
Automobil Ul Electric
35
‚ Automobilu l electric www.referat.ro
-
Upload
strimbeanuandrei -
Category
Documents
-
view
56 -
download
2
description
In principiu, orice automobil care are motor de tractiune electric este considerat automobil electric. Sursa de alimentare, aflata pe vehicul, poate fi de diverse tipuri, insa, pentru majoritatea covarsitoare a automobilelor electrice realizate pana in prezent, sursa este o baterie de acumulatoare electrice.
Transcript of Automobil Ul Electric
‚
Automobilul electric
www.referat.ro
Cuprins
1. Generalitati
2. Modele de automobile electrice
2.1. Chevrolet Geo Prism 1994 EV
2.2. Tesla Roadster
3. Comparatie intre automobile electrice
4. Parti componente. Descriere amanuntita
4.1. Controler (Chopper/Invertor)
4.2. Motorul electric
4.3. Baterii
4.3.1. Tipuri de baterii
4.3.2. Utilizarea supracondensatoarelor
5. Concluzii. Avantaje si dezavantaje
6. Bibliografie
1. Generalitati despre autovehicule electrice
In principiu, orice automobil care are motor de tractiune electric este considerat
automobil electric. Sursa de alimentare, aflata pe vehicul, poate fi de diverse tipuri, insa,
pentru majoritatea covarsitoare a automobilelor electrice realizate pana in prezent, sursa
este o baterie de acumulatoare electrice.
Vehiculele electrice au, fata de vehiculele cu motoare termice, o serie de avantaje
notabile, si anume:
reducerea drastica a poluarii chimice si fonice;
posibilitatea de utilizare a unor sisteme de actionare sofisticate, oferite de cele mai
moderne realizari in domeniul actionarilor electrice;
posibilitatea realizarii comode a sistemelor de franare antiblocante, prin utilizarea
franarii electrice; daca franrea este recuperative, se face si o importanta economie de
energie;
posibilitatea de actionare individuala a rotilor (eventual, prin inglobarea motoarelor
de tractiune in roti, realizand asanumitele motoroti); aceasta conduce la simplificarea
sistemelor de transmisie, cea mai importanta fiind eliminarea diferentialului mecanic.
Principalele probleme pe care le pun automobilele electrice si care ingreuneaza,
deocamdata, proliferarea acestora sunt urmatoarele:
densitatea de energie si de putere a acumulatoarelor electrice actuale este semnificativ
mai scazuta decat a combustibililor ( la un automobil pe benzina densitatea de energie
este 10500 Wh/kg, iar la un automobil electric cu acumulator cu plumb-acid
densitatea de energie fiind 161 Wh/kg); aceasta face ca , pe de o parte, autonomia
automobilelor electrice sa fie inferioara celei din cazul automobilelor clasice: 150-250
km, fata de 400-800 km; pe de alta parte, viteza maxima a automobilelor electrice
(100-130 km/h) este mai scazuta decat a automobilelor clasice (cca 200 km/h); de
asemenea, acceleratiile realizate cu automobilele electrice sunt inferioare celor din
cazul automoblielor clasice;
sunt necesare statii de incarcare a bateriilor de acumulatoare; acestea pot fi dotate fie
cu acumulatoare preincarcate, care sa le schimbe pe cele descarcate de pe
automoblile-ceea ce pune probleme de depozitare si de asigurare a unei diversitati de
baterii, in functie de tipurile de automobile existente-, fie cu instalatii de incarcare a
bateriilor direct pe automobile; in ultimul caz, se pune problema timpului de
incarcare, acesta fiind de ordinal orelor pentru o incarcare completa normala (doar
pentru incarcari partiale, el poate fi redus la ordinal minutelor-zecilor de minute);
sunt necesare investitii initiale mari, daca productia automobilelor este de serie mica.
Bateriile de acumulatoare cu energii mari si , mai ales, pilele electrice de
combustie
ofera, insa, noi posibilitati, justificand o reevaluare promitatoare a fezabilitatii vehiculelor
electrice rutiere.
Sistemul de actionare a unui automobil electric trebuie sa satisfaca o serie de
cerinte, cele mai importante fiind prezentate mai jos:
Pentru o baterie data, autonomia automobilului creste daca, pe de o parte, pierderile in
sistemul de actionare sunt mai scazute, iar, pe de alta parte, masa acestui sistem este
mai scazuta ( contribuind, astfel, la scaderea masei totale a automobilului si, implicit,
la scaderea energiei necesare accelerarii si invingerii rezistentei la inaintare a
automobilului); reducerea pierderilor din sistemul de actionare implica utilizarea unor
sisteme de comanda si motoare electrice de tractiune cu randamente ridicate: masa
sistemului de actionare poate fi redusa, in esenta, pe doua cai:
- utilizand acele tipuri de motoare electrice si de convertoare care au puteri
specifice (kW/kg) mari;
- introducand racirea fortata, cu aer sau chiar cu apa, a motorului si a
convertorului ( cu posibilitatea de utilizare a fluidului cald – atunci cand este
necesar – la incalzirea automobilului)
2. Modele de automobile electrice
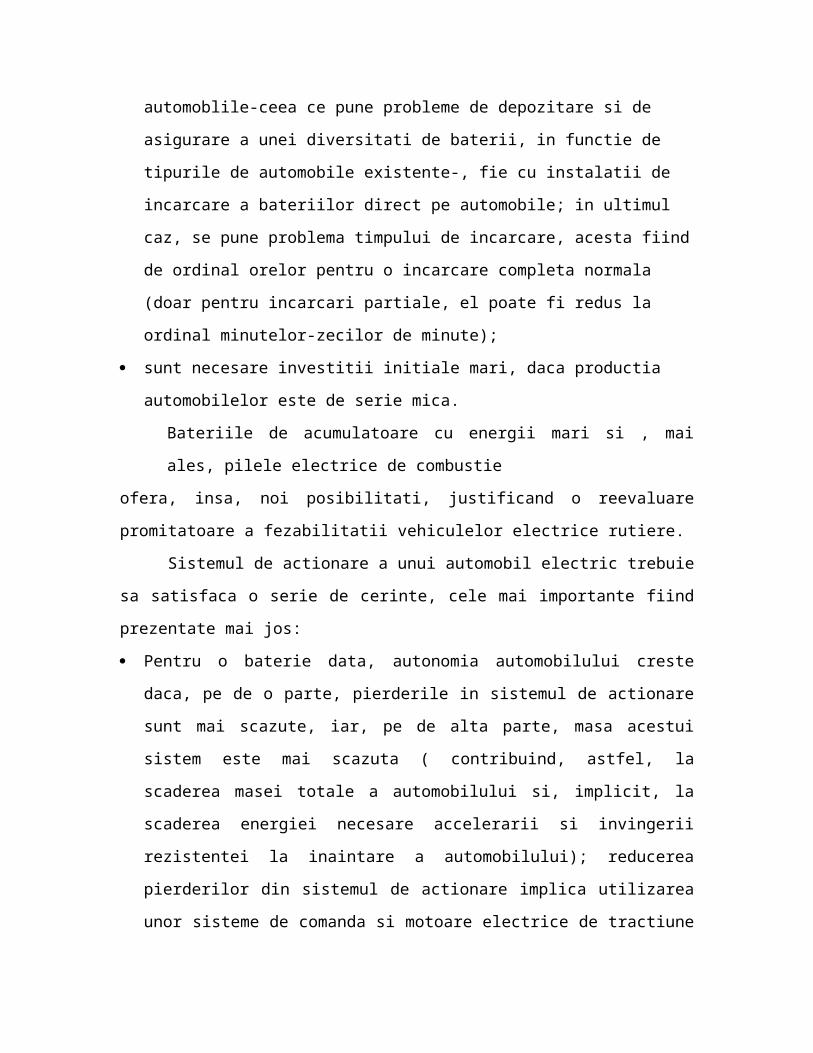
2.1. Primul exemplu de automobil electric prezentat va fi unul modificat dintr-un
vehicul de serie (Chevrolet Geo Prism 1994), propulsat de un motor cu combustie interna
(pe benzina).
Acest vehicul este detinut de catre Jon Mauney.
Modificarile care au dus la transformarea intr-un automobil electric:
Motorul cu combustie interna a fost inlocuit cu un motor de curent
alternativ;
Ansamblul ambreiajului a fost scos impreuna cu toba de esapament,
catalizatorul si rezervorul autovehiculului;
Transmisia manuala a ramas montata pe masina functionand numai in
treapa a II-a de viteza;
Motorul de curent alternativ este comandat prin intermediul unui invertor
(P=50 kW, Uin=300 V cc, Uies=240 V ca, trifazat);
Bateriile au fost asezate pe podeaua automobilului;
50 de baterii de 12 V plumb-acid conectate in serie cate 25 pentru a avea
Uin=300 V cc;
Au fost adaugate motoare electrice pentru: pompa de apa, servodirectie,
aer conditionat;
Schimbatoruld e viteze de la transmisia manuala a fost inlocuit cu un
comutator, deghizat intr-un schimbator automat pentru controlul mersului
inainte si inapoi;
Un mic incalzitor electric a fost adaugat pentru a produce caldura;
Un incarcator a fost adaugat pentru ca bateriile sa poata fi
reincarcate.Particularitatea acestui autovehicul consta in faptul ca are 2
sisteme de incarcare: unul normal de 120 V / 240 V si unul cu incarcare de
la paleta magnetica inductiva;
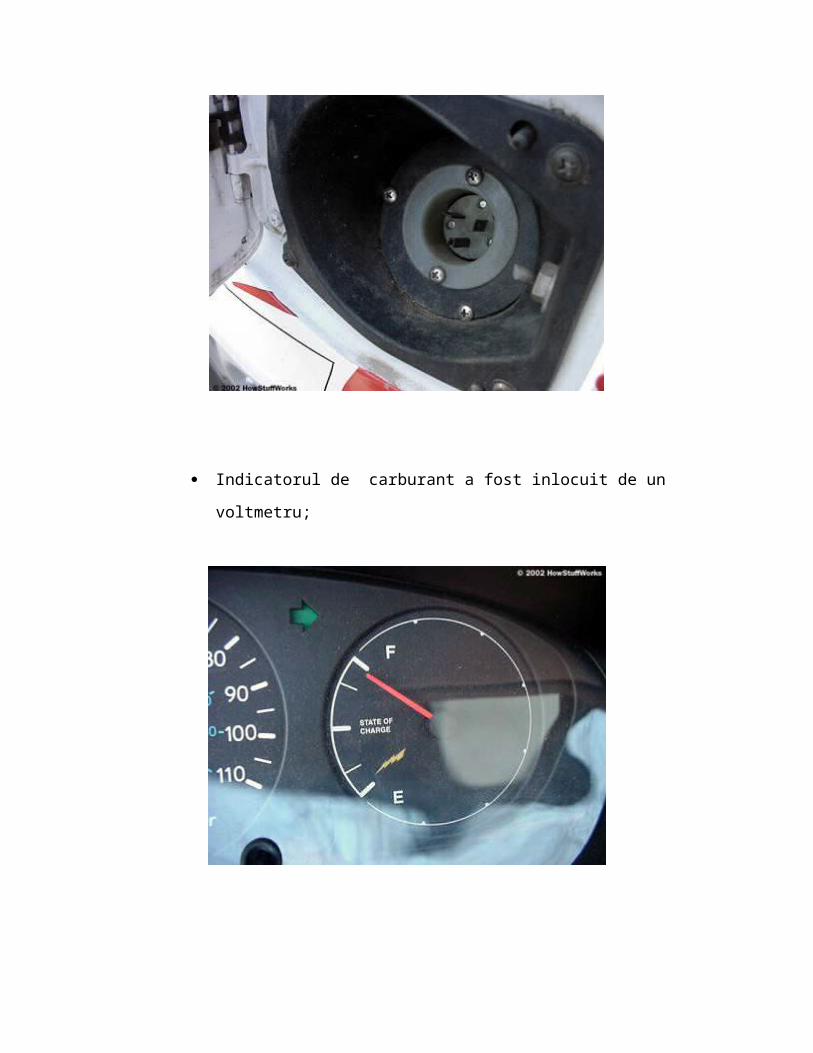
Indicatorul de carburant a fost inlocuit de un voltmetru;
Specificatiile tehnice ale autovehiculului construit:
- autonomie: 80 km;
- acceleratie: 0 – 100 km/h in 15 secunde;
- consum la reincarcare: 12kWh;
- greutatea bateriilor: 500 kg;
- durata de viata a bateriilor: 3 ani.
Pentru a compara costul pe o mila, dintre un autovehicul electric si unul pe
carburant, iata un exemplu: energia electrica in Carolina de Nord este 8 centi/kWh pe
timpul zilei si 4 centi/kWh pe timpul noptii. Inseamna ca pentru o reincarcare completa
costul este de 1 $ ziua si 50 centi noaptea. Pretul carburantului este de 1,2 $ pe galon si
masina merge 30 de mile cu un galon, atunci costul pe o mila este de 4 centi.
In dezavantajul autovehiculului electric sta costul ridicat al bateriilor (aproximativ
2000 $). Durata de viata a bateriilor este de 20000 de mile, ceea ce inseamna 10 centi pe
mila.
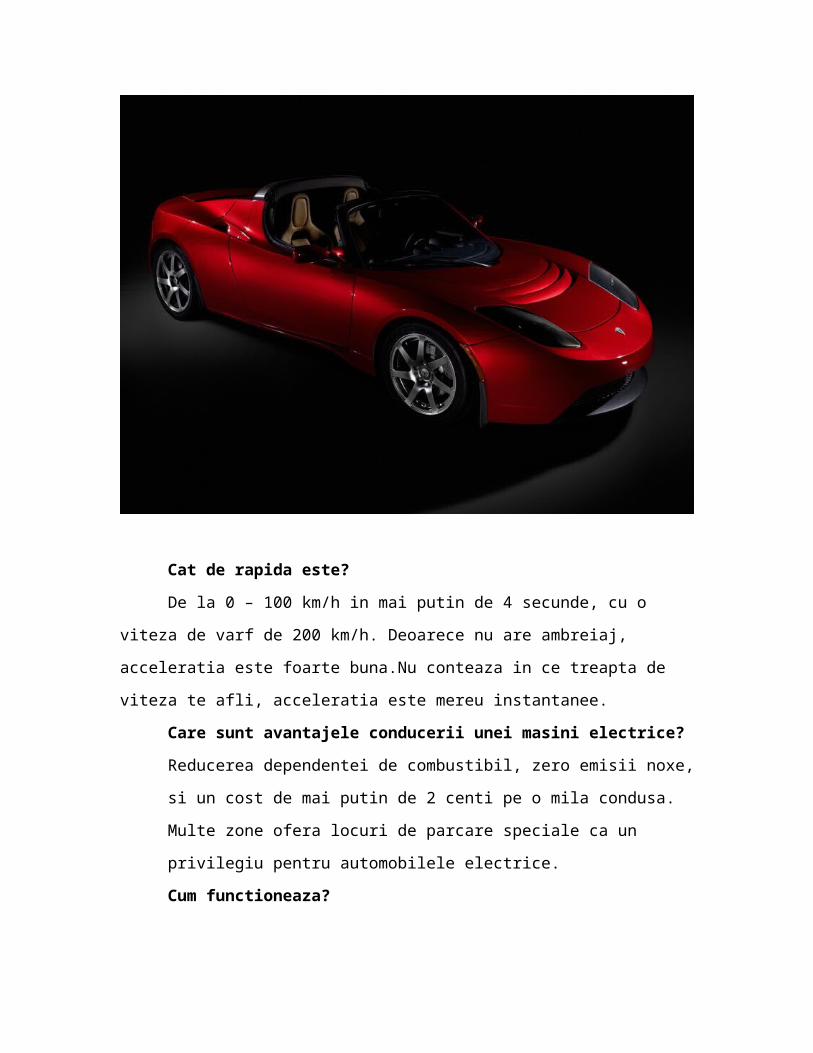
2.2. Al doilea tip de autovehicul electric se numeste Tesla Roadster, este produs de
Tesla Motors.
Cat de rapida este?
De la 0 – 100 km/h in mai putin de 4 secunde, cu o viteza de varf de 200 km/h.
Deoarece nu are ambreiaj, acceleratia este foarte buna.Nu conteaza in ce treapta de viteza
te afli, acceleratia este mereu instantanee.
Care sunt avantajele conducerii unei masini electrice?
Reducerea dependentei de combustibil, zero emisii noxe, si un cost de mai putin
de 2 centi pe o mila condusa. Multe zone ofera locuri de parcare speciale ca un
privilegiu pentru automobilele electrice.
Cum functioneaza?
Un vehicul electric nu are o mecanica atat de complexa ca unul ce foloseste motor
cu ardere interna. De exemplu: motorul in 4 timpi al unui automobil conventional are
peste 100 de parti mobile, in comparatie motorul de la Tesla Roadster are doar unul si
anume rotorul. In concluzie, masina transporta o greutate mai mica si are mai putine piese
care se pot defecta in timp. Comparatia nu se opreste numai la partile in miscare, ci
continua cu cosumul de ulei, filtre, ambreiaj, bujii, filtru de aer, pompa de apa,
catalizator, toba de esapament etc., toate aceste necesitand service. Toate aceste
componente nefiind necesare unui autovehicul electric.
Sistemul de stocare a energiei (ESS)
Atunci cand se doreste construirea unei masini electrice foarte performante, cea
mai mare provocare o reprezinta inca de la inceput, bateriile. Complexitatea lor este
clara: sunt grele, scumpe si ofera o putere limitata. Are o calitate care eclipseaza toate
aceste dezavantaje: e curat din punct de vedere ecologic.
Blocul de baterii de la Tesla Roadster, reprezinta cea mai mare inovatie pe care au
descoperit-o cei de la Tesla Motors, fiind cele mai avansate tipuri de baterii din lume,
combina tehnologia bazata pe Litiu-Ion cu un bloc de baterii unic care prezinta mai multe
straturi de izolatie. Sunt usoare, durabile, reciclabile si sunt capabile sa dezvolte
suficienta putere pentru a accelera autovehiculul de la 0 – 100 km/h in 3,9 secunde.
Motor
Multor oameni le este greu sa creada ca Tesla Roadster invinge la acceleratie un
Lamborghini, fiind propulsat de un motor electric de marimea unui pepene verde.
Mai important decat greutatea motorului este randamentul acestuia. Motoarele
construite de Tesla Motors au o eficienta de 85 – 95 %.
Transmisie
Tesla Roadster are doar 2 viteze si iti permite sa poti sa conduci dupa bunul plac,
indiferent daca folosesti treapta de viteza adecvata sau nu, deasemenea nu exista pedala
de ambreiaj. Odata cuplata in viteza din schimbator, invertorul comanda motorul.
Sistemul Electronic de Comanda al motorului
Majoritatea subsistemelor instalate pe Tesla Roadster sunt in totalitate comandate
electronic sub supravegherea permanenta unui calculator de bord. Toata partea de
comanda este integrata intr-un DSP. El controleaza cuplul motorului, reincarcare,
franarea recuperativa si monitorizeaza tensiunea furnizata de baterii, turatia motorului si
temperatura.
3. Comparatie intre automobile electrice
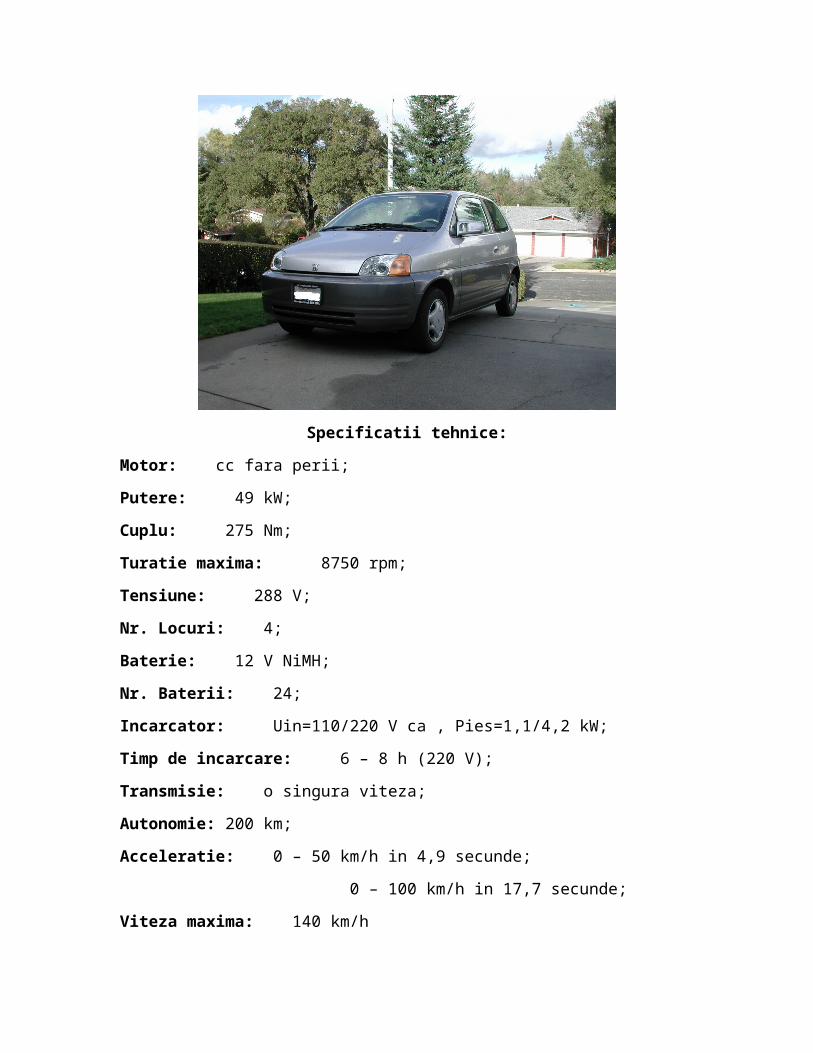
Honda EV +
Specificatii tehnice:
Motor: cc fara perii;
Putere: 49 kW;
Cuplu: 275 Nm;
Turatie maxima: 8750 rpm;
Tensiune: 288 V;
Nr. Locuri: 4;
Baterie: 12 V NiMH;
Nr. Baterii: 24;
Incarcator: Uin=110/220 V ca , Pies=1,1/4,2 kW;
Timp de incarcare: 6 – 8 h (220 V);
Transmisie: o singura viteza;
Autonomie: 200 km;
Acceleratie: 0 – 50 km/h in 4,9 secunde;
0 – 100 km/h in 17,7 secunde;
Viteza maxima: 140 km/h
Wrightspeed X1
Specificatii tehnice:
Motor: trifazat de ca;
Putere: 176 kW sau 236 CP;
Turatie maxima: 13300 rpm;
Greutate: 700 kg;
Transmisie: o singura treapta de viteza, fara ambreiaj;
Acceleratie: 0 – 100 km/h in 3 secunde;
Viteza maxima: 180 km/h (limitata electronic);
Autonomie: 160 km (in mediu urban);
Incarcator: Uin= 100 – 250 V la 50 sau 60 Hz si curentul ajustabil pana la 80 A;
Timp de incarcare: 1,25 h la un curent de 80 A.
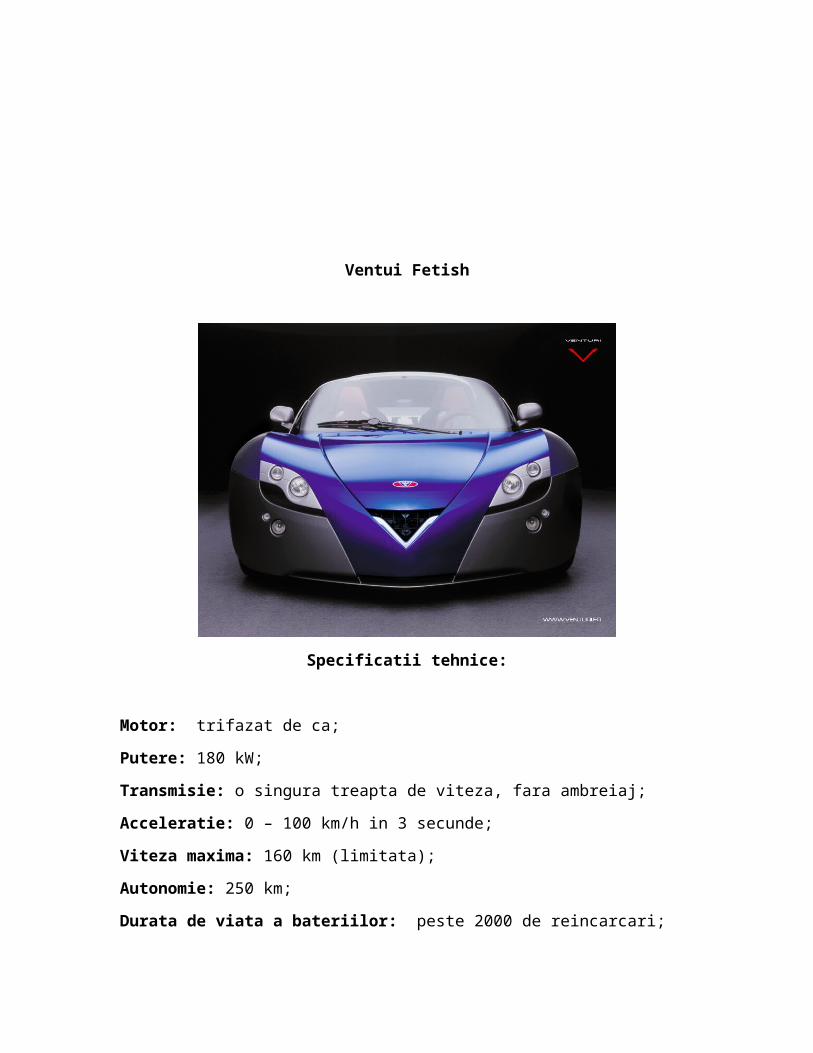
Ventui Fetish
Specificatii tehnice:
Motor: trifazat de ca;
Putere: 180 kW;
Transmisie: o singura treapta de viteza, fara ambreiaj;
Acceleratie: 0 – 100 km/h in 3 secunde;
Viteza maxima: 160 km (limitata);
Autonomie: 250 km;
Durata de viata a bateriilor: peste 2000 de reincarcari;
Timp de reincarcare: 3 – 4 h;
Tipuri de franare: frane pe disc (ventilate pe fata si normale pe spate) si franare
recuperativa cu aportul energiei recuperate in baterii;
Greutatea bateriilor: 248 kg;
Greutatea totala: 980 kg;
Caroserie: fibra de carbon.
Tesla Roadster
Specificatii tehnice:
Stil: 2 locuri, decapotabila, tractiune spate;
Autonomie: 400 km;
Viteza maxima: 200 km/h;
Durata de viata a bateriilor: 100000 mile;
Timp de incarcare: 3,5 h;
Tip baterie: Litiu-Ion;
Acceleratie: 0 – 100 km/h sub 4 secunde;
Frane: pe disc cu ABS la fiecare roata;
Motor: trifazat, 4 poli, 185 kW, turatie maxima 13000 rpm, franare recuperativa;
Greutate totala: 1000 kg.
Pretul de baza: 98000 $
Tabel comparativ automobile electrice:
Nume Putere[kW]
Tip motor
Acceleratie 0 – 100
km/h [s]
Viteza maxima [km/h]
Autonomie [km]
Timp de incarcare
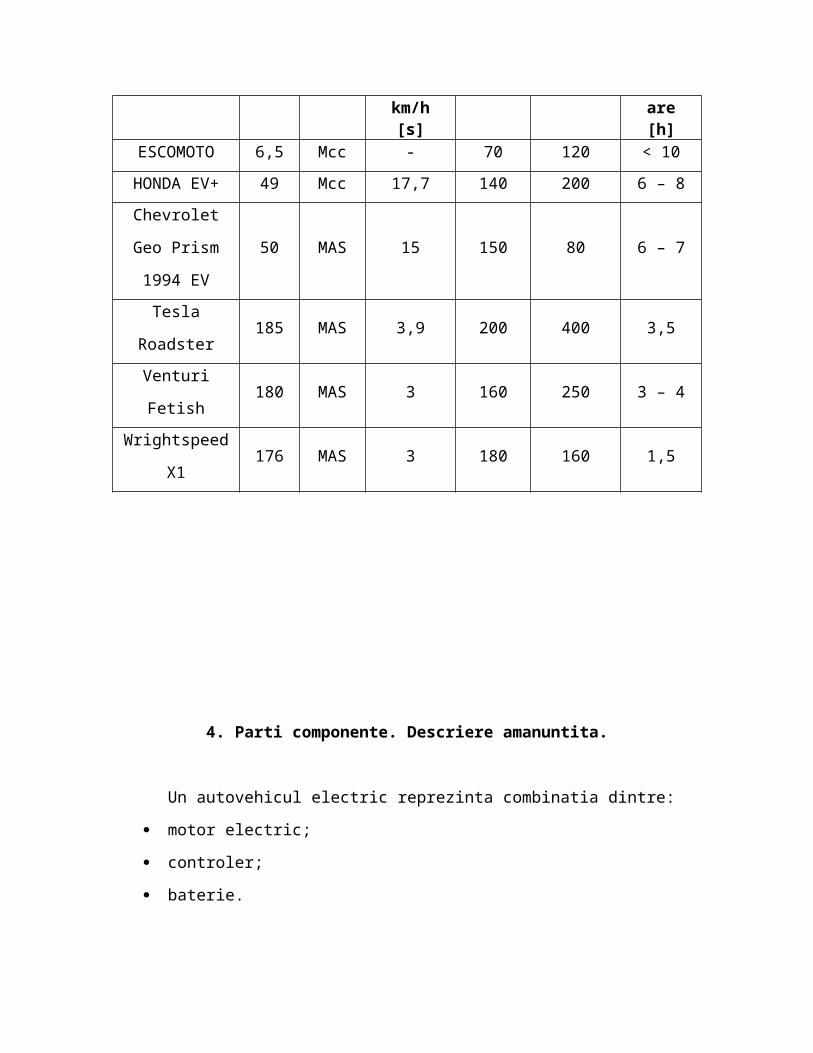
[h]ESCOMOTO 6,5 Mcc - 70 120 < 10
HONDA EV+ 49 Mcc 17,7 140 200 6 – 8
Chevrolet Geo
Prism 1994 EV50 MAS 15 150 80 6 – 7
Tesla Roadster 185 MAS 3,9 200 400 3,5
Venturi Fetish 180 MAS 3 160 250 3 – 4
Wrightspeed X1 176 MAS 3 180 160 1,5
4. Parti componente. Descriere amanuntita.
Un autovehicul electric reprezinta combinatia dintre:
motor electric;
controler;
baterie.
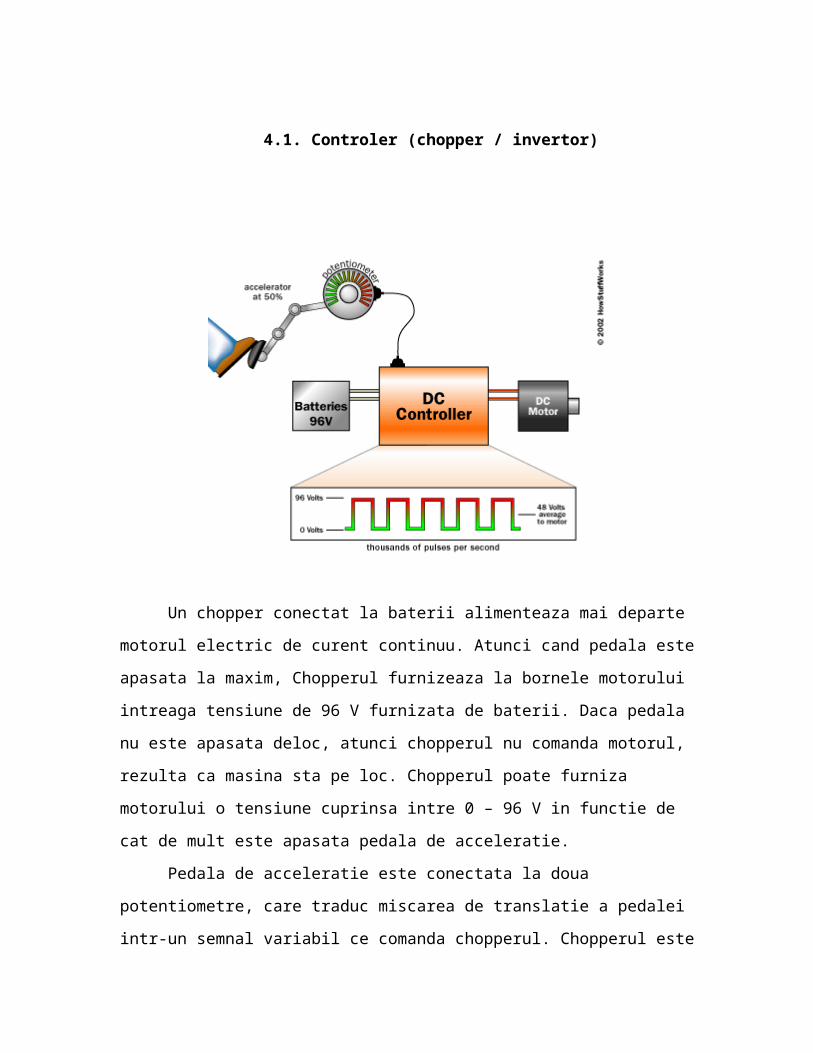
4.1. Controler (chopper / invertor)
Un chopper conectat la baterii alimenteaza mai departe motorul electric de curent
continuu. Atunci cand pedala este apasata la maxim, Chopperul furnizeaza la bornele
motorului intreaga tensiune de 96 V furnizata de baterii. Daca pedala nu este apasata
deloc, atunci chopperul nu comanda motorul, rezulta ca masina sta pe loc. Chopperul
poate furniza motorului o tensiune cuprinsa intre 0 – 96 V in functie de cat de mult este
apasata pedala de acceleratie.

Pedala de acceleratie este conectata la doua potentiometre, care traduc miscarea
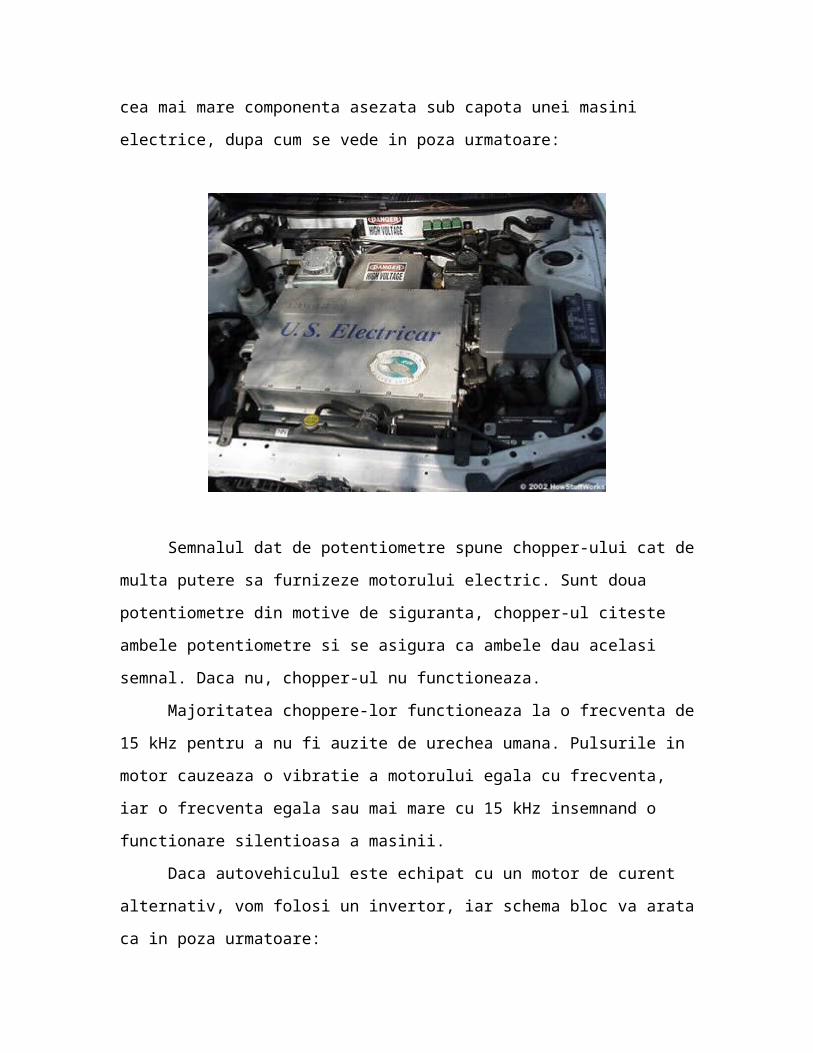
de translatie a pedalei intr-un semnal variabil ce comanda chopperul. Chopperul este cea
mai mare componenta asezata sub capota unei masini electrice, dupa cum se vede in poza
urmatoare:
Semnalul dat de potentiometre spune chopper-ului cat de multa putere sa
furnizeze motorului electric. Sunt doua potentiometre din motive de siguranta, chopper-ul
citeste ambele potentiometre si se asigura ca ambele dau acelasi semnal. Daca nu,
chopper-ul nu functioneaza.
Majoritatea choppere-lor functioneaza la o frecventa de 15 kHz pentru a nu fi
auzite de urechea umana. Pulsurile in motor cauzeaza o vibratie a motorului egala cu
frecventa, iar o frecventa egala sau mai mare cu 15 kHz insemnand o functionare
silentioasa a masinii.
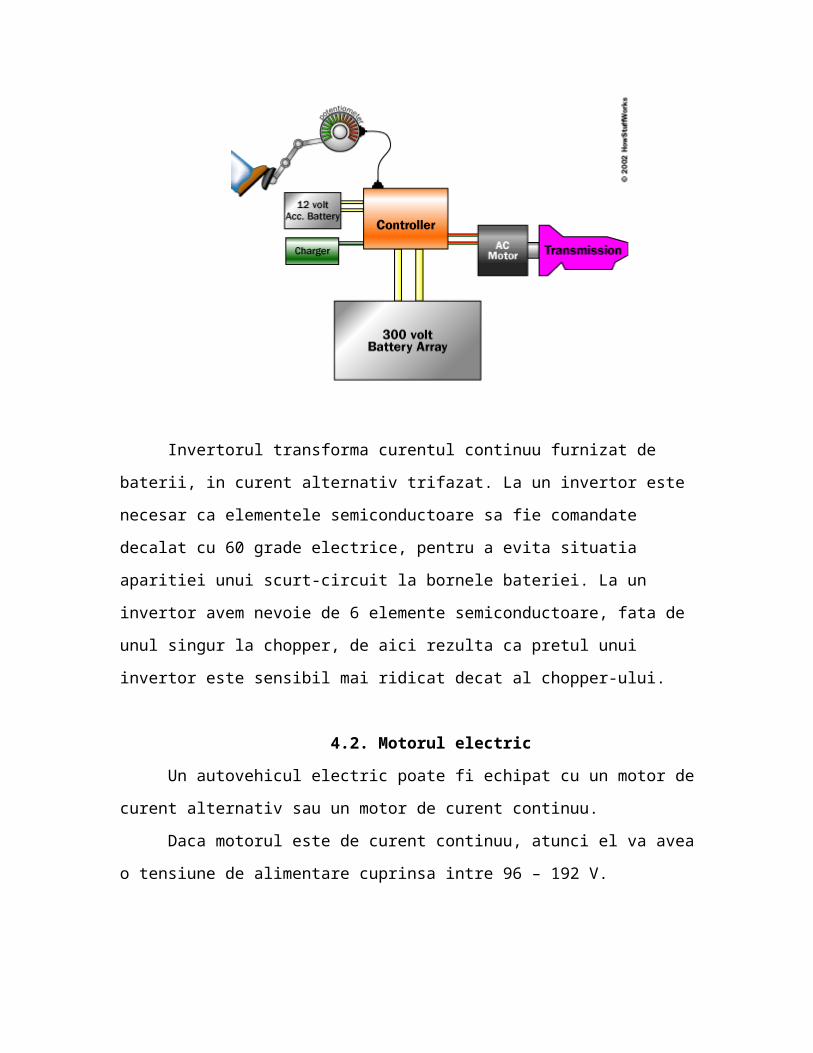
Daca autovehiculul este echipat cu un motor de curent alternativ, vom folosi un
invertor, iar schema bloc va arata ca in poza urmatoare:
Invertorul transforma curentul continuu furnizat de baterii, in curent alternativ
trifazat. La un invertor este necesar ca elementele semiconductoare sa fie comandate
decalat cu 60 grade electrice, pentru a evita situatia aparitiei unui scurt-circuit la bornele
bateriei. La un invertor avem nevoie de 6 elemente semiconductoare, fata de unul singur
la chopper, de aici rezulta ca pretul unui invertor este sensibil mai ridicat decat al
chopper-ului.
4.2. Motorul electric
Un autovehicul electric poate fi echipat cu un motor de curent alternativ sau un
motor de curent continuu.
Daca motorul este de curent continuu, atunci el va avea o tensiune de alimentare
cuprinsa intre 96 – 192 V.
Daca motorul este de curent alternativ, atunci el va avea o tensiune de alimentare
cuprinsa intre 240 – 300 V. De obicei sunt trifazate asincrone sau sincrone fara perii.
Cazurile de mai sus sunt generale, deci pot exista si motoare care sa se alimenteze
la alte tensiuni.
Motoarele de curent continuu sunt mai usor de instalat si mai ieftine. In general
un motor are intre 20 – 30 de kW, iar chopper-ul intre 40 – 60 kW (de exemplu: un
chopper alimentat de la 96 V va putea furniza maxim 400 – 600 A). Acest tip de motoare
pot si suprasolicitate pentru perioade scurte de timp, fara sa se deterioreze. Aceasta
caracteristica da autovehiculului respectiv o acceleratie rapida.
Motoarele de curent alternativ sunt folosite aproape in intreaga industrie, deci se
poate gasi mult mai usor unul potrivit si pentru un vehicul electric. In timpul franarii,
motorul se transforma in generator si incarca bateriile prin intermediul invertorului, care
poate functiona si ca redresor.
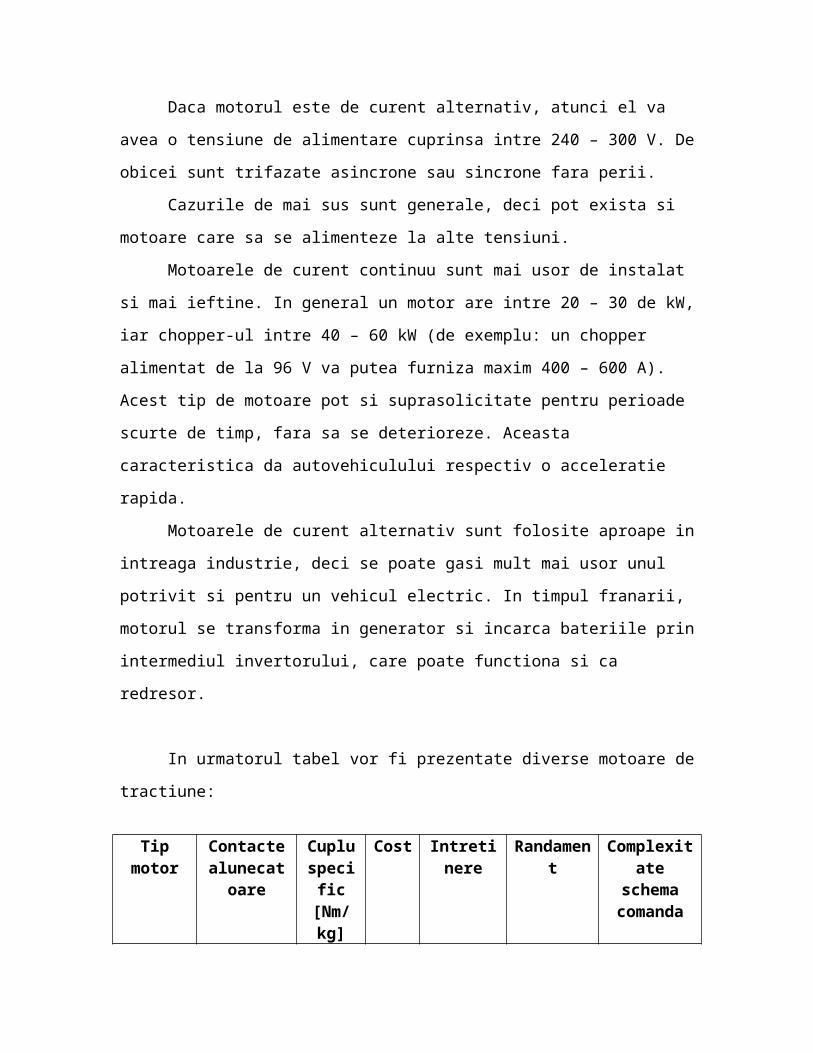
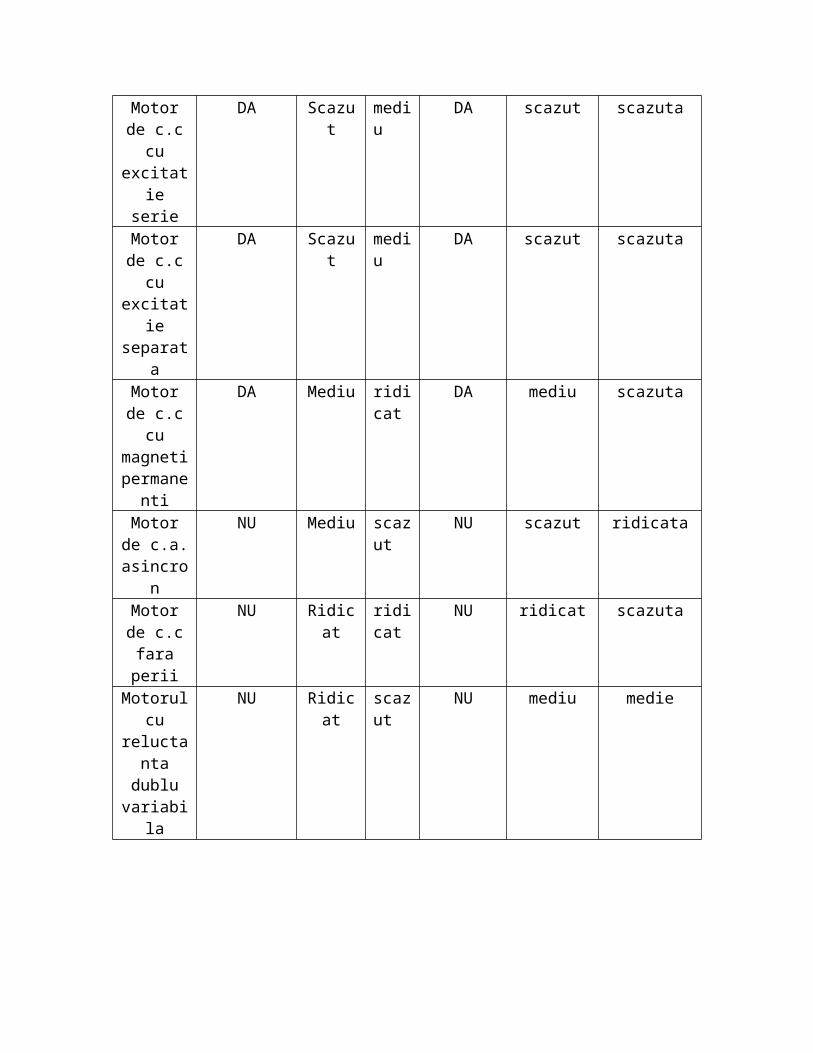
In urmatorul tabel vor fi prezentate diverse motoare de tractiune:
Tip motor Contacte alunecatoar
e
Cupluspecific[Nm/kg]
Cost Intretinere
Randament
Complexitate
schemacomanda
Motor de c.c cu
excitatie serie
DA Scazut mediu
DA scazut scazuta
Motor de c.c cu
excitatie separata
DA Scazut mediu
DA scazut scazuta
Motor de c.c cu
magneti permanent
i
DA Mediu ridicat
DA mediu scazuta
Motor de c.a.
asincron
NU Mediu scazut
NU scazut ridicata
Motor de c.c fara
perii
NU Ridicat ridicat
NU ridicat scazuta
Motorul cu
reluctanta dublu
variabila
NU Ridicat scazut
NU mediu medie
Dintre toate tipurile de motoare electrice, cea mai promitatoare solutie pentru
actionarea considerate se arata a fi motorul de c.c fara perii. Intr-adevar, acest motor nu
are rival in privinta a doua caracteristici importante: randamentul si dimensiunile (masa).
In plus, nu are contacte alunecatoare, implicand, deci, o intretinere foarte simpla.
De asemenea, el permite un reglaj foarte simplu al vitezei; invertorul sau PWM
este actualmente binecunoscut si in continuu progress din punct de vedere al pretului,
fiabilitatii si compactizarii.
Este adevarat ca, deocamdata, pretul acestui motor este ridicat, datorita costului
magnetilor permanenti, dar el trebuie considerat in corelatie cu celelalte costuri: al
energiei consumate de automobil – mai scazuta datorita randamentului mai ridicat si
greutatii mai mici; al schemei de comanda – relativ simpla; al intretinerii foarte putin
pretentioase. In plus, se intrevede o scadere in timp a costului magnetilor permanenti,
ceea ce va determina si o scadere a pretului motorului.
Transmiterea cuplului motor la roti
Una dintre cele mai importante probleme ale tractiunii bazate pe aderenta o
constituie modul de amplasare a motorului de tractiune pe vehicul si de actionare a rotilor
motoare, acesta trebuind sa asigure atat transmiterea cuplului motor, cat si protejarea
motorului de tractiune fata de socurile primite de la calea de rulare. In plus, la vehiculele
cu roti pneumatice, transmiterea cuplului motor trebuie sa se faca astfel incat sa se
asigure independenta rotilor motoare, pentru a reduce uzura pneurilor.
Deseori, parametrii sistemului de transmisie si parametrii electrici si mecanici ai
motorului de tractiune se conditioneaza reciproc. La aceasta contribuie si faptul ca, spre
deosebire de actionarile stationare, gabaritele care stau la dispozitie pe vehiculele
electrice sunt restranse.
Actionarea rotilor motoare ale unui automobil electric poate fi:
individuala, la care fiecare roata motoare este actionata de cate un motor;
colectiva, la care un motor actioneaza un grup de roti.
Solutia clasica de actionare a automobilelor electrice (utilizata si la automobilele
cu motoare termice) este aceea a actionarii collective. Pentru ca, o data cu transmiterea
cuplului de la motor la roti, sa se asigure si independenta rotilor, in acest caz, este
necesara utilizarea unui diferential mecanic, existand diverse solutii pentru realizarea
acestuia. In figura urmatoare este prezentata una dintre cele mai simple solutii.
Principiul constructiv al unui diferential mecanic:
M - motor de tractiune; PN – pinion; RD – roata dintata;
CD – “carcasa” diferentialului; P – planetare; S – sateliti; RM – roti motoare.
Diferentialul propriu-zis este format din “carcasa” CD, rotile dintate-planetare P
si rotile dintate-sateliti S. Cuplul se transmite de la motorul M la carcasa diferentialului,
prin intermediul unui reductor format din pinionul PN – fixat pe arborele lui M – si roata
dintata RD – fixate pe CD (pentru simplitate, s-a considerat ca reductorul are o singura
treapta, cu roti dintate cilindrice). In continuare, cuplul transmis planetarelor (si, implicit,
rotilor automobilului, rigidizate pe axele corespunzatoare ale planetarelor) prin
intermediul satelitilor, acestia din urma putandu-se, eventual, roti in jurul axelor proprii.
In acest fel, se asigura independenta relativa a celor doua roti motoare RM1 si RM2.
Acest sistem are o serie de dezavantaje:
randamentul actionarii este micsorat de frecarile introduse de diferential;
diferentialul contribuie la cresterea greutatii automobilului;
diferentialul are un cost relativ ridicat si necesita o intretinere suplimentara.
Pentru inlaturarea acestor dezavantaje, la automobilele electrice moderne se
utilizeaza
actionarea individuala, fiecare roata motoare avand motorul sau.
In acest caz, al actionarii individuale, cuplul poate fi transmis rotilor motoare in
doua moduri:
direct;
prin angrenaje.
La transmiterea directa, rotorul motorului este solidar (eventual, prin intermediul
unei
transmisii cardanice – permite deplasarea relativa pe verticala intre anumite limite a
rotilor fata de cadrul automoblilului -) cu roata motoare, turatia rotii fiind, deci, egala cu
turatia motorului.
La transmiterea prin angrenaj, intre motor si roata motoare se dispune un
angrenaj reductor, care face ca turatia rotii sa fie inferioara turatiei motorului (raportul de
transmisie it>1).
Transmiterea cuplului de la motorul de tractiune la roti:
a) directa; b) prin angrenaj.
M – motor; RM – roata motoare; R – reductor.
Cu toate ca transmiterea directa a cuplului este mai simpla, ea nu este folosita
decat in cazuri foarte rare – cand simplitatea constructiei este hotaratoare - , avand
urmatoarele dezavantaje esentiala:
demontarea motorului pentru revizii necesita scoaterea rotii motoare;
vitezele uzuale, relativ reduse, de circulatie implica motoare cu turatii reduse;
acestea au, la o putere data, gabarite si greutati mai mari decat motoarele cu turatii
ridicate; la motoarele electrice uzuale, din considerente de gabarit si de utilizare
economica a materialelor active (cupru, fier), viteza periferica a rotorului trebuie
sa fie mai mare de cca 50 m/s; constructive, sa fie cel mult 70% din diametrul
rotii; admitand viteza periferica a rotorului 50 m/s, rezulta ca viteza vehiculului
trebuie sa fie egala cu cel putin (50/0,7) m/s=71 m/s=266 km/h, pentru ca motorul
sa fie bine utilizat.
4.3. Baterii
Dupa cum se stie alimentarea motoarelor de tractiune ale automobilelor electrice
se face, uzual, de la baterii electrice, care in esenta sunt formate prin formarea, in diverse
conexiuni a mai multor elemente – surse electrochimice. Sursele electrochimice
convertesc energia chimica in energie electrica.
Veriga slaba intr-un autovehicul electric o reprezinta bateriile. Sunt cel putin 6
mari probleme ale bateriilor plumb-acid:
sunt grele (un bloc de baterii poate cantari 500 kg);
sunt voluminoase (autovehiculele devin robuste);
au capacitate limitata (poate furniza intre 12 – 15 kWh, ceaa ce poate insemna o
autonomie de 80 km);
procesul de incarcare necesita timp indelungat (aporximativ 10 h);
au o durata de viata relativ scurta (3 – 4 ani, sau 200 de reincarcari);
sunt destul de scumpe (aproximativ 2000 $).
Bateriile plumb-acid pot fi inlocuite cu cele NiMH (nichel hidruri metalice).
Autonomia autovehiculului se va dubla, iar bateriile au o durata de viata de aproximativ
10 ani, dar costul bateriilor este de 10 – 15 ori mai ridicat decat cel al bateriilor plumb-
acid. Cu alte cuvinte, bateriile NiMH costa aproximativ 20000 – 30000 $, iar cele cu
plumb-acid costa doar 2000 $.
Daca privim probleme referitoare la baterii, vom avea o perspectiva diferita
asupra folosirii benzinei si anume: la 7,5 litri de benzina ceea ce inseamna o greutate de 7
kg, costa 3 dolari si dureaza 30 de secunde pentru a o introduce in rezervor; este
echivalentula 500 kg de baterii plumb-acid care costa 2000 $ si dureaza 4 h incarcarea.
Problemele pe care le au bateriile explica de ce se pune accent asupra dezvoltarii
pilelor de combustie. Acestea sunt mult mai mici, mai usoare, poluare chimica redusa,
randament energetic ridicat (60%), densitate masica a energiei ridicata si se reincarca
foarte rapid. Este evident ca autovehiculele viitorului vor folosi motorul electric pentru
tractiune, iar energia electrica necesara va fi produsa de catre pilele de combustie.
Tabel comparativ pentru baterii
Sistem
Densitate de energie
Wh/kg Wh/l
Putere specifica
W/kg
Nr. de cicluri de incarca -
descarcare
Disponibilitate industriala
Pb-acid 31 – 40 75 – 90 90 – 125 600 – 1000 DaNi-Cd 45 – 58 80 – 95 190 2000 DaNiMH 55 – 60 100 – 130 175 * NuNi-Fe 50 – 60 80 – 95 110 1000 – 1500 NuNa-S 80 – 100 110 – 135 100 – 120 500 Nu
Li 80 – 120 100 – 120 70 >200 Nu
5. Concluzii
Avantaje si dezavantaje ale folosirii autovehiculelor electrice in locul
autovehiculelor cu motoare clasice cu combustie interna.
Avantaje:
- au un cost de exploatare aproape gratuit (circa 1 euro/100km);
- se pot conduce usor, (unele nu au comenzi cu pedale pot fi utilizate si de catre
anumite persoane cu handicap fizic);
- intretinere simpla, usor de manevrat in parcare si de incarcat bateriile;
- nu fac zgomot si nu emana fum, oxid de carbon, metale grele si alte noxe
daunatoare mediului si vietii;
- nu consuma suplimentar la stationarea temporara -in trafic- la semafoare, etc;
- posibilitatea de utilizare a unor sisteme de actionare sofisticate, oferite de cele
mai moderne realizari in domeniul actionarilor electrice;
- posibilitatea realizarii comode a sistemelor de franare antiblocante, prin
utilizarea franarii electrice; daca franrea este recuperative, se face si o
importanta economie de energie;
- posibilitatea de actionare individuala a rotilor (eventual, prin inglobarea
motoarelor de tractiune in roti, realizand asanumitele motoroti); aceasta
conduce la simplificarea sistemelor de transmisie, cea mai importanta fiind
eliminarea diferentialului mecanic;
- au cuplu constant la variatii ale turatiei in limite mari.
Dezavantaje:
- principalul dezavantaj este acela al autonomiei reduse;
- au cost de achizitie ridicat;
- bateria de acumulatori are o densitate de energie scazuta, o durata de viata
relativ mica limitata de numarul de cicluri incarcare – descarcare, timpi mari
de incarcare;
- cheltuielile pentru intretinerea bateriilor sunt destul de ridicate;
- sunt necesare investitii initiale mari, daca productia automobilelor este de
serie mica.
7. Bibliografie
1. http://ro.wikipedia.org
2. www.venturifetish.fr
3. www.teslamotors.com
4. www.wrightspeed.com
5. http://www.econogics.com/ev/evhistry.htm
6. http://www.newton.mec.edu
7. http://www.dassault.fr
8. http://sloan.stanford.edu
9. http://mikes.railhistory.railfan.net
10. http://inventors.about.com
11. www.youtube.com


















