
Curs Statica
4
STRUCTURI STATIC NEDETERMINATE 2.1 EXPRESIA ȘI SEMNIFICAIA ECUAIILOR DE CONDIIE, A NECUNOSCUTELOR, A COEFICIENILOR ȘI A TERMENILOR LIBERI 2.1.1 Expresiaecua iilor de condiie, a coeficienilor și a termenilor liberi Pentru sistemul de bază, încărcat cu fore exterioare și cu necunoscute, se aplic ă suprapunerea de efecte și deci eforturile și deplasările pot fi exprimate prin relaii liniare. Astfel, pentru cazul general al unei structuri de N ori static nedeterminată, o deplasare oarecare se poate scrie sub forma: ( ) ( ) ext i n i i i i F X ∆ + ∆ = ∆ ∑ =1 (2.1) ( ) ( ) ( ) ( ) ( ) ( ) ( ) ext i n i j i i i i i i i F X X X X X X ∆ + ∆ + + ∆ + ∆ + + ∆ + ∆ + ∆ = ∆ ... ... 3 2 1 (2.2) ( ) i ii i i X X δ = ∆ , unde: ii δ reprezintă deplasarea în punctul i produsă de o foră 1 = i X ; j ij j i X X δ = ∆ , unde: ij δ reprezintă deplasarea în punctul i produsă de o foră 1 = j X . EI dx m m j i ij ∫ = δ 0 > = ∫ EI dx m m i i ii δ ( ) EI dx M m F ext F i ext i ∫ = ∆ • i m reprezintă diagrama de moment rezultată din încărcarea S.B. cu o foră 1 = i X ; • j m reprezintă diagrama de moment rezultată din încărcarea S.B. cu o for ă 1 = j X ; • ext F M reprezint ă diagrama de moment rezultată din încărcarea S.B. cu for ele exterioare. Relaia (2.2) devine: ( ) ext i n in j ij i ii i i i i F X X X X X X ∆ + + + + + + + + = ∆ δ δ δ δ δ δ ... ... 3 3 2 2 1 1 (2.3) Considerând sistemul de bază încărcat simultan cu forele exterioare și cu necunoscutele i X și inând cont de condi ia de compatibilitate a deformatei sistemului de bază cu legăturile structurii reale, S.B. trebuie să se comporte la fel ca structura dată, adică să aibe aceeași poziie deformată. Înseamnă că valorile necunoscutelor 1 X , ..., n X trebuie să rezulte din condiia ca deplasările pe direciile legăturilor suprimate să fie nule. Se ajunge deci la condi iile: 0 1 = ∆ ; ...; 0 = ∆ n . Rezultă un sistem de ecuaii liniare de forma: ( ) ( ) ( ) ( ) 0 ... ... 0 ... ... 0 ... ... 0 ... ... 1 1 1 1 1 1 1 1 1 1 1 11 1 = ∆ + + + + + + = ∆ = ∆ + + + + + + = ∆ = ∆ + + + + + + = ∆ = ∆ + + + + + + = ∆ ext n n nn j nj i ni n n ext j n jn j jj i ji j j ext i n in j ij i ii i i ext n n j j i i F X X X X F X X X X F X X X X F X X X X δ δ δ δ δ δ δ δ δ δ δ δ δ δ L L L L L L L L L L L L L L (2.4)
-
Upload
marian-marius-serban -
Category
Documents
-
view
7 -
download
0
description
Statica
Transcript of Curs Statica
-
STRUCTURI STATIC NEDETERMINATE
2.1 EXPRESIA I SEMNIFICAIA ECUAIILOR DE CONDIIE, A NECUNOSCUTELOR, A COEFICIENILOR I A TERMENILOR LIBERI
2.1.1 Expresiaecuaiilor de condiie, a coeficienilor i a termenilor liberi
Pentru sistemul de baz, ncrcat cu fore exterioare i cu necunoscute, se aplic suprapunerea de efecte i deci eforturile i deplasrile pot fi exprimate prin relaii liniare. Astfel, pentru cazul general al unei structuri de N ori static nedeterminat, o deplasare oarecare se poate scrie sub forma:
( ) ( )extin
iiii FX +=
=1(2.1)
( ) ( ) ( ) ( ) ( ) ( ) ( )extinijiiiiiii FXXXXXX ++++++++= ......321 (2.2) ( ) iiiii XX = , unde: ii reprezint deplasarea n punctul i produs de o for 1=iX ; ( ) jijji XX = , unde: ij reprezint deplasarea n punctul i produs de o for 1=jX .
EIdx
mm jiij = 0>= EIdx
mm iiii ( ) EIdxMmF
extFiexti =
im reprezint diagrama de moment rezultat din ncrcarea S.B. cu o for 1=iX ; jm reprezint diagrama de moment rezultat din ncrcarea S.B. cu o for 1=jX ;
extFM reprezint diagrama de moment rezultat din ncrcarea S.B. cu forele exterioare.
Relaia (2.2) devine: ( )extininjijiiiiiii FXXXXXX ++++++++= ......332211 (2.3)
Considernd sistemul de baz ncrcat simultan cu forele exterioare i cu necunoscutele iX i innd cont de condiia de compatibilitate a deformatei sistemului de baz cu legturile structurii reale, S.B. trebuie s se comporte la fel ca structura dat, adic s aibe aceeai poziie deformat. nseamn c valorile necunoscutelor 1X , ..., nX trebuie s rezulte din condiia ca deplasrile pe direciile legturilor suprimate s fie nule. Se ajunge deci la condiiile: 01 = ; ...; 0=n . Rezult un sistem de ecuaii liniare de forma:
( )
( )( )
( ) 0... ...
0... ... 0 ... ...
0 ... ...
11
11
11
11111111
=++++++=
=++++++==++++++=
=++++++=
extnnnnjnjininn
extjnjnjjjijijj
extininjijiiiii
extnnjjii
FXXXX
FXXXX
FXXXX
FXXXX
LLLLLLL
LLLLLLL
(2.4)
-
Sistemul (2.4) poate fi scris i sub form matricial (2.5): [ ]{ } { } { }0=+extF
X unde: (2.5)
[ ]
=
nnnjnin
jnjjjij
inijiii
nji
LL
LLLLLL
LL
LL
LLLLLL
LL
1
1
1
11111
{ }
=
n
j
i
X
XX
X
X
L
L
1
{ }
=
ext
ext
ext
ext
ext
Fn
Fj
Fi
F
F
,
,
,
,1
L
L
Prin rezolvarea sistemului ecuaiilor de condiie devin cunoscute forele static nedeterminate 1X , ..., nX i deci toate forele exterioare care acioneaz pe sistemul de baz.
2.1.2 Semnificaiaecuaiilor de condiie, a necunoscutelor, a coeficienilor i a termenilor liberi
Semnificaia unei ecuaii depinde de natura legturii scoase. 0= i poate s reprezinte o translaie nul sau o rotire nul. Translaiile reprezint deplasri liniare, iar rotirile reprezint deplasri unghiulare. Att translaiile ct i rotirile pot fi absolute ct i relative. 0= i poate fi o deplasare absolut cnd legatura scoas este o legtur exterioar (dintr-un reazem) sau o deplasare relativ cnd legtura scoas este o legatur interioarstructurii.
reprezint matricea coeficienilor de flexibilitate a sistemului de baz. Aceast matrice are urmatoarele 2 proprieti:
este simetric n raport cu diagonala principal, astfel ncat jiij = [ ] [ ]( ) =T ;
toi termenii de pe diagonala principal sunt pozitivi, adic 0>ii .
reprezintvectorul necunoscutelor
forelor de legtur
reprezintvectorul termenilor liberi
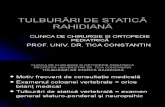
P1
Figura 2.1 Structura folosit la evidenierea semnificaiei ecuaiilor de condiie
Contur nchis
54333 === LKN
P1
X2 X1
X3 X1
X3
X2 X4
X5
Contur nchis Contur nchis
-
n cazul structurii din figura 2.1 cele 5 ecuaii de condiie au urmtoarele semnificaii: 01 = reprezint o translaie relativ orizontal; 02 = reprezint o translaie relativ vertical; 03 = reprezint o rotire relativ; 04 = reprezint o translaie absolut vertical; 05 = reprezint o rotire absolut.
Necunoscutele au semnificaia unor fore generalizate. Prin fora generalizat se inelege for sau moment ncovoietor.
Coeficienii necunoscutelor sunt deplasri unitare produse pe direciile necunoscutelor cnd sistemul de baz este ncrcat succesiv cu X1=1, X2=1,....Xn=1; prin deplasare unitar se va inelege deplasarea produs de o for generalizat egal cu unitatea.
Termenii liberi sunt deplasrile pe direciile necunoscutelor cnd sistemul de baz este ncrcat cu forele exterioare. Semnificaia termenilor liberi este aceeai cu semnificaia ecuaiilor, adic termenii liberi pot reprezenta o translaie (relativ sau absolut) sau o rotire (relativ sau absolut).
OBSERVAII
Termenii liberi pot fi pozitivi, negativi sau nuli. Cel puin un termen liber trebuie s fie diferit de zero pentru a nu se obine soluia banal (Xi=0, pentru i=1,n);
Se observ c numai termenii liberi depind de forele exterioare date, n timp ce coeficienii necunoscutelor depind numai de caracteristicile structurii i de natura materialului din care se execut structura. Astfel, n cazul mai multor ipoteze de ncrcare, pstrnd acelai sistem de baz, n sistemul de ecuaii se schimb numai termenii liberi.
2.2 ETAPE DE REZOLVARE A STRUCTURILOR PRIN METODA FORELOR
Identificarea gradului de nedeterminare static; Alegerea unui sistem de baz static determinat prin scoaterea din structur static nedeterminat
a unui numr de legturi simple egal cu gradul de nedeterminare static; Se verific dac sistemul de baz este invariabil geometric; n locul legturilor scoase se prevd forele de legtur ca necunoscute (X1, ..., Xn). Aceste fore
sunt static nedeterminate deoarece nu se pot obine din condiia de echilibru static. Se impune sistemului de baz condiia ca deplasrile pe direcia legturilor scoase s fie nule, aa cum sunt i la structura real;
Se obine un sistem liniar de N ecuaii cu N necunoscute; se rezolv i se verific rezolvarea sistemului;
Se traseaz diagrama final de moment ncovoietor M prin suprapunere de efecte:
nnF
n
iiiF XmXmMXmMM extext +++=+=
=
K111
;
-
Se verific diagrama final a momentului ncovoietor; pentru verificare sefolosesc cele dou condiii: (i) Condiia de echilibru static.Se verific mai nti echilibrul tuturornodurilor (suma momentelor pe fiecare nod interior trebuie s fie egal cu 0). Cum diagrama
extFM i diagramele
unitare mi respect condiia deechilibru static, rezult ci diagrama finalM, obinut prin suprapunere de efecte, respect condiia de echilibru static. Verificarea static nu d asigurarea c diagrama de moment ncovoietor este corect, deoarece pot fi greeli la calculul termenilor din sistemul ecuaiilor de condiie sau la rezolvarea acestuia; (ii) Condiia de continuitate. Se calculeaz deplasrile pe direcia legturilor structurii reale, care n realitate sunt nule. n ceea ce privete modul de calcul al acestor deplasri se va discuta n paragraful urmtor;
Diagrama de for tietoare T se determin punnd condiia de echilibru pentru fiecare bar n parte. Pentru aceast se izoleaz fiecare bar din structur i se incarc cu momentele finale de pe capetele de bar i cu forele exterioare ce acioneaz pe lungimea barei;
Diagrama de for axialN se determin cunoscnd diagrama de for tietoare T i punnd condiia de echilibru asupra nodurilor. Se izoleaznodurile i se ncarc cu forele tietoare de pe barele concurente n nod (cunoscute), cu forele axiale de pe barele concurente n nod (necunoscute) i cu forele exterioare care acioneaz pe nod. Se scriu ecuaiile de echilibru la translaie de nod ( = 0X ; = 0Y ). Deteminarea forelor axiale ncepe cu nodurile avnd 2 bare.Se obin astfel valorile forei axiale la capetele barelor.
Problem
S se traseze diagramele de eforturi pentru urmtoarea structur: (aplicata 4 pg 110 pdf)
90 KN
45 KN
4,5
4
4
1
I
I
2,25I
2,25I
1
2
3
4
5
= = + 3 = 0 + 5 3 1 = 2
Stabilirea gradului de nedeterminare static:
STRUCTURA ESTE DE DOU ORI STATIC NEDETERMINAT
















![Tulburari de statica rahidiana[1]](https://static.fdocumente.com/doc/165x107/544dbf79af7959ef138b4fee/tulburari-de-statica-rahidiana1.jpg)