SCS2-curs2

of 21
-
Upload
eleonora-jelescu -
Category
Documents
-
view
223 -
download
0
Transcript of SCS2-curs2
-
8/2/2019 SCS2-curs2
1/21
SCS II : Teoria sistemelor
Capitolul 1. Introducere
Capitolul 2. Sisteme analogice
Capitolul 3. Sisteme discreteCapitolul 4. Graful de fluenta
Capitolul 5. Analiza stabilitatiiCapitolul 6. Ecuatii de stare
SCS II , 2003-2004
-
8/2/2019 SCS2-curs2
2/21
2. SISTEME ANALOGICE
2.1 Caracterizarea sistemelor analogice
2.2 Analiza sistemelor analogice liniare si invariante
2.3 Sisteme analogice liniare si invariante de ordinul I si II
SCS II 2. Sisteme analogice
-
8/2/2019 SCS2-curs2
3/21
2.1 Caracterizarea sistemelor analogice liniare si invariante(SALI)
ecuaia difereniala n timp cu coeficieni constani;
funcia de sistem;
funcia pondere;
rspunsul indicial;
rspunsul n frecven.
n timp n frecven
SCS II - 2. Sisteme analogice
-
8/2/2019 SCS2-curs2
4/21
2.1 Caracterizarea sistemelor analogice SALI
Ecuaia diferenial cu coeficieni constani
pt. un SALI cu o intrare x(t) i o ieire y(t):
1 1
1 1 0 1 1 01 1
1 0 1 0
( ) ( ) ( ) ( ) ( ) ( )( ) ( )
; , , , , , , , constante reale
n n m m
n n m mn n m m
n n m m
d y t d y t dy t d x t d x t dx t a a a a y t b b b b x t
dt dtdt dt dt dt
unde m n a a a b b b
+ + + + = + + + +
=
0 10
1 ( ) ( )( )
k km n
k kk kk k
d x t d y t y t b a
a dt dt = =
=
1
( ) ( )
0 0
(0) (1)
(2)
( ) ( 1)
1( ) ( ) ( )
: ( ) ( ); ( ) ( ) ( ) ( )
( ) ( ) ( ) ( ) ( ) ;
; ( ) ( ) ( )
n n
k n k k n k
k kn
t
t t
k k
y t b x t a y ta
unde y t y t y t y t u t y d
y t y t u t u t y d d
y t y t u t
= =
=
= = =
= =
=
SCS II - 2. Sisteme analogice
-
8/2/2019 SCS2-curs2
5/21
-
8/2/2019 SCS2-curs2
6/21
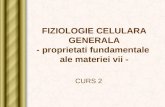
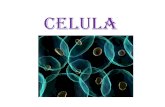
2.1 Caracterizarea sistemelor analogice SALI
Figura 2.2 Circuit RL serie
e(t)
i(t) R L
uR(t) uL(t)
( ) ( ) ( )
( )( ) ( ); ( )
R L
R L
u t u t e t
di tu t R i t u t L
dt
+ =
= =
Exemplul 2.1
1 ( ) 1( ) ( ) ( ) ( ) ( )
t tdi t
i t e t L sau i t e d R i d R dt L
= =
b)Figura 2.3 Scheme bloc pentru ecuaia de funcionare ataat unui circuit RL serie
a)
e(t) i(t)
-L
D
i(t)e(t)
-R
L
1
R
1
( )( ) ( )
di tL R i t e t
dt + =
SCS II - 2. Sisteme analogice
-
8/2/2019 SCS2-curs2
7/21
2.1 Caracterizarea sistemelor analogice SALI
1( ) ( ) ( ) ( ); ( ) ( )
( )1( ) ( ) ; ( )
R L C R b
t
b
L b C
i t i t i t i t i t u t R
du ti t u d i t C
L dt
= + + =
= =
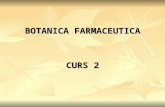
Exemplul 2.2
2
2
( ) ( )( ) 1 1 1 1( ) ( ) ( ) ( ) ( )
t t t t
b b
b b b b
d u t du t di tu t L C sau u t i d u d u d
dt R dt C R Ldt
= =
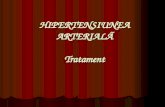
Figura 2.4 Circuit RLC paralel
iL
iR
iC
R
L
C
ub(t)
i
Figura 2.5 Scheme bloc pentru ecuaia de funcionare ataat unui circuit RLC paralel
C
1
a)
D
D
i(t) ub(t)L
D
-C
b)
i(t) ub(t)
R
1R
1
L
1
2
2
( ) ( )1 1 ( )( )b b b
d u t du t di tC u t
R dt L dtdt + + =
SCS II - 2. Sisteme analogice
-
8/2/2019 SCS2-curs2
8/21
2.1 Caracterizarea sistemelor analogice SALI
Funcia de sistem (circuit, transfer)
( )( )
( )conditii initiale nule
Y sH s
X s= pt. un SALI cu o intrare x(t) i o ieire y(t):
1 1
1 1 0 1 01 1
1
1
1
1 1 0
1
( ) ( ) ( ) ( ) ( )( ) ( )
(0) (0): ( ) 0 pentru 0; 0; 0; (0) 0;
( )( )
( )
n n m m
n n m mn n m m
n
n
m m
m m
n
n n
d y t d y t dy t d x t d x t a a a a y t b b b x t
dtdt dt dt dt
d y dyunde x t t y
dtdtb s b s b s bY s
H sX s a s a
+ + + + = + + +
= < = = =
+ + + + = =
+
1
1 0
ns a s a + + +
SCS II - 2. Sisteme analogice
-
8/2/2019 SCS2-curs2
9/21
2.1 Caracterizarea sistemelor analogice SALI
Exemplul 2.3
Figura 2.2 Circuit RL serie
e(t)
i(t) R L
uR(t) uL(t)
1
( ) ( ) ( )
1
( ) 1( )
( )
di tL R i t e tdt
I s LH s
RU s L s R sL
+ =
= = =
+ +
Exemplul 2.4
2
2
2 22
( ) ( )1 1 ( )( )
1( )
( )1 1( )
b b
b
b
d u t du t di tC u t
R dt L dtdt
sU s RL s CH sI s RLC s L s R
s s
RC LC
+ + =
= = =
+ + + +Figura 2.4 Circuit
RLC paralel
iL
iR
iC
R
L
C
ub(t)
i
SCS II - 2. Sisteme analogice
-
8/2/2019 SCS2-curs2
10/21
2.1 Caracterizarea sistemelor analogice SALI
Natura funciilor de circuit:
impedan admitan
amplificare n tensiune
amplificare n curent.
( )( )
( )( )
, 1
, 1
i i
k k
p H p i n
z H z O k m
= =
= =
.
Punctele critice ale unei funcii de circuit:
polii:
zerourile:
1 2 1
1 2
1
( )( ) ( ) ( )( )
( )( ) ( ) ( ) ( )
( )
m
k
m m m k
n
n n n
ii
s zb s z s z s z bB s
H sA s a s p s p s p a
s p
=
=
= = =
SCS II - 2. Sisteme analogice
-
8/2/2019 SCS2-curs2
11/21
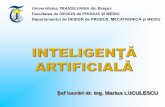
2.1 Caracterizarea sistemelor analogice SALI
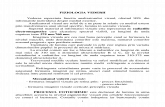
Exemplul 2.5
Figura 2.6 Diagrame pol-zero pentru circuitele RL serie i RLC
paralel
a) b)
Im s
Re s
H1(s)
p1
p2
H2(s)
p1
p1,2p1 p2 Re s Re sRe s
Im s Im s Im s
1 1 1
1
12
1 2
1 2 1,2 2
1 1( ) ; ; ;
( ) ;( ) ( )
1 1 1 1
; 0; ; 2 (2 )
RH s K K z p
s p L L
s zH s K
s p s p
K z z pC RC LC RC
= = = =
=
= = = =
SCS II - 2. Sisteme analogice
-
8/2/2019 SCS2-curs2
12/21
2.1 Caracterizarea sistemelor analogice SALI
11 12 11 1
21 22 22 2
1 2
( ) 0, 1,2, 1, 1,
( ) ( ) ( )
( ) ( ) ( )( ) ( )
( ) ( ) ( )( ) ( )( ) ; ( ) ; ( )
( ) ( ) ( )( ) ( )
( ): ( )( )
p
r
r
l l lr r r
kkl
l X s p l l r
s s s
H s H s H sY s X s
H s H s H sY s X ss s s
H s H s H sY s X s
Y sunde H sX s
= = +
=
= = =
=
Y H X
Y X H
pt. un SALI cu intrari multiple x(t) i ieiri multiple y(t):
SCS II - 2. Sisteme analogice
-
8/2/2019 SCS2-curs2
13/21
2.1 Caracterizarea sistemelor analogice SALI
Exemplul 2. 6
Figura 2.7 Diport
u2(t)D
i1(t) i2(t)
u1(t)1
1
2
2
2 1
2 1
1 11 12 1
2 21 22 2
1 111 12
1 2( ) 0 ( ) 0
2 2
21 221 2( ) 0 ( ) 0
( ) ( ) ( ) ( )
( ) ( ) ( ) ( )
( ) ( )( ) ; ( )
( ) ( )
( ) ( )
( ) ; ( )( ) ( )
U s U s
U s U s
I s Y s Y s U s
I s Y s Y s U s
I s I sY s Y s
U s U s
I s I s
Y s Y sU s U s
= =
= =
=
= =
= =
SCS II - 2. Sisteme analogice
-
8/2/2019 SCS2-curs2
14/21
2.1 Caracterizarea sistemelor analogice SALI
Funcia pondere (raspuns la impuls)
, 0( ) ; ( ) 1 ( ) ( )
0, 0
( ) ( )
tt t dt si x t h t
t
t h t
+
== =
pt. un SALI cu o intrare x(t) i o ieire y(t):
{ } { } { }1( ) 1 ( ) ( ) ( ) ( )L t H s L h t si h t L H s = = =
Observatii:
SCS II - 2. Sisteme analogice
-
8/2/2019 SCS2-curs2
15/21
2.1 Caracterizarea sistemelor analogice SALI
1 1
1
( )
( ) ( )
( )
m
km k
in
ni
i
s zbh t L h t a
s p
=
=
= =
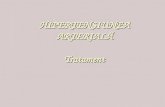
Figura 2.8 Contribuia unui pol simplu la realizareafunciei pondere
Im s
Re s
t t
t t t
pi
pi
pipipi
pi* pi* pi*
t
hi(t) hi(t) hi(t)hi(t)
hi(t) hi(t)
Im s
Re s
tt
t t
hi(t) hi(t)
hi(t) hi(t)
pi*pi* pi*
hi(t) hi(t)
Figura 2.9 Contribuia polilor multipli la realizareafunciei pondere
SCS II - 2. Sisteme analogice
-
8/2/2019 SCS2-curs2
16/21
2.1 Caracterizarea sistemelor analogice SALI
( ) ( ) ( ) ( ) ( ) ( ) (
( )
)x x yx t M y t x t h d x t h d M h d M
h d
=
=
legatura dintre stabilitate, functia pondere si pozitia polilor la un
SALI cu o intrare x(t) i o ieire y(t):
Un sistem este stabil dac la o excitaie mrginit rspunde cu un
semnal mrginit.
Sistem asimptotic stabil= toi polii aparin semiplanului stng al
domeniuluis. Sistem neasimptotic stabil= polii aparin semiplanului stng al
domeniuluis, dar exist poli imaginari simpli
Sistem instabil = exist poli n semiplanul drept sau poli imaginari
multipli.
SCS II - 2. Sisteme analogice
-
8/2/2019 SCS2-curs2
17/21
2.1 Caracterizarea sistemelor analogice SALI
Influenta punctelor critice asupra proprietatilor SALI:
Polii determina stabilitatea; Zerourile - influeneaz dinamica.
Sistem de faz minim = att polii, ct i zerourile au parteareal negativ admit sisteme inverse
Sistem de faz neminim = polii au partea real negativiexist zerouri cu partea real pozitiv sau nul nu admit sisteme
inverse
SCS II - 2. Sisteme analogice
-
8/2/2019 SCS2-curs2
18/21
2.1 Caracterizarea sistemelor analogice SALI
( ) ( ) ( ) ( ) ( )y t x t h t x h t d
+
= =
functia pondere si convolutia la un SALI cu o intrare x(t) i o ieire
y(t):
comutativitate:
( ) ( ) ( ) ( )x t h t h t x t =
asociativitate:
distributivitate:
proprietate referitoare
la derivare:
1 2 1 2( ) [ ( ) ( )] [ ( ) ( )] ( )x t h t h t x t h t h t =
1 2
1 2
( ) [ ( ) ( )]
[ ( ) ( )] [ ( ) ( )]
x t h t h t
x t h t x t h t
+ =
= +
( ( ) ( )) ( ) ( ) ( ) ( )x t h t x t h t x t h t = =
Figura 2.11 Echivalene n conectarea sistemelor analogice liniare invariante
x(t) y(t)h(t)h(t) y(t)x(t)
h1(t)* h2(t) y(t)x(t)h1(t) y(t)x(t) h2(t)
h1(t)+ h2(t)y(t)x(t)y(t)
h1(t)
h2
(t)
x(t)
h(t)x(t)h(t)x(t)
a)
b)
c)
d)
dt
d
dt
d dt
tdy )(
dt
tdy )(
SCS II - 2. Sisteme analogice
-
8/2/2019 SCS2-curs2
19/21
2.1 Caracterizarea sistemelor analogice SALI
pentru sisteme cauzale
0 0
( ) ( ) ( ) ( ) ( ) ( ) ( )
(0) ( ) ( ) (0) ( ) ( )
t t
t t
y t x t h t x h t d x t h d
y x h t d y x t h d
= = = =
= + = +
SCS II - 2. Sisteme analogice
-
8/2/2019 SCS2-curs2
20/21
2.1 Caracterizarea sistemelor analogice SALI
Rspunsul indicial
1, 0( ) ( ) ( ) ( ) ( )0, 0
tu t si u t a t u t a t t
>=
-
8/2/2019 SCS2-curs2
21/21