137701996 Reglarea Automata a Tensiunii Si Puterii Reactive in Sistemele Energetice
141
REGLAREA AUTOMATĂ A TENSIUNII ŞI PUTERII REACTIVE ÎN SISTEMELE ENERGETICE (RAT) 1. OBIECTUL RAT. NECESITATEA ŞI AVANTAJELE RAT. PRINCIPIUL METODELOR DE RAT 1. OBIECTUL SI NECESITATEA INTRODUCERII RAT Pentru a asigura o repartiţie de putere convenabilă consumatorilor, concomitent cu o producţie raţională a energiei electrice este absolut necesar ca tensiunea la consumatori, deci şi la nodurile generatoare ale sistemului ergetic (SE), să fie cît mai constantă posibil. În funcţionarea normală, de regim, a unui SE se produc însă, permanent variaţii ale sarcinilor active şi reactive, care determină variaţii de tensiune la barele consumatorilor de energie electrică, cît şi la nodurile de distribuţie sau generatoare. Deranjamentele din reţelele electroenergetice sunt de asemenea însoţite de importante variaţii ale tensiunii. La scurtcircuitele din SE se produce scăderea nivelelor de tensiune pe barele centralelor şi staţiilor electrice de transformare sau interconexiune şi se creează pericolul pierderii sincronismului funcţionării si a stabilităţii sistemului energetic. Deconectarea de către protecţia prin relee a unor linii radiale de înaltă tensiune, branşările sau deconectările unor consumatori importanţi sunt însoţite de importante variaţii ale tensiunii la bornele generatoarelor sau ale consumatorilor. Obiectul RAT este deci menţinerea constantă sau, cel puţin, între valori limită prestabilite, a tensiunii în nodurile generatoare (şi implicit la consumări), independent, sau slab dependent de perturbaţii (variaţiile sarcinii active). Reglarea tensiunii se poate efectua manual sau automat. Experienţa demonstrează că reglarea manuală a tensiunii, efectuată de personalul de exploatare nu este eficace şi nici suficient de precisă. Totodată, în condiţiile existenţei staţiilor fără personal, ar urma să se renunţe la supravegherea tensiunii pe barele acestora. În figura 1, a s-a reprezentat schema de reactanţe echivalentă, pentru o singură fază, în cazul unui generator sincron G echivalent, care debitează pe barele B, la care se leagă consumatorul echivalent C. S-au notat cu: 1
-
Upload
cosmin-lupu -
Category
Documents
-
view
173 -
download
4
Transcript of 137701996 Reglarea Automata a Tensiunii Si Puterii Reactive in Sistemele Energetice

REGLAREA AUTOMATĂ A TENSIUNII ŞI PUTERII REACTIVE ÎN SISTEMELE ENERGETICE (RAT)
1. OBIECTUL RAT. NECESITATEA ŞI AVANTAJELE RAT. PRINCIPIUL METODELOR DE RAT
1. OBIECTUL SI NECESITATEA INTRODUCERII RAT
Pentru a asigura o repartiţie de putere convenabilă consumatorilor, concomitent cu o producţie raţională a energiei electrice este absolut necesar ca tensiunea la consumatori, deci şi la nodurile generatoare ale sistemului ergetic (SE), să fie cît mai constantă posibil.
În funcţionarea normală, de regim, a unui SE se produc însă, permanent variaţii ale sarcinilor active şi reactive, care determină variaţii de tensiune la barele consumatorilor de energie electrică, cît şi la nodurile de distribuţie sau generatoare. Deranjamentele din reţelele electroenergetice sunt de asemenea însoţite de importante variaţii ale tensiunii. La scurtcircuitele din SE se produce scăderea nivelelor de tensiune pe barele centralelor şi staţiilor electrice de transformare sau interconexiune şi se creează pericolul pierderii sincronismului funcţionării si a stabilităţii sistemului energetic. Deconectarea de către protecţia prin relee a unor linii radiale de înaltă tensiune, branşările sau deconectările unor consumatori importanţi sunt însoţite de importante variaţii ale tensiunii la bornele generatoarelor sau ale consumatorilor.
Obiectul RAT este deci menţinerea constantă sau, cel puţin, între valori limită prestabilite, a tensiunii în nodurile generatoare (şi implicit la consumări), independent, sau slab dependent de perturbaţii (variaţiile sarcinii active).
Reglarea tensiunii se poate efectua manual sau automat. Experienţa demonstrează că reglarea manuală a tensiunii, efectuată de personalul de exploatare nu este eficace şi nici suficient de precisă. Totodată, în condiţiile existenţei staţiilor fără personal, ar urma să se renunţe la supravegherea tensiunii pe barele acestora.
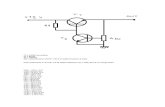
În figura 1, a s-a reprezentat schema de reactanţe echivalentă, pentru o singură fază, în cazul unui generator sincron G echivalent, care debitează pe barele B, la care se leagă consumatorul echivalent C. S-au notat cu:
— reactanţa sincronă longitudinală a lui G, ţinând seama de saturaţie;
—reactanţa element clor ele legatara dintre generator şi bare;
— impedanţa consumatorului C;
— t.e.m. eficace pe fază (în spatele roactantei xd);U-tensiunea eficace pe fază, pe barele B]
-unghiul electric intern dintre U si Ed
-valoarea eficace a curentului debitat de G;
1

Fig.1 Variaţia tensiunii la bornele generatorului sincron:a — schema de reactanle echivalentă, pe o fază; b — diagrama fazorială a căderilor de
tensiune.
P y Qg -- puterile activă, respectiv reactivă, debitate de G;
Pc,Qc — puterile activă, respectiv reactivă, consumate de C;
cosζ — factorul de putere, presupus identic, la generator şi la consumator.
în figura1, b este reprezentată diagrama fazorială a căderilor de tensiune, corespunzătoare schemei din figura 1, a.
Considerând proiecţiile fazoriale pe axele Ox, Oy se pot scrie ecuaţiile:
Edcos δ = U + XIg cos (90° - ζ),
Edsin S = XIgcos ζ, (1)unde:
X=xd+x8
Igcos(90° — ζ) = Igsin ζ = Igr— componenta reactivă a curentului generat. Exprimând:
se obţine:
(3)
2

La o anumită scară, segmentul ab reprezintă Pg şi segmentul ac, pe Qg. Relaţiile (2), (3) exprimă că, pentru Ed=const si X =const, orice variaţie a puterilor Pg, Qg se traduce prin variaţii ale tensiunii la bare k şi unghiului electric 8.
În figurile de mai jos s-au reprezentat variaţiile Pg, Qg în funcţie de U, pentru Ed=const şi X =const, iar a=parametru, în fgura3 s-au reprezentat variaţiile Pg,Qg în funcţie de S, pentru Ed = const, X = const, iar U = parametru.
În regim staţionar se realizează echilibrul dintre puterile consumate şi cele generate: Pc=Pg si Qc=Qg.
Fig2. Variaţia Qg, = O,(U) pentru Eda = Fig3. Variaţiile P Q în funcţie de = const, X = const şi = parametru. Edg =const U=parametru
Fig.4.Variaţiile puterilor generate şi consumate cu tensiunea
În general, la consumator puterea activa Pc este independenta de variaţiile tensiunii, dar puterea reactivă creşte cu tensiunea, în figura 4, a si b, s-au reprezentat pe acelaşi grafic variaţiile
3

puterilor generate si consumate cu tensiunea u, pentru =parametru, Ed şi X = constante, în
punctul A (fig.4, a) se stabileşte un punct de funcţionare (PCl = Pg1 . La creşterea puterii
consumate: P = P + APC, APC >0, se stabileşte un nou punct de funcţionare în A ,la
U2<U1, corespunzător unui . Variaţiile puterii consumate ( PC) se traduc prin noi poziţii de echilibru (A, A' . . .') realizate prin autoreglare, dar cu preţul unor variaţii inacceptabile
pentru SE. În figura 4b, 6 se constată că variaţiile determină noi puncte de funcţionare (B, B),
cu înrăutăţirea valorilor U, respectiv ).
2. AVANTAJELE INTRODUCERII RAT ÎN SE
Menţinerea constantă a tensiunii aduce mari avantaje în exploatarea SE, în general si în funcţionarea consumatorilor de energie electrică, în particular. Astfel, RAT, reducând creşterea unghiului electric , măreşte stabilitatea statica a sistemului energetic;creste, totodata, valoarea valoarea puterii maxime ce se poate debita în regim static de functionare. Spre a ilustra aceasta , în fig de mai jos s-a reprezentat diagrama fazorială tensiune-curent, precum şi variaţiile Pg( ) si Qg(
) în cazurile absenţei RAT.
În primul caz, Ed1 const, E = const,X const şi vârful fazorului Ed descrie un cerc cu
centrul în O (Edl = Ed? = const, fig 6); pentru Pc2>PCl, se obţine U2 < U1, > . În condiţiile existenţei RAT, variază Edl ca urmare a forţării excitaţiei generatorului
sincron. Din figura 6, a se observă că, în acest caz, Ed2 > Edl
(pentru Pc2 = Pc1 + ) astfel încat U1=U2=U=const si variaţia este mult mai redusă decit în cazul absenţei RAT prin variaţia corespunzătoare a lui cos (în sensul scăderii
puterii active), se poate obţine . fig5. cazul existentei RAT
4

Fig. 6 Diagrama fazoriala tensiune-curent .
Ca urmare a introducerii RAT, creşte stabilitatea dinamică a SE [1,30]. în figura 7 s-au reprezentat variaţiile Pg(8) în cele trei situaţii: 1— regim normal; 2 — regim de după avarie, fără RAT si 3 — regim de după avarie, cu RAT, pentru toate situaţiile în condiţiile schemei echivalente din figura 1. Se poate vedea că în cazul 3, aria de accelerare S1(+) este mult mai mică decît aria de frânare S2(-) deoarece RAT, forţînd excitaţia (deci mărind Ed), sau reducînd reactanţa totală în regim de avarie, face să crească tensiunea pe bare pînă la o valoare apropiată de valoarea nominală Un.
Ca urmare, se măreşte sensibil stabilitatea dinamică a funcţionării agregatelor din SE si a sistemului în ansamblu.
Fig. 7.Influenta RAT asupra stabilitatii dinamice a functionarii sistemului energetic.
5

Fig.8. Variaţiile Qg şi Qc în funcţie de U, pentru un consumator de tipul motor asincron de putere.
Datorită RAT, se evită producerea fenomenului de avalanşă de tensiune, caracterizat prin scăderea continuă si aproape totală a tensiunii pe bare, ca urmare a unui defect sau regim anormal, nerezolvat la timp, precum şi a încercărilor nereuşite de autopornire a motoarelor asincrone, alimentate de la barele respective.
În impedanţele motoarelor care refuză să autopornească se produc căderi de tensiune suplimentare.
Se cunoaşte (fig. 8) că la U = 0,7 Unom, variaţia cuplului motoarelor asincrone prezintă o discontinuitate; dacă se împiedică scăderea tensiunii pe bare sub această valoare, se obţin puncte stabile de funcţionare (A, B) la intersecţia Qg — Qc (fig.8) şi, astfe autopornirea motorului asincron este asigurată.
Reglarea automată a tensiunii mai prezintă si alte avantaje, cum sunt:— mărirea sensibilităţii
protecţiei prin relee, în special în regim minim de,scurtcircuit;
— creşterea indicilor de calitate ai energiei electrice produse si a fiabilităţii instalaţiilor SE, în ansamblu.
3. PRINCIPIUL METODELOR DE RAT. SCHEME PRINCIPIALE DE RAT
Conform relaţiilor (2) şi (3) există, principial, două posibilităţi pentru reglarea tensiunii pe barele generatorului sau staţiei electrice:
— variaţia t.e.m. Ed(Ea şi variabile), prin variaţia excitaţiei generatorului sincron reglat;
— variaţia reactanţei de legătură X (X şi variabile), prin variaţia raportului de transformare al transformatoarelor din staţiile electrice, prevăzute cu prize pentru reglaj sub sarcină.
6

Cazul = const nu se ia în considerare, deoarece ar complica mult problema RAT; reglarea se face însă unilateral, actionînd asupra lui Ed sau X şi rezultînd corespunzător.
Fig. 9. Reglarea tensiunii prin variatia raportului de transformari.
SISTEME DE EXCITAŢIE PENTRU GENERATOARELE SINCRONE
1. CLASIFICAREA SISTEMELOR DE EXCITAŢIE
Noţiunea de sistem de excitaţie s-a impus odată cu dezvoltarea şi creşterea;; complexităţii echipamentelor specializate în asigurarea excitării maşinii sincrone generatoare si conducerea procesului de excitaţie după o anumită lege în corelaţie cu cerinţele sistemelor electroenergetice. Aceste sisteme de excitaţie sunt mult diversificate.
Se poate realiza, însă, o grupare a sistemelor de excitaţie avînd în vedere-următoarele criterii:
— după autonomia sau neautonomia sursei de energie necesară excitaţiei ;— după natura sursei primare care alimentează înfăşurarea de excitaţie a
generatorului sincron;— după principiul de funcţionare a sistemului de excitaţie;— după caracterul mobil (de rotaţie) sau imobil (static) al elementelor componente din
cuprinsul sistemului de excitaţie.— după modalitatea de obţinere a tensiunii continue pentru excitarea maşinii
sincrone.Cel din urmă se dovedeşte a fi cel mai unitar şi mai general criteriu declarificare. Din acest punct de vedere, se disting:a) sisteme de excitaţie eu maşini de curent continuu; b)sisteme de excitaţie cu maşini de curent alternativ;
7

c) sisteme de excitaţie fără maşini excitatoare.
După principiul de funcţionare, din grupa a se desprind subgrupele:— sisteme de excitaţie cu maşini de c.c. funcţionînd ca generator de c.c.;— sisteme de excitaţie cu maşini de c.c. amplificatoare;— sisteme de excitaţie cu maşini de c.c. survoltoare-devoltoare.
Din grupa b se deosebesc subgrupele:— sisteme cu reglarea excitaţiei generatorului principal;— sisteme cu reglarea excitaţiei generatorului auxiliar.
Din grupa c se disting subgrupele:— sisteme cu reglarea excitaţiei prin circuite magnetice;— sisteme cu redresare necomandată;— sisteme cu redresare comandată.Se evidenţiază calităţile unor sisteme de excitaţie moderne, cu elemente statice, în special
pentru grupurile cu putere unitară mare.
2. PERFORMANŢELE SISTEMELOR DE EXCITAŢIE
Parametrii sistemului de excitaţie au o mare influenţă asupra stabilităţii SE, în special în cazul reţelelor puţin buclate si încărcate la valori situate în vecinătatea capacităţii maxime de transport [30]. De aceea, cunoaşterea, în detaliu, a performanţelor reglajului automat al excitaţiei este necesară pentru stabilirea limitelor admisibile de funcţionare în regim permanent a generato-rului respectiv, atât din punctul de vedere al stabilităţii statice (de exemplu, posibilitatea de funcţionare în regim capacitiv), cât si al reglajului tensiunii si puterii reactive în reţeaua de transport si distribuţie a energiei electrice.
Principalele performanţe ale sistemelor de excitaţie, care condiţionează funcţionarea stabilă a maşinii sincrone sînt [57, 63]:
— timpul de răspuns (tr ex);— plafonul tensiunii de excitaţie (pex);— viteza medie de răspuns a sistemului de excitaţie (Vexmed);---durata dezexcităni rapide.
Fig.10.Variatia tensiunii de excitatie.
8

Timpul de raspuns al ecitatiei t are valori diferite în raport cu tipul de regulator utilizat. La generatoarele sincrone de mare putere se tinde spre realizarea de sisteme de reglare a tensiunii de excitatie cu performante superioare, în special în ceea ce priveşte rapiditatea răspunsului la
perturbaţiile din reţea. În fig 10 este reprezentatavariaţia tensiunii de excitaţie u (t) în cazul raspunsului ideal pentru un sistem de excitaţie static,cu redresoare comandate (curba1) şi în cazul unui sistem clasic, cu excitatoare de c.c. rotaivă (curba2), pentru aceeaşi curbă de excitaţie maximă
U .
Tipul regulatorului utilizat Timpul de răspuns V'* [s]
Clasic (de exemplu electromecanic) 0,2 .. ...0,4
Cu amplificatoare magnetice 0,05.. ...0,07
Cu redresoare comandate în sistemul de excitaţie (de exem-1 piu cu tiristoare comandate)
0... ...0,01
Tabeleul 1.
Plafonul excitaţiei trebuie să se situeze între 1,5 ,'şi 2,5
(valorile inferioare sunt valabile pentru reţelele mult buclate).
Viteza medie de răspuns a excitaţiei , exprimată de un interval de timp
, trebuie să se afle între (0,8 si 1,2) Uenom [V/s]. în cazul generatoarelor sincrone de mare putere se procedează la definirea Vexme pe un interval de timp mult mai scurt (A£ = 0,025 .. .0,5) si, în conformitate cu recomandările CIGRE.
În ceea ce priveşte comportarea sistemelor de reglare a tensiunii de excitaţie, se menţionează [1,23] că ridicarea numai a plafonului de excitaţie, fără o creştere a vitezei de atingere a acestui plafon se dovedeşte ineficientă, în general, pentru obţinerea unei funcţionări stabile în regim dinamic este necesar ca plafonul pex, de minimum 2, să fie atins în maximum 50 ms; dacă acelaşi plafon este atins în peste 300 ms, se constată că forţarea excitaţiei la valoarea de plafon nu mai contribuie, în mod practic, la îmbunătăţirea stabilităţii dinamice a funcţionării, în tabelul 13.2 se prezintă datele caracteristice şi performanţele sistemelor de excitaţie pentru generatoarele sincrone instalate , în sistemul energetic naţional.
9

Datele caracteristice şi performantele sistemelor de excitaţie ale generatoarelor sincrone instalat în sistemul energetic naţional
Puterea nominală a generatorului [MW]
50-60 50 100 150 (160) 200 315/330
Parametrii reglaţiue(ie)
ue(ie) ue(ie} ue(ie] u.(i.) u.(ij
Tensiunea de excitaţie nominală Uenom ţ [V]
250 350 360 270 316 360
Tensiunea de excitaţie Uemax (V)
Palfonul excitaţieiDurata maximă de forţare(in secunde)
20 5 4 20 20 8
Viteza de răspuns a excitaţiei pentru 0.5s
_ 2.5 2.2 2 2 2.75
Domeniul de reglaj pentru gradul de statism (%)
_ 0..10% 0…10% _ 0…5% 0…8%
Zona martă a RAT(timpul de răspuns) (s)
_ 0.05 0.05 _ 0.03 0.01
Gradul de insensibilitate al RAT (%)
_ _ _ _ 0.5 0
SISTEME DE REGLARE AUTOMATĂ A TENSIUNII DE EXCITAŢIE SINCRONE
1. SISTEME DE AUTOEXCITAŢIE PENTRU GENERATOARELE SINCRONE
Sistemele de excitaţie fără maşini excitatoare se bazează pe principiul autoexcitării generatoarelor sincrone. Energia necesară excitării maşinii sincrone generatoare este luată de la
10

barele generatorului respectiv, prin intermediul unuia sau mai multor transformatoare electrice şi apoi este redresată cu ajutorul unor punţi redresoare. Avantajul acestor scheme constă în costul redus si simplitatea constructivă. O clasificare a sistemelor de autoexcitaţie pentru generatoarele sincrone permite gruparea acestora în:
— sisteme de autoexcitaţie cu redresare necomandată;— sisteme de autoexcitaţie cu reglare prin circuite magnetice;— sisteme de autoexcitaţie cu redresare comandată. • Sisteme de autoexeitaţie eu redresare necomandată. Reglarea propriu-zisă a tensiunii de
excitaţie este înlocuită prin autoreglarea pe baza principiului compundarii (curenţii mari, care apar la un scurtcircuit apropiat de bornele generatorului reglat, determină un curent suplimentar de excitaţie, care conduce la creşterea tensiunii de excitaţie, în raport cu valoarea înregistrată în momentul producerii defectului).
În figura 11 b, c se prezintă cîteva scheme folosite pentru sistemele de autoexcitaţie cu redresare necomandată.
Fig.11. Sisteme de autoexcitatie cu redresare necomandata.
În figura 11 b se prezintă un . sistem asemănător; tensiunea de excitaţie se obţine prin însumarea tensiunii secundare a transformatorului derivaţie cu tensiunea obţinută pe reactanţele L, nesaturate, conectate ca sarcjnă a transformatorului serie TS.
În cazul schemei din figura 10 c, compundarea este asigurată de un transformator de compundare, avînd înfăşurarea primară în serie, iar înfăşurarea secundară, racordată la tensiunea pe fază. În acest fel, însumarea celor două componente, de curent şi de tensiune, ale compundării, se face în circuitul magnetic al transformatorului de compundare TC. Pentru alimentarea înfăşurării de excitaţie, se foloseşte un transformator de adaptare (TA) şt o punte trifazată cu diode cu siliciu RN. Nici această schemă nu permite reglarea tensiunii de excitaţie.
Deoarece sistemele de autoexcitatie cu redresare necomandată nu permit reglarea tensiunii, ele nu se mai utilizează decât pentru generatoare sincrone de mică putere.
11

METODE DE REGLARE AUTOMATA ŞI STABILIZAREA TENSIUNII LA BORNELE GENERATORULUI SINCRON ÎN REŢEA PROPIE
Funcţionarea instabilă a generatorului sincron poate fi caracterizată printr-o serie de parametrii. Parametrul de calitate al funcţionării maşinii îl constituie puterea debitată sau energia produsă. La rândul său energia sau puterea sunt caracterizate prin tensiunea şi frecvenţa la diversele receptoare. Se disting următoarele regimuri electromagnetice în funcţionarea maşinii sincrone:
•regimul permanent (staţionar) nominal pentru care maşina se proiectează şi care trebuiesă fie cel mai avantajos din punct de vedere tehnico-economic. Acest regim se caracterizeazăprin datele înscrise pe plăcuţa indicatoare a maşinii.
o regimul permanent postăvarii care se stabileşte după deconectarea accidentala a anumitor consumatoare . În acest regim indicii tehnico-economici sunt defavorabili.
•regimul tranzitoriu de funcţionare înseamnă trecerea de la un regim permanent la un alt regim permanent de funcţionare. Se disting următoarele regimuri tranzitorii: regimul tranzitoriu normal dictat de o exploatare raţionala a sistemului (conectarea sau deconectarea anumitor consumaroare; şi regim tranzitoriu de avarii care survine atunci când sistemul în care debitează generatorul sau chiar în interiorul generatorului, variază brusc parametrii de regim.
În proiectarea schemelor de excitaţie se impune ca una din condiţiile esenţiale pentru buna funcţionare a generatorului realizarea unei viteze de răspuns mare, adică asigurarea unei viteze de creştere a curentului în înfăşurarea la bornele generatorului sincron constantă în regim de avarie.
În afară de o mare viteză de răspuns , sistemele de excitaţie trebuie să asigure şi un plafon ridicat al tensiunii de excitaţie pentru a asigura aceşti parametrii. La generatoarele moderne se întâlnesc foarte multe variante ale celor două scheme principale de excitaţie.
Generatoarele sincrone în cadrul sistemului electroenergetic "funcţionează în paralel"Probelemele întâlnite în această situaţie sunt de două categorii .Privind conectarea pentru
funcţionarea în paralel şi privind repartizarea sarcinii active şi reactive între generatoarele sistemului în funcţie de necesităţile spontane ale consumatoarelor, astfel încât să se aigure în permanenţă echilibru între puterile generate şi consumate astfel încât sistemul să funcţioneze stabil.
Un generator sincron este conectat pentru o funcţionare în paralel pe barele unui sistem energetic a cărui putere instalată este mult mai mare decât puterea generatorului. În acest caz
12

tensiunea la bare poate fi considerată a fi constantă, adică puterea sistemului este infinit mai mare decât puterea generatorului considerat.
Urmărind legătura dintre variaţia curentului de excitaţie şi variaţia puterii reactive, puterea activă este considerată constantă iar tensiunea la borne invariabilă. Valoarea curentului de excitaţie corespunzătoare curentului de sarcină minim, la o putere activă dată, se numeşte curent de excitaţie optim. Maşina funcţionează în regim supraexcitat când curentul de excitaţie este mai mare decât curentul de excitaţie optim şi în regim subexcitat când curentul de excitaţie este sub valoarea curentului de excitaţie optim.
Repartiţia puterii reactive între generatoarele sincrone care funcţionează în paralel, într-un sistem sau într-o reţea dată, se realizează prin intermediul regulatoarelor automate rapide de tensiune cu care sunt echipate generatoarele moderne.
13

Fenomenul de scurtcircuit în cazul maşinilor electrice prezintă două regimuri distincte: primul denumit scurtcircuit stabil sau permanent, apare dacă se micşorează lent sarcina generatorului de la gol (ZT=cc) sau de la sarcină nominală (Zr=Zn) la scurtcircuit (Zr=0). În acest caz teoretic variaţia temporară lentă a sarcinii permite trecerea de la regimul de gol sau de sarcină nominală la regimul de scurtcircuit permanent, fără alte fenomene intermediare. Calitativ diferit apare fenomenul întâlnit în exploatare în care trecerea la scurtcircuit nu se face treptat ci brusc de unde şi denumirea de scurtcircuit brusc. În cel de-al doilea caz spre deosebire de scurtcircuitul permanent variaţia temporară bruscă a sarcinii crează un cuplaj inductiv strâns în înfăşurarea statorului şi în înfăşurările de excitaţie şi de amortizare din rotor, ceea ce are ca efect obţinerea unui regim de foarte scurtă durată dar în care intensităţile curentului din înfaşurări sunt foarte mari şi care se termină prin regimul permanent de scurtcircuit, aşa cum l-am definit mai sus. Regimul în care se găseşte generatorul la trecerea de la regimul stabil de funcţionare sub tensiune către regimul de scurtcircuit brusc stabil se numeşte regim tranzitoriu de scurtcircuit.
În cazul unui scurtcircuit fluxul inductor scade de la valoarea iniţială la o valoare foarte mică. Aceasta scădere nu se poate face brusc ci treptat datorită inerţiei magnetice.. Există deci o perioadă tranzitorie de stabilire a scurtcircuitului brusc în generator.
Deoarece inductanţa înfăşurării de amortizare este mica şi rezistenţa mare, constanta de timp a înfăşurării de amortizare este mult mai mică decât a înfăşurării de excitaţie.
În cazul variaţiilor bruşte de sarcină şi în special atunci când acestea au un caracter de avarie, de exemplu în cazul unui scurtcircuit pe linie, tensiunea U a reţelei scade. În acelaşi timp se reduce gradul de stabilitate al tuturor generatoarelor care lucrează în paralel pe o reţea comună, adică puterea maximă pe care o pot ele debita.
La un curent mare al scurtcircuitului, căderea de tensiune inductivă în înfăşurarea statorică este foarte mare, şi tensiunea U la borne rămâne foarte mică, cu atât mai mică cu cât scurtcircuitul se produce mai aproape de centrală. Tensiunea U fiind mică şi unghiul 0 dintre t.e.m. indusă şi tensiunea fiind foarte mare, rezultă că apar condiţii grele de stabilitate dinamică. Amplitudinea sinusoidei P=f(9) este foarte mică.
În primele momente ale scurtcircuitului situaţia este agravată de faptul că curentul iniţial de scurtcircuit al statorului a crescut relativ mai mult decât curentul iniţial al excitaţiei, iar unghiul 9 este şi mai mare.
Pentru a evita funcţionarea instabilă a sistemului este necesar să se mărească te.m. Ee.Metoda folosită cel mai bine pentru acest lucru este forţarea excitaţiei , adică creşterea
tensiunii de excitaţie U la bornele excitatoarei , deci a circuitului de excitaţie al acesteia şi deci a curentului de excitaţie al generatorului , Ie . În acest scop se întrebuinţează excitaţia rapidă , adică maşina excitatoare la care valoarea inductivitaţii circuitului de excitaţie este minimă , ceea ce duce la o creştere a curentului de excitaţie al excitatoarei rapidă, adică a lui U.
În momentul avariei , un regulator cu acţiune rapidă scurtcircuitează rezistenţa de reglare din circuitul de excitaţie al excitatoarei şi asigură creşterea excitaţiei generatorului.
Reglarea automată a tensiunii era folosită numai pentru menţinerea constantă a tensiunii la borne, în cazul variaţiei sarcinii . Întrucât acesta era rolul principal al regulatoarelor de tensiune acestora nu li se impunea sa mărească prea mult curentul de excitaţie , în cazul când aveau loc scăderi mari de tensiune . Din contră aproape la toate generatoarele la care tensiunea era reglata automat, se folosea limitarea curentului de excitaţie în caz de scurtcircuit, ceea se realiza prin conectarea unei rezistenţe suplimentare în circuitul de excitaţie al excitatoarei.
14

15

De obicei, regulatoarele erau reglate astfel încât Ia scăderi de tensiune mari datorită scurtcircuitelor, curentul de excitaţie să depăşească numai cu puţin valoarea curentului de excitaţie corespunzător regimului de funcţionare normal.
Forţarea excitaţiei , adică folosirea curentului maxim de excitaţie pe care îl poate debita excitatoarea (când lipsesc rezistentele suplimentare din circuitul de excitaţie al excitatoarei şi în circuitul de excitaţie ai generatorului ) , măreşte stabilitatea funcţionării în paralel al generatoarelor sporind t.e.m. Ec , asigură restabilirea rapidă a tensiunii după întreruperea scurtcircuitelor şi măreşte siguranţa în funcţionare a protecţiei prin relee temporizate. Din această cauză , în condiţiile actuale , rolul principal al regulatoarelor de tensiune constă în mărirea excitaţiei generatoarelor până la valoarea maximă de plafon , în toate cazurile de avarii însoţite de o scădere a tensiunii. O deosebită importanţă o are forţarea excitaţiei în sistemele care funcţionează cu o rezervă mică de putere.
Reglarea automată a curentului de excitaţie poate fi realizată cu ajutorul regulatoarelor automate de tensiune sau cu ajutoml dispozitivelor de forţare a excitaţiei şi de compoundare. Toate aceste dispozitive înglobate dau regulatorul automat de excitaţie. Pentru cazul deconectării regulatorului automat de excitaţie , din cauza defectării acestuia , trebuie ca toate generatoarele să fie prevăzute cu dispozitive cu relee pentru forţarea excitaţiei.
Dispozitivul de forţare al excitaţiei poate fi realizat cu ajutorul unei scheme simple , formată dintr-un releu minimal de tensiune şi un releu intermediar sau un contactor , care să scurtcircuiteze rezistenţa reostarului din circuitul de excitaţie al excitatoarei.
Când tensiunea la borne scade sub o valoare anume, intră în funcţiune releul minimal , care închide circuitul de curent continuu şi releul cu contactoare , scurtcircuitând rezistenţa excitatoarei.
Datorită simplităţii sale , dispozitivul de forţare al excitaţiei s-a dovedit foarte avantajos şi este folosit pe scară largă.
Introducerea pe scară mare a dispozitivelor de forţare al excitaţiei care folosesc excitaţia maximă , a provocat grija în privinţa menţinerii în bună stare a generatorului, din cauza apariţiei eventual a unor suprasarcini. Dar aceste griji s-au dovedit a fi neîntemeiate deoarece în cazul generatoarelor prevăzute cu dispozitive de forţare a excitaţiei , valoarea şi durata suprasarcinilor sunt mai puţin periculoase decât cele care au loc în caz de nefolosire a dispozitivelor de forţare a excitaţiei. Acest fenomen paradoxal la prima vedere are o explicaţie foarte simplă . În sistemele care nu sunt prevăzute cu dispozitivele de forţare a excitaţiei au loc adesea deranjamente în privinţa stabilităţii în funcţionare si pendulaţii care se prelungesc timp îndelungat . În timpul desfăşurării acestor fenomene , generatoarele sunt prevăzute cu curenţi cu mult mai mari decât curenţii nominali şi cu mult mai mari şi de mai lungă durata decăt curenţii care îi provoacă forţarea excitaţiei.
Rolul principal al reglării automate a excitaţiei constă în evitarea desprinderii generatorului şi restabilirea rapidă a tensiunii , după întreruperea scurtcircuitului. În acest scop în timpul scurtcircuitului, curentul de excitaţie trebuie să se mărească astfel încât fluxul magnetic rezultant , şi deci t.e.m. tranzitorie.a înfăşurării statorice , să aibă valori cât mai mari în momentul întreruperii scurtcircuitului.
Scurtcircuitul este însoţit de creşterea curentului statoric şi prin urmare de creşterea reacţiei indusului . În primul moment al scurtcircuitului , fluxul magnetic al maşinii rămâne constant , din care cauza curentul din rotor creşte pană la valoarea necesara pentru a compensa creşterea bruscă a reacţiei indusului în momentul iniţial al scurtcircuitului.
16

Apoi curentul tranzitoriu indus în înfăşurarea de excitaţie începe să scadă , din care cauza are loc scăderea fluxului magnetic inductor , deci şi a t.e.m. a generatorului.
Din cauza scăderii tensiunii în momentul scurtcircuitului , dispozitivul de forţare al excitaţiei intră în acţiune şi în consecinţă , curentul debitat de excitatoare începe să crească până ajunge la valoarea sa maximă. Curentul total din rotor este deci egal cu suma curentului tranzitoriu indus în înfăşurarea sa şi curentul excitatoarei . Forţarea excitaţiei împiedică scăderea rapidă a curentului de excitaţie după curba exponeţială a curentului tranzitoriu şi menţine curentul de excitaţie deci şi t.e.m. Ecki Ia o valoare relativ ridicată.
Pentru a menţine fluxul magnetic inductor constant în tot timpul scurtcircuitului, curentul de forţare al excitaţiei ar trebui să aibă în orice moment o astfel de valoare încât adunat cu curentul tranzitoriu să dea un curent egal cu curentul rotoric din primul moment al scurcircuitului. în cazul când această condiţie este respectată , t.e.m. Eeki şi curentul statoric de scurtcircuit nu se vor amortiza.
Tensiunea generatorului este aplicata prin intermediul transformatorului cu faze multiple, redresorului, bobinei de şoc rezistonilui şi a potenţiometmlui la puntea de măsurare alcătuită din două diode Zener şi din rezistori. (Fig.12.)
17

Fig.12. Unitatea de comandă
45 - transformatorul cu faze multiple 46 - redresor 44 - bobina de şoc 65 - rezistor 66 - potenţiometrul 42 - diode Zener 43 - rezistori
18

Caracteristica acestei punţi de măsurare este prezentată în Fig.13. Tensiunea electrică de ieşire notată cu Uuy a punţii de măsurare este modulată prin reducerea variabilă a tensiunii electrice a rezistorilor oscilanţi notaţi cu 1 şi decalată cu 90° fată de tensiunea de alimentare a redresorului de câmp prin intermediul bobinei de şoc.
Fig.13.Caracteristica punţii de măsurare
Variaţia tensiunii electrice la bornele de conexiune ale generatorului produce o variaţie a semnalului la ieşirea din puntea de măsurare şi implicit defazarea pe verticală a undei sinusoidale la căderea de tensiune electrică descrisa mai sus.(Fig.14.)
Fig.14. Tensiunea electrică de comandă a generatorului
a) sarcina nominalăb) condiţii de sub-solicitarec) condiţii de suprasolicitare.
Tensiunea electrică astfel obţinută acţionează ca semnal de comandă pentru unitatea de aprindere. Aceasta este alcătuită din două oscilatoare , câte unul pentru fiecare tiristor .
19

Fig.15. Unitatea de aprindere
Oscilatorul este generatorul de auto-reglaj , care transferă tensiunea electrică de comandă în impulsuri de aprindere pentru tiristori.(Fig 15). Rolul oscilatorului este de a amorsa generarea impulsurilor de aprindere după ce va depăşi prin tensiunea electrică de comandă o anumită valoare de acţionare. Daca această tensiune electrică nu este depăşită , oscilatorul nu va putea să funcţioneze. Oscilatorul este alimentat de tensiunea de undă de semiperioadă , practic dreptunghiulară , de la unitatea de alimentare .
Semnalul electric de comandă este aplicat la bornele de conexiune 2-6 si 8-12.(Fig.16.)Impulsurile de aprindere cu frecvenţa de 1,5 kHz, pentru aprinderea tiristorilor sunt
generate de transformatorii secundari.Pentru limitarea creşterilor de tensiune electrică în nivelul tranzistoarelor în timpul
blocării lor , tranzistorii au fost şuntaţi cu diodele Zener . Diodele din circuitele emitorului tranzistorului sunt folosite pentru obţinerea unei reacţii negative împiedicând funcţionarea oscilatorilor când nu există, semnal de comanda. în funcţie de valoarea semnalului punţii de măsurare , care este proporţională cu valoarea tensiunii generatorului , momentul acţionării oscilatorului şi implicit a tiristorului adicâ unghiul de aprindere este modificat de la 0 ° la 180 °. Tensiunea nominală de câmp a generatorului este astfel aleasă faţă de tensiunea electrica a generatorului , încât la sarcină nominală unghiul electric de funcţionare al tiristorului este de 90
20

Fig.16. Caracteristica electrică a transformatotului.
21

Fig.17. Formele undelor de tensiune electrică de comandă.
Transformatorul de la unitatea de alimentare este alimentat cu tensiunea de fază W- cu f= 50 Hz sau 60 Uz şi este prevăzut cu şase înfăşurări secundare : cele cu bornele de conexiune 36 -37 - 38 pentru frecvenţa de 50 Hz ,36 a - 37 a - 38 a pentru frecvenţa de 60 Hz asigurându-se astfel tensiunea electrică de alimentare a oscilatorului.
22

Fig.17.Schema transformatorului de la unitatea de alimentare
Aceste tensiuni electrice sunt redresate şi tăiate de diodele Zener . Din cauza valorilor ridicate ale tensiunilor electrice secundare ale transformatorului faţă de tensiunea electrica a diodelor Zener , tensiunile de alimentare ale oscilatorului au forma de unda aproximativ dreprunghiulară.(Fig.18.) Alimentarea oscilatorilor cu tensiune electrică pe semiperioadă prezintă avantajul câ tiristorii pot fi comandaţi numai în timpul semiperioadei pozitive.
Fig.18. Caracteristica tensiunii.
Înfăşurările cu bornele 33 - 34 pentru frecvenţa 1=50Hz şi bornele de conexiune 33 - 34a pentru frecventa f=60 Hz alimentează circuitul electric alcătuit din bobina de şoc 14 şi rezistorii l. Curentul electric care circulă prin acest circuit este defazat cu 90 ° de către bobina de şoc şi producea căderea de tensiune modulând tensiunea electrică a punţii de măsurare.
Coeficientul transformatorului este astfel ales ca oscilatorul să poată să funcţioneze deja la aproximativ 30% din tensiunea nominală a generatorului.Redresorul de câmp pentru unitatea de pornire (Fig.19.) este alimentat cu tensiunea electrică de fază a generatorului prin intermediul bobinei de şoc a cărui rol este acela de a limita panta de creştere a curentului electric al tiristorilor şi de a suprima interferenţele radio-electrice. Siguranţele fuzibile cu acţionare rapidă sunt utilizate pentru protecţia tiristorilor împotriva avariei iar circuitele RC sunt aplicate pentru amortizarea supratensiunilor electrice ale tiristorilor şi diodelor
23

Fig.19. redresorul de câmp pentru unitatea de pornire.
Generatorul - regulator funcţionează automat în timp ce viteza generatorului creşte de la 0 la n n . Valoarea minimă a tensiunii electrice reziduale a generatorului care asigură autoexcitaţia agregatului este de 3,5 V. Condensatorul şi bobina şoc-transformator acţionează pe principiul rezonanţei şi permite magnetizarea iniţială a generatorului. Ca urmare a rezonanţei serie , valoarea tensiunii electrice a înfăşurării primare a transformatorului de şoc depăşeşte de multe ori valoarea tensiunii electrice reziduale. Înfăşurarea secundară a ansamblului bobină şoc-transfonnator este conectată direct la bornale generatorului prin intermediul unor diode. Astfel curentul circulă prin înfăşurarea de excitaţie , începând şi iniţiind procesul de autoexcitaţie de tip avalanşă.
Atunci când tensiunea electrică a generatorului atinge o valoare de 7 V autoexcitaţia este continuată de către tiristori.
24

Circuitele poartă ale acestor tiristori sunt scurtcircuitate prin intermediul anozilor de la bobinele şoc , diodelor , contactelor inactive ale releului de curent şi ale întrerupătorului, ceea ce face ca curentul electric să poată circula prin aceste circuite şi să aprindă tiristorii mărind în continuare tensiunea electrică a generatorului.
La o tensiune electrică de aproximativ 3- 40 V , releul este acţionat şi închide înfăşurarea primara a ansamblului bobină de şoc-transformator prin intermediul contactelor sale. întrucât în momentul acţionării releului tensiunea electrica are o valoarea suficient de mare pentru alimentarea oscilatorilor , comanda tiristorilor se face prin intermediul oscilatorilor. Astfel tensiunea generatorului creşte până la valoarea nominală. Diodele şi bobina şoc protejează circuitele poartă ale ale tiristorilor împotriva avariilor în timp ce condensatorul şi rezistorul din circuitul său folosesc la temporizarea declanşării armăturii releului în cazul reducerii tensiunii electrice ale generatorului. În cazul scăderii tensiunii electrice de excitaţie disjunctorul principal deconectează generatorul de la reţea .
Fig.20.Limitatorul curenetului electric de excitaţie.
Tensiune pe fază a generatorului alimentează transformatorul prin intermediulunuisistem de rezonanţă paralel care programat la o frecvenţă de 50 de Hz sau de 60 de Hz.
Condensatorul montat în paralel cu înfăşurarea primară a transformatorului împreună cu un alt condensator formează un divizor de tensiune care limitează tensiunea armonică.
Tensiunea secundară a transfomiatorului depinzând de frecvenţă redresată de diode şi liniarizată de un condensator comandă tranzistorul care în mod normal pentru o frecvenţă situată sub frecventa nominală într-un domeniu de ± 10 % nu este conducător şi astfel nu va afecta deloc funcţionarea regulatorului de tensiune electric. Când începe sa devină conducător tensiunea electrică de la-secundarul transformatorului redresată şi liniarizată, este
25

aplicată rezistorului de la unitatea de comandă . În acest mod la apariţia unei căderi de tensiune electrică , se produce o cădere a unghiului de conductivitate a tiristoarelor şi deci şi o cădere a curentului electric de excitaţie a generatorului. Un rezistor variabil permite o ajustare precisă a valorii maxime de curent electric de excitaţie necesar în timpul devierii generatorului.
Corecţiile adecvate la tensiunea de comandă a oscilatorilor sunt produse de corectorul de distribuţie a puterii reactive între generatorii care funcţionează în paralel astfel încât aceasta să se situeze în limitele admisibile.(Fig.21.)
Fig.21. Corector de distribuţie a puterii reactive pentru pentru funcţionare paralela.
Căderea de tensiune a potenţiometrului este proporţională cu curentul de sarcină de la generator în timp ce tensiunea din secundarul transformatorului este proporţională cu tensiunea de linie a generatorului.
În cazul unei distribuţii incorecte între generatori tensiunile electrice vor fi diferite şi atunci va începe să circule un curent electric de egalizare.
Căderea de tensiune electrică la nivelul rezistenţelor produsă de circulaţia acestui curent de egalizare se adaugă la semnalul de ieşire al punţii de măsurare ceea ce face să se producă o corecţie a curentului electric de excitaţie şi o egalizare a distribuţiei puterii reactive.
Înainte de a monta regulatorul de tensiune se verifică întotdeauna pentru a stabili dacă tipul de generator marcat pe regulator la valorile nominale este conform cu tipul de generator la care regulatorul de tensiune urmează să fie conectat.
După montajul regulatorului de tensiune automat ,aplicând o sarcină la generator , se verifică dacă caracteristica generatorului este înclinată , asa cum arată Fig.21, iar reglajul de tensiune se situiaza în limtele ± 2,5% din tensiunea electrică nominala.
26

Fig.22. Caracteristica tensiune la generatorul sincron Precizia de resilare a tensiunii electrice se determină cu formula :
în care : Uo tensiunea electrică a circuitului deschis,
Un tensiunea electrică nominală Uk tensiunea electrică a curentului nominal
Apariţia tensiunii electrice la bornele de conexiune ale generatorului este automată după pornirea motorului de acţionare a generatorului. Menţinerea nivelului de tensiune electrică şi distribuţia puterii reactive în condiţii variabile de sarcină , frecvenţă şi temperatură a mediului se obţine în mod automat.
Nivelul tensiunii electrice a generatorului poate fi ajustat în cadrul limitelor admisibile de Un ± 5% cu ajutorul unui potenţiometru montat pe partea frontală a regulatorului şi care poartă inscripţia de identificare Umin - Umax.
În cadrul unei funcţionări în paralel a generatoarelor nu se montează niciodată generatori echipaţi cu regulatori de tensiune electrică tip TUR cu generatori echipaţi cu alt tip de regulator de tensiune electrică.(Fig.23.)
Dacă este nevoie de un transfer de sarcină de la reţeaua de alimentare cu energie electrică a navei către reţeaua de energie electrică de pe uscat şi invers , există posibilitatea de a sincroniza provizoriu reţeaua navei cu cea de pe uscat. Pentru realizarea acestui lucru va trebui să se mărească sau sa se diminueze tensiunea electrică a tuturor generatorilor ce funcţionează în paralel cu ajutorul potenţiometrelor frontale . Aceste modificări se introduc treptat astfel încât să nu se producă curenţi electrici de mărime exagerată provocaţi de distribuţia incorectă a puterii sau să se diminueze tensiunea electrică a tuturor generatorilor ce funcţionează în paralel cu ajutorul potenţiometrelor frontale . Aceste modificări se introduc treptat astfel încât să nu se producă curenţi electrici de mărime exagerată provocaţi de distribuţia incorectă a puterii tip de regulator de tensiune electrică.(Fig.23.).
Prin repetarea acestor proceduri se obţine o egalizare satisfăcător de precisă a ambelor tensiuni electrice ale celor două reţele de alimentare cu energie electrică .(Fig.24.)
27

Construcţia regulatorului automat de tensiune permite suprimarea câmpului generatorului iară sa se oprească motorul de antrenare al generatorului.
28

29

Fig.23 schema de principiu a instalaţiei electrice exterioare între generatorul sincron şi regulatorul de tensiune electrica TUR
30

Fig.24. Schema de principiu a instalaţiei electrice exterioare între generatorul sincron şi regulatorul de tensiune electrică TUR pentru o funcţionare paralelă.
Progresul făcut în dezvoltarea dispozitivelor semiconductoare moderne permite echipamentelor de excitare statice pentru generatoare sincrone să fie fabricate astfel încât să se distingă prin avantaje considerabile faţă de echipamentele utilizate în mod normal până acum. Prin utilizarea echipamentului de excitaţie electronic (EEE) este sigur că tensiunea generatorului este menţinută la o valoare constantă în domeniul 0-100% al curentului nominal, toleranţa ridicându-se la +(-) 1.5%, cu factori de putere cos 0 de la 0 la 1.0 (supraexcitat), la o variaţie de frecvenţă între -4%+10% şi independent de starea de încălzire a. generatorului.
31

Echipamentul de excitaţie reacţionează aproape fără întârziere astfel încât, de exemplu , o schimbare de tensiune făcută prin adăugarea sarcinii nominale va fi egalată în cuprinsul a 100-200 ms. Simplificări majore au fost făcute în ceea ce priveşte funcţionarea în paralel.
Echipamentul de excitaţie este furnizat în funcţie de diferite cerinţe, cu sau fără transformator compound. În cazul unui scurtcircuit, componentele sunt cele care sunt răspunzătoare de furnizarea unui curent de scurtcircuit continuu stabil.
Întregul echipament de excitaţie este anexat generatoarelor sau montat pe partea superioară a acestora fiind astfel parte integrantă. În mod corespunzător, echipamentul de excitaţie a fost destinat satisfacerii cerinţelor şi codurilor celor mai importante societăţi de clasificare şi standardizare. Împreuna cu generatorul, echipamentul de excitaţie formează o buclă de comandă închisă. În această conexiune generatorul reprezintă sistemul controlat, în timp ce dispozitivul de comandă este format de către regulator şi partea electrică.
În cadrul generatoarelor cu convertor cu tiristor uni-impuls partea electrică utilizată este un convertor cu tiristor uni-impuls (element de comandă) cu dioda nesincronizată.Capătul de intrare al elementului de comandă se leagă direct peste terminalele generatorului iar capătul de ieşire peste inelele colectoare ale înfăşurării de excitaţie. Clapa de comandă a convertorului cu curent controlabil (tiristor p) este conectată în funcţie de tensiunea generatorului şi tensiunea de excitaţie nominală. Tensiunea de excitaţie maximă (plafonul de tensiune) cu acest circuit se ridică la 0.45 x tensiunea de conectare , de exemplu în cazul unei tensiuni a generatorului de 390 V aceasta ajunge până la 0.45 x 225 V =100 V, iar pentru circuitul U-W aceasta este 0.45 x 390V =175 V. Nu există diferenţe funcţionale între aceste circuite, oricum este necesară o unitate de control diferită având în vedere diferenţa în poziţiile fazelor.
În cazul unei operări normale a generatorului unghiul de control al tiristorului este mai mic de 180 grade în proiecţie verticală, astfel încât există o deficienţă în tensiunea de excitaţie (fig 25 a).
Fig.25.a. Relaţia curent-tensiune
Ug -tensiunea generatoniluiUf- tensiunea de excitaţiea - unghiul de controlit- curentul de excitaţieip - debitul de curent în tiristorin - debitul de curent în dioda nesincronozatâ
32

Oricum, ca rezultat al inductivităţii mari a înfăşurării de excitaţie care acţionează ca un element de liniarizare, curentul de excitaţie este păstrat de asemenea la o valoare constantă şi în restul timpului. În acest timp curentul "curge" prin dioda nesincronizată în (fig.B şi C).
B .Curentul de excitaite in timpul C.fazei conducătoarea tiristorului
C-curentul de excitatie pe timpul fazei de blocare a tristorului.
Siguranţa semiconductorului cu acţiune ultrarapidă protejează împotriva supracurentului şi serveşte drept protecţie a tiristorului împotriva scurtcircuitelor.
În vederea protejării tuburilor electronice ale convertorului de curent (tiristor p şi dioda n) împotriva supratensiunii tranzitorii temporare (supratensiune tranzitorie de comutaţie ) tuburile electronice sunt prevăzute cu un circuit de condensatoare şi rezistoare .
În cadrul generatoarelor prevăzute cu un transformator de curent pentru compundaregeneratorul este prevăzut cu acelaşi controler şi acelaşi element de control cu tiristor ca
şi modelul generatorului fără componente. Datorită cerinţelor specifice ale anumitor utilizatori cu privire la reţeaua de alimentare trifazată, de ex. pe vapoare, este oricum prevăzut cu un transformator de curent pentru compundare.
Acest transformator alimentează înfăşurarea de excitaţie a înfăşurării secundarului printr-un ansamblul de rederesare în paralel cu firistorul. În acest mod,este obţinut în timpul operării normale un curent de sarcină cu reglaj suplimentar prin urmărire al generatorului, şi în cazul unui scurtcircuit acesta face să fie asigurat de către generator un curent de scurtcircuit constant, stabil.
Ansamblul de redresare îndeplineşte funcţiunea unei diode nesincronizate ca o funcţiune suplimentară (fîg.26ab) astfel încât pe perioada fazei de blocare a tiristorului curentul de excitaţie trece prin ramurile montajului în paralel ale ansamblului de redresare.
Fig 26a. Curentul de excitaţie pe timpul fazei conducătoare a tristorului de tip ST
Fig.26b.Curentul de excitaţie pe timpul fazei de blocare a trisorului de tip ST
33

După conexiunea adăugată transformatorului de curent nu se va produce nici o schimbare în ceea ce priveşte funcţionarea tiristorului. Pentru a proteja ansamblul de redresare împotriva supratensiunii de şoc maxime, este prevăzut un montaj cu rezistenţe dependente de tensiune (varistori) sau supresoare de supratensiune cu seleniu.
Echipamentul de comandă electronic pentru tiristor este într-o carcasă separată şi constă în transformatoare de intrare , plăcuţe cu circuit imprimat şi partea pentru reglarea rezistorilor şi conectarea terminalelor controlerului.
Dispozitivele semiconductoare cu siliciu sunt componente utilizate exclusiv pentru un astfel de ansamblu. Transformatoarele pot opera în conexiune în "V" şi furnizează tensiunile pentru atingerea valorilor actuale şi pentru alimentarea întregului regulator.
Tensiunea efectivă este generată prin-redresarea tensiunii generatorului în puntea cu diode cu liniarizare ulterioară şi este comparată cu tensiunea prescrisă, tensiunea printr-o diodă . În paralel cu valoarea actuală se leagă un rezistor reglabil cu rol de regulator al valorii prescrise.
Rezistorul face posibil influenţarea valoarii efective a tensiunii, astfel încât aceasta să poată declanşa continuu formarea valorii efective a variabilei în cuprinsul unui domeniu ce trebuie obţinut. Tensiunea diferenţială obţinută din valoarea efectivă şi tensiunea prestabilită controlează etajul de amplificare cu tranzistor. .Amplificatorul cu limitare automată este echipat cu un feedback ; prin aceasta sunt obţinute o amplificare şi o comportare în timp sigure, necesare pentru obţinerea unui control optim al comportamentului. Cu ajutorul unui rezistor variabil amplificarea poate fi redusă mai mult astfel încât abaterea remanentă a tensiunii generatorului să crească cu cât creste sarcina. În acest mod rezultă tendinţa de scădere a caracteristicilor tensiunii efective a generatorului, necesară pentru operarea paralelă .Tensiunea diferenţială crescută este suprapusă peste o tensiune de sincronizare pentru a elibera impulsurile de aprindere ale tiristorului pe perioada fazei de aprindere când aceasta este pregătită. Dacă totalul valorilor tensiunii diferenţiale şi tensiunii de sincronizare este mai mic decât tensiunea de răspuns a tiristorului atunci ultima va bloca şi tensiunea de alimentare care se aplică generatorului de impulsuri de aprindere . Etajul de impulsuri este un circuit oscilant de blocare care în cazul aplicării unei tensiuni începe automat să oscileze şi generează lanţuri de impulsuri rectangulare până ce tensiunea se" stinge". Impulsurile de aprindere simt alimentate la sistemul controlat al tiristorului.
După cum se ştie tensiunea remanentă a generatorului este utilizată pentru propria autoexcitaţie . În acest mod inevitabil un tiristor este amplificat prin controlul fiecărei semiunde pozitive astfel încât să fie făcut să se comporte ca o diodă. Acum, tensiunea remanentă fiind aplicată simultan către racordul tiristorului va fi suficient să se introducă un debit mic de curent prin înfăşurarea de excitaţie şi să se amplifice tensiunea remanenta astfel încât procesul de autoexcitaţie să fie iniţiat. La aproximativ 30% din Ug un controler poate începe să furnizeze impulsuri de aprindere. îndată ce tensiunea de răspuns a releului a fost atinsă , aprinderea forţată este întreruptă iar controlul ulterior este luat de către regulator. Releul şi dioda sunt montate pe plăcuţe cu circuite imprimate , releul fiind în întregime fără întreţinere, cu contact de protecţie. În
34

cazul opririlor care se întind pe perioade foarte lungi de timp tensiunea remanentă poate dispărea aproape în întregime iar autoexcitaţia poate deveni nesigură. În acest caz este posibil să se iniţieze autoexcitaţia prin conectarea temporară a unei baterii (de la 6 V pina la 24 V) la terminalele + si - de pe tabloul de conexiune . Aceste terminale sunt în contact cu terminalele inelului colector al înfăşurării de excitaţie printr-o diodă de excitaţie, şi un rezistor de limitare . În acest caz dioda serveşte drept protecţie împotriva curentului invers atunci când generatorul devine excitat iar rezistorul face ca curentul din baterie să fie limitat la mai puţin de 2,5 A.
Cu ajutorul echipamentului de excitaţie electronică este posibil să se regleze tensiunea generatorului în cuprinsul unui domeniu definit. Regulatorul de referinţă de pe regulator serveşte acestui scop . Reglarea de la fabrică a acestui rezistor este făcută astfel încât să debiteze tensiunea
specificată pe plăcuţa cu marca fabricii. Dacă utilizatorul consideră necesar ca această tensiune să fie reglabilă în funcţie de tipul de operare (de ex. pt. operarea paralela) , se poate conecta un potenţiometru paralel . Un rezistor cu conductor reglabil de 500 ,5W poate fi utilizat ca un rezistor comandat de la distanţă. Acest rezistor exterior face ca tensiunea generatorului să fie reglată în cuprinsul domeniului +5%, -5% faţă de tensiunea nominală.
Tensiunea generatorului este practic sinusoidală. Prin aprinderea unui tiristor sunt suprapuse impulsuri de scurtă durată, individuale peste această tensiune. Aceste impulsuri sunt întreruperi ale tensiunii a căror durată nu depăşeşte 0,4 miiisecunde cu o adâncime a căderii ce ajunge pana la 30 % din amplitudine. Limitele suprafeţelor din graficul timp -tensiune pentru aceste căderi de tensiune de seurtă-durată se ridică până la 2 % în cele mai multe suprafeţe timp - tensiune ale semiundei .
Dacă generatorul este operat pe o reţea de alimentare cu electricitate având multe sinusoide , aceasta poate produce dereglări în unitatea de comandă .
Dacă nu sunt comandate altfel generatoarele sunt proiectate şi construite cu un câmp rotitor spre dreapta , iar echipamentul de excitaţie este conectat la terminale ţinând cont de acest lucru .Dacă echipamentul de excitaţie trebuie să fie operat pe un câmp rotitor spre stânga ,conexiunile fazelor la terminalele de intrare ale controlerului trebuie să fie schimbate .
În scopul protejării împotriva tensiunilor mari nepermise care pot proveni de la o defecţiune în echipamentul de excitaţie controlerul este echipat cu un controler electronic de tensiune automat. Componentele sunt montate pe plăcuţele cu circuite imprimate. Circuitele constau într-un etaj cu circuit basculant cu tranzistori al căror prag de reacţie poate fi reglat prin intermediul unui rezistor. Tranzistorul serveşte aici la stabilizarea temperaturii etajelor cu circuite basculante .Tranzistorul formează amplificatorul de comutare pentru ieşirea releelor .Releele au contacte protectoare cu gaz şi în consecinţă sunt insensibile la contaminări şi foarte sigure în comutare.
În cazul supratensiunii, releele reacţionează fie producând impulsurile de aprindere pe ieşirea oscilatorului de blocare care trebuie scurtcircuitată şi prin aceasta se evita ca tiristorul să continue să se încălzească, fie se implică ca un releu cu contact de întrerupere care în cazul unui răspuns întrerupe circuitul de iniţiere a autoexcitaţiei printr-o diodă. Coacţiunea celor doua relee face ca generatorul să fie dezexcitat, până la o valoare de aprox. 30 % din tensiunea nominală . Pe această perioadă generatorul este deconectat de la reţeua de alimentare cu electricitate prin declanşare la tensiune minimă, astfel încât dacă s-ar produce o reexcitare după căderea releului, acest lucru nu ar provoca nici o deteriorare.
35

36

SISTEME DE EXCITAŢIE SI DE STABILIZARE A TENSIUNII UTILIZATE LA GENERATOARELE SINCRON
Pentru asigurarea funcţionării normale a maşinii sincrone este necesară o sursă de tensiune continuă care să furnizeze înfăşurării de excitaţie curentul continuu necesar. La maşini de puteri mijlocii şi mari ansamblul maşinilor şi aparatelor necesare prevăzute pentru acest scop este destul de complex, formând " sistemul de excitaţie " al maşinii. Acesta joacă diferite roluri în funcţionarea maşinii , având influenţe determinate în performanţele maşinii şi adesea hotărâtoare în ceea ce priveşte siguranţa în funcţionare.
Sistemele de excitaţie îndeplinesc mai multe funcţiuni cum ar fi:- producerea câmpului magnetic inductor, care asigură însăşi principiul de funcţionare al
maşinii în regimul ei de bază. staţionar;- asigurarea manevrelor necesare în exploatare, cum ar fi de exemplu sincronizarea şi
cuplarea la reţea, reglarea puterii reactive, asigurarea curentului optim de funcţionare, etc;- îndeplinirea unor funcţiuni de protecţie în cazul avariilor ca de exemplu forţarea
excitaţiei, dezexcitarea rapidă;- realizarea funcţiunilor de reglare automată a tensiunii şi repartizarea automată a sarcinii
reactive la mers în paralel.Datele nominale fundamentale sunt cele ale înfăşurării de excitaţie, fiind în general în limitele
de mai jos:- tensiunea nominală Um = 80 ... 540 V- curentul nominal Ien= 10 ... 6000 A- puterea nominală egala cu produsul Ucn Ien şi care faţă de puterea nominală a maşinii
sincrone este de 0,2 ... 0,8 % la maşini de mare putere şi de 0,6 ... 3 % la maşini de medie şi mică putere.
Clasificarea sistemelor de excitaţie se poate face din mai multe puncte de vedere . Astfel după elementele componente avem:
- de curent continuu (clasice)- de curent alternativ cu redresoare necomandate, sau comandate.- de curent alternativ, fără perii - sisteme statice cu redresoare comandate cu tiristoare
Din punct de vedere al modului de amorsare avem:- sisteme de excitaţie separată- sisteme cu autoexcitaţieÎn afara funcţiilor de forţare - dezexcitare sistemele de excitaţie îndeplinesc şi funcţiuni de
reglare - automatizare cum ar fi :- reglarea automată a curentului de excitaţie pentru menţinerea tensiunii la bare în limite de
± 5%- compundarea generatoarelor cu autoexcitaţie
- asigurarea statismului caracteristicilor în vederea repartiţiei optime a puterilor reactive pe mai multe grupuri în paralel .
• Sisteme de excitaţie statice
Pentru a se elimina dezavantajul introducerii inerţiilor inerente înfăşurărilor maşinilor şi pentru a se putea exploata la maximum calităţile de rapiditate ale elementelor componente moderne ale electronicii de putere se folosesc în practică sistemele de excitaţie statică. De asemeni ele satisfac şi cerinţele din punct de vedere a stabilităţii statice şi dinamice a maşinilor sincrone de mare putere. Aceste sisteme de excitaţie permit atingerea performanţelor ridicate, o siguranţă ridicată în funcţionare şi întreţinere minimă. în Fig. 27. este prezentată schema de principiu a unui astfel de sistem.
Fig. 27. Sisteme de excitaţie statice
TA - transformator de alimentare având raportul de transformare impus de valoarea plafonului dorit de forţare.
d - redresor
37

de excitaţie de mare putere, alcătuind cu TA bucla principală de autoexcitaţie a generatorului principal
CA - circuit suplimentar de amorsare pentru amorsarea iniţială a procesului de autoexcitaţieTrd - traductor de tensiune cu asigurarea statismului de curentReg - regulator electronic de tensiune prevăzut cu dispozitiv de stabilire a valorii de consemn
U, pentru tensiunea generatoruluiF - filtruDC - dispozitiv electronic de comandă a tiristoarelorRs - rezistenţă de stingere a câmpuluiÎntreaga instalaţie este realizată pe module standardizate, fiind dispusă în dulapuri metalice tip
aşezate în apropierea generatorului principal. Este întâlnit şi într-o altă variantă constructivă unde alimentarea circuitului de excitaţie se face
separat de la generatoare sincrone auxiliare montate pe acelaşi ax cu agregatul sincron.
• Sisteme cu autoexcitaţie şi compundaj
Prin eliminarea surselor suplimentare de tensiune continuă sau alternativă, sistemele de excitaţie devin mai simple şi mai sigure, având o greutate şi un preţ mai scăzute.
Sistemele de autoexcitaţie folosesc obligatoriu un redresor . deoarece curenţii în înfăşurările maşinii sincrone sunt de frecvenţe diferite ( alternativ 50 Hz în indus şi curent continuu în inductor). în Fig. 28. este prezentată schema de principiu:
Fig.28. Sisteme cu autoexcitaţie şi compundaj
Procesul de autoexcitaţie necesită îndeplinirea unor condiţii care pentru mersul în gol sunt următoarele:
a) existenţa unei tensiuni remanente la mersul în gol neexcitat al generatorului, ca urmare a magnetismului remanent al materialelor feromagnetice din care este realizat inductorul.(datorită unei funcţionări anterioare); Redresorul nu are impedanţă infinită de intrare şi absorbind un curent mic, tensiunea la borne remanentă Ur va fi puţin mai mică decât tensiunea Er.
b) curentul de excitaţie redresat sub acţiunea tensiunii Ur trebuie să producă un câmp magnetic de acelaşi sens cu cel remanent contribuind la intensificarea câmpului rezultant din maşină. Sub acţiunea câmpului mărit va creşte tensiunea la bornele maşinii deci ale redresorului crescând din nou curentul de excitaţie redresat, care va produce o nouă creştere a câmpului rezultant şi aşa mai departe, rezultând un proces în lanţ. Acest proces se termină atunci când tensiunea produsă la bornele generatorului de către curentul icf produce prin redresare un curent la ieşirea redresorului egal cu .
Acest lucru are loc la intersectarea celor două caracteristici.
ensiunea U funcţie de curentul de excitaţie ie
pentru generatorul sincron (curba 1) care este încărcat pe sarcina echivalentă impedanţei de intrare a redresorului.
urentul ic de la ieşirea redresorului, funcţie tensiunea U aplicat
38

ă la intrarea acestuia , redresorul fiind încărcat pe o impedanţa egală cu cea a înfăşurării de excitaţie (curba 2).
- c) caracteristica redresorului să fie sub cea a generatorului, intersecţia lor având loc la tensiunea necesară de funcţionare (U„). Astfel este necesar ca rezistenţa pe partea de curent continuu să fie mai mică ca o anumită valoare critică ( la valori mari caracteristica redresorului este notată cu 3)
Datorită curburii iniţiale a caracteristicii redresorului, cauzată de pragul de tensiune al diodelor în conducţie, este necesar o t.e.m. remanentă mai mare ca la execuţiile obişnuite fapt ce se poate asigura prin introducerea unor magneţi permanenţi în tălpile polare sau prin intercalarea unui transformator ridicător de tensiune între bornele generatorului şi redresor. T.e.m. remanentă indicată este de cel puţin 10%Un .
Pentru o mai bună stabilitate a tensiunii la borne este de preferat o caracteristică de mers în gol mai curbată a generatorului, lucru ce se poate obţine prin punţi de saturaţie practicate în miezul polilor maşinii.
Siguranţa în funcţionare este asigurată prin alimentarea înfăşurării de excitaţie independentă de regimul reţelei la care este cuplat generatorul, (ca cel din Fig.4.2. ). Astfel la un scurtcircuit apropiat la bornele maşinii tensiunea scade , produce scăderea curentului de excitaţie, exact invers de cum trebuie procedat pentru menţinerea stabilităţii.
Pentru evitarea dezexcitării se foloseşte metoda compundării, care are efecte favorabile asupra funcţionării maşinii. Metoda compundarii excitaţiei permite efectuarea unei reglări prealabile a tensiunii fară o precizie prea mare deoarece se bazează pe principiul compensării perturbaţiei dominante si nu pe principiul reglării după abaterea faţă de valoarea de consemn. Prin folosirea metodei de compundare , RAT -ui efectează doar reglarea unor mici variaţii ale mărimii de intrare , rezultând deci o putere mica şi o funcţionare liniara. Toate metodele de compundare sunt bazate pe suplimentarea la mersul în sarcină al maşinii sincrone a curentului de excitaţie de la mersul în gol , cu o componentă care să depindă de curentul I de sarcină ( compundare simplă) sau atât de curentul I cât şi de factorul de putere (compundare de fază).
Compundarea simplă se foloseşte numai în cazul sarcinilor la care coscp este practic constant şi este prezentată în Fig.29.
39

Fig.29. Sistem de excitaţie şi compundare simplă la constant
La mersul în gol schema funcţionează numai cu bucla formată de transformatorul de tensiune TT şi redresorul Rdl. La intrarea în sarcina inductivă funcţionează şi cea dea a doua bucla cu transformatoarele de curent TC si redresorul Rd2 care suplimentează curentul de excitaţie în mod proporţional cu curentul L la dat. Pentru o altă valoare a lui schema funcţionează prost, curentul de compundare fiind variabil şi deci şi tensiunea de la borne nu mai este constantă. Acest neajuns dispare la compundarea în fază la care se poate menţine tensiunea la borne în limite destul de restrânse ( 2,5 ... 5%) , indiferent de al sarcinii şi de curentul I. Schema de principiu de compundaj este prezentată în Fig.30.. La30.a este prezentată schema de compundaj serie (cu sumarea tensiunii) , la30. b schema paralel ( cu sumare curenţi). La ambele scheme sumarea semnalelor se face înaintea redresării , deci cu luarea în consideraţie a defazării semnalelor.
Fig.30. Sisteme de excitaţie şi compundare de fază
• Sisteme de excitaţie fără perii
Dispozitivul de excitaţie fără perii a luat aproape complet locul excitatoarei de curent continuu pentru generatoarele de putere cuprinse între 2 şi 100 MVA. Funcţionarea continuă, fără întreţinere şi fără să prezinte pericol de formare a scânteilor are o mare importanţă pentru numeroase centrale, instalaţii de incinerare a deşeurilor şi centrale termice.
40

Principalii componenţi ai sistemului de excitaţie fără perii sunt constituiţi din excitatoarea în curent alternativ cu punte redresoare şi dispozitivul de reglare electronică. Alimentarea regulatorului de tensiune poate fi asigurată de un generator cu magneţi permanenţi sau de un transformator racordat la bornele generatorului.
• Excitatoarea de curent alternativ cu redresor cu diode pe rotor
Posibilităţile tehnice oferite de câţiva ani de către diodele de putere cu siliciu , au condus la starea actuală a excitatoarelor Brown Boveri.
În funcţie de puterile generatoarelor şi de necesităţile lor de excitaţii diferite, sunt disponibile două tipuri de excitatoare.
Pentru turbo-gcneratoarele de putere ajungând până la 20 MV A, se utilizează excitatoare fără perii de tip WFT. Acesta este un generator sincron cu poli proeminenţi cu o înfăşurare trifazată în rotor şi o înfăşurare de curent continuu în stator. Este montată în capătul axului. Această maşină este auto ventilată. Inelul port-diode cu şase diode de siliciu montate în punte supradimensionată se găseşte lângă roata polară a rotorului. Între palierul de susţinere al generatorului si excitatoare pot fi montate inele necesare pentru a măsura tensiunea de excitaţie şi pentru a indica defecţiunea punerii la pământ a rotorului.
Pentru excitarea turbo-generatoarelor de putere mai mare de 20 MV A, se utilizează excitatoarea fără perii de tip WBT, echipată cu o flanşă palier la un capăt şi cuplată rigid la axul generatorului la celălalt capăt.
Această excitatoare, care este în egală măsură autoventilată, este complet închisă , făcând abstracţie de două canale din placa de baza ce permit o ventilaţie forţată. Astfel, condiţiile severe impuse astăzi în ceea ce priveşte emisia de zgomot pot fi respectate fără dificultate.
În comparaţie cu excitatoarea de curent continuu, utilizată de obicei până acum, excitatoarea de curent alternativ prezintă o caracteristică dinamică mult mai bună în ceea ce priveşte tehnica reglării.
Excitatoarea de tip WBT constituie un element de construcţie complet şi independent care poate fi cuplat la generatoare de orice fabricaţie, presupunând capătul axului să fie suficient de rezistent şi că rotorul să aibă un alezaj central.
41

Fig.31. Schema excitatoarei fără perii de tip WBT
De la stânga la dreapta se văd dispuse pe ax polii cu magnet permanent, rotorul excitatoarei de curent alternativ şi inelul port+diode. Acesta din urmă este montat pe axul excitatoarei cu toate elementele necesare transformării curentului alternativ în curent continuu.
1-excitatoarea principală trifazată
2-excitatoarea auxiliară cu magnet permanent
3-redresor rotativ
4-dioda cu siliciu
5-circuit de protecţie RT
6-siguranţă fuzibilă
7-conductori legaţi la înfăşurarea inductorului
8-inele de măsură
9-parte rotativă
42

10-miezuri magnetice pentru supravegherea diodelor.
Se află aici diode de putere cu siliciu, cu 3 sau mai multe ramuri de diode în paralel, de radiatoare pentru evacuarea căldurii,de condensare împotriva efectului de acumulare de purtători de sarcină, de rezistenţe pentru a face simetrică tensiunea inversă în mers asincron în caz de perturbări, ţi de siguranţe fuzibile individuale prevăzute pe fiecare diodă. Numărul de diode în paralel este mai mare decât a celui pentru un regim normal de funcţionare. În cazul dispariţiei puterii de blocare a unei diode, ramura de diode scurtcircuitate este scoasă de sub tensiune în mod selectiv, astfel încât să rămână asigurat regimul normal de funcţionare,chiar dacă un element de diodă este defectuos( principiul n-l).
Pentru generatoarele cvadripolare de tip WG Societatea brown Boveri a pus la punct o excitatoare fără perii care, spre deosebire de excitatoarele WFT şi WBT, se găseşte în interiorullagărelor şi al carcasei generatorului şi care formează o unitate independentă cu cea din urmă.Excitatoarea este un agenerator sincron cu polii exteriori de tipul polilor aparenţi cu o înfăşurare trifazatăîn statorul excitat de curent continuu. Între excitatoare şi roată polară se găseşte redresorul rotativ.
Pentru generatoarele industriale se folosesc dispozitivele de excitaţie fără perii şi dispozitivele de reglare electronice din seria Unitrol.
Pentru generatoarele de putere de până la 20MVA, se utilizează de preferinţă o excitaţie fără perii la bornele generatoarelor.
Necesarul de putere al unei excitaoare WFT cere un regulator de tensiune cu un curent de ieşire maximal de 8A pentru orice domeniu de putere. Această condiţie este îndeplinită de regulatorul Unitrol 2212.
Pentru satisfacerea dorinţei a numeroşi clienţi, a fost pus la punct un sistem de regulatoare cu reducanţă pentru instalaţiile industriale(Fig.32). Dovadă sunt numeroasele sisteme de acest tip care au fost livrate cu specificaţia Unitrol K14001. Două regulatoare Unitrol 2212 sunt montate într+un dulap standardizat,unul pentru regimul automat , iar
celălalt pentru regimul manual . Această variantă este numită pe scurt regulatorul cu canal dublu . În cazul unei defecţiuni a canalului automat, comutarea pe canalul manual se face automat printr-un releu de protecţie. În funcţionarea normală, adică automată, regulatorul de tensiune este în funcţiune.
Tensiunea şi curentul generatorului sunt măsurate prin transformatoarele de măsura fj si f4 . Alimentarea elementului final, un montaj în punte cu tristori, încorporat regulatorului Unitrol, se face începând cu bornele generatorului prin intermediul unui transfonnator de adaptare special.
Conform abaterii măsurate faţa de o valoare de consum reglată, regulatorul de tensiune furnizează o tensiune de excitaţie mai mare sau mai mica la polii statorici
43

(înfăşurare inductor) ai excitatoarei de curent alternativ. Aceasta lucrează ca o maşină amplificatoare clasică şi produce puterea necesară în înfăşurarea inclusului rotativ.
Curentul furnizat este redresat printr-un redresor cu diode rotativ şi serveşte la excitaţia roţii polare a generatorului.
Fig.32.Dispozitiv de excitaţie fără perii, cu alimentare începând de la bornele generatorului şi compundare
a2 - întrerupător de dezexcitaţief1f4 - transformatoare de măsurăf3 - transformator de curentk1 transformator de compundarem1-alternatorm2- excitatoare de curent alternativm4 - transfonnator de alimentaren1- redresor rotativ cu rotorn2 - redresor de compundareU1- regulator de tensiune : comandă automatau2 - regulator de tensiune : comanda manuală
Un loc important în cadrul reţelelor industriale îl ocupă echipamentul de compundare pentru alimentarea regulatorului începând cu bornele generatorului. în caz de perturbare în reţea, alimentarea dispozitivului de excitaţie nu este asigurată.,Scopul compundării este de a menţine excitaţia în cazul scurtcircuitelor în reţeaua industrială şi în consecinţă să garanteze de asemenea un curent de scurtcircuit permanent determinat de generator, ceea ce permite scoatarea din funcţiune selectivă a receptorului de energie în cauză. Circuitul de compundare se compune dintr-un transformator de măsură de compundare kj (de exemplu o bobină de inductanţă) şi din redresorul n; . Transformatorul de măsură ki este dimensionat pentru producerea, la ieşirea din redresorul n: , a unei tensiuni suplimentare proporţionale curentului generatoarelor. În caz de scurtcircuit,
44

tensiunea de excitaţie suplimentară este limitată la valoarea cerută, din cauza saturării acestui transformator de măsură. Acest dispozitiv este denumit de asemenea de compundare în serie, pentru că tensiunea de excitaţie suplimentară pe care acesta o furnizează este în serie cu tensiunea de ieşire din regulator.
Pentru generatoarele de putere de peste 20 MVA Societatea Brown Boveri utilizează un dispozitiv de excitaţie alimentat de o excitatoare auxiliara cu magneţi permanenţi.(Fig.33.) Pentru acest montaj, ea utilizează excitatare fară perii de tip WBT cu generator cu magneţi permanenţi integraţi ce serveşte ca excitatoare pilot. Generatorul cu magneţi permanenţi este un generator trifazat a cărui excitaţie este asigurată de rotaţia magneţilor permanenţi. El alimentează înfăşurarea inductor (înfăşurarea stator) a excitatoarei principale prin intermediul elementului final al regulatorului de tensiune . Astfel dispozitivul de excitaţie poate deveni complet independent de reţea. Magneţii permanenţi ai generatorului sunt dimensionaţi astfel încât scurtcircuitele si demontările să nu poată să împiedice niciodată funcţionarea sau siguranţa lor. .
Pentru generatoare de puteri cuprinse între 20 şi 80 MVA, dispunem de regulatorul de tensiune combinat Unitrol K 16008 cu canal dublu cu două regulatoare de tensiune Unitrol 3313.
Fig. 33. Dispozitiv de excitaţie fâră perii alimentat de un generator cu magneţi permanenţi.
a2 - întreaipător de dezeLxcitare f1,f2- transformatoare de măsură;
f3 – transformator de curent.
m1 - generator m2 - excitatoaro de curent alternativ m3 - generator cu magneţi permanenţi n1 - redresor rotativ solidar cu rotorul r2 -rezistenţa de dezexcitaţie u1 - regulator de tensiune xomandă automată u2 - regulator de tensiune : comanda manuală
45

Compundarea poate fi deci suprimată aici pentru că, independent de fenomenele exterioare, generatorul cu magneţi permanenţi furnizează la bornele sale o tensiune aproape constantă pentru alimentarea regulatorului.
Fiecare regulator de tensiune poate fi combinat în plus cu un limitator Unitrol K 3001 în vederea limitării curentului generatorului. Valorile limită reglabile sunt adaptate diagramelor de putere ale generatorului sincron (unghi de decalaj intern, curent statoric şi rotoric)
Limitatoarele sunt utilizate pentru generatoarele ce lucrează în paralel cu reţeaua sau cu alte generatoare. Prezenţa regulatorului de tensiune permite utilizarea generatoarelor într-un mod optim obţinându-se creşterea securităţii funcţionării în paralel. În plus se poate încorpora regulatorul Unitrol 1040 care, după cuplare, serveşte la reglarea factorului de putere al generatorului ( ) sau factorului de putere în punctul de schimb. La tensiune constantă, factorul de putere al generatorului este menţinut aproape egal cu = 0,8 prin dispozitivul de reglare al curentului într-un domeniu restrâns, încorporat în regulatorul de tensiune. Dar variaţii de tensiune provoacă variaţii de curent reactiv care antrenează pe de o parte cheltuieli mari atunci când energia reactivă este furnizată de reţea şi pe de altă parte supraîncărcarea inutilă a generatorului atunci când puterea reactivă este retrimisă în reţea prin acesta. În exploatare este necesară o reglare a factorului de putere la nivelul punctului de racordare la reţea. Astfel că apare necesar un dispozitiv de reglare a valorilor limită pentru generator. Pe de altă parte, în reţelele industriale existente, factorul de putere este adesea îmbunătăţit cu maşinile electrice rotative sau cu aparate statice. Introducerea unui nou turbo-grup nu trebuie să influenţeze dispozitivul de comandă sau de reglaj existent pentru factorul de putere în reţeaua industrială. De aceea se cere adesea un reglaj pentru la nivelul generatorului.
• Dispozitive de excitaţie statică
Pentru turbo-generatoarele de putere medie şi mare, ca şi pentru generatoarele hidraulice, Societatea Brovvn Boveri utilizează în general dispozitive de excitaţie statică cu tiristori. Elementul final cu tiristori utilizat pentru excitaţia generatorului este în acest caz alimentat de la bornele acestuia, prin intermediul unui transformator.
Acest tip de excitaţie este utilizat din ce în ce mai mult şi pentru maşinile mici, deoarece acesta permite o alegere liberă a amplasării echipamentului corespunzător şi o lungime mai mică a maşinii, şi de asemena obţinerea unui timp de reglare scurt în caz de perturbare în reţeaua de alimentare.
Un dispozitiv de excitaţie statică conţine un transfonnator de putere, un element final cu tiristori, un dispozitiv de reglare electronică şi un dispozitiv de dezexcitaţie.(Fig.34.)
46

Fig. 34. Schema de principiu a unui dispozitiv de excitaţie cu tiristori alimentaţi de la bornele generatorului
a2 - întrerupător de dezexcitaţief1/2/3/4 - transformatoare de măsurăm - generatorm2}m3,m4, - transformatoaren1 - redresor comandatu1 - regulator de tensiuner1 - dispozitiv de dezexcitaţier2 - dispozitiv de activare
Dacă în dispozitivele de excitaţie cu excitatoare, puterea necesară roţii polare este cedată mecanic axului, dispozitivul de excitaţie statică preia energia electrică, necesară bornelor generatoarului. Dimensiunile dispozitivului de excitaţie statică sunt determinate de valoarea puterii electrice furnizate.
Orice dispozitiv de reglare trebuie sa fie probat încă de la punerea în funcţiune, pentru scurt timp la valori mai mari decât valorile nominale necesare. Această capacitate de supraveghere este definita de către curentul şi tensiunea limită. Tensiunea limită a dispozitivului de excitaţie cu tiristori poate fi aleasă în mod liber, fiind cuprinsă în general între (1,6 si 2) tensiunea de excitaţie.
Datorită dispozitivelor de măsură, de reglare şi de activare electronică pentru tiristori, timpul de reglare este extrem de scurt (apox. 10 ms).
Schema funcţionala permite descrierea funcţionării simple a regulatorului de tensiune cu clement final cu tiristori.(Fig. 35) Valoarea instantanee, furnizată de
47

transformatoarele de măsură si f2 , este redresată într-un convertizor de valoare de măsură I şi redusă la nivelul de comparaţie al regulatorului propiu-zis. Abaterea în comparaţie cu valoarea prescrisa Uo este amplificată în regulatorul PID II şi trimisa într-un dispozitiv de activare pentru tiristori.Acesta conţine şi un dispozitiv de comandă al pârghiilor III şi un anumit număr de etaje finale cu impulsuri IV. Astfel, tensiunea de excitaţie furnizată prin puntea redresoare poate fi făcută să varieze între 0 şi 100%.
Fig. 35. Schema funcţională a unui dispozitiv de excitaţie cu tiristori
- generator
I - convertizor de valori de măsură pentru regulatorul de tensiuneII - amplificator de reglare pentru regulatorul de tensiuneIII - dispozitiv de comanda al pârghiilorIV - etaj final cu impulsuriV - amplificator de reglare pentru limitatoail de curent rotoricVI - element de temporizare, integratorVII - amplificator de reglare pentru reglajul unghiului de decalaj internVIII - amplificator de reglare pentru reglajul inductiv al curentului
statoric IX - amplificator de reglare pentru reglajul capacitiv al curentului
statoricX - convertizor de valori de măsură pentru reglajul curentului rotoricXI - convertizor de valori de măsura pentru reglajul unghiului de decalaj
internXII- convertizor de valori de măsură pentru reglajul curentului statoricXIII- discriminator pentru limitarea inductivă sau capacitivă a curentului statoric.
48

Pentru obţinerea unei dezexcitaţii rapide în timpul unei descărcări a generatorului, se pune în funcţiune provizoriu un ondulor, elementul final cu tiristori cuplat direct la înfăşurarea de excitaţie. Tensiunea de ieşire a punţii trifazate devine atunci negativă. Cum sensul curentului nu s-a schimbat în înfăşurarea inductoare energia este extrasă din câmp, iar timpul de reglare este mult redus prin diminuarea rapidă a fluxului.
Brown Boveri propune un dispozitiv de excitaţie standard ce conţine limitatorii:- limitatorul de curent rotoric cu convertizor de valori de măsura şi element de
temporizare .- Iimitator de unghi de decalaj intern cu convertizor de valori de măsură .- Iimitator de curent statoric inductiv şi dispozitiv de temporizare . Dispozitivele menţionate permit încărcarea maşinii până la maximul capacităţii
sale.Dimensionarea aparatelor de alimentare pentru echipamentul electronic de reglare
garantează o alimentare sigură cu energie într-un domeniu cuprins între 30 şi 130% din tensiunea nominala. Generatorul nu trebuie sâ fie excitat decât timp de câteva secunde printr-un dispozitiv auxiliar de activare până la atingerea unei valori de 30% din tensiunea nominală. Puterea necesară acestui lucru este foarte mică şi este furnizată de bateria de acumulatori a centralei (aprox. 10% din puterea de excitaţie în gol timp de 4 s). începând de la aceasta valoare a tensiunii, dispozitivul de reglare asigură alimentarea înfăşurării de excitaţie iar dispozitivul auxiliar de activare este scos din funcţiune. Un echipament de dezexcitaţie protejează generatorul şi dispozitivul de excitaţie complet. In caz de perturbaţii, un întrerupător special şi o rezistenţă neliniarâ asigură diminuarea rapidă câmpului. Pentru generatoarele mici şi medii există dispozitive de excitaţie standardizate cu cablaj fix montate în dulapuri. în funcţie de utilizarea pe care o dăm generatorului, se alege dispozitivul care satisface condiţiile puse şi care garantează redundanţa necesară atât în echipamentul electronic cât şi în elementul final.
Caracteristica principală a acestor sisteme este curentul permanent de limitare al dispozitivului de excitaţie cu tiristori. Este curentul maximal pe care elementul final de putere îl poate furniza în permanenţă, fără restricţii.
Un exemplu de o unitate constructivă dat de aceiaşi societate îl reprezintă un montaj în punte trifazată cu şase tiristori şi etajul final cu impulsuri. Se pot monta în paralel până la patru astfel de montaje. Ramele mobile , foarte uşor accesibile din ambele părţi , conţin echipament electronic de reglare.
Pentru puterile mari, se utilizează sisteme THYSERT. Elementul final şi echipamentul electronic de reglare sunt în cazul acestui sistem, ţinute în dulapuri separate.
Etajele cu impulsuri se găsesc pe o ramă mobilă. Pierderile produse în tiristori sunt mici în comparaţie cu puterea ce trece prin elementul final cu tiristori. Ele sunt evacuate prin radiatoare şi prin ventilaţie forţată şi trimise în mediul înconjurător.
Trebuie prevăzută şi o răcire a locului unde se află montat dispozitivul de excitaţie statică. Puterea elementelor finale cu tiristori este determinată de numărul montajelor în punte utilizate (fiecare din acestea conţine câte 6 tiristori).
Caracateristici standard ale unităţilor:
49

Pentru dispozitivul de excitaţie cu tiristori alimentaţi de la bornele generatorului, curentul de generator va fu la nevoie, mărit printr-un montaj compound. Aparatele necesare pentru acest lucru pot fi o bobină de inductanţă trifazată sau un redresor cu diode şi sunt dimensionate după curentul generatorului care trebuie menţinut în caz de scurtcircuit.
Pentru centralele industriale unde se foloseşte acest dispozitiv de excitaţie statica la generatoarele sincrone se garantează o siguranţă maxima şi o calitate maxima cu un minimum de cheltuieli.
Acest rezultat este obţinut datorită componenţilor electronici care lucrează farâ uzură şi care are constante de timp neglijabile. Timpii de stabilizare de reglare nu sunt dependenţi decât de constanta de timp a generatorului şi de tensiunea limita aleasa.
Exactitatea conceperii sistemelor de excitaţie Brown Boveri a fost probată în numeroase centrale industriale şi uzine de producţie unde aceste echipamente de excitaţie sunt actualmente în funcţiune.
•Considerente teoretice privind soluţiile moderne de excitaţie ale generatoarelor sincrone.
Generatoarele sincrone continuă o preocupare de bază a fabricanţilor de maşini electrice, ajungându-se la o importantă evoluţie a soluţiilor constructive în care ele să se realizeze.
Primele realizări constructive, constau în generatoare la care curentul continuu necesar asigurării solenaţiei lor de excitaţie e obţinut de la generatoare rotitoare de curent continuu. Acestea erau fie într-o execuţie separată de generator, fie într-una înglobată, cel mai adesea montată în consola pe partea opusă capului de arbore destinat cuplării generatorului.
Un pas important în construcţia generatoarelor s-a realizat când în locul surselor rotative de producere a curentului continuu de excitaţie s-au introdus sursele statice. In noua execuţie generatoarele păstrau inelele colectoare cu ajutorul cărora curentul continuu de excitaţie ajungea la bornele polare. In schimb curentul continuu de excitaţie nu mai este produs de un generator rotativ ci chiar de generator. Se recurge la un redresor care transformă curentul alternativ pe care îl furniza generatorul sistemului de excitaţie , în curent continuu.
50

SISTEME DE EXCITAŢIE ŞI REGLARE A TENSIUNII PENTRU GENERATOARE SINCRONE, REALIZATE CU ELEMENTE STATICE
În ultimii ani, din ce în ce mai mult îşi fac loc şi se impun soluţiile moderne de excitaţie cu sisteme statice (cu punţi redresoare comandate, folosind fie diode de putere, fie tiristoare de putere). Alegerea uneia sau alteia dintre soluţiile posibile se face atît pe baza consideraţiilor de specific de reţea, cît şi pe baza posibilităţilor de fabricare sau procurare a sistemelor respective.
Continua perfecţionare a redresoarelor comandate (tiristoarele) şi ridicarea valorilor curenţilor maximi de trecere ai acestora au asigurat Abţinerea unor sisteme moderne de excitaţie statică, în care comanda şi controlul curentului de excitaţie se realizează direct în circuitul de excitaţie al alternatorului principal (alternatorul de putere), cu constante de timp practic nule, realizîn-du-se totodată răspunsuri rapide şi foarte rapide.
În cele ce urmează vor fi prezentate câteva scheme caracteristice pentru sistemele de excitaţie cu elemente statice, analizate în vederea utilizării în SEN.
• Varianta l : excitatoare rotativă de c.c. Ex şi alternator pilot Apt pe acelaşi ax cu alternatorul principal A. Se foloseşte un regulator automat de tensiune tranzistorizat, alimentat cu o combinaţie fazorială tensiune-curent, ce este realizată cu ajutorul unor transformatoare de tensiune TT şi de curent TC, montate la bornele alternatorului principal.
Fig. 36 Sistem de reglare a tensiunii cu alternator pilot si alternator de excitatie.
Varianta 2 : alternator de excitaţie AEx care alimentează o punte redresoare PI) cu diode de mare putere, instalată în circuitul de excitaţie al alternatorului principal A. Excitaţia alternatorului de excitaţie conţine la rîndul ei o punte redresoare trifazată cu tiristoare P T, de mica putere, comandate de aceiaşi regulator automat de tensiune tranzistorizat (RAT), descris mai sus.
Puntea PT este alimentată de un alternator pilot auxiliar Aap; acesta este o maşină sincronă, folosind o sursă auxiliară pentru propria excitaţie.
51

În figura 36 este reprezentată principial această variantă.• Varianta 3 : alternator auxiliar de excitaţie AEx, care alimentează excitaţia
generatorului principal A printr-o punte trifazată cu diode de calitate (de exemplu cu siliciu) şi de mare putere. Regulatorul automat de tensiune (RAT) comandă excitaţia alternatorului auxiliar printr-o punte cu tiristoare PT, alimentat de la un transformator de excitaţie TEx)
legat la bornele alternatorului principal.Această variantă, reprezentată principial în figura 38, este o variantă a sistemului
TRANSIPOL.• Varianta 4 : excitaţia alternatorului principal A se face cu redresoare de
putere comandate (diode şi tiristoare), plasate direct în circuitul de excitaţie al acestuia şi alimentate de la o reţea auxiliară de curent alternativ (fig. 37).
• Varianta 5: excitaţia alternatorului A se face prin intermediul unorredresoare (RC şi RE) alimentate în compundaj de la transformatorul de excitaţie serie şi paralel TEXs si TExv care culeg curent, respectiv tensiune, de la bornele alternatorului (fig. 39). Regulatorul automat de tensiune tranzistorizat, RAT,analog celor folosite de celelalte variante prezentate, comandă tiristoareie punţii mixte trifazate PDT. Această variantă este cunoscută sub numele de excitaţie statică compound.
• Alte variante folosesc redresoare cu vapori de mercur, instalate în • excitaţia alternatorului principal şi alimentate de la un alternator auxiliar.
• În figura 37 se prezintă o variantă de realizare a reglării excitaţieialternatorului principal cu transformator de excitaţie de putere şi cu punte detiristoare PT, comandată în circuitul de excitaţie al alternatorului principal A.Regulatorul de tensiune (RAT) comandă tiristoareie punţii PT prin intermediul unui generator de semnal GS.
Fig. 37. Sistem de reglare a tensiunii cu redresoare de putere, comandate în circuitul de excitatie.
52

Fig.38.Sistem de reglare a tensiunii cu transformator de excitatie.
Fig.39. Sistem de reglare a tensiunii cu excitatie statică compound.
Fig. 40 .Sistem de reglare a tensiunii cu generator de semnal.
53

Comparativ, schemele din figurile37, 38 şi 39 prezintă avantajul că, lipsind alternatoarele de excitaţie (suplimentare, sau pilot) pe acelaşi ax cu alternatorul principal, lungimea grupului este mult mai mică, reprezentînd economii importante la construcţia sălii maşinilor. Viteza de răspuns la perturbaţii este mare, schemele funcţionează bine si la defecte cu durată prelungită, în schimb, ele prezintă dezavantajul existenţei acestor transfor-matoare pentru excitaţie (TEx, TExs sau TExp], care au dimensiuni importante (trebuie supradimensionate, mai ales în cazul TEx — derivaţie) si greutate foarte mare; de asemenea, dezexcitarea rapidă este puţin eficace.
• În figurile 41 si 42 se prezintă schemele de principiu SEMIPOL I si II. Acestea prezintă avantajul unei viteze mari de răspuns, indiferent de mărimea perturbaţiei (inclusiv în cazul scurtcircuitelor cu caracter de durată) si a unei dezexcitări rapide, care se efectuează în foarte bune condiţiuni. Se menţine, însă, dezavantajul costului relativ ridicat din cauza lungimii mari a grupului (alternator principal + alternator auxiliar cu tensiune constantă). Aceste scheme se folosesc pe larg la generatoarele de mare putere (fie hidrogeneratoare, fie turbogeneratoare, cu puteri instalate de peste 150—200 MW).
Fig. 41 Schema simpol 1.
54

Fig. 42. Schema Semipol 2.
• Schema reprezentată în figura 43 este schema de reglare a tensiunii de excitaţie pentru hidrogeneratoarele de 190 MVA, de la centrala hidroelectrică Porţile de Fier. Regulatorul de tensiune este de tip PD, cu amplificatoare magnetice; schema se caracteri-zează printr-o mai mare fiabilitate în funcţionare, în raport cu schemele tranzistorizate.
Comportarea schemei de reglare este bună, indiferent de mărimea si tipul pertur-baţiei. În plus, schemele SEMIPOL asigură o dezexcitare rapidă eficace. Pe durata pornirii se aplică alimentarea de rezervă, prin transformatorul racordat la barele serviciilor proprii ale grupului sau centralei (fig.43). Schema aplicată la Porţile de Fier foloseste o stabilizare prin frecvenţa a funcţionării RAT. Prin aplicarea de semnale adiţionale [31, 63], cu funcţie
de stabilizare (de exemplu şi derivatele lor de ordinul l si 2, la care se adaugă derivata tensiunii statorice) s-au realizat indici de calitate ai regimurilor tranzitorii si staţionare net superiori celor ce se obţin cu sistemele de RAT clasice, concomitent cu mărirea limitelor de stabilitate statică ale generatoarelor sincrone, în regimuri speciale de funcţionare [30].
La funcţionarea alternatoarelor în regimuri speciale (de exemplu: funcţionarea cu sarcină capacitivă, pe reţeaua de cabluri de înaltă tensiune a unui oraş), cînd se cere de la maşina sincronă mai multă putere reactivă şi aceasta trebuie încărcată până la limita de stabilitate statică, s-au dovedit deosebit de eficiente în exploatare schemele de reglare a excitaţiei de tipul SEMIPOL II (fig. 22). în plus, această schemă permite o excitaţie de şoc ridicată (nu sunt limitări funcţionale în acest caz).
• În sfîrşit, menţionăm existenţa unor realizări româneşti, folosind regulatoare UNIDIN (regulatoare pentru procese rapide), în figura 44 este dată schema de principiu pentru un sistem de excitaţie şi reglare a tensiunii generatorului sincron cu alternator auxiliar trifazat, realizat cu elementele sistemului unificat UNIDIN-S.
În regim normal, comanda redresorului cu tiristoare 8 este asigurată de regulatorul de tensiune 7. Regulatorul de curent de excitaţie 3 are rolul de a limita valoarea maximă a
55

curentului de excitaţie, semnalul său trecând cu prioritate prin circuitul poarta de minim,in cazul in care semnalul provenit de la la circuitul 4 ar conduce la un curent de excitatie superior unei valori limita prestabilite.
Fig. 43.Schema de RAT pentru hidrogeneratoarele de 190MVA.
Fig. 44.Schema de principiu a RAT cu elemente UNIDIN-S.
56

Regulatorul de tensiune 11 al geeratorului auxiliar 19 asigură menţinerea tensiunii la bornele acestuia,indiferent de regimul de sarcină.
Folosirea tristoarelor pentru autoexcitarea alternatorului auxiliar şi excitarea alternatorului principal, precum şi a echipamentului de reglare tranzistaţionar, cât şi în regim dinamic.
În figura 44 este reprezentată schema blocurilor funcţionale ale unui sistem de excitaţie statică pentru turboalternatorul T 12 2(15 MVA,12MVA,6,3KV,50Hz) de producţie românească.
Schema asigură reglarea tensiunii generatorului (prin reglarea tensiunii
excitaţie ) si reglarea curentului de excitaţie, cu limitări funcţionale date( şi ). Se folosesc tristoare comandate prin impulsuri, având catod şi radiator cu răcire forţată,pentru operare in paralel,cu sisteme proprii de protecţie la supra tensiuni şi supracurenţi, tristoarele sunt alimentate prin intermediul unor punţi redresoare trifazate.
Fig. 44. Schema blocurilor functionale pentru excitaţia statică destinată turboalternatorului T-12-2.
În figură sunt arătate şi funcţiile de transfer ale principalelor blocuri componente. Se remarcă utilizarea unui compundaj tensiune-curent de la bornele generatorului G. În ultimii 2—3 ani, lucrările de diplomă realizate de absolvenţi ai Facultăţii de Automatică şi ai Facultăţii de Energetică din cadrul Institutului Politehnic — Bucureşti au demonstrat posibilitatea folosirii, cu bune rezultate, a unor elemente de tipul celor analizate mai sus,
57

pentru excitarea şi reglarea tensiunii seneratoarelor sincrone, cu puteri mai mari, funcţionând cu alternator auxiliar gutoexcitat.
SCHEME DE REGLARE NUMERICĂ A EXCITAŢIEI GENERATOARELOR SINCRONE
Trecerea la metodele numerice de prelucrare a informaţiilor a deschis largi posibilităţi pentru realizarea conducerii dirijate a proceselor tranzitorii din sistemele electroenergetice. Perspective deosebite are comanda numerică a excitaţiei generatoarelor sincrone de mare putere, bazată pe utilizarea regulatoarelor numerice autonome, a regulatoarelor numerice complexe şi a mini-calculatoarelor în timp real, care folosesc pentru elaborarea mărimilor de comandă şi pentru stabilizarea funcţionării parametri informaţionali generali, reprezentînd semnale ponderate de amplitudine, frecvenţă, fază ş.a. [63].
În cazul utilizării echipamentelor numerice de comandă şi reglare automată, transmiterea datelor este mai sigură, influenţa perturbaţiilor şi zgomotelor este mult mai mică. Dacă în ceea ce priveşte captarea datelor pot fi întîmpinate unele dificultăţi, echipamentele numerice de măsurat prezintă avantajul conservării mai uşoare a datelor obţinute în momente discrete, în sfîrşit, aparatura numerică se pretează la miniaturizare şi la execuţii în sisteme de elemente unificate şi poate sa funcţioneze interconectat cu calculatoare numerice sau maşini de control centralizat.
Recent, s-au evidenţiat cercetările efectuate în diferite ţări, cu privire la aplicarea teoriei moderne a controlului optimal şi la sinteza regulatoarelor automate, pentru sistemul de excitaţie [20], [21], [22], [23], [73], [74] şi [82].
58

Fig.45. Sistem de RAT numeric.
Fig.46. Schema de reglare adaptiva cu calculator numeric.
59

Fig.47 .Schema de reglare optimala cu minicalculator.
• în figura 45 se prezintă schema funcţională a unui sistem de reglarea excitaţiei cu regulator numeric (RN) si convertoare (numeric-analogic N/Asi analog-numeric A /N). Un generator auxiliar de 500 Hz, de construcţie specială (cu rotor dinţat), autoexcitat, furnizează tensiunea pentru alimentarea1
punţii cu tiristoare PT. Regulatorul comandă dispozitivul de comandă pegrilă (DCG) al punţii PT.
• O schemă de reglare optimală cu minicalculator este reprezentată, principial în figura 27. Variabilele controlate sînt tensiunea de excitaţie Ue, ten-
siunea la borne UB şi variaţia fluxului de excitaţie .• O simplificare a problemei se obţine în cazul reglăiii mono variabile,cînd singura mărime reglată este tensiunea UB la bornele generatorului, în acest caz,
se poate folosi reglarea adaptivă cu semnal de probă (un zgomot pseudo-aleatoriu, care se suprapune peste semnalul util) [73]. Cu ajutorul unui calculator numeric CN se determină funcţiile de autocorelaţie; acelaşi calculator serveşte pentru comandarea modificării factorului de amplificare KR al regulatorului adaptiv RA (fig. 46).
60

SOLUTII DE REGLARE A EXCITATIEI CU ELEMENTE STATICE
MICROCONTROLERUL UTILIZĂRI SI PERSPECTIVEScurt istoric
Primele controlere au fost realizate în tehnologii pur analogice si/sau electromecanice. Cele care fac apel la tehnica numerică au fost realizate iniţial pe baza logicii cablate (circuite numerice SSI şi MSI) şi a unei electronici analogice uneori complexe şi "străluceau" prin dimensiuni mari, consum energetic pe măsură şi nu ele puţine ori o fiabilitate care lăsa de dorit. În anul 1969, o echipă de ingineri japonezi propun companiei INTEL, construirea după proiectele proprii a unuei structuri de circuit integrat a cărei funcţionare să fie determinată de un program memorat în el, lucru ce ar fi condus la o configuraţie mult mai simplă, dar aceasta ar fi presupus mult mai multă memorie decât ar fi presupus proiectul propus de inginerii niponi. După un timp, cu toate că inginerii de la INTEL au căutat să găsească o soluţie mai simplă, ideea s-a menţinut, ba mai mult s-a pus în aplicare şi astfel a luat naştere primul microcontroler, INTEL reuşind să scoată un produs din prima sa concepţie, obţinând totodată şi drepturile de a vinde acest produs.
Astfel în timpul acelui an, apare pe piaţă un microprocesor numit 4004, fiind primul microprocesor de 4 biţi cu viteză 6000 operaţii pe secundă. La scurt timp după aceea, compania americană CTC propune companiilor INTEL şi Texas Instruments să conceapă un microprocesor pe 8 biţi pentru folosinţă cu terminale. Cu toate că CTC a renunţat la această idee până la sfârşit, INTEL şi Texas Instruments au continuat să lucreze la microprocesor şi în aprilie 1972 a apărut pe piaţă primul microprocesor de 8 biţi sub numele de 8008 capabil să adreseze 64Kb de memorie şi avea 45 de instrucţiuni şi viteza de 300.000 de operaţii pe secundă. Acel microprocesor a fost predecesorul tuturor microprocesoarelor de astăzi. INTEL a continuat dezvoltările până în aprilie 1974 şi au lansat pe piaţă microprocesorul de 8 biţi sub numele de 8080 ce putea adresa 64Kb de memorie şi avea 75 de instrucţiuni, iar preţul începuse de la 360$. Apare deja concurenţa astfel că, o altă companie americană Motorola, lansează pe piaţă un microprocesor de 8 biţi 6800, şi pe lângă microprocesorul propriu-zis, Motorola a fost prima companie care a făcut şi alte periferice cum ar fi 6820 şi 6850. La acel timp multe companii cum ar fi MOS Technology au recunoscut marea importanţă a microprocesoarelor şi au început propriile lor dezvoltări, continuând să lucreze intensiv la dezvoltarea acestora, aşa că la expoziţia WESCON din Statele Unite din 1975 a avut loc un eveniment critic în istoria microprocesoarelor, MOS Technology anunţând că produce microprocesoarele 6501 şi 6502 (6502 este un microcontroler pe 8 biţi cu 56 de instrucţiuni şi o capabilitate de adresare directă de 64Kb de memorie) la preţul de 25$ bucata, pe care cumpărătorii le puteau cumpăra imediat. Preţul scăzut a avut un impact senzaţional şi astfel ca un răspuns la concurenţă, atât INTEL cât şi Motorola au scăzut preţurile lor în prima zi a expoziţiei până la 69.95$ pe microprocesor. Datorită costului scăzut, 6502 devine foarte popular, şi este instalat în computere ca :KIM-1, Apple I, Apple II, Atari, Comodore, Acorn, Orie, Galeb, Orao, Ultra şi multe altele. în 1976 Zilog anunţă apariţia lui Z80, un microprocesor mai puternic decât cele apărute până acum, care putea adresa direct 64Kb de
61

memorie, avea 176 instrucţiuni, o singură sursă, şi viteză de lucru mult mai mare. Z80 a reprezentat o relevaţie în acest domeniu, toată lumea făcând conversia de la 8080 la Z80 şi din acest moment Z80 devine cel mai de succes microcontroler de 8 biţi a acelui timp, fiind inima a multor computere ca : Spectrum, Partner, TRS703, Z-3 şi Galaxi. In 1976, INTEL iese pe piaţă cu o versiune îmbunătăţită de microprocesor pe 8 biţi numit 8085, dar tot Z80 era mai bun, astfel încât INTEL pierde monopolul pieţii. în ciuda apariţiei pe piaţă a mai multor tipuri de microprocesoare (6809,2650,SC/MP Mostek, NEC, SHARP şi SGS etc), un fapt era deja hotărât: nu mai erau de făcut îmbunătăţiri importante ca să-i determine pe producători să se reorienteze spre ceva mai "nou", aşa că 6502 şi Z80 împreună cu 6800 au rămas ca cei mai reprezentativi ai microprocesoarelor de 8 biţi a acelui timp.
1. Introducere
1.1 Ce este un microcontroler ?La modul general un controler ("controller" termen de origine anglo-saxonă, cu un
domeniu de cuprindere foarte larg) este o structură electronică destinată controlului unui proces sau unei caracteristici a mediului exterior, fără să fie necesară intervenţia operatorului uman.
Un microcontroler este un "calculator pe un chip". Cuvântul "micro" sugerează mărimea redusă a dispozitivului iar "controler" ne spune că dispozitivul poate fi folosit pentru a controla obicte, procese sau evenimente. Microcontrolerele pot fi găsite in componenta oricărui tip de aparat. Orice aparat care măsoară, stochează, comandă, calculează sau afişează informaţii este o potenţială gazdă pentru un microcontroler. De exemplu orice automobil fabricat astăzi este echipat cu cel puţin un microcontroler care comandă motorul maşinii şi adesea chiar cu mai multe pentru comanda sistemelor adiţionale din automobil. In calculatoarele de birou (PC) se pot găsi microcontrolere in tastatură, modemuri, imprimante şi alte periferice. In echipamentele de testare fac posibilă adăugarea unor facilităţi ca de exemplu memorarea rezultatelor măsurării, afişarea mesajelor şi formelor de undă. Produsele de larg consum care includ microcontrolere sunt camerele video, video-recorderele, compact-disk (CD) playere şi altele. Circumstanţele în care ne găsim astăzi în domeniul microcontrolerelor şi-au avut începuturile în dezvoltarea tehnologiei circuitelor integrate. Această dezvoltare a făcut posibilă înmagazinarea a sute de mii de tranzistoare într-un singur cip. Aceasta a fost un prerechizit pentru producţia de microprocesoare, şi primele computere au fost făcute prin adăugarea perifericelor ca memorie, linii intrare-ieşire, timeri şi altele. Următoarea creştere a volumului capsulei a dus la crearea circuitelor integrate. Aceste circuite integrate conţin atât procesorul cât şi perifericele. Aşa s-a întâmplat cum primul cip conţinând un microcomputer, sau ce va deveni cunoscut mai târziu ca microcontroler a luat fiinţă. Un microcontroler este similar unui microprocesor. Ambele conţin o unitate centrală de prelucrare sau UCP (central processing unit). UCP execută instrucţiuni care îndeplinesc operaţiile de bază logice, matematice şi de transport a informaţiei. Pentru a construi un calculator complet, microprocesorul necesită memorie pentru păstrarea datelor şi programelor, interfeţe de intrare-iesire (l/O) pentru conectarea dispozitivelor externe cum ar fi tastatura sau monitorul. Spre diferenţă de microprocesor, microcontrolerul este un calculator pe un chip deorece el conţine şi memorie şi interfeţe de intrare-iesire pe lângă
62

CPU. Deoarece memoria şi interfeţele care încap pe un chip sunt limitate, microcontrolerele tind să fie utilizate în sisteme mai mici care necesită doar un microcontroler şi câteva elemente adiţionale. Resursele integrate la nivelul microcircuitului trebuie să includă cel puţin următoarele componente: o unitate centrală (CPU), o memorie locală tip RAM şi eventual una de tip ROM/ PROM / EPROM, I/O - intrări/ ieşiri numerice (paralele şi seriale), timere (temporizatoare), numărătoare, un sistem de întreruperi. Este posibil ca la acestea să fie adăugate, la un preţ de cost avantajos, caracteristici specifice sarcinii de control care trebuie îndeplinite.
Un microcontroler tipic mai are facilităţi de prelucrare la nivel de bit, de acces direct şi uşor la intrări/ieşiri şi un mecanism de prelucrare a întreruperilor rapid şi eficient.
OBS. Utilizarea unui microcontroler, oricât de evoluat, nu elimină unele componente ale interfeţei cu mediul exterior (atunci când ele sunt chiar necesare): subsisteme de prelucrare analogică, elemente pentru realizarea izolării galvanice, elemente de comutaţie de putere (electromecanice sau statice).
1.2 Variante constructive
Există la ora actuală un număr foarte mare de tipuri constructive de microcontrolere. Un criteriu de clasificare care se poate aplica întotdeauna este lungimea (dimensiunea) cuvântului de date. Funcţie de puterea de calcul dorită şi de alte caracteristici se pot alege variante având dimensiunea cuvântului de date de 4, 8, 16, sau 32 de biţi. Nu este obligatoriu ca dimensiunea cuvântului de date să fi egală cu dimensiunea unui cuvânt maşină. Există şi multe variante zise dedicate (specializate prin intermediul codului preprogramat şi al resurselor hard) pentru comunicaţie, controlul tastaturilor, controlul aparaturii audio-video, prelucrarea numerică a semnalului, etc...
1.3 Tehnologii de fabricaţiePractic cea mai mare parte a microcontrolerelor se realizează la ora actuală întehnologie CMOS (tehnologii similare seriilor standard CMOS de circuite numerice
HC, AC, ALV).Se pot realiza astfel structuri cu un consum redus (care depinde de frecvenţa de lucru)permiţând eventual alimentarea de la baterie.Logica internă este statică (total, sau în cea mai mare parte) permiţând astfel, înanumite condiţii, micşorarea frecvenţei de ceas sau chiar oprirea ceasului în ideeaoptimizării consumului.Tehnologia este caracterizată şi de o imunitate mai mare la perturbaţii, esenţială într-
un mare număr de aplicaţii specifice.Se realizează şi variante pentru domeniu extins al temperaturii de funcţionare (de
exemplu -40... +85 °C)Există diverse variante de încapsulare (plastic şi mai rar ceramică), multe destinatemontării pe suprafaţă (SMT) : DIP (de la 8 la 68 pini), SOIC, PLCC, PQFP, TQFP (>
100 pini), etc...
2. Unitatea de memorie UM
63

2.1 Mod de funcţionare
Unitatea de memorie este acea parte a microcontrolerului care are funcţia de a înmagazina informaţia sub formă de date şi de a o face accesibilă (operaţie denumită "Citire'') atunci când se doreşte acest lucru.
Pentru a explica şi a înţelege mai uşor funcţionarera acestui bloc, putem să-l comparăm şi să-l descriem ca fiind un dulap cu mai multe sertare. Introducând conceptul de locaţie de memorie" şi atribuind sertarelor această denumire, fiecare locaţie de memorie având câte o valoare numerotată de la 0 - 15 în aşa fel încât să nu fie confundate, oricare din conţinuturile locaţiilor de memorie (sertarelor) vor fi atunci uşor accesibile. Pentru a realiza această accesibilitate introducem al doilea concept nou numitVA adresare" care poate fi definit ca fiind operaţia de "selectare" sau "desemnare" a unei locaţii de memorie.
OBS.Trebuie menţionat faptul că adresarea nu se face la întâmplare, ea se efectuează în
conformitate cu un "cod de adresă" care este unic, aceasta înseamnă că fiecărei locaţii de memorie îi este alocat codul corespunzător de selecţie.
Este suficient să se ştie desemnarea sertarului (codul de adresă corespunzător unei locaţii de memorie) şi astfel conţinuturile locaţiei se vor face cunoscute în mod sigur.
Pentru un anumit cod de adresă aplicat la intrarea " Adrese" (vezi figura) obţinem la ieşirea "Date", conţinutul sub formă de date a unei anumite locaţii de memorie adresate. Se poate spune deci că memoria este alcătuită din toate locaţiile de memorie şi adresarea nu este altceva decât alegerea uneia din ele.
Aceasta înseamnă trebuie selectată locaţia de memorie la un capăt, şi la celălalt capăt trebuie să aşteptăm conţinutul sub formă de date ale acelei locaţii, adică s-a efectuat operaţia de "Citire" a locaţiei respective.
în afară de citirea dintr-o locaţie de memorie, memoria trebuie de asemenea să permită "Scrierea" în ea (reîmprospătarea). Aceasta se face cu ajutorul unei linii adiţionale numită linie de control. Vom desemna această linie ca W/R (scrie /citeşte). Linia de control
64

este folosită în următorul fel : dacă W/R=l, se face citirea, şi dacă W/R=0 atunci atunci se face scrierea în locaţia de memorie.
2.2 Variante de realizare a memoriei locale
În afară de memoria locală de tip RAM, de dimensiuni relativ reduse (x10 octeţi la x1 Kocteţi), implementată ca atare sau sub forma unui set de registre şi destinată memorării datelor (variabilelor), mai există o serie de aspecte specifice, marea majoritate a acestora fiind legată de implementarea fizică a memoriei de program (şi eventual a unei părţi a memoriei de date) cu ajutorul unor memorii nevolatile.
a. EEPROMmulte microcontrolere au şi o memorie de acest tip, de dimensiune limitată, destinată
memorării unui număr limitat de parametrii (memorie de date) care eventual trebuie modificaţi din timp în timp şi este o memorie relativ lentă cu un număr limitat (uzual mic) de cicluri de scriere/citire.
b. FLASH EPROMeste o soluţie mai bună decât EEPROM-uI atunci când este necesar un volum mare de
memorie program (nevolatilă) mai rapidă şi cu un număr garantat mai mare de cicluri scriere/cirire; este utilizată numai ca memorie de program.
c. NOVRAMRealizat prin alimentarea locală (baterie, acumulator) a unui masiv RAM CMOS
atunci când este necesar un volum mare de memorie de program şi de date nevolatilă; mult mai rapidă decât toate celelalte tipuri şi fără limitări ca număr de cicluri.
d. Programarea "IN SISTEM" (ISP)Folosirea unor memorii nevolatile de tip FLASH face posibilă "programarea" unui
astfel de microcontroler fără a-l scoate din sistemul în care este încorporat (on-line, In System Programming); programarea se face prin intermediul unei interfeţe seriale şi este posibilă astfel modificarea codului program sau a unor constante de lucru (local sau de la distanţă).
e. OTP (ON TIME PROGRAMMABLE)Majoritatea producătorilor oferă variante de microcontrolere la care memoria- locală de program este de tip OTP , practic o memorie PROM identică intern cu
varianta EPROM, dar fără fereastra de ştergere (deci şi mai ieftine); aceste variante pot fi utilizate ca o alternativă pentru o producţie limitată, până în momentul testării şi validării finale a codului, moment în care pot fi comandate variante (mask) ROM propriu-zise, cele mai economice pentru o producţie de masă.
f. PROTEJAREA CODULUIProtejarea codului program dintr-o memorie locală nevolatilă împotriva- accesului neautorizat (copierea codului, a aplicaţiei, "REVERSE
ENGINEERING") este oferită ca o opţiune, ea mai trebuind să fie şi folosită la variantele EPROM sau OTP.
65

La variantele cu ROM propriu-zis ea este de multe ori implicită.3. Unitatea centrală de procesare CPU3.1 Rol şi funcţionalitate
Este blocul din componenţa unui microcontroler capabil să acţioneze asupra conţinutului (datelor) uneia sau mai multor locaţii conţinute în unitatea de memorie UM, specializat pe operaţii (de adunare, înmulţire, împărţire, extragere şi reintroducere) de date, care poate să depoziteze datele atâta timp cât asupra acestora se efectuează operaţii. In urma efectuării acestor operaţii se va depune înapoi în unitatea de memorie, (în locaţiile de memorie) rezultatul operaţiilor efectuate (un nou conţinut de date). Deci putem spune că acest bloc lucrează direct cu unitatea de memorie, poate accesa (prin operaţia de "Adresare") şi prelua datele (prin operaţia de "Citire"), din fiecare locaţie de memorie din cadrul UM, le depune în regiştrii săi (care sunt de fapt tot locaţii de memorie altele decât cele din UM).
Aici are loc prelucrarea asupra datelor corespunzător operaţiei specificate (impuse) de program ("Mutarea" conţinutului dintr-un registru în altul), finalizând prin a depune rezultatul înapoi în locaţiile de memorie din cadrul UM (prin operaţia de "Scriere")-Partea pe care tocmai am adăugat-o este numită "unitatea de procesare centrală" (CPU). Locaţiile ei de memorie sunt numite regiştri.
Exemplul unei de unităţi simplificate de procesare centrală cu trei regiştri.
Deci concluzionând, regiştrii sunt locaţii de memorie a căror rol este de a ajuta prin prelucrarea şi executarea a variate operaţii matematice sau a altor operaţii cu date oriunde se vor fi găsit datele in cadrul UM.
66

3.2 Caracteristici arhitecturale
Arhitectura unităţii centrale de calcul (CPU) este unul din elementele cele mai importante care trebuie avut in vedere în analiza oricărui sistem de calcul. Principalele concepte luate în considerare sunt următoarele:
a. Arhitecturile de tip von "Neumann"Microcontrolerele bazate pe această arhitectură sunt caracterizate de existenţa unui
singur spaţiu de memorie utilizat pentru memorarea atât a codului instrucţiunilor cât şi a datelor ce fac obiectul prelucrării. Există deci o singură magistrală internă (bus) care este folosită pentru prelucrarea (fetch) instrucţiunilor şi datelor; efectuarea celor două operaţii separate, în mod secvenţial având ca efect încetinirea operaţiilor. Este arhitectura standard pentru microprocesoarele de uz general.
b. Arhitecturile de tip "Harvard"La această arhitectură există spaţii de memorie separate pentru program şi date în
consecinţă există şi magistrale separate pentru instrucţiuni şi date.Există astfel posibilitatea execuţiei cvasiparalele (suprapunerii) a celor două operaţii
menţionate. Codul unei instruncţiuni poate fi preluat din memorie în timp ce se execută operaţiile cu datele aferente instrucţiunii anterioare.
Este posibilă (cel puţin teoretic) o execuţie mai rapidă, pe seama unei complexităţi sporite a microcircuitului mai ales atunci când există şi un "PIPE LINE" (acest termen va fi prezentat într-un articol viitor).
Este arhitectura standard pentru procesoarele numerice de semnal (DSP).
c. CISCAproape toate microcontrolerele au la baza realizării CPU conceptul CISC (Complex
Instruction Set Computer). Aceasta înseamnă un set de peste 80 instrucţiuni, multe din ele foarte puternice şi specializate. De obicei multe din aceste instrucţiuni sunt foarte diferite între ele. Unele operează numai cu anumite spaţii de adrese sau regiştrii, altele permit numaianumite moduri de adresare, etc. Pentru programatorul în limbaj de asamblare există unele avantaje prin utilizarea unei singure instruncţiuni complexe în locul mai multor instrucţiuni simple (analog macro- -instrucţiunilor clasice).
d. RISCRISC (Reduced Instruction Set Computer) este un concept de realizare a CPU care a
început să fie utilizat cu succes şi la realizarea microcontrolerelor. Prin implementarea unui set redus de instrucţiuni care se pot efectua foarte rapid, se obţine o reducere a complexităţii microcircuitului, suprafaţa disponibilizată poate astfel să fie utilizată în alte scopuri. Printre caracteristicile asociate de obicei unui CPU RISC se pot menţiona:
-arhitectură Harvard-viteză sporită de execuţie prin implementarea unui PIPE-Line pentru instrucţiuni-set de instrucţiuni ortogonal (simetric): fiecare instrucţiune operează cu orice spaţiu
de adrese (memorie) sau registru, instrucţiunile nu prezintă combinaţii speciale, excepţii, restricţii sau efecte colaterale.
67

Obs.Dacă revenim la situţia curentă, rezultă deci că avem două entităţi independente
(memoria şi CPU) ce sunt interconectate, şi astfel orice schimb de informaţii este ascuns, ca şi funcţionalitatea sa.
Dacă, de exemplu, dorim să adunăm conţinuturile a două locaţii de memorie şi întoarcem rezultatul înapoi în memorie, vom avea nevoie de o conexiune între memoria UM şi CPU. Mai simplu formulat, trebuie să avem o anumită "cale" prin care datele circulă de la un bloc la altul.
4. Bus-ul - Magistrala de date şi adrese4.1 Rol şi funcţionalitate
Această cale este numită "bus"-magistrală. Din punct de vedere fizic, el reprezintă un grup de 8, 16, sau mai multe fire (panglică de fire speciale care permit transmisia de date la anumite viteze impuse).
Există două tipuri de bus-uri : bus de adresă sau magistrală de adrese (pe care circulă semnale sub formă de cod de adrese care adresează UM) bus de date sau magistrală de date (pe care circulă datele preluate din UM şi urmează a fi depuse în regiştrii CPU spre a fi prelucrate şi nu numai atât.)
4.2 Magistrala de adrese
Este alcătuită din atâtea linii cât este cantitatea de memorie şi serveşte la transmiterea adreselor de la CPU la memorie, practic indică de unde trebuie preluate datele, unde trebuie trimise şi adresa instrucţiunilor care trebuie executate.
4.3 Magistrala de date
Transportă informaţia supusă prelucrării şi este atât de iată cât sunt cuvintele de date 8, 16, sau 32 biţi (în cazul nostru 8 biţi) sau cât este linia de conectare servind totodată la conectarea tuturor blocurilor din interiorul microcontrolerului.
Din momentul de faţă putem avea o viziune clară asupra modului de interconectare şi funcţionare al celor două entităţi privite ca blocuri componente din cadrul microcontrolerului deci putem introduce noţiunea de "funcţionalitate" ca parametru fictiv al microsistemului care a luat naştere prin prezentarea acestora.
68

5. Unitatea intrare-ieşire5.1 Rol şi funcţionalitate
În ceea ce priveşte funcţionalitatea, situaţia s-a îmbunătăţit, dar o nouă problemă a apărut de asemenea: avem o unitate ce este capabilă să lucreze singură, care nu are nici un contact cu lumea de afară, sau cu noi !
Pentru a înlătura această deficienţă, să adăugăm un bloc ce conţine câteva locaţii de memorie a căror singur capăt este conectat la busul de date, iar celălat are conexiune cu liniile de ieşire la microcontroler ce pot fi văzute cu ochiul liber ca pini la componenta electronică.
Aceste locaţii care tocmai le-am adăugat sunt numite "porţi". Sunt diferite tipuri de porţi: intrare, ieşire sau porţi pe două-căi.
Când se lucrează cu porţi, mai întâi de toate este necesar să se aleagă cu ce port urmează să se lucreze, şi apoi să se trimită, sau să se ia date de la port.
În timpul accesării, portul se comportă ca o locaţie de memorie, unde "ceva" este pur şi simplu scris în el sau citit din el, şi este posibil de a remarca uşor aceasta la pinii microcontrolerului.
Toate microcontrolerele au de un număr oarecare de intrări/ieşiri numerice ( xl...xlO). Conexiunile exterioare sunt bidirecţionale sau unidirecţionale, unele sunt multifuncţionale (se oferă funcţii alternative pe acelaşi pin), altele pot avea o capacitate sporită de a absorbi curent (de ex. pentru comanda directă a unui LED).
69

Exemplul unei unităţi simplificate intrare-ieşire ce permite comunicarea cu lumea externă.
5.2 Tipuri reprezentative de porturiÎn afară de acestea pentru interfaţa cu mediul exterior se oferă o serie de alte facilităţicum ar fi :a. UART (UNIVERSAL ASYNCHRONOUS RECEIVER TRANSMITTER)Este un port serial bidirecţional destinat implementării unui protocol clasic de
comunicaţie asincron; USART ( UNIVERSAL SYNCHRONOUS RECEIVER TRANSMITTER) Este un port similar cu cele cunoscute, dar care permite implementarea şi a unui protocol sincron cu obţinerea unor viteze mai mari de comunucaţie.
b. PORTURI SERIALE SINCRONE DEDICATESunt destinate transferului serial de date de mare viteză cu unele periferice
specializate (sisteme de afişare, convertoare analog numerice,etc) sau permit conectarea într-o reţea de comunicaţie simplă.
Implică şi implementarea unor protocoale mai mult sau mat puţin complexe de transfer al informaţiei. Există câteva implementări răspândite (prezentate în ordinea crescătoare a complexităţii):
- SPI (Serial Peripheral Interface)Este un port serial sincron şi SCI (serial comunications interface) un circuit de tip
UART îmbunătăţit, definite si utilizate de fima Motorola- Microwire / Plus
70

Este o interfaţă serială bidirecţională sincronă utilizată de firma National Semiconductor.
- I2C (Inter Integrated Circuits bus)Este o interfaţă serială bidirecţională (pe doua fire) , dezvoltată de firma Philips,
destinată aplicaţiilor de 8 biţi . Există şi multe circuite "periferice" care sunt prevăzute cu o astfel de interfaţă.
- CAN (Controller Area Network)Sunt standarde de comunicaţie serială utilizate in industria de automobile, permiţând
interconectarea într-o reţea a diverselor componente inteligente (senzori, elemente de execuţie, etc.) folosite într-un automobil modern.
6. Comunicaţia serialăS-ar părea la prima vedere că este rezolvată posibilitatea comunicării cu lumea de
afară dar, în ciuda acestui fapt, acest mod de comunicare are neajunsurile sale. Unul din acestea este numărul de linii ce trebuie să fie folosite pentru a transfera datele. Să punem următoarea problemă: Ce s-ar întâmpla dacă acestea ar trebui transferate la distanţă de câţiva kilometri?
Numărul de linii şi numărul de kilometri nu promite costuri eficiente pentru proiect. Nu ne rămâne decât să reducem numărul de linii în aşa fel încât să nu afectăm funcţionalitatea. Să presupunem că lucrăm doar cu 3 linii, şi că o linie este folosită pentru trimiterea de date, alta pentru recepţie şi a treia este folosită ca o linie de referinţă atât pentru partea de intrare cât şi pentru partea de ieşire. Pentru ca aceasta să funcţioneze, trebuie să stabilim regulile de schimb ale datelor. Aceste reguli sunt numite protocol. De aceea protocolul este definit în avans ca să nu fie nici o neînţelegere între părţile ce comunică una cu alta.
De exemplu, dacă un om vorbeşte în franceză, şi altul vorbeşte în engleză, este puţin probabil că ei se vor înţelege repede şi eficient unul cu altul. Să presupunem că avem următorul protocol. Unitatea logică "1" este setată pe linia de transmisie până ce începe transferul. Odată ce începe transferul, coborâm linia de transmisie la "0" logic pentru o perioadă de timp (pe care o vom desemna ca T), aşa că partea receptoare va şti că sunt date de primit, astfel că va activa mecanismul ei de recepţie.
Să ne întoarcem acum la partea de transmisie şi să începem să punem zero-uri şi unu-uri pe linia de transmisie în ordinea de la bitul cel mai puţin semnificativ (LSB) la bitul cel mai mult semnificativ (MSB). Să lăsăm ca fiecare bit să rămână pe linie pentru o perioadă de timp egală cu T, şi la sfârşit, sau după al 8-lea bit, să aducem unitatea logică "1" înapoi pe linie ce va marca sfârşitul transmisiei unei date. Protocolul ce tocmai l-am descris este numit în literatura profesională NRZ (Non-Return to Zero).
71

Pentru că avem linii separate de recepţie şi de transmitere, este posibil să recepţionăm şi să transmitem date (informaţii) în acelaşi timp. Blocul ce permite acest mod de comunicare este numit blocul de comunicaţie serială. Spre deosebire de transmisia paralelă, datele sunt mutate aici bit cu bit, sau într-o serie de biţi, de unde vine şi numele de comunicaţie serială. După recepţia de date trebuie să le citim din locaţia de transmisie şi să le înmagazinăm în memorie în mod opus transmiterii unde procesul este invers. Datele circulă din memorie prin bus către locaţia de trimitere, şi de acolo către unitatea de recepţie conform protocolului.
7. Unitatea de timer
Odată rezolvată problema comunicaţiei seriale, putem recepţiona, trimite şi procesa date.
Totuşi, ca să îl putem utiliza, în special în industrie, mai avem nevoie de câteva blocuri. Unul din acestea este blocul de timer care este important pentru noi pentru că ne dă informaţia de timp, durată, protocol etc. Unitatea de bază a timer-ului este un contor liber care este de fapt un registru a cărui valoare numerică creşte cu intervale de timp egale, aşa încât luându-i valoarea după intervalele TI şi T2 şi pe baza diferenţei lor să putem determina cât timp a trecut. Acesta este o parte foarte importantă a microcontrolerului a cărui control necesită cea mai mare parte a timpului nostru.
72

8. Watchdog-ul
Încă un lucru ce necesită atenţia noastră este funcţionarea fără defecte a microcontrolerului în timpul funcţionării. Să presupunem că urmare a unei anumite interferenţe (ce adesea se întâmplă în industrie) microcontrolerul nostru se opreşte din executarea programului, sau şi mai rău, începe să funcţioneze incorect.
Bineînţeles, când aceasta se întâmplă cu un computer, îl resetăm pur şi simplu şi va continua să lucreze. Totuşi, nu există buton de resetare pe care să apăsam în cazul microcontrolerului care să rezolve astfel problema noastră. Pentru a depăşi acest obstacol, avem nevoie de a introduce încă un bloc numit watchdog-câinele de pază. Acest bloc este de fapt un alt contor liber unde programul nostru are nevoie să scrie un zero ori de câte ori se execută corect. în caz că programul se "înţepeneşte", nu se va mai scrie zero, iar contorul se va reseta singur până la obţinerea valorii sale maxime. Aceasta va duce la rularea programului din nou, şi corect de această dată pe toată durata. Acesta este un element important al fiecărui program ce trebuie să fie fiabil fără supravegherea omului.
9. Convertorul Analog-Digital
Pentru că semnalele de la periferice sunt substanţial diferite de cele pe care le poateînţelege (zero şi unu), ele trebuie convertite într-un mod care să fie înţeles demicrocontroler.Această sarcină este îndeplinită de un bloc pentru conversia analog-digitală sau de unconvertor AD. Acest bloc este responsabil pentru convertirea unei informaţii privind
o anumită valoare analogă într-un număr binar şi pentru a o urmări pe tot parcursul la unbloc CPU în aşa fel ca blocul CPU să o poată procesa.
73

Convertoarele utilizate fac parte de regulă dintr-un sistem de achiziţie de date, existând şi un multiplexor analogic cu mai multe canale.Rezoluţia disponibilă este de 8 sau 10 biţi cu precizia corespunzătoare numai pentru 8 (9) biţi, pentru mărime de intrare unipolară. Referinţa utilizată este externă. Timpul minim de conversie obtenabil este în plaja xl ps - xlO ms. Există microcontrolere care utilizează tehnici de (re)calibrare pentru mărimea şi/sau menţinerea preciziei.
Tehnicile de conversie utilizate sunt: aproximaţii succesive (majoritatea) cu eşantionare implicită sau rampă digitală.
Există şi subsisteme locale care, în cazul când sunt prezente, pot fi folosite pentru implementarea unor alte tehnici de conversie (cu utilizarea unui număr minim de componente exterioare): numărătoare de impulsuri, circuite comparatoare (analogice, standard), intrări de captare (forţează memorarea "captarea" valorii unui numărător care numără liber în momentul activării, permiţând măsurarea intervalelor de timp sau frecvenţelor, etc.
Obs. în ultimul timp au apărut şi variante de CAN cu rezoluţii mari şi foarte mari realizate în tehnica sigma-delta. Realizările respective sunt mai degrabă un CAN cu microcontroler (firma Analog Device oferă un nucleu de 8051 plus un CAN sigma-delta cu rezoluţii până la 24 biţi!)
Convertoare NUMERIC ANALOGICE (CNA)Practic singura tehnică de conversie numeric analogică care poate fi folosită este
bazată pe modulaţia factorului de umplere (PWM). Există unul sau mai multe canale pe care se poate genera un tren de impulsuri cu factor de umplere programabil (0 -100%).
Eventual în acest scop se poate utiliza şi sistemul de timere/numărătoare.Printr-o filtrare de tip trece jos, exterioară, se poate obţine o tensiune proporţională cufactorul de umplere.
10. Cofiguraţia fizică a interiorului unui microcontroier
Astfel microcontrolerul este acum terminat, şi tot ce mai rămâne de făcut este de a-l pune într-o componentă electronică unde va accesa blocurile interioare prin pinii acestei componente. Imaginile de mai jos ne sugerează cum arată un microcontroier la exterior şi în interior.
74

10.1 Structura internă şi elemente componente de bază
Schiţa microcontrolerului cu elementele lui de bază şi conexiunile sale interne.
75

APLICAŢIE
Sisteme statice de excitaţie UNITROL P
Aceste unitai ale controlerelor programabile PSR de mare viteză alcătuiesc un sistem universal de control,reglare şi monitorizare ce a fost făcut special pentru convertoarele de putere.
Sistemul a fost optimizat pentru a servi ca un nod al procesului de control incluzând toate funcţiile necesare acestui scop si asigură o interfaţă, bineînteles, pentru comunicarea cu sistemul de control al procesului principal.
PSR-urile au operat cu succes ani de-a rândul ăn sisteme de control de mare viteză cum ar fi:
Porturi de viteză variabile Trnasmisie de înaltă tensiune DC( HVDC ) Compensatoare statice Var Centrale rectificatoare
Introducerea generaţiei a doua de PSR, mai puternice, a făcut posibilă ca domeniu de aplicabilitate să se extindă la sistemele de excitaţie statice, acestea fiind găsite sub numele de UNITROL P.
Datorită marii capacităţi de calcul a generaţiei a doua de PSRuri funcţiilr de control,reglare,monitorizare şi protecţie pot fi efectuate de o singură unitate de procesare în ciuda numărului de funcţii efectuate, valoarile impuse şi valorile reale se compară la fiecare milisecundă. Disponibilitatea de aproape 100% este atinsă de configuraţia redundantă a procesorului şi perifericelor. Pentru acestea sunt asigurate două canale de control identice dar independente. Modul de control manual este facilitat de faptul că fiecare dintre canale este echipat cu un simplu regulator de câmp al curentului în plus faţă de regulatorul de tensiune. Controlerul programabil logic (PLC ) si funcţiile de monitorizare sunt de asemenea duplicate ca şi acele funcţii de protecţie . Acestea sunt asigurate şi integrate în software-ul generaţiei a doua de PSR-uri.
ELECTRONICA NOILOR CONVERTOARE
Metoda foarte răspândită a alimentării sistemelor de excitaţie direct de la terminalele generatoare, solicită foarte mult în special poarta de control a unităţii. Aceasta trebuie sa opereze fiabil într-o plajă largă de tensiune şi frecvenţă şi de asemena să asigure o activare continuă şi pozitivă a tristorilor în cazul unui scurtcircuit al tuturor sistemelor de putere. Unitatea de convertire electronică este localizată imediat lângă punţile tristorilor şi include amplificatorul de pulsuri de activare şi siguranţa de monitorizare a circuitelor pentru ramurile tristorilor şi ventilatoarelor (unde sunt instalate). Opţional este disponibil de asemenea un sistem de monitorizare al fluxului de curent prin tristori (monitorizarea conducţiei).
FIG 1
76

MAI PUŢINE LIPITURI DATORITĂ ARC NET
Schimbul de date dintre sistemul de excitaţie cu punţi convertoare şi sistemul de dezexcitaţie are loc printr-o magistrală serială ARCnet. Unitatea de control şi afişaj pentru operaţiile locale ale sistemului de control sunt de asemenea conectate la magistrala ARCnet. O a doua unitate de control şi deşi afişaj poate fi amplasată până la maxim 250 m distanţă încă poate să opereze prin magistrala ARCnet.
UŞOR DE OPERAT.
Unităţile de control şi afişaj folosite pentru controlul sitemului vizualizează valorile reale de operare şi anunţă erarile. Acestea se compun din :
Un display LCD cu 8 linii şi iluminare de semnal cu LED, interschimbabile între prezentarea alfanumerică şi mixtă alfanumerică-analogă.
Un rân de 10 taste de funcţii pentru controlul funcţiilor displayului si 2 rânduri de 8 taste fiecare pentru controlul sistemului de excitaţie.
Funcţiile unităţilor de control şi afişaj precum şi setările parametrilor de operare sunt programa sunt programte cu un PC.
FIG 2
STRUCTURĂ SI FUNCŢII
Diagrama schematică a figurii 2 arată configuraţia sistemului conţinând regulatorul UNITROL M cu secţiunea sistemului de putere. Ar tebui să fie observabile diferenţele ăntre regulatorul cu convertor integrat ce are tristori aplicaţi la sistemul de excitaţie indirectă (cu excitaţie rotativă ) şi regulatorul pentru control al unui convertor extern folosit pentru sistemul de excitaţie statică directă.
Regulator de tip UNK4807 cu convertor integrat cu tristori
Electronica de control conţine ca unitate toată electonica modulelor funcţiilor precum şi alimentarea convertorilor. Lanţul operaţional începe cu regulatorul şi limtatoarele şi continuă cu generarea şi amplificarea de pulsuri către convertorul cu tristori.
Electronica de control este dotată cu intrări pentru semnale de comandă şi ieşiri pentru indicarea stării şi valorilor măsurate.
Secţiunea de putere conţine 2 componente ce vor fi evaluate individual pe specificul aplicaţiei: transformatorul de alimentare şi întrerupătorul de câmp.
Fig 1 dă o idee despre designeul de bază al regulatorului: Fereastra de jos ce include modulele funcţiilor cum ar fi regulatorul,
limitatoarele,generatorul de pulsuri şi funcţii adiţionale precum şi panoul de
77

interfaţă cu intrări-iesiri digitale. Acest panou este mobil şi poate fi scos prin spate.
Fereastra de sus conţine nivelul de putere al tristorilor UNL3301, transformatoarele pentru măsurarea cantităţilor de curent alternativ şi circuitul de excitaţie la pornire.
Regulator tip UNK4806 pentru controlul unui controler extern
Electronica de control este construită similar, dar cu posibilitatea de a transmite semnale de control la amplificatorul extern de puls.
Modulele de control ale electronicii adiţionale pot fi adăugate in partea de sus în locul componentelor de putere.
Pentru a avea o idee despre principiul celor mai importante module ale funcţiilor sistemului modular acestea (funcţiile) sunt descrise în relaţia lor logică începând cu însuşi AVR şi funcţiile alăturate pentru procesarea semnalului.
Date caracteristice ale generatorului sincron de 330MW
Puterea aparenta nominala Sn=388MVA
Puterea aparenta maxima =405.8MVA
Puterea active maxima =345MW
Puterea active nominala =330MW
Tensiunea nominala la borne =24KV
Curentul nominal =9760A
Factorul de putere nominal =0.85Frecventa sincrona f=50HzTuratia nominala rotor n=3000rot/minNumar faze statorice N=3Conexiunea bobinaj statoric steaRandament la Pn =98.87
Rezistenta statorica pe faza =0.00266
Rezistenta rotorica =0.125
Reactanta supratranzitorie nesaturata
Reactanţa supratranzitorie saturată =28.8%
Reactanţa inversă =24.6%
Reactanţa sincronă longitudinală =207%
Reactanţa homopolară =11.6%
78

Reactanţa de scăpări în stator =19.4%
Inductanţa în întrefier B=8840
Densitatea de curent în înfăşurările statorice =5.95A/
Densitatea de current în înfăşurarea rororică =8.7A/
Tensiunea de excitaţie nominală =402VPlafonul excitaţiei p=2
Tensiunea de excitaţie plafon =804V
Curentul de excitaţie maxim =5220A
Curentul de excitaţie nominal =2610A
Constanta de timp rotorică cu statorul în gol =6sec
79

80

Ecuaţiile de transfer ale sistemului de excitaţie şi ale generatorului sincron
Dacă şi reprezintă tensiunea de referinţă,rezultă
Un detector de tensiune cu funcţia de transfer , măsoară tensiunea la ieşire şi furnizează o tensiune proporţională cu aceasta.
Excitaţia este dată de funcţia
Pentru o mică variaţie, în jurul unui punct de funcţionare caracterizat prin valorile
, , se poate efectua o liniarizare .
sau
cu valoarea
iar ,în ipoteza unei sarcini pur omice .
Tensiunea de excitaţie se poate scrie ca fiind suma dintre excitaţia la momentul
şi tensiunea de corecţie , rezultată din acţiunea regulatorului
81

rezultă
dacă se admite şi se obţine :
Ecuaţia caracteristică este o ecuaţie de ordinul patru (pentru maşina sincronă fără amortizare):
.Dacă se neglijează fenomenele pe axa în cuadratură,ecuaţia devine o ecuaţie de
gradul trei. Cu ajutorul acestei ecuaţii se poate calcula variaţia tensiunii la ieşire,pentru un regulator sincron cu regulator de excitaţie cu funcţionare continuă.
82

Sisteme de reglare cu stabilirea oscilatiilor generator-sistem electroenergetic (PSS)
1. Modelarea sistemelor de reglare automataSimularea funcţionarii în regim tranzitoriu a sistemului energetic include modelarea
sistemelor de excitaţie si stabilizatoare de putere, a turbinelor (hidro/termo) si a sistemelor de admisie, aferente grupurilor generatoare.
1.1. Sistemul de excitaţieSistemul de excitaţie (care include regulatorul automat de tensiune) are un rol
important în îmbunătăţirea stabilităţii tranzitorii, fiind capabil sa răspundă la apariţia unor perturbaţii mari, asociate de obicei cu scăderea tensiunii la borne, prin creşterea rapida a excitaţiei în concordanta cu capabilitatea pe termen scurt a generatorului; variaţiile rapide până la plafon ale tensiunii de excitaţie contribuie la frânarea mişcării generatorului în regim tranzitoriu.
Sistemele de excitaţie includ în principal regulatorul automat de tensiune (RAT), sursa sau sistemul de excitaţie (SEexc) si în unele cazuri componente de stabilizare PSS (Power System Stabilizer) sau SSE (Stabilizator pentru sistemul de excitaţie) (fig. 48,a).
Fig.48.
83

Fig. 3.6. a. Schema de principiu a sistemului de reglare automata a tensiunii (SRAT); b. Modelul compensatorului de sarcina si al traductorului tensiunii la borne.
Traductorul de tensiune constituie un element de filtrare pentru tensiunea de la bornele generatorului, fiind caracterizat de o constanta de timp Tr (vezi fig.3.6,6). Tensiunea de ieşire din traductor constituie principalul semnal de control al sistemului de excitaţie. Daca nu se utilizează compensatorul de sarcina si se neglijează constanta de timp Tr, atunci Uc=Ug.
Uneori, în bucla RAT, se foloseşte un circuit suplimentar denumit compensator de sarcina, pentru a controla o tensiune într-un punct din interiorul sau exteriorul generatorului [KU94]. Compensatorul poate corecta mărimile ^ si ><: care simulează impedanta între bornele generatorului si punctul în care se controlează efectiv tensiunea.
Folosind aceasta impedanta si curentul statoric măsurat, se calculează o cădere de tensiune care poate fi adăugata sau scăzuta din tensiunea la borne:
Ug=\Hg+{Rc+JXc)lg\• Daca Re si Xq sunt pozitive, atunci căderea de tensiune din compensator se
adaugă la tensiunea la bornele generatorului. Compensatorul reglează tensiunea în interiorul generatorului si deci produce o cădere de tensiune. în felul acesta, generatoarele cuplate
la acelaşi transformator îsi împart corespunzător între ele puterea reactiva.• Daca Re si Xq sunt negative, compensatorul reglează tensiunea într-un punct
exterior, bornele statorice ale generatorului. Aceasta forma de compensare se utilizează pentru a compensa căderea de tensiune din transformatorul comun, atunci când doua sau mai multe generatoare sunt conectate prin transformatoare individuale.
• Atunci când nu se utilizează compensatorul de sarcina, Re si Xc sunt nule.Stabilizatorul sistemului de excitaţie (SSE) — este principalul circuit de reacţie al
SRAT, care realizează compensarea parţiala a constantei de timp a sistemului de excitaţie SExc si prin aceasta asigura totodată o comportare stabila a acestuia atunci când sunt adoptate constante de amplificare cu valori mari. Modelarea stabilizatorului se face prin intermediul constantei de timp Ts si a constantei de amplificare Ks din modelele SRAT.
Stabilizatorul oscilaţiilor generator — sistem electroenergetic (PSS), este un bloc funcţional care modelează folosirea unor semnale adiţionale alături de cel de tensiune pentru îmbunătăţirea stabilităţii dinamice a generatorului. Aceste semnale sunt alese astfel încât sa fie forţată amortizarea oscilaţiilor dintre generator si sistemul electroenergetic si sunt de obicei semnale de viteza, frecventa, tensiune la borne, putere de accelerare.
Sistemul de excitaţie (SExc) cunoscut si ca excitatoare produce tensiunea pentru alimentarea înfăşurării de excitaţie a maşinii sincrone. în mod uzual puterea excitatoarei este de circa 0,2 ... 0,8 % din puterea în MW a generatorului. în cazul generatoarelor mari puterea excitatoarei poate ajunge k câţiva MW. Tensiunea nominala a excitatoarei nu depăşeşte în mod curent 1000 V.
în general sisteme de excitatie/excitatoarele pot fi împărţite în doua categorii: rotative si statice (fîg. 3.7). în cazul sistemelor de excitaţie rotative tensiunea de excitaţie este produsa fie de către un generator (sau doua legate în cascada) de tensiune continua (fig. 3.7,a), fie de către un generator de tensiune alternativa ce alimentează o punte de redresare care la rândul ei furnizează tensiunea continua necesara pentru excitarea maşinii sincrone (fig. 3.7,b).
84

Fig.49
În cazul sistemelor de excitaţie statice, care nu conţin excitatoare rotative, se folosesc punţi statice / convertoare cu tiristoare care sunt controlate direct de către un regulator de tensiune. Astfel, în figura 3.7,c este data o excitatrice alimentata printr-un transformator auxiliar (TA) de la bara de servicii proprii. în figura 3.7,d este prezentata o alternativa a schemei anterioare în care excitatoarea este alimentata prin intermediul unui transformator auxiliar (TA), chiar de bornele maşinii sincrone. Principalul dezavantaj al excitatoarelor statice este necesitatea de a utiliza inele colectoare pentru alimentarea înfăşurării rotorice a maşinii sincrone.
în figura 3.8 este prezentata schema bloc a sistemului de reglare a excitaţiei unei maşini sincrone.
Fig.50
Fig. 50 Schema bloc a sistemului de reglare a excitaţiei unei maşini sincrone: Hu(s) - funcţia de transfer pentru modelarea canalului de tensiune; Ha(s) - funcţia de transfer pentru modelarea canalului aferent semnalelor adiţionale; He(s) - funcţia de
transfer pentru modelarea excitaţiei.
Pentru început se considera regulatorul automat de tensiune fara canale adiţionale {Ha(s) = 0), iar pentru celelalte funcţii se aleg următoarele expresii
85

H , H
în care:K , Ke reprezintă factorii de amplificare ai RAT respectiv ai excitatricei; Tu ,
T ,Te -constantele de timp ale RAT si respectiv excitatricei.Funcţiile de transfer Hu(s), Ha(s), He(s) pot fi simple sau complexe, cu maimulţi poli si zerouri.în acest caz ecuaţiile diferenţiale ale sistemului de reglare a tensiunii
generatoarelor sincrone sunt:
(1+T
E=EEm<E<EM
{l + Tes)Ef = K E în care: Ug0 - Ug este abaterea de tensiune la bornele generatorului;
Ug -tensiunea la bornele generatorului;
U - tensiunea de consemn a regulatorului;E - t.e.m. proporţionala cu tensiunea de excitaţie a excitatoarei, Eofiind valoarea acesteia în regimul permanent iniţial;
Em,E ~ limitele minima si maxima ale tensiunii electromotoare E; s - operatorul d/dt.
Obs. Ecuaţia diferenţiala (3.68"") corespunde acţiunii de forţare a excitatricei.în continuare, se prezintă modelul matematic al unui sistem de excitaţie având ca
sursa un generator de tensiune alternativa care alimentează o punte cu tiristoare pentru furnizarea curentului de excitaţie al maşinii sincrone, având schema bloc corespunzătoare prezentata în figura 51.
Fig. 51. Schema bloc a unui sistem de excitaţie cu excitatoare de tensiune alternativa si punte de tiristoare .
Mărimea Uer = {Uref - Ug) reprezintă tensiunea de eroare aplicata regulatorului automat de tensiune, Uref fiind tensiunea de referinţa, iar Ug tensiunea la bornele generatorului (s-a neglijat tensiunea de compensare proporţionala cu intensitatea curentului statoric); Us este tensiunea suplimentara furnizata de un dispozitiv de stabilizare (PSS). Mărimea de ieşire £/este t.e.m. proporţionala cu tensiunea de excitaţie a maşinii sincrone .
86

Mărimea interna u (ieşirea din blocul de întârziere/anticipare) se calculează prin descompunerea în fracţii simple a funcţiei de transfer (1+sTc)/(1+sTb). Rezulta astfel identitatea:
căreia îi corespunde o ecuaţie diferenţiala si una algebrica:
Modelul matematic complet al sistemului de excitaţie din figura 3.9 este următorul:
x=UER+Us
daca x< VImin<x< VImax x x=x
daca x V
daca x V
daca
daca E
daca E
În figura 52 este dată schema excitaţiei turbogeneratorului de 315 MV A având ca maşina excitatoare principala un alternator sincron auxiliar 2; curentul continuu de excitaţie al generatorului sincron 1 se obţine prin redresare în puntea cu diode 5. Reglarea curentului de excitaţie se face în funcţie de curentul si tensiunea de la bornele generatorului sincron, prin intermediul punţii de redresare cu tiristoare comandate 4, care la rândul ei alimentează excitaţia alternatorului de excitaţie 2. Puntea de redresare 4 este alimentata de la alternatorul pilot 3. Alternatoarele de excitaţie 2 si pilot 3 sunt antrenate de axul principal al generatorului sincron 1.
87

Fig. 52. Schema excitaţiei turbogeneratorului de 315 MVA (CET Craiova):1 - generator sincron; 2 - alternator de exciatie; 3 - alternator pilot;4 - redresor cu tiristoare; 5 - redresor cu diode de siliciu; 6 - transformator de
tensiune;7-transformator de curent; 8 - RAT; 9 - dispozitiv de comanda pe grila.în figura 3.11 este redata schema bloc a unui sistem de excitaţie în care se observa
existenta a patru canale adiţionale.
88

Fig. 53. Schema regulatorului RAT cu patru canale adiţionale, folosit de EDF.
Programele de calcul a stabilităţii conţin de regula un catalog cu diverse tipuri de sisteme de excitaţie standardizate, din care se utilizează cele efectiv necesare la elaborarea unui anumit studiu. în programe de calcul performante (ex. EUROSTAG) se pot crea scheme bloc nestandardizate ale sistemelor de excitaţie prin agregarea unor funcţii de transfer elementare.
1.2. Modelarea stabilizatorului de putere (PSS)Extinderea reţelelor electrice, din motive economice si de securitate, prin linii de
interconexiune, poate ridica probleme de stabilitate dinamica prin apariţia unor oscilaţii inter-regiuni de frecventa foarte scăzuta (oscilaţii electromecanice spontane de 0,1 ... 1 Hz). Aceste oscilaţii corespund la un grup de maşini sincrone care oscilează coerent dar în opoziţie cu unul sau mai multe grupuri de maşini dintr-o alta regiune. Exista si alte tipuri de oscilaţii în reţele: oscilaţii locale - unde o maşina oscilează în opoziţie cu o alta maşina din aceeaşi centrala electrica sau în raport cu reţeaua electrica si oscilaţii subsincrone - unde sunt excitate modurile mecanice ale maşinii.
89

Oscilaţiile inter-regiuni si oscilaţiile locale sunt în strânsa legătura cu stabilitatea reţelei în prezenta micilor perturbaţii în jurul punctului de funcţionare nominal (Pnom) si sunt vizibile în răspunsul vitezei generatoarelor în regim permanent. Soluţia propusa la problema oscilaţiilor de tip local si inter-regiuni consta în adăugarea unei bucle de comanda, sensibila la oscilaţii, numita „stabilizator de putere - PSS" (Power Systems Stabilizer) care permite amortizarea acestora.
Pentru studiul oscilaţiilor cele mai importante mărimi ale maşinii sincrone sunt: cuplul mecanic (Cm) si puterea mecanica (Pm) furnizate de turbina, tensiunea de excitaţie {Uexc) furnizata de regulatorul de tensiune (RAT), frecventa electrica (sau turaţia echivalenta), puterea electrica (Pe), tensiunea la bornele generatorului (Ug).
Din punct de vedere istoric prima soluţie pentru problema amortizării oscilaţiilor în sistemele electrice a fost echiparea alternatoarelor cu înfăşurări de amortizoare. Totuşi, aceasta soluţie s-a dovedit insuficienta în condiţiile funcţionarii reţelelor în apropierea limitei lor de stabilitate.
Regulatoarele de tensiune (RAT) care contribuie la ameliorarea stabilităţii în regim permanent, pot deveni insuficiente pentru problemele pe care le ridica stabilitatea tranzitorie. în practica însă, cuplul adăugat de către RAT asupra maşinilor sincrone nu este suficient pentru a acţiona împotriva oscilaţiilor ce apar în reţeaua electrica. Astfel, extinderea interconectării de reţele arata ca tranzite puternice de putere pe aceste interconexiuni (în special liniile de FIT) ag-aveaza fenomenele de instabilitate.
Pentru a face fata acestor probleme de oscilaţie si instabilitate au fost adăugate bucle de reacţie (sau corectoare) numite PSS, la regulatoarele de tensiune (RAT). Aceste corectoare au ca scop de a produce un cuplu care sa acţioneze împotriva modurilor oscilatorii care se manifesta asupra arborilor grupurilor. Pentru studiul oscilaţiilor cele mai importante mărimi ale maşinii sincrone sunt: cuplul mecanic (Cm) si puterea mecanica (Pm) furnizate de turbina, tensiunea de excitaţie (Uexc) furnizata de regulatorul de tensiune (RAT), frecventa electrica (sau turaţia echivalenta), puterea electrica (Pe), tensiunea la bornele generatorului (Ug), Mărimile maşinii sincrone cele mai sensibile la oscilaţii sunt adesea încorporate în aceasta bucla sub forma de semnale de intrare: turaţia, puterea electrica, puterea mecanica sau frecventa.
în scopul de a creste amortizarea oscilaţiilor din reţelele electrice, PSS trebuie sa producă o componenta ce corespunde la un moment de cuplu electric în faza cu variaţia vitezei rotorului maşinii sincrone (Aco). Funcţia de transfer a PSS va trebui sa compenseze întârzierea de faza existenta între intrarea excitaţiei si momentul de cuplu electric.
în general, un PSS de tip "clasic" comporta în mod obişnuit doua filtre, trece sus si trece jos, un factor de amplificare si un compensator de faza (fig.3.12).
Filtrele trece jos si trece sus sunt concepute pentru a limita acţiunea corectorului în banda de frecventa dorita. Astfel, blocul sincronizat prin "filtru" corespunde unui filtru
T s trece-jos, cu rolul de a atenua amplificarea la frecvente înalte. Blocul este un bloc"de ştergere" ce nu permite a se răspunde la variaţiile normale de viteza ale maşinii sincrone (filtru trece-sus). Constanta de timp Tw permite eliminarea componentei continui a variabilei de intrare în bucla.
90

Fig. 54. Schema unui PSS clasic.
Factorul de amplificare Ks determina mărimea amortizării introdusa de PSS. Deşi ideal, Ks ar trebui sa fie setat la o valoare corespunzătoare amortizării maxime, în
practica valoarea sa este limitata pe anumite considerente.Compensatorul de faza, realizat prin doua blocuri de tip anticipare-întârziere, este
conceput pentru a deplasa modul de oscilaţie instabil înspre partea stânga a planului complex si deci spre zona de stabilitate. Constantele de timp T1, T2> T3 si T4 permit obţinerea compensării fazei.
Funcţia de transfer a PSS prezentat în figura 3.12 este:
G . Filtru (s)Utilizarea PSS pentru amortizarea oscilaţiilor în sistemele electroenergetice implica
doua aspecte si anume: de poziţionare si de reglare.
U
U
U
unde: UPSS este semnalul de ieşire al corectorului; Ks - factorul de amplificare al corectorului; Tt - constantele de timp ale corectorului; Ui - variabile intermediare; AIntrare - semnalul de intrare în corector.
91

Poziţionarea PSS. în general, nu este necesar a se instala PSS-uri la toate generatoarele din cadrul sistemului electric. Pentru obţinerea unei îmbunătăţiri de stabilitate se vor selecţiona numai anumite generatoare. în acest scop se pot utiliza diferite metode, însă cea mai utilizata este cea care are k baza factorii de participare. Aceştia furnizează participarea relativa a variabilelor de stare la diferite moduri de oscilaţie. în consecinţa, ei permit a cunoaşte maşinile cele mai implicate în fiecare mod de oscilaţie. Astfel, maşina sincrona care poseda cel mai mare factor de participare la modul corespunzător pentru variabilele sau va necesita un PSS.
Reglajul PSS. După ce s-a stabilit poziţionarea unui PSS, urmează a se efectua reglajul acestuia. în mod tradiţional, semnalul de intrare corespunde vitezei de rotaţie a maşinii, poziţia unghiulara a rotorului sau puterea electrica debitata de maşina. Aproape toate metodele au la baza compensarea de faza. Reglajul unui PSS poate fi descompus în doua etape. în prima etapa se are în vedere de a se obţine faza dorita si în continuare se caută factorul de amplificare optim al PSS.
În figura 55 este prezentata schema simplificata a unui PSS "clasic", însă fara a se evidenţia filtruL
Fig. 55. Schema simplificata a unui PSS "clasic" [KU94].Acest PSS comporta un semnal de intrare (fiJntrare), un compensator de faza
(blocurileT1 ... T4), filtru trece jos (T )si un factor de amplificare( KS). Ecuaţiile ce descriu acest model sunt:
sau
92

PROBLEME GENERALE ALE TEHNOLOGIEI ELEMENTELOR ŞI SISTEMELOR DE AUTOMATIZARE SI TEHNICA DE CALCUL
FUNDAMENTELE STIINŢIFICE ALE TEHNOLOGIEI1.1
Obiectul tehnologiei, denumita şi ,,stiinta aplicării stiintelor", îl constituie studiul,
introducerea şi evaluarea proceselor tehnologice de producţie, ca o unitate dialectica a laturilor
lor social-economică si tehnico-materială. În consecinţa, aplicarea legilor natuirii in procesele
de fabricaţie trebuie sa reflecte :
— obţinerea unui anumit efect util, respectiv obţinerea unui produs util; de
aici rezultă necesitatea specializării tehnologiei pe ramuri de Industrie, dar totodata
tehnologia nu se poate limita la considerarea izolată şi parţială a unor procedee de lucru, ci
trebuie să considere ansamblul unitar al procedeelor şi tehnicilor, constituite într-un tot
sistematic, care conduc la executarea unei clase de produse sau de elemente de produse;
— obtinerea efectului utilă în modul cel mai economic; de aici rezulta
necesitatea unei analize valide a relaţiilor reciproce dintre laturile social economică si
tehnico-materiala ale procesului de producţie, fapt care deschide calea pentru creşterea
producţiei şi productivitaţii muncii, asigurarea altor cerinţe economice ale procesului
muncii.
Tehnologia se stabileşte pe baza unei logici specifice acestui domeniu de activitate, care
imprimă un sistem de gândire. De aici rezultă necesitatea pregătirii tehnologice, componentă
inseparabilă a formaţiei teoretice şi practice a oricărui specialist, destinat a fi coparticipant
în procesele de fabricaţie, atît de variate.
Specialistul modern trebuie :
— să înţeleagă complexul de probleme ce se pun, în legătură cu coordonarea
diferiţilor factori care participă în procesul de producţie
— să determine, de fiecare dată şi în termen util pentru finalizarea
scopului (sarcina de plan), soluţia tehnologică optimă din punct de vedere tehnico-economic;
— să stabilească acest optim în raport de practica anterioară, fără
şablonizarea acesteia, astfel încât să se ţină scama, conştient şi raţional, de cele mai noi
93

realizări ale ştiinţei şi tehnicii, dar şi de diferitele constrângeri ce pot fi în vigoare la un
moment dat (resurse materiale, energetice şi umane, limitări financiare şi de bază
materială, termene, limitări de calitate şi fiabilitate, asigurarea protecţiei muncii etc).
Orice tehnologie implică :
— existenţa unui scop bine determinat (tehnic, economic, social) şi a unor
mijloace materiale şi financiare disponibile pentru realizarea acestui scop;
— existenţa şi pregătirea unei forţe de muncă diversificat şi adecvat calificate;
—existenţa şi crearea unor metode şi mijloace tehnice, denumite şi „procedee
tehnologice" sau simplu „tehnici", capabile să asigure scopul urmărit în limitele unor
condiţionări tehnico-economice şi sociale bine precizate.
Tehnologia implică, totodată, existenţa unor structuri industriale, în cadrul
cărora se desfăşoară mecanismul producţiei.
În acest fel, tehnologia poate fi considerată a fi un sistem, reprezentat de o structură,
respectiv de o mulţime de elemente şi de o mulţime de relaţii între aceste elemente, cu o
anumită finalitate [3]. în acest caz, structurile sînt materiale şi organizatorice (inclusiv
tehnico-economice), intrările reprezintă resurse şi condiţionări, iar ieşirile produsul util, cu
performanţe specificate [4].
Atâta vreme cât, în trecutul omenirii, tehnologia constituia numai un ansamblu de
practici, rezultate din constatări empirice, procedeului tehnologic îi corespundea o structură
apriori şi posteriori necunoscută, cu obţinerea unui produs util cu performanţe extrem de
limitate şi fără posibilităţi de reglare. Schimbările tehnologice erau rare, iar aspectul inovativ
deseori blocat.
Tehnologia modernă implică o cunoaştere structurală completă şi conştient
predeterminată, cu relaţii între elemente cunoscute şi previzibile iar rezultatul util este posibil
de realizat în numeroase variante, inclusiv în ceea ce priveşte performanţele. În fine, este de
subliniat realizarea, în condiţii justificate economic, a unor produse tehnologice cu structuri
şi relaţii bazate pe linii automate şi roboţi, ceea ce implică a se construi modele automatice
şi moduri de operare deterministe ori probabilisticii ale acestor procese, reflex al cunoaşterii
complete (în anumite limite) a sistemului considerat.
Oricare ar fi sistemul tehnologic considerat, el implică metode, adică, un ansamblu
de reguli sau principii de cunoaştere şi de transformare a realităţii obiective, în speţă de
94

transformare a materialelor şi materiilor prime. Metoda implică, pînă la un anumit punct,
reguli fixe, tipizare şi standardizare, fără de care nu s-ar putea asigura reproductibilitatea
efectelor utile şi numărul de copii identice rezultate din procesul de fabricaţie. Prin copiere a
unor rezultate verificate ca bune, metoda implică aparent Stagnare. Când elementele
inovative sunt puse în condiţii favorabile, ele determină noi ansambluri de reguli sau principii
de cunoaştere şi transformare, noi stadii tehnologice evolutive.
Pe de altă parte, este de subliniat că este posibil ca numai unele părţi ale tehnologiei
să sufere modificări, altele să rămână la normele anterioare. Se înţelege însă că revoluţionare
sînt acele tehnologii, care au complet un caracter inovator, aşa cum, de exemplu, în
electronică, tehnologia circuitelor integrate a înlocuit pe aceea a componentelor discrete, ori
aşa cum echipamentele de calcul şi sistemele de automatizare din generaţiile 3—3,5 au
înlocuit pe cele din generaţiile 1 şi.2. in mod similar se pune problema noilor generaţii de
roboţi, prevăzuţi cu inteligenţă artificială [5]. Această a doua revoluţie industrială,
caracteristică epocii în care trăim în prezent, are ca factori determinanţi tehnologici (şi nu
numai tehnologici) microelectronica, automatica şi informatica [9], [10].
Tehnologia prezintă clar un caracter praxiologic (fiind structurată pe sporirea
maximă a gradului de eficienţă a acestei activităţi umane), unul deontic (dat fiind
caracterul normativ şi imperativ al aspectelor logice şi structurale ale formelor de gândire
în concepţia tehnologică), precum şi unul teleologic (întrucât scopul intervine ca factor
motivaţional în structurarea acţiunilor umane creatoare).
1.2. Implicaţiile tehnologiei ca ştiinţa
Potrivit dimensiunii praxiologice a conceptului de metodă, tehnologia prezintă
următoarele implicaţii:
— acţiunea are prioritate ontologică în raport cu reflexia teoretică
generalizatoare, orice generalizare fiind precedată de experimentări numeroase;
— metodele de decizie urmăresc o optimizare în raport cu anumiţi indici de
calitate sau tehnico-economici;
— metodele tehnologice au caracter istoric şi duc la generaţii succesive de soluţii
tehnologice;
— metodele tehnologice trebuie sa aibă caracter flexibil, pentru a putea face
95

faţă la diferite constrângeri şi a conduce la tipovariante numeroase, în condiţii de cerinţe
variate;
— profesionalizarea agenţilor acţionali, respectiv a inginerilor de
specialitate, constituie condiţia sigură de însuşire rapidă a unor metode specifice şi de
translare în practica a rezultatelor cercetării;
— promovarea progresului se poate finaliza superior numai prin
transformarea celor mai noi cunoştinţe ştiinţifice în instrumente de acţiune asupra naturii, iar
pe de altă parte prin însoţirea acţiunii de o justificare solidă teoretică, pe baza generalizării
experienţei anterioare.
Aplicarea metodelor specifice tehnologiei implică însă şi o logică specifică. în
numeroase aspecte tehnologice, logica bivalentă este suficientă. Potrivit acestui tip de logică,
raţionamentele decurg din principiul terţiului exclus : orice propoziţie este sau adevărată,
sau falsă, terţium non datur.
Astfel de aspecte în tehnologie sunt întîlnite, în mod deosebit, în metodo-logiile de
control de calitate şi de determinare a fiabilităţii produselor. în. acest caz, este vorba de
controlul prin atribute, care stabileşte dacă produsul sau elementul corespunde, ori nu
corespunde. Determinarea fiabilităţii se bazează pe statistica evenimentelor de tip
defecţiune, prin opoziţie cu evenimentul de tip „bună funcţionare". Pe baza acestei .statistici
bivalente se trag concluzii, prin metode adecvate, al căror model matematic conduce la
determinarea nivelului indicatorilor de calitate şi fiabilitate.
În cele mai multe însă dintre aspectele tehnologice, inclusiv ale unor aspecte de
calitate şi fiabilitate, se face apel la logica trivalenţă, care introduce conceptul de posibil
(Lukasiewicz), de unde şi aplicarea logicii probabilităţilor. Mai mult, se face apel atât la logici
modale {în care se consideră în mod explicit modalităţile unei propoziţii: posibilitatea şi
negarea ei, necesitatea etc), precum şi la logici polivalente (în care se pleacă de la
supoziţia că o propoziţie poate avea mai mult decât două valori de adevăr — adevărul şi
falsul — fără a se explicita de la început studiul modalităţilor).
Tehnologia este în marc parte satisfăcută deci de logicile modale şi polivalente,
Specialistul tehnolog are, întotdeauna practic, la dispoziţia sa, mai multe soluţii posibile
pentru rezolvarea scopului propus. Bl are de făcut faţă, cum s-a precizat, la cerinţe impuse
96

sub forma unor obiective sau performanţe de realizat, precum şi la constrângeri sau
limitări, în raport cu care trebuie realizată o anumită optimalitate. Printre obiective sunt, în
primul rând, performanţele tehnice, indicatorii de calitate şi fiabilitate, precum şi costul
posesiei produsului (reprezentat de costul de achiziţie al acestuia şi costul meutenanţei pe
perioada utilizării sale).
Se adaugă la aceste obiective : destinaţia ca utilizare {produs de larg consum,
industrial sau profesional); destinaţia ca mediu de funcţionare (climat deosebit de cel
temperat, medii cu diferite tipuri de noxe şi solicitări externe); mărimea seriei; nivelul costului;
nivelul productivităţii muncii; consumul specific de anumite materiale şi de energie; efortul
valutar; utilajul şi experienţa existente ; mâna de lucru şi nivelul folosirii sale intensive ;
asigurarea protecţiei muncii şi a securităţii instalaţiilor etc. Unele dintre aceste obiective au
caracter de constrângere şi caracter normativ, în raport cu care trebuie realizată o
minimizare, ca de exemplu în privinţa consumului energetic specific, ori a efortului valutar.
în ultimă analiză, aproape toate obiectivele urmărite la realizarea unui proiect tehnologic
au un caracter de constrângere, limitativ. Numai că, în acest caz, modelul matematic al
soluţiei este complicat, legăturile interne dintre obiectivele propuse nepermiţând
optimizarea în parte a fiecăruia dintre acestea, fără a atrage după sine consecinţe negative
asupra altor obiective. Soluţiile modelului pot fi deci obţinute numai prin iteraţii succesive.
Există însă şi o limitare absolută, aceea dată de limitele istorice ale cunoaşterii.
A adopta o conduită raţională în rezolvarea problemelor tehnologice înseamnă a
utiliza procedee, strategii şi mijloace adecvate scopului stabilit, în acest fel, ideea de
raţionalitate, singura valabilă în actul tehnologic, îmbracă cele trei ipostaze distincte :
încadrarea într-un text demonstrativ; explicarea determinist-cauzală a unei stări sau
eveniment; motivarea unei acţiuni necesare în vederea unui obiectiv final, superior sub
raport axiologic obiectivelor sau stărilor anterioare.
Consecinţele acţiunii tehnologice depăşesc îneă sfera directă de aplicabilitate a
acesteia. Ele au efecte asupra omului, ca factor al sistemului tehnologic, precum şi asupra
societăţii în general, revoluţia în ştiinţă şi tehnologie avînd un impact direct asupra
dezvoltării sociale. Obiectivele tehnologice, implicit sau explicit incluse în direcţiile de
97

dezvoltare imprimate ţării noastre de către cel de al XTT-lea Congres al P.C.K. [6], contribuie
în mod direct la transformarea societăţii noastre spre noi orizonturi materiale şi spirituale.
1.1.3. Structura şi rolul procesului tehnologic
• Totalitatea operaţiilor de prelucrare şi asamblare la care sînt supuse materialele
şi semifabricatele în cursul procesului de producţie, pentru a se obţine un anumit produs
sau părţi ale produsului (repere şi subansamble) se numeşte proces tehnologic. Structura
procesului tehnologie reprezintă deci un ansamblu de operaţii şi faze tehnologice.
Prin operaţie se înţelege o parte a procesului tehnologic, aplicată unei piese sau unui
grup de piese şi subansamble şi executată de un muncitor (sau o grupa bine determinată de
muncitori), În mod neîntrerupt şi la acelaşi loc de munca. Operaţia este unitatea de bază
pentru obţinerea unor rezultate tehnice definite, pentru stabilirea retribuţiei muncitorilor
direct productivi, precum şi pentru planificarea şi evidenţa producţiei.
Operaţiile se împart, de cele mai multe ori, în faze, caracterizate prin :
— limitarea procesului la o porţiune sau o grupă de porţiuni din supra faţa piesei;
— limitarea procesului la o grupă de unităţi de asamblare;
— utilizarea unei singure scule sau a unui set de scule funcţionând simultan;
— menţinerea aceluiaşi regim tehnologic.
Modificarea oricăruia din aceste elemente caracteristice face să apară o fază
tehnologică nouă.
Procesele tehnologice pot avea următorul caracter:
—de modificare a formei sau a proprietăţilor fizice ale materialelor şi
semifabricatelor, ceea ce se obţine prin prelucrări la cald (turnare, forjare,
sudare, tratamente termice) şi prin prelucrări la rece (aşchiere, ştanţare, presare, obinare);
—de prelucrări chimice (eroziune, protecţie anticorozivă, structuri ale corpului
solid etc);
— de asamblare (montare, reglare, echilibrare).
• Rolul procesului tehnologic este de a asigura :
— fabricaţia în volumul de fabricaţie dat;
— productivitatea mare a muncii;
— costul scăzut şi rentabilitatea fabricaţiei;
98

— realizarea performanţelor tehnice ale produsului, în conformitate cu
condiţiile tehnice impuse;
— aspectul corespunzător al produselor.
Bolul multiplu al procesului tehnologic se realizează prin diferite mijloace :
— organizarea corectă a fabricaţiei, în funcţie de mărimea seriei;
— aplicarea principiului interschimbabilităţii pieselor şi fabricarea pe stoc a
acestora, fără prelucrări suplimentare ;
— proiectarea celor mai raţionale planuri de tăiere a materialelor livrabile
sub formă de foi şi prevederea celor mai mici adaosuri de prelucrare ;
— întrebuinţarea maşinilor celor mai potrivite din punct de vedere tehnic şi
economic pentru operaţiile respective, la regimurile cele mai intensive;
— utilizarea pe scară largă a dispozitivelor şi sculelor universale şi speciale,
care duc la o execuţie calitativ superioară şi la creşterea produc tivităţii muncii;
— divizarea operaţiilor complicate în operaţii elementare, care permit, în special în
cazul fabricaţiei de serie, specializarea utilajului şi munci torilor şi deci atingerea unei
productivităţi înalte;
— prescrierea acelor operaţii, care duc la un ciclu de fabricaţie cît mai scurt şi la
parcurgerea unui număr cît mai mic de ateliere, fără întoarceri;
— introducerea automatizării şi cibernetizării producţiei [11];
— prescrierea celor mai productive şi mai eficiente procedee şi mijloace de control.
Trebuie precizat că pentru fiecare temă pusă în faţa tehnologului există mai multe
soluţii tehnice. Se alege aceea care, dintr-o comparaţie pe bază de calcule tehnico-
economice, este cea mai avantajoasă. în anumite situaţii, nu costurile impun soluţia, ci se
adoptă varianta care corespunde unui nivel tehnic mai ridicat, sau care asigură condiţii mai
bune de muncă pentru om, inclusiv de protecţie a muncii. Măsurile de protecţie a muncii
au caracter obligatoriu în cadrul proiectării unui proces tehnologie, noţiunea de
economicitate trebuind astfel să capete un înţeles mai larg, corespunzător principiilor de
organizare a societăţii noastre.
99

1.2. ORGANIZAREA MUNCII UE CONCEPŢIE TEHNOLOGICĂ
1.2.1. Organizarea compartimentului tehnologic
Compartimentul tehnologic dintr-o întreprindere reprezintă veriga esenţială a
procesului de pregătire tehnică a fabricaţiei. Documentaţia de proiectare, elaborată de
compartimentul de proiectare poate fi realizată cu diferite tehnologii. Documentaţia
tehnologică este aceea care stabileşte specificitatea organizării fabricaţiei pentru condiţiile
date ale uzinei şi ţine seama de caracterul sistemului de producţie: producţia individuală {de
unicate), producţia de serie şi producţia de masă.
În producţia individuală se fabrică un singur exemplar, sau un lot (număr de produse
care se lansează simultan în producţie) de câteva exemplare, la intervale mari de timp.
În producţia de serie se prevede fabricarea de produse identice în loturi care se succed
la diferite intervale de timp, determinate de planul de producţie şi cuprind un număr mare
de unităţi (repete, subansamble, produse finite). După numărul de exemplare se deosebesc :
producţia de serie mică, de serie mijlocie şi de serie mare. Acest caracter este specific
majorităţii întreprinderilor de mijloace de automatizare şi tehnică de calcul.
Prin producţia de masă se înţelege fabricarea de produse în cantităţi foarte mari în
mod continuu (într-o perioadă lungă de timp), cu executarea ritmică a produsului finit; toate
locurile de muncă comportă o specializare îngusta, în fiecare loc de muncă se execută o
operaţie bine determinată.
Documentul de bază elaborat de compartimentul tehnologic este fişa tehnologică.
Forma de prezentare a acesteia este diferită, pentru prelucrări sau pentru asamblări.
Gradul de detaliere a documentaţiei tehnologice creşte pe măsură ce loturile de
piese sunt mai mari. Astfel, la producţia individuală este suficient să se dea o simplă înşiruire
a principalelor operaţii, deoarece mâna de lucru este de calificare ridicată. în acest caz,
fişa tehnologică se întocmeşte sub formă de fişă de lucru singulară , care serveşte în acelaşi
timp şi ca formular de evidenţă în fabricaţie. Pentru lucrările de serie mică se întocmeşte fişa
tehnologică de prelucrare mecanică, care se utilizează şi pentru montaj, în ultimul caz fiind
însoţită de lista de piese şi materiale componente pentru operaţiile de montaj. Pentru
lucrările de serie mijlocie-mare, fişa tehnologică se înlocuieşte cu un plan de operaţii ,care se
îutocmeşte pentru fiecare operaţie în parte, cu defalcarea detaliată a tuturor fazelor şi a
100

regimurilor de lucru. Pentru producţia de masă se poate utiliza fie planul de operaţii, fie fişa
tehnologică pentru producţia de masă, care este lipsită de schiţa operaţiei, în schimb este
însoţită de un desen separat şi de un model al operaţiei.
Totodată se calculează consumurile specifice de materiale, adică acele cantităţi de
materii prime, materiale şi semifabricate, exprimate în unităţi de măsură sau bucăţi necesare
pe unitate de produs. Consumul specific se stabileşte prin însumarea normei de consum
net (greutatea netă a piesei în stare finită) cu pierderile tehnologice. în cadrul pierderilor
tehnologice intră pierderile inevitabile, cum sînt arderile (la piesele turnate şi forjate),
deşeurilor de ştanţare, pierderile prin croire şi debitare şi şpanul provenit de la operaţiile de
aşchiere. Pentru materialele livrate sub formă de foi, bare etc. se întocmesc planuri de tăiere.
101