Carte MGN

of 214
-
Upload
jitca-george-cosmin -
Category
Documents
-
view
252 -
download
1
description
Manevrabilitatea si guvernarea navei
Transcript of Carte MGN
-
DAN OBREJA LIVIU CRUDU SNDIA PCURARU
MANEVRABILITATEA NAVEI
Galati University Press
-
C U P R I N S
Capitolul 1. Consideraii generale ...................................................................................... 9 Capitolul 2. Modelarea matematic a manevrabilitii navei ........................................ 12
2.1. Modelul Abkowitz ................................................................................................ 12 2.1.1. Ecuaiile micrii corpului cu ase grade de libertate.................................. 12
2.1.2. Fore i momente hidrodinamice pe corpul navei .. .................................... 22 2.1.3. Soluia sistemului ecuaiilor liniare de micare........................................... 24 2.1.4. Stabilitatea direcional a navei .................................................................... 25 2.1.5. Rspunsul navei la aciunea forelor i momentelor de control ...................... 28 2.1.6. Soluia sistemului ecuaiilor neliniare de micare.......................................... 32 2.2. Prognoza teoretic a derivatelor hidrodinamice....................................................... 36 Capitolul 3. Determinarea experimental a derivatelor hidrodinamice ......................... 40 3.1. Teste cu P.M.M. .................................................................................................... 40 3.2. Sisteme cu bra rotitor............................................................................................. 74 Capitolul 4. Manevrele standard ale navei ......................................................................... 76 4.1. Giraia navei .......................................................................................................... 77 4.2. Ieirea din giraie .................................................................................................... 84 4.3. Testul de zig-zag (Kempf) ...................................................................................... 85 4.4. Manevrele de spiral (Dieudonn i Beck).............................................................. 91 4.5. Testele de stop....................................................................................................... 94 4.6. Manevra om la ap (giraia Williamson)............................................................ 96 4.7. Criterii de manevrabilitate....................................................................................... 98 4.8. Metode pentru determinarea performanelor de manevrabilitate ........................... 99 4.8.1. Prognoze preliminare................................................................................... 99 4.8.2. Metode C.F.D. ............................................................................................. 101 4.8.3. Metode experimentale pe model la scar ................................................... 102 4.8.4. Teste experimentale de manevrabilitate la scar natural ............................ 104 Capitolul 5. Suprafee pasive de control ............................................................................ 105 5.1. Hidrodinamica suprafeelor de control ................................................................... 105 5.2. Interaciunea corp - propulsor - crm ................................................................... 126 5.3. Verificarea crmei la cavitaie ................................................................................ 131 5.4. Calculul hidrodinamic al crmei............................................................................ 134 5.5. Determinarea eficienei crmei.............................................................................. 145 5.6. Tipuri de crme ..................................................................................................... 158 5.6.1. Crme convenionale................................................................................... 160 5.6.2. Crme speciale ............................................................................................ 168 5.6.3. Crme cu portan nalt............................................................................... 172 5.6.4. Sisteme de crme acionate simultan............................................................. 177 5.7. Influena formei crmei asupra performanelor de manevrabilitate ......................... 177 5.8. Poziionarea complexului elice-crm ..................................................................... 181
-
Capitolul 6. Sisteme active de control ................................................................................ 185 6.1. Propulsoare transversale cu jet ................................................................................ 185 6.2. Crme active ........................................................................................................... 191 Capitolul 7. Influena forelor externe asupra manevrabilitii navei.............................. 194 7.1. Fore date de aciunea vntului................................................................................ 194 7.2. Interaciunea nav-nav ......................................................................................... 199 7.3. Manevrabilitatea navei n acvatoriu limitat .............................................................. 204 7.3.1. Efectul adncimii limitate............................................................................. 206 7.3.2. Efectul restriciilor n plan orizontal ............................................................. 210 7.3.3. Efectul squat ............................................................................................. 214 Referine bibliografice ........................................................................................................ 220
-
C A P I T O L U L 1
CONSIDERAII GENERALE
Micarea navelor cu suprafa liber este caracterizat, n cazul general, prin prezena a ase grade de libertate. Manevrabilitatea studiaz micarea navelor cu suprafa liber n planul orizontal. Conceptul de manevrabilitate nsumeaz mai multe caliti nautice distincte:
stabilitatea de drum (calitatea navei de a-i menine direcia de navigaie); manevrabilitatea propriu-zis (calitatea navei de a-i schimba rapid
direcia de navigaie); modificarea vitezei (inclusiv oprirea navei).
Manevrabilitatea navei poate fi descris de urmtoarele caliti specifice [2]: - capacitatea de a iniia, ct mai rapid, o manevr de evitare a unui obstacol (o
manevr de giraie); -capacitatea de a menine o vitez ridicat n manevra de giraie; -capacitatea de a iei din micarea de giraie; -capacitatea de oprire a navei n timp scurt i pe o distan ct mai mic; -capacitatea de a menine direcia de navigaie, n absena perturbaiilor externe
(vnt, valuri, cureni maritimi).
-
Manevrabilitatea navei _______________________________________________________________________________________________
10
Dac nava se deplaseaz cu vitez maxim, atunci caracteristicile de giraie sunt eseniale, deoarece pentru a evita un obstacol este mai raional s schimbi direcia iniial de navigaie, dect s realizezi o manevr de oprire. n schimb, capacitatea de oprire a navei este foarte important n domeniul vitezelor mici de navigaie. n regimul obinuit de navigaie este esenial capacitatea navei de a-i menine direcia de navigaie. Pstrarea traiectoriei iniiale este legat de conceptul de echilibru stabil. Un corp se afl n echilibru stabil dac revine la poziia iniial de echilibru dup ncetarea aciunii factorilor perturbatori. n caz contrar, timonierul sau pilotul automat trebuie s aplice corecii de traiectorie, care implic creterea consumului de combustibil i a duratei cursei. Modelele teoretice ale manevrabilitii conduc la investigarea micrilor navei n planul orizontal, n domeniul de timp. Principala dificultate legat de simularea manevrelor navei este aceea de a determina forele hidrodinamice care acioneaz asupra carenei navei. Investigaiile se realizeaz, adesea, n condiii restrictive de navigaie (fund limitat, influena pereilor laterali), iar efectul suprafeei libere i vscozitatea fluidului sunt de cele mai multe ori neglijate. Performanele de manevrabilitate ale navei sunt determinate i de tipul echipamentelor de guvernare adoptate de proiectantul navei pentru controlul traiectoriei sau poziiei acesteia. Mijloacele de guvernare de la bordul navei se mpart n dou grupe distincte [5]:
mijloace de control active; mijloace de control pasive.
Mijloacele de control active sunt alimentate de o form de energie echivalent care este transformat n fore i momente de control. Cele mai uzuale mijloace active de guvernare sunt:
propulsoarele principale (elice cu pas fix sau reglabil, propulsor azimutal, propulsor Voith-Schneider, elice n duz fix sau orientabil, elice n duz cu arip pentru guvernare);
propulsoarele transversale (cu elice sau cu pompe); crmele active.
Funcionarea mijloacelor de guvernare active este controlat prin intermediul sensului de rotaie, a turaiei elicei, a pasului elicei i a unghiului de inciden a profilului palei. Mijloacele de guvernare active sunt utilizate n domeniul vitezelor moderate ale navelor, spre deosebire de cele pasive care sunt eficiente doar la viteze mai mari.
Mijloacele de control pasive absorb energie din mediul fluid, datorit vitezei de avans a navei sau vitezei curentului de fluid la ieirea din propulsor. Cel mai utilizat mijloc pasiv de guvernare este crma, a crei eficien este controlat prin unghiul de atac sau prin mrimea suprafeei imerse.
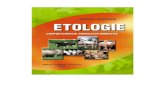
Forele i momentul de control produse de aciunea mijloacelor de guvernare asupra corpului navei sunt prezentate n fig.1.1. S-a notat cu X fora longitudinal, cu Y fora lateral, iar N reprezint momentul de rotire a navei n plan orizontal.
-
Capitolul 1. Consideraii generale _______________________________________________________________________________________________
11
Forele i momentele de control sunt influenate de geometria corpului navei i de tipul mijloacelor de guvernare. Dac asupra navei acioneaz o for lateral de guvernare, atunci mediul fluid se va opune deplasrii laterale cu o for de reacie hidrodinamic, notat cu Yr.
Fig. 1.1 Fore i momente de control produse de aciunea mijloacelor de guvernare
Forele i momentele de control depind de componentele longitudinale u i u& ale vitezei i respectiv acceleraiei micrii, de componentele laterale v i v& ale vitezei i respectiv acceleraiei micrii, de componentele r i r& ale vitezei i respectiv acceleraiei micrii de rotaie n planul orizontal, precum i de unghiul de bandare a crmei, . Dac unghiul de nclinare transversal a navei, , depete valoarea de 10o atunci dependenele prezentate anterior se amplific substanial, fapt ce determin considerarea suplimentar a momentului de nclinare transversal, K, generat fie de aciunea vntului la travers, fie chiar de manevra de giraie a navei, efectuat la valori mai mari ale numrului Froude ( )25,0>nF . n aceast situaie particular, sistemul ecuaiilor micrii navei n planul orizontal se completeaz cu ecuaia caracteristic micrii de rotaie a navei n jurul axei longitudinale.
-
C A P I T O L U L 2
MODELAREA MATEMATIC A MANEVRABILITII NAVEI
2.1 MODELUL ABKOWITZ
2.1.1 ECUAIILE MICRII CORPULUI CU ASE GRADE DE LIBERTATE
Se consider un sistem de axe Oxyz legat de corpul navei [1]. Axa longitudinal 0x are sens pozitiv nspre prova, este situat n planul diametral i este paralel cu planul de baz sau cu planul suprafeei libere a apei calme. Axa lateral 0y este perpendicular pe planul diametral i are sens pozitiv spre tribord. Axa vertical 0z este perpendicular pe planul suprafeei libere a apei calme i are sens pozitiv spre chila navei. n general, micarea unui corp cu suprafa liber are ase grade de libertate, constnd n trei translaii (x,y,z) i trei rotaii ( ) ,, n raport cu axele sistemului de coordonate ales. Dac privim de pe puntea navei spre prova, atunci micarea de rotaie n jurul axei Ox (micarea de ruliu, ) este pozitiv n sensul naintrii acelor de
-
Capitolul 2. Simularea manevrabilitii navei _______________________________________________________________________________________________
13
ceasornic. Micarea de rotaie n jurul axei Oy (micarea de tangaj, ) este pozitiv dac prova urc sau iese din ap. Micarea de rotaie n jurul axei 0z este pozitiv dac nava se rotete spre tribord. S analizm ecuaiile de micare ale corpului cu ase grade de libertate, lund n consideraie sistemul de axe 0xyz legat de corp. Se aplic teoremele universale ale mecanicii (teorema impulsului i teorema momentului cinetic [9]). Teorema impulsului aplicat unui punct material (i) exprim faptul c derivata cantitii de micare (impulsului) este egal cu fora exterioar iF care acioneaz asupra punctului material
( )iii vmdtdF = (2.1)
S-a notat cu mi masa punctului material i cu iv viteza de deplasare. Corpul rigid este alctuit dintr-un numr mare de puncte materiale. Pentru un sistem de N puncte materiale de mase mi, Ni ,...,1= , ecuaiile de micare ale acestor puncte pot fi scrise n conformitate cu principiile mecanicii newtoniene, sub forma
( ) = ==
=+N
i
N
iii
N
iii vmdt
dRF1 11
(2.2)
unde iR reprezint forele interioare ale sistemului. n virtutea principiului aciunii i reaciunii suma forelor interioare sistemului se anuleaz
01
==
N
iiR . (2.3)
n aceste condiii, ecuaia (2.2.) devine ( )ii
N
i
N
ii vmdt
dF = == 11
. (2.4)
Notm faptul c vitezele iv nu sunt independente, deoarece punctele materiale sunt ataate corpului rigid. Dac ir este raza vectoare a punctului material i fa de originea 0 a sistemului de axe solidar legat de corp, 0v este viteza corpului n origine, iar este viteza unghiular de rotaie a corpului, atunci viteza total iv devine
ii rvv += 0 . (2.5) nlocuind relaia (2.5) n (2.4) se obine
( )[ ]
+
=
=+=
=
==
i
N
ii
N
iii
N
ii
rmdtd
tv
m
rvmdtdF
1
0
10
1
(2.6)
-
Manevrabilitatea navei _______________________________________________________________________________________________
14
unde =
=
N
iimm
1 reprezint masa corpului. n continuare, dac se noteaz cu Gr raza
vectoare a centrului de greutate G i inem cont de relaia
( )=
=
N
iiiG rmrm
1 (2.7)
atunci expresia (2.6) devine ( )
( )
( )
( ) .000
0
0
0
0
1
+++
=
=
+++
=
=
++
=
=
+
=
=+
== =
GG
GG
GG
G
G
N
ii
rvrdt
dtv
m
rvrdt
dtv
m
dtrd
rdt
dtv
m
rdtd
tv
m
rdtd
mtv
mFF
(2.8)
Pentru dezvoltarea produselor vectoriale de mai sus, se utilizeaz urmtoarele notaii ale componentelor vectorilor
kZjYiXFkrjqipkwjviuv
kzjyixr GGGG
++=
++=
++=
++=
0 (2.9)
i se obine
kxdtdqy
dtdpjz
dtdp
xdtdriy
dtdr
zdtdq
zyxdtdr
dtdq
dtdp
kjir
dtd
GGGGGG
GGG
G
+
+
=
==
-
Capitolul 2. Simularea manevrabilitii navei _______________________________________________________________________________________________
15
( ) ( ) ( )kquvpjwpurivrwqwvu
rqpkji
v
++=
== 0
( ) ( ) ( )kxqypjzpxriyrzqzyxrqpkji
r
GGGGGG
GGG
G
++=
==
( )
( ) ( )[ ]( ) ( )[ ]( ) ( )[ ] .22
22
22
kzqpyqxprjyprxpzrq
ixrqzryqp
xqypzpxryrzqrqpkji
r
GGG
GGG
GGG
GGGGGG
G
+++
++++
+++=
=
=
nlocuind produsele vectoriale de mai sus n relaia (2.8) se obin cele trei ecuaii ale micrii corpului, rezultate prin aplicarea teoremei impulsului [23]
( ) ( )
+++++
= GGGGG xrqprzqyydtdr
zdtdq
rvqwt
umX 22
( ) ( )
+++++
= GGGGG yprqpxrzzdtdp
xdtdrpwru
t
vmY 22
( ) ( )
+++++
= GGGGG zqprqypxxdtdqy
dtdpqupv
t
wmZ 22 .
(2.10)
Celelalte trei ecuaii de micare se obin prin utilizarea teoremei momentului cinetic [9] care exprim faptul c derivata momentului cinetic fa de un punct fix 0 este egal cu momentul forei fa de acel punct. Pentru un sistem de N puncte materiale, teorema momentului cinetic se poate scrie sub forma
( ) ( )iiNi
i
N
iiii vmdt
drFrM =+
== 11 (2.11)
unde iM este momentul exterior care acioneaz asupra punctului material i. n virtutea principiului aciunii i reaciunii suma momentelor interioare sistemului este
-
Manevrabilitatea navei _______________________________________________________________________________________________
16
nul i nu a mai fost luat n consideraie n relaia de mai sus. n continuare, introducnd relaiile (2.5) i (2.7) n (2.11) se obin succesiv relaiile de mai jos
( ) ( )( )
( )[ ]
( )
( )[ ]
( )
( )[ ]
( )[ ].11
00
1
01
0
1
011
0
011
0
11
0
1
0
1
0
1
011
i
N
iiii
N
iiiG
i
N
iii
Gi
N
iiiG
i
N
iii
N
iiii
N
iiiG
i
N
iiii
N
iiiG
iN
iiii
N
iii
N
iii
ii
N
iii
i
N
iii
i
N
iii
N
iiii
rrmrt
rmvtv
rm
rrm
vrmrt
rmtv
rm
rrm
vrmrt
rmtv
rm
rvrmrt
rmtv
rm
dtrd
rmrdt
rmtv
rm
dtrd
rdt
dtv
rm
rdtd
tv
rm
rvdtd
rmFrM
+
+
+
=
=+
++
+
=
=+
++
+
=
=++
+
=
=
+
+
=
=
++
=
=
+
=
=+=+
==
=
=
=
==
==
===
=
=
==
(2.12)
Dezvoltnd produsele vectoriale de mai sus se obin urmtoarele forme
kxtqy
tpjz
tp
xtriy
tr
ztq
zyxtr
tq
tp
kjir
t
iiiiii
iii
i
+
+
=
=
=
-
Capitolul 2. Simularea manevrabilitii navei _______________________________________________________________________________________________
17
( )( )( ) kz
tqy
tp
xyxtr
jytr
ztp
xzxtq
ixtr
ztqyzy
tp
xtqy
tp
ztp
xtry
tr
ztq
zyxkji
rt
r
iiiii
iiiii
iiiii
iiiiii
iiiii
+
+
+
+
+
+
+
+
+
+
=
=
=
22
22
22
( ) ( ) ( )kqupvjpwruirvqwwvu
rqpkji
v
++=
== 0
kqupvtwjpwru
tvirvqw
tu
vtv
+
+
+
+
+
=+
0
0
krvqwtuypwru
tv
xm
jqupvtw
xrvqwtu
zm
ipwrutv
zqupvtwym
qupvtwpwru
tv
rvqwtu
mzmymxkji
vtv
rm
GG
GG
GG
GGGG
+
+
+
+
+
+
+
+
+
+
=
=
+
+
+
=
+
00
-
Manevrabilitatea navei _______________________________________________________________________________________________
18
( ) ( ) ( )[ ]( ) ( )[ ]( ) ( )[ ]kzqpqypxr
jyprpxrzqixrqrzqypr
iii
iii
iiii
22
22
22
+++
++++
+++=
( )[ ] ( ) ( ) ( ) ( )[ ]( ) ( ) ( ) ( )[ ]( ) ( ) ( ) ( )[ ]
( ) ( )[ ]( ) ( )[ ]( ) ( )[ ] .2222
2222
2222
2222
2222
2222
kyxqpzqrxzpryyxpqjxzrpzpqyyrqxzxrpizyrqyprxzpqxzyqr
kyxrqrzqypyyxprpxrzqxjzxqpqypxrxzxrqrzqypz
izyprpxrzqzzyqpqypxryrr
iiiiiiii
iiiiiiii
iiiiiiii
iiiiiiiiii
iiiiiiiiii
iiiiiiiiiiii
+++
++++
+++=
=++++++
+++++++
++++++=
n continuare, se definete matricea momentelor de inerie mecanice
zzzyzx
yzyyyx
xzxyxx
III
III
III
I =
(2.13)
n care
( )( )( )22
1
22
1
22
1
ii
N
iizz
ii
N
iiyy
ii
N
iixx
yxmI
zxmI
zymI
+=
+=
+=
=
=
=
.
1
1
1
=
=
=
==
==
==
N
iiiizyyz
N
iiiizxxz
N
iiiiyxxy
zymII
zxmII
yxmII
innd cont de expresiile (2.13) se obin urmtoarele dezvoltri echivalente
-
Capitolul 2. Simularea manevrabilitii navei _______________________________________________________________________________________________
19
( )( )( )
.
22
1
22
1
22
11
kItrI
tqI
tp
jItrI
tqI
tp
iItrI
tqI
tp
kztqy
tp
xyxtr
m
jytr
ztp
xzxtq
m
ixtr
ztqyzy
tp
mrt
rm
zzzyzx
yzyyyx
xzxyxx
iiiii
N
ii
iiiii
N
ii
iiiii
N
iii
N
iii
+
+
=
+
+
+
=
+
+
+
=
=
+
+
+
+
+
+
+
+
+
+
=
=
=
==
=
N
iiirm
1( )[ ] = ir
=
+++=N
iiiiiiiiii izyrqyprxzpqxzyqrm
1
2222 )]()[(
=
=
++++
++++
N
iiiiiiiiii
N
iiiiiiiiii
kyxqpzqrxzpryyxpqm
jxzrpzpqyyrqxzxrpm
1
2222
1
2222
)]()[(
)]()[(
.)]()[()]()[()]()[(
22
22
22
kIIqpqrIprIIqp
jIIrppqIrqIIpriIIrqprIpqIIrq
xxyyxzyzxy
zzxxyzxyxz
yyzzxyxzyz
+++
++++
+++=
Membrul stng al ecuaiei (2.11) reprezint momentul total care acioneaz asupra corpului, avnd componentele K, M, N
( ) .1
kNjMiKFrMN
iiii ++=+
=
(2.14)
Cu notaiile de mai sus, se obin cele trei ecuaii ale micrii corpului, rezultate prin aplicarea teoremei momentului cinetic
-
Manevrabilitatea navei _______________________________________________________________________________________________
20
( ) ( )
+
+
+
++++
+
+
+
=
pwrut
vzqupv
t
wym
prIpqIIrqIIrq
It
rIt
qIt
pK
GG
xyxzyzyyzz
xzxyxx
22
(2.15)
( ) ( )
+
+
+
++++
+
+
+
=
qupvt
wxrvqw
t
uzm
qpIqrIIprIIpr
It
rIt
qIt
pM
GG
yzxyxzzzxx
yzyyyx
22
( ) ( ).
22
+
+
+
++++
+
+
+
=
rvqwtuypwru
tv
xm
qrIprIIqpIIpq
ItrI
tqI
tpN
GG
xzyzxyxxyy
zzzyzx
Relaiile (2.10) i (2.15) reprezint sistemul ecuaiilor difereniale ale micrii corpului rigid cu ase grade de libertate, n cazul n care originea sistemului de axe nu este n centrul de greutate al corpului. n ipoteza neglijrii momentelor de inerie centrifugale, ecuaiile (2.15) se simplific
( )
+
+
+
++
=
pwrutv
zqupvtwym
IIrqItpK
GG
yyzzxx
( )
+
+
+
++
=
qupvtw
xrvqwtu
zm
IIprItqM
GG
zzxxyy
(2.16)
-
Capitolul 2. Simularea manevrabilitii navei _______________________________________________________________________________________________
21
( ).
+
+
+
++
=
rvqwtuypwru
tv
xm
IIpqItrN
GG
xxyyzz
Termenii care conin coordonatele centrului de greutate (xG, yG, zG) reprezint momentele rezultate din aciunea forelor de reacie, de natur inerial, cauzate de acceleraia centrului de greutate. Dac originea sistemului de axe de coordonate este fixat chiar n centrul de greutate al corpului, atunci 0=Gr i sistemul ecuaiilor difereniale ale micrii corpului (2.10) i (2.16) capt forma simplificat
+
=
+
=
+
=
qupvt
wmZ
pwrut
vmY
rvqwt
umX
(2.17)
( )( )
( ).xxyyzzzzzzyy
yyzzxx
IIpqItrN
IIprItqM
IIrqItpK
+
=
+
=
+
=
(2.18)
n cadrul studiului manevrabilitii navelor de suprafa, micrile principale care trebuiesc luate n considerare sunt micrile din planul orizontal. Micrile verticale ale navei pot fi neglijate. Totui, micarea de ruliu poate fi cuplat cu micrile din planul orizontal, mai ales n cazul navelor rapide, care dezvolt o nclinare transversal apreciabil n cursul manevrei de giraie. n aceast situaie, dac se alege originea sistemului de axe de coordonate n planul de simetrie al navei (n planul diametral), atunci 0=Gy , 0=w , 0=q i sistemul ecuaiilor difereniale de micare (2.10) i (2.16) devine
++
=
+
=
GG
GG
zdtdp
xdtdr
rutv
mY
przxrrvtu
mX 2
(2.19)
-
Manevrabilitatea navei _______________________________________________________________________________________________
22
.
+
+
=
+
=
rut
vmxI
t
rN
rut
vmzI
t
pK
Gzz
Gxx
(2.20)
n continuare, n ipoteza neglijrii micrii de ruliu (p = 0), sistemul ecuaiilor difereniale ale micrii (2.19) i (2.20) capt forma simplificat
++
=
=
G
G
xdtdr
rutv
mY
xrrvtu
mX 2
(2.21)
+
+
= rut
vmxI
t
rN Gzz .
(2.22)
2.1.2 FORE I MOMENTE HIDRODINAMICE PE CORPUL NAVEI
n cadrul acestui paragraf sunt analizate forele i momentele hidrodinamice exercitate de ap asupra navei care execut o micare de manevrabilitate impus. Torsorul hidrodinamic depinde de numeroi factori, cum ar fi:
- proprietile corpului (dimensiunile principale, geometria formelor, masa, poziia centrului de greutate, momentele de inerie mecanice);
- mrimile fizice caracteristice micrii corpului (vitezele liniare i unghiulare, amplitudinile i acceleraiile micrilor);
- proprietile fluidului (densitatea, vscozitatea, tensiunile superficiale, presiunea);
- parametrii suprafeei de control (bandarea crmei, viteza i acceleraia bandrii).
Dintre acetia, cei mai importani factori sunt mrimile fizice caracteristice micrii corpului i densitatea apei. Deoarece torsorul hidrodinamic este o funcie cu mai multe variabile, pentru o exprimare matematic mai simpl se utilizeaz dezvoltarea n serie Taylor. Astfel, pentru o funcie de o singur variabil, dezvoltarea n serie Taylor (n jurul unei valori x0) este dat de expresia
( ) ( ) ( ) ( ) ( ) ( ) ...!2
1 202
02
00
0 +
+
+= xx
x
xfxx
x
xfxfxf . (2.23)
-
Capitolul 2. Simularea manevrabilitii navei _______________________________________________________________________________________________
23
Introducnd notaiile ( )
( )2
02
0
x
xffx
xff
xx
x
=
=
relaia (2.23) devine ( ) ( ) ( ) ( ) ...
!21 2
000 +++= xxfxxfxfxf xxx
iar n cazul 00 =x se obine
( ) ( ) ...!2
10 2 +++= xfxffxf xxx .
Pentru o funcie de dou variabile, rezult n mod analog urmtoarea expresie ( ) ( ) ( ) ( )
( ) ( ) ( )( )[ ] ....2!2
1,,
002
02
0
0000
++++
+++=
yyxxfyyfxxf
yyfxxfyxfyxf
xyyyxx
yx
iar n cazul 000 == yx se obine
( ) ( ) ( ) ...2!2
10,0, 22 ++++++= xyfyfxfyfxffyxf xyyyxxyx .
Dac dezvoltarea n serie Taylor se limiteaz la termenii de ordinul nti, atunci se obin formele liniarizate ale dezvoltrii. Adoptnd micarea rectilinie cu vitez constant ( )Uu = drept condiie iniial de echilibru a navei i eliminnd termenii de ordin superior (r2 i rv) ai sistemului ecuaiilor difereniale de micare (2.21) i (2.22), se obin urmtoarele forme liniarizate ale micrii navei n plan orizontal [23]
( )( ).rUvmxrIrNvNrNvNN
xrrUvmrYvYrYvYYumuXuXX
Gzzrvrve
Grvrve
uue
++=++++
++=++++
=++
&&&&
&&&&
&&
&&
&&
&
(2.24)
unde eX , eY , eN sunt componentele torsorului exterior eF (generat de aciunea propulsorului i a organului de guvernare). Coeficienii uX , uX & , vY , rY , vY& , rY& ,
vN , rN , vN & i rN & caracterizeaz aciunea mediului fluid asupra carenei navei i se numesc coeficieni hidrodinamici sau derivate hidrodinamice.
-
Manevrabilitatea navei _______________________________________________________________________________________________
24
2.1.3 SOLUIA SISTEMULUI ECUAIILOR LINIARE DE MICARE
Sistemul (2.24) poate fi scris i sub form echivalent ( )( ) ( ) ( )( ) ( ) ( ) .eGrvrzzvG
ervrGv
euu
NrUmxNvNrNIvNmxYrmUYvYrYmxvYm
XuXuXm
+=+
++=+
+=
&&
&&
&
&&
&&
&
(2.25)
Observm c prima ecuaie (care caracterizeaz micarea navei pe direcie longitudinal) este decuplat de ecuaiile micrii de deriv lateral i de rotaie n plan orizontal. Notnd cu { }rvs ,= vectorul de stare de componente v i r, sistemul ecuaiilor cuplate (de deriv lateral i de rotaie n plan orizontal) poate fi scris sub forma matricial [23]
e
Grv
rv
rzzvG
rGv FsUmxNN
mUYYs
NINmxYmxYm
+
=
&
&&
&&
.
(2.26)
Notnd matricea din membrul stng cu M i pe cea din membrul drept cu P, relaia (2.26) devine
eFsPsM += &r
. (2.27) Matricea M este matricea maselor i momentelor de inerie mecanice ale navei, care este totdeauna inversabil. Dac se noteaz cu 1M inversa matricei M i se amplific ecuaia (2.27) cu 1M , se obin formele echivalente
eFMsPMs11 +=&
r
(2.28)
eFBsAs +=&r
(2.29) n care
.
1
1
=
=
MBPMA
(2.29a)
Matricea A caracterizeaz dinamica intern a sistemului, iar matricea P este matricea de amortizare potenial. La prima vedere, sistemul ecuaiilor cuplate (de deriv lateral i de rotaie n plan orizontal) are patru necunoscute: v , r , v& i r& . Dac se obin soluiile necunoscutelor v i r ca funcii de timp, atunci prin derivare se determin implicit v& i r& . Rezult c variabilele v& i r& sunt dependente, iar sistemul celor dou ecuaii cuplate are dou necunoscute independente (v i r). Dac se obin soluiile necunoscutelor v& i r& ca funcii de timp, atunci prin integrare rezult variabilele dependente v i r.
-
Capitolul 2. Simularea manevrabilitii navei _______________________________________________________________________________________________
25
2.1.4 STABILITATEA DIRECIONAL A NAVEI
Se consider o nav aflat n micare rectilinie i uniform, asupra creia acioneaz o perturbaie infinit mic care determin o uoar modificare a traiectoriei. Dac nava revine la condiia iniial de echilibru dup ncetarea aciunii perturbaiei externe, atunci este stabil la drum, meninndu-i direcia de deplasare iniial. O nav instabil dinamic n micarea rectilinie i uniform de avans, nu-i poate menine direcia iniial de navigaie dac nu este acionat sistemul de guvernare. Studiul stabilitii direcionale a navei se poate efectua pe baza analizei stabilitii soluiilor sistemului ecuaiilor de micare rectilinie i uniform, n absena oricrei perturbaii externe (forma omogen a sistemului 2.29)
sAs =&r (2.30) obinndu-se astfel criteriile de stabilitate direcional. Facem observaia c o nav cu stabilitate de drum excesiv pierde din performanele de manevrabilitate propriu-zise (de giraie). Pe de alt parte, o nav instabil nu pstreaz drumul drept i trebuie acionat n mod repetat asupra sistemului de guvernare pentru pstrarea traiectoriei iniiale. n consecin, este necesar s se realizeze un compromis ntre calitile de stabilitate direcional i manevrabilitate propriu-zis. S considerm urmtoarea form echivalent a sistemului omogen (2.30)
2221212
2121111
sAsAssAsAs
+=
+=
&
& (2.31)
unde vs =1 i rs =2 . Din prima ecuaie a sistemului (2.31) separm necunoscuta s2
12
11112 A
sAss
=
&.
Apoi, se calculeaz derivata 2s&
12
11112 A
sAss
&&&&
= .
Se nlocuiesc necunoscutele 2s i 2s& n cea de-a doua ecuaie din sistemul (2.31) i se obin formele echivalente
12
111122121
12
1111
AsAsAsA
AsAs
+= &&&&
( ) ( ) 0121122211122111 =++ sAAAAsAAs &&& . (2.32) Condiia necesar i suficient pentru ca soluia ecuaiei difereniale omogene (2.32) s fie stabil este aceea ca fiecare coeficient al ecuaiei s fie pozitiv
-
Manevrabilitatea navei _______________________________________________________________________________________________
26
.00
21122211
2211
>
>
AAAAAA
(2.33)
n continuare, se determin elementele matricei A, innd cont de relaia (2.29a). Mai nti se calculeaz inversa matricei M, utiliznd expresia
= M
MM
det11
. (2.34) Determinantul construit cu elementele matricei M are valoarea
( )( ) ( )( ).det
vGrGrzzv
rzzvG
rGv
NmxYmxNIYmNINmx
YmxYmM
&&&&
&&
&&
=
=
=
(2.35)
Transpusa matricei M are forma
=
rzzrG
vGvt
NIYmxNmxYm
M&&
&&
(2.36)
iar matricea M (construit cu complemenii algebrici ai matricei transpuse) devine ( )
( )
=
vvG
rGrzz
YmNmxYmxNI
M&&
&&
. (2.37)
innd cont de relaiile (2.34) i (2.37) se obine urmtoarea expresie a matricei inverse 1M
( )( )
=
vvG
rGrzz
YmNmxYmxNI
MM
&&
&&
det11
. (2.38)
n continuare, se calculeaz produsul matricelor 1M i P ( )
( )( ) ( ) ( )( ) ( )( )
( ) ( ) ( )( ) ( )( )
++
=
=
==
UmxNYmmUYNmxNYmYNmxUmxNYmxmUYNINYmxYNI
M
UmxNNmUYY
YmNmxYmxNI
MPMA
GrvrvGvvvvG
GrrGrrzzvrGvrzz
Grv
rv
vvG
rGrzz
&&&&
&&&&
&&
&&
det1
det11
pentru a determina elementele ( )2,1, =jiAij ale matricei A, prezentate separat cu relaiile de mai jos
-
Capitolul 2. Simularea manevrabilitii navei _______________________________________________________________________________________________
27
( ) ( )( )( ) ( )( )
( )( ) ( )( )( )( ) ( )( )
( ) ( )( )( ) ( )( )
( )( ) ( )( )( )( ) ( )( ) .22
21
12
11
vGrGrzzv
rGvrGv
vGrGrzzv
vvvGv
vGrGrzzv
rGGrrrzz
vGrGrzzv
vGrvrzz
NmxYmxNIYmNUmxYmYmUmxNA
NmxYmxNIYmNYmYmxNA
NmxYmxNIYmNUmxmxYYmUNI
A
NmxYmxNIYmNmxYYNI
A
&&&&
&&
&&&&
&&
&&&&
&&
&&&&
&&
=
+=
=
+=
(2.39)
S analizm condiiile de stabilitate (2.33) innd cont de expresiile (2.39) ale coeficienilor ( )2,1,, =jiAij . Se introduc urmtoarele ipoteze simplificatoare:
- originea sistemului de axe se afl n centrul de greutate ( )0=Gx ; - derivatele hidrodinamice vN , vN & , rY i rY& au valori foarte mici n
comparaie cu celelalte derivate; - termenul vY& este de ordinul de mrime al masei navei, m; - termenul zzr IN &
i expresiile (2.39) se pot scrie sub urmtoarele forme ( )
( )( )( )( )
( )( )( )
( )( )( )
( )( ).22
21
12
11
rzzv
rv
rzzv
vvvv
rzzv
rrrrzz
rzzv
rzzv
NIYmNYmA
NIYmNYmYNA
NIYmNYYmUNIA
NIYmNIYA
&&
&
&&
&&
&&
&&
&&
&
=
+=
+=
=
(2.40)
innd cont de faptul c derivatele hidrodinamice vY i rN sunt totdeauna negative, iar factorii ( )vYm & i ( )rzz NI & sunt pozitivi, rezult c
0
0
22
11
++
rzzv
vvvvrrrrzz
rzzv
vrrzzv
NIYmNYmYNNYYmUNI
NIYmYmNNIY
&&
&&&&
&&
&&
Dar
00
00
00
>
>
+= rvGrv YmUNUmxNYC . (2.42) Deplasnd abscisa centrului de greutate spre prova, stabilitatea direcional se mbuntete, deoarece derivatele vY i rN sunt negative.
2.1.5 RSPUNSUL NAVEI LA ACIUNEA FORELOR I MOMENTELOR DE CONTROL
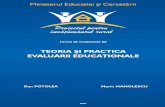
Sistemele de guvernare dezvolt fore i momente pentru controlul traiectoriei navei. Dac ne referim la crm ca principal organ de guvernare, prin bandarea crmei (cu unghiul ) n acelai sens cu sensul pozitiv al unghiului , de rotire a navei n plan orizontal (fig. 2.1), va rezulta o rotire a navei n sens negativ i o foarte mic micare de translaie lateral n sensul pozitiv al axei y.
-
Capitolul 2. Simularea manevrabilitii navei _______________________________________________________________________________________________
29
Fig. 2.1 Sisteme de axe de coordonate
n fig. 2.1 sistemul mobil de axe 0xyz este legat de corpul navei, iar sistemul de axe 00x0y0z0 este fixat n spaiu. Dac centrul de greutate al navei coincide cu originea sistemului mobil de axe 0, atunci vectorul vitez Ov este tangent la traiectoria navei n punctul 0. Unghiul de rotire se mai numete unghi de cap. Unghiul dintre direcia vectorului vitez Ov , tangent la traiectoria navei i planul diametral al navei (materializat prin axa 0x) se numete unghi de deriv (sau unghi de atac) i se noteaz cu . n continuare, componentele torsorului exterior eF (generat de bandarea crmei) pot fi scrise sub forma
NNYY
e
e
=
=
(2.43)
n ipoteza neglijrii efectelor produse de componentele& i&& [3], unde Y i N reprezint derivatele hidrodinamice ale bandrii crmei. n momentul iniial al bandrii crmei, vectorul de stare { }rvs ,= este nul, termenii de acceleraie care depind de componentele vectorului { }rvs &&&r ,= sunt dominani, iar sistemul ecuaiilor cuplate (2.26) se poate scrie sub forma
=
NY
r
v
NINmxYmxYm
rzzvG
rGv
&
&
&&
&&
. (2.44)
-
Manevrabilitatea navei _______________________________________________________________________________________________
30
Mrimile rY& i Gmx din prima linie matricial pot fi neglijate ntr-o prim aproximaie i se obine
( )vYm
Yv
&
&
0 . (2.45)
Cum numitorul vYm & este pozitiv, rezult c nava va avea la momentul iniial o micare de translaie lateral n sensul pozitiv al axei y. Micarea iniial de rotire a navei n plan orizontal va avea loc n sensul negativ al unghiului deoarece derivata N este negativ, iar numitorul rzz NI & este pozitiv
( )rzz NI
Nr
&
&
0 . (2.46)
Pentru a obine forma simplificat de mai sus s-au neglijat mrimile vN & i Gmx de pe cea de-a doua linie matricial. Faza iniial a bandrii suprafeei de control este urmat de regimul tranzitoriu, n care vectorii de stare sunt mrimi dependente de timp i apoi de regimul stabilizat de micare, n care acceleraiile micrii navei sunt nule. n consecin, n regimul stabilizat sistemul ecuaiilor cuplate (2.26) devine
0=
+
NY
r
v
UmxNNmUYY
Grv
rv. (2.47)
Sistemul poate fi scris i sub forma 0=+ eFsP (2.48)
iar soluia s devine eFPs =
1. (2.49)
Inversa matricei P se determin cu relaia
= PP
Pdet
11. (2.50)
Determinantul construit cu elementele matricei P are valoare
( ) ( ) CYmUNUmxNYUmxNN
mUYYP
rvGrv
Grv
rv
=+=
=
=det. (2.51)
Transpusa matricei P are forma
=
UmxNmUYNY
PGrr
vvt (2.52)
iar matricea P devine
-
Capitolul 2. Simularea manevrabilitii navei _______________________________________________________________________________________________
31
( )
=
vv
rGr
YNmUYUmxN
P . (2.53)
innd cont de relaiile (2.50) i (2.53) se obine urmtoarea expresie a matricei inverse 1P
( )
=
vv
rGr
YNmUYUmxN
CP 11 . (2.54)
nlocuind relaia (2.54) n (2.49) se obine ( )
=
NY
YNmUYUmxN
Crv
vv
rGr1
i componentele vectorului de stare { }rvs ,= devin ( ) ( )[ ] NmUYYNUmxCv rrG +=
( ) NYYNCr vv = . (2.55)
Neglijnd produsul YN v , viteza unghiular de rotaie stabilizat devine
NYC
r v= . (2.56)
Dac nava este stabil la drum ( )0>C atunci 0
-
Manevrabilitatea navei _______________________________________________________________________________________________
32
Aceast analiz este valabil n condiia acceptrii ipotezelor modelului liniar de manevrabilitate, adic la unghiuri mici de bandare a crmei i valori reduse ale vitezei unghiulare de rotaie r . Un parametru important al manevrabilitii navei este unghiul de deriv (fig. 2.1). Avnd n vedere relaia de definiie a unghiului de deriv ([3], [6])
tgUv = (2.59) n ipoteza unghiurilor mici de deriv ( ) tg rezult [3]
( ) ( )[ ] NmUYYNUmxUCUv
rrG +== . (2.60) Mrirea unghiului de bandare a crmei conduce la creterea unghiului de deriv. Manevrele realizate la unghiuri mari de bandare a crmei necesit considerarea termenilor hidrodinamici neliniari i a componentelor ineriale neliniare. Studiul traiectoriei navei la unghiuri mari de bandare a crmei se realizeaz cu ajutorul modelelor hidrodinamice neliniare.
2.1.6 SOLUIA SISTEMULUI ECUAIILOR NELINIARE DE MICARE
Pentru a obine prognoze realiste ale performanelor de manevrabilitate ale navei se utilizeaz modele matematice neliniare, care includ termeni de ordin superior ai dezvoltrilor n serie Taylor pentru componentele torsorului hidrodinamic [1]. Astfel, dezvoltarea n serie Taylor (incluznd termenii de ordinul III) pentru forele hidrodinamice care acioneaz pe direcia longitudinal a navei se poate scrie sub forma
( )( )(
).6...663...33...
!31
2...22!2
1
222333
222
rvXuuvXuvrX
rXruXvuXXvXuX
rXurXuvXXvXuX
XrXvXuXrXvXuXXX
rvuuvuvr
ruuruuvvvvuuu
ruruvvvuu
rvurvue
&&&
&
&
&&&
&&&
&
&
&&&
++++
+++++++++
+++++++++
++++++++=
(2.61)
n mod analog, se pot obine dezvoltri ale forelor hidrodinamice laterale Y i ale momentelor de rotaie n plan orizontal N . Forele laterale exterioare asimetrice eY (generate de aciunea propulsorului i a organului de guvernare) pot fi considerate funcii dependente de viteza navei i n consecin, modelul matematic va include derivate hidrodinamice de forma 'uY i
'
uuY . n mod analog vor fi luate n consideraie i derivatele de forma 'uN i
'
uuN , datorate momentelor exterioare de rotaie n plan orizontal.
-
Capitolul 2. Simularea manevrabilitii navei _______________________________________________________________________________________________
33
Forma ecuaiilor neliniare se simplific, inndu-se cont de observaiile lui Abkowitz [21]: termenii de acceleraie de ordin superior pot fi neglijai, termenii cuplai dintre parametrii de vitez i acceleraie sunt neglijabil de mici, iar pentru corpuri simetrice 0======== uuuuuuuuuuuuuu NNNNYYYY && .
n aceste condiii, forma neliniar a modelului manevrabilitii navei, utilizat de Strom-Tejsen, are n vedere ecuaiile de mai jos [21]
( ) ( ),,,1 rvufXuXuXm euu ++= && ( ) ( ) ( ) ( ),,,2 rvufYrmUYvYrYmxvYm ervrGv +++=+ && &&
( ) ( ) ( ) ( ),,,3 rvufNrUmxNvNrNIvNmx eGrvrzzvG ++=+ && && (2.62)
n care,
( ) ( )( )
( ) ( )urXuvXvruXuXurXuvXuXvrmXrXvX
rmxXXvXuXrvuf
uruvvruurruvvu
uuuvrrv
Grrvvuu
++++++
++++++
+
++++=
222
3
22221
21
61
21
21
,,,
( ) ( )( )( )( )
vrYuYruYvuYrY
rYvYvYrvYvrY
YrYvY
uYruYvuYYuYuYrvuf
vruuruuvuurr
rvvvrvvvrr
rrrvvv
uruvuuuu
+++++
++++++
++++
++++++=
2222
22222
333
2''2
212161
,,,
( ) ( )( )( )( ) .
212161
,,,
2222
22222
333
2''3
vrNuNruNvuNrN
rNvNvNrvNvrN
NrNvN
uNruNvuNNuNuNrvuf
vruuruuvuurr
rvvvrvvvrr
rrrvvv
uruvuuuu
+++++
++++++
++++
++++++=
(2.63)
-
Manevrabilitatea navei _______________________________________________________________________________________________
34
Prezena funciilor ( ),,, rvuf i , pentru 3...1=i , din cadrul sistemului neliniar (2.62) constituie elementul distinctiv n comparaie cu forma (2.25) a sistemului ecuaiilor liniare de micare. Introducnd notaiile
( ) ( ) ,,,,,, 1'1 rvufXuXrvuf eu ++= ( ) ( ) ( ) ,,,,,, 2'2 rvufYrmUYvYrvuf erv +++=
( ) ( ) ( ) ,,,,,, 3'3 rvufNrUmxNvNrvuf eGrv ++= (2.64)
sistemul ecuaiilor neliniare (2.62) capt forma echivalent ( ) ( ),,,'1 rvufuXm u = &&
( ) ( ) ( ),,,'2 rvufrYmxvYm rGv =+ && && ( ) ( ) ( ).,,,'3 rvufrNIvNmx rzzvG =+ && &&
(2.65)
Sistemul (2.65) poate fi rezolvat n raport cu acceleraiile u& , v& i r& . Astfel, pentru decuplarea ultimelor dou ecuaii ale sistemului (2.65) se calculeaz r& din ultima ecuaie
( ) ( )( )rzz
vG
NIvNmxrvuf
r&
&&
&
=
,,,'3 (2.66)
i se nlocuiete n cea de-a doua ecuaie, obinndu-se
( ) ( ) ( ) ( )[ ]( ) ( )
,,,
,,,'
2
'
3 rvufNI
vNmxrvufYmxvYm
rzz
vGrGv =
+&
&&
&
&& .
Prin transformri echivalente, ultima ecuaie devine succesiv ( )( ) ( ) ( ) ( )( )
( ) ( )
,,,
,,,
'
2
'
3
rvufNIvNmxYmxrvufYmxvNIYm
rzz
vGrGrGrzzv
&
&&&&&&&
=
=+
( )( ) ( )( )[ ]( ) ( ) ( ) ( ) ,,,,,, '3'2 rvufYmxrvufNI
NmxYmxNIYmv
rGrzz
vGrGrzzv
&&
&&&&&
=
=
( ) ( ) ( ) ( )( )( ) ( )( )vGrGrzzv
rGrzz
NmxYmxNIYmrvufYmxrvufNI
v&&&&
&&&
=
,,,,,, '3'2.
(2.67)
nlocuind soluia (2.67) n ecuaia (2.66) se obine succesiv
-
Capitolul 2. Simularea manevrabilitii navei _______________________________________________________________________________________________
35
( ) ( ) ( ) ( ) ( ) ( )( )( ) ( )( )( )rzz
vGrGrzzv
rGrzzvG
NINmxYmxNIYm
rvufYmxrvufNINmxrvufr
&
&&&&
&&
&
&
=
,,,,,,,,,'
3'
2'3
( )( ) ( ) ( )( ) ( )( )( ) ( )( )[ ]( )rzzvGrGrzzv
rzzvGrzzv
NINmxYmxNIYmrvufNINmxrvufNIYm
r&&&&&
&&&&&
=
,,,,,, '2'3
( ) ( ) ( ) ( )( )( ) ( )( )vGrGrzzv
vGv
NmxYmxNIYmrvufNmxrvufYm
r&&&&
&&&
=
,,,,,, '2'3. (2.68)
Soluiile sistemului ecuaiilor neliniare (2.65) ale micrii navei n plan orizontal sunt grupate mai jos
( )( )uXm
rvufu
&
&
=
,,,'1
( ) ( ) ( ) ( )( )( ) ( )( )vGrGrzzv
rGrzz
NmxYmxNIYmrvufYmxrvufNI
v&&&&
&&&
=
,,,,,, '3'2
( ) ( ) ( ) ( )( )( ) ( )( )vGrGrzzv
vGv
NmxYmxNIYmrvufNmxrvufYm
r&&&&
&&&
=
,,,,,, '2'3.
(2.69)
n principiu, modelul matematic neliniar al manevrabilitii navei poate fi redus la un set de trei ecuaii difereniale de ordinul nti, care se rezolv prin metode numerice aproximative
[ ][ ][ ])(),(),()(,
)(),(),()(,
)(),(),()(,
"
3
"
2
"
1
ttrtvtutfdtdr
ttrtvtutfdtdv
ttrtvtutfdtdu
=
=
=
(2.70)
n care ( )
( )uXmrvuff&
=
,,,'1"1
( ) ( ) ( ) ( )( )( ) ( )( )vGrGrzzv
rGrzz
NmxYmxNIYmrvufYmxrvufNIf&&&&
&&
=
,,,,,, '3'2"2
( ) ( ) ( ) ( )( )( ) ( )( )vGrGrzzv
vGv
NmxYmxNIYmrvufNmxrvufYmf&&&&
&&
=
,,,,,, '2'3"3 .
-
Manevrabilitatea navei _______________________________________________________________________________________________
36
Soluia numeric a vitezelor necunoscute u, v i r la pasul de timp ( )tt + se obine cunoscnd valorile u, v i r la pasul de timp t
( )( )( ) ).()(
)()()()(
trttrttr
tvttvttv
tuttuttu
&
&
&
+=++=++=+
(2.71)
Formele (2.71) rezult prin dezvoltarea n serie Taylor a funciilor u, v i r, pe baza termenilor de ordinul unu. Aceast metod este adecvat pentru ecuaiile difereniale (2.70) deoarece acceleraiile u& , v& i r& variaz lent n timp (masa i ineria navei este mare n comparaie cu forele i momentele produse de suprafeele de control). Pentru calcularea soluiilor (2.71) trebuie cunoscute valorile funciilor u(0), v(0) i r(0) la pasul de timp t = 0. Cunoscnd valorile vitezelor u(t), v(t) i r(t) la fiecare pas de timp se pot determina - valorile instantanee ale unghiului de cap
( ) )()( trtttt +=+ (2.72) - coordonatele traiectoriei navei fa de sistemul fix de axe O0x0y0z0 ( ) [ ]
( ) [ ])(cos)()(sin)()()(sin)()(cos)()(
00
00
ttvttuttyttyttvttuttxttx
++=++=+
(2.73)
- raza instantanee a traiectoriei navei
)()()()(
22
tr
tvtutR
+= (2.74)
- valoarea instantanee a unghiului de deriv
Utv
arctgt )()( = . (2.75) Acurateea soluiilor depinde de valoarea pasului de timp t . Rezolvarea practic a modelelor matematice de manevrabilitate necesit cunoaterea derivatelor hidrodinamice. Acestea pot fi determinate att pe cale teoretic, ct i experimental.
2.2. PROGNOZA TEORETIC A DERIVATELOR HIDRODINAMICE
Ecuaiile liniare (2.25) care descriu micrile cuplate (de translaie lateral i de rotaie n jurul axei verticale) pot fi prezentate sub forma echivalent [23]
( ) ( ) ( )( ) ( ) ( ) .evvGrGrzz
erGrvv
NvNvNmxrNUmxrNIYrYmxrYmUvYvYm
=++
=++
&&
&&
&&
&&
(2.76)
Ecuaiile (2.76) pot fi adimensionalizate cu ajutorul urmtoarelor mrimi fizice viteza U, lungimea navei L i densitatea fluidului .
-
Capitolul 2. Simularea manevrabilitii navei _______________________________________________________________________________________________
37
Urmnd o modalitatea standard de lucru, mai nti se construiesc mrimile adimensionale (notate cu indice prim) prezentate mai jos
( )
( ) .//
///
2'
'
22'
'
LUr
r
LUr
r
LUv
ULLv
v
Uv
v
&&
&&&
=
=
==
=
(2.77)
Aplicnd o procedur similar, se definesc urmtoarele mrimi adimensionale
( ) 2223'
'
523
'
3
21
/21
1'
21
21
21'
LU
Y
LUL
YY
UUU
Lx
x
L
I
LL
II
L
mm
ee
e
GG
zzzzzz
=
=
==
=
=
=
=
( ) 3222'
222
'
21
//21
21
/21
L
Y
LULU
YY
UL
Y
ULU
YY
vvv
vv
v
&&
&=
=
=
=
(2.78)
-
Manevrabilitatea navei _______________________________________________________________________________________________
38
( )
( )
( )
( )
( ).
21
//21
21
//21
21
//21
21
/21
21
21
21
//21
21
//21
5232
'
432
'
4232
'
332
'
3222
'
4222
'
322
'
L
N
LULU
NN
UL
N
LULU
NN
L
N
LULU
NN
UL
N
ULU
NN
LU
N
LLU
NN
L
Y
LULU
YY
UL
Y
LULU
YY
rrr
rrr
vvv
vvv
eee
rrr
rrr
&&
&
&&
&
&&
&
=
=
=
=
=
=
=
=
=
=
=
=
=
=
(2.78)
Notm c forele au fost adimensionalizate cu 2221 LU , iar momentele cu
32
21 LU . innd cont de relaiile (2.78), ecuaiile liniare (2.76) pot fi scrise sub forma adimensional de mai jos ( ) ( ) ( )
( ) ( ) ( ) .'''''''''''''''''
'''''''
''''''
evvGGrzz
erGrvv
NvNvNxmrrNUxmrNIYrYxmrYUmvYvYm
=++
=++
&&
&&
&&
&&
(2.76a)
Derivatele hidrodinamice liniare, adimensionale, din ecuaiile de mai sus pot fi determinate teoretic cu ajutorul formulelor de regresie propuse de Clarke, Gedling i Hine [5] pentru o nav fr asiet
-
Capitolul 2. Simularea manevrabilitii navei _______________________________________________________________________________________________
39
( ) ( ) ( )[ ]( ) ( )[ ]( ) ( ) ( )[ ]( ) ( ) ( )[ ]( ) ( ) ( )[ ]( ) ( )[ ]( ) ( ) ( )[ ]( ) ( ) ( )[ ]LBTBLTN
LBTBCLTN
LTLTN
TBLBLTN
TBLBLTY
TBLBLTY
TBCLTY
LBTBCLTY
r
Br
v
v
r
r
Bv
Bv
/56,0/039,025,0//33,0/017,012/1/
/4,25,0//041,0/1,1/
/08,0/2,25,0//0033,0/67,0/
/4,01//1,5/16,01/
2'
2'
2'
2'
2'
22'
2'
22'
+=
+=
+=
=
+=
=
+=
+=
pi
pi
pi
pi
pi
pi
pi
pi
&
&
&
&
(2.79)
n care L este lungimea navei, B este limea navei, T este pescajul navei, iar CB este coeficientul bloc. n cazul navelor cu asiet, derivatele hidrodinamice liniare (adimensionale) 'vY ,
'
rY , '
vN i '
rN se multiplic cu factori de corecie. n consecin, pentru diferena de pescaje
FPAP TTt = unde TAP este pescajul n dreptul perpendicularei pupa, iar TFP este pescajul la perpendiculara prova, derivatele hidrodinamice de vitez devin
[ ]( )[ ]
( )( )[ ]( )[ ]./3,01)(
//27,01)(/8,01)(
)/(67,01)(
''
''''
''
''
TtNtNNYTtNtN
TtYtY
TtYtY
rr
vvvv
rr
vv
+=
=
+=
+=
(2.80)
Formele de mai sus se bazeaz pe rezultatele unor teste experimentale cu modele din Seria 60, pentru valori ale raportului t/T cuprinse n domeniul 6,0/2,0 Tt . Investigarea derivatelor hidrodinamice se poate efectua i pe cale experimental, prin teste specifice pe model la scar.
-
C A P I T O L U L 3
DETERMINAREA EXPERIMENTAL A DERIVATELOR HIDRODINAMICE
Relaiile de calcul pentru determinarea derivatelor hidrodinamice pot fi utilizate n stadiile iniiale de proiectare. Aproximrile teoretice ale coeficienilor hidrodinamici sunt nlocuite cu determinri experimentale mult mai realiste, realizate n faza de proiect tehnic cu ajutorul testelor pe model captiv. Acestea pot fi efectuate n dou moduri distincte:
- utilizndu-se mecanisme pentru generarea micrilor plane (P.M.M.); - cu sisteme cu bra rotitor.
3.1. TESTE CU P.M.M.
Metodologia experimental bazat pe utilizarea mecanismului de generare a micrilor plane a fost dezvoltat (pentru prima dat) la David Taylor Model Basin n S.U.A. n cadrul testelor experimentale cu model captiv, modelul este forat s execute o micare impus, precis controlat. Forele i momentele hidrodinamice care acioneaz asupra modelului experimental sunt msurate cu dinamometre specializate, iar derivatele hidrodinamice se obin prin prelucrarea rezultatelor msurtorilor.
-
Capitolul 3. Determinarea experimental a derivatelor hidrodinamice _______________________________________________________________________________________________
41
Forele i momentele hidrodinamice depind de parametrii micrii generate. Derivatele hidrodinamice dependente de un singur parametru se obin prin efectuarea testelor la valori variabile ale parametrului considerat, toi ceilali parametri fiind anulai. n cazul testelor pe model captiv cu doi parametri variabili simultan, dac forele i momentele hidrodinamice difer de rezultatul obinut prin suprapunerea efectelor independente ale parametrilor considerai, atunci diferenele exprim influena efectului cuplrii, iar derivatele hidrodinamice obinute msoar intensitatea fenomenului de cuplare a celor dou efecte. n mod similar, se pot determina derivatele hidrodinamice dependente de trei sau mai muli parametri, utilizate n modelele matematice neliniare ale manevrabilitii navei. n principiu, mecanismul de generare a micrilor n planul orizontal realizeaz o traiectorie sinusoidal a modelului experimental (fig. 3.1), tractat de-a lungul bazinului de carene cu viteza cruciorului CU . Traiectoria prezentat n fig. 3.1 corespunde unei micri pure de rotaie n planul orizontal, deoarece vectorul vitez rezultant U este tangent la traiectorie i direcia sa coincide cu urma planului diametral al navei (unghiul de deriv este nul). Pentru a obine o rotaie unghiular pur, modelul experimental este simultan deplasat cu viteza relativ RU , perpendicular pe direcia axei longitudinale a cruciorului.
Fig. 3.1 Micare sinusoidal de rotire (pur) a modelului n plan orizontal
-
Manevrabilitatea navei _______________________________________________________________________________________________
42
Deplasarea unghiular a modelului fa de axa longitudinal a bazinului de tractare (unghiul de cap) se determin cu relaia
C
R
UU
tg = . (3.1)
O soluie practic de impunere a micrii armonice n planul orizontal este reprezentat schematic n fig. 3.2. [22]. Dou mecanisme biel-manivel cuplate la un ax rigid, transform micarea de rotaie ntr-o micare de translaie periodic pe direcie perpendicular pe axa longitudinal a cruciorului. Se poate calcula unghiul de faz dintre micrile mecanismelor biel-manivel ce antreneaz punctele fixe F i A, ale modelului experimental, astfel nct s fie ndeplinit condiia de micare de rotaie unghiular, pur, n plan orizontal.
Fig. 3.2 Reprezentarea schematic a micrii generate de P.M.M. Deplasrile laterale ale punctelor F i A ( F i respectiv A ) fa de axa longitudinal a cruciorului sunt date de relaiile
-
Capitolul 3. Determinarea experimental a derivatelor hidrodinamice _______________________________________________________________________________________________
43
( )tat
tat
A
F
sin)(sin)(
=
+= (3.2)
n care a este amplitudinea micrii sinusoidale, este viteza unghiular de rotaie a mecanismelor biel-manivel, este defazajul deplasrilor laterale, iar t este timpul. Viteza relativ RU este derivata n raport cu timpul a deplasrilor laterale medii
+=
2AF
R dtdU . (3.3)
Prin transformri echivalente, obinem
( )[ ]
.
2cos
2cos
2cos
2cos2
2
coscos2
+=
=
+=
=++=
ta
ta
ttaU R
(3.4)
Unghiul de cap se determin cu relaia
dAF
2sin = (3.5)
n care d este distana de la punctele F i A la originea O a sistemului de axe, dFOAO == . Prin transformri succesive, rezult
( )[ ].
2cos
2sin
sinsin2
sin
+=
=+=
tda
ttda
(3.6)
nlocuind relaiile (3.4) i (3.6) n formula (3.1) i innd cont de aproximaia 1cos (valabil n domeniul unghiurilor mici), obinem succesiv
.
2
2cos
2cos
2cos
2sin
C
C
Ud
tg
tUa
tda
=
+=
+
(3.7)
Rezult c unghiul de faz nu are o variaie sinusoidal, depinznd de viteza unghiular de rotaie i de viteza cruciorului CU , distana d fiind constant pe modelul experimental dat. Relaia (3.7) exprim condiia realizrii micrii pure de
-
Manevrabilitatea navei _______________________________________________________________________________________________
44
rotaie unghiular n plan orizontal. Pentru valori mici ale unghiului de cap se poate utiliza aproximarea sin i n consecin relaia (3.6) devine
+=
2cos
2sin t
da
. (3.8) Viteza unghiular de rotaie a modelului experimental se determin cu expresia
+==
2sin
2sin t
da
dtd
r (3.9) iar acceleraia unghiular devine
+==
2cos
2sin
2
t
da
dtdr
r& . (3.10)
Se observ c viteza unghiular i acceleraia unghiular sunt defazate cu 90o una fa de cealalt, prima depinznd de funcia sinus, iar a doua de funcia cosinus. n mod similar, dac mecanismele biel-manivel lucreaz n faz ( 0= ), atunci planul diametral al modelului este totdeauna paralel cu axul longitudinal al cruciorului (sau bazinului de tractare), iar modelul experimental realizeaz o micare lateral pur. Elongaia, viteza i acceleraia micrii laterale se determin cu expresiile
.sin
cos
sin
2 tadtdv
v
tadtdy
v
tay
==
==
=
&
(3.11)
i n acest caz, viteza i acceleraia micrii laterale sunt defazate cu 90o una fa de cealalt. Micarea de rotaie unghiular n plan orizontal poate fi suprapus fie cu un unghi de deriv 0 , fie cu un unghi de bandare a crmei 0 . Unghiul de deriv nenul se obine modificnd lungimile braelor S1F i S2A din fig. 3.2. Efectul unghiului de deriv se obine nlocuind mrimea d cu produsul cosd n formulele (3.7), (3.8), (3.9) i (3.10). n fig. 3.3 este prezentat o schi de principiu a mecanismului de micri plane, iar n fig. 3.4 este sugerat o modalitate de cuplare a modelului navei la P.M.M. [14]. Mecanismul este construit pe un cadru suport plan, din eav rectangular. Cruciorul transversal al mecanismului se mic pe dou ine orizontale. ina inferioar are seciune circular i preia greutatea cruciorului prin intermediul a dou lagre axiale. Coloana vertical prin care se realizeaz legtura dintre model i mecanism este fixat de cruciorul transversal prin intermediul a dou lagre de alunecare i poate fi rotit cu un bra radial i un cuplaj cu roi dinate conice. Partea de jos a coloanei este
-
Capitolul 3. Determinarea experimental a derivatelor hidrodinamice _______________________________________________________________________________________________
45
prins de o grind rigid orizontal, care se fixeaz n modelul experimental. ntre grind i model sunt prevzute dou articulaii care permit libertatea micrilor modelului navei, n plan longitudinal-vertical.
Micrile armonice laterale sunt generate cu ajutorul braului pentru micri laterale, iar micrile armonice de rotaie unghiular n plan orizontal sunt realizate cu ajutorul unui bra oscilant i al unui generator tangenial.
Micrile armonice sunt controlate de un motor de curent continuu, cu turaie variabil i sunt generate prin intermediul a dou reductoare cu roi dinate, antrenate de un ax comun.
Legend: 1-cadru suport 2-crucior transversal 3-in orizontal inferioar
4-in orizontal superioar Fig. 3.3 Schema de principiu a unui mecanism de micri plane
-
Manevrabilitatea navei _______________________________________________________________________________________________
46
Fig. 3.4 Cuplarea modelului navei la P.M.M.
Modelul experimental este prins la grinda orizontal a mecanismului de micri plane prin intermediul a dou blocuri de for (prova i pupa) care cuprind dinamometrele pentru msurarea forelor i momentelor hidrodinamice (fig. 3.5 [22]). Dinamometrele au form cubic. ntre cele dou plci de transmitere a forelor sunt ncastrate patru bretele elastice, paralele. n apropierea zonei de ncastrare, pe fiecare bretea sunt lipite cte dou mrci tensometrice. Cele opt mrci tensometrice ale unui dinamometru sunt legate n serie, n punte Wheatstone.
-
Capitolul 3. Determinarea experimental a derivatelor hidrodinamice _______________________________________________________________________________________________
47
Fig. 3.5 Bloc de for cu dinamometre
-
Manevrabilitatea navei _______________________________________________________________________________________________
48
n fig. 3.6 este prezentat o vedere de ansamblu a mecanismului de micri plane construit i utilizat n bazinul de carene de la ICEPRONAV Galai.
Fig. 3.6 Vedere de ansamblu a unui mecanism de micri plane
Testele cu mecanismul de micri plane se realizeaz n dou moduri diferite de operare: static i dinamic. n cazul testelor statice, modelul este tractat cu vitez constant pe axa longitudinal a bazinului (axa 0x , fig. 3.7 [22]), fr a se impune micri de natur armonic. Testele statice se efectueaz cu modificarea unghiului de deriv i a unghiului de bandare a crmei .
n cadrul testelor statice se msoar forele i momentele hidrodinamice care acioneaz asupra modelului experimental, rezultate prin tractarea acestuia la diverse valori ale unghiului de deriv i ale unghiului de bandare a crmei.
n cazul testelor dinamice, mecanismul de micri plane impune modelului experimental urmtoarele tipuri de micri armonice, cu amplitudini prestabilite [22]:
a) micri armonice laterale pure (fig. 3.8), n care rezult viteze i acceleraii laterale nenule ( 0,0 vv & ), iar vitezele i acceleraiile unghiulare sunt nule ( 0== rr & );
-
Capitolul 3. Determinarea experimental a derivatelor hidrodinamice _______________________________________________________________________________________________
49
b) micri armonice de rotaie n plan orizontal, pure (fig. 3.9), n care rezult viteze i acceleraii unghiulare nenule ( 0,0 rr & ), iar vitezele i acceleraiile laterale sunt nule ( 0== vv & ); c) micri armonice de rotaie, cu unghi de deriv nenul ( 0 , fig. 3.10); d) micri armonice de rotaie, cu unghi de bandare a crmei nenul ( 0 , fig. 3.11).
Ultimele dou tipuri de teste dinamice sunt utilizate pentru determinarea derivatelor hidrodinamice cuplate.
Fig. 3.7 Teste statice
M.Triantafyllou i Franz S.Hoven prezint n referina [23] o modalitate de a determina derivatele hidrodinamice specifice ecuaiilor liniare care caracterizeaz micarea lateral i micarea de rotaie n plan orizontal. Se presupune c micrile armonice impuse modelului experimental de ctre cele dou mecanisme biel-manivel sunt date de relaiile
( )
+=
=
tatytaty
F
A
cos)(cos)(
(3.12)
n care a reprezint amplitudinea micrii armonice, este pulsaia, t este timpul, iar este defazajul micrilor. Forele hidrodinamice laterale, de natur armonic, sunt scrise sub forma
( ) ( )( ) ( )FFFFFF
AAAAAA
ttYtYtY
ttYtYtY
sinsincoscoscos)(sinsincoscoscos)(
00
00
=+=
=+= (3.13)
unde A i F sunt defazajele forelor hidrodinamice pupa i respectiv prova, fa de micrile impuse.
-
Manevrabilitatea navei _______________________________________________________________________________________________
50
Fig. 3.8 Micri armonice laterale pure
Fig. 3.9 Micri armonice de rotaie pure
Fig. 3.10 Micri armonice de rotaie, cu unghi de deriv nenul ( )0
Fig. 3.11 Micri armonice de rotaie, cu unghi de bandare a crmei nenul ( )0
-
Capitolul 3. Determinarea experimental a derivatelor hidrodinamice _______________________________________________________________________________________________
51
Sistemul ecuaiilor liniare de micare n plan orizontal (2.25) poate fi scris i sub forma echivalent
( ) ( ) ( )( ) ( ) ( ) ( )dYYvNvNmxrNUmxrNI
YYrYmxrYmUvYvYm
AFvvGrGrzz
AFrGrvv
=++
+=++
&&
&&
&&
&&
(3.14)
unde mrimea d reprezint distana de la punctele de transmitere a micrii armonice (de pe model) la originea sistemului de axe (fig. 3.2). Viteza micrii laterale a modelului se calculeaz cu relaia
( )[ ]( )
( )[ ]
sincoscos1sin2
cossincossinsin2
sinsin2
21
tta
ttta
tta
dtdy
dtdy
v FA
++=
=++=
=++=
=
+=
(3.15)
iar acceleraia micrii laterale devine
( )[ ] sinsincos1cos2
2
tta
dtdv
v +==& . (3.16) n mod analog, viteza unghiular a micrii de rotaie a modelului n plan orizontal se determin cu relaia
( )[ ]( )
( )[ ]
sincos1cossin2
sincossincossin2
sinsin2
21
ttd
a
tttd
a
ttd
a
dtdy
dtdy
dr AF
+=
=+=
=+=
=
=
(3.17)
iar acceleraia micrii de rotaie devine
( )[ ] sinsin1coscos2
2
ttd
a
dtdr
r ==& . (3.18) nlocuind relaiile (3.15), (3.16), (3.17) i (3.18) n sistemul ecuaiilor liniare de micare (3.14) i egalnd termenii care conin funcia tsin i apoi pe cei ce conin funcia tcos , se obin patru ecuaii independente
-
Manevrabilitatea navei _______________________________________________________________________________________________
52
( ) ( ) ( )
( ) ( ) AAFFrG
rvv
YYd
aYmx
daYmUaYaYm
coscos1cos2
sin2
sin2
cos12
00
2
2
+=
+
+
+
+
&
&
(3.19)
( ) ( ) ( )
( ) ( ) ( ) ( )AAFF
rGr
vv
YYd
aYmxd
aYmU
aYaYm
sinsin
sin2
1cos2
cos12
sin2
00
2
2
=
=
+
++
&
&
(3.20)
( ) ( ) ( )
( ) ( )( )AAFF
vvG
rGrzz
YYd
aNaNmx
aNUmxd
aNI
coscos
sin2
cos12
sin2
1cos2
00
2
2
=
=
+
+
+
+
&
&
(3.21)
( ) ( ) ( ) ( )
( ) ( ) ( ) ( ).sincoscos12
sin2
1cos2
sin2
00
2
2
AAFFvvG
rGrzz
YYdaNaNmx
daNUmx
daNI
+=+
+
+
+
&
&
(3.22)
n setul celor patru ecuaii de mai sus se cunosc urmtoarele mrimi fizice: viteza modelului navei U , amplitudinea micrilor armonice a , defazajul i pulsaia . Testele pe model experimental cu mecanismul de micri plane permit determinarea amplitudinilor forelor hidrodinamice laterale
0FY i
0AY , precum i a defazajelor
dintre excitaie i rspunsul hidrodinamic ( F i A ). n acelai timp se cunosc: masa modelului navei m, momentul de inerie mecanic n raport cu axa vertical zzI i abscisa centrului de greutate al modelului Gx . Cazul 0= caracterizeaz micarea lateral pur, iar cazul 0180= se refer la micarea pur de rotaie n plan orizontal. Ecuaiile (3.19) (3.22) permit identificarea rapid a derivatelor hidrodinamice specifice modelului liniar.
-
Capitolul 3. Determinarea experimental a derivatelor hidrodinamice _______________________________________________________________________________________________
53
Astfel, pentru 0= se obine ( )
AAFFv
AAFFv
YYaY
YYaYm
sinsin2
2
coscos2
2
00
00
2
=
+=
&
( ) ( )( ).sincos
22
coscos2
2
00
00
2
AAFFv
AAFFvG
YYdaN
YYdaNmx
+=
=
&
(3.23)
n mod similar, pentru 0180= rezult ( )
( ) AAFFr
AAFFrG
YYd
aYmU
YYd
aYmx
sinsin2
2
coscos2
2
00
00
2
=
+=
&
( ) ( )( ) ( ).sincos
22
coscos2
2
00
00
2
AAFFrG
AAFFrzz
YYdd
aNUmx
YYdd
aNI
+=
=
&
(3.24)
Astfel, cele opt derivate hidrodinamice specifice modelului liniar de micare pot fi deduse pe baza testelor dinamice de deriv lateral pur ( 00= ) i de rotaie pur n plan orizontal ( 0180= ). O procedur practic pentru determinarea derivatelor hidrodinamice pe cale experimental este descris n referina [12]. Metodologia a fost aplicat n cazul particular al unei nave de pescuit ([17], [19]).
Transversalul planului de forme este prezentat n fig. 3.12, iar principalele caracteristice ale navei i ale modelului experimental sunt explicite n tabelul 3.1. Schema lanului experimental utilizat la testele statice i dinamice este prezentat n fig. 3.13.
Modelul experimental a fost cuplat la cruciorul de tractare al bazinului de carene prin intermediul mecanismului de generare a micrilor plane (P.M.M.). n cazul testelor statice, modelul a fost fixat la un unghi de deriv prestabilit, iar crma a fost bandat cu un unghi impus. La curgerea oblic n ap calm, asupra modelului experimental acioneaz cmpul presiunilor hidrodinamice, iar prin
-
Manevrabilitatea navei _______________________________________________________________________________________________
54
intermediul dinamometrelor se preiau forele hidrodinamice laterale prova ( FY ) i pupa ( AY ), precum i cele longitudinale prova ( FX ) i pupa ( AX ).
Fig. 3.12 Transversalul planului de forme al unei nave de pescuit
Forele i momentele hidrodinamice rezultante se determin cu relaiile
( )dYYNYYY
XXX
AFe
AFe
AFe
=
+=
+=
(3.25)
-
Capitolul 3. Determinarea experimental a derivatelor hidrodinamice _______________________________________________________________________________________________
55
unde d este distana de la dreapta suport a forei hidrodinamice laterale la originea sistemului de axe. Menionm c dreptele suport ale forelor hidrodinamice laterale prova i pupa sunt egal deprtate de originea sistemului de axe.
Tabelul 3.1 Principalele caracteristici ale navei i ale modelului experimental
Caracteristici principale Simboluri Date pentru nav
Date pentru model experimental (scara:1/12)
Lungimea maxim maxL 32.7 m 2.725 m
Lungimea ntre perpendiculare
L 25.0 m 2.083 m
Limea maxB 8.0 m 0.667 m
Deplasamentul volumetric V 296.0 m3 0.171 m3 Pescajul prova
FT 2.42 m 0.202 m Pescajul pupa
AT 2.74 m 0.228 m Abscisa centrului de greutate
LCG 11.32 m 0.943 m
Cota centrului de greutate KG 3.05 m 0.254 m nlimea metacentric transversal
TGM 0.65 m 0.054 m
Perioada natural de ruliu T 6.2 s 1.8 s Raza de inerie la ruliu
xxK 2.46 m 0.205 m Raza de inerie la tangaj
yyK 6.78 m 0.565 m Raza de inerie la rotaia n plan orizontal
zzK
6.90 m
0.575 m Aria suprafeei plutirii
WLA 163.74 m2 1.137 m2
Diametrul elicei D 1.8 m 0.150 m Aria crmei
RA 2.880 m2 0.020 m2
Viteza U 12 Nd 1.8 m/s Numrul Froude
nF 0.4 0.4
Valorile adimensionale ale forelor i momentelor hidrodinamice rezultante au fost calculate cu expresiile ( )
( )( )23
22
22
5,0/5,0/
5,0/
ULNNULYY
ULXX
ead
ead
ead
=
=
=
(3.26)
-
Manevrabilitatea navei _______________________________________________________________________________________________
56
n care este densitatea apei, L este lungimea modelului experimental, iar U este viteza de tractare a modelului.
Legend: 1 model experimental 2 crucior de tractare 3 mecanism de generare a micrilor plane (P.M.M.) 4 maina crmei 5 bloc pentru comanda crmei 6 instalaia de propulsie a modelului 7 dinamometre pentru msurarea forelor laterale 8 dinamometre pentru msurarea forelor longitudinale 9 amplificator tensometric 10 sistem de achiziie i prelucrare a datelor experimentale
Fig. 3.13 Teste statice i dinamice. Schema lanului experimental
Considerndu-se urmtoarele valori efective md 510,0= mL 083,2= smU /8,1=
42 /937,101 mskg=
-
Capitolul 3. Determinarea experimental a derivatelor hidrodinamice _______________________________________________________________________________________________
57
s-au determinat factorii de adimensionalizare
.5,14925,05,7165,0
23
22
mkgfULkgfUL
=
=
n tabelul 3.2 sunt prezentate forele hidrodinamice laterale i momentele hidrodinamice de rotaie n plan orizontal, determinate la testele statice, n absena elicei. n tabelul 3.3 sunt prezentate forele hidrodinamice longitudinale obinute la testele statice, n absena elicei. Valorile marcate cu simbolul ( ) din tabelele 3.2 i 3.3 au fost corectate ulterior prin interpolare numeric i au fost nlocuite cu urmtoarele valori:
pentru 00= - dac 00= , 10105 =adY i 10105 =adN ; - dac 010= Babord, 615105 =adX , 130105 =adY i
50105 =adN ; - dac 010= Tribord, 67105 =adY i 40105 =adN ; pentru 03= Tribord - dac 020= Babord, 25105 =adN ; pentru 09= Tribord - dac 010= Babord, 670105 =adX ; - dac 020= Babord, 690105 =adX i 100105 =adN ; - dac 030= Babord, 90105 =adN ; pentru 03= Babord - dac 010= Tribord, 80105 =adN ; - dac 020= Tribord, 40105 =adN .
n fig. 3.14 sunt exemplificate diagramele forelor hidrodinamice laterale adY i ale momentelor hidrodinamice de rotaie n plan orizontal adN (n mrime adimensional). Valorile negative ale unghiului de crm corespund bandrii crmei n tribord. Exprimnd valorile adimensionale ale forelor i momentelor hidrodinamice prin dezvoltri n serie Taylor n funcie de componenta lateral adimensional a vitezei fluidului ( sin' =v ) i unghiul de bandare a crmei ( )
'
0'3'2'2'3''
'
0'3'2'2'3''
'
02''2'
''''
''''
''
NvNvNvNvNNNNYvYvYvYvYYYY
XvXvXXX
vvvvvvvad
vvvvvvvad
vvvad
++++++=
++++++=
+++=
(3.27)
-
Manevrabilitatea navei _______________________________________________________________________________________________
58
i aplicnd o procedur de regresie, se determin derivatele hidrodinamice specifice testelor statice, care sunt prezentate n tabelul 3.4. De asemenea, poate fi utilizat o relaie aproximativ pentru determinarea derivatei hidrodinamice 'uX &
'05,0' mX u & (3.28) unde m este valoarea adimensional a masei modelului.
n cazul testelor dinamice cu micri armonice laterale pure, modelul experimental (cu unghi de deriv nul) este tractat la viteza de regim i efectueaz o micare descris de ecuaia
tyy sin0= (3.29) n care my 09,00 = este amplitudinea excitaiei. n conformitate cu natura armonic a excitaiei, dinamometrele de msur preiau forele hidrodinamice laterale din prova ( FY ) i din pupa ( AY ), care pot fi exprimate sub forma ( )
( )AAAFFF
tYY
tYY
=
=
sinsin
0
0 (3.30)
unde F i A constituie diferenele de faz dintre excitaie i rspuns, msurate cu ajutorul dinamometrului prova i respectiv pupa. Pe baza testelor dinamice au fost determinate amplitudinile prova (
0FY ) i pupa (
0AY ) ale forelor hidrodinamice laterale, precum i diferenele de faz F i A , care sunt prezentate n tabelul 3.5. n continuare, se determin componentele n faz (
inin AF YY , ) i componentele defazate cu 900 (
outout AF YY , ) ale forelor hidrodinamice laterale
AAA
FFF
AAA
FFF
YY
YY
YY
YY
out
out
in
in
sinsin
cos
cos
0
0
0
0
=
=
=
=
(3.31)
precum i componentele n faz (inin AF
NN , ) i componentele defazate cu 900 (
outout AFNN , ) ale momentelor hidrodinamice de rotaie n plan orizontal
.dYNdYNdYN
dYN
outout
outout
inin
inin
AA
FF
AA
FF
=
=
=
=
(3.32)
-
Capitolul 3. Determinarea experimental a derivatelor hidrodinamice _______________________________________________________________________________________________
59
Tabelul 3.2 Teste statice. Fore laterale i momente de rotaie n plan orizontal UNGHI DE
DERIV
[ ]grade
UNGHI DE CRM [ ]grade
FY [ ]Kgf
AY [ ]Kgf
eY [ ]Kgf
eN [ ]mKgf
510adY 510adN
300 Tb 0,9 -3,059 -2,159 2,019 -301,33 135,28 200 Tb 0,66 -1,689 -1,029 1,198 -143,61 80,27
100 Tb 0,5 -1,450 -0,950 0,995 -132,59( ) 66,67( )
0 0,346 -1,210 -0,864 0,794 -120,59( ) 53,2( )
100 Bb 0,004 0,291 0,295 -0,146 41,17( ) -9,78( ) 200 Bb -0,677 2,537 1,860 -1,639 259,6 -109,82
00
300 Bb -1,046 3,446 2,4 -2,291 334,96 -153,5 300 Tb 3,199 -2,781 0,418 3,05 58,34 204,34
200 Tb 2,877 -1,524 1,353 2,245 188,83 150,39 100 Tb 2,4 -0,328 2,072 1,057 289,18 110,2
0 2,175 0,128 2,303 1,044 321,42 69,95 100 Bb 2,013 0,583 2,596 0,729 458,6 -17,50 200 Bb 1,397 2,872 4,269 -0,752 595,81
-104,99( )
30 Tribord
300 Bb 1,230 2,916 4,146 -0,86 578,65 -57,61 300 Tb 5,444 -4,02 1,424 4,827 198,74 323,39
200 Tb 5,082 -3,068 2,014 4,157 281,09 278,49 100 Tb 4,869 -1,941 2,928 3,473 408,65 232,7
0 4,605 -0,602 4,003 2,656 558,69 177,93 100 Bb 4,249 0,536 4,785 1,894 667,83 126,88 200 Bb 3,7 1,776 5,476 0,981 764,27 65,74
60 Tribord
300 Bb 3,731 1,913 5,644 0,927 787,72 62,12 300 Tb 8,522 -5,085 3,437 6,94 479,69 464,96
200 Tb 8,256 -3,852 4,404 6,175 614,65 413,74 100 Tb 7,782 -2,206 5,576 5,094 778,23 341,3
0 7,165 -0,189 6,976 3,751 973,62 251,29 100 Bb 6,8 1,83 8,63 2,535 1204,47 169,83 200 Bb 6,192 3,898 10,09 1,17 1408,23 163,29
90 Tribord
300 Bb 6,148 3,784 9,932 1,206 1386,18 168,27 300 Tb -1,488 -1,493 -2,981 0,0026 -416,05 0,17
200 Tb -1,399 -1,517 -2,916 0,06 -406,98 4,02( ) 100 Tb -2,005 0,84 -2,136 -1,451 -298,05
-97,22( ) 0 -2,36 1,005 -1,355 -1,716 -189,11 -114,97
100 Bb -2,544 1,37 -1,174 -1,996 -163,85 -133,74 200 Bb -2,886 2,616 -0,27 -2,806 -37,68 -188,01
30 Babord
300 Bb -3,496 3,936 0,44 -3,79 61,41 -253,96 300 Tb -3,783 -1,666 -5,449 -1,08 -760,5 -72,34
200 Tb -3,821 -1,292 -5,113 -1,29 -713,61 -86,42 100 Tb -4,18 -0,174 -4,354 -2,043 -607,68 -136,89
0 -4,682 1,549 -3,133 -3,178 -437,26 -212,92 100 Bb -5,153 2,923 -2,23 -4,119 -311,24 -275,96 200 Bb -5,43 3,834 -1,596 -4,725 -222,75 -316,56
60 Babord
300 Bb -5,921 4,939 -0,982 -5,539 -137,06 -371,1 300 Tb -6,257 -2,842 -9,099 -1,742 -1269,92 -116,69
200 Tb -6,479 -2,297 -8,776 -2,133 -1224,84 -142,9 100 Tb -6,953 -0,85 -7,541 -3,113 -1052,41 -208,54
0 -7,47 1,165 -6,305 -4,404 -879,97 -295,07 100 Bb -7,964 3,309 -4,925 -5,612 -687,37 -375,98 200 Bb -8,342 4,803 -3,539 -6,704 -493,93 -449,18
90 Babord
300 Bb -8,763 5,956 -2,807 -7,507 -391,77 -502,96
-
Manevrabilitatea navei _______________________________________________________________________________________________
60
Tabelul 3.3. Teste statice. Fore hidrodinamice longitudinale UNGHI DE
DERIV [ ]grade
UNGHI DE CRM [ ]grade
FX [ ]Kgf
AX [ ]Kgf
eX [ ]Kgf
510adX
300 Tb 24,268 -28,826 -4,558 -636,15 200 Tb 24,739 -28,994 -4,255 -593,86
100 Tb 21,055 -25,265 -4,21 -587,58 0 21,441 -25,575 -4,134 -576,97
100 Bb 25,814 -30,424 -4,61 -643,41 )
200 Bb 24,838 -29,63 -4,792 -668,81
00
300 Bb - - - - 300 Tb 22,784 -27,838 -5,054 -705,37
200 Tb 23,852 -28,558 -4,706 -656,8 100 Tb 23,654 -28,196 -4,542 -644,94
0 22,78 -27,316 -4,536 -633,08 100 Bb 27,396 -31,912 -4,516 -630,21 200 Bb 27,138 -31,874 -4,736 -660,99
30 Tribord
300 Bb 25,778 -31,008 -5,23 -729,94 300 Tb 20,686 -26,038 -5,352 -746,96
200 Tb 21,078 -26,216 -5,138 -717,1 100 Tb 21,18 -26,162 -4,982 -695,32
0 21,024 -25,928 -4,904 -684,44 100 Bb -2,684 -2,354 -5,038 -703,14 200 Bb -2,99 -2,364 -5,358 -747,8
60 Tribord
300 Bb -2,502 -3,412 -5,914 -825,4 300 Tb -21,723 8,05 -5,346 -746,13
200 Tb -22,192 8,555 -5,082 -709,28 100 Tb -21,676 8,404 -4,868 -679,41
0 -21,324 8,297 -4,73 -660,15 100 Bb -22,578 18,462 -4,116
-574,46 ) 200 Bb -22,592 18,124 -4,468
-623,59 )
90 Tribord
300 Bb -22,196 17,044 -5,152 -719,05 300 Tb -6,922 1,632 -5,29 -738,31
200 Tb -8,032 3,322 -4,71 -657,36 100 Tb -7,28 2,79 -4,49 -626,66
0 -6,554 2,228 -4,326 -603,77 100 Bb -8,106 3,676 -4,43 -6