FACULTATEA DE INGINERIE MECANICĂ MECATRONICĂ ŞI … de Fizica Generala.pdf · INTRODUCERE...
137
UNIVERSITATEA „ŞTEFAN CEL MARE” SUCEAVA FACULTATEA DE INGINERIE MECANICĂ MECATRONICĂ ŞI MANAGEMENT Lector univ. dr. Cristian Pîrghie Suceava, 2010
Transcript of FACULTATEA DE INGINERIE MECANICĂ MECATRONICĂ ŞI … de Fizica Generala.pdf · INTRODUCERE...
UNIVERSITATEA „ŞTEFAN CEL MARE” SUCEAVA
FACULTATEA DE INGINERIE MECANICĂ
MECATRONICĂ ŞI MANAGEMENT
Lector univ. dr. Cristian Pîrghie
Suceava, 2010
INTRODUCERE
Obiectul fizicii, fenomene fizice, mărimi fizice
Cuvântul fizică provine din grecescul „physis” care înseamnă natură.
Fizica - ştiinţă fundamentală a naturii care studiază formele de existenţă ale
materiei şi mişcările ei.
Prin materie se înţelege realitatea obiectivă care există în mod independent
de conştiinţa umană şi este reflectată adecvat de aceasta.
Atributul fundamental al materiei, modul său de existenţă, este mişcarea.
Prin mişcare se înţelege orice schimbare sau proces: deplasare mecanică în
spaţiu, reacţie chimică, radiaţie electromagnetică, proces biologic, gândire.
Scopul fizicii este de a descrie, explica şi prevedea fenomenele naturii,
pentru a le putea stăpâni şi folosi. Descoperirile şi realizările fizicii stau la baza
dezvoltării tehnicii. Fizica stabileşte legi pe baza observaţiilor şi a experimentelor
ştiinţifice.
Legea – exprimă legătura necesară şi esenţială între fenomene, legătura
între cauză şi efect, care condiţionează o dezvoltare determinată a fenomenelor.
Observaţia este studiul fenomenului în condiţiile sale naturale de
desfăşurare, în timp ce experimentul ştiinţific este reproducerea fenomenului în
diverse condiţii create artificial, cu scopul de a descoperi legităţile fenomenului.
În proprietăţile materiei se evidenţiază ideea dezvoltării şi interconexiunii,
precum şi principiul cauzalităţii – bază a prevederii desfăşurării fenomenelor.
Conform acestui principiu orice fenomen fizic are o determinare cauzală
bine definită.
Dezvoltarea fizicii duce la elaborarea conceptului general de materie (ca
substanţă sau câmp), ca realitate obiectivă şi obiect al cunoaşterii fizice.
Materia este infinită şi inepuizabilă în proprietăţile sale, în formele sale de
organizare şi manifestare. Obiectele şi fenomenele din natură se găsesc în nesfârşite
interconexiuni şi interdependenţe. De aceea, în studiul fenomenelor naturii suntem
totdeauna nevoiţi să simplificăm, să „schematizăm” procesele studiate, să creăm
„modele” teoretice ale obiectelor şi fenomenelor. Fără schematizarea fenomenelor
studiate, fizica n-ar putea folosi aportul matematic, n-ar avea o teorie, n-ar putea
conferi experienţei un scop determinat.
Un model corect trebuie să ia în considerare particularităţile principale ale
fenomenului (obiectului, procesului) studiat în problema pusă, lăsând la o parte
trăsăturile secundare, neesenţiale, necaracteristice. Numai astfel se pot stabili legile
şi relaţiile cantitative. Arta fizicianului este de a şti ce să păstreze şi ce să neglijeze
în problema propusă.
Mărimi fizice
Mărimile fizice sunt categorii fizice care servesc la studiul cantitativ al
fenomenelor fizice. Ele reflectă acele proprietăţi ale realităţii obiective ce pot fi
cercetate cu ajutorul metodelor fizice.
A măsura o mărime fizică (x), înseamnă a compara mărimea respectivă cu o
altă mărime de aceeaşi natură, luată convenţional ca unitate de măsură [x].
Rezultatul măsurătorii reprezintă valoarea mărimii măsurate (a) astfel încât:
x
ax
(1)
Dacă pentru aceeaşi mărime folosim mai multe unităţi de măsură şi diferite, atunci
este valabilă următoarea relaţie:
1 1 n nx a x a x ... a x (2)
De unde rezultă:
1 2
1 2
x xa a; ; ...
a x a x (3)
Relaţiile (3) ne arată că raportul valorilor unei mărimi fizice, obţinute în
urma folosirii a două unităţi de măsură, este egal cu inversul raportului celor două
unităţi.
Orice măsurare fizică este întotdeauna un proces de interacţiune între
obiectul măsurat şi dispozitivul (aparatul) de măsură, proces care modifică şi starea
obiectului măsurat (pentru microparticule această perturbare este principial
inevitabilă).
Mărimile fizice se pot clasifica după diferite criterii:
A. După natura mărimilor fizice:
- mărimi scalare, caracterizate numai prin valoare numerică;
- mărimi vectoriale, caracterizate prin direcţie, sens, modul şi punct de
aplicaţie;
- mărimi tensoriale, caracterizate printr-o serie de legi de transformare, la
trecerea de la un sistem de coordonate la altul.
Fiecare dintre aceste mărimi au asociate un anumit procedeu de calcul, un
aparat matematic corespunzător, respectiv: calcul numeric, calcul vectorial, calcul
tensorial.
B. După modul de definire al mărimilor fizice:
- mărimi fizice fundamentale, care nu se definesc cu ajutorul altor mărimi
fizice (ele nu au formulă de definiţie). Aceste mărimi se stabilesc convenţional.
În anul 1961 s-au acceptat şase mărimi fundamentale:
1) lungimea (L)
2) masa (m)
3) timpul (t)
4) temperatura (T)
5) intensitatea curentului electric (i)
6) intensitatea luminoasă (I)
La mărimile fundamentale s-au adăugat ulterior încă două mărimi
suplimentare:
1) unghiul plan ( )
2) unghiul solid ( )
- mărimi fizice derivate, care se definesc cu ajutorul altor mărimi fizice (au
formulă de definiţie), de exemplu: M r F
= momentul forţei;
impulsul p m v
; lucrul mecanic L F r
; viteza dr
vdt
;
C. Din punct de vedere al posibilităţilor de măsurare:
- mărimi fizice măsurabile, pentru care există mijloace de măsurare directe.
De exemplu: lungimea, timpul, intensitatea curentului.
- mărimi fizice calculabile, care se determină prin calcul, folosind mărimi
fizice măsurabile. Exemplu: volumul, densitatea corpurilor.
Unităţi de măsură
Unităţile de măsură ale mărimilor fundamentale se stabilesc cu ajutorul
etaloanelor, care se păstrează la Biroul Internaţional de Mărimi şi Greutăţi de la
Sèvres (Franţa). Ansamblul unităţilor de măsură ale mărimilor fundamentale
formează un sistem fundamental de unităţi.
La cea de-a XI-a Conferinţă Generală de Măsuri şi Greutăţi ţinută la Paris,
în luna octombrie 1960, s-a adoptat un nou sistem de unităţi de măsură, bazat pe
sistemul metric, numit Sistem Internaţional (SI).
Unităţile de măsură fundamentale ale mărimilor fundamentale în sistemul
internaţional (SI) sunt: metrul (m), kilogramul (kg), secunda (s), Kelvinul (K),
amperul (A), candela (cd), radianul (rad), steradianul (strad).
Etaloanele alese s-au definit astfel:
1. METRUL – este egal cu distanţa parcursă de lumină în vid în timp de
1/299792458 dintr-o secundă. (1983)
2. SECUNDA – este 9.192.631.770 Tcs, unde Tcs este perioada tranziţiei
între nivelele hiperfine ale stării fundamentale a 133
Cs.
3. KILOGRAMUL – este masa etalonului păstrat la Sèvres, 1kg este
aproximativ egal cu masa unui dm3 apă pură la 4
oC.
4. AMPERUL – este intensitatea unui curent electric constant care
menţinut în doi conductori paraleli, de lungimi infinite
şi secţiuni neglijabile, aşezaţi în vid la 1m distanţă,
determină apariţia între conductori a unei forţe de 2·10-
7 N pe fiecare metru de lungime.
5. KELVINUL – unitate de temperatură termodinamică reprezentând
1/273 din temperatura termodinamică a punctului triplu
al apei.
6. CANDELA – este intensitatea luminoasă emisă manual pe suprafaţa
de 1/600.000 m2 de un corp negru incandescent (Pt) în
condiţii normale.
7. RADIANUL – unghiul la centrul unui cerc care subîntinde pe cerc un
arc cu lungimea egală cu raza cercului.
8. STERADIANUL – unghiul cu vârful în centrul unei sfere care
delimitează pe suprafaţa sferei o arie egală cu aria unui
pătrat cu latura egală cu raza sferei.
Unităţile de măsură ale mărimilor derivate se stabilesc cu ajutorul formulelor de
definiţie.
Pentru multiplii şi submultiplii diferitelor unităţi se folosesc următoarele prefixe:
Multipli Prefix Unităţi Submultipli Prefix Unităţi
deca da 10 deci d 10-1
hecto h 102
centi c 10-2
kilo k 103
mili m 10-3
mega M 106
micro 10-6
giga G 109
nano n 10-9
tera T 1012
pico p 10-12
peta P 1015
femto f 10-15
exa E 1018
atto a 10-18
Formule dimensionale
Dacă notăm cu L, M, T unităţile mărimilor fundamentale: lungime, masă şi
timp, atunci pentru oricare unitate mecanică avem ecuaţia:

α β γA L M T (4)
numită ecuaţie de dimensiuni sau formulă dimensională a mărimii A faţă de
mărimile fundamentale alese.
Exponenţii , , sunt numere întregi pentru mărimi mecanice.
Constantele care intervin în legile fizicii pot fi atât dimensionale, cât şi
adimensionale (în ultimul caz nu intervin în formula dimensională).
Deoarece nu se pot aduna sau egala decât mărimi fizice de aceeaşi natură,
fiecare formulă fizică trebuie să fie omogenă din punct de vedere dimensional,
adică ambii membri ai egalităţii, cât şi fiecare termen al unei sume algebrice,
trebuie să aibă aceleaşi dimensiuni fizice, altfel formula n-are sens. Acesta este
principiul omogenităţii dimensionale a formulelor fizice.
Analiza dimensională. Principiul omogenităţii dimensionale a formulelor
fizicii ne permite să găsim chiar forma unor legi fizice. De exemplu, ştiind din
experienţe că perioada unui pendul simplu gravitaţional depinde de lungimea sa l şi
de acceleraţia gravitaţională g, scriem:
α βT const. l g (5)
unde şi sunt constante. Trecând la dimensiuni:
β
α 2 α β 2βT L L T L T (6)
Prin identificarea exponenţilor, găsim:
1 1
α β 0; 1 -2β β - ; α2 2
(7)
l
T constg
(8)
unde const este o constantă adimensională de ordinul unităţii 2 .
Calculul erorilor de măsură
Se ştie că măsurarea repetată a unei mărimi fizice în condiţii identice nu
conduce la acelaşi rezultat. Abaterea valorii măsurate de la adevărata ei valoare se
numeşte eroare de măsurare. Această abatere nu poate fi eliminată complet
niciodată. Erorile se clasifică în:
1. Erori grosolane sau greşeli, datorită unor accidente în măsurare;
2. Erori sistematice, care se repetă în aceeaşi măsură la fiecare măsurătoare,
fiind determinate de instrumentele de măsură;
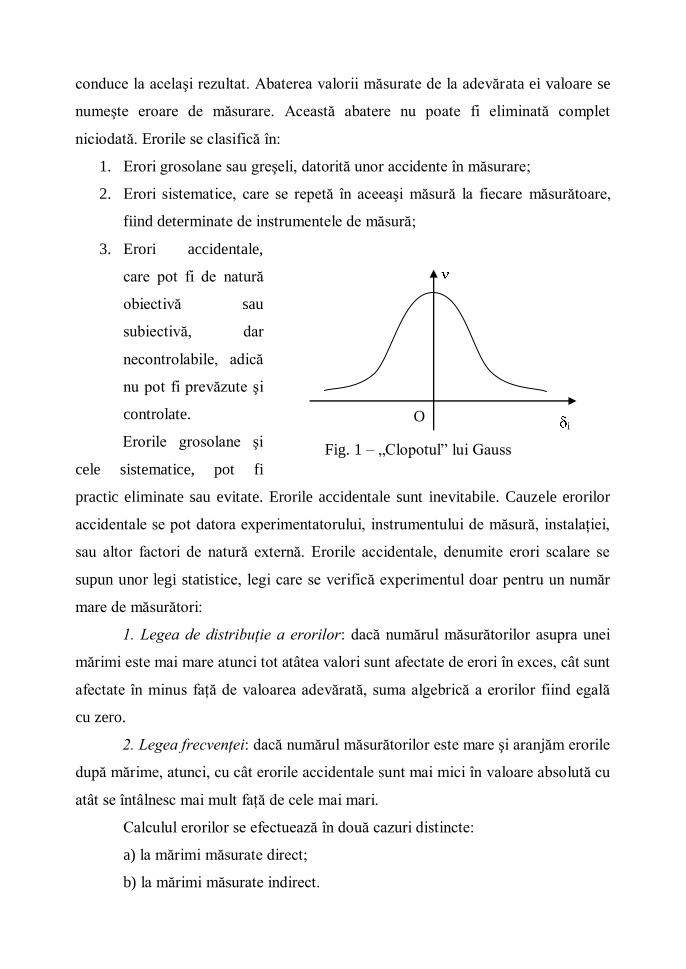
3. Erori accidentale,
care pot fi de natură
obiectivă sau
subiectivă, dar
necontrolabile, adică
nu pot fi prevăzute şi
controlate.
Erorile grosolane şi
cele sistematice, pot fi
practic eliminate sau evitate. Erorile accidentale sunt inevitabile. Cauzele erorilor
accidentale se pot datora experimentatorului, instrumentului de măsură, instalaţiei,
sau altor factori de natură externă. Erorile accidentale, denumite erori scalare se
supun unor legi statistice, legi care se verifică experimentul doar pentru un număr
mare de măsurători:
1. Legea de distribuţie a erorilor: dacă numărul măsurătorilor asupra unei
mărimi este mai mare atunci tot atâtea valori sunt afectate de erori în exces, cât sunt
afectate în minus faţă de valoarea adevărată, suma algebrică a erorilor fiind egală
cu zero.
2. Legea frecvenţei: dacă numărul măsurătorilor este mare şi aranjăm erorile
după mărime, atunci, cu cât erorile accidentale sunt mai mici în valoare absolută cu
atât se întâlnesc mai mult faţă de cele mai mari.
Calculul erorilor se efectuează în două cazuri distincte:
a) la mărimi măsurate direct;
b) la mărimi măsurate indirect.
i
O
Fig. 1 – „Clopotul” lui Gauss

a) Calculul erorilor la mărimi măsurate direct
Dacă asupra unei mărimi de valoare reală x, se efectuează n măsurători
directe obţinându-se valorile xi i 1, n , erorile reale pentru fiecare măsurătoare
sunt:
i iδ x x (9)
Deoarece valoarea reală a mărimii măsurate (x) nu se cunoaşte, nu pot fi
determinate nici erorile reale. Problema ce se pune este de a găsi cu ajutorul
rezultatelor experimentale o valoare a mărimii măsurate care să fie cât mai aproape
de valoarea adevărată.
Metoda celor mai mici pătrate – la baza acestei metode se află teorema
mediei aritmetice care arată că valoarea cea mai bună, care poate exprima valoarea
reală a unei mărimi măsurate de un număr de ori, este media aritmetică a valorilor
obţinute, numită valoare medie. Pentru acest fapt, în practică, în locul erorii reale,
se foloseşte eroarea aparentă, pe care o notăm Vi, numită şi eroare reziduală.
Eroarea Vi a unei măsurători se exprimă prin abaterea valorii experimentale xi faţă
de valoarea medie a rezultatelor măsurătorii, adică:
i iV x x, i 1,n (10)
Deoarece, conform legii distribuţiei erorilor:
n
i
n i 1
V0
nlim (11)
rezultă că nu este convenabil să operăm cu erori aparente. În locul acestora se
folosesc erori aparente absolute (erori absolute):
i ix x , i 1,n (12)
unde n este numărul determinărilor efectuate.
Pentru aprecierea măsurătorilor efectuate în sensul cunoaşterii gradului de
precizie se folosesc o serie de mărimi statistice specifice şi anume:

1) Eroarea medie:
n2
i
i 1mn
(13)
2) Eroarea pătratică medie:
n2
i
i 1Sn n 1
(14)
3) Eroarea probabilă:
2
R S3
(15)
4) Eroarea limită:
L 3S (16)
Rezultatul măsurătorilor efectuate asupra mărimii x, se exprimă prin
valoarea medie x, determinată, indicându-se eroarea de măsură E, adică:
x x E S,R,L (17)
Felul erorii folosite în exprimarea mărimii x indică intervalul de precizie
folosit în măsurătoare.
Erorile prezentate sunt erori absolute şi se exprimă în aceleaşi unităţi de
măsură, ca şi mărimile fizice respective. În afară de erori absolute se mai folosesc
şi erori relative, definite prin raportul dintre eroarea absolută şi valoarea medie a
mărimii măsurate. Aceste erori se exprimă în numere zecimale sau în procente.
Astfel avem:
a) eroarea pătratică medie relativă ( s):
s s
S S; (%) 100;
x x (18)
b) eroarea probabilă relativă:
R
Rε
x (19)
c) eroarea limită relativă ( L):

L
Lε
x (20)
Erorile relative indică în procente gradul de precizie cu care s-au efectuat
determinările.
O măsurătoare este bine efectuată dacă eroarea relativă nu depăşeşte 1%.
b) Calculul erorilor la mărimi măsurate indirect
În cazul măsurătorilor indirecte, se pune problema stabilirii legăturii între
erorile mărimilor măsurabile direct şi erorile mărimii ce se determină indirect cu
ajutorul formulei. Presupunem că avem o mărime z, exprimată prim mărimile xi
( i 1,k ) .
z = f(x1, x2, x3, ..., xk)
Dacă x1, x2, x3, ..., xk sunt erorile mărimilor x1, x2, x3, ..., xk atunci
avem:
1 1 2 2 ( , , ..., )k kz z f x x x x x x (21)
Valorile erorilor fiind mici în comparaţie cu valorile mărimilor putem
dezvolta funcţia (21) în serie Taylor:
1 2 k 1 2 k
1 2 k
2
1 2 k
1 2 k
f f fz Δz f x ,x ,...,x x x ... x
x x x
1 f f fx x ... x ...
2! x x x
(22)
Dacă se neglijează termenii de ordin superior, obţinem expresia erorii
absolute a funcţiei z:
1 21 2
... kk
f f fz x x x
x x x (23)
Teoria erorilor arată că, făcându-se asupra fiecărei mărimi xi ( i 1,n ), care
este cuprinsă în formulele (23), direct în număr mare de determinări, respectiv n1
pentru mărimea x1, n2 pentru x2, etc., avem:

22
z 1 k1 k
f fS S ... S
x x (24)
unde:
1
1
1
k
k
k
n2
i
i 1
1 1 1
1 1
n2
i
i 1
k k k
k k
x
S ( i 1,n )n n 1
x
S ( i 1,n )n n 1
Cunoscând eroarea pătratică medie putem determina valoarea celorlalte erori R şi
L.
Mărimea măsurată în funcţie de intervalul de încredere şi gradul de precizie
dorit se exprimă prin:
z z E( R,L,S ) unde 1 2 kz f x , x , ..., x
şi
z
E( R,L,S )
z (25)
Pentru un anumit grad de precizie al măsurătorilor la măsurarea diferitelor
mărimi, se folosesc instrumente cu o anumită precizie, dată de cea mai mică
diviziune ce poate fi citită pe instrument.
Capitolul I
Elemente de cinematica punctului material
Mecanica – acea ramură a fizicii care se ocupă cu studiul mişcării
corpurilor şi cu stabilirea condiţiilor în care corpurile se află în echilibru.
Cinematica – studiul modului în care se efectuează mişcarea, fără a se
cerceta cauzele mişcării.
Dinamica – studiul mişcării ca efect al acţiunii unor forţe.
Statica – studiul condiţiilor în care corpurile sunt în echilibru sub acţiunea
forţelor aplicate.
I.1 Cinematica punctului material
Mişcarea mecanică – schimbarea poziţiei unui corp faţă de un alt corp
considerat fix.
Sistem de referinţă. Corpul care se consideră prin convenţie fix şi faţă de
care se studiază mişcarea altor corpuri se numeşte corp de referinţă. De corpul de
referinţă este legat rigid un sistem de coordonate, de exemplu: un sistem ortogonal
de 3 axe. Pentru măsurarea timpului trebuie ales un proces periodic, de exemplu:
oscilaţiile unui pendul. Sistemul de coordonate pentru măsurarea poziţiei şi
ceasornicul pentru măsurarea timpului constituie un sistem de referinţă sau reper
(SR).
Mişcarea unui corp arată în general diferit în sisteme de referinţă diferite.
Se alege întotdeauna un sistem de referinţă astfel încât fenomenul studiat să arate
cât mai simplu. De exemplu, dacă studiem mişcarea satelitului natural al
Pământului, Luna, faţă de Pământ (sistem de referinţă legat de Pământ) traiectoria
ei este o elipsă pe când dacă am studia mişcarea lunii faţă de Soare (sistem de
referinţă legat de Soare) traiectoria este sub forma unui tor.
Punct material. Mobil. O primă simplificare este neglijarea deformării
corpului, adică considerarea corpului rigid (distanţele mutuale dintre părţile
corpului presupuse fixe). Dar chiar şi aşa, mişcarea este complexă. De aceea se
studiază mai întâi mişcarea unui corp ale cărui dimensiuni (deci şi rotaţii proprii)
sunt neglijabile în problema dată. Acesta este punctul material, caracterizat numai
prin masa sa. În cinematică masa nu interesează, de aceea punctul material îl vom
numi mobil, adică un punct geometric care se mişcă. Un corp oarecare poate fi
considerat acum ca un sistem de puncte materiale.
Traiectoria. Ecuaţiile mişcării. Se numeşte traiectorie curba descrisă de
mobil în timpul mişcării sale, adică locul geometric al punctelor prin care trece
mobilul.
Traiectoria poate fi rectilinie sau curbilinie (în particular, circulară). Forma
traiectoriei depinde de sistemul de coordonate folosit.
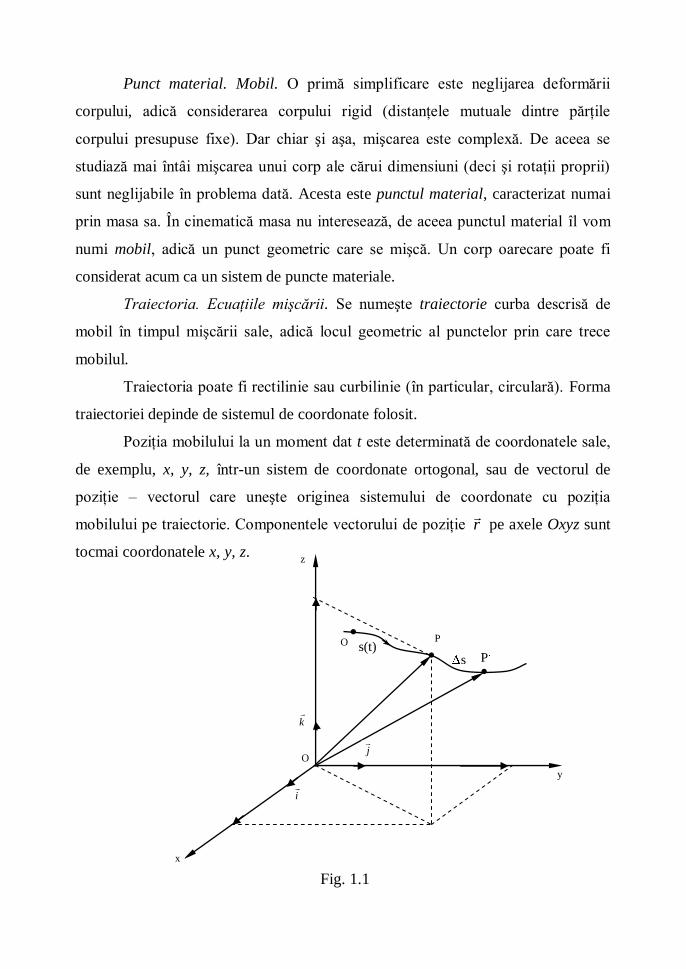
Poziţia mobilului la un moment dat t este determinată de coordonatele sale,
de exemplu, x, y, z, într-un sistem de coordonate ortogonal, sau de vectorul de
poziţie – vectorul care uneşte originea sistemului de coordonate cu poziţia
mobilului pe traiectorie. Componentele vectorului de poziţie r
pe axele Oxyz sunt
tocmai coordonatele x, y, z.
y
s
x
z
O
O s(t) P
P
k
i
j
Fig. 1.1

2 2 2 2
r xi yj zk
r x y z
i , j ,k
- versorii axelor, i j k 1
2 2 2i j k 1; i . j j .k k .i 0
i i j j k k 0; i j k ; j k i ;k i j
Coordonatele punctului material x, y, z sunt funcţii finite, uniforme şi continue de
timp:
1 2 3x f t ; y f t ; z f t (1.1)
1 2 3r xi yj zk f t i f t j f t k r t
(1.2)
Cele trei ecuaţii (1.1) se numesc ecuaţii cinematice ale mişcării şi reprezintă
ecuaţiile parametrice ale traiectoriei, în care parametrul este timpul. Prin eliminarea
timpului din (1.1)se obţin ecuaţiile traiectoriei:
1 2F x,y,z 0; F x,y,z 0 (1.3)
Fiecare ecuaţie de aici reprezintă o suprafaţă, iar ansamblul lor reprezintă curba de
intersecţie a celor două suprafeţe.
Mişcarea poate fi descrisă cu ajutorul traiectoriei (1.3) şi a legii de mişcare
pe această traiectorie, numită legea spaţiului (deci tot trei ecuaţii)
s f t (1.4)
unde s este coordonata curbilinie de-a lungul traiectoriei mobilului, adică lungimea
arcului de traiectorie măsurată de la un punct origine O de pe traiectorie, ţinând
seama de sensul pozitiv ales pe curbă.
I.1.1 Viteza şi acceleraţia. Tipuri de mişcări ale punctului material
a) Viteza. Vectorul viteză
Presupunem că un mobil M se mişcă pe o traiectorie (C). Fie M1 şi M2 două
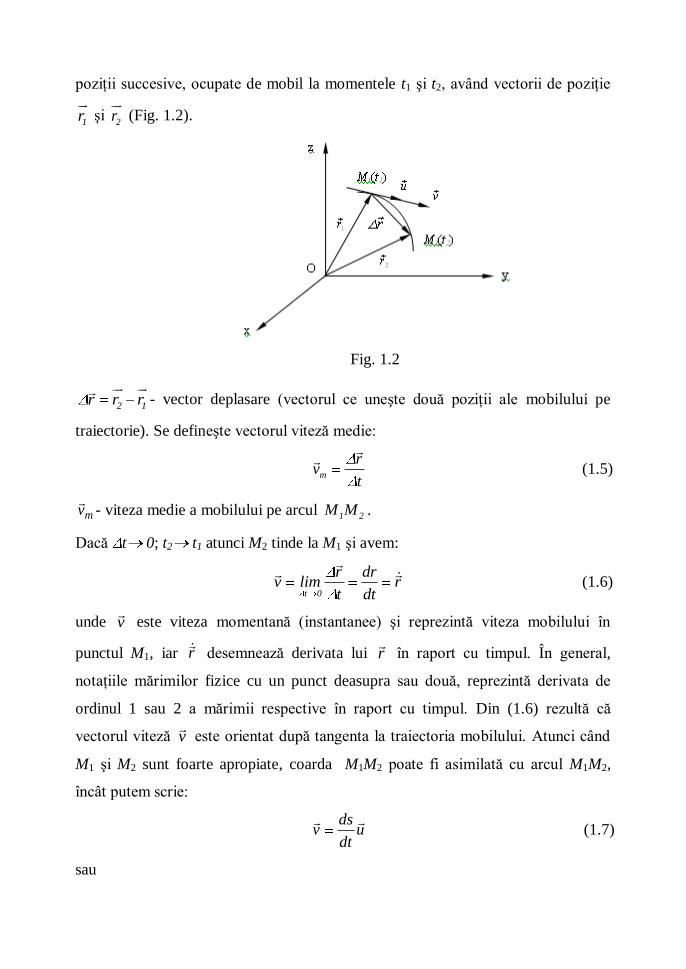
poziţii succesive, ocupate de mobil la momentele t1 şi t2, având vectorii de poziţie
1r
şi 2r
(Fig. 1.2).
2 1r r r
- vector deplasare (vectorul ce uneşte două poziţii ale mobilului pe
traiectorie). Se defineşte vectorul viteză medie:
m
rv
t
(1.5)
mv
- viteza medie a mobilului pe arcul 1 2M M .
Dacă t 0; t2 t1 atunci M2 tinde la M1 şi avem:
t 0
r drv lim r
t dt
(1.6)
unde v
este viteza momentană (instantanee) şi reprezintă viteza mobilului în
punctul M1, iar r desemnează derivata lui r
în raport cu timpul. În general,
notaţiile mărimilor fizice cu un punct deasupra sau două, reprezintă derivata de
ordinul 1 sau 2 a mărimii respective în raport cu timpul. Din (1.6) rezultă că
vectorul viteză v
este orientat după tangenta la traiectoria mobilului. Atunci când
M1 şi M2 sunt foarte apropiate, coarda M1M2 poate fi asimilată cu arcul M1M2,
încât putem scrie:
ds
v udt
(1.7)
sau
Fig. 1.2
v v u
(1.8)
u
- fiind versorul tangentei în punctul în care este definită viteza v
,
iar ds
vdt
- modulul vitezei.
Dacă mişcarea este raportată la un sistem cartezian atunci:
x y zv v i v j v k
(1.9)
sau
v xi yj zk (1.10)
unde:
x y z
dx dy dzv x ; v y ; v z
dt dt dt (1.11)
reprezintă coordonatele vitezei după cele trei axe, modulul vectorului viteză fiind
dat de relaţia:
2 2 2
x y zv v v v (1.12)
În sistemul internaţional unitatea de măsură pentru viteză este:
1v LT ; v 1m / s (1.13)
Pentru a obţine legea de mişcare se porneşte de relaţia de definiţie a vitezei:
ds
v ds v dtdt
(1.14)
şi integrând în ambii membri avem:
0 0 0
0
s t t
2 2 2
0 x y z
s t t
t
2 2 2
0
t
ds v dt; s s v v v dt
s s x y z dt
(1.15)
Mişcarea rectilinie uniformă
Mişcarea rectilinie uniformă este mişcarea la care vectorul viteză este
constant în timp (traiectoria este dreaptă iar modulul vitezei este constant).
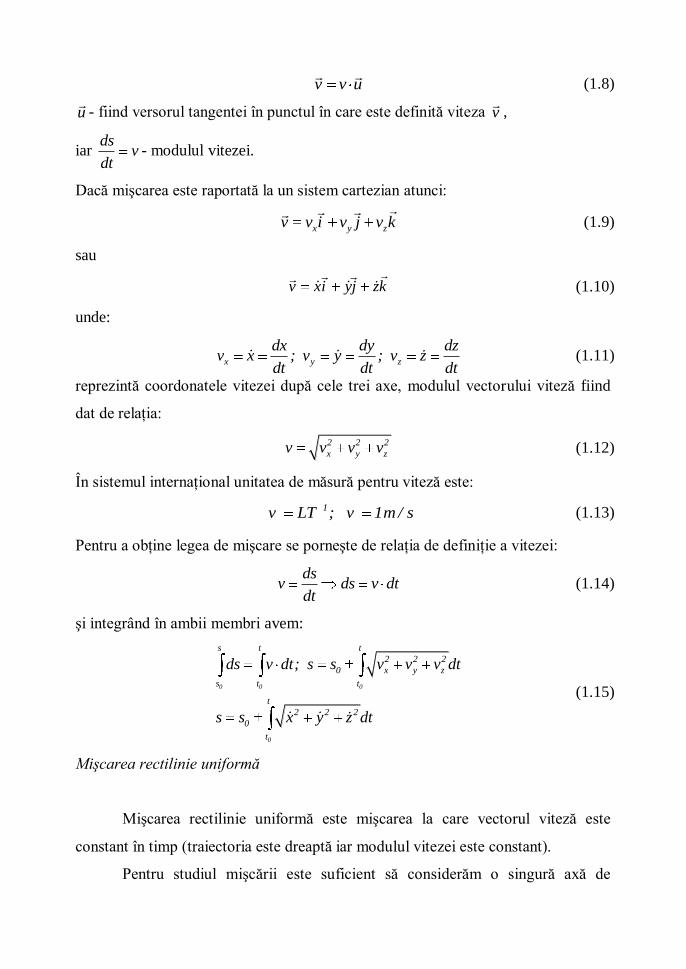
Pentru studiul mişcării este suficient să considerăm o singură axă de
coordonate a cărei direcţie şi sens să coincidă cu direcţia şi sensul de mişcare a
mobilului. Fie aceasta axa Ox ,iar M0 şi M două puncte de pe traiectorie unde se
găsesc mobilele la momentele de timp t0 şi t, 0r
respectiv r
fiind vectorii de
poziţie ale punctelor M0 respectiv M (Fig. 1.3).
Expresia dr
vdt
în urma integrării devine:
0
t
0
t
r r vdt
Ţinând seama de faptul că în cazul mişcării rectilinii uniforme vectorul viteză este
constant din relaţia de mai sus obţinem legea mişcării rectilinii uniforme sub formă
vectorială:
0 0r r v t t
(1.16)
sau proiectând această ecuaţie pe axa Ox avem:
0 0x x v t t (1.17)
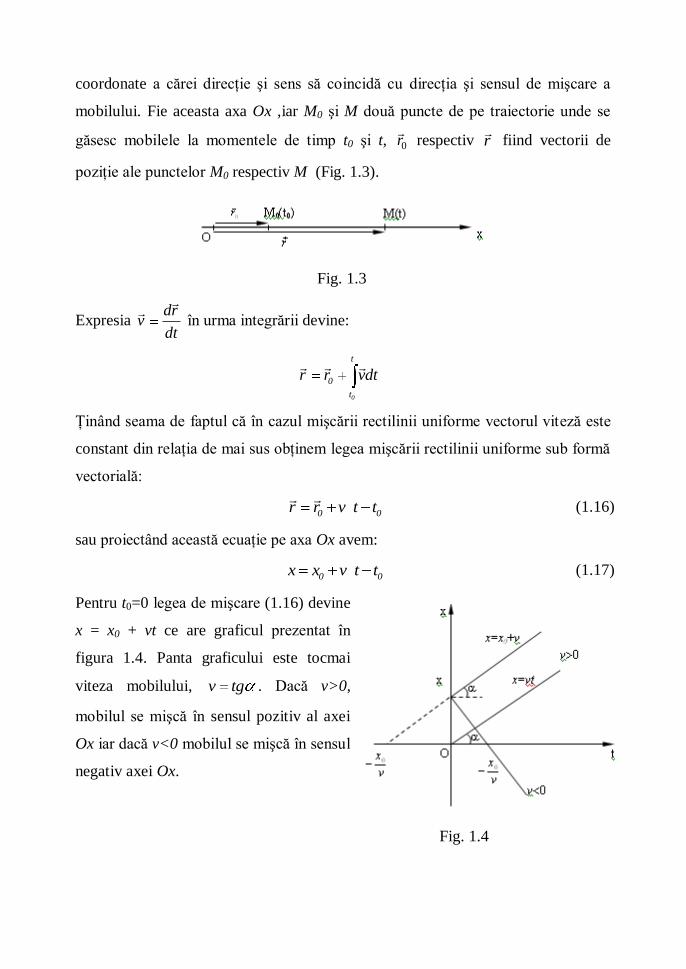
Pentru t0=0 legea de mişcare (1.16) devine
x = x0 + vt ce are graficul prezentat în
figura 1.4. Panta graficului este tocmai
viteza mobilului, v tg . Dacă v>0,
mobilul se mişcă în sensul pozitiv al axei
Ox iar dacă v<0 mobilul se mişcă în sensul
negativ axei Ox.
Fig. 1.3
Fig. 1.4
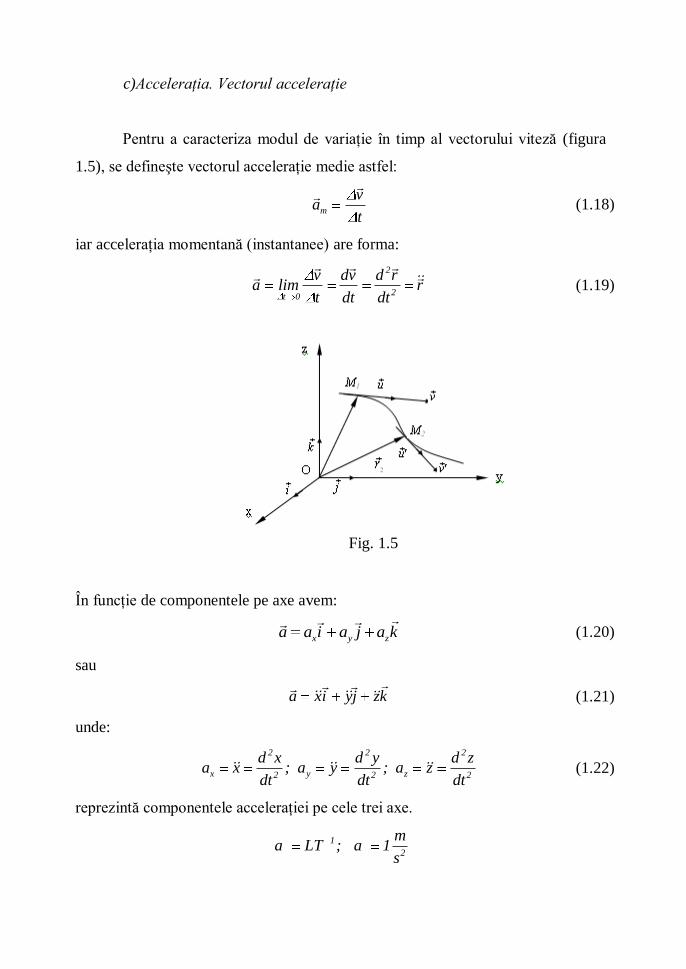
c)Acceleraţia. Vectorul acceleraţie
Pentru a caracteriza modul de variaţie în timp al vectorului viteză (figura
1.5), se defineşte vectorul acceleraţie medie astfel:
m
va
t
(1.18)
iar acceleraţia momentană (instantanee) are forma:
2
2t 0
v dv d ra lim r
t dt dt
(1.19)
În funcţie de componentele pe axe avem:
x y za a i a j a k
(1.20)
sau
a xi yj zk (1.21)
unde:
2 2 2
x y z2 2 2
d x d y d za x ; a y ; a z
dt dt dt (1.22)
reprezintă componentele acceleraţiei pe cele trei axe.
1
2
ma LT ; a 1
s
Fig. 1.5
Se constată că vectorul acceleraţie este dat de variaţia vectorului viteză în
timp. Aşadar avem acceleraţie atunci când avem o variaţie a vectorului viteză, prin
aceasta înţelegând fie variaţia direcţiei, fie variaţia modulului sau ambele.
Dacă mişcarea este rectilinie atunci vectorul viteză nu variază în direcţie. În
acest caz putem vorbi de acceleraţie doar dacă avem o variaţie a modulului
vectorului viteză. Dacă modulul vectorului viteză creşte v v, v 0 atunci a 0 şi
spunem că avem o mişcare rectilinie accelerată; dacă modulul vectorului viteză
scade în timp, adică v v, v 0 atunci a 0 putem afirma că avem o mişcare
rectilinie încetinită (frânată).
Dacă acceleraţia este constantă în timp a const.
şi traiectoria este dreaptă
avem de-a face cu o mişcare rectilinie uniform variată.
Dacă a 0 se pune în evidenţă o mişcare rectilinie uniform accelerată, iar
pentru a 0 o mişcare rectilinie uniform încetinită.
Mişcarea fiind rectilinie pentru studiul mişcării este suficient să ne alegem o
singură axă care să coincidă cu direcţia şi sensul de mişcare.
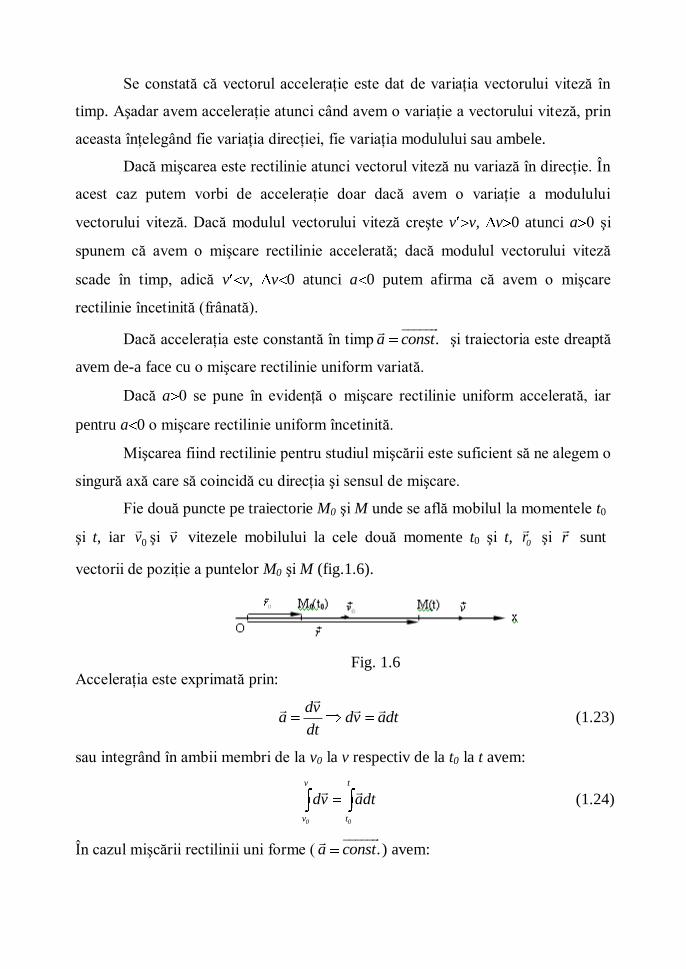
Fie două puncte pe traiectorie M0 şi M unde se află mobilul la momentele t0
şi t, iar 0v
şi v
vitezele mobilului la cele două momente t0 şi t, 0r
şi r
sunt
vectorii de poziţie a puntelor M0 şi M (fig.1.6).
Acceleraţia este exprimată prin:
dv
a dv adtdt
(1.23)
sau integrând în ambii membri de la v0 la v respectiv de la t0 la t avem:
0 0
v t
v t
dv adt
(1.24)
În cazul mişcării rectilinii uni forme ( a const.
) avem:
Fig. 1.6

0 0v v a t t
(1.25)
0 0v v a t t (1.26)
Relaţia (1.25) reprezintă legea vitezei în cazul mişcării rectilinii uniform
variate. Reprezentarea grafică a legii vitezei pentru t0=0 este dată în figura 1.7.
Panta graficului este tocmai acceleraţia mobilului, tg =a, iar aria mărginită de
graficul vitezei reprezintă deplasarea Δx.
Pentru a găsi legea mişcării rectilinii uniform variate pornim de la legea vitezei pe
care o integrăm în ambii membri:
0 0
0
x t
x t
t
0 0 0
t
2
0
0 0 0
dxv dx vdt
dt
dx vdt
x x v a t t dt
a t tx x v t t
2
de unde reiese:
2
0
0 0 0
a t tx x v t t
2 (1.27)
(1.26) este legea mişcării rectilinii uniforme, unde:
Fig. 1.7
x – coordonata mobilului la momentul t oarecare,
x0 – coordonata mobilului la momentul iniţial t0,
v0 – viteza iniţială, la momentul t0,
v – viteza mobilului la momentul t oarecare.
Pentru t0=0 ecuaţia (1.27) devine:
2
0 0
atx x v t
2 (1.28)
x – x0 = s – reprezintă spaţiul parcurs de mobil în timpul t
2
0
ats v t
2 (1.29)
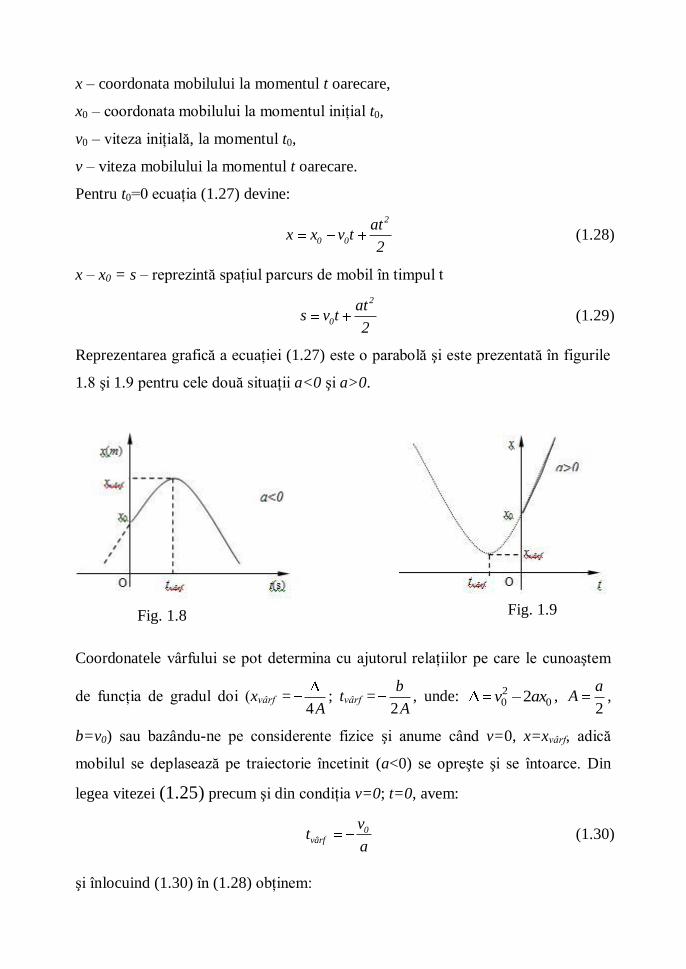
Reprezentarea grafică a ecuaţiei (1.27) este o parabolă şi este prezentată în figurile
1.8 şi 1.9 pentru cele două situaţii a<0 şi a>0.
Coordonatele vârfului se pot determina cu ajutorul relaţiilor pe care le cunoaştem
de funcţia de gradul doi (xvârf =4A
; tvârf =2
b
A, unde: 2
0 02v ax , 2
aA ,
b=v0) sau bazându-ne pe considerente fizice şi anume când v=0, x=xvârf, adică
mobilul se deplasează pe traiectorie încetinit (a<0) se opreşte şi se întoarce. Din
legea vitezei (1.25) precum şi din condiţia v=0; t=0, avem:
0vârf
vt
a (1.30)
şi înlocuind (1.30) în (1.28) obţinem:
Fig. 1.8 Fig. 1.9

0vârf 0
vx x
2a (1.31)
Pentru a>0 parabola are vârful în jos, xvârf < x0.
Dacă din ecuaţiile (1.26) şi (1.27) eliminăm timpul obţinem viteza
mobilului funcţie de coordonata lui pe traiectorie, adică formula lui Galilei:
2 2
0 0v v 2a x x (1.32)
Dacă mişcarea nu este rectilinie atunci avem şi o variaţie a direcţiei vectorului
viteză ceea ce duce la existenţa a două componente ale acceleraţiei mobilului şi
anume o componentă datorată variaţiei modulului vectorului viteză, care este
tangentă la traiectorie, numită acceleraţie tangenţială ta
şi o componentă datorată
variaţiei direcţiei vectorului viteză, perpendiculară pe tangenta la traiectorie în
punctul în care este definită acceleraţia, numită acceleraţie normală na
.
Ştim că v v u
unde u
este versorul tangentei la traiectorie în punctul în
care este definită viteza şi din dv
adt
avem:
d dv du
a vu u vdt dt dt
(1.33)
Relaţia (1.33) ne arată că vectorul acceleraţie este o sumă de doi vectori:
primul vector având acelaşi versor ca vectorul viteză
t t
dv dva u; a
dt dt
reprezintând componenta tangenţială a acceleraţiei, iar cel de-al doilea vector fiind
perpendicular pe primul (u fiind vector unitar 2
u 1
, prin derivare avem:
du2u 0
dt
ceea ce arată că vectorii u
şi du
dt
au direcţii perpendiculare), este
orientat după normala principală la traiectorie în punctul considerat şi reprezintă
componenta normală, na
, a acceleraţiei:
n
dua v
dt
(1.34)
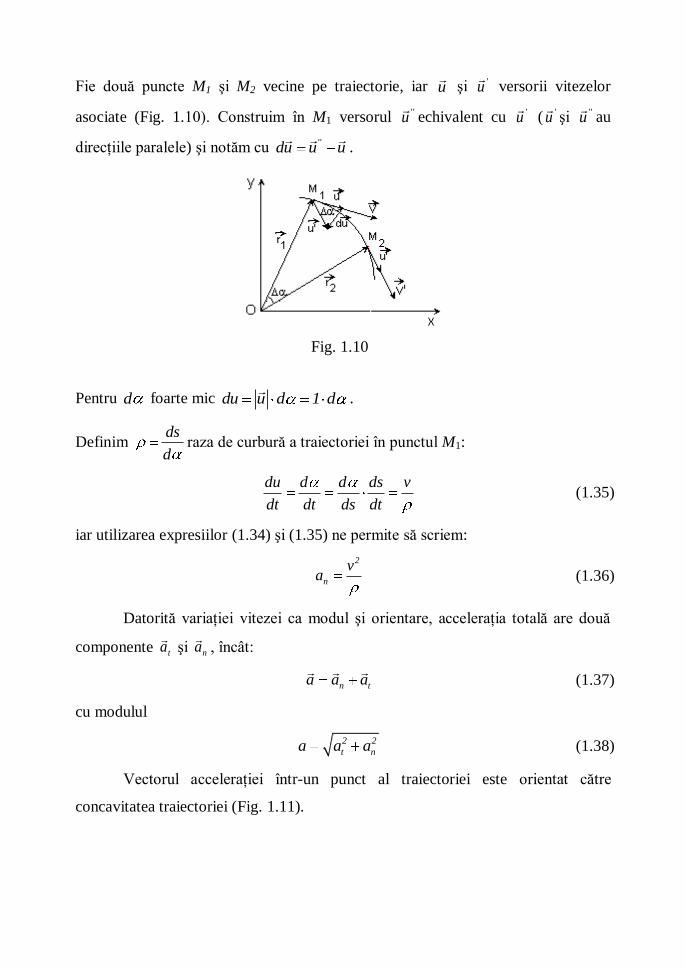
Fie două puncte M1 şi M2 vecine pe traiectorie, iar u
şi 'u
versorii vitezelor
asociate (Fig. 1.10). Construim în M1 versorul ''u
echivalent cu 'u
( 'u
şi ''u
au
direcţiile paralele) şi notăm cu ''du u u
.
Pentru d foarte mic du u d 1 d
.
Definim ds
draza de curbură a traiectoriei în punctul M1:
du d d ds v
dt dt ds dt (1.35)
iar utilizarea expresiilor (1.34) şi (1.35) ne permite să scriem:
2
n
va (1.36)
Datorită variaţiei vitezei ca modul şi orientare, acceleraţia totală are două
componente ta
şi na
, încât:
n ta a a
(1.37)
cu modulul
2 2
t na a a (1.38)
Vectorul acceleraţiei într-un punct al traiectoriei este orientat către
concavitatea traiectoriei (Fig. 1.11).
Fig. 1.10
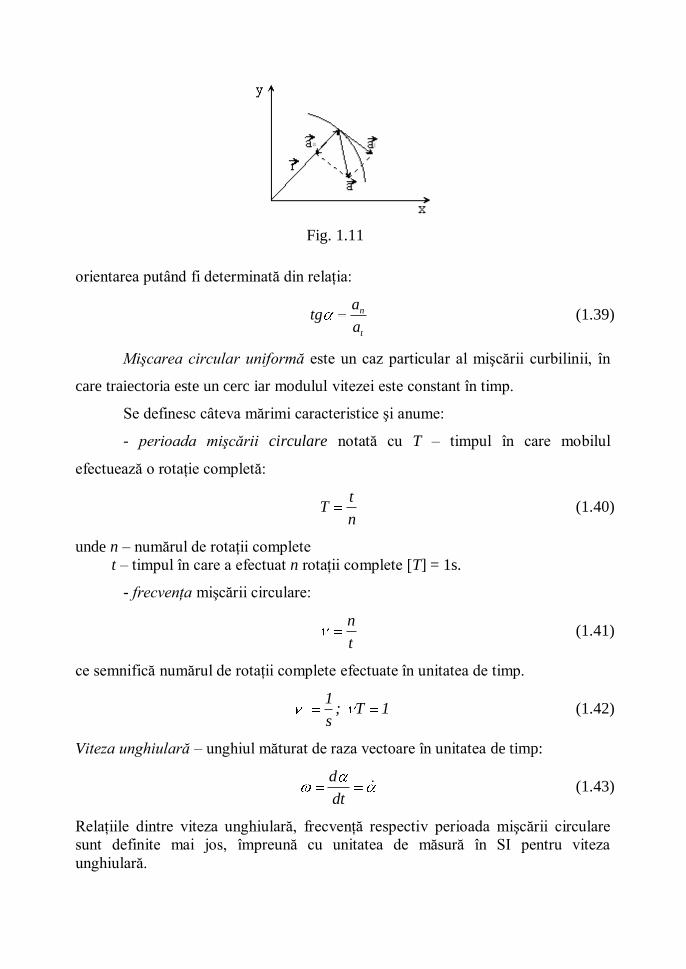
orientarea putând fi determinată din relaţia:
n
t
atg
a (1.39)
Mişcarea circular uniformă este un caz particular al mişcării curbilinii, în
care traiectoria este un cerc iar modulul vitezei este constant în timp.
Se definesc câteva mărimi caracteristice şi anume:
- perioada mişcării circulare notată cu T – timpul în care mobilul
efectuează o rotaţie completă:
t
Tn
(1.40)
unde n – numărul de rotaţii complete
t – timpul în care a efectuat n rotaţii complete [T] = 1s.
- frecvenţa mişcării circulare:
n
t (1.41)
ce semnifică numărul de rotaţii complete efectuate în unitatea de timp.
1
; T 1s
(1.42)
Viteza unghiulară – unghiul măturat de raza vectoare în unitatea de timp:
d
dt (1.43)
Relaţiile dintre viteza unghiulară, frecvenţă respectiv perioada mişcării circulare
sunt definite mai jos, împreună cu unitatea de măsură în SI pentru viteza
unghiulară.
Fig. 1.11

0
22 ; v v
T
rad1
s
Integrând (1.43) obţinem legea mişcării circular uniforme (figura 1.12):
0
t
0
t
x t
d dt
dt
iar pentru - const. (mişcare circulară uniformă) relaţiile anterioare se reduc la:
0 0t t (1.44)
cu acceleraţia corespunzătoare mobilului
n ta a a
Pentru mişcarea circulară uniformă acceleraţia tangenţială va căpăta forma:
t
t
dva u
dta 0
dv0
dt
(1.45)
Din (1.37) şi (1.45) reiese
na a
(1.46)
În timp ce acceleraţia normală este dată de relaţia 2
n
va n
unde n
reprezintă
normala la traiectorie.
Fig. 1.12 Fig. 1.13
Aşadar pentru mişcarea circulară = r – raza de curbură a traiectoriei (a cercului)
se poate scrie:
2 2
n n
v va n; a
r r
2
n
va a
r (1.47)
acceleraţia dată de (1.47) fiind orientată spre centrul de curbură al traiectoriei şi
poartă numele de acceleraţie centripetă:
2
cp
va
r (1.48)
Expresia vitezei liniare în funcţie de viteza unghiulară şi de raza cercului descris
este de forma:
( )ds d r d
v r rdt dt dt
(1.49)
vectorul viteză unghiulară
având dreapta suport perpendiculară pe planul
cercului (traiectoriei) şi sensul dat de regula burghiului. Din figura (1.13) se
observă că:
v r
(1.50)
Mişcarea circulară uniform variată
În acest caz viteza unghiulară nu este constantă în timp, iar pentru
acceleraţia tangenţială, utilizând relaţia (1.49) avem:
( )
;t t
dv d r da a r
dt dt dt
2
2
d d
dt dt (1.51)
unde cu am notat acceleraţia unghiulară. Unitatea de acceleraţie unghiulară este
egală cu acceleraţia unghiulară a unui mobil aflat în mişcare circulară uniform
accelerată a cărui viteză unghiulară creşte cu o unitate (1rad/s) într-un interval de
timp egal cu unitatea (1s):
[ ]2
rad1
s
Folosind relaţiile obţinute până acum putem scrie pentru acceleraţia tangenţială,
acceleraţia normală respectiv totală, expresiile:
t
22
n
2 2n t
a r
va r
r
a a a
(1.52)
Acceleraţia mobilului în funcţie de raza cercului descris, acceleraţia unghiulară şi
viteza unghiulară poate fi redată sub forma:
2 4a r (1.53)
Integrând în ambii membri relaţia (1.51) putem scrie:
( )0 0t t (1.54)
Utilizând definiţia lui :
d
dt
şi integrând de la t0 la t şi de la 0 la avem:
0
t
0t
dt (1.55)
Comparând ecuaţiile (1.54) şi (1.55) reiese:
( )0 0
t t
0 0 0t t
dt t t dt
respectiv
( )
( )2
00 0 0
t tt t
2 (1.56)
Eliminând acum timpul din ecuaţiile (1.54) şi (1.56) rezultă:
( )2 20 02 (1.57)
în timp ce numărul de rotaţii efectuate este dat de:

0N2
(1.58)
Având în vedere elementele expuse se poate observa o analogie între mişcarea
circulară (uniformă, uniform variată etc.) şi mişcarea rectilinie corespunzătoare
(uniformă, uniform variată etc.), mai exact între mărimile unghiulare şi cele liniare.
Respectivele relaţii de legătură dintre aceste mărimi sunt incluse în tabelul de mai
jos.
Analogia dintre mărimile liniare şi mărimile unghiulare
Mişcarea rectilinie
(mărimi liniare )
Mişcarea circulară
(mărimi unghiulare)
s Θ
t T
v s
0s s vt 0 t
a v s
0v v at 0 t
2
0 0
ats s v t
2
2
0 0
tt
2
2 20v v 2as 2 2
0 2 t
0v vs t
2 0 t
2
CAPITOLUL II
Elemente de dinamica punctului material. Principiile mecanicii
clasice, mărimi dinamice, energie mecanică, impulsul mecanic, legi
de conservare, ciocniri
Dinamica este capitolul mecanicii care studiază cauzele mişcării corpurilor
încercând să răspundă la întrebarea de ce un anumit corp este: în repaus, în mişcare
rectilinie uniformă, uniform variată, circulară etc.
II.1 Principiile dinamicii
Inerţia – proprietatea unui corp de a-şi menţine starea de repaus sau de
mişcare rectilinie şi uniformă, în absenţa acţiunilor exterioare, sau de a se opune la
orice acţiune exterioară care caută să-i schimbe starea de mişcare.
O măsură a inerţiei este masa inerţială. Pe lângă aceasta în literatura de
specialitate se specifică şi masa gravitaţională care reprezintă o măsură a
interacţiunii gravitaţionale dintre două corpuri. Masa inerţială şi masa
gravitaţională ale unui corp sunt două mărimi fizice, cu semnificaţii fizice diferite
deoarece ele caracterizează proprietăţi diferite ale aceluiaşi corp. Se demonstrează,
teoretic şi experimental, că pentru un acelaşi corp, cele două mase sunt egale,
mi=mg=m, astfel încât, pentru simplitate, vom vorbi despre masa unui corp.
[m]=1kg
Principiul I (principiul inerţiei)
Un punct material îşi păstrează starea de mişcare rectilinie şi uniformă sau de
repaus relativ atât timp cât asupra sa nu acţionează alte corpuri care să-i schimbe
această stare.

Sistemele de referinţă în care este valabil principiul inerţiei se numesc sisteme de
referinţă inerţiale. Orice sistem de referinţă care se mişcă rectiliniu şi uniform faţă
de un sistem de referinţă inerţial este de asemenea un sistem de referinţă inerţial.
Interacţiunea desemnează acţiunea reciprocă dintre două corpuri, iar forţa este
măsura interacţiunii.
Forţele produc efecte statice de deformare a corpurilor (sau de echilibrare a
altor forţe) şi efecte dinamice de modificare a vitezei adică de creare a
acceleraţiilor.
Principiul II (principiul fundamental)
Dacă rezultanta forţelor ce acţionează asupra punctului material este
diferită de zero şi constantă atunci aceasta determină corpului o acceleraţie
constantă ce are aceeaşi direcţie şi sens cu rezultanta forţelor şi a cărui modul este
direct proporţional cu modulul forţei şi invers proporţional cu masa acestuia:
F
am
(2.1)
Având în vedere expresia matematică a principiului II precum şi cea a acceleraţiei
rezultanta forţelor ce acţionează asupra unui punct material poate fi redată şi prin:
( )
.
dvF m aF m d mv
Fdtdvdta
m constdt
(2.2)
unde p m v
reprezintă impulsul punctului material.
În aceste condiţii relaţia anterioară se transformă în:
dpF
dt
(2.3)
unitatea de măsură a impulsului în SI fiind:
[p]=1 N.s

Legea independenţei acţiunii forţelor
Dacă asupra unui corp acţionează mai multe forţe atunci fiecare forţă
determină corpului propria sa acceleraţie independent de acţiunea celorlalte,
acceleraţia rezultantă fiind suma vectorială a acceleraţiilor individuale.
... ...1 2 n 1 2 nF F F m a a a
; ;n n
i i
i 1 i 1
R m a R F a a
(2.4)
Scriind vectorul forţă în funcţie de componentele sale pe cele trei axe de
coordonate Oxyz avem:
; 2 2 2x y z x y zF F i F j F k F F F F
x x
y y
z z
F m a mx
F m a my
F m a mz
(2.5)
Principiul III ( principiul acţiunii şi reacţiunii)
Dacă un corp acţionează asupra altui corp cu o forţă numită acţiune atunci
cel de-al doilea corp acţionează asupra primului cu o forţă egală în modul dar de
sens contrar numită reacţiune.
II.2 Transformările Galilei. Compunerea vitezelor în mecanica clasică.
Este important de stabilit legătura dintre un eveniment măsurat de diferiţi
observatori (din diferite sisteme de referinţă), adică transformările de coordonate
care dau trecerea de la un sistem de referinţă la altul. Astfel, putem vedea care
aspecte ale fenomenelor sunt relative, adică dependente de sistemul de referinţă
(SR) şi care sunt absolute sau invariante sau independente de SR (aceleaşi pentru
toţi observatorii). În continuare vom presupune că riglele şi ceasornicele diferiţilor
observatori sunt construite şi etalonate identic.
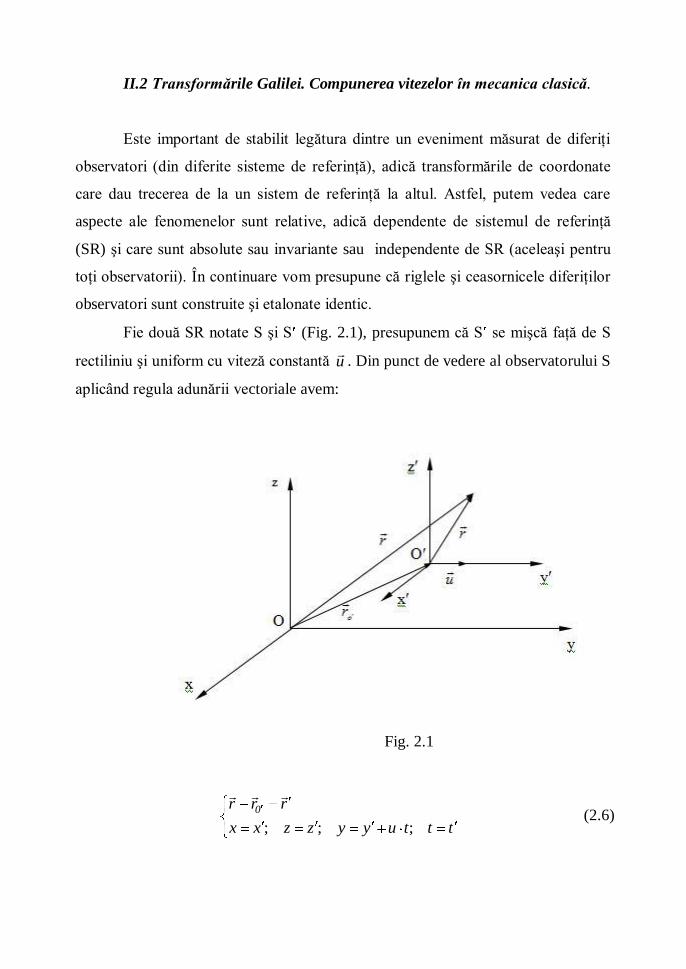
Fie două SR notate S şi S (Fig. 2.1), presupunem că S se mişcă faţă de S
rectiliniu şi uniform cu viteză constantă u
. Din punct de vedere al observatorului S
aplicând regula adunării vectoriale avem:
; ; ;
0r r r
x x z z y y u t t t
(2.6)
Fig. 2.1

Setul de relaţii (2.6) poartă numele de formulele de transformare a lui
Galilei, iar derivarea acestora în raport cu timpul conduce la scrierea relaţia de
compunere a vitezelor:
'
'
'
x x
y y u
z z
(2.7)
Dacă derivăm relaţiile (2.7) în raport cu timpul obţinem:
; ;x x y y z z (2.8)
de unde rezultă că acceleraţiile punctului material sunt aceleaşi în ambele sisteme.
Sistemele inerţiale prezintă o proprietate fizică foarte importantă şi anume:
mişcarea acestora nu influenţează fenomenele fizice din cuprinsul lor. În cadrul
sistemelor inerţiale, legile mecanicii au aceeaşi formă, adică sunt invariante faţă de
schimbarea sistemului inerţial, acesta constituind principiul relativităţii clasice
stabilit de Galilei.
Masa punctului material fiind constantă în ambele sisteme, în baza relaţiilor
(2.8) putem scrie:
ma ma sau F F
(2.9)
Din (2.9) rezultă că legea fundamentală a dinamicii rămâne invariantă în
raport cu sistemele inerţiale, iar asupra punctului material acţionează aceeaşi forţă
în ambele sisteme inerţiale.
Considerăm că sistemul (S) este neinerţial (are o mişcare accelerată faţă de
sistemul considerat fix). Dacă acceleraţia punctului material de masă m în sistemul
fix este a
, iar faţă de sistemul mobil este a'
, atunci relaţia de compunere a
acceleraţiilor conform cu (2.7) va avea forma:
0a a a
(2.10)
unde 0a
este acceleraţia sistemului de referinţă (S’) faţă de sistemul fix (S).
Dacă înmulţim cu m relaţia (2.10) rezultă:
0 0 0 0 0F F F F F F F F m a
(2.11)

adică observatorul legat de sistemul mobil aflat în mişcare accelerată constată
existenţa, pe lângă forţa 'F
şi a unei forţe '
0F
, îndreptată în sens opus acceleraţiei
0a
. Această forţă se numeşte forţă de inerţie.
II.3 Impulsul forţelor
Presupunem un corp de masă m, asupra căruia acţionează un sistem de forţe
a căror rezultantă este F
. Conform principiului al II-lea al dinamicii:
dv
F m a mdt
(2.12)
În cazul mecanicii clasice,
2
1
t
2 1t
dp F dt
H F dt H p p p m v
(2.13)
ceea ce conduce la scrierea:
2 1H mv mv
(2.14)
unde H
este impulsul forţei.
Ecuaţia (2.14) exprimă teorema de variaţie a impulsului unui punct material
care se enunţă astfel:
Impulsul forţei rezultante aplicată punctului material este egal cu variaţia
impulsului punctului material.
Dacă rezultanta forţelor aplicate este permanent nulă, impulsul punctului
material se conservă.
; ; ;2 1 2 1F 0 H 0 p 0 p p 0 p p
(2.15)
II. 4 Lucrul mecanic
Dacă o forţă acţionează în mod continuu un anumit timp asupra unui corp,
şi îl deplasează, spunem că această forţă efectuează un lucru mecanic L.
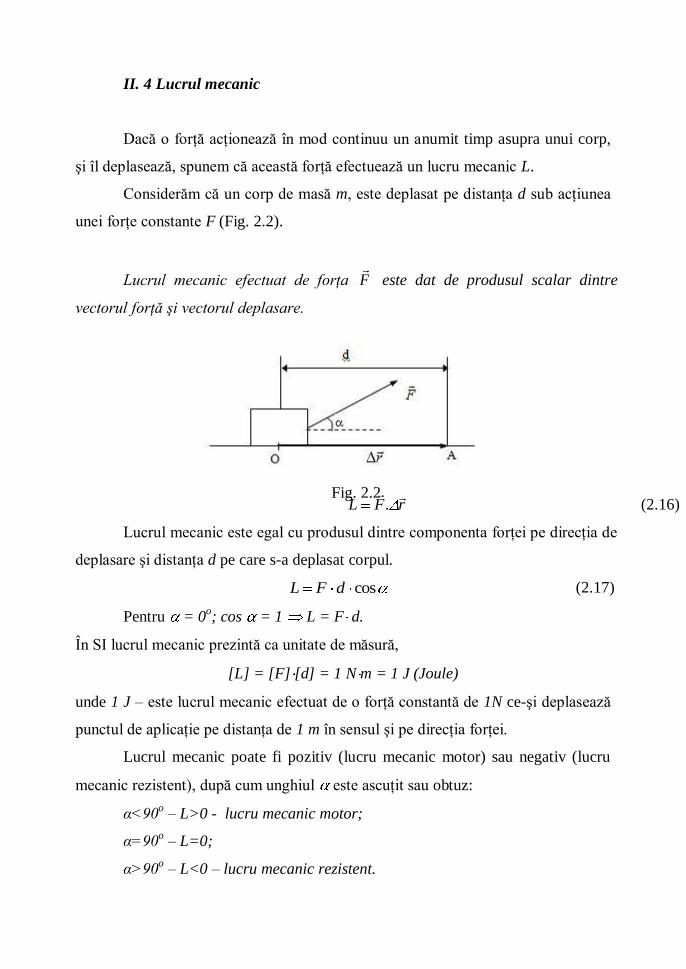
Considerăm că un corp de masă m, este deplasat pe distanţa d sub acţiunea
unei forţe constante F (Fig. 2.2).
Lucrul mecanic efectuat de forţa F
este dat de produsul scalar dintre
vectorul forţă şi vectorul deplasare.
.L F r
(2.16)
Lucrul mecanic este egal cu produsul dintre componenta forţei pe direcţia de
deplasare şi distanţa d pe care s-a deplasat corpul.
cosL F d (2.17)
Pentru = 0o; cos = 1 L = F d.
În SI lucrul mecanic prezintă ca unitate de măsură,
[L] = [F] [d] = 1 N m = 1 J (Joule)
unde 1 J – este lucrul mecanic efectuat de o forţă constantă de 1N ce-şi deplasează
punctul de aplicaţie pe distanţa de 1 m în sensul şi pe direcţia forţei.
Lucrul mecanic poate fi pozitiv (lucru mecanic motor) sau negativ (lucru
mecanic rezistent), după cum unghiul este ascuţit sau obtuz:
α<90o – L>0 - lucru mecanic motor;
α=90o – L=0;
α>90o – L<0 – lucru mecanic rezistent.
Fig. 2.2
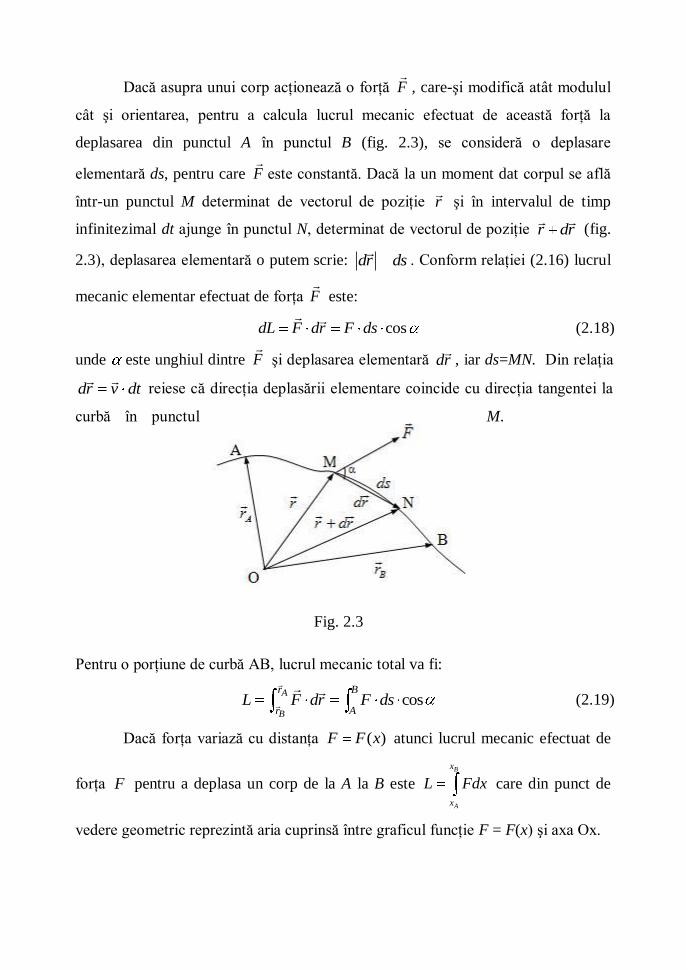
Dacă asupra unui corp acţionează o forţă F
, care-şi modifică atât modulul
cât şi orientarea, pentru a calcula lucrul mecanic efectuat de această forţă la
deplasarea din punctul A în punctul B (fig. 2.3), se consideră o deplasare
elementară ds, pentru care F
este constantă. Dacă la un moment dat corpul se află
într-un punctul M determinat de vectorul de poziţie r
şi în intervalul de timp
infinitezimal dt ajunge în punctul N, determinat de vectorul de poziţie r dr
(fig.
2.3), deplasarea elementară o putem scrie:
dr ds
. Conform relaţiei (2.16) lucrul
mecanic elementar efectuat de forţa F
este:
cosdL F dr F ds
(2.18)
unde este unghiul dintre F
şi deplasarea elementară dr
, iar ds=MN. Din relaţia
dr v dt
reiese că direcţia deplasării elementare coincide cu direcţia tangentei la
curbă în punctul M.
Pentru o porţiune de curbă AB, lucrul mecanic total va fi:
cosA
B
r B
r AL F dr F ds
(2.19)
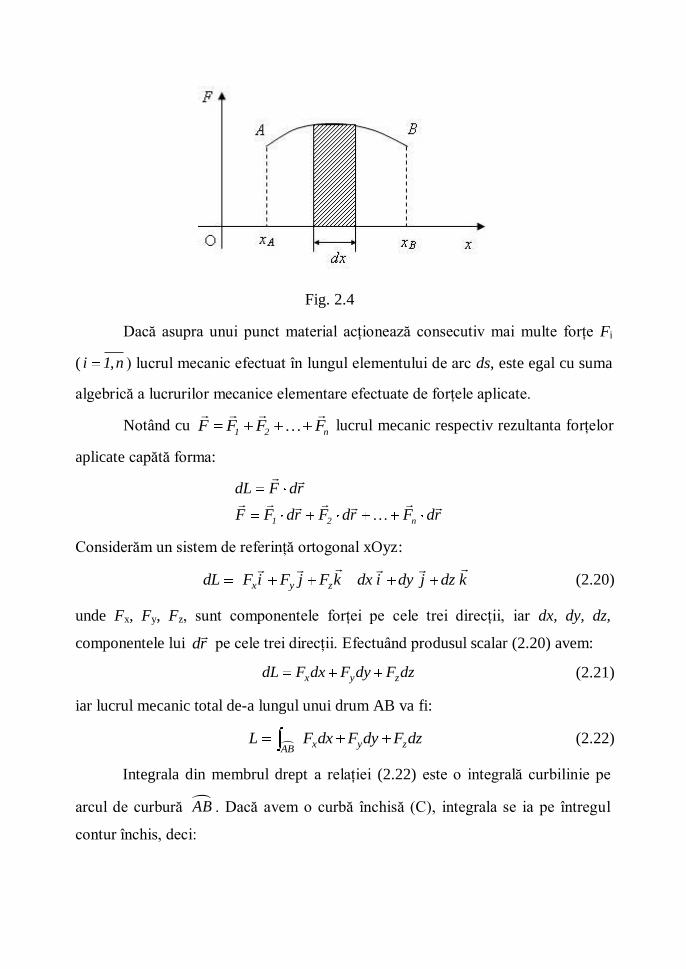
Dacă forţa variază cu distanţa ( )F F x atunci lucrul mecanic efectuat de
forţa F pentru a deplasa un corp de la A la B este B
A
x
x
L Fdx care din punct de
vedere geometric reprezintă aria cuprinsă între graficul funcţie F = F(x) şi axa Ox.
Fig. 2.3
Dacă asupra unui punct material acţionează consecutiv mai multe forţe Fi
( ,i 1 n ) lucrul mecanic efectuat în lungul elementului de arc ds, este egal cu suma
algebrică a lucrurilor mecanice elementare efectuate de forţele aplicate.
Notând cu 1 2 nF F F F
lucrul mecanic respectiv rezultanta forţelor
aplicate capătă forma:
1 2 n
dL F dr
F F dr F dr F dr
Considerăm un sistem de referinţă ortogonal xOyz:
x y zdL F i F j F k dx i dy j dz k
(2.20)
unde Fx, Fy, Fz, sunt componentele forţei pe cele trei direcţii, iar dx, dy, dz,
componentele lui dr
pe cele trei direcţii. Efectuând produsul scalar (2.20) avem:
x y zdL F dx F dy F dz (2.21)
iar lucrul mecanic total de-a lungul unui drum AB va fi:
x y zAB
L F dx F dy F dz (2.22)
Integrala din membrul drept a relaţiei (2.22) este o integrală curbilinie pe
arcul de curbură AB . Dacă avem o curbă închisă (C), integrala se ia pe întregul
contur închis, deci:
Fig. 2.4
C
L F dr
(2.23)
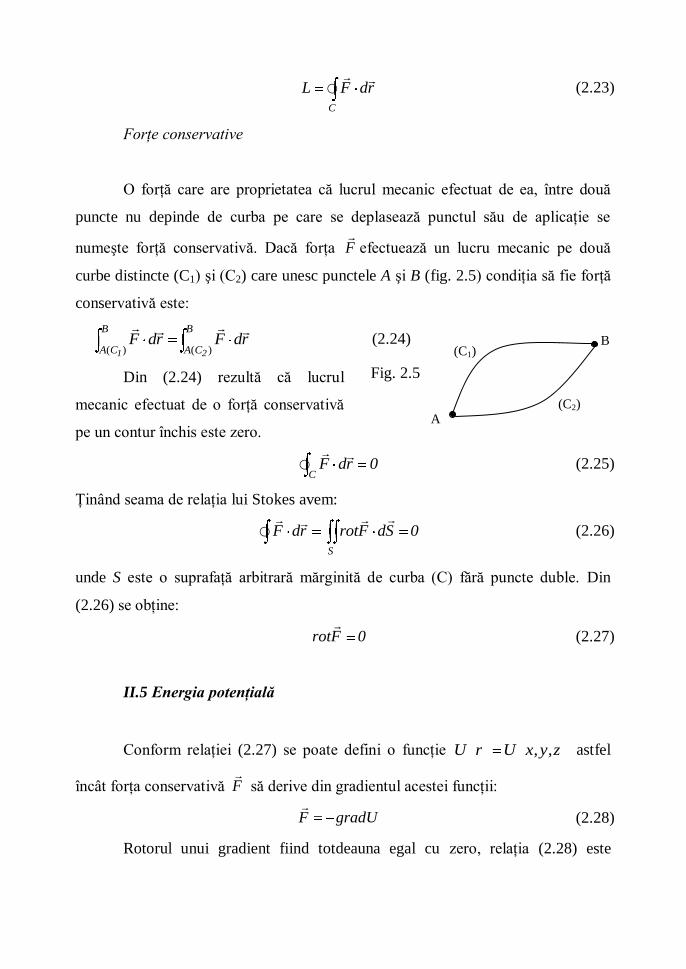
Forţe conservative
O forţă care are proprietatea că lucrul mecanic efectuat de ea, între două
puncte nu depinde de curba pe care se deplasează punctul său de aplicaţie se
numeşte forţă conservativă. Dacă forţa F
efectuează un lucru mecanic pe două
curbe distincte (C1) şi (C2) care unesc punctele A şi B (fig. 2.5) condiţia să fie forţă
conservativă este:
( ) ( )1 2
B B
A C A CF dr F dr
(2.24)
Din (2.24) rezultă că lucrul
mecanic efectuat de o forţă conservativă
pe un contur închis este zero.
C
F dr 0
(2.25)
Ţinând seama de relaţia lui Stokes avem:
S
F dr rotF dS 0
(2.26)
unde S este o suprafaţă arbitrară mărginită de curba (C) fără puncte duble. Din
(2.26) se obţine:
rotF 0
(2.27)
II.5 Energia potenţială
Conform relaţiei (2.27) se poate defini o funcţie U r U x,y,z astfel
încât forţa conservativă F
să derive din gradientul acestei funcţii:
F gradU
(2.28)
Rotorul unui gradient fiind totdeauna egal cu zero, relaţia (2.28) este
A
B (C1)
(C2)
Fig. 2.5

satisfăcută. Funcţia U r
astfel definită se numeşte funcţie potenţială a cărei
valoare într-un punct depinde de vectorii de poziţie şi de timp. Sensul minus indică
faptul că forţa F
este orientată în sensul descreşterii funcţiei potenţiale. Lucrul
mecanic efectuat de o forţă conservativă între două puncte infinit vecine este:
.dL F dr U dr
(2.29)
Efectuând produsul:
U U UU dr i j k dx i dy j dz k
x y z
U U Udx dy dz dU
x y z
rezultă:
dL dU (2.30)
Conform relaţiei (2.30) lucrul mecanic efectuat de o forţă conservativă între
punctele A şi B este:
( ) ( )B
A
r
A B
r
L F dr U r U r
(2.31)
Dacă funcţia ( )U r
nu depinde explicit de timp, ci numai de coordonatele
punctului respectiv, ea reprezintă o mărime numită energie potenţială, Ep.
Din (2.31) se poate stabili legea de variaţie a energiei potenţiale. Lucrul
mecanic efectuat de o forţă F
conservativă, pentru a deplasa un punct material de
masă m, de la un punct AA r
la altul BB r
este egal cu variaţia energiei potenţiale
luată în sensul descreşterii sale.
Dacă valoarea energiei potenţiale, într-un anumit punct AA r
este
p AE r
atunci energia potenţială într-un punct oarecare de vector de poziţie r
, va
fi:
( ) ( )B
A
r
p p A
r
E r E r F dr
(2.32)
B
A
r
p
r
p
E F dr
E L
Aşadar valorile energiei potenţiale se exprimă în diferite puncte ale
câmpului de forţe, în raport cu o valoare cunoscută. Punctul A se poate alege,
convenţional, ca punct de referinţă, în care energia potenţială este considerată egală
cu zero, astfel avem:
r
p0
E F dr L
(2.33)
Prin urmare energia potenţială a punctului material într-un punct oarecare M( r
)
este egală cu lucrul mecanic efectuat de forţa conservativă F
pentru a deplasa un
punct material din punctul de referinţă în punctul considerat, luat cu semn
schimbat.
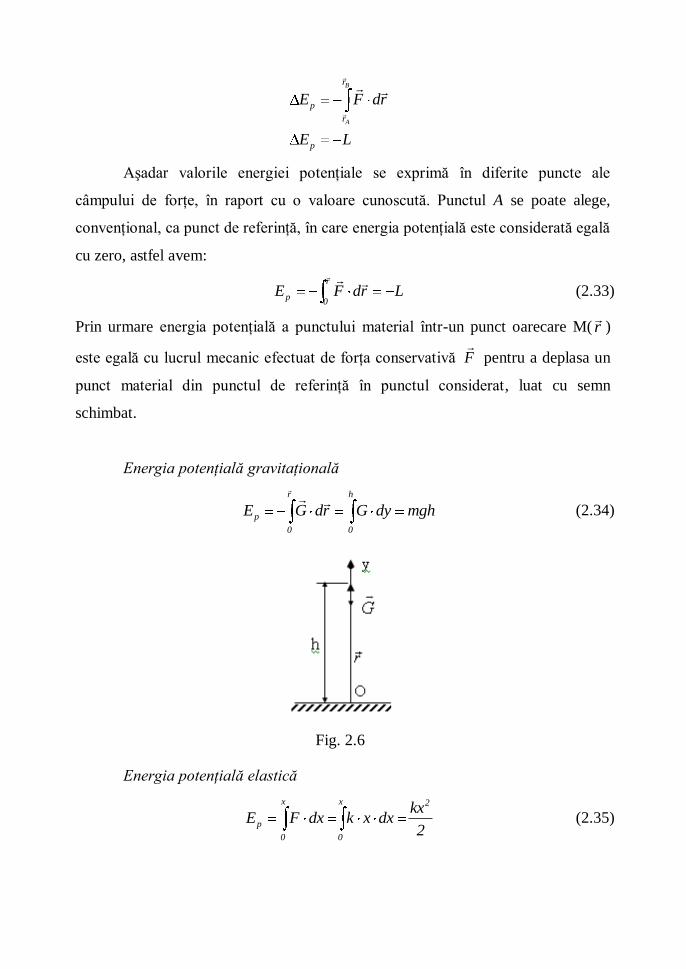
Energia potenţială gravitaţională
r h
p
0 0
E G dr G dy mgh
(2.34)
Energia potenţială elastică
x x 2
p
0 0
kxE F dx k x dx
2 (2.35)
Fig. 2.6

II.6 Puterea
Acelaşi lucru mecanic poate fi efectuat în diferite intervale de timp.
Definim puterea medie în intervalul de timp t prin raportul dintre lucrul mecanic
efectuat în acest interval de timp şi intervalul t:
m
LP
t (2.36)
şi puterea instantanee:
limt 0
L dLP L
t dt (2.37)
Ţinând seama de relaţia de definiţie a lucrului mecanic, dL F dr
avem puterea
dezvoltată de o forţă constantă în timp egală cu produsul scalar dintre forţă şi
viteză,
dL dr
P F F vdt dt
(2.38)
sau puterea dezvoltată de o forţă este egală cu produsul scalar dintre forţă şi
viteză. Unitatea de măsură în SI pentru putere este:
[ ]
[ ] ( )[ ]
L JP 1 1W WATT
t s (2.39)
iar o unitate tolerată o reprezintă calul-putere:
1CP 736W (2.40)
II.7 Energia cinetică. Teorema de variaţie a energiei cinetice
Din dL F dr
şi dr
F mdt
avem:
; .2
c
dvdL m dr
1dtdL m v dv d mv dE m const
dr 2v
dt
Prin urmare, lucrul mecanic se poate scrie:
2 1
2
c c c1
L F dr E E E
(2.41)
unde:
; .2def
2
c
1 pE m v m const
2 2m (2.42)
se numeşte energie cinetică a punctului material (p=m.v este impulsul punctului
material). Relaţia (2.41) exprimă tocmai teorema de variaţie a energiei cinetice care
se enunţă astfel:
Lucrul mecanic efectuat de forţa rezultantă, aplicată punctului material,
este egal cu variaţia energiei cinetice a punctului material.
II.8 Conservarea energiei mecanice
Să considerăm mişcarea particulei într-un câmp de forţe conservative.
Aplicând teorema energiei cinetice obţinem:
.
( )
2 1 1 2c c p p p
c p c p
L F dr E E E E E
E E E E 0
ceea ce conduce la:
.p cE E E const (2.43)
(2.43) reprezentând teorema conservării energiei mecanice care se enunţă astfel:
Într-un câmp de forţe conservative are loc în timpul mişcării o
transformare reciprocă a energiei cinetice şi potenţiale, suma lor rămânând
constantă.
Să presupunem că punctul material se află într-un câmp de forţe
conservative F r
şi este supus în acelaşi timp la o forţă neconservativă
(disipativă) 'F
. Aplicând teorema energiei cinetice obţinem:

( ') ' '
2 2 2
c p
1 1 1
L F F dr E F dr F dr E L
(2.44)
' ' ( )
2
c p
1
L F dr E E
(2.45)
Relaţia (2.45) reprezintă teorema de variaţie a energiei totale care se enunţă astfel:
Lucrul mecanic al forţelor neconservative (disipative) aplicate punctului
material este egal cu variaţia energiei mecanice a punctului material.
II.9 Momentul forţei. Momentul cinetic
Momentul forţei faţă de un punct şi faţă de o axă
Dacă un rigid are un punct fix (o articulaţie) în jurul căruia se poate roti
liber, atunci aplicând o forţă rigidului, el se va roti în jurul unei axe ce trece prin
articulaţie, perpendiculară pe planul definit de articulaţie şi forţă. Efectul este
acelaşi oriunde am aplica forţa pe suportul său. Dacă suportul forţei trece prin
articulaţie, rigidul nu se roteşte.
Efectul de rotaţie este determinat de forţă şi de distanţa de la articulaţie
până la suportul său (braţul forţei b). Ţinând seama de direcţia axei şi de sensul de

rotaţie, putem spune că efectul de rotaţie este dat de o mărime fizică vectorială
numită momentul forţei faţă de polul O M
, definit de produsul vectorial:
sin
sin
def
M r F
M r F F b
b r
(2.46)
unde r
este vectorul de poziţie al punctului de aplicaţie al forţei, iar b este braţul
forţei, adică distanţa de la pol la dreapta de acţiune a forţei (Fig. 2.7). Momentul
forţei se măsoară în SI în N∙m, fiind numeric egal cu aria paralelogramului
construit pe cei doi vectori ( r
, F
) sau cu dublul ariei triunghiului construit din O
pe F
. Momentul forţei nu se schimbă dacă forţa lunecă pe suportul său.
Dacă rigidul are o axă fixă în jurul căreia se poate roti liber, atunci o forţă
paralelă cu axa de rotaţie sau concurentă cu aceasta nu produce rotaţie. Efectul de
rotaţie este produs numai de componenta transversală (pe axă) a forţei, înmulţită cu
braţul ei, adică de momentul forţei în raport cu axa (Fig. 2.8).
||
def
M F b (2.47)
Acesta este egal cu proiecţia pe axă a vectorului moment M r F
faţă de un pol
de pe axă:
( )M e M e r F
(2.48)
unde e
este versorul axei.
Fig. 2.8
Cealaltă componentă M tinde să rotească doar axa de rotaţie.
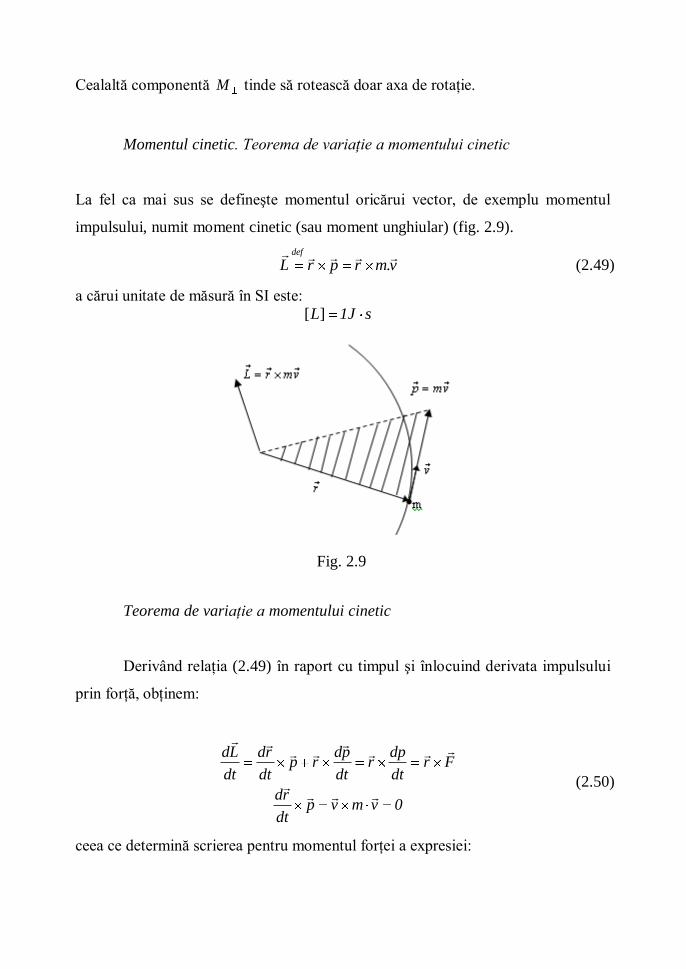
Momentul cinetic. Teorema de variaţie a momentului cinetic
La fel ca mai sus se defineşte momentul oricărui vector, de exemplu momentul
impulsului, numit moment cinetic (sau moment unghiular) (fig. 2.9).
.def
L r p r m v
(2.49)
a cărui unitate de măsură în SI este:
[ ]L 1J s
Teorema de variaţie a momentului cinetic
Derivând relaţia (2.49) în raport cu timpul şi înlocuind derivata impulsului
prin forţă, obţinem:
dL dr dp dpp r r r F
dt dt dt dt
drp v m v 0
dt
(2.50)
ceea ce determină scrierea pentru momentul forţei a expresiei:
Fig. 2.9
d dLM r F r F L
dt dt
M L
(2.51)
Luând în considerare relaţia anterioară putem afirma că momentul forţei este egal
cu derivata momentului cinetic în raport cu timpul. Momentul forţei şi momentul
cinetic se consideră faţă de acelaşi punct (pol) fix într-un SR iniţial.
Analog cu teorema impulsului obţinem teorema momentului cinetic:
2 2
1 1
def t t
2 1t t
K M dt r dH L L L
(2.52)
adică impulsul momentului (sau momentul impulsului) forţei aplicată punctului
material este egal cu variaţia momentului cinetic al punctului material.
Dacă momentul forţei rezultante este nul, momentul cinetic al punctului
material se conservă: un punct material nu-şi poate schimba momentul său cinetic
decât sub acţiunea unui moment al forţei.
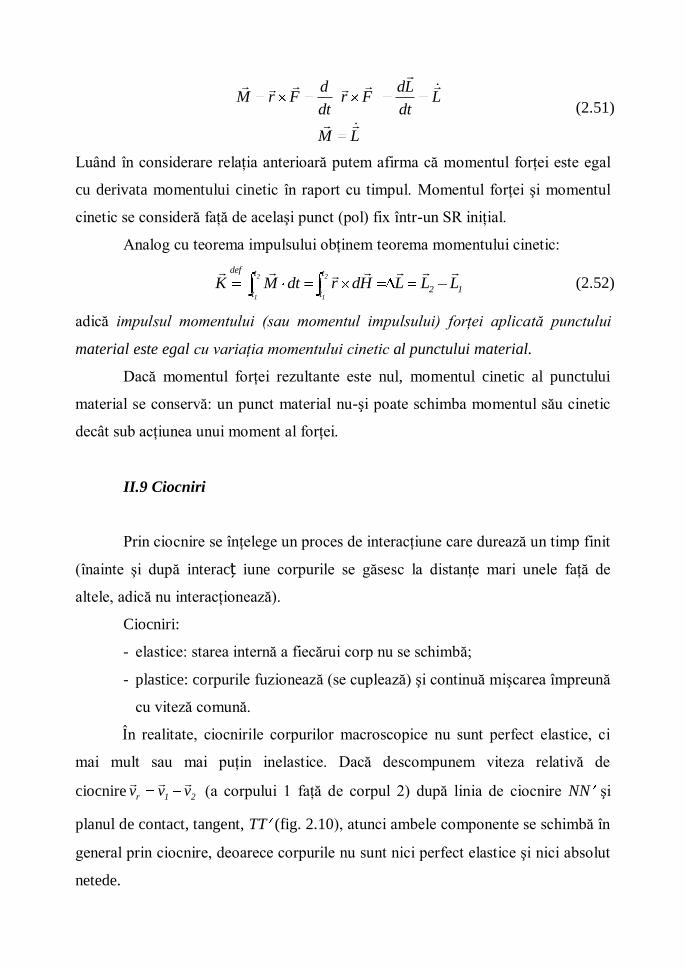
II.9 Ciocniri
Prin ciocnire se înţelege un proces de interacţiune care durează un timp finit
(înainte şi după interacț iune corpurile se găsesc la distanţe mari unele faţă de
altele, adică nu interacţionează).
Ciocniri:
- elastice: starea internă a fiecărui corp nu se schimbă;
- plastice: corpurile fuzionează (se cuplează) şi continuă mişcarea împreună
cu viteză comună.
În realitate, ciocnirile corpurilor macroscopice nu sunt perfect elastice, ci
mai mult sau mai puţin inelastice. Dacă descompunem viteza relativă de
ciocnire r 1 2v v v
(a corpului 1 faţă de corpul 2) după linia de ciocnire NN şi
planul de contact, tangent, TT (fig. 2.10), atunci ambele componente se schimbă în
general prin ciocnire, deoarece corpurile nu sunt nici perfect elastice şi nici absolut
netede.
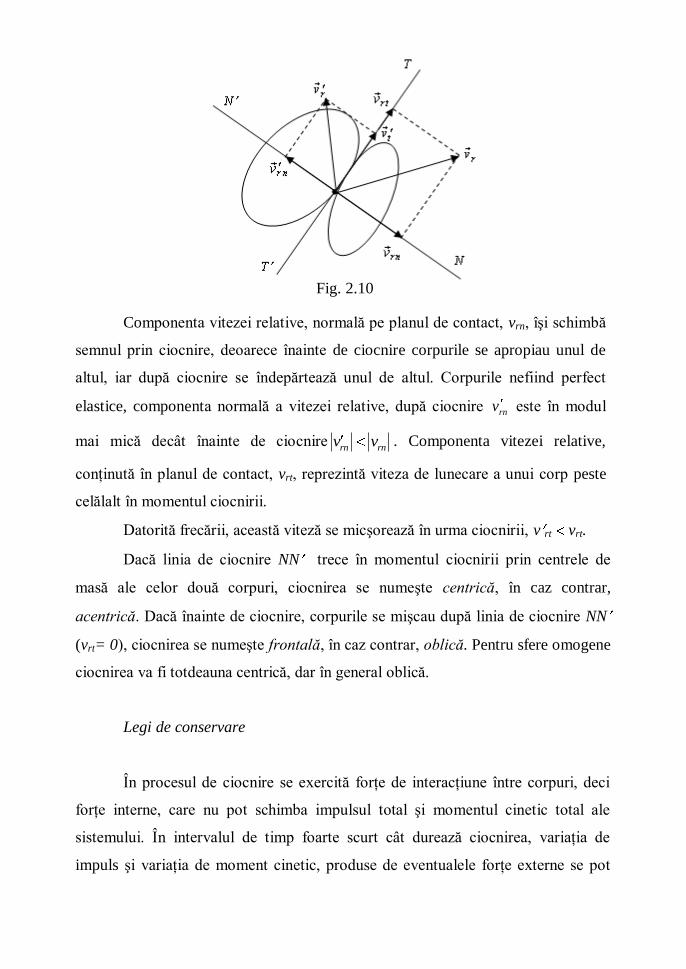
Componenta vitezei relative, normală pe planul de contact, vrn, îşi schimbă
semnul prin ciocnire, deoarece înainte de ciocnire corpurile se apropiau unul de
altul, iar după ciocnire se îndepărtează unul de altul. Corpurile nefiind perfect
elastice, componenta normală a vitezei relative, după ciocnire rnv este în modul
mai mică decât înainte de ciocnirern rnv v . Componenta vitezei relative,
conţinută în planul de contact, vrt, reprezintă viteza de lunecare a unui corp peste
celălalt în momentul ciocnirii.
Datorită frecării, această viteză se micşorează în urma ciocnirii, v rt vrt.
Dacă linia de ciocnire NN trece în momentul ciocnirii prin centrele de
masă ale celor două corpuri, ciocnirea se numeşte centrică, în caz contrar,
acentrică. Dacă înainte de ciocnire, corpurile se mişcau după linia de ciocnire NN
(vrt= 0), ciocnirea se numeşte frontală, în caz contrar, oblică. Pentru sfere omogene
ciocnirea va fi totdeauna centrică, dar în general oblică.
Legi de conservare
În procesul de ciocnire se exercită forţe de interacţiune între corpuri, deci
forţe interne, care nu pot schimba impulsul total şi momentul cinetic total ale
sistemului. În intervalul de timp foarte scurt cât durează ciocnirea, variaţia de
impuls şi variaţia de moment cinetic, produse de eventualele forţe externe se pot
Fig. 2.10
neglija în comparaţie cu variaţiile de impuls şi de moment cinetic ale fiecărui corp
în parte, produse de forţele interne, care deşi durează puţin, sunt mult mai mari
decât forţele obişnuite externe. De aceea impulsul total şi momentul cinetic total
ale corpurilor care se ciocnesc, imediat înainte de ciocnire, sunt egale cu impulsul
total şi momentul cinetic total ale corpurilor imediat după ciocnire, adică impulsul
total şi momentul cinetic total a sistemului de corpuri care se ciocnesc se conservă
în procesul ciocnirii. Eventualele forţe externe aplicate produc o variaţie de impuls
şi de moment cinetic neglijabile în timpul foarte scurt cât durează ciocnirea.
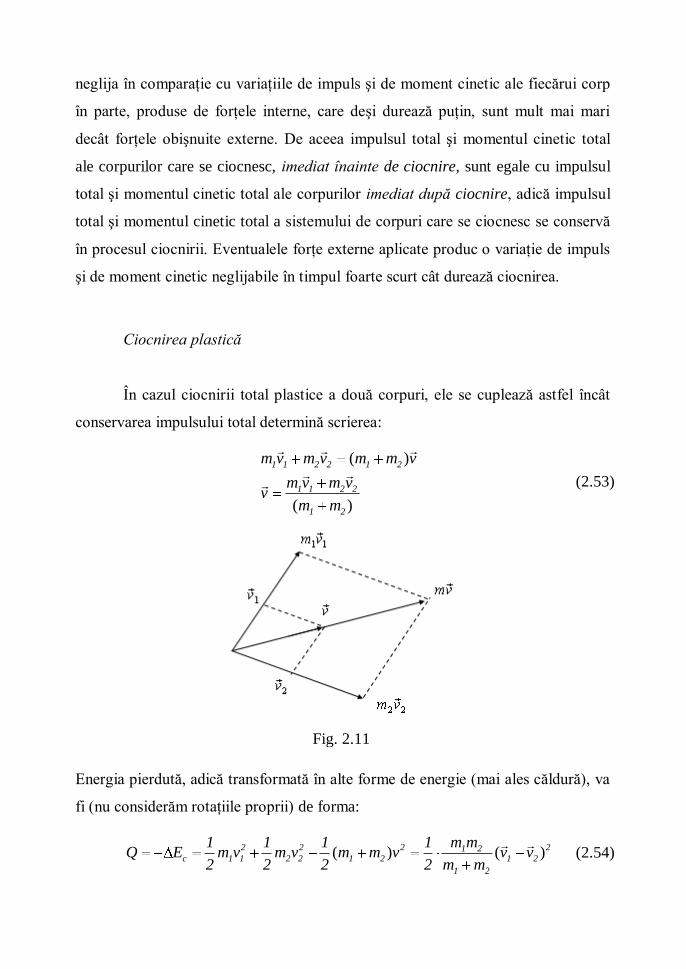
Ciocnirea plastică
În cazul ciocnirii total plastice a două corpuri, ele se cuplează astfel încât
conservarea impulsului total determină scrierea:
( )
( )
1 1 2 2 1 2
1 1 2 2
1 2
m v m v m m v
m v m vv
m m
(2.53)
Energia pierdută, adică transformată în alte forme de energie (mai ales căldură), va
fi (nu considerăm rotaţiile proprii) de forma:
( ) ( )2 2 2 21 2c 1 1 2 2 1 2 1 2
1 2
m m1 1 1 1Q E m v m v m m v v v
2 2 2 2 m m
(2.54)
Fig. 2.11

sau:
2
r
1Q v
2 (2.55)
unde:
1 2
1 2
r 1 2
m m
m m
v v v
se numeşte masă redusă a celor două corpuri, iar rv
este viteza lor relativă (a
corpului 1 faţă de corpul 2).
Ciocnirea elastică
În cazul ciocnirii perfect elastice, pe lângă impulsul total se conservă şi
energia cinetică totală. Considerând ciocnirea centrică şi frontală, corpurile înainte
şi după ciocnire se mişcă pe aceeaşi direcţie (cazul unidimensional) şi avem:
1 1 2 2 1 1 2 2
2 2 2 2
1 1 2 2 1 1 2 2
m v m v m v m v
m v m v m v m v
2 2 2 2
(2.56)
( ) ( )
( )( ) ( )( )
1 1 1 2 2 2
1 1 1 1 1 2 2 2 2 2
m v v m v v
m v v v v m v v v v (2.57)
Împărţind relaţiile (2.57) obţinem:
( )
1 1 2 2
r 1 2 1 2 r
v v v v
v v v v v v (2.58)
Fig. 2.12

adică viteza relativă îşi schimbă doar semnul. Primele relaţii din (2.58) şi (2.56)
alcătuiesc un sistem ce are soluţiile v1 şi v2 care reprezintă vitezele corpurilor
imediat după ciocnire.
2 1 1 2
1 1 2 2 1 1 2 2
v v v v
m v m v m v m v
1 1 2 2 2 1 2 21
1 2
m v m v m v m vv
m m
Dacă la numărătorul ecuaţiei de mai sus adunăm şi scădem 1 1 2 2m v m v , efectuăm
calculele şi distribuim numărătorul la numitor obţinem:
1 1 2 21 1
1 2
m v m vv 2 v
m m (2.59)
În mod analog reiese:
1 1 2 22 2
1 2
m v m vv 2 v
m m (2.60)
sau:
1 CM 1
2 CM 2
v 2v v
v 2v v (2.61)
unde am notat cu 1 1 2 2CM
1 2
m v m vv
m m viteza centrului de masă a celor două corpuri.
Ciocnirea cu un perete
În cazul ciocnirii perfect elastice, centrice şi frontale, cu un perete, adică cu
un corp de masă foarte mare, ce are viteza v2 şi masa m2 >> m1, din (2.60) rezultă:
1 2 1
2 2
v 2v v
v v (2.62)
În particular, pentru un perete în repaus, v2 = 0, rezultă:
1 1
2 2
v v
v v 0 (2.63)

adică corpul (1) se întoarce cu aceeaşi viteză cu care ciocneşte peretele.
În cazul ciocnirii oblice (perfect elastice) cu un perete în repaus (fig. 2.13):
' ' '
t t n nv v ; v v ; v v
adică viteza incidentă v
şi viteza reflectată 'v
sunt în acelaşi plan cu normala şi
unghiul de reflexie ' este egal cu unghiul de incidenţă .
Dacă notăm cu durata ciocnirii, atunci forţa medie exercitată de perete asupra
particulei va fi perpendiculară pe perete:
( )m v mv mv
f
2mvcos
f (2.64)
Conform principiului acţiunii şi reacţiunii, o forţă egală în modul şi de sens
contrar se exercită perpendicular asupra peretelui din partea particulei.
Coeficienţii de ciocnire
O măsură a caracterului mai mult sau mai puţin elastic al ciocnirii este
coeficientul de restituire (Newton), definit prin raportul dintre componenta normală
Fig. 2.13

(pe planul de contact) a vitezei relative după ciocnire ' ' '
rn 1n 2nv v v şi înainte de
ciocnire rn 1n 2nv v v .
def
rn 1n 2n
rn 1n 2n
v v vk ; 0 k 1
v v v (2.65)
Se introduce şi un coeficient de frecare momentană f definită prin raportul
dintre componenta tangenţială (în planul de contact) a vitezei relative, după
ciocnire, ' ' '
rt 1t 2tv v v , şi înainte de ciocnire rt 1t 2tv v v , anume:
def
rt 1t 2t
rt 1t 2t
v v vf ; 0 f 1
v v v (2.66)
Acest coeficient este de obicei apropiat de 1 şi se pune adesea egal cu 1 (la
ciocniri apropiate de ciocniri frontale, sau la corpuri netede).
Pentru ciocnirea perfect plastică avem îndeplinite condiţiile
rv 0 k 0, f 0 , în timp ce pentru ciocnirea perfect elastică se respectă
rn rnv v k 1, f 1.
În cazul ciocnirii unidimensionale cu coeficientul de restituţie k, obţinem din
conservarea impulsului:
( )
( )
21 CM 2 1
1 2
12 CM 1 2
1 2
kmv v v v
m m
kmv v v v
m m
(2.67)
şi energia cinetică pierdută:
( )( ) ( )2 2 2 21 2c 1 2 r
1 2
m m1 1Q E 1 k v v 1 k v
2 m m 2 (2.68)

Capitolul III
Oscilaţii mecanice
Orice variaţie periodică în timp a mărimilor caracteristice unui sistem fizic,
însoţită de o transformare a energiei dintr-o formă în alta poartă denumirea de
oscilaţie. În cazul oscilaţiilor mecanice această mărimea fizică ce variază periodic
în timp este coordonata mobilului. Altfel spus mobilul se mişcă de o parte şi de alta
a poziţiei sale de echilibru.
Dacă energia electrică se transformă în energie magnetică, şi invers, avem
de a face cu oscilaţie electromagnetică
Ecuaţia mişcării:
f(t) = f(t+T) → mişcare periodică
III.1. Mărimi caracteristice mişcării oscilatorii:
x – elongaţia reprezintă depărtarea mobilului faţă de poziţia de echilibru la
un moment dat;
A=xmax - amplitudinea mişcării oscilatorii, reprezintă elongaţia maximă;
După cum rezultă şi din definiţiile de mai sus atât elongaţia cât şi amplitudinea
mişcării oscilatorii se măsoară în metri.
T - perioada mişcării oscilatorii, reprezintă timpul în care oscilatorul
efectuează o oscilaţie completă;
[T] = 1s
ν - frecvenţa mişcării oscilatorii, reprezintă numărul de oscilaţii complete
efectuate în unitatea de timp.
[ ] 11s 1Hz
s
tT
nT 1
n
t
(3.1)
unde n reprezintă numărul de oscilaţii complete efectuate de mobil în timpul t. Prin
oscilaţii complete înţelegem mişcarea oscilatorului între două treceri succesive şi
în acelaşi sens prin poziţia de echilibru. O altă mărime fizică utilizată pentru
caracterizarea mişcării oscilatorii este pulsaţia notată cu ω0. Legătura dintre
pulsaţie şi perioadă respectiv frecvenţă este:
[ ] /
2πω 2π
T
1rad s
Pentru a determina frecvenţa unui oscilator este suficient să măsurăm
timpul t în care oscilatorul efectuează n oscilaţii complete şi folosind relaţia (3.1)
calculăm frecvenţa. Dar această metodă poate fi folosită doar atunci când frecvenţa
de oscilaţie nu este prea mare. În cazul frecvenţelor mari se foloseşte o altă metodă
numită metoda stroboscopică. Aceasta constă în iluminarea oscilatorului cu
ajutorul unei surse luminoase ce emite în impulsuri cu o frecvenţă ce o putem regla.
Atunci când, astfel iluminat oscilatorul, îl vedem ca şi cum ar fi în repaus,
înseamnă că frecvenţa de oscilaţie a sa este egală cu frecvenţa cu care sursa emite
pulsurile luminoase; în cazul în care se văd două poziţii ale oscilatorului înseamnă
că frecvenţa sursei este de două ori mai mare decât frecvenţa de oscilaţie a
oscilatorului şi aşa mai de parte.
III.2. Legea de mişcare pentru oscilatorul liniar armonic
Oscilatorul liniar este oscilatorul la care direcţia de oscilaţie este o dreaptă.
Oscilatorul armonic este un model fizic şi reprezintă oscilatorul care are
amplitudinea constantă în timp, adică oscilaţiile nu sunt atenuate.

Fie un corp de masă m prins de un perete vertical prin intermediul unui
resort de constantă elastică k şi care se poate mişca pe planul orizontal fără frecare.
Se neglijează de asemenea forţa de rezistenţă din partea mediului înconjurător.
Astfel, dacă scoatem corpul din poziţia de echilibru şi îl lăsăm liber acesta se va
mişca de o parte şi de alta faţă de poziţia de
echilibru efectuând astfel o mişcare oscilatorie
armonică (pendul elastic fig. 3.1).
Scriind ecuaţia principiului II al
dinamicii pentru sistemul din fig. 3.1 obţinem
ecuaţia diferenţială a oscilatorului liniar
armonic:
eF m a (3.2)
ma k x 0 (3.3)
Înmulţind ecuaţia (3.3) cu 1
m şi notăm 2
0
k
m , numită pulsaţia proprie a
oscilatorului liniar armonic, avem:
2
ox ω x 0 (3.4)
Studiul acestei ecuaţii diferenţiale omogene de ordinul II ne conduce la legea de
mişcare pentru oscilatorul liniar armonic. Soluţia generală a unei astfel de ecuaţii
este:
1 2t t
1 2x C e C e
(3.5)
unde C1 şi C2 sunt constante iar λ1 şi λ2 sunt rădăcinile ecuaţiei caracteristice:
2 2
0 0 (3.6)
Rezolvând ecuaţia (3.6) şi înlocuind în (3.5) obţinem soluţia generală a ecuaţiei
(3.4) de forma:
0 0i t i t
1 2x C e C e
(3.7)
Folosind formulele lui Euler:
eF
k m
x
Fig. 3.1
O x
cos sin
cos sin
ia
ia
e a i a
e a i a
(3.8)
avem:
cos sin cos sin
cos sin
1 0 1 0 2 0 2 0
1 2 0 2 1 0
x C t C i t C t C i t
x C C t C C i t
(3.9)
Notând C1+ C2=A şi (C2- C1)i=B şi înlocuind în a doua ecuaţie din (3.9) prin
scoatere forţată în factor a lui 2 2A B avem:
cos sin2 2
0 02 2 2 2
A Bx A B t t
A B A B
(3.10)
de unde se observă că:
2 2
2 2 2 2
A B1
A B A B
(3.11)
ceea ce înseamnă că există un [ , )0 0 2 unic astfel încât sin 02 2
A
A B
şi
cos 02 2
B
A B
. Notăm 2 2
0A A B o constantă care desemnează
amplitudinea mişcării oscilatorie.
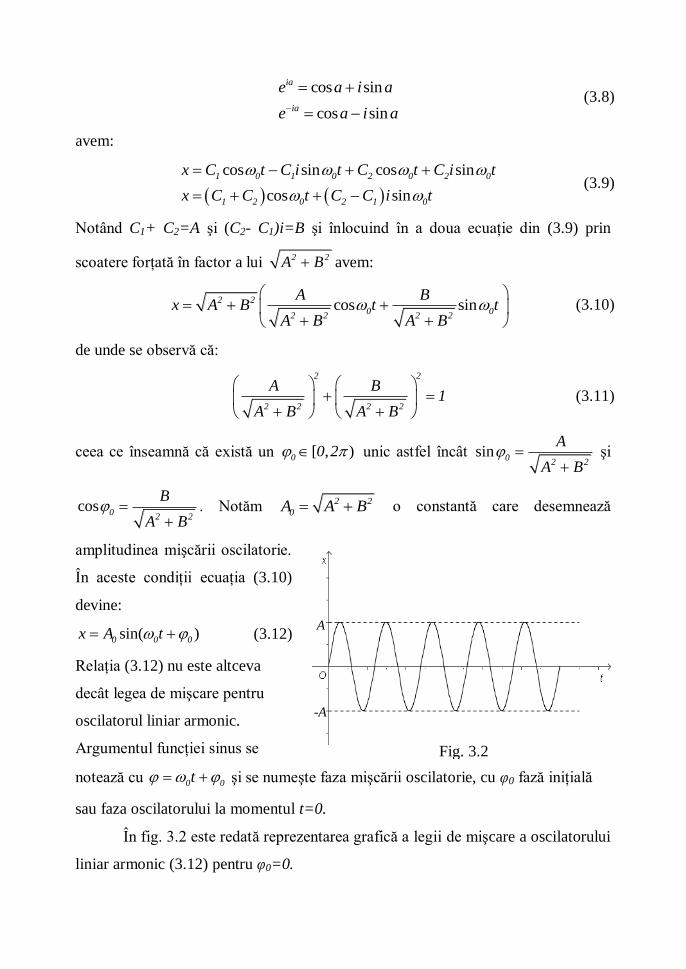
În aceste condiţii ecuaţia (3.10)
devine:
sin( )0 0 0x A t (3.12)
Relaţia (3.12) nu este altceva
decât legea de mişcare pentru
oscilatorul liniar armonic.
Argumentul funcţiei sinus se
notează cu 0 0t şi se numeşte faza mişcării oscilatorie, cu φ0 fază iniţială
sau faza oscilatorului la momentul t=0.
În fig. 3.2 este redată reprezentarea grafică a legii de mişcare a oscilatorului
liniar armonic (3.12) pentru φ0=0.
Fig. 3.2
A
-A
Derivând legea de mişcare (3.12) în raport cu timpul o dată respectiv de două ori
obţinem viteza respectiv acceleraţia oscilatorului:
cos( )
sin( )
0 0 0
2
0 0 0
v A t
a A t
(3.13)
Din (3.12) şi (3.13) se poate observa că între viteză şi elongaţie este o diferenţă de
fază de π/2 iar între acceleraţie şi elongaţie diferenţa de fază este π.
III. 3. Compunerea oscilaţiilor armonice, paralele şi de aceeaşi pulsaţie
De foarte multe ori ne întâlnim cu situaţii când trebuie să compunem două
sau mai multe oscilaţii. De aceea vom studia pentru început compunerea a două
oscilaţii paralele (aceeaşi direcţie de oscilaţie) şi de aceeaşi pulsaţie (frecvenţă). În
acest caz un punct material este supus acţiunii simultane a cel puţin două oscilaţii
armonice având aceeaşi direcţie. În literatura de specialitatea sunt cunoscute două
metode pentru a compune cele două oscilaţii: metoda analitică şi metoda fazorială.
a) Metoda analitică
Fie două mişcări oscilatorii cu aceeaşi direcţie (Ox) de oscilaţie date de
ecuaţiile:
sin( )
sin( )
1 1 1
2 2 2
x A t
x A t
(3.14)
Punctul material va efectua o oscilaţie armonică rezultantă după aceeaşi direcţie şi
de aceeaşi pulsaţie cu oscilaţiile componente, având elongaţia:
1 2x x x (3.15)
Înlocuind (3.14) în (3.15) avem:

sin cos sin cos sin cos sin cos
cos cos sin sin sin cos
sin sincos cos sin cos
cos cos
1 1 1 1 2 2 2 2
1 1 2 2 1 1 2 2
1 1 2 21 1 2 2
1 1 2 2
x A t A t A t A t
A A ωt A A ωt
A AA A ωt t
A A
În vederea efectuării calculelor notăm:
sin sin sin
cos cos cos
1 1 2 2
1 1 2 2
A Atg
A A
(3.16)
ș i
cos cossin cos sin cos
cos
cos cossin
cos
1 1 2 2
1 1 2 2
A Ax t t
A At
(3.17)
avându-se în considerare şi expresiile:
cos cos cos
cos cos cos cos sin sin sin sin
coscos cos
1 1 2 2
2 2 2 2 2 2 2 2
1 2 2 1 2 1 2 1 1 2 2 1 2 1 2
2 2
1 2 1 2 2 1
1 1 2 2
1 121 tgΑ Α
Α 1 Α 2Α Α Α Α 2A A
1A A 2A A
A A
Cu 2 1 , diferenţa de fază dintre oscilaţiile componente (care se compun)
şi toate considerentele de mai sus ecuaţia (3.17) corespunzătoare elongaţiei mişcării
oscilatorie rezultante devine:
cos sin2 2
1 2 1 2x A A 2A A t
unde:
cos2 2
1 2 1 2A A A 2A A (3.18)
este amplitudinea mişcării oscilatorii rezultante. Astfel putem scrie ecuaţia mişcării
rezultante în urma compunerii celor două oscilaţii paralele şi de aceeaşi pulsaţie:
sinx A t (3.19)
unde φ (faza mişcării oscilatorii rezultante) este dat de (3.16).
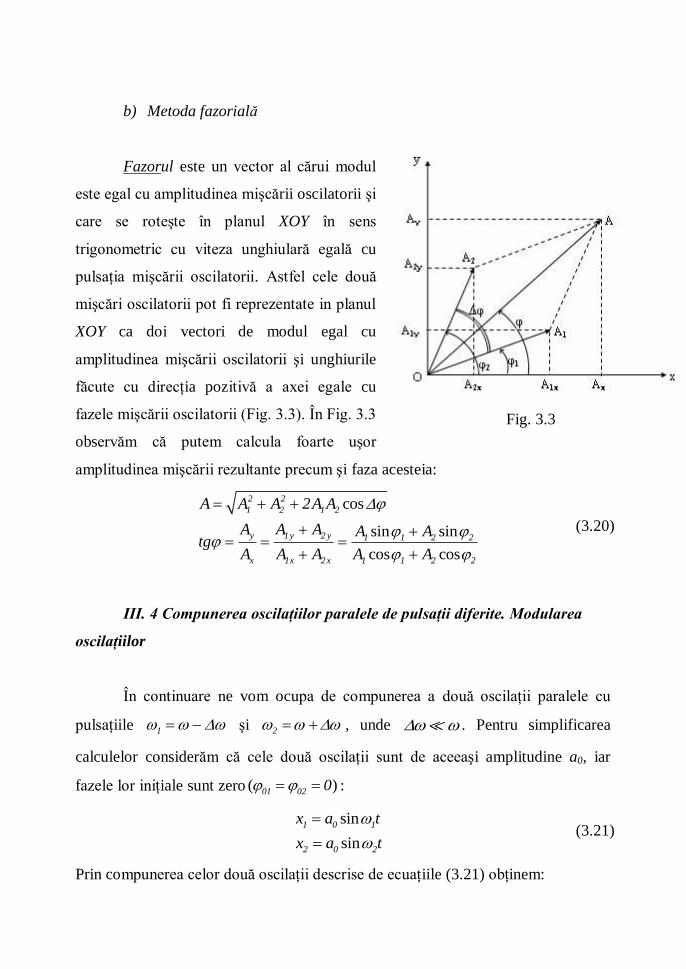
b) Metoda fazorială
Fazorul este un vector al cărui modul
este egal cu amplitudinea mişcării oscilatorii şi
care se roteşte în planul XOY în sens
trigonometric cu viteza unghiulară egală cu
pulsaţia mişcării oscilatorii. Astfel cele două
mişcări oscilatorii pot fi reprezentate in planul
XOY ca doi vectori de modul egal cu
amplitudinea mişcării oscilatorii şi unghiurile
făcute cu direcţia pozitivă a axei egale cu
fazele mişcării oscilatorii (Fig. 3.3). În Fig. 3.3
observăm că putem calcula foarte uşor
amplitudinea mişcării rezultante precum şi faza acesteia:
cos
sin sin
cos cos
2 2
1 2 1 2
y 1y 2 y 1 1 2 2
x 1x 2x 1 1 2 2
A A A 2A A
A A A A Atg
A A A A A
(3.20)
III. 4 Compunerea oscilaţiilor paralele de pulsaţii diferite. Modularea
oscilaţiilor
În continuare ne vom ocupa de compunerea a două oscilaţii paralele cu
pulsaţiile 1 şi 2 , unde . Pentru simplificarea
calculelor considerăm că cele două oscilaţii sunt de aceeaşi amplitudine a0, iar
fazele lor iniţiale sunt zero ( )01 02 0 :
sin
sin
1 0 1
2 0 2
x a t
x a t
(3.21)
Prin compunerea celor două oscilaţii descrise de ecuaţiile (3.21) obţinem:
Fig. 3.3
cos sin
cos( ) sin
2 1 1 21 2 0
0
x x x 2a t t2 2
2a t t
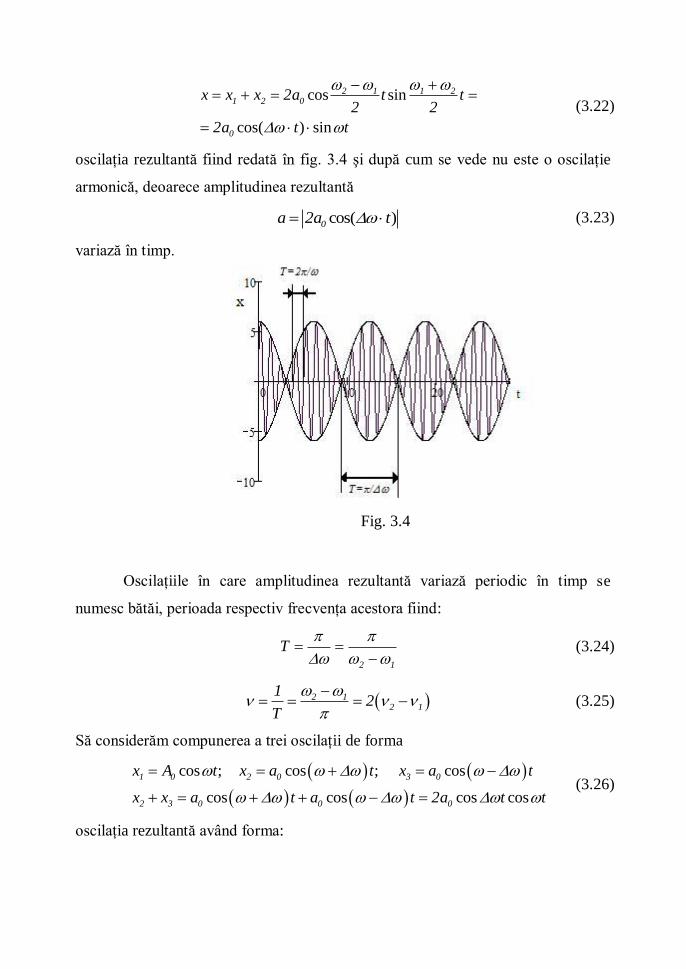
(3.22)
oscilaţia rezultantă fiind redată în fig. 3.4 şi după cum se vede nu este o oscilaţie
armonică, deoarece amplitudinea rezultantă
cos( )0a 2a t (3.23)
variază în timp.
Oscilaţiile în care amplitudinea rezultantă variază periodic în timp se
numesc bătăi, perioada respectiv frecvenţa acestora fiind:
2 1
T
(3.24)
2 12 1
12
T
(3.25)
Să considerăm compunerea a trei oscilaţii de forma
cos ; cos ; cos
cos cos cos cos
1 0 2 0 3 0
2 3 0 0 0
x A t x a t x a t
x x a t a t 2a t t
(3.26)
oscilaţia rezultantă având forma:
Fig. 3.4
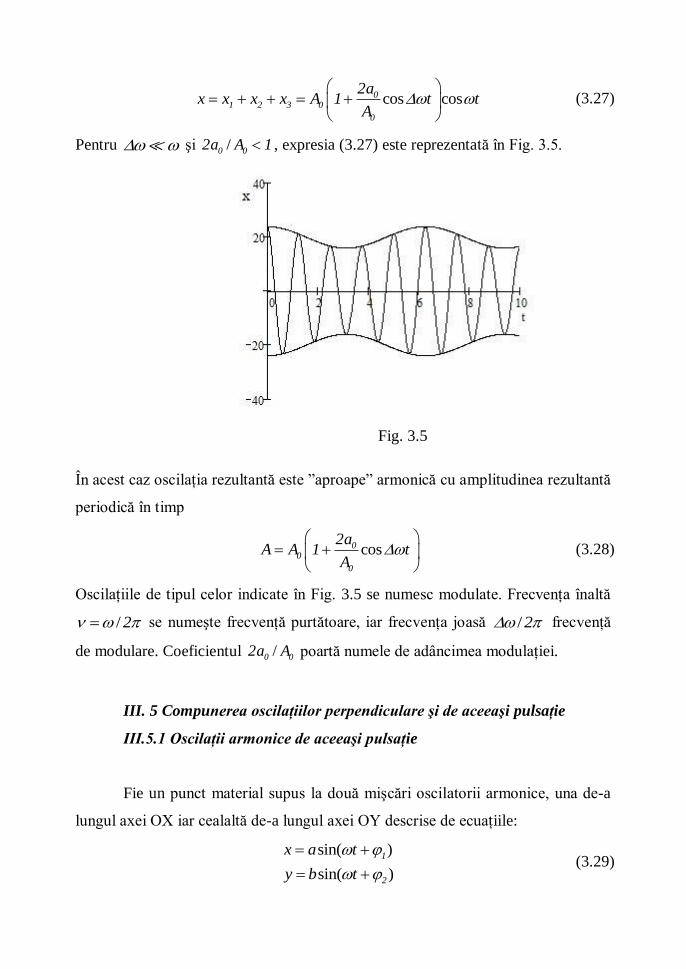
cos cos01 2 3 0
0
2ax x x x A 1 t t
A
(3.27)
Pentru şi /0 02a A 1 , expresia (3.27) este reprezentată în Fig. 3.5.
În acest caz oscilaţia rezultantă este ”aproape” armonică cu amplitudinea rezultantă
periodică în timp
cos00
0
2aA A 1 t
A
(3.28)
Oscilaţiile de tipul celor indicate în Fig. 3.5 se numesc modulate. Frecvenţa înaltă
/2 se numeşte frecvenţă purtătoare, iar frecvenţa joasă /2 frecvenţă
de modulare. Coeficientul /0 02a A poartă numele de adâncimea modulaţiei.
III. 5 Compunerea oscilaţiilor perpendiculare şi de aceeaşi pulsaţie
III.5.1 Oscilaţii armonice de aceeaşi pulsaţie
Fie un punct material supus la două mişcări oscilatorii armonice, una de-a
lungul axei OX iar cealaltă de-a lungul axei OY descrise de ecuaţiile:
sin( )
sin( )
1
2
x a t
y b t
(3.29)
Fig. 3.5

Pentru a găsi ecuaţia traiectoriei rezultante pe care o va descrie punctul material în
urma compunerii celor două mişcări oscilatorii trebuie să eliminăm timpul din
ecuaţiile parametrice ale traiectoriei (3.29). Pentru aceasta împărţim ecuaţiile în
ambii membrii cu amplitudinea a respectiv b şi dezvoltăm funcţiile sinus, obţinând:
sin cos sin cos
sin cos sin cos
1 1
2 2
xt t
a
yt t
b
(3.30)
În relaţia de mai sus înmulţim pe rând prima ecuaţie cu cosφ2 şi sinφ2 iar a doua
ecuaţie cu cosφ1 şi sinφ1 şi de fiecare dată le scădem membru cu membru,
rezultând:
cos cos sin cos
sin sin sin sin
2 1 2 1
2 1 2 1
x yt
a b
x yt
a b
(3.31)
Ridicăm la pătrat ambele ecuaţii (3.31) şi le adunăm membru cu membru, obţinând
astfel ecuaţia traiectoriei punctului material supus la cele două mişcări oscilatorii:
cos sin2 2
2
2 2
x y 2xy
a b ab (3.32)
unde 2 1 este diferenţa de fază dintre cele două mişcări oscilatorii.
Ecuaţia (3.32) reprezintă ecuaţia unei elipse înscrisă într-un dreptunghi având
laturile 2a şi 2b numit dreptunghiul amplitudinilor, axa elipsei făcând un unghi
cu ordonata (Fig. 3.6).
Fig. 3.6

O astfel de oscilaţie poartă denumirea de oscilaţie eliptic polarizată.
Excentricitatea elipsei, direcţia axelor elipsei cât şi sensul de mişcare al punctului
material, depinde de amplitudinile a şi b a celor două oscilaţii precum şi de
diferenţa de fază 2 1 .
În funcţie de valorile defazajului distingem următoarele cazuri:
1.Dacă 2n (n=0,1,2,3,...) cele două oscilaţii sunt în fază, iar ecuaţia
(3.32) devine:
2 2
2 2
x y 2xy b0 y x
a b ab a (3.33)
În aceste condiţii elipsa degenerează într-o dreaptă care coincide cu prima
diagonală a dreptunghiului amplitudinilor (Fig. 3.7).
2.Dacă 2n 1 (n=0,1,2,3,...) cele două oscilaţii sunt în opoziţie de
fază, iar din (3.32) se obţine:
2 2
2 2
x y 2xy b0 y x
a b ab a (3.34)
elipsa degenerând într-o dreaptă ce coincide cu cea de-a doua diagonală a
dreptunghiului amplitudinilor (Fig. 3.8).
Fig. 3.7

3.Dacă /2n 1 2 (n=0,1,2,3,...) cele două oscilaţii sunt în
cvadratură, iar din (3.32) rezultă:
2 2
2 2
x y1
a b (3.35)
Reprezentând ecuaţia unei elipse a cărei axe coincide cu axele de coordonate,
conduce la obţinerea fig. 3.9, oscilaţia rezultantă a punctului material numindu-se
oscilaţie polarizată eliptic.
4. Mişcarea rezultantă în cazurile:
/ ; / ; /0 2 2 3 2 şi /3 2 2 , are loc pe
elipse de configuraţie şi caracteristici variabile. Dacă punctul material se mişcă în
sens invers acelor de ceasornic avem oscilaţii polarizate la stânga, iar dacă se mişcă
în sensul acelor de ceasornic oscilaţiile rezultante sunt polarizate la dreapta.
Fig. 3.8
Fig. 3.9
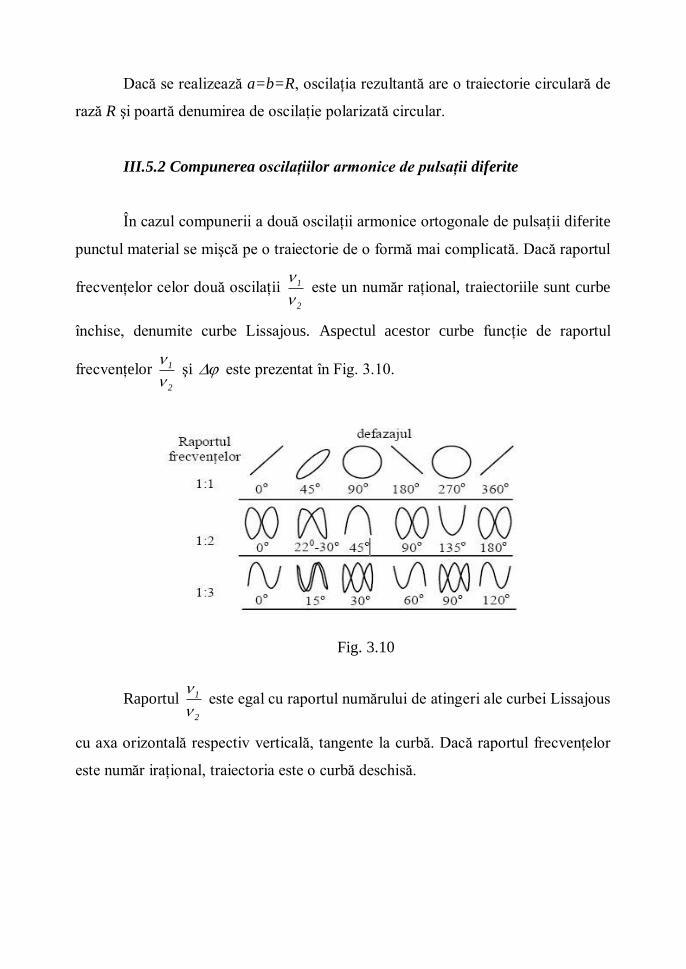
Dacă se realizează a=b=R, oscilaţia rezultantă are o traiectorie circulară de
rază R şi poartă denumirea de oscilaţie polarizată circular.
III.5.2 Compunerea oscilaţiilor armonice de pulsaţii diferite
În cazul compunerii a două oscilaţii armonice ortogonale de pulsaţii diferite
punctul material se mişcă pe o traiectorie de o formă mai complicată. Dacă raportul
frecvenţelor celor două oscilaţii 1
2
este un număr raţional, traiectoriile sunt curbe
închise, denumite curbe Lissajous. Aspectul acestor curbe funcţie de raportul
frecvenţelor 1
2
şi este prezentat în Fig. 3.10.
Raportul 1
2
este egal cu raportul numărului de atingeri ale curbei Lissajous
cu axa orizontală respectiv verticală, tangente la curbă. Dacă raportul frecvenţelor
este număr iraţional, traiectoria este o curbă deschisă.
Fig. 3.10
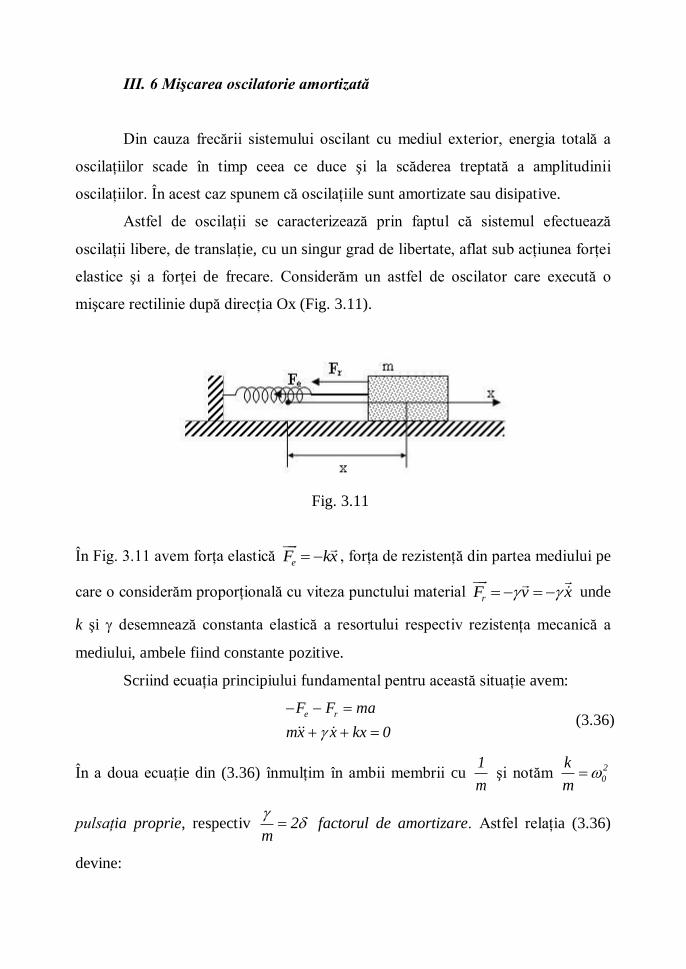
III. 6 Mişcarea oscilatorie amortizată
Din cauza frecării sistemului oscilant cu mediul exterior, energia totală a
oscilaţiilor scade în timp ceea ce duce şi la scăderea treptată a amplitudinii
oscilaţiilor. În acest caz spunem că oscilaţiile sunt amortizate sau disipative.
Astfel de oscilaţii se caracterizează prin faptul că sistemul efectuează
oscilaţii libere, de translaţie, cu un singur grad de libertate, aflat sub acţiunea forţei
elastice şi a forţei de frecare. Considerăm un astfel de oscilator care execută o
mişcare rectilinie după direcţia Ox (Fig. 3.11).
În Fig. 3.11 avem forţa elastică eF kx
, forţa de rezistenţă din partea mediului pe
care o considerăm proporţională cu viteza punctului material rF v x unde
k şi desemnează constanta elastică a resortului respectiv rezistenţa mecanică a
mediului, ambele fiind constante pozitive.
Scriind ecuaţia principiului fundamental pentru această situaţie avem:
e rF F ma
mx x kx 0
(3.36)
În a doua ecuaţie din (3.36) înmulţim în ambii membrii cu 1
m şi notăm 2
0
k
m
pulsaţia proprie, respectiv 2m
factorul de amortizare. Astfel relaţia (3.36)
devine:
Fig. 3.11

2
0x 2 x 0 (3.37)
ecuaţia (3.37) reprezentând ecuaţia diferenţială a oscilaţiilor amortizate efectuate de
punctul material.
Pentru a determina soluţia generală a acestei ecuaţii distingem 3 cazuri, după
valoarea discriminantului ecuaţiei caracteristice
2 2
0
2 2
0
2 0
4
(3.38)
a) 0 0
În acest caz soluţia generală este de forma
1 2t t
1 2x c e c e
(3.39)
unde
,
2 2
1 2 0 (3.40)
Cu aceste considerente putem afirma că mişcarea este una aperiodică, amplitudinea
oscilatorului scăzând exponenţial în timp.
b) 0 0
Pentru această ipoteză soluţia generală este de forma:
t
1 2x e c c t (3.41)
unde
1 2 (3.42)
În acest caz mişcarea este aperiodic critică, fiind un regim tranzitoriu de trecere de
la mişcarea aperiodică la cea periodică.
c) 0 0
În acest caz soluţiile ecuaţiei caracteristice sunt:
,
2 2
1 2 0i (3.43)
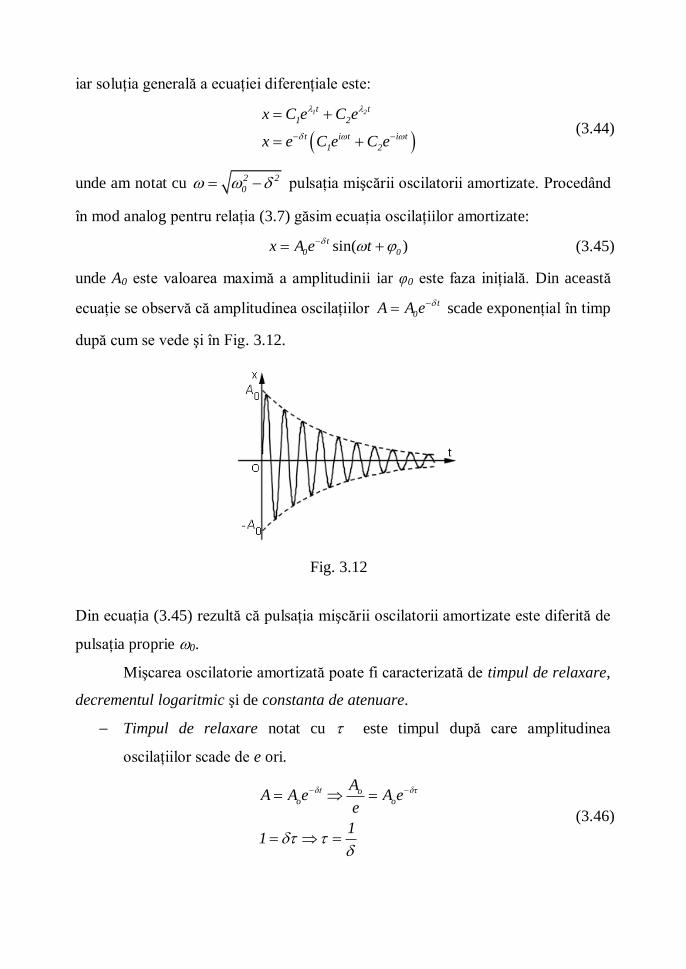
iar soluţia generală a ecuaţiei diferenţiale este:
1 2t t
1 2
t i t i t
1 2
x C e C e
x e C e C e
(3.44)
unde am notat cu 2 2
0 pulsaţia mişcării oscilatorii amortizate. Procedând
în mod analog pentru relaţia (3.7) găsim ecuaţia oscilaţiilor amortizate:
sin( )t
0 0x A e t (3.45)
unde A0 este valoarea maximă a amplitudinii iar φ0 este faza iniţială. Din această
ecuaţie se observă că amplitudinea oscilaţiilor t
0A A e scade exponenţial în timp
după cum se vede şi în Fig. 3.12.
Din ecuaţia (3.45) rezultă că pulsaţia mişcării oscilatorii amortizate este diferită de
pulsaţia proprie 0.
Mişcarea oscilatorie amortizată poate fi caracterizată de timpul de relaxare,
decrementul logaritmic şi de constanta de atenuare.
Timpul de relaxare notat cu este timpul după care amplitudinea
oscilaţiilor scade de e ori.
δt δτoo o
AA A e A e
e
11
(3.46)
Fig. 3.12
Decrementul logaritmic, notat cu Δ reprezintă logaritmul natural al
raportului dintre două amplitudini succesive ale oscilaţiilor amortizate
( )ln ln ln ln
( )
δtδt δt δT δTo
-δ(t T)
o
A t A ee e
A t T A e
T
(3.47)
Dacă notăm cu N numărul de oscilaţii complete după care amplitudinea oscilaţiilor
scade de e ori, putem scrie că TN
iar din (3.46) şi (3.47) rezultă:
1
N (3.48)
Constanta de atenuare (atenuarea) are expresia:
0Q (3.49)
Se observă că dacă Q 1 mişcarea punctului material este aperiodică, iar
dacă Q 1 avem oscilaţii cvasiperiodice. Energia totală se poate determina
înmulţind ecuaţia (3.36) cu dx
xdt
2
2 22
mxx x kxx 0
d mx kxx
dt 2 2
(3.50)
Expresia din paranteză este tocmai energia totală E şi avem:
2
c
dEx
dt
dE4 E
dt
(3.51)
Deoarece factorul de amortizare şi energia cinetică sunt mereu pozitive rezultă că:
dE
0dt
(3.52)
Prin urmare, datorită rezistenţei mediului, oscilatorul pierde în mod continuu
energie până când aceasta ajunge la zero. Pierderea de energie nu este uniformă pe
parcursul unei pseudo-perioade. Ea este maximă când Ec este maximă (când
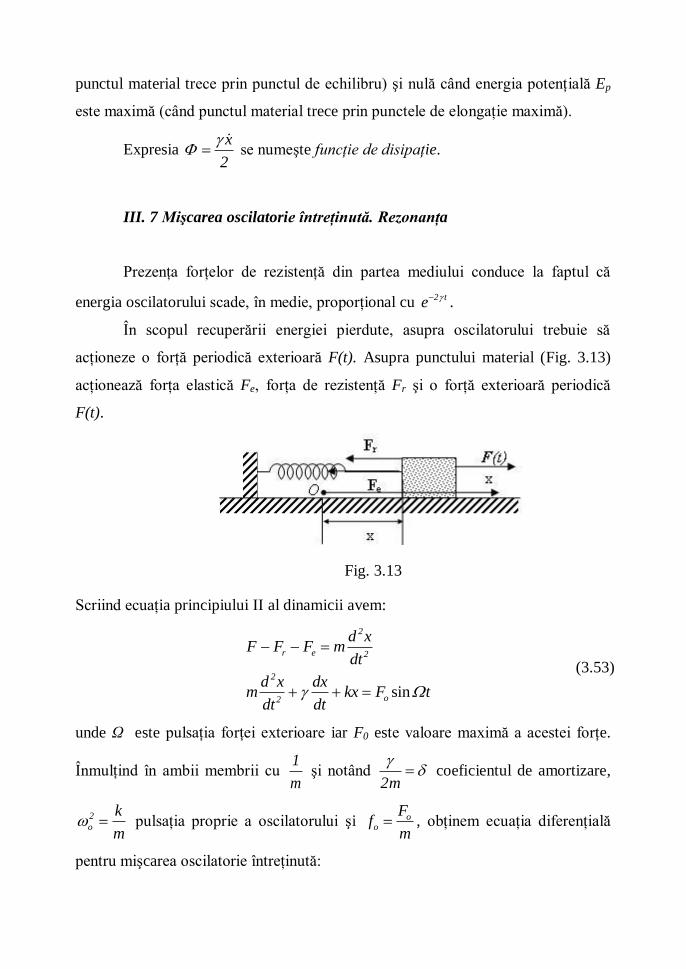
punctul material trece prin punctul de echilibru) şi nulă când energia potenţială Ep
este maximă (când punctul material trece prin punctele de elongaţie maximă).
Expresia x
2
se numeşte funcţie de disipaţie.
III. 7 Mişcarea oscilatorie întreţinută. Rezonanţa
Prezenţa forţelor de rezistenţă din partea mediului conduce la faptul că
energia oscilatorului scade, în medie, proporţional cu 2 te .
În scopul recuperării energiei pierdute, asupra oscilatorului trebuie să
acţioneze o forţă periodică exterioară F(t). Asupra punctului material (Fig. 3.13)
acţionează forţa elastică Fe, forţa de rezistenţă Fr şi o forţă exterioară periodică
F(t).
Scriind ecuaţia principiului II al dinamicii avem:
sin
2
r e 2
2
o2
d xF F F m
dt
d x dxm kx F t
dt dt
(3.53)
unde Ω este pulsaţia forţei exterioare iar F0 este valoare maximă a acestei forţe.
Înmulţind în ambii membrii cu 1
m şi notând
2m
coeficientul de amortizare,
2
o
k
m pulsaţia proprie a oscilatorului şi o
o
Ff
m , obţinem ecuaţia diferenţială
pentru mişcarea oscilatorie întreţinută:
Fig. 3.13

sin2
o ox 2 x x f t (3.54)
Soluţia unei ecuaţii diferenţiale de forma (3.54) este suma dintre soluţia ecuaţiei
diferenţiale omogene şi o expresie de forma termenului liber, F(t). Soluţia ecuaţiei
diferenţiale omogene reprezintă mişcarea oscilatorie amortizată (3.45), care datorită
scăderii exponenţiale a amplitudinii, după un timp t suficient de mare faţă de ,
poate fi neglijată. Aşadar, pentru t , soluţia ecuaţiei (3.54) este de forma
funcţiei F(t).
sin( )x B t (3.55)
unde β este defazajul dintre oscilaţiile sistemului şi ale forţei exterioare.
Constantele B şi β se determină din condiţia ca soluţia (3.55) să verifice ecuaţia
(3.54).
cos( )
sin( )
2
2
2
x B t
x B t
sin cos sin sin2 2
o oB t 2 B t B t f t
Dezvoltând funcţiile sin şi cos şi identificând termenii obţinem:
cos sin
sin cos
2 2
o o
2 2
o
B 2 B f
B 2 B 0
(3.56)
Rezolvând sistemul (3.56) obţinem amplitudinea şi oscilaţiilor B şi defazajul β
dintre oscilaţiile amortizate şi cele forţate, respectiv dintre elongaţie şi forţa
exterioară:
o
o
tg tg2 2
2 2
22
o
arctg2 2
2
(3.57)
o
o
fB ; tg
costg cos
2
2 2
11
2

2 2
0 2 22 2 2 2 2 2
o o o
2 2 22 2 2 2
2 2o
o 2 2
o
4f 1
f 4B
4 4
o
22 2 2 2
o
fB
4
(3.58)
Dacă în (3.58) considerăm 0 obţinem elongaţia statică B0 produsă de forţa F0:
0 00 2
0
F FB
m k (3.59)
Amplitudinea B şi defazajul β depind de structura sistemului oscilant (k, m)
şi de frecvenţa forţei exterioare. Conform cu (3.57) şi (3.58) odată cu variaţia
frecvenţei (pulsaţiei) forţei exterioare 0 are loc variaţia amplitudinii
oscilaţiilor B cât şi a defazajului φ. Valoarea maximă a amplitudinii Bmax se obţine
pentru pulsaţia Ω care face minimă cantitatea de sub radical a expresiei (3.58)
numită pulsaţie de rezonanţă ωr.
2 2 2o
o2
2 2 2 2
o
d f4 8 0
d2 4
2 2 2
o
2 2 2
o
2 2 2
o
2 0
2 0
2
2 2 2 2
r o 2 (3.60)
Se observă că frecvenţa de rezonanţă se apropie cu atât mai mult de frecvenţa
proprie de oscilaţie cu cât coeficientul de atenuare δ este mai mic. Înlocuind (3.60)
în (3.58) rezultă:
max0
2 2
0
FB
2m
(3.61)
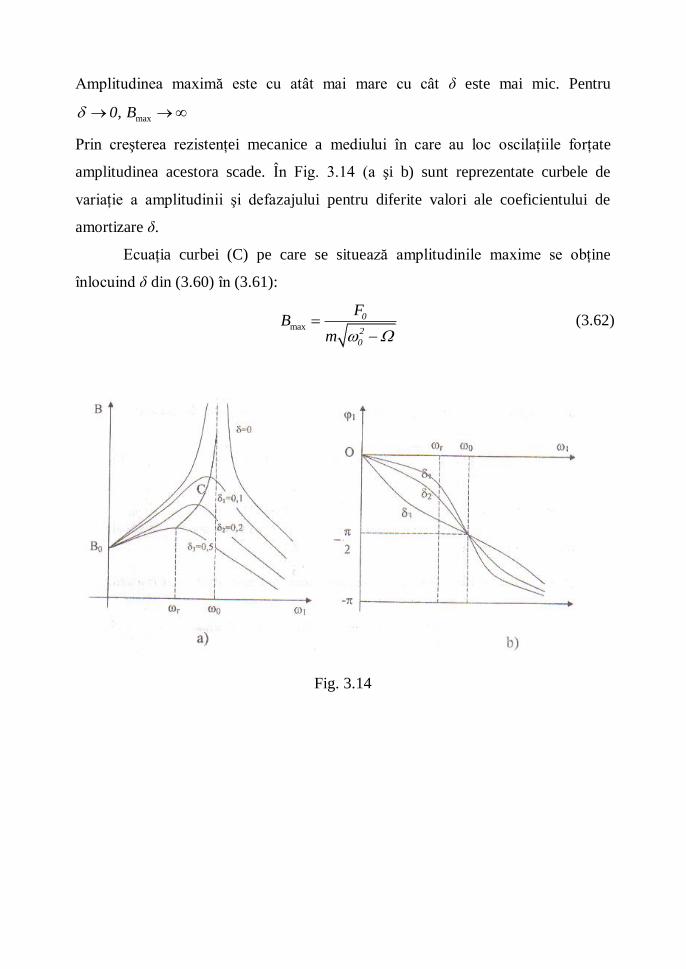
Amplitudinea maximă este cu atât mai mare cu cât δ este mai mic. Pentru
max,0 B
Prin creşterea rezistenţei mecanice a mediului în care au loc oscilaţiile forţate
amplitudinea acestora scade. În Fig. 3.14 (a şi b) sunt reprezentate curbele de
variaţie a amplitudinii şi defazajului pentru diferite valori ale coeficientului de
amortizare δ.
Ecuaţia curbei (C) pe care se situează amplitudinile maxime se obţine
înlocuind δ din (3.60) în (3.61):
max
0
2
0
FB
m
(3.62)
Fig. 3.14
CAPITOLUL IV
Unde mecanice (elastice)
IV.1 Introducere
Mediile continue (gazele, lichidele, solidele) sunt sisteme de particule
legate, adică de particule care interacţionează între ele. De aceea, dacă una din
particule oscilează, vor oscila după ea şi particulele vecine. Oscilaţiile se vor
propaga în mediu de la particulă la particulă sub formă de unde, numite unde
elastice. Propagarea undelor nu se face instantaneu ci cu viteză finită.
Unda fenomen de propagare a unor perturbaţii din aproape în aproape
datorută faptului că particulele mediului interacţionează între ele. Perturbaţia se
propagă din aproape în aproape astfel încât o particulă din mediu ce se găseşte în
spaţiul de propagare al undei va intra în oscilaţie cu aceeaşi amplitudine, respectiv
cu aceeaşi frecvenţă cu care oscilează sursa (particula asupra căreia s-a intervenit
din exterior provocând oscilaț ia) dar după un timp necesar perturbaţiei să ajungă
de la sursă la punctul respectiv.
Din cele spuse reiese că unda transportă energie dar nu şi masă.
După direcț ia de oscilaț ie a particulelor mediului avem:
- unde transversale la care particulele mediului au direcţia de oscilaţie
perpendiculară pe direcţia de propagare a undei;
- unde longitudinale la care particulele mediului au direcţia de oscilaţie
paralelă cu direcţia de propagare a undei.
Suprafaţa de undă este locul geometric al tuturor punctelor din spaţiu care
oscilează în fază.
În funcţie de forma suprafeţei de undă avem:
- unde plane, suprafaţa de undă este plană;
- unde sferice, suprafaţa de undă este sferică;
- unde cilindrice, suprafaţa de undă este un cilindru.
Front de undă cea mai avansată suprafaţă de undă.
Mecanismul de propagare a undelor în spaţiu a fost explicat de Huygens
care a enunț at un principiu ce permite explicarea modului de propagare a undelor.
Principiul lui Huygens
Orice punct de pe o suprafaţă de undă devine un nou centru de perturbaţie
care emite unde secundare, noua suprafaţă de undă fiind dată de înfăşurătoarea
suprafeţelor de unde secundare.
IV.2 Unda plană progresivă neatenuată
Dacă toate particulele situate într-un plan perpendicular pe direcţia de
propagare a undei oscilează identic (în fază), unda se numeşte plană.
Fie o undă plană care se propagă fără atenuare în direcţia axei Ox cu viteza
constantă c. Dacă în originea x=0 elongaţia u a particulei urmează o anumită lege:
u(0,t ) f ( t ) (4.1)
atunci pentru oricare punct de coordonată x de pe axa Ox elongaţia u(x,t) a
particulei de acolo, măsurată de la poziţia sa de echilibru, va oscila la fel ca
particula din origine, dar cu o anumită întârziere x/c, dată de timpul necesar undei
ca să ajungă din origine până la punctul considerat. În punctul de coordonată x la
momentul t elongaţia trebuie să fie aceeaşi ca în origine la momentul x
tc
.
x x
u( x,t ) u 0, f t F x ctc c
(4.2)
Elongaţiile u(x,t) ale particulelor, măsurate de la poziţiile lor de echilibru, pot fi atât
în direcţia de propagare a undei, atunci unda se numeşte longitudinală, cât şi într-o
direcţie perpendiculară pe direcţia de propagare, atunci unde se numeşte
transversală.
Expresia (4.2) reprezintă ecuaţia unei unde plane progresive care se propagă
fără atenuare în sensul pozitiv al acei Ox. Trecând viteza c trece în –c în (4.2)
obț inem ecuaț ia undei plane regresive:
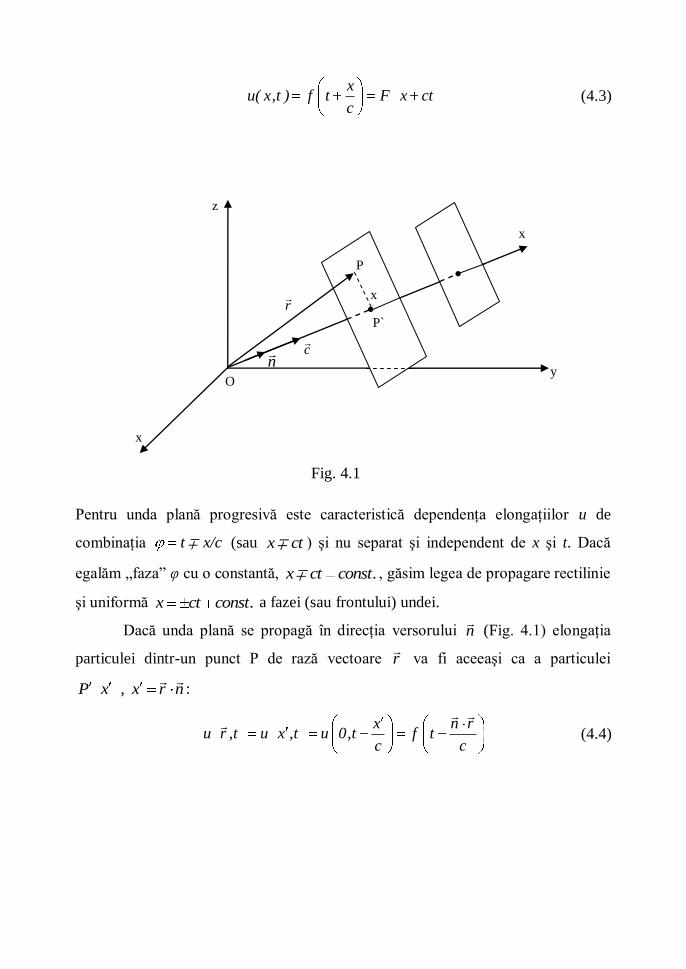
x
u( x,t ) f t F x ctc
(4.3)
Pentru unda plană progresivă este caracteristică dependenţa elongaţiilor u de
combinaţia t x/c (sau x ct ) şi nu separat şi independent de x şi t. Dacă
egalăm „faza” φ cu o constantă, x ct const. , găsim legea de propagare rectilinie
şi uniformă x ct const. a fazei (sau frontului) undei.
Dacă unda plană se propagă în direcţia versorului n
(Fig. 4.1) elongaţia
particulei dintr-un punct P de rază vectoare r
va fi aceeaşi ca a particulei
P x , x r n
:
x n r
u r ,t u x ,t u 0,t f tc c
(4.4)
O
x
z
y
P
x
`
x
` P``
r
c
n
Fig. 4.1

IV.3 Unda plană monocromatică
În unda plană monocromatică, oscilaţiile în fiecare punct sunt armonice
(sinusoidale), de o anumită frecvenţă (pulsaţie):
u 0,t Asin t f ( t )
x xu x,t f t Asin t
c c
(4.5)
Elongaţia u este nu numai periodică în timp, cu perioada 2
T , ci şi periodică în
spaţiu, în raport cu coordonata x, cu perioada λ, numită lungime de undă, care
rezultă din condiţia de periodicitate spaţială:
x xsin t sin t 2 2
c c c
2 c cc T
(4.6)
Lungimea de undă este egală cu distanţa parcursă de undă în timpul unei perioade
T, sau altfel spus, cu distanţa dintre două maxime (minime sau anulări) succesive
ale undei în spaţiu la un moment dat.
Ecuaţia undei (4.5) se mai poate scrie sub forma:
x t x
u Asin t Asin 2c T
(4.7)
u Asin t kx (4.8)
unde 2 2
kcT c
se numeşte număr de undă, egal cu numărul de lungimi de
undă care se cuprind în 2π unităţi de lungime.
Mai general, se defineşte vectorul de undă k
având modulul 2
kc
ca fiind orientat în direcţia şi sensul de propagare a undei:
2
k k n n nc
(4.9)

Atunci ecuaţia undei plane monocromatice care se propagă în spaţiu în direcţia şi
sensul vectorului de undă k
se scrie:
i t k r
i t k r
u Asin t k r Re Ae
u Ae
(4.10)
Argumentul funcț iei sinus se numeşte faza undei:
def .
t k r
(4.11)
Suprafeţele de undă sunt suprafeţe de fază constantă şi ele sunt perpendiculare (în
medii izotrope) pe direcţia de propagare a undei. Ecuaţia t k r const.
reprezintă ecuaţia unui plan, vectorul k
fiind perpendicular pe acesta. Normalele
pe suprafeţele de undă se numesc raze (direcț ia de propagare a undei).
Viteza undei plane monocromatice coincide cu viteza de deplasare a fazei,
numită viteză de fază.
Dacă faza din punctul de coordonată x la momentul t a ajuns în punctul de
coordonată x+dx la momentul t+dt, înseamnă că:
t kx ( t dt ) k( x dx )
d dt kdx 0
f
dxv c
dt k T (4.12)
Undele elastice se numesc şi unde sonore şi se împart în 3 game:
- infrasunete: cu frecvenţă sub 16 Hz;
- sunete auzibile: cu frecvenţele între 16 Hz şi 20 Hz (lungimi de undă în
aer între 20 m şi 2 cm);
- ultrasunete: cu frecvenţe peste 20 kHz (până la ~10 GHz).
IV.4 Ecuaţia diferenț ială a undelor
La un moment dat t, relaţiile (4.7) şi (4.8) dau deplasarea u de la poziţia de
echilibru a unei particule ca funcţie de coordonata x a particulei. Dacă unda este o
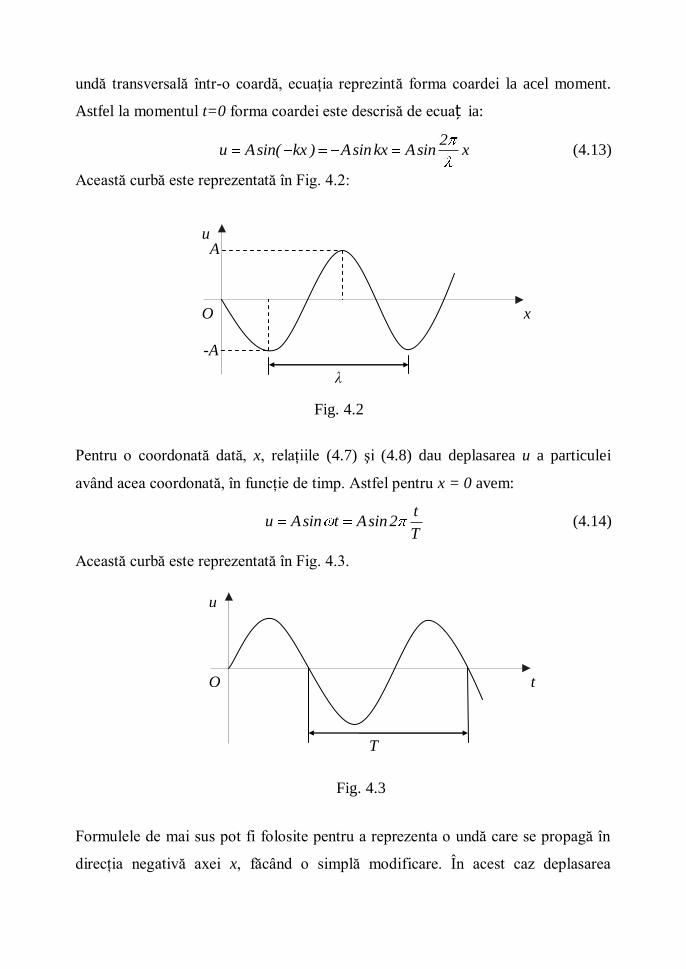
undă transversală într-o coardă, ecuaţia reprezintă forma coardei la acel moment.
Astfel la momentul t=0 forma coardei este descrisă de ecuaț ia:
2
u Asin( kx ) Asin kx Asin x (4.13)
Această curbă este reprezentată în Fig. 4.2:
Pentru o coordonată dată, x, relaţiile (4.7) şi (4.8) dau deplasarea u a particulei
având acea coordonată, în funcţie de timp. Astfel pentru x = 0 avem:
t
u Asin t Asin 2T
(4.14)
Această curbă este reprezentată în Fig. 4.3.
Formulele de mai sus pot fi folosite pentru a reprezenta o undă care se propagă în
direcţia negativă axei x, făcând o simplă modificare. În acest caz deplasarea
Fig. 4.2
λ
u
x O
-A
A
Fig. 4.3
T
u
t O

punctului de coordonată x la momentul t este aceeaşi cu deplasarea punctului de
coordonată x=0 la un moment ulterior x
tc
şi relaţia (4.5) devine:
x t x
u Asin 2 t Asin 2 Asin t kxc T
(4.15)
Este esenţial să se facă deosebirea între viteza de propagare, c a undei şi
viteza particulei, v, adică viteza unei particule din mediul prin care se propagă
unda. Viteza undei, c, este dată de:
ck
(4.16)
Viteza v a particulei într-un punct oarecare al unei unde transversale, adică
la o valoare fixă a coordonatei x, se obţine luând derivata lui u în raport cu t şi
considerând pe x constant.
O astfel de derivată se numeşte derivată parţială şi se notează u
t.
Astfel pentru o undă descrisă de ecuaț ia:
u Asin t kx (4.17)
avem pentru viteza punctului:
u
v Acos t kxt
(4.18)
Acceleraţia punctului este dată de cea de-a doua derivată parţială:
2
2
2
ua Asin t kx
t (4.19)
Se pot calcula derivatele parţiale în raport cu x, considerând pe t constant. Prima
derivată u
x este panta coardei într-un punct oarecare.
u
Ak cos t kxx
(4.20)
2
2
2
uAk sin t kx
x (4.21)
Din relaţiile (4.19) şi (4.21) rezultă că:
2
222
2 2
2
u
t cu k
x
(4.22)
Obț inem ecuaț ia cu derivate parț iale:
2 2
2 2 2
u 1 u0
x c t (4.23)
care este ecuaț ia diferenț ială a undelor care se propagă pe direcț ia axei Ox. În
cazul undelor care se propagă după o direcț ie oarecare ecuaț ia undelor se poate
scrie:
2
2 2
2
2 2
1 uu 0
c t
1u 0
c t
(4.24)
unde 2 2 2
2 2 2
u u u
x y z este operatorul lui Laplace. Ecuaț ia (4.24) este ecuaț ia
diferenț ială a undelor ș i ea mai poate fi scrisă sub forma:
u 0 (4.25)
unde 2
2 2
1
c t este operatorul lui d’Alembert.
Orice funcț ie care verifică ecuaț ia diferenț ială a undelor (4.25) poartă
denumirea de funcț ie de undă (notată de regulă cu ψ) ș i ea descrie o miș care
oscilatorie ce se propagă în spaț iu sub forma unei unde cu viteza c.
IV.5 Viteza undelor transversale ș i longitudinale
a) Viteza undelor transversale
Vom deduce o relaţie între viteza de propagare ct a unei unde într-o coardă
întinsă şi proprietăţile mecanice ale coardei, masa pe unitatea de lungime m
l şi
tensiunea din coardă T.
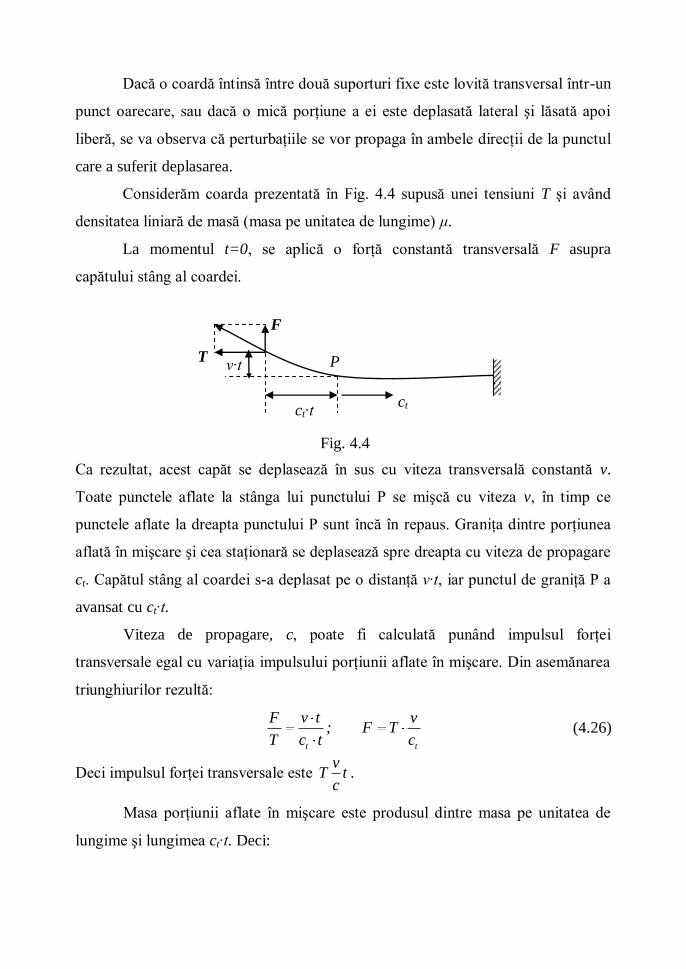
Dacă o coardă întinsă între două suporturi fixe este lovită transversal într-un
punct oarecare, sau dacă o mică porţiune a ei este deplasată lateral şi lăsată apoi
liberă, se va observa că perturbaţiile se vor propaga în ambele direcţii de la punctul
care a suferit deplasarea.
Considerăm coarda prezentată în Fig. 4.4 supusă unei tensiuni T şi având
densitatea liniară de masă (masa pe unitatea de lungime) μ.
La momentul t=0, se aplică o forţă constantă transversală F asupra
capătului stâng al coardei.
Ca rezultat, acest capăt se deplasează în sus cu viteza transversală constantă v.
Toate punctele aflate la stânga lui punctului P se mişcă cu viteza v, în timp ce
punctele aflate la dreapta punctului P sunt încă în repaus. Graniţa dintre porţiunea
aflată în mişcare şi cea staţionară se deplasează spre dreapta cu viteza de propagare
ct. Capătul stâng al coardei s-a deplasat pe o distanţă v∙t, iar punctul de graniţă P a
avansat cu ct∙t.
Viteza de propagare, c, poate fi calculată punând impulsul forţei
transversale egal cu variaţia impulsului porţiunii aflate în mişcare. Din asemănarea
triunghiurilor rezultă:
t t
F v t v; F T
T c t c (4.26)
Deci impulsul forţei transversale este v
T tc
.
Masa porţiunii aflate în mişcare este produsul dintre masa pe unitatea de
lungime şi lungimea ct∙t. Deci:
ct ct∙t
v∙t P T
F
Fig. 4.4
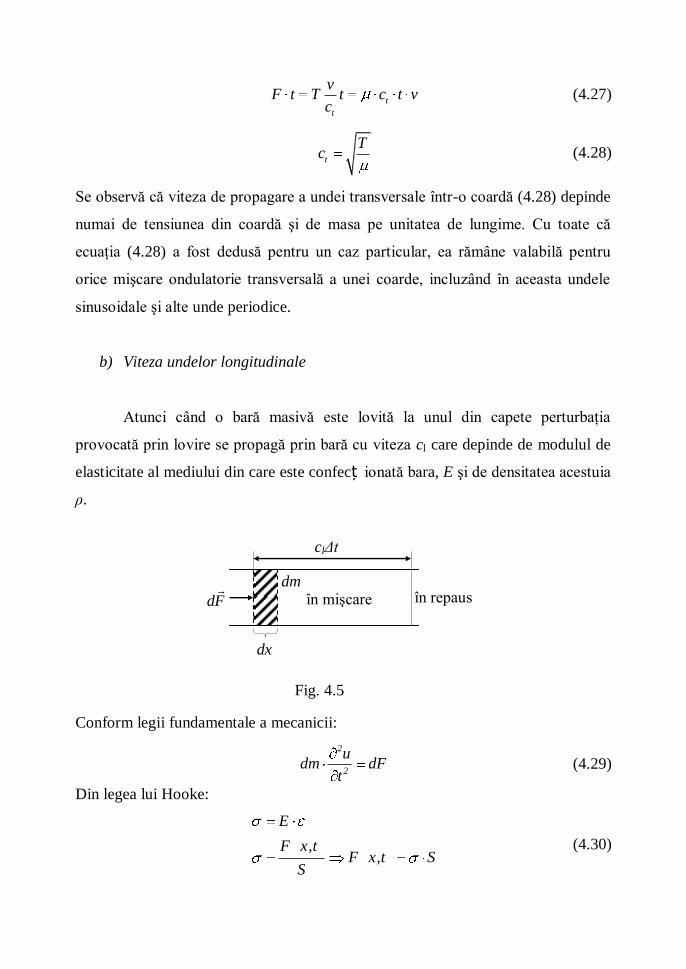
t
t
vF t T t c t v
c (4.27)
t
Tc (4.28)
Se observă că viteza de propagare a undei transversale într-o coardă (4.28) depinde
numai de tensiunea din coardă şi de masa pe unitatea de lungime. Cu toate că
ecuaţia (4.28) a fost dedusă pentru un caz particular, ea rămâne valabilă pentru
orice mişcare ondulatorie transversală a unei coarde, incluzând în aceasta undele
sinusoidale şi alte unde periodice.
b) Viteza undelor longitudinale
Atunci când o bară masivă este lovită la unul din capete perturbaţia
provocată prin lovire se propagă prin bară cu viteza cl care depinde de modulul de
elasticitate al mediului din care este confecț ionată bara, E şi de densitatea acestuia
ρ.
Conform legii fundamentale a mecanicii:
2
2
udm dF
t (4.29)
Din legea lui Hooke:
E
F x,tF x,t S
S
(4.30)
în mişcare în repaus dF
dx
dm
clΔt
Fig. 4.5
dF dxSx
(4.31)
Un strat infinit de subţire dx cu masa dm = ρSdx (ρ – densitatea în absenţa undei)
va fi supus la forţa rezultantă dată de (4.31).
Din (4.29), (4.30) şi (4.31) avem:
2
2
2 2
2 2
uSdx dxS
t x
E ; Ex x
u
x
u uSdx dxSE
t x
2 2
2 2
u u0
x E t (4.32)
Comparând (4.32) cu ecuaţia generală a undelor (4.23) găsim viteza undelor
longitudinale:
l
Ec (4.33)
IV.6 Reflexia şi refracţia undelor
IV.6.1 Reflexia undelor
Reflexia undelor este fenomenul de întoarcere a unei unde în mediul din
care provine atunci când întâlneşte o suprafaţă de separaţie dintre două medii
diferite (medii în care unda se propagă cu viteze diferite).
Fie un fascicul de raze paralele (front de undă plan) care se propagă într-un
mediu elastic cu viteza v1 ș i întâlneș te o suprafaț ă de separaț ie ∑ dintre acest
mediu ș i un alt mediu în care unda se propagă cu viteza v2 (Fig.4.6 ). Unghiul pe
care-l face fasciculul incident, pe suprafaț a de separaț ie dintre cele două medii,
cu normala la suprafaț ă în punctul de incidenț ă se numeș te unghi de incidenț ă
ș i se notează cu i. La întâlnirea suprafeț ei de separaț ie dintre cele două medii
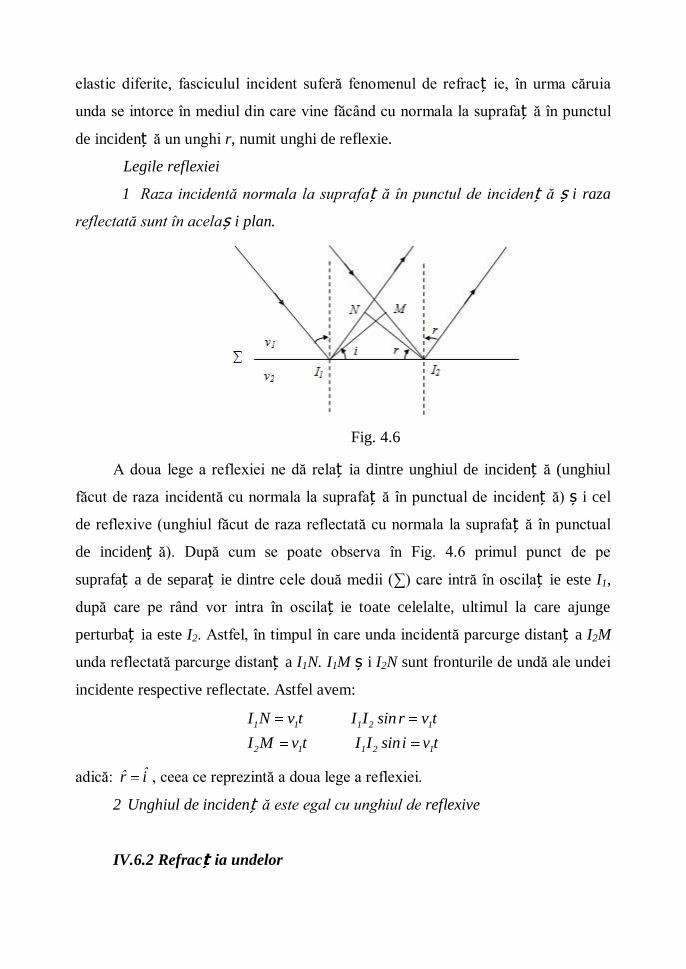
elastic diferite, fasciculul incident suferă fenomenul de refracț ie, în urma căruia
unda se intorce în mediul din care vine făcând cu normala la suprafaț ă în punctul
de incidenț ă un unghi r, numit unghi de reflexie.
Legile reflexiei
1 Raza incidentă normala la suprafaț ă în punctul de incidenț ă ș i raza
reflectată sunt în acelaș i plan.
A doua lege a reflexiei ne dă relaț ia dintre unghiul de incidenț ă (unghiul
făcut de raza incidentă cu normala la suprafaț ă în punctual de incidenț ă) ș i cel
de reflexive (unghiul făcut de raza reflectată cu normala la suprafaț ă în punctual
de incidenț ă). După cum se poate observa în Fig. 4.6 primul punct de pe
suprafaț a de separaț ie dintre cele două medii (∑) care intră în oscilaț ie este I1,
după care pe rând vor intra în oscilaț ie toate celelalte, ultimul la care ajunge
perturbaț ia este I2. Astfel, în timpul în care unda incidentă parcurge distanț a I2M
unda reflectată parcurge distanț a I1N. I1M ș i I2N sunt fronturile de undă ale undei
incidente respective reflectate. Astfel avem:
1 1 1 2 1
2 1 1 2 1
I N v t I I sinr v t
I M v t I I sini v t
adică: ˆr̂ i , ceea ce reprezintă a doua lege a reflexiei.
2 Unghiul de incidenț ă este egal cu unghiul de reflexive
IV.6.2 Refracț ia undelor
Fig. 4.6

Refracţia undelor este fenomenul de schimbare a direcţiei de propagare a
unei unde la trecerea printr-o suprafaţă de separaţie dintre două medii diferite.
Legile refracţiei
1. Raza de incidenţă normala la suprafaţă în punctul de incidenţă şi raza
refractată sunt în acelaşi plan.
Cea de-a doua lege a refracț iei ne dă legătura dintre unghiul de incidenț ă
(unghiul făcut de raza incidentă cu normala la suprafaț ă în punctual de incidenț ă)
ș i unghiul de refracț ie (unghiul făcut de raza refractată cu normala la suprafaț ă
în punctual de incidenț ă).
Fig. 4.7
Urmând un raț ionament asemănător cu cel utilizat pentru găsirea legii a doua a
reflexiei avem:
2 1 1 2 1
1 2 1 2 2
1 2
2 1
MI v t; I I sin i v t
I N v t; I I sin r v t
I N v
I M v
1 221
2 1
v nsin in
sin r v n (4.34)
unde n1 ș i n2 sunt indicii de refracţie a celor două medii iar n21 indicele de
refracţie relativ a mediului 2 faţă de mediul 1.
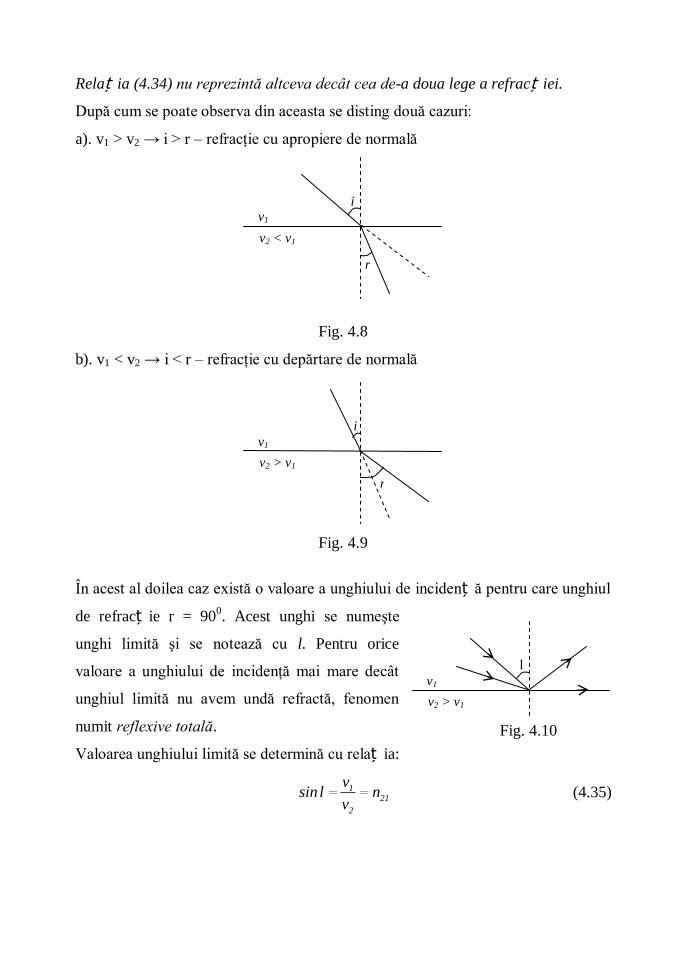
Relaț ia (4.34) nu reprezintă altceva decât cea de-a doua lege a refracț iei.
După cum se poate observa din aceasta se disting două cazuri:
a). v1 > v2 → i > r – refracţie cu apropiere de normală
Fig. 4.8
b). v1 < v2 → i < r – refracţie cu depărtare de normală
Fig. 4.9
În acest al doilea caz există o valoare a unghiului de incidenț ă pentru care unghiul
de refracț ie r = 900. Acest unghi se numeşte
unghi limită şi se notează cu l. Pentru orice
valoare a unghiului de incidenţă mai mare decât
unghiul limită nu avem undă refractă, fenomen
numit reflexive totală.
Valoarea unghiului limită se determină cu relaț ia:
121
2
vsin l n
v (4.35)
i
r
v1
v2 < v1
i
r
v1
v2 > v1
l
v1
v2 > v1
Fig. 4.10
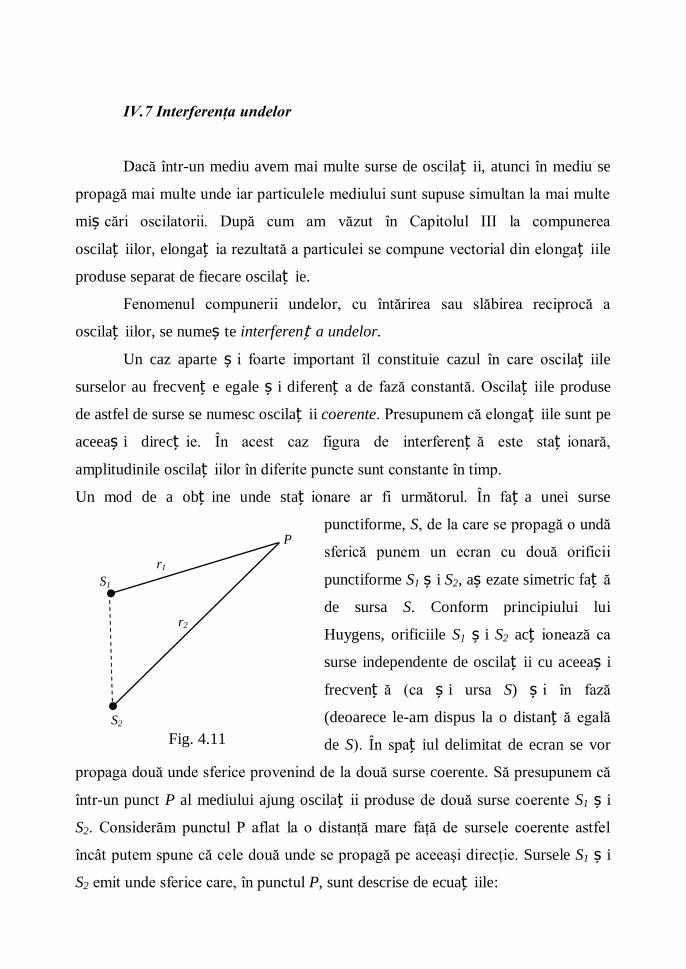
S1
S2
P
r1
r2
Fig. 4.11
IV.7 Interferenţa undelor
Dacă într-un mediu avem mai multe surse de oscilaț ii, atunci în mediu se
propagă mai multe unde iar particulele mediului sunt supuse simultan la mai multe
miș cări oscilatorii. După cum am văzut în Capitolul III la compunerea
oscilaț iilor, elongaț ia rezultată a particulei se compune vectorial din elongaț iile
produse separat de fiecare oscilaț ie.
Fenomenul compunerii undelor, cu întărirea sau slăbirea reciprocă a
oscilaț iilor, se numeș te interferenț a undelor.
Un caz aparte ș i foarte important îl constituie cazul în care oscilaț iile
surselor au frecvenț e egale ș i diferenț a de fază constantă. Oscilaț iile produse
de astfel de surse se numesc oscilaț ii coerente. Presupunem că elongaț iile sunt pe
aceeaș i direcț ie. În acest caz figura de interferenț ă este staț ionară,
amplitudinile oscilaț iilor în diferite puncte sunt constante în timp.
Un mod de a obț ine unde staț ionare ar fi următorul. În faț a unei surse
punctiforme, S, de la care se propagă o undă
sferică punem un ecran cu două orificii
punctiforme S1 ș i S2, aș ezate simetric faț ă
de sursa S. Conform principiului lui
Huygens, orificiile S1 ș i S2 acț ionează ca
surse independente de oscilaț ii cu aceeaș i
frecvenț ă (ca ș i ursa S) ș i în fază
(deoarece le-am dispus la o distanț ă egală
de S). În spaț iul delimitat de ecran se vor
propaga două unde sferice provenind de la două surse coerente. Să presupunem că
într-un punct P al mediului ajung oscilaț ii produse de două surse coerente S1 ș i
S2. Considerăm punctul P aflat la o distanţă mare faţă de sursele coerente astfel
încât putem spune că cele două unde se propagă pe aceeaşi direcţie. Sursele S1 ș i
S2 emit unde sferice care, în punctul P, sunt descrise de ecuaț iile:

11 1
1
22 2
2
rA t( r ,t ) sin 2
r T
rA t( r ,t ) sin 2
r T
(4.36)
În (4.36) notăm: 1 2
1 2
A Aa ; a
r r. Elongaț ia punctului P, supus la cele două
miș cări oscilatorii descrise de (4.36), se obț ine prin însumarea elongaț iilor date
de fiecare undă în P.
1 2
1 2
1 2
r rt tψ a sin2 a sin2
T T
a a a
2 1 1 2r r r rtψ 2acos 2 sin2
2 T 2 (4.37)
Relaț ia (4.37) reprezintă ecuaț ia de oscilaț ie a punctului P supus acț iunii celor
două perturbaț ii provenite de la sursele coerente S1 ș i S2. După cum putem
observa punctul P are tot o miș care oscilatorie armonică dar a cărei amplitudine
depinde de diferenț a de drum de la cele două surse:
2 1P
r rA 2a cos 2
2 (4.38)
Din (4.38) se poate observa că în funcț ie de diferenț a de drum 2 1r r r ,
aplitudinea de oscilaț ie poate avea diferite valori:
a) PA 0 pentru 2 1r r2 ( 2m 1)
2 2, adică 2 1r r r ( 2m 1)
2, cu
m 1,n . Deci toate punctele, din spaț iul de propagare a celor două unde,
pentru care diferenț a de drum este un număr impar de semilungimi de
undă, nu vor oscila (minim de interferenț ă).
b) PA 2a pentru 2 1r r2 m
2, adică 2 1r r r m , cu m 1,n . Deci
toate punctele, din spaț iul de propagare a celor două unde, pentru care
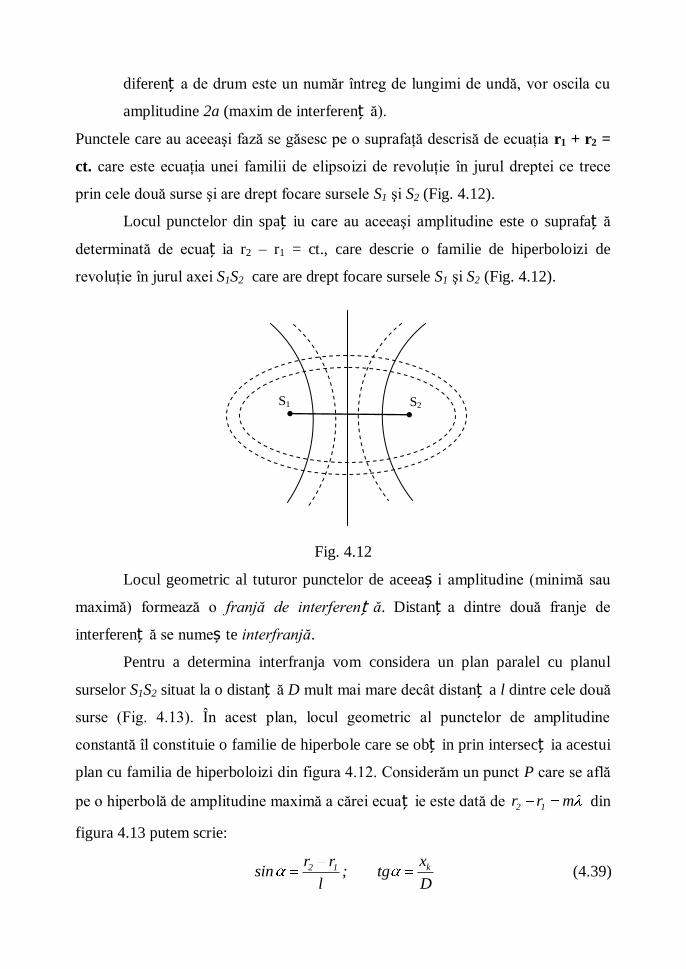
diferenț a de drum este un număr întreg de lungimi de undă, vor oscila cu
amplitudine 2a (maxim de interferenț ă).
Punctele care au aceeaşi fază se găsesc pe o suprafaţă descrisă de ecuaţia r1 + r2 =
ct. care este ecuaţia unei familii de elipsoizi de revoluţie în jurul dreptei ce trece
prin cele două surse şi are drept focare sursele S1 şi S2 (Fig. 4.12).
Locul punctelor din spaț iu care au aceeaşi amplitudine este o suprafaț ă
determinată de ecuaț ia r2 – r1 = ct., care descrie o familie de hiperboloizi de
revoluţie în jurul axei S1S2 care are drept focare sursele S1 şi S2 (Fig. 4.12).
Fig. 4.12
Locul geometric al tuturor punctelor de aceeaș i amplitudine (minimă sau
maximă) formează o franjă de interferenț ă. Distanț a dintre două franje de
interferenț ă se numeș te interfranjă.
Pentru a determina interfranja vom considera un plan paralel cu planul
surselor S1S2 situat la o distanț ă D mult mai mare decât distanț a l dintre cele două
surse (Fig. 4.13). În acest plan, locul geometric al punctelor de amplitudine
constantă îl constituie o familie de hiperbole care se obț in prin intersecț ia acestui
plan cu familia de hiperboloizi din figura 4.12. Considerăm un punct P care se află
pe o hiperbolă de amplitudine maximă a cărei ecuaț ie este dată de 2 1r r m din
figura 4.13 putem scrie:
k2 1xr r
sin ; tgl D
(4.39)
S1 S2
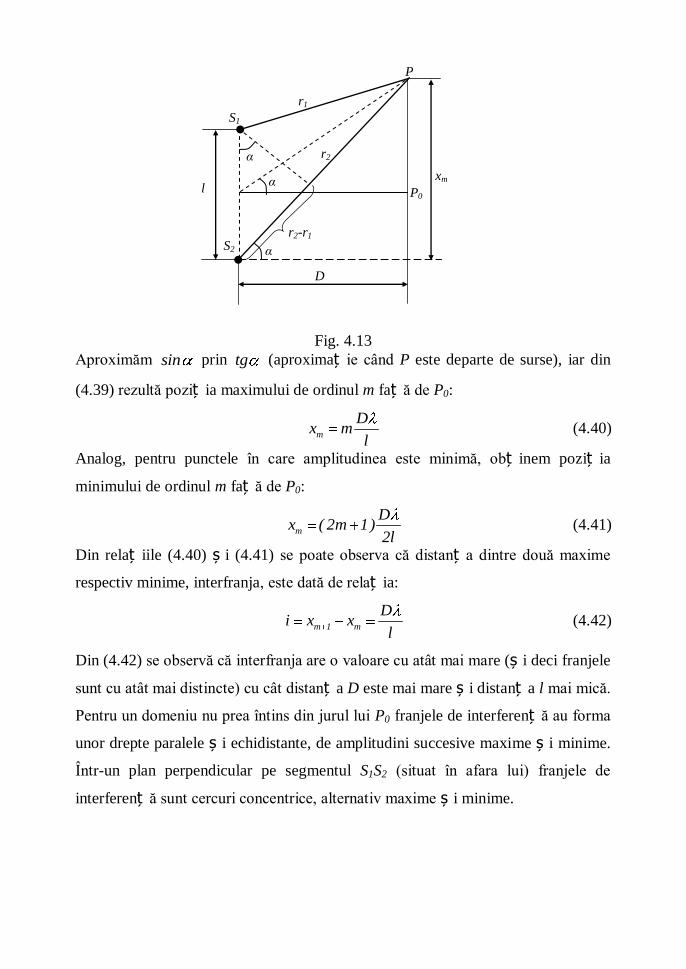
S1
S2
r1
r2
xm
r2-r1
α
α
l
D
P
P0
α
Fig. 4.13
Aproximăm sin prin tg (aproximaț ie când P este departe de surse), iar din
(4.39) rezultă poziț ia maximului de ordinul m faț ă de P0:
m
Dx m
l (4.40)
Analog, pentru punctele în care amplitudinea este minimă, obț inem poziț ia
minimului de ordinul m faț ă de P0:
m
Dx ( 2m 1)
2l (4.41)
Din relaț iile (4.40) ș i (4.41) se poate observa că distanț a dintre două maxime
respectiv minime, interfranja, este dată de relaț ia:
m 1 m
Di x x
l (4.42)
Din (4.42) se observă că interfranja are o valoare cu atât mai mare (ș i deci franjele
sunt cu atât mai distincte) cu cât distanț a D este mai mare ș i distanț a l mai mică.
Pentru un domeniu nu prea întins din jurul lui P0 franjele de interferenț ă au forma
unor drepte paralele ș i echidistante, de amplitudini succesive maxime ș i minime.
Într-un plan perpendicular pe segmentul S1S2 (situat în afara lui) franjele de
interferenț ă sunt cercuri concentrice, alternativ maxime ș i minime.
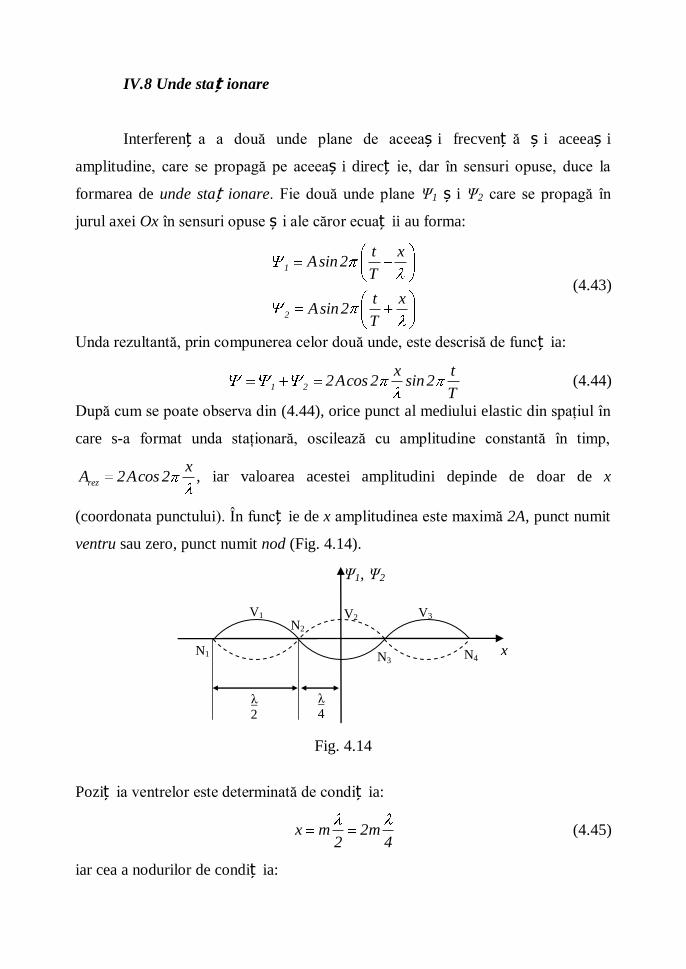
IV.8 Unde staț ionare
Interferenț a a două unde plane de aceeaș i frecvenț ă ș i aceeaș i
amplitudine, care se propagă pe aceeaș i direcț ie, dar în sensuri opuse, duce la
formarea de unde staț ionare. Fie două unde plane Ψ1 ș i Ψ2 care se propagă în
jurul axei Ox în sensuri opuse ș i ale căror ecuaț ii au forma:
1
2
t xAsin 2
T
t xAsin 2
T
(4.43)
Unda rezultantă, prin compunerea celor două unde, este descrisă de funcț ia:
1 2
x t2Acos 2 sin 2
T (4.44)
După cum se poate observa din (4.44), orice punct al mediului elastic din spaţiul în
care s-a format unda staţionară, oscilează cu amplitudine constantă în timp,
rez
xA 2Acos 2 , iar valoarea acestei amplitudini depinde de doar de x
(coordonata punctului). În funcț ie de x amplitudinea este maximă 2A, punct numit
ventru sau zero, punct numit nod (Fig. 4.14).
Fig. 4.14
Poziț ia ventrelor este determinată de condiț ia:
x m 2m2 4
(4.45)
iar cea a nodurilor de condiț ia:
V1 V2 V3
N1
N2
N3 N4
λ
2
λ
4
x
Ψ1, Ψ2
x 2m 14
(4.46)
Distanț a dintre două noduri consecutive sau dintre două ventre consecutive este
2, iar distanț a dintre un nod ș i un ventru este
4.
Undele staț ionare se caracterizează prin aceea că amplitudinea unui punct
dat de pe direcț ia de propagare are aceeaș i valoare la orice moment. Acest lucru
nu este valabil pentru cazul unei singure unde, când amplitudinea unui punct din
spaț iul de propagare variază în timp.
IV.9 Unde sonore
Unele dintre cele mai studiate unde elastice sunt undele care sunt capabile
să producă o senzaț ie auditivă, numite unde sonore sau pe scurt sunete. Aceste
unde mecanice pentru a putea să fie percepute de urechea umană trebuie să
îndeplinească următoarele caracteristici:
a) timpul de oscilaţie trebuie să fie mai mare decât o valoare minimă de
0,06 s.
b) intensitatea trebuie să fie mai mare decât o valoare minimă de 10-12
W/m2, numită prag de audibilitate.
c) frecvenţa trebuie să fie cuprinsă între ν = 20 Hz ÷ 20 kHz.
Partea din fizică care se ocupă cu studiul sunetelor se numeș te acustică. În
cadrul acusticii intră ș i studiul undelor sonore cu frecvenț e mai mari de 20 kHz,
numite ultrasunete, precum ș i cel al undelor sonore cu frecvenț e mai mici de 20
kHz, numite infrasunete (care în general sunt generate de trepidaț ii).
Caracteristicile sunetelor
Prin caracteristicile unui sunet se înț eleg acele mărimi care îl deosebesc de
un alt sunet: înălț ime, intensitate ș i timbru.

a) Înălţimea sunetului este o caracteristică dată de frecvenţa sa – sunetele
înalte au frecvenţă mare ș i sunt sunete ascuţite, iar sunete joase sau grave au
frecvenţa mică.
Determinarea frecvenț ei unui sunet se poate face prin comparaț ie cu un
sunet de referinț ă de frecvenț ă cunoscută. Metoda comparaț iei se bazează pe
fenomenul de bătăi în cazul undelor sonore care se suprapun într-un punct situat la
aceeaș i distanț a x de cele două surse care generează sunetele (cel de frecvenț ă
necunoscută ν ș i cel de frecvenț ă variabilă cunoscută ν0). Considerând că cele
două au aceeaș i amplitudine a, elongaț iile particulei mediului elastic din punctul
de coordonată x vor fi date de relaț iile:
1 0
2
xψ x,t a sin2 t
v
xψ x,t a sin2 t
v
unde v este viteza de propagare a undelor în mediu.
Elongaț ia rezultantă a particulei mediului din punctul de coordonată x va fi:
0 01 2
x x2a cos 2 t sin 2 t
2 v 2 v
Amplitudinea undei rezultante nu este constantă în timp, rezultă că aceasta
prezintă întăriri ș i slăbiri periodice de intensitate. Acest fenomen este cunoscut sub
denumirea de fenomen de bătăi, de frecvenț ă b 0 , permite ca din
determinarea experimentală a lui νb ș i din cunoaș terea lui ν0 să se poată calcula
frecvenț a ν a sunetului considerat.
b) Intensitatea sunetului. În cazul sunetelor se deosebesc două tipuri de
intensităț i:
- intensitatea sonoră (sau acustică) Is
- intensitatea auditivă Ia
Intensitatea sonoră Is reprezintă energia transportată de unda sonoră în
unitatea de timp prin unitatea de suprafaț ă transversală la direcţia de propagare:
s
1 WI
S t (4.47)
Pentru sunetul normal cu frecvenț a de 1000 Hz, intensitatea acustică
variază între 10-12
W/m2 ș i 10
2 W/m
2. Valoarea minimă a intensităț ii sonore care
poate fi percepută de urechea noastră se numeș te prag de audibilitate, iar valoarea
maximă care poate fi suportată de urechea noastră se numeș te prag de senzaț ie
dureroasă.
Datorită gamei de valori prea largi pentru intensitatea sonoră s-a convenit să
se definească o altă mărime caracteristică, al cărei domeniu de valori să fie mai
restrâns. Această mărime, numită nivel sonor (acustic) se defineș te prin relaț ia:
ss
0
IN lg
I (4.48)
unde Is este intensitatea sonoră a sunetului considerat, iar I0 este intensitatea de pe
pragul de audibilitate corespunzătoare frecvenț ei ν=1000 Hz (I0=10-12
W/m2).
Când Is variază între 10-12
W/m2 ș i 10
2 W/m
2, nivelul sonor Ns variază de la 0 la 14.
Un bel reprezintă nivelul sonor al unui sunet a cărui intensitate sonoră este de 10
ori mai mare decât cea a pragului de audibilitate, I0. Urechea omului este sensibilă
la variaț ii ale intensu tăț ii sonore mai mici decât cea care corespunde pentru un
bel, în sensul că poate distinge două sunete a căror intensitate variază cu 26 %. Din
acest motiv în practică se foloseș te decibelul, cu simbolul dB. Un decibel
reprezintă nivelul sonor al unui sunet a cărui intensitate sonoră este de 1,26 ori mai
mare decât cea a pragului de audibilitate I0. ivelurile sonore în decibeli pot fi
calculate cu relaț ia:
ss
0
IN ( dB ) 10 lg
I (4.49)
Sunetele audibile au nivelul sonor între 0 ș i 140 dB.
Intensitatea auditivă (Ia). S-a constatat că urechea noastră percepe două
sunete care au aceeaș i intensitate sonoră, dar frecvenț e diferite, ca două sunete de
tărie diferită. Astfel s-a introdus o altă mărime numită intensitate auditivă, notată
cu Ia, ce caracterizează senzaț ia auditivă produsă omului de către un sunet.
Definirea acestei mărimi se bazează pe legea Weber – Fechner, stabilită
experimental, al cărei enunț este următorul: senzaț ia auditivă fiziologică este
proporț ională cu logaritmul zecimal al excitaț iei sonore. Prin definiț ie,
intensitatea auditivă a unui sunet este egală cu intensitatea sonoră a unui sunet
normal (ν=1000 Hz) care produce aceeaș i senzaț ie auditivă ca ș i sunetul dat.
Corespunzător, se defineș te ș i nivelul auditiv:
aa
0
IN 10 lg
I (4.50)
Nivelul auditiv se măsoară în foni. Fonul reprezintă nivelul auditiv al unui sunet a
cărui intensitate auditivă este de 1,26 ori mai mare decât intensitatea auditivă I0 de
pe pragul de audibilitate a sunetului normal.
c) Timbrul sunetului este acea caracteristică care permite să fie deosebite
între ele două sunete de aceeaș i frecvenț ă ș i intensitate, emise de două surse de
naturi diferite. Această deosebire între sunete este determinată de faptul că în
general un sunet nu este simplu, ci este compus dintr-o suprapunere de sunete
simple de frecvenț e ν, 2ν, 3ν,…Dintre acestea, sunetul cu frecvenț a cea mai
joasă, ν, se numeș te sunet fundamental, iar sunetele cu frecvenț ele 2ν, 3ν,… se
numesc armonice superioare ale sunetului fundamental. Două corpuri ce emit
acelaș i sunet fundamental, emit armonice superioare diferite ș i acestea definesc
timbrul sunetului.
IV.10 Absorbț ia undelor
Unda emisă de o sursă se disipă într-un volum din ce în ce mai mare,
aceasta înseamnă că energia undei va traversa suprafeţe din ce în ce mai mari. Ca
urmare a interacț iunii undei cu mediu mediul prin care se propagă unda se
atenuează pe măsura propagării, adică energia transportată de undă este din ce în ce
mai mică. Astfel, spunem că unda suferă fenomenul de absorbţie în mediul unde se
propagă.
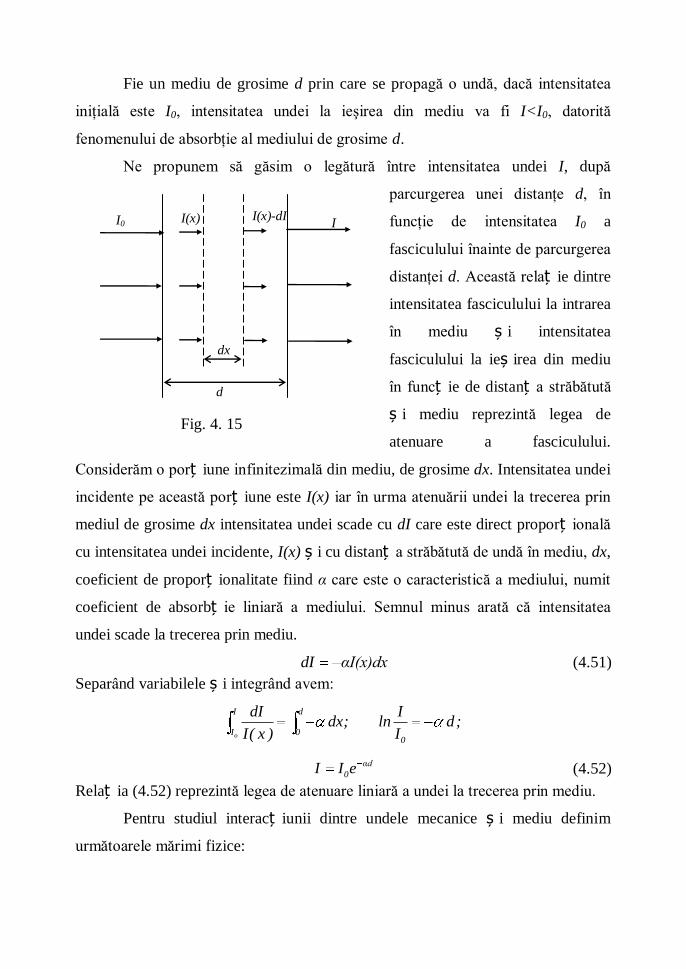
Fie un mediu de grosime d prin care se propagă o undă, dacă intensitatea
iniţială este I0, intensitatea undei la ieşirea din mediu va fi I<I0, datorită
fenomenului de absorbţie al mediului de grosime d.
Ne propunem să găsim o legătură între intensitatea undei I, după
parcurgerea unei distanţe d, în
funcţie de intensitatea I0 a
fasciculului înainte de parcurgerea
distanţei d. Această relaț ie dintre
intensitatea fasciculului la intrarea
în mediu ș i intensitatea
fasciculului la ieș irea din mediu
în funcț ie de distanț a străbătută
ș i mediu reprezintă legea de
atenuare a fasciculului.
Considerăm o porț iune infinitezimală din mediu, de grosime dx. Intensitatea undei
incidente pe această porț iune este I(x) iar în urma atenuării undei la trecerea prin
mediul de grosime dx intensitatea undei scade cu dI care este direct proporț ională
cu intensitatea undei incidente, I(x) ș i cu distanț a străbătută de undă în mediu, dx,
coeficient de proporț ionalitate fiind α care este o caracteristică a mediului, numit
coeficient de absorbț ie liniară a mediului. Semnul minus arată că intensitatea
undei scade la trecerea prin mediu.
dI αI(x)dx (4.51)
Separând variabilele ș i integrând avem:
o
I d
I 00
dI Idx; ln d;
I( x ) I
αd
0I I e (4.52)
Relaț ia (4.52) reprezintă legea de atenuare liniară a undei la trecerea prin mediu.
Pentru studiul interacț iunii dintre undele mecanice ș i mediu definim
următoarele mărimi fizice:
I(x) I0
dx
d
I I(x)-dI
Fig. 4. 15
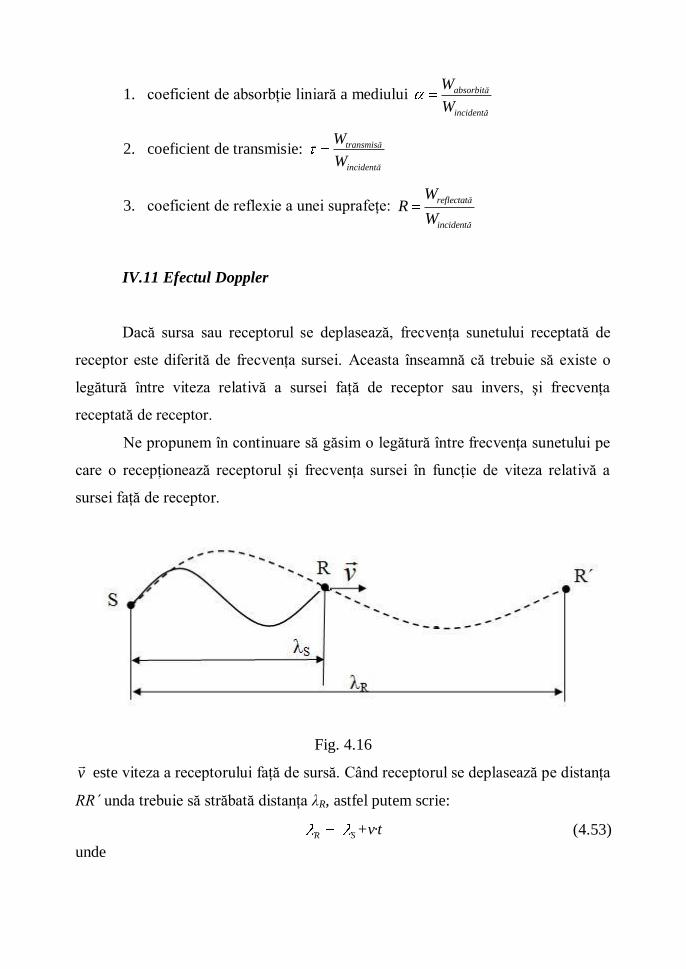
1. coeficient de absorbţie liniară a mediului absorbită
incidentă
W
W
2. coeficient de transmisie: transmisă
incidentă
W
W
3. coeficient de reflexie a unei suprafeţe: reflectată
incidentă
WR
W
IV.11 Efectul Doppler
Dacă sursa sau receptorul se deplasează, frecvenţa sunetului receptată de
receptor este diferită de frecvenţa sursei. Aceasta înseamnă că trebuie să existe o
legătură între viteza relativă a sursei faţă de receptor sau invers, şi frecvenţa
receptată de receptor.
Ne propunem în continuare să găsim o legătură între frecvenţa sunetului pe
care o recepţionează receptorul şi frecvenţa sursei în funcţie de viteza relativă a
sursei faţă de receptor.
Fig. 4.16
v
este viteza a receptorului faţă de sursă. Când receptorul se deplasează pe distanţa
RR´ unda trebuie să străbată distanţa λR, astfel putem scrie:
R S +v·t (4.53)
unde
RR
λ c·t; t
c (4.54)
iar c este viteza de propagare a sunetului în mediul respectiv. Înlocuind (4.54) în
(4.53) ș i efectuând calculele obț inem:
S R
v1
c (4.55)
Relaț ia (4.55) este valabilă când receptorul se îndepărtează de sursă cu
viteza v. Dacă receptorul se apropie de sursă frecvenţa receptată de receptor este:
S R
v1
c (4.56)
Ț inând cont că c
frecvenț a semnalului recepț ionată de receptor este dată de
relaț ia:
R S
c v
c (4.57)
unde semnul minus corespunde cazului în care receptorul se îndepărtează de sursă
iar semnul plus cazului în care receptorul se apropie de sursă.
În cazul în care, atât sursa cât ș i receptorul se deplasează, frecvenț a
recepț ionată de receptor poate fi găsită după relaț ia:
RR S
S
c v
c v (4.58)
unde vR ș i vS sunt vitezele receptorului respectiv sursei.
Din relaț ia (4.57) se poate observa că atunci când receptorul se apropie de sursă,
frecvenț a pe care o recepț ionează acesta este mai mare decât frecvenț a sursei,
iar atunci când receptorul se îndepărtează de sursă frecvenț a recepț ionată este
mai mică decât frecvenț a sursei. Acest lucru se poate observa cel mai uș or dacă
stăm pe marginea străzii ș i suntem atenț i la maș inile care trec. Dacă o maș ină
care are claxonul pornit ș i se apropie de noi, sunetul emis îl auzim mai ascuț it
(frecvenț ă mare) în timp ce atunci când se îndepărtează sunetul este mai gros
(frecvenț ă mică). După cum se poate observa din (4.58) frecvenț a recepț ionată
de receptor depinde atât de viteza sursei cât ș i de cea a receptorului.
Capitolul V
ELECTROSTATICA
V.1 Sarcina electrică
Primul fenomen care a condus la apariţia electricităţii este electrizarea
corpurilor prin frecare. Din vremea lui Thales din Milet (624 – 546 î.e.n.) s-a
observat că unele substanţe, cum este chihlimbarul (electron, în limba greacă), după
ce sunt frecate cu alte materiale (stofă, blană de pisică, ş.a.) pot atrage corpuri mai
uşoare (fire de păr, bucăţi mici de paie, bucăţele de pergament ş.a.). Corpurile care
prin frecare capătă proprietatea de a atrage alte corpuri au fost numite corpuri
electrizate, iar ceea ce conferă această proprietate a fost numită electricitate. W.
Gilbert (în anul 1600) arată că şi alte substanţe (sticla, răşina) pot fi electrizate. El a
introdus cuvântul electricitate provenind de la cuvântul electron precum şi
termenul de forţă electrică. Acum cunoaştem un mare grup de substanţe care se pot
electriza în felul chihlimbarului (izolanţi): ebonit, celuloidul plexiglasul, etc. şi ştim
că frecarea se poate face nu numai cu blănuri de animale, ci şi cu postav, mătase,
hârtie etc. Mărimea fizică ce caracterizează starea de electrizare a unui este sarcina
electrică.
După cum se ştie, în structura atomului există o parte centrală, încărcată
pozitiv numită nucleu în jurul căreia se mişcă electroni (sarcini negative). Notând
sarcina cea maică, cunoscută, sau sarcina elementară cu e (e>0), s-a stabilit
experimental că sarcina electronului este –e, iar sarcina elementară pozitivă este
cea a protonului din nucleu (e). În orice particulă constituentă a substanţelor, atomi,
molecule, există sarcini pozitive (+npe) şi sarcini negative (-nne). Dacă particula
este neutră, atunci numărul sarcinilor pozitive este egal cu numărul sarcinilor
negative (np=nn). Deci, în procesul de electrizare, dacă vor fi smulşi un număr de
electroni, corpul respectiv va rămâne încărcat pozitiv, iar corpul care îi va prelua se
va încărca negativ. O sarcină macroscopică va fi reprezentată printr-un număr
întreg de sarcini electrice elementare (q=Ne).
Din cele spuse până acum rezultă că sarcina electrică este o mărime fizică
cuantificată (sarcina elementară reprezintă cuanta de sarcină electrică) care în
sisteme izolate se conservă. Sarcina netă a oricărui corp este egală cu suma
algebrică a sarcinilor particulelor elementare din care este constituit corpul dat.
Ţinând seama de mecanismul procesului de electrizare prin frecare, rezultă
că numărul de sarcini elementare, luate de pe un corp, trebuie să fie egale cu
numărul de sarcini elementare, transferate pe un alt corp sau pe un sistem de
corpuri. Sarcina electrică nu poate fi distrusă. Această concluzie stă la baza legii
conservării sarcinii electrice: într-un sistem închis, suma algebrică a sarcinilor
electrice rămâne totdeauna constantă.
Sarcina electrică fiind o mărime fizică scalară este caracterizată, pe lângă
număr şi de o unitate de măsură. Unitatea de măsură pentru sarcina electrică, în
Sistemul Internaţional este Coulombul (C). Sarcina electrică elementară este
191e 1,602 10 C . De aici rezultă:
18
19
e1C 6,24 10 e
1,602 10 (5.1)
adică unitatea SI de sarcină electrică, Coulombul, este egal cu sarcina a 186,24 10
electroni.
V.2 Distribuţia sarcinilor electrice
În condiţii normale, în substanţe sarcinile pozitive şi negative, egale ca
mărime, sunt distribuite uniform. Inducerea unei distribuţii neuniforme de sarcini
pozitive şi negative în corpuri (prin frecare) sau între părţi diferite ale aceluiaşi
corp (prin influenţă) reprezintă un proces de electrizare. În urma unui proces de
electrizare sarcina electrică se distribuie pe corpurile electrizate în mod diferit în
funcţie de natura corpului. În cazul conductorilor sarcina se distribuie pe suprafaţa
acestora (distribuţie superficială de sarcină) iar în cazul izolatorilor sarcina se
distribuie în volum (distribuţie volumică de sarcină).
a) Densitatea volumică de sarcină. La scară microscopică, sarcina
electrică are o structură granulară (discontinuă). Orice sarcină electrică este egală
cu un multiplu de sarcini electrice elementare egale cu cea a electronului, fie că
este pozitivă sau negativă. La scară macroscopică se poate considera că este
valabilă ipoteza continuităţii, deoarece în experienţele de electricitate efectuate la
această scară intervin sarcini electrice atât de mari – de cel puţin 104 sarcini
elementare – încât nu se poate distinge caracterul discontinuu al acestora. Dacă
sarcinile sunt distribuite într-un volum V, pentru a caracteriza starea de electrizare a
acestuia într-un punct P, se introduce noţiunea de densitate volumică de sarcină,
care se defineşte prin formula:
dq
dV (5.2)
în care dq este sarcina conţinută într-un element de volum dV, din jurul punctului
P; ρ se măsoară în C/m3. Întreaga sarcină electrică q din volumul V se va calcula
după formula:
V
q dV (5.3)
b) Densitatea superficială de sarcină. Dacă volumul în care se află o
sarcină electrică q are una din dimensiuni tinzând la zero, se spune că avem o
distribuţie superficială de sarcini. O astfel de distribuţie se poate considera că există
în cazul conductoarelor. Astfel se defineşte noţiunea de densitate superficială de
sarcină, prin formula:
dq
dS (5.4)
unde dq este sarcina care se află pe elementul de suprafaţă dS din jurul punctului P;
σ se măsoară în C/m2. În acest caz putem scrie:
S
q dS (5.5)
c) Densitatea liniară de sarcină. Dacă două dimensiuni ale volumului în
care se află sarcina q tind către zero, atunci spunem că distribuţia volumică se
reduce la o distribuţie liniară. În acest fel se poate considera repartiţia sarcinii
electrice pe un fir foarte subţire, cu diametrul neglijabil faţă de lungime. Astfel
definim densitatea liniară de sarcină λ, într-un punct P de pe curba C pe care se
află sarcinile prin formula:
dq
dl (5.6)
unde dl este un element de lungime din jurul punctului P, iar dq este sarcina pe
care o poartă acest element de lungime.
V.3 Conductori şi izolatori
Toate materialele (substanţele) se împart, după comportarea lor electrică, în
două categorii mari: conductori şi izolatori.
Conductorii sunt materiale în interiorul cărora există particule cu
sarcină electrică capabile să se deplaseze în material pe distanţe macroscopice.
Aceste particule se numesc purtători de sarcină liberi. La rândul lor conductorii
sunt de mai multe tipuri:
Metalele;
Electroliţii;
Gazele ionizate (plasma);
Semiconductorii.
Metalele sunt conductori buni (de clasa I). Purtătorii de sarcină în
metale sunt electronii liberi numiţi şi electroni de conducţie. Datorită prezenţei în
conductori a purtătorilor de sarcină liberi, orice sarcină în exces, comunicată
conductorului, într-un punct al acestuia nu rămâne la locul respectiv ci se
repartizează, practic instantaneu, pe toată suprafaţa conductorului. Dacă încercăm
să electrizăm prin frecare o vergea conductoare ţinută în mână nu reuşim, deoarece
orice deficit de electroni pe conductor este completat, practic instantaneu, prin
corpul experimentatorului, de la Pământ.
Electroliţii sunt conductori de clasa a II-a, în care purtătorii de sarcină
sunt ionii liberi, de ambele semne.
Gazele ionizate sunt tot conductori de clasa a II-a în care purtătorii de
sarcină pot fi atât ionii de ambele semne cât şi electronii. În starea de plasmă gradul
de ionizare al gazului este atât de mare încât plasme pot fi conductori tot atât de
buni ca şi metalele.
Semiconductorii sunt materiale cu concentraţia purtătorilor de sarcină
maică de 104 – 10
5 ori decât în metale În semiconductori purtătorii de sarcină pot fi
(negativi) electronii sau (pozitivi) golurile.
Izolatorii (dielectricii) sunt materiale fără purtători de sarcină liberi.
Sarcinile electrice din izolatori sunt legate de atomii sau de moleculele de care
aparţin. Acestea se numesc sarcini electrice legate. Ele au posibilitatea să se
deplaseze doar pe distanţe de ordinul a 1Å, ceea ce are ca efect polarizarea
dielectricului. Din cauza absenţei în izolatori a purtătorilor de sarcină liberi, orice
sarcină în exces comunicată izolatorului într-un punct al acestuia rămâne la locul
respectiv, nu se repartizează pe toată suprafaţa acestuia.
V.4 Interacţiunea a două sarcini electrice punctiforme. Legea lui Columb
Fie două sarcini electrice punctiforme q1 şi q2, de acelaşi semn situate într-
un mediu oarecare la distanţa r una de cealaltă (Fig. 5.1). Punctiforme, pot fi
considerate şi sarcinile a două corpuri încărcate dacă dimensiunile liniare ale
corpurilor sunt mici comparativ cu distanţa dintre ele. Legea lui Coulomb exprimă
forţa de interacţiune dintre cele două sarcini:
1 2
2
q qF k
r (5.7)
unde k este o constantă care depinde de mediul în care se găsesc cele două sarcini.
Această constantă este de forma:
1
k4
(5.8)
unde ε este o constantă care depinde de caracteristicile electrice ale mediului în
care se găsesc cele două sarcini, numită permitivitate electrică a mediului. Astfel,
forţa de interacţiune dintre două sarcini electrice punctiforme (legea lui Coulomb)
este dată de relaţia:
1 2
2
q qF
4 r (5.9)
Dacă sarcinile se află în vid atunci expresia legii lui Coulomb este:
1 2
0 2
0
q qF
4 r (5.10)
unde ε0 este o constantă universală numită permitivitatea electrică a vidului şi are
valoarea 2
12
0 2
C F8,85.10
N m m, de unde
29
2
0
1 N m9 10
4 C
Din expresia scalară (5.9) a legii lui Coulomb nu rezultă toate proprietăţile forţei de
interacţiune dintre sarcinile electrice. Fiind o mărime vectorială, forţa cu care
acţionează sarcina punctiformă q1, asupra sarcinii punctiforme q2, aflată în vid, la
distanţa r de q1 se scrie:
1 2
2
0
q qˆF r
4 r
(5.11)
unde r
r̂r
este versorul direcţiei ce uneşte cele două sarcini.
1 2
3
0
q qF r
4 r
(5.12)
Enunţul legii lui Columb: Forţa de interacţiune dintre două sarcini electrice
punctiforme este direct proporţională cu produsul sarcinilor, invers proporţională
cu pătratul distanţelor dintre sarcini şi acţionează după direcţia ce uneşte cele
două sarcini.

Din relaţia (5.12) se poate observa că două sarcini electrice punctiforme de
acelaşi semn se resping în timp ce două sarcini electrice punctiforme de semne
contrare se atrag (Fig. 5.1).
Forţele coulombiene satisfac legea a treia a lui Newton: dacă sarcina q1
acţionează asupra sarcinii q2 cu forţa 12F
atunci sarcina q2 acţionează asupra
sarcinii q1 cu forţa 21 12F F
Dacă considerăm două sarcini electrice punctiforme situate la distanţa r una
de cealaltă, într-un mediu cu permitivitatea electrică ε, forţa de interacţiune dintre
cele două sarcini va fi dată de relaţia (5.9). În cazul în care aceleaşi două sarcini
sunt situate la aceeaşi distanţă r, una de cealaltă, dar în vid, forţa de interacţiune
dintre cele două sarcini este dată de relaţia (5.10). Împărţind cele două relaţii
membru cu membru obţinem:
0r
0
F
F (5.13)
Se observă că raportul dintre cele două forţe este o constantă εr dată de raportul
dintre permitivitatea electrică a mediului şi permitivitatea electrică a vidului,
numită permitivitate electrică relativă a mediului. Această constantă ce
caracterizează mediul ne arată de câte ori forţa de interacţiune dintre cele două
r̂
Fig. 5.1
y
x
O
21F
12F
r
2q
1q
r̂
y
x
O
21F
12F
r
2q
1q

sarcini aflate în vid este mai mare decât forţa de interacţiune dintre cele două
sarcini aflate în mediul cu permitivitatea ε. Din (5.13) se observă că r 0 .
V.5 Câmpul electric
V.5.1 Noţiunea de câmp electric
Forma de existenţă a materiei diferită de substanţa prin care se transmit (cu
viteză finită) interacţiunile electrice, se numeşte câmp electric. Câmpul electric
produs de sarcinile imobile (statice), poartă denumirea de câmp electrostatic. În
cazul sarcinilor mobile (în mişcare dirijată) se utilizează numai denumirea de câmp
electric.
În jurul unei sarcini electrice Q există întotdeauna câmp electric. Existenţa
acestui câmp se pune în evidenţă cu ajutorul unei alte sarcini q0, plasată în regiunea
din spaţiu unde se manifestă câmpul electric. Asupra acestei sarcini, numită sarcină
de probă, acţionează o forţă de natura celei exprimate de legea lui Coulomb. Prin
sarcină de probă se înţelege o sarcină atât de mică încât nu modifică câmpul
electric în care se află aceasta. Prin convenţie sarcina corpului de probă este
considerată pozitivă. Atunci putem introduce o mărime fizică vectorială care să
caracterizeze câmpul electric într-un punct al său. Această mărime numită
intensitatea câmpului electric se defineşte după relaţia:
0
FE
q
(5.14)
Intensitatea câmpului electric într-un punct al său este dată de raportul dintre forţa
cu care acel câmp acţionează asupra unităţii de sarcină pozitivă plasată în acel
punct.
Deci forţa coulombină de interacţiune dintre sarcina Q (numită şi sarcină
generatoare de câmp) şi sarcina de probă q0 poate fi scrisă:
0F q E
(5.15)

Această forţă cu care câmpul electric creat de sarcina Q acţionează asupra sarcinii
de probă q0, aflată într-un punct al câmpului, poartă denumirea de forţă electrică.
În cazul câmpului electric creat de o sarcină electrică punctiformă vectorul câmp
electric în orice punct al câmpului (dat de vectorul de poziţie r
) poate fi găsit
folosind relaţiile (5.12) şi (5.14):
3
0
QE r
4 r
(5.16)
Vectorul câmp electric are aceeaşi direcţie ca şi F
, iar sensul lui depinde de
semnul sarcinii Q (Fig. 5.2). Modulul vectorului câmp electric (intensitatea
câmpului electric) este dat de relaţia:
2
0
QE
4 r (5.17)
V.5.2 Reprezentarea câmpului electric
Din punct de vedere intuitiv câmpul electric se reprezintă prin linii şi tuburi
de câmp.
Linia de câmp, sau linia de forţă, este o curbă tangentă la vectorul câmp
electric în fiecare punct (Fig. 5.3, a). O suprafaţă generată de liniile de câmp care
se sprijină pe un contur închis, se numeşte tub de câmp sau tub de forţă (Fig. 5.3,
Q
q0
E
F
r
Fig. 5.2
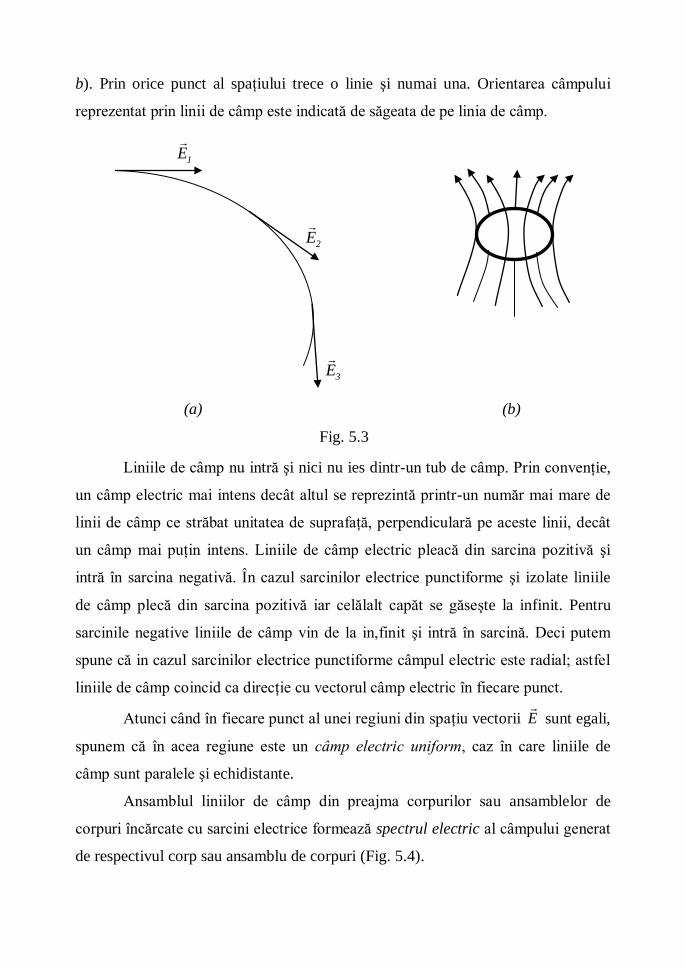
b). Prin orice punct al spaţiului trece o linie şi numai una. Orientarea câmpului
reprezentat prin linii de câmp este indicată de săgeata de pe linia de câmp.
Liniile de câmp nu intră şi nici nu ies dintr-un tub de câmp. Prin convenţie,
un câmp electric mai intens decât altul se reprezintă printr-un număr mai mare de
linii de câmp ce străbat unitatea de suprafaţă, perpendiculară pe aceste linii, decât
un câmp mai puţin intens. Liniile de câmp electric pleacă din sarcina pozitivă şi
intră în sarcina negativă. În cazul sarcinilor electrice punctiforme şi izolate liniile
de câmp plecă din sarcina pozitivă iar celălalt capăt se găseşte la infinit. Pentru
sarcinile negative liniile de câmp vin de la in,finit şi intră în sarcină. Deci putem
spune că in cazul sarcinilor electrice punctiforme câmpul electric este radial; astfel
liniile de câmp coincid ca direcţie cu vectorul câmp electric în fiecare punct.
Atunci când în fiecare punct al unei regiuni din spaţiu vectorii E
sunt egali,
spunem că în acea regiune este un câmp electric uniform, caz în care liniile de
câmp sunt paralele şi echidistante.
Ansamblul liniilor de câmp din preajma corpurilor sau ansamblelor de
corpuri încărcate cu sarcini electrice formează spectrul electric al câmpului generat
de respectivul corp sau ansamblu de corpuri (Fig. 5.4).
1E
2E
3E
(a) (b)
Fig. 5.3
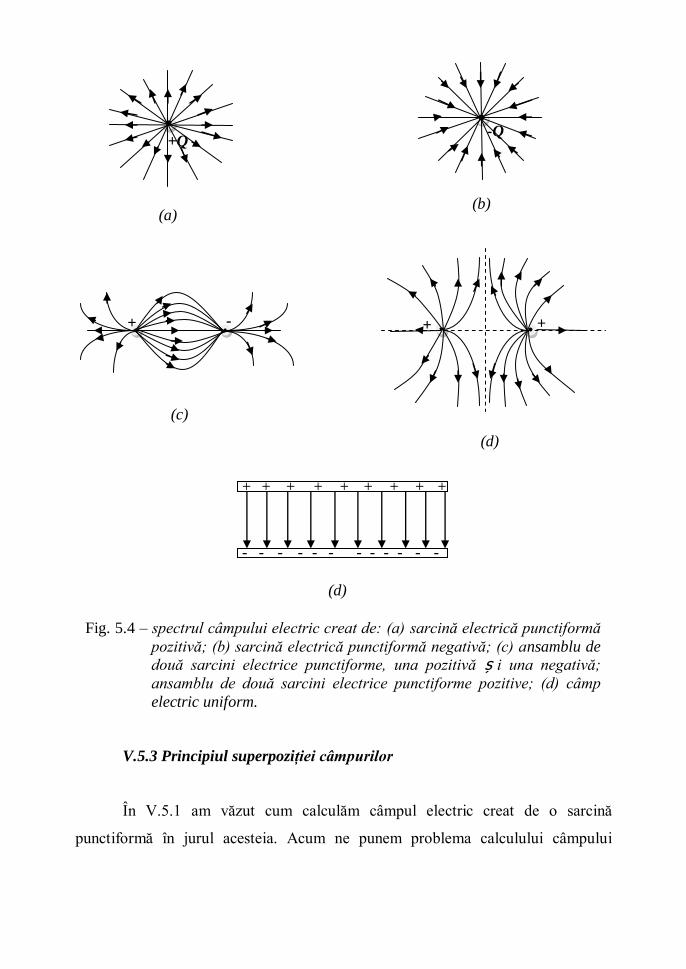
V.5.3 Principiul superpoziţiei câmpurilor
În V.5.1 am văzut cum calculăm câmpul electric creat de o sarcină
punctiformă în jurul acesteia. Acum ne punem problema calculului câmpului
Fig. 5.4 – spectrul câmpului electric creat de: (a) sarcină electrică punctiformă
pozitivă; (b) sarcină electrică punctiformă negativă; (c) ansamblu de
două sarcini electrice punctiforme, una pozitivă ș i una negativă;
ansamblu de două sarcini electrice punctiforme pozitive; (d) câmp
electric uniform.
+Q
(a)
-Q
(b)
+ -
(c)
+
q
+
q
(d)
+ + + + + + + + +
- - - - - - - - - - - -
(d)
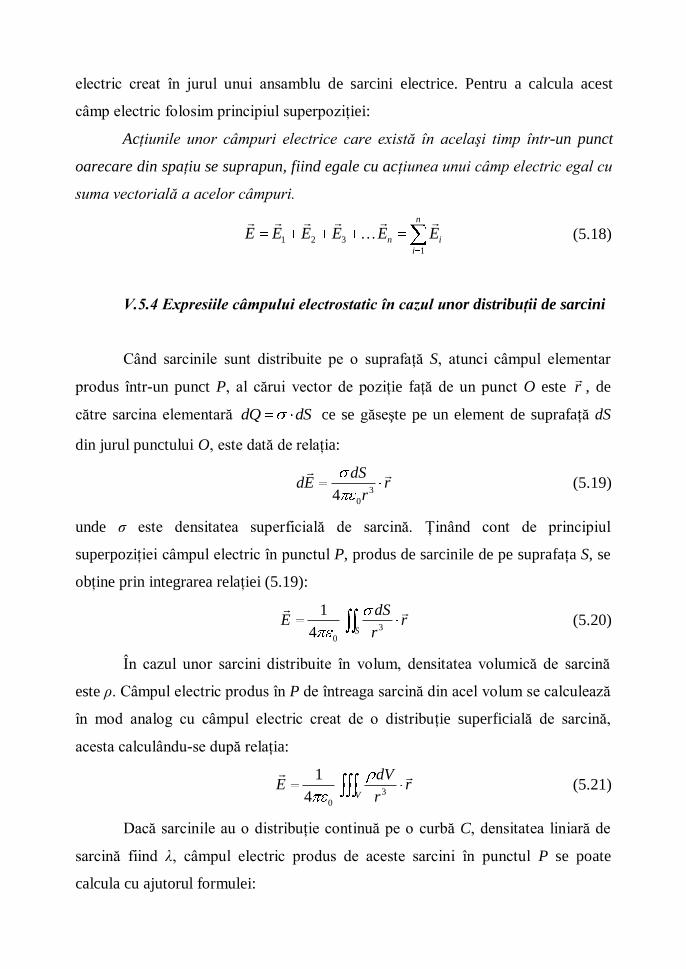
electric creat în jurul unui ansamblu de sarcini electrice. Pentru a calcula acest
câmp electric folosim principiul superpoziţiei:
Acţiunile unor câmpuri electrice care există în acelaşi timp într-un punct
oarecare din spaţiu se suprapun, fiind egale cu acţiunea unui câmp electric egal cu
suma vectorială a acelor câmpuri.
1 2 3
1
n
n i
i
E E E E E E
(5.18)
V.5.4 Expresiile câmpului electrostatic în cazul unor distribuţii de sarcini
Când sarcinile sunt distribuite pe o suprafaţă S, atunci câmpul elementar
produs într-un punct P, al cărui vector de poziţie faţă de un punct O este r
, de
către sarcina elementară dQ dS ce se găseşte pe un element de suprafaţă dS
din jurul punctului O, este dată de relaţia:
3
04
dSdE r
r
(5.19)
unde σ este densitatea superficială de sarcină. Ţinând cont de principiul
superpoziţiei câmpul electric în punctul P, produs de sarcinile de pe suprafaţa S, se
obţine prin integrarea relaţiei (5.19):
3
0
1
4 S
dSE r
r
(5.20)
În cazul unor sarcini distribuite în volum, densitatea volumică de sarcină
este ρ. Câmpul electric produs în P de întreaga sarcină din acel volum se calculează
în mod analog cu câmpul electric creat de o distribuţie superficială de sarcină,
acesta calculându-se după relaţia:
3
0
1
4 V
dVE r
r
(5.21)
Dacă sarcinile au o distribuţie continuă pe o curbă C, densitatea liniară de
sarcină fiind λ, câmpul electric produs de aceste sarcini în punctul P se poate
calcula cu ajutorul formulei:
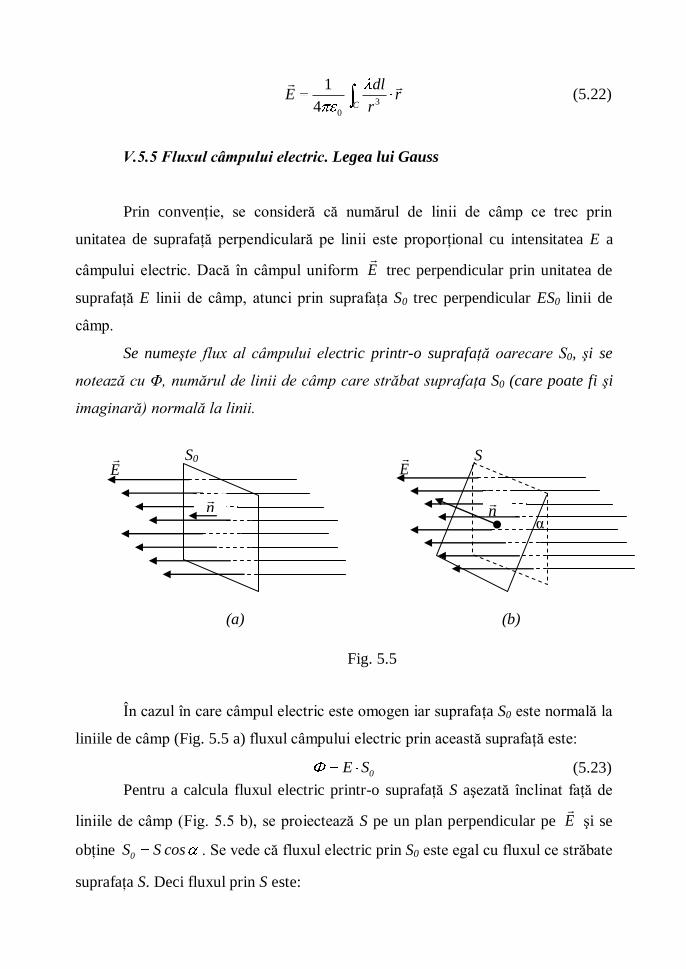
3
0
1
4 C
dlE r
r
(5.22)
V.5.5 Fluxul câmpului electric. Legea lui Gauss
Prin convenţie, se consideră că numărul de linii de câmp ce trec prin
unitatea de suprafaţă perpendiculară pe linii este proporţional cu intensitatea E a
câmpului electric. Dacă în câmpul uniform E
trec perpendicular prin unitatea de
suprafaţă E linii de câmp, atunci prin suprafaţa S0 trec perpendicular ES0 linii de
câmp.
Se numeşte flux al câmpului electric printr-o suprafaţă oarecare S0, şi se
notează cu Φ, numărul de linii de câmp care străbat suprafaţa S0 (care poate fi şi
imaginară) normală la linii.
În cazul în care câmpul electric este omogen iar suprafaţa S0 este normală la
liniile de câmp (Fig. 5.5 a) fluxul câmpului electric prin această suprafaţă este:
0E S (5.23)
Pentru a calcula fluxul electric printr-o suprafaţă S aşezată înclinat faţă de
liniile de câmp (Fig. 5.5 b), se proiectează S pe un plan perpendicular pe E
şi se
obţine 0S S cos . Se vede că fluxul electric prin S0 este egal cu fluxul ce străbate
suprafaţa S. Deci fluxul prin S este:
(a) (b)
S0
n
E
S
E
n
α
Fig. 5.5

0 0E S E S cos (5.24)
sau
E S
(5.25)
unde se notează cu S
vectorul:
S S n
iar n
este vectorul normalei la suprafaţă.
În cazul în care câmpul electric este neuniform ( E cons tant
), se
defineşte, mai întâi, un flux electric elementar:
d E dS
(5.26)
printr-un element de suprafaţă dS
, pe care E
poate fi considerat constant şi prin
integrare se determină fluxul total:
S SE dS EdS cos
(5.27)
Se observă că fluxul electric este o mărime algebrică, iar semnul lui depinde
de alegerea sensului normalei la suprafaţă.
Legea lui Gauss exprimă fluxul câmpului electric printr-o suprafaţă în
funcţie de zona în care se găseşte sarcina (sau ansamblu de sarcini) faţă de
suprafaţă.
0
S0
qdacă sarcina se gaseşte în int eriorul sup rafeţei
qE dS dacă sarcina segaseşte în int eriorul sup rafeţei
2
0 dacă sarcina se găseşte înexteriorul sup rafeţei
(5.28)
Relaţia (5.28) reprezintă forma integrală a legii lui Gauss. Legea lui Gauss
ne permite calculul câmpului electric creat de diferite distribuţii de sarcină.
Forma locală (diferenţială) a legii lui Gauss.
Dacă sarcina Q este distribuită în spaţiu, densitatea volumică de sarcină este
dQ
dV unde dQ este sarcina cuprinsă în elementul de volum dV. Sarcina electrică
totală Q este:
V
Q dV (5.29)
Conform teoremei Green – Ostrogradski fluxul total se poate scrie:
S VE dS divE dV
(5.30)
adică, fluxul vectorului E
prin suprafaţa închisă S este egal cu integrala de volum a
divergenţei vectorului E
, extinsă la volumul delimitat S.
Folosind relaţiile (5.29) şi (5.30) legea lui Gauss poate fi scrisă astfel:
S V V
1E dS divE dV dV
(5.31)
De unde se obţine forma locală (diferenţială) a legii lui Gauss:
divE
(5.32)
Din (5.32) observăm că semnificaţia fizică a divergenţei este dată de densitatea
volumică a sarcinilor electrice. Divergenţa este mai mare în punctele unde există o
densitate de volum a sarcinilor electrice mai mare. Cu cât pornesc mai multe linii
de câmp dintr-o suprafaţă închisă, cu atât fluxul electric total este mai mare şi ca
urmare, cu atât divergenţa câmpului electric va fi şi ea mai mare. Dacă într-un
punct, divE 0
, din acel punct nu pornesc linii de câmp şi 0 . Dacă într-un alt
punct, divE 0
, acest punct reprezintă o sursă de câmp electric.
V.5.6 Câmpul electric creat de un plan infinit încărcat uniform
Pentru a calcula câmpul electric creat de un plan infinit încărcat uniform cu
sarcină electrică vom alege convenabil o suprafaţă gaussiană de forma unui cilindru
perpendicular pe plan (Fig. 5.6).
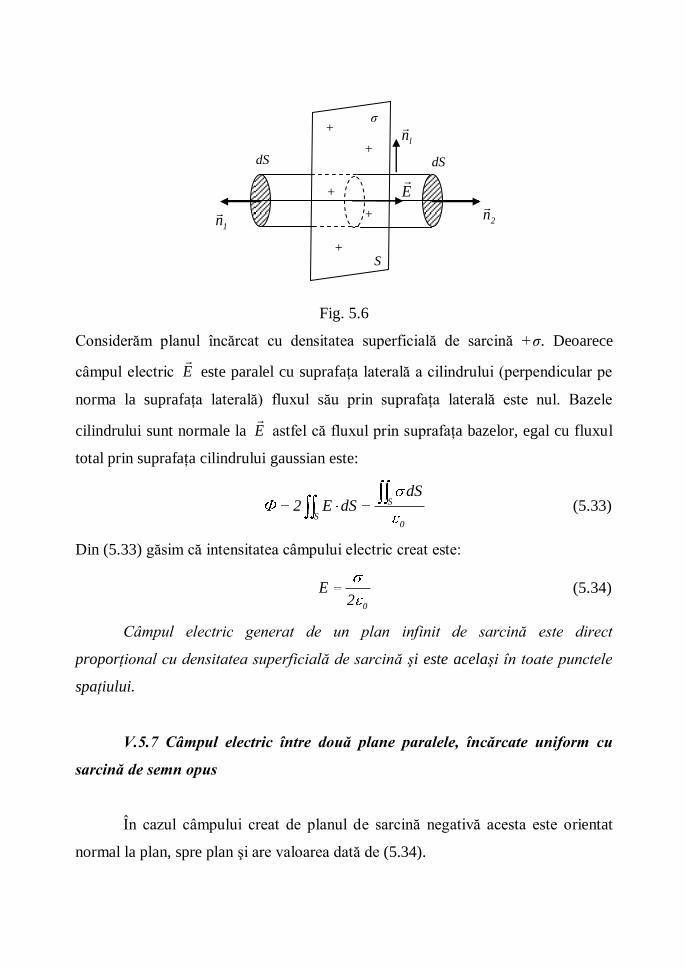
Fig. 5.6
Considerăm planul încărcat cu densitatea superficială de sarcină +σ. Deoarece
câmpul electric E
este paralel cu suprafaţa laterală a cilindrului (perpendicular pe
norma la suprafaţa laterală) fluxul său prin suprafaţa laterală este nul. Bazele
cilindrului sunt normale la E
astfel că fluxul prin suprafaţa bazelor, egal cu fluxul
total prin suprafaţa cilindrului gaussian este:
S
S0
dS2 E dS (5.33)
Din (5.33) găsim că intensitatea câmpului electric creat este:
0
E2
(5.34)
Câmpul electric generat de un plan infinit de sarcină este direct
proporţional cu densitatea superficială de sarcină şi este acelaşi în toate punctele
spaţiului.
V.5.7 Câmpul electric între două plane paralele, încărcate uniform cu
sarcină de semn opus
În cazul câmpului creat de planul de sarcină negativă acesta este orientat
normal la plan, spre plan şi are valoarea dată de (5.34).
+
+
+
+
+
dS dS
σ
S
2n
1n
ln
E
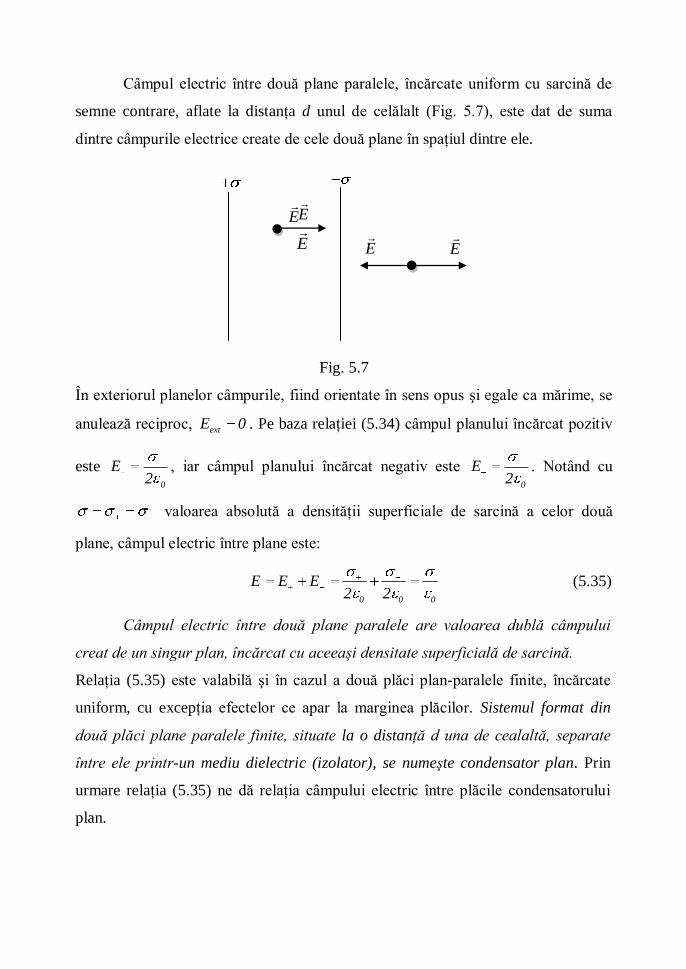
Câmpul electric între două plane paralele, încărcate uniform cu sarcină de
semne contrare, aflate la distanţa d unul de celălalt (Fig. 5.7), este dat de suma
dintre câmpurile electrice create de cele două plane în spaţiul dintre ele.
E
Fig. 5.7
În exteriorul planelor câmpurile, fiind orientate în sens opus şi egale ca mărime, se
anulează reciproc, extE 0 . Pe baza relaţiei (5.34) câmpul planului încărcat pozitiv
este 0
E2
, iar câmpul planului încărcat negativ este 0
E2
. Notând cu
valoarea absolută a densităţii superficiale de sarcină a celor două
plane, câmpul electric între plane este:
0 0 0
E E E2 2
(5.35)
Câmpul electric între două plane paralele are valoarea dublă câmpului
creat de un singur plan, încărcat cu aceeaşi densitate superficială de sarcină.
Relaţia (5.35) este valabilă şi în cazul a două plăci plan-paralele finite, încărcate
uniform, cu excepţia efectelor ce apar la marginea plăcilor. Sistemul format din
două plăci plane paralele finite, situate la o distanţă d una de cealaltă, separate
între ele printr-un mediu dielectric (izolator), se numeşte condensator plan. Prin
urmare relaţia (5.35) ne dă relaţia câmpului electric între plăcile condensatorului
plan.
E
E
E
E
V.6 Potenţialul electric
V.6.1 Lucrul mecanic efectuat de forţa electrică
O sarcină electrică liberă q0, aflată într-un câmp electric de intensitate E
,
este acţionată de forţa 0F q E
, care îi va imprima o mişcare accelerată. Acest
lucru mecanic este dat, pe deoparte de produsul scalar dintre vectorul forţă electrică
şi vectorul deplasare, pe de altă parte de variaţia energiei potenţiale a sistemului
sarcină – câmp electric.
Lucrul elementar efectuat de forţa câmpului este:
0dL F dl q E dl
(5.36)
Lucrul mecanic efectuat de câmp se obţine prin integrarea ecuaţiei (5.36):
2 2
12 0
1 1
L dL q E dl
(5.37)
Dacă notăm cu W(1) şi W(2) energia potenţială a sistemului câmp electric – sarcină
în punctele 1 şi 2, atunci lucrul mecanic îl putem scrie:
2
12 0
1
L W( 2 ) W(1) q E dl
(5.38)
Dacă sarcina q0 este deplasată fără acceleraţie din punctul 2 în punctul 1,
împotriva forţei câmpului, de către o forţă exterioară, aceasta efectuează un lucru
mecanic egal cu (5.38) şi de semn opus. Întreg lucrul efectuat de forţa exterioară se
înmagazinează în energia potenţială a sistemului sarcină – câmp electric, care
creşte de la W(2) la W(1).
V.6.2 Potenţialul câmpului electric
Potenţialul câmpului electric într-un punct al câmpului reprezintă raportul
dintre energia potenţială a unei sarcini în acel punct şi sarcina respectivă.
Împărţind (5.38) prin q0 obţinem:
2
1
V( 2 ) V(1) E dl
(5.39)
unde
0 0
W(1) W( 2 )V(1) , V( 2 )
q q (5.40)
sunt potenţialele câmpului electric în punctele (1) şi (2). Relaţia (5.39) mai poate fi
scrisă:
dV E dl
(5.41)
Observăm că potenţialul este o mărime fizică scalară care este funcţie
numai de punctul în care este definit. Câmpul electric poate fi caracterizat atât cu
ajutorul potenţialului cât şi cu ajutorul intensităţii câmpului E
.
Din (5.38) rezultă că lucrul mecanic al forţelor electrice este proporţional cu
variaţia potenţialului V între punctele (1) şi (2).
12 0 2 1 0 12L q (V V ) q U (5.42)
De aici se poate defini diferenţa de potenţial dintre punctele (1) şi (2) (sau tensiune
electrică): U12 este numeric egală cu lucrul mecanic necesar deplasării unităţii de
sarcină pozitive în câmpul electric între punctele (1) şi (2). Potenţialul, creat de o
sarcină electrică punctiformă, într-un punct oarecare din spaţiu, aflat la distanţa r de
sarcina generatoare de câmp, Q, se exprimă în funcţie de o constantă arbitrară
aditivă:
0
QV C
4 r (5.43)
Pentru determinarea univocă a potenţialului electric, se impune o condiţie
suplimentară. În cazul unui câmp generat de o sarcină punctiformă sau în cazul
unei distribuţii de sarcină localizată într-o regiune finită din spaţiu, se alege, prin
convenţie, constanta aditivă egală cu zero, astfel încât potenţialul să tindă la zero
când distanţa r tinde la infinit (V 0 ).
Rezultă că potenţialul într-un punct (1) este numeric egal cu lucrul mecanic
necesar deplasării unităţii de sarcină pozitivă din acel punct la infinit:
11
0 0
L QV
q 4 r (5.44)
Unitatea de măsură pentru potenţial respectiv pentru tensiunea electrică este:
JV U 1V 1
C.
În practică se alege frecvent ca potenţial de referinţă potenţialul Pământului,
care se ia egal cu zero ( solV 0 ). Astfel potenţialul unui conductor reprezintă
diferenţa de potenţial între potenţialul unui punct de pe suprafaţa sa şi Pământ
(„masa”). Această alegere este justificată, prin faptul că Pământul se comportă ca o
sferă suficient de conductoare şi se poate admite că potenţialul acestuia este
constant. În plus, Pământul, datorită dimensiunilor lui foarte mari, se comportă ca
un rezervor care nu-şi modifică starea electrică atunci când capătă sau pierde
sarcini electrice de valori uzuale.
Convenţia practică, solV 0 , nu rămâne valabilă la scară astronomică. În
cazul ansamblului Pământ – atmosferă, Pământul se comportă ca şi cum ar purta
sarcini (în general negative).
În cazul unei sarcini punctuale, după cum arată formula (5.44), atunci când
r tinde la zero, V tinde la infinit, ceea ce înseamnă că în punctul în care se află
sarcina punctuală potenţialul este infinit. Aceasta nu poate avea loc în realitate,
deoarece în natură nu există sarcini riguros punctuale. Orice sarcină electrică, oricât
de mică, - cum ar fi sarcina electronului - , este purtată de o sarcină care are
dimensiuni finite.
Locul geometric al punctelor în care potenţialul electric are aceeaşi valoare
formează o suprafaţă echipotenţială. În cazul unei sarcini punctiforme, condiţia
V=constant, conduce la r=constant, care reprezintă ecuaţia unei sfere. Deci
suprafeţele echipotenţiale ale unei sarcini punctiforme sunt sferice.
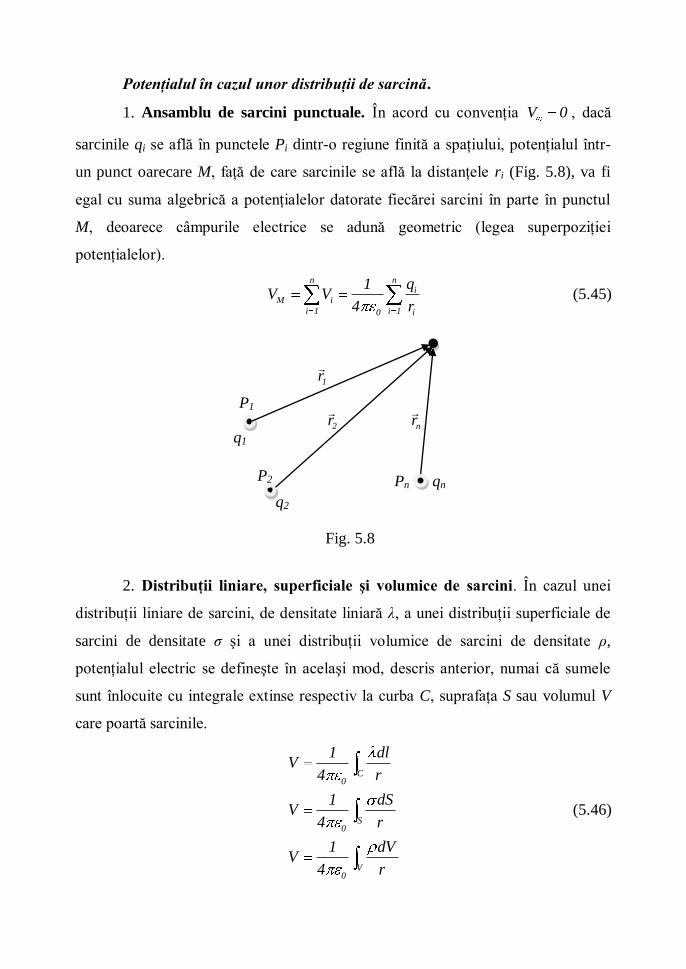
Potenţialul în cazul unor distribuţii de sarcină.
1. Ansamblu de sarcini punctuale. În acord cu convenţia V 0 , dacă
sarcinile qi se află în punctele Pi dintr-o regiune finită a spaţiului, potenţialul într-
un punct oarecare M, faţă de care sarcinile se află la distanţele ri (Fig. 5.8), va fi
egal cu suma algebrică a potenţialelor datorate fiecărei sarcini în parte în punctul
M, deoarece câmpurile electrice se adună geometric (legea superpoziţiei
potenţialelor).
n n
iM i
i 1 i 10 i
q1V V
4 r (5.45)
2. Distribuţii liniare, superficiale şi volumice de sarcini. În cazul unei
distribuţii liniare de sarcini, de densitate liniară λ, a unei distribuţii superficiale de
sarcini de densitate σ şi a unei distribuţii volumice de sarcini de densitate ρ,
potenţialul electric se defineşte în acelaşi mod, descris anterior, numai că sumele
sunt înlocuite cu integrale extinse respectiv la curba C, suprafaţa S sau volumul V
care poartă sarcinile.
C0
S0
V0
1 dlV
4 r
1 dSV
4 r
1 dVV
4 r
(5.46)
1r
2r
nr
P1
P2 Pn
q1
q2
qn
Fig. 5.8

Observaţie
Când sarcinile care produc câmpul electric sunt distribuite până la infinit,
convenţia teoretică V 0 nu se poate aplica.
V.6.3 Relaţia între câmp şi potenţial
Considerăm un condensator plan (două plăci conductoare, încărcate cu
sarcini electrice egale dar de semn contrar, aflate în aer, la o distanţă d una de
cealaltă). Câmpul electric într-un asemenea condensator este uniform (Fig. 5.9).
Dorim să calculăm diferenţa de potenţial dintre armăturile acestui condensator în
funcţie de intensitatea câmpului electric şi de distanţa dintre armături.
Fig. 5.9
Diferenţa de potenţial dintre cele două armături poate fi calculată cu
ajutorul relaţiei:
AB 0 A B 0 AB 0 BAL q (V V ) q U q U (5.47)
unde LAB este lucrul mecanic efectuat de câmp pentru a transporta sarcina de probă,
pozitivă, q0, între cele două armături, iar UAB este tensiunea electrică (diferenţa de
potenţial dintre cele două armături). Pe de altă parte acest lucru mecanic mai poate
fi calculat şi cu ajutorul relaţiei:
AB ABL F d (5.48)
E
-
-
-
-
-
-
-
-
x
y
O
A B
+
+
+
+
+
+
+
x1 x2
1 2

unde FAB este forţa cu care câmpul transportă sarcina electrică q0 între cele două
armături, aceasta fiind data de relaţia
AB 0F q E (5.49)
unde E este intensitatea câmpului electric dintre armături.
Din relaţiile (5.47), (5.48) şi (5.49) găsim pentru tensiunea electrică dintre armături
relaţia:
AB BAU E d U (5.50)
Considerăm două puncte 1 şi 2 foarte apropiate astfel că 2 1x x dx şi
1 2V V dV sunt variaţiile foarte mici ale acestor mărimi între cele două puncte.
Folosind relaţia (5.50) putem scrie:
1 2 2 1V V E( x x ) (5.51)
Astfel ţinând seama că xE E din (5.51) rezultă:
x
dVE
dx (5.52)
În situaţii mai generale, când câmpul electric nu este orientat în direcţia axei x, ca
în figura 5.9, vom avea componente similare ale câmpului electric pe direcţiile y şi
z:
x y z
V V VE ; E ; E ;
x y z (5.53)
unde semnul „∂”, în loc de semnul d, arată că pentru obţinerea componentelor Ex,
Ey şi Ez a câmpului electric derivarea potenţialului V(x,y,z) se face numai în raport
cu variabilele x, y şi z.
x y z
V V VE E i E j E k i j k
x y z
i j k V grad Vx y z
(5.54)
Astfel intensitatea câmpului electric poate fi exprimată prin relaţia:
E grad V
(5.55)
unde
grad i j kx y z
Intensitatea câmpului electric într-un punct din spaţiu este egală în valoare
cu gradientul potenţialului în acel punct şi are orientarea opusă vectorului
gradient.
Din (5.50) se vede că E poate fi exprimat în SI şi în V/m.
Liniile din câmp ce au acelaşi potenţial în toate punctele lor se numesc linii
echipotenţiale. Liniile câmpului electric sunt întotdeauna normale la liniile
echipotenţiale şi sunt orientate în sensul micşorării potenţialului (5.55).
Suprafeţele din câmp ce au acelaşi potenţial în toate punctele lor se numesc
suprafeţe echipotenţiale. De exemplu, suprafeţele sferice centrate pe sarcina
punctiformă ce generează câmpul electric sunt suprafeţe echipotenţiale, planele
paralele cu plăcile din interiorul plăcilor unui condensator plan sunt de asemenea
suprafeţe echipotenţiale. În acest caz liniile câmpului electric sunt întotdeauna
normale la suprafeţele echipotenţiale şi orientate în sensul micşorării potenţialului.
Volumele din spaţiu care au acelaşi potenţial în toate punctele se numesc volume
echipotenţiale. În subcapitolul următor V.7 arătăm că volumul oricărui conductor
este echipotenţial.
V.7 Conductori în câmp electrostatic
Din punct de vedere microscopic, în cazul conductoarelor metalice, se poate
considera că purtătorii de sarcini (electronii) se mişcă liber şi dezordonat în reţeaua
cristalină, iar ionii reţelei, care sunt pozitivi sunt consideraţi imobili (aceştia
execută miș cări de oscilaţii în jurul poziţiei de echilibru datorită agitaţiei termice).
Dacă un asemenea conductor, neutru din punct de vedere electric, este
plasat în câmp electric omogen cu intensitatea 0E
, câmpul pătrunde în conductor şi
acţionează asupra sarcinilor electrice libere, care vor începe să se mişte în sens
opus câmpului. Deoarece conductorul este neutru din punct de vedere electric, în
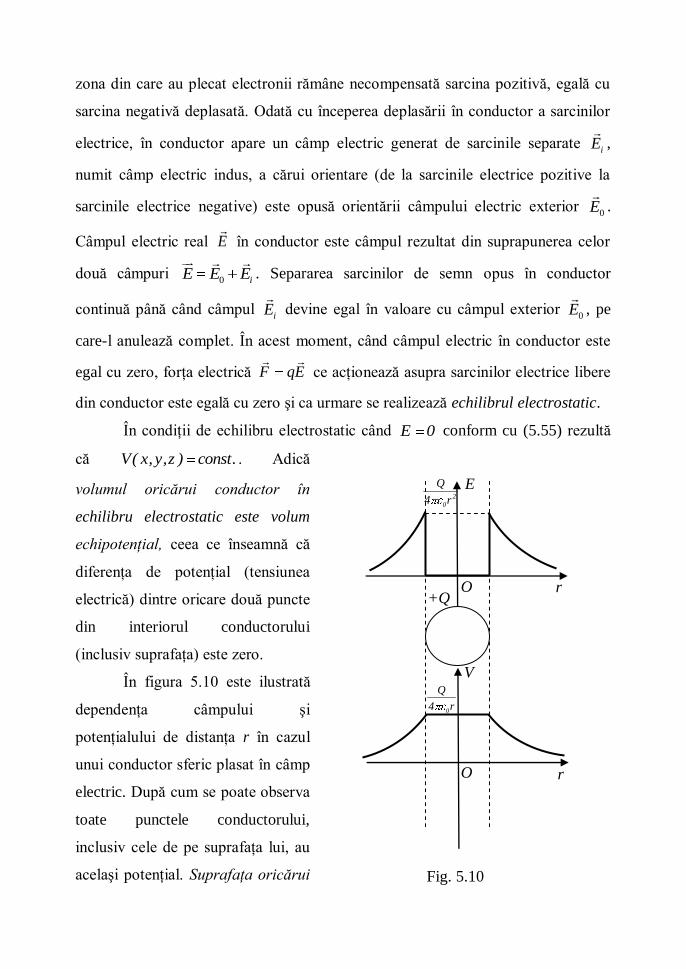
zona din care au plecat electronii rămâne necompensată sarcina pozitivă, egală cu
sarcina negativă deplasată. Odată cu începerea deplasării în conductor a sarcinilor
electrice, în conductor apare un câmp electric generat de sarcinile separate iE
,
numit câmp electric indus, a cărui orientare (de la sarcinile electrice pozitive la
sarcinile electrice negative) este opusă orientării câmpului electric exterior 0E
.
Câmpul electric real E
în conductor este câmpul rezultat din suprapunerea celor
două câmpuri 0 iE E E
. Separarea sarcinilor de semn opus în conductor
continuă până când câmpul iE
devine egal în valoare cu câmpul exterior 0E
, pe
care-l anulează complet. În acest moment, când câmpul electric în conductor este
egal cu zero, forţa electrică F qE
ce acţionează asupra sarcinilor electrice libere
din conductor este egală cu zero şi ca urmare se realizează echilibrul electrostatic.
În condiţii de echilibru electrostatic când E 0 conform cu (5.55) rezultă
că V( x,y,z ) const. . Adică
volumul oricărui conductor în
echilibru electrostatic este volum
echipotenţial, ceea ce înseamnă că
diferenţa de potenţial (tensiunea
electrică) dintre oricare două puncte
din interiorul conductorului
(inclusiv suprafaţa) este zero.
În figura 5.10 este ilustrată
dependenţa câmpului şi
potenţialului de distanţa r în cazul
unui conductor sferic plasat în câmp
electric. După cum se poate observa
toate punctele conductorului,
inclusiv cele de pe suprafaţa lui, au
acelaşi potenţial. Suprafaţa oricărui
+Q O
E
r
V
r O
Fig. 5.10
2
0
Q
4 r
0
Q
4 r
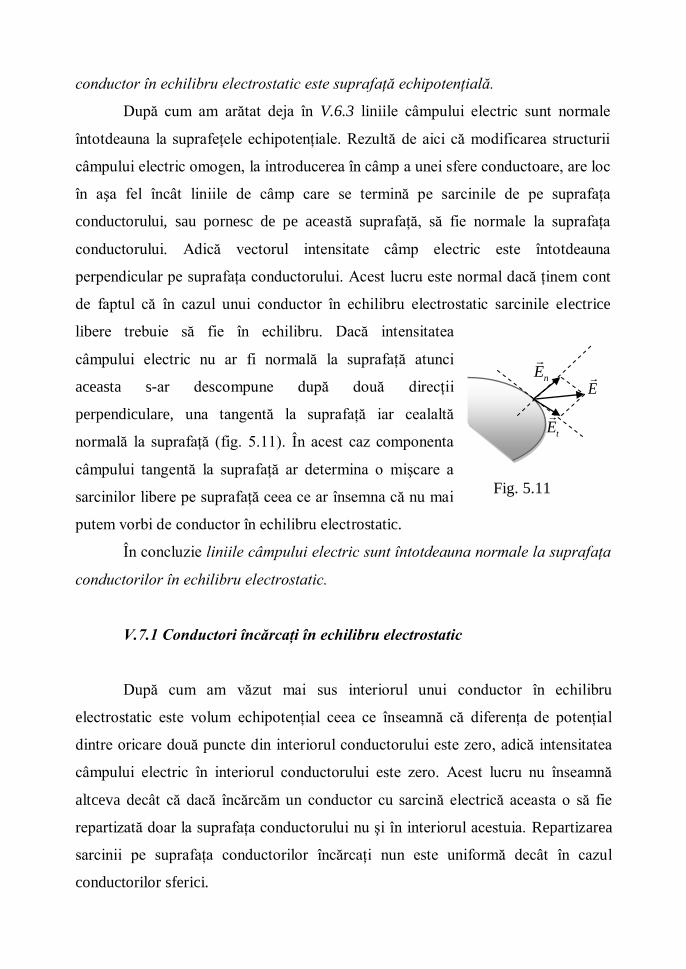
conductor în echilibru electrostatic este suprafaţă echipotenţială.
După cum am arătat deja în V.6.3 liniile câmpului electric sunt normale
întotdeauna la suprafeţele echipotenţiale. Rezultă de aici că modificarea structurii
câmpului electric omogen, la introducerea în câmp a unei sfere conductoare, are loc
în aşa fel încât liniile de câmp care se termină pe sarcinile de pe suprafaţa
conductorului, sau pornesc de pe această suprafaţă, să fie normale la suprafaţa
conductorului. Adică vectorul intensitate câmp electric este întotdeauna
perpendicular pe suprafaţa conductorului. Acest lucru este normal dacă ţinem cont
de faptul că în cazul unui conductor în echilibru electrostatic sarcinile electrice
libere trebuie să fie în echilibru. Dacă intensitatea
câmpului electric nu ar fi normală la suprafaţă atunci
aceasta s-ar descompune după două direcţii
perpendiculare, una tangentă la suprafaţă iar cealaltă
normală la suprafaţă (fig. 5.11). În acest caz componenta
câmpului tangentă la suprafaţă ar determina o mişcare a
sarcinilor libere pe suprafaţă ceea ce ar însemna că nu mai
putem vorbi de conductor în echilibru electrostatic.
În concluzie liniile câmpului electric sunt întotdeauna normale la suprafaţa
conductorilor în echilibru electrostatic.
V.7.1 Conductori încărcaţi în echilibru electrostatic
După cum am văzut mai sus interiorul unui conductor în echilibru
electrostatic este volum echipotenţial ceea ce înseamnă că diferenţa de potenţial
dintre oricare două puncte din interiorul conductorului este zero, adică intensitatea
câmpului electric în interiorul conductorului este zero. Acest lucru nu înseamnă
altceva decât că dacă încărcăm un conductor cu sarcină electrică aceasta o să fie
repartizată doar la suprafaţa conductorului nu şi în interiorul acestuia. Repartizarea
sarcinii pe suprafaţa conductorilor încărcaţi nun este uniformă decât în cazul
conductorilor sferici.
E
nE
tE
Fig. 5.11
Calculul câmpului şi potenţialului creat de un conductor sferic încărcat se
poate face observând (fig. 5.10) că pe suprafaţa acestuia şi în exteriorul
conductorului câmpul electric şi potenţialul au aceeaşi valoare cu câmpul electric
creat de o sarcină electrică punctiformă la distanţa r de aceasta. Ca şi cum sarcina
de pe suprafaţa conductorului ar fi concentrată în centrul conductorului sferic sub
forma unei sarcini punctiforme.
În cazul conductorilor alungiţi, sau cu vârfuri ascuţite, sarcina electrică se
aglomerează pe capetele conductorilor şi pe vârfurile ascuţite. Datorită faptului că
densitatea de sarcină pe vârfurile ascuţite ale conductorilor este mai mare, câmpul
electric de la suprafaţa conductorului este mai intens în jurul vârfurilor ascuţite. În
jurul vârfurilor foarte ascuţite intensitatea câmpului electric poate deveni foarte
mare încât sub acţiunea forţei sale electronii liberi de la suprafaţă sunt smulşi şi
conductorul se descarcă, fenomen numit emisie de câmp. Funcţionarea
paratrăsnetului se bazează pe efectul emisiei de câmp a electronilor de pe vârful său
ascuţit. Electronii smulşi de pe vârful paratrăsnetului, prin descărcare lentă,
neutralizează norii învecinaţi şi astfel se elimină descărcarea lor violentă prin alte
corpuri pe care le-ar putea distruge.
Faptul că în interiorul cavităţilor din conductori câmpul electric este nul
face ca aceste cavităţi să fie folosite pentru ecranarea electrostatică a aparatelor de
măsură sensibile la câmpuri electrice perturbatoare. Nu este necesar ca peretele
cavităţii să fie continuu, ci este suficient o cuşcă din plasă de sârmă care va avea
acelaşi efect de ecranare ca şi o cavitate închisă complet. Dacă această cavitate se
leagă la pământ poate primi sau pierde sarcină electrică, atingând potenţialul zero,
fără ca în interiorul ei să apară câmp electric.
Trebuie precizat faptul că un strat conductor nu ecranează aparatele din
exteriorul său faţă de câmpul electric generat de sarcinile electrice aflate în
interiorul cavităţii sale. În cazul în care stratul conductor este legat la pământ
ecranează aparatele din exterior şi faţă de câmpul sarcinilor electrice aflate în
interiorul său; este un ecran din interior spre exterior şi din exterior spre interior.
Aceste lucruri pot fi demonstrate folosind teorema lui Gauss aplicate în
cazul unei cavităţi dintr-un conductor. Această demonstraţie ar constituii un real
exerciţiu pentru cei ce doresc să înţeleagă pe deplin aceste mecanisme.
V.7.2 Capacitatea electrică
Dacă încărcăm un conductor cu sarcină electrică acesta va căpăta un
potenţial faţă de pământ (reamintim că potenţialul pământului, prin convenţie, este
zero). Cu cât sarcina electrică de pe conductor este mai mare cu atât potenţialul
acestuia faţă de pământ este mei mare. Se constată că oricare ar fi sarcina Q de pe
conductor şi potenţialul V corespunzător acesteia, pentru un conductor dat raportul
QC
V este constant. Constanta C, caracteristică fiecărui conductor, care-l
caracterizează în mod univoc, este numită capacitate electrică a conductorului
izolat.
Capacitatea electrică a unui conductor izolat este dată de raportul dintre
sarcina electrică de pe conductor şi potenţialul acestuia faţă de pământ.
Capacitatea electrică a conductorului izolat depinde numai de forma geometrică şi
dimensiunile conductorului. Unitatea de măsură în SI pentru capacitatea electrică
este faradul (F). Un farad este capacitatea uni conductor izolat care încărcat cu
sarcina de 1C capătă un potenţial de 1V faţă de pământ. Pentru a estima ce
dimensiuni trebuie să aibă un conductor izolat pentru a avea o capacitate de 1C vom
calcula capacitatea unui conductor sferic de rază r:
0
0
QC 4 r
Q
4 r
(5.56)
Din (5.56) se poate observa că permitivitatea electrică, ε se poate exprima în SI şi în
F/m. Tot din (5.56) putem calcula raza pe care ar trebui să o aibă o sferă
conductoare pentru a avea capacitatea electrică de 1F:

9 6
0 0
C 1Fr 9 10 m 9 10 km
4 4 ( F / m ) (5.57)
După cum se poate observa o sferă conductoare pentru a avea capacitatea de 1F ar
trebui să aibă o rază mai mare decât raza Pământului, ceea ce face forte incomod de
a folosi în practică faradul ac unitate de măsură a capacităţii electrice. Din acest
motiv s-au introdus unităţi de capacitate electrică care sunt submultipli ai faradului:
microfaradul: 1µF=10-6
F
nanofaradul: 1nF=10-9
F
picofaradul: 1pF=10-12
F
Pământul, a cărui rază medie este R=6,4.106m, poate fi considerat o sferă
conductoare cu capacitatea electrică:
6 6
0 9
1 FC 4 R 6,4 10 ( m ) 711 10 F 711 F
9 10 m (5.58)
V.7.3 Energia conductorului încărcat
Dacă avem un conductor încărcat cu sarcină electrică acesta are
înmagazinată energie potenţială electrostatică. Acest lucru se poate observa forte
uşor în cazul în care apropiem de conductor un corp de probă (care prin convenţie
se consideră încărcat cu sarcină electrică pozitivă) şi vom observa că acesta este
atras sau respins de conductor în funcţie de semnul sarcinii de pe conductor.
Această energie potenţială înmagazinată de conductor nu este altceva decât energia
pe care am consumato pentru a încărca conductorul cu sarcină electrică. Evaluăm
energia pe care trebuie să o consumăm pentru a încărca un conductor de capacitate
C cu sarcina Q. La un moment dat în procesul de încărcare sarcina de pe conductor
este q iar conductorul va căpăta un potenţial q
VC
. Pentru a mai depune pe
conductorul ce are potenţialul V sarcina dq, adusă de la infinit, trebuie efectuat,
lucrul mecanic:
q dq
dL dq V V V dqC
(5.59)
Pentru a calcula lucrul mecanic efectuat pentru a încărca conductorul de la sarcina
q 0 la sarcina q Q integrăm relaţia (5.59) între aceste limite:
2
Q
0
q dq QL
C 2C (5.60)
Lucrul mecanic L dat de relaţia (5.60) nu reprezintă altceva decât energia pe
care trebuie să o consumăm pentru a încărca conductorul de capacitate C cu sarcina
electrică Q. Această energie se înmagazinează sub formă de energie electrică
potenţială a conductorului încărcat. Notând energia conductorului încărcat prin W
avem:
2 2Q CV QV
W2C 2 2
(5.61)
V.8 Condensatorul electric
După cum am văzut mai sus, pentru ca un conductor izolat să aibă
capacitate electrică mare este necesar ca el să aibă dimensiuni foarte mari. Acest
lucru ar face destul a dificil în practică folosirea conductoarelor pentru a acumula
sarcină electrică. De aceea s-a pus problema realizării unei piese care să aibă
capacitate electrică mare şi dimensiuni reduse. Pentru aceasta se foloseşte
fenomenul influenţei electrostatice dintre doi conductori încărcaţi. Astfel este
posibil ca un sistem format din mai mulţi conductori să aibă capacitate destul de
mare, chiar dacă dimensiunile conductorului ce formează sistemul nu sun mari.
Dacă avem un conductor încărcat cu sarcina Q1 şi în prejma acestuia aducem un alt
conductor neîncărcat dar care este legat la pământ, atunci cel de-al doilea se va
încărca cu sarcina 2 1Q Q , mecanism cunoscut sub numele de încărcare prin
influenţă electrostatică. Izolând conductorul al doilea faţă de pământ acesta va

reţine sarcina Q2 şi va avea potenţialul 2V 0 . În acest caz potenţialul V1 al
conductorului încărcat cu sarcina Q1 aflat în vecinătatea conductorului cu sarcina Q2
nu este determinat numai de sarcina Q1 ci şi de sarcina Q2. La fel se întâmplă şi cu
potenţialul V2 al conductorului încărcat cu sarcina Q2. Acest lucru se exprimă
matematic prin relaţiile:
1 11 1 12 2
2 21 1 22 2
V a Q a Q
V a Q a Q (5.62)
unde coeficienţii aij poartă denumirea de coeficienţi de potenţial şi reprezintă o
măsură a gradului în care sarcina înscrisă lângă ei determină valoarea potenţialului
(a11 este măsura gradului în care sarcina Q1 determină potenţialul V1, a12 este
măsura gradului în care sarcina Q2 determină potenţialul V1 etc.). Influenţa
electrostatică este reciprocă ceea ce înseamnă că coeficienţii a12 şi a21 sunt egali.
După cum am arătat mai sus 2 1Q Q Q ceea ce înseamnă că (5.62) poate fi
scris:
1 11 12
2 21 22
V a Q a Q
V a Q a Q (5.63)
Scăzând relaţiile membru cu membru obţinem diferenţa de potenţial dintre cei doi
conductori:
1 2 11 22 12
QV V ( a a 2a )Q
C (5.64)
unde constanta C care depinde numai de forma, dimensiunea şi poziţia reciprocă a
conductorilor nu este altceva decât capacitatea electrică a sistemului format din cei
doi conductori.
Ansamblul format din două conductoare (numite armături) situate la
distanţa finită unul de celălalt poartă denumirea de condensator electric. Din
(5.64) obţinem pentru capacitatea electrică a condensatorului relaţia:
1 2
QC
V V (5.65)
Adică, capacitatea electrică a condensatorului este dată de raportul dintre sarcina
electrică de pe armături şi diferenţa de potenţial dintre armături. Capacitatea
electrică a condensatorului este mai mare decât suma capacităţii conductorilor
izolaţi (armăturilor) care formează condensatorul. Armăturile condensatorului se
încarcă cu sarcina +Q şi –Q, de regulă, prin legarea la polii (+), respectiv (–) ai
unei surse de tensiune.
În funcţie de forma armăturilor condensatoarele pot fi: plane, sferice,
cilindrice. Pentru fiecare tip de condensator în parte se poate calcula capacitatea
corespunzătoare, prin calculul diferenţei de potenţial dintre armăturile sale în
funcţie de sarcina de pe armături. Pentru a simboliză condensatorul, în circuite, se
folosesc următoarele simboluri:
V.8.1 Condensatorul plan
Condensatorul plan are armăturile plane paralele iar distanţa dintre armături
d este mult mai mică decât dimensiunile liniare ale armăturilor. Astfel câmpul
electric dintre armături este omogen şi poate fi exprimat în funcţie de diferenţa de
potenţial dintre armături cu ajutorul relaţiei:
1 2V V UE
d d (5.66)
Prin încărcarea condensatorului cu sarcina electrică, aceasta se distribuie uniform şi
numai pe feţele interioare ale armăturilor, deoarece între sarcinile pozitive şi
negative de pe armături se manifestă forţe de atracţie (fig. 5.12). Astfel se formează
+ -
condensator cu capacitate constantă
condensator cu capacitate variabilă
condensator electrolitic

două straturi superficiale de sarcini cu densităţile
Q
S, unde S este aria fiecărei armături.
Astfel pornind de la expresia capacităţii electrice
a unui condensator dată de (5.65) putem calcula
expresia capacităţii condensatorului plan:
1 2 0
Q S SC
V V Ed / d
Pentru capacitatea electrică a condensatorului plan avem relaţia:
0SC
d (5.67)
Folosind acelaşi raţionament recomandăm ca exerciţiu calculul capacităţii
unui condensator sferic. Condensatorul sferic este format din două armături sferice
concentrice de raze a şi b (a<b). Se va calcula capacitatea electrică în cazurile în
care armăturile sunt încărcate cu sarcina Q şi în cazul în care armătura interioară
este legată la pământ. În care din cele două cazuri capacitatea electrică este mai
mare?
V.8.2 Gruparea condensatorilor
Condensatoarele sunt elemente foarte des întâlnite în circuitele electrice.
Într-un anumit circuit capacitatea electrică pe care trebuie să o introducem trebuie
să aibă o anumită valoare. Nu întotdeauna dispunem de condensatori cu valoarea
capacităţii egală cu cea necesară în circuit. În acest caz se grupează împreună mai
mulţi condensatori în aşa fel încât capacitatea grupării („bateriei”) de condensatori
să fie cea dorită. Cele mai dese moduri de grupări ale condensatorilor, pe care le
întâlnim în practică, sunt grupările serie şi paralel.
Prin capacitatea electrică echivalentă a unei grupări de condensatori se
înţelege capacitatea unui condensator care montat la aceeaşi diferenţă de potenţial
+ -
+σ -σ
E
d
Fig. 5.12

B M N P D A
+Q -Q +Q
-Q +Q -Q +Q -Q
C1 C2 C3 Cn
ca şi gruparea se încarcă cu aceeaşi sarcină electrică cu care s-a încărcat
întreaga grupare de condensatori.
În continuare ne propunem să găsim relaţiile pentru capacitatea echivalentă
în cazul grupărilor serie şi paralel.
Gruparea serie (în cascadă). Legarea în serie a condensatorilor se face
ca în fig. 5.13.
Fig. 5.13
Bornele A şi B sunt legate la sursă. Se observă că numai două armături, una a
primului condensator cealaltă a ultimului condensator, sunt legate la sursă, celelalte
armături ale condensatorilor se încarcă prin influenţă electrostatică. Dacă armătura
condensatorului 1 legată la polul A al sursei se încarcă cu sarcina +Q, această
sarcină separă (prin influenţă electrostatică) sarcina –Q pe armătura a doua a
condensatorului 1 şi sarcina –Q pe prima armătură a condensatorului 2 ş.a.m.d.
Astfel observăm că toţi condensatorii grupării se încarcă cu aceeaşi sarcină,
indiferent de capacitatea lor. Se observă că diferenţa de potenţial dintre punctele A
şi B (UAB) este suma căderilor de tensiune pe fiecare condensator:
AB AM MN NP DBU = U +U +U + ...+U (5.68)
Sau ţinând cont de expresia capacităţii electrice a unui condensator (5.65) avem:
S 1 2 3 n
S 1 2 3 n
Q Q Q Q Q...
C C C C C
1 1 1 1 1...
C C C C C
(5.69)
Unde CS este capacitatea echivalentă a grupării serie de condensatoare care pentru
o baterie de n condensatoare poate fi calculată după relaţia:

A B +Q
-Q
+Q
-Q
+Q
-Q
C1
C2
Cn
n
i 1S i
1 1
C C (5.70)
Din (5.70) observăm că în cazul legării în serie a condensatorilor capacitatea
echivalentă serie este mai mică decât capacitatea oricărui condensator din grupare.
Griparea paralel (în derivaţie). Gruparea paralel se realizează ca în fig.
5.14.
Fig. 5.14
Bornele A şi B sunt legate la sursă la o diferenţă de potenţial UAB. Se observă că în
cazul grupării paralel avem aceeaşi diferenţă de potenţial între plăcile tuturor
condensatorilor, ceea ce înseamnă că sarcina cu care se încarcă fiecare condensator
depinde de capacitatea electrică a fiecărui condensator în parte. Sarcina totală cu
care se încarcă gruparea de condensatori este egală cu suma sarcinilor ce revin
fiecărui condensator:
1 2 3 n
p 1 2 3 n
p 1 2 3 n
Q =Q +Q +Q +...+Q
C = C U+C U+C U+...+C U
C =C +C +C +...+C
(5.71)
unde Cp este capacitatea grupării paralel a condensatorilor:
n
p i
i 1
C C (5.72)
Din (5.72) se observă că în cazul grupării paralel a condensatoarelor capacitatea
electrică echivalentă a grupării este mai mare decât capacitatea oricărui
condensator din grupare.
V.9 Dielectrici în câmp electric
Experienţa arată că dacă între armăturile condensatorului se introduce un
dielectric capacitatea condensatorului creşte. Notând cu 00
SC
d capacitatea
condensatorului fără dielectric şi cu S
Cd
capacitatea lui în prezenţa
dielectricului avem:
r
0 0
C
C (5.73)
Permitivitatea relativă a dielectricului dintre armăturile condensatorului εr, arată de
câte ori creşte capacitatea condensatorului, dacă în loc de vid, între plăcile
condensatorului se află un dielectric.
Explicarea măririi capacităţii unui condensator la introducerea unui
dielectric între plăci constă în faptul că sub influenţa câmpului electric se produce o
deplasare a sarcinilor în moleculele dielectricului; electronii se deplasează spre
polul pozitiv, iar nucleele spre polul negativ, moleculele se polarizează. Ca urmare
a acestei deplasări molecula se alungeşte iar centrul sarcinilor pozitive nu mai
coincide centrul sarcinilor negative.