
CERCETĂRI PRIVIND CONTROLUL RĂSPUNSULUI SEISMIC PRIN...
159
UNIVERSITATEA TEHNICĂ DE CONSTRUCŢII BUCUREŞTI FACULTATEA DE CONSTRUCŢII CIVILE,INDUSTRIALE ŞI AGRICOLE CERCETĂRI PRIVIND CONTROLUL RĂSPUNSULUI SEISMIC PRIN AMORTIZORI ACORDAŢI TEZĂ DE DOCTORAT Ing. Mihai PAVEL Conducători ştiinţifici : Prof.Univ.Dr.Ing.Liviu CRAINIC Prof.Univ.Dr.Ing. Petre PĂTRUŢ - 2009 –
Transcript of CERCETĂRI PRIVIND CONTROLUL RĂSPUNSULUI SEISMIC PRIN...

UNIVERSITATEA TEHNICĂ DE CONSTRUCŢII BUCUREŞTI
FACULTATEA DE CONSTRUCŢII CIVILE,INDUSTRIALE ŞI
AGRICOLE
CERCETĂRI PRIVIND CONTROLUL RĂSPUNSULUI
SEISMIC PRIN AMORTIZORI ACORDAŢI
TEZĂ DE DOCTORAT
Ing. Mihai PAVEL
Conducători ştiinţifici :
Prof.Univ.Dr.Ing.Liviu CRAINIC
Prof.Univ.Dr.Ing. Petre PĂTRUŢ
- 2009 –
CUPRINS Pagina 2 din 159
CUVÂNT ÎNAINTE
Autorul doreşte să mulţumească tuturor celor care au adus o contribuţie, directă sau
indirectă, la realizarea acestei lucrări.
În primul rând, mulţumirile sunt adresate conducătorilor ştiinţifici ai tezei, Prof.
Univ. Dr. Ing. Liviu CRAINIC, pentru efortul constant de îndrumare depus pe perioada
elaborării tezei, fără de care finalizarea ei nu ar fi fost posibilă, respectiv Prof. Univ. Dr. Ing.
Petre PĂTRUŢ, pentru şansa acordată de a putea participa la studiile efectuate în cadrul
programelor de cercetare de excelenţă “Sistem integrat de protecţie a clădirilor la acţiuni
seismice” şi ,,Sisteme autonome avansate pentru controlul oscilaţiilor structurilor”.
Participarea autorului la aceste studii de cercetare a permis acestuia accesul la o bază de
rezultate deosebite în domeniul controlului seismic structural, rezultate pe care s-au pus
bazele elaborării acestei lucrări.
În continuare, doresc să mulţumesc Prof. Univ. Dr. Ing. Dan LUNGU şi Prof. Univ.
Dr. Ing. Radu Văcăreanu pentru posibilitatea participării mele, în cadrul Centrului Naţional
de Reducere a Riscului Seismic, la evenimentele ştiinţifice şi de cercetare care au avut loc în
perioada 2003-2007, incluzând participarea la două stagii valoroase de pregătire în Japonia.
Deasemenea, ţin să mulţumesc colegilor de la Centrul Naţional de Reducere a Riscului
Seismic, pentru încrederea şi colegialitatea de care au dat dovadă.
Doresc să îmi exprim mulţumirile colectivului Catedrei de Construcţii din Beton
Armat a Facultăţii de Construcţii Civile, Industriale şi Agricole, în cadrul căreia am activat în
perioada 2002-2007, şi în special Prof. Univ. Dr. Tudor POSTELNICU, pentru sprijinul şi
încrederea acordate.
Mulţumesc, în mod special, Dlui. Conf. Univ. Dr. Ing. Ştefan BEŢEA pentru
valoroasele contribuţii ştiintifice pe care le-a adus la lucările de cercetare elaborate de
colectivul din care şi eu am făcut parte şi din care am valorificat o bună parte din rezultate în
teza de doctorat. Îi mulţumesc deasemenea şi pentru generozitatea cu care m-a sprijinit şi m-a
îndrumat pe tot parcursul elaborării tezei.
Pe această cale, mulţumesc Prof. Univ. Dr. Ing. Dan CREŢU, care prin calitatea sa
de îndrumător al disertaţiei de studii aprofundate mi-a îndrumat paşii, pentru prima oară, pe
domeniul controlului structural.
Nu în ultimul rând aş dori să mulţumesc tatălui meu, Prof. Univ. Dr. Ing. Constantin
PAVEL, pentru grija sa de părinte şi pentru sprijinul ca îndrumător profesional şi consultant
ori de câte ori a fost nevoie. Deasemenea adresez mulţumiri colegului meu, Ing. Lucian
STANCIU pentru comentariile şi sugestiile valoroase referitoare la subiectul tezei de
doctorat.
Întreaga mea activitate didactică şi de cercetare s-a desfăşurat în cadrul Facultăţii de
Construcţii Civile, Industriale şi Agricole, în cadrul căreia am beneficiat de condiţii optime
de lucru, şi pentru care îmi exprim deosebita mea recunoştiinţă conducerii acestei facultăţi.

CUPRINS Pagina 3 din 159
CUPRINS
CUVÂNT ÎNAINTE ............................................................................................................................................. 2
Capitolul 1 - INTRODUCERE ........................................................................................................................... 5
1.1. Date generale. Formularea problemei ......................................................................................................... 5
1.2. Evoluţia metodelor de protecţie la acţiuni seismice .................................................................................... 6
1.3. Tipuri de metode de control al răspunsului structural ............................................................................... 15
1.4. Obiectul tezei de doctorat .......................................................................................................................... 23
1.5. Conţinutul tezei ......................................................................................................................................... 24
Capitolul 2 – CONTRIBUŢII LA DEZVOLTAREA UNOR METODE DE CONTROL STRUCTURAL
PRIN UTILIZAREA DE AMORTIZORI SEMI-ACTIVI ............................................................................. 27
2.1. Aspecte generale ....................................................................................................................................... 27
2.2. Amortizorul semi-activ realizat în cadrul programului de cercetare U.T.C.B.-U.P.B. .............................. 29
2.3. Formularea matematică a dinamicii sistemului cu amortizare suplimentară controlată la nivelul bazei ... 31
2.4. Experimentări numerice privind comportarea unor structuri echipate cu amortizori semi-activi ............. 35
2.4.1. Determinarea răspunsului sistemului utilizând reprezentarea în spaţiul stărilor. Exemplu comparativ
pentru trei strategii de control. ..................................................................................................................... 35
2.4.2. Strategia 1. Forţa dispozitivului de disipare depinde doar de viteza bazei )( bazadispdisp xcc ....... 38
2.4.3. Strategia 2. Forţa dispozitivului de disipare depinde de viteza şi deplasarea bazei ........................... 41
2.4.4. Strategia 3. Menţinerea constantă a forţei din dispozitiv peste o anumită viteză ............................... 44
2.5. Concluzii ................................................................................................................................................... 47
Capitolul 3 – CONTRIBUŢII LA PERFECŢIONAREA CONTROLULUI STRUCTURAL PRIN
IZOLAREA BAZEI ........................................................................................................................................... 49
3.1. Generalităţi. Tipuri de sisteme de izolare a bazei ...................................................................................... 49
3.1.1. Principiul metodei .............................................................................................................................. 49
3.1.2. Izolatori seismici din elastomeri ........................................................................................................ 50
3.1.3. Izolatori seismici din elastomeri cu miez de plumb (LRB) ................................................................ 52
3.1.4. Sisteme de izolare a bazei cu frecare ................................................................................................. 54
3.1.5. Izolatori cu resorturi elastice .............................................................................................................. 55
3.2. Comentarii referitoare la condiţiile de aplicare a tehnologiei de izolare a bazei în ţara noastră ............... 57
3.3. Aspectul energetic al problemei ................................................................................................................ 58
3.4. Posibilităţi de utilizare a unor metode mixte de control structural. Studiu parametric pe structuri multi-
etajate pentru diferite nivele de amortizare ...................................................................................................... 62
3.5. Observaţii şi concluzii ............................................................................................................................... 69
Capitolul 4 – STUDIU DE CAZ PRIVIND OPORTUNITATEA APLICĂRII METODELOR DE
CONTROL AL RĂSPUNSULUI STRUCTURAL ŞI OPTIMIZAREA ACESTORA ................................ 71

CUPRINS Pagina 4 din 159
4.1. Obiectul studiului ...................................................................................................................................... 71
4.2. Probleme legate de utilizarea metodelor de control ale răspunsului structural în România ...................... 72
4.2.1. Aspecte legate de particularităţile acţiunii seismice........................................................................... 72
4.2.2. Aspecte legate de modelarea structurii şi de tehnologiile de cuantificare a răspunsului .................... 77
4.2.3. Aspecte economice ............................................................................................................................ 77
4.3. Studii parametrice pe modele simplificate cu 1 G.L.D. ,cu baza izolată, pentru determinarea
caracteristicilor optime de amortizare şi de reglare a raportului forţă pasivă/forţă semi-activă ....................... 78
4.4. Studiu de caz pe un model spaţial în ipotezele folosirii a diferite metode de control al răspunsului
structural ........................................................................................................................................................... 82
4.4.1. Modelul cu bază fixă .......................................................................................................................... 85
4.4.2. Modelul cu baza izolată prin izolatori elastomerici fără amortizare .................................................. 89
4.4.3. Modelul cu baza izolată – cu izolatori elastomerici şi cu amortizare adiţională pasivă ..................... 94
4.4.4. Modelul cu baza izolată – cu izolatori elastomerici şi cu amortizare adiţională semi-activă ............. 98
4.4.5. Bilanţ energetic comparativ ............................................................................................................. 100
4.5. Concluzii ................................................................................................................................................. 102
Capitolul 5 – APLICAŢIE A METODEI DE IZOLARE A BAZEI LA UN COMPLEX DE CLĂDIRI
DIN BUCUREŞTI............................................................................................................................................. 104
5.1. Descrierea lucrării ................................................................................................................................... 104
5.2. Principii de calcul şi modelare ................................................................................................................ 108
5.3. Rezultatele calculului .............................................................................................................................. 114
5.4. Aspecte locale de proiectare şi de tehnologia execuției .......................................................................... 127
Capitolul 6 - CONCLUZII ............................................................................................................................... 129
6.1. Bazele lucrării .Contextul științific al lucrării. ........................................................................................ 129
6.2. Contribuţiile proprii ale lucrării .............................................................................................................. 130
6.3. Direcţii viitoare de cercetare ................................................................................................................... 132
ANEXA 1 ........................................................................................................................................................... 134
ANEXA 2 ........................................................................................................................................................... 149
ANEXA 3 ........................................................................................................................................................... 153
BIBLIOGRAFIE .............................................................................................................................................. 157

CAPITOLUL 1 - INTRODUCERE Pagina 5 din 159
Capitolul 1
INTRODUCERE
1.1. Date generale. Formularea problemei
Încărcarea gravitaţională are caracter fundamental întrucât acţionează
permanent asupra tuturor construcţiilor, având direcţie şi intensitate cunoscute şi
constante. În consecinţă, proiectarea structurală din toate timpurile a trebuit să
ţină seama în primul rând de acest tip de încărcare.
Pe măsura dezvoltării fondului construit, a dimensiunilor şi
performanţelor construcţiilor s-a impus considerarea în proiectare şi a altor
tipuri de acţiuni şi, în particular a acţiunii sesimice în zonele în care această
acţiune are intensităţi semnificative.
Primele măsuri de protecţie seismică au avut caracter empiric, întrucât
ştiinţa construcţiilor nu dispunea de cunoştiinţele necesare întelegerii
fenomenologiei legate de mişcările seismice şi de o bază de calcul adecvată.
Proiectarea modernă la acţiuni seismice îşi are originile la începutul
secolului al XX-lea. Bazele acesteia au fost puse în Statele Unite ale Americii,
în zona Californiei, o zonă încercată sistematic de seisme cu intensităţi
semnficative.
Metodele moderne de proiectare la acţiunea seismică au evoluat în timp,
începând cu modelarea şi cuantificarea, din ce în ce mai perfecţionată, a acţiunii
seismice şi a efectului acesteia asupra construcţiilor, fapt care a condus, în mod
logic, către dezvoltarea unor soluţii structurale din ce în ce mai performante şi
mai conforme cu nivelul cunoştinţelor acumulate.
Ca o încununare a acestei activităţi moderne de proiectare, care s-a întins
pe mai multe decenii ale secolului al XX-lea, s-a ajuns, în ultimii ani, la :
formularea şi dezvoltarea unei concepţii sintetice, integrate, de proiectare
care valorifică considerabila cantitate de informaţie acumulată pe parcursul mai
multor decenii de cercetare teoretică, activităţi de laborator, studii parametrice,

CAPITOLUL 1 - INTRODUCERE Pagina 6 din 159
activităţi didactice şi ştiinţifice, în strânsă legătură cu activitatea practică.
Această concepţie se caracterizează prin ceea ce numim azi proiectarea bazată
pe performanţă seismică ;
dezvoltarea, ca alternativă la soluţiile şi sistemele clasice de proiectare, a
unor sisteme de control al răspunsului structural la acţiunea seismică.
Înzestrate cu o capacitate de adaptare în vederea optimizării răspunsului
structural, aceste soluţii integrate duc la obţinerea a ceea ce ar putea fi denumit
construcţii inteligente.
Studierea particularităţilor specifice ale diferitelor metode de control
structural, a numeroaselor aspecte ale aplicării practice a acestor metode,
examinarea avantajelor şi limitelor lor constituie astăzi un câmp extrem de fertil
de cercetare.
În această tendinţă majoră a cercetării din domeniul ingineriei seismice se
înscrie contribuţia pe care încearcă să o aducă prezenta teză de doctorat.
Pentru a situa cât mai obiectiv demersul autorului prezentei teze în
contextul modern al proiectării construcţiilor la acţiunea seismică, se va
sintetiza pe scurt, în cele ce urmează, evoluţia metodelor de proiectare la acţiuni
seismice, evidenţiind modul în care cunoştinţele teoretice acumulate în timp au
condus, într-o evoluţie logică, la apariţia metodelor şi sistemelor de control al
răspunsului structural.
1.2. Evoluţia metodelor de protecţie la acţiuni seismice
A. Primele încercări. Probabil, cele mai vechi preocupări de a trata
inginereşte problema protecţiei construcţiilor la acţiuni seismice au apărut pe
coasta vestică a Statelor Unite ale Americii, mai ales ca urmare a cutremurului
devastator de la San Francisco din anul 1906, cutremur care a luat viața a mai
mult de 2000 de oameni şi a distrus peste 27000 clădiri (FEMA 454, 2006).
Răspunsul ingineresc ulterior acestui cutremur şi celor care au urmat la relativ

CAPITOLUL 1 - INTRODUCERE Pagina 7 din 159
scurt timp (Santa Barbara – 1925 , Long Beach 1933) a fost orientat în două
direcţii :
a) Dezvoltarea unor sisteme structurale adecvate preluării în
siguranţă a acţiunii seismice;
b) Iniţierea unor cercetări privind efectul cutremurului asupra
construcţiilor, modelarea acţiunii sale şi pregătirea unor prescripţii de proiectare
anti-cutremur.
În consecinţă, începând cu anul 1927, codul vest-american UBC
(Historical UBC CD-ROM, 1999) include recomandări, transformate mai târziu
în norme obligatorii, referitoare la proiectarea clădirilor la o forţă orizontală
considerată a proveni din acţiunea seismică. Această forţă orizontală, statică,
asimilată în conştiinţa acelor vremuri ca fiind asemănătoare ca aplicare şi mod
de acţiune cu cea provenită din acţiunea vântului, avea valori de 7,5..10% din
greutatea construcţiei. Construcţia se presupunea a avea un răspuns de solid
rigid, acceleraţia ei fiind, în toate punctele, egală cu acceleraţia terenului.
Răspunsul structural se presupunea a fi unul eminamente elastic, fără a se pune
problema ductilităţii, a rigidităţii la forţe laterale sau a deplasărilor relative de
nivel. Condiţiile de proiectare erau strict condiţii exprimate în forţe aplicate
static, abordarea dinamică fiind încă necunoscută. Această metodă de
proiectare, deși depășită din punct de vedere informaţional a fost folosită mult
timp, şi încă mai stă la baza unor coduri de proiectare. Este ceea ce a rămas, în
literatura de specialitate, sub numele de metoda statică.
Sistemele de protecţie seismică dezvoltate în această perioadă sunt în
conformitate cu nivelul de conştientizare şi cunoaştere a efectului acţiunii
seismice asupra construcţiilor. Necunoscându-se aspectele răspunsului
dinamic,elastic sau postelastic al structurilor,în alcătuirea constructivă a
structurilor s-au menţinut prevederile constructive specifice solicitărilor statice
în domeniul elastic.
CAPITOLUL 1 - INTRODUCERE Pagina 8 din 159
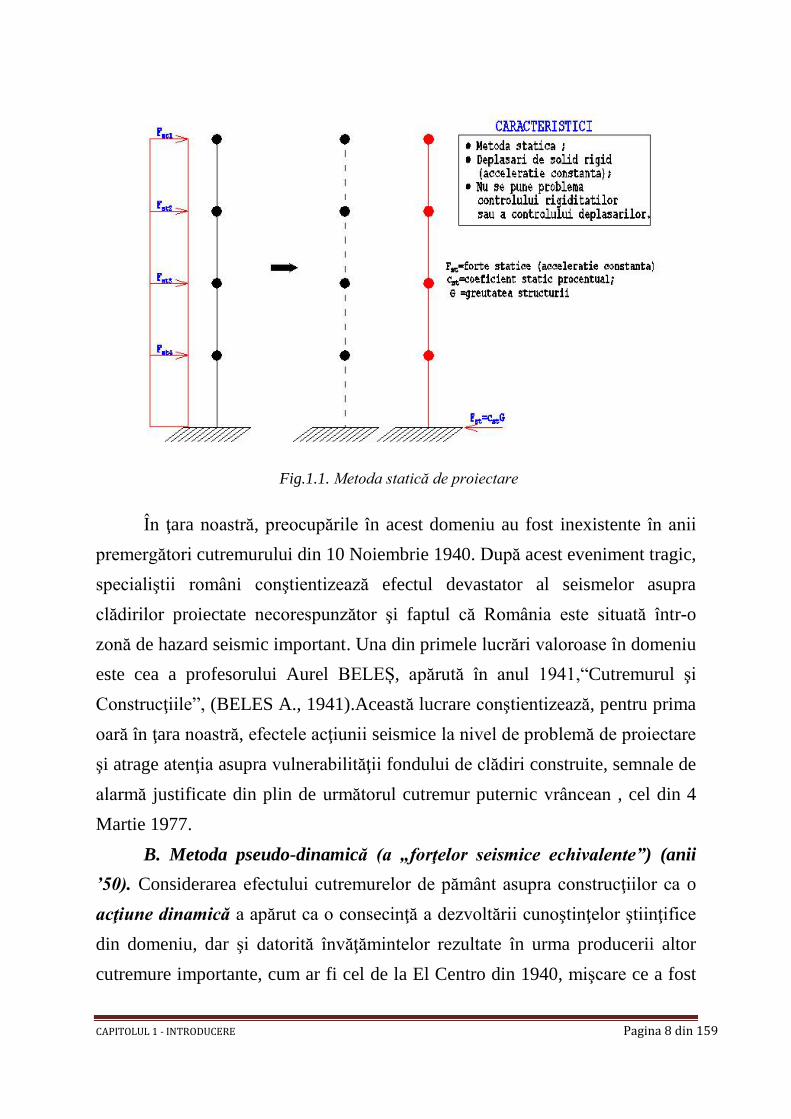
Fig.1.1. Metoda statică de proiectare
În ţara noastră, preocupările în acest domeniu au fost inexistente în anii
premergători cutremurului din 10 Noiembrie 1940. După acest eveniment tragic,
specialiştii români conştientizează efectul devastator al seismelor asupra
clădirilor proiectate necorespunzător şi faptul că România este situată într-o
zonă de hazard seismic important. Una din primele lucrări valoroase în domeniu
este cea a profesorului Aurel BELEȘ, apărută în anul 1941,“Cutremurul şi
Construcţiile”, (BELES A., 1941).Această lucrare conştientizează, pentru prima
oară în ţara noastră, efectele acţiunii seismice la nivel de problemă de proiectare
şi atrage atenţia asupra vulnerabilităţii fondului de clădiri construite, semnale de
alarmă justificate din plin de următorul cutremur puternic vrâncean , cel din 4
Martie 1977.
B. Metoda pseudo-dinamică (a „forţelor seismice echivalente”) (anii
’50). Considerarea efectului cutremurelor de pământ asupra construcţiilor ca o
acţiune dinamică a apărut ca o consecinţă a dezvoltării cunoştinţelor ştiinţifice
din domeniu, dar şi datorită învăţămintelor rezultate în urma producerii altor
cutremure importante, cum ar fi cel de la El Centro din 1940, mişcare ce a fost

CAPITOLUL 1 - INTRODUCERE Pagina 9 din 159
instrumentată şi a oferit, pentru prima dată, o idee asupra caracterului şi
conţinutului în frecvenţe a undelor seismice.
Aceasta metodă încearcă să cuantifice răspunsul structurii ca fenomen
dinamic, plan sau spaţial, prin forţe seismice orizontale „echivalente” forţelor de
inerţie punând în evidenţă importanţa modurilor proprii de oscilaţie asupra
mărimii acestora. Acţiunea seismică globală este în continuare exprimată ca o
forţă orizontală egală cu un anumit procent din greutatea construcţiei, cu toate
că valoarea „coeficientului seismic” este exprimat ca funcţie de perioada proprie
a clădirii iar distribuţia forţei seismice pe înălţimea clădirii se face în funcţie de
vectorii proprii ai sistemului dinamic ce modelează structura. Din punct de
vedere teoretic, metoda se bazează pe analiza modală şi pe spectrele elastice de
răspuns, forţa seismică ce ar corespunde unui răspuns elastic fiind corectată apoi
cu coeficienţi empirici de reducere, asociaţi (iniţial) gradului de nedeterminare
statică a structurii.
Bazele teoretice ale acestei abordări au fost formulate şi discutate pentru
întâia dată la prima Conferinţa Mondială de Inginerie Seismică, desfășurată la
San Francisco în 1956 (Proceedings of The First World Conference on
Earhquake Engineering, 1956). Se consideră că această conferinţă constituie
„actul de naştere” al Ingineriei Seismice, disciplină nouă în domeniul calculului
structural care, de la acea dată, a cunoscut o dezvoltare spectaculoasă.
Fig.1.2. Metoda pseudodinamică de proiectare

CAPITOLUL 1 - INTRODUCERE Pagina 10 din 159
În ţara noastră, sunt de evidenţiat contribuţiile fundamentale ale prof.
Alexandru CIȘMIGIU şi ing. Emilian ŢIŢARU, încă din anii ’50, la
introducerea conceptelor moderne ale calculului pseudo-dinamic la acţiuni
seismice, anticipând, încă din acei ani, ideea caracterului post-elastic al
răspunsului seismic şi necesitatea controlului deplasărilor laterale.
Structurilor proiectate potrivit metodei pseudo-dinamice li se impunea un
set de măsuri de alcătuire generală şi de detaliu astfel încât răspunsul seismic să
fie cât mai favorabil. Dintre măsurile cuprinse în acest set se pot aminti cele
legate de simetria structurală (reducerea la minim a efectului de torsiune de
ansamblu), de alcătuirea cât mai uniformă (monotonă) pe verticală, de dispunere
avantajoasă a elementelor cu rigiditate maximă la deplasări orizontale, etc.
C. Considerarea caracterului post-elastic al răspunsului seismic (anii
’60-’90). Cercetările teoretice şi de laborator, mereu cu un pas înaintea codurilor
şi a practicii de proiectare, au pus în evidenţă, încă din anii ’50, caracterul
post-elastic al răspunsului seismic. O cuprinzătoare sinteză asupra calculului
post-elastic al structurilor la acţiuni seismice, cu evidenţierea rolului ductilităţii
asupra capacităţii structurilor de a disipa energia indusă de cutremur precum şi
asupra detaliilor constructive ce asigură o ductilitate ridicată, o constituie cartea
Design of Multistory Reinforced Concrete Buildings for Earthquake Motions
(BLUME J.A.,NEWMARK N.M.,CORNING L.H., 1961). Dezvoltarea rapidă,
spectaculoasă, a mijloacelor de calcul automat (echipamente şi programe de
calcul), începând cu anii ’60, a permis implementarea în practica de proiectare,
cel puţin pentru construcţiile de importanţă majoră concepute de proiectanţii
de vârf ai domeniului, a calculului post-elastic la acţiuni seismice în diferite
variante: procedee „push over”, analiza dinamică neliniară, metode energetice.
Un factor major care a facilitat introducerea în normele de proiectare
seismică a cercetărilor referitoare la răspunsul post-elastic al structurilor la
acţiunea unor cutremure puternice o constituie dezvoltarea metodei proiectării
capacităţii de rezistenţă a structurilor (Thomas Paulay). Importanţa acestei

CAPITOLUL 1 - INTRODUCERE Pagina 11 din 159
metode constă în faptul că, prin rafinarea şi adaptarea metodei
pseudo-dinamice, familiară inginerilor proiectanţi, permite asigurarea unui
răspuns post-elastic controlat, făcând posibilă diferenţierea zonelor plastice
potenţiale de cele la care se poate impune un răspuns elastic, prin ierarhizarea
capacitaţilor de rezistenţă.
Răspunsul dinamic complex post-elastic este recunoscut, în această
perioadă, de normele de proiectare care încep să conţină cerinţe şi reguli
specifice. Asigurarea unei capacităţi suficiente de rezistenţă şi a unei înalte
capacităţi de disipare de energie prin deformaţii postelastice a impus norme
noi, condiţii legate de materiale, secţiuni şi elemente. Este de amintit în acest
context sintagma, enough resistance, high ductility enunţată de către
profesorul japonez Kyioshi Muto.
Fig.1.3. Proiectarea considerând comportarea postelastică a structurilor
Ierarhizarea capacitaţilor de rezistenţă şi proiectarea ţinând cont de
ductilitate a condus la dezvoltarea unor abordări energetice ale proiectării
seismice ( fig. 1.4).

CAPITOLUL 1 - INTRODUCERE Pagina 12 din 159
Fig.1.4. Abordări energetice în proiectarea structurilor
În paralel, în anii ’70, se evidenţiază importanţa controlului deplasărilor
laterale în asigurarea unui răspuns avantajos, privind protecţia elementelor
nestructurale cu rupere fragilă. În ţara noastră, efectele acestor cuceriri ale
ingineriei seismice se fac simţite atât prin contribuţia prin studii de cercetare
efectuate de către specialiştii români, cât şi prin dezvoltarea şi actualizarea
codurilor de proiectare seismică. Un moment crucial în introducerea în normele
de proiectare seismică a ultimelor cuceriri ştiinţifice este legat de devastatorul
cutremur de pământ din seara zilei de 4 Martie 1977. Acest cutremur, care a luat
viața a mai mult de 2000 de oameni şi a produs pagube materiale însemnate a
generat o nouă direcţie în proiectarea seismică românească. Astfel normativul
după care se efectua proiectarea (P13-70, 1970), care nu conţinea măsuri
referitoare la ductilitate sau la controlul deplasărilor laterale şi avea ca bază de
calcul modelul spectrului cu amplificare dinamică în zona perioadelor “joase”
(0,2..0,5 sec) a cutremurului de la El Centro (1940) (USGS Description of the
El Centro Earthquake Website, 2008) a fost radical schimbat, prin elaborarea
noului normativ P100-78,urmat apoi de P100-81, adaptate la progresul ştiinţei la
momentul respectiv şi conţinând condiţiile spectrale de amplasament specifice
cutremurelor de pămănt cu epicentrul în Munţii Vrancei. La elaborarea acestor
norme s-a beneficiat, pentru prima dată în România, de o înregistrare
instrumentală, din care să rezulte caracteristicile mişcărilor seismice vrâncene,
fundamental diferite de cele de la El Centro, California.

CAPITOLUL 1 - INTRODUCERE Pagina 13 din 159
D. Tendinţe actuale în proiectarea la acţiuni seismice: proiectarea
bazată pe conceptul de performanţă seismică. Cu scopul valorificării cantităţii
uriaşe de cunoştinţe referitoare la comportarea, calculul şi alcătuirea judicioasă
ale construcţiilor supuse cutremurelor de pământ de mare intensitate, Asociaţia
Inginerilor Structurişti din California („SEAOC”) a încredinţat unui colectiv
puternic de specialişti elaborarea unui raport de sinteză şi a unui program menit
să conducă la dezvoltarea unei noi generaţii de norme de proiectare la acţiuni
seismice. Ca prim rezultat al activităţii acestui colectiv a fost documentul
intitulat „Vision 2000. A Framework for Performance Based Earthquake
Engineering" (SEAOC, 1995). Raportul are ca scop propunerea unor metode
practice referitoare la amplasarea, proiectarea, execuţia şi întreţinerea
construcţiilor astfel încât acestea să răspundă acţiunilor seismice de un anumit
nivel, într-un mod predictibil faţă de un set predefinit de cerinţe, pe toată durata
lor de viaţă.
Procesul de cuantificare, definire şi implementare în normele californiene
de proiectare la acţiuni seismice al propunerilor conţinute în acest document-
cadru este, în prezent, în plină desfăşurare.
Fig.1.5. Proiectarea bazată pe criterii de performanţă
E. Controlul structural. Filosofia „clasică” (fără control structural
explicit) de proiectare la acţiuni seismice acceptă, din considerente economice,
comportarea post-elastică a structurilor, ca bază a reducerii intensităţilor forţelor
seismice de proiectare. Aceasta înseamnă că o construcţie proiectată potrivit
CAPITOLUL 1 - INTRODUCERE Pagina 14 din 159
acestei concepţii va suferi unele degradări la cutremurele de mare intensitate,
acestea fiind, în principiu, limitate ca extindere şi uşor de reparat. Caracterul
incert al degradărilor implicate de acceptarea comportării post-elastice a
structurilor, necesitatea intervenţiilor după cutremur, cu implicaţii economice
semnficative şi cu întreruperi inevitabile ale unor activităţi sunt neajunsuri
inerente în această concepţie de proiectare. Se naşte astfel întrebarea dacă nu
s-ar putea minimiza aceste costuri prin introducerea în construcţie a unor
dispozitive care să asigure o decuplare a bazei construcţiei de la sol sau care să
îi mărească semnificativ capacitatea de amortizare. Cu alte cuvinte, se pune
problema găsirii şi utilizării unor dispozitive adecvate care să asigure un grad
ridicat de control al răspunsului seismic.
O structură, indiferent de complexitatea ei, poate fi privită ca un sistem
dinamic, al cărui răspuns la o excitaţie exterioară este caracterizat de trei
parametri: masă , amortizare şi rigiditate. Intervenţia controlată, în stadiul de
proiectare sau post-proiectare (consolidare), asupra oricăruia din aceşti trei
parametri pot modifica răspunsul structurii, în sensul reducerii efectelor produse
de către acţiunea seismică. Tehnicile de modificare a oricăruia dintre aceşti
parametri în vederea optimizării răspunsului seismic poartă denumirea de
control al răspunsului.(fig 1.6.). Controlul răspunsului se poate materializa fie
prin reducerea amplitudinii oscilaţiilor, când se intervine asupra caracteristicilor
inerţiale ale sistemului, fie prin creşterea amortizării inerente fiecărei structuri,
permiţând astfel o disipare suplimentară de energie prin amortizare, fie prin
modificarea rigidităţii structurii prin introducerea unor discontinuităţi pe
înălţimea clădirii, cu rol de “decuplare” a structurii de fundaţie sau de partea
care oscilează, fie prin combinaţia metodelor de mai sus. Dispozitivele de
control, uneori derivate ale produselor folosite cu succes în alte industrii, sunt
într-o continuă dezvoltare, fiind potenţate şi de expansiunea bagajului de
cunoştinţe acumulate în ultimii ani.

CAPITOLUL 1 - INTRODUCERE Pagina 15 din 159
Fig.1.6. Controlul răspunsului structural
Evoluţia sistemelor de protecţie seismică, de la începuturile ingineriei
seismice până în zilele noastre poate fi descrisă sintetic în schema din fig. 1.7.
(FEMA 454, 2006).
1.3. Tipuri de metode de control al răspunsului structural
Principial, sistemele de control al răspunsului structural se pot clasifica în
trei mari categorii :
- sisteme pasive de control structural :
o sisteme de izolare seismică :
elastomeri ;
elastomeri cu miez de plumb ;
sisteme de izolare cu frecare ;
o amortizori
amortizori metalici ;
amortizori cu frecare uscată ;
sisteme cu amortizare vâscoelastică uscată sau cu lichid ;
amortizori pasivi acordați;
o sisteme cu masă acordată pasivă ;

CAPITOLUL 1 - INTRODUCERE Pagina 16 din 159
Fig.1.7. Evoluția metodelor de proiectare seismică
CAPITOLUL 1 - INTRODUCERE Pagina 17 din 159
- sisteme semi-active şi active ;
amortizori semi-activi cu rigiditate variabilă ;
amortizori semi-activi cu amortizare variabilă ;
masă acordată activă ;
amortizori activi ;
amortizori cu masa lichidă acordaţi (tuned liquid
dampers);
materiale inteligente (piezoelectrice, fluide
electroreologice, magnetoreologice, etc.)
A. Sisteme de control structural pasive, active şi semi-active. Scurtă
descriere
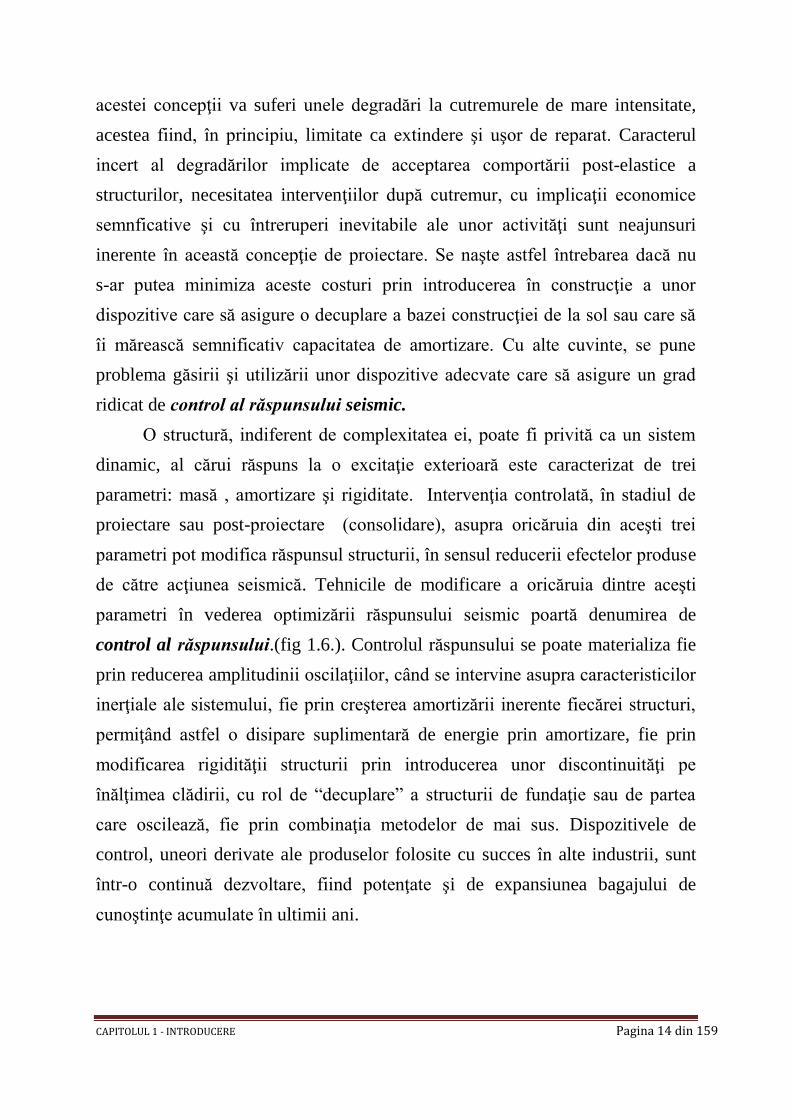
Sistemele de control pasive se caracterizează prin faptul că, odată
instalate corespunzător în sistem, nu necesită nicio sursă de energie exterioară
pentru a funcţiona şi nu includ forţe suplimentare de control al răspunsului în
structură. Ele se activează la incidenţa unei acţiuni externe (cutremur sau vânt),
energia care asigură funcţionarea lor fiind dată chiar de către energia indusă de
către excitaţia respectivă, iar funcţionarea lor modifică atât caracteristicile
structurii cât şi a răspunsului dinamic, aşa cum reiese din figura 1.8.
Fig.1.8. Principiul de funcţionare a sistemelor pasive de control
CAPITOLUL 1 - INTRODUCERE Pagina 18 din 159
Spre deosebire de cele pasive, sistemele de control active dezvoltă forţe
suplimentare de control al răspunsului în structură generate prin aport de energie
exterioară structurii. Amplitudinea şi direcţia acestor forţe sunt determinate de
un “ controller”, bazat pe anumiţi senzori şi algoritmi de control. De exemplu,
pentru un sistem activ hidraulic, forţele de control pot fi dezvoltate de actuatori
hidraulici, iar în cazul acţiunilor de intensitate ridicată aceste forţe de control
pot fi însemnate. Funcţionarea sursei exterioare de energie trebuie asigurată în
permanenţă pe timpul acţiunii seismice.
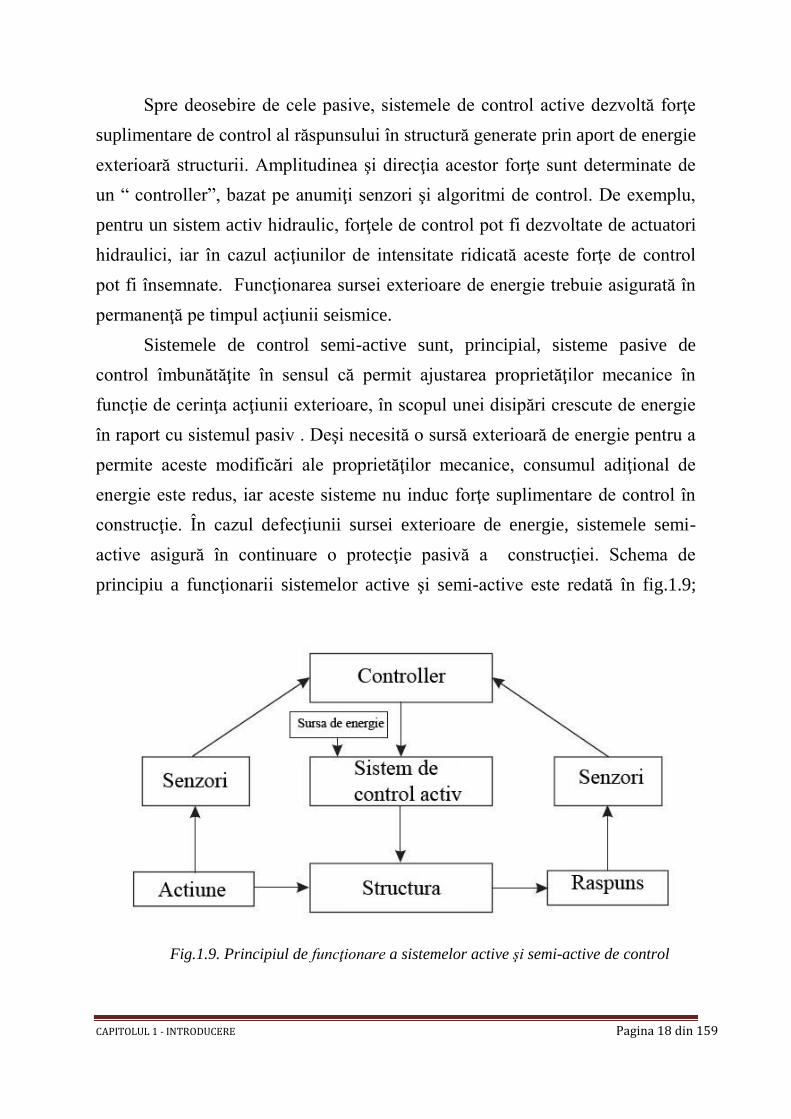
Sistemele de control semi-active sunt, principial, sisteme pasive de
control îmbunătăţite în sensul că permit ajustarea proprietăţilor mecanice în
funcţie de cerinţa acţiunii exterioare, în scopul unei disipări crescute de energie
în raport cu sistemul pasiv . Deşi necesită o sursă exterioară de energie pentru a
permite aceste modificări ale proprietăţilor mecanice, consumul adiţional de
energie este redus, iar aceste sisteme nu induc forţe suplimentare de control în
construcţie. În cazul defecţiunii sursei exterioare de energie, sistemele semi-
active asigură în continuare o protecţie pasivă a construcţiei. Schema de
principiu a funcţionarii sistemelor active şi semi-active este redată în fig.1.9;
Fig.1.9. Principiul de funcţionare a sistemelor active şi semi-active de control

CAPITOLUL 1 - INTRODUCERE Pagina 19 din 159
B. Avantaje şi dezavantaje ale diferitelor metode de control al
răspunsului structural
Toate cele trei sisteme de control ale răspunsului seismic prezentate mai
sus prezintă atât avantaje caracteristice, cât şi dezavantaje inerente. Câteva
dintre acestea sunt sintetizate pe scurt, în cele ce urmează :
SISTEME DE CONTROL PASIV :
Avantaje :
- cost de realizare relativ scăzut ;
- instalare şi întreținere uşor de efectuat ;
- nu introduc forţe suplimentare în structură ;
- nu necesită o sursă exterioară de energie pentru a funcţiona ;
- pot fi produse pe scară largă, fără a se cunoaşte în mod detaliat
comportarea fiecărei structuri în parte ;
Dezavantaje :
- necesită ( în cazul izolatorilor seismici) asigurarea unui spaţiu de
deplasare aferent clădirii relativ însemnat ;
- proprietăţile materialelor depind de condiţiile de mediu ;
- proprietățile materialelor se modifică în timp şi după un număr de
cicluri de funcţionare ;
- pot necesita înlocuirea după o acţiune seismică importantă ;
SISTEME DE CONTROL SEMI - ACTIV :
Avantaje :
- nu introduc forţe suplimentare în structură ;

CAPITOLUL 1 - INTRODUCERE Pagina 20 din 159
- permit ajustarea proprietăţilor mecanice, în funcţie de intensitatea
excitaţiei ;
- necesită o sursă exterioară de energie de capacitate redusă pentru a
funcţiona ;
- în cazul defectării sursei de energie, funcţionarea nu este împiedicată,
sistemul comportându-se ca şi unul pasiv ;
Dezavantaje :
- complexitatea şi implicit costul realizării lor sunt superioare sistemelor
pasive ;
- comportarea dinamică a structurii trebuie cunoscută la un nivel înalt
de fidelitate, înainte de a se elabora algoritmii de control ;
SISTEME DE CONTROL ACTIV :
Avantaje :
- permit un control eficient, în timp real al structurii, permițând ajustarea
oscilaţiilor structurii, în funcţie de acţiune ;
- eficacitatea controlului depinde mai puţin de proprietăţile materialelor
sau de comportarea în timp ;
Dezavantaje :
- costul de realizare şi întreţinere este ridicat ;
- induc forţe adiţionale care pot fi însemnate în structură ;
- funcţionalitatea lor depinde decisiv de funcţionarea neîncetată a sursei
exterioare de energie ;
- consumul de energie realizat de sursa exterioară poate fi ridicat;
- algoritmii de control necesită o complexitate şi o acurateţe
considerabilă ;
CAPITOLUL 1 - INTRODUCERE Pagina 21 din 159
C. Aplicaţii semnificative ale tehnicilor de control structural
Realizările pe plan mondial în domeniul controlului structural sunt
concentrate în ţările cu economie dezvoltată şi active din punct de vedere al
evenimentelor seismice ( Japonia, SUA, Noua Zeelandă etc.) dar tendinţa este
una de extindere şi de creştere a gradului de accesibilitate şi pentru ţări mai
puţin dezvoltate ( ex. Tarile Americii Latine, Turcia, Orientul Mijlociu etc.)
În domeniul izolării bazei exemple semnificative sunt date de realizările
din Statele Unite ale Americii unde ar fi de menţionat intervenţia de izolare a
bazei a clădirii primăriei din Los Angeles (1996) (NAEIM F. , KELLY J.M.,
1999), cu o suprafaţa totală de 83.000 mp. Sistemul de izolare consta în 475 de
izolatori din cauciuc cu amortizare ridicată,60 de izolatori cu frecare şi 52
amortizori vâsco-elastici. Costul total al lucrărilor a fost de 150 milioane de
dolari, din care 3,5 milioane preţul efectiv al dispozitivelor.
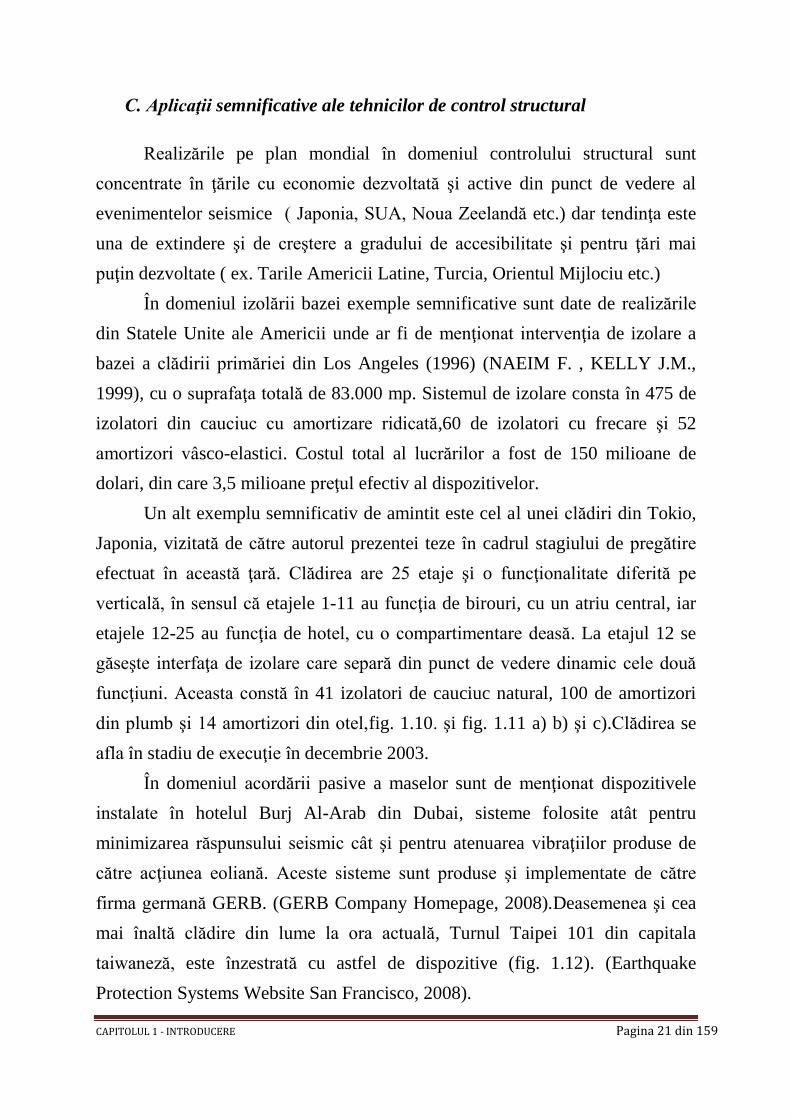
Un alt exemplu semnificativ de amintit este cel al unei clădiri din Tokio,
Japonia, vizitată de către autorul prezentei teze în cadrul stagiului de pregătire
efectuat în această ţară. Clădirea are 25 etaje şi o funcţionalitate diferită pe
verticală, în sensul că etajele 1-11 au funcţia de birouri, cu un atriu central, iar
etajele 12-25 au funcţia de hotel, cu o compartimentare deasă. La etajul 12 se
găseşte interfaţa de izolare care separă din punct de vedere dinamic cele două
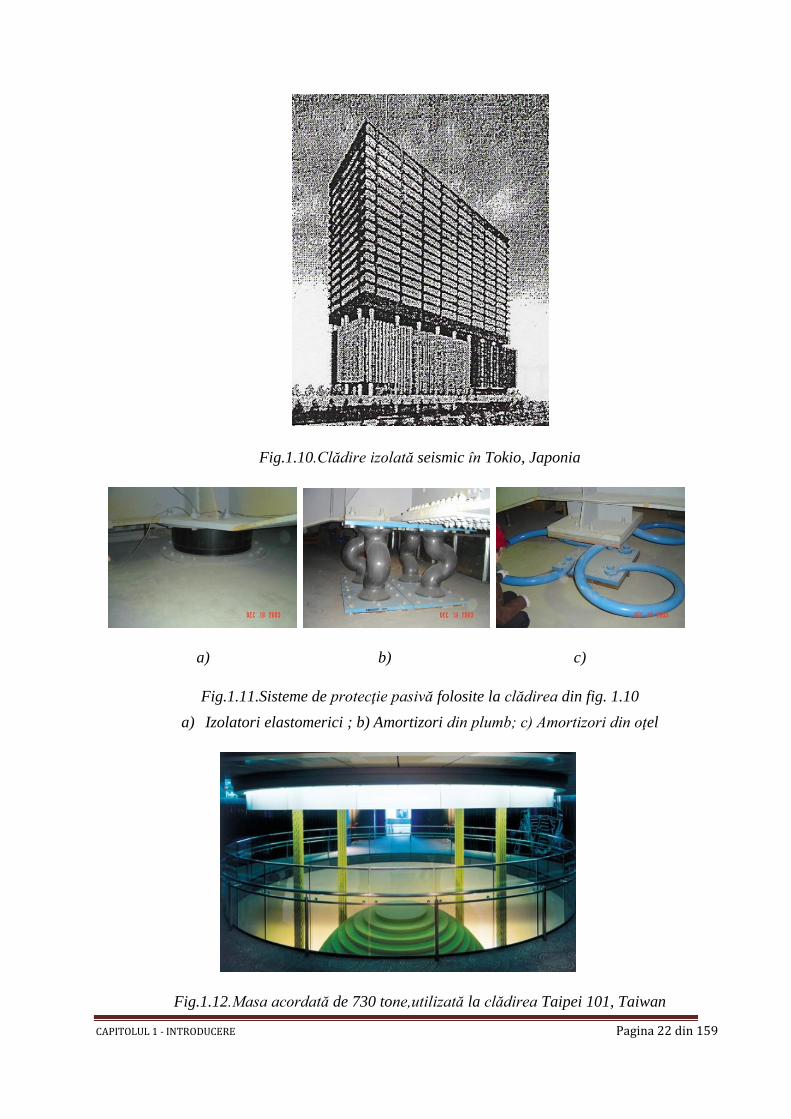
funcţiuni. Aceasta constă în 41 izolatori de cauciuc natural, 100 de amortizori
din plumb şi 14 amortizori din otel,fig. 1.10. şi fig. 1.11 a) b) şi c).Clădirea se
afla în stadiu de execuţie în decembrie 2003.
În domeniul acordării pasive a maselor sunt de menţionat dispozitivele
instalate în hotelul Burj Al-Arab din Dubai, sisteme folosite atât pentru
minimizarea răspunsului seismic cât şi pentru atenuarea vibraţiilor produse de
către acţiunea eoliană. Aceste sisteme sunt produse şi implementate de către
firma germană GERB. (GERB Company Homepage, 2008).Deasemenea şi cea
mai înaltă clădire din lume la ora actuală, Turnul Taipei 101 din capitala
taiwaneză, este înzestrată cu astfel de dispozitive (fig. 1.12). (Earthquake
Protection Systems Website San Francisco, 2008).
CAPITOLUL 1 - INTRODUCERE Pagina 22 din 159
Fig.1.10.Clădire izolată seismic în Tokio, Japonia
a) b) c)
Fig.1.11.Sisteme de protecţie pasivă folosite la clădirea din fig. 1.10
a) Izolatori elastomerici ; b) Amortizori din plumb; c) Amortizori din oţel
Fig.1.12.Masa acordată de 730 tone,utilizată la clădirea Taipei 101, Taiwan
CAPITOLUL 1 - INTRODUCERE Pagina 23 din 159
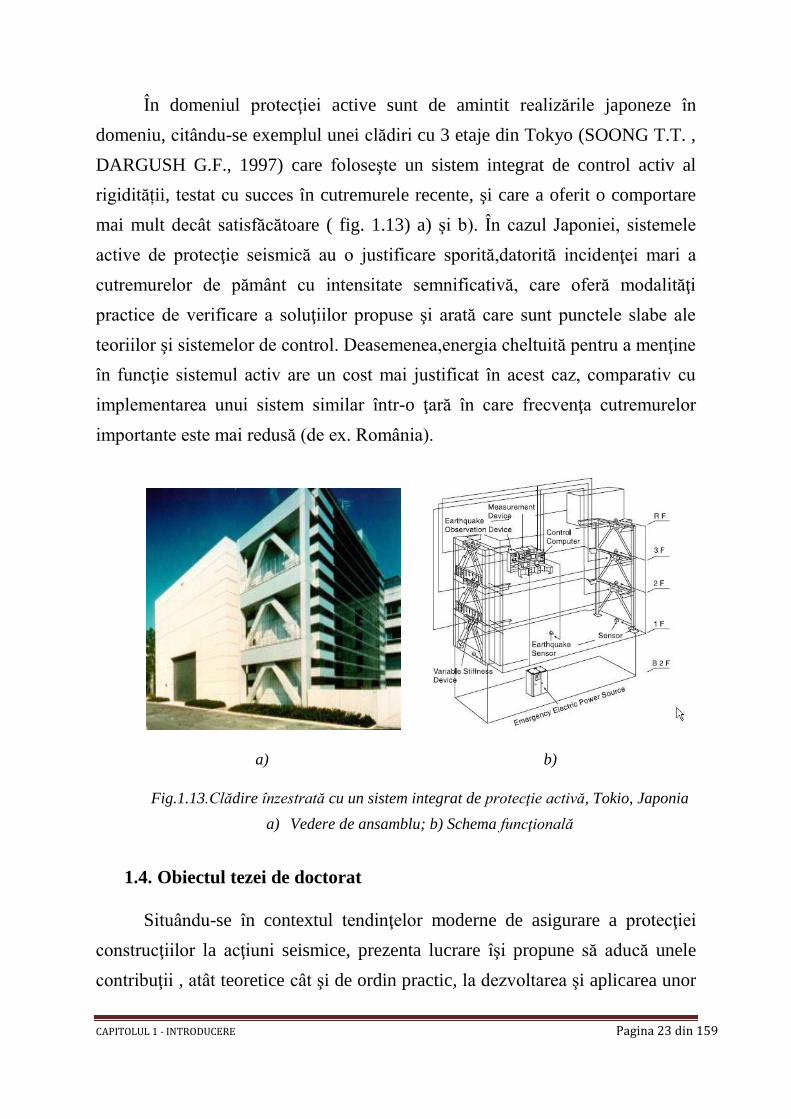
În domeniul protecţiei active sunt de amintit realizările japoneze în
domeniu, citându-se exemplul unei clădiri cu 3 etaje din Tokyo (SOONG T.T. ,
DARGUSH G.F., 1997) care foloseşte un sistem integrat de control activ al
rigidității, testat cu succes în cutremurele recente, şi care a oferit o comportare
mai mult decât satisfăcătoare ( fig. 1.13) a) şi b). În cazul Japoniei, sistemele
active de protecţie seismică au o justificare sporită,datorită incidenţei mari a
cutremurelor de pământ cu intensitate semnificativă, care oferă modalităţi
practice de verificare a soluţiilor propuse şi arată care sunt punctele slabe ale
teoriilor şi sistemelor de control. Deasemenea,energia cheltuită pentru a menţine
în funcţie sistemul activ are un cost mai justificat în acest caz, comparativ cu
implementarea unui sistem similar într-o ţară în care frecvenţa cutremurelor
importante este mai redusă (de ex. România).
a) b)
Fig.1.13.Clădire înzestrată cu un sistem integrat de protecţie activă, Tokio, Japonia
a) Vedere de ansamblu; b) Schema funcţională
1.4. Obiectul tezei de doctorat
Situându-se în contextul tendinţelor moderne de asigurare a protecţiei
construcţiilor la acţiuni seismice, prezenta lucrare îşi propune să aducă unele
contribuţii , atât teoretice cât şi de ordin practic, la dezvoltarea şi aplicarea unor

CAPITOLUL 1 - INTRODUCERE Pagina 24 din 159
metode avansate de control al răspunsului structural, adaptate condiţiilor
specifice ţării noastre.
Autorul prezentei teze de doctorat a avut şansa de a fi fost implicat direct
în desfăşurarea unui vast program de cercetare, iniţiat şi condus de către Prof.
Univ.Dr. Ing. Petre PĂTRUŢ, care a avut ca finalitate realizarea – la nivel de
prototip, gata de a fi utilizat în practică – a unui amortizor seismic semi-activ de
concepţie originală precum şi precizarea specificaţiilor de utilizare, în condiţiile
ţării noastre, a unor procedee practice de izolare a bazei. Din ampla cercetare
desfăşurată de două colective de specialişti, unul din cadrul Universităţii
Tehnice de Construcții București (U.T.C.B.) şi celălalt de la Universitatea
Politehnica Bucureşti (U.P.B.) implicat în studierea aspectelor de automatizare,
partea la care a lucrat direct autorul tezei s-a referit la aspectele structurale ale
implementării sistemului de control structural propus. Aceste cercetări şi
rezultate sunt prezentate în capitolele al doilea şi al treilea ale tezei.
În scopul evidenţierii aspectelor practice şi a rezultatelor efective ale
aplicării acestor sisteme de control structural, autorul a efectuat un studiu de caz
complet, al cărui conţinut este prezentat sintetic în capitolul al patrulea al tezei.
În ultimii ani, autorul tezei a participat, în calitate de co-proiectant, la
conceperea şi proiectarea sistemului de izolare a bazei unei importante clădiri de
birouri ce urmează a se amplasa în centrul Capitalei. Aspectele teoretice şi
practice apărute pe parcursul procesului de proiectare a acestui obiectiv
constituie obiectul capitolului al cincilea al prezentei lucrări.
1.5. Conţinutul tezei
Teza de doctorat este structurată pe șase capitole.
Primul capitol, cu caracter introductiv, are ca scop definirea cadrului
general în care se situează obiectul tezei de doctorat. În această idee se face o
scurtă descriere a evoluţiei metodelor de proiectare la acţiuni seismice, pornind
de la nivelul anilor ’30 şi ajungându-se până la tendinţele corespunzătoare
CAPITOLUL 1 - INTRODUCERE Pagina 25 din 159
primului deceniu al mileniului al III-lea. Analiza caută să evidenţieze logica
apariţiei sistemelor de control al răspunsului structural ca procedeu modern,
avansat, de asigurare a protecţiei construcţiilor la acţiuni seismice de mare
intensitate. Metodele de control structural sunt clasificate şi explicate prin
modificările aduse unuia dintre cei trei parametri esenţiali ce caracterizează
comportarea oricărui sistem dinamic: masă, amortizare, rigiditate. Sunt
prezentate, pe scurt, cele mai reprezentative metode, modul lor de funcţionare,
principalele avantaje şi dezavantaje, precum şi aplicaţii reale ale acestor
dispozitive şi tehnologii.
Capitolul al II-lea analizează în detaliu principiile amortizării
semi-active, prezintă avantajele şi dezavantajele acestei tehnologii. Sunt
prezentate contribuţiile autorului tezei la aspectele structurale ale programului
de cercetare desfăşurat de către amplul colectiv multidisciplinar
U.T.C.B.-U.P.B., care a condus la realizarea unui amortizor semi-activ de
concepţie originală. Aceste contribuţii au încercat să clarifice problemele legate
de aplicarea acestei metode de control structural în practică, atât prin
consideraţii de ordin calitativ cât şi cantitativ.
Capitolul al III-lea aduce în atenţie tehnologia de izolare a bazei, cu
problemele aferente utilizării acesteia în condiţiile specifice ţării noastre. Sunt
studiate în detaliu şi sunt prezentate posibilităţile de utilizare a acestui sistem,
direct sau în combinaţie cu alte tipuri de sisteme de control al răspunsului
seismic.
Capitolul al IV-lea prezintă un studiu de caz, efectuat pe o structură din
cadre de beton armat dimensionată astfel încât să prezinte o flexibilitate
exagerată şi o conformare dinamică defectuoasă. Studiul de caz caută să
determine, prin studii parametrice, în ce condiţii se poate asigura o protecţie
seismică corespunzătoare, chiar şi pentru o structură proiectată defectuos, prin
implementarea unor dispozitive de control structural pentru care se determină
caracteristicile optime ale fracţiunii din amortizarea critică precum şi raportul
optim intre forţa dezvoltată într-un amortizor semi-activ (compatibil cu cel
prezentat la capitolul al doilea) şi cea dezvoltată în regim pasiv pentru un

CAPITOLUL 1 - INTRODUCERE Pagina 26 din 159
amortizor cu aceleaşi caracteristici. Structura în cadre din beton armat este
analizată în patru ipoteze (baza fixă, izolarea bazei fără amortizare, izolarea
bazei cu amortizare pasivă, izolarea bazei cu amortizare semi-activă),
concluziile fiind formulate atât prin monitorizarea principalilor parametri de
răspuns (acceleraţii structură, deplasări structură, drifturi), cât şi la nivel de
bilanţ energetic comparativ.
Capitolul al V-lea prezintă rezultatele obţinute de către autor în activitatea
practică de co-proiectare a unei structuri reale, în Bucureşti, de dimensiuni
importante şi alcătuire complexă, înzestrată cu dispozitive de control structural
de tip izolatori cu miez de plumb. Sunt prezentate considerentele care au stat la
baza alegerii sistemului de control al răspunsului, problemele concrete apărute
în cazul adaptării la condiţiile de amplasament corespunzătoare oraşului
Bucureşti, modelarea pentru calcul şi rezultatele ei, precum şi dificultăţile, atât
teoretice cât şi practice, care pot apărea în realizarea acestui edificiu.
Capitolul al VI-lea, ultimul, încadrează lucrarea în contextul ştiinţific
aferent. Se prezintă contribuţiile lucrării la dezvoltarea domeniului de
cunoaştere al protecţiei la acţiuni seismice prin implementarea unor metode
concrete de control al răspunsului structural, se formulează concluziile autorului
şi se prezintă direcţiile viitoare de cercetare evidenţiate prin elaborarea prezentei
lucrări.

Capitolul 2 –CONTRIBUTII LA DEZVOLTAREA UNOR METODE DE CONTROL STRUCTURAL Pagina 27 din 159 PRIN UTILIZAREA DE AMORTIZORI SEMI-ACTIVI
Capitolul 2
CONTRIBUȚII LA DEZVOLTAREA UNOR
METODE DE CONTROL STRUCTURAL PRIN
UTILIZAREA DE AMORTIZORI SEMI-ACTIVI
2.1. Aspecte generale
Sistemele cu regim semi-activ combină cu succes avantajele sistemelor
de protecţie pasivă cu cele ale sistemelor de protecţie activă, fără nicio influenţă
negativă asupra parametrilor dinamici ale structurii protejate. În principiu,
sistemele cu regim semi-activ sunt o variantă îmbunătăţită a celor pasive,
oferind un regim variabil al amortizării sau rigidităţii, în funcţie de unii
parametri structurali (viteză, deplasare, acceleraţie).
Sistemele semi-active includ două categorii: cele cu rigiditate variabilă
activă şi cu amortizare variabilă activă. În cadrul primei categorii, rigiditatea
structurii este modificată astfel încât să se obţină o condiţie de non-rezonanţă. În
cadrul celei de a doua categorii, anumite dispozitive disipatoare de energie
(lichide, cu frecare, electroreologice sau magnetoreologice) sunt modificate
astfel încât să permită anumite corecţii în proprietăţile lor mecanice în timpul
excitaţiei de intrare astfel ca răspunsul să poată fi în continuare redus. în
ambele categorii, la fel ca la sistemele pasive, forţele de control sunt generate de
oscilaţia structurii şi de asemenea, similar structurilor active, există dispozitive
care monitorizează efectele sistemului pentru a găsi şi a dezvolta comenzi
eficiente pentru a determina coeficienţii de rigiditate sau de amortizare a
izolatorilor .
Prezenta lucrare dezvoltă şi aduce contribuţii în domeniul sistemelor
semi-active bazate pe controlul amortizării vâscoase.
Amortizorii cu regim variabil pentru structuri au eficienţă ridicată în
reducerea răspunsului seismic, la diferite încărcări dinamice, caracterizându-se
Capitolul 2 –CONTRIBUTII LA DEZVOLTAREA UNOR METODE DE CONTROL STRUCTURAL Pagina 28 din 159 PRIN UTILIZAREA DE AMORTIZORI SEMI-ACTIVI
prin avantajul utilizării unei surse de energie cu capacitate redusă, care poate fi
alimentată permanent fără consumuri mari de energie.
Legea constitutivă de principiu a amortizorilor vâscoşi ilustrează faptul că
forţele induse în structură sunt direct proporţionale cu viteza, după relaţii de
tipul :
𝐹𝑎 = 𝑐 ∙ 𝑣𝛼 (2.1)
unde :
Fa = forţa de amortizare dezvoltată în dispozitiv ;
c = coeficient de amortizare (constant sau variabil);
v = viteza de oscilaţie ;
α = parametru de amortizare,în general subunitar. α=1 reprezintă cazul
amortizării vâscoase liniare ;
Examinând legea de mai sus şi, în plus, analizând din punct de vedere
calitativ ecuaţia de mişcare a unui sistem dinamic, se constată că forţele
dezvoltate în amortizori, fiind direct proporţionale cu viteza, sunt maxime
atunci când structura oscilează în jurul poziţiei de echilibru. În aceste momente
forţele induse de cutremur, care sunt direct proporţionale cu deplasările (pentru
o structură cu răspuns elastic) sunt minime. În situaţia opusă, când deplasările
sunt maxime, forţele în amortizori au valori minime. Cu alte cuvinte cele două
efecte nu se suprapun, ducând astfel la reducerea forţelor induse în structură şi
la o comportare de ansamblu cu stabilitate ridicată. Un alt avantaj al folosirii
dispozitivelor pasive (semi-active) cu amortizare vâscoasă este faptul că forţele
de control dezvoltate de aceştia se opun întotdeauna direcţiei de oscilaţie,
mărind astfel stabilitatea de ansamblu a structurii.
Pentru amortizori variabili, coeficientul de amortizare c(t) în timpul
răspunsului poate fi încadrat între două limite , inferioară şi superioară aşa cum
rezultă mai jos :
maxmin )( ctcc ; (2.2)
Capitolul 2 –CONTRIBUTII LA DEZVOLTAREA UNOR METODE DE CONTROL STRUCTURAL Pagina 29 din 159 PRIN UTILIZAREA DE AMORTIZORI SEMI-ACTIVI
Eficienţa dispozitivelor semi-active este pusă în evidenţă prin
determinarea, prin simulări numerice sau experimente în laborator, a unei legi
constitutive optime pentru reglarea coeficientului de amortizare sau a forţei
maxime dezvoltată în aceste sisteme pentru minimizarea parametrilor de
răspuns dinamici (deplasare, acceleraţie, forte seismice) ai structurii înzestrate
cu astfel de dispozitive.
2.2. Amortizorul semi-activ realizat în cadrul programului de cercetare
U.T.C.B.-U.P.B.
În cadrul programului de cercetare de excelenţă având ca parteneri
Universitatea Tehnică de Construcţii din Bucureşti( U.T.C.B.) şi Universitatea
Politehnică din Bucureşti (U.P.B), realizat începând cu anul 2004, s-au elaborat
principiile teoretice şi s-a realizat un dispozitiv semi-activ cu amortizare
variabilă. Acest sistem funcţionează pe baza amortizării cu lichid vâscos. Pentru
anumite caracteristici ale mişcării seismice (viteze reduse) are un caracter pasiv,
amortizarea fiind constantă. Pentru viteze superioare unei viteze particulare,
nivelul de amortizare devine variabil, prin folosirea unui circuit adiţional de
circulare a lichidului vâscos. Prin activarea acestor proprietăţi de amortizare
activă, se obţin avantaje deosebite, cum ar fi :
- Păstrarea forţei dezvoltate în amortizorul semi activ sub o anumită
valoare limită, redusă substanţial faţă de forţa dezvoltată în cazul unui amortizor
pasiv, cu implicaţii directe în dimensionarea unei soluţii de consolidare sau
proiectare ;
- Folosirea acestor proprietăţi semi-active se face cu un consum minim de
energie exterioară, necesar doar activării circuitului adiţional. În rest, energia
exterioară indusă de cutremur asigură funcţionarea dispozitivului.
- Pentru mişcări seismice de intensitate redusă, sau pentru mişcări eoliene
dispozitivul se manifestă ca un dispozitiv pasiv;
- Nu necesită înlocuirea după un cutremur important ;

Capitolul 2 –CONTRIBUTII LA DEZVOLTAREA UNOR METODE DE CONTROL STRUCTURAL Pagina 30 din 159 PRIN UTILIZAREA DE AMORTIZORI SEMI-ACTIVI
- Fiabilitatea sistemului este ridicată, cu costuri de mentenanţă şi
intervenţii minime pe durata exploatării;
- Costul realizării şi instalării acestor dispozitive este comparabil cu
realizarea unor soluţii de consolidare clasice şi, odată cu începerea producţiei de
serie, poate scădea ;
În cadrul programului de cercetare de excelenţă s-a realizat un dispozitiv
care funcţionează după o lege constitutivă de tipul celei prezentate în figura 2.1.
Dimensionarea amortizorului semi-activ s-a realizat considerând caracteristicile
spaţiale ale unei mişcări seismice de tip VRANCEA, cât şi răspunsul
tridimensional al unor structuri compatibile cu cele proiectate în ţara noastră, în
special în Bucureşti, în anii `70-`80. La momentul elaborării prezentului
material, aceste sisteme de disipare de energie şi control al oscilaţiilor sunt în
stadiul posibilităţii începerii producţiei în serie, în diferite game, în funcţie de
parametrul de intrare forţă. În Laboratorul de Construcţii Metalice al
Universităţii de Construcţii Bucureşti, s-a testat, cu succes, un dispozitiv de
acest tip, în luna Noiembrie 2007 (fig. 2.2).Acest amortizor este capabil să
dezvolte forţe disipative maxime de 50 tf.
Fig. 2.1 Legea constitutivă a dispozitivului cu amortizare variabilă realizat la U.T.C.B.
În intervalul de viteze de răspuns 0-v1 (v1=21,5 cm/sec) dispozitivul se
comportă ca un amortizor pasiv. În intervalul v1-v2 (v2=50 cm/sec) dispozitivul
funcţionează în regim semi-activ, dezvoltând forţe inferioare valorii Fv max
(450kN). Este posibilă şi realizarea altor dispozitive având alţi parametri
constitutivi de tip forță-viteză. Mai multe date referitoare la caracteristicile de

Capitolul 2 –CONTRIBUTII LA DEZVOLTAREA UNOR METODE DE CONTROL STRUCTURAL Pagina 31 din 159 PRIN UTILIZAREA DE AMORTIZORI SEMI-ACTIVI
funcționare a amortizorului cu regim semi-activ testat la U.T.C.B. se regăsesc în
anexa 1 a lucrării.
Fig. 2.2. Dispozitivul cu amortizare variabilă,în curs de testare în Laboratorul de Construcții
Metalice al U.T.C.B.
2.3. Formularea matematică a dinamicii sistemului cu amortizare
suplimentară controlată la nivelul bazei
În cele ce urmează se va analiza comportarea unui sistem dinamic având
o caracteristică variabilă (în mod controlat), supus unei excitaţii de tip seismic
impusă bazei (descrisă printr-o accelerogramă). Rezultatele obţinute în urma
analizei sistemului cu proprietăţi variabile vor fi apoi comparate cu rezultatele
obţinute în urma analizei unor sisteme similare, având proprietăţi constante în
timp. Sistemul din figura 2.3. are două grade de libertate dinamică (translaţii
laterale) şi un nivel de amortizare intrinsecă (naturală) corespunzător a 5% din
nivelul critic.
Fig.2.3. – Schematizarea dinamică a unui sistem cu baza izolată şi cu amortizare adițională

Capitolul 2 –CONTRIBUTII LA DEZVOLTAREA UNOR METODE DE CONTROL STRUCTURAL Pagina 32 din 159 PRIN UTILIZAREA DE AMORTIZORI SEMI-ACTIVI
Un disipator de energie adiţional face legătura între suportul de rezemare
şi una dintre masele sistemului – “mbază”. Disipatorul de energie este de tip
cilindru hidraulic, cu forţă disipativă variabilă. Problema care stă la baza
folosirii raţionale a acestui dispozitiv de amortizare este alegerea unei legi
constitutive eficiente şi cuantificarea mărimilor de răspuns aferente. În cele ce
urmează se propun 3 tipuri de legi constitutive specifice amortizorului variabil
numite, în prezentul capitolul – “strategii”. Ele au, în principiu, următoarea
formă :
;x)x(cF bazabazadispdisp (2.3)
;x)x,(xcF bazabazabazadispdisp (2.4)
;Fxc,F
;Fxc,xcF
maxbazadispmax
maxbazadispbazadisp
disp
(2.5)
Legile de variaţie de tip (2.3) şi (2.4) corespund unor strategii de control
bazate pe “fuzzy logic”, descrisă mai pe larg în anexa 2 a lucrării. Legea
constitutivă (2.5) este o funcţie în care forţa în amortizor depinde doar de viteza
bazei. Legile de variaţie (2.3) şi (2.4) descriu forţa în amortizor ca fiind o
funcţie atât de viteza bazei cât şi de deplasarea bazei, în timp ce legea
constitutivă (2.5) corespunde unei strategii bazată pe menţinerea constantă a
forţei din disipatorul adiţional. Ultima strategie menţionată stă la baza studiului
pe un sistem real multietajat prezentat la capitolul al patrulea al prezentei
lucrări.
În ecuaţiile (2.3), (2.4) şi (2.5) semnificaţiile mărimilor sunt :
- Fdisp – reprezintă forţa din dispozitivul controlat;
- cdisp – reprezintă coeficientul de vâscozitate al dispozitivului de disipare
controlat;
- bazabaza xx , - reprezintă deplasarea, respectiv viteza masei “mbază” în raport
cu suportul de rezemare fix;

Capitolul 2 –CONTRIBUTII LA DEZVOLTAREA UNOR METODE DE CONTROL STRUCTURAL Pagina 33 din 159 PRIN UTILIZAREA DE AMORTIZORI SEMI-ACTIVI
- Fmax – reprezintă valoarea la care este limitată forţa din dispozitivul de
disipare, în cazul strategiei menţinerii constante a forţei ;
Rezultatele obţinute utilizând un astfel de model pot fi considerate ca fiind
reprezentative într-o măsură destul de bună pentru construcţii cu baza izolată.
Astfel, pentru un sistem cu baza izolată, (fig. 2.4), întreaga suprastructură este
redusă la o masă şi o rigiditate echivalentă.“m1”, respectiv “k1” – reprezintă
masa şi rigiditatea laterală a oscilatorului echivalent, corespunzător modului
propriu fundamental, iar “kb” – reprezintă rigiditatea laterală a sistemului de
izolare.”mb” reprezintă masa sistemul de izolare. cb şi c1 – coeficienţii de
amortizare a căror obţinere este descrisă mai departe.
Fig.2.4 – Forţele exercitate asupra maselor unui sistem dinamic cu 1 G.L.D., cu baza izolată
În urma scrierii ecuaţiilor de echilibru în care intervin forţele care
acţionează asupra celor două mase din fig.2.4., se obţine următorul sistem:
.0FFF
;0FFFFF
1,elast1,am1,in
1,elastdispb,elastb,amb,in
.0xxkxc)xx(m
;0xxkxcxkxcxxm
b1111g11
b11bdispbbbbgbb
(2.6)

Capitolul 2 –CONTRIBUTII LA DEZVOLTAREA UNOR METODE DE CONTROL STRUCTURAL Pagina 34 din 159 PRIN UTILIZAREA DE AMORTIZORI SEMI-ACTIVI
După rescrierea ecuaţiilor setului de mai sus, acestea devin:
.0xxkxcxm
;xcxmxkxkkxcxm
b111111
bdispgb11b1bbbbb
(2.7)
Sub formă matriceală, ecuaţiile (2.7) se prezintă aşa cum urmează:
bcontrolg1x2natural x]C[xI]M[}x{]K[}x{]C[xM . (2.8)
Matricele de definire ale sistemului au următoarea formă:
- matricea maselor: ;m0
0mM
1
b
- matricea de amortizare:
00
0c
c0
0c
c0
0ccC
cont
1
b
1
contb
controlnatural CC , unde MC natural .
- matricea de rigiditate:
.kk
kkkK
11
11b
Se observă că matricea de amortizare a fost descompusă în două
componente: o componentă care introduce în calcul efectul amortizării naturale
- naturalC şi o componentă care introduce în calcul efectul sporului de amortizare
datorat dispozitivului de disipare controlat - controlC . În ecuaţiile (2.8) forţa
exercitată de dispozitivul de disipare asupra bazei a fost trecută în termenul din
dreapta, devenind astfel “sarcină”. Acest “artificiu” face ca mai departe să se
lucreze cu un sistem cu comportare liniar-elastică, supus acţiunii a două tipuri
de sarcini:
- o deplasare impusă bazei de rezemare;
- o forţă variabilă controlat, aplicată asupra mb.
Capitolul 2 –CONTRIBUTII LA DEZVOLTAREA UNOR METODE DE CONTROL STRUCTURAL Pagina 35 din 159 PRIN UTILIZAREA DE AMORTIZORI SEMI-ACTIVI
2.4. Experimentări numerice privind comportarea unor structuri
echipate cu amortizori semi-activi
2.4.1. Determinarea răspunsului sistemului utilizând reprezentarea
în spaţiul stărilor. Exemplu comparativ pentru trei strategii de
control.
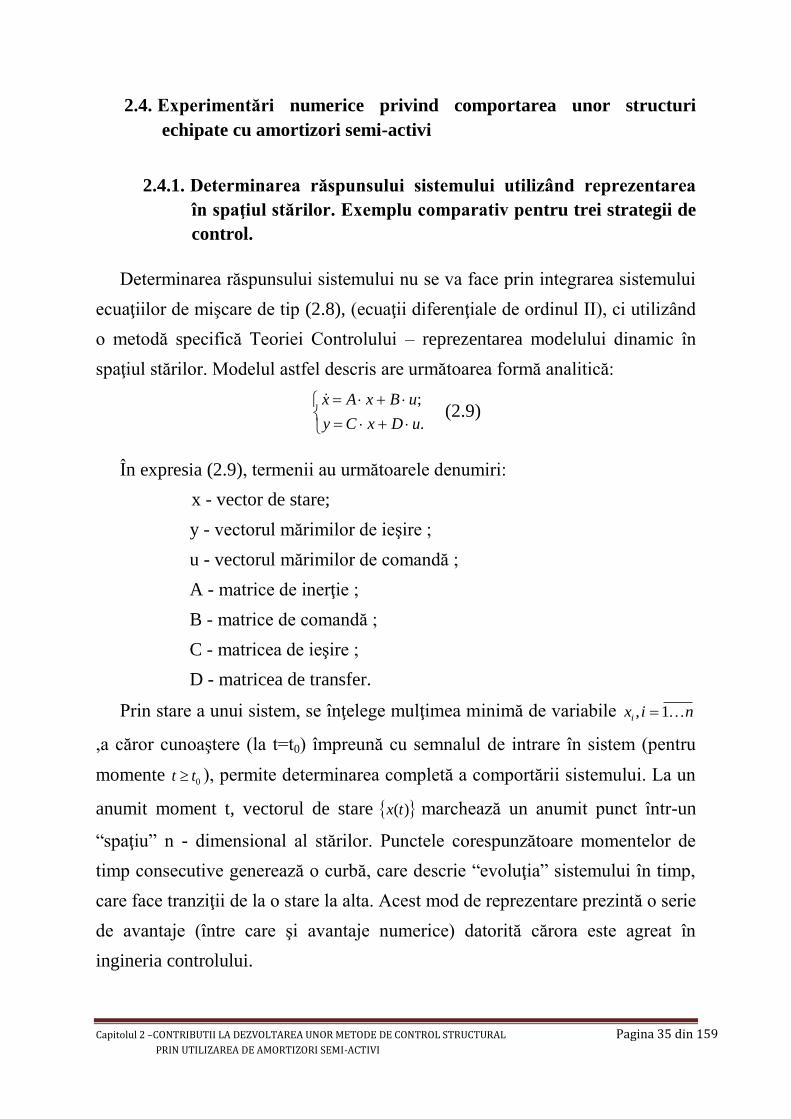
Determinarea răspunsului sistemului nu se va face prin integrarea sistemului
ecuaţiilor de mişcare de tip (2.8), (ecuaţii diferenţiale de ordinul II), ci utilizând
o metodă specifică Teoriei Controlului – reprezentarea modelului dinamic în
spaţiul stărilor. Modelul astfel descris are următoarea formă analitică:
.
;
uDxCy
uBxAx (2.9)
În expresia (2.9), termenii au următoarele denumiri:
x - vector de stare;
y - vectorul mărimilor de ieşire ;
u - vectorul mărimilor de comandă ;
A - matrice de inerţie ;
B - matrice de comandă ;
C - matricea de ieşire ;
D - matricea de transfer.
Prin stare a unui sistem, se înţelege mulţimea minimă de variabile nixi 1,
,a căror cunoaştere (la t=t0) împreună cu semnalul de intrare în sistem (pentru
momente 0tt ), permite determinarea completă a comportării sistemului. La un
anumit moment t, vectorul de stare )(tx marchează un anumit punct într-un
“spaţiu” n - dimensional al stărilor. Punctele corespunzătoare momentelor de
timp consecutive generează o curbă, care descrie “evoluţia” sistemului în timp,
care face tranziţii de la o stare la alta. Acest mod de reprezentare prezintă o serie
de avantaje (între care şi avantaje numerice) datorită cărora este agreat în
ingineria controlului.

Capitolul 2 –CONTRIBUTII LA DEZVOLTAREA UNOR METODE DE CONTROL STRUCTURAL Pagina 36 din 159 PRIN UTILIZAREA DE AMORTIZORI SEMI-ACTIVI
Reprezentarea în spaţiul stărilor nu este unică. În cazul de faţă se va utiliza
următoarea formă:
1b1b
T x,x,x,xx , xy ,
disp
g
F
xu
(2.10) ;
]]C[]M[[]]K[]M[[
]I[0A
11
2x22X2 ,
01
11
00
00
B ,
1000
0100
0010
0001
C ,
00
00
00
00
D (2.11);
Se poate scrie mai departe ecuaţia (2.10) extinsă:
.F
x
00
00
00
00
x
x
x
x
1000
0100
0010
0001
y
y
y
y
;F
x
01
11
00
00
x
x
x
x
m
c0
m
k
m
k
0m
c
m
k
m
kk1000
0100
x
x
x
x
disp
g
1
b
1
b
4
3
2
1
disp
g
1
b
1
b
1
1
1
1
1
1
b
b
b
1
b
1b
1
b
1
b
(2.12);
În continuare, pentru înţelegerea teoriei se prezintă un exemplu numeric
simplu, al unui sistem cu 1 G.L.D., cu baza izolată, cu valori concrete ale
parametrilor de sistem, pentru a exemplifica cele descrise analitic mai sus :
Se presupune, pentru un sistem cu 1 G.L.D., cu baza izolată:
Masa suprastructurii, m
skNm
2
1 74.2038
;
Masa bazei: ;75.4072
m
skNmb
Rigiditatea laterală a oscilatorului echivalent, corespunzător
modului fundamental de vibraţie:
Capitolul 2 –CONTRIBUTII LA DEZVOLTAREA UNOR METODE DE CONTROL STRUCTURAL Pagina 37 din 159 PRIN UTILIZAREA DE AMORTIZORI SEMI-ACTIVI
s5.0Tm
kN321945k 11 ; (perioada de vibraţie a sistemului cu
1 G.L.D.),cu baza izolată;
Rigiditatea laterală a sistemului izolat, aproximat ca fiind un sistem
cu un singur grad de libertate dinamică,cu baza izolată: m
kNkb 10732 , astfel
încât ;3sTiz
Matricea de amortizare corespunzătoare capacităţii naturale de
disipare:
MC natural
4260
085M
3
205.02M2 iz.sist
. (2.13);
Matricea de inerţie a modelului sistemului dinamic din spaţiul stărilor:
209.0091.15791.157
0209.056.78988.815
1000
0100
A . (2.14);
Excitaţia la care va fi supus sistemul este dată de către accelerograma
VRANCEA 04 Martie 1977, componenta N-S, înregistrată la I.N.C.E.R.C.,
BUCUREŞTI.

Capitolul 2 –CONTRIBUTII LA DEZVOLTAREA UNOR METODE DE CONTROL STRUCTURAL Pagina 38 din 159 PRIN UTILIZAREA DE AMORTIZORI SEMI-ACTIVI
2.4.2. Strategia 1. Forţa dispozitivului de disipare depinde doar de
viteza bazei )( bazadispdisp xcc
Primul pas în crearea unui sistem de control bazat pe logica fuzzy este
stabilirea domeniilor de valori pentru mărimile de intrare şi ieşire. Sistemul de
control va lucra cu mărimi normalizate: max/vv şi max/ ccdisp
, în care:
bxv - viteza instantanee a bazei;
maxv - reprezintă viteza spectrală a sistemului cu 1 G.L.D. având
m=(mb+m1), k=kb şi %5 ;
- cmax= – valoarea maximă pe care o poate avea coeficientul de
vâscozitate (corespunzătoare amortizării pasive) ;
În consecinţă, domeniul de valori este :
maxdisp c0.11.0c ; (2.15);
crmax c%25c ; (2.16);
s
m1.1
SASVvmax
; (2.17);
22v/v max . (2.18);
O descriere a tehnologiei de fuzzificare- defuzzificare este dată în anexa 2
a prezentei lucrări. În continuare, în acest capitol se prezintă doar rezultatele
obţinute:
Reprezentarea valorilor c/cmax în funcţie de rapoartele v/vmax alcătuiesc o
“curbă de control”, prezentată în figura (2.5).
Rezultatele obţinute aplicând această strategie de control sunt prezentate
în figurile (2.6) – (2.11).Cu albastru sunt ilustrate valorile pentru un nivel de
amortizare pasiv, iar cu roşu cele pentru un nivel de amortizare semi-activ
controlat. Se reaminteşte faptul că valoarea maximă a coeficientului de
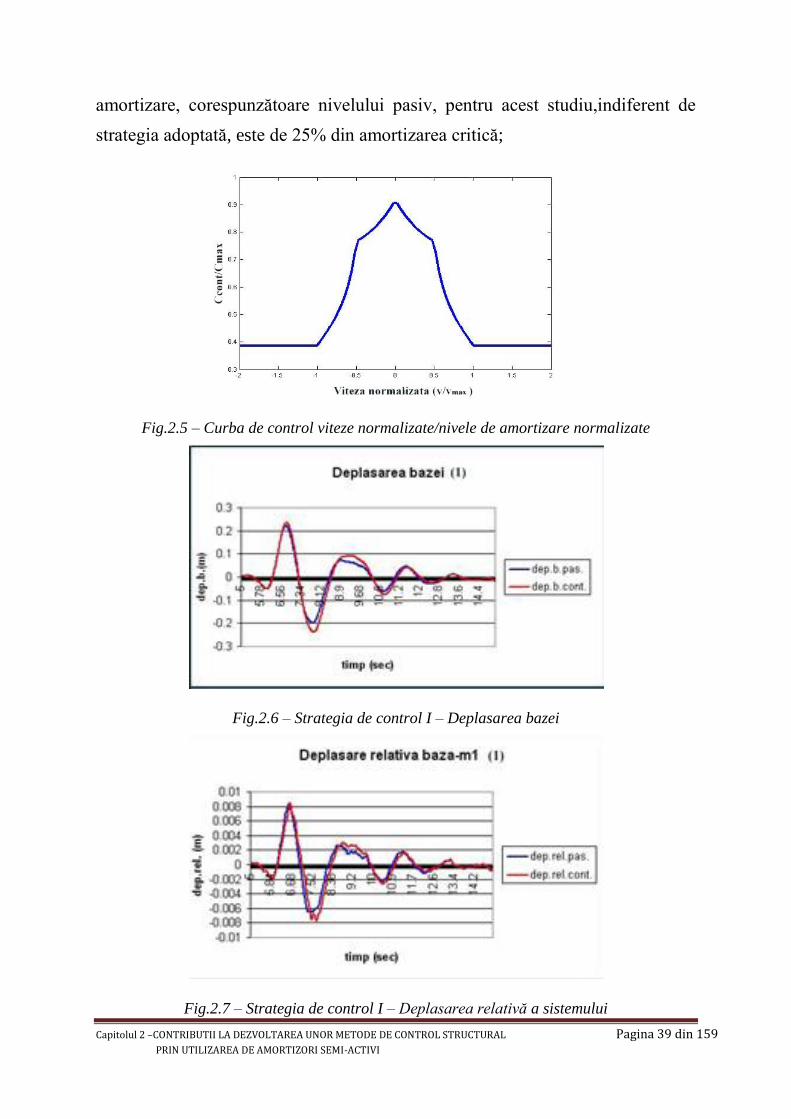
Capitolul 2 –CONTRIBUTII LA DEZVOLTAREA UNOR METODE DE CONTROL STRUCTURAL Pagina 39 din 159 PRIN UTILIZAREA DE AMORTIZORI SEMI-ACTIVI
amortizare, corespunzătoare nivelului pasiv, pentru acest studiu,indiferent de
strategia adoptată, este de 25% din amortizarea critică;
Fig.2.5 – Curba de control viteze normalizate/nivele de amortizare normalizate
Fig.2.6 – Strategia de control I – Deplasarea bazei
Fig.2.7 – Strategia de control I – Deplasarea relativă a sistemului

Capitolul 2 –CONTRIBUTII LA DEZVOLTAREA UNOR METODE DE CONTROL STRUCTURAL Pagina 40 din 159 PRIN UTILIZAREA DE AMORTIZORI SEMI-ACTIVI
Fig.2.8 – Strategia de control I – forţa tăietoare de bază
Fig.2.9 – Strategia de control I – acceleraţia absolută
Fig.2.10 – Strategia de control I – forţa în dispozitivul de amortizare

Capitolul 2 –CONTRIBUTII LA DEZVOLTAREA UNOR METODE DE CONTROL STRUCTURAL Pagina 41 din 159 PRIN UTILIZAREA DE AMORTIZORI SEMI-ACTIVI
Fig.2.11 – Strategia de control I – evoluţia coeficientului de amortizare
2.4.3. Strategia 2. Forţa dispozitivului de disipare depinde de viteza şi
deplasarea bazei ),( bazabazadispdisp xxcc
A doua strategie de control bazată pe “fuzzy logic”, urmăreşte reducerea
acceleraţiilor absolute, a deplasărilor relative de nivel şi a forţei tăietoare de
bază, prin limitarea forţelor de amortizare. Limitarea forţelor de amortizare se
face prin reducerea coeficientului de amortizare al dispozitivului de disipare
atunci când viteza bazei are valori mari, sau când deplasarea bazei are valori
mici. De altfel, la sisteme cu un singur grad de libertate dinamică, viteza şi
deplasarea sunt defazate. Viteza este mare când “masa” trece prin dreptul
poziţiei de echilibru – deplasare zero.
Dispozitivul de control are ca mărimi de intrare deplasarea şi viteza bazei,
iar ca mărime de ieşire, Fdisp - forţa din dispozitivul de disipare. max/ dd şi max/vv
aparţin intervalului(-3,3).
Sistemul fuzzy are ca mărimi de intrare deplasarea normalizată şi viteza
normalizată a bazei. Valorile deplasării şi vitezei cu care se face normalizarea
sunt deplasarea şi viteza spectrală ale sistemului cu 1 G.L.D. având M=mb+m1,
K=kb şi ν=5% : SD=0,526 m şi SV=1,10 m/s. Mărimea de ieşire este ccont/cmax,

Capitolul 2 –CONTRIBUTII LA DEZVOLTAREA UNOR METODE DE CONTROL STRUCTURAL Pagina 42 din 159 PRIN UTILIZAREA DE AMORTIZORI SEMI-ACTIVI
coeficientul de vâscozitate normalizat. Valoarea cmax=0,25 este limita superioară
a coeficientului de amortizare.
În urma considerării tuturor combinaţiilor posibile ale mărimilor de
intrare şi aplicarea mecanismului de inferenţă fuzzy, rezultă suprafaţa de control
din figura (2.12)
Fig.2.12 – Strategia de control II – Suprafaţa de control rezultată
Se remarcă faptul că rezultatele sunt similare – la toate mărimile
examinate între sistemul pasiv puternic ( Cmax ) şi sistemul controlat dar, cu
forţe considerabil mai mici ( aproximativ la jumătate) în cazul sistemului semi-
activ.
Fig.2.13 – Strategia de control II – Deplasarea bazei

Capitolul 2 –CONTRIBUTII LA DEZVOLTAREA UNOR METODE DE CONTROL STRUCTURAL Pagina 43 din 159 PRIN UTILIZAREA DE AMORTIZORI SEMI-ACTIVI
Fig.2.14 – Strategia de control II – Deplasarea relativă a sistemului
Fig.2.15 – Strategia de control II – forţa tăietoare de bază
Fig.2.16 – Strategia de control II – acceleraţia absolută

Capitolul 2 –CONTRIBUTII LA DEZVOLTAREA UNOR METODE DE CONTROL STRUCTURAL Pagina 44 din 159 PRIN UTILIZAREA DE AMORTIZORI SEMI-ACTIVI
Fig.2.17 – Strategia de control II – forţa în dispozitivul de amortizare
Fig.2.18 – Strategia de control II – evoluţia coeficientului de amortizare
2.4.4. Strategia 3. Menţinerea constantă a forţei din dispozitiv peste o
anumită viteză
Dispozitivul de control adiţional are vâscozitate constantă atâta timp cât
Fdisp rămâne inferioară unei valori limită Fmax, fixată. În caz contrar, coeficientul
de vâscozitate al dispozitivului este modificat astfel încât maxFFdisp . Se caută
astfel a se obţine avantaje specifice situaţiilor în care se folosesc pistoane cu
capacitate mare de amortizare, fără a fi însă necesar a echipa sistemul cu
dispozitive mari care să poată lucra la forţele care tind să se dezvolte.
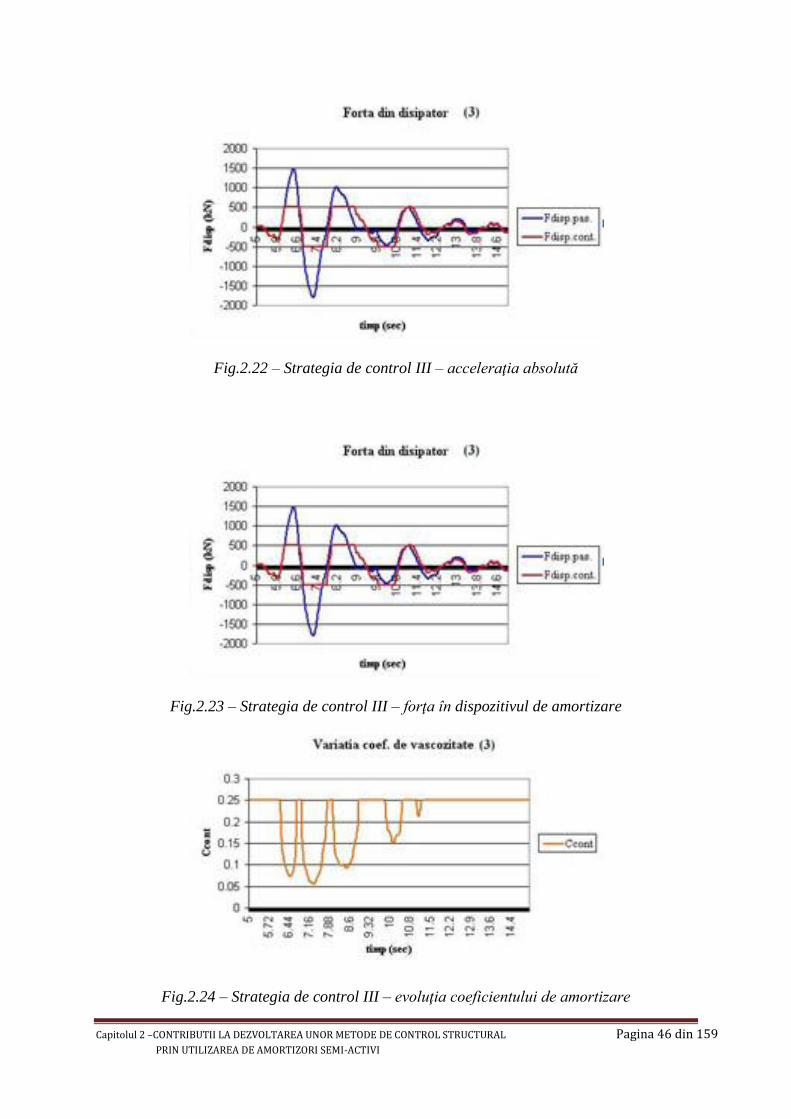
Rezultatele parametrilor de ieşire folosind strategia a III-a sunt prezentate
în cele ce urmează. Se menţionează faptul că, în simulare, a fost considerată o

Capitolul 2 –CONTRIBUTII LA DEZVOLTAREA UNOR METODE DE CONTROL STRUCTURAL Pagina 45 din 159 PRIN UTILIZAREA DE AMORTIZORI SEMI-ACTIVI
forţă maximă Fmax=500 kN (forţa care nu iese din limitele practicii inginereşti,
putând fi preluată cu nişte dispozitive de mărime raţională).
Fig.2.19 – Strategia de control III – Deplasarea relativă a bazei
Fig.2.20 – Strategia de control III – Deplasarea relativă a sistemului
Fig.2.21 – Strategia de control III – forţa tăietoare de bază
Capitolul 2 –CONTRIBUTII LA DEZVOLTAREA UNOR METODE DE CONTROL STRUCTURAL Pagina 46 din 159 PRIN UTILIZAREA DE AMORTIZORI SEMI-ACTIVI
Fig.2.22 – Strategia de control III – acceleraţia absolută
Fig.2.23 – Strategia de control III – forţa în dispozitivul de amortizare
Fig.2.24 – Strategia de control III – evoluţia coeficientului de amortizare
Capitolul 2 –CONTRIBUTII LA DEZVOLTAREA UNOR METODE DE CONTROL STRUCTURAL Pagina 47 din 159 PRIN UTILIZAREA DE AMORTIZORI SEMI-ACTIVI
Din analiza rezultatelor de mai sus se observă cum că, pentru o forţă Fmax
de peste trei ori mai mică decât cea care ar tinde să se dezvolte în cazul în care
cdisp=constant, se obţine un răspuns care nu diferă semnificativ faţă de cazul în
care dispozitivul de disipare este pasiv. Deci este posibilă obţinerea unui
răspuns îmbunătăţit folosind dispozitive cu forţă disipativă reglabilă (dispozitive
semi-active) de dimensiuni mai mici decât cele necesare în cazul în care
cdisp=const (dispozitive pasive).
2.5. Concluzii
Cele trei strategii de control prezentate au performanţe similare
deoarece au ca numitor comun acelaşi obiectiv – acela de a evita apariţia unor
forţe excesiv de mari (şi necontrolabile) în dispozitivul de amortizare. De
asemenea, strategiile de control evidenţiază posibilitatea reducerii (substanţiale)
a forţelor într-un dispozitiv semi-activ faţă de unul pasiv, fără repercusiuni
negative asupra celorlalte mărimi de răspuns. Toate cele trei strategii pun în
evidenţă acest fapt, atestând eficienţa sistemelor semi-active de control al
răspunsului structural.
Se detaşează prin simplitate şi eficienţă strategia a III-a în care forţa
din dispozitiv este menţinută constantă de la o anumită viteză în sus. Aceasta
strategie stă la baza dispozitivului elaborat de către echipa de cercetare
U.T.C.B.-U.P.B., prezentat la paragraful 2.2 şi în anexa 1. Sistemul este la
stadiul de aplicabilitate în practica inginerească curentă, atât pentru proiectarea
noilor structuri, cât şi pentru reabilitarea celor vechi.
O serie de programe comerciale de analiză dinamică neliniară
(de exemplu programul PERFORM – 3D ) au elemente finite de tip disipatori
vâscoşi. Cu ajutorul lor se pot face calculele necesare implementării acestor
sisteme în practică. Capitolul al patrulea al acestei lucrări se bazează pe un
studiu realizat în acest program de calcul.
Amortizarea suplimentară de la nivelul bazei izolate are ca scop
principal reducerea deplasărilor bazei. Se pot obţine reduceri de 30% a

Capitolul 2 –CONTRIBUTII LA DEZVOLTAREA UNOR METODE DE CONTROL STRUCTURAL Pagina 48 din 159 PRIN UTILIZAREA DE AMORTIZORI SEMI-ACTIVI
deplasării în condiţiile unei amortizări moderate de 20 – 25% din fracţiunea
critică. Se obţin reduceri şi la alte mărimi de referinţă pentru suprastructură :
forţă tăietoare de bază şi acceleraţia absolută însă, în proporţii mai mici.
Pentru disipatorii de tip semi-activ, cu legile de control prezentate în
acest capitol, s-au obţinut practic aceleaşi reduceri cu forţe de 2 – 3 ori mai mici
în dispozitiv.
Soluţia este avantajoasă pentru structuri cu regim relativ mic de
înălţime (4-6 nivele) care pot fi menţinute în stadiul elastic fără intervenţii
costisitoare. Pentru structurile cu regim mediu de înălţime acceptarea unor
incursiuni limitate în stadiul plastic se dovedeşte a fi un compromis acceptabil.

CAPITOLUL 3 – CONTRIBUŢII LA PERFECŢIONAREA CONTROLULUI STRUCTURAL PRIN IZOLAREA BAZEI Pagina 49 din 159
Capitolul 3
CONTRIBUŢII LA PERFECŢIONAREA
CONTROLULUI STRUCTURAL PRIN
IZOLAREA BAZEI
3.1. Generalităţi. Tipuri de sisteme de izolare a bazei
3.1.1. Principiul metodei
Metoda de izolare seismică a bazei este unul dintre cele mai aplicate
procedee de control al răspunsului structural la ora actuală. Tehnicile de izolare
seismică introduc una sau mai multe discontinuităţi pe înălţimea structurii care
trebuie izolată, astfel că aceasta este împărţită în două sau mai multe părţi: de
exemplu, fundaţiile clădirii (aflate în contact direct cu terenul) sunt decuplate de
suprastructura clădirii („izolarea bazei”). Este de menţionat că această decuplare
poate fi realizată atât la contactul dintre fundaţie şi suprastructură, cât şi pe
înălţimea suprastructurii (de exemplu, pentru o suprastructură realizată din două
sau mai multe subansamble cu funcţii şi alcătuiri diferite). Sistemul de izolare
seismică este, în principiu, realizat din dispozitive speciale, „izolatori”, cu sau
fără amortizori adiţionali. Izolatorii sunt dispozitive de rezemare care permit
deplasări orizontale importante (20-40 cm), rigiditatea lor orizontală fiind
sensibil mai mică decât cea verticală. (WANG Y.P., 2003).
Strategiile de izolare seismică se axează pe două direcţii: creşterea
perioadei fundamentale de oscilaţie a clădirii până la valori de 2-3 secunde si,
prin aceasta, reducerea efectelor de amplificare dinamică, precum şi decuplarea
din punct de vedere inerţial a structurii şi discontinuizarea transmiterii forţelor
de la teren la structura izolată.
În timpul unei mişcări seismice importante structurile convenţionale
răspund prin deplasări orizontale semnificative, care conduc la degradări
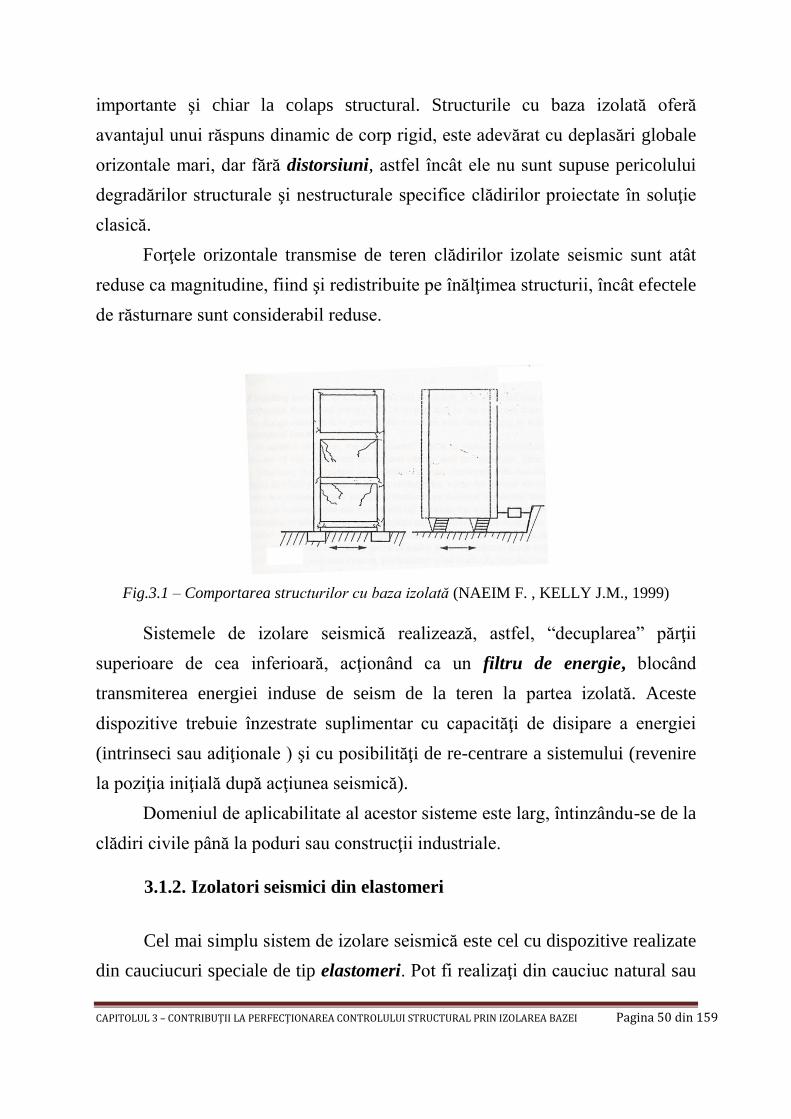
CAPITOLUL 3 – CONTRIBUŢII LA PERFECŢIONAREA CONTROLULUI STRUCTURAL PRIN IZOLAREA BAZEI Pagina 50 din 159
importante şi chiar la colaps structural. Structurile cu baza izolată oferă
avantajul unui răspuns dinamic de corp rigid, este adevărat cu deplasări globale
orizontale mari, dar fără distorsiuni, astfel încât ele nu sunt supuse pericolului
degradărilor structurale şi nestructurale specifice clădirilor proiectate în soluţie
clasică.
Forţele orizontale transmise de teren clădirilor izolate seismic sunt atât
reduse ca magnitudine, fiind şi redistribuite pe înălţimea structurii, încât efectele
de răsturnare sunt considerabil reduse.
Fig.3.1 – Comportarea structurilor cu baza izolată (NAEIM F. , KELLY J.M., 1999)
Sistemele de izolare seismică realizează, astfel, “decuplarea” părţii
superioare de cea inferioară, acţionând ca un filtru de energie, blocând
transmiterea energiei induse de seism de la teren la partea izolată. Aceste
dispozitive trebuie înzestrate suplimentar cu capacităţi de disipare a energiei
(intrinseci sau adiţionale ) şi cu posibilităţi de re-centrare a sistemului (revenire
la poziţia iniţială după acţiunea seismică).
Domeniul de aplicabilitate al acestor sisteme este larg, întinzându-se de la
clădiri civile până la poduri sau construcţii industriale.
3.1.2. Izolatori seismici din elastomeri
Cel mai simplu sistem de izolare seismică este cel cu dispozitive realizate
din cauciucuri speciale de tip elastomeri. Pot fi realizaţi din cauciuc natural sau
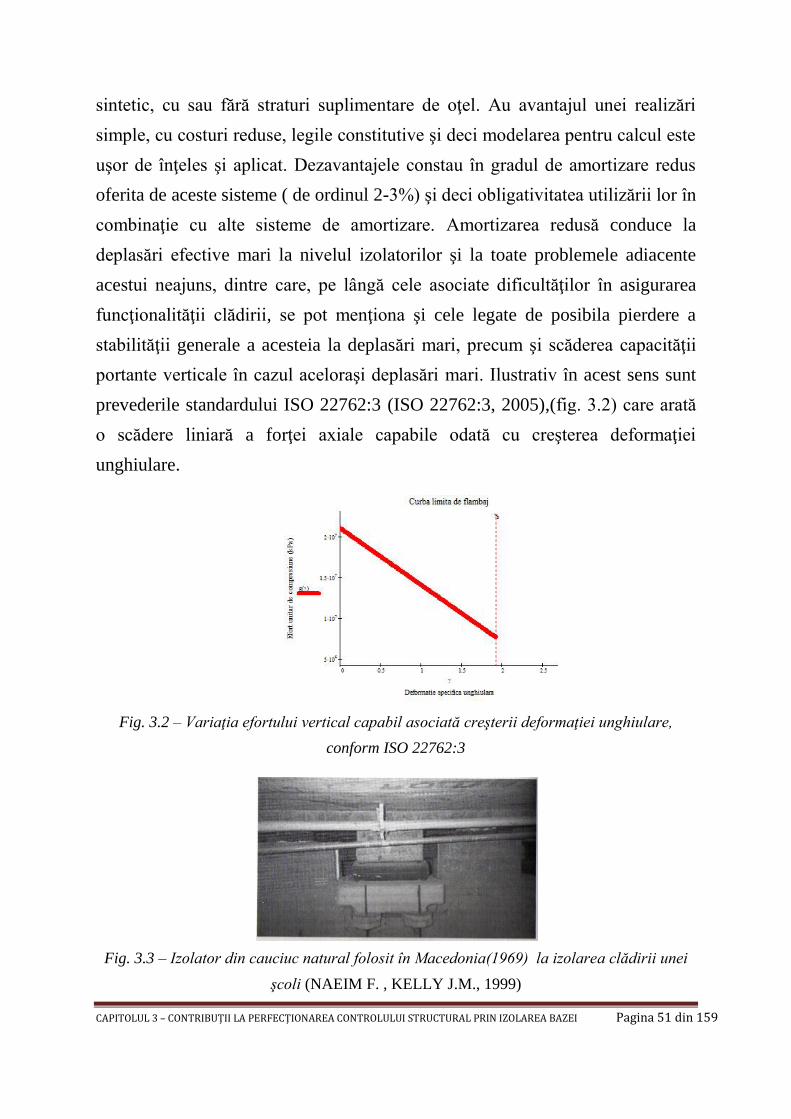
CAPITOLUL 3 – CONTRIBUŢII LA PERFECŢIONAREA CONTROLULUI STRUCTURAL PRIN IZOLAREA BAZEI Pagina 51 din 159
sintetic, cu sau fără straturi suplimentare de oţel. Au avantajul unei realizări
simple, cu costuri reduse, legile constitutive şi deci modelarea pentru calcul este
uşor de înţeles şi aplicat. Dezavantajele constau în gradul de amortizare redus
oferita de aceste sisteme ( de ordinul 2-3%) şi deci obligativitatea utilizării lor în
combinaţie cu alte sisteme de amortizare. Amortizarea redusă conduce la
deplasări efective mari la nivelul izolatorilor şi la toate problemele adiacente
acestui neajuns, dintre care, pe lângă cele asociate dificultăţilor în asigurarea
funcţionalităţii clădirii, se pot menţiona şi cele legate de posibila pierdere a
stabilităţii generale a acesteia la deplasări mari, precum şi scăderea capacităţii
portante verticale în cazul aceloraşi deplasări mari. Ilustrativ în acest sens sunt
prevederile standardului ISO 22762:3 (ISO 22762:3, 2005),(fig. 3.2) care arată
o scădere liniară a forţei axiale capabile odată cu creşterea deformaţiei
unghiulare.
Fig. 3.2 – Variaţia efortului vertical capabil asociată creşterii deformaţiei unghiulare,
conform ISO 22762:3
Fig. 3.3 – Izolator din cauciuc natural folosit în Macedonia(1969) la izolarea clădirii unei
şcoli (NAEIM F. , KELLY J.M., 1999)
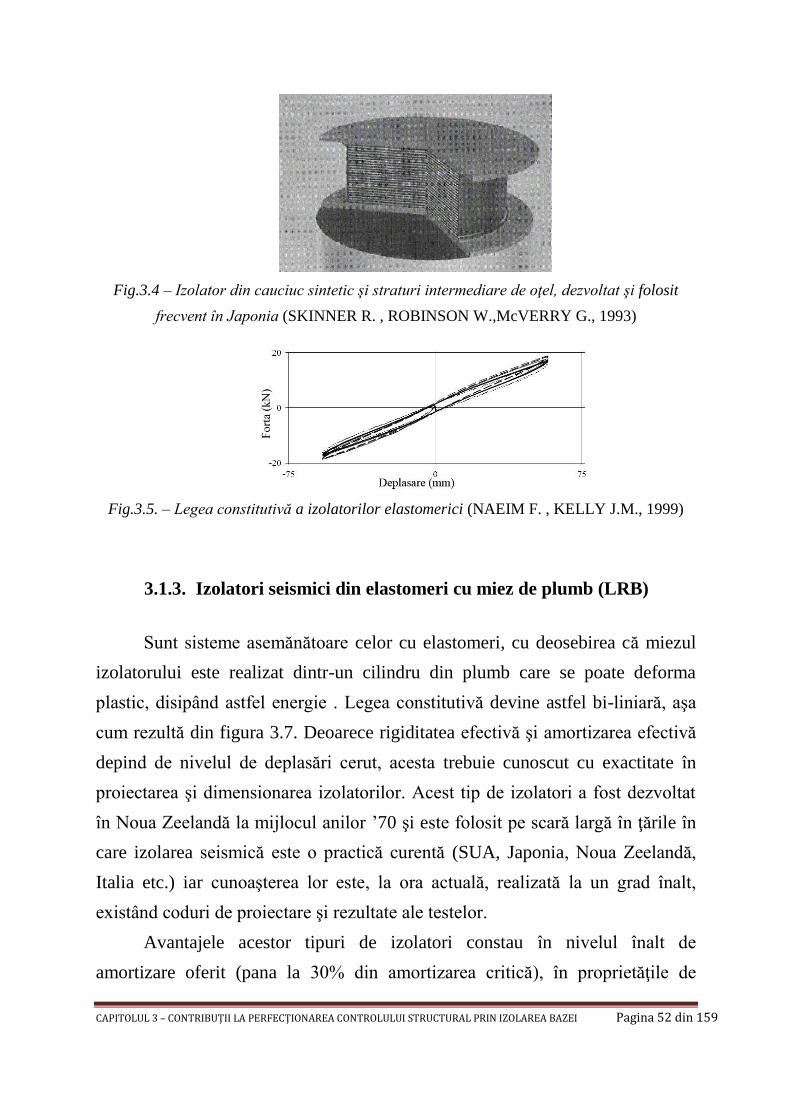
CAPITOLUL 3 – CONTRIBUŢII LA PERFECŢIONAREA CONTROLULUI STRUCTURAL PRIN IZOLAREA BAZEI Pagina 52 din 159
Fig.3.4 – Izolator din cauciuc sintetic şi straturi intermediare de oţel, dezvoltat şi folosit
frecvent în Japonia (SKINNER R. , ROBINSON W.,McVERRY G., 1993)
Fig.3.5. – Legea constitutivă a izolatorilor elastomerici (NAEIM F. , KELLY J.M., 1999)
3.1.3. Izolatori seismici din elastomeri cu miez de plumb (LRB)
Sunt sisteme asemănătoare celor cu elastomeri, cu deosebirea că miezul
izolatorului este realizat dintr-un cilindru din plumb care se poate deforma
plastic, disipând astfel energie . Legea constitutivă devine astfel bi-liniară, aşa
cum rezultă din figura 3.7. Deoarece rigiditatea efectivă şi amortizarea efectivă
depind de nivelul de deplasări cerut, acesta trebuie cunoscut cu exactitate în
proiectarea şi dimensionarea izolatorilor. Acest tip de izolatori a fost dezvoltat
în Noua Zeelandă la mijlocul anilor ’70 şi este folosit pe scară largă în ţările în
care izolarea seismică este o practică curentă (SUA, Japonia, Noua Zeelandă,
Italia etc.) iar cunoaşterea lor este, la ora actuală, realizată la un grad înalt,
existând coduri de proiectare şi rezultate ale testelor.
Avantajele acestor tipuri de izolatori constau în nivelul înalt de
amortizare oferit (pana la 30% din amortizarea critică), în proprietăţile de

CAPITOLUL 3 – CONTRIBUŢII LA PERFECŢIONAREA CONTROLULUI STRUCTURAL PRIN IZOLAREA BAZEI Pagina 53 din 159
re-centrare a clădirii după cutremur, datorită elasticităţii materialului
elastomeric, în simplitatea instalării în comparaţie cu alte dispozitive adiţionale
de amortizare asociate unor izolatori elastomerici şi, în final, în adoptarea unor
costuri medii de producţie şi folosire. Dezavantajele constau în proprietăţile
acestora dependente de structură şi de conţinutul în frecvenţe ale undelor
seismice, în costurile de întreţinere şi în necesitatea înlocuirii lor după un
eveniment semnificativ.
Fig. 3.6. – Schema de principiu a izolatorului cu miez de plumb
Dispozitivele de tip LRB pot fi dimensionate să preia şi forţe de întindere,
dar, asemenea izolatorilor elastomerici, trebuie ţinut cont de efectul deplasărilor
mari asupra capacităţii lor de rezistenţă.
Fig. 3.7. – Legea constitutivă a izolatorilor cu miez de plumb

CAPITOLUL 3 – CONTRIBUŢII LA PERFECŢIONAREA CONTROLULUI STRUCTURAL PRIN IZOLAREA BAZEI Pagina 54 din 159
3.1.4. Sisteme de izolare a bazei cu frecare
Sunt realizate, în principiu, din materiale elastomerice, prevăzute la
partea superioară cu o placă dintr-un material metalic, care este în contact
permanent cu alta placă dintr-un material similar, aflată la partea inferioară a
suprastructurii. Prin frecarea celor două materiale se realizează o disipare de
energie prin amortizare uscată (coulombiană). Datorită elasticităţii materialului
elastomer se realizează re-centrarea sistemului după cutremur. Sisteme de acest
tip au fost folosite în S.U.A. (Clădirea Curţii de Apel din San Francisco,
Aeroportul Internaţional din San Francisco; în Grecia se menţionează izolarea
cu dispozitive de tip FPS a rezervoarelor ce constituie rezerva naţională de gaz
natural lichefiat, iar în Franţa a fost utilizat la sistemul Electricite de France.
Un exemplu de astfel de sistem este cel de tip FPS (friction pendulum
system – pendul cu frecare), dispozitive dezvoltate la mijlocul deceniului al IX-
lea al secolului trecut, în Statele Unite ale Americii (San Francisco – în
principal de către preşedintele asociaţiei Earthquake Protection Systems,
Dr. Victor Zayas (Earthquake Protection Systems Website San Francisco,
2008). Frecarea se realizează pe o suprafaţa sferică, din oţel inoxidabil,
revenirea după cutremur se realizează datorită curburii suprafeţei, iar sistemul
oferă o disipare a energiei prin frecarea celor doua suprafeţe.
Avantajele acestui tip de izolator seismic constau în faptul că proprietăţile
sale sunt strict de natură mecanică şi, în consecinţă, nu sunt afectate de
îmbătrânire sau de variaţiile de temperatură. Folosirea acestora depinde mai
puţin de natura suprastructurii şi de conţinutul în frecvenţe al cutremurului de
proiectare. Parametrii de proiectare a unui izolator de tip FPS (perioadă proprie,
rigiditate) depind numai de caracteristicile sale interne, fiind independente de
alţi parametri exteriori statici sau dinamici.
Costurile unui asemenea tip de sistem sunt deasemenea reduse faţă de alte
dispozitive concurente. Nu necesită înlocuire după un cutremur mai important.
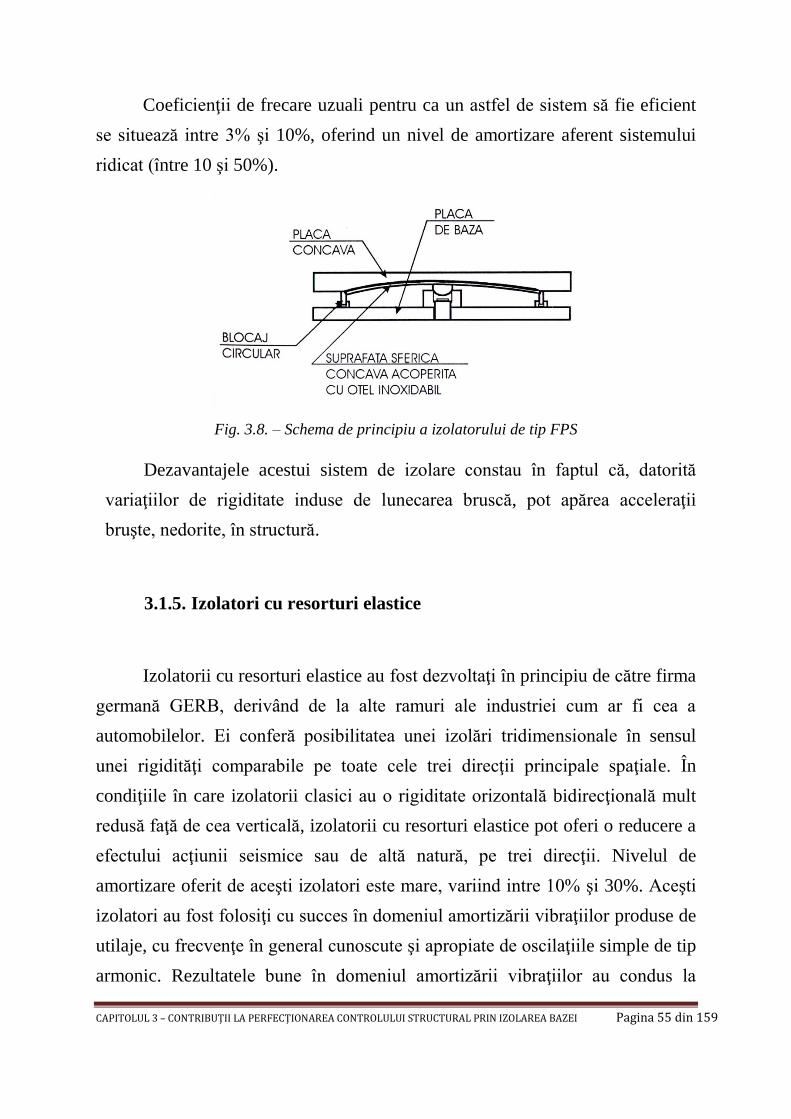
CAPITOLUL 3 – CONTRIBUŢII LA PERFECŢIONAREA CONTROLULUI STRUCTURAL PRIN IZOLAREA BAZEI Pagina 55 din 159
Coeficienţii de frecare uzuali pentru ca un astfel de sistem să fie eficient
se situează intre 3% şi 10%, oferind un nivel de amortizare aferent sistemului
ridicat (între 10 şi 50%).
Fig. 3.8. – Schema de principiu a izolatorului de tip FPS
Dezavantajele acestui sistem de izolare constau în faptul că, datorită
variaţiilor de rigiditate induse de lunecarea bruscă, pot apărea acceleraţii
bruşte, nedorite, în structură.
3.1.5. Izolatori cu resorturi elastice
Izolatorii cu resorturi elastice au fost dezvoltaţi în principiu de către firma
germană GERB, derivând de la alte ramuri ale industriei cum ar fi cea a
automobilelor. Ei conferă posibilitatea unei izolări tridimensionale în sensul
unei rigidităţi comparabile pe toate cele trei direcţii principale spaţiale. În
condiţiile în care izolatorii clasici au o rigiditate orizontală bidirecţională mult
redusă faţă de cea verticală, izolatorii cu resorturi elastice pot oferi o reducere a
efectului acţiunii seismice sau de altă natură, pe trei direcţii. Nivelul de
amortizare oferit de aceşti izolatori este mare, variind intre 10% şi 30%. Aceşti
izolatori au fost folosiţi cu succes în domeniul amortizării vibraţiilor produse de
utilaje, cu frecvenţe în general cunoscute şi apropiate de oscilaţiile simple de tip
armonic. Rezultatele bune în domeniul amortizării vibraţiilor au condus la

CAPITOLUL 3 – CONTRIBUŢII LA PERFECŢIONAREA CONTROLULUI STRUCTURAL PRIN IZOLAREA BAZEI Pagina 56 din 159
extinderea domeniului de aplicabilitate pentru vibraţii de natura seismică. Odată
cu aceasta tendinţă s-a constatat un dezavantaj al acestui sistem şi anume
sensibilitatea la mişcări de tip “rocking”, adică rotirea în plan vertical de tip
solid rigid, fenomen observat în cazul cutremurului de la Northridge 1994
(SOONG T.T. , DARGUSH G.F., 1997),datorat rigidităţii verticale comparabile
cu cea orizontală. În figurile 3.9, respectiv 3.10 sunt prezentate astfel de
dispozitive de izolare, cât şi răspunsul în acceleraţii al unui astfel de sistem la o
mişcare de tip Northridge. Se observă nivelul redus al răspunsului în acceleraţii
al structurii izolate faţă de cea convenţională.
Fig. 3.9. – Izolator de tip GERB
Fig. 3.10. – Răspunsul în acceleraţii la o mişcare de tip Northridge pentru un sistem GERB
(GERB Company Homepage, 2008)
CAPITOLUL 3 – CONTRIBUŢII LA PERFECŢIONAREA CONTROLULUI STRUCTURAL PRIN IZOLAREA BAZEI Pagina 57 din 159
3.2. Comentarii referitoare la condiţiile de aplicare a tehnologiei de
izolare a bazei în ţara noastră
Aspectele particulare ale implementării tehnologiei de izolare a bazei,
folosită împreună cu alte dispozitive adiţionale de amortizare este descrisă pe
larg în capitolul 4 al prezentei lucrări. În acest paragraf se vor preciza doar
noţiuni legate de utilizarea spectrelor elastice de proiectare, conform normelor
actuale seismice, (P100-1, 2006) , în selectarea unor soluţii de control al
răspunsului seismic prin izolarea bazei, precum şi o abordare energetică a
problemei dinamice. În fig. 3.11 sunt prezentate spectrele elastice de proiectare
aferente normativului P100/2006, spectre de acceleraţie şi de deplasare.
Spectrele sunt calculate pentru diferite niveluri de amortizare. Din analiza
lor se observă necesitatea abordării strategiei de creştere a perioadei proprii de
vibraţie pana la valori de cel puţin 3,0 secunde. Nivelul de amortizare este mai
puţin semnificativ pentru perioade de acest ordin de mărime. Prin reducerea
spectrelor de acceleraţie se poate obţine un răspuns elastic pentru un nivel al
forţei de proiectare comparabil cu cel folosit pentru structuri convenţionale în
care se folosesc factori de comportare semnificativ supraunitari.
Familia de spectre elastice de deplasări, pentru nivele diferite de
amortizare, pune în evidenţă cerinţa ridicată de deplasări specifică cutremurelor
vrâncene şi importanţa, însemnată, a nivelului de amortizare ridicat. Aşa cum se
va arăta şi în capitolul 4, prin studii parametrice pe modele cu 2 G.L.D., un
nivel de amortizare de ordinul 20-40% duce la o reducere a cerinţelor de până la
2-3 ori faţă de cerinţele elastice de deplasări.
Cutremurele vrâncene, în comparaţie cu alte tipuri de acţiuni seismice
pentru care s-au dezvoltat astfel de sisteme de protecţie, au o particularitate
deosebită şi anume cerinţe mari de deplasări,respectiv cerinţe energetice
crescute pentru perioade mari de vibraţie (1,2 – 1,5 sec).Deasemenea se observă
extinderea zonei de amplificare dinamică spre domeniul perioadelor proprii
mari de oscilaţie. În consecinţă, eficacitatea dispozitivelor de izolare seismică,

CAPITOLUL 3 – CONTRIBUŢII LA PERFECŢIONAREA CONTROLULUI STRUCTURAL PRIN IZOLAREA BAZEI Pagina 58 din 159
certificată în alte condiţii de amplasament, este mai redusă în cazul particular al
ţării noastre. De asemenea, folosirea dispozitivelor de izolare a bazei trebuie, în
mod obligatoriu, însoţită de folosirea de dispozitive de amortizare pasive,
semi-active sau active care sa reducă deplasările mari suportate de izolatori.
Fig. 3.11. – Spectre elastice de proiectare – acceleraţie, respectiv deplasare, conform
P100/2006
3.3. Aspectul energetic al problemei
În cele ce urmează se vor analiza, din punct de vedere energetic, ecuaţiile
de echilibru pentru un sistem convenţional cu 1 G.L.D., cu caracteristici uzuale
de masă şi rigiditate, respectiv pentru unul izolat şi prevăzut cu amortizare
pasivă adiţională, modelat ca sistem cu 2 G.L.D şi se va prezenta ponderea pe
care o au diferitele forme de disipare ale energiei faţă de energia totală.
Pentru un anumit sistem dinamic, plecând de la mărimile de răspuns
relative, se poate face următorul bilanţ energetic:
irabsdkr EEEE (3.1)

CAPITOLUL 3 – CONTRIBUŢII LA PERFECŢIONAREA CONTROLULUI STRUCTURAL PRIN IZOLAREA BAZEI Pagina 59 din 159
în care:
Ekr – reprezintă energia cinetică “relativă”;
Ed – energia disipată prin amortizare vâscoasă;
Eabs – energia absorbită de sistem;
Eir – energia “relativă” indusă.
Energia absorbită de sistem se compune din energie consumată pentru
deformare elastică (recuperabilă) – Es şi energia disipată prin deformaţii plastice
sau disipată datorită comportării elastic neliniare a materialului – Ehyst.
hystsabs EEE (3.2)
În cazul sistemelor cu comportare liniar elastică, practic toată energia
indusă este disipată prin amortizare vâscoasă, deoarece 0hystE .
Pentru sisteme cu baza izolată sau echipate cu disipatori de energie
adiţionali este de preferat ca energia indusă să fie disipată prin dispozitivele de
disipare special prevăzute şi nu prin eventuale deformaţii plastice. În al doilea
caz, controlul modului în care energia indusă este consumată prin deformare
plastică este greu de făcut.
Următorul exemplu se referă la un sistem cu 1 G.L.D., cu comportare
liniar elastică.Sistemul este astfel dimensionat încât să aibă o perioadă de 0,5
secunde şi un nivel de amortizare de 5% din amortizarea critică. Ecuaţia
bilanţului energetic se poate obţine integrând în raport cu deplasarea relativă
instantanee, ecuaţia de mişcare scrisă în funcţie de mărimile relative ale
răspunsului:
)4(
0
)3(
0
)2(
0
2
(1)
0
)()()()( dtuumdtufdtucdtuum
t
g
t
s
tt
( 3.3)
(Nota : variabila a fost schimbată: )dtudu

CAPITOLUL 3 – CONTRIBUŢII LA PERFECŢIONAREA CONTROLULUI STRUCTURAL PRIN IZOLAREA BAZEI Pagina 60 din 159
Expresiile de mai sus reprezintă :
(1) lucrul mecanic al forţei um (energie cinetică relativă) în intervalul
(0,t);
(2) lucrul mecanic al forţei de amortizare (energie disipată prin
amortizare vâscoasă);
(3) lucrul mecanic al forţei elastice (energia absorbită);
(4) energia “relativă” indusă – lucrul mecanic al forţei gum .
În figura 3.12 sunt date caracteristicile sistemului elastic şi este
reprezentată repartiţia energiei absorbite de către sistem şi materializată prin
deformaţii postelastice Ehyst, ca pondere a energiei totale induse Eir.
Fig. 3.12. – Bilantul energetic al unui sistem elastic cu 1 G.L.D., cu baza fixă
Comparativ, acelaşi sistem cu 1 G.L.D. se va înzestra cu o interfaţă de
izolare de rigiditate şi masă astfel aleasă încât să confere sistemului izolat o
perioada de 3,0 secunde şi un coeficient de amortizare echivalent unei fracţiuni
din amortizarea critică de 25%. Prin prelucrarea corespunzătoare a expresiei 3.3,
ţinând cont de masa şi rigiditatea sistemului de izolare, cât şi de noul nivel de
amortizare, rezultă reprezentarea grafică din fig. 3.13.

CAPITOLUL 3 – CONTRIBUŢII LA PERFECŢIONAREA CONTROLULUI STRUCTURAL PRIN IZOLAREA BAZEI Pagina 61 din 159
Fig. 3.13. – Bilanţul energetic al sistemului cu 1 G.L.D., izolat şi cu amortizare adiţională
Prin analiza comparativă a fig. 3.12 şi 3.13 se observă că, în cazul
sistemului izolat şi adiţional amortizat, majoritatea energiei induse este disipată
la nivelul interfeţei de izolare. În aceste condiţii, sistemul va avea o comportare
elastică, întrucât ponderea energiei disipate prin amortizare echivalent vâscoasă
în cazul sistemului izolat este sensibil mai mare decât cea disipată prin
deformaţii histeretice în cazul sistemului convenţional. În capitolul al patrulea
se va prezenta pe larg extinderea concluziilor acestui exemplu la o structură
reală, multietajată, cu mai multe grade de libertate dinamică, supuse unui
cutremur real (VRANCEA,4 Martie 1977 ).
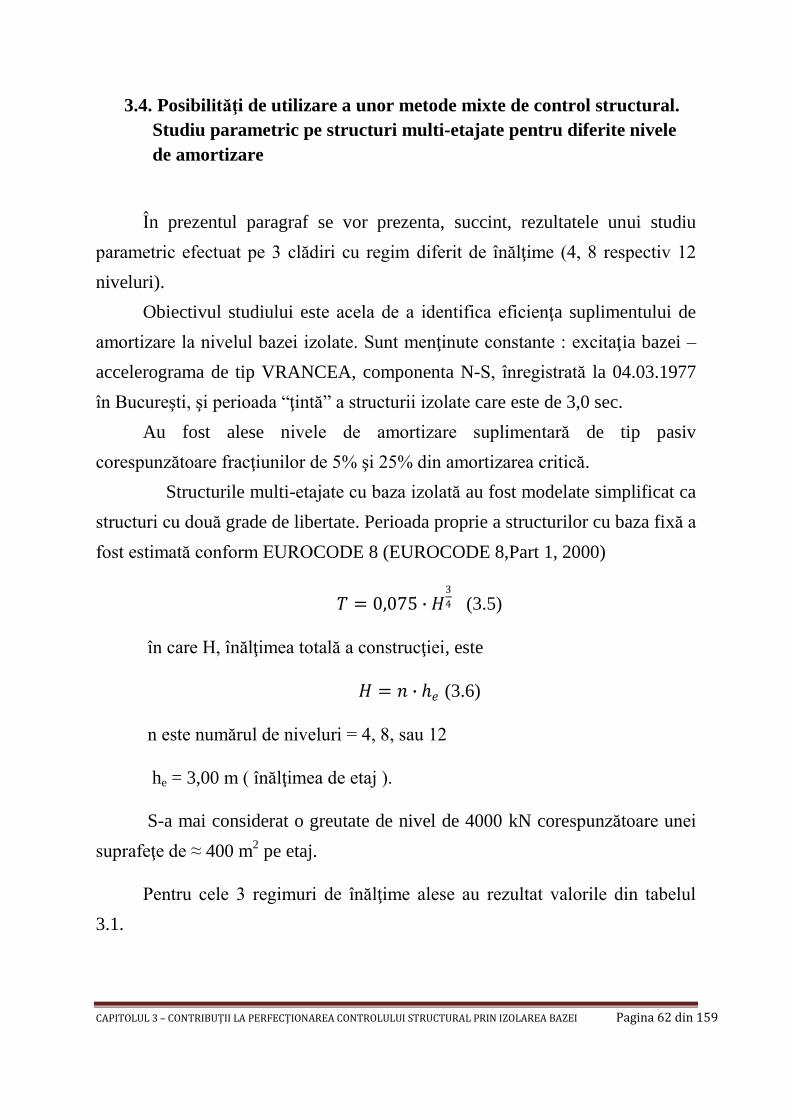
CAPITOLUL 3 – CONTRIBUŢII LA PERFECŢIONAREA CONTROLULUI STRUCTURAL PRIN IZOLAREA BAZEI Pagina 62 din 159
3.4. Posibilităţi de utilizare a unor metode mixte de control structural.
Studiu parametric pe structuri multi-etajate pentru diferite nivele
de amortizare
În prezentul paragraf se vor prezenta, succint, rezultatele unui studiu
parametric efectuat pe 3 clădiri cu regim diferit de înălţime (4, 8 respectiv 12
niveluri).
Obiectivul studiului este acela de a identifica eficienţa suplimentului de
amortizare la nivelul bazei izolate. Sunt menţinute constante : excitaţia bazei –
accelerograma de tip VRANCEA, componenta N-S, înregistrată la 04.03.1977
în Bucureşti, şi perioada “ţintă” a structurii izolate care este de 3,0 sec.
Au fost alese nivele de amortizare suplimentară de tip pasiv
corespunzătoare fracţiunilor de 5% şi 25% din amortizarea critică.
Structurile multi-etajate cu baza izolată au fost modelate simplificat ca
structuri cu două grade de libertate. Perioada proprie a structurilor cu baza fixă a
fost estimată conform EUROCODE 8 (EUROCODE 8,Part 1, 2000)
𝑇 = 0,075 ∙ 𝐻3
4 (3.5)
în care H, înălţimea totală a construcţiei, este
𝐻 = 𝑛 ∙ 𝑒 (3.6)
n este numărul de niveluri = 4, 8, sau 12
he = 3,00 m ( înălţimea de etaj ).
S-a mai considerat o greutate de nivel de 4000 kN corespunzătoare unei
suprafeţe de ≈ 400 m2 pe etaj.
Pentru cele 3 regimuri de înălţime alese au rezultat valorile din tabelul
3.1.
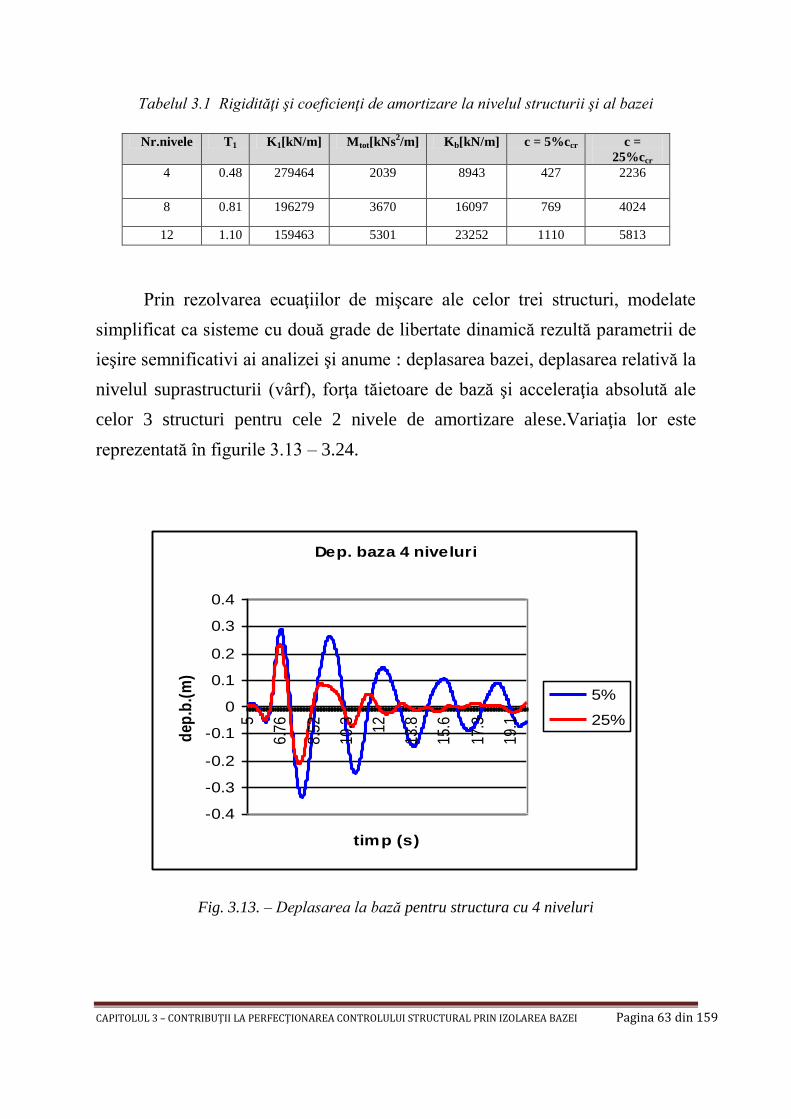
CAPITOLUL 3 – CONTRIBUŢII LA PERFECŢIONAREA CONTROLULUI STRUCTURAL PRIN IZOLAREA BAZEI Pagina 63 din 159
Tabelul 3.1 Rigidităţi şi coeficienţi de amortizare la nivelul structurii şi al bazei
Nr.nivele T1 K1[kN/m] Mtot[kNs2/m] Kb[kN/m] c = 5%ccr c =
25%ccr
4 0.48 279464 2039 8943 427 2236
8 0.81 196279 3670 16097 769 4024
12 1.10 159463 5301 23252 1110 5813
Prin rezolvarea ecuaţiilor de mişcare ale celor trei structuri, modelate
simplificat ca sisteme cu două grade de libertate dinamică rezultă parametrii de
ieşire semnificativi ai analizei şi anume : deplasarea bazei, deplasarea relativă la
nivelul suprastructurii (vârf), forţa tăietoare de bază şi acceleraţia absolută ale
celor 3 structuri pentru cele 2 nivele de amortizare alese.Variaţia lor este
reprezentată în figurile 3.13 – 3.24.
Fig. 3.13. – Deplasarea la bază pentru structura cu 4 niveluri
Dep. baza 4 niveluri
-0.4
-0.3
-0.2
-0.1
0
0.1
0.2
0.3
0.4
5
6.76
8.52
10.3 12
13.8
15.6
17.3
19.1
timp (s)
dep
.b.(
m)
5%
25%

CAPITOLUL 3 – CONTRIBUŢII LA PERFECŢIONAREA CONTROLULUI STRUCTURAL PRIN IZOLAREA BAZEI Pagina 64 din 159
Fig. 3.14. – Deplasarea relativă pentru structura cu 4 niveluri
Fig. 3.15. –Forţa tăietoare de bază pentru structura cu 4 niveluri
Dep. relativa
-0.01
-0.008
-0.006
-0.004
-0.002
0
0.002
0.004
0.006
0.008
0.01
5
7.04
9.08
11.1
13.2
15.2
17.2
19.3
timp (s)
dep
.rel
.(m
)
5%
25%
-3000
-2000
-1000
0
1000
2000
3000
5
6,96
8,92
10,8
8
12,8
4
14,8
16,7
6
18,7
2
FT
B (k
N)
timp (s)
F.T.B.
5%
25%
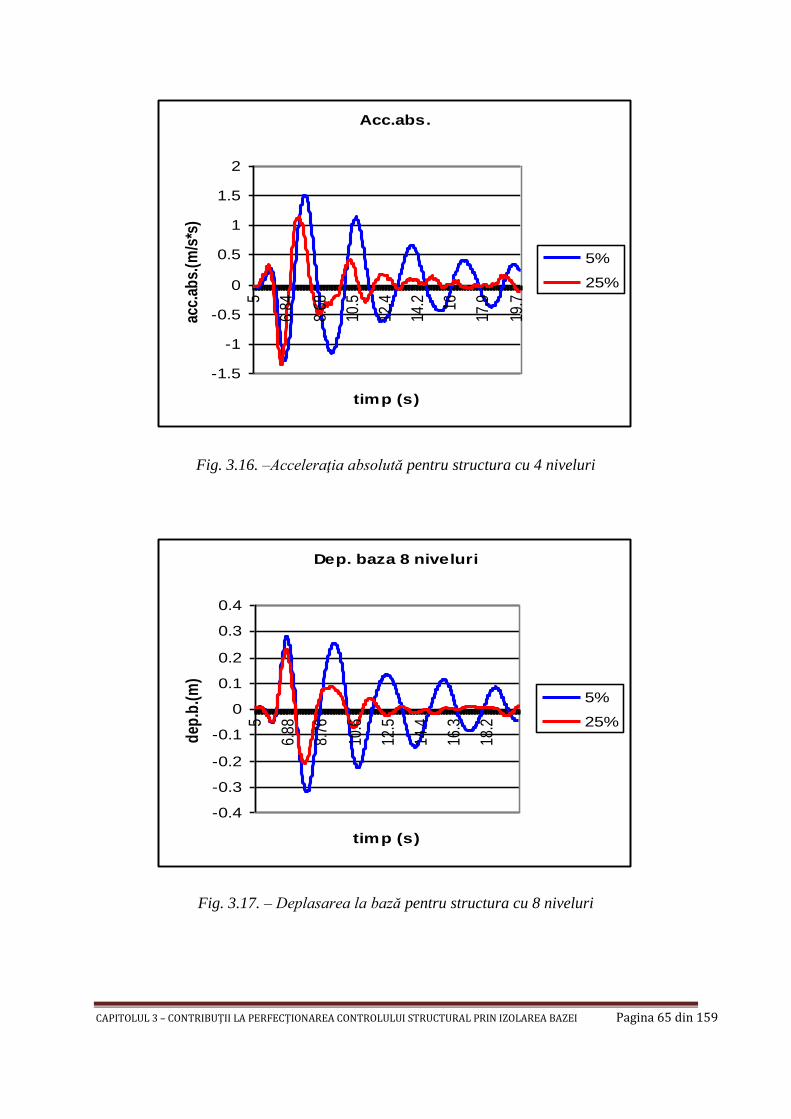
CAPITOLUL 3 – CONTRIBUŢII LA PERFECŢIONAREA CONTROLULUI STRUCTURAL PRIN IZOLAREA BAZEI Pagina 65 din 159
Fig. 3.16. –Acceleraţia absolută pentru structura cu 4 niveluri
Fig. 3.17. – Deplasarea la bază pentru structura cu 8 niveluri
Acc.abs.
-1.5
-1
-0.5
0
0.5
1
1.5
2
5
6.84
8.68
10.5
12.4
14.2 16
17.9
19.7
timp (s)
acc.
abs.
(m/s
*s)
5%
25%
Dep. baza 8 niveluri
-0.4
-0.3
-0.2
-0.1
0
0.1
0.2
0.3
0.4
5
6.88
8.76
10.6
12.5
14.4
16.3
18.2
timp (s)
dep
.b.(
m)
5%
25%
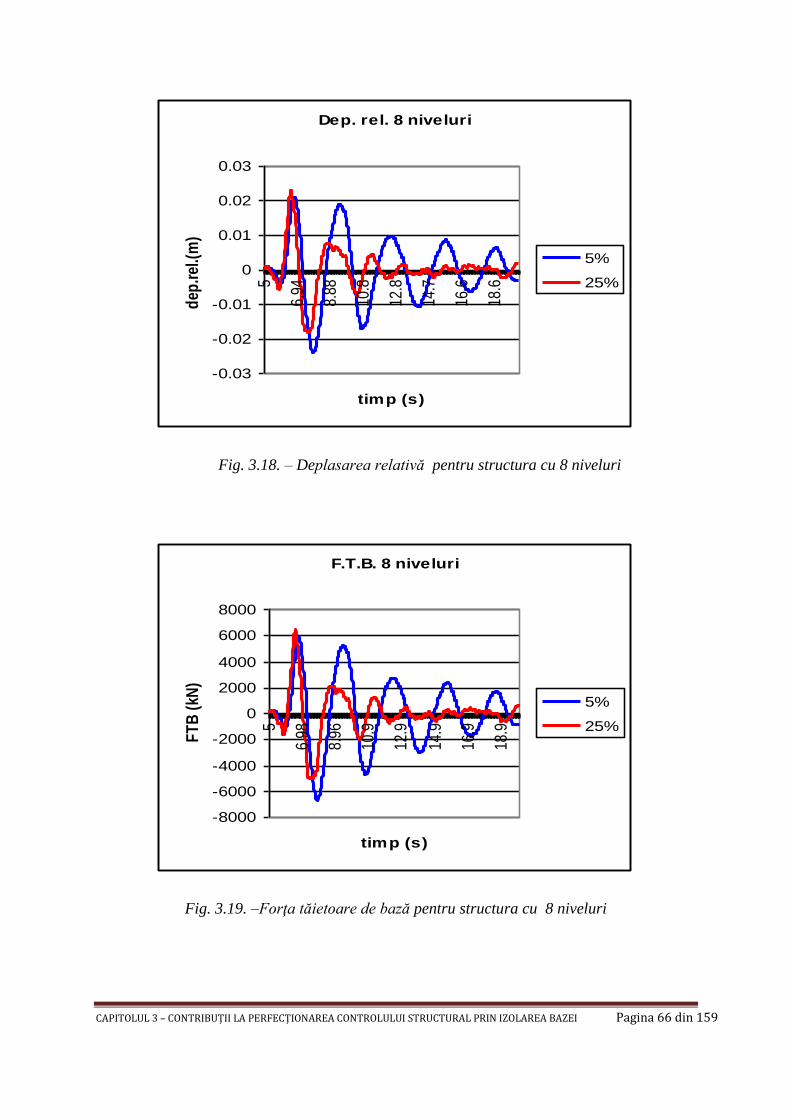
CAPITOLUL 3 – CONTRIBUŢII LA PERFECŢIONAREA CONTROLULUI STRUCTURAL PRIN IZOLAREA BAZEI Pagina 66 din 159
Fig. 3.18. – Deplasarea relativă pentru structura cu 8 niveluri
Fig. 3.19. –Forţa tăietoare de bază pentru structura cu 8 niveluri
Dep. rel. 8 niveluri
-0.03
-0.02
-0.01
0
0.01
0.02
0.03
5
6.94
8.88
10.8
12.8
14.7
16.6
18.6
timp (s)
dep
.rel
.(m
)
5%
25%
F.T.B. 8 niveluri
-8000
-6000
-4000
-2000
0
2000
4000
6000
8000
5
6.98
8.96
10.9
12.9
14.9
16.9
18.9
timp (s)
FT
B (
kN)
5%
25%

CAPITOLUL 3 – CONTRIBUŢII LA PERFECŢIONAREA CONTROLULUI STRUCTURAL PRIN IZOLAREA BAZEI Pagina 67 din 159
Fig. 3.20. –Acceleraţia absolută pentru structura cu 8 niveluri
Fig. 3.21. – Deplasarea la bază pentru structura cu 12 niveluri
Acc.abs. 8 niveluri
-2
-1.5
-1
-0.5
0
0.5
1
1.5
2
5
6.88
8.76
10.6
12.5
14.4
16.3
18.2
timp (s)
acc.
abs.
(m
/s*s
)
5%
25%
Dep. baza 12 niveluri
-0.4
-0.3
-0.2
-0.1
0
0.1
0.2
0.3
5
6.88
8.76
10.6
12.5
14.4
16.3
18.2
timp (s)
dep
.b.(
m)
5%
25%

CAPITOLUL 3 – CONTRIBUŢII LA PERFECŢIONAREA CONTROLULUI STRUCTURAL PRIN IZOLAREA BAZEI Pagina 68 din 159
Fig. 3.22. – Deplasarea relativă pentru structura cu 12 niveluri
Fig. 3.23. –Forţa tăietoare de bază pentru structura cu 12 niveluri
Dep. rel. 12 niveluri
-0.05
-0.04
-0.03
-0.02
-0.01
0
0.01
0.02
0.03
0.04
0.05
5
6.96
8.92
10.9
12.8
14.8
16.8
18.7
timp (s)
dep
.rel
. (m
)
5%
25%
F.T.B. 12 niveluri
-15000
-10000
-5000
0
5000
10000
15000
5
7.08
9.16
11.2
13.3
15.4
17.5
19.6
timp (s)
FT
B (
kN)
5%
25%

CAPITOLUL 3 – CONTRIBUŢII LA PERFECŢIONAREA CONTROLULUI STRUCTURAL PRIN IZOLAREA BAZEI Pagina 69 din 159
Fig. 3.24. –Acceleraţia absolută pentru structura cu 12 niveluri
3.5. Observaţii şi concluzii
Deplasările maxime ale bazei izolate sunt sensibil mai mici decât cele
estimate din spectrul de proiectare al deplasărilor ( fig. 3.11 ). Pentru nivelul de
amortizare de 5 % deplasarea înregistrată este de 0,32 m, în comparaţie cu cea
de 0,50 m rezultată din spectrul de proiectare, iar pentru nivelul de amortizare
de 25% deplasarea este de 0,22 m comparativ cu cea estimată din spectrul de
proiectare de 0,30 m, ceea ce confirmă caracterul acoperitor al spectrului de
proiectare în zona perioadelor mari. Reducerile deplasărilor bazei sunt de ≈ 30%
în toate cazurile de regim de înălţime analizate, deci, semnificative.
Şi la celelalte mărimi examinate se constată reduceri ale valorilor
maxime, însă în proporţii mai puţin spectaculoase: de exemplu la structura cu 8
niveluri forţa tăietoare de bază scade de la 6725 kN la 6378 kN ( aproximativ
5% ). Este, însă, de remarcat că amplitudinile maxime se înregistrează în primul
Acc. abs. 12 niveluri
-1.5
-1
-0.5
0
0.5
1
1.5
2
5
6.88
8.76
10.6
12.5
14.4
16.3
18.2
timp (s)
acc.
abs.
(m/s
*s)
5%
25%

CAPITOLUL 3 – CONTRIBUŢII LA PERFECŢIONAREA CONTROLULUI STRUCTURAL PRIN IZOLAREA BAZEI Pagina 70 din 159
ciclu de oscilaţie, care este mai puţin amortizat, în ciclurile următoare
amplitudinile fiind de câteva ori mai mici la amortizarea puternică de 25%.
Acest aspect este esenţial pentru structurile alcătuite din elemente care
prezintă o degradare a rigidităţii la solicitări ciclice (cum sunt grinzile din beton
armat) şi, în general, atenuează considerabil fenomenul de oboseală la un număr
redus de cicluri (low cycle fatigue).
Dacă se examinează raportul forţă tăietoare/greutate totală
suprastructură se constată că acesta creşte cu numărul de nivele, practic
independent de mărimea amortizării. Astfel la 4 niveluri se înregistrează un
nivel de 13% din greutatea totală, la 8 niveluri se înregistrează 20% din
greutatea totală, respectiv 24% din greutatea totală la 12 niveluri.
De aici rezultă că pentru structuri cu mai mult de 4...6 niveluri duse la
“perioada ţintă” fixă de 3,0 secunde, prin izolarea bazei, menţinerea
suprastructurii în stadiul elastic devine greu de realizat în condiţii
tehnico-economice avantajoase.
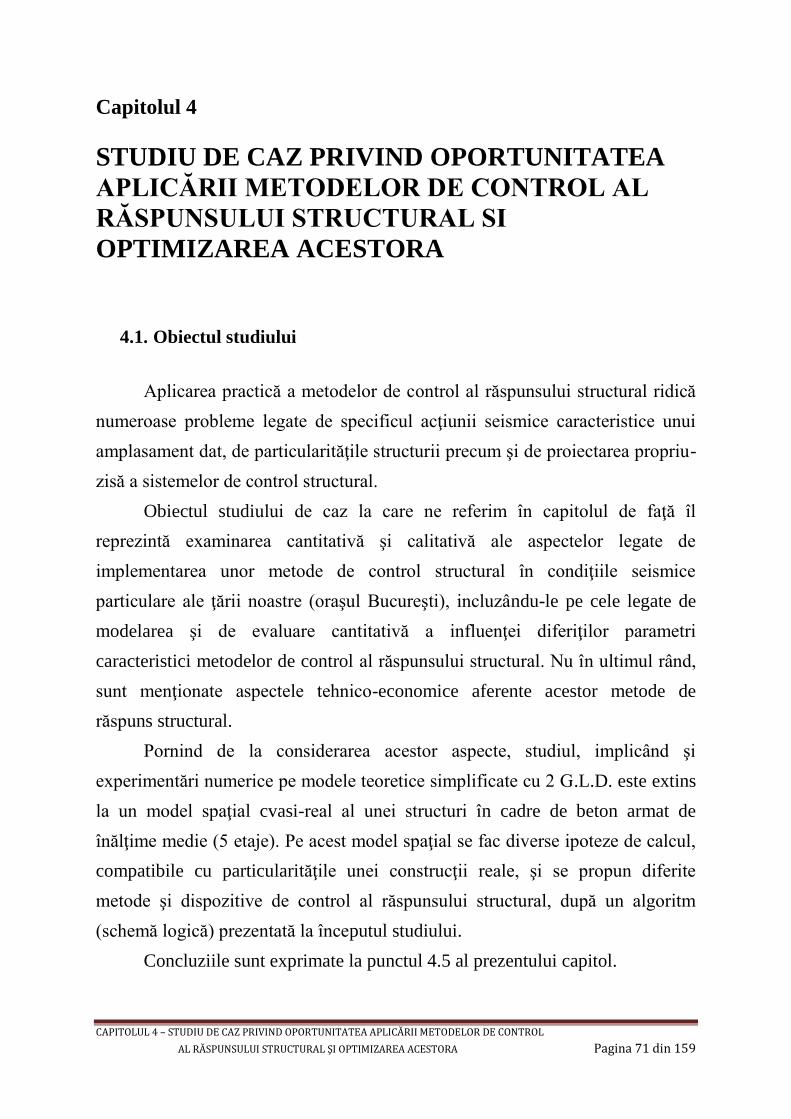
CAPITOLUL 4 – STUDIU DE CAZ PRIVIND OPORTUNITATEA APLICĂRII METODELOR DE CONTROL
AL RĂSPUNSULUI STRUCTURAL ŞI OPTIMIZAREA ACESTORA Pagina 71 din 159
Capitolul 4
STUDIU DE CAZ PRIVIND OPORTUNITATEA
APLICĂRII METODELOR DE CONTROL AL
RĂSPUNSULUI STRUCTURAL SI
OPTIMIZAREA ACESTORA
4.1. Obiectul studiului
Aplicarea practică a metodelor de control al răspunsului structural ridică
numeroase probleme legate de specificul acţiunii seismice caracteristice unui
amplasament dat, de particularităţile structurii precum şi de proiectarea propriu-
zisă a sistemelor de control structural.
Obiectul studiului de caz la care ne referim în capitolul de faţă îl
reprezintă examinarea cantitativă şi calitativă ale aspectelor legate de
implementarea unor metode de control structural în condiţiile seismice
particulare ale ţării noastre (oraşul Bucureşti), incluzându-le pe cele legate de
modelarea şi de evaluare cantitativă a influenţei diferiţilor parametri
caracteristici metodelor de control al răspunsului structural. Nu în ultimul rând,
sunt menţionate aspectele tehnico-economice aferente acestor metode de
răspuns structural.
Pornind de la considerarea acestor aspecte, studiul, implicând şi
experimentări numerice pe modele teoretice simplificate cu 2 G.L.D. este extins
la un model spaţial cvasi-real al unei structuri în cadre de beton armat de
înălţime medie (5 etaje). Pe acest model spaţial se fac diverse ipoteze de calcul,
compatibile cu particularităţile unei construcţii reale, şi se propun diferite
metode şi dispozitive de control al răspunsului structural, după un algoritm
(schemă logică) prezentată la începutul studiului.
Concluziile sunt exprimate la punctul 4.5 al prezentului capitol.

CAPITOLUL 4 – STUDIU DE CAZ PRIVIND OPORTUNITATEA APLICĂRII METODELOR DE CONTROL
AL RĂSPUNSULUI STRUCTURAL ŞI OPTIMIZAREA ACESTORA Pagina 72 din 159
4.2. Probleme legate de utilizarea metodelor de control ale răspunsului
structural în România
4.2.1. Aspecte legate de particularităţile acţiunii seismice
Particularităţile specifice ale acţiunilor seismice generate de cutremurele
vrâncene au fost înţelese şi cuantificate, în mare măsură, în urma prelucrării
înregistrării făcute la Bucureşti (sediul INCERC) la 4 Martie 1977. Ulterior,
studii extinse pe accelerograme înregistrate în staţii seismice amplasate pe
întreg teritoriul ţării afectat de cutremurele vrâncene au adâncit cunoştinţele
obţinute în 1977.
Se ştie, astfel, că cutremurele vrâncene de adâncime medie generează la
Bucureşti mişcări seismice cu bandă îngustă de frecvenţe, cu acceleraţii
spectrale maxime corespunzând structurilor cu perioadă proprie mare
(construcţii înalte) şi cu cerinţe de deplasare substanţial mai mari decât cele ce
corespund cutremurelor cu bandă lată cum ar fi cele înregistrate în SUA (de
exemplu El Centro, 1940), Japonia, Noua Zeelandă e.t.c.
Aceste particularităţi aduc dificultăţi la aplicarea filozofiilor de elaborare
a măsurilor de protecţie la acţiuni seismice implementate cu succes în alte
ţări.Deasemenea gradul de recurenţă relativ redus al evenimentelor importante
(2-3 pe durata unui secol sau, mai precis,câte unul pe durata de activitate a unei
generaţii de specialişti) duce la îngreunarea urmăririi eficienţei sistemelor de
protecţie seismică aplicate în condiţii locale, precum şi la un interes mai redus
din partea proprietarilor şi utilizatorilor de structuri faţă de aceste tipuri de
măsuri şi sisteme.
În fig. 4.1 a), b) şi c) sunt prezentate spectrele de răspuns în acceleraţii,
viteze, respectiv deplasări pentru componenta N-S a mişcării înregistrate la
4 martie 1977, amortizare 5% . Spectrele au fost construite cu ajutorul
programului SEISMO SIGNAL (Seismosoft - Home Page, 2008).
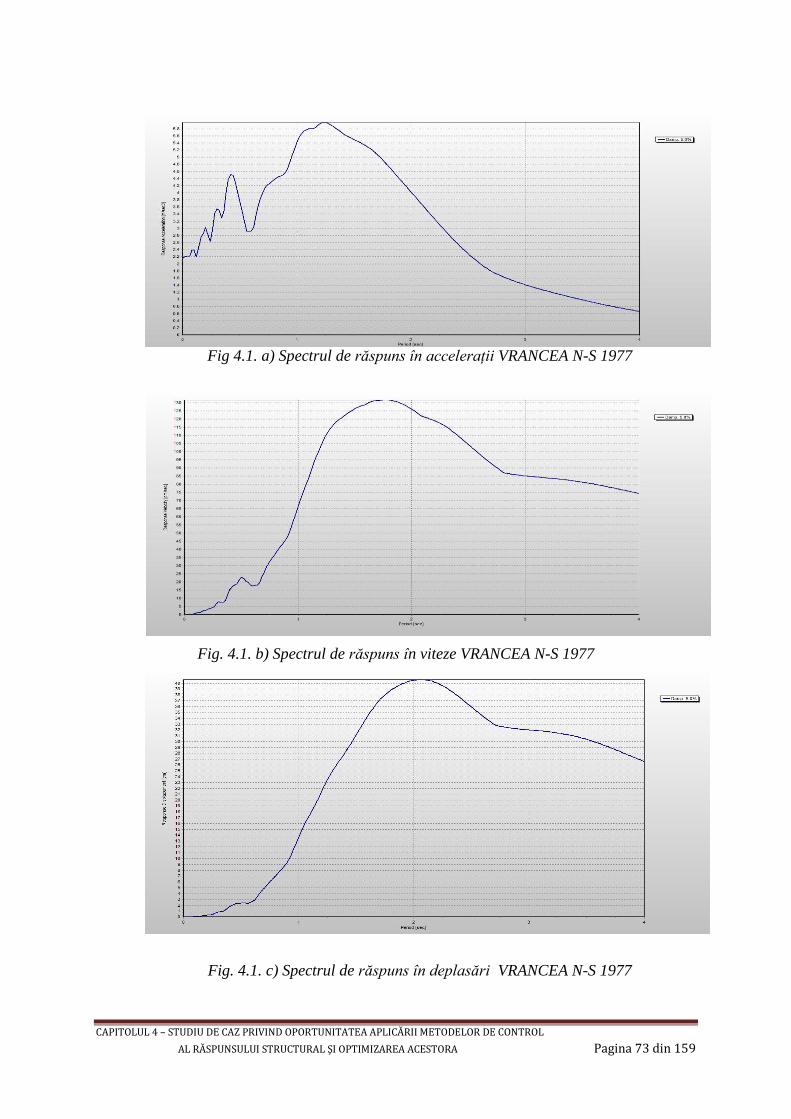
CAPITOLUL 4 – STUDIU DE CAZ PRIVIND OPORTUNITATEA APLICĂRII METODELOR DE CONTROL
AL RĂSPUNSULUI STRUCTURAL ŞI OPTIMIZAREA ACESTORA Pagina 73 din 159
Fig 4.1. a) Spectrul de răspuns în accelerații VRANCEA N-S 1977
Fig. 4.1. b) Spectrul de răspuns în viteze VRANCEA N-S 1977
Fig. 4.1. c) Spectrul de răspuns în deplasări VRANCEA N-S 1977
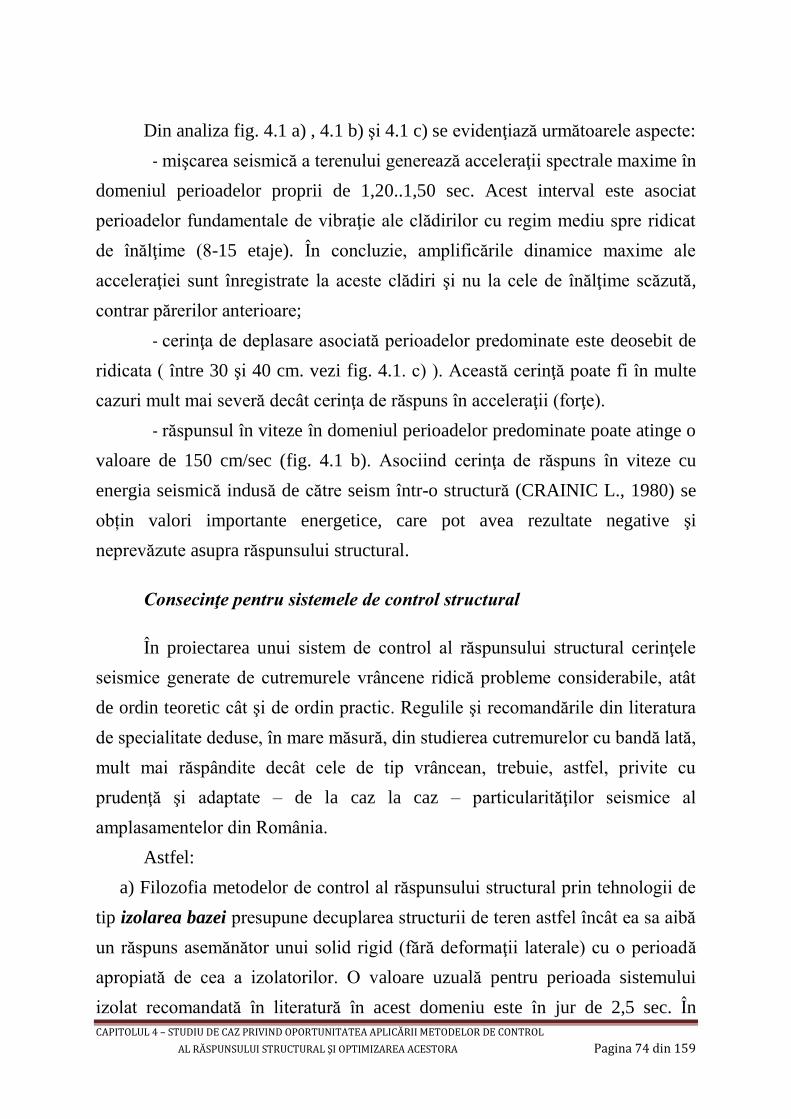
CAPITOLUL 4 – STUDIU DE CAZ PRIVIND OPORTUNITATEA APLICĂRII METODELOR DE CONTROL
AL RĂSPUNSULUI STRUCTURAL ŞI OPTIMIZAREA ACESTORA Pagina 74 din 159
Din analiza fig. 4.1 a) , 4.1 b) şi 4.1 c) se evidenţiază următoarele aspecte:
- mişcarea seismică a terenului generează acceleraţii spectrale maxime în
domeniul perioadelor proprii de 1,20..1,50 sec. Acest interval este asociat
perioadelor fundamentale de vibraţie ale clădirilor cu regim mediu spre ridicat
de înălţime (8-15 etaje). În concluzie, amplificările dinamice maxime ale
acceleraţiei sunt înregistrate la aceste clădiri şi nu la cele de înălţime scăzută,
contrar părerilor anterioare;
- cerinţa de deplasare asociată perioadelor predominate este deosebit de
ridicata ( între 30 şi 40 cm. vezi fig. 4.1. c) ). Această cerinţă poate fi în multe
cazuri mult mai severă decât cerinţa de răspuns în acceleraţii (forţe).
- răspunsul în viteze în domeniul perioadelor predominate poate atinge o
valoare de 150 cm/sec (fig. 4.1 b). Asociind cerinţa de răspuns în viteze cu
energia seismică indusă de către seism într-o structură (CRAINIC L., 1980) se
obțin valori importante energetice, care pot avea rezultate negative şi
neprevăzute asupra răspunsului structural.
Consecinţe pentru sistemele de control structural
În proiectarea unui sistem de control al răspunsului structural cerinţele
seismice generate de cutremurele vrâncene ridică probleme considerabile, atât
de ordin teoretic cât şi de ordin practic. Regulile şi recomandările din literatura
de specialitate deduse, în mare măsură, din studierea cutremurelor cu bandă lată,
mult mai răspândite decât cele de tip vrâncean, trebuie, astfel, privite cu
prudenţă şi adaptate – de la caz la caz – particularităţilor seismice al
amplasamentelor din România.
Astfel:
a) Filozofia metodelor de control al răspunsului structural prin tehnologii de
tip izolarea bazei presupune decuplarea structurii de teren astfel încât ea sa aibă
un răspuns asemănător unui solid rigid (fără deformaţii laterale) cu o perioadă
apropiată de cea a izolatorilor. O valoare uzuală pentru perioada sistemului
izolat recomandată în literatură în acest domeniu este în jur de 2,5 sec. În
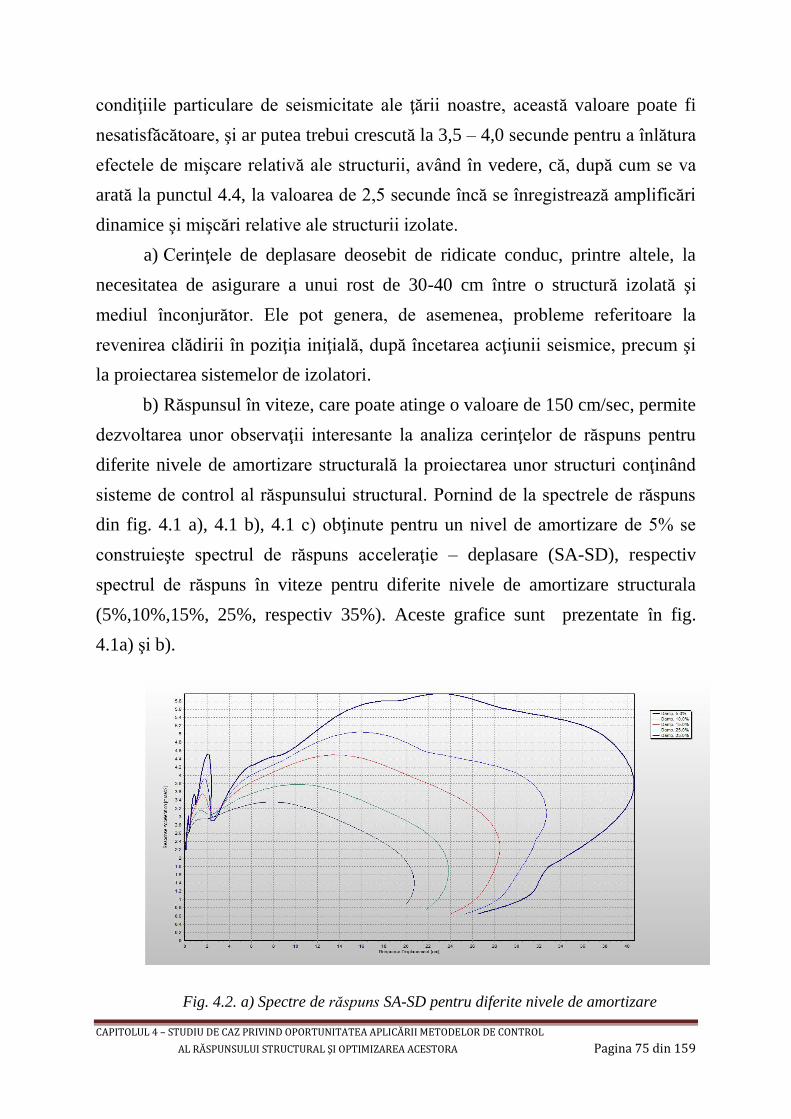
CAPITOLUL 4 – STUDIU DE CAZ PRIVIND OPORTUNITATEA APLICĂRII METODELOR DE CONTROL
AL RĂSPUNSULUI STRUCTURAL ŞI OPTIMIZAREA ACESTORA Pagina 75 din 159
condiţiile particulare de seismicitate ale ţării noastre, această valoare poate fi
nesatisfăcătoare, şi ar putea trebui crescută la 3,5 – 4,0 secunde pentru a înlătura
efectele de mişcare relativă ale structurii, având în vedere, că, după cum se va
arată la punctul 4.4, la valoarea de 2,5 secunde încă se înregistrează amplificări
dinamice şi mişcări relative ale structurii izolate.
a) Cerinţele de deplasare deosebit de ridicate conduc, printre altele, la
necesitatea de asigurare a unui rost de 30-40 cm între o structură izolată şi
mediul înconjurător. Ele pot genera, de asemenea, probleme referitoare la
revenirea clădirii în poziţia iniţială, după încetarea acţiunii seismice, precum şi
la proiectarea sistemelor de izolatori.
b) Răspunsul în viteze, care poate atinge o valoare de 150 cm/sec, permite
dezvoltarea unor observaţii interesante la analiza cerinţelor de răspuns pentru
diferite nivele de amortizare structurală la proiectarea unor structuri conţinând
sisteme de control al răspunsului structural. Pornind de la spectrele de răspuns
din fig. 4.1 a), 4.1 b), 4.1 c) obţinute pentru un nivel de amortizare de 5% se
construieşte spectrul de răspuns acceleraţie – deplasare (SA-SD), respectiv
spectrul de răspuns în viteze pentru diferite nivele de amortizare structurala
(5%,10%,15%, 25%, respectiv 35%). Aceste grafice sunt prezentate în fig.
4.1a) şi b).
Fig. 4.2. a) Spectre de răspuns SA-SD pentru diferite nivele de amortizare

CAPITOLUL 4 – STUDIU DE CAZ PRIVIND OPORTUNITATEA APLICĂRII METODELOR DE CONTROL
AL RĂSPUNSULUI STRUCTURAL ŞI OPTIMIZAREA ACESTORA Pagina 76 din 159
Fig. 4.2. b) Spectre de răspuns SV pentru diferite nivele de amortizare
Analiza spectrelor de răspuns SA-SD pentru diferite nivele de
amortizare arată o diferenţă considerabilă a cerinţelor seismice, în sensul
reducerii acestora, odată cu creşterea amortizării structurale. Astfel se pot obţine
reduceri de ordinul 1,7..2 ori a cerinţelor seismice prin creşterea amortizării
structurale la valori de 30-35% din amortizarea critică. În cazul sistemelor
prevăzute cu dispozitive de control al răspunsului seismic de tip izolare a bazei,
acest deziderat poate fi realizat prin prevederea de amortizori adiţionali asociaţi
izolatorilor seismici. La punctul 4.4 al prezentului capitol vor fi detaliate aceste
aspecte.
Analiza spectrelor de răspuns SV pentru diferite nivele de amortizare,
pun în evidenţă o diferenţă mare de cerinţe de viteză în zona perioadelor
predominate şi o cerinţă aproape constantă (variind intre 60 şi 90 cm/sec) pentru
perioade lungi de vibraţie (peste 3,0 sec). Cu alte cuvinte, energia indusă de
către seism în structură, în cazul sistemelor izolate seismic, nu este redusă
considerabil în funcţie de nivelul de amortizare, cum s-a observat în domeniul
cerinţelor de acceleraţie şi de deplasare. Diferă, însă, modul de disipare a acestei
energii în structură, sistemele cu amortizare mai ridicată disipă mult din aceasta
energie în amortizori, lăsând doar o mică parte din energia seismică să fie
disipată prin alte mecanisme.
CAPITOLUL 4 – STUDIU DE CAZ PRIVIND OPORTUNITATEA APLICĂRII METODELOR DE CONTROL
AL RĂSPUNSULUI STRUCTURAL ŞI OPTIMIZAREA ACESTORA Pagina 77 din 159
4.2.2. Aspecte legate de modelarea structurii şi de tehnologiile de
cuantificare a răspunsului
Modelarea structurii trebuie să aibă un grad sporit de fidelitate şi
complexitate, pentru a reflecta cât mai clar fiecare particularitate. Este de
remarcat faptul că teoriile generale, statice si dinamice, trebuie completate în
mod obligatoriu cu dinamica particulară a fiecărui obiectiv. Nu este admisă
folosirea “reţetelor de proiectare”. Efortul de modelare şi interpretare a
rezultatelor creşte în mod semnificativ, la fel şi cerintele de calitate impuse
concepţiei inginerului proiectant. Un alt aspect de modelare este acceptarea
echivalării suprastructurii cu un sistem cu un grad de libertate dinamic.În timp
ce pentru structuri simple, cu iregularităţi mici de masă şi rigiditate aceasta
echivalare poate fi acceptată, pentru structuri complexe este necesar un model
real, spatial, cu multiple grade de libertate dinamică.
Comportarea dispozitivelor de control structural trebuie să fie clară,
rezultată atât din considerente teoretice, dar şi din multe încercări.Deasemenea
trebuie considerate şi aspectele legate de fiabilitatea acestor dispozitive, de
posibilitatea efectuării verificărilor de mentenanţă pe durata de viaţă a
construcţiei şi de posibilitatea înlocuirii acestor dispozitive, atât după o mişcare
seismică importantă, cât şi în cazul modificării în timp a parametrilor de
proiectare. Urmarirea în timp a comportării construcţiei capată în acest caz o
importanţă sporită în comparaţie cu structurile clasice. Deasemenea baza legală
de proiectare (standarde, normative) trebuie bine pusă la punct, şi trebuie să
conţină atât prescripţii de proiectare raţionale, cât şi prescriptii de calitate pentru
fabricarea,instalarea si mentenanţa dispozitivelor.
4.2.3. Aspecte economice
Incidenţa redusă a cutremurelor importante în ţara noastră determină
posibilităţi scăzute de verificare reală a comportării sistemelor de control.
Deasemenea sunt de menţionat probleme legate de costul producerii şi
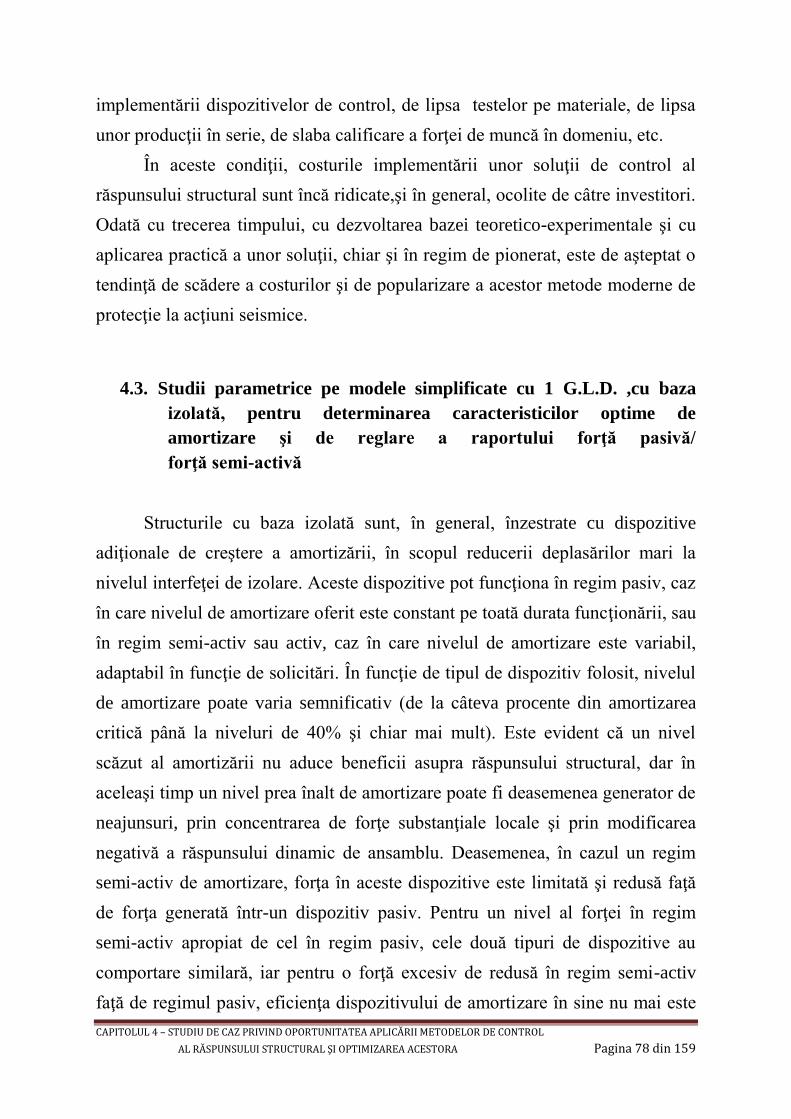
CAPITOLUL 4 – STUDIU DE CAZ PRIVIND OPORTUNITATEA APLICĂRII METODELOR DE CONTROL
AL RĂSPUNSULUI STRUCTURAL ŞI OPTIMIZAREA ACESTORA Pagina 78 din 159
implementării dispozitivelor de control, de lipsa testelor pe materiale, de lipsa
unor producţii în serie, de slaba calificare a forţei de muncă în domeniu, etc.
În aceste condiţii, costurile implementării unor soluţii de control al
răspunsului structural sunt încă ridicate,şi în general, ocolite de câtre investitori.
Odată cu trecerea timpului, cu dezvoltarea bazei teoretico-experimentale şi cu
aplicarea practică a unor soluţii, chiar şi în regim de pionerat, este de aşteptat o
tendinţă de scădere a costurilor şi de popularizare a acestor metode moderne de
protecţie la acţiuni seismice.
4.3. Studii parametrice pe modele simplificate cu 1 G.L.D. ,cu baza
izolată, pentru determinarea caracteristicilor optime de
amortizare şi de reglare a raportului forţă pasivă/
forţă semi-activă
Structurile cu baza izolată sunt, în general, înzestrate cu dispozitive
adiţionale de creştere a amortizării, în scopul reducerii deplasărilor mari la
nivelul interfeţei de izolare. Aceste dispozitive pot funcţiona în regim pasiv, caz
în care nivelul de amortizare oferit este constant pe toată durata funcţionării, sau
în regim semi-activ sau activ, caz în care nivelul de amortizare este variabil,
adaptabil în funcţie de solicitări. În funcţie de tipul de dispozitiv folosit, nivelul
de amortizare poate varia semnificativ (de la câteva procente din amortizarea
critică până la niveluri de 40% şi chiar mai mult). Este evident că un nivel
scăzut al amortizării nu aduce beneficii asupra răspunsului structural, dar în
aceleaşi timp un nivel prea înalt de amortizare poate fi deasemenea generator de
neajunsuri, prin concentrarea de forţe substanţiale locale şi prin modificarea
negativă a răspunsului dinamic de ansamblu. Deasemenea, în cazul un regim
semi-activ de amortizare, forţa în aceste dispozitive este limitată şi redusă faţă
de forţa generată într-un dispozitiv pasiv. Pentru un nivel al forţei în regim
semi-activ apropiat de cel în regim pasiv, cele două tipuri de dispozitive au
comportare similară, iar pentru o forţă excesiv de redusă în regim semi-activ
faţă de regimul pasiv, eficienţa dispozitivului de amortizare în sine nu mai este
CAPITOLUL 4 – STUDIU DE CAZ PRIVIND OPORTUNITATEA APLICĂRII METODELOR DE CONTROL
AL RĂSPUNSULUI STRUCTURAL ŞI OPTIMIZAREA ACESTORA Pagina 79 din 159
interesantă.Deasemenea, răspunsul dinamic al structurii prevăzute cu astfel de
dispozitive poate fi deficitar prin apropierea de limite. Între aceste limite, atât
din punct de vedere al nivelului de amortizare pasiv, cât şi al raportului dintre
forţa maximă în regim pasiv şi cea maximă în regim semi-activ se situează
domeniul optim de funcţionare. Studiul parametric prezentat în cadrul acestui
paragraf îşi propune să identifice acest domeniu optim de funcţionare, pentru un
sistem cu 1 G.L.D. , cu baza izolată, şi apoi, prin extindere, să aplice rezultatele
obţinute asupra unui sistem spaţial,având aceleaşi caracteristici de masă şi
rigiditate cu cele ale sistemului simplificat.Modelul sistemului cu 1 G.L.D. , cu
baza izolată, pe care se conduce studiul parametric este prezentat în fig. 4.3.
Fig. 4.3. Schematizarea dinamică a modelului simplificat cu baza izolată şi
amortizare aditională
Modelul din fig. 4.3. derivă dintr-un model cu baza fixă. Masa şi
rigiditatea acestuia sunt astfel alese încât să conducă la o perioadă proprie de
vibraţie de 0,93 secunde (asemănătoare cu cea a sistemului multi-etajat de la
paragraful 4.4). Nivelul de amortizare natural al acestui sistem este de 5%.Acest
model este, în faza următoare a analizei, înzestrat cu o interfaţă de izolare a
bazei, alcătuită din izolatori fără amortizare aditională a bazei, având
caracteristici dinamice alese astfel încât perioada sistemului izolat să fie de 3,39
secunde (similară cu cea a sistemului multi-etajat de la paragraful
4.4).Parametrul rigiditate rămane astfel constant pe durata analizei.Răspunsul
dinamic al structurii izolate este guvernat de ecuaţia 4.1.
gxMxKxCxM (4.1)

CAPITOLUL 4 – STUDIU DE CAZ PRIVIND OPORTUNITATEA APLICĂRII METODELOR DE CONTROL
AL RĂSPUNSULUI STRUCTURAL ŞI OPTIMIZAREA ACESTORA Pagina 80 din 159
Matricea maselor (M), are valoarea :
1
b
m0
0mM ;
mskN331m
2
b ,
mskN3740m
2
1 (4.2)
Matricea de rigiditate (K), are valoarea :
11
11b
kk
kkkK ;
mkN14994k b ,
mkN170713k1 (4.3)
Matricea de amortizare (C), are valoarea :
11
1cont1b
cc
ccccC ; 0cb ,
mskN2527c1 (4.4)
sau
00
0c
cc
cccCCC
cont
11
11b
controlnatural (4.5)
În ecuaţia 4.5. matricea de amortizare este descompusă în doi termeni,
unul reprezentând contribuţia amortizării naturale (5%) a sistemului, iar cel
de-al doilea reprezentând amortizarea adiţională adusă de către dispozitivele
adiţionale.Ecuaţia de mişcare rescrisă cu aceste consideraţii capată forma :
xCxMxKxCxM controlgnatural (4.6)
Pentru controlul nivelului de amortizare se foloseşte o strategie de control
a forţei (strategia a III-a prezentată în capitolul al doilea al lucrării). Legea
constitutivă a unui amortizor semi-activ este descrisă în ecuaţia 4.7.
.Ftxcif,F
;Ftxcif,txctF
limbcontlim
limbcontbcont
cont
(4.7)
În relatia 4.7. Fcont este forţa efectivă dezvoltată în amortizor, Flim este
valoarea limită impusă în amortizor,iar bx este viteza de oscilaţie a
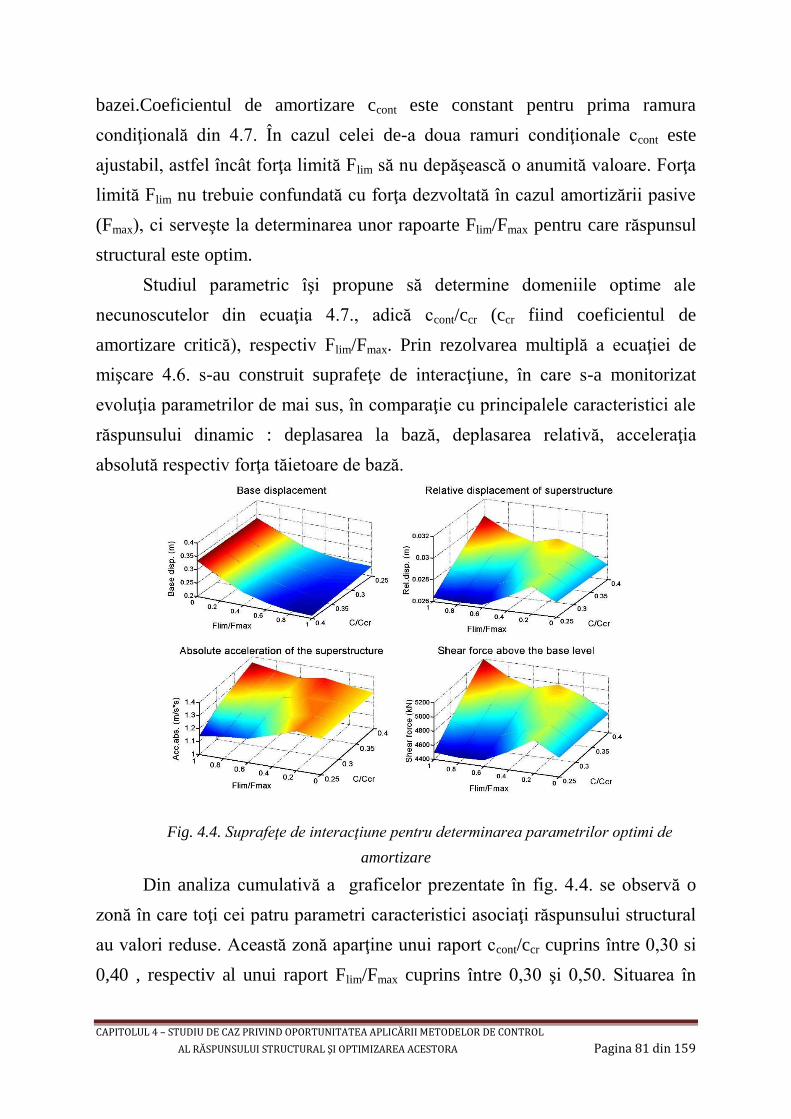
CAPITOLUL 4 – STUDIU DE CAZ PRIVIND OPORTUNITATEA APLICĂRII METODELOR DE CONTROL
AL RĂSPUNSULUI STRUCTURAL ŞI OPTIMIZAREA ACESTORA Pagina 81 din 159
bazei.Coeficientul de amortizare ccont este constant pentru prima ramura
condiţională din 4.7. În cazul celei de-a doua ramuri condiţionale ccont este
ajustabil, astfel încât forţa limită Flim să nu depăşească o anumită valoare. Forţa
limită Flim nu trebuie confundată cu forţa dezvoltată în cazul amortizării pasive
(Fmax), ci serveşte la determinarea unor rapoarte Flim/Fmax pentru care răspunsul
structural este optim.
Studiul parametric îşi propune să determine domeniile optime ale
necunoscutelor din ecuaţia 4.7., adică ccont/ccr (ccr fiind coeficientul de
amortizare critică), respectiv Flim/Fmax. Prin rezolvarea multiplă a ecuaţiei de
mişcare 4.6. s-au construit suprafeţe de interacţiune, în care s-a monitorizat
evoluţia parametrilor de mai sus, în comparaţie cu principalele caracteristici ale
răspunsului dinamic : deplasarea la bază, deplasarea relativă, acceleraţia
absolută respectiv forţa tăietoare de bază.
Fig. 4.4. Suprafeţe de interacţiune pentru determinarea parametrilor optimi de
amortizare
Din analiza cumulativă a graficelor prezentate în fig. 4.4. se observă o
zonă în care toţi cei patru parametri caracteristici asociaţi răspunsului structural
au valori reduse. Această zonă aparţine unui raport ccont/ccr cuprins între 0,30 si
0,40 , respectiv al unui raport Flim/Fmax cuprins între 0,30 şi 0,50. Situarea în

CAPITOLUL 4 – STUDIU DE CAZ PRIVIND OPORTUNITATEA APLICĂRII METODELOR DE CONTROL
AL RĂSPUNSULUI STRUCTURAL ŞI OPTIMIZAREA ACESTORA Pagina 82 din 159
afara acestor domenii duce la maximizarea a cel puţin unuia dintre parametrii
asociaţi răspunsului structural.
În concluzie, se consideră şi se folosesc în studiul de caz efectuat mai jos
pe un model spaţial tridmensional următoarele date de intrare asociate
răspunsului optim :
Un nivel de amortizare pasivă de 35% din amortizarea critică ;
Un raport dintre forţa maximă permisă în regim semi-activ şi forţa
în regim pasiv de 0,40.
4.4. Studiu de caz pe un model spaţial în ipotezele folosirii a diferite
metode de control al răspunsului structural
În cadrul acestui paragraf, se vor detalia aspectele rezultate în urma
calculului extins, pornind de la consideraţiile prezentate mai sus, pe un model
spaţial (PAVEL M., BETEA ST., VEZEANU G. ,STANCIU L., 2007).Modelul
spaţial reprezintă o clădire cu regim de înălţime P+5 niveluri, cu structura din
cadre de beton armat. Această clădire este alcătuită geometric şi este
dimensionată conform normelor de proiectare de la nivelul anilor 1995-2000
(P100-92, 1992),excepţie făcând capacitatea structurii la deplasări relative de
nivel (drifturi), care este mult sub cerinţele acestui normativ. Modelul spaţial al
structurii este prezentat în figura 4.5.

CAPITOLUL 4 – STUDIU DE CAZ PRIVIND OPORTUNITATEA APLICĂRII METODELOR DE CONTROL
AL RĂSPUNSULUI STRUCTURAL ŞI OPTIMIZAREA ACESTORA Pagina 83 din 159
Fig. 4. 5. – Alcătuirea geometrică a modelului spaţial
Forma în plan a structurii este dreptunghiulară, având dimensiunile
de 32,00 x 22,00 m, cu 6 travei de 6,00 m sau 4,00 m şi 4 deschideri, de
asemenea de 6,00 m sau 4,00 m . Înălţimea totala este de 18,00 m ( 6 niveluri a
3,00 m). Structura prezintă neregularităţi (retrageri) atât pe verticală cât şi pe
orizontală. Structura este din beton armat de clasă C16/20, stâlpii având
secţiunea de 50x50 cm, fiind armaţi longitudinal cu 12Φ25,oţel rotund de tip
OB37, în timp ce grinzile au o secţiune de 25x50 cm, fiind armate cu 4Φ20,
OB37, la partea superioară şi 4Φ16 la partea inferioară. Grosimea plăcilor este
de 13 cm, încărcarea medie pe unitatea de suprafaţă în gruparea specială fiind
de 11,0 kN/mp. Greutatea totală a structurii, în gruparea specială de încărcări
este astfel de 36674 kN.
Structura astfel alcătuită şi dimensionată se apropie de condiţia uneia
reale, rezultată din aplicarea principiilor şi prescripţiilor de calcul ale anilor
premegători cutremurului din 4 Martie 1977.
Studiul de caz a urmat paşii din fig. 4.6.
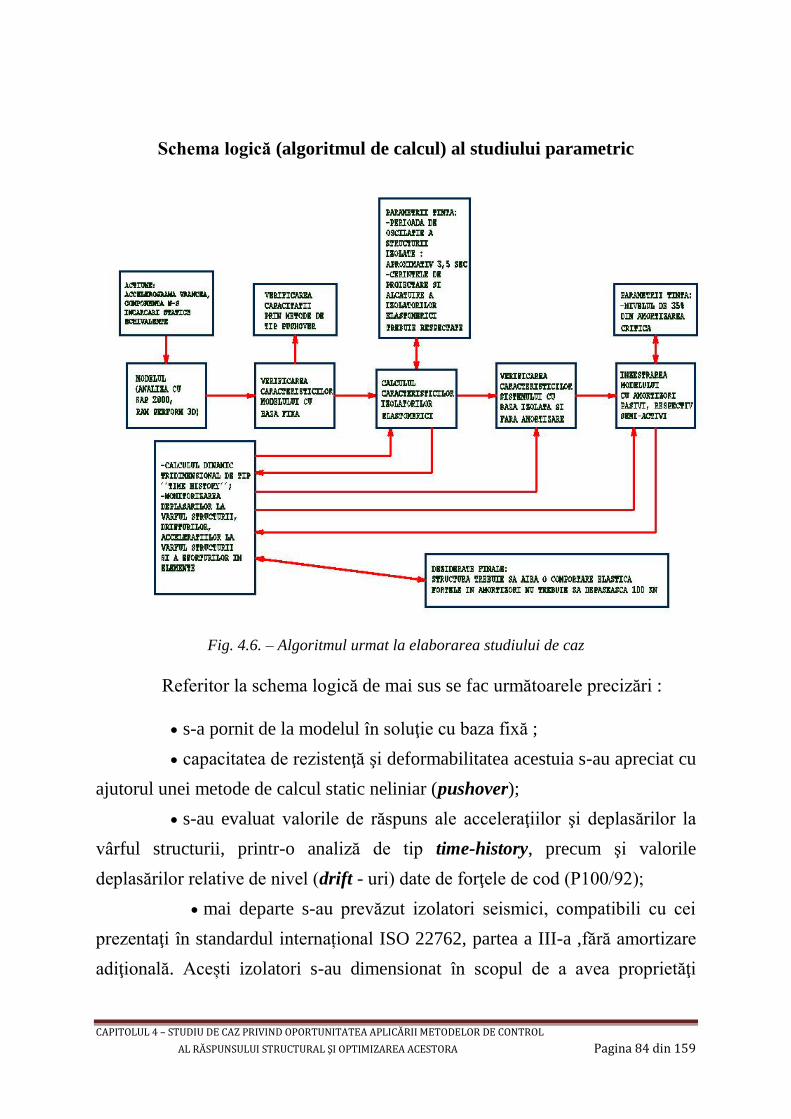
CAPITOLUL 4 – STUDIU DE CAZ PRIVIND OPORTUNITATEA APLICĂRII METODELOR DE CONTROL
AL RĂSPUNSULUI STRUCTURAL ŞI OPTIMIZAREA ACESTORA Pagina 84 din 159
Schema logică (algoritmul de calcul) al studiului parametric
Fig. 4.6. – Algoritmul urmat la elaborarea studiului de caz
Referitor la schema logică de mai sus se fac următoarele precizări :
s-a pornit de la modelul în soluţie cu baza fixă ;
capacitatea de rezistenţă şi deformabilitatea acestuia s-au apreciat cu
ajutorul unei metode de calcul static neliniar (pushover);
s-au evaluat valorile de răspuns ale acceleraţiilor şi deplasărilor la
vârful structurii, printr-o analiză de tip time-history, precum şi valorile
deplasărilor relative de nivel (drift - uri) date de forţele de cod (P100/92);
mai departe s-au prevăzut izolatori seismici, compatibili cu cei
prezentaţi în standardul internațional ISO 22762, partea a III-a ,fără amortizare
adiţională. Acești izolatori s-au dimensionat în scopul de a avea proprietăţi

CAPITOLUL 4 – STUDIU DE CAZ PRIVIND OPORTUNITATEA APLICĂRII METODELOR DE CONTROL
AL RĂSPUNSULUI STRUCTURAL ŞI OPTIMIZAREA ACESTORA Pagina 85 din 159
geometrice şi fizice de natura a-i conferi structurii izolate o perioada de
aproximativ 3,50 sec, o prima “ţintă” a studiului, calculul fiind unul iterativ ;
o a doua “ţintă” a studiului a fost reducerea deplasărilor la nivelul
interfeţei izolatorilor până la valoarea maximă de 20 cm. Aceasta s-a realizat
prin prevederea de amortizori pasivi, iterându-se până la realizarea obiectivului ;
s-au studiat din nou valorile mărimilor de răspuns (acceleraţie,
deplasare, drift) comparându-se cu cele inițiale ;
o a treia şi ultima “ţintă” a studiului a fost reducerea forţelor din
izolatori până la o valoare maximă de 100 kN, fapt realizat prin prevederea de
amortizori semi-activi în locul celor pasivi, cu amortizare în domeniul optim
precizat la paragraful 4.3;
s-au măsurat şi comparat din nou valorile mărimilor de răspuns.
4.4.1. Modelul cu bază fixă
Modelul de bază, pe care s-au propus diferite variante de îmbunătăţire
a performanţei, prin prevederea de diverse sisteme de control structural, se
caracterizează printr-o conformaţie deficitară în domeniul flexibilităţii şi al
oscilaţiilor de ansamblu. Caracteristicile modelului cu bază fixă sunt redate în
tabelul 4.1.
Tabelul 4.1. – Caracteristicile modelului cu bază fixă
Caracteristica Direcție transversală Direcție longitudinală
Perioada de oscilație
fundamentală
0,99 sec ( translație
cuplată cu torsiune)
1,04 sec (translație
cuplată cu torsiune)
Drift pushover 2,27% 2,58%
Drift admisibil P100/92 0,35% 0,35%
Accelerații la vârful
structurii(pentru
mișcarea VRANCEA)
5,042 m/s2 5,207 m/s
2
Amplificare dinamică la
vârful structurii 2,60 2,68
Mecanism de plastificare Favorabil Favorabil

CAPITOLUL 4 – STUDIU DE CAZ PRIVIND OPORTUNITATEA APLICĂRII METODELOR DE CONTROL
AL RĂSPUNSULUI STRUCTURAL ŞI OPTIMIZAREA ACESTORA Pagina 86 din 159
La tabelul 4.1. se fac observaţiile că valorile drift-ului obţinut din
analizele de tip PUSH-OVER sunt neacceptabile în raport cu cerinţele codului
P100/92, cod în vigoare la data efectuării prezentului studiu.Noul normativ
seismic P100-2006 prevede deplasări relative ultime mai puţin
riguroase.Deasemenea, prin mecanism de plastificare favorabil se întelege
obţinerea unei distribuţii ale deformaţiilor plastice în stadiul ultim prin care se
antrenează cât mai mult din capacitatea de ductilitate a grinzilor, evitându-se
formarea de articulaţii plastice în stâlpi, cu excepţia secţiunilor de la bază.
a) b)
Fig. 4.7. – Drifturi comparative pentru structura cu baza fixă
a) longitudinal şi b)transversal
Fig. 4.8. – Configuraţia mecanismului de plastificare – cadru curent longitudinal
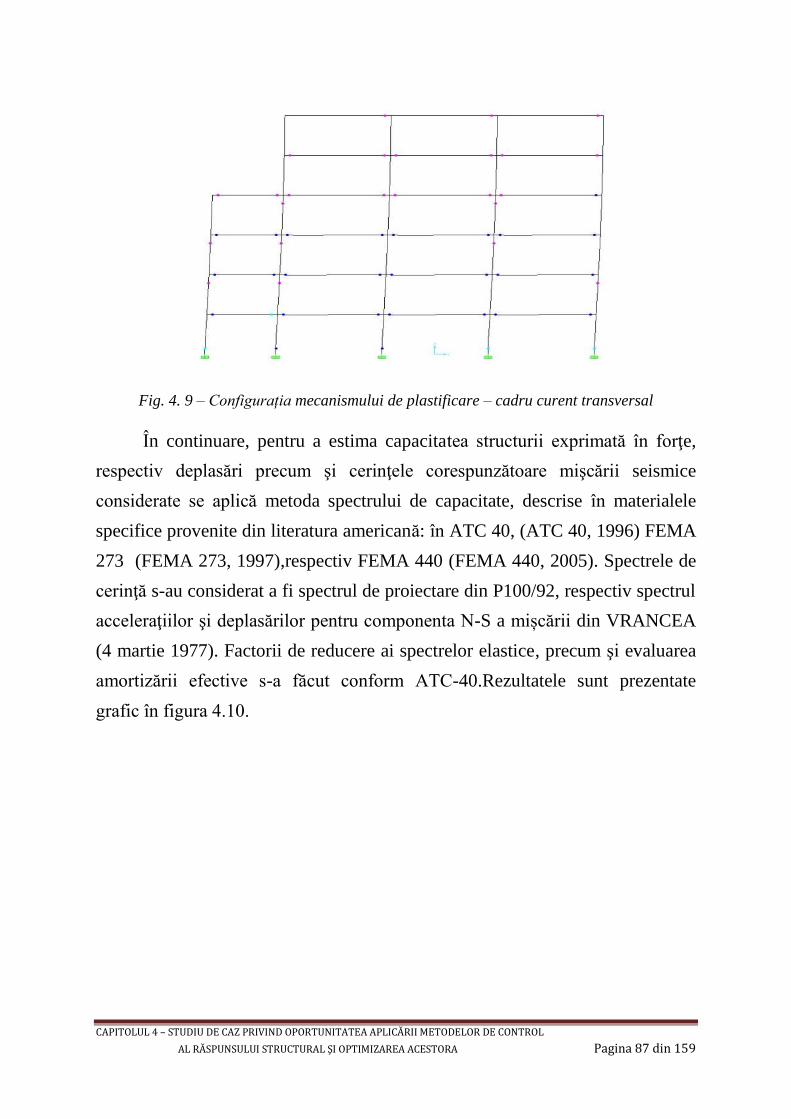
CAPITOLUL 4 – STUDIU DE CAZ PRIVIND OPORTUNITATEA APLICĂRII METODELOR DE CONTROL
AL RĂSPUNSULUI STRUCTURAL ŞI OPTIMIZAREA ACESTORA Pagina 87 din 159
Fig. 4. 9 – Configurația mecanismului de plastificare – cadru curent transversal
În continuare, pentru a estima capacitatea structurii exprimată în forţe,
respectiv deplasări precum şi cerinţele corespunzătoare mişcării seismice
considerate se aplică metoda spectrului de capacitate, descrise în materialele
specifice provenite din literatura americană: în ATC 40, (ATC 40, 1996) FEMA
273 (FEMA 273, 1997),respectiv FEMA 440 (FEMA 440, 2005). Spectrele de
cerinţă s-au considerat a fi spectrul de proiectare din P100/92, respectiv spectrul
acceleraţiilor şi deplasărilor pentru componenta N-S a mișcării din VRANCEA
(4 martie 1977). Factorii de reducere ai spectrelor elastice, precum şi evaluarea
amortizării efective s-a făcut conform ATC-40.Rezultatele sunt prezentate
grafic în figura 4.10.
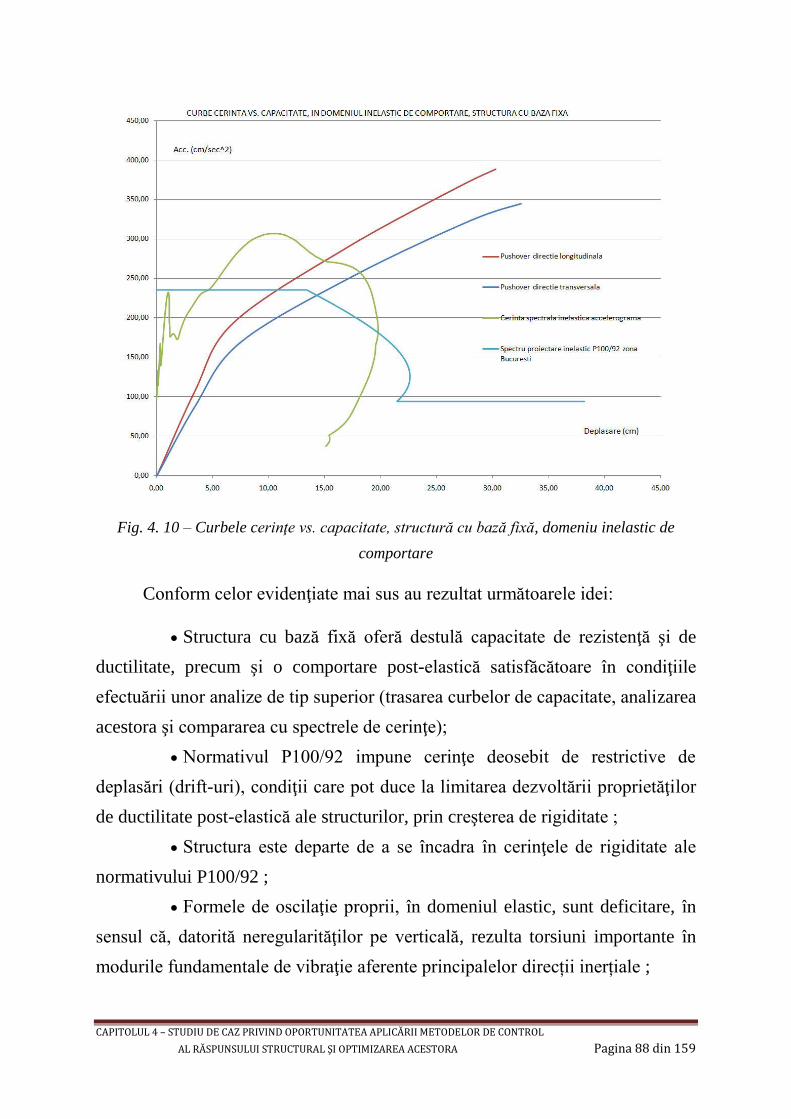
CAPITOLUL 4 – STUDIU DE CAZ PRIVIND OPORTUNITATEA APLICĂRII METODELOR DE CONTROL
AL RĂSPUNSULUI STRUCTURAL ŞI OPTIMIZAREA ACESTORA Pagina 88 din 159
Fig. 4. 10 – Curbele cerinţe vs. capacitate, structură cu bază fixă, domeniu inelastic de
comportare
Conform celor evidenţiate mai sus au rezultat următoarele idei:
Structura cu bază fixă oferă destulă capacitate de rezistenţă şi de
ductilitate, precum şi o comportare post-elastică satisfăcătoare în condiţiile
efectuării unor analize de tip superior (trasarea curbelor de capacitate, analizarea
acestora şi compararea cu spectrele de cerinţe);
Normativul P100/92 impune cerinţe deosebit de restrictive de
deplasări (drift-uri), condiţii care pot duce la limitarea dezvoltării proprietăţilor
de ductilitate post-elastică ale structurilor, prin creşterea de rigiditate ;
Structura este departe de a se încadra în cerinţele de rigiditate ale
normativului P100/92 ;
Formele de oscilaţie proprii, în domeniul elastic, sunt deficitare, în
sensul că, datorită neregularităţilor pe verticală, rezulta torsiuni importante în
modurile fundamentale de vibraţie aferente principalelor direcții inerțiale ;

CAPITOLUL 4 – STUDIU DE CAZ PRIVIND OPORTUNITATEA APLICĂRII METODELOR DE CONTROL
AL RĂSPUNSULUI STRUCTURAL ŞI OPTIMIZAREA ACESTORA Pagina 89 din 159
În consecinţă, conform practicii inginereşti curente, o expertiză
efectuată asupra acestei structuri, în lumina normativului P100/92, după care se
elaborează expertizele tehnice la data susţinerii prezentei teze, ar recomanda
creşterea rigidităţii acestei structuri. În mod curent, aceasta s-ar face prin
cămăşuirea unor stâlpi şi grinzi, sau prin introducerea de noi pereţi de beton
armat, conectaţi sau nu la o nouă fundaţie. Aceasta soluţie, deşi uzuală în
condiţiile ţării noastre în acest moment, este costisitoare, în sensul producerii
efectelor secundare de neînlăturat (întreruperea funcţionalităţii clădirii,
obturarea unor spatii utile, reconfigurarea spatiilor, şi un lung timp de
implementare a soluţiei)
În cele ce urmează, se va propune o metodă alternativă de consolidare şi
îmbunătăţire a performanţei structurale şi anume prevederea de izolatori
seismici,cu sau fără amortizori pasivi sau semi-activi şi se va justifica prin
calcul alegerea acestora.
4.4.2. Modelul cu baza izolată prin izolatori elastomerici fără
amortizare
Acest model presupune decuplarea suprastructurii de infrastructură prin
prevederea de izolatori elastomerici dimensionaţi conform ISO 22762:3.
Pornind de la forţele axiale existente în stâlpii structurii, în gruparea specială de
încărcări,şi a cerinţelor de forţe orizontale, s-au calculat următoarele valori
pentru izolatorii elastomerici (s-au prevăzut 35 de izolatori elastomerici, cate
unul sub fiecare stâlp al structurii,conform Tabelului 4.2 şi 4.3.):
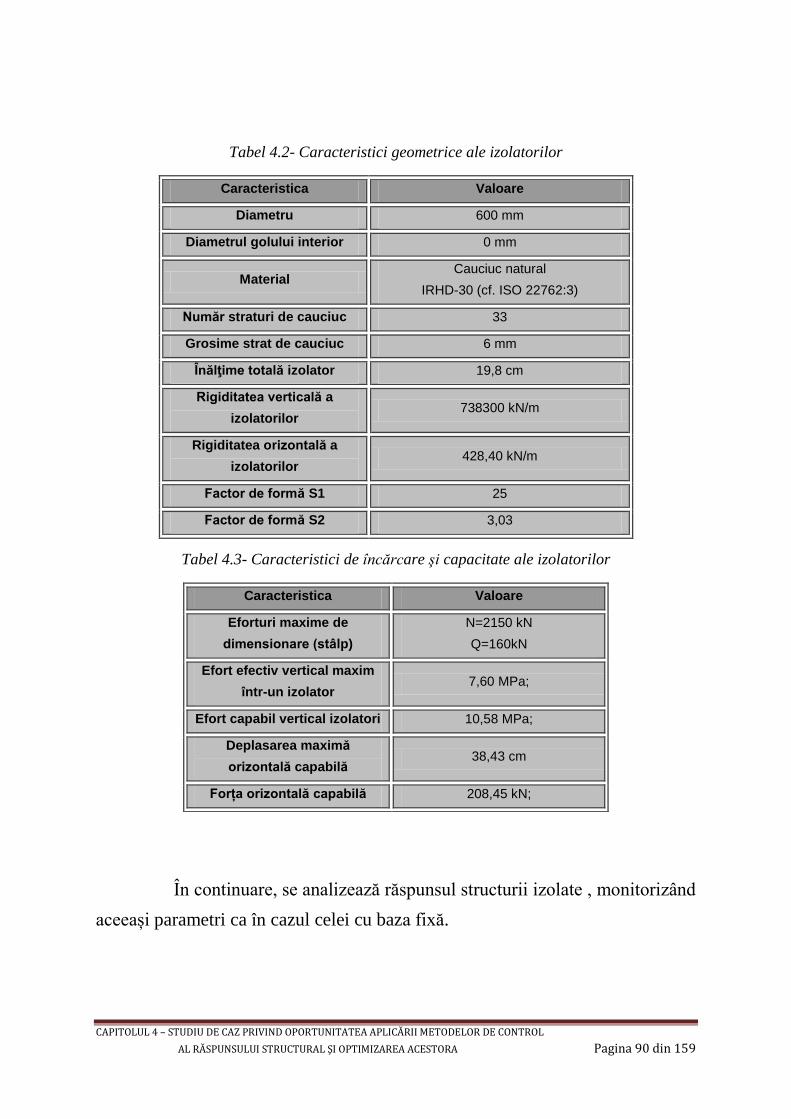
CAPITOLUL 4 – STUDIU DE CAZ PRIVIND OPORTUNITATEA APLICĂRII METODELOR DE CONTROL
AL RĂSPUNSULUI STRUCTURAL ŞI OPTIMIZAREA ACESTORA Pagina 90 din 159
Tabel 4.2- Caracteristici geometrice ale izolatorilor
Tabel 4.3- Caracteristici de încărcare şi capacitate ale izolatorilor
În continuare, se analizează răspunsul structurii izolate , monitorizând
aceeași parametri ca în cazul celei cu baza fixă.
Caracteristica Valoare
Diametru 600 mm
Diametrul golului interior 0 mm
Material Cauciuc natural
IRHD-30 (cf. ISO 22762:3)
Număr straturi de cauciuc 33
Grosime strat de cauciuc 6 mm
Înălţime totală izolator 19,8 cm
Rigiditatea verticală a
izolatorilor 738300 kN/m
Rigiditatea orizontală a
izolatorilor 428,40 kN/m
Factor de formă S1 25
Factor de formă S2 3,03
Caracteristica Valoare
Eforturi maxime de
dimensionare (stâlp)
N=2150 kN
Q=160kN
Efort efectiv vertical maxim
într-un izolator 7,60 MPa;
Efort capabil vertical izolatori 10,58 MPa;
Deplasarea maximă
orizontală capabilă 38,43 cm
Forța orizontală capabilă 208,45 kN;

CAPITOLUL 4 – STUDIU DE CAZ PRIVIND OPORTUNITATEA APLICĂRII METODELOR DE CONTROL
AL RĂSPUNSULUI STRUCTURAL ŞI OPTIMIZAREA ACESTORA Pagina 91 din 159
Tabel 4.4- Caracteristici ale structurii izolate – fără amortizare
a) b)
Fig. 4. 11 – Drifturi comparative pentru structura cu baza izolată, fără amortizare
a) longitudinal şi b)transversal
a) b)
Fig. 4. 12 – Răspunsuri în forţe în izolatori (abscisa- secunde, ordonata – kN)
a) longitudinal şi b)transversal
Caracteristica Direcție transversală Direcție longitudinală
Perioada de oscilație
fundamentală
3,64 sec ( translație
cuplata cu torsiune) 3,41 sec (translație)
Drift admisibil
P100/92 0,35% 0,35%
Accelerații la vârful
structurii(pentru
mișcarea VRANCEA)
2,970 m/s2 3,340 m/s
2
Amplificare dinamică
la vârful structurii 1,53 1,38
Deplasare maximă la
vârful structurii (cm) 32,89 32,12

CAPITOLUL 4 – STUDIU DE CAZ PRIVIND OPORTUNITATEA APLICĂRII METODELOR DE CONTROL
AL RĂSPUNSULUI STRUCTURAL ŞI OPTIMIZAREA ACESTORA Pagina 92 din 159
a) b)
Fig. 4. 13 – Răspunsuri în deplasări în izolatori (abscisa - secunde, ordonata – m)
a) longitudinal şi b)transversal
Structura izolată, dar fără prevederea niciunei forme de amortizare, are
avantajul unei comportări favorabile faţă de cea cu bază fixă, în sensul reducerii
semnificative a parametrilor monitorizaţi (deplasări relative de nivel – până la
un nivel acceptabil în raport cu cerinţele normativului P100/92 – fapt cu
implicaţie directă în reducerea efectelor de degradare datorată incidenţei unui
cutremur, amplificare dinamică – prin reducerea acceleraţiilor la vârful
structurii până aproape la nivelul acceleraţiei terenului,în concluzie fiind reduse
şi forţele de inerţie relative aplicate structurii). Primele două forme de oscilaţie
proprie ale structurii arată efecte de torsiune generală reduse, şi factori de
participare mari pentru aceste două moduri (>90%) ceea ce evidenţiază o
mişcare predominantă de solid rigid,conform cu aşteptările, şi care validează
corectitudinea studiilor parametrice efectuate pe modelele simplificate cu
1 G.L.D., cu baza izolată(paragraful 4.3). Bilanţul energetic prezentat la punctul
4.4.5 arata un consum al energiei seismice în principal prin oscilaţii- elastice şi
prin deformarea reversibilă a izolatorilor elastomerici. O mică parte a energiei
seismice se consumă prin deformarea post-elastică a structurii – în special
localizată la nivelul stâlpilor şi grinzilor de la primul nivel adiacent interfeţei de
izolare, deformaţii post-elastice de intensitate redusă. Se menţionează faptul că
drift-urile şi mărimile de ieşire ale structurii au fost măsurate în ipoteza acțiunii
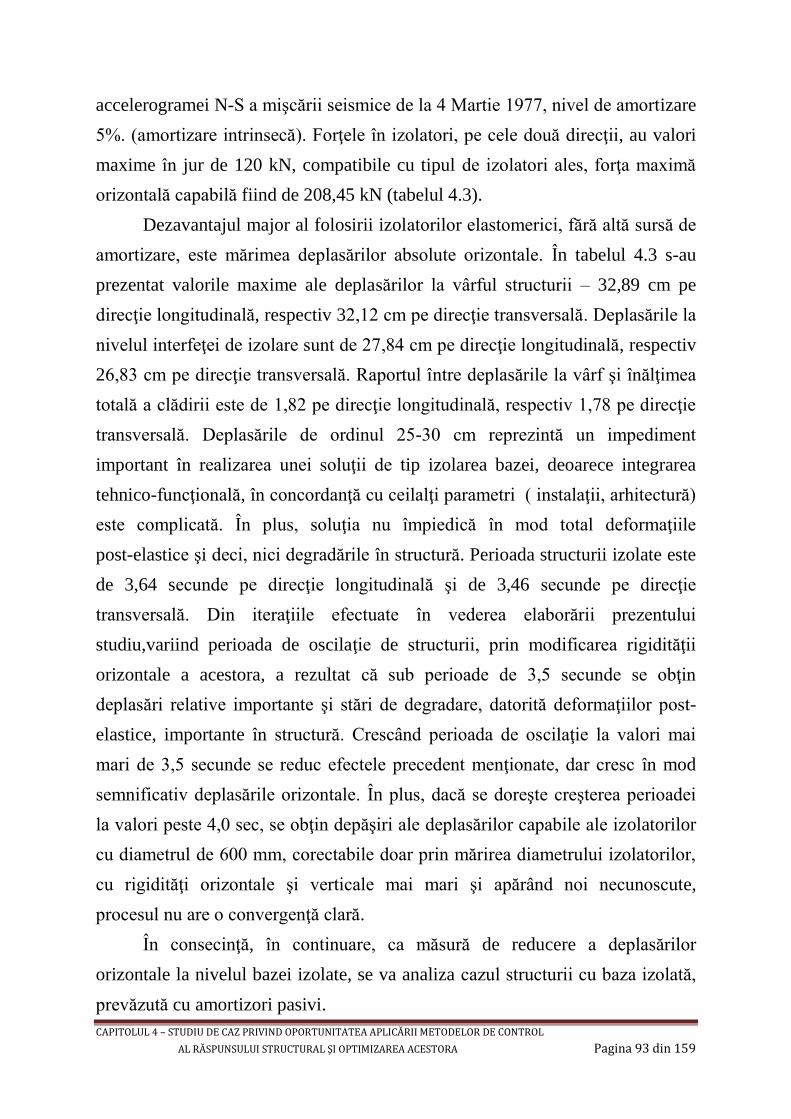
CAPITOLUL 4 – STUDIU DE CAZ PRIVIND OPORTUNITATEA APLICĂRII METODELOR DE CONTROL
AL RĂSPUNSULUI STRUCTURAL ŞI OPTIMIZAREA ACESTORA Pagina 93 din 159
accelerogramei N-S a mişcării seismice de la 4 Martie 1977, nivel de amortizare
5%. (amortizare intrinsecă). Forţele în izolatori, pe cele două direcţii, au valori
maxime în jur de 120 kN, compatibile cu tipul de izolatori ales, forţa maximă
orizontală capabilă fiind de 208,45 kN (tabelul 4.3).
Dezavantajul major al folosirii izolatorilor elastomerici, fără altă sursă de
amortizare, este mărimea deplasărilor absolute orizontale. În tabelul 4.3 s-au
prezentat valorile maxime ale deplasărilor la vârful structurii – 32,89 cm pe
direcţie longitudinală, respectiv 32,12 cm pe direcţie transversală. Deplasările la
nivelul interfeţei de izolare sunt de 27,84 cm pe direcţie longitudinală, respectiv
26,83 cm pe direcţie transversală. Raportul între deplasările la vârf şi înălţimea
totală a clădirii este de 1,82 pe direcţie longitudinală, respectiv 1,78 pe direcţie
transversală. Deplasările de ordinul 25-30 cm reprezintă un impediment
important în realizarea unei soluţii de tip izolarea bazei, deoarece integrarea
tehnico-funcţională, în concordanţă cu ceilalţi parametri ( instalaţii, arhitectură)
este complicată. În plus, soluţia nu împiedică în mod total deformaţiile
post-elastice şi deci, nici degradările în structură. Perioada structurii izolate este
de 3,64 secunde pe direcţie longitudinală şi de 3,46 secunde pe direcţie
transversală. Din iteraţiile efectuate în vederea elaborării prezentului
studiu,variind perioada de oscilaţie de structurii, prin modificarea rigidităţii
orizontale a acestora, a rezultat că sub perioade de 3,5 secunde se obţin
deplasări relative importante şi stări de degradare, datorită deformaţiilor post-
elastice, importante în structură. Crescând perioada de oscilaţie la valori mai
mari de 3,5 secunde se reduc efectele precedent menţionate, dar cresc în mod
semnificativ deplasările orizontale. În plus, dacă se doreşte creşterea perioadei
la valori peste 4,0 sec, se obţin depăşiri ale deplasărilor capabile ale izolatorilor
cu diametrul de 600 mm, corectabile doar prin mărirea diametrului izolatorilor,
cu rigidităţi orizontale şi verticale mai mari şi apărând noi necunoscute,
procesul nu are o convergenţă clară.
În consecinţă, în continuare, ca măsură de reducere a deplasărilor
orizontale la nivelul bazei izolate, se va analiza cazul structurii cu baza izolată,
prevăzută cu amortizori pasivi.
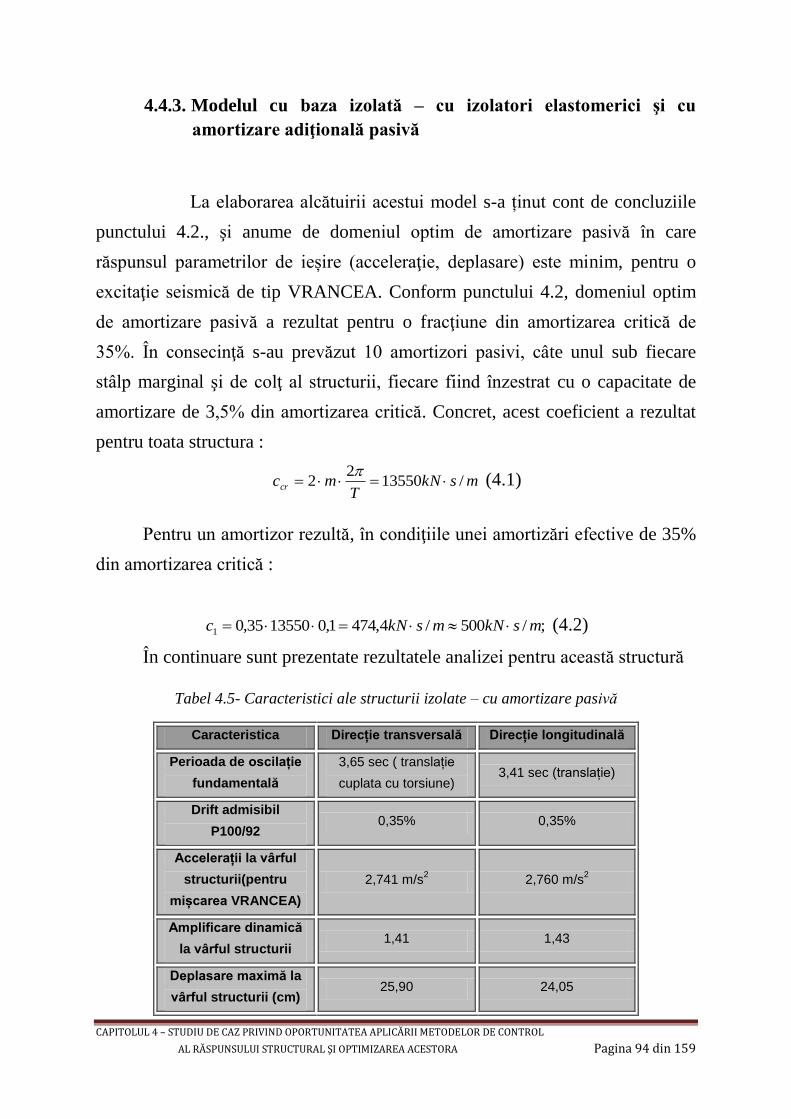
CAPITOLUL 4 – STUDIU DE CAZ PRIVIND OPORTUNITATEA APLICĂRII METODELOR DE CONTROL
AL RĂSPUNSULUI STRUCTURAL ŞI OPTIMIZAREA ACESTORA Pagina 94 din 159
4.4.3. Modelul cu baza izolată – cu izolatori elastomerici şi cu
amortizare adiţională pasivă
La elaborarea alcătuirii acestui model s-a ținut cont de concluziile
punctului 4.2., şi anume de domeniul optim de amortizare pasivă în care
răspunsul parametrilor de ieșire (acceleraţie, deplasare) este minim, pentru o
excitaţie seismică de tip VRANCEA. Conform punctului 4.2, domeniul optim
de amortizare pasivă a rezultat pentru o fracţiune din amortizarea critică de
35%. În consecinţă s-au prevăzut 10 amortizori pasivi, câte unul sub fiecare
stâlp marginal şi de colţ al structurii, fiecare fiind înzestrat cu o capacitate de
amortizare de 3,5% din amortizarea critică. Concret, acest coeficient a rezultat
pentru toata structura :
mskNT
mccr /135502
2
(4.1)
Pentru un amortizor rezultă, în condiţiile unei amortizări efective de 35%
din amortizarea critică :
;/500/4,4741,01355035,01 mskNmskNc (4.2)
În continuare sunt prezentate rezultatele analizei pentru această structură
Tabel 4.5- Caracteristici ale structurii izolate – cu amortizare pasivă
Caracteristica Direcție transversală Direcție longitudinală
Perioada de oscilație
fundamentală
3,65 sec ( translație
cuplata cu torsiune) 3,41 sec (translație)
Drift admisibil
P100/92 0,35% 0,35%
Accelerații la vârful
structurii(pentru
mișcarea VRANCEA)
2,741 m/s2 2,760 m/s
2
Amplificare dinamică
la vârful structurii 1,41 1,43
Deplasare maximă la
vârful structurii (cm) 25,90 24,05
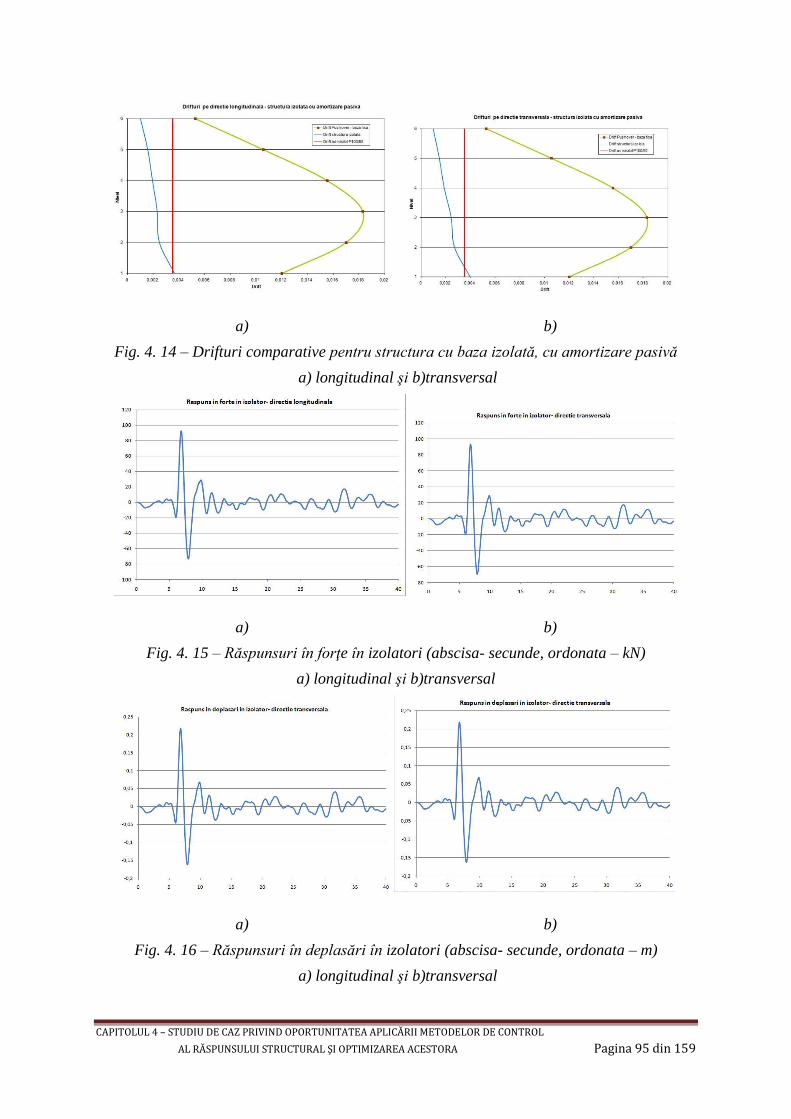
CAPITOLUL 4 – STUDIU DE CAZ PRIVIND OPORTUNITATEA APLICĂRII METODELOR DE CONTROL
AL RĂSPUNSULUI STRUCTURAL ŞI OPTIMIZAREA ACESTORA Pagina 95 din 159
a) b)
Fig. 4. 14 – Drifturi comparative pentru structura cu baza izolată, cu amortizare pasivă
a) longitudinal şi b)transversal
a) b)
Fig. 4. 15 – Răspunsuri în forţe în izolatori (abscisa- secunde, ordonata – kN)
a) longitudinal şi b)transversal
a) b)
Fig. 4. 16 – Răspunsuri în deplasări în izolatori (abscisa- secunde, ordonata – m)
a) longitudinal şi b)transversal
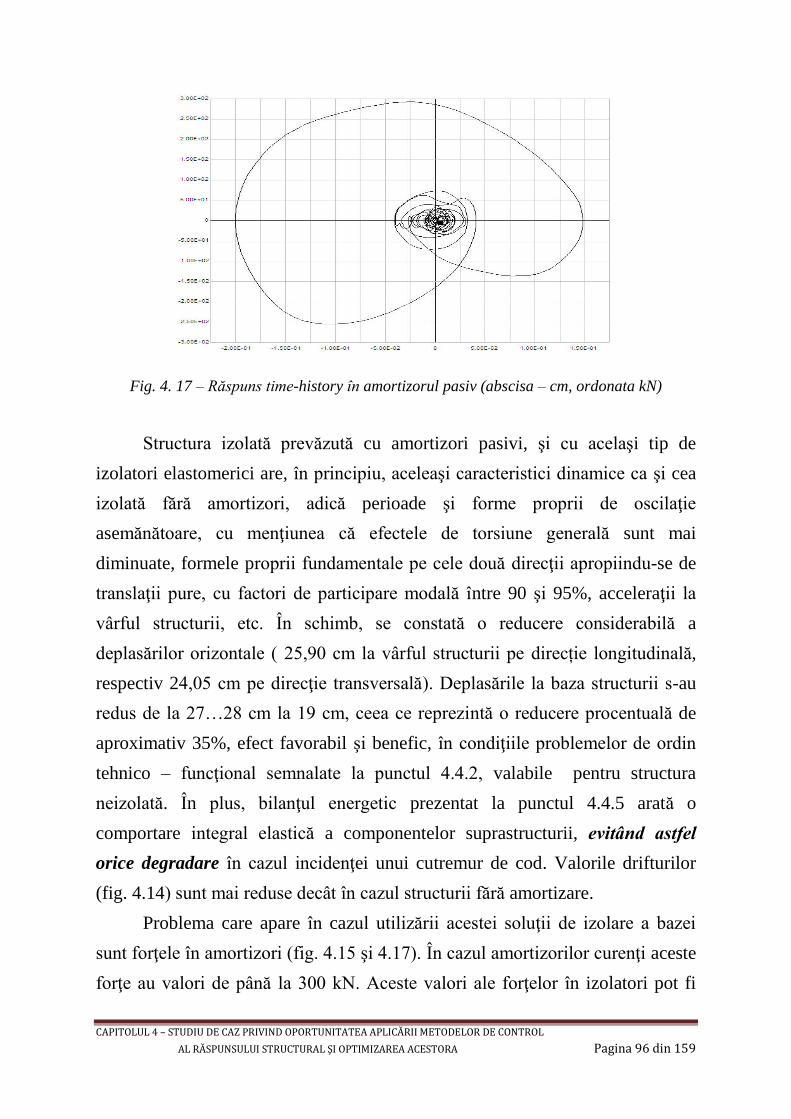
CAPITOLUL 4 – STUDIU DE CAZ PRIVIND OPORTUNITATEA APLICĂRII METODELOR DE CONTROL
AL RĂSPUNSULUI STRUCTURAL ŞI OPTIMIZAREA ACESTORA Pagina 96 din 159
Fig. 4. 17 – Răspuns time-history în amortizorul pasiv (abscisa – cm, ordonata kN)
Structura izolată prevăzută cu amortizori pasivi, şi cu acelaşi tip de
izolatori elastomerici are, în principiu, aceleaşi caracteristici dinamice ca şi cea
izolată fără amortizori, adică perioade şi forme proprii de oscilaţie
asemănătoare, cu menţiunea că efectele de torsiune generală sunt mai
diminuate, formele proprii fundamentale pe cele două direcţii apropiindu-se de
translaţii pure, cu factori de participare modală între 90 şi 95%, acceleraţii la
vârful structurii, etc. În schimb, se constată o reducere considerabilă a
deplasărilor orizontale ( 25,90 cm la vârful structurii pe direcție longitudinală,
respectiv 24,05 cm pe direcţie transversală). Deplasările la baza structurii s-au
redus de la 27…28 cm la 19 cm, ceea ce reprezintă o reducere procentuală de
aproximativ 35%, efect favorabil şi benefic, în condiţiile problemelor de ordin
tehnico – funcţional semnalate la punctul 4.4.2, valabile pentru structura
neizolată. În plus, bilanţul energetic prezentat la punctul 4.4.5 arată o
comportare integral elastică a componentelor suprastructurii, evitând astfel
orice degradare în cazul incidenţei unui cutremur de cod. Valorile drifturilor
(fig. 4.14) sunt mai reduse decât în cazul structurii fără amortizare.
Problema care apare în cazul utilizării acestei soluţii de izolare a bazei
sunt forţele în amortizori (fig. 4.15 şi 4.17). În cazul amortizorilor curenţi aceste
forţe au valori de până la 300 kN. Aceste valori ale forţelor în izolatori pot fi

CAPITOLUL 4 – STUDIU DE CAZ PRIVIND OPORTUNITATEA APLICĂRII METODELOR DE CONTROL
AL RĂSPUNSULUI STRUCTURAL ŞI OPTIMIZAREA ACESTORA Pagina 97 din 159
problematice pentru elementele de prindere ale lor, şi, în plus, costul
dispozitivelor de amortizare creste neliniar cu valoarea forţelor capabile ale
acestora.
Modalitatea de a înlătura aceasta problemă apare din studiul calitativ al
ecuaţiei de echilibru instantaneu al unui corp (structură) supusă la oscilaţii de
către o mişcare de tip seismic.
Conform ecuaţiei de echilibru instantaneu se cunoaşte că, pentru o
amortizare de tip vâscos, sau echivalabilă unei amortizări vâscoase, forţa de
amortizare este proporţională cu viteza mișcării, în timp ce forţele elastice sunt
proporţionale cu deplasarea ;
;xcFa (4.3.)
;xkFx (4.4)
În consecinţă, atunci când clădirea oscilează sub acţiunea unui cutremur,
sau se află în domeniul de oscilaţii libere amortizate, forţele elastice sunt
maxime în punctul de maximă deplasare a acesteia, în acest punct viteza fiind
zero, la fel ca şi forţele de amortizare.În punctul de echilibru forţele de
amortizare sunt maxime, viteza fiind maximă, în timp ce deplasarea este zero.
Deci, este clară observaţia că, în cazul unui coeficient de amortizare constant
(specific amortizării pasive), forţa în acest amortizor depinde în mod exclusiv
de viteza mişcării, şi creste proporţional cu aceasta. O soluţie elegantă de a
optimiza acest fenomen este prevederea unui nivel de amortizare variabil,
adaptiv, care să limiteze forţa de amortizare la un nivel redus, prin scăderea
nivelului de amortizare la viteze mari, respectiv creşterea acestuia la viteze mici.
Un astfel de dispozitiv, descris calitativ mai sus, se numeşte amortizor
“semi-activ”. Avantajele acestuia, precum şi principiul de funcţionare au fost
descrise în cadrul capitolului al doilea. În continuare se va ilustra
funcţionalitatea cantitativă a acestuia în cadrul prezentului studiu parametric.
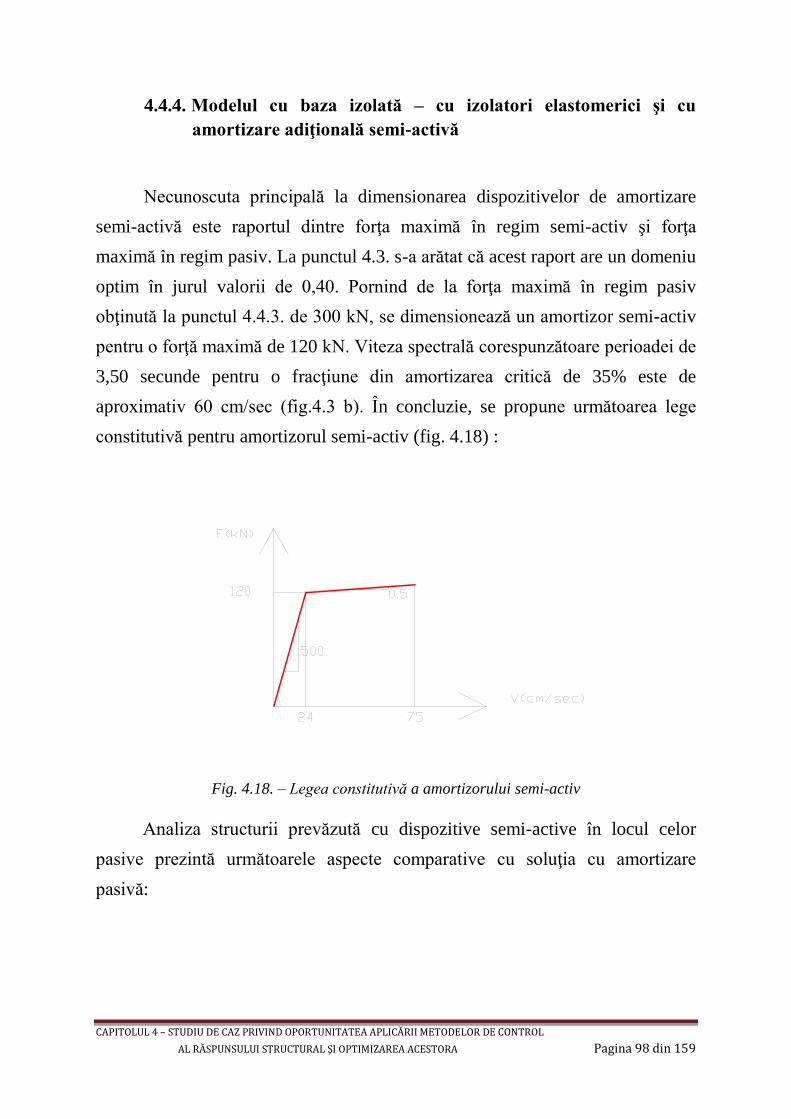
CAPITOLUL 4 – STUDIU DE CAZ PRIVIND OPORTUNITATEA APLICĂRII METODELOR DE CONTROL
AL RĂSPUNSULUI STRUCTURAL ŞI OPTIMIZAREA ACESTORA Pagina 98 din 159
4.4.4. Modelul cu baza izolată – cu izolatori elastomerici şi cu
amortizare adiţională semi-activă
Necunoscuta principală la dimensionarea dispozitivelor de amortizare
semi-activă este raportul dintre forţa maximă în regim semi-activ şi forţa
maximă în regim pasiv. La punctul 4.3. s-a arătat că acest raport are un domeniu
optim în jurul valorii de 0,40. Pornind de la forţa maximă în regim pasiv
obţinută la punctul 4.4.3. de 300 kN, se dimensionează un amortizor semi-activ
pentru o forţă maximă de 120 kN. Viteza spectrală corespunzătoare perioadei de
3,50 secunde pentru o fracţiune din amortizarea critică de 35% este de
aproximativ 60 cm/sec (fig.4.3 b). În concluzie, se propune următoarea lege
constitutivă pentru amortizorul semi-activ (fig. 4.18) :
Fig. 4.18. – Legea constitutivă a amortizorului semi-activ
Analiza structurii prevăzută cu dispozitive semi-active în locul celor
pasive prezintă următoarele aspecte comparative cu soluţia cu amortizare
pasivă:
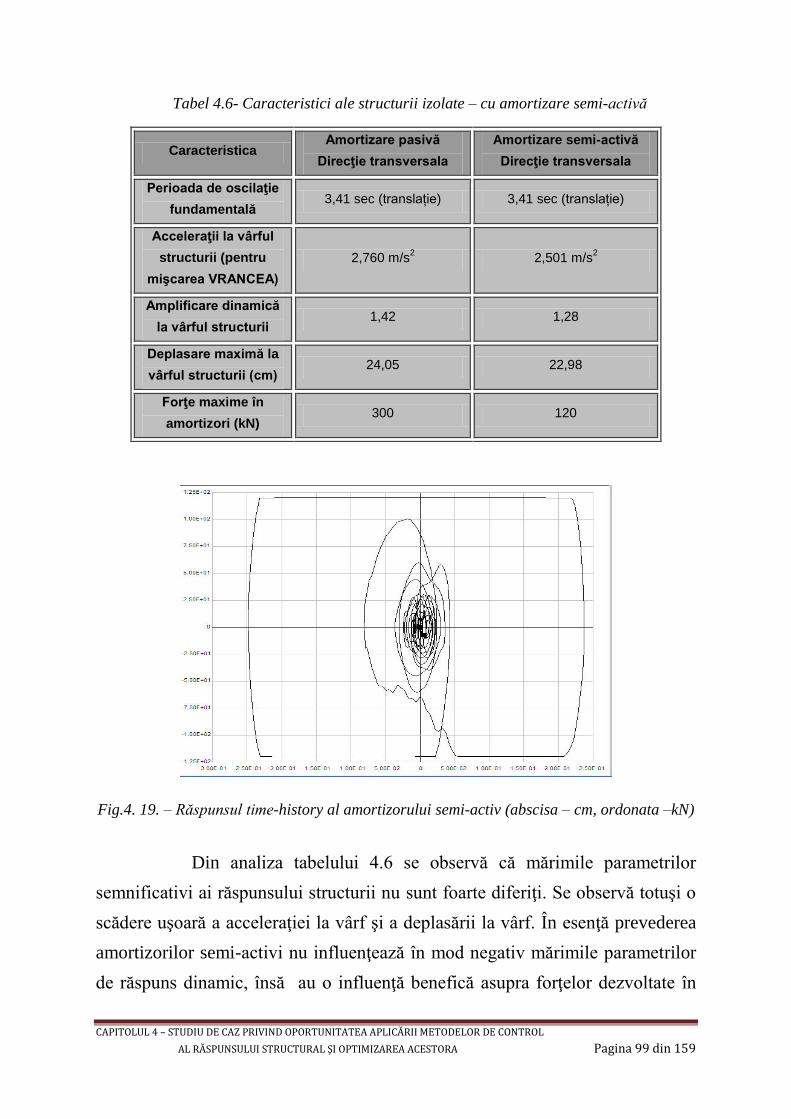
CAPITOLUL 4 – STUDIU DE CAZ PRIVIND OPORTUNITATEA APLICĂRII METODELOR DE CONTROL
AL RĂSPUNSULUI STRUCTURAL ŞI OPTIMIZAREA ACESTORA Pagina 99 din 159
Tabel 4.6- Caracteristici ale structurii izolate – cu amortizare semi-activă
Fig.4. 19. – Răspunsul time-history al amortizorului semi-activ (abscisa – cm, ordonata –kN)
Din analiza tabelului 4.6 se observă că mărimile parametrilor
semnificativi ai răspunsului structurii nu sunt foarte diferiţi. Se observă totuşi o
scădere uşoară a acceleraţiei la vârf şi a deplasării la vârf. În esenţă prevederea
amortizorilor semi-activi nu influenţează în mod negativ mărimile parametrilor
de răspuns dinamic, însă au o influenţă benefică asupra forţelor dezvoltate în
Caracteristica Amortizare pasivă
Direcţie transversala
Amortizare semi-activă
Direcţie transversala
Perioada de oscilaţie
fundamentală 3,41 sec (translație) 3,41 sec (translație)
Acceleraţii la vârful
structurii (pentru
mişcarea VRANCEA)
2,760 m/s2 2,501 m/s
2
Amplificare dinamică
la vârful structurii 1,42 1,28
Deplasare maximă la
vârful structurii (cm) 24,05 22,98
Forţe maxime în
amortizori (kN) 300 120

CAPITOLUL 4 – STUDIU DE CAZ PRIVIND OPORTUNITATEA APLICĂRII METODELOR DE CONTROL
AL RĂSPUNSULUI STRUCTURAL ŞI OPTIMIZAREA ACESTORA Pagina 100 din 159
aceștia, cu implicaţie directă în scăderea costurilor atât în realizarea
dispozitivelor de prindere, cât şi în realizarea dispozitivelor de amortizare.
4.4.5. Bilanţ energetic comparativ
În acest paragraf se prezintă modul de consumare al energiei seismice, pe
componente, pentru fiecare tip de model analizat. Rezultatele sunt prezentate,
mai jos, în figurile 4.20.,4.21.,4.22. şi 4.23.
Fig.4.20. – Bilanţ energetic – structura cu bază fixă
Fig.4.21. – Bilanţ energetic – structura cu baza izolată – fără amortizare

CAPITOLUL 4 – STUDIU DE CAZ PRIVIND OPORTUNITATEA APLICĂRII METODELOR DE CONTROL
AL RĂSPUNSULUI STRUCTURAL ŞI OPTIMIZAREA ACESTORA Pagina 101 din 159
Fig.4.22– Bilanţ energetic – structura cu baza izolată – cu amortizare pasivă
Fig.4.23. – Bilanţ energetic – structura cu baza izolată – cu amortizare semi-activă
Graficele prezintă modalitatea de distribuţie a energiei seismice. În fig
4.20., zona haşurată cu roşu reprezintă procentul din energia seismică totală
disipat prin deformaţii post-elastice la nivelul suprastructurii. Nivelul
deformaţiilor post-elastice, şi deci a degradărilor este important, întrucât un
mare procent este consumat prin acest tip de manifestare. Fig. 4.21 arată modul
de consumare al energiei seismice în clădirea izolată dar fără amortizare
adiţională. Se observă o componentă importantă dată de deplasările elastice
mari la nivelul izolatorilor (zona maro), cât şi din deformaţii elastice la nivelul
CAPITOLUL 4 – STUDIU DE CAZ PRIVIND OPORTUNITATEA APLICĂRII METODELOR DE CONTROL
AL RĂSPUNSULUI STRUCTURAL ŞI OPTIMIZAREA ACESTORA Pagina 102 din 159
suprastructurii (zona bleu).Energia disipată prin deformaţii post-elastice de tip
histeretic este redusă, în acest caz plastificările fiind limitate, dar totuşi
existente(zona roșie) . În următoarea figură (fig. 4.22.) se prezintă comportarea
structurii înzestrată cu izolatori elastomerici şi amortizori pasivi adiţionali. În
acest caz, deformaţiile post-elastice dispar cu desăvârşire, structura rămânând în
întregime elastică (zona roșie este inexistentă). O mare parte din energia
seismică este disipată la nivelul amortizorilor (zona mov). Modelul prevăzut cu
amortizori semi-activi are o comportare similară cu cel cu amortizori pasivi
(fig.4.23.), cu beneficiul faptului că forţele în amortizori sunt considerabil
reduse.
4.5. Concluzii
Concluziile acestui studiu sunt structurate conform cu aspectele
prezentate de-a lungul capitolului.
Prevederea unor soluţii de control al răspunsului structural este
strâns legată şi dependentă de acţiunea seismică caracteristică ţării noastre.
Având în vedere trăsăturile mai puţin comune ale acesteia şi anume : perioade
predominante lungi (1,2..1,5 sec), cerinţe de deplasare mari (de ordinul 30..40
cm) asociate spectrelor elastice, precum şi un nivel de cerinţe de viteză constant,
pentru diferite nivele de amortizare, asociat perioadelor mari de oscilaţie se
afirmă că soluţiile de control al răspunsului structural valabile şi aplicabile pe
scară largă în alte ţări, necesită un studiu amănunţit şi o calibrare specială pentru
a putea fi aplicate în condiţiile ţării noastre.
Sistemele de izolare a bazei trebuie să fie dimensionate astfel încât
să asigure o perioadă de oscilaţie a structurii izolate de minim 3,5 secunde
(valoare după care mişcarea de solid rigid începe să fie confirmată, pentru valori
mai mici această teorie dovedindu-se a fi nefundamentată). Izolatorii trebuie să
asigure deplasări orizontale cât mai mari (cel puţin 20..25 cm), pentru o clădire
cu regim mediu de înălţime şi încărcări, considerabil mai mult decât cerinţele de

CAPITOLUL 4 – STUDIU DE CAZ PRIVIND OPORTUNITATEA APLICĂRII METODELOR DE CONTROL
AL RĂSPUNSULUI STRUCTURAL ŞI OPTIMIZAREA ACESTORA Pagina 103 din 159
dimensionare asociate altor ţări cu tradiţie de proiectare şi aplicare ale acestor
soluţii.
Eficienţa acestor sisteme de izolare creşte în cazul folosirii acesteia
împreună cu dispozitive de amortizare adiţională, care pot fi localizate atât la
nivelul interfeţei de izolare (exteriori sau înglobaţi în izolatori), precum şi în
suprastructură. Dispozitivele de amortizare pasivă au un domeniu optim de
folosire în cazul unei amortizări efective de 30-40% din amortizarea critică.
Aceste dispozitive de amortizare reduc deplasările orizontale ale clădirilor
izolate, corectează formele de vibraţie şi păstrează suprastructura în domeniul
elastic de comportare. Preţul plătit este acela al unor forţe relativ mari în
structură, cu dificultăţi în realizarea prinderilor, şi cu pericolul deteriorării
sistemelor de prindere. De asemenea costurile asociate amortizorilor şi
dispozitivelor de prindere pot fi importante.
Reducerea forţelor şi implicit, a costurilor, se realizează prin
introducerea de dispozitive cu amortizare semi-activă în locul celor pasive.
Sistemele semi-active reprezintă o soluţie elegantă şi superioară de păstrare a
performanţelor structurale cu avantajul unor forţe reduse (studiile efectuate în
cazul prezentului capitol arată un domeniu optim între forţa maximă semi-activă
şi cea maxima pasivă) de 0,40. Prin realizarea de astfel de clădiri se contează pe
un răspuns elastic în cazul cutremurelor importante, ceea ce înseamnă că
structurile nu necesită reparaţii sau întreruperea funcţionalităţii după incidenţa
acestor cutremure, avantaj major în reducerea costurilor de întreţinere a unei
clădiri. Sistemul este aplicabil şi în cazul reabilitării/consolidării structurilor
existente, şi în acest caz putându-se păstra funcţionalitatea clădirii în timpul
lucrărilor de intervenţie.

CAPITOLUL 5 – APLICAŢIE A METODEI DE IZOLARE A BAZEI LA UN COMPLEX DE CLĂDIRI DIN BUCUREŞTI Pagina 104 din 159
Capitolul 5
APLICATIE A METODEI DE IZOLARE A
BAZEI LA UN COMPLEX DE CLĂDIRI DIN
BUCUREȘTI
5.1. Descrierea lucrării
În centrul Bucureştiului, s-a început proiectarea şi se va începe executarea
unui complex de clădiri, cu destinaţia birouri, de înălţime variabilă (de la P+6
pana la P+8). Clădirea va avea o infrastructură comună, cu 4 niveluri, care se va
realiza, cel mai probabil, prin tehnologia “top-down”. Infrastructura va fi
realizată din cadre de beton armat, cu pereţi mulaţi pe contur. Suprastructura va
fi realizată din cadre de beton armat. Interfaţa de izolare va fi realizată la cota
0,00 şi va fi alcătuită din 50 de izolatori de tip LRB (lead rubber bearing)
precum şi din dispozitive adiţionale de tip SD (sliding device) – amortizori cu
frecare, prevăzuţi pe contur. Nuclee de circulaţie (scări, lifturi) vor asigura
circulaţia atât la nivelul suprastructurii cât şi la cel al infrastructurii. În acest
scop, interfaţa de izolare a nucleelor de circulaţie va fi realizată la nivelul
radierului general, nucleul fiind solidar cu suprastructura. Primele două planşee
ale suprastructurii vor fi complete, pentru a asigura o mişcare de ansamblu de
solid rigid a sistemului, urmând ca mai sus fiecare clădire să se dezvolte separat.
Izolatorii cu miez de plumb sunt de producţie italiană. Pentru calculele
efectuate s-au folosit caracteristicile unor izolatori produşi în mod curent de
către o firmă italiană. Fişa tehnică a izolatorilor, oferită de producător, se
găseşte în anexa 3 a lucrării.Dispozitivele de amortizare cu frecare sunt de
producţie japoneză.
Proiectarea complexului de clădiri se va face, în colaborare, de către o
echipa de specialişti italieni şi una românească, din care face parte şi autorul
prezentei teze.

CAPITOLUL 5 – APLICAŢIE A METODEI DE IZOLARE A BAZEI LA UN COMPLEX DE CLĂDIRI DIN BUCUREŞTI Pagina 105 din 159
În continuare sunt prezentate, pe scurt, câteva din reprezentările
arhitecturale care au stat la baza alcătuirii structurii.
Fig. 5.1. Planul de ansamblu al unui subsol curent

CAPITOLUL 5 – APLICAŢIE A METODEI DE IZOLARE A BAZEI LA UN COMPLEX DE CLĂDIRI DIN BUCUREŞTI Pagina 106 din 159
Fig. 5.2. Planul de ansamblu al nivelului de la cota 0,00, unde va fi localizată interfaţa de
izolare
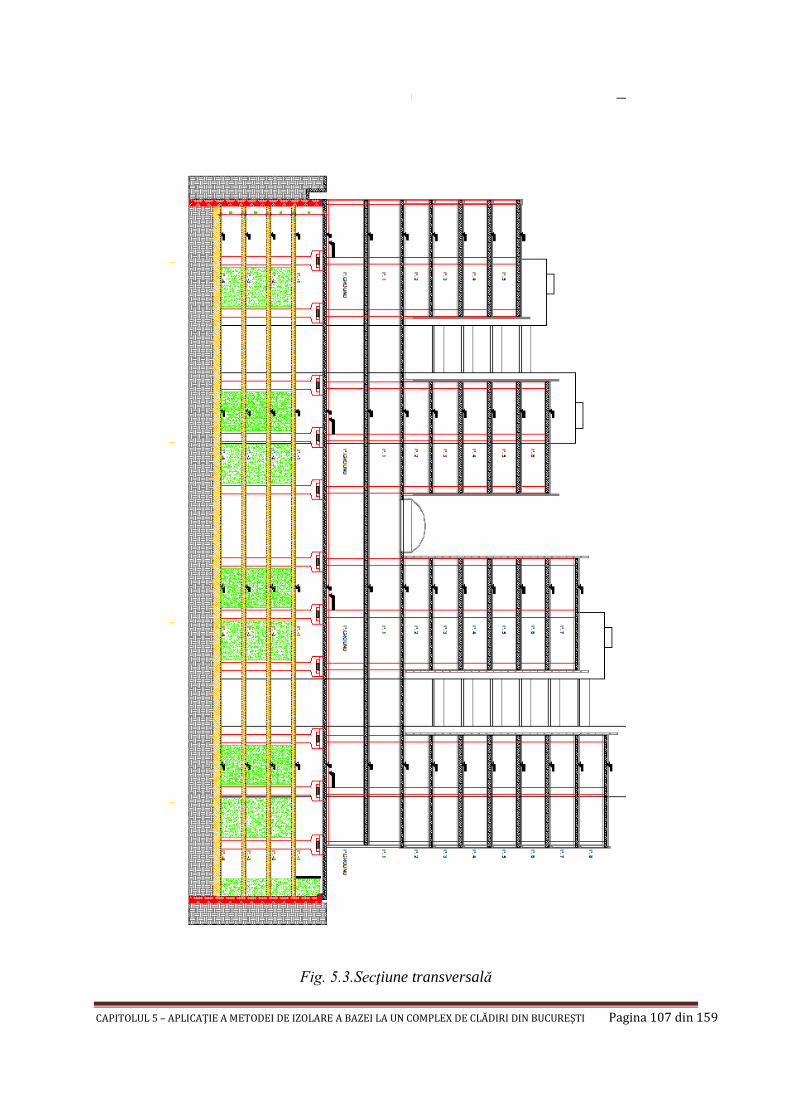
CAPITOLUL 5 – APLICAŢIE A METODEI DE IZOLARE A BAZEI LA UN COMPLEX DE CLĂDIRI DIN BUCUREŞTI Pagina 107 din 159
Fig. 5.3.Secţiune transversală

CAPITOLUL 5 – APLICAŢIE A METODEI DE IZOLARE A BAZEI LA UN COMPLEX DE CLĂDIRI DIN BUCUREŞTI Pagina 108 din 159
5.2. Principii de calcul şi modelare
Eforturile de proiectare şi calcul depuse de echipa italiană şi de cea
românească au urmat direcţii diferite urmând a se verifica reciproc
corectitudinea datelor de intrare şi ale ipotezelor folosite. Astfel echipa italiană
a urmat etapele :
- Predimensionarea izolatorilor utilizând pentru structură un model cu 2
grade de libertate dinamică ;
- Evaluarea încărcărilor conform normelor europene;
- Evaluarea cerinţelor de răspuns seismic utilizând atât normele
europene,cât şi datele puse la dispoziţie de către echipa românească
(accelerograme de tip VRANCEA 1977, precum şi accelerograme sintetice
compatibile) ;
- Obţinerea parametrilor constitutivi pentru izolatori şi amortizori, de la
firmele producătoare ;
- Verificarea dinamicii de ansamblu, prin calcule dinamice elastice şi
inelastice, folosind modele echivalente cu 1 grad de libertate dinamică
(G.L.D),cu baza izolată;
- Verificarea locală a compatibilităţii sistemului de izolare cu cerinţele
funcţionale şi tehnologice ale structurii ;
Cercetările echipei româneşti au fost axate pe următoarele aspecte :
- Elaborarea de spectre de dimensionare, precum şi de accelerograme
sintetice compatibile ;
- Modelarea spaţială, tridimensională a complexului de clădiri pentru a
valida ipoteza emisă de partea italiană, de simplificare a calculului la unul cu
două grade de libertate dinamică;
- Validarea cerinţelor de deplasare la nivelul izolatorilor, obţinută în
urma calculelor dinamice, elastice şi inelastice pe modelul real;
- Obţinerea unei stări de eforturi şi deplasări pentru modelul real ;

CAPITOLUL 5 – APLICAŢIE A METODEI DE IZOLARE A BAZEI LA UN COMPLEX DE CLĂDIRI DIN BUCUREŞTI Pagina 109 din 159
- Verificarea compatibilităţii proiectării, atât de ansamblu, cât şi de
detaliu, pentru infrastructură, suprastructură şi interfaţa de izolare;
- Verificarea respectării normelor de proiectare romaneşti în vigoare;
- Consultanţă tehnică de specialitate şi urmărire a execuţiei;
În concordanţă cu cele de mai sus, echipa italiană de proiectare a propus,
iniţial, folosirea unor izolatori cu miez de plumb cu diametrul total de 700 mm,
a căror lege constitutivă este cea prezentată în figura 5.4.
Fig. 5.4. Legea constitutivă a izolatorului LRB700
Faţă de această propunere a echipei italiene, analizând şi aspectele
dinamice specifice mişcărilor vrâncene, caracteristicile în acceleraţii şi
deplasări, precum şi nivelul de încărcare al structurii s-a propus o sporire a
capacitaţilor de forţă şi deplasare ale izolatorilor, propunându-se izolatori cu
diametrul de 800 mm (LRB800) a căror fişa tehnică este conţinută în întregime
în Anexa 3, aferentă prezentei lucrări. Deplasarea capabilă sporeşte de la 30 la
36 cm în cazul acestora, măsură necesară în condiţiile cerinţelor mari de
deplasări aferente cutremurelor vrâncene. Conform cerinţelor normativului
P100-2006 s-au generat şi luat în calcul trei accelerograme compatibile cu
spectrul de proiectare, prezentate în fig. 5.5. a) , b) şi c). Accelerogramele
sintetice au fost generate cu programul SIMQKE. (SIMQKE2, 1999).

CAPITOLUL 5 – APLICAŢIE A METODEI DE IZOLARE A BAZEI LA UN COMPLEX DE CLĂDIRI DIN BUCUREŞTI Pagina 110 din 159
a)
b)
c)
Fig. 5.5. Accelerograme sintetice generate

CAPITOLUL 5 – APLICAŢIE A METODEI DE IZOLARE A BAZEI LA UN COMPLEX DE CLĂDIRI DIN BUCUREŞTI Pagina 111 din 159
O alta observaţie este cea legată de nivelul de amortizare asigurat de
către aceste dispozitive, evaluat preliminar cu ajutorul formulelor din
EUROCODE 8 la 28%, (EUROCODE 8,Part 1, 2000),nivel ridicat, care trebuie
confirmat prin calcule ulterioare. Perioada fundamentală de vibraţie a sistemului
izolat a fost estimată în jurul valorii de 3,0 sec.
Evaluarea cerinţelor de deplasare asociate accelerogramei naturale
înregistrate la 04 Martie 1977 precum şi a celor compatibile cu spectrul de
proiectare duce la o deplasare maximă a sistemului cu 1 G.L.D., cu perioada de
3,0 sec, de 35 cm pentru nivelul de amortizare de 5%, respectiv de 28 cm pentru
nivelul de amortizare de 28% ( fig. 5.6).
Pentru a se valida veridicitatea ipotezelor emise în aceasta faza a
concepţiei s-a trecut la realizarea, de către partea română, a unui model
tridimensional complet, considerând izolatorii propuşi. Modelul a fost realizat
cu ajutorul programului ETABS NONLINEAR v. 9.1.4. Izolatorii şi amortizorii
au fost modelaţi prin elemente de tip LINK. S-au efectuat analize de tip
time-history neliniar pentru determinarea răspunsului clădirii la acţiunea
accelerogramelor de proiectare.
Fig. 5.6. Răspunsul în deplasări al unui sistem cu 1 GLD asociat accelerogramelor sintetice,
pentru nivelele de amortizare de 5%, respectiv 28% din amortizarea critică

CAPITOLUL 5 – APLICAŢIE A METODEI DE IZOLARE A BAZEI LA UN COMPLEX DE CLĂDIRI DIN BUCUREŞTI Pagina 112 din 159
Fig. 5.7. Modelul spaţial al complexului de clădiri cu baza izolată
Pe acest model se vor valida ipotezele preliminare legate de dinamică de
ansamblu a complexului de clădiri, se vor evalua cerinţele de deplasare reale la
nivelul izolatorilor şi se vor evidenţia problemele locale atât de dinamică cât şi
de proiectare seismică.
Modelul de calcul ia în considerare o încărcare distribuită echivalentă de
aproximativ 1,3 tone/m2, în gruparea specială de încărcare, ceea ce este o
valoare acceptabilă pentru acest tip de structură.
Conform cerinţelor normativului P100/2006 pentru analiza seismică s-au
considerat simultan forţe seismice pe două direcţii, după expresiile :
𝐸𝐸𝑑𝑥 ′ = 𝐸𝐸𝑑𝑥 + 0,30 ∙ 𝐸𝐸𝑑𝑦 (5.1.)
𝐸𝐸𝑑𝑦 ′ = 𝐸𝐸𝑑𝑦 + 0,30 ∙ 𝐸𝐸𝑑𝑥 (5.2.)
De asemenea au fost considerate şi oscilaţii verticale, după expresiile :
𝐸𝐸𝑑𝑧 ′ = 𝐸𝐸𝑑𝑧 + 0,30 ∙ 𝐸𝐸𝑑𝑥 + 0,30 ∙ 𝐸𝐸𝑑𝑦 (5.3.)
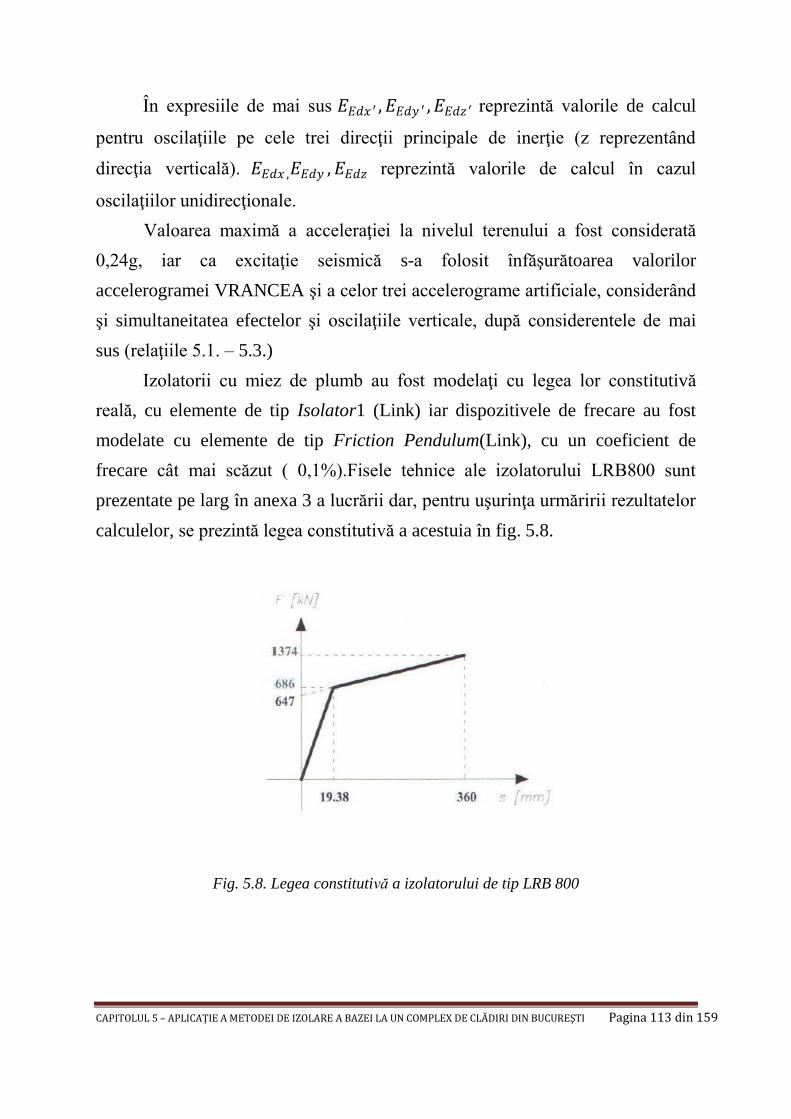
CAPITOLUL 5 – APLICAŢIE A METODEI DE IZOLARE A BAZEI LA UN COMPLEX DE CLĂDIRI DIN BUCUREŞTI Pagina 113 din 159
În expresiile de mai sus 𝐸𝐸𝑑𝑥 ′ , 𝐸𝐸𝑑𝑦 ′ , 𝐸𝐸𝑑𝑧 ′ reprezintă valorile de calcul
pentru oscilaţiile pe cele trei direcţii principale de inerţie (z reprezentând
direcţia verticală). 𝐸𝐸𝑑𝑥 ,𝐸𝐸𝑑𝑦 , 𝐸𝐸𝑑𝑧 reprezintă valorile de calcul în cazul
oscilaţiilor unidirecţionale.
Valoarea maximă a acceleraţiei la nivelul terenului a fost considerată
0,24g, iar ca excitaţie seismică s-a folosit înfăşurătoarea valorilor
accelerogramei VRANCEA şi a celor trei accelerograme artificiale, considerând
şi simultaneitatea efectelor şi oscilaţiile verticale, după considerentele de mai
sus (relaţiile 5.1. – 5.3.)
Izolatorii cu miez de plumb au fost modelaţi cu legea lor constitutivă
reală, cu elemente de tip Isolator1 (Link) iar dispozitivele de frecare au fost
modelate cu elemente de tip Friction Pendulum(Link), cu un coeficient de
frecare cât mai scăzut ( 0,1%).Fisele tehnice ale izolatorului LRB800 sunt
prezentate pe larg în anexa 3 a lucrării dar, pentru uşurinţa urmăririi rezultatelor
calculelor, se prezintă legea constitutivă a acestuia în fig. 5.8.
Fig. 5.8. Legea constitutivă a izolatorului de tip LRB 800

CAPITOLUL 5 – APLICAŢIE A METODEI DE IZOLARE A BAZEI LA UN COMPLEX DE CLĂDIRI DIN BUCUREŞTI Pagina 114 din 159
5.3. Rezultatele calculului
Primul parametru examinat după efectuarea modelării a fost dinamica de
ansamblu a clădirilor. Rezultatele (prezentate în tabelul 5.1) confirmă
veridicitatea comportării de solid rigid şi deci validează ipotezele emise pe
modelul cu 1 G.L.D., cu baza izolată. Prima perioadă fundamentală are valoarea
de 2,65 secunde, ceea este o bună aproximaţie faţă de structura cu 1 G.L.D., cu
baza izolată, a cărei perioadă estimată era de 3,0 secunde. Totuşi formele
proprii de vibraţie au şi o componentă torsională, ceea ce poate duce la deplasări
mai mari în unii izolatori.
Tabelul 5.1. – Parametrii dinamici proprii ai modelului
Cerinţele de deplasare, acceleraţie, respectiv forţa tăietoare de bază
maximă sunt redate în tabelul 5.2. Având în vedere că o parte a interfeţei de
izolare este localizată la cota 0,00 în timp ce structurile nucleelor centrale sunt
izolate la nivelul radierului, s-au determinat valorile parametrilor de răspuns atât
la cota 0,00 m, cât şi la nivelul radierului.
Caracteristica Mod 1 de oscilație Mod 2 de oscilație Mod 3 de oscilație
Perioada 2.65 secunde 2,34 secunde 2,26 secunde
Forma de oscilație
Preponderent
translație, cu
componente
torsionale
Preponderent
translație, cu
componente
torsionale
Torsiune generală
Masa antrenată 98,66% 98,40% 1%
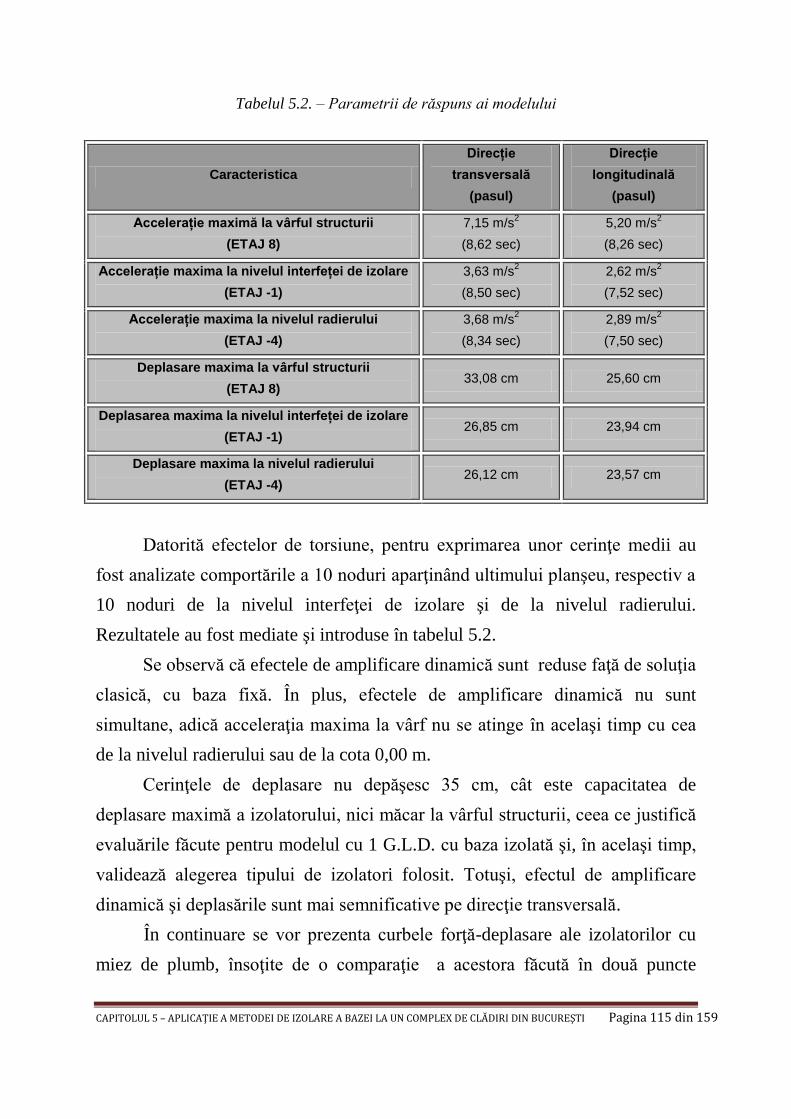
CAPITOLUL 5 – APLICAŢIE A METODEI DE IZOLARE A BAZEI LA UN COMPLEX DE CLĂDIRI DIN BUCUREŞTI Pagina 115 din 159
Tabelul 5.2. – Parametrii de răspuns ai modelului
Datorită efectelor de torsiune, pentru exprimarea unor cerinţe medii au
fost analizate comportările a 10 noduri aparţinând ultimului planşeu, respectiv a
10 noduri de la nivelul interfeţei de izolare şi de la nivelul radierului.
Rezultatele au fost mediate şi introduse în tabelul 5.2.
Se observă că efectele de amplificare dinamică sunt reduse faţă de soluţia
clasică, cu baza fixă. În plus, efectele de amplificare dinamică nu sunt
simultane, adică acceleraţia maxima la vârf nu se atinge în acelaşi timp cu cea
de la nivelul radierului sau de la cota 0,00 m.
Cerinţele de deplasare nu depăşesc 35 cm, cât este capacitatea de
deplasare maximă a izolatorului, nici măcar la vârful structurii, ceea ce justifică
evaluările făcute pentru modelul cu 1 G.L.D. cu baza izolată şi, în acelaşi timp,
validează alegerea tipului de izolatori folosit. Totuşi, efectul de amplificare
dinamică şi deplasările sunt mai semnificative pe direcţie transversală.
În continuare se vor prezenta curbele forţă-deplasare ale izolatorilor cu
miez de plumb, însoţite de o comparaţie a acestora făcută în două puncte
Caracteristica
Direcție
transversală
(pasul)
Direcție
longitudinală
(pasul)
Accelerație maximă la vârful structurii
(ETAJ 8)
7,15 m/s2
(8,62 sec)
5,20 m/s2
(8,26 sec)
Accelerație maxima la nivelul interfeței de izolare
(ETAJ -1)
3,63 m/s2
(8,50 sec)
2,62 m/s2
(7,52 sec)
Accelerație maxima la nivelul radierului
(ETAJ -4)
3,68 m/s2
(8,34 sec)
2,89 m/s2
(7,50 sec)
Deplasare maxima la vârful structurii
(ETAJ 8) 33,08 cm 25,60 cm
Deplasarea maxima la nivelul interfeței de izolare
(ETAJ -1) 26,85 cm 23,94 cm
Deplasare maxima la nivelul radierului
(ETAJ -4) 26,12 cm 23,57 cm

CAPITOLUL 5 – APLICAŢIE A METODEI DE IZOLARE A BAZEI LA UN COMPLEX DE CLĂDIRI DIN BUCUREŞTI Pagina 116 din 159
extreme de la cota 0,00 m (izolatorul 695, respectiv izolatorul 786, situaţi la
extremităţile planşeului de la cota 0,00), precum şi în puncte de la nivelul de
contact cu radierul (izolatorul 753). Această analiză duce la observarea
potenţialelor efecte torsionale de ansamblu şi la sporul de cerinţe de deplasare
dat către de aceasta tendinţă. Rezultatele sunt prezentate în figurile
5.9,5.10,5.11,5.12, 5.13 şi 5.14.
Fig. 5.9. Lege forţă deplasare direcţie longitudinală - izolator 695, la nivelul cotei 0,00
Fig. 5.10. Lege forţă deplasare direcţie transversală – izolator 695, la nivelul cotei 0,00
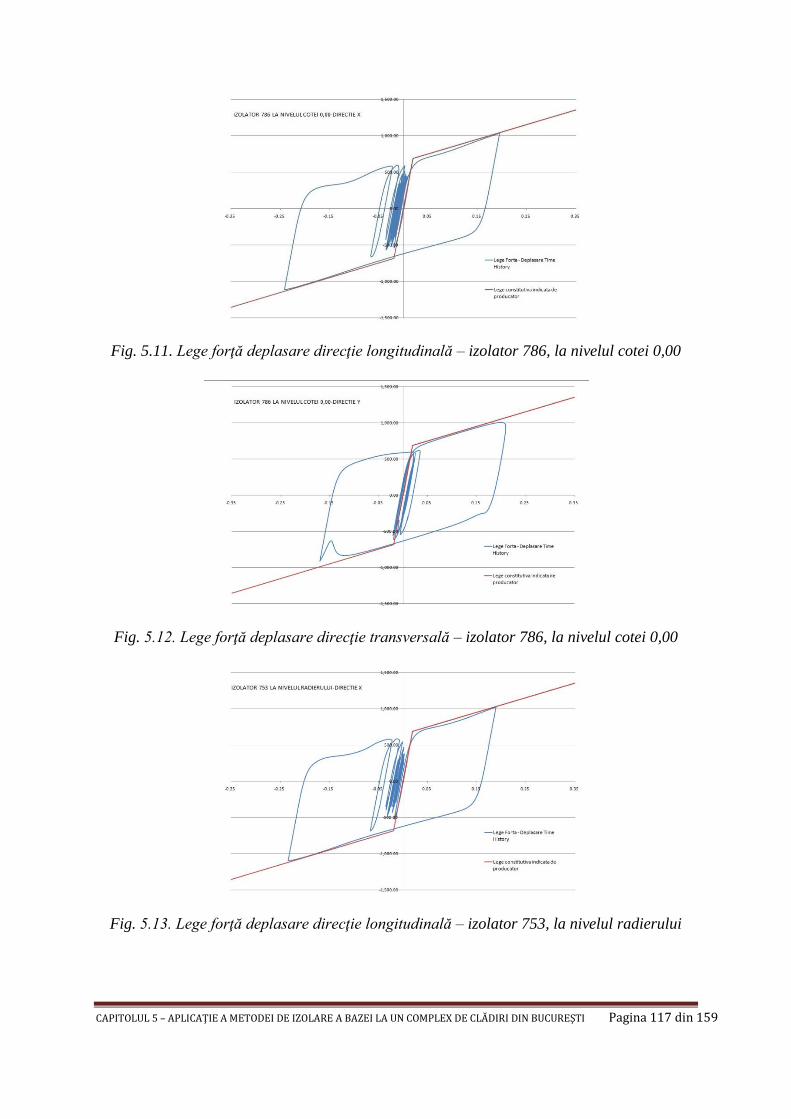
CAPITOLUL 5 – APLICAŢIE A METODEI DE IZOLARE A BAZEI LA UN COMPLEX DE CLĂDIRI DIN BUCUREŞTI Pagina 117 din 159
Fig. 5.11. Lege forţă deplasare direcţie longitudinală – izolator 786, la nivelul cotei 0,00
Fig. 5.12. Lege forţă deplasare direcţie transversală – izolator 786, la nivelul cotei 0,00
Fig. 5.13. Lege forţă deplasare direcţie longitudinală – izolator 753, la nivelul radierului

CAPITOLUL 5 – APLICAŢIE A METODEI DE IZOLARE A BAZEI LA UN COMPLEX DE CLĂDIRI DIN BUCUREŞTI Pagina 118 din 159
Fig. 5.14. Lege forţă deplasare direcţie transversală – izolator 753, la nivelul radierului
Din analiza figurilor de mai sus, rezultă că sporul de deplasări în izolatori,
dat de către efectele de torsiune generală, este nesemnificativ, ducând la
diferenţe de cerinţe de deplasări de cel mult 1..2 cm, în condiţiile în care nicio
cerinţă de deplasare nu depăşeşte 25 cm. Nivelul de forţe axiale în izolatori este
moderat. Pentru cel mai încărcat izolator, forţa axială maximă la nivelul cotei
0,00 este de aproximativ 5235 kN, ceea ce duce la un efort axial maxim de
10,42 N/mm2, inferior celui garantat de producător (conform fişei tehnice din
anexa 3) de 12,02 N/mm2.
Un alt aspect al cărui analiză necesită atenţie este cel al nivelului efectiv
de amortizare oferit de aceste dispozitive. Pe baza relaţiilor din EUROCODE 8
(EUROCODE 8,Part 1, 2000) s-a estimat, la nivelul modelului cu 1 G.L.D., cu
baza izolată, acest nivel ca fiind de 28%.
După rularea calculului s-a estimat, pe baza răspunsului time-history a
fiecărui izolator, un nivel de amortizare efectivă. Estimarea s-a făcut conform cu
unele metodologii descrise în literatura americană de specialitate. În consecinţă
s-au utilizat relaţiile din FEMA274, Capitolul 9 (1997), respectiv FEMA440,
Capitolul 6 (2005).O valoare medie a cerinţei de deplasare în izolatori se
situează în jurul valorii de 24 cm.Ţinând cont şi de parametrii legii constitutive
din figura 5.8. , izolatorul cu comportare bilineară se caracterizează printr-un
indice “cerinţă” de ductilitate de deplasare de :
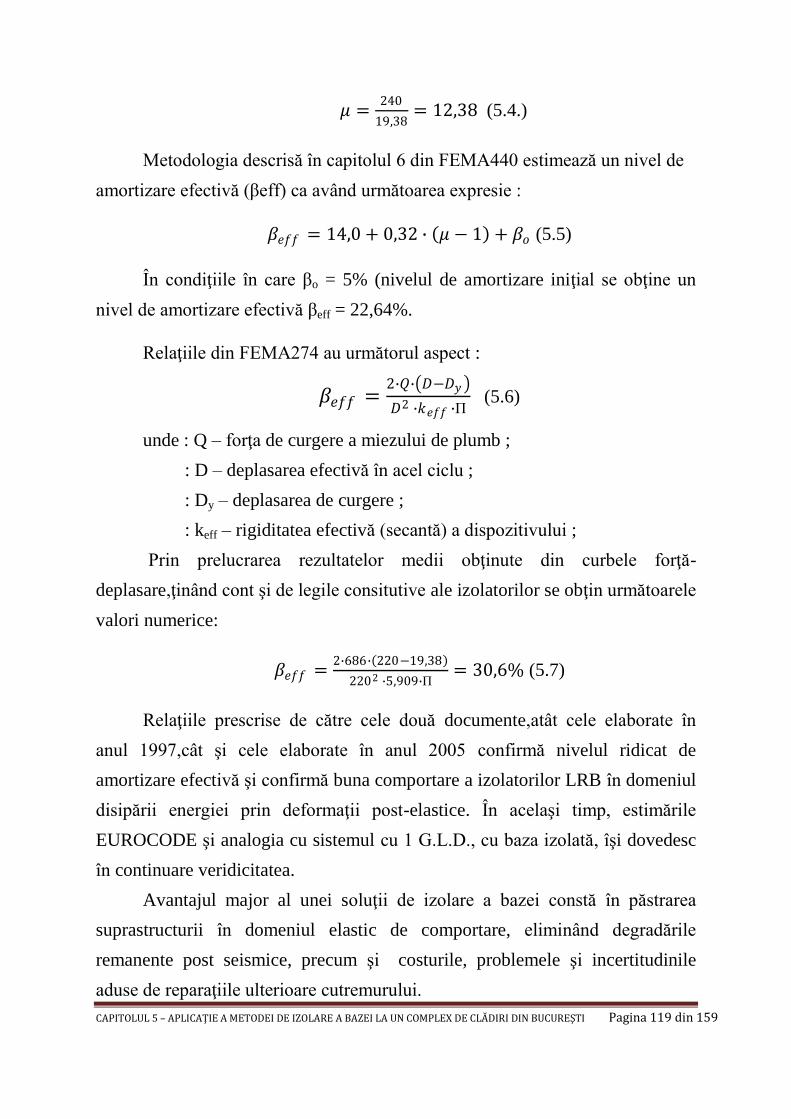
CAPITOLUL 5 – APLICAŢIE A METODEI DE IZOLARE A BAZEI LA UN COMPLEX DE CLĂDIRI DIN BUCUREŞTI Pagina 119 din 159
𝜇 =240
19,38= 12,38 (5.4.)
Metodologia descrisă în capitolul 6 din FEMA440 estimează un nivel de
amortizare efectivă (βeff) ca având următoarea expresie :
𝛽𝑒𝑓𝑓 = 14,0 + 0,32 ∙ 𝜇 − 1 + 𝛽𝑜 (5.5)
În condiţiile în care βo = 5% (nivelul de amortizare iniţial se obţine un
nivel de amortizare efectivă βeff = 22,64%.
Relaţiile din FEMA274 au următorul aspect :
𝛽𝑒𝑓𝑓 =2∙𝑄∙ 𝐷−𝐷𝑦
𝐷2 ∙𝑘𝑒𝑓𝑓 ∙Π (5.6)
unde : Q – forţa de curgere a miezului de plumb ;
: D – deplasarea efectivă în acel ciclu ;
: Dy – deplasarea de curgere ;
: keff – rigiditatea efectivă (secantă) a dispozitivului ;
Prin prelucrarea rezultatelor medii obţinute din curbele forţă-
deplasare,ţinând cont şi de legile consitutive ale izolatorilor se obţin următoarele
valori numerice:
𝛽𝑒𝑓𝑓 =2∙686∙ 220−19,38
2202 ∙5,909∙Π= 30,6% (5.7)
Relaţiile prescrise de către cele două documente,atât cele elaborate în
anul 1997,cât şi cele elaborate în anul 2005 confirmă nivelul ridicat de
amortizare efectivă şi confirmă buna comportare a izolatorilor LRB în domeniul
disipării energiei prin deformaţii post-elastice. În acelaşi timp, estimările
EUROCODE şi analogia cu sistemul cu 1 G.L.D., cu baza izolată, îşi dovedesc
în continuare veridicitatea.
Avantajul major al unei soluţii de izolare a bazei constă în păstrarea
suprastructurii în domeniul elastic de comportare, eliminând degradările
remanente post seismice, precum şi costurile, problemele şi incertitudinile
aduse de reparaţiile ulterioare cutremurului.

CAPITOLUL 5 – APLICAŢIE A METODEI DE IZOLARE A BAZEI LA UN COMPLEX DE CLĂDIRI DIN BUCUREŞTI Pagina 120 din 159
Complexitatea modelului de calcul şi limitarea, la momentul actual, a
evoluţiei programelor de calcul nu permit o analiza dinamic neliniară spaţială în
care zonele plastice sa fie localizate atât la nivelul izolatorilor, cât şi în grinzile
şi stâlpii suprastructurii. Totuşi, problema rămânerii în domeniul elastic a
suprastructurii este una prea importantă pentru a fi neglijată şi, în concluzie, s-a
abordat problema având la bază criterii energetice globale. Analiza validării
comportării elastice a suprastructurii a presupus parcurgerea următorilor paşi :
- Suprastructura celor patru clădiri de birouri, în afara de planşeele
comune de peste primele două niveluri, s-a predimensionat din condiţii strict
gravitaţionale, fără impunerea unor condiţii de rigiditate laterală sau de
ductilitate seismică. Astfel, au rezultat secţiuni relativ modeste în comparaţie cu
exigenţele actuale de proiectare : grinzi cu secţiunea de 25x50 cm pe
deschiderea de 7,50 m , stâlpi de 40 x 40 cm , stâlpi rotunzi de diametrul 40...50
cm , etc;
- S-a făcut un bilanţ global al energiei induse de către cutremur
considerând valoarea consumată de către suprastructură şi cea disipată în
elementele de tip izolator;
- Energia consumată de către izolatori a fost calculată pe baza
caracteristicilor lor mecanice date de către furnizor;
- Restul de energie s-a presupus a fi „consumat” de către suprastructură;
- Pentru aceasta energie, consumată de către suprastructură, s-a calculat
o cerinţă de forţă şi o cerinţă de deplasare, din condiţia de echivalenţă de
energii;
- Nivelul acestor cerinţe s-au comparat cu valorile uzuale folosite în
proiectare ;
Ilustrarea grafică şi analitică a metodologiei prezentate mai sus este
redată în cele ce urmează. S-a făcut analiza doar pentru o direcţie principală de
inerţie a clădirii (cea longitudinală), având în vedere comportarea similară a
acesteia pe orice direcţie.
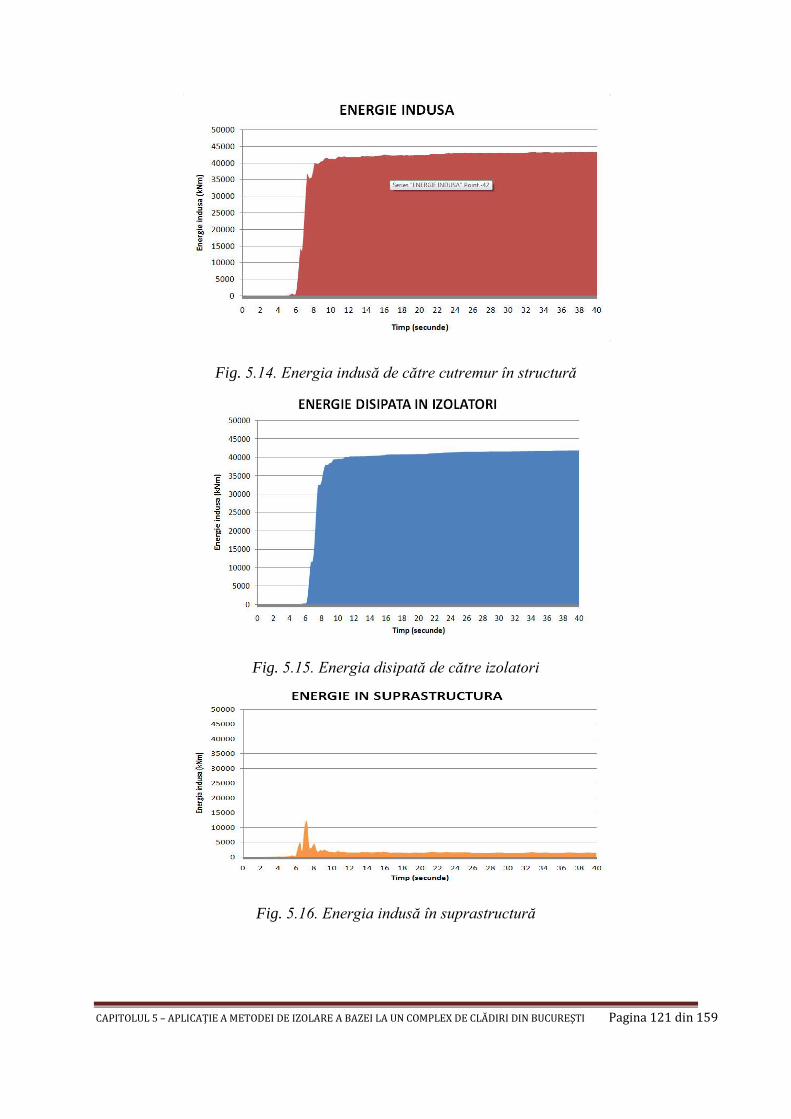
CAPITOLUL 5 – APLICAŢIE A METODEI DE IZOLARE A BAZEI LA UN COMPLEX DE CLĂDIRI DIN BUCUREŞTI Pagina 121 din 159
Fig. 5.14. Energia indusă de către cutremur în structură
Fig. 5.15. Energia disipată de către izolatori
Fig. 5.16. Energia indusă în suprastructură

CAPITOLUL 5 – APLICAŢIE A METODEI DE IZOLARE A BAZEI LA UN COMPLEX DE CLĂDIRI DIN BUCUREŞTI Pagina 122 din 159
Fig. 5.17. Bilanţul consumării energiei induse de către cutremur
Din analiza fig. 5.14, 5.15, 5.16 si, în special, 5.17 rezulta eficienţa
sistemului de izolare a bazei cu amortizare ridicată. Nivelul de amortizare de
aproximativ 30%, însoţit de deplasările capabile mari duc la absorbirea a până la
95% din energia indusă de către cutremur. În fig. 5.17 se observă şi faptul că
până după secunda 4 a oscilaţiei seismice, izolatorii nu îşi exercită proprietăţile
postelastice disipatoare de energie şi contribuţia acestora la bilanţul energetic
total este scăzută, structura consumând aproape în totalitate energia seismică
printr-o comportare elastică. Se face observaţia că şi nivelul energiei induse în
primele 4 secunde este, procentual, aproape inexistent (fig. 5.16). După secunda
4 şi pana la sfârşitul mişcării seismice (secunda 40) contribuţia sistemului de
izolare creşte spectaculos şi rămâne constant, reducând energia indusă de
cutremur la pana la 5% din valoarea ei. Analizând fig. 5.16 se constată că
maximul energiei induse de către cutremur este de 12356,6 kNm, obţinut la
secunda 7,2 a oscilaţiei seismice. Următoarele valori semnificative au intensitate
de mai puţin de 5000 kNm ( 4949,4 kNm la secunda 6,44, respectiv 4544,75
kNm, la secunda 8,06). Daca se echivalează aceste energii disipate, cu cerinţe
de forţe şi deplasare, cunoscând cerinţa de deplasare totală de aproximativ

CAPITOLUL 5 – APLICAŢIE A METODEI DE IZOLARE A BAZEI LA UN COMPLEX DE CLĂDIRI DIN BUCUREŞTI Pagina 123 din 159
30 cm, din ecuația 5.8 ( Eintrare reprezintă energia indusă în suprastructură, Fel
reprezintă cerinţa de forţă elastică, iar Δel cerinţa de deplasare în condiţiile unui
răspuns elastic )
𝐸𝑖𝑛𝑡𝑟𝑎𝑟𝑒 =𝐹𝑒𝑙 ∙Δ𝑒𝑙
2 (5.8)
rezultă că forţa necesară producerii acestei energii este de aproximativ 33000
kN, adică de 8,25% din greutatea casei. Forţa elastică inerţială care ar acţiona
asupra structurii în lipsa izolatorilor este, conform normativului P100/2006, de
aproximativ 66,00% din greutate. În consecinţă, rezultă o reducere a cerinţelor
de forţa de aproximativ 8 ori, ceea ce justifică considerarea unui răspuns elastic.
În cazul vârfului înregistrat intre secunda 6,44 şi 8,06 cerinţele de forţă sunt
scăzute de numai 3,33 ori, ceea ce ar putea permite o plastificare limitată, dar
fără degradări semnificative.
De asemenea, prin analiza directă a bilanţului energetic (fig. 5.17), dacă
se consideră că energia indusă în suprastructură nu depăşeşte 5%, adică 1/20 din
energia totală, rezultă că raportul de forţe este şi mai redus, adică cerinţele
globale de forţe asupra structurii nu depăşesc 3,3% din greutatea masei
oscilante. Această analiză ignora vârful de energie înregistrat intre secundele 6
şi 8.
Pentru a ilustra suplimentar cele afirmate mai sus, se analizează eforturile
de dimensionare exercitate într-un element curent de tip grindă, respectiv de tip
stâlp. Elementele sunt localizate la etajul 3 al suprastructurii, deasupra celor
două planşee pline (dezvoltate pe toata suprafaţa clădirii) şi au dimensiunile de
25x40 cm (grinda), respectiv diametrul de 60 cm (stâlpul). Deschiderea grinzii
este de 6,00 m, respectiv înălţimea de nivel este 3,50 m.
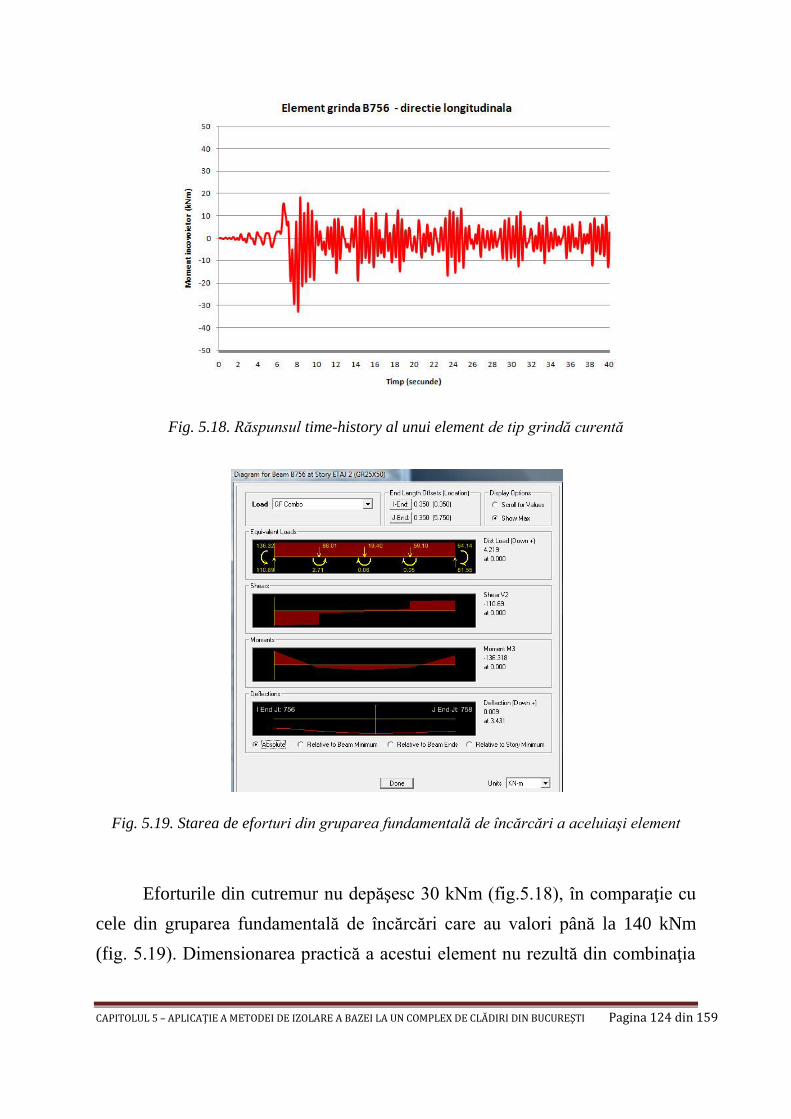
CAPITOLUL 5 – APLICAŢIE A METODEI DE IZOLARE A BAZEI LA UN COMPLEX DE CLĂDIRI DIN BUCUREŞTI Pagina 124 din 159
Fig. 5.18. Răspunsul time-history al unui element de tip grindă curentă
Fig. 5.19. Starea de eforturi din gruparea fundamentală de încărcări a aceluiaşi element
Eforturile din cutremur nu depăşesc 30 kNm (fig.5.18), în comparaţie cu
cele din gruparea fundamentală de încărcări care au valori până la 140 kNm
(fig. 5.19). Dimensionarea practică a acestui element nu rezultă din combinaţia
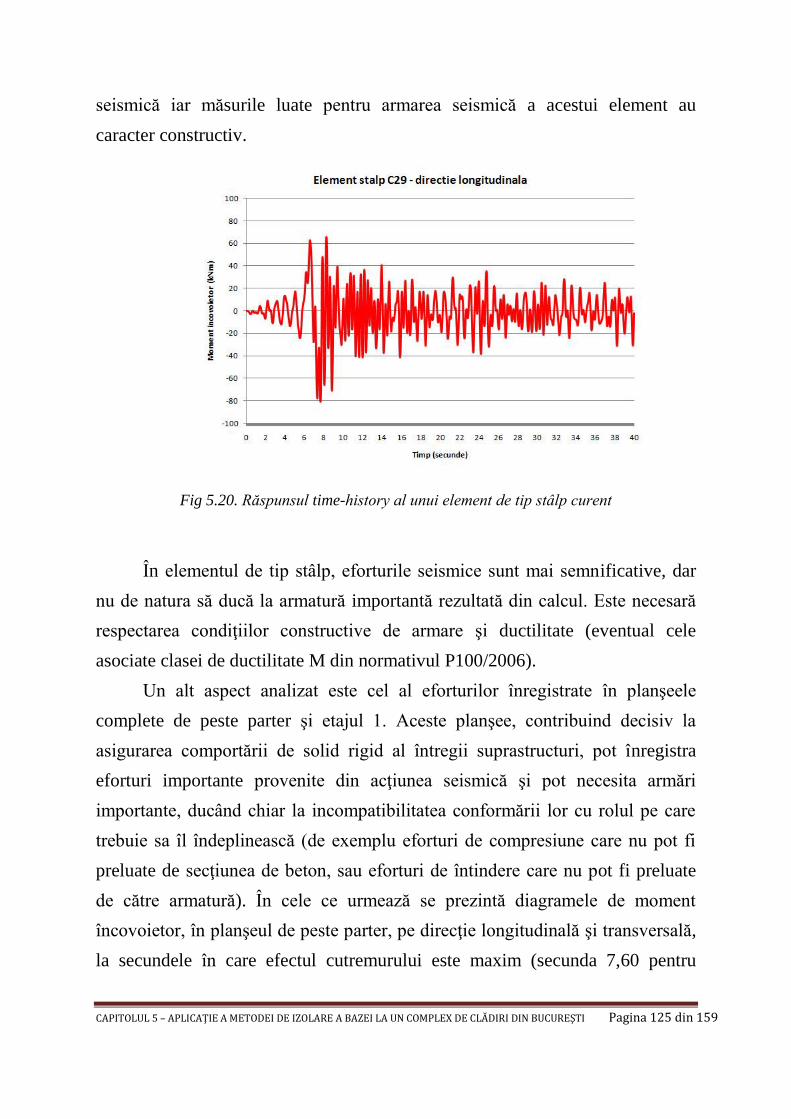
CAPITOLUL 5 – APLICAŢIE A METODEI DE IZOLARE A BAZEI LA UN COMPLEX DE CLĂDIRI DIN BUCUREŞTI Pagina 125 din 159
seismică iar măsurile luate pentru armarea seismică a acestui element au
caracter constructiv.
Fig 5.20. Răspunsul time-history al unui element de tip stâlp curent
În elementul de tip stâlp, eforturile seismice sunt mai semnificative, dar
nu de natura să ducă la armatură importantă rezultată din calcul. Este necesară
respectarea condiţiilor constructive de armare şi ductilitate (eventual cele
asociate clasei de ductilitate M din normativul P100/2006).
Un alt aspect analizat este cel al eforturilor înregistrate în planşeele
complete de peste parter şi etajul 1. Aceste planşee, contribuind decisiv la
asigurarea comportării de solid rigid al întregii suprastructuri, pot înregistra
eforturi importante provenite din acţiunea seismică şi pot necesita armări
importante, ducând chiar la incompatibilitatea conformării lor cu rolul pe care
trebuie sa îl îndeplinească (de exemplu eforturi de compresiune care nu pot fi
preluate de secţiunea de beton, sau eforturi de întindere care nu pot fi preluate
de către armatură). În cele ce urmează se prezintă diagramele de moment
încovoietor, în planşeul de peste parter, pe direcţie longitudinală şi transversală,
la secundele în care efectul cutremurului este maxim (secunda 7,60 pentru

CAPITOLUL 5 – APLICAŢIE A METODEI DE IZOLARE A BAZEI LA UN COMPLEX DE CLĂDIRI DIN BUCUREŞTI Pagina 126 din 159
direcţia longitudinală – fig. 5.21, respectiv 8,40 pentru direcţia transversală -
fig.5.22 ).
Fig. 5.21.Diagrama de moment încovoietor în planşeul de peste parter
secunda 7,60, direcţie longitudinală
Fig 5.22.Diagrama de moment încovoietor în planşeul de peste parter
secunda 8,40, direcţie transversală

CAPITOLUL 5 – APLICAŢIE A METODEI DE IZOLARE A BAZEI LA UN COMPLEX DE CLĂDIRI DIN BUCUREŞTI Pagina 127 din 159
Analiza figurilor 5.21 şi 5.22 pune în evidenţă un nivel de solicitare
moderată în planşeele care asigură comportarea de solid rigid a suprastructurii,
cu eforturi care nu depăşesc 20kNm/ml ( în condiţiile în care aceste planşee au o
grosime de 25 cm). Analiza la forţe de întindere şi compresiune (eforturi de
membrană) arată că nu se depăşeşte un maxim de 70...100 kN/ml, ceea ce nu
duce la armări ieşite din scara uzuală de proiectare şi nici la pericolul depăşirii
eforturilor unitare în beton. Se constată, aşa cum era de aşteptat, o concentrare
de eforturi în jurul zonelor discontinue din planşeu (tuburi de lifturi, case de
scări) etc, dar acest fenomen nu are un caracter alarmant.
Concretizând şi concluzionând toate aspectele prezentate mai sus, se
poate afirma că, în timpul unui cutremur de pământ similar cu cel înregistrat la
4 Martie 1977, structura analizată în cadrul acestui capitol îndeplineşte toate
condiţiile pentru a avea o comportare elastică. Forţele exercitate de cutremur
asupra ei vor fi reduse de către acţiunea disipativă a interfeţei de izolare, cu
factori de ordinul de mărime 8...10.
5.4. Aspecte locale de proiectare şi de tehnologia execuției
În calculul şi detalierea unei structuri de acest tip, intervin aspecte
numeroase de detaliere locală, a căror importanţă este însemnata, putând
conduce, în cazul netratării corespunzătoare, la evenimente nedorite şi la
anularea tuturor avantajelor rezultate din calculul global. Atât proiectantul de
detalii de execuţie, cât şi specialistul care execută o lucrare de asemenea
complexitate trebuie sa rezolve o lista considerabilă de aspecte. În cele ce
urmează se vor menţiona câteva dintre ele, fără a emite pretenţia că enumerarea
sa fie exhaustivă :
- Lucrările de instalare a izolatorilor trebuie făcute în concordanţă cu
recomandările producătorului, ţinând cont, în calcul, de diversele scheme de
calcul care pot rezulta ;

CAPITOLUL 5 – APLICAŢIE A METODEI DE IZOLARE A BAZEI LA UN COMPLEX DE CLĂDIRI DIN BUCUREŞTI Pagina 128 din 159
- Mentenanţa, garanţia precum şi procedurile de înlocuire a
dispozitivelor, atât după un cutremur important, cât şi ca urmare a consumării
intervalelor uzuale de întreţinere sunt momente importante în viața construcţiei.
Trebuie ţinut cont şi de detalierea elementelor de susţinere (de exemplu sporul
de sarcină axială dat de înlocuirea unui izolator trebuie să poată fi preluat de
către elementele adiacente, dimensionate în acest sens, etc.).
- Elementele de izolare trebuie sa fie accesibile, în vederea examinării
stării acestora sau a schimbării ;
- Tehnologia de execuţie trebuie sa fie bine pusă la punct şi conştientă
asupra modului de funcţionare a clădirii (de exemplu importanţa asigurării
rostului de mişcare seismică de cel puţin 35 cm trebuie sa fie bine înţeleasă de
toţi factorii implicaţi în materializarea structurii) ;
- Acest rost seismic aduce complicaţii în rezolvarea funcţionalităţii
clădirii, în special a parţii de instalaţii şi trebuie găsite soluţii în consecinţă ;
- Tehnologia top-down de execuţie a infrastructurii, mai ales în
condiţiile în care o bună parte din fundaţie se va executa sub apă este de
asemenea o problemă delicată ;

CAPITOLUL 6 - CONCLUZII Pagina 129 din 159
Capitolul 6
CONCLUZII
6.1. Bazele lucrării .Contextul științific al lucrării.
Lucrarea de faţă s-a născut în urma participării autorului la o parte din
studiile desfăşurate în cadrul unui amplu program de cercetare multidisciplinară,
iniţiat şi condus de către prof. univ. dr. ing. Petre PĂTRUŢ, care a condus la
realizarea unui amortizor semi-activ aflat în prezent în faza de prototip, testat şi
pregătit pentru a intra în producţia de serie pe piaţa autohtonă sau internaţională.
Acest amortizor va putea fi folosit atât la controlul şi optimizarea răspunsului
seismic al structurilor noi, cât şi la reabilitarea clădirilor existente. Contribuţia
autorului prezentei teze la acest program s-a concretizat prin studierea unor
aspecte legate de modelarea, cuantificarea şi optimizarea răspunsului structurii
cu amortizori precum şi prin pregătirea unor date de intrare necesare proiectării
amortizorilor propriu-zişi. Aceste contribuţii au făcut obiectul capitolului 2 al
prezentei teze.
Cercetarea iniţială a colectivului multidisciplinar a fost ulterior extinsă
abordându-se studierea unor procedee de control structural prin izolarea bazei,
în condiţiile particulare de manifestare a cutremurelor vrâncene din România.
Un obiectiv al acestei cercetări a fost şi studierea condiţiilor în care s-ar putea
utiliza metode mixte de control structural respectiv izolarea bazei asociată cu
implementarea de izolatori semi-activi. Contribuţiile autorului tezei la această a
doua direcţie de cercetare sunt prezentate în capitolele 3 şi 4 ale tezei
Începând cu anul 2007, autorul tezei a participat direct la proiectarea, de
către o echipă româno-italiană, a unui ansamblu de clădiri de birouri amplasate
în Bucureşti, la care se va aplica conceptul de izolare a bazei. în acest cadru, a
efectuat o activitate ştiinţifică de optimizare a soluţiilor ce urmează a fi
implementate, având şi contribuţii personale referitoare la cuantificarea
CAPITOLUL 6 - CONCLUZII Pagina 130 din 159
influenţei soluţiei de izolare a bazei asupra comportării clădirilor la acţiunile
seismice specifice României şi oraşului Bucureşti (capitolul 5 al tezei).
Fiecare din aceste linii de cercetare au fost precedate de un studiu
bibliografic extins care a permis autorului să îşi însuşească stadiul actual al
problemelor, inclusiv tipurile de dispozitive mecanice corespunzătoare
procedeelor curent utilizate, aspectele specifice de calcul, normativele mai
importante existente pe plan mondial şi naţional, precum şi programele de
calcul automate performante ce pot fi folosite la modelarea comportării acestor
sisteme.
Pornind de la cele patru direcţii majore descrise mai sus, se pot sintetiza
contribuţiile personale ale tezei după cum urmează :
6.2. Contribuţiile proprii ale lucrării
Contribuţiile autorului la dezvoltarea conceptului de control al
răspunsului structural la acţiuni seismice, care constituie obiectul tezei, se pot
grupa în patru direcţii majore :
A. Contribuţii la rezolvarea unor probleme structurale generate de
implementarea amortizorilor semi-activi dezvoltaţi în cadrul programului de
cercetare UTCB-UPB. Aceste contribuţii pot fi sintetizate după cum urmează:
Studiu bibliografic al stadiul actual al problematicii pe plan
mondial;
Participarea la elaborarea de legi constitutive pentru amortizorii de
tip semi-activ;
Participarea la elaborarea de modele structurale adecvate aplicării
dispozitivelor de amortizare semi-activă ;
Analiza acestor modele şi a aspectelor particulare rezultate, în
condiţiile seismice ale ţării noastre ;
Participarea la elaborarea de strategii de control a funcţionării
amortizorilor semi-activi ;
Studierea aplicabilităţii metodei pentru construcţii existente .

CAPITOLUL 6 - CONCLUZII Pagina 131 din 159
B. Contribuţii teoretice şi analitice privind realizarea controlului
structural la acţiuni seismice, folosind tehnologia de izolare a bazei. Ele
constau, în principal, din următoarele:
Identificarea tipurilor actuale de sisteme de izolare a bazei, cu
avantaje, dezavantaje şi domenii optime de utilizare ;
Dezvoltarea unei abordări energetice pentru cuantificarea
comportării sistemelor de amortizori ;
Examinarea posibilităţii de utilizare a unor metode mixte de control
structural (izolarea bazei asociată cu sisteme de amortizori semi-activi) prin
realizarea unui studiu parametric prezentat la sfârşitul capitolului al patrulea al
lucrării.
C. Analizarea oportunităţii utilizării metodelor de control structural pe
baza unui studiu de caz. În această direcţie s-au realizat următoarele:
Analiza particularităților spectrale ale miscărilor seismice de tip
VRANCEA ;
Elaborarea unui model structural adecvat;
Analiza comparativă a răspunsului structural în diferite ipoteze
(baza fixă, izolare fără amortizare, izolare cu amortizare pasivă, izolare cu
amortizare semi-activă);
Analiza energetică a eficienţei fiecărei soluţii.
D. Contribuţii la aplicarea concretă a izolării bazei a unui ansamblu de
structuri amplasate în Bucureşti :
Evaluarea cerinţelor de deplasare date de către mişcările seismice
caracteristice ţării noastre, asupra structurii cu baza izolată;
Studiu asupra alegerii judicioase a caracteristicilor sistemului de
izolare;
Evaluarea amortizării efective oferite de către dispozitivele de
izolare;

CAPITOLUL 6 - CONCLUZII Pagina 132 din 159
Studiul dinamicii de ansamblu al complexului de clădiri cu baza
izolată şi studiul posibilităţii validării teoriilor emise pe modele simplificate;
Abordarea energetică a cerinţelor efective de forte şi deplasări;
Elucidarea unor aspecte specifice de proiectare şi de tehnologie a
execuţiei.
Lucrarea se înscrie în contextul ştiinţific oferit de dezvoltarea cunoaşterii
fenomenologice şi tehnice din ultimii ani, cunoaştere care a dus la dezvoltarea,
ca alternativa la soluţiile şi sistemele clasice de proiectare, a unor sisteme de
control al răspunsului structural la acţiuni seismice prin realizarea de sisteme
integrate, înzestrate cu posibilităţi de adaptare şi optimizare a răspunsului
seismic, ceea ce ar putea fi denumit, pe scurt, construcţii inteligente.
6.3. Direcţii viitoare de cercetare
Utilizarea controlului structural în ţara noastră se află, încă, într-un stadiu
incipient. Aplicaţiile în acest domeniu sunt puţin numeroase şi puţin cunoscute.
Pe de altă parte, specialiştii sunt unanim de acord că progresul viitor al clădirilor
seismo-rezistente, atât al celor noi cât şi al celor existente, nu va putea fi făcut
fără implementarea unor sisteme din ce în ce mai perfecţionate de control
structural, fapt ce deschide un câmp extrem de larg şi de provocator cercetării,
care poate fi materializată prin activitatea de dezvoltare de coduri de proiectare,
testare, implementare în practică, etc.
Direcţiile viitoare de cercetare sugerate de prezenta lucrare au ca obiect,
în principal, continuarea cercetărilor şi elucidarea a multiple aspecte, dintre care
cele mai semnificative ar fi următoarele :
extinderea cercetării în vederea identificării posibilităţilor de
aplicare a unor sisteme de control structural optime, adecvate diferitelor tipuri
de clădiri, aflate atât în stadiul de proiect, cât şi celor existente, vulnerabile
acţiunii seismice;

CAPITOLUL 6 - CONCLUZII Pagina 133 din 159
informare continuă asupra evoluţiei pe plan mondial a metodelor
de control structural şi studierea aplicabilităţii lor în condiţiile seismice ale ţării
noastre;
studiul aplicabilităţii unor noi legi constitutive pentru amortizorii
semi-activi;
testarea în laborator a unor subansambluri structurale echipate cu
dispozitive de control semi-activ al răspunsului structural
studii în vederea implementării, în codurile româneşti de proiectare
şi evaluare, a prevederilor referitoare la metode şi tehnologii de control al
răspunsului structural la acţiuni seismice.
* * *
Studiile elaborate în cadrul prezentei lucrări precum şi direcţiile viitoare
de cercetare formulate au avut în intenţie să contribuie la dezvoltarea, într-un
viitor apropiat, a unei filozofii alternative de proiectare, faţă de cea acceptată în
prezent, care să încorporeze tehnologiile moderne de control a răspunsului
structural la acţiuni seismice orientate spre înalta performanţă şi adaptare
seismică şi care să diminueze substanţial neajunsurile efectelor negative
post-seismice acceptate astăzi în mod curent.

ANEXA 1 Pagina 134 din 159
ANEXA 1
CARACTERISITICILE ŞI CALCULUL AMORTIZORULUI
SEMI-ACTIV PRODUS ÎN CADRUL PROGRAMULUI DE
CERCETARE U.T.C.B. – U.P.B
A1.Stabilirea preliminară a parametrilor sistemului disipativ fluidic,autoreglabil
A1.1. Date iniţiale
Parametrii de lucru ai disipatorilor semiactivi au fost optimizaţi în urma simulărilor
dinamice a unei structuri din beton armat P+8,izolate la bază, solicitată de cutremurul
VRANCEA 1977 ( conform fig A1.1) :
Fig. A1.1. Simulare dinamică a unei structuri din beton armat P+8, izolate la bază
1.Fundaţia ; 2. Clădire P+8 ;3. Rezemare elastică;4.Dispozitive de reazem cu
disipare parţială vâsco-elastică;5.Disipatori fluidici semiactivi;
Notând cu x şi y direcţiile principale după care au fost efectuate simulările, au
rezultat:
Kx = Ky = K = 233 tf/m ;
Fx=Fy=Fv = 4 x 45 tf (patru cilindri disipatori pe o direcţie) ;
δ = ±20 cm (deplasarea maxima pe o direcţie) ;

ANEXA 1 Pagina 135 din 159
În urma simulării efectuate asupra structurii din beton armat P+8, a rezultat ca fiind
optimă, din punct de vedere a energiei disipate, legea de reglaj automat, prezentată în fig.
A1.2, în care
Fig. A1.2.Legea de reglaj automat a amortizorului semi-activ
Fv,max = 45 tf pentru un disipator semiactiv ;
v1 = 0,215 m/s – viteza de început a reglajului automat ;
v2 = 0,50 m/s – viteza maximă atinsă de clădire ;
În intervalul de viteze 0...v1 disipatorul funcţionează în regim pasiv ;
În intervalul de viteze v1...v2 disipatorul funcţionează în regim semiactiv,cu reglarea
automată a forţei disipative în regimul Fv=Fvmax = 45 tf (forţă constantă) ;
Coeficienţii de amortizare :
a) în punctul de viteză v1 :
Cmax = Fv,max/v1 =45000/20 = 2250 daN*s/cm ;
b)în punctul de viteză v2 :
Cmin = Fv,max/v2 = 45000/40 = 1125 daN*s/cm;
În domeniul de viteze v=0....v1, fantele rezistive ale pistoanelor, generează un
coeficient de amortizare C=Cmax=constant;
În domeniul de viteze v=v1=v2, distribuitorul proporţional autoreglabil împreună cu
fantele pistoanelor generează un coeficient de amortizare autoreglabil C=Cmax=Cmin ;
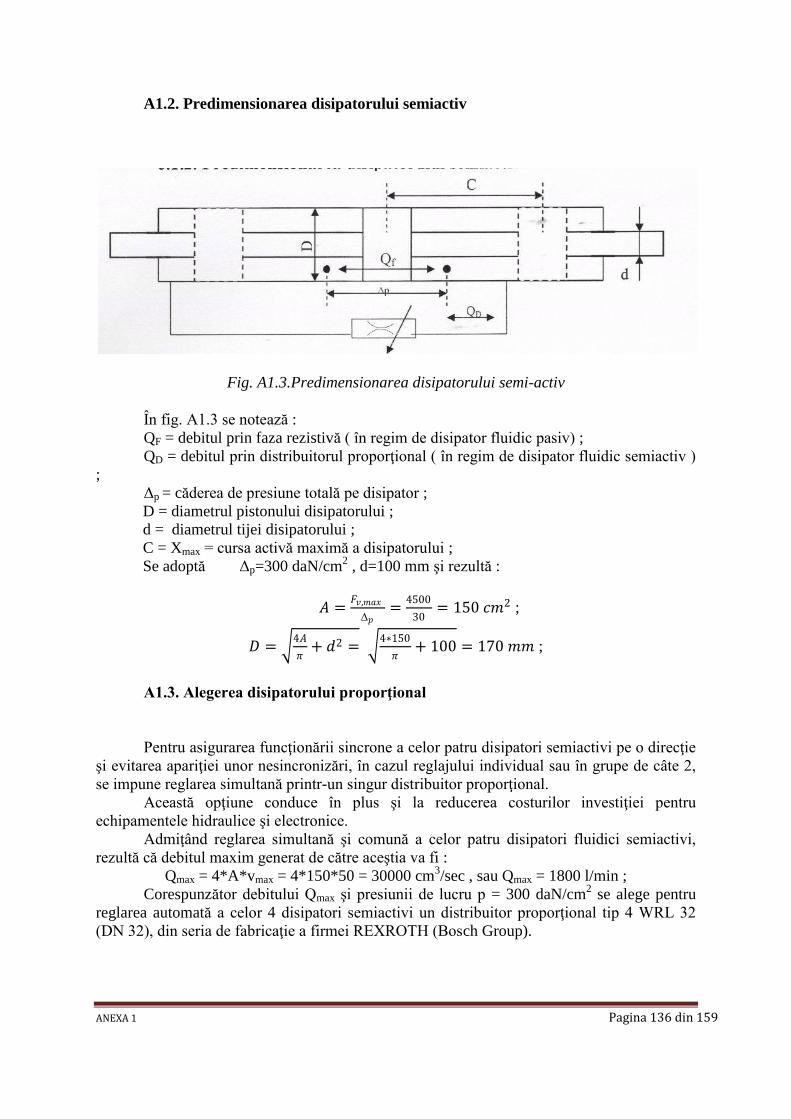
ANEXA 1 Pagina 136 din 159
A1.2. Predimensionarea disipatorului semiactiv
Fig. A1.3.Predimensionarea disipatorului semi-activ
În fig. A1.3 se notează :
QF = debitul prin faza rezistivă ( în regim de disipator fluidic pasiv) ;
QD = debitul prin distribuitorul proporţional ( în regim de disipator fluidic semiactiv )
;
Δp = căderea de presiune totală pe disipator ;
D = diametrul pistonului disipatorului ;
d = diametrul tijei disipatorului ;
C = Xmax = cursa activă maximă a disipatorului ;
Se adoptă Δp=300 daN/cm2 , d=100 mm şi rezultă :
𝐴 =𝐹𝑣,𝑚𝑎𝑥
Δ𝑝=
4500
30= 150 𝑐𝑚2 ;
𝐷 = 4𝐴
𝜋+ 𝑑2 =
4∗150
𝜋+ 100 = 170 𝑚𝑚 ;
A1.3. Alegerea disipatorului proporţional
Pentru asigurarea funcţionării sincrone a celor patru disipatori semiactivi pe o direcţie
şi evitarea apariţiei unor nesincronizări, în cazul reglajului individual sau în grupe de câte 2,
se impune reglarea simultană printr-un singur distribuitor proporţional.
Această opţiune conduce în plus şi la reducerea costurilor investiţiei pentru
echipamentele hidraulice şi electronice.
Admiţând reglarea simultană şi comună a celor patru disipatori fluidici semiactivi,
rezultă că debitul maxim generat de către aceştia va fi :
Qmax = 4*A*vmax = 4*150*50 = 30000 cm3/sec , sau Qmax = 1800 l/min ;
Corespunzător debitului Qmax şi presiunii de lucru p = 300 daN/cm2 se alege pentru
reglarea automată a celor 4 disipatori semiactivi un distribuitor proporţional tip 4 WRL 32
(DN 32), din seria de fabricaţie a firmei REXROTH (Bosch Group).

ANEXA 1 Pagina 137 din 159
A2. Calculul rezistenţelor hidraulice echivalente ale fantelor cilindirice ale
pistoanelor şi ale droselului proporţional
În fig. A1.4. se prezintă structura ansamblului rezistiv, în care s-au notat :
R1…R4 = rezistenţele hidraulice echivalente ale fantelor cilindrice, aparţinând
pistoanelor (nereglabile) ;
RD = rezistenţa hidraulică echivalentă a droselului proporţional (
autoreglabil) ;
QF = debitul prin fanta cilindrică ;
QD = debitul prin distribuitorul proporţional ;
Q = debitul total, generat de către cele patru pistoane;
Fig.A1.4 – Structura ansamblului rezistiv
A2.1. Calculul rezistenţelor hidraulice echivalente ale fantei cilindrice
Dimensionarea fantei cilindrice
Fig.A1.5 – Fanta cilindrică

ANEXA 1 Pagina 138 din 159
Pentru dimensionarea elementelor geometrice ale fantei şi respectiv a rezistenţei
hidraulice echivalente, se notează :
D = diametrul mediu al fantei ;
J = jocul diametral ;
µ = vâscozitatea dinamică a lichidului de lucru ;
ρ = densitatea lichidului ;
L = lăţimea axială a fantei ;
QF = debitul prin fantă.
Debitul maxim QF printr-o singură fantă, în punctul A din fig A1.5, va fi:
QF = A * v1 = 150 * 20 = 3000 cm3 /sec ;
Pentru fanta circulară concentrică, având în vedere analogia de calcul electro-
hidraulică, căderea de presiune este :
Δ𝑝 =96
𝜋∗
𝐿
𝐷∗𝐽3 ∗ 𝜇 ∗ 𝜌 ∗ 𝑄𝐹 = 𝑅𝐹 ∗ 𝑄𝐹; RF=R1=R2=R3=R4 ;
Având în vedere faptul că, în punctul A, forţa vâscoasă de amortizare atinge valoarea
maximă FV,max = 45 tf, la o presiune de 300 daN/cm2 rezultă :
𝑅𝐹 =Δ𝑝
𝑄𝐹=
300
3000= 0,1 𝑑𝑎𝑁 ∗
𝑠
𝑐𝑚 3 ; 𝑅𝐹 =96
𝜋∗
𝐿
𝐷∗𝐽3 ∗ 𝜇 ∗ 𝜌 ;
Pentru dimensionarea jocului diametral J al fantei rezistive, se consideră :
L = 90 mm ; D = 170 mm ; µ = 40 daN*s/cm2 ; 𝜌 =
𝛾
𝑔=
9∗10−4
981∗
𝑑𝑎𝑁∗𝑠2
𝑐𝑚 3 ; 𝑅𝐹 = 0,1𝑑𝑎𝑁 ∗𝑠
𝑐𝑚 2 ;
Înlocuind valorile de mai sus se obţine :
𝐽 = 96 ∗ 𝐿 ∗ 𝜇 ∗ 𝜌
𝜋 ∗ 𝐷 ∗ 𝑅𝐹
3
= 96 ∗ 9 ∗ 40 ∗ 9
𝜋 ∗ 17 ∗ 981 ∗ 10000
3
= 31,104
52365,78
3
= 0,39 𝑚𝑚 ;
A2.2. Calculul rezistenţelor hidraulice echivalente a rezistenţelor fixe R1...R4
Având în vedere funcţionarea în paralel a rezistenţelor R1....R4, se poate scrie, în baza
analogiei electrohidraulice de calcul :
1
𝑅𝑇𝐹=
1
𝑅1+
1
𝑅2+
1
𝑅3+
1
𝑅4
unde s-a notat cu RTF – rezistenţa hidraulică echivalentă a montajului :
1
𝑅𝑇𝐹=
𝑅2 ∗ 𝑅3 ∗ 𝑅4 + 𝑅1 ∗ 𝑅3 ∗ 𝑅4 + 𝑅1 ∗ 𝑅2 ∗ 𝑅4 + 𝑅1 ∗ 𝑅2 ∗ 𝑅3
𝑅1 ∗ 𝑅2 ∗ 𝑅3 ∗ 𝑅4

ANEXA 1 Pagina 139 din 159
𝑅𝑇𝐹 =1
40= 0,025
𝑑𝑎𝑁
𝑐𝑚5;
A2.3. Rezistenţa hidraulică echivalentă a distribuitorului proporţional 4WRL32
(REXROTH)
În fig. A1.6. sunt prezentate caracteristicile principale de lucru ale distribuitorului
proporţional DN 32, având electronică şi traductor de reacţie locală pe sertarul treptei finale
înglobate. În această figură s-au notat :

ANEXA 1 Pagina 140 din 159
Fig.A1.6 – Schema distribuitorului proporţional 4WRL32 (REXROTH)
A.Aparat vedere exterioară ; B.Secţiune prin etajul pilot şi respectiv final;
C.Caracteristica debit (%),tensiune de comandă (V);D.Structura internă a rampelor de
comandă ; E. Ansamblul general al distribuitorului; F. “Oglinda” de conectare la sistem.
În fig. A1.7. au fost transpuse caracterisiticile de debit ale distribuitorului proporţional
DN32, pornind de la caracteristica similară din fig. A1.6 C, în care QN ‚ 1000 l/min, la o
cădere de presiune de 5 daN/cm2 pentru tranzitul lichidului pe muchia care controlează sensul
de curgere. Transpunerea este facută după relaţia :
𝑄300 = 𝑄𝑁 ∗ 300
5 ;
unde Q300 – debitul tranzitat prin aceeaşi muchie la o cădere de presiune de 300
daN/cm2 ;
Fig.A1.7 – Caracteristicile de debit ale distribuitorului proporţional DN32

ANEXA 1 Pagina 141 din 159
În vederea calculării rezistenţei hidraulice echivalente a distribuitorului proporţional,
au fost adoptate următoarele valori ale elementelor geometrice ale acestuia :
d = 25 mm (diametrul sertarului) , ymax,I = 4 mm – deschiderea maximă a sertarului la
finele domeniul I, fig. A1.7 (Uc ‚ 4V), ymax,II = 9 mm – deschiderea maximă la finele
domeniului II (Uc = 10 V);
Pentru calculul coeficientului de debit pe cele două domenii caracteristice ale
distribuitorului proporţional DN32, întrucât furnizorul aparatului nu conferă date constructive
internă privitoare la geometria secţiunilor de curgere prin aparat ( în principal d, ymax, ymax II)
s-a procedat la iteraţii succesive între relaţiile :
- expresia debitului prin aparat :
𝑄 = 𝐶𝐷 ∗ 𝜋 ∗ 𝑑 ∗ 𝑦 ∗ 2
𝜌∗ Δp ; 𝐶𝐷 =
𝑄
𝜋∗𝑑∗𝑦∗ 2
𝜌∗ Δ𝑝
;
- expresiile tensiunilor de comandă 8 şi 9, pentru UcI şi UCII ; în aceste relaţii se
notează
𝐾1 = 𝜌∗4∗𝐴∗𝑈𝐶𝐿
2
2∗𝐶𝐷12 ∗𝜋2∗𝑑2∗𝑦𝑚𝑎𝑥 ,𝐼𝐼
2 ; 𝐾2 = 𝜌∗4∗𝐴∗𝑈𝐶𝐿 ,𝐼𝐼
2
2∗𝐶𝐷22 ∗𝜋2∗𝑑2∗𝑦𝑚𝑎𝑥 ,𝐼𝐼
2 ;
- În baza acestor expresii, s-a calculat din caracteristica de debit a distribuitorului
proporţional (fig. A1.7)
𝐾1 = 0,093𝑉
𝑐𝑚 6
𝑑𝑎𝑁 ∗𝑠
1/2 ; 𝐾2 = 0,0278𝑉
𝑐𝑚 6
𝑑𝑎𝑁 ∗𝑠
1/2
În baza acestor valori a fost calculat produsul CDI * d* ymax,I ca având valoarea
CDI * d* ymax,I = 0,2458 ;
Pentru valoarea de d=2,5 cm adoptată anterior, pentru ymaxI = 0,4 cm rezultă
CDI=0,2458 ;
Procedându-se similar, pentru domeniul II de lucru rezultă :
CDII * d* ymax,II = 1,9004 ;
CD = 0,8446
A3. Calculul tensiunilor de comandă ale distribuitorului proporţional
Pentru calculul acestor valori, se porneşte de la expresia de calcul a deplasării
sertarului, având în vedere că această mărime este proporţională cu tensiunea efectuată de
comanda distribuitorului proportional, unde

ANEXA 1 Pagina 142 din 159
𝑦 =𝑄𝑒𝑓
𝐶𝐷∗𝜋∗𝑑∗ 2
𝜌∗ Δ𝑝
= 𝑦𝑚𝑎𝑥 ∗𝑈𝐶
𝑈𝐶𝐿;
unde : Qef = debitul efectiv care traversează distribuitorul ; UCL = tensiunea limită de
comandă la finele domeniului I, respectiv II ; ymax,L = deplasarea limită la finele domeniului I,
respectiv II ;
Condiţia de deschidere a distribuitorului proporţional, pentru a putea fi traversat de
debitul Qef este :
4 ∗ 𝐴 ∗𝑑𝛿
𝑑𝑡> 𝑄𝐹 + 𝑄𝑃 ;
unde Qp = 40 l/min – debitul de pilotare a distribuitorului proporţional (dată de
catalog) ;
Pentru determinarea punctului de deschidere a distributorului, la depăşirea minimă a
vitezei v1, se dimensionează debitul prin fante impunând condiţia :
4*A*v1 > 12100 +666.6 ;
unde QF = 12100 cm3/sec valoare stabilită din condiţii tehnologice de execuţie a
fantelor ;
QP = 666,6 cm3/sec – debitul de pilotare ( dat de catalog) ;
rezultă v1>12766,60/600
se adoptă v1 = 21,5 cm/sec ;
Cu valoarea QF dată s-a procedat la redimensionarea fantelor cilindrilor, după
recalcularea noii rezistenţe hidraulice.
𝑅𝑇𝐹 =Δp
𝑄𝐹=
300
12100= 0,02479 𝑑𝑎𝑁 ∗ 𝑠/𝑐𝑚5 ;
𝑅𝐹 =96
𝜋∗
𝐿
𝐷∗𝐽3 ∗ 𝜇 ∗ 𝜌
L = 90 mm, D = 170 mm, µ = 40 daN*s/cm2 ; ρ = 9/981*10 daN*s
2 /cm
2 ;
𝐽 = 96∗𝐿∗𝜇∗𝜌
𝜋∗𝐷∗𝑅𝐹
3=
96∗9∗40∗9
𝜋∗17∗981∗10000
3=
31,104
1309,14∗4
3= 1,8 𝑚𝑚 ; (jocul diametral) ;
Debitul generat de disipatoare de la care începe deschiderea distribuitorului
proporţional la c=0 : Q> 12766 cm3/sec ;
Această valoare corespunde debitului Qef = 0 prin distribuitor ;
Domeniile de lucru ale distribuitorului proporţional, vor avea valori de prag ale
debitelor efective corespunzătoare tensiunilor de comandă ale limitelor domeniilor I şi II
astfel :
Qef,PI = 774,5 l/min - UCI = 4V , Qef,II = 1034,4 l/min - UC II = 9 V ;
Valoarea limită pe domeniul II de lucru al distribuitorului proporţional QEf,P II a fost
determinată după relaţia :

ANEXA 1 Pagina 143 din 159
4*A*v2- (QF + QP) = Qef PII ;
4*150*50 – 12766 = 1034,4 l/min unde v2 = 50 cm/sec ;
Cu aceste precizări, relaţiile de calcul ale tensiunilor de comandă, pentru cele două
domenii (fig A1.7) devin :
𝑈𝑐𝐼 =𝑄𝑒𝑓 ∗4
𝐶𝐷𝐼 ∗𝜋∗𝑑∗ 2
𝜌∗ Δ𝑝 ∗𝑦𝑚𝑎𝑥 ,𝐼
; 𝑈𝑐𝐼𝐼 =𝑄𝑒𝑓 ∗10
𝐶𝐷𝐼𝐼 ∗𝜋∗𝑑∗ 2
𝜌∗ Δ𝑝 ∗𝑦𝑚𝑎𝑥 ,𝐼𝐼
;
A4. Stabilirea algoritmului final de reglare automată a disipatorului semiactiv
Pornind de la expresia analogiei de calcul electrohidraulice, rezistenţa hidraulică
echivalentă a distribuitorului proporţional DN32, va fi
𝑅𝐷 =𝜌∗𝐴
2∗𝐶𝐷2∗𝑆𝐷
2 ∗ 𝑑𝛿
𝑑𝑡 ;
În care : S = π*d*y ; y = ymax * 𝑈𝐶
𝑈𝐶𝐿; sau 𝑅𝐷 =
𝜌∗𝐴
2∗𝐶𝐷2∗(𝜋∗𝑑∗𝑦𝑚𝑎𝑥 ∗
𝑈𝐶𝑈𝐶𝐿
)2 ;
Pentru patru disipatori funcţionând în paralel :
𝑈𝐶 = 𝜌∗𝐴∗𝑈𝐶𝐿
2 ∗4
2∗𝐶𝐷2∗𝜋2∗𝑑2∗𝑦𝑚𝑎𝑥
2 ∗𝑅𝐷∗
𝑑𝛿
𝑑𝑡 ;
Relaţia de calcul a tensiunilor de comandă ale distribuitorului proporţional se
particularizează pe domeniile specifice de lucru ale acestuia, I şi II , pentru patru disipatori
funcţionând în paralel.
În baza prelucrărilor din diagrama de debit a distribuitorului DN32, a rezultat :
𝑈𝐶𝐼 = 0,093 ∗ 𝑑𝛿𝑑𝑡
𝑅𝐷𝐼 ; 𝑈𝐶𝐼𝐼 = 0,0278 ∗
𝑑𝛿𝑑𝑡
𝑅𝐷𝐼𝐼 ;
Cu precizarea că relaţiile de calcul ale rezistenţelor hidraulice locale echivalente ale
distribuitorului proporţional se determină pornind de la relaţia RD= Δp / Qef , în bucla de
reglaj, aceasta se transpune în formulele corespunzătoare celor domenii :
𝑅𝐷𝐼 = 휀𝑝
𝑄𝑒𝑓 ,𝐼 şi 𝑅𝐷𝐼𝐼 =
휀𝑝
𝑄𝑒𝑓 ,𝐼𝐼
Valoarea de prag a debitului efectiv este Qef,PRAG ‚ 12908,3 cm3/sec
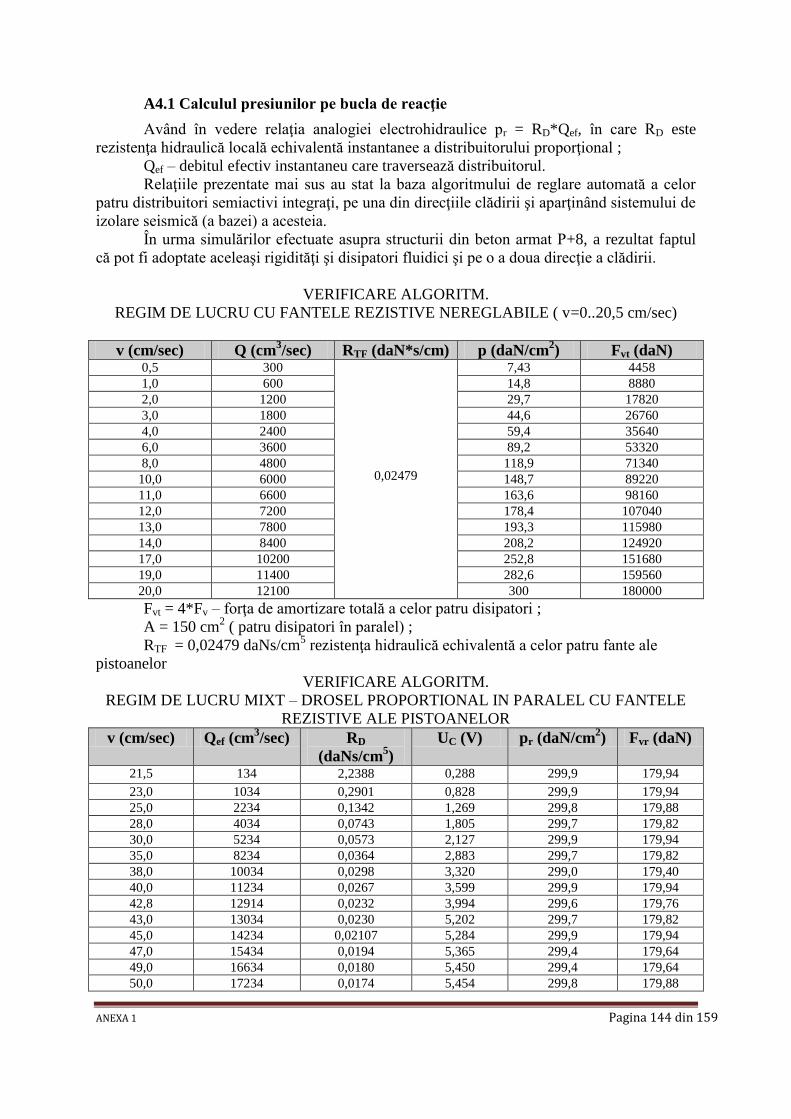
ANEXA 1 Pagina 144 din 159
A4.1 Calculul presiunilor pe bucla de reacţie
Având în vedere relaţia analogiei electrohidraulice pr = RD*Qef, în care RD este
rezistenţa hidraulică locală echivalentă instantanee a distribuitorului proporţional ;
Qef – debitul efectiv instantaneu care traversează distribuitorul.
Relaţiile prezentate mai sus au stat la baza algoritmului de reglare automată a celor
patru distribuitori semiactivi integraţi, pe una din direcţiile clădirii şi aparţinând sistemului de
izolare seismică (a bazei) a acesteia.
În urma simulărilor efectuate asupra structurii din beton armat P+8, a rezultat faptul
că pot fi adoptate aceleaşi rigidităţi şi disipatori fluidici şi pe o a doua direcţie a clădirii.
VERIFICARE ALGORITM.
REGIM DE LUCRU CU FANTELE REZISTIVE NEREGLABILE ( v=0..20,5 cm/sec)
v (cm/sec) Q (cm3/sec) RTF (daN*s/cm) p (daN/cm
2) Fvt (daN)
0,5 300
0,02479
7,43 4458
1,0 600 14,8 8880
2,0 1200 29,7 17820
3,0 1800 44,6 26760
4,0 2400 59,4 35640
6,0 3600 89,2 53320
8,0 4800 118,9 71340
10,0 6000 148,7 89220
11,0 6600 163,6 98160
12,0 7200 178,4 107040
13,0 7800 193,3 115980
14,0 8400 208,2 124920
17,0 10200 252,8 151680
19,0 11400 282,6 159560
20,0 12100 300 180000
Fvt = 4*Fv – forţa de amortizare totală a celor patru disipatori ;
A = 150 cm2 ( patru disipatori în paralel) ;
RTF = 0,02479 daNs/cm5 rezistenţa hidraulică echivalentă a celor patru fante ale
pistoanelor
VERIFICARE ALGORITM.
REGIM DE LUCRU MIXT – DROSEL PROPORTIONAL IN PARALEL CU FANTELE
REZISTIVE ALE PISTOANELOR
v (cm/sec) Qef (cm3/sec) RD
(daNs/cm5)
UC (V) pr (daN/cm2) Fvr (daN)
21,5 134 2,2388 0,288 299,9 179,94
23,0 1034 0,2901 0,828 299,9 179,94
25,0 2234 0,1342 1,269 299,8 179,88
28,0 4034 0,0743 1,805 299,7 179,82
30,0 5234 0,0573 2,127 299,9 179,94
35,0 8234 0,0364 2,883 299,7 179,82
38,0 10034 0,0298 3,320 299,0 179,40
40,0 11234 0,0267 3,599 299,9 179,94
42,8 12914 0,0232 3,994 299,6 179,76
43,0 13034 0,0230 5,202 299,7 179,82
45,0 14234 0,02107 5,284 299,9 179,94
47,0 15434 0,0194 5,365 299,4 179,64
49,0 16634 0,0180 5,450 299,4 179,64
50,0 17234 0,0174 5,454 299,8 179,88

ANEXA 1 Pagina 145 din 159
A= 150 cm2 ;
C = 12766 cm3/sec ;
휀𝑝 = 300𝑑𝑎𝑁
𝑐𝑚 2 ;
A.5. Algoritmul de calcul a forţelor de amortizare generate de fantele rezistive
ale pistoanelor (v=0…21,5 cm/s)
Pentru stabilirea algoritmului de calcul s-a pornite de la relaţia analogiei electronice
de calcul a curgerii prin fante circulare concentrice, la care se adaugă valoarea reajustată a
rezistenţei totale echivalente a celor 4 fante, funcţionând în paralel.
RTF =0,02479 daN*s/cm5 ;
În consecinţă presiunea reactivă creată de cele patru forţe legate în paralel
care determină mărimea forţei de amortizare totale va fi :
𝑝 = 𝑄 ∗ 𝑅𝑇𝐹 = 4 ∗ 𝐴 ∗ 0,02479 ∗ 𝑑𝛿
𝑑𝑡 ;
𝑝 = 14,874 ∗ 𝑑𝛿
𝑑𝑡; ;
A.6. Calculul arcurilor de rezemare elastică latentă a structuriii
Elemente iniţiale
- Cursa h = 200 mm ;
- Sageata în stare montată f1 = 230 mm ;
- Constanta elastică totală 2c =2330 kNm ;
Stabilirea numărului de arcuri :
Din condiţia de gabarit s-a stabilit un număr de 35 arcuri pentru fiecare latură
Constanta elastică a unui singur arc rezultă :
𝒄 =𝟐𝟑𝟑𝟎
𝟕𝟐≅ 𝟑𝟐, 𝟒 𝒅𝒂𝑵/𝒄𝒎 ;
Săgeata maximă de lucru a arcului ;
fn = f1 + h = 230 + 200 = 430 mm ;
Sarcina de montaj ;
𝑃1 = 𝑐 ∗ 𝑓1 = 32,4 ∗ 23 ≅ 815 𝑑𝑎𝑁; Sarcina maximă de lucru :
𝑃𝑢 = 𝑐 ∗ 𝑓𝑛 = 32,4 ∗ 43 ≅ 1400 𝑑𝑎𝑁;
Calculul diametrului spirei :

ANEXA 1 Pagina 146 din 159
𝒅 = 𝒌 ∗𝟖
𝝅∗
𝒊∗𝑷𝒏
𝝉𝒂 ;
unde k este coeficientul de formă :
k = 1 + 1,6 /i
i – indicele arcului ;
i = Dm/d ;
Dm – diametrul mediu al arcului ;
Pn - sarcina maximă ;
τa - tensiunea tangenţială admisibilă
τa = 6500 daN/cm2 ;
Se alege indicele arcului i = 10 ;
Rezultă coeficientul de formă k = 1+1,6/10 = 1,16 ;
𝑑 = 1,16 ∗8
𝜋∗
10 ∗ 1400
6500= 2,52 𝑐𝑚 ;
Se alege d=28 mm ;
Diametrul mediu al arcului :
Dm = i*d = 10*28 = 280 mm ;
Diametrul exterior al arcului :
D = Dm +d = 280 +28 = 308 mm ;
Numărul de spire active (n) :
𝒏 =𝑮
𝟖∗
𝒅𝟒
𝑫𝒎𝟑
∗𝒇𝒎
𝑷𝒎;
unde G este modulul de elasticitate transversal G = 800.000 daN/cm2 ;
𝒏 =𝟖𝟎𝟎𝟎𝟎𝟎
𝟖∗
𝟐,𝟖𝟒
𝟐𝟖𝟑 ∗𝟒𝟑
𝟏𝟒𝟎𝟎= 𝟖, 𝟔 spire
Numărul spirelor de reazem :
nr = 2,4 ;
Numărul total de spire :
n1 = n + nr = 11 spire ;
Lungimea arcului de blocare :
𝑯𝒃 ≅ 𝒏𝟏 ∗ 𝒅 = 𝟏𝟏 ∗ 𝟐𝟖 = 𝟑𝟎𝟖 𝒎𝒎; Pasul spirelor active în stare liberă (t)
𝒕 = 𝒅 +𝒇𝒏
𝒏+ 𝟎, 𝟏 ∗ 𝒅 = 𝟐𝟖 +
𝟒𝟑𝟎
𝟖,𝟔+ 𝟐, 𝟖 = 𝟖𝟏 𝒎𝒎;
Pasul trebuie să îndeplinească condiţia : 𝐷𝑚
4+ 0,2 ≤ 𝑡 ≤
2
3∗ 𝐷𝑚 ; 70,2 ≤ 𝑡 ≤ 186
Condiţia este îndeplinită :
Lungimea arcului în stare liberă (Ho)
Ho = t*n+(nr-0,5) *d =81*8,6+1,9*28=750 mm;
Lungimea arcului în stare montată (H1) :
H1 = Ho – f1 = 750 -230 = 520 mm ;
Lucrul mecanic acumulat (A) :
A = P*h/2 ;
unde P este sarcina preluată de arc după consumarea cursei :
h – cursa arcului ;
P= c*h = 32,4*20 = 648 daN; A = 648*20/2 = 6480 daN*cm ;
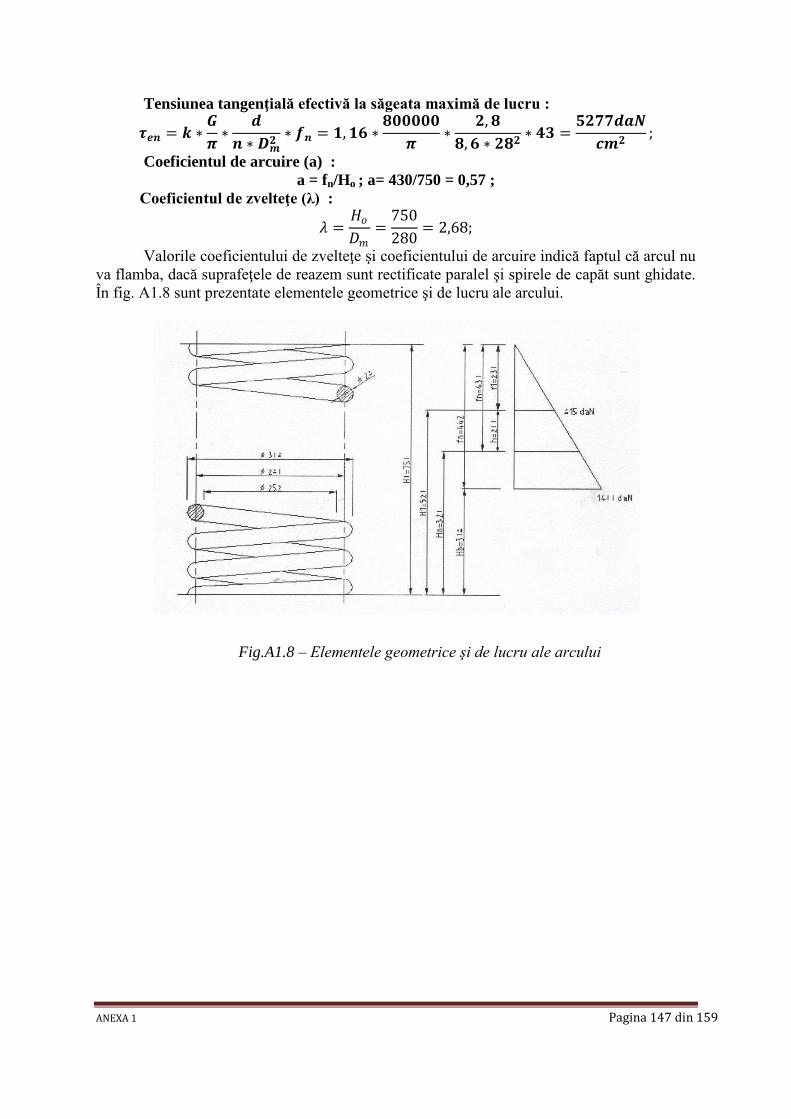
ANEXA 1 Pagina 147 din 159
Tensiunea tangenţială efectivă la săgeata maximă de lucru :
𝝉𝒆𝒏 = 𝒌 ∗𝑮
𝝅∗
𝒅
𝒏 ∗ 𝑫𝒎𝟐
∗ 𝒇𝒏 = 𝟏, 𝟏𝟔 ∗𝟖𝟎𝟎𝟎𝟎𝟎
𝝅∗
𝟐, 𝟖
𝟖, 𝟔 ∗ 𝟐𝟖𝟐∗ 𝟒𝟑 =
𝟓𝟐𝟕𝟕𝒅𝒂𝑵
𝒄𝒎𝟐;
Coeficientul de arcuire (a) :
a = fn/Ho ; a= 430/750 = 0,57 ;
Coeficientul de zvelteţe (λ) :
𝜆 =𝐻𝑜
𝐷𝑚=
750
280= 2,68;
Valorile coeficientului de zvelteţe şi coeficientului de arcuire indică faptul că arcul nu
va flamba, dacă suprafeţele de reazem sunt rectificate paralel şi spirele de capăt sunt ghidate.
În fig. A1.8 sunt prezentate elementele geometrice şi de lucru ale arcului.
Fig.A1.8 – Elementele geometrice şi de lucru ale arcului

ANEXA 1 Pagina 148 din 159

ANEXA 2 Pagina 149 din 159
ANEXA 2
SCURTĂ DESCRIERE A METODOLOGIEI „FUZZY” FOLOSITĂ LA
DETERMINAREA RĂSPUNSULUI SEISMIC AL STRUCTURILOR
ÎNZESTRATE CU AMORTIZORI SEMI-ACTIVI
Logica fuzzy, sintagmă provenind din limba engleză având ca
semnificaţie la origine logica “vagă”, a fost definită în 1965 de către prof. Lotfi
ZADEH, de la Universitatea Berkeley din California. Spre deosebire de logica
clasică, care lucrează cu două valori numerice exacte (0 pentru fals şi 1 pentru
adevărat), logica fuzzy foloseşte o plajă continuă de valori logice cuprinse în
intervalul 0-1, unde 0 indică falsitatea completă, iar 1 indică adevărul complet.
Astfel, dacă în logica clasică un obiect poate aparţine (1) sau nu (0) unei
mulţimi date, în logica fuzzy putem defini gradul de apartenenţă al obiectului la
mulţime şi care poate lua valori între 0 şi 1.
Logica fuzzy oferă instrumentele necesare pentru reprezentarea în
sistemele inteligente a unor concepte imprecise cum sunt „mare”, „mic”,
„scump”, „ieftin” e.t.c., concepte numite variabile lingvistice sau variabile
fuzzy. Pentru reprezentarea acestora se folosesc seturile fuzzy sau funcţiile de
apartenenţă, care captează din punct de vedere cantitativ interpretarea calitativă
a termenilor.
În determinarea răspunsurilor sistemelor structurale înzestrate cu
amortizori semi-activi, parametrul “fuzzy” de intrare a fost considerat a fi viteza
oscilaţiilor bazei.În consecinţă s-au definit 5 mulţimi “fuzzy” pentru parametrul
viteză
Aceste mulţimi au denumiri ce corespund într-o oarecare măsură
limbajului curent: “PozFM” – viteză normalizată pozitivă foarte mare,
“PozM” – viteză normalizată pozitivă mare, “Zero” viteză neglijabilă,
“NegM”- viteză normalizată negativă mare,”NegFM” – viteză normalizată
negativă foarte mare. S-a estimat în cazul de faţă că viteza normalizată poate să
fie împărţită în 5 categorii: pozitivă/negativă foarte mare, pozitivă/negativă
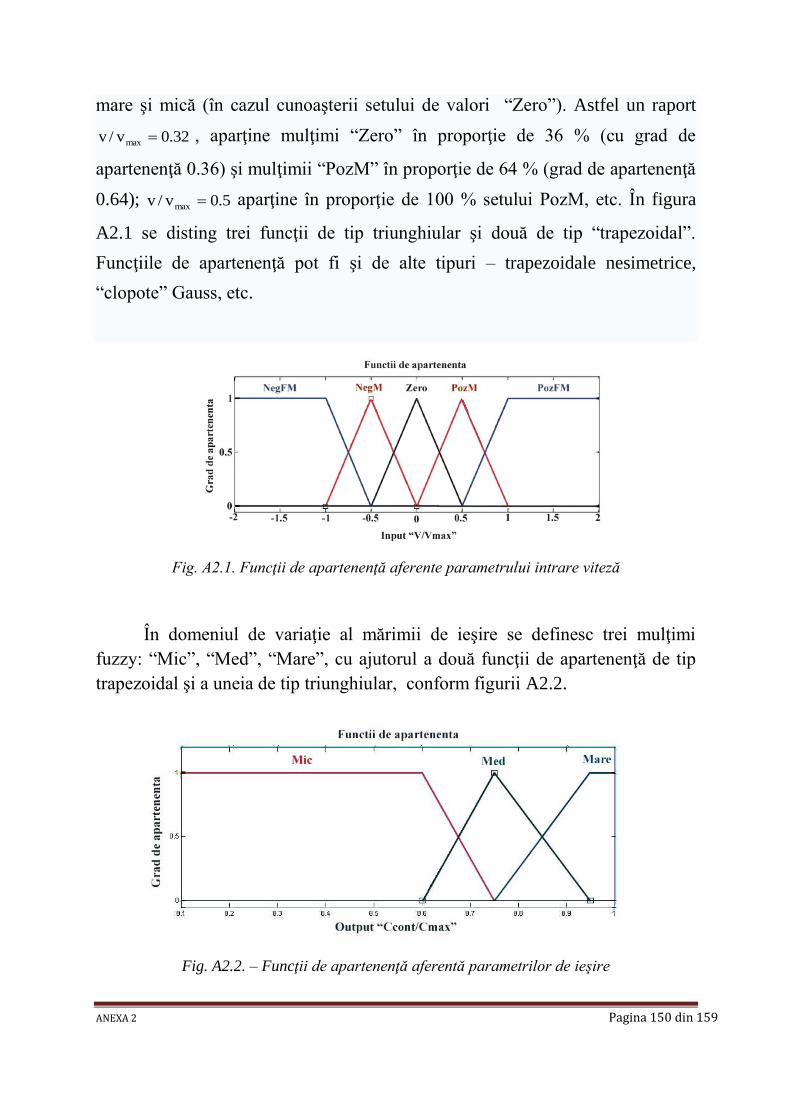
ANEXA 2 Pagina 150 din 159
mare şi mică (în cazul cunoaşterii setului de valori “Zero”). Astfel un raport
32.0v/v max , aparţine mulţimi “Zero” în proporţie de 36 % (cu grad de
apartenenţă 0.36) şi mulţimii “PozM” în proporţie de 64 % (grad de apartenenţă
0.64); 5.0v/v max aparţine în proporţie de 100 % setului PozM, etc. În figura
A2.1 se disting trei funcţii de tip triunghiular şi două de tip “trapezoidal”.
Funcţiile de apartenenţă pot fi şi de alte tipuri – trapezoidale nesimetrice,
“clopote” Gauss, etc.
Fig. A2.1. Funcţii de apartenenţă aferente parametrului intrare viteză
În domeniul de variaţie al mărimii de ieşire se definesc trei mulţimi
fuzzy: “Mic”, “Med”, “Mare”, cu ajutorul a două funcţii de apartenenţă de tip
trapezoidal şi a uneia de tip triunghiular, conform figurii A2.2.
Fig. A2.2. – Funcţii de apartenenţă aferentă parametrilor de ieşire

ANEXA 2 Pagina 151 din 159
Odată ce mulţimile fuzzy şi funcţiile de apartenenţă sunt create, se
defineşte un set de reguli (fuzzy rules) în baza cărora funcţiile de apartenenţă
ale mărimii de intrare sunt legate de cele ale mărimii de ieşire. Formal, setul de
reguli se prezintă sub forma unei succesiuni de enunţuri de tip “If-Then”. In
exemplul de faţă au fost definite cinci reguli:
1. IF v/vmax - NegFM, THEN c/cmax – Med;
2. IF v/vmax - PozFM, THEN c/cmax – Med;
3. IF v/vmax - NegM, THEN c/cmax – Med;
4. IF v/vmax - PozM, THEN c/cmax – Med;
5. IF v/vmax - Zero, THEN c/cmax – Mare.
Instrucţiunile de mai sus se pot exemplifica în felul următor : dacă viteza
bazei este “foarte mare”, atunci se reduce vâscozitatea, astfel încât Fdisp să nu
aibe valori prea mari, care să genereze un răspuns defavorabil.
Îndată ce mărimile înregistrate de senzori ajung la dispozitivul de control,
acestea mai departe sunt “ fuzzyficate”, adică valorilor numerice ale acestora le
sunt atribuite grade de apartenenţă în mulţimile fuzzy anterior definite (v. ex.
anterior cu v/vmax=0.32).
Metodologia fuzzy prespune, în continuare, parcurgerea următoarelor
etape :
● Implicaţia – mecanismul prin care (pe baza setului de reguli anterior)
se stabilesc valorile fuzzy ale mărimii de ieşire, corespunzătoare mărimii de
intrare. De exemplu, pentru v/vmax=0.32 sunt active regulile “4” şi “5”.
Stabilirea legăturii între mărimile de intrare şi de ieşire eprimate în termeni
fuzzy se face prin două metode consacrate – metoda minimului şi metoda
produsului.
● Agregarea – procesul prin care sunt combinate valorile fuzzy ale
output-ului, corespunzătoare valorilor fuzzy ale input-ului. Pentru agregare
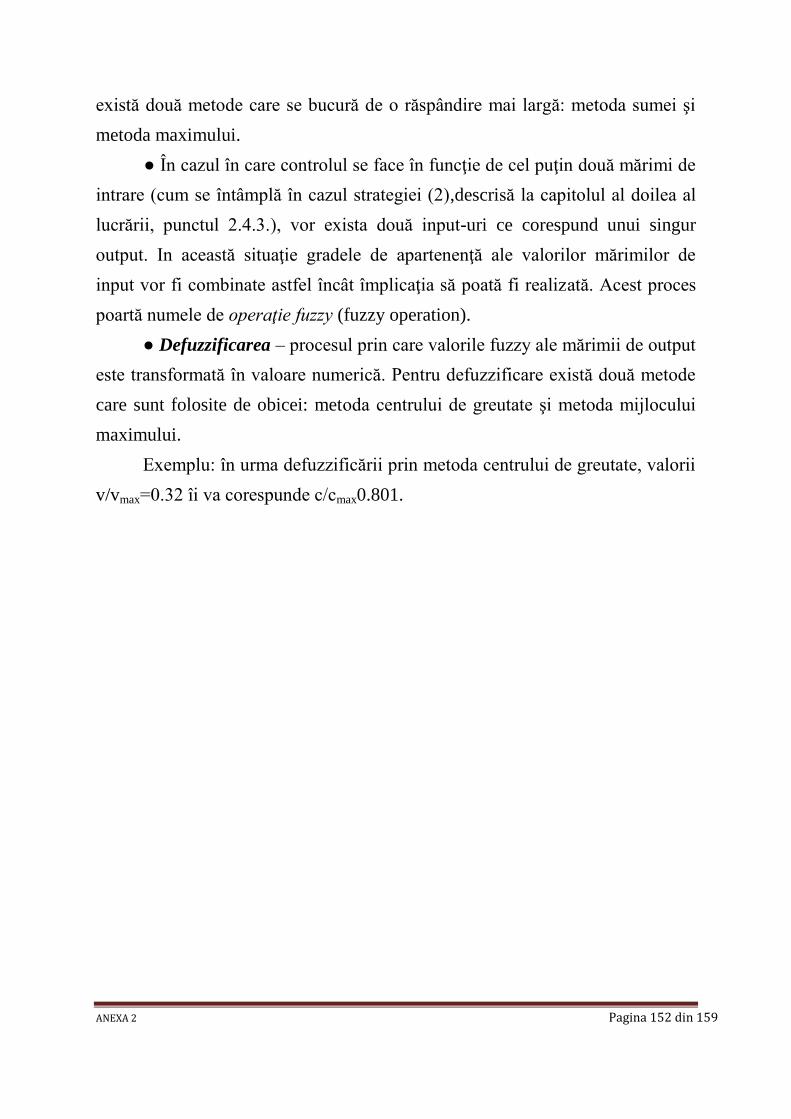
ANEXA 2 Pagina 152 din 159
există două metode care se bucură de o răspândire mai largă: metoda sumei şi
metoda maximului.
● În cazul în care controlul se face în funcţie de cel puţin două mărimi de
intrare (cum se întâmplă în cazul strategiei (2),descrisă la capitolul al doilea al
lucrării, punctul 2.4.3.), vor exista două input-uri ce corespund unui singur
output. In această situaţie gradele de apartenenţă ale valorilor mărimilor de
input vor fi combinate astfel încât împlicaţia să poată fi realizată. Acest proces
poartă numele de operaţie fuzzy (fuzzy operation).
● Defuzzificarea – procesul prin care valorile fuzzy ale mărimii de output
este transformată în valoare numerică. Pentru defuzzificare există două metode
care sunt folosite de obicei: metoda centrului de greutate şi metoda mijlocului
maximului.
Exemplu: în urma defuzzificării prin metoda centrului de greutate, valorii
v/vmax=0.32 îi va corespunde c/cmax0.801.

ANEXA 3 Pagina 153 din 159
ANEXA 3
FIŞA TEHNICĂ A IZOLATORILOR LRB700, RESPECTIV LRB800
UTILIZAŢI ÎN CALCULUL COMPLEXULUI DE BIROURI CU BAZA
IZOLATĂ, DIN BUCUREŞTI
FIȘA TEHNICĂ A IZOLATORULUI LRB700
Denumire Simbol Valoare/UM Observatii
Caracteristici constructive forţă-deplasare
Încărcare maximă
verticală în
combinaţia seismică
V 5000 kN
Încărcare minimă
verticală în
combinaţia seismică
Vs min 0 kN
Deplasare orizontală
capabilă dE 300 mm
Rotire capabilă α 0,0050 rad
Caracteristici geometrice
Diametrul extern al
izolatorului Dg 700 mm
Diametrul exterior al
miezului laminat D 680 mm
Numărul de miezuri
de plumb nf 1 buc
Diametrul miezului
de plumb d 220 mm
Grosimea lamelelor
integrate în stratul de
cauciuc
ts 3 mm minim 2 mm
Numărul de straturi
din cauciuc ng 37 mm
Grosimea unui strat
de cacuciuc ti 6 mm
Distanţa între două
lamele de oţel ts ext 25 mm minim 20 mm
Efortul unitar de
curgere al lamelelor
din oţel
fyk 275 MPa

ANEXA 3 Pagina 154 din 159
Denumire Simbol Valoare/UM Observatii
Modulul de
elasticitate
longitudinal
Eb 2000 MPa
Modulul de
elasticitate
transversal
Gdin 1,10 MPa
Caracteristici geometrice
Aria transversală a
părţii de cauciuc A 346832 mm
2
Aria miezului de
plumb Af 38013 mm
2
Suprafaţa laterală L 12818 mm2
Înălţimea totală a
izolatorului Σti + Σtext 222,0 mm
Înălţimea de calcul te 222,0 mm
Aria echivalentă de
calcul Ar 148619 mm
2
Modulul de
compresibilitate axial Ec 1108,51 MPa
Verificări
Factorul de formă S1 S1 25,37
Factorul de formă S2 S2 3,06 minim 3
Sarcina limită de
instabilitate Vcr 12703 kN
Raport de
instabilitate Vcr / V 2,54 minim 2
Înălţimea totală,
incluzând şi
dispozitivele de
prindere
h 380 mm
Volumul părţii
vulcanizate vol 131,80 dm
3
Volum total V 146,24 dm3
Efort unitar de
compresiune capabil σv,sis 14,42 MPa
Rigiditate verticală Kv 1624 kN/mm
Rigiditate orizontală Kg 1,719 kN/mm
Rigiditate orizontală
echivalentă (secantă) Ke 3,049 kN-mm
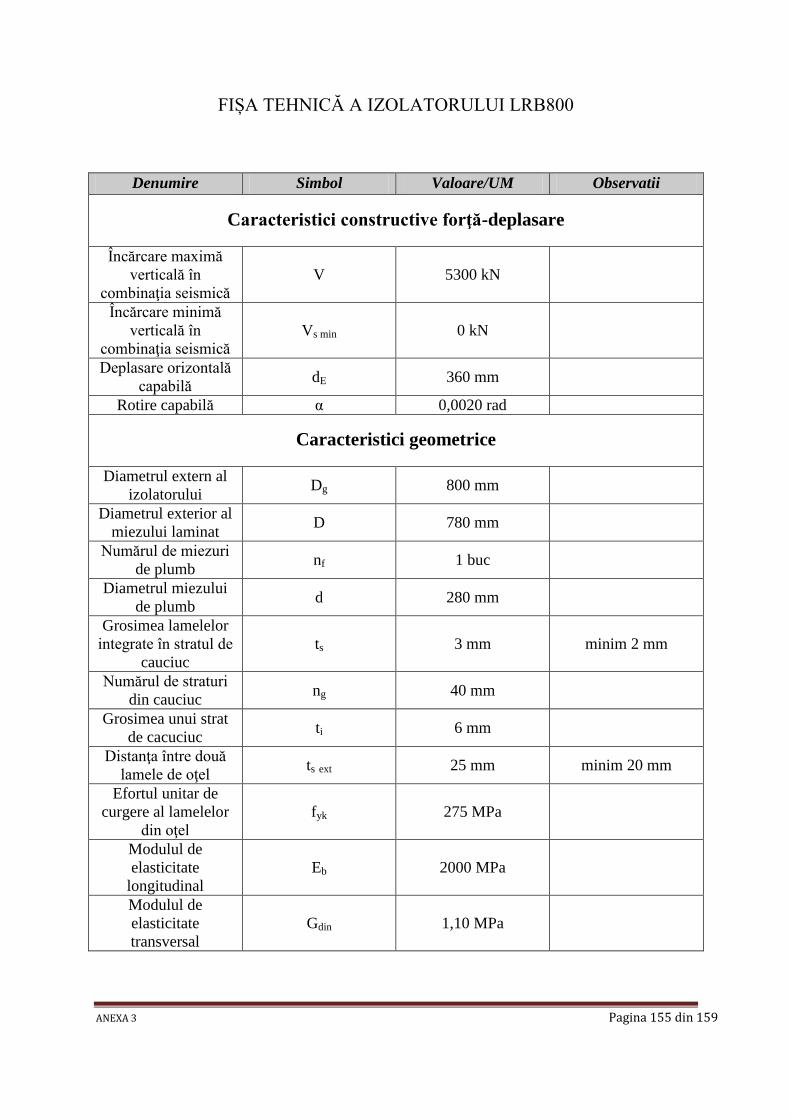
ANEXA 3 Pagina 155 din 159
FIȘA TEHNICĂ A IZOLATORULUI LRB800
Denumire Simbol Valoare/UM Observatii
Caracteristici constructive forţă-deplasare
Încărcare maximă
verticală în
combinaţia seismică
V 5300 kN
Încărcare minimă
verticală în
combinaţia seismică
Vs min 0 kN
Deplasare orizontală
capabilă dE 360 mm
Rotire capabilă α 0,0020 rad
Caracteristici geometrice
Diametrul extern al
izolatorului Dg 800 mm
Diametrul exterior al
miezului laminat D 780 mm
Numărul de miezuri
de plumb nf 1 buc
Diametrul miezului
de plumb d 280 mm
Grosimea lamelelor
integrate în stratul de
cauciuc
ts 3 mm minim 2 mm
Numărul de straturi
din cauciuc ng 40 mm
Grosimea unui strat
de cacuciuc ti 6 mm
Distanţa între două
lamele de oţel ts ext 25 mm minim 20 mm
Efortul unitar de
curgere al lamelelor
din oţel
fyk 275 MPa
Modulul de
elasticitate
longitudinal
Eb 2000 MPa
Modulul de
elasticitate
transversal
Gdin 1,10 MPa

ANEXA 3 Pagina 156 din 159
Denumire Simbol Valoare/UM Observatii
Caracteristici geometrice
Aria transversală a
părţii de cauciuc A 441080 mm
2
Aria miezului de
plumb Af 61575 mm
2
Suprafaţa laterală L 14703 mm2
Înălţimea totală a
izolatorului Σti + Σtext 240,0 mm
Înălţimea de calcul te 240,0 mm
Aria echivalentă de
calcul Ar 180631 mm
2
Modulul de
compresibilitate axial Ec 1168,65 MPa
Verificări
Factorul de formă S1 S1 28,31
Factorul de formă S2 S2 3,25 minim 3
Sarcina limită de
instabilitate
Vcr (UTCB,UPB, 2007)
(UTCB, UPB, 2007) 18283 kN
Raport de
instabilitate Vcr / V 3,45 minim 2
Înălţimea totală,
incluzând şi
dispozitivele de
prindere
h 407 mm
Volumul părţii
vulcanizate vol 179,52 dm
3
Volum total V 204,58 dm3
Efort unitar de
compresiune capabil σv,sis 12,02 MPa
Rigiditate verticală Kv 2027 kN/mm
Rigiditate orizontală Kg 2,022 kN/mm
Rigiditate orizontală
echivalentă (secantă) Ke 3,818 kN-mm

BIBLIOGRAFIE Pagina 157 din 159
BIBLIOGRAFIE
1. AIJ. (1994). Structural Design Guidelines for Reinforced Concrete Buildings. Architectural Institute of
Japan.
2. ATC 40. (1996). Seismic Evaluation and Retrofit of Concrete Buildings. Applied Technology Council.
3. BALAN ST. , CRISTESCU V. , CORNEA I. (1982). Cutremurul de pământ din România din 4 martie
1977. Bucuresti: Editura Academiei.
4. BELES A. (1941). Cutremurul si Constructiile. Bucuresti: Buletinul Societatii Politehnice.
5. BERTERO R.D. , BERTERO V.V. (2004). Performance Based Seismic Engineering - Development
and Application of a Comprehensive Conceptual Approach to the Design of Buldings. Florida: CRC
Press.
6. BLUME J.A.,NEWMARK N.M.,CORNING L.H. (1961). Design of Multi-storied Buildings for
Earthquake ground motions. Chicago: Portland Cement Association.
7. CHOPRA A.K. (2006). Dynamics of Structures 3rd edition. New York: Prentice Hall.
8. CHUNG, L.L., REINHORN, A.M. and SOONG, T.T. (1988). Experiments on Active Control of
Seismic Structures. Journal of Engineering Mechanics , Vol 114, pages 241-256.
9. CRAINIC L. (1980). Concepte si Metode Energetice in Calculul Constructiilor. Bucuresti: Editura
Academiei.
10. CRAINIC L. (2003). Reinforced Concrete Structures. Cluj Napoca: Napoca Star Publishing House.
11. DATTA T.K. (2006). A State of The Art Review on Active Control of Structures. 22nd ISSET Annual
Lecture .
12. Earthquake Protection Systems Website San Francisco. (2008). Preluat de pe
http://www.earthquakeprotection.com/index.html
13. EUROCODE 8,Part 1. (2000). Design of structures for earthquake resistance,prEN1998.
14. FEMA 273. (1997). NEHRP Guidelines for the Seismic Rehabilitation of Buildings. Federal
Emergency Management Agency.
15. FEMA 274. (1997). NEHRP Commentary on the Guidelines for the Seismic Rehabilitation of the
Buildings. Federal Emergency Management Agency.
16. FEMA 440. (2005). Improvment of Nonlinear Static Seismic Procedures. Federal Emergency
Management Agency.
17. FEMA 454. (2006). Designing for Earthquake, A Manual for Architects. Federal Emergency
Management Agency.
18. FENG, M.Q. (1993). Application of Hybrid Sliding Isolation System to Buildings. Journal of
Engineering Mechanics , Vol. 119, No. 10, pages 90-108.
19. Friction Dampers – Pall Dynamics Ltd – USA. (2008). Preluat de pe www.palldynamics.com
20. GERB Company Homepage. (2008). Preluat de pe www.gerb.com
21. GUPTA A.K. (1992). Response Spectrum Method. CRC Press.
22. HANSON R.D. , SOONG T.T. Seismic Design with Supplemental Energy Dissipation - Monograph.
Oakland California.
23. Historical UBC CD-ROM. (1999). The Early Years (1927-1964) computer file version 1.0. Whittier,
California.
24. HOUSNER G.W., BERGMAN L.A., CAUGHEY T.K., CHASSAKIOS A.G., CLAUS R.O., MASRI
S.F.,SKELTON R.E., SOONG T.T., SPENCER JR. B.F.,YAO J.T.P. (1997). Structural Control: Past,
Present and Future. Journal of Engineering Mechanics ASCE , Vol. 123, No. 9, pages 897-971.
25. ICCPDC. (1978). Cutremurul din Romania din 4 Martie 1977 si efectele sale asupra constructiilor -
monografie. Bucuresti: Institutul Central de Cercetare Proiectare şi Directivare în Constructii.
26. IFRIM M. (1984). Dinamica Structurilor si Inginerie Seismica. Bucuresti: Editura Didactica si
Pedagogica.
27. ISO 22762:3. (2005). Elastomeric seismic production isolators.
28. KELLY J.M. (1996). Earthquake Resistant Design with Rubber. Londra: Springer-Verlag.
29. Khajekaramodin A. , Haji-kazemi H.,Rowhanimanesh A.,Akbarzadeh M-R. (2007). Semi-active
Control of Structures Using Neuro-Inverse Model of MR Dampers. First Joint Congress on Fuzzy and
Intelligent Systems Ferdowsi University of Mashhad, Iran.
30. KURATA N. (2001). Actual Seismic Response Control Building with Semi-Active Damper System.
Structures 2001 - A Structural Engineering Odyssey . Reston: Conference Proceedings.
31. NAEIM F. , KELLY J.M. (1999). Design of Seismic Isolated Structures . New York: Ed. Wiley.
32. NAEIM F. (2001). The Seismic Design Handbook. Springer Science.

BIBLIOGRAFIE Pagina 158 din 159
33. NEWMARK N.M.,HALL W.J. (1982). Earthquake Spectra and Design. Oakland, California:
Earthquake Engineering Research Institute.
34. NEWMARK N.M.,ROSENBLUETH E. . (1971). Fundamentals of Earthquake Engineering. New
Jersey: Prentice Hall Inc.,Englewood Cliffs.
35. P100-1. (2006). Cod de Proiectare Seismica - Prevederi de proiectare pentru cladiri. Bucuresti.
36. P100-81. (1981). Normativ privind proiectarea antiseismica a constructiilor de locuinte , social-
culturale , agozootehnice si industriale. BUCURESTI: IPCDC.
37. P100-92. (1992). Normativ pentru proiectarea antiseismica a constructiilor de locuinte,social-
culturale,agrozootehnice si industriale. BUCURESTI.
38. P13-70. (1970). Normativ pentru proiectarea constructiilor civile si industriale din regiuni seismice.
Bucuresti.
39. PARK. R. (1992). Ductility of Structural Concrete . IABSE Report.
40. PAULAY T. , BACHMAN H. , MOSER K. (1997). Proiectarea structurilor din beton armat la actiuni
seismice. Bucuresti: Editura Tehnica.
41. PAULAY T. , PRIESTLEY M.J.N. (1992). Seismic Design of Reinforced Concrete and Masonry
Building . New York: Jon Wiley&Sons Inc.
42. PAVEL M. (2008). Sisteme de control al raspunsului la actiuni seismice.Stadiul actual al problemei -
Referat in cadrul stagiului de doctorat. Bucuresti: UTCB.
43. PAVEL M. (2008). Studii parametrice referitoare la comportarea structurilor cu amortizori acordati.
Referat in cadrul stagiului de doctorat. Bucuresti: UTCB.
44. PAVEL M., BETEA ST., VEZEANU G. ,STANCIU L. (2007). Structural Control Systems for Base
Isolated Buildings. Bucuresti: Thirty Years from the Romania Earthquake of March 4, 1977,UTCB.
45. Proceedings of The First World Conference on Earhquake Engineering. (1956). San Francisco.
46. RADU C. Seismicitatea teritoriului Romaniei in perioada 1901 – 1980. manuscris.
47. RITER L. (1990). Earthquake Hazard Analysis:Issues and Insights. New York: Columbia University
Press.
48. Robinson Seismic Ltd. – (Lead Rubber Bearing) - New Zealand. (2008). Preluat de pe
www.robinsonseismic.com
49. SADEK F. , MOHRAZ B. (1998). Variable Dampers for Semi-Active Control of Flexible Structures.
Journal of Structural Mechanics (pg. 981-990). ASCE.
50. SEAOC. (1995). Vision 2000.A framework for Performance Based Design. Sacramento, California.
51. Seismosoft - Home Page. (2008). Preluat de pe Earthquake Engineering Software Solutions:
http://www.seismosoft.com
52. SIMQKE2. (1999). National Information Service for Earthquake Engineering Web Site. Preluat de pe
http://nisee.berkeley.edu/
53. SKINNER R. , ROBINSON W.,McVERRY G. (1993). An Introduction to Seismic Isolation. UK: Ed.
Wiley.
54. SOONG T.T. , CONSTANTINOU M.C. (1994). Passive and Active Structural Vibration Control in
Civil Engineering. New York: Springer-Verlag.
55. SOONG T.T. , DARGUSH G.F. (1997). Passive Energy Dissipation Systems in Structural
Engineering. New York: Ed. Wiley.
56. SOONG T.T. (1992). Active Structural Control: Theory and Practice. London: Longman Scientific
and Technical.
57. SPENCER B.F. JR, HU Y.X. (2000). Earthquake Engineering Frontiers in the New Millenium.
Beijing: China-US Millennium Symposium on Earthquake Hazard Mitigation.
58. SYMANS M.D., MADDEN, G.J., WONGPRASERT, N. (1999). Semi-Active Hybrid Seismic
Isolation Systems : Addresing the Limitations of Passive Isolation Systems. Proceedings of Structures
Congress , (pg. 862-865). New Orleans.
59. SYMANS M.D. , CONSTANTINOU M.C. (1998). Semi-Active Control Systems for Seismic
Protection of Structures : A State of the Art Review. Engineering Structures , Vol 21 no.6 pages 469-
487.
60. USGS Description of the El Centro Earthquake Website. (2008). Preluat de pe El Centro Earthquake:
http://www.vibrationdata.com/elcentro.htm
61. UTCB, UPB. (2007). Sisteme Autonome Avansate pentru Controlul Oscilatiilor Structurilor - grant
CEEX CNCSIS. Bucuresti.
62. UTCB,UPB. (2007). Sistem Integrat de Protectie a Cladirilor la Solicitari Seismice - Grant
CEEX/CNCSIS. BUCURESTI.
63. WANG Y.P. (2003). Fundamentals of Seismic Base Isolation Design of Building Structures. Taipei.

BIBLIOGRAFIE Pagina 159 din 159
64. WILSON E.L. (2002). Three Dimensional Static and Dynamic Analysis of Structures.
Berkeley,California.
65. YANG J.N. , WU J.C. ,LI Z. (1996). Control of seismic-excited buildings using active variable
stiffness systems. Engineering Structures , Vol. 19, no.9, pages 589-596.
66. YOSHIDA K. , FUJIO T. (2000). Semi-active Base Isolation for a Building Structure. International
Journal of Computer Applications in Technology , Vol 31 Issue 1, Pages 52-58.
67. ZADEH L. (1978). Fuzzy sets as a basis for a theory of possibility. Fuzzy Sets and Systems , Vol 1,
pages 3-28.


















