motor asincron

of 12
description
simularea unui motor asincron in matlab
Transcript of motor asincron
Ecuaiile si bilanul puterilor la generatorul de curent continuu cu excitaie separat
Se rotete generatorul cu un motor de antrenare i se alimenteaz excitaia separat la curentul ie. Se obine tensiunea indus prin micare: Uea=kepn, proporional cu turaia n i fluxul polar al excitaiei,p.
Dac se conecteaz la borne sarcina Rs, n aceasta apare curentul i. Diferena dintre tensiunea indus Uea i cea la borne U este reprezentat de cderea de tensiune pe rezistena Ra a tuturor nfurrilor legate n serie la perii (indus, de compensaie i de comutaie) i cea la perii Up:
,(1)
cu
i
(2)Pentru circuitul excitaiei este valabil ecuaia:
(3)
Cuplul electromagnetic dezvoltat de generator, n sens contrar rotaiei, se poate obine din balana de puteri electrice n:
Ui = Ueai
-Rai2
-Upi putereaputerea
pierderile pierderile
electric electromagnetic n nfurarea Joule la perii (4)
la sarcin
indusului
Fig.1. Generatorul de curent continuu cu excitaie separat.
Puterea electromagnetic reprezint produsul dintre cuplul electromagnetic Me i viteza unghiular 2n:
(5)
Utiliznd (2) rezult :
(6)
Cuplul electromagnetic al generatorului este proporional cu fluxul polar p i cu curentul indusului i.
La balana complet de puteri trebuie avute n vedere pierderile n fier PFe produse n tolele rotorului de fluxul principal prin cureni turbionari i histerezis la frecvena corespunztoare curenilor din indus fi = p1n i pierderile mecanice pmec (prin frecare cu aerul i n lagre).
Aceste pierderi (pFe i pmec) se scad din puterea mecanic de intrare P1m a mainii de antrenare:
(7)
restul urmnd a se converti n putere electromagnetic Pelm. De aici ncolo balana de puteri electrice este ilustrat n ecuaia (4).
Se obine astfel balana complet de puteri dat n Fig. 2.
Fig.2. Balana de puteri la generatorul de curent continuu (Gc.c.).
Randamentul G c.c. se calculeaz pe baza balanei complete de puteri :
(8)
Adesea se adaug pierderile suplimentare ps n sarcin produse n esen de cmpul de dispersie rotoric n tlpile polare statorice. Pierderile suplimentare ps se separ greu, chiar experimental, i, de aceea, adesea, se consider a fi 0,5 (1)% din puterea util n regim nominal, trebuind s fie luate n considerare la studiul nclzirii (rcirii) mainii.Problema 1:
Un generator de curent continuu cu excitaie separat prevzut cu o nfurare buclat simpl cu constanta ke= 90, debiteaz puterea electric nominal P2en = 100kW la Un = 440 V cu un randament n = 92% la turaia nn = 1200rpm.
Pierderile date sunt : pFen = Pmecn = 1,3% P2en; pp = 0,4% P2en, ps = 1,0% P2en.
Se cere :
a) curentul nominal In, pierderile n nfurarea indusului pCun i rezistena indusului Ra;
b)cderea de tensiune la perii, Up, tensiunea indus Uea i fluxul polar p.
Soluie :
Pe baza definiiei puterii electrice P2e se obine curentul nominal In:
Pierderile n cupru se calculeaz din balana de puteri:
Rezistena indusului :
b) Cderea de tensiune la perii Up este:
Tensiunea indus Uea se calculeaz din:
Fluxul polar p se determin din:
Ecuaiile si bilanul puterilor la motorul de curent continuu cu excitaie separat
Motorul cu excitaie separat (de tip electromagnetic sau cu magnei permaneni) are nc pondere n acionrile electrice de putere mic si medie cu rspuns rapid n cuplu i turaie, alimentate prin convertoare statice de putere. Schema echivalent este prezentat n Fig.3.
Fig.3. Motorul cu excitaie separat
Excitaia cu magnei permaneni (cu caracteristica de demagnetizare liniar) se poate echivala cu o excitaie electromagnetic avnd curentul de excitaie strict constant ie.
n regim permanent, ecuaiile circuitelor electrice se scriu direct :
(9)
(10)
Multiplicnd ecuaia (9) cu i rezult ecuaia balanei de puteri electrice:
(11)Puterea electromagnetic Pelm reprezint produsul dintre cuplul electromagnetic i viteza unghiular 2n :
(12)
Pentru a completa balana conversiei electromecanice a energiei trebuie luate n considerare i pierderile n fier, pFe, produse de cmpul excitaiei n tolele rotorice unde curenii turbionari au frecvena f = p1n, pierderile mecanice, pmec, n lagre i prin frecare cu aerul i pierderile suplimentare, ps. Aceste mrimi sunt similare cu cele considerate la generatorul cu excitaie separat. Circulaia puterii se prezint n Fig. 4.
Fig.4. Balana de puteri la motorul cu excitaie separatRandamentul este :
(13)
Trecerea din regim de motor n cel de generator are loc natural prin schimbarea sensului curentului (P1e devine negativ).
La turaie dat, aceast trecere se face prin simpla reducere a tensiunii la borne n rotor.
Schimbarea sensului curentului i conduce i la schimbarea sensului cuplului electromagnetic (12), deci i al puterii electromagnetice. Circulaia de puteri devine cea de la generator.Problema 2:
Un motor de curent continuu cu excitaie separat are puterea nominal Pn=P2n=3kW i turaia nominal nn=1200rpm, pierderile nominale pp=ps=0,5% Pn, pFen=pmec=1% Pn, i PCun=4% Pn i tensiunea nominal Un=110V.
Se cere :
a) randamentul n i curentul nominal In;
b) rezistena indusului Ra, tensiunea indus i cuplul electromagnetic;
c) cuplul nominal la arbore.Soluie:
a) randamentul n este:
Curentul nominal:
b) Rezistena :
cderea de tensiune la perii :
Tensiunea indus Uean se poate determina din:
Cuplul electromagnetic Me rezult:
c) Cuplul la arbore Man rezult direct din puterea nominal:
Motoare pas cu pas generaliti si motoare pas cu pas cu reluctan variabilGeneraliti. Clasificarea motoarelor pas cu pas
Aceste motoare sunt de fapt motoare sincrone speciale (denumite uneori i motoare sincrone cu pulsuri) adaptate funcionrii discrete incrementale, nfurrile fazelor fiind concentrate pe poli apareni i alimentate cu pulsuri de curent. n acest mod se produce un cmp nvrtitor a crui ax ocup doar poziii fixe, ceea ce determin schimbarea poziiei rotorului cu un unghi precizat numit pas. n fond, aceste motoare se comport ca nite convertoare electromecanice numeric-analoge, ce trec un numr bine determinat de impulsuri ntr-o deplasare. Caracterul de motor sincron se manifest i prin viteza de deplasare care depinde direct de frecvena impulsurilor de alimentare. Spre deosebire de motoarele sincrone, motoarele pas cu pas pot intra n sincronism din starea de repaus fr alunecare iar frnarea se poate realiza tot sincron. n acest mod este posibil parcurgerea ntregului parcurs, adic regimuri tranzitorii i mers la vitez constant fr pierderea informaiei, adic fr pierderea de pai. n fine, o proprietate deosebit de important este aceea c poziia final a rotorului corespunde ultimului impuls de comand i aceast poziie se pstreaz pn la apariia unui nou impuls de comand.
Cu ajutorul motoarelor pas cu pas se pot realiza sisteme automate de tip discret care nu necesit reacii (legturi inverse) deoarece definesc o coresponden direct riguros univoc ntre informaia primit i deplasarea unghiular realizat.
n prezent se ntlnesc motoare de diverse tipuri i puteri, ceea ce determin ordonarea acestora dup dou criterii de baz: constructiv i funcional.
Criteriul constructiv se refer la geometria i structura magnetic a motorului. Dup acest criteriu, motoarele pas cu pas se mpart n:
motoare pas cu pas cu reluctan variabil;
motoare pas cu pas cu magnei permaneni;
motoare pas cu pas hibride.
Dup construcia rotorului se deosebesc motoare cu rotor pasiv (dinat) i motoare cu rotor activ (magnet permanent sau bobine de excitaie). Numrul fazelor este diferit: 3, 4, 5, 6 i mai multe, dispuse pe stator sub form de nfurri concentrate pe poli apareni.
Dup construcia statorului se deosebesc motoare pas cu pas monostatorice i polistatorice; la cele din urm rotorul este comun, iar statorul este compus dintr-un numr de seciuni separate magnetic n vederea asigurrii unui cuplu electromagnetic mrit.
Clasificarea funcional este determinat de modul de legare a nfurrilor i de alimentarea fazelor. Din acest punct de vedere se face distincia ntre trei categorii:
inductoare (cu excitaie independent sau autoexcitaie);
reactive;
inductor reactive.
n continuare vor fi analizate principalele tipuri constructive de motoare pas cu pas.
Motoare pas cu pas cu reluctan variabilMotoarele pas cu pas cu reluctan variabil reprezint tipul de baz al acestor motoare electrice. Constructiv exist dou tipuri de baz: motoare pas cu pas cu reluctan variabil monostatorice (cu o singur unitate stator-rotor) i polistatorice (cu mai multe uniti stator-rotor).
Rotorul este de tip pasiv avnd dinii i crestturile repartizate uniform pe suprafaa acestuia. Aceste motoare funcioneaz dup principiul reluctanei minime aa cum reiese i din exemplul urmtor.
Fie un motor pas cu pas cu reluctan variabil monostatoric avnd trei faze statorice (v. fig. 1). Statorul prezint 12 dini (cu un dinte pe pol) iar rotorul 8 dini. nfurarea corespunztoare unei faze statorice este format din patru bobine dispuse corespunztor pe 4 dini statorici.
Fig. 1. Motor pas cu pas cu reluctan variabil avnd 3 faze statorice,
12 dini statorici i 8 dini rotorici.
Dac se alimenteaz nfurarea AA a fazei 1 atunci patru dini rotorici (cei mai apropiai) se aeaz n faa celor 4 dini statorici (notai cu 1) pe care sunt aezate bobinele excitate. n acest mod, circuitul magnetic prezint o reluctan magnetic minim. Comutnd alimentarea pe faza 2 apare o deplasare a rotorului cu 15o astfel nct ceilali patru dini rotorici se vor alinia la cei patru dini statorici (notai cu 2) pe care se afl bobinele excitate ale fazei 2, .a.m.d.
Cuplul electromagnetic care se dezvolt este de tip sincron reactiv fiind direct proporional cu diferena dintre inductivitatea longitudinal Ld i cea transversal Lq.
Un unghi de pas de 15o se poate obine i cu ajutorul unui motor cu patru faze, caz n care numrul dinilor statorici este opt iar cel rotoric ase. Bobinele care alctuiesc o faz statoric sunt plasate pe doi dini statorici diametrali opui (v. fig. 2). Cu motoarele pas cu pas cu patru faze se obine o stabilitate mai bun n regim dinamic.
Fig. 2. Motor pas cu pas cu reluctan variabil avnd 4 faze statorice, 8 dini statorici i 6 dini rotorici.
Fig. 3. Motor pas cu pas monostatoric cu reluctan variabil comandat prin
alimentarea simultan a dou faze statorice (de tip inductor-reactiv).
n situaia alimentrii n secven simpl i n lipsa unui cuplu de frecri, unghiul de pas este efectuat cu oscilaii importante.
Motoarele pas cu pas prezentate anterior pot fi comandate i prin alimentarea simultan a dou faze statorice. n fig. 3 este prezentat alimentarea n secven dubl pentru cazul motorului pas cu pas din fig. 2. Printr-o astfel de comand se obine un cuplu electromagnetic mai mare.
Prin mrirea numrului de dini statorici i rotorici se obine o mrire a numrului de pai i implicit un unghi de pas mai mic. n fig. 4 este reprezentat un motor pas cu pas avnd acelai numr de poli i faze ca cel din fig. 2, dar cu 5 dini pe pol i 50 dini rotorici. Unghiul de pas obinut este egal cu 1,8.
Fig. 4. Motor pas cu pas monostatoric cu reluctan variabil avnd
pasul egal cu 1,8 o, de tip inductor cu autoexcitaie.
Prin urmare, realiznd diferite combinaii de dini i crestturi se pot obine teoretic orice numr de pai se dorete. n realitate ns, numrul de pai este limitat de procesul tehnologic pe de-o parte i de considerente de cuplu pe de alt parte. Astfel, prin mrirea numrului de pai se ajunge la scderea valorii cuplului electromagnetic.
n cazul motoarelor pas cu pas polistatorice, miezurile magnetice sunt dispuse n aceai carcas dar prezint independen din punct de vedere electric i magnetic. Miezurile rotorice se gsesc de asemenea pe acelai arbore fiind ns separate din punct de vedere magnetic.
Pentru a se obine o micare de rotaie, miezurile statorice sau cele rotorice trebuie s fie decalate radial unele fa de altele. Astfel, n situaia unui motor pas cu pas cu trei faze, pachetele statorice sunt decalate cu o treime din pasul dentar.
Motoarele pas cu pas cu reluctan variabil se caracterizeaz printr-o construcie simpl, frecvene mari de comand (2000 3000 [Hz]) ceea ce permite obinerea unor viteze mari. Trebuie subliniat faptul c motoarele pas cu pas cu 4 faze sunt mai rapide dect cele cu trei faze iar la efectuarea pailor oscilaiile sunt mai reduse. Un alt avantaj este dat de faptul c pot fi realizate pentru o plaj larg de unghiuri de pas.
Principalele dezavantaje ale acestor motoare sunt date de faptul c nu memoreaz poziia i nu dezvolt cuplul electromagnetic n lipsa curentului de comand din fazele statorice. De asemenea, dezvolt cupluri de sincronizare mai mici.
Motoare pas cu pas motoare pas cu pas cu magnei permaneni si hibrideMotoare pas cu pas cu magnei permaneni La aceast categorie de motoare nfurrile de excitaie sunt nlocuite cu magnei permaneni. n fig. 1 este prezent un motor pas cu pas cu magnei permaneni cu dou faze statorice i un rotor cilindric magnetizat cu doi poli. Magnetul permanent plasat n rotor duce la o magnetizare radial a rotorului. Prin alimentarea nfurrilor de comand se produce un flux magnetic care interacioneaz cu fluxul magnetului permanent, avnd ca rezultat micarea rotorului care ocup o poziie ce corespunde reluctanei minime a circuitului magnetic.
Fig. 1. Motor pas cu pas realizat cu magnet permanent n rotor
n general, la motoarele pas cu pas cu magnei permaneni, unghiul de pas se calculeaz cu una din relaiile:
,
(1)
n care p este numrul de perechi de poli rotorici iar m1 este numrul de faze statorice.
n cazul motorului prezentat n figur, cele dou faze statorice sunt excitate cu pulsuri rectangulare conform figurii 2.
Fig. 2. Formele de und ale tensiunilor de faz.
Cuplul sincron se produce similar ca i ntr-un motor sincron. Secvena de comutare este:
Conform relaiei (5.348), unghiul de pas este:
.
Astfel, dup fiecare puls de comand sub aciunea cuplului sincron, rotorul se deplaseaz cu 90o.
La motoarele pas cu pas cu magnei permaneni, frecvenele de succesiune a pulsurilor de comand pot ajunge pn la 300 400 [Hz].
Avantajele acestor motoare sunt date de:
posibilitatea de memorare a poziiei;
energie de excitare a fazelor mai mic;
datorit magneilor permaneni, micarea rotorului la fiecare pas are un caracter
amortizat.
Dezavantajele sunt [4]:
t.e.m. indus n faze este mare;
unghiul de pas este relativ mare;
performanele motorului sunt influenate de modificarea caracteristicilor magneilor
permaneni.
Motoare pas cu pas cu hibrideMotoarele pas cu pas de tip hibrid reprezint o soluie modern a motoarelor pas cu pas, devenit foarte popular n aplicaiile industriale. Numele deriv din principiul de funcionare al acestor motoare care se bazeaz pe o combinaie a principiilor motoarelor pas cu pas cu magnei permaneni i a celor cu reluctan variabil. Aceste motoare pot dezvolta cupluri apreciabile.
Un exemplu de motor pas cu pas hibrid este prezentat n fig. 3.
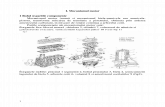
Fig. 3. Motor pas cu pas hibrid cu magnei permaneni i reluctan
variabil: a. seciune longitudinal; b. vedere frontal.
Se poate observa c motorul este alctuit din dou miezuri stator - rotor. nfurrile fazelor statorice sunt plasate pe ambele pachete statorice. Cele dou miezuri rotorice sunt decalate unul fa de cellalt cu o jumtate de dinte. Cele patru faze sunt amplasate pe cei opt poli statorici. nfurrile statorice produc un cmp magnetic heteropolar iar magnetul permanent din rotor produce un cmp magnetic unipolar.
Magnetul permanent, magnetizat axial, este introdus ntre cele dou rotoare conform figurii.
Atunci cnd fazele statorice nu sunt parcurse de curent, maina nu dezvolt cuplu n schimb cmpul magnetic unipolar dezvoltat de magnetul permanent realizeaz un cuplu de poziionare (de fixare) a rotorului.
n varianta constructiv prezentat n figur, fiecare pol statoric prezint cinci dini. n rotor sunt n total 48 dini. n aceste condiii se obin 200 pai pe rotaie.
Se pot realiza i construcii inversate n care magnetul permanent s fie plasat ntre pachetele statorice.
Datorit energiei nmagazinat n magnetul permanent din rotor sau stator, motoarele pas cu pas hibride sunt caracterizate de un randament bun. Un alt avantaj l reprezint posibilitatea de-a funciona cu frecvene mari de comand. Dintre dezavantaje trebuie amintite ineria mare a rotorului i faptul c performanele mainii sunt afectate de modificarea caracteristicilor magnetului permanent.
_1512221016.unknown
_1512221020.unknown
_1512221025.unknown
_1512221027.doc
93457
,
0
)
04
,
0
01
,
0
01
,
0
005
,
0
005
,
0
1
(
3000
3000
p
P
P
n
n
n
_1512221210.unknown
_1512221211.unknown
_1512221209.unknown
_1512221026.unknown
_1512221023.unknown
_1512221024.unknown
_1512221022.unknown
_1512221018.unknown
_1512221019.unknown
_1512221017.unknown
_1512221012.unknown
_1512221014.unknown
_1512221015.unknown
_1512221013.unknown
_1512221010.unknown
_1512221011.unknown
_1512221009.unknown