Capitolul 1 Noţiuni Generale - omtr.pub.ro · PDF filestatic determinate sau static...

If you can't read please download the document
Transcript of Capitolul 1 Noţiuni Generale - omtr.pub.ro · PDF filestatic determinate sau static...
Capitolul 1
Noiuni Generale
1.1 Definiii
Fora este aciunea asupra unui corp care produce acceleraia acestuia cucondiia ca asupra corpului s nu acioneze i alte fore de sens contrarprimeia. Fora este un vector.
Timpul este o msur a succesiunii unor evenimente. n mecanica new-tonian este o cantitate absolut. n mecanica relativist timpul esterelativ fa de sistemul de referin n care se observ succesiunea deevenimente. Unitatea de msur este secunda.
Masa este o msur cantitativ a ineriei.
Acceleraia gravitaional Orice obiect care cade n vid ntr-o anumitlocaie de pe suprafaa Pmntului va avea aceeai acceleraie g. Calcu-larea cu precizie a acceleraiei gravitaionale trebuie s ia n considerarerotaia Pmntului, aplatizarea din zona polilor i altitudinea fa denivelul mrii. Valoarea utilizat n mod curent este g = 9, 80665m/s2.
Greutatea este fora rezultant de atracie ce acioneaz asupra masei unuicorp datorit unui cmp gravitaional.
Impulsul este produsul dintre mas i viteza liniar a unui corp. Impulsuleste un vector.
Momentul cinetic Este produsul dintre momentul de inerie al unui corpi viteza unghiular, ambele msurate fa de o ax fix.
9
10 CAPITOLUL 1. NOIUNI GENERALE
1.2 Sisteme i uniti de msur
n sistemul absolut de msur, unitile pentru lungime, mas i timp suntconsiderate uniti fundamentale i toate celelalte uniti sunt exprimate nfuncie de acestea (ex. pentru for: 1N = 1Kg m/s2).
n sistemul gravitaional, unitile pentru lungime, for i timp sunt con-siderate uniti fundamentale i toate celelalte uniti sunt exprimate n func-ie de acestea (ex. pentru mas: 1Kg = 1N s2/m).
n sistemul internaional SI, unitatea de msur pentru mas este kilo-gramul (Kg) i pentru lungime metrul (m). O for de un Newton (N) estefora care produce unui corp cu masa de 1Kg o acceleraie de 1m/s2.
1.3 Legile generale ale mecanicii
Legile lui Newton:
I. Dac un sistem de fore n echilibru acioneaz asupra unui punct ma-terial staionar, acesta va rmne staionar. Dac un sistem de fore nechilibru acioneaz asupra unui punct material aflat n micare, acestava rmne n micare rectilinie neaccelerat.
II. Dac un sistem de fore neechilibrat acioneaz asupra unui punct ma-terial, acesta va accelera proporional cu mrimea i direcia forei re-zultante a sistemului.
III. Dac dou particule exercit fore una asupra celeilalte, atunci acestefore sunt egale ca mrime, opuse ca direcie i coliniare.
Ecuaia fundamental a mecanicii:
Relaia de baz dintre mas, acceleraie i for este dat de legea a II-a a luiNewton: fora este egal cu produsul dintre mas i acceleraie. Aceasta esteo ecuaie vectorial deoarece direcia forei trebuie s coincid cu direcia ac-celeraiei. Alternativa legii a II-a a lui Newton stipuleaz c fora rezultanteste egal cu derivata impulsului n funcie de timp: F = d(mv)/dt.
Legea conservrii masei
Masa unui corp rmne neschimbat (se conserv) n orice condiii fizice sauchimice la care acesta ar putea fi supus.
1.4. DIVIZIUNILE MECANICII 11
Legea conservrii energiei
Principiul conservrii energiei stipuleaz c energia mecanic total a unuisistem rmne neschimbat dac sistemul este supus doar unor fore caredepind de poziie or configuraie.
Legea conservrii impulsului
Impulsul unui sistem de corpuri rmne neschimbat dac asupra sistemuluinu acioneaz nici o for exterioar. De asemenea, momentul cinetic alunui sistem de corpuri fa de o ax rmne constant dac nu exist nici unmoment exterior fa de aceast ax.
Legea atraciei reciproce (Gravitaia)
Dou corpuri se atrag cu o for F proporional cu masele lor (m1 im2) i invers proporional cu ptratul distanei r dintre ele. Altfel spus,F = km1m2/r
2, unde k este constanta gravitaional. Valoarea constanteigravitaionale este k = 6, 673 1011 m
3
kgs2.
EXEMPLU: Dou sfere de oel cu diametrul de 150mm cntresc 7, 8kgfiecare la suprafaa Pmntului, fora de greutate fiind G = 76, 5N . Aceastaeste fora de atracie dintre Pmnt i sfera de oel. Fora de atracie reci-proc dintre cele dou sfere dac acestea se afl n poziia n care se atingeste F = 0, 00000018N = 1, 8 107N .
1.4 Diviziunile mecanicii
Potrivit unei mpriri clasice, mecanica se compune din urmtoarele treipri: staica, cinematica i dinamica.
n static se face abstracie de micare i se studiaz forele care acio-neaz asupra unui corp sau asupra unui sistem de corpuri, determinndu-seclasa sistemelor de fore echivalente. n particular, statica se ocup cu sub-clasa sistemelor de fore care i fac echilibru.
Cinematica studiaz micarea corpurilor, fcnd abstracie de forele careacioneaz asupra lor.
Dinamica studiaz micarea corpurilor sub aciunea forelor care acio-neaz asupra lor.
12 CAPITOLUL 1. NOIUNI GENERALE
Capitolul 2
Statica Rigidului
2.1 Consideraii generale
Dac forele care acioneaz asupra unui corp rigid nu produc nici o ac-celeraie, atunci ele se neutralizeaz, adic formeaz un sistem de fore nechilibru. Echilibrul forelor este stabil dac, n urma unei deplasri foartemici din poziia de echilibru, corpul sub aciunea forelor revine n poziiainiial. Echilibrul este instabil atunci cnd corpul tinde s se ndeprtezede poziia de echilibru atunci cnd este supus unei deplasri foarte mici fade poziia iniial. Echilibrul este neutru dac forele i menin echilibrul idup deplasarea corpului din poziia iniial.
echilibru stabil
echilibru instabil
echilibru neutru
2.2 Fore externe i interne
Forele prin care particulele individuale ale unui corp acioneaz una asupraalteia se numesc fore interne. Toate celelalte fore se numesc fore externe.Dac un corp se sprijin pe alte corpuri i estesupus unor fore exterioare,n punctele de sprijin se produc deformaii i fore interne, iar acestea sunt
13
14 CAPITOLUL 2. STATICA RIGIDULUI
distribuite n interiorul corpului astfel nct s existe un achilibru, iar corpulse consider a fi n una sau mai multe din urmtoarele stri: tensiune, com-presiune sau forfecare. Forele exercitate de corp asupra corpurilor pe carese sprijin se numesc reaciuni.
Dac un corp este n repaus, forele externe care acioneaz asupra saformeaz un sistem de fore n echilibru.
2.3 Compunerea, descompunerea i echilibrul
forelor
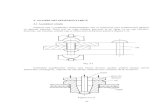
Rezultanta mai multor fore cu acelai punct de aplicaie (fore concurente)este o for ce va produce acelai efect ca forele individuale acionnd m-preun. Rezultanta R a dou fore F1 i F2 aplicate unui corp rigid n acelaipunct este egal n magnitudine i direcie cu diagonala paralelogramuluiformat de forele F1 i F2.
R
F2
F1
1
2
R =
F 21
+ F 22
+ 2F1F2 cos sin 1 =F2 sin
Rsin 2 =
F1 sin
R
O for R poate fi descompus n dou fore componente ce se inter-secteaz n acelai punct cu R i care acioneaz n acelai plan ca R prininversarea procesului de calcul a rezultantei. Prin repetarea acestei opera-iuni, fora R poate fi descompus ntr-un numr orict de mare de forecomponente cu acelai punct de aplicaie i acionnd n acelai plan.
Rezultanta unui sistem de fore concurente aplicate unui corp
rigid se afl prin descompunerea fiecrei fore F n componente pe trei axede coordonate ortogonale. Dac , i sunt unghiurile fa de axele Ox,Oy, Oz ale unei fore F , componentele sale vor fi: F cos de-a lungul axeiOx, F cos de-a lungul axei Oy i F cos de-a lungul axei Oz.
Rezultanta va fi:
R =
(
X)2
+(
Y)2
+(
Z)2
2.4. CUPLURI DE FORE I MOMENTE 15
Unghiurile rezultantei fa de cele trei axe sunt date de:
cos r =
X/R cos r =
Y/R cos r =
Z/R
Condiia de echilibru static este R = 0 adic
X = 0;
Y = 0;
Z = 0 .
2.4 Cupluri de fore i momente
Cuplul de fore Dou fore paralele, necoliniare, egale i acionnd n di-recii opuse formeaz un cuplu de fore.
a
F
F
Un cuplu de fore nu poate fi redus la o singurp for. Momentul unuicuplu este acelai n orice punct din spaiu.
Momentul unui cuplu de fore este produsul dintre modulul uneiadintre fore i distana dintre dreptele de-a lungul crora acioneaz celedou fore.
M = F a
Unitatea de msur n sistem internaional este [N m]. Sensul momentu-lui este considerat pozitiv dac cuplul de fore tinde s produc o rotaie nsens trigonometric. Magnitudinea, direcia i sensul momentului unui cuplude fore sunt reprezentate printr-un vector, perpendicular pe planul n careacioneaz fora sau forele care-l produc, cu sensul dictat de regula miniidrepte sau a urubului drept (dac fora acioneaz n plan orizontal i tindes produc o rotaie n sens trigonometric, atunci direcia vectorului esteorientat n sus).
Momentul unui vector fa de un punct
Momentul unui vector V n raport cu un punct O este produsul vectorialdintre vectorul de poziie r al punctului de aplicaie A al vectorului i vectorulV , adic:
MO = r V
16 CAPITOLUL 2. STATICA RIGIDULUI
MO
r
V
d B
A
Rezult c momentul unui vector n raport cu un punct este un vectora crui direcie este perpendicular pe planul P determinat de punct i desuportul vectorului, al crui sens este acela al urubului drept i al cruimodul este egal cu produsul |r| |V | sin . Dar |r| sin = d rezult:
|MO| = |V | d
Momentele se pot compune prin nsumarea vectorilor dup regula para-lelogramului, similar compunerii forelor.
2.5 Forele de reaciune pentru sprijinul corpu-
rilor
Forele externe, aflate n echilibru, ce acioneaz asupra unui corp pot fistatic determinate sau static nedeterminate, n funcie de numrul de forenecunoscute.
Primul pas n rezolvarea problemelor de static este determinarea tuturorforelor de reaciune. Pentru cunoaterea complet a forelor de reaciunesunt necesare urmtoarele date: magnitudinea, d