2-2 Elemente de Mecanica Newtoniana - Probleme
23
2. Elemente de mecanică newtoniană 80 PROBLEME REZOLVATE 2.1. Două particule se mişcă pe direcţia Ox conform ecuaţiilor: () 1 0 x t x vt = + 1 , () 2 2 2 1 x t vt at 2 = + a) Să se reprezinte grafic , şi () 1 x t ( ) 2 x t . b) Să se exprime distanţa dintre particule ca funcţie de timp. c) Este posibilă întâlnirea particulelor? d) Să se stabilească momentul când distanţa dintre particule este minimă, precum şi valoarea acesteia. Se consideră: . 2 0 1 2 x 1m;v 1m / s;v 2m / s;a 1m/ s = = = =− Rezolvare: a) () () 2 1 2 1 x t 1 t; x t 2t t 2 = + = − b) D= () () 2 1 2 1 D x t x t 1 t t 2 ⎛ ⎞ = − = − + ⎜ ⎟ ⎝ ⎠ c) Nu, deoarece ecuaţia D=0 are rădăcini imaginare. d) dD 0 dt = conduce la t=1s. La acest moment de timp distanţa dintre particule este minimă. D(1)=1/2 m 2.2. Să se stabilească traiectoria punctului material care se deplasează în planul xOy conform ecuaţiilor:
Transcript of 2-2 Elemente de Mecanica Newtoniana - Probleme

2. Elemente de mecanică newtoniană 80
PROBLEME REZOLVATE 2.1. Două particule se mişcă pe direcţia Ox conform ecuaţiilor:
( )1 0x t x v t= + 1 , ( ) 22 2
1x t v t at2
= +
a) Să se reprezinte grafic , şi ( )1x t ( )2x t . b) Să se exprime distanţa dintre particule ca funcţie de timp. c) Este posibilă întâlnirea particulelor? d) Să se stabilească momentul când distanţa dintre particule este minimă, precum şi valoarea acesteia. Se consideră: . 2
0 1 2x 1m;v 1m/ s;v 2m/ s;a 1m/ s= = = = −
Rezolvare:
a) ( ) ( ) 21 2
1x t 1 t; x t 2t t2
= + = −
b) D= ( ) ( ) 21 2
1D x t x t 1 t t2
⎛ ⎞= − = − +⎜ ⎟⎝ ⎠
c) Nu, deoarece ecuaţia D=0 are rădăcini imaginare.
d) dD 0dt
= conduce la t=1s. La acest moment de timp distanţa dintre particule
este minimă. D(1)=1/2 m
2.2. Să se stabilească traiectoria punctului material care se deplasează în planul xOy conform ecuaţiilor:

2. Elemente de mecanică newtoniană 81
a) 0 x 0 yx x v t; y y v t= + = +
b) 20 x 0 y
1x x v t; y y v t at2
= + = + +
c) 20 x 0 y
1x x v t at ; y y v t2
= + + = +
d) . x A cos t; y A sin t= ω = ω Să se recunoască natura geometrică a curbelor obţinute; sunt constante.
0 0 x yx ,y ,A,v ,v ,a,ω
Rezolvare: Pentru a afla traiectoriile se elimină timpul între cele două ecuaţii în
fiecare caz în parte. Astfel, rezultă:
a) (y0 0
x
vy y x x
v= + − ) , dreaptă
b) ( ) (y0 0 2x x
v ay y x x x xv 2v
= + − + − )0 , parabolă
c) ( ) (x0 0 2y y
v ax x y y y yv 2v
= + − + − )0
2
, parabolă
d) , cerc. 2 2x y r+ = 2.3. Legea de mişcare a unui punct material este dată de relaţia:
2x x y y z 0
1r 1 v t 1 (v t at ) 1 z cos t2
= + + +r uur uur uur
ω
Să se calculeze: a) Viteza şi acceleraţia b) Aplicaţia numerică pentru t=0 şi t=1s, ştiind că:
2x yv v 1m/ s,a 1m/ s ,z 1m= = = = şi 1s−ω = π .
Rezolvare:
a) Se ştie că: rdtrdv &rr
r== . Astfel: x x y y z 0v 1 v 1 (v at) 1 z sin t= + + − ω ω
r uur uur uur
x xv (t) v
, de
unde rezultă componentele vitezei: = ; ;
. yv (t) v= y at+
z 0v (t) z sin t= − ω ωDeci, v(t) va fi:

2. Elemente de mecanică newtoniană 82
2 22 2 2x y 0v(t)= v (v at) z sin t+ + + ω ω
Ştiind că
tcosz1a1vdt
rda 20zy2
2ωω−===
rr&r
rr
,
componentele acceleraţiei vor fi:
x
y2
z 0
a (t) 0a (t) a
a (t) z cos t
⎧ =⎪⎪ =⎨⎪
= − ω ω⎪⎩
Atunci a(t) va fi: 22 4 2
0a(t) a z cos t= + ω ω .
b) v(0) 1,41m/ s≅
4 2
4 2
a(0) 1 9,9m/ s
v(1) 5 2,2m/ s
a(1) 1 9,9m/ s
= + π ≅
= ≅
= + π ≅
2.4. Să se găsească viteza şi poziţia unui corp la momentul de timp t=1s, dacă acceleraţia acestuia are componentele: x 0 y 0 za a ; a a cos t; a kt= = ω = .
Aplicaţie numerică: 3 10k 2ms ; s ;a 50cm/ s
2− − 2π
= ω = = .
Se ştie că la momentul de timp t=0, corpul se află în originea sistemului de referinţă, şi în repaus. Rezolvare: Ştiind că :
xx
dvadt
= , yy
dva
dt= , z
zdvadt
= ,
vom calcula componentele vitezei:
x xv a= ∫ dt y yv a= ; dt∫ ; z zv a= dt∫ .
Prin integrare obţinem:

2. Elemente de mecanică newtoniană 83
x 0x 0
0y 0y
2z 0z
v v a tav v sin
1v v Kt2
⎧⎪ = +⎪⎪ t= + ω⎨ ω⎪⎪
= +⎪⎩
Din condiţiile iniţiale, rezultă că: 2
0 0 0 0 Ox Oy Oza 0,5m/ s ;x y z 0;v v v 0= = = = = = = , şi atunci:
2 2 2x y zv v +v +v= ( )
2 22 20
0a 1a t sin t Kt
2⎛ ⎞ ⎛ ⎞= + ω + ⎜ ⎟⎜ ⎟ω ⎝ ⎠⎝ ⎠
Deoarece xdxvdt
= , ydyvdt
= , zdzvdt
= , vom obţine coordonatele x, y, z prin
integrarea vitezelor. La modul general, acestea sunt:
20x0x ta
21tvdtvx +== ∫
0y 0y 2
ay v dt v t cos= = −ω∫ tω
3z 0z
1z v dt v t Kt6
= = +∫ .
Vectorul de poziţie:
x y zr(t) 1 x(t) 1 y(t) 1 z(t)= ⋅ + ⋅ + ⋅r uur uur uur
are modulul:
2 2 2r(t) x y z= + + . Ţinând seama de condiţiile iniţiale, la momentul t=1s se obţin:
x y z1v 0,5m/ s;v m/ s;v 1m/ s;v 1,16m/ s= = = =π
x 0,25m;y 0m;z 1/ 3m;r 0,46m= = = = . 2.5. Considerând două puncte materiale aflate în mişcare, pentru care se cunosc
şi , să se găsească 21a (t) t t= + 2
2a (t) 2t= −& 21 21r r (t)= dacă la t=0 se ştie că şi 2,0 1,0a 0,v 2,0v 0= 1,0= = 2,0r r 0= = .

2. Elemente de mecanică newtoniană 84
Rezolvare: Pentru primul corp avem:
2 31 1
t tv a dt C2 3 1= = + +∫
Dar astfel că 1,0 1v 0 C= ⇒ = 02 3
1t tv (t)2 3
= + . Atunci
3 41 1
t tr v dt C6 12
= = + +∫ 2
0
Deoarece . 1,0 2r 0 C= ⇒ =Pentru cel de-al doilea corp, obţinem:
32 2
2a a dt t C3
= = − +∫ & 3.
0 0
Deoarece rezultă că 2,0a = 3C = astel că 32
2a t3
= − .
Atunci: 4
2 2tv a dt C6
= = − +∫ 4 0, unde din aceleaşi considerente şi
atunci:
4C =
52 2
1r v dt t C30
= = − +∫ 5 , iar 5C 0= .
Astfel 3
5 421 2 1
1 1r r r t t30 12 6
= − = − − −t .
2.6. Pentru un punct material aflat în mişcare accelerată se cunosc: 1a(t) t2
=&& şi
. Să se calculeze spaţiul parcurs de punctul material în prima secundă de la începutul mişcării. ( )a 0 1,a(0) 2,v(0) 3= = =&
Rezolvare:
2
1 1ta adt C ;a(0) 1 C4
= = + = ⇒ =∫& && & 1
Deci: 2ta 14
= +&
Astfel: 3
2ta adt t C12
= = + +∫ &

2. Elemente de mecanică newtoniană 85
Deoarece rezultă că a(0) 2= 2C 2= şi 3ta t
122= + + .
Atunci: 4 2
3t tv adt 2t C48 2
= = + + +∫ , unde 3C 3= . Astfel ( )s t va fi:
5 32
4t ts(t) vdt t 3t C
240 6= = + + + +∫ .
Atunci spaţiul parcurs în prima secundă va fi: 1 1 101s s(1) s(0) 4 m
240 6 240Δ = − = + + = .
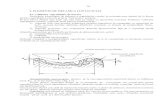
2.7. Un punct material se deplasează cu viteza constantă v pe o curbă continuă realizată din două semicercuri de raze 1R 2m= şi 2R 1m= , conform figurii de mai jos. Să se determine punctele în care apare un salt al acceleraţiei normale şi să se calculeze raportul valorilor acesteia. Rezolvare:
Pentru mişcarea circulară, acceleraţia normală este dată de: 2
nvaR
=
Cum pe parcursul întregii mişcări v = constant, este constantă pe semicercul
AB, având valoarea
na2
n,11
vaR
= şi semicercul BC unde valoarea 2
n,22
vaR
= .
Apare astfel un singur punct de salt al acceleraţiei normale şi anume în punctul B, raportul celor două valori fiind:
n,2 1
n,1 2
a R 2a R
= = .

2. Elemente de mecanică newtoniană 86
2.8. Considerând două puncte materiale, care la t=0, pleacă fără viteză iniţială din poziţiile 1 xr (0) 2 1 1y= ⋅ −
ur uur uur, respectiv, 2r (0) 0=
ur
y1
, cu acceleraţiile constate:
, respectiv, a 11a 2= ⋅uur u
x y1 1+ur uur
2 x= −uur uur uru
, să se determine poziţia relativă a corpului 2 faţă de corpul 1 la t =4s. Rezolvare: Pentru o mişcare cu a =constant, viteza este
r1 0v(t) adt C at v= + = +∫
r r uur r uur şi
vectorul de poziţie va fi: 2
2 0atr(t) v(t)dt C v t r2
= + = +∫ 0+
rr r uuur uur ur
.
Atunci, vectorii de poziţie pentru cele două puncte materiale sunt:
2 21
1 01 01 x ya t tr (t) v t r (2 1 1 ) 2 1 1
2 2= + + = ⋅ + + ⋅ −
uurur uuur uur uur uur uur uur
x y
2 22
2 02 02 xa t tr (t) v t r (1 1 )
2 2= + + = −
uurur uuuur uuur uur uur
y .
Poziţia relativă 12r
uur a corpului 2 faţă de corpul 1 este:
( )2
12 2 1 x y x ytr (t) r (t) r (t) 1 2 1 2 1 12
= − = − − ⋅ − ⋅ +uur ur ur uur uur uur uur
Astfel, pentru t = 4s, se obţine:
12 x yr (4) 10 1 15 1= − ⋅ − ⋅uur uur uru
2.9. Două corpuri, cu energiile cinetice constante şi egale între ele, se mişcă pe cercurile concentrice de raze şi . 1r 2ra) Să se găsească raportul dintre forţele care acţionează asupra corpurilor. b)Aplicaţie numerică pentru: 1 2r 2r= .
Rezolvare: a) Energia cinetică constantă conduce la relaţia:
C2vm
2vm 2
22211 ==

2. Elemente de mecanică newtoniană 87
De aici rezultă că vitezele 1v şi 2 sun nstante şi deci acceleraţiile tangenţiale,
definite ca
v t co
tdvadt
= , su n e.t nul
Acceleraţiile normale sunt date de relaţia:
mrC2
rva
2n == .
Astfel, raportul dintre forţele ce acţionează asupra corpurilor este:
1
2
1 n1 2
2 2 n
m aF rF m a r1
= =
b) 1
2
F 0,5F
= .
2.10. Să se scrie energia potenţială corespunzătoare forţei conservative:
2 2x y
1F xy1 (x y )1 yz12
= + + +r uur uur ur
zu
.
Rezolvare:
Ţinând cont de relaţia dintre forţă şi potenţial:
x yU U UF U 1 1 1x y z
⎛ ⎞∂ ∂ ∂= −∇ = − + +⎜ ⎟∂ ∂ ∂⎝ ⎠
r uur uur uurz
şi exprimând lucrul mecanic efectuat între punctele 0rur
şi rr
ca suma lucrurilor mecanice efectuate pe segmentele:
( ) (0 0 0 0 0x ,y ,z x,y ,z− ) , ( ) ( )0 0 0x,y ,z x,y,z− şi ( ) ( )0x,y,z x,y,z− , se obţine:
0 0 0
yx z2 2
0 0x y z
1U xy dx (x z )dy yzdz2
= − − + −∫ ∫ ∫ =
( ) ( )( ) ( ) =−−+−−−−= 20
220
20
20
20 zzy
21zxyy
21xxy
21
2 2 2 20 0 0
1 1(x z )y (x z )y2 2
= + − +
Cum potenţialul este definit până la o constantă aditivă, obţinem:
( ) 2 21U x,y,z (x z )y2
= − + .

2. Elemente de mecanică newtoniană 88
2.11. Să se găsească care din următoarele două câmpuri de forţă bidimensionale este conservativ şi să se evalueze potenţialul asociat acestuia: a) . x yF =ky , F =kx
b) , k fiind o constantă. x yF =ky , F kx= −
Rezolvare:
Pentru un câmp de forţe conservativ lucrul mecanic realizat prin deplasarea în câmpul de forţe pe orice contur închis este nul:
0dF =∫ lrr
Conform teoremei Stockes:
∫∫ ⋅×∇=S
SdFdFrr
lrr
,
unde , este vectorul unitar normal la suprafaţa dS. Astfel, pentru un câmp de forţe conservativ trebuie ca:
ndS dS 1= ⋅ur uur
n1uur
F 0∇× =r
. În cazul unui câmp bidimensional, singura componentă nenulă a rotorului este componenta normală pe plan care va fi calculată în cele 2 cazuri:
a) ( ) y yz
F FF 0
x y∂ ∂
∇× = − =∂ ∂
r.
În acest caz câmpul este conservativ. Potenţialul este legat de câmp prin relaţiile:
xFx∂φ
= −∂
yFy∂φ
= −∂
Astfel: kxy ct.φ = − +
b) ( ) 0k2y
Fx
FF xy
z ≠−=∂∂
−∂
∂=×∇
r.
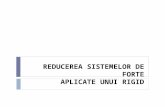
Câmpul nu este conservativ. 2.12. Găsiţi coordonatele centrului de masă al unei foi de tablă având forma din figură.

2. Elemente de mecanică newtoniană 89
Rezolvare:
m. 266,066,1
65,0x23,01,0x3y
m 233,064,1
65,03,0x21,0x3x
CM
CM
≅=++
=
≅=++
=
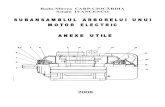
2.13. Găsiţi poziţia centrului de masă pentru sistemul de patru puncte materiale având masele , şi dispuse în planul xy ca în figura de mai jos.
1m =1kg 2m =2kg, 3m =2kg 4m =1kg
Rezolvare:
iM m 6= = kg∑
m611
Mxmxmxmxm
x 44332211CM =
+++=
m6
10M
ymymymymy 44332211
CM =+++
=
CMz 0=

2. Elemente de mecanică newtoniană 90
Atunci yxCM 1351
511r
rrr+= .
2.14. Să se calculeze momentul de inerţie al unei semisfere faţă de: a) axa de simetrie; b) o axă perpendiculară pe axa de simetrie ce trece prin centrul bazei; Semisfera este considerată omogenă, de densitate ρ şi rază R.
Rezolvare: a) Se alege axa de simetrie ca axă Oz cu originea în centrul bazei. Atunci, lucrând în coordonate sferice, momentul de inerţie al semisferei va fi:
( )2 R2
2 2 4 3
0 0 0
x y dV r sin drd d
ππ
Ι = ρ + = ρ θ θ ϕ∫ ∫ ∫∫ =
52 2R 4 2 2VR MR
5 3 5 5π
= ρ = ρ = ,
unde M este masa totală a sferei, 34 RM
3π
= ρ . Astfel 58 R15
Ι = ρπ .
La calculul momentului de inerţie s-a ţinut cont că, în coordonate sferice: 2dV r sin drd d= θ θ ϕ şi 2 2 2 2x y r sin+ = θ
b) Se consideră axa care ne interesează ca fiind axa Ox. Atunci:
( )2 R2
2 2 4 2
0 0 0
y z dV r (cos sin
ππ
Ι = ρ + = ρ θ θ +∫ ∫ ∫ ∫
R 23 2 4 2
0 0
sin sin )drd d r dr[2 cos sin d
π
+ θ ϕ θ ϕ = ρ π θ θ θ∫ ∫ +
2 22 3
0 0
sin d sin d ]
ππ
+ ϕ ϕ θ∫ ∫ =
5 52R 1 2 R 4 2[2 ] MR
5 3 3 5 3 5π
= ρ π ⋅ + π ⋅ = ρ = ,

2. Elemente de mecanică newtoniană 91
unde s-au folosit 2 2 2 2y r sin sin= θ ϕ2 2 2z r cos= θ .
2.15. Să se calculeze momentul de inerţie al unui cilindru de rază R şi înălţime h faţă de: a) axa de simetrie; b) faţă de o axă perpendiculară pe axa de simetrie în centrul de masă; Se consideră cilindrul omogen, de densitate ρ.
Rezolvare: a) Se alege axa de simetrie ca axă Oz cu originea în centrul de masă şi se lucrează în coordonate cilindrice:
( )h / 2 2 R
2 2 3
h / 2 0 0
x y dV r drd dzπ
−
Ι = ρ + = ρ ϕ =∫ ∫ ∫ ∫
4 2R M2 h
4 2= ρ π =
R
2
,
unde dV = r dr dϕ dz, şi M=ρV cu 2 2x y r+ = 2V=R hπ . b) Se alege axa care ne interesează ca fiind Ox:
( )h / 2 2 R
2 2 2
h / 2 0 0
y z r drd dzπ
−
Ι = ρ + ⋅ ϕ =∫ ∫ ∫
2 R 3
2 22
0 0
hhr sin r drdr
π ⎛ ⎞= ρ ϕ + ⋅ ⋅ ϕ =⎜ ⎟⎜ ⎟
⎝ ⎠∫ ∫
4 3 2 2 2 2
2hR h R MR Mh M hR4 12 4 12 4 3
⎡ ⎤ ⎛π π= ρ + = + == +⎜ ⎟⎢ ⎥ ⎜ ⎟⎢ ⎥⎣ ⎦ ⎝
⎞
⎠
.
2.16. Un corp execută o mişcare oscilatorie armonică de-a lungul axei Ox conform ecuaţiei:
m3
tcos2x ⎟⎠⎞
⎜⎝⎛ π
+π= .

2. Elemente de mecanică newtoniană 92
Se cere să sea) Viteza şi accelera
determine: ţia corpului;
raţia corpului la b) Poziţia, viteza şi accele s1t = şi la 0t = ; c) Viteza şi acceleraţia maxime; d) Care este deplasarea corpului între 0t = şi ? t = s1 Rezolvare:
Comparând cu ecuaţia de miş care a oscilatorului armonic în forma ei ( )ϕ+ωts 1s,m2A −π=ω= , generală, , rezultă: = coAx
Hz5,02
=2 π
π=
πω şi s21T =
ν= . =ν
( ) s/m3⎟⎠⎞πtsin2tsinA
dtdxv ⎜
⎝⎛ +ππ−=ϕ+ωω−== a)
( ) 222 s/m3
tcos2tcosAdtdva ⎟
⎠⎞
⎜⎝⎛ π +ππ−=ϕ+ωω−==
)
b s1t = ⇒
m1212m
3cos2x −=⎟
⎠⎞
⎜⎝⎛−=⎟
⎠⎞
⎜⎝⎛ π
+π=
s/m3s/m232s/m
3sin2v π=⎟
⎟⎠
⎞⎜⎜⎝
⎛−π−=⎟
⎠⎞
⎜⎝⎛ π
+ππ−=
2222 s/m212
3cos2a π=⎟
⎠⎞
⎜⎝⎛−π−=⎟
⎠⎞
⎜⎝⎛ π
+ππ−=
⇒= 0t
m13
cos2x =π
= 0
s/m3s/m232
3sin2v0 π−=⎟
⎟⎠
⎞⎜⎜⎝
⎛π−=
ππ−=
22220 s/m
212
3cos2a π−=⎟
⎠⎞
⎜⎝⎛π−=
ππ−= .
c) s/m2Avmax π=ω=
d)
222max s/m2Aa π=ω= .
( ) ( ) m2m1m10x1xx −=−−=−=Δ .

2. Elemente de mecanică newtoniană 93
2.17. Un punct material cu masa kg2,0m = , legat de un resort de masă
neglijabilă având constanta elastică , oscilează cu amplitudinea , fără frecare, pe o suprafaţă orizontală.
1−Nm5k =cm5A =
Să se calculeze: a) energia totală a corpului b) viteza maximă c) viteza, energia cinetică şi energia potenţială la elongaţia de cm3d) care este elongaţia sistemului la viteza de . s/m1,0 Rezolvare: a)
J105,62
mN102
1252
102552
kAE
4
442
−
−−
⋅=
=⋅⋅=⋅⋅
==
b)
s/m25,0s/m10525Amkv
2mv
2kAE
2max
2max
2max,c
=⋅⋅=⋅=⇒
⇒==
−
c)
( ) ( ) s/m109252,0
5xAmkv
2kA
2kx
2mv
2kAEEE
222
222
2pc
−⋅−±=−±=
⇒=+
==+
s/m2,0s/m101625v 2 ±=⋅⋅±= −
J1040J004,0J2
04,02,02
mvE 42
c−⋅==
⋅==
J105,22J21095
2kxE 4
42p
−−
⋅=⋅⋅
== .
Evident, suma lor este . J105,62 4−⋅

2. Elemente de mecanică newtoniană 94
d) ⇒=+2
kA2
kx2
mv 222
( ).cm6,4x
m1021m10425x
m01,052,01025v
kmAx
24
422
±≈
⋅±=⋅−±=
⋅−⋅±=−±=⇒
−−
−
2.18. Un pendul gravitaţional, cu masa m şi lungimea , este scufundat într-un mediu vâscos care determină o forţă încetinitoare proporţională cu viteza, constanta de proporţionalitate fiind
b
b/gm2 . Iniţial pendulul se află în repaus, făcând cu verticala un unghi mic. Să se găsească: unghiul pe care-l face acesta cu verticala la un moment de timp t ulterior şi viteza pendulului.
α
Rezolvare: Se alege ca variabilă independentă unghiul θ făcut de pendul cu verticala ce trece prin punctul de suspensie. Ecuaţia de mişcare de-a lungul arcului de cerc de rază b este:
θ−θ−=θ &&& cbsinmgmb unde s-a notat b/gm2c = . Deoarece unghiul iniţial făcut de pendul cu vericala a fost mic şi unghiurile
atinse de pendulul în mişcare vor fi mici, se poate face aproximaţia: α
θθ≅θsin
Atunci, ecuaţia se scrie:
0bg
mc
=θ+θ+θ &&& .
Aceasta este ecuaţia de mişcare pentru un pendul amortizat. Se notează 20b
gω= şi
γ= 2mc . Ecuaţia devine:
02 20 =θω+θγ+θ &&&
Soluţia este de forma: ( )ϕ+ωθ=θ γ− tcose t0 , unde 22
0 γ−ω=ω .
Viteza va fi: ( ) ( )[ ]ϕ+ωγ+ϕ+ωωθ−=θ γ− tcostsine t
0& . Constantele şi se determină din condiţiile iniţiale. 0θ ϕ

2. Elemente de mecanică newtoniană 95
2.19. Un oscilator mecanic cu masa kg1m = execută oscilaţii de aceeaşi perioadă cu un circuit oscilant RLC. Ştiind că pulsaţiile proprii ale celor două oscilaţii coincid şi că Ω= 2R , iar coeficientul forţei rezistive mecanice este , să se afle inductanţa bobinei, L .
1kgs3 −=ρ
Rezolvare: Condiţia conduce la ecuaţia: 21 ω=ω
22
202
21
201 22 γ−ω=γ−ω .
Dat fiind că m21ρ
=γ şi L2
R2 =γ , egalitatea 0201 ω=ω impune:
L2R
m2=
ρ
adică
H23mRL =
ρ= .
2.20. O masă legată de un resort de constantă elastică execută oscilaţii amortizate. Ştiind că după oscilaţii amplitudinea scade de ori, să se afle: a) decrementul logaritmic al amortizării; b) perioada oscilaţiilor amortizate şi coeficientul de amortizare.
m kqn
Rezolvare: a) Ştim că . Într-o mişcare amortizată: Td γ=
nT0n eAA γ−= .
Astfel ndAA
ln0
n = . Deoarece qAA
n
0 = , rezultă qlnn1d = .
b) Pulsaţia oscilaţiei amortizată este:
2220 m
kγ−⎟
⎠⎞
⎜⎝⎛=γ−ω=ω .
Dar T2π
=ω şi Td
=γ astfel că obţinem ecuaţia:
22
Td
mk
T2
⎟⎠⎞
⎜⎝⎛−⎟
⎠⎞
⎜⎝⎛=
π
din care rezultă

2. Elemente de mecanică newtoniană 96
22 d4kmT +π⋅= şi
Td
=γ .
2.21. O vergea elastică cu masa kg0m 2,= oscilează forţat sub acţiunea forţei
se afle ce rela
Rezolvare: oscila cu pulsaţia . Condiţia ca vergeaua să nu se rupă
( )Ne6F it5= . Ştiind că vergeaua se rupe pentru deformaţii mai mari de cm15 , să ţie trebuie să verifice coeficientul de amortizare al mişcării pentru ca
vergeaua să nu se rupă la rezonanţă? Vergeaua va 1s5 −=ω
ţinând cola rezonanţă este cm15AR < , care nt de expresia lui RA se scrie:
15,02
mF0
220
<γ−ωγ
,
unde . Dar, la rezonanţă, N6F0 = 220R 2γ−ω=ω trebuie să fie egal cu
ă . În acest caz, condiţia impusă pentru devine:
1s− , adic5=ω 2220 2γ+ω=ω RA
15,02
mF
220
0
<γ+ωγ
.
Astfel, ţinând seama de datele problemei, relaţia pe care trebuie să o verifice γ este:
( )2
0222
15,02mF
⎟⎟⎟⎟
⎠
⎞
⎜⎜⎜⎜
⎝
⎛
×>γ+ωγ ,
( ) 422 1025 >γ+γadică .
.22. Presupunând că în molecula liniară de legăturile oscilează 2 2CO
enţă independent, ambele oscilaţii fiind de aceeaşi frecv şi amplitudine, să se stabilească care este diferenţa de fază între cele două oscilaţii pentru deplasarea maximă, respectiv, minimă a atomului de C . Rezolvare:

2. Elemente de mecanică newtoniană 97
O C O
În figură este prezentată molecula de , unde şi sunt
ia oscilaţiei rezultante va fi:
2CO 1x 2xelongaţiile ce caracterizează oscilaţiile atomului de carbon corespunzătoare celor două legături. Elongaţ
1xx −= 2x Scriind:
( ) ( )11 tcosatx ϕ+ω= şi
( ) ( )22 tcosatx ϕ+ω= rezultă:
( ) ( )ϕ+ω= tcosAtx unde
( )2122 cosa2a2A ϕ−ϕ+= .
Astfel, A este maxim când 21 ϕ=ϕ şi m nim când i π=ϕ−ϕ 21 .
( )tf2.23. Să se analizeze spectrul semnalului periodic reprezentat în figurile:
a) b)
Rezolvare: Fourier, coeficienţii din dezvoltarea în serie:
a) Conform analizei
( ) ( )∑ ω+ω+= nn0 tnsinBtncosAAtf n

2. Elemente de mecanică newtoniană 98
sunt
( )25dt5
T1dttf
T1A
2T
0
T
00 === ∫∫
( ) 0tnsinn1
T10tdtncos
T10tdtncostf
T2A 2
T
0
2T
0
T
0n =ω
ω=ω=ω= ∫∫
( ) ( )[ ].11n5t
T2ncos
n1
T10tdtnsintf
T2B n2
T
0
T
0n −−
π=
⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡π
−ω
=ω= ∫
Astfel, semnalul dat se scrie:
...t5sin510t3sin
310t( ) sin105tf
2+ω+ω
π π+ω
π
iar spectrul său arată astfel:
+=
b) În acest caz, coeficienţii din dezvoltarea în serie Fourier sunt:
( ) 0dtT
dtT
dttfT
A
2T
T
000 ∫∫∫ 441 T2T
=+−==
( ) 0tdtncosT8tdtncos
T8tdtncostf
T2A
T
2T
2T
0
T
0n =ω+ω−=ω= ∫∫∫

2. Elemente de mecanică newtoniană 99
( )
( )[ ].11n8t
T2ncos
n1
T8t
T2ncos
n1
T8
tdtnsinT8tdtnsin
T8tdtnsintf
T2B
nT
2T
2T
0
T
2T
2T
0
T
0n
−−π
=π
ω−
πω
=
=ω+ω−=ω= ∫∫∫
Astfel:
( ) ...t5sin516t3sin
316tsin16tf −ω
π−ω
π−ω
π−=
iar spectrul semnalului este:
2.24. Un pendul gravitaţional de lungime m5,2=l de la începutul m
cşora am2ms10 − .
pierde, în urma amortizării din energia sa în primele işcării. Ştiind că la
, să afle de câte ori se va mi plitudinea mişcării după
plete. Se va considera
%99,0t =
de oscila
s100
g0AA =
ţii com
100
=
Rezolavare: Datorită amortizării, amplitudinea pendulului variază după legea:
( ) 0eAtA = tγ− .
Ştiind că energia oscilaţiilor pendulului ( ) ( )tkA21tE 2= scade la din %1
valoarea iniţială după s100t1 = de la începutul mişcării, rezultă că:
( ) ( )101
EtE
A100A
0
1
0==
de unde

2. Elemente de mecanică newtoniană 100
10010ln
=γ .
Cum 10 s
g2 −π=π=ω
l şi 0ω<<γ se poate considera că :
022
0T2
ω≅γ−ω=π
=ω .
Astfel, după de oscilaţii complete, adică la momentul de timp
, amplitudinea va fi: 100
s200T100t2 ==
( ) ( ) 10ln20
200100100
⋅ln
02 eAeA200AtA −−=== .
Astfel, obţinem: ( ) 10ln2
0AeT100A −= .
2.25. Un corp de masă aflat pe o suprafaţă orizontală este legat de două resorturi de constante elastice şi , ale căror extremităţi sunt fixate rigid.
esorturilor şi ştiind că mişcarea pe suprafaţa orizontală se face afle pulsaţia cu care oscilează corpul.
Rezolvare:
m1k 2k
Neglijând masa rfără frecare, să se
Să presupunem că tensionăm resorturile astfel că faţă de poziţia de echilibru deplasarea corpului este notată cu Asupra corpului acţionează forţele
x . xkF 11 −= şi xkF 22 −= , orientate ca
în figură. Astfel, ecuaţia de mişcare pentru corpul de masă este: m
( )xkkxm 21 +−=&& care, rearanjând termenii, devine:

2. Elemente de mecanică newtoniană 101
0xm
kkx 21 =
++&& .
Atunci, pulsaţia oscilaţiilor executate de corpul de masă m este:
mkk 21 +
=ω .
2.26. Un sistem alcătuit din două corpuri de mase şi legate între ele
ără frecare pe o suprafaţă orizontală. Să se calculeze pulsaţia oscilaţiilor sistemului dacă se neglijează masa resortului.
1m 2printr-un resort de constantă elastică k şi lungime 0l , oscilează f
m
Rezolvare:
Presupunem că iniţial resortul este alungit şi apoi sistemul este lăsat liber. Asupra corpurilor şi vor acţiona forţele elastice 1m 2m 1F
r şi 2F
r care sunt egale
în modul kx=FF 21 =rr
, unde 012 xxx l−−= este alungirea resortului. Atunci
ecuaţiile de mişcare sunt:
.kxxmkxxm
22
11−=
=&&
&&
Înmulţind cu 2m cu 1m şi scăzându-le obţinem: prima ecuaţie şi a doua ecuaţie ( ) ( )xmmkxxmm 21122 +−=− &&&& . 1
Observând că x&& şi rearanjând termenii, ecuaţia devine: xx12 &&&& =−
0x
mmmm 21+
kx
21
=+&& .
a ă a sistem Introducând m sa redus ului alcătuit din cele două corpuri
21
21mmmm +
=μ , ecuaţia va fi scrisă sub forma:

2. Elemente de mecanică newtoniană 102
0xkx =μ
+&& .
Astfel, pulsaţia oscilaţiilor sistemului este:
μ=ω
k .