Curs 4 BCRI
4
2.2 SCHEMELE CINEMATICE PENTRU MODULE DE ROTAŢIE ŞI DE TRANSLAŢIE ALE ROBOŢILOR INDUSTRIALI În construcţia roboţilor industriali intră lanţuri cinematice de rotaţie şi de translaţie. În cele ce urmează vor fi prezentate schemele cinematice ale modulelor de rotaţie şi respectiv de translaţie. Modulele de rotaţie din structura roboţilor industriali pot fi acţionate electric, hidraulic, pneumatic sau combinat. Construcţia modulelor de rotaţie este dependentă de natura acţionării şi de tipul motorului de antrenare care poate fi oscilant, rotativ sau liniar. În cazul acţionării electrice se poate folosi una din variantele reprezentate schematic în figurile 2.10, 2.11, 2.12. În figura 2.10 sunt prezentate scheme cinematice la care motorul de acţionar este cuplat prin intermediul unui reductor în diverse variante cu elementul acţionat.
description
Bazele cinematicii robotilor industriali
Transcript of Curs 4 BCRI

2.2 SCHEMELE CINEMATICE PENTRU MODULE DE ROTAŢIE ŞI DE TRANSLAŢIE ALE ROBOŢILOR INDUSTRIALI
În construcţia roboţilor industriali intră lanţuri cinematice de rotaţie şi de translaţie. În cele ce urmează vor fi prezentate schemele cinematice ale modulelor de rotaţie şi respectiv de translaţie. Modulele de rotaţie din structura roboţilor industriali pot fi acţionate electric, hidraulic, pneumatic sau combinat. Construcţia modulelor de rotaţie este dependentă de natura acţionării şi de tipul motorului de antrenare care poate fi oscilant, rotativ sau liniar. În cazul acţionării electrice se poate folosi una din variantele reprezentate schematic în figurile 2.10, 2.11, 2.12.
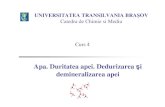
În figura 2.10 sunt prezentate scheme cinematice la care motorul de acţionar este cuplat prin intermediul unui reductor în diverse variante cu elementul acţionat.
Fig. 2.10

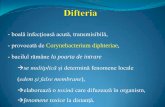
Fig. 2.11
În figura 2.11 sunt date scheme cinematice pentru module de rotaţie la care motorul de acţionare este cuplat prin intermediul unui reductor în diverse variante şi al unei roţi dinţate de dimensiuni mari cu elementul acţionat.
În figura 2.12 sunt prezentate modele de acţionare pentru lanţuri cinematice de rotaţie la care motorul de acţionare este egal prin intermediul unui reductor în diverse variante şi al unei coroane dinţate cu elementul acţionat.
Fig. 2.12

Fig. 2.13
În figura 2.13 sunt prezente module de acţionare utilizate în lanţurile cinematice de translaţie la care motorul de acţionare transmite mişcarea unui mecanism pinion-cremalieră.
În figura 2.14 sunt prezentate module de acţionare utilizate în lanţurile cinematice de translaţie la care motorul de antrenare transmite mişcarea unui mecanism şurub-piuliţă cu bile.
Fig. 2.14