Structuri argumentative & structuri textuale FCRP | 3.12.’12
Upload
ion-tomitaCategory
view
217download
2description
Curs Roboti
4. Orientarea obiectului de lucru
Orientarea reprezint poziia unghiular a obiectului de lucru (obiectul manipulat).
4.1. Orientarea cnd este cunoscut spaiul robot Orientarea OL este dat de orientarea (rotaia) ultimului sistem de axe (n(, al structurii, deoarece OL este solidar cu acesta. Rezult c orientarea este dat de matricea (7) cnd i = n. Deci orientarea S a obiectului de lucru este:
.
Matricea S (3x3) se obine din matricea general a structurii T extrgnd primele trei linii i trei coloane, deoarece:
Matricea S cuprinde 9 parametri (cosinusurile directoare):
,
ntre care exist 6 relaii de de dependen (ce exprim mrimea unitar a versorului i perpendicularitatea versorilor). Deci, evident, orientarea necesita cunoatera numai a: 9-6 = 3 parametri. Introducerea cestor trei parametri se poate face n diferite moduri: variante ce utilizeaz unghiuri Euler, unghiuri Kardan.
Mai jos este utilizat metoda unghiurilor Kardan ca fiind mai simpl n prezentare. Posibilitatea exprimrii matricei prin numai trei parametri (unghiuri Kardan) : xk1, xk2, xk3, care pot fi considerai ca fiind componentele unui vector xk:
Pentru aceasta obinerea orientrii se face, convenional, considernd trei rotaii succesive, pornind de la sistemul fix sau de la o orientare prealabil cunoscut. Unghiurile acestor rotaii constituie parametrii cutai. Obinerea orientrii pornind de la sistemul fix se face astfel
o rotaie cu unghiul n jurul axei OX0;
o rotaie cu unghiul n jurul noii axe OYA; o rotaie cu unghiul n jurul noii axe OZB.
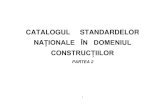
n fig. 5 sunt reprezentate aceste transformri. Prima transformare este rotaia SX (xk1) de la (0( la (A( (fig. 5,a):
Fig. 5
Urmeaz rotaia Sy (xk2) de la (A( la (B( (fig.5,b):
Ultima rotaie este SZ(xk3) de la (B( la (n( (fig. 5,c):
Matricea orientrii kardan se obine prin produsul matricilor de mai sus:
S (xk1, xk2, xk3) = SX (xk1) SY (xk2) SZ (xk3)
Dup efectuarea calculelor se obine (se noteaz prescurtat cos c; sins):
(14)
Trecerea de la exprimarea prin cosinusuri directoare la unghiurile kardan se face prin identificarea termenilor matricelor:
; ;
Practic, utilizarea relaiilor (15) se face n cadrul unui subprogram care va determina valorile corecte ale funciilor trigonometrice inverse, verificrile fcndu-se cu ajutorul termenilor neutilizai ai matricei (s21, s22, s31 i s23). Detalii sunt date n fiierul Mathcad: Ex Str4.mcd, unde se poate rula i un exemplu de calcul.
Avnd orientarea dat sub forma vectorului xk se poate defini poziia generalizat prin vectorul x cu 6 componente, primele trei fiind coordonatele carteziene , iar ultimele sunt componentele lui xk:
(15)
4.2. Obinerea orientrii din spaiul de lucru
Orientarea OL obinut din spaiul de lucru este legat de aplicaia robotului.
n practica aplicaiilor RI se ntlnesc dou cazuri privind orientarea:
a) cnd este necesar orientarea unei singure axe a OL;
b) cnd se cere orientarea total a OL.
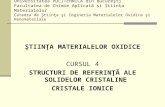
Fig. 6
a) Orientarea unei singure axe (orientarea parial). Este cazul manipulrii OL cilindrice (paletizare, ncrcare pe maini-unelte, unele operaii de montaj, etc). Este, de asemenea cazul poziionrii electrodului la sudur, a capetelor simple de vopsire. n aceste situaii este necesar orientarea numai a unei singure axe a OL care poate fi aleas paralel cu axa OnXn ca n exemplul din fig. 6, a. Pentru axa OnXn, vor fi cunoscute cosinusurile directoare:
S11 = cos(OnXn , OX0) ; S21 = cos(OnXn , OY0) ; S31 = cos(OnXn , OZ0),
care sunt corelate prin relaia:
S112 + S212 + S311 = 1
Deci, pentru orientarea parial, sunt necesari numai doi parametri: de exemplu dou din unghiurile ce apar n relaiile de mai sus . O astfel de orientare poate fi realizat de RI cu 5 grade de libertate. Evident i de ctre RI cu 6 grade de libertate, n care caz mobilitatea disponibil fiind preluat de alte criterii sau convenional.
b) Orientarea total presupune orientarea a dou axe ale corpului , care pot fi i perpendiculare (v. fig.6,b). Acest tip de orientare este necesar pentru montajul arborilor cu pene, cu caneluri, pentru montajul pieselor prismatice, etc. Dac cele dou axe ce dau orientarea total sunt OnXn i OnYn , atunci sunt cunoscute i cosinusurile directoare ale acesteia din urm, adic :
S12 = cos(OnYn , OX0) ; S22 = cos(OnYn , OY0) ; S32 = cos(OnYn , OZ0).
Aceste cosinusuri directoare sunt de asemenea, dependente :
S122 + S222 + S322 = 1
Cele dou axe ce sunt legate de OL au un unghi bine definit ntre ele , n cazul particular de fa , sunt perpendiculare. Analitic aceasta se poate exprima prin valoarea produsului scalar :
S11S12 + S21S22 + S31S32 = 0
Pentru orientarea total sunt, deci, necesari a fi cunoscui , n total 3 parametri , deoarece ntre cele 6 cosinusuri directoare exist cele 3 dependene de mai sus.Practic se pot da, de exemplu, trei unghiuri : unghiurile axei OnYn cu doua din axele sistemului fix (0( i un unghi al axei OnZn cu una din axele sistemului fix. Evident, cele trei condiii pot fi date i direct prin valoarea cosinusurilor directoare: S11, S12 i S32.
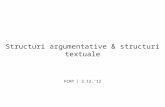
O modalitate mai general de redare a orientrii poate fi i aceea a rotaiei Rodriguez. Sistemul {n} se poate obine din {0} prin rotirea acestuia din urm n jurul axe ( cu unghiul ( (fig. 7).Fig. 7
Orientarea OL solidar cu sistemul de axe OXYZ se obine pornind de la sistemul de referin O0X0Z0Z0 prin rotirea n jurul axei (( (ce are versorul ) cu unghiul ( .
Notnd cu i0 , j0 i k0 i versorii ce definesc sistemul de referin se pot calcula versorii i ce definesc sistemul rotit (orientat):
(16)
n fisierul Ex Str4.mcd se gsete, de asemenea un exemplu de calcul referitor la folosirea metodei Rodriguez pentru obinerea orientrii._1128546027.unknown
_1128546103.unknown
_1128546163.unknown
_1128546278.unknown
_1128546279.unknown
_1128546276.unknown
_1128546277.unknown
_1128546174.unknown
_1128546275.unknown
_1128546115.unknown
_1128546119.unknown
_1128546105.unknown
_1128546078.unknown
_1128546092.unknown
_1128546051.unknown
_1128545973.unknown
_1128545998.unknown
_1128546012.unknown
_1128545984.unknown
_1016222468.unknown
_1127400649.unknown
_1128545963.unknown
_1127400679.unknown
_1016222482.unknown
_1016221032.unknown
_1016221044.unknown
_1016221023.unknown