Reglarea Turatiei a Ma
26
5.6. Reglarea vitezei motoarelor asincrone trifazate Posibilităţile de reglare a vitezei se obţin din analiza expresia a cuplului electromagnetic, impunând condiţia ca la un cuplu electromagnetic precizat să se obţină valori diferite ale alunecării , respectiv a vitezei unghiulare . Astfel se obţin două categorii de metode de reglare a vitezei, după cum se modifică parametrii corespunzătorii înfăşurării stator, respectiv înfăşurării rotor. 5.6.1. Metode de reglare a vitezei prin modificarea unor parametrii ai înfăşurării stator Memento Aceste metode se pot aplica la orice motor asincron indiferent de tipul constructiv al rotorului, dar se utilizează, în special, la motoare cu rotorul în colivie. 5.6.1.1. Metoda variaţiei tensiunii de alimentare
-
Upload
valentinmuller -
Category
Documents
-
view
33 -
download
0
description
Se prezinta metodele de reglarea turatiei masinii asincrone
Transcript of Reglarea Turatiei a Ma

5.6. Reglarea vitezei motoarelor asincrone trifazate
Posibilităţile de reglare a vitezei se obţin din analiza expresia a cuplului electromagnetic, impunând condiţia ca la un cuplu electromagnetic precizat să se obţină valori diferite ale alunecării , respectiv a vitezei unghiulare .
Astfel se obţin două categorii de metode de reglare a vitezei, după cum se modifică parametrii corespunzătorii înfăşurării stator, respectiv înfăşurării rotor.
5.6.1. Metode de reglare a vitezei prin modificarea unor parametrii ai înfăşurării stator
MementoAceste metode se pot aplica la orice motor asincron indiferent de tipul constructiv al
rotorului, dar se utilizează, în special, la motoare cu rotorul în colivie.
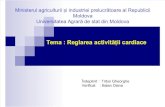
5.6.1.1. Metoda variaţiei tensiunii de alimentare
(a) (b)
Fig.5.34 Reglarea vitezei prin variaţia tensiunii de alimentarea) schema electrică;b) caracteristici mecanice pentru diferite tensiuni de alimentare.
M
Un
U1<Un
s
U2<U1
Mr
m
B
C
A

5.6.1.2. Metoda modificării numărului de perechi de poli
.
.
p=2 p=1
(a) (b)
Fig.5.35 Reglarea vitezei prin modificarea numărului de perechi de poli magnetici
a) explicativă privind modul de realizare;a modificării numărului de perechi de poli
b) caracteristicile mecanice ale maşinii.
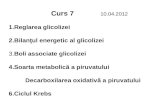
5.6.1.3. Metoda variaţiei frecvenţei tensiunii de alimentare
Modificarea frecvenţei a tensiunii de alimentare conduce la modificarea
; .
,
,
motor
Me
s1 A
Mr
s2
generator
D
B
C
N
N
S
S
N
S

Memento În cazul scăderii frecvenţei sub valoarea frecvenţei nominale , pentru a
menţine starea de saturaţie la valoarea impusă de punctul nominal de funcţionare, trebuie respectată condiţia:
care asigură menţinerea constantă a fluxului total statoric .
În cazul creşterii frecvenţei peste valoarea frecvenţei nominale , nu mai poate fi respectată condiţia conservării valorii fluxului magnetic, pentru că ar conduce la creşterea tensiunii electromotoare , ceea ce periclitează izolaţia maşinii. Astfel pentru acest caz se utilizează condiţia:
;
care conduce la o scădere a fluxului total statoric din maşină.
Alunecarea maximă
;
Pentru cazul , valoarea cuplului maxim este, practic, independentă de
valoarea frecvenţei
;
Pentru cazul , valoarea cuplului maxim variază invers proporţional cu
valoarea frecvenţei :
.
În practică se folosesc mai multe metode de reglare a turaţiei, în funcţie de mărimea electrică sau magnetică care se menţine constantă. În toate cazurile se modifică tensiunea de fază de alimentare şi frecvenţa acestei tensiuni .

(a) (b) (c)
Fig.5.36 Variaţia unor mărimi importante de funcţionare în cazul reglării vitezei prin modificarea frecvenţeia) variaţia tensiunii electromotoare şi a fluxului total statoric;b) variaţia cuplului maxim şi a alunecării maxime;c) variaţia tensiunii la borne.
În cazurile practice, pentru valori ale frecvenţei apropiate de frecvenţa nominală, sau mai mari, căderea de tensiune pe rezistenţa stator reprezintă foarte puţin in raport cu tensiunea electromotoare astfel încât se poate considera că . La
frecvenţe joase, când , nu poate fi neglijată căderea de tensiune pe rezistenţa
stator tensiunea având valori diferite de valorile tensiunii electromotoare .
s
Ues
fsfn
Uen
Us Ue
Us
Ues
fsfn
sm
Mm
fsfn
Uen
fn
Me
Ues= const.
sn
= const.
f1<fn
f2<f1
f3>fn
f4>f3
Mn
(b)
fn
Me
sn
Us= const.
f1<fnf2=0,5fn
f3>fn
f4=1,5fn
Mn
(a)
= const.

fn
Me
sn
f1<fn
f2<f1
f3>fn
f4=f3
Mn
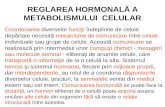
Fig 5.38 Caracteristici mecanice obţinute prin metoda variaţiei frecvenţei, considerând constantă valoarea efectivă a curentului statoric. Fig.5.3 7 Caracteristici
mecanice obţinute prin metoda variaţiei frecventei:
a)în cazul considerării numai a variaţiei tensiunii de alimentare;b) în cazul considerării numai a variaţiei fluxului total statoric;c) în cazul considerării numai a variaţiei fluxului total din întrefier;d) în cazul considerării numai a variaţiei fluxului total rotoric.
Observaţii:
Avantajul metodei (a) constă în faptul că se efectuează reglajul unor mărimi care se pot măsura la bornele de alimentare ale maşinii, iar dezavantajul metodei constă în reducerea capacităţii de supraîncărcare (reducerea cuplului maxim) odată cu variaţia frecventei.
În raport cu metoda (a), metoda (b) are avantajul conservării capacităţii de supraîncărcare (a valorii cuplului maxim) pentru frecvenţe mai mici decât frecvenţa nominală şi a obţinerii unui cuplu maxim mai mare, pentru orice valoare a frecvenţei şidzavantajul că tensiunea electromotoare stator , care nu este o mărime măsurabilă la bornele maşinii.
În cazul metodei (c) s-e obţin caracteristici mecanice cu aceleaşi proprietăţi ca şi în cazul metodei (b), cu diferenţa că valoarea cuplului maxim este aproximativ dublă; dezavantajul metodei constă in faptul că tensiunea electromotoare utilă
nu este o mărime măsurabilă la borne. Avantajul metodei (d) constă în obţinerea unor caracteristici mecanice liniare, iar
dezavantajul constă în faptul că la acelaşi cuplu, curentul rotoric va avea valori mai mari decât în cazul metodelor precedente, iar tensiunea electromotoare rotor nu poate fi măsurată.
Avantajul metode prezentată în figura 5.38 constă în uşurinţa cu care se pot măsura mărimile de reglaj şi
, similare metodei (a), dar având performanţe
fn
Me
Ue= const.
sn
= const.
f1<fn
f2<f1
f3>fn
f4>f3
Mn
(c)
fn
Me
Uer= const.
sn
= const.
f1<fn
f2<f1
f3>fn
f4>f3
Mn
(d)

superioare, comparabile cu performanţele metodei (b), iar dezavantajul principal constă în faptul că, la sarcini mici, circuitul magnetic al maşinii se saturează puternic şi cresc pierderile în fier şi curentul de mers în gol
8.6.2. Metode de reglare a vitezei prin modificarea unor parametrii ai înfăşurării rotor
MementoAceste metode se pot aplica numai pentru motoare asincrone cu rotorul bobinat,
care permit accesul din exterior la înfăşurările de fază rotor.
5.6.2.1. Metoda variaţiei rezistenţei de fază a înfăşurării rotor
(a)
Me
1
Mr
1
R’g=0
R’g = R1
R’g = R2 >R1
R’g = R3 >R2R’g = R4
>R3
Mr
2
(b)

Fig.5.39 Reglarea vitezei prin modificarea rezistentei înfăşurării rotor:
a) schema electrică; b) caracteristici mecanice.
5.6.2.2. Metoda conectării în cascadă
(a)(b)
Fig.5.40 Conectarea în cascadă a dună motoare asincrone:a) motorul are înfăşurarea rotor bobinată;b) motorul are înfăşurarea rotor în colivie,
Pentru frecvenţa a tensiunii de alimentare maşina are viteza unghiulară
sincronă
,

iar în cazul în care cascada are viteza unghiulară , frecvenţa tensiunii de alimentare a maşinii , egală cu frecvenţa tensiunii electromotoare induse în înfăşurarea rotorică a maşinii , este:
.
Corespunzător frecvenţei , viteza unghiulară sincronă a maşinii este:
.
Pentru o funcţionare stabilă a grupului este necesar ca viteza de rotaţie să fie apropiată de viteza sincronă a maşinii . Astfel se poate considera ipoteza:
,
care neglijează, în funcţionare, valoarea alunecării pentru maşina .Rezulta expresia vitezei unghiulare :
- dacă funcţionează numai maşina conectată la reţea,
- dacă funcţionează numai maşina
conectată la reţea,
- dacă funcţionează ambele maşini.
Dacă cuplarea celor două maşinii se face printr-o transmisie mecanică cu raportul
de transformare , atunci viteza unghiulară va avea expresia:
.
Observaţie: În afara faptului că necesită folosirea mai multor motoare, cascada are şi
dezavantajul obţinerii unor caracteristici funcţionale inferioare utilizării unui singur motor. Aceasta, datorită faptului că, fiecare motor absoarbe puterea reactivă necesară funcţionării sale şi a tuturor motoarelor care urmează după el în cascadă, având astfel, în funcţionare, un curent de magnetizare mare şi un factor de putere slab.

5.7. MAŞINI ASINCRONE MONO ŞI BIFAZATE
Maşinile asincrone mono şi bifazate sunt utilizate în multe acţionări de putere relativ mică,dar care impun anumite condiţii speciale: utilizarea unor reţele de alimentare monofazate, dezvoltarea unor cupluri numai pe perioade scurte de timp etc.
5.7.1. Maşina asincronă monofazatăO înfăşurare monofazată, parcursă de curentul i, determină în întrefier o undă magnetică pulsarorie:
care poate fi echivalată prin două unde progresive de succesiuni diferite:

indicele d corespunde undei directe, iar indicele i undei inverse.
Fig.5.41 Explicativă privind sensurile vitezelor unghiulare în cazul echivalăriiunei maşini asincrone monofazate prin două maşini asincrone trifazate.
Dacă considerăm că rotorul se deplasează cu viteza unghiulară în sensul crescător al coordonatei spaţiale s atunci unda directă (a) are faţă de rotor alunecarea directă :
iar unda inversă are alunecarea inversă:
5.7.1.1 Motorul asincron monofazat
axa spatialastator s s
s
s
s =s =2-ssd i
masina directa masina inversa

Fig.5.42 Caracteristica mecanică a maşinii asincrone monofazate.
Din analiza caracteristicii mecanice rezultă că:
motorul monofazat nu are cuplu de pornire; motorul poate funcţiona identic, în ambele sensuri de rotaţie, sensul de
mişcare fiind impus de sensul unui impuls iniţial.
Absenţa cuplului de pornire este dezavantajul major al motorului monofazat.

Fig.5.43 Explicativă privind efectele unui defect pe linia de alimentare a), b) linie de alimentare bună – maşină trifazată; c), d) linie de alimentare cu defect – maşină monofazată.
5.7.1.2. Tahogeneratorul asincron
Pe statorul tahogeneratorului sunt dispuse două înfăşurări monofazate, decalate
spaţial cu unghiul , iar pe rotor este dispusă o înfăşurare în colivie.
i
ii
1
2
3
i1
i2i3
(b)(a)
1
23
32
1i
2i 2i
i
1 1
12 12
(c) (d)

Fig.5.44 Modelul electric al unui tahogenerator asincron bifazat.
Unda directă determină în înfăşurarea origine de fază a rotorului (înfăşurarea care are axa spaţială suprapusă peste axa spaţială a rotorului) o tensiune electromotoare de forma:
Expresia tensiunii electromotoare induse de unda de succesiune inversă este:
Rezulta:
sistemul curenţilor de succesiune directă; curentul prin înfăşurarea origine de fază este determinat de tensiunea ued şi are expresia:
sistemul curenţilor de succesiune inversă; curentul prin înfăşurarea origine de fază este determinat de tensiunea uei şi are expresia:
unde s-a considerat că fiecare fază rotor este pur rezistivă, fiind caracterizată de rezistenţa electrică R.
Sistemele de curenţi rotorici creează în întrefier unde magnetice progresive rotorice, care determină în înfăşurarea nealimentată (înfăşurarea de lucru) fluxuri magnetice de forma:

unde s-a notat cu Llr inductivitatea ciclică dintre înfăşurarea de lucru şi înfăşurarea de fază rotor.
Valoarea tensiunii electromotoare induse în înfăşurarea de lucru este:
Rezultă:
unde Ue este valoarea măsurată, iar celelalte elemente sunt constante şi cunoscute.În cazul real, rotorul este caracterizat atât de rezistenţă, cât şi de reactanţă,
astfel încât nu se mai respectă relaţia de dependenţă liniară între viteza unghiulară şi valoarea efectivă a tensiunii electromotoare. Erorile introduse sunt relativ mici pentru zona de viteze unghiulare unde se utilizează tahogeneratorul, astfel încât tahogeneratorul asincron este unul dintre cele mai precise instrumente de măsurare a turaţiei.
5.7.2. Maşina asincronă bifazată

Fig.5.45 Schema electrică a unei maşini bifazate; a) reprezentarea maşinii reale; b) reprezentarea prin echivalarea cu două maşini trifazate.
Se produc în întrefier două unde staţionare diferite:
Campul magnetiv rezultant este:
respectiv:

Existenţa celor două unde progresive de succesiuni diferite, sugerează
echivalarea maşinii bifazate prin două maşini trifazate . Cele două maşini trifazate pot avea înfăşurări identice pe stator, dar sunt alimentate cu sisteme de curenţi trifazaţi, simetrici şi echilibraţi, de valori efective diferite; curenţii care parcurg înfăşurările origine de fază (cu axele spaţiale suprapuse peste axa spaţială stator) sunt :
unde valorile efective Id şi Ii se determină astfel încât să se obţină amplitudinile corespunzătoare Bd şi Bi pentru undele progresive bd şi bi.
5.7.2.1. Motorul asincron bifazat

Fig.5.46 Caracteristici mecanice ale unei maşini bifazate a) maşina porneşte în sens direct;
b) maşina porneşte în sens invers.
Rezultă existenţa cuplului de pornire Mp, maşina pornind numai într-un anumit sens de rotaţie, impus de valoarea cuplului de pornire.
s
s
M
M
M
M
M
M
M
M
M
MMM Me emdp
mi
i
d
mi
md
p
d
i
(a) (b)

p
i1
si2
C
retea
axaspatialastator
Fig. 5.47 Efectul întreruperii unei faze la o maşină trifazată a), b) cazul înfăşurării conectate în triunghi; c), d) cazul înfăşurării conectate în stea.
5.7.2.2. Maşina cu alimentare monofazată
În cazul acestor maşini alimentarea celor două înfăşurări se face de la aceeaşi reţea. Defazajul temporal este impus de condensatorul C, care are o valoare astfel aleasă încât, se pot considera următoarele expresii ale curenţilor prin cele două înfăşurări:
i23
(a)
1 1i
32
1
3
2
1
ii
i
(b)
2i23
2
i
(c)
i2
1i
i
(d)
3i
1 2
1

curentul i2 are un puternic caracter capacitiv
Fig.5.48 Schema electrică a unui motor bifazat cu alimentare monofazată.
În cazul în care construcţia celor două înfăşurări asigură un decalaj spaţial
, atunci undele magnetice progresive determinate de cele două înfăşurări:
produc două unde progresive de expresie:
care demonstrează că maşina are, preponderent, cuplul electromagnetic direct.
Observaţie. Condensatorul C poate fi înlocuit şi printr-o rezistenţă R; în acest caz curentul i2 capătă un puternic caracter rezistiv, în raport cu curentul i1, care păstrează un caracter puternic inductiv. Astfel se poate considera că:
Maşina funcţionează ca o maşină cu condensator, dar se obţine un cuplu de pornire mai mic şi un randament mai slab datorită consumului pe rezistenţa R.

5.7.2.3. Maşina monofazată cu spiră în scurtcircuit
Fig.5.49 Maşina monofazată cu spiră în scurtcircuit; a) model constructiv; b) compunerea câmpurilor magnetice.
Acest tip constructiv de motor are avantajul simplităţii şi robusteţii constructive, dar şi dezavantajul obţinerii unor cupluri de pornire mici şi a unor randamente slabe. Se utilizează pentru ventilatoare de mică putere (sub 50W).
5.7.2.4. Servomotorul asincron bifazat
Fig.5.50 Servomotorul asincron bifazat: a)schema echivalentă; b)caracteristica mecanică în cazul când înfăşurarea de comandă nu este alimentată; c)caracteristica mecanică în cazul când înfăşurarea de comandă este alimentată.

Spre deosebire de motorul asincron bifazat care, după pornire, poate funcţiona ca motor chiar dacă nu este alimentată una dintre înfăşurări, servomotorul trebuie să se autofrâneze la dispariţia semnalului de comandă atunci când înfăşurarea de comandă nu va mai fi alimentată.
Fig.5.51 Explicativă privind funcţionarea servomotorului asincron bifazat.
i
Me
s
s
MMM
i
i 1
2 2=0
0
s0
-
f A
BC
p
12