Cadiz Hevia Reyes-2013-Mecanica Clasica

of 212
-
Upload
javiera-rivera -
Category
Documents
-
view
117 -
download
1
Transcript of Cadiz Hevia Reyes-2013-Mecanica Clasica
-
Mecnica ClsicaFabin CdizSamuel A. HeviaSebastin A. Reyes
-
Mecnica Clsica
Fabin Cdiz Samuel A. Hevia Sebastin A. Reyes
Figuras: Pa Homm Diagramacin: Mara Jos Vandeputte
-
Mecnica Clsica
Fabin Cdiz, Samuel Hevia, Sebastin A. Reyes.
Figuras: Pa Homm
Diagramacin: Mara Jos Vandeputte
Departamento de Fsica
Pontificia Universidad Catlica de Chile
25 de enero de 2013
-
II
-
Prlogo VII
1 Cinemtica 1
1.1 Cinemtica en una dimensin . . . . . . . . . . . . . . . . . . . . . . . . 1
1.1.1 Desplazamiento . . . . . . . . . . . . . . . . . . . . . . . . . . . 3
1.1.2 Velocidad Media . . . . . . . . . . . . . . . . . . . . . . . . . . . 4
1.1.3 Velocidad Instantnea . . . . . . . . . . . . . . . . . . . . . . . . 4
1.1.4 El concepto de la derivada . . . . . . . . . . . . . . . . . . . . . . 4
1.1.5 Rapidez . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 5
1.1.6 Aceleracin Media . . . . . . . . . . . . . . . . . . . . . . . . . . 6
1.1.7 Aceleracin Instantnea . . . . . . . . . . . . . . . . . . . . . . . 7
1.1.8 Movimiento a velocidad constante (o no acelerado) . . . . . . . . 7
1.1.9 Movimiento con aceleracin constante . . . . . . . . . . . . . . . 10
1.1.10 Movimiento Relativo . . . . . . . . . . . . . . . . . . . . . . . . . 13
1.2 Cinemtica en dos dimensiones . . . . . . . . . . . . . . . . . . . . . . . 16
1.2.1 Posicin bidimensional, concepto de vector. . . . . . . . . . . . . 16
1.2.2 Desplazamiento . . . . . . . . . . . . . . . . . . . . . . . . . . . 17
1.2.3 Velocidad Media . . . . . . . . . . . . . . . . . . . . . . . . . . . 18
1.2.4 Velocidad Instantnea . . . . . . . . . . . . . . . . . . . . . . . . 18
1.2.5 Rapidez . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 19
1.2.6 Aceleracin Media . . . . . . . . . . . . . . . . . . . . . . . . . . 19
1.2.7 Aceleracin Instantnea . . . . . . . . . . . . . . . . . . . . . . . 20
1.2.8 Movimiento Uniformemente Acelerado . . . . . . . . . . . . . . . 23
1.2.9 Movimiento Circular . . . . . . . . . . . . . . . . . . . . . . . . . 27
1.3 Problemas resueltos . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 30
2 Dinmica 41
2.1 Leyes de Newton . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 41
2.2 Fuerzas . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 42
2.2.1 Fuerza de Gravedad: Ley de gravitacin universal de Newton . . 43
2.2.2 Fuerza elstica y Ley de Hook . . . . . . . . . . . . . . . . . . . 44
2.2.3 Fuerzas de contacto entre dos cuerpos . . . . . . . . . . . . . . 49
III
-
2.3 Aplicaciones de las leyes de Newton . . . . . . . . . . . . . . . . . . . . 54
2.3.1 La Mquina de Atwood. . . . . . . . . . . . . . . . . . . . . . . . 54
2.3.2 Movimientos ligados . . . . . . . . . . . . . . . . . . . . . . . . . 55
2.4 Dinmica del Movimiento Circular . . . . . . . . . . . . . . . . . . . . . . 58
2.5 Problemas resueltos . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 63
3 Trabajo y Energa 79
3.1 Introduccin . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 79
3.2 Teorema de Trabajo y Energa Cintica . . . . . . . . . . . . . . . . . . . 80
3.3 Energa Potencial: fuerzas conservativas . . . . . . . . . . . . . . . . . . 84
3.3.1 Potencial gravitacional . . . . . . . . . . . . . . . . . . . . . . . . 85
3.3.2 Potencial del resorte . . . . . . . . . . . . . . . . . . . . . . . . . 86
3.4 Trabajo de la fuerza de roce . . . . . . . . . . . . . . . . . . . . . . . . . 87
3.5 Potencia . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 89
3.6 Problemas resueltos . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 90
4 Momntum y colisiones 107
4.1 Introduccin . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 107
4.2 Impulso . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 108
4.3 Sistemas de partculas y conservacin del momntum . . . . . . . . . . 108
4.4 Centro de masa . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 114
4.5 Problemas resueltos . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 117
5 Momntum angular y torque 145
5.1 Introduccin . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 145
5.2 Momntum angular . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 145
5.3 Torque . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 148
5.4 Rotacin en torno a un eje fijo . . . . . . . . . . . . . . . . . . . . . . . . 152
5.4.1 Momento de inercia de un cuerpo rgido . . . . . . . . . . . . . . 154
5.4.2 Teorema de los ejes paralelos . . . . . . . . . . . . . . . . . . . . 155
5.4.3 Energa rotacional . . . . . . . . . . . . . . . . . . . . . . . . . . 157
5.5 Ejercicios resueltos . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 158
6 Solucin a los ENTENDISTEST 195
6.1 Captulo 1 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 195
6.2 Captulo 2 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 197
IV
-
6.3 Captulo 3 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 198
6.4 Captulo 4 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 199
6.5 Captulo 5 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 199
ndice 201
V
-
VI
-
PrlogoEste texto de estudio fue elaborado teniendo en mente a estudiantes avanzados de
enseanza media o que estn prontos a ingresar a su primer ao de Universidad. Sepresenta en forma concisa gran parte de los contenidos de Mecnica Clsica que seespera un alumno domine antes de comenzar su primer curso avanzado de MecnicaClsica de nivel universitario. Es importante mencionar que, aunque se introducen yutilizan conceptos bsicos de Clculo, no es necesario contar con conocimiento pre-vio en esta materia. Se espera, eso s, que el lector tenga conocimientos bsicos detrigonometra y vectores.
La metodologa del libro es simple y se basa en nuestro convencimiento de quela mejor manera de aprender Mecnica Clsica es ejercitando y resolviendo proble-mas en forma reflexiva. Los contenidos e ideas bsicas se presentan en forma breve,utilizando ejemplos ilustrativos cuando es necesario. Al final de cada captulo se desa-rrollan diversos problemas escogidos cuidadosamente por su valor pedaggico. Estosejercicios deben ser considerados como parte fundamental (y no opcional) del pro-ceso de estudio. Cabe sealar que los ejemplos y problemas presentados en estetexto tienen orgenes diversos. Algunos se disearon exclusivamente para este libro,otros fueron inventados por los autores con anterioridad, y los restantes son ejerciciosclsicos cuya autora es difcil de determinar.
Antes de comenzar es bueno hacer algunas recomendaciones bsicas que cree-mos le ayudarn a hacer el proceso de aprendizaje provechoso y entretenido:
1. Las ideas bsicas de la Mecnica Newtoniana se pueden enunciar y explicar enpocas pginas. Esto no quiere decir que sean fciles de aprender. De hecho, esnatural que para llegar a una plena comprensin y dominio de los conceptos serequiera de mucho tiempo de reflexin y prctica.
VII
-
2. Desarrolle los problemas planteados reflexionando y entendiendo todos los pa-sos. No sirve copiar o transcribir problemas para memorizar! En el proceso deaprendizaje hay tres elementos muy importantes: pensar, pensar y pensar.
3. nimo, la recompensa es grande! La Mecnica Clsica no slo es una de lasteoras cientficas ms exitosas y utilizadas, sino que adems es una bella yfascinante descripcin de la Naturaleza.
Estamos seguros de que en esta primera versin del texto existe un amplio mar-gen para mejorar y el aporte de los lectores ser fundamental en este proceso. Losinvitamos a participar con sus comentarios y sugerencias en www.librodefisica.cl.
Por ltimo, queremos agradecer el apoyo del Departamento de Fsica, de la Direc-cin Academica de Docencia y de la Facultad de Ingeniera de la Pontificia UniversidadCatlica de Chile. En particular, queremos agradecer el apoyo de Mauricio Lpez y losconstructivos comentarios y observaciones de ngel Abusleme y Alejandra Snchez.
Fabin Cdiz, Samuel Hevia, Sebastin A. Reyes
Santiago, Enero de 2013.
VIII
-
1Cinemtica
El propsito de la mecnica clsica es describir el movimiento de los cuerpos y enten-der sus causas, una de las inquietudes ms antiguas de la humanidad. En este primercaptulo nos concentraremos en la cinemtica, es decir, en la descripcin del movi-miento sin preocuparnos por sus causas. Para esto introduciremos algunos conceptosy herramientas matemticas que nos permitirn hacer esta descripcin de maneracompleta y rigurosa1.
Para este tipo de anlisis muchas veces es adecuado pensar en el objeto en cuestincomo un punto ubicado en su centro, cuya posicin puede varar en el tiempo. Tal esel caso, por ejemplo, de la descripcin del movimiento de una bala, de un automvil,de una persona corriendo o incluso del movimiento de los planetas alrededor del sol.
En lo que sigue introduciremos conceptos bsicos como desplazamiento, velocidad yaceleracin, que sern de gran importancia a lo largo de todo el texto.
Cinemtica en una dimensin 1.1
Para comenzar estudiaremos ciertos tipos de movimiento que pueden ser descritospor una sola coordenada, llamados unidimensionales. Sabemos que nuestro mundoes tridimensional y esto podra parecer una sobresimplificacin, pero veremos queel estudio del movimiento en una dimensin ser de gran utilidad para resolver unaamplia variedad de problemas interesantes. Adems, muchas de las ideas que se pre-
1Las causas del movimiento las estudiaremos en el siguiente captulo.
1
-
2 Captulo 1. Cinemtica
sentan aqu sern fcilmente generalizadas para los casos en donde el movimientoocurre en ms dimensiones.
Consideremos entonces un objeto que se mueve en una lnea recta. En primer lugardefinimos un eje x de referencia paralelo a la direccin del objeto en movimiento, ycuyo origen (x = 0) definimos arbitrariamente. Una vez hecho esto, la trayectoria (oitinerario) del mvil queda completamente descrita por una funcin del tiempo x(t) quenos entrega la posicin del objeto para cada instante de tiempo t , cuyo origen (t = 0)tambin es escogido arbitrariamente.
Por ejemplo, supongamos que queremos describir la trayectoria que sigue el velocistaUsain Bolt al correr una carrera de cien metros planos. Para esto definamos un ejex que pasa justo por el carril de Bolt y cuyo origen est en el punto de partida de lacarrera. Elijamos adems el sentido positivo de este eje apuntando en la direccin enque se desplazan los corredores, como se muestra en la Fig. 1.1. La eleccin de uneje y su origen es lo que llamaremos sistema de referencia.
xO
Figura 1.1: Usain Bolt se prepara para romper el record mundial de cien metros planos.Para describir su movimiento hemos escogido un eje X que pasa por el carril delcorredor.
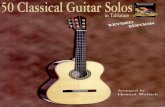
Consideraremos el origen del tiempo como el instante t0 en que suena el disparo ycomienza la carrera (t0 = 0). Sabemos que en ese momento la posicin del corredores x(t0) = 0 m, y usando las imgenes de televisin podemos ver, por ejemplo, que suposicin a los 3 segundos de haber comenzado la carrera es x(t1 = 3 s) = 22.5 m yque a los 8 segundos despus del comienzo de la carrera su posicin es x(t2 = 8 s) =81.7 m. Podemos imaginar entonces que si llevamos un registro de la posicin paradistintos instantes de tiempo, la trayectoria del corredor queda representada por lospuntos que se ven en la Fig. 1.2.
-
1.1. Cinemtica en una dimensin 3
0 2 4 6 8 1 002 04 06 08 01 0 0
T i e m p o ( s )
U s a i n B o l t
Figura 1.2: En el grfico vemos puntos que representan la posicin de Bolt en distintosinstantes de tiempo. Si furamos capaces de medir la posicin en cada instante detiempo, obtendramos la lnea continua que representa matemticamente la trayectoriaseguida por Usan Bolt al recorrer los cien metros planos.
La lnea continua que se muestra en la Fig. 1.2 representa una funcin del tiempo, x(t),que da la posicin de Bolt en cada instante de tiempo t . Toda la informacin relevanteal movimiento del corredor est contenida en esta funcin x(t) que llamaremos funcinposicin.
Introduzcamos ahora algunos conceptos bsicos de cinemtica.
Desplazamiento 1.1.1
Si la posicin de un objeto en los tiempos t1 y t2 corresponde, respectivamente, a lascoordenadas x(t1) y x(t2), definimos el desplazamiento entre t1 y t2 como la diferenciaentre las posiciones respectivas en dichos instantes:
d21 = x(t2) x(t1) (1.1)
El desplazamiento tiene dimensiones de longitud y en el sistema internacional de uni-dades (S.I) 2 lo medimos en metros [m]. Por ejemplo, el desplazamiento de Bolt entrelos tiempos especificados anteriormente es d21 = x(t2) x(t1) = 59.2 m.
2El S.I es el sistema de unidades que se usa en la mayora de los pases. Un metro (m) es la unidadde longitud, y la unidad de tiempo es el segundo (s).
-
4 Captulo 1. Cinemtica
Velocidad Media 1.1.2
La velocidad media (o promedio) sobre un intervalo de tiempo [t1, t2] corresponde aldesplazamiento dividido por el intervalo de tiempo en el que ste ocurri:
v21 =d21
t2 t1 =x(t2) x(t1)
t2 t1 (1.2)
Notemos que la velocidad media entre dos instantes puede ser pequea a pesar deque el objeto haya recorrido una gran distancia entre t1 y t2. En particular, si sterecorre una larga trayectoria y vuelve a su posicin original, su velocidad media enese intervalo de tiempo ser cero. En ese sentido, la velocidad media es insensible ala historia que ocurre entre t1 y t2. La velocidad tiene dimensiones de longitud divididapor tiempo y en el S.I. se mide en [m/s]. Por ejemplo, podemos calcular la velocidadmedia de Bolt entre t1 = 3 s y t2 = 8 s, que es v21 = (x2 x1)/(t2 t1) = 11.4 m/s.
Velocidad Instantnea 1.1.3
Como vimos anteriormente, la velocidad media nos permite estimar cunto vale eldesplazamiento por unidad de tiempo. Pero para esto nos bast calcular un promedioen un intervalo de tiempo dado, pero todo detalle de lo que ocurre dentro de eseintervalo no es tomado en cuenta. Imaginemos ahora que dicho intervalo de tiempose vuelve muy pequeo en torno a un cierto valor del tiempo t , hablamos entonces deuna velocidad asociada a dicho instante de tiempo, v (t). A esta cantidad la llamamosvelocidad instantnea y queda expresada matemticamente por:
v (t) = lmt0
x(t +t) x(t)t
(1.3)
En esta ecuacin el smbolo lmt0 significa lmite cuando t se aproxima a 0. Esdecir, la velocidad instantnea en el instante t corresponde la velocidad media en elintervalo de tiempo [t , t + t ], cuando t es infinitamente pequeo. En este punto esimportante hacer un pequeo parntesis para introducir el concepto de la derivada deuna funcin.
El concepto de la derivada 1.1.4
En la figura 1.3 hemos representado una trayectoria arbitraria (en rojo) de un objetopuntual en trminos de su funcin posicin x(t). Fijemos nuestra atencin en un trozode esta funcin entre dos tiempos particulares t0 y t0 + t . De esta figura podemosnotar que la cantidad x/t , definida como:
xt
=x(t0 +t) x(t0)
t(1.4)
-
1.1. Cinemtica en una dimensin 5
t
)(tx
t
0t
I
II
III
0t tt0
t
)()( 00 txttx
Figura 1.3: La velocidad media entre t0 y t0 +t corresponde a la pendiente de la rectaque pasa por los puntos (t0, x(t0)) y (t0 +t , x(t0 +t)).
corresponde a la pendiente de la recta que pasa por los puntos (t0, x(t0)) y (t0+t , x(t0+t)). A medida que el tamao del intervalo de tiempo t se hace ms pequeo, lapendiente de la recta se asemeja cada vez ms a la pendiente de la recta tangente ala curva en x(t0). Por lo tanto, si tomamos t 0 ambas pendientes sern iguales yla anotaremos como sigue:(
dxdt
)t0
= lmt0
x(t0 +t) x(t0)t
. (1.5)
Notemos que al variar t0 obtenemos distintos valores para 1.5, dicho de otra forma, 1.5es una funcin del tiempo t . Esta nueva funcin es lo que se conoce como derivada dex(t). El smbolo dxdt es la notacin comnmente utilizada para denotar la derivada (tam-bin se utiliza mucho la notacin x (t)). Observe que el lado derecho de la ecuacin1.5 es justamente la definicin de velocidad instantnea en el instante t0. Por lo tanto,la velocidad de un objeto en un instante t corresponde a la derivada de la funcin quedefine la trayectoria de ese objeto evaluada en el instante t .
ENTENDISTEST? 1.1
En cul de las zonas definidas como I, II y III en la figura 1.3, el mvil tiene una mayorvelocidad instantnea?
Rapidez 1.1.5
Cuando un objeto recorre una determinada trayectoria entre dos instantes t1 y t2, nospodemos preguntar, que tan rpido se movi? (sin importar la direccin del movi-miento). Para responder esta pregunta es adecuado definir la rapidez media entre t1 y
-
6 Captulo 1. Cinemtica
t2 como:
r 21 =s21
t2 t1 (1.6)
donde s21 es la longitud total de la trayectoria recorrida entre t1 y t2. Anlogamente alcaso de la velocidad, tambin se puede definir la rapidez instantnea en un instantede tiempo t al considerar un t infinitesimal alrededor de t .
Es importante darnos cuenta de que este concepto es muy diferente a la velocidaddefinida anteriormente. En efecto, la rapidez media es una cantidad siempre positivao nula (cuando no hay ningn movimiento en absoluto). Por ejemplo, si una personacorre cien metros en lnea recta y luego corre de vuelta para regresar a su punto departida demorndose 40 s en todo el proceso, entonces la rapidez media para este re-corrido es r = 200 m/40 s = 5 m/s. Sin embargo, como el punto final de la trayectoriaes el mismo que el inicial, su velocidad media claramente ser v = 0 m/s.
La diferencia ecencial entre rapidez y velocidad es que slo esta ltima es sensiblea los cambios de direccin. De acuerdo con la definicin de rapidez, es fcil darsecuenta que la rapidez instantnea corresponde al mdulo de la velocidad instantnea3 r (t) = |x (t)|.
Aceleracin Media 1.1.6
Otro concepto necesario para describir adecuadamente el movimiento de un objetoes la aceleracin. sta nos dice cunto vara la velocidad por unidad de tiempo. Laaceleracin media entre t1 y t2 se define como:
a21 =v (t2) v (t1)
t2 t1 (1.7)
Es importante destacar que, anlogamente a la velocidad media, el objeto puede sersometido a grandes variaciones de velocidad durante el intervalo de tiempo considera-do y sin embargo el valor medio de la aceleracin puede ser pequeo. Para determinarla aceleracin media solo son necesarias las velocidades final e inicial, y el intervalode tiempo. La aceleracin tiene dimensiones de velocidad dividida por tiempo y en elS.I se mide en [m/s2].
Por ejemplo, el 14 de Octubre de 2012, el paracaidista Felix Baumgartner realiz unsalto desde 39000 metros de altura, logrando romper la barrera del sonido (velocidadde 1137 kilmetros por hora, o equivalentemente, 315.8 m/s) luego de 40 segundosde cada libre. Suponiendo que cuando se deja caer su velocidad vertical es nula, la
3El mdulo de un nmero real x se define como |x | = x si x 0, o |x | = x si x < 0.
-
1.1. Cinemtica en una dimensin 7
aceleracin media al cabo de 40 segundos fue de:
a =315.8 0
40 0 = 7.9ms2
El lector que ya est familiarizado con la gravitacin reconocer una diferencia entreesta aceleracin media y la aceleracin de gravedad, g = 9.81 ms2 , que en principioexperimentan todos los objetos que caen hacia la superficie de la Tierra. En efecto, elcontacto del paracaidista con el aire a su alrededor es el responsable de esta menoraceleracin.
Aceleracin Instantnea 1.1.7
De manera similar a lo visto anteriormente cuando definimos el concepto de veloci-dad instantnea, definiremos la aceleracin instantnea como la aceleracin mediapara un intervalo de tiempo infinitamente pequeo alrededor del instante en el cualdeseamos calcularla. Es decir,
a(t) = lmt0
v (t +t) v (t)t
=dv (t)
dt(1.8)
Notar que la aceleracin corresponde entonces a la segunda derivada de la posicin,a(t) = ddt v (t) =
ddt (
dx(t)dt ) = x
(t).
A continuacin, veremos como describir 2 tipos de movimiento muy importantes yaque corresponden a un gran nmero de situaciones de la vida cotidiana.
Movimiento a velocidad constante (o no acelerado) 1.1.8
El caso ms sencillo consiste en el movimiento de un objeto cuya velocidad es cons-tante, es decir, independiente del tiempo (esto es equivalente a decir que la acele-racin es nula). Esto significa que en iguales intervalos de tiempo recorre la mismadistancia. Si escogemos un cierto origen para la coordenada x que describe el mo-vimiento, y digamos que conocemos la posicin inicial para t = 0, cmo podemosdeterminar la posicin x(t) para un instante posterior t (arbitrario)?.
Por el momento nicamente sabemos que su velocidad est dada por una constanteque llamaremos v0. Notemos que para cualquier intervalo de tiempo [t1, t2] la velocidadmedia es necesariamente igual a v0:
v t1t2 =x(t2) x(t1)
t2 t1 = v0
-
8 Captulo 1. Cinemtica
Llamaremos x0 a la posicin del objeto en el instante t = 0. Luego, para algn tiempot , se tiene que la velocidad entre 0 y t es:
v0 =x(t) x0
t 0de donde obtenemos:
x(t) = x0 + v0t (1.9)
Esta es la descripcin general de cualquier movimiento unidimensional a velocidadconstante. Notemos que como la velocidad es constante, tanto la aceleracin mediasobre cualquier intervalo de tiempo como la aceleracin instantnea para un instantet cualquiera son nulas. Movimiento a velocidad constante es entonces sinnimo demovimiento no acelerado.
Si se grafica la posicin x de la partcula en funcin de t , obtenemos una lnea rectacomo se ve en la Fig. 1.4.
t
)(tx
2t
tvxx(t) 00
1t
0x
1x
2x
Figura 1.4: El grfico de la posicin v/s tiempo para un movimiento a velocidad cons-tante corresponde a una recta. La pendiente de esta recta es igual a la velocidad dela partcula.
Notemos que esto es consistente con el hecho de que la velocidad es igual a la pen-diente de la recta tangente a x(t). En este caso, la recta tangente a x(t) es igual a x(t),cuya pendiente es constante e igual a v0.
A partir de la Ecuacin 1.9, podemos determinar por ejemplo el tiempo t que demoraun objeto en recorrer una distancia x como:
t =xv0
Ejemplo 1.1
Considere un automvil de 4 m de largo que viaja con una rapidez constante de 120km/h por una carretera recta de una pista por sentido de trnsito. Por el mismo carril yms adelante viaja un camin de 16 m de largo a una velocidad de 100 km/h. En un
-
1.1. Cinemtica en una dimensin 9
instante dado, el conductor del automvil ve al camin y decide realizar una maniobrade adelantamiento manteniendo la rapidez del auto constante. Cul es el mnimo in-tervalo de tiempo que debe estar el automvil en el carril contrario para realizar estamaniobra de forma segura? Considere que la maniobra es segura cuando la distanciaparalela a la carretera entre el auto y el camin es mayor a 5 m. Adems desprecie eldesplazamiento lateral.
Solucin: La maniobra de adelantamiento puede ser descrita en tres etapas. Prime-ro se realiza el cambio de carril, luego el sobrepaso por un costado del otro vehculoy finalmente el cambio al carril original. Para representar grficamente esta situacindibujaremos los vehculos en el instante inicial y final de la maniobra en la figura si-guiente:
Ad
SLSL
Cd
CL AL
Av
Cv
El trayecto dA que recorre el automvil est dado por:
dA = LC + LA + 2LS + dC (1.10)
donde dC es la distancia que recorre el camin durante la maniobra. Por lo tanto, eltiempo mnimo que debe estar el automvil en el carril contrario es:
tm =dAvA
(1.11)
La distancia dC que recorre el camin es:
dC = vCtm (1.12)
Luego, reemplazando 1.11 y 1.12 en 1.10, se obtiene:
vAtm = LC + LA + 2LS + vCtm (1.13)
Despejando, obtenemos que el tiempo est dado por:
tm =LC + LA + 2LS
vA vC (1.14)
-
10 Captulo 1. Cinemtica
Anlisis del Resultado
Si vA = vC = t , lo cual es de esperar, ya que si el automvil viaja a una velocidadmuy cercana a la del camin, el tiempo que tarda en adelantarlo ser muy grande. Enparticular, si las velocidades son iguales, este resultado indica que no es posible eladelantamiento.
Note adems que el resultado slo depende de la diferencia de las velocidades. Estoindica que el tiempo es el mismo que si el camin est detenido y el auto se desplazaa 20 km/h.
Obteniendo un valor numrico: Para evaluar los datos en 1.14 es recomendablerealizar un cambio de unidades, desde km/h a m/s.
1kmh
=1000 m3600 s
1kmh
=1 m
3, 6 s
Como nos interesa la diferencia de las velocidades, se tiene que:
vA vC = 120 kmh 100kmh
= 20kmh
vA vC = 203, 6ms
Evaluando en 1.14:
t =16 m + 4 m + 10 m
20 m3,6 s
t = 5, 4 s
Por lo tanto, el tiempo mnimo requerido para realizar la maniobra de adelantamientoen forma segura es 5,4 s.
Movimiento con aceleracin constante 1.1.9
Ahora veamos el caso en que existe una aceleracin constante en el tiempo, es decir,a(t) = a. Esto significa que la aceleracin media sobre cualquier intervalo de tiempoes constante e igual a a. Si la velocidad inicial en t = 0 es v0, entonces:
a0,t =v (t) v0
t 0 = a0 (1.15)
y obtenemos que la velocidad vara en el tiempo de acuerdo a la ecuacin:
v (t) = v0 + at (1.16)
-
1.1. Cinemtica en una dimensin 11
Notemos que esto ltimo es fcil de deducir pues la relacin que existe entre v (t) ya(t) es absolutamente anloga a la relacin entre x(t) y v (t). Por lo tanto, nos bastarecordar el resultado obtenido para x(t) en el caso de velocidad constante (Ecuacin1.9).
Para movimiento con aceleracin constante la velocidad vara de manera uniforme,por lo que al graficar la velocidad en funcin del tiempo se obtiene una lnea rectacomo vemos en la Fig. 1.5.
t
v
*t
at
0v
v
)( *tv
0v
)(tv
Figura 1.5: Velocidad en funcin del tiempo para movimiento uniformemente acelera-do.
Ahora, supongamos adems que para t = 0 la partcula se encuentra en x0, de maneraque despus de un tiempo t , se encontrar en:
x(t) = x0 + v0,t t , (1.17)
donde v0,t es la velocidad media en el intervalo [0, t ]. Pero, como la aceleracin esconstante, podemos obtener la velocidad media calculando el promedio entre la velo-cidad inicial y la velocidad final. Es decir,
v0,t =12
[v0 + v (t)] =12
[v0 + v0 + at ] (1.18)
v0,t = v0 + at/2 (1.19)
Reemplazando en la ecuacin 1.17, obtenemos la ecuacin que describe el movimien-to de una partcula que se mueve con aceleracin constante:
x(t) = x0 + v0t + at2/2 (1.20)
Por otra parte, de la ecuacin para la velocidad, podemos despejar t como:
t =v (t) v0
a. (1.21)
-
12 Captulo 1. Cinemtica
x
t
tvxx 00
2
21
00 attvxx
Figura 1.6: El grfico de la posicin v/s tiempo para un movimiento con aceleracinconstante corresponde a una parbola.
Si ahora lo reemplazamos en la expresin que obtuvimos para x(t) tenemos:
x(t) = x0 + v0
(v (t) v0
a
)+
a2
(v (t) v0
a
)2(1.22)
Trabajando sobre esta ecuacin obtenemos una expresin que relaciona la velocidadcon la posicin en un instante de tiempo t ,
v (t)2 v20 = 2a(x(t) x0) (1.23)
Ejemplo 1.2
Eliseo, un piloto de frmula uno, corre a una velocidad v1 cuando se percata que dmetros ms adelante y en la misma pista, va otro auto que se mueve ms lentamentea una velocidad constante v2 < v1. Eliseo aplica los frenos y da a su automvil unaaceleracin constante (a) (contraria a la direccin de movimiento). Demostrar que sila distancia que los separa cumple d > (v2 v1)2/2a, no habr choque.
SolucinEn el instante en que Eliseo nota el acercamiento con el otro automvil, los separa unadistancia d . Elegimos un sistema de referencia cuyo origen coincide con la posicindel automvil de Eliseo en el instante en que comienza a frenar.
dx
2v1v
De esta forma, las ecuaciones de movimiento que describen las trayectorias de Eliseo(x1(t)) y del otro piloto (x2(t)) son:
x1(t) = v1t at2
2
-
1.1. Cinemtica en una dimensin 13
x2(t) = d + v2t
Si se produce un choque, quiere decir que para algn tiempo t las posiciones deambos automviles deberan coincidir:
v1t at2
2= d + v2t
Escrito de otra manera:a2
t 2 + (v2 v1)t + d = 0
Hemos obtenido una ecuacin de segundo grado para el tiempo t , cuyas solucionesestn dadas por:
t =v1 v2
(v2 v1)2 2ad
a
Notemos que si:(v2 v1)2 2ad < 0
entonces las soluciones para t son imaginarias, lo que carece de sentido fsico. Estoquiere decir que bajo esta condicin no existe una solucin (real) para t, y entoncesno habr choque. Es decir, debe cumplirse:
(v2 v1)22a
< d
Aplicacin numrica: Supongamos que Eliseo viaja inicialmente a v1 = 300 km/h,que el otro auto se mueve a 200 km/h, y que los separa una distancia de 200 m. Paraevitar un desastre la desaceleracin debe cumplir con:
a >(v2 v1)2
2d= 1.929 ms2
.
Movimiento Relativo 1.1.10
El concepto de velocidad est estrechamente relacionado con el concepto de siste-ma de referencia. Por ejemplo, cuando decimos que un vehculo viaja a 100 km/h endireccin norte, mentalmente asociamos la direccin del desplazamiento y asumimosque los 100 km/h son medidos respecto a un observador que est en tierra, ya queentendemos que es la nica manera de que esta afirmacin tenga sentido. Por ello,cuando nos referimos a la velocidad de un objeto, es necesario definir respecto a qusistema de referencia se mide el desplazamiento de ste y en qu orientacin espacial
-
14 Captulo 1. Cinemtica
se desplaza. Por lo tanto, se debe establecer un sistema de referencia y la orientacinde sus coordenadas.
Por ejemplo, podramos definir dos sistemas de referencia, tales que sus orgenes sedesplacen el uno respecto del otro con una velocidad constante. Estos dos sistemasseran igualmente adecuados para describir el movimiento de un objeto. A modo deejemplo, consideremos tres meteoritos A, B y C que viajan por el espacio en unamisma direccin. Si decimos que el meteorito A tiene una rapidez mayor que el me-teorito B, y este ltimo una rapidez mayor que C, intuitivamente estamos definiendoun sistema de referencia en el cual ello ocurre. Para aclarar esto ultimo, partamos con-siderando un sistema que tiene su origen en el meteorito C, desde el cual se ve queB y A se estn alejando y este ltimo lo hace con mayor velocidad. En este sistemade referencia las velocidades de A y B seran 1000 m/s y 600 m/s, tal como se repre-senta en la figura siguiente (las flechas indican la direccin del movimiento de cadameteorito):
x
C
o
B
sm600
A
sm1000
Ahora, consideremos un sistema de referencia con su origen en el meteorito B.
C
sm600 xo
B A
sm400
Por ltimo, fijemos el sistema de referencia en el meteorito A.
B
sm600
C
sm1000 xo
A
Al observar los tres casos anteriores, podemos decir que el meteorito A se aleja delmeteorito C con una rapidez de 1000 m/s (primer sistema de referencia), o equiva-lentemente, que el meteorito C se aleja del meteorito A con una rapidez de 1000 m/s(tercer sistema de referencia). En la tabla 1.1 se muestran las diferencias de las velo-cidades calculadas en los tres sistemas de referencia.
Lo primero que queda en evidencia en la tabla anterior es que la diferencia de lasvelocidades, que llamamos velocidad relativa, es independiente del sistema de refe-rencia. Por ejemplo, la velocidad relativa del meteorito A respecto al meteorito B seravAB = vA vB, que tiene un valor de 400 m/s en direccin x (por tener signo positivo),o sea, A se aleja de B a 400 m/s en la direccin positiva de la coordenada x . Anlo-gamente, la cantidad vBA = vB vA nos indica que B se aleja de A a 400 m/s en la
-
1.1. Cinemtica en una dimensin 15
Sistema de referencia vA vB vB vA vA vC vC vA vB vC vC vB
En A 400 -400 1000 -1000 600 -600
En B 400 -400 1000 -1000 600 -600
En C 400 -400 1000 -1000 600 -600
Tabla 1.1: La velocidad relativa entre 2 objetos es siempre la misma, independientedel sistema de referencia.
direccin negativa de la coordenada x .
En el problema de la maniobra de adelantamiento a velocidad constante, encontramosque el tiempo que tarda el automvil en adelantar al camin depende slo de la dife-rencia de las velocidades. Este resultado indica que el tiempo que tarda el automvilen adelantar el camin es independiente del sistema de referencia en el cual se calcu-la. O sea, si se observa la maniobra desde un tercer vehculo y se es capaz de medirlas velocidades de los otros vehculos, al calcular el tiempo que tarda la maniobra stedebe ser el mismo que el calculado por un observador en tierra.
Estos resultados sugieren que dos sistemas de referencia que se mueven a velocidadconstante uno respecto al otro son completamente equivalentes para describir el mo-vimiento de los objetos (esto ser discutido con ms detalle en el captulo 2). Vemosentonces que no existe una velocidad absoluta de un objeto, pues sta siempre de-pender del sistema de referencia utilizado. Sin embargo, la velocidad relativa entre 2objetos ser la misma en todos los sistemas de referencia.
ENTENDISTEST? 1.2
Considere dos sistemas de referencia donde uno se mueve a una velocidad constanterespecto al otro. Vimos que la velocidad de un objeto no ser la misma en ambos sis-temas de referencia, qu ocurre con la aceleracin?, depende tambin del sistemade referencia?.
-
16 Captulo 1. Cinemtica
Cinemtica en dos dimensiones 1.2
En esta seccin estudiaremos el movimiento en dos dimensiones. Mostraremos cmolos conceptos vistos en la seccin anterior son generalizados para este caso, en baseal tratamiento vectorial de las cantidades involucradas. Veremos que es natural intro-ducir el concepto de magnitud vectorial y notaremos cmo esto facilita el tratamientode los distintos problemas.
Posicin bidimensional, concepto de vector. 1.2.1
La posicin de un objeto que se mueve en dos dimensiones queda completamentedescrita al referirla respecto a un sistema de coordenadas bidimensional. A modo deejemplo, imaginemos que le lanzamos una manzana al profesor en vez de dejarla deforma corts en su mesa. El movimiento que realiza la manzana despus de que staabandona la mano del lanzador es en dos dimensiones, ya que ella se desplaza hori-zontalmente a lo largo de la lnea de lanzamiento, y adems su posicin vertical varapor la accin de la gravedad. Con el propsito de indicar la posicin de la manzana enun instante de tiempo t posterior al lanzamiento, utilizaremos el sistema de referenciamostrado en la figura 1.7.
)(tz
z
x
)(tr
)(tx
Figura 1.7: La trayectoria de la manzana no puede ser descrita por una sola coorde-nada. Se trata de un movimiento bidimensional.
Notamos que la ubicacin de la manzana est determinada por el valor de su posicinen la direccin horizontal que hemos llamado x(t), y por la posicin vertical z(t). Porcomodidad podemos agrupar ambas coordenadas, x(t) y z(t), para formar un vector~r (t), al cual llamaremos vector posicin. En la figura 1.7, vemos que la posicin de lamanzana se representa por una flecha, que une el origen del sistema de referencia conla posicin de la manzana. Esto no es otra cosa que el vector posicin de la manzanaen dicho instante. De forma general, un vector es un arreglo de varias coordenadas, yse representa siempre por una flecha en el espacio.
-
1.2. Cinemtica en dos dimensiones 17
Note que el vector ~r (t) solo tiene sentido si lo hemos referido a un sistema de coorde-nadas. De la figura 1.7, podemos ver que este vector puede ser escrito matemtica-mente de la siguiente manera:
~r (t) = x(t)x + z(t)z (1.24)
donde x y z representan, respectivamente, las direcciones de los ejes X y Z . Tambinse utiliza la notacin simplificada ~r (t) = (x(t), z(t)). Note que el nombre de los ejes escompletamente arbitrario, aunque usualmente se utilizan los smbolos X , Y y Z pa-ra designar 3 direcciones en el espacio tridimensional. Otra notacin que utlizaremosbastante consiste en nombrar i , j , k a las direcciones x , y y z, respectivamente.
A medida que la manzana se mueve, tanto el mdulo (largo de la flecha) como la di-reccin del vector posicin varan, generando as una trayectoria en dos dimensiones.El mdulo de un vector se calcula fcilmente con el teorema de pitgoras, y se utilizala siguiente notacin : ~r (t) = x(t)2 + y (t)2Las direcciones x , y z son, por construccin, vectores de mdulo igual a 1.
Desplazamiento 1.2.2
Tambin es conveniente definir el desplazamiento en el caso bidimensional como unacantidad vectorial, ya que para referirnos al desplazamiento del objeto debemos es-pecificar cunto se desplaz (mdulo del vector) y en qu direccin lo hizo (direccinen la que apunta la flecha del vector). En el contexto del movimiento de la manzana(figura 1.8), podemos ver que el desplazamiento de sta entre los tiempos t1 y t2 estdado por la ecuacin 1.25, la cual es obtenida simplemente a partir de la resta de losdos vectores posicin evaluados en los instantes involucrados.
~d21 = ~r (t2)~r (t1) (1.25)
El desplazamiento es tambin un vector, que grficamente une el punto ~r (t1) con ~r (t2).El desplazamiento de un objeto siempre puede ser escrito en trminos del vector posi-cin como en la ecuacin 1.25. Note sin embargo que, a diferencia del vector posicin,el vector desplazamiento no depende del sistema de referencia escogido. Esto puedeser observado directamente de la figura 1.9, en la cual hemos introducido otro siste-ma de referencia (direcciones i-j , respecto del cual se han representado los vectoresposicin ~r (t1) y ~r (t2) de la manzana en los mismos tiempos t1 y t2.
-
18 Captulo 1. Cinemtica
z
x
)( 1tr
)( 2tr
12d
Figura 1.8: El desplazamiento entre t1 yt2 se define como la diferencia del vector po-sicin evaluado en los instantes de tiempo t1 y t2.
i
j
)(' 1tr
)(' 2tr
z
x
)( 1tr
)( 2tr
12d
Figura 1.9: El desplazamiento de un objeto es un vector que no depende del sistemade referencia utilizado.
Velocidad Media 1.2.3
La velocidad media se define anlogamente al caso unidimensional, donde el despla-zamiento es ahora un vector:
~v21 =~d21
t2 t1 =~r (t2)~r (t1)
t2 t1 (1.26)
Por supuesto, le velocidad media es independiente del sistema de referencia utilizado.Note que la direccin de la velocidad media es la misma que la del vector desplaza-miento.
-
1.2. Cinemtica en dos dimensiones 19
Velocidad Instantnea 1.2.4
Anlogamente al caso unidimensional, la velocidad instantnea est dada por:
~v = lmt0
~r (t +t)~r (t)t
=ddt~r (t) (1.27)
donde la derivada de ~r (t) se define simplemente como el vector cuyas componentesson las derivadas de las componentes del vector posicin:
ddt
(x(t)x + z(t)z) =(x (t)x + z (t)z
)= ~v (t)
En la siguiente figura se representan las velocidades de la manzana en dos instantesde tiempo t1 y t2 respectivamente. Es posible mostrar que el vector velocidad es siem-pre tangente a la curva que describe la trayectoria del objeto. Note que en generaltanto la direccin como el mdulo de la velocidad cambian.
)( 1tv
)( 2tv
Figura 1.10: La velocidad de un objeto puede cambiar en magnitud (mdulo) perotambin en direccin.
Rapidez 1.2.5
Nuevamente podemos generalizar el caso unidimensional para decir que la rapidezinstantnea de un objeto est dada por:
r (t) = ~v (t) (1.28)
es decir, corresponde al mdulo de la velocidad. (Atencin!, no confundir r (t) con elvector posicin ~r (t)).
ENTENDISTEST? 1.3
Usualmente nos referimos al medidor de velocidad de un auto como velocmetro. Se-gn los conceptos definidos hasta aqu, es realmente un medidor de velocidad? Esadecuado llamarlo velocmetro?
-
20 Captulo 1. Cinemtica
Aceleracin Media 1.2.6
La aceleracin media entre los instantes de tiempo t1 y t2 est dada por la expresin:
~a =~v (t2) ~v (t1)
t2 t1 (1.29)
Grficamente, el vector ~v (t2) ~v (t1) est representado en la siguiente figura:)( 1tv
)( 2tv )()( 12 tvtv
Figura 1.11: El vector ~v (t2)~v (t1) es aquel que une el extremo de ~v (t1) con el extremode ~v (t2).
Note que direccin de la aceleracin media es la misma que la direccin del vectordefinido por la resta de los vectores ~v (t2) y ~v (t1) . Matemticamente esto se expresacomo:
~a~a = ~v (t2) ~v (t1)~v (t2) ~v (t1) (1.30)
Aceleracin Instantnea 1.2.7
La aceleracin instantnea est dada por la derivada de la velocidad:
~a = lmt0
~v (t +t) ~v (t)t
=ddt~v (t) (1.31)
En trminos del vector posicin ~r (t) = x(t)x + z(t)z, se tiene ~a(t) = x (t)x + z (t)z. En lafigura 1.12 se muestra la aceleracin de la manzana en distintos instantes de tiempo.
Este es un caso particular en donde la aceleracin es un vector constante (mismadireccin y magnitud para todo instante de tiempo). Esto es consecuencia de la ley degravitacin universal (ver captulo 2).
-
1.2. Cinemtica en dos dimensiones 21
Figura 1.12: En el caso particular de un objeto en cada libre cerca de la superficieterrestre, la aceleracin es un vector que apunta siempre hacia el piso, de magnitud~a = g = 9.8 ms2.
Ejemplo 1.3
Se pueden utilizar los conceptos aprendidos para analizar la trayectoria de un alumnodurante su viaje en metro al campus San Joaqun. Para hacer ms fcil nuestra tarea,usaremos una versin simplificada de la red del ferrocarril metropolitano, en la cualcada una de las principales estaciones de las rutas que analizaremos estn ubicadasen los vrtices de un cuadriltero. En la figura se muestran las coordenadas de estosvrtices respecto a un sistema de referencia con su origen en la estacin Tobalaba.Las distancias se encuentran expresadas en kilmetros ([km]). Suponga que San Joa-qun se encuentra exactamente en el punto medio entre Baquedano y Vicente Valds.
El alumno se sube al metro en Tobalaba a las 7:30 am y llega Baquedano a las 7:45am. Luego, toma el metro hacia San Joaqun a las 7:50 am llegando al Campus a las8:00 am, con tiempo suficiente para repasar la materia de la clase anterior.
1. Encuentre el desplazamiento total del alumno y la velocidad media con que viaja la Universidad.
2. Calcule el desplazamiento y velocidad media para el tramo Baquedano-San Joa-qun.
3. Cul es la rapidez media del metro entre Baquedano y San Joaqun?
4. Si el alumno tomara la decisin de viajar a la Universidad a travs de Prncipe deGales y Vicente Valds, demorara una hora y veinte minutos en llegar. Calculeel desplazamiento total, la velocidad media y la rapidez media para este trayecto.
Solucin
a) El estudiante se mueve desde el origen del sistema de coordenadas hasta la po-sicin del Campus San Joaqun. Debemos entonces determinar la posicin de esteltimo. Como se nos dice en el enunciado, el Campus se encuentra justo en el puntomedio entre Baquedano y Vicente Valds, por lo tanto,
~PSJ =~PBaq + ~PVV
2=(3.2 + 0
2,2.4 15
2
)km = (1.6,8.7) km. (1.32)
-
22 Captulo 1. Cinemtica
El desplazamiento total es entonces ~d = ~PSJ ~0 = (1.6,8.7) km. Dado que su viajecompleto dur exactamente 30 minutos, tenemos que su velocidad media fue,
~Vm =(1.6,8.7)103 m
30 60 s = (0.889,4.83) m/s. (1.33)
b) El desplazamiento total en el tramo Baquedano-San Joaqun est dado por,
~dBSJ = ~PSJ ~PBaq = (1.6,8.7) km (3.2,2.4) km = (1.6,6.3) km (1.34)Si consideramos el momento en que el alumno se sube al metro en Baquedano comoel comienzo de la segunda parte del viaje, vemos que el tiempo que demora es 10minutos. Finalmente la velocidad media de este tramo es,
~Vm =
(1.6,6.3)103 m10 60 s = (2.667,10.5) m/s. (1.35)
c) La rapidez media entre Baquedao y San Joaqun es el largo de la trayectoria dividopor el tiempo que demor en recorrerla. En este caso, dado que el tramo correspondea una lnea recta, el largo de la trayectoria es simplemente
~dBSJ:rm =
~dBSJ10 60 s =
1.62 + 6.32 103 m
600 s=
6500 m600 s
= 10.83 m/s
Notar que dado que el desplazamiento que se est considerando se llev a cabo enuna lnea recta y en un solo sentido, la rapidez media es tambin el mdulo de lavelocidad media,
|~V m| =
2.6672 + (10.5)2m/s = 10.83 m/s. (1.36)
d) A pesar de haber hecho un recorrido diferente, el estudiante tiene la misma posicinfinal e inicial, lo que significa que su desplazamiento es nuevamente ~d , el mismo que
-
1.2. Cinemtica en dos dimensiones 23
obtuvimos en la parte (a). Sin embargo, el tiempo de viaje es ahora de 80 minutos, loque resulta en una velocidad media:
~Vm =
(1.6,8.7)103 m80 60 s = (0.33,1.81) m/s (1.37)
que apunta en la misma direccin que la velocidad media obtenida en (a) pero tieneuna magnitud considerablemente menor.
Para determinar la rapidez debemos calcular primero la longitud total (S) del trayectorecorrido, que en este caso est compuesto por una serie de tramos rectilneos,
S = |~PPG ~0| + |~PVV ~PPG| + |~PSJ ~PVV |. (1.38)Usted puede verificar que el resultado es S = 23.294 km. La rapidez media para estetrayecto es entonces,
rm =St
=23.294 103 m
80 60 s = 4.853 m/s. (1.39)
Movimiento Uniformemente Acelerado 1.2.8
Consideremos ahora el caso particular de un objeto que se mueve con aceleracinconstante ~a. Si utilizamos dos ejes x e y para describir el movimiento, entonces laaceleracin puede ser descrita como:
~a = ax x + ay y =ddt~v (t) (1.40)
donde ax , ay son constantes, y la velocidad del objeto en el instante t se escribe:
~v (t) = vx (t)x + vy (t)y . (1.41)
Al igual que en el caso unidimensional, se obtiene fcilmente que:
~v (t) = ~v0 + ~at
lo que puede ser escrito en trminos de sus componentes:
vx (t) = v0x + ax t (1.42)vy (t) = v0y + ay t (1.43)
El problema es entonces idntico al de dos movimientos unidimensionales con ace-leracin constante. Utilizando los resultados obtenidos para el caso unidimensionalpodemos encontrar la solucin para las coordenadas del vector posicin:
x(t) = x0 + v0x t +12
ax t2 (1.44)
y (t) = y0 + v0y t +12
ay t2 (1.45)
-
24 Captulo 1. Cinemtica
Y la posicin del objeto est determinada entonces por el vector:
~r (t) =(
x0 + v0x t +12
ax t2)
x +(
y0 + v0y t +12
ay t2)
y (1.46)
El movimiento de un cuerpo que cae cerca de la superficie terrestre es un tpico ejem-plo de movimiento con aceleracin constante. Debido a la atraccin gravitacional dela Tierra, todos los objetos caen hacia su centro con aceleracin constante de magni-tud g = 9.81 m/s2. En el ejemplo del alumno que arroja una manzana al profesor, laaceleracin de la manzana una vez que ha sido lanzada puede ser escrita como:
~a = 0x gy (1.47)Donde el sistema de referencia utilizado se puede ver en la figura 1.13: Notar que en
y
x
)(tr
g
O
Figura 1.13: La aceleracin de todo objeto bajo la influencia de la gravedad de laTierra es un vector de magnitud g que apunta hacia el suelo.
el eje horizontal la aceleracin es nula. Luego, el movimiento es uniforme en dichadireccin y est descrito por:
x(t) = x0 + v0x t (1.48)
caracterizado por una velocidad horizontal constante. En el eje vertical se tiene unmovimiento uniformemente acelerado:
y (t) = y0 + v0y t 12gt2 (1.49)
Ahora, notar que el sistema de referencia utilizado es totalmente arbitrario, y por su-puesto el movimiento puede ser descrito en cualquier otro sistema. En particular, con-sideremos por ejemplo un nuevo sistema de ejes, digamos x y y , que se obtiene apartir del original mediante una rotacin en un ngulo (Ver Figura 1.14).
Recordemos que la aceleracin de gravedad en el sistema original se escribe:
~a = gyDe la figura, podemos ver que el vector y se escribe en trminos del nuevo sistema dereferencia:
-
1.2. Cinemtica en dos dimensiones 25
g
sin y
x
'y
'x
cos
Figura 1.14: Un nuevo sistema de referencia se puede obtener, por ejemplo, medianteuna rotacin del sistema original.
y = sin()x + cos()y
Con lo que la aceleracin en el nuevo sistema de referencia queda:
~a = g sin()x g cos()y
Podemos ver entonces que con esta eleccin de ejes, el movimiento no se descompo-ne en un movimiento con velocidad constante y un movimiento uniformemente acele-rado. En efecto, ahora ambos movimientos sern acelerados:
x (t) = x 0 + v0x t
12
g sin()t2 (1.50)
y (t) = y 0 + v0y t
12
g cos()t2 (1.51)
Ejemplo 1.4
Suponga que usted patea una piedra hacia un lago con velocidad inicial de magnitudv , formando un ngulo con la horizontal. Cunto tiempo demora la piedra en caeral lago?
Respuesta: Es conveniente fijar un sistema de referencia tal que el origen coincidacon la posicin inicial de la piedra.
La velocidad inicial est dada por:
~v0 = v cos()x + v sin()y v0x x + v0y y (1.52)
As, la posicin de la piedra est determinada en cualquier instante de tiempo t por:
~r (t) = x(t)x + y (t)y , (1.53)
-
26 Captulo 1. Cinemtica
y
x
v
o
Figura 1.15: El origen del sistema de referencia escogido coincide con el punto delanzamiento.
con:
x(t) = v cos()t (1.54)y (t) = v sin()t 12gt2. (1.55)
Para determinar el tiempo que demora la piedra en caer al lago, utilizamos el hechode que ste ser el doble del tiempo que demora en alcanzar su mxima altura:
j
oi
Altura
mxima
Sea t* el tiempo de mxima altura. ste puede ser obtenido considerando la compo-nente vertical de la velocidad:
vy =dy (t)
dt= v0y gt = v sin() gt (1.56)
Para t = 0, vy (0) = v sin(). Luego, la velocidad vertical comienza a disminuir en eltiempo por efecto de la gravedad hasta que llega un instante en que se anula. En eseinstante la piedra deja de subir, y por lo tanto se trata justamente del instante en quealcanza la mxima altura. As:
vy (tmax ) = v sin() gtmax = 0 (1.57)tmax =
v sin()g
(1.58)
Finalmente, el tiempo de vuelo es:
tvuelo = 2tmax =2v sin()
g(1.59)
Adems, la mxima altura que alcanza la piedra es:
-
1.2. Cinemtica en dos dimensiones 27
hmax = y (tmax ) =v2
2gsin2()
El tiempo de vuelo puede ser expresado en trminos de esta altura mxima:
tvuelo = 2tmax =
8hmax
g(1.60)
ENTENDISTEST? 1.4
Con el propsito de calibrar un can de corto alcance ubicado en una fragata, serealizan tres disparos registrndose las trayectorias A, B y C mostradas en la figura.En cul de estos disparos el proyectil tarda menos tiempo en impactar la superficiedel mar?
Movimiento Circular 1.2.9
Existen muchas situaciones para las cuales es importante estudiar el movimiento deun cuerpo en una trayectoria circular. Por ejemplo, la trayectoria de la Tierra en tornoal Sol es aproximadamente circular, como lo es tambin la de un auto que gira por unarotonda. Aunque en este caso el movimiento se lleva a cabo en un plano, es decir, endos dimensiones, nos podemos dar cuenta de que una vez conocido el radio (R) dela trayectoria, necesitamos saber solo el ngulo (t) que forma el vector posicin conel eje horizontal para determinar su posicin en cualquier instante de tiempo, como semuestra en la Fig. 1.16.
Vemos que el vector posicin vendr dado por:
~r = R(cos (t)x + sin (t)y ) = Rr (t), (1.61)
donde hemos definido el vector unitario r (t) = cos (t)x + sin (t)y , llamado vector ra-dial, que apunta en todo instante de tiempo en la direccin de la posicin. El lector
-
28 Captulo 1. Cinemtica
r
r
y
x
Figura 1.16: Un objeto en movimiento circular describe una circunferencia en el plano.La posicin en todo instante puede ser escrita en trminos del vector radial r (t), como~r (t) = Rr (t).
puede verificar que efectivamente el mdulo de este vector es igual a uno, r = 1.
A partir de la posicin podemos calcular la velocidad instantnea usando los mtodosque aprendimos anteriormente:
~v (t) = lmt0
~r (t +t)~r (t)t
(1.62)
= lmt0
Rt{[cos((t +t)) cos((t))] x + [sin((t +t)) sin((t))] y} .
Ahora, de manera similar a lo que vimos para cinemtica en una dimensin en laseccin 1.10, la posicin angular (t) cambia en el tiempo a una determinada razn(t) que llamamos velocidad angular. Dada nuestra definicin del ngulo , serpositivo si el objeto gira en el sentido contrario a los punteros del reloj y viceversa.Cuando el intervalo de tiempo t es muy pequeo, podemos entonces suponer que:
(t +t) = (t) + (t)t . (1.63)
Volviendo ahora a la ecuacin (1.63), y usando identidades trigonomtricas encontra-mos el trmino correspondiente a la componente x :
cos((t) + (t)t) cos((t)) = cos((t)) cos((t)t) sin((t)) sin((t)t) cos((t)) cos((t)) sin((t))(t)t cos((t))= (t)t sin((t))
y de manera similar para el trmino que corresponde a la componente y de la veloci-dad,
-
1.2. Cinemtica en dos dimensiones 29
sin((t) + (t)t) sin((t)) = sin((t)) cos((t)t) + cos((t)) sin((t)t) sin((t)) sin((t)) + (t)t cos((t)) sin((t))= (t)t cos((t)).
Podemos ahora reemplazar estos resultados en (1.63) para obtener finalmente,
~v = R(t)( sin((t))x + cos((t))y ) = R(t) (t). (1.64)La velocidad tiene entonces una direccin tangente a la trayectoria y una magnitud|~v | = R|(t)|. En la ltima igualdad definimos el vector unitario = sin((t))x +cos((t))y , que apunta siempre en la direccin de la tangente a la circunferencia enla posicin . Es decir, es perpendicular al vector r en todo instante.
Es importante notar que el resultado (1.64) se puede obtener de manera ms directausando argumentos simples. En la Fig. 1.17 podemos observar que el vector despla-zamiento en el pequeo intervalo de tiempo t , dado por ~vt , apuntar siempre enla direccin tangencial. Podemos concluir entonces, que el vector velocidad apuntarsiempre en esa direccin.
Figura 1.17: El vector velocidad instantnea es siempre tangente a la curva.
Por otra parte, la longitud del arco recorrido en t est dado por:
s = R = Rt , (1.65)
y el mdulo de la velocidad es entonces |~v | = s/t = R.Consideremos ahora el caso en que la aceleracin angular, es decir, la tasa de aumen-to de la velocidad angular, es constante (). De manera parecida a como derivamosla expresin para la velocidad a partir de la posicin, se puede tambin encontrar laaceleracin a partir de la velocidad en (1.64).
~a(t) = lmt0
~v (t +t) ~v (t)t
(1.66)
= R( (t) 2 (t)) (1.67)
-
30 Captulo 1. Cinemtica
Conclumos entonces que en el movimiento circular uniformemente acelerado existendos componentes de la aceleracin: una tangencial y otra radial. La tangencial de-pende de la aceleracin angular y la radial apunta hacia el interior del crculo y esla encargada de cambiar continuamente la direccin de la velocidad para obtener unmovimiento circular. (Si la velocidad no cambiara su direccin, entonces el objeto seestara moviendo en lnea recta.)
Ejemplo 1.5
Considere que la Tierra gira en torno al Sol en una rbita circular uniforme de radioR = 149597871 km. Calcule el mdulo de la velocidad y de la aceleracin con que girala tierra. Cmo se compara esta aceleracin con g = 9.8 m s2, la aceleracin con lacual caen los objetos cerca de la superficie terrestre?.
SolucinEn un movimiento circular uniforme, = 0 y entonces el mdulo de la velocidad essimplemente:
v = wR
con R el radio de la rbita, y w la velocidad angular. Sabemos que la Tierra da unavuelta (recorre un ngulo de 2pi) en un 365 das, es decir:
w =2pi
365 24 = 7.17 104 rad/hora
Luego:
v = wR = 107262 km/hora = 29.8 km/s
El mdulo de la aceleracin es:
a = v2/R = 0.00593 m/s2
Es decir, unas 1661 veces ms pequea que g.
Problemas resueltos 1.3
Problema 1.1
Un robot se encuentra caminando sobre un puente de la va frrea que une los puntosA y B. Repentinamente, cuando se encuentra a 3/8 del tramo AB, desde A escuchael silbido del tren, que se acerca a velocidad constante vT . El robot slo es capaz decorrer con velocidad constante. Si el robot corre hacia A, el tren lo alcanza en A, sicorre hacia B, el tren lo alcanza en B. A qu velocidad corre este robot?
-
1.3. Problemas resueltos 31
SolucinLa siguiente ilustracin muestra la situacin inicial del robot, que est programado paraevitar (en lo posible) su propia destruccin, de acuerdo a las leyes de la robtica.
d
xA
L
o B
Tv
L83
La posicin del tren en funcin del tiempo est dada por:
xT (t) = d + vT t
donde d es la distancia (a priori desconocida) entre el tren y el punto A en el instanteinicial. Supongamos que el robot decide correr hacia la izquierda, de esta forma
xR(t) =3L8 vr t
Sabemos que en este caso, el robot es arrollado cruelmente por el tren en A (x = 0),esto significa que:
0 = d + vT t1 = 3L8 vr t1donde t1 corresponde al tiempo donde ambos se encuentran. De esto se desprende:
t1 =dvT
y entonces encontramos la primera relacin:
vr =3LvT8d
Ahora bien, si el robot decide correr hacia la derecha, se tiene:
xR(t) =3L8
+ vr t
En este caso, el robot y el tren se encuentran en B, en un tiempo t2:
L = d + vT t2 = 3L8 + vr t2
-
32 Captulo 1. Cinemtica
De aqu obtenemos:L + d
vT= t2
y entonces
L =3L8
+ vrL + d
vT
De la primera relacin encontrada se obtiene:
8dvr3vT
= L
Reemplazando:8dvr3vT
=38
8dvr3vT
+ vr8dvr3vT
+ d
vT
5vT = 8vr + 3vT
Finalmente encontramos la velocidad a la que se mueve el robot en trminos de lavelocidad del tren:
2vT = 8vr vr = vT4
Problema 1.2
Un auto parte del reposo y viaja en una recta tal que acelera a razn constante (a1 = 10m/s2) durante 10 segundos, y luego desacelera a razn a2 = 2 m/s2. Calcule el in-tervalo de tiempo que demora el auto en detenerce, desde que ste comienza a des-acelerar.
SolucinEl movimiento a aceleracin constante est caracterizado por:
x(t) = x0 + v0t + at2
2
La velocidad en funcin del tiempo est dada por:
v (t) =dx(t)
dt= v0 + at = at
Durante los primeros 10 segundos, la aceleracin est dada por a1 = 10 m/s2. Ent = 10 segundos se tendr:
-
1.3. Problemas resueltos 33
v (10) = 10a1 = 100 [m/s]
Ahora, fijamos un nuevo origen para el tiempo en el instante en que comienza a des-acelerar ( a2 = 2 m/s2). De esta forma:
v (t) = v0 + a2t = 100 2t
Sea t el instante en el cual el auto se detiene. Esto quiere decir que v (t ) = 0:
v (t ) = 100 2t = 0 t = 50 [s]
El auto demora 50 segundos en frenar.
Problema 1.3
Suponga que un alumno desea arrojar una manzana al profesor Kings, quien constan-temente se ve obligado a reemplazar la ventana de su oficina. sta se encuentra enun edificio, a una altura H. El alumno est a una distancia d del edificio.
d
H
Kings
Con qu velocidad (magnitud y direccin) debe lanzar la manzana de forma que staingrese de forma horizontal por la ventana del profesor Kings? Desprecie la altura delalumno en comparacin con la del edificio.
Respuesta:Fijamos el origen en el punto de lanzamiento. Sea v la magnitud de la velocidad delanzamiento, y el ngulo que forma con la horizontal.
La posicin de la letal piedra est descrita por el siguiente vector:
~r (t) = v cos()t i +(
v sin()t 12
gt2)
j (1.68)
-
34 Captulo 1. Cinemtica
j
i
)(tr
v
y la velocidad se escribe de la siguiente manera:
~v (t) = v cos()i + (v sin() gt) j (1.69)
Sea t el instante en el cual la manzana impacta con la ventana. Debe tenerse enton-ces:
y (t) = v sin()t 12
gt2 = H
x(t) = v cos()t = d
Adems, la velocidad vertical en dicho instante debe ser nula para que la piedra im-pacte la ventana de forma horizontal (esto quiere decir que la piedra alcanza su alturamxima justo al impactar la ventana) :
v sin() gt = 0 (1.70)
De aqu encontramos el tiempo de impacto,
t = v sin()g
(1.71)
Remplazando t:
v2
2gsin2() = H (1.72)
v2
gsin() cos() = d (1.73)
Dividiendo ambas ecuaciones encontramos una condicin para el ngulo de lanza-miento:
Hd
=tan()
2
con lo que se obtiene:
-
1.3. Problemas resueltos 35
= tan1(
2Hd
)Ahora, para determinar la velocidad de disparo elevamos al cuadrado la expresin1.73, obteniendo:
d2g2 = v4 cos2() sin2()
y utilizando la ecuacin 1.72:
d2g2 = v4(
1 sin2())
sin2() = v4(
1 2Hgv2
)2Hgv2
d2g2 =(v2 2Hg)2Hg
Finalmente, la magnitud de la velocidad de lanzamiento debe ser:
v =
d2g2H
+ 2Hg
Aplicacin numrica: supongamos que la oficina del profesor se encuentra a unaaltura H = 7 m y que el lanzamiento se desea efectuar a una distancia de d = 10 m.La velocidad de lanzamiento debe ser entonces de v = 14.4 ms1, formando unngulo = 54.46 grados respecto a la horizontal.
Problema 1.4
Un guardaparques quiere lanzar un dardo tranquilizante con rapidez inicial v0 a unmono feroz que est en la copa de un rbol, a distancia horizontal d y altura h = d .Suponiendo que el mono se deja caer en el mismo instante del disparo, y recordandoque la gravedad tambin acta sobre el dardo, en qu ngulo con respecto a la hori-zontal debe ser lanzado ste?. Todos los valores de v0 garantizan un impacto?
SolucinLa siguiente figura ilustra la situacin en el instante inicial:
La ecuacin de movimiento para la bala es:
xB(t) = Vox t
yB(t) = v0y t 12gt2
y para el mono:
-
36 Captulo 1. Cinemtica
xm(t) = d
ym(t) = d 12gt2
La bala impactar al mono si se cumple que,
xB(t ) = xm(t ) y yB(t ) = ym(t )
para algn t . Esto es:
v0x t = d t = dv0x
v0y t 12g(t)2 = d 1
2g(t )2
Reemplazando t = dv0x :
v0yd
v0x= d
Finalmente:
v0yv0x
= 1 v0 sinv0 cos
= 1
De esta forma, el ngulo de lanzamiento cumple:
tan = 1 = pi4
-
1.3. Problemas resueltos 37
Note que si el cazador est suficientemente lejos del mono, ste podra llegar al pisoantes de que la bala lo alcance. Para que el dardo lo alcance, se debe tener quecuando xB = d , yB > 0. Es decir:
ym(t ) = d 12gt2 = d 1
2g
d2
v20 cos2 > 0
Recordando que = pi2 , obtenemos:
v20 > gd
Problema 1.5
Dos proyectiles son lanzados simultneamente desde el mismo punto, con igual ra-pidez y con ngulos respecto a la horizontal y ( > ), respectivamente. Ambosllegan a un mismo punto, ubicado a igual altura que el punto del lanzamiento, perollegan en instantes diferentes.a) Exprese el ngulo en funcin de . b) Encuentre la razn entre los tiempos de llegada (exprese en trminos de ).
SolucinConsideremos un ngulo general de lanzamiento. Fijando el origen en el lugar dellanzamiento, tenemos que:
y (t) = v0 sint 12gt2
x(t) = v0 cos
El tiempo que demora en alcanzar la altura mxima es tal que:
y (tmax ) = 0 tmax = v0 sing
Luego, el tiempo de vuelo total es:
-
38 Captulo 1. Cinemtica
tvuelo = 2v0 sin
g
Con esto, la distancia en el eje x a la cual cae el proyectil es:
R = x(tvuelo) = v0 cos2v0 sin
g=
v20 sin(2)g
Como ambos proyectiles caen en la misma posicin:
v20 sin(2)g
=v20 sin(2)
g
luego:sin(2) = sin(2)
De esto se deduce:
=pi
2
b) Como tvuelo es 2v0 sin/g, la razn entre ambos tiempos de llegada es:
tt
=2v0 sin
g2v0 sin
g
=sinsin
luego:tt
=sin
sin(pi2 )=
sincos
= tan
Problema 1.6
Una partcula se mueve en el plano X Y con una velocidad (que depende de la po-sicin) ~v = ax + bxy , donde a y b son constantes. En el instante inicial, la partcula seencuentra en el origen. Encuentre la ecuacin de la trayectoria y (x).
SolucinSea
~r (t) = x(t)i + y (t)j
el vector posicin de la partcula. La velocidad est dada por:
~v (t) = x(t)i + y (t)j
Por otro lado, sabemos que:
-
1.3. Problemas resueltos 39
~v (t) = ai + bxj
De manera que:
x(t) = a
y (t) = bx(t)
La primera ecuacin indica que a lo largo del eje x , el movimiento es uniforme, esdecir:
x(t) = x(0) + at = at
ya que en t = 0, la partcula se encuentra en el origen (x0 = 0). Sustituyendo en laecuacin para y (t):
y (t) = bat
De donde se ve que el movimiento en el eje y es uniformemente acelerado, luego:
y (t) = y (0) + y (0) +12
bat2 =12
bat2
Ya que y0 = 0 y y (0) = ba 0 = 0. En resumen, las coordenadas x e y de la partculacomo funcin del tiempo estn dadas por:
x(t) = at
y (t) =ab2
t2
de donde, t = x/a y se deduce que la ecuacin de trayectoria es:
y (x) =bx2
2a
Es decir, la trayectoria de la partcula es una parbola en el plano XY.
-
40 Captulo 1. Cinemtica
-
2Dinmica
El captulo anterior fue dedicado a introducir una serie de conceptos con el propsi-to de estudiar la descripcin matemtica de la trayectoria de un cuerpo. Note que enningn momento nos referimos a las causas de este movimiento, si no que slo lo des-cribimos mediante elementos matemticos, como vectores, funciones y sus derivadas.En este captulo, estudiaremos el movimiento de los cuerpos como resultado de lasfuerzas que actan sobre l. Como veremos a continuacin, tanto la definicin riguro-sa del concepto de fuerza, como su relacin con el movimiento, fueron establecidashace ms de tres siglos.
Leyes de Newton 2.1
Las tres leyes de movimiento fueron compiladas y publicadas por primera vez en 1687por el fsico ingls Sir Isaac Newton en su clebre trabajo Philosophiae NaturalisPrincipia Mathematica (latin para Principios Matemticos de la Filosofa Natural) yconstituyen las ideas fundamentales de la Mecnica Clsica. Si bien pueden ser enun-ciadas en pocas palabras, sus consecuencias y rango de aplicacin son enormes yson fundamentales tanto para entender fenmenos de nuestra vida diaria, como pararesolver complejos problemas ingeniera. De hecho, podramos decir que los captulossiguientes no son ms que una exploracin sistemtica de diversas consecuencias delas tres Leyes de Newton que se enuncian y explican a continuacin.
41
-
42 Captulo 2. Dinmica
Primera Ley: En un sistema de referencia inercial, cada cuerpo material persisteen su estado de reposo o movimiento uniforme en lnea recta, a menos que unafuerza acte sobre l y lo obligue a cambiar su estado de movimiento.
Esta se conoce como la ley de inercia, y en realidad no es otra cosa que la defi-nicin de un marco de referencia inercial como uno en cual una partcula que noes sometida a una fuerza no acelera. Por ejemplo, para establecer si el laboratorioen el que estamos realizando nuestros experimentos est en un marco de referenciainercial podemos hacer lo siguiente: Tomar un cuerpo y asegurarnos que sobre el noexista ninguna accin externa. Luego, si al medir su velocidad determinamos que staes constante, entonces el marco de referencia de nuestro laboratorio es inercial, delo contrario no lo es y debemos tener cuidado en la interpretacin de los resultadosde nuestros experimentos porque en este marco de referencia no inercial las leyes demovimiento no necesariamente se cumplirn.
Segunda Ley: En un sistema inercial, el cambio de la cantidad m~v de una partculaes igual a la fuerza neta que acta sobre ella
La segunda ley de Newton se puede escribir en trminos matemticos de la siguientemanera:
~F = m~a = md~vdt
= md2~r (t)
dt2(2.1)
Se puede demostrar que la segunda ley de Newton permite determinar (en principio)la trayectoria completa de un cuerpo si se conoce su masa, la fuerza que acta sobreste en todo tiempo t y su posicin y velocidad en algn momento t0.
Tercera Ley: Si un cuerpo A ejerce una fuerza sobre otro cuerpo B, entonces steltimo ejercer sobre A una fuerza de igual magnitud y en la direccin opuesta.
Esta ley, conocida tambin como el principio de accin y reaccin, seala que unafuerza nunca aparecer sola, sino que siempre vendr acompaada de otra fuerzaigual y contraria. Sus consecuencias sern estudiadas en los captulos siguientes, enparticular cuando estudiemos colisiones entre dos o ms objetos.
Fuerzas 2.2
Se puede definir fuerza como una accin sobre un cuerpo que es capaz de modificarsu estado de movimiento, cuando ste es observado desde un sistema inercial. Porsupuesto, esta definicin est ntimamente relacionada con la segunda ley de Newton,la cual nos dice que al aplicar una fuerza a un cuerpo de masa m ste experimenta uncambio en su velocidad dado por la ecuacin 2.1. Las fuerzas son entonces cantida-des vectoriales, cuya magnitud se mide en el sistema internacional usando la unidad
-
2.2. Fuerzas 43
llamada Newton, definida como N = kg m/s2.
A continuacin, definiremos en detalle algunos tipos de fuerzas que resultan de granutilidad para analizar diversos problemas de mecnica. Estas fuerzas son: de grave-dad, elstica, tensin, fuerzas de contacto y de roce. Cabe sealar que de estas slola de gravedad es considerada como una de las fuerzas fundamentales de la Natura-leza. Las otras cuatro son manifestaciones indirectas de la fuerza electromagntica,tambin considerada como fundamental1.
Fuerza de Gravedad: Ley de gravitacin universal de Newton 2.2.1
Esta importante ley, que tambin fue publicada por primera vez en el Principia deNewton, establece que entre dos cuerpos puntuales con masa existe una fuerza atrac-tiva a lo largo de la lnea que los une, cuyo mdulo es proporcional al producto de lasmasas de los cuerpos, e inversamente proporcional al cuadrado de la distancia D entreellos: ~F = Gm1m2
D2,
donde m1 y m2 son las masas de los cuerpos y la constante G 6, 673x1011N m2/kg2es llamada la constante de gravitacin universal2. Esta ley permite predecir tanto laforma de las rbitas de planetas y satlites, como explicar la aceleracin vertical queobservamos todos los das cerca de la superficie de la Tierra.
En este libro nos concentraremos principalmente en los fenmenos que ocurren cercade la superficie terrestre. Debido a que el radio de nuestro planeta es de unos 6.371kilmetros, en la mayora de los casos consideraremos que la distancia entre algncuerpo cerca de su superficie y el centro de la Tierra es constante e igual al radio deesta ltima (RT ). Por lo tanto, en estos casos es una buena aproximacin considerarque un cuerpo de masa m es atrado hacia el centro de la Tierra por una fuerza demagnitud
~F = mGMTR2T
= mg,
donde MT es la masa de la Tierra, y g = 9, 81m/s2 es la aceleracin de un cuerpo quecae libremente3.
1Las otras dos fuerzas conocidas consideradas como fundamentales son la nuclear fuerte y la nu-clear dbil.
2Newton demostr matemticamente que esta ley tambin es vlida para cuerpos esfricos, dondeD es la distancia entre sus centros.
3Debido a que la Tierra no es perfectamente esfrica existen variaciones del orden del 1 % respectoa este valor de g.
-
44 Captulo 2. Dinmica
Fuerza elstica y Ley de Hook 2.2.2
En general, todo cuerpo que est sometido a la accin de una fuerza experimenta unadeformacin. Esta puede ser despreciable o no, dependiendo del material del que esthecho el cuerpo y de la magnitud de la fuerza aplicada. Un resorte es un ejemplo deun objeto que se deforma (se estira o se contrae) cuando se aplica una fuerza sobre l.
Consideremos una barra que posee un largo natural L (ante la ausencia de fuerzaaplicada) y de seccin transversal A. Imaginemos ahora que la barra est sometida ala accin de un par de fuerzas aplicadas en sus extremos de igual magnitud pero ensentido opuesto (esto es necesario para que la barra est en equilibrio), tal como semuestra en la figura 2.1. Bajo la accin permanente de estas fuerzas, el largo de labarra cambiar en una cantidad L. Queremos encontrar una relacin entre L y lafuerza F aplicada.
Si fijamos nuestra atencin en un trozo de la barra de longitud x , de manera tal queen un extremo de este trozo est actuando la fuerza F , que el agente externo ejerce,y en el otro extremo est actuando la fuerza interna Fint que el trozo de barra restanteejerce sobre ste.
!
L + "L
!
A
!
F
!
F
!
F
!
Fint
!
xFigura 2.1: Barra sometida a esfuerzo axial.
Claramente Fint = F , dado que la barra est en reposo. El origen de esta fuerza internaes electromagntico, de hecho es producto de la interaccin entre los tomos que lacomponen. Los tomos que estn en la cara del trozo de barra de la derecha, ejercenuna fuerza sobre los que estn en la cara del trozo de la izquierda, y viceversa.
Ley de Hooke
Cuando las deformaciones son relativamente pequeas, los enlaces entre tomos nosufren mayor variacin y por tanto el estiramiento de la barra es proporcional a la
-
2.2. Fuerzas 45
fuerza aplicada. Este rgimen es descrito mediante la Ley de Hooke, la cual indicaque la relacin entre la fuerza aplicada F y el estiramiento L es lineal, esto es:
F = kL
La constante de proporcionalidad k depende del material del que est hecha la barray de sus dimensiones. Es comn escribir esta relacin en trminos del esfuerzo y ladeformacin que se definen como = FA (fuerza por unidad de rea) y =
LL (cambio
relativo en el largo). En trminos de estas cantidades la Ley de Hooke queda escritaas:
= Y
donde la constante de proporcionalidad Y = kL/A es conocida con el nombre deMdulo de Young, el cual es una propiedad del material que conforma el objeto y porende no depende de su geometra.
Es claro que existir un valor de la fuerza aplicada para el cual la barra se romper oquedar deformada de forma permanente. De hecho, la ley de Hooke es vlida solohasta un cierto valor de esfuerzo y deformacin. La figura 2.2 muestra el comporta-miento tpico de una barra de acero que es sometida a un ensayo de traccin, comoel de la figura 2.1.
Punto de ruptura
Punto de uencia
Zona els3ca Zona pls3ca
Figura 2.2: Representacin de una curva de esfuerzo versus deformacin caracters-tica, obtenida en un ensayo de traccin de una barra de acero.
La regin en la cual es vlida la ley de Hooke es justamente la curva roja (zona lineal),esta regin es tambin llamada zona elstica. La zona elstica es aquella en que unavez que se deja de aplicar un esfuerzo, la barra regresa a su estado original. La zonaplstica es aquella en que el esfuerzo al que la barra es sometida es tal que sta
-
46 Captulo 2. Dinmica
queda con una deformacin permanente. El punto de fluencia es el punto en el cualocurre la transicin desde la zona elstica a la zona plstica, y el punto de ruptura esel punto en el cual la barra se rompe.
El resorte es un ejemplo de aparato que obedece la ley de Hooke. ste se fabricacon caracteristicas adecuadas para un aplicacin particular. Por ejemplo, se utilizangrandes resortes rgidos (k muy grande) en la suspensin de un automvil, o pequeosy flexibles (k relativamente pequeo) en un lpiz de punta retrctil. Por supuesto queen el caso de los resortes, la constante elstica k no depende slo del material delcual ste est hecho, sino que tambin depende de su geometra, esto es, del nmerode vueltas, del dimetro del alambre, del radio de curvatura, etc.
Para ejemplificar cmo se aplica la ley de Hooke en el caso de un sistema con resortes,consideremos un problema en el cual se desea determinar el estiramiento total cuandose aplica una fuerza de mdulo F a dos resortes iguales conectados en serie como semuestra en la figura siguiente. Considere que la constante elstica de los resortes esk y el largo sin deformar es L.
F
k
k
Figura 2.3: Dos resortes conectados en serie.
Para analizar este tipo de problemas en los que interactan diferentes cuerpos y fuer-zas, es muy til realizar un diagrama comnmente llamado "diagrama de cuerpolibre" (DCL). Este diagrama consiste en representar por separado todos los cuerposinvolucrados en el problema, y en cada uno de ellos indicar las fuerzas a las que estnsometidos. Realizar este tipo de diagramas facilita enormemente el anlisis y resolu-cin de un problema.
Para resolver este problema tenemos que realizar dos diagramas de cuerpo libre, unopara cada resorte. Sobre el resorte de la derecha acta la fuerza externa F en unode sus extremos y en el otro acta la fuerza FID, que es la fuerza que el resorte de laizquierda ejerce sobre el de la derecha. Sobre el resorte de la izquierda acta la fuerza
-
2.2. Fuerzas 47
que ejerce la pared FP , y la fuerza FDI , que es la fuerza que el resorte de la derechaejerce sobre el resorte de la izquierda.
k
FDI
FP
L +LI
k
FID
F
L +LD
Figura 2.4: Diagramas de cuerpo libre para dos resortes conectados en serie.
La tercera ley de Newton, el principio de accin y reaccin, establece que FID debeser igual a FDI . Luego, aplicando la segunda ley de newton al resorte de la derechay considerando que ste est en reposo (a = 0), se obtiene que FID = F . Realizandoel mismo anlisis en el resorte de la izquierda, se obtiene que FP = FDI = F . De esteresultado se desprende que ambos resortes experimentan la misma deformacin, laque podemos calcular mediante la ley Hooke. Por lo tanto el estiramiento del sistemaes:
Ltotal = 2L = 2Fk
Note que ste sistema de dos resortes de constante k en serie es equivalente a unresorte de constante k/2.
Tensin
La tensin en una cuerda es similar a la fuerza interna en el caso de la barra elsticao de un resorte que se discuti anteriormente (figura 2.1). El valor de la tensin co-rresponde al mdulo de la fuerza interna originada por la interaccin electromagnticaentre los tomos que la componen. Consideremos el caso simple de un bloque queest colgando desde el techo de un galpn mediante una cuerda. Para este caso, eldiagrama de cuerpo libre para el bloque queda como se muestra en la figura 2.5. Cla-ramente la aceleracin del bloque es nula, por ello al aplicar la segunda ley de Newtonse obtiene que la tensin de la cuerda debe contrarestar al peso del bloque. Esto es,T = mg. Claramente ste es el valor de la tensin en la cuerda justo en la zona cercadel contacto con el bloque, ya que si la cuerda tiene masa, la tensin a lo largo de stavara.
Para estudiar cmo vara la tensin de la cuerda cuando sta tiene una masa M yuna longitud L, utilizaremos la figura 2.6. En esta figura hemos incluido el diagrama decuerpo libre de un trozo de cuerda de largo (Lx), en el que uno de sus extremos est
-
48 Captulo 2. Dinmica
mg
T
m
a = 0
Figura 2.5: Diagrama de cuerpo libre para un bloque de masa m colgando desde eltecho de un galpn mediante una cuerda.
en contacto con el bloque y el otro extremo est a una distancia x del techo del galpn.Sobre este trozo de cuerda el bloque ejerce una fuerza de mdulo mg, y el trozo decuerda restante ejerce una fuerza T (x), que es justamente el valor de la tensin de lacuerda en ese punto. El peso del trozo de cuerda es llamado WLx .
m
g
L
x
L x
mg
T(x)
WLx
Figura 2.6: Bloque de masa m colgando desde el techo de un galpn mediante unacuerda de masa M y largo L, y diagrama de cuerpo libre de un trozo de la cuerda.
Para que este trozo de cuerda est en equilibrio, esto es, que tenga aceleracin nula,se debe cumplir que:
-
2.2. Fuerzas 49
T (x) = mg + WLx
donde WLx = Mg(Lx)L , valor que se obtiene por la aplicacin de una simple regla detres (se supone que la masa M de la cuerda est uniformemente distribuida a lo largode sta). Luego, la tensin en la cuerda en funcin de la variable x , es:
T (x) = mg +Mg(L x)
LNote que cuando x = L la tensin es mg, que es el mismo resultado obtenido
anteriormente. Cuando x = 0, la tensin en la cuerda es (M + m)g, que es justamenteel valor de la fuerza necesaria para sostener al bloque y cuerdas juntos. En el caso deuna cuerda ideal consideramos que su masa es despreciable respecto a la masa delbloque (M
-
50 Captulo 2. Dinmica
Es decir, ~FPM = M~g. Esto se representa en la figura 2.8. Por supuesto, la fuerza queejerce el bloque sobre el plano ( ~FMP) debe ser igual a ~FPM , por lo tanto ~FMP = M~g.Esto ltimo nos parece evidente, ya que finalmente es el plano el que soporta el pesodel bloque.
Mg
FPM
FMP
Figura 2.8: Diagrama de cuerpo libre del bloque ( a la izquierda) y del plano inclinado(a la derecha).
Ahora fijemos nuestra atencin en la fuerza ~FPM . Usualmente esta fuerza se descom-pone en dos fuerzas, que comnmente llamamos Fuerza Normal y Fuerza de Roce.La fuerza normal es la componente perpendicular a las superficies de contacto y evitaque los tomos de un cuerpo ingresen en el otro, formando un slo objeto. Es de ca-rcter repulsivo (es sta fuerza la que nos permite, por ejemplo, pararnos sobre unasuperficie, pues de no existir la fuerza normal, nuestros tomos podran atravesar elpiso o una pared). La fuerza de roce es la componente paralela a estas superficies,y tiende a oponerse al deslizamiento relativo entre ambos objetos. Por supuesto, am-bas componentes son producto de la interaccin electromagntica entre los tomosde ambos cuerpos que estn en la zona de contacto.
Fuerza de roce
La fuerza de roce tiene la particularidad de que siempre se opone al desplazamientorelativo entre las superficies. Esta fuerza es la responsable de evitar que el bloquedeslice por el plano inclinado en la figura 2.7.
Con el propsito de estudiar el comportamiento de la fuerza de roce entre dos super-ficies, consideremos el montaje experimental mostrado en la figura 2.9. Este consistede un bloque de masa M que descansa sobre una tabla, la cual a su vez est ubicadasobre una mesa de aire de tal modo que la fuerza de roce entre la mesa y la tabla
-
2.2. Fuerzas 51
es despreciable (pues no hay contacto entre ambas superficies). Dado que estamosinteresados en medir la fuerza de roce entre el bloque y la tabla, esta ltima se conec-ta a un dinammetro4, el cual a su vez est fijo a la mesa. El dinammetro entoncesmide la fuerza de roce entre ambos cuerpos. Finalmente el bloque se conecta a unpeso que cuelga mediante una cuerda ideal, la cual a su vez pasa por una polea ideal.
Tabla M
W
Dinammetro
Mesa de aire
Figura 2.9: Montaje experimental utilizado para medir la fuerza de roce.
El experimento se realiza aumentando paulatinamente el peso suspendido y regis-trando la lectura del dinammetro. Intuitivamente, el peso W transmite una fuerza albloque M (a travs de la tensin de la cuerda), y entonces el bloque M intentar desli-zar respecto a la tabla. Sin embargo, la fuerza de roce entre el bloque y la tabla evitaen un principio este movimiento. En este rgimen, la fuerza de roce es igual en mag-nitud a la fuerza aplicada sobre el bloque M.
Para un cierto valor crtico del peso suspendido, el bloque comienza a deslizar sobrela tabla. En ese instante la lectura en el dinammetro disminuye levemente. Luego, sesigue aumentando el peso suspendido, lo que ocasiona que la velocidad del bloquesea cada vez mayor. Sin embargo, a pesar de que la velocidad del bloque aumenta,la lectura en el dinammetro presenta slo leves variaciones aleatorias. Finalmentecuando la velocidad del bloque es muy grande, la lectura en el dinammetro tiende aaumentar. El resultado de este experimento se representa grficamente en el grficode la figura 2.10.
El comportamiento de la fuerza de roce se clasifica en 2 regmenes distintos, quellamamos esttico (cuando el bloque no se mueve) y cintico (cuando el bloque des-liza). Note que la fuerza de roce esttica es variable y posee un valor mximo quemarca la transicin hacia un roce cintico. Por otro lado, la fuerza de roce cintica esprcticamente constante y de magnitud menor que la mxima fuerza de roce esttica.
4dinammetro: instrumento utilizado para medir la magnitud de una fuerza
-
52 Captulo 2. Dinmica
0 2 4 6 8 1 0 1 2 1 4 1 6 1 8 2 0 2 2
0
2
4
6
8
Fuerza me
dida
F u e r z a a p l i c a d a
Figura 2.10: Comportamiento de la fuerza de roce entre dos cuerpos.
Empricamente se ha observado que para dos superficies en contacto, tanto la magni-tud de la fuerza de roce cintica fc como el valor mximo de la fuerza esttica fmax , sonproporcionales a la magnitud de la fuerza normal entre ambas superficies, es decir:
fc = cN
fmax = eN,
donde c, e son los coeficientes de roce , siempre inferiores a uno, y c < e. Lafuerza de roce siempre acta en la direccin paralela al movimiento relativo entre lasdos superficies, con sentido opuesto al del movimiento.
Ejemplo 2.1
Considere nuevamente el caso del bloque en reposo sobre el plano inclinado de lafigura siguiente:
Sabemos que la fuerza de roce entre el plano y el bloque es la que evita que este lti-mo deslize hacia abajo bajo la accin de la gravedad. Sin embargo, hemos visto que lafuerza de roce esttica posee un valor mximo, y que si la componente del peso en ladireccin paralela al plano inclinado es demasiado grande, el bloque inevitablementecomenzar a deslizar. Supongamos que el coeficiente de roce esttico es e, paraqu valores del ngulo (entre 0 y 90 grados) el bloque permanecer en reposo?.
Solucin:En la figura siguiente vemos el diagrama de fuerzas para el bloque.
El equilibrio de fuerzas en el eje X (paralelo al plano inclinado) nos da:
fe = Mg sin
Mientras que en el eje Y (perpendicular a X):
-
2.2. Fuerzas 53
g
N = Mg cos
La fuerza de roce esttica debe ser menor o igual a eN (o de lo contrario el bloquecaer):
fe = Mg sin eMg cos
y luego:
tan e
El bloque permanecer en reposo siempre y cuando 0 tan1(e).
-
54 Captulo 2. Dinmica
Aplicaciones de las leyes de Newton 2.3
La Mquina de Atwood. 2.3.1
La mquina de Atwood es un aparato conformado por dos bloques de masas M1 yM2, los cuales estn conectados mediante una cuerda y una polea (disco en el cualse hace pasar la cuerda) tal como se muestra en la siguiente figura. El propsito deeste aparato es obtener un movimiento con aceleracin constante, cuyo valor puedeser manipulado mediante la eleccin de diferentes valores de las masas M1 y M2. Paravisualizar mejor este hecho, resolveremos el problema y obtendremos una expresinpara la aceleracin en funcin de estas cantidades.
g
Figura 2.11: Mquina de Atwood.
a
M1
M1g
a
Figura 2.12: DCLs de la mquina de Atwood
-
2.3. Aplicaciones de las leyes de Newton 55
Los DCLs para ambas masas se muestran en la figura 2.12. Note que hemos conside-rado que si el bloque de masa M1 sube con aceleracin a, entonces el bloque M2 debebajar con la misma aceleracin (esto es consecuencia de que el largo de la cuerdaes constante, esto ser explicado en 2.3.2). Aplicando la segunda ley de Newton paraambos bloques se tiene:
T M1g = M1a
M2