






Limbile
Pagini
Legal


Mihai ULEA
Mihaela Violeta MUNTEANU
Statica Tehnică
Aplicații
Ediția a II-a revăzută și adăugită
Editura Universităţii Transilvania din Braşov
2014
CUPRINS
1. Sisteme de forţe……………………………………........................1
2. Centre de greutate ...........................................................................30
3. Statica rigidului...............................................................................66
4. Echilibrul sistemelor de rigide......................................................108
5. Diagrame de eforturi secţionale....................................................146
6. Momente de inerţie........................................................................171
Bibliografie selectivă ......................................................................193
1
Capitolul I
SISTEME DE FORŢE
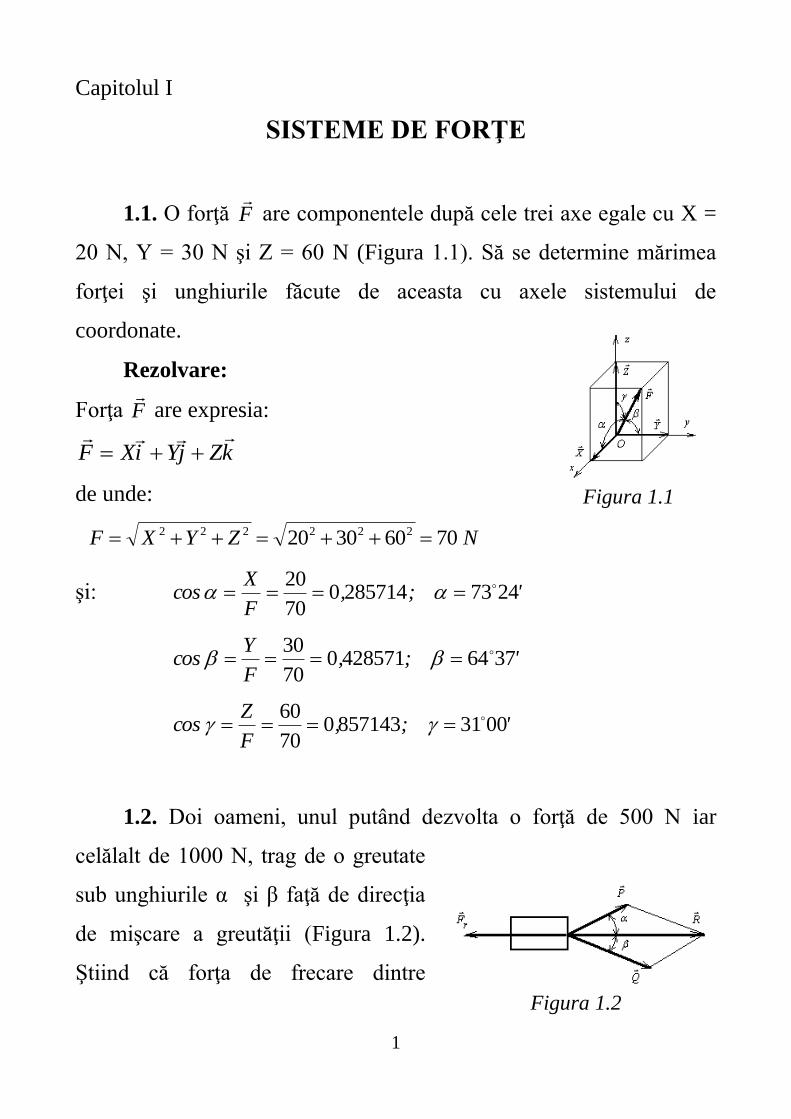
1.1. O forţă F
are componentele după cele trei axe egale cu X =
20 N, Y = 30 N şi Z = 60 N (Figura 1.1). Să se determine mărimea
forţei şi unghiurile făcute de aceasta cu axele sistemului de
coordonate.
Rezolvare:
Forţa F
are expresia:
kZjYiXF
de unde:
NZYXF 70603020 222222
şi: ';,F
Xcos 24732857140
70
20
';,F
Ycos 37644285710
70
30
';,F
Zcos 00318571430
70
60
1.2. Doi oameni, unul putând dezvolta o forţă de 500 N iar
celălalt de 1000 N, trag de o greutate
sub unghiurile α şi β faţă de direcţia
de mişcare a greutăţii (Figura 1.2).
Ştiind că forţa de frecare dintre
Figura 1.1
Figura 1.2
2
greutate şi orizontală este de 1250 N, să se determine cele două
unghiuri.
Rezolvare:
Rezultanta celor două forţe este egală cu forţa de rezistenţă:
)cos(22222 PQQPFR r
de unde:
3125,010005002
10005001250
2)cos(
222222
QP
QPFr
Rezultă: '4771 . Teorema sinusului ne dă relaţia:
sinsin
QP sau: )'4771sin(sin QP
)'4771cos(sincos)'4771sin(sin QQP
sin3125,01000cos949118,01000sin500
'2122;'2649;168145,15,812
118,949tan oo
1.3. Se dă forţa kjiF
32 . Să se descompună după două
direcţii, una care face un unghi egal cu cele trei axe ale sistemului de
coordonate şi una care se găseşte în planul Oxy.
Rezolvare:
21 FFF
cu: kjiF
1 ; jiF 2 .
Rezultă sistemul:
3
2
1
cu soluţia: 123 ;; .

3
Deci: kjiF
3331 şi jiF
22 .
1.4. Să se găsească componenta forţei
kjiF
32 după direcţia dreptei care
trece prin punctele A(6,0,5) şi B(4,3,0).
Rezolvare:
Direcţia dreptei AB este
2AB
2AB
2AB
ABABABAB
)zz()yy()xx(
k)zz(j)yy(i)xx(
AB
ABe
38
k5j3i2
şi atunci proiecţia forţei F
după această direcţie este:
38
532
38
53232 kjikjikjieeFF ABABAB
kjikjiFAB
532
38
11532
38
1562
1.5. Se dă o forţă F, de valoare
NF 6 , care acţionează într-un punct
B al unui corp de forma din Figura 1.5,
de-a lungul dreptei BE. Se cere să se
calculeze momentul acestei forţe în
punctele C şi O.
Rezolvare:
Figura 1.5
Figura 1.4

4
Momentul forţei F în punctul C este dat de relaţia: FxCBMC
.
Expresia vectorială a forţei F este dată de:
kjikij
BE
OEAOBAF
BE
BEFeFF
2
6
26
unde e
este versorul vectorului BE care indică direcţia forţei. Atunci:
jkkjixiFxCBMC
2)2(
Avem şi:
Fx)ABOA(FxOBMO
jiikjkkjixji
2222)2()2(
1.6. Se cunoaşte vectorul forţă kjiF
2 şi vectorul
moment dat de această forţă într-un
punct O, jiMO
2 . Se cere să se
determine ecuaţia dreptei suport a forţei
(Figura 1.6).
Rezolvare:
Ecuaţia dreptei suport este:
)kji(
kji
FF
MxFr O
2
121
012
121
2222
)6
5()2
3
1()
6
1()2(
6
52
kjikji
kji
sau, pe componente:
Figura 1.6.
5
;x 6
1
;y 23
1
.z 6
5
Dacă se elimină λ se obţine ecuaţia dreptei suport sub forma:
1
6
5
2
3
1
1
6
1
zyx
adică o dreaptă care are direcţia forţei şi trece prin punctul de
coordonate
6
5,
3
1,
6
1P . Se observă că am luat pentru forţă şi moment
vectorii din aplicaţia de la punctul 1.5. Ca urmare ar trebui să obţinem
ca soluţie dreapta BE. Într-adevăr, se constată că punctele E(0,0,1) şi
B(1,2,0) verifică ecuaţia obţinută.
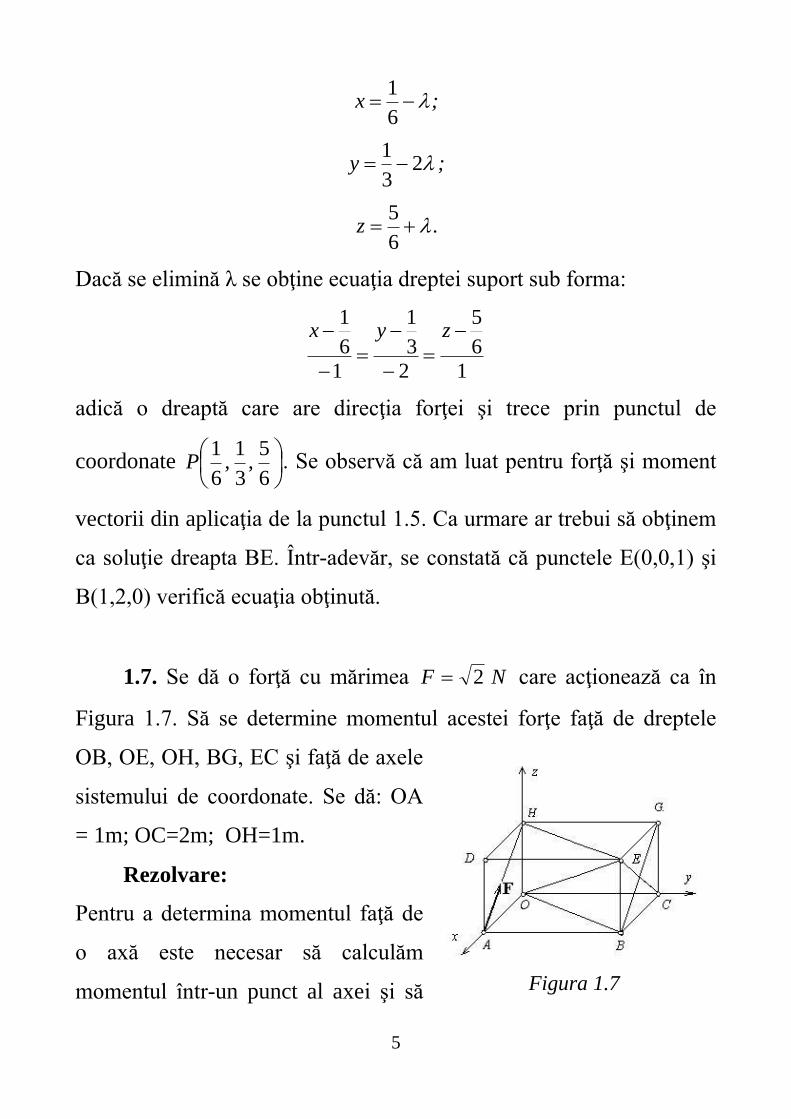
1.7. Se dă o forţă cu mărimea NF 2 care acţionează ca în
Figura 1.7. Să se determine momentul acestei forţe faţă de dreptele
OB, OE, OH, BG, EC şi faţă de axele
sistemului de coordonate. Se dă: OA
= 1m; OC=2m; OH=1m.
Rezolvare:
Pentru a determina momentul faţă de
o axă este necesar să calculăm
momentul într-un punct al axei şi să
Figura 1.7
6
cunoaştem direcţia axei respective. Expresia vectorială a forţei F
va
fi:
AH
AHFeFF
ki
ki
AH
OHAOF
22
Dreptele OB, OE, OH, BG, EC vor avea, respectiv, direcţiile:
5
2 ji
OB
ABOA
OB
OBeOB
;
6
2 kji
OB
BEABOA
OB
OEeOE
keOH
;
2
ki
OB
CGBC
BG
BGeBG
;
2
ki
OB
BECB
CB
CEeCE
Calculăm momentul forţei în punctele O, B, C. Avem:
jkixiFxOAFMO
)()(
ikkixjFxBAFMB
22)(2)(
ikjkixjiFxCAFMC
22)()2()(
Acum se pot calcula momentele faţă de axe:
5
52
5
2
5
2
jijeMM OBOOB
jiji
eeMM OBOBOOB
2
5
2
5
2
5
2
3
6
6
2
6
2
kjijeMM OEOOE

7
kjikji
eeMM OEOEOOE
2
3
1
6
2
6
2
0 kjeMM OHOOH
(forţa intersectează dreapta OH)
02
22
ki
ikeMM BGBBG
(forţa este paralelă cu
dreapta BG)
222
4
2)22(
kiikjeMM CECCE
)(22
22 kiki
eeMM CECECCE
1.8. Se dă sistemul de forţe
reprezentat în Figura 1.8.a. Să se
determine:
a) torsorul de reducere al sistemului de
forţe în punctul C ;
b) torsorul de reducere în origine;
c) momentul minim;
d) axa centrală a sistemului de forţe.
Rezolvare:
a) Scriem expresiile vectoriale ale forţelor:
jiji
GE
DEGD
GE
GEFeFF
2221111
kiik
EC
BCEB
EC
ECFeFF
2
5
2552222
Figura 1.8.a

8
kjiijk
EO
AOBAEB
EO
EOFeFF
2
6
2663333
kiki
OD
ADOA
OD
ODFeFF
2
6
2664444
ji2
ji2
AC
OCAO2
OD
ODFeFF 5555
kkFF
66
Rezultanta sistemului de forţe este:
kjiR
Calculăm momentul fiecărei forţe în punctul C:
ijkjixkiFxCEFxCGM C
22)()2(111 ;
02 CM
;
ikkjixkiFxCEM C
2)2()2(33 ;
ikkixjFxCOM C
2)2(44 ;
05 CM
;
ijkxjiFxCAM C
)(66
Momentul rezultant va fi:
kjiMC
3
Torsorul de reducere al sistemului
de forţe în punctul C va fi:
TC 131111ˆ
b) Cu teorema momentului se
i
j
k
1 1 1 0
2 -1 -2 0
3 -1 -1 -2
4 1 0 2
5 1 1 0
6 0 0 1
Σ 1 -1 1
Figura 1.8.b
9
determină momentul rezultant în punctul O:
jkjixjkjiRxOCMM CO
3)(3
Torsorul de reducere în punctul O va fi:
TO 030111ˆ
c) 33
3min
R
MRM O
kjikji
R
RMM
33minmin
d) Ecuaţia axei centrale este dată de relaţia:
)kji(
kji
RR
MxRr O
3
030
111
2
kjikjiki
)1()1()(3
33
sau, pe componente:
.z
;y
;x
1
1
(forma parametrică a axei centrale)
Dacă se elimină se poate obţine ecuaţia axei centrale sub forma:
1
1
11
1
zyx
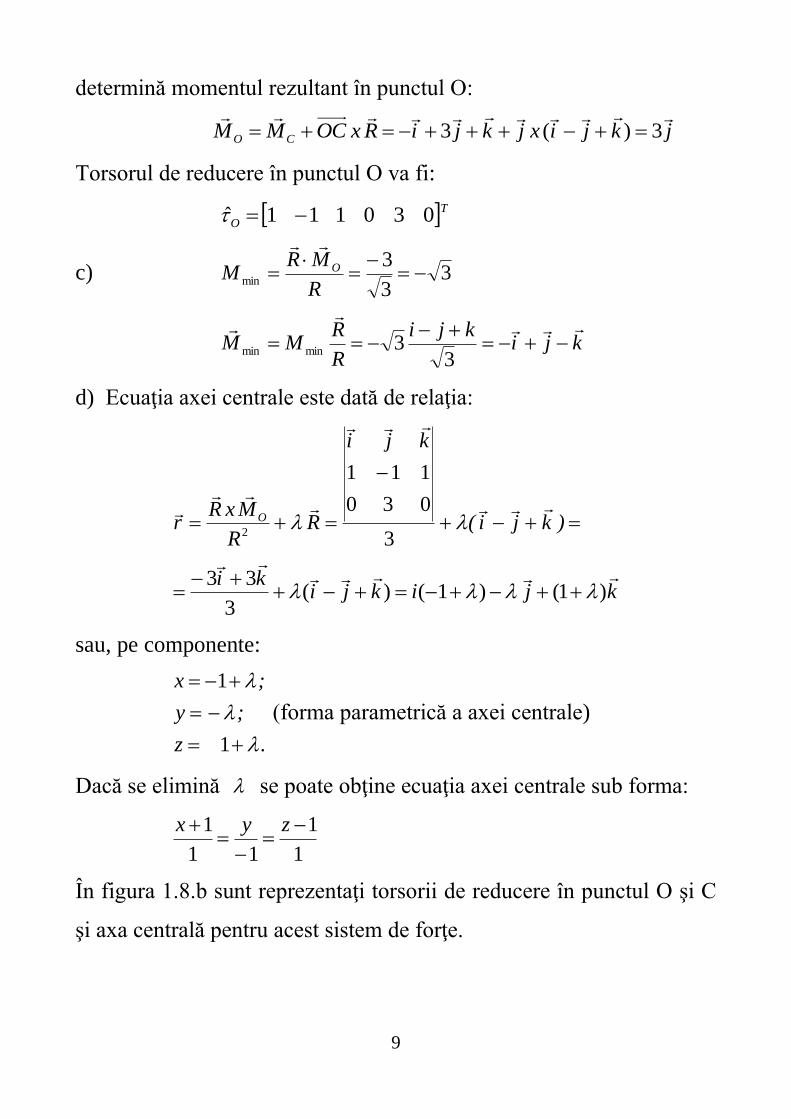
În figura 1.8.b sunt reprezentaţi torsorii de reducere în punctul O şi C
şi axa centrală pentru acest sistem de forţe.
10
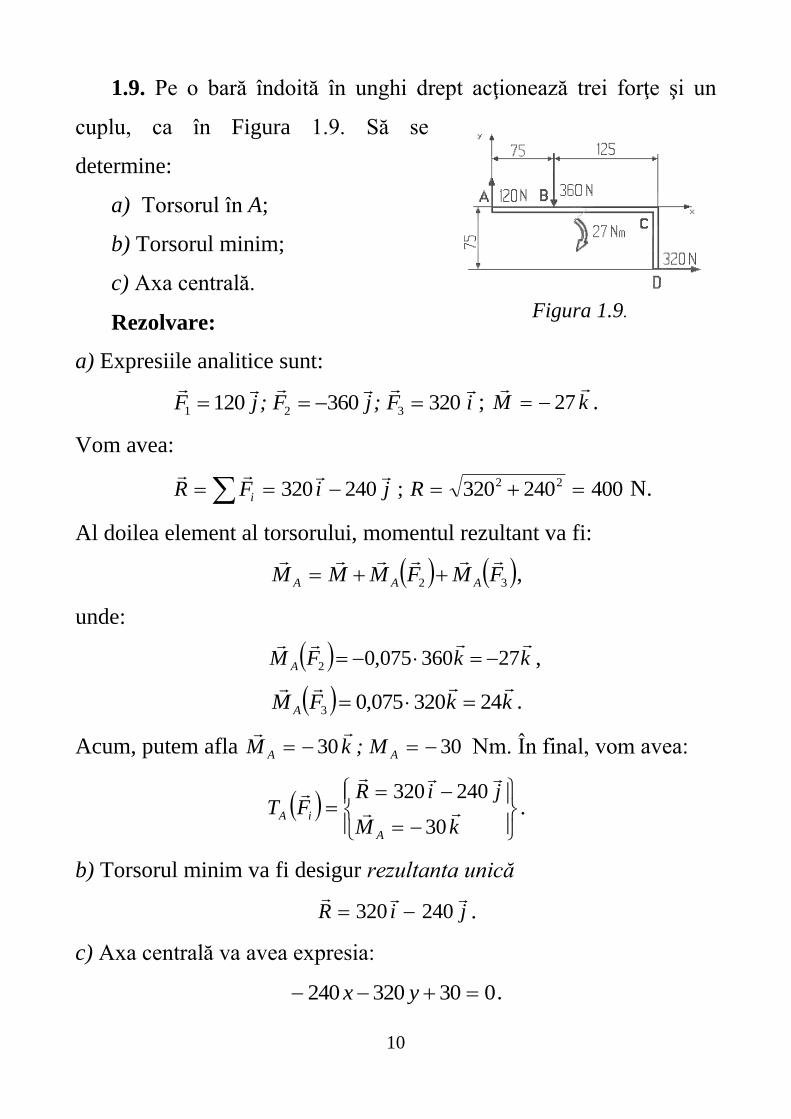
1.9. Pe o bară îndoită în unghi drept acţionează trei forţe şi un
cuplu, ca în Figura 1.9. Să se
determine:
a) Torsorul în A;
b) Torsorul minim;
c) Axa centrală.
Rezolvare:
a) Expresiile analitice sunt:
iF;jF;jF
320360120 321 ; kM
27 .
Vom avea:
400240320;240320 22 RjiFR i
N.
Al doilea element al torsorului, momentul rezultant va fi:
32 FMFMMM AAA
,
unde:
kkFM A
27360075,02 ,
kkFM A
24320075,03 .
Acum, putem afla 3030 AA M;kM
Nm. În final, vom avea:
kM
jiRFT
A
iA
30
240320.
b) Torsorul minim va fi desigur rezultanta unică
jiR
240320 .
c) Axa centrală va avea expresia:
030320240 yx .
Figura 1.9.
11
Ea va intersecta axele de coordonate în punctele:
125,00 xy m, respectiv 09375,00 yx m.
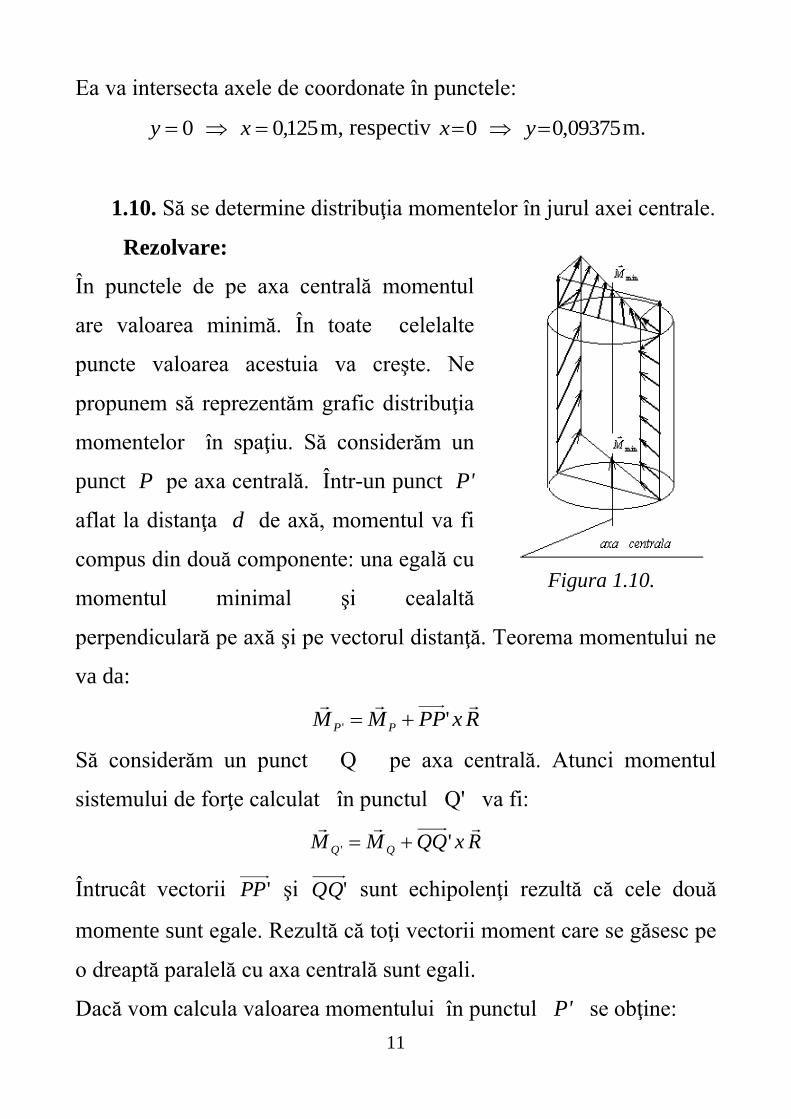
1.10. Să se determine distribuţia momentelor în jurul axei centrale.
Rezolvare:
În punctele de pe axa centrală momentul
are valoarea minimă. În toate celelalte
puncte valoarea acestuia va creşte. Ne
propunem să reprezentăm grafic distribuţia
momentelor în spaţiu. Să considerăm un
punct P pe axa centrală. Într-un punct P'
aflat la distanţa d de axă, momentul va fi
compus din două componente: una egală cu
momentul minimal şi cealaltă
perpendiculară pe axă şi pe vectorul distanţă. Teorema momentului ne
va da:
RxPPMM PP
''
Să considerăm un punct Q pe axa centrală. Atunci momentul
sistemului de forţe calculat în punctul Q' va fi:
RxQQMM QQ
''
Întrucât vectorii 'PP şi 'QQ sunt echipolenţi rezultă că cele două
momente sunt egale. Rezultă că toţi vectorii moment care se găsesc pe
o dreaptă paralelă cu axa centrală sunt egali.
Dacă vom calcula valoarea momentului în punctul P' se obţine:
Figura 1.10.
12
222
min
222
min
222
' ')'( RdMRPPMRxPPMM PP
Rezultă că toate punctele situate pe suprafaţa unui cilindru de rază d
au aceeaşi valoare a momentului (simetrie cilindrică).
Pe baza acestor două rezultate se poate desena distribuţia de momente
ca în Figura 1.10.
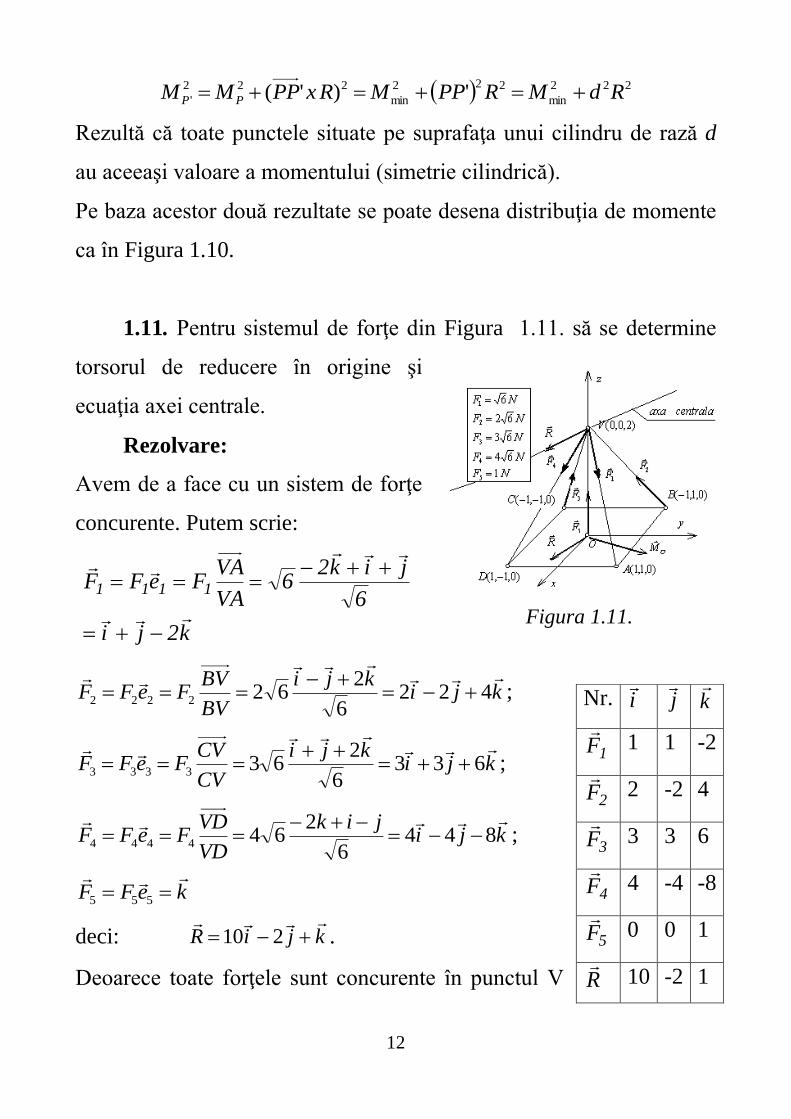
1.11. Pentru sistemul de forţe din Figura 1.11. să se determine
torsorul de reducere în origine şi
ecuaţia axei centrale.
Rezolvare:
Avem de a face cu un sistem de forţe
concurente. Putem scrie:
k2ji
6
jik26
VA
VAFeFF 1111
kjikji
BV
BVFeFF
422
6
2622222
;
kjikji
CV
CVFeFF
633
6
2633333
;
kjijik
VD
VDFeFF
844
6
2644444
;
keFF
555
deci: kjiR
210 .
Deoarece toate forţele sunt concurente în punctul V
Nr. i
j
k
1F
1 1 -2
2F
2 -2 4
3F
3 3 6
4F
4 -4 -8
5F
0 0 1
R
10 -2 1
Figura 1.11.
13
rezultă că momentul rezultant în punctul V este zero. Rezultă torsorul
de reducere în punctul V:
TVˆ 0001210
Momentul în punctul O poate fi calculat cu teorema lui Varignon:
ijkjixkRxOVMO
420)210(2
deci se va găsi în planul Oxy. Torsorul de reducere în punctul O va fi
deci:
TO 02041210ˆ
În punctul V momentul este zero, deci este momentul minim; rezultă
că punctul V va aparţine axei centrale. Cum aceasta este o dreaptă
paralelă cu rezultanta şi trece prin punctul V, ecuaţia vectorială a ei va
fi:
)(kji)kji(kROVr 22102102
sau, pe componente:
.z
;y
;x
2
2
10
Dacă se elimină se obţine ecuaţia axei centrale sub forma:
1
2
210
zyx
1.12. Se dă sistemul de forţe în plan din Figura 1.12. Să se
determine torsorul de reducere al sistemului în origine şi ecuaţia axei

14
centrale. Se cunosc mărimile forţelor NF 51 ; ;12 NF ;13 NF
NF 24 ; ;55 NF ;26 NF NF 27 .
Rezolvare:
Se determină expresiile vectoriale ale forţelor:
jiji
F
BG
AGBAF
BG
BGFeFF
25
251
11111
iieFF
1222 ;
jjeFF
1333;
jeFF
2444
jiij
HO
AOHAF
HO
HOFeFF
2
5
2555555
jiji
CF
EFCEF
CF
CFFeFF
2266666
jiji
HF
EFHEF
HF
HFFeFF
2277777
Prin însumare se obţine rezultanta :
jiR
62
Momentele date de fiecare forţă se vor calcula cu relaţiile:
kjixiFxOBM
6)2(311 ;
kixjiFxOGM
2)22(22 ;
03 M
; kjxiFxOAM
42244 ;
05 M
; kjixjFxOCM
)(66 ;
Figura 1.12.

15
kjixjiFxOHM
3)()2(77 .
Momentul rezultant se obţine prin însumare:
7
1
10i
iO kFM
Axa centrală are ecuaţia:
0 yXxYMoz ;
sau: 02610 yx ;
53 xy .
1.13. Se consideră un sistem de forţe aflate într-un plan ca în
Figura 1.13. Să se determine torsorul de reducere în D şi ecuaţia axei
centrale.
Rezolvare:
Facem calculele în planul XBY. Notăm cu ie
1 , 2e
şi 3e
versorii
axei BX, BY respectiv BZ. Rezultă expresiile vectoriale ale forţelor:
Figura 1.13.

16
2211 1 eeFF ;
2121
22 4252
4252 ee
ee
BC
BCFF
;
2233 2eeFF
;
1144 1 eeFF ;
1155 1 eeFF
Rezultanta este: 23eR
Calculăm momentele date de fiecare forţă în D:
;M D 01
;eeexeFxDBM D 321222 8424
;e)e(xeFxDCM D 32133 422
04 DM ;
31255 4)(4 eexeFxDBM D
Rezultă momentul în D: 0DM
deci puncul D aparţine axei centrale. Atunci putem scrie axa centrală
sub forma:
22 34 eeRrr D
sau:
34 Y , cu X = 0,
deci o dreaptă paralelă cu axa OY, care trece prin D, deci OD.
Pentru a determina componentele rezultantei şi momentului rezultant
în sistemul de referinţă Oxyz ţinem seama de relaţiile:
kcosjsine;ksinjcose;ie
321
17
Rezultă: kjkjeR
sin4
3cos
4
153)sin(cos33 2
Momentul în D fiind zero, putem calcula momentul în O cu teorema
momentului:
iiiM
kjxjRxODM
O
O
4
15
4
15
4
14cossin4
)sincos3(cos4
1.14. Două forţe paralele au mărimile F1=3 N şi F2=6 N , iar
dreptele suport se găsesc la distanţa a = 1m una de cealaltă (Figura
1.14). Să se determine axa centrală în acest caz.
Rezolvare:
Dacă a este distanţa dintre dreptele suport ale
celor două forţe, să căutăm un punct C între cele
două drepte în care momentul este egal cu zero.
Acest lucru se întâmplă dacă a se împarte prin
punctul C în raportul 2:1. În acest caz axa centrală va fi o dreaptă
paralelă cu forţele şi care trece prin punctul C. În orice punct de pe axa
centrală momentul este nul.
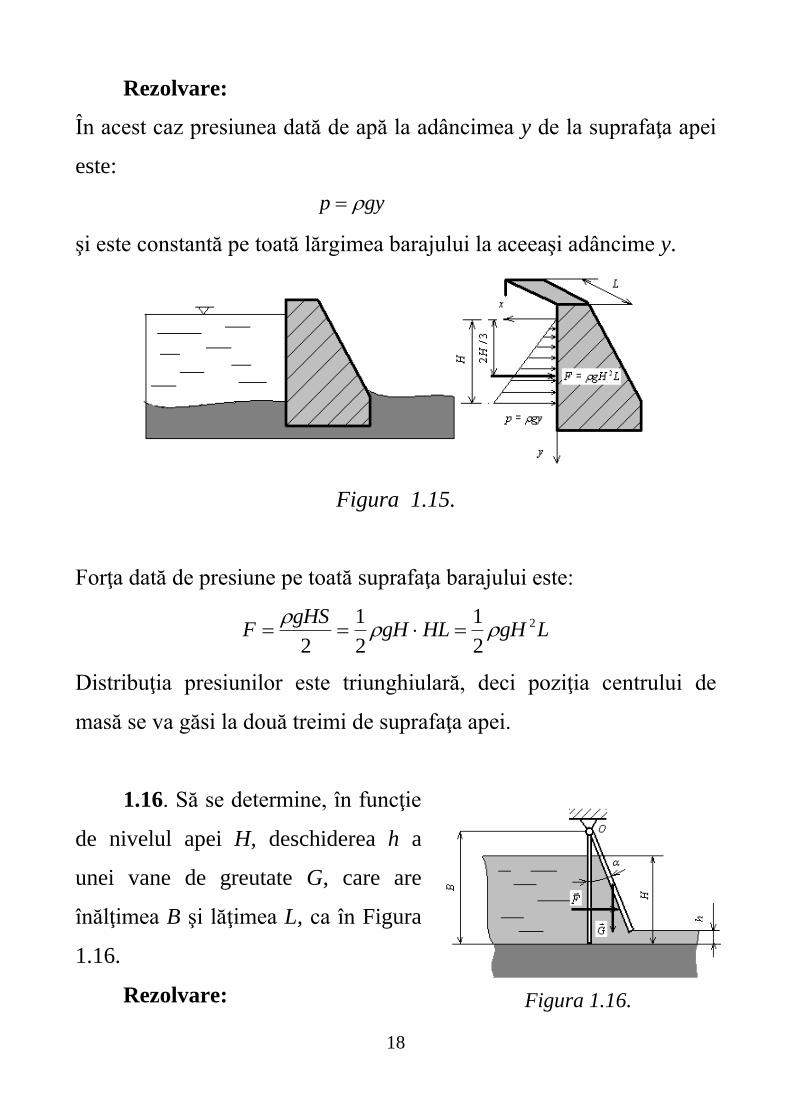
1.15. Se consideră un baraj cu perete vertical asupra căruia
acţionează presiunea apei (Figura 1.15). Ne propunem să determinăm
poziţia centrului de presiune în acest caz şi forţa exercitată de apă
asupra barajului, dacă înălţimea apei este H iar lărgimea barajului este
L.
Figura 1.14.
18
Rezolvare:
În acest caz presiunea dată de apă la adâncimea y de la suprafaţa apei
este:
gyp
şi este constantă pe toată lărgimea barajului la aceeaşi adâncime y.
Figura 1.15.
Forţa dată de presiune pe toată suprafaţa barajului este:
LgHHLgHgHS
F 2
2
1
2
1
2
Distribuţia presiunilor este triunghiulară, deci poziţia centrului de
masă se va găsi la două treimi de suprafaţa apei.
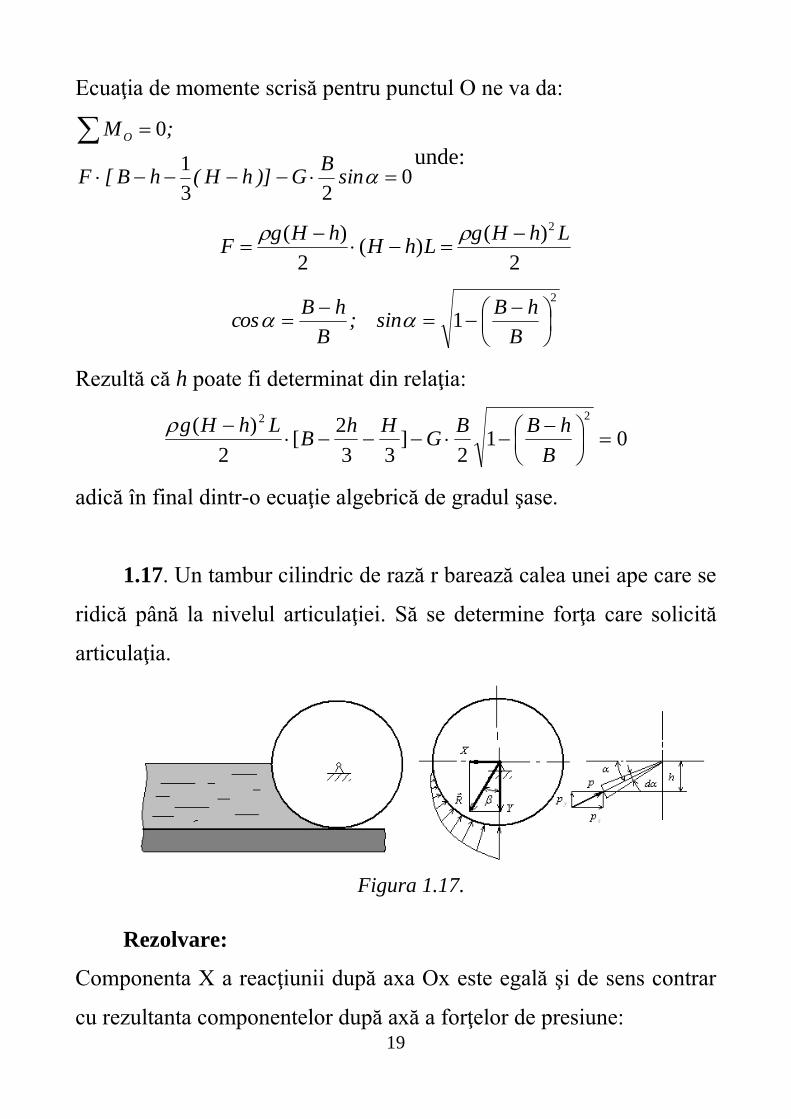
1.16. Să se determine, în funcţie
de nivelul apei H, deschiderea h a
unei vane de greutate G, care are
înălţimea B şi lăţimea L, ca în Figura
1.16.
Rezolvare:
Figura 1.16.
19
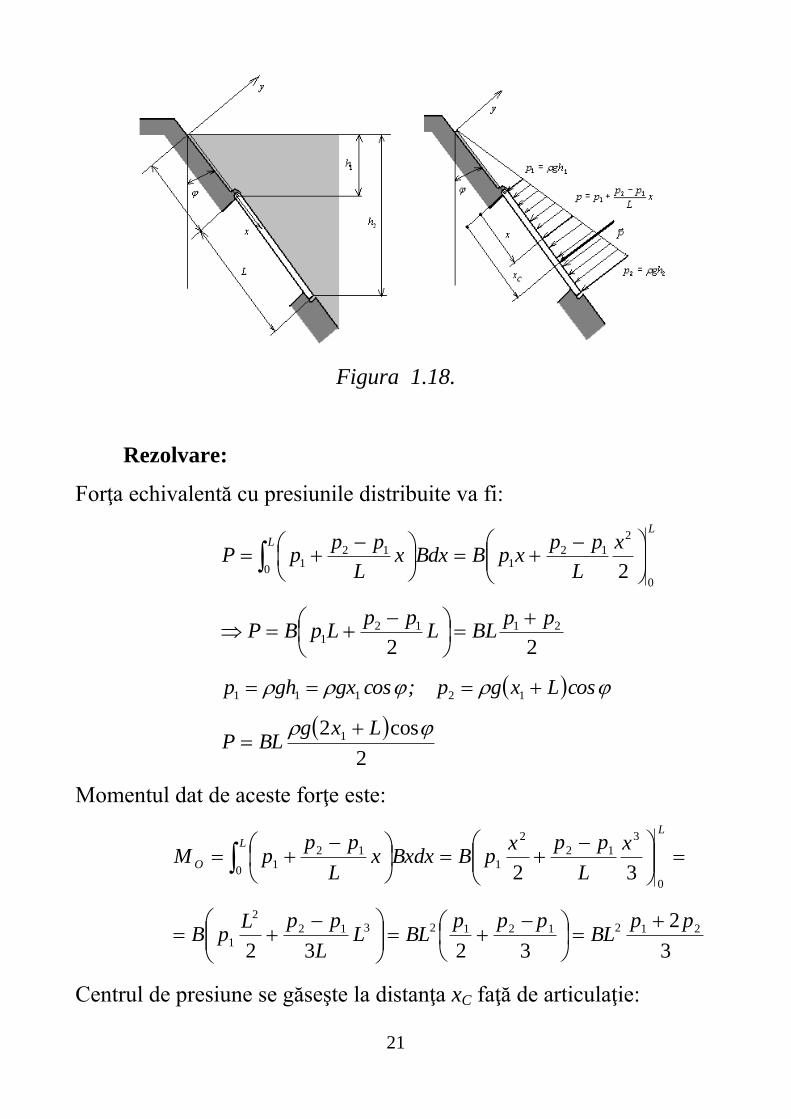
Figura 1.17.
Ecuaţia de momente scrisă pentru punctul O ne va da:
023
1
0
sinB
G)]hH(hB[F
;MO
unde:
2
)()(
2
)( 2 LhHgLhH
hHgF
2
1
B
hBsin;
B
hBcos
Rezultă că h poate fi determinat din relaţia:
012
]33
2[
2
)(22
B
hBBG
HhB
LhHg
adică în final dintr-o ecuaţie algebrică de gradul şase.
1.17. Un tambur cilindric de rază r barează calea unei ape care se
ridică până la nivelul articulaţiei. Să se determine forţa care solicită
articulaţia.
Rezolvare:
Componenta X a reacţiunii după axa Ox este egală şi de sens contrar
cu rezultanta componentelor după axă a forţelor de presiune:

20
2
2cos4
22sin4
1
cossin
2
2
0
2
2
0
2
2
0
2
0
2
0
LgRLgRdLgR
dgRRLRdpLdSpX xx
S-a considerat că elementul de suprafaţă pe care acţionează presiunea
normală este:
LRddS
iar componenta presiunii după axa x este:
cossincoscos gRghppx
În mod analog putem calcula componenta reacţiunii din articulaţie
după axa y:
4
224
2214
1 2
20
2
2
0
2
2
0
2
0
2
0
LgRsin
LgRdcosLgR
dsinsingRRLRdpLdSpY yy
Componenta după axa y a presiunii a fost calculată cu relaţia:
2sinsinsin gRghpp y
Unghiul făcut de rezultantă cu axa y este dat de:
222
2
LgR
LgRtg
1.18. Să se determine forţa necesară pentru ridicarea unui chepeng
asupra căruia acţionează presiunea apei unui râu (Figura 1.18) şi locul
unde ar trebui să acţioneze această forţă pentru a contracara efectul
forţelor de presiune (poziţia centrului de presiune).
21
Figura 1.18.
Rezolvare:
Forţa echivalentă cu presiunile distribuite va fi:
LL
x
L
ppxpBBdxx
L
pppP
00
2
121
121
2
22
21121
ppBLL
ppLpBP
cosLxgp;cosgxghp 12111
2
cos2 1 LxgBLP
Momentul dat de aceste forţe este:
LL
O
x
L
ppxpBBxdxx
L
pppM
00
3
12
2
1
12
132
3
2
3232
2121212312
2
1
ppBL
pppBLL
L
ppLpB
Centrul de presiune se găseşte la distanţa xC faţă de articulaţie:
22
)(3
)2(2
2
3
2
21
21
21
212
pp
ppL
ppBL
ppBL
P
Mx O
C
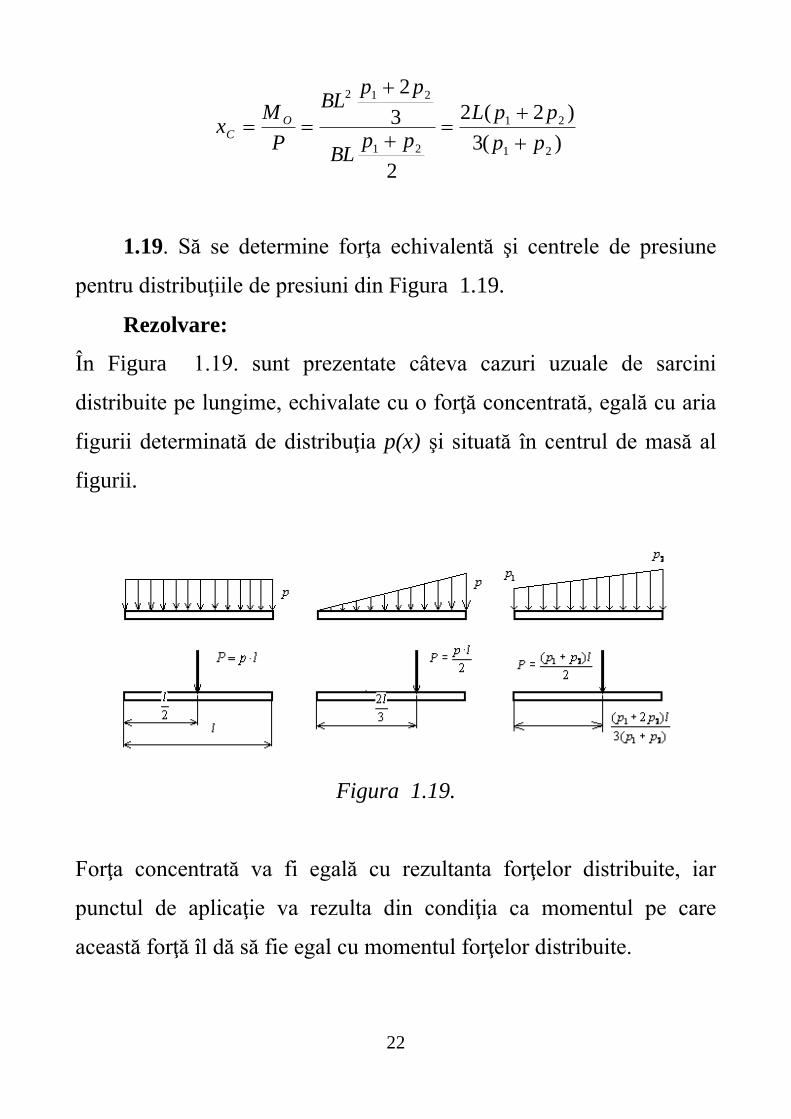
1.19. Să se determine forţa echivalentă şi centrele de presiune
pentru distribuţiile de presiuni din Figura 1.19.
Rezolvare:
În Figura 1.19. sunt prezentate câteva cazuri uzuale de sarcini
distribuite pe lungime, echivalate cu o forţă concentrată, egală cu aria
figurii determinată de distribuţia p(x) şi situată în centrul de masă al
figurii.
Figura 1.19.
Forţa concentrată va fi egală cu rezultanta forţelor distribuite, iar
punctul de aplicaţie va rezulta din condiţia ca momentul pe care
această forţă îl dă să fie egal cu momentul forţelor distribuite.
23
O
B (0, b)
F
A (a, 0)
x
y
Figura 1.21
1.20. Dacă a, b, c sunt diferiţi de zero şi avem, între trei forţe,
relaţia: 0321 FcFbFa
, atunci suporţii celor trei forţe se găsesc în
plane paralele.
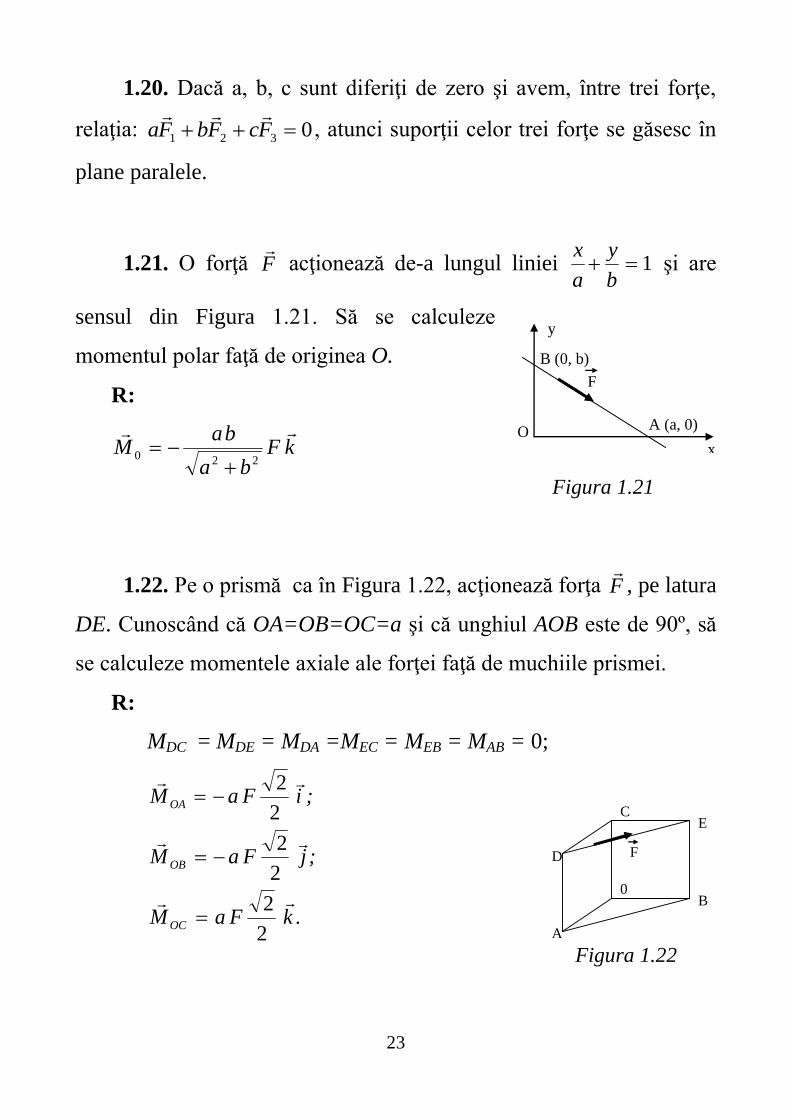
1.21. O forţă F
acţionează de-a lungul liniei 1b
y
a
x şi are
sensul din Figura 1.21. Să se calculeze
momentul polar faţă de originea O.
R:
kFba
baM
220
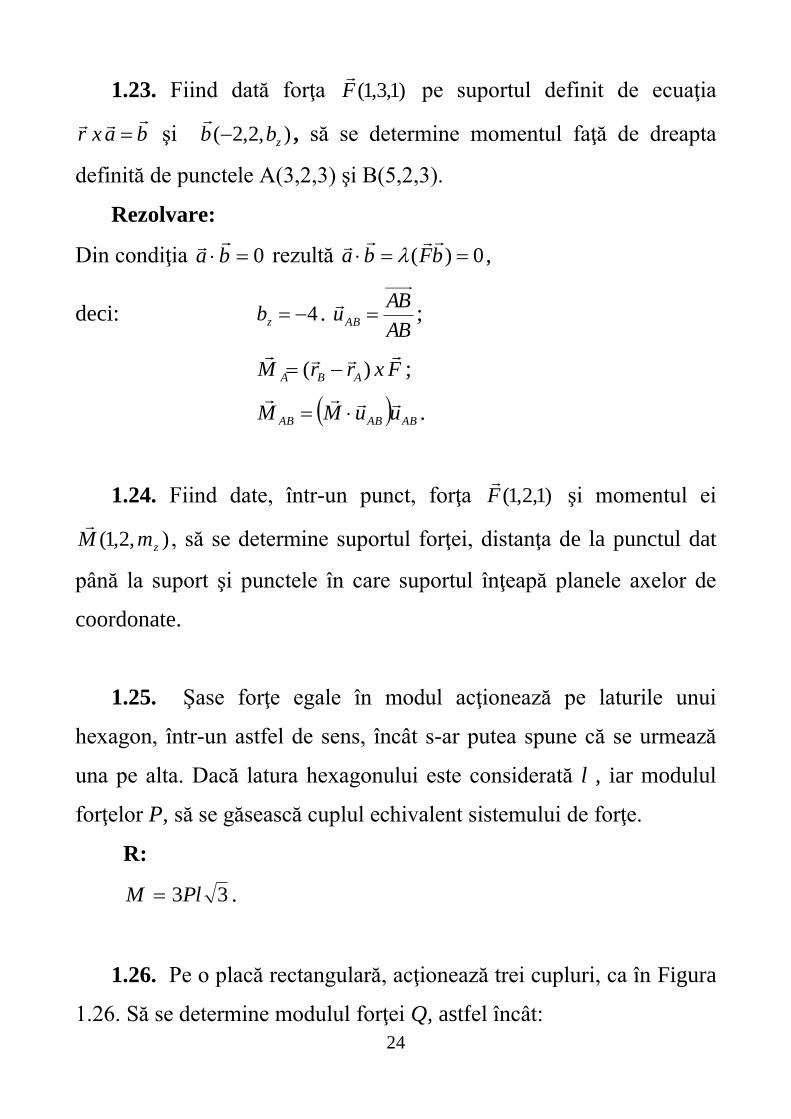
1.22. Pe o prismă ca în Figura 1.22, acţionează forţa F
, pe latura
DE. Cunoscând că OA=OB=OC=a şi că unghiul AOB este de 90º, să
se calculeze momentele axiale ale forţei faţă de muchiile prismei.
R:
MDC = MDE = MDA =MEC = MEB = MAB = 0;
.kFaM
;jFaM
;iFaM
OC
OB
OA
2
2
2
2
2
2
A
B
E C
0
D F
Figura 1.22
24
1.23. Fiind dată forţa )1,3,1(F
pe suportul definit de ecuaţia
baxr
şi ),2,2( zbb
, să se determine momentul faţă de dreapta
definită de punctele A(3,2,3) şi B(5,2,3).
Rezolvare:
Din condiţia 0ba
rezultă 0)( bFba
,
deci: 4zb . AB
ABuAB
;
FxrrM ABA
)( ;
ABABAB uuMM
.
1.24. Fiind date, într-un punct, forţa )1,2,1(F
şi momentul ei
),2,1( zmM
, să se determine suportul forţei, distanţa de la punctul dat
până la suport şi punctele în care suportul înţeapă planele axelor de
coordonate.
1.25. Şase forţe egale în modul acţionează pe laturile unui
hexagon, într-un astfel de sens, încât s-ar putea spune că se urmează
una pe alta. Dacă latura hexagonului este considerată l , iar modulul
forţelor P, să se găsească cuplul echivalent sistemului de forţe.
R:
33PlM .
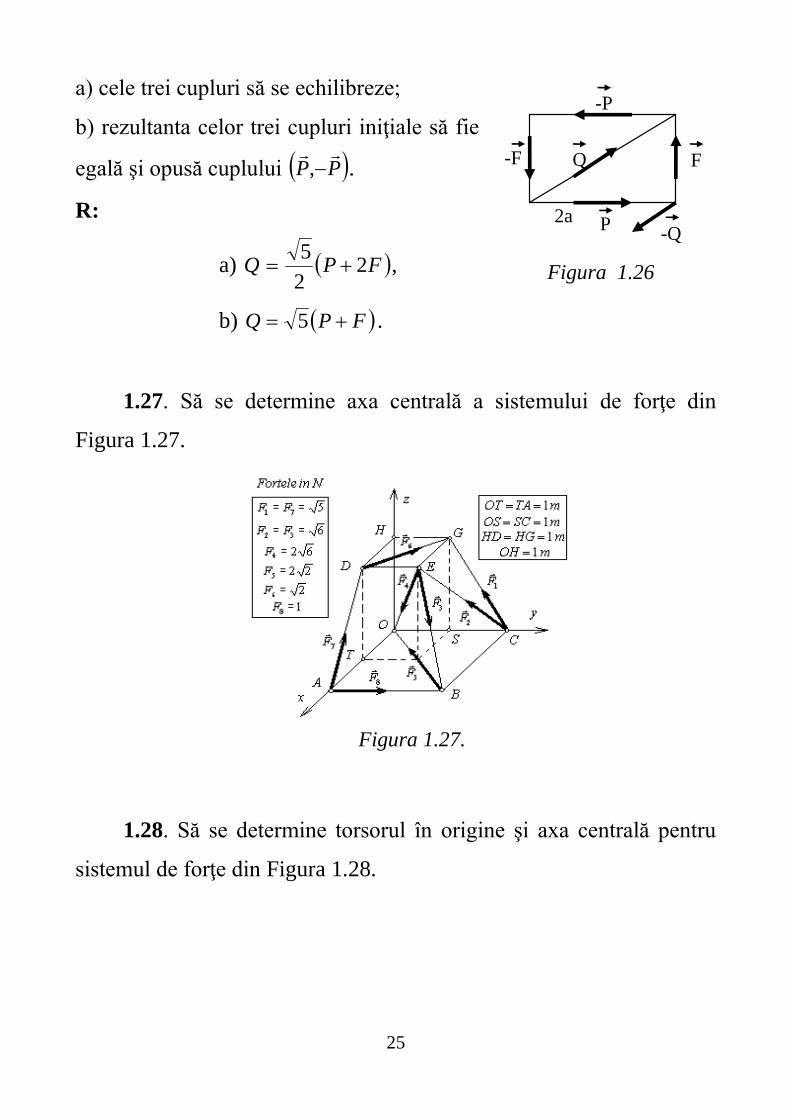
1.26. Pe o placă rectangulară, acţionează trei cupluri, ca în Figura
1.26. Să se determine modulul forţei Q, astfel încât:
25
Figura 1.27.
a) cele trei cupluri să se echilibreze;
b) rezultanta celor trei cupluri iniţiale să fie
egală şi opusă cuplului PP
, .
R:
a) FPQ 22
5 ,
b) FPQ 5 .
1.27. Să se determine axa centrală a sistemului de forţe din
Figura 1.27.
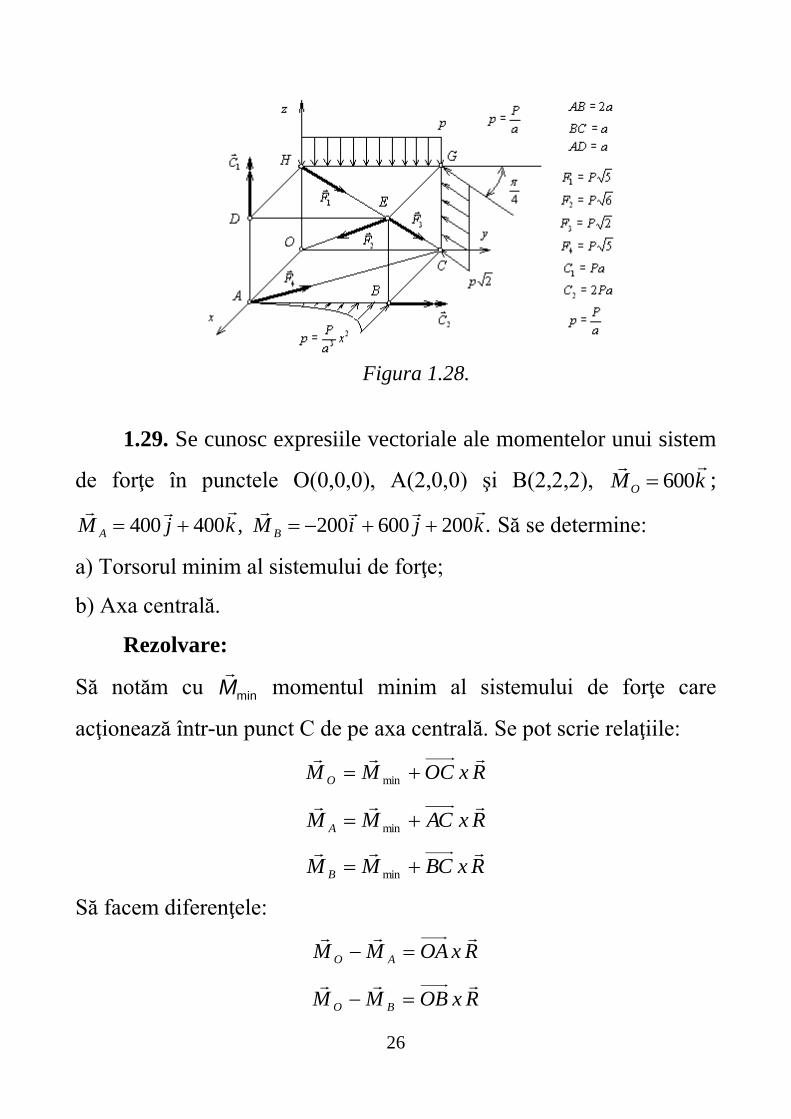
1.28. Să se determine torsorul în origine şi axa centrală pentru
sistemul de forţe din Figura 1.28.
-Q P
F
-P
Q
2a
-F
Figura 1.26
26
Figura 1.28.
1.29. Se cunosc expresiile vectoriale ale momentelor unui sistem
de forţe în punctele O(0,0,0), A(2,0,0) şi B(2,2,2), kMO
600 ;
,400400 kjM A
.200600200 kjiM B
Să se determine:
a) Torsorul minim al sistemului de forţe;
b) Axa centrală.
Rezolvare:
Să notăm cu minM
momentul minim al sistemului de forţe care
acţionează într-un punct C de pe axa centrală. Se pot scrie relaţiile:
RxOCMM O
min
RxACMM A
min
RxBCMM B
min
Să facem diferenţele:
RxOAMM AO
RxOBMM BO

27
şi produsul vectorial:
RxOAxMMMMxMM BOAOBO
sau:
ROAMMOARMMMMxMM BOBOAOBO
de unde:
OAMM
MxMMxMMxMR
BO
AOBAOB
După efectuarea calculelor se obţine:
jjiR
200100100
Mai departe, pentru calculul momentului minim, putem scrie:
12
OAMM
MMxMM
OAMM
MxMMxMMxMMR
BO
OBA
O
BO
AOBAOB
O
şi atunci momentul minim este:
kjiR
R
MRM O
R
400200200
2 .
1.30. Fie sistemul )( 1S care se reduce în punctul (x1,0,z1) la
torsorul ),( 11 MR
, vectorii 1R
şi 1M
găsindu-se în planul xOz şi
sistemul )( 2S care se reduce în punctul (O,y2,z2) la torsorul ),( 22 MR
,
vectorii 2R
şi 2M
găsindu-se în planul yOz. Se cer:
a) torsorii de reducere ai sistemelor )( 1S respectiv )( 2S în origine;
b) ecuaţia axei centrale pentru sistemul )( 1S respectiv )( 2S ;
c) condiţia ca axa centrală pentru fiecare sistem să treacă prin origine;

28
d) condiţia ca axa centrală a sistemului )( 21 SS să treacă prin origine.
1.31. Fiind dată forţa )1,3,2(F
şi momentul ei într-un punct
),1,3( zO MM
, să se determine Mz şi ecuaţia suportului dreptei.
Rezolvare:
Din condiţia 0 OMF
rezultă 9zM . Pe suportul forţei momentul
este zero, deci:
0 rxFMM O
Prin preînmulţire vectorială cu F şi desfacerea dublului produs
vectorial, după operaţii care au mai fost prezentate, se obţine:
)32(
913
13214
12
kji
kji
FF
MxFr O
kji
)7()321()228(
sau:
7321228 z;y;x
sau încă:
.1
7
3
21
2
28
zyx
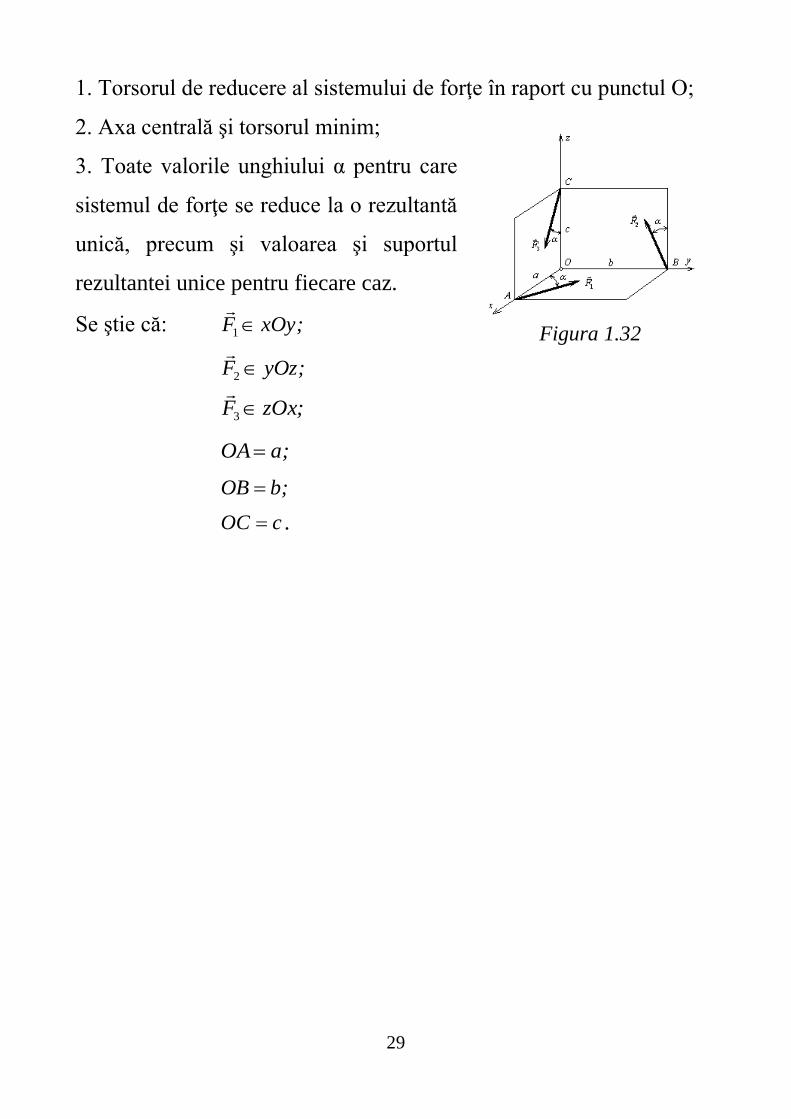
1.32. Asupra unui corp rigid acţionează un sistem de 3 forţe, aşa
cum se arată în Figura 1.32, forţele având modulele F1 = F, F2 = 2F,
F3 = 3F.
Să se determine:
29
1. Torsorul de reducere al sistemului de forţe în raport cu punctul O;
2. Axa centrală şi torsorul minim;
3. Toate valorile unghiului α pentru care
sistemul de forţe se reduce la o rezultantă
unică, precum şi valoarea şi suportul
rezultantei unice pentru fiecare caz.
Se ştie că: ;xOyF 1
;yOzF 2
;zOxF 3
;aOA
;bOB
cOC .
Figura 1.32

30
Capitolul II
CENTRE DE GREUTATE
2.1. Să se determine coordonatele centrului de greutate pentru un
arc de cerc.
Rezolvare:
Pentru un arc de cerc ca în Figura 2.1.a,
datorită simetriei, avem 0Cx . Rămâne
de calculat Cy . Avem:
L
ydL
yC
Se observă că avem relaţiile: cosRy ; Rddl . Unghiul θ are o
variaţie de la - α până la α, deci putem scrie:
sinR
Rd
dcosR
yC
În cazul în care avem de calculat centrul de masă a unei jumătăţi din
circumferinţa unui cerc (Figura 2.1.b), în formula anterioară facem α
= π/2 şi se obţine:
R
sin
RyC
2
2
2
Dacă avem un sfert de
Figura 2.1.a
Figura 2.1.b.
31
circumferinţă, atunci alegând sistemul de axe ca în Figura 2.1.b,
putem scrie CC yx . Coordonata CY a centrului de greutate faţă de o
axă OY care este prima bisectoare va fi:
R
sinRYC
22
4
4
iar coordonatele centrului de greutate sunt:
RcosYyx CCC
2
4
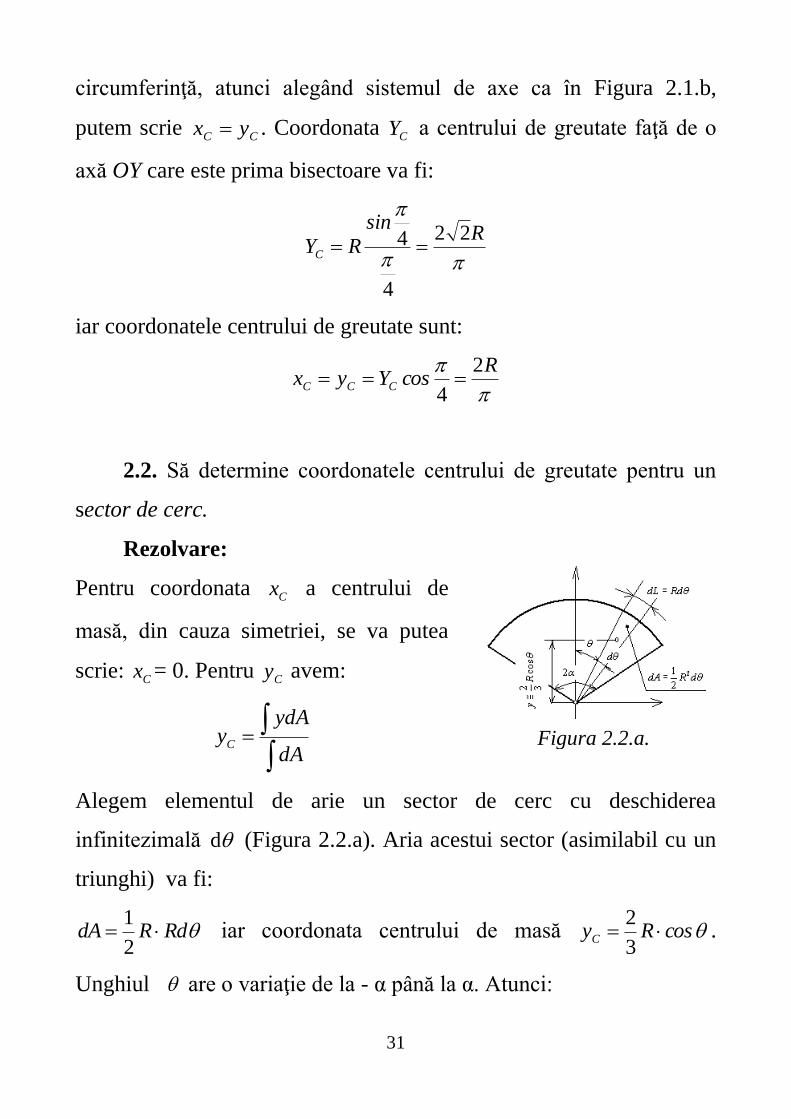
2.2. Să determine coordonatele centrului de greutate pentru un
sector de cerc.
Rezolvare:
Pentru coordonata Cx a centrului de
masă, din cauza simetriei, se va putea
scrie: Cx = 0. Pentru Cy avem:
dA
ydAyC
Alegem elementul de arie un sector de cerc cu deschiderea
infinitezimală d (Figura 2.2.a). Aria acestui sector (asimilabil cu un
triunghi) va fi:
RdRdA 2
1 iar coordonata centrului de masă cosRyC
3
2.
Unghiul are o variaţie de la - α până la α. Atunci:
Figura 2.2.a.
32
sinR
dR
dRcosR
yC3
2
2
1
2
1
3
2
2
2
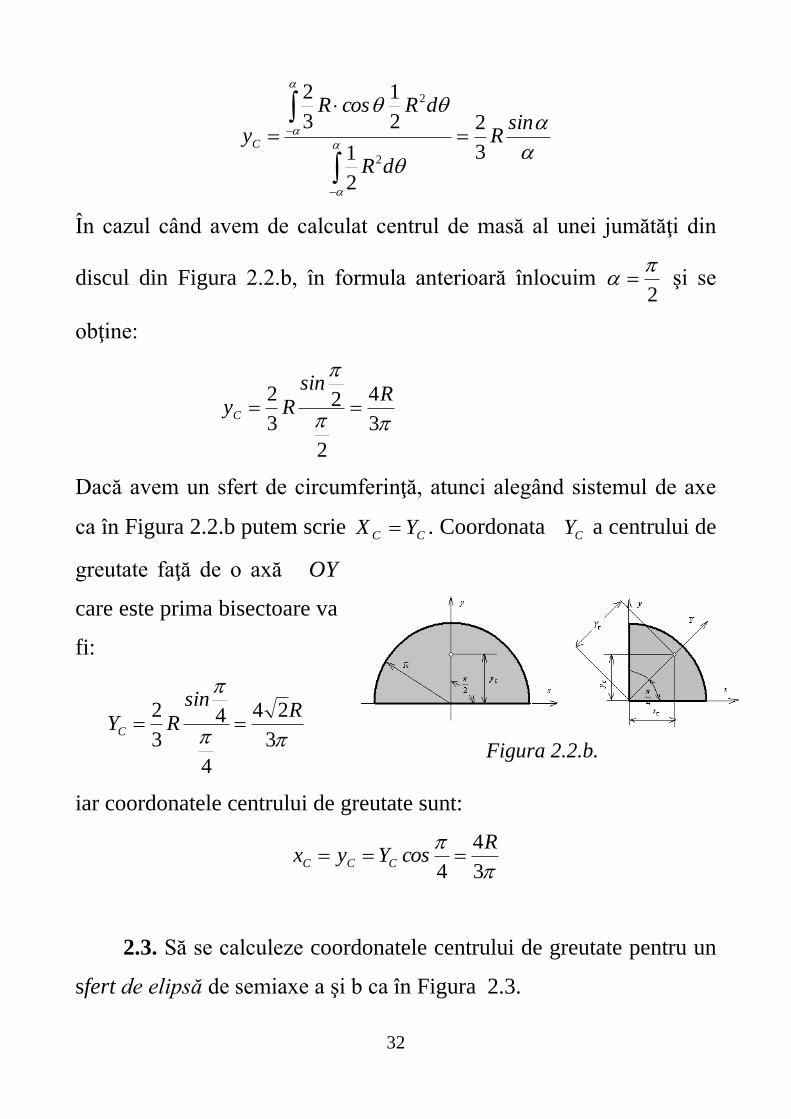
În cazul când avem de calculat centrul de masă al unei jumătăţi din
discul din Figura 2.2.b, în formula anterioară înlocuim 2
şi se
obţine:
3
4
2
2
3
2 Rsin
RyC
Dacă avem un sfert de circumferinţă, atunci alegând sistemul de axe
ca în Figura 2.2.b putem scrie CC YX . Coordonata CY a centrului de
greutate faţă de o axă OY
care este prima bisectoare va
fi:
3
24
4
4
3
2 Rsin
RYC
iar coordonatele centrului de greutate sunt:
3
4
4
RcosYyx CCC
2.3. Să se calculeze coordonatele centrului de greutate pentru un
sfert de elipsă de semiaxe a şi b ca în Figura 2.3.
Figura 2.2.b.
33
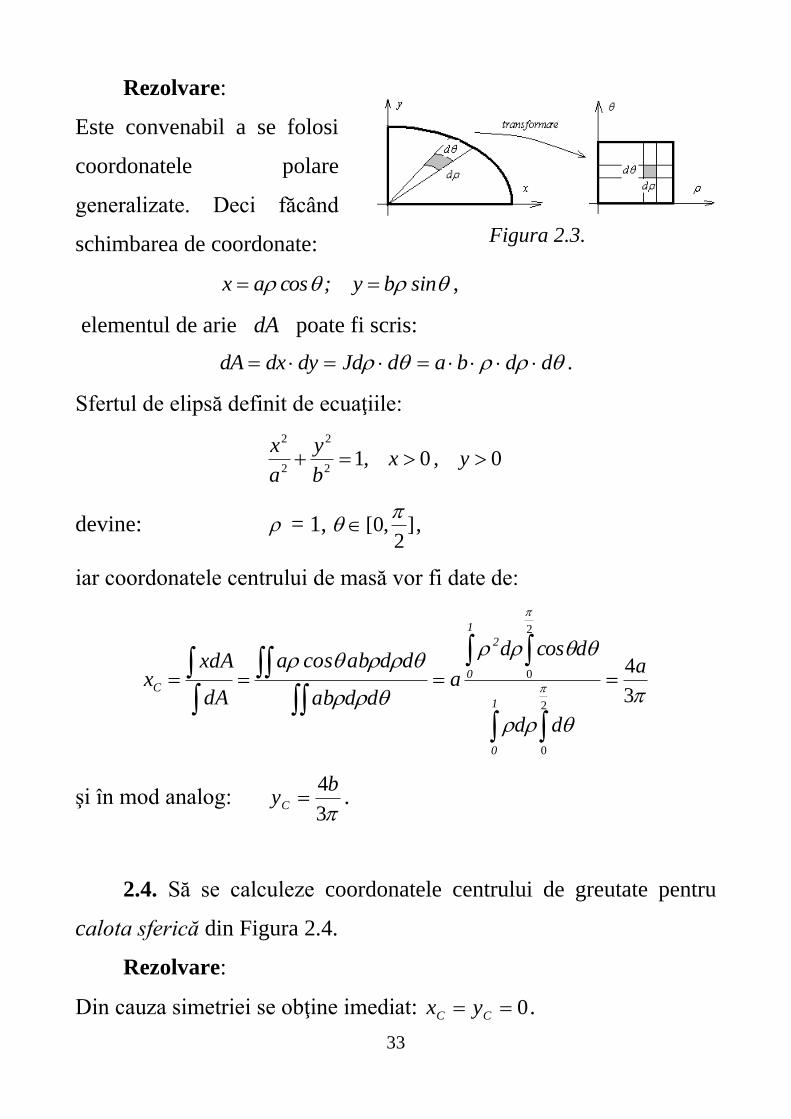
Rezolvare:
Este convenabil a se folosi
coordonatele polare
generalizate. Deci făcând
schimbarea de coordonate:
sinby;cosax ,
elementul de arie dA poate fi scris:
. ddbadJddydxdA
Sfertul de elipsă definit de ecuaţiile:
0012
2
2
2
y,x,b
y
a
x
devine: = 1, ]2
,0[
,
iar coordonatele centrului de masă vor fi date de:
dA
xdAxC
ddab
ddabcosa
1
0
1
0
2
dd
dcosd
a2
0
2
0
3
4a
şi în mod analog: 3
4byC .
2.4. Să se calculeze coordonatele centrului de greutate pentru
calota sferică din Figura 2.4.
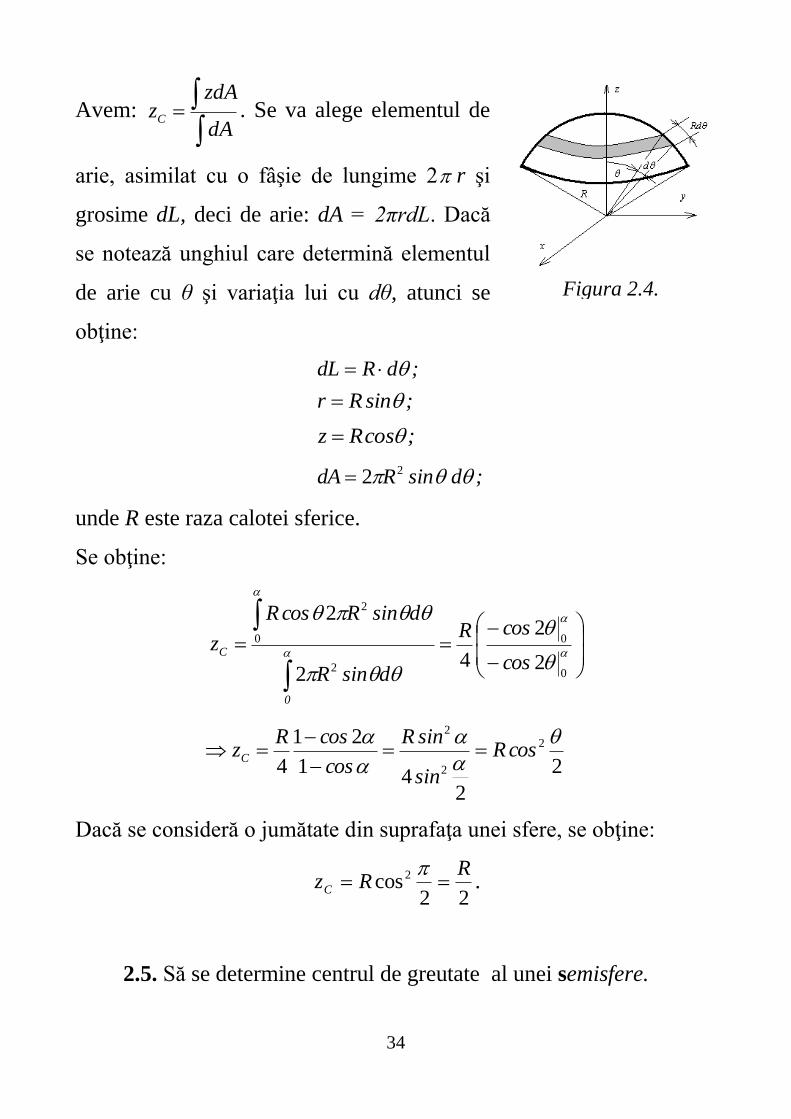
Rezolvare:
Din cauza simetriei se obţine imediat: 0 CC yx .
Figura 2.3.
34
Avem:
dA
zdAzC
. Se va alege elementul de
arie, asimilat cu o fâşie de lungime 2 r şi
grosime dL, deci de arie: dA = 2πrdL. Dacă
se notează unghiul care determină elementul
de arie cu θ şi variaţia lui cu dθ, atunci se
obţine:
;dRdL
;sinRr
;cosRz
;dsinRdA 22
unde R este raza calotei sferice.
Se obţine:
0
0
2
0
2
2
2
42
2
cos
cosR
dsinR
dsinRcosR
z
0
C
2
24
1
21
4
2
2
2
cosR
sin
sinR
cos
cosRzC
Dacă se consideră o jumătate din suprafaţa unei sfere, se obţine:
22cos2 R
RzC
.
2.5. Să se determine centrul de greutate al unei semisfere.
Figura 2.4.
35
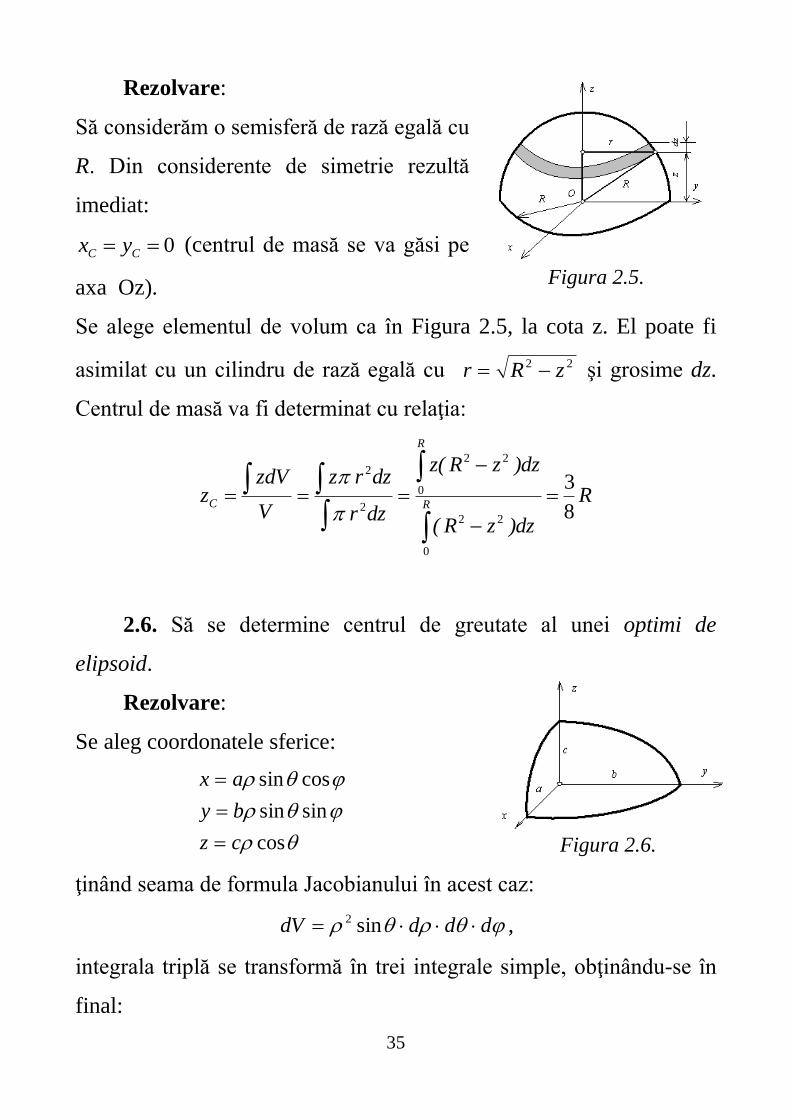
Rezolvare:
Să considerăm o semisferă de rază egală cu
R. Din considerente de simetrie rezultă
imediat:
0 CC yx (centrul de masă se va găsi pe
axa Oz).
Se alege elementul de volum ca în Figura 2.5, la cota z. El poate fi
asimilat cu un cilindru de rază egală cu 22 zRr şi grosime dz.
Centrul de masă va fi determinat cu relaţia:
R
dz)zR(
dz)zR(z
dzr
dzrz
V
zdVz
R
R
C8
3
0
22
0
22
2
2
2.6. Să se determine centrul de greutate al unei optimi de
elipsoid.
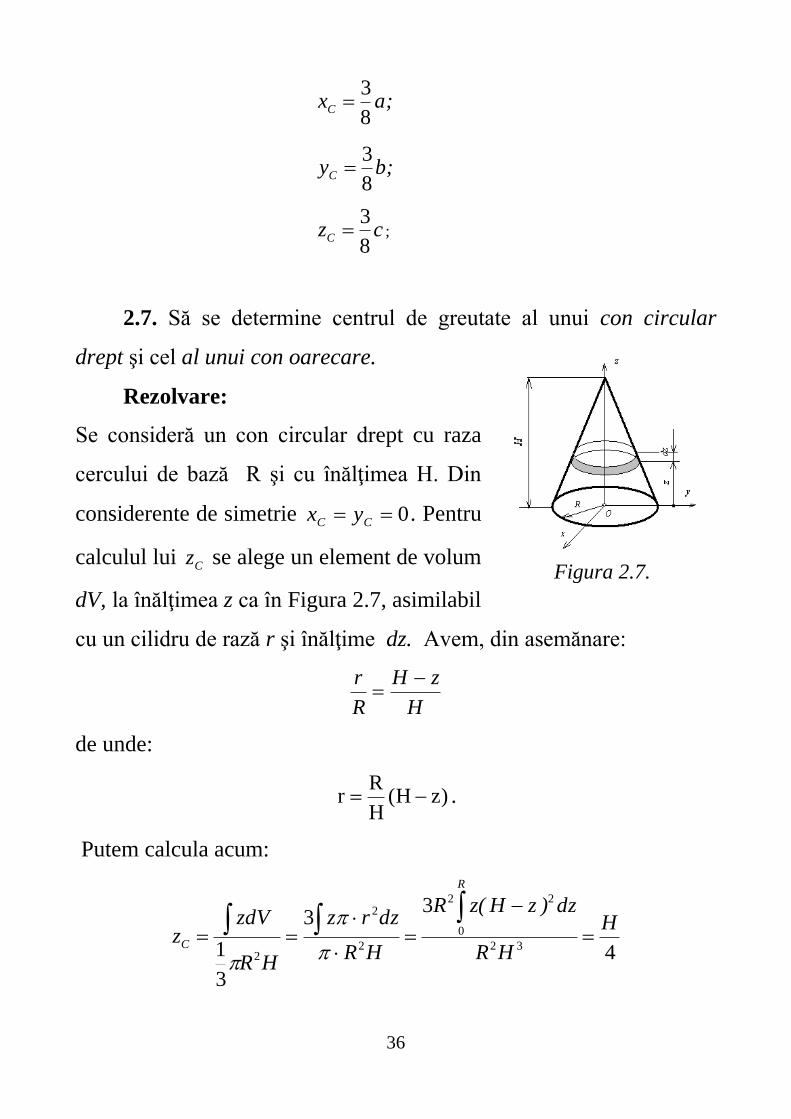
Rezolvare:
Se aleg coordonatele sferice:
cos
sinsin
cossin
cz
by
ax
ţinând seama de formula Jacobianului în acest caz:
ddddV sin2 ,
integrala triplă se transformă în trei integrale simple, obţinându-se în
final:
Figura 2.5.
Figura 2.6.
36
;axC8
3
;byC8
3
czC8
3 ;
2.7. Să se determine centrul de greutate al unui con circular
drept şi cel al unui con oarecare.
Rezolvare:
Se consideră un con circular drept cu raza
cercului de bază R şi cu înălţimea H. Din
considerente de simetrie 0 CC yx . Pentru
calculul lui Cz se alege un element de volum
dV, la înălţimea z ca în Figura 2.7, asimilabil
cu un cilidru de rază r şi înălţime dz. Avem, din asemănare:
H
zH
R
r
de unde:
)zH(H
Rr .
Putem calcula acum:
4
33
3
1 32
0
22
2
2
2
H
HR
dz)zH(zR
HR
dzrz
HR
zdVz
R
C
Figura 2.7.

37
deci centrul de masă se va găsi la o pătrime din înălţime faţă de bază.
Rezultatul rămâne valabil şi dacă conul nu este circular sau drept.
2.8. Să se determine coordonatele centrului de greutate pentru
piramida regulată dreaptă (Figura 2.8).
R:
4
HzC .
2.9. Să se determine coordonatele centrului de greutate pentru
suprafaţa laterală a unui con.
Rezolvare:
Putem concepe suprafaţa laterală a conului
alcătuită din suprafeţe triunghiulare
infinitezimale. Pentru un triunghi oarecare
centrul de greutate se va găsi la o treime de
bază şi două treimi de vârf, deci distanţa de la
acesta până la planul bazei va fi o treime din înălţime. Centrele de
greutate ale tuturor triunghiurilor infinitezimale se va găsi într-un plan
aflat la distanţa de H/3 de bază deci va rezulta că şi centrul de
greutate al întregii suprafeţe se va găsi în acest plan, adică:
3
HzC .
Figura2.8.
Figura 2.9.
38
2.10. Să se determine coordonatele centrului de greutate pentru
suprafaţa laterală a unei piramide.
R:
3
HzC .
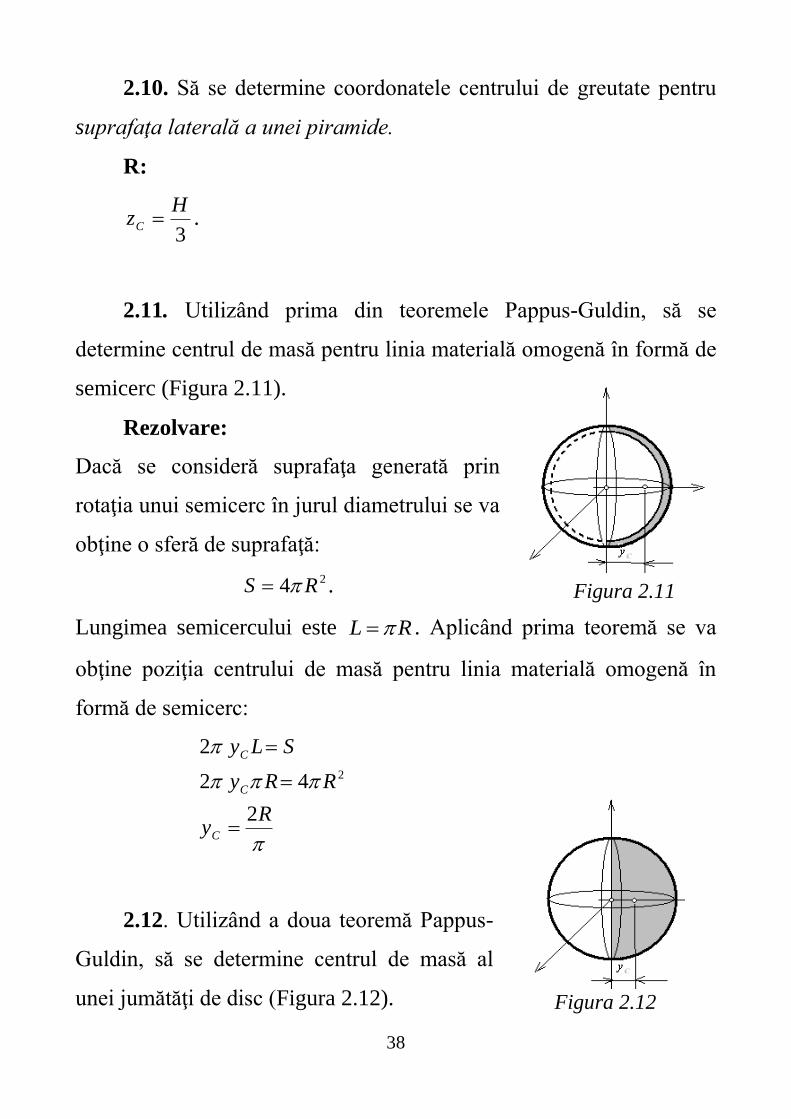
2.11. Utilizând prima din teoremele Pappus-Guldin, să se
determine centrul de masă pentru linia materială omogenă în formă de
semicerc (Figura 2.11).
Rezolvare:
Dacă se consideră suprafaţa generată prin
rotaţia unui semicerc în jurul diametrului se va
obţine o sferă de suprafaţă:
24 RS .
Lungimea semicercului este RL . Aplicând prima teoremă se va
obţine poziţia centrului de masă pentru linia materială omogenă în
formă de semicerc:
Ry
RRy
SLy
C
C
C
2
42
2
2
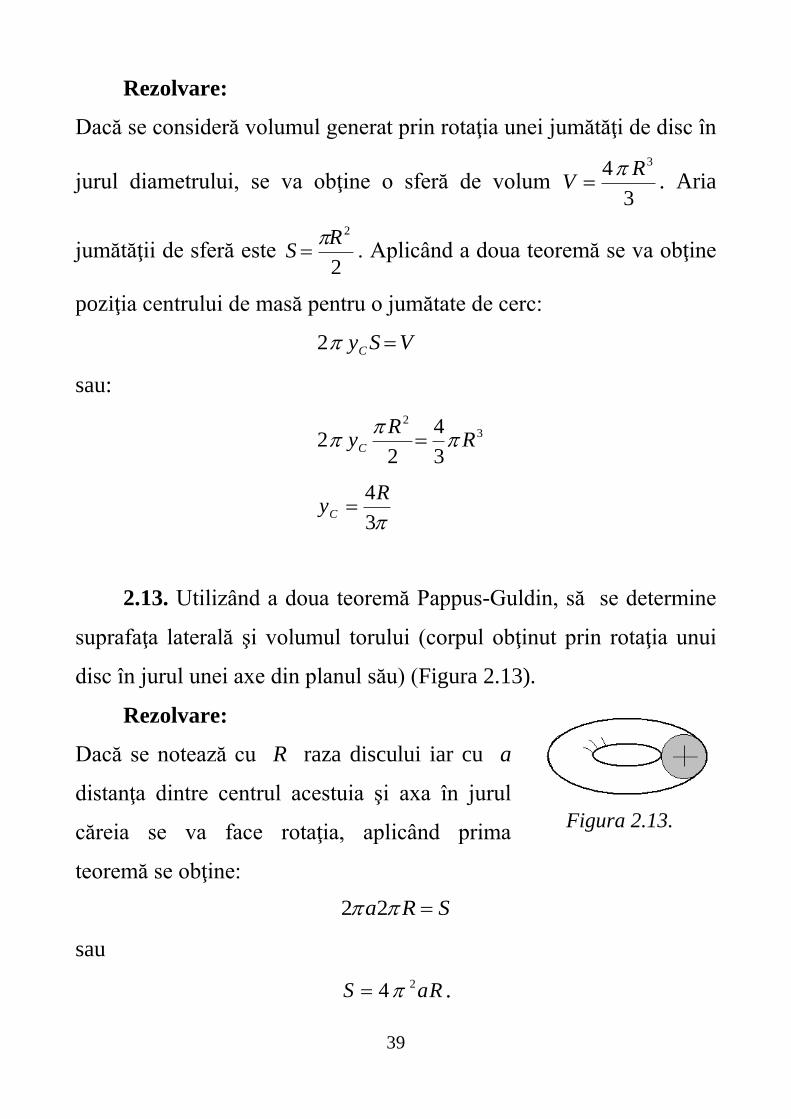
2.12. Utilizând a doua teoremă Pappus-
Guldin, să se determine centrul de masă al
unei jumătăţi de disc (Figura 2.12).
Figura 2.12
Figura 2.11
39
Rezolvare:
Dacă se consideră volumul generat prin rotaţia unei jumătăţi de disc în
jurul diametrului, se va obţine o sferă de volum 3
4 3RV
. Aria
jumătăţii de sferă este 2
2RS
. Aplicând a doua teoremă se va obţine
poziţia centrului de masă pentru o jumătate de cerc:
VSyC 2
sau:
32
3
4
22 R
RyC
3
4RyC
2.13. Utilizând a doua teoremă Pappus-Guldin, să se determine
suprafaţa laterală şi volumul torului (corpul obţinut prin rotaţia unui
disc în jurul unei axe din planul său) (Figura 2.13).
Rezolvare:
Dacă se notează cu R raza discului iar cu a
distanţa dintre centrul acestuia şi axa în jurul
căreia se va face rotaţia, aplicând prima
teoremă se obţine:
SRa 22
sau
RaS 24 .
Figura 2.13.
40
Aplicând cea de-a doua teoremă, se va obţine:
VRa 22 deci 222 RaV
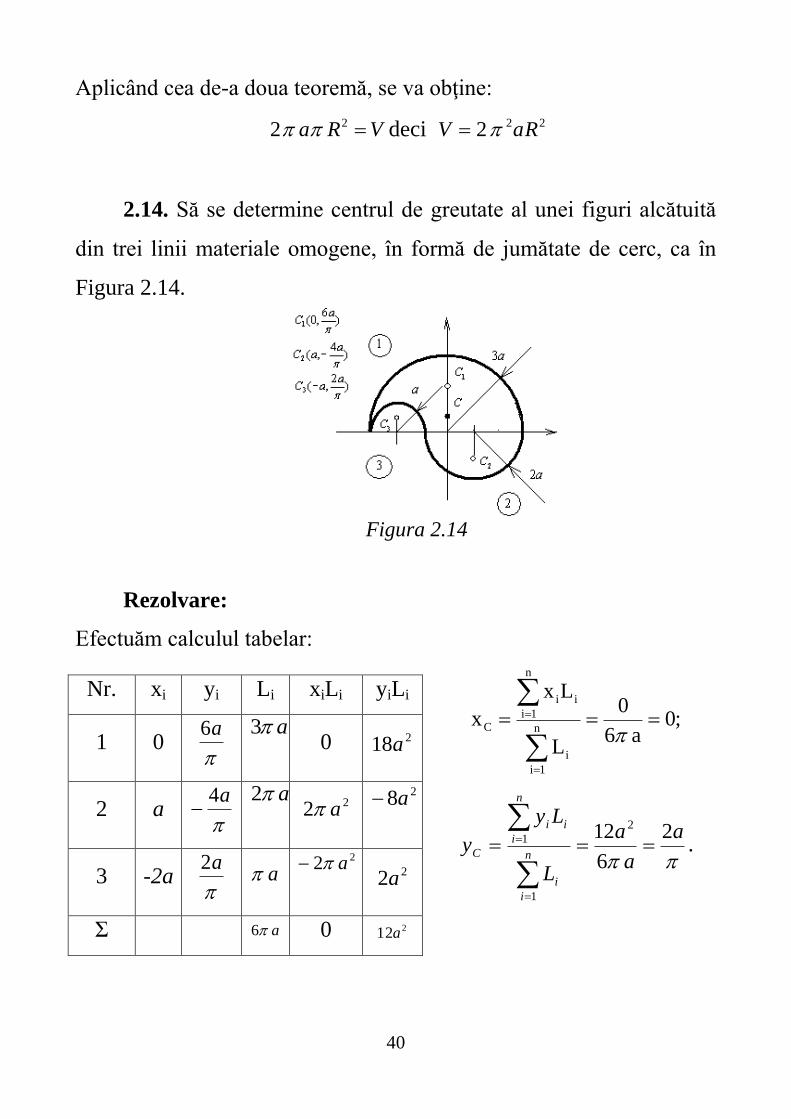
2.14. Să se determine centrul de greutate al unei figuri alcătuită
din trei linii materiale omogene, în formă de jumătate de cerc, ca în
Figura 2.14.
Rezolvare:
Efectuăm calculul tabelar:
;0a6
0
L
Lx
xn
1i
i
n
1i
ii
C
a
a
a
L
Ly
yn
i
i
n
i
ii
C
2
6
12 2
1
1
.
Nr. xi yi Li xiLi yiLi
1 0
a6
a3
0 218a
2 a
a4
a2
22 a
28a
3 -2a
a2 a
22 a
22a
Σ a6 0 212a
Figura 2.14
41
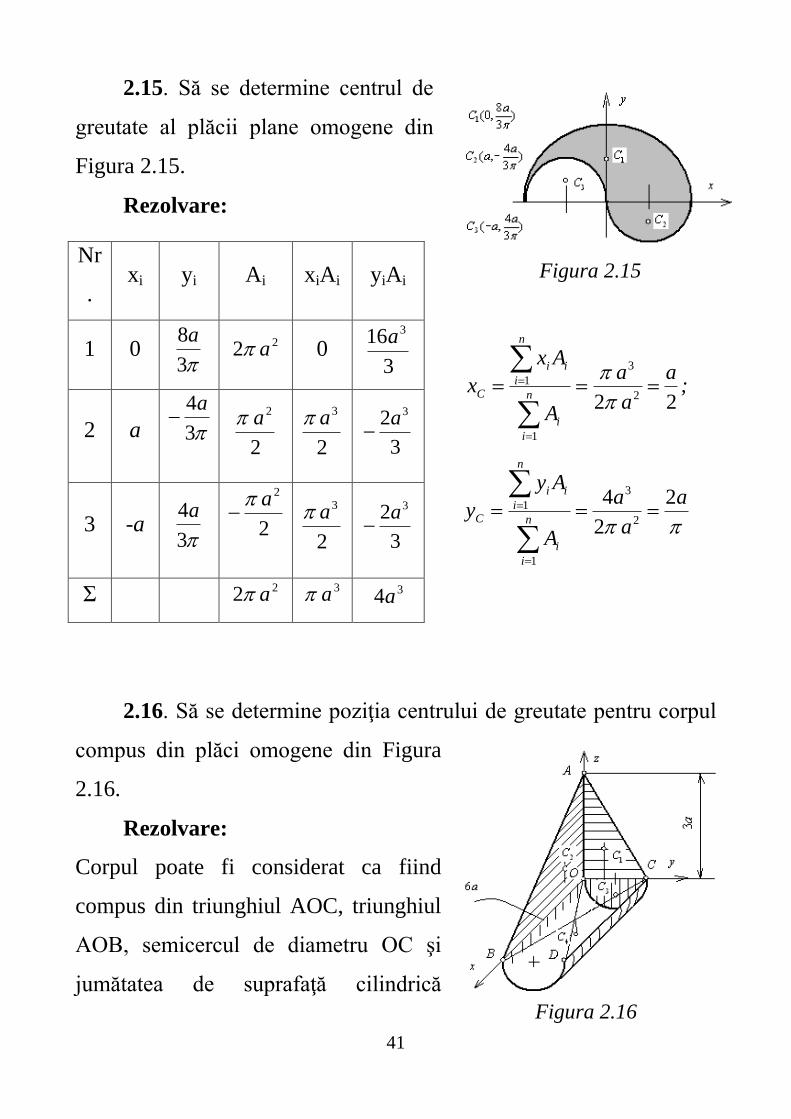
2.15. Să se determine centrul de
greutate al plăcii plane omogene din
Figura 2.15.
Rezolvare:
;a
a
a
A
Ax
xn
i
i
n
i
ii
C22 2
3
1
1
a
a
a
A
Ay
yn
i
i
n
i
ii
C
2
2
42
3
1
1
2.16. Să se determine poziţia centrului de greutate pentru corpul
compus din plăci omogene din Figura
2.16.
Rezolvare:
Corpul poate fi considerat ca fiind
compus din triunghiul AOC, triunghiul
AOB, semicercul de diametru OC şi
jumătatea de suprafaţă cilindrică
Nr
. xi yi Ai xiAi yiAi
1 0 3
8a 22 a 0
3
16 3a
2 a 3
4a
2
2a
2
3a
3
2 3a
3 -a 3
4a 2
2a
2
3a
3
2 3a
Σ 22 a 3a 34a
Figura 2.15
Figura 2.16
42
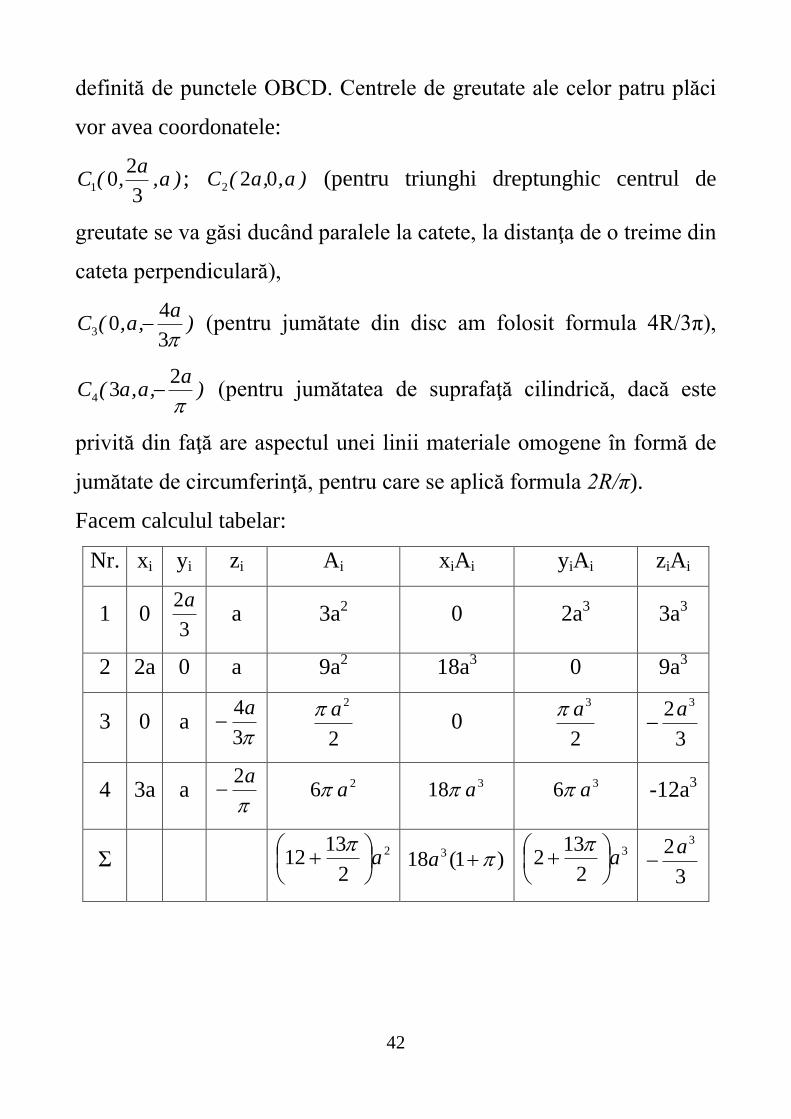
definită de punctele OBCD. Centrele de greutate ale celor patru plăci
vor avea coordonatele:
)a,a
,(C3
201 ; )a,,a(C 022 (pentru triunghi dreptunghic centrul de
greutate se va găsi ducând paralele la catete, la distanţa de o treime din
cateta perpendiculară),
)a
,a,(C3
403 (pentru jumătate din disc am folosit formula 4R/3π),
)a
,a,a(C
234 (pentru jumătatea de suprafaţă cilindrică, dacă este
privită din faţă are aspectul unei linii materiale omogene în formă de
jumătate de circumferinţă, pentru care se aplică formula 2R/π).
Facem calculul tabelar:
Nr. xi yi zi Ai xiAi yiAi ziAi
1 0 3
2a a 3a2 0 2a3 3a3
2 2a 0 a 9a2 18a3 0 9a3
3 0 a 3
4a
2
2a 0
2
3a
3
2 3a
4 3a a
a2 26 a 318 a 36 a -12a3
Σ 2
2
1312 a
)1(18 3 a
3
2
132 a
3
2 3a

43
;)(a
a
)(a
A
Ax
xn
i
i
n
i
ii
C
2
1312
118
2
1312
118
2
3
1
1
;
a
a
a
A
Ay
yn
i
i
n
i
ii
C
2
1312
2
132
2
1312
2
132
2
3
1
1
;a
a
a
A
Az
zn
i
i
n
i
ii
C
2
13123
2
2
1312
3
2
2
3
1
1
2.17. Să se determine centrul de greutate al corpului alcătuit din
plăci omogene ca în Figura 2.17.a.
Rezolvare:
Sistemul poate fi descompus în părţile sale constitutive ca în Figura
2.17.
Calculul este condus tabelar:
Figura 2.17.a.
Figura 2.17.b.
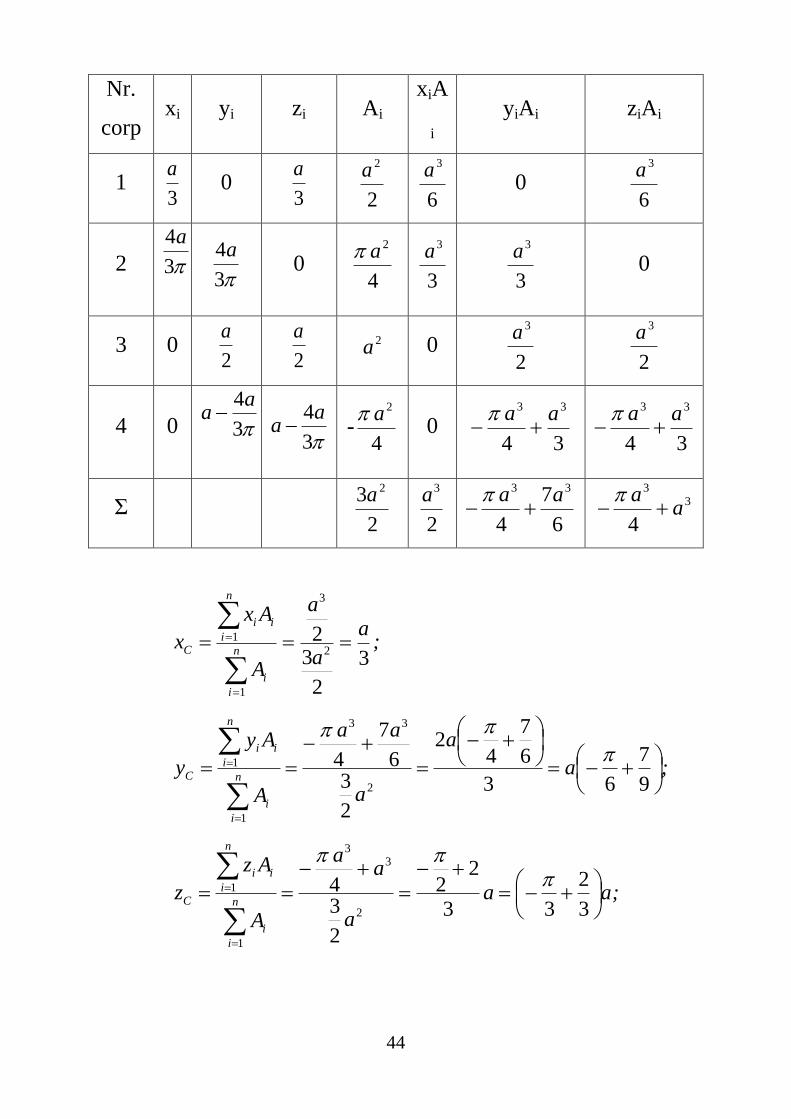
44
Nr.
corp xi yi zi Ai
xiA
i
yiAi ziAi
1 3
a 0
3
a
2
2a
6
3a 0
6
3a
2 3
4a
3
4a 0
4
2a
3
3a
3
3a 0
3 0 2
a
2
a 2a 0
2
3a
2
3a
4 0 3
4aa
3
4aa -
4
2a 0
34
33 aa
34
33 aa
Σ 2
3 2a
2
3a
6
7
4
33 aa
3
3
4a
a
;a
a
a
A
Ax
xn
i
i
n
i
ii
C3
2
32
2
3
1
1
;a
a
a
aa
A
Ay
yn
i
i
n
i
ii
C
9
7
63
6
7
42
2
36
7
4
2
33
1
1
;aa
a
aa
A
Az
zn
i
i
n
i
ii
C
3
2
33
22
2
34
2
33
1
1
45
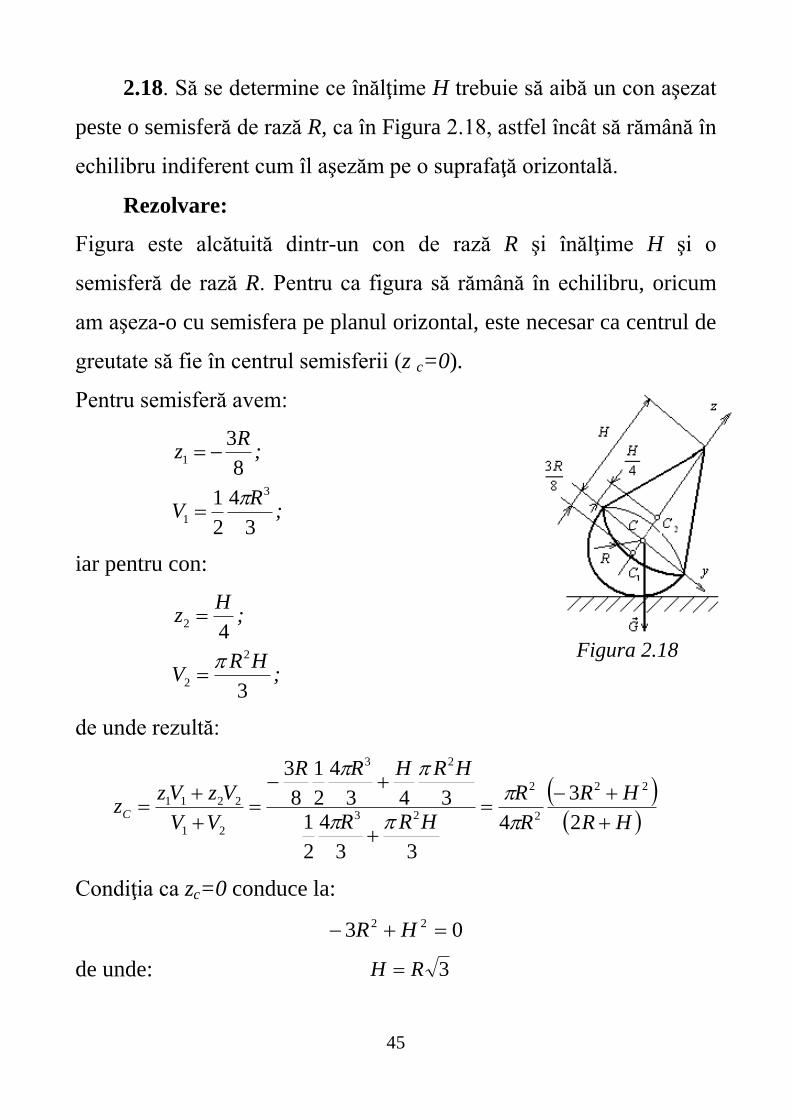
2.18. Să se determine ce înălţime H trebuie să aibă un con aşezat
peste o semisferă de rază R, ca în Figura 2.18, astfel încât să rămână în
echilibru indiferent cum îl aşezăm pe o suprafaţă orizontală.
Rezolvare:
Figura este alcătuită dintr-un con de rază R şi înălţime H şi o
semisferă de rază R. Pentru ca figura să rămână în echilibru, oricum
am aşeza-o cu semisfera pe planul orizontal, este necesar ca centrul de
greutate să fie în centrul semisferii (z c=0).
Pentru semisferă avem:
;R
V
;R
z
3
4
2
1
8
3
3
1
1
iar pentru con:
;HR
V
;H
z
3
42
2
2
de unde rezultă:
HR
HR
R
R
HRR
HRHRR
VV
VzVzzC
2
3
4
33
4
2
1343
4
2
1
8
322
2
2
23
23
21
2211
Condiţia ca zc=0 conduce la:
03 22 HR
de unde: 3RH
Figura 2.18
46
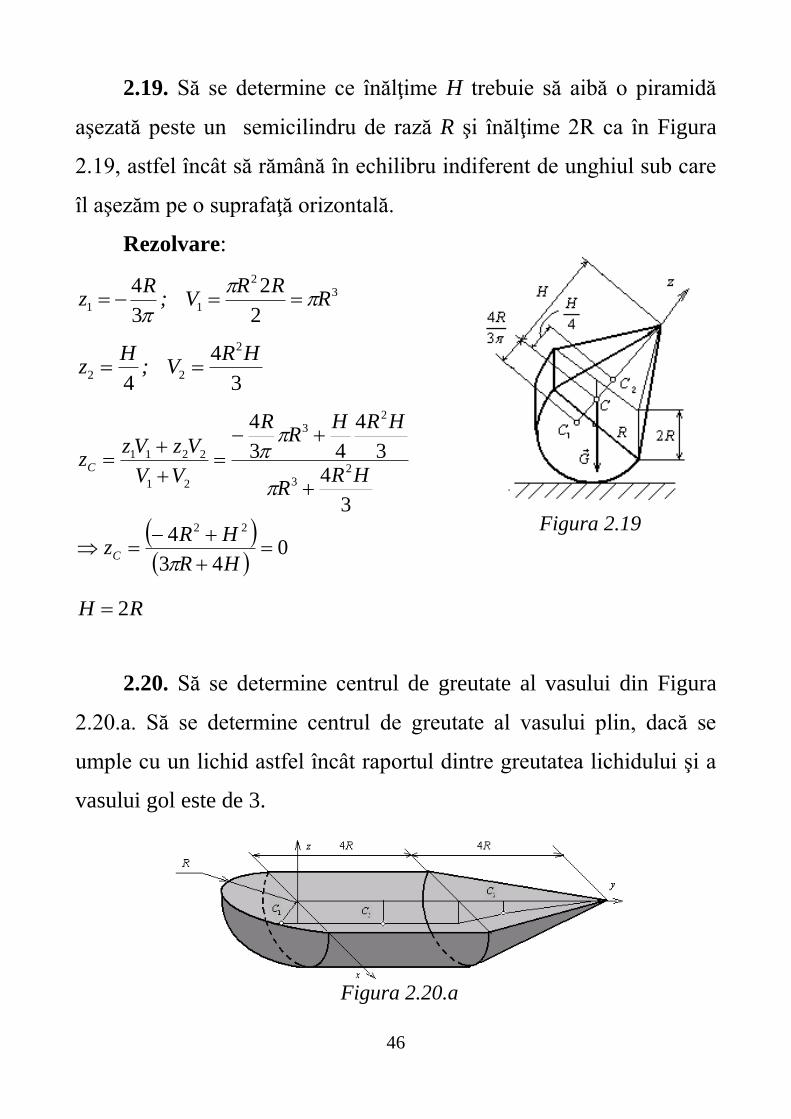
2.19. Să se determine ce înălţime H trebuie să aibă o piramidă
aşezată peste un semicilindru de rază R şi înălţime 2R ca în Figura
2.19, astfel încât să rămână în echilibru indiferent de unghiul sub care
îl aşezăm pe o suprafaţă orizontală.
Rezolvare:
32
112
2
3
4R
RRV;
Rz
3
4
4
2
22
HRV;
Hz
043
4
3
43
4
43
4
22
23
23
21
2211
HR
HRz
HRR
HRHR
R
VV
VzVzz
C
C
RH 2
2.20. Să se determine centrul de greutate al vasului din Figura
2.20.a. Să se determine centrul de greutate al vasului plin, dacă se
umple cu un lichid astfel încât raportul dintre greutatea lichidului şi a
vasului gol este de 3.
Figura 2.19
Figura 2.20.a
47
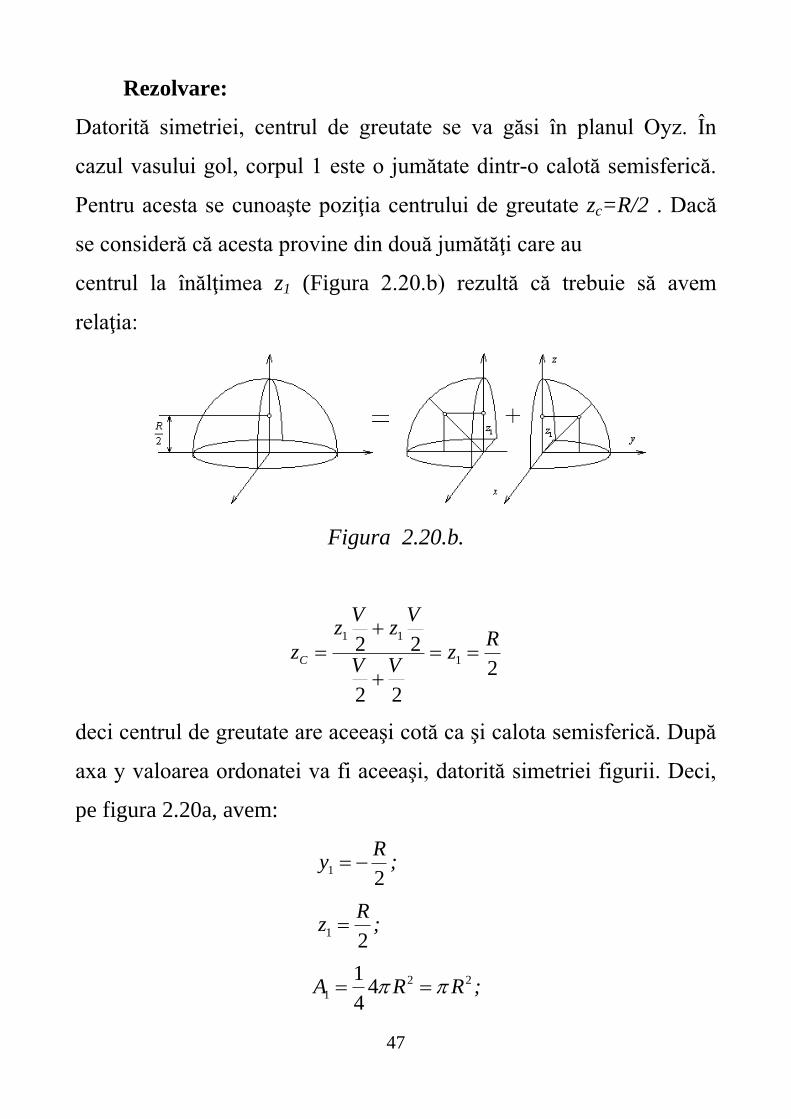
Rezolvare:
Datorită simetriei, centrul de greutate se va găsi în planul Oyz. În
cazul vasului gol, corpul 1 este o jumătate dintr-o calotă semisferică.
Pentru acesta se cunoaşte poziţia centrului de greutate zc=R/2 . Dacă
se consideră că acesta provine din două jumătăţi care au
centrul la înălţimea z1 (Figura 2.20.b) rezultă că trebuie să avem
relaţia:
Figura 2.20.b.
2
22
221
11 Rz
VV
Vz
Vz
zC
deci centrul de greutate are aceeaşi cotă ca şi calota semisferică. După
axa y valoarea ordonatei va fi aceeaşi, datorită simetriei figurii. Deci,
pe figura 2.20a, avem:
;R
y2
1
;R
z2
1
;RRA 22
1 44
1
48
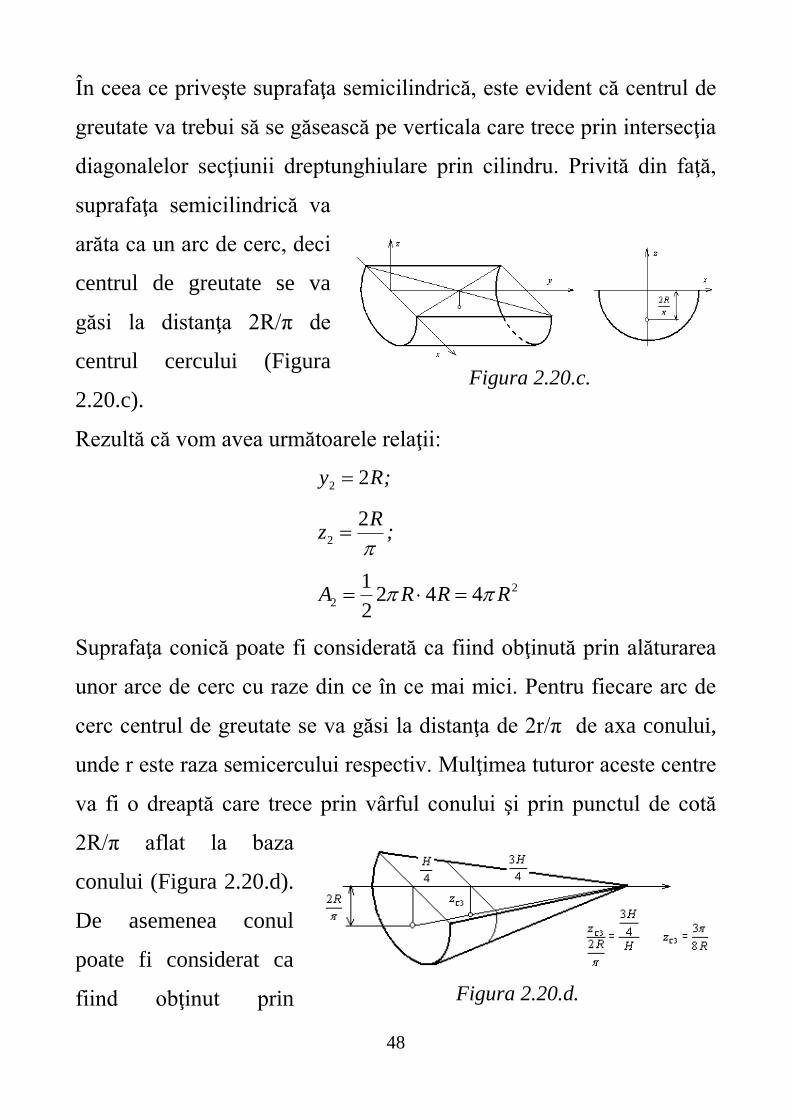
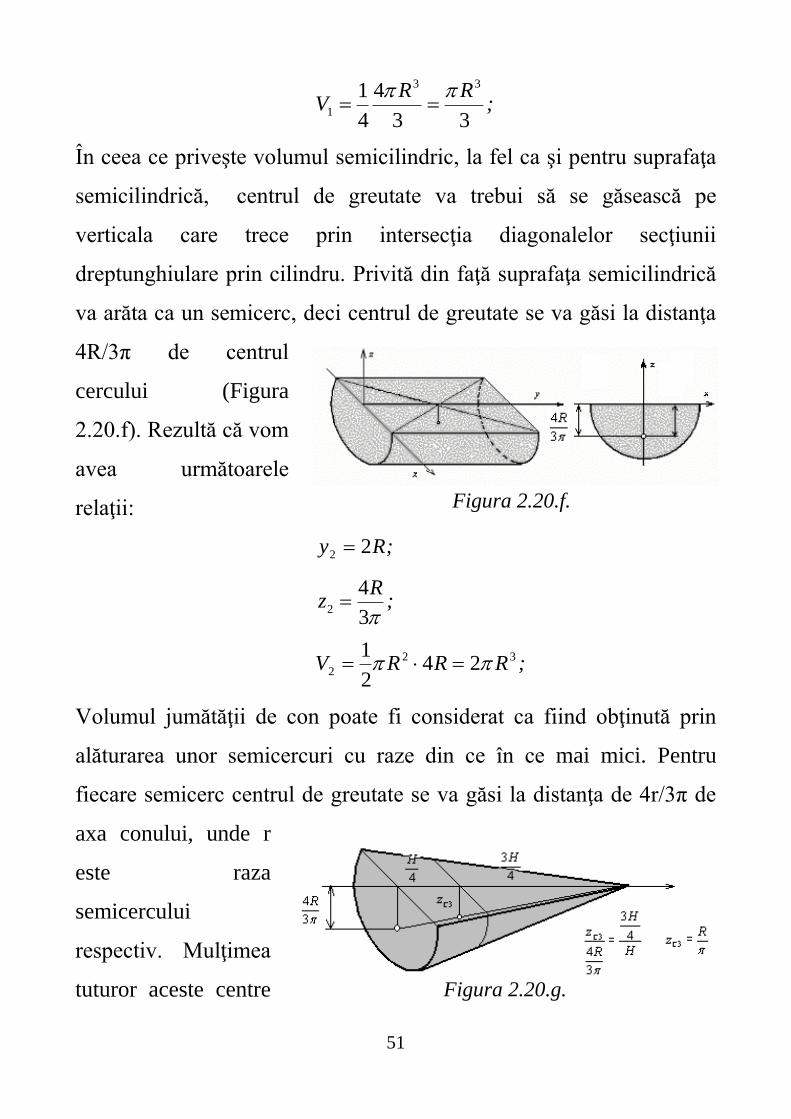
În ceea ce priveşte suprafaţa semicilindrică, este evident că centrul de
greutate va trebui să se găsească pe verticala care trece prin intersecţia
diagonalelor secţiunii dreptunghiulare prin cilindru. Privită din faţă,
suprafaţa semicilindrică va
arăta ca un arc de cerc, deci
centrul de greutate se va
găsi la distanţa 2R/π de
centrul cercului (Figura
2.20.c).
Rezultă că vom avea următoarele relaţii:
;Ry 22
;R
z
22
2
2 4422
1RRRA
Suprafaţa conică poate fi considerată ca fiind obţinută prin alăturarea
unor arce de cerc cu raze din ce în ce mai mici. Pentru fiecare arc de
cerc centrul de greutate se va găsi la distanţa de 2r/π de axa conului,
unde r este raza semicercului respectiv. Mulţimea tuturor aceste centre
va fi o dreaptă care trece prin vârful conului şi prin punctul de cotă
2R/π aflat la baza
conului (Figura 2.20.d).
De asemenea conul
poate fi considerat ca
fiind obţinut prin
Figura 2.20.c.
Figura 2.20.d.
49
alăturarea unor triunghiuri cu vârful în vârful conului şi baza pe baza
conului. Aceste triunghiuri au centrul de greutate situat la o treime de
bază şi două treimi de vârf. De aici rezultă că centrul de greutate al
suprafeţei laterale a semiconului se va găsi într-un plan paralel cu
baza, situat la o distanţă de o treime din înălţimea conului faţă de
planul bazei. Intersecţia dintre acest plan şi dreapta centrelor de
greutate stabilită anterior va da coordonatele centrului de greutate
pentru această suprafaţă:
;Ry 53
;R
z8
33
;R
GRA2
17
2
1 2
3
Se obţine:
R,
)(R
RRR
RRRRR
R
A
Ay
yyn
i
i
n
i
ii
IC
522
2
1741
2
1758
2
1
2
174
2
17542
22
22
222
1
1
2
17RR4R
2
17R
8
R3R4
R2R
2
R
A
Az
zz2
22
222
n
1ii
n
1iii
IC
50
R4425,0
2
1741
)16
1738
2
1(R
zC
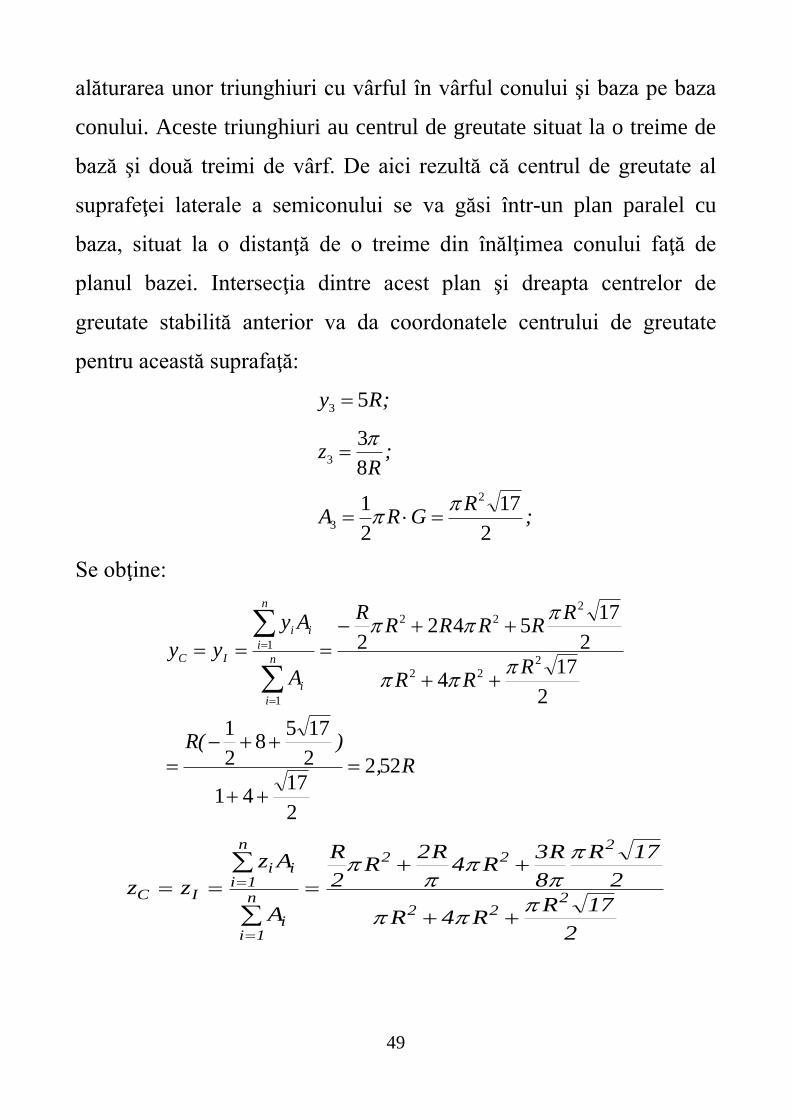
Dacă tot corpul este plin, atunci corpul 1 este o jumătate dintr-o
semisferă.
Pentru acesta se cunoaşte poziţia centrului de greutate zc=3R/8. Dacă
se consideră că acesta provine din două sferturi de sferă care au
centrul la înălţimea z1 (Figura 2.20.e) rezultă că trebuie să avem
relaţia:
8
3
22
221
11 Rz
VV
Vz
Vz
zC
După axa y valoarea ordonatei va fi aceeaşi, datorită simetriei figurii.
Deci, pe figura 2.20.a, avem:
;R
y8
31
;R
z8
31
Figura 2.20.e.
51
;RR
V33
4
4
1 33
1
În ceea ce priveşte volumul semicilindric, la fel ca şi pentru suprafaţa
semicilindrică, centrul de greutate va trebui să se găsească pe
verticala care trece prin intersecţia diagonalelor secţiunii
dreptunghiulare prin cilindru. Privită din faţă suprafaţa semicilindrică
va arăta ca un semicerc, deci centrul de greutate se va găsi la distanţa
4R/3π de centrul
cercului (Figura
2.20.f). Rezultă că vom
avea următoarele
relaţii:
;Ry 22
;R
z3
42
;RRRV 32
2 242
1
Volumul jumătăţii de con poate fi considerat ca fiind obţinută prin
alăturarea unor semicercuri cu raze din ce în ce mai mici. Pentru
fiecare semicerc centrul de greutate se va găsi la distanţa de 4r/3π de
axa conului, unde r
este raza
semicercului
respectiv. Mulţimea
tuturor aceste centre
Figura 2.20.f.
Figura 2.20.g.
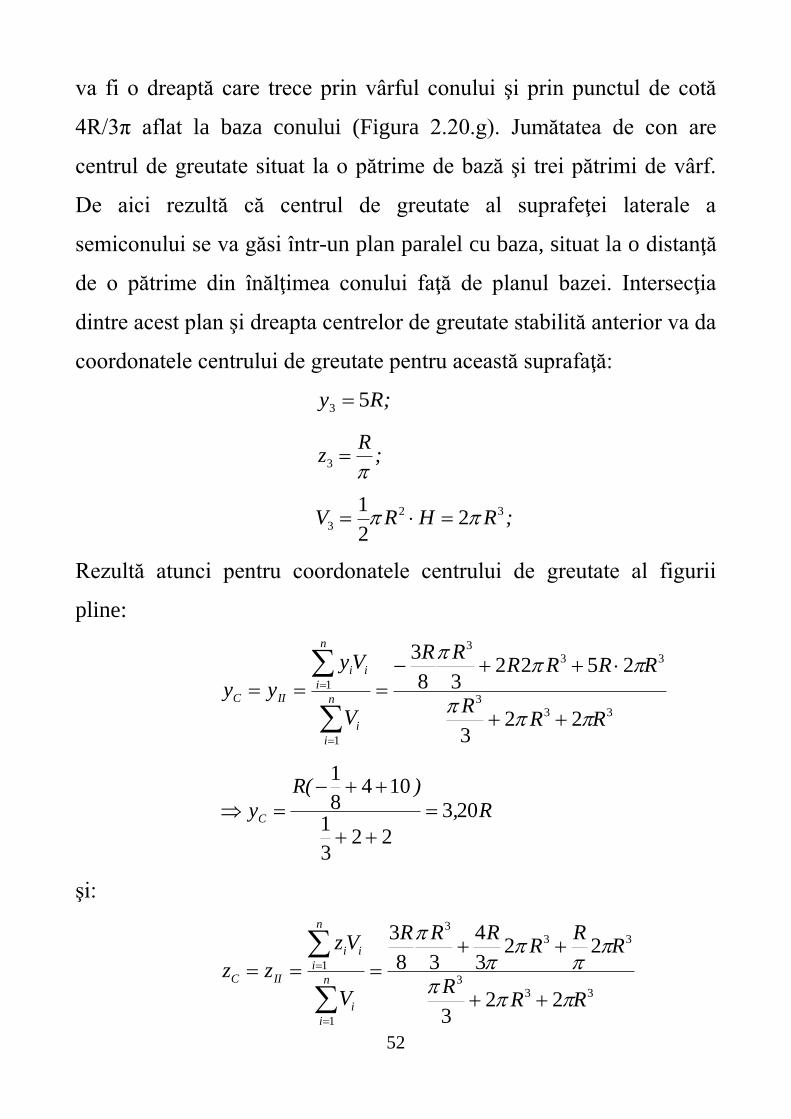
52
va fi o dreaptă care trece prin vârful conului şi prin punctul de cotă
4R/3π aflat la baza conului (Figura 2.20.g). Jumătatea de con are
centrul de greutate situat la o pătrime de bază şi trei pătrimi de vârf.
De aici rezultă că centrul de greutate al suprafeţei laterale a
semiconului se va găsi într-un plan paralel cu baza, situat la o distanţă
de o pătrime din înălţimea conului faţă de planul bazei. Intersecţia
dintre acest plan şi dreapta centrelor de greutate stabilită anterior va da
coordonatele centrului de greutate pentru această suprafaţă:
;Ry 53
;R
z
3
;RHRV 32
3 22
1
Rezultă atunci pentru coordonatele centrului de greutate al figurii
pline:
333
333
1
1
223
252238
3
RRR
RRRRRR
V
Vy
yyn
i
i
n
i
ii
IIC
R,
)(R
yC 203
223
1
1048
1
şi:
333
333
1
1
223
223
4
38
3
RRR
RR
RRRR
V
Vz
zzn
i
i
n
i
ii
IIC
53
R,
)(R
zC 370
43
1
2
3
8
8
1
Centrul de greutate al vasului plin cu lichid se obţine cu formula:
4
3
3
3 III
II
IIIII
III
IIIIIIC
yy
GG
GyGy
GG
GyGyy
R,
R,,yC 033
4
2033522
R,
R,,z
zz
GG
GzGz
GG
GzGzz
C
III
II
IIIII
III
IIIIIIC
3904
3703440
4
3
3
3
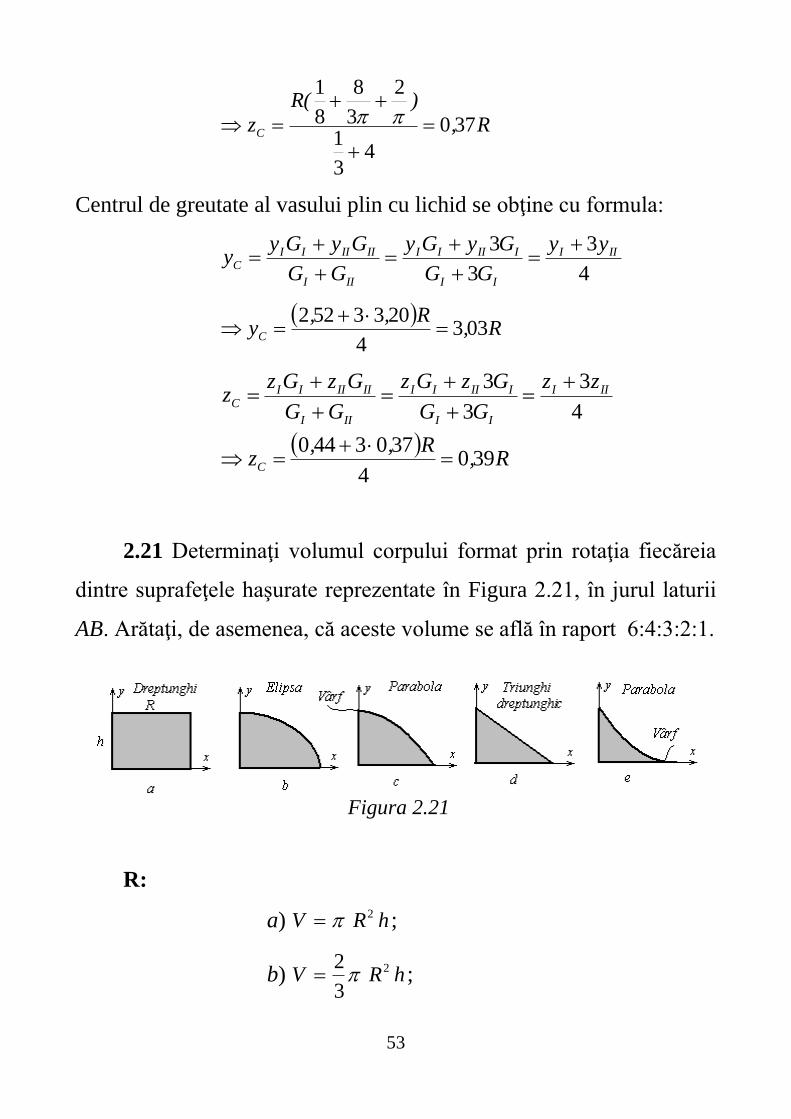
2.21 Determinaţi volumul corpului format prin rotaţia fiecăreia
dintre suprafeţele haşurate reprezentate în Figura 2.21, în jurul laturii
AB. Arătaţi, de asemenea, că aceste volume se află în raport 6:4:3:2:1.
R:
a) hRV 2 ;
b) hRV 2
3
2 ;
Figura 2.21
54
c) hRV 2
2
1 ;
d) hRV 2
3
1 ;
e) hRV 2
6
1
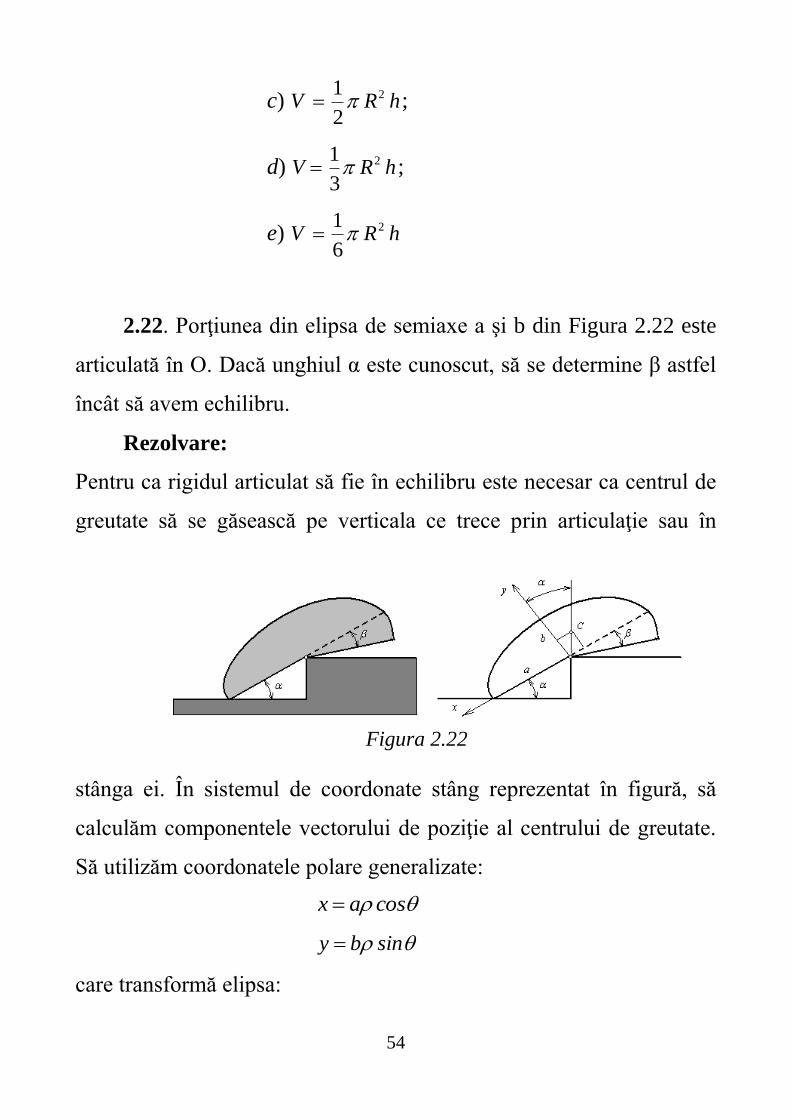
2.22. Porţiunea din elipsa de semiaxe a şi b din Figura 2.22 este
articulată în O. Dacă unghiul α este cunoscut, să se determine β astfel
încât să avem echilibru.
Rezolvare:
Pentru ca rigidul articulat să fie în echilibru este necesar ca centrul de
greutate să se găsească pe verticala ce trece prin articulaţie sau în
stânga ei. În sistemul de coordonate stâng reprezentat în figură, să
calculăm componentele vectorului de poziţie al centrului de greutate.
Să utilizăm coordonatele polare generalizate:
cosax
sinby
care transformă elipsa:
Figura 2.22

55
12
2
2
2
b
y
a
x în 1 , 2,0 .
Jacobianul transformării este: abJ şi atunci vom avea:
dd
ddcosa
dJd
dJdcosa
dA
xdAxC
2
sinasina
dd
dcosdaxC
3
2
3
21
0 0
1
0 0
2
dd
ddsina
dJd
dJdsinb
dA
ydAyC
2
cosbcosb
dd
dsindbyC
3
2
3
21
0 0
1
0 0
2
Din figură, rezultă:
tan
b
a
cosb
sina
y
xtan
Condiţia de echilibru se va putea scrie deci sub forma:
tana
btan .
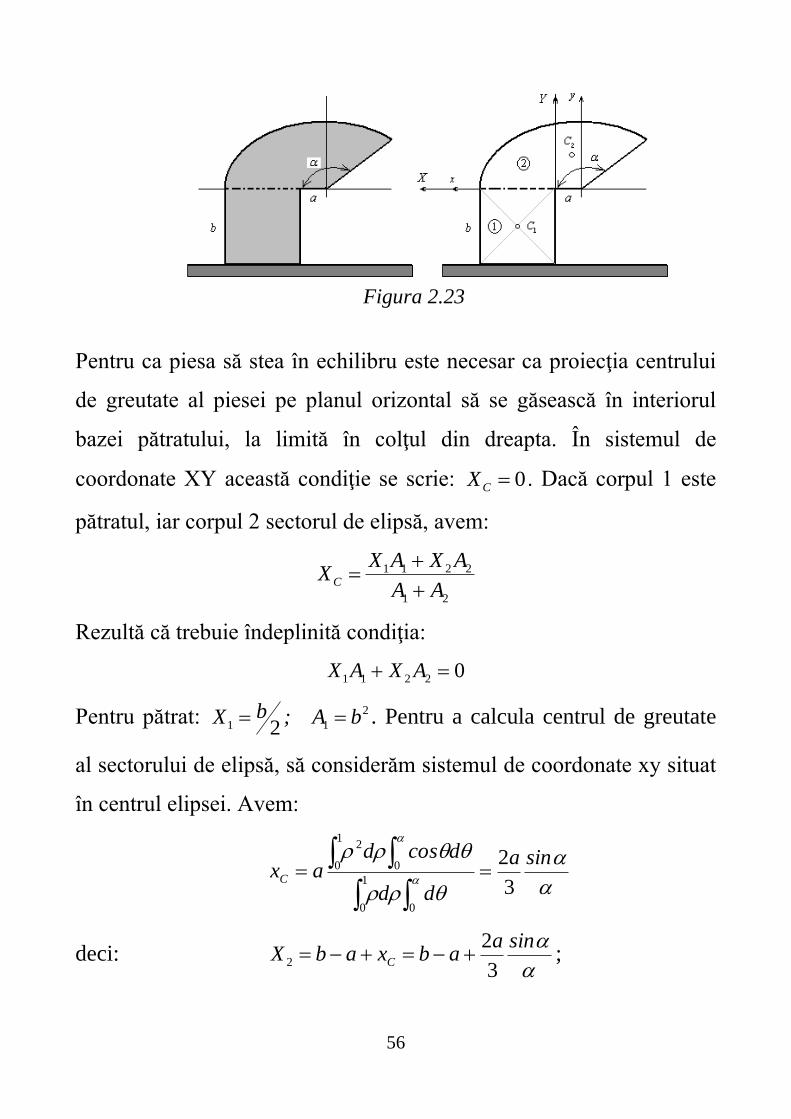
2.23. Să se determine α astfel încât corpul format din pătratul de
latură b şi porţiunea de elipsă de semiaxe a şi b (a>b) să se găsească în
echilibru (Figura 2.23). Aplicaţie: 1122 b;a .
Rezolvare:
56
Pentru ca piesa să stea în echilibru este necesar ca proiecţia centrului
de greutate al piesei pe planul orizontal să se găsească în interiorul
bazei pătratului, la limită în colţul din dreapta. În sistemul de
coordonate XY această condiţie se scrie: 0CX . Dacă corpul 1 este
pătratul, iar corpul 2 sectorul de elipsă, avem:
21
2211
AA
AXAXXC
Rezultă că trebuie îndeplinită condiţia:
02211 AXAX
Pentru pătrat: 2
11 2bA;bX . Pentru a calcula centrul de greutate
al sectorului de elipsă, să considerăm sistemul de coordonate xy situat
în centrul elipsei. Avem:
sina
dd
dcosdaxC
3
21
0 0
1
0 0
2
deci:
sinaabxabX C
3
22 ;
Figura 2.23
57
2
1
0 02
baddabA
.
Va trebui să avem: 023
2
2
2
basinaabb
b
sau: 03
2 222 sin
aaabb ,
relaţie care va da α.
Pentru valorile date, rezultă: 3
2 .
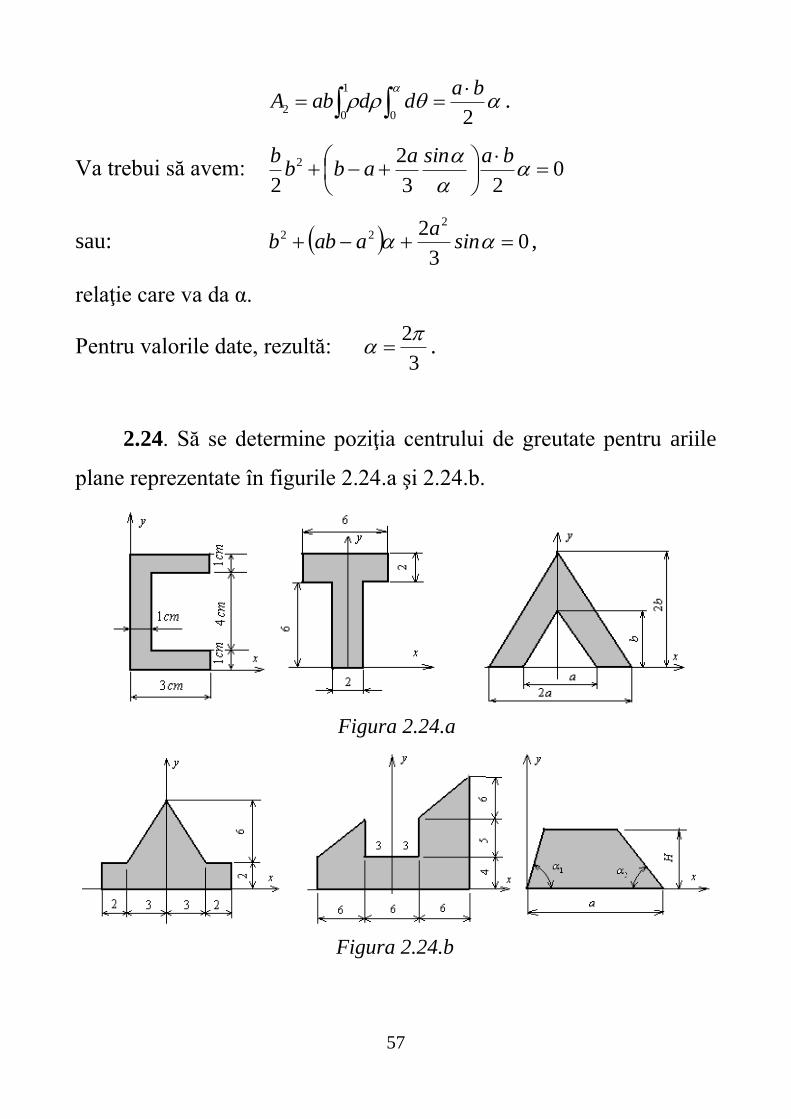
2.24. Să se determine poziţia centrului de greutate pentru ariile
plane reprezentate în figurile 2.24.a şi 2.24.b.
Figura 2.24.a
Figura 2.24.b
58
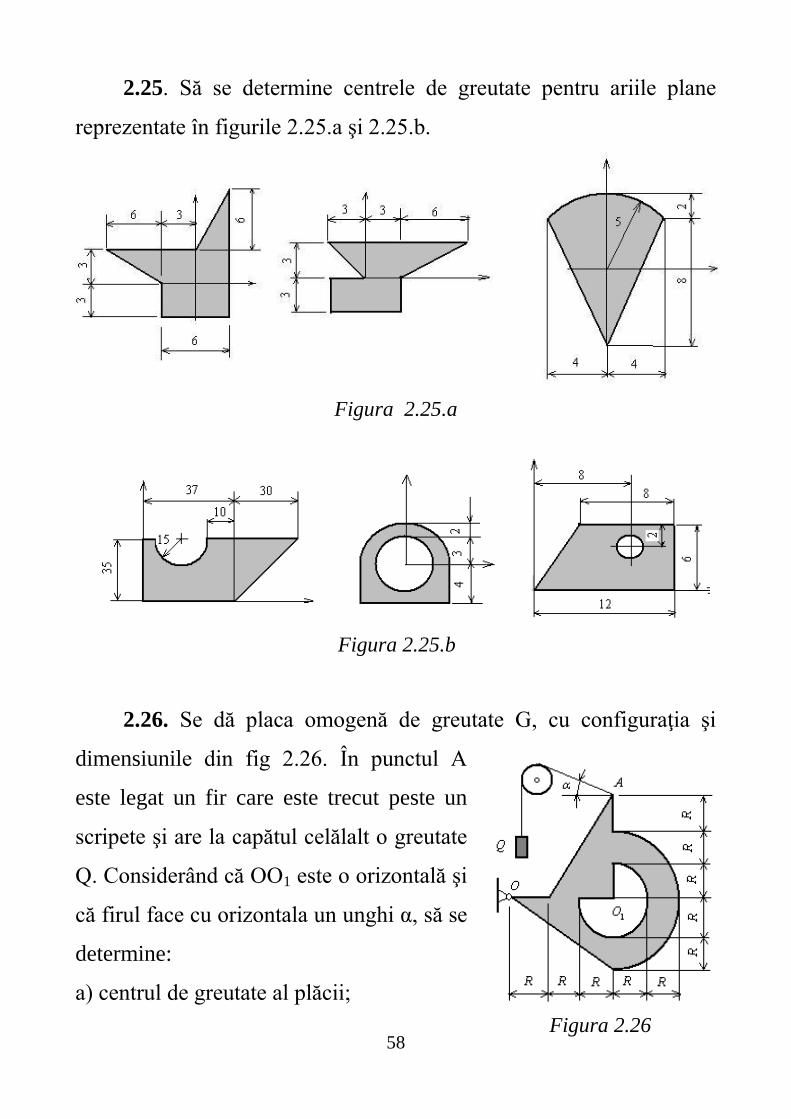
2.25. Să se determine centrele de greutate pentru ariile plane
reprezentate în figurile 2.25.a şi 2.25.b.
Figura 2.25.a
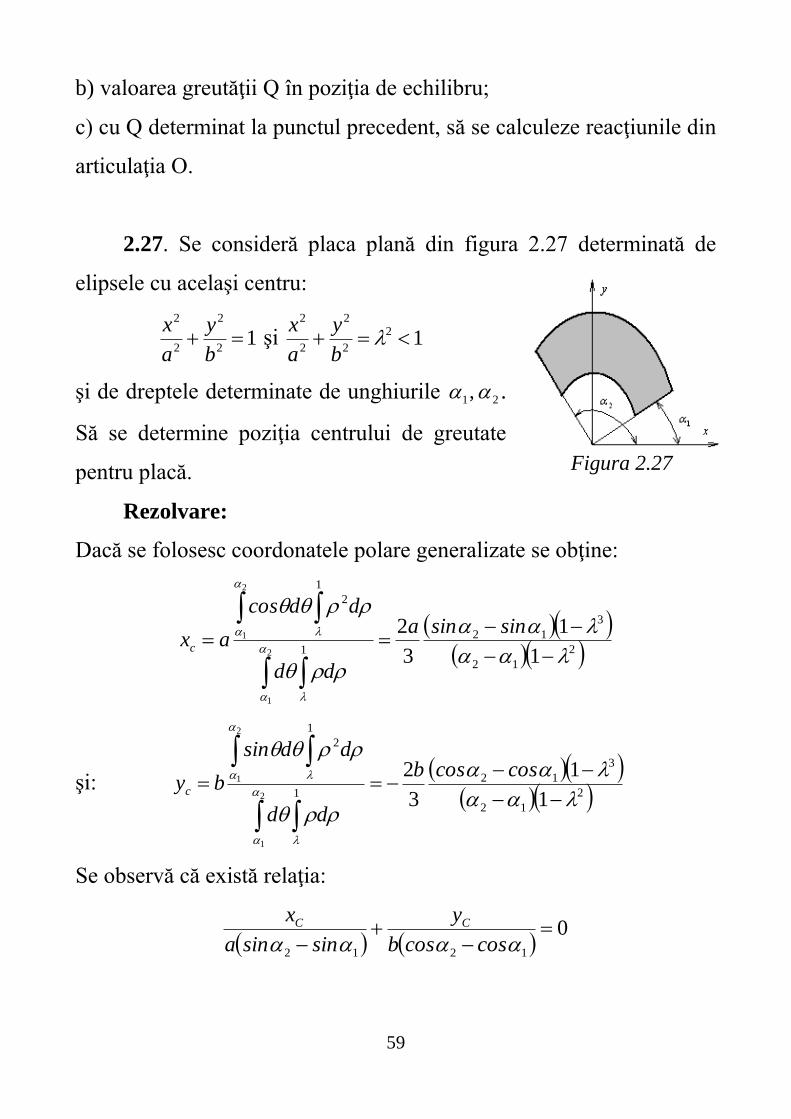
2.26. Se dă placa omogenă de greutate G, cu configuraţia şi
dimensiunile din fig 2.26. În punctul A
este legat un fir care este trecut peste un
scripete şi are la capătul celălalt o greutate
Q. Considerând că OO1 este o orizontală şi
că firul face cu orizontala un unghi α, să se
determine:
a) centrul de greutate al plăcii;
Figura 2.25.b
Figura 2.26
59
b) valoarea greutăţii Q în poziţia de echilibru;
c) cu Q determinat la punctul precedent, să se calculeze reacţiunile din
articulaţia O.
2.27. Se consideră placa plană din figura 2.27 determinată de
elipsele cu acelaşi centru:
12
2
2
2
b
y
a
x şi 12
2
2
2
2
b
y
a
x
şi de dreptele determinate de unghiurile 21, .
Să se determine poziţia centrului de greutate
pentru placă.
Rezolvare:
Dacă se folosesc coordonatele polare generalizate se obţine:
2
12
3
12
1
1
2
1
1
3
22
1
2
1
sinsina
dd
ddcos
axc
şi:
2
12
3
12
1
1
2
1
1
3
22
1
2
1
coscosb
dd
ddsin
byc
Se observă că există relaţia:
0
1212
coscosb
y
sinsina
x CC
Figura 2.27
60
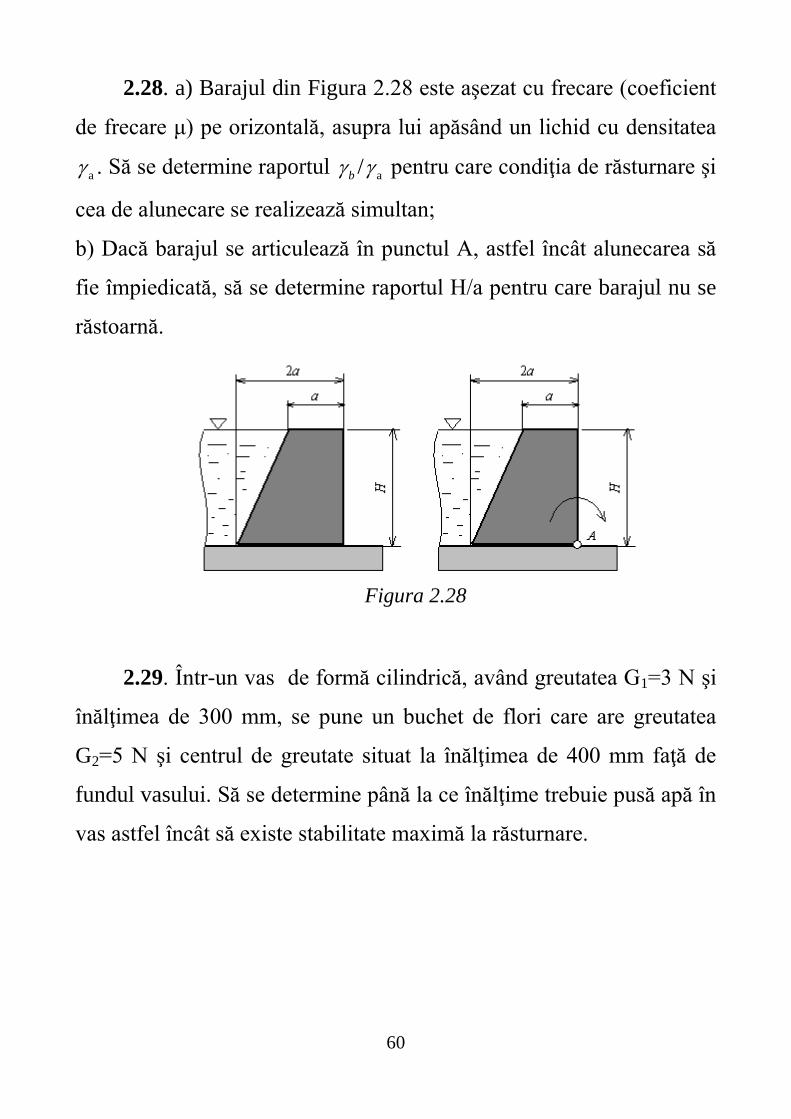
2.28. a) Barajul din Figura 2.28 este aşezat cu frecare (coeficient
de frecare μ) pe orizontală, asupra lui apăsând un lichid cu densitatea
a . Să se determine raportul b /
a pentru care condiţia de răsturnare şi
cea de alunecare se realizează simultan;
b) Dacă barajul se articulează în punctul A, astfel încât alunecarea să
fie împiedicată, să se determine raportul H/a pentru care barajul nu se
răstoarnă.
2.29. Într-un vas de formă cilindrică, având greutatea G1=3 N şi
înălţimea de 300 mm, se pune un buchet de flori care are greutatea
G2=5 N şi centrul de greutate situat la înălţimea de 400 mm faţă de
fundul vasului. Să se determine până la ce înălţime trebuie pusă apă în
vas astfel încât să existe stabilitate maximă la răsturnare.
Figura 2.28
61
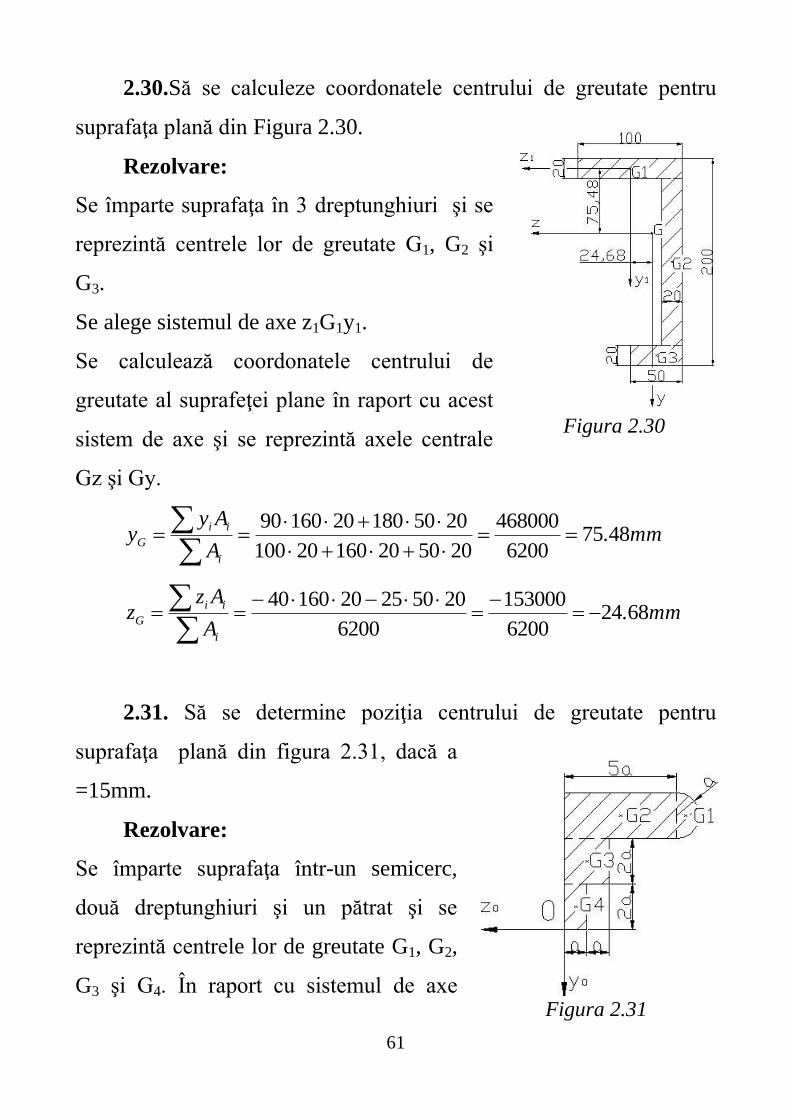
2.30.Să se calculeze coordonatele centrului de greutate pentru
suprafaţa plană din Figura 2.30.
Rezolvare:
Se împarte suprafaţa în 3 dreptunghiuri şi se
reprezintă centrele lor de greutate G1, G2 şi
G3.
Se alege sistemul de axe z1G1y1.
Se calculează coordonatele centrului de
greutate al suprafeţei plane în raport cu acest
sistem de axe şi se reprezintă axele centrale
Gz şi Gy.
mm.A
Ayy
i
ii
G 48756200
468000
20502016020100
20501802016090
mm.A
Azz
i
ii
G 68246200
153000
6200
2050252016040
2.31. Să se determine poziţia centrului de greutate pentru
suprafaţa plană din figura 2.31, dacă a
=15mm.
Rezolvare:
Se împarte suprafaţa într-un semicerc,
două dreptunghiuri şi un pătrat şi se
reprezintă centrele lor de greutate G1, G2,
G3 şi G4. În raport cu sistemul de axe
Figura 2.30
Figura 2.31
62
z0Oy0 se calculează coordonatele centrului de greutate.
2222
2222
24102
2431052
5
aaaa
aaaaaaa
a
yG
mm.a.
a
yG 34610894
162
642
5
2222
2222
24102
2504105223
45
aaaa
aa.aaaa.aa
a
zG
mm.a.a
a
zG 8832192
162
3
92
2
5
162
14253
2
2
5
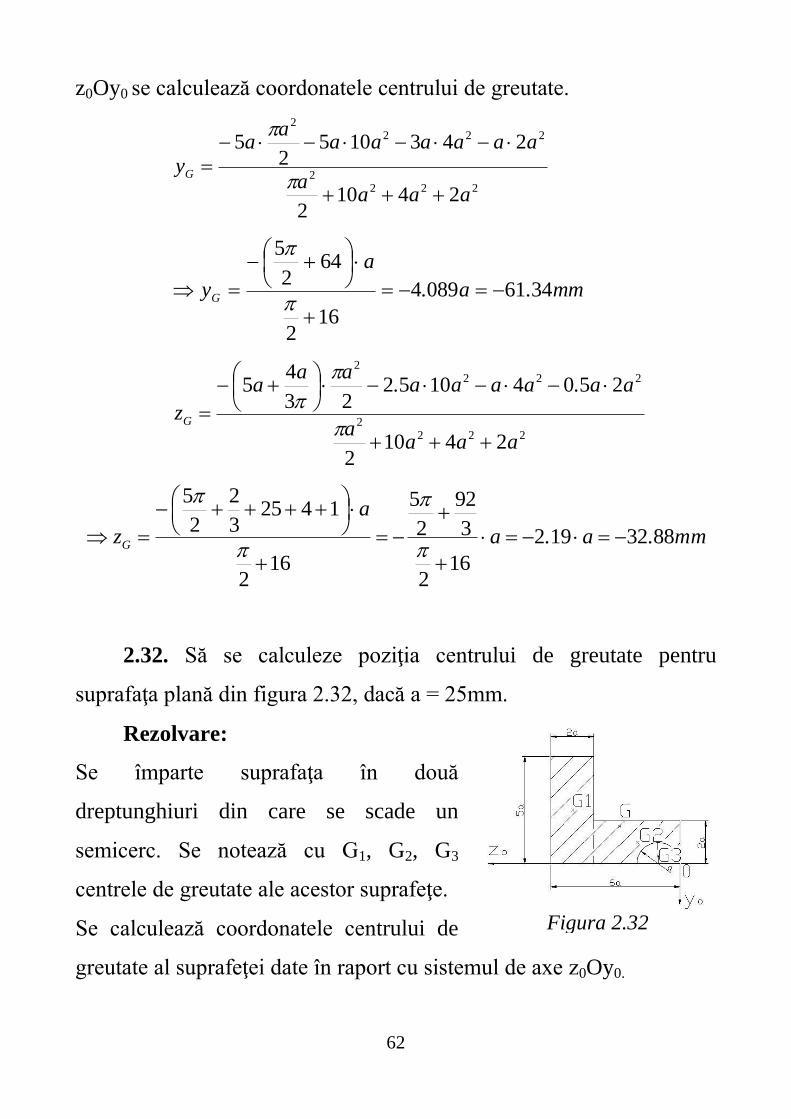
2.32. Să se calculeze poziţia centrului de greutate pentru
suprafaţa plană din figura 2.32, dacă a = 25mm.
Rezolvare:
Se împarte suprafaţa în două
dreptunghiuri din care se scade un
semicerc. Se notează cu G1, G2, G3
centrele de greutate ale acestor suprafeţe.
Se calculează coordonatele centrului de
greutate al suprafeţei date în raport cu sistemul de axe z0Oy0.
Figura 2.32
63
mm2.49a96.1y
2
aa8a10
2
a
3
a4a8aa10a5.2
y
G
222
222
G
mm04.98a92.3
2
aa8a10
2
aaa8a2a10a5
z2
22
222
G
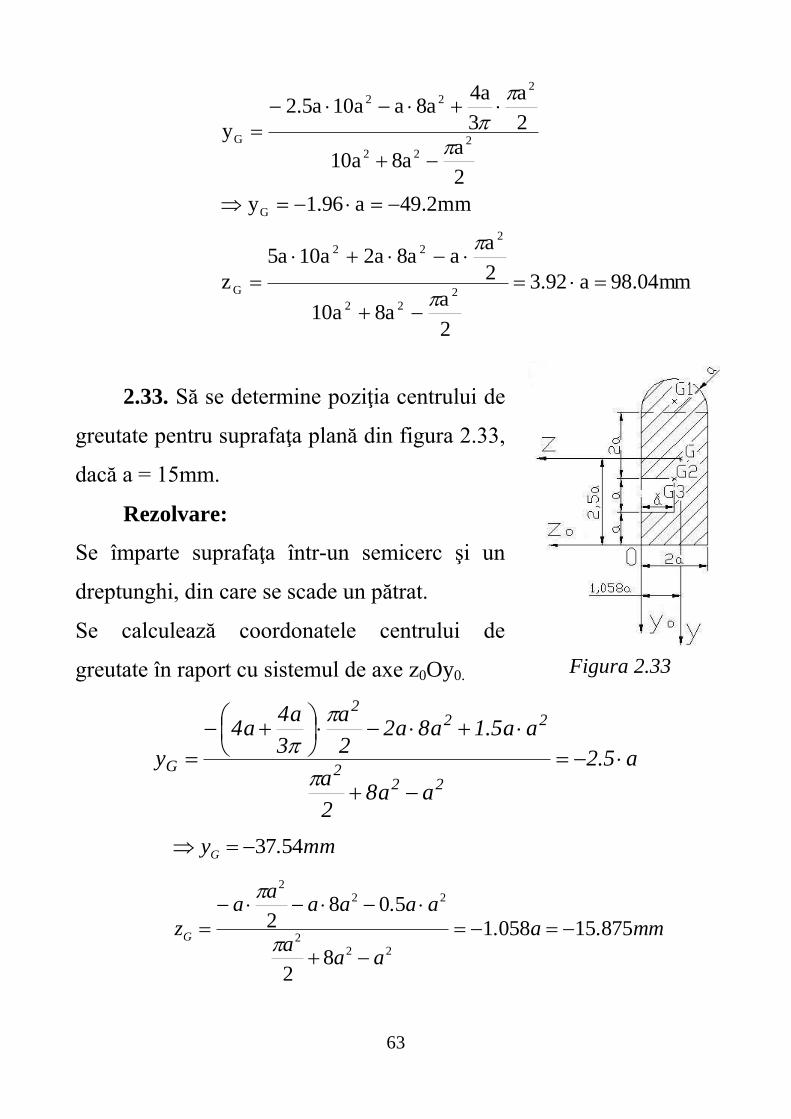
2.33. Să se determine poziţia centrului de
greutate pentru suprafaţa plană din figura 2.33,
dacă a = 15mm.
Rezolvare:
Se împarte suprafaţa într-un semicerc şi un
dreptunghi, din care se scade un pătrat.
Se calculează coordonatele centrului de
greutate în raport cu sistemul de axe z0Oy0.
a5.2
aa82
a
aa5.1a8a22
a
3
a4a4
y22
2
222
G
mm.yG 5437
mm.a.
aaa
aa.aaa
a
zG 875150581
82
5082
222
222
Figura 2.33
64
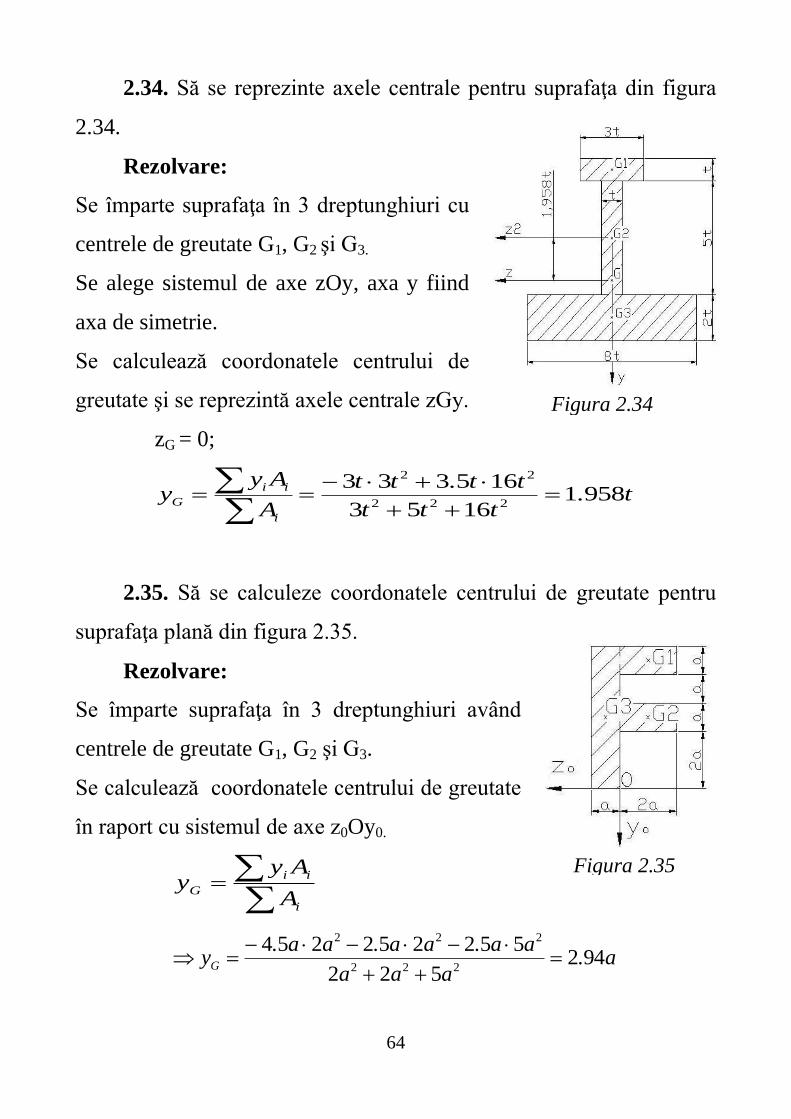
2.34. Să se reprezinte axele centrale pentru suprafaţa din figura
2.34.
Rezolvare:
Se împarte suprafaţa în 3 dreptunghiuri cu
centrele de greutate G1, G2 şi G3.
Se alege sistemul de axe zOy, axa y fiind
axa de simetrie.
Se calculează coordonatele centrului de
greutate şi se reprezintă axele centrale zGy.
zG = 0;
t.ttt
tt.tt
A
Ayy
i
ii
G 95811653
165333222
22
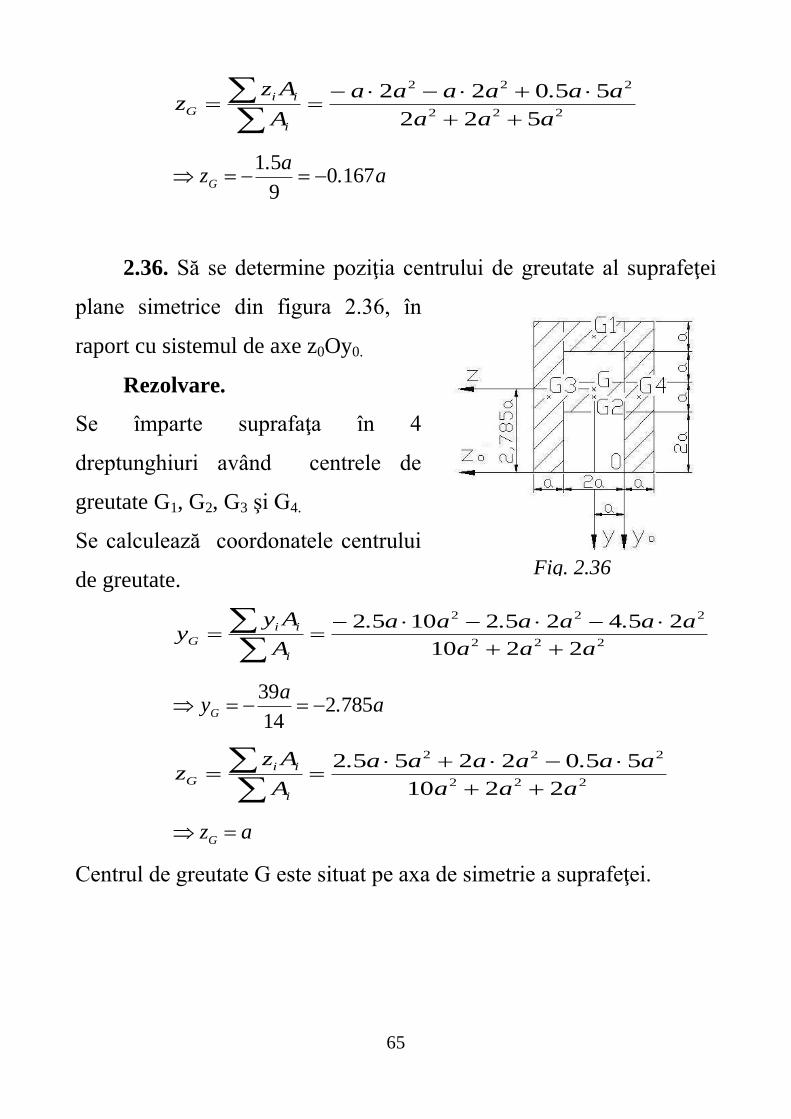
2.35. Să se calculeze coordonatele centrului de greutate pentru
suprafaţa plană din figura 2.35.
Rezolvare:
Se împarte suprafaţa în 3 dreptunghiuri având
centrele de greutate G1, G2 şi G3.
Se calculează coordonatele centrului de greutate
în raport cu sistemul de axe z0Oy0.
i
ii
GA
Ayy
a.aaa
aa.aa.aa.yG 942
522
552252254222
222
Figura 2.34
Figura 2.35
65
222
222
522
55022
aaa
aa.aaaa
A
Azz
i
ii
G
a.a.
zG 16709
51
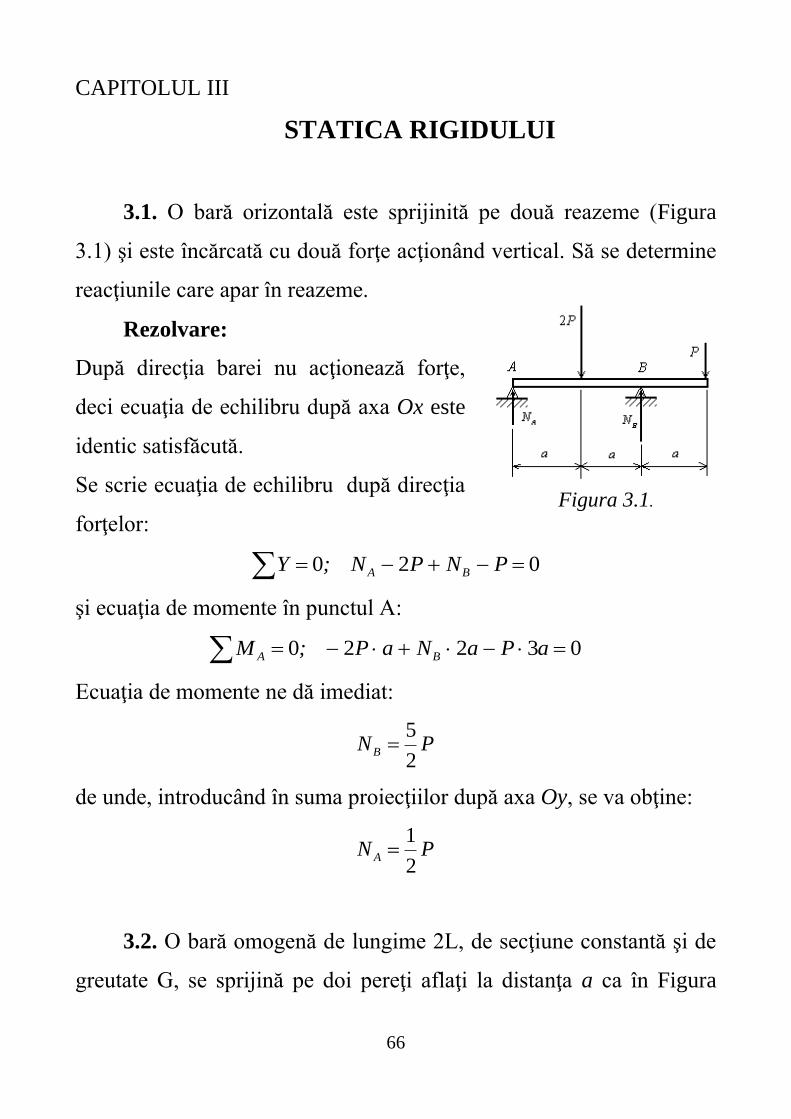
2.36. Să se determine poziţia centrului de greutate al suprafeţei
plane simetrice din figura 2.36, în
raport cu sistemul de axe z0Oy0.
Rezolvare.
Se împarte suprafaţa în 4
dreptunghiuri având centrele de
greutate G1, G2, G3 şi G4.
Se calculează coordonatele centrului
de greutate.
222
222
2210
2542521052
aaa
aa.aa.aa.
A
Ayy
i
ii
G
a.a
yG 785214
39
222
222
2210
55022552
aaa
aa.aaaa.
A
Azz
i
ii
G
azG
Centrul de greutate G este situat pe axa de simetrie a suprafeţei.
Fig. 2.36
66
CAPITOLUL III
STATICA RIGIDULUI
3.1. O bară orizontală este sprijinită pe două reazeme (Figura
3.1) şi este încărcată cu două forţe acţionând vertical. Să se determine
reacţiunile care apar în reazeme.
Rezolvare:
După direcţia barei nu acţionează forţe,
deci ecuaţia de echilibru după axa Ox este
identic satisfăcută.
Se scrie ecuaţia de echilibru după direcţia
forţelor:
020 PNPN;Y BA
şi ecuaţia de momente în punctul A:
03220 aPaNaP;M BA
Ecuaţia de momente ne dă imediat:
PNB2
5
de unde, introducând în suma proiecţiilor după axa Oy, se va obţine:
PN A2
1
3.2. O bară omogenă de lungime 2L, de secţiune constantă şi de
greutate G, se sprijină pe doi pereţi aflaţi la distanţa a ca în Figura
Figura 3.1.
67
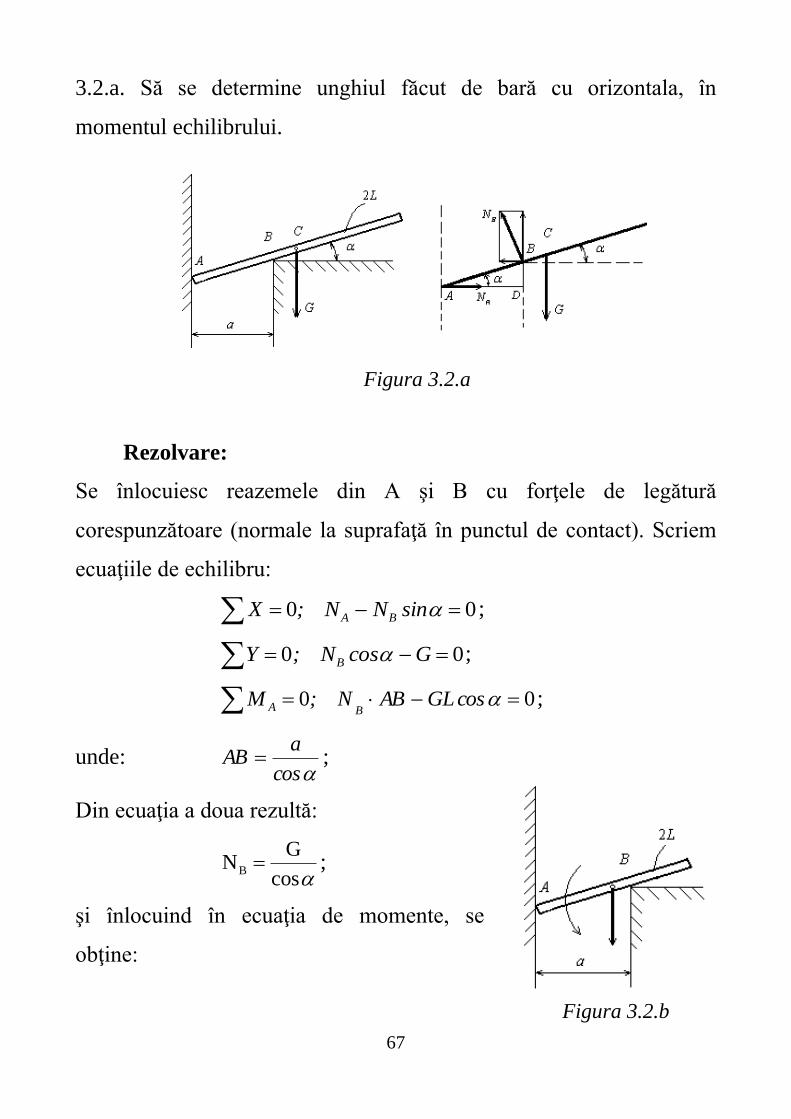
3.2.a. Să se determine unghiul făcut de bară cu orizontala, în
momentul echilibrului.
Rezolvare:
Se înlocuiesc reazemele din A şi B cu forţele de legătură
corespunzătoare (normale la suprafaţă în punctul de contact). Scriem
ecuaţiile de echilibru:
00 sinNN;X BA;
00 GcosN;Y B ;
00 cosGLABN;MBA ;
unde: cos
aAB ;
Din ecuaţia a doua rezultă:
cos
GNB ;
şi înlocuind în ecuaţia de momente, se
obţine:
Figura 3.2.a
Figura 3.2.b
68
0
cosGLcos
a
cos
G
sau:
3
L
acos
Deoarece trebuie să avem 1cos rezultă că, pentru a avea echilibru,
trebuie ca La , adică centrul de greutate al barei să se găsească în
dreapta punctului de sprijin B. În caz contrar (Figura 3.2.b) bara va
cădea între cei doi pereţi, indiferent sub ce unghi va fi aşezată.
Echilibrul barei este un echilibru instabil întrucât, dacă o scoatem din
poziţia de echilibru, ea va cădea, sau între cei doi pereţi, sau pe planul
orizontal.
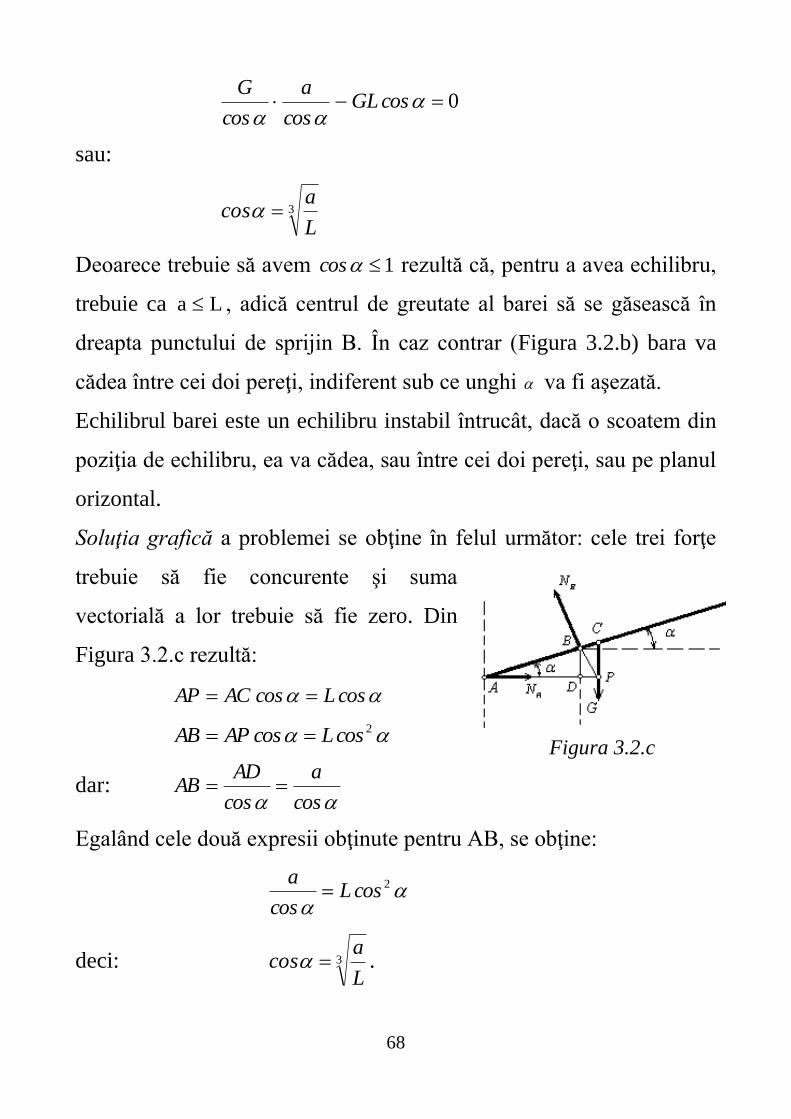
Soluţia grafică a problemei se obţine în felul următor: cele trei forţe
trebuie să fie concurente şi suma
vectorială a lor trebuie să fie zero. Din
Figura 3.2.c rezultă:
cosLcosACAP
2cosLcosAPAB
dar: cos
a
cos
ADAB
Egalând cele două expresii obţinute pentru AB, se obţine:
2cosLcos
a
deci: 3
L
acos .
Figura 3.2.c
69
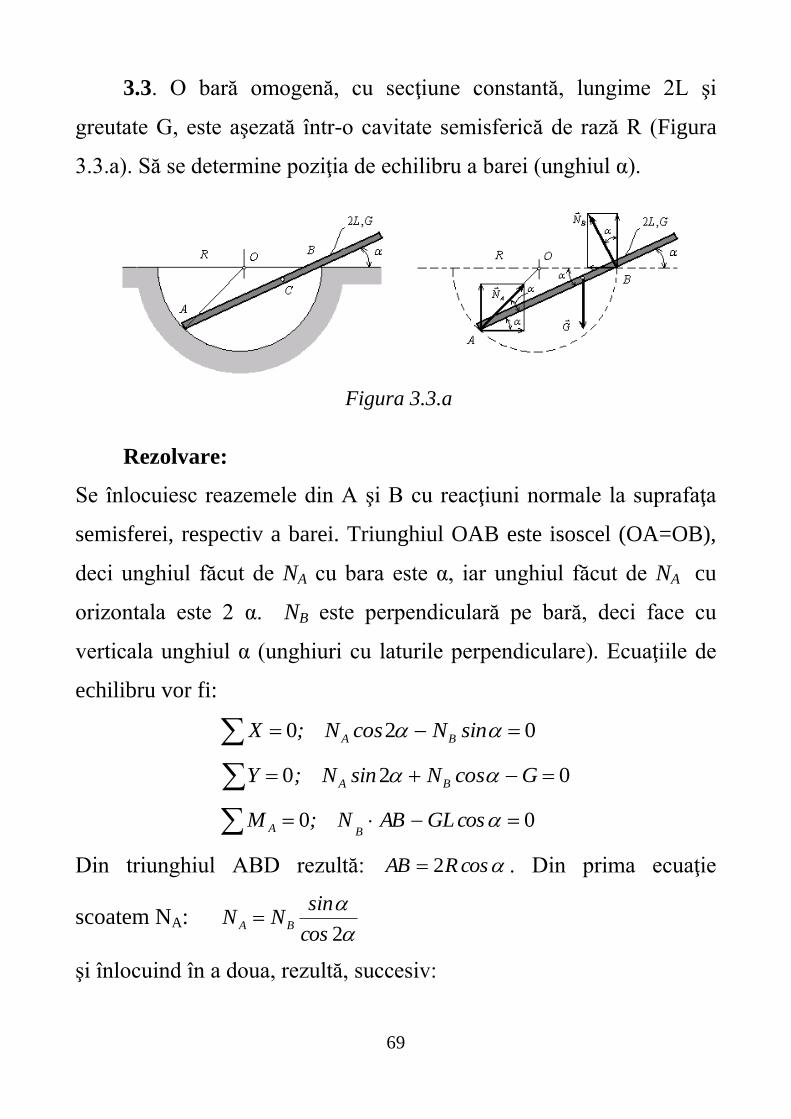
3.3. O bară omogenă, cu secţiune constantă, lungime 2L şi
greutate G, este aşezată într-o cavitate semisferică de rază R (Figura
3.3.a). Să se determine poziţia de echilibru a barei (unghiul α).
Rezolvare:
Se înlocuiesc reazemele din A şi B cu reacţiuni normale la suprafaţa
semisferei, respectiv a barei. Triunghiul OAB este isoscel (OA=OB),
deci unghiul făcut de NA cu bara este α, iar unghiul făcut de NA cu
orizontala este 2 α. NB este perpendiculară pe bară, deci face cu
verticala unghiul α (unghiuri cu laturile perpendiculare). Ecuaţiile de
echilibru vor fi:
020 sinNcosN;X BA
020 GcosNsinN;Y BA
00 cosGLABN;MBA
Din triunghiul ABD rezultă: cosRAB 2 . Din prima ecuaţie
scoatem NA:
2cos
sinNN BA
şi înlocuind în a doua, rezultă, succesiv:
Figura 3.3.a

70
GcosNsincos
sinN BB
2
2
Gcos
coscossinsinNB
2
22
Gcos
)cos(NB
2
2
de unde:
cos
cosGNB
2
Înlocuind NB în ecuaţia de momente, se obţine ecuaţia trigonometrică:
022 cosLcosR
(soluţia 0cos nu convine). Relaţia obţinută se mai poate scrie:
0122 2 cosL)cos(R
Cu notaţia cost , se obţine ecuaţia de gradul doi:
024 2 RtLtR
cu singura soluţie convenabilă:
R
RLLcost
8
32 22
Condiţia 1cos duce la: RRLL 832 22 sau, după efectuarea
calculelor: LR 2 adică bara trebuie să fie mai lungă decât diametrul
semisferei, pentru ca problema să fie posibilă.
Echilibrul realizat este stabil, adică dacă scoatem bara din poziţia de
echilibru schimbând cu o cantitate mică, ea va tinde să revină în
poziţia de echilibru.
Soluţia grafică (Figura 3.3.b) impune, la fel ca la problema
precedentă, ca toate cele trei forţe să fie concurente şi suma vectorială
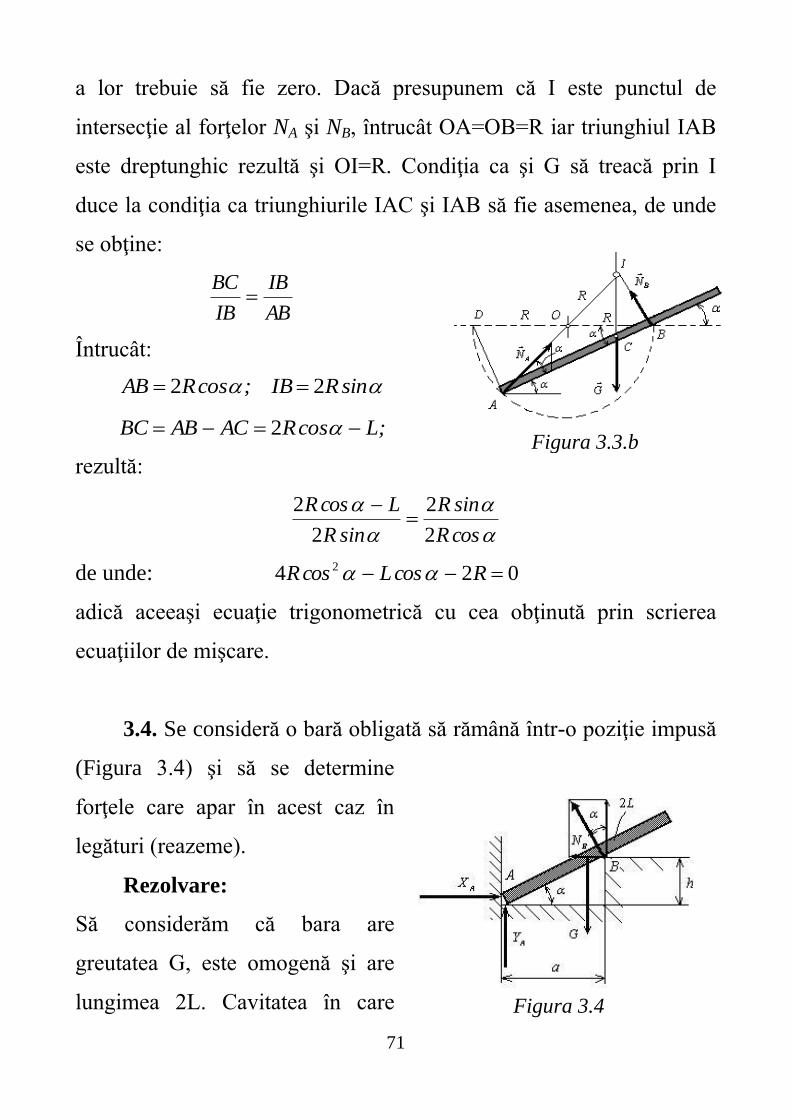
71
a lor trebuie să fie zero. Dacă presupunem că I este punctul de
intersecţie al forţelor NA şi NB, întrucât OA=OB=R iar triunghiul IAB
este dreptunghic rezultă şi OI=R. Condiţia ca şi G să treacă prin I
duce la condiţia ca triunghiurile IAC şi IAB să fie asemenea, de unde
se obţine:
AB
IB
IB
BC
Întrucât:
sinRIB;cosRAB 22
;LcosRACABBC 2
rezultă:
cosR
sinR
sinR
LcosR
2
2
2
2
de unde: 024 2 RcosLcosR
adică aceeaşi ecuaţie trigonometrică cu cea obţinută prin scrierea
ecuaţiilor de mişcare.
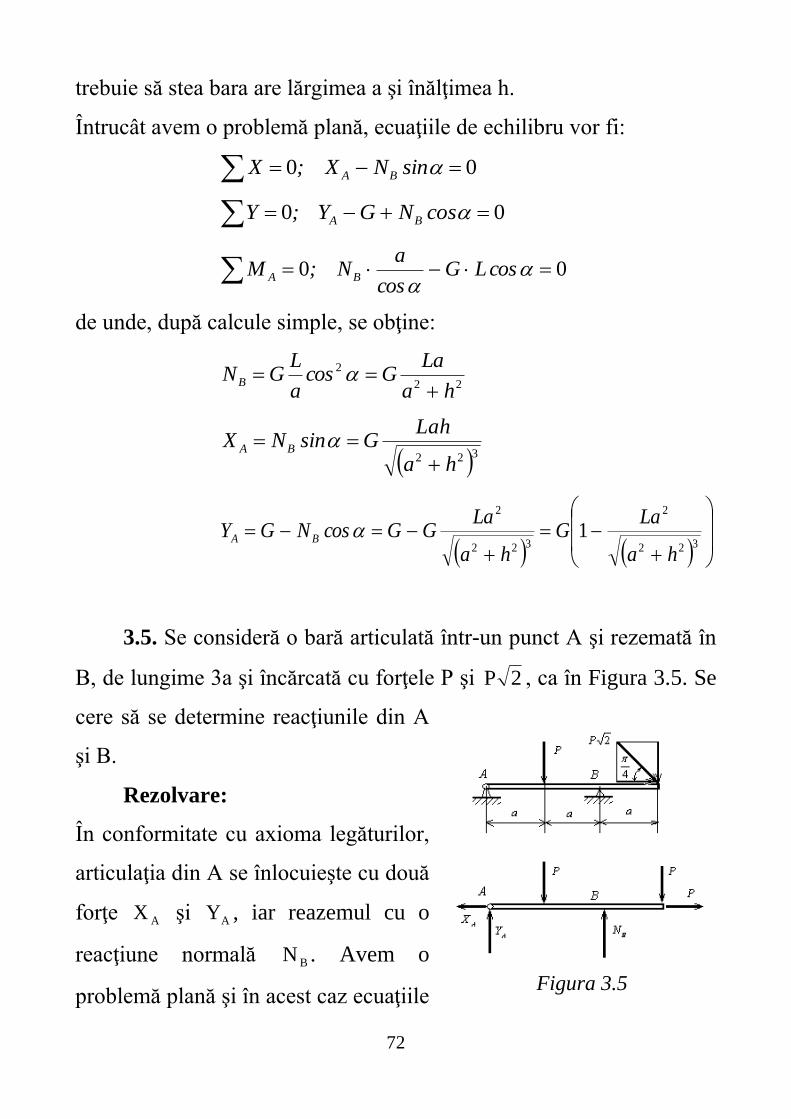
3.4. Se consideră o bară obligată să rămână într-o poziţie impusă
(Figura 3.4) şi să se determine
forţele care apar în acest caz în
legături (reazeme).
Rezolvare:
Să considerăm că bara are
greutatea G, este omogenă şi are
lungimea 2L. Cavitatea în care
Figura 3.3.b
Figura 3.4
72
trebuie să stea bara are lărgimea a şi înălţimea h.
Întrucât avem o problemă plană, ecuaţiile de echilibru vor fi:
00 sinNX;X BA
00 cosNGY;Y BA
00
cosLGcos
aN;M BA
de unde, după calcule simple, se obţine:
22
2
ha
LaGcos
a
LGNB
322 ha
LahGsinNX BA
322
2
322
2
1ha
LaG
ha
LaGGcosNGY BA
3.5. Se consideră o bară articulată într-un punct A şi rezemată în
B, de lungime 3a şi încărcată cu forţele P şi 2P , ca în Figura 3.5. Se
cere să se determine reacţiunile din A
şi B.
Rezolvare:
În conformitate cu axioma legăturilor,
articulaţia din A se înlocuieşte cu două
forţe AX şi AY , iar reazemul cu o
reacţiune normală BN . Avem o
problemă plană şi în acest caz ecuaţiile
Figura 3.5
73
de echilibru pot fi scrise sub forma:
00 PX;X A
00 PNPY;Y BA
0320 aPaNaP;M BA
Rezultă imediat: PX A , PNB 2 , 0AY
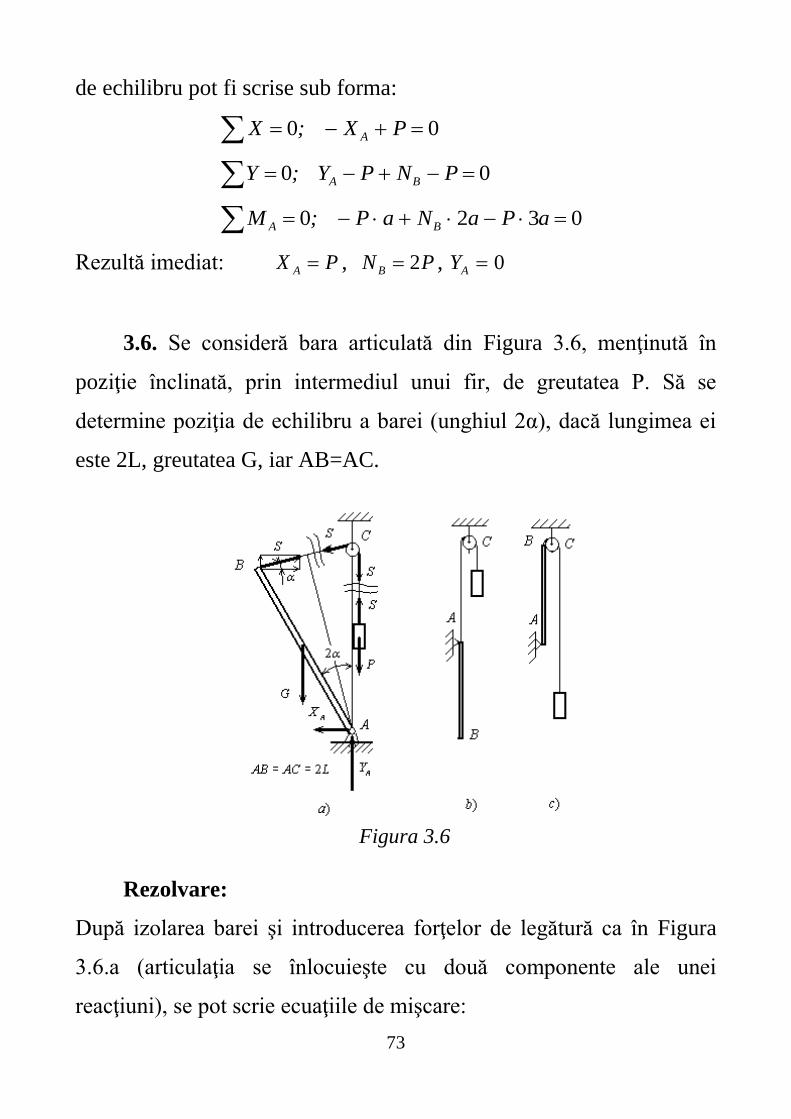
3.6. Se consideră bara articulată din Figura 3.6, menţinută în
poziţie înclinată, prin intermediul unui fir, de greutatea P. Să se
determine poziţia de echilibru a barei (unghiul 2α), dacă lungimea ei
este 2L, greutatea G, iar AB=AC.
Rezolvare:
După izolarea barei şi introducerea forţelor de legătură ca în Figura
3.6.a (articulaţia se înlocuieşte cu două componente ale unei
reacţiuni), se pot scrie ecuaţiile de mişcare:
Figura 3.6
74
00 AXcosS;X ;
00 AYGsinS;Y ;
0220 sinGLcosLS;M A
Tensiunea din fir este egală cu P şi atunci rezultă imediat ecuaţia
trigonometrică care dă pe α:
022 cossinGcosP
sau 0 )sinGP(cos
cu soluţia: 2
0
;cos
Această poziţie de echilibru reprezintă situaţia din figura 3.6.b, firul
trage de bara aflată în poziţie verticală. Bara nu se poate mişca,
tracţiunea firului fiind blocată de articulaţie. Această poziţie
particulară nu este interesantă pentru practică. Echilibrul este în acest
caz instabil, o mică deplasare din poziţia de echilibru permiţând
greutăţii P să mişte bara până în a doua poziţie de echilibru, dată de
relaţia:
G
Psin
Această poziţie este de echilibru stabil, forţa P căutând să aducă bara
înapoi, dacă o scoatem din poziţia determinată, cu o deplasare
unghiulară mică.
Pentru ca problema să fie posibilă trebuie ca 1sin , ceea ce duce la
GP . În caz contrar, forţa P fiind prea mare, va trage de bară până o
75
va bloca în punctul C, datorită particularităţilor constructive (Figura
3.6.c).
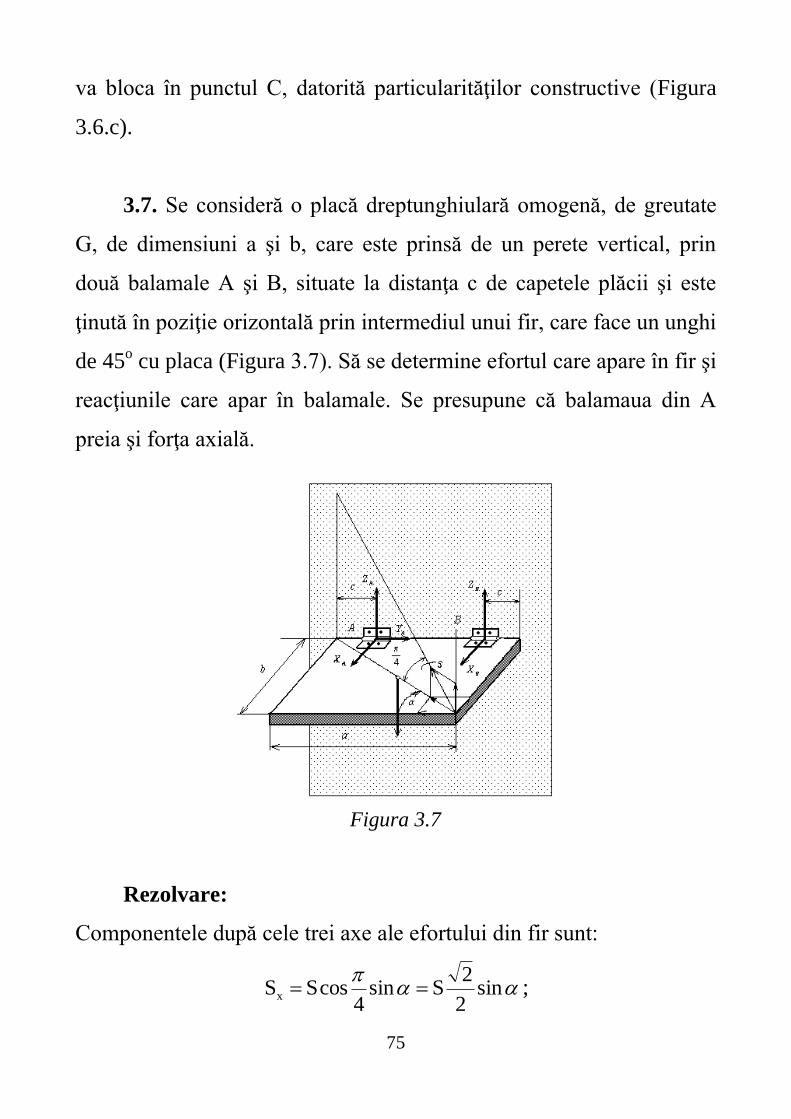
3.7. Se consideră o placă dreptunghiulară omogenă, de greutate
G, de dimensiuni a şi b, care este prinsă de un perete vertical, prin
două balamale A şi B, situate la distanţa c de capetele plăcii şi este
ţinută în poziţie orizontală prin intermediul unui fir, care face un unghi
de 45o cu placa (Figura 3.7). Să se determine efortul care apare în fir şi
reacţiunile care apar în balamale. Se presupune că balamaua din A
preia şi forţa axială.
Rezolvare:
Componentele după cele trei axe ale efortului din fir sunt:
sin2
2Ssin
4cosSSx ;
Figura 3.7
76
cos2
2Scos
4cosSSy ;
2
2S
4sinSSz
Se scriu ecuaţiile de echilibru:
00 xBA SXX;X
00 yA SY;Y
00 GSZZ;Z zBA
02
0 bSb
G;M z'OB
02
0 a
GcZ)ca(Z;M BAD'B
00 bYcX)ca(X;M ABA'DD
Se obţine un sistem de şase ecuaţii cu şase necunoscute, care oferă
tensiunea din fir şi reacţiunile în articulaţii.
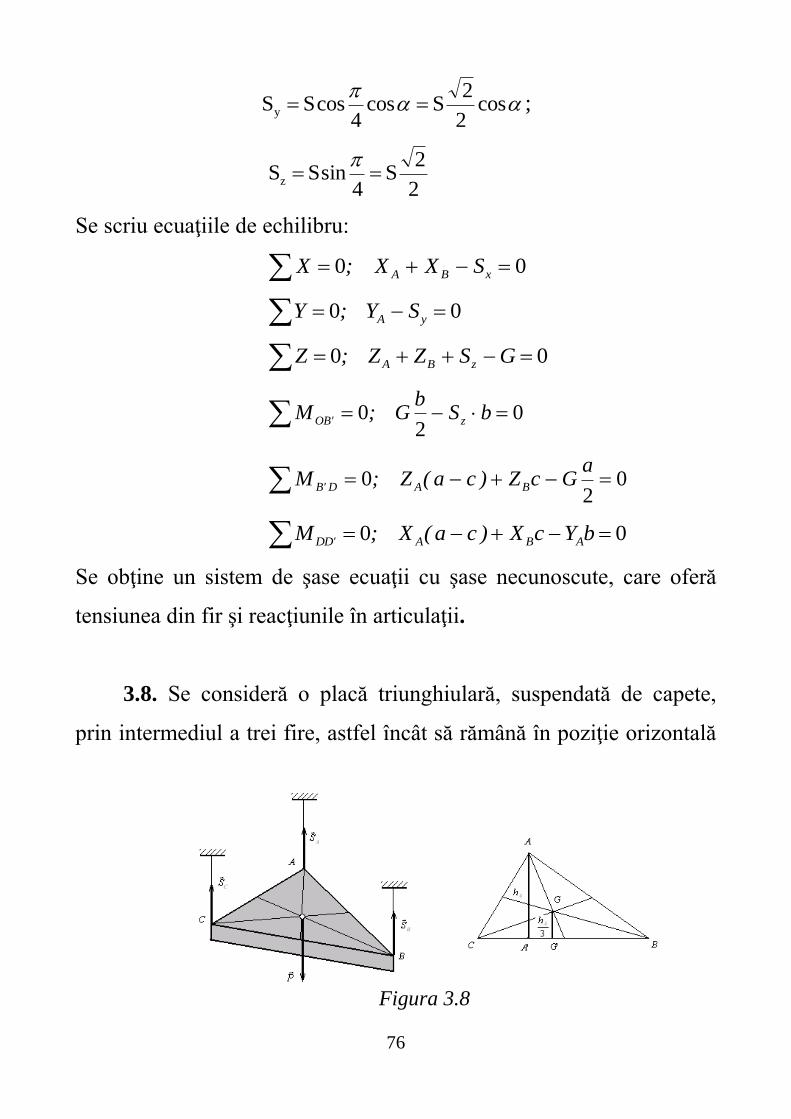
3.8. Se consideră o placă triunghiulară, suspendată de capete,
prin intermediul a trei fire, astfel încât să rămână în poziţie orizontală
Figura 3.8
77
(Figura 3.8). Să se determine tensiunile care solicită cele trei fire.
Rezolvare:
Cel mai convenabil este să se scrie ecuaţiile de momente faţă de cele
trei laturi ale triunghiului. Astfel, ecuaţia de momente faţă de latura
BC este:
00 'GGP'AAS;M ACB
de unde:
3
3 P
h
h
P'AA
'GGPS
A
A
A
În mod analog, scriindu-se ecuaţiile de momente faţă de celelalte două
laturi, se va obţine:
3
3 P
h
h
P'BB
'GGPS
A
A
B
3
3 P
h
h
P'CC
'GGPS
A
A
C
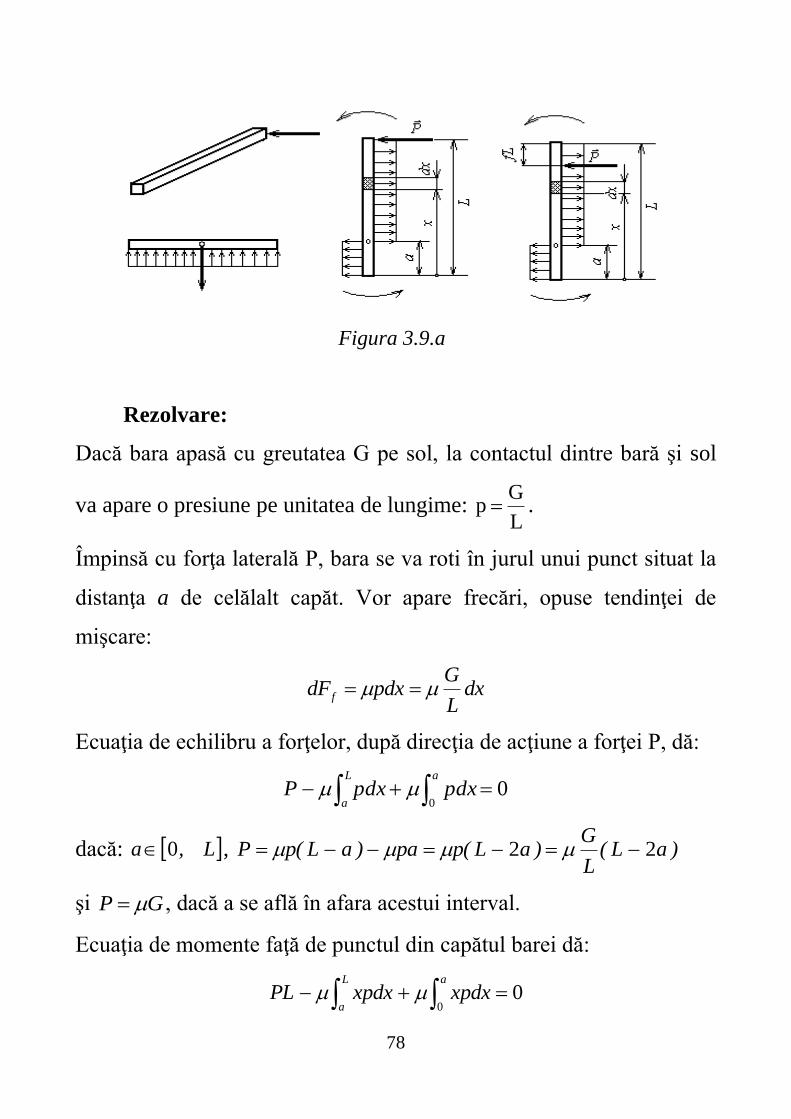
3.9. O bară omogenă de lungime L şi greutate G este împinsă, la
un capăt, cu o forţă P. Să se determine P, astfel încât bara să fie scoasă
din echilibru (Figura 3.9.a). Să se rezolve aceeaşi problemă în cazul
în care forţa nu mai acţionează la capăt, ci la distanţa f L de capăt.
78
Rezolvare:
Dacă bara apasă cu greutatea G pe sol, la contactul dintre bară şi sol
va apare o presiune pe unitatea de lungime: L
Gp .
Împinsă cu forţa laterală P, bara se va roti în jurul unui punct situat la
distanţa a de celălalt capăt. Vor apare frecări, opuse tendinţei de
mişcare:
dxL
GpdxdFf
Ecuaţia de echilibru a forţelor, după direcţia de acţiune a forţei P, dă:
00
aL
apdxpdxP
dacă: L,a 0 , )aL(L
G)aL(ppa)aL(pP 22
şi GP , dacă a se află în afara acestui interval.
Ecuaţia de momente faţă de punctul din capătul barei dă:
L
a
a
xpdxxpdxPL0
0
Figura 3.9.a
79
022
222
a
paL
pPL
Înlocuind pe P cu valoarea obţinută anterior, considerând că a se
găseşte între cele două capete ale barei, se obţine:
024 22 aaLL
de unde:
2
21
2
2
2
242 22
21 LLLLLL
a ,
semnificaţie fizică având soluţia cu minus, întrucât am presupus că a
se găseşte între capetele barei.
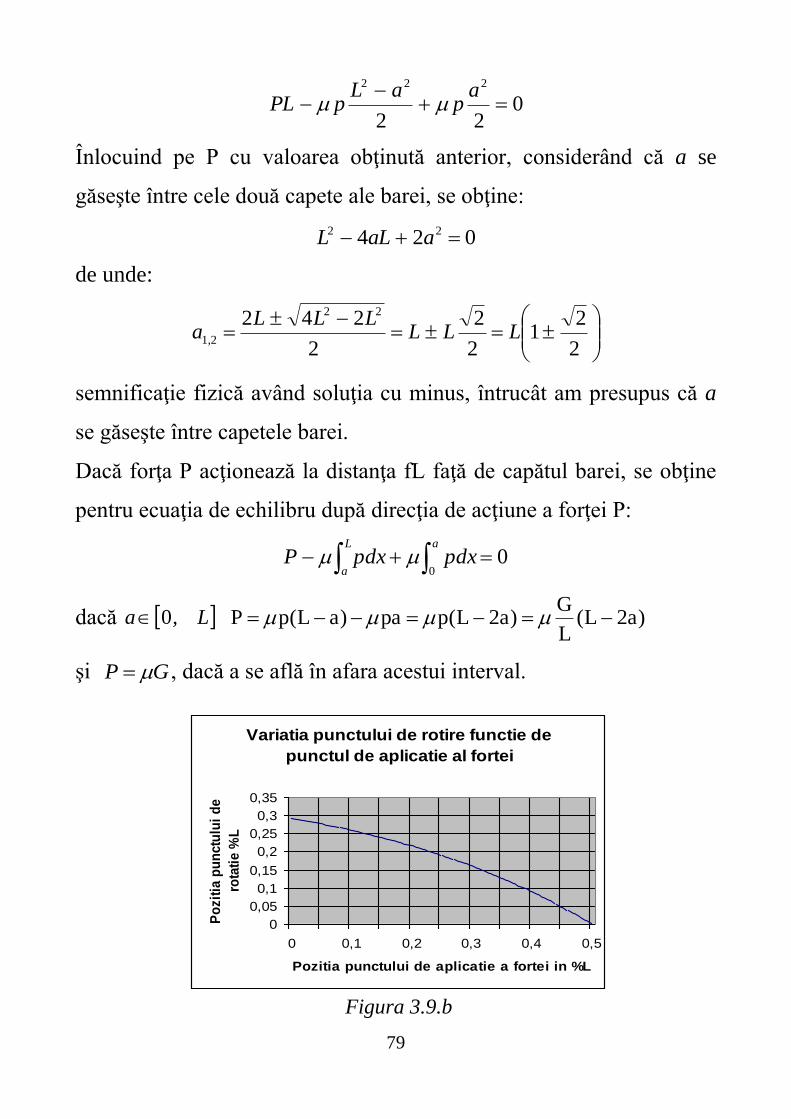
Dacă forţa P acţionează la distanţa fL faţă de capătul barei, se obţine
pentru ecuaţia de echilibru după direcţia de acţiune a forţei P:
00
aL
apdxpdxP
dacă L,a 0 )a2L(L
G)a2L(ppa)aL(pP
şi GP , dacă a se află în afara acestui interval.
Variatia punctului de rotire functie de
punctul de aplicatie al fortei
0
0,05
0,1
0,15
0,2
0,25
0,3
0,35
0 0,1 0,2 0,3 0,4 0,5
Pozitia punctului de aplicatie a fortei in %L
Po
zit
ia p
un
ctu
lui
de
rota
tie %
L
Figura 3.9.b

80
Ecuaţia de momente faţă de punctul din capătul barei dă:
L
a
a
xpdxxpdx)f(PL0
01
022
1222
a
paL
p)f(PL
Înlocuind pe P cu valoarea obţinută anterior se obţine:
02442 222 aafLaLfLL
de unde:
2
2111
2
421412
21
2222
21
)f(L)f(La
fLL)f(L)f(La
,
,
semnificaţie fizică având soluţia cu minus. Dacă f = 0,5, punctul de
rotire se obţine la capătul barei. De fapt, în acest caz, când P
acţionează la mijlocul barei, se poate verifica că orice punct aflat pe
axa barei şi situat în afara ei, poate fi punct de rotaţie, verificând
ecuaţiile de echilibru, deci în acest caz problema este nedeterminată.
3.10. Se consideră o bară omogenă, de secţiune constantă, de
lungime 2L şi greutate G, care se sprijină pe doi pereţi, ca în Figura
3.10.a. Să se determine cât de înclinată poate fi aşezată bara, astfel
încât să rămână în echilibru.
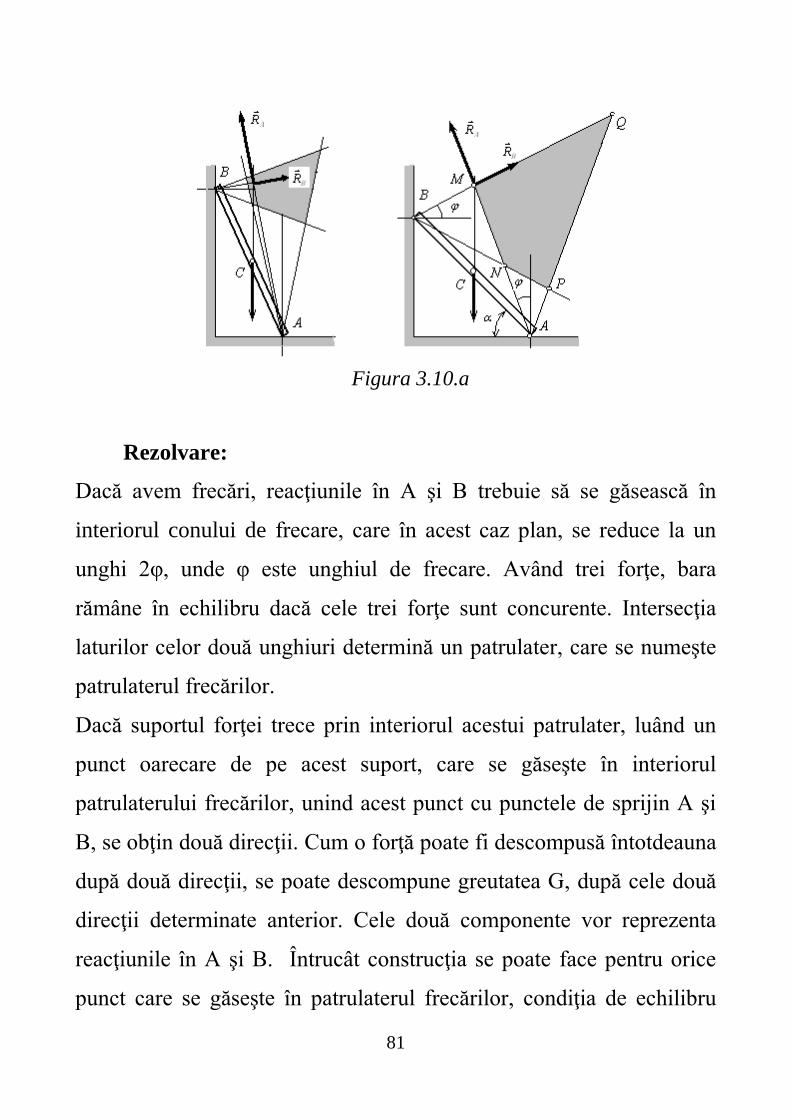
81
Rezolvare:
Dacă avem frecări, reacţiunile în A şi B trebuie să se găsească în
interiorul conului de frecare, care în acest caz plan, se reduce la un
unghi 2φ, unde φ este unghiul de frecare. Având trei forţe, bara
rămâne în echilibru dacă cele trei forţe sunt concurente. Intersecţia
laturilor celor două unghiuri determină un patrulater, care se numeşte
patrulaterul frecărilor.
Dacă suportul forţei trece prin interiorul acestui patrulater, luând un
punct oarecare de pe acest suport, care se găseşte în interiorul
patrulaterului frecărilor, unind acest punct cu punctele de sprijin A şi
B, se obţin două direcţii. Cum o forţă poate fi descompusă întotdeauna
după două direcţii, se poate descompune greutatea G, după cele două
direcţii determinate anterior. Cele două componente vor reprezenta
reacţiunile în A şi B. Întrucât construcţia se poate face pentru orice
punct care se găseşte în patrulaterul frecărilor, condiţia de echilibru
Figura 3.10.a
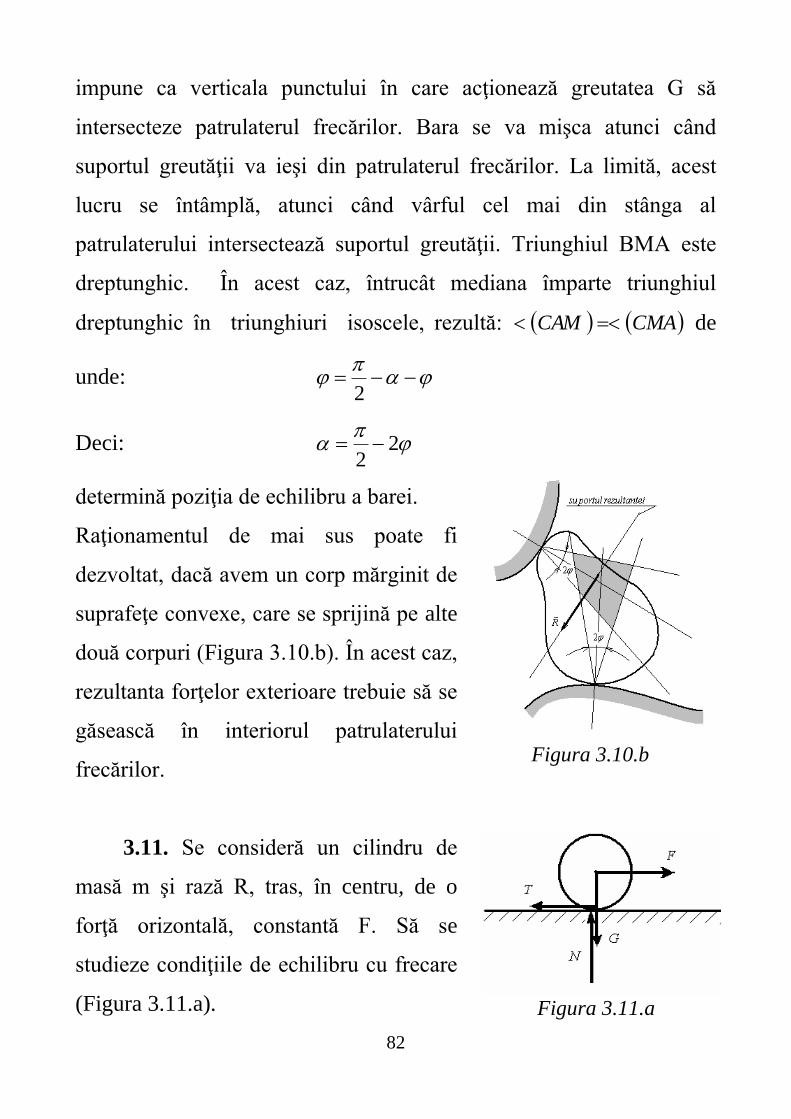
82
impune ca verticala punctului în care acţionează greutatea G să
intersecteze patrulaterul frecărilor. Bara se va mişca atunci când
suportul greutăţii va ieşi din patrulaterul frecărilor. La limită, acest
lucru se întâmplă, atunci când vârful cel mai din stânga al
patrulaterului intersectează suportul greutăţii. Triunghiul BMA este
dreptunghic. În acest caz, întrucât mediana împarte triunghiul
dreptunghic în triunghiuri isoscele, rezultă: CMACAM de
unde:
2
Deci:
22
determină poziţia de echilibru a barei.
Raţionamentul de mai sus poate fi
dezvoltat, dacă avem un corp mărginit de
suprafeţe convexe, care se sprijină pe alte
două corpuri (Figura 3.10.b). În acest caz,
rezultanta forţelor exterioare trebuie să se
găsească în interiorul patrulaterului
frecărilor.
3.11. Se consideră un cilindru de
masă m şi rază R, tras, în centru, de o
forţă orizontală, constantă F. Să se
studieze condiţiile de echilibru cu frecare
(Figura 3.11.a).
Figura 3.10.b
Figura 3.11.a

83
Rezolvare:
Ecuaţiile de echilibru vor fi:
0
0
0
rMRT
GN
TF
alături de condiţiile empirice: sGsNM;GNT r
Pot exista mai multe moduri de rupere a legăturii cu frecare:
a) În cazul în care avem rostogolire fără alunecare, ecuaţiile de
echilibru devin:
R
sGT
TF 0
,
de unde, prin adunare: GR
sF
GGR
sT
Rezultă condiţia de rostogolire fără alunecare, sub acţiunea unei forţe
motoare F:
R
s; G
R
sF
b) Rostogolire cu alunecare
În acest caz, la limită, GT , sGM r , iar ecuaţiile de echilibru
devin:
0
0
sGRF
GF

84
Rezultă: R
s; GF .
În general, egalitatea între cei doi coeficienţi de frecare se întâmplă
rar. Dacă este îndeplinită această condiţie, corpul se găseşte în
echilibru, cu tendinţa de mişcare de alunecare şi rostogolire în acelaşi
timp. Echilibrul se rupe, dacă există relaţiile:
GR
sF;GF
când corpul va avea o mişcare de alunecare şi rostogolire.
c) Alunecare fără rostogolire. Acest mod de mişcare este teoretic
posibil, dar mai rar întâlnit în practică. Legătura se rupe, permiţând
alunecarea cilindrului, dar nu şi rostogolirea lui.
Avem: GNT , sGM r , iar ecuaţiile de echilibru devin:
0
0
rMRF
GF
de unde: GF şi R
s .
În Figura 3.11.b sunt reprezentate zonele de echilibru ale cilindrului
tras pe plan orizontal.
Figura 3. 11.b
85
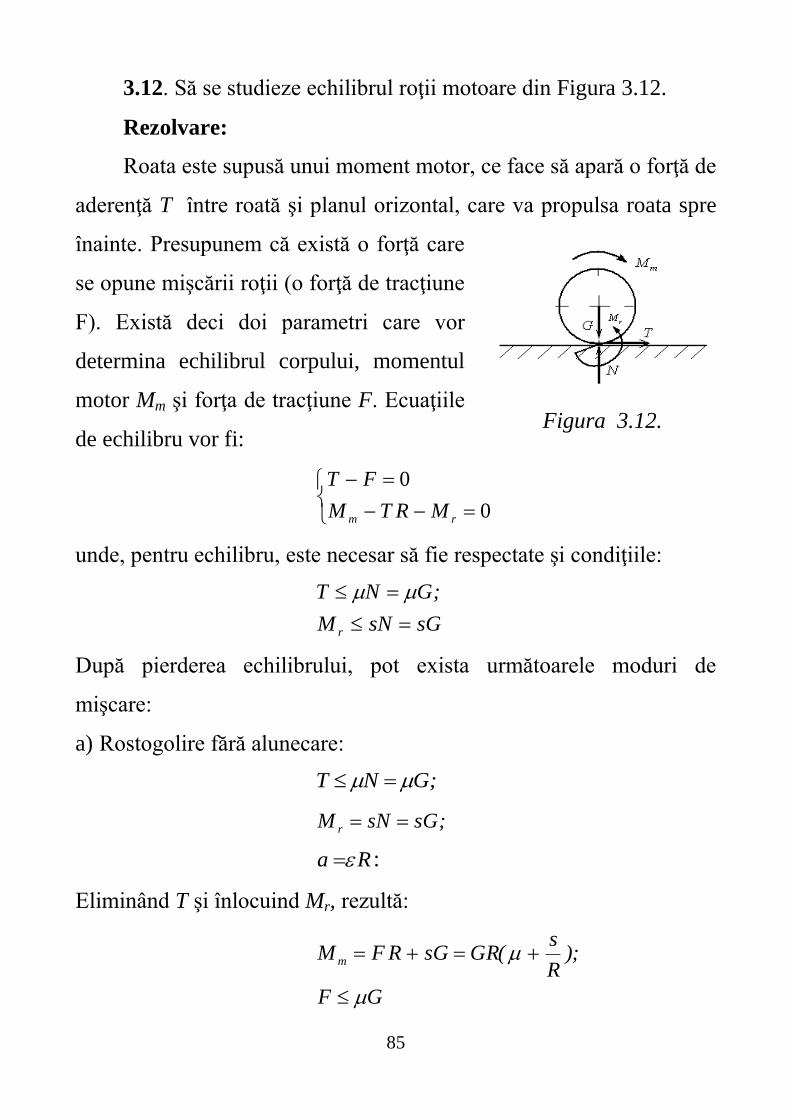
3.12. Să se studieze echilibrul roţii motoare din Figura 3.12.
Rezolvare:
Roata este supusă unui moment motor, ce face să apară o forţă de
aderenţă T între roată şi planul orizontal, care va propulsa roata spre
înainte. Presupunem că există o forţă care
se opune mişcării roţii (o forţă de tracţiune
F). Există deci doi parametri care vor
determina echilibrul corpului, momentul
motor Mm şi forţa de tracţiune F. Ecuaţiile
de echilibru vor fi:
0
0
rm MRTM
FT
unde, pentru echilibru, este necesar să fie respectate şi condiţiile:
sGsNM
;GNT
r
După pierderea echilibrului, pot exista următoarele moduri de
mişcare:
a) Rostogolire fără alunecare:
;GNT
;sGsNM r
Ra :
Eliminând T şi înlocuind Mr, rezultă:
GF
);R
s(GRsGRFMm
Figura 3.12.

86
Condiţia de rostogolire fără alunecare este îndeplinită, dacă se măreşte
masa corpului care se rostogoleşte, pe un drum dat, a cărui aderenţă
este definită de coeficientul de frecare la alunecare şi la rostogolire.
b) Rostogolire cu alunecare:
;GT
;sGsNM r
În acest caz aderenţa este ruptă, forţa T devine egală cu forţa limită de
frecare GT (şi indiferent de valoarea momentului nu poate depăşi
această valoare), iar ecuaţiile de echilibru dau:
GF ;
)R
s(GRsGRGM m .
Acest caz reprezintă o situaţie cu totul particulară, în care sunt
condiţionate ca valoare, atât forţa F cât şi momentul Mm.
c) alunecare fără rostogolire:
;GNT
;sGsNM r
Rezultă:
GF ;
)R
s(GRM m
87
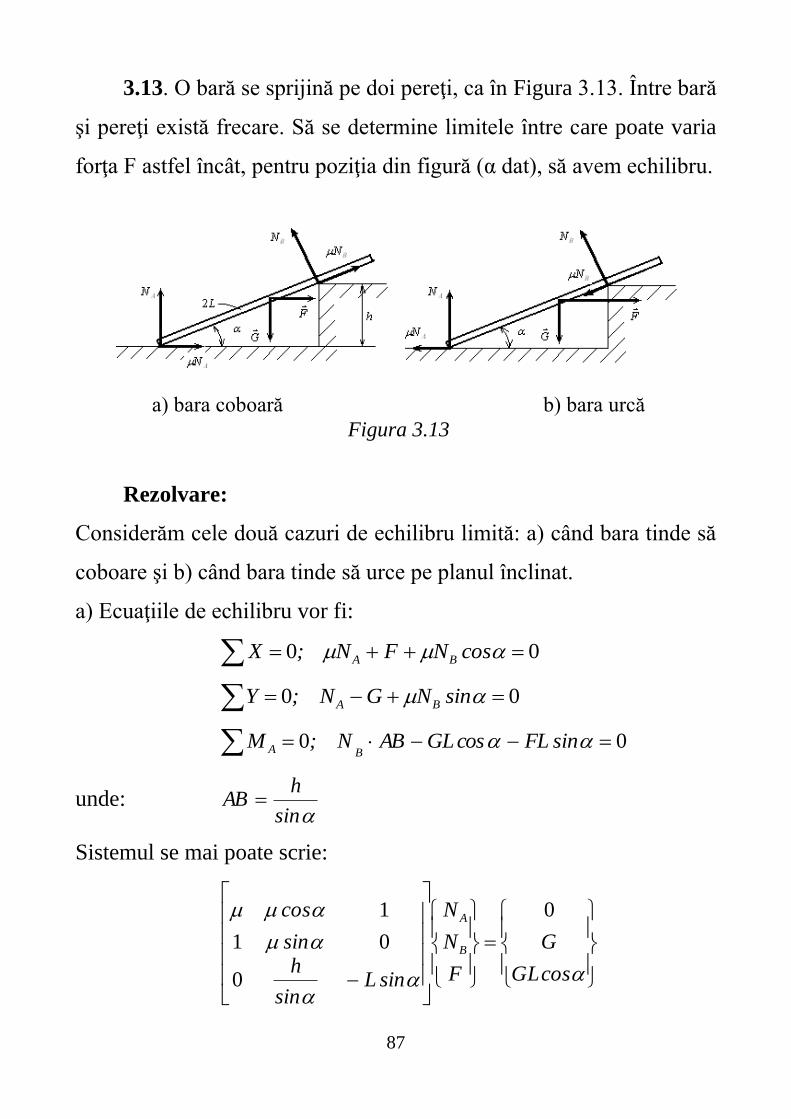
3.13. O bară se sprijină pe doi pereţi, ca în Figura 3.13. Între bară
şi pereţi există frecare. Să se determine limitele între care poate varia
forţa F astfel încât, pentru poziţia din figură (α dat), să avem echilibru.
Rezolvare:
Considerăm cele două cazuri de echilibru limită: a) când bara tinde să
coboare şi b) când bara tinde să urce pe planul înclinat.
a) Ecuaţiile de echilibru vor fi:
00 cosNFN;X BA
00 sinNGN;Y BA
00 sinFLcosGLABN;MBA
unde: sin
hAB
Sistemul se mai poate scrie:
cosGL
G
F
N
N
sinLsin
hsin
cos
B
A 0
0
01
1
a) bara coboară b) bara urcă
Figura 3.13
88
Rezultă:
cosGL
G
sinLsin
hsin
cos
F
N
N
B
A 0
0
01
1
1
de unde:
sin
hcossincossinL
GFF min
2
cu:
cossinLsin
hsinL 2
b) La coborâre, ecuaţiile de echilibru vor fi:
00 cosNFN;X BA
00 sinNGN;Y BA
00 sinFLcosGLABN;MBA
cu soluţia:
sin
hcossincossinL
GFF max
2
cu:
cossinLsin
hsinL 2
Echilibrul există atâta timp cât forţa F îndeplineşte condiţiile:
maxmin FFF
3.14. O bară de lungime 2L se sprijină pe doi pereţi înclinaţi, ca în
Figura 3.14.a. Să se determine poziţia de echilibru a barei (unghiul θ),
în două cazuri:
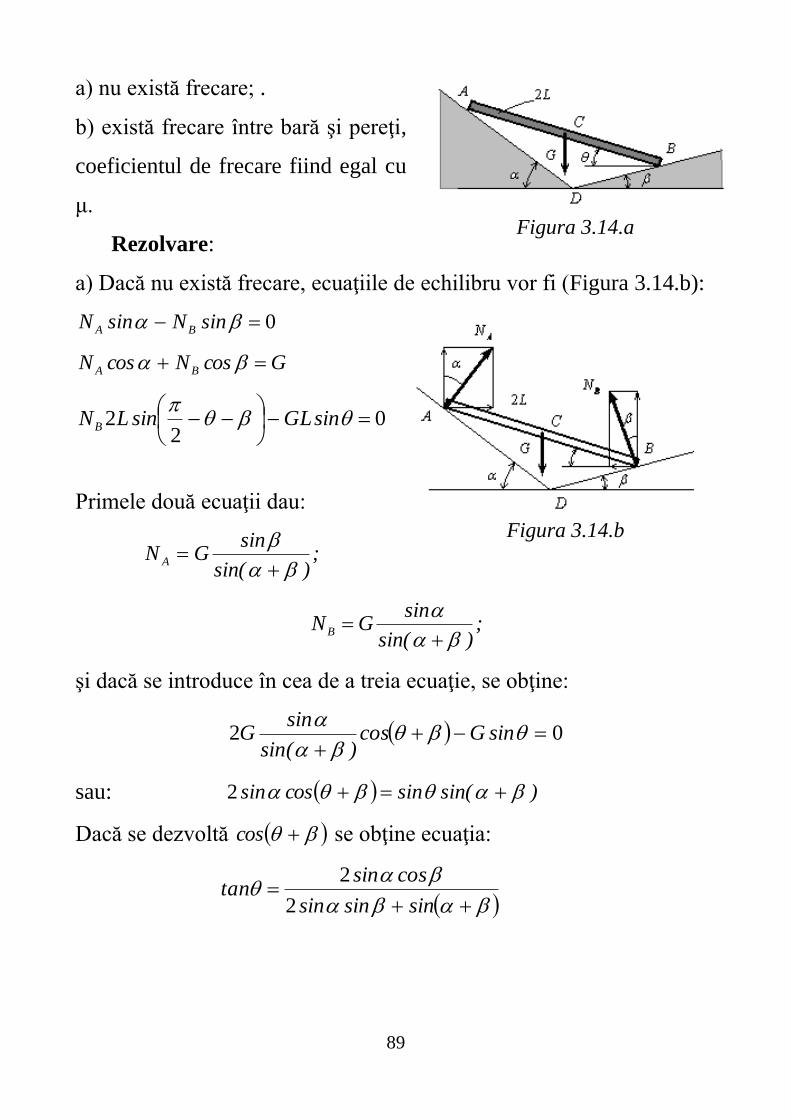
89
a) nu există frecare; .
b) există frecare între bară şi pereţi,
coeficientul de frecare fiind egal cu
μ.
Rezolvare:
a) Dacă nu există frecare, ecuaţiile de echilibru vor fi (Figura 3.14.b):
0 sinNsinN BA
GcosNcosN BA
02
2
sinGLsinLNB
Primele două ecuaţii dau:
;)sin(
sinGN A
;)sin(
sinGNB
şi dacă se introduce în cea de a treia ecuaţie, se obţine:
02
sinGcos
)sin(
sinG
sau: )sin(sincossin 2
Dacă se dezvoltă cos se obţine ecuaţia:
sinsinsin
cossintan
2
2
Figura 3.14.a
Figura 3.14.b
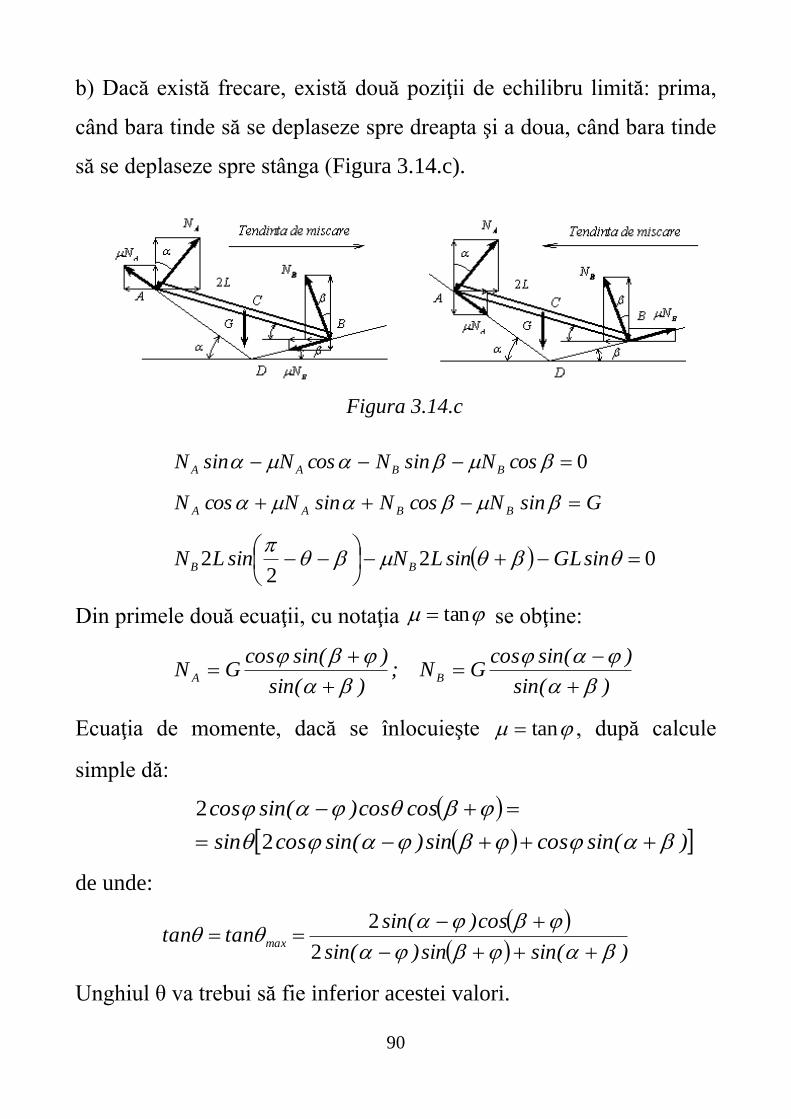
90
b) Dacă există frecare, există două poziţii de echilibru limită: prima,
când bara tinde să se deplaseze spre dreapta şi a doua, când bara tinde
să se deplaseze spre stânga (Figura 3.14.c).
0 cosNsinNcosNsinN BBAA
GsinNcosNsinNcosN BBAA
022
2
sinGLsinLNsinLN BB
Din primele două ecuaţii, cu notaţia tan se obţine:
)sin(
)sin(cosGN;
)sin(
)sin(cosGN BA
Ecuaţia de momente, dacă se înlocuieşte tan , după calcule
simple dă:
)sin(cossin)sin(cossin
coscos)sin(cos
2
2
de unde:
)sin(sin)sin(
cos)sin(tantan max
2
2
Unghiul θ va trebui să fie inferior acestei valori.
Figura 3.14.c

91
În cazul în care se consideră a doua situaţie de echilibru limită,
ecuaţiile de echilibru sunt:
0 cosNsinNcosNsinN BBAA
GsinNcosNsinNcosN BBAA
022
2
sinGLsinLNsinLN BB
cu soluţia:
)sin(sin)sin(
cos)sin(tantan min
2
2
Unghiul θ va trebui să fie superior acestei valori. Rezultă:
maxmin tantantan
3.15. O bară omogenă, de greutate G şi de lungime egală cu 2L, se
sprijină într-un plan vertical, pe suprafaţa interioară a unui cilindru.
Figura 3.15

92
Coeficientul de frecare, dintre bară şi pereţi, este egal cu μ. Să se
determine poziţia de echilibru a barei (unghiul θ între verticală şi
perpendiculara din centrul cercului pe bară).
Rezolvare:
Ecuaţiile de echilibru vor fi:
;0X
0 )sin(N)cos(N)sin(N)cos(N BBAA ;
;Y 0
;G)cos(N)sin(N)cos(N)sin(N BBAA
00 sinsinGRRNRN;MBAO .
Din primele două ecuaţii rezultă:
0 )cos(N)cos(N BA
cosG)sin(N)sin(N BA
Cu soluţia: ;sin
)cos(cosGN A
2
;sin
)cos(cosGNB
2
Introducând în ecuaţia de momente, se obţine:
sinsinGR)cos()cos(
sin
cosRG
2;
Rezultă, după simplificări: sinsin)cos(sin 2
Dacă se dezvoltă )cos( , se obţine soluţia:
22 sinsin
cossintan
.
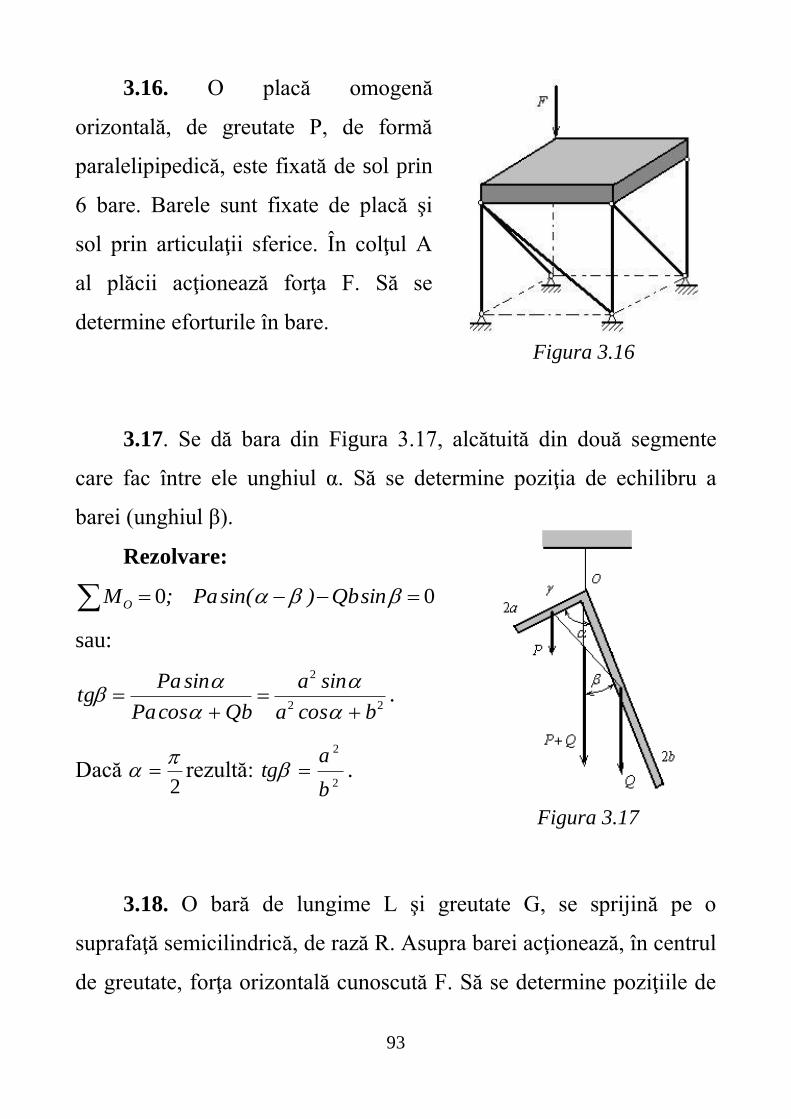
93
3.16. O placă omogenă
orizontală, de greutate P, de formă
paralelipipedică, este fixată de sol prin
6 bare. Barele sunt fixate de placă şi
sol prin articulaţii sferice. În colţul A
al plăcii acţionează forţa F. Să se
determine eforturile în bare.
3.17. Se dă bara din Figura 3.17, alcătuită din două segmente
care fac între ele unghiul α. Să se determine poziţia de echilibru a
barei (unghiul β).
Rezolvare:
00 sinQb)sin(Pa;MO
sau:
22
2
bcosa
sina
QbcosPa
sinPatg
.
Dacă 2
rezultă:
2
2
b
atg .
3.18. O bară de lungime L şi greutate G, se sprijină pe o
suprafaţă semicilindrică, de rază R. Asupra barei acţionează, în centrul
de greutate, forţa orizontală cunoscută F. Să se determine poziţiile de
Figura 3.16
Figura 3.17
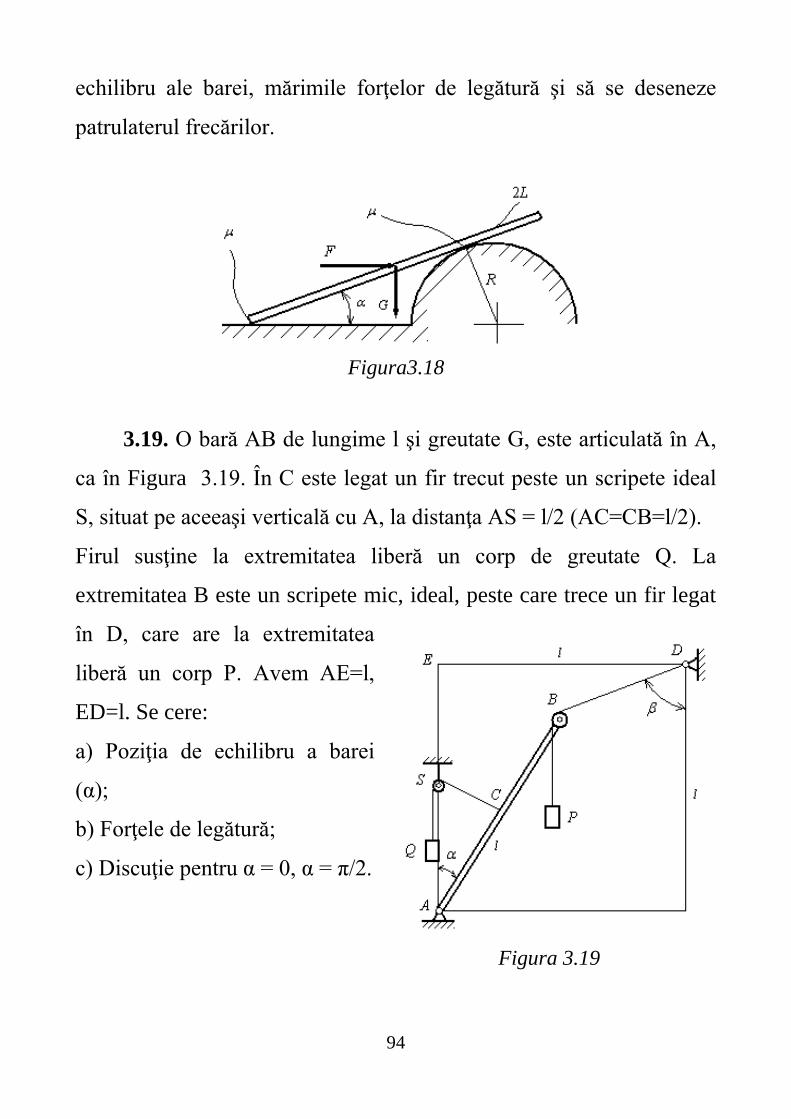
94
echilibru ale barei, mărimile forţelor de legătură şi să se deseneze
patrulaterul frecărilor.
3.19. O bară AB de lungime l şi greutate G, este articulată în A,
ca în Figura 3.19. În C este legat un fir trecut peste un scripete ideal
S, situat pe aceeaşi verticală cu A, la distanţa AS = l/2 (AC=CB=l/2).
Firul susţine la extremitatea liberă un corp de greutate Q. La
extremitatea B este un scripete mic, ideal, peste care trece un fir legat
în D, care are la extremitatea
liberă un corp P. Avem AE=l,
ED=l. Se cere:
a) Poziţia de echilibru a barei
(α);
b) Forţele de legătură;
c) Discuţie pentru α = 0, α = π/2.
Figura3.18
Figura 3.19
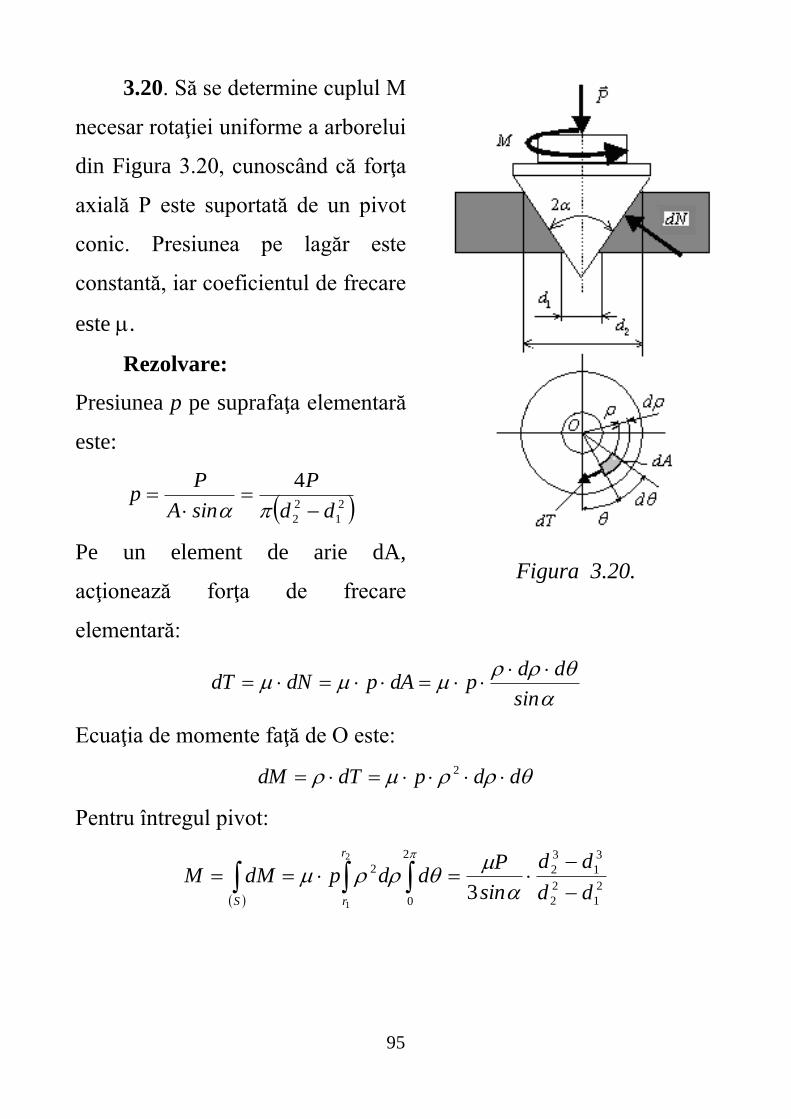
95
3.20. Să se determine cuplul M
necesar rotaţiei uniforme a arborelui
din Figura 3.20, cunoscând că forţa
axială P este suportată de un pivot
conic. Presiunea pe lagăr este
constantă, iar coeficientul de frecare
este .
Rezolvare:
Presiunea p pe suprafaţa elementară
este:
2
1
2
2
4
dd
P
sinA
Pp
Pe un element de arie dA,
acţionează forţa de frecare
elementară:
sin
ddpdApdNdT
Ecuaţia de momente faţă de O este:
ddpdTdM 2
Pentru întregul pivot:
2
1
2
2
3
1
3
2
2
0
2
3
2
1dd
dd
sin
PddpdMM
r
rS
Figura 3.20.
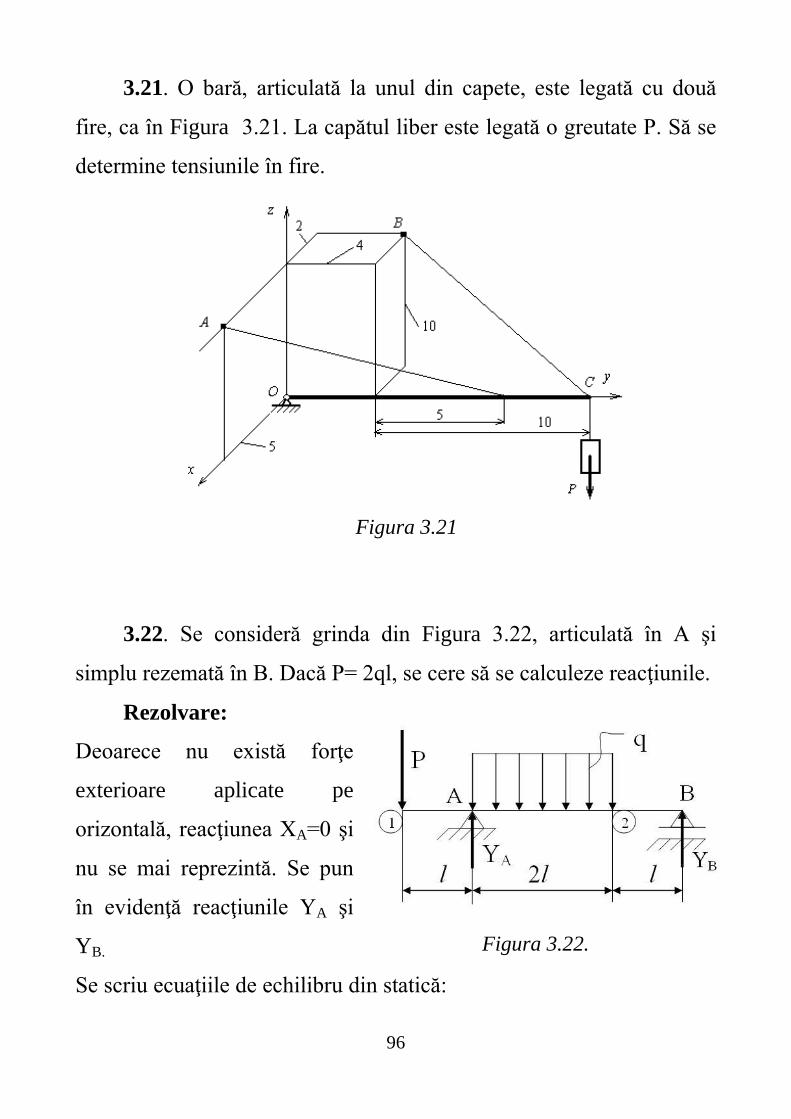
96
Figura 3.22.
3.21. O bară, articulată la unul din capete, este legată cu două
fire, ca în Figura 3.21. La capătul liber este legată o greutate P. Să se
determine tensiunile în fire.
3.22. Se consideră grinda din Figura 3.22, articulată în A şi
simplu rezemată în B. Dacă P= 2ql, se cere să se calculeze reacţiunile.
Rezolvare:
Deoarece nu există forţe
exterioare aplicate pe
orizontală, reacţiunea XA=0 şi
nu se mai reprezintă. Se pun
în evidenţă reacţiunile YA şi
YB.
Se scriu ecuaţiile de echilibru din statică:
Figura 3.21
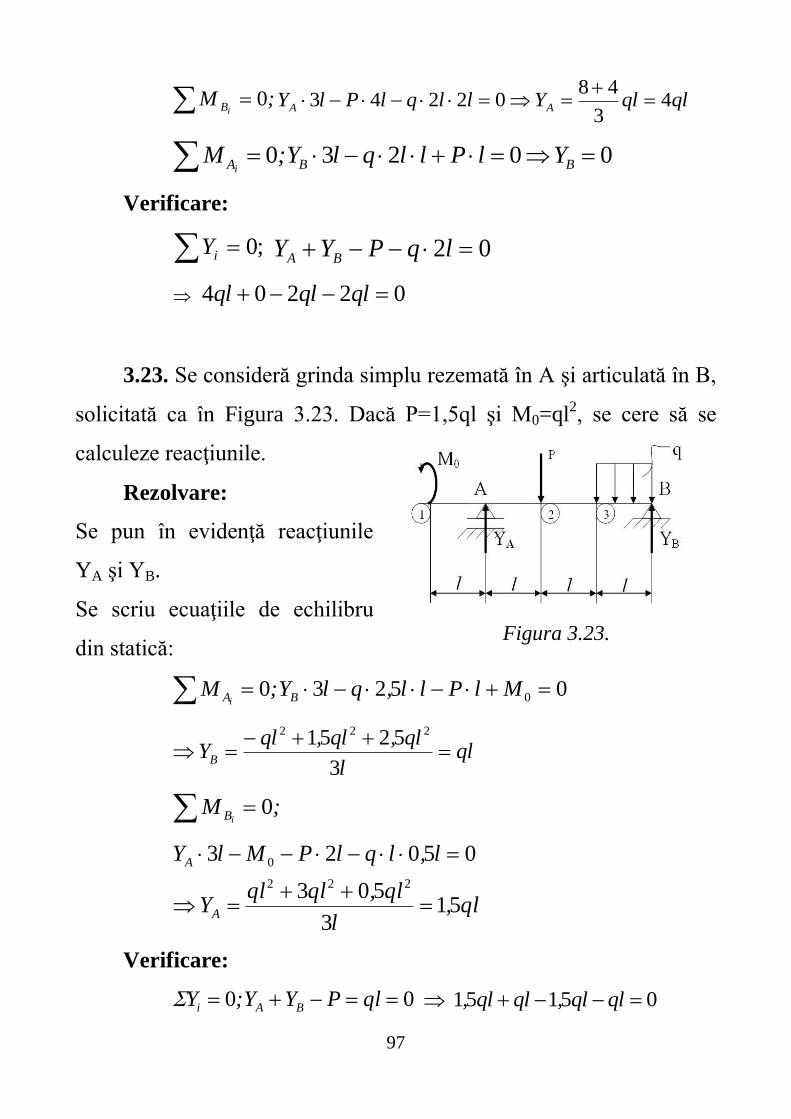
97
Figura 3.23.
;MiB 0 qlqlYllqlPlY AA 4
3
4802243
00230 BBA YlPllqlY;Mi
Verificare:
;0iY 02 lqPYY BA
02204 qlqlql
3.23. Se consideră grinda simplu rezemată în A şi articulată în B,
solicitată ca în Figura 3.23. Dacă P=1,5ql şi M0=ql2, se cere să se
calculeze reacţiunile.
Rezolvare:
Se pun în evidenţă reacţiunile
YA şi YB.
Se scriu ecuaţiile de echilibru
din statică:
05230 0 MlPll,qlY;M BAi
qll
ql,ql,qlYB
3
5251 222
;MiB 0
ql,l
ql,qlqlY
l,lqlPMlY
A
A
513
503
05023
222
0
Verificare:
00 qlPYY;Y BAi 05151 qlql,qlql,
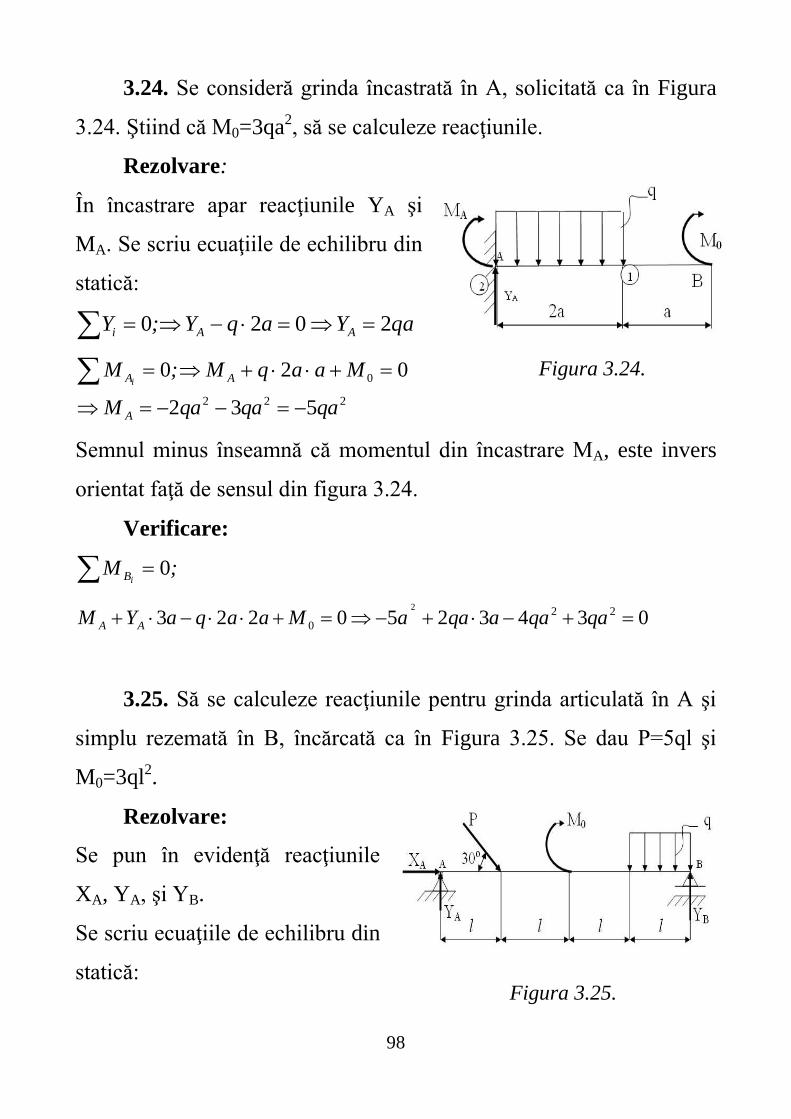
98
Figura 3.24.
Figura 3.25.
3.24. Se consideră grinda încastrată în A, solicitată ca în Figura
3.24. Ştiind că M0=3qa2, să se calculeze reacţiunile.
Rezolvare:
În încastrare apar reacţiunile YA şi
MA. Se scriu ecuaţiile de echilibru din
statică:
qaYaqY;Y AAi 2020
222
0
532
020
qaqaqaM
MaaqM;M
A
AAi
Semnul minus înseamnă că momentul din încastrare MA, este invers
orientat faţă de sensul din figura 3.24.
Verificare:
;MiB 0
0343250223 22
0
2
qaqaaqaaMaaqaYM AA
3.25. Să se calculeze reacţiunile pentru grinda articulată în A şi
simplu rezemată în B, încărcată ca în Figura 3.25. Se dau P=5ql şi
M0=3ql2.
Rezolvare:
Se pun în evidenţă reacţiunile
XA, YA, şi YB.
Se scriu ecuaţiile de echilibru din
statică:
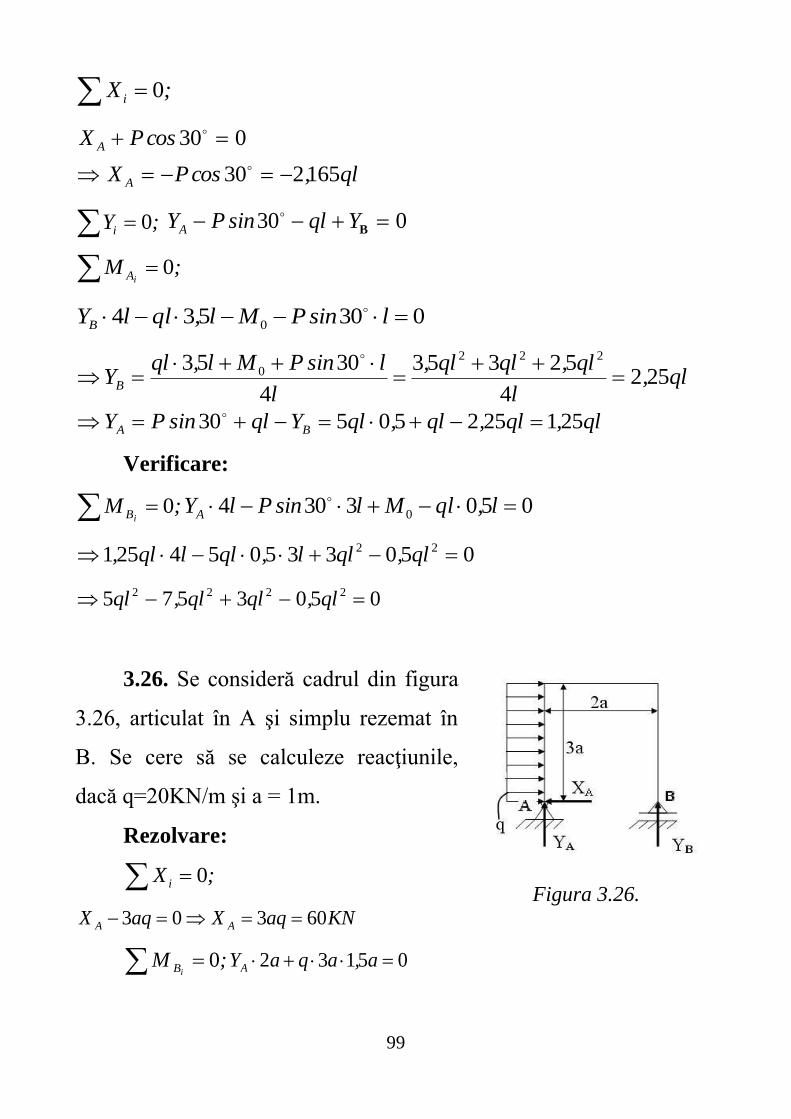
99
Figura 3.26.
;X i 0
ql,cosPX
cosPX
A
A
165230
030
;Yi 0 030 BYqlsinPYA
;MiA 0
030534 0 lsinPMl,qllYB
ql,l
ql,qlql,
l
lsinPMl,qlYB 252
4
52353
4
3053 222
0
ql,ql,ql,qlYqlsinPY BA 25125250530
Verificare:
;MiB 0 0503304 0 l,qlMlsinPlYA
050335054251 22 ql,qll,qllql,
0503575 2222 ql,qlql,ql
3.26. Se consideră cadrul din figura
3.26, articulat în A şi simplu rezemat în
B. Se cere să se calculeze reacţiunile,
dacă q=20KN/m şi a = 1m.
Rezolvare:
;X i 0
KNaqXaqX AA 60303
;MiB 0 05132 a,aqaYA

100
Figura 3.27
KNqa,qa,
YA 452522
54
Verificare:
;Yi 0 045450 BA YY
3.27. Să se calculeze reacţiunile pentru grinda cotită plană din
Figura 3.27, încastrată în B şi solicitată de o sarcină distribuită liniar,
o forţă concentrată P= 2aq şi un moment
concentrat M0= 3a2q.
Rezolvare:
Se pun în evidenţă reacţiunile din
încastrare XB, YB, şi MB.
Se scriu ecuaţiile de echilibru din
statică:
;X i 0 aqXaqX BB 022
1
;Yi 0 aqPYPY BB 20
;MiA 0 0
3
22
2
10 AMaaqaPM
qaqaqaqaaqaPMM A
22222
03
1
3
223
3
2
Verificare:
;MiA 0 02
3
22
2
12 0 aaqMMaXaY ABB
03
43
3
122 22222 qaqaqaqaqa
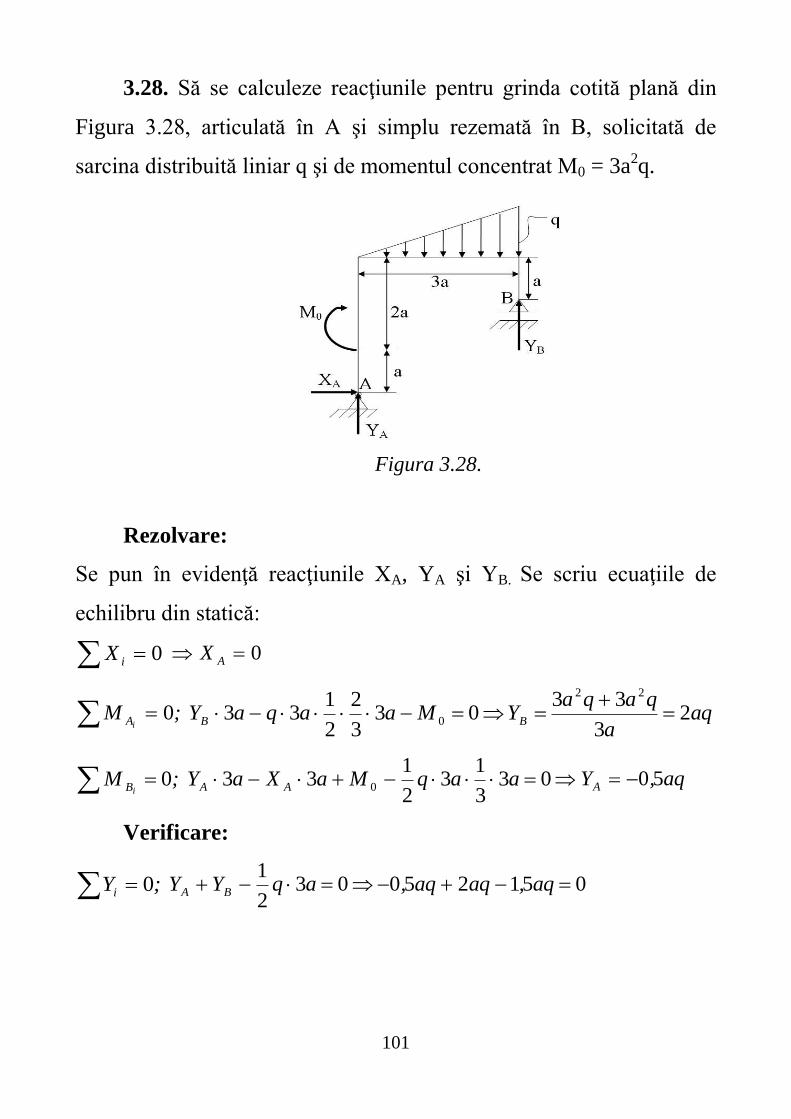
101
Figura 3.28.
3.28. Să se calculeze reacţiunile pentru grinda cotită plană din
Figura 3.28, articulată în A şi simplu rezemată în B, solicitată de
sarcina distribuită liniar q şi de momentul concentrat M0 = 3a2q.
Rezolvare:
Se pun în evidenţă reacţiunile XA, YA şi YB. Se scriu ecuaţiile de
echilibru din statică:
0iX 0 AX
;MiA 0 aq
a
qaqaYMaaqaY BB 2
3
3303
3
2
2
133
22
0
;MiB 0 03
3
13
2
133 0 aaqMaXaY AA
aq,YA 50
Verificare:
;Yi 0 051250032
1 aq,aqaq,aqYY BA
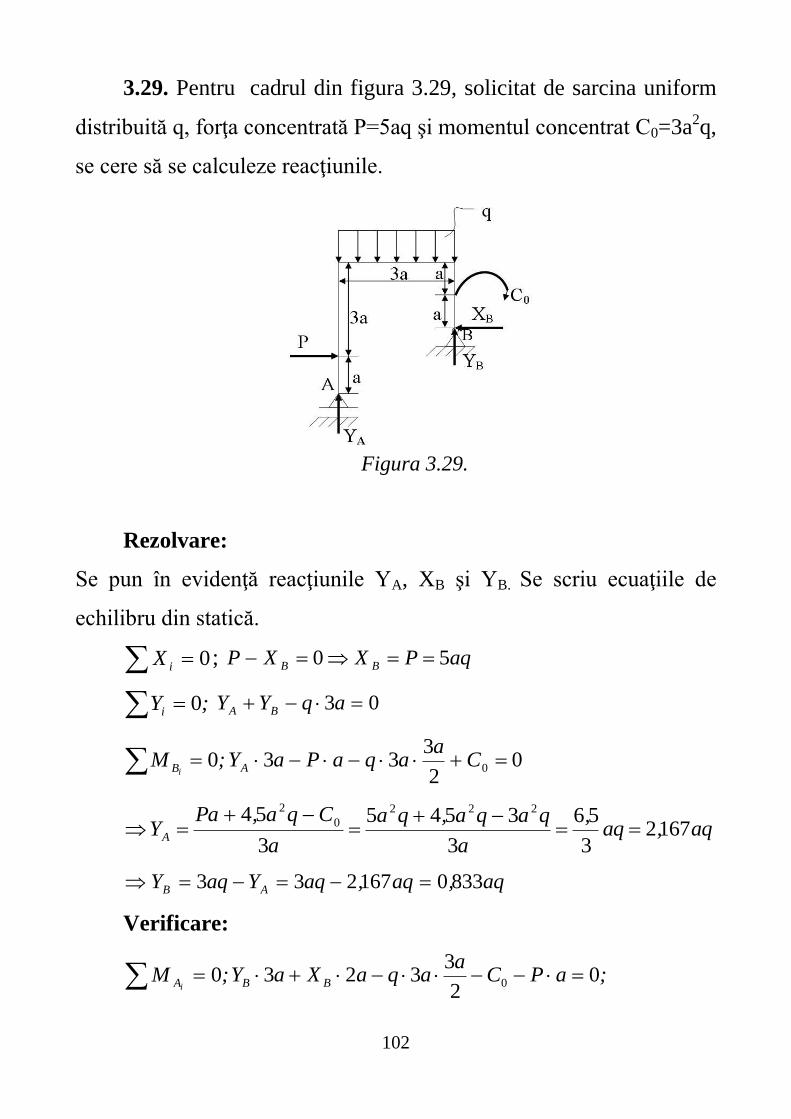
102
Figura 3.29.
3.29. Pentru cadrul din figura 3.29, solicitat de sarcina uniform
distribuită q, forţa concentrată P=5aq şi momentul concentrat C0=3a2q,
se cere să se calculeze reacţiunile.
Rezolvare:
Se pun în evidenţă reacţiunile YA, XB şi YB. Se scriu ecuaţiile de
echilibru din statică.
0iX ; aqPXXP BB 50
;Yi 0 03 aqYY BA
;MiB 0 0
2
333 0 C
aaqaPaYA
aq,aq,
a
qaqa,qa
a
Cqa,PaYA 1672
3
56
3
3545
3
54 222
0
2
aq,aq,aqYaqY AB 8330167233
Verificare:
;MiA 0 ;aPC
aaqaXaY BB 0
2
3323 0
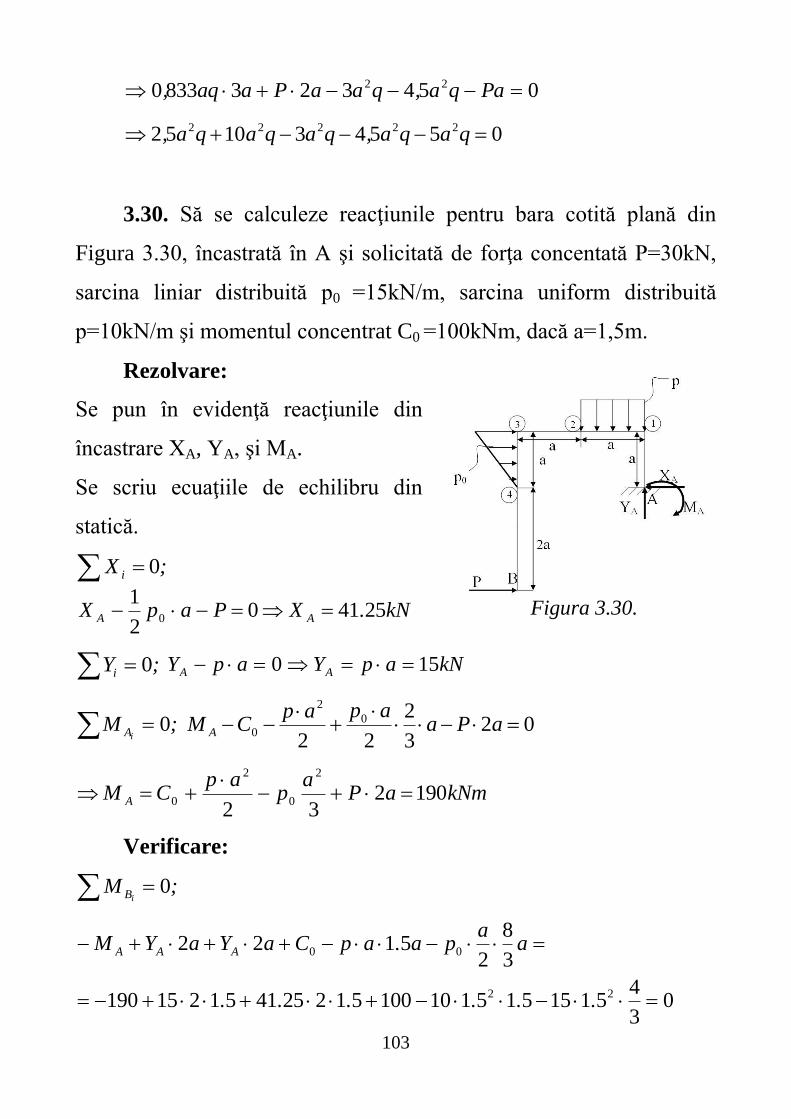
103
Figura 3.30.
0543238330 22 Paqa,qaaPaaq,
055431052 22222 qaqa,qaqaqa,
3.30. Să se calculeze reacţiunile pentru bara cotită plană din
Figura 3.30, încastrată în A şi solicitată de forţa concentată P=30kN,
sarcina liniar distribuită p0 =15kN/m, sarcina uniform distribuită
p=10kN/m şi momentul concentrat C0 =100kNm, dacă a=1,5m.
Rezolvare:
Se pun în evidenţă reacţiunile din
încastrare XA, YA, şi MA.
Se scriu ecuaţiile de echilibru din
statică.
;X i 0
kN.XPapX AA 254102
10
;Yi 0 kNapYapY AA 150
;MiA 0 02
3
2
22
0
2
0
aPaapap
CM A
kNmaPa
pap
CM A 190232
2
0
2
0
Verificare:
;MiB 0
03
45115515110100512254151215190
3
8
25122
22
00
......
aa
pa.apCaYaYM AAA
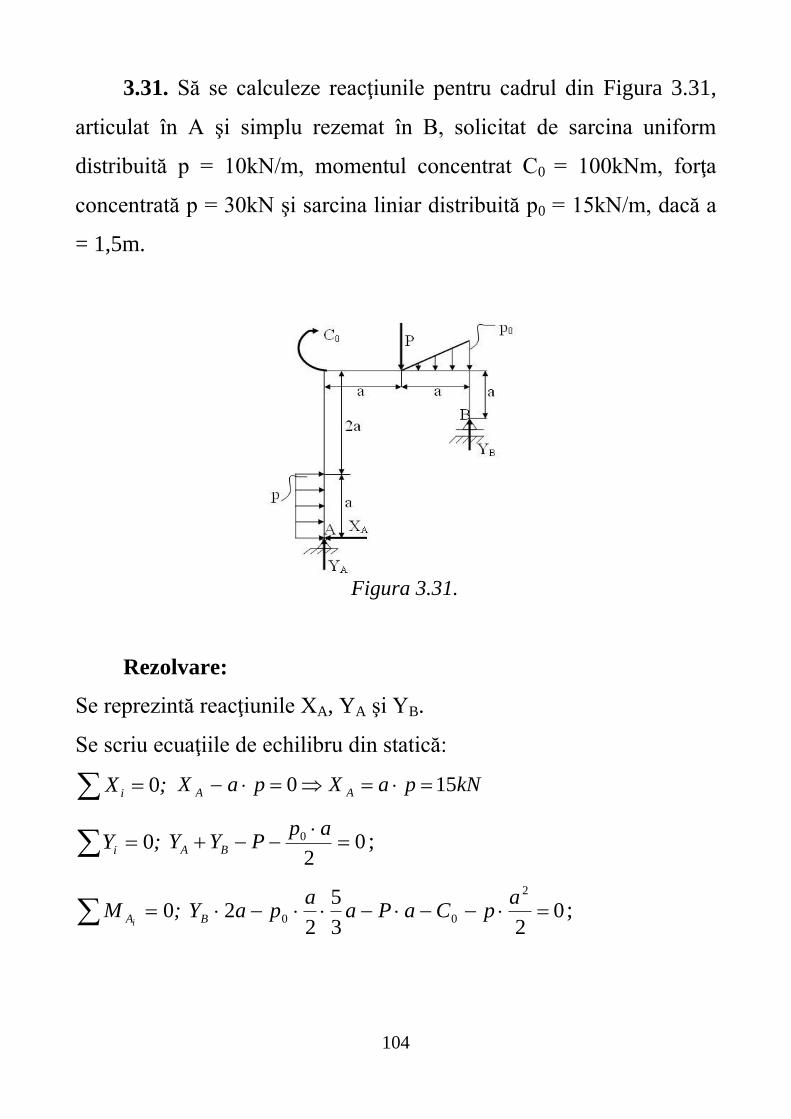
104
Figura 3.31.
3.31. Să se calculeze reacţiunile pentru cadrul din Figura 3.31,
articulat în A şi simplu rezemat în B, solicitat de sarcina uniform
distribuită p = 10kN/m, momentul concentrat C0 = 100kNm, forţa
concentrată p = 30kN şi sarcina liniar distribuită p0 = 15kN/m, dacă a
= 1,5m.
Rezolvare:
Se reprezintă reacţiunile XA, YA şi YB.
Se scriu ecuaţiile de echilibru din statică:
;X i 0 kNpaXpaX AA 150
;Yi 0 02
0
ap
PYY BA ;
;MiA 0 0
23
5
22
2
00 a
pCaPaa
paYB ;
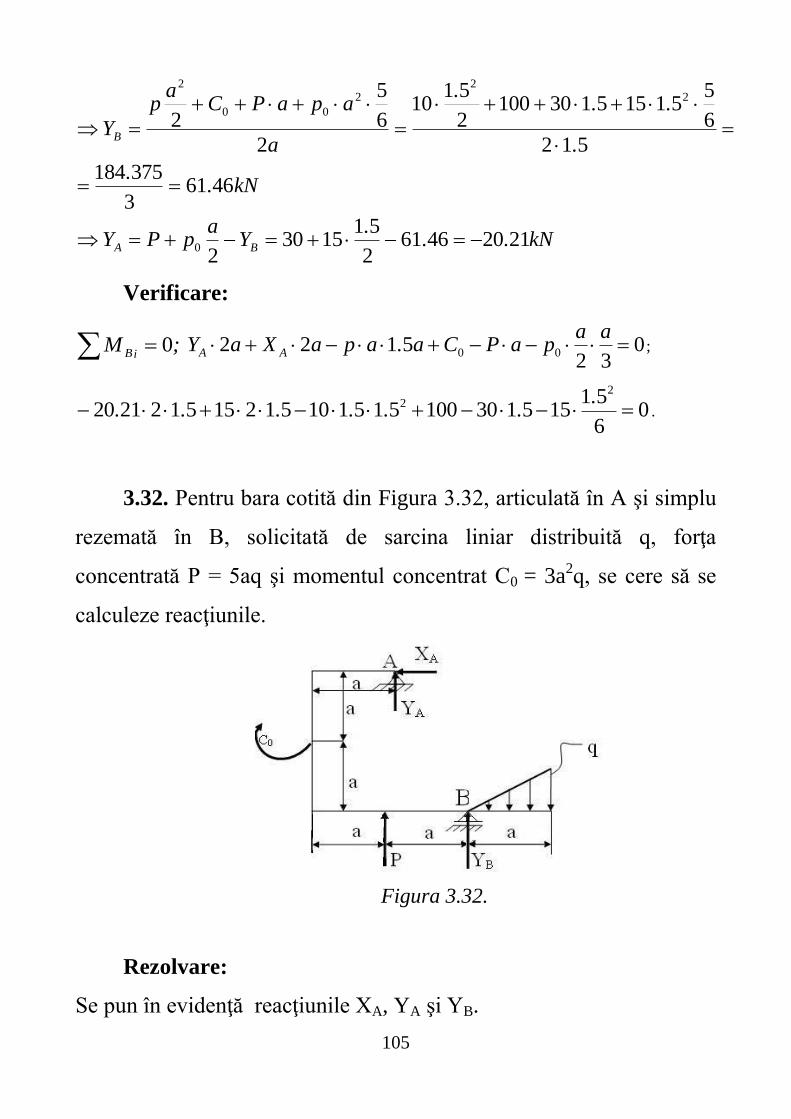
105
Figura 3.32.
kN..
.
...
a
apaPCa
p
YB
46613
375184
512
6
551155130100
2
5110
2
6
5
2
22
2
00
2
kN...
Ya
pPY BA 212046612
511530
20
Verificare:
;MiB 0 0
325122 00
aapaPCa.apaXaY AA ;
06
51155130100515110512155122120
22
....... .
3.32. Pentru bara cotită din Figura 3.32, articulată în A şi simplu
rezemată în B, solicitată de sarcina liniar distribuită q, forţa
concentrată P = 5aq şi momentul concentrat C0 = 3a2q, se cere să se
calculeze reacţiunile.
Rezolvare:
Se pun în evidenţă reacţiunile XA, YA şi YB.
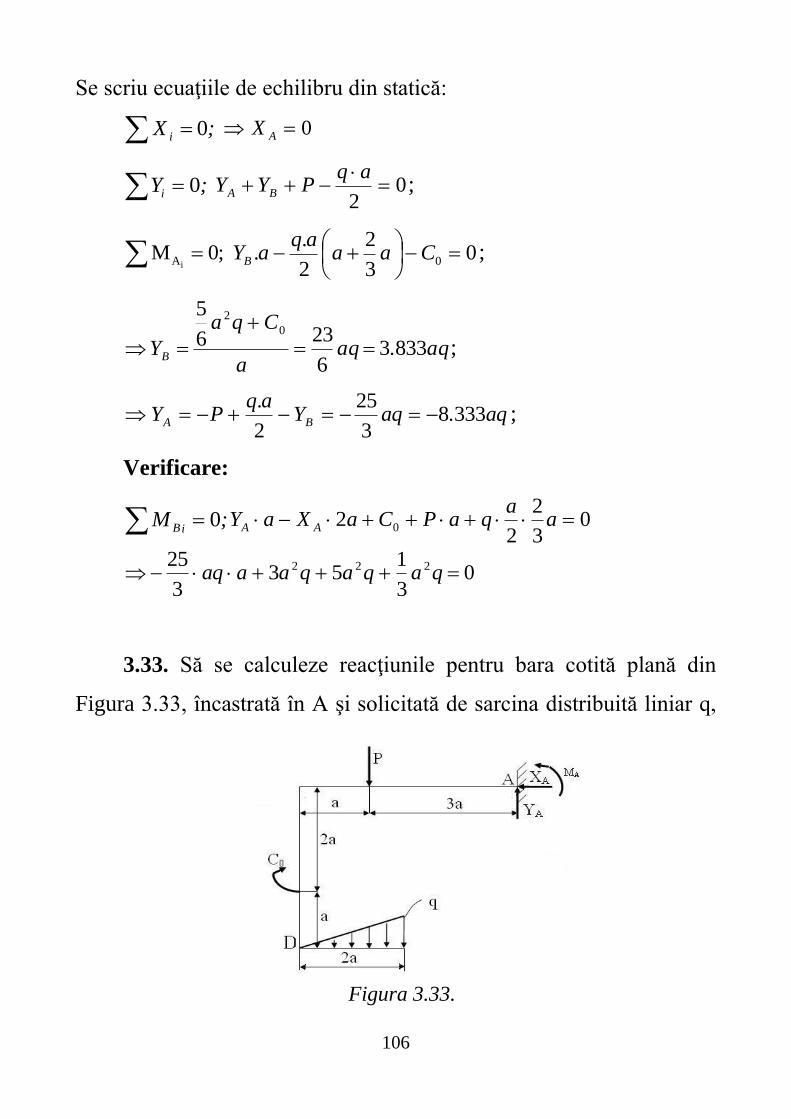
106
Figura 3.33.
Se scriu ecuaţiile de echilibru din statică:
;X i 0 0 AX
;Yi 0 02
aq
PYY BA ;
;0MiA 0
3
2
20
Caa
a.qa.YB
;
aq.aqa
Cqa
YB 83336
236
50
2
;
aq.aqYa.q
PY BA 33383
25
2 ;
Verificare:
;MiB 0 0
3
2
22 0 a
aqaPCaXaY AA
03
153
3
25 222 qaqaqaaaq
3.33. Să se calculeze reacţiunile pentru bara cotită plană din
Figura 3.33, încastrată în A şi solicitată de sarcina distribuită liniar q,

107
momentul concentrat C0 = 3a2q şi forţa concentrată P = 5aq.
Rezolvare:
Se pun în evidenţă reacţiunile XA, YA şi MA.
Se scriu ecuaţiile de echilibru din statică:
;X i 0 0 AX ;
;Yi 0 aqqaPYa
qPY AA 602
2 ;
;MiA 0 032
3
12
2
20
AMaPCaa
aq ;
qa.qaapCa
aqM A
22
0 67143
443
3
8
Verificare:
;MiD 0 ;a
aqCaPaYM AA 02
3
2
2
24 0
03
43524
3
44 22222 qaqaqaqaqa
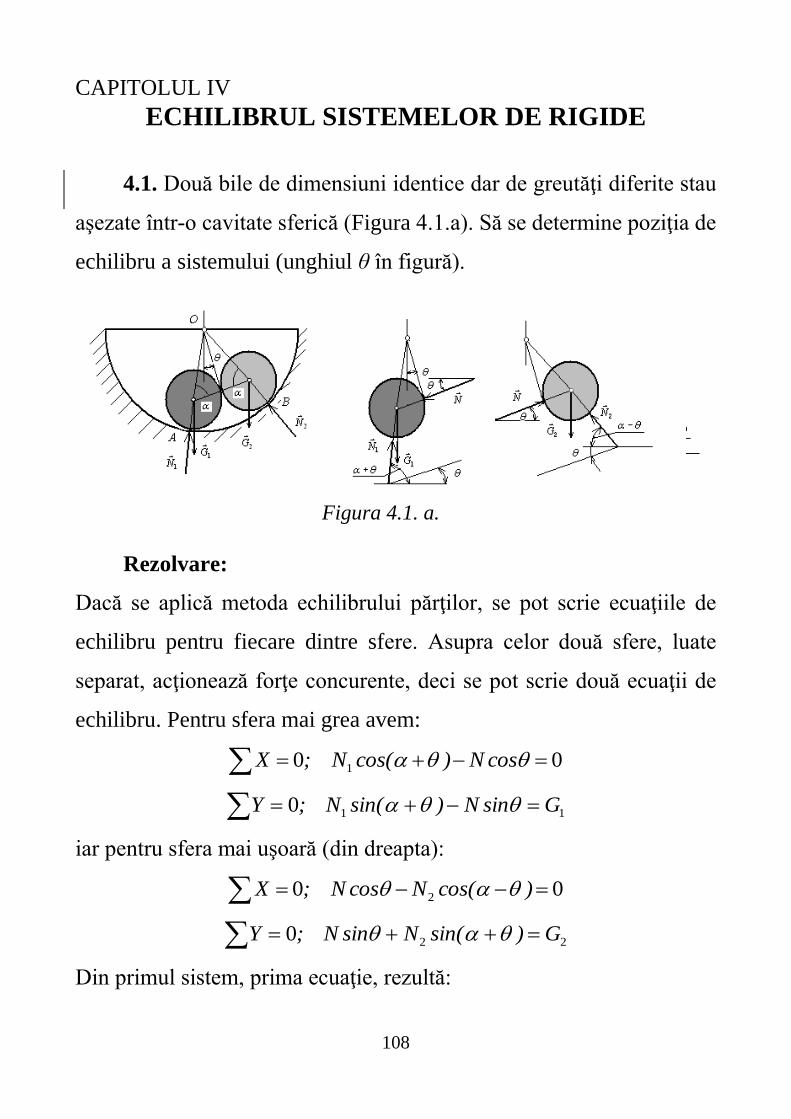
108
CAPITOLUL IV
ECHILIBRUL SISTEMELOR DE RIGIDE
4.1. Două bile de dimensiuni identice dar de greutăţi diferite stau
aşezate într-o cavitate sferică (Figura 4.1.a). Să se determine poziţia de
echilibru a sistemului (unghiul θ în figură).
Rezolvare:
Dacă se aplică metoda echilibrului părţilor, se pot scrie ecuaţiile de
echilibru pentru fiecare dintre sfere. Asupra celor două sfere, luate
separat, acţionează forţe concurente, deci se pot scrie două ecuaţii de
echilibru. Pentru sfera mai grea avem:
00 1 cosN)cos(N;X
110 GsinN)sin(N;Y
iar pentru sfera mai uşoară (din dreapta):
00 2 )cos(NcosN;X
220 G)sin(NsinN;Y
Din primul sistem, prima ecuaţie, rezultă:
Fig. 4.1.a
Fig.4.1.a.
Figura 4.1. a.
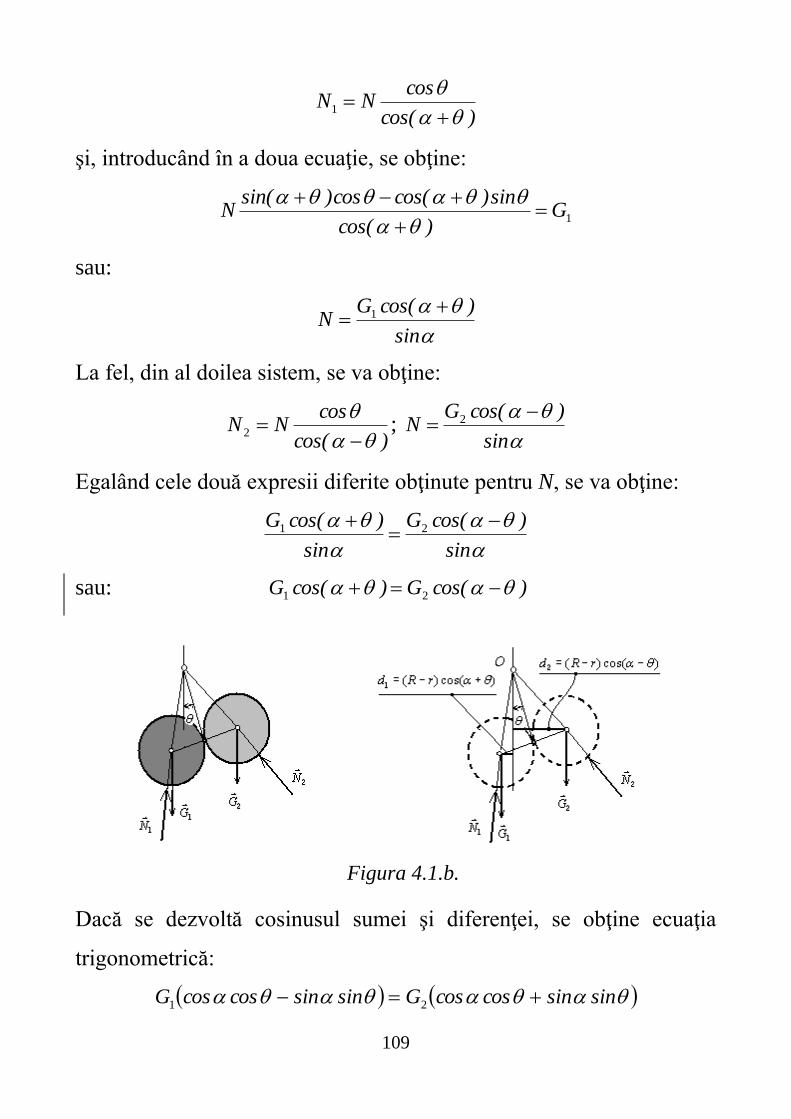
109
)cos(
cosNN
1
şi, introducând în a doua ecuaţie, se obţine:
1G)cos(
sin)cos(cos)sin(N
sau:
sin
)cos(GN
1
La fel, din al doilea sistem, se va obţine:
)cos(
cosNN
2 ;
sin
)cos(GN
2
Egalând cele două expresii diferite obţinute pentru N, se va obţine:
sin
)cos(G
sin
)cos(G
21
sau: )cos(G)cos(G 21
Dacă se dezvoltă cosinusul sumei şi diferenţei, se obţine ecuaţia
trigonometrică:
sinsincoscosGsinsincoscosG 21
Figura 4.1.b.
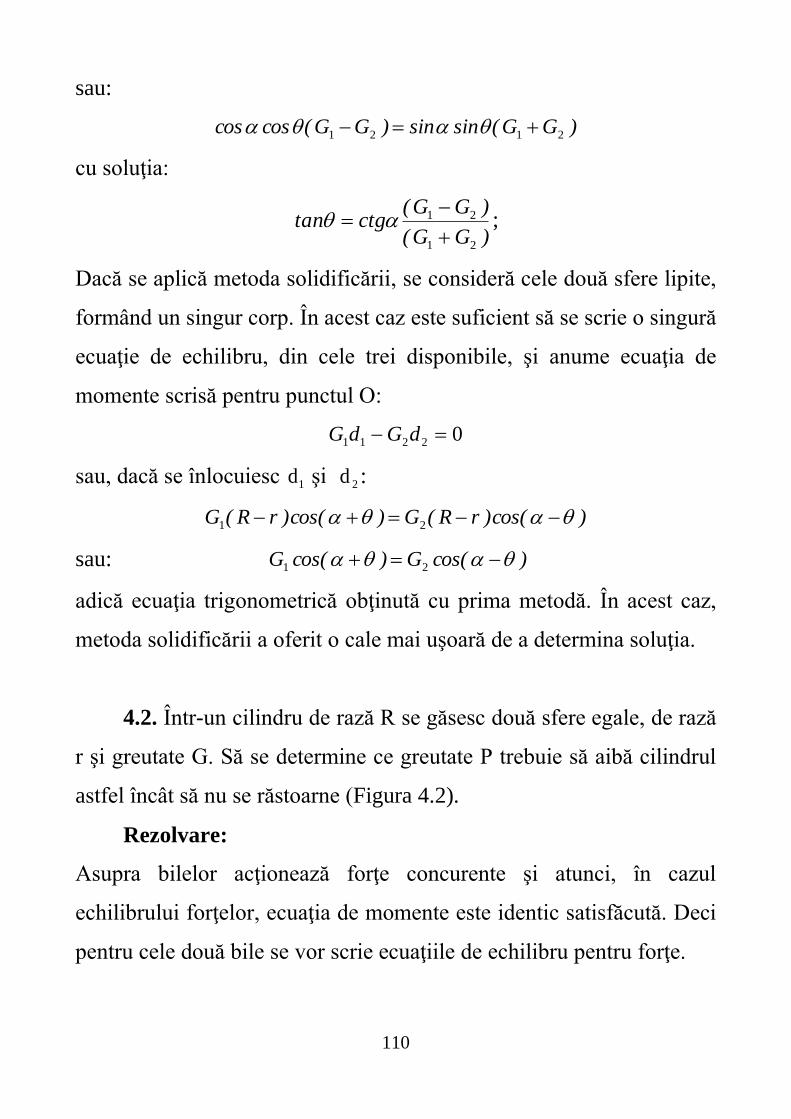
110
sau:
)GG(sinsin)GG(coscos 2121
cu soluţia:
)GG(
)GG(ctgtan
21
21
;
Dacă se aplică metoda solidificării, se consideră cele două sfere lipite,
formând un singur corp. În acest caz este suficient să se scrie o singură
ecuaţie de echilibru, din cele trei disponibile, şi anume ecuaţia de
momente scrisă pentru punctul O:
02211 dGdG
sau, dacă se înlocuiesc 1d şi 2d :
)cos()rR(G)cos()rR(G 21
sau: )cos(G)cos(G 21
adică ecuaţia trigonometrică obţinută cu prima metodă. În acest caz,
metoda solidificării a oferit o cale mai uşoară de a determina soluţia.
4.2. Într-un cilindru de rază R se găsesc două sfere egale, de rază
r şi greutate G. Să se determine ce greutate P trebuie să aibă cilindrul
astfel încât să nu se răstoarne (Figura 4.2).
Rezolvare:
Asupra bilelor acţionează forţe concurente şi atunci, în cazul
echilibrului forţelor, ecuaţia de momente este identic satisfăcută. Deci
pentru cele două bile se vor scrie ecuaţiile de echilibru pentru forţe.
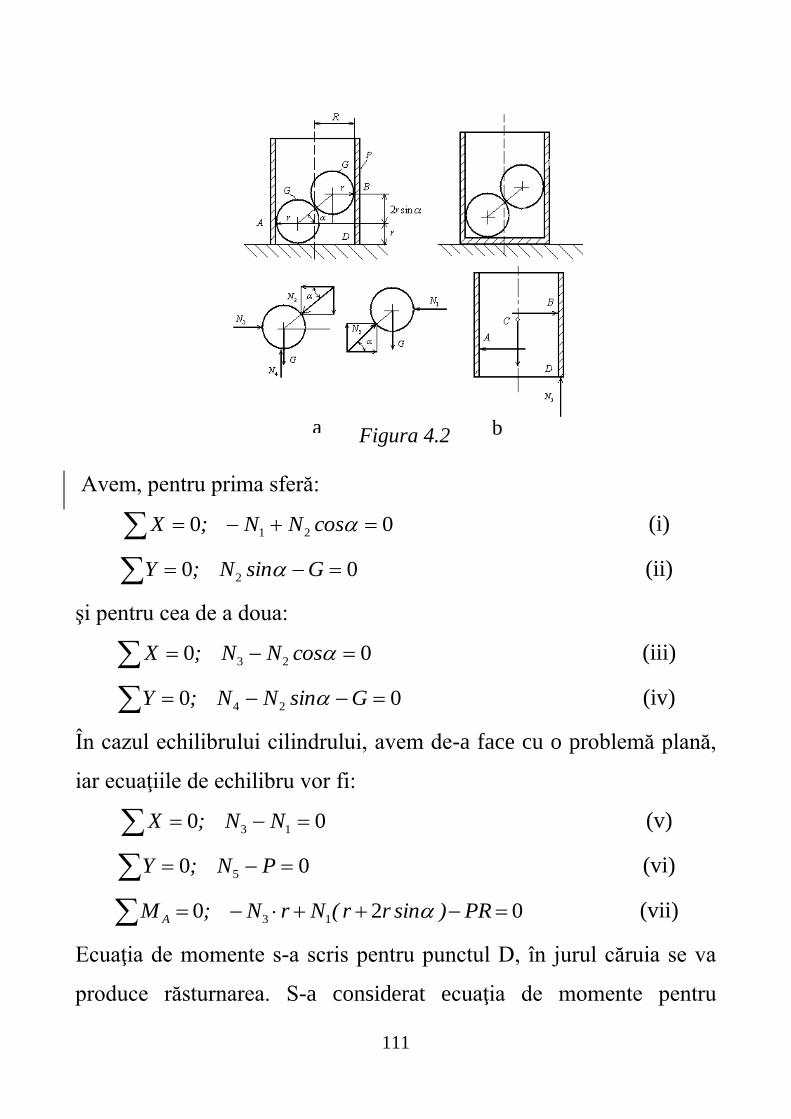
111
Avem, pentru prima sferă:
00 21 cosNN;X (i)
00 2 GsinN;Y (ii)
şi pentru cea de a doua:
00 23 cosNN;X (iii)
00 24 GsinNN;Y (iv)
În cazul echilibrului cilindrului, avem de-a face cu o problemă plană,
iar ecuaţiile de echilibru vor fi:
00 13 NN;X (v)
00 5 PN;Y (vi)
020 13 PR)sinrr(NrN;M A (vii)
Ecuaţia de momente s-a scris pentru punctul D, în jurul căruia se va
produce răsturnarea. S-a considerat ecuaţia de momente pentru
Figura 4.2 a
b

112
echilibru limită, deci oricare ar fi valoarea forţei P mai mică decât cea
obţinută în acest caz, ea va asigura echilibru. Forţa totală a reacţiunii
solului N5 acţionează în D numai în momentul răsturnării, în rest ea
fiind o forţă distribuită pe conturul cercului de bază al cilindrului, cu
poziţia centrului de presiune între centrul cercului şi punctul D. Avem
un sistem de şapte ecuaţii cu şase necunoscute, deci una din ecuaţii
poate fi folosită pentru verificarea rezultatelor. Din (v) se obţine:
13 NN şi, introducând în (vii):
sinrR
NP 21
Din (i) şi (ii) rezultă:
sin
G
cos
NN 1
2
de unde:
R
rG
r
rRG
R
rcosG
R
rsinr
sinR
cosGP 12
2
22222
În Figura 4.2.b. s-a reprezentat un cilindru care are fund. În acest caz
cilindrul nu se va mai răsturna, deoarece centrul de greutate al figurii
se va găsi pe generatoarea cilindrului şi, prin capacul de pe fundul său,
cilindrul va apăsa în mod uniform asupra solului.
4.3. Se consideră un sistem alcătuit din două bare, una în formă
de sfert de cerc de rază a şi solicitată la mijloc cu o forţă concentrată
P, acţionând la 45o faţă de orizontală, iar cealaltă dreaptă, fiind
solicitată de o forţă distribuită, acţionând perpendicular pe ea, de o
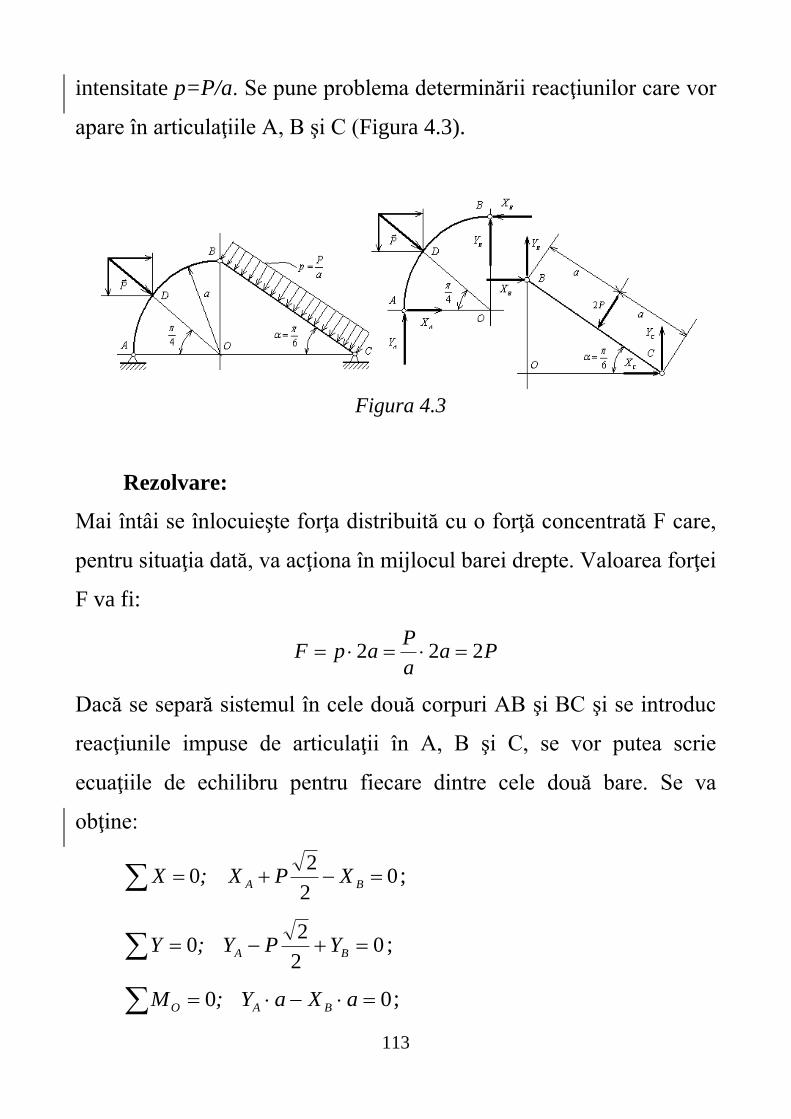
113
intensitate p=P/a. Se pune problema determinării reacţiunilor care vor
apare în articulaţiile A, B şi C (Figura 4.3).
Rezolvare:
Mai întâi se înlocuieşte forţa distribuită cu o forţă concentrată F care,
pentru situaţia dată, va acţiona în mijlocul barei drepte. Valoarea forţei
F va fi:
Paa
PapF 222
Dacă se separă sistemul în cele două corpuri AB şi BC şi se introduc
reacţiunile impuse de articulaţii în A, B şi C, se vor putea scrie
ecuaţiile de echilibru pentru fiecare dintre cele două bare. Se va
obţine:
02
20 BA XPX;X ;
02
20 BA YPY;Y ;
00 aXaY;M BAO;
Figura 4.3

114
pentru bara în formă de sfert de cerc şi:
00 CB XPX;X ;
0Y3PY;0Y CB ;
0320 aYaXPa;M CCA ;
Rezultă:
.P.Y;P.X;P.Y
;P.X;P.Y;P.X
CCB
BAA
008400146272161
014610146172161
4.4. Se consideră un sistem alcătuit din două bare AB şi BC,
încărcate cu forţe concentrate şi distribuite ca în Figura 4.4.a. În
punctul A avem o încastrare, în B o articulaţie, iar în C un reazem. Ne
propunem să determinăm reacţiunile care apar în punctele A, B şi C.
Rezolvare:
Sarcinile distribuite triunghiular pe bara AB se înlocuiesc, la o treime
de baza triunghiului, cu o sarcină concentrată egală cu 3P/2. Sarcinile
cu distribuţie constantă de pe bara BC se înlocuiesc, la distanţa a de
punctul C, cu o forţă concentrată egală cu 2P. În acest caz, dacă se
Figura 4.4.a
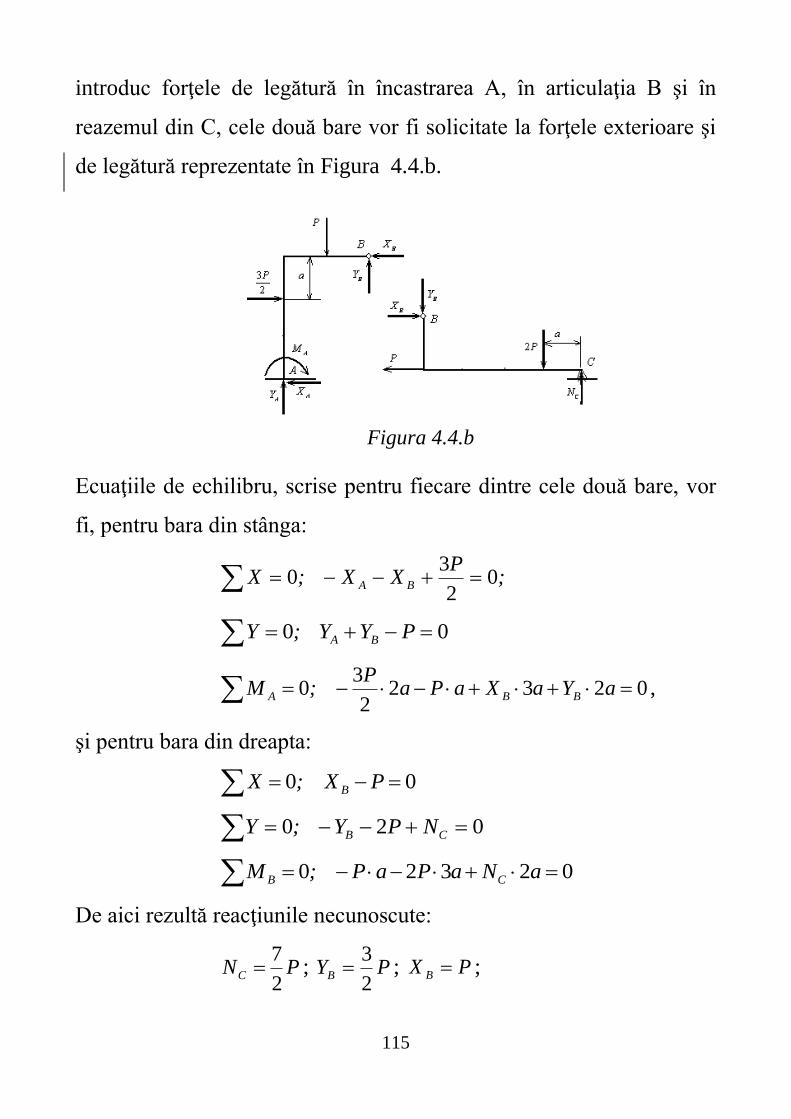
115
introduc forţele de legătură în încastrarea A, în articulaţia B şi în
reazemul din C, cele două bare vor fi solicitate la forţele exterioare şi
de legătură reprezentate în Figura 4.4.b.
Ecuaţiile de echilibru, scrise pentru fiecare dintre cele două bare, vor
fi, pentru bara din stânga:
;P
XX;X BA 02
30
00 PYY;Y BA
02322
30 aYaXaPa
P;M BBA ,
şi pentru bara din dreapta:
00 PX;X B
020 CB NPY;Y
02320 aNaPaP;M CB
De aici rezultă reacţiunile necunoscute:
PNC2
7 ; PYB
2
3 ; PX B ;
Figura 4.4.b
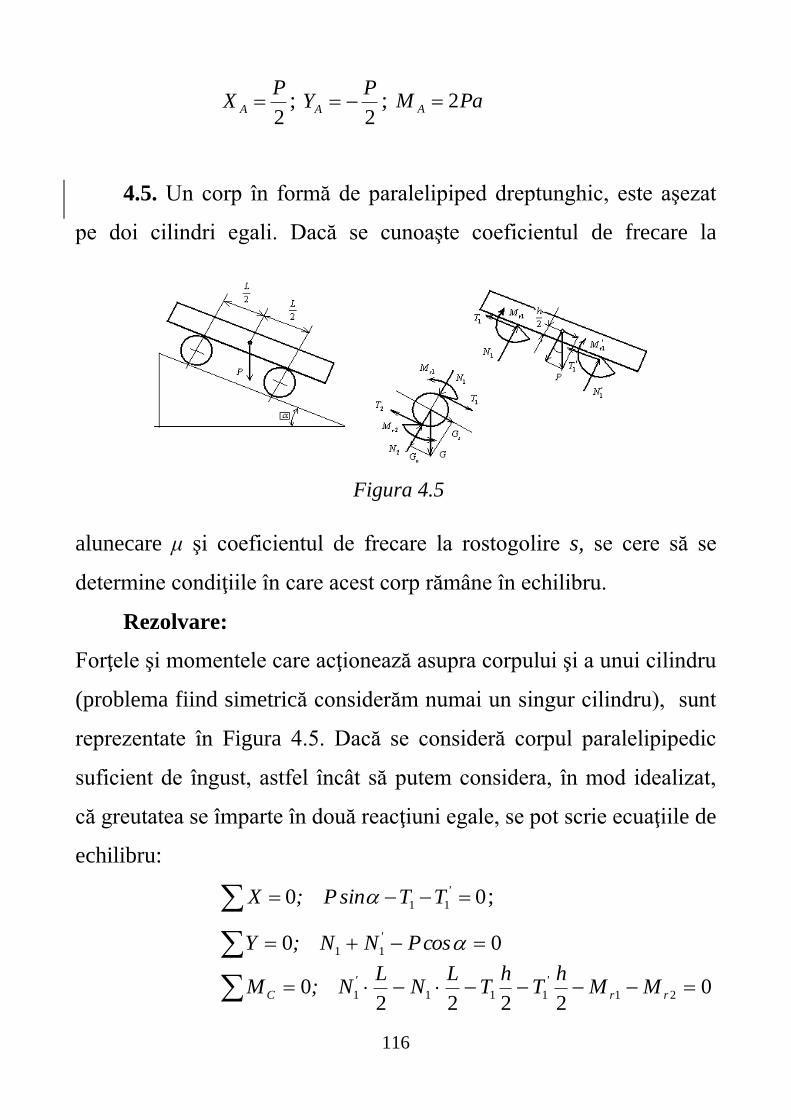
116
2
PX A ;
2
PYA ; PaM A 2
4.5. Un corp în formă de paralelipiped dreptunghic, este aşezat
pe doi cilindri egali. Dacă se cunoaşte coeficientul de frecare la
alunecare μ şi coeficientul de frecare la rostogolire s, se cere să se
determine condiţiile în care acest corp rămâne în echilibru.
Rezolvare:
Forţele şi momentele care acţionează asupra corpului şi a unui cilindru
(problema fiind simetrică considerăm numai un singur cilindru), sunt
reprezentate în Figura 4.5. Dacă se consideră corpul paralelipipedic
suficient de îngust, astfel încât să putem considera, în mod idealizat,
că greutatea se împarte în două reacţiuni egale, se pot scrie ecuaţiile de
echilibru:
00 11 'TTsinP;X ;
00 11 cosPNN;Y '
02222
0 211111 rr
''
C MMh
Th
TL
NL
N;M
Figura 4.5
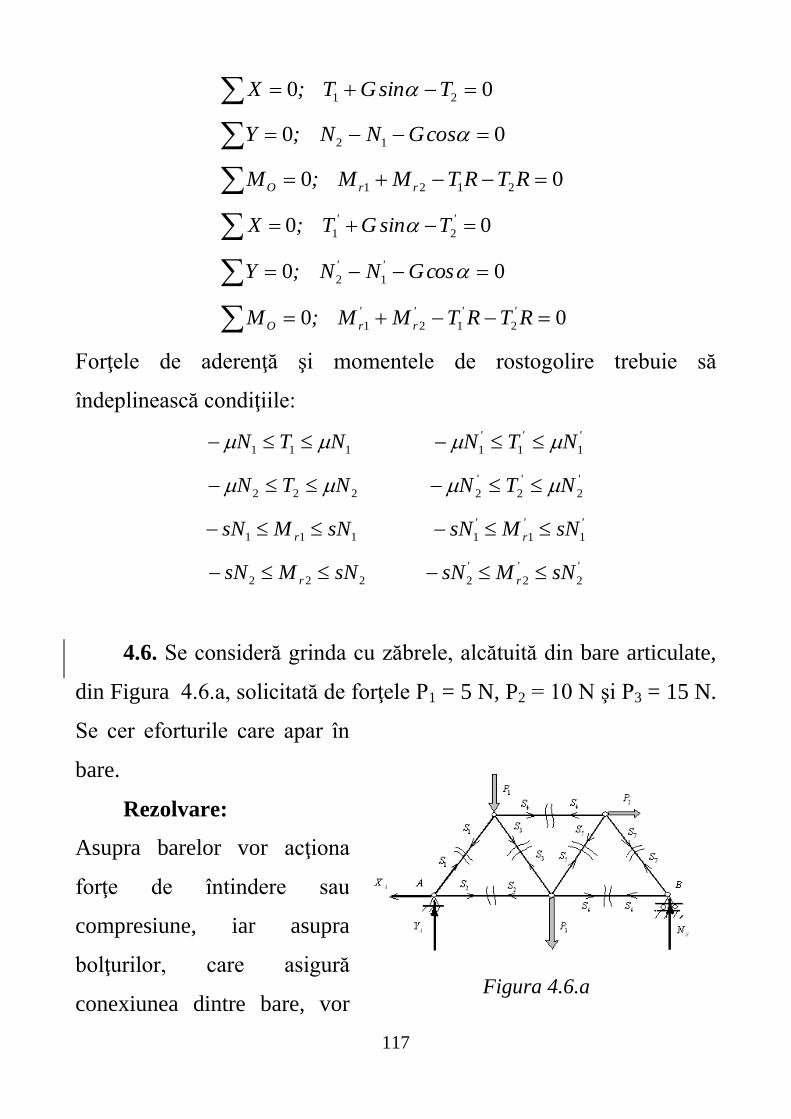
117
00 21 TsinGT;X
00 12 cosGNN;Y
00 2121 RTRTMM;M rrO
00 21 '' TsinGT;X
00 12 cosGNN;Y ''
00 2121 RTRTMM;M '''
r
'
rO
Forţele de aderenţă şi momentele de rostogolire trebuie să
îndeplinească condiţiile:
111 NTN ''' NTN 111
222 NTN '
2
'
2
'
2 NTN
111 sNMsN r ''
r
' sNMsN 111
222 sNMsN r ''
r
' sNMsN 222
4.6. Se consideră grinda cu zăbrele, alcătuită din bare articulate,
din Figura 4.6.a, solicitată de forţele P1 = 5 N, P2 = 10 N şi P3 = 15 N.
Se cer eforturile care apar în
bare.
Rezolvare:
Asupra barelor vor acţiona
forţe de întindere sau
compresiune, iar asupra
bolţurilor, care asigură
conexiunea dintre bare, vor
Figura 4.6.a
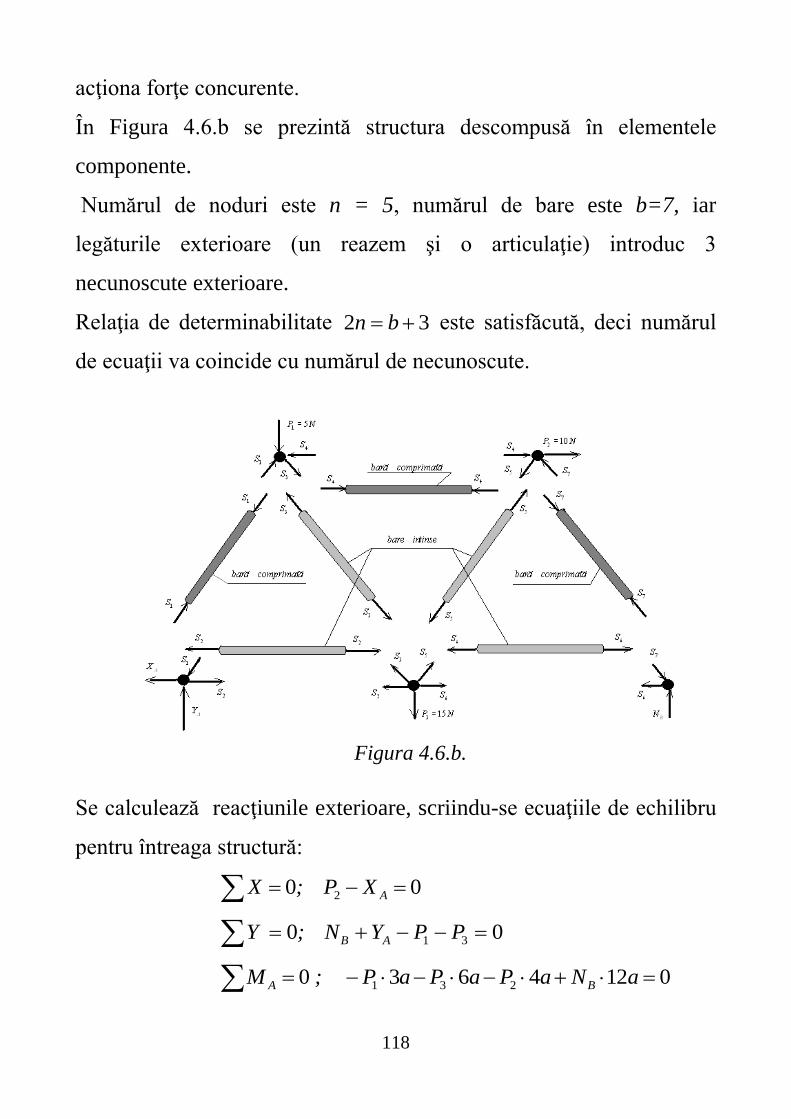
118
acţiona forţe concurente.
În Figura 4.6.b se prezintă structura descompusă în elementele
componente.
Numărul de noduri este n = 5, numărul de bare este b=7, iar
legăturile exterioare (un reazem şi o articulaţie) introduc 3
necunoscute exterioare.
Relaţia de determinabilitate 32 bn este satisfăcută, deci numărul
de ecuaţii va coincide cu numărul de necunoscute.
Se calculează reacţiunile exterioare, scriindu-se ecuaţiile de echilibru
pentru întreaga structură:
00 2 AXP;X
00 31 PPYN;Y AB
0124630 231 aNaPaPaP;M BA
Figura 4.6.b.

119
Rezultă:
N,N;N,Y;NX BAA 101290710
Pentru nodul 1 (Figura 4.6.c), putem scrie ecuaţiile de
echilibru:
00
00
1
21
A
A
YsinS;Y
XScosS;X
cu soluţia: N,S;N,S 9515959 21 .
Rezultă că efortul în bara 1 este de compresiune (invers decât l-am pus
pe figură), iar efortul în bara 2 este de întindere (direcţia din figură
corespunde). Avem:
605
380
5
4,cos;,sin
Pentru nodul 2 se poate scrie:
00 431 ScosScosS;X
00 131 PsinSsinS;Y
cu soluţia: N,S;N,S 208703 43 .
Efortul în bara 3 este de întindere, iar în bara 4 de compresiune.
Pentru nodul 3 avem:
00 6532 ScosScosSS;X
00 353 PsinSsinS;Y
cu soluţia: N,S;N,S 1091515 65 .
Eforturile în barele 5 şi 6 sunt de întindere.
Pentru nodul 4 se poate scrie:
00 2754 PcosScosSS;X
Figura 4.6.e
Figura 4.6.f
Figura 4.6.c
Figura 4.6.d
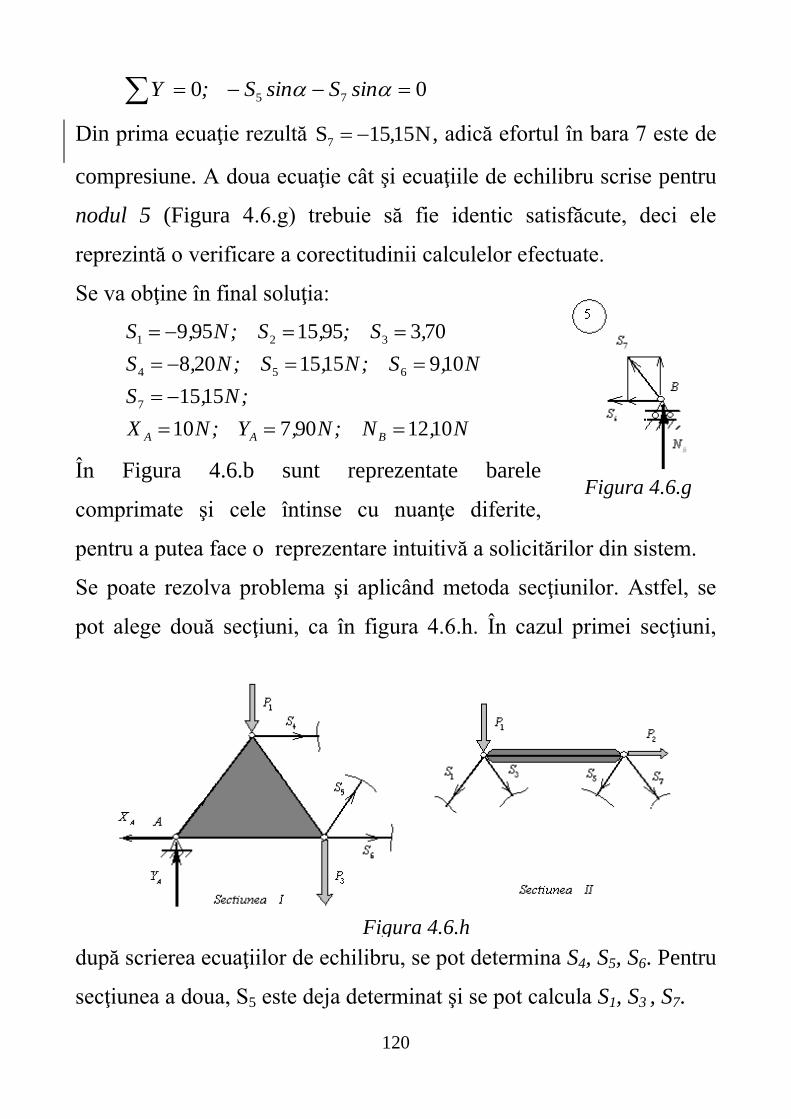
120
00 75 sinSsinS;Y
Din prima ecuaţie rezultă N15,15S7 , adică efortul în bara 7 este de
compresiune. A doua ecuaţie cât şi ecuaţiile de echilibru scrise pentru
nodul 5 (Figura 4.6.g) trebuie să fie identic satisfăcute, deci ele
reprezintă o verificare a corectitudinii calculelor efectuate.
Se va obţine în final soluţia:
N,N;N,Y;NX
;N,S
N,S;N,S;N,S
,S;,S;N,S
BAA 101290710
1515
1091515208
7039515959
7
654
321
În Figura 4.6.b sunt reprezentate barele
comprimate şi cele întinse cu nuanţe diferite,
pentru a putea face o reprezentare intuitivă a solicitărilor din sistem.
Se poate rezolva problema şi aplicând metoda secţiunilor. Astfel, se
pot alege două secţiuni, ca în figura 4.6.h. În cazul primei secţiuni,
după scrierea ecuaţiilor de echilibru, se pot determina S4, S5, S6. Pentru
secţiunea a doua, S5 este deja determinat şi se pot calcula S1, S3 , S7.
Figura 4.6.g
Figura 4.6.h

121
Scriem ecuaţiile de echilibru pentru partea din stânga a structurii, în
cazul primei secţiuni:
00 465 AXSScosS;X
00 315 AYPPsinS;Y
02
3
20 354 aPasinS
aS
aP;M A
sau: 1060 465 SSS,
101290715580 5 ,,S,
015802
3
2
15 54 S,S
de unde: N,S 2084 ; N,S;N,S 1091515 65 .
Pentru secţiunea a doua, ecuaţiile de echilibru se scriu sub forma:
00 27531 PcosScosScosScosS;X
00 17531 PsinSsinSsinSsinS;Y
00 752 asinSasinS;M
de unde, după înlocuirea mărimilor cunoscute, se obţine:
N,S 9591 ; N,S;,S 1515703 73
4.7. Se dă structura din bare articulate, din Figura 4.7.a. Să se
determine eforturile din bare, dacă se cunosc: P1 = 10 N, P2 = 20 N,
P3 = 10 N, P4 = 20 N şi a = 0,1 m.
Rezolvare:
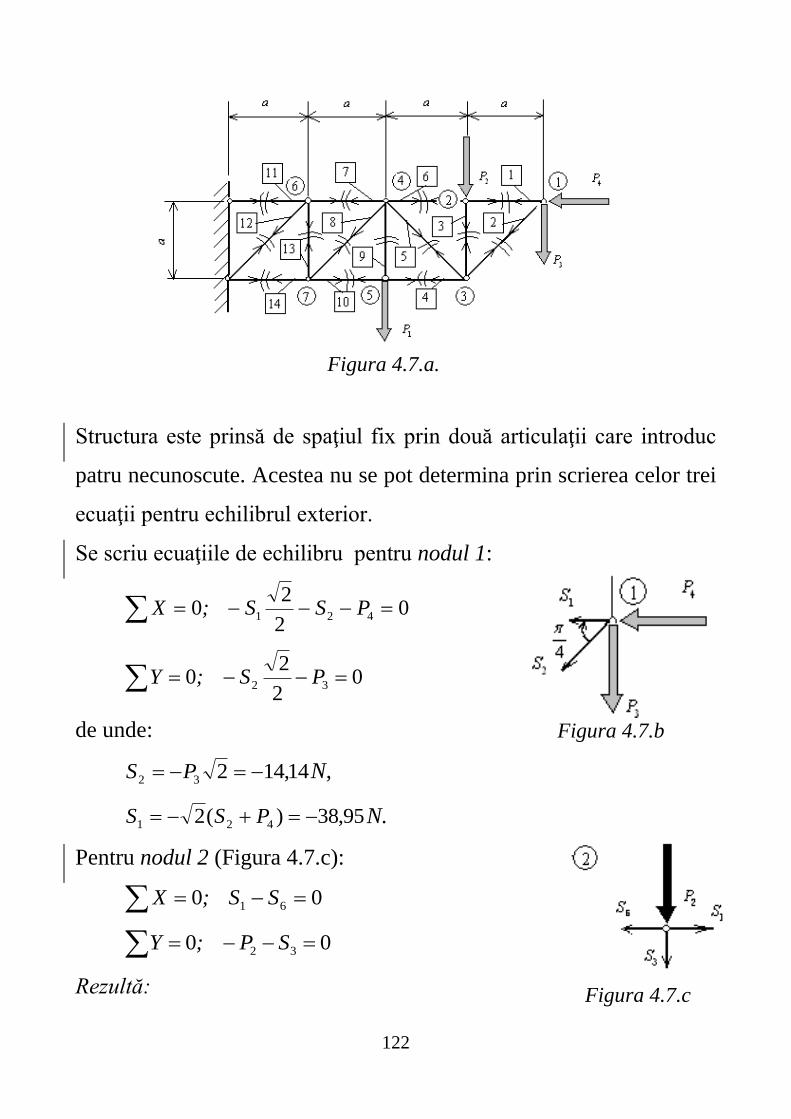
122
Structura este prinsă de spaţiul fix prin două articulaţii care introduc
patru necunoscute. Acestea nu se pot determina prin scrierea celor trei
ecuaţii pentru echilibrul exterior.
Se scriu ecuaţiile de echilibru pentru nodul 1:
02
20 421 PSS;X
02
20 32 PS;Y
de unde:
14,14232 PS N,
95,38)(2 421 PSS N.
Pentru nodul 2 (Figura 4.7.c):
00 61 SS;X
00 32 SP;Y
Rezultă:
Figura 4.7.a.
Figura 4.7.c
Figura 4.7.b
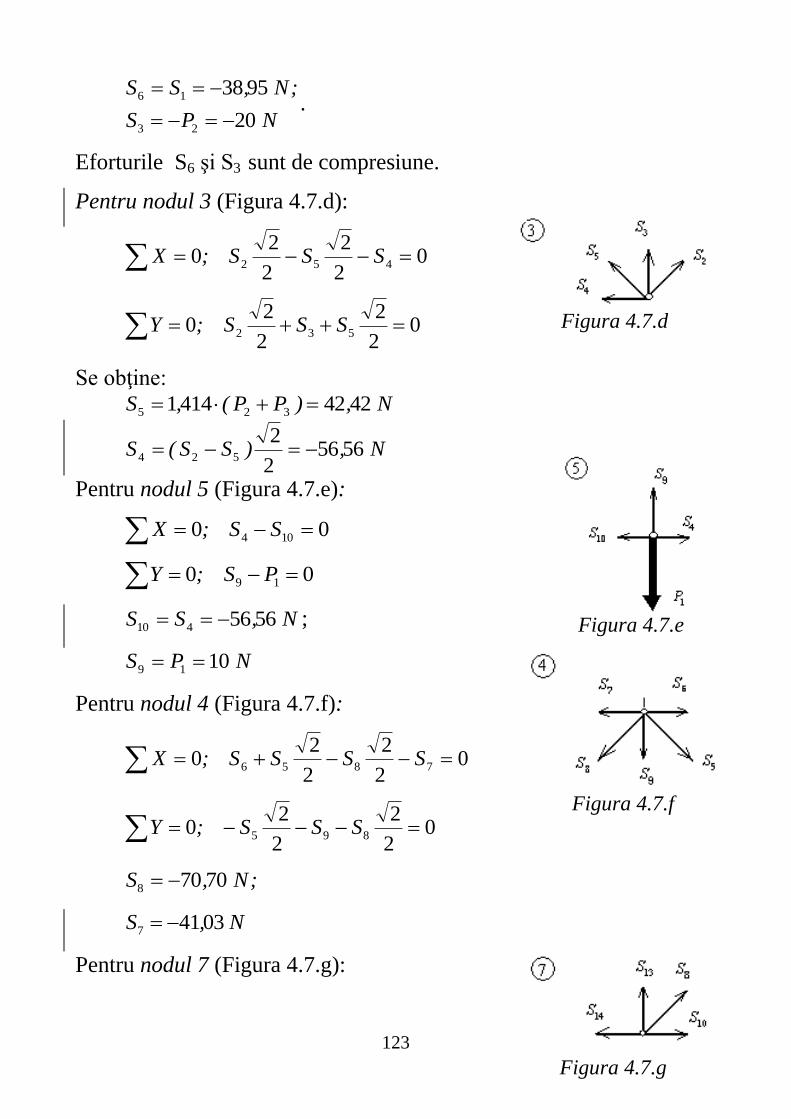
123
NPS
;N,SS
20
9538
23
16
.
Eforturile S6 şi S3 sunt de compresiune.
Pentru nodul 3 (Figura 4.7.d):
02
2
2
20 452 SSS;X
02
2
2
20 532 SSS;Y
Se obţine: N,)PP(,S 42424141 325
N,)SS(S 56562
2524
Pentru nodul 5 (Figura 4.7.e):
00 104 SS;X
00 19 PS;Y
N,SS 5656410 ;
NPS 1019
Pentru nodul 4 (Figura 4.7.f):
02
2
2
20 7856 SSSS;X
02
2
2
20 895 SSS;Y
;N,S 70708
N,S 03417
Pentru nodul 7 (Figura 4.7.g):
Figura 4.7.d
Figura 4.7.f
Figura 4.7.e
Figura 4.7.g
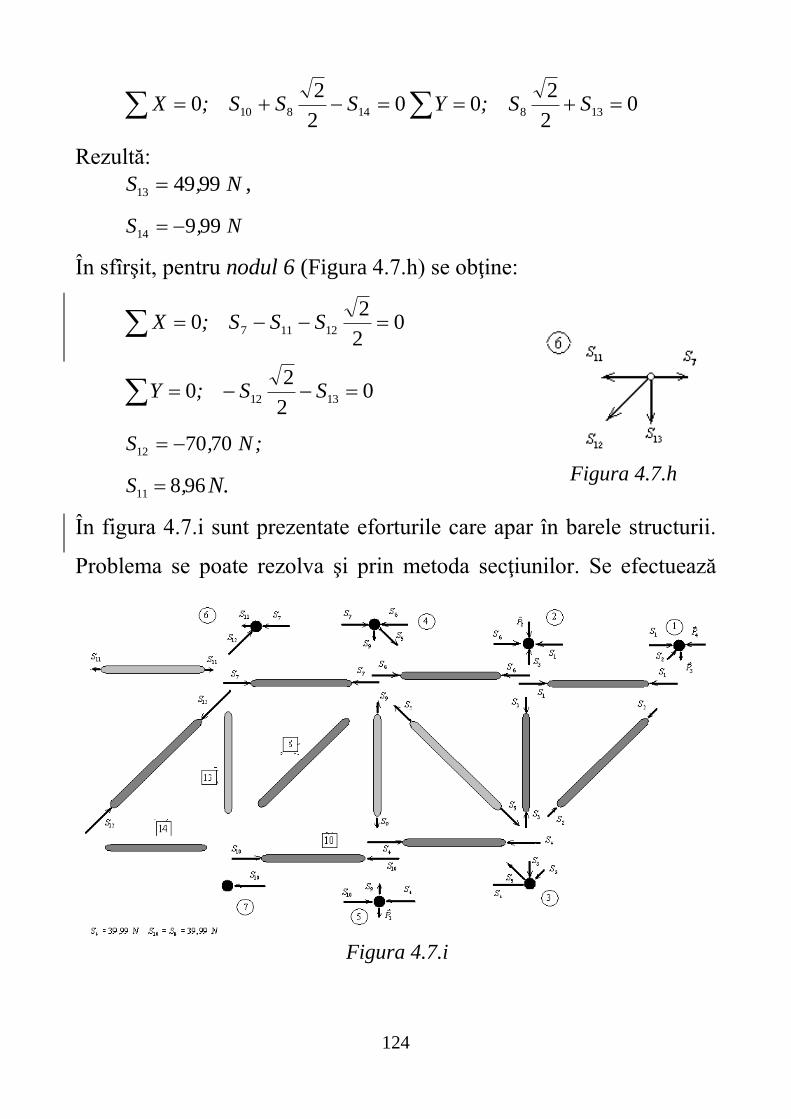
124
02
20 14810 SSS;X 0
2
20 138 SS;Y
Rezultă:
N,S 994913 ,
N,S 99914
În sfîrşit, pentru nodul 6 (Figura 4.7.h) se obţine:
02
20 12117 SSS;X
02
20 1312 SS;Y
;N,S 707012
96811 ,S N.
În figura 4.7.i sunt prezentate eforturile care apar în barele structurii.
Problema se poate rezolva şi prin metoda secţiunilor. Se efectuează
Figura 4.7.h
Figura 4.7.i
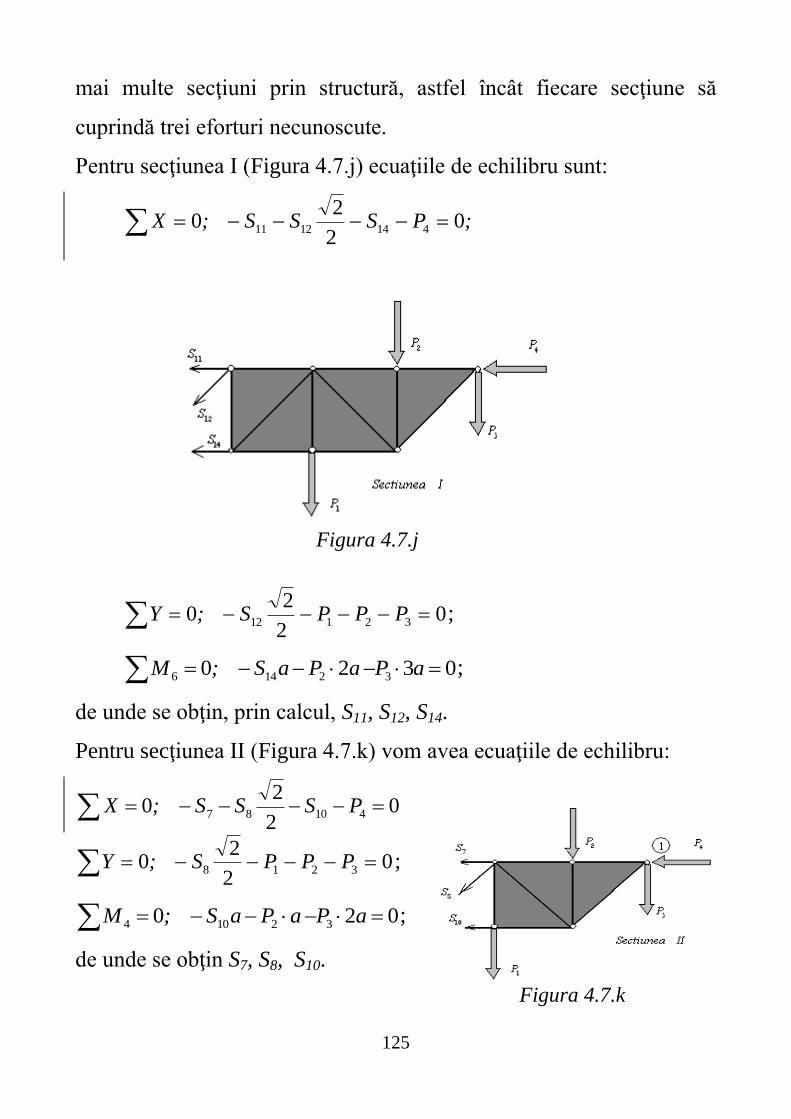
125
mai multe secţiuni prin structură, astfel încât fiecare secţiune să
cuprindă trei eforturi necunoscute.
Pentru secţiunea I (Figura 4.7.j) ecuaţiile de echilibru sunt:
;PSSS;X 02
20 4141211
02
20 32112 PPPS;Y ;
0320 32146 aPaPaS;M ;
de unde se obţin, prin calcul, S11, S12, S14.
Pentru secţiunea II (Figura 4.7.k) vom avea ecuaţiile de echilibru:
02
20 41087 PSSS;X
02
20 3218 PPPS;Y ;
020 32104 aPaPaS;M ;
de unde se obţin S7, S8, S10.
Figura 4.7.j
Figura 4.7.k
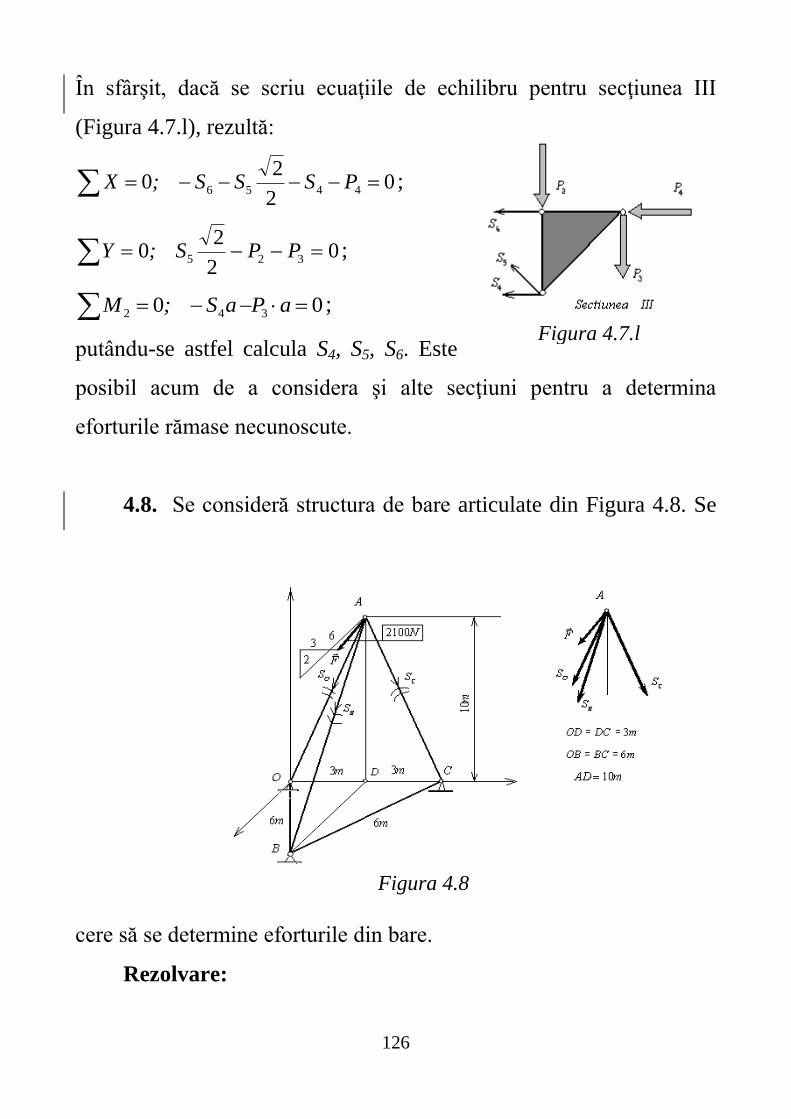
126
În sfârşit, dacă se scriu ecuaţiile de echilibru pentru secţiunea III
(Figura 4.7.l), rezultă:
02
20 4456 PSSS;X ;
02
20 325 PPS;Y ;
00 342 aPaS;M ;
putându-se astfel calcula S4, S5, S6. Este
posibil acum de a considera şi alte secţiuni pentru a determina
eforturile rămase necunoscute.
4.8. Se consideră structura de bare articulate din Figura 4.8. Se
cere să se determine eforturile din bare.
Rezolvare:
Figura 4.8
Figura 4.7.l
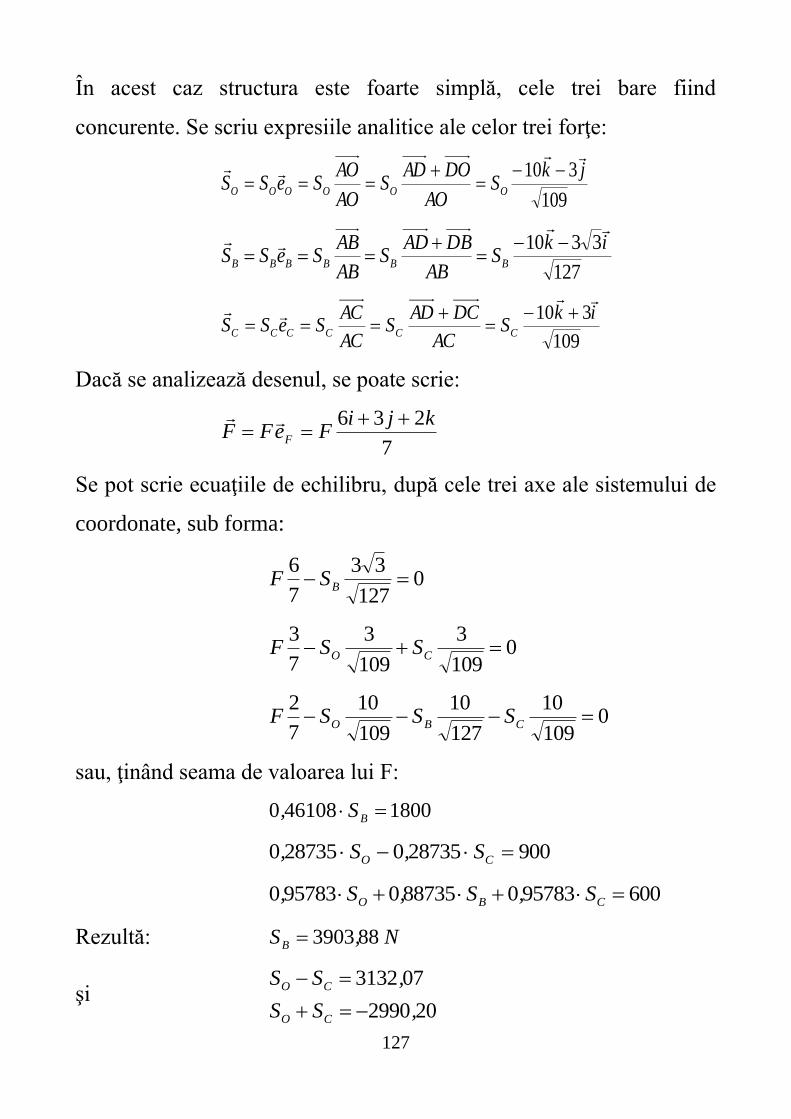
127
În acest caz structura este foarte simplă, cele trei bare fiind
concurente. Se scriu expresiile analitice ale celor trei forţe:
109
310 jkS
AO
DOADS
AO
AOSeSS OOOOOO
127
3310 ikS
AB
DBADS
AB
ABSeSS BBBBBB
109
310 ikS
AC
DCADS
AC
ACSeSS CCCCCC
Dacă se analizează desenul, se poate scrie:
7
236 kjiFeFF F
Se pot scrie ecuaţiile de echilibru, după cele trei axe ale sistemului de
coordonate, sub forma:
0127
33
7
6 BSF
0109
3
109
3
7
3 CO SSF
0109
10
127
10
109
10
7
2 CBO SSSF
sau, ţinând seama de valoarea lui F:
1800461080 BS,
900287350287350 CO S,S,
600957830887350957830 CBO S,S,S,
Rezultă: N,SB 883903
şi 202990
073132
,SS
,SS
CO
CO
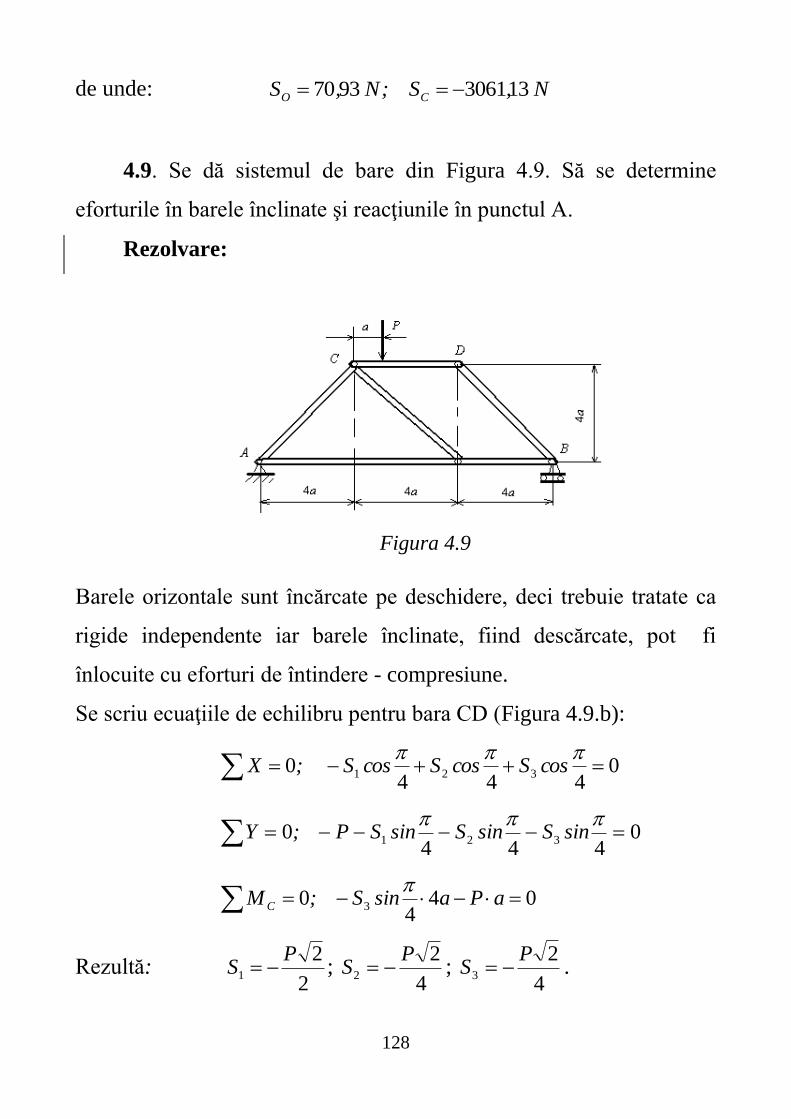
128
de unde: N,S;N,S CO 1330619370
4.9. Se dă sistemul de bare din Figura 4.9. Să se determine
eforturile în barele înclinate şi reacţiunile în punctul A.
Rezolvare:
Barele orizontale sunt încărcate pe deschidere, deci trebuie tratate ca
rigide independente iar barele înclinate, fiind descărcate, pot fi
înlocuite cu eforturi de întindere - compresiune.
Se scriu ecuaţiile de echilibru pentru bara CD (Figura 4.9.b):
0444
0 321
cosScosScosS;X
0444
0 321
sinSsinSsinSP;Y
044
0 3 aPasinS;MC
Rezultă: 2
21
PS ;
4
22
PS ;
4
23
PS .
Figura 4.9
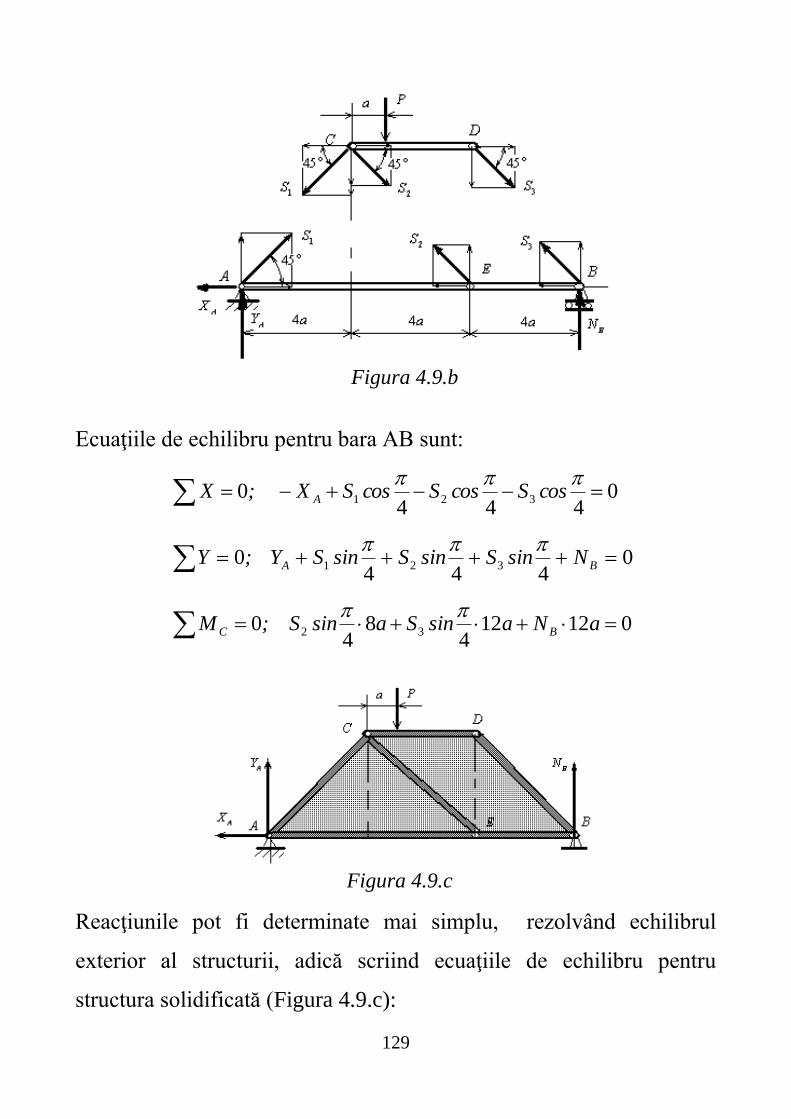
129
Ecuaţiile de echilibru pentru bara AB sunt:
0444
0 321
cosScosScosSX;X A
0444
0 321 BA NsinSsinSsinSY;Y
012124
84
0 32 aNasinSasinS;M BC
Reacţiunile pot fi determinate mai simplu, rezolvând echilibrul
exterior al structurii, adică scriind ecuaţiile de echilibru pentru
structura solidificată (Figura 4.9.c):
Figura 4.9.b
Figura 4.9.c
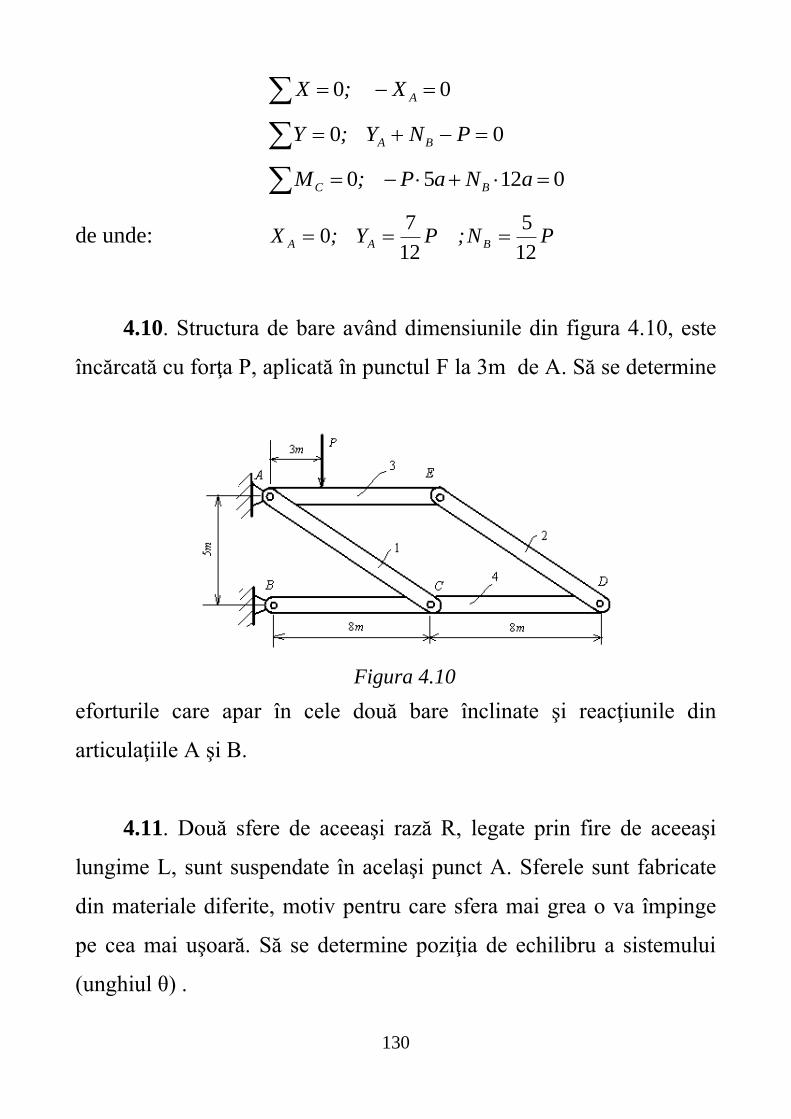
130
00 AX;X
00 PNY;Y BA
01250 aNaP;M BC
de unde: PN;PY;X BAA12
5
12
70
4.10. Structura de bare având dimensiunile din figura 4.10, este
încărcată cu forţa P, aplicată în punctul F la 3m de A. Să se determine
eforturile care apar în cele două bare înclinate şi reacţiunile din
articulaţiile A şi B.
4.11. Două sfere de aceeaşi rază R, legate prin fire de aceeaşi
lungime L, sunt suspendate în acelaşi punct A. Sferele sunt fabricate
din materiale diferite, motiv pentru care sfera mai grea o va împinge
pe cea mai uşoară. Să se determine poziţia de echilibru a sistemului
(unghiul θ) .
Figura 4.10
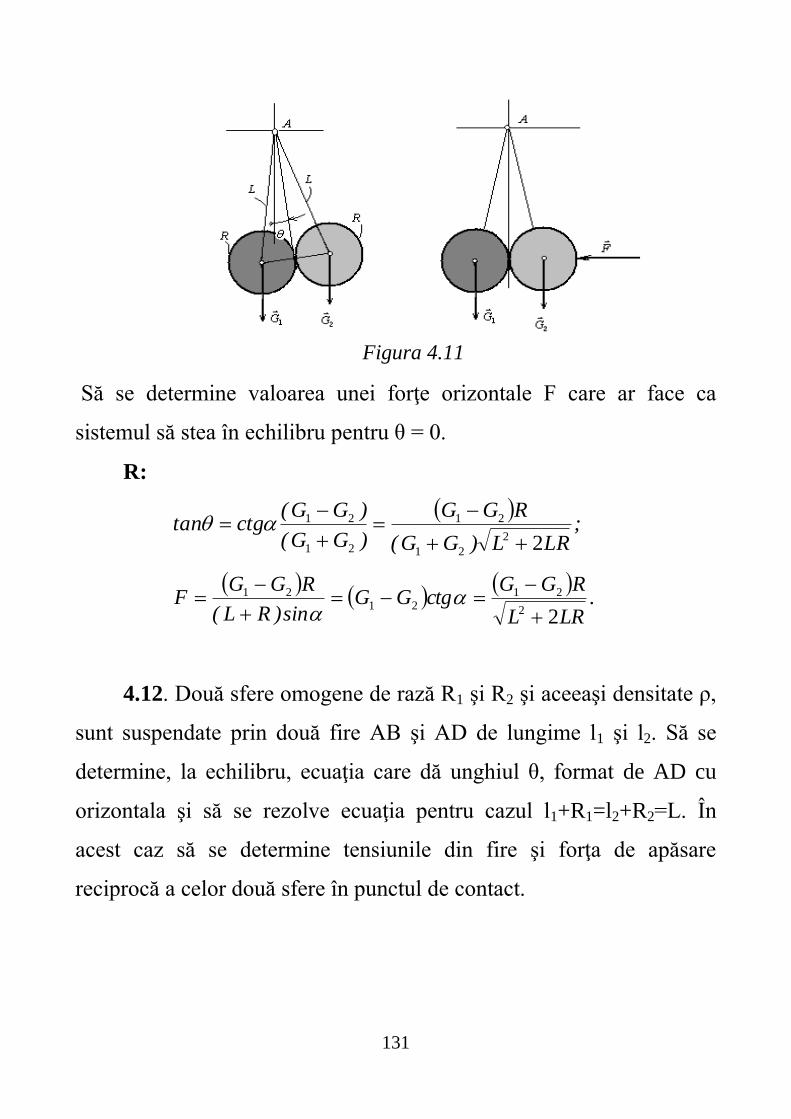
131
Să se determine valoarea unei forţe orizontale F care ar face ca
sistemul să stea în echilibru pentru θ = 0.
R:
;LRL)GG(
RGG
)GG(
)GG(ctgtan
22
21
21
21
21
.
LRL
RGGctgGG
sin)RL(
RGGF
22
2121
21
4.12. Două sfere omogene de rază R1 şi R2 şi aceeaşi densitate ρ,
sunt suspendate prin două fire AB şi AD de lungime l1 şi l2. Să se
determine, la echilibru, ecuaţia care dă unghiul θ, format de AD cu
orizontala şi să se rezolve ecuaţia pentru cazul l1+R1=l2+R2=L. În
acest caz să se determine tensiunile din fire şi forţa de apăsare
reciprocă a celor două sfere în punctul de contact.
Figura 4.11
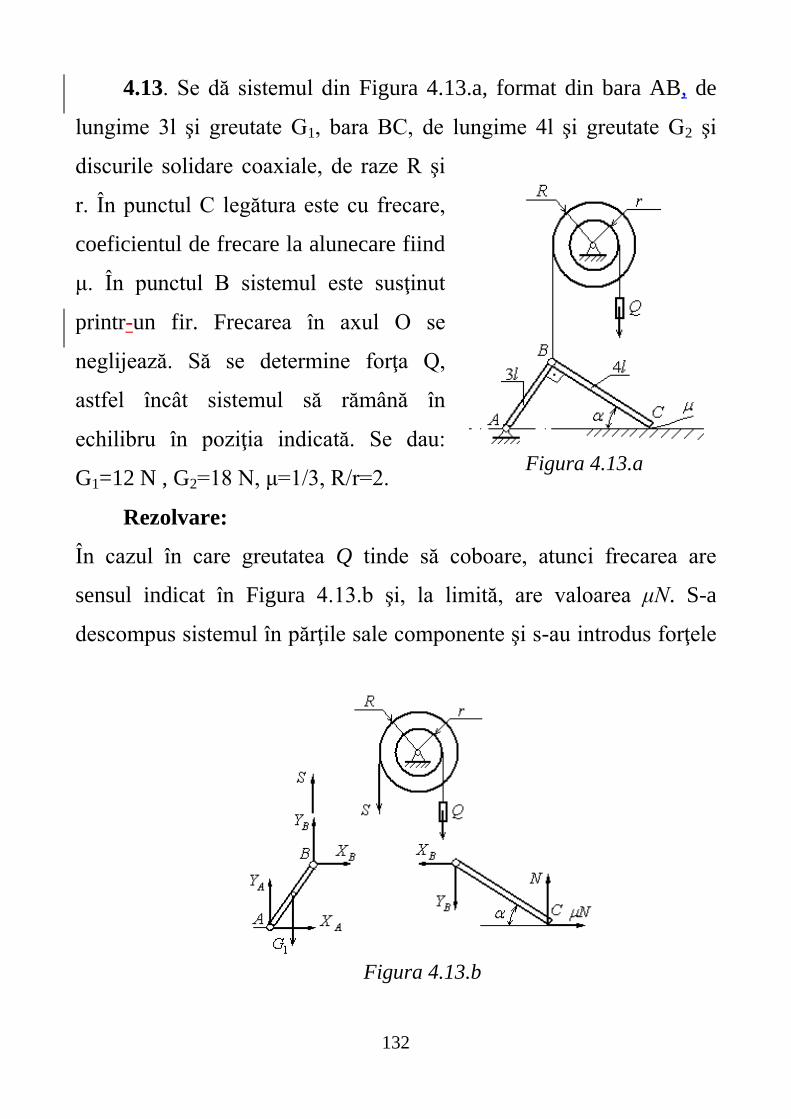
132
4.13. Se dă sistemul din Figura 4.13.a, format din bara AB, de
lungime 3l şi greutate G1, bara BC, de lungime 4l şi greutate G2 şi
discurile solidare coaxiale, de raze R şi
r. În punctul C legătura este cu frecare,
coeficientul de frecare la alunecare fiind
μ. În punctul B sistemul este susţinut
printr-un fir. Frecarea în axul O se
neglijează. Să se determine forţa Q,
astfel încât sistemul să rămână în
echilibru în poziţia indicată. Se dau:
G1=12 N , G2=18 N, μ=1/3, R/r=2.
Rezolvare:
În cazul în care greutatea Q tinde să coboare, atunci frecarea are
sensul indicat în Figura 4.13.b şi, la limită, are valoarea μN. S-a
descompus sistemul în părţile sale componente şi s-au introdus forţele
Figura 4.13.a
Figura 4.13.b

133
de legătură. Pentru bara BC, se obţin trei ecuaţii de echilibru cu trei
necunoscute:
00 NX;X B
00 2 NGY;Y B
04240 2 sinlNcoslGcoslN;M B
de unde:
272
2 ,)sin(cos
cosGN
N
42,NX B N
8102 ,GNYB N
Pentru bara AB se scrie:
00 BA XX;X
00 1 GSYY;Y BA
;M A 0 02
333 1 sin
lGcoslXsinlSY BB
de unde: 202
22 1
sin
sinYsinGcosXS BB N;
42,XX BA N;
82,YA N .
Scriind ecuaţia de momente pentru scripete, se obţine:
00 QrSR;MO
de unde: 40r
SRQ N.

134
Dacă greutatea Q tinde să se ridice, atunci forţa de frecare îşi schimbă
sensul. Ecuaţiile de echilibru se scriu în mod analog, ţinându-se seama
de noul sens al forţei de frecare:
00 NX;X B ;
00 2 NGY;Y B;
04240 2 sinlNcoslGcoslN;M B;
de unde: 122
2
)sin(cos
cosGN
N;
4 NX B N;
62 GNYB N
Celelalte ecuaţii rămân neschimbate şi, introducând noile valori ale forţelor, se obţine:
211,S N;
42,XX BA N;
10AY N;
422,r
SRQ N.
Pentru echilibru, trebuie ca forţa Q să se găsească între cele două
valori determinate:
maxmin QQQ
sau
NQN, 40422
4.14. Se consideră sistemul format din două bare omogene OA şi
OB, articulate între ele, având fiecare lungimea 2l şi greutatea P
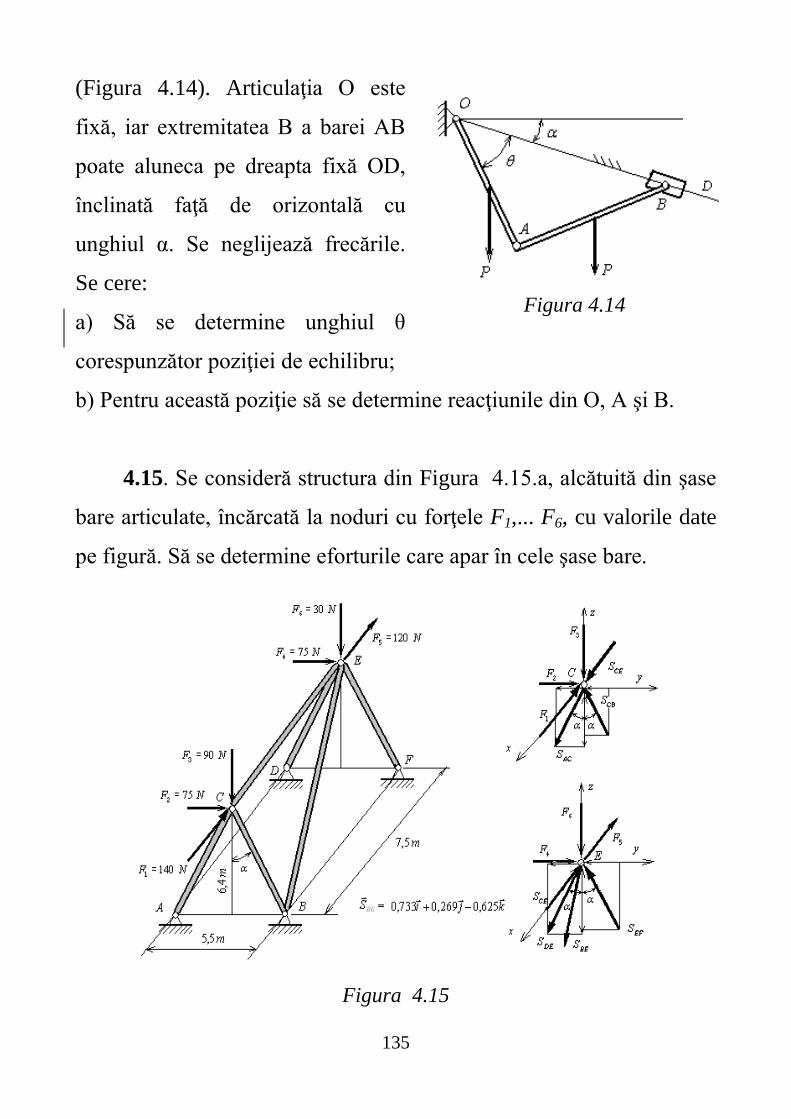
135
(Figura 4.14). Articulaţia O este
fixă, iar extremitatea B a barei AB
poate aluneca pe dreapta fixă OD,
înclinată faţă de orizontală cu
unghiul α. Se neglijează frecările.
Se cere:
a) Să se determine unghiul θ
corespunzător poziţiei de echilibru;
b) Pentru această poziţie să se determine reacţiunile din O, A şi B.
4.15. Se consideră structura din Figura 4.15.a, alcătuită din şase
bare articulate, încărcată la noduri cu forţele F1,... F6, cu valorile date
pe figură. Să se determine eforturile care apar în cele şase bare.
Figura 4.15
Figura 4.14

136
Rezolvare:
Se calculează versorul barei BE:
k,j,i,,,,
i,j,k,eEB
625026907330
5775246
5775246222
Efortul din bara BE este:
kS,jS,iS,,,,
i,j,k,SeSS EBEBEBEBEBEBEB
625026907330
5775246
5775246222
Pentru nodul C, ecuaţiile de echilibru sunt:
00 1 CESF;X
00 2 sinSsinSF;Y CBAC
0cosScosSF;0Z CBAC3
9187701
1
39478501
4297046
752
2
2
,tan
cos
;,tan
tansin
;,,
,tan
de unde: ;NFSCE 1401
98189,SS CBAC ;
9697,SS CBAC .
Se obţine: ;N,SCB 97143
;N,SAC 0146
Pentru nodul E se poate scrie:
00 5 EBxCE SFS;X
00 4 EByDEEF SsinSsinSF;Y
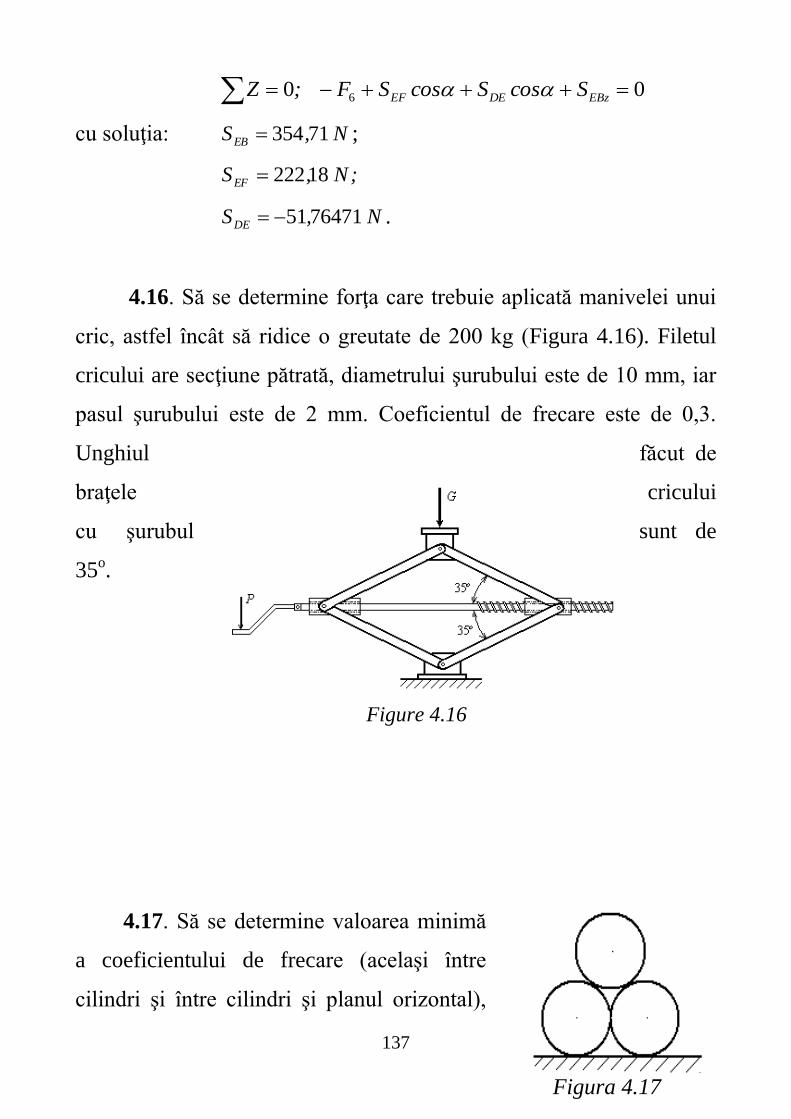
137
00 6 EBzDEEF ScosScosSF;Z
cu soluţia: N,SEB 71354 ;
;N,SEF 18222
N,SDE 7647151 .
4.16. Să se determine forţa care trebuie aplicată manivelei unui
cric, astfel încât să ridice o greutate de 200 kg (Figura 4.16). Filetul
cricului are secţiune pătrată, diametrului şurubului este de 10 mm, iar
pasul şurubului este de 2 mm. Coeficientul de frecare este de 0,3.
Unghiul făcut de
braţele cricului
cu şurubul sunt de
35o.
4.17. Să se determine valoarea minimă
a coeficientului de frecare (acelaşi între
cilindri şi între cilindri şi planul orizontal),
Figure 4.16
Figura 4.17
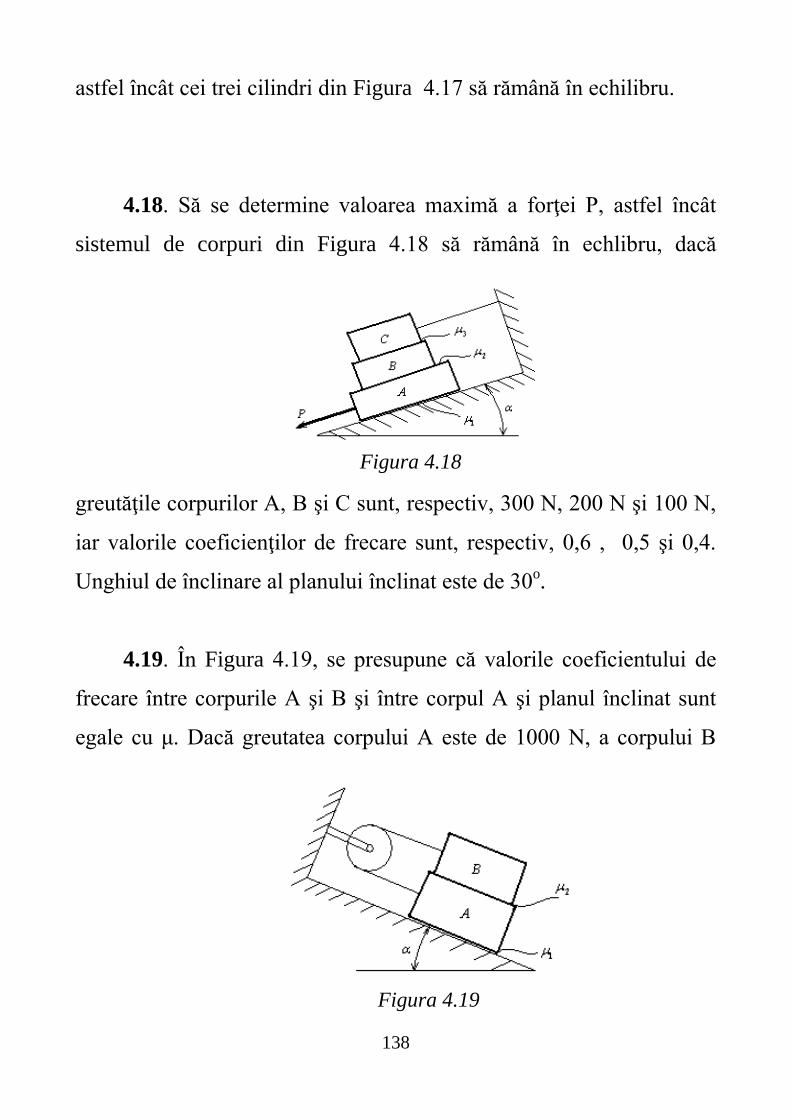
138
astfel încât cei trei cilindri din Figura 4.17 să rămână în echilibru.
4.18. Să se determine valoarea maximă a forţei P, astfel încât
sistemul de corpuri din Figura 4.18 să rămână în echlibru, dacă
greutăţile corpurilor A, B şi C sunt, respectiv, 300 N, 200 N şi 100 N,
iar valorile coeficienţilor de frecare sunt, respectiv, 0,6 , 0,5 şi 0,4.
Unghiul de înclinare al planului înclinat este de 30o.
4.19. În Figura 4.19, se presupune că valorile coeficientului de
frecare între corpurile A şi B şi între corpul A şi planul înclinat sunt
egale cu μ. Dacă greutatea corpului A este de 1000 N, a corpului B
Figura 4.18
Figura 4.19
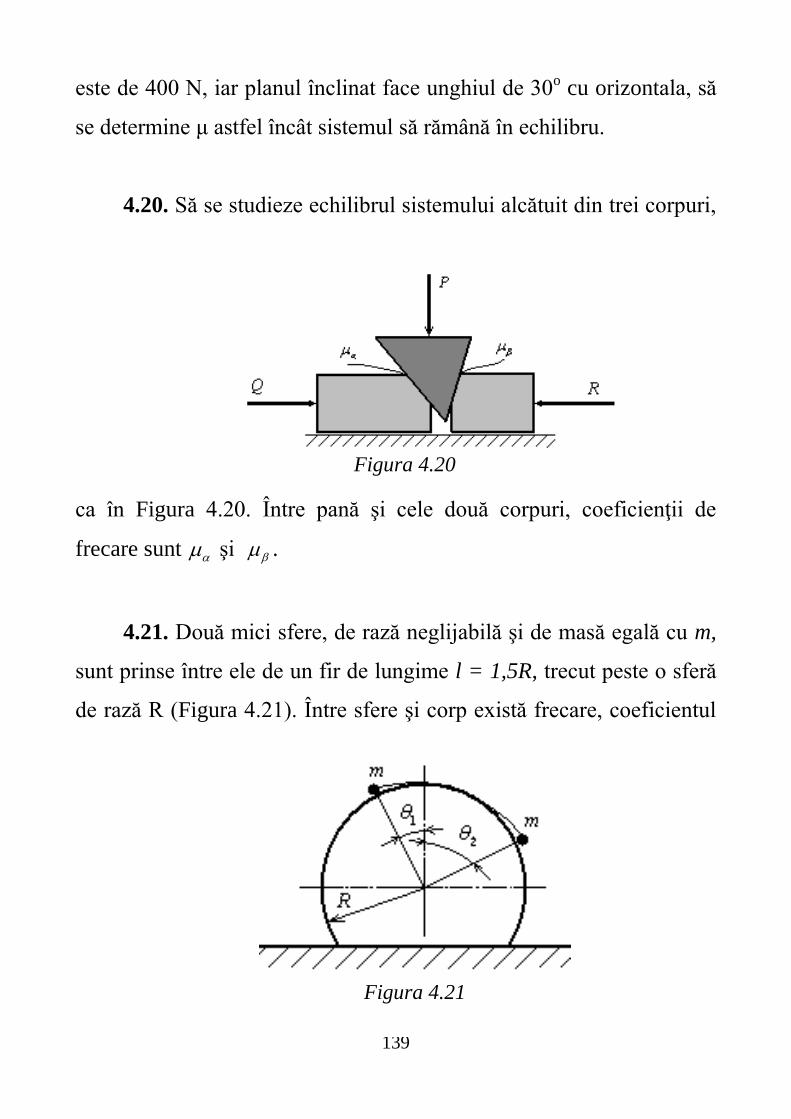
139
este de 400 N, iar planul înclinat face unghiul de 30o cu orizontala, să
se determine μ astfel încât sistemul să rămână în echilibru.
4.20. Să se studieze echilibrul sistemului alcătuit din trei corpuri,
ca în Figura 4.20. Între pană şi cele două corpuri, coeficienţii de
frecare sunt şi .
4.21. Două mici sfere, de rază neglijabilă şi de masă egală cu m,
sunt prinse între ele de un fir de lungime l = 1,5R, trecut peste o sferă
de rază R (Figura 4.21). Între sfere şi corp există frecare, coeficientul
Figura 4.20
Figura 4.21
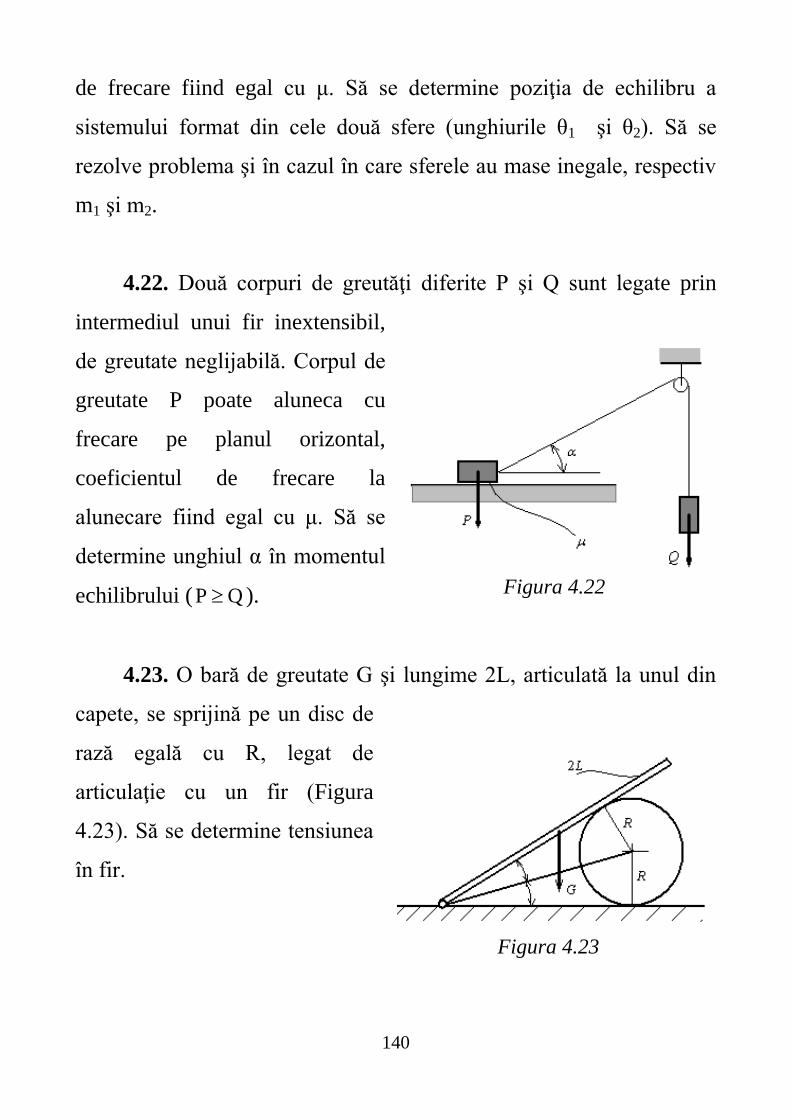
140
de frecare fiind egal cu μ. Să se determine poziţia de echilibru a
sistemului format din cele două sfere (unghiurile θ1 şi θ2). Să se
rezolve problema şi în cazul în care sferele au mase inegale, respectiv
m1 şi m2.
4.22. Două corpuri de greutăţi diferite P şi Q sunt legate prin
intermediul unui fir inextensibil,
de greutate neglijabilă. Corpul de
greutate P poate aluneca cu
frecare pe planul orizontal,
coeficientul de frecare la
alunecare fiind egal cu μ. Să se
determine unghiul α în momentul
echilibrului ( QP ).
4.23. O bară de greutate G şi lungime 2L, articulată la unul din
capete, se sprijină pe un disc de
rază egală cu R, legat de
articulaţie cu un fir (Figura
4.23). Să se determine tensiunea
în fir.
Figura 4.22
Figura 4.23
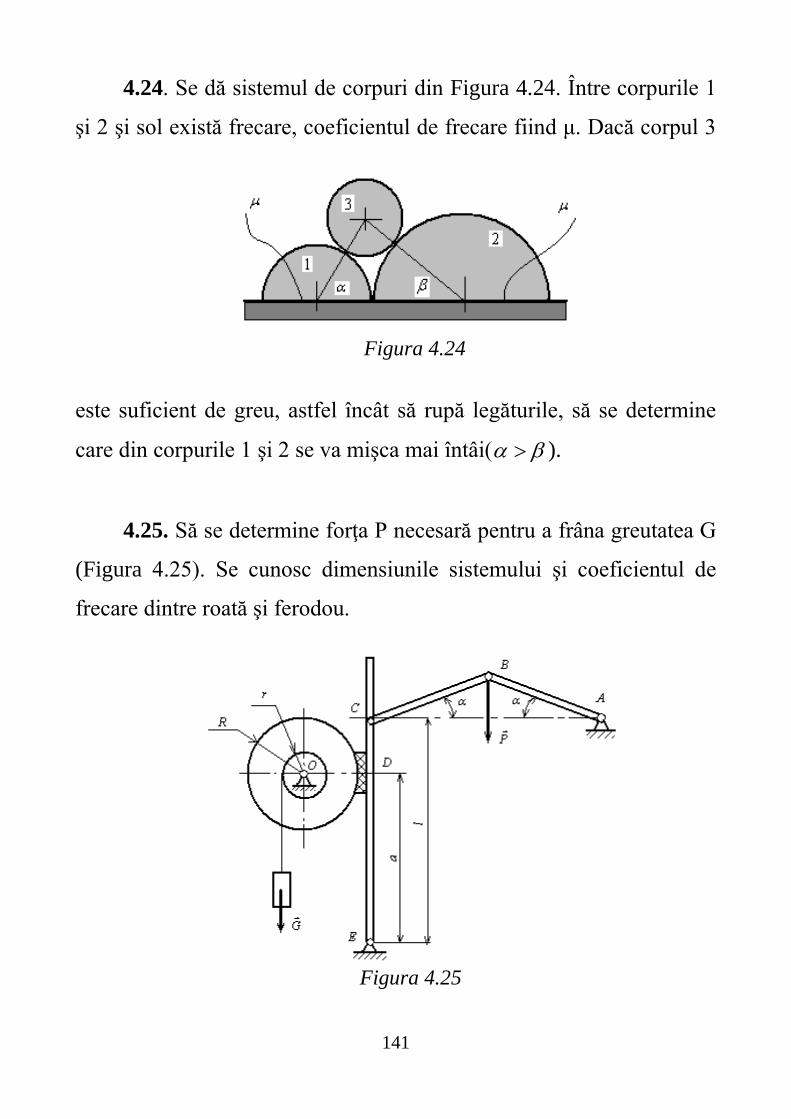
141
4.24. Se dă sistemul de corpuri din Figura 4.24. Între corpurile 1
şi 2 şi sol există frecare, coeficientul de frecare fiind μ. Dacă corpul 3
este suficient de greu, astfel încât să rupă legăturile, să se determine
care din corpurile 1 şi 2 se va mişca mai întâi( ).
4.25. Să se determine forţa P necesară pentru a frâna greutatea G
(Figura 4.25). Se cunosc dimensiunile sistemului şi coeficientul de
frecare dintre roată şi ferodou.
Figura 4.24
Figura 4.25
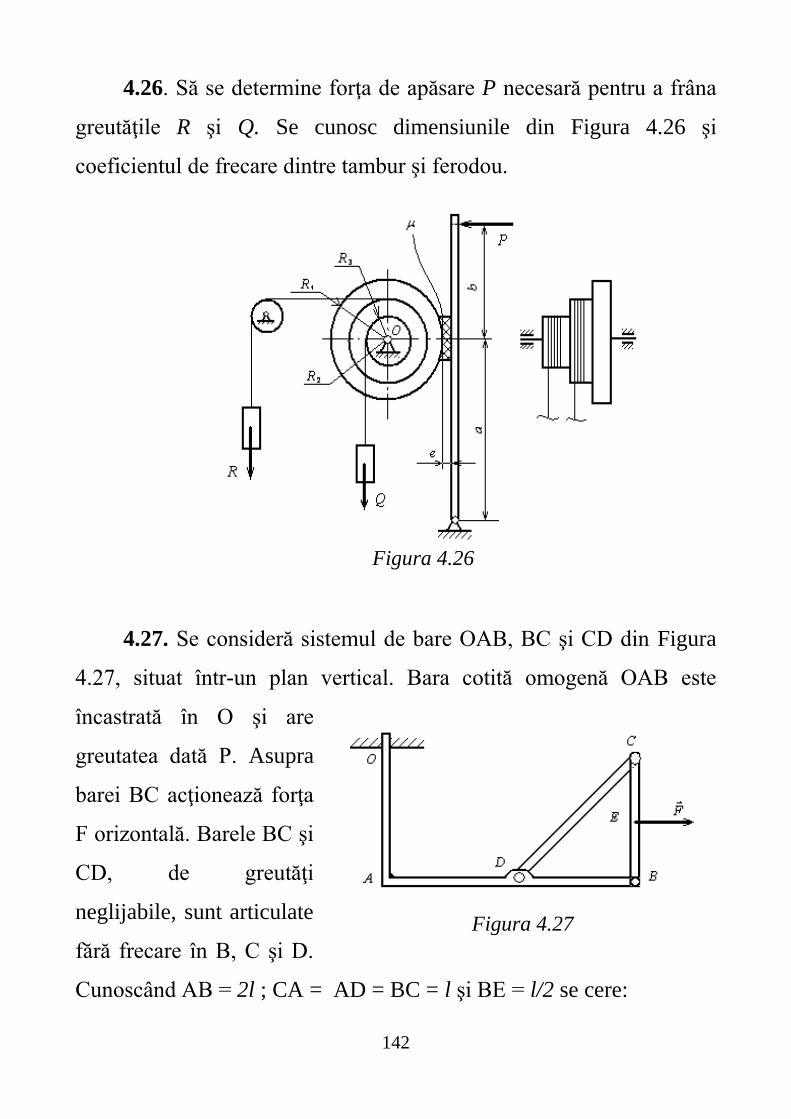
142
4.26. Să se determine forţa de apăsare P necesară pentru a frâna
greutăţile R şi Q. Se cunosc dimensiunile din Figura 4.26 şi
coeficientul de frecare dintre tambur şi ferodou.
4.27. Se consideră sistemul de bare OAB, BC şi CD din Figura
4.27, situat într-un plan vertical. Bara cotită omogenă OAB este
încastrată în O şi are
greutatea dată P. Asupra
barei BC acţionează forţa
F orizontală. Barele BC şi
CD, de greutăţi
neglijabile, sunt articulate
fără frecare în B, C şi D.
Cunoscând AB = 2l ; CA = AD = BC = l şi BE = l/2 se cere:
Figura 4.26
Figura 4.27
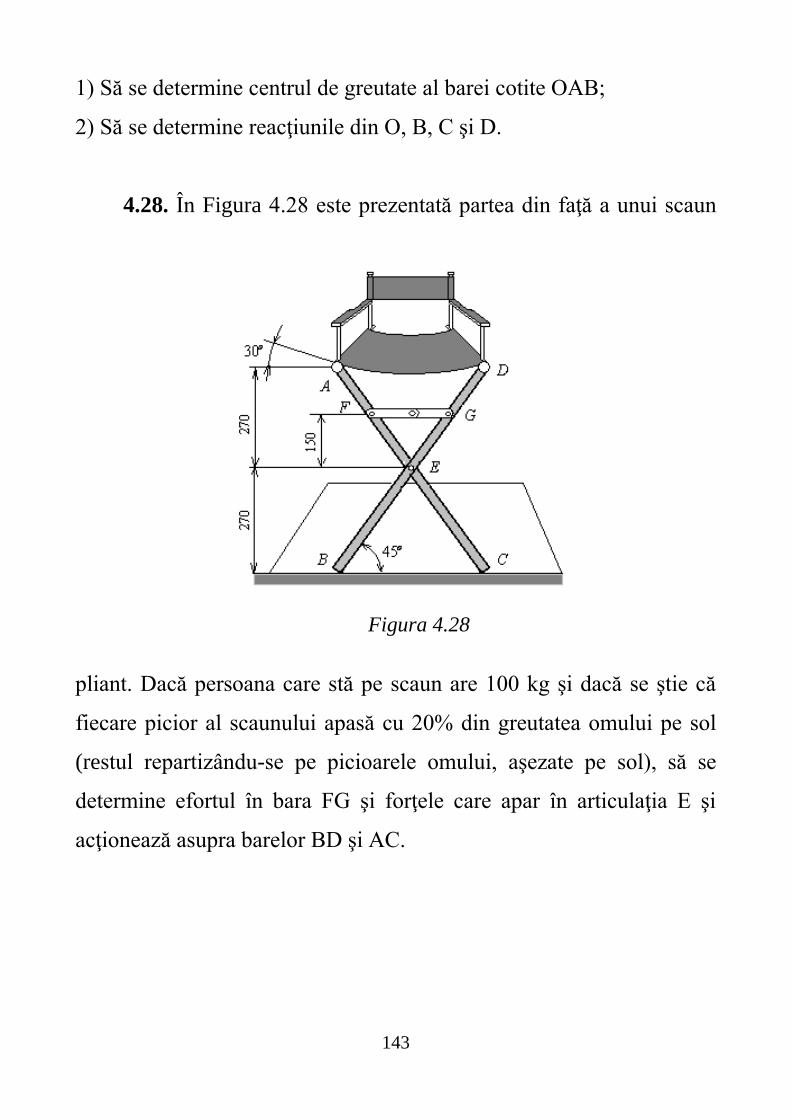
143
1) Să se determine centrul de greutate al barei cotite OAB;
2) Să se determine reacţiunile din O, B, C şi D.
4.28. În Figura 4.28 este prezentată partea din faţă a unui scaun
pliant. Dacă persoana care stă pe scaun are 100 kg şi dacă se ştie că
fiecare picior al scaunului apasă cu 20% din greutatea omului pe sol
(restul repartizându-se pe picioarele omului, aşezate pe sol), să se
determine efortul în bara FG şi forţele care apar în articulaţia E şi
acţionează asupra barelor BD şi AC.
Figura 4.28
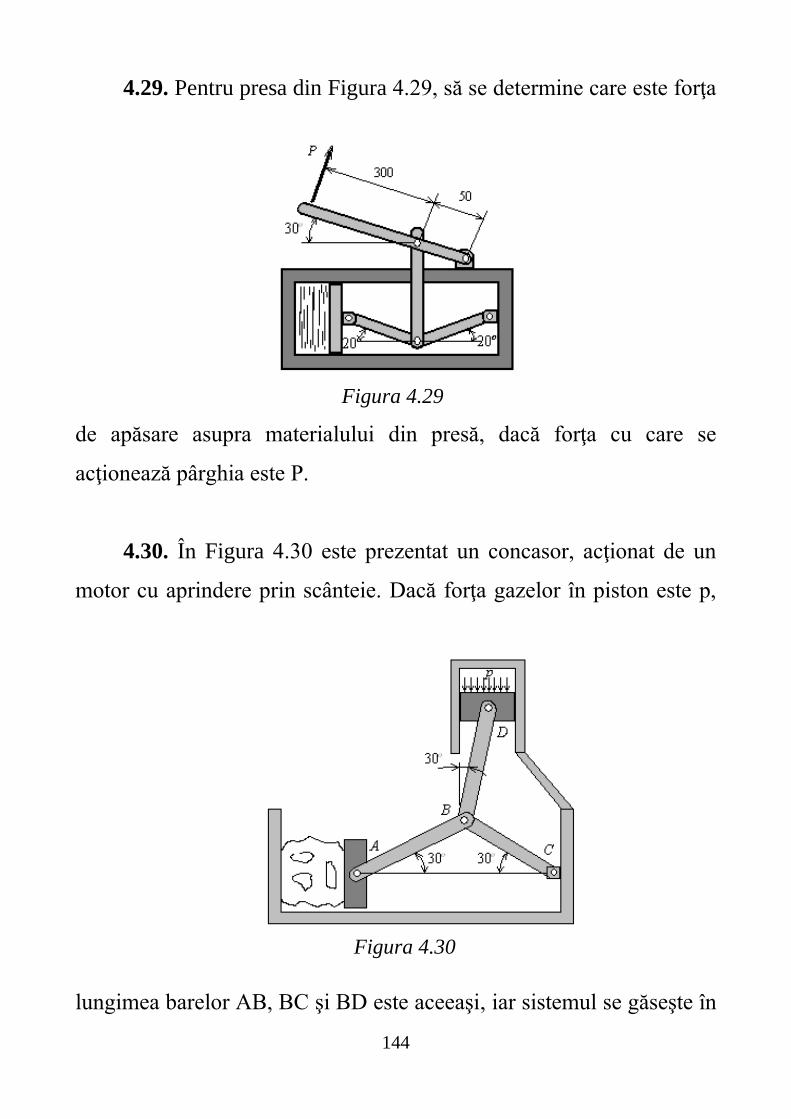
144
4.29. Pentru presa din Figura 4.29, să se determine care este forţa
de apăsare asupra materialului din presă, dacă forţa cu care se
acţionează pârghia este P.
4.30. În Figura 4.30 este prezentat un concasor, acţionat de un
motor cu aprindere prin scânteie. Dacă forţa gazelor în piston este p,
lungimea barelor AB, BC şi BD este aceeaşi, iar sistemul se găseşte în
Figura 4.29
Figura 4.30
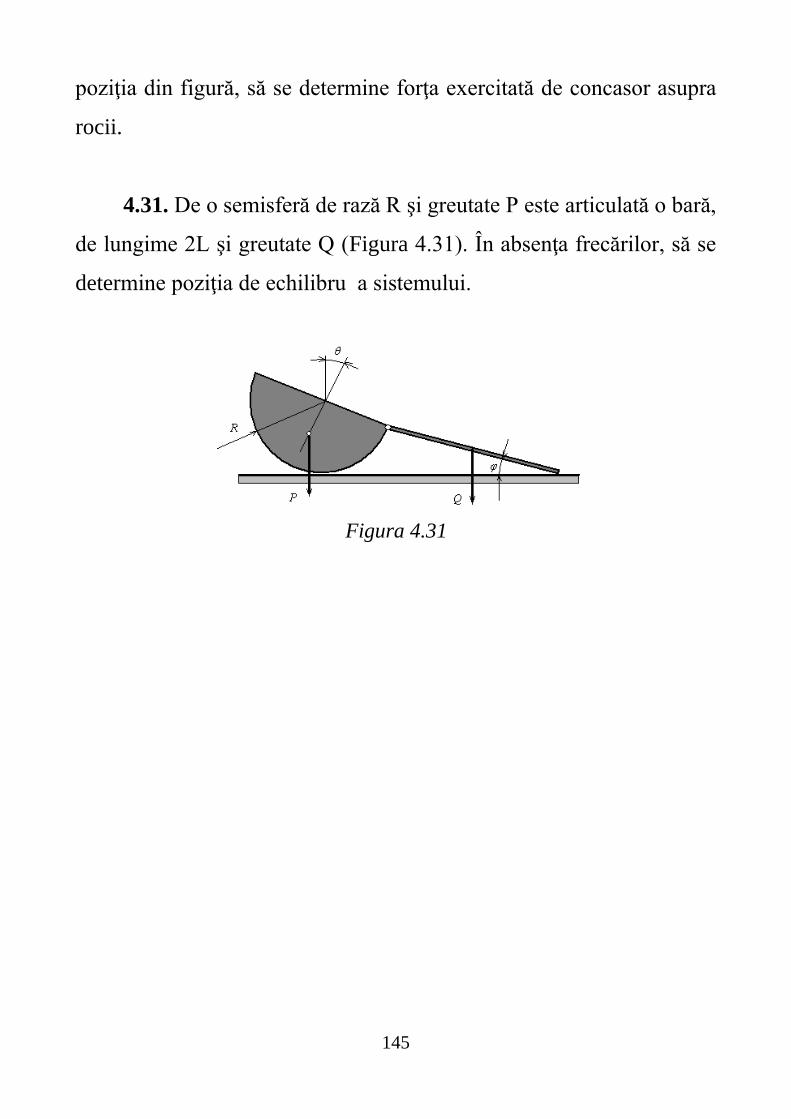
145
poziţia din figură, să se determine forţa exercitată de concasor asupra
rocii.
4.31. De o semisferă de rază R şi greutate P este articulată o bară,
de lungime 2L şi greutate Q (Figura 4.31). În absenţa frecărilor, să se
determine poziţia de echilibru a sistemului.
Figura 4.31
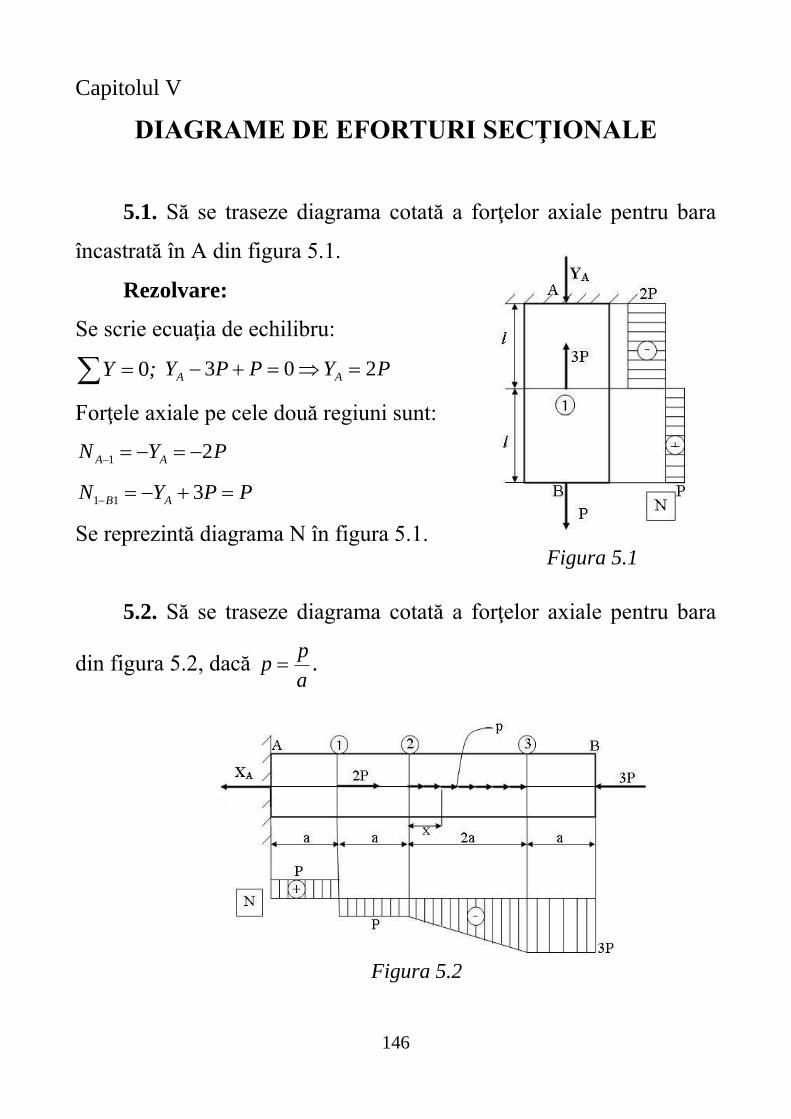
146
Capitolul V
DIAGRAME DE EFORTURI SECŢIONALE
5.1. Să se traseze diagrama cotată a forţelor axiale pentru bara
încastrată în A din figura 5.1.
Rezolvare:
Se scrie ecuaţia de echilibru:
;Y 0 PYPPY AA 203
Forţele axiale pe cele două regiuni sunt:
PYN AA 21
PPYN AB 311
Se reprezintă diagrama N în figura 5.1.
5.2. Să se traseze diagrama cotată a forţelor axiale pentru bara
din figura 5.2, dacă a
pp .
Figura 5.1
Figura 5.2
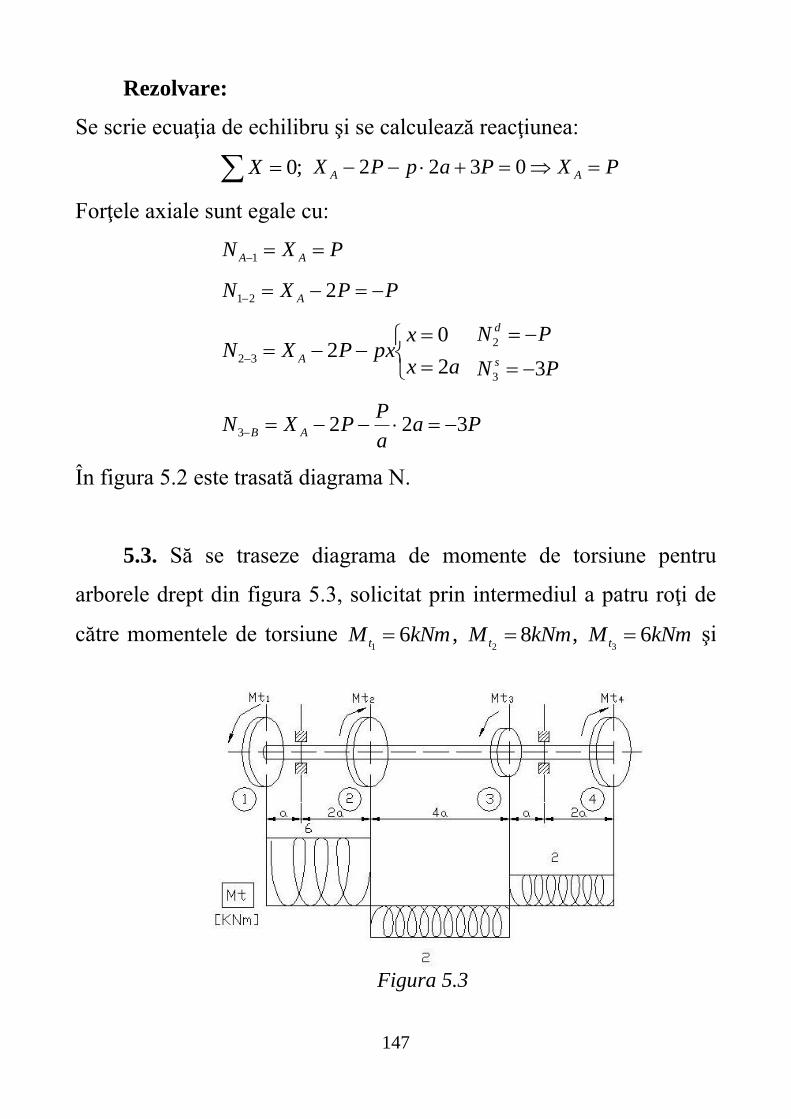
147
Rezolvare:
Se scrie ecuaţia de echilibru şi se calculează reacţiunea:
;0X PXPapPX AA 0322
Forţele axiale sunt egale cu:
PXN AA 1
PPXN A 221
ax
xpxPXN A
2
0232
PN
PN
s
d
33
2
Paa
PPXN AB 3223
În figura 5.2 este trasată diagrama N.
5.3. Să se traseze diagrama de momente de torsiune pentru
arborele drept din figura 5.3, solicitat prin intermediul a patru roţi de
către momentele de torsiune kNmM t 61 , kNmM t 8
2 , kNmM t 6
3 şi
Figura 5.3
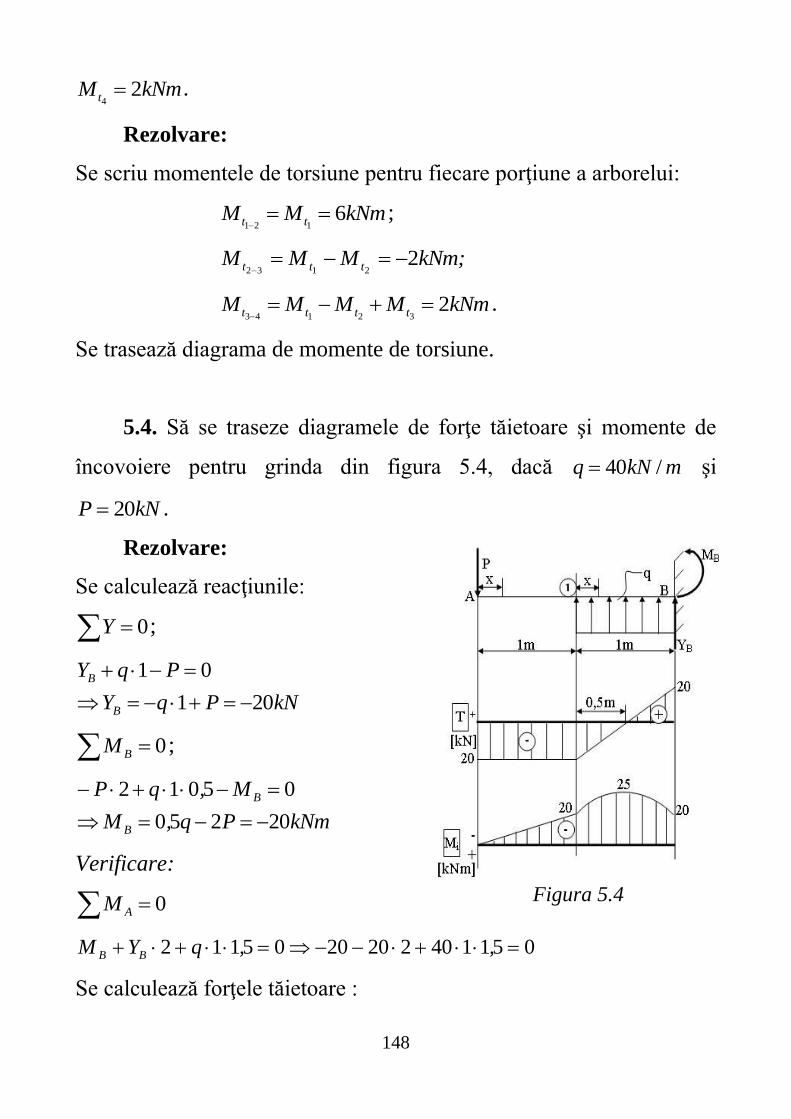
148
kNmM t 24 .
Rezolvare:
Se scriu momentele de torsiune pentru fiecare porţiune a arborelui:
kNmMM tt 6121
;
;kNmMMM ttt 22132
kNmMMMM tttt 232143
.
Se trasează diagrama de momente de torsiune.
5.4. Să se traseze diagramele de forţe tăietoare şi momente de
încovoiere pentru grinda din figura 5.4, dacă mkNq /40 şi
kNP 20 .
Rezolvare:
Se calculează reacţiunile:
0Y ;
kNPqY
PqY
B
B
201
01
0BM ;
kNmPq,M
M,qP
B
B
20250
05012
Verificare:
0AM
0511402202005112 ,,qYM BB
Se calculează forţele tăietoare :
Figura 5.4
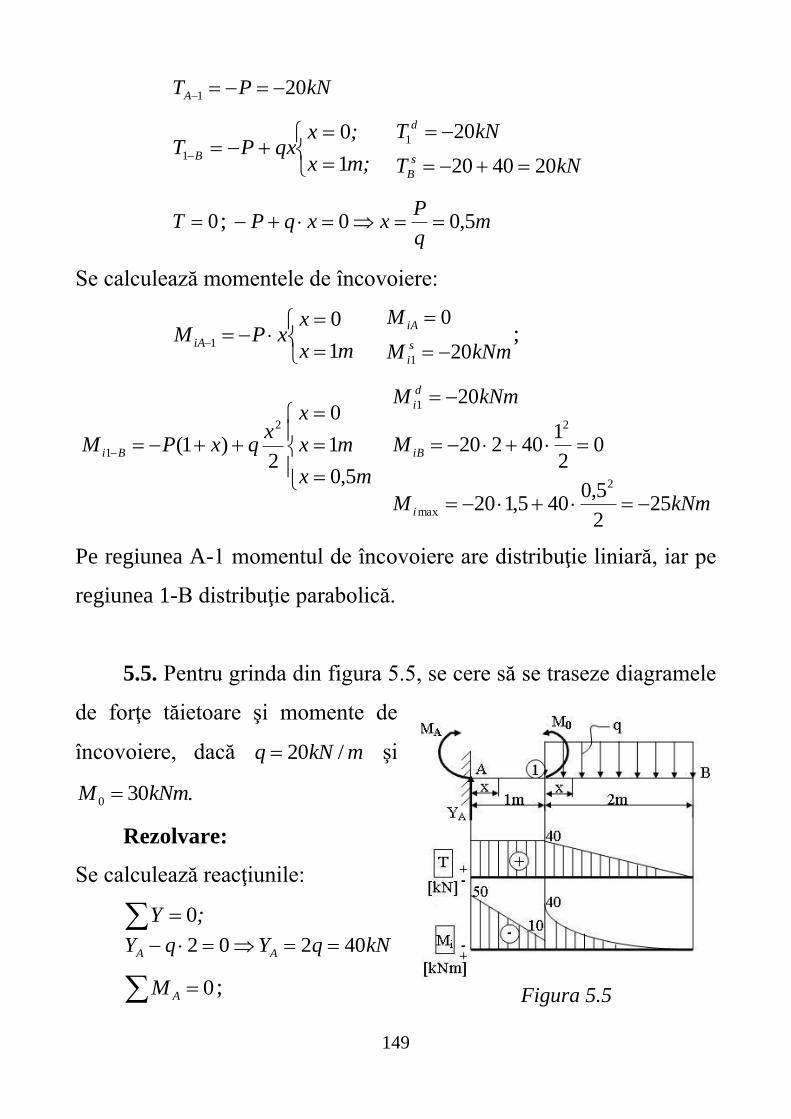
149
kNPTA 201
;mx
;xqxPT B
1
01
kNT
kNT
s
B
d
204020
201
0T ; mq
PxxqP 5,00
Se calculează momentele de încovoiere:
mx
xxPM iA
1
01
kNmM
M
s
i
iA
20
0
1
;
mx
mx
xx
qxPM Bi
5,0
1
0
2)1(
2
1
kNmM
M
kNmM
i
iB
d
i
252
5,0405,120
02
140220
20
2
max
2
1
Pe regiunea A-1 momentul de încovoiere are distribuţie liniară, iar pe
regiunea 1-B distribuţie parabolică.
5.5. Pentru grinda din figura 5.5, se cere să se traseze diagramele
de forţe tăietoare şi momente de
încovoiere, dacă mkNq /20 şi
.300 kNmM
Rezolvare:
Se calculează reacţiunile:
;Y 0
kNqYqY AA 40202
0AM ;
Figura 5.5

150
0220 qMM A;
kNmM A 50222030 ;
Verificare:
0BM ; 0212030340500123 0 qMYM AA
Se calculează forţele tăietoare:
kNYT AA 401
mx
xqxYT AB
2
01
022040
401
B
d
T
kNT
Se calculează momentele de încovoiere:
mx
xxYMM AAiA
1
01
kNmM
kNmM
s
i
iA
104050
50
1
mx
xxqMxYMM AABi
2
0
2)1(
2
0
0
403040501
iB
d
i
M
kNmM
În diagrama de momente de încovoiere, în secţiunea 1, apare un salt
egal cu momentul concentrat 0M .
5.6. Să se traseze diagramele de forţe tăietoare şi momente de
încovoiere pentru grinda din figura 5.6, dacă aqP 2 şi qaM 2
0 3 .
Rezolvare:
Se calculează reacţiunile:
0AM ; 035 0 MaPaYB
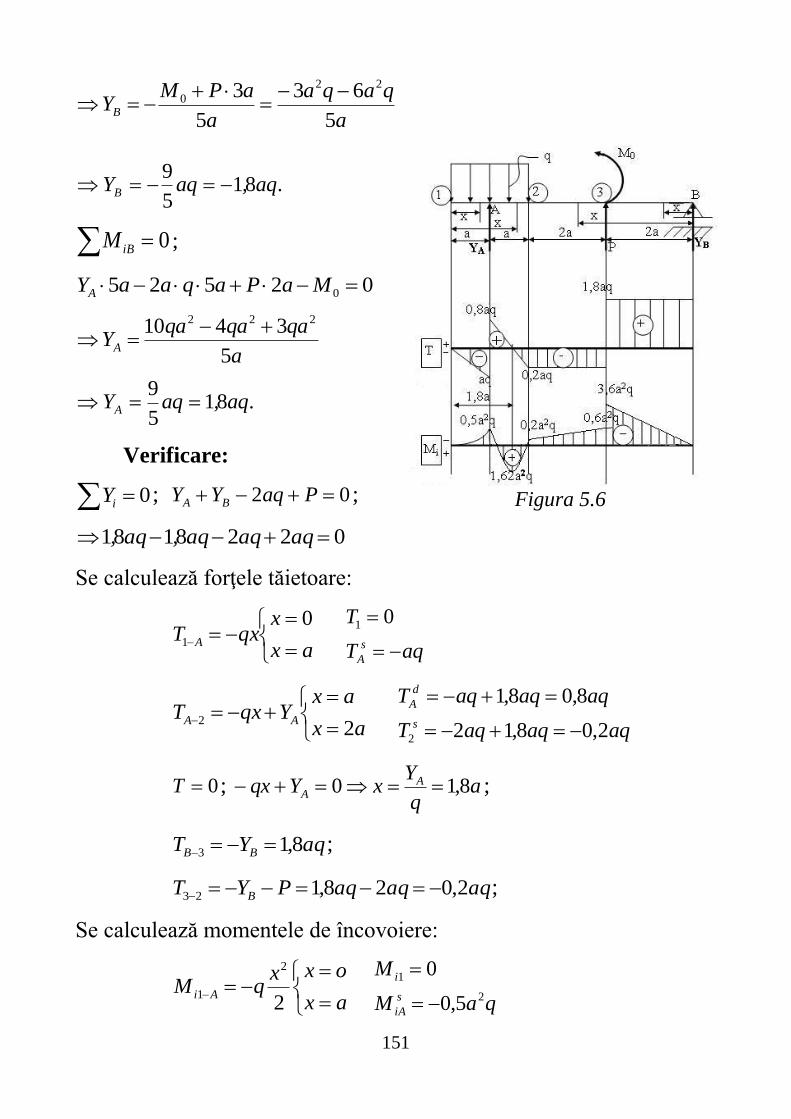
151
a
qaqa
a
aPMYB
5
63
5
3 22
0
.aq,aqYB 815
9
0iBM ;
02525 0 MaPaqaaYA
a
qaqaqaYA
5
3410 222
.aq,aqYA 815
9
Verificare:
0iY ; 02 PaqYY BA ;
0228181 aqaqaq,aq,
Se calculează forţele tăietoare:
ax
xqxT A
01
aqT
T
s
A
01
ax
axYqxT AA
22
aqaqaqT
aqaqaqT
s
d
A
2,08,12
8,08,1
2
0T ; aq
YxYqx A
A 8,10 ;
aqYT BB 8,13 ;
aqaqaqPYT B 2,028,123 ;
Se calculează momentele de încovoiere:
ax
oxxqM Ai
2
2
1
qaM
M
s
iA
i
2
1
5,0
0
Figura 5.6
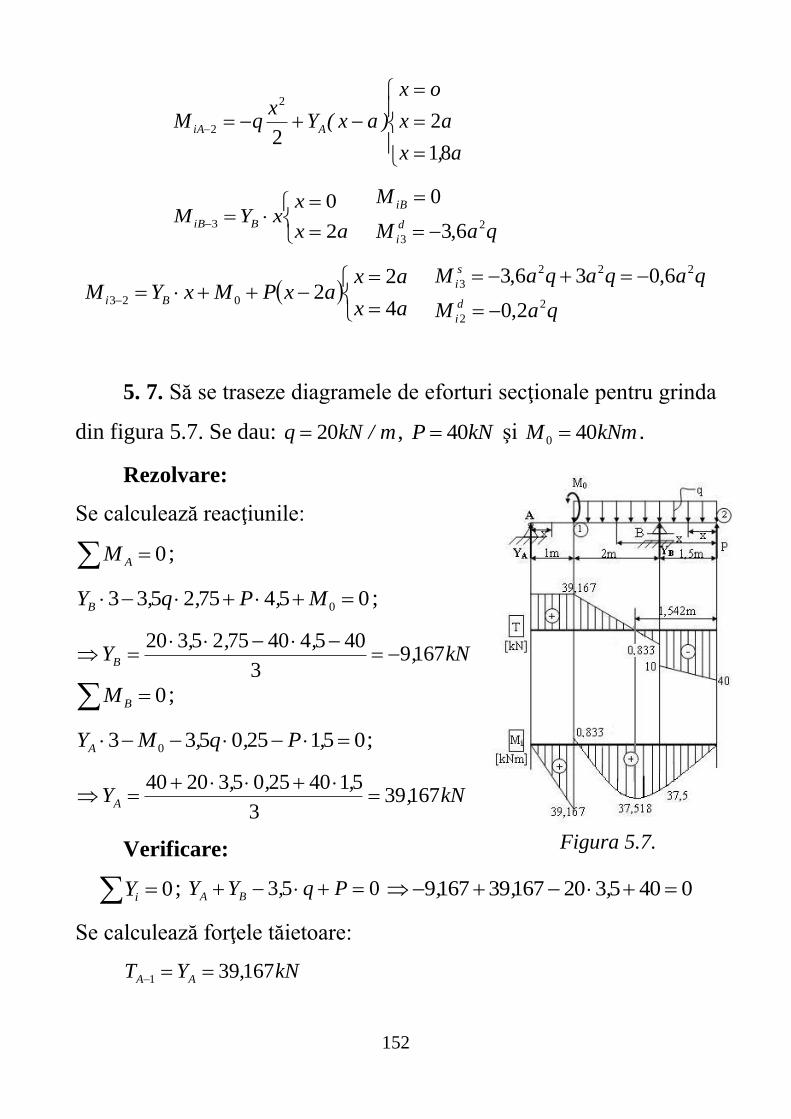
152
a,x
ax
ox
)ax(Yx
qM AiA
81
22
2
2
ax
xxYM BiB
2
03
qaM
M
d
i
iB
2
3 6,3
0
ax
axaxPMxYM Bi
4
22023
qaM
qaqaqaM
d
i
s
i
2
2
222
3
2,0
6,036,3
5. 7. Să se traseze diagramele de eforturi secţionale pentru grinda
din figura 5.7. Se dau: m/kNq 20 , kNP 40 şi kNmM 400 .
Rezolvare:
Se calculează reacţiunile:
0AM ;
054752533 0 M,P,q,YB ;
kN,,,,
YB 16793
4054407525320
0BM ;
051250533 0 ,P,q,MYA ;
kN,,,,
YA 167393
5140250532040
Verificare:
0iY ; 053 Pq,YY BA 0405320167391679 ,,,
Se calculează forţele tăietoare:
kNYT AA 167,391
Figura 5.7.

153
mx
xPqxT B
5,1
02
kNT
kNT
d
B 105,12040
402
mx
mxYqxPT BB
2
5,11
kNT
kNT
d
s
B
167,39
833,0167,95,13040
1
0T ; mq
YPxYqxP B
B 542,120
167,9400
Se calculează momentele de încovoiere:
mx
xxYM AiA
1
01
kNmM
M
s
i
iA
167,39
0
1
mx
xxqPxM Bi
5,1
0
2
2
2
kNmM
M
d
iB
i
5,372
5,1205,140
0
2
2
mx
mx
mx
xYx
qPxM BiB
542,1
5,3
5,1
5,12
2
1
kNmM
kNmM
kNmM
i
d
i
s
iB
518,37
833,0
54,37
max
1
5.8. Dacă qlP şi 2
0 qlM , se cere să se calculeze forţa
tăietoare şi momentul de încovoiere în secţiunea I-I, pentru grinda din
figura 5.8.
Rezolvare:
Se calculează reacţiunile:
0AM ; 02
2523 0 l
qlMlPl,qllYB
;
qll
ql,qlqlql,YB
3
4
3
50252 2222
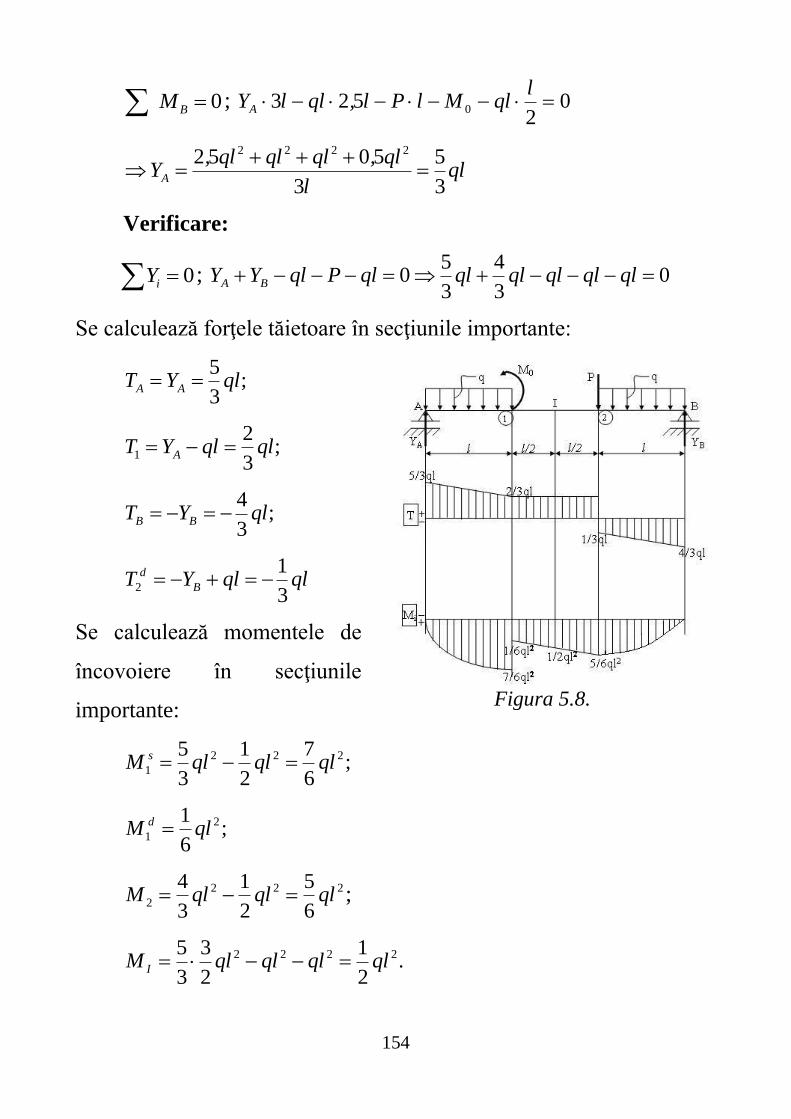
154
0 BM ; 02
523 0 l
qlMlPl,qllYA
qll
ql,qlqlql,YA
3
5
3
5052 2222
Verificare:
0iY ; 03
4
3
50 qlqlqlqlqlqlPqlYY BA
Se calculează forţele tăietoare în secţiunile importante:
;3
5qlYT AA
;3
21 qlqlYT A
;3
4qlYT BB
qlqlYT B
d
3
12
Se calculează momentele de
încovoiere în secţiunile
importante:
;6
7
2
1
3
5 222
1 qlqlqlM s
;6
1 2
1 qlM d
222
26
5
2
1
3
4qlqlqlM ;
.2
1
2
3
3
5 2222 qlqlqlqlM I
Figura 5.8.
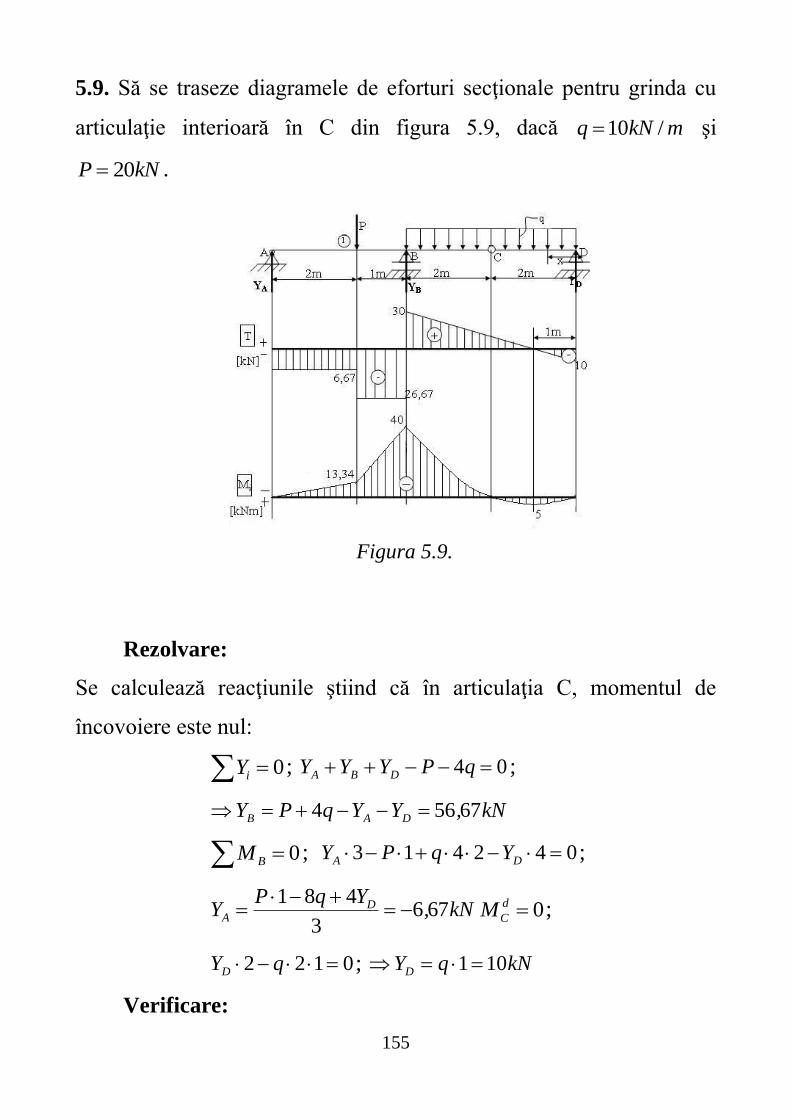
155
5.9. Să se traseze diagramele de eforturi secţionale pentru grinda cu
articulaţie interioară în C din figura 5.9, dacă mkNq /10 şi
kNP 20 .
Rezolvare:
Se calculează reacţiunile ştiind că în articulaţia C, momentul de
încovoiere este nul:
0iY ; 04 qPYYY DBA ;
kN,YYqPY DAB 67564
0BM ; 042413 DA YqPY ;
kN,YqP
Y DA 676
3
481
0d
CM ;
0122 qYD ; kNqYD 101
Verificare:
Fig.5.9.
Figura 5.9.
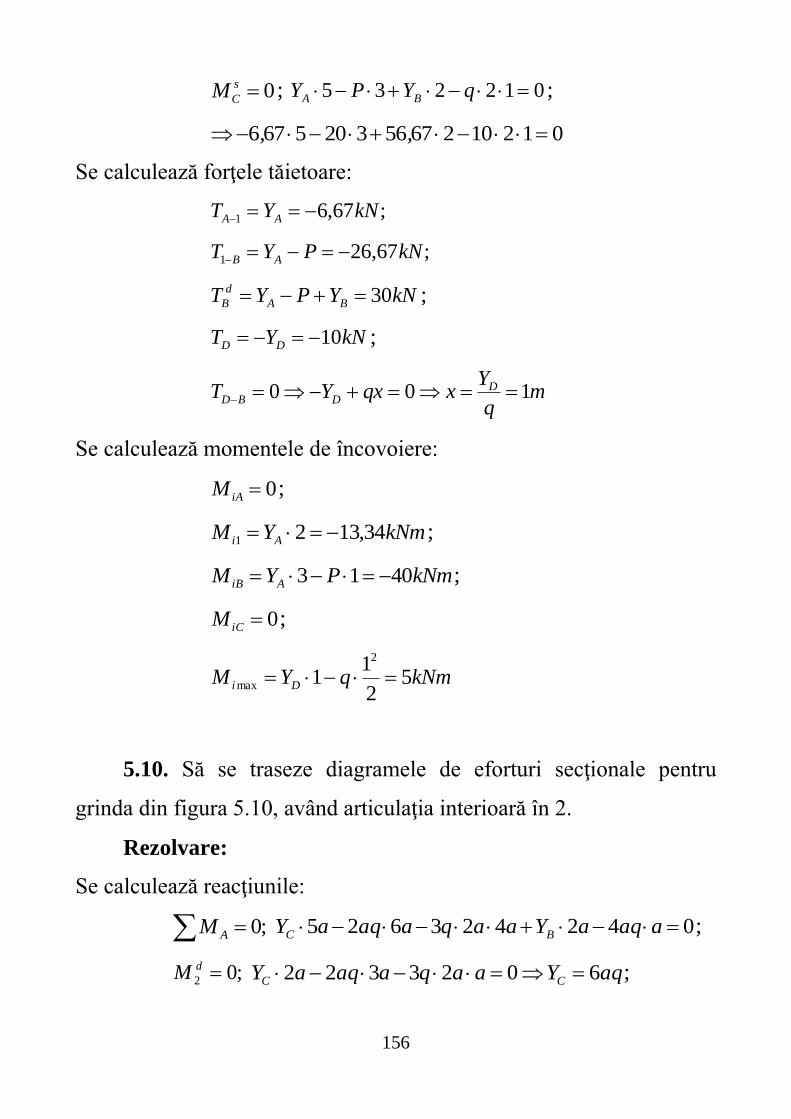
156
0s
CM ; 012235 qYPY BA ;
01210267563205676 ,,
Se calculează forţele tăietoare:
;67,61 kNYT AA
;67,261 kNPYT AB
kNYPYT BA
d
B 30 ;
kNYT DD 10 ;
mq
YxqxYT D
DBD 100
Se calculează momentele de încovoiere:
0iAM ;
kNmYM Ai 34,1321 ;
kNmPYM AiB 4013 ;
0iCM ;
kNmqYM Di 52
11
2
max
5.10. Să se traseze diagramele de eforturi secţionale pentru
grinda din figura 5.10, având articulaţia interioară în 2.
Rezolvare:
Se calculează reacţiunile:
;0AM 042423625 aaqaYaaqaaqaY BC ;
;02 dM aqYaaqaaqaY CC 6023322 ;
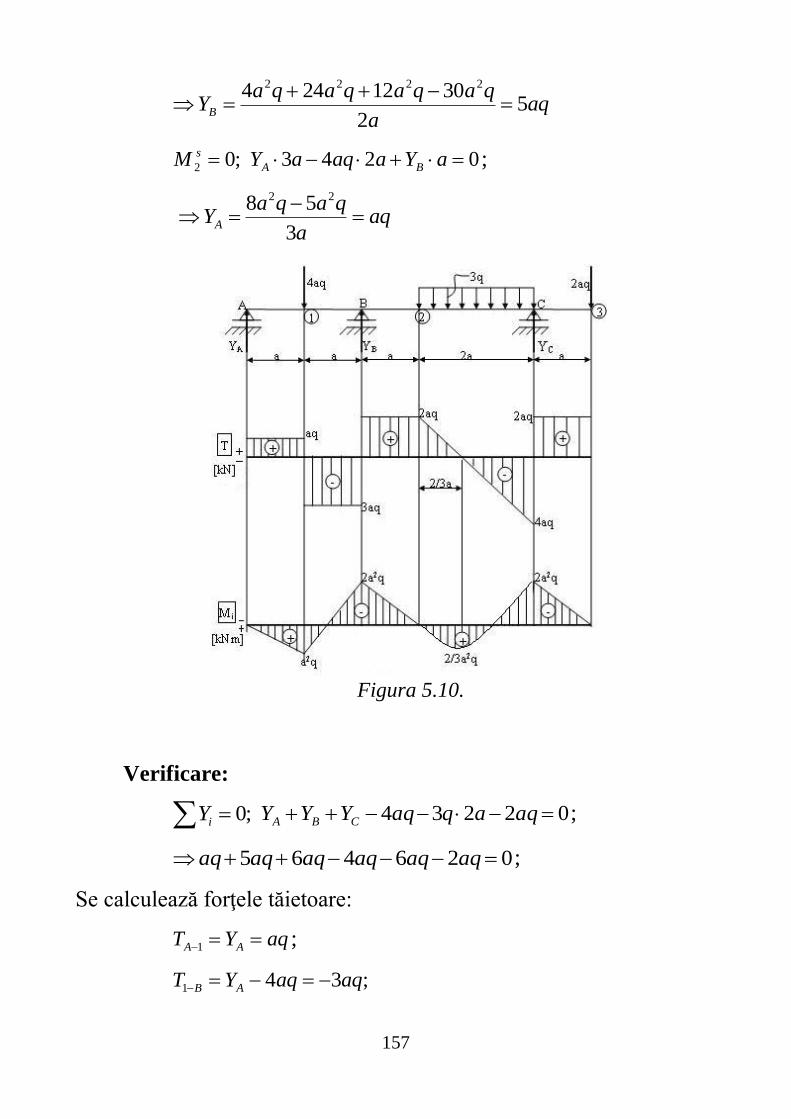
157
aqa
qaqaqaqaYB 5
2
3012244 2222
;02 sM 0243 aYaaqaY BA ;
aqa
qaqaYA
3
58 22
Verificare:
;0iY
02234 aqaqaqYYY CBA ;
026465 aqaqaqaqaqaq ;
Se calculează forţele tăietoare:
aqYT AA 1 ;
;341 aqaqYT AB
Figura 5.10.

158
aqYaqYT BAB 242 ;
;4aqT s
C
aq
YaqYxqxYaqYT BA
BAC3
240402
Se calculează momentele de încovoiere:
0iAM ;
qaaYM Ai
2
1 ;
qaaaqaYM AiB
2242 ;
02 iM ;
;03 iM
;2 2qaM iC
qaa
qa
Ya
aaqM Ci
2
2
max3
2
2
1
3
4
3
4
3
42
.
5.11. Dacă aqP 5 şi qaM 2
0 4 , se cere să se traseze
diagramele de eforturi secţionale pentru grinda din figura 5.11.
Rezolvare:
Se calculează reacţiunile:
;0AM aq5,11Y0a2PMa5a4q2a4Y B0B
;0BM aq5,1Y0aa4q2Ma2Pa4Y A0A
Verificare:
;0iY 0855,115,1042 aqaqaqaqaqPYY BA
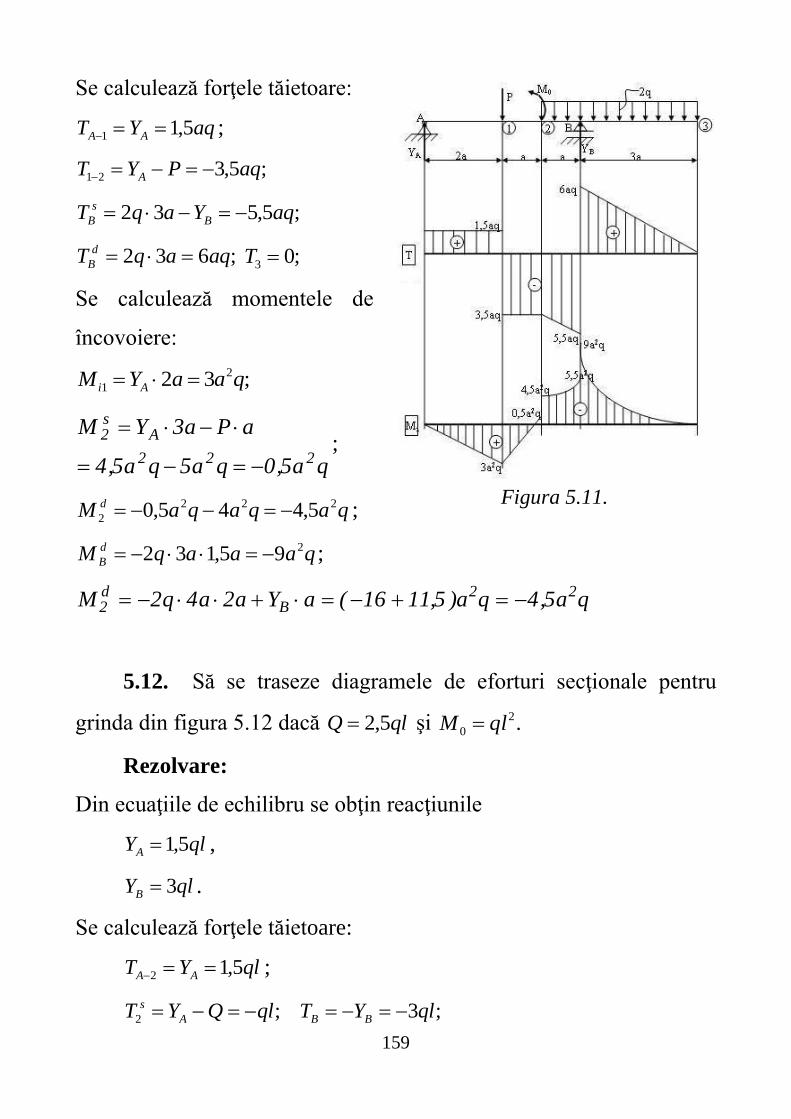
159
Se calculează forţele tăietoare:
aqYT AA 5,11 ;
;5,321 aqPYT A
;5,532 aqYaqT B
s
B
;632 aqaqT d
B ;03 T
Se calculează momentele de
încovoiere:
;32 2
1 qaaYM Ai
qa5,0qa5qa5,4
aPa3YM
222
As2
;
qaqaqaM d 222
2 5,445,0 ;
qaaaqM d
B
295,132 ;
qa5,4qa)5,1116(aYa2a4q2M 22B
d2
5.12. Să se traseze diagramele de eforturi secţionale pentru
grinda din figura 5.12 dacă qlQ 5,2 şi .2
0 qlM
Rezolvare:
Din ecuaţiile de echilibru se obţin reacţiunile
qlYA 5,1 ,
qlYB 3 .
Se calculează forţele tăietoare:
qlYT AA 5,12 ;
;2 qlQYT A
s ;3qlYT BB
Figura 5.11.
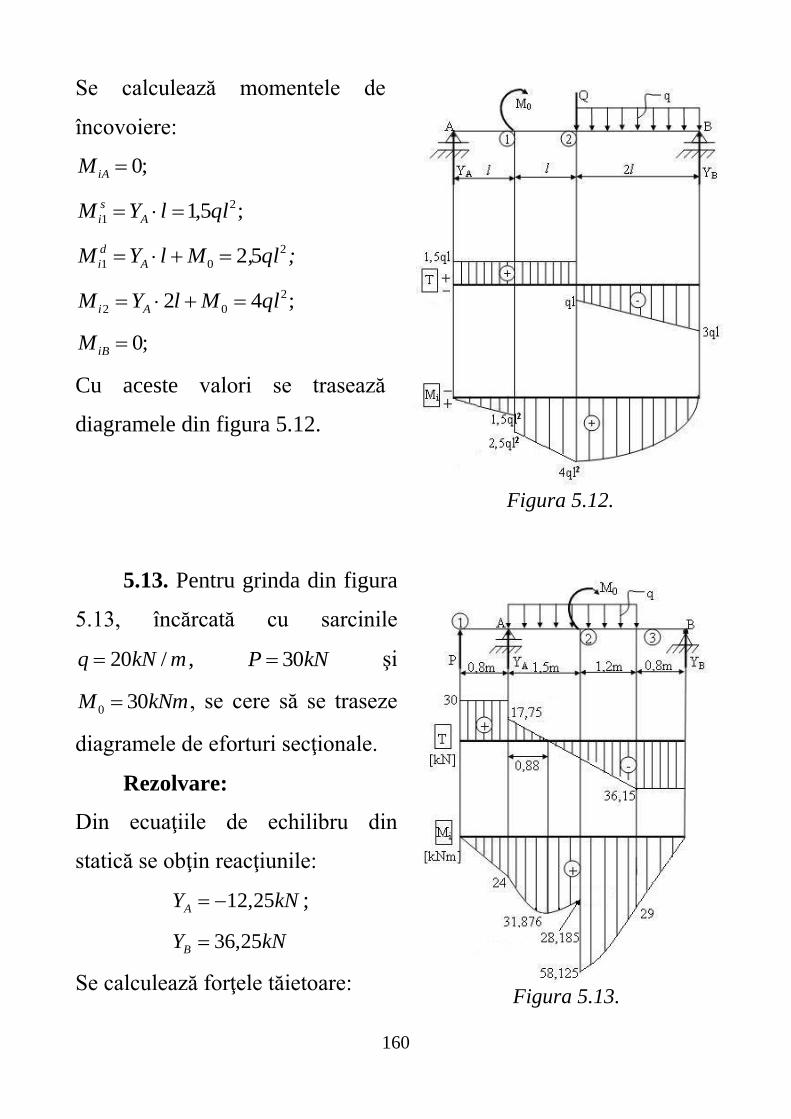
160
Se calculează momentele de
încovoiere:
;0iAM
;5,1 2
1 qllYM A
s
i
;ql,MlYM A
d
i
2
01 52
;42 2
02 qlMlYM Ai
;0iBM
Cu aceste valori se trasează
diagramele din figura 5.12.
5.13. Pentru grinda din figura
5.13, încărcată cu sarcinile
mkNq /20 , kNP 30 şi
kNmM 300 , se cere să se traseze
diagramele de eforturi secţionale.
Rezolvare:
Din ecuaţiile de echilibru din
statică se obţin reacţiunile:
kNYA 25,12 ;
kNYB 25,36
Se calculează forţele tăietoare:
Figura 5.12.
Figura 5.13.

161
kNPT A 301 ; ;75,17 kNYPT A
d
A
;25,363 kNYT BB
03 AT ; ;887,00 mxqxYP A
Se calculează momentele de încovoiere:
;01 iM
;248,0 kNmPM iA
;125,282
5,15,13,2
2
2 kNmqYPM A
s
i
;0iBM
kNmYM Bi 298,03 ;
kNmMMM s
i
d
i 125,58022
;kNm,,
q,Y,PM Amaxi 876312
887088706871
2
Cu aceste valori se trasează diagramele din figura 5.13.
5.14. Să se traseze diagramele T şi iM pentru grinda din figura
5.14 dacă qlP 2 şi .3 2
0 qlM
Rezolvare:
Se obţin reacţiunile:
qlYA 2 ;
;4qlYB
Se calculează forţele tăietoare:
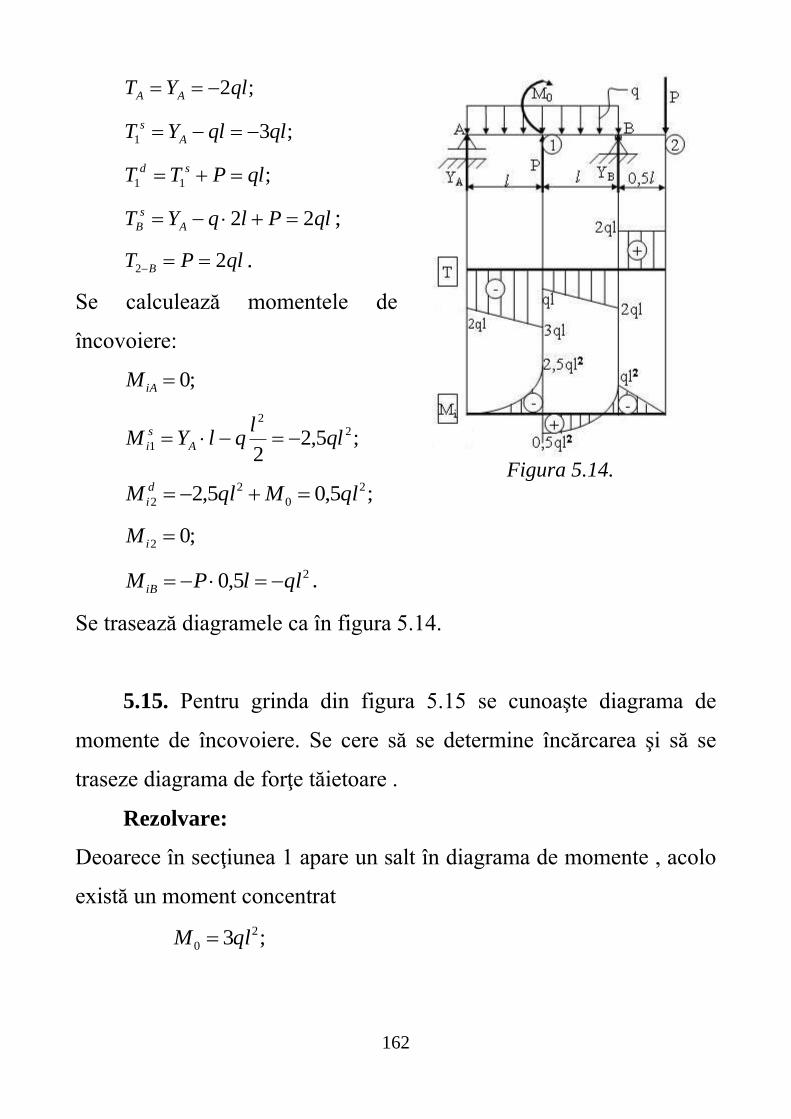
162
;2qlYT AA
;31 qlqlYT A
s
;11 qlPTT sd
qlPlqYT A
s
B 22 ;
qlPT B 22 .
Se calculează momentele de
încovoiere:
;0iAM
;5,22
22
1 qll
qlYM A
s
i
;5,05,2 2
0
2
2 qlMqlM d
i
;02 iM
25,0 qllPM iB .
Se trasează diagramele ca în figura 5.14.
5.15. Pentru grinda din figura 5.15 se cunoaşte diagrama de
momente de încovoiere. Se cere să se determine încărcarea şi să se
traseze diagrama de forţe tăietoare .
Rezolvare:
Deoarece în secţiunea 1 apare un salt în diagrama de momente , acolo
există un moment concentrat
;3 2
0 qlM
Figura 5.14.
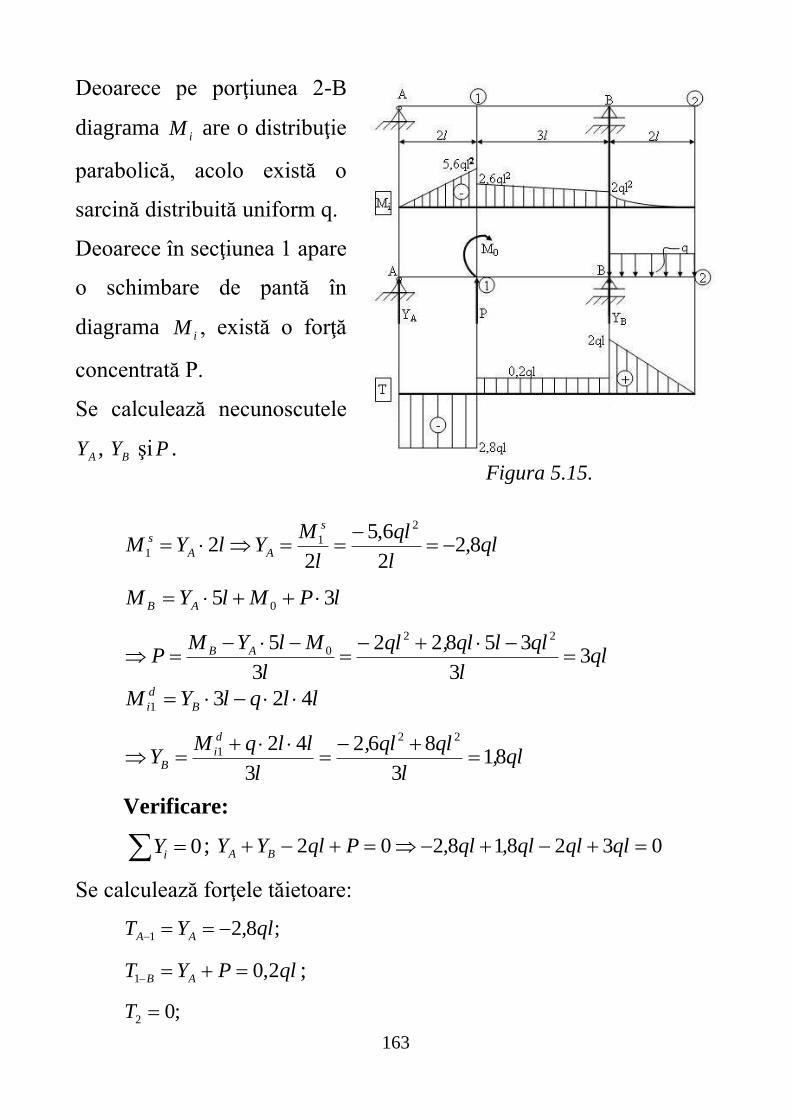
163
Deoarece pe porţiunea 2-B
diagrama iM are o distribuţie
parabolică, acolo există o
sarcină distribuită uniform q.
Deoarece în secţiunea 1 apare
o schimbare de pantă în
diagrama iM , există o forţă
concentrată P.
Se calculează necunoscutele
AY , BY şi P .
qll
ql
l
MYlYM
s
AA
s 8,22
6,5
22
2
11
lPMlYM AB 35 0
qll
qllql,ql
l
MlYMP AB 3
3
35822
3
5 22
0
llqlYM B
d
i 4231
ql,l
qlql,
l
llqMY
d
iB 81
3
862
3
42 22
1
Verificare:
0iY ; 0328,18,202 qlqlqlqlPqlYY BA
Se calculează forţele tăietoare:
;8,21 qlYT AA
qlPYT AB 2,01 ;
;02 T
Figura 5.15.
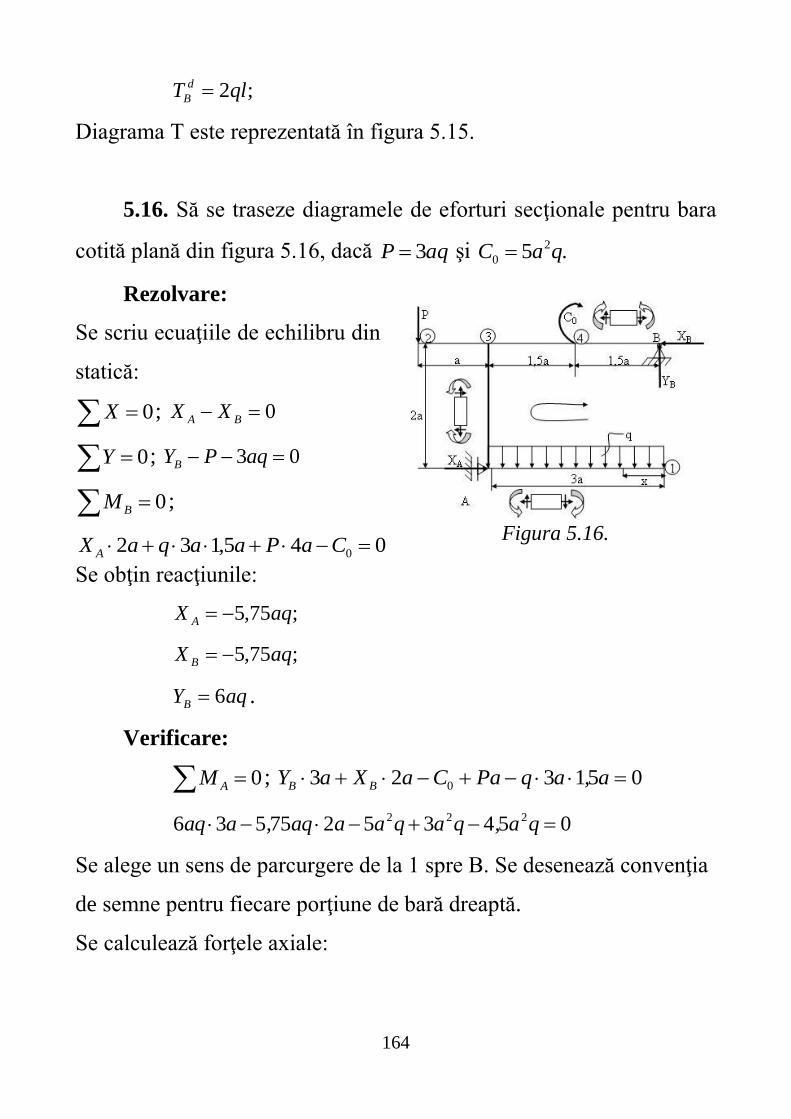
164
;2qlT d
B
Diagrama T este reprezentată în figura 5.15.
5.16. Să se traseze diagramele de eforturi secţionale pentru bara
cotită plană din figura 5.16, dacă aqP 3 şi .5 2
0 qaC
Rezolvare:
Se scriu ecuaţiile de echilibru din
statică:
0X ; 0 BA XX
0Y ; 03 aqPYB
0BM ;
045,132 0 CaPaaqaX A
Se obţin reacţiunile:
;75,5 aqX A
;75,5 aqX B
aqYB 6 .
Verificare:
0AM ; 051323 0 a,aqPaCaXaY BB
05435275536 222 qa,qaqaaaq,aaq
Se alege un sens de parcurgere de la 1 spre B. Se desenează convenţia
de semne pentru fiecare porţiune de bară dreaptă.
Se calculează forţele axiale:
Figura 5.16.
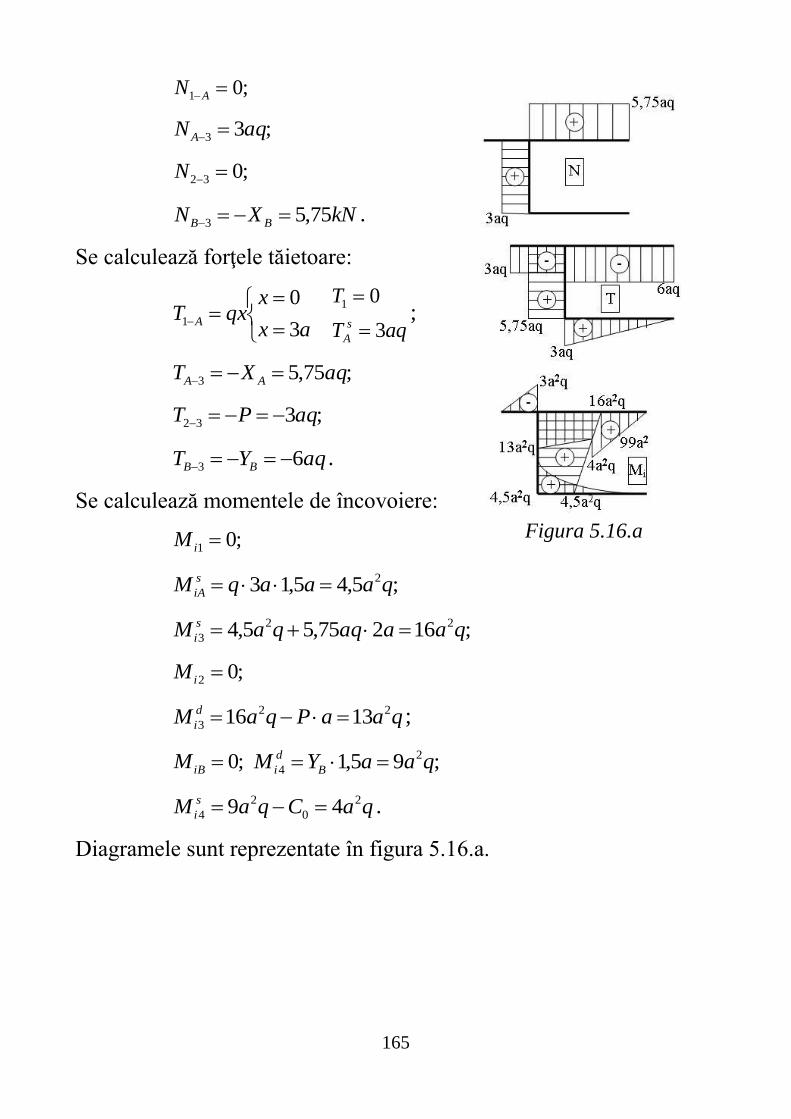
165
;01 AN
;33 aqNA
;032 N
kNXN BB 75,53 .
Se calculează forţele tăietoare:
ax
xqxT A
3
01
aqT
T
s
A 3
01
;
;75,53 aqXT AA
;332 aqPT
aqYT BB 63 .
Se calculează momentele de încovoiere:
;01 iM
;5,45,13 2qaaaqM s
iA
;16275,55,4 22
3 qaaaqqaM s
i
;02 iM
qaaPqaM d
i
22
3 1316 ;
;0iBM ;95,1 2
4 qaaYM B
d
i
qaCqaM s
i
2
0
2
4 49 .
Diagramele sunt reprezentate în figura 5.16.a.
Figura 5.16.a
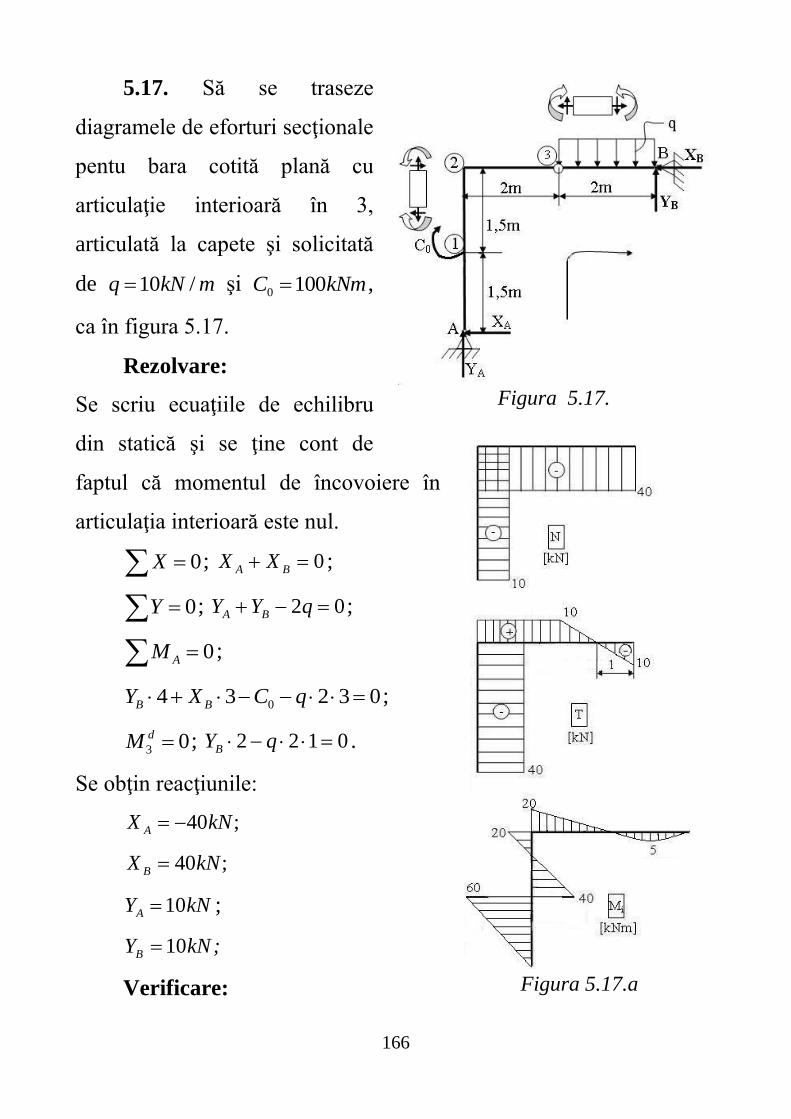
166
5.17. Să se traseze
diagramele de eforturi secţionale
pentu bara cotită plană cu
articulaţie interioară în 3,
articulată la capete şi solicitată
de mkNq /10 şi kNmC 1000 ,
ca în figura 5.17.
Rezolvare:
Se scriu ecuaţiile de echilibru
din statică şi se ţine cont de
faptul că momentul de încovoiere în
articulaţia interioară este nul.
0X ; 0 BA XX ;
0Y ; 02 qYY BA ;
0AM ;
03234 0 qCXY BB ;
03 dM ; 0122 qYB .
Se obţin reacţiunile:
;40kNX A
;40kNX B
kNYA 10 ;
;kNYB 10
Verificare:
Figura 5.17.
Figura 5.17.a
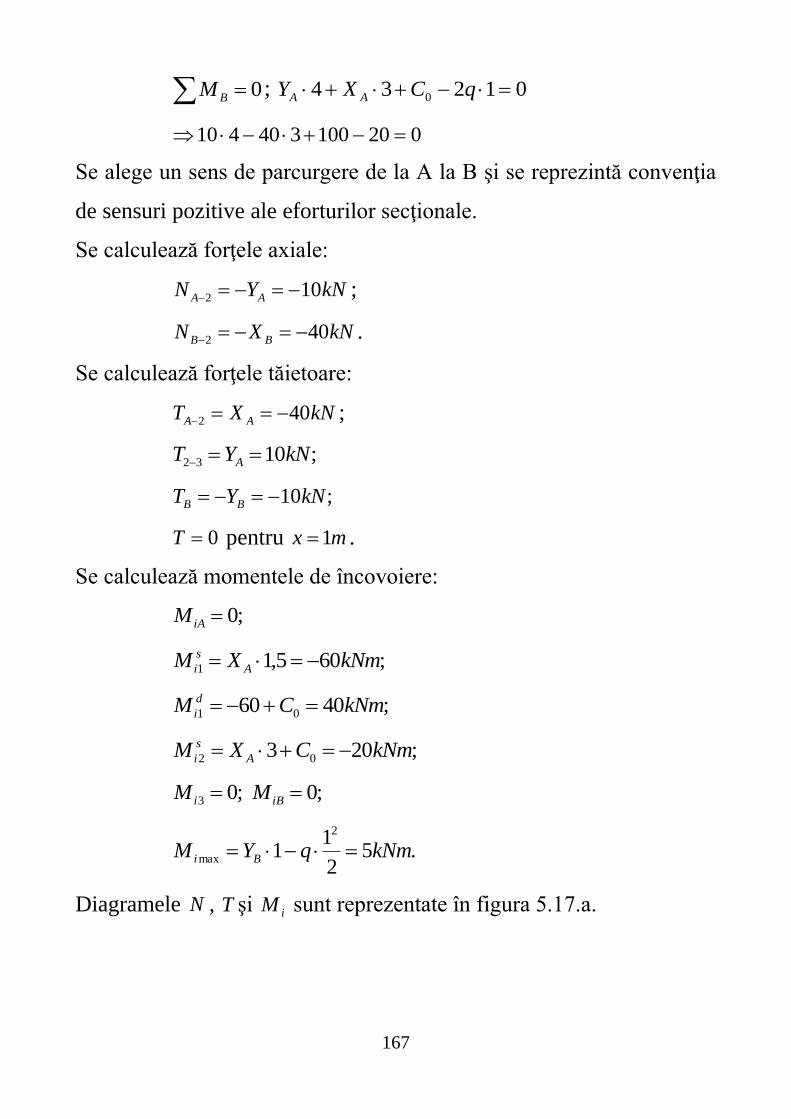
167
0BM ; 01234 0 qCXY AA
020100340410
Se alege un sens de parcurgere de la A la B şi se reprezintă convenţia
de sensuri pozitive ale eforturilor secţionale.
Se calculează forţele axiale:
kNYN AA 102 ;
kNXN BB 402 .
Se calculează forţele tăietoare:
kNXT AA 402 ;
;1032 kNYT A
;10kNYT BB
0T pentru mx 1 .
Se calculează momentele de încovoiere:
;0iAM
;605,11 kNmXM A
s
i
;4060 01 kNmCM d
i
;203 02 kNmCXM A
s
i
;03 iM ;0iBM
.52
11
2
max kNmqYM Bi
Diagramele N , T şi iM sunt reprezentate în figura 5.17.a.
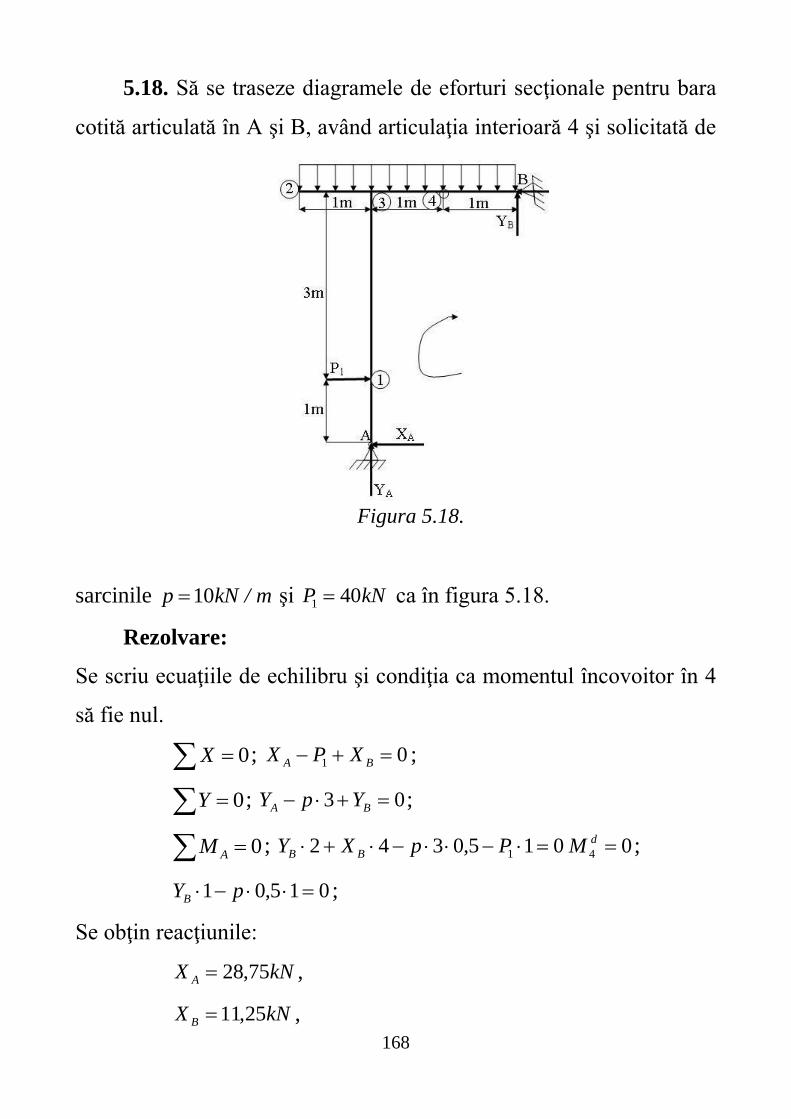
168
5.18. Să se traseze diagramele de eforturi secţionale pentru bara
cotită articulată în A şi B, având articulaţia interioară 4 şi solicitată de
sarcinile m/kNp 10 şi kNP 401 ca în figura 5.18.
Rezolvare:
Se scriu ecuaţiile de echilibru şi condiţia ca momentul încovoitor în 4
să fie nul.
0X ; 01 BA XPX ;
0Y ; 03 BA YpY ;
0AM ; 015,0342 1 PpXY BB 04 dM ;
015,01 pYB ;
Se obţin reacţiunile:
kNX A 75,28 ,
kNX B 25,11 ,
Figura 5.18.
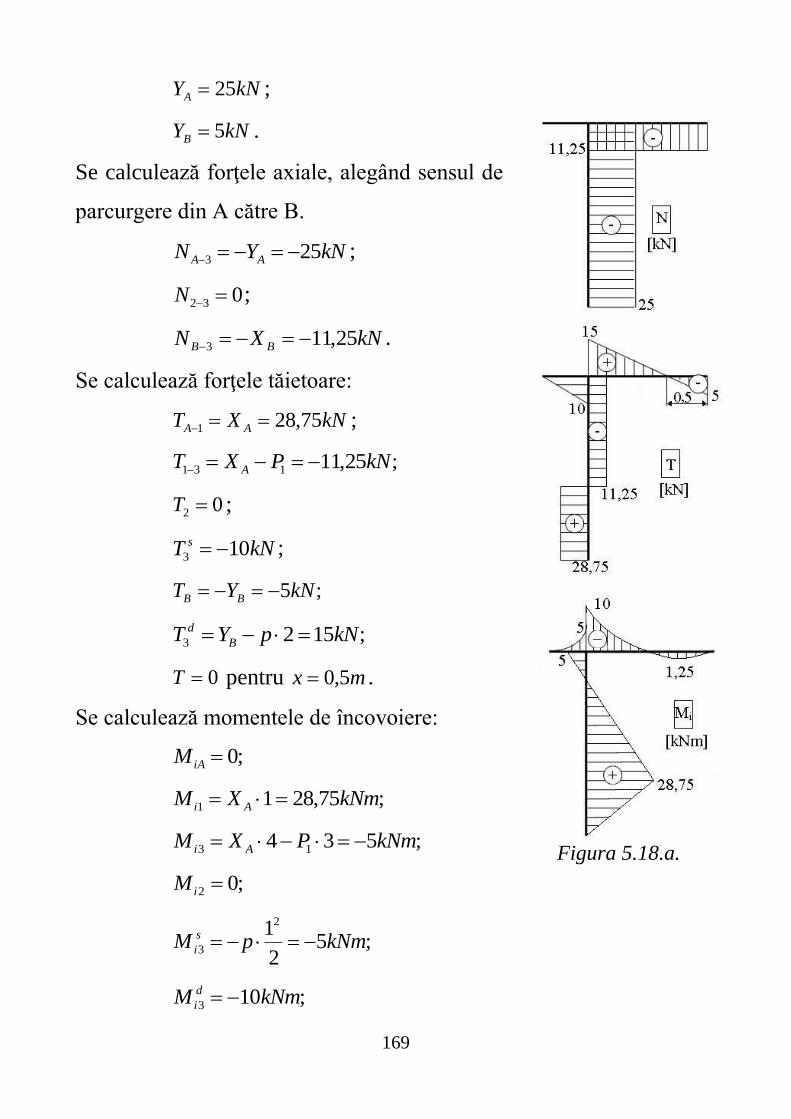
169
kNYA 25 ;
kNYB 5 .
Se calculează forţele axiale, alegând sensul de
parcurgere din A către B.
kNYN AA 253 ;
032 N ;
kNXN BB 25,113 .
Se calculează forţele tăietoare:
kNXT AA 75,281 ;
;25,11131 kNPXT A
02 T ;
kNT s 103 ;
;5kNYT BB
;1523 kNpYT B
d
0T pentru mx 5,0 .
Se calculează momentele de încovoiere:
;0iAM
;75,2811 kNmXM Ai
;534 13 kNmPXM Ai
;02 iM
;52
12
3 kNmpM s
i
;103 kNmM d
i
Figura 5.18.a.
170
.25,12
5,05,0
2
max kNmpYM Bi
Diagramele N , T , iM sunt reprezentate în figura 5.18.a.
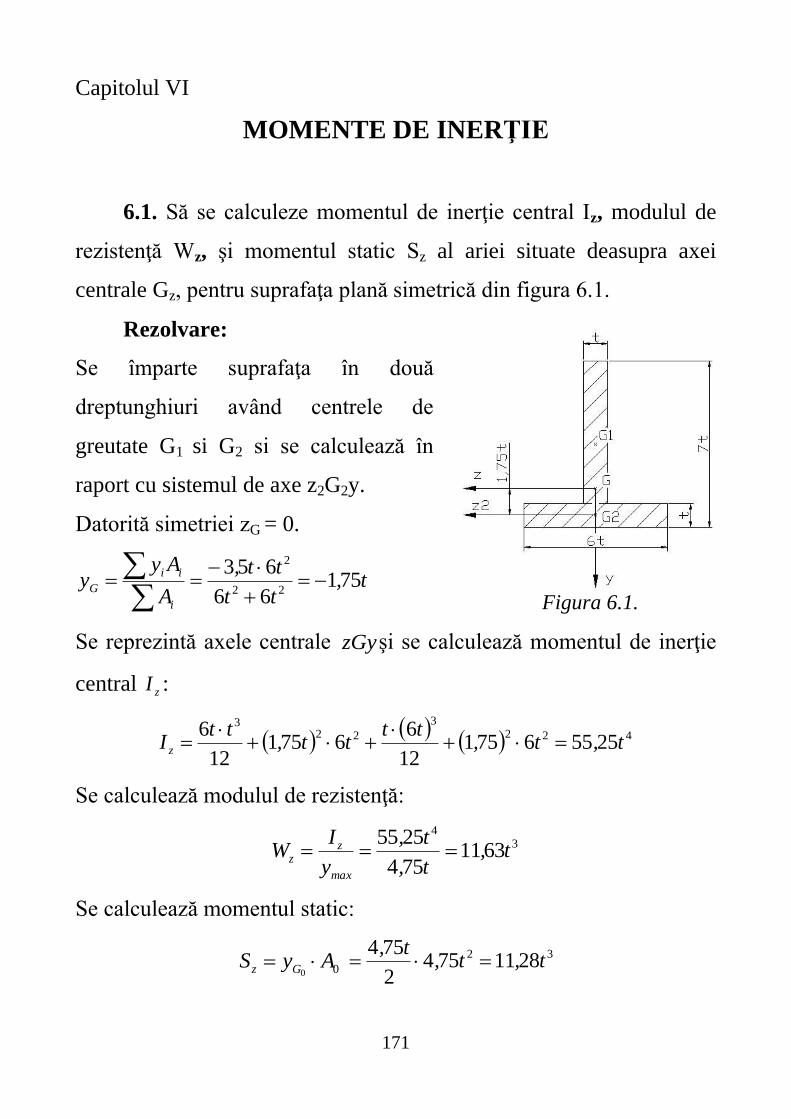
171
Capitolul VI
MOMENTE DE INERŢIE
6.1. Să se calculeze momentul de inerţie central Iz, modulul de
rezistenţă Wz, şi momentul static Sz al ariei situate deasupra axei
centrale Gz, pentru suprafaţa plană simetrică din figura 6.1.
Rezolvare:
Se împarte suprafaţa în două
dreptunghiuri având centrele de
greutate G1 si G2 si se calculează în
raport cu sistemul de axe z2G2y.
Datorită simetriei zG = 0.
t,tt
tt,
A
Ayy
i
ii
G 75166
65322
2
Se reprezintă axele centrale zGyşi se calculează momentul de inerţie
central zI :
4223
223
2555675112
66751
12
6t,t,
tttt,
ttI z
Se calculează modulul de rezistenţă:
34
6311754
2555t,
t,
t,
y
IW
max
zz
Se calculează momentul static:
00AyS Gz 32 2811754
2
754t,t,
t,
Figura 6.1.
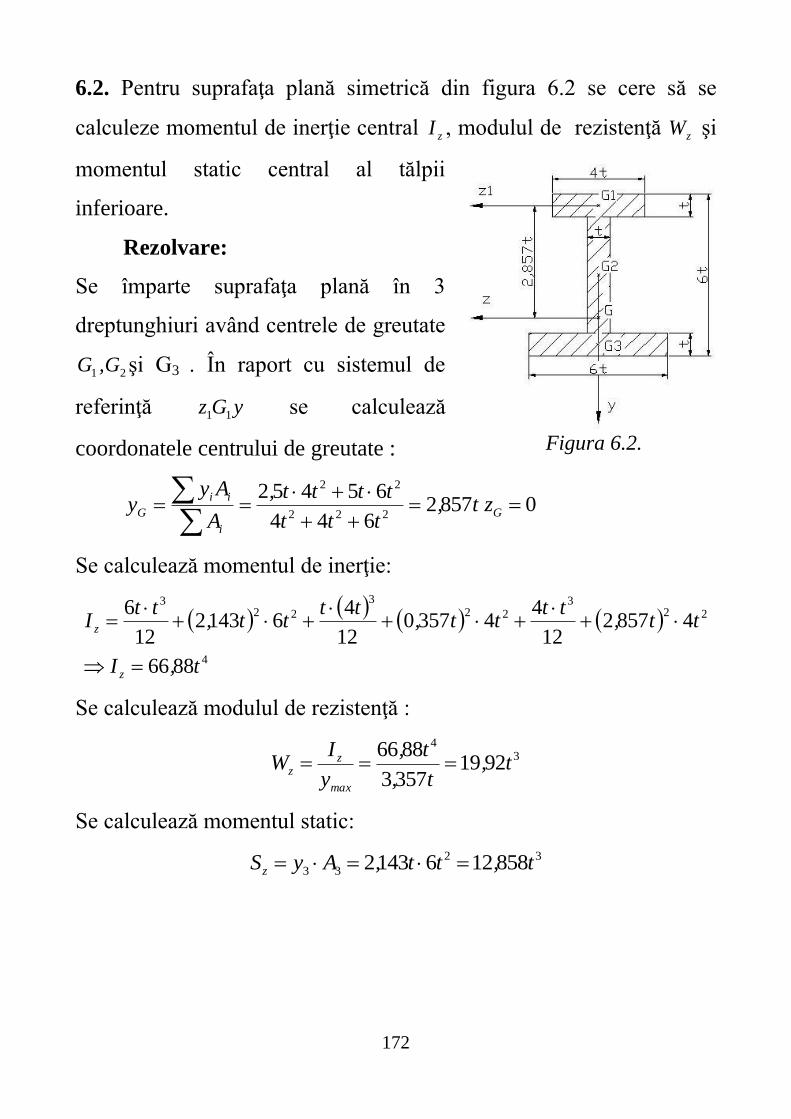
172
6.2. Pentru suprafaţa plană simetrică din figura 6.2 se cere să se
calculeze momentul de inerţie central zI , modulul de rezistenţă zW şi
momentul static central al tălpii
inferioare.
Rezolvare:
Se împarte suprafaţa plană în 3
dreptunghiuri având centrele de greutate
21 G,G şi G3 . În raport cu sistemul de
referinţă yGz 11 se calculează
coordonatele centrului de greutate :
t,ttt
tttt,
A
Ayy
i
ii
G 8572644
65452222
22
0Gz
Se calculează momentul de inerţie:
4
223
223
223
8866
4857212
443570
12
461432
12
6
t,I
tt,tt
tt,tt
tt,tt
I
z
z
Se calculează modulul de rezistenţă :
34
92193573
8866t,
t,
t,
y
IW
max
zz
Se calculează momentul static:
32
33 8581261432 t,tt,AySz
Figura 6.2.
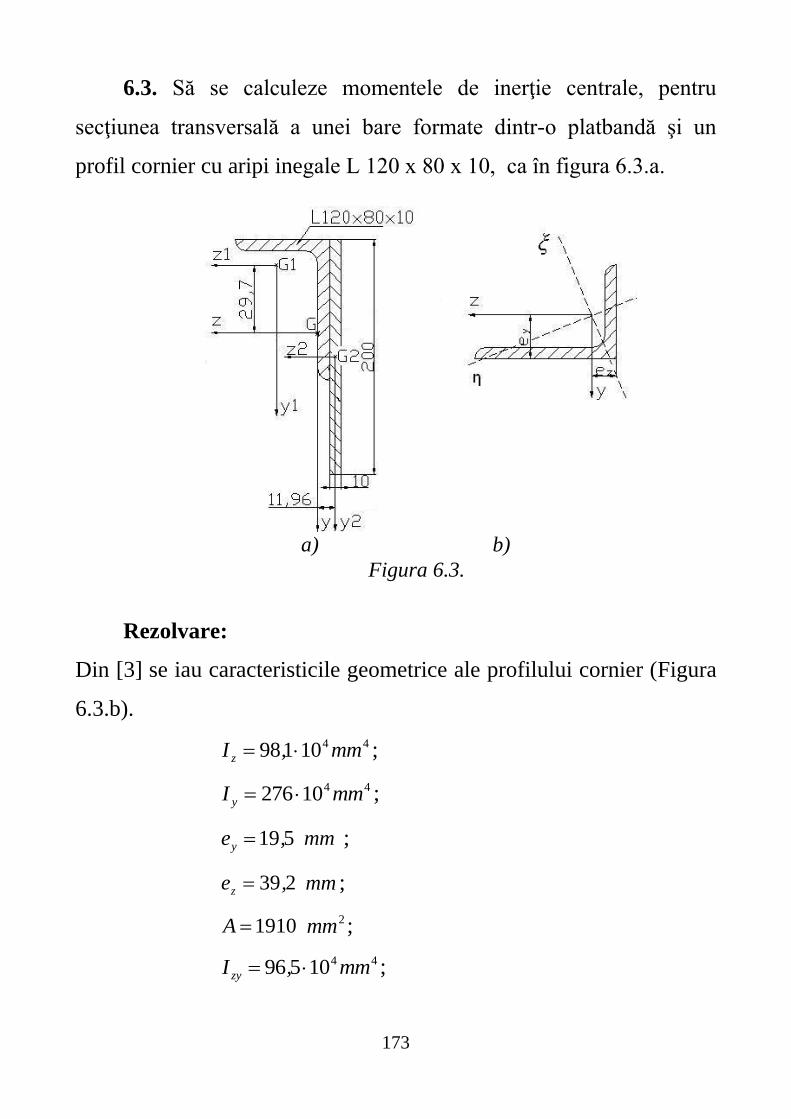
173
6.3. Să se calculeze momentele de inerţie centrale, pentru
secţiunea transversală a unei bare formate dintr-o platbandă şi un
profil cornier cu aripi inegale L 120 x 80 x 10, ca în figura 6.3.a.
Rezolvare:
Din [3] se iau caracteristicile geometrice ale profilului cornier (Figura
6.3.b).
4410198 mm,I z ;
4410276 mmI y ;
519,ey mm ;
239,ez mm ;
1910A 2mm ;
4410596 mm,I zy ;
a) b)
Figura 6.3.
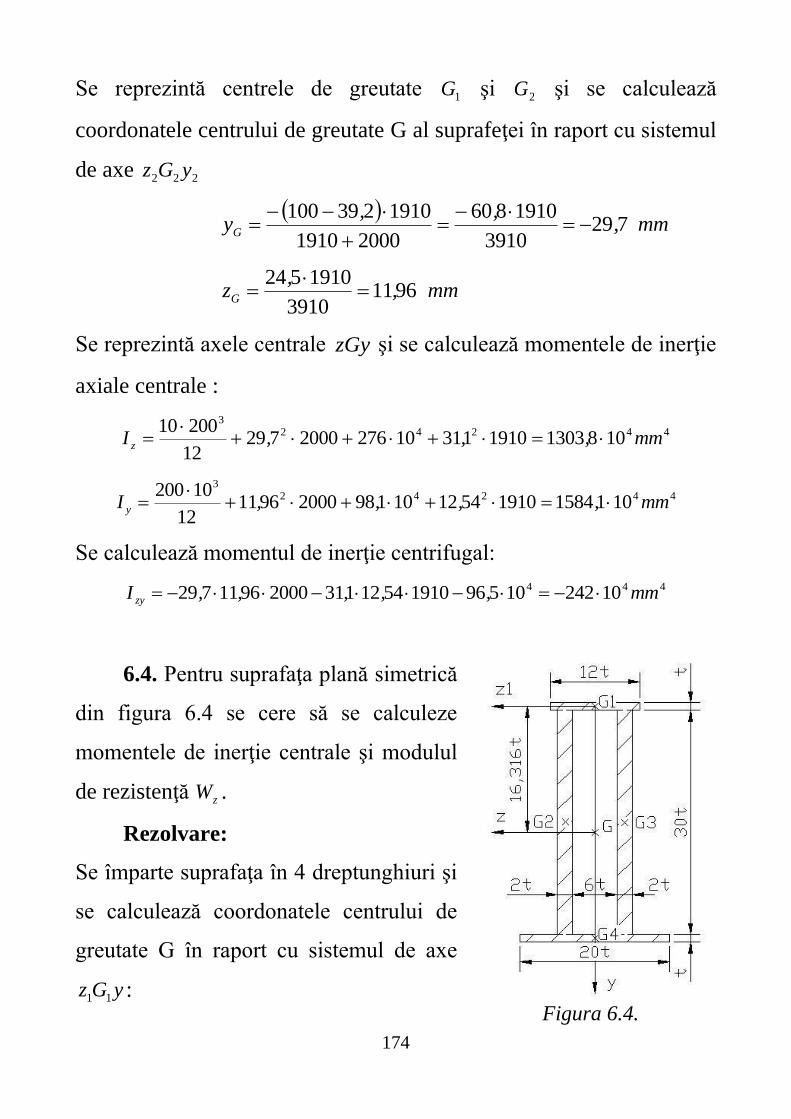
174
Se reprezintă centrele de greutate 1G şi 2G şi se calculează
coordonatele centrului de greutate G al suprafeţei în raport cu sistemul
de axe 222 yGz
729
3910
1910860
20001910
1910239100,
,,yG
mm
96113910
1910524,
,zG
mm
Se reprezintă axele centrale zGy şi se calculează momentele de inerţie
axiale centrale :
442423
1081303191013110276200072912
20010mm,,,I z
442423
101158419105412101982000961112
10200mm,,,,I y
Se calculează momentul de inerţie centrifugal:
444 10242105961910541213120009611729 mm,,,,,I zy
6.4. Pentru suprafaţa plană simetrică
din figura 6.4 se cere să se calculeze
momentele de inerţie centrale şi modulul
de rezistenţă zW .
Rezolvare:
Se împarte suprafaţa în 4 dreptunghiuri şi
se calculează coordonatele centrului de
greutate G în raport cu sistemul de axe
yGz 11 :
Figura 6.4.
175
t,ttt
ttttt,y
A
Ayy
G
i
ii
G
316162012012
20313022515222
2
0Gz datorită simetriei.
Se calculează momentele de inerţie centrale:
4223
23
223
8219701206841412
20
3028160212
30221231616
12
12
t,tt,tt
ttt,tt
tt,tt
I z
4
32
33
67104212
2030242
12
2302
12
12t,
ttttt
ttttI y
0 zyI datorită simetriei
Se calculează modulul de rezistenţă:
34
61117181616
8219701t,
t,
t,
y
IW
max
zz
6.5. Să se calculeze momentele de inerţie centrale pentru
suprafaţa plană din figura 6.5.
Rezolvare:
Se împarte suprafaţa în 3 dreptunghiuri şi se calculează coordonatele
centrului de greutate G în raport cu sistemul de axe 222 yGz :
mm24,8y240032001500
240065150065
A
Ayy G
i
iiG
mm5,9z240032001500
240050150035
A
Azz G
i
iiG
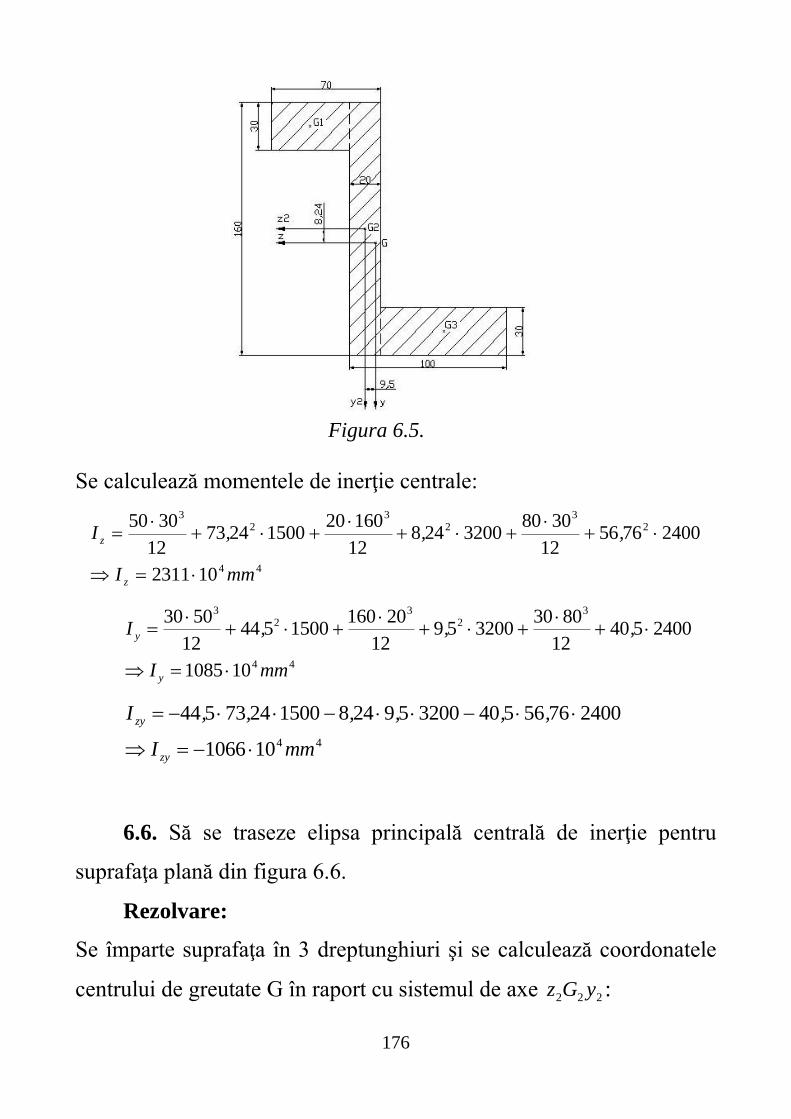
176
Se calculează momentele de inerţie centrale:
44
23
23
23
102311
2400765612
30803200248
12
1602015002473
12
3050
mmI
,,,I
z
z
44
32
32
3
101085
240054012
8030320059
12
201601500544
12
5030
mmI
,,,I
y
y
44101066
2400765654032005924815002473544
mmI
,,,,,,I
zy
zy
6.6. Să se traseze elipsa principală centrală de inerţie pentru
suprafaţa plană din figura 6.6.
Rezolvare:
Se împarte suprafaţa în 3 dreptunghiuri şi se calculează coordonatele
centrului de greutate G în raport cu sistemul de axe 222 yGz :
Figura 6.5.
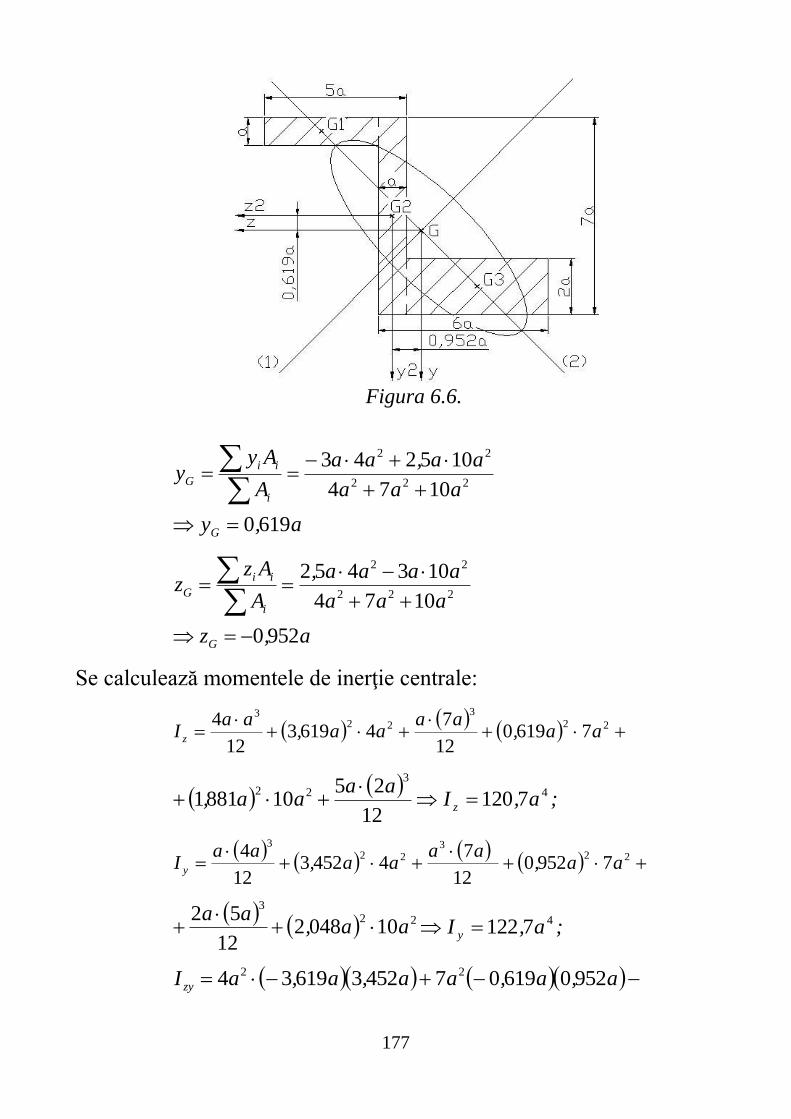
177
a,y
aaa
aa,aa
A
Ayy
G
i
ii
G
6190
1074
105243222
22
a,z
aaa
aaaa,
A
Azz
G
i
ii
G
9520
1074
103452222
22
Se calculează momentele de inerţie centrale:
223
223
7619012
746193
12
4aa,
aaaa,
aaI z
12
25108811
3
22 aaaa,
;a,I z
47120
22
322
3
7952012
744523
12
4aa,
aaaa,
aaI y
22
3
10048212
52aa,
aa
;a,I y
47122
a,a,aa,a,aI zy 952061907452361934 22
Figura 6.6.
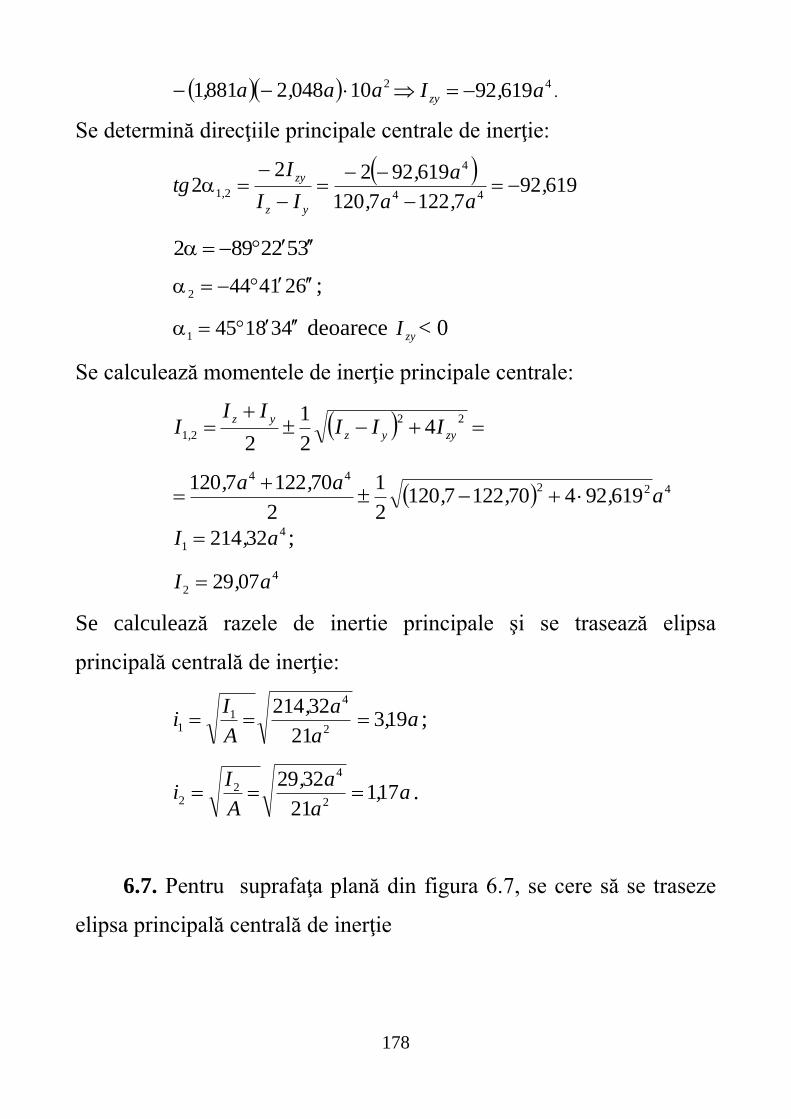
178
21004828811 aa,a, 461992 a,I zy .
Se determină direcţiile principale centrale de inerţie:
61992
71227120
61992222
44
4
21 ,a,a,
a,
II
Itg
yz
zy
,
3522892
6214442 ;
4381451 deoarece zyI < 0
Se calculează momentele de inerţie principale centrale:
22
21 42
1
2zyyz
yz
, IIIII
I
42244
6199247012271202
1
2
701227120a,,,
a,a,
4
1 32214 a,I ;
4
2 0729 a,I
Se calculează razele de inertie principale şi se trasează elipsa
principală centrală de inerţie:
a,a
a,
A
Ii 193
21
322142
4
11 ;
a,a
a,
A
Ii 171
21
32292
4
22 .
6.7. Pentru suprafaţa plană din figura 6.7, se cere să se traseze
elipsa principală centrală de inerţie
179
Rezolvare:
Se împarte suprafaţa în 3 dreptunghiuri şi se calculează coordonatele
centrului de greutate :
a,aaa
aayG 6920
733
33222
2
a,aaa
aazG 9230
733
62222
2
Se calculează momentele de inerţie centrale:
422
322
3
223
64936920
12
376920
12
733082
12
3
a,aa,
aaaa,
aaaa,
aaI z
422
3
223
223
1830771
12
379230
12
730771
12
3
aaa,
aaaa,
aaaa,
aaI y
4
222
6929
307716920792306920307713082
a,I
aa,a,aa,a,aa,a,I
zy
zy
Figura 6.7.

180
Se determină direcţiile principale de inerţie:
6134018649
6929222 21 ,
,
,
II
Itg
yz
zy
,
414174
645415
2313312
2
1
Se calculează momentele de inerţie centrale principale:
4
2
4
1
88244
22
21
26515
33552
69294186492
1
2
18649
42
1
2
a,I
a,I
a,a,aa,
IIIII
I zyyz
yz
,
Deoarece 0zyI direcţia de maxim (1) trece prin cadranul II. Se
calculează razele de inerţie principale centrale şi se trasează elipsa
principală centrală de inerţie având ca semiaxe aceste raze :
a,a
a,
A
Ii 052
13
335522
41
1
a,a
a,
A
Ii 1741
13
265152
42
2
6.8. Să se traseze elipsa principală centrală de inerţie pentru
suprafaţa plană din figura 6.8.
Rezolvare:
Se calculează coordonatele centrului de greutate în raport cu sistemul
de axe 111 yGz :
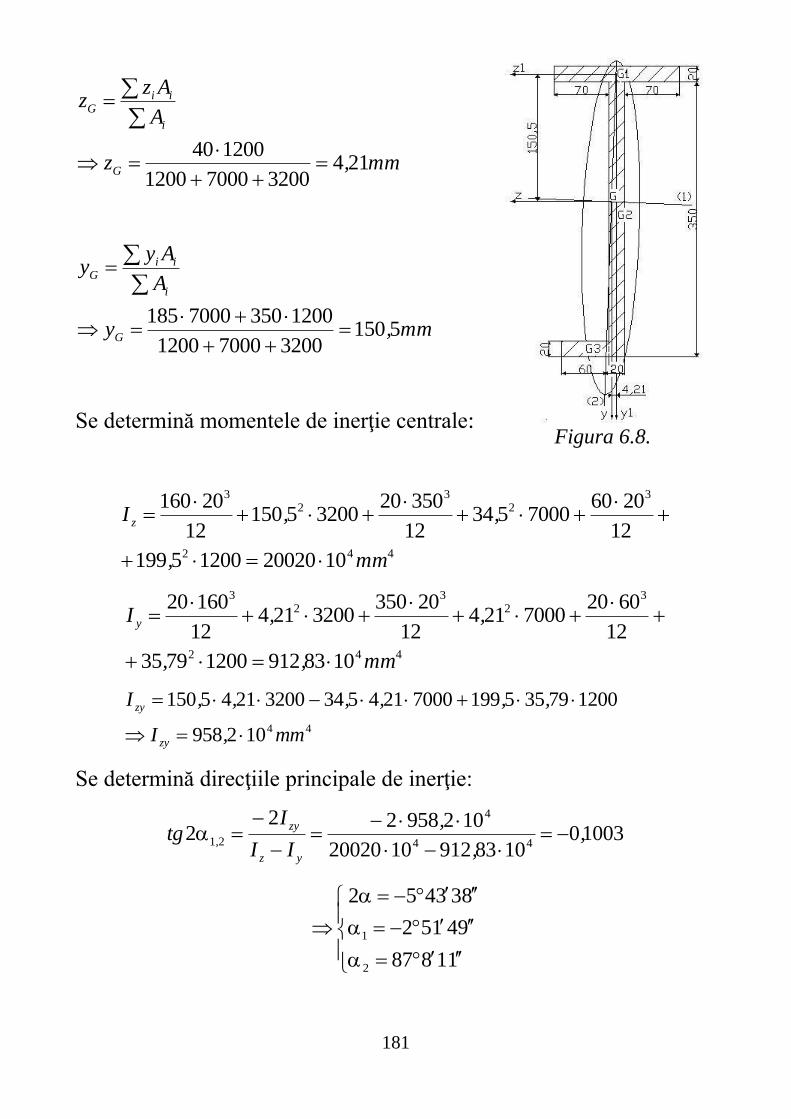
181
mm,z
A
Azz
G
i
iiG
214320070001200
120040
mm,y
A
Ayy
G
i
iiG
5150320070001200
12003507000185
Se determină momentele de inerţie centrale:
442
32
32
3
102002012005199
12
20607000534
12
3502032005150
12
20160
mm,
,,I z
442
32
32
3
108391212007935
12
60207000214
12
203503200214
12
16020
mm,,
,,I y
44102958
120079355199700021453432002145150
mm,I
,,,,,,I
zy
zy
Se determină direcţiile principale de inerţie:
1003010839121020020
102958222
44
4
21 ,,
,
II
Itg
yz
zy
,
11887
94152
833452
2
1
Figura 6.8.

182
Deoarece 0zyI direcţia de maxim (1) trece prin cadranul II. Se
calculează razele de inerţie principale:
44
2
44
1
2424444
22
21
1083864
1020068
1029584108391210200202
1
2
10839121020020
42
1
2
mm,I
mmI
,,,
IIIII
I zyyz
yz
,
Se determină rezele de inerţie principale şi se trasează elipsa
principală centrală de inerţie :
mm,A
Ii 7132
10114
10200682
4
11
mm,,
A
Ii 527
10114
10838642
4
22
6.9. Pentru suprafaţa plană din figura 6.9 să se traseze elipsa
principală centrală de inerţie:
Rezolvare:
Se calculează coordonatele centrului de
greutate în raport cu sistemul 111 yGz :
i
iiG
A
Azz
a,
aaa
aaaa,zG 751
6166
621652222
22
a,aaa
aaaa
A
Ayy
i
ii
G 62506166
616222
22
Figura 6.9.

183
Se calculează momentele de inerţie centrale:
422
2
223
223
0834163750
12
23163750
12
4466250
12
6
a,aa,
aaaa,
aaaa,
aaI z
422
3
223
223
333446250
12
3216750
12
446751
12
6
a,aa,
aaaa,
aaaa,
aaI y
4
222
510
6250375016750375067516250
a,I
aa,a,a,a,aa,a,I
zy
zy
Se determină direcţiile principale de inerţie:
4663334408341
510222
44
4
21 ,a,a,
a,
II
Itg
yz
zy
,
5463130
546340
921812
1
2
,
,
Se calculează momentele de inerţie principale centrale:
4
2
4
122
210832
33534
2
1
2 a,I
a,IIII
III zyyz
yz
,
Se determină rezele de inerţie principale şi se trasează elipsa
principală centrală de inerţie :
a,a
a,
A
Ii 821
16
33532
4
11
a,a
a,
A
Ii 421
16
08322
4
22
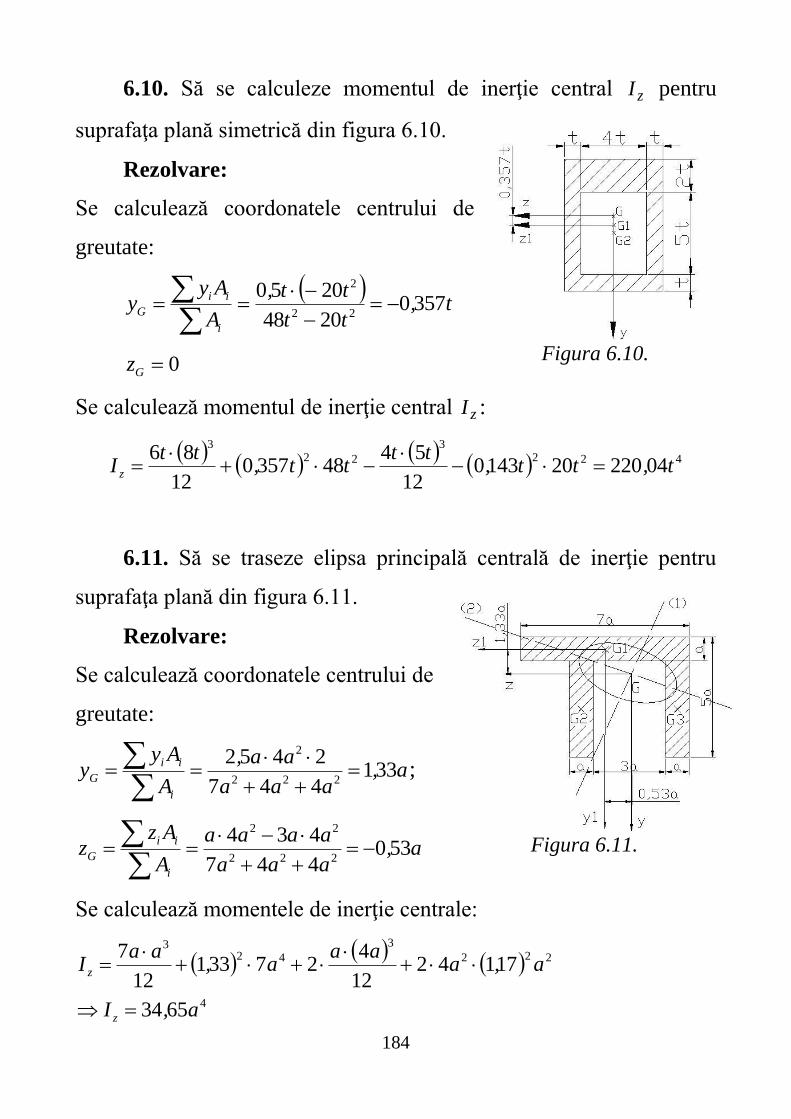
184
6.10. Să se calculeze momentul de inerţie central zI pentru
suprafaţa plană simetrică din figura 6.10.
Rezolvare:
Se calculează coordonatele centrului de
greutate:
t,
tt
tt,
A
Ayy
i
ii
G 35702048
205022
2
0Gz
Se calculează momentul de inerţie central zI :
422
3
223
0422020143012
54483570
12
86t,tt,
tttt,
ttI z
6.11. Să se traseze elipsa principală centrală de inerţie pentru
suprafaţa plană din figura 6.11.
Rezolvare:
Se calculează coordonatele centrului de
greutate:
a,aaa
aa,
A
Ayy
i
ii
G 331447
2452222
2
;
a,aaa
aaaa
A
Azz
i
ii
G 530447
434222
22
Se calculează momentele de inerţie centrale:
4
222
3
423
6534
1714212
427331
12
7
a,I
a,aaa
a,aa
I
z
z
Figura 6.10.
Figura 6.11.

185
4
22222
3
423
9864
5314472412
427530
12
7
a,I
a,aa,aaa
a,aa
I
y
y
222 453117144721717530331 aa,a,aa,a,aa,a,I zy
4339 a,I zy
Se determină direcţiile principale centrale de inerţie:
61530
98646534
339222
44
4
21 ,a,a,
a,
II
Itg
yz
zy
,
151174
98415
8163312
1
2
Deoarece 0zI direcţia de maxim (1) trece prin primul cadran.
Se calculează momentele de inerţie centrale principale:
4
2
4
1
2424444
22
21
0132
6267
3394986465342
1
2
98646534
42
1
2
a,I
a,I
a,a,a,a,a,
IIIII
I zyyz
yz
,
Se calculează razele de inerţie principale şi se trasează elipsa
principală centrală de inerţie:
a,a
a,
A
Ii 122
15
62672
4
11
a,a
a,
A
Ii 461
15
01322
4
22
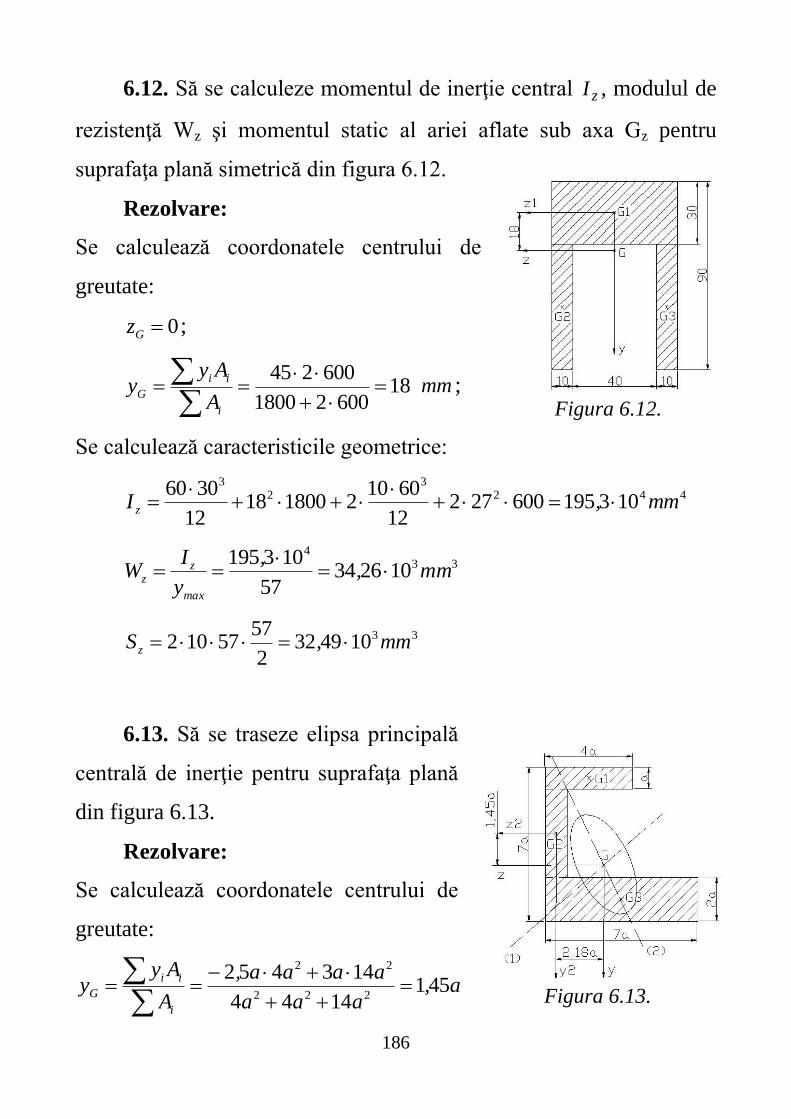
186
6.12. Să se calculeze momentul de inerţie central zI , modulul de
rezistenţă Wz şi momentul static al ariei aflate sub axa Gz pentru
suprafaţa plană simetrică din figura 6.12.
Rezolvare:
Se calculează coordonatele centrului de
greutate:
0Gz ;
1860021800
600245
i
ii
GA
Ayy mm ;
Se calculează caracteristicile geometrice:
4423
23
10319560027212
60102180018
12
3060mm,I z
334
10263457
103195mm,
,
y
IW
max
zz
331049322
5757102 mm,Sz
6.13. Să se traseze elipsa principală
centrală de inerţie pentru suprafaţa plană
din figura 6.13.
Rezolvare:
Se calculează coordonatele centrului de
greutate:
a,aaa
aaaa,
A
Ayy
i
ii
G 4511444
143452222
22
Figura 6.12.
Figura 6.13.

187
a,aaa
aaaa,
A
Azz
i
ii
G 1821444
143451222
22
Se calculează momentele de inerţie centrale:
4
223
22
2322
3
78114
1455112
274451
12
44953
12
4
a,I
aa,aa
aa,aa
aa,aa
I
z
z
4
223
223
223
1193
1482012
724182
12
44680
12
4
a,I
aa,aa
aa,aa
aa,aa
I
y
y
4
222
1841
1482055141824514680953
a,I
aa,a,aa,a,aa,a,I
zy
zy
Se determină direcţiile principale centrale de inerţie:
6473127
647337
2351752
2
1
Se calculează momentele de inerţie principale centrale :
2424444
22
21
184141193781142
1
2
119378114
42
1
2
a,a,a,a,a,
IIIII
I zyyz
yz
,
4
2
4
1
3661
53146
a,I
a,I
Se calculează razele de inerţie principale centrale şi se trasează elipsa
principală centrală de inerţie:
a,a
a,
A
Ii 582
22
531462
4
11
83119378114
1841222
44
4
21 ,a,a,
a,
II
Itg
yz
zy
,
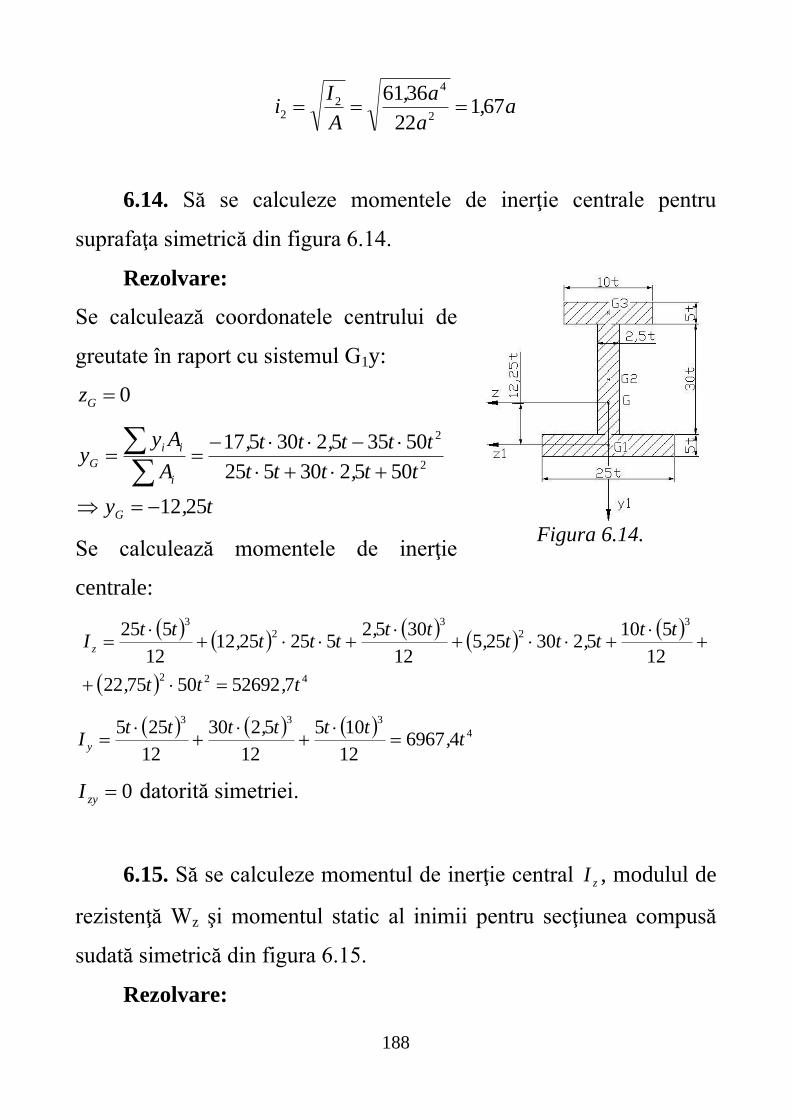
188
a,a
a,
A
Ii 671
22
36612
4
22
6.14. Să se calculeze momentele de inerţie centrale pentru
suprafaţa simetrică din figura 6.14.
Rezolvare:
Se calculează coordonatele centrului de
greutate în raport cu sistemul G1y:
0Gz
t,y
tt,ttt
ttt,tt,
A
Ayy
G
i
ii
G
2512
505230525
503552305172
2
Se calculează momentele de inerţie
centrale:
422
32
32
3
752692507522
12
5105230255
12
30525252512
12
525
t,tt,
ttt,tt,
tt,ttt,
ttI z
4
333
4696712
105
12
5230
12
255t,
ttt,tttI y
0zyI datorită simetriei.
6.15. Să se calculeze momentul de inerţie central zI , modulul de
rezistenţă Wz şi momentul static al inimii pentru secţiunea compusă
sudată simetrică din figura 6.15.
Rezolvare:
Figura 6.14.
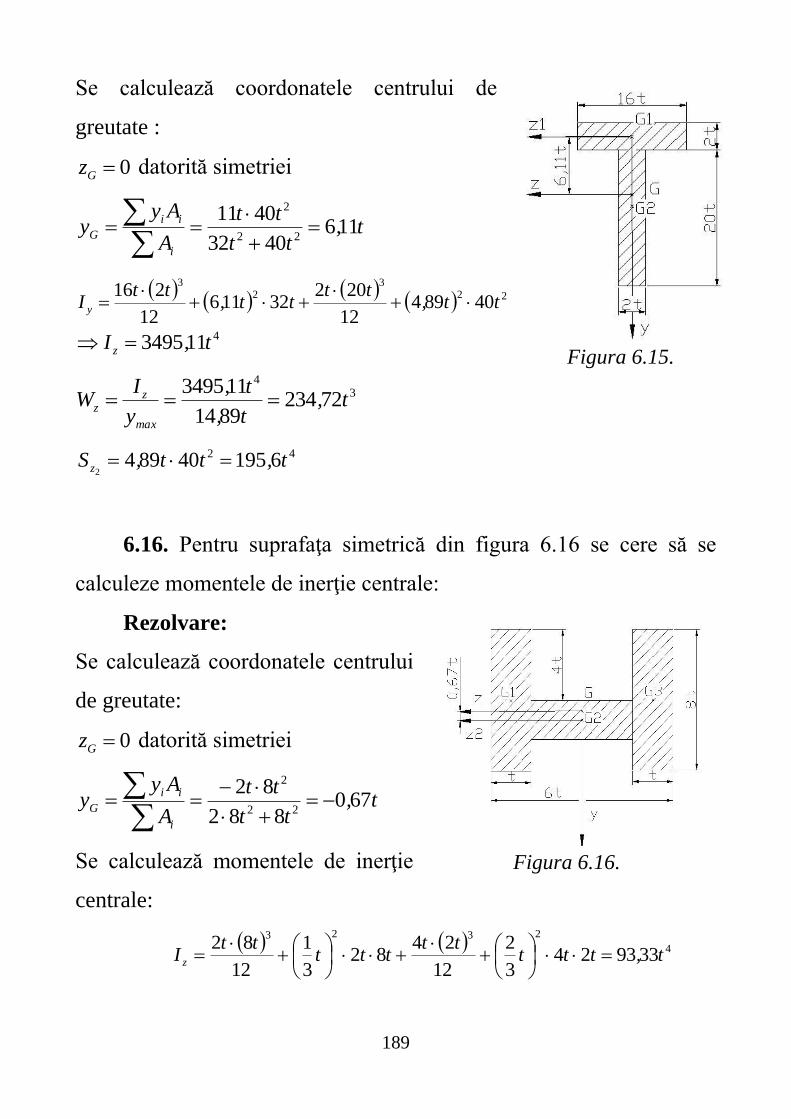
189
Se calculează coordonatele centrului de
greutate :
0Gz datorită simetriei
t,tt
tt
A
Ayy
i
ii
G 1164032
401122
2
22
32
3
4089412
20232116
12
216tt,
tttt,
ttI y
4113495 t,I z
34
722348914
113495t,
t,
t,
y
IW
max
zz
42 6195408942
t,tt,S z
6.16. Pentru suprafaţa simetrică din figura 6.16 se cere să se
calculeze momentele de inerţie centrale:
Rezolvare:
Se calculează coordonatele centrului
de greutate:
0Gz datorită simetriei
t,tt
tt
A
Ayy
i
ii
G 670882
8222
2
Se calculează momentele de inerţie
centrale:
4
2323
3393243
2
12
2482
3
1
12
82t,ttt
ttttt
ttI z
Figura 6.15.
Figura 6.16.
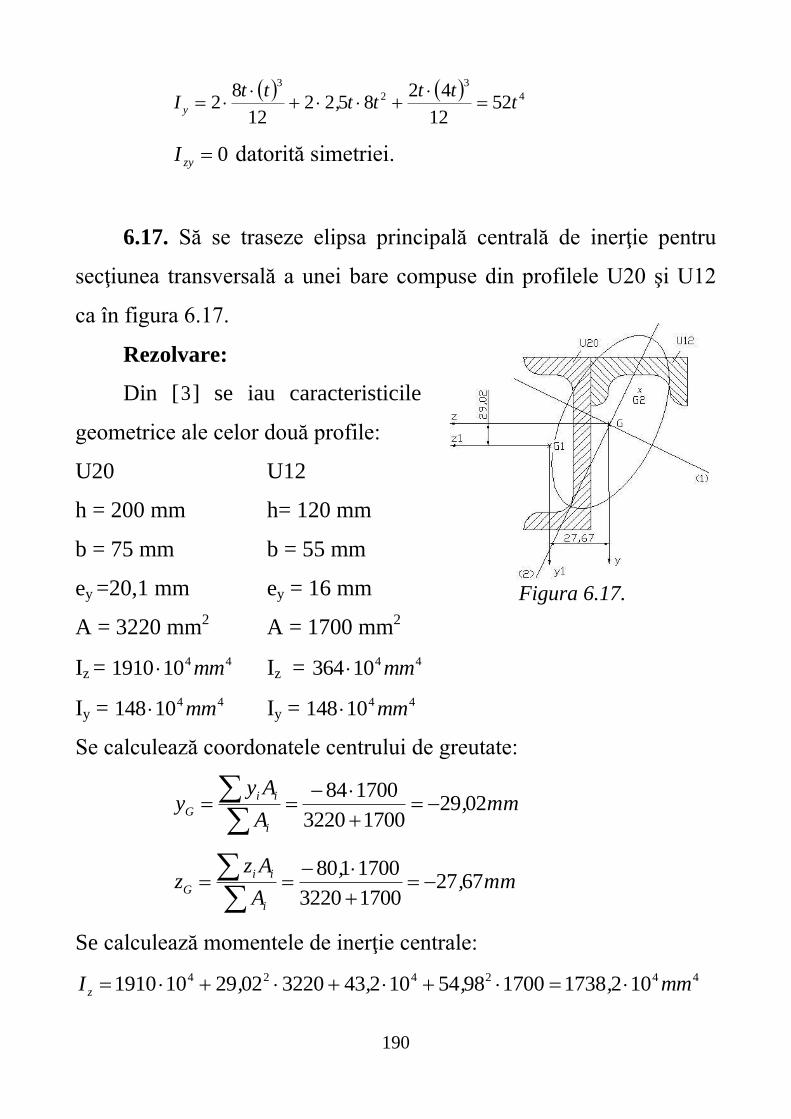
190
4
3
2
3
5212
428522
12
82 t
tttt,
ttI y
0zyI datorită simetriei.
6.17. Să se traseze elipsa principală centrală de inerţie pentru
secţiunea transversală a unei bare compuse din profilele U20 şi U12
ca în figura 6.17.
Rezolvare:
Din [3] se iau caracteristicile
geometrice ale celor două profile:
U20 U12
h = 200 mm h= 120 mm
b = 75 mm b = 55 mm
ey =20,1 mm ey = 16 mm
A = 3220 mm2 A = 1700 mm2
Iz = 44101910 mm Iz = 4410364 mm
Iy = 4410148 mm Iy = 4410148 mm
Se calculează coordonatele centrului de greutate:
mm,A
Ayy
i
ii
G 022917003220
170084
mm,,
A
Azz
i
ii
G 672717003220
1700180
Se calculează momentele de inerţie centrale:
442424 1021738170098541024332200229101910 mm,,,,I z
Figura 6.17.

191
44424 108122517004352103643220672710148 mm,,,I y 44106748170043529854322067270229 mm,,,,,I zy
Se determină direcţiile principale centrale de inerţie:
9899010812251022738
106748222
44
4
21 ,,,
,
II
Itg
yz
zy
,
148367
911222
8324442
2
1
Se calculează momentele de inerţie centrale principale:
44
2
44
1
2424444
22
21
109917
1013046
1067484108122510227382
1
2
10812251022738
42
1
2
mm,I
mm,I
,,,,,
IIIII
I zyyz
yz
,
Se calculează razele de inerţie şi se trasează elipsa principală centrală
de inerţie:
mm,,
A
Ii 6878
4920
1013046 4
11
mm,,
A
Ii 1943
4920
109917 4
22
6.18. Să se calculeze momentele de inerţie centrale pentru
suprafaţa plană din figura 6.18.
Rezolvare:
Se calculează coordonatele centrului de greutate:
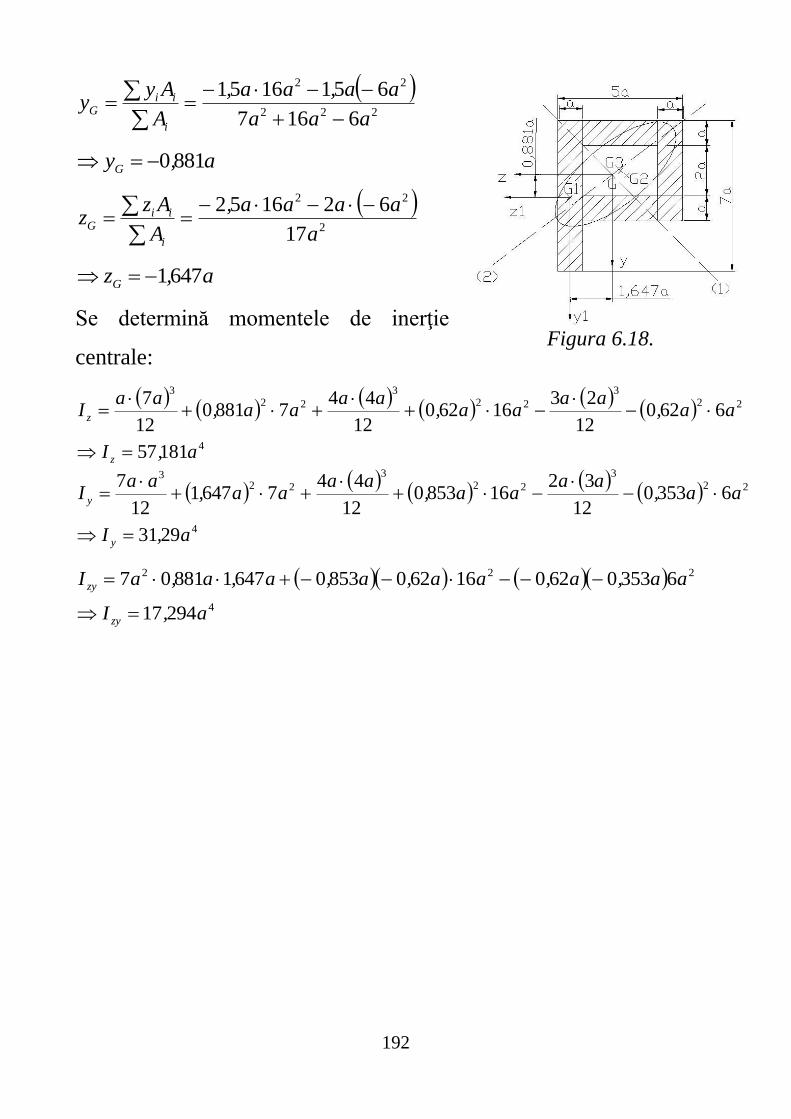
192
222
22
6167
6511651
aaa
aa,aa,
A
Ayy
i
iiG
a,yG 8810
2
22
17
621652
a
aaaa,
A
Azz
i
iiG
a,zG 6471
Se determină momentele de inerţie
centrale:
4
223
223
223
18157
662012
2316620
12
4478810
12
7
a,I
aa,aa
aa,aa
aa,aa
I
z
z
4
223
223
223
2931
6353012
32168530
12
4476471
12
7
a,I
aa,aa
aa,aa
aa,aa
I
y
y
4
222
29417
63530620166208530647188107
a,I
aa,a,aa,a,a,a,aI
zy
zy
Figura 6.18.
193
BIBLIOGRAFIE SELECTIVĂ
1. Bălan, Şt., Probleme de mecanică, E.D.P., Bucureşti, 1972;
2. Ciofoaia, V., Ulea, M., Teoria elasticităţii şi rezistenţa
materialelor, Reprografia Universităţii Transilvania Braşov,
1992;
3. Deliu, Gh., Vlase, S., Statică.Culegere de probleme, Editura
Albastră, Cluj- Napoca, 2004;
4. Goia, I., Sperchez, Fl., Ciofoaia, V., Radu, Gh., Ulea, M.,
Ţierean, M., Rezistenţa materialelor, Culegere de probleme,
Reprografia Universităţii Transilvania Braşov, 1991;
5. Goia, I., Rezistenţa materialelor, Editura Universităţii
Transilvania Braşov, 2001;
6. Rădoi, M., Deciu, E., Mecanica, E.D.P., Bucureşti, 1981;
7. Tofan, M., Statica, Reprografia Universităţii Transilvania Braşov,
1979;
8. Ulea, M., Purcărea, R., Munteanu, V., Statica Tehnică. Aplicații,
Editura Universității Transilvania din Brașov, 2006;
9. Vlase S., Mecanica Statica, Editura Infomarket, Braşov, 2003;
10. Vlase, S., Mecanică Computaţională, Editura Infomarket, Braşov,
2005;
11. Vlase S., Mecanica Statica, Ediția a II-a, Editura Infomarket, Braşov,
2008;

194
12. Voinea, R., Voiculescu, D., Ceauşu, V., Mecanica, E.D.P.,
Bucureşti, 1983.
Top Related