Cap 5 Curbe in Spatiu

of 34
-
Upload
stefan-mudrag -
Category
Documents
-
view
119 -
download
4
description
matematica
Transcript of Cap 5 Curbe in Spatiu
-
Curbe n spaiu 5.1. Moduri de reprezentare a unei curbe n spaiu. Puncte singulare. 5.2. Lungimea unui arc de curb plan. Elementul de arc. Parametrizare
natural. 5.3. Tangenta ntr-un punct la o curb. 5.4. Plan osculator la o curb. 5.5. Planul normal. Normala ntr-un punct la o curb 5.6. Planul rectifiant 5.7. Triedrul lui Frenet 5.8. Formulele lui Frenet 5.9. Curbura i torsiunea unei curbe strmbe 5.10. Calculul curburii i torsiunii
5.1. Moduri de reprezentare a unei curbe n spaiu Fie un sistem de coordonate carteziene n spaiu ; , ,O i j k . Definiie. Aplicaia vectorial r : I de clas Ck, , definit
pe intervalul real I prin 3 k n
, ,y t ,r t x t z t It se numete drum parametrizat n . 3
Definiie. Se numete curb n spaiu de clas Ck submulimea de puncte
din plan: = {P | t I : P = r(t) }. (5.1) 3
Se noteaz cu r(I ) = Im(r) = {r(t)|t I } i se numete imaginea (urma, suportul) geometric a curbei.
-
____________________________________________________________Geometrie diferenial 1
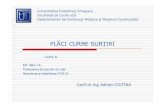
Fig. 5.1. Drum. Curb n spaiu n continuare, prezentm cteva moduri concrete de reprezentare a unei
curbe. 1. Reprezentarea vectorial Fiecrui punct , ,x t y t z t din r(I) i se poate asocia vectorul de poziie
r t x t i y t j z t k , iar ecuaia ,r r t t I , (5.2)
se numete ecuaia vectorial a drumului parametrizat r. 2. Reprezentarea parametric Relaiile
x x t
y y t
z z t
, t I, (5.3)
se numesc ecuaiile parametrice ale drumului r. Presupunem c funciile x(t), y(t), z(t) sunt derivabile de k *k ori.
Aceast ipotez este necesar i util n aplicaii. Exemplu. Elicea cilindric Este curba al crei suport este suportul drumului parametrizat
3:r , r(t) = (Rcost, Rsint, ht), cu R, h > 0. (fig. 5.1). Elicea cilindric ste curba descris de un punct aflat pe cilindrul de ecuaie
x2 + y2 = R2, aflat iniial n punctul A(R, 0, 0). Micarea punctului se compune dintr-o rotaie uniform n jurul axei Oz i dintr-o translaie uniform de-a lungul acestei axe. Alegem ca parametru, care definete poziia unui punct M(x, y, z) al elicei, unghiul t format de proiecia ortogonal OP a segmentului pe planul xOy cu axa Ox. Coordonatele x i y ale punctului M sunt aceleai cu ale punctului P, deci x = Rcost, y = R sint. Deplasarea pe vertical z este proporional cu t, adic z = ht. Se obin astfel ecuaiile paremetrice ale elicei:
x = Rcost, y = Rsint, z = ht. Arcul de curb dintre punctele A i B (R, 0, 2h) se numete spir a elicei, iar
distana AB = 2h se numete pasul elicei. Se folosete deseori urmtoarea reprezentare parametric a unei curbe:
1
-
____________________________________________________________Geometrie diferenial 2
, ( ),
( ), ( , ),
x ty y t
z z t t a b
sau ( ),
( ), ( , ).y y x
z z x x a b
care se mai numesc i ecuaiile carteziene explicite. Se pune problema n ce condiii o curb admite o astfel de parametrizare. Teorem. Fie C o curb parametrizat de clas C1 reprezentat de drumul r,
cu ecuaiile parametrice (5.3). Dac, de exemplu, x'(t0) 0, atunci, ntr-o vecintate suficient de mic a punctului t0, curba C se poate defini prine cuaiile
y = y(x), z = z(x), unde y i z sunt funcii de x, de clas C1.
Demonstraia se bazeaz pe teorema de inversiune local. 3.Reprezentarea implicit Ecuaiile
, , 0
, , 0
F x y z
G x y z
(5.4)
se numesc ecuaii implicite ale curbei, curba obinndu-se ca intersecia a dou suprafee 1, : , ,F G D F G C D , unde o mulime deschis. 3D
Mulimea , , ; , , 0, , , 0x y z D F x y z G x y z
nu este, n general, urma unei curbe. Mulimea este urma unei curbe dac satisface condiiile teoremei urmtoare.
Teorem. Fie un punct al curbei M0(x0, y0, z0) . Dac n acest punct rangul matricei jacobiene
F F Fx y zG G Gx y z
(5.5)
este 2, atunci exist o vecintate W a punctului M0, astfel nct este urma unei curbe.
W
2
-
____________________________________________________________Geometrie diferenial 3
Demonstraie. S presupunem c 0
,0
,M
D F GD y z
. Conform teoremei
funciilor implicite, exist o vecintate deschis I a punctului x0 i o vecintate deschis U V a punctului (y0, z0), precum i funciile implicite f : I U, g : I V, f, g C1(I), astfel nct
, , ;W x f x g x x I . Observaie. Dac rangul matricei (5.5) este 2 n orice punct din , atunci din
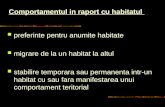
teorem rezult c este "local" urma unei curbe parametrizate. Exemplu. Curba lui Vivianu. Este curba care se obine intersectnd o sfer cu cilindrul drept a crui baz
este un cerc avnd diametrul egal cu raza sferei. Poriunea de curb din semispaiul z > 0 este reprezentat n fig. 5.2.
Fig. 5.2.
Avem deci 3 2 2 2 2 2 2, , ; ,x y z x y z R x y Rx ,
cu suprafeele 2 2 2 2 2 2, , , , ,F x y z x y z R G x y z x y Rx . Matricea
2 2 22 2 0
x y zx R y
are rangul 2 pentru orice punct diferit de (R, 0, 0). Atunci, pentru orice astfel de punct, exist o vecintate W astfel nct
este urma curbei. WCa i n cazul curbelor plane, introducem n cele ce urmeaz, noiunile de
punct singular, vitez, acceleraie, gradient pentru cazul curbelor n spaiu. Definiie. Un punct (x0, y0, z0) se numete singular dac:
3
-
____________________________________________________________Geometrie diferenial 4
0 0 0 0 0 0 0 0 0, , , , , , 0F F Fx y z x y z x y zx y z n reprezentare vectorial, punctul t I se numete singular dac ' 0r t . Definiie. Un punct t I se numete nesingular dac ' 0r t . Curba de clas C1 se numete nesingular sau neted dac:
2 2 2' ' ' 0, .x t y t z t t I Definiie. Vectorul ' ' ' 'r t x t i y y j z t k se numete vectorul
vitez. Pentru k 2, vectorul " " " 'r t x t i y t j z t ' k se numete vectorul acceleraie la drumul r n punctul t.
n cazul unui imobil, faptul c 'r t 0 , t I, are semnificaia c mobilul "se mic" tot timpul (de aceea punctele singulare se numesc uneori puncte staionare).
Exemplu. Drumul , t (Rcost, R sin t), unde R > 0 i z0 sunt constante,
este un drum parametrizat de cals C, nesingular, al crui suport este cercul cu centrul n punctul (0, 0, z0), de raz R, situat n planul z = z0.
3: 0,2r
Definiie. Fie un punct (x0, y0, z0) . Vectorul grad 0 0 0 0 0 0 0 0 0 0 0 0, , , , , , , , 0F F FF x y z x y z i x y z j x y z kx y z
se numete gradientul aplicatiei F.
5.2. Lungimea unui arc de curb. Parametrizarea natural Fie o curb n spaiu () dat n reprezentare vectorial: ,r r t t I . Se consider arcul AB pe aceast curb astfel nct A(t = t0 = a) i
B(t = tn = b), unde a, b (, ), a < b. Se mparte arcul AB n subarce prin punctele M0 = A, M1, , Mn = B, Mi(xi,yi, zi), 0 i n. Se formeaz astfel o linie poligonal nscris n arcul AB (fig.5.3.), adic am realizat o diviziune a arcului
4
-
____________________________________________________________Geometrie diferenial 5
AB, creia i corespunde o diviziune a intervalului real I, = (a = t0 < t1 < < tn = b), astfel nct , ,i i i i i ix x t y y t z z t 0 I n.
Fig. 5.3.
Punctele Mi, 0 I n, determin o linie poligonal nscris n arcul AB, care
au o anumit lungime. nlocuind diviziunea cu o diviziune mai fin, lungimea liniei poligonale corespunztoare crete.
Se noteaz norma vectorului 1i iM M prin li: 1 , 0,1,2,..., 1i i il M M i n .
Definiie. Se numete lungime a arcului AB expresia:
1
0max| | 0
limi
n
in il
l
dac aceast limit exist i este unic.
Observaie . Lungimea arcului AB se noteaz prin s. Deci:
1
0max| | 0
limi
n
in il
s l
.
Definiie. Un arc de curb n spaiu () se spune c este rectificabil dac:
1
0max| | 0
limi
n
in il
l
exist i este unic, adic dac arcul () are o lungime s.
5
-
____________________________________________________________Geometrie diferenial 6
Se poate demonstra urmtoarea teorem: Teorem. Fie curba n spaiu () dat n reprezentare parametric: ( ) : , ,r r t t
i fie AB un arc pe curba () astfel nct A(t = t0 = a), B(t = tn = b), a, b (, ), a < b.
Dac AB este un arc regulat de curb, atunci lungimea sa este dat de formula:
ba
s r t dt , unde:
drr t tdt
. Observaie. n cazul n care curba n spaiu () este dat n reprezentare
parametric: ,
x x t
y y t
z z t t I
atunci
2 2 2r t x t y t z t , rezult:
2 2 2ba
s x t y t z t dt . Teorema. Se consider curba n spaiu (), regulat, dat n reprezentare
vectorial: 1 2( ) : , ,r r t t t t , i fie 0M M un arc regulat pe curba (), cu M0 punct fix, M0(t0), iar M un punct curent pe curba (), M(t). Atunci lungimea s a arcului 0M M este o funcie continu i derivabil de parametru t:
s = s(t). Demonstraie. Din teorema precedent rezult:
6
-
____________________________________________________________Geometrie diferenial 7
0
t
ts r t dt
unde integrala din membrul al doilea este o integral definit scalar, limita superioar fiind parametrul t. Se demonstreaz n analiza scalar c o asemenea integral este o funcie continu i derivabil de parametru t:
s = s(t). Observaie. Dac se consider curba n spaiu () regulat, atunci din
condiiile de regularitate, rezult c: 2 2 2 0ds r t x t y t z t
dt
deci: 1 2 1 2: , ,s t t s t t , este o funcie surjectiv, strict cresctoare i continu, deci bijectiv. n plus, inversa ei:
t = t(s), este continu i derivabil, cu derivata:
1 0dt dss t sds dt
. Observaie. Fie arcul 0M M i coarda 0M M . Dac arcul 0M M este
rectificabil, atunci se demonstreaz uor c:
0lim
M M
s ll
, unde s este lungimea arcului 0M M , l este lungimea coardei [MM0], iar punctul M tinde ctre M0 pe arcul 0M M .
Fie () o curb n spaiu dat n reprezentare vectorial: 1 2( ) : , ,r r t t t t Se consider 0M M un arc regulat pe curba (). Conform teoremei
anterioare, lungimea arcului 0M M este o funcie continu i derivabil, de parametru t:
s = s(t). Definiie. Se numete element de arc al curbei n spaiu (), difereniala ds
a funciei s = s(t).
7
-
____________________________________________________________Geometrie diferenial 8
Teorem. Fie () o curb n spaiu regulat i ds elementul de arc pe (). 1. Dac () este dat n reprezentare vectorial: 1 2: ,r r t t t t , ,
atunci: ds dr 2. Dac () este dat n reprezentare parametric:
1 2
:
, ,
x x t
y y t
z z t t t t
atunci: 2 2ds dx dy dz 2 .
Demonstraie. 1. Fie punctele M, M' (), M(t), M'(t + t) (fig. 5.4).
1'MM r t t r tt
, unde t este creterea lui t, rezult pe baza observaiei de mai sus:
0 0
'lim limt t
MM r t t r tds r tdt t t
de unde:
ds r t dt , sau: ds dr .
Fig. 5.4.
2. Dac se ine cont de relaiile: r t x t i y t j z t k , 2 2 2r t x t y t z t ,
8
-
____________________________________________________________Geometrie diferenial 9
dr dxi dyj dzk , 2 2dr dx dy dz 2
rezult c: 2 2 2ds x t y t z t dt
sau 2 2ds dx dy dz 2 .
Definiie. Parametrul s este numit parametru natural al curbei n spaiu (),
iar reprezentarea vectorial a curbei (): () : r r s , s parametru natural,
se numete reprezentare natural a curbei n spaiu (). Noiunea de orientare pe o curb n spaiu se introduce n acelai mod ca
pentru o curb plan. Definiie. Se numete sens pozitiv de parcurs pe curba n spaiu: 1 2: , (r r t t t t , ) ,
sensul care corespunde la valorile cresctoare ale parametrului t. Evident, exist dou moduri de orientare a lui () i trecerea de la o
orientare la orientarea opus poate fi efectuat printr-o transformare parametric a crei derivat este negativ.
Observaie. Utilizarea reprezentrii naturale a unei curbe n spaiu va
simplifica unele calcule ce se vor face n consideraiile ce urmeaz a fi fcute asupra unei curbe n spaiu.
Observaie. Punctul M0(t = t0) (), corespunztor la s = 0, poate fi ales n relaia:
0 0
t t
t ts t r t dt r t r t dt
n mod arbitrar. Sensul pozitiv al reprezentrii naturale este acelai cu al reprezentrii
iniiale. Problem. S se determine parametrizarea natural a drumului
3: 0,2 ,r cos , sin , .t tr t e t e t e t
9
-
____________________________________________________________Geometrie diferenial 10
Soluie. Deoarece ' cos sin sin costr t e t t i t t j k
, rezult c
' tr t e 3 . Atunci 0
3 3 1t
u ts t e du r . Rezolvnd n raport cu t, obinem 3ln
3st , deci 1 3ln
3ss . Imaginea intervalului [0, 2] prin
funcia este intervalul 20, 3 1J e . Drumul cu parametrizare natural echivalent 3 3cosln ,
3 3s s s 3 3 3sin ln ,
3 3 3s ss
cu drumul dat
este . 3: J
5.3. Tangenta ntr-un punct la o curb
Definiie. Se numete tangent la curba n spaiu () n punctul nesingular M, poziia limit a dreptei secante MM' cnd M' M (fig. 5.5).
Fig. 5.5.
Teorem. O curb de clasa C1 are tangent n orice punct. Demonstraie. Fie M, M' , OM r t , 'OM r t t . Atunci
'MM r t t r t . Vectorul 1'' ' r t t r tMM MM
t t
este coliniar cu 'MM
. Punctul M fiind nesingular, vectorul r t t r t
t
10
-
____________________________________________________________Geometrie diferenial 11
are o limit nenul, bine determinat i anume 'r t , cnd t 0, deci cnd M' M, M' . Acest vector limit, nenul, are ca dreapt suport chiar dreapta cutat MT.
Am artat c o curb parametrizat de clas C1 are tangent n orice punct i c un vector director al tangentei n punctul M este 'r t .
Punctul M se numete punct de contact al tangentei. Cum 'r t este continuu, rezult c direcia tangentei variaz continuu cnd punctul de contact descrie curba.
Deoarece sensul lui 'MM
coincide sau nu cu sensul n care se mic punctul curent al curbei C, dup cum t > 0 sau t < 0, rezult c sensul vectorului 1 'MMt
este acelai cu sensul micrii punctului curect al curbei cnd t crete. Deci sensul lui 'r t este acelai cu sensul micrii punctului curent al curbei cnd t crete. Dac orientm curba astfel nct sensul pozitiv de-a lungul curbei s fie acelai cu sensul micrii punctului curent al curbei cnd t crete, putem spune c sensul derivatei este acelai cu sensul pozitiv pe curb.
S determinm ecuaiile tangentei n diverse reprezentri ale curbei. n acest scop considerm un punct oarecare P(X, Y, Z) pe tangenta n M la
curba . Reprezentare parametric Cum MP
este coliniar cu 'r t , exist astfel nct 'MP r t ,
relaie echivalent cu ecuaiile
' ,
'
' .
X x t x t
Y y t y t ,
Z z t z t
(5.6)
numite ecuaii parametrice ale tangentei. Ecuaiile (5.6) se mai pot scrie sub forma
' ' 'X x t Y y t Z z t
x t y t z t (5.7)
i se numesc ecuaii canonice ale tangentei. Reprezentare explicit
11
-
____________________________________________________________Geometrie diferenial 12
n cazul n care curba este dat prin ecuaii explicite, ecuaiile (5.7) devin
1 ' '
Y y x Z z xX xy x z x (5.8)
Reprezentare implicit Vom scrie acum ecuaiile tangentei n cazul curbelor n spaiu date implicit
de ecuaiile
, , 0
, , 0
F x y z
G x y z
(5.9)
Fie M0(x0, y0, z0) un punct, cu x0, y0, z0 satisfcnd (5.9) i
0
2
M
F F Fx y z
rangG G Gx y z
Dac, de exemplu, 0
,0
,M
D F GD y z
, atunci, conform teoremei funciilor
implicite, local, putem scrie ,y y x z z x . Derivnd n raport cu x egalitile
, ,
, ,
F x y x z x
G x y x z x
00
(5.10)
obinem ' 'F F Fy x z x
x y z 0
' 'G G Gy x z xx y z
0 Atunci, din sistemul de mai sus, obinem
, ,, ,
' , ', ,, ,
D F G D F GD x z D y x
y x z xD F G D F GD y z D y z
Folosind (5.9), ecuaiile tangentei n acest caz vor fi
12
-
____________________________________________________________Geometrie diferenial 13
0 0
0 0
, , ,, , ,
0
0
M M M
X x Y y Z zD F G D F G D F GD y z D z x D x y
(5.11)
Definim versorul tangent n punctul M la curb c fiind
''
r tt
r t
(5.12)
Probleme. 1. S se determine tangentele la curba n spaiu: 4 3 21 1:
2 3r t i t j t k
care sunt paralele cu planul: () : 3x 2y 2z 1 = 0. Soluie: Parametrii directori ai direciei unei tangente oarecare la curba
dat sunt (2t3, t, 2t). Pentru ca tangenta s fie paralel cu planul dat trebuie ca produsul scalar
dintre vectorul director, 3 22 , ,2v t t t , al tangentei i normala la plan, 3, 2, 2N s fie zero (cei doi vectori s fie perpendiculari). Adic:
3 2t3 + 2t2 4t = 0,
cu soluiile t1 = 1, i 2 23t , (pentru t = 0 nu se obine un punct ordinar al curbei ()).
Coordonatele punctului corespunztor valorii t1 = 1 sunt 1 1,2 3
x y z = 1, iar parametrii directori ai direciei tangentei n acest punct sunt: (2, 1, 2).
Ecuaiile tangentei n acest punct sunt: 1 2 1 3 1: 4 3
12
x y zT
n mod analog pentru 23
t se obine:
2 81 8 81 8 9 4: 4 3x y zT 1
.
13
-
____________________________________________________________Geometrie diferenial 14
2) S se scrie ecuaiile tangentei la curba de reprezentant , 3:r 4 2 3 4 31, 4 5 2,r t t t t t t t , n punctul A(3, 7, 2).
Soluie. Determinm valorile lui t pentru care r(t) = A. Acestea trebuie s satisfac ecuaiile: t4 + t2 + 1 = 3, 4t3 + 5t + 2 = 7, t4 t3 = 2. Din prima ecuaie obinem t1 = 1, t2 = 1. Numai t = 1 satisface i celelalte dou ecuaii. Aadar A = r(1). Deoarece 3 2 3' 4 2 12 5 4 3r t t t i t j t t k 2 , rezult c ' 1 6 17r i 7j k .
n consecin, ecuaiile tangentei n punctul A sunt 3 7
6 17 7x y z
2 .
3) S se scrie ecuaiile tangentei n punctul M0(1, 3, 4) la curba de ecuaii
x2 + y2 = 10, y2 + z2 = 25. Soluie. Folosind ecuaiile (5.19), unde F(x, y, z) = x2 + y2 10,
G(x, y, z) = y2 + z2 25.
Obinem 0
,48
,M
D F GD y z
, 0
,16
,M
D F GD z x
, 0
,12
,M
D F GD x y
.
Deoarece vectorii 48 16 12i j k i 12 4 3i j k sunt coliniari, ecuaiile tangentei n punctul M0 sunt
1 312 4 3
x y z 4 .
5.4. Plan osculator la o curb Fie o curb parametrizat de clas C2, 'PT r t vectorul tangent n
punctul P la curb i P' , P' P. Se numete plan osculator la curba () n punctul P poziia limit a planului ce trece prin punctul P' i prin tangenta la curba () n punctul P, cnd P' P, dac aceast poziie exist i este unic (fig.5.6).
14
-
____________________________________________________________Geometrie diferenial 15
Fig. 5.6.
Fie dou puncte P', P i OP r t , 'OP r t t . Aplicm formula lui Taylor pentru cmpuri vectoriale i obinem:
2
' "2t
r t t r t r t t r t t
(5.13) unde 0t cnd t 0. Atunci vectorul
1 ' "2tPA PP PT r t t
t
este coliniar cu , deci planul PTP' coincide cu planul PTA. 'PP
Dac alegem vectorul 2TB TAt
, atunci
"TB r t t i planele PTA i PTB coincid. Aadar, planul PTP' coincide cu planul PTB.
Dar, cnd t 0, "TB r t , deci planul osculator este determinat de vectorii necoliniari 'r t i "r t .
Am artat c o curb parametrizat de clas C2 are un plan osculator n orice punct n care vectorii 'r t , nu sunt coliniari. Planul osculator ce trece prin P are ca vectori directori vectorii
"r t t'r i "r t .
S determinm acum ecuaia planului osculator. Vectorii PN, i fiind coninui n planul osculator, sunt coplanari,
deci produsul lor mixt este nul, adic : 'r t "r t
15
-
____________________________________________________________Geometrie diferenial 16
' ''PN r t r t care constituie ecuaia vectorial a planului osculator n punctul P la curba n spaiu ().
Dac X, Y, Z sunt coordonatele unui punctului curent P din planul osculator, ecuaia planului osculator n punctul P (x(t), y(t), z(t)) este
' ' '" " "
X x t Y y y Z z tx t y t z tx t y y z t
0 (5.14)
Introducnd notaiile
' '" "
y t z tl
y t z t ,
' '" "
z t x tm
z t x t ,
' '" "
x t y tn
x t y t (5.15)
ecuaia planului osculator se mai scrie 0l X x t m Y y t n Z z t . (5.16) Observaie. Dac curba regulat () este plan, atunci planul osculator n
orice punct P (), coincide cu planul curbei. ntr-adevr, fie () planul curbei (), deci () () i fie punctele P, P',
P" (). Se poate uor arta c planul osculator (0) n P la curba () este poziia limit a unui plan (') ce trece prin punctele P, P', P" (), cnd P P i P" P.
Deoarece P, P', P" () rezult c () ('). ns poziia limit a planului (), adic (0) este identic cu ('), deci:
(0) (). Probleme. 1. S se determine punctele curbei n spaiu: 4 3: 1 1r t i t j tk 2
ale cror plane osculatoare sunt paralele cu dreapta de ecuaie: 1 1:
12 7 2x y zd .
Soluie: Ecuaia planului osculator ntr-un punct curent M (), de vector de poziie r t este:
16
-
____________________________________________________________Geometrie diferenial 17
4 3
3 20
2
1 1 2
: 4 3 2
12 6 0
x t y t z t
t t
t t
0
sau:
4 2 3 40 :12 1 24 1 12 2 0t x t t y t t z t adic:
4 3 30 : 1 2 1 2x t t y t t z t 0 . Pentru ca planul (0) s fie paralel cu dreapta (d) trebuie s fie ndeplinit
condiia: 0
N d (vectorul normal la planul osculator: 0 31,2 ,N t t s fie ortogonal pe vectorul director al dreptei : 12, 7,2d d , deci:
12(1) 7(2t) + 2t3 = 0. Soluiile acestei ecuaii sunt: t1 = 2, t2 = 1, t3 = 3. Deci punctele cutate
sunt M1(15, 7, 4), M2(0, 0, 2) i M3(80, 28, 6). 2. S se scrie ecuaia planului osculator la curba , 3:r
2 2, , 20r t t t t , n punctul A(9, 3, 7). Soluie. Evident A = r(3). Deoarece 2' 2 3r t ti j t k , " 2 6r t i tk ,
rezult c ' 3 6 27r i j k , " 3 2r 18i k , deci l = 18, m = 54, n = 2. Ecuaia planului osculator devine: 9x 27y z + 7 = 0. 3. S se scrie ecuaia planului osculator la curba de ecuaii y2 = x, x2 = z, n
punctul A(1, 1, 1). Soluie. Curba se poate parametriza uor alegnd ca parametru y = t.
Ecuaiile parametrice ale curbei vor fi: x = t2, y = t, z = t4. Procednd ca n exemplul anterior, obinem ecuaia planului osculator: 6x 8y z + 3 = 0.
4. S se scrie ecuaia planului osculator la curba de ecuaii x2 + y2 1 = 0, x2
2yz = 0, n punctul A(0, 1, 0). Soluie. Folosind teorema funciilor implicte, putem gndi local y i z ca
funcii de x. Derivnd de dou ori cele dou egaliti n raport cu x, rezult x + yy' = 0, x y'z yz' = 0, respectiv 1 + (y')2 + yy" = 0, 1 y"z 2y'z' yz" = 0. Scriind
17
-
____________________________________________________________Geometrie diferenial 18
aceste relaii n punctul A, obinem y'(0) = 0, z'(0) = 0, y"(0) = 1, z"(0) = 1. Atunci
ecuaia planului osculator este 1
1 0 00 1 1
x y z0
, adic y + z 1 = 0.
5.5. Plan normal. Normala ntr-un punct Fie () o curb parametrizat de clas C2 i r un drum al curbei () cu
proprietatea c vectorii 'r t i "r t nu sunt coliniari. Aadar ' " 0,r t r t t I ,
deci drumul r este nesingular.
Definiie. Se numete plan normal n punctul M la curba (), planul care trece prin M i este perpendicular pe tangenta n punctul M la ().
innd seama de ecuaiile canonice ale tangentei, ecuaia planului normal pentru o curb dat parametric este
' 'X x t x t Y y t y t Z z t z t ' 0 (5.17) n cazul ecuaiilor tangentei (5.10) pentru curbe date implicit, avnd n
vedere i (5.11), ecuaia planului normal este:
0 0
0 0 0, , ,
0, , ,
M M
D F G D F G D F GX x Y y Z z
D y z D z x D x y
0M
(5.18)
Am definit n paragraful 5.3 versorul tangent n punctul M la curb ca fiind:
''
r tt
r t
.
Mulimea dreptelor care trec M i sunt perpendiculare pe se numesc normale n punctul M la curba (). Aadar, o curb n spaiu are o infinitate de normale ntr-un punct al su.
t
Definiie. Se numete normala principal n punctul M la curba () normala
situat n planul osculator n punctul M la curba ().
18
-
____________________________________________________________Geometrie diferenial 19
Definiie. Se numete binormal n punctul M la curba () normala la planul osculator n punctul M la curba ().
Aadar, ecuaiile binormalei sunt: X x t Y t z Z z t
l m n . (5.19)
Normala principal fiind intersecia dintre planul normal i planul osculator, ecuaiile ei vor fi:
' '
0
X x t x t Y y y y t Z z t z t
l X x t m Y y t n Z z t
' 0
. (5.20)
5.6. Plan rectifiant Definiie. Se numete plan rectifiant n punctul M la curba () planul
determinat de tangenta i binormala n punctul M la curb. Prin urmare, ecuaia planului rectifiant este:
' ' 'X x t Y y y Z z t
x t y t z tl m n
0 (5.21)
S considerm acum : J drumul parametrizat natural echivalent cu drumul r : I .
n capitolul 7, pentru t0 I fixat, am definit funcia schimbare de parametru:
0
' ,t
t
s t t r d t I . Atunci J = s(I), = r s1 i ,r t s t t I . (5.22) Avem c: ' ' ,s t r t t I . Derivnd n relaia (5.22), obinem: ' ' ' ' 'r t s t s t s t r t ,
adic
19
-
____________________________________________________________Geometrie diferenial 20
'
''
r ts t
r tt
. (5.23)
Avem de asemenea, n continuare:
2
2
" " ' ' "
" ' ' "
r t s t s t s t s t
s t r t s t s t
(5.24)
ntruct
22' ' ' 's t r t r t r t derivnd, rezult:
' " ' "s t s t r t r t , Adic:
' ""
'r t r t
s tr t
.
Aadar, (5.23) se mai scrie:
2 ' "" " ' '
'r t r t
r t s t r t s tr t
,
din care obinem
2 2
' "1" "' '
r t r t's t r t
r t r tr t
(5.25)
Din (5.25) rezult c vectorul " s t se afl n planul osculator n punctul M la curb. ntruct avem
' 1, ,s t t I (5.26) conform regulii de derivare, rezult c:
" 's t s t t Astfel, " s t se afl n planul normal n punctul M la curb, deci
" s t este coliniar cu normala principal n punctul M la curb. Definim versorul normalei principale n punctul M la curb ca:
"
"
s tt
s t
. (5.27)
20
-
____________________________________________________________Geometrie diferenial 21
i de asememea, prin definiie, versorul binormalei, n punctul M la curb astfel: t t t .
5.7. Triedul lui Frenet
Definiie. Triedrul tridreptunghic format din: - tangent (orientat n sensul creterii parametrului), - normala principal i - binormal
se numete triedru principal sau triedrul lui Frenet al curbei C n M. Aadar, versorii triedului lui Frenet al curbei C n punctul M = r(t) sunt notai
, ,t t t . Feele triedrului lui Frenet sunt: - planul osculator, - planul normal i - planul rectifiant.
Fig. 5.7.
Observaie. n practic nu este nevoie obligatoriu de determinarea
parametrizrii naturale : J n problema determinrii triedrului lui Frenet. Pentru versorii axelor triedrului lui Frenet se folosesc:
- versorul tangentei: ''
r tt
r t
, (5.28)
- versorul binormalei: ' "' "
r t r tt
r t r t
, (5.29)
- versorul normalei: t t t . (5.30) Determinarea relaiei (5.28) se face folosind urmtoarele:
21
-
____________________________________________________________Geometrie diferenial 22
Pornim de la relaia:
' "
"
s t st
s t
t
.
ce deriv din (5.23) i (5.27). Avem de asemenea
3' "
' "'
r t r ts t s t
r t
,
iar din (5.26) i (5.27) obinem " ' "s t s t s t ,
deci
3' "
"'
r t r ts t
r t
. (5.31)
n consecin obinem formula de calcul (5.29). Probleme. 1) S se scrie ecuaiile muchiilor i feelor triedrului lui Frenet ntr-un punct
oarecare al curbei de reprezentant , r(t) = (acos , asint, bt), a, b > 0. 3:r tSoluie. Avem ' sin cosr t a ti a tj bk , " cos sinr t a t i a t j .
Atunci 2sin ti ab tj a k ' "r t r t ab , deci l = absint, m = abcost, n = a2. n consecin, ecuaiile tangentei sunt
cos sinsin cos
x a t y a t z ba t a t b
t , iar ecuaiile binormalei sunt
cos sinsin cos
x a t y a t z bb t b t a
t De asemenea, ecuaia planului normal este axsint aycost bz + b2t = 0
iar a planului osculator este bxsint bycost + az abt = 0. Folosind (5.21), ecuaia planului rectifiant este xcost + ysint a = 0
deci ecuaiile normalei principale sunt cos sin
cos sin 0x a t y a t z b
t t t .
22
-
____________________________________________________________Geometrie diferenial 23
2) S se determine versorul triedului lui Frenet ntr-un punct oarecare al curbei de reprezentant 3 2 3: 0, , cos ,sin ,cos22r r t t t t
(
.
Soluie. Vom folosi formulele (4.19), (4.35), 4.36). Deoarece 3 2' 3cos sin 3sin cos 2sin 2r t t ti t tj tk ,
rezult c ' 5sin cor t t t s . Atunci ' 3 3cos sin
5 5'r t
t tir t
45
tj k .
De asemenea, 2 2 2 2" 3cos 2sin cos 3sin 2cos sin 4cos2r t t t t i t t t j tk , deci 2 2cos 4cos 4sin 3t t ti tj k ' " 3sinr t r t .
n consecin, 2 2' " 15sin cosr t r t t t , deci 1 4cos 4sin 35t ti tj k . Atunci sin cost t t ti tj .
3) Fie curba de reprezentant , r(t) = (tsint, tcost, tet). S se
determine versorii triedului lui Frenet n origine. 3:r
Soluie. Deoarece ' sin cos cos sin 1 tr t t t t i t t t j t e k " 2cos sin 2sin cos 2 tr t t i t i t t t j t e k ,
rezult c 'r t j k , " 0 2 2r i k , ' 0 2r . Atunci .' 0 12' 0r j k
r
Dar ' 0 2j " 0 2 2r r i k , ' 0 " 0 2 3r r , deci 0 .i j k 1
3
Atunci 10 26
i j k0 0 .
5.8. Formulele lui Frenet
Fie o curb parametrizat de clas C3, : J parametrizarea sa natural, s parametrul natural pe curb, M = (s) un punct pe curb i
, ,s s s
versorii tangentei, normalei principale respectiv binormalei n punctul M. Din (5.28) i (5.29) rezult c:
's s ,
23
-
____________________________________________________________Geometrie diferenial 24
""
ss
s
,
s s s . Ne propunem s exprimm ' , ' , 's s s n funcie de
, ,s s s . Acestea sunt date de formulele lui Frenet: 1. ' s K s s prima formul a lui Frenet. (5.32) 2. ' s K s s T s s a doua formul a lui Frenet (5.33) 3. ' s T s s , a treia formul a lui Frenet (5.34) Demonstraie: 1. Deoarece ' "s s , rezult c ' s este coliniar cu s , deci
' s s s . Vom nota (s) = K(s) i o vom numi curbura curbei n punctul M. 2. Pe de alt parte, deoarece 1, 's s s , rezult c vectorii
, , 's s s sunt coplanari, deci 1 2 1 2' ,s s s s s s s , .
nmulind scalar cu s , obinem c 1 's s s . Derivnd relaia 0s s i innd seama de (5.31), rezult c 1 's s s K s .
Vom nota 2(s) = T(s) i o vom numi torsiunea nctul M. curbei n pu3. Derivnd relaia s s s , obinem ' ' 's s s s s . Folosind (5.31) i (5.32), rezult c 2 2' 's s s k s s s k s s . Aadar, formulele lui Frenet sunt:
'
'
'
s K s s
s K s s T s s
s T s s
Formulele lui Frenet sunt de mare importan pentru demonstrarea urmtoarei teoreme fundamentale a teoriei curbelor n spaiu i anume:
Teorem. Fie K = K(s), = (s) dou funcii continue pe intervalul I
[0,) i astfel nct K(s) > 0 pentru orice s I. n aceste condiii exist o curb care admite o reprezentare natural cu s ca parametru i pentru care K(s) i (s) sunt
24
-
____________________________________________________________Geometrie diferenial 25
curbura i respectiv torsiunea. Dou curbe cu aceast proprietate difer cel mult printr-o rotaie i o translaie.
Observaie. Rezultatul dat n teorema anterioar arat c funciile continue: K = K(s), = (s), K(s) > 0, s I,
determin o curb pn la rotaii i translaii n spaiu. Din acest motiv, ecuaiile de mai sus se numesc ecuaii intrinseci ale curbelor n spaiu.
Exemplu. Fie curba n spaiu: 2: 2 ln ,r t ti t j tk t 0 S se determine ecuaiile muchiilor i feelor triedrului Frenet n punctul
P(2, 1, 0). Soluie: Pe curba () punctul P(2, 1, 0) corespunde la valoarea t = 1 a
parametrului. Vectorul director al tangentei n P este:
1
12 2 2 2P
tr i t j k i j
t
k , iar ecuaiile tangentei n P la curba () sunt date de:
2 1:2 2 1
x y zT . Planul normal are drept vector normal N r i ecuaia: : 2 2 2 1 1 0 0N x y z
sau: : 2 2 6 0N x y z Planul osculator conine punctul P i este determinat de vectorii ,
P Pr r ,
ecuaia sa este:
02 1
: 2 2 1 00 2 1
x y z
,
sau: : 2 2 3 0N x y z Dreapta binormal este perpendicular pe planul osculator n P, deci are
vectorul director 2, 1, 2PN , rezult ecuaiile: 2 1:
2 1b 2x y zN .
Normala principal se afl la intersecia dintre planul normal i planul osculator, i are ecuaiile:
25
-
____________________________________________________________Geometrie diferenial 26
2 2 6: 2 2 3p x y zN x y z 00
Planul rectificant conine dreapta tangent i dreapta binormal iar ecuaia sa este:
2 1
: 2 2 1 02 1 2
R
x y z
sau: : 2 2R x y z 0 .
5.9. Curbura i torsiunea unei curbe n strmbe
Fie o curb de clas C2 i dou puncte ale curbei M(x(t), y(t), z(t)) i N , N M, N(x(t + t), y(t + t), z(t + t)) (fig.). n cele dou puncte M, N ale curbei, ducem tangentele t , respectiv t t .
Fig. 5.8.
Definiie. Se numete unghi de contingen , notat cu , al unui arc de
curb MN , unghiul format de tangentele t i t t duse la extremitile arcului. Unghiul de contingen msoar deviaia pe care o are tangenta cnd punctul curent descrie arcul MN datorit curbrii (ncovoierii) curbei.
Am notat, de asemenea cu |s| lungimea arcului MN . Gradul de ncovoiere al arcului se msoar prin raportul
s , dintre unghiul
de contingen i lungimea arcului i avem atunci urmtoarea definiie:
26
-
____________________________________________________________Geometrie diferenial 27
Definiie. Se numete curbur a curbei n punctul M i o vom nota cu K(t) limita raportului
s , cnd N M, N .
Observaii. 1) n cazul unei drepte, tangenta n orice punct coicide cu dreapta, deci
curbura unei drepte este nul. 2) Curbura unei drepte este prin definiie nenegativ. 3) n cazul unui cerc, unghiul de contingen corespunztor arcului MN este
egal cu unghiul normalelor n M i N, deci cu unghiul razelor n M i N. Dac R este raza cercului, atunci |s| = R. Prin urmare, raportul 1
s R este constant,
deci 1K tR
. Aadar, pentru un cerc curbura este aceeai n orice punct i anume inversul razei, deci raza este inversa curburii.
Prin analogie cu cazul cercului, putem folosi urmtoarea definiie. Definiie. Se numete raza de curbur a unei curbe ntr-un punct inversa
curburii n acel punct. Dac R(t) este raza de curbur ntr-un punct, atunci curbura K(t) n acel punct
este
1K t
R t .
Teorem. O curb parametrizat de clas C2 are o curbur bine determinat
n orice punct. Dac s este parametrizarea natural a curbei, atunci: "K t s t (5.35) Demonstraie. Fie s i s s versorii tangentelor n punctele M
respectiv N. Cum s i s s sunt versori, unghiul dintre ei fiind , din teorema cosinusului rezult c:
2sin2
s s s i avem:
27
-
____________________________________________________________Geometrie diferenial 28
2sin sin2 22
s s ss s s
.
ntruct 0 cnd s 0, trecnd la limit, obinem:
0lims
s s sK s
s
.
Cum 's s t , rezult (5.35). Observaie. O curb a crei curbur n orice punct este nul este o dreapt.
ntr-adevr, din " s 0 , obinem prin integrri succesive 0s a r
, s , (5.36) unde vectorii i a li mj nk 0 0 0 0r x i y j z k
sunt constani. Relaia (5.36)
se mai scrie: x = x0 + ls, y = y0 + ms, z = z0 + ns, s ,
deci curba este o dreapt. Am introdus anterior noiunea de torsiune ca fiind un anumit factor n
formulele lui Frenet. n continuare vom da torsiunii o definiie geometric, similar cu definiia curburii.
Fie M un punct al curbei , de clas C3 i fie N , N M. n cazul curbelor plane, binormalele n M i N sunt perpendiculare pe planul curbei. Cnd curba nu este plan, unghiul al planelor osculatoare n punctele M i N, care coincide cu unghiul binormalelor n M i N, msoar deviaia pe care o sufer binormala cnd punctul curent descrie arcul MN , datorit faptului c arcul MN iese din planul osculator M. Fie |s| lungimea arcului MN .
Definiie. Se numete torsiune absolut limita raportului s
cnd N M,
N . Dac s este parametrizarea natural a curbei, atunci torsiunea este:
0lim 's
T s ss
. (5.37)
Teorem. O curb de clas C3 are torsiunea absolut |T(s)| bine determinat
n orice punct n care curbura este nenul. Demonstraie. Din motive de continuitate, curbura fiind nenul n punctul
M(x(s), y(s), z(s)), este nenul ntr-o vecintate a acestui punct. n orice punct n
28
-
____________________________________________________________Geometrie diferenial 29
care curbura este nenul, vectorii ' s i " s sunt necoliniari, deci n orice punct din vecintatea lui M exist un plan osculator bine determinat.
Fie N(x(s + s), y(s + s), z(s + s)) i fie s i s s versorii binormalelor n punctele M i N. Unghiul dintre aceti versori fiind , din teorema cosinusului rezult c 2sin
2s s s . Prin urmare,
2sin sin2 22
s s ss s s
deci 0
lim 's
ss
. Conform celei de-a treia formule a lui Frenet, obinem c
20lims k ss , adic (5.37).
Definiie. Se numete raz de torsiune ntr-un punct i se noteaz cu T(t)
inversa torsiunii n acel punct, adic 1
TR t T t .
Observaii. 1) Curbura i torsiunea unei curbe ntr-un punct au fost definite geometric,
deci exprim proprieti intrinseci ale curbei. Aadar, curbura i torsiunea sunt invariani scalari ai curbei. Se poate arta c dac se cunosc curbura i torsiunea unei curbe, curba este determinat abstracie fcnd de poziia sa.
2) Curbele cu proprietatea RT(t) d2 = const., unde d este distana de la origine la planul osculator n punctul curent al curbei, au fost studiate de matematicianul romn Gh. ieica. De aceea i poart numele, numindu-se curbe ieica.
3) O curb este plan dac i numai dac torsiunea ei n orice punct este nul. ntr-adevr, curba fiind plan, n orice punct al curbei planul osculator coincide cu planul curbei, deci ' s 0. Conform (7.1), T(s) = 0. Reciproc, din T(s) = 0 rezult c este un vector constant, deci s Ai Bj Ck . Dar 0s s , adic
sau A x'(s) + B y'(s) + C z'(s) = 0. Integrnd, rezult A x(s) + B y(s) + C z(s) = D, deci curba se afl n planul de ecuaie Ax + by + Cz + D = 0.
's r s 0
29
-
____________________________________________________________Geometrie diferenial 30
5.10. Calculul curburii i torsiunii unei curbe strmbe
n continuare, vom aborda problema calculului curburii i torsiunii. innd seama de (5.31), formula curburii este 3
' "
'
r t r tK t
r t
(5.38)
Cnd curba este dat de ecuaiile parametrice
x x t
y y t
z z t
, t I,
obinem pentru curbur urmtoarea expresie:
2 2 2
3/ 22 2 2' ' '
l m nK tx t y t z t
unde
' '" "
y t z tl
y t z t ,
' '" "
z t x tm
z t x t ,
' '" "
x t y tn
x t y t .
Probleme. 1) S se calculeze curbura ntr-un punct oarecare a curbei dat de
, 3:r cos , sin ,t tr t e t e t e t . Soluie. Avem: ' cos sin sin costr t e t t i t t j k
, " ( 2sin 2costr t e ti tj k) . Atunci ' 3 tr t e , sin cos 2i t t j k2' " 2 sin costr t r t t t
, deci
2' " 6 tr t e r t . Folosind (5.28) obinem pentru curbur 23 t
K te
. 2) S se calculeze curbura ntr-un punct oarecare al curbei dat de
, 3:r cos , sin , , , 0.r t a t a t bt a b
30
-
____________________________________________________________Geometrie diferenial 31
Soluie. Imaginea curbei este elicea cilindric. Deoarece , rezult c ' sin cosr t a ti a tj bk 2' " sin cosr t r t ab ti ab tj a k ,
deci 2 2'r t a b , 2 2a b' "r t r t a . n acest caz, folosind (5.28), obinem 2 aK t a b 2 . Aadar, curbura elicei
cilindrice este constant. 3) S se calculeze raza de curbur a curbei dat de , 3:r
32 1, ,1r t t t t 2 , n punctul A(1, 0, 1). Soluie. Este clar c A = r(0). Dar 2' 2 3 2r t i t j tk , " 6 2r t tj k . n
consecin , ' 0 2r i " 0 2r k , ' 0 " 0 4r r j , deci ' 0 2r . Raza de curbur a curbei n punctul A este R(0) = 2.
4) S se calculeze raza de curbur a curbei de ecuaii x2 + y2 = a2, x2 2yz =
0, n punctul A(0, a, 0), a > 0. Soluie. Metoda I. Vom folosi teorema funciilor implicite. Coordonatele
punctului A verific cele dou ecuaii, deci punctul se afl pe curb. Dac notm F(x, y, z) = x2 + y2 a2, G(x, y, z) = x2 2yz, rezult c 2
,4
,A
D F Ga
D y z , deci,
local, putem gndi y i z ca funcii de x. Alegnd x ca parametru, local, curba este dat de ecuaiile
x xy y x
z z x
Prin urmare x2 + y2(x) a2 = 0, x2 2y(x) z(x) = 0. Derivnd de dou ori n raport cu x, obinem 2x + 2y(x) y'(x) = 0, 2x 2y'(x) z(x) 2y(x) z'(x) = 0, 2 + 2y'2(x) + 2y(x) y"(x) = 0,2 2y"(x) z(x) 4y'(x) 2y(x) z"(x) = 0.
Scriind aceste ecuaii n punctul A, deci innd seama c y(0) = a, z(0) = 0, rezult c y'(0) = 0, z'(0) = 0, y"(0) = 1
a , 1" 0z
a . Atunci ' 0r i ,
31
-
____________________________________________________________Geometrie diferenial 32
1 1" 0r j k a a
, 1 1' 0 " 0r r j ka a
, ' 0 1r , 2' 0 " 0r ra
.
Raza de curbur a curbei n punctul A este 02
aR . Metoda a II-a. Ecuaiile parametrice ale curbei sunt:
2
cossin
cossin
x a ty a t
a tzt
Atunci 2
A r , ' 2r ai
, "
2r aj ak
, 2 2' "
2 2r r a j a k
,
'2
r a
, ' "2 2
r r a
2 . n consecin, raza de curbur a curbei n
punctul A este 2 2
aR . Pentru calculul torsiunii, din formula a doua a lui Frenet obinem: 'T s s s
Dar ' "s s s R s s s . Pe de alt parte, din
"s R s s rezult ' ' " "'s R s s R s s . Atunci 21
' , " , "'s s sT s
k s
(5.39)
Aadar, torsiunea T (s) a curbei C n punctul M este dat de 2
' , " , "'
' "
s s sT s
s s
(5.40)
Ne propunem acum s gsim formula de calcul a torsiunii n cazul unei parametrizri oarecare.
S considerm : J drumul parametrizat natural echivalent cu drumul r : I .
Din (5.24) rezult: 3"' "' ' 3 " ' " ' "'r t s t s t s t s t s t s t s t (5.41)
Din (5.23), (5.24) i (5.41) obinem
32
-
____________________________________________________________Geometrie diferenial
33
33
6' , " , "' ' ' , " , "'r t r t r t r t t t t . Dar din (5.23) i (5.25) avem
3' "
' "'
r t r ts t s t
r t
Atunci, din (5.40) rezult 2
' , " , "'
' "
r t r t r tT t
r t r t
sau
2 2 2
' ' '" " ""' "' "'
x t y t z tx t y t z tx t y t z t
T tl m n
(5.42) unde l, m, n sunt dai de (5.15).
Probleme. 1) S se calculeze torsiunea curbei dat de , r(t) = (acost, asint,
bt), a, b > 0. 3:r
Soluie. Imaginea rbei este elicea cilindric. Avem: cu ' sin cosr t a ti a tj bk , " cos sir t a ti a tj n , "' sin cosr t a ti a tj .
Atunci 2cos tj a k' " sinr r ab ti ab , deci 2' "r r 2 2 2a a b . Folosind (7.5), obinem 2 2
bTa b
. Aadar, torsiunea elicei este constant. 2) S se determine funcia t f(t), t > 0, astfel nct curba dat de
3: 0,r , 2, ln ,r t t t f t s fie o curb plan. Soluie. Condiia T(t) = 0, t >0, conduce la ecuaia diferenial 2 "' " ' 0t f t tf t f t . Rezult c 21 2 3 lnf t C t C C t .
Curbe n spaiu 5.1. Moduri de reprezentare a unei curbe n spaiu 5.2. Lungimea unui arc de curb. Parametrizarea natural 5.3. Tangenta ntr-un punct la o curb 5.4. Plan osculator la o curb 5.5. Plan normal. Normala ntr-un punct 5.6. Plan rectifiant 5.7. Triedul lui Frenet 5.8. Formulele lui Frenet 5.9. Curbura i torsiunea unei curbe n strmbe 5.10. Calculul curburii i torsiunii unei curbe strmbe