Centre de greutate si momente de inertie mecanice.(Bretcan A. MSYM an.2).docx
31
Centrul de greutate şi centrul maselor Teoremele lui Guldin-Pappus Momente statice. Teorema momentelor statice Momente de inerţie. Raze de inerţie Variaţia momentelor de inerţie la translaţia axelor. Teorema lui Steiner Variaţia momentelor de inerţie la rotaţia axelor Direcţii principale de inerţie. Momente de inerţie principale
Transcript of Centre de greutate si momente de inertie mecanice.(Bretcan A. MSYM an.2).docx

Centrul de greutate şi centrul maselor
Teoremele lui Guldin-Pappus
Momente statice. Teorema momentelor statice
Momente de inerţie. Raze de inerţie
Variaţia momentelor de inerţie la translaţia axelor. Teorema lui Steiner
Variaţia momentelor de inerţie la rotaţia axelor
Direcţii principale de inerţie. Momente de inerţie principale

Centrul de greutate şi centrul maselorParticulele materiale aflate la suprafaţa Pământului sunt supuse acţiunii câmpului gravitaţional terestru care se manifestă prin forţa de atracţie:
denumită greutate.
Se observă că această forţă depinde de masa particulei materiale şi de vectorul, care se numeşte acceleraţie gravitaţională.
Pentru un sistem de puncte materiale, greutatea sistemului material are expresia:
iar punctul de aplicaţie se numeşte centru de greutate al sistemului de puncte materiale.
Poziţia centrului de greutate al unui sistem de puncte materiale este dată de relaţia:
sau:

Prin definiţie, suma maselor punctelor materiale ale unui sistem este masa sistemului de puncte materiale:
iar centrul maselor unui sistem de puncte materiale este dat de relaţia:
sau:
Proprietăţi:– dacă un sistem de puncte materiale admite un plan de simetrie, o axă de simetrie sau un centru de simetrie, centrul de masă se găseşte în acel plan, pe acea axă, respectiv în acel centru (centrul de masa al unui sistem material constituit dintr-o linie dreapta se afla pe acea dreapta, iar centrul maselor unui sistem material plan se afla in acel plan);
– dacă un sistem de puncte materiale (S) se descompune
într-un număr de subsisteme (S1), (S2),..., (Sp) ale căror
mase M1, M2,..., Mp şi centre de masă (C1), (C2),..., (Cp) se
cunosc, poziţia centrului său de masă se poate determina
cu relaţia:

– dacă un sistem de puncte materiale (S) poate fi
considerat ca rezultând dintr-un sistem (S1) din care
lipseşte un sistem (S2), atunci:
S2S1
- poziţia centrului de masa nu depinde de sistemul de coordonate ales, deoarece depinde numai de poziţia reciproca a punctelor materiale Mi;
- daca valorile maselor sistemului material sunt multiplicate cu o constanta scalara nenula, poziţia centrului de masa al sistemului nu se modifica. Proprietatea aceasta permite reprezentarea maselor prin linii, arii sau volume, constanta fiind densitatea sistemului considerat omogen.

n =
n =
G y
G y
Centre de masa pentru corpuri omogene
Pentru o bara omogena având masa M uniform distribuita pe lungimea ei (notata L), se defineşte densitatea unităţii
de lungime ρ=M/L. Relaţia centrelor de masa se scrie după simplificarea cu ρ:
n∑ li ⋅ xi
x = i = 1 ;∑ lii =1
n∑ li ⋅ yi
i = 1 G n∑
lii =1
Pentru o placa omogena cu aria A si masa M cunoscute, se
defineşte densitatea unităţii de suprafaţa ρ=M/A. Relaţia centrelor de masa se scrie după simplificarea cu ρ:
n∑ Ai ⋅ xi
x = i = 1 ;∑ Aii =1
n∑ Ai ⋅ yi i = 1
G n∑ Aii =1
Teoremele lui Guldin-Pappus
(a) Aria suprafeţei generate de un arc de curbă plană, care se roteşte în jurul unei axe din planul curbei, pe care nu o intersectează, este egală cu lungimea arcului de curbă multiplicată cu lungimea cercului descris de centrul de masă al curbei date, presupuse omogene:
Teorema I Guldin-Pappus

(b) Volumul generat prin rotirea unei suprafeţe plane în jurul unei axe din planul său pe care nu o intersectează, este egal cu aria considerată multiplicată cu lungimea cercului descris de centrul de masă al ariei:
Teorema II Guldin-Pappus
Determinarea poziţiei centrului de masă pentru o barăomogenă de forma unui:
– arc de cerc

– sector de cerc
Momente statice. Teorema momentelor statice
Se numeşte moment static al unui sistem de puncte materiale în raport cu un plan, o axă sau un pol, suma produselor dintre masele punctelor materiale care alcătuiesc sistemul şi distanţele de la aceste puncte la planul, axa sau polul considerat:
Pentru un sistem de referinţă cartezian, expresiile:
reprezintă momentele statice ale sistemului de particule materiale, în raport cu planele yoz, zox, respectiv xoy.

Dacă punctele materiale sunt situate toate în acelaşi plan, atunci expresiile:
reprezintă momentele statice ale sistemului în raport cu axa Oy, respectiv Oz.
Din relaţiile care dau coordonatele centrului de greutate al unui sistem de puncte materiale, rezultă:
relaţii cunoscute sub denumirea de teorema momentelor statice.Momentul static al unui sistem de puncte materiale în raport cu un plan sau o axă este egal cu produsul dintre masa întregului sistem şi distanţa de la centrul de masă al sistemului la acel plan sau la acea axă.

Momente de inerţie. Raze de inerţieSe numeşte moment de inerţie al unui sistem de puncte materiale în raport cu un plan, o axă sau un pol, suma produselor dintre masele particulelor care alcătuiesc sistemul şi pătratul distanţelor acestor particule până la planul, axa sau polul considerat:
Faţă de un sistem de referinţă cartezian avem:– momente de inerţie planare:
– momente de inerţie axiale:
– moment de inerţie polar:
– momente de inerţie centrifugale:

Se numeşte rază de inerţie (giraţie) distanţa la care trebuie plasată întreaga masă a sistemului material M, concentrată într-un singur punct la un plan xoy, o axă∆ sau un pol O pentru a obţine aceeaşi valoare a momentului de inerţie planar, axial sau polar ca şi cea dată de întreg sistemul material.
Proprietăţi:– momentele de inerţie planare, axiale sau polare sunt mărimi pozitive. Ele sunt nule numai atunci când sistemul de puncte materiale este conţinut în planul, pe axa sau în polul la care ne referim;– momentele de inerţie axiale sunt egale cu suma momentelor de inerţie în raport cu două plane rectangulare:

– momentul de inerţie polar poate fi calculat ca:• semisuma momentelor de inerţie axiale în raport cu trei axe rectangulare ce trec prin acel punct:
• suma momentelor de inerţie planare:
• suma momentelor de inerţie în raport cu un planşi o axă normală la acel plan:
– momentele de inerţie centrifugale pot fi pozitive, negative sau nule.
CARACTERISTICI GEOMETRICE ALE SECŢIUNILOR TRANSVERSALE ALE BARELOR In definirea răspunsului elementelor de construcţii detipul barelor la acţiunea forţelor exterioare, privindforţele interioare si deformaţiile care se produc in acestea, alături de proprietăţile fizice ale materialelor din care sunt alcătuite si dimensiunile acestora, intra si unele mărimi legate direct de forma si dimensiunile secţiunilor transversale ale barelor numite caracteristici geometrice ale secţiunilor.

Daca se considera secţiunea transversala compusa dintr-o infinitate de arii elementare dA, rezulta:
x
Aria secţiunii: A = ∫ dA O y
AzG
unde indicele A la semnul de integrare specifica extinderea integralei pe toata secţiunea.
Momentele statice fata de axa y,
yG z
G
y
dA
respectiv z:
S y = ∫ zdA ;A
S z = ∫ ydA
A
Prin convenţie, axelez secţiunii transversale
se notează Oy si Oz!!!
reprezintă suma produselor ariilor elementare dA cu distanta la axa corespunzătoare (y sau z) .
Daca se considera secţiunea transversala compusa dintr-o infinitate de arii elementare dA, rezulta:
xDaca se noteaz
ă cu y
G
si z
G
coordonatele centrului de masa

A A
sau de greutate ale secţiunii rezulta:
O y
zGyG
zyG
= 1 ∫ ydA ;A
zG = 1 ∫ zdA
A
Gy
Obs. Din relaţia de mai sus se dA
deduce ca momentul static alsecţiunii fata de o axa care trece z
prin centrul de greutate al acestei secţiuni este nul.Axele de coordonate care trec prin centrul de greutate al secţiunii se numesc axe centrale, sistemele de axe rectangulare yOz cu originea in centrul de greutate al secţiunii numindu-se sisteme de axe centrale.

n =G z
In cazul unei secţiuni compuse din mai multe secţiuni simple Ai, pentru care sunt cunoscute coordonatele yi si zi ale centrului de greutate Gi, coordonatele centrului de masa sau de greutate ale întregii secţiuni rezulta:
Obs.
n∑ Ai ⋅ yi
y = i = 1
;∑ Aii =1
n∑ Ai ⋅ zi i = 1
G n∑ Aii =1
Ariile secţiunilor transversale plane au dimensiunea (L2), si se măsoară in mm2, cm2, m2….
Momentele statice ale secţiunilor transversale plane au dimensiunea (L3), si se măsoară in mm3, cm3, m3….
Se numeşte moment de inerţie axial al figurii plane, de arie A, in raport cu o axa din planul sau, suma produselor elementelor de arie dA cu pătratele distantelor lor la axa considerata. In raport cu axele Oy si Oz momentele deinerţie sunt:
I y = ∫ z
A
2dA ; I z = ∫ y
A
x2dA O y
zG
Suma produselor elementelor de arie dA cu distantele lor la un sistem de axe rectangular Oyz se
numeşte moment de inerţie centrifugal al figurii plane in raport cu axele Oyz.

I yz = ∫ yzdA
A
yG z
G y
dA
z

Moment de inerţie polar al unei figuri plane, in raport cu un punct (pol) din planul figurii, este suma produselor elementelor de arie dA cu pătratele distantelor lor la acelpunct
.
I p = ∫ r
A
x2dA O y
r 2 = z
2
+ y 2
2 2 2yG
zGz
I p = ∫ rA
dA = ∫ ( z + y
A
)dA =I y + I z G
y⇒ Suma momentelor de inerţie axialein raport cu axele rectangulare cu dA
aceeaşi origine O reprezintă un invariant la rotirea sistemului de axe. z
Obs. Momentele de inerţie (axiale, centrifugale si polare)au dimensiunea (L4), si se măsoară in mm4, cm4, m4….
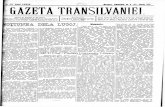
Momente de inerţie la dreptunghi
Sa se determine momentele de inerţie axiale in raport cu axele centrale Oy si Oz paralele cu laturile dreptunghiului.
Axa centrala Oy ; suprafaţa elementare dA || axa Oy⇒ dA = b·dz
I y = ∫ z 2dA =
bA
h / 2∫ z 2dz =− h / 2
bh3
12
I z = ∫
A
y 2dA = hb3
12
În calculele de rezistenţă intervin mărimi care depind de forma şi dimensiunile

y
secţiunii transversale, denumite caracteristici geometrice. Se prezintă în continuare
principalele caracteristici geometrici ale suprafeţelor plane .
Momente statice, centre de greutate
Se consideră o suprafaţă plană oarecare (fig. 1.1) un sistem de axe rectangulare
z1O1y1 şi un element de suprafaţă diferenţial dA. Se definesc momentele statice faţă
de axele O1z1, O1y1 ca
având expresiile:
S z1 = ∫ y1
dA S y1
A
= ∫ z1 dA (1.1)A
z1 O1 z1 O1
z1 b1
y1a (yG)
z1
(O) G
d1
yG
z y2
G1 A1 a1
y d
z (b)zG
a2 y3
G2 a3
z2G3
A2 A3
dA y z1
y1
z3
zG
b2 b3
y1 y
fig. 1.1 fig. 1.2
Momentul static poate fi pozitiv, negativ sau nul, şi se măsoară în unitate de
lungime la puterea a treia [L3], de regulă, cm3 sau mm3.
Dacă se aplică teorema lui Varignon, se obţin egalităţile:
y1 ∫ dA = yG ∫ dA şi
∫ z1 dA = zG ∫ dA ,

care permit determinarea coordonatelor centrului de greutate al suprafeţei

z yS
yG = 1 = A
∫ y 1 dA
A
S zG = 1 =
A∫ z 1dA
A(1.2)
Sistemul de axe rectangulare zOy cu originea în centrul de greutate al suprafeţei poartă
denumirea de sistem central iar axele respective axe centrale.
Momentele statice faţă de axe centrale sunt în mod evident nule,
proprietate care permite verificarea coordonatelor centrului de greutate.
Când secţiunea este compusă din mai multe figuri simple (fig. 1.2)
pentru care se cunosc centrele de greutate şi distanţele yi şi zi la axele de
referinţă z1O1y1, integralele din relaţiile (1.2) se
transformă în sume şi centrul de greutate al secţiunii va avea coordonatele: (1.3)
yG =∑= A
i y
i
zG =∑= A
i z
i∑ A i ∑ A
i
În concluzie pentru stabilirea centrului de greutate al unei suprafeţe
se alege un sistem arbitrar de axe de referinţă, se calculează momentul
static al fiecărei suprafeţe faţă de aceste axe şi aria suprafeţei, şi se aplică
relaţiile (1.3).
Momente de inerţie axiale, centrifugale, polare
Considerând suprafaţa oarecare din figura 1.1 se definesc faţă de
sistemul de axe zOy următoarele momente de inerţie geometrice:
- momente de inerţie axiale
- moment de inerţie centrifugal
Iz = ∫ y 2 dAA
Iy = ∫ z 2
dAA
(1.4)
- moment de inerţie polar
Izy = ∫ zydA (1.5)A
Ip = Io = ∫ d 2 dAA
cu d2 = z2 + y2 momentul de inerţie polar (faţă de polul O) se poate scrie:
(1.6)
Ip = Iz + Iy (1.7)
deci suma momentelor de inerţie faţă de sisteme rectangulare cu

aceiaşi origine este un invariant.

Determinarea momentelor de inerţie pentru suprafeţe simple
Aplicarea relaţiilor (1.4) presupune alegerea unui element de
suprafaţă dA, astfel ca integralele să se rezolve cât mai uşor. De aceea
aceste relaţii se pot aplica pentru suprafeţe simple, cum ar fi dreptunghi,
triunghi, suprafaţă circulară.
a) Dreptunghi
Se determină expresiile momentelor de inerţie faţă de axele z şi y care
trec prin centrul de greutate al dreptunghiului.
h Gz
ydA ymax
dy
zmax
yb
fig. 1.3
Se alege elementul de arie la distanţa y de axa z.
dA = b ⋅ dy
Se aplică relaţia (1.4)
h
2
Iz = ∫ y 2 dA = ∫ y 2 ⋅ b ⋅ dy = b ⋅h
y3 2
3 h
bh 3
=12
(1.8)
A − h −2 2
În mod similar, dacă se alege un element de suprafaţă paralel cu axa y rezultă:
bh 3
Iy =12
(1.8')
Momentul de inerţie centrifugal Izy = ∫ z ⋅ y
dAA
= 0 pentru că elementul de suprafaţă dA are
coordonata z = 0. Rezultatul se poate extinde ca o concluzie generală şi anume: la secţiuni cu cel
puţin o axă de simetrie, momentul de inerţie centrifugal este nul.
Dacă secţiunea este pătrat b = h = a şi deci
a 4
Iz =

Iy =12
(1.9)

b
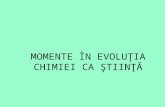
b) Triunghi dreptunghic, momente de inerţie faţă de laturi
bPentru triunghiul din figura 1.4 se alege elementul de arie dA = b1dy =
h
integrala din (1.4) devine integrală simplă. Rezultă:
(h − y) dy, cu care
Iz = ∫ y 2 dA =h∫ (h − y)y 2 dy =
b ⎛ y3⎜ h hy 4 ⎞− ⎟ =
bh 3
(1.10)
A h
0h ⎝ 3
4 ⎠ 0 12
În mod similar, cu element de arie paralel cu axa y rezultă
b3 hIy = ∫ z
2 dA = (1.10')
Momentul de inerţie centrifugal
A 12
h 1 b b b
2
h 2
Izy = ∫ z ⋅ ydA = ∫ 2 h (h − y)⋅ y
h (h − y)dy =
24
(1.11)
A 0
bz A O
b1 y
dy
h
B
y
fig 1.4.
Momentul de inerţie polar rezultă pe baza relaţiei (1.7)
Ip = Iz + Iy =bh 3
12
b3 h+
12=
bh
12(b2 + h2) (1.12)
c) Suprafaţă circulară
Din motive de simetrie momentele de inerţie axiale sunt egale Iz = Iy, iar momentul de
inerţie polar este Ip = Iz + Iy = 2Iz
Se calculează momentul de inerţie polar luând o suprafaţă elementară, coroană circulară cu

raza r şi grosimea dr (fig. 1.5) cu aria A = 2πr dr

4
4
drz G
rz G
R
y d
y D
D
fig.1.5 fig.1.6
R R πR 4 πD
4
Ip = ∫ r 2 dA = ∫ r 2 2πr dr = =
(1.13)
0 0
I pIz = Iy =2
πR 4
=4
2 32
πD 4
=64
(1.14)
d) Coroană circulară (secţiune inelară)
Prin analogie cu calculele efectuate la suprafaţa circulară rezultă (fig. 1.6)
π πD 4 ⎡ ⎛ d ⎞ ⎤Ip = (D 4 − d
4 ) = ⎢1 − ⎜ ⎟ ⎥ (1.15)
32 32 ⎝ D ⎠I p πD
4 ⎡ ⎛ d ⎞ ⎤Iz = Iy = = ⎢1 − ⎜ ⎟ ⎥ (1.16)
2 64
e) Momente de inerţie la profile laminate
⎝ D ⎠În tabele se dau caracteristicile geometrice ale profilelor laminate, momente de inerţie
axiale, module de rezistenţă, momente statice, etc.
Exemplu:
- profil I d
b, h, t, d, A, Iz, Iy, Wz, Wy, iz, iy, Sz al secţiunii h z
Notare I20 cu h = 200 mm
- profil U, notare U30 cu h = 300 m t- cornier cu aripi egale L 100 × 100 × 10
- cornieri cu aripi inegale ╚ 80 × 65 × 8 y
b

O 1
2
2
Variaţia momentelor de inerţie cu translaţia axelor
Se consideră corpul din figura 1.1 cu sistemul de axe centrale zOy
faţă de care se cunosc momentele de inerţie. Se doreşte a se calcula
momentele de inerţie faţă de axele z1O1y1 translatate
faţă de axele centrale. Se aplică relaţiile de definiţie:
I = y 2 dA = (y + a )2 dA = y 2 dA +
2a y dA + a 2dA = Iz + a2A (5.17)
z1 ∫ 1 ∫A A
∫ ∫ ∫A A A
nul.
În (1.17) se remarcă că ∫ y dA = Sz care este momentul static faţă de axa centrală z şi esteA
În mod similar se obţin:
I y1
I
= Iy + b2 A (1.17)
= Izy + ab A (1.18)y1 z1
I O1
= I + d 2
A (1.19)
Formulele de variaţie a momentelor de inerţie la translaţia axelor
sunt utile la calculul momentelor de inerţie la secţiuni compuse din mai
multe figuri simple. În această situaţie se cunosc momentele de inerţie faţă
de axele centrale proprii fiecărei figuri şi se doreşte calculul
caracteristicilor inerţiale faţă de sistemul de axe central al întregii secţiuni.
De exemplu, pentru secţiunea compusă din figura 1.23
Iz
= ∑ I zi
+ a i A
i
(1.17)
i =1
3Iy
= ∑ I yi
+ b i
A i
i =1
(1.17’)
3Izy
= ∑ I zi yi
+ a i b
i A
ii=1
(1.18)
Formulele (1.17) (1.18) se mai numesc formulele lui Steiner pentru
calculul momentelor de inerţie faţă de axe translatate.