
PartialPartial
67
Cuprins Capitolul I: Introducere........................................... 3 1.1 Istoric şi descriere a ablaţiei cu microunde.................4 1.2 Stadiu actual............................................... 4 Capitolul II – Ablaţia cu microunde – Caracteristici şi stadiu actual............................................................. 5 2.1 Descriere.................................................... 5 2.2 Avantajele ablaţiei cu microunde.............................7 Capitolul III – Obiectiv, configuraţii testate, etape de realizare a sistemului......................................................... 9 3.1 Configuraţiile testate în vederea pentru realizarea obiectivului:.................................................... 9 3.2 Etapele de realizare ale sistemului:........................10 Capitolul IV – Principiul de funcţionare, implementarea sistemului, descriere componente.............................................. 11 4.1 Implementarea sistemului folosind instrumentaţia virtuală.....11 4.2 Joncţiunea de referinţă.......................................14 4.3 Generalităţi ale Termocuplului tip J:.........................15 4.4 Modificări făcute termocuplului de tip J pentru a facilita experimentele..................................................... 17 4.5 Placa de achiziţie Ni-USB6211................................18 4.6 Intrări analogice........................................... 23 4.7 Intervalul intrării analogice...............................23 4.8 Metode de achiziţie de date de la intrări analogice.........24 Capitolul V – Sistemul bazat pe placa de dezvoltare Arduino Uno: descriere componente, testare, principiu de funcţionare...........30 5.1 Placa de dezvoltare Arduino Uno.............................30 5.2 Senzori de temperatura-termocuplu...........................32 Avantaje ale utilizării termocuplului...........................33 5.4 Modul releu pentru Arduino..................................34
-
Upload
alexandruionutradu -
Category
Documents
-
view
14 -
download
0
description
Partial
Transcript of PartialPartial

Cuprins
Capitolul I: Introducere..........................................................................................................................3
1.1 Istoric şi descriere a ablaţiei cu microunde..................................................................................4
1.2 Stadiu actual................................................................................................................................4
Capitolul II – Ablaţia cu microunde – Caracteristici şi stadiu actual........................................................5
2.1 Descriere......................................................................................................................................5
2.2 Avantajele ablaţiei cu microunde.................................................................................................7
Capitolul III – Obiectiv, configuraţii testate, etape de realizare a sistemului..........................................9
3.1 Configuraţiile testate în vederea pentru realizarea obiectivului:.................................................9
3.2 Etapele de realizare ale sistemului:............................................................................................10
Capitolul IV – Principiul de funcţionare, implementarea sistemului, descriere componente...............11
4.1 Implementarea sistemului folosind instrumentaţia virtuală..........................................................11
4.2 Joncţiunea de referinţă..................................................................................................................14
4.3 Generalităţi ale Termocuplului tip J:...............................................................................................15
4.4 Modificări făcute termocuplului de tip J pentru a facilita experimentele.......................................17
4.5 Placa de achiziţie Ni-USB6211.......................................................................................................18
4.6 Intrări analogice..........................................................................................................................23
4.7 Intervalul intrării analogice.........................................................................................................23
4.8 Metode de achiziţie de date de la intrări analogice....................................................................24
Capitolul V – Sistemul bazat pe placa de dezvoltare Arduino Uno: descriere componente, testare, principiu de funcţionare.......................................................................................................................30
5.1 Placa de dezvoltare Arduino Uno...............................................................................................30
5.2 Senzori de temperatura-termocuplu..........................................................................................32
Avantaje ale utilizării termocuplului................................................................................................33
5.4 Modul releu pentru Arduino.......................................................................................................34
5.5 Modulul SD-card........................................................................................................................35
5.6 Amplificator Termocuplu- Max31855K.......................................................................................36
Capitolul VI – Protocol experimental, date experimentale, rezultate, dificultăţi întâmpinate.............42
6.1 Protocol experimental................................................................................................................42
6.2 Teste realizate............................................................................................................................47
6.3 Dificultăţi întâlnite pe parcursul testelor....................................................................................48
Bibliografie..........................................................................................................................................51


Capitolul I: Introducere
În cadrul acestui proiect ne-am propus să implementam un dispozitiv care sa ajute la
tratarea metastazelor hepatice prin metoda ablației cu microunde. Pentru a putea realiza
vizarea ţesutului malign într-un mod selectiv, ne vom folosi de microundele focale care vor
determina modificarea termică a ţesutului . Am plecat de la principiul că atunci când un ţesut
este supus radiaţiei cu microunde, moleculele de apă se învârt de miliarde de ori pe secundă.
Această agitaţie produce frecare, iar rezultatul frecării moleculeor are ca rezultat creşterea
temperaturii. Astfel că proiectul pentru care am implementat acest dispozitiv presupune
utilizarea unor substanţe tip antigeni care au proprietatea de a adera la un anumit tip de celule
– în cazul nostru la celulele cancerigene hepatice (aşa numiţii markeri tumorali). De aceşti
antigeni sunt prinse diferite tipuri de nanoparticule cu proprietăți magnetice care in câmp
electromagnetic fac ca frecările intermoleculare să fie mai mari, ceea ce duce la o creștere
locală a temperaturii față de restul masei țesutului. Cu alte cuvinte antigenii cu nanoparticuele
se lipesc de celulele tumorale, în procesul de încălzire a ficatului, celulele sănătoase ajung la
42 de grade, iar celulele cancerigene care au ataşate de ele antigenii cu nanoparticulele ajung
la 45-46 grade Celsius, ceea ce face ca acele celule sa fie distruse. Dispozitivul pe care a
trebuit sa îl implementăm are ca scop controlul temperaturii în intervale de timp stabilite într-
o zonă selectată de ţesut.
Potrivit acestor date, noi am apelat la două metode pentru a rezolva cerintele propuse
metodă care utilizează un cuptor cu microunde si are la baza pentru partea
de comandă și control o placa de achizitie NI-USB6211
altă metodă este cea în care am utilizat acelașii cuptor cu microunde iar
pentru partea de comandă și control am utilizat un sistem bazat pe o placă
de dezvoltare Arduino Uno

1.1 Istoric şi descriere a ablaţiei cu microunde
Energia creată de microunde este cercetată de zeci de ani ca o modalitate de a ajuta
tratamentul medical. Primele date ale cercetărilor apar încă din începutul anilor 1930. De
atunci, cercetările asupra microundelor au avut o strânsă legătură cu alte domenii de interes
medical: oncologie, urologie, cardiologie şi chirurgie generală. Până în prezent, utilizarea
microundelor în domeniul medical a fost mai puţin familiară comunităţii medicale, faţă de alte
modalităţi (lasere,radio-frecventa,ultrasunete).
Tehnica de ablaţie termică pentru tratarea metastazelor hepatice prin intermediul
ablaţiei cu radiofrecvenţa a fost descrisă începând cu anul 1995. S-a utilizat la început pentru
tratarea tumorilor la animale,iar începând cu anul 2000 s-a ajuns la tratarea în acest mod al
oamenilor. Ablaţia cu microunde a apărut ca o formă de ablaţie nouă, cu o sumedenie de
avantaje faţă de alte metode privind tratarea cancerului. Beneficiile ablaţiei cu microunde faţă
de alte modalităţi bazate pe căldura (ablaţia prin radiofrecvenţa,ablaţia cu laser) includ o
aplicaţie prin care creşte aria şi viteza de încălzire a ţesutului. Un alt avantaj al acestei
tehnologii este prezenta temperaturilor constant ridicate intratumorale. Pentru pacienţii
nechirurgicali, tehnicile de ablaţie bazate pe căldura au persmis controlul local al tumorilor
fără rezecţie. Terapia prin microunde a crescut în utilizare pentru pacienţii cu carcinom
hepatocelular. Acest lucru se datorează faptului că pacienţii se prezintă cu o boală hepatică
avansată.
1.2 Stadiu actual
Există şase sisteme de ablaţie prin microunde la ora actuală disponibile în S.U.A.
Aceste sisteme utilizează :
-un generator de 915 MHz (Evident, Avecure, Medwaves, San Diego, CĂ Covidien,
Mansfield, MĂ; MicrothermX, BSD Medical, Salt Lake City, UT);
-un generator de 2450 MHz (Certus 140, Neuwave, Madison, WI; Amica, Hospital Service,
Rome, Italy; Acculis MTA, Microsulis, Hampshire, England);
Sistemele cer că antenele să fie răcite la interior cu fluide la temperatura camerei, cu
dioxid de carbon pentru a reduce încălzirea conductoare şi a preveni deteriorarea pielii.
Ablaţia prin microunde se număra printre formele de ablaţii termice care se utilizează
în radiologia intervenţională pentru tratarea cancerului. Acest tip de ablaţie utilizează undele
electromagnetice regăsite în spectrul de energie al microundelor (300 MHz - 300 GHz).
Radiaţia cu microunde se referă la regiunea cu frecvenţe între 900 MHz- 2450 MHz. Acest tip
de radiaţie se găseşte între radiaţiile infraroşu şi undele radio.
Capitolul II – Abla ia cu microunde – Caracteristici şi stadiu actualț
2.1 Descriere
Undele electromagnetice din acest spectru sunt utilizate, în cazul nostru, pentru a
produce efecte de încălzire ale ţesutului. Se produce o oscilaţie a moleculelor care determină
încălzire prin frecare ducând la necroza ţesutului privit ca tumoare solidă. Ca
principiu,obiectivele acestui tip de ablaţie sunt : înlăturarea ţesutului bolnav şi o marjă a
parenchimului normal ce îl înconjoară; evitarea leziunilor asupra structurilor critice şi crearea
mai rapidă a unui domeniu de ablaţie cât mai mare.
Tratamentul prin acest tip de ablaţie este flexibil: percutant, laparoscopic şi cu acces
chirugical.
Tumora este localizată în mod imagistic şi o antenă de microunde este plasată direct pe
ea. Se emite o undă electromagnetică. Se produce o agitaţie a moleculelor de apă în ţesutul
din jur şi, prin frecare, se produce căldură, inducând astfel moartea celulelor prin necroza de
coagulare. Moleculele de apă (H2O) sunt polare, astfel sarcinile electrice ale lor nu sunt
simetrice. Alinierea şi sarcinile atomilor sunt aranjate astfel încât partea Hidrogenului are
sarcină pozitivă iar partea Oxigenului are sarcină negativă. Radiaţia electromagnetică are,de
asemenea,sarcina electrică. Reprezentarea în undă este,de fapt,sarcina electrică pe unda care
se roteşte între negativ şi pozitiv. Pentru o microundă care oscilează la 9,2 x 108 Hz, sarcina
îşi schimbă semnul de aproximativ 2 miliarde de ori pe secundă. Atunci când o sarcină
electrică oscilanta a radiaţiei se intersectează cu o moleculă de apă,moleculă se răstoarnă În
fig. 2.1 este descris acest principiu care stă la baza ablaţiei cu microunde.

Fig. 2.1: Principiu ablaţie cu microunde
Microundele sunt o cale rapidă pentru a distruge ţesutul bolnav. Ele sunt absorbite de
ţesut şi creează căldură prin interacţiunea cu moleculele de apă prezente în ţesut. Energia
microundelor se disipă foarte repede la o distanţă de câţiva centimetri de punctul în care se
aplică, astfel un avantaj al ablaţiei cu microunde este şi faptul că zona de încălzire este uşor de
controlat şi precisă. Acest lucru îl regăsim evidenţiat în imaginea de mai jos(fig. 2.2). În
cadrul acestei proceduri se utilizează un sistem de ghidare imagistică (ecografie sau
tomografie computerizată). Doctorul este capabil să introducă o sondă subţire direct în ţesutul
vizat.
Fig. 2.2: Exemplificarea preciziei controlului temperaturii
Radiaţiile microundelor sunt special setate pentru frecventa naturală a moleculelor de
apă pentru a maximiza interacţiunea. Temperatura este măsurată ca viteza de mişcare a
moleculelor într-o substanţă, iar cu cât mişcarea moleculelor este mai puternică, cu atât creşte
şi temperatura apei.
Din studiile rezultate până în acest moment asupra ablaţiei prin microunde se
evidenţiază că în cazul ablaţiei ţesutului complet succesul se situează în intervalul 50-100 %,
în funcţie de dimensiunea tumorii şi succesul în cazul tumorilor mai mici se afla în jurul
valorii de 100 %. Recurenţa în cazul sistemului ce utilizează ablaţia prin microunde este
foarte puţin probabilă.
2.2 Avantajele ablaţiei cu microunde
Această tehnică medicală prezintă o gamă largă de beneficii, atât pentru comunitatea
medicală,cât şi pentru pacienţi. Unele dintre aceste beneficii le voi enumera mai jos.
Avantajele luate în considerare de medici:
-timpul scurt necesar creerii zonelor mari de coagulare duce la avantajul că mai multe puncte
de coagulare pot fi făcute în acelaşi timp, într-o fereastră operativă dată.
-viteza, precizia şi predictibilitatea ne dau informaţiile potrivit cărora zona de coagulare dorită
poate fi realizată într-un mod mai simplu şi mai benefic.
-dezvoltarea zonei de interes este predominant sferică de la început, ceea ce înseamnă că
coagularea progresivă poate fi creată folosind parametri de timp şi imagini în timp real.
-simplitatea de funcţionare a sistemului ne indică faptul că coagularea se poate face
laparascopic şi prin proceduri percutante, fără a fi necesare echipament auxiliar.
-abilitatea de a monitoriza dezvoltarea zonei de interes în timp real, prin intermediul
imagisticii sau prin ultrasunete înseamnă că doctorii pot monitoriza cu acurateţe progresul
ablaţiei şi pot atinge cu încredere marjele de coagulare.
Toate aceste avantaje reprezintă pentru oncologi, chirurgi şi radiologi un nou mod de
abordare a posibilităţilor de tratament. Ei pot lua în considerare o gamă mult mai largă de
posibilităţi de tratament atunci când proiectează strategii de vindecare a pacienţilor.

Avantajele luate în considerare de spital:
-viteza cu care această procedură se face se traduce direct în costurile scăzute în comparaţie
cu alte proceduri similare,cum ar fi ablaţia prin radio-frecventa;
-reducerea timpului de internare a pacienţilor (reducerea costurilor de şedere în spital) datorită
recuperării rapide şi a lipsei complicaţiilor;
Avantaje care vizează pacienţii :
-ablatia prin microunde este o tehnică putin invazivă,ceea ce înseamnă mai puţin timp
petrecut internat şi puţin timp necesar recuperării;
-la fel ca în cazul altor proceduri de ablaţie,complicaţiile sunt posibile. Dar rezultatele ablaţiei
cu microunde până în prezent ne indică faptul că aceste complicaţii sunt puţin probabile.

Capitolul III – Obiectiv, configuraţii testate, etape de realizare a sistemului
Proiectul a fost realizat ca urmare a unei colaborări dintre Facultatea de Inginerie
Electrică, Energetică şi Informatică Aplicată şi Universitatea de Medicină din Iaşi, în cadrul
proiectului de cercetare „CheTherDel – Chemo-hyperthermal Delivery-Combined chemo-
hypothermal control of hepatic tumors, based on mircowave-activated subendothelial-targeted
nano-assemblies”.
Obiectiv:
Realizarea unui dispozitiv capabil să menţină o anumită temperatură într-o zonă de
ţesut expusă într-un anumit interval de timp.
3.1 Configura iile testate în vederea pentru realizarea obiectivului:ț
Varianta 1: Să se folosească o sursă radiantă cu infraroşu care să ţintească zona de
ţesut dorită;
Varianta 2: Să se folosească o baie termostabilă cu lichid în care să se scufunde
ţesutul;
Varianta 3: Să se utilizeze 2 padele încălzite(electric,fluid,etc) în care să fie pus
ţesutul;
Varianta 4: Utilizarea microundelor
În urma testelor efectuate pe țesut mort (ficat de pui din comerț) în toate cele 4
variante au fost identificate o serie de avantaje şi dezavantaje pentru soluțiile menționate mai
sus:
Varianta 1: încălzirea se face prin convecţie, ceea ce duce la supraîncălzirea părţii
exterioare a ţesutului neasigurându-se o încălzire uniformă în toată masa ţesutului;
Varianta 2: din punct de vedere anatomic, nu toate organele pot fi scufundate într-un
lichid. Apar dificultăţi de manipulare mai ales ținând cont de faptul că experimentele
se vor face pe cobai vii.

Varianta 3: au fost făcute teste,dar s-a constatat o inerţie termică foarte mare a
ţesutului, fapt pentru care nu se putea face o expunere la o temperatură prestabilită, un
timp t de 1 minut sau sub 1 minut, conform cerinţele protocolului experimental.
Varianta 4: a fost varianta care răspundea pe deplin cerințelor obiectivului propus:
încălzire rapidă și uniformă în toată masa țesutului, ca urmare, aceasta a fost varianta
aleasă.
3.2 Etapele de realizare ale sistemului:
Etapa1:
A fost ales un cuptor cu microunde de 800 W. S-a eliminat partea de comandă şi
control a cuptorului, în locul acesteia poziţionându-se un comutator(PTT) în paralel cu o
intrare pentru un releu, și pe circuitul de alimentare al magnetronului a fost introdus un
ampermetru pentru a vedea momentul intrării în sarcină a magnetronului. Cuptorul are şi o
rezistență pentru gril. A fost prevăzută o intrare separată şi pentru acesta în vederea
termostatării incintei cuptorului pe timpul experimentului la 37 de grade celsius. Această
aplicație va fi dezvoltată într-o etapă viitoare a proiectului când în protocolul experimental va
fi cerută o temperatură generală a corpului de 37 de grade. În imaginea următoare este
prezentat panoul de comandă modificat al cuptorului (Figura 3.1)

Figura 3.1: Panou de control modificat
- Etapa 2: Realizarea părţii de acţionare a sistemului
Au fost alese 2 configuraţii:
1.Prima variantă are la bază un calculator, o placă de achiziţie soft, 2 senzori de
temperatură şi un releu.
2. În cea de-a doua variantă, partea de monitorizare și control a fost realizată folosind
placa de dezvoltare Arduino Uno, 2 senzori de temperatură şi un releu.
Capitolul IV – Principiul de funcţionare, implementarea sistemului, descriere componente
Principiul de funcţionare:
Senzorul de temperatură(termocuplu) este introdus în ţesutul de test(ficat).
Magnetronul cuptorului este alimentat printr-o buclă de comandă cu un releu comandat de
placa de achiziţie sau de Arduino, în funcţie de configuraţie. Releul este închis sau deschis, în

funcţie de temperatura atinsă de ţesutul expus microundelor astfel încât temperatura din
țesutul monitorizat să rămână între limitele prestabilite.,
4.1 Implementarea sistemului folosind instrumentaţia virtuală
Componente hardware:
1.Cuptor cu microunde modificat.
2.Senzori de temperatura-termocuplu tip J modificat.
3.Placa de achiziţie Ni PCI 6110
4.Releu 5V, 50 mĂ
1. Cuptor cu microunde modificat:
Aşa cum am menţionat anterior, s-a ales un cuptor cu microunde de 800 W care a fost
supus mai multor modificări, în concordanţă cu cerinţele protocolului experimental. Partea de
comandă şi de control a cuptorului a fost eliminată. Am utilizat în locul acestei părţi un
comutator (un buton PPT) pus în paralel cu o intrare pentru un releu de 5V. Mai jos,în fig. 4.1
sunt expuse modificările pe care le-am prezentat.
Figura 4.1: Cuptor cu microunde modificat
2. Senzori de temperatura-termocuplu de tip J modificat.

Termocuplul este un dispozitiv precis şi fiabil, un dispozitiv primar de măsurare a
temperaturii. Precizia lor poate fi regăsita la Institutul Naţional de Standarde şi Tehnologie
(NIST). Este compus din 2 fire metalice diferite unite între ele la ambele capete. Temperatura
de la unul din capete este ales şi cunoscut ca referinţă(uneori denumit „joncţiune rece”).
Celălalt capăt este captul pentru măsurare(regăsit sub numele de „joncţiune caldă”). Acest
dispozitiv oferă un mijloc de detectare a temperaturii într-o multitudine de procese. Ştim că
temperatura este procesul măsurat cel mai mult şi realizarea măsurării ei este critică în multe
procese de fabricare. Termocuplul poate fi construit într-o gamă foarte largă de moduri: de la
fire flexibile mai subţiri decât un fir de păr până la teci de câţiva centimetri. În figura
următoare(Figura 4.2) este prezentat circuitul unui termocuplu:
Fig. 4.2: Circuitul unui termocuplu
Aceste dispozitive sunt de joasă impedanţa şi lucrează prin producerea de forţe
electro-motrice. Forţa electro-motrică apare ca urmare a gradienţilor de temperatură de-a
lungul firului şi nu la joncţiune.
Cele 3 legi ale circuitelor termoelectrice care explica comportamentul termocuplului
sunt Legea Metalelor Intermediare care ne explică faptul că forţele electro-motrice ale unui
circuit sunt aditive algebric cu excepţia cazului în care temperatura este uniforma. Legea
Metalelor Omogene ne indică faptul că o forţă electro-motrică nu poate fi creată decât dacă un
alt tip de metal exista în circuit şi există, de asemeni,un gradient de temperatură. A treia lege
este Legea Temperaturilor Intermediare. În cazul în care 2 metale diferite şi omogene produc
o forţă electro-motrica egală cu X, ea va rămâne aceeaşi chiar dacă se introduce un alt
material în circuit, dacă ambele capete ale acestui al treilea material sunt la aceeaşi
temperatură.
Semnalul de ordinul milivolţilor produs de termocuplu este un semnal de nivel foarte
scăzut. Astfel, transmiterea acestui semnal poate fi dificilă, dacă orice zgomot extern este
introdus în sistem. Pentru a elimina această problemă se poate utiliza un fir ecranat, mai ales

în zonele cu zgomot în exces. Acest fir care se extinde de la termocuplu trebuie să se
potrivească calibrării termocuplului.
Ieşirea unui termocuplu depinde de valoarea diferenţei de temperatură dintre
joncţiunea măsurată şi joncţiunea de referinţă. În timp ce joncţiunea de măsurare(joncţiunea
fierbinte) este stabilă la o temperatură dată, punctul de ieşire al joncţiunii de referinţă trebuie
să fie compensată. Acest lucru se realizează prin compensarea joncţiunii reci. În figură de mai
jos(Fig. 4.3) este expus conceptul compensaţiei joncţiunii reci.
Fig. 4.3: Concept joncţiune rece
În figura de mai sus, tensiunea V1 este tensiunea termocuplului generată de diferenţa
dintre temperatura necunoscută (TX) şi temperatura conectorului (TC). Temperatura
conectorului este măsurată cu un senzor (care nu este termocuplu) iar tensiunea
corespunzătoare senzorului V2 este scalata electronic pentru a reprezenta aceeaşi tensiune a
termocuplului(raportată la 0 °C).
4.2 Joncţiunea de referinţă
Este general faptul că pentru a localiza joncţiunea de referinţă trebuie să ne raportăm
la o distanţă considerabilă faţă de joncţiunea de măsurare. Acest lucru se întâmplă din motive
de siguranţă a personalului care lucrează cu acest dispozitiv şi de confort, ca în cazul în care
temperatura ambiantă este prea mare pentru un transmiţător electronic sau pentru un tehnician
să supravieţuiască. Acest lucru se realizează prin adăugarea unei bucăţi de fir suplimentar la
ambele parti-negativa şi pozitiva- ale termocuplului. Astfel joncţiunea de referinţă se extinde
pentru o mai bună manipulare fără a afecta acurateţea. Acest fir suplimentar este confecţionat
din acelaşi material ca şi termocuplul sau dintr-un aliaj care prezintă la ieşire aceeaşi valoare
de milivolţi pe unitate de temperatura ca şi termocuplul. Aceasta prelungire nu este testată

însă la temperaturi ce depăşesc 200 ° C iar tensiunea de la ieşire poate devia într-o oarecare
măsură de la cea a termocuplului la temperaturi mai mari decât această valoare, ceea ce ar
cauza erori de măsură.
Conectorii din alamă sau din argint (buni conductori de căldură) sunt deseori utilizaţi
pentru a lega firul de prelungire de firul termocuplului. Conexiunea terminală, chiar dacă e
confecţionată din alte materiale decât materialul termocuplului nu va afecta acurateţea şi
precizia măsurătorilor pentru că nu există diferenţa de temperatură de-alungul conexiunii. În
imaginea următoare(fig. 4.4) este expus principiul jonţiunii de referinţă. În punctul X
diferenţa de temperatură produce o tensiune de ordinul milivolţilor.
Fig.4.4 : Funcţionare joncţiune de referinţă
Relaţia matematică tensiune-temperatură pentru un termocuplu
În cazul metalelor tipice utilizate în termocuple, tensiunea de ieşire creşte aproximativ
liniar cu diferenţa de temperatura pe un interval mărginit de temperaturi. Pentru măsurători
precise sau pentru măsurători în afară intervalului liniar de temperatură, neliniaritatea trebuie
corectată. Relaţia neliniară dintre diferenţa de temperatură(T) şi tensiunea de ieşire(mV) a
unui termocuplu poate fi redata printr-un polinom:
Ecuatia 1
Coeficienţii an sunt daţi pentru n de la 0 la 5-13, în funcţie de metale. În unele cazuri,
acurateţea mai bună se obţine adăugând termeni non-polinomiali. Există online o bază de date
de tensiuni funcţie de temperatură şi coeficienţi de transformare a tensiunii în temperatura şi
vice-versa pentru mai multe tipuri de termocuple. În echipamentele moderne ecuaţia este pusă
în aplicare,de obicei,de un controler digital sau stocată într-un tabel. Aproximări liniare pe
porţiuni sunt sunt o alternativă pentru corecţiile polinomiale.

În cadrul proiectului nostru am ales că senzor de temperatură un termocuplu de tip J.
Acest tip de termocuplu este compus dintr-o parte pozitivă, formată din fier şi dintr-o parte
negativă formată din 45% Nichel şi 55% Cupru (Constantan este un aliaj compus din Cupru şi
Nichel). Termocuplul de tip J are un domeniu mai restrâns de temperatură decât cel de tip
K(de la −40 °C la +750 °C) dar prezintă o sensibilitate mult mai mare de aproximativ
50µV/°C. Punctul Curie al fierului(770°C) determina o schimbare mică a caracteristicii, care
determină linia superioară a temperaturii. Poate fi utilizat în diverse medii : în vid,în mediu cu
oxidare, în mediu cu reducere, în medii cu atmosfere inerte. Sunt recomandate acolo unde
există ca cerinţă durata lungă de viaţă la temperaturi de peste 500°C. Elementul pozitiv este
frecvent ruginit şi este magnetic. Prezintă o rezistenţă mică în ohmi.
4.3 Generalităţi ale Termocuplului tip J:
Tip Compoziţie metalică
Punct de topire
Temperatura practicăuzuală
Toleranţa(%din citire)
JFierConstantan
1220° C 0 - 400° C ± 0.75%
În imaginea de mai jos(fig. 4.5) sunt expuse părţile componente ale unui termocuplu de tip J
Fig. 4.5: Termocuplu de tip J
Liniarizare

Măsurătorile termocuplului,pentru a fi precise, au nevoie de condiţionarea modulelor
semnalului cu ieşiri, care sunt scalate liniar de temperatură. Tensiunile modulelor de ieşire
care au factorul de scalare liniara în volţi pe unitate de măsură sau în amperi pe unitate de
măsură elimină necesitatea tabelelor de valori deoarece conversia tensiunii de la termocuplu
în temperatură e construit în factorul de scală liniar la ieşire. Ca un exemplu de neliniaritate,
în figura de mai jos se evidenţiază acest lucru prin reprezentarea grafică(fig. 4.6) a diferenţei
dintre un răspuns liniar şi răspunsul termocuplului de tip J într-un interval de la 0 la 150 °C.
Fig. 4.6: Reprezentare grafică neliniaritate
Sensibilitatea unui termocuplu de tip J este de aproximativ 54 μV/ °C. Este evident în
figura de mai sus ca asumând un răspuns liniar pentru termocuplele de tip J pot rezulta în
aproape 2 grade de eroare. În mod clar, liniarizarea este absolut necesară pentru a facilita
măsurarea temperaturii exacte cu un termocuplu. Dataforth a dezvoltat tehnici proprii de
circuit, care oferă liniarizare precisă pentru semnale. Deşi calculatoarele moderne sau alte
microprocesoare încorporate pot liniariza un termocuplu utilizând tehnici software,
liniarizarea în mod hardware oferă rezultate mai rapide nu utilizează resursele calculatorului.
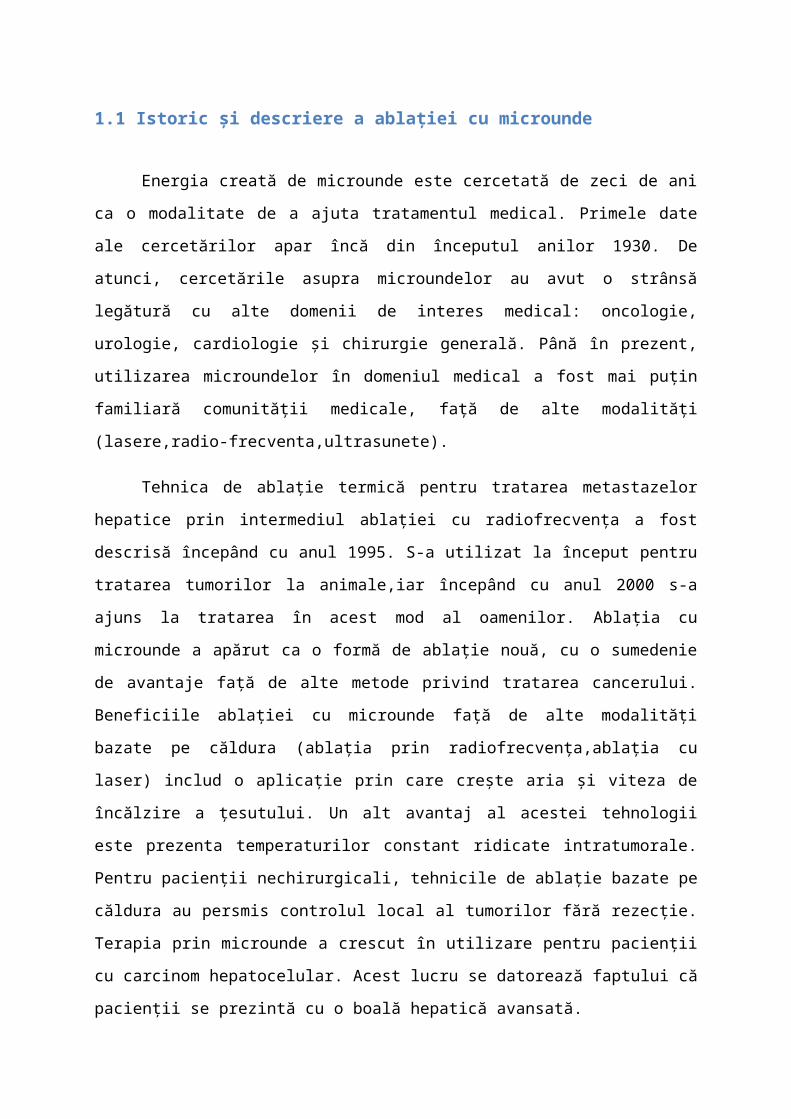
4.4 Modificări făcute termocuplului de tip J pentru a facilita experimentele
Având în vedere cerinţele protocolului experimental, noi am folosit un termocuplu de
tip J făcut special pentru a reuşi să-l introducem într-un ţesut viu (ficat, muşchi etc). Astfel,
firele termocuplului au fost sudate în vârful unui ac de seringă de 0.9 mm, partea sensibilă
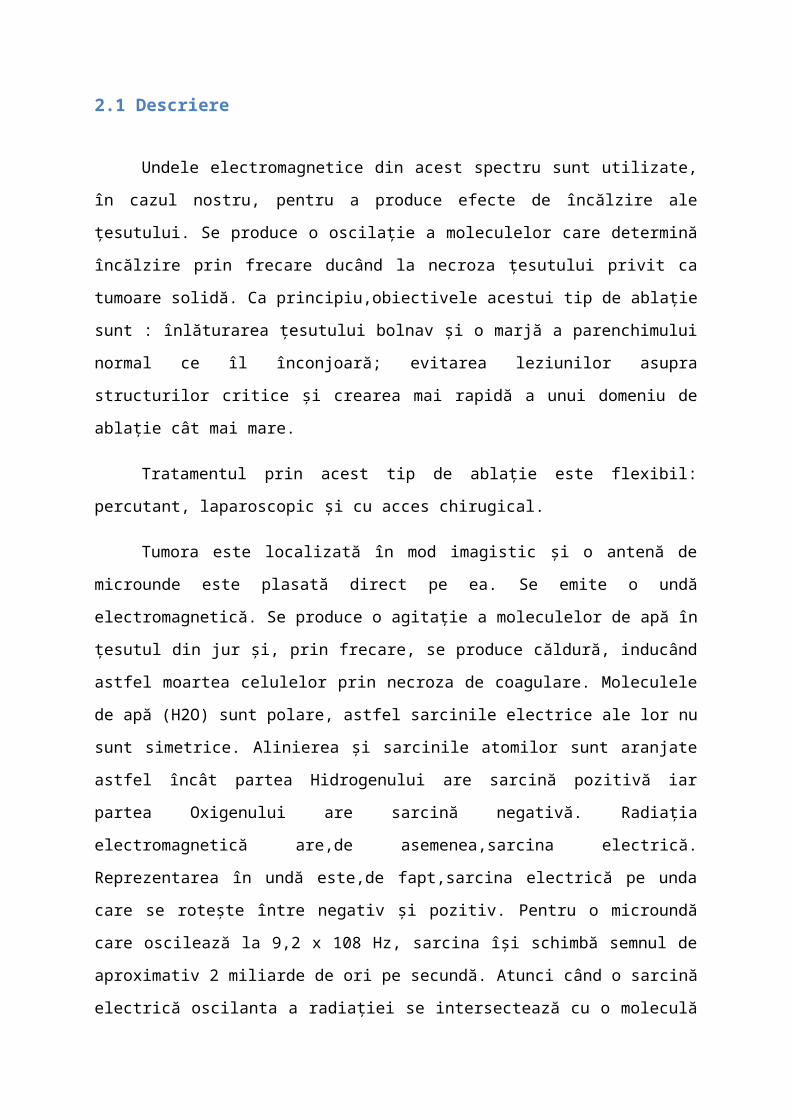
fiind tesitura vârfului acului de seringă. Aceste aspecte sunt evidenţiate în fig 4.7 şi în fig. 4.8.

Fig.4.7 : Fir termocuplu modificat
Jonctiune
Ac de seringa
Fig.4.8 : Schema termocuplu cu ac de seringă
Astfel firele care vin de la termocuplu până la placă(două fire +şi – într-o teacă
metalică) sunt la rândul lor sudate de cele două fire care formează termocuplul. De aceea
compensarea se face prin introducerea în blocul de achiziţie a temperaturii a valorii mediului
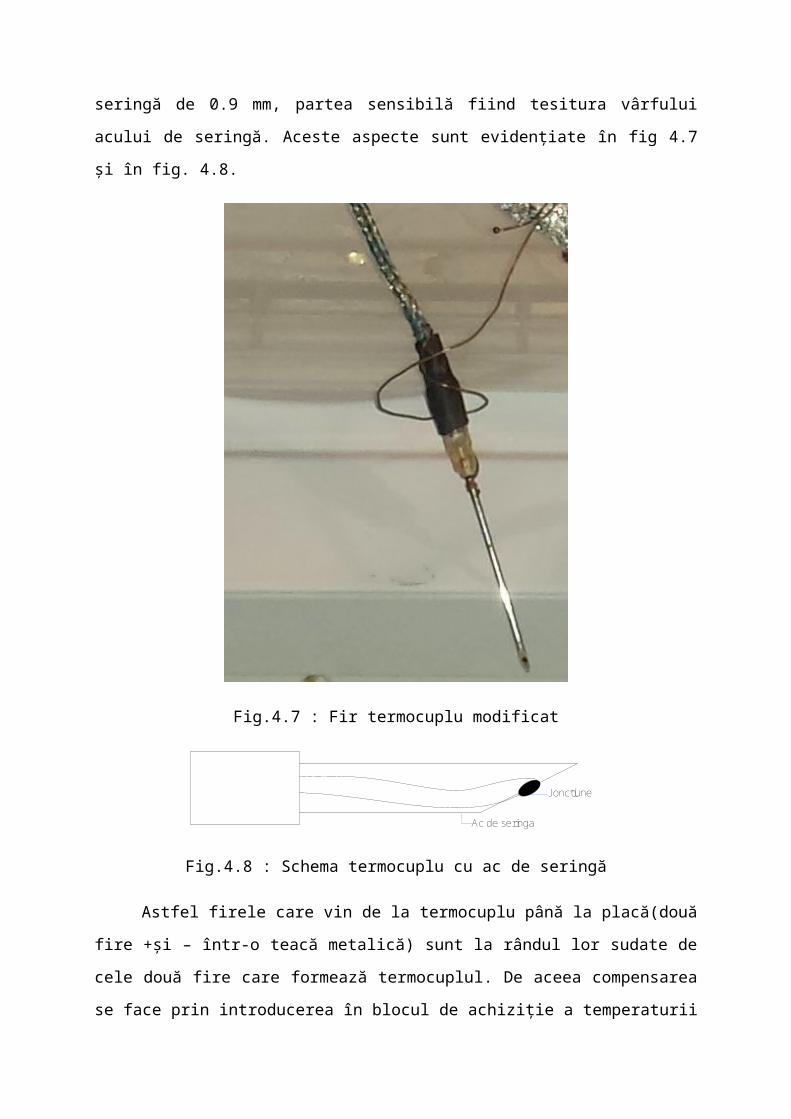
ambiant în care se face experimentul. În experimentul nostru se iau 2 temperaturi: o
temperatură din lobul ficatului expus ce urmează a fi încălzit şi o temperatură de sub ecranajul
cu staniol dintr-un lob rămas în şobolan pentru a vedea dacă apar sau nu fluctuaţii de
temperatură datorate ecranării proaste a cobaiului. Această operaţiune se observa în fig. 4.9.

Fig. 4.9: Prezentare prelevare temperaturi din lob şi de sub ecranaj
4.5 Placa de achiziţie Ni-USB6211
Placa de achiziţie NI-USB 6211 este un dispozitiv (alimentat de la magistrala)
multifuncţional de achiziţii de date din seria M. Este optimizat pentru acurateţe superioară la
raţe de eşantionare rapide. Este prevăzut cu 16 intrări analogice; 250kS/s fiind rata de
eşantionare pentru un singur canal. De asemenea oferă 2 ieşiri analogice, 4 pini de intrare
digitală, 4 pini de ieşire digitală, 4 intrări cu gama de tensiune (de la±0,2V la ±10 V)
programabilă, declanşare digitală şi 2 numărătoare/cronometre.
Placa de achiziţie NI-USB6211 este concepută special pentru aplicaţii mobile sau
pentru aplicaţii cu constrângere de spaţiu. Conexiunile de tip şurub tine costurile scăzute şi
simplifica conexiunile de semnal. Acest dispozitiv nu necesită alimentare externă.
În tabelul următor vom preciza specificaţii ale acestei plăci de achiziţie:
General
Nume placă de ahizitie USB-6211
Familia din care face parte Multifunction Data Acquisition

General
Forma factorului USB
Număr 780104-01 , 779676-01
Siateme de operare Linux , Mac OS , Windows
Familia dispozitivelor de achiziţie de date Seria M
Tipul măsurătorii Tensiune
Tipul izolaţiei Nu există
Conformitate RoHS Da
Alimentare USB Alimentare prin magistrala
Intrări Analogice
Canale 16 , 8
Canale cu un singur capăt 16
Canale diferenţiale 8
Rezoluţie 16 biţi
Rata de eşantionare 250 kS/s
Tensiunea maximă 10 V
Intervalul de tensiune -10 V - 10 V
Intervalul de tensiune pentru precizie maximă 2.69 mV
Tensiunea maximă pentru sensibilitate 91.6 µV
Intervalul minim de tensiune -200 mV - 200 mV
Tensiunea pentru precizie maximă 0.088 mV
Senzitivitatea pentru tensiunea minimă 4.8 µV
Numărul de intervale 4
Eşantionare simultană Nu
Memoria 4095 eşantioane
Ieşiri analogice

General
Canale 2
Rezoluţie 16 biţi
Tensiunea maximă 10 V
Intervalul de tensiune maxim -10 V - 10 V
Acurateţea intervalului maxim de tensiune 3.512 mV
Intervalul de tensiune minim -10 V - 10 V
Acurateţea intervalului minim de tensiune 3.512 mV
Rata de actualizare 250 kS/s
Curent pe unitate 2 mĂ
Current total 4 mĂ
Intrări/Ieşiri digitale
Canale bidirecţionale 0
Cnale de intrare 4
Cnale de ieşire 4
Sincronizare Prin software
Nivele logice TTL
Fluxul curentului de intrare Scufundare,aprovizionare
Fluxul curentului la ieşire Scufundare,aprovizionare
Filtre programabile la intrare Nu
Curent pe unitate 16 mĂ
Current total 50 mĂ
Suporta model intrare/ieşire?
Intervalul maxim la intrare 0 V - 5.25 V

General
Intervalul maxim la ieşire 0 V - 3.8 V
Numărătoare/cronometre
Numărătoare 2
Operaţii tamponate Da
Îndepărtarea coborârii Da
Sincronizare GPS Nu
Interval maxim 0 V - 5.25 V
Frecvenţa maximaa sursei 80 MHz
Generator de puls Da
Rezoluţie 32 biţi
Stabilitatea timpului de bază 50 ppm
Nivele logice TTL
Specificaţii fizice
Lungime 16.9 cm
Lăţime 9.4 cm
Înălţime 3.1 cm
Conectori Intrare/Ieşire Terminale tip şurub
Declanşare
Declanşare Digitală
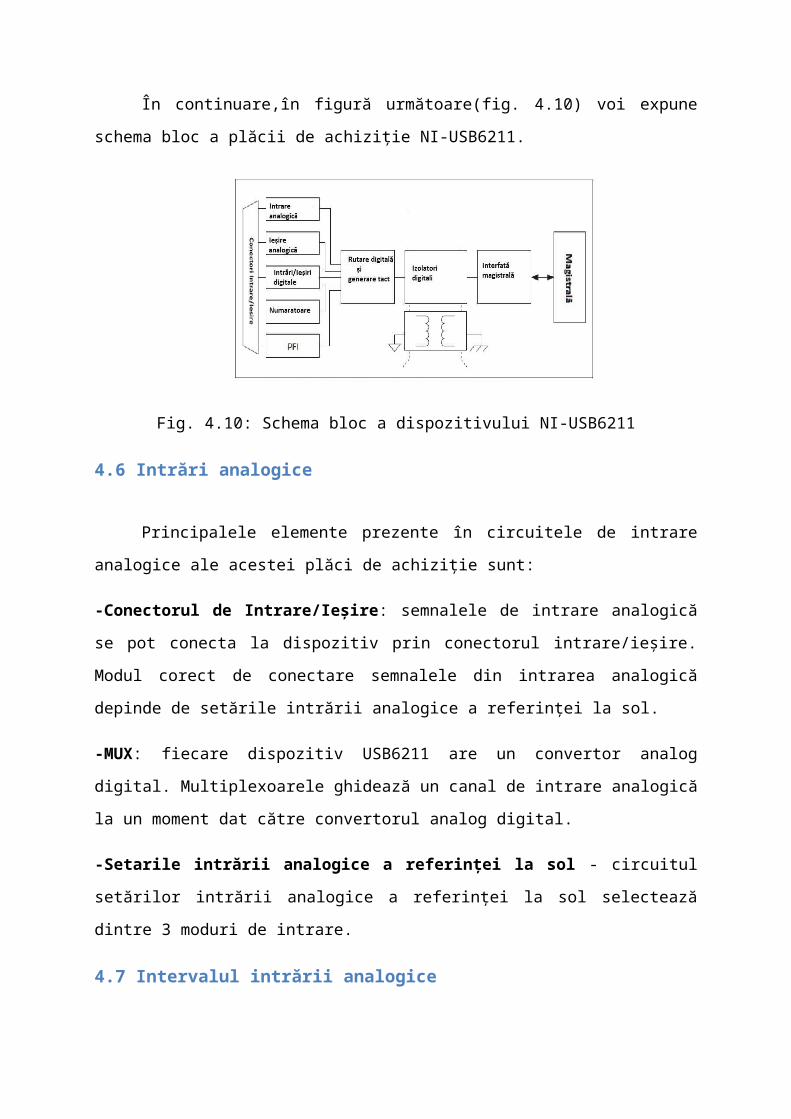
În continuare,în figură următoare(fig. 4.10) voi expune schema bloc a plăcii de
achiziţie NI-USB6211.

Fig. 4.10: Schema bloc a dispozitivului NI-USB6211
4.6 Intrări analogice
Principalele elemente prezente în circuitele de intrare analogice ale acestei plăci de
achiziţie sunt:
-Conectorul de Intrare/Ieşire: semnalele de intrare analogică se pot conecta la dispozitiv
prin conectorul intrare/ieşire. Modul corect de conectare semnalele din intrarea analogică
depinde de setările intrării analogice a referinţei la sol.
-MUX: fiecare dispozitiv USB6211 are un convertor analog digital. Multiplexoarele ghidează
un canal de intrare analogică la un moment dat către convertorul analog digital.
-Setarile intrării analogice a referinţei la sol - circuitul setărilor intrării analogice a
referinţei la sol selectează dintre 3 moduri de intrare.
4.7 Intervalul intrării analogice
Intervalul de intrare afectează rezoluţia plăcii de achiziţie pentru un canal de intrare
analogică. De exemplu,un convertor analog digital converteşte intrările analogice în una din
cele 65536 de valori digitale posibile. Aşadar,pentru un interval de intrare de la -10V la +10V,
tensiunea pentru fiecare cod de 16 biţi este:
Dispozitivul USB6211 foloseşte o metodă de calibrare care necesită nişte coduri
pentru a se întinde în afară intervalului specificat. Această metodă de calibrare îmbunătăţeşte
acurateţea absolută, dar creşte rezoluţia nominală a intervalului de intrare cu aproximativ 5%
peste ceea ce ar rezulta din formula indicată mai sus. De obicei se alege un interval de intrare
care se potriveşte cu intervalul aşteptat la intrarea semnalului. Un interval mare la intrare
poate găzdui o variaţie mare a semnalului dar va reduce rezoluţia tensiunii. Dar alegerea unui
interval mai mic la intrare va avea ca rezultat ieşirea semnalului de intrare din intervalul
stabilit, chiar dacă rezoluţia tensiunii se va îmbunătăţi.
În tabelul următor sunt trecute intervalele de intrare şi rezoluţiile corespondente ce
sunt suportate de placă de achiziţie NI-USB6211:
Intervalul de intrare Rezoluţia nominală luând în considerare şi procentul de 5% care intervine în interval
-10V – 10V 320 µV
-5V – 5V 160 µV -1V – 1V 32 µV -200mV – 200mV 6,4 µV
4.8 Metode de achiziţie de date de la intrări analogice
Atunci când vrem să efectuăm măsurători de intrare analogică, putem alege să
efectuăm ca metode: achiziţia prin software sau achiziţia prin hardware.
Ř În cadrul primei metode(achiziţia prin software) soft-ul controlează rata de achiziţie.
Acesta trimite comandă către componenta hardware să iniţieze fiecare conversie
analog digitală. Achiziţiile prin această metodă sunt de asemenea menţionate ca
achiziţii imediate sau statice şi sunt utilizate pentru a citi un singur eşantion de date.
Ř La achiziţia prin hardware, un semnal digital hardware(un ceas de eşantionare cu
intrare analogică) controlează rata de achiziţie. Acest semnal poate fi generat intern pe
dispozitiv sau poate proveni din exterior
A doua metodă de achiziţie prezintă numeroase avantaje faţă de achiziţia prin soft:
- Timpul dintre eşantioane este mult mai scurt;
- Timpul dintre eşantioane este determinist;
- A doua metodă poate utiliza declanşarea prin hard
Consideraţii cablare de câmp
Zgomotul din mediul înconjurător poate afecta într-un mod destul de serios acurateţea
măsurătorilor dispozitivului dacă nu se lucrează cu grijă atunci când se rulează firele de
semnal între sursa semnalului şi dispozitiv.
Pentru a reduce riscul ca măsurătorile să fie afectate de zgomot, sunt date nişte recomandări:
- Se recomandă utilizarea conexiunilor diferenţiale pentru a rejecta zgomotul de mod comun;
- Pentru conectare, se recomanda folosirea de perechi de fire răsucite ecranate individual. Cu
acest tip de fire, semnalele ataşate la partea pozitivă şi la partea negativă a canalului de intrare
sunt răsucite împreună şi apoi sunt ecranate. Acest tip de conexiune este necesar pentru
transmiterea semnalelor prin zone cu câmpuri magnetice mari sau cu interferenţe
electromagnetice.
Intrări/Ieşiri digitale
Placa de achiziţie NI-USB6211 are în componenţa 8 pini de intrare digitală(P0<0..7>)
şi 8 pini de ieşire digitală(P1<0..7>). Pinii de ieşire digitală sunt dezactivaţi(impedanţă mare
cu un rezistor de 47kΩ la deschidere. Prin soft se poate activa şi dezactiva întregul port.
În momentul în care portul este activat,fiecare pin poate fi configurat individual:
-Se setează un pin la un 0 static;
-Un alt pin este setat la 1 static;
-Se exportă un semnal sincronizat la ieşire.
Conectarea Intrare/Ieşire digitală la placă de achiziţie NI-USB6211
Semnalele ieşire digitală şi intrare digitală sunt raportate la GND digital. Aplicaţiile cu
intrare digitală includ recepţionarea unui semnal TTL şi detectarea stărilor dispozitivelor
externe, de pildă starea comutatorului expus în fig.4.11. Aplicaţiile cu ieşire digitală includ
trimiterea semnalului TTL şi manipularea dispozitivelor exterioare, asemeni LED-ului expus
în figura următoare(fig.in 4.11)

Fig. 4.11: Manipulare dipozitive exterioare şi detectare stări dispozitive externe
Dispozitive de programare software
Dispozitivele de măsurare ale Naţional Instruments au propriile lor softuri de achiziţie
de date, o bibliotecă extinsă de funcţii şi instrumente virtuale(cum ar fi LabVIEW sau
LabWindows/CVI) pentru programare. Soft-ul are o interfaţă de programare a
aplicaţiilor(API). Este o librărie de instrumente virtuale,funcţii,clase,atribute şi proprietăţi
care pot fi atribuite dispozitivului de măsurare.
Pentru placa noastră de achiziţie NI-USB6211 am ales pentru programare LabVIEW.
În LabVIEW, în panoul frontal adăugăm controale şi indicatori. În rândul controalelor avem
butoane, butoane cu apăsare, cadrane şi o altă mare varietate de mecanisme de intrare.
Indicatorii pot fi grafice, LED-uri sau alte dispozitive de afişare. După ce se construieşte
interfaţa în panoul frontal, putem adăuga cod utilizând instrumente virtuale şi structuri în
diagramă bloc pentru a controla obiectele din panoul frontal.
În cadrul proiectului am implementat în LabVIEW un instrument virtual prin care să
putem realiza cu succes testele. Astfel, ne-am stabilit de la început ce vrem de la acest
instrument virtual realizat:
-Setarea parametrilor testelor se va realiza în modul prezentat în fig. 4.12. În acest mod se va
stabili durata testului(în secunde) şi intervalul de temperatură(limita superioară/limita
inferioară).

Fig. 4.12: Setare parametri test
-Butoane pentru pornire/oprire test şi pentru înregistrare date, aşa cum se observa în fig. 4.13.
Am ales butoane care se acţionează atunci când sunt apăsate.
Fig. 4.13: Prezentare butoane utilizate
-Afişarea temperaturilor apare ca în fig. 4.14:
Fig. 4.14: Afişare temperaturi

-De asemenea, ne-am propus să afişăm variaţia temperaturilor în timp printr-un grafic, aşa cum se observă în fig. 4.15:
Fig. 4.15: Afişare grafică în timp real
-În final, instrumentul virtual creat arată asa cum este expus in fig. 4.16. Pe lânga cele menţionate mai sus, mai există cateva operaţii realizate de instrumentul virtual creat: afişează valorile curente, timpul rămas până la terminarea testului, ora sistemului.
Fig. 4.16: Instrument virtual
În fig. 6.17 se expune funcţionarea instrumentului virtual.

Fig. 4.17: Funcţionare instrument virtual
Capitolul V – Sistemul bazat pe placa de dezvoltare Arduino Uno: descriere componente, testare, principiu de funcţionare
Sistemul care are la bază placa de dezvoltare Arduino Uno prezintă, în afară de
avantajul costurilor scăzute şi un alt mare avantaj, cel al portabilităţii. Chiar de la această idee
am pornit lucrul la acest proiect. Pentru implementarea acestui sistem am utilizat următoarele
componente:
5.1 Placa de dezvoltare Arduino Uno
Prezentare:
Arduino Uno este o placă de dezvoltare open-source bazată pe un procesor
Atmega328. Această placă de dezvoltare prezintă 14 ieşiri/intrări digitale (dintre care 6 pini
pot fi utilizaţi ca ieşiri PWM), un oscilator cu cuarţ de 16 MHz, 6 intrări analogice, conexiune
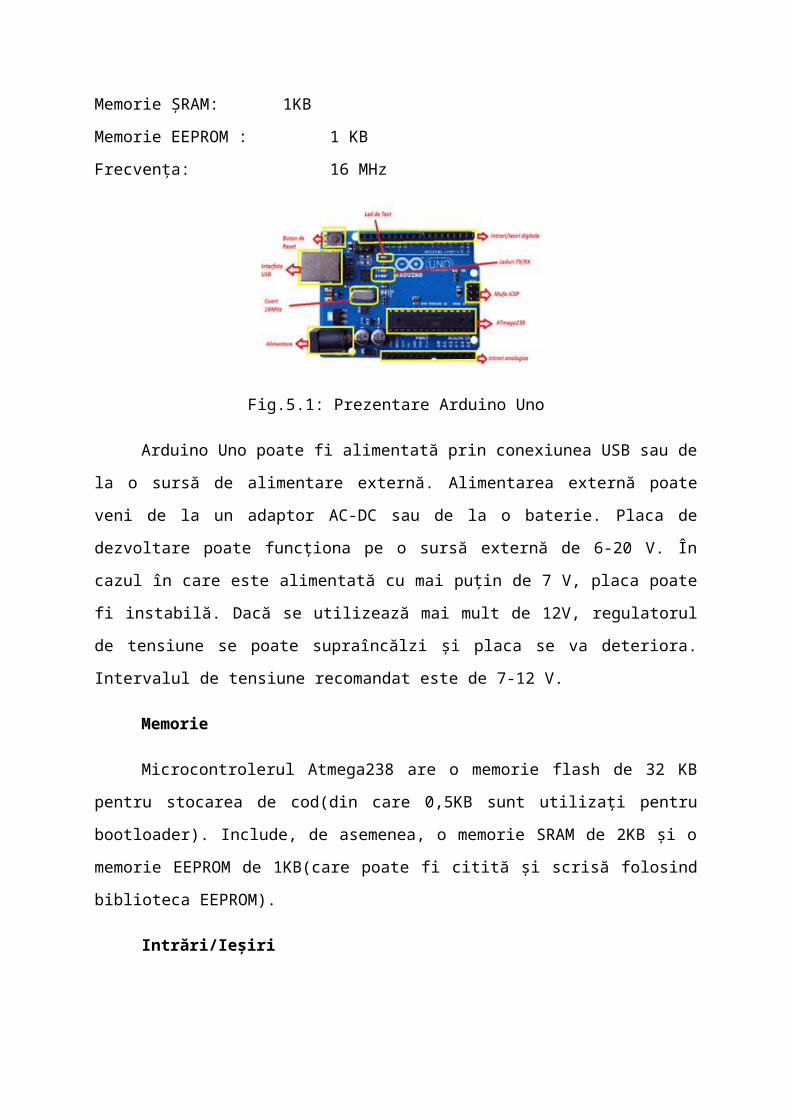
USB. Prezintă toate lucrurile necesare pentru a suporta un microcontroler. Principalele
componente ale plăcii Arduino Uno sunt prezentate in Fig 5.1
Specificaţii tehnice:
Microcontroler : ATmega328
Tensiunea de alimentare : 5V
Tensiune de intrare : 7-12V
Intrări/Ieşiri digitale: 14
Intrări analogice: 6
Curentul pentru intrare/ieşire digitală : 40mA
Memoria flash: 32 KB
Memorie ŞRAM: 1KB
Memorie EEPROM : 1 KB
Frecvenţa: 16 MHz

Fig.5.1: Prezentare Arduino Uno
Arduino Uno poate fi alimentată prin conexiunea USB sau de la o sursă de alimentare
externă. Alimentarea externă poate veni de la un adaptor AC-DC sau de la o baterie. Placa de
dezvoltare poate funcţiona pe o sursă externă de 6-20 V. În cazul în care este alimentată cu
mai puţin de 7 V, placa poate fi instabilă. Dacă se utilizează mai mult de 12V, regulatorul de
tensiune se poate supraîncălzi şi placa se va deteriora. Intervalul de tensiune recomandat este
de 7-12 V.
Memorie
Microcontrolerul Atmega238 are o memorie flash de 32 KB pentru stocarea de
cod(din care 0,5KB sunt utilizaţi pentru bootloader). Include, de asemenea, o memorie SRAM
de 2KB şi o memorie EEPROM de 1KB(care poate fi citită şi scrisă folosind biblioteca
EEPROM).
Intrări/Ieşiri
Arduino Uno are incluşi 14 pini digitali care pot fi utilizaţi că intrări sau ieşiri,
folosind funcţiile pinMode(), digitalWrite() şi digitalRead(). Ele funcţionează la tensiunea de
5V. Fiecare pin poate scoate sau poate primi un curent de maxim 40mA. De asemenea,unii
pini au şi funcţii specializate:
(RX) şi (TX) (pinii 0 şi 1) serial sunt folosiţi pentru a recepta(RX) şi transmite(TX)
date seriale.
Întreruperi externe (pinii 2 şi 3): pot fi configuraţi pentru a declanşa o întrerupere
pentru o valoare mică, o margine în creştere sau în cădere sau o chimbare a valorii. Se
utilizează funcţia attachInterrupt ().
Pinii de PWM (3,5,6,9,10,11): furnizează ieşire PWM de 8 biţi cu funcţia analog
Write().

Pinii SPI: 10(ŞŞ),11(MOŞI,12(MISO),13(SCK). Aceşti pini sunt suport pentru
comunicaţiile SPI, care, deşi este furnizată de platforma hardware,încă nu este inclusă
în limbajul Arduino.
Ledul de Test (13):Atunci când pe acest pin este o valoare mare, Led-ul este aprins
iar când valoarea este mică, Led-ul este închis.
Arduino Uno are 6 intrări analogice, fiecare dintre ele oferă 10 biţi de rezoluţie(de
exemplu 1024 de valori diferite). Şi în cazul acestor pini există funcţii specializate:
I2C: SDA(4) şi 5(SCL) sunt suport pentru comunicaţiile I2C utilizând biblioteca
„WIRE”
Utilitatea altor pini incluşi pe Arduino Uno:
AREF: tensiunea de referinţă pentru intrările analogice. Se utilizează cu funcţia
analogReference().
Reset: utilizat pentru adăugarea butonului de Reset.
Comunicare:
Arduino Uno poate comunica cu un calculator, cu o altă placă Arduino sau cu alte
microcontrolere. În acest sens, placa prezintă diverse facilităţi. Atmega238 furnizează UART
TTL(5V) comunicare serială care este disponibilă la pinii digitali 0(RX) şi 1(TX).Atmega8U2
prezent pe placa face posibilă comunicare serială prin USB şi apare pe calculator ca un port
Com. Ledurile RX şi TX de pe placa vor clipi în momentul în care se transmit date prin
intermediul USB.
Atmega238 sprijină, de asemenea, comunicaţiile I2C(DST) şi SPI. Softul Arduino
include librăria „Wire” pentru a face mai uşoară acest tip de comunicare.
5.2 Senzori de temperatura-termocuplu
Un termocuplu este un senzor utilizat în măsurarea temperaturilor. Este compus din
două metale diferite care sunt unite la un capăt. În momentul în care joncţiunea dintre cele
două metale este încălzită sau răcită este produsă o tensiune care, prin prelucrare, poate fi
corelată în temperatură. Aliajele care formează un termocuplu sunt, de obicei, sub forma unor
fire. Tensiunea produsă la joncţiunea de referinţă depinde atât de temperatură de la joncţiunea
măsurată cât şi de joncţiunea de referinţă. Deoarece termpcuplul este mai degrabă un
dispozitiv diferenţial decât un dispozitiv de măsurare a temperaturii absolute, temperatura
joncţiunii de referinţă trebuie cunoscută pentru a obţine o citire cât mai precisă a temperaturii.
Acest proces îl găsim cunoscut sub numele de compensare a joncţiunii de
referinţă(compensare a joncţiunii reci).
Măsurarea temperaturilor utilizând ca senzor termocuplul a devenit metoda standard a
industriei de a măsura o gamă largă de temperaturi cu acurateţe rezonabilă şi cu eficienţa
sportita din punct de vedere al costurilor. Sunt folosite într-o mare varietate de aplicaţii ce
includ temperaturi de aproximativ 2500°C. Spre exemplu, putem enumera : cazane,
încălzitoare de apă, cuptoare, motoare de aeronave, etc. Cel mai cunoscut tip de termocuplu
este termocuplul de tip K, format din aliaje de nichel ce conţin crom, aluminiu, mangan şi
respectiv silicon. Termocuplul de tip K are un interval de măsurare cuprins între -200 ° C şi
1250 ° C. Acest tip de termocuplu l-am utilizat în poiectul implementat.
Avantaje ale utilizării termocuplului
termocuplul poate fi utilizat într-un interval cât mai larg şi mai practic de
temperaturi:de la criogenie până la evacuarea motoarelor cu jet.
un alt avantaj îl reprezintă robusteţea termocuplului. Aceşti senzori sunt imuni la
vibraţii şi şocuri, ceea ce îi face utilizabili în cele mai periculoase medii.
rapiditatea reacţiei. Acest avantaj se datorează în principal faptului că sunt mici şi au
capacitate termică scăzută. Termocuplul răspunde rapid la orice schimbare de
temperatură, în special atunci când joncţiunea este expusă. Răspunsul venit din partea
termocuplului poate fi dat în câteva sute de milisecunde.
nu prezintă autoincalzire pentru că nu are nevoie de sursa de excitaţie. Nu este
predispus la încălzire autonomă şi sunt protejaţi intrinsec.
Pe de altă parte,utilizarea termocuplului poate implica şi diverse dezavantaje,din care
amintim:
conditionarea complicată a semnalului. Este nevoie de o condiţionare substanţială a
semnalului pentru a converti tensiunea de ieşire a termocuplului într-o citire utilizabilă
a temperaturii. În mod normal, condiţionarea semnalului presupune o investiţie destul
de importantă de timp pentru proiectare pentru a evita introducerea erorilor ce ar
afecta precizia măsurătorilor.

în ceea ce priveşte precizia măsurătorilor, la inexactităţile inerente ale termocuplului
datorate proprietăţilor metalurgice se adăugă şi faptul că măsurătoarea cu termocuplu
este precisă doar când joncţiunea de referinţă poate fi măsurată.
sensibilitatea la zgomot reprezintă un alt dezavantaj în ceea ce priveşte măsurătoarea
utilizând termocuplul. Atunci când măsurăm tensiuni la nivel de microvolţi, zgomotele
provenite de la câmpurile electromagnetice nedorite pot reprezenta o problemă. Prin
răsucirea perechii de fire a termocuplului se poate reduce într-un mod însemnat
preluarea de câmp magnetic. De asemenea, utilizând un cablu ecranat putem reduce
substanţial preluarea de câmp electric. Dispozitivul de măsurare trebuie prevăzut cu
filtrare de semnal, fie în mod hardware sau software care să respingă frecvenţa de
linie(50Hz/60Hz) şi, de asemenea,armonicele acestei frecvente.
5.4 Modul releu pentru Arduino
Pentru a putea utiliza acest tip de senzor de temperatură, a fost necesar să ne folosim
de un releu. Prin intermediul acestuia am putut controla temperatura, fiind utilizat pentru a
declanşa/opri încălzirea. În figura de mai jos (fig. 5.2) sunt prezentate schema releului şi
schema de control a releului prin Arduino.
Fig. 5.2: Schemă releu Arduino

5.5 Modulul SD-card
Modulul SD-card reprezintă modul în care putem stoca date de la Arduino pentru un
timp îndelungat. În timp ce Arduino are incorporată o memorie permanenta EEPROM ,
aceasta reprezintă doar câteva sute de biţi,în comparaţie, spre exemplu, cu un card SD de
2GB. Un mare avantaj pe care îl prezintă un card SD este preţul scăzut, astfel că este o alegere
evidentă pentru stocarea datelor pentru o anumită perioadă de timp. Acest modul lucrează la o
tensiune de 3,3 V.
Pinii modulului SD-card şi conectarea la Arduino:
-10(SS)-„Slave Select” pentru CS;
-11(MOSI)-„Master Out Slave In” pentru DI;
-12(MISO)-„Master In Slave Out” pentru DO;
-13(SCK)-„System Clock” pentru CLK;
-G pentru GND şi pentru +5V
În figura următoare (Figura 5.3) este prezentat modul în care modulul SD-card se va
conecta la placa Arduino UNO
Fig. 5.3: Conectare SD-card la Arduino

5.6 Amplificator Termocuplu- Max31855K
Termocuplul este un senzor foarte sensibil. Pentru a fi util, el are nevoie de un
amplificator cu o referinţă de compensare rece. Conţine un cip, un regulator de 3,3V cu
capacitori de bypass de 10 mircoF. De asemenea, este un convertor termocuplu-digital.
Dispozitivul conţine joncţiune rece pentru compensare şi corecţie, un controler digital,
o interfaţă compatibilă cu SPI şi o logică de control asociată. Dispozitivul are ca destinaţie
munca în colaborare cu un microcontroler extern în procesew de control termostatic sau de
monitorizare a unor aplicaţii.
Prezintă structură hardware de condiţionare semnal pentru a converti semnalul receptat
de la termocuplu într-o tensiune compatibilă cu canalele de intrare ale convertorului analog
digital. Intrările T+ şi T- sunt conectate la circuitele interne, având ca scop reducerea erorilor
datorate zgomotului din firele de termocuplu. Înainte de a converti tensiunile termoelectrice în
valorile de temperatură echivalente, trebuie compensată diferenţa dintre joncţiunea rece a
termocuplului şi referinţă virtuală 0NC. Pentru tipul nostru de termocuplu utilizat, tipul K,
tensiunea se schimbă de aproximativ 41FV/NC , care aproximează caracteristicile
termocuplului prin următoare ecuaţie liniară:
Uieșire=(41.276FV/NC)X(Tjoncțiune-Tdispozitiv),unde :
Uieșire este tensiunea de ieşire a termocuplului; Tjoncțiune este temperatura joncţiunii
termocuplului şi Tdispozitiv este tensiunea dispozitivului.
Compensarea joncţiunii reci
Funcţia termocuplului este de a sesiza diferenţa de temperatură dintre cele două fire
ale sale. Joncţiunea fierbinte a termocuplului poate fi citită de-a lungul întregului regim de
funcţionare. Joncţiunea de referinţă (joncţiunea rece) ar trebui să se afle la aceeaşi
temperatură ca şi placă pe care este montat dispozitivul. Poate varia de la -55 la +125. În timp
ce temperatura la capătul rece fluctuează, dispozitivul continuă să detecteze cu precizie
diferenţa de temperatură de la capătul opus. Dispozitivul detectează şi corectează schimbările
din joncţiunea de referinţă prin compensarea joncţiunii reci. Acest lucru se realizează prin
măsurarea temperatura internă, care trebuie menţinută la aceeaşi temperatură cu joncţiunea de
referinţă. Următorul pas e să măsoare tensiunea de ieşire a termocuplului la joncţiunea de
referinţă şi convertirea ei în valoarea temperaturii. Această valoare este adăugată la

temperatura dispozitivului pentru a calcula temperatura joncţiunii fierbinţi. Această
temperatură a joncţiunii fierbinţi poate fi mai mică decât temperatura joncţiunii reci sau a
joncţiunii de referinţă.
Funcţiile de conversie
În timpul conversiei, tconv, sunt efectuate 3 funcţii: conversia temperaturii joncţiunii
interne reci, conversia temperaturii exterioare termocuplului şi detectarea erorilor
termocuplului. În momentul în care este în lucru etapa de conversie a temperaturii pentru
circuitul intern de compensare a joncţiunii reci, legătura către semnalul primit de la
termocuplu este deschisă şi legătura către circuitul de compensare a joncţiunii reci se închide.
Atunci când se realizează conversia temperaturii primite de la termocuplu, se deschid
legăturile către circuitul de depistare a erorilor. Legătura către referinţa internă a masei şi
legătura către ADC sunt închise. Acest lucru permite ADC să proceseze tensiunea detectată
între cele două terminale T+ şi T-.
Figura 5.4: Prezentare amplificator Max31855K
În imaginea de mai sus (fig. 5.4) este evidenţiat un astfel de dispozitiv-amplificator
pentru termocuplu Max31855K.
Ca principiu de funcţionare, utilizarea acestui sistem este simplă. Senzorii de
temperatură (în cazul nostru termocuplu de tip K) preiau temperaturile de pe ţesut şi din
interiorul corpului cobaiului. Se stabileşte de la început un interval de timp în care
temperatura poate oscila. În momentul în care temperatura atinge pragul de jos setat, intră în
funcţiune releul programat prin placa Arduino Uno . Acesta declanşează încălzirea.
Magnetronul generează microunde,care determină ca moleculele de apă din ţesutul vizat să se
rotească de milioane de ori pe secundă. În acest mod este generată căldură. În momentul în
care temperatura atinge pragul de sus setat de utilizator prin intermediul plăcii Arduino Uno,

releul opreşte generarea microundelor prin magnetron, în acest mod oprindu-se încălzirea.
Datele rezultate în urma testelor sunt transmise direct către computer sau sunt stocate pe un
modul SD-card pentru Arduino Uno.
Sistemul care are la baza placă de dezvoltare Arduino Uno este în curs de
implementare.Am reuşit până în acest moment să achiziţionăm piesele necesare, să testăm
aceste piese şi să lucrăm la secvenţa de cod care să pună în funcţiune întregul sistem.
Componența hardware a sistemului de comandă și control:
-Placa de dezvoltare Arduino Uno;
-Modul SD-card pentru placă de dezvoltare Arduino;
-Senzor de temperatură –temocuplu de tip K;
-Amplificator temocuplu pentru placă de dezvoltare Arduino Uno;
-Modulul Releu pentru placa noastră de dezvoltare.
Testarea pieselor din componența sistemului:
1. Testare placă de dezvoltare Arduino
În cadrul testării plăcii achiziţionate am apelat la un program de bază pentru Arduino:
programarea unui LED să se aprindă şi să stea astfel timp de o secundă, după care să se
menţină închis timp de o secundă. Aprinderea LED-ului se declanşează atunci când nivelul
tensiunii creşte şi se închide atunci când nivelul tensiunii scade. (fig. 5.5 prezintă partea fizică
a acestui test).

Fig. 5.5: Test Arduino cu LED
2. Testare modul SD-card
Pentru testarea acestui modul am ales o schiţă de scriere a unor valori primite de la un
senzor de temperatură şi umiditate DHT11, acesta fiind utilizat şi în cadrul unui mic proiect
din timpul facultăţii. În imaginea care urmează (fig. 5.6) regăsim partea fizică a acestui test.
Figura 5.6 - Testare modul SD-card
3. Testarea modulului Releu
Acest modul l-am testat montând în circuit un ventilator. Am programat releul astfel
încât să declanşeze şi să oprească ventilatorul în funcţie de diverşi parametri. În acelaşi timp
am montat un buton care să declanşeze reacţia releului atunci când este apăsat. De asemenea,
partea fizică a acestui test o regăsim mai jos, în fig. 5.7.
Fig. 5.7: Testare releu
Schema bloc a sistemului cu Arduino
Fig.5.8: Schema bloc a sistemului cu Arduino Uno

Mai sus, în fig. 5.8, este prezentată schema bloc a sistemului nostru care are la bază placa de dezvoltare Arduino Uno. Se vor conecta la placa de dezvoltare modulele necesare realizării experimentului: amplificatorul Max31855K, modulul releu şi modulul SD-card. Am utilizat pentru conectare un BreadBoard. Senzorii folosiţi(temocuplu de tip K) se vor conecta la placa de dezvoltare prin intermediul amplificatorului Max31855K. Cobaiul va fi introdus în interiorul cuptorului pentru a fi pregătit pentru teste. Senzorul martor se va introduce in interiorul cobaiului pentru monitorizarea temperaturii interne. Senzorul activ se va introduce în lobul de ficat ce urmează a fi încălzit. Controlul cuptorului va fi realizat prin intermediul releului programat de Arduino. În cadrul acestui sistem, setarea parametrilor pentru teste(temperaturi, timp) se va realiza tot prin Arduino. Rezultatele testelor, datele şi diferite mesaje vor fi trimise de Arduino pe card sau vor fi afişate.

Capitolul VI – Protocol experimental, date experimentale, rezultate, dificultăţi întâmpinate
6.1 Protocol experimental
În cadrul protocolului experimental s-au respectat mai multe etape, având în vedere că s-a lucrat asupra unui ţesut aparţinând unui cobai viu. Astfel s-a ţinut cont de diverşi parametri şi de mediul în care s-a realizat experimentul.
În desfășurarea experimentului s-au folosit şobolani de laborator – Wistar(fig. 6.1),
procuraţi de la Institutul Cantacuzino – Bucureşti, cu o greutate cuprinsă între 250-350 gr.
menţinuţi la o temperatură ambientală constantă, supuşi unui ciclu de lumină zi/noapte
12h/12h, cu apă şi mâncare ad libitum.
Fig 6.1: Şobolani de laborator Wistar
Şobolanii au fost anesteziaţi cu o mixtură de ketamină 56mg/kgc si xilazină 15 mg/kgc
după care au fost dezinfectaţi, după o prealabilă tundere.
Iniţial, cu 24 de ore înaintea experimentului, şobolanii au fost cântăriţi, aşezaţi separat
in cuşti. Li s-a dat apă si hrană, monitorizânduli-se parametrii consideraţi esenţiali în cadrul
experimentului cu ajutorul unei grile de evaluare. Ulterior, cu ajutorul grilei de evaluare,
animalele au fost studiate zilnic, respectiv palpate la nivelul locului experimentului.
După ce şobolanul a fost pregătit, experimentul a urmat paşii descrişi mai jos:

Ř 1 S-a ras zona în care va fi făcută incizia pregătindu-se astfel frontul operator
Ř 2. Se incizează șobolanul şi se scoate lobul superior al ficatului
4. Se aşează pe staniol,aşa cum se poate observa în fig. 6.2.
Fig. 6.2: Aşezarea şobolanului pe staniol
5. Se introduce senzorul de temperatură martor(termocuplul) pentru monitorizarea
temperaturii interne. Acest procedeu este expus în fig. 6.3
Ř
Fig.6.3: Introducerea senzorului martor

Ř 6. Se înveleşte şobolanul în staniol, scoţându-se printr-o fantă de 1-2 cm lungime lobul ficatului ce va fi expus la microunde în afara stanioului. Se înveleşte total în staniol pentru a obţine o ecranare electromagnetică cât mai bună. Temperatura interioară nu trebuie să se modifice pentru a nu afecta precizia măsurătorilor. În fig. 6.4 se arată modul în care s-a realizat această etapă.
Fig. 6.4: Scoaterea lobului de interes al ficatului
Ř 7. Se introduce pachetul astfel construit în cuptorul cu microunde, legându-se staniolul la masă, după cum se poate observa în figura 6.5.
Fig.6.5: Staniolul se leagă la masă

Ř 8. Se introduce senzorul activ în lobul de ficat ce urmează a fi încălzit, procedeu descris de fig.6. 6
Fig. 6.6 Introducerea senzorului active în lobul de interes
Ř 9. În această etapă se închide cuptorul şi se setează în panoul frontal al instrumentului (fig. 6.7 )virtual parametrii testului. Parametrii ce vor fi stabiliţi sunt:
-Numele fişierului de date în care se vor salva rezultatele testului. Acest lucru se cere în momentul în care se porneşte instrumentul virtual creat în LabVIEW. Extensia fişierelor va fi ”.csv”. Se utilizează aceasta extensie deoarece se urmăreşte obţinerea unui fişier ce poate fi uşor exportat pentru prelucrarea datelor în Microsoft Excel.
-Se stabileşte timpul de încălzire necesar efectuării testului. Timpul de încălzire se va stabili şi în funcţie de alţi parametri.De obicei,timpul stabilit în testele noastre a fost de 1 minut.
-Se va stabili, de asemenea,temperatura de încălzire. Se va stabili un interval de temperaturi cu un minim la care temperatura poate să ajungă fără a afecta cobaiul sau măsurătorile şi un maxim peste care temperatura nu are voie să treacă. Intervalul nostru de temperatură prestabilit a fost între 41,9° C şi 42,2° C.

Fig. 6.7 Panoul frontal
Testele au decurs conform planificării, chiar dacă au apărut şi o serie de dificultăţi și de provocări de-a lungul experimentelor. În imaginea de mai jos(fig. 6.8) este prezentat modul în care s-au desfăşurat testele.
Fig. 6.8: Mod funcţionare teste

Ř 10. Ultimul pas reprezintă de fapt inversarea paşilor în ordine de la pasul 8 la pasul 3.
Urmează coaserea cobaiului sau recoltarea ţesutului, în funcţie de experimentul realizat şi în funcţie de experimentele care vor urma.
6.2 Teste realizate
Au fost efectuate trei tipuri de teste cu obiective diferite.
Primul tip de teste viza urmărirea modului de încălzire a țesutului expus în volum. Pentru teste au fost folosiți simultan trei senzori introduși într-un singur lob de ficat de pasăre (din comerț). Au fost efectuate un număr de peste 200 de teste, iar în urma analizării datelor experimentale culese s-a tras concluzia că pentru un lob de ficat de dimensiunile celui de șobolan (5-10 grame) încălzirea este uniformă în întregul său volum, diferențele de temperatură apărute fiind nesemnificative în derularea experimentului.
Al doilea tip de teste viza demonstrarea faptului că singura parte de țesut care-şi modifică temperatura este partea de țesut expusă și ca temperatura țesutului ecranat rămâne constantă (fig. 6.9). Acest tip de test a folosit cei doi senzori de temperatură, unul postat în interiorul ecranului de staniol intr-un lob al ficatului și cel de-al doilea postat în lobul expus. În urma testelor s-a observat că nu au existat nici un fel de variații interne de temperatură, indiferent de timpii de expunere și de temperatura setată pentru lobul expus. Au fost efectuate un număr de 60 de experimente pe 10 șobolani.
19:25:5219:26:0219:26:1619:26:3519:26:5719:27:2419:27:5519:28:290
5
10
15
20
25
30
35
40
45
50
T1 T2
Fig. 6.9 test de verificare a modului de menținere a temperaturii în interiorul ecranului de staniol.
Al treilea tip de teste a fost cel pentru care a fost proiectat instrumentul: expunerea unei porțiuni de țesut pentru a fi încălzit cu microunde la o temperatură prestabilită o perioada de timp dată (fig. 6.10). Au fost efectuate peste 70 de experimente fiecare dintre

ele efectuându-se pe câte un individ separat. Până la sfârșitul proiectului sunt prevăzute a se efectua un număr de peste 300 de experimente.
11:29:2911:29:3411:29:3911:29:4611:29:5311:30:0211:30:1111:30:210
5
10
15
20
25
30
35
40
45
T1 T2
Fig. 6.10: Experiment de tipul 3
6.3 Dificultăţi întâlnite pe parcursul testelor
Bineînţeles, în cadrul experimentelor am întâlnit diverse dificultăţi pe care a trebuit să le rezolvăm.
a) Una dintre problemele apărute a fost reprezentată de variaţiile foarte rapide ale temperaturii. Princiala cauză ce a determinat această problemă a fost puterea prea mare a magnetronului, raportată la cantitatea de ţesut expusă.
Ca metodă de rezolvare s-a ales plasarea unui element absorbant pentru microunde în fata gurii de emisie a magnetronului(o sticlă plată umpluta cu apă).
În continuare voi prezenta 2 grafice care evidenţiază diferenţa dintre testele care nu au utilizat ecranul cu apă poziționat în fața ghidului de unda al magnetronului şi cele care au folosit.
Acest prim grafic ne evidenţiază în mod clar prima dificultate apărută în timpul testelor. Se observă cum temperatura oscilează foarte puternic (fig. 6.11), neavând un interval în care să poată fi încadrată şi menţinută.

14:27:0214:27:0814:27:1514:27:2314:27:3114:27:3814:27:4714:27:550
10
20
30
40
50
60
T1 T2
Fig. 6.11: Test fără prezenţa elementului absorbant
În următorul grafic problema a fost rezolvată. În circuit a fost introdus elementul absorbant şi astfel temperaturile au putut fi menţinute sub control, astfel încât testele să se efectueze cu succes. Se observă cum temperaturile nu mai prezintă oscilaţii puternice (fig 6.12), ci sunt menţinute într-un anumit interval, în funcţie de pragurile de încălzire.
11:57:4211:57:4811:57:5411:58:0211:58:1111:58:2111:58:3211:58:450
5
10
15
20
25
30
35
40
45
50
T1 T2
Fig. 6.12 Test cu prezenţă a elementului absorbant
b) A doua dificultate a fost reprezentată de apariţia zgomotului (fig. 6.13) în valoarea citită de la termocuplu. Ca rezolvare pentru această problemă am legat senzorii şi calculatorul la o masă comună. În plus am ecranat si zona senzorilor dintre teaca metalică a joncțiunii (acul de seringa) și masa firelor fapt care a dus la diminuarea acestor probleme Fig. 6.14. Software am introdus un filtru care realizeaza o mediere a unui numar de n valori stabilite de utilizator. Programul are inițializată valoarea de 10 valori pentru care se face o mediere și se obține un punct.
Fig. 6.13: Semnal cu zgomot
Fig.6.14: Semnal filtrat.

Bibliografie
1. Strickland AD, Clegg PJ, Cronin NJ „Experimental study of large-volume microwave ablation in the liver” E.Br J Surg.2002 ;
2. Alexander ES, Hankins CA, Machan JT, Healey TT, Dupuy DE (2013). „ Rib Fractures after Percutaneous Radiofrequency and Microwave Ablation of Lung Tumors: Incidence and Relevance. Radiology ” ;
3. Ph. D. Jack Purdum- „ Beginning C for Arduino” ;
4. Usha Chandra- „ Microwave heating” ;5. Matthew Duff and Joseph Towey- „Two Ways to Measure Temperature Using
Thermocouples Feature Simplicity, Accuracy and Flexibillity” ;6. National Instruments- „NI PCI-6110/6111 User Manual” ;
7. Maxim Integrated- „Max31855- Cold-Junction Compensated Thermocouple-to-Digital Converter” ;
8. National Instruments- „LabVIEW- User Manual” ;
9. Larsen E.L, Jacobi J.H, „Medical Applications of Microwave Imaging" ;10. Kantor G, „Evolution and survey of microwave and radio frequency applicators",
Journal of Microwave Power, vol. 1.16, pp. 136 - 150, 1981.11. Magin R. L. , Peterson A. F. „Noninvasive microwave phased arrays for local
hyperthermia: a review” ;12. Some things to keep in mind when using the SD Library:
http://arduino.cc/en/Reference/SDCardNotes ;13. Hayes, B. L. „Microwave Synthesis: Chemistry at the Speed of Light”Microwave
Synthesis: Chemistry at the Speed of Light14.


















