Cap 3.Procesul Autopropulsarii
63
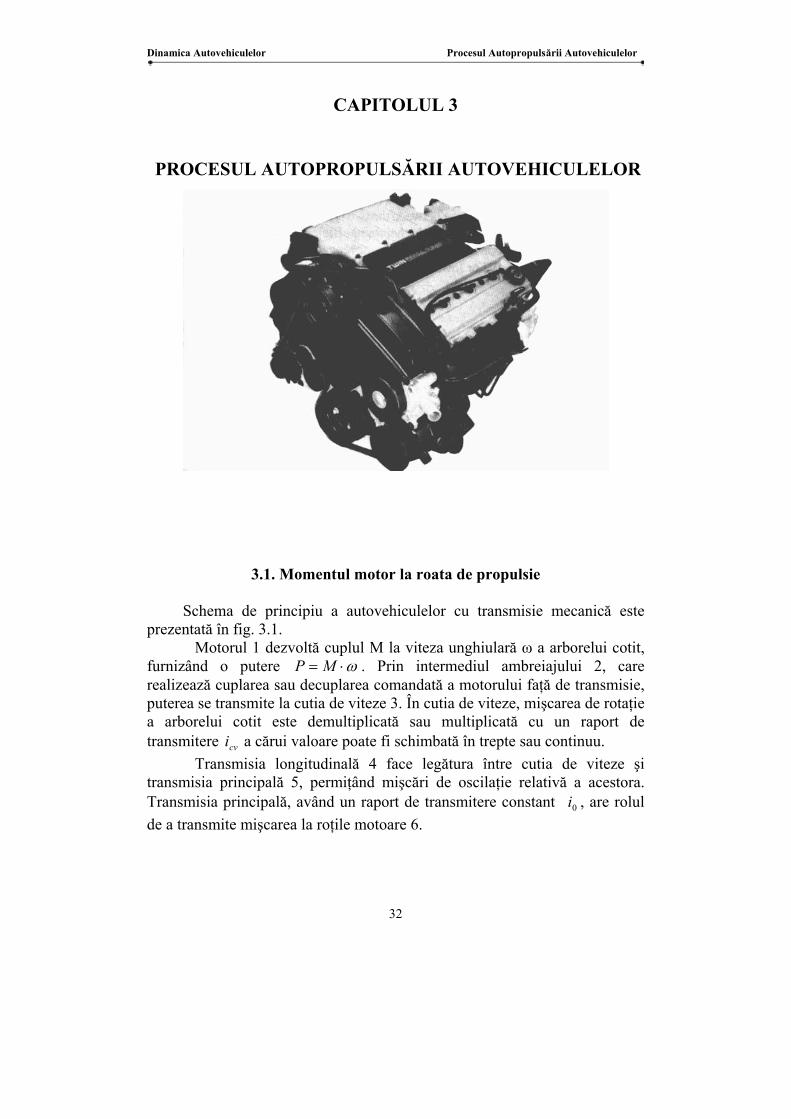
Dinamica Autovehiculelor Procesul Autopropulsării Autovehiculelor 32 CAPITOLUL 3 PROCESUL AUTOPROPULSĂRII AUTOVEHICULELOR 3.1. Momentul motor la roata de propulsie Schema de principiu a autovehiculelor cu transmisie mecanică este prezentată în fig. 3.1. Motorul 1 dezvoltă cuplul M la viteza unghiulară ω a arborelui cotit, furnizând o putere ω ⋅ = M P . Prin intermediul ambreiajului 2, care realizează cuplarea sau decuplarea comandată a motorului faţă de transmisie, puterea se transmite la cutia de viteze 3. În cutia de viteze, mişcarea de rotaţie a arborelui cotit este demultiplicată sau multiplicată cu un raport de transmitere cv i a cărui valoare poate fi schimbată în trepte sau continuu. Transmisia longitudinală 4 face legătura între cutia de viteze şi transmisia principală 5, permiţând mişcări de oscilaţie relativă a acestora. Transmisia principală, având un raport de transmitere constant 0 i , are rolul de a transmite mişcarea la roţile motoare 6.
-
Upload
lorenaungureanu4 -
Category
Documents
-
view
32 -
download
1
description
geodezie
Transcript of Cap 3.Procesul Autopropulsarii
Dinamica Autovehiculelor Procesul Autopropulsării Autovehiculelor
32
CAPITOLUL 3
PROCESUL AUTOPROPULSĂRII AUTOVEHICULELOR
3.1. Momentul motor la roata de propulsie
Schema de principiu a autovehiculelor cu transmisie mecanică este prezentată în fig. 3.1.
Motorul 1 dezvoltă cuplul M la viteza unghiulară ω a arborelui cotit, furnizând o putere ω⋅= MP . Prin intermediul ambreiajului 2, care realizează cuplarea sau decuplarea comandată a motorului faţă de transmisie, puterea se transmite la cutia de viteze 3. În cutia de viteze, mişcarea de rotaţie a arborelui cotit este demultiplicată sau multiplicată cu un raport de transmitere cvi a cărui valoare poate fi schimbată în trepte sau continuu.
Transmisia longitudinală 4 face legătura între cutia de viteze şi transmisia principală 5, permiţând mişcări de oscilaţie relativă a acestora. Transmisia principală, având un raport de transmitere constant 0i , are rolul de a transmite mişcarea la roţile motoare 6.
Dinamica Autovehiculelor Procesul Autopropulsării Autovehiculelor
33
Figura 3.1
După cum se ştie datorită frecărilor care apar în organele transmisiei
la roţile motoare ale autovehiculelor ajunge puterea: RP = ωηη ⋅⋅=⋅ MP tt (3.1)
Viteza unghiulară de rotaţie a roţilor motoare Rω se obţine cunoscând viteza unghiulară ω a arborelui cotit şi raportul total de transmitere ti :
=Rωcvt iii ⋅=
0
ωω (3.2)
Cunoscând puterea la roată RP şi viteza unghiulară Rω de rotaţie a roţilor motoare, se poate calcula momentul de antrenare a roţilor denumit moment la roată RM cu relaţia:
RP
RRM ω= (3.3)
Dacă se ţine seama de expresiile (3.1) şi (3.2) se obţine, pentru momentul la roată, expresia:
ttR iMM η⋅⋅= (3.4) Rularea roţilor poate avea loc datorită acţiunii momentului la roată
RM , datorită unor forţe de împingere sau tragere F şi sub acţiunea unui moment de frânare fM .
În funcţie de forţele şi momentele care acţionează asupra roţilor autovehiculului, acestea pot fi:
Roţi motoare sau antrenate, când asupra lor se aplică un moment motor RM , care are acelşi sens cu viteza unghiulară Rω a roţii;
Roţi conduse sau neantrenate, când se aplică forţa de tragere sau împingere F (cu acelaşi sens sau sensul de deplasare) sau forţe de reţinere (de sens opus deplasării autovehiculului) şi
Roţi frânate, când asupra lor se aplică un moment de frânare fM , ce are sensul invers al vitezei unghiulare a roţii Rω .
Dinamica Autovehiculelor Procesul Autopropulsării Autovehiculelor
34
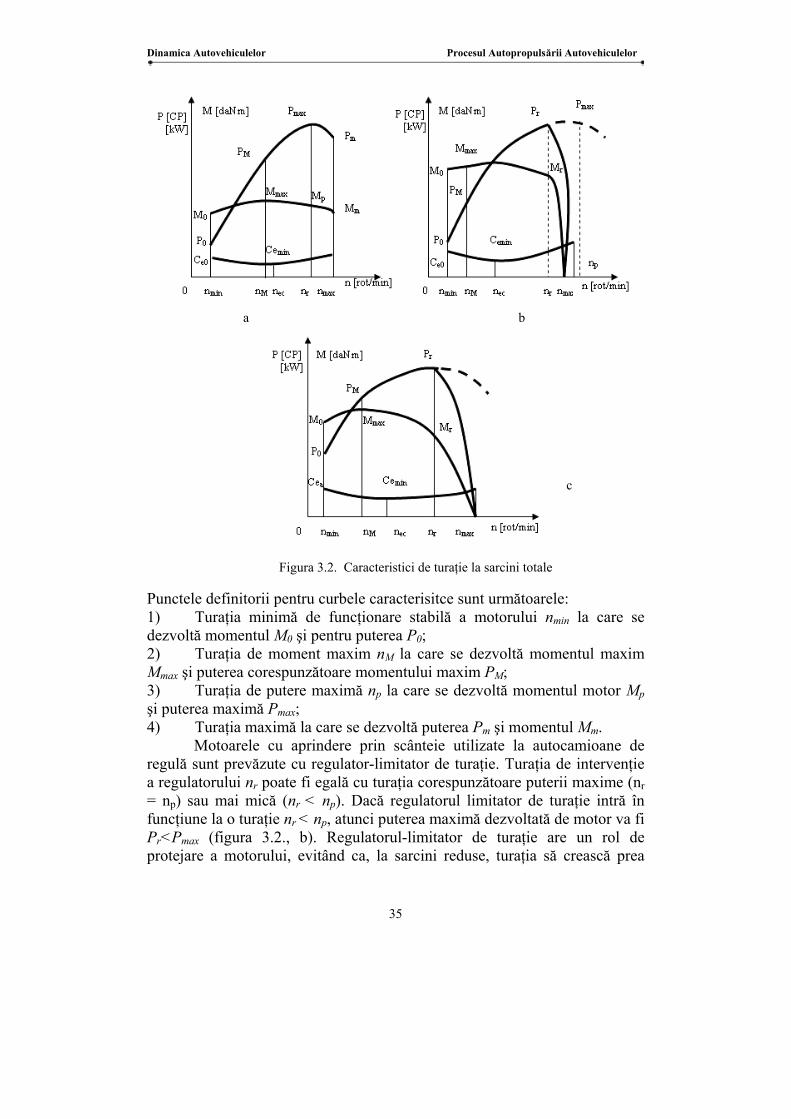
3.2. Caracteristicile principale ale motoarelor folosite de autovehicule Motorul este ansamblul de bază din construcţia autovehiculului din care cauză studiul acestuia se face separat. În cazul de faţă se vor trata numai unele din caracteristicile sale, legate nemijlocit de procesul autopropulsării autovehiculului. După cum s-a arătat, autovehiculele sunt echipate cu motoare termice (în marea majoritate) şi cu motoare electrice. Din categoria motoarelor termice, utilizarea cea mai largă o au însă motoarele cu ardere internă cu piston. 3.2.1. Caracteristica de turaţie exterioară a motorului cu ardere internă cu piston Parametrii de funcţionare ai motorului cu ardere internă cu piston sunt exprimaţi cu ajutorul caracteristicii de turaţie exterioare, întâlnită uneori şi sub denumirea de caracteristica de turaţie la sarcină totală. Prin caracteristica de turaţie exterioară - sau pe scurt caracteristica exterioară – se înţelege funcţia de dependenţă a momentului motor şi a puterii motorului faţă de viteza unghiulară de rotaţie a arborelui cotit, la admisie totală, reglajele motorului şi temperatura de funcţionare fiind cele optime. Caracteristica exterioară se determină experimental, pe standuri de probă, puterea motorului fiind consumată de o frână cu moment rezistent reglabil. La motoarele cu aprindere prin scânteie (M.A.S) admisiunea totală este realizată la poziţia clapetei carburatorului complet deschisă, iar la motoarele cu aprindere prin comprimare (M.A.C) admisiunea totală este realizată la poziţia de debit maxim a pompei de injecţie. La determinarea caracteristicii exterioare, variaţia turaţiei se obţine numai prin mărirea sau micşorarea cuplului de încărcare a motorului. Pentru o valoare a cuplului motor M, citită la frână, şi pentru viteza unghiulară corespunzătoare ω a arborelui cotit, la mers uniform, de asemenea măsurată se poate calcula puterea dezvoltată de motor: ω⋅= MP (3.5) Caracterisitca exterioară a motorului mai cuprinde şi curba consumului specific, de combustibil ce. În figura 3.2 sunt redate exemple de caracteristici exterioare pentru motoare cu aprindere prin scânteie (figura 3.2, a), pentru motoare cu aprindere prin scânteie cu reglator – limitator de turaţie (figura 3.2, b) şi pentru motoare cu aprindere prin comprimare (figura 3.2, c), prevăzute şi ele cu regulator-limitator de turaţie.
Dinamica Autovehiculelor Procesul Autopropulsării Autovehiculelor
35
Punctele definitorii pentru curbele caracterisitce sunt următoarele: 1) Turaţia minimă de funcţionare stabilă a motorului nmin la care se dezvoltă momentul M0 şi pentru puterea P0; 2) Turaţia de moment maxim nM la care se dezvoltă momentul maxim Mmax şi puterea corespunzătoare momentului maxim PM; 3) Turaţia de putere maximă np la care se dezvoltă momentul motor Mp şi puterea maximă Pmax; 4) Turaţia maximă la care se dezvoltă puterea Pm şi momentul Mm.
Motoarele cu aprindere prin scânteie utilizate la autocamioane de regulă sunt prevăzute cu regulator-limitator de turaţie. Turaţia de intervenţie a regulatorului nr poate fi egală cu turaţia corespunzătoare puterii maxime (nr = np) sau mai mică (nr < np). Dacă regulatorul limitator de turaţie intră în funcţiune la o turaţie nr < np, atunci puterea maximă dezvoltată de motor va fi Pr<Pmax (figura 3.2., b). Regulatorul-limitator de turaţie are un rol de protejare a motorului, evitând ca, la sarcini reduse, turaţia să crească prea
Figura 3.2. Caracteristici de turaţie la sarcini totale
a b
c
Dinamica Autovehiculelor Procesul Autopropulsării Autovehiculelor
36
mult. Porţiunea din caracteristica exterioară cuprinsă între turaţia nr şi nmax poartă numele de caracteristică de regulator. La motoarele cu aprindere prin comprimare, prevăzute întotdeauna cu reglator – limitator de turaţie, intrarea în funcţiune a acestuia se face la turaţia nr, astfel aleasă încât turaţia maximă nmax să fie mai mică decât turaţia de putere maximă np posibilă la funcţionarea fără regulator. Intervalul de turaţii în care funcţionează motorul este [nM, nmax] pentru motoarele fără regulator şi [nM, nr] pentru motoarele cu regulator. Zona de turaţii n < nM se numeşte zonă de nestabilitate, deoarece odată cu scăderea turaţiei datorate creşterii sarcinii scade şi momentul motor produs, fenomen care determină oprirea motorului. Zona de funcţionare a motorului [ nM, nmax] sau [nM, nr] se numeşte zona de funcţionare stabilă sau zona de stabilitate, deoarece odată cu creşterea sarcinii şi scăderea turaţiei, momentul motor produs creşte şi echilibrează momentele rezistente suplimentare. Cu cât zona de stabilitate este mai mare, cu atât motorul este mai bun pentru propulsarea automobilului. Mărimea zonei de stabilitate este caracterizată prin coeficientul de elasticitate:
p
Me n
nC = sau r
Me n
nC = (3.6)
Pentru motoarele cu aprindere prin scânteie, ceficientul de elasticitate este Ce = 0,45...0,65 iar pentru motoarele cu aprindere prin comprimare valorile sunt Ce = 0,55...0,75. Variaţia momentului motor în zona de stabilitate este caracterizată prin coeficientul de adaptabilitate:
p
e MM
C max= sau r
e MM
C max= (3.7)
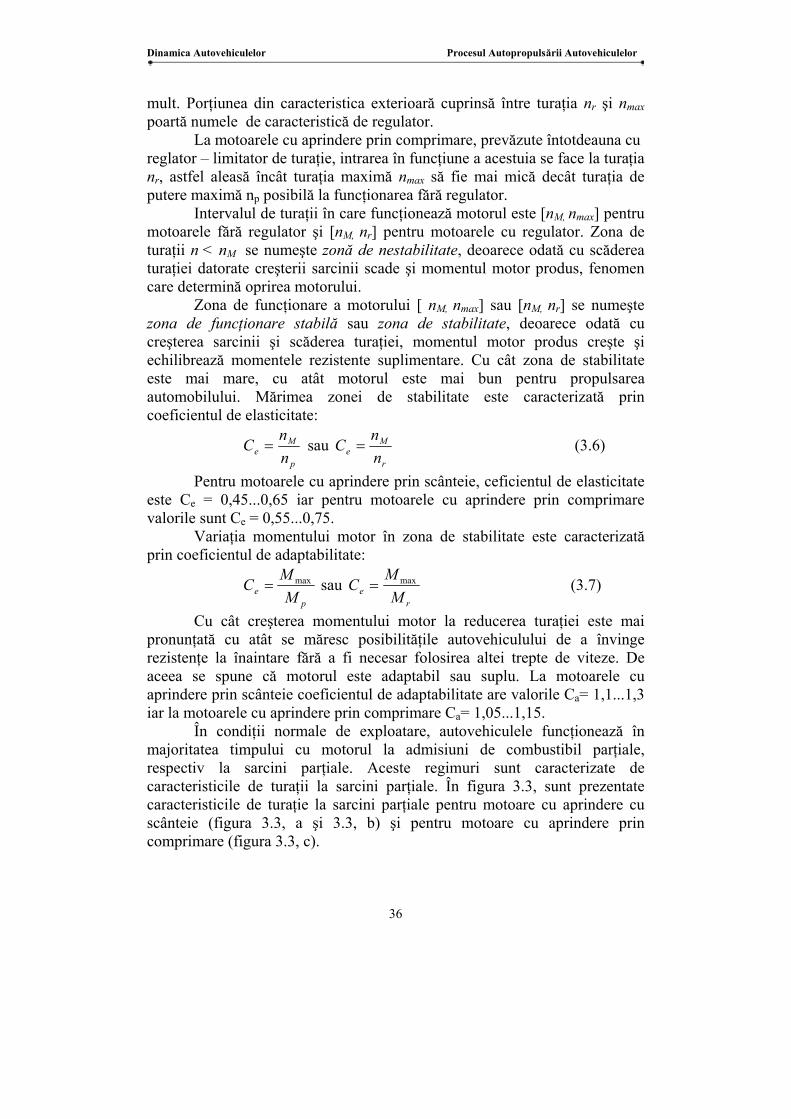
Cu cât creşterea momentului motor la reducerea turaţiei este mai pronunţată cu atât se măresc posibilităţile autovehiculului de a învinge rezistenţe la înaintare fără a fi necesar folosirea altei trepte de viteze. De aceea se spune că motorul este adaptabil sau suplu. La motoarele cu aprindere prin scânteie coeficientul de adaptabilitate are valorile Ca= 1,1...1,3 iar la motoarele cu aprindere prin comprimare Ca= 1,05...1,15. În condiţii normale de exploatare, autovehiculele funcţionează în majoritatea timpului cu motorul la admisiuni de combustibil parţiale, respectiv la sarcini parţiale. Aceste regimuri sunt caracterizate de caracteristicile de turaţii la sarcini parţiale. În figura 3.3, sunt prezentate caracteristicile de turaţie la sarcini parţiale pentru motoare cu aprindere cu scânteie (figura 3.3, a şi 3.3, b) şi pentru motoare cu aprindere prin comprimare (figura 3.3, c).
Dinamica Autovehiculelor Procesul Autopropulsării Autovehiculelor
37
Se observă că la motoarele cu aprindere prin scânteie funcţionarea acestora la sarcini parţiale determină o sporire a coeficientului de adaptabilitate Ca, variaţia momentului motor cu turaţia fiind mai accentuată, în timp ce la motoarele cu aprindere prin comprimare aliura curbelor rămâne aproape aceeaşi îndiferent de sarcină. Semnificativ la motoarele cu aprindere prin scânteie este faptul că valoarea turaţiei de moment maxim scade odată cu micşorarea sarcinii. Pentru motoarele a căror caracteristică exterioară nu este determinată experimental, cum este cazul când se proiectează un motor nou, se foloseşte o exprimare analitică a caracteristicii exterioare de forma P = P(n), M= M(n). Pentru aceasta se apelează la formule empirice care să permită construirea curbelor cât mai exact în funcţie de caracterisitcile sale. Aceste formule au la bază parametrii caracteristicii de turaţie exterioară Pmax – puterea maximă a motorului; np – turaţia corespunzătoare puterii maxime; Mp - momentul dezvoltat de motor la puterea maximă.
Figura 3.3. Caracteristici de turaţie la sarcini parţiale

Dinamica Autovehiculelor Procesul Autopropulsării Autovehiculelor
38
3.2.2. Determinarea caracteristicii exterioare pe cale analitică Una dintre cele mai răspândite formule, prin care curba puterii se aproximează cu o parabolă de ordinul trei, este următoarea:
⎥⎥
⎦
⎤
⎢⎢
⎣
⎡
⎟⎟⎠
⎞⎜⎜⎝
⎛−⎟⎟
⎠
⎞⎜⎜⎝
⎛+=
32
maxpnp n
nnn
nnPP γβα (3.8)
unde coeficienţii α, β, γ sunt astfel determinaţi încât curba funcţiei (3.8) să aproximeze cât mai bine caracteristica exetrioară obţinută pe cale experimentală. Valorile coeficienţilor α, β, γ depind de coeficienţii de elasticitate şi de adaptabilitate ai motorului şi se pot obţine cu relaţiile:
2
2
)1()12(
−−−
=e
eae
CCCC
α ; 2)1()1(2
−−
=e
ae
CCC
β ; 2)1(1
−−
=e
a
CC
γ (3.9)
Curba momentului motor se aproximează cu o parabolă, iar formula cu care se poate determina este:
⎥⎥
⎦
⎤
⎢⎢
⎣
⎡
⎟⎟⎠
⎞⎜⎜⎝
⎛−⎟
⎟⎠
⎞⎜⎜⎝
⎛+=
2
ppp n
nnnMM γβα (3.10)
Expresia (3.10) s-a obţinut cu ajutorul formulei(3.8) şi a relaţiei care exprimă dependenţa dintre moment, putere şi turaţie, respectiv:
nPM 4,955= [daNm] (3.11)
unde P se exprimă în kW, iar n în rot/min. Valorile medii ale coeficienţilor α, β, γ sunt date în tabelul 3.1.
Tabelul 3.1. Valorile medii ale coeficienţilor α, β, γ .
Valoarea coeficientului Tipul motorului α β γ
Motoare cu aprindere prin scânteie 1
1
1
Motoare cu aprindere prin compresie în doi timpi 0,87 1,13
1
Motoare cu aprindere prin compresie în patru timpi 0,53 1,56 1,09
Pentru a mări precizia de determinare a caracteristicii externe pe cale analitică, mai ales în zona turaţiilor mari, la motoarele cu aprindere prin scânteie se poate folosi expresia :
Dinamica Autovehiculelor Procesul Autopropulsării Autovehiculelor
39
⎥⎥
⎦
⎤
⎢⎢
⎣
⎡
⎟⎟⎠
⎞⎜⎜⎝
⎛−⎟⎟
⎠
⎞⎜⎜⎝
⎛+=
32
max '''pnp n
nnn
nnPP γβα (3.12)
unde coeficienţii α’, β’, γ ’ se determină cu relaţiile:
2
2
)1(32
'−
+−=
e
aee
CCCC
α ; 2
2
)1(23
'−−−
=e
ea
CCC
β ; 2)1()(2
−+−
=e
ea
CCC
γ (3.13)
Între coeficientul de elasticitate Ce şi turaţia corespunzătoare puterii maxime np: 2,0
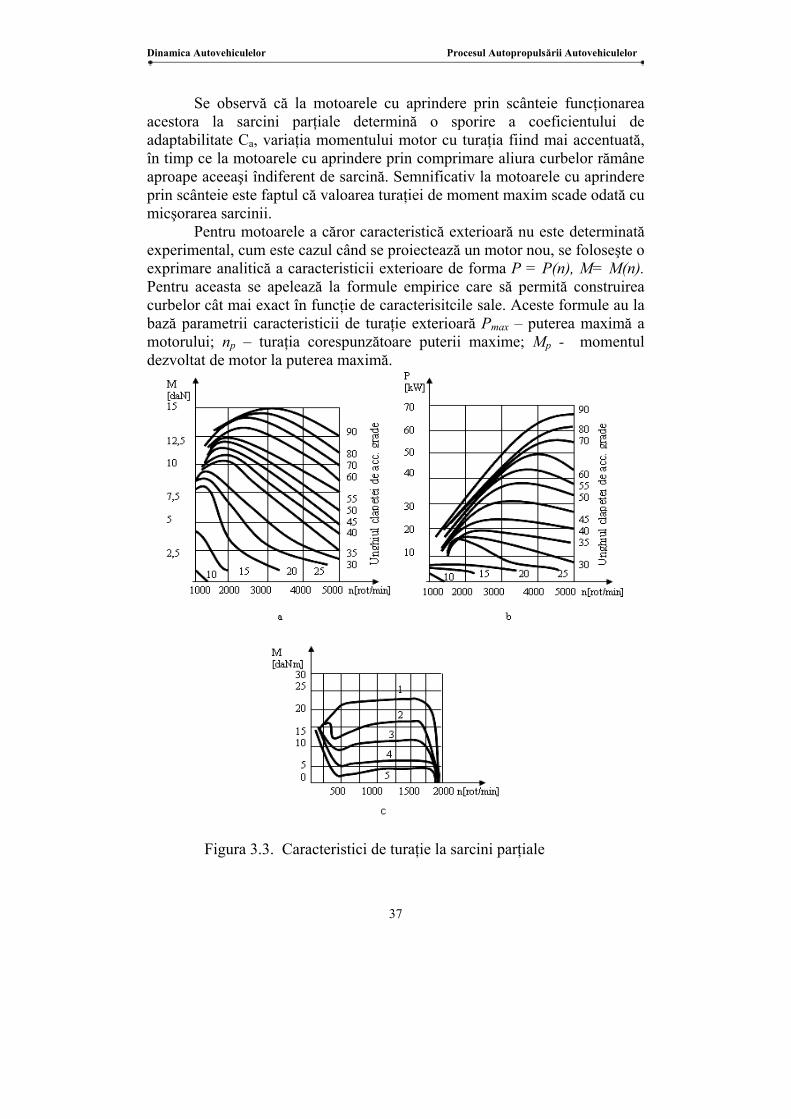
pee nKC ⋅= (3.14) unde Ke este un coeficient ale cărui valori depind de tipul motorului şi sunt date în tabelul 3.2, iar între coeficientul de adaptabilitate Ca şi coeficientul de elasticitate Ce există o relaţie cu caracter statistic de forma: ea CC 5,05,1 −= (3.15)
Tabelul 3.2. Valorile coeficientului Ke
Nr. crt.
Tipul motorului
Coeficientul
Ke
1 Motoare cu carburator cu difuzor variabil 0,075...0,100
2 Motoare cu carburator cu una sau mai multe camere 0,1...0,125
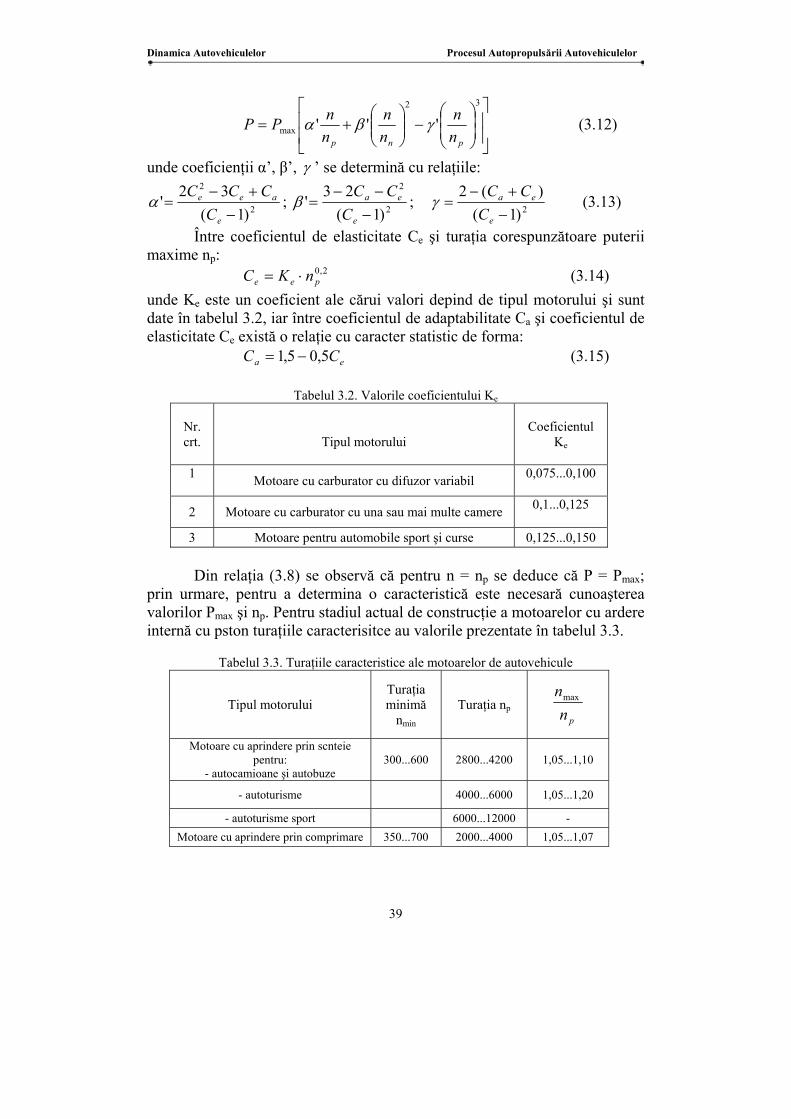
3 Motoare pentru automobile sport şi curse 0,125...0,150 Din relaţia (3.8) se observă că pentru n = np se deduce că P = Pmax; prin urmare, pentru a determina o caracteristică este necesară cunoaşterea valorilor Pmax şi np. Pentru stadiul actual de construcţie a motoarelor cu ardere internă cu pston turaţiile caracterisitce au valorile prezentate în tabelul 3.3.
Tabelul 3.3. Turaţiile caracteristice ale motoarelor de autovehicule
Tipul motorului
Turaţia minimă
nmin
Turaţia np
pnnmax
Motoare cu aprindere prin scnteie pentru:
- autocamioane şi autobuze 300...600 2800...4200 1,05...1,10
- autoturisme 4000...6000 1,05...1,20
- autoturisme sport 6000...12000 - Motoare cu aprindere prin comprimare 350...700 2000...4000 1,05...1,07
Dinamica Autovehiculelor Procesul Autopropulsării Autovehiculelor
40
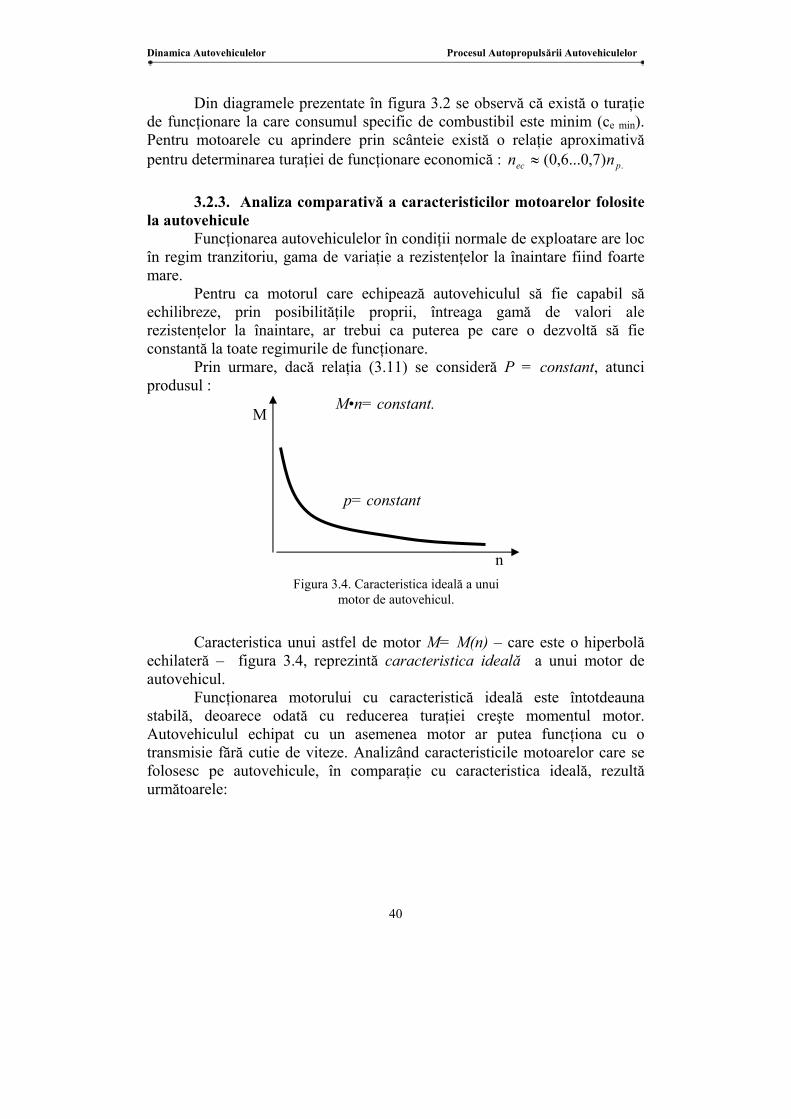
Din diagramele prezentate în figura 3.2 se observă că există o turaţie de funcţionare la care consumul specific de combustibil este minim (ce min). Pentru motoarele cu aprindere prin scânteie există o relaţie aproximativă pentru determinarea turaţiei de funcţionare economică : .)7,0...6,0( pec nn ≈ 3.2.3. Analiza comparativă a caracteristicilor motoarelor folosite la autovehicule Funcţionarea autovehiculelor în condiţii normale de exploatare are loc în regim tranzitoriu, gama de variaţie a rezistenţelor la înaintare fiind foarte mare. Pentru ca motorul care echipează autovehiculul să fie capabil să echilibreze, prin posibilităţile proprii, întreaga gamă de valori ale rezistenţelor la înaintare, ar trebui ca puterea pe care o dezvoltă să fie constantă la toate regimurile de funcţionare. Prin urmare, dacă relaţia (3.11) se consideră P = constant, atunci produsul : M•n= constant. Caracteristica unui astfel de motor M= M(n) – care este o hiperbolă echilateră – figura 3.4, reprezintă caracteristica ideală a unui motor de autovehicul.
Funcţionarea motorului cu caracteristică ideală este întotdeauna stabilă, deoarece odată cu reducerea turaţiei creşte momentul motor. Autovehiculul echipat cu un asemenea motor ar putea funcţiona cu o transmisie fără cutie de viteze. Analizând caracteristicile motoarelor care se folosesc pe autovehicule, în comparaţie cu caracteristica ideală, rezultă următoarele:
Figura 3.4. Caracteristica ideală a unui motor de autovehicul.
p= constant
n
M
Dinamica Autovehiculelor Procesul Autopropulsării Autovehiculelor
41
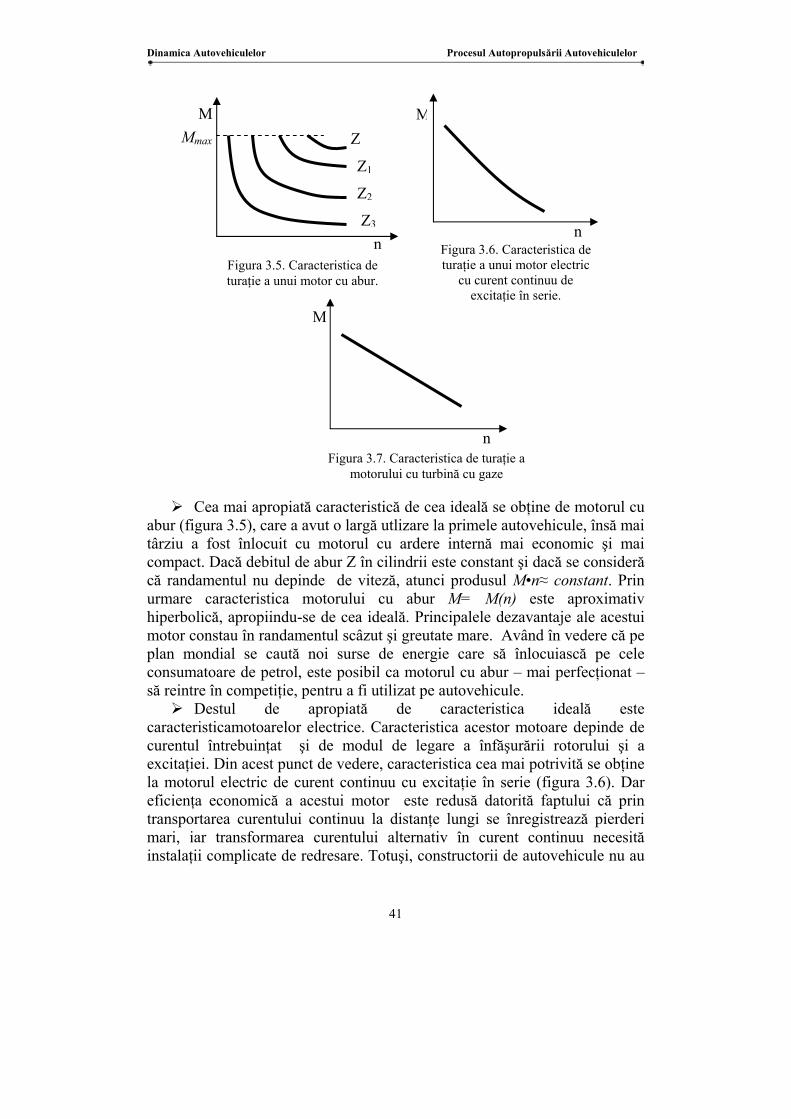
Cea mai apropiată caracteristică de cea ideală se obţine de motorul cu
abur (figura 3.5), care a avut o largă utlizare la primele autovehicule, însă mai târziu a fost înlocuit cu motorul cu ardere internă mai economic şi mai compact. Dacă debitul de abur Z în cilindrii este constant şi dacă se consideră că randamentul nu depinde de viteză, atunci produsul M•n≈ constant. Prin urmare caracteristica motorului cu abur M= M(n) este aproximativ hiperbolică, apropiindu-se de cea ideală. Principalele dezavantaje ale acestui motor constau în randamentul scâzut şi greutate mare. Având în vedere că pe plan mondial se caută noi surse de energie care să înlocuiască pe cele consumatoare de petrol, este posibil ca motorul cu abur – mai perfecţionat – să reintre în competiţie, pentru a fi utilizat pe autovehicule.
Destul de apropiată de caracteristica ideală este caracteristicamotoarelor electrice. Caracteristica acestor motoare depinde de curentul întrebuinţat şi de modul de legare a înfăşurării rotorului şi a excitaţiei. Din acest punct de vedere, caracteristica cea mai potrivită se obţine la motorul electric de curent continuu cu excitaţie în serie (figura 3.6). Dar eficienţa economică a acestui motor este redusă datorită faptului că prin transportarea curentului continuu la distanţe lungi se înregistrează pierderi mari, iar transformarea curentului alternativ în curent continuu necesită instalaţii complicate de redresare. Totuşi, constructorii de autovehicule nu au
Figura 3.7. Caracteristica de turaţie a motorului cu turbină cu gaze
n
M
Figura 3.6. Caracteristica de turaţie a unui motor electric
cu curent continuu de excitaţie în serie.
n
M
Z3
Z2
Z1
ZMmax
Figura 3.5. Caracteristica de turaţie a unui motor cu abur.
n
M
Dinamica Autovehiculelor Procesul Autopropulsării Autovehiculelor
42
abandonat folosirea motoarelor electrice şi în ultimul timp cercetările şi chiar fabricarea de autovehicule electrice a început să ocupe un loc din ce în ce mai însemnat.
Motorul cu turbină cu gaze prezintă, de asemenea, o caracteristică cutendinţă de creştere a momentului la reducerea turaţiei (figura 3.7), deşi nu este apropiată de cea ideală. Folosirea motorului cu turbină cu gaze este în fază de experimentare şi a câpâtat o oarecare răspândire la trenurile rutiere. Dezavantajele care limitează utilizarea acestui motor constau în randament termic inferior motoarelor cu ardere internă cu piston; randament scăzut la sarcini parţiale sau la turaţii mici şi randament rdicat la temperaturi mari ale gazelor care influenţează calităţile mecanice ale organelor componente. Din analiza succintă făcută asupra caracteristicilor motoarelor ce se pot folosi la autovehicule, rezultă că din acest punct de vedere motoarele cu ardere internă cu piston sunt cele mai puţin indicate pentru acest scop, având în vedere calităţile de tracţiune reduse.
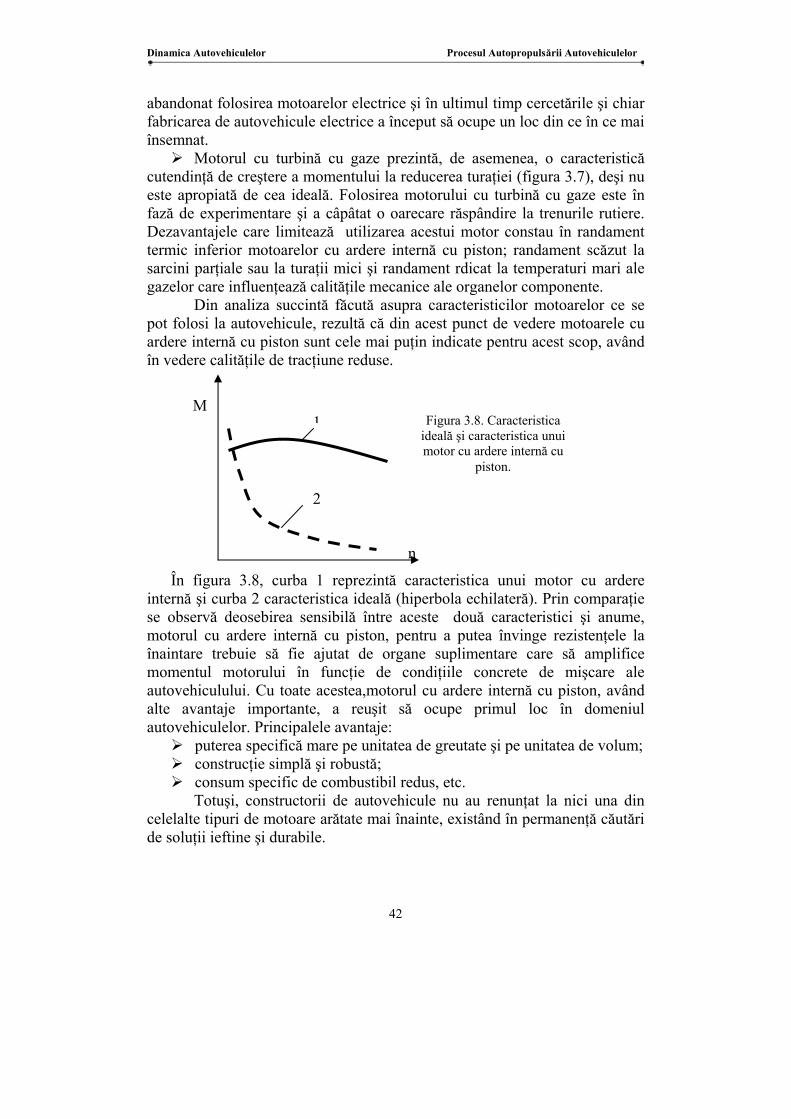
În figura 3.8, curba 1 reprezintă caracteristica unui motor cu ardere
internă şi curba 2 caracteristica ideală (hiperbola echilateră). Prin comparaţie se observă deosebirea sensibilă între aceste două caracteristici şi anume, motorul cu ardere internă cu piston, pentru a putea învinge rezistenţele la înaintare trebuie să fie ajutat de organe suplimentare care să amplifice momentul motorului în funcţie de condiţiile concrete de mişcare ale autovehiculului. Cu toate acestea,motorul cu ardere internă cu piston, având alte avantaje importante, a reuşit să ocupe primul loc în domeniul autovehiculelor. Principalele avantaje:
puterea specifică mare pe unitatea de greutate şi pe unitatea de volum; construcţie simplă şi robustă; consum specific de combustibil redus, etc.
Totuşi, constructorii de autovehicule nu au renunţat la nici una din celelalte tipuri de motoare arătate mai înainte, existând în permanenţă căutări de soluţii ieftine şi durabile.
Figura 3.8. Caracteristica ideală şi caracteristica unui motor cu ardere internă cu
piston.
n
M 1
2
Dinamica Autovehiculelor Procesul Autopropulsării Autovehiculelor
43
3.3. Procesul rulării roţilor de autovehicule
3.3.1. Pneurile autovehiculelor:construcţie, caracteristici
geometrice.
Mişcarea autovehiculului este controlată aproape în întregime de
forţele exercitate asupra cauciucului de către şosea (drum). De aceea caracteristicile cauciucului au un efect major în tratarea problemelor legate de dinamica autovehiculelor. Acest capitol prezintă informaţiile necesare privind tratarea proprietăţilor cauciucului. Pentru integrarea acestei probleme în context sunt de asemenea prezentate şi câteva informaţii generale. Funcţia esenţială a unui cauciuc este de a interacţiona cu şoseaua pentru a produce forţele necesare în susţinerea şi mişcarea vehiculului.
Roţile autovehiculelor sunt organe de propulsie şi de rulare. Ele sunt prevăzute cu bandaje elastice pneumatice. O asemenea soluţie s-a impus din necesitatea adaptării roţii la calea de rulare prin micşorarea presiunii specifice la contactul cu ea, a rezistenţei la rulare, a oscilaţiilor autovehiculului precum şi prin mărirea aderenţei.
Forţele sunt necesare pentru a produce acceleraţia, frânarea şi virajele. Cauciucul este de asemenea necesar pentru amortizarea neregularităţilor şoselei.
În continuare, se vor trata doar forţele de control ale autovehiculului produse asupra cauciucului de către şosea, fără însă a sugera că alte forţe, precum cele care produc, vibraţiile nu ar fi importante într-o privire de ansamblu.
Dinamica Autovehiculelor Procesul Autopropulsării Autovehiculelor
44
Interacţiunea roţilor cu calea este determinantă pentru dinamica sa. Datorită elasticităţii pronunţate a pneurilor, aplicarea rezultantelor cunoscute din mecanica tehnică cu privire la rularea corpurilor cilindrice la roţile de autovehicul nu conduce la descrierea corespunzătoare a comportării acestora, fiind necesară o analiză adecvată.
În mai mult de 100 de ani de la apariţia roţii cu cameră de aer, o serie de alte alternative au fost investigate şi unele chiar au fost probate pe şosele, nu a fost însă nici un succes comercial semnificativ pentru nici una din variante. Dominaţia anvelopei de cauciuc este rezultatul unei combinaţii remarcabile, a proprietăţilor care permit cauciucului să asigure suport şi control cu o bună durabilitate în condiţii dificile, fiind în acelaşi timp uşor adaptabil la diferite aplicaţii. Pentru un cauciuc anume şi suprafaţa unei şosele, forţa laterală produsă la contactul cu şoseaua depinde de mai mulţi factori, în special de poziţia unghiurilor dintre planul median al roţii şi planul longitudinal al autovehiculului, forţa verticală, presiunea din pneu. Mulţi alţi factori au o influenţă secundară, incluzând de exemplu viteza de deplasare. Când sunt luate în considerare mai multe modele de cauciucuri şi suprafeţe de drumuri, mult mai mulţi factori sunt introduşi.
Acest capitol încearcă să ofere o înţelegere calitativă şi cantitativă, a comportamentului cauciucului şi a factorilor care îl influenţează, oferind o privire de ansamblu asupra modelării acestuia.
Construcţia pneurilor Roata autovehiculului constă din partea centrală metalică numită disc,
montată pe butuc, partea metalică periferică numită jantă şi din pneu. Pneul reprezintă partea elastică a roţii, fiind montat pe jantă, având rolul de a reduce presiunea dintre roată şi cale, de a micşora sarcina dinamică la roată de a mări aderenţa dintre ea şi calea de rulare.
Pneurile pot fi cu camera de aer si fara camera de aer. În primul caz, aerul este menţinut sub presiune în interiorul unei camere de aer, pe când în al doile caz acesta este reţinut chiar de către anvelopă şi jantă, luându-se unele măsuri constructive adecvate.
Anvelopa constituie partea principală a pneului fiind un înveliş alcătuit din cauciuc, materiale textile şi de altă natură, ea menţinând aerul sub presiune în interiorul său fie direct, fie prin intermediul unei camere de aer.
În cazul jantelor realizate din elemente detaşabile sau care prezintă nituri prin construcţie, pentru a proteja camera de aer se foloseşte o bandă de jantă ce se montează între jantă şi cameră. Se evită astfel frecările dintre cameră şi jantă şi prinderea camerei de aceste nituri.
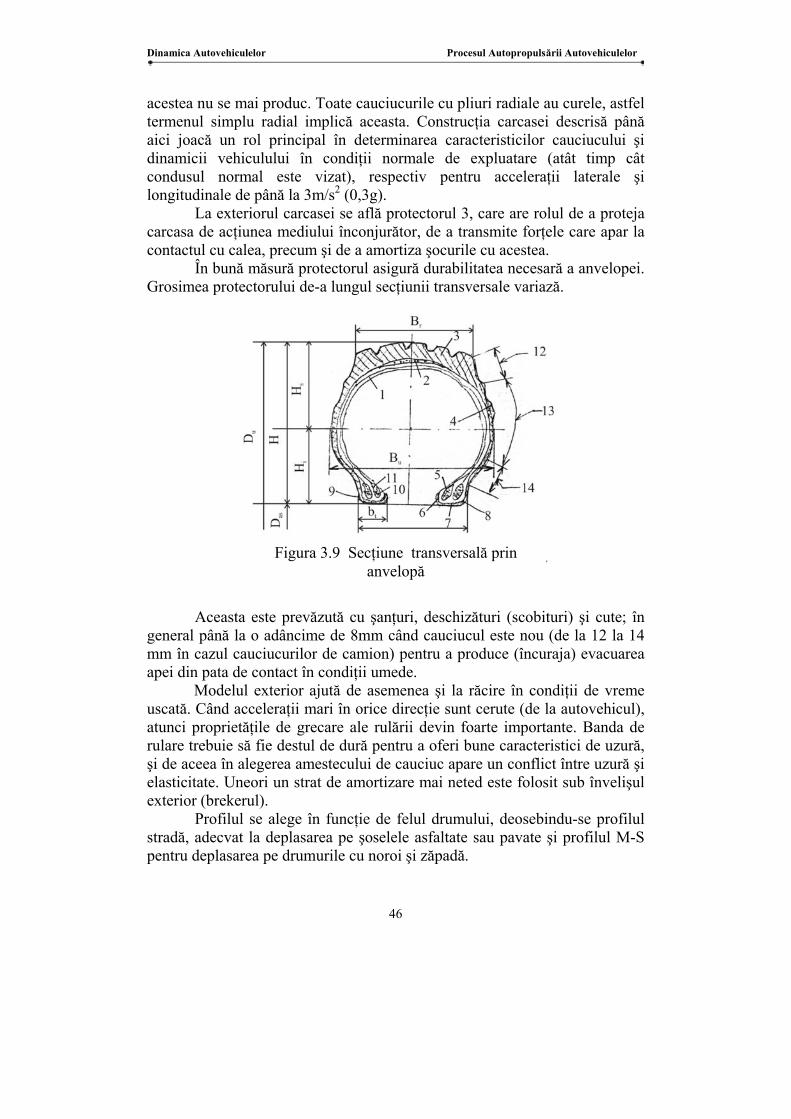
O secţiune prin anvelopă este prezentată în figura 2.6.1, pe care se pot urmări părţile componente ale anvelopei. Elementul constructiv esenţial
Dinamica Autovehiculelor Procesul Autopropulsării Autovehiculelor
45
pentru pneul modern este carcasa – un cauciuc maleabil întărit de câteva straturi de corzi sau (ţesături) fibre, fiecare strat fiind numit pliu. Carcasa intră în contact cu janta la baza talonului de anvelopă. Sunt folosite mai multe taloane de anvelopă dacă există mai mult de 8 pliuri, de exemplu la camione sau avioane. Carcasa este umflată cu aer, uneori folosindu-se un tub interior subţire pentru sigilare tensionând astfel carcasa. Presiunea este în general de la 120-200 kPa pentru autoturisme, 300-600 kPa pentru camioane. Acestea sunt desigur presiuni ale manometrelor de aer, presiunile absolute sunt mai ridicate cu o atmosferă (în jur de 101 kPa sau 1 bar). Firele de cord, de obicei din plastic, mătase artificială au un modul de elasticitate mai înalt decât cauciucul, iar frecarea este mai mică, astfel acestea preia cea mai mare parte din eforturi, iar cauciucul este mai puţin solicitat.
Carcasa 1 reprezintă partea principală a anvelopei, care asigură rezistenţa anvelopei supusă acţiunii presiunii aerului din interior şi forţelor radiale, tangenţiale şi laterale din exterior.
Ea determină o anumită formă a anvelopei, fiind alcătuită din mai multe straturi de cordon cauciucat numite şi pliuri sau pânze la care se pot adăuga şi straturi de cauciuc numite şapaje.
Aliniamentul firelor de cord este o trăsătură importantă care influenţează modul de comportare al vehiculului. În cazul cauciucului în construcţie radială, corzile sunt tensionate radial. Acesta este caracterizat ca un unghi de coroană de 90°. Unghiul de coroană este măsurat de la un rand la o linie periferică în jurul cauciucului. La pliul înclinat (numit deasemenea pliul de diagonală sau încrucişat) al cauciucului, coarda unghiului de coroană este de obicei de 40°, pliuri alternante fiind puse în unghiuri la dreapta şi la stânga liniei centrale. Cauciucul carcasei este destul de neted pentru a-i oferi o bună rezistenţă la uzură. Au fost folosite o serie de materiale pentru corzi. Cordul original al lui Dunlopp era din in. Bumbacul era dominant până în 1945, apoi mătasea artificială până în 1960 şi mai apoi plasticul. Începând cu 1975 polyesterul a fost cel mai des folosit. Oţelul, fibrele de sticlă au câştigat de asemenea teren din 1970. Aceste schimbări sunt în legătură directă cu trăsăturile mecanice ale materialelor candidate. Firul de oţel placat (suflat) cu alamă este preferat în cazul autovehiculelor comerciale sau cerinţelor din afara şoselelor (maşini de teren). Întinderea corzilor este o operaţie manuală scumpă, dar cauciucul fără corzi nu a apărut încă în fluxul comercial. Densitatea suportului variază considerabil, exemplu: plastic 1100 kg/m3, fibra de sticlă 2500 kg/m3, oţelul 7800 kg/m3. La cauciucurile cu pliuri radiale, coroana prezintă o centură circumferenţială de susţinere din plastic sau corzi de oţel. Unele cauciucuri cu pliuri înclinate (diagonale) au fost produse cu centuri (tipul înclinat) dar
Dinamica Autovehiculelor Procesul Autopropulsării Autovehiculelor
46
acestea nu se mai produc. Toate cauciucurile cu pliuri radiale au curele, astfel termenul simplu radial implică aceasta. Construcţia carcasei descrisă până aici joacă un rol principal în determinarea caracteristicilor cauciucului şi dinamicii vehiculului în condiţii normale de expluatare (atât timp cât condusul normal este vizat), respectiv pentru acceleraţii laterale şi longitudinale de până la 3m/s2 (0,3g).
La exteriorul carcasei se află protectorul 3, care are rolul de a proteja carcasa de acţiunea mediului înconjurător, de a transmite forţele care apar la contactul cu calea, precum şi de a amortiza şocurile cu acestea.
În bună măsură protectorul asigură durabilitatea necesară a anvelopei. Grosimea protectorului de-a lungul secţiunii transversale variază.
Aceasta este prevăzută cu şanţuri, deschizături (scobituri) şi cute; în
general până la o adâncime de 8mm când cauciucul este nou (de la 12 la 14 mm în cazul cauciucurilor de camion) pentru a produce (încuraja) evacuarea apei din pata de contact în condiţii umede. Modelul exterior ajută de asemenea şi la răcire în condiţii de vreme uscată. Când acceleraţii mari în orice direcţie sunt cerute (de la autovehicul), atunci proprietăţile de grecare ale rulării devin foarte importante. Banda de rulare trebuie să fie destul de dură pentru a oferi bune caracteristici de uzură, şi de aceea în alegerea amestecului de cauciuc apare un conflict între uzură şi elasticitate. Uneori un strat de amortizare mai neted este folosit sub învelişul exterior (brekerul).
Profilul se alege în funcţie de felul drumului, deosebindu-se profilul stradă, adecvat la deplasarea pe şoselele asfaltate sau pavate şi profilul M-S pentru deplasarea pe drumurile cu noroi şi zăpadă.
Figura 3.9 Secţiune transversală prin anvelopă
Dinamica Autovehiculelor Procesul Autopropulsării Autovehiculelor
47
Uneori profilul benzii de rulare mai este denumit şi desenul anvelopei.
Materialul benzii este supus unor solicitări complexe şi deosebit de puternice, având loc o uzură accentuata a părţii care face contact direct cu calea de rulare.
Din cauza solicitarilor neuniforme nu se alege acelaşi material pentru întreaga bandă de rulare. Anume, pentru porţiunea aflată sub şanţurile profilului, numită baza benzii de rulare, se foloseşte un cauciuc cu elasticitate mai mare şi rezistenţă la uzură mai redusă, iar pentru porţiunea profilului se utilizează un cauciuc cu elasticitate mai mică şi rezistenţă la uzură mai mare.
Părţile laterale ale protectorului se numesc flancurile protectorului, pe care se află nervura antişoc 4, care are rolul de a proteja anvelopa contra loviturilor laterale.
Flancurile anvelopei reprezintă părţile laterale ale anvelopei situate între zona umerilor şi cea a taloanelor, în locurile cele mai subţiri. Flancurile trebuie să fie suficient de subţiri şi de elastice, grosimea stratului de cauciuc variind de la 1,5 mm la 3,5 mm.
Între flancuri şi banda de rulare există o zonă de trecere 12 numită umăr, după care urmează zona de flexiune 13, solicitată puternic la încovoiere. Flancurile se termină în partea de jos cu zonele de ranforsare 14.
Între protector şi carcasă se găseşte brekerul 2, format dintr-un număr de straturi de cordon cauciucat, care se plasează în zona de rulare a anvelopei.
El este necesar pentru ranforsarea carcasei şi îmbunătăţirea legăturii dintre banda de rulare şi carcasă.
Totodată, mai asigură atenuarea şocurilor primite de la bandă la carcasă.
De obicei, între banda de rulare şi breker se mai dispune un strat de cauciuc, numit pernă de cauciuc cu efect de amortizare la şocuri.
Carcasa, prin pliurile ei, realizează legătura cu taloanele 5 care constituie partea rigidă a anvelopei cu care se fixează pe jantă.
Talonul este alcătuit din următoarele elemente: vârful talonului 6 situat către interiorul anvelopei, baza talonului 7, care reprezintă o suprafaţă interioară cilindrică sau conică cu care talonul se montează pe jantă, călcâiul talonului 8, inelele de talon 9, care constituie elemente de rezistenţă şi rigidizare a taloanelor, fiind formate din mai multe straturi de sârmă izolată în amestec de cauciuc, învelitoarele de talon 10 reprezentate prin benzi înguste de pânză cauciucată care înfăşoară inelele de talon, umplutura de talon 11, cu rolul de a asigura trecerea e la inelul metalic către flancul anvelopei.
La pneurile fără cameră de aer pe suprafaţa interioară a anvelopei se depune un strat de ermetizare, care constituie o peliculă dintr-un amestec
Dinamica Autovehiculelor Procesul Autopropulsării Autovehiculelor
48
special de cauciuc cu impermeabilitate foarte bună faţă de aer, pentru a asigura menţinerea presiunii.
Pliurile sau pânzele reprezintă o ţesătură cu urzeală foarte deasă şi bătătura foarte rară, alcătuită din fire de cordon cauciucat.
Firele de cordon sau, mai simplu, cordonul se confectionează din bumbac, vâscoză, fibre poliamidice (kapron, perlon, nazlon), fibre de sticlă, sârmă de oţel ş.a. În general, astăzi, cordonul din bumbac nu se mai utilizează.
Firele de cordon propriu-zise sunt alcătuite din fire grupate şi răsucite într-un anumit mod. Cel mai frecvent grosimea firului de cordon este de
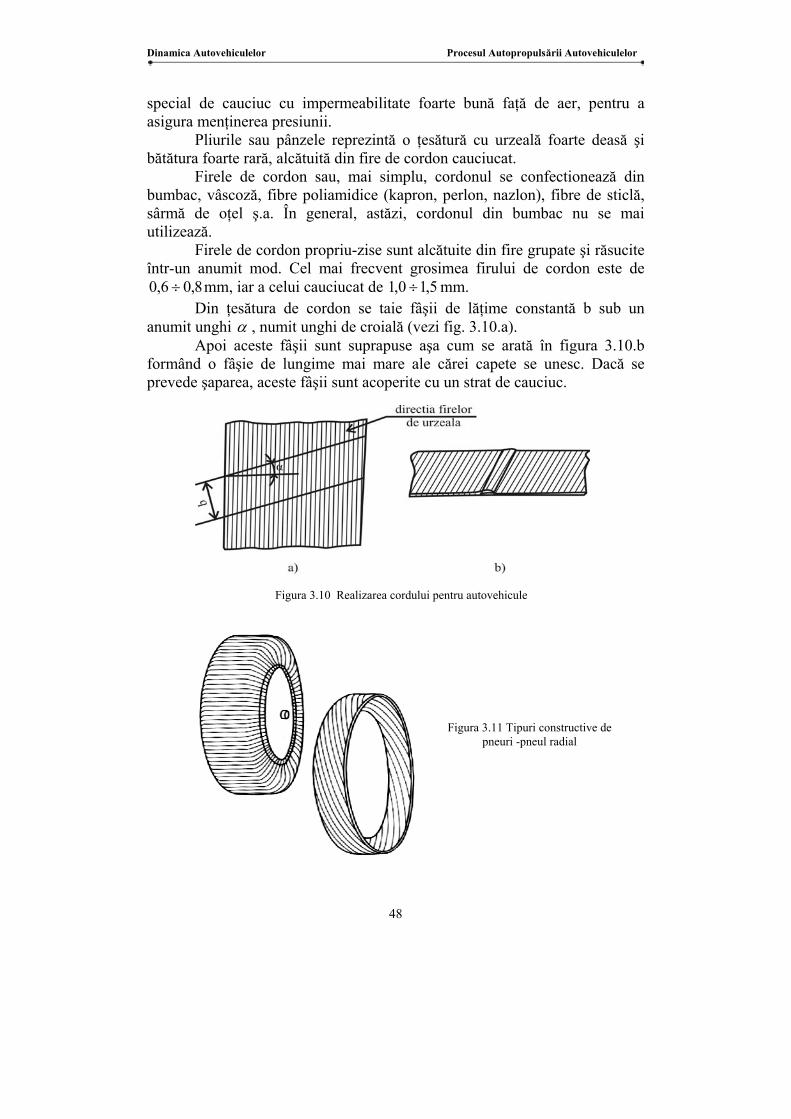
8,06,0 ÷ mm, iar a celui cauciucat de 5,10,1 ÷ mm. Din ţesătura de cordon se taie fâşii de lăţime constantă b sub un
anumit unghi α , numit unghi de croială (vezi fig. 3.10.a). Apoi aceste fâşii sunt suprapuse aşa cum se arată în figura 3.10.b
formând o fâşie de lungime mai mare ale cărei capete se unesc. Dacă se prevede şaparea, aceste fâşii sunt acoperite cu un strat de cauciuc.
Figura 3.10 Realizarea cordului pentru autovehicule
Figura 3.11 Tipuri constructive de pneuri -pneul radial
Dinamica Autovehiculelor Procesul Autopropulsării Autovehiculelor
49
Trebuie observat că încă înaintea tăierii acestor fâşii ţesătura de cord cauciucat este supusă ea însăşi cauciucării, pentru a realiza legătura dintre fire. Din fâşiile astfel obţinute se formează benzi rezultate din suprapunerea la capete după tăierea în diagonală. Ele constituie tocmai pliurile carcasei cărora li se dă, pe maşini speciale, forma toroidală. Marginile acestor pliuri sunt petrecute peste taloanele anvelopei. Numărul suprapunerilor la pliu se limitează la 3-4 şi se dispun simetric pentru a asigura echilibrarea.
Numărul de pliuri pentru pneurile de autoturisme este de 62 ÷ , iar cele pentru autocamioane de 2, 4, 6, 8, 10 şi chiar mai mult.
Întotdeauna se alege număr par de pliuri dispuse astfel ca orientarea firelor să fie diferită pentru două pliuri alăturate.
În cazul cînd o0≠α se obţine anvelopa în construcţie diagonală. Dacă o0=α , deci dacă firele sunt dispuse radial sau în planul meridian, atunci rezulta anvelopa în construcţie radială. La aceste anvelope se utilizează breker rigid, la care firele de cord formează un unghi foarte mic cu ecuatorul.
Aceste anvelope au fost realizate prima data de firma Michelin în anul 1951 sub denumirea de pneuri X.
Flancurile la anvelopele radiale se execută din cauciuc de mai bună calitate şi într-un strat mai gros, pentru a se obţine o legătură mai bună a firelor pliurilor pe circumferinţă.
La aceste anvelope solicitările la flancuri sunt aproape duble faţă de cele convenţionale.
Caracteristici geometrice şi mecanice ale pneurilor
Mărimea pneului este în mod normal specificată de două dimensiuni principale : diametrul jantei roţii şi lăţimea (balonajul) secţiunii (fig. 3.9). Această lăţime a secţiunii este redată în mm la cauciucurile cu pliuri radiale. Capacitatea de încărcare a unui cauciuc depinde în principal de mărimea acestuia. Diametrul exterior variază în mod independent faţă de dimensiunea jantei. Tendinţa este spre un balonaj mai mic şi o înălţime mai mică, oferind un aspect proporţional mai mic, condus de profile extrem de joase în cursă (în întreceri). Cauciucurile moderne de autovehicul au seria de 50,60, 70, 78 şi 82% iar pentru autovehiculele de curse poate coborî până la 30%. Seriile scăzute (65%) sunt acum folosite şi la autocamioane. Pentru un cauciuc cu pliuri radiale aspectul proporţional depinde de unghiul de coroană al corzii; în timp ce pentru radială (verticală) acesta depinde de efctul restrictiv al curelei. Modelul structural şi selecţia materialelor pentru un cauciuc este un echilibru delicat şi, deşi este cunoscut modul de îmbunătăţire a fiecărei proprietăţi a cauciucului în parte, problema constă în obţinerea acestuia fără un sacrificiu încă şi mai mare a unei alte proprietăţi.
Comportarea pneului depinde de sarcina pe care o suportă şi de presiunea din pneu.
Dinamica Autovehiculelor Procesul Autopropulsării Autovehiculelor
50
Anvelopa se caracterizează prin elementele secţiunii sale. Secţiunea constituie figura geometrică ce se obţine în planul de secţiune ce trece prin axa de simetrie a anvelopei (v.fig. 3.9.).
Secţiunea este caracterizată prin înălţime şi lăţime. Înălţimea secţiunii H reprezintă distanţa de la baza talonului până la punctul superior al coroanei, prin coroană înţelegându-se partea mediană exterioară a benzii de rulare. La nivelul flancurilor se defineşte axa orizontală a secţiunii, astfel încât ea determină iH şi sH . Lăţimea secţiunii uB reprezintă distanţa între extremităţile flancurilor anvelopei umflate la presiunea maximă de regim, fără a se lua în consideraţie inscripţiile, cordoanele şi nervurile de protecţie. În cazul când se iau în consideraţie elementele menţionate se obţine lăţimea totală a secţiunii.
Banda de rulare se caracterizează prin lăţimea benzii de rulare rB , măsurată pe coardă, de la o extremitate la alta, şi prin raza de curbură brR , considerată pentru suprafaţa exterioară a benzii de rulare.
Lăţimea de aşezare a anvelopei este asB , iar lăţimea unui talon este
tb . Diametrul exterior al anvelopei uD reprezintă diametrul anvelopei
umflate la presiunea de regim, măsurat la partea exterioară a benzii de rulare. Diametrul uD reprezintă o dimensiune nominală. În condiţii reale de exploatare diametrul exterior prezintă abateri datorită impreciziei tehnologice de fabricaţie şi dilatărilor care intervin sub acţiunea diverşilor factori. Acest diametru este denumit diametrul exterior maxim total al anvelopei în exploatare.
Diametrul de aşezare al talonului asD reprezintă diametrul cercului rezultat din intersecţia suprafeţei de aşezare a talonului cu planul lateral al călcâiului talonului.
Tipul anvelopei este determinat de forma secţiunii ce se apreciază îndeosebi prin raportul uBH / . Astfel se deosebesc:
anvelopă balon, pentru anvelopa diagonală cu 0,1/ ≈uBH ; anvelopă superbalon pentru anvelopa convenţională cu 95,0/ =uBH ; anvelopă cu secţiune joasă pentru anvelopa în construcţie diagonală
cu uBH / cuprins între 0,86 şi 0,89; anvelopă cu secţiune foarte joasă pentru anvelopa în construcţie
diagonală cu 82,0/ =uBH anvelopă seria milimetrică pentru anvelopa în construcţie radială cu
82,0/ ≈uBH şi anvelopă cu secţiune lată pentru anvelopa cu lăţimea secţiunii foarte mare, destinată, în special, exploatării pe terenuri nisipoase.
Dinamica Autovehiculelor Procesul Autopropulsării Autovehiculelor
51
Pneurile şi respectiv anvelopele sunt standardizate. De asemenea, terminologia cu privire la pneuri este reglementată prin STAS 9125-78. Anvelopa se notează într-un anume mod în concordanţă cu dimensiunile ei standardizate.
Această notare sau simbolizare se marchează pe flancurile anvelopei pentru identificarea acesteia. Prin notare se indică lăţimea secţiunii, numită uneori şi balonaj, şi diametru de aşezare a talonului, precizânduse şi alte elemente constructive importante.
Se deosebesc următoarele două tipuri de notaţii: a) uB - asD / pN PR STAS Nr.; b) uB Sb asD - pN PR STAS Nr. sau uB Sb asD / pN PR STAS Nr. unde Nr. reprezintă numărul standardului respectiv (în unele situaţii la
pneurile radiale de autoturisme nu se indică PR şi numărul STAS) iar Sb reprezintă o simbolizare care poate avea următoarele forme: S, R, SR, HR, VR şi HD. Exemple: 9,00 + 20-14 PR STAS 8485/2 – 77; 10,00 R20 – 16 PR cord metalic STAS 10960 – 77 (pentru pneuri radiale de autocamioane); 5,60 SR 13 STAS 9091/1 – 76; 155 SR 13.
Lăţimea secţiunii se indică în inch sau în mm. Diametrul de aşezare se exprima în inchi. Este de observat că aceasta reprezintă şi diametrul jantei. La un acelaşi diametru pot corespunde mai multe lăţimi de secţiuni.
Simbolul R indică o anvelopă de construcţie radială, iar simbolul S arată că ea este destinată pentru rularea cu viteze mari, iar simbolul H pentru viteze foarte mari.
Simbolul SR se referă la anvelope radiale de autoturisme pentru viteze până la 180 km/h.
Simbolurile HR şi VR se folosesc pentru aceleaşi tipuri de anvelope dar pentru viteze până la 210 Km/h şi, respectiv, peste 210 Km/h.
Simbolul HD, folosit numai pentru anvelope de autocamion, indică o construcţie ranforsată, pentru regim greu de funcţionare (Heavy Duty).
pN este numărul de pliuri echivalente (PR) care arată rezistenţa carcasei anvelopei. Un pliu echivalent corespunde cordului de bumbac cu sarcina de rupere a firului de 90 daN.
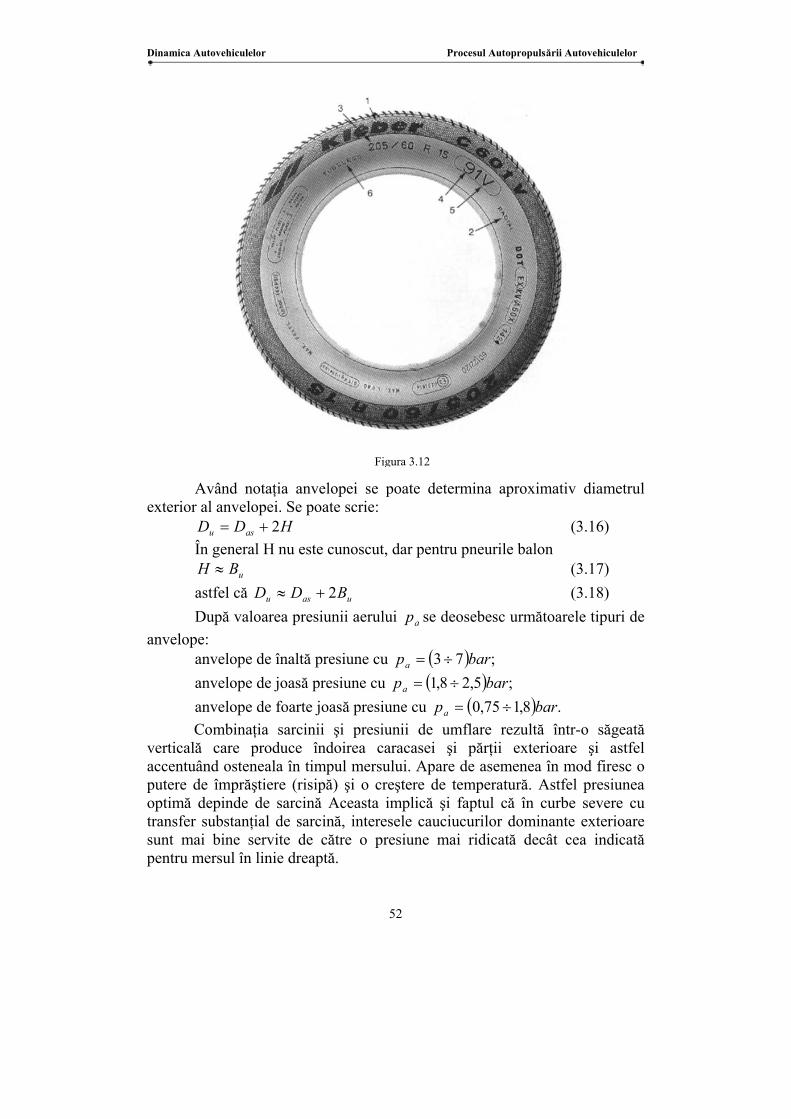
În figura 3.12 sunt puse în evidenţă simbolurile pneului: 1) firma producătoare a anvelopei; 2) tipul pneului (radial sau diagonal); 3) simbolizarea anvelopei; 4) cod de sarcină; 5) cod de viteză; 6) TUBELESS - fară cameră de aer.
Dinamica Autovehiculelor Procesul Autopropulsării Autovehiculelor
52
Având notaţia anvelopei se poate determina aproximativ diametrul
exterior al anvelopei. Se poate scrie: HDD asu 2+= (3.16)
În general H nu este cunoscut, dar pentru pneurile balon uBH ≈ (3.17)
astfel că uasu BDD 2+≈ (3.18) După valoarea presiunii aerului ap se deosebesc următoarele tipuri de
anvelope: anvelope de înaltă presiune cu ( ) ;73 barpa ÷= anvelope de joasă presiune cu ( ) ;5,28,1 barpa ÷= anvelope de foarte joasă presiune cu ( ) .8,175,0 barpa ÷=
Combinaţia sarcinii şi presiunii de umflare rezultă într-o săgeată verticală care produce îndoirea caracasei şi părţii exterioare şi astfel accentuând osteneala în timpul mersului. Apare de asemenea în mod firesc o putere de împrăştiere (risipă) şi o creştere de temperatură. Astfel presiunea optimă depinde de sarcină Aceasta implică şi faptul că în curbe severe cu transfer substanţial de sarcină, interesele cauciucurilor dominante exterioare sunt mai bine servite de către o presiune mai ridicată decât cea indicată pentru mersul în linie dreaptă.
Figura 3.12
Dinamica Autovehiculelor Procesul Autopropulsării Autovehiculelor
53
Alegerea unui cauciuc cu sau fără cameră de aer depinde până la un anumit punct de serviciile de service, deşi pentru folosirea pentru şosea este în general o chestiune de obişnuinţă locală, cu obiceiuri care variază în mod vizibil între ţări diferite. Cauciucul fără cameră de aer este iniţial mai economic şi este mai rezistent la înţepături (pană), ambele tipuri au o distanţă de drum tipică între penetrările carcasei de 30000 km, dar cauciucul fără cameră de aer necesită o schimbare a roţii (de mers) la o penetrare din 5. În cazul unor condiţii dure precum raliurile sau alte activităţi în afara şoselei, tipul de cauciuc fără cameră de aer se poate ridica de pe jantă într-un impact puternic. Pentru o pană de drum normală aceasta se dezumflă mai încet decât un cauciuc cu cameră de aer. Tipul fără cameră de aer este de asemenea puţin mai uşor. Însărcinat cu producerea unui cauciuc nou pentru un autovehicul nou, proiectantul de cauciucuri se confruntă în general cu restricţii dimensionale – diametrul roţii pentru adaptarea potrivită a frânelor, plus diametrul maxim exterior şi balonajul pentru motive de integrare în caroserie. Capacitatea de încărcare este influenţată de dimensiuni şi de presiunea de umflare. Odată ce diametrele şi lărgimea secţiunii sunt determinate, forma secţiunii trebuie decisă. Coarda de tensiune trebuie să ofere echilibru împotriva presiunii de umflare şi doar un singur unghi de coroană este compatibil cu o serie de valori date ale razei jantei, lărgimea jantei, raza cauciucului şi lăţimea secţiunii. Unghiul de coroană al corzii unui cauciuc fără curea, influenţează multe din proprietăţile de bază. Pentru un unghi de coroană mai mare, respectiv unul aproape radial, lăţimea secţiunii este mai mică, rezistenţa de rulare mai scăzută, presiunea de tăiere mai joasă, presiunea talonului anvelopei mai ridicată, tensiunea corzii mai joasă, lungimea contactului mai mare, înţepenirea laterală mai mică, uzura părţii exterioare mai mare, cedarea peretelui lateral mai mare, cedarea părţii exterioare mai mică, înţepenirea în cazul virajelor mai mică, mersul mai neted (mai uşor) şi forţa de explozie mai mare. Detaliile constructive ale carcasei sunt mult mai complexe şi subtile decât cum ar putea rezulta din această concisă descriere, iar proprietăţile cauciucului pot fi vizibil modificate de mici modificări de proiectare, în special a unghiurilor de corzi. Deşi cauciucul cu pliuri diagonale va continua fără îndoială sa fie folosit în întrebuinţări specializate, pentru cele mai multe cerinţe cauciucul cu pliuri radiale este superior, în special pentru rata de uzare şi se aşteaptă să domine în utilizarea pentru autovehicul.
În ANEXA 2 sunt prezentate caracteristicile geometrice pentru câteva tipuri de pneuri diagonale şi radiale.
Dinamica Autovehiculelor Procesul Autopropulsării Autovehiculelor
54
3.3.2. Deformaţiile pneurilor Cunoaşterea comportării pneului la acţiunea sarcinilor exterioare este
foarte importantă pentru studiul dinamicii autovehiculului. Comportarea pneurilor în exploatare influenţează siguranţa circulaţiei, gradul de confort economicitatea autovehiculelor.
Pneul reprezintă o membrană elastică cu pereţi subţiri, plină cu aer comprimat. El trebuie să îndeplinească trei funcţii distincte:
- preluare sarcinii verticale; - dezvoltarea forţelor tangenţiale care să accelereze sau să decelereze
autovehiculul; - dezvoltarea forţelor laterale care să ghideze autovehiculul. Deformarea pneului sub acţiunea presiunii interioare a aerului Dacă asupra unui pneu neîncărcat din exterior se aplică o presiune
interioară, dimensiunile iniţiale ale anvelopei se modifică până la o anumită valoare a presiunii, diferit în funcţie de construcţia pneului. Astfel la pneurile cu raportul BH subunitar (fig. 3.13, a), diametrul exterior se măreşte, iar la pneurile cu raportul BH supraunitar (fig. 3.13, b) diametrul se micşorează. În primul caz, elementele benzii de rulare, iniţial întinse, în timpul rulării sub sarcină primesc o compresiune tangenţială mai redusă şi ca urmare şi tensiunile tangenţiale sunt mai mici. Acest fenomen influenţează favorabil rezistenţa la uzură, micşorează alunecarea, dar reduce într-o oarecare măsură rezistenţa la forfecare.
Eforturile în pneu, determinate de presiunea aerului sunt preluate de către firele cordului şi sunt maxime la ecuator - la pneurile fără breker - şi în dreptul umerilor în cazul pneurilor cu breker.
Din cercetări experimentale a rezultat că la solicitarea pneului de către presiunea interioară, modificările dimensionale şi de configuraţie au loc la o presiune de cca 2/1 cmdaN şi se datoreşte modificării unghiurilor între firele de cord şi deformaţiile cauciucului.
Deformarea pneului sub acţiunea sarcinii normale în stare imobilă Sub acţiunea sarcinii normale RG pneul capătă deformaţii conplexe,
dar pentru simplificare se consideră că deformaţiile sunt orientate în direcţiile:
- verticală (radială); - longitudinală; - transversală.
Dinamica Autovehiculelor Procesul Autopropulsării Autovehiculelor
55
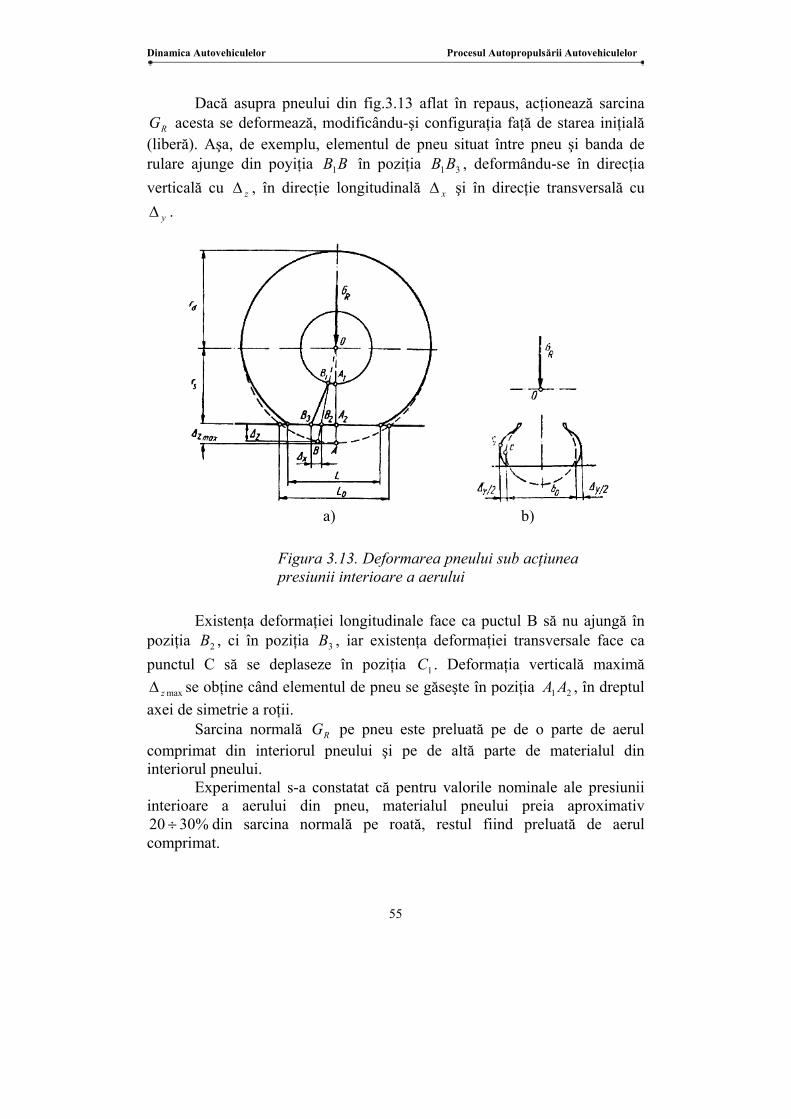
Dacă asupra pneului din fig.3.13 aflat în repaus, acţionează sarcina RG acesta se deformează, modificându-şi configuraţia faţă de starea iniţială
(liberă). Aşa, de exemplu, elementul de pneu situat între pneu şi banda de rulare ajunge din poyiţia BB1 în poziţia 31BB , deformându-se în direcţia verticală cu z∆ , în direcţie longitudinală x∆ şi în direcţie transversală cu
y∆ .
Existenţa deformaţiei longitudinale face ca puctul B să nu ajungă în
poziţia 2B , ci în poziţia 3B , iar existenţa deformaţiei transversale face ca punctul C să se deplaseze în poziţia 1C . Deformaţia verticală maximă
maxz∆ se obţine când elementul de pneu se găseşte în poziţia 21 AA , în dreptul axei de simetrie a roţii.
Sarcina normală RG pe pneu este preluată pe de o parte de aerul comprimat din interiorul pneului şi pe de altă parte de materialul din interiorul pneului.
Experimental s-a constatat că pentru valorile nominale ale presiunii interioare a aerului din pneu, materialul pneului preia aproximativ
%3020 ÷ din sarcina normală pe roată, restul fiind preluată de aerul comprimat.
Figura 3.13. Deformarea pneului sub acţiunea presiunii interioare a aerului
a) b)
Dinamica Autovehiculelor Procesul Autopropulsării Autovehiculelor
56
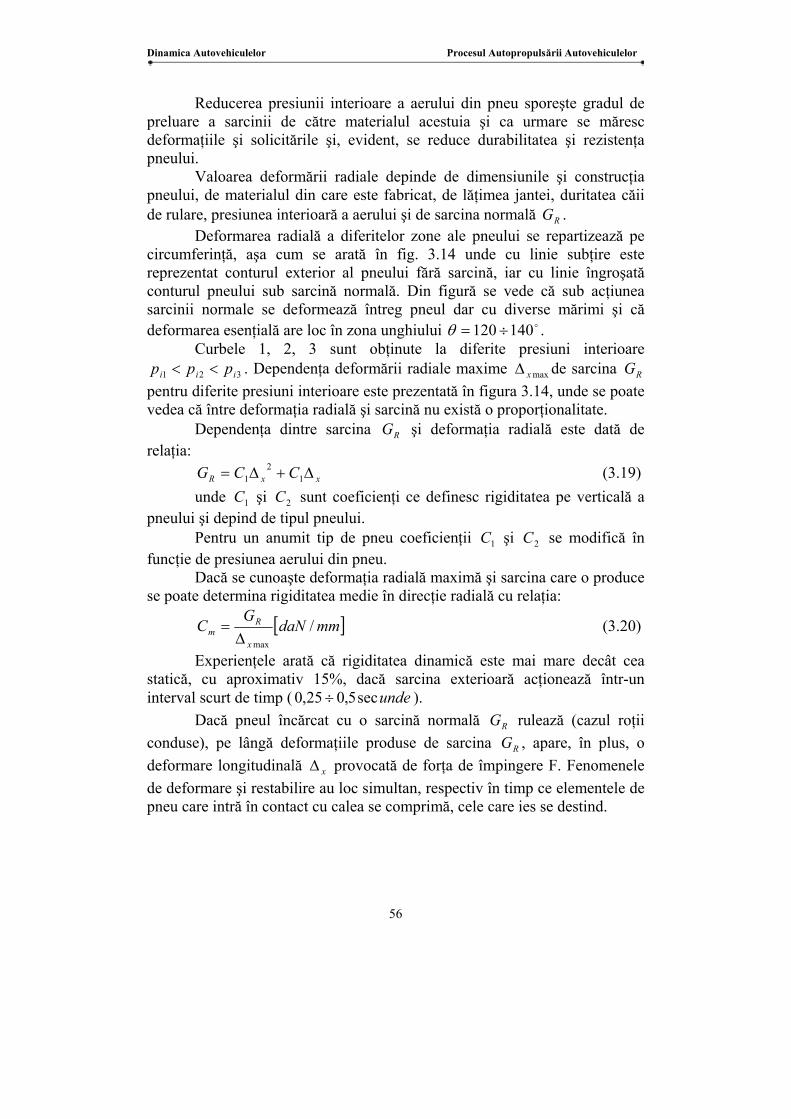
Reducerea presiunii interioare a aerului din pneu sporeşte gradul de preluare a sarcinii de către materialul acestuia şi ca urmare se măresc deformaţiile şi solicitările şi, evident, se reduce durabilitatea şi rezistenţa pneului.
Valoarea deformării radiale depinde de dimensiunile şi construcţia pneului, de materialul din care este fabricat, de lăţimea jantei, duritatea căii de rulare, presiunea interioară a aerului şi de sarcina normală RG .
Deformarea radială a diferitelor zone ale pneului se repartizează pe circumferinţă, aşa cum se arată în fig. 3.14 unde cu linie subţire este reprezentat conturul exterior al pneului fără sarcină, iar cu linie îngroşată conturul pneului sub sarcină normală. Din figură se vede că sub acţiunea sarcinii normale se deformează întreg pneul dar cu diverse mărimi şi că deformarea esenţială are loc în zona unghiului o140120 ÷=θ .
Curbele 1, 2, 3 sunt obţinute la diferite presiuni interioare 321 iii ppp << . Dependenţa deformării radiale maxime maxx∆ de sarcina RG
pentru diferite presiuni interioare este prezentată în figura 3.14, unde se poate vedea că între deformaţia radială şi sarcină nu există o proporţionalitate.
Dependenţa dintre sarcina RG şi deformaţia radială este dată de relaţia:
xxR CCG ∆+∆= 12
1 (3.19) unde 1C şi 2C sunt coeficienţi ce definesc rigiditatea pe verticală a
pneului şi depind de tipul pneului. Pentru un anumit tip de pneu coeficienţii 1C şi 2C se modifică în
funcţie de presiunea aerului din pneu. Dacă se cunoaşte deformaţia radială maximă şi sarcina care o produce
se poate determina rigiditatea medie în direcţie radială cu relaţia:
[ ]mmdaNG
Cx
Rm /
max∆= (3.20)
Experienţele arată că rigiditatea dinamică este mai mare decât cea statică, cu aproximativ 15%, dacă sarcina exterioară acţionează într-un interval scurt de timp ( undesec5,025,0 ÷ ).
Dacă pneul încărcat cu o sarcină normală RG rulează (cazul roţii conduse), pe lângă deformaţiile produse de sarcina RG , apare, în plus, o deformare longitudinală x∆ provocată de forţa de împingere F. Fenomenele de deformare şi restabilire au loc simultan, respectiv în timp ce elementele de pneu care intră în contact cu calea se comprimă, cele care ies se destind.

Dinamica Autovehiculelor Procesul Autopropulsării Autovehiculelor
57
În figura 3.14., cu linii întrerupte, se indică poziţia pneului şi a
elementelor sale înainte de acţiunea forţei F, iar cu linii continue poziţia acestora după acţiunea forţei F. În acest caz se observă că modificarea sesizabilă a profilului pneului are loc în jumătatea inferioară a circumferinţei pneului. Astfel, urmărind comportarea unui element de pneu, începând cu zona nedeformată, rezultă că în absenţa forţei F (stare imobilă) elementul de pneu 11 ′− din zona nedeformată capătă forma 43 ′− , în suprafaţa de contact. Prin rularea pneului sub acţiunea forţei de împingere F elementul de pneu care, în zona nedeformată, are poziţia 22 ′− , în zona de contact cu calea capătă forma .33 ′−
Poziţia 43 ′− este o poziţie imaginară, care ar exista în cazul când sub acţiunea sarcinii G în stare imobilă pneul nu s-ar deforma în direcţie longitudinală.
Prin urmare, segmentul 43− reprezintă deformaţia longitudinală x∆ , pe care o capătă elementul de pneu în stare imobilă sub acţiunea sarcinii RG , iar segmentul 43 ′−′ reprezintă deformaţia longitudinală x∆ pe care o capătă elementul de pneu în timpul rulării sub acţiunea forţei de împingere F. Evident, în realitate, fenomenele se petrec simultan, iar deformaţiile prezentate nu pot fi separate, explicaţia de mai sus având doar rolul de a distinge influenţa forţelor care intervin în cele două situaţii.
Rezultă că rularea pneului pe cale, constând într-o succesiune continuă de deformări şi reveniri ale acestuia, se face cu consum de energie. Energia consumată la deformare este mai mare decât energia cedată în timpul revenirii la forma iniţială, diferenţa transformându-se în căldură (fenomen cunoscut sub numele de histerezis).
Figura 3.14. Deformarea pneului sub acţiunea sarcinii normale în stare imobilă
Dinamica Autovehiculelor Procesul Autopropulsării Autovehiculelor
58
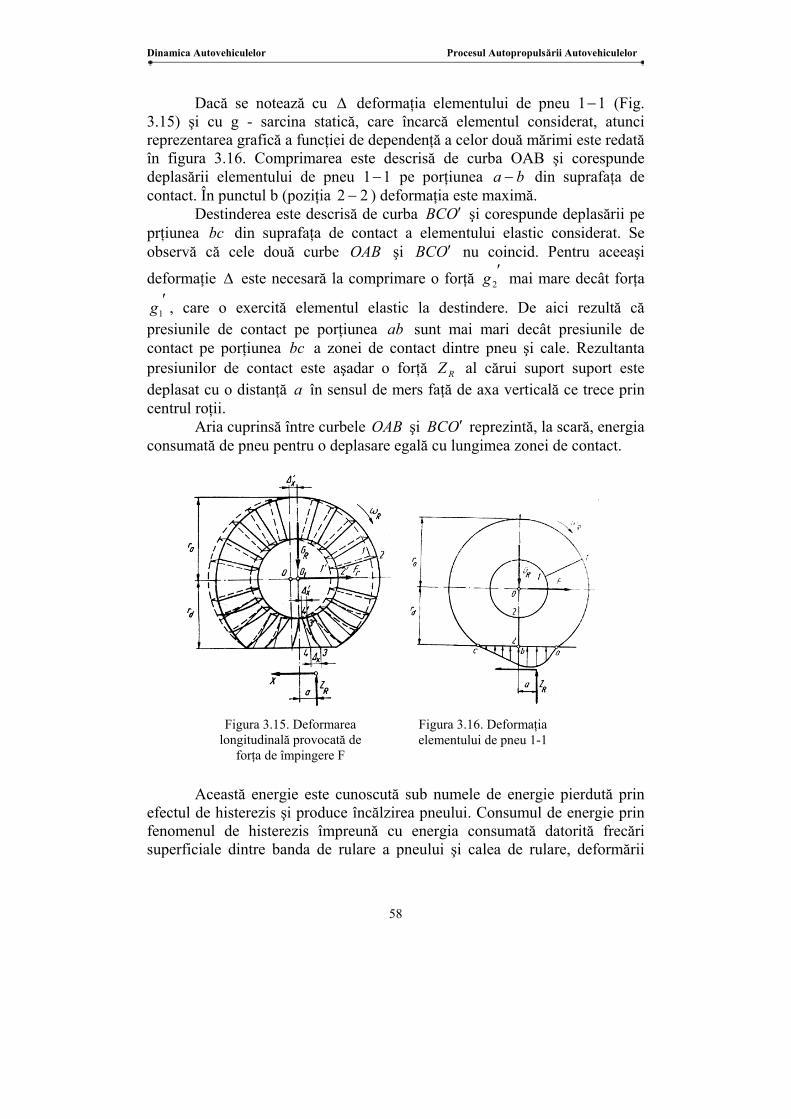
Dacă se notează cu ∆ deformaţia elementului de pneu 11− (Fig. 3.15) şi cu g - sarcina statică, care încarcă elementul considerat, atunci reprezentarea grafică a funcţiei de dependenţă a celor două mărimi este redată în figura 3.16. Comprimarea este descrisă de curba OAB şi corespunde deplasării elementului de pneu 11− pe porţiunea ba − din suprafaţa de contact. În punctul b (poziţia 22 − ) deformaţia este maximă.
Destinderea este descrisă de curba OBC ′ şi corespunde deplasării pe prţiunea bc din suprafaţa de contact a elementului elastic considerat. Se observă că cele două curbe OAB şi OBC ′ nu coincid. Pentru aceeaşi
deformaţie ∆ este necesară la comprimare o forţă ′2g mai mare decât forţa
′1g , care o exercită elementul elastic la destindere. De aici rezultă că
presiunile de contact pe porţiunea ab sunt mai mari decât presiunile de contact pe porţiunea bc a zonei de contact dintre pneu şi cale. Rezultanta presiunilor de contact este aşadar o forţă RZ al cărui suport suport este deplasat cu o distanţă a în sensul de mers faţă de axa verticală ce trece prin centrul roţii.
Aria cuprinsă între curbele OAB şi OBC ′ reprezintă, la scară, energia consumată de pneu pentru o deplasare egală cu lungimea zonei de contact.
Această energie este cunoscută sub numele de energie pierdută prin
efectul de histerezis şi produce încălzirea pneului. Consumul de energie prin fenomenul de histerezis împreună cu energia consumată datorită frecări superficiale dintre banda de rulare a pneului şi calea de rulare, deformării
Figura 3.15. Deformarea longitudinală provocată de
forţa de împingere F
Figura 3.16. Deformaţia elementului de pneu 1-1
Dinamica Autovehiculelor Procesul Autopropulsării Autovehiculelor
59
drumului, efectului de ventuză produs de profilele cu contur închis de pe banda de rulare, se manifestă prin apariţia unei forţe rezistente, ce se opune rulării - numită rezistenţă la rulare.
Deformarea pneului sub acţiunea momentului motor sau momentului
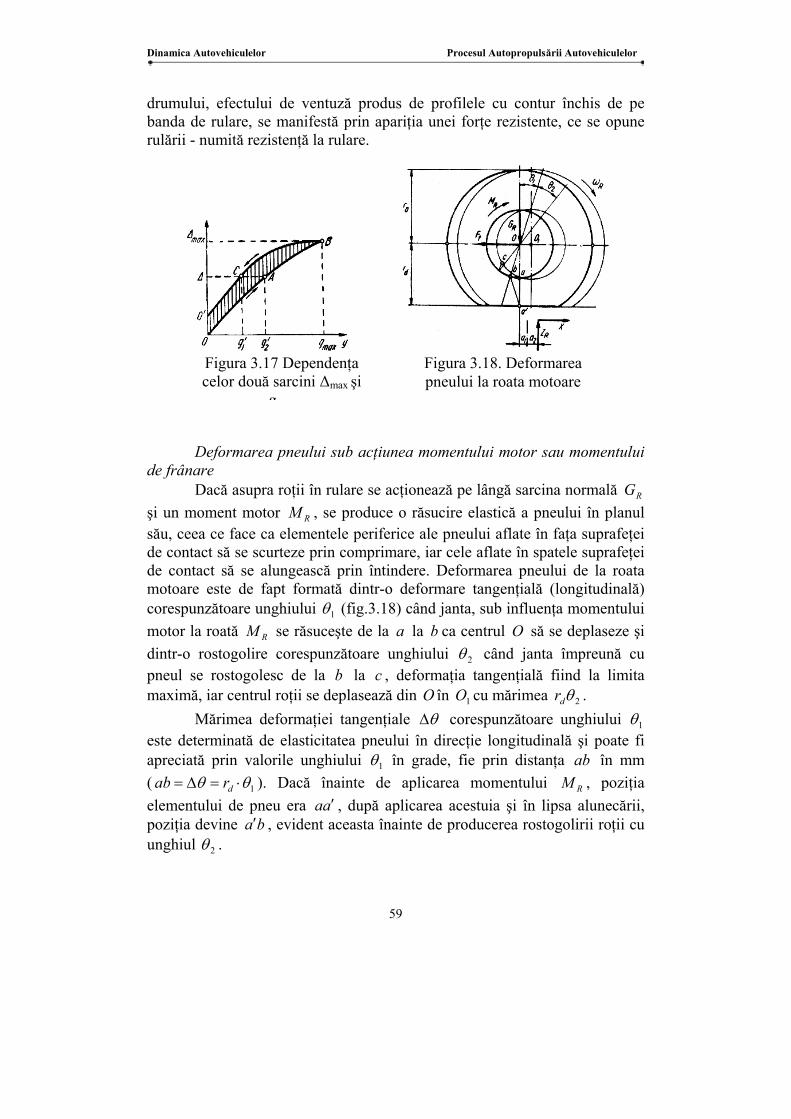
de frânare Dacă asupra roţii în rulare se acţionează pe lângă sarcina normală RG
şi un moment motor RM , se produce o răsucire elastică a pneului în planul său, ceea ce face ca elementele periferice ale pneului aflate în faţa suprafeţei de contact să se scurteze prin comprimare, iar cele aflate în spatele suprafeţei de contact să se alungească prin întindere. Deformarea pneului de la roata motoare este de fapt formată dintr-o deformare tangenţială (longitudinală) corespunzătoare unghiului 1θ (fig.3.18) când janta, sub influenţa momentului motor la roată RM se răsuceşte de la a la b ca centrul O să se deplaseze şi dintr-o rostogolire corespunzătoare unghiului 2θ când janta împreună cu pneul se rostogolesc de la b la c , deformaţia tangenţială fiind la limita maximă, iar centrul roţii se deplasează din O în 1O cu mărimea 2θdr .
Mărimea deformaţiei tangenţiale θ∆ corespunzătoare unghiului 1θ este determinată de elasticitatea pneului în direcţie longitudinală şi poate fi apreciată prin valorile unghiului 1θ în grade, fie prin distanţa ab în mm ( 1θθ ⋅=∆= drab ). Dacă înainte de aplicarea momentului RM , poziţia elementului de pneu era aa ′ , după aplicarea acestuia şi în lipsa alunecării, poziţia devine ba′ , evident aceasta înainte de producerea rostogolirii roţii cu unghiul 2θ .
Figura 3.17 Dependenţa celor două sarcini ∆max şi
g
Figura 3.18. Deformarea pneului la roata motoare

Dinamica Autovehiculelor Procesul Autopropulsării Autovehiculelor
60
Sub influenţa momentului RM , ca urmare a majorării deformaţiilor radiale şi longitudinale, devierea reacţiunii verticale RZ este mai mare şi poate fi formată din devierea produsă în urma deformării provocate de sarcina RG şi din devierea produsă de deformarea cauzată de momentul motor la roată 2dZ R ⋅ .
Variaţia deformaţiei tangenţiale a pneului în funcţie de încărcarea şi descărcarea acestuia cu momentul RM este prezentată în figura 3.19.
Rezultă că linia curbă 1 obţinută prin încărcarea pneului la diferite valori ale momentului RM şi linia curbă 1′ obţinută prin descărcare nu corespund. Acest lucru confirmă existenţa fenomenului de histerezis la deformarea tangenţială a pneului. Din figură mai rezultă unghiul de răsucire al pneului se micşorează cu mărirea presiunii interioare a pneului ip şi cu creşterea sarcinii RG .
Raportul dintre momentul RM şi unghiul derăsucire θ produs de acesta caracterizează rigiditatea unghiulară a pneului 0C :
[ ]graddaNM
C R /0 θ= (3.21)
Momentul motor la roată RM influenţează mărimea razei dinamice
dr şi a razei de rulare rr .
Figura 3.19. Variaţia deformaţiei tangenţiale a pneului în funcţie de încărcarea şi descărcarea
acestuia cu momentul RM
1-[ ][ ]daNG
cmdaNp
R 1150/0,3 2
1
==
2- - [ ][ ]daNG
cmdaNp
R 1150/5,2 2
2
==
3- - [ ][ ]daNG
cmdaNp
R 1150/0,2 2
3
==
4- - [ ][ ]daNG
cmdaNp
R 1450/5,2 2
4
==
Dinamica Autovehiculelor Procesul Autopropulsării Autovehiculelor
61
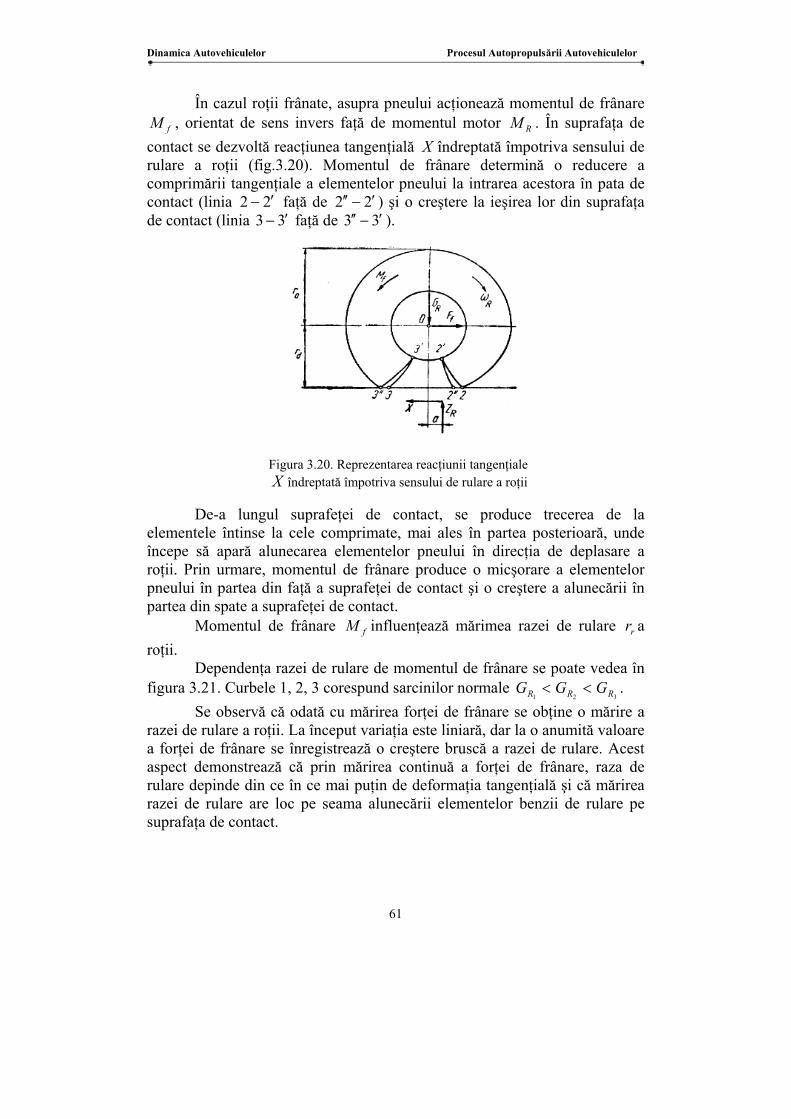
În cazul roţii frânate, asupra pneului acţionează momentul de frânare fM , orientat de sens invers faţă de momentul motor RM . În suprafaţa de
contact se dezvoltă reacţiunea tangenţială X îndreptată împotriva sensului de rulare a roţii (fig.3.20). Momentul de frânare determină o reducere a comprimării tangenţiale a elementelor pneului la intrarea acestora în pata de contact (linia 22 ′− faţă de 22 ′−′′ ) şi o creştere la ieşirea lor din suprafaţa de contact (linia 33 ′− faţă de 33 ′−′′ ).
De-a lungul suprafeţei de contact, se produce trecerea de la
elementele întinse la cele comprimate, mai ales în partea posterioară, unde începe să apară alunecarea elementelor pneului în direcţia de deplasare a roţii. Prin urmare, momentul de frânare produce o micşorare a elementelor pneului în partea din faţă a suprafeţei de contact şi o creştere a alunecării în partea din spate a suprafeţei de contact.
Momentul de frânare fM influenţează mărimea razei de rulare rr a roţii.
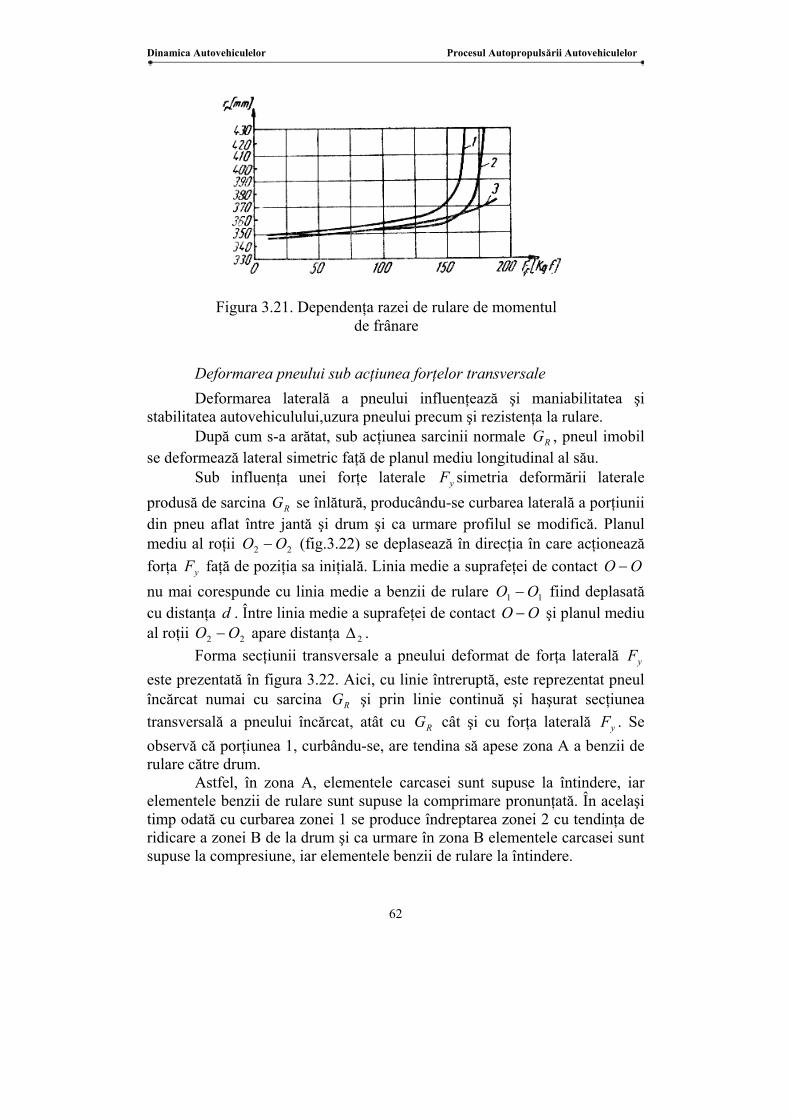
Dependenţa razei de rulare de momentul de frânare se poate vedea în figura 3.21. Curbele 1, 2, 3 corespund sarcinilor normale
321 RRR GGG << . Se observă că odată cu mărirea forţei de frânare se obţine o mărire a
razei de rulare a roţii. La început variaţia este liniară, dar la o anumită valoare a forţei de frânare se înregistrează o creştere bruscă a razei de rulare. Acest aspect demonstrează că prin mărirea continuă a forţei de frânare, raza de rulare depinde din ce în ce mai puţin de deformaţia tangenţială şi că mărirea razei de rulare are loc pe seama alunecării elementelor benzii de rulare pe suprafaţa de contact.
Figura 3.20. Reprezentarea reacţiunii tangenţiale X îndreptată împotriva sensului de rulare a roţii
Dinamica Autovehiculelor Procesul Autopropulsării Autovehiculelor
62
Deformarea pneului sub acţiunea forţelor transversale Deformarea laterală a pneului influenţează şi maniabilitatea şi
stabilitatea autovehiculului,uzura pneului precum şi rezistenţa la rulare. După cum s-a arătat, sub acţiunea sarcinii normale RG , pneul imobil
se deformează lateral simetric faţă de planul mediu longitudinal al său. Sub influenţa unei forţe laterale yF simetria deformării laterale
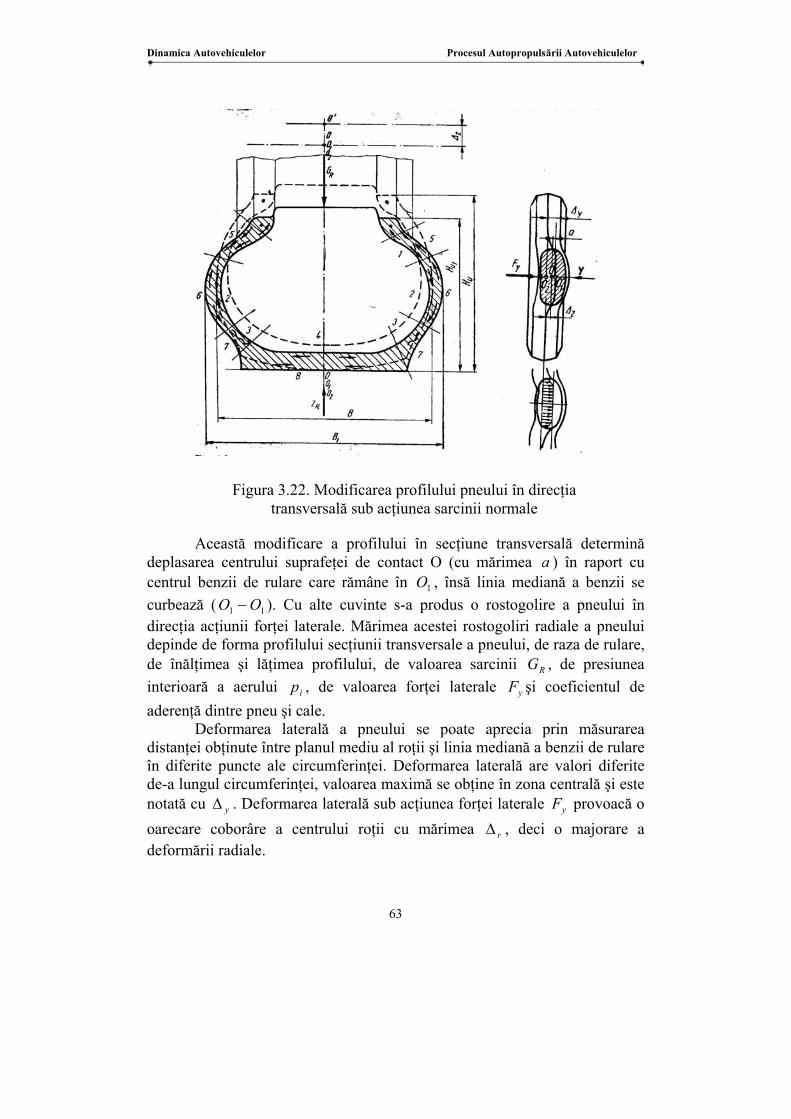
produsă de sarcina RG se înlătură, producându-se curbarea laterală a porţiunii din pneu aflat între jantă şi drum şi ca urmare profilul se modifică. Planul mediu al roţii 22 OO − (fig.3.22) se deplasează în direcţia în care acţionează forţa yF faţă de poziţia sa iniţială. Linia medie a suprafeţei de contact OO − nu mai corespunde cu linia medie a benzii de rulare 11 OO − fiind deplasată cu distanţa d . Între linia medie a suprafeţei de contact OO − şi planul mediu al roţii 22 OO − apare distanţa 2∆ .
Forma secţiunii transversale a pneului deformat de forţa laterală yF este prezentată în figura 3.22. Aici, cu linie întreruptă, este reprezentat pneul încărcat numai cu sarcina RG şi prin linie continuă şi haşurat secţiunea transversală a pneului încărcat, atât cu RG cât şi cu forţa laterală yF . Se observă că porţiunea 1, curbându-se, are tendina să apese zona A a benzii de rulare către drum.
Astfel, în zona A, elementele carcasei sunt supuse la întindere, iar elementele benzii de rulare sunt supuse la comprimare pronunţată. În acelaşi timp odată cu curbarea zonei 1 se produce îndreptarea zonei 2 cu tendinţa de ridicare a zonei B de la drum şi ca urmare în zona B elementele carcasei sunt supuse la compresiune, iar elementele benzii de rulare la întindere.
Figura 3.21. Dependenţa razei de rulare de momentul de frânare
Dinamica Autovehiculelor Procesul Autopropulsării Autovehiculelor
63
Această modificare a profilului în secţiune transversală determină
deplasarea centrului suprafeţei de contact O (cu mărimea a ) în raport cu centrul benzii de rulare care rămâne în 1O , însă linia mediană a benzii se curbează ( 11 OO − ). Cu alte cuvinte s-a produs o rostogolire a pneului în direcţia acţiunii forţei laterale. Mărimea acestei rostogoliri radiale a pneului depinde de forma profilului secţiunii transversale a pneului, de raza de rulare, de înălţimea şi lăţimea profilului, de valoarea sarcinii RG , de presiunea interioară a aerului ip , de valoarea forţei laterale yF şi coeficientul de aderenţă dintre pneu şi cale.
Deformarea laterală a pneului se poate aprecia prin măsurarea distanţei obţinute între planul mediu al roţii şi linia mediană a benzii de rulare în diferite puncte ale circumferinţei. Deformarea laterală are valori diferite de-a lungul circumferinţei, valoarea maximă se obţine în zona centrală şi este notată cu y∆ . Deformarea laterală sub acţiunea forţei laterale yF provoacă o oarecare coborâre a centrului roţii cu mărimea r∆ , deci o majorare a deformării radiale.
Figura 3.22. Modificarea profilului pneului în direcţia transversală sub acţiunea sarcinii normale
Dinamica Autovehiculelor Procesul Autopropulsării Autovehiculelor
64
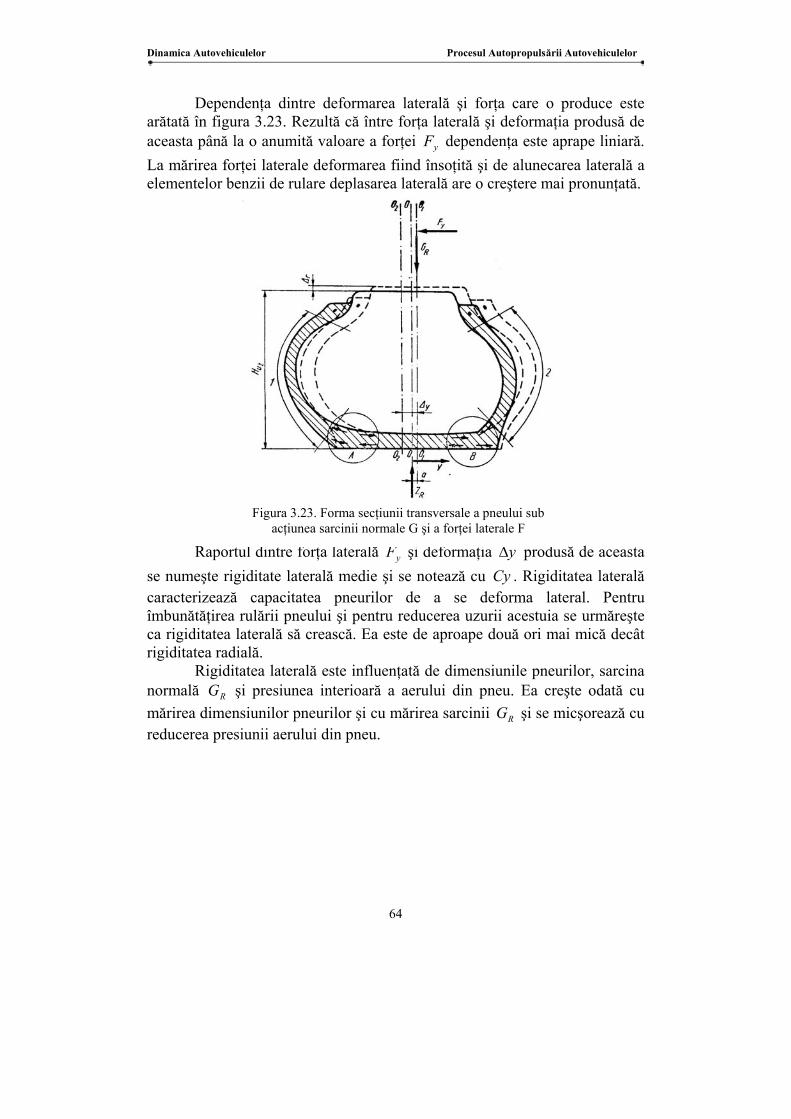
Dependenţa dintre deformarea laterală şi forţa care o produce este arătată în figura 3.23. Rezultă că între forţa laterală şi deformaţia produsă de aceasta până la o anumită valoare a forţei yF dependenţa este aprape liniară. La mărirea forţei laterale deformarea fiind însoţită şi de alunecarea laterală a elementelor benzii de rulare deplasarea laterală are o creştere mai pronunţată.
Raportul dintre forţa laterală yF şi deformaţia y∆ produsă de aceasta
se numeşte rigiditate laterală medie şi se notează cu Cy . Rigiditatea laterală caracterizează capacitatea pneurilor de a se deforma lateral. Pentru îmbunătăţirea rulării pneului şi pentru reducerea uzurii acestuia se urmăreşte ca rigiditatea laterală să crească. Ea este de aproape două ori mai mică decât rigiditatea radială.
Rigiditatea laterală este influenţată de dimensiunile pneurilor, sarcina normală RG şi presiunea interioară a aerului din pneu. Ea creşte odată cu mărirea dimensiunilor pneurilor şi cu mărirea sarcinii RG şi se micşorează cu reducerea presiunii aerului din pneu.
Figura 3.23. Forma secţiunii transversale a pneului sub acţiunea sarcinii normale G şi a forţei laterale F

Dinamica Autovehiculelor Procesul Autopropulsării Autovehiculelor
65
3.3.3 Razele pneurilor Sub influenţa forţelor care acţionează asupra pneului pe direcţiile radiale şi tangenţiale apar deformaţii ale pneului. Din această cauză la roata autovehiculului se deosebesc următoarele raze: raza liberă, raza statică, raza dinamică şi raza de rulare. Raza liberă (r0) - reprezintă raza cercului exterior al benzii de rulare a pneului, la presiunea prescrisă, măsurată fără încărcarea pneului, pneul fiind în stare de repaus. Raza statică (rs) - reprezintă distanţa de la centrul roţii la calea de rulare pentru pneul încărcat cu sarcină nominală, aflat în repaus şi la presiunea nominală. Raza dinamică (rd) - reprezintă distanţa de la centrul roţii la calea de rulare pentru pneul încărcat cu sarcină nominală, aflat la presiunea nominală şi la o viteză de deplasare v. Raza dinamică depinde de o serie de factori, printre care presiunea interioară a pneului, elasticitatea materialului pneului şi tipul forţelor sau momentelor exterioare ce încarcă pneul. Raza de rulare (rr) - reprezintă raza unei roţi imaginare care se roteşte fără alunecări şi care are aceeaşi viteză de translaţie ca şi roata autovehiculului. Folosirea noţiunii de rază de rulare a roţii autovehiclului este necesară deoarece, pneul fiind deformabil pe direcţie radială şi tangenţială, viteza de translaţie a centrului roţii este mai mică decât cea corespunzătoare razei dinamice, pentru aceeaşi viteză unghiulară a roţii. Raza de rulare depinde de sarcina verticală pe roată, de presiunea interioară a aerului din pneu, de starea căii de rulare şi de mărimea momentului motor aplicat roţii.
3.3.4. Eforturile unitare in pata de contact dintre pneu şi cale
Presiunea normală pe suprafaţa de contact Presiunea normală pe suprafaţa de contact este dată de raportul dintre
valoarea sarcinii normale RG şi mărimea ariei suprafeţei de contact. Raportul dintre sarcina normala RG şi aria totală a suprafeţei de contact tA se numeşte
presiune normală medie: ]/[ 2cmdaNAGp
t
Rnm = (3.21)
iar raportul dintre sarcina normală RG şi aria efectivă a suprafeţei de contact
eA se numeşte presiune normală medie efectivă:
]/[ 2cmdaNAGp
e
Rne = (3.22)
Dinamica Autovehiculelor Procesul Autopropulsării Autovehiculelor
66
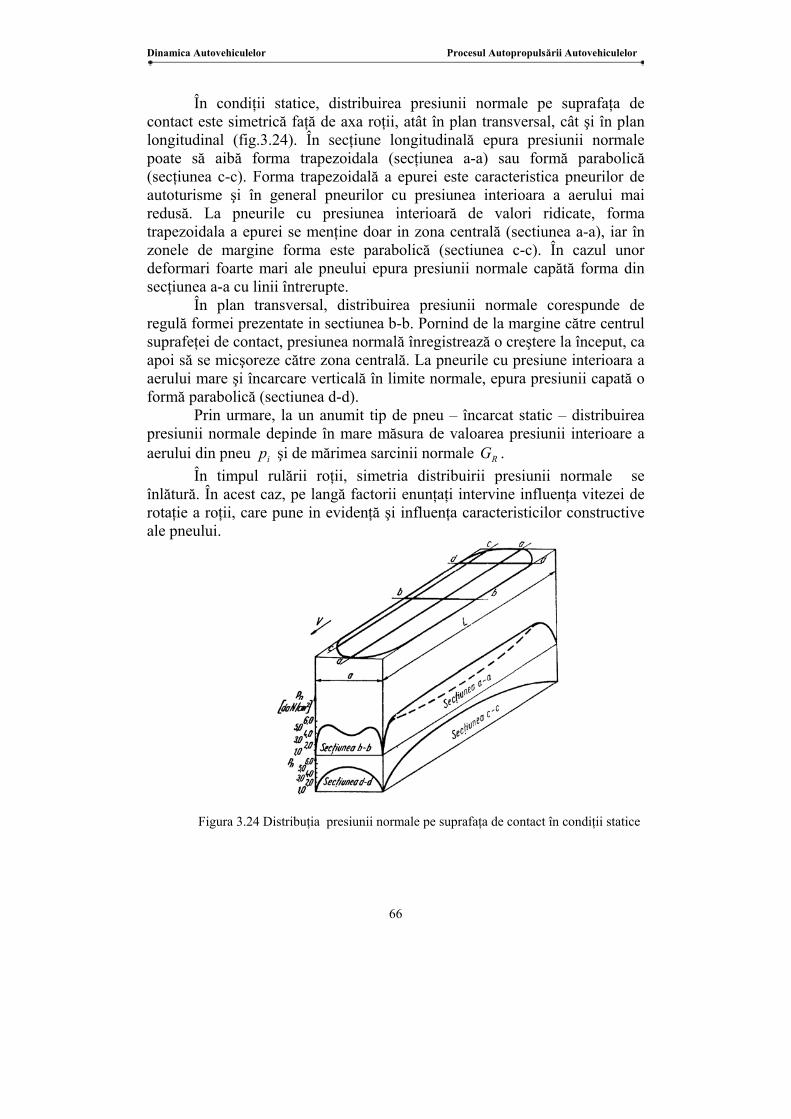
În condiţii statice, distribuirea presiunii normale pe suprafaţa de contact este simetrică faţă de axa roţii, atât în plan transversal, cât şi în plan longitudinal (fig.3.24). În secţiune longitudinală epura presiunii normale poate să aibă forma trapezoidala (secţiunea a-a) sau formă parabolică (secţiunea c-c). Forma trapezoidală a epurei este caracteristica pneurilor de autoturisme şi în general pneurilor cu presiunea interioara a aerului mai redusă. La pneurile cu presiunea interioară de valori ridicate, forma trapezoidala a epurei se menţine doar in zona centrală (sectiunea a-a), iar în zonele de margine forma este parabolică (sectiunea c-c). În cazul unor deformari foarte mari ale pneului epura presiunii normale capătă forma din secţiunea a-a cu linii întrerupte.
În plan transversal, distribuirea presiunii normale corespunde de regulă formei prezentate in sectiunea b-b. Pornind de la margine către centrul suprafeţei de contact, presiunea normală înregistrează o creştere la început, ca apoi să se micşoreze către zona centrală. La pneurile cu presiune interioara a aerului mare şi încarcare verticală în limite normale, epura presiunii capată o formă parabolică (sectiunea d-d).
Prin urmare, la un anumit tip de pneu – încarcat static – distribuirea presiunii normale depinde în mare măsura de valoarea presiunii interioare a aerului din pneu ip şi de mărimea sarcinii normale RG .
În timpul rulării roţii, simetria distribuirii presiunii normale se înlătură. În acest caz, pe langă factorii enunţaţi intervine influenţa vitezei de rotaţie a roţii, care pune in evidenţă şi influenţa caracteristicilor constructive ale pneului.
Figura 3.24 Distribuţia presiunii normale pe suprafaţa de contact în condiţii statice
Dinamica Autovehiculelor Procesul Autopropulsării Autovehiculelor
67
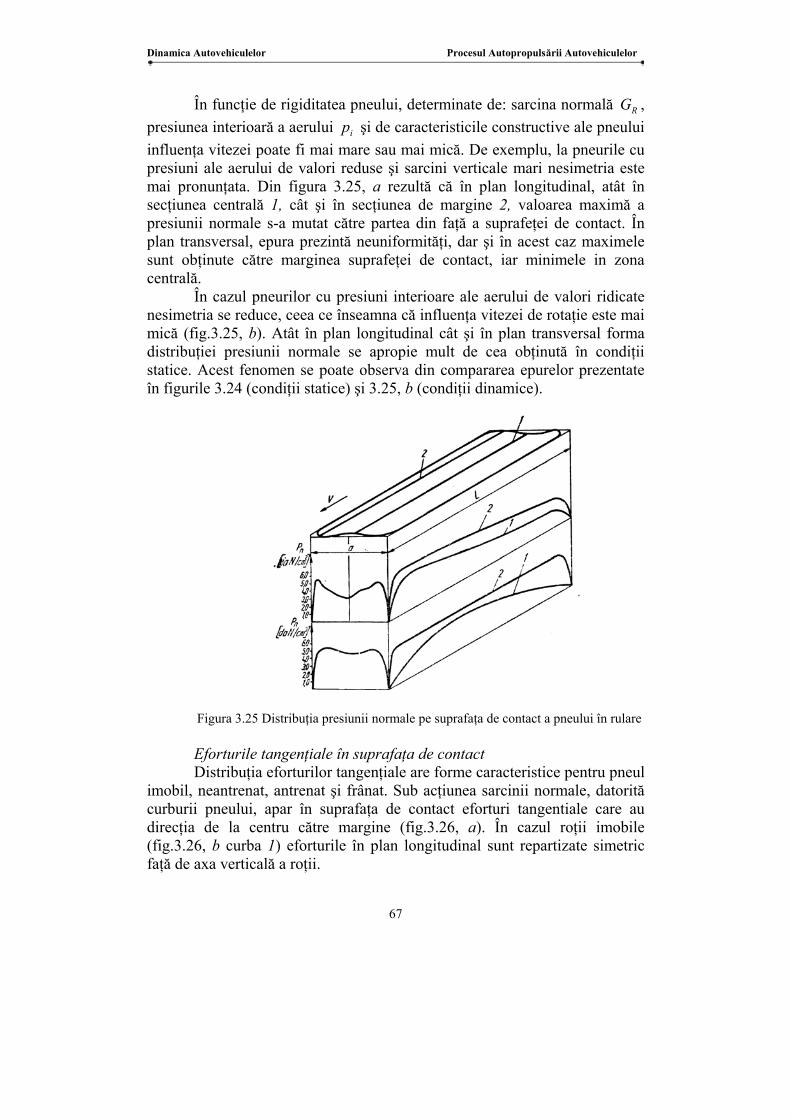
În funcţie de rigiditatea pneului, determinate de: sarcina normală RG , presiunea interioară a aerului ip şi de caracteristicile constructive ale pneului influenţa vitezei poate fi mai mare sau mai mică. De exemplu, la pneurile cu presiuni ale aerului de valori reduse şi sarcini verticale mari nesimetria este mai pronunţata. Din figura 3.25, a rezultă că în plan longitudinal, atât în secţiunea centrală 1, cât şi în secţiunea de margine 2, valoarea maximă a presiunii normale s-a mutat către partea din faţă a suprafeţei de contact. În plan transversal, epura prezintă neuniformităţi, dar şi în acest caz maximele sunt obţinute către marginea suprafeţei de contact, iar minimele in zona centrală.
În cazul pneurilor cu presiuni interioare ale aerului de valori ridicate nesimetria se reduce, ceea ce înseamna că influenţa vitezei de rotaţie este mai mică (fig.3.25, b). Atât în plan longitudinal cât şi în plan transversal forma distribuţiei presiunii normale se apropie mult de cea obţinută în condiţii statice. Acest fenomen se poate observa din compararea epurelor prezentate în figurile 3.24 (condiţii statice) şi 3.25, b (condiţii dinamice).
Figura 3.25 Distribuţia presiunii normale pe suprafaţa de contact a pneului în rulare Eforturile tangenţiale în suprafaţa de contact Distribuţia eforturilor tangenţiale are forme caracteristice pentru pneul
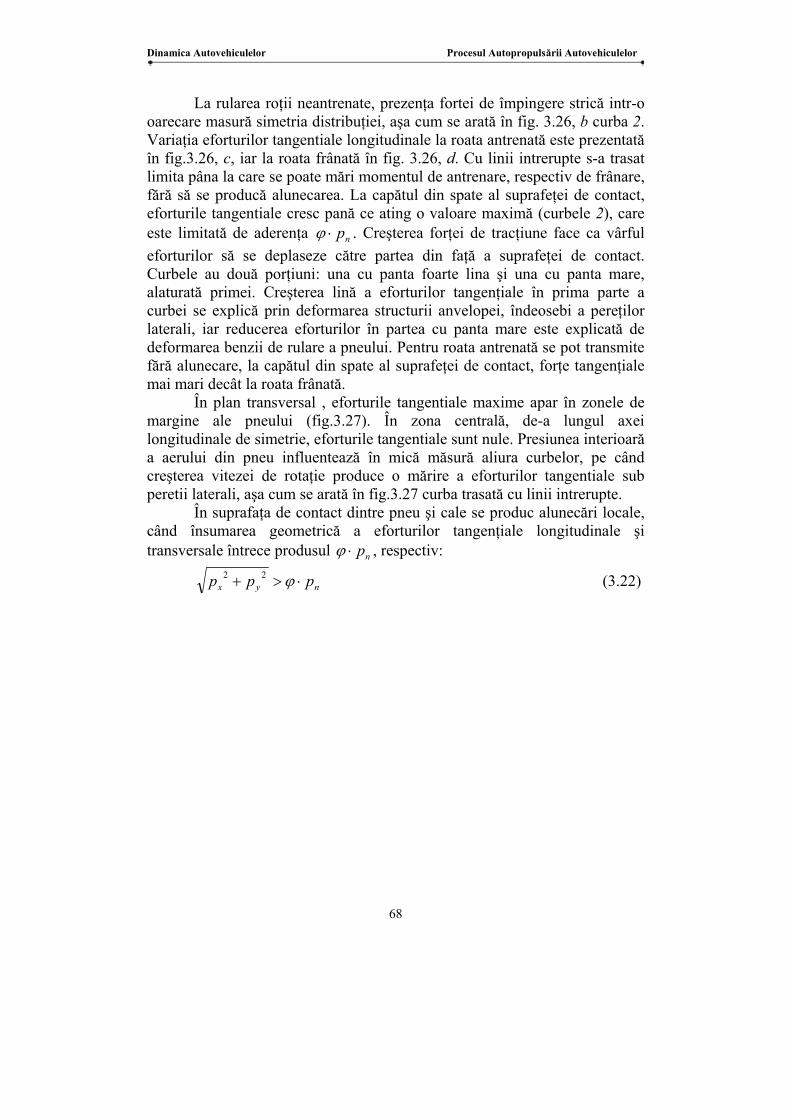
imobil, neantrenat, antrenat şi frânat. Sub acţiunea sarcinii normale, datorită curburii pneului, apar în suprafaţa de contact eforturi tangentiale care au direcţia de la centru către margine (fig.3.26, a). În cazul roţii imobile (fig.3.26, b curba 1) eforturile în plan longitudinal sunt repartizate simetric faţă de axa verticală a roţii.
Dinamica Autovehiculelor Procesul Autopropulsării Autovehiculelor
68
La rularea roţii neantrenate, prezenţa fortei de împingere strică intr-o oarecare masură simetria distribuţiei, aşa cum se arată în fig. 3.26, b curba 2. Variaţia eforturilor tangentiale longitudinale la roata antrenată este prezentată în fig.3.26, c, iar la roata frânată în fig. 3.26, d. Cu linii intrerupte s-a trasat limita pâna la care se poate mări momentul de antrenare, respectiv de frânare, fără să se producă alunecarea. La capătul din spate al suprafeţei de contact, eforturile tangentiale cresc pană ce ating o valoare maximă (curbele 2), care este limitată de aderenţa np⋅ϕ . Creşterea forţei de tracţiune face ca vârful eforturilor să se deplaseze către partea din faţă a suprafeţei de contact. Curbele au două porţiuni: una cu panta foarte lina şi una cu panta mare, alaturată primei. Creşterea lină a eforturilor tangenţiale în prima parte a curbei se explică prin deformarea structurii anvelopei, îndeosebi a pereţilor laterali, iar reducerea eforturilor în partea cu panta mare este explicată de deformarea benzii de rulare a pneului. Pentru roata antrenată se pot transmite fără alunecare, la capătul din spate al suprafeţei de contact, forţe tangenţiale mai mari decât la roata frânată.
În plan transversal , eforturile tangentiale maxime apar în zonele de margine ale pneului (fig.3.27). În zona centrală, de-a lungul axei longitudinale de simetrie, eforturile tangentiale sunt nule. Presiunea interioară a aerului din pneu influentează în mică măsură aliura curbelor, pe când creşterea vitezei de rotaţie produce o mărire a eforturilor tangentiale sub peretii laterali, aşa cum se arată în fig.3.27 curba trasată cu linii intrerupte.
În suprafaţa de contact dintre pneu şi cale se produc alunecări locale, când însumarea geometrică a eforturilor tangenţiale longitudinale şi transversale întrece produsul np⋅ϕ , respectiv:
nyx ppp ⋅>+ ϕ22 (3.22)
Dinamica Autovehiculelor Procesul Autopropulsării Autovehiculelor
69
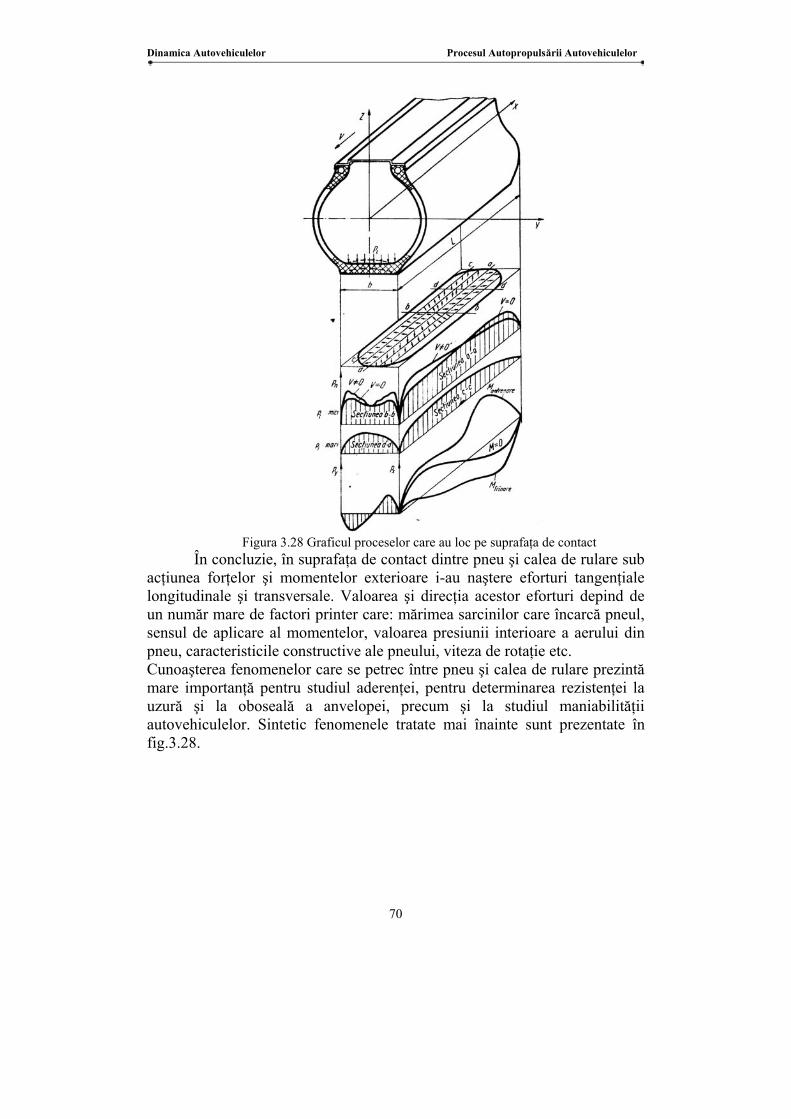
Figura 3.26 Distribuţia eforturilor tangenţiale pe suprafaţa de contact
Figura 3.27 Distribuţia eforturilor transversale pe suprafaţa de contact
Dinamica Autovehiculelor Procesul Autopropulsării Autovehiculelor
70
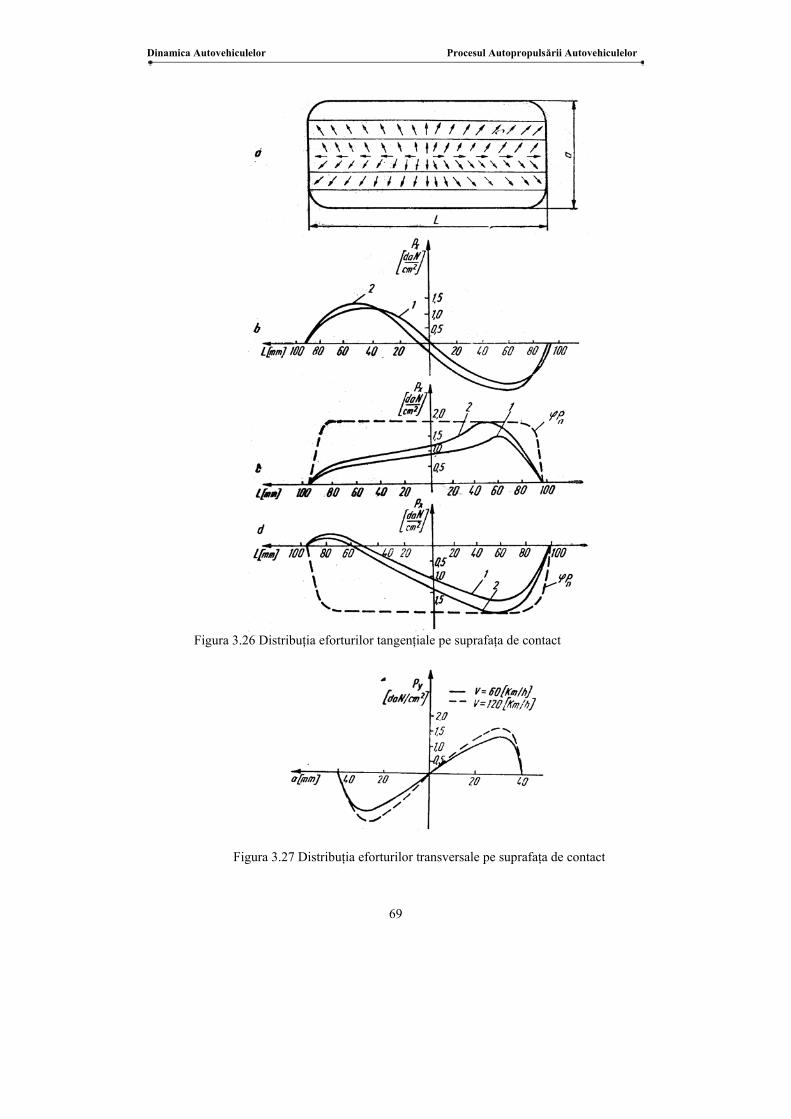
Figura 3.28 Graficul proceselor care au loc pe suprafaţa de contact
În concluzie, în suprafaţa de contact dintre pneu şi calea de rulare sub acţiunea forţelor şi momentelor exterioare i-au naştere eforturi tangenţiale longitudinale şi transversale. Valoarea şi direcţia acestor eforturi depind de un număr mare de factori printer care: mărimea sarcinilor care încarcă pneul, sensul de aplicare al momentelor, valoarea presiunii interioare a aerului din pneu, caracteristicile constructive ale pneului, viteza de rotaţie etc. Cunoaşterea fenomenelor care se petrec între pneu şi calea de rulare prezintă mare importanţă pentru studiul aderenţei, pentru determinarea rezistenţei la uzură şi la oboseală a anvelopei, precum şi la studiul maniabilităţii autovehiculelor. Sintetic fenomenele tratate mai înainte sunt prezentate în fig.3.28.
Dinamica Autovehiculelor Procesul Autopropulsării Autovehiculelor
71
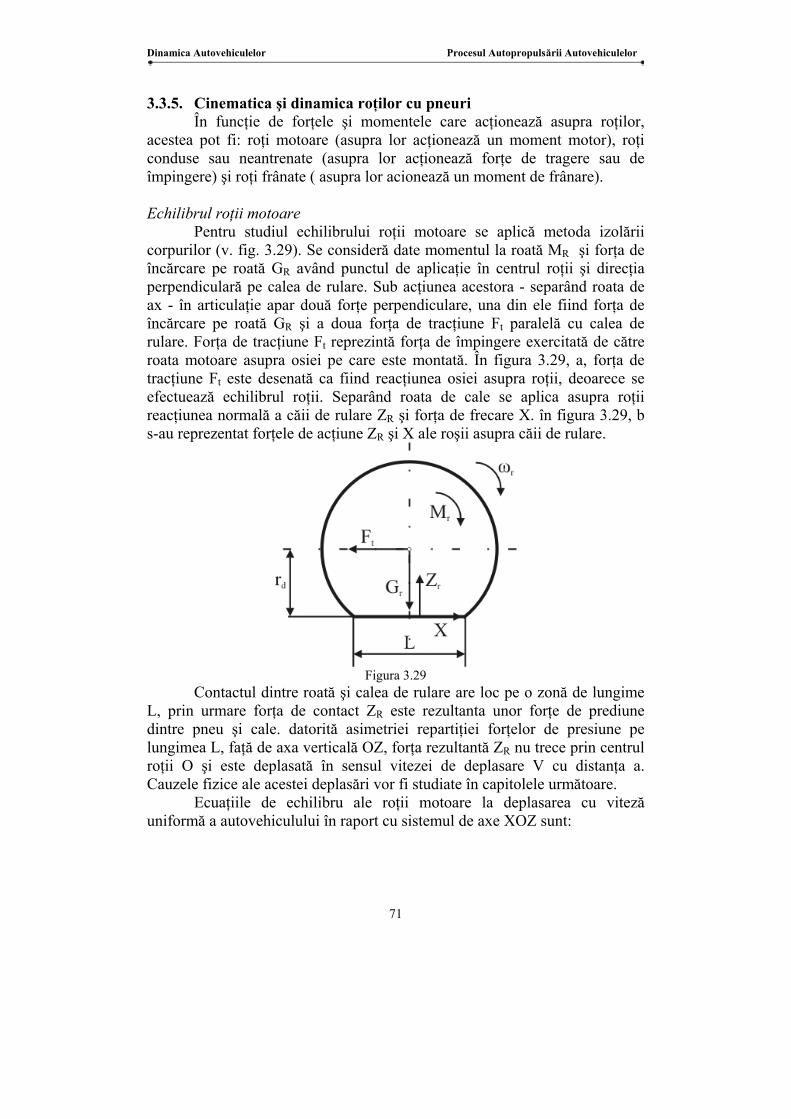
3.3.5. Cinematica şi dinamica roţilor cu pneuri În funcţie de forţele şi momentele care acţionează asupra roţilor, acestea pot fi: roţi motoare (asupra lor acţionează un moment motor), roţi conduse sau neantrenate (asupra lor acţionează forţe de tragere sau de împingere) şi roţi frânate ( asupra lor acionează un moment de frânare). Echilibrul roţii motoare Pentru studiul echilibrului roţii motoare se aplică metoda izolării corpurilor (v. fig. 3.29). Se consideră date momentul la roată MR şi forţa de încărcare pe roată GR având punctul de aplicaţie în centrul roţii şi direcţia perpendiculară pe calea de rulare. Sub acţiunea acestora - separând roata de ax - în articulaţie apar două forţe perpendiculare, una din ele fiind forţa de încărcare pe roată GR şi a doua forţa de tracţiune Ft paralelă cu calea de rulare. Forţa de tracţiune Ft reprezintă forţa de împingere exercitată de către roata motoare asupra osiei pe care este montată. În figura 3.29, a, forţa de tracţiune Ft este desenată ca fiind reacţiunea osiei asupra roţii, deoarece se efectuează echilibrul roţii. Separând roata de cale se aplica asupra roţii reacţiunea normală a căii de rulare ZR şi forţa de frecare X. în figura 3.29, b s-au reprezentat forţele de acţiune ZR şi X ale roşii asupra căii de rulare.
Figura 3.29
Contactul dintre roată şi calea de rulare are loc pe o zonă de lungime L, prin urmare forţa de contact ZR este rezultanta unor forţe de prediune dintre pneu şi cale. datorită asimetriei repartiţiei forţelor de presiune pe lungimea L, faţă de axa verticală OZ, forţa rezultantă ZR nu trece prin centrul roţii O şi este deplasată în sensul vitezei de deplasare V cu distanţa a. Cauzele fizice ale acestei deplasări vor fi studiate în capitolele următoare. Ecuaţiile de echilibru ale roţii motoare la deplasarea cu viteză uniformă a autovehiculului în raport cu sistemul de axe XOZ sunt:
Dinamica Autovehiculelor Procesul Autopropulsării Autovehiculelor
72
0
00
=−⋅+⋅=−
=−
RRd
RR
t
MaZrXGZ
FX (3.23)
Din ecuaţia de momente din sistemul (3.23) se deduce:
d
Rd
R
raZ
rMX ⋅−= (3.24)
în care rd este raza dinamică a roţii motoare, celelalte mărimi au fost prezentate mai înainte. Se defineşte în mod convenţional forţa la roată FR, forţa rezultantă a eforturilor de frecare care, aplicată în suprafaţa de contact cu calea ar produce acelaşi moment motor la roată MR, adica:
d
RR r
MF = (3.25)
Raportul dra este denumit coeficient de rezistenţă la rulare şi se
notează cu f. Cu aceste precizări relaţia (3.24) se poate scrie, dacă se ţine seamă şi de ecuaţiile de proiecţii din (3.23): rRRRt RFGfFF −=⋅−= (3.26) unde s-a notat Rr expresia Gf ⋅ care are dimensiunea unei forţe denumită rezistenţa la rulare. Relaţia: rRt RFF −= arată că forţa de tracţiune se poate exprima prin diferenţa dintre forţa la roată şi rezistenţa la rulare. Forţa de tracţiune Ft este o forţă care se manifestă în axul roţii şi produce împingerea autovehiculului.
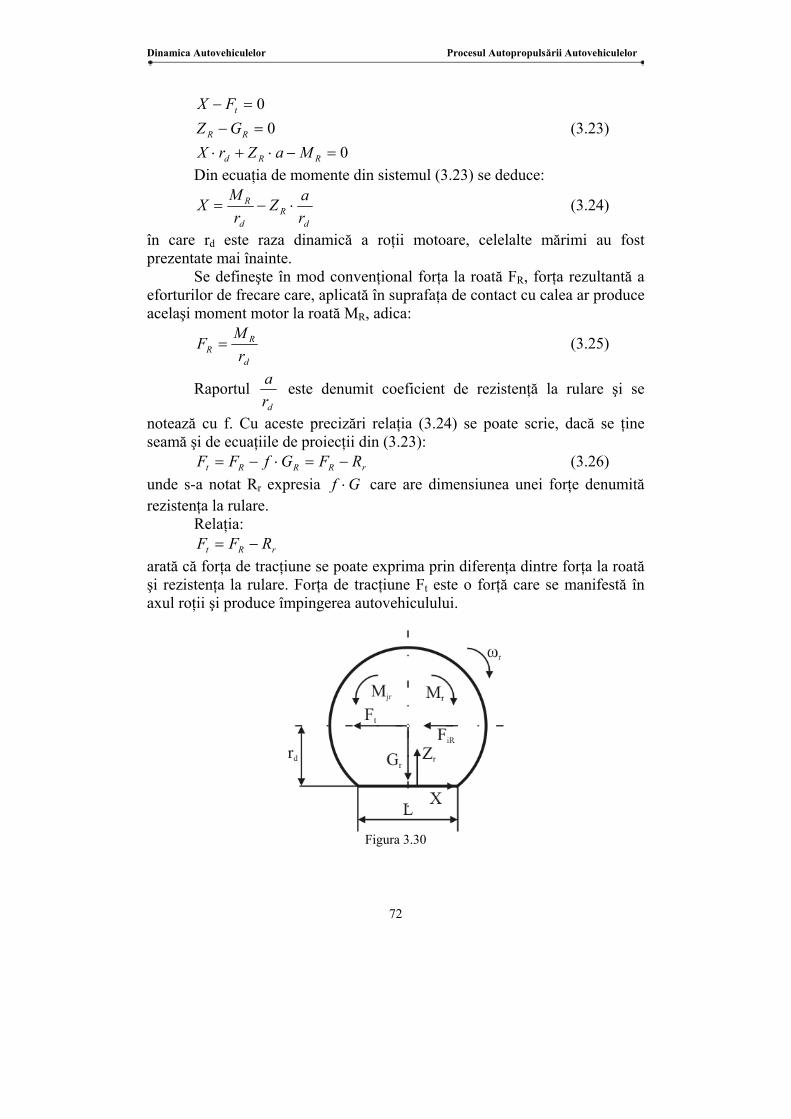
Figura 3.30
Dinamica Autovehiculelor Procesul Autopropulsării Autovehiculelor
73
Forţa care produce împingerea autovehiculului Ft este mai mică decât forţa la roată FR. diferenţa dintre acestea reprezintă partea din forţa la roată Rr, care se consumă la învingerea rezistenţelor opuse şa deformarea pneului şi a frecărilor dintre pneu şi drum, numită rezistenţa la rulare. Forţa de tracţiune a autovehiculului este suma forţelor de tracţiune obţinute de fiecare roată motoare. În cazul deplasării autovehiculului cu viteză variabilă (fig. 3.30) ecuaţiile de echilibru ale roţii motoare sunt:
0
0
0
=⋅−−⋅+⋅
=−
=⋅−−
dtdIMaZrX
GZdtdvmFX
RRRRd
RR
Rt
ω (3.27)
unde iRR Fdtdvm =⋅ este forţa de inerţie a roţii care se opune mărimii vitezei
de translaţie a roţii, JRR
R Mdt
dI =⋅ω - momentul forţei de inerţie a roţii care
se opune accelerării rostogolirii roţii; mR - masa roţii; IR - momentul de inerţie al roţii în raport cu axa de rotaţie; Rω - viteza unghiulară a roţii. În acest caz reacţiunea tangenţială X este:
dt
drI
raZ
rMX R
d
R
dR
d
R ω⋅−⋅−= (3.28)
Dacă se are în vedere că:
r
R
rR rdt
dvdt
drv 1 si ⋅==
ωω (3.29)
atunci din sistemul de ecuaţii (2.24) forţa de tracţiune Ft:
⎟⎟⎠
⎞⎜⎜⎝
⎛⋅
+⋅−⋅−=rd
RR
dR
d
Rt rr
Im
dtdv
raZ
rM
F (3.29)
şi dacă se înlocuieşte rd
Rd
R RraF
rM
=⋅= R Zsi relaţia (3.29) devine:
⎟⎟⎠
⎞⎜⎜⎝
⎛⋅
+⋅−−=rd
RRrRt rr
Im
dtdvRFM (3.30)
în care rr este raza de rulare a roţii iar expresia:
⎟⎟⎠
⎞⎜⎜⎝
⎛⋅
+⋅rd
RR rr
Im
dtdv
Dinamica Autovehiculelor Procesul Autopropulsării Autovehiculelor
74
reprezintă forţele de inerţie care se opun mişcării roţii; în mişcarea de rotaţie
⎟⎟⎠
⎞⎜⎜⎝
⎛⋅
⋅rd
R
rrI
dtdv şi în mişcare de translaţie ⎟
⎠⎞
⎜⎝⎛ ⋅
dtdvmR .
Deci la deplasarea roţii motoare în regim de viteză variabilă, forţa de tracţiune este diminuată faţă de regimul de mişcare uniformă cu valoarea forţelor de inerţie care intervin la accelerare. Echilibrul roţii conduse Pentru rularea roţii conduse (fig.3.31) este necesară o forţă de împingere F paralelă cu calea exercitată de osie asupra centrului roţii pentru a se roti cu o anumită viteză unghiulară reacţiunea X a căii de rulare trebuie să fie orientată în sens invers deplasării.
Figura 3.31
Ecuaţiile de echilibru ale roţii conduse la deplasarea cu viteză variabilă sunt:
0
0
0
=⋅+⋅−⋅
=−
=⋅−−
dtdIrXaZ
GZdtdvmXF
RRdR
RR
R
ω (3.31)
În acest caz expresia reacţiunii tangenţiale X este:
dt
drI
raZX R
d
R
dR
ω⋅+⋅= (3.32)
Deci reacţiunea tangenţială are două componente: d
Rr raZR ⋅= şi
dtd
rI
R R
d
Ri
ω⋅= .
Expresia forţei de împingere a roţii în regim de viteză variabilă are forma:

Dinamica Autovehiculelor Procesul Autopropulsării Autovehiculelor
75
⎟⎟⎠
⎞⎜⎜⎝
⎛⋅
+⋅−=rd
RRr rr
Im
dtdvRF (3.33)
Prin urmare forţa de împingere trebuie să învingă rezistenţa la rulare şi forţele de inerţie ale acesteia ce apar în mişcarea în regim variabil. Echilibrul roţii frânate În cazul roţii frânate (fig. 3.32) roata este acţionată de un moment de frânare de sens opus sensului de rotaţie al acestuia. În axul roţii acţionează încărcarea pe roată RG şi forţa de frânare paralelă cu calea de rulare, reprezentând reacţiunea autovehiculului asupra roţii frânate. În pata de contact acţionează asupra roţii reacţiunea normală a căii RZ şi reacţiunea tangenţială X de sens opus vitezei de deplasare. Ecuaţiile de echilibru pentru roata frânată sunt:
0
0
0
=⋅−⋅−⋅+
=−
=⋅+−
dtdIrXaZM
GZdtdvmXF
RRdRf
RR
Rf
ω (3.34)
În acest caz expresia reacţiunii tangenţiale X este:
dt
drI
raZ
rM
X R
d
R
dR
d
f ω⋅−⋅+= (3.35)
Expresia forţei de frânare este:
⎟⎟⎠
⎞⎜⎜⎝
⎛⋅
+⋅−+=rd
RRrfrf rr
Im
dtdvRFF (3.36)
Se observă că în regim de frânare forţa de frânare este diminuată de forţele de inerţie ale roţii aflată în mişcare de translaţie şi mişcare de rotaţie.
Figura 3.32
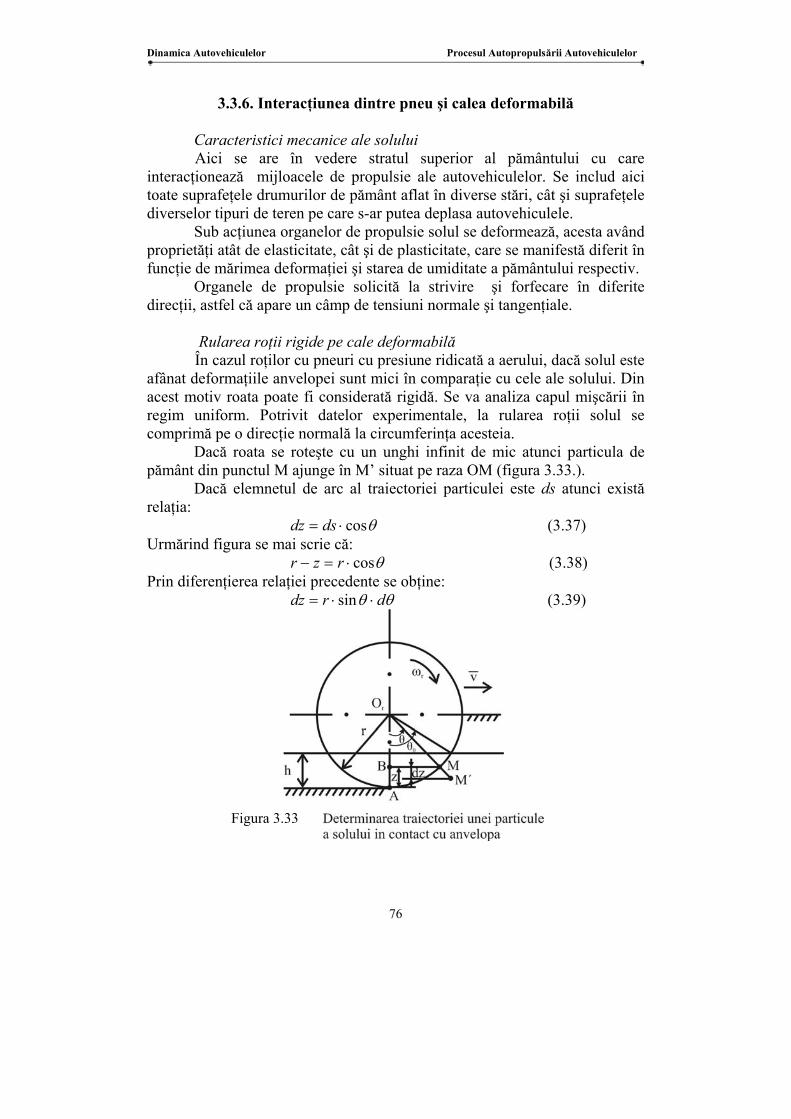
Dinamica Autovehiculelor Procesul Autopropulsării Autovehiculelor
76
3.3.6. Interacţiunea dintre pneu şi calea deformabilă Caracteristici mecanice ale solului
Aici se are în vedere stratul superior al pământului cu care interacţionează mijloacele de propulsie ale autovehiculelor. Se includ aici toate suprafeţele drumurilor de pământ aflat în diverse stări, cât şi suprafeţele diverselor tipuri de teren pe care s-ar putea deplasa autovehiculele. Sub acţiunea organelor de propulsie solul se deformează, acesta având proprietăţi atât de elasticitate, cât şi de plasticitate, care se manifestă diferit în funcţie de mărimea deformaţiei şi starea de umiditate a pământului respectiv. Organele de propulsie solicită la strivire şi forfecare în diferite direcţii, astfel că apare un câmp de tensiuni normale şi tangenţiale.
Rularea roţii rigide pe cale deformabilă În cazul roţilor cu pneuri cu presiune ridicată a aerului, dacă solul este
afânat deformaţiile anvelopei sunt mici în comparaţie cu cele ale solului. Din acest motiv roata poate fi considerată rigidă. Se va analiza capul mişcării în regim uniform. Potrivit datelor experimentale, la rularea roţii solul se comprimă pe o direcţie normală la circumferinţa acesteia. Dacă roata se roteşte cu un unghi infinit de mic atunci particula de pământ din punctul M ajunge în M’ situat pe raza OM (figura 3.33.). Dacă elemnetul de arc al traiectoriei particulei este ds atunci există relaţia: θcos⋅= dsdz (3.37) Urmărind figura se mai scrie că: θcos⋅=− rzr (3.38) Prin diferenţierea relaţiei precedente se obţine: θθ drdz ⋅⋅= sin (3.39)
Figura 3.33
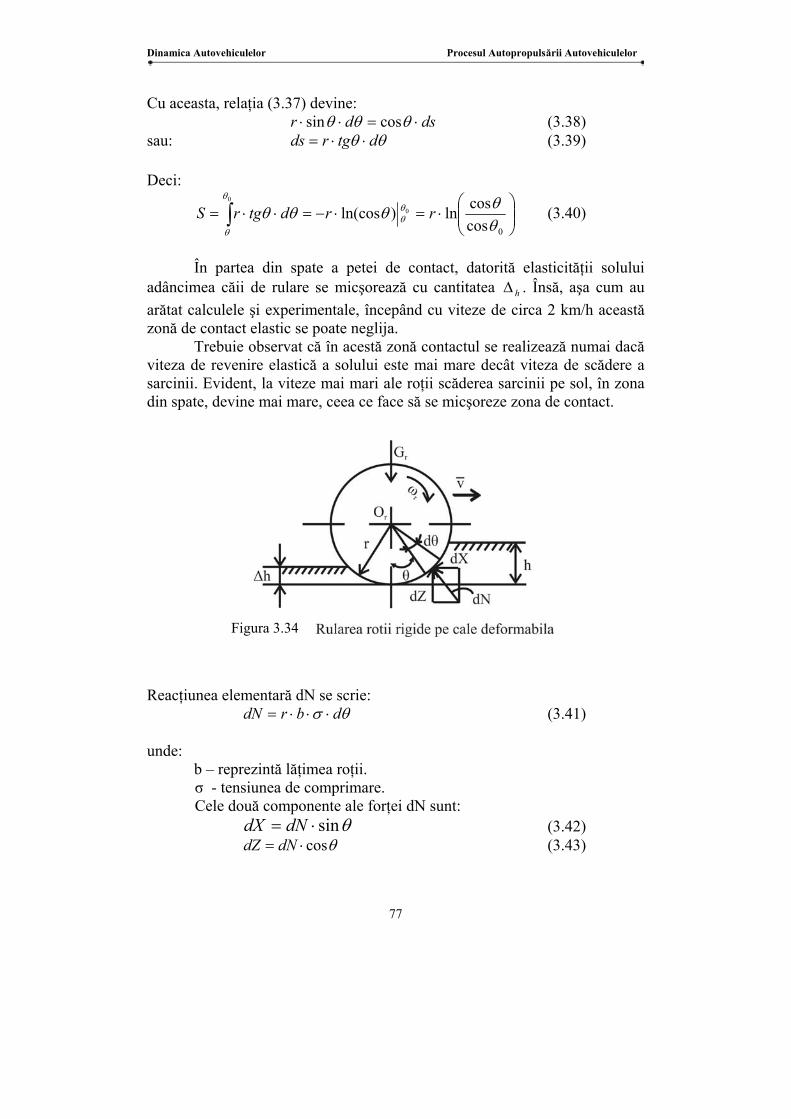
Dinamica Autovehiculelor Procesul Autopropulsării Autovehiculelor
77
Cu aceasta, relaţia (3.37) devine: dsdr ⋅=⋅⋅ θθθ cossin (3.38) sau: θθ dtgrds ⋅⋅= (3.39) Deci:
⎟⎟⎠
⎞⎜⎜⎝
⎛⋅=⋅−=⋅⋅= ∫
0coscosln)ln(cos
0
0
θθθθθ
θ
θ
θθ rrdtgrS (3.40)
În partea din spate a petei de contact, datorită elasticităţii solului adâncimea căii de rulare se micşorează cu cantitatea h∆ . Însă, aşa cum au arătat calculele şi experimentale, începând cu viteze de circa 2 km/h această zonă de contact elastic se poate neglija. Trebuie observat că în acestă zonă contactul se realizează numai dacă viteza de revenire elastică a solului este mai mare decât viteza de scădere a sarcinii. Evident, la viteze mai mari ale roţii scăderea sarcinii pe sol, în zona din spate, devine mai mare, ceea ce face să se micşoreze zona de contact. Reacţiunea elementară dN se scrie: θσ dbrdN ⋅⋅⋅= (3.41) unde: b – reprezintă lăţimea roţii.
σ - tensiunea de comprimare. Cele două componente ale forţei dN sunt: θsin⋅= dNdX (3.42) θcos⋅= dNdZ (3.43)
Figura 3.34

Dinamica Autovehiculelor Procesul Autopropulsării Autovehiculelor
78
Rularea roţii elastice pe cale deformabilă La presiuni mai reduse ale aerului din pneuri deformaţiile anvelopei
nu mai pot fi neglijate. Ca urmare se formează o suprafaţă mai mare de contact dintre anvelopă şi calea de rulare, făgaşul obţinut fiind mai puţin adânc, având ca urmare şi o scădere a rezistenţei la rulare. Există o presiune a aerului, numită presiune critică, sub care deformaţiile anvelopei devin însemnate. Scăderea prea accentuată a presiunii conduce la micşorarea rigidităţii laterale a pneurilor şi la solicitări prea mari ale anvelopei datorită deformaţiilor accentuate la care sunt supuse, ceea ce le diminuează considerabil durabilitatea. Din experimentările efectuate rezultă că suprafaţa de contact a anvelopei cu solul este, cu suficientă exactitate, o suprfaţă cilindrică. Din acest motiv roata elastică poate fi înlocuită cu o roată rigidă cu diametru majorat, astfel încât pot fi utilizate direct formulele obţinute anterior.
Figura 3.35 Echivalarea roţii reale cu roata rigidă Urmărind figura 3.35, se pot scrie relaţiile: 22 )(' phhrrIO −−−= (3.44)
22 )(' hrrIO ee −−= (3.45) unde: hp – reprezintă deformaţia pneului; re – reprezintă raza suprafeţei cilindrice de contact care constituie tocmai raza roţii rigide echivalente. Din cele două relaţii rezultă: 22 2)()(2 hhrhhhhr epp −=+−+
sau: hDhhhhhD eppp =⋅−−+ 2)( 2 Dar deformaţiile sunt mult mai mici decât diametrele astfel că:
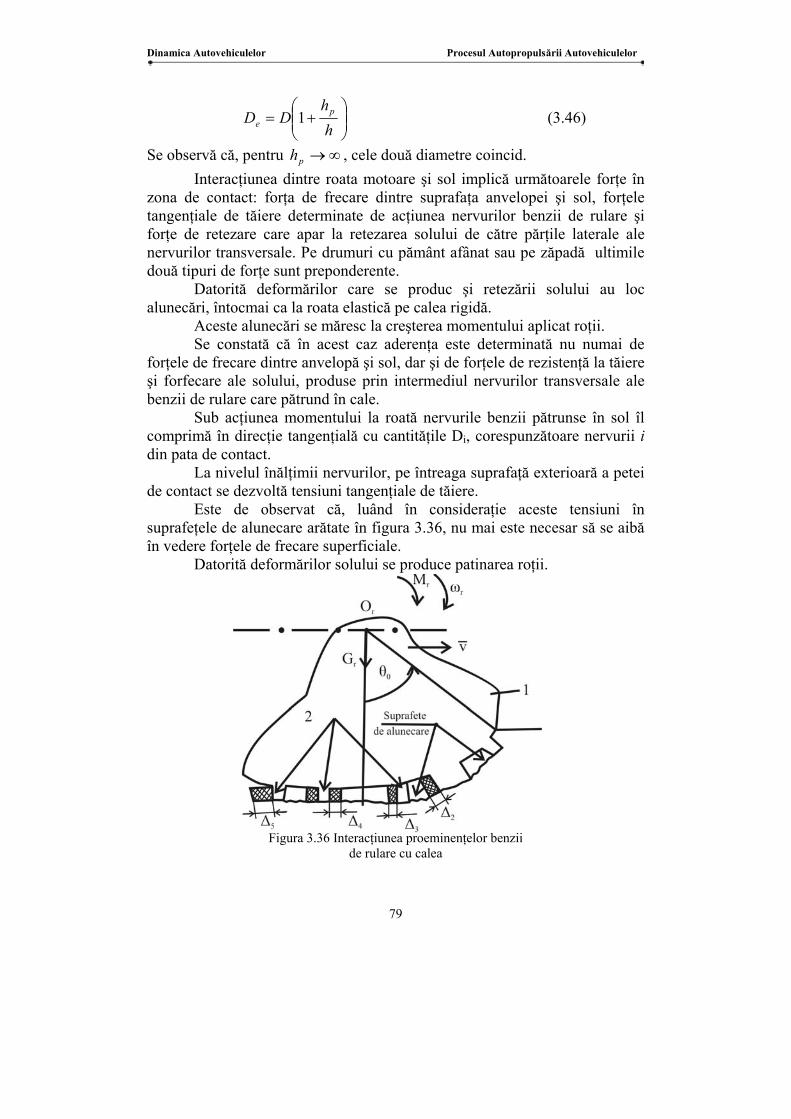
Dinamica Autovehiculelor Procesul Autopropulsării Autovehiculelor
79
⎟⎟⎠
⎞⎜⎜⎝
⎛+=
hh
DD pe 1 (3.46)
Se observă că, pentru ∞→ph , cele două diametre coincid. Interacţiunea dintre roata motoare şi sol implică următoarele forţe în zona de contact: forţa de frecare dintre suprafaţa anvelopei şi sol, forţele tangenţiale de tăiere determinate de acţiunea nervurilor benzii de rulare şi forţe de retezare care apar la retezarea solului de către părţile laterale ale nervurilor transversale. Pe drumuri cu pământ afânat sau pe zăpadă ultimile două tipuri de forţe sunt preponderente. Datorită deformărilor care se produc şi retezării solului au loc alunecări, întocmai ca la roata elastică pe calea rigidă. Aceste alunecări se măresc la creşterea momentului aplicat roţii. Se constată că în acest caz aderenţa este determinată nu numai de forţele de frecare dintre anvelopă şi sol, dar şi de forţele de rezistenţă la tăiere şi forfecare ale solului, produse prin intermediul nervurilor transversale ale benzii de rulare care pătrund în cale. Sub acţiunea momentului la roată nervurile benzii pătrunse în sol îl comprimă în direcţie tangenţială cu cantităţile Di, corespunzătoare nervurii i din pata de contact. La nivelul înălţimii nervurilor, pe întreaga suprafaţă exterioară a petei de contact se dezvoltă tensiuni tangenţiale de tăiere. Este de observat că, luând în consideraţie aceste tensiuni în suprafeţele de alunecare arătate în figura 3.36, nu mai este necesar să se aibă în vedere forţele de frecare superficiale. Datorită deformărilor solului se produce patinarea roţii.
Figura 3.36 Interacţiunea proeminenţelor benzii de rulare cu calea
Dinamica Autovehiculelor Procesul Autopropulsării Autovehiculelor
80
3.3.7 Studiul aderenţei dintre pneu şi calea de rulare
Reacţiunea tangenţială maximă maxX , care poate lua naştere între pneu şi cale, este limitată la valoarea:
RZX ⋅= ϕmax , (3.47) unde ϕ este coeficientul de aderenţă şi RZ - reacţiunea normală a căii asupra roţii.
Dacă se depăşeşte această valoare prin transmiterea unui moment la roată mai mare, apare alunecarea elementelor pneului pe calea de rulare. În acest caz reacţiunea tangenţială va fi dată de relaţia:
Raa ZX ⋅= ϕ (3.48) unde aϕ este coeficientul de frecare la alunecare şi este de regulă mai mic decât coeficientul de aderenţă ϕ .
ϕϕ <a (3.49)
Alunecarea pneului pe calea de rulare La rostogolirea unei roţi pe o cale nedeformabilă, la prima vedere s-ar
putea crede că distanţa parcursă de roată este egală cu produsul dintre lungimea circumferinţei roţii şi numărul de rotaţii făcute de aceasta. Calculul acesta este valabil doar în cazul unei roţi rigide care se rostogoleşte fără alunecare. În realitate, distanţa parcursă de o roată în rulare este diferită de mărimea rezultată din produsul dintre lungimea circumferinţei şi numărul de rotaţii. Această diferenţă variază în funcţie de mărimea forţelor şi momentelor care acţionează asupra roţii, care produc deformări şi alunecări ale elementelor pneului în rulare.
În procesul de alunecare dintre pneu şi calea de rulare se disting două cazuri prezentate în fig. 3.37. Dacă roata este antrenată (fig.3.37, a) , capătă o turaţie mai mare decât cea corespunzătoare vitezei de translaţie v în direcţia mişcării. Este situaţia când roata patinează la rotaţie. Dacă roata este frânată (fig.3.37, b) fenomenul se petrece invers, roata nu se roteşte, dar alunecă pe cale ca o sanie. Este situaţia când roata este blocată.
În ambele situaţii a fost depaşită aderenţa dintre pneu şi cale, ca urmare a unei forţe tangenţiale la roată mai mare decât limita impusă de aderenţă.
Trecerea de la situaţia de aderare a roţii la cale la cea de alunecare se poate explica cu ajutorul fig. 3.38, unde se prezintă cazul deplasării unui autovehicul cu puntea motoare dispusă în spate. Cele două roţi parcurg – evident – aceeaşi distanţă S. Roata din faţă se roteşte cu un unghi 0θ , iar roata din spate, încarcată cu momentul M, se roteşte cu un unghi θ , diferit ca
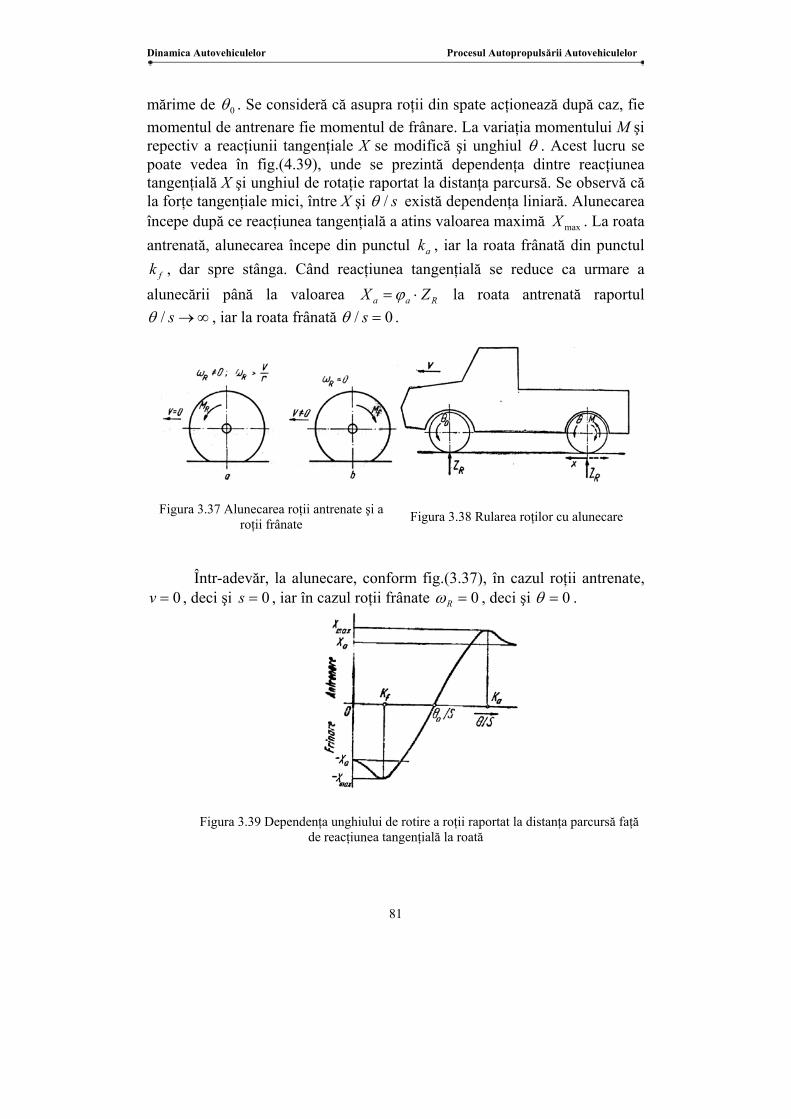
Dinamica Autovehiculelor Procesul Autopropulsării Autovehiculelor
81
mărime de 0θ . Se consideră că asupra roţii din spate acţionează după caz, fie momentul de antrenare fie momentul de frânare. La variaţia momentului M şi repectiv a reacţiunii tangenţiale X se modifică şi unghiul θ . Acest lucru se poate vedea în fig.(4.39), unde se prezintă dependenţa dintre reacţiunea tangenţială X şi unghiul de rotaţie raportat la distanţa parcursă. Se observă că la forţe tangenţiale mici, între X şi s/θ există dependenţa liniară. Alunecarea începe după ce reacţiunea tangenţială a atins valoarea maximă maxX . La roata antrenată, alunecarea începe din punctul ak , iar la roata frânată din punctul
fk , dar spre stânga. Când reacţiunea tangenţială se reduce ca urmare a alunecării până la valoarea Raa ZX ⋅= ϕ la roata antrenată raportul
∞→s/θ , iar la roata frânată 0/ =sθ .
Figura 3.37 Alunecarea roţii antrenate şi a roţii frânate
Figura 3.38 Rularea roţilor cu alunecare
Într-adevăr, la alunecare, conform fig.(3.37), în cazul roţii antrenate,
0=v , deci şi 0=s , iar în cazul roţii frânate 0=Rω , deci şi 0=θ .
Figura 3.39 Dependenţa unghiului de rotire a roţii raportat la distanţa parcursă faţă
de reacţiunea tangenţială la roată

Dinamica Autovehiculelor Procesul Autopropulsării Autovehiculelor
82
Prin urmare, revenind la figura (3.38), rezultă că cele două roţi prezentate, deşi parcurg aceeaşi distanţă (ca roţi ale aceluiaşi autovehicul), ele se rotesc cu unghiuri diferite. Diferenţa dintre cele două unghiuri, raportată la unghiul cel mare, se numeşte alunecare şi se notează cu a. Astfel, raportul:
0
0
0
0
///
θθθ
θθθ −
=−
=s
ssa f (3.50)
Reprezintă alunecarea unei roţi frânate, iar raportul:
θθθ
θθθ 00
/// −
=−
=s
ssat (3.51)
reprezintă alunecarea unei roţi antrenate. Deoarece procesul alunecării este variabil în timp, este necesar ca
definirea acesteia să se facă şi prin variaţia unghiurilor de rotire θd şi 0θd raportată la variaţia distanţei de deplasare ds . Se obţine, astfel, pentru alunecarea la frânare pornind de la relaţia (3.50):
0
0
0
0
0
0
R
RRf
dsdt
dtd
dsdt
dtd
dsdt
dtd
dsd
dsd
dsd
aω
ωωθ
θθ
θ
θθ−
=⋅
⋅−⋅=
−= (3.52)
şi prin alunecarea la antrenare, procedându-se la fel, se obţine:
R
RRta
ωωω 0−
= (3.53)
unde Rω este viteza unghiulară a roţii încărcate cu momentul M şi 0Rω - viteza unghiulară a roţii conduse.
Dacă se are în vedere că viteza de translaţie a roţilor este aceeaşi, atunci:
rrv Rrr ⋅=⋅= 0ωω (3.54) unde: rr este raza de rulare a roţii antrenate sau frânate, r – raza de rulare a roţii conduse. La roţile conduse (libere) diferenţa dintre raza de rulare şi raza dinamică este mai mică decât la roţile antrenate sau frânate. Din această cauză în relaţiile care definesc procesul de alunecare se foloseşte uneori, în locul razei de rulare a roţii conduse, raza dinamică a roţii conduse dr . Astfel egalitatea (3.54) devine:
rrdR rrv ⋅=⋅= ωω 0 . (3.55) Dacă se introduce în relaţiile (3.52) şi (3.53), raza dinamică dr şi se
ţine seama de (3.54), se obţine:
vrva Rd
fω−
= ; rd
rdt r
vraω
ω −= (3.56)
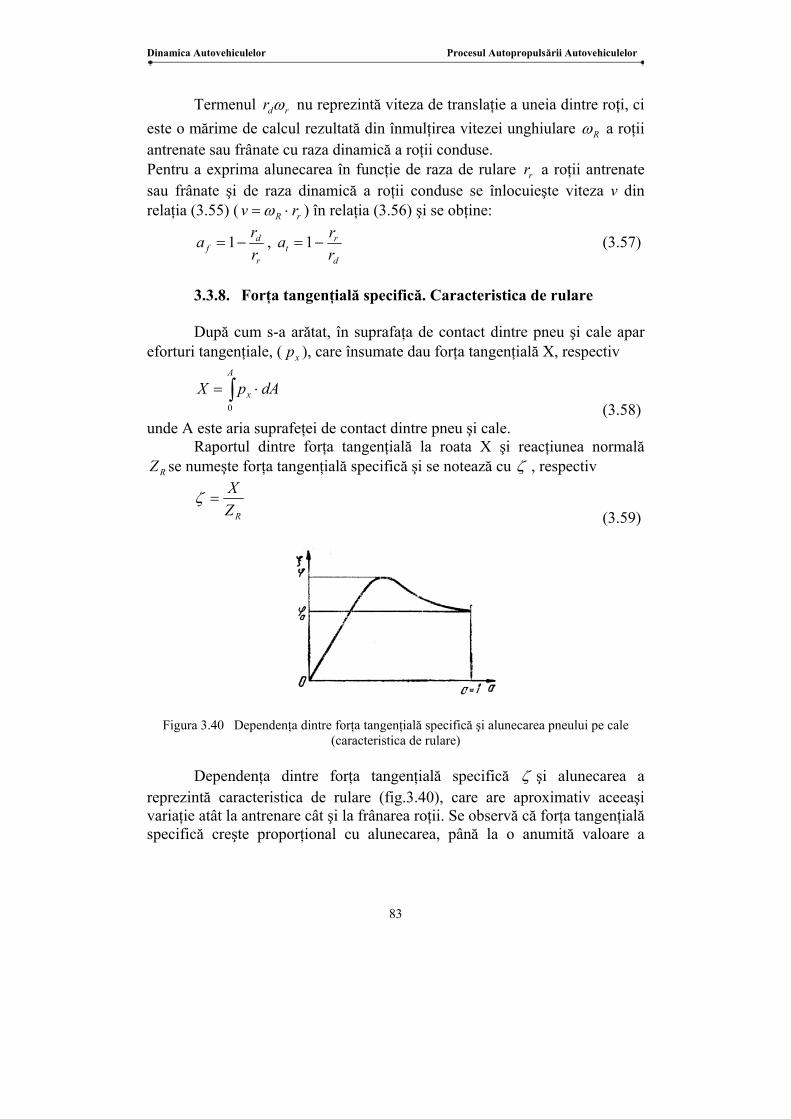
Dinamica Autovehiculelor Procesul Autopropulsării Autovehiculelor
83
Termenul rdr ω nu reprezintă viteza de translaţie a uneia dintre roţi, ci este o mărime de calcul rezultată din înmulţirea vitezei unghiulare Rω a roţii antrenate sau frânate cu raza dinamică a roţii conduse. Pentru a exprima alunecarea în funcţie de raza de rulare rr a roţii antrenate sau frânate şi de raza dinamică a roţii conduse se înlocuieşte viteza v din relaţia (3.55) ( rR rv ⋅= ω ) în relaţia (3.56) şi se obţine:
r
df r
ra −=1 , d
rt r
ra −=1 (3.57)
3.3.8. Forţa tangenţială specifică. Caracteristica de rulare După cum s-a arătat, în suprafaţa de contact dintre pneu şi cale apar eforturi tangenţiale, ( xp ), care însumate dau forţa tangenţială X, respectiv
∫ ⋅=A
x dApX0 (3.58)
unde A este aria suprafeţei de contact dintre pneu şi cale. Raportul dintre forţa tangenţială la roata X şi reacţiunea normală
RZ se numeşte forţa tangenţială specifică şi se notează cu ζ , respectiv
RZX
=ζ (3.59)
Figura 3.40 Dependenţa dintre forţa tangenţială specifică şi alunecarea pneului pe cale (caracteristica de rulare)
Dependenţa dintre forţa tangenţială specifică ζ şi alunecarea a reprezintă caracteristica de rulare (fig.3.40), care are aproximativ aceeaşi variaţie atât la antrenare cât şi la frânarea roţii. Se observă că forţa tangenţială specifică creşte proporţional cu alunecarea, până la o anumită valoare a
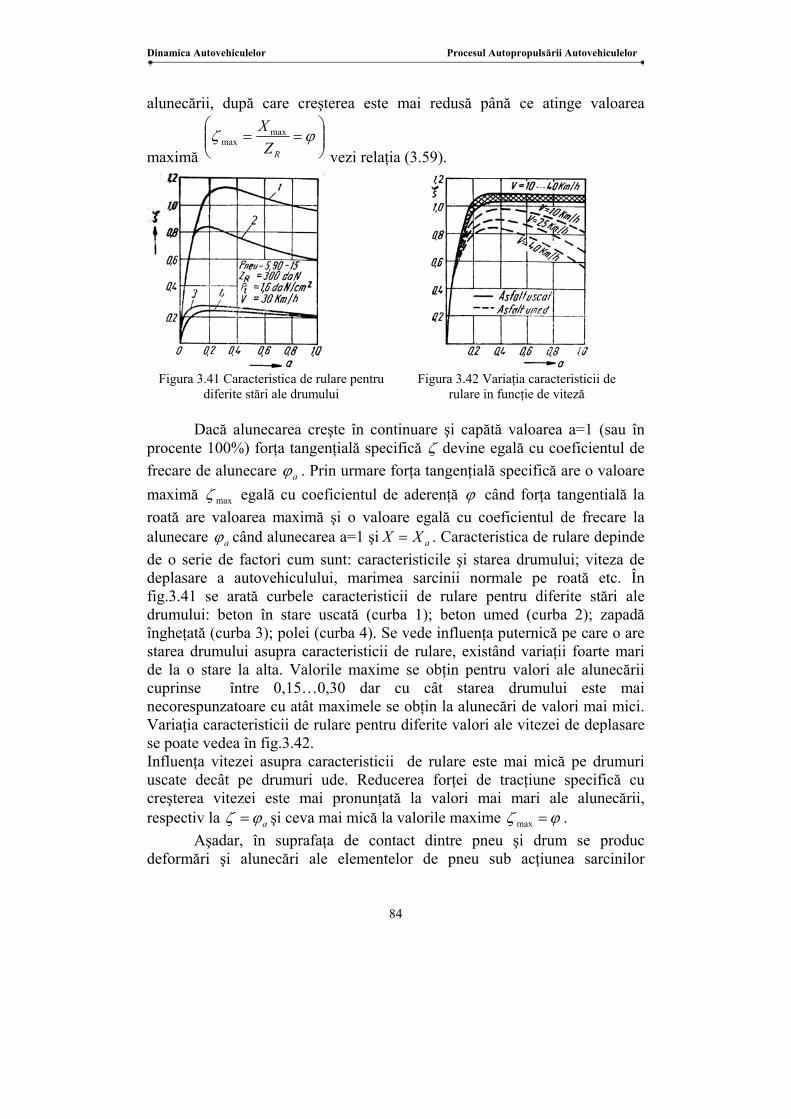
Dinamica Autovehiculelor Procesul Autopropulsării Autovehiculelor
84
alunecării, după care creşterea este mai redusă până ce atinge valoarea
maximă ⎟⎟⎠
⎞⎜⎜⎝
⎛== ϕζ
RZX max
max
vezi relaţia (3.59).
Figura 3.41 Caracteristica de rulare pentru
diferite stări ale drumului Figura 3.42 Variaţia caracteristicii de
rulare in funcţie de viteză
Dacă alunecarea creşte în continuare şi capătă valoarea a=1 (sau în procente 100%) forţa tangenţială specifică ζ devine egală cu coeficientul de frecare de alunecare aϕ . Prin urmare forţa tangenţială specifică are o valoare maximă maxζ egală cu coeficientul de aderenţă ϕ când forţa tangentială la roată are valoarea maximă şi o valoare egală cu coeficientul de frecare la alunecare aϕ când alunecarea a=1 şi aXX = . Caracteristica de rulare depinde de o serie de factori cum sunt: caracteristicile şi starea drumului; viteza de deplasare a autovehiculului, marimea sarcinii normale pe roată etc. În fig.3.41 se arată curbele caracteristicii de rulare pentru diferite stări ale drumului: beton în stare uscată (curba 1); beton umed (curba 2); zapadă îngheţată (curba 3); polei (curba 4). Se vede influenţa puternică pe care o are starea drumului asupra caracteristicii de rulare, existând variaţii foarte mari de la o stare la alta. Valorile maxime se obţin pentru valori ale alunecării cuprinse între 0,15…0,30 dar cu cât starea drumului este mai necorespunzatoare cu atât maximele se obţin la alunecări de valori mai mici. Variaţia caracteristicii de rulare pentru diferite valori ale vitezei de deplasare se poate vedea în fig.3.42. Influenţa vitezei asupra caracteristicii de rulare este mai mică pe drumuri uscate decât pe drumuri ude. Reducerea forţei de tracţiune specifică cu creşterea vitezei este mai pronunţată la valori mai mari ale alunecării, respectiv la aϕζ = şi ceva mai mică la valorile maxime ϕζ =max . Aşadar, în suprafaţa de contact dintre pneu şi drum se produc deformări şi alunecări ale elementelor de pneu sub acţiunea sarcinilor
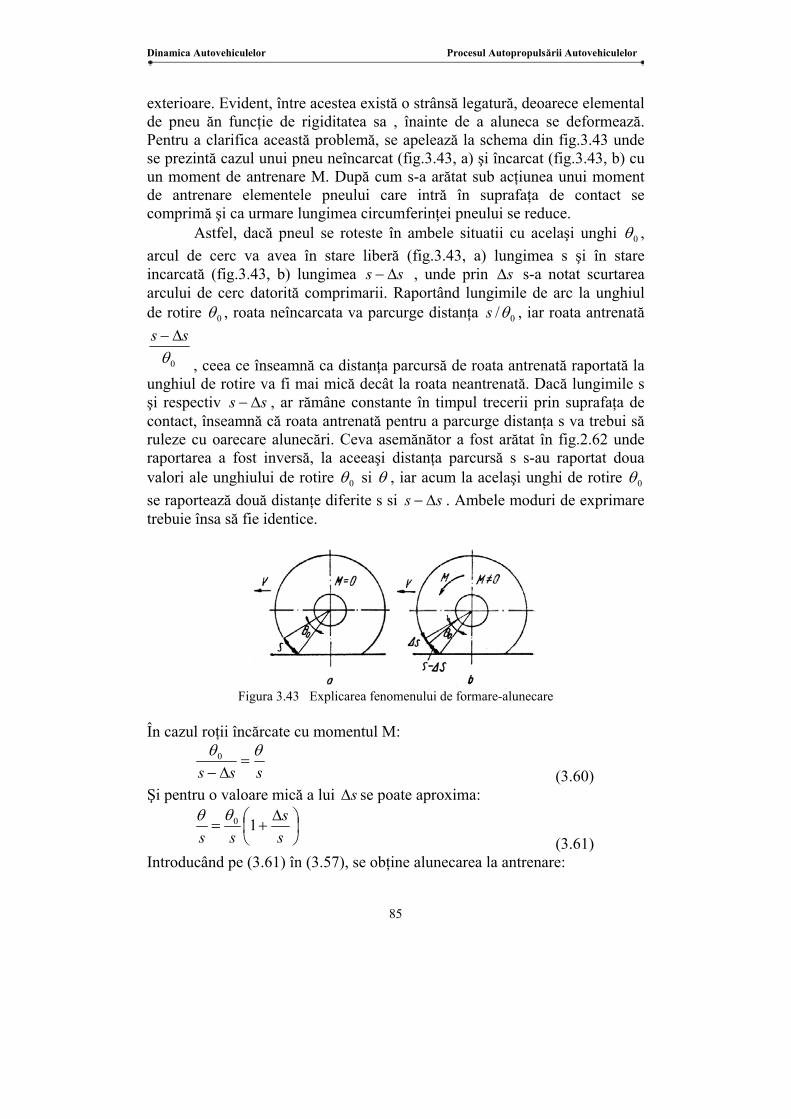
Dinamica Autovehiculelor Procesul Autopropulsării Autovehiculelor
85
exterioare. Evident, între acestea există o strânsă legatură, deoarece elemental de pneu ăn funcţie de rigiditatea sa , înainte de a aluneca se deformează. Pentru a clarifica această problemă, se apelează la schema din fig.3.43 unde se prezintă cazul unui pneu neîncarcat (fig.3.43, a) şi încarcat (fig.3.43, b) cu un moment de antrenare M. După cum s-a arătat sub acţiunea unui moment de antrenare elementele pneului care intră în suprafaţa de contact se comprimă şi ca urmare lungimea circumferinţei pneului se reduce. Astfel, dacă pneul se roteste în ambele situatii cu acelaşi unghi 0θ , arcul de cerc va avea în stare liberă (fig.3.43, a) lungimea s şi în stare incarcată (fig.3.43, b) lungimea ss ∆− , unde prin s∆ s-a notat scurtarea arcului de cerc datorită comprimarii. Raportând lungimile de arc la unghiul de rotire 0θ , roata neîncarcata va parcurge distanţa 0/θs , iar roata antrenată
0θss ∆−
, ceea ce înseamnă ca distanţa parcursă de roata antrenată raportată la unghiul de rotire va fi mai mică decât la roata neantrenată. Dacă lungimile s şi respectiv ss ∆− , ar rămâne constante în timpul trecerii prin suprafaţa de contact, înseamnă că roata antrenată pentru a parcurge distanţa s va trebui să ruleze cu oarecare alunecări. Ceva asemănător a fost arătat în fig.2.62 unde raportarea a fost inversă, la aceeaşi distanţa parcursă s s-au raportat doua valori ale unghiului de rotire 0θ si θ , iar acum la acelaşi unghi de rotire 0θ se raportează două distanţe diferite s si ss ∆− . Ambele moduri de exprimare trebuie însa să fie identice.
Figura 3.43 Explicarea fenomenului de formare-alunecare
În cazul roţii încărcate cu momentul M:
sssθθ
=∆−0
(3.60) Şi pentru o valoare mică a lui s∆ se poate aproxima:
⎟⎠⎞
⎜⎝⎛ ∆+=
ss
ss10θθ
(3.61) Introducând pe (3.61) în (3.57), se obţine alunecarea la antrenare:

Dinamica Autovehiculelor Procesul Autopropulsării Autovehiculelor
86
ss
sss
sssat
∆≈
∆+∆
=−
=/
// 0
θθθ
. (3.62) În cazul roţii încărcate cu un moment de frânre, se va produce o lungire a arcului de cerc )( ss ∆+ . În rest calculul se desfăşoară asemănător, respectiv:
;0
sssθθ
=∆+
⎟⎠⎞
⎜⎝⎛ ∆−=
ss
ss10θθ
(3.63) şi alunecarea la frânare:
ss
sssa f
∆=
−=
///
0
0
θθθ
(3.64)
După cum se ştie raportul ss∆ reprezintă alungirea specifică (variaţia
lungimii raportată la lungimea iniţială) şi se poate determina cunoscându-se efortul unitar σ şi modulul de elasticitate longitudinal E. În cazul pneului, efortul unitar σ este dat de raportul dintre forţa tangenţială X şi aria secţiunii transversale A a pneului (inclusiv elementele benzii de rulare), respectiv:
EaE
ss
AX
⋅=⋅∆
==σ (3.65)
Din această relaţie rezultă expresia forţei tangenţiale X în funcţie de alunecarea a, respectiv: EaFX ⋅⋅= (3.66) Cu ajutorul relaţiilor (3.59) şi (3.66) se poate obţine expresia forţei tangenţiale specifice în funcţie de alunecare şi deformare:
a
ZEF
ZX
RR
⋅⋅
==ζ (3.67)
Reprezentarea grafică a dependenţei (3.67) este aratată în fig.3.44 cu linie întreruptă. Cu linie continuă este prezentată variaţia forţei de tracţiune specifică funcţie de alunecare, aşa cum s-a arătat în fig.3.40. Rezultă că numai la valori mici ale alunecării există o corespondenţă între cele două dependenţe. Deoarece relaţia (3.67) a fost dedusă în ipoteza că în suprafaţa de contact nu apare alunecare, ci numai deformaţie, înseamnă că la alunecări mici predomină deformaţiile elementelor pneului. La valori mai mari ale alunecării, atunci când forţa tangenţială specifică creşte apar alunecări parţiale în suprafaţa de contact. Evidenţierea mai clară a proceselor care au loc în suprafaţa de contact dintre pneu şi cale se poate face prin divizarea curbei caracteristicii de rulare în trei domenii:
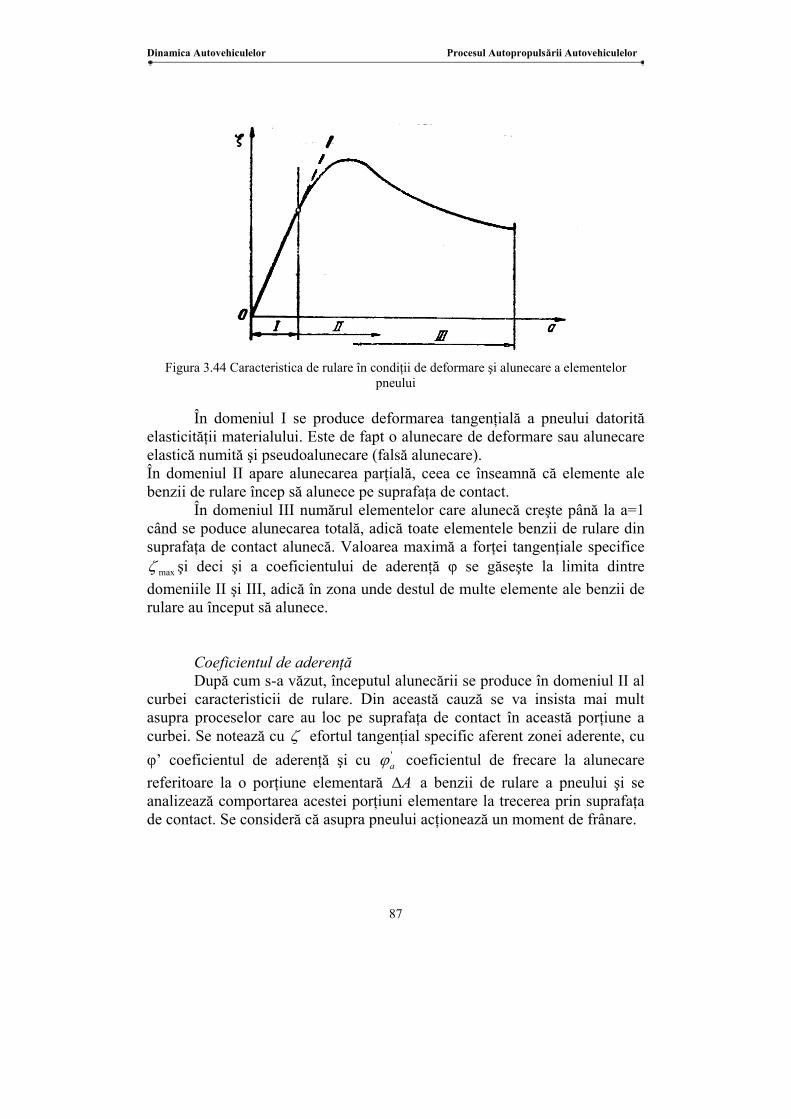
Dinamica Autovehiculelor Procesul Autopropulsării Autovehiculelor
87
Figura 3.44 Caracteristica de rulare în condiţii de deformare şi alunecare a elementelor pneului
În domeniul I se produce deformarea tangenţială a pneului datorită elasticităţii materialului. Este de fapt o alunecare de deformare sau alunecare elastică numită şi pseudoalunecare (falsă alunecare). În domeniul II apare alunecarea parţială, ceea ce înseamnă că elemente ale benzii de rulare încep să alunece pe suprafaţa de contact. În domeniul III numărul elementelor care alunecă creşte până la a=1 când se poduce alunecarea totală, adică toate elementele benzii de rulare din suprafaţa de contact alunecă. Valoarea maximă a forţei tangenţiale specifice
maxζ şi deci şi a coeficientului de aderenţă φ se găseşte la limita dintre domeniile II şi III, adică în zona unde destul de multe elemente ale benzii de rulare au început să alunece. Coeficientul de aderenţă După cum s-a văzut, începutul alunecării se produce în domeniul II al curbei caracteristicii de rulare. Din această cauză se va insista mai mult asupra proceselor care au loc pe suprafaţa de contact în această porţiune a curbei. Se notează cu ζ efortul tangenţial specific aferent zonei aderente, cu φ’ coeficientul de aderenţă şi cu '
aϕ coeficientul de frecare la alunecare referitoare la o porţiune elementară A∆ a benzii de rulare a pneului şi se analizează comportarea acestei porţiuni elementare la trecerea prin suprafaţa de contact. Se consideră că asupra pneului acţionează un moment de frânare.
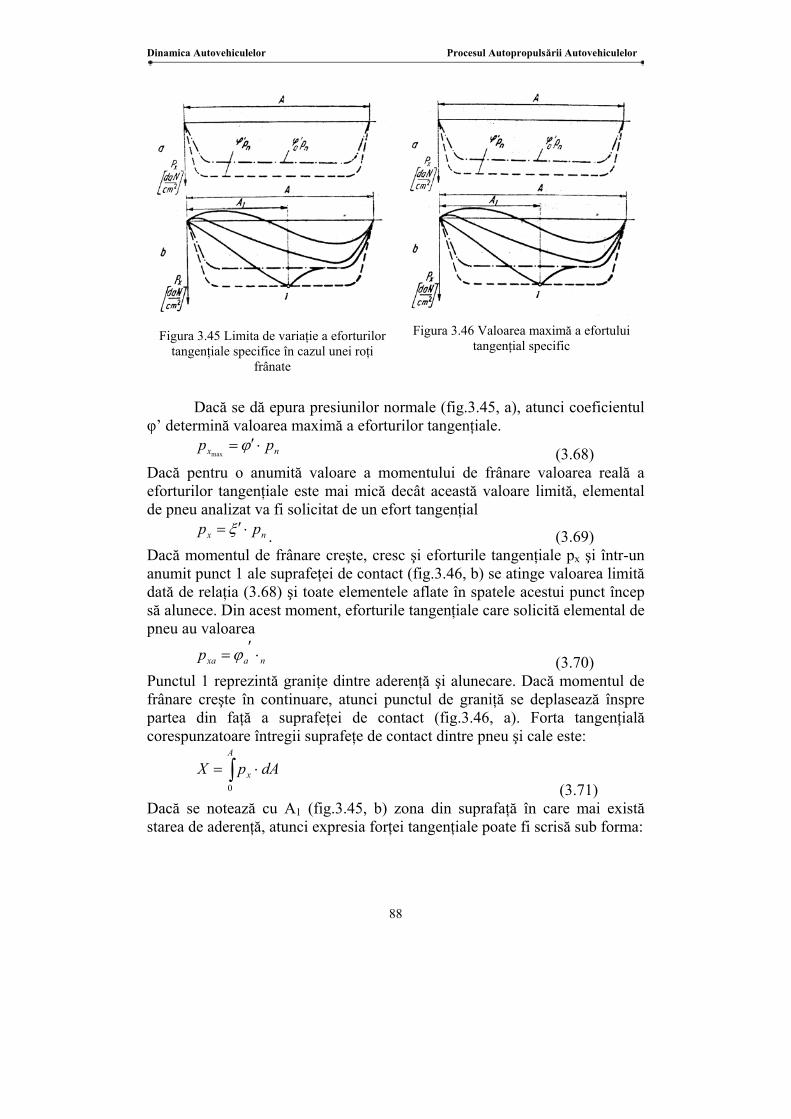
Dinamica Autovehiculelor Procesul Autopropulsării Autovehiculelor
88
Figura 3.45 Limita de variaţie a eforturilor
tangenţiale specifice în cazul unei roţi frânate
Figura 3.46 Valoarea maximă a efortului tangenţial specific
Dacă se dă epura presiunilor normale (fig.3.45, a), atunci coeficientul φ’ determină valoarea maximă a eforturilor tangenţiale.
nx pp ⋅′= ϕmax (3.68)
Dacă pentru o anumită valoare a momentului de frânare valoarea reală a eforturilor tangenţiale este mai mică decât această valoare limită, elemental de pneu analizat va fi solicitat de un efort tangenţial
nx pp ⋅′= ξ . (3.69) Dacă momentul de frânare creşte, cresc şi eforturile tangenţiale px şi într-un anumit punct 1 ale suprafeţei de contact (fig.3.46, b) se atinge valoarea limită dată de relaţia (3.68) şi toate elementele aflate în spatele acestui punct încep să alunece. Din acest moment, eforturile tangenţiale care solicită elemental de pneu au valoarea
naxap ⋅′= ϕ (3.70) Punctul 1 reprezintă graniţe dintre aderenţă şi alunecare. Dacă momentul de frânare creşte în continuare, atunci punctul de graniţă se deplasează înspre partea din faţă a suprafeţei de contact (fig.3.46, a). Forta tangenţială corespunzatoare întregii suprafeţe de contact dintre pneu şi cale este:
∫ ⋅=A
x dApX0 (3.71)
Dacă se notează cu A1 (fig.3.45, b) zona din suprafaţă în care mai există starea de aderenţă, atunci expresia forţei tangenţiale poate fi scrisă sub forma:
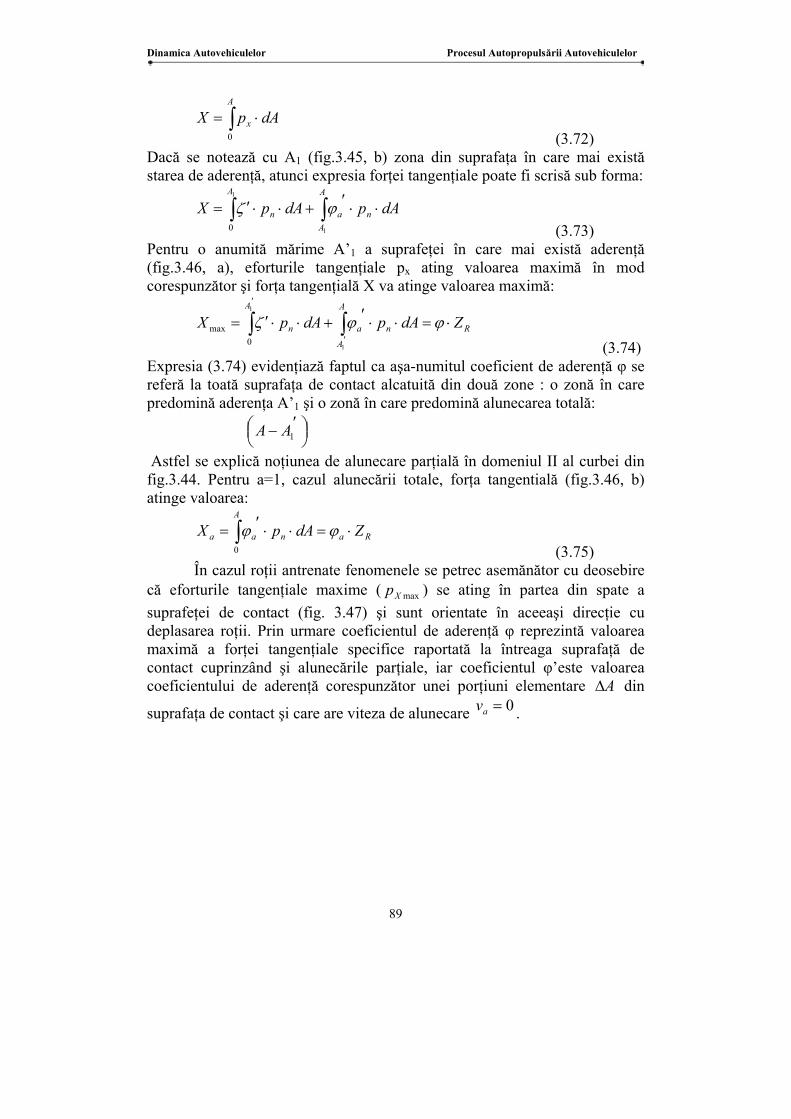
Dinamica Autovehiculelor Procesul Autopropulsării Autovehiculelor
89
∫ ⋅=A
x dApX0 (3.72)
Dacă se notează cu A1 (fig.3.45, b) zona din suprafaţa în care mai există starea de aderenţă, atunci expresia forţei tangenţiale poate fi scrisă sub forma:
∫∫ ⋅⋅′+⋅⋅′=A
Ana
A
n dApdApX1
1
0
ϕζ (3.73)
Pentru o anumită mărime A’1 a suprafeţei în care mai există aderenţă (fig.3.46, a), eforturile tangenţiale px ating valoarea maximă în mod corespunzător şi forţa tangenţială X va atinge valoarea maximă:
Rn
A
A
a
A
n ZdApdApX ⋅=⋅⋅′+⋅⋅′= ∫∫′
′
ϕϕζ1
1
0max
(3.74) Expresia (3.74) evidenţiază faptul ca aşa-numitul coeficient de aderenţă φ se referă la toată suprafaţa de contact alcatuită din două zone : o zonă în care predomină aderenţa A’1 şi o zonă în care predomină alunecarea totală:
⎟⎠⎞⎜
⎝⎛ ′− 1AA
Astfel se explică noţiunea de alunecare parţială în domeniul II al curbei din fig.3.44. Pentru a=1, cazul alunecării totale, forţa tangentială (fig.3.46, b) atinge valoarea:
Ra
A
naa ZdApX ⋅=⋅⋅′= ∫ ϕϕ0 (3.75)
În cazul roţii antrenate fenomenele se petrec asemănător cu deosebire că eforturile tangenţiale maxime ( maxXp ) se ating în partea din spate a suprafeţei de contact (fig. 3.47) şi sunt orientate în aceeaşi direcţie cu deplasarea roţii. Prin urmare coeficientul de aderenţă φ reprezintă valoarea maximă a forţei tangenţiale specifice raportată la întreaga suprafaţă de contact cuprinzând şi alunecările parţiale, iar coeficientul φ’este valoarea coeficientului de aderenţă corespunzător unei porţiuni elementare A∆ din
suprafaţa de contact şi care are viteza de alunecare 0=av .
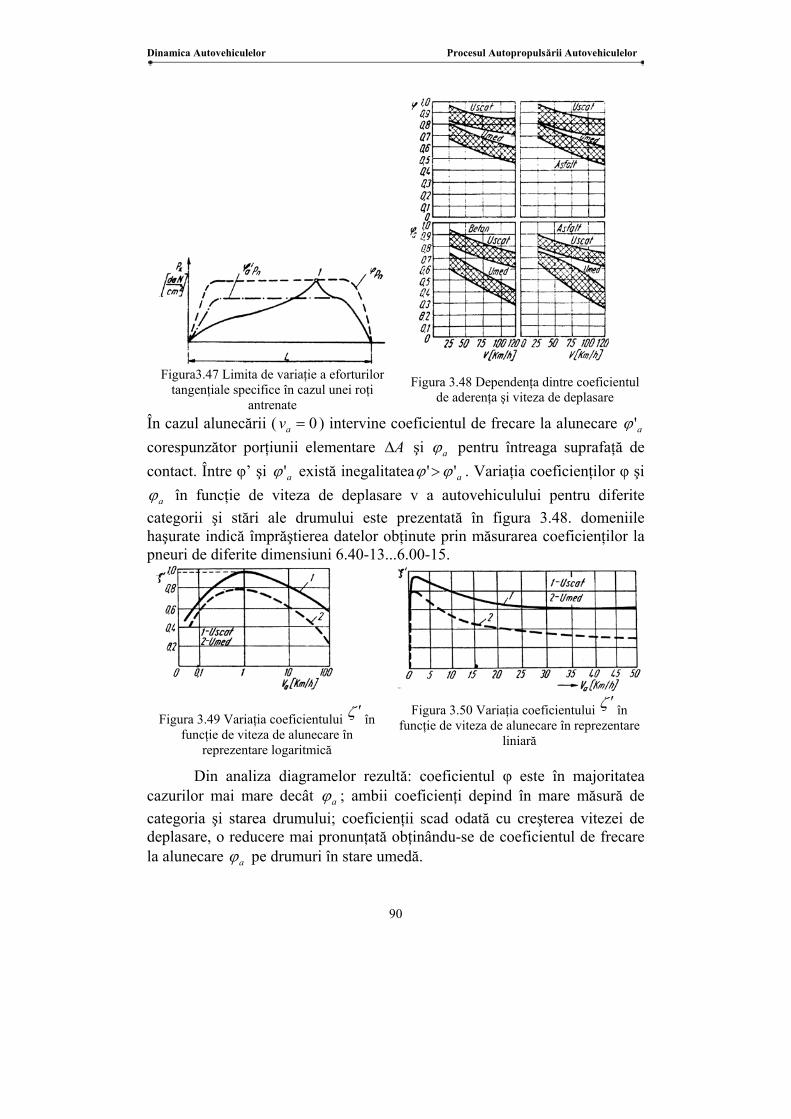
Dinamica Autovehiculelor Procesul Autopropulsării Autovehiculelor
90
Figura3.47 Limita de variaţie a eforturilor
tangenţiale specifice în cazul unei roţi antrenate
Figura 3.48 Dependenţa dintre coeficientul de aderenţa şi viteza de deplasare
În cazul alunecării ( 0=av ) intervine coeficientul de frecare la alunecare a'ϕ corespunzător porţiunii elementare A∆ şi aϕ pentru întreaga suprafaţă de contact. Între φ’ şi a'ϕ există inegalitatea a'' ϕϕ > . Variaţia coeficienţilor φ şi
aϕ în funcţie de viteza de deplasare v a autovehiculului pentru diferite categorii şi stări ale drumului este prezentată în figura 3.48. domeniile haşurate indică împrăştierea datelor obţinute prin măsurarea coeficienţilor la pneuri de diferite dimensiuni 6.40-13...6.00-15.
Figura 3.49 Variaţia coeficientului ζ ′ în funcţie de viteza de alunecare în
reprezentare logaritmică
Figura 3.50 Variaţia coeficientului ζ ′ în funcţie de viteza de alunecare în reprezentare
liniară
Din analiza diagramelor rezultă: coeficientul φ este în majoritatea cazurilor mai mare decât aϕ ; ambii coeficienţi depind în mare măsură de categoria şi starea drumului; coeficienţii scad odată cu creşterea vitezei de deplasare, o reducere mai pronunţată obţinându-se de coeficientul de frecare la alunecare aϕ pe drumuri în stare umedă.
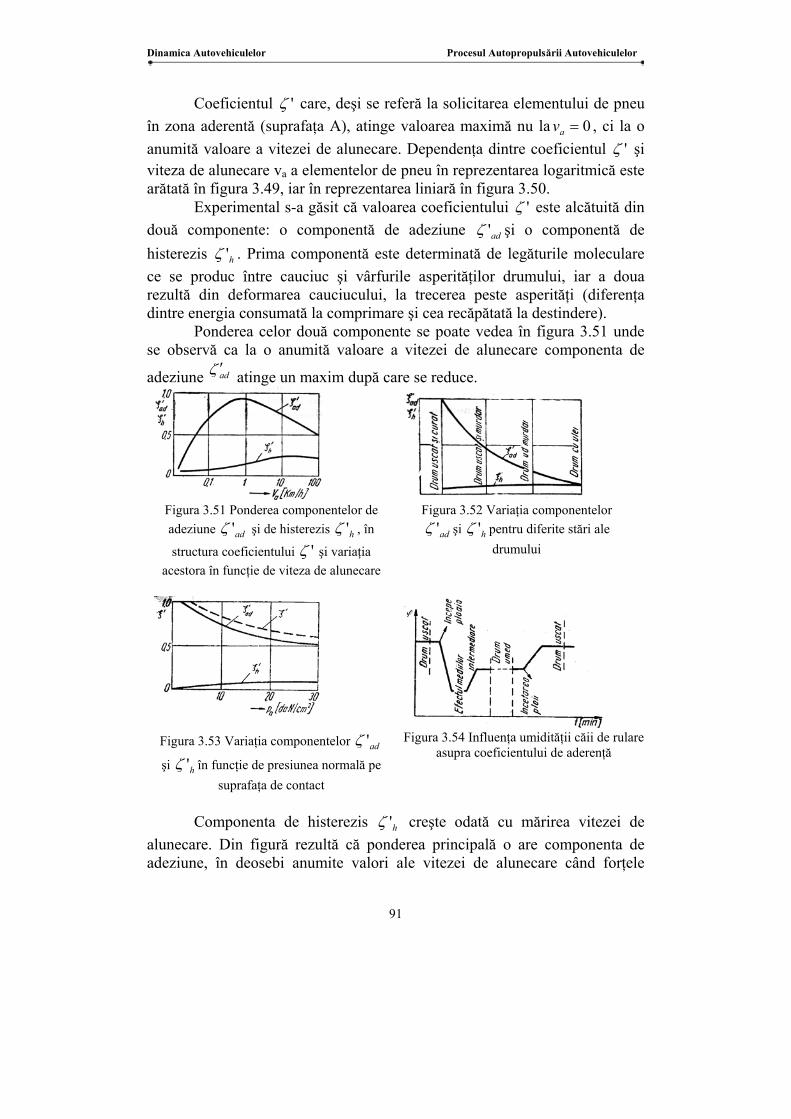
Dinamica Autovehiculelor Procesul Autopropulsării Autovehiculelor
91
Coeficientul 'ζ care, deşi se referă la solicitarea elementului de pneu în zona aderentă (suprafaţa A), atinge valoarea maximă nu la 0=av , ci la o anumită valoare a vitezei de alunecare. Dependenţa dintre coeficientul 'ζ şi viteza de alunecare va a elementelor de pneu în reprezentarea logaritmică este arătată în figura 3.49, iar în reprezentarea liniară în figura 3.50. Experimental s-a găsit că valoarea coeficientului 'ζ este alcătuită din două componente: o componentă de adeziune ad'ζ şi o componentă de histerezis h'ζ . Prima componentă este determinată de legăturile moleculare ce se produc între cauciuc şi vârfurile asperităţilor drumului, iar a doua rezultă din deformarea cauciucului, la trecerea peste asperităţi (diferenţa dintre energia consumată la comprimare şi cea recăpătată la destindere). Ponderea celor două componente se poate vedea în figura 3.51 unde se observă ca la o anumită valoare a vitezei de alunecare componenta de
adeziune adζ ′ atinge un maxim după care se reduce.
Figura 3.51 Ponderea componentelor de adeziune ad'ζ şi de histerezis h'ζ , în
structura coeficientului 'ζ şi variaţia acestora în funcţie de viteza de alunecare
Figura 3.52 Variaţia componentelor
ad'ζ şi h'ζ pentru diferite stări ale drumului
Figura 3.53 Variaţia componentelor ad'ζ
şi h'ζ în funcţie de presiunea normală pe suprafaţa de contact
Figura 3.54 Influenţa umidităţii căii de rulare asupra coeficientului de aderenţă
Componenta de histerezis h'ζ creşte odată cu mărirea vitezei de alunecare. Din figură rezultă că ponderea principală o are componenta de adeziune, în deosebi anumite valori ale vitezei de alunecare când forţele
Dinamica Autovehiculelor Procesul Autopropulsării Autovehiculelor
92
moleculare sunt preponderente şi când contactul dintre cele două suprafeţe aflate în frecare este nemijlocit. Dacă între aceste suprafeţe se află un strat ce le separă (apă, noroi etc) atunci componenta ad'ζ scade sensibil până la valoarea celeilalte componente h'ζ aşa cum rezultă şi din figura 3.52. Variaţia presiunii normale pe suprafaţa de contact uscată influenţează valoarea coeficientului 'ζ . Cu cât presiunea normală creşte cu atât se reduce suma had '' ζζ + (fig. 3.53). În cazul unei căi de rulare umede, ad'ζ scade mărindu-se ponderea componentei de histerezis h'ζ care creşte odată cu mărirea presiunii normale (fig 3.52). Dacă însă grosimea peliculei de apă creşte, încât cele două suprafeţe nu se găsesc în contact direct atunci şi componenta h'ζ se reduce până la 0. în acest caz o creştere a presiunii normale pe cale este avantajoasă făcând, prin eliminarea apei, să se apropie cele două suprafeţe în frecare şi cu aceasta să reapară adeziunea şi deformarea (histerezis). În vederea eliminării apei din suprafaţa de contact benzile de rulare ale pneului trebuie să fie prevăzute cu caneluri şi fante care să asigure condiţii de drenaj. În cazul căii de rulare uscate, prezenţa canelurilor şi a fantelor micşorează coeficentul de aderenţă printr-o presiune normală mai mare. Există deci un fenomen cu efecte inverse. Profilurile avantajoase pe suprafeşe umede sunt mai puţin avantajoase pe suprafeţe uscate. Pe suprafeţe uscate cele mai bune sunt pneurile fără profil, dar nu mai sunt acceptate pe suprafeţe umede. Însă, datorită faptului că la rularea pe căi umede coeficienţii sunt mai mici decât pe căi de rulare uscate, se preferă ca totuşi pneurile să fie profilate. Calitativ fenomenul se prezintă ca în figura 3.55. La rulare foarte înceată apa este eliminată total din suprafaţa de contact (fig. 3.55, a).pe măsură ce viteza creşte, se formează o pană de apă între pneu şi drum (fig. 3.55, b) ca apoi la viteza critică pana de apă să fie egală cu lungimea suprafeţei de contact şi să apară desprinderea pneului de drum (fig. 3.55, c). În sfârşit peste viteza critică pneul pluteşte total pe apă (fig. 3.55, d), contactul dintre acesta şi drum fiind exclusiv prin mediu lichid.
Figura 3.55 Procesul de rulare a unui pneu pe o cale umedă
Dinamica Autovehiculelor Procesul Autopropulsării Autovehiculelor
93
Analizând cazul din figura 3.55, b se constată existenţa a patru zone distincte a contactului dintre pneu şi drum (fig. 3.56): Zona I este zona de deviere a pelicului de apă în care predomină efectele inerţiale; Zona II este zona penei de apă în care predomină forţa de presiune; Zona III este zona de distrugere a penei de apă în care predomină proprietăţile vâscoase ale apei; Zona IV este zona de contact uscat care asigură existenţa forţei de aderenţă a pneului. Coeficientul de aderenţă este influenţat în mare măsură de construcţia şi materialul anvelopei. Rezultatele încercărilor efectuate în condiţii de frânare pentru pneuri radiale şi diagonale cu formă, profil şi bande de rulare identice sunt prezentate în figura 3.57. se observă că la pneurile radiale se obţin coeficienţi de aderenţă φ de valori mai mari şi coeficienţi de frecare la alunecare φa mai mici decât la pneurile diagonale. Exlicaţia este dată de faptul că la pneurile radiale suprafaţa de contact dintre pneu şi cale este mai mare, iar presiunea normală este mai uniformă. Folosirea pneurilor cu bande de rulare profilate conduce la creşterea coeficientului de aderenţă la rularea pe suprafeţe umede. Mărimea numărului de caneluri de lăţime egală este favorabilă la viteze mari, iar creşterea lăţimii canelurilor înlesneşte evacuarea peliculelor de fluid subţiri captate în suprafaţa de contact.
Figura 3.56 Zonarea contactului dintre pneu şi calea de rulare
Figura 3.57 Variaţia coeficientului de aderenţă ϕ şi a coeficientului de frecare la alunecare în funcţie de viteză pentru pneuri
radiale şi diagonale Utilizarea unor crestături (fante) pe suprafaţa nervurii conduce la îmbunătăţirea coeficientului de aderenţă atât în direcţie longitudinală cât şi transversală. Influenţa crestăturilor este mai pronunţată la rularea pe suprafeţe de drum netede când asperităţile acestuia nu sunt mari şi ascuţite. Fantele închise exercită o funcţie de rezervoare cu presiune redusă care absoarbe
Dinamica Autovehiculelor Procesul Autopropulsării Autovehiculelor
94
pelicula de fluid de pe suprafaţa drumului. Efectul de rezervor al crestăturilor este mai redus în cazul roţii frânate, deoarece lipsa forţei centrifuge face ca apa din crestătură să nu poată fi eliminat. S-a constatat că un număr mai mare de crestături, dar mai înguste, este preferabil unui număr redus de crestături cu suprafaţă de deschidere mai mare. Asupra coeficientului de aderenţă influenţează şi calitatea materialului benzii de rulare. Banda de rulare fabricată din materiale mai elastice duce la deformări mai mari în contact cu calea şi ca urmare se măreşte componenta de histerezis h'ζ , cu efectele cunoscute. Coeficientul de aderenţă variază odată cu modificarea presiunii interioare a aerului din pneu. În cazul unui pneu care rulează pe o cale dură, uscată, micşorarea presiunii interioare duce la mărirea suprafeţei de contact şi la reducerea presiunii normale pe cale, însoţită de o creştere oarecare a coeficientului de aderenţă – prin componenta de adeziune ad'ζ (vezi fig. 3.53). Pe o cale de rulare cu suprafaţa dură şi umedă influenţa este inversă; sporirea presiunii interioare areca rezultat o mărire a coeficientului de aderenţă explicată prin subţierea şi eliminarea peliculei de apă care acţionează ca un lubrifiant. La rularea roţilor pe drumuri deformabile coeficientul de aderenţă creşte odată cu micşorarea presiunii aerului din pneu. Aceasta este determinată de mărirea suprafeţei de contact şi de îmbunătăţirea caracterului de interacţiune a pneului cu drumul.