03b_Pachet nr 3

of 3
-
Upload
alexandru-nistor -
Category
Documents
-
view
214 -
download
0
Transcript of 03b_Pachet nr 3
-
8/18/2019 03b_Pachet nr 3
1/3
Universitatea Tehnică Gh. Asachi IaşiFacultatea Construcţii de Maşini
Catedra Tehnologia Construcţiei de Maşini
Disciplina: PTSF Proiectarea Tehnologiilor în Sisteme Flexibile
Prof.Dr.Ing. Petru Du şa
1
Legi de decizie şi proceduri de planificare a tehnologiei în SFF
Precizare: După ces-au stabilitrelaţiiletemporaledintreoperaţii, trebuiestability, funcţie de restricţii, după celegi sunt înlănţuiteoperaţiileîntreele simodul in care se succed. Operaţiilesunt asociatepieselor însecvenţe şi distribuite peo structur ădată (structurasistemului flexibil).Definiţie: Se numeşte lege de decizie, înSFF, o regulă de selectarea unui post de transformare, scule particulare şi a unuidispozitiv de transport adecvate, având un număr de alternative disponibile, în scopul realizăriiunei anumitesecvenţedeoperaţii pentruo anumită piesă.Legile de decizietrebuie să fielegi dinamice, avândîn vedere dinamicadin SFF.Sunt prezentateîn Tabelul următor treilegide decizie dinamice.
Legi de decizie şi proceduri de planificare a tehnologiei în SFF
SOTA
SOTA : (obiectiv : timpminim/operaţ ie) : proceduraurmăreşteminimizareatimpuluide prelucrarepemaşini şi a duratelordepornire/maşină cu considerareaalternativelor pentru MU şi STP care realizează operaţia de prelucrare (de tip 9) şi operaţi idetransport piesă (de tip 6).
Pentruselectarea MU, timpul de operaţieeste definitca sumatimpilorpentruoperaţiile 4, 8, 9, 10.
( )[ ] ( )[ ] ( )[ ] ( )[ ]Top T O i j T O i j T O i j T O i jMU ml ml ml ml= + + +4 8 9 10, , , ,Pentru selectareadispozitivului de transport, operaţii de tip 5, 6, 7.
( )[ ] ( )[ ] ( )[ ]Top T O i j T O i j T O i jDT ml ml ml= + +5 6 7, , ,
T = TopMU + TopDT
Procedura SOTA se refer ă la selectareapostului de transformare M.U. şi la selectareadispozitivului de transport DT.Cum opereaz ă ?
- Cu timpi minimi peoperaţii.Care sunttimpiiluaţ iîn considerare?
- timpireferitorila MU- timpireferitorila operaţii de tip 4, 8, 9, 10- timpireferitorila operaţii de tip 5, 6, 7
( )[ ] [ ] [ ] [ ]TMU = + + +T O i j T O T O T Oml4 8 9 10, [ ] [ ] [ ]TDT = + +T O T O T O5 6 7
Concluzie: Alegânddin maimultevariantese stabileşte traseul pentrucare timpul/operaţieeste minim.T= TopMU+ TopDT
T T T MINMU DT= + → .
Legi de decizie şi proceduri de planificare a tehnologiei în SFF
ESTA
ESTA : (obiectiv: timp minim de începere/operaţ ie.) Procedura urmăreşte utilizareaintensivă a M.U., a sculelor din bazacomună simultancu echilibrarea încărcării M.U. Regula ESTA selecţionează timpii ceimai lungi de nefolosire.
Exemplu:Se consider ă patru varianteposibile de desf ăşurarea unuialgoritm(asociatunei piese) într-ostructur ă a unuiSFF.
Concluzie : Procedura ESTA - timp minim începere/operaţie- avândîn vederestareadată a sistemului şi algoritmul asociatpiesei,va fi selectată maşina care poate începe prima operaţia necesar ă piesei.
Dacă toate condiţiile sunt îndeplinite(v. tab. de restricţii) şidacă piesa începe printr-ooperaţie de tip.1, atunci dintretoate variantelede operaţii de tip.1 va fialeasă aceeacare poateîncepeprima
-------------------------------------------
--------------------------------------------------------------------------------------
-------------------------------------------
--------------------------------------------------------------------------------------
-------------------------------------------
--------------------------------------------------------------------------------------
-------------------------------------------
-------------------------------------------
-------------------------------------------
--------------------------------------------------------------------------------------
--------------------------------------------------------------------------------------
--------------------------------------------------------------------------------------
-------------------------------------------
--------------------------------------------------------------------------------------
-------------------------------------------
--------------------------------------------------------------------------------------
-------------------------------------------
--------------------------------------------------------------------------------------
-------------------------------------------
-------------------------------------------
--------------------------------------------------------------------------------------
-------------------------------------------
--------------------------------------------------------------------------------------
-------------------------------------------
-------------------------------------------
--------------------------------------------------------------------------------------
-------------------------------------------
--------------------------------------------------------------------------------------
-------------------------------------------
-------------------------------------------
--------------------------------------------------------------------------------------
-------------------------------------------
-
8/18/2019 03b_Pachet nr 3
2/3
Universitatea Tehnică Gh. Asachi IaşiFacultatea Construcţii de Maşini
Catedra Tehnologia Construcţiei de Maşini
Disciplina: PTSF Proiectarea Tehnologiilor în Sisteme Flexibile
Prof.Dr.Ing. Petru Du şa
2
Legi de decizie şi proceduri de planificare a tehnologiei în SFF
EFTA
EFTA ( obiectiv: timp minim de terminare/operaţ ie) Procedura urmăreşte minimizareatemporală a fluxuluide piese
combinândregulile SOTA şi ESTA.
Exemplu:Se consider ă patruv arianteposibile de desf ăşurarea unuialgoritm(asociat unei piese) într-ostructur ă a unuiSFF.
Concluzie: Dacă în sistemsunt respectaterestricţiiletemporaleasociate operaţiilor (v. tab. de restricţii), conform proceduriiEFTA,vafi aleasă aceav ariantă care corespundeunui timp de terminareoperaţie minim, pentruoperaţia specificată (aici var. 4).
Exemplu de ac ţ iune a Legilor de Decizie în SFF
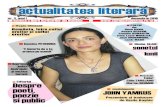
Exemplu. Se prezintain continuare un exempluprivind procedurade selectarea m.u. şi a secvenţelorde încărcare, la nivelul 1 decizional, adicăselectaream.u.). Se consider ă că două pieseP1 şi P2 sufer ă câtedouă operaţii de prelucrareîntr-un SFF (similar cu celprezentatanterior)M.U. disponibile pentrufiecare fază de prelucraresunt MU1 şi MU2, respectivM3 şi M4 pentruP1 şi MU2 şi MU3 pentruP2.
Nodurile asociabile pt. Piesa 1
Concluzie: Se observă care suntmaimultevariante posibilede prelucrare pentrufiecarepiesă.Intrebare : Cum se alege una din variantele posibile ?Raspuns:Acţionânduna din legilede decizie SOTA, ESTA, EFTA.
Se presupune că acţionează Legea de decizieSOTA:- se calculează timpii peOp. pentrufiecarevariantă, de exemplupentru P1-se determină timpulminim la celetrei variante şi alege un traseu.Inrebare : Dacă maşinilesuntla fel, de unde arputeaaparetimpidiferiţi ?Raspuns:1.O sculă necesar ă pentru a prelucrapiesaI, la operaţiaj arputeafipe o altă maşină ş i aducereaei necesită timp;2.Timpul de comutareal programelor;3.Timpul de reconfigurare. Se alegeacea maşină în care reconfigurarea pentruopera ţia curentă să durezecel maipu ţin;4.S-ar puteaca pe maşină să existealte piese, care suntîncurs de prelucrare, iartimpiicât arurma să maidurezeprelucrarea suntdepista ţi de sistem şi prelucraţi.Observaţie: Se observă că în nodul 2 pot accesaambele piese. Acestaeste un nod cu acces conflictual şi se rezolvă ca atare.
Legendă:i- nr. de piesă j- nr. fază de prelucrarem- nr. maşinii unelte
ST- Ts minim pt. op…..FT- Tf minim pt. op. ….n- nr. nod de prelucrare
S F
S F
S F
S F
→ → →
→ → →
→ → →
→ → →
⎧
⎨
⎪⎪
⎩
⎪⎪
2 3
2 4
1 3
1 4
S F
S F
S F
S F
S FS F
→ → →
→ → →
→ → →
→ → →
→ → →→ → →
⎧
⎨
⎪⎪⎪
⎩
⎪
⎪⎪
5 7
5 8
6 7
6 8
2 72 8
Nodurile asociabile pt. Piesa 2
Fiabilitatea algoritmilor tehnologici în SFF
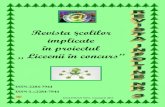
Fiabilitateatehnologiei constă în capacitateaunui algoritm de operaţii implementatpe o structur ă, alocată cu resurse, de a-şi îndeplinifuncţia pentrucare a fost proiectat, încondiţii de utilizare precizate, de-a lungul uneidurate de timpdeterminate (durata misiunii).Maşinileunelte, roboţii, transportoarele, sculele, soft-urile din SFF reprezintă resurse care sunt alocate pentruefectuareaoperaţiilordeprelucrare, deplasare, fixarea pieselor şi reziduurilorde fabricaţie.La prelucrareaunei piese, succesiuneanecesar ă de operaţii (o secvenţă de prelucrare), este o succesiuneserie, o succesiuneordonată.Nu se poatetrece la operaţia a 3-a dacă nus-a f ăcut prima (adică nuse poateprelucrao piesă dacă nua fostbazată, de ex.).
Dacă fiecareoperaţie esteconsiderată “o zea”dintr-un lanţ, atunci modelul structuriitehnologiceeste: Op.2Op.1 Op.3 Op.nOp.i... ...
START FIN
Siguranţa tehnologieiSth , depinde de siguranţatuturoroperaţiilor si, fiindînsă maimicădecâtsiguranţaoricărei operaţii. Siguranţa sistemelor a căror model structurat estede tipserie(cazul ordonanţării operaţiilorde prelucrarea uneipiese) poate fi calculată cu :
STh ==
∏ sii
N
1
Observaţie: Relaţia de calcul a siguranţei tehnologieieste sinonimă cu relaţia de predicţie a performanţelorviitoare ale tehnologiei.
Altfelspus, dacă o secvenţă de prelucrareeste compusă din n -operaţii, fiecareoperaţietrecând prins stări posibile, stuncisecvenţa deprelucrare treceprin:
s s s s si
k
⋅ ⋅ = ∏,...,de k ori
s, adicã S1 24 34 1
-------------------------------------------
-------------------------------------------
--------------------------------------------------------------------------------------
-------------------------------------------
--------------------------------------------------------------------------------------
-------------------------------------------
-------------------------------------------
-------------------------------------------
--------------------------------------------------------------------------------------
--------------------------------------------------------------------------------------
--------------------------------------------------------------------------------------
-------------------------------------------
--------------------------------------------------------------------------------------
-------------------------------------------
--------------------------------------------------------------------------------------
-------------------------------------------
--------------------------------------------------------------------------------------
-------------------------------------------
-------------------------------------------
--------------------------------------------------------------------------------------
-------------------------------------------
--------------------------------------------------------------------------------------
-------------------------------------------
-------------------------------------------
--------------------------------------------------------------------------------------
-------------------------------------------
--------------------------------------------------------------------------------------
-------------------------------------------
-------------------------------------------
--------------------------------------------------------------------------------------
-------------------------------------------
-
8/18/2019 03b_Pachet nr 3
3/3
Universitatea Tehnică Gh. Asachi IaşiFacultatea Construcţii de Maşini
Catedra Tehnologia Construcţiei de Maşini
Disciplina: PTSF Proiectarea Tehnologiilor în Sisteme Flexibile
Prof.Dr.Ing. Petru Du şa
3
Fiabilitatea algoritmilor tehnologici în SFF
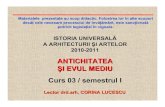
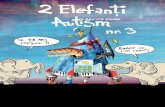
Exemplu : Se presupune c ă un algoritm tehnologicse compune dintr-un lanţ de 5 operaţ ii, pentrucare se iauîn considerare drept resursenumai
sculele (se procedeaz ă aşa pentrusimplicitate), adic ă resursede tipulrij cu i=ct=1, resursede tipul 1, altelepentrufiecare operaţ ie.Se consider ă c ă siguranţ a înfunc ţ ionarea tehnologieieste determinat ă de siguranţ a sculei, care se prezint ă astfel:
Restricţie:
Să se determine vectorul alocaţiei cu scule a tehnologiei ri(r1, r2, r3, r4, r5) care maximizează siguranţa tehnologiei.
Explicaţii: (algoritmul Katelle)
Pasul 1 - Se alocă câte o resursă pentrufiecareoperaţie, atât câteste necesarpentruca procesul să se iniţieze;Se calculează nesiguranţa maximă. Se observă că estemaximă pentruop.3 (vezi simbolul *).
Pasul 2 - Se alocă două resurser13 şi se recalculează nesiguranţa. Se observă că estemaximă pentruop.2.Pasul 3 - Se alocă două resurser12 ş.a.m.d.
Algoritmul continuă până cândse atinge restricţia 125 < 132.Observaţie: Algoritmulde mai suspoatefi uşor proiectatîn EXCEL.
( )g x c r i in
1
1
132= ⋅