inerie geometrice. Prin definiie, momentul de inerie geometric, fa de un anumit reper, n cazul unei plci omogene, este:
n care l este distana de la elementul de suprafa de arie dA, la reperul considerat. Dac se ine cont de expresia densitii, n cazul plcilor:
ntre momentele de inerie mecanic i momentele de inerie geometric exist relaia:
Se face precizarea c relaia este valabil nu doar n cazul plcilor omogene, ci i n cazul barelor i al blocurilor omogene.
Raza de inerie (raza de giraie) este distana fictiv, fa de un anumit reper, la care ar trebui plasat ntreaga mas a sistemului de puncte materiale, sau a rigidului, astfel nct s se obin acelai moment de inerie mecanic:
-
193
n care M este masa corpului, iar i este raza de inerie. n funcie de reperul considerat, exist: - raz de inerie planar:
- raz de inerie axial:
- raz de inerie polar:
Variaia momentelor de inerie fa de axe paralele (teorema lui Steiner)
Se consider un sistem de puncte materiale , i un sistem de axe Oxyz ales n aa fel nct axa Oz s conin centrul de greutate al sistemului
, adic s fie ax central pentru sistemul de puncte materiale (fig. 4.21).
Fig. 4.21
E
y O
x
z
i y i x
b
d a
i z
) 0 , 0 ( , C
) , , ( b a D
1
) , , ( i i i i z y x A
-
194
Dac se noteaz cu axa central care coincide cu axa Oz, atunci, conform relaiei momentul de inerie mecanic fa de axa este:
Momentul de inerie mecanic al sistemului de puncte materiale, calculat fa
de axa , care este paralel cu axa i situat la distana d, are expresia:
unde a i b sunt coordonatele punctului D n care dreapta neap planul xOy. Fcnd calculele, se obine:
n relaia termenii care reprezint momentele statice ale sistemului de puncte materiale fa de planul yOz, respectiv xOz, sunt egali cu zero:
Cu aceast observaie, relaia devine:
relaie care arat legtura dintre dou momente de inerie mecanice calculate n raport cu dou axe paralele, dintre care una este ax central (teorema lui Steiner). Evident, teorema lui Steiner este valabil att pentru sisteme de puncte materiale, ct i pentru rigid.
Observaie: Dac se cunoate momentul de inerie mecanic fa de o ax care nu este ax central, atunci momentul de inerie mecanic fa de axa central va fi:
Se observ c momentul de inerie mecanic calculat fa de axa central , are valoarea cea mai mic.
Variaia momentelor de inerie mecanice fa de axe concurente
Se consider sistemul de puncte materiale , , pentru care se cunosc
momentele de inerie axiale , precum i momentele de inerie centrifugale
, fa de sistemul de axe Oxyz (fig. 4.22).
-
195
yO
z
id
),,( iiii zyxA
u
iB
ir
Fig. 4.22
Se cere s se calculeze momentul de inerie fa de o ax oarecare , de versor , a crei direcie face, cu axele de coordonate, unghiurile i :
Dac se scrie vectorul de poziie al punctului material , sub forma:
atunci proiecia sa pe axa va fi:
n aceste condiii, ptratul distanei de la punctului material , la axa va fi:
Utiliznd relaia dintre cosinuii directori:
relaia devine:
sau, fcnd calculele i grupnd convenabil:
Momentul de inerie fa de axa , va fi :
-
196
n care sumele reprezint momentele de inerie axiale, respectiv centrifugale. n final,
expresia momentului de inerie al sistemului de puncte materiale, fa de axa , este:
Relaia este valabil pentru sisteme de puncte materiale n spaiu. Pentru cazul particular al sistemului de puncte materiale n plan, avem:
i relaia devine:
Momente de inerie principale. Elipsoidul de inerie
Momentul de inerie , calculat cu relaia , depinde de poziia axei fa de sistemul de axe, prin cosinuii si directori. Astfel, pentru anumite valori ale
unghiurilor i , se obin valori extreme (maxime i minime) ale momentului de inerie . Axele fa de care momentele de inerie au valori extreme, se numesc axe principale de inerie i se noteaz, n mod obinuit, cu 1, 2 i 3 (fig. 4.23). Momentele de inerie calculate n raport cu axele principale de inerie, se numesc momente principale de inerie.
y
x
z
1
3
2
O
Fig. 4.23
-
197
Pentru a avea o imagine spaial a modului de variaie a momentelor de inerie axiale, se folosete elipsoidul de inerie. Pentru a obine ecuaia acestuia, se
mparte relaia la i se scrie sub forma:
Se fac notaiile:
i relaia devine:
care reprezint ecuaia unui elipsoid numit elipsoidul de inerie. Axele elipsoidului de inerie sunt chiar axele principale de inerie, fa de care momentele de inerie au valori extreme. Fa de axele sale de inerie, ecuaia elipsoidului de inerie devine:
ceea ce arat c momentele de inerie centrifugale sunt nule fa de axele principale de inerie:
Observaie: Dac se alege originea sistemului de axe chiar n centrul de
greutate al corpului, atunci momentele de inerie se numesc momente de inerie centrale, iar dac i axele sunt axe principale de inerie, avem momente de inerie centrale i principale.
Aplicaii 1) Momentul de inerie mecanic al unei bare drepte omogene (fig. 4.24)
A B
x
l
dx
y
x
Fig. 4.24
-
198
Folosind relaia , momentul de inerie mecanic al barei drepte omogene AB, fa de captul A (axa Oy), este:
Fa de axa care trece prin centrul de greutate C al barei omogene, i este perpendicular pe bar, momentul de inerie mecanic se obine folosind relaia lui
Steiner :
2) Momentele de inerie mecanice ale unei plci dreptunghiulare omogene (fig. 4.25)
Cu relaia , momentul de inerie mecanic al plcii dreptunghiulare omogene, calculat fa de axa Ox, va fi:
O
y
dy
1y
1x
y
x
C
a
b
Fig. 4.25
Procednd la fel, momentul de inerie fa de axa Oy va fi:
Relaiile i arat c momentele de inerie axiale ale plcii dreptunghiulare omogene au aceeai expresie ca i momentul de inerie al barei
omogene (relaia ). Cu relaia se calculeaz momentul de inerie polar:
-
199
Momentele de inerie mecanice fa de axele centrale , respectiv , se determin cu relaia lui Steiner:
Momentul de inerie centrifugal fa de axele centrale este nul (ambele axe sunt axe de simetrie), n schimb, fa de axele Ox i Oy, utiliznd Steiner, momentul de inerie centrifugal va fi:
3) Momentele de inerie mecanice ale unui disc omogen (fig. 4.26) Se consider discul omogen de raz R. Dac se alege un element de disc
inelar, de suprafa:
atunci momentul de inerie fa de axa central perpendicular pe planul discului (axa Cz), adic momentul de inerie polar, va fi:
COx
y
r
dr
Fig. 4.26
Din motive de simetrie, momentele de inerie axiale sunt egale, i din relaia rezult:
-
200
4.2.1.2. Lucrul mecanic elementar al
unui sistem de fore care acioneaz asupra unui rigid
Se consider un solid rigid acionat de un sistem de fore , , i dou sisteme de referin: sistemul fix i sistemul mobil Oxyz (fig. 4.27).
Aplicnd relaia , lucrul mecanic elementar al forei va fi:
i dac se ine cont de expresia vitezei punctului de aplicaie al forei, fa de sistemul fix, devine:
1x
1y
1z
O
z
y
x
iF
iA
0r
ir
ir1
1O
Fig. 4.27
Lucrul mecanic elementar al ntregului sistem de fore va fi:
Relaia arat faptul c nu doar forele dau lucru mecanic, aa cum se tie de la dinamica punctului material, ci i momentele dau lucru mecanic proporional cu deplasarea unghiular.
-
201
4.2.1.3. Impulsul
- pentru un sistem de puncte materiale, aplicnd relaia , impulsul este:
Aplicnd teorema momentelor statice:
impulsul unui sistem de puncte materiale va fi:
n concluzie, impulsul unui sistem de puncte materiale este o mrime vectorial egal cu masa sistemului nmulit cu viteza centrului de greutate al sistemului.
- pentru rigid se folosete relaia:
i fcnd calculele n mod analog, se obine aceeai expresie ca la sistemul de puncte
materiale (relaia ).
4.2.1.4. Momentul cinetic
Momentul cinetic (momentul cantitii de micare) calculat ntr-un punct O,
pentru un punct material de mas , i care se deplaseaz cu viteza , conform
relaiei , este:
n care este vectorul de poziie al punctului material fa de punctul O.
Pentru un sistem de puncte materiale , , momentul cinetic va fi:
Momentul cinetic al unui rigid, ntr-un punct O, se calculeaz cu expresia:
care se poate simplifica, dac se nlocuiete vectorul vitez cu expresiile corespunztoare deduse la micrile particulare ale rigidului.
-
202
a) Micarea de translaie Se tie c la micarea de translaie, toate punctele de pe rigid au aceeai vitez, nu doar ca modul, ci i ca vector:
n aceste condiii, relaia devine:
i dac se ine cont de teorema momentului static aplicat rigidului, n raport cu punctul O, atunci momentul cinetic al rigidului, care execut micare de translaie, este:
ceea ce arat c, n acest caz, momentul cinetic se calculeaz ca i cnd toat masa rigidului ar fi concentrat n centrul su de greutate.
b) Micarea de rotaie Se consider un rigid (fig. 4.28) care execut o micare de rotaie cu viteza
unghiular:
i un punct oarecare A, a crei poziie, fa de sistemul de referin Oxyz, este dat de vectorul de poziie:
O
z
y
x
A
r
Fig. 4.28
Viteza punctului A are expresia:
-
203
Produsul vectorial din relaia este de forma:
i dac se fac calculele, rezult:
nlocuind relaia n relaia , rezult c momentul cinetic fa de un punct O, al unui rigid care execut micare de rotaie, are componentele:
Dac axa de rotaie coincide cu axa Oz, rezult i , iar
momentul cinetic devine:
Dac n relaia se face (axa de rotaie Oz este ax de simetrie),
atunci momentul cinetic devine:
Spre exemplu, momentul cinetic al unui disc omogen i de grosime constant, avnd
masa M i raza R, care se rotete cu viteza unghiular n jurul axei centrale perpendicular pe planul discului, are mrimea:
c) Rigidul cu punct fix Se consider un rigid cu punct fix pentru care se aleg axele de coordonate chiar axele principale de inerie, n raport cu punctul fix. n aceste condiii, momentele centrifugale sunt nule:
-
204
iar momentul cinetic devine:
n care , i sunt momentele de inerie principale ale rigidului, n raport cu punctul fix O.
Aplcaia 4.6 O sfer omogen, avnd greutatea G i raza R, este suspendat n centrul su de greutate i se rotete n jurul unei axe centrale, cu viteza unghiular . S se calculeze momentul cinetic al sferei, fa de centrul su de greutate O. Rezolvare:
Dac se alege ca mas elementar masa elementului sferic situat la distana r fa de punctul O, i de grosime dr:
atunci momentul de inerie al sferei, fa de centrul su de greutate este:
Cum axele principale de inerie sunt, n cazul sferei, i axe de simetrie, rezult c momentele de inerie principale sunt egale ntre ele, i din relaia de legtur dintre
momentul de inerie polar i momentele de inerie axiale (relaia ), rezult:
Dac se alege axa Oz chiar axa de rotaie, atunci: i , i
momentul cinetic al sferei, fa de centrul su de greutate este:
4.2.1.5. Energia cinetic
Energia cinetic a unui sistem de puncte materiale se calculeaz cu relaia:
iar n cazul rigidului energia cinetic este dat de relaia:
-
205
Expresia din relaia poate fi adus la o form mai simpl, n cazul principalelor micri particulare ale rigidului.
a) Micarea de translaie nlocuind relaia n relaia , energia cinetic a rigidului aflat
n micare de translaie devine:
ca i cum toat masa rigidului ar fi concentrat n centrul su de greutate. b) Micarea de rotaie
Un punct oarecare A aparinnd rigidului aflat n micare de rotaie, execut micare circular cu viteza:
unde este viteza unghiular, iar d este raza traiectoriei circulare (distana de la punctul A la axa de rotaie), (fig. 4.29).
O
x
Av
d
y
z
Fig. 4.29
nlocuind expresia vitezei n relaia , se obine energia cinetic a rigidului aflat n micare de rotaie:
n care reprezint momentul de inerie mecanic al rigidului fa de axa de rotaie. Relaia arat c, spre deosebire de micarea de translaie, n expresia energiei cinetice la micarea de rotaie apare viteza unghiular, n loc de viteza liniar,
respectiv , adic modul de distribuire a masei rigidului fa de axa , n loc de masa M.
-
206
c) Micarea elicoidal Viteza unui punct oarecare de pe un rigid aflat n micare elicoidal (fig.
4.30), are expresia:
iar ptratul su este:
nlocuind relaia n relaia , se obine energia cinetic a rigidului aflat n micare elicoidal:
O
x
0v
y
z
Fig. 4.30
Se observ c energia cinetic la micarea elicoidal a rigidului este suma energiilor cinetice ale micrilor componente (rotaie i translaie).
d) Micarea plan - paralel Se consider un rigid aflat n micare plan paralel i sistemul de referin
Oxyz cu originea n centrul de greutate al rigidului (fig. 4.31).
Viteza unui punct oarecare de pe rigidul aflat n micare plan - paralel are expresia:
iar ptratul su este:
-
207
x
cv
CO
z
y
Fig. 4.31
nlocuind relaia n relaia , se obine expresia:
n care integralele reprezint momentele statice planare ale rigidului, i care sunt nule deoarece s-a ales originea sistemului de referin n centrul de greutate al rigidului:
n concluzie, energia cinetic a rigidului aflat n micare plan paralel are expresia:
care reprezint suma energiilor cinetice ale micrilor componente (rotaie n jurul
axei centrale i translaie pe direcia perpendicular pe axa ). Observaie: Dac se aplic teorema lui Steiner i se scrie momentul de inerie fa de axa central , n funcie de momentul de inerie fa de o ax care este perpendicular pe planul micrii i trece prin centrul instantaneu de rotaie I:
atunci relaia devine:
-
208
tiind c viteza centrului de greutate al rigidului, fa de centrul instantaneu de rotaie, este:
rezult c ultimii doi termeni din relaia se reduc, i energia cinetic a rigidului aflat n micare plan paralel se poate calcula i cu relaia:
Aplicaia 4.7 Un disc de mas M i raz R se rostogolete, fr s alunece, pe un plan orizontal (fig. 4.32). tiind c viteza centrului su de greutate este u, se cere s se calculeze energia cinetic a discului.
I
R
Cu
Fig. 4.32
Rezolvare:
tiind c momentul de inerie al discului fa de axa central, perpendicular pe planul discului, este:
relaia devine:
n care s-a folosit: .
La acelai rezultat se ajunge dac folosim, pentru calculul energiei cinetice,
relaia . Deoarece centrul instantaneu de rotaie, la rostogolirea fr alunecare a discului pe planul orizontal, coincide cu punctul teoretic de contact dintre disc i
plan, rezult . Aplicnd teorema lui Steiner, momentul de inerie fa de centrul instantaneu de rotaie va fi:
-
209
i cu relaia rezult aceeai expresie a energiei cinetice dat de relaia .
4.2.2. TEOREME GENERALE N DINAMICA
SISTEMELOR DE PUNCTE MATERIALE I A RIGIDULUI
4.2.2.1. Teorema impulsului
Se consider un sistem de n puncte materiale , ,........, , de mase
,acionate de fore exterioare , , i fore de legtur interioare , ,
, (fig. 4.33).
Impulsul sistemului de puncte materiale se calculeaz cu relaia:
y
x
z
O
ir
iA1iF
2i
F
ijF
1A
2A
inF
nA
jA
jiF
iF
Fig. 4.33
Dac se deriveaz n raport cu timpul relaia , se obine:
-
210
n care suma forelor de legtur interioare este nul ( ). Rezult:
relaie care reprezint teorema impulsului: Derivata n raport cu timpul a impulsului unui sistem de puncte materiale, este egal cu suma forelor exterioare care acioneaz asupra sistemului de puncte materiale.
Dac suma forelor exterioare este nul, relaia devine , i dac se integreaz rezult:
adic teorema conservrii impulsului: Dac suma forelor exterioare este nul, atunci impulsul sistemului de puncte materiale se conserv pe toat durata micrii.
Observaie: Relaiile i sunt valabile i n cazul rigidului.
4.2.2.2. Teorema momentului cinetic
Pentru un sistem de puncte materiale, momentul cinetic, fa de punctul O, este dat de relaia . Derivnd aceast relaie n raport cu timpul, se obine:
n care prima sum este nul (produsul vectorial a doi vectori coliniari este nul), iar n a doua sum se nlocuiete:
Fcnd calculele, rezult:
care reprezint teorema momentului cinetic, fa de un punct O, valabil att pentru sistemul de puncte materiale, ct i pentru rigid: Derivata n raport cu timpul a momentului cinetic al unui sistem de puncte materiale, sau al unui rigid, calculat
ntr-un punct O, este egal cu suma momentelor forelor exterioare, calculate n acelai punct O.
n relaia s-a folosit faptul c suma momentelor forelor de legtur interioare este nul:
-
211
Dac suma momentelor forelor exterioare este nul, relaia devine:
i dac se integreaz, rezult relaia:
care reprezint teorema conservrii momentului cinetic: Dac suma momentelor forelor exterioare este nul, atunci momentul cinetic, calculat ntr-un punct O, se conserv pe toat durata micrii.
4.2.2.3. Teorema energiei cinetice
a) Sistem de puncte materiale Pentru un sistem de puncte materiale energia cinetic este dat de relaia
. Difereniind aceast relaie, i fcnd calculele se obine:
sau, innd cont de faptul c produsul scalar dintre for i deplasarea elementar
reprezint lucrul mecanic elementar, relaia devine:
care reprezint teorema energiei cinetice, n form diferenial, pentru un sistem de puncte materiale, sau pentru un sistem de corpuri.
n relaia s-au fcut notaiile:
care reprezint lucrul mecanic elementar al forelor exterioare, respectiv:
-
212
care reprezint lucrul mecanic elementar al forelor de legtur interioare, i care poate fi nul n anumite situaii. Pentru a identifica aceste cazuri, se calculeaz lucrul
mecanic elementar pentru perechea de fore de legtur interioar i :
Dac se face notaia:
ceea ce reprezint viteza relativ a punctului fa de punctul , relaia
devine:
Relaia arat c n urmtoarele cazuri:
1. , ceea ce se ntmpl, spre exemplu, n cazul a dou corpuri legate
ntre ele cu un fir considerat netensionat;
2. , ceea ce se ntmpl, spre exemplu, la rostogolirea fr alunecare a
unui corp pe un alt corp;
3. vectorii i sunt perpendiculari ntre ei, cum se ntmpl n cazul a dou
corpuri legate printr-un fir inextensibil i perfect ntins.
b) Rigid n cazul rigidului, lucrul mecanic elementar al forelor de legtur interioare este nul, i teorema energiei cinetice, n form diferenial, este:
Integrnd ntre dou momente notate cu 0, respectiv 1, se obine teorema energiei cinetice, n form finit:
adic: Variia energiei cinetice a unui corp, sau a unui sistem de corpuri, ntre dou momente oarecare, este egal cu lucrul mecanic al forelor exterioare, ntre cele dou poziii.
Aplicaia 4.8 Se d sistemul de corpuri din figura 4.34 a, pentru care se
cunosc: , i greutile corpurilor 1, 2 i 3, - unghiul fcut de planul nclinat cu orizontala, - coeficientul de frecare dintre corpul 3 i planul nclinat, r raza
discului 2. tiind c sistemul de corpuri este pus n micare de greutatea , care
-
213
coboar, iar firul care leag corpurile este considerat inextensibil i perfect flexibil, se cere s se determine legea de micare a sistemului. Rezolvare:
Se d corpului 1 o deplasare n jos, notat cu h, i prin intermediul firului de legtur, sunt antrenate n micare i celelalte corpuri ale sistemului. Analiza cinematic este prezentat n tabelul 4.2.
Tabel 4.2
Corp Felul micrii Deplasarea Viteza Acceleraia
1 Translaie h
2 Rotaie
3 Translaie
3
r
1
2
3
r
1
2V
H
P
Q
T
N O
G
h
a) b)
Fig. 4.34
Problema se va rezolva cu teorema energiei cinetice, n form finit (relaia 4.214).
Energia cinetic a sistemului la momentul iniial este nul (sistemul se afla n repaus), iar la momentul 1, cnd corpurile 1 i 3 s-au deplasat cu distana h, este:
tiind c momentul de inerie al discului 2, fa de punctul O, este:
energia cinetic devine:
-
214
n figura 4.34 b s-au reprezentat toate forele exterioare care acioneaz
asupra sistemului. Astfel, n afara forelor de greutate , i , s-au mai reprezentat
reaciunile i date de articulaia din punctul O, asupra corpului 2, precum i
reaciunile i date de planul nclinat, asupra corpului 3. Lucrul mecanic al tuturor forelor exterioare, ntre momentul iniial 0 i momentul 1, este:
n expresia lucrului mecanic s-a inut cont de faptul c forele , i nu dau lucru mecanic, deoarece punctul de aplicaie O nu se deplaseaz; de asemenea, nici forele
i nu dau lucru mecanic, deoarece deplasarea lor se face dup o direcie perpendicular pe direciile acestora.
Aplicnd relaia (4.214), se obine relaia:
care, prin derivare n raport cu timpul, devine:
Legea de micare a sistemului va fi:
4.2.2.4. Teorema conservrii energiei mecanice
Un sistem de puncte materiale , , se numete sistem conservativ dac forele interioare deriv dintr-o funcie de for U. Aplicnd relaia rezult c lucrul mecanic al forelor interioare este:
i relaia (4.207) devine:
sau:
ntroducnd noiunea se energie potenial, la fel ca la punctul material, avem:
i relaia se scrie:
-
215
adic:
Dac lucrul mecanic al forelor exterioare este nul, atunci relaia , dup integrare, devine:
care reprezint teorema conservrii energiei mecanice: Energia mecanic a unui sistem conservativ, ntr-un interval de timp dat, este constant (se conserv n timp), dac lucrul mecanic al forelor exterioare este nul.
4.2.2.5 Teorema deplasrii centrului de mas
Dac se deriveaz, n raport cu timpul, impulsul unui sistem de puncte
materiale, sau al unui rigid (relaia ), se obine:
Din relaiile i (4.202) rezult:
care reprezint teorema deplasrii centrului de mas.
4.2.3. MICAREA RELATIV A UNUI SISTEM DE PUNCTE MATERIALE SAU A UNUI RIGID FA DE CENTRUL DE GREUTATE
4.2.3.1. Momentul cinetic i teorema momentului cinetic
Se consider un sistem de puncte materiale , (sau un rigid), i dou sisteme de referin, astfel: sistemul fix i sistemul mobil, solidar cu rigidul Oxyz, ales astfel nct originea sa s coincid cu centrul de greutate al
sistemului de puncte. Poziia unui punct oarecare , este dat de vectorul de poziie
, fa de sistemul fix, respectiv de vectorul de poziie , fa de sistemul mobil (fig. 4.35). Din triunghiul vectorial al vectorilor de poziie rezult:
n care este vectorul de poziie al centrului de greutate al sistemului de puncte materiale, fa de sistemul fix. Derivnd relaia se obine viteza absolut a punctului :
-
216
iA
ir
ir
1
O
CO
cr
1x
1y
1z
x
y
z
Fig. 4.35
Cu relaiile i momentul cinetic al sistemului de puncte materiale, fa de originea sistemului fix, este:
sau:
Din teorema momentului static al sistemului de puncte materiale, fa de punctul C, rezult:
i relaia devine:
-
217
n care reprezint momentul cinetic al sistemului de puncte materiale, fa de punctul C.
Relaia (numit i prima formul a lui Koenig), arat c momentul cinetic al unui sistem de puncte materiale, sau al unui rigid, fa de originea
sistemului fix , este egal cu suma dintre momentul cinetic al unui punct material
fictiv situat n centrul de greutate i avnd masa egal cu masa sistemului de puncte (rigidului), i momentul cinetic din micarea relativ a sistemului de puncte (rigidului) fa de centrul su de greutate.
Aplicnd teorema momentului cinetic fa de punctul fix (relaia 4.204), se obine:
Dac se deriveaz relaia i se nlocuiete , rezult:
sau:
Dac se ine cont de relaia , rezult relaia final:
care reprezint teorema momentului cinetic al sistemului de puncte materiale (rigidului), n micarea relativ fa de centrul su de greutate. Se observ c teorema momentului cinetic pstreaz aceeai form att fa de un punct fix, ct i fa de centrul de greutate.
Aplicaia 4.9 Un disc cu greutatea G i raza R, are nfurat, pe circumferina sa, un fir considerat inextensibil i perfect flexibil, i care este fixat n
punctul (fig. 4.36 a). Se cere s se determine legea de micare i tensiunea din fir, la micarea liber a discului pe vertical.
-
218
x
xO
1O
R
x
xO
1O
Rx
y
1x
1y
T
I
yy
G
a) b)
Fig. 4.36
Rezolvare:
Se alege sistemul de referin fix i sistemul de referin mobil Oxy cu originea n centrul de greutate al discului. Dac se izoleaz discul, atunci forele
care acioneaz asupra sa sunt: fora de greutate i tensiunea din fir (fig. 4.36 b). Aplicnd prima formul a lui Koenig, momentul cinetic al discului, fa de
punctul fix , are expresia:
i este un vector perpendicular pe planul vertical al micrii, cu modulul:
Momentul cinetic al discului, fa de centrul su de greutate, se calculeaz cu relaia:
n care s-a folosit observaia c discul execut micare plan-paralel, cu centrul instantaneu de rotaie n I; astfel, viteza centrului de greutate al discului este:
n final, momentul cinetic al discului, fa de punctul fix , este:
Aplicnd teorema momentului cinetic fa de punctul fix , se obine:
-
219
de unde rezult legea de micare:
Pentru a obine i tensiunea din fir, se aplic teorema momentului cinetic fa de centrul de greutate:
i rezult:
4.2.3.2. Energia cinetic i teorema energiei cinetice
Pentru un sistem de puncte materiale, energia cinetic fa de sistemul de referin fix, este:
i innd cont de relaia , devine:
Dac se ine cont de relaia , atunci energia cinetic a sistemului de puncte materiale, fa de sistemul de referin fix, este:
Relaia reprezint a doua formul a lui Koenig, i arat c energia cinetic a unui sistem de puncte materiale, sau a unui rigid, fa de originea
sistemului fix , este egal cu suma dintre energia cinetic a unui punct material fictiv situat n centrul de greutate i avnd masa egal cu masa sistemului de puncte (rigidului), i energia cinetic din micarea relativ a sistemului de puncte (rigidului) fa de centrul su de greutate.
Aplicnd teorema energiei cinetice fa de punctul fix (relaia 4.207), se obine:
-
220
n care lucrul mecanic al forelor exterioare este:
iar lucrul mecanic al forelor de legtur interioare este:
Dac se difereniaz relaia se obine:
Se nlocuiesc relaiile , i n relaia , i cu observaia
c suma forelor de legtur interioare este nul , rezult:
Primul termen din membrul stng al relaiei poate fi prelucrat astfel:
i relaia devine:
n care s-au fcut notaiile:
ce reprezint lucrul mecanic elementar al forelor exterioare n micarea relativ fa de centrul de greutate, respectiv:
ce reprezint lucrul mecanic elementar al forelor de legtur interioare n micarea relativ fa de centrul de greutate
Relaia reprezint teorema energiei cinetice a sistemului de puncte materiale, sau a rigidului, n micarea relativ fa de centrul su de greutate. Se observ c teorema energiei cinetice pstreaz aceeai form att fa de un punct fix, ct i fa de centrul de greutate.
Aplicaia 4.10 Bara cu lungimea l i masa neglijabil, se rotete cu
viteza unghiular constant n jurul articulaiei . n captul A al barei este
-
221
articulat un disc de raz R i greutate G, care se rotete, n planul su, cu viteza
unghiular constant (fig. 4.37). Se cere s se calculeze energia cinetic a discului.
1
2
1O
G
A R
Fig. 4.37
Rezolvare:
Cu relaia , energia cinetic a discului este:
n care este energia cinetic a discului fa de centrul su de greutate:
iar este viteza centrului de greutate al discului (care coincide cu captul A al barei),
fa de punctul :
n final, energia cinetic a discului este:
4.2.4. DINAMICA RIGIDULUI CU O AX FIX
Rigidul cu ax fix se ntlnete forte des n practic, n special n aplicaiile tehnice. Se impune, deci, studierea separat a dinamicii rigidului aflat n acest caz particular. Pentru aceasta se consider un solid rigid acionat de sistemul de fore
exterioare , , care execut micare de rotaie n jurul axei (fig. 4.38).
-
222
1O
1R
1y
y
1x x
iA
ir
2O
zz1
C
2R
iF
h
Fig. 4.38
Cunoscnd momentele de inerie ale rigidului, coordonatele centrului de greutate
, i distana h dintre punctele de articulaie i , se cere s se determine legea de micare a rigidului, precum i reaciunile din articulaii. Alegnd cele dou sisteme de referin fix i mobil, cu originea n punctul
de articulaie , i axele Oz i suprapuse, atunci legea de micare a rigidului este dat de variaia n timp a unghiului de rotaie:
Cum cele dou reaciuni din articulaii i au fiecare cte 3 componente, rezult 6 necunoscute scalare, i mpreun cu legea de micare totalizeaz 7 necunoscute. Pentru determinarea acestora, se aplic teoremele impulsului i momentului cinetic. Impulsul rigidului cu ax fix este:
Dervnd relaia i innd cont de relaia lui Poisson , rezult relaia vectorial:
=
-
223
Observaie: La acelai rezultat se ajunge dac se deriveaz impulsul dup regula de derivare a unui vector care are proieciile pe sistemul de referin mobil:
unde reprezint derivata relativ a impulsului.
Aplicnd teorema impulsului (relaia 4.202), se obin 3 relaii scalare:
Momentul cinetic al rigidului, calculat n raport cu punctul fix , se
determin cu relaia . Se obine:
n care i sunt momentele de inerie centrifugale, iar este momentul de
inerie axial. Aplicnd regula de derivare, se obine:
Cu teorema momentului cinetic (relaia 4.204), se obine:
Produsul vectorial din relaia poate fi scris sub forma:
n final, aplicnd teorema momentului cinetic se obin alte 3 relaii scalare:
-
224
Observaie: Dac se folosete i teorema energiei cinetice, nu se obine a aptea ecuaie de care am avea nevoie pentru a rezolva problema. Pentru a demonstra acest lucru, se scrie energia cinetic a rigidului n micarea de rotaie:
i se aplic teorema energiei cinetice n form diferenial (relaia 4.213). Deoarece rezultanta forelor exterioare nu d lucru mecanic, rezult c lucrul mecanic elementar al forelor exterioare este:
Aplicnd teorema energiei cinetice, se obine:
sau:
din care rezult relaia:
care este identic cu ecuaia a treia din relaiile . n concluzie, problema rigidului cu ax fix este o problem nedeterminat (din cele 6 ecuaii nu se pot determina dect 6 necunoscute). Din ecuaia:
care este o ecuaie independent fa de celelalte 5 ecuaii, nu se pot determina
ambele necunoscute i . Pentru a elimina acest neajuns, n practic se adopt diferite soluii constructive, una dintre ele fiind utilizarea unei articulaii care s
introduc doar 2 necunoscute, n loc de 3necunoscute ( ). Legea de micare a rigidului se obine din relaia :
din care, prin integrri succesive, se obine . O alt problem foarte important la dinamica rigidului cu ax fix, cu aplicaie n construcia de maini, este aceea de a face ca reaciunile din articulaii (lagre) s fie ct mai mici, pentru a se produce frecri i uzuri ct mai reduse. n acest sens, se consider c reaciunile au cte dou componente:
-
225
Dac , atunci componentele dinamice sunt nule, iar relaiile i devin:
din care se pot determina componentele statice ale reaciunilor.
nlocuind relaiile i n relaiile i , se obine sistemul de ecuaii:
Spunem c rigidul cu ax fix este echilibrat, atunci cnd reaciunile dinamice sunt
nule. n aceast situaie, sistemul de ecuaii devine:
Din primele dou ecuaii din rezult:
relaie care exprim condiia ca rigidul s fie echilibrat static, adic centrul de greutate al rigidului s se afle pe axa de rotaie (fig. 4.39 b).
Sistemul format din ultimile dou ecuaii din relaiile , considernd
i ca necunoscute, admite o soluie nebanal, dac determinantul format din coeficienii necunoscutelor este nul:
ceea ce conduce la relaia:
care este ndeplinit doar dac:
-
226
Relaia reprezint condiia ca rigidul s fie echilibrat dinamic, adic axa de rotaie s fie ax principal de inerie (fig. 4.39 c).
G
G
GC CC
)a )c)b Fig. 4.39
4.2.5. DINAMICA RIGIDULUI CU UN PUNCT FIX
4.2.5.1 Ecuaiile de micare
Se consider un rigid cu o articulaie sferic n punctul fix O, acionat de
sistemul de fore exterioare , , (fig. 4.40). Se cere s se determine legile de micare ale rigidului, precum i reaciunea din articulaia sferic.
x
1y
1x
1z
1O
O
R
iA
iF
x
P
N
Fig. 4.40
-
227
Se aleg cele dou sisteme de referin fix i mobil n aa fel nct orginile lor s coincid cu articulaia sferic, iar axele sistemului mobil s fie chiar axele principale de inerie ale rigidului, fa de punctul fix O. Rigidul cu punct fix are trei grade de libertate, deci poziia sa la un moment dat este precizat cu ajutorul a trei parametri independeni, care de obicei se aleg unghiurile lui Euler:
- unghiul de precesie (rotirea rigidului n jurul axei );
- unghiul de nutaie (rotirea rigidului n jurul axei );
- unghiul de rotaie proprie (rotirea rigidului n jurul axei ).
Dac se noteaz cu , , respectiv , vitezele unghiulare corespunztoare unghiurilor lui Euler, atunci vectorul vitez unghiular va avea componentele (fig. 4.41):
1z
1O
P
z
x
y
N
O
P
sin
a) b)
Fig. 4.41
Fcnd calculele, rezult c viteza unghiular va avea, pe axele sistemului mobil Oxyz, componentele:
Impulsul rigidului cu punct fix este:
-
228
care, prin derivare dup regula de derivare a unui vector care are proieciile pe sistemul de referin mobil, determin relaia:
Teorema impulsului, aplicat rigidului cu un punct fix, este:
n care este reaciunea dat de articulaia sferic, i care are expresia:
Deoarece axele sistemului mobil sunt axe principale de inerie, fa de punctul fix O, rezult c momentele de inerie centrifugale ale rigidului sunt nule, iar momentul cinetic al rigidului, fa de acest punct, este:
Folosind regula de derivare a unui vector cu componente pe sistemul de axe mobil
(relaia ), derivata, n raport cu timpul, a momentului cinetic este:
Aplicnd teorema momentului cinetic, n raport cu punctul fix O:
se obin ecuaiile lui Euler pentru rigidul cu un punct fix:
n care necunoscutele sunt , i .
Observaie: Deoarece sistemul este dificil de rezolvat, se studiaz, de obicei, cele mai importante cazuri particulare ntlnite n practic, astfel:
1) Cazul Euler Poinsot, caracterizat prin faptul c momentul forelor exterioare,
n punctul O, este nul ;
-
229
2) Cazul Lagrange Poisson, caracterizat prin faptul c , i centrul de greutate al rigidului se afl pe axa Oz;
3) Cazul Sofia Kovalevskaia, caracterizat prin faptul c , i centrul de greutate al rigidului se afl n planul ecuatorial Oxy.
4.2.5.2 Giroscopul centrat
Giroscopul este un corp de revoluie, suspendat ntr-un punct aflat pe axa de simetrie, i care se rotete cu vitez unghiular foarte mare n jurul axei de simetrie. Giroscopul centrat este un caz particular al cazului Euler Poinsot, n care centrul su de greutate coincide cu punctul de suspendare (fig. 4.42).
a) Stabilitatea axei de rotaie este un fenomen caracteristic giroscopului, caracterizat prin faptul c axa de rotaie este o ax fix n spaiu, i orice perturbare a poziiei acesteia nu poate fi dect de scurt durat. Aceast proprietate st la baza construciei aparatelor direcionale ntlnite la bordul navelor, avioanelor, etc.
G
C
Fig. 4.42
Pentru a demonstra aceast proprietate, n relaiile se nlocuiesc
i (fiind un corp de revoluie), i ecuaiile lui Euler, n acest caz, devin:
Prin construcie se adopt . Din ecuaia a treia din relaiile rezult , i prin integrare:
-
230
mprind la primele dou ecuaii din relaiile rezult:
Derivnd, n raport cu timpul, prima ecuaie din relaiile se obine:
Dac se elimin termenul din relaiile i , se obine ecuaia
diferenial de ordinul doi, cu coeficieni constani:
n care s-a fcut notaia:
Soluia ecuaiei difereniale este de forma:
care introdus n prima ecuaie din relaiile determin:
Relaiile i demonstreaz stabilitatea axei de rotaie, deoarece
funciile i sunt mrginite n timp, i sunt periodice, cu perioada:
care, pentru , are valori foarte mici.
b) Efectul giroscopic este tot un fenomen caracteristic giroscopului,
caracterizat prin faptul c, dac se acioneaz cu o for asupra giroscopului, atunci acesta va cpta o deplasare pe direcia perpendicular pe planul determinat de for i punctul O, n sensul momentului forei fa de punctul O. Pentru a demonstra efectul giroscopic, se consider giroscopul centrat din
figura 4.43, care se rotete cu viteza unghiular n jurul axei principale, centrale de inerie Oz, i care este o ax stabil de rotaie a giroscopului. Momentul cinetic, n raport cu punctul O, este:
-
231
x
y
z
F
OM
OK OKd
OK
O
Fig. 4.43
Acionnd asupra giroscopului cu fora , paralel cu axa Ox, n planul Oxz, aceasta
produce un moment pe direcia axei Oy, care, la rndul su, determin modificarea momentului cinetic al giroscopului:
Aplicnd teorema momentului cinetic, se obine:
care arat c variaia momentului cinetic al giroscopului are direcia i sensul
momentului forei . Noua ax de rotaie a giroscopului va fi pe direcia lui ,
deci nclinat fa de axa iniial cu un unghi mic . c) Micarea de precesie regulat este micarea unui rigid cu un punct fix,
care se rotete cu o vitez unghiular constant n jurul axei sale de simetrie Oz; la rndul ei, n acelai timp, axa Oz se rotete cu alt vitez unghiular constant n jurul
unei axe fixe (fig. 4.44).
Viteza unghiular rezultant va fi:
i are direcia pe o ax numit ax instantanee de rotaie. Aceast ax descrie, n jurul axei Oz, un con numit conul polodic, avnd unghiul la vrf 2 , i n jurul axei
, conul herpolodic, cu unghiul la vrf 2 . Conul descris de axa mobil Oz, fa de
axa fix , se numete conul de precesie, i are unghiul la vrf .
-
232
x
y
z
O
1z
1x
1y1
Fig. 4.44
Micarea de precesie regulat are loc ntotdeauna n cazul Euler Poinsot, atunci cnd elipsoidul de inerie este un elipsoid de revoluie, i este caracterizat de urmtoarele proprieti:
unghiurile i , fcute de axa instantanee de rotaie cu axa Oz, respectiv cu
axa , sunt unghiuri constante n timp; cum unghiul de nutaie este dat de relaia:
rezult c i acesta este constant n timp;
viteza unghiular rezultant este constant n timp;
cele dou micri de rotaie (rotaia proprie i precesia), sunt micri uniforme.
4.2.5.3 Giroscopul necentrat
Giroscopul necentrat este similar cu giroscopul centrat, singura deosebire
constnd n faptul c centrul de suspendare nu mai coincide cu centrul de greutate, ci se afl ntr-o poziie oarecare pe axa de simetrie (fig. 4.45). Acesta se ncadreaz n cazul Lagrange Poisson.
Fora de greutate proprie produce efectul giroscopic descris la giroscopul
centrat. Astfel, fora determin, n punctul fix O, momentul , care duce la
apariia momentului cinetic , i deci la micarea de precesie (micarea de rotaie a
-
233
axei Oz a giroscopului n jurul axei fixe , cu viteza unghiular mult mai mic dect viteza unghiular ).
G
1
O
Fig. 4.45
Cu ipotezele:
momentul cinetic, fa de punctul O, poate fi aproximat cu relaia:
Aplicnd regula de derivare a unui vector cu componente pe sistemul de axe mobil,
se obine:
iar din teorema momentului cinetic rezult:
Din relaiile i rezult:
-
234