Contribuţii privind analiza şi modelarea

of 77
-
Upload
madalina-ioana -
Category
Documents
-
view
19 -
download
0
description
SEA
Transcript of Contribuţii privind analiza şi modelarea
-
Investete n oameni!
FONDUL SOCIAL EUROPEAN Programul Operaional Sectorial Dezvoltarea Resurselor Umane 2007 2013 Axa prioritar 1 Educaie i formare profesional n sprijinul creterii economice i dezvoltrii societii bazate pe cunoatere Domeniul major de intervenie 1.5. Programe doctorale i post-doctorale n sprijinul cercetrii Titlul proiectului: Burse doctorale si postdoctorale pentru cercetare de excelenta Numrul de identificare al contractului: POSDRU/159/1.5/S/134378 Beneficiar: Universitatea Transilvania din Braov Partener:
Universitatea Transilvania din Braov coala Doctoral Interdisciplinar
Departament: Sisteme Electrice Avansate
Ing. Ciprian Gheorghe NISTOR
Contribuii privind analiza i modelarea zgomotului motoarelor de inducie trifazate
Contributions regarding noise analysis and modelling of three phase induction motors
Conductor tiinific
Prof.dr.ing. Gheorghe SCUTARU
BRAOV, 2014
-
1
MINISTERUL EDUCAIEI NAIONALE UNIVERSITATEA TRANSILVANIA DIN BRAOV
BRAOV, B-DUL EROILOR NR. 29, 500036, TEL. 0040-268-413000, FAX 0040-268-410525 RECTORAT
D-lui (D-nei) ..............................................................................................................
COMPONENA Comisiei de doctorat
Numit prin ordinul Rectorului Universitii Transilvania din Braov Nr. 7066 din 30.10.2014
PREEDINTE: -Conf. Dr. Ing. Carmen GERIGAN Decan Facultatea de Inginerie Electric i tiina Calculatoarelor Universitatea Transilvania Braov
CONDUCTOR TIINIFIC: -Prof. Dr. Ing. Gheorghe SCUTARU Universitatea Transilvania Braov
REFERENI: -Prof. Dr. Ing. Gheorghe MANOLEA
Universitatea din Craiova -Prof. Dr. Ing. Sergiu IVANOV
Universitatea din Craiova -Prof. Dr. Ing. Ioan Clin ROCA
Universitatea Transilvania Braov Data, ora i locul susinerii publice a tezei de doctorat: 5.12.2014, ora 1100, sala N I 1. Eventualele aprecieri sau observaii asupra coninutului lucrrii v rugm s le transmitei n timp util, pe adresa [email protected]. Totodat v invitm s luai parte la edina public de susinere a tezei de doctorat.
V mulumim.
-
Contribuii privind analiza i modelarea zgomotului motoarelor de inducie trifazate
2
CUPRINS Pg.
teza
Pg.
rezumat
INTRODUCERE 4 6
CAPITOLUL 1 STADIUL ACTUAL PRIVIND ANALIZA ZGOMOTULUI N CAZUL MOTOARELOR DE INDUCIE TRIFAZATE I DEFINIREA MRIMILOR DE BAZ UTILIZATE
9 11
1.1 Consideraii privind stadiul actual n analiza zgomotului n cazul motoarelor
de inducie trifazate
9 11
1.2 Definirea mrimilor acustice 11 121.3 Efectele zgomotelor i vibraiilor 16 13
1.3.1 Limitele admisibile ale nivelurilor de zgomot n cldiri 19 141.4 Reglementri privind normele de zgomot pentru mainile electrice 21 161.5 Sursele de zgomot n motoarele electrice 25 17
1.6 Aparate de msur i metode de msurare a zgomotului n cazul motoarelor electrice 1.7 Concluzii
37 18
41 19
CAPITOLUL 2 MODELAREA ZGOMOTULUI DE NATUR MAGNETIC UTILIZND PROGRAMUL DE ELEMENT FINIT FLUX 2D
42 20
2.1 Definirea parametrilor de funcionare pentru motoarele studiate
43 20
2.2 Modelarea i analiza zgomotului magnetic pentru motorul asincron trifazat de randament premium de tip MAL 160M cu puterea de 7,5kW/1000rpm
49 23
2.3 Modelarea i analiza zgomotului magnetic pentru motorul asincron trifazat de randament premium de tip MAL 160L cu puterea de 11kW/1000rpm
58 25
2.4 Concluzii 65 28 CAPITOLUL 3 MODELAREA ZGOMOTULUI DE NATUR MECANIC UTILIZND PROGRAMUL ANSYS 3D
67 30
3.1 Definirea parametrilor de material pentru motoarele studiate
67 30
3.2 Determinarea modurilor i a frecvenelor de vibraie pentru motorul asincron trifazat de randament premium cu puterea de 7,5kW/1000 rpm
70 32
3.3 Determinarea modurilor i a frecvenelor de vibraie pentru motorul asincron trifazat de randament premium cu puterea de 11kW/1000 rpm
85 35
3.4 Validarea rezultatelor 95 373.5 Concluzii 111 39
CAPITOLUL 4 MODELAREA ZGOMOTULUI I VIBRAIILOR N CAZUL MOTOARELOR DE INDUCIE TRIFAZATE. DETERMINRI EXPERIMENTALE
112 40
4.1 Msurarea zgomotului produs de motoarele asincrone de randament IE3 cu puteri de 7,5kW/1000 rpm respectiv 11kW/1000 rpm
112 40
-
Rezumatul tezei doctorat
3
4.1.1 Msurri de zgomot pentru motorul de tip MAL 160M cu puterea de 7,5kW
114 41
4.1.2 Msurri de zgomot pentru motorul de tip MAL 160L cu puterea de 11kW
122 42
4.2 Prezentarea platformei de analiz a zgomotelor i vibraiilor produse de motoarele asincrone SV-100. Determinri comparative de zgomot pentru motoarele analizate
130 43
4.3 Concluzii 142 51
CAPITOLUL 5 ANALIZA REGIMULUI TERMIC AL MOTOARELOR ASINCRONE TRIFAZATE
144 53
5.1 Modelul termic al motorului asincron trifazat cu rotorul n scurtcircuit 145 53 5.2 Msurtori de termoviziune pentru motorul asincron trifazat de tip MAL
160M 152 57
5.3 Msurtori de termoviziune pentru motorul asincron trifazat de tip MAL 160L
155 60
5.4 Concluzii 158 61
CAPITOLUL 6 CONCLUZII GENERALE I CONTRIBUII ORIGINALE. DIRECII VIITOARE DE CERCETARE
159 62
6.1 Concluzii generale asupra tezei 159 62 6.2 Contribuii originale 160 63 6.3 Direcii viitoare de cercetare 161 64
BIBLIOGRAFIE 162 65
ANEXE
Anexa 1. Rezumat n limba romn Abstract
170 74170 74
Anexa 2. Curriculum vitae n limba romn Curriculum vitae n limba englez
171 75172 76
-
Contributions regarding noise analysis and modelling of three phase induction motors
4
TABLE OF CONTENTS Pg.
thesis
Pg.
content
INTRODUCTION 4 6CHAPTER 1 ACTUAL STAGE REGARDING NOISE ANALYSIS IN THE CASE OF THREE PHASE INDUCTION MOTORS AND DEFINING FUNDAMENTAL USED MEASURES
9 11
1.1 Reflection regarding actual stage in noise analyis in the case of three phase
induction motors
9 11
1.2 Defining the acoustic measures 11 12
1.3 Effects of noises and vibrations 16 13
1.3.1 The allowable limits of noise levels in buildings 19 14
1.4 Regulations regarding the noise standards for electrical machines 21 16
1.5 Noise sources in induction motors 25 17
1.6 Noise measuring devices and methods in the case of induction motors
1.7 Conclusions
37 18
41 19
CHAPTER 2 MAGNETIC NOISE MODELLING BY USING FLUX 2D FINITE ELEMENT PROGRAM
42 20
2.1 Defining the operating parameters for the studied motors
43 20
2.2 Magnetic noise modelling and analysis for the premium efficiency three phase asynchronous motor type MAL 160M of 7,5kW/1000rpm power
49 23
2.3 Magnetic noise modelling and analysis for the premium efficiency three phase asynchronous motor type MAL 160L of 11kW/1000rpm power
58 25
2.4 Conclusions 65 28 CHAPTER 3 MECHANICAL NOISE MODELLING BY USING ANSYS 3D PROGRAM
67 30
3.1 Defining the material parameters for the studied motors
67 30
3.2 Determination of vibration modes and frequencies for premium efficiency three phase asynchronous motor of 7.5kW /1000 rpm power
70 32
3.3 Determination of vibration modes and frequencies for premium efficiency three phase asynchronous motor of 11kW /1000 rpm power
85 35
3.4 Validation of the results 95 373.5 Conclusions 111 39
CHAPTER 4 NOISES AND VIBRATIONS MODELLING IN THE CASE OF THREE PHASE INDUCTION MOTORS. EXPERIMENTAL DETERMINATIONS
112 40
4.1 Measurement of noise generated by efficiency IE3 asynchronous motors of 7,5kW/1000 rpm, respectively, 11kW/1000 rpm powers
112 40
-
Abstract of doctoral thesis
5
4.1.1 Noise measurements for the induction motor type MAL 160M of 7,5kW power
114 41
4.1.2 Noise measurements for the induction motor type MAL 160L of 11kW power
122 42
4.2 Presentation of SV-100 analysis platform for noises and vibrations generated by asynchronous motors. Comparative noise determinations for the analyzed motors
130 43
4.3 Conclusions 142 51 CHAPTER 5 THERMAL REGIME ANALYSIS OF THREE PHASE ASYNCHRONOUS MOTORS
144 53
5.1 Thermal model of the three phase asynchronous motor with squirrel cage rotor
145 53
5.2 Thermo vision measurements for the three phase asynchronous motor type MAL 160M
152 57
5.3 Thermo vision measurements for the three phase asynchronous motor type MAL 160L
155 60
5.4 Conclusions 158 61
CHAPTER 6 GENERAL CONCLUSIONS AND ORIGINAL CONTRIBUTIONS. FURTHER RESEARCH DIRECTIONS
159 62
6.1 General conclusions of the thesis 159 62 6.2 Original contributions 160 63
6.3 Further research directions 161 64
REFERENCES 162 65 APPENDIX
Annex 1. Romanian resume Abstract
170 74 170 74
Annex 2. Curriculum vitae in Romanian Curriculum vitae in English
171 75 172 76
-
Contribuii privind analiza i modelarea zgomotului motoarelor de inducie trifazate
6
INTRODUCERE 1. Actualitatea i necesitatea temei ncepnd cu data de 1.01.2015, conform standardului CEI 60034 seciunea 30, se impune producerea motoarelor asincrone trifazate cu puteri mai mari de 7,5kW, numai n limtele de randament premium IE3. ncadrarea n aceast norm de randament implic, automat, reducerea zgomotelor totale generate de aceste motoare conform limitelor prevzute n acelai standard ns la seciunea a 9a. Unul din obiectivele generale ale lucrrii a fost analiza i modelarea zgomotelor a dou motoare de randament premium, n scopul includerii acestora n categoria de randament obligatorie. Din perspectiv practic aceste motoare vor fi utilizate n componena morilor de mcinat cereale. Un aspect foarte important, din punctul de vedere al productorilor de motoare electrice, l constituie analiza costurilor de producie necesare ncadrrii acestor tipuri de motoare n clasa de randament IE3. Din perspectiva instalaiilor de msurare a zgomotelor i vibraiilor, care au un pre de cost relativ ridicat, a fost obligatoriu necesar proiectarea, precum i, realizarea unui echipament n acest sens, care s aib aceleai performane, ns la un pre mult mai sczut. 2. Problema propus spre rezolvare Prin intermediul acestei lucrri se dorete realizarea unui studiu privind nivelurile de zgomote, vibraii i nclzire pentru dou motoare prototip de randament premium IE3. Aceste motoare sunt de tip MAL 160M, respectiv MAL 160L cu puteri de 7,5kW/1000 rpm i 11kW/1000 rpm. Din punct de vedere al zgomotelor emise, se va realiza o modelare a acestora prin intermediul programului de element finit FLUX 2D, care va fi comparat cu msurtori practice realizate prin intermediul a dou dispozitive primul un sonometru de tip 2250 Bruel&Kjaer (clasa de precizie 1), iar al doilea un dispozitiv proiectat n cadrul tezei, nglobat ntr-o platform integrat de analiz a zgomotelor i vibraiilor. Analiza i modelarea vibraiilor vizeaz determinarea modurilor i a frecvenelor de vibraie pentru componentele celor dou motoare. Aceasta se va realiza prin intermediul programului ANSYS 3D. Modelrile vor fi validate prin determinri experimentale realizate n laborator, dar i prin intermediul celei de-a doua componente: a platformei de analiz care se va proiecta Analiza vibraiilor. Analiza nclzirii se va efectua prin ntocmirea modelului termic al motorului asincron de randament premium IE3, iar validarea rezultatelor se va face prin msurtori de laborator cu ajutorul unei camere de termoviziune.
-
Rezumatul tezei doctorat
7
Platforma nglobat de analiz a zgomotelor i vibraiilor va conine i partea hardware aferent, de procesare i analiz a parametrilor msurai. 3. Obiectivele tezei Avnd n vedere necesitatea acestui studiu, impus prin standardele actuale, principalele obiective ale lucrrii sunt urmtoarele:
1. Realizarea unor modele de motoare de randament IE3 n bazele de date ale programelor studiate FLUX 2D respectiv ANSYS 3D.
2. Analiza vibratorie (modal) termic i acustic a celor dou prototipuri pentru ncadrarea n norma de randament IE3.
3. Realizarea unui mecanism de separare a zgomotelor emise de cele dou motoare. 4. ntocmirea unei platforme hardware i software cu costuri reduse care s permit, cu o
bun precizie, determinarea nivelurilor de zgomot si vibraii.
4. Metodologia cercetrilor doctorale Lucrarea elaborat este bazat pe studiul unor lucrri recente din domeniu, cri, articole tiinifice, teze de doctorat, instrumente software menionate n cadrul Bibliografiei. Din perspectiv substanial, n cazul motoarelor de inducie, randamentul total este determinat de nivelurile de zgomot, vibraii i nclzire emise. Pentru a putea obine o analiz complet a celor trei componente meionate este necesar studierea aprofundat a fiecreia. Astfel, analiza i modelarea zgomotelor este util mai ales din perspectiva separrii acestora la nivel de motor. Forele electromagnetice din interior creeaz zgomotul de aceeai natur. Vibraiile de ordin mecanic i aerodinamic sunt generate de rulmeni respectiv de ventilator, toate aceste trei componente alctuiesc zgomotul total al motorului radiat direct n mediul acustic. Analiza modal vibratorie este necesar pentru determinarea frecvenelor de rezonan, n special la nivelul ansamblului carcas stator. Analiza termic certific, funcional, manifestrile celor dou analize menionate, prin distrubuia nclzirii la nivel de motor. Pe baza datelor de execuie, oferite de ctre productor, au fost ntocmite modele bidimensionale i tridimensionale pentru cele dou motoare. Caracteristicile de materiale au fost alese din bazele de date ale celor dou programe menionate (FLUX 2D i ANSYS 3D), iar acolo unde a fost cazul s-au calculat parametrii innd cont de alte date tehnice. Programul de element finit FLUX 2D a permis o modelare a zgomotului de natur magnetic, produs de cele dou motoare n regim normal de funcionare. Acest lucru are o semnificaie deosebit de important, ntruct acest tip de zgomot are o pondere foarte mare n producerea zgomotului total. Validarea rezultatelor obinute s-a cuantificat prin separarea zgomotului, pe componente, i compararea nivelurilor de zgomot magnetic obinute.
-
Contribuii privind analiza i modelarea zgomotului motoarelor de inducie trifazate
8
n mod similar, s-a realizat o analiz modal de natur mecanic respectiv determinarea frecvenelor de vibraie prin intermediul programului ANSYS 3D pentru cele dou motoare. Analiza s-a realizat pe ntreg sistemul motor i pe componente pentru a determina frecvenele comune de rezonan cu cele ale zgomotului. Validarea acestor rezultate s-a efectuat n cadrul laboratorului de analiz modal al Catedrei de Rezistena Materialelor, din cadrul Universitii Transilvania Braov. Msurtorile de zgomot s-au efectuat n camera semianecoic a ntreprinderii productoare S.C Electroprecizia S.A Scele Braov. Toate msurtorile s-au efectuat considernd regimul de funcionare n gol, prin alimentare de la reea, dar i prin invertor, iar evaluarea numeric a acestor rezultate s-a efecuat cu ajutorul unui sonometru de tip 2250 Bruel&Kjaer. S-a proiectat i realizat o platform de analiz a zgomotelor i vibraiilor pentru aceste categorii de motoare, prin intermediul creia s-au comparat rezultatele experimentale, obinute anterior, cu ajutorul aparaturii de laborator. Aceast platform include un instrument software i unul hardware, care ofer o bun precizie a msurtorilor, n condiiile unor costuri mici de realizare. Aceast platform este util, ndeosebi laboratoarelor de cercetare, dar i oricrui utilizator interesat s msoare niveluri de vibraii i zgomote pentru orice echipament mecanic sau electric. 5. Noutatea tiinific a rezultatelor obinute n lucrarea de fa se studiaz cele trei componente principale ale randamentului premium, specifice motoarelor asincrone, respectiv: componenta vibraiilor, a zgomotelor i a nclzirii. Proiectarea optim a unui astfel de motor se cuantific prin evaluarea acestor trei componente, care, implicit, confirm categoria de randament n care se ncadreaz. S-au realizat modele noi de analiz vibraional i acustic pentru cele dou motoare respectiv: MAL 160M i MAL 160L. Prin intermediul acestor modele s-au determinat frecvenele radiate n spectrul acustic. Platforma integrat de analiz a zgomotelor i vibraiilor produse de motoarele asincrone SV -100 i analizorul Vibro M-100 permit determinarea cu uurin a nivelurilor de zgomot i vibraii, indiferent de locaie i/sau mediul de funcionare, asigurnd o ergonomie i o precizie bun a msurtorilor. Analizele de zgomote, vibraii i nclzire reprezin o noutate n cazul motoarelor de randament premium IE3 produse la noi in ar. Prin aceste analize se ofer i o certificare a producerii n serie a acestora odat cu nceputul anului 2015, cnd seciunea 30 a standardului CEI 60034 va intra n vigoare.
-
Rezumatul tezei doctorat
9
6. Valoarea aplicativ a lucrrii Valoarea practic a lucrrii poate fi cuantificat prin faptul c determinrile efectuate constituie elemente de baz, primare, n analiza i modelarea motoarelor de randament IE3. Acestea pot fi dezvoltate n aplicaii/modelri viitoare respectiv:
- Dezvoltarea unor modele pentru motoare cu gabarite diferite, ntruct ncepnd cu data de 1.01.2017 toate motoarele cu puteri mai mici de 7,5 kW vor trebui produse conform normei IE3.
- Optimizarea nivelului de zgomot magnetic i, implicit, creterea randamentului motorului.
- Analiza vibraiilor i zgomotelor prin intermediul platformei software specializate, proiectate n acest sens SV-100 i, respectiv, a analizorului Vibro M-100.
- Stabilirea pe baza msurtorilor efectuate a unor noi modele de componente cu frecvene proprii de rezonan, de amplitudine redus.
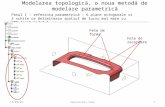
7. Diseminarea rezultatelor Rezultatele obinute pe parcursul elaborrii lucrrii cuprind un numr de 4 lucrri publicate prim-autor i 4 lucrri publicate n calitatea de co-autor n volumele unor conferine de specialitate naionale sau internaionale, din care 2 sunt articole ISI (prim-autor). 8. Structura tezei Aceast lucrare cuprinde 6 capitole n care se regsesc un numr de 189 figuri, 64 tabele i 53 de formule. Capitolul 1 Stadiul actual privind analiza zgomotului n cazul motoarelor de inducie trifazate i definirea mrimilor de baz utilizate prezint rezultatele cercetrilor efectuate pn n prezent, din perspectiva analizei zgomotului, n cazul motoarelor asincrone trifazate. n structura acestui capitol se definesc i mrimile de baz utilizate n lucrare, alturi de standardele actuale privitoare la normele de zgomot, n cazul mainilor electrice. Sunt descrise, din perspectiv structural i funcional, sursele de zgomot produse de motoarele electrice, iar la final sunt prezentate aparatele de msurare a zgomotelor generate de motoarele asincrone. Capitolul 2 Modelarea zgomotului de natur magnetic utiliznd programul de element finit FLUX 2D prezint o modelare a zgomotului de natur magnetic folosind programul de element finit Flux 2D. Dup definirea parametrilor de funcionare, pentru cele dou motoare analizate, (MAL 160M -7,5 kW/1000 rpm i MAL 160L 11kW/1000 rpm) s-au prezentat, pe rnd, rezultatele modelrilor de zgomot magnetic. S-a considerat alimentarea motoarelor direct de la reea, precum i prin invertor la frecvenele de 40 Hz, 50 Hz i 60 Hz, innd cont de toate particularitile practice ce apar n funcionarea acestora.
-
Contribuii privind analiza i modelarea zgomotului motoarelor de inducie trifazate
10
La finalul capitolului toate rezultatele obinute au fost centralizate i prezentate n mod comparativ pentru cele dou motoare. Capitolul 3 Modelarea zgomotului de natur mecanic utiliznd programul ANSYS 3D prezint o modelare a zgomotului de natur mecanic n condiii similare cu cele din capitolul anterior. Dup definirea parametrilor de material s-au determinat modurile i frecvenele de vibraie pentru cele dou motoare studiate, att pe ansamblu motor ct i pe component. n a doua parte a capitolului, toate rezultatele obinute au fost validate de msurtori prin metoda ciocanului de impact, realizate n laboratorul de vibraii al Universitii Transilvania. Motoarele s-au considerat fixate pe suportul de susinere, conform modului real de funcionare, att n simulri, ct i n cazul msurtorilor. Capitolul 4 Msurarea zgomotului i vibraiilor n cazul motoarelor de inducie trifazate. Determinri experimentale. Acest capitol este structurat n dou pri principale. Prima parte prezint msurtorile de zgomot, efectuate n camera semianecoic, pentru cele dou motoare analizate. Mai departe s-a ntocmit o separare a zgomotelor n acord cu aparatul teoretic descris n partea introductiv a capitolului. Condiiile de alimentare ale celor dou motoare sunt identice cu cele simulate n Capitolul 2, respectiv alimentare de la reea, dar i prin convertor de frecven. A doua parte a capitolului prezint Platforma integrat de analiz a zgomotelor i vibraiilor produse de motoarele asincrone SV 100 mpreun cu analizorul Vibro M 100. Acestea sunt prezentate din punct de vedere structural i funcional, iar la finalul acestei pri s-au prezentat i rezultatele msurtorilor de vibraii i zgomote efectuate, n mod comparativ, cu instrumentele standardizate pentru cele dou motoare. La sfritul capitolului s-au prezentat sub form grafic ponderile procentuale ale zgomotelor la nivel de motor. Capitolul 5 Analiza regimului termic al motoarelor asincrone trifazate prezint a treia component definitorie a randamentului premium pentru motoarele asincrone, i anume, componenta termic. S-a prezentat baza teoretic de analiz a nclzirii motoarelor, precum i modelul termic al unui motor asincron trifazat de randament premium. Partea experimental a constituit-o analiza regimului termic prin intermediul camerei de termoviziune. S-au prezentat sub form de termograme distribuiile temperaturilor pentru cele dou motoare analizate. Capitolul 6 Concluzii generale i contribuii originale. Direcii viitoare de cercetare prezint concluziile generale asupra lucrrii, din perspectiv fenomenologic, reflectate direct, n temeiul interior al celor prezentate. S-au specificat contribuiile originale ale autorului, precum i direciile viitoare de cercetare.
-
Rezumatul tezei doctorat
11
CAPITOLUL 1
STADIUL ACTUAL PRIVIND ANALIZA ZGOMOTULUI N CAZUL MOTOARELOR DE INDUCIE TRIFAZATE I DEFINIREA
MRIMILOR DE BAZ UTILIZATE 1.1 Consideraii privind stadiul actual n analiza zgomotului n cazul motoarelor de
inducie trifazate Primele studii asupra problemei zgomotelor la nivelul motoarelor asincrone sunt efectuate de ctre W. Steil [91] ncepnd cu anul 1919. Atunci s-a testat un motor asincron cu 4 poli cruia i-au fost introduse pe rnd mai multe tipuri de rotoare. Cercettorul german a observat c n cazul rotoarelor cu numr impar de crestturi, zgomotul creat n spectrul acustic era mai mare dect n cazul rotoarelor cu numr par de crestturi. Acesta a recomandat construcia rotoarelor cu numr par de crestturi n construcia motoarelor de inducie. ncepnd cu anul 1930 Kron i Jordan [46, 54] stabilesc noi metode de proiectare a motoarelor de inducie innd cont de numrul optim de crestturi statorice i rotorice n vederea reducerii zgomotului acustic. La nceputul anilor 70, odat cu evoluia proceselor tehnologice s-a impus controlul fin al turaiei n cazul motoarelor asincrone utilizate n liniile de producie. Modificarea turaiei se realizeaz prin intermediul invertoarelor, care n funcie de principiul de funcionare (PWM, SPWM, etc.) introduc armonici suplimentare odat cu reglajul frecvenei care au ca efect direct creterea zgomotului total al motorului. Cel mai defavorabil caz apare n momentul n care o component din spectrul frecvenelor forelor magnetice din ntrefier coincide cu una din frecvenele naturale ale statorului, n aceast situaie aprnd fenomenul neplcut din punct de vedere acustic, denumit i rezonan. n jurul anului 1990 Timar i Belmans ncep analiza zgomotelor i vibraiilor n cazul motoarelor de inducie alimentate prin invertor n lucrrile [5, 6, 94]. De asemenea studii similare s-au mai efectuat i n lucrrile [4, 29, 33, 42, 67, 68, 79, 80, 84, 105]. n anul 1994 R. Belmans realizeaz o lucrare de cercetare asupra zgomotelor generate de motoarele asincrone monofazate alimentate prin invertor (de curent i tensiune) respectiv, n diferite configuraii ale numrului de crestturi statorice i rotorice. Analize ale zgomotului de natur magnetic s-au realizat utiliznd metoda elementului finit i n lucrrile [ 35, 41, 45, 48, 52, 73, 83, 93, 100, 101, 102]. n anul 2006 Jacek Gieras prezint n lucrarea sa [29] un studiu comparativ asupra zgomotelor emise de motoarele asincrone polifazate alimentate att de la reea ct i prin intermediul invertorului, prezentndu-se i metode de reducere a zgomotelor.
-
Contribuii privind analiza i modelarea zgomotului motoarelor de inducie trifazate
12
Odat cu implementarea tehnologiei de modulaie SPWM (Space Vector Pulse Width Modulation) la nivelul construciei invertoarelor, n anul 2009 s-a realizat de ctre S. Thangaprakash un studiu care a urmrit reducerea zgomotelor i vibraiilor n cazul motoarelor de inducie alimentate la frecvene diferite. n perioada 2009-2010 s-au realizat diferite studii [22, 40] legate de tehnologia de comand a invertoarelor i avantajele acestora asupra nivelului sczut de zgomot generat de motoare. La sfritul anului 2013 Konstantinos N. n lucrarea [45] studiaz efectul nclinrii crestturilor statorice la alimentarea prin invertor dar i de la reea cu implicaii directe n zgomotul total al unui motor de inducie i realizeaz un model de cresttur ce poate fi implementat n construcia motoarelor datorit faptului c se obine zgomot total redus i randament optim. La nivel naional, studii asupra zgomotelor i vibraiilor generate de motoarele electrice s-au efectuat n diferite lucrri de specialitate [17, 20, 38, 53, 61, 62, 63, 96 ]. De asemenea ncepnd cu anii 90 s-au elaborat instrumente software de calcul optimizat [86] al motoarelor de inducie considernd limitele de zgomot i implict de randament permise i reglementate de standardele n vigoare. ncepnd cu anul 2002 s-au elaborat i programe de calcul al zgomotelor pentru motoare de inducie monofazate i trifazate alimentate att de la reea ct i prin invertor [85, 86]. Actualmente i n ara noastr se utilizeaz pentru simularea zgomotului n cazul motoarelor de inducie, metoda elementului finit [25] ntruct se obine o mai bun precizie a determinrilor i un timp de lucru mult mai redus. 1.2 Definirea mrimilor acustice Controlul zgomotului produs de un motor de inducie are implicaii directe n randamentul acestuia. Un zgomot total crescut determin un randament sczut al motorului ceea ce nseamn costuri de producie i mentenan mari dar i o fiabilitate sczut. Pentru a se realiza analiza din punct de vedere al zgomotului acustic n cazul unui motor de inducie este fundamental necesar definirea termenilor de baz care intervin n acest caz. Vibraia [83] reprezint o micare oscilatorie a unui corp elastic de mas m datorate unei fore exterioare la care a fost supus iniial corpul. Sunetul reprezint o consecin a vibraiei transmis ntr-un mediu elastic, lichid, solid sau gazos cu frecvene cuprinse n domeniul 20 Hz 20 kHz (domeniu perceptibil de ctre urechea uman) [21, 49]. nlimea sunetului reprezint caracteristica acestuia la rspunsul n frecven n funcie de vibraia pe care o produce unda sonor. nlimea sunetului poate avea diferite frecvene care poate genera diferite niveluri de sunet, respectiv: sunet ascuit (frecvene nalte), sunet grav (frecvene medii) sau sunet profund ori acut (frecvene joase).
-
Rezumatul tezei doctorat
13
Presiunea acustic reprezint presiunea exercitat asupra urechii umane ntr-un mediu elastic de ctre o und sonor.
( )= T i ttpTp 02 d1 (1.1)
n care: pi presiunea acustic instantanee t perioada Zgomotul este un sunet emis pe o frecven care creeaz o senzaie de disconfort la nivelul urechii umane i mai departe ctre creier cu implicaii directe la nivelul sistemului nervos. Nivelul de presiune acustic [L], al unui sunet de presiune efectiv [p], este dat de relaia:
0p
plog20L = , sau2
0pplog10L
= (1.5)
n care: 50 102p = N/ m
2 i este presiunea acustic a nivelului de referin sau de prag care are corespondent n frecvena nivelului de trie al sunetului etalon la 1 kHz i un prag de 0 foni. Nivelul de putere acustic [Lp] al unei surse de sunet caracterizat de puterea [P] se calculeaz cu relaia [49, 83]:
0
p PPlog10L = (1.6)
n care: P0=10-12 W este puterea acustic de referin. Nivelul de putere acustic nu este o unitate de msur propriu-zis, [83] mai concret este un raport ntre dou mrimi fizice, o mrime msurat direct iar cealalt adoptat n mod convenional. 1.3 Efectele zgomotelor i vibraiilor Zgomotele i vibraiile produc senzaii de iritabilitate la nivelul urechii umane i mai departe aceste senzaii sunt transmise la nivelul creierului sub form de semnale. Urechea uman percepe frecvene cuprinse n domeniul 20 Hz 20 kHz denumit i spectru audio [21, 28, 49, 99, 103]. Pentru caracterizarea nivelurilor de zgomot se introduce noiunea de curb de trie acustic. Curbele de trie acustic [49] reprezint caracteristicile n frecven ale sensibilitii urechii umane. n anul 1985 s-au definitivat curbele de trie acustic pe baza cercetrilor efectuate n timp de mai muli cercettori i care sunt centralizate n standardul ISO 226:2003 [28, 49].
-
Contribuii privind analiza i modelarea zgomotului motoarelor de inducie trifazate
14
Limitele admisibile de zgomot se determin pe baz de standarde sau norme internaionale [49, 83]. Parametrii de apreciere a limitelor de zgomot se definesc in funcie de: nivelul presiunii acustice L [dB(A)] pentru un zgomot care nu se modific semnificativ n timp i n funcie de nivelul de zgomot echivalent Laeq [dB(A)] sau L10 [dB(A)] n cazul unui zgomot intermitent sau variabil n timp ( Laeq este definit conform STAS 6161-1/89, iar L10 este definit conform STAS 1957-3/88). 1.3.1 Limitele admisibile ale nivelurilor de zgomot n cldiri
Limitele admisibile ale nivelurilor de zgomot n cldiri se stabilesc n funcie de utilizarea specific i de activitile ce se desfoar n unitile respective. n tabelul 1.1 se prezint limitele admisibile de zgomot n cldiri n funcie de natura activitii desfurate.
Tabelul 1.1 Limitele admisibile ale nivelurilor de zgomot n cldiri Nr. Crt.
Unitatea funcional Limita admisibil a nivelului de
zgomot echivalent
interior dB(A)
Numrul de ordine al curbei
corespunztoare
1. ncperi de locuit, dormitoare; Spaii pentru activiti intelectuale: - birouri cu concentrare mare a ateniei, sli
de studii, sli de lectur n biblioteci - birouri cu activitate normal, administraie,
laboratoare, calculatoare - birouri de lucru cu publicul
35
35 40 45
30
30 35 40
Spaii pentru audiii: - studio de nregistrri
25
20
-
Rezumatul tezei doctorat
15
- laborator de cercetri acustice, audiologie - sli de conferine, sli de audiii, teatru,
concert, spectacole - sli de clas, amfiteatre
30 30
35
25 25
30
Alte spaii: - cabinete medicale i de consultaii - sli de restaurant i alte uniti de
alimentaie public, sli de mese - foayere, hoteluri - anexe sociale, vestiare, toalete
35
50 55 45
30
45 50 40
2. Spitale, policlinici, dispensare: - saloane (rezerve) 1-2 paturi - saloane 3 sau mai multe paturi - saloane de terapie intensiv - sli de operaie i anexe ale acestora
30 35 35 35
25 30 30 30
3. Grdinie, cree: - dormitoare
30
25
4. Biblioteci: - cabinete individuale de lucru - ncperi pentru eliberarea crilor - sala cataloagelor, expoziii - depozite
30 45 45 -
25 40 40 65
5. Cldiri pentru activiti culturale i de divertisment: - sal de repetiii - sal de ah - sal de gimnastic (dans) - sal de jocuri
30 30 45 50
25 25 40 45
6. Cldiri comerciale i depozite (inclusiv spaiile comerciale incluse la parterul i nivelele inferioare ale cldirilor de locuit): Uniti de prestri servicii: - spaii de lucru cu publicul (uniti de
curtorie, croitorii, cizmrii, etc.) Uniti de desfacere cu amnuntul: - spaii de vnzare i anexe ale acestora, cu i
fr agregate frigorifice
50
65
45
60 7. Anexe tehnico-administrative ale halelor de
producie: - birouri tehnice, cabine de comand i
control (dispecerat energetic, dispecerat mijloace de transport rutier, feroviar, naval), laboratoare pentru msurri, cercetare sau proiectare situate n interiorul sau n imediata apropiere a halelor de producie
- laboratoare de ncercri sau depanri, cabine de supraveghere a proceselor tehnologice
60
75
55
70
n cazul unitilor funcionale: apartamente de locuit din cldiri, camere de locuit i apartamente de cmine, hoteluri i case de oaspei; dormitoare din grdinie sau cree; camere i saloane de bolnavi din spitale i policlinici, nivelul de zgomot interior echivalent, datorat
-
Contribuii privind analiza i modelarea zgomotului motoarelor de inducie trifazate
16
tututor surselor de zgomot exterioare (inclusiv agregatelor, din spaiile comerciale sau din centralele de instalaii aferente cldirilor), nu trebuie s depeasc cu mai mult de 5 uniti nivelul de referin stabilit prin normativ. 1.4 Reglementri privind normele de zgomot pentru mainile electrice n cazul mainilor electrice rotative, limitele admisibile de zgomot sunt prevzute de norme acustice internaionale, respectiv de ctre Comisia Electrotehnic Internaional (CEI) prin intermediul standardului CEI 60034-9 (Seciunea Maini Electrice Rotative). Acest standard specific nivelul de putere acustic n funcie de vitez/turaie, dup cum se prezint n figura urmtoare [36]: Pentru categoria mainilor electrice rotative, metodele standardizate de msurare a zgomotului sunt stabilite de standardele internaionale: CEI 34-9, ISO 1680, ISO 3741, ISO 3742, ISO 3745. n tabelul 1.4 se prezint nivelul maxim de putere acustic ponderat [LWA] prevzut n standardul CEI 60034-9 pentru motoarele asincrone trifazate cu rotorul n scurtcircuit la funcionare n gol pe diferite categorii de puteri [69].
Tabelul 1.4 Nivelurile maxime de putere acustic ponderat (LWA ) [dB] pentru motoarele asincrone trifazate cu rotorul n scurtcircuit la funcionare n gol prevzute de standardul CEI 60034-9
Puterea nominal (Pn) [kW]
8 poli 6 poli 4 poli 2 poli 50 Hz 60 Hz 50 Hz 60 Hz 50 Hz 60 Hz 50 Hz 60 Hz
1.0 < Pn 2.2 70 71 70 71 70 71 78 85 2.2 < Pn 5.5 73 76 73 76 73 76 83 88 5.5 < Pn 11 77 80 77 80 78 81 88 91 11 < Pn 22 81 84 81 84 85 88 91 94 22 < Pn 37 84 87 84 87 88 91 93 100 37 < Pn 55 86 90 87 91 91 95 95 101
55 < Pn 110 89 93 91 95 95 98 97 104 110 < Pn 220 94 97 96 99 99 102 100 107 220 < Pn 440 96 98 98 101 102 105 103 109
440 < Pn 1000 97 99 99 102 105 108 105 110 1000 < Pn Se stabilete prin acord contractual
Fig. 1.4 Limitele de zgomot prevzute de norma CEI 34-9
-
Rezumatul tezei doctorat
17
n anul 2008 s-a aprobat seciunea 30 din normativul 60034 n care se prezint clasificarea motoarelor n funcie de randament pe trei categorii respectiv:
-IE 1 standard; -IE 2 randament ridicat; -IE 3 randament premium;
ncepnd cu data de 1.01.2015 toate motoarele asincrone trifazate cu puteri peste 7.5kW vor trebui produse conform normei IE3 iar din data de 1.01.2017 toate motoarele cu puteri sub 7.5kW vor trebui produse conform normei menionate anterior. 1.5 Sursele de zgomot in motoarele electrice
Din punct de vedere structural i funcional sursele de zgomot produse de motoarele electrice cu rotorul de tip colivie pot fi mprite n trei categorii dup cum urmeaz: - surse aerodinamice - surse mecanice - surse electromagnetice Prin urmare fiecare dintre aceste surse genereaz vibraii proprii care au ca i efect generarea zgomotelor respectiv: zgomot aerodinamic, zgomot mecanic i zgomot magnetic [59, 60, 69]. Suma total a acestor categorii de zgomote creeaz zgomotul total al motorului generat n spectrul acustic. Pentru separarea zgomotelor, la nivel de laborator, se apeleaz la diferite procedee tehnice cum ar fi: - antrenarea motorului (fara sarcin la arbore i cu ventilatorul decuplat) prin intermediul unei curele, de la un motor de test aflat n exteriorul camerei anecoice pentru stabilirea nivelului de zgomot produs de rulmeni (zgomot mecanic).Pentru stabilirea zgomotului aerodinamic, se monteaz ventilatorul i se procedeaz n mod identic cu situaia descris anterior iar prin comparaia cu rezultatul obinut n prima situaie se deduce zgomotul aerodinamic. - alimentarea motorului de la sursa de tensiune fr sarcin la arbore cu ventilatorul decuplat pentru determinarea zgomotului magnetic. Din punct de vedere practic, valoarea zgomotului mecanic produs de rulmeni depinde n principal de civa factori calitativi ai rulmenilor, ce trebuie luai n considerare la proiectarea motorului, respectiv: - condiiile de lubrifiere din interiorul rulmentului; - sfericitatea rulmentului i drumul de rulare al bilelor; - temperatura de lucru maxim admis, fr a se creea deformarea bilelor; - turaia maxim de lucru. Sursa cea mai important de zgomot aerodinamic este ventilatorul. Numarul de pale, unghiul de nclinare, dar i grosimea acestora depind foarte mult n dimensionarea corect a ventilatorului, tocmai n scopul reducerii zgomotului dar i asigurarea unei rciri eficiente. n analiza zgomotului, produs de motoarele electrice, un rol important l constituie determinarea frecvenelor naturale ale statorului/carcasei. Un efect foarte neplcut, din punct de vedere
-
Contribuii privind analiza i modelarea zgomotului motoarelor de inducie trifazate
18
acustic, apare n situaia n care frecvena forelor magnetice radiale coincide cu una din frecvenele naturale ale carcasei motorului, avnd ca efect apariia fenomenului de rezonan. Zgomotul total al unui motor de inducie depinde n foarte mare msur i de frecvena de alimentare a acestuia, ntruct la alimentarea prin invertor (turaie reglabil), se produc o serie de armonici care vor contribui la modificarea zgomotului total al motorului. Principalele cauze care produc zgomotul de natur electromagnetic sunt date de: - distribuia neuniform a crestturilor; - excentricitatea rotorului fa de stator; - apariia fenomenului de magnetostriciune; - apariia fenomenului de saturaie magnetic a tolei. Toate cauzele menionate mai sus sunt caracterizate, din punct de vedere al distribuiei spaio-temporale, de armonici superioare ale cmpului electromagnetic din stator i rotor, iar zgomotul de natur electromagnetic apare datorit interaciunii acestor armonici. Din punct de vedere al cauzelor care le produc, undele armonice pot fi mprite n dou categorii respectiv:
I. Armonici de spaiu: - datorate saturaiei; - datorate excentricitii; - datorate distribuiei neuniforme a nfurrilor; - datorate crestturilor;
II. Armonici de timp: - datorate tensiunii de alimentare nesinusoidale (alimentare prin invertor)
1.6 Aparate de msur i metode de msurare a zgomotului n cazul motoarelor electrice Msurarea zgomotului generat de motoarele electrice se face cu ajutorul sonometrului n interiorul unei camere anecoice. Conform standardului ISO 1680/1 care reglementeaz modul de msurare al zgomotelor n cazul motoarelor electrice, aparatura de msur trebuie s fie conceput pentru a msura nivelurile de putere acustic ponderat A, ca medie ptratic i n banda de octav sau 1/3 din octav mediat n timp precum i pe suprafaa de msurare [65, 66, 76]. Sonometrul utilizat n aceast lucrare cu care s-au realizat n prim faz msurtorile este produs de firma Bruel&Kjaer de tip 2250 prezentat n figura 1.12. Acest sonometru permite nregistrarea nivelului global de presiune acustic dup un timp prestabilit de ctre utilizator.
Fig. 1.12 Sonometru Bruel&Kjaer de tip 2250
-
Rezumatul tezei doctorat
19
Traductorul acustic utilizat pentru evaluarea nivelului de zgomot n cazul sonometrului de tip 2250 este un microfon piezoelectric (fig.1.13) tip 4189 cu o sensibilitate de 50mV/Pa i capacitate de 14pF la 250 Hz. Msurtorile de zgomot trebuiesc efectuate ntr-o camer semianecoic dup cerinele specificate n standardul 1680/1. Caracteristicile tehnice ale camerei semianecoice de la ntreprinderea Electroprecizia Scele (acolo unde s-au efectuat msurtorile de zgomot) sunt urmtoarele: - domeniul analizei de frecvene de la 22 Hz la 40000 Hz; - nivelul zgomotului de fond sub 5 dB; - erori de msurare 0.5 dB; - dimensiunile geometrice ale slii: 3 m 3,5 m 2,45 m; 1.7 Concluzii Prezentarea aparatului teoretic de analiz al zgomotelor n cazul motoarelor asincrone este deosebit de util. Relaiile de calcul permit determinarea cu uurin a parametrilor afereni zgomotelor att la modul cel mai general ct i n cazul analizei motoarelor asincrone. Standardele prezentate permit verificarea direct a valorilor de zgomote obinute n cadrul simulrilor sau a msurtorilor experimentale. Rezultatele determinrii zgomotului n mod analitic i numeric pot s difere n mod semnificativ fa de msurtorile efectuate. Forele care genereaz vibraii i zgomote sunt doar o mic parte din fora principal produs prin interaciunea curentului fundamental cu componenta fundamental normal a densitii fluxului magnetic. Puterea transformat n zgomot este aproximativ 10-6 pn la 10-4 din puterea de intrare. Acurateea determinrii nivelului de putere acustic nu depinde doar de exactitatea modelului, ci i de exactitatea datelor de intrare (de ex: influena saturaiei magnetice pe deschiderea crestturilor, coeficientul de amortizare, modulul de elasticitate, armonicile superioare, etc). Toate aceste date de intrare sunt totui dificil de determinat.
Fig. 1.13 Microfonul de tip 4189 utilizat n construcia sonometrului
-
Contribuii privind analiza i modelarea zgomotului motoarelor de inducie trifazate
20
CAPITOLUL 2 MODELAREA ZGOMOTULUI DE NATUR MAGNETIC UTILIZND
PROGRAMUL DE ELEMENT FINIT FLUX 2D S-au studiat dou motoare asincrone trifazate de gabarit 160: MAL 160M - 7,5 kW/1000 rpm 3 poli respectiv MAL 160L - 11 kW/1000 rpm 3 poli nfurri simplu strat, norma de randament IE3. Alimentarea acestora s-a considerat att de la reea (50 Hz) ct i prin invertor trifazat la frecvenele de 40 Hz, 50Hz i 60 Hz. Capitolul de fa se refer la analiza zgomotului magnetic pentru cele dou motoare. Pentru aceast analiz s-a utilizat programul de element finit FLUX 2D, care, pe parametrilor introdui a calculat zgomotul magnetic creat de motor precum i ali parametrii ce apar n funcionarea de regim normal si far sarcin a motoarelor asincrone trifazate [13, 14]. Analiza zgomotului de natur mecanic s-a realizat prin intermediul programului de element finit ANSYS 3D iar n cadrul acestei analize s-a urmrit determinarea modurilor i a frecvenelor de vibraie pentru fiecare element component al celor dou motoare n mod separat dar i asamblate toate aceste date sunt prezentate n capitolul 3. Modelarea zgomotelor de natur mecanic i magnetic este necesar pentru evaluarea zgomotului total produs de fiecare motor i compararea cu rezultatele experimentale obinute n condiiile validrii de ctre standardul 60034-9 pentru maini electrice rotative norma de randament IE3 care va intra n vigoare ncepnd cu data de 01.01.2015 pentru motoare cu puteri mai mari de 7,5 kW. 2.1 Definirea parametrilor de funcionare pentru motoarele studiate Parametrii motorului asincron trifazat de tip MAL 160 M cu puterea de 7,5 kW/1000 rpm sunt prezentai n tabelul 2.1.
Tabelul 2.1 Parametrii motorului asincron trifazat cu puterea de 7,5 kW/1000 rpm Putere [kW] 7,5 Vitez de sincronism [rpm] 1000 Tensiune nominal [V] 400 Frecven [Hz] 50 Grad de protecie IP 55 Clasa de izolaie / Clasa de temperatur F/B Lungimea fierului [mm] 220 Numr crestturi statorice 36 Numr crestturi rotorice 26 nlimea ntrefierului [mm] 0,5 Perechi de poli 3 Cuplu pornire/Cuplu nominal 2,51 Randament [%] 0,88
-
Rezumatul tezei doctorat
21
Alunecare [%] 4,0 Factor de putere 0,65 Curent pornire/Curent nominal 5,22 Tip tol stator M400-65 Numrul de straturi - nfurare stator 1 Numrul de spire pe faz - stator 180 Diametrul conductorului stator [mm] 4x0.94 Lungimea carcasei [mm] 449
Diametrul exterior carcas [mm] 260 Masa [kg] 87 Rezistena nfurrii statorice la 20 C []
0,914
Curentul absorbit la funcionarea n gol [A]
13,1
n cazul motorului asincron trifazat cu rotorul n scurtcircuit de tip MAL 160 L cu puterea de 11kW/1000 rpm parametrii tehnici i constructivi furnizai de ctre productor sunt prezentai n tabelul 2.2.
Tabelul 2.2 Parametrii motorului asincron trifazat cu puterea de 11 kW/1000 rpm Putere [kW] 11 Vitez de sincronism [rpm] 1000 Tensiune nominal [V] 400 Frecven [Hz] 50 Grad de protecie IP 55 Clasa de izolaie / Clasa de temperatur F/B Lungimea fierului [mm] 280 Numr crestturi statorice 36 Numr crestturi rotorice 26 nlimea ntrefierului [mm] 0,50 Perechi de poli 3 Cuplu pornire/Cuplu nominal 2,2 Randament [%] 0,89 Alunecare [%] 3,45 Factor de putere 0,69 Curent pornire/Curent nominal 4,8 Tip tol stator M400-65 Numrul de straturi - nfurare stator 1 Numrul de spire pe faz - stator 144 Diametrul conductorului stator [mm] 2x0,9 +2x0,95 Lungimea carcasei [mm] 449 Diametrul exterior carcas [mm] 260 Masa [kg] 88,5 Rezistena nfurrii statorice la 20 C []
0,809
Curentul absorbit la funcionarea n gol [A]
16,1
Schemele electrice echivalente pentru cele dou motoare sunt reprezentate n figurile 2.1 i 2.2. Acestea sunt necesare cu precdere pentru simularea zgomotului magnetic prin intermediul programului de element finit FLUX 2D [24, 56].
-
Contribuii privind analiza i modelarea zgomotului motoarelor de inducie trifazate
22
Tabelul 2.3 Valorile elementelor aferente schemei Tabelul 2.4 Valorile elementelor aferente schemei electrice pentru motorul de tip MAL 160 M (7.5kW) electrice pentru motorul de tip MAL 160 L (11kW)
Parametru Denumire n Flux 2D Valoare
Surs de tensiune [V] V _ U 400 Surs de tensiune [V] V _ V 400 Surs de tensiune [V] V _ W 400
Rezisten intern surs [] R_U 0.9
Rezisten intern surs [] R_V 0.9
Rezisten intern surs [] R_W 0.9
Rezisten [] R1 106 Rezisten [] R2 106 Rezisten [] R3 106
Rezisten bobin de faz [] BOB1PH1 0,914
Rezisten bobin de faz [] BOB1PH2 0,914
Rezisten bobin de faz [] BOB1PH3 0,914
Rezisten bobin de faz [] BOB2PH1 0,914
Rezisten bobin de faz [] BOB2PH2 0,914
Rezisten bobin de faz [] BOB2PH3 0,914
Inductana captului de nfurare [H] L_U
51.12 x10-3
Inductana captului de nfurare [H] L_V
51.12 x10-3
Inductana captului de nfurare [H] L_W
51.12 x10-3
Parametru Denumire n Flux 2D Valoare
Surs de tensiune [V] V _ U 400 Surs de tensiune [V] V _ V 400 Surs de tensiune [V] V _ W 400
Rezisten intern surs [] R_U 0.9
Rezisten intern surs [] R_V 0.9
Rezisten intern surs [] R_W 0.9
Rezisten [] R1 106 Rezisten [] R2 106 Rezisten [] R3 106
Rezisten bobin de faz [] BOB1PH1 0,8
Rezisten bobin de faz [] BOB2PH1 0,8
Rezisten bobin de faz [] BOB1PH2 0,8
Rezisten bobin de faz [] BOB2PH2 0,8
Rezisten bobin de faz [] BOB1PH3 0,8
Rezisten bobin de faz [] BOB2PH3 0,8
Inductana captului de nfurare [H] L_U
72.16 x10-3
Inductana captului de nfurare [H] L_V
72.16 x10-3
Inductana captului de nfurare [H] L_W
72.16 x10-3
Fig. 2.1 Schema electric echivalent a motorulului asincron
trifazat cu puterea de 7.5 kW/1000 rpm
Fig. 2.2 Schema electric echivalent a motorulului asincron
trifazat cu puterea de 11 kW/1000 rpm
-
Rezumatul tezei doctorat
23
2.2 Modelarea i analiza zgomotului magnetic pentru motorul asincron trifazat de randament premium de tip MAL 160M cu puterea de 7.5 kW/1000 rpm n analiza zgomotului magnetic se genereaz /calculeaz urmtorii parametrii:
- Distribuia induciei magnetice n seciunea motorului; - Distribuia liniilor de cmp magnetic n seciune; - Valoarea i graficul induciei magnetice n ntrefier; - Nivelul continuu al presiunii acustice n funcie de amplitudinea armonicilor, respectiv
nivelul de zgomot magnetic radiat n spectrul acustic. Fiecare parametru de mai sus caracterizeaz din punct de vedere fenomenologic dar i structural zgomotul magnetic. Geometria miezului magnetic i tipul de crestturi utilizate pentru motorul de tip MAL 160M, 7.5 kW/1000 rpm a fost realizat utiliznd programul FLUX 2D i este prezentat n figura 2.7.
Reeaua de elemente finite i raportul acesteia, generate n cazul motorului asincron trifazat de randament premium cu puterea de 7.5 kW /1000 rpm, sunt prezentate n figura 2.9 i tabelul 2.7.
Tabelul 2.7 Datele reelei de elemente finite Procentul de elemente neevaluate 0 %
Procentul de elemente de calitate excelent 98.89 % Procentul de elemente de calitate bun 1.07%
Procentul de elemente de calitate medie 0.04 % Procentul de elemente de calitate slab 0%
Procentul de elemente anormale 0 % Numrul de noduri 87257
Ordinul elementelor reelei 2
Fig. 2.7 Geometria miezului magnetic pentru motorul MAL 160M-7.5 kW/ 1000 rpm
Fig. 2.8 a) cresttur statoric; b) cresttur rotoric;
Fig. 2.9 Reeaua de elemente finite generat n cazul motorulului
asincron trifazat cu puterea de 7.5 kW/1000 rpm
-
Contribuii privind analiza i modelarea zgomotului motoarelor de inducie trifazate
24
n continuare se vor prezenta distribuiile magnetice i liniile de cmp n seciune (dup finalizarea regimului tranzitoriu de la pornire), care caracterizeaz att din punct de vedere structural ct i fenomenologic, zgomotul de natur electromagnetic generat de motorul de tip MAL 160M cu puterea de 7.5 kW/1000 rpm, randament premium IE3. Datorita distribuiei spaio temporale limitate valorile medii ale zgomotului magnetic sunt prezentate sub form tabelar.
I. Alimentare prin invertor la frecvena de 40 Hz
II. Analiza comparativ n cazul alimentrii prin invertor la frecvena de 50 Hz i direct de la reea
Fig. 2.10 Distribuia induciei magnetice (n
seciune) pentru motorul asincron trifazat cu puterea de 7,5 kW/1000 rpm
Fig. 2.11 Distribuia liniilor de cmp pentru motorul asincron trifazat cu puterea de 7,5
kW/1000 rpm
Fig. 2.14 Distribuia induciei magnetice (n seciune) pentru motorul studiat, alimentat: a)
prin invertor la frecvena de 50 Hz; b) direct de la reea
-
Rezumatul tezei doctorat
25
III. Alimentare prin invertor la frecvena de 60 Hz
2.3 Modelarea i analiza zgomotului magnetic pentru motorul asincron trifazat de randament premium de tip MAL 160L cu puterea de 11 kW/1000 rpm Algoritmul funcional prin care se analizeaz zgomotul magnetic n cazul motorului de tip MAL 160L cu puterea de 11kW/1000 rpm este simlar cu cel prezentat anterior. n cadrul analizei efectuate s-a considerat c motorul funcioneaz n regim normal i fr sarcin la arbore. n prim faz se prezint geometria i tipurile de crestturi statoric respectiv rotoric din structura miezului magnetic realizate prin intermediul platfomei specializate din componena programului FLUX 2D.
Fig. 2.15 Distribuia liniilor de cmp pentru motorul asincron trifazat cu puterea de 7,5 kW/1000 rpm alimentat: a) prin invertor la frecvena de 50 Hz; b) direct de
la reea
Fig. 2.18 Distribuia induciei magnetice (n seciune) pentru motorul asincron trifazat cu puterea de 7,5 kW/1000 rpm
Fig. 2.19 Distribuia liniilor de cmp pentru motorul asincron trifazat cu puterea de 7,5
kW/1000 rpm
-
Contribuii privind analiza i modelarea zgomotului motoarelor de inducie trifazate
26
Din punct de vedere al geometriei miezului magnetic, att motorul cu puterea de 11kW ct i cel cu puterea de 7.5 kW sunt identice. Reeaua de elemente finite generat de program, n cazul motorului asincron trifazat de randament premium cu puterea de 11 kW /1000 rpm este prezentat n figura 2.24. Raportul generat de program al acestei transformri este prezentat n tabelul urmtor.
Tabelul 2.8 Structura reelei de elemente finite Procentul de elemente neevaluate 0 %
Procentul de elemente de calitate excelent 98.91 % Procentul de elemente de calitate bun 1.07%
Procentul de elemente de calitate medie 0.01 % Procentul de elemente de calitate slab 0%
Procentul de elemente anormale 0 % Numrul de noduri 86129
Ordinul elementelor reelei 2 n mod comparativ cu reeaua motorului studiat anterior se observ faptul c procentul de elemente de calitate excelent este diferit. Acest lucru se datoreaz faptului c prin intermediul metodei de calcul identice, n cazul motorului cu puterea de 11kW s-au putut identifica mai puine noduri de reea i implicit acest fenomen a dus la aceast diferen nesemnificativ din punct de vedere practic. Pentru analiza zgomotului magnetic, aa cum s-a procedat i n cazul motorului studiat anterior se va considera alimentarea motorului att de la reea ct i prin invertor.
Fig. 2.22 Geometria miezului magnetic pentru motorul MAL 160L-11 kW/1000 rpm
Fig. 2.23 a) cresttur statoric; b) cresttur rotoric;
Fig. 2.24 Reeaua de elemente finite generat n cazul
motorulului asincron trifazat cu puterea de 11 kW/1000 rpm
-
Rezumatul tezei doctorat
27
I. Alimentare prin invertor la frecvena de 40 Hz
II. Alimentare direct de la reea (50Hz) i prin invertor 50Hz
Fig. 2.25 Distribuia induciei magnetice (n seciune)
pentru motorul asincron trifazat cu puterea de 11 kW/1000 rpm
Fig. 2.26 Distribuia liniilor de cmp pentru
motorul asincron trifazat cu puterea de 11 kW/1000 rpm
Fig. 2.29 Distribuia induciei magnetice (n seciune) pentru motorul studiat,
alimentat: a) prin invertor la frecvena de 50 Hz; b) direct de la reea
Fig. 2.30 Distribuia liniilor de cmp pentru motorul asincron trifazat cu puterea de 11
kW/1000 rpm alimentat: a) prin invertor la frecvena de 50 Hz; b) direct de la reea
-
Contribuii privind analiza i modelarea zgomotului motoarelor de inducie trifazate
28
III. Alimentare prin invertor la frecvena de 60 Hz
2.4 Concluzii Conform documentaiei tehnice de specialitate [30, 39, 68] n cazul motoarelor de randament premium IE3, componenta magnetic a zgomotului radiat n mediu are cea mai mare pondere n producerea zgomotului total. Din perspectiva generrii zgomotului magnetic s-a realizat o comparaie a valorii acestuia pentru ambele motoare la cele trei frecvene de alimentare, prin invertor (40 Hz, 50 Hz, 60 Hz) respectiv, alimentare de la reea (50 Hz). Aceste rezultate sunt prezentate n tabelul urmtor. Tabelul 2.9 Nivelul de zgomot magnetic generat de cele dou motoare analizate, respectiv 7.5 kW/1000
rpm i 11 kW/1000 rpm Modul de alimentare i frecvena de
alimentare
Valoarea medie a zgomotului magnetic modelat prin intermediul programului
FLUX 2D [dB]
Motor 7.5 kW-1000 rpm
Motor 11 kW-1000 rpm
Invertor 40 Hz 44.8 42.3 Invertor 50 Hz 43.9 43.4 Reea 50 Hz 39.8 37.9
Invertor 60 Hz 46.4 51.6 Datorit faptului c aceste dou motoare sunt identice din punct de vedere constructiv, singura diferen este dat de caracteriticile nfurrilor statorice, cuantificate prin valorile zgomotului magnetic modelat prezentate n tabelul anterior. Topologia i modelul matematic al invertorului implementat pentru analiza zgomotului magnetic au fost realizate n conformitate cu schema real a invertorului trifazat cu care s-au fcut msurtorile practice de zgomot.
Fig. 2.33 Distribuia induciei magnetice (n seciune) pentru motorul asincron trifazat cu
puterea de 11 kW/1000 rpm
Fig. 2.34 Distribuia liniilor de cmp pentru motorul asincron trifazat cu puterea de 11
kW/1000 rpm
-
Rezumatul tezei doctorat
29
Din punct de vedere practic reducerea zgomotului magnetic (reducerea armonicilor cmpului) se realizeaz prin urmtoarele metode: alegerea numrului optim de crestturi statorice i rotorice; alegerea unei scurtri corespunztoare a pasului de nfurare; nclinarea crestturilor (la nivel de rotor); mrirea ntrefierului motorului. Pentru a limita oscilaia datorat forelor magnetice, este necesar o analiz foarte minuioas a acestor cauze din punctul de vedere al numrului corespunztor de crestturi. Dup cum s-a artat n capitolul anterior, raportul numrului de crestturi din stator i din rotor are o influen esenial asupra forelor radiale i implicit asupra zgomotului total.
-
Contribuii privind analiza i modelarea zgomotului motoarelor de inducie trifazate
30
CAPITOLUL 3
MODELAREA ZGOMOTULUI DE NATUR MECANIC UTILIZND PROGRAMUL ANSYS 3D
3.1 Definirea parametrilor de material pentru motoarele analizate n cazul analizei frecvenelor de vibraie pentru cele dou motoare studiate se definesc n prim faz caracteristicile materialelor utilizate n construcia acestora. Aceste date sunt preluate de la productor sau dup caz se regsesc n baza de date intern a programului de element finit cu care s-a facut modelarea Ansys 3D. Proprietile aluminiului utilizat n construcia carcaselor dar i a barelor rotorice sunt prezentate n tabelul 3.1.
Tabelul 3.1 Proprietile aluminiului necesare analizei modale Densitate [kg/m3] 2770 Coeficient de expansiune termic [1/C] 2.3 10-5
Cldura specific [J/kgC] 875 Modulul lui Young [Pa] 7.1 1010
Raportul lui Poisson 0.33 n cazul infurrilor se utilizeaz, din punct de vedere al materialului existent n crestturi, cuprul. Proprietile acestui material sunt prezentate n tabelul urmtor.
Tabelul 3.2 Proprietile cuprului utilizat n construcia nfurrii statorice Densitate [kg/m3] 8300 Coeficient de expansiune termic [1/C] 1.8 10-5
Cldura specific [J/kgC] 380 Modulul lui Young [Pa] 1.1 1011
Raportul lui Poisson 0.34 Proprietile tolei M 400 65 sunt prezentate n tabelul 3.3. De menionat faptul c n cazul acestui tip de tol parametrii prezentai sunt cei care se utilizeaz pentru analiza modal a sistemului. n situaia n care se dorete o alt analiz sunt necesare i alte date suplimentare.
Tabelul 3.3 Proprietile tolei M400 - 65 Densitate [kg/m3] 7850 Coeficient de expansiune termic [1/C] 1.2 10-5
Modulul lui Young [Pa] 2 1011
Raportul lui Poisson 0.30 Ventilatoarele de rcire sunt confecionate din material plastic rigid cu densitatea de 2250 [kg/m3]. n cazul arborilor i a uruburilor de fixare datele pentru materialul utilizat n construcia acestora sunt prezentate n tabelul 3.4.
-
Rezumatul tezei doctorat
31
Tabelul 3.4 Proprietile fierului utilizat n construcia arborilor i a uruburilor de fixare
Densitate [kg/m3] 7200 Coeficient de expansiune termic [1/C] 1.1 10-5
Cldura specific [J/kgC] 520 Modulul lui Young [Pa] 1.1 1011
Raportul lui Poisson 0.28 Temperatura de referin definit prin proprietile materialului la care s-au fcut determinrile este de 220 C. n analiza modal a vibraiilor s-au considerat, din perspectiva condiiilor de frontier i punctele de reazem (cu amortizarea specific) pentru motoarele analizate. Frecvena de vibraie pentru o main electric la un mod oarecare m de vibraie este dat de relaia [11, 21, 28, 75]:
st
m xg
gmgk
mkf
=
=
=
21
21
21
[Hz] (3.1)
unde k - este constanta elastic a suspensiei elastice [N/m]; m - masa mainii [kg]; g acceleraia gravitaional (g = 9,81 m/s2);
xst deformaia static ( kgmxst
= ) , [m].
deformaia static va fi dat de expresia:
22481.9
mst f
x
=
[m] (3.3)
Relaia (3.3) exprim deformaia pentru momentul static n care se afl sistemul mecanic (motorul) analizat. n cazul n care motorul funcioneaz n sarcin la o turaie n relaia de calcul a deformaiei este dat de relaia [87, 95]:
+=
Tnxst
119002 [m] (3.4)
n care: n turaia motorului; T transmisibilitatea.
-
Contribuii privind analiza i modelarea zgomotului motoarelor de inducie trifazate
32
3.2 Determinarea modurilor i a frecvenelor de vibraie pentru motorul asincron trifazat de randament premium cu puterea de 7.5 kW/1000 rpm Analiza modal s-a efectuat pentru fiecare subansamblu n parte respectiv pentru tot motorul asamblat. Frecvenele i modurile de vibraie obinute au fost validate de partea experimental efectuat prin metoda ciocanului de impact. Elementele componente ale motorului de randament premium IE3 de tip MAL 160M- 7.5 kW/1000 rpm sunt prezentate n figurile urmtoare. Statorul motorului asincron studiat de gabarit 160, confecionat din tole de tip M400-65 cu un numr de 36 crestturi este prezentat n figura 3.2.
Rotorul motorului asincron studiat este de tip colivie i conine un numr de 26 de crestturi cu bare rotorice din aluminiu scurtcircuitate la capete. Geometria acestuia este prezentat n figura 3.3.Geometria capacelor de fixare i a rulmenilor de tip 6909Z se prezint n figurile 3.4 respectiv 3.5.
Fig. 3.1 Carcasa motorului de tip MAL 160 M -
7.5kW/1000 rpm
Fig. 3.2 Statorul motorului de tip MAL 160 M-7.5kW/1000 rpm
Fig. 3.4 Capacele motorului de tip MAL 160 M-
7.5kW/1000 rpm
Fig. 3.5 Rulmenii de tip 6909Z
Fig. 3.3 Rotorul motorului de tip MAL 160
M-7.5kW/1000 rpm
Fig. 3.6 Axul motorului de tip MAL 160M
-
Rezumatul tezei doctorat
33
ntregul ansamblu al motorului de gabarit 160 (cu toate piesele asamblate) este prezentat n figura 3.7. Din considerente spaiale nu se vor mai prezenta sub form grafic reelele de elemente finite aplicate pe fiecare component ci direct rezultatul simulrii obinute. n continuare se vor prezenta n mod centralizat valorile frecvenelor de vibraie pentru fiecare component a motorului studiat precum i cele mai semnificative reprezentri grafice ale modurilor de vibraie la nivel de componente dar i de motor asamblat. Modurile i frecvenele proprii de vibraie simulate pentru motorul de tip MAL 160M 7.5kW/1000 rpm sunt prezentate n tabelul 3.5.
Tabelul 3.5 Modurile i frecvenele proprii de vibraie pentru motorul de tip MAL 160M
Carcas Stator Carcas- stator
Rotor
Motor asamblat
Modul Frecvena [Hz]
Frecvena [Hz]
Frecvena [Hz]
Frecvena [Hz]
Frecvena [Hz]
1 81.187 1.72 26.17 6 6.2 2 186.24 2.36 40.87 44.2 10.4 3 271.46 2.72 48.71 88.12 12.9 4 463.61 8.439 59.95 427 22 5 501.41 8.4997 85.17 470.65 46.2 6 793.39 13.039 151.95 562 62.9 7 1009.9 708.1 230.2 730 78 8 1021.1 940 273.81 917 152.12 9 1178.7 1000.6 310.12 984.96 250
10 1276.6 1176 830 1120 296 11 1406 1250 1009 1149 503 12 1545.8 1358.7 1050 1191.17 784 13 1709.1 1420.8 1166.5 1210 1009.2 14 1723.3 1558.3 1191 1264.95 1493.16 15 1774.5 1620 1209 1294 2274
Fig. 3.7 Geometria motorului de tip MAL 160M 7.5kW/1000
rpm
-
Contribuii privind analiza i modelarea zgomotului motoarelor de inducie trifazate
34
Fig. 3.10 Modul 4 de vibraie al carcasei pentru motorul MAL 160 M (f = 463.61 Hz)
Fig. 3.15 Modul 10 de vibraie al statorului pentru motorul MAL 160 M (f = 1176 Hz)
Fig. 3.19 Modul 15 de vibraie al
ansamblului stator - carcas pentru motorul MAL 160 M (f = 1209 Hz)
Fig. 3.24 Modul 15 de vibraie al rotorului pentru motorul MAL 160 M (f = 1294 Hz)
Fig. 3.28 Modul 15 de vibraie motorului asamblat de tip MAL 160 M (f = 2274 Hz)
-
Rezumatul tezei doctorat
35
3.3 Determinarea modurilor i a frecvenelor de vibraie pentru motorul asincron trifazat de randament premium cu puterea de 11 kW/1000 rpm Datorit faptului c cele dou motoare au aceeai geometrie, n cadrul acestei analize nu se vor mai prezenta modurile de vibraie i frecvenele acestora pentru toate elementele componente ci doar cele care sunt diferite din punct de vedere geometric. Diferena major ntre componente, const n faptul c motorul de tip MAL 160 L cu puterea de 11 kW/1000 rpm are o lungime a miezului statoric mai mare, respectiv un numr mai mare de spire pe crestatur n cazul nfurrii statorice. Statorul motorului asincron de tip MAL 160 L este confecionat din tole de tip M400-65 cu un numr de 36 crestturi i este prezentat n figura 3.29. Rotorul motorului asincron studiat este de tip colivie si conine un numr de 26 de crestturi strbtute de bare rotorice din aluminiu scurtcircuitate la capete - n mod identic cu motorul studiat n subcapitolul anterior. Geometria acestuia este prezentat n figura 3.30. ntregul ansamblu al motorului de tip MAL 160 L cu puterea 11kW/1000 rpm (cu toate piesele asamblate) este prezentat n figura 3.31.
Fig. 3.29 Statorul motorului de tip MAL 160 L 11 kW/1000
rpm
Fig. 3.30 Rotorul motorului de tip MAL 160 L 11 kW/1000 rpm
Fig. 3.31 Geometria motorului de tip MAL 160L 11 kW/1000 rpm
-
Contribuii privind analiza i modelarea zgomotului motoarelor de inducie trifazate
36
n mod similar cu motorul studiat anterior se vor prezenta sub form centralizat valorile frecvenelor de vibraie pentru fiecare component a motorului precum i cele mai semnificative reprezentri grafice ale modurilor de vibraie la nivel de componente dar i de motor asamblat.
Tabelul 3.6 Modurile i frecvenele proprii de vibraie pentru motorul de tip MAL 160 L
Carcas Stator Carcas- stator
Rotor
Motor asamblat
Modul Frecvena [Hz]
Frecvena [Hz]
Frecvena [Hz]
Frecvena [Hz]
Frecvena [Hz]
1 81.187 1.72 26.17 6 6.2 2 186.24 2.36 40.87 44.2 10.4 3 271.46 2.72 48.71 88.12 12.9 4 463.61 8.439 59.95 427 22 5 501.41 8.4997 85.17 470.65 46.2 6 793.39 13.039 151.95 562 62.9 7 1009.9 708.1 230.2 730 78 8 1021.1 940 273.81 917 152.12 9 1178.7 1000.6 310.12 984.96 250
10 1276.6 1176 830 1120 296 11 1406 1250 1009 1149 503 12 1545.8 1358.7 1050 1191.17 784 13 1709.1 1420.8 1166.5 1210 1009.2 14 1723.3 1558.3 1191 1264.95 1493.16 15 1774.5 1620 1209 1294 2274
Fig. 3.34 Modul 5 de vibraie al statorului pentru
motorul MAL 160 L (f = 13.42 Hz)
Fig. 3.38 Modul 13 de vibraie al rotorului pentru
motorul MAL 160 L (f = 946 Hz)
Fig. 3.41 Modul 15 de vibraie al ansamblului stator - carcas pentru motorul MAL 160 M (f = 1056.89 Hz)
Fig. 3.44 Modul 14 de vibraie al ansamblului stator - carcas pentru motorul MAL 160 L (f = 1571.48 Hz)
-
Rezumatul tezei doctorat
37
3.4 Validarea rezultatelor Pentru determinarea frecvenelor de vibraie, n cazul celor dou motoare studiate s-a utilizat metoda ciocanului de impact. Msurtorile au fost efectuate n cadrul laboratorului de vibraii al Facultii de Inginerie Mecanic de la Universitatea Transilvania Braov. n cadrul studiului de fa s-a utilizat platforma PULSE 12 produs de firma Bruel&Kjaer. Schema bloc a ntregului stand de msur a vibraiilor n cazul motoarelor de tip MAL 160 M respectiv MAL 160 L este prezentat n figura 3.45.
Msurarea deformaiei la nivelul carcasei se face prin intermediul unui accelerometru. Amplificatorul realizeaz o cretere n amplitudine a undei provenite de la accelerometru pentru a stabili nivelul optim al semnalului la intrarea plcii de achiziie a datelor. Achiziia datelor se face prin intermediul unui modul dedicat, care n prealabil realizeaz conversia analog - digital a semnalului msurat. Datele furnizate de placa de achiziii sunt prezentate i prelucrate cu ajutorul unui program de analiz modal care realizeaz o analiz FFT a semnalului provenit de la accelerometru. n cazul standului de fa placa de achiziie a datelor are un numr de 8 intrri analogice i 2 ieiri digitale. Determinrile efectuate au constat n analiza frecvenelor de vibraie pentru ansamblul carcas-stator, rotor, respectiv motor asamblat. Din perspectiva punctelor de reazem s-a realizat o impunere identic cu cea din realitate aa cum s-a considerat i n cadrul analizei software. Valorile centralizate ale frecvenelor de vibraie obinute pentru cele dou motoare studiate sunt prezentate n tabelele 3.7 respectiv 3.8.
Fig. 3.45 Schema bloc a standului utilizat pentru determinarea frecvenelor de vibraii n cazul motoarelor studiate prin metoda ciocanului de impact
-
Contribuii privind analiza i modelarea zgomotului motoarelor de inducie trifazate
38
Tabelul 3.7 Modurile i frecvenele proprii de vibraie pentru motorul de tip MAL 160 M -7.5 kW/1000 rpm determinate prin metoda ciocanului de impact
Tabelul 3.8 Modurile i frecvenele proprii de vibraie pentru motorul de tip MAL 160 L -11 kW/1000 rpm determinate prin metoda ciocanului de impact
Dispunerea accelerometrelor n cazul ansamblului carcas-stator pentru motorul de tip MAL 160 L (11 kW/1000 rpm)s-a realizat conform figurii 3.52.
Carcas- stator
Rotor
Motor asamblat
Modul Frecvena [Hz]
Frecvena [Hz]
Frecvena [Hz]
1 29 6 4 2 37 44 8 3 48 88 13 4 61 428 22 5 83 470 46 6 152 560 63 7 230 729 77 8 273 917 152 9 310 985 251
10 830 1120 297 11 1009 1149 503 12 1057 1191 784 13 1166 1210 1009 14 1191 1265 1493 15 1209 1294 2274
Carcas- stator
Rotor
Motor asamblat
Modul Frecvena [Hz]
Frecvena [Hz]
Frecvena [Hz]
1 8 37 4 2 17 42 10 3 37 86 15 4 87 178 26 5 144 181 38 6 176 414 56 7 462 428 78 8 658 657 146 9 820 692 248
10 856 712 290 11 910 734 501 12 930 868 794 13 987 946 1108 14 1024 987 1571 15 1057 1152 2282
Fig. 3.52 Amplasarea accelerometrelor pentru ansamblul stator-carcas n cazul motorului de
tip MAL 160 L -11 kW/1000 rpm
-
Rezumatul tezei doctorat
39
3.5 Concluzii Valorile frecvenelor de vibraie ale ansamblului carcas-stator difer ntr-o mic msur fa de cele determinate prin intermediul programului ANSYS 3D, ntruct structura materialelor utilizate n execuia componentelor este una neomogen. Totodat, s-a modificat i baza de date a materialelor din structura programului cu parametrii afereni. Acetia sunt prezentai la nceputul capitolului. n cazul analizei frecvenelor de vibraie, pentru varianta de motoare asamblate, modurile de vibraie au valori identice ale frecvenelor. Din punct de vedere principial, acest fenomen se datoreaz, faptului c cele dou motoare au aceeai geometrie. Diferena major (aa cum s-a mai mentionat anterior) const n lungimea mai mare a miezului statoric (i implicit a miezului rotoric) pentru motorul de tip MAL 160L cu puterea de 11 kW/1000 rpm. De menionat este faptul c modurile cele mai semnificative de vibraie pentru cele dou motoare, la frecvenele specificate (prezentate n analizele anterioare), sunt de fapt frecvenele de rezonan ale acestora, situaie valabil i n cazul analizei pe componente. Analiza vibraiilor pentru cele dou motoare studiate, a fost necesar ntruct vibraiile genereaz zgomote. Controlul eficient al vibraiilor, sau analiza acestora ofer un rspuns al randamentului motorului din perspectiva proiectrii. n situaiile n care nivelurile de zgomot/vibraii nu sunt identificate prin normativ cu statutul motorului acesta se va reproiecta. Aa cum s-a preconizat anterior, n cazul celor dou motoare analizate, toate valorile de zgomot/vibraii obinute se ncadreaz n normativul IEC 60034 ale cror valori de randament sunt prezentate n Capitolul 1 al lucrrii.
-
Contribuii privind analiza i modelarea zgomotului motoarelor de inducie trifazate
40
CAPITOLUL 4
MSURAREA ZGOMOTULUI I VIBRAIILOR N CAZUL MOTOARELOR DE INDUCIE TRIFAZATE. DETERMINRI
EXPERIMENTALE 4.1 Msurarea zgomotului produs de motoarele asincrone de randament IE3 cu puteri de 7.5 kW-1000 rpm respectiv 11kW -1000 rpm Din perspectiv substanial msurarea nivelului de zgomot produs de motoarele asincrone const n msurarea nivelului continuu al presiunii acustice A conform valorilor specificate n normativul IEC 60034-9. Aceast parte experimental a lucrrii va prezenta o analiz a nivelelor de zgomot msurate n cazul celor dou motoare studiate. Astfel, pentru fiecare motor s-a ntocmit o separare a zgomotelor n acord cu aparatul teoretic descris n subcapitolul 1.5 din structura Capitolului 1. n structura acestui capitol urmeaz s prezentm rezultatele experimentale obinute prin msurarea direct a nivelelor de zgomot generate de cele dou tipuri de motoare analizate respectiv MAL 160M -7,5 kW-1000 rpm i MAL 160L 11kW-1000 rpm. Setul de msurtori s-a realizat n camera semianecoic (fig. 4.1) a ntreprinderii Electroprecizia Scele n concordan cu standardele actuale (CEI 43-1; ISO 1680/1). Cele dou motoare au funcionat n gol, iar modul de alimentare a fost direct de la reea, dar i prin convertor de frecven trifazat, alimentat la frecvenele 40Hz, 50 Hz , 60 Hz. Convertorul de frecven trifazat utilizat (fig. 4.2) este de tip ALTIVAR 58 Telemecanique cu puterea de 15kW, iar frecvena de comutaie (care are un rol semnificativ n generarea zgomotului) este de 4kHz.
Fig. 4.1 Camera semianecoic a ntreprinderii Electroprecizia Scele
Fig. 4.2 Convertor de frecven de tip ALTIVAR 58
-
Rezumatul tezei doctorat
41
Sonometrul utilizat este de tip 2250 Bruel&Kjaer (fig. 4.3) ale crui caracteristici tehnice au fost prezentate n subcapitolul Aparate de msur i metode de msurare a zgomotului n cazul motoarelor electrice din structura capitolului 1. n cazul de fa, analiza zgomotului msurat, a cuprins separarea zgomotelor generate de motoarele analizate. Particulariznd, aceast separare parcurge urmtoarele etape:
I. Determinarea zgomotului mecanic+aerodinamic Aceasta s-a realizat prin antrenarea motorului din exterior (cu ajutorul unei curele de transmisie) - fr ventilator montat - zgomotul msurat este zgomotul de rulment
- cu ventilatorul montat - zgomotul msurat este cel mecanic (zgomot de rulment+aerodinamic) II. Determinarea zgomotului magnetic
Zgomotul magnetic se determin prin alimentarea motorului direct de la reea/invertor fr ventilator cuplat. Nivelul de zgomot msurat n acest caz este dat de zgomotul magnetic + mecanic. Valoarea nivelului de zgomot mecanic se cunoate, iar prin eliminarea acesteia rezult nivelul de zgomot magnetic. n situaia n care motorul are ventilatorul montat i este alimentat, nivelul de zgomot msurat este cel total generat de motor. n cele ce urmeaz, se vor prezenta sub form tabelar msurtorile de zgomot, pe componente, determinate prin intermediul sonometrului, pentru fiecare motor studiat. 4.1.1 Msurri de zgomot pentru motorul de tip MAL 160 M, cu puterea de 7.5kW/1000 rpm Nivelul continuu al presiunii acustice ponderate A - LAeq, obinute n cazul motorului de randament IE3 de tip MAL 160M prin cele dou moduri de alimentare (reea i convertor de frecven) se prezint n tabelul 3.9. Tabelul 3.9 Nivelul continuu al presiunii acustice ponderate A pe componente pentru motorul de tip MAL
160 M 7.5 kW/1000 rpm Modul de alimentare
Nivelul continuu al presiunii acustice ponderate A [dB]
Total Magnetic Mecanic Aerodinamic Reea 50 Hz 66,1 45,6 8,6 11,9
Invertor 40 Hz 68,8 49,2 8,2 11,4 Invertor 50 Hz 68,0 47,4 8,7 11,9 Invertor 60 Hz 69,3 47,9 8,9 12,5
Fig. 4.3 Sonometru Bruel&Kjaer de tip 2250
-
Contribuii privind analiza i modelarea zgomotului motoarelor de inducie trifazate
42
Amplasarea sonometrului la distana de 1m fa de surs (motor), (conform reglementrilor prezentate n Capitolul 1 al lucrrii) s-a efectuat prin intermediul unui trepied dup cum se prezint n figura 4.20. 4.1.2 Msurri de zgomot pentru motorul de tip MAL 160 L, cu puterea de 11kW/1000 rpm n mod similar s-au efectuat msurtori asupra nivelului continuu al presiunii acustice ponderate A i pentru motorul de tip MAL 160L, cu puterea de 11 kW. Rezultatele obinute sunt prezentate dup algoritmul primului motor studiat (subcapitolul 4.1.1). Motorul este alimentat prin invertor la cele trei frecvene 40 Hz, 50 Hz i respectiv 60 Hz, respectiv direct de la reeaua trifazat.
Tabelul 3.10 Nivelul continuu al presiunii acustice ponderate A pe componente pentru motorul de tip MAL 160 L 11 kW/1000 rpm
Modul de alimentare
Nivelul continuu al presiunii acustice ponderate A [dB]
Total Magnetic Mecanic Aerodinamic Reea 50 Hz 67,9 47,3 8,6 12
Invertor 40 Hz 69,6 50,4 8,3 10,9 Invertor 50 Hz 68,8 49,2 8,4 11,2 Invertor 60 Hz 69,4 48,6 7,9 12,9
ntreaga instalaie de msurare a nivelului de zgomot este prezentat n figura de mai jos.
Fig. 4.20 Amplasarea sonometrului la nivelul motorului analizat
Fig. 4.37 Instalaia de msurare a zomotului pentru motorul de tip
MAL 160 L-11kW-1000 rpm
-
Rezumatul tezei doctorat
43
4.2 Prezentarea platformei integrate de analiz a zgomotelor i vibraiilor produse de motoarele asincrone-SV-100. Determinri comparative de zgomot pentru motoarele analizate. Partea aplicativ a lucrrii de fa s-a cuantificat n planul material prin realizarea unui instrument, cu component hardware i software, care s permit cu uurin analiza zgomotelor, dar i a vibraiilor generate de motoarele asincrone. Din punct de vedere practic, acest produs conine, pe partea de program, un instrument software realizat prin intermediul programului LabView versiunea 2013 [58] i compilat sub form de executabil care, conectat cu al doilea instrument hardware Platforma Vibro M-100 permite vizualizarea fenomenelor de analiz descrise anterior. Obiectivul principal al conceperii acestei platforme a fost integrarea eficient a celor dou subiecte de analiz vibraii i zgomote. Actualmente, aparatura existent n acest sens nu se regsete nglobat ntr-o platform compact, ci doar separat, att din punct de vedere structural ct i funcional. Acest instrument este foarte accesibil i din raionamente economice. Costurile totale de realizare a platformei reprezint maxim 10% din valoarea comercial a unui produs, parial similar, existent la momentul actual pe pia. n cele ce urmeaz se vor prezenta succint, din punct de vedere structural, cele dou componente:
1. Instrumentul software Platforma integrat de analiz a zgomotelor i vibraiilor produse de motoarele asincrone SV-100
Panoul frontal al programului este prezentat n figura de mai jos.
Fig. 4.38 Panoul frontal al aplicaiei SV-100
-
Contribuii privind analiza i modelarea zgomotului motoarelor de inducie trifazate
44
Utilizatorul poate opta fie pentru partea de analiz a vibraiilor, fie pentru partea de analiz a zgomotelor. De menionat este faptul c, pentru partea de vibraii va trebui conectat instrumentul hardware Vibro M-100, iar pentru analiza zgomotului doar microfonul condensator conectat la portul aferent plcii de baz a calculatorului (fig. 4.39).
Funcia de analiz a vibraiilor permite vizualizarea rspunsului dat de 3 accelerometre ce pot fi conectate la analizorul Vibro M-100 (fig. 4.40). Se pot vizualiza pentru fiecare accelerometru deplasrile pe cele trei axe (X, Y i Z) simultan sau, n mod individual, n funcie de timp (fig. 4.41).
Fig. 4.41 Interfaa de rspuns a unui accelerometru
a) b)
Fig. 4.39 a) Analizorul Vibro M-100; b) Microfonul condensator
Fig. 4.40 Interfaa de analiz a vibraiilor
-
Rezumatul tezei doctorat
45
Programul poate nregistra evenimente timp de 60 minute; setarea intervalului de monitorizare dorit se face la nceput. De asemenea, pentru o bun calibrare, poziia fiecrui accelerometru este controlat prin vizualizarea 3D a acestuia. Orice vibraie este nregistrat i vizualizat n timp real. Datele aferente fiecrui grafic, pe tot parcursul nregistrrii pot fi exportate n fiiere Excel. Funcia de analiz a zgomotelor Aceast funcie a platformei integrate SV-100 permite vizualizarea cu uurin a analizei spectrale n cazul unui zgomot/sunet nregistrat. Avantajul major al acestui instrument software (fig. 4.43 a i b) l constituie faptul c nu necesit echipament hardware auxiliar.
Fig. 4.41 Interfaa de rspuns a unui accelerometru
-
Contribuii privind analiza i modelarea zgomotului motoarelor de inducie trifazate
46
Orice sonometru fabricat n momentul actual, conine, pe lng interfaa software, i echipamentul hardware de procesare a semnalului, mpreun cu traductorul electroacustic. n situaia de fa, traductorul electroacustic este un microfon condensator (fig. 4.39b), iar prelucrarea electric a semnalelor se realizeaz prin placa de sunet a sistemului informatic, pe care ruleaz aplicaia. n momentul lansrii aplicaiei este detectat, n mod automat, placa de sunet existent n configuraia calculatorului, mpreun cu microfonul. S-a procedat la o astfel de structur din dou raionamente :
1) Eliminarea componentelor hardware n cazul sonometrelor clasice, toate componentele electronice utilizate, pe partea de procesare a semnalului, introduc un zgomot propriu; fapt care duce la o perturbare a semnalului purttor, vizualizat prin intermediul programului aferent de analiz. Prin filtrare se elimin doar parial aceste perturbaii. Eliminarea total implic filtre electronice, ceea ce duce la un cost ridicat al produsului final.
2) Costurile de realizare sczute din punct de vedere practic, partea hardware (placa de sunet) se gsete n toate configuraiile sistemelor informatice, iar microfonul se achiziioneaz separat. Pentru utilizator este necesar doar instrumentul software care are o valoare maxim de 15% din preul unui sonometru comercializat la ora actual.
Fig. 4.43 (a) Interfaa de analiz a zgomotelor
Fig. 4.43 (b) Interfaa de analiz a zgomotelor
-
Rezumatul tezei doctorat
47
2. Analizorul Vibro M-100 Acest echipament realizeaz, din perspectiv structural, dar i funcional, partea de prelucrare i transmitere a semnalelor, provenite de la cele 3 accelerometre, conectate, n mod individual, la cele 3 porturi. Elementul principal al unitii electronice interioare l constituie microcontrollerul ATMEGA 328 P care, prin intermediul circuitului n care este conectat, realizeaz achiziia datelor provenite de la accelerometre (SDA + SCL), pe pinii de intrare afereni A0 A5 realiznd, totodat, i transmiterea acestora pe portul USB ctre utilizator prin intermediul protocolului I2C.
Din raionamente financiare ntregul sistem este nglobat sub forma unei plci electronice de tip Arduino Uno. n cazul execuiei manuale, preul de cost al tuturor elementelor ar fi fost acelai cu cel al achiziiei plcii. Din acest motiv placa electronic nu s-a mai realizat manual, ci s-a achiziionat din comer. Schema bloc a unitii electronice este prezentat n figura urmtoare.
Acest echipament electronic conine i un acumulator, care poate fi ncrcat, prin intermediul mufelor de conectare existente pe panoul din spate al aparatului. Autonomia echipamentului este de 72h funcionare continu, cu acumulatorul ncrcat la 90%. Accelerometrele utilizate mpreun cu acest dispozitiv sunt de tip ADXL 345 ale cror caracteristici sunt prezentate n tabelul 4.1. Reprezentarea formal a acestora este prezentat n figura 4.47.
Fig. 4.44 Panoul frontal al analizorului Vibro M-100
Fig. 4.45 Schema bloc a analizorului Vibro M-100
-
Contribuii privind analiza i modelarea zgomotului motoarelor de inducie trifazate
48
Tabelul 4.1 Caracteristicile tehnice ale accelerometrului de tip ADXL 345 Tensiune de alimentare 2...3,6 V cc. Curent absorbit n funcionare 40uA Curent absorbit n stand-by 0,1uA Temperatur de lucru -40 0C pn la +105 0C Rezoluie 4mg/LSB Frecven de lucru 6,25 Hz 3,2 kHz Acest tip de accelerometru are detecie automat pentru loviturile/btile duble i cdere liber.
Determinri experimentale n cadrul acestei pri se prezint determinri de vibraii i zgomote pentru cele dou motoare studiate. Aceste motoare funcioneaz n regim normal, fr sarcin la arbore, alimentate att de la reea ct i prin invertor. Analiza vibraiilor se prezint grafic ca fiind reprezentarea deplasrii [mm] n funcie de timp pe cele 3 axe , X, Y i Z. Din perspectiv practic, fiecare motor asincron, n funcie de putere are o deplasare (vibraie) permis. Orice defeciune sau funcionare anormal se reflect n mod direct asupra nivelului de vibraie al acestuia. Datorit ncadrrii spaiale restrnse i multitudinii informaiilor analizate, se vor prezenta, n mod aleatoriu, nivelele de vibraii msurate pe cele dou motoare studiate. La final se va prezenta o monitorizare a vibraiilor n cazul n care un motor are un rulment defect. Datele prezentate sunt preluate de la accelerometrul nr. 1.
Fig. 4.47 Accelerometru de tip ADXL 345
Fig. 4.49(a) Nivelul de vibraii al motorului de tip MAL 160 M la funcionare n gol, alimentat prin invertor trifazat la frecvena de 50 Hz
-
Rezumatul tezei doctorat
49
Fig. 4.49 (b) Nivelul de vibraii al motorului de tip MAL 160 M la funcionare n gol, alimentat
prin invertor trifazat la frecvena de 50 Hz
Fig. 4.50 Nivelul de vibraii al motorului de tip MAL 160 L la funcionare n gol, alimentat prin invertor trifazat la frecvena de 60 Hz
-
Contribuii privind analiza i modelarea zgomotului motoarelor de inducie trifazate
50
Plasarea accelerometrului la nivelul motorului de tip MAL 160 M se prezint n figura urmtoare.
Dup cum s-a menionat anterior, se vor prezenta n mod comparativ, msurtori de zgomot pentru cele dou motoare. Situaia centralizat a nivelelor continue ale presiunii acustice ponderate A evaluate n mod comparativ este prezentat n tabelele 4.2, respectiv, 4.3. Tabelul 4.2 Nivelele de zgomot total, generat de motorul asincron, de tip MAL 160 M -7,5 kW-1000 rpm
prezentate n mod comparativ Nr. crt.
Mod de alimentare Nivelul total de zgomot msurat [dB] Sonometru de tip 2250
Bruel&Kjaer