L3a_v5.pdf

of 7
-
Upload
chris-maher -
Category
Documents
-
view
279 -
download
0
Transcript of L3a_v5.pdf
-
7/25/2019 L3a_v5.pdf
1/7
1
Lucrarea 3a
Reglarea turaiei n bucl nchis a motorului de curent
continuu alimentat de la un redresor de patru cadrane
1.Generaliti
Funcionarea optim a acionrilor electrice de vitez variabil se bazeaz n mareamajoritate a cazurilor pe utilizarea convertoarelor electronice de putere comandate cuajutorul unitilor digitale de calcul (microprocesoare, microcontrolere, FPGA, etc.). n ciudaunor dezavantaje evidente (cheltuieli mari de ntreinere, factor de putere sczut, fiabilitateredus a motorului de curent continuu) acionrile electrice de curent continuu au anumiteavantaje fa de acionrileelectrice de curent alternativ:
- Cuplu de pornire mare;
-
Plaj mare de variaie a vitezei la putere constant;- Investiie iniial relativ redus;- Reglare simpl a vitezei i cuplului.
Parametrizarea, respectiv punerea n funciune a unui convertor considerndcerinele specifice unei aplicaii practice reprezint o deprindere important a unui inginerelectric. n aceast lucrare de laborator, pentru evidenierea controlului n bucl nchis,respectiv a funcionrii n patru cadrane a unui motor de curent continuu cu excitaieindependent se va utiliza un redresor Simoreg DC Master produs de Siemens. Familia deconvertoare Simoreg acoper o plaj mare de puteri, ntre 6.3 i 2500 kW. Prin utilizareatehnologiei BICO proprie Siemens convertorul poate fi parametrizat innd cont de
particularitile fiecrei aplicaii. Aceasta presupune faptul c funciile de reglare n buclnchis sunt implementate sub forma unor module de program, module ce sunt conectatentre ele cu ajutorul unor parametri predefinii.
Pe baza porturilor de intrare/ieire analogice i digitale respectiv a posibilitii deconectare n reea sistemul poate fi parametrizatrespectiv controlat de la distan. Se potrealiza de asemenea reele industriale de tip master/slave sau PROFIBUS.
Parametrizarea unui convertor Simoreg DC master se poate realiza n mai multemoduri:
- Cu ajutorul panoului de operare (PMU parametrization unit); este o metodgreoaie din cauza faptului ca PMU conine un afiaj, 3 butoane respectiv 3 led-uride status astfel navigarea prin lista de parametr i i modificarea valorii acestoraeste o activitate mare consumatoare de timp. Din acest motiv, de obicei de laPMU se realizeaz ajustri simple i intite ale parametrilor convertorului sau serealizeaz parametrizarea n cazul n care avem o aplicaie simpl de realizat.
- Prin conexiune serial cu un PC utiliznd software-ul DriveMonitor. Aplicaia softpermite vizualizarea parametrilor convertorului ntr-o manier compact iprietenoas cu utilizatorul pentru o parametrizare rapid. De asemenea esteposibil realizarea unui fiier personalizat off-line care apoi este ncrcat automat
n memoria convertorului. n cazul unei aplicaii n care exist mai multeconvertoare parametrizate identic aceast capabilitate este foarte folositoare.Nu n ultimul rnd, cu ajutorul funciei TRACE este posibil vizualizarea i
nregistrarea parametrilor de funcionare ai convertorului n regim tranzitoriu ca
-
7/25/2019 L3a_v5.pdf
2/7
2
de exemplu: viteza, cuplul electromagnetic, curentul din indus, tensiunea dinindus, etc.
- Prin utilizarea unei reele industriale de tip PROFIBUS, acest lucru presupunndexistena unui control de nivel superior a aplicaiei.
n aceast lucrare de laborator se va folosi aplicaia DriveMonitor pentru controlul i
vizualizarea mrimilor electrice aferentemotorului de curent continuu.
2.Consideraii teoretice
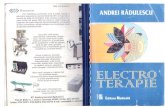
O soluie tehnic des utilizat pentru obinerea unei acionri electrice de vitezavariabil presupune alimentarea unui motor de curent continuu cu excitaie independentprin intermediul unui convertor de patru cadrane cu tiristoare. De fapt, respectivulconvertor conine dou circuiteseparate pentru alimentarea indusului i a excitaiei, ca nfigura 2.1.
MCC
Ex
R
N
R
S
T
T1P
T4N
T3P
T6N
T5P
T2N
T4P
T1N
T6P
T3N
T2P
T5N
Fig. 2.1. Redresor de patru cadrane cu tiristoare.
Pentru a realiza funcionarea motorului n toate cele patru cadrane, indusul acestuiaeste alimentat de la dou convertoare trifazate cu tiristoare conectate n anti-paralel.Redresorul care alimenteaz motorul la mersul nainte conine elementele notate cu
indicele P i se numete pozitiv, n timp ce redresorul ce conduce n timpul mersului napoiconine elementele notate cu N i se numete negativ. Circuitul excitaiei este alimentatindependent de la un redresor cu tiristoare pentru a realiza funcionarea prin slbireacmpului a motorului de curent continuu.
Funcionarea circuitului de alimentare a indusului fr cureni de circulaie (cazultopologiei din figura 2.1 respectiv a redresorului Simoreg DC master) se bazeaz pecomanda precis a celor dou redresoare pozitiv i negativ astfel nct la un moment datdoar unul din cele dou conduce. n regimstaionar, la mersul nainte redresorul pozitiv estecomandat n timp ce impulsurile de comand pentru redresorul negativ sunt suprimate, intimp ce pentru mersul napoi procedura se inverseaz. n regim dinamic, de exemplu n cazul
n care aplicaia necesit o schimbare rapid avitezei motorului de la o valoare mare la ovaloare mai mic, conducia trece de la redresorul pozitiv la cel negativ datorit intrrii n
-
7/25/2019 L3a_v5.pdf
3/7
3
regim de generator a motorului de curent continuu. n acest fel, curentului din indus ischimb sensul transfernd energie ctre surs chiar dac vitez motorului rmne nacelai sens. Dac se realizeaz scderea vitezei n timpul mersului napoi, conducia trecede la redresorul negativ la cel pozitiv i maina intr n regim de generator.
n momentul n care conducia trece de la un redresor la cellalt este obligatoriu
faptul ca tensiunea medie de ieire a celor dou redresoare s fie aceeai. Acest lucru serealizeaz aplicnd urmtoarea relaie:
()
() (2.1)
unde:tensiunea de vrf de linie de alimentare;unghiul de comand a redresorului pozitiv;unghiul de comand a redresorului negativ;
De unde rezult:(
) (
) (2.2)
Iar legea ce guverneaz funcionarea unui convertor cu conexiune n anti-paralel esteurmtoarea:
(2.3)
Respectarea relaiei 2.3 este imperios necesar n dezvoltarea structurii de comanda convertorului, ns la un moment dat doar unul din cele dou redresoare conectate nantiparalel conduce.
n cazul n care aplicaia cere operarea la o vitez mai mare dect viteza nominal,tensiunea de alimentare a indusului este meninut la valoarea nominal n timp ceredresorul monofazat ce alimenteaz nfurarea de excitaie este comandat n vedereascderii curentului de excitaie sub valoarea nominal. n mod uzual se pot obine valori alevitezei cu 30% mai mari dect viteza nominal prin metoda slbirii cmpului.
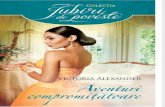
Comanda celor dou convertoare trebuie integrat ntr-o structur unitar decontrol. n figur 2.2 este prezentat structura simplificat de control a redresorului SimoregDC Master.
Schema de reglare a convertorului Siemens DC Master se bazeaz pe utilizarea ncascad a regulatoarelor P sau PI. n circuitul indusului structura este format dintr-o buclinterioar de reglare a curentului respectiv o bucl exterioar de reglare a vitezei. n buclade curent blocul Precontrol indus este folosit pentru a mbunti performanele
sistemului n timpul fenomenului de conducie ntrerupt ce apare la cureni mici n circuitulindusului. Blocul Generator de impulsuri de comand convertor induseste utilizat pentrua calcula unghiurile de comand i pe baza tensiunii de referin primit de laregulatorul de curent. De asemenea, n acest bloc se selecteaz sensul curentului din indusi se activeaz n consecin redresorul pozitiv sau cel negativ.
Protecia la supracureni se realizeaz cu ajutorul blocului de limitare a curentuluidin indus. Tipul regulatorului este selectat cu ajutorul unor parametri dedicai. Tot pe bazaunor parametri se activeaz i se ajusteaz unele filtre adiionale ce pot fi necesare n cazulunor aplicaii specifice.
Curentul din indus este msurat cu ajutorul unui traductor de curent intern n timp
ce viteza este determinat de un traductor de vitez care poate fi: encoder incremental,resolver sau tahogenerator analogic. La nceputul buclei de reglare se gsesc blocurile de
-
7/25/2019 L3a_v5.pdf
4/7
4
setare a i limitare a pantei de variaie a referinei de vitez, respective de setare i limitarea valorii maxime a vitezei motorului. Doi parametri extrem de importani sunt cei careimpun timpul de accelerare respectiv decelerare a motorului.
Referin de
vitez+
0 t
Generator
ramp
0 x
y
Limitare
vitez
0 t
Regulator
vitez
0 x
y
Limitare
curent indus
0 t
0 x
y
Regulator
curent indus
Precontrol
indus
Generator
impulsuri de
comand
convertor
indus-
Convertor cu
tiristoare n
antiparalel
~
MCC
Curentul msurat n indus
Trad.
U
Tensiunea msurat n indus
Calcul tensiune
electromotoare EMFTrad.
vitez
-
Viteza msurat
0 t
Referin
EMF -
Regulator
EMF
Tensiunea electromotoare
0 x
y
Precontrol
EMF
+0 x
y
Limitare curent
excitaie
+0 t
Regulator
curent excitaieGenerator
impulsuri de
comand
convertor
excitaie
Convertor cu
tiristoare
Ex.
-
Curentul msurat n excitaie
~0 x
y
Precontrol
excitaie
Fig. 2.2. Structura simplificat de control a convertorului Simoreg DC Master.
Structura de control a excitaiei este format dintr-o bucl intern de control acurentului de excitaie i o bucl exterioar pentru controlul tensiunii electromotoare.Ambele bucle sunt prevzute cu blocuri de precontrol a curentului respectiv a tensiuniielectromotoare pentru optimizarea performanelor sistemului de acionare.
Blocul de limitare a curentului de excitaie protejeaz la supracureni nfurarea deexcitaie, respectiv impune un curent pozitiv n aceast nfurare. Valoarea real a tensiuniielectromotoare este calculat pe baza curentului i a tensiunii msurate n indus. Blocul degenerare impulsuri de comand realizeaz calculul unghiului de comand pentru redresorul
monofazat cu tiristoare.
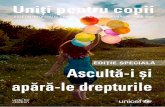
3.Montajul experimental
Legend:ATAutotransformator trifazat (220 V, 18 A). Ampermetre 0-20 A.Voltmetru 0-250 Vcc.Voltmetru 0-250 V~.
Reostat 3x29 .
Comutator tripolar.
-
7/25/2019 L3a_v5.pdf
5/7
5
Date de catalog:Redresor SIEMENS TG - Tahogenerator Radio-Energie
Excitaie
MCCMotor de curent continuu MIMotor asincron cu inele
Redresor
Siemens
Excitaie
MCC
AaVa
MI
AsVs
R
S
T
K1
AT
Rr
Calculator
Personal +DriveMonitor
TG
Fig. 3.1. Montajul experimental.
1.Mersul lucrrii
1. Se realizeaz montajul din figura 3.1.
2.
Se alimenteaz Redresorul Siemens i Autotransformatorul AT de la panoul decomand(este deschis).
-
7/25/2019 L3a_v5.pdf
6/7
6
3. Se pornete calculatorul i se iniializeaz programul DriveMonitor. Se alege FileSet Up an USS Online Connection START.n pagina urmtoare se apas butonulDirect to Parameter List. n acest mod se alege opiunea de afiare a ntregului setde parametri. Se identifica parametri ce reprezint turaia de referin, turaiainstantanee a motorului respectiv tensiunea din indus. Atenie!!! Valorile pentruturaie att cea de referin ct i cea instantanee sunt procente din turaia
maxim admis .4. Se fixeaz referina de turaie la i se pornete redresorul de la butonul de
START (butonul verde n DriveMonitor) completnd tabelul cu valorile citite.5. Se nchide i se fixeaz din AT diferite valori pentru curentul (minim 2 valori,
maxim 15A).6. Se repet punctele 4 i 5 pentru urmtoarele valori ale vitezei:
7. Se oprete redresorul de la butonul de stop (Butonul roun DriveMonitor).8. Se nscrie o turaie de referin de i se pornete din nou redresorul. Dup
stabilizarea vitezei se selecteaz referina de turaie egal cu zero citindu-se curentulde frnare.
9. Se oprete redresorul dela butonul de stop (Butonul rou n DriveMonitor).10.Se ridic caracteristicile mecanice () pentru fiecare referin de vitez
conform tabelului, inclusivn cadranul II punctul de frnare msurat la punctul 9.11.Relaii de calcul:
,
, .
Fig. 3.2. Panoul de lucru DriveMonitor.
-
7/25/2019 L3a_v5.pdf
7/7
7
Nr.
crt. [V]
[A]
[%]
rpm
[V]
[A]
[rad/s]
1
23
45
67
8
910
1112
1314
1516