Curs 6
8
MODELAREA IDENTIFICAREA ŞI SIMULAREA ACŢIONĂRILOR ELECTRICE 1 V. Modelarea matematică a sistemelor de acţionare cu motoare de inducţie cu rotorul în scurt circuit 5.3 Modelul matematic al maşinii asincrone 5.3.1 Modelul matematic în curenţi SAE reglabile necesită un control adecvat prin intermediul subsistemelor electronice de putere şi al subsistemului numeric de calcul. Metodele uzuale de control se bazează pe modele de referinţă. Condiţiile esenţiale impuse modelului de referinţă sunt următoarele: să fie de timp real şi să fie ajustabil, în sensul că trebuie să urmărească toate modificările parametrilor reali ai maşinii electrice în timpul funcţionării acesteia. Din aceste motive, modelele de referinţă utilizează mărimile globale: tensiune, flux, curent, deci nu operează cu mărimile locale corespunzătoare: intensităţi ( ) , E H , inducţii ( ) , DB şi densitate de curent J . Descrierea comportării maşinii electrice se realizează prin intermediul ecuaţiilor de tensiuni şi de mişcare. Mărimile fizice care intervin în ecuaţiile de tensiuni sunt mărimi trifazate în regim general variabil. Efectul global cumulat al mărimilor trifazate se poate descrie prin intermediul fazorilor reprezentativi. Se consideră maşina de inducţie trifazată alimentată de la un invertor trifazat de curent, intr-o schemă tipică de forma celei din figura 5.6. Bobina de filtrare din circuitul intermediar L F este suficient de mare astfel încât Id este un curent continuu practic constant. Invertorul cu IGBT este unul de curent cu un sistem de comandă PWM sau fazorial, astfel încât conţinutul de armonici se găseşte la frecvenţe mult mai mari decât fundamentala şi poate fi neglijat, cei trei curenţi i S1 , i S2 şi i S3 fiind consideraţi sinusoidali. Fig. 5.6 Maşina asincronă trifazată alimentată de la un invertor de curent
-
Upload
laurentiu-ochirosi -
Category
Documents
-
view
218 -
download
1
description
MISAE
Transcript of Curs 6
-
MODELAREA IDENTIFICAREA I SIMULAREA ACIONRILOR ELECTRICE
1
V. Modelarea matematic a sistemelor de acionare cu motoare de inducie cu
rotorul n scurt circuit
5.3 Modelul matematic al mainii asincrone
5.3.1 Modelul matematic n cureni
SAE reglabile necesit un control adecvat prin intermediul subsistemelor electronice de putere i al subsistemului numeric de calcul. Metodele uzuale de control se bazeaz pe modele de referin. Condiiile eseniale impuse modelului de referin sunt urmtoarele: s fie de timp real i s fie ajustabil, n sensul c trebuie s urmreasc toate modificrile parametrilor reali ai mainii electrice n timpul funcionrii acesteia. Din aceste motive, modelele de referin utilizeaz mrimile globale: tensiune, flux, curent, deci nu opereaz cu mrimile locale corespunztoare: intensiti ( ),E H , inducii ( ),D B i densitate de curent J .
Descrierea comportrii mainii electrice se realizeaz prin intermediul ecuaiilor de tensiuni i de micare. Mrimile fizice care intervin n ecuaiile de tensiuni sunt mrimi trifazate n regim general variabil. Efectul global cumulat al mrimilor trifazate se poate descrie prin intermediul fazorilor reprezentativi.
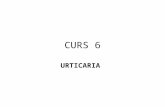
Se consider maina de inducie trifazat alimentat de la un invertor trifazat de curent, intr-o schem tipic de forma celei din figura 5.6. Bobina de filtrare din circuitul intermediar LF este suficient de mare astfel nct Id este un curent continuu practic constant. Invertorul cu IGBT este unul de curent cu un sistem de comand PWM sau fazorial, astfel nct coninutul de armonici se gsete la frecvene mult mai mari dect fundamentala i poate fi neglijat, cei trei cureni iS1, iS2 i iS3 fiind considerai sinusoidali.
Fig. 5.6 Maina asincron trifazat alimentat de la un invertor de curent
-
2
Folosind reprezentarea fazorial, ecuaiile electrice ale mainii asincrone se scriu sub forma
. ( )
( ) . ( ) [ ( )]
0 . ( ) [ ( )]
( ) ( ) ( ).
ss ss
rrr
j tm s r
du t R i t tdt
dR i t tdt
i t i t i t e
= +
= + = +
(5.38)
- Rs i Rr sunt rezistenele pe o faz ale nfurrilor statorice i rotorice,
- is(t), ir(t) i im(t) sunt fazorii curent statoric, rotoric i respectiv de magnetizare total,
- s(t) i r(t) fazorii fluxurilor totale din nfaurarea statoric i rotoric,
- (t) unghiul spaial dintre axele de referin ale celor dou nfurri.
Ca urmare a conexiunii de tip stea a motorului exist relaia:
( ) ( ) ( )1 2 3 0.s s si t i t i t+ + = (5.39)
Alimentarea se face de la sistemul trifazat de cureni de forma :
1
2
3
( ) 2 sin(2 )2( ) 2 sin(2 ).3
4( ) 2 sin(2 )3
s s s
s s s
s s s
i t I f
i t I f
i t I f
==
=
(5.40)
Se definete fazorul spaial curent statoric:
2
1 2 3( ) ( ) . ( ) . ( ).s s s si t i t a i t a i t= + + (5.41) Din cele 3 ecuaii (5.38) au sens numai ecuaiile 2 i 3 ntruct curentul statoric este direct
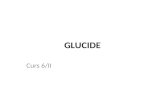
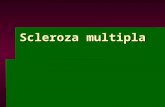
injectat n main. n ceea ce privete ecuaia de cureni, introduce dificultatea dat de imposibilitatea accesului la curentul rotoric. Depirea acestei dificulti se face prin orientarea mrimilor din main fa de aa numitul cmp de magnetizare rotoric, materializat prin curentul de magnetizare rotoric imr, fig.5.7. Acest curent reprezint o component a curentului rotoric ir care produce cmpul, respectiv fluxul magnetic. Fazorul imr face cu axa statoric fix din main un unghi
Fig. 5.7 Determinarea componentelor isd isq
q
isq
is imr
isd Ax statoric
Ax rotoric
d
-
MODELAREA IDENTIFICAREA I SIMULAREA ACIONRILOR ELECTRICE
3
( ) ( ) ( ),q t t t= + (5.42)
variabil n timp, unde (t) este poziia acestuia fa de axa rotoric mobil n micare cu viteza mainii.
n raport cu aceast orientare, ecuaia curentului de magnetizare rotoric devine:
. ( )( ) ( ) (1 ). ( ). ,j tmr s rri t i t i t e= + + (5.43)
unde r este coeficientul de cuplaj magnetic al rotorului. Din aceast ecuaie se calculeaz
. ( ) ( ) ( )( ). .1
j t mr sr
r
i t i ti t e = + (5.44)
Fluxul magnetic din rotor, reprezentat fa de axa rotoric, se calculeaz cu relaia:
( ) . ( ) . . ,jr sr rt L i t M i e = + (5.45)
- Lr reprezint inductivitatea proprie (rotoric),
- M inductivitatea mutual stator-rotor.
Ecuaia pentru circuitul rotoric va fi :
. ( ) . ( ) . ( )( ) ( ) ( ) ( )0 [ ] [ ( ) ].1 1
j t j t j tmr s mr ssr r
r r
i t i t d i t i t dR e L e M i t edt dt
= + ++ + (5.46) ntre inductivitile proprii i mutuale exist relaiile :
(1 )(1 )
s s
r r
L ML M
= += + (5.47)
unde s este coeficientul de cuplaj magnetic al statorului.
Se noteaz prin
rrr
LR
= (5.48) constanta de timp a nfurrii rotorice, cu valori relativ mari de ordinul zecimilor de secund, iar prin
11(1 )(1 )s r
= + + (5.49) un coeficient de cuplaj magnetic global. Trecnd la reprezentarea tuturor mrimilor fa de axa statoric se scriu realiile
( )
[ ( ) ( )]
jq tmr mr
j q t ts s
i i ei i e +
== . (5.50)
Cu aceste reprezentri, ecuaia rotoric devine:
.jmrr r mr mr r mr sdi dq dj i i j i i edt dt dt
+ + = (5.51) Pe de alt parte
.cos sin ,js s s sd sqi e i ji i ji = + = + (5.52)
-
4
unde isd i isq se numesc componente longitudinal, respectiv transversal, a curentului statoric. Rezult ecuaiile :
mrr mr sd
r mr r mr sq
di i idt
dq i i idt
+ =
=. (5.53)
Prima ecuaie indic faptul ca isd, componenta longitudinal a curentului statoric produce n main fluxul rotoric, dup constanta de timp r. Cea de a doua ecuaie determin, prin integrare, poziia n spaiu a fazorului imr, deci a aceluiai flux. Componentele longitudinal i transversal se pot calcula cu uurin din
( ). j qs s s si i j i i e
+= + = (5.54)
prin nmulirea
( . )(cos sin ) . ,jq js s s s sd sqi e i j i j i e i j i
= + = = + (5.55) astfel :
cos sinsin cos
sd s
sq s
i ii i
= . (5.56)
Deci cele dou componente se pot calcula dup transformarea trifazat-bifazat, dac se cunoate poziia q a cmpului magnetic rotoric. Prin transformarea d/q cele dou componente isd i isq nu mai au o variaie n timp sinusoidal ci sunt mrimi continui, ceea ce favorizeaz configurarea controlului automat.
La ecuaiile 5.53 trebuie adugat ecuaia de micare a mainii :
( ) ( ) ( ),sd tJ m t m t
dt = (5.57)
Expresia generalizat a cuplului electromagnetic m(t) are forma:
*2( ) .Im[ .( ) ]3
js rm t M i i e
= , (5.58) unde Im reprezint partea imaginar a expresiei, iar * complex conjugatul parantezei.
Rezult:
2( ) . . . ,3 1 mr sq m mr sqr
Mm t i i k i i= =+ (5.59) ceea ce indic faptul ca isq, componenta transversal a curentului statoric, produce cuplul electromagnetic din main. Ecuaia este asemntoare cu expresia de calcul a cuplului de la maina de curent continuu, acesta fiind de altfel motivul introducerii transformatei d/q.
-
MODELAREA IDENTIFICAREA I SIMULAREA ACIONRILOR ELECTRICE
5
Modelul matematic va avea forma :
.
. . .
mrr mr sd
sq
r mr
m mr sq s
di i idt
idqdt i
dJ k i i mdt
+ =
= +
=
(5.60)
Modelul are ordinul 3 i este neliniar ca urmare a neliniaritilor de tip produs dintre isq i imr. De asemenea, neliniariti mai introduc caracteristica de magnetizare a mainii, prin variaia inductivitii rotorice Lr cu cmpul magnetic, i variaia rezistenei rotorice Rr cu temperatura din main, amndou prin intermediul constantei de timp rotorice r. Dac se dorete o precizie mare a rspunsului modelului cele dou variaii trebuiesc estimate.
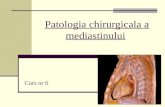
Estimarea cmpului de magnetizare rotoric. Cunoaterea curentului de magnetizare rotoric imr i a poziiei q este esenial pentru integrarea modelului. Sunt mai multe metode de achiziie sau calcul al acestor mrimi. Achiziia se poate face prin prevederea n ntrefierul mainii de traductoare de tip Hall sau de bobine speciale de msurare prevzute n crestturile statorice, n paralel, ca poziie, cu nfurarea statoric. Ambele metode au dezavantaje: costuri mari, necesitatea schimbrii traductoarelor la rebobinarea mainii i coninut mare de armonici n semnalul cules ca urmare a armonicilor de cmp produse de dinii miezului feromagnetic statoric. Cea mai simpl i economic metod este cea de calcul pe baza modelului mainii, fig.5.9. Mrimile necesare pentru calcul sunt formate din cei trei cureni rotorici i viteza unghiular a mainii, mrimi care se pot achiziiona fr probleme. Structura de calcul rezult din ecuaiile modelului (5.60).
is
is 3/2 e
-jq
isq
isd imr Km
1 r :
q
m
-ms
is1
is2
is3
Fig. 5.8 Schema bloc a modelului n cureni
3/2 e-jq
isq
isd imr r
:
q is1
is2
is3
is
is
Fig.5.9 Calculul cmpului magnetic rotoric
-
6
5.3.2 Modelul n tensiuni
n majoritatea aplicaiilor se folosesc invertoare de tensiune. Rezult deci necesitatea realizrii unui model pentru acest tip de funcionare. Se consider filtrul LFCF din circuitul intermediar astfel dimensionat nct tensiunea Vd este practic constant. Comanda invertorului de tensiune este asemntoare cu cea a invertorului de curent, astfel c tensiunile us1, us2, us3 pot fi considerate sinusoidale.
1
2
3
2 sin(2 )22 sin(2 )3
42 sin(2 )3
s s s
s s s
s s s
u U f
u U f
u U f
==
=
(5.61)
Modelul n acest caz presupune introducerea relaiilor de legtur ntre tensiunile i curenii statorici. Pentru aceasta se pleac de la ecuaia statoric (5.38) unde fluxul statoric este de forma
( ) . . . .js s rst L i M i e = + (5.62)
Cu aceast precizare ecuaia pentru stator devine
( )( ) . ( ) ( . ).jss s rs sd i t du t R i t L M i e
dt dt= + + (5.63)
Utiliznd expresia curentului rotoric
. ( ) ( ) ( )( ). ,1
j t mr sr
r
i t i ti t e = +
(5.64) innd cont de ecuaiile:
(1 )(1 )
s s
r r
L ML M
= += + ,
11(1 )(1 )s r
= + + , ( )
[ ( ) ( )]
jq tmr mr
j q t ts s
i i ei i e +
== (5.65)
i notnd prin
Fig. 5.10 Maina asincron trifazat alimentat de la un invertor de tensiune
-
MODELAREA IDENTIFICAREA I SIMULAREA ACIONRILOR ELECTRICE
7
sss
LR
= (5.66) constanta de timp a nfurrii statorice se obine:
. (1 ). ( )s ss mrs ss
u di di iR dt dt
= + + . (5.67) Reprezentnd mrimile n coordonate statorice, curentul de magnetizare rotoric se scrie sub
forma :
. ,jqmr mri i e= (5.68) iar
( ) . .jq jqmrmr mrdid dqi e j i e
dt dt dt= + (5.69)
Folosind (5.69), ecuaia (5.67) capt forma:
. (1 ). ( . )s jq jqs mrs s s mrs
u didi dqi e j i eR dt dt dt
= + + + (5.70) sau
.
. . (1 ). ( )jq
s jq jqs mrs s s mr
s
u e didi dqi e e j iR dt dt dt
= + + + . (5.71) Aceasta se dezvolt dup cum urmeaz:
( ). . . . . ,jq j q jq js s s sd sqi e i e e i e i j i + = = = +
. ( . )(cos sin ) .jqs s s sd squ e u j u q j q u j u = + = + , (5.72)
( )( . ). [( . ) ]. .sqjq j q jq jq jqs sds sd sq sd sqdididi d d dq dqe i e e i j i e e j j i i
dt dt dt dt dt dt dt + = = + = + +
Utiliznd relaiile de mai sus se obine ecuaia complex:
. . . . . .
(1 ) .(1 ) ,
sq sqsd sdsd sq s s s sd s sq
s s
mrs s mr
u diu di dq dqj i ji j j i iR R dt dt dt dt
di dqj idt dt
+ = + + + + +
+ + (5.73)
din care rezult sistemul de ecuaii:
. . (1 )sd sd mrs sd s sq ss
di u didqi idt R dt dt
+ = + (5.74)
. . (1 ) ,sq sqs sq s sd s mrs
di u dq dqi i idt R dt dt
+ = care permite calculul componentelor d i q ale curentului statoric n funcie de sistemul de tensiuni statorice de alimentare. Rezult structura prii din model care completeaz modelul n curent. Schema
-
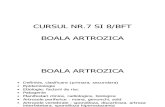
8
bloc corespunztoare ecuaiilor (5.74) este prezentat n fig.5.11. De fapt aceast schem bloc nu constituie modelul integral al acionrii, ci numai partea de calcul a componentelor simetrice isd i isq. Pentru a obine modelul n tensiuni complet se vor nlocui primele dou blocuri, 3/2 i e-jq, din fig. 5.8 cu schema din figura 5.11, restul modelului rmnnd nemodificat. Mrimile necesare pentru calcul, dq/dt i imr, sunt furnizate de partea de model propriu-zis, fig.5.8. O problem suplimentar const n estimarea derivatei dimr/dt. Realizarea n model a derivatei nu este recomandat, de aceea se recurge la utilizarea primei ecuaii din 5.60, de unde rezult:
.mr sd mrs
di i idt
= (5.75)
1/Rs
x
us1
us2
us3
us
us
3/2 e-jq
q
usd
usq 1/Rs
-s(1-) dimr/dt
isd
dq/dt
isq
imr
-s(1-)
x
x
Fig. 5.11 Schema bloc a modelului n tensiuni