- Partea 1

of 24
Transcript of - Partea 1
-
8/12/2019 - Partea 1
1/24
Cuprins
Actionari electrice in mecatronica
Partea 1 Introducere Notiuni introductiveClasificarea sistemelor mecatroniceDezvoltarea mecatronicii in domeniul scolar
Partea 2
Sisteme de actionare in mecatronica
Notiuni , forme de energie, clasificareMotoare pas cu pas MPP consideratii teoreticeMetode de comanda a MPPDistribuitoare de impulsuri
Servomotoare de c.cCircuite integrate pentru comanda servomotoarelor de c.cOptimizarea parametrilor mecanismelor de actionareRapoarte de transmitere optime la actionarile cu MCC
Actuatori piezoelectrici
-
8/12/2019 - Partea 1
2/24
Pag1
PARTEA1- INTRODUCERE
Conceptul de mecatronic: definiie; modele
Termenul mecatronic (MECAnic + elecTRONIC) a fost conceput n 1969 deun inginer al firmei japoneze Yaskawa Electric i protejat pn n 1982 ca marc aacestei firme. Se referea iniial la complectarea structurilor mecanice din construciaaparatelor cu componente electronice. n prezent termenul definete o tiininginereasc interdisciplinar, care, bazndu-se pe mbinarea armonioas a elementelor dinconstrucia de maini, electrotehnic i informatic, i propune s mbunteasc performanele i funcionalitatea sistemelor tehnice.
Ca i n cazul multor altor domenii de mare complexitate, n literatura de specialitatenu exist o definiie unitar a noiunii de mecatronic. n IEEE/ASME Transactions on
Mechatronics(1996) mecatronica a fost definit astfel:Mechatronics is thesynergetic integration of mechanical engineering with electronic and intelligentcomputer control in the design and manufacturing products and processes., ntraducere: Mecatronic este integrarea sinergetic a ingineriei mecanice cucontrolul electronic i cel inteligent cu calculatoare n proiectarea i fabricaia
produselor i proceselor. . Termenul sinergetic impune o detaliere. n MicDicionar Enciclopedic (Editura Enciclopedic Romn, 1972) termenul sinergieeste definit astfel:
- gr. Synergia (conlucrare) s.f. (FIZIOL.) Asociaie a mai multor organe sau esuturi pentru ndeplinirea aceleiai funciuni.
Cele mai sugestive reprezentri ale mecatronicii sunt reprezentate prin intersecia atrei sau mai multor cercuri. Dup modul n care sunt definite zonele de intersecie,exist multe modele, unele fiind prezentate n figura 1.1[GIU02].
Modelul din figura 1.2 detaliaz coninutul celor 3 cercuri din figura1.1,a isintetizeaz principiile pe baza crora a fost conceput nvmntul de mecatronic laUniversitateaTransilvania din Braov:Studiul mecatronicii i proiectarea irealizarea sistemelor mecatronice trebuie cldite pe cei trei piloni principali:mecanica, electronica, tehnica de calcul, fiecare cu subsistemele i subdomeniile lui
principale, iar intersecia acestora conduce la sisteme i produse cu caracteristici
remarcabile, superioare unei simple reuniuni a componentelor de diferite tipuri. Acestlucru impune nzestrarea specialistului n mecatronic cu cunotine temeinice dindomeniul mecanicii, electronicii i tehnicii de calcul, dar i al sistemelor mecatronice,de cele mai diferite tipuri, i al principiilor i etapelor de proiectare i realizare aacestora.
-
8/12/2019 - Partea 1
3/24
Pag2
Fig. 1.1 Diagrame pentru ilustrarea noiunii de mecatronic: a) Conceptul UniversitiiStanford; b) Conceptul Universitii Missouri-Rolla; c) Conceptul Universitii Purdue
Fig. 1.2 Diagram cu detalierea subsistemelor
-
8/12/2019 - Partea 1
4/24
Pag3
Evoluia sistemelor tehnice: de la sisteme pur mecanice la sisteme mecatronice
Dezvoltarea mecatronicii i a produselor i tehnologiilor mecatronice reprezint o etaplogic i concret n evoluia tiinei i tehnologiei, iar revelaia inginerului de laYaskawa era inevitabil, n condiiile n care electronica devenise o component care numai putea fi separat de sistemele mecanice.
Evoluia omenirii a fost nsoit de o dezvoltare lent a uneltelor, dispozitivelor isistemelor create i realizate de om, ncepnd din paleolitic i pn n secolul 18, cndodat cu inventarea mainii cu abur (James Watt - 1788), care a marcat nceputulrevoluiei industriale, sistemele tehnice au cunoscut o evoluie rapid. Maina cu abur s-constituit ntr-una dintre primele borne ale procesului de nlocuire a muncii fizice, prestate de oameni i animale, cu lucrul mecanic efectuat de maini. Cteva repereimportante de-a lungul acestui drum: 1775 - prima main orizontal de gurit i aleza
evile de tun (englezul John Wilkinson); 1784 - ciocanul mecanic cu abur; 1795 - presacu transmisie hidraulic; 1797 - primul strung cu crucior i ppu mobil, acionate deun ax elicoidal; vaporul cu aburi (nceputul secolului 19); locomotiva cu aburi (mijlocusecolului 19).Pe parcursul secolului al 19-lea apar i se dezvolt motoarele cu ardere intern, ca
rezultat al preocuprii unor inventatori de geniu de a realiza mijloace de transport rutiere1807 - brevet pentru un motor cu un cilindru vertical, cu funcionare cu gaz i cuaprindere cu ajutorul unei scntei electrice; 1872 - invenia motorului cu benzin isupape laterale - motorul Otto; 1887 - motorul Daimler, cu ardere intern, cu doi cilindri
V, la care aprinderea combustibilului avea loc la fiecare rotaie a arborelui (capacitateacilindric de 1,5 l; puterea de 7,5 CP);Caracteristica esenial a sistemelor tehnice de pn n jurul anilor 1900 este aceea c
acestea erau pur mecanice. Mecanica pur a permis realizarea unor adevrate bijuteritehnice, cum ar fi precursorul genial al calculatorului electronic, reprezentat de maina dcalcul a lui Charles Babbage, sau maina de scris mecanic; s-au pus ns n eviden limitele acestor sisteme.
Germenii unei ere noi apar odat cu dezvoltarea motoarelor electrice - motorul de
curent continuu n 1870 i cel de curent alternativ n 1889, care au permis, realizarea, lnceputul secolului 20, a unor sisteme mecanice cu acionare electric (pompe,mainiunelte etc.). Electrotehnica a permis i saltul la realizarea unor sisteme mecanicecu control automat, bazate pe relee electrice, regulatoare PI, amplificatoare electrice, avndca exponeni avioanele, mainile-unelte, turbinele cu aburi, automobilele (fig.1.3).
-
8/12/2019 - Partea 1
5/24
Pag4
Perioada de dup cel de-al doilea rzboi mondial este caracterizat prin realizritiinifice i strpungeri tehnologice remarcabile: primul calculator electronic numeric 1945, tranzistorul cu germaniu n 1948, cel cu siliciu n 1952, tiristorul n 1958, primucircuit integrat n 1959, laserul etc.
n 1953 la Massachussets Institute of Technology (M.I.T.) s-a realizat i s-au fcutdemonstraii cu o main de frezat cu comand numeric. Ca nceput al mainilor unelte cucomand numeric poate fi considerat utilizarea benzii perforate n rzboiul de esuautomat (de ctre Jaquard) i n pianola mecanic cu program. Un rol important n perfecionarea acestor maini l-a avut utilizarea calculatorului n locul benzii perforateajungndu-se la comanda numeric, cu ajutorul calculatorului, a mainilor unelte.
La nceputul anilor 1960 sunt realizai i primii roboi industriali. Fabricarea i utilizare
roboilor a fost facilitat de rezolvarea anterioar a unor probleme tehnice, indispensabil pentru funcionarea roboilor:
Problema manipulrii pieselor la distan, cu ajutorul mecanismelor articulate,denumite telemanipulatoare. Dezvoltarea telemanipulatoarelor a fost impus denecesitatea manipulrii materialelor radioactive, extrem de nocive pentruorganismele vii, n procesul utilizrii energiei nucleare. n 1947 a fost construit primul telemanipulator cu servo-acionare electric, n care operatorul uman nucontrola fora de prindere. n 1948 a fost introdus legtura invers (feed-back),realizndu-se astfel telemanipulatorul cu bucl nchis. Fabricarea
manipulatoarelor cu operator uman a implicat rezolvarea unor probleme eseniale pentru proiectarea i realizarea unui robot: modelarea cu ajutorul mecanismelor amicrilor braului i antebraului omului (mecanisme de poziionare); modelarea cuajutorul mecanismelor a micrilor a micrilor de orientare specifice ncheieturiiminii omului (mecanisme de orientare); modelarea micrilor degetelor minii,specifice operaiilor de prindere.Problema automatizrii mainilor unelte prin intermediul comenzii numerice. A
permis stpnirea comenzii incrementale a micrilor i a poziionrii de mare precizie, prin dezvoltarea de servo-motoare, servo-comenzi i senzori de
poziie/deplasare.Problema automatizrii calculelor i a controlului cu ajutorul calculatoarelorelectronice
Iat cteva repere semnificative n evoluia roboticii:1961 - instalarea primului robot industrial - UNIMATE la General Motors. i nurmtoarele decenii industria automobilului a fost fora motrice pentru producia
-
8/12/2019 - Partea 1
6/24
pag5
roboilor industriali. Astfel, n 2002, n Germania erau 120 de roboi la fiecare10.000 de angajai, dar n industria automobilului proporia era de 1 robot la 10muncitori productivi.1963 - Cercettorii de la Rancho Los Amigos Hospital din California au construitRancho Arm pentru sprijinirea persoanelor handicapate. Avea 6 articulaii,dispunea de gradele de mobilitate ale minii umane i a deschis drumul spreconstruirea roboilor antropomorfi.Studentul n construcia de maini, Victor Scheinman, a realizat la StanfordArtificial Intelligence Laboratory, robotul Stanford pentru microchirurgie. Avea 6grade de mobilitate i era primul robot conceput pentru comanda cu calculatorul. Afost precursorul unor roboi industriali remarcabili, ca PUMA (ProgrammableUniversal Manipulator for Assembly), robotul cu cel mai mare succes de pia pn n prezent.
1979 - Robotul mobil Stanford Cart a reuit prima parcurgere a unei incintemobilate cu scaune. Se baza pe o camer video, montat pe o sanie, i i stabileadrumul pe baz de grafuri i algoritmi de cutare. Primele maini mobilereprezentative au fost ns broatele estoase Elsie i Elmer ale englezului GreyElmer, n 1950, capabile s identifice o priz electric i s-i ncarce bateriile.1973 - La Universitatea Waseda din Tokyo a fost realizat primul robot umanoid n
mrime natural - Wabot-1. Japonezii sunt cei mai puternici susintori aidezvoltrii unor roboi cu aspect umanoid, care s fie acceptai mai uor caparteneri n servicii, munci casnice, ajutorarea persoanelor handicapate. Exemple
semnificative: roboii P3 (Honda) i Asimo (Advanced Step in InnovativeMobility). Acesta din urm, realizat n 2001, are o nlime de 1,20 m, o greutatede 43 kg, iar prin modificarea centrului su de greutate se poate deplasa i n curbe.Doi roboi umanoizi renumii de la M.I.T. - Kismet (Soart), are buze de
cauciuc, urechi rozalii, care arat ca dou erveele mpturite, ochi mari, n caresunt montate camere miniaturale i poate vedea, auzi i vorbi cu ajutorul unuisintetizator; Cog (Cognition = Cunoatere), este constituit dintr-un trunchi derobot, care poate prinde obiecte i le poate aduce n dreptul celor doi ochi,materializai prin dou camere video.
Cteva dintre realizrile din domeniul roboticii par a fi desprinse din science-fiction i elnu ar fi fost posibile fr dezvoltarea spectaculoas a tehnicii de calcul i, n special, amicroelectronicii, care este un pilon de baz al sistemelor. n finalul acestui paragraf se vo puncta cteva dintre principalele etape ale dezvoltrii tehnicii de calcul.
-
8/12/2019 - Partea 1
7/24
Pag6
Prelucrarea automat a informaiilor a fost revoluionat de apariia i dezvoltareacalculatoarelor electronice numerice. Prima generaie a fost realizat cu tuburielectronice, primul calculator din aceasta generaie fiind ENIAC (Electronical NumericaIntegrator and Calculator), construit ntre 1942-1946 la Universitatea Pennsylvania. Aurmat generaia a doua, cu tranzistoare, ntre anii 1950-1960, pentru ca natereamicroelectronicii s genereze salturi revoluionare, marcate de urmtoarele etapesemnificative:
- 1959 - anul de natere a microelectronicii; primul circuit integrat (TEXASINSTRUMENTS);
- 1971 - producerea primului microprocesor de 4 bii - INTEL-4004;- 1974 - apariia microprocesoarelor de 8 bii - INTEL-8080;- 1978 - producerea primului microcontroller;- 1981 - primul calculator personal IBM PC-XT;
- 1985 - lansarea sistemelor software AUTOCAD, dBASE III, IV i a unor noilimbaje de programare de nivel superior: PASCAL, C;
- 1986 - limbaje de programare destinate rezolvrii problemelor de inteligenartificial: LISP, PROLOG; procesare n limbaj natural;
- 1987- explozie tehnologic n arhitectura hardware lansarea calculatoarelorechipate cu hard-disk-uri;
Alte etape importante parcurse din 1987 i pna n prezent: - mrirea continu a capacitii de stocare a discurilor hard; - dezvoltarea tehnicilor de procesare n paralel;
- introducerea discurilor optice read/write;- utilizarea de microprocesoare din ce n ce mai performante;- dezvoltarea unor noi sisteme de operare, cu performane superioare; - mrirea capacitii memoriei interne;- creterea vitezei de prelucrare;- extinderea posibilitilor de lucru n mod grafic etc.
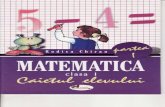
Succinta prezentare a evoluiei sistemelor tehnice, de la sisteme pur mecanice lasisteme mecatronice, sintetizat i n figura 1.3, permite evidenierea ctorva concluzii: Integrarea electronicii i a tehnicii de calcul a condus la simplificarea
substanial a componentelor mecanice i la sisteme mai ieftine. Pri mecaniceau fost nlocuite cu componente electronice, mai ieftine, mai fiabile i mai uorde ntreinut, ntruct pot facilita auto-diagnoza. Aceste sisteme sunt mai precise,ntruct precizia nu se bazeaz pe rigiditatea i stabilitatea mecanic, ci pesisteme electronice de msurare i reglare. Simplificarea construciei mecanice afost facilitat i de comanda descentralizat, cu ajutorul microcalculatoarelor, aacionrilor electrice, ca, de exemplu, la maini de scris, maini de cusut,manipulatoare cu mai multe cuple.
-
8/12/2019 - Partea 1
8/24
Pag7
n perspectiva unor construcii mai uoare, s-au realizat sisteme relativ elastice,cu o amortizare mecanic redus, dar la care o comand cu reacie adecvat, bazat pe electronic, senzori i actuatori adecvai, asigur o amortizareelectronic. Exemple: roboi elastici, transmisii de putere elastice, macaraleuriae, sisteme hidraulice, conducte i construcii n spaiul cosmic.
Introducerea unor sisteme de reglare pentru poziie, vitez, for etc. permite nunumai meninerea n limite rezonabile de precizie a mrimilor programate, dar iobinerea unei comportri quasi-liniare, chiar dac sistemul mecanic comandateste neliniar.
Sisteme pur mecanice Pn n 1900
1870 - motorul de c.c.1889 - motorul de c.a.
Sisteme mecanice cu acionare 1920electric
Relee electriceAmplificatoare
Regulatoare Sisteme mecanice cu control Anii 1930automat
1948, 1952 - tranzistorul1955 - tiristorul
1959 - circuitul integrat
1971- microprocesorul Sisteme mecanice cu: ncepnd cu Control electronic anii 1950 pnanalogic; la mijlocul Control secvenial; anilor 1980 Control numeric.
1978 - microcontrollerul1981 PC-ul
magistrale de procesnoi senzori i actuatori
integrarea componentelor Sisteme mecatronice De la mijlocul
Integrare mecanic & anilor 1980electronic&tehnic de calcul Sinergie;
Software-ul determinfunciile;
Noi instrumente de proiectare.
1788 - maina cu abur;1872 - motorul Otto; 1887 - motorulDaimler; Maina de calcul a luiBabbagge; maina de scris mecanic.
Maini unelte;Pompe.
Avioane; Automobile; Turbinecuabur; Maina de scris electric.
Lifturi cu control automat;Maini unelte cu comandnumeric;Roboi industriali;Periferice de calculator.
Roboi mobili;Linii flexibile;Controlul electronic alautomobilului (ABS, ESP);Uniti CD-ROM.
Fig.1.3 Evoluia sistemelor mecanice, electrice i mecatronice
-
8/12/2019 - Partea 1
9/24
Pag8
Clasificarea sistemelor mecatronice
O imagine asupra diversitii i complexitii domeniilor care sunt incluse n vastanoiune de Mecatronic poate fi furnizat de tematica seciunilor primei conferineIFAC (International Conference of Automatic Control) de Sisteme Mecatronice,organizat ntre 18 i 20 septembrie 2000 la Darmstadt (Germania):
Seciunea A - Sisteme mecatronice, incluznd vehicule mecatronice, motoare imaini mecatronice, trenuri mecatronice i sisteme spaiale mecatronice;
Seciunea B- Componente mecatronice, cu temele actuatori i dispozitivemecatronice i lagre magnetice;
Seciunea C - Roboi i maini pitoare, cuprinznd roboi mecatronici, sistemerobotice mobile, maini pitoare;
Seciunea D - Proiectarea sistemelor mecatronice - a avut ca centre de greutate:modelarea i identificarea; instrumente software; simularea n timp real ihardware-in-the-loop;
Seciunea E - Controlul automat al sistemelor mecatronice, s-a concentrat asuprametodelor de control, a controlului micrii i vibraiilor i a sistemelormecatronice pentru detectarea i diagnosticarea erorilor.
Conceptul de sistem mecatronic
Un sistem mecatronic este un sistem tehnic care integreaz, ntr-o configuraie flexibil,componente mecanice, electronice i de comand cu sisteme numerice de calcul, pentru
generarea unui control inteligent al micrilor, n vederea obinerii unei multitudini de funcii. Diagrama bloc a unui sistem mecatronic este prezentat n fig.1.4.
Fig.1.4 Diagrama bloc a unui sistem mecatronic
-
8/12/2019 - Partea 1
10/24
Pag9
cuvinte cheie n mecatronic?
Integrare Integrare spaial prin ntreptrunderea constructiv a subsistemelor
mecanice, electronice i de comand; Integrare funcional, asigurat prin software.
Inteligen, raportat la funciile de control ale sistemului mecatronic icaracterizat printr-o comportare adaptiv, bazat pe percepie, raionament,autonvare, diagnosticarea erorilor i reconfigurarea sistemului (comutarea pemodule intacte n cazul unor defeciuni) etc.
Flexibilitate, caracterizat de uurina cu care sistemul poate fi adaptat, sau se poate adapta singur, la un nou mediu, pe parcursul ciclului su de funcionare;implic schimbarea adecvat a programelor de control (software) i nu a structurii
sale mecanice sau electrice (hardware).Fr ndoial c pot fi luate n considerare multiple criterii pentru clasificarea
sistemelor mecatronice, iar cteva dintre cele mai interesante, vor fi prezentate ncontinuare.
n [ISE96] clasificarea se bazeaz pe sistemele mecanice, care constituie suportul pentru configurarea unei structuri mecatronice:
Componente mecanice (incluznd componente mecanice de baz- lagre,ghidaje, cuplaje, angrenaje etc. i componente pentru generarea forelor imicrilor- lanuri cinematice, lanuri de acionare, componente
hidraulice/pneumatice, componente electromecanice etc.); Maini (incluznd maini generatoare de energie - electromotoare, motoare cucombustie intern, turbine etc.) i maini consumatoare de energie - maini-unelte, utilaje tehnologice, maini agricole);
Vehicule (automobile, trenuri, vapoare, avioane, navete spaiale); Produse ale mecanicii fine (incluznd componente mecanice de precizie - lagre,
ghidaje, lanuri cinematice i de acionare, comutatoare, relee, senzori, actuatori idispozitive de mecanic fin- nregistratoare, imprimante, dispozitive decomunicaie, aparatur electrocasnic, aparatur optic, aparatur medical);
Produse ale micro-mecanicii (incluznd componente micro-mecanice - lagre,ghidaje, lanuri cinematice i de acionare i sisteme micro-mecanice - senzori,
actuatori, motoare, pompe).Prin adugarea i integrarea componentelor electronice i de comand cu sisteme de
calcul la/n aceste structuri mecanice se obin sisteme mecatronice corespunztoare,care pot fi clasificate n:
Componente mecatronice; Maini mecatronice; Vehicule mecatronice; Mecatronic de precizie;
-
8/12/2019 - Partea 1
11/24
pag10
Micro-mecatronic.
O alt clasificare (fig.1.5), propus n [LYS02], mparte sistemele mecatronice n: Sisteme mecatronice convenionale; Sisteme micro-mecatronice; Sisteme nano-mecatronice.
Fig. 1.5 Variant de clasificare a sistemelor mecatronice [LYS02]
Presupunnd c prima categorie acoper primele patru grupe ale clasificrii prezentate mai sus, se observ c n aceast a doua clasificare apare o clas nou desisteme mecatronice, respectiv sistemele nano-mecatronice. Dac principiile deoperare i teoriile fundamentale sunt aceleai pentru sistemele mecatroniceconvenionale i sistemele micro-mecatronice, respectiv mecanica clasic ielectromagnetismul, sistemele nano-mecatronice sunt studiate cu ajutorul unorconcepte i teorii diferite, cum ar fi mecanica cuantic i nano-electromecanica.
O a treia clasificare prezentat n acest paragraf [RZE03], analizeaz sistemelemecatronice din punct de vedere al caracteristicilor lor comportamentale, i le mparten:
Sisteme mecatronice automate; Sisteme mecatronice inteligente; Reele mecatronice inteligente.
Sistemele mecatronice automate sunt capabile s manevreze materiale i energie,comunicnd cu mediul nconjurtor i au capacitatea de auto-reglare, care le permite sreacioneze la schimbri previzibile ale mediului ntr-un mod programat anterior.Marea majoritate a sistemelor mecatronice aparin acestei categorii.
Sistemele mecatronice inteligente sunt capabile s realizeze un scop impus n condiii deincertitudine. Spre deosebire de sistemele automate, care sunt programate pentru a secomporta ntr-un mod dorit i sunt, n consecin, previzibile, sistemele inteligente
-
8/12/2019 - Partea 1
12/24
Pag11
pot atinge un scop specificat ntr-un mod imprevizibil. Ele sunt nzestrate cu un naltnivel de flexibilitate, fiind capabile s rspund la schimbri frecvente ale mediului,fr a fi necesar o reprogramare a lor. Aceast diferen calitativ n comportamenteste determinat de separarea bazei de cunotine (knowledge base) de motorul derezolvare a problemei (inference engine), concept de baz n inteligena artificial.Exemple de astfel de sisteme sunt mainile-unelte inteligente, roboii inteligeni,vehicule cu ghidare autonom, avioane fr pilot, rachete auto-ghidate, compresoareinteligente cu geometrie variabil.
Att sistemele mecatronice automate, ct i cele inteligente, pot fi incluse ntr-una dingrupele celor dou clasificri precedente, n funcie de specificul lor.
O nou i interesant grup propus n [RZE03] este cea a unor reele de sistemeinteligente, interconectate mutual, saureele mecatronice inteligente . Aceste reelesunt capabile s decid asupra comportamentului lor prin negocieri ntre unitile
componente autonome(nodurile reelei). Fiecare component este un sistemmecatronic inteligent. Semnificativ este pentru acest fel de reele capacitatea fiecreiuniti de a-i mbunti performanele prin auto-organizare (modificarea relaiilordintre unitile componente, n scopul mbuntirii performanelor globale alesistemului). Cele mai evoluate reele sunt supuse unui continuu proces de evoluie(prin deconectarea i eliminarea unitilor mai puin utile i conectarea unor noi uniti cuefecte benefice pentru scopurile urmrite de reea).
Flotile de avioane fr pilot, colonii de maini agricole inteligente, sisteme defabricaie inteligente (de exemplu, holonice), echipe de roboi militari, de salvare sau de jocuri sportive, sunt exemple semnificative pentru astfel de reele.
O ultim clasificare are la baz domeniile n care sunt utilizate sistemele mecatronice(tabelele 1.1 - 1.3).Se regsesc, grupate dup un alt criteriu - cel al domeniului de utilizare - multe
dintre sistemele mecatronice care au fost menionate cu ocazia prezentrii criteriilor declasificare precedente. Ceea ce se poate deduce din examinarea tabelelor 1.1 1.3,care sunt oricum selective i incomplecte, este faptul c nu exist nici un domeniu alvieii economice i sociale n care sistemele mecatronice s nu aib un rol
predominant, iar acest rol crete continuu.Muli oameni au o imagine relativ clar despre rolul acestora: n industrie, reprezentat de
roboi, maini unelte cu comand numeric, sisteme flexibile, sisteme complexe de
msurare i control, magazii automate etc.; n vehicule civile i militare: automobile,trenuri de mare vitez, avioane, rachete etc., dar mai puini, poate, intuiesc rolulacestora n agricultur. n tabelul 1.2 sunt enumerate: maini agricole autonome, roboagricoli, sisteme pentru irigaii comandate de calculator, dar rolul mecatronicii nagricultur este mult mai amplu. Fermele moderne, de mare productivitate, presupunmpnzirea terenului agricol cu o multitudine de senzori, receptai prin satelit (GPS),care furnizeaz date despre umiditatea din sol, despre coninutul n substane nutritiveetc, pe baza crora se realizeaz irigarea i distribuirea automat a ngrmintelor.
-
8/12/2019 - Partea 1
13/24
Pag12
Tabel 1.1I. N INDUSTRIE
Lagre magnetice; Elemente constructive ale mainilor, cu electronic integrat; Sisteme de injecie electronice ; Sisteme automate pentru comanda vehiculelor;
Maini unelte cu comand numeric; Roboi industriali; Roboi mobili i pitori, de diferite tipuri i configuraii; Vehicule cu ghidare automat;
Avioane militare autonome; Rachete autoghidate;
Sisteme pentru condiionarea aerului; Imprimante laser i plottere; Sisteme pentru citirea/scrierea informaiei etc.
-
8/12/2019 - Partea 1
14/24
pag13
Tabel 1.2II. N AGRICULTUR, MEDICIN, BIOMECANIC
n agricultur Roboi agricoli;
Roboi pentru industria alimentar;
Maini agricole autonome;
Sisteme pentru irigaii comandate prin calculator;n
medicin i biomecanic
Roboi medicali;
Organe artificiale;
Dispozitive chirurgicale;
Aparate pentru investigaii medicale complexe etc.
-
8/12/2019 - Partea 1
15/24
Pag14
Tabel 1.3III.
Camere foto i video; Aparatur video;
PENTRU UZ GENERAL
Antene TV cu poziionare automat; Automate comerciale i bancare; O gam larg de aparatur electro-casnic inteligent :
- maini de splat;
- maini de cusut;- roboi pentru servicii etc.
IV. N CONSTRUCII Roboi pentru construcii; Sisteme de securitate automate Automatizarea locuinelor i a cldirilor etc.
V. PRODUSE MICRO-MECATRONICE Micro-Mechanic-Electro-Systems (MEMS);
Micro-actuatori;
Micro-senzori;
Microsisteme etc.
-
8/12/2019 - Partea 1
16/24
pag15
Consideraii privind proiectarea sistemelor mecatronice
Este un fapt evident, c produsele mecatronice prezentate n tabelele 1.1 1.3 sunt prea complexe, pentru a fi proiectate de o singur persoan, sau de un numr mare de persoane, de diferite specializri, n msura n care acestea nu lucreaz n echip.
Varianta de proiectare clasic, anterioar filozofiei mecatronice, presupunea proiectarea unui produs, avnd o funcie mecanic (de execuie de micri sautransmitere de fore) i nzestrat cu componente electrice i electronice i un sistem decontrol, n mai multe etape succesive (fig.1.6):
ntr-o prim etap, ingineri mecanici proiectau structura mecanic de baz; n a doua faz a proiectrii, inginerii de profil electric i electronic complectau
aceast structur cu senzorii i actuatorii necesari; ultima etap era realizat de ingineri automatiti, al cror rol consta n
implementarea unei structuri de control i a unui algoritm adecvat funcionrii
ntregului ansamblu.Aceast filozofie, utilizat n proiectarea unor produse complexe, a condus nu
numai la soluii scumpe i ineficiente, dar a generat i multe efecte dezastroase.
Fig.1.6 Modelul proiectrii clasice (secveniale)
Prin contrast, mecatronica are la baz principiile ingineriei concurente, impunnd,nc din momentul demarrii proiectrii unui produs, munca ntr-o echip, care includeatt ingineri de diferite specializri, ct i reprezentani ai compartimentelor defabricaie, marketing, din domeniul financiar etc. Colaborarea permanent pe parcursul proiectrii este esenial, ntruct sistemul mecanic influeneaz sistemul electronic, invers, sistemul electronic are un rol important n proiectarea unei structuri mecaniceadecvate. Obinerea efectelor sinergetice poate fi realizat numai prin ingineriesimultan (fig.1.7).
-
8/12/2019 - Partea 1
17/24
Pag16
Fig. 1.7 Modelul proiectrii simultane (concurente)
Vor fi prezentate i comentate dou puncte de vedere privind etape i principii de proiectare a sistemelor mecatronice, aparinnd unor personaliti de prestigiu dinEuropa, cu rezultate remarcabile n proiectarea, realizarea i testarea de produsemecatronice.
Conform cu [ISE99] etapele proiectrii unui sistem mecatronic sunt sintetizate nfigura 1.8. Etapele specifice sistemelor mecatronice sunt listate cu litere cursive.
Cteva aspecte importante, care trebuie avute n vedere de proiectanii de sistememecatronice, sunt sintetizate n [ISE96]. Succesiunea etapelor de proiectare din figura1.8 este comentat i argumentat n [ISE99]:
1. Funcii ale sistemului mecatronic Proiectarea sistemului mecanic de baz: simplificare;
mprirea funciilor ntre mecanic i electronic; Performane n funcionare: precizie, domenii mari de lucru, funcionarea n
apropierea limitelor extreme; Funcii noi: controlul mrimilor care nu pot fi msurate, generarea unorcomportamente dinamice speciale, sisteme adaptive, detectarea timpurie aerorilor n funcionare i diagnosticarea erorilor;
Vehicule drive-by-wire, avioane fly-by-wire: tolerante la erori,componente redundante, propieti influenate de software;
Noi senzori (micro-mecatronic), senzori inteligeni; Noi actuatori: electro-mecanici, piezo-electici, electro-reologici.
2. Forme de integrare Integarea componentelor (integrarea hardware, integrarea senzorilor,
actuatorilor i a microelectronicii n structura mecanic a sistemului); Integrarea prin procesarea informaiei (integrarea software, bazat pe
cunoaterea modelului i a procesului, metode algortmice).3. Componente electronice
Lan de prelucrare a informaiei: senzori microcalculatoare actuatori; Microelectronic dedicat (embedded); Microprocesoare, microcontrollere, DSP-uri, ASIC; Magistrale i protocoale de comunicaie: CAN-, PROFI-, SERCO-Bus;
-
8/12/2019 - Partea 1
18/24
pag17
1. Prima construcie de baz a procesului(Mecanic, electric, termodinamic)
2. Prima mprire a funciilor de baz Flux de energie; Flux de informaii
3. Senzoric, Acionare, Energie auxiliar Principii; Integrare constructiv ; Prelucraredescentralizat a informaiei (componente inteligente)
4. Funcii de baz ale prelucrrii informaieiComand, Reglare; Supraveghere; Coordonare, Optimizare.
5. Deservire, Interfa om-mainSoluii convenionale;Soluii noi.
6. Arhitectur Hardware Microprocesoare (standard/speciale) ; Structur de baz :descentral-central ; Magistral i protocol de comunicaie .
7. Software Probleme, cerine; Structura software; Implementare(codificare); Validare; Limbaj; Capabiliti de timp.
8. Integrarea funcional a procesului sielectronicii prin prelucrarea informaiei
Adaptarea funciilor de baz ; Amortizare electronic ; Liniarizare prin algoritmi; Influenarea mrimilor nemsurabile. Domenii mari de lucru cu ajutorul algoritmilor adaptivi ; Faciliti denvare ; Diagnosticarea erorilor.
9. Simplificarea construciei de bazCinematica, acionri descentralizate, Construcie uoar i
flexibil.
10. Msuri pentru mrirea fiabilitilor i siguranei Recunoaterea timpurie a erorilor;Redundan fail-safe; Reconfigurare.
11. Utilizarea unor instrumente speciale de proiectare Elaborarea de modele; Identificarea; Simularea (inclusiv Hardware-in-the-Loop); Optimizarea funciilor (CAD)
12. Verificare experimentalPe componente; ntregul sistem.
Fig.1.8 Etapele proiectrii unui sistem mecatronic [ISE99]
-
8/12/2019 - Partea 1
19/24
Pag18
Structuri redundante: arhitecturi duble i triple pentru funciile critice pentrusigurana sistemului.
4. Operare: noi interfee om-main Pedale electronice sau manete cu reacie haptic;
Tele-manipulare; Noi tipuri de sisteme de afiare.
5. Metode de proiectare Instrumente software pentru modelare i simulare; Instrumente software pentru proiectarea i construcia sistemelor mecanice i
electronice; Simulare n timp real (simulare hardware-in-the-loop, prototipare a
controlului).6. Efecte sinergetice
Noi efecte prin integrarea hardware i software; Reducerea componentelor mecanice, prin mbinarea componentelor mecanice
i electronice.Una dintre cele mai provocatoare probleme n proiectarea sistemelor mecatronice este
aceea a elaborrii arhitecturii sistemului, respectiv a alegerii componentelor hardware(actuatori, senzori, electronic de putere, circuite integrate (ICs - Integrated Circuits),microcontrollere, DSP-uri) i a modulelor software (algoritmii pentru realizarea percepiei i controlului, fluxul de informaie i achiziia datelor, simularea,vizualizarea i prototiparea virtual).
Principalele diferene de abordare a proiectrii sistemelor convenionale i a celormecatronice sunt sintetizate n tabelul 1.4.
Tabel 1.4 Diferene principiale ntre proiectarea convenional i cea mecatronicProiectare convenional
Componente separate i, n consecin,sisteme mecanice complexe
Precizie realizat prin tolerane foartestrnseConstrucie rigidProbleme de cablare
Micare comandatMrimile care nu pot fi msurate nu pot fiinfluenateSupraveghere simpl, bazat pe valorilimit
Proiectare mecatronicSisteme integrate, cu preluarea unorfuncii mecanice de ctre electronic isoftwarePrecizie realizat prin msurare i buclede reacieConstrucie elastic i uoarUtilizarea magistralelor, de exempluCAN-BusMicare programatCalculul i reglarea mrimilor care nu pot fimsurateSupraveghere prin diagnoza erorilor
Extrem de utile pot fi pentru specialiti i principiile privind proiectarea conceptual, prezentate n [RZE03]. Articolul se refer, n principal, la sisteme mecatronice
-
8/12/2019 - Partea 1
20/24
Pag19
inteligente i reele de sisteme mecatronice inteligente (vezi seciunea 1.3), dar coninecteva principii foarte interesante privind proiectarea conceptual, care pot fi de unreal folos pentru proiectani.
Conform [RZE03], programarea conceptual este o faz iniial a proiectrii , ncare proiectanii selecteaz conceptele care vor fi utilizate n rezolvarea unei anumite probleme i decid cum s interconecteze aceste concepte ntr-o arhitectur adecvat asistemului. Iat sinteza principalelor reguli aferente programrii conceptuale:
Unul dintre cele mai importante secrete ale unei proiectri reuite const n pstrarea deschis, ct mai mult timp posibil, a opiunilor de proiectare. Lanceputul fiecrui proces de proiectare exist a varietate mare de candidai lasoluionarea problemei respective i mult incertitudine privind cea mai potrivitsoluie. Aceast situaie este mai acut n cazul sistemelor pentru carespecificaiile utilizatorului sunt foarte vagi, sau care au o dinamic nalt. Regulade baz const n reducerea incertitudinii n mod gradual, pas cu pas, evitndu-se
ancorarea de o soluie de proiectare particular, att timp ct nu este strict necesar.O modalitate de a pstra deschise opiunile, legate de soluiile problemei, esteoferit de amnarea selectrii componentelor fizice pn dup selectareaconceptelor privind rezolvarea proiectului, interconectarea acestora ntr-un sistemde concepte adecvat i validarea proiectrii conceptuale. Un rezultat important alacestei etape este reprezentat de o diagram, denumitarhitectura sistemului , caresintetizeaz legturile dintre blocurile conceptuale.Pe parcursul proiectrii conceptuale a sistemelor mecatronice principala alegere
privind arhitectura trebuie fcut ntre un sistem ierarhic i cel de tipul unei reele.Conform legii lui Metcalf, valoarea unei reele este egal cu ptratul numrului denoduri, crescnd polinomial, n timp ce valoarea unui sistem ierarhic crete liniar,
odat cu mrirea numrului de noduri. Un alt argument, care recomand o reeafa de un sistem ierarhic, este acela c un sistem n care decizia este distribuit nnoduri, este mai aproape de senzori i actuatori i poate reaciona mult mai rapiddect un sistem centralizat, cu un drum i interval mai lung ntre raportarea unuieveniment i recepionarea deciziei. Concluzia este valabil i pentru reeleconstituite din oameni.Alt regul de baz a fost este cea autilizrii ingineriei concurente , n detrimentul
proiectrii clasice, succesive, i a mai fost tratat n acest paragraf.
Autorul articolului prezint cteva exemple de proiectare conceptual, bazate peexperiena personal (o main-unealt inteligent, un compresor inteligent cu
geometrie variabil), dar i un studiu de caz, foarte interesant, privind eecul proiectrii unui sistem mecatronic foarte complex, reprezentat de o nav de rzboi,comandat cu sisteme numerice sofisticate. Proiectarea s-a realizat separat pentru celetrei sisteme mecatronice componente: nava, cu sistemele ei de propulsie, sistemul decomunicaie i sistemul de rachete, dar nava nu a putut s realizeze misiunea ei de baz, constnd n lansarea cu maxim precizie a rachetelor, fr o sincronizareadecvat cu micrile navei i sistemul de comunicaie i au fost necesari mai muli an pentru remedierea deficienelor. Principalele erori de proiectare au constat n:
-
8/12/2019 - Partea 1
21/24
Pag20
Proiectarea separat a celor trei componente mecatronice i a sistemului lor decontrol;
Ignorarea condiiilor extrem de imprevizibile i volatile de operare a navei pemare, n condiii de rzboi, care ar fi impus o soluie cu control inteligent,distribuit, n locul unei comenzi centralizate.
Metodele i principiile de proiectare, prezentate mai sus, sunt foarte importante, darabilitile i competenele de proiectare i realizare a sistemelor mecatronice se ctig prin lucrul n echip pentru rezolvarea de proiecte concrete. Japonezii nu sunt numai promotorii conceptului de mecatronic, dar i maetrii ai proiectrii concurente i aiintegrrii, fapt dovedit de nalta calitate i competitivitate a produselor lor. ncompaniile japoneze mari, ca Toshiba, Hitachi, Canon, Fujitsu etc., care au un portofoliu de produse foarte larg i i motiveaz specialitii pentru a rmne n cadrufirmei, fiecare inginer proiectant este repartizat, succesiv, la un anumit numr de proiecte, care pot fi din domenii dintre cele mai deosebite. De exemplu, un inginer
poate lucra, n ordine cronologic, n echipe care proiecteaz un reactor chimic,componente ale unui automobil sau noi tipuri de memorii optice pentru calculatoare. Elva dobndi competene deosebite n domeniul mecatronicii, fiind apt, la rndul lui, scoordoneze echipe de proiectani.
Dezvoltarea mecatronicii in domeniul scolar
Primul program de educaie mecatronic n inginerie a fost elaborat n 1978 laUniversitatea Toyohashi din Japonia, de ctre profesorul K. Yamazaky. Mai bine de undeceniu japonezii au scris despre mecatronic numai n limba matern. Prima lucrarenenglez, legat de tehnologia i educaia mecatronic a fost susinut n 1984, de
profesorul Yamazaky, la o conferin internaional pe probleme de educaietehnologic n inginerie, desfurat n Germania. Intensificarea viziteloruniversitarilor europeni n Japonia, dup1980, au creat premizele introducerii decursuri de mecatronic i a nfiinrii de specializri de mecatronic la universiti de prestigiu din Germania, Marea Britanie, Belgia, Finlanda, Elveia, Olanda etc. nmartie 1986 Comitetul Consultativ pentru Cercetare i Dezvoltare al ComunitiiEuropene afirm c:mecatronica este o nevoie major pentru cercetarea european i
pentru programele educaionale.
Cteva repere cronologice semnificative ale dezvoltrii educaiei mecatronice nEuropa, sunt sintetizate n [MT03], avnd la baz o ampl documentare. Iat unele
dintre ele: Belgia: n 1980 a fost nfiinat, prin eforturile profesorului Hendrik Van Brussel,Institutul de Mecatronic la Universitatea Catolic din Leuven, considerat drept poarta deintrare a mecatronicii n Comunitatea European. Marea Britanie: n 1984 a fost nfiinat Consiliul pentru Educaie Tehnologic i
Afaceri (BTEC), care a elaborat un Program Naional de Educaie Mecatronic. n1990 a fost recunoscut oficialU.K. Mechatronics Forum, care organizeazconferine internaionale bienale de mecatronic, n colaborare cu parteneri externi. Tot
-
8/12/2019 - Partea 1
22/24
Pag21
n 1990, sub egida Consiliului pentru tiin i Cercetare n Inginerie (SERC), a fostnfiinat Centrul de Cercetare i Proiectare n Mecatronic la Universitatea dinLancaster. Elveia: n 1988 s-a nfiinat Centrul de Cercetare n Mecatronic la Institutul Federalde
Tehnologie din Zrich. n 2003 Elveia a gzduit Olimpiada Internaional deMecatronic.
Finlanda: n 1985 s-au nfiinat specializrile de mecatronic la universitile dinTampere, Helsinki i Oulu. n anul 1987 a fost lansat Programul Naional de EducaieMecatronic, care include obiective clare pentru nvmnt, cercetare i producie i esteunul dintre cele mai pragmatice programe de acest tip din Europa.
Olanda: n 1989 guvernul olandez a nfiinat Centrul de Cercetare n Mecatronic laUniversitatea din Twente.
Frana: Dup 1990 au fost nfiinate mai multe Institute de Mecatronic. S-au impus, prin rezultatele obinute pe plan internaional cele din Besanon i Clermont-FerrandInstitutul de Mecatronic din Besanon a iniiat congresele Frana-Japonia de
mecatronic.
-
8/12/2019 - Partea 1
23/24
-
8/12/2019 - Partea 1
24/24