2-Caracteristici geometrice
16
Caracteristici geometrice si de inertie ale suprafetelor plane 1) Definitii Definiţii Considerând o suprafaţă plană, de formă oarecare (fig. 2.1), având centrul de greutate în punctul G, se alege un sistem arbitrar de axe perpendiculare între ele (yOz) (în studiul rezistenţei materialelor, axa x coincide, de obicei, cu axa longitudinală a corpului solid). Coordonatele lui G sunt z G şi y G . Fie un element de arie (dA), la distanţele y şi z faţă de axele de coordonate, respectiv r – faţă de polul O. În aceste condiţii, se pot defini mai multe caracteristici ale suprafeţei. 1. Aria A dA m A [ ] 2 (2.1) Aria este totdeauna o mărime strict pozitivă (fiind zero numai dacă suprafaţa se reduce la un punct). 2. Momentele statice (faţă de axe) S ydA y A S zdA z A z G A y G A [m 3 ] (2.2) Momentele statice sunt nule în raport cu axele care trec prin centrul de greutate G. Pentru o suprafaţă de formă complexă care poate fi descompusă în (n) suprafeţe elementare, pentru care se pot calcula ariile A i şi poziţiile centrelor de greutate G i , momentele statice globale vor fi: S y A respectiv S z A z G i i n y G i i n i i 1 1 (2.3)
-
Upload
vintiloius -
Category
Documents
-
view
25 -
download
4
Transcript of 2-Caracteristici geometrice

Caracteristici geometrice si de inertie ale suprafetelor plane
1) Definitii
Definiţii
Considerând o suprafaţă plană, de formă oarecare (fig. 2.1), având centrul de greutate în punctul G, se alege un sistem arbitrar de axe perpendiculare între ele (yOz) (în studiul rezistenţei materialelor, axa x coincide, de obicei, cu axa longitudinală a corpului solid). Coordonatele lui G sunt zG şi yG. Fie un element de arie (dA), la distanţele y şi z faţă de axele de coordonate, respectiv r – faţă de polul O. În aceste condiţii, se pot defini mai multe caracteristici ale suprafeţei. 1. Aria
A dA mA
[ ]2
(2.1)Aria este totdeauna o mărime strict pozitivă (fiind zero numai dacă suprafaţa se reduce la un punct).
2. Momentele statice (faţă de axe)
S y dA y A
S zdA z A
z GA
y GA
[m3] (2.2)
Momentele statice sunt nule în raport cu axele care trec prin centrul de greutate G.
Pentru o suprafaţă de formă complexă care poate fi descompusă în (n) suprafeţe elementare, pentru care se pot calcula ariile A i şi poziţiile centrelor de greutate Gi, momentele statice globale vor fi:
S y A respectiv S z Az G ii
n
y G ii
n
i i
1 1 (2.3)Aceste relaţii sunt folosite la calculul coordonatelor centrului de greutate pentru suprafeţele complexe, pe baza egalării momentelor statice globale calculate cu (2.3), respectiv cu ultima formă din (2.2).
y
S
A
y A
A
zS
A
z A
AG
zG i
i
n
ii
n Gy
G ii
n
ii
n
i i
1
1
1
1 (2.4) 3. Momentele de inerţie
a) axiale

I y dA respectiv I z dAzA
yA
2 2
[m4] (2.5)Dacă sistemul de axe este dus în centrul de greutate (axe centrale), atunci momentele axiale se numesc centrale.
b) polar
I r dApA
2
[m4] (2.6)Momentele axiale şi polare sunt mărimi strict pozitive, având valoarea zero numai pentru suprafeţele reduse la un punct.
c) centrifugal
I yzdAzyA
[m4] (2.7)
Dacă una dintre axe este axă de simetrie a suprafeţei, atunci momentul centrifugal este nul.
Deoarece raza polară r este legată de coordonatele y şi z prin relaţia (r2 = y2+z2), ca laturi ale unui triunghi dreptunghic (fig. 2.1), rezultă că între momentele de inerţie axiale şi cel polar există relaţia:Ip = Iz + Iy (2.8)De aici rezultă că, pentru un anumit pol, suma momentelor axiale este un invariant, de valoarea momentului polar, nedepinzând de alegerea axelor de coordonate.
Pentru o suprafaţă de formă complexă care poate fi descompusă în (n) suprafeţe elementare, momentele de inerţie globale se vor calcula (aşa cum se calculează şi aria totală) ca sume algebrice ale momentelor suprafeţelor componente (luând cu semn negativ termenii care corespund unor decupări), cu condiţia ca toate momentele dintr-o asemenea relaţie să fie calculate faţă de un acelaşi sistem de axe.
2) Variatia momentelor de inertie la deplasarea prin translatie a axelor de coordonate
Variaţia momentelor de inerţie la deplasarea prin translaţie a axelor de coordonate
Dacă se duc, în centrul de greutate G al suprafeţei din figura 2.1, axele de coordonate y1 şi z1, care se găsesc la distanţele zG, respectiv yG, faţă de axele iniţiale, atunci între momentele de inerţie calculate faţă de aceste perechi de axe există relaţiile demonstrate de Steiner (cunoscute din mecanica tehnică) şi care în acest caz se vor scrie sub forma următoare:I I A y I I A z
I I A y z
z z G y y G
zy z y G G
1 1
1 1
2 2
(2.9)Aceste relaţii sunt foarte utile la calculul momentelor globale ale suprafeţelor complexe, aşa cum se va vedea în aplicaţiile de mai jos.

3) Variatia momentelor de inertie la deplasarea prin rotire a axelor de coordonate
Variaţia momentelor de inerţie la deplasarea prin rotire a axelor de coordonate
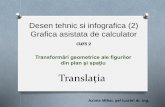
Se consideră sistemul de axe (yOz), precum şi un nou sistem (y1Oz1), rotit faţă de primul cu unghiul a (fig. 2.2). Dacă se scriu relaţiile între coordo-natele faţă de cele două repere ale elementului de arie dA şi se introduc în (2.5) şi (2.7), atunci se obţin relaţiile (2.10) pentru calculul momentelor de inerţie ale suprafeţei, faţă de noul reper, în funcţie de momentele iniţiale şi de unghiul de rotire.
II I I I
I
II I I I
I
II I
I
zz y z y
zy
yz y z y
zy
z yz y
zy
1
1
1 1
2 22 2
2 22 2
22 2
cos sin
cos sin
sin cos
a a
a a
a a(2.10)
Se observă că prin sumarea, membru cu membru, a primelor două egalităţi (2.10) se obţine:I I I Iz y z y1 1
ceea ce reprezintă o confirmare a relaţiei (2.8).
4) Momentele de inertie principale centrale
Momentele de inerţie principale centrale
Dacă se imaginează o bară prismatică, de secţiune dreptunghiulară (de forma unei rigle de plastic), este uşor de înţeles că ea poate fi îndoită mult mai uşor în jurul laturii mai lungi a secţiunii transversale, decât pe direcţia laturii mai scurte. Rezultă că, pentru astfel de bare, rezistenţa la solicitarea descrisă (încovoiere) depinde în mod direct de orientarea secţiunii transversale faţă de direcţia pe care se produce solicitarea.
Se va arăta ulterior că mărimea hotărâtoare în această privinţă este momentul de inerţie al secţiunii faţă de axa de îndoire. În acest sens, o secţiune transversală
O
y
a
z z
y
dA z1 y1
z1
y1
Fig. 2.2.

oarecare va conduce la rezistenţa maximă a barei la încovoiere dacă momentul său de inerţie faţă de axa momentului încovoietor are cea mai mare valoare posibilă.
Trebuie făcută precizarea că barele se consideră a fi rezemate şi solicitate pe axa lor geometrică. Aceasta reprezintă şirul centrelor de greutate ale secţiunilor transversale, astfel că, dintre toate punctele unei secţiuni, în rezistenţa materialelor este important centrul său de greutate.
Caracteristicile de inerţie ale secţiunii vor fi aşadar calculate cu raportare la axe care trec prin G (axe centrale), iar discuţia care urmează, deşi valabilă pentru oricare punct al unei suprafeţe finite plane, se va face cu referire la punctul G.
Se pune problema să se determine valorile extreme (principale) ale momentelor de inerţie axiale, adică este necesar să se deriveze, în raport cu (2a), primele două relaţii (2.10). Se ajunge la anularea acestor derivate pentru situaţiile în care se îndeplineşte condiţia
tgI
I Izy
z y
22
a (2.11)
Deoarece funcţia (tg2a) are perioada (kp), rezultă că soluţia ecuaţiei trigonometrice de mai sus se scrie sub forma:
ap
1
2
2
2arctg
I
I Ik
zy
z y (2.12)
Aceste valori de unghi reprezintă înclinările, faţă de sistemul iniţial (yGz), ale axelor de coordonate în raport cu care se obţin valorile extreme ale momentelor de inerţie axiale pentru secţiunea considerată.
Se observă că este vorba, de fapt, despre numai două axe, perpendiculare între ele, una corespunzând valorii maxime (I1), cealaltă valorii minime (I2) a momentelor de inerţie. Aceste valori reprezintă momentele de inerţie principale centrale ale secţiunii şi se calculează cu următoarea relaţie:
II I
I I Iz y
z y zy1 2
22
2
1
24,
(2.13)
Axele, duse prin G, care corespund acestor valori se numesc axele principale centrale ale secţiunii. De regulă, acestea vor fi chiar axele y şi z ale reperelor folosite în rezolvarea problemelor întâlnite în studiul rezistenţei materialelor.
Prin urmare, determinarea axelor principale centrale ale secţiunilor transversale ale corpurilor va reprezenta o etapă importantă a rezolvării diverselor situaţii de solicitare.
Atenţie: Din relaţia (2.11) rezultă că vor fi axe principale acele axe pentru care Izy = 0. După cum s-a precizat anterior, această condiţie este îndeplinită de axele de simetrie ale secţiunii. Prin urmare, oricare axă de simetrie a unei secţiuni plane este axă principală centrală a ei!
Consecinţe:1. 1. Dacă o suprafaţă plană are o axă de simetrie, aceasta este axă principală
centrală, cea de-a doua fiind perpendiculară pe prima, în centrul de greutate.2. 2. Secţiunile cu mai mult decât două axe de simetrie (cum sunt poligoanele
regulate şi, la limită, cercul), au o infinitate de axe principale centrale. În plus, cum valorile maxime şi minime ale momentelor principale sunt egale,

rezultă că I1 = I2 = Iz = Iy = ct, adică momentele de inerţie axiale centrale ale acestor secţiuni nu depind, ca valoare, de axele alese.
În directă legătură cu momentele principale centrale se definesc alte două caracteristici ale suprafeţelor plane, după cum urmează.
Razele de inerţie (de giraţie)
iI
Arespectiv i
I
Azz
yy
[m] (2.14)
Modulele de rezistenţă
Se calculează ca raport între momentul de inerţie axial sau polar şi distanţa maximă a unui punct de pe secţiune până la axa (sau punctul) de reper. Sunt de două categorii:
a) axiale
WI
yrespectiv W
I
zzz
yy
max max [m3] (2.15)
b) polar
WI
rpp
max [m3] (2.16)
Atenţie: Pentru suprafeţele compuse, razele de inerţie şi modulele de rezistenţă nu pot fi calculate ca sume algebrice ale valorilor corespunzătoare suprafeţelor elementare, ci numai prin aplicarea definiţiei!
Exemple de calcul
Exemple de calcul
A. Caracteristicile de inerţie ale figurilor geometrice elementare
2.1. Dreptunghiul de laturi b şi hAceastă secţiune are două axe de simetrie, care vor fi deci axele principale centrale y şi z. Se defineşte, la distanţa y de axa z, un element de arie dA, de formă dreptunghiulară şi laturi b şi dy (fig. 2.3).
Rezultă că aria lui va fi:dA = b dy
h
y
dy
z G
b
y
Fig. 2.3.

Pentru a verifica dacă abordarea problemei este corectă, se calculează aria dreptunghiului, după definiţia din relaţia (2.1), astfel:
A dA b dy bh h
b hA h
h
2
2
2 2
(2.17)Momentul de inerţie faţă de axa (z) fi:
I y dA y b dy bh h b h
zA h
h
2 2
2
2 3 3 31
3 2 2 12
(2.18)
Procedând analog, se obţine:I
b hy
3
12
Razele de inerţie:
iI
A
h hrespectiv i
b bz
zy
2 2
12
3
6 12
3
6 (2.19)Modulele de rezistenţă:
WI
y
b h
h
b hrespectiv W
I
b
b hz
zy
y max / /
3
2 212
2 6 2 6 (2.20)Observaţie: Caracteristicile polare sunt importante şi vor fi calculate numai pentru secţiunile circulare! 2.2. Cercul de rază R şi diametru d
Cercul are o infinitate de axe de simetrie, deci oricare diametru al său coincide cu direcţia unei axe principale centrale.
Elementul de arie se alege (fig. 2.3) sub forma unui inel de rază r şi grosime (dr), iar aria lui este: dA = 2p r drAria cercului va fi:
A r drr
Rd
RR
2 22 4
2
0
22
0
p p pp
Momentele de inerţie:
I r drr R d
p
RR
2 24 2 32
34
0
4 4
0
p pp p
(2.21)Folosind relaţia (2.8) şi egalitatea Iz = Iy, se pot afla momentele axiale:
d
r dr
z G R
y
Fig. 2.3.

I II d
z yp
2 64
4p
(2.22)
Razele de inerţie:i i
I
A
d dz y
z 2
16 4 (2.23)
Modulele de rezistenţă:W
I
r
I
d
dp
p p max / 2 16
3p
(2.24)
W WI
y
I
d
dz y
z z max / 2 32
3p
(2.25)
2.3. Secţiunea circulară inelară cu dint = d şi dext = D (fig. 2.4).
Pe baza rezultatelor de mai sus, momentele de inerţie se calculează prin “scăderea” cercului interior din cel exterior:
I
D d
I ID d I
p
z yp
p
p
4 4
4 4
32
64 2 (2.26)
Razele de inerţie vor fi:
i i
I
A
D d
D d
D dz y
z
p
p
4 4
2 2
2 2
64
4
4 (2.27)
Modulele de rezistenţă se calculează după relaţiile de definiţie (2.15)-(2.16):
W
I
r
I
D
D d
Dpp p
max / 2 16
4 4p
(2.28)
W W
I
y
I
D
D d
Dz yz z
max / 2 32
4 4p
(2.29)
D
d z G
y
Fig. 2.4.

2.4. Triunghiul isoscel, cu baza b şi înălţimea h
Axele principale centrale sunt cele din figura 2.5. Elementul de arie este dreptunghiular, de laturi b(y) şi dy. Pe baza asemănării unor triunghiuri se poate scrie că:
b y
b
hy
hb y
b
h
hy
( )( )
2
3 2
3
Aria triunghiului şi momentul de inerţie faţă de axa principală centrală (z) vor fi:
Ab
h
hy dy
b
h
h h h h h
b
h
hh
h b
h
h h b h
h
h
2
3
2
3
2
3 3
1
2
4
9 9
2
3
1
2 3
4
6 2
3
2
3 2 2
2 2 2
Ib
hy
hy dy
b
h
h h h h h
b
h
h h h b h b h
zh
h
2
3
2
3 3 3 4 4
3 4 3 3
2
3
2
3
1
3
2
3 3
1
4
2
3 3
2
9
9
27
1
4
15
81 272
5
4 36 (2.30)
Este uşor de observat că, în acest caz, nu se poate scrie momentul faţă de axa (y) prin permutarea literelor b şi h, deoarece axele au poziţii diferite faţă de laturile triunghiului (axa z este paralelă cu una dintre laturi).
Pentru a folosi, totuşi, rezultatul precedent, se fac notaţiile din figura 2.6, unde M este mijlocul lui BC, iar axa (y1) trece prin centrul de greutate G1 al triunghiului ABM.
b(y)
h/3
h y
dy
z G
b
y
Fig. 2.5.
A
G1 M B C
h y1
z G
b
y
Fig. 2.6.

În aceste condiţii, momentul Iy1(ABM) se poate afla cu o relaţie de forma (2.30) după care, cu relaţia lui Steiner (2.9), se calculează Iy(ABM), aşa cum se arată în expresia (2.31):
I ABC I ABM I ABMBM AM b
hb b
h b h b b h
y y y( ) ( ) ( )
2 22 6
22
3622 36
24 36
1
21
48
1
2
3
2 3 3
(2.31)
Modulele de rezistenţă:
WI
y
b h
hb h
respectiv WI
z
b h
bb h
zz
yy
max max
3
2
3
2362
324
48
224
(2.32)
Razele de inerţie:
iI
A
h hrespectiv i
I
A
b bz
zy
y 2 2
18
2
6 24
6
12 (2.33)
B. Aplicaţii pentru alte secţiuni plane
Rezultatele obţinute în subcapitolul precedent sunt utilizate în mod curent la calculul caracteristicilor unor secţiuni derivate din cele elementare, sau care se descompun în suprafeţe elementare, aşa cum se arată în continuare. 2.5. Triunghiul echilateral de latură a (fig. 2.7)
Se observă că înălţimea triunghiului poate fi exprimată în funcţie de latura a, astfel:
h aa a
22
4
3
2
Aplicând relaţiile (2.29) şi (2.30), se pot calcula momentele de inerţie principale centrale:
A
B C
h z G
b = a
y
Fig. 2.7.

Ib h
aa a
Ib h
aa a
z
y
3 3 4
33
4
36
1
36
3 3
8
3
96
48
1
48
3
2
3
96Rezultă că, în cazul triunghiurilor echilaterale, momentele de inerţie centrale sunt invariante, la rotirea axelor (pentru că maximul şi minimul lor au, de fapt, aceeaşi valoare!). Acest fapt se explică, aşa cum s-a arătat mai sus, prin existenţa celor 3 axe de simetrie ale acestor suprafeţe, toate fiind axe principale centrale. 2.6. Secţiune compusă din mai multe figuri geometrice elementare
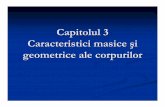
Se consideră secţiunea delimitată de punctele ABNMQPCD (fig. 2.8), formată prin decuparea dreptunghiului MNPQ din dreptunghiul ABCD. Să se calculeze momentele de inerţie principale centrale şi modulele de rezistenţă ale acestei secţiuni.
Rezolvare
Se observă că secţiunea admite o axă de simetrie orizontală, care va fi axa principală centrală (z) a secţiunii. Axa (y) va fi perpendiculara pe (z) în centrul de greutate G al întregii secţiuni.
Pentru a determina poziţia pe axa (z) a lui G, se alege o axă (y1), de exemplu pe latura AD a secţiunii.
Folosind cea de-a doua relaţie (2.4) se calculează coordonata căutată, ţinând seama că centrele de greutate ale dreptunghiurilor elementare se află la distanţele (9/2)t, respectiv [3t + (6/2)t] faţă de axa (y1).
Rezultă că:
z
z A
A
t t t t t t t
t t t t
t
ttG
G i
i
i
9
29 12 3
6
26 8
9 12 6 8
18 27 16
12 9 4
33
10
3
2
Prin urmare, axa principală centrală (y) va avea poziţia arătată în figura 2.8.
Dacă se începe prin a calcula momentul Iy, alegând descompunerea secţiunii în cele două dreptunghiuri precizate mai sus, ABCD şi MNPQ, se observă că nici unul dintre ele nu are centrul de greutate pe axa globală (y) a secţiunii. Pentru calculul momentului lor faţă de axa (y) se va aplica relaţia lui Steiner, astfel:
E
F
12t
9t 3t
y1
B A
M N
P
D C
Q
zG2
zG1
z G 8t
y
Fig. 2.8.

I I ABCD I MNPQBC AB
t z A
NP MNt z A
t tt t t t
t tt t t t t
y y y G ABCD
G MNPQ
( ) ( )3 2
32
3 2
3 24
12
9
2
126
12 9
12
9
2
33
109 12
8 6
126
33
106 8 9 81
144
10012
48 3729
100
243 91 36 343
25
9765
25390 64 4 4t t t,
Pentru calculul celuilalt moment principal central, se poate proceda în două moduri.
a) Cu descompunerea secţiunii în cele două dreptunghiuri de mai susÎn acest caz, ambele dreptunghiuri elementare au centrul de greutate pe axa principală globală (z), deci folosirea relaţiei Steiner nu mai este necesară:
I I ABCD I MNPQAB BC MN PN
t t t tt t
z z z
( ) ( )3 3
3 34 4
12 12
9 12
12
6 8
129 144 4 64 1040
b) Cu descompunerea secţiunii într-un dreptunghi “vertical” FMQE, cu centrul de greutate pe axa (z) şi două dreptunghiuri “orizontale”, ABNF şi EPCD (pe liniile punctate din figura 2.8), având centrele de greutate pe axele (z1) şi (z2), care sunt axele lor principale centrale, paralele cu (z).
Momentul global faţă de axa(z) va fi:
I I FMQE I ABNFFM MQ AB BN
t t AB BNt t t t
t t t
t t t
z z z
( ) ( )212
212
2 43 8
122
9 2
1225 9 2
2 64 2 6 450 128 912 1040
3 3
23 3
2
4 4 4
Atenţie: S-a obţinut acelaşi rezultat prin ambele metode, dar calculul a fost mai laborios în cazul al doilea! Rezultă că este important ca descompunerea secţiunilor complexe să se facă în modul care conduce la cele mai simple calcule (ceea ce se învaţă, prin exerciţiu), micşorându-se astfel şi probabilitatea apariţiei greşelilor de calcul.
Pentru determinarea modulelor de rezistenţă ale secţiunii globale, se aplică definiţia acestor mărimi, observând că
ymax = (12/2)t = 6tzmax = 9t - zG = 9t - (33/10)t = (57/10)t
Rezultă:

WI
y
t
tt respectiv W
I
z
t
ttz
zy
y
max max
, ,1040
6173 3
9765
2557
10
68 534
3
4
3
Prin urmare, o grindă cu secţiunea transversală de forma şi proporţiile din figura 2.8 va avea capacitatea maximă de rezistenţă la încovoiere dacă se va orienta cu axa principală centrală (z) pe direcţia momentului încovoietor (adică îndoirea barei se va produce în jurul acestei axe).
5) Determinarea momentelor principale centrale pentru sectiunile lipsite de simetriiDeterminarea momentelor principale centrale pentru secţiunile lipsite de simetrii
Cele mai multe dintre secţiunile plane întâlnite în calculele inginereşti au cel puţin o axă de simetrie, aşa cum au fost toate secţiunile abordate în aplicaţiile de mai sus.
Pentru secţiunile fără vreo axă de simetrie, caracteristicile de inerţie se calculează ceva mai complicat. Deoarece în capitolele următoare din lucrarea de faţă nu se vor întâlni asemenea exemple, se vor preciza în acest paragraf doar etapele de lucru ale unei astfel de probleme.
Pe scurt, la calculul momentelor principale centrale ale unei secţiuni arbitrare, fără simetrie, se procedează astfel:
Se alege un sistem oarecare de axe rectangulare. Se descompune, eventual, secţiunea, în figuri geometrice elementare. Se calculează coordonatele centrului de greutate G al secţiunii. Se transferă sistemul de referinţă în punctul G (alegând o poziţie a
axelor care să simplifice calculele ulterioare). Se calculează, în raport cu acest sistem de axe, momentele Iz, Iy şi Izy
ale întregii secţiuni. Cu relaţia (2.11) se determină unghiul de înclinare a axelor principale
centrale ale secţiunii. Folosind relaţia (2.13) se calculează momentele principale centrale
ale secţiunii, I1 şi I2. Dacă este necesar, se calculează, cu relaţiile de definiţie (2.14) şi
(2.15), razele de inerţie şi respectiv modulele de rezistenţă ale secţiunii studiate.