TCM
214
1 CONCEPTE FUNDAMENTALE UTILE ÎN EXERCITAREA PROFESIEI DE INGINER. SUPORT TEORETIC PENTRU SUSŢINEREA EXAMENULUI DE LICENŢĂ SECŢIA TCM
description
Concepte fundamentale utile in exercitarea profesiei de inginer TCM. Brosura a UC
Transcript of TCM
1 CONCEPTE FUNDAMENTALE UTILE N EXERCITAREA PROFESIEI DE INGINER. SUPORT TEORETIC PENTRU SUSINEREA EXAMENULUI DE LICENSECIA TCM 2 CUPRINS 1. Desen tehnic.........................................3 2. Mecanic.............................................................................................................20 3. Rezistena Materialelor.....................................................................................32 4.Mecanisme...........................................................................................................55 5. Mecanica fluidelor i maini hidraulice...........................................................59 6. Organe de maini...............................................................................................71 7. Termotehnic.....................................................................................................85 8. Studiul materialelor.........................................................................................100 9. Tehnologia materialelor..................................................................................108 10. Tolerane........................................................................................................118 11.Bazeleachieriiibazelegenerriisuprafeelorpemaini-unelte.....................................................................................................................129 12. Maini-unelte..................................................................................................139 13. Automatizarea proceselor i sistemelor de producie................................149 14. Proiectarea i construcia dispozitivelor.....................................................160 15. Proiectarea sculelor speciale.........................................................................176 16. Tehnologia fabricrii produselor.................................................................190 17. Tratamente termice.......................................................................................202 18. Scule acietoare..............................................................................................205 3 1. DESEN TEHNIC 1.1 GENERALITI 1.1.1. SCURTA ISTORIE Arta descrierii prin folosirea liniilor dateaza practic de cand a aparut omul. Arheologii au descoperithieroglifepeperetisipietrecaunmartormutalcapacitatiiomuluideadesena. Gradualimaginiledescrisedeomulpreistoricinsimboluriaveaucapacitateadeaspuneo poveste.Imaginea,incoordonatespatialesitemporale,inmicro-simacro-universuloricaruia dintrenoi,esteprezentamereusiaproapepestetot.Comunicamprinimaginitottimpulsi oriunde.Mintalasaureala,virtualasaumateriala,digitalasauanalogica,tehnicasauartistica, imaginea este unul din simbolurile fiintei umane.Oamenii si-au facut viata mai buna si mai comoda folosind imagini, abilitatea de a desena a omului a aparut inaintea celei de a scrie. Minti creatoare si ingenioase au descoperit ca, pentru aconstruiproduseutilecumarfiautomobile,televizoare,mobilier,motoare,tomografe, amfiteatresiapartamente,robotisijucarii,stadioane,vapoaresimicrocipuri,trebuiesale desenam. Cat mai fidel si mai complet, pentru ca multi altii dupa aceea sa le poata realiza dupa desenele noastre, desigur.Civilizatii la rand si-au exprimat si continua sa isi exprime ideile si conceptiile de progres tehnic prin imagini.LeodardodaVinci,mareleartistsiinginercareatraitnultimajumatateasecoluluial XV-lea si nceputul secolului al XVI-lea a fost numit parintele desenului modern. El a practicat sianvatatometodadscriptivagraficacareaconceputsinregistratideiprivindingineria mecanica.Spre sfarsitul secolului al XVIII-lea, Gaspard Monge, un matematician francez a introdus doua planuri de proiectie la un unghi drept pentru investigarea grafica a problemelor geometriei solide.Fiecaresenastecuabilitateadeavizualiza.Copiiiprescolari,deexemplu,pretinda vedea n multe feluri, dar odata ce n scoala sunt criticati pentru pentru aceasta vedere sau visare aloraparecarezultatoatrofiereaacesteivizualizariodatacutrecereatimpului.nschimb abilitateadeavizualizaartrebuidezvoltataprinliniidinmomentceogandireclarainclude folosirea imaginilor mentale. Un vorbitor, descriind un fenomen, va ntreba adesea "Vezi? Vezi imaginea?" Un profesorspunea ca majoritatea studentilor care au picatexamenul de Geometrie Descriptiva au facut-o datorita faptului ca nu erau n stare sa vada n trei dimensiuni. O persoana pregatitatehnictrebuiesafiecapabilasaconceapa,saverificesisadescrieideilesalesiprin urmaretrebuiesasidezvolteabilitateasagandeascavizual.Eltrebuiesafieaptsaformeze imagini mentale. Trebuie sa fie pregatit sa formeze imagini mentale ale pieselor nefacute, ori idei considerateafiposibilesolutiilaproblemeleluatenconsiderare.S-adescoperitcalideriin multe domenii au o abilitate remarcabila de a vizualiza. Albert Einstein descria frecvent analogii si imagini mentale pe care le folosea pentru a descrie teorii. Nicolai Tesla probabil este cazul cel maielocventprinmodalitateasaneobisnuitadeavizualizaanumiteobiecte.Elfrecvent concepeadiferiteaparatenminteasasileconstruiasiletestasaptamanintregi,iarapoi examina prototipul vizual de defectiuni si stabilea metode de a le mbunatati.Odatacuevolutiacunoasteriispretehnicasistiinta,s-aconturatsiapois-aimpus necesitateauneidescrierisintetice,claresineambigueaformeisidimensiunilorobiectelordin lumeareala,precumsiaobiectelorpecareminteaomuluile-aconceputsipecareomulsi-a propus sa le fabrice pentru comoditatea vietii lui.4 Cantitateadeinformatienglobatantr-oreprezentaregraficaestemare.Aceeasi informatiearnecesitamultecuvintesifraze,pentruafiredatatextual.nplus,timpulde receptare a informatiei vizuale este redus, n comparatie cu cel necesar citirii unui text.Stocareainformatieisiacunostintelornformatgraficesteavantajoasa,dinpunctde vederealspatiuluisialcompactizarii,atatnmemoriaomului,catsipesuporturifizicede stocare: hartie, discuri magnetice, discuri optice, filme, panza etc. Capacitatea omului de a regasi si a recunoaste informatia grafica este remarcabila.Pentru ca imaginile sa transmita clar si coerent anumite concepte, s-au ales reguli precise deexprimare.S-adefinitastfelunlimbajgrafic.S-astabilitun"vocabular",formatdinlinii, forme geometrice, simboluri, culori, o semantica a acestora, adica o semnificatie pe care o au, si o sintaxa, un mod de combinare a elementelor in reprezentari complexe, care sa descrie unitar si neambiguu creatia mintii noastre.Ingineriisiarhitectiiauadoptatacestlimbajpentrua-sireprezentaproiectele. Informaticienii i-au adaugat noi valente, invatand calculatorul sa deseneze. Nu neaparat in locul omului, ci impreuna cu el. Asa s-a dezvoltat proiectarea asistata de calculator. Modelele virtuale ale proiectelor ingineresti, in doua, trei sau chiar in patru dimensiuni sunt in plina evolutie.Relatia biunivoca spatiu-plan pentru corpurile geometrice reale (materializate) sau fictive (existente n imaginatiaomului de conceptie si ceruta de creativitatea tehnica, latura esentiala a profesionalismuluitehnic)impunecunostinteteoreticesiexercitiiaplicativesubstantialen domeniul reprezentarilor grafice.Scopul esential al creatiei tehnice, ntr-o viziune sintetica, l reprezinta transpunerea plana aimaginilorspatiale(realesauimaginate)urmatadematerializareaacestoracuajutorulunui sistem tehnologic adecvat.Graficainginereascapoateficonsideratacafiindalcatuitadintreiparti,comunicare, analiza problemei si designul creativ.Tehnica a impus definirea si utilizarea unui limbaj de comunicare bazat pe simtul vizual, avand o larga independenta fata de limba vorbita si scrisa, si anume, desenul tehnic. S-au stabilit regulisinormespecificedereprezentare,desenultehnicimpunandu-secalimbajesentialde comunicare n domeniul tehnic. 1.1.2. OBIECTUL DISCIPLINEI
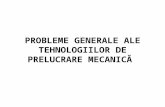
Desenul tehnic este un limbaj grafic universal, utilizat n domeniul tehnic pentru a realiza comunicarea ntre proiectantii, producatorii si beneficiarii produselor din acest domeniu.Pentru a scrie si a vorbi acest limbaj un inginer trebuie sa aiba cunostiinte despre alfabet, vocabular, gramatica si compozitie. Inginerul trebuie sa nteleaga simbolurile grafice, sa poata sa leciteascasisalescrielizibil.Studentul,invatandsareprezintepuncte,linii,planurisiobiecte solide n diferite proiectii va continuand sa lucreze cu instrumente si sa schiteze pana cand se va familiarizacusimbolurile,conventiilesiabrevierileacestuilimbaj.Dependentaingineruluide desencamijlocdecomunicareestepusanevidentadeunvechiproverbchinezescconform caruiaundesenvaloreazacatomiedecuvinte".Desenulestedeajutorpentruointerpretare facilaaunuiobiectsauconstructiistabilindastfelomaibunacomunicarentreinginersi conducere, ntre designer si producator, ntre vanzator si consumator. 1.1.3. LINII UTILIZATE IN DESENUL TEHNIC INDUSTRIAL Reprezentareaobiectelorserealizeazaprintr-unansambludetipurideliniifiecarelinie avand o specificatie bine definita. Liniile utilizate n desenul tehnic industrial sunt cuprinse n SR EN ISO 128-20:2002.Partea 20 a ISO 128 stabileste tipurile de linii, notarea, forma si grosimea acestora si de asemenearegulilegeneraledereprezentarealiniilorutilizatendesenultehnic,deexemplula diagrame, planuri sau harti.5 1.1.3.1. LINII FRECVENT UTILIZATE IN DESENUL TEHNIC INDUSTRIAL SuntcuprinseinSRENISO128-20:2002.siclasificatefunctiedegrosimesiforma. Grosimealinieisenoteazacubsisealegedinurmatorulsirdevalori:0,18;0,25;0,35;0,50; 0,70; 1,0; 1,4; 2,0. Linia subtire are grosimea de aproximativ b/3. Tipurile de linii sunt: -linie continua groasa - tip A - cu grosimea b utilizata la reprezentarea de contururi, muchii reale vizibile, sectiuni intercalate, varful filetului, chenarul formatului, etc. -linie continua subtire - tip B - cu grosimea b/3 utilizata la reprezentarea de muchii fictive, linii de cota, linii ajutatoare, linii de indicatie, hasuri, rupturi, conturul sectiunilorsuprapuse, linia de fund a filetului, etc. -linie continua subtire ondulata - tip C - cu grosimea b/3 utilizata pentru reprezentarea rupturilor in materiale de orice fel. -liniacontinuasubtireinzig-zag-tipD-cugrosimeab/3utilizatalareprezentarearupturilor executate cu aparate automate. -linia intrerupta subtire - tip E - cu grosimea b/3 utilizata la reprezentarea contururilor acoperite si a muchiilor acoperite. -liniaintreruptagroasa-tipF-cugrosimeabutilizatatotlareprezentareacontururilorsi muchiilor acoperite. -linia punct subtire - tip G - cu grosimea b/3 utilizata la reprezentarea liniilor de axa, suprafetelor de rostogolire a rotilor dintate. -linia punct mixta - tip H - cu grosimea b, b/3 utilizata la indicarea traseelor de sectionare. -liniapunctgroasa-tipJ-cugrosimeabutilizatalareprezentarealiniilorsisuprafetelorcu prescriptii speciale. -linia doua puncte subtire - tip K - cu grosimea b/3 utilizata la reprezentarea conturului pieselor invecinate, pozitii intermediare si extreme de miscare a pieselor mobile. 1.1.4. FORMATE Formatul reprezinta suportul material pe care se realizeaza desenul. Deseneletehnicedintoatedomeniiletehnicesereprezintapeplansededesen preimprimate sau nu pe formate specifice care sunt standardizate prin SR ISO 5457-94 avandu-seinvederesatisfacereacerinteloratattraditionaledemultiplicaresifolosirecatsimijloacele actuale de micrografiere si modelare automata. Referitor la formate, standardul precizeaza regulile si elementele grafice cu privire la: 6 - pozitia si dimensiunile indicatorului; - margini si chenar; - repere de centrare; - repere de orientare; - gradatia metrica de referinta; - sistem de coordonate; - unghi de decupare. Prevederile de mai sus se aplica desenelor originale precum si reproducerilor. Pentruexecutareadesenelorsealegeunformatavandcelemaimicidimensiunicaresa permitaoclaritatesipreciziecorespunzatoare.Formatelesealegdinseriilepreferentiale prezentate in tabele. Formate seria A FORMATDIMENSIUNI (mm) A0841 x 1189 A1594 x 841 A2420 x 594 A3297 x 420 A4210 x 297 Formate alungite speciale FORMATDIMENSIUNI (mm) A3x3420 x 891 A3x4420 x 1189 A4x3297 x 630 A4x4297 x 841 A4x5297 x 1051 Pentruformatele mai alungite se foloseste unuldin formatele obtinute prin modificarea dimensiuniimiciaunuiformatdinseriaAsiculungimeaegalacuunmultiplualdimensiunii mici a formatului de baza ales. Formate alungite exceptionale FORMATDIMENSIUNI (mm) A0x21189 x 1682 A0x31189 x 2523 A1x3841 x 1783 A1x4 841 x 2376 A2x3594 x 1261 A2x4594 x 1682 A2x5594 x 2102 A3x5420 x 1486 A3x6420 x 1783 A3x7420 x 2080 A4x6297 x 1261 A4x7297 x 1471 A4x8297 x 1682 A4x9297 x 1892 7 1.2. REGULI GENERALE DE REPREZENTARE N DESENULTEHNIC 1.2.1 SISTEME DE REPREZENTARE Reprezentarea unui obiect pe un plan de proiectie se face prin metoda proiectiilor. A proiecta un obiect oarecare pe un plan inseamna a duce prin punctele lui caracteristice linii, iar la intersectia acestora cu planul se vor determina proiectiile acestor puncte care unite in ordinea lor fireasca vor determina imaginea obiectului pe acel plan. Planul pe care se face proiectia se numeste plan de proiectie. Liniile care unesc punctele din spatiu cu proiectiile lor se numesc proiectante. Metodele de proiectie utilizate n desenul tehnic au la baza standardele SR EN ISO 5456-1,SRENISO5456-2,SRENISO5456-3,SRENISO5456-4,corespondenteleserieiISO 5456. n domeniul activitatilor tehnice sunt utilizate diferite metode de proiectie pentru reprezentarea obiectelor. Toate aceste metode au fiecare avantajele si dezavantajele lor. Desenultehnicnormalesteadeseaoproiectieortogonalancaresuntutilizare reprezentarilemaimultorvederi(ISO5456-2)pentrudesenareasidefinireacompletaatuturor obiectelor cu ajutorul vederilor si sectiunilor alese cu atentie. Totusi,executiaunorastfeldereprezentaribidimensionalenecesitantelegereaatata metodei de proiectie cat si a interpretarii acesteia, astfel ncat un observator sa poata, plecand de lavederiindividualesavizualizezeobiectulnceletreidimensiuni.Pentrumultedomenii tehnicesinivelurilelordedezvoltareestetotusi,necesarsaserealizezedesenecaresadea observatoriloroimaginecaresafienteleasausor.Astfeldedesene,denumitereprezentarin perspectiva, furnizeaza o vedere tridimensionala a unui obiect asa cum va aparea observatorului. Pentru citirea reprezentarilor n perspectiva nu este necesara o instruire tehnica speciala. Reprezentarilenperspectivapotfiprezentatesinguresaupotcompletareprezentarile ortogonale.Crestereapermanentaainterconexiunilortehnicelanivelglobalprecumsievolutia metodelordeproiectiesidedesenasistatdecalculatorcudiferitelelortipuridereprezentari tridimensionale impun necesitatea clarificarii acestei probleme de catre comisiile ISO/TC 10. Se recomanda caregulile conventiilor stabilite nISO 5456 safie utilizate conformISO 128, pentru toate tipurile de desen tehnic si n toate domeniile de activitati tehnice precum: - desene mecanice si de constructii; - manuale si manuale de instructiuni; - vederi n transparenta; - vederi expandate. Metodele de proiectie sunt definite prin: - tipul liniilor de proiectie, care pot fi paralele sau convergente; - pozitia planului de proiectie fata de liniile de proiectie, care poate fi ortogonal sau oblic; -pozitiaobiectului(caracteristicasaprincipala),carepoatefiparalela/ortogonalasauoblicape planul de proiectie. 1.2.2. REPREZENTARILE AXONOMETRICE Reprezentarile axonometrice sunt reprezentari n perspectiva simple obtinute prin proiectareaobiectuluidereprezentatdelaunpunctpozitionatlaodistantainfinita(centrulde proiectie), pe un plan de proiectie unic(perpendicular pe desen). Acest tip de proiectie paralela asigura o aproximatie suficienta pentru vederile ndepartate. Reprezentarea rezultanta depinde de formaobiectuluisidepozitiilerelativealecentruluideproiectie,aplanuluideproiectiesia obiectuluinsusi.Printreposibilitatileinfinitedereprezentareaxonometrica,doarcatevatipuri suntrecomandatepentrudeseneletehnicedintoatedomeniiledeactivitatetehnice(mecanice, electrice, de constructii etc). Reprezentarileaxonometricenusuntutilizateatatdemultpedeseneletehniceprecum reprezentarile ortogonale. 8 La reprezentarile axonometrice trebuie avut in vedere ca pozitia axelor de coordonate sa fiealeasa.princonventie,astfelncatunadintreaxeledecoordinate(axaZ)safieverticala. Obiectuldereprezentatestepozitionatcufetelesaleprincipale,axelesimuchiileparalelecu planurile de coordonate. Obiectul trebuie orientat pentru a pune n evidenta vederea principala si alte vederi care se aleg de preferinta atunci cand obiectul este reprezentat n proiectii ortogonale. Axelesiliniileplanurilordesimetriealeobiectuluinutrebuiesafiedesenatedecatdacaeste necesar. Contururile si muchiile ascunse este preferabil sa fie omise. Hasurileutilizatepentrupunereanevidentaauneisectiunitrebuiedesenatedepreferat la un unghi de 45, tinand seama de axele si contururile sectiunii (figura 1.1). Fig. 1.1 Hasurileutilizatepentrupunereanevidentaaplanurilorparalelecuplanurilede coordonate trebuie desenate paralel cu axa de coordonate proiectata, asa cum este reprezentat n figura 1.2. Fig. 1.2. Cotareapereprezentarileaxonometriceestenmodnormalevitata.Daca,dinmotive speciale, se considera necesara cotarea, trebuie utilizate aceleasi reguli stabilite pentru proiectiile ortogonale (ISO 129 si ISO 3098-1). Reprezentarile axonometrice recomandate pentru desenele tehnice sunt: - reprezentare axonometrica izometrica; - reprezentare axonometrica dimetrica; - reprezentare axonometrica oblica. AxeledecoordonateX,Y,Ztrebuieindicatecumajuscule.Dacaalteelemente(de exemplu cote) trebuie indicate ntr-un tabel sau pe desen, trebuie utilizate minusculele x, y, z pentru o mai buna diferentiere (ISO 6412-2). 1.2.2.1. REPREZENTARE AXONOMETRICA IZOMETRICA Reprezentareaaxonometricaizometricaestereprezentareaaxonometricaortogonalan care planul de proiectie formeaza trei unghiuri egale cu cele trei axe de coordonate X, Y si Z. Trei segmente ale unitatii de lungime ux, uy si uz pe cele trei axe de coordonate X, Y si Z sunt respectiv proiectate ortogonal pe un plan de proiectie n trei segmente egale ux', uy ' si uz ' pe axele proiectate X', Y' si Z' ale caror lungimi sunt: 9 ux ' = uy ' = uz ' = (2/3)1/2 = 0,816 Proiectia X', Y' si Z' a celor trei axe de coordonate X, Y si Z pe planul de proiectie (suprafata desenului) este reprezentata n figura 1.3. Fig. 1.3. npracticadedesen,segmenteledelungimedeunitateproiectatepeaxeleX',Y'siZ' sunt considerate ca ux''= uy'' = uz'' = 1, ceea ce corespunde unei reprezentari grafice a obiectului marit cu un coeficient (3/2)1/2 = 1,225. 1.3. REPREZENTAREA VEDERILOR Vederea,conformSRISO128-30:2008,SRISO128-34:2008,ISO128-40,este reprezentareanproiectieortogonalapeunplanauneipiesenesectionate.Cuprindeconturul aparentalpieseireprezentate,formatdinconturulfiecareiformegeometricesimple,precumsi muchiile si liniile de intersectie vizibile din directia de proiectare. 1.3.1. CLASIFICAREA VEDERILOR 1) Dupa directia de proiectie: a) vedere obisnuita - este vederea obtinuta dupa una din directiile de proiectie conform SR EN ISO 5456-2 sau ISO 5456 si dispusa conform acestuia (cubul de proiectie - metoda europeana E sau metoda americana A- figura 1.4., 1.5.). Obiectul este considerat situat in interiorul unui cub iar proiectiile laterale se reprezinta, pentru metoda europeana vederea din stanga se reprezinta in dreapta,ceadindreaptainstanga.Pentrumetodaamericanavedereasereprezintainaceeasi parte de unde este privita piesa. Nu se noteaza (figura 6.a.). Fig. 1.4. 10 Fig. 1.5. b)vedereparticulara(nclinata)estevedereaobtinutadupaaltadirectiedeproiectiedecat conformSRENISO5456-2saudupadirectiiledeproiectieconformSRENISO5456-2,dar dispusa n alta pozitie. Acest tip de vedere se noteaza (figura 1.6.b, c, d). Fig.1.6. 2) Dupa proportia n care se face reprezentarea obiectului: a)vederecompleta-nproiectiarespectivaobiectulestereprezentatnntregimenvedere (figura 6.a). b) vedere partiala - n proiectia respectiva numai o parte a obiectului este reprezentata, limitata prin linie de ruptura. c) vedere locala - n vederea respectiva numai un element simetric al obiectului este reprezentat n vedere, fara linii de ruptura (figura 1.7, 1.8, 1.9.). Lareprezentareavederilorlocalenutrebuiesaexisterisculdeambiguitate.Vederile localesereprezintatotdeaunautilizandmetodadeproiectieA,conformSRENISO5456-2, indiferent de metoda de proiectie utilizata pe desen. 11 Fig. 1.7. Fig. 1.8. Fig. 1.9. La reprezentarea vederilor trebuie sa se tina seama de urmatoarele reguli: -Vedereaprincipalaestesituatatotdeaunapeplanulverticaldeproiectiesicontinecelemai multe detalii ale obiectului ; -Liniiledeconturvizibilesimuchiiledeintersectievizibilesereprezintaculiniecontinua groasa. - Muchiile fictive, daca sunt necesare pentru claritatea desenului si daca nu se confunda cu linii decontur,sereprezintaculiniecontinuasubtirecarenutrebuiesaatingaliniiledecontur, muchiile reale de intersectie sau alte muchii fictive (figura 1.10.). 12 Fig. 1.10. Muchiafictivaesteintersectiadintredouasuprafeteneperpendiculareracordateprintr-o rotunjire (figura 1.11.). Fig. 1.11. Deregulamuchiilefictivecorespunzatoareunorracordarifoartefinenusereprezinta (figura 1.12.). Fig. 1.12. Daca o linie de contur sau alta muchie fictiva trece printr-o muchie fictiva, aceasta trecere se reprezinta printr-o ntrerupere de 1...2 mm (figura 1.13.). Dacaprinproiectiauneisuprafetenclinaterezultadouamuchiifictiveconcentricesau paralelefoarteapropiate,sereprezintanumaiunadintreceledouamuchii,sianume,cea corespuzatoare grosimii mai mici a piesei (figura 1.13, 1.14). 13 Fig. 1.13. Fig. 1.14. nclinareasauconicitateafoartemicaaunorsuprafetepoatefimaritaconventional, pentru a fi posibila reprezentarea ei (figura 1.15.). Liniiledecontursimuchiiledeintersectieacoperitevederiisereprezintaculinie ntrerupta subtire sau groasa, nsa numai daca sunt necesare pentru ntelegerea formei obiectului reprezentat (figura 1.15.). Fig. 1.15. 1.4. REPREZENTAREA SECTIUNILOR Sectiunea-reprezentareanproiectieortogonalapeunplanaobiectuluidupa intersectareaacestuiacuosuprafatafictivadesectionaresindepartareaimaginaraapartii obiectului aflata ntre ochiul observatorului si suprafata respectiva. 14 Fig. 1.16. In scopul reprezentarii obiectului ntr-un numar minim de proiectii, rezulta necesitatea de a alege suprafetele de sectionare cele mai potrivite, pentru ca intersectarea sa se faca pe locurile care redau clar cele mai multe detalii ale formei interioare a acestuia. 1.4.1. CLASIFICAREA SECTIUNILOR 1) Dupa modul de reprezentare: a)sectiunepropriu-zisa,dacasereprezintanumaifigurarezultataprinintersectareaobiectului cu suprafata de sectionare (figura 1.17.b.). Fig. 1.17. b)sectiunecuvedere,dacasereprezintaatatsectiuneapropriu-zisacatsi,nvedere,partea obiectului aflata n spatele suprafetei de sectionare (figura 1.18.c) 2) Dupa pozitia suprafetei de sectionare fata de planul orizontal de proiectie: a)sectiuneorizontala-suprafatadesectionareesteparalelacuplanulorizontaldeproiectie (figura 1.18.b). b)sectiuneverticala-suprafatadesectionareesteperpendicularapeplanulorizontalde proiectie (figura 1.18.a). c) sectiune particulara (nclinata) - suprafata de sectionare are o pozitie oarecare fata de planul orizontal de proiectie (figura 1.18.c). 15 ab Fig. 1.18. Sectiunile orizontale, verticale sau particulare pot fi: -longitudinale,dacasuprafatadesectionarecontinesauesteparalelacuaxaprincipalaa obiectului. - transversale, daca suprafata de sectionare este perpendiculara pe axa principala a obiectului. nsectiunelongitudinala,niturile,piulitele,stifturile,suruburile,arborii,osiile,penele, bielele,manerele,tijele,spitelerotilor,etc.sereprezintanesectionatesicaurmarenuse hasureaza. Configuratia lor interioara poate fi reprezentata printr-o sectiune partiala. Aripile, nervurile si tablele se reprezinta sectionat numai n cazul sectiunilor transversale prin ele. 3) Dupa forma suprafetei de sectionare: a) sectiune plana - daca suprafata de sectionare este un plan (figura 1.17.b, 1.17.c). b)sectiunefranta-dacasuprafatadesectionareesteformatadindouasaumaimulteplane consecutiv concurente sub un unghi diferit de 90 de grade (figura 1.18.b). c)sectiunentrepte-dacasuprafatadesectionareesteformatadindouasaumaimulteplane paralele (figura 1.18.b). d) sectiune cilindrica - daca suprafata de sectionare este cilindrica, iar sectiunea este desfasurata pe unul din planele de proiectie (figura 1.19.). Fig. 1.19. 16 Notareasectiuniiesteurmatadesemnulconventionalcarearenaltimeaegalacu naltimea nominala de nscriere a literelor. Pozitia semnului este aceeasi indiferent de sensul de desfasurare. Sectiunile frante se proiecteaza pe un plan de proiectie orizontal, vertical sau lateral dupa cum suprafata de sectionare cuprinde plane orizontale, verticale sau laterale. 5) Sectiunile propriu-zise, dupa pozitia lor pe desen fata de proiectia obiectului a carui sectiune o reprezinta, pot fi: a) sectiune obisnuita - daca sectiunea se reprezinta n afara conturului proiectiei si este dispusa conform SR EN ISO 5456-2. b) sectiune suprapusa - daca sectiunea se reprezinta peste vederea propriu-zisa. Se reprezinta cu linie continua subtire (figura 1.20, 1.21, 1.22). Fig. 1.20. Fig. 1.21.Fig. 1.22. c) sectiune deplasata - daca sectiunea se reprezinta deplasata de-a lungul traseului de sectionare, n afara conturului obiectului (figura 1.23, 1.24.) sau se reprezinta n alta pozitie (figura 1.25). Fig. 1.23. Fig. 1.24. d)sectiuneintercalata-dacasectiuneasereprezintanintervalulderupturadintreceledoua parti ale aceleiasi vederi a obiectului (figura 2.88.). Fig. 1.25. 17 Sectiunile suprapuse, deplasate sau intercalate se reprezinta functie de pozitia traseului de sectionare,nproiectiedinstangasidesus.Nuseadmitereprezentarearotitaaunorastfelde sectiuni. 1.4.2. REPREZENTAREA RUPTURILOR Ruptura este ndepartarea unei parti dintr-un obiect printr-o suprafata de ruptura n scopul: - reprezentarii unor vederi sau sectiuni partiale; - reducerii spatiului ocupat de reprezentarea pe desen, fara sa fie afectata claritatea si precizia acesteia. Linia de ruptura reprezinta urma suprafetei de ruptura pe planul de proiectie. Se executa culiniecontinuasubtirecuformaondulatapentrurupturinpiesedeoriceformasideorice material, n zig-zag pentru desene realizate automat. Linia de ruptura nu trebuie sa coincida cu o muchie sau cu o linie de contur a obiectului sau sa fie trasata n continuarea acestora (figura 1.26.). Fig. 1.26. Daca ruptura se face de-a lungul axei obiectului, linia de ruptura nu se traseaza, ea fiind reprezentata prin linia de axa respectiva. 1.5. REPREZENTAREA, COTAREA SI NOTAREA FILETELOR 1.5.1.GENERALITATI Filetul este o nervura elicoidala realizata pe o suprafata de rotatie, cilindrica sau conica, exterioara sau interioara, nervura ce poate avea profil triunghiular, patrat, trapezoidal, rotund etc. Cand se executa pe o suprafata exterioara se numeste filet exterior (fig. 1.27), iar cand se executa pe o suprafata interioara se numeste filet interior. Eliceacilindrica(conica)esteocurbageneratadeunpunctcareexecutaomiscarede translatie de-a lungul generatoarei unui cilindru circular drept (con circular drept) care executa n acelasi timp o rotatie uniforma n jurul axei sale (figura 1.27). Fig.1.27. 18 Fileteleauomareaplicarenexecutareaunorelementedeasamblare(suruburi,piulite etc.)sauaaltorpiesedinconstructiademasini,fiindcelemaiutilizatepentrurealizarea asamblarilor demontabile. Elementelecaracteristicealefiletuluisunt:profilulfiletului,naltimeafiletului,unghiul filetului, pasul filetului, diametrul exterior, mediu si interior. Profiluldebazaesteprofilulteoreticalfiletului,ntr-unplanaxial,definitprin dimensiunisiunghiuriteoreticecomunepentrufileteleexterioaresiinterioare.Poatefi: triunghiular, patrat, trapezoidal, rotund etc. Profilul generator este profilul de la care pleaca forma si dimensiunile profilului de baza. Pasul filetului, p: distanta ntre punctele medii a doua flancuri nvecinate , situate ntr-un plan axial, de aceeasi parte a filetului. Cilindrul primitiv: cilindrul fictiv al carui suprafata exterioara ntretaie filetul astfel ncat latimea plinului si latimea golului sunt egale. Linia primitiva: generatoarea cilindrului primitiv. Diametrulexterior:diametruluneisuprafetecilindricefictivetangentalavarfuripentru un filet exterior (d) si la funduri pentru un filet interior (D). 5.2. REPREZENTAREA FILETELOR Se face conform normelor prevazute n SR ISO 6410-2002. Fileteleexterioaresiinterioarepotficuiesire,cutreceresaucudegajare(figura1.28). Iesirea si degajarea filetului se indica prin notare conform STAS 3508-80. Fig.1.28. Filetulseindicapediametrulexteriorpentrufiletulrespectiv;ncazulfiletelorconice, notarea se indica pe proiectia longitudinala, aproximativ la jumatatea lungimii filetului. Reguli: In desenul tehnic reprezentarea elementelorfiletate seface prin conventii simplificate si numai in anumite cazuri detaliat. Filetul exterior se reprezinta cu linie continua groasa pe diametrul exterior (varful filetului) si cu linie continua subtire pe diametrul interior (fundul filetului) (figura 1.29, 1.30). Fig.1.29.a. Fig.1.29.b. 19 Fig.1.30. Filetulinterior(figura1.31)sereprezintaculiniecontinuasubtirepediametrulexterior (fundul filetului) si cu linie continua groasa pe diametrul interior (varful filetului). Distanta dintre liniile care reprezinta varful si fundul filetului este recomandat sa fie egala cu inaltimea filetului, insa nu trebuie sa fie mai mica decat de doua ori grosimea liniei groase sau 0,7mm.Pentrudeseneleexecutatepecalculator,pentrudiametrulnominald>8mmse recomanda o distanta de 1,5 mm. Fig.1.31. Fig.1.32. In proiectie transversala (laterala), linia care reprezinta fundul filetului se traseaza printr-unarcdecercexecutatculiniecontinuasubtireavandlungimeadeaproximativ3/4din circumferinta,depreferatincadranulsuperiordindreaptaastfelincatsanuinceapasisanuse termine pe liniile de axa. 20 2. MECANIC 2.1.MOMENTULUNUIVECTOR(FORE)NRAPORTCUUNPUNCT I N RAPORT CU O AX. CUPLUL DE VECTORI (FORE). Momentul unui vector legatvr, avnd punctul de aplicaie n A n raport cu punctul O, se definete ca fiind produsul vectorial dintre vectorul de poziieA O rrr=al punctului de aplicaie al vectorului i vector, adic: v r MOr rr = Elementele caracteristice ale momentului OMr sunt: -punctul de aplicaie este chiar punctul de referin O; -direcia este perpendicular pe planul determinat de vectoriirr ivr; -sensul este determinat de regula burghiului drept; -mrimea este:( ) d v sin rv v , r sin v r MO = = =r r DacvectorulvresteforaFr,atuncimomentulforeiFrarecaunitatedemsurnSI (Sistemul Internaional) Nm. Prin exprimarea analitic a vectorilorrr ivr, raportai la sistemul xOzy se obine: k z j y i x A O rr r r rr+ + = = ,k v j v i v vz y xr r rr+ + =( ) ( ) ( )k yv xv j xv zv i zv yvv v vz y xk j iv x r k M j M i M Mx y z x y zz y xOz Oy Ox Or r rr r rr rr r r r + + = = = + + = cu x y Oz z x Oy y z Oxyv xv M , xv zv M , zv yv M = = = . Momentulunuivectorvrlegatsaualunectornraportcuoax()orientatprin versorulur,sedefinetecafiindproieciapeaxa()amomentuluivectoruluivrcalculatn raport cu un punct arbitrar O al axei, adic:u M MOrr =. Dacdreapta()faceunghiurile,,cuaxelesistemuluixOzyatunci, k cos j cos i cos ur r rr + + = , situaie n care: rr Od x z y A(x,y,z) () OMvur vr21 + + = =cos M cos M cos M u M MOz Oy Ox Orr. Cupluldevectorisedefinetecafiindunsistemdedoivectori) v , v (2 1r rcusuporturile paralele i rezultanta Rrnul, adic:0 v v R2 1rr rr= + = . Momentul cuplului este: 2211Ov OA v OA Mr rr + =Cuv v v2 1r r r= = se obine: = + = ) v ( OA v OA M 2 1Or rr ( ) = = v OA OA 2 1r ) v ( x A A v A A2 1 1 2r r = =Se constat c vectorul moment al cuplului este un vector liniar, adic nu depinde de punctul n raport cu care se calculeaz. Mrimea momentului unui cuplu este: MO=M=v1d=v2d=vd, unde: d- reprezint distana dintre axele 1 i 2 (braul cuplului) 2.2. TORSORUL DE REDUCERE AL UNUI SISTEM DE VECTORI Torsorul de reducere al unui sistem de vectori ivr cu punctele de aplicaie Ai,n , 1 i =n raport cu punctul O este format din:- Rezultanta Rra sistemului de vectori care se calculeaz cu relaia: ==n1 iiv Rrr; - Momentul rezultant OMr al sistemului de vectori care se calculeaz cu relaia: = =n1 iiiOv OA Mrr
Prin exprimarea analitic a mrimilor vectoriale fa de sistemul xOyz se obine: k Z j Y i X vi i i ir r rv+ + = ,k z j y i x OAi i iir r r+ + =k Z j Y i X v k Z j Y i X Rn1 iin1 iin1 in1 ii ir r rrr r r r++= = + + = = = = = cu = = == = =n1 iin1 iin1 iiZ Z , Y Y , X X ,carereprezintproieciilerezultanteiRrpeaxele sistemului xOyz; k ) X y Y x ( j ) Z x X z (i ) Y z Z y (Z Y Xz y xk j iv OA k M j M i M Mi i i in1 ii i i in1 ii i i in1 in1 ii i ii i i in1 iiOz Oy Ox Or rrr r rrr r r r + ++ = = = + + = = == = = A1 A2 O d (1) (2) 1vr 2vr OMr 22 cu: ) Y z Z y ( Mi i i in1 iOx ==;) Z x X z ( Mi i i in1 iOy ==;) X y Y x ( Mi i i in1 iOz ==,care reprezint proieciile momentului rezultant OMr pe axele sistemului xOyz. 2.3. MOMENTUL UNUI VECTORvrN RAPORT CU UN PUNCT O ESTE DEFINIT CA: a) Produsul scalar dintre vector i braul vectorului( ) b vrr ; b) Produsul vectorial dintre vector i vitez; c) Produsul vectorial dintre vector i vectorul de poziie al punctului de aplicaie al vectorului n raport cu punctul O, adicv r MOr rr = ; d) O mrime scalar egal cu braul vectorului; e) O mrime scalar care se msoar n kilograme. Rspuns corect : c. 2.4.MOMENTEDEINERIEMECANICEPENTRUSISTEMEDE PUNCTE MATERIALE. DEFINIII I RELAII NTRE ELE. VARIAIA MOMENTELORDEINERIENRAPORTCUAXEPARALELE (FORMULELE LUI STEINER HUYGHENS) Momenteledeineriemecanicearatmodulncareestedistribuitmasaunuisistemde puncte materiale fa de diferite elemente geometrice de referin: plan, ax, punct. Fa de sistemul xOyz se pot defini urmtoarele momente de inerie: - momente de inerie planare: 2in1 ii yOz2in1 ii xOz2in1 ii xOyx m J ; y m J ; z m J = = == = =- momente de inerie axiale: ) z x ( m J ); z x ( m J ); z y ( m J2in1 i2i i zz2in1 i2i i yy2in1 i2i i xx = = =+ = + = + =- moment de inerie polar: ) z y x ( m J2in1 i2i2i i O =+ + =- momente de inerie centrifugale: x xi z y yi zi Mi(xi, yi, zi) (mi) O irr23 = = == = =n1 in1 ii i i yz i i i xzn1 ii i i xyz y m J ; z x m J ; y x m Jn SI (Sistemul Internaional) toate momentele de inerie au ca unitate de msur kgm2. ntre momentele de inerie ase pot stabili urmtoarele relaii: xx zz yy yOz yy zz xx xOz zz yy xx xOyyOz xOz zz yOz xOy yy xOz xOy xxzz yOz yy xOz zz xOy OyOz xOz xOy Ozz yy xxOJ J J J 2 ; J J J J 2 ; J J J J 2J J J ; J J J ; J J JJ J J J J J J; J J J J ;2J J JJ + = + = + =+ = + = + =+ = + = + =+ + =+ +=
SeconsidersistemuldepunctematerialeraportatlasistemeledereferinxOyzi x'Cy'z', C fiind centrul de mas al sistemului de puncte materiale, iar axele celor dou sisteme de referin sunt paralele. ntremomenteledeinerie,nraportcuceledousistemedereferinsepotstabili urmtoarele relaii (formulele Steiner): -pentru momentele de inerie planare: 2 2 2xOy x' Cy' C xOz x' Cz' C yOz y' Cz' CJ J Mz; J J My; J J Mx = + = + = + . -pentru momente de inerie axiale: 2 2 2xx x' x' xx' x' x' C C2 2 2yy y' y' yy' y' y' C C2 2 2zz z' z' zz' z' z' C CJ J Md J M(y z);J J Md J M(x z)J J Md J M(x y)= + = + += + = + += + = + + -pentru momentul de inerie polar: 2 2 2 2O C c C C C CJ J mr J M(x y z) = + = + + +-pentru momentele de inerie centrifugale: xy x' y' C C xz x' z' C C yz y' z' C CJ J Mxy; J J Mxz; J J Myz = + = + = + C(x,y,z) O x y z x' y' z' 'i'i'ii i iiz , y , xz , y , xM(mi) dxx' dyy' dzz' xC yC Crr zC irrirr24 2.5 STATICA PUNCTULUI MATERIAL LIBER CondiianecesarisuficientcaunpunctmaterialliberMsfienechilibru,esteca rezultanta Rra forelor care actioneaz asupra sa, s fie nul, adic: R Xi Yj Zk 0 = + + =r r r r r Prin proiectarea acestei ecuaii pe axele reperului cartezian xOyz se obine: n n ni i ii 1 i 1 i 1X X 0, Y Y 0, Z Z 0= = == = = = = = . Acesteecuaiideechilibrupermitdeterminareacoordonatelor(x,y,z)alepoziieide echilibru a punctului material. 2.6 STATICA SOLIDULUI RIGID LIBER SUPUS LA LEGTURI Rigidul liber este rigidul care poate ocupa orice poziie n spaiu sub aciunea sistemului de fore care acioneaz asupra sa. Condiia necesar i suficient ca un rigid liber s fie n echilibru ntr-o poziie oarecare estecatorsoruldereducerealforelor iF, i 1,n =r,careacioneazasuprasanraportcuun punct oarecare O s fie nul, adic: OR 0, M 0 = =r r innd seama de expresiile analitice ale elementelor torsorului de reducere i proiectnd ecuaiile anterioare pe axele reperului cartezian xOyz se obine: n n ni i ii 1 i 1 i 1n n nOx i i i i Oy i i i i Oz i i i ii 1 i 1 i 1X X 0; Y Y 0;Z Z 0;M (yZ z Y) 0;M (zX xZ) 0;M (x Y yX ) 0= = == = == = = = = == = = = = = Acesteaseecuaiipermitdeterminareaceloraseparametriscalariindependenicare determina poziia de echilibru a rigidului. ncazulrigiduluisupuslalegturi,unelemicrialeacestuiasuntmpiedicate.Pentru studiulechilibruluiacestuiaseaplicaxiomelelegturilorpebazacreialegturaeste ndeprtatinlocuitcuelementemecanicecorespunztoare(foresau/imomente)care exprim efectul mecanic al legturii. n acestecondiii asupra rigidului acioneaz dou sisteme de fore: unul al forelor exterioare cunoscute, respectiv al forelor de legtur (reaciuni) necunoscute. Prin reducerea acestor sisteme de fore n raport cu un punct O, se obine un torsor de reducere al forelor exterioare format din rezultanta R 'r i momentul rezultant OM'r. Pentru echilibrul rigidului trebuie satisfcute condiiile: 0 0R R' 0, M M' 0 + = + =r r r r r r, careproiectatepeaxelereperuluicartezianxOyzconduclaaseecuaiiscalarede echilibru. Din acesteecuaii de echilibru se pot determinaforele de legtur i daceste cazul ipoziiadeechilibru.Dacnumrulnecunoscutestemaimaredect6,problemaestestatic nedeterminat. Dac toate foreleexterioare sunt n plan, numrul ecuaiilor scalare ce se obin sunt 3. Deci problema este static determinat, dac are 3 necunoscute. Legturile rigidului sunt: 25 -reazemul simplu care introduce o necunoscut (reaciunea normal); -articulaia care introduce trei necunoscute; -ncastrarea care introduce ase necunoscute; -legturacufircareintroduceosingurnecunoscut,valoareaefortuluidinfir,direcia fiind n lungul firului. n cazul forelor plane articulaia introduce 2 necunoscute, iar ncastrarea 3 necunoscute. 2.7 TRAIECTORIA. VITEZ. ACCELERAIE Traiectoria reprezint locul geometric al poziiilor succesive ocupate n timp de un punct material mobil n spaiu. Fier r(t) OM = =uuurr r vectorul de poziie al punctului material M. Ecuaia vectorial a traiectoriei are forma: 0 1r r(t), t t , t = r r Seadmitengeneralcfunciar r(t) =r restecontinu,uniformiderivabilpe intervalul [t0, t1], deoarece discontinuitile traiectoriei nu au sens fizic. VitezamedieapunctuluimaterialMnintervalul[t,t=t+t]sedefineteprinrelaia vectorial: mr(t ') r(t) rvt ' t t = = r r rr VitezainstantaneeapunctuluimaterialMlamomentultsedefineteprinrelaia vectorial: mt ' t t 0r(t ') r(t) drv v(t) lim lim v r(t)t ' t dt = = = = =r r rr r r r& Acceleraia medie a punctului material M n intervalul [t, t=t+t] se definete prin relaia vectorial: mv(t ') v(t) vat ' t t = = r r rr Acceleraia instantanee a punctului material M la momentul t se definete prin relaia vectorial: 2m 2t ' t t 0v(t ') v(t) dv dra a(t) lim lim a v(t) r(t)t ' t dt dt = = = = = = =r r r rr r r r r& && nSI(SistemulInternaional)viteazaarecaunitatedemsurms-1,iaracceleraia ms-2. r r O M M MO () r(t)rr(t ')rv(t)rv(t ')r 26 2.8CINEMATICAPUNCTULUIMATERIALNSISTEMULDE COORDONATE CARTEZIENE FIX (XOYZ) PoziiapunctuluimaterialMpe traiectoria()lamomentulteste determinat de vectorul de poziierr dat de relaia: r r(t) OM x(t)i y(t)j z(t)k = = = + +uuur r r rr r, unde: x=x(t),y=y(t),z=z(t),reprezint ecuaiileparametricealetraiectoriei punctului material. Prineliminareatimpuluitdin acesteecuaiiseobineecuaia traiectoriei n sistemul cartezian care este curba de intersecie a dou suprafee de ecuaii: 1 2(x, y, z) 0; (x, y,z) 0 = =Vitezavra punctului material este: x y zv vi v j v k r(t) xi yj zk = + + = = + +r r r r r rr r&& & & cu x y zv x, v y, v z = = =& & &carereprezintproieciilevitezeipunctuluipeaxele sistemului cartezian. Mrimea vitezei este dat de relaia: 2 2 2 2 2 2x y zv v v v x y z = + + = + +r& & & Acceleraia punctului material este: x y za ai aj a k v(t) r(t) xi yj zk = + + = = = + +r r r r r rr r r& &&&& && && cu x y za x,a y,a z = = =&& && &&, care reprezint proieciile acceleraiei pe axele sistemului cartezian. Mrimea acceleraiei este dat de relaia: 2 2 2 2 2 2x y za a a a x y z = + + = + +r&& && && 2.9GRADEDE LIBERTATEPENTRU SOLIDUL RIGID Unsolidrigidliberaren spaiuasegradede libertate,caresepotintoduce ca: -fietreitranslaiii treirotaiinlungul injurulaxelor reperului (T0); jrX Z Y O M(x,y,z) () irkrrr1jr ir 1irorr1jr Xo Zo Yo O1 M (T1) 1ir1kr O z Z1 y Y1 x X1 jrkr 1krrr1rr(T0) (S.R) 27 -fie trei rotaii i trei translaii n jurul i n lungul axelor reperului (T0); 2.9DISTRIBUIA(CMPUL)VITEZELORIACCELERAIILOR PENTRU SOLIDUL RIGID Distribuia vitezelor pentru un solid rigid este dat de relaia: M 0v v r, M S.R, r OM = + =uuurr r r r r, cunoscut sub numele de formula Euler, unde: Mvr- viteza punctului MS.R; 0vr- viteza originii O a reperului mobil (T); r- viteza unghiular absolut, instantanee a solidului rigid; r OM =uuurr- vectorul de poziie al punctului M fa de reperul mobil (T). Distribuia de acceleraii pentru solidul rigid este dat de relaia: M 0a a r ( r), M S.R = + + r r r rr r r cunoscut sub numele de formula Rivals, unde: Mar- acceleraia punctului MS.R; 0ar- viteza originii O a reperului mobil (T); r- acceleraia unghiular absolut, instantanee a solidului rigid; 2.10CINEMATICA(MICAREA)SOLIDULUIRIGIDCUAXFIX. LEGEA DE MICARE. DISTRIBUIA DE VITEZE I ACCELERAII Unsolidrigidexecutomicarederotaiecuaxfix,atuncicndntottimpul micrii dou puncte ale sale rmn fixe n spaiu. Dreapta care unete cele dou puncte este axa de rotaie a solidului rigid. Prin raportarea rigidului la cele dou repere astfel ca axa Ox=On (linia nodurilor), gradul de libertate al rigidului este unghiul de precesie Euler dat de relaia:(t) = , care reprezint i legea de micare a rigidului cu ax fix. Vitezaunghiulararedirecia axeiderotaieiexpresiadatde relaia: 1 1(t) k k (t)k (t)k = = = = = r r r rr r& & adicestederivatnraportcutimpula legii de micare a rigidului. Mrimea vitezei unghiulare este: = = r&VitezapunctuluiMS.R.se determin cu relaia: M x y z 0v vi v j v k v r = + + = + r r rr r r r innd seama de faptul c: (t) = r r, 0v 0 =r(deoarece punctul O estefix),r xi yj zk = + +r r rr,relaia anterioar devine: M(x,y,z) O=O1 Z1=zX1 O S.R y Y1 1jr1k k =r rjrr rr ir 1ir rd 28 M x y zi j kv vi v j v k r 0 0 y i x jx y z= + + = = = + r r rr r r r rr rr Rezult: vx=-y,vy=x,vz=0,carereprezintproieciilevitezeipunctuluiMpeaxelereperuluimobil (ataat rigidului). Mrimea vitezei punctului M este dat de relaia: 2 2 2 2 2M x y zv v v v x y d = + + = + = r, unde: d reprezint raza cercului descris de punctul M n micare de rotaie. Pebazarelaiiloranterioaresepoateconcluzionacvitezaoricruipunctceaparine rigidului n micare de rotaie este situat ntr-un plan perpendicular pe axa de rotaie. Acceleraiaunghiulararigiduluiaredireciaaxeiderotaieiexpresiadatade relaia: 1 1 1(t) k k (t)k (t)k (t)k k = = = = = = = r r r r r rr& & && && , adic este derivata n raport cu timpul a vitezei unghiulare sau derivata a doua n raport cu timpul a legii de micare a rigidului. Mrimea acceleraiei unghiulare este: = = = r& &&Acceleraia punctului MS.R. se determin cu relaia: M x y z 0a ai aj a k a r ( r) = + + = + + r r rr r r r r r r innd seama de faptul c: 0a 0 =rr (deoarece punctul O este fix),k, k = = r rr r r xi yj zk = + +r r rr, relaia anterioar devine: M x y z2 2i j k i j ka ai aj a k r ( r) 0 0 0 0x y z y x 0( y x )i (x y )j= + + = + = + = + r r r r r rr r rr r r r r rr r Rezult: 2 2x y za y x ;a x y ;a 0 = = = , care reprezint proieciile acceleraiei punctului M pe axele reperului mobil (ataat rigidului). Mrimea acceleraiei punctului M este dat de relaia: 2 2 2 2 2 2 4 2 2 2 4M x y za a a a (x y) (x y) d = + + = + + + = + r Pebazarelaiiloranterioaresepoateconcluzionacacceleraiaoricruipunctce aparine rigidului aflat n micare de rotaie este coninut ntr-un plan perpendicular pe axa de rotaie. Obsertvaie Punctele de vitez i acceleraie nul se gsesc pe axa de rotaie a rigidului. 2.12LUCRULMECANICELEMENTARCORESPUNZTORUNEI FOREFrCEACIONEAZASUPRAUNUIPUNCTMATERIALMI DEPLASRIIELEMENTAREdrrAACESTUIA.DEFINIIE,RELAII DE CALCUL, UNITI DE MSUR. 29 Lucrul mecanicelementar corespunztor forteiFr ce acioneazasupra punctului M i deplasriielementaredrraacestuia,sedefinetecafiindprodusulscalardintreforaFri deplasarea elementar drr, adic: dL F dr = rr innd seama de faptul c: dr v dt = r r, relaia anterioar devine: dL F v dt = rr. CuexpresiileanaliticealeforeiFrideplasriielementaredrrfadereperul cartezian x0yz date de relaiile: x y zF F i Fj F k = + + r r r r ;dr dx i dy j dz k, = + + r r rr expresia lucrului mecanic elementar devine: x y zdl F dr F dx F dy F dz = = + + rr LucrulmecanicesteomrimescalarcarearecaunitatedemsurnSistemul Internaional, Joule.SIL J = . 2.13.PUTERE.DEFINIIE.RELAIIDECALCUL.UNITATEDE MSUR Putereasedefinetecafiindlucrulmecanicefectuatnunitateadetimp.Atuncicnd fora sau momentul sunt constante n timp relaia de calcul este: LPt= ,iar atunci cnd fora sau momentul sunt variabile n timp, relaia de calcul este: dLPdt=innd seama de expresia lucrului mecanic elementar, se obine: F drP F vdt= = rrrr, Respectiv: MdP Mdt = = r rrr n Sistemul Internaional, puterea are ca unitate de msur wattul. SIP W = 2.14.ENERGIACINETIC.DEFINIIE.RELAIEDECALCUL. UNITATE DE MSUR Energiacineticesteomrimescalarstrictpozitivcarecaracterizeazstareade micare a punctului material la un moment dat. PentruunpunctmaterialMdemasmivitezvr,energiacineticsedefineteprin relaia: 30 21T mv2=r. n Sistemul Internaional, energia cinetic are ca unitate de msur joule: SIT J = . 2.15.IMPULSUL.MOMENTULCINETIC.RELAIIDECALCUL. UNITI DE MSUR UnpunctmaterialMdemasmsedeplaseazpetraiectoria(),avndlamomentult vitezavr. VectorulHr coliniar cu vitezavrdefinit prin relaia: H mv =rr, se numete impulsul punctului material M. Unitatea de msur este: 1SIH kg ms = Momentulcineticalpunctului materialnraportcupunctulOse definetecafiindunvector 0krdatde relaia: 0k r H r mv = = r rr r r,care reprezintmomentulvectoruluiimpuls Hr n raport cu punctul O. Unitatea de msur este: 2 10SIK kg m s = 2.16. TEOREMA ENERGIEI CINETICE. ENUN Variaia energiei cinetice n intervalul elementar de timp dt este egal cu lucrul mecanic elementarefectuatnacelaiintervaldetimp,dectrerezultantaforelorcareacioneaz asupra punctului material studiat, adic: dt=L. Prin integrareaacestei relaii se obine teorema energiei cinetice sub form finit care are expresia: T1-T0=L01, adicdiferenadintreenergiacineticnpoziiafinalienergiacineticnpoziia iniial,esteegalculucrulmecanicefectuatdeforelecareacioneazasuprapunctului material ntre cele dou poziii. 2.17. ECUAIILE DIFERENIALE ALE PUNCTULUI MATERIAL Ecuaia fundamental a dinamicii punctului material (ecuaia Newton) are forma: ma F =rr. Ecuaia diferenial a micrii punctului material scris sub form vectorial este: z M(x,y,z) () y x rr vrHr 0kr m31 mr F(t,r,r) =rr r r&& & Prinproiectareaacesteiecuaiipeaxelereperuluicartezianseobinecuaiile difereniale sub form scalar ale micrii punctului material care au forma: x x y y z zma F, ma F, ma F = = =sau x y zmx F, my F, mz F = = =&& && && unde: x y zF, F, F - reprezint proieciile pe axele reperului cartezian ale rezultanteiFra forelor care acioneaz asupra punctului material. 32 3. REZISTENA MATERIALELOR 3.1 ELEMENTE GENERALE Dacseianconsideraie,conformfig.3.1,oporiunedinseciuneaprinpiesAi fora-efortcorespunztoareacesteiporiuni F (numit,,efortelementar)sedefinete tensiunea vectorial medie ,, pm astfel: pm=F / A. CndelementuldearieA sereducetreptat,tinzndctre centrulsu,tensiuneamedietindectreforainterioardinacel punct, denumit ,,tensiune (efort unitar) astfel: p =0lim A F / A=d F /dA. Aceastmrimeareaceeaidireciecaiforaelementar d F .Mrimeaeiestedeterminatattdemrimeaforeid F ctideorientareapecare suprafaaAoarefadedireciaforei.nconsecin,efortulunitar,,pesteomrime ,,tensorial. Avnd o direcie oarecare, tensiunea se poate descompune: ntr-o component pe direcia normal la seciune, care se numete tensiune normal i se noteaz cu ; ntr-o component n planul seciunii, care se numete tensiune tangenial i se noteaz cu (conform fig.3.1). Tensiuneanormal()areefectdentinderesaucompresiune,exercitatdeparteade corp nlturat asupra celei rmase. Tensiunea tangenial () areefect de tiere forfecare sau alunecare transversal. Unitatea de msur a tensiunilor (p, , ) este: N/mm2 sau N/m2. Unitatea de msur n Sistemul Internaional de Uniti este: = 1 N/m2 = 1 Pa (PaPascal). ntre cele trei tipuri de tensiuni exist relaia: p= + , respectivp2 = 2 + 2. Subefectulforelorexterioaresaua unorfactoricuefectanalog(variaiide temperatur)corpurilesedeformeaziar particuleleinterioarecomponentese deplaseaz.inndseamademodulncarese deformeazuncorp,sedeosebescdoucazuri distincte:deplasriideformaiiliniarei unghiulare. Vomdefinideplasrileideformaiile folosindschemadinfig.3.2.Pecorpulliber (nencrcat)sedefinesctreipuncte(A,B,C),senoteazlungimeasegmentuluiABcu,,l0i unghiul din A cu ,,0. Corpul este ncrcat cu un sistem de fore care produc deformaia sa; n situaiadeformat,celetreipunctevorocupapoziiileA1,B1,C1.SegmentulA1B1areacum lungimea ,,l1 iar unghiul din A1 este ,,1. Deplasrile punctelor de pe un corp ce se deformeaz sunt: deplasare liniar: lungimea segmentului BB1; deplasare unghiular: unghiul dintre segmentul AB i A1B1. Deformaiile absolute sunt: deformaiiliniare:diferenadintrelungimeafinalasegmentuluiA1B1(depe corpul deformat) i lungimea iniial AB, astfel: l = l1 l0; Fig. 3.1 Fig. 3.2 33 deformaii unghiulare: diferena dintre unghiul final ,, 1 de pe corpul n stare deformat i unghiul iniial ,,0, astfel: = 1 0. Deformaiile specifice se definesc astfel: deformaia liniar specific: = l / l0 = (l1 l0) / l0(%); deformaiaunghiularspecific:-esteunghiulcucaresemodificununghi iniial (de pe corpul nedeformat) de 900. Alturidedeformaiiledefiniteanteriorsemai poatepunenevidendeformaiatransversalcare constnmodificareadimensiuniicorpuluipedirecie perpendicular pe suportul forelor exterioare (ce produc deformaiile).Conformschieidinfig.3.3,corpul nencrcataregrosimeainiial,,l0iarnurma solicitriilantinderecuforele,,Fgrosimeascadelavaloarea,,l.Sedefinetecontracia transversal specific ,,t astfel: t = (l l0) / l0 = . S-a notat cu ,, alungirea specific (longitudinal sau pe direcia ncrcrilor) i cu ,, coeficientuldecontracietransversalalmaterialuluirespectiv(coeficientulPoisson). Coeficientuldecontracietransversalesteocaracteristicamaterialuluiis-aconstatatc pentru metale este 0,2 ... 0,3. Sub aciunea forelor exterioare corpurile se deformeaz, concomitent aprnd tensiuni n interiorul lor. Supuse la aceeai sarcin, materialele se comport diferit. Pentru un material, ntre tensiuniideformaiispecifice,existolegturexprimatprintr-ofuncie=().Graficul acestei funcii este numit ,,curba caracteristic a materialului. Ea se determin experimental, prinncercarealantindereamaterialului.nfig.3.4estetrasatcurbacaracteristicpentruun oel tenace. Pe aceast curb se pot pune n eviden domeniile caracterizate n continuare. Domeniuldeproporionalitate(poriuneaOA)estecaracterizatprintr-oliniedreapt, deci tensiunile sunt proporionate cu deformaiile specifice conform legii lui HOOKE = E, unde am notat cu E modulul de elasticitatelongitudinalalmaterialului (estepantadrepteiOAisemsoarn Pa).Valoareamodululuideelasticitate ,,Earatcomportareamaterialuluisub aciuneancrcrilor,cuctestemai marecuattdeformaiilesuntmaimici (materialul este mai rigid). Modululdeelasticitateeste determinatdeforeledelegtur interatomice(adicdenatura materialului)iestepuininfluenatde tratamenteletermicesauadaosuride aliere.Estensputernicinfluenatde temperatur, scznd o dat cu creterea acesteia. Valoarea tensiunii n punctul A al curbei este notat cu ,,p i se numete ,,limit de proporionalitate a materialului. Domeniuldeelasticitate(poriuneaAB)ncarenusemairespectcustrictee proporionalitateantretensiuniideformaii.Totuimaterialulsolicitatnacestdomeniuse comport elastic, adic dup anularea ncrcrilor, deformaiile se anuleaz. Valoarea tensiunii n punctul B se noteaz cu ,,, numindu-se ,,limit de elasticitate. Domeniulplastic(poriuneaB-C-K)ncare,pentrucreterimicialetensiunii, deformaiilecrescfoartemultcomparativcudomeniileanterioare.Dupnlturareasarcinii, Fig. 3.3 Fig. 3.4 34 materialulnumairevineladimensiunileiniiale,aprndodeformaieremanent.Tensiunea corespunztoaredeformaiilormari,numite,,decurgere,senoteazcu,,cisenumete ,,tensiune de curgere. Domeniul deformaiilor mari (poriunea K-D-H) n care deformaiile cresc foarte mult odatcucretereatensiunii.Tensiuneamaxim,corespunztoarepunctuluiD,senoteazcu ,,r i se numete ,,rezisten de rupere. Pn la limita de rupere (punctul D) fiecare element al materialului se alungete aproximativ identic iar peste tensiunea de rupere deformaia barei se concentreazntr-unsingurloc,aiciaprndgtuireamaterialuluiiruperea.Se definesc,,alungirea la rupere (Z) i ,,gtuirea la rupere () astfel: Z = (L L0) / L0, = (S0 S) / S0 100 (%), undes-anotat:Llungimeafinalabareisupuselancercare,L0lungimeainiialabarei nencrcate,S0seciuneainiialabareincercate,Sseciuneabareinzonagtuit,de rupere. Analiznd curba ,,caracteristic a materialelor se evideniaz mai multe tipuri de materiale: materialele tenace: au proprietatea de a se deforma foarte mult nainte de rupere (absorb multenergienaintederupere);exemplificmcuoelslabaliat,cupru,aluminiui alijele sale; materialelefragile:aurezistenrelativmiclasolicitareadentinderesausolicitare variabiliprezintdeformaiifoartemicinaintederupere;aurezistensuperioarla solicitarea de compresiune; exemplificm cu font, oel cu coninut ridicat de carbon. Caracterulfragilsautenacealmaterialelorserefernumailacomportareaacestorala temperaturobinuit.Latemperaturijoasesauridicateacesteaipotpierdetenacitateaipot deveni fragile (exemplu: oelul la temperaturi joase). Ecruisarea materialului se manifest prin creterea rezistenei materialului dup limita de curgere.DacnurmancrcriimaterialuluiseajungenpunctulMalcurbei(fig.3.4)ise producedescrcarea,seobservcrevenireanusemaifacedupcurbacaracteristicde ncrcarecidupdreaptaMN,paralelcuporiuneadeproporionalitate,prezentndo deformaie remanent ,,r. Dupdepirealimiteidecurgereseconstatmicorareaseciuniitransversaleaprobei (epruvetei)folosite(micorareaestefoartemaredupatingereatensiuniimaximr,dupcare gtuireace apare micoreaz accentuat seciunea,curba devenind descendentnainte de rupere). npracticaexperimentalestedificilsseinseamadeacestecontraciitransversale, considerndu-secseciunearmneconstant.Aceastipotezsimplificatoarefaceca,dup apariiacurgerii,curbatrasatsfieconvenional.Dacs-arineseamadecontracieatunciar rezulta o curb continuucresctoare, pn la rupere (curbapunctat din fig.3.4).Se pot trasa i alte curbe caracteristice,dacepruvetelesuntsupuselaaltesolicitri.Astfelsepoatecompletacurba determinatprin ntindere cu cea de compresiunea materialului, rezul- tnd curba dincadranul III, fig.3.5 (se poateremarca faptul c pentru un materialtenace este dificil de pus n eviden ruperea, materialulscurtndu-sefoartemultfrssedistrug).Dacepruvetaestesolicitatlarsucire atuncisepoatetrasacurbacaracteristiccearatdependenatensiuniitangen-ialedelunecarea specific =(); aceast curba caracteristic este prezentat n fig.3.6. Sepotevideniatoatelimiteleartatelasolicitareadentindere(p,e,c,r)i"modululde elasticitatetransversal"Gcareestepantaporiuniiliniare,poriunepecaresepoateaplica legeaHOOKE la rsucire: = G .ntruct nu se poate defini o valoare net a tensiunii limitde elasticitateiatensiuniidecurgeres-austabilitvaloriconvenionale,numite"limitetehnice". Limitadeelasticitatetehnic(notatcu0,02)esteaceatensiunecareodatatinsiapoi descrcatepru-vetasenregistreazodeformaiespecificremanentde0,02%.Limitade curgeretehnicestetensiuneacareindusnepruvetiapoianulat(piesasedescarc) conducela o deformaie specific remanent de 0,2% (notat cu s0,2). 35 Materialecarenurespect legea lui HOOKE nafardeoelilemn, celelaltematerialenuau poriuneliniar.Aliajeca font,cupru,aluminiuauo curb caracteristic de forma celeidinfigura3.7,iar materialeleorganice (fibretexti-le,piele)se conportconformcurbeidin fig.3.8.nacestesituaii legeaHOOKEsepoateaplicanumaipeintervalemici,modululdeelasticitate(E)fiindpanta tangentei la curb npunctul definit de tensiunea/deformaia respeciv sau de panta corzii ce aproxi- meazcurba pe un interval ct mai mic. n cazul materialelor ce nu respect legea HOOKE se poate folosi o form analitic a curbei caracteristice, de exemplu: Influene asupra curbei caracteristice Formacurbeicaracteristiceivalorilepara-metrilormecanicidefiniipeaceastasunt variate,depinznd,pentruacelaimaterial,demulifactori,ceimaiimportanifiindtrecuin revistncontinuare.Secunoatecdepirealimiteidecurgereducelao"ntrire"a materialului(ecruisarea).Launelemetaleacestlucruesteevident;pelngexempluldat cuoelurilesepoateremarcasituaiacuprului,conformfig.3.9,materialulneecruisat(curba1) comportndu-senetdiferitfadecelecruisat(curba2).Ecruisareaesteconsecincomun atehnologiilordedeformarelarece.Tipulsolicitriipoateinfluena,launelemateriale,curba caracteristic.Semnalmnacestsenscelmaicunoscutcaz,celalfontei,carearerezistenala rupere maimare atunci cnd este solicitat lacompresiune, conform fig.B.10; un alt material des ntlnit,carearerezistenmultmaimarelacompresiune,estebetonul.Modulderealizarea ncercriiin-flueneazcurbacaracteristic.Astfel,dacsemodificparametrii epruvetei(diametru,lungime)ivitezadeaplicareancrcriisevorinfluenavalorilecarac- teristicilormecanice.Dacdiametrulnuestefoartemiccarcteristicilenusuntinfluenatede acesta;excepienotabilesteceaasrmelor,cndrezistenacreteodatcumicorarea diametrului.Lungimeaepruveteiinflueneazalungirealarupere,aceastafiindmaimarepe epruvetescurte.Vitezadecretereasar-ciniintimpulncrcriiinflueneazcarac-teristicile mecanice, viteza mic scade rezistena la rupere i mrete alungirea; de aceea se recomand ca pnlalimitadecurgerencercareassefaccuvitezmax.10MPa/siardupaceastlimit vitezadedeformaiesfiede30%/min(pentruepruveteobinuitencercareatrebuiesdureze ntre1i6min.).Temperaturamaterialuluiesteunparametrucuoputernicinfluenasupra curbei caracteristice (variaii de min. 30-400). Se poate exemplifica aceasta cu un oel tenace de micrezistencareprezintocreterearezisteneipnla200-3000Cdupcarescade accentuat;deasemeneamodululdeelasticitate,limiteledecurgereilimitelede proporionalitatesuntinfluenatedetemperatur,sczndcontinuuodatcucretereaacesteia. Lascdereatempe-raturiisub00Coelurilesuferocreterearezisteneilarupereia modulului de elasticitate, transformndu-sedinmaterialetenacenfragile(deformaiileplasticesediminueaz foarte mult).Timpul n care epruveta este n stare ncrcat influeneaz curba caracteristic (dac timpulestesuficientdelung).Sepoatespunec,ngeneral,metaleleimicoreaz caracteristicilemecaniceiardeformaiilecrescmult.Acestfenomen(comportamentreologic) este cunoscut sub numele de "fluaj". Fig. 3.5 Fig. 3.6 36 3.2 CARACTERISTICI GEOMETRICE ALE SUPRAFEELOR PLANE Valoareaimoduldedistribuieatensiunilorceseproducntr-opiessolicitatdepindede eforturidarideseciuneatransversalprinpies(formimrime).Necesitateaparametrilor, definiincontinuare,vafipusneviden,maiales,laanalizasolicitrilordencovoierei rsucire. Momentul static Momentul static al unei suprafee plane este, prin definiie, produsul dintre arie i distana launpunctsaulaoax(distanasemsoardelacentrul degreutatealseciunii).Pentruosuprafaoarecare, momentul static fa de o ax () este: = =AAb dA S unde am notat: distana la ax a elementului infinit mic desuprafa,dAsuprafaaelementar,A-aria ntregiisuprafee,b-distanadelaaxlacentrulde greutate(punctulC)alseciunii;notaiilesuntfcute conform figurii 4.1. Momentulstaticfadeaxeledecoordonatesunt, prin definiie, conform condiiilor urmtoare: = = = =Ac zAc yy A ydA Sz A zdA S Notaiile din relaii se refer la figura 3.11. ncazulparticularalaxeicaretreceprincentruldegreutatealseciunii,distanala aceasta fiind nul, este evident c i momentul static fa de respectiva ax este nul. Momente de inerie Momentul de inerie axial: Schematizarea este dat n figura 3.11. Momentele de inerie fa de axele de coordonate, prin definiie, sunt: Fig. 3.7Fig. 3.8Fig. 3.9 Fig. 3.10 37 =AydA z I2, =AzdA y I2. Momentele de inerie se numesc centrala dac sistemul de axe are originea n centrul de greutate al seciunii (punctul C). Momente de inerie centrifugale: Se folosete schematizarea din figura 3.11. Aceste momente sunt, prin definiie: =AyzdA z y IDac mcar una din axe este de simetrie, momentul centrifugal fa de acestea este nul. Momente de inerie polare: Schematizarea este dat de figura 3.11, momentul de inerie polar fiind, prin definiie: + = + = =A Ay zI I dA z y dA r I ) (2 2 20 Dup cum se observ, momentul de inerie fa de un punct (pol)esteegalcusumamomentelordeineriefadedouaxe rectangulare, centrate n acel pol. Momente de inerie pentru suprafee simple: DREPTUNGHI:conformschemeiprezentatenfig.3.11, momentul de inerie fa de axa Oy va fi: 222232 23) (hhAhhyz bdz b z dA z I = = = ,Iy=(bh3)/12. CERC:conformschemeidinfigura3.12,momentuldeinerie,plecnddelarelaiade definiie, va fi: 64,4 2) cos (sin4, cos ) ( ) cos (4 420 040202 3 2 2DIR rI I d dr r d r dr r dA z IyRyA ARz y= =+ = = = = = Momentul de inerie polar este: I0 = Iz + Iy = D4/(64) + D4/64 = D4/32. Variaiamomentelordeinerienraportcuaxe translatate n esen, problema este c, dac se cunosc momentul de ineriefadeoax(Oy)Iy,ariaseciuniiAidistana dfadeonouax(O1y1),secautssedetermine momentul de inerie Iy1 fa de noua ax. Pentru a se deduce relaia de calcul a noului moment de inerie, se va folosi schema Fig. 3.12 Fig. 3.13 Fig. 3.11 Fig. 3.12 38 din figura 3.13. Plecnd de la definiia momentului de inerie axial i cunoscndu-se deplasarea dz a noii axe O1y1 fa de axa Oy, vom avea: = + = =A A Az yd z dA d z dA z I2 2 21 1) ( .Iy1 = Iy + 2dzSy + A dz2. Relaia de mai sus este cunoscut i ca teorema Steiner. S-au fcut notaiile: Sy-momentul static al seciunii fa de axa iniial Oy, A-aria seciunii. Dac axele sunt centrale, atunci Sy=0 i relaia devine: Iy1=Iy + A dz2. Similar, se deduce pentru axa (Oz): Iz1=Iz + 2dySz + Ady2, Iz1=Iz + Ady2(pentru axe centrate Sz=0). Relaiadecalculamomentuluideineriecentrifugalfadenoileaxesedemonstreaz similar, astfel: = + + = =A Az y z ydA d z d y dA z y I ) )( (1 1 1 1 = + + + = Az yAyAzAdA d d dA zd dA yd yzdA =Iyz + dz Sz + dy Sy + dy dz A. Dac axele iniiale sunt centrale, vom avea relaia: Iy1z1 =Iyz + dy dz A. Notaiilefolositeausemnificaie:Iyz-momentdeineriecentrifugalfadeaxeleiniiale, Iy1z1-momentul fa de noileaxe, dy i dz distanele ntre axe, A-aria suprafeei. Raz de inerie. Modul de rezisten Prin definiie, raza de inerie este: AIiyy = , AIizz =, unde cu A s-a notat aria seciunii. Semnificaiafizicarazeideinerieestedistanalacareartrebuisseconcentrezesuprafaa pentru a avea acelai moment de inerie ca i suprafaa real. Pentru definirea modulelor de rezisten se va folosi desenul din figura 3.15. a) Modulul de rezisten axial: prin definiie Wy = Iy /zmax ,Wz = Iz/ymax , unde ymax i zmaxsuntdistaneledelaaxeledecoordonate(fadecaresecalculeazmomentelede inerie) la punctele cele mai deprtate ale seciunii. b) Modulul de rezisten polar: prin definiie esteWp = Ip /rmax , unde am notat cu rm distana de la pol la punctul cel mai deprtat al seciunii. Modulele de rezisten pentru cele trei suprafee particulare studiate sunt: 3.3 SOLICITAREA AXIAL Definirea solicitrii: aceast solictare simpl se prduce atunci cnd fora ce acioneaz este coaxial cu piesa, adic atunci cnd exist efort axial N n pies (conform figurii 3.16: a-ntindere, b-compresiune). Starea de tensiuni la solicitare axial Dacsetraseazpesuprafaauneibaresupuselantinderesau compresiune,oreeadedreptecaredelimiteazelementedreptunghiulare (fig.3.16),nurmasolicitriiideformriiacesteia,elementeledreptunghiulare imodificdimensiunilelaturilordarnuischimbforma.Acestfapt experimental,ilustratnfigura3.16atestcnbarseproducnumaitensiuni Fig. 3.16 39 normale (existena tensiunilor tangeniale ar transforma dreptunghiurile n paralelograme). Distribuia tensiunilor pe seciune se consider uniform. ntre tensiunea normal care se produce ntr-o seciune a piesei , efortul axial N n acea seciune i aria seciunii A, exist deci relaia: =N/A. Calculul de rezisten Se fae analiza rezistenei pieselor solicitate de un efort axial. Acest calcul se poate aplica, cuobunprecizie,numaipentrupiesecareauseciuneconstantnlungullorialcror materialesteomogen.Sebazeazperelaiadedeterminareatensiuniidefinitmaisus.Exist trei tipuri de calcul la solicitarea axial i anume: a)Calcul de verificare: -se cunosc: eforturile axiale (din diagrama de efort) i aria seciunii transversale; -se determin: tensiunea normal efectiv maxim n seciunea de calcul; -seimpunecondiiacatensiuneaefectivsfiemaimicdecttensiuneaadmisibil (maxim) pentru a se ndeplini condiia de rezisten impus: ef=Nmax/Aef a . b)Calculul de dimensionare: -secunosc:eforturileaxiale(dindiagram)itensiuneaadmisibilimpus materialului; -se determin: aria necesar a seciunii (indiferent de forma ei) cu relaia: Anec=Nmax/a c)Calculul capacitii portante: -se cunosc: aria seciunii i tensiunea admisibil impus materialului; -se determin: fora axial maxim admisibil: Nad=Aefa . Deformaii la ntindere-compresiune Ecuaia deformaiei barei ce suport efort axial constantsedeterminacceptndcaadevratlegea lui HOOKE, din care se obine alungirea: =E,N/A=El/l => l=Nl/(EA) , notaiile avnd semnificaia: l lungimea tronsonului pecareefortulaxialesteconstant,EArigiditatea axial,Emodululdeelasticitatelongitudinalalmaterialului,Aariaseciuniitransversale (considerat constant n lungul barei). Dacefortulaxialvariaznlungulbareiconformfig.3.18,sevorcalculaalungirilepe fiecare tronson n parte, alungirea total fiind suma acestora, astfel: ltot=N1l1/(EA)+N2l2/(EA)+N3l3/(EA) . Relaiastabilitsepoateaplicanumaipetronsoanecuefortaxialiseciuneconstante; efortul axial se introduce cu semnul pe care l are n diagram, semnul + al deformaiei totale ne va arta c piesa se lungete. Dacefortulnumaiesteconstant(deexemplu,ncazuldeformaieibareicugreutate proprie) trebuie s calculm deformaia prin integrare, astfel: ( )EAlG F dxEAx l A FdxEAx Nll l + = += = 2 /)] ( [ ) (0 0 , unde am notat cu G greutatea barei. Dacsevaineseamadedeformaiapieseisupuselasolicitareaxial,spunemcseva faceuncalculderigiditate.nacestcaz,seimpunedeformaiaadmisibilapiesei,existnd urmtoarele variante de analiz: ocalculul de verificare: se cunosc eforturile axiale i deformaia admisibil i se determin deformaiaefectiv,caretrebuiesfiemaimicsauegalcudeformaiaadmisibil, adic: lef=(Nl)/(EA)la . ocalculul de dimensionare: se cunosc eforturile axiale (diagrama) i deformaia admisibil; se calculeaz aria transversal necesar (indiferent de forma seciunii)Anec=(Nl)/(Ela) . Fig. 3.18 40 ocapacitateaportant:secunoscariaseciuniitransversaleideformaiaadmisibil;se calculeaz efortul axial maxim admisibil Nad=(EAla)/l . Calculullarigiditatesefacemultmairardectcelderezisten,fiindaplicatnumain cazurispeciale.Dimensiunilerezultatedincondiiaderigiditatesunt,deobicei,multmaimari dect cele obinute din condiia de rezisten. Deformaia unui element de bar de lungime infinit mic este: d(x)=Ndx/(EA). Lucrul mecanic elementar dL efectuat de efortul axial N la deformareaelementului de bar de lungime dx este: dL=Nd(x)=(EA)/(x)xd(x), iar prin integrare se obine lcrul mecanic efectuat la deformarea unei poriuni de bar de lungime x care este numeri egal cu energia potenial de deformaie elastic a barei W, astfel: EAx NEANxxEA xxEAx d xxEALxx2 2 2) (22020= = = = . DacforaaxialNiariaseciuniiAnusuntconstantenlungulbarei,energiade deformaie se obine prin integrare: dxEANWl =022 . 3.4 SOLICITAREA LA FORFECARE PUR Definiie Aceastsolicitareestemairarntlnitiseproduceatuncicndforeleexterioare acioneaz asemenea unui foarfece (suportul forelor transversale pe pies sunt paralele i foarte apropiate,teoreticputndficonsideratecoaxiale). Definiia solicitrii: acioneaz ncrcri transversale pe bar,iarsuporturileforelorsuntinfinitapropiate. Schema solicitrii este dat n figura 3.22. n plus, aria transversalapieseitrebuiesfiefoartemic comparativculungimea(saupoatesfiedeasemenea foarte subire). Exemple de cazuri deforfecare pur: asamblri cuniturisauuruburinestrnse,asamblriprinsudursaucuboluri,tiereatablelorprin forfecare. Solicitarea de forfecare pur este ntotdeauna nsoit de solicitri secundare axiale sau de ncovoiere,daracesteaproductensiunifoartemiciideci,efectullorpoatefineglijat.Adesea, ncrcrileceproducforfecareapurseaplicpesuprafeerelativmicialepiesei,nacestcaz aprndopresiunemarepeaceasuprafa,efectcenumaipoatefineglijat.Solicitarea superficial a piesei forfecate se manifest ca tensiune de contact. Tensiuni i deformaii la forfecare pur Tensiuni la forfecare pur Fenomenulrealpermitessefacipotezasimplificatoareianumectensiunea tangenialprodusdeefortultietoresteuniformdistribuitpeseciune.Deci,sepoatedefini relaia de calcul a tensiunii: =T/A, notaiile fiind: T fora tietoare, A aria seciunii transversale a piesei. Pebazarelaieidemaisussepoatefacecalcululderezistenlaforfecare,dupcum urmeaz: Fig. 3.22 41 a)calcululdeverificare:estenecesarcatensiuneaefectivsfiemaimicdect tensiunea admisibil, adic: ef=Tef/Aef a ; b)calcululdedimensionare:sedeterminarianecesarAnecfunciedeforatietoare maximTitensiuneatangenialadmisibilamaterialului(indiferentdeformaseciunii): Anec=Tmax/a ; c) calculul de capacitate portant: se determin fora maxim (capabil) ce are voie s se produc n pies pentru a se ndeplini condiia de rezisten: Tcap=Aef a . Exemple de cazuri de forfecare pur 6.3.1. Asamblri cu nituri: Se aplic laasamblarea tablelor.nfigura 3.24este dat schema de studiu a acestui caz. Dimensionareaniturilorconstndeterminarea diametrului.nschemadecalculdinfig.3.24,s-aluatn consideraieunsingurnit;dacexistmaimultenituri,efortul de forfecare este T=F/N (N numrul de nituri); diametrul este: Anec=T/a=(d2)/4,) /( ) 4 ( N n F da = ,undeamnotat:n numrul planelor de forfecare, N numrul niturilor. Strivireantreurubipereiiguriitrebuieanalizat, existndpericolulptrunderiitableintijanitului(tabla acioneaz ca o foarfec). Tensiunea efectiv maxim de strivire este dat de relaia: s=F/As, As=ds . unde am notat: s tensiunea de strivire (contact), Asariadestrivire,sgrosimeatablei.Trebuiendeplinitcondiiade rezisten,adictensiuneaefectivcalculattrebuiesfiemaimicdect cea admisibil impus. Asamblri cu tifturi sau boluri: Schematizarea este dat n figura 3.25. Dimensionarea bolului la forfecare se face cu relaiile: a=T/(2A), A=(d2)/4,) /( ) 2 ( N F da = . Se face, ca i la nituri, verificarea la strivire cu relaiile: s=F/Asa,As=2ad,sauAs=2bd,undeamnotata,bgrosimile pieselorasamblate,stensiuneadestrivire,Asariadestrivire,a tensiunea admisibil de strivire. Asamblri cu pene ntre roi i arbori: Seanalizeazcazulpenelorparalele (fig.3.26a) i penelor-disc (fig.3.26)b. n fig.3.26.b suntdatedimensiuniletransversalealepenelori forele F ce le solicit la forfecare. Fora de forfecare (echivalena momentului de torsiune) este: Fd/2=Mt,F=2Mt/d . Dimensionareapeneiconstnstabilirealungimiiacesteia,cunoscndu-sedimensiunile seciunii (a i h). Lungimea penei se calculeaz astfel: =F/A,A=al,l=2Mt/(daa) , unde s-aufolositnotaiile:llungimeapenei,Mtmomentuldetorsiunecetrebuietransmisprin arbore, a tensiunea admisibil a materialului. Este necesar verificarea la strivire, dup cum urmeaz: s=F/As=(4Mt)/(hld)asunde am notat (as) tensiunea admisibil la strivire. Fig. 3.24 Fig. 3.25 Fig. 3.26 42 Asamblri prin sudur de col: Schematizarea este dat n figura 3.27.Calcululprezentatn continuareestevalabilnumain cazulsolicitriilongitudinalea cordonului de sudur. Calcululgrosimiiminime a cordonului: a=T/A,A=nlsd,a=T/(nlsa), unde am notat: n numrul cordoanelor (n exemplul dinfigura6.6n=2),a grosimeacordonului,ls lungimeacordonului,a tensiunea tangenial admisibil a materialului din cordon. Tierea tablelor: Se calculeaz fora necesar pentru tierea uneitablecuoghilotin.Pentrutiereacu foarfeca(conformfig.6.7)sefaceuncalculde capacitate portant, astfel: F=cAr,A=ls,undeamnotat:c coeficientde siguran (recomandat 1,2-1,3),r tensiuneade ruperea materialului, A ariaseciuniide tiere,l lungimea tieturii,s grosimea tablei. Debitareadiferitelorprofiledintablsefaceprintanare.Estenecesarssecalculezeforacetrebuie aplicatpetan.nfig.3.29seprezintcazuldebitriiunuidreptunghil1l2,foradetanare fiind: F=c(ps)r,p=2(l1+l2), unde am notat: p perimetrul piesei tanate (lungimea tieturii). 3.5SOLICITAREA LA TORSIUNE Elemente generale Solicitareade rsucireseproduceatunci cndforeledencrcare,n urmareduceriincentrulseciuniitransversale,conduclauntorsorntreelementelecruiase Fig. 3.27 Fig. 3.28 Fig. 3.29 Fig. 3.30 43 gsete i un moment fa de axa piesei. Existena singular a momentului fa de ax este rar n practic, aceasta producndu-se numai n cazul existenei cuplurilor de fore (dou fore paralele, demodulegalidesenscontrar);deobicei,reducereaforelorfadeseciuneadecalcula piesei duce la o solicitare complex. nfig.3.30i3.31suntprezentatesituaiidencrcarece conduc la solicitarea de rsucire.nschemeledecalculderezisten,solicitarealatorsiuneeste evideniatconvenionaldemomentelecoaxiale,reprezentate convenionalcanfig.3.30a.nfig.3.30.besteprezentatschema desolicitareauneipiesecutreicuplurideforecaresereducpe axabareilatreimomenteechivalente;cuplurilesuntMt1=2F1d1, Mt2=F2d,Mt3=F3D(s-a notatcuddistana ntresuportulforelor cuplului;forelesunt coninutenplane transversalepepies).Cazulcelmaigeneralde ncrcareceproduceirsucireestealuneifore oarecare, aplicat la distana d fa de ax (fig.3.31); foravaaveatreicomponente(dounplanul transversallapies,componentaradialFri tangenial Ft, i a treia component axial Fa paralel cu axa barei), momentul fa de axa barei (de torsiune) fiind Mt=Ftd. Un caz special l constituie arborii pe care sunt montate roi (decurea sau dinate) princare se transmite energie mecanic. Momentul transmis (cuplul) printr-o roat montat pe arbore (ntre mainile cuplate prin roile respective se transmite energie,conformfig.3.32.a)este:Mt=9550P/nNm,undeamnotat:Pputereatransmisprin roat(nkW),nturaiaarborelui(nrot./min).Momentelede torsiuneredusepearboreconduclaschemadesolicitaredin fig.3.32.b(momentulM2estemotor,celelaltefiind consumate). Diagramadeeforttorsionalsetraseazsimilarcuceade efort axial, potrivit schemei din fig.3.32.c. S-a folosit convenia de semn:momentulmotorestepozitiv,celtransmislamainile conduse fiind negativ. Tensiuni n bare cu seciune circular Sevaurmrissedeterminecetensiuniseproduci modul n care variaz tensiunea produs de momentul de torsiune n seciunea transversal a unei piese ce are seciunea circular. Pentruadeterminatipuldetensiuneprodusdeefortultorsional,sevortrasa,pe suprafaauneibare,oreeadeliniilongitudinaleitransversalecarevordelimitasuprafee dreptunghiulare.Dup torsionare,seconstatc generatoareledevincurbe elicoidale,iarliniile circumferenialenuse deformeazinusedeplaseaz pedirecieaxial.Elementele dreptunghiulareipstreaz Fig. 3.31 Fig. 3.32 Fig. 3.33 Fig. 3.35 44 lungimealaturilordarsedeplaseaznumalateraliinclinlaturile,transformndu-sen paralelogram. Toate acestea sunt prezentate n fig.3.33. Pentru a determina legea de variaie a tensiunii n seciunea transversal a unei piese, se izoleazdintr-obarsupuslarsucireunelementinfinitmic,delungimedx,uncaptse considerncastrat,cellaltfiindncrcatcumomentulMt(conformfig.3.34).Generatoarea CB,iniialdreaptasedeformeazdevenindCB(formaesteteoreticelicoidaldarpentruc lungimea dx este foarte mic, poriunea CB se poate considera o dreapt).FigurileBCB(pesuprafaalateralacilindrului)iOBB(nseciuneadecapt)se asimileaz cu triunghiuri (fig.3.35.a). Se pot scrie relaiile (n cele dou triunghiuri): -n triunghiul BCB:tg =BB/BC; -n triunghiul OBB:BB=rd . Lunecarea specific este, deci: tg =(rd)/dx=r undeamnotatdunghiulderotaiealrazeiOB,unghiulderotirespecific(rotirea relativdintredouseciuniaflateladistanade1m).SepoatescrielegealuiHOOKEi folosindu-se relaia de mai sus, vom avea: =G=Gr=(G)r . Sepoateobserva,dinrelaiademaisus,ctensiuneatangenialvariazliniarcuraza r. Se calculeaz momentul n seciune funcie de tensiunea tangenial, folosind schema din fig.3.35.b.MomentulseobineprinintegrareamomentuluielementardMprodusdefora elementardF(forasedatoreazexisteneitensiuniitangenialeceacioneazpearia elementardA).Vomavea,deci:dM=rdF=r(dA);seintegreazisefoloseterelaia tensiunii dedus anterior i se obine: . ) (2 = = = =A A A AtdA r G dA r G r dA r dF r M , Mt=GIp,Sefoloseterelaiainiialatensiuniiirelaiamomentuluidedusobinndu-se: G=Mt/Ip ,=(G)r=Mt/(Ip)r . Dacsedefinetemodululderezistenpolar(Wp),tensiuneamaximva fi:m=Mt/Wp,Wp=Ip/R , i se produce la raza maxim, adic la suprafaa piesei. Relaia de mai sus se folosete la calculul de rezisten la rsucire a pieselor cu seciune circular. Vom avea cele trei variante ale calculului, dup cum urmeaz: calcululdeverificare,princaresedetermintensiuneaefectivmaximcuformula:max=Mt/Wp a, piesa ndeplinind condiia de rezisten la rsucire dac se ndeplinete inegalitatea de mai sus; calculul de dimensionare prin care se determin diametrul d al seciunii, impunndu-se tensiunea admisibil a materialului, astfel: Wp=Mt/a=(d3)/16 => d; calculul de capacitate portant n care se determin momentul maxim admis Mt folosind relaia:Mt=Wpa . n formule, s-a notat cu a tensiunea admisibil a materialului. Observndu-se distribuia liniar a tensiunii tangeniale, cresctoare de la zero (n centru), seconstatcmaterialuldinzonacentralapieseiestepuinsolicitat.Ometoddearemedia risipa de material la piesele rsucite, const n a scoate materialul din zona slab solicitat, adic de a folosi forma tubular pentru construcii (vezi fig.3.36). Dac se analizeaz tensiunile n seciuni rotite cu 45 fa de axa barei, se constat c pe acesteaacioneaznumaitensiuninormaledentindereicompresiune,egalenmodulcu tensiuneatangenialdinseciuneatransversal.Acestfaptesteartatschematizatnfig.3.37. Existenatensiunilornormalemaximeexplicifenomenulderuperenseciunila45a arborilordinmaterialfragil(materialulfragilarerezistenmaimiclantinderedectla forfecare). 45 Deformaia la rsucire a barelor cu seciune circular Porninddeladeformaiaspecificdeterminatanterior,vomobinerotaiarelativntre dou seciuni ale barei (deformaia): =Mt/(GIp),d=dx,d=dxMt/(GIp),deformaiadersucire(rotaiarelativadou seciuni transversale) obinndu-se prin integrare, astfel: = ptI Gdx M , unde GIp este rigiditatea la rsucire. Dac momentul de torsiune este constant pe lungimea l a piesei, deformaia (n radiani) va fi: =(Mtl)/(GIp). Pe baza relaiei deformaiei, se poate face calculul la rigiditate al unei piese. Acest calcul const n: calculdeverificare:seimpunedeformaiaspecificadmisibilaisefoloseterelaia: =Mt/(GIp)a ; calcul de dimensionare: se determin diametrul necesar Ip=Mt/(Ga)=d4/32 => d; calcululdecapacitateportant:secalculeazmomentulmaximadmiscurelaia: Mt=GIpa . npracticadeproiectare,seimpunenmodobinuit,atuncicndneintereseaz deformabilitateapieseiproiectate,deformaiaspecifica=0,25/m...1/m(adic4,410-7... 17,610-7rad/m).Pebazadeformaieispecificeminime(0,25/m)sepoatedefiniorelaiede predimensionareaarborilordinoelobinuitastfel: 4/ 3 , 1 n P d ,ncaretrebuieintrodus puterea transmis P n kW i turaia n n rot/min, diametrul obinndu-se n metri. Energia de deformaie la rsucire Din relaiile anterioare, se observ c momentul de torsiune Mt este direct proporional cudeformaia.Deci,sepoateacceptarelaiageneralalucruluimecanicprodusdeforele (momentele) variabile liniar (pot fi luate valorile medii aritmetice i considerate constante): d M dLt) 0 ( 5 , 0 + = , = =V pttVGIdx MM dL L 5 , 0 , = =V ptGIdx ML W22. Seobservcrelaiadecalculaenergieiareoformsimilarcuceadeterminatn cazurile celorlalte solicitri simple (ntindere, forfecare). Calculul arcurilor elicoidale cilindrice Sevorstudiaarcurilecareauspirelepuinnclinate(spire strnse),unghiulplanuluispireitrebuindsfiemaxim10-15. Srmaarculuiestesupuslarsucireiforfecare,darsepoate neglijaforfecarea,lundu-senconsideraienumaisolicitarea principal (de torsiune).Conform fig.3.38, momentul de torsiune, pentru o seciune oarecare a srmei arcului, este: Mt=FR, =Mt/Wp, Wp=d3/16, de unde diametrul minim al Fig. 3.38 Fig. 3.36 Fig. 3.37 46 srmei arcului va fi:316aFRd= , unde am notat: F fora de ncrcare a arcului, R raza de nfurare a srmei arcului; tensiunea admisibil ce se poate adopta pentru materialul arcului este mare, aproximativ 400 600 MPa. Pentruasevedeaefectulforeitietoare(cares-aneglijat),sevorcomparatensiunile produse de tiere i torsiune n punctul cel mai solicitat (punctul B, unde cele dou tensiuni sunt paralele i de acelai sens). Raportul ntre tensiunea de torsiune i de forfecare va fi: dRddRWARA FWFRppTt416 /4/32= = = = = . Pentruafievidentdiferenantretensiuni,raportuldemaisusiavaloarea40pentru R=10 cm, d=1 cm. Acest raport arat c neglijarea forfecrii este justificat.Sgeataarculuisevadeterminafolosindu-serelaiaenergieipotenialededeformaiela rsucire deja determinat, pe de o parte, i a lucrului mecanic al forei elastice, pe de alt parte: 2) 2 () ( ) ( ) (5 , 0 5 , 02 2 2fF RnGIFRdxGIFRGIdx FRGIdx MWp l p V p V pt= = = = = , 4364Gdn FRf = ,undeamnotat:fsgeata,Gmodululdeelasticitatetransversalalmaterialului,n numruldespire.VariaiasgeiidatoratuneivariaiiFaforeidencrcareeste: f=(64FR3n)/(Gd4) . npractic,estecomoddefolositconstantaelasticaresortului(F=kx).Aceast constant elastic va fi: F=f(Gd4)/(64R3n), deci k=Gd4/(64R3n) . Folosindu-ne de relaia sgeii, se poate impune o valoare admisibil a acesteia, putndu-se determina d, n sau R. Modulele de elasticitate pentru oelul special folosit la fabricarea arcurilor sunt: E=2,2105 MPa, G=0,85105 MPa. 7.6. Rsucirea barelor de seciune dreptunghiular Dsitribuiatensiuniipesecineestemultmai complicatdectncazulseciuniicirculare.Studiulfiind complex, ne vom limita numai la prezentarea rezultatelor unor studii,maialesnvedereafolosiriilorncalculelede proiectare.Formaseciuniiesteesenialpentrustabilirea distribuiei tensiunii; pentru forme oarecare de seciuni, studiul distribuieiseciunilordepetenetnivelullucrriidefa, deci va fi ignorat. Seciunea dreptunghiular fiind des ntlnit npractic,sevorprezentanumairezultatelestudiului.Distrbuiatensiuniinseciunea dreptunghiular este schiat n figura 3.39 i se caracterizeaz prin: distribuie neliniar fa de distana la centrul de greutate al seciunii i diferit valoric pe cele dou direcii ale dreptunghiului; tensiunea este nul pe muchiile barei prismatice; tensiunea este maxim la suprafa, la jumtatea laturii; cea mai mare tensiune este la jumtatea laturii mai mari. Valoarea tensiunii maxime (conform fig.7.9) se calculeaz cu relaia: max=1=Mt/(hb2),2=1 . Coeficieniiigsindu-senlucrriledespecialitate(rezistenamaterialelor) funcie de h/b al laturilor dreptunghiului. Dac raportul laturilor este mare, atunci coeficientul respectiv tinde spre valoarea 1/3, tensiunea maxim devenind:max=3Mt/(hb2) . Fig. 3.39 47 Pentru alte forme de seciuni, momentul de inerie polar Ip i modulul de rezisten polar secalcleazconformschemelorirelaiilordatenfinalulcapitolului(max=Mt/Wp).Tensiunile maxime sunt n punctele A i B (artate pe figurile din finalul capitolului). Deformaiaspecificabareideseciunedreptunghiularsolicitatlarsuciresepoate calcula cu relaia: =Mt/(hb3G). Coeficienii , i se dau n tabelul urmtor: h/b11,51,7522,5346810 0,2080,2310,2390,2460,2580,2670,2820,2990,3070,3130,333 0,1410,1960,2140,2290,2490,2630,2810,2990,3070,3130,333 10,8590,820,7950,7660,7530,7450,7430,7420,7420,742 Rsucirea barelor cu perei subiri Bare cu profil subire deschis Distribuiatensiuniipegrosimeapereteluivariazliniar,fiind 0lajumtateagrosimii(conformfigurii3.40,detaliulA).Pentru calcululuneiastfeldeseciuni,seaplicrelaiadeterminatpentru seciune dreptunghiular cu raportul laturilor foarte mare: =3Mt/hs2 , notnd cu s grosimea profilului i h lungimea profilului (n cazul profilului n form de Z din fig.7.10,lungimeahestesumalaturilor).Pentruexemplificare,seprezintprofilulsubire deschis din fig.7.11; tensiunea maxim ce se produce va fi: m=Mt/(Ip)dmax , Ip=1/(3)(s1d13+ s2d23+ s3d33) . Deformaiaspecificabarelorcuprofilsubiredeschissecalculeazcurelaia: =Mt/(GIp).ncazulexempluluidinfigura3.41, unghiuldedeformaiespecificeste:=3Mt/(Gsidi3) . Calcululprezentatesteaproximativ, neinndcont,deexemplu,deconcentrrilede tensiuninzoneledecolaleprofilului;n zoneledecol,tensiuneaesteinvers proporionalcurazaderacordare(decipentru unghi ascuit, fr racordare, tensiunea este mult mai mare). Bare cu profil subire nchis nschemadinfigura3.42seprezintunprofilsubirenchis,deformrectangular. Tensiuneatangenialesteconstantpetoatgrosimeaperetelui(fig.3.42,detaliulA).Se definete fluxul de forfecare , care va fi constant n lungul profilului:==11=22=const. , cu notnd grosimea peretelui. Seurmretedeterminarearelaieidecalculatensiunii pentruoriceformgeometricaunuiprofilsubirenchis.Vom folosischemadinfig.3.43.Pentrucalculultensiuniisevascrie momentulprodusdeaceastapeelementuldeariedAiseva integra pe ntreg profilul (fig.3.43) astfel: dF=dA=ds; dM=rdF=rds;) 2 ( = = Strds M ,tensiunea ntr-o zon a seciunii de grosime va fi: =Mt/(2) . S-a notat cu aria suprafeei cuprins n interiorul curbei cereprezintloculgeometricaljumtiigrosimiiperetelui profilului (fig.3.43). Fig. 3.40 Fig. 3.41 Fig. 3.42 Fig. 3.43 48 Calculul de rezisten const ntr-o verificare n zona cu tensiune maxim. Tensiunea este maxim m n zona cu grosime minim m: m=Mt/(2m) a . Pentrucalcululdeformaieispecifice,seapeleazlateoremaconservriienergiei,lucrul mecanic efectuat de momentul de torsiune exterior fiind egal cu energia potenial de defomaie elastic a piesei. Va rezulta urmtoarea relaie de calcul a deformaiei specifice: =ltdsGM24. Integrala este curbilinie, n lungul liniei medii a grosimii peretelui. Deci pentru o seciune oarecare (profil subire nchis) se poate defini un moment de inerie polar de forma: =dsIp24. Dac grosimea peretelui este constant, vom avea: Ip=(42)/s,=(Mts)/(4G2)unde am notat s lungimea curbei mediane a peretelui. 3.6 NCOVOIEREA BARELOR DREPTE Elemente generale Solicitarea de ncovoiere se produce atunci cnd efortul este un moment perpendicular pe axa piesei (barei), ca n figura 3.45. Schema de calcul a unei bare este prezentat n figura 3.45. Bara prismatic este ncrcat cuceletreiforeceauodirecieoarecarenspaiuidoumomenteconcentrate(forele 213 21, , , , M M F F F , conform fig.3.45.a). Se face o schematizare, bara se reduce la axa sa OO*, ncrcat conform figurii 8.1.b cu sistemul de fore i momente enunat. Sefaceoseciunela distana x de captul O pentruasepunen evideneforturile (conformfig.3.45.c).n seciuneafcut,exist eforturitietoarepecele douaxe(OyiOz) precumimomentele ncovoietoareMyiMz, acestea din urm producnd solicitarea la ncovoiere a barei (n seciune nu s-au pus n eviden toate eforturile din considerente de claritate a tratrii solicitrii de ncovoiere). Exist mai multe tipuri de ncovoiere, n funcie de complexitatea sistemului de ncrcare i de geometria piesei, dup cum urmeaz: a) ncovoierea spaial Forelesistemuluidencrcareareopoziieoarecarefadeaxabareisauaxabareinu este ocurb coplanar. forele tietoare au proiecii n ambele plane a cror intersecie este axa piesei; la fel i cuplurile de fore au ca efect momente n cele dou plane. b) ncovoierea plan Sistemul de fore exterioare este coplanar, iar momentele concentrate sunt perpendiculare pe planul forelor. Schema de solicitare este dat n fig.8.3.a, iar proiecia n planul xOz a barei ncrcate este dat n fig.8.3.b. Acest tip de solicitare este cel mai des ntlnit n practic. c) ncovoierea pur Acest tip de solicitare este puin ntlnit n realitate. ncovoierea pur exist atunci cnd asupra piesei acioneaz numai momente ncovoietoare (momente perpendiculare pe axa piesei). Noiuni auxiliare: Fig. 3.45 49 plandencovoiere:planulceconineforeledencrcare(momentulncovoietoreste perpendicular pe plan); axaneutr:esteaxabarei;caracteristicaxeineutreestefaptulcdeformaiaeiconst numai dintr-o curbare, nu i din alungire; tensiunea pe axa neutr este nul; fibr: orice dreapt ce aparine corpului i este paralel cu axa neutr; fibra medie deformat: fibra ceaparine planuluiperpendicular pe planulde ncrcare i care trece prin axa neutr. ncovoierea pur a barelor drepte Distribuia tensiunii pe nlimea seciunii AplicndecuaiaNAVIERpeoseciunesimpl, dreptunghiular,seconstatcdistribuiavariazliniarpe nlimeaseciunii,canfig.3.46.Analiznddistribuiatensiunii pe nlimea seciunii se constat urmtoarele: tensiunea variaz liniar cu distana la centrul de greutate; tensiuneaestemaximpefibraextremceamaideprtat (dacseciuneaestesimetricfadeaxaorizontalOy, atuncitensiunilemaximesuntegaledardesemncontrar), putndu-secalculacurelaia:max=(M/Iy)zmax=M/Wy, unde Wy este modulul de rezisten al seciunii fa de axa Oy; tensiunea este 0 pe axa neutr. Axa neutr trece prin centrul de greutate. Acest adevr se poate demonstra calculndu-se efortul axial din seciune. Fora axial ce acioneaz pe suprafaa elementar dA este:dN=dF=dA=EdA=E(z/)dA,iarpetoatseciunea,efortulNseobineprinintegrare, foraaxialnseciunefiindnul(existnumaimomentncovoietor,prinipotez): 0 = = = = ySEdA zEdN N . Dincondiiademaisus,rezultcmomentulstaticSyfadeaxa(Oy)estenul,deci axa fa de care s-a calculat trece prin centrul de greutate al seciunii. Distribuia tensiunii pe limea seciunii Secalculeazmomentulfadecealaltax(Oz)produsdetensiuneanormaldepe suprafaaelementardA,sensumeazpetoatseciunea(seintegreaz)iseegaleazcu0, astfel: dMz=ydF=y(dA)=y(E/()zdA) , 0 0 = = = =yz yzAzI IEzydAEM . MomentulfadeaxaOzestenulprinipotez,ntructncrcrilesuntcoplanaren planul xOz) i deci va exista moment numai fa de axa (Oy). Rezult, din relaia de mai sus, c momentuldeineriecentrifugalIzyestenul,deciiaxele(Oz)i(Oy)suntaxeprincipale