
44090454 Inteligenta Artificial A Inferenta in Logica Propozitionala Si Predicativa
Upload
catanescu-alexandru-laurentiuCategory
view
236download
3description

UNIVERSITATEA "POLITEHNICA" BUCUREŞTIFacultatea de Inginerie ElectricăDepartamentul de Electrotehnică
Ing. CĂTĂNESCU ALEXANDRU-LAURENŢIU
ACŢIONĂRI NECONVENŢIONALE UTILIZÂND ACTUATORI
MAGNETOSTRICTIVI
- TEZĂ DE DOCTORAT -
Conducător ştiinţificProf. Dr. Ing. CEZAR FLUERAŞU
Bucureşti2014

Cuprinsul:
Listă cu simboluri pag. 4
1. Introducere pag. 81.1. Motivare
pag. 81.2. Fundamentele fizice ale fenomenului de magnetostricţiune
pag. 81.3. Efectele magnetostricţiunii
pag. 151.4. Ecuaţiile constitutive liniarizate ale magnetostricţiunii
pag. 171.5. Materiale magnetostrictive şi proprietăţile lor
pag. 181.5.1. Materiale magnetostrictive GMM (Giant Magnetostrictive Materials) pag. 181.5.2. Material Terfenol-D disponibil pag. 201.5.3. Modulul lui Young pag. 201.5.4. Coeficientul de cuplaj, coeficientul magnetomecanic şi factorul de calitate pag. 211.6. Optimizarea parametrilor magnetostrictivi
pag. 221.7. Convertorul magnetostrictiv
pag. 251.7.1. Determinarea impedanţelor , şi a coeficienţilor de conversie , pag. 261.7.2. Modele electrice pag. 26
2. Obiective pag. 28
3. Stadiul actual al cunoaşterii pag. 28
4. Sistemul de actuaţie a elementului magnetostrictiv pag. 294.1. Formularea problemelor
pag. 294.2. Distribuţia câmpului magnetic în axul solenoidului
pag. 314.3. Puterea consumată de bobina de actuaţie
pag. 334.4. Pierderile prin curenţi turbionari în bara magnetostrictivă
pag. 35
5. Elemente de proiectare a actuatorului magnetostrictiv pag. 375.1. Dimensionarea barei din Terfenol-D
pag. 375.2. Dimensionarea circuitului magnetic
pag. 39
2

5.3. Precizăripag. 41
6. Regimul electromecanic al actuatorului magnetostrictiv pag. 44
7. Regimul electrotermic al actuatorului magnetostrictiv pag. 517.1. Structura tipică a actuatorului GMA (actuator cu magnetostricţiune ridicată) pag. 517.2. Circuitul termic echivalent cu parametrii concentraţi pag. 527.3. Distribuţia temperaturii în magnetul permanent
pag. 54
8. Modelarea matematică a materialelor magnetostrictive pag. 56
9. Vibratorul magnetostrictiv de detensionare VMS - 1 pag. 599.1. Descrierea VMS - 1
pag. 599.2. Proiectarea, realizarea şi încercarea VMS – 1
pag. 629.2.1. Model de calcul pentru estimarea VMS – 1 pag. 629.2.2. Calculul circuitului magnetic VMS – 1 pag. 649.2.3. Calculul încălzirii bobinei actuatorului magnetostrictiv pag. 679.2.4. Proiectarea, realizarea şi încercarea sursei de alimentare VMS – 1 pag. 699.2.4.1. Modul de funcţionare a sursei de activare a actuatorilor magnetostrictivi pag. 709.2.5. Stand de măsurare a parametrilor electromagnetici, mecanici şi termici pag. 739.2.6. Rezultate experimentale pag. 759.2.7. Aplicaţia software pentru monitorizarea VMS – 1 pag. 839.2.7.1. Modul software compatibil PC104 pag. 839.2.7.2. Modul software compatibil IBM-PC/AT (LAPTOP) pag. 859.2.7.3. Implementarea aplicaţiei software pentru controlul modelului funcţional pag. 85
10. Concluzii pag. 88
11. Bibliografie pag. 90
Anexa 1 - Caracteristicile şi parametrii materialului Terfenol-D Etrema pag. 93Anexa 2 - Desene de execuţie vibrator magnetostrictiv pag. 94
3
Listă cu simboluri
Magnetostricţiunea implică trei domenii fundamentale: electromagnetism, mecanică, electrotermie. În fiecare domeniu există notaţii consacrate pentru mărimile fizice implicate care, din păcate, de multe ori se suprapun. Ca urmare, în fiecare pragraf din teză sunt precizate simbolurile folosite şi în plus, aceste simboluri au fost centralizate în prezenta listă.
- deformaţie de întindere relativă - magnetostricţiunea liniară relativă
- densitatea de volum a energiei magnetice - densitatea de volum a energiei electrice
- moment magnetic - intensitatea câmpului magnetic
- inducţia magnetică - permitivitatea electrică a mediului - permeabilitatea magnetică a mediului
- densitatea masică - intensitatea câmpului electric - inducţia electrică - densitatea volumică a forţei electromagnetice - componenta magnetică
- efortul mecanic unitar - permeabilitatea magnetică la tensiune mecanică constantă
4

- coeficient magnetomecanic
- coeficient magnetomecanic
- modulul lui Young în câmp magnetic constant - complianţa elastică în câmp magnetic constant
- permeabilitatea magnetică la deformaţie mecanică constantă - coeficienţi de magnetostricţiune
- densitatea de volum a energiei mecanice - densitatea de volum a energiei magnetice - densitatea de volum a energiei mutuale magnetoelastică
- coeficientul de cuplaj
- panta caracteristicii deformaţie specifică - câmp magnetic la modul “33”; elongaţia longitudinală (actuaţie standard)
- coeficientul de cuplaj corespunzător actuaţiei standard - modulul lui Young la inducţie magnetică constantă
- modulul lui Young la câmp magnetic constant - factorul de calitate intern al materialului - factor de calitate; la vibraţii forţate
- modulul lui Young; s-a introdus indicele “y” pentru a păstra notaţia pentru intensitatea câmpului electric
- fluxul magnetic - tensiune electromotoare - inductivitate - intensitatea curentului electric
- constanta de elasticitate - timp
- unitate imaginară - frecvenţa
- pulsaţia - impedanţa electrică
- număr de spire - diametrul solenoidului, respectiv raza
- lungimea solenoidului, respectiv bobinei - coordonta punctului curent din axul solenoidului măsurată faţă de unul din capete
- parametri adimensionali ai solenoidului - raza interioară a bobinei
5
- raza exterioară a bobinei - diametrul conductorului
- parametri adimensionali ai bobinei - numărul de spire pe strat - numărul de straturi
- lungimea conductorului - aria secţiunii axiale a bobinei
- rezistenţa în c.c. a unităţii de lungime a conductorului - adâncimea de pătrundere a câmpului electromagnetic
- rezistivitatea electrică a conductorului - rezistenţa în c.c. a bobinei - rezistenţa în c.a. a bobinei
- puterea aparentă a bobinei - factorul de pierderi prin curenţi turbionari
- parametri adimensionali prin care se exprimă factorul de pierderi (funcţiile lui Kelvin)
- forţa de blocare a barei magnetostrictive în câmp magnetic constant - tensiunea mecanică din bară
sau - reluctanţa magnetică - lungimea barei magnetostrictive - raza barei magnetostrictive - raza interioară a bobinei de actuaţie - raza exterioară a bobinei de actuaţie - lungimea bobinei de actuaţie
- parametri adimensionali de calcul - factorul lui Fabri
- valoarea câmpului magnetic de la vârf la vârf - conductivitate electrică
- funcţiile modificate ale lui Bessel de prima speţă, respectiv de a doua speţă şi de ordin zero
- funcţiile modificate ale lui Bessel de prima speţă, respectiv de a doua speţă şi de ordin unu
- reprezentarea în complex simplificat a mărimii sinusoidale M - magnetizaţia - magnetizaţia la saturaţie
- constanta de amortizare - susceptivitatea magnetică
6

- unghiul de pierderi prin histerezis - temperatura - încălzirea
- rezistenţa termică - puterea termică transferată
- conductivitatea termică - densitate masică
- căldura specifică - coeficient de convecţie
- numărul lui Nusselt - numărul lui Prandtl - numărul lui Reynolds
- numărul lui Grashoff - complianţa elastică
- tensiunea mecanică - deformaţia unitară
- transmisivitatea globală a temperaturii - factorul de umplere al undei de tensiune
7

1. Introducere
1.1. Motivare
Tensiunile mecanice din corpurile elastice sunt induse termic, metalurgic, mecanic, chimic. Două dintre metodele de fabricaţie a componentelor mecanice cu gabarit mare, turnarea şi sudura, produc tensiuni interne ce cauzează schimbări de dimensiuni inacceptabile.
Metoda clasică de detensionare o constituie tratamentul termic. Procesul are loc în cuptoare mari, iar încălzirea se face cu combustibili fosili. Acestea implică un consum energetic mare, poluarea mediului şi nu în ultimul rând, modificarea structurii metalice sub influenţa temperaturii.
O metodă alternativă, care s-a impus în ultimii douăzeci de ani, o constituie detensionarea prin vibraţii mecanice. Piesa este vibrată la frecvenţa de rezonanţă mecanică proprie, cu o anumită amplitudine, pe o anumită durată de timp, în funcţie de caracteristicile mecanice ale piesei. Prin vibrare se activează energia latentă a câmpurilor de forţe determinate de tensiunile interne, accelerându-se procesele de rearanjare a planelor atomice şi de disipare a energiei interne din material. Se spune că are loc o îmbătrânire accelerată sau artificială a materialului. Comparativ cu tratamentul termic, metoda vibraţiilor mecanice reclamă un consum energetic mic, iar poluarea mediului este redusă sensibil.
Vibratoarele mecanice pot fi acţionate electric prin motoare (asincrone, de c.c.), prin efect piezoelectric sau prin efect magnetostrictiv. La acţionarea cu motoare electrice randamentul este mic, avariile sunt dese, iar domeniul de frecvenţe este limitat.
În procesul de detensionare, precizia reglării frecvenţei de vibraţie este esenţială. Dacă la acţionarea cu motoare electrice precizia este de , la vibratorul magnetostrictiv – actuatorul magnetostrictiv, într-o denumire mai cuprinzătoare - precizia este de . O tehnologie potenţial viabilă o constituie actuaţia piezoelectrică.
8

Valoarea raportului dintre densitatea de volum a energiei magnetice ( ) şi a energiei electrice ( ), adică (pentru câmpuri tehnic utilizabile
, ) impune tehnologia magnetostrictivă. Un alt avantaj major al acesteia este că nu utilizează tensiuni mari şi, deci nu ridică probleme speciale de izolaţie, aşa cum se întâmplă la tehnologia piezoelectrică.
În cadrul unui program de cercetare comun cu INCDIE ICPE-CA Bucureşti şi ICMET Craiova s-a proiectat, fabricat şi încercat un vibrator magnetostrictiv de , cu frecvenţa de lucru în domeniul şi cu o forţă maximă de actuaţie de . În continuare se pune problema optimizării parametrilor prin simularea matematică a cuplajului dintre câmpul electromagnetic şi câmpul termic.
1.2. Fundamentele fizice ale fenomenului de magnetostricţiune
Magnetostricţiunea constă în deformarea unui corp prin aplicarea unui câmp magnetic (efect magnetostrictiv direct sau efect Joule) sau în magnetizarea acestuia în urma unei deformări mecanice (efect magnetostrictiv invers sau efect Villari), ambele cauzate de dependenţa reciprocă dintre permitivitatea locală şi starea de deformaţie a corpului. Efectul magnetostrictiv direct depinde de natura materialului, de tratamentul termic aplicat anterior acestuia, de temperatură, precum şi de mărimea şi direcţia câmpului magnetic aplicat. Astfel efectul este mai puternic la materialele fero- şi ferimagnetice, scade cu temperatura şi dispare complet în punctul Curie, manifestându-se mai intens în direcţia câmpului magnetic (efect longitudinal). În această direcţie, alungirea relativă variază monoton cu intensitatea câmpului prezentând o tendinţă de saturaţie. După natura materialului, poate atinge valori pozitive sau negative (până la
la Terfenol-D). Variaţia relativă de volum este aproximativ mai mică.
Efectul magnetostrictiv direct este explicat intuitiv în Fig. 1.1 şi este cauzat de reorientarea prin rotire a domeniilor magnetice. Creşterea progresivă a câmpului magnetic aplicat face ca numărul domeniilor implicate să crească, iar orientarea acestora să fie tot mai netă. Curba ideală a variaţiei lungimii specifice în funcţie de câmpul magnetic aplicat este dată în Fig. 1.2.
Fig. 1.1. Deformaţia mecanică funcţie de câmpul magnetic aplicat, [6].
9

Fig. 1.2. Caracteristica deformaţie specifică – câmp magnetic aplicat, [6].
Fundamentele fizice care explică alura acestei curbe sunt prezentate în continuare [1].
În fiecare domeniu magnetic – domeniu Weiss, moleculele au momente magnetice spontane omoparalele la (energia de schimb într-un domeniu este minimă în acest caz). Trecerea de la o orientare a magnetizaţiei la alta se face prin mici rotaţii succesive ale momentelor magnetice care despart două domenii Weiss – peretele Bloch.
Se consideră corpul format din două domenii şi , plasat în câmpul magnetic exterior şi care are orientarea magnetizaţiei spontane din - fig. 1.3.a1.
10

Fig. 1.3. Deplasarea pereţilor Bloch, [1].
Din cauză că energia potenţială a unei molecule este minimă în câmpul magnetic, atunci când atomii peretelui Bloch (fig. 1.3.a2)şi ai domeniului tind să se orienteze în sensul lui ; acest proces de rotire conduce la micşorarea volumului în favoarea măririi aceluia al domeniului , ceea ce e echivalent cu deplasarea peretelui Bloch de la stânga la dreapta, în sensul pozitiv al axei Ox (fig. 1.3.a2).
La corpurile reale, cristalele prezintă defecte ale reţelei (impurităţi, defecte ale reţelei produse de prelucrări mecanice şi termice). Aceste defecte determină variaţii ale energiei necesare rotirii în sensul câmpurilor magnetice exterioare ale momentelor spontane moleculare; prin urmare energia care trebuie cedată peretelui Bloch pentru a deplasa variază aleatoriu. În fig. 1.3.a3 este reprezentată variaţia aleatorie a energiei corpului considerat după axa .
La stabilirea câmpului magnetic, peretele Bloch se deplasează din dreptul unui minim al energiei – notat cu - corespunzător echilibrului termodinamic din starea cu
, în puncte vecine, trebuind, eventual, să escaladeze “munţi” de energie potenţială ca acela notat cu , pentru a ajunge în altă “vale”, ; escaladarea “muntelui” presupune realizarea unei valori relativ mari a mărimii . La anularea câmpului magnetic , peretele tinde să revină în poziţia iniţială de echilibru stabil, în punctul corespunzător “văii” ; pentru aceasta, trebuie escaladat din nou “muntele” q tranziţie, în general, imposibilă la şi la temperaturi uzuale, deoarece peretele nu are suficientă energie pentru a trece din în (eventual, dacă ar fi ajuns în , el s-ar fi putut înapoia până în ); rezultă că la anularea câmpului magnetic peretele nu revine, în general, la poziţia iniţială, deci procesul de deplasare a pereţilor Bloch este ireversibil (dacă deplasările nu sunt extrem de mici), adică materialul prezintă magnetizaţie remanentă. La variaţii foarte mici ale lui , când creşte de la zero la o valoare care determină deplasarea peretelui Bloch în imediata vecinătate a punctului de echilibru, din
în , de pildă, procesul poate fi reversibil. Cu cât defectele reţelei cristaline sunt mai numeroase (procent mare de impurităţi, tensiuni mecanice importante etc.) cu atât mai greu se realizează magnetizarea şi demagnetizarea.
Precizările făcute permit interpretarea alurei caracteristicii deformaţie specifică-câmp magnetic din fig. 1.2.
Dacă materialul este iniţial complet demagnetizat, la stabilirea unui câmp magnetic şi la creşterea sa continuă se parcurge curba .
11

În câmpuri magnetice foarte slabe, corespunzătoare porţiunii , se produc deplasări reversibile ale pereţilor Bloch ca acelea realizate pe distanţa şi - fig. 1.3.a3).
Porţiunii îi corespund deplasări ireversibile ale pereţilor Bloch ca acelea dintre şi sau , care presupun escaladări de “munţi” de energie potenţială. Deplasarea pereţilor Bloch conduce la mărirea domeniilor ale căror magnetizaţii formează unghiurile cele mai mici cu , în detrimentul celorlalte, aşa cum se arată schematic în fig. 1.3.b1) şi 1.3.b2), în care domeniul este cel mai favorizat.
La parcurgerea porţiunii când se deplasează pereţii Bloch, momentele spontane ale atomilor din domeniile defavorizate (ca şi 4 din fig. 1.3.b)) se rotesc părăsind o direcţie de magnetizare uşoară (cea din ). Din cauză că tranziţiile se efectuează între direcţiile de magnetizare uşoară, porţiunii nu îi corespunde o absorţie de energie (de magnetizare) importantă şi magnetizaţie, respectiv deformaţia cresc rapid cu .
În punctul materialul se găseşte în starea indicată în fig. 1.3.b3) în care cristalul a devenit un singur domeniu Weiss, iar (linia plină) este orientat după direcţia de magnetizare uşoară .
La parcurgerea porţiunii momentele spontane se orientează în direcţia câmpului , deci după o direcţie de magnetizare mai grea; în procesul acesta se realizează deci o absorţie mai mare de energie şi mărimea , respectiv deformaţia cresc mai încet cu .
În punctul toate momentele spontane omoparalele din domeniu au aceaşi orientare ca şi s-a ajuns la magnetizaţia, respectiv deformaţia la saturaţie.
Expresia forţei de magnetostricţiune se obţine cu teoria macroscopică a câmpului electromagnetic, [2]. Se pleacă de la posibilitatea reducerii forţelor electromagnetice care acţionează în interiorul corpurilor la tensiuni mecanice. Fie volumul închis de suprafaţa şi densitatea de volum a forţelor, rezultanta fiind
(1.1)
Prin reducerea la tensiuni, rezultă că trebuie să fie egală cu rezultanta tensiunilor care acţionează din exterior asupra lui
(1.2)
Relaţiile (1), (2) şi teorema lui Gauss conduc la
(1.3)
unde - densitatea volumică a impulsului electromagnetic este
12

(1.4)
iar divergenţa tensorială are expresia
(1.5)
în care , , , , , , .
În mediile liniare, izotrope, fără polarizare permanentă, fără magnetizare permanentă şi în care depind numai de densitatea masică , tensorul are forma
(1.6)
în care
, , , (1.7)
(1.8)
La efectuarea calculelor indicate se ţine seama că
Rezultă în final, expresia densităţii de volum a forţei electromagnetice:
(1.9)
Termenii din membrul doi ai relaţiei reprezintă densităţile de volum ale forţelor: câmp asupra corpurilor încărcate cu sarcină electrică adevărată, câmp asupra corpurilor prin care circulă curenţi de conducţie, câmp asupra mediilor neomogene ca urmare a
13

existenţei unui gradient de permitivitate, respectiv de permeabilităţi; în ceea ce priveşte ultimii termeni
(1.10)
primul este densitatea volumică a forţei de electrostricţiune, iar cel de al doilea densitatea volumică a forţei de magnetostricţiune. Densitatea volumică a forţelor de stricţiune sau determină deformarea materialului datorită tensiunilor interne care apar în mediu. În cazul câmpurilor electromagnetice care variază periodic în timp, în mediu apar vibraţii mecanice. Dacă există rezonanţă între frecvenţa propie de oscilaţie a unui cristal şi frecvenţa câmpului electromagnetic, aceste vibraţii sunt suficiente de puternice şi devin tehnic utilizabile.
În teoria macroscopică a constantelor de material se arată că în mediile slab polarizate magnetic temporar, susceptivitatea magnetică este proporţională cu numărul de molecule din unitatea de volum, deci cu densitatea de masă a substanţei
(1.11)
în care - constantă. Această relaţie fenomenologică poate fi considerată şi ca o lege experimentală de material, fără a face apel la considerente microscopice. Cum
(1.12)
iar
(1.13)
Este interesant de calculat densitatea volumică a forţei exercitate în regim magnetostatic
(1.14)
Cum
(1.15)
(1.16)
14

rezultă că
(1.17)
Concluzii
Magnetostricţiunea este alungirea a unei bare plasate axial într-un câmp magnetic extern. Efectul magnetostrictiv este un efect par deoarece semnul deformaţiei nu se schimbă la variaţia sensului câmpului magnetic. Într-un material feromagnetic, magnetostricţiunea se manifestă în interiorul fiecărui domeniu magnetic din cauza deformării spontane a reţelei cristaline în direcţia vectorului magnetizării spontane, dar din cauza orientării haotice a domeniilor deformarea medie este nulă. În momentul aplicării unui câmp magnetic, prin orientarea domeniilor pe direcţia câmpului apare o deformare netă a probei.
Din punct de vedere fenomenologic, magnetostricţiunea este de două tipuri:
magnetostricţiunea spontană care apare într-un material cu proprietăţi magnetice atunci când acesta este răcit în câmp magnetic extern nul, la temperaturi mai mici decât temperatura Curie. Materialul trece din starea paramagnetică într-o stare ordonată magnetic cu structură caracteristică de domenii magnetice;
magnetostricţiunea indusă care apare ca rezultat al orientării domeniilor magnetice la aplicarea unui câmp magnetic extern. Magnetostricţiunea liniară apare pentru o magnetizare a materialului mai mică decât cea de saturaţie şi este definită ca modificarea relativă în lungime a materialului sub influenţa unui câmp magnetic extern. Dacă valoarea câmpului magnetic creşte până la valori comparabile cu cele necesare atingerii saturaţiei, magnetostricţiunea indusă dispare.
1.3. Efectele magnetostricţiunii
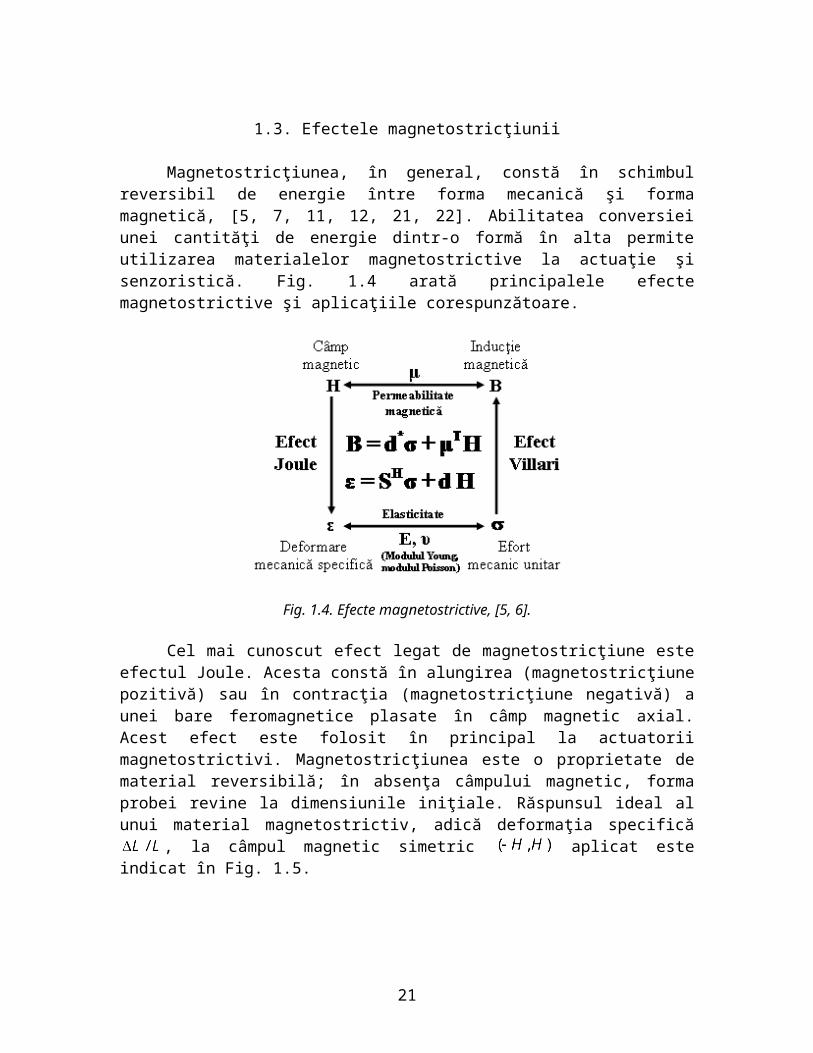
Magnetostricţiunea, în general, constă în schimbul reversibil de energie între forma mecanică şi forma magnetică, [5, 7, 11, 12, 21, 22]. Abilitatea conversiei unei cantităţi de energie dintr-o formă în alta permite utilizarea materialelor magnetostrictive la actuaţie şi senzoristică. Fig. 1.4 arată principalele efecte magnetostrictive şi aplicaţiile corespunzătoare.
15

Fig. 1.4. Efecte magnetostrictive, [5, 6].
Cel mai cunoscut efect legat de magnetostricţiune este efectul Joule. Acesta constă în alungirea (magnetostricţiune pozitivă) sau în contracţia (magnetostricţiune negativă) a unei bare feromagnetice plasate în câmp magnetic axial. Acest efect este folosit în principal la actuatorii magnetostrictivi. Magnetostricţiunea este o proprietate de material reversibilă; în absenţa câmpului magnetic, forma probei revine la dimensiunile iniţiale. Răspunsul ideal al unui material magnetostrictiv, adică deformaţia specifică
, la câmpul magnetic simetric aplicat este indicat în Fig. 1.5.
Fig. 1.5. Deformaţia specifică funcţie de câmpul magneticsimetric aplicat, [6].
La materialul Terfenol-D raportul este aproximativ dar poate atinge valoarea la frecvenţa de rezonanţă.
Tabelul 1.1 conţine o sinteză a tehnologiilor alternative folosite în actuaţie şi senzoristică. Sunt prezentate caracteristicile diferitelor materiale şi structurile tipice în care au fost folosite.
Tabel 1.1. Tehnologii alternative folosite în actuaţie [6, 11, 12, 19, 20].Caracteristici tipice PZT Terfenol-D SMA
16

Mecanismul de actuaţie Material piezoelectric
Material magnetostrictiv
Aliaje cu memoria formei
Elongaţie 0,1% 0,2% 5%Densitatea de energie 2,5kJ/m3 20kJ/m3 1J/m3
Lăţimea de bandă a frecvenţei 100kHz 10kHz 0,5kHzParametrul de histerezis μ0Hc/Br 10% 2% 30%
Costuri de referinţă 200$/m3 400$/m3 200$/m3
Clasificarea tehnologiilor făcută în [19] este utilă la selectarea tehnologiei optime pentru aplicaţiile particulare.
Un alt efect legat de magnetostricţiune, cu o largă utilizare, este efectul Villari. Acest efect se bazează pe faptul că într-o probă magnetostrictivă supusă unei tensiuni mecanice este generat un câmp magnetic cu o intensitate proporţională cu nivelul tensiunii mecanice. Variaţia fluxului magnetic din probă poate fi detectată de o bobină de măsură. Efectul Villari este reversibil şi are aplicaţii în senzoristică.
Similar efectului Joule este efectul Wiedemann. Dacă la efectul Joule câmpul magnetic produce alungirea sau comprimarea materialului, la efectul Wiedemann câmpul magnetic torsionează materialul determinând deformaţii tangenţiale.Inversul efectului Wiedemann este denumit efectul Matteuci. Torsionarea unei bare feromagnetice modifică magnetizaţia. Detectând variaţia fluxului magnetic corespunzătoare cu o bobină de măsură se poate calcula valoarea cuplului de torsionare.
1.4. Ecuaţiile constitutive liniarizate ale magnetostricţiunii
Ecuaţiile constitutive liniarizate pentru modelele unidimensionale, conform IEEE Standard 1991, au expresiile
(1.18)
unde şi sunt deformaţia mecanică specifică, respectiv efortul mecanic unitar; şi sunt inducţia magnetică, respectiv intensitatea câmpului magnetic; este
complianţa elastică în câmp magnetic constant; este permeabilitatea magnetică la tensiune mecanică constantă; şi sunt coeficienţi magnetomecanici. Aceşti doi coeficienţi pot fi determinaţi experimental conform definiţiilor:
; (1.19)
De notat că la deformaţii mici, coeficienţii pot fi consideraţi egali (Wang, 2007). Comutând poziţiile şi în ecuaţiile (1.18) se obţin ecuaţiile
17

(1.20)
unde: este modulul lui Young în câmp magnetic constant; este permeabilitatea la deformaţie mecanică constantă; coeficienţii
şi pot fi calculaţi cu relaţiile
, (1.21)
Coeficientul de cuplaj al materialului , este definit (Wang, 2007) prin relaţia
(1.22)
unde , şi sunt: densitatea de volum a energiei mecanice, a energiei magnetice, respectiv a energiei mutuale magnetoelastică. Introducând aceste expresii în (1.22) se obţine
(1.23)
1.5. Materiale magnetostrictive şi proprietăţile lor
1.5. 1. Materiale magnetostrictive GMM (Giant Magnetostrictive Materials)
Deşi fenomenul de magnetostricţiune este cunoscut de mai bine de un secol şi jumătate (în 1842 Joule descoperea magnetostricţiunea la Ni), aplicaţiile pe baza acestuia au apărut mult mai târziu, odată cu descoperirea în 1963 a magnetostricţiunii gigant la Tb (Terbium) şi Dy (Dysprosium) la temperaturi joase, însă materialele prezentau unele inconveniente. În primul rând, toate pământurile rare (PR) prezintă temperaturi Curie mai mici decât temperatura mediului ambiant ( ). Pentru a creşte valorile temperaturii Curie, pământurile rare magnetostrictive ca Tb şi Dy au fost aliate cu metale magnetice de tranziţie (Ni, Fe şi Co). Unii din aceşti compuşi prezintă temperaturi Curie mult mai ridicate (până la ) însă magnetostricţiunea lor la are valori moderate. În anul 1971 s-a descoperit că la compuşii Laves PRFe2 (TbFe2, SmFe2) prezintă magnetostricţiune gigant la temperatura mediului ambiant.
Deşi valorile magnetostricţiunii sunt extrem de mari, anizotropiile magnetice ale acestor compuşi sunt, de asemenea, foarte mari ceea ce face magnetostricţiunea de saturaţie să se obţină pentru câmpuri magnetice extrem de mari (cu două ordine de mărime mai mari decât cele necesare pentru a se obţine magnetostricţiunea de saturaţie a Ni sau Fe). S-a presupus atunci că magnetostricţiunea mare şi anizotropia magnetică mică sunt două mărimi antagonice şi incomatibile. Însă studiile teoretice au arătat că dacă doi
18

compuşi pe bază de PR au anizotropii magnetice de semne opuse şi magnetostricţiune de acelaşi semn, atunci s-ar putea obţine o magnetostricţiune gigant şi o anizotropie magnetică moderată.
Acest material a fost descoperit de A.E. Clark şi Colab. de la Naval Ordonance Laboratory şi avea în compoziţie Tb şi Dy. Acest compus a fost numit Terfenol-D (“Ter” de la terbium, “fe” de la fier, “nol” de la Naval Ordonance Laboratory şi “D” de la dysprosium).
Terfenol-D are însă şi dezavantaje: este un material scump şi sensibil la coroziune din cauza prezenţei Tb şi Dy, dar este şi fragil din punct de vedere mecanic. De aceea, pentru unele aplicaţii se preferă utilizarea unor materiale compozite pe bază de Terfenol-D, care au proprietăţi mecanice mult mai bune şi preţuri de cost sensibil scăzute.
Pentru a obţine un material compozit cu bune proprietăţi magnetostrictive trebuie luaţi în considerare mai mulţi factori:
a) Coeficienţi de dilatare termică ai fazelor constituiente (dacă diferenţele între aceşti constituienţi sunt mari, atunci vor fi induse tensiuni interne mari în materialul compozit şi chiar rupturi majore);
b) materialul matricei trebuie să fie compatibil din punct de vedere chimic cu cel al fazelor dispersate;
c) fazele constituiente trebuie să aibă module de elasticitate similare;d) din punct de vedere magnetic, trebuie considerate interacţiile magnetice dintre
fazele constituiente; dacă materialele care formează compozitul cu permeabilităţi magnetice diferite, va apărea un fenomen de ecranare magnetică între constituienţi; prezenţa unei a doua faze creşte densitatea pereţilor de domenii magnetice de fixare (pinning), în acest fel scăzând sensibilitatea magnetică a materialului compozit; proprietăţile magnetice ale unui material compozit vor fi cu atât mai bune cu cât fazele constituiente sunt cuplate magnetic între ele.
Terfenol-D asigură o magnetostricţiune pozitivă cu valori tipice în câmpuri magnetice de ; în câmpuri
magnetice intense, la frecvenţe de rezonanţă se poate obţine .Deformaţia specifică maximă este un parametru cheie pentru dispozitivele care
utilizează GMM. Comparativ cu alte GMM, la Terfenol-D există compatibilitate între valori mari pentru deformaţia specifică şi temperatura Curie ridicată. Magnetostricţiunea se produce la temperaturi sub temperatura Curie, dar adeseori temperatura Curie este sub temperatura ambientală, aşa că valoarea practică a deformaţiei specifice este mică. Tabelul 1.2 compară deformaţiile specifice şi temperaturile Curie pentru diferitele materiale magnetostrictive.
Tabel 1.2. Deformaţia specifică pentru diferitele materiale magnetostrictive, [4, 18].Material Deformaţia la saturaţie [ppm] Temperatura Curie [K]
NiFe
Fe3O4
Terfenol-DTb0,5Zn0,5
19

Tb0,5DyxZn
Proprietăţile materialului Terfenol-D necesare la calculul şi proiectarea unui actuator cu GMM sunt sumarizate în Tabel 1.3.
Tabel 1.3. Proprietăţi ale materialului Terfenol-D, [3, 4, 6, 7, 11, 12].Proprietatea Valoare Comentarii
1. Compoziţia nominală şi 2. Densitate Depinde de fabricaţie
3. Proprietăţi mecaniceEfortul la comprimare
Efortul la întindereModulul lui Young Modulul lui Young
Viteza sunetului
Preferabil în aplicaţiiDe evitat în aplicaţii
La La
Efectul 4. Proprietăţi termice
Coeficientul de dilatareCăldura specifică
Conductivitatea termică
5. Proprietăţi electriceRezistivitatea
6. Proprietăţi magnetomecanicePermeabilitatea relativă Permeabilitatea relativă
Magnetizaţie de saturaţieCoeficientul de cuplaj
Coeficientul magnetomecanic Factorul de calitate
La efort mecanic constantLa deformaţie mecanică
constantă
Depinde de aplicaţieDepinde de câmpul magnetic
Depinde de aplicaţie
Încontinuare sunt analizaţi parametrii de material prin prisma aplicaţiilor în actuaţie. De interes major în proiectare sunt parametrii care nu rămân constanţi în procesul de actuaţie.
1.5.2. Material Terfenol-D disponibil
Terfenol-D este un aliaj al fierului cu pământuri rare, argintiu la culoare, friabil la temperatura camerei şi din cauza materialelor de bază este puternic reactiv, conţine impurităţi şi este greu de produs. Metodele cele mai folosite sunt: (Modified Bridgmann) şi (Free Stand Zone Melting). Se folosesc şi procese de sinterizare pentru obţinerea de material pentru frecvenţe înalte ( ).
20
Materialul are formă de: bare cu diametrul până la şi lungime până la , bare cu secţiune pătrată, tuburi, discuri, plăci, ţinte pentru sputering, pudră, etc.
[4].Materialul este foarte friabil la întindere. Efortul admisibil la întindere ( )
este foarte mic, comparativ cu valoarea corespunzătoare compresiei ( ).Densitatea materialului este mai mare faţă de densitatea oţelurilor uzuale; valoarea tipică este .
1.5.3. Modulul lui Young
Modulul lui Young nu este contant în timpul unui ciclu operaţional; el creşte liniar cu creşterea câmpului magnetic aplicat – efectul - fig. 1.6.
Fig. 1.6. Modulul lui Young funcţie de câmpul magnetic aplicat [6].Modulul lui Young la inducţia magnetică constantă are expresia
(1.24)
Aşa cum indică ecuaţia (1.24), există o valoare a inducţiei pentru care modulul lui Young devine infinit; se spune că materialul a ajuns în “starea de blocaj”. În această stare încetează rotirea domeniilor magnetice, iar materialul nu-şi mai poate schimba dimensiunile ca răspuns la eforturile mecanice aplicate, [17].
1.5.4. Coeficientul de cuplaj, coeficientul magnetomecanic şi factorul de calitate
Eficienţa procesului de conversie a energiei este indicată de coeficientul de cuplaj definit prin relaţia (1.22). Valorile uzuale ale acestui coeficient sunt cuprinse în
domeniul şi indică o eficienţă de . În aplicaţiile în care interesează numai elongaţia longitudinală (actuaţia standard) sunt de interes proprietăţile de material legate de axa longitudinală. Acest mod este denumit “modul 33”, iar coeficientul de cuplaj corespunzător este şi este dat de relaţia:
21

(1.25)
În această relaţie coeficientul magnetomecanic reprezintă panta caracteristicii deformaţie specifică-câmp magnetic aplicat ( ).
(1.26)
În fig. 1.7 coeficientul de cuplaj este determinat grafic. Există o porţiune în care panta este mare, iar dependenţa deformaţie-câmp magnetic este liniară. Acesta este domeniul optim de funcţionare; conversia energiei magnetice în energie mecanică se face cu pierderi minime, deci cu eficienţă maximă.
Fig. 1.7. Dependenţa deformaţiei specifice funcţie de câmpul magnetic aplicat [6].Coeficienţii şi nu rămân constanţi în procesele reale de actuaţie. Fig. 1.8
ilustrează impactul pretensionării asupra valorilor celor doi coeficienţi.
Fig. 1.8. Dependenţa coeficienţilor şi de pretensionarea materialului [6, 16].
22

În condiţii cvasistatice (excitaţie continuă dată de un curent sinusoidal) şi fără pretensionare mecanică, între deformaţia specifică şi câmpul aplicat există relaţia liniară
în care coeficientul magnetomecanic este practic independent de frecvenţă. Când proba vibrează liber, la frecvenţa primei rezonanţe amplitudinea vibraţiei creşte sensibil
Factorul de amplificare este denumit factorul de calitate intern al materialului şi are valori cuprinse în domeniul . În cazul vibraţiilor forţate valoarea se reduce la denumită factor de calitate.
1.6. Optimizarea parametrilor magnetostrictivi
Proprietăţile materialului magnetostrictiv variază mult la schimbarea condiţiilor de operare. Pentru a se obţine cu acurateţe parametrii nominali de funcţionare, cu un bun control asupra lor, la o densitate de energie ridicată se impun măsuri adiţionale care optimizează performanţele convertorului.
Premagnetizarea care fixează punctul de funcţionare în zona în care panta caracteristicii - este maximă – vezi fig. 1.9.
Fig. 1.9. Optimizarea prin premagnetizare, [6].
La o bară magnetostrictivă, fixată la unul din capete, plasată axial în câmp magnetic sinusoidal, în absenţa premagnetizării, alungirile se produc la fiecare alternanţă a câmpului magnetic, deci vibraţiile au o frecvenţă dublă faţă de de frecvenţa tensiunii aplicate pe bobina de actuaţie; dacă bara este premagnetizată, alungirile apar numai la
23
alternanţele ce produc un câmp magnetic de acelaşi sens cu câmpul magnetic de premagnetizare – Fig. 1.10.
Nivelul premagnetizării este în domeniul şi se realizează cu magneţi permanenţi sau cu bobine alimentate în c.c.; uzuală este folosirea magneţilor permanenţi, [11, 12].
Fig. 1.10. Magnetostricţiunea (a) fără şi (b) cu premagnetizare, [15].
Pretensionarea mecanică a barei magnetostrictive face ca o creştere mică a câmpului magnetic aplicat să producă deformaţii mari ale materialului magnetostrictiv, [13, 14] – vezi fig. 1.11.
Fig. 1.11. Optimizarea prin pretensionarea mecanică, [6, 13, 14].
Acest fenomen este confirmat experimental şi este explicat prin orientarea momentelor magnetice după o direcţie perpendiculară pe direcţia de pretensionare, fără însă a justifica cum un fenomen pur mecanic influenţează un fenomen magnetic.
La valori mari ale pretensionării aceasta devine dominantă iar deformaţiile barei scad. Există deci o valoare optimă a pretensionării mecanice la care deformaţiile se multiplică cu factorul (valoarea obţinută experimental).
Efectele premagnetizării şi pretensionării mecanice sunt independente. O analiză generată a acestora a fost făcută în [4, 6].
24

Structurile tipice pentru actuatorii magnetostrictivi şi analiza critică a lor sunt indicate în tabelul 1.4.
Tabel 1.4. Structurile tipice ale actuatorului magnetostrictiv şi analiza lor, [6, 11, 12].Structură tipică de
actuator
TC TCM TMC MTC
Premagnetizare cu Bobină în c.c. Magnet permanent
- -
Nivel de premagnetizare* Mic Mediu Mediu, ridicat
Ridicat
Formă Terfenol-D Bară Bară Bară Cilindru cavStructură Simplă Medie Medie Complexă
Neomogenitatea câmpului Mică Mică Medie Mare* Aprecierile “mic”, “mediu” şi “ridicat” se referă la domeniul de premagnetizare cuprins între 10÷100 kA/m.
Practica a impus structurile TC şi TCM.
1.7. Convertorul magnetostrictiv
Se consideră o bară din Terfenol-D de lungime , fixată la un capăt, celălalt capăt fiind liber să se mişte longitudinal. Bara este introdusă într-un solenoid ideal cu spire care produce un câmp magnetic longitudinal uniform în orice secţiune transversală a barei. Solenoidul are la borne tensiunea şi este parcurs de curentul . Proprietăţile de material (mecanice, magnetice, electrice) sunt liniare. Cu aceste ipoteze, ecuaţiile (1.18) devin:
(1.27)
(1.28)
Ecuaţia (1.27) arată că deformaţia mecanică a materialului este produsă de doi factori: tensiunea mecanică aplicată (legea lui Hooke) şi câmpul magnetic aplicat (efectul magnetostrictiv Joule). Similar, ecuaţia (1.28) corelează inducţia magnetică cu tensiunea mecanică din material şi cu câmpul magnetic aplicat (efectul Villari).
Conversia energiei electrice în energie mecanică este modelată printr-un cuadripol care include: un circuit electric cu o sursă de tensiune şi o impedanţă electrică, un “circuit” mecanic care include forţa ce acţionează asupra unei impedanţe mecanice, cuplajul dintre cele două circuite fiind realizat de o “cutie neagră” denumită convertor – fig. 1.12.
25
Fig. 1.12. Reprezentarea schematică a convertorului electromecanic, [8].
Transformata Laplace a ecuaţiilor corespunzătoare cuadripolului conduce la expresiile:
(1.29)(1.30)
în care: - impedanţa electrică măsurată când mişcarea mecanică este blocată, - impedanţa mecanică măsurată când circuitul electric este deschis, - coeficientul de conversie ce reprezintă t.e.m. din circuitul electric corespunzătoare vitezei unitare din circuitul mecanic, - coeficientul de conversie ce reprezintă forţa corepunzătoare unităţii de curent, - transformata vitezei în circuitul electric.
1.7.1. Determinarea impedanţelor , şi a coeficienţilor de conversie ,
Uzând de cunoscutele formule: , , , , , , ecuaţia conduce la expresia t.e.m.:
(1.31)
În regim permanent sinusoidal, transformata Laplace a ecuaţiei (1.31) este
(1.32)
în care
(1.33)
reprezintă echivalentul constantei de elasticitate a unui arc.Similar, ecuaţia conduce la
26

(1.34)
Din ecuaţiile (1.32) şi (1.34), prin identificare cu ecuaţiile (1.30), respectiv (1.29) se obţin expresiile:
(1.35)
(1.36)
(1.37)
1.7.2. Modele electrice
Caracterul antisimetric (1.38) al ecuaţiilor reclamă o anumită creativitate la construcţia circuitelor electrice echivalente. Există o varietate de metode.
Metoda Hunt (1982) se bazează pe analogia forţă-curent şi conduce la ecuaţiile [8, 10].
(1.38)
(1.39)
Circuitul electric echivalent în al acestui sistem de ecuaţii este indicat în Fig. 1.13.
Fig. 1.13. Circuitul electric echivalent în T [8, 9].
Circuitul din fig. 13 poate fi redesenat folosind un transformator ideal, aşa că se obţine circuitul din fig. 1.14 [8]. S-au folosit notaţiile din (1.14), iar este definit prin relaţia (1.16)
27

Fig. 1.14. Circuitul echivalent pentru cuplajul magnetostrictiv [8, 9].
În circuitul din fig. 14 trebuie introdus un rezistor care să reprezinte rezistenţa electrică a solenoidului; rezultă modelul pentru circuitul echivalent din fig. 1.15.
Fig. 15. Model pentru circuitul electric echivalent, [8, 9].
Precizare: Dacă mişcarea actuatorului este blocată, în model apare numai impedanţa solenoidului (sarcină inductivă), iar termenul corespunzător vitezei dispare; dacă circuitul electric este deschis, în schemă apare o singură sursă de tensiune - tensiunea magnetostrictivă - iar convertorul funcţionează ca traductor.
2. Obiective
Obiectivele tezei de faţă sunt:
proiectarea, realizarea şi încercarea unui actuator magnetostrictiv; dezvoltarea unui algoritm de proiectare a actuatorului magnetostrictiv; modelarea matematică a materialelor magnetostrictive.
Comentarii:
Un actuator magnetostrictiv constă dintr-o bobină de câmp în care este plasat elementul magnetostrictiv. Bobina este alimentată de un amplificator de putere comandat de un generator de semnal. Frecvenţa şi amplitudinea pot fi controlate prin variaţia formei semnalului. Sistemul de actuaţie funcţionează în domeniul frecvenţelor înalte, cu amplitudini mari şi eficienţă energetică bună.
Elementele de proiectare care fac obiectul tezei sunt:
dimensionarea barei magnetostrictive;
28

stabilirea premagnetizării şi a pretensionării mecanice; calculul circuitului magnetic; dimensionarea bobinei de câmp; calculul regimului electrotermic; calculul regimului electromecanic; proiectarea sursei de alimentare.
Studiul fenomenelor cuplate este fundamental în modelarea materialelor magnetostrictive. Nu există o teorie coerentă care să permită formularea corectă a unei astfel de probleme (existenţă, unicitate şi stabilitatea soluţiilor) ca şi a modelelor numerice asociate.
În teză este indicată strategia de modelare matematică pentru:
cuplajul câmp electromagnetic - câmp termic; cuplajul câmp electromagnetic - câmp mecanic.
3. Stadiul actual al cunoaşterii
Există o literatură bogată referitoare la proiectarea şi încercarea actuatorilor pentru diverse aplicaţii. Literatura este focalizată pe proprietăţile materialelor magnetostrictive, pe caracteristicile câmp magnetic-deformaţie mecanică, condiţii de operare şi elemente de proiectare. În ceea ce priveşte sistemul electromagnetic de actuaţie datele din literatură sunt însă foarte limitate. Exemplele următoare justifică această afirmaţie:
În 1986 Sewell [23] a raportat un actuator pentru sonar. Pentru bara magnetostrictivă cu , bobina are şi produce un câmp de la un curent de .
Butler [24] a raportat un actuator pentru sonar. Cu o bară magnetostrictivă cu , bobina produce câmpul de la curentul de .
J Bi [25] a raportat un miniactuator cu două bare de din Terfenol-D. Bobina de câmp având produce cu .
Yamamoto [5] a realizat şi încercat un actuator de poziţionare cu bară de . Actuatorul operează la şi produce cu o bobină cu
. Butler [26] a raportat un actuator pentru sonar cu frecvenţa . S-au folosit
bare magnetostrictive laminate. Consumul de putere este de , la un randament de .
Etrema Inc [4] comercializează seria de actuatori 050LH cu următoarele caracteristici:
Caracteristici Descriere050LH
Gama de frecvenţă [Hz] 0÷2500Forța dinamică maximă [N] 1110Deplasarea maximă [μm] ±25
29

Forța de blocare [N] 2220Gama de temperatură [°C] -20÷100
Curentul maxim în c.a. [Arms] 5Rezistenţa în c.c. [Ω] 1
Inductanţa [mH] 1,8Greutate [kg] 2,7
O lucrare elaborată privind bobinele solenoidale este [8]. Sunt analizaţi parametrii de proiectare ai bobinei şi optimizarea acestora. Autorul identifică un factor geometric al bobinei a cărui maximizare conduce la o valoare maximă a câmpului produs cu un consum minim de energie. Se discută şi despre alegerea conductorului de bobinaj: cupru, aluminiu şi material supraconductor. La un gabarit dat, bobina din aluminiu este mai uşoară, bobina din cupru produce acelaşi câmp cu un consum de putere redus cu , iar materialul supraconductor permite obţinerea unor câmpuri foarte intense dar reclamă un sistem de asigurare criogenică.
4. Sistemul de actuaţie al elementului magnetostrictiv
4.1. Formularea problemelor
Un actuator magnetostrictiv constă dintr-o bobină de câmp în care este plasat elementul magnetostrictiv. Bobina este alimentată de un amplificator de putere comandat de un generator de semnal. Frecvenţa şi amplitudinea pot fi controlate prin variaţia formei semnalului. În fig. 4.1 este schiţată metoda de actuaţie a unei bare magnetostrictive.
Fig. 4.1. Metoda de actuaţie a unei bare magnetostrictive, [27].
Sistemul de actuaţie funcţionează în domeniul frecvenţelor înalte, cu amplitudini mari şi eficienţă energetică bună.
30

Configuraţia geometrică şi tipul de material magnetostrictiv au influenţe sensibile asupra eficienţei sistemului de actuaţie. Structura mecanică adecvată trebuie selectată plecând de la valorile pentru frecvenţă şi amplitudine.
În al doilea rând se proiectează premagnetizarea şi pretensionarea mecanică pentru maximizarea parametrilor de ieşire ale actuatorului.
Proiectarea sistemului de actuaţie implică: bobina de câmp, circuitul magnetic, sursa de alimentare şi generatorul de semnal.
Puterea consumată creşte cu frecvenţa de operare deoarece cresc: reactanţa, pierderile prin curenţi turbionari şi prin efect pelicular aşa că se impun anumite compromisuri în alegerea parametrilor nominali.
Puterea consumată poate fi redusă prin:
utilizarea materialelor magnetice moi şi construcţii speciale pentru magneţii permanenţi din circuitul magnetic;
creearea unei rezonanţe electrice la frecvenţa de operare prin inserarea unui capacitor.
Metodologia de proiectare include determinarea valorilor optime pentru diametrul conductorului, numărului de spire, lungimea bobinei şi a întregului sistem de actuaţie. Metodologia implică şi evaluarea pierderilor prin efectul pelicular din bobină şi a pierderilor prin curenţii turbionari din materialul magnetostrictiv.
4.2. Distribuţia câmpului magnetic în axul solenoidului
Fig. 4.2 prezintă schematic un solenoid fără miez cu , cu lungimea şi cu diametrul prin care trece curentul .
31

Fig. 4.2. Schema unei bobine solenoidale, [27].
Intensitatea câmpului magnetic în punctul din axa solenoidului este dată de relaţia
(4.1)
în care
, , (4.2)
Fig. 4.3 indică distribuţia câmpului magnetic din axul solenoidului pentru diferite valori ale parametrului
32

Fig. 4.3. Distribuţia câmpului magnetic din axul solenoidului, [27].
Pentru (lungimea este egală cu diametrul) variaţia câmpului este rapidă la deplasarea din centru către capetele solenoidului. Pentru câmpul rămâne uniform pe din lungime. Rezultă că pentru a avea un câmp uniform pe întreaga lungime a barei magnetostrictive, bobina trebuie să fie mai lungă decât bara.
Prin rezolvarea ecuaţiei (1) se poate determina distanţa de la capetele solenoidului la care câmpul magnetic reprezintă un anumit procent din valoarea maximă . Ecuaţia este rezolvată pentru valori ale parametrului în domeniul ; rezultatele sunt date în fig. 4.4.
Fig. 4.4. Câmpul magnetic pentru diferite lungimi ale solenoidului, [27].
33

De exemplu, pentru câmpul din ax scade la din la distanţa faţă de ambele capete ale solenoidului. Această analiză este utilă la determinarea lungimii necesare a bobinei pentru atingerea valorii dorite a câmpului în orice punct din axul barei magnetostrictive – vezi fig. 4.5.
Fig. 4.5. Lungimea necesară pentru bobină, [27].
De exemplu, pentru o bară la care raportul , pentru a avea în ax un câmp minim de din , lungimea bobinei trebuie să fie .
4.3. Puterea consumată de bobina de actuaţie
Puterea consumată de bobina de actuaţie depinde de impedanţa bobinei. Se consideră bobina cu: lungimea , raza interioară , raza exterioară , diametrul conductorului . În practică se folosesc parametrii adimensionali
şi (4.3)
Se consideră apoi că diametrul interior al bobinei este aproximativ egal cu diametrul barei . Numărul de spire pe strat şi numărul de straturi sunt date de relaţiile
, (4.4)
Rezultă lungimea conductorului de bobinaj şi aria efectivă a bobinei
34

(4.5)
(4.6)
Dacă rezistenţa pe unitatea de lungime a conductorului este , rezistenţa în c.c. este
(4.7)
În c.a., având în vedere efectul pelicular caracterizat de adâncimea de pătrundere
(4.8)
se obţine expresia
(4.9)
Indicele inferior “cu” din relaţiile (4.8), (4.9) desemnează generic materialul conductorului de bobinaj, este rezistivitatea electrică a materialului.
Reactanţa inductivă a bobinei are expresia
(4.10)
în care este permeabilitatea miezului.Curentul necesar pentru a genera câmpul magnetic în bobină este
(4.11)
Puterea aparentă consumată de bobina de actuaţie se calculează cu formula
(4.12)
Puterea depinde de zece parametrii:
35

(4.13)
De notat că în (4.13) nu apare curentul deoarece acesta a fost exprimat prin parametrii , şi conform relaţiei (4.11).
În [2] s-au comparat valorile calculate cu relaţia (4.12) şi valorile măsurate experimental ale puterii consumate. Măsurările s-au făcut pe o bobină fără miez, cu: lungimea , diametrul interior , număr de spire , conductor din cupru cu
.Rezultatele date în fig. 4.6 arată o bună concordanţă între cele două seturi de
valori.
Fig. 4.6. Curba putere-frecvenţă pentru , [27].
4.4. Pierderile prin curenţi turbionari în bara magnetostrictivă
Caracteristicile bobinei de actuaţie fără miez se modifică prin introducerea miezului magnetostrictiv. Câmpul magnetic produs de bobină, pentru o valoare dată a curentului, este mai mic comparativ cu câmpul bobinei fără miez deoarece în miez apar pierderi produse de curenţii turbionari.
Pierderile prin curenţii turbionari în materialele magnetice, cu diverse configuraţii geometrice sunt descrise extensiv în [28]. Factorul de pierderi pentru bare cilindrice este exprimat prin funcţiile lui Kelvin. În [11] expresia factorului de pierderi, adaptată barelor magnetostrictive este
36

; (4.14)
în care
; (4.15)
Parametrul reprezintă raportul dintre frecvenţa de operare şi frecvenţa critică a barei magnetostrictive cu diametrul şi rezistivitatea electrică (
pentru Terfenol-D). Limita superioară de sumare se calculează cu
(4.16)
Factorul de pierderi prin curenţi turbionari are valori între şi . Pentru o valoare dată , curentul necesar producerii unui câmp magnetic este
(4.17)
Pentru calculul puterii aparente absorbite de bobina cu miez, relaţia (4.11) se înlocuieşte cu relaţia (4.17). În felul acesta ecuaţia (4.13) devine
(4.18)
adică puterea depinde de unsprezece parametrii şi care includ influenţele efectului pelicular din conductor şi al curenţilor turbionari din miezul magnetostrictiv.
În [2] sunt calculate mărimile curentul şi puterea absorbită pentru a produce un câmp de , la frecvenţa de , în funcţie de numărul de spire din bobină; s-au considerat trei tipuri de conductoare cu diametrele (AGW#24) , (AGW#26) , respectiv (AGW#28) . Rezultatele sunt date în fig. 4.7.
37
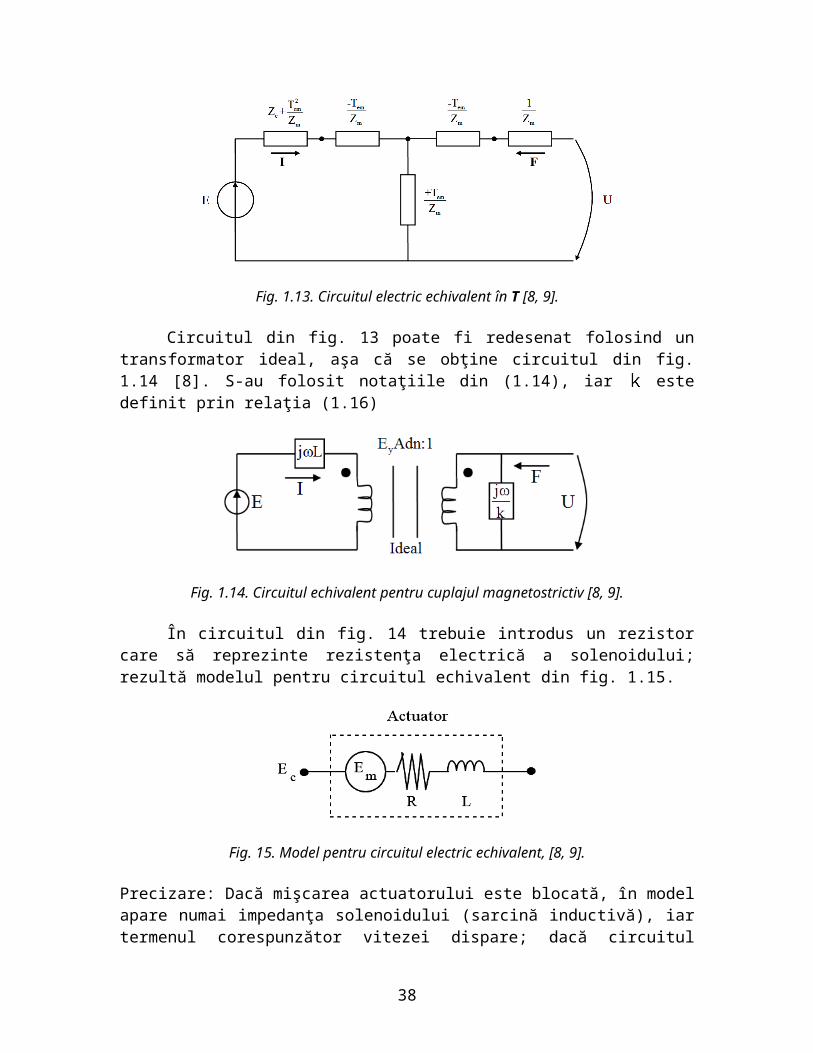
Fig. 4.7. Puterea şi curentul necesar - câmp magnetic de 36 Oe la frecvenţa 2kHz, [27].
Datele din figură arată că valori optime pentru putere se obţin în jurul lui , dar curentul absorbit este foarte mare. Pe de altă parte, la curenţi mai
mici puterile absorbite sunt foarte mari. Atât puterea cât şi tensiunea au valori fezabile pentru domeniul . În acest domeniu, deşi bobinajul din conductor cu
necesită cea mai mică putere absorbită, nu este preferat deoarece puterea disipată este maximă. Este preferat bobinajul din conductor cu şi cu
.
5. Elemente de proiectare a actuatorului magnetostrictiv
Se indică o procedură de proiectare a actuatorului magnetostrictiv cu geometrie liniară plecând de la datele de proiectare: deformaţie mecanică şi forţa dezvoltată.
5.1. Dimensionarea barei din Terfenol-D
Dimensiunile barei din Terfenol-D rezultă din datele de proiectare printr-un calcul parametric.
Forţa corespunzătoare deformaţiei magnetostrictive maximă, denumită şi forţă de blocare, se calculează cu [16]
38

(5.1)
în care: - forţa de blocare, - modulul lui Young, - deformaţie specifică, - aria secţiunii transversale a barei.
Relaţia (5.1) indică o comportare elastică a materialului şi este folosită la calculul forţei dezvoltate pentru orice valoare moderată a câmpului magnetic aplicat.
Deformaţia specifică se calculează cu formula (1.1):
(5.2)
în care: - tensiunea mecanică, - coeficientul de complianţă, - coeficientul de cuplaj.
Exemplu de calcul:
Se consideră o bară din Terfenol-D cu dimensiunile , plasată în câmpul magnetic . Forţa de pretensionare mecanică este . Mărimi de material date: , , .
Deformaţia specifică în absenţa pretensionării (5.2) este
Forţa de blocare corespunzătoare (5.1) este:
Forţa de comprimare produsă de pretensionarea mecanică este
şi se opune forţei dezvoltate de bară. Rezultă forţa de blocare netă
Deformaţia specifică a barei pretensionată mecanic (5.2) este
şi corespunde alungirii
39

5.2. Calculul circuitului magnetic
O configuraţie tipică pentru actuatorul magnetostrictiv cu structura TCM (§1.6, Tabel 1.4) este indicată în fig. 5.1.
Fig. 5.1. Configuraţia actuatorului magnetostrictiv cu structură TCM, [15].
Această configuraţie include o cămaşă din magnet permanent pentru premagnetizarea barei din Terfenol-D.
Un model analitic se obţine cu următoarele ipoteze de calcul:
se neglijează fluxul magnetic de scăpări; se neglijează efectul de capăt; nu există întrefier şi ; căderile de tensiune magnetică în pisele polare sunt neglijabile.
Legea circuitului magnetic, aplicată conturului din fig. 5.1, conduce la relaţia
(5.3)
Legea fluxului magnetic se exprimă prin
(5.4)
Indicele “ ” se referă la magnetul permanent iar indicele “ ” la bara din Terfenol-D.
Se adaugă relaţiile constitutive
(5.5)(5.6)
în care: - inducţia remanentă a magnetului permanent, - permeabilitatea relativă a barei.
Din relaţiile (5.3)÷(5.6) şi din se obţine
40

(5.7)
în care câmpul de premagnetizare are expresia
(5.8)
Pentru optimizarea parametrilor funcţionali ai actuatorului se impune simularea neliniară a acestuia printr-un soft 2D. Modelul de calcul este indicat în fig. 5.2.
Fig. 5.2. Model de actuator magnetostrictiv încorporat în volumul de aer (spaţiu liber), [15].
Modelul include materiale magnetice, magneţi permanenţi, materiale electric conductoare, spaţiu liber (aer), aşa că fiecare zonă a actuatorului are proprietăţi de material specifice. În fig. 5.3 este dată curba de magnetizare pentru Terfenol-D [13].
Fig. 5.3. Caracteristica pentru Terfenol-D cu pretensionarea , [29].
41

Calculul analitic prezentat anterior constituie primul pas al simulării neliniare a actuatorului. Valorile , şi sunt estimate din datele de proiectare (§ 5.1). Se alege valoarea (valorile uzuale nu depăşesc ) şi cu relaţia (5.7) se determină . Cunoscând numărul de spire se dimensionează bobina de excitaţie şi se recalculează câmpul din bară. Optimizarea structurii actuatorului se face prin încercări, urmând următorul algoritm de calcul:
Se calculează fluxul fascicular din bară
Se calculează reluctanţa totală a circuitului magnetic în care
Se recalculează
5.3. Precizări
Alegerea magneţilor permanenţi
Magneţii permanenţi sunt folosiţi la crearea câmpului magnetic de premagnetizare (§1.6) evitând astfel premagnetizarea cu o bobină de c.c. În [30] se arată că este esenţială condiţia “lungimea materialului/rază ”; în afara acestui interval amplitudinea câmpului de premagnetizare şi omogenitatea acestuia scad drastic. Un calcul făcut cu metoda elementelor finite arată că la premagnetizarea obţinută cu doi magneţi permanenţi, cu diametrul de şi cu lungimea , neomogenitatea creşte de la
la , iar amplitudinea scade cu . Magneţii permanenţi cresc reluctanţa ceea ce deteriorează capacitatea de magnetizare a bobinei. Rezultă că magneţii
permanenţi se recomandă la acţionările cu frecvenţe joase la care se cer forţă mare şi deformaţie redusă.
Regimul nominal de funcţionare
În ceea ce priveşte deformaţia actuatorului, practica a impus regula: “deformaţia ” în care este lungimea activă a barei, [30].
Există un compromis între necesarul de material activ şi eficienţa electromagnetică adică între “necesarul de material/capacitatea de răcire”. Condiţiile de funcţionare ale actuatorului se pot clasifica, funcţie de valoarea pretensionării mecanice
42

(§1.6), în condiţii uşoare dacă pretensionarea este sub , medii pentru domeniul şi grele pentru valori superioare valorii de .
Pentru funcţionarea optimă, adică pentru o eficienţă maximă la o sarcină dată simulările numerice şi studiile experimentale indică următoarea regulă empirică pentru determinarea pretensionării mecanice [30].
(5.9)
Valoarea câmpului magnetic de la vârf la vârf este dată de relaţia
(5.10)
Corespunzător, curentul de magnetizare este
(5.11)
Semnificaţia parametrilor geometrici ai bobinei de actuaţie este în Fig. 5.4. Factorul are valoarea maximă pentru şi . Valorile uzuale ale factorului (factorul Fabri) sunt în domeniul , [30].
Fig. 5.4. Geometria bobinei de actuaţie, [30].
Valoarea efectivă a curentului în ipoteza
(5.12)
Pentru se obţin: şi .
43

Dimensionarea bobinei
Curentul de magnetizare, conform (5.11), este invers proporţional cu numărul de spire şi direct proporţional cu lungimea activă a materialului . Tensiunea la borne este proporţională cu inductanţa totală a actuatorului şi cu frecvenţa nominală.
Pentru o geometrie dată, adică pentru valori specificate ale parametrilor , , , şi pentru un curent nominal dat se pot estima energia magnetică a sistemului şi
tensiunea maximă de la borne . Cu relaţiile:
(5.13)
(5.14)
şi cu relaţiile (5.9), (5.10) se pot exprima mărimile şi funcţie de valorile şi :
(5.15)
(5.16)
Pierderile de energie din actuator
La proiectarea actuatorului se impune minimizarea pierderilor prin curenţi turbionari. Folosind materiale laminate cu grosimea aceste pierderi sunt reduse semnificativ dacă nu se depăşeşte frecvenţa critică dată de relaţia
(5.17)
Pierderile prin histerezis pot fi estimate uzând de modele de histerezis adecvate în simulările de dinamica actuaţiei. (§ 6).
Rezultatele unor astfel de studii indică pierderi maxime de pentru condiţii de funcţionare uşoare şi medii [31].Exemplu: pentru o bară magnetostrictivă cu diametrul şi cu lungimea de , pierderile sunt de .
Pierderile rezistive din bobina de actuaţie sunt determinate uşor prin estimarea rezistenţei bobinei
(5.18)
în care - factorul de umplere al bobinei.Există pierderi prin curenţi turbionari şi în restul circuitului magnetic. O metodă
fezabilă de reducere a acestor pierderi o constituie utilizarea unor materiale adecvate cum
44

ar fi PERMEDYN. În felul acesta pierderile sunt cu un ordin de mărime mai mici comparativ cu pierderile din materialul activ dacă inducţia din circuit nu depăşeşte valoarea de .
6. Regimul electromecanic al actuatorului magnetostrictiv
Câmpul electromagnetic de reacţie din bara magnetostrictivă se determină cu metoda integrării ecuaţiei Helmholtz.
Se consideră consideră conductorul cilindric circular de rază , infinit lung, situat axial într-un câmp magnetic inductoric uniform în lipsa conductorului
, reprezentat în complex prin . Din motive de simetrie problema este plan paralelă. În sistemul de coordonate cilindric cu axa Oz în axa conductorului, componentele câmpului electromagnetic complex au formele
(6.1)
În exteriorul conductorului câmpul magnetic satisface ecuaţia lui Laplace
cu soluţia
Cum prin introducerea conductorului în câmpul magnetic, acesta nu poate creşte la infinit, rezultă
În interiorul conductorului câmpul magnetic complex satisface ecuaţia lui Helmholtz
adică o ecuaţie de tip Bessel cu soluţia
45

şi sunt funcţiile modificate ale lui Bessel de prima speţă, respectiv a doua speţă şi de ordin zero.
Cu legea circuitului magnetic se deduce câmpul electric complex
(6.2)
în care s-a ţinut seama de relaţiile şi .Deoarece în axa cilindrului şi fiindcă termenul este infinit în axă,
rezultă
Din condiţia de continuitate a componentelor tangenţiale ale câmpului magnetic pe suprafaţa conductorului
(6.3)
se deduce constanta
(6.4)
Cu aceste valori ale constantelor, soluţia problemei interioare este
(6.5)
Soluţia ecuaţiei (6.5) dă valorile din care se obţine . Se consideră că valoarea activă a câmpului este valoarea mediată a lui pe secţiunea transversală a barei. Fig. 6.1 arată dependenţa valorii active a câmpului de frecvenţa câmpului aplicat.
46

Fig. 6.1. Valorile câmpului magnetic aplicat , [33].
Se observă că la creşterea frecvenţei, amplitudinea câmpului activ scade, iar defazajul creşte.
Se admite că răspunsul materialului este dictat de câmpul activ şi este dat de modelul Jiles-Atherton [32].
(6.6)
în care: - magnetostricţiunea, - magnetizaţie, - magnetizaţia de saturaţie. În câmpuri magnetice slabe, deformaţia totală este dată de superpoziţia magnetostricţiunii cu deformaţia elastică .
(6.7)
Un model pentru dinamica actuatorului magnetostrictiv este ilustrat în fig. 6.2, [33].
Fig. 6.2. Model pentru dinamica actuatorului magnetostrictiv [33].
Actuatorul este modelat ca un rezonator cu parametrii concentraţi, cu un singur grad de libertate. Bara magnetostrictivă este echivalată cu un element elastic cu lungimea
, cu secţiunea transversală şi cu constanta de elasticitate . Sarcina mecanică
47

este compusă din masa care se deplasează cu sub acţiunea forţei , arcul de pretensionare cu constanta de elasticitate şi amortizorul cu constanta .
Ecuaţia mişcării este
(6.8)
Cu relaţia (6.7), în care şi cu notaţiile
mc2 , (6.9)
ecuaţia devine
(6.10)
Ecuaţia (6.10) este o ecuaţie diferenţială de gradul 2 cu condiţiile iniţiale şi . Dependenţa magnetostricţiunii de câmpul magnetic activ este neliniară şi prezintă histerezis.
Justificare: Din ecuaţia (6.6) se observă că ; dar - ciclul de magnetizare care este neliniar şi prezintă histerezis.Bobina cu miez magnetostrictiv poate fi liniarizată prin aproximaţia curentului echivalent sinusoidal; în acest caz bobina se studiază cu reprezentarea în complex. Se definesc
mărimile complexe , respectiv cu relaţia .
Relaţiile reprezintă ecuaţiile parametrice ale ciclului eliptic
echivalent ciclului de magnetizare.Între , şi - unghiul de pierderi prin histerezis există relaţia
Pentru câmpuri magnetice periodice, magnetostricţiunea poate fi exprimată printr-o serie Fourier.
(6.11)
Uzând de principiul superpoziţiei, soluţia ecuaţiei (6.10) se scrie astfel:
(6.12)
48

în care
(6.13)
(6.14)
Calculele au fost făcute pentru un model de actuator liniar din Terfenol-D cu parametrii:
, , - frecvenţă naturală, - coeficientul de amortizare, iar rezultatele sunt date în fig. 6.3.
Fig. 6.3. Dependenţa deformaţie-câmp activ pentru diferite frecvenţe. Linie continuă: rezultatele calculului; linie punctată: rezultate experimentale, [33].
Se observă că modelul analitic prezentat descrie cu acurateţe variaţia formei buclei de histerezis şi mărimea vârf la vârf a deformaţiilor.
Deformaţia maximă şi bucla de histerezis cu arie maximă se obţin la o frecvenţă de rezonanţă ( ) şi la un defazaj total de . La defazajul total contribuie atât
49

dinamica actuaţiei cât şi difuzia câmpului magnetic aplicat. Din această cauză deformaţia maximă se obţine la o frecvenţă inferioară frecvenţei de rezonanţă mecanică.
Concluzii privind oscilaţia forţată (sau întreţinută)
Dacă asupra unui sistem mecanic acţionează o forţă sinusoidală de forma
care nu este influenţată de oscilaţiile sistemului (sistemele sunt independente), în prezenţa forţelor de frecare ecuaţia mişcării este
Forţa de frecare la viteze mici este proporţională cu viteza , reprezentând rezistenţa mecanică a sistemului. Cu notaţiile: - coeficient sau factor de amortizare, , , ecuaţia de mişcare este
Soluţia ecuaţiei este de forma
unde: este soluţia generală a ecuaţiei omogene
în care: şi - constantele de integrare, iar şi - rădăcinile ecuaţiei caracteristice
Pentru (amortizare redusă), rădăcinile ecuaţiei caracteristice sunt complex-conjugate
iar soluţia se scrie
50

unde: , ,
este soluţia particulară a ecuaţiei neomogene
în care: ,
Se observă că scade exponenţial cu timpul şi caracterizează starea tranzitorie de mişcare a sistemului, iar după un anumit timp mişcarea este reprtezentată numai de , intrând în regim staţionar în care pulsaţia mişcării devine egală cu pulsaţia forţei perturbatoare.
Cu notaţiile:
şi - factor de calitate,
rezultă
,
Parametrul are un maxim pentru o valoare , obţinută prin anularea derivatei numitorului
Oscilaţia cu amplitudine maximă a sistemului se numeşte oscilaţie de rezonanţă şi se produce la pulsaţia
,
Cu cât factorul de amortizare este mai mic, cu atât rezonanţa se obţine pentru mai apropiat de ; pentru , , şi . Prin analogie cu
circuitul electric oscilant RLC serie, se defineşte impedanţa mecanică
51

unde: - rezistenţa mecanică, - reactanţa mecanică, - inertanţa, - complianţa mecanică.
7. Regimul electrotermic al actuatorului magnetostrictiv
7.1. Structura tipică a actuatorului GMA (actuator cu magnetostricţiune ridicată), [44]
Structura tipică a actuatorului GMA este arată în fig. 7.1 şi este alcătuit din elementele: 1 - capul axului, 2 - flanşa superioară a carcasei, 3 - arc disc, 4 – carcasă, 5 – bobina de excitaţie, 6 – magnet permanent, 7 – bară magnetostrictivă, 8 – bloc de ghidare, 9 – şurub de pretensionare, 10 – placă actuator. Cu şurubul (9) se fixează pretensionarea mecanică (de obicei la nivelul de ). Curentul continuu din bobina de excitaţie (5) fixează punctual de funcţionare în zona liniară a caracteristicii . Curentul alternativ suprapus pe curentul continuu asigură vibraţia barei magnetostrictive.
Fig. 7.1. Structura GMA: 1 - capul axului, 2 - flanşa superioară a carcasei, 3 - arc disc, 4 – carcasă, 5 – bobina de excitaţie, 6 – bobina de premagnetizare, 7 – bară magnetostrictivă, 8 –
bloc de ghidare, 9 – şurub de pretensionare, 10 – placă actuator, [44].
7.2. Circuitul termic echivalent cu parametrii concentraţi
Simetria de rotaţie a configuraţiei geometrice din fig. 7.1 simplifică studiul teoretic al regimului termic prin utilizarea metodei circuitelor termice cu parametri concentraţi. Modelul teoretic al transferului de căldură este arătat în fig. 7.2. În acest
52

model bobina de excitaţie este sursa de căldură care se transferă pe două căi: de la bobină, via carcasă, la mediul ambiant şi de la bobină, via magnet permanent, fluid staţionar, la bara magnetostrictivă.
Circuitul termic echivalent este indicat în fig. 7.3. Cum bobina de excitaţie este generatorul major al căldurii (căldura generată de curenţii turbionari şi de histerezis este neglijată), puterea generată de curentul ce trece prin rezistenţa electrică se divide în: puterea transferată la bara magnetostrictivă prin magnetul permanent cu rezistenţa termică conductivă şi prin fluidul staţionar cu rezistenţa termică convectivă şi în puterea transferată în aer prin carcasa cu rezistenţa termică conductivă şi prin rezistenţa termică convectivă . este temperatura bobinei de excitaţie (sursa de căldură), - temperatura barei magnetostrictive, - temperatura ambientală.
Fig. 7.2. Modelul termic echivalent al actuatorului GMA în regim staţionar.
53

Fig. 7.3. Modelul circuitului termic echivalent al actuatorului GMA, [27].
Rezultă ecuaţiile
(7.1)(7.2)
În regim staţionar, în absenţa surselor de căldură ecuaţia conducţiei este
(7.3)
Pentru convecţia liberă (în mediul ambiant şi în fluidul staţionar) se aplică formula Newton
(7.4)
în care - coeficientul de convecţie, .
Ecuaţia (7.3) conduce la următoarele expresii pentru rezistenţele termice:
, , , (7.5)
în care: - rezistenţa termică a jumătăţii interioare a bobinei, - rezistenţa termică a jumătăţii exterioare a bobinei, - rezistenţa termică a magnetului permanent, - rezistenţa termică a carcasei; şi sunt conductivităţile termice ale bobinei de excitaţie, magnetului permanent, respectiv al carcasei, - lungimile axiale ale magnetului permanent, respectiv ale carcasei.
Similar, ecuaţia (7.4) conduce la expresiile pentru rezistenţele termice
, (7.6)
54

în care: - rezistenţa termică convectivă dintre magnetul permanent şi fluidul staţionar interior, - rezistenţa termică convectivă dintre carcasă şi mediul ambiant.
Analog legii lui Ohm din circuitele electrice, pentru circuitul termic din fig. 7.3 se obţin relaţiile:
(7.7)(7.8)
7.3. Distribuţia temperaturii în magnetul permanent
Integrarea ecuaţiei (7.3) conduce la soluţia
(7.9)
Constantele de integrare şi se determină din condiţiile de frontieră
(7.10)
(7.11)
în care: - temperatura magnetului permanent, - temperatura fluidului este necunoscută.
Rezultă expresiile constantelor de integrare:
(7.12)
aşa că distribuţia temperaturii în magnetul permanent este
(7.13)
în care este necunoscută.
Temperatura se determină cu ipoteza
(7.14)
cu procedura:
55

Se admite că în fluidul staţionar din canalul inelar se injectează căldura în timpul
(7.15)
Căldura determină o creştere a temperaturii fluidului(7.16)
aşa că
(7.17)
în care: - căldura specifică a fluidului, - lungimea şurubului de pretensionare mecanică, - lungimea barei magnetostrictive, - lungimea blocului de ghidare, - lungimea capului axului.
Din relaţiile (7.14), (7.15), (7.16) şi (7.17) rezultă succesiv:
(7.18)
(7.19)
(7.20)
Din relaţiile (7.1), (7.2), (7.7), (7.8), (7.13) prin eliminarea parametrilor , , rezultă expresiile:
(7.21)
(7.22)
Relaţia (7.22) dă distribuţia temperaturii în magnetul permanent. Mai trebuie precizate expresiile coeficienţilor de convecţie şi . Coeficientul de convecţie se obţine din numărul care se calculează cu o ecuaţie criterială
56

Pentru fluidul staţionar din spaţiul inelar ce înconjoară bara magnetostrictivă se aplică ecuaţia criterială Sieder-Tate (valabilă pentru valori mici ale numărului Reynolds), [44]
(7.23)
în care: - numărul Reynolds corespunzător temperaturii medii a fluidului, - numărul Prandtl corespunzător temperaturii medii a fluidului, - vâscozitatea dinamică a fluidului la temperatura medie, - vâscozitatea dinamică a fluidului la temperatura feţei interioare a bobinei de premagnetizare.
Pentru convecţie liberă în spaţiul nelimitat din jurul carcasei se aplică ecuaţia criterială
(7.24)
în care: - constantă, - numărul lui Grashoff, şi - coeficienţi.
8. Modelarea matematică a materialelor magnetostrictive
Procesele energetice din materialele magnetostrictive se pot reduce la două tipuri de procese elementare reversibile: electric → magnetic şi magnetic → mecanic. Diagrama cuplajelor dintre procese este indicată sintetic în Fig. 8.1.
Fig. 8.1. Diagrama cuplajelor energetice din materialul magnetostrictiv, [34, 35].
Efectul curenţilor turbionari este modelat în §4.4. În continuare este modelat matematic cuplajul .
57

Ecuaţiile constitutive liniarizate ale magnetostricţiunii analizate în §1.4 au expresiile indicate în IEEE Standard 1991. Pentru a conserva notaţiile din teoria electromagnetismului se introduc următoarele notaţii pentru parametrii mecanici: - modulul lui Young→ , - complianţa elastică; - deformaţia mecanică specifică→ ; - efortul mecanic unitar→ . Forma ecuaţiilor constitutive devine:
(8.1)(8.2)
Modelarea implică următorii paşi:
Se admite că parametrii şi sunt constanţi: şi . Considerându-se modelul de calcul unidimensional, adică mărimile de câmp
variază numai după direcţia , deformaţia specifică este
(8.3)
în care - deplasarea elementară de coordonată .
Legea a doua a lui Newton
conduce la
(8.4)
în care - densitatea masică a materialului magnetostrictiv.
Ecuaţiile lui Maxwell
(8.5)
(8.6)
la care se adaugă ecuaţiile
(8.7)(8.8)
58

conduc la
(8.9)
Pentru modelul unidimensional, ecuaţia (8.9) devine:
În final se obţin ecuaţiile cuplajului dintre câmpurile şi :
(8.10)
(8.11)
În regim armonic permanent ecuaţiile (8.10) şi (8.11) au formele:
(8.12)
(8.13)
în care şi sunt imaginile în complex simplificat ale mărimilor , respectiv .
Parametrii de material folosiţi anterior ( şi ) sunt reevaluaţi iterativ după schema din Fig. 8.2.
Fig. 8.2. Evaluarea iterativă, [34].
59

Pentru descrierea comportării materialului magnetostrictiv se pot folosi programe de simulare numerică cu elemente finite (de ex.: Comsol © Multiphysics) care permit calculul mărimilor variabile din material pentru diferite tipuri de excitaţii (de exemplu, pentru regimuri armonice). Pentru implementarea ecuaţiilor diferenţiale cu derivate parţiale se foloseşte modul General al Programului. Este foarte importantă, în procesul de simulare, setarea subdomeniilor cu ecuaţii diferenţiale specifice.
9. Vibratorul magnetostrictiv de detensionare VMS - 1
9.1. Descrierea VMS – 1
Vibratorul magnetostrictiv (VMS - 1) este alcătuit din:
Vibrator magnetostrictiv; Generator de tensiune şi frecvenţă variabilă; Hardware pentru controlul procesului de detensionare; Software pentru controlul procesului de detensionare.
Caracteristicile tehnice ale VMS – 1 sunt:
Forţa maximă de acţionare: ; Tensiunea electrică de alimentare: ; Tensiunea electrică de alimentare a vibratorului magnetostrictiv: ; Curentul electric maxim: ; Frecvenţa de lucru: ; Puterea maximă: ; Regimul de funcţionare: continuu.
Utilizarea VMS – 1 prezintă următoarele avantaje:
precizia reglării frecvenţei de vibrare, importantă pentru procesul de detensionare eficientă este de . În cazul vibratoarelor mecanice acţionate de motoare asincrone sau de curent continuu, precizia de reglare a frecvenţei este de minim
; softul echipamentului afişează în mod continuu valorile curente ale canalelor
analogice de intrare achiziţionate. Se oferă posibilitatea realizării unei înregistrări a valorilor eşantionate pentru canalele analogice, valori care vor fi memorate în funcţie de valoarea frecvenţei semnalului de intrare. Se pot obţine astfel patru grafice de tipul: acceleraţie în funcţie de frecvenţă, tensiune în funcţie de frecvenţă, curent în funcţie de frecvenţă, putere în funcţie de frecvenţă;
pentru interpretarea eficienţei procesului de detensionare, softul poate suprapune caracteristicile de frecvenţă a puterii absorbite de vibratorul magnetostrictiv, înainte şi după detensionare;
reducerea costurilor de detensionare de aproximativ şi o economie de consum energetic de aproximativ ;
60

În fig. 9.1 este arătată structura actuatorului, iar în fig. 9.2 sunt arătate principalele repere ale actuatorului. În fig. 9.3 este redată poza actuatorului magnetostrictiv de vibraţii, în fig 9.4 este pozat actuatorul cuplat la tabla ce urmează a fi detensionată, iar în fig. 9.5 este prezentat echipamentul de detensionare prin vibraţii cu actuatorul magnetostrictiv.
Fig. 9.1. Structura actuatorului magnetostrictiv, [37].
Fig. 9.2. Reperele principale ale actuatorului magnetostrictiv, [37].
61
Fig. 9.3. Actuatorul magnetostrictiv de vibraţii, [36, 37].
Fig. 9.4. Actuatorul magnetostrictiv montat pe piesa de detensionat, [36, 37].
62

Fig. 9.5. Echipament de detensionare prin vibraţii cu actuator magnetostrictiv, [36].
9.2. Proiectarea, realizarea şi încercarea VMS – 1
9.2.1. Model de calcul pentru estimarea VMS – 1
Materialul magnetostrictiv se deformează când este expus unui câmp magnetic şi-şi schimbă starea de magnetizare când este deformat. Ecuaţia a magnetostricţiunii este
(9.1)
în care: - magnetizaţia, - susceptivitatea magnetică, - intensitatea câmpului magnetic, - constanta magnetostrictivă de tensiune mecanică, - deformaţia mecanică specifică. Constanta poate fi exprimată prin constanta de deformaţie şi modulul lui Young : .
Relaţia constitutivă care leagă pe - inducţia magnetică cu şi
63

(9.2)
duce la relaţia constitutivă a magnetostricţiunii
(9.3)
Un model simplificat al dispozitivului magnetostrictiv este arătat în fig. 9.6.
Fig. 9.6. Modelul simplificat al dispozitivului magnetostrictiv, [36, 41].
În ipoteza că vibraţia este sinusoidală cu pulsaţia , curentul care trece prin rezistenţa este
; ; (9.4)
Puterea la borne corespunzătoare este
(9.5)
Valoarea maximă a puterii se obţine la
(9.6)
64

9.2.2. Calculul circuitului magnetic VMS – 1
Configuraţia geometrică a circuitului magnetic a actuatorului este indicată în fig. 9.7; s-au folosit notaţiile: T – Terfenol-D, F – flanşă feromagnetică, M – magnet permanent.
Fig. 9.7. Configuraţia geometrică a circuitului magnetic, [37, 39, 40, 41, 42, 43].
Simetria de rotaţie a circuitului magnetic permite utilizarea în calcule a jumătăţii schemei echivalente a circuitului magnetic - fig. 9.8. O schemă simplificată se obţine considerând cu o bună aproximaţie .
Fig. 9.8. Schema echivalentă corespunzătoare circuitului magnetic, [37, 39, 41].
Calculul reluctanţelor, [36, 37, 40, 41, 42, 43]:
Reluctanţa barei magnetostrictive:
65

(9.7)
Reluctanţa flanşei
(9.8)
Reluctanţa magnetului permanent (ALNICO)
(9.10)
Reluctanţa de scăpări
(9.11)
în care: , - lungimea medie a liniei de câmp din bara magnetostrictivă, respectiv din magnetul permanent, , - aria secţiunilor transversale, - grosimea flanşei, , - raza exterioară, respectiv interioară ale flanşei.
Relaţiile , , justificând schema simplificată a circuitului magnetic din fig. 9.11.
Se pune condiţia ca în bara magnetostrictivă densitatea de volum să fie apropiată de valoarea maximă; se alege
(9.12)
valoare care corespunde inducţiei magnetice
(9.13)
respectiv fluxului magnetic
(9.14)
În schema simplificată este considerată numai tensiunea magnetomotoare generată de magnetul permanent
(9.15)Teoremele lui Kirchhoff conduc la sistemul de ecuaţii
66

(9.16)
la care se adaugă ecuaţiile de material
(9.17)
Din (9.16) şi (9.17) se obţin:
(9.18)
(9.19)
(9.20)
Factorul ia în consideraţie fluxul de scăpări al magnetului permanent.Se alege magnetul permanent ALNICO8-LNGT40 (Catalog Chen Yang Technologies GmbH&Co, 2006) cu inducţia remanentă şi cu câmpul coercitiv
. Din curba de demagnetizare rezultă punctul de funcţionare (, ).
Configuraţia geometrică a bobinei este dată în fig. 9.9.
Fig. 9.9. Configuraţia geometrică a bobinei de magnetizare, [36, 37].
Caracteristicile bobinei sunt:
67

(9.21)
Bobina are , cu prize la şi .Inducţia în centrul bobinei se calculează cu relaţia
(9.22)
Uzând de principiul superpoziţiei (fluxul într-o latură a circuitului este suma algebrică a fluxurilor generate de fiecare tensiune magnetomotoare), rezultă:
(9.23)
Rezultatele sunt sumarizate în tabelul 9.1.
Tabel. 9.1. Parametrii actuatorului magnetostrictiv, [37].Număr de spire
3000 7,5 15,5 14 0,11 1 0,21 0,822000 7,5 12,8 8 0,05 1 0,14 0,751000 7,5 10,2 3,5 0,012 1 0,07 0,68
*s-a considerat (conform Anexa 1).
9.2.3. Calculul încălzirii bobinei actuatorului magnetostrictiv
Bobina excitată în curent continuu, aşezată pe un miez feromagnetic, transferă căldură către miezul feromagnetic. Din bilanţul puterilor dezvoltate şi evacuate rezultă supratemperatura medie a bobinei, [38]:
(9.24)
unde:
- rezistenţa conductorului; - diametrul conductorului; - lungimea spirei medii a bobinei.
Aria activă de material conductor, obţinută la secţionarea în lung a bobinei este:
68

(9.25)
unde:
- numărul de spire al bobinei; - factorul de umplere; - grosimea bobinei.
Rezistenţa bobinei se obţine ţinând seama de relaţia:
(9.26)
Această valoare se introduce în relaţia şi se obţine supratemperatura:
(9.27)
În regim intermitent, dacă se notează: - durata de lucru; - durata de pauză; - perioada, se numeşte durată relativă de conectare:
(9.28)
iar curentul echivalent rezultă din relaţia:
, respectiv
În aceste condiţii supratemperatura medie a bobinei este:
(9.29)
Supratemperatura se calculeaza cu formula de mai sus [4]:
(9.30)
unde:
- rezistivitatea conductorului de cupru;
69

- coeficientul de temperatură al rezistivităţii (sau transmisivitatea globala a
caldurii , pentru cazul unei bobine cilindrice) se poate considera : ;
- grosimea bobinei;
– durata de conectare, (în situaţii extreme); - numărul de spire, ( pentru cele trei prize); - curentul absorbit de bobină , - lungimea bobinei ( în cazul bobinei actuatorului);
- factorul de umplere al bobinei.
Tabel. 9.2. Valorile calculate ele temperaturii bobinei actuatorului magnetostrictiv.N[spire] 1000 3000 4000
I[A] ~18 ~5 ~40,543 0,163 0,2173
[ ] 96 65 52
9.2.4. Proiectarea, realizarea şi încercarea sursei de alimentare VMS – 1, [37]
În schema electronică a sursei specifice de activare a actuatorilor magnetostrictivi, [37], figura 9.10, se pot observa următoarele blocuri funcţionale componente:
Sursă de tensiune continuă, de ; Sursă de tensiune continuă, de ; Bloc separator, interfaţă optică; Controller-ul DRV101T de forme de undă PWM; Driver-ul etajului final, bufferul IGBT; Etajul final de putere, realizat cu două tranzistoare IGBT, IRG4PH40KDPbF; Sursă externă de tensiune continuă tip 4102 M pentru alimentarea etajului final de
putere; Generatorul de funcţii extern, tip KZ 1404 A.
În figura 9.11, se prezintă schema electronică detaliată a surselor interne de tensiune continuă pozitivă de , respectiv .
70

Fig. 9.10. Schema electronică detaliată a sursei specifice de activare a actuatorilor magnetostrictivi, [37].
9.2.4.1. Modul de funcţionare a sursei de activare a actuatorilor magnetostrictivi
Întreaga aplicaţie a cărei schemă detaliată este redată în figura 9.20, este centrată pe utilizarea controller-ului de forme de undă PWM, DRV101T, fabricat de către firma Burr-Brown & Texas Instruments. Sursa specifică realizată în cadrul departamentului MNE al institutului INCDIE ICPE-CA, prezintă unele particularităţi, pe care le vom prezenta în cele ce urmează:
a) În primul rând, se observă în figura 9.18, un modul diferit de alimentare cu tensiune continuă, a etajului final de putere, respectiv a controllerului şi driverului. Astfel, etajul final de putere este alimentat de către o sursă externă de tensiune continuă tip 4102 M, iar controllerul de forme de undă PWM şi circuitele electronice aferente sunt alimentate de către o sursă de tensiune continuă stabilizată internă de . Acest mod specific de alimentare cu tensiune continuă permite utilizatorului conectarea oricăror dispozitive de tip actuator magnetostrictiv, singura limitare fiind dată de tensiunea drenă-sursă a tranzistoarelor IGBT, IRG4PH40KDPbF, respectiv curentul de drenă a acestuia, ID. În cazul nostru, curentul maxim care poate circula prin actuatorul magnetostrictiv ar putea fi de , atunci când tensiunea vârf la vârf maximă este de V.
71

b) Dacă pe intrarea circuitului DRV101T, pin 1, figura 9.18, se aplică un semnal dreptunghiular, cu amplitudinea şi frecvenţa variabilă,
, de la un generator de funcţii extern, tip KZ 1404, actuatorul magnetostrictiv a cărui bobină se va comporta în modul oscilant, adică echipamentul mobil al actuatorului va realiza o mişcare liniară şi periodică alternativă, de aceeaşi frecvenţă.
c) Între grila tranzistoarelor de putere IGBT (comandate cu impulsuri de tensiune) IRG4PH40KDPbF şi iesirea controllerului, DRV101T (pinul 6), figura 9.18, se plasează în etaj buffer IGBT realizat cu tranzistoarele complementare BD 139 şi BD 140, respectiv tranzistorul IGBT T3G7N60C3 şi componentele aferente.
d) În regimul „actuator liniar”, pe intrarea controllerului (fig. 9.20), pinul 1, figura 9.18, se aplică un semnal „1” logic, în logica TTL. Numai în acest caz actuatorul magnetostrictiv poate lucra în „modul liniar”, iar factorul de umplere al tensiunii de comandă, aplicată pe grila IGBT-ului este variabil, în limitele , frecvenţa este constantă, . Se observă că acest semnal „1” logic TTL se aplică intrării microcontrolerului prin intermediul unei interfeţe optice, realizată cu un optocuplor TTL, tip HCPL 2630.
Se precizează că sursele de tensiune continuă stabilizată de , respectiv , ale căror scheme electronice sunt redate în figura 9.19, sunt aplicaţii ale
stabilizatoarelor integrate de tensiune pozitivă 7815, negativă 7915, respectiv pozitivă TTL, 7805. De asemenea, se observă în figura 9.21, că etajul final de putere, este răcit forţat cu ajutorul a două miniventilatoare. Sursa specifică este pregatită să activeze simultan doi actuatori magnetostrictivi. În cazul în care apare necesitatea funcţionării în modul „defazat în timp” a celor două actuatoare, există posibilitatea controlului fazei pentru unul dintre actuatoare.
Fig. 9.11. Schema electronică detaliată a surselor interne de tensiune continuă pozitivă de , respectiv , [37].
În fig. 9.12 este prezentat controllerul realizat cu circuitul integrat DRV 101T, iar în fig. 9.13 etajul final de putere al sursei de activare a actuatorului magnetostrictiv. De asemenea, în fig. 9.14 este prezentată forma de undă la ieşirea etajului final de putere.
72

Fig. 9.12. Controllerul realizat cu circuitul integrat DRV 101T, [37].
Fig. 9.13. Etajul final de putere, [37].
73

Fig. 9.14. Forma de undă de la ieşirea etajului final de putere.
9.2.5. Stand de măsurare a parametrilor electromagnetici, mecanici şi termici
Încercările experimentale au un dublu rol: de a demonstra fezabilitatea principiului de actuaţie şi de validare a modelelor de calcul propuse.
Elementele principale ale montajului experimental sunt arătate în fig. 9.15.
Fig. 9.15. Ansamblul actuatorului (incluzând senzor de forţă şi poziţie)în secţiune transversală pentru măsurători de performanţă, [29].
Actuatorul este echipat cu un senzor de forţă (senzor piezoelectric, de exemplu) şi cu un senzor de deplasare (palpator cu pas micrometric marca Schut (cu diviziunea
74

) şi un dinamometru IMADA model NK-500 cu domeniul ) care permit măsurarea cu acurateţe, în regim dinamic, a forţei
dezvoltate, respectiv a deplasării capului de actuaţie.Alimentarea bobinei de actuaţie se face cu o tensiune variabilă în timp. Se
înregistrează variaţiile în timp ale: tensiunii şi curentului la borne, forţele axiale şi deplasările axiale. Pentru definirea pretensionării optime se evaluează curbele deplasare-curent la care pretensionarea mecanică apare ca parametru.
Verificarea la încălzire a actuatorului magnetostrictiv se face prin relevarea profilului termic din zonele critice ale actuatorului folosind camera de termoviziune în infraroşu Fluke Ti 20.
Figurile 9.16, 9.17 şi 9.18 arată principalele componente ale stadului de măsură: sistemul de măsurare a deplasărilor, sistemul de monitorizare a vibraţiilor, respectiv sursa de activare a actuatorului.
Fig. 9.16. Standul de măsurare a deplasărilor actuatorului magnetostrictiv.
75

Fig. 9.17. Sistemul de monitorizare a vibraţiilor actuatorului magnetostrictiv, [36, 37].
Fig. 9.18. Sursa specifică de activare a actuatorului magnetostrictiv, [37].
9.2.6. Rezultate experimentale
În continuare sunt prezentate rezultatele reprezentative ale VMS – 1
Caracteristicile deplasare-forţă de pretensionare la frecvenţa şi pentru diferite valori ale tensiunii de alimentare (fig. 9.19÷9.22).
76

Fig. 9.19. Caracteristica deplasare-forţă de pretensionare la U=24V şi frecvenţa 10Hz(priză bobină 1-2).
Fig. 9.20. Caracteristica deplasare-forţă de pretensionare la U=24V şi frecvenţa 10Hz(priză bobină 1-3).
Fig. 9.21. Caracteristica deplasare-forţă de pretensionare la U=48V şi frecvenţa 10Hz(priză bobină 1-2).
77

Fig. 9.22. Caracteristica deplasare-forţă de pretensionare la U=48V şi frecvenţa 10Hz(priză bobină 1-3).
Caracteristica curent-frecvenţă la tensiune constantă este redată în fig. 9.23.
Fig. 9.23. Caracteristica curent-frecvenţă la tensiune constantă (U=33V).
De remarcat, pentru ambele tipuri de caracteristici, concordanţa dintre valorile măsurate şi valorile calculate.
Monitorizarea acceleraţiei vibraţiei funcţie de de frecvenţă, tensiunii în funcţie de frecvenţă, curentului în funcţie de frecvenţă, puterii în funcţie de frecvenţă: a) graficul cu roşu – piesa înainte de detensionare; b) graficul cu verde - piesa detensionată (vezi fig. 9.24÷9.27).
78
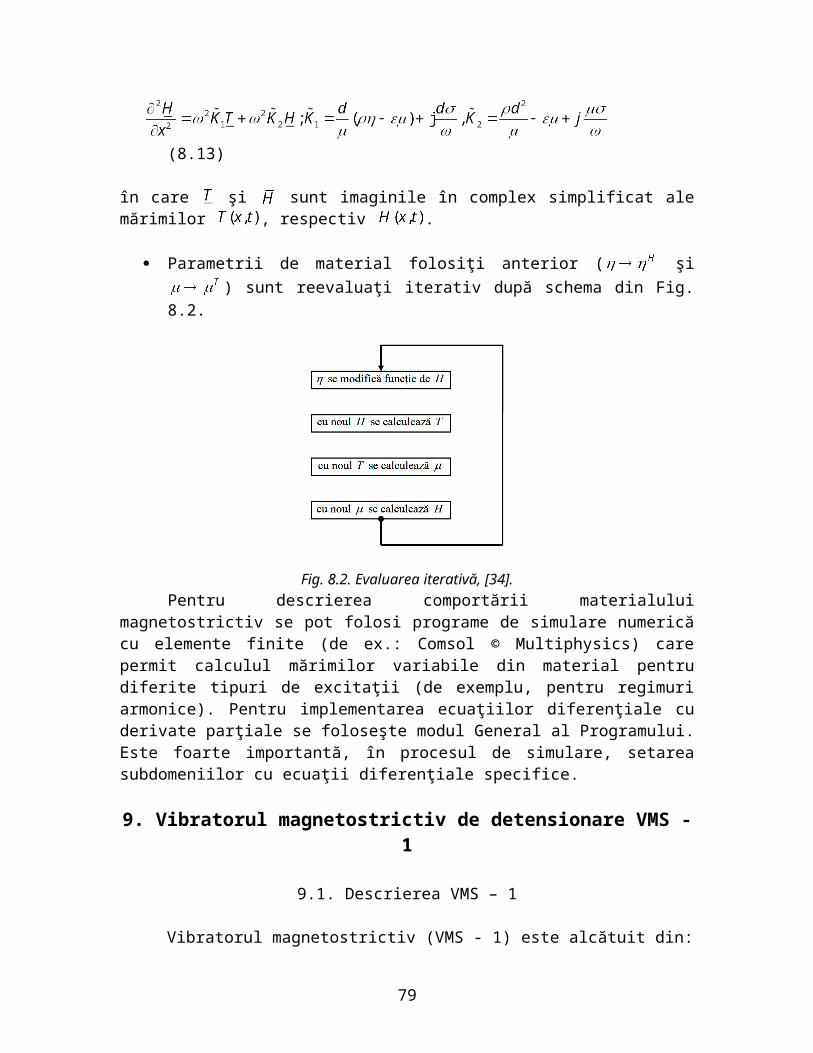
Fig. 9.24. Caracteristica de monitorizare a acceleraţiei vibraţiei în functie de frecvenţăla tensiune constantă, [36].
Fig. 9.25. Caracteristica de monitorizare a tensiunii de alimentarea vibratorului magnetostrictiv în functie de frecvenţă, [36].
79

Fig. 9.26. Caracteristica de monitorizare a curentului în functie de frecvenţăla tensiune constantă, [36].
Fig. 9.27. Suprapunerea caracteristicilor de frecvenţă ale puterii absorbite de actuatorul magnetostrictiv la tensiune contantă, [36].
80

De remarcat: dacă acceleraţiile de vibraţie diferă sensibil la prima caracteristică, celelalte caracteristici, practic se suprapun.
Influenţa factorului de umplere
Se consideră alimentarea VMS – 1 cu o tensiune cu forma de undă dreptunghiulară. Forma de undă (fig. 9.28) este caracterizată de factorul de umplere definit astfel:
(9.31)
unde - durata impulsului, iar - perioada semnalului.
Fig. 9.28. Semnalul periodic dreptunghiular de la intrarea generatorului de funcţii tip KZ 1404.
Studiul privind influenţa factorului de umplere asupra parametrilor VMS – 1 este rezumat în tabelul 9.3.
Tabel 9.3. Influenţa factorului de umplere asupra parametrilor VMS – 1.
Rezultatele studiului arată că pentru domeniul , influenţa factorului de umplere este semnificativă. Diagramele din fig. 9.29÷9.31 confirmă rezultatele din tabelul 9.3.
U[V] f[Hz] k[%] F[N] I[A]I d[mm] Priza bobina24V 10Hz 10% 100N 0,717A 0,01 1-224V 10Hz 15% 100N 0,82A 0,014 1-224V 10Hz 20% 100N 0,985A 0,019 1-224V 10Hz 25% 100N 1,052A 0,025 1-224V 10Hz 30% 100N 1,108A 0,030 1-224V 10Hz 40% 100N 1,159A 0,036 1-224V 10Hz 50% 100N 1,167A 0,043 1-2
81

Fig. 9.29. Forma de undă a tensiunii aplicată actuatorului, cu factor de umplere k= 10%.
Fig. 9.30. Forma de undă a tensiunii aplicată actuatorului, cu factor de umplere k= 30%.
Fig. 9.31. Forma de undă a tensiunii aplicat actuatorului, cu factor de umplere k= 50%.
82

Profilul termic al actuatorului magnetostrictiv, realizat în jurul miezului pentru un factor de umplere al tensiunii ( ), vine să confirme rezultatele experimentale anterioare. Se observă că în zona miezului magnetostrictiv (Terfenol-D) avem un maxim de aproximativ (fig. 9.33); de asemenea se observă că temperatura carcasei în zona fantelor de răcire ajunge la temperatura de (fig. 9.34). Echipamentul cu care s-a realizat profilul termic al actuatorului magnetostrictiv este o camera de termoviziune in infraroşu, Fluke Ti 20.
Fig. 9.32. Profilul termic al actuatorului în zona miezului magnetostrictiv, [37].
Fig. 9.33. Detaliu al profilului termic al miezului de terfenol, [37].
83
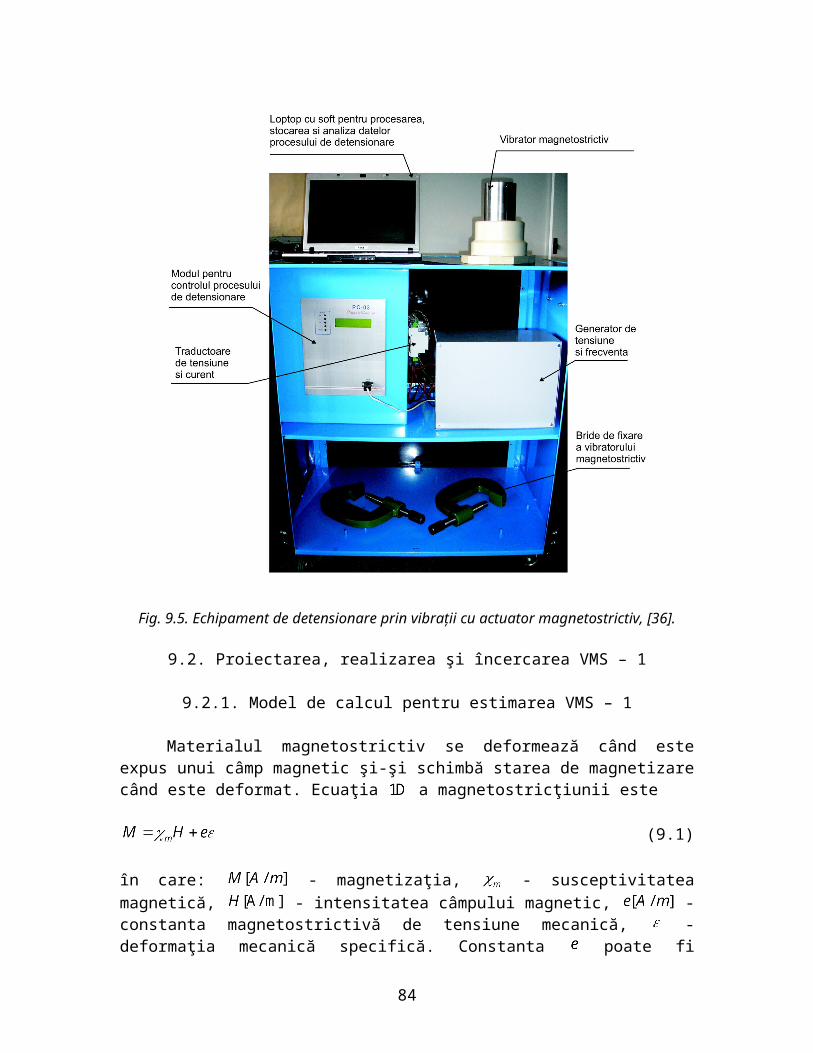
Fig. 9.34. Profilul termic al actuatorului magnetostrictiv în zona fantelor de răcire a actuatorului magnetostrictiv, [37].
9.2.7. Aplicaţia software pentru monitorizarea VMS – 1
Aplicaţia software aferentă vibratorului magnetostrictiv de detensionare (VMS - 1) presupune doua componente: modulul software compatibil PC104 şi modulul software compatibil IBM-PC/AT (Laptop).
9.2.7.1. Modul software compatibil PC104
Modulul software compatibil PC104 este implementat la nivelul echipamentului de control al procesului de detensionare magnetostrictiv PC-03, în vederea măsurării parametrilor ce caractezizează procesul, comanda parametrilor (amplitudinea tensiunii) şi (frecvenţa) comform protocoalelor de lucru prestabilite şi transferul datelor la echipamentul compatibil IBM-PC/AT
Modulul software compatibil PC104, realizat în C++, implementeaza funcţiile pentru achiziţia parametrilor procesului, folosind interfeţele:
ADC 104-XA – pentru achiziţia valorilor mărimilor analogice de intrare; PC104–DIO&TIMER – pentru măsurarea frecvenţei tensiunii ce alimentează
dispozitivul magnetostrictiv.
În continuare sunt prezentate funcţiile de achiziţie pentru semnalele analogice de intrare care caracterizează procesul şi respectiv pentru măsurarea frecvenţei.
Funcţia de achiziţie pentru semnalele analogice de intrare:
void achiz(short *val){
84
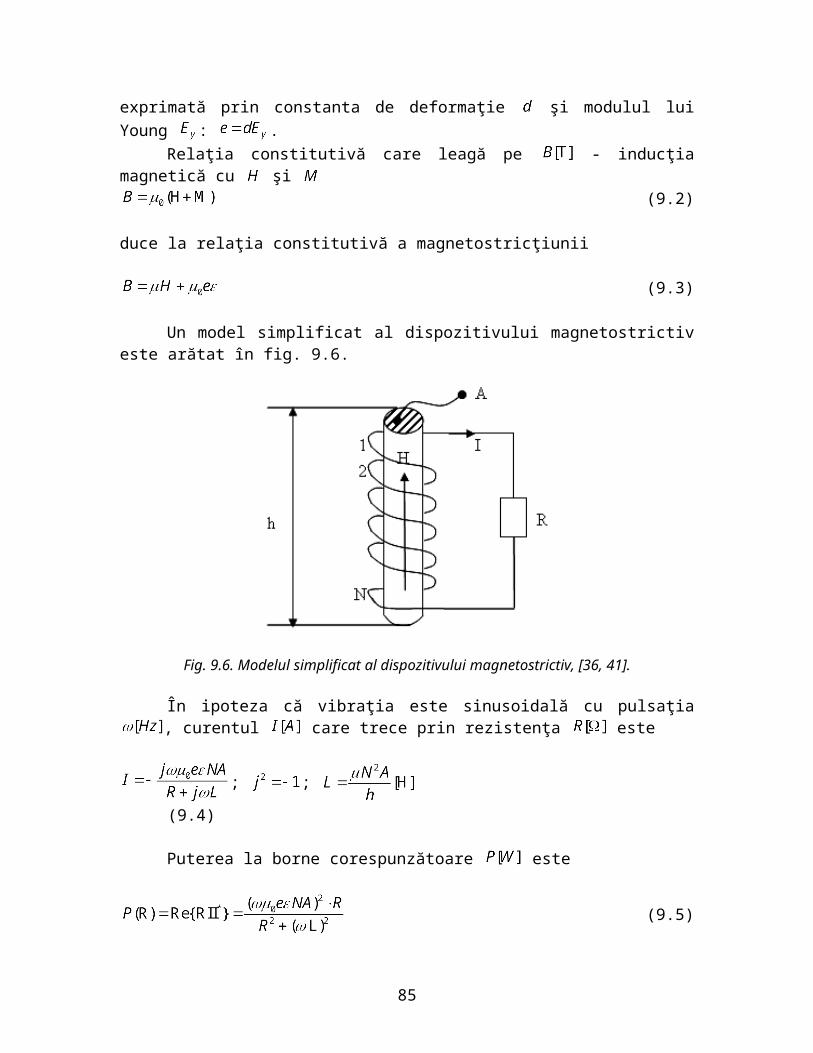
unsigned int cuante; if (val == NULL) return; unsigned short min, max; unsigned long med; for (int chn = 0; chn < 4; chn ++) { min = 0xffff; max = 0; med = 0; outp (GPIO1, (char)chn+4 | 0x08); for (int flt = 0; flt < 7; flt ++) { outp (GPIO1, (char)chn | 0x00); delay (1); outp (GPIO1, (char)chn | 0x08); delay (1); cuante = (unsigned short)(inp (GPIO1)) | (unsigned short)(inp (GPIO0) << 8); cuante = cuante >> 4; if (cuante < min) min = cuante; if (cuante > max) max = cuante; med += cuante; } med -= min; med -= max; //val [chn] = (short)((med/5) - 2048); val [chn] = (short)((med/5)); }}
Funcţia pentru determinarea frecvenţei tensiunii de alimentare a VMS – 1:
void achiz_frq(short *val){ unsigned short N1, N2; short N3; skipThisMS = 1; low1 = inp (TIMER1); high1 = inp (TIMER1); low2 = inp (TIMER2); high2 = inp (TIMER2); skipThisMS = 0; N1 = ((unsigned short)low1 | (((unsigned short)high1) << 8)); N2 = ((unsigned short)low2 | (((unsigned short)high2) << 8)); if(N1 < 10000 || N2 < 10000 || !vltOk) {
85

*val = 0; vltOk = 0; return; } N3 = N1 - N2; if(N3 < 0) N3 *= -1; *val = (unsigned short) N3;}
De asemenea la nivelul PC-03 sunt implementate funcţiile pentru controlul tensiunii ce alimentează VMS – 1 (controlul amplitudinii şi frecvenţei tensiunii), folosind facilităţile interfeţei de ieşiri analogice de tip AX 10415.
9.2.7.2. Modul software compatibil IBM-PC/AT (LAPTOP)
Acest modulul software este implementat la nivelul echipamentului compatibil IBM-PC/AT (LAPTOP) şi realizează interfaţa cu utilizatorul, comunicaţia cu PC-03 în vederea preluării datelor, afişarea, stocarea, procesarea, elaborarea documentelor şi analiza datelor.
Interfaţa cu utilizatorul este interactivă şi sugestivă pentru utilizator. Prelucrarea şi afişarea informaţiilor se efectuază în timp real. Interfaţa cu utilizatorul este implementată cu ajutorul mediului de dezvoltare VisualC++.
Modulul software de la nivelul IBM-PC/AT realizează de asemenea transferul de date de la PC-03, fiind implementat un protocol de date de tip master/slave, organizat pe pachete de comunicaţie.
9.2.7.3. Implementarea aplicaţiei software pentru controlul modelului funcţional
Interfaţa cu utilizatorul aferentă acestui modul software, ca şi facilităţile acestuia sunt descrise în continuare.
Programul afişează în mod continuu valorile curente ale canalelor analogice de intrare achiziţionate. Se oferă posibilitatea realizării unei înregistrări a valorilor eşantionate pentru canalele analogice, valori care vor fi memorate în funcţie de valoarea frecvenţei semnalului de intrare. Se pot obţine astfel echivalentul a 4 grafice de tipul:
acceleraţie în funcţie de frecuenta; tensiune în funcţie de frecvenţă; curent în funcţie de frecvenţă; putere în funcţie de frecvenţă.
Eşantioanele memorate vor fi salvate într-un fişier care poate fi accesat de acest program în vederea vizualizării graficelor asociate acestei înregistrări. Pentru a putea accesa vizualizările asociate unei înregistrări se va proceda ca în figura de mai jos:
86

Vizualizarea graficului selectat este realizată imediat după apăsarea butonului OK.
Dacă se închide fereastra cu vizualizarea curentă se poate alege o altă vizualizare şi se poate continua în acest fel până se apasă butonul CANCEL din fereastra pentru alegerea tipului de grafic.
87
Fig. 9.35. Caracteristica de frecvenţă a acceleraţiilor.
Fig. 9.36. Caracteristica de frecvenţă a puterii.
88

Fig. 9.37. Suprapunerea caracteristicilor de frecvenţă ale puterii absorbite de vibratorul magnetostrictiv: roşu – piesa înainte de detensionare ; verde - piesa detensionată.
10. Concluzii
Teza este axată pe proiectarea, realizarea şi încercarea unui vibrator magnetostrictiv (VMS - 1) – are un caracter aplicativ. Din literatura de specialitate s-au extras modele utile pentru calculul parametrilor vibratorului. Modelele adoptate permit dezvoltarea unui algoritm de proiectare şi de modelare a actuatorului magnetostrictiv – contribuţii originale. Acestea sunt:
Coordonarea colectivului de cercetare din INCDIE ICPE-CA Elaborarea temei de proiectare pentru VMS – 1 şi a temei de proiectare pentru
sursa de alimentare Calculul circuitului magnetic al VMS – 1 Calculul încălzirii VMS – 1 Analiza regimului electromecanic al VMS – 1 Dezvoltarea unui algoritm de proiectare a actuatorului magnetostrictiv Elaborarea strategiei de modelare matematică a materialelor magnetostrictive Participare la realizarea standului de încercări ale VMS – 1 Echiparea VMS – 1 cu un senzor de deplasare şi cu un senzor de forţă pentru
monitorizarea dinamicii actuaţiei. Verificarea experimentală a regimului electrotermic al VMS – 1 Verificarea experimentală a regimului electromecanic al VMS – 1
89
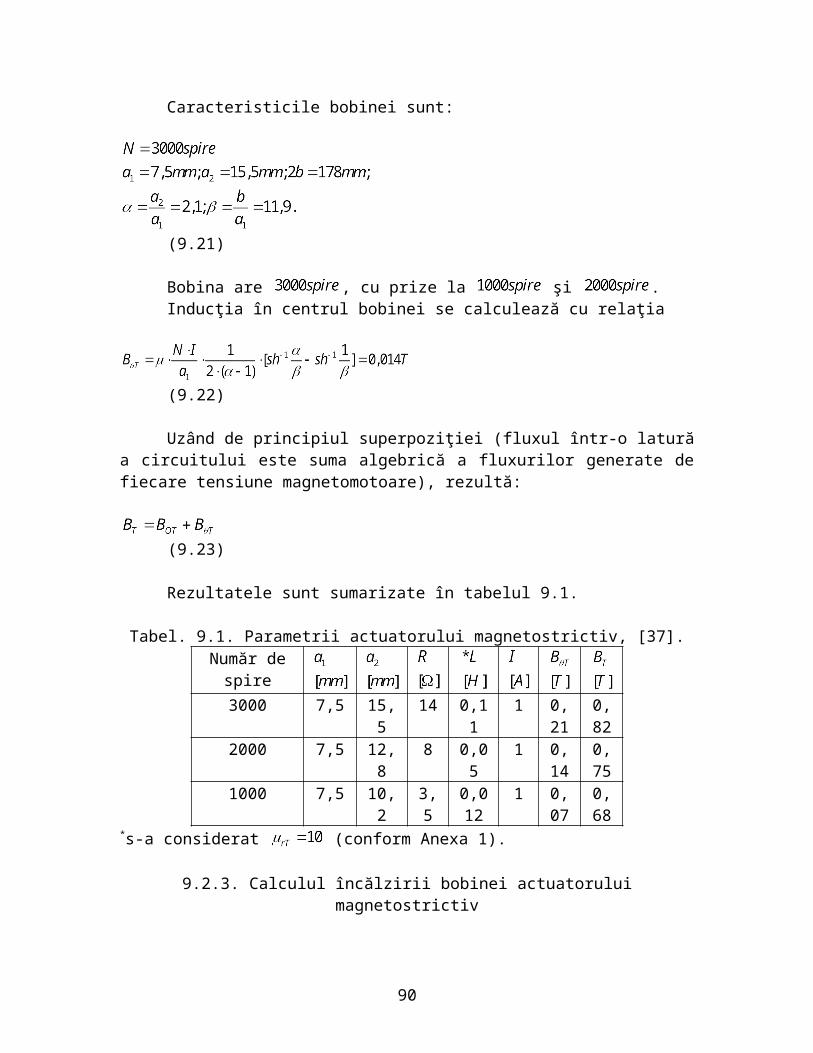
Publicare articole la conferinţe şi simpozioane; teza masterat în Magnetism Tehnic Aplicat:
Mircea Ignat, Ioan Puflea, Alexandru-Laurenţiu Cătănescu, Adrian Vintilă, „Design aspects on the vibration magnetostrictive actuators”, XIX International Conference on Electrical Machines – ICEM 2010, Italy, Rome, IEEE Catalog Number: CFP1090B-CDR, Library of Congress: 2009901651, RF-007641 pp. 1-5, ISBN: 978-1-4244-4175-4.
Cătănescu Alexandru-Laurenţiu, “Actuatori magnetostrictivi”, teza de dizertaţie în Magnetism Tehnic Aplicat, UPB, Facultatea de Inginerie Electrică, Bucureşti, 2009.
Alexandru-Laurenţiu Cătănescu, Ioan Puflea, Mircea Ignat, Adrian Vintilă, „The design aspects on the magnetostrictive actuators”, 1st International Workshop „INNOVATION AND EVOLUTION by R&D – SMEs STRATEGIC PARTNERSHIP”, Bucharest, ROMANIA, September 10th-12th, 2009.
Alexandru-Laurenţiu Cătănescu, Ioan Puflea, Mircea Ignat, Adrian Vintilă, „Experimental aspects about a magnetostrictive actuator for mechanical vibrations”, 1st International Workshop „INNOVATION AND EVOLUTION by R&D – SMEs STRATEGIC PARTNERSHIP”, Bucharest, ROMANIA, September 10th-12th, 2009.
Mircea IGNAT, Alexandru-Laurentiu CATANESCU, Ioan PUFLEA, „Applications of the Magnetostrictive Actuators in the Aerospace Structures”, International Conference of Aerospace Sciences “AEROSPATIAL 2010”, Bucharest, 20-21 October, 2010, Proceedings, Section 4. Materials and Structures, ISSN 2067-8622, pp.1-6.
Cătănescu Alexandru-Laurenţiu, „Design aspects for magnetostrictive microactuators”, MEMS and NEMS Symposium of Junior Researcher, Dedicated to 10 years INCDIE ICPE-CA and 90 years Electrical Engineering Faculty, INCDIE ICPE-CA, Bucharest, 26-27 may 2011.
Mircea Ignat, Ioan Cristinel Hărăguţă, Puflea Ioan, Cătănescu Alexandru-Laurenţiu, „Micromechanical aspects between the magnetostriction vibratory actuation and the micro pores of oil ganglions of mobilization of residual oil”, Vol. IV, Nr. 1-2, ISBN 2069-1505, Bucharest, Septembrie 2013.
Cercetarea de faţă se înscrie în ariile tematice economice prioritare ale României ca ţară membră UE. A constituit obiectul proiectului de cercetare în cadrul contractului 21-059/2007 intitulat „Cecetări privind realizarea de tehnologii ecologice pe baza vibraţiilor induse magnetostrictiv în vederea reducerii consumurilor energetice ce au ca efect încălzirea” finanţat de Ministerul Educaţiei şi Cercetării Ştiinţifice căruia îi multumesc pe această pentru sprijinul oferit.
Se propune continuarea lucrării în următoarele direcţii:
90

Aplicaţii ale actuatorilor magnetostrictivi în domeniul tehnologiilor electrotehnice – împreună cu Institutul Naţional de Cercetare, Dezvoltare şi Testare în Inginerie Electrică ICMET Craiova.
Exploatarea zăcămintelor din terenuri sărăcite de petrol prin metode magnetostrictive – împreună cu Institutul Naţional de Cercetare - Dezvoltare Turbomotoare COMOTI şi PETROM.
11. Bibliografie
[1] Ifrim A., „Materiale Electrotehnice”, vol. 2, Institutul Politehnic Bucureşti, 1976.[2] G. Moisil, Fizica pentru ingineri, vol. I, Editura Tehnică, Bucureşti, 1968.[3] F. Claeyssen, N. Lhermet, R. Le Letty, Cedrat Recherche, Zirst, F38246 Meylan Cedex, France and P. Bouchiloux, Magsoft Corporation, NY 12180, USA, Actuators, transducers and motors based on giant magnetostrictive materials, Journal of Alloys and Component 258 (1997), pp. 61-73.[4] ETREMA Products Inc. – “Terfenol-D magnetostrictive actuator information, Specifications”, http://www.etrema-usa.com/[5] Yamamoto Y., Eda H., Shimizu J., “Application of giant magnetostrictive materials to positioning actuators”, Published in: Advanced Intelligent Mechatronics Proceedings of 1999 IEEE/ASME International Conference on Advanced Mechatronics, Atlanta, USA, 1999, Conference paper, ISBN: 0-7803-5038-3, pp. 215-220.[6] Olabi A.G., Grunwald A., “Design and application of magnetostrictive materials”, ScienceDirect, Materials and Design, No. 29 (2), 2008, pp. 469-483, ISSN 0261-3069.[7] M.J. Dapino, Department of MechanicalEngineering, The Ohio State University 2091 Robinson Laboratory Columbus, OH 43210-1107, USA, “On magnetostrictive materials and their use in smart material transducer”, Structural Engineering and Mechanics Journal, USA 2002, pp. 1-28.[8] Jon Pratt, Alison B. Flatau, “Development and Analysis of a Self-Sensing Magnetostrictive Actuator Design”, Proceedings SPIE Smart Structures and Materials, 1971, Albuquerque, USA, 1993, pp. 952-961.[9] Pratt, J, “Design and analysis of a self-sensing Terfenol-D magnetostrictive actuator”, Master's thesis, Iowa State Universtiy, Ames, IA, 1993.[10] Hunt, Frederick V., “Electroacoustics: The Analysis of Transduction, and Its Historical Background”, Acoustical Society of America, 1982, pp 92-102, 216-221.[11] H. Janocha (ed.), F. Claeyssen, “Adaptronics and Smart Structures”, Springer Verlag, ISBN 3-540-61484-2, Germany 1999, pp. 124-143.[12] H. Janocha (ed.), Actuators, Springer Verlag, ISBN 3-540-61564-4, Germany 2004, pp. 277-292.[13] F.T. Calkins, M.J. Dapino and A.B. Flatau, “Effect of prestress on the dynamic performance of a Terfenol-D transducer”, Proceedings of SPIE Smart Structures and Materials 1997, Vol. 3041, pp. 293-304, San Diego, CA, March 1997.[14] R. Kellog, A. Flatau, Aerospace Eng. & Eng., Mechanics, Iowa State University, IA50011, Blocked force investigation of a Terfenol-D transducer,1999 SPIE's Symposium on Smart Structures and Materials, paper # 3668-19.
91

[15] S. Karunanidhi, M. Singaperumal, “Design, analysis and simulation of magnetostrictive actuator and its application to high dynamic servo valve”, Sensors and Actuators A: Physical, Volume 157, Issue 2, February 2010, pp. 185–197.[16] A.G.I. Jenner, R.J.E. Smith, R.D. Greenough, Department of Physics, University of Hull, Hull HU6 7RX, UK; A.J. Wilkinson, School of Engineering, University of Hull , “Actuation and transduction by giant magnetostrictive alloys”, Mechatronics 10, Journal 2000, pp. 457-466.[17] Marcelo J. Dapino, Frederick T. Calkins, Alison B. Flatau, Iowa State University, Department of Aerospace Engineering & Engineering Mechanics2019 Black Engineering Bldg., Ames, IA 50011, “Measured Terfenol-D material properties under varied applied magnetic field levels”, SPIE Symposium on Smart Structures & Materials 2/96 paper No. 2717-66.[18] C.H. Joshi, Energen Inc. Billericia MA USA, Compact Magnetostrictive Actuators and Linear Motors,Conference Actuator 2000, Bremen, Germany June 2000, Conference paper.[19] Zupan M., Ashby M.F., Fleck N.A., “Actuator classifications and selection, the development of a database”, Advanced Engineering Materials, 2002, 4, No. 12, pp. 933-939.[20] Z. Houquing, L. Jianguo, W. Xiurong, X. Yanhoung, Institute of Acoustics, Academia Sinica, Beijing 100080, China, Z. Hongping, Central Iron and Steel Research Institute, Beijing 100081, China, “Application of Terfenol-D in China”, Journal of Alloys and Compounds 258, 1997, pp. 49-52.[21] C. MacWilliam, “Design of a Magnetostrictive Actuator”, School Of Engineering and Industrial Design, University of Western Sydney, March 2004, Thesis, pp.1-86.[22] Y. Yamamoto, Tokai University Hiratsuka, Japan; T.Makino, Hiro Matsui, Institute of Advanced Technology, Moritex Corporation, Yokohama, Japan; “Micro Positioning and Actuation Devices Using Giant Magnetostriction Materials”, Conference, 2000 IEEE International Conference on Robotics and Automation, San Francisco CA USA 2000, Conference paper pp. 3635-3640.[23] Sewell M. J., “Principles applicable to Terfenol-D Devices”, 1986 First International Terfenol Conference on Giant Magnetostrictive alloys Mar7-9 Marbella Spain.[24] Jhon L. Butler, “Application manual for the design of ETREMA Terfenol-D Magnetostrictive Transducers”, EDGE Technologies, Inc., 1988.[25] Bi, J., “A study of magnetostrictive mini-actuators”, PhD. Dissertation, UMBC, 1998.[26] Butler Stephen C., “2.5-kHz magnetostrictive Tonpilz sonar transducer design”, Proc. SPIE, Vol. 4699, p.p. 510-521, Smart Structures and Materials 2002: Active Materials: Behavior and Mechanics, 2002.[27] Raghavendra Angara, “High frequency high amplitude magnetic field driving system for magnetostrictive actuators”, ProQuest, UMI Dissertation Publishing (September 11, 2011), ISBN-10: 1244025828.[28] R. M. Bozorth, Ferromagnetism, Toronto: Van Nostrand, 1951, Ch. 17.[29] A. Grunwald, A. G. Olabi, “Design of a magnetostrictive (MS) actuator”, Sensors and Actuators A: Physical, Volume 144, Issue 1, 28 May 2008, pp. 161–175.[30] G. Engdahl Kungliga Tekniska Högskolan, Stockholm, Sweden, “Design procedures for optimal use of giant magnetostrictive materials in magnetostrictive actuators
92

applications”, ACTUATOR 2002, 8th International Conference on New Actuators, 10-12 June 2002, Bremen, Germany, pp. 554-557.[31] Montgomery D.B., “Solenoid Magnetic Design”, Wiley –Interscience John Wiley, 1968.[32] D C Jiles, “Theory of the magnetomechanical effect”, Journal of Physics D: Applied Physics, Vol. 28, p. 1537.[33] Sarawate NN, Dapino MJ (2008), “A dynamic actuation model for magnetostrictive materials”, Smart Mater Struct 17:065013.[34] M. Bailoni, Y.Wei, L. Norum, “Mathematical Modelling and Simulation of Magnetostrictive Materials by Comsol Multiphysics”, COMSOL Confernce 05/11/2008, Hannover, pp. 1-5.[35] Jonathan G.Benatar, Fem implementations of Magnetostrictive-Based applications, University of Maryland, USA, 2005.[36] Mircea Ignat, Ioan Puflea, Alexandru-Laurenţiu Cătănescu, Adrian Vintilă, „Design aspects on the vibration magnetostrictive actuators”, XIX International Conference on Electrical Machines – ICEM 2010, Italy, Rome, IEEE Catalog Number: CFP1090B-CDR, Library of Congress: 2009901651, RF-007641 pp. 1-5, ISBN: 978-1-4244-4175-4.[37] Cătănescu Alexandru-Laurenţiu, “Actuatori magnetostrictivi”, teza de dizertaţie în Magnetism Tehnic Aplicat, UPB, Facultatea de Inginerie Electrică, Bucureşti, 2009.[38] Gheorghe Hortopan, „Probleme de aparate electrice”, Editura Didactică şi Pedagogică, Bucureşti, 1982.[39] Alexandru-Laurenţiu Cătănescu, Ioan Puflea, Mircea Ignat, Adrian Vintilă, „The design aspects on the magnetostrictive actuators”, 1st International Workshop „INNOVATION AND EVOLUTION by R&D – SMEs STRATEGIC PARTNERSHIP”, Bucharest, ROMANIA, September 10th-12th, 2009.[40] Alexandru-Laurenţiu Cătănescu, Ioan Puflea, Mircea Ignat, Adrian Vintilă, „Experimental aspects about a magnetostrictive actuator for mechanical vibrations”, 1st
International Workshop „INNOVATION AND EVOLUTION by R&D – SMEs STRATEGIC PARTNERSHIP”, Bucharest, ROMANIA, September 10th-12th, 2009.[41] Mircea IGNAT, Alexandru-Laurentiu CATANESCU, Ioan PUFLEA, „Applications of the Magnetostrictive Actuators in the Aerospace Structures”, International Conference of Aerospace Sciences “AEROSPATIAL 2010”, Bucharest, 20-21 October, 2010, Proceedings, Section 4. Materials and Structures, ISSN 2067-8622, pp.1-6.[42] Cătănescu Alexandru-Laurenţiu, „Design aspects for magnetostrictive microactuators”, MEMS and NEMS Symposium of Junior Researcher, Dedicated to 10 years INCDIE ICPE-CA and 90 years Electrical Engineering Faculty, INCDIE ICPE-CA, Bucharest, 26-27 may 2011.[43] Mircea Ignat, Ioan Cristinel Hărăguţă, Puflea Ioan, Cătănescu Alexandru-Laurenţiu, „Micromechanical aspects between the magnetostriction vibratory actuation and the micro pores of oil ganglions of mobilization of residual oil”, Vol. IV, Nr. 1-2, ISBN 2069-1505, Bucharest, Septembrie 2013.[44] Yuchuan Zhu, Liang Ji, “Theoretical and experimental investigations of the temperature andthermal deformation of a giant magnetostrictive actuator”, Sensors and Actuators A, 218 (2014), pp. 167–178.
93

Anexa 1 - Caracteristicile şi parametrii materialului Terfenol-D Etrema
CARACTERISTICI MECANICE:DensitateModulul lui YoungViteza sunetuluiEfortul la tracţiuneEfortul la compresie
CARACTERISTICI TERMICE:Coeficientul de dilatare termicăCaldura specificăConductivitate termică
94

CARACTERISTICI ELECTRICE:RezistivitateTemperatura Curie
CARACTERISTICI MAGNETOSTRICTIVE:Capacitatea de deformareDensitatea de energie
CARACTERISTICI MAGNETOMECANICE:Permeabilitatea relativăFactor de cuplare
COMPOZIŢIA STOECHIOMETRICĂ STANDARD:
PERPENDICULARITATEA LA CAPETE:
TOLERANŢELE LA PRELUCRAREA DIAMETRULUI:
TOLERANŢELE LA PRELUCRAREA LUNGIMII:
Anexa 2 - Desen de execuţie - ansamblu vibrator magnetostrictiv
95

96


















