Impactul modelelor economice asupra dezvoltării economiilor ...
1
Capitolul 2
DETERMINAREA MODELELOR MATEMATICE ALE ELEMENTELOR ŞI SISTEMELOR LINIARE
2.1. Tipuri de semnale utilizate în studiul sistemelor de reglare automate Principalele tipuri de semnale aplicate la intrarea sistemelor de reglare
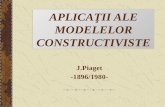
automate sunt următoarele: • impulsul unitar (Dirac) • treapta unitară • rampa unitară • semnalul sinusoidal Impulsul unitar (Dirac), notat cu δ(t), are valori nule în toate intervalele
de timp, cu excepţia momentului t=0 (momentul aplicării sale), când valoarea sa tinde către infinit, iar aria cuprinsă între curba de variaţie a impulsului şi axa timpului este egală cu unitatea (fig. 2.1.a).
∫+∞
∞−
=1)( dttδ (2.1)
a) b)
Fig. 2.1. Semnal impuls Dirac. Dacă impulsul unitar este aplicat la momentul τ ≠ 0, atunci este notat cu
δ(t-τ) şi se reprezintă ca în figura 2.1.b.
t 0 τ
)( τδ −t)(tδ
t 0
2
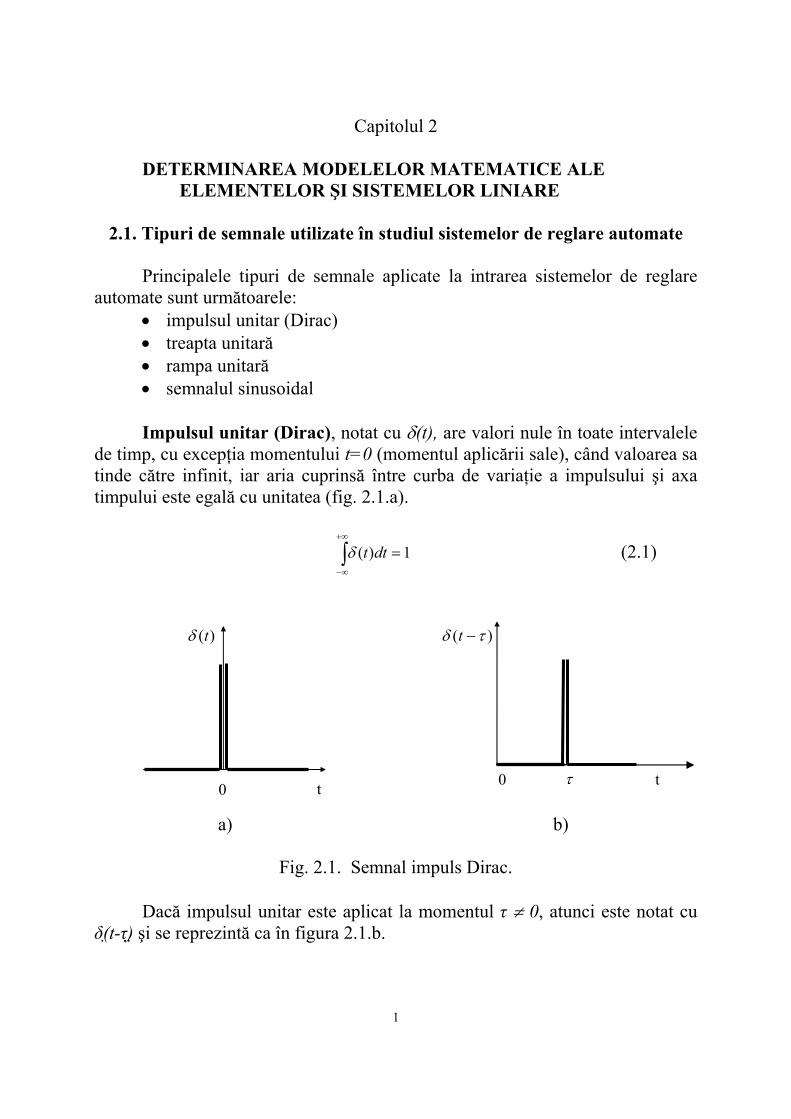
Treapta unitară, notată cu u1(t), are valori nule pentru t < 0 şi valoarea 1 pentru t > 0, la t = 0 având loc trecerea prin salt între cele două valori (fig. 2.2.a).
0 t ≤ 0
u1(t) = (2.2) 1 t > 0
a) b)
Fig. 2.2. Semnal treaptă unitară.
Dacă treapta unitară este aplicată la momentul τ ≠ 0, atunci este notată cu
u1(t-τ) şi se reprezintă ca în figura 2.2.b.
0 t ≤ τ u1(t-τ) = (2.3)
1 t > τ Semnalul se numeşte simplu semnal treaptă, dacă înălţimea treptei are o
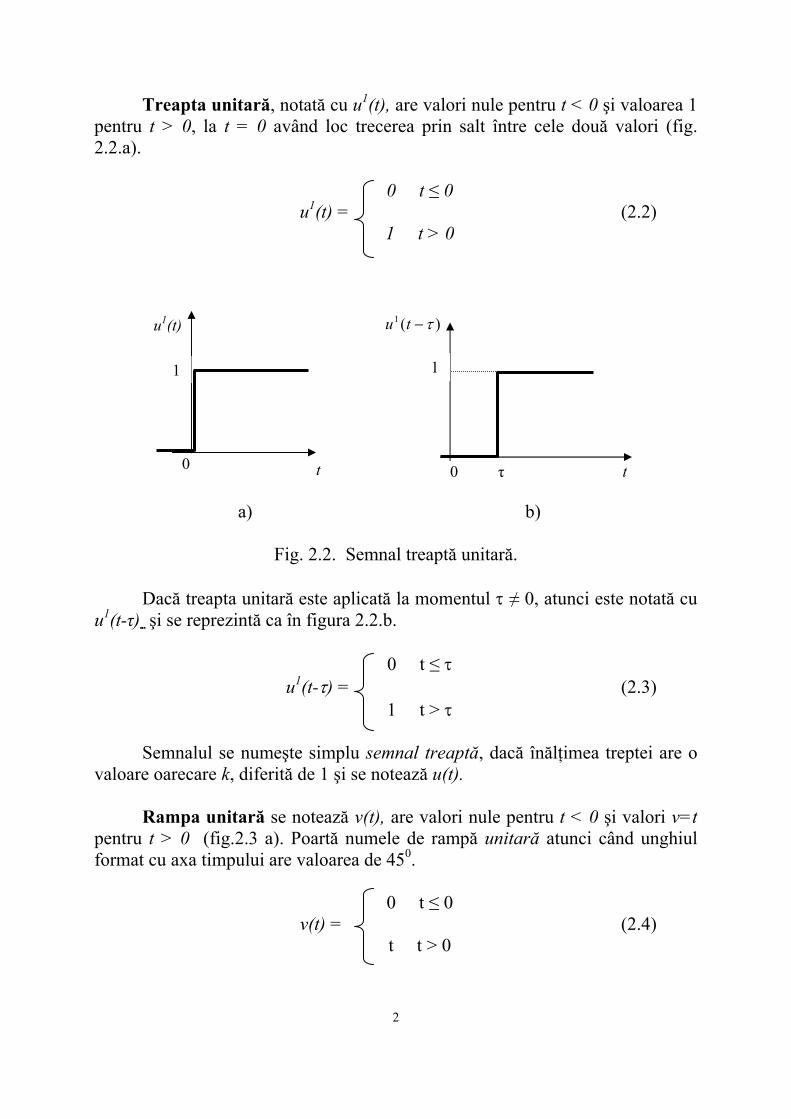
valoare oarecare k, diferită de 1 şi se notează u(t). Rampa unitară se notează v(t), are valori nule pentru t < 0 şi valori v=t
pentru t > 0 (fig.2.3 a). Poartă numele de rampă unitară atunci când unghiul format cu axa timpului are valoarea de 450.
0 t ≤ 0
v(t) = (2.4) t t > 0
0
u1(t)
t
1
0 τ
)(1 τ−tu
1
t
3
a) b)
Fig. 2.3. Semnal rampă. Dacă rampa este aplicată la momentul τ≠ 0, atunci este notată cu v(t-τ)
(fig. 2.3.b).
0 t ≤ τ v(t-τ) = (2.5)
t t > τ
Semnalul sinusoidal este utilizat pentru analiza în frecvenţă a sistemelor automate. Este definit matematic cu ajutorul funcţiei trigonometrice sinus sau cosinus.
A=Am sinωt A=Am cosωt (2.6)
Impulsul unitar reprezintă derivata în sens generalizat a treptei unitare:
δ(t)=dt
tdu )(1
(2.7)
Răspunsul unui sistem (sau element) la un impuls unitar este denumit
funcţie pondere. Răspunsul unui sistem (sau element) la o treaptă unitară este denumit răspuns indicial.
0 t
v(t)
0 t 0 τ
v(t-τ)
4
2.2. Modele matematice liniare de tipul intrare-ieşire Stabilirea modelului unui sistem se efectuează pe baza legilor fizicii,
mecanicii, chimiei, electrotehnicii, etc., care definesc funcţionarea elementelor componente. Întocmirea modelului unui sistem impune evidenţierea unor elemente idealizate care alcătuiesc sistemul şi în cadrul cărora are loc acumularea, disiparea sau transformarea de energie. Un asemenea model obţinut este un model fizic. Stabilirea ecuaţiilor de funcţionare ale fiecărui element idealizat permite întocmirea modelului matematic al sistemului.
Modelele matematice utilizate în studiul sistemelor automate pot fi de tipul intrare-ieşire (ecuaţii diferenţiale, funcţii de transfer, caracteristici de frecvenţă) şi de tipul intrare-stare-ieşire (ecuaţii de stare).
Sistemele studiate în automatizări pot fi de natură electrică, mecanică, termică, hidraulică, chimică, etc. Pentru un studiu mai comod cu ajutorul modelelor experimentale, uneori, se recurge la modele analog-electrice. Acestea se pot realiza cu mai mare uşurinţă şi reproduc suficient de exact comportamentul sistemelor studiate care sunt de obicei de o natură alta decât cea electrică. Modelele experimentale sub forma circuitelor electrice conţin de obicei rezistoare R, bobine L şi condensatoare C. Într-un rezistor are loc disipare de energie, într-o bobină are loc acumulare de energie cinetică, iar într-un condensator are loc acumulare de energie potenţială.
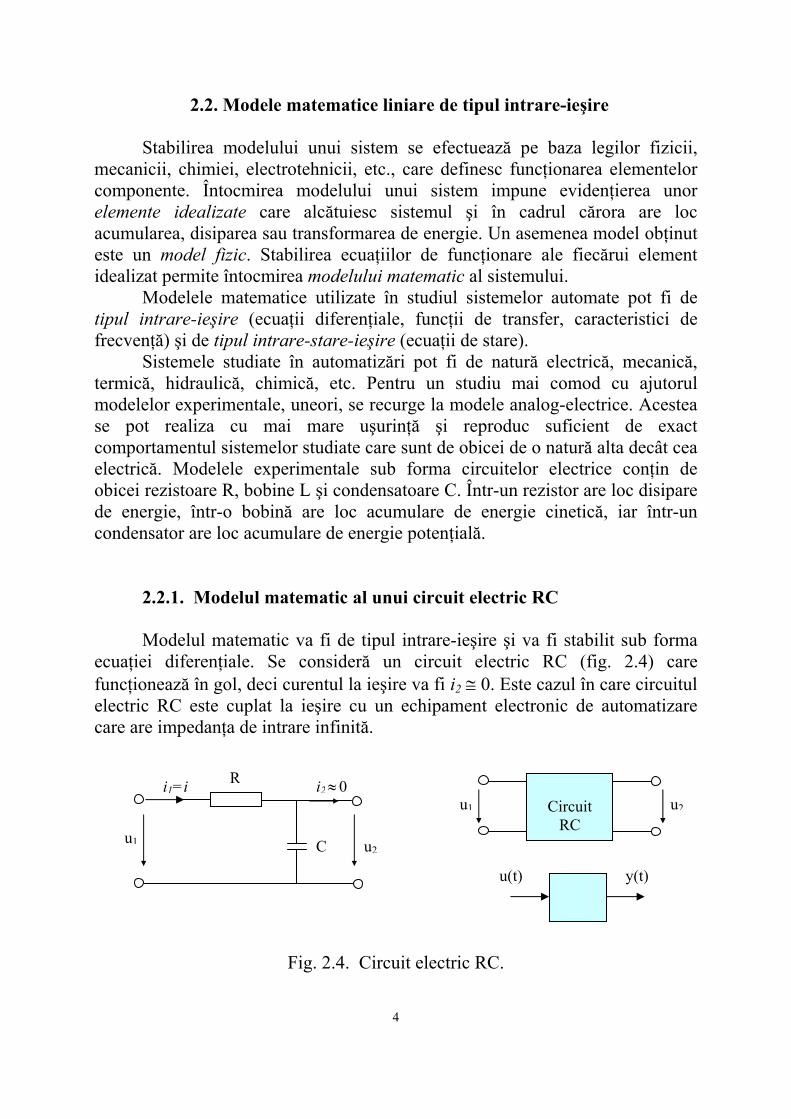
2.2.1. Modelul matematic al unui circuit electric RC Modelul matematic va fi de tipul intrare-ieşire şi va fi stabilit sub forma
ecuaţiei diferenţiale. Se consideră un circuit electric RC (fig. 2.4) care funcţionează în gol, deci curentul la ieşire va fi i2 ≅ 0. Este cazul în care circuitul electric RC este cuplat la ieşire cu un echipament electronic de automatizare care are impedanţa de intrare infinită.
Fig. 2.4. Circuit electric RC.
i2≈0
u1 u2C
i1=i R Circuit
RC u1 u2
u(t) y(t)
5
Rezistorul R este un element de circuit în care are loc disipare de energie, iar condensatorul este un element în care are loc acumulare de energie potenţială.
Prin aplicarea legilor electrotehnicii circuitului RC, se obţin ecuaţiile:
u1=uR+uC (2.8) uR=Ri (2.9) uC= ∫ + 0
1Cuidt
C (2.10)
Tensiunea la ieşirea circuitului este chiar tensiunea la bornele condensatorului, deci uc=u2 şi tensiunea iniţială la bornele condensatorului este nulă, deci uC0 = 0. Relaţia (2.10) devine:
u2= ∫ idt
C1 (2.11)
Se derivează relaţia (2.11), dt
du2 = )(1 tiC
şi se obţine curentul la intrarea
circuitului:
i(t)= C dt
du2 (2.12)
Înlocuim i(t) în (2.9) şi rescriem ecuaţia (2.8).
u1= RC 22 u
dtdu
+
RC 122 uu
dtdu
=+
Notând T = RC, constanta de timp a circuitului se obţine ecuaţia
diferenţială liniară cu coeficienţi constanţi (2.13), care reprezintă modelul matematic al sistemului.
T 122 uu
dtdu
=+ (2.13)
Conform notaţiilor din figura 2.4, folosite de regulă în sistemele automate,
u1 = u (intrarea) şi u2 = y (ieşirea), modelul matematic se scrie sub forma următoare:
6
T )()()( tuty
dttdy
=+ (2.14)
În teoria sistemelor automate, sistemul (elementul) descris printr-o astfel
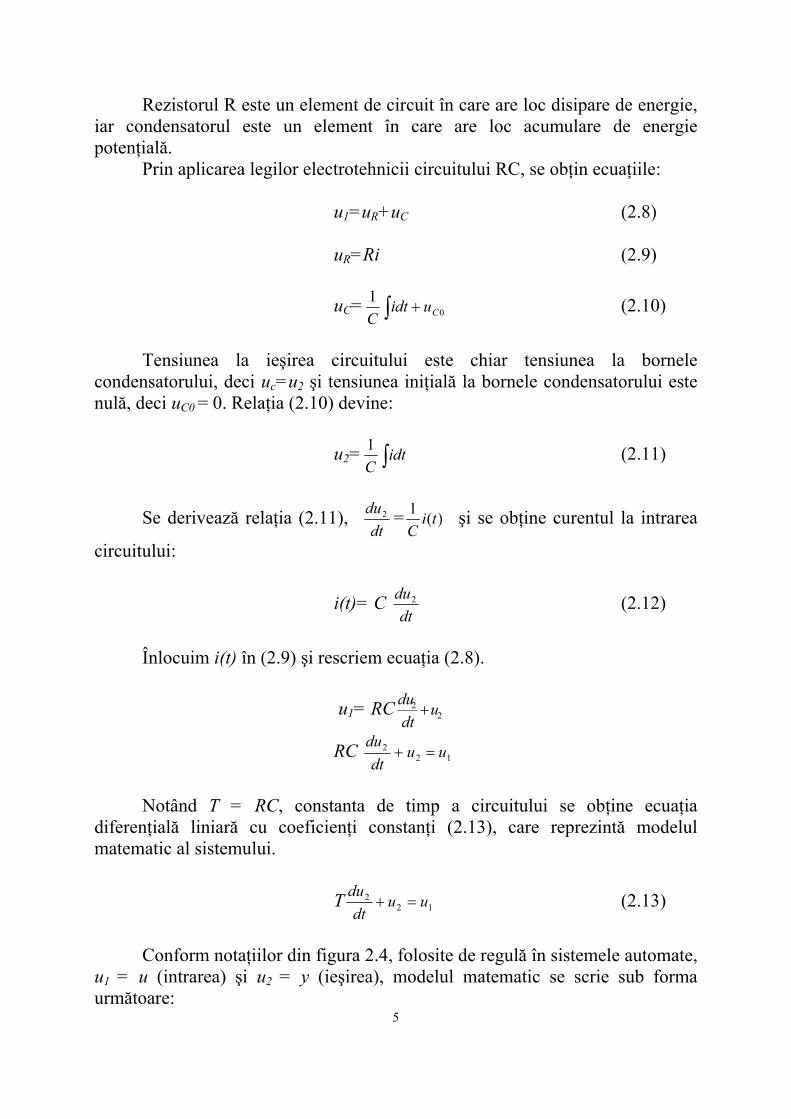
de ecuaţie diferenţială poartă numele de sistem (element) de ordinul întâi. 2.2.2. Modelul matematic al unui circuit electric RLC Modelul matematic va fi stabilit sub forma ecuaţiei diferenţiale. Se
consideră că circuitul funcţionează în gol, i2 ≅ 0.
Fig. 2.5. Circuit RLC. Elementele circuitului au următoarea semnificaţie: R- disipare de energie,
L- acumulare de energie cinetică, C- acumulare de energie potenţială. Prin aplicarea legilor electrotehnicii circuitului RLC se obţin ecuaţiile:
u1(t)=uR+uL+uC (2.15)
uR=Ri (2.16) uL=L
dtdi (2.17)
uC= ∫ + 0
1Cuidt
C (2.18)
Condensatorul se consideră iniţial descărcat, uC0 = 0, se derivează relaţia
lui uC = u2 şi se obţine relaţia curentului i(t): dt
tduCtitiCdt
tdu )()()(1)( 22 =⇒= .
Circuit RLC
u1 u2i2≈0
u1 u2C
i1=i R L
u(t) y(t)
7
Deoarece în relaţia (2.17) i(t) apare derivat, 22
2 )()(dt
tudCdt
tdi= . Deci, vom avea
prin înlocuire în relaţia (2.15)
u1(t)= )()()(2
22
2 tudt
tudLCdt
tduRC ++ (2.19)
care prin ordonare devine
)()()()(
122
22
2
tutudt
tduRC
dttud
LC =++ (2.20)
o ecuaţie diferenţială liniară cu coeficienţi constanţi, care este de fapt modelul matematic al circuitului RLC. Ecuaţia (2.20) se împarte prin LC:
)(1)(1)()(12
22
22
tuLC
tuLCdt
tduLCRC
dttud
=++ (2.21)
Se notează:
LCn12 =ω (2.22)
LR
n =ξω2 (2.23)
u1=u, u2=y (2.24)
Din (2.22) se obţine pulsaţia naturală a sistemului
LCn1
=ω (2.25)
şi din (2.23) se obţine factorul de amortizare al sistemului
CL
R
LCL
RLRL
R
nn 21222
====ωω
ξ (2.26)
Se obţine în final modelul matematic al circuitului RLC sub forma
ecuaţiei diferenţiale liniare cu coeficienţi constanţi, obişnuită în teoria sistemelor automate:
8
)()()(2)( 222
2
tutydt
tdydt
tydnnn ωωξω =++ (2.27)
Sistemul (elementul) descris printr-o astfel de ecuaţie poartă numele de
sistem (element) de ordinul doi. 2.2.3. Modelul matematic al unui sistem mecanic
cu resort şi amortizor Considerăm un sistem mecanic compus dintr-o masă inerţială, un resort şi
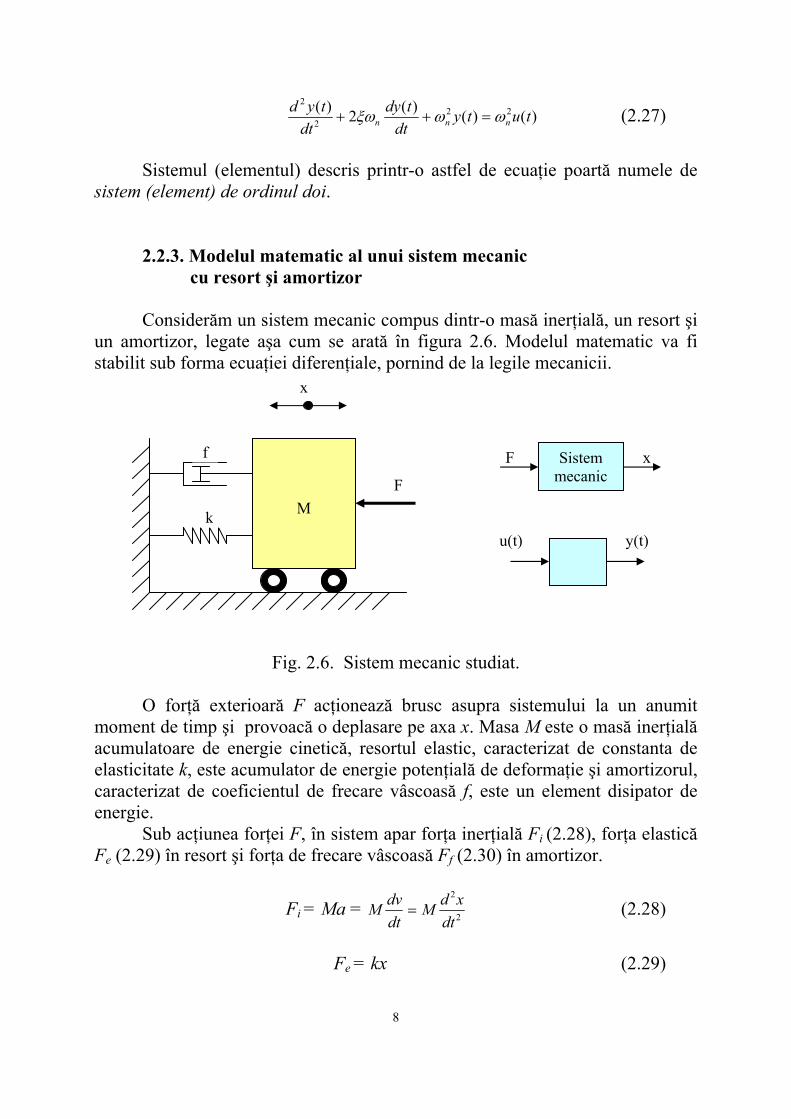
un amortizor, legate aşa cum se arată în figura 2.6. Modelul matematic va fi stabilit sub forma ecuaţiei diferenţiale, pornind de la legile mecanicii.
Fig. 2.6. Sistem mecanic studiat. O forţă exterioară F acţionează brusc asupra sistemului la un anumit
moment de timp şi provoacă o deplasare pe axa x. Masa M este o masă inerţială acumulatoare de energie cinetică, resortul elastic, caracterizat de constanta de elasticitate k, este acumulator de energie potenţială de deformaţie şi amortizorul, caracterizat de coeficientul de frecare vâscoasă f, este un element disipator de energie.
Sub acţiunea forţei F, în sistem apar forţa inerţială Fi (2.28), forţa elastică Fe (2.29) în resort şi forţa de frecare vâscoasă Ff (2.30) în amortizor.
Fi = Ma = 2
2
dtxdM
dtdvM = (2.28)
Fe = kx (2.29)
M k
f
x
F
Sistem mecanic
F x
u(t) y(t)

9
Ff = fv = dtdxf (2.30)
Ecuaţia de echilibru a forţelor pentru sistem este
Fi+Fe+Ff = F (2.31)
care prin înlocuire devine
Fkxdtdxf
dtxdM =++2
2
o ecuaţie diferenţială liniară cu coeficienţi constanţi.
Se împarte ecuaţia prin M:
MFx
Mk
dtdx
Mf
dtxd
=++2
2
şi se notează:
Mk
n =ω pulsaţia naturală,
x = y, F = u
Se obţine:
)(1)()(2)( 222
2
tuk
tydt
tdydt
tydnnn ωωξω =++ (2.33)
modelul matematic al sistemului mecanic sub forma ecuaţiei diferenţiale liniare cu coeficienţi constanţi. Se constată că şi sistemul mecanic studiat este tot un sistem de ordinul doi.
2.2.4. Modelul matematic al unui transportor cu bandă Transportorul cu bandă este o instalaţie pentru construcţii care reprezintă
un exemplu tipic de proces cu timp mort. Timpul mort TM din modelul
Mf
n =ξω2kMf
MkM
fMf
n 222
===ω
ξ factorul de amortizare,
(2.32)
10
matematic pune în evidenţă întârzierile introduse de procesele fizice cu fenomene de transport de masă sau energie, care se realizează cu viteze finite.
Modelul matematic va fi stabilit sub forma ecuaţiei diferenţiale.
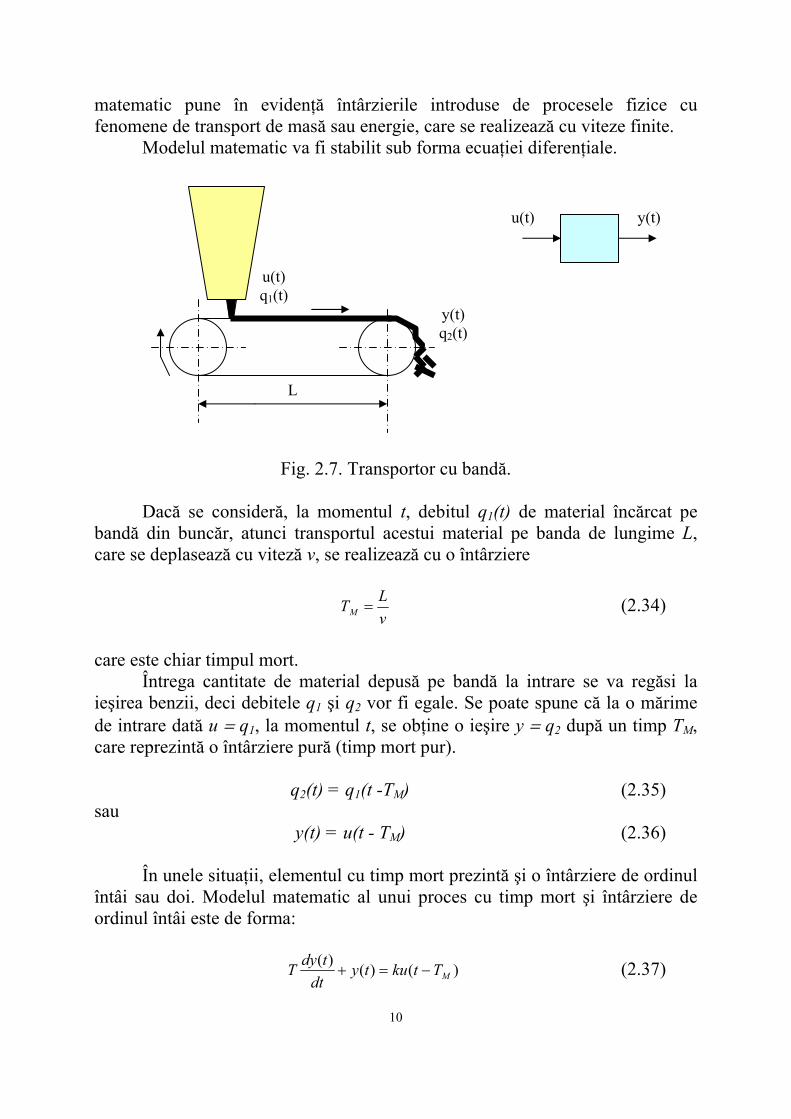
Fig. 2.7. Transportor cu bandă. Dacă se consideră, la momentul t, debitul q1(t) de material încărcat pe
bandă din buncăr, atunci transportul acestui material pe banda de lungime L, care se deplasează cu viteză v, se realizează cu o întârziere
vLTM = (2.34)
care este chiar timpul mort.
Întrega cantitate de material depusă pe bandă la intrare se va regăsi la ieşirea benzii, deci debitele q1 şi q2 vor fi egale. Se poate spune că la o mărime de intrare dată u = q1, la momentul t, se obţine o ieşire y = q2 după un timp TM, care reprezintă o întârziere pură (timp mort pur).
q2(t) = q1(t -TM) (2.35)
sau y(t) = u(t - TM) (2.36) În unele situaţii, elementul cu timp mort prezintă şi o întârziere de ordinul
întâi sau doi. Modelul matematic al unui proces cu timp mort şi întârziere de ordinul întâi este de forma:
)()()(
MTtkutydt
tdyT −=+ (2.37)
u(t) q1(t)
y(t) q2(t)
L
u(t) y(t)

11
în care T este constanta de timp (exprimă inerţia procesului) şi k este constanta de proporţionalitate.
2.2.5. Modelul matematic general al unui sistem. Conceptul de liniaritate
In general, pentru un sistem oarecare (proces supus automatizării), cu
intrarea u şi ieşirea y, se obţine modelul matematic general al sistemului :
)()(...)()(
)()(...)()(
011
1
1
011
1
1
tubdt
tdubdt
tudbdt
tudb
tyadt
tdyadt
tydadt
tyda
m
m
mm
m
m
n
n
nn
n
n
+⋅++⋅+⋅
=+⋅++⋅+⋅
−
−
−
−
−
−
În mod necesar an ≠ 0, deoarece altfel ecuaţia ar avea alt ordin. Dacă se
consideră an = 1 atunci ecuaţia devine:
)()(...)()()(...)()(01011
1
1 tubdt
tdubdt
tudbtyadt
tdyadt
tydadt
tydm
m
mn
n
nn
n
+⋅++⋅=+⋅++⋅+ −
−
−
Această ecuaţie reprezintă un model matematic ce poate caracteriza
funcţionarea sistemului în jurul unui punct static de funcţionare. În acest caz, variabilele u şi y reprezintă abateri în jurul acestuia şi care sunt atât de mici, încât permit utilizarea unui model matematic liniar.
Conceptul de liniaritate poate fi definit prin principiul superpoziţiei, aplicabil numai sistemelor liniare.
Fig. Principiul superpoziţiei aplicat unui sistem. Răspunsul y(t) al unui sistem liniar, la mai multe intrări u1(t) , u2(t) , … ,
uk(t) care acţionează simultan, este egal cu suma răspunsurilor la fiecare intrare considerată singură:
y(t)
u1(t)
u2(t)
uk(t)
u(t) y(t)
12
kkk yyyyyuyuyu +++=⇒→→→ ...;...;; 212211 Spunem că sistemul este liniar dacă la o intrare )(...)()()( 21 tutututu k+++=
se obţine o ieşire )(...)()()( 21 tytytyty k+++= .
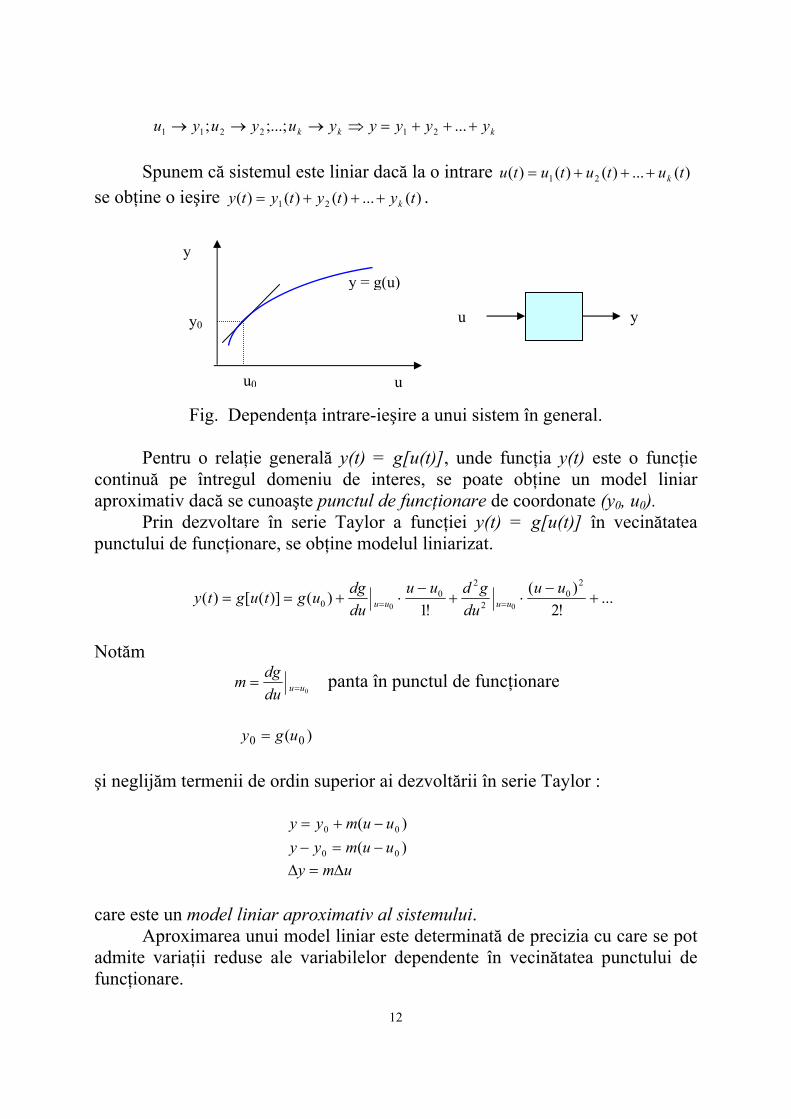
Fig. Dependenţa intrare-ieşire a unui sistem în general.
Pentru o relaţie generală y(t) = g[u(t)], unde funcţia y(t) este o funcţie continuă pe întregul domeniu de interes, se poate obţine un model liniar aproximativ dacă se cunoaşte punctul de funcţionare de coordonate (y0, u0).
Prin dezvoltare în serie Taylor a funcţiei y(t) = g[u(t)] în vecinătatea punctului de funcţionare, se obţine modelul liniarizat.
...!2
)(!1
)()]([)(2
02
20
0 00+
−⋅+
−⋅+== ==
uudu
gduududgugtugty uuuu
Notăm
0uududgm == panta în punctul de funcţionare
)( 00 ugy =
şi neglijăm termenii de ordin superior ai dezvoltării în serie Taylor :
)( 00 uumyy −+= )( 00 uumyy −=−
umy Δ=Δ
care este un model liniar aproximativ al sistemului. Aproximarea unui model liniar este determinată de precizia cu care se pot
admite variaţii reduse ale variabilelor dependente în vecinătatea punctului de funcţionare.
u0
y0
u
y
y = g(u)
u y

13
2.2.6. Funcţia de transfer
Un alt model matematic de tipul intrare-ieşire, utilizat pentru
caracterizarea funcţionării sistemelor liniare continue monovariabile se obţine prin utilizarea transformatei Laplace.
Prin definiţie, funcţia de transfer a unui sistem liniar (se defineşte numai pentru sistemul liniar) reprezintă raportul între transformata Laplace a variabilei de la ieşire şi transformata Laplace a variabilei de la intrare, definite în condiţii iniţiale nule
( 0=ti
i
dtyd = 0 pentru i = 0, 1,…, n-1 şi 0=tj
j
dtud = 0 pentru j = 0,1,…,m-1 )
)()()(
sUsYsH =
În cazul în care ecuaţia diferenţială a sistemului este scrisă în jurul unui
punct în regim staţionar, condiţiile iniţiale reprezintă în practică chiar valorile de regim staţionar.
Deoarece variabila s = σ + jω este o variabilă complexă, atunci şi H(s) este o funcţie complexă :
)()()( sjHsHsH imRE +=
Transformata Laplace realizează trecerea unei funcţii reale în timp f(t),
într-o funcţie complexă F(s) :
∫∞
−=0
)()( dtetfsF st
Se utililizează notaţiile F(s) = £ [f(t)] pentru transformata Laplace directă
şi f(t) = £-1 [f(t)] pentru transformata Laplace inversă. F(s) poartă numele de funcţia imagine şi f(t) poartă numele de funcţia original.
În domeniul timp, funcţia de transfer nu are echivalent pentru studiul sistemelor şi astfel se explică importantele facilităţi de studiu datorate utilizării transformatei Laplace şi a proprietăţilor sale.
Funcţia de transfer reprezintă un model funcţional de tipul intrare–ieşire,
care se poate obţine şi prin aplicarea transformatei Laplace ecuaţiei diferenţiale ce caracterizează sistemul. Sub forma generală, funcţia de transfer a unui sistem se poate obţine pornind de la ecuaţia diferenţială generală a unui sistem. Astfel, utilizând teorema derivării originalului şi aplicând transformata Laplace în

14
ambii membrii ai ecuaţiei diferenţiale generale a unui sistem, în condiţii iniţiale nule obţinem
)...)(()...)(( 01
101
1 bsbsbsUasassY mm
mm
nn
n +++=+++ −−
−− ,
de unde
0
11
01
1
......
)()()(
asasbsbsb
sUsYsH n
nn
mm
mm
++++++
== −−
−− ,
este funcţia de transfer a unui sistem sub forma generală.
În continuare se vor stabili funcţiile de transfer, pornind de la ecuaţiile diferenţiale determinate anterior, pentru sistemul de ordinul I, sistemul de ordinul II, elementul cu timp mort şi sistemul cu întârziere de ordinul I cu timp mort.
a) Sistemul (elementul) de ordinul I
Ecuaţia diferenţială a fost dedusă pornind de la circuitul electric RC
)()()( tutydt
tdyT =+
Se aplică teorema derivării originalului şi transformata Laplace în ambii
membri ai ecuaţiei diferenţiale. În condiţii iniţiale nule avem :
)()()( sUsYsTsY =+ din care se obţine funcţia de transfer conform definiţiei acesteia
sTsUsYsH
+==
11
)()()( .
În general, pentru un sistem de ordinul I
sTKsH+
=1
)(
unde T – constanta de timp a procesului K – coeficientul de proporţionalitate al procesului.

15
b) Sistemul (elementul) de ordinul II
Ecuaţia diferenţială a fost dedusă pornind de la circuitul electric RLC, sau pornind de la sistemul mecanic cu resort şi amortizor.
2
2 )(dt
tyd 2+ )()()( 22 tutydt
tdynnn ωωξω =+
Se aplică teorema derivării originalului şi transformata Laplace ambilor
membri ai ecuaţiei diferenţiale. În condiţii iniţiale nule se obţine
)()()(2)( 222 sUsYssYsYs nnn ωωξω =++ şi
22
2
2)()()(
nn
n
sssUsYsH
ωξωω
++== ,
funcţia de transfer a sistemului de ordinul II, notaţiile având semnificaţiile următoare s = σ + jω variabila complexă nω pulsaţia naturală a sistemului ξ factorul (gradul) de amortizare al sistemului
c) Sistemul (elementul) cu timp mort
Relaţia intrare-ieşire în domeniul timp a fost stabilită pentru un
transportor cu bandă. Modelul matematic pune în evidenţă întârzierile introduse de procesele fizice cu fenomene de transport de masă sau energie, care se realizează cu viteze finite. Întârzierile se concretizează prin timpul mort TM.
)()( MTtuty −=
Aplicăm transformata Laplace şi se obţine
MsTesUsY −= )()( ,
de unde rezultă funcţia de transfer pentru elementul cu timp mort pur
MsTesUsYsH −==)()()( .
16
d) Elementul de întârziere de ordinul I cu timp mort
Modelul matematic al unui proces cu timp mort şi întârziere de ordinul I este de forma:
)()()(
MTtkutydt
tdyT −=+
Procedând similar cazurilor precedente avem
msTeskUsYsTsY −=+ )()()( şi
1)(
)()(+
==−
Tske
sUsYsH
MsT
funcţia de transfer pentru sistemul cu timp mort şi întârziere de ordinul I.
2.2.7. Transformata Laplace O funcţie reală f(t) de o variabilă reală t > 0 admite o transformată
Laplace definită prin relaţia
£f(t)=F(s)= ∫∞
+
−
0
)( dtetf st ,
unde s este o variabilă complexă definită prin s=σ+jω, σ şi ω sunt variabile reale şi j 1−= . Transformata Laplace transformă o problemă din domeniul real al timpului în domeniul variabilei complexe s. Pentru trecerea inversă din domeniul complex în domeniul real se foloseşte transformata Laplace inversă.
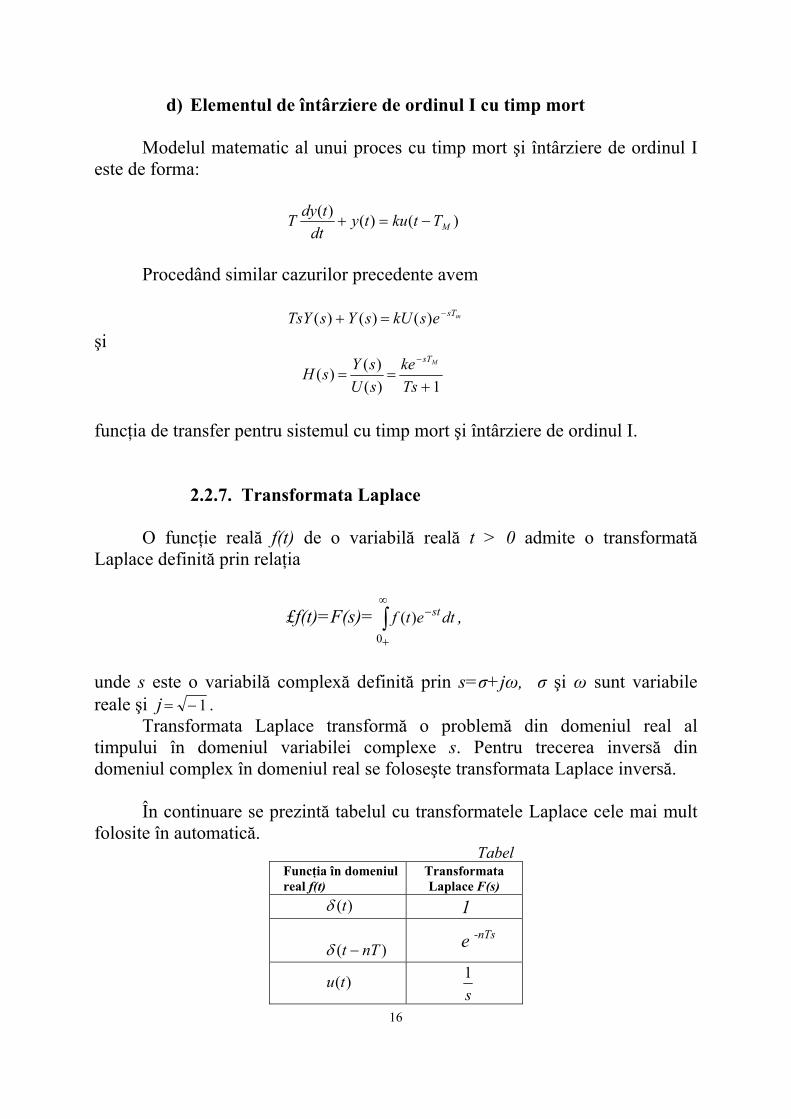
În continuare se prezintă tabelul cu transformatele Laplace cele mai mult
folosite în automatică. Tabel
Funcţia în domeniul real f(t)
Transformata Laplace F(s)
)(tδ 1
)( nTt −δ e -nTs
)(tu s1
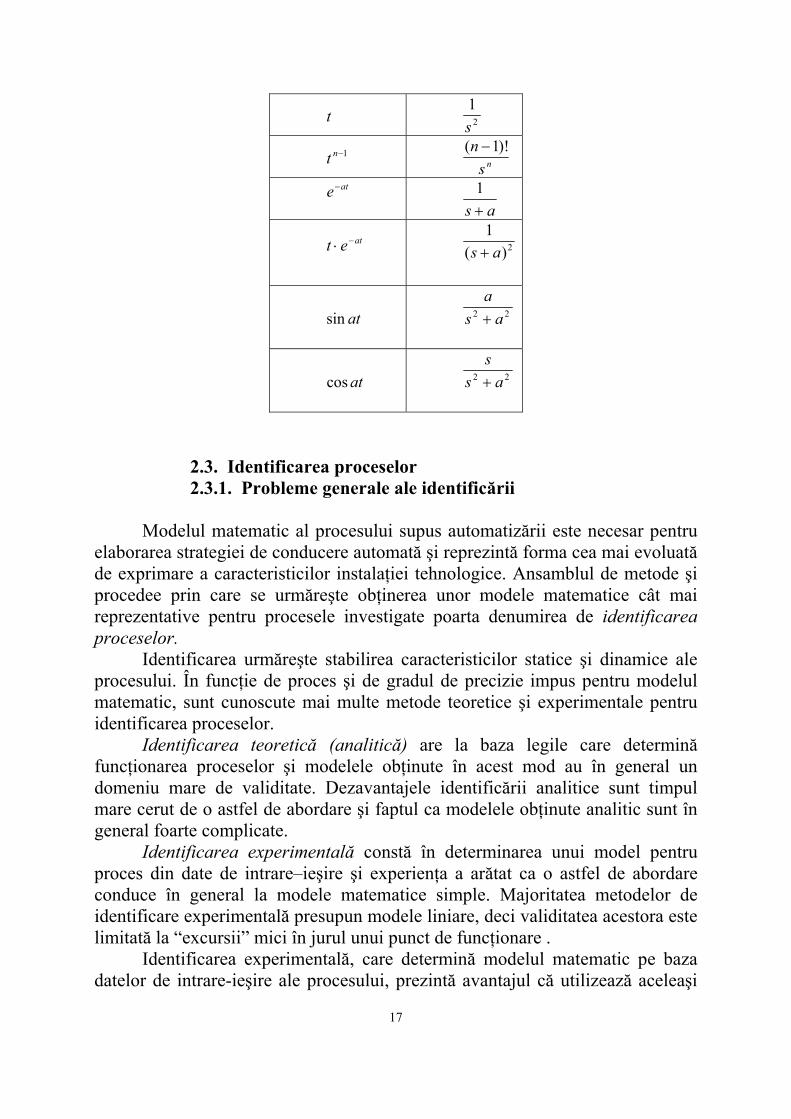
17
t 2
1s
1−nt nsn )!1( −
ate−
as +1
atet −⋅ 2)(1as +
atsin 22 asa+
atcos 22 ass+
2.3. Identificarea proceselor 2.3.1. Probleme generale ale identificării
Modelul matematic al procesului supus automatizării este necesar pentru
elaborarea strategiei de conducere automată şi reprezintă forma cea mai evoluată de exprimare a caracteristicilor instalaţiei tehnologice. Ansamblul de metode şi procedee prin care se urmăreşte obţinerea unor modele matematice cât mai reprezentative pentru procesele investigate poarta denumirea de identificarea proceselor.
Identificarea urmăreşte stabilirea caracteristicilor statice şi dinamice ale procesului. În funcţie de proces şi de gradul de precizie impus pentru modelul matematic, sunt cunoscute mai multe metode teoretice şi experimentale pentru identificarea proceselor.
Identificarea teoretică (analitică) are la baza legile care determină funcţionarea proceselor şi modelele obţinute în acest mod au în general un domeniu mare de validitate. Dezavantajele identificării analitice sunt timpul mare cerut de o astfel de abordare şi faptul ca modelele obţinute analitic sunt în general foarte complicate.
Identificarea experimentală constă în determinarea unui model pentru proces din date de intrare–ieşire şi experienţa a arătat ca o astfel de abordare conduce în general la modele matematice simple. Majoritatea metodelor de identificare experimentală presupun modele liniare, deci validitatea acestora este limitată la “excursii” mici în jurul unui punct de funcţionare .
Identificarea experimentală, care determină modelul matematic pe baza datelor de intrare-ieşire ale procesului, prezintă avantajul că utilizează aceleaşi

18
metode şi tehnici pentru cele mai diferite tipuri de procese. Prin prelucrarea datelor de intrare-ieşire se obţin modele funcţionale care descriu numai componentele intrare–ieşire ale procesului, modele cu largă aplicabilitate în proiectarea sistemelor de reglare automată.
În cazul instalaţiilor tehnologice în care se desfăşoară procese rapide, cum sunt prin excelenţă acţionările electrice, identificarea se efectuează uşor şi cu un grad ridicat de precizie, deoarece ecuaţiile diferenţiale care descriu funcţionarea maşinilor electrice sunt determinate în literatura de specialitate (identificare teoretică).
Mult mai complicată este identificarea proceselor lente, care reprezintă majoritatea proceselor supuse automatizării. Descrierea matematică a acestor procese poate fi obţinută numai în mod aproximativ, cu o precizie sensibil mai redusă decât în cazul proceselor rapide. Există o mare varietate de procese lente pentru care nu există ecuaţii gata stabilite prin care să se descrie matematic aceste procese, cu excepţia unui număr redus de cazuri. În al doilea rând, stabilirea acestor ecuaţii este deosebit de dificilă datorită complexităţii instalaţiilor şi al numărului mare de factori care intervin, iar ecuaţiile obţinute sunt complicate.
Datorită consideraţiilor menţionate, metodele experimentale joacă un rol preponderent în identificarea proceselor lente, însă gradul de precizie al identificării este cu mult mai redus decât în cazul proceselor rapide. 2.3.2. Identificarea experimentală a proceselor pe baza răspunsului indicial
Identificarea experimentală se poate realiza prin aplicarea la intrarea
procesului a unor semnale speciale cunoscute sub numele de semnale de probă. Modelele construite pe baza răspunsului indicial sunt modele ale
ansamblului format din procesul tehnologic, traductorul şi elementul de execuţie (partea fixată a sistemului automat). Semnalul de intrare, sub forma unei comenzi, se aplică elementului de execuţie, iar variabila măsurată se obţine la ieşirea traductorului.
Fig. Partea fixată a sistemului automat supusă identificării Funcţia de transfer a părţii fixate se notează cu HF(s) şi este dată de relaţia
E P Tu(t) y(t)
19
)()()()( sTPEF HsHsHsH ⋅⋅=
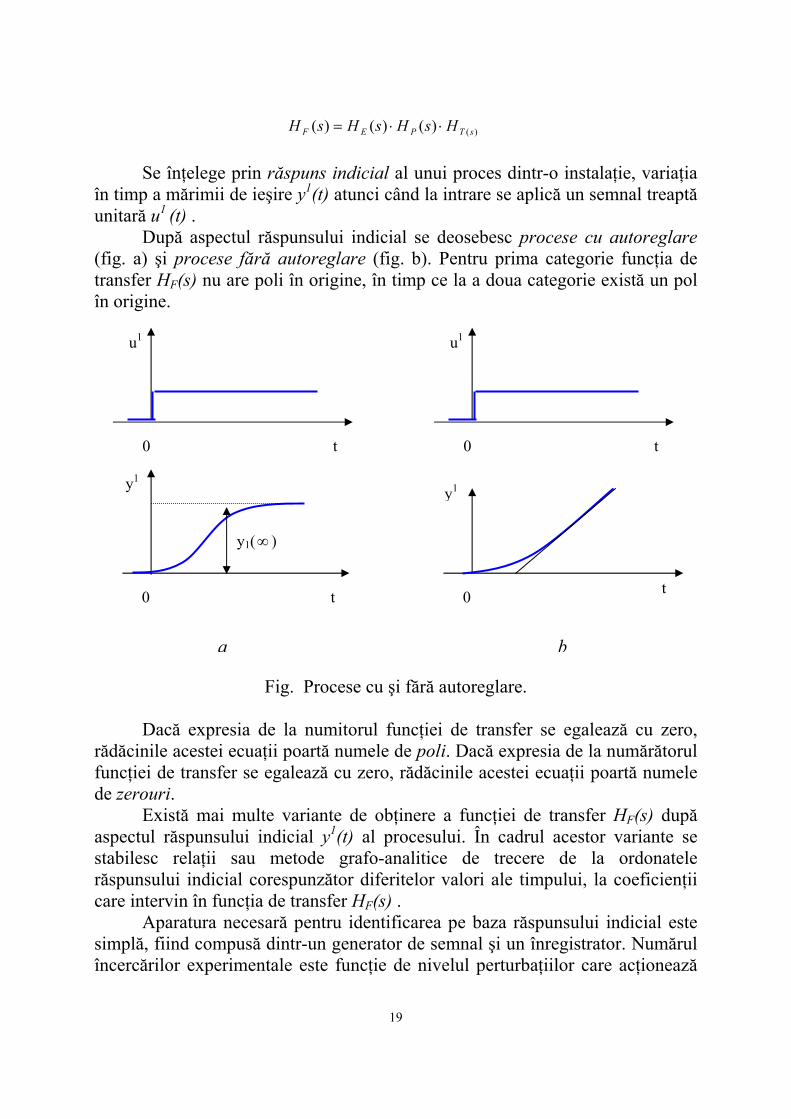
Se înţelege prin răspuns indicial al unui proces dintr-o instalaţie, variaţia
în timp a mărimii de ieşire y1(t) atunci când la intrare se aplică un semnal treaptă unitară u1 (t) .
După aspectul răspunsului indicial se deosebesc procese cu autoreglare (fig. a) şi procese fără autoreglare (fig. b). Pentru prima categorie funcţia de transfer HF(s) nu are poli în origine, în timp ce la a doua categorie există un pol în origine.
Fig. Procese cu şi fără autoreglare. Dacă expresia de la numitorul funcţiei de transfer se egalează cu zero,
rădăcinile acestei ecuaţii poartă numele de poli. Dacă expresia de la numărătorul funcţiei de transfer se egalează cu zero, rădăcinile acestei ecuaţii poartă numele de zerouri.
Există mai multe variante de obţinere a funcţiei de transfer HF(s) după aspectul răspunsului indicial y1(t) al procesului. În cadrul acestor variante se stabilesc relaţii sau metode grafo-analitice de trecere de la ordonatele răspunsului indicial corespunzător diferitelor valori ale timpului, la coeficienţii care intervin în funcţia de transfer HF(s) .
Aparatura necesară pentru identificarea pe baza răspunsului indicial este simplă, fiind compusă dintr-un generator de semnal şi un înregistrator. Numărul încercărilor experimentale este funcţie de nivelul perturbaţiilor care acţionează
y1
a
y1(∞ )
u1
t0
0 t t
y1
b
u1
t0
0
20
asupra sistemului, recomandându-se 3…5 testări chiar şi în cazul unor perturbaţii neglijabile.
O metodă des folosită pentru identificarea proceselor este utilizarea unor modele cu funcţii de transfer tipice, de dimensiune redusă, acceptabile pentru un număr destul de mare de procese tehnologice. Metoda este folosită în cazul proceselor lente şi foarte lente. Drept funcţii de transfer tipice se utilizează de obicei una din formele:
sT
eKsHF
sTF
F
M
⋅+⋅
=⋅−
1)(
1 n
F
sTF
F sTeK
sHM
)1()(2 ⋅+
⋅=
⋅−
)1()1(
)(21
3 sTsTeKsH
FF
sTF
F
M
⋅+⋅⋅+⋅
=⋅−
.
În cazul acestor modele apare timpul mort TM, care este prezent în
majoritatea proceselor lente.
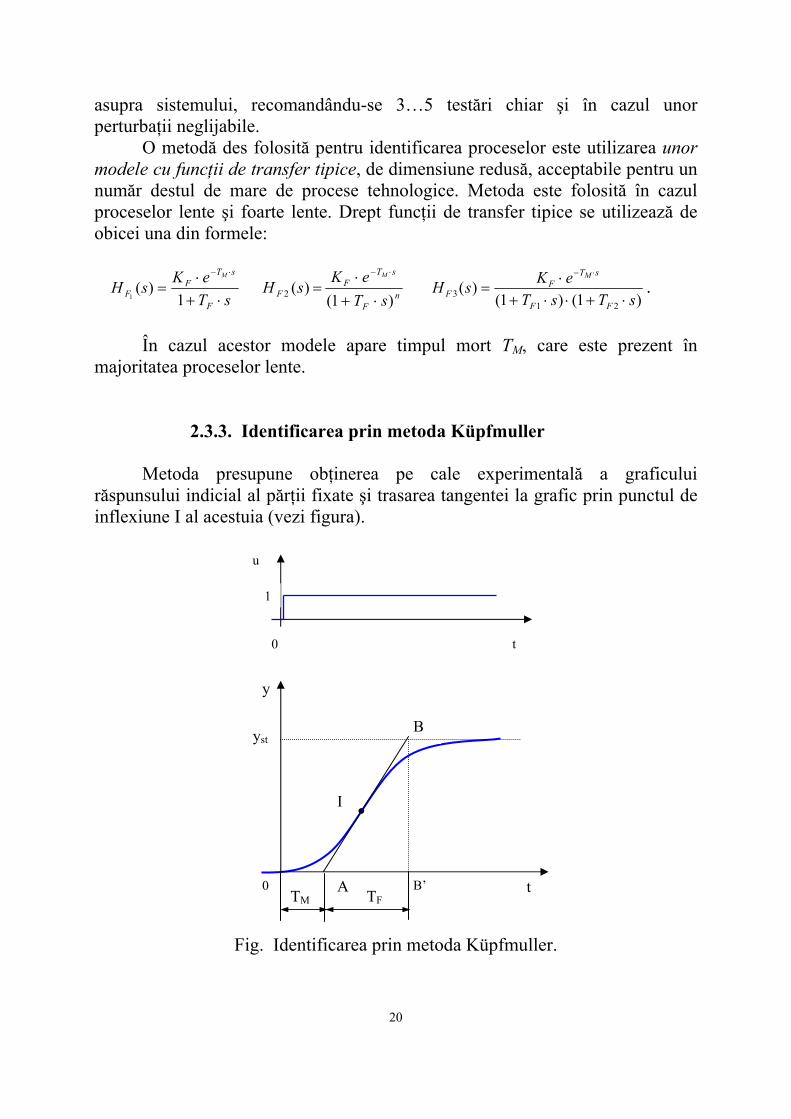
2.3.3. Identificarea prin metoda Küpfmuller
Metoda presupune obţinerea pe cale experimentală a graficului răspunsului indicial al părţii fixate şi trasarea tangentei la grafic prin punctul de inflexiune I al acestuia (vezi figura).
Fig. Identificarea prin metoda Küpfmuller.
0 t TFTM
•
B’
B
y
yst
A
I
t0
u
1

21
Se stabilesc punctele de intersecţie A şi B ale acestei tangente cu axa timpului, respectiv cu orizontala valorii staţionare y(∞ ) = yst. Se consideră că procesul tranzitoriu real poate fi înlocuit prin unul caracterizat de un timp mort echivalent TM şi o constantă de timp TF , valoarea lui TM fiind egală cu intervalul OA , iar valoarea lui TF cu intervalul AB’.
Pentru un răspuns indicial de tipul celui prezentat în figură se poate aproxima funcţia de transfer a procesului identificat conform metodei Küpfmuller sub forma:
F
sTF
F sTeKsH
M
+⋅
=⋅−
1)(
unde factorul de amplificare al părţii fixate KF se calculează cu ajutorul relaţiei :
initial
initialst
ttF uuyy
uyK
−−
=ΔΔ
=∞→∞→
limlim
Din punctul de vedere al proiectării sistemelor automate (acordarea
regulatorelor) este important, în primul rând, ca aproximarea să fie bună în porţiunea iniţială a răspunsului indicial, acolo unde se manifestă timpul mort.
2.3.4. Identificarea prin metoda Strejc Metoda Küpfmuller aproximează grosier începutul răspunsului indicial.
Un grad mai ridicat de precizie îl prezintă identificarea care conduce de la un răspuns indicial aperiodic la o funcţie de transfer de forma :
nF
sTF
F sTeKsH
M
)1()(
+⋅
=⋅−
Această aproximare se bazează pe faptul ca funcţia de transfer a unui sistem caracterizat de n constante de timp poate fi cu bună precizie aproximată printr-o funcţie de transfer conţinând de n ori o aceeaşi constantă de timp.
Răspunsul indicial al părţii fixate, conform metodei Strejc, poate fi prelucrat ca în figură.
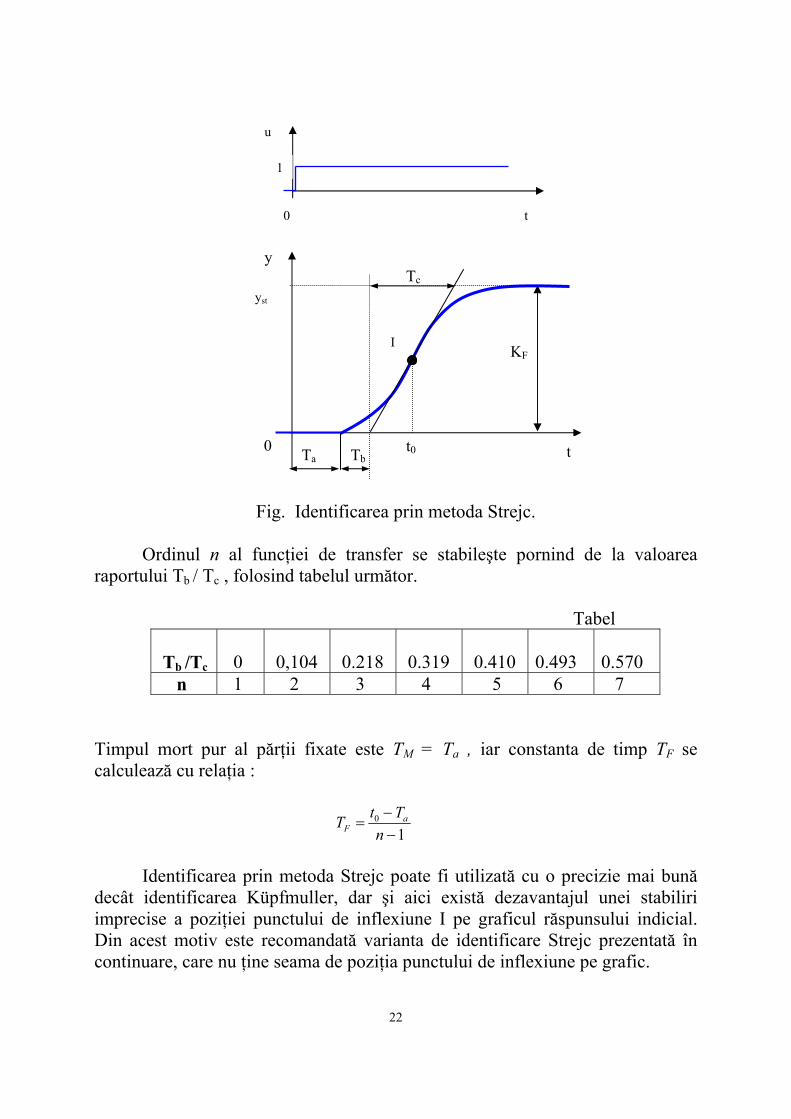
22
Fig. Identificarea prin metoda Strejc. Ordinul n al funcţiei de transfer se stabileşte pornind de la valoarea
raportului Tb / Tc , folosind tabelul următor.
Tabel Tb /Tc 0
0,104
0.218
0.319
0.410
0.493
0.570
n 1 2 3 4 5 6 7 Timpul mort pur al părţii fixate este TM = Ta , iar constanta de timp TF se calculează cu relaţia :
10
−−
=n
TtT aF
Identificarea prin metoda Strejc poate fi utilizată cu o precizie mai bună
decât identificarea Küpfmuller, dar şi aici există dezavantajul unei stabiliri imprecise a poziţiei punctului de inflexiune I pe graficul răspunsului indicial. Din acest motiv este recomandată varianta de identificare Strejc prezentată în continuare, care nu ţine seama de poziţia punctului de inflexiune pe grafic.
t0
I KF
Tc
yst
y
Ta Tb0 t
t0
u
1
23
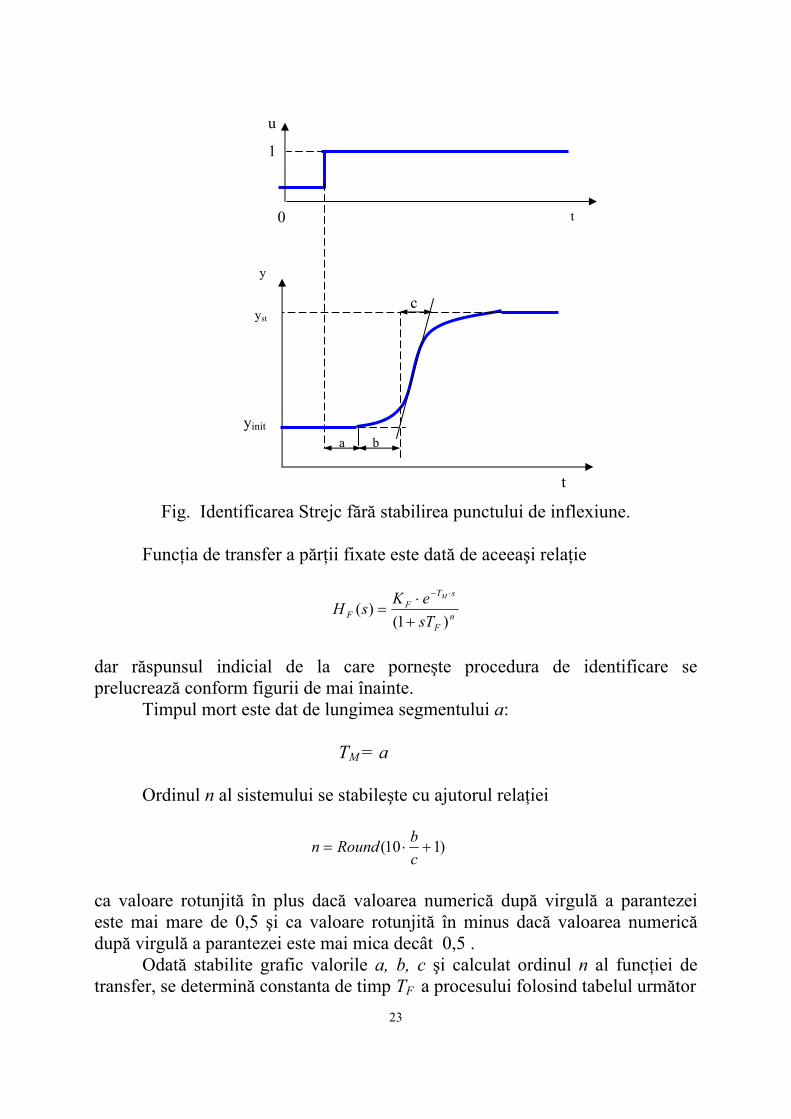
Fig. Identificarea Strejc fără stabilirea punctului de inflexiune.
Funcţia de transfer a părţii fixate este dată de aceeaşi relaţie
nF
sTF
F sTeKsH
M
)1()(
+⋅
=⋅−
dar răspunsul indicial de la care porneşte procedura de identificare se prelucrează conform figurii de mai înainte.
Timpul mort este dat de lungimea segmentului a:
TM = a Ordinul n al sistemului se stabileşte cu ajutorul relaţiei
)110( +⋅=cbRoundn
ca valoare rotunjită în plus dacă valoarea numerică după virgulă a parantezei este mai mare de 0,5 şi ca valoare rotunjită în minus dacă valoarea numerică după virgulă a parantezei este mai mica decât 0,5 .
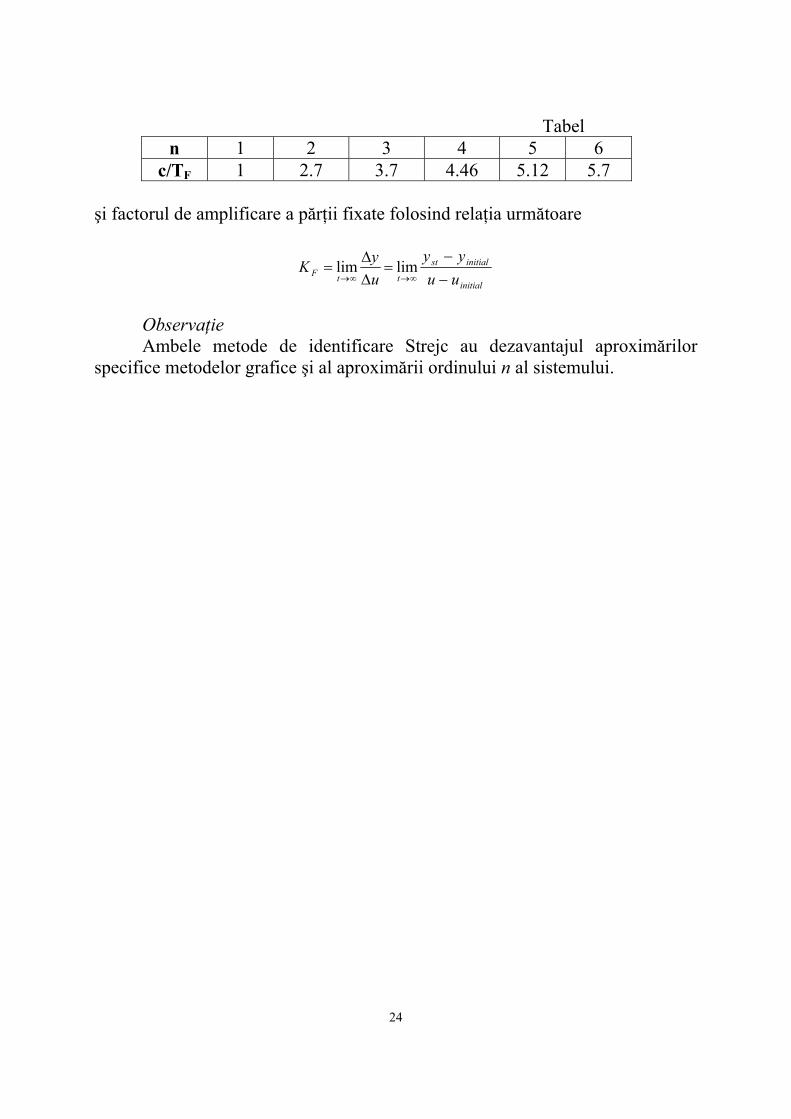
Odată stabilite grafic valorile a, b, c şi calculat ordinul n al funcţiei de transfer, se determină constanta de timp TF a procesului folosind tabelul următor
yinit
0
t
t
u
c
a b
yst
y
1
24
Tabel
n 1 2 3 4 5 6 c/TF 1 2.7 3.7 4.46 5.12 5.7
şi factorul de amplificare a părţii fixate folosind relaţia următoare
initial
initialst
ttF uuyy
uyK
−−
=ΔΔ
=∞→∞→
limlim
Observaţie Ambele metode de identificare Strejc au dezavantajul aproximărilor
specifice metodelor grafice şi al aproximării ordinului n al sistemului.