Capitolul 12_Momente de Inertie Mecanice (Final)
21
MECANICĂ. TEORIE ŞI APLICAŢII 369 Capitolul 12 ― MOMENTE DE INERŢIE MECANICE Capitolul 12. Momente de inerție mecanice În conformitate cu aspectele generale, prezentate în §1.2, din capitolul întâi, masa, ca noțiune fundamentală în dinamică, se caracterizează prin două proprietăți fundamentale: gravitația şi inerția. În același paragraf, se arată că inerția reprezintă proprietatea corpurilor de a opune rezistenţă oricărei schimbări a stării sale. Prezentul capitol, se constituie ca o extensie a momentelor masice, definite în §2.7, din capitolul doi. Extensia se referă la momentele de inerție mecanice, a căror expresie de definiție a fost arătată prin (2.33). Conform acestei definiții, momentele de inerție mecanice, caracterizează inerția corpurilor, aflate în mișcare de rotație pe de o parte, iar pe de altă parte, sunt mărimi fizice ce caracterizează sistemul material, sub aspectul răspândirii masei. Equation Chapter 12 Section 12 12.1 Expresii ale momentelor de inerţie mecanice Pentru stabilirea expresiilor consacrate momentelor de inerție mecanice, în Fig. 12.1.a se ia în studiu un sistem de n puncte materiale i M , de masă i m , iar în Fig.12.1.b un rigid S , divizat într-o infinitate de mase elementare dm , continuu distribuite în întregul său volum. Poziţia fiecărei particule i M , şi respectiv dm , este caracterizată de raza vectoare i r , respectiv r . Distanţa de la particula i m şi respectiv dm la un plan, o axă sau un pol, simbolizată prin u , se notează cu i , respectiv . Fig. 12.1 i M i r i z i x i y z y x O . a i dm r z x y z y x O . b S
description
mecanica pentru facultate politehnica , mecanica II
Transcript of Capitolul 12_Momente de Inertie Mecanice (Final)
-
MECANIC. TEORIE I APLICAII 369
Capitolul 12 MOMENTE DE INERIE MECANICE
Capitolul 12. Momente de inerie mecanice
n conformitate cu aspectele generale, prezentate n 1.2, din capitolul nti,
masa, ca noiune fundamental n dinamic, se caracterizeaz prin dou proprieti
fundamentale: gravitaia i ineria. n acelai paragraf, se arat c ineria reprezint
proprietatea corpurilor de a opune rezisten oricrei schimbri a strii sale.
Prezentul capitol, se constituie ca o extensie a momentelor masice, definite
n 2.7, din capitolul doi. Extensia se refer la momentele de inerie mecanice, a
cror expresie de definiie a fost artat prin (2.33). Conform acestei definiii,
momentele de inerie mecanice, caracterizeaz ineria corpurilor, aflate n micare
de rotaie pe de o parte, iar pe de alt parte, sunt mrimi fizice ce caracterizeaz
sistemul material, sub aspectul rspndirii masei. Equation Chapter 12 Section 12
12.1 Expresii ale momentelor de inerie mecanice
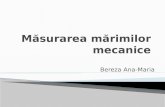
Pentru stabilirea expresiilor consacrate momentelor de inerie mecanice, n
Fig. 12.1.a se ia n studiu un sistem de n puncte materiale iM , de mas im , iar n
Fig.12.1.b un rigid S , divizat ntr-o infinitate de mase elementare dm , continuu
distribuite n ntregul su volum. Poziia fiecrei particule iM , i respectiv dm , este
caracterizat de raza vectoare ir , respectiv r . Distana de la particula im i
respectiv dm la un plan, o ax sau un pol, simbolizat prin u , se noteaz cu i ,
respectiv .
Fig. 12.1
iM
ir
iz
ixiy
z
y
x
O
.a
i
dm
r
zx
y
z
y
x
O
.b
S
-
370 MECANIC. TEORIE I APLICAII
Capitolul 12 MOMENTE DE INERIE MECANICE
n conformitate cu (2.33), prin definiie, momentul de inerie mecanic reprezint suma produselor dintre masele particulelor materiale i ptratul distanei
la planul, axa sau polul , adic:
2 2
1
;n
ii
I m dm
(12.1)
Dimensional, momentul de inerie mecanic, este exprimat n Sistemul International
cu ajutorul relaiei urmtoare: 2SI
I kg m .
Observaii:
n cazul corpului rigid, masele elementare dm fiind continuu distribuite n ntregul
volum, sumele se transform n integrale masice, astfel: i ii
m dm2 2
1
.
Dac distana i i respectiv este raportat la unul din planele sistemului de referin, atunci se obine momentul de inerie mecanic planar, conform cu:
2 2 2 2 2 2
1 1 1
; ; ; ; ;n n n
xx i i yy i i zz i ii i i
I m x x dm I m y y dm I m z z dm
(12.2)
Dac i i respectiv , din (12.1), reprezint distana la una din axele
u x y z, , ale sistemului de referin, se obine momentul de inerie mecanic axial:
n
x i i ii
n
y i i ii
n
z i i ii
I m y z y z dm
I m z x z x dm
I m x y x y dm
2 2 2 2
1
2 2 2 2
1
2 2 2 2
1
;
;
;
(12.3)
Dac i i respectiv , din relaia (12.1), reprezint distana la punctul O al sistemului xOyz , rezult momentul de inerie mecanic polar:
n
O i i i i i i ii
I m x y z r dm x y z dm2 2 2 2 2 2 2
1
;
(12.4)
-
MECANIC. TEORIE I APLICAII 371
Capitolul 12 MOMENTE DE INERIE MECANICE
Alturi de momentul de inerie mecanic planar, axial i polar, n aplicaii se ntlnesc momentele de inerie mecanice centrifugale, exprimate prin:
1
1
1
;
;
;
n
xy yx i i ii
n
yz zy i i ii
n
zx xz i i ii
I I m x y x y dm
I I m y z y z dm
I I m z x z x dm
(12.5)
Conform expresiilor (12.5), momentele de inerie mecanice centrifugale reprezint
suma produselor dintre masele im i distanele de la acestea la dou plane
perpendiculare ntre ele.
12.2 Relaii ntre momentele de inerie mecanice
n aceast seciune se prezint, conform cu [P01], [V01] i [V02], cteva
relaii matematice ntre momentele de inerie mecanice, definite n 12.1.
Momentul de inerie mecanic polar este egal cu semisuma momentelor de inerie
mecanice axiale, n raport cu axele sistemului de referin Oxyz , avnd originea n
polul considerat. Combinnd (12.3) i (12.4), rezult urmtoarea expresie de legtur:
O x y zI I I I1
2 (12.6)
Momentul de inerie mecanic polar este egal cu suma dintre momentele de inerie
mecanice n raport cu un plan i respectiv o ax normal la plan n polul considerat.
Din (12.2) i (12.4) rezult expresia:
O xx x yy y zz zI I I I I I I (12.7)
Momentul de inerie mecanic polar reprezint suma momentelor de inerie
mecanice n raport cu planele sistemului de referin cu originea n polul ales.
nsumnd (12.2) i innd seama de (12.4) se obine:
O xx yy zzI I I I (12.8)
Momentul de inerie mecanic axial reprezint suma momentelor de inerie
mecanice n raport cu dou plane, care se intersecteaz perpendicular dup acea
ax. Din (12.2) i (12.3) rezult urmtoarele expresii de legtur:
x yy zz y zz xx z xx yyI I I I I I I I I; ; (12.9)
-
372 MECANIC. TEORIE I APLICAII
Capitolul 12 MOMENTE DE INERIE MECANICE
Suma momentelor de inerie mecanice n raport cu dou axe ale unui sistem de
referin este mai mare sau cel puin egal cu momentul de inerie mecanic n raport
cu a treia ax a sistemului considerat. nsumnd relaiile (12.3) sau (12.9), rezult
urmtoarele relaii de inegalitate:
x y zI I I ; y z xI I I ; z x yI I I (12.10)
n cazul unui sistem material situat ntr-un plan, suma momentelor de inerie
mecanice n raport cu dou axe perpendiculare din plan este egal cu momentul de
inerie n raport cu punctul de intersecie al acestor axe, spre exemplu:
x y O zI I I I (12.11)
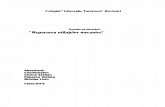
Conform Fig.12.2 se consider dou sisteme de referin, notate prin S i
'S concurente n polul O .
Rotaia sistemului 'S , cu unghiul 4 , fa de S , se exprim prin
urmtoarea matrice de rotaie:
4 4 0 2 2 2 2 0
; 4 4 0 2 2 2 2 04
0 0 1 0 0 1
c s
R z s c
(12.12)
Unghiul de rotaie fiind 4 arat c ' 0x i ' 0y sunt planele bisectoare ale
diedrelor formate din: 0x i 0y . Poziia unei particule iM fa de axele
sistemului S este dat prin:
Fig. 12.2
irix
iy 45
iMxy
y
x
O
S
S
-
MECANIC. TEORIE I APLICAII 373
Capitolul 12 MOMENTE DE INERIE MECANICE
i i
i i
x x
y y
'2 2 2 2
'2 2 2 2
,
de unde rezult:
2 22 2 ' ' ; 2 2 ' ' ; 1 2 ' 'i i i i i i i i i ix x y y x y x y x y (12.13)
Astfel, momentul de inerie mecanic centrifugal fa de planele x 0 i y 0 , este:
2 21
1 1' ' ' '
2 2
n
xy i i i i i i xx yyi
I m x y m x y I I
(12.14)
adic semidiferena momentelor de inerie mecanice planare (planele bisectoare
' 0x i ' 0y ). n mod similar, se exprim momentele de inerie mecanice
centrifugale fa de celelalte dou plane: 0; 0y z , respectiv 0; 0x z .
12.3 Raza de inerie (raza de giraie)
Momentul de inerie mecanic poate fi exprimat cu ajutorul unei mrimi
geometrice ui numit raz de inerie sau raz de giraie, conform [V02] i [R01].
Denumirea de raz de giraie vine de la cazul frecvent ntlnit n tehnic al rotaiei
unui corp n jurul unei axe. Raza de inerie reprezint distana fictiv la care ar trebui
plasat ntreaga mas a corpului, concentrat ntr-un punct, pentru ca n raport cu o
ax, un plan sau un pol s fie ndeplinit condiia, exprimat prin relaia:
n
u i i ui
I m dm M i2 2 2
1
;
(12.15)
n cazul momentului de inerie mecanic polar relaia (12.15) se exprim prin:
O OI M i2 . (12.16)
n funcie de raza de inerie, conform cu (12.15) momentele de inerie mecanice axiale, se pot exprima astfel:
2x xI M i ;
2y yI M i ;
2z zI M i (12.17)
Pe baza celor trei expresii prezentate mai sus, se pot determina razele de inerie:
xx
Ii
M ;
yy
Ii
M ; zz
Ii
M (12.18)
Raza de inerie (raza de giraie) este exprimat n uniti de lungime.
-
374 MECANIC. TEORIE I APLICAII
Capitolul 12 MOMENTE DE INERIE MECANICE
12.4 Momente de inerie geometrice
n cazul corpurilor omogene, conform cu 2.4, densitatea este o constant:
V A l cst, , . Ca urmare, elementul de mas dm se va nlocui n relaiile (12.2)-
(12.5) cu una din expresiile urmtoare:
; ;V A ldm dV dA dl , Aadar, n cazul corpurilor omogene, momentul de inerie devine:
u V A lI dV dA dl2 2 2; ; (12.19) Expresia (12.19) arata c integralele masice s-au transformat n integrale geometrice, care se noteaz conform cu:
ugI dv dA dl2 2 2; ; i poart denumirea de momente de inerie geometrice. Aadar, (12.19) se transform n:
u V A l ugI I, , (12.20)
Relaia (12.20) exprim legtura matematic dintre momentele de inerie mecanice i cele geometrice, adic: momentul de inerie mecanic este egal cu produsul dintre momentul de inerie geometric i densitatea (volumetric, superficial sau liniar).
n funcie de forma geometric a corpului, exist trei tipuri de momente de inerie geometrice: momentul de inerie geometric al volumului:
ug VdV dx dy dz2 2I (12.21)
momentul de inerie geometric al suprafeei:
ug AdA dx dy2 2I (12.22)
momentul de inerie geometric al barei:
ug ldl2I (12.23)
Observaii: Momentele de inerie geometrice ale suprafeelor plane, sunt: momentele de inerie geometrice axiale sau ecuatoriale:
2Ixg Ay dA ;
2Iyg Ax dA (12.24)
momente de inerie geometrice polare:
2 2IOg A x y dA (12.25) momente de inerie geometrice centrifugale:
Ixyg Ax y dA (12.26)
Expresiile anterioare se particularizeaz pentru formele geometrice simple ale corpurilor.
-
MECANIC. TEORIE I APLICAII 375
Capitolul 12 MOMENTE DE INERIE MECANICE
12.5 Variaia momentelor de inerie mecanice
n general, momentele de inerie mecanice se calculeaz n raport cu axele unui sistem de referin cu originea n centrul maselor. Uneori, aplicaiile solicit determinarea momentelor de inerie mecanice n raport cu alte axe, diferite de cele pentru care momentele de inerie sunt definite n tabele, vezi [V01].
Astfel, dac C este axa pentru care CI este cunoscut, iar este o
ax oarecare n spaiu, atunci conform cu [V01], se poate exprima momentul de
inerie mecanic I n raport cu axa dup cum urmeaz:
CI f I , adic se determin mai nti I n raport cu paralel cu C ;
I f I , cele dou axe i sunt concurente n polul O, (a se vedea Fig. 12.3.). Aadar, problema de mai sus se evideniaz prin dou aspecte fundamentale: variaia momentelor de inerie mecanice n raport cu axe paralele, urmat de variaia momentelor de inerie mecanice n raport cu axe concurente.
12.5.1 Variaia momentelor de inerie n raport cu axe paralele
Aa cum s-a artat n seciunea anterioar, momentul de inerie mecanic al
unui corp n raport cu axa C , ce trece prin centrul maselor este, n general o mrime cunoscut. Una dintre necunoscutele ntlnite n aplicaii se refer la momentul de
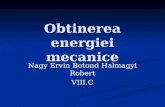
inerie mecanic, n raport cu o ax paralel cu axa C . Pentru a demonstra variaia momentului de inerie mecanic n raport cu cele dou axe paralele, n Fig.12.4
se consider un rigid S , cu o form geometric regulat, avnd masa M i poziia
centrului maselor C cunoscute, conform geometriei maselor (vezi (2.10) din 2.4).
z
x
y
z
y
Cx
OC
1S
Fig. 12.3 d121212121212
12.2
C
S
Cz
Cy x
-
376 MECANIC. TEORIE I APLICAII
Capitolul 12 MOMENTE DE INERIE MECANICE
Cu originea n centrul maselor se fixeaz sistemul de referin CS , ale crui axe devin axe centrale. n conformitate cu aspectele din acelai capitol al geometriei maselor,
corpul S este divizat ntr-o infinitate de particule elementare, infinitezimale dm ,
continuu distribuite n ntregul su volum. Fiecare particul elementar dm , este
poziionat fa de sistemul de referin CS prin raza vectoare: T
r x y z .
innd seama de considerentele ce fac obiectul acestei seciuni, momentul de inerie
mecanic al corpului S , n raport cu axa C CCz , este cunoscut conform cu:
2 2zC CI I x y dm (12.27) ntr-un punct 1O C , situat n planul 0Cz i aparinnd corpului S , se
fixeaz un al doilea sistem de referin 1S , paralel cu sistemul CS , a crui
poziie este dat prin vectorul: 1 1 1 0T
CO x y . Ptratul distanei dintre cele
dou sisteme este: 2
2 2 21 1 1CO x y d (12.28)
Particula de mas elementar dm este repoziionat fa de sistemul 1S prin:
1 1 1 1 .T
r r CO x x y y z (12.29)
Fig. 12.4
C
dm
Cx
Cy
S
1z
1O
CS
Cz
1x
1y1r
r
1S
1
C
-
MECANIC. TEORIE I APLICAII 377
Capitolul 12 MOMENTE DE INERIE MECANICE
Lund n studiu axa 1 1 1O z , paralel cu C , mrimea ce trebuie
determinat ca o funcie de C
I , cunoscut prin (12.27), este momentul de inerie
mecanic n raport cu axa 1 , adic:
2 2
1 11 1zI I x x y y dm
(12.30)
Prin dezvoltarea expresiei (12.30) se obine:
2 2 2 21 1 1 11 2 2I x y dm x x dm y y dm x y dm (12.31)
innd seama c CS are originea n centrul maselor, conform teoremei
momentelor statice, rezult:
0, : 0; 0.Cr dm
r de unde x dm y dmdm
(12.32)
Ca urmare, expresia momentului de inerie mecanic fa de axa 1 devine: 2
1I I
CM d (12.33)
Expresia (12.33), reprezint variaia momentelor de inerie mecanice n raport cu axe paralele, cunoscut sub denumirea de teorema lui Steiner. Enunul acestei teoreme este: momentul de inerie mecanic fa de o ax este egal cu momentul de inerie fa de axa paralel cu aceasta, trecnd prin centrul maselor sistemului, nsumat cu produsul dintre masa total a sistemului i ptratul distanei dintre cele dou axe. Observaii: Prin similitudinea cu variaia momentelor de inerie axiale, n cele ce urmeaz se arat variaia momentelor de inerie mecanice centrifugale n raport cu cele dou
sisteme de referin CS i 1S , paralele ntre ele, conform Fig.12.4. n acest
caz, vectorul de poziie 1CO se caracterizeaz prin:
1 1 1 1 1T T
CO a b c r r x x y y z z ,
1 1 1:TT
x y z x a y b z crespectiv .
Cunoscnd expresia momentului de inerie mecanic centrifugal:
x yC CI x y dm , (12.34)
se cere s se determine momentele de inerie n raport cu planele 1 0x i 1 0y ,
adic 1 1x y
I . Conform expresiilor de definiie (12.5), rezult:
-
378 MECANIC. TEORIE I APLICAII
Capitolul 12 MOMENTE DE INERIE MECANICE
1 11 1I
.
x y x y dm x a y b dm
x y dm b x dm a y dm a b dm
(12.35)
innd seama de (12.32), se obine:
1 1I Ix y x yC C M a b , (12.36)
expresie ce arat variaia momentului de inerie mecanic centrifugal n raport cu sisteme de referin paralele.
n Fig. 12.5, alturi de sistemul de referin CS se iau n studiu alte dou sisteme
de referin, 1S i 2S paralele ntre ele i paralele cu axa C , situate la
distanele 1d i 2d fa de CS .
Cunoscnd masa corpului M i distanele 1d i 2d , precum i momentul de inerie
mecanic 1
I fa de axa 1 aparinnd sistemului de referin 1S , se cere
determinarea momentului de inerie mecanic 2
I n raport cu axa 2 , aparinnd
sistemului de referin 2S . n acest studiu, se apeleaz teorema lui Steiner, (12.33), sub urmtoarea form:
2 21 21 2
,C C
I I M d I I M d (12.37)
Scznd cele dou ecuaii din (12.37), membru cu membru, se obine:
2 22 12 1I I M d d (12.38) Expresia (12.38), constituie o particularizare a teoremei lui Steiner (12.33), mai sus demonstrat.
1
2
C
2d
1d
Fig.12.5
C
Cx
Cy
S
1z
2O
Cz
1x
1y1O
2y
2z
2x
-
MECANIC. TEORIE I APLICAII 379
Capitolul 12 MOMENTE DE INERIE MECANICE
12.5.2 Tensorul inerial. Variaia momentelor de inerie n raport cu axe concurente
n studiul dinamic al corpurilor solide, caracterizate printr-o micare de rotaie, un rol esenial al distribuiei maselor l au momentele de inerie mecanice axiale i centrifugale. Acestea, se grupeaz matematic, conform cu [N01], [V01]-
[V03], ntr-o matrice de dimensiuni 3 3 , ce poart denumirea de tensor inerial i
care face obiectul central al prezentei seciuni.
n acest scop, Fig.12.6 prezint un corp rigid S , cu o form geometric
oarecare, al crui studiu privind distribuia maselor se efectueaz n raport cu
sistemele de referin 0 i S , concurente n punctul O , cu observaia c
sistemul S este invariabil legat de corpul S . Pentru o analiz unitar, se
introduc urmtoarele notaii:
; ; ; ; ; ; ; ;u u u uu x y z w y z x . (12.39)
0 0 0 0 0
; ; c c c ; ; ;
; ; c c c ; c c c
T
u u u
T TS S S S Sx y z x y z
u i j k w j k i
u i j k w
. (12.40)
unde u i w sunt axele sistemului S , iar u i w versorii ce exprim orientarea
axelor sistemului mobil S , n raport cu sistemul de referin fix 0 .
x
y
z
0y
0z
z
ck c
c
y
cj c
c
x
ci c
c
u
u
0k
0i
0j
0x
s
Cr
ud
C
Sr
Sr
;0 S
;0 Sdm
S
O
M
Fig.12.6
u
-
380 MECANIC. TEORIE I APLICAII
Capitolul 12 MOMENTE DE INERIE MECANICE
O alt notaie consacrat matricei de rotaie (vezi (4.12) din capitolul patru, dar i (8.4), din capitolul opt) este:
0
0
0
0
S T
S T
SS T
x y z
ic c c
R i j k c c c j
c c c k
, (12.41)
0 0 0 0
T
x x xT T S S S
y y yST
z z z
i c c c
R j c c c i j k
c c ck
, (12.42)
unde 0 T
SR este transpusa matricei de rotaie.
n conformitate cu distribuia maselor, corpul S este divizat ntr-o infinitate
de particule elementare dm , continuu distribuite n ntregul su volum, iar pe baza
relaiei (2.10) se obine vectorul ce exprim poziia centrului maselor, adic S Cr . n
centrul maselor, notat C , sunt fixate alte dou sisteme de referin simbolizate ntr-
o form scurt prin 0 i S , cu proprietatea 0 0OR OR , respectiv
OR ORS S , adic 0 pstreaz orientarea sistemului 0 , iar S
orientarea sistemului S .
Poziia particulei dm fa de sistemele de referin 0 i S , respectiv
0 i S , se exprim prin vectorii:
; , ;
T TS S S S S S S S S Sr r r x y z r r r x y z
n consonan cu (4.19) i (4.20) (vezi 4.1 din capitolul patru), se scriu urmtoarele expresii matriceale de transfer:
0 0
;
S
TS S
S S
x x
r y R r r y R r
z z
(12.43)
innd seama de (1.31), matricea antisimetric asociat vectorului de poziie, precum i transpusa acesteia se rescriu:
0 0
0 ; 0
0 0
T
z y z y
r z x r r z x
y x y x
(12.44)
-
MECANIC. TEORIE I APLICAII 381
Capitolul 12 MOMENTE DE INERIE MECANICE
n stabilirea tensorului inerial, se presupune c momentele de inerie
mecanice axiale i centrifugale, adic: uI i uwI , sunt cunoscute fa de sistemul de
referin fix 0 , iar fa de sistemul de referin mobil S , aceleai momente de
inerie mecanice axiale i centrifugale, notate S uI i S
uwI , sunt necunoscute i ca
urmare ele se vor determina n cele ce urmeaz.
Pentru nceput, se determin momentul de inerie mecanic axial S uI . Conform
Fig.12.6, se noteaz prin ud distana de la particula dm la axa u i se determin:
su ud u r u r (12.45) Ca urmare, momentul de inerie mecanic axial n raport cu axa u , aparinnd
rigidului S , se stabilete conform cu relaia:
2S u uI d dm (12.46) innd seama de (12.45), ptratul distanei de la particula dm la axa u a sistemului de referin mobil, este echivalent cu:
2T
ud u r u r , (12.47)
unde
0
0
0
u u u u
u u u u
u u u u
c c x z c y c
u r c c y x c z c
c c z y c x c
.
Conform algebrei matriceale, vectorii ce compun (12.47) se exprim cu:
,T
T T T Tu r r u r u u r r u u r .(12.48)
Substituind (12.48) n (12.46), se obine:
TS TuI u r r dm u (12.49) Integrala masic din (12.49), se noteaz prin:
0 0
0 0
0 0
T
S
z y z y
I r r dm z x z x dm
y x y x
(12.50)
Dezvoltnd produsul matriceal din (12.50) i aplicnd asupra lui integrala masic, se obine matricea:
2 2
2 2
2 2
T
S
y z dm y x dm z x dm
I r r dm y x dm z x dm z y dm
z x dm z y dm x y dm
(12.51)
-
382 MECANIC. TEORIE I APLICAII
Capitolul 12 MOMENTE DE INERIE MECANICE
innd seama de definiia momentelor de inerie mecanice axiale i centrifugale
(12.3)-(12.5), matricea (12.51), ia forma final:
x xy xz
T
S yx y yz
zx zy z
I I I
I r r dm I I I
I I I
. (12.52)
Astfel, s-a obinut o matrice ptrat, coninnd pe diagonala principal momentele
de inerie mecanice axiale, fa de sistemul 0 , iar simetric fa de diagonala
principal i negativ definite sunt dispuse momentele de inerie mecanice
centrifugale n raport cu planele aceluiai sistem 0 . Drept urmare, SI poart
denumirea de tensorul inerial axial-centrifugal al corpului S n raport cu sistemul
fix 0 . innd seama de (12.52), momentul de inerie mecanic n raport cu axa u ,
aparinnd sistemului de referin mobil S , devine:
S Tu S u u u Su
c
I u I u c c c I c
c
, (12.53)
unde u este substituit prin notaiile din (12.39), rezultnd momentele de inerie
mecanice axiale, n raport cu sistemul de referin mobil S , adic: S xI , S
yI i S
zI .
n continuare se determin momentul de inerie mecanic centrifugal n raport cu
planele 0u i 0w a sistemului de referin mobil S , adic:
S S SuwI u w dm (12.54)
unde Su i Sw , conform cu notaiile (12.39), reprezint coordonatele vectorului de
poziie S r . Aadar, innd seama de notaiile (12.39) i (12.40), pe baza expresiilor
(12.43) se obin coordonatele vectorului S r , sub forma:
; ;S T S T Tu u r w w r r w (12.55)
iar S S T Tu w u r r w . (12.56)
-
MECANIC. TEORIE I APLICAII 383
Capitolul 12 MOMENTE DE INERIE MECANICE
Produsul matriceal din (12.56) se dezvolt mai jos, astfel:
2
2
2
T
x x y x zx
r r y x y z y x y y z
z z x z y z
, expresie echivalent cu:
2 2
2 2 2 2 2
2 2
1 0 0
0 1 0 ,
0 0 1
T
y z x y x z
r r x y z y x z x y z
z x z y x y
(12.57)
unde matricea diagonal se noteaz 3I i poart denumirea de matrice unitate (vezi
(4.34), 4.2, din capitolul patru).
Urmare a acestei observaii, dar i produsului matriceal din (12.51), se obine:
2 2 2 3TTr r x y z I r r (12.58)
Substituind (12.58) n (12.56), rezult:
2 2 2 TS S T Tu w x y z u w u r r w (12.59)
unde 0Tu w , datorit proprietilor sistemului de referin cartezian, triortogonal
i drept orientat. n consecin, expresia (12.59) se particularizeaz i devine:
TS S Tu w u r r w (12.60)
Substituind (12.60) n (12.54) i innd seama tensorul inerial (12.50)-(12.52), rezult:
TS T Tuw S
x xy xz wS
uw u u u yx y yz w
wzx zy z
I u r r dm w u I w
I I I c
I c c c I I I c
cI I I
;
.
(12.61)
Prin substituia lui u i w , conform cu (12.39), se obin momentele de inerie
mecanice centrifugale n raport cu sistemul mobil S , adic: S Sxy yzI I, i S
zxI .
Ca urmare, a aspectelor de mai sus, expresiile (12.53) i (12.61) se scriu sub o
form matriceal dup cum urmeaz:
S S S Tx xy xz
S S S S TS yx y yz S
TS S Szx zy z
I I I i
I I I I j I i j k
kI I I
(12.62)
-
384 MECANIC. TEORIE I APLICAII
Capitolul 12 MOMENTE DE INERIE MECANICE
unde S SI este tensorul inerial axial centrifugal al corpului S (indicele din dreapta
jos), n raport cu sistemul mobil S (indicele din stnga sus).
innd seama de matricele de rotaie (12.41) i (12.42), expresia (12.62) ia forma:
0 0TS
S SS SI R I R (12.63)
TS
S SS Ssau I R I R
0 0 (12.64)
Expresia matriceala (12.63) sau (12.64), caracterizeaz legea de variaie a
tensorului inerial n raport cu sisteme de referin concurente. Spre deosebire de
(12.63), demonstrat pe baza considerentelor de mai sus, expresia (12.64) s-a
obinut printr-o transformare matriceala simpl, aplicat asupra expresiei (12.63).
n aplicaii, se cunoate S SI i se determin cu (12.64) tensorul inerial al
corpului S n raport cu sistemul de referina fix 0 . Aadar, conform cu (12.64),
se obin urmtoarele expresii:
S S Sx xy xz
xTS T S S S S S
u S x y z yx y yz y
S S Szzx zy z
I I I c
I u I u c c c I I I c
cI I I
0 0
(12.65)
S S Sx xy xz
xTS T S S S S S
uw S x y z yx y yz y
S S Szzx zy z
I I I c
I u I w c c c I I I c
cI I I
0 0
(12.66)
adic, momentele de inerie mecanice axiale uI i centrifugale uwI , fa de sistemul
de referin fix, simbolurile u w, , i avnd semnificaiile din (12.39) i (12.40).
Observaii: Dezvoltnd (12.53) se obine urmtoarea expresie:
2 2 2
2 2 2
Su x u y u z u
xy u u yz u u zx u u
I I c I c I c
I c c I c c I c c
(12.67)
Prin dezvoltarea expresiei (12.61) rezult:
Suw x u w y u w z u w
xy u w w u
yz u w w u zx u w w u
I I c c I c c I c c
I c c c c
I c c c c I c c c c
(12.68)
-
MECANIC. TEORIE I APLICAII 385
Capitolul 12 MOMENTE DE INERIE MECANICE
Procednd similar cu expresiile (12.65) i (12.66), se obine:
S S Su x x y y y z z
S S Sxy x y yz y z zx z x
I I c I c c I c
I c c I c c I c c
2 2 2
2 2 2 ;
(12.69)
S S Suw x x x y y y z z z
Sxy x y y x
S Syz y z z y zx z x x z
I I c c I c c I c c
I c c c c
I c c c c I c c c c .
(12.70)
Expresiile (12.67) i (12.69) caracterizeaz variaia momentelor de inerie mecanice axiale n raport cu axe concurente, n timp ce relaiile (12.68) i (12.70) exprim variaia momentelor de inerie mecanice centrifugale n raport cu sisteme de referin concurente.
12.6 Legea de variaie a tensorului inerial
n conformitate cu aspectele prezentate n seciunea precedenta, n general,
se cunosc momentele de inerie mecanice axiale i centrifugale fa de un sistem de
referin cu originea n centrul maselor. Lund n considerare expresia de definiie a
tensorului inerial, (12.52), se poate scrie:
;
T TS S S S S S
S SI r r dm I r r dm (12.71)
unde ;S SS S SI I I reprezint tensorul inerial al corpului S fie n raport cu
sistemul de referin 0 fie n raport cu *S , ambele concurente n centrul
maselor, expresiile celor doi tensori fiind de forma (12.63) i (12.64), adic:
T TS S
S S S S S S S SI R I R I R I R0 0 0 0, . (12.72)
n ecuaia de definiie a tensorului inerial (12.52) i (12.71), intervine
matricea antisimetric i transpusa acesteia asociat vectorului de poziie. Drept
urmare, transferul tensorului inerial din sistemul de referin 0 , (vezi (12.72)) n
sistemul 0 , cu originea n punctul O , are la baz ecuaia vectorial:
SC C S Sr r r r R r0 (12.73)
-
386 MECANIC. TEORIE I APLICAII
Capitolul 12 MOMENTE DE INERIE MECANICE
Matricea antisimetric i transpusa acesteia, aferent vectorului de poziie sunt:
0 0 TS
C S Sr r R r R (12.74)
0 0TTT TS
C S Sr r R r R (12.75)
Cele dou expresiile anterioare, sunt substituite n (12.52) sau (12.71), rezultnd:
0 0
T
S
TT TS SC C S S
I r r dm
r r dm R r r dm R
(12.76)
Primul termen din membrul drept al expresiei (12.76) se noteaz astfel:
C C C C C C
T TSC C C C C C C C C C C
C C C C C C
y z x y x z
I r r dm M r r M y x z x y z
z x z y x y
2 2
2 2
2 2
(12.77)
i reprezint matricea de inerie axial centrifugal a centrului maselor n raport cu
sistemul de referin fix 0 . Al doilea termen din membrul drept al expresiei (12.76)
este identic cu (12.72) i exprim tensorul inerial axial-centrifugal al corpului S n
raport cu sistemul de referin 0 aplicat n centrul maselor. Drept urmare, expresia (12.76) ia urmtoarea form final:
T
S C C S SC SI M r r I I I (12.78)
Fiind cunoscute urmtoarele proprieti de mas: SC SM r I, , , expresia (12.78) caracterizeaz legea de variaie generalizat a tensorul inerial axial centrifugal al
corpului S n raport cu sistemul 0 .
12.7 Momente de inerie principale. Axe principale de inerie
Expresiile (12.67) i (12.69) arat c momentul de inerie mecanic axial fa de
axa u , care trece prin punctul O , originea sistemelor de referin S i 0 este o
funcie de orientarea axei, reprezentat prin versorul T
u u uu c c c ,
respectiv TS
x y zu c c c0 . Aceast dependen va conduce la valori
extreme (maxime i minime) pentru momentele de inerie mecanice axiale, cunoscute
sub denumirea de momente principale de inerie. Axele fa de care se obin aceste
-
MECANIC. TEORIE I APLICAII 387
Capitolul 12 MOMENTE DE INERIE MECANICE
valori extreme poart denumirea de axe principale de inerie. Conform cu [V01]-[V03],
stabilirea momentelor de inerie principale se reduce la stabilirea extremelor unei
funcii implicite, de trei variabile, de forma (12.67) sau (12.69) rescrise mai jos:
u x u y u z u xy u u yz u u zx u uI I c I c I c I c c I c c I c c2 2 2 2 2 2
S S S Su x x y y y z z xy x y
S Syz y z zx z x
I I c I c c I c I c c
I c c I c c
2 2 2 2
2 2 .
n cele ce urmeaz, se analizeaz expresia momentului de inerie mecanic
axial S uI . Cele trei variabile u u, i u , sunt legate prin relaia trigonometric:
2 2 2 1u u uc c c (12.79)
Drept urmare, pentru definirea momentelor principale de inerie principale, se aplic
metoda multiplicatorilor lui Lagrange, conform creia se introduce o funcie auxiliar:
2 2 21S u u u uI c c c , (12.80) ntruct, exist o singur funcie de legtur intre cele trei variabile, funcia auxiliar
conine un singur parametru nedeterminat, notat prin , numit multiplicatorul lui
Lagrange. innd seama de (12.67) i (12.79), funcia auxiliar devine:
2 2 2
2 2 2
2
2 2 1
x u y u z u xy u u
yz u u zx u u u u u
I c I c I c I c c
I c c I c c c c c
(12.81)
Condiiile pentru care funcia auxiliar admite un extrem sunt urmtoarele:
0; 0; 0
u u uc c c
(12.82)
n urma aplicrii condiiilor (12.82) asupra (12.81), se obin expresiile:
x u xy u zx u u
u
y u xy u yz u uu
z u yz u zx u u
u
I c I c I c cc
I c I c I c cc
I c I c I c cc
2 2 2 2 0
2 2 2 2 0
2 2 2 2 0
(12.83)
Expresiile (12.83) se scriu sub form matriceal astfel:
-
388 MECANIC. TEORIE I APLICAII
Capitolul 12 MOMENTE DE INERIE MECANICE
30x xy xz u
yx y yz u
zx zy z u
I I I c
I I I c
I I I c
, (12.84)
reprezentnd un sistem de ecuaii liniare i omogene ale crei necunoscute sunt
u uc c, i uc . Sistemul nu poate admite soluiile banale:
u uc c0, 0 i uc 0 ,
ntruct contravine relaiilor de legtur (12.79). Ca urmare, determinantul asociat matricei necunoscutelor din sistem trebuie s fie nul, adic:
0
x xy xz
yx y yz
zx zy z
I I I
I I I
I I I
(12.85)
Prin dezvoltarea relaiei (12.85), se obine o ecuaie de gradul al treilea, n necunoscuta , ecuaie de forma:
3 2 2 2 22 2 2 2 0 ,
x y z x y y z z x xy yz zx
x y z xy z yz x zx y xy yz zx
I I I I I I I I I I I I
I I I I I I I I I I I I
(12.86)
Intrucat elementele determinatului sunt simetrice fa de diagonala principal, soluiile ecuaiei (12.86) sunt ntotdeauna reale [V01]. n continuare, se arat c
soluiile ecuaiei (12.86), adic 1 2, i 3 , reprezint valorile extreme ale
momentului de inerie mecanic S uI . Ca urmare, substituind i n (12.84), se
obin cosinusurile directoare ale versorului:
T
i i i iu c c c ,
care exprim orientarea unei axe iu , fa de care momentul de inerie mecanic axial prezint o valoare extrem. Ecuaiile (12.84) se rescriu sub forma:
S i i iI u u 0 . (12.87)
nmulind scalar (12.87) cu Tiu , rezult:
0
x xy xz
T Ti yx y yz i i i i
zx zy z
I I I
u I I I u u u
I I I
, (12.88)
-
MECANIC. TEORIE I APLICAII 389
Capitolul 12 MOMENTE DE INERIE MECANICE
de unde: S Tu i S i iiI u I u , iar i 1, 2, 3 (12.89)
Expresia (12.89), arat c momentele de inerie mecanice principale, reprezint soluiile ecuaiei (12.86). Cosinusurile directoare ale axelor principale de inerie se determin cu:
i i i
y i yz yz yx yx y i
zy z i z i zx zx zy
c c ci
I I I I I I
I I I I I I
, 1, 2, 3
. (12.90)
n urma rezolvrii ecuaiei (12.90), rezult:
i y i z i yzc I I IB
21
, (12.91)
i yz zx yx z ic I I I IB
1 , (12.92)
i i ic c c2 21 , (12.93)
unde:
y i z i yz
yx zy zx y i yz zx yx z i
B I I I
I I I I I I I I
22
2 2.
(12.94)
innd seama de (12.88), n cele ce urmeaz se arat c axele principale de inerie sunt perpendiculare ntre ele. Astfel, se scriu expresiile:
T T T Tj S i i j i i S j j i ju I u u u u I u u u0; 0. (12.95)
Fcnd diferena ntre cele dou expresii din (12.95), rezult:
0Ti j j iu u , (12.96)
Dar innd seama de faptul c: i j , rezult: 0Tj iu u , (12.97)
ceea ce conduce la concluzia c: j iu u unde i iar j, : 1, 2, 3, 2, 3, 1 , adic
(12.97) demonstreaz perpendicularitatea axelor principale de inerie. Pentru stabilirea momentelor de inerie mecanice centrifugale n raport cu
axele principale de inerie, se scrie, mai nti, conform cu (12.61) expresia: S T
ij i S jI u I u . (12.98)
Ca urmare, (12.95) ia forma: S T
ij j i jI u u 0 , unde i iar j: 1, 2, 3, 2, 3,1 i j i . (12.99)
innd seama de (12.97) rezult:
0Tij i S jI u I u . (12.100)
Aadar momentele de inerie centrifugale fa de axele principale de inerie sunt nule.