STATICĂ - deliu.ro · PDF file · 2014-07-09STATICA este partea mecanicii care se...
150
MECANICĂ*N* NB. STATICĂ - 1 - NB. STATICĂ
Transcript of STATICĂ - deliu.ro · PDF file · 2014-07-09STATICA este partea mecanicii care se...

MECANICĂ*N* NB. STATICĂ
- 1 -
NB.
STATICĂ

MECANICĂ*N* NB. STATICĂ
- 2 -
CUPRINS
Introducere...................................................................................................................................................... 3 Capitolul NB.01. Statica punctului material .................................................................................................. 5
NB.01.1. Statica punctului material liber .......................................................................................... 5 NB.01.2. Statica punctului material supus la legături ....................................................................... 6 NB.01.3. Echilibrul punctului pe un plan înclinat aspru ................................................................... 11
Capitolul NB.02. Reducerea sistemelor de forțe ........................................................................................... 14
NB.02.1. Torsorul unui sistem de vectori ......................................................................................... 14 NB.02.2. Teorema lui Varignon ........................................................................................................ 19 NB.02.3. Axa centrală a unui sistem de vectori alunecători ............................................................. 20 NB.02.4. Echivalența sistemelor de vectori alunecători. Operații elementare de echivalență. Teorema de echivalență ..................................................................................................................... 24
NB.02.5. Sisteme simple de vectori alunecători ............................................................................... 27 NB.02.6. Cazurile de reducere a sistemelor de vectori alunecători .................................................. 33 NB.02.7. Reducerea sistemelor particulare de vectori alunecători ................................................... 35 NB.02.8. Aplicaţii ............................................................................................................................. 40 NB.02.9. Exemplu numeric .............................................................................................................. 45
Capitolul NB.03. Statica solidului rigid liber ................................................................................................ 53 NB.03.1. Studiul geometric sub formă matriceală. Parametri de poziţie şi orientare ....................... 53 NB.03.2. Matricele de rotaţie simplă ................................................................................................ 57 NB.03.3. Statica rigidului liber. Ecuaţiile de echilibru ..................................................................... 64 NB.03.4. Observaţii asupra echilibrului rigidului liber ..................................................................... 66 NB.03.5. Ecuaţiile de echilibru în cazul plăcilor .............................................................................. 67 Capitolul NB.04. Statica solidului rigid cu legături ...................................................................................... 70 NB.04.1. Echilibrul rigidului supus legăturilor ................................................................................. 70 NB.04.2. Statica rigidului supus legăturilor cu frecare ..................................................................... 76 NB.04.3. Fenomenul de autofixare şi autoblocare ............................................................................ 77 NB.04.4. Influenţa frecării de alunecare în cuplele prismatice ......................................................... 79 NB.04.5. Frecarea de rostogolire ...................................................................................................... 82 NB.04.6. Frecarea de pivotare ........................................................................................................... 85 NB.04.7. Frecarea în cuplele de rotaţie ............................................................................................. 87 Capitolul NB.05. Statica sistemelor materiale ............................................................................................... 90 NB. 05.1. Sisteme de puncte materiale ............................................................................................. 90 NB. 05.2. Sisteme de corpuri rigide .................................................................................................. 93 NB. 05.3. Sisteme de bare articulate ................................................................................................. 97 NB. 05.4. Sisteme de bare static determinate .................................................................................... 99 NB. 05.5. Metode pentru determinarea eforturilor din bare .............................................................. 100 Capitolul NB.06. Statica firelor ..................................................................................................................... 104 NB. 06.1. Introducere. Ipotezele modelului mecanic ........................................................................ 104 NB. 06.2. Ecuaţiile de echilibru ale firelor perfect flexibile şi inextensibile .................................... 104 NB. 06.3. Ecuaţiile de echilibrul ale firului în triedrul Frénet .......................................................... 106 NB. 06.4. Ecuaţiile de echilibru ale firului în triedrul cartezian ....................................................... 107 NB. 06.5. Cazuri particulare de fire perfect flexibile şi inextensibile .............................................. 108 NB. 06.6. Rigiditatea firelor ............................................................................................................. 116 NB. 06.7. Maşini de ridicat ............................................................................................................... 117

MECANICĂ*N* NB. STATICĂ
- 3 -
Capitolul NB.07. Autoevaluare ..................................................................................................................... 121 Capitol NB.01. Statica punctului material ........................................................................................ Exerciţii şi probleme rezolvate ...................................................................................................... Exerciţii şi probleme propuse spre rezolvare ................................................................................. Întrebări/ chestiuni recapitulative .................................................................................................. Capitol NB.02. Reducerea sistemelor de forțe .................................................................................. Exerciţii şi probleme rezolvate ...................................................................................................... Exerciţii şi probleme propuse spre rezolvare ................................................................................. Întrebări/ chestiuni recapitulative ................................................................................................... Capitol NB.03. Statica solidului rigid liber....................................................................................... Exerciţii şi probleme rezolvate ...................................................................................................... Exerciţii şi probleme propuse spre rezolvare ................................................................................. Întrebări/ chestiuni recapitulative ................................................................................................... Capitol NB.04. Statica solidului rigid cu legături ............................................................................ Exerciţii şi probleme rezolvate ...................................................................................................... Exerciţii şi probleme propuse spre rezolvare ................................................................................. Întrebări/ chestiuni recapitulative ................................................................................................... Capitol NB.05. Statica sistemelor materiale ..................................................................................... Exerciţii şi probleme rezolvate ...................................................................................................... Exerciţii şi probleme propuse spre rezolvare ................................................................................. Întrebări/ chestiuni recapitulative ................................................................................................... Capitol NB.06. Statica firelor ........................................................................................................... Exerciţii şi probleme rezolvate ...................................................................................................... Exerciţii şi probleme propuse spre rezolvare ................................................................................. Întrebări/ chestiuni recapitulative ................................................................................................... Bibliografie ......................................................................................................................................

MECANICĂ*N* NB. STATICĂ
- 4 -
Introducere
STATICA este partea mecanicii care se ocupa cu studiul echilibrului punctului material, rigidului, sistemelor de puncte materiale si sistemelor de corpuri, sub actiunea unui sistem de forte.
Studiul echilibrului punctului material este urmat de analiza sistemelor de forte modelate ca vectori alunecatori. Se studiaza echilibrul solidului rigid liber si cu legaturi, echilibrul sistemelor si echilibrul firelor.
Partea de teorie este urmata de probleme rezolvate si probleme cu raspuns, utile in formarea deprinderilor de a rezolva probleme si in autoevaluarea studentului.

MECANICĂ*N* NB.01.Statica punctului material
- 5 -
Capitolul NB.01. Statica punctului material
Cuvinte-cheie Punct material liber, Condiția de echilibru, Repaus, Ecuaţii scalare de echilibru,
Punct material supus la legături, Forţă de legătură, Reacţiune, Axioma legăturilor, Forţă de frecare
NB.01.1. Statica punctului material liber
Se cunoaşte că un punct material este un punct geometric dotat cu masă. Un punct material este liber atunci când poate ocupa orice poziţie în spaţiu, iar el se găseşte numai sub acţiunea unor forţe date, poziţia lui depinzând de aceste forţe.
Un punct material liber supus acţiunii unor forţe având rezultanta R este în echilibru față de un reper inerţial, dacă viteza sa în raport cu acel reper este zero în orice moment, adică în cazul în care coordonatele sale rămân constante.
Din definiţia anterioară rezultă 0=v , de unde 0==dtvda . Folosind acest rezultat în legea a doua a
lui Newton Fam = , rezultă că 0=F , ceea ce reprezintă condiția necesară de echilibru.
Pe de altă parte, plecând de la condiţia 0=F , rezultă 0=a adică, prin integrare, 0vv = unde 0v este o viteză constantă care, dacă este nulă, punctul este în repaus iar dacă nu, punctul este în mişcare rectilinie şi uniformă.
Condiţia necesară şi suficientă ca un punct material liber aflat iniţial în repaus să rămână în repaus
sub acţiunea unui sistem de forţe date este ca rezultanta ∑=
==
ni
iiF
1R a acestui sistem să fie nulă
0=R . (1.1)
Prin proiectarea ecuaţiei vectoriale (1.1) pe axele unui reper, se obţin trei ecuaţii scalare de echilibru:
01
== ∑=
=
ni
iix x
FR , 01
== ∑=
=
ni
iiy y
FR și 01
== ∑=
=
ni
iiz z
FR (1.2)
În cazul unui sistem de forţe coplanare situate, de exemplu, în planul xOy , se pot scrie numai două ecuaţii scalare de echilibru:
01
== ∑=
=
ni
iix x
FR și 01
== ∑=
=
ni
iiy y
FR . (1.3)
O problemă de echilibru se spune că este static determinată dacă numărul de ecuaţii coincide cu numărul de necunoscute. În cazul când numărul necunoscutelor depăşeşte numărul ecuaţiilor, atunci problema se spune că este static nedeterminată. Dacă sistemul de ecuaţii scalare este nedeterminat

MECANICĂ*N* NB.01.Statica punctului material
- 6 -
sau imposibil, atunci punctul material poate rămâne în repaus într-o infinitate de poziţii sau, respectiv, nu are o poziţie de repaus.
Necunoscutele sistemului de ecuaţii de echilibru pot fi elemente care determină poziția de echilibru (coordonate, distanțe, unghiuri) sau, dacă se cunoaște poziția de echilibru, forțele ce acționează asupra punctului pentru a-l menține în poziția de echilibru dată.
NB.01.2. Statica punctului material supus la legături
Un punct material este supus la legături dacă poziţia sa nu este determinată exclusiv de forţele date care acţionează asupra sa, ci şi de anumite obligaţii geometrice ca, de exemplu, de a rămâne pe o curbă sau pe o suprafaţă, indiferent de mărimea forţelor ce acţionează asupra punctului.
Pentru a putea scrie ecuaţii de echilibru atunci când punctul este supus la legături, este necesară o nouă axiomă. Acest lucru este evidenţiat de următorul exemplu simplu. Presupunem că un punct material de masă m este în repaus pe un plan orizontal (fig. 1.1.a), prin urmare asupra lui acţionează o singură forţă dată, şi anume greutatea sa, care este nenulă. Acest fapt este în contradicţie cu condiţiile de repaus ale unui punct material liber, unde se preciza că rezultanta forţelor care acţionează asupra punctului trebuie să fie egală cu zero. Prin urmare, principiile mecanicii, aşa cum au fost enunţate de Newton, se aplică doar punctului material liber, ceea ce conduce la concluzia că, pentru punctul material supus la legături, este necesară o nouă axiomă care să permită reducerea problemei la o problemă echivalentă cu cea a unui punct material liber. Dacă în exemplul dat ne imaginăm că îndepărtăm planul, atunci, pentru a menţine punctul în repaus, trebuie să acţionăm asupra lui cu o forţă notată N , egală şi de sens opus cu G (fig.1.1.b). Desenul din figura 1.1b, în care legăturile fizice sunt înlocuite cu forțe, se numește diagramă de corp liber. Din punct de vedere mecanic cele două situaţii sunt echivalente, iar forţa introdusă N se numește forţă de legătură sau reacţiune. Presupunând că procedeul se poate generaliza pentru toate tipurile de legături la care poate fi supus punctul material, se poate enunța axioma legăturilor:
Orice legătură geometrică se poate înlocui cu o forță denumită forță de legătură sau reacțiune, necunoscută, notată în general cu R , iar punctul material, eliberat de legătură și acționat de rezultanta tuturor forțelor efectiv aplicate F numite și forțe date și de forța de reacțiune R , este echivalent din punct de vedere mecanic cu punctul material supus la legături.
gmG = G
N
a. b. Fig. 1.1. a. Punctul material supus la legătură;
b. Punctul material eliberat de legătură

MECANICĂ*N* NB.01.Statica punctului material
- 7 -
Condiţia necesară şi suficientă pentru ca un punct material, aflat iniţial în repaus şi acţionat de o forţă rezultantă RF +=R , să rămână în repaus sub acţiunea acesteia, este ca rezultanta să fie nulă:
0=+ RF . (1.4)
Dacă punctul material este supus la mai multe legături, atunci F este rezultanta tuturor forţelor date iar R este rezultanta tuturor forțelor de legătură.
Atunci când se neglijează frecările, legăturile se numesc ideale, iar atunci când se ţine cont de frecări, legăturile se numesc reale.
Practic, un punct material poate fi supus la două tipuri de legături, ce sunt prezentate în continuare.
Legătura prin fir (fig. 1.2.a) sau tijă (fig. 1.2.b). Firul este considerat ideal, adică inextensibil, perfect flexibil (nu opune nicio rezistență la încovoiere) și de greutate neglijabilă. El se înlocuieşte cu reacţiunea T , orientată în lungul firului, spre punctul de ancorare şi are modulul necunoscut (fig. 1.2.a). Tija este o bară rigidă de greutate neglijabilă. Ea se înlocuieşte cu o reacţiune S , numită efort sau tensiune în tijă, orientată în lungul ei, având sensul arbitrar ales şi modulul necunoscut (fig. 1.2.b). Sensul tensiunii în tijă nu poate fi precizat dinainte, deoarece tija, fiind rigidă, poate prelua atât forţe de întindere cât şi forţe de compresiune, spre deosebire de fir care, pentru a exista legătura, poate fi numai întins. După rezolvarea sistemului de ecuaţii scalare de echilibru, provenit din (3.4) prin proiectarea pe axele unui reper, atunci când tensiunea din tijă rezultă cu semnul plus, atunci sensul presupus este corect iar, în caz contrar, sensul real este opus celui presupus iniţial, în mod arbitrar.
Această legătură este considerată ideală.
Legătura numită reazem, care înseamnă că punctul este în echilibru, sprijinindu-se pe o curbă (fig. 1.3.a), sau pe o suprafață (fig. 1.3.b). Reazemul se înlocuiește cu o reacțiune R , care se descompune în două componente. În cazul rezemării pe o curbă, reacțiunea R are o componentă T , orientată după tangenta la curbă și o componentă N , numită recțiune normală sau, pe scurt, normală, situată în planul normal la curbă (fig. 1.3.a). Dacă ecuațiile curbei sunt:
T S
a. b.
Fig. 1.2. a. Legătura prin fir; b. Legătura prin tijă

MECANICĂ*N* NB.01.Statica punctului material
- 8 -
( ) 0,, =zyxf și ( ) 0,, =zyxg , (1.5)
adică curba este dată ca intersecție a două suprafețe, reacțiunea N este în planul determinat de normalele la cele două suprafețe, care este și normal la curbă, având ecuația:
)grad()grad( gfN µλ += , (1.6)
unde kdzdfj
dydfi
dxdffgrad ++= , k
dzdgj
dydgi
dxdgggrad ++= iar λ și µ sunt doi scalari reali.
Această componentă are modulul necunoscut.
Componenta tangenţială T se numeşte forţă de frecare, este notată adesea fF , are sensul opus tendinţei de alunecare a punctului şi modulul:
NFT f µ≤= , (1.7)
relaţie determinată experimental, în care µ se numeşte coeficient de frecare de alunecare. Dacă
NT µ= echilibrul se numeşte la limită, caz în care componenta fFT = poate fi calculată în
raport cu N . Dacă NT µ< , atunci echilibrul nu este la limită și forţa de frecare este complet
necunoscută.
În cazul rezemării pe o suprafaţă, reacţiunea R are o componentă N , orientată după normala la suprafață și de modul necunoscut și o componentă T , aflată în planul tangent la suprafață (fig. 1.3.b). Dacă suprafața are ecuația:
( ) 0,, =zyxf , (1.8)
atunci
)grad( fN λ= (1.9)
unde kdzdfj
dydfi
dxdffgrad ++= , iar λ este un scalar real.
T
T
R
R N N
M M
a. b.
Fig. 1.3. a. Rezemarea pe o curbă; b. Rezemarea pe o suprafață
α α

MECANICĂ*N* NB.01.Statica punctului material
- 9 -
Ca și în cazul rezemării pe o curbă, componenta tangențială T se numește forță de frecare, este notată fF și are sensul opus tendinței de alunecare, modulul fiind:
NFT f µ≤= . (1.10)
Dacă echilibrul este la limită forța de frecare are valoarea maximă NTF f µ== max , iar dacă
NF f µ< , echilibrul nu este la limită și forța de frecare este complet necunoscută.
Legătura numită reazem poate fi reală (cu frecare) sau ideală (când se neglijează frecările). Reazemul ideal se înlocuieşte numai cu reacţiunea normală, forţa de frecare fiind considerată nulă.
Numărul de ecuaţii scalare rezultate prin proiectarea pe axele de coordonate a relaţiei vectoriale (1.4) este doi în cazul unei probleme plane, şi trei în cazul unei probleme spaţiale. În cazul reazemului ideal de tip curbă plană, necunoscutele sunt modulul reacţiunii normale şi lungimea
arcului de curbă MMS 0= , care determină poziţia punctului. Dacă reazemul este ideal de tip curbă spaţială, necunoscutele sunt modulele celor două componente ale reacţiunii normale situate în planul normal la curbă şi arcul s de curbă care determină poziţia punctului. Dacă reazemul este ideal de tip suprafaţă, necunoscutele sunt modulul reacţiunii normale şi doi parametri ce determină poziţia punctului pe suprafaţă.
În cazul legăturilor reale, dacă echilibrul este la limită, problema are aceleaşi necunoscute ca și în cazul legăturilor ideale.
Dacă echilibrul nu este la limită, apare o necunoscută în plus, şi anume modulul forţei de frecare
fF . Inegalitatea (1.10) arată că problema de statică este nedeterminată și deci există anumite
regiuni de pe o curbă sau de pe o suprafață în care este posibil echilibrul.
Observații:
1. Când ecuația unei suprafețe este (1.8), atunci:
kzfj
yfi
xff
∂∂
+∂∂
+∂∂
=grad , (1.11)
iar relația (1.4) furnizează următoarele ecuații scalare:
0=∂∂
+xfFx λ , 0=
∂∂
+yfFy λ , 0=
∂∂
+zfFz λ , (1.12)
necunoscutele fiind scalarul λ și cele trei coordonate zyx ,, ale punctului. Cele patru ecuații scalare (1.8) și (1.12) sunt, în general, suficiente pentru a le determina.
În cazul unei curbe de ecuaţii (1.5), reacţiunea normală este dată de (1.6), care, înlocuită în (1.4), furnizează următoarele ecuaţii scalare:
0=∂∂
+∂∂
+xg
xfFx µλ , 0=
∂∂
+∂∂
+yg
yfFy µλ , 0=
∂∂
+∂∂
+zg
zfFz µλ , (1.13)

MECANICĂ*N* NB.01.Statica punctului material
- 10 -
necunoscutele fiind scalarii λ și µ şi cele trei coordonate zyx ,, ale punctului. Cele cinci necunoscute se pot determina rezolvând sistemul de cinci ecuaţii scalare (1.5) şi (1.13).
În ambele situaţii de mai sus sistemele de ecuaţii scalare pot fi, uneori, nedeterminate sau imposibile, ceea ce arată că punctul are o infinitate de poziţii de echilibru sau, respectiv, că nu este posibilă o asemenea poziţie.
2. Sensul reacțiunii normale N se poate determina practic, în unele situaţii, ca fiind identic cu sensul în care se desface legătura: la legătura prin fir sensul comprimării firului sau către punctul de ancorare, iar la reazem, sensul în care punctul poate să se desprindă de acesta. Dacă legătura nu poate fi părăsită pe direcție normală (de exemplu punctul se află într-un tub sau între două suprafețe paralele) atunci sensul reacțiunii normale este necunoscut.
3. Pentru a găsi, dacă se cer, condiţiile în care punctul se desface de legătură, se impune în sistemul de ecuaţii de echilibru condiţia de anulare a expresiei de calcul a reacţiunii normale.
4. S-a constatat experimental că factorii cei mai importanţi, care determină mărimea coeficientului de frecare de alunecare µ , sunt rugozitatea suprafeţelor în contact şi natura materialului din care sunt confecţionate.
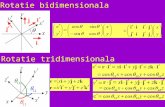
5. În cadrul studiului echilibrului punctului material se poate evidenția și un sugestiv aspect geometric. Astfel se consideră un punct material aflat în echilibru pe o suprafață aspră, coeficientul de frecare de alunecare fiind µ. Se notează cu α unghiul dintre forța de reacțiune R și reacțiunea normală N (fig.1.3b). Rezultanta forțelor date F și forța de reacțiune R sunt coliniare și de sensuri opuse, deoarece din ecuația de echilibru rezultă că FR −= . Din figura 1.3b rezultă că tangenta unghiului ascuțit α este
N
Ttg =α . (1.14)
În cazul echilibrului la limită, forța de frecare are valoarea maximă NT µ=max , iar unghiul α
capătă valoarea maximă αmax=ϕ cu
µµ
ϕ ===N
N
N
Ttg
max. (1.15)
Unghiul ϕ definit de relația (1.15) se numește unghi de frecare. Deoarece maxTT ≤ , din (1.14) și
(1.15) rezultă inegalitatea
ϕα tgtg ≤ , (1.16)
care conduce la
ϕα ≤ . (1.17)
Relația (1.17) conduce la o formulare geometrică a condiției de echilibru care afirmă că un punct material este în echilibru pe o suprafață aspră dacă suportul forței de reacțiune R , deci și al

MECANICĂ*N* NB.01.Statica punctului material
- 11 -
rezultantei forțelor date F , face cu direcția normalei la suprafață un unghi mai mic sau cel mult egal cu unghiul de frecare.
Condiția de echilibru de mai sus poate căpăta o exprimare mai generală. Pentru aceasta, se
consideră o pânză conică circulară care are ca axă direcția normalei la plan iar unghiul generatoarelor cu normala este ϕ (fig. 1.4). Acest con este denumit con de frecare. Condiția geometrică de echilibru a punctului pe o suprafață aspră este ca suportul rezultantei forțelor date F să fie în interiorul conului de frecare. Acest lucru este necesar deoarece numai așa suportul lui F face cu direcția normalei la suprafață un unghi α mai mic decât ϕ, fiind astfel îndeplinită condiția de echilibru (1.17).
În cazul echilibrului pe o curbă spațială se consideră o pânză conică circulară care are ca axă direcția tangentei la curbă iar generatoarele fac cu direcția acesteia un unghi complementar unghiului de frecare adică un unghi β = 90°-ϕ (fig. 1.5). Acest con se numește tot con de frecare. Condiția geometrică de echilibru a punctului pe o curbă spațială aspră este ca suportul rezultantei forțelor date F să fie în exteriorul conului de frecare. Acest lucru este necesar deoarece numai așa suportul lui F face cu direcția normalei la suprafață un unghi α mai mic decât ϕ, fiind astfel îndeplinită condiția de echilibru (1.17).
NB.01.3. Echilibrul punctului pe un plan înclinat aspru
1. Să se determine forța F pentru care un punct material de greutate G poate rămâne în repaus pe un plan aspru, înclinat cu un unghi α față de orizontală, cunoscând că valoarea coeficientului de frecare la alunecare este µ (fig. 1.6.a).
F
F
N
N
M M
Fig. 1.4. Conul de frecare în cazul rezemării
pe o suprafață aspră
α
ϕ
α
β ϕ
Fig.1.5 Conul de frecare în cazul
rezemării pe o curbă spațială aspră

MECANICĂ*N* NB.01.Statica punctului material
- 12 -
Există două situații distincte.
a) Punctul are tendința de a aluneca spre baza planului înclinat (fig.1.6.b). Ecuațiile de
echilibru față de un reper xOy considerat ca în figură, sunt:
0sincos: =−+ αβ GTFOx ,
0cossin: =−− αβ GFNOy .
Deoarece echilibrul nu este la limită, forța de frecare T este necunoscută și satisface inegalitatea:
NT µ≤ .
Explicitând necunoscutele N și T din ecuațiile de proiecție de forțe, se obține:
αβ cossin GFN += ,
βα cossin FGT −= .
Înlocuind aceste valori în inegalitate, avem:
( ) ( )βµβαµα sincoscossin +≤− FG ,
de unde se obține condiția ca punctul să nu alunece spre baza planului înclinat:
( )βµβ
αµα
sincos
cossin
+
−≥
GF dacă 0cossin >− αµα .
În cazul în care 0cossin ≤− αµα , adică µα ≤tg atunci punctul material nu alunecă spre baza
planului oricare ar fi mărimea lui F , fenomen denumit autofixare.
b) Punctul are tendința de a urca pe plan.
α α
β β x
y
N T
a. b. Fig. 1.6. a. Punctul material pe planul înclinat; b. Punctul material având
tendința de alunecare spre baza planului
G
F
G
F

MECANICĂ*N* NB.01.Statica punctului material
- 13 -
Situația aceasta se tratează analog cu cea de la punctul a) cu deosebirea că forța T are sensul invers față de cel desenat în figura 1.6.b. Ecuațiile de echilibru sunt acum:
0sincos =−− αβ GTF ,
0cossin =−− αβ GFN .
După explicitarea necunoscutelor N și T și înlocuirea expresiilor lor în inegalitatea NT µ≤ , se
obține:
( )βµβ
αµα
sincos
cossin
−
+≤
GF dacă 0sincos >− βµβ .
În cazul în care 0sincos ≤− βµβ , adică µ
β 1≥tg , punctul material nu alunecă în sus pe planul
înclinat oricare ar fi valoarea lui F , fenomen denumit autoblocare.
Dacă 0cossin >− αµα și 0sincos >− βµβ , condiția pe care trebuie să o îndeplinească F pentru ca punctul să rămână în echilibru pe plan este:
( ) ( )βµβ
αµα
βµβ
αµα
sincos
cossin
sincos
cossin
−
+≤≤
+
− GF
G.
Observație:
În general, la rezolvarea problemelor, se renunță la scrierea modulelor forțelor cu notația obișnuită folosită pentru modul și, pentru ușurința scrierii, se scrie doar litera ce notează forța. De exemplu, în
loc de G se scrie simplu G, fără a uita că, prin aceasta, se înțelege modulul forței.

MECANICĂ*N* NB.02.Reducerea sistemelor de forțe
- 14 -
Capitolul NB.02. Reducerea sistemelor de forțe
Cuvinte-cheie Torsorul unui sistem de vectori, Vectorul rezultant al sistemului, Vectorul moment rezultant al sistemului,
Trinom invariant, Teorema lui Varignon, Rezultantă, Axa centrală, Torsorul minimal, Operaţii elementare de echivalenţă, Teorema de echivalenţă, Cuplu de vectori, Cazurile de reducere, Sisteme particulare de vectori,
Centrul sistemului de vectori paraleli, Centrul de greutate, Sistem de forțe coplanare distribuite, Metoda versorului
NB.02.1. Torsorul unui sistem de vectori
Fie ( ) nFFFS ,...,, 21= un sistem de vectori legaţi aplicaţi în punctele Ai sau un sistem de vectori alunecători (așa cum au fost definiți în capitolul NA.01.) cu suporturile trecând prin punctele Ai și O un pol. Notăm vectorii iOA cu ir .
Pentru sistemul (S) se definesc vectorii:
Vectorul rezultant al sistemului, notat R , definit ca suma vectorilor din sistem consideraţi liberi:
∑=
==+++=
ni
iin FFFF
121 ...R . (2.1)
Acest vector este un vector liber.
Vectorul moment rezultant al sistemului în polul O, notat OM , definit ca suma momentelor
vectorilor iF calculate în raport cu polul O:
( ) ( ) ( ) ( )∑=
==+++=
ni
iiOnOOOO FMFMFMFM
121 ...M , (2.2)
în care
( ) iiiO FrFM ×= . (2.3)
Vectorul moment rezultant este, în general, un vector legat aplicat în polul O, dar există și situații când este un vector liber.
Dacă se cunosc expresiile analitice ale vectorilor iF şi ale momentelor lor ( )iO FM calculate în
raport cu un reper ( )kjiOR ,,, , proiecţiile vectorului rezultant R și ale momentului rezultant OM sunt date de expresiile:
∑∑∑
∑∑∑=
=
=
=
=
=
=
=
=
=
=
=
===
===
ni
ii
ni
ii
ni
ii
ni
ii
ni
ii
ni
ii
zyx
zyx
MMM
FFF
111
111
;;
,;;
OzOyOx
zyx
MMM
RRR
. (2.4)

MECANICĂ*N* NB.02.Reducerea sistemelor de forțe
- 15 -
Definiţie: Se numeşte torsor al sistemului (S) în polul O, notat TO(S), perechea OMR , formată din vectorul rezultant şi vectorul moment rezultant în polul O.
Proprietăţile torsorului
1. Fie λ un scalar şi ( )Sλ sistemul format din vectorii alunecători sau legaţi ( )nFFF λλλ ,...,, 21 . Torsorul în polul O al sistemului ( )Sλ este:
( ) ( )STST OO λλ = , (2.5)
deoarece:
( ) OO ST MR λλλ ,= . (2.6)
Un caz particular important este pentru 1−=λ când avem:
( ) ( )STST OO −=− . (2.7)
Fie sistemul ( ) ( ) ( ) ( )
=
112
111 ,...,, nFFFS având torsorul în polul O ( ) ( ) ( )
=
10
11 ,MRSTO şi sistemul
( ) ( ) ( ) ( )
=
222
212 ,...,, mFFFS având torsorul în polul O ( ) ( ) ( )
=
20
22 ,MRSTO , două sisteme de
vectori alunecători sau legaţi. Se defineşte sistemul ( ) ( ) ( ) ( ) ( ) ( ) ( )
=
222
21
112
11 ,...,,,,...,, mn FFFFFFS ca
suma celor două sisteme. Torsorul sistemului (S) în polul O este egal cu suma torsorilor celor două sisteme calculate în același pol.
( ) ( ) ( ) ( )2121 STSTSSTST OOOO +=+= , (2.8)
deoarece:
( ) ( ) ( ) ( ) ( )
++=+
20
10
2121 , MMRRSSTO . (2.9)
Proprietățile anterioare se pot generaliza în sensul că, în condițiile în care 1λ și 2λ sunt scalari și (S1) și (S2) sunt două sisteme de vectori alunecători sau legați, atunci:
( ) ( ) ( )22112211 STSTSST OOO λλλλ +=+ . (2.10)
Vectorul moment rezultant al unui sistem de vectori alunecători sau legaţi (S) se schimbă la schimbarea polului din O în O', după legea:
RMM ×+= '' OOOO . (2.11)
Relaţia (1.9), din capitolul NA.01., se scrie pentru un vector iF al sistemului ( )S , sub forma:
( ) ( ) iiOiO FOOFMFM ×+= '' , ni ,...,2,1= . (2.12)
Vectorul moment rezultant în polul O este:

MECANICĂ*N* NB.02.Reducerea sistemelor de forțe
- 16 -
( ) ( )[ ]
( ) RM
M
×+=×+=
=×+==
∑ ∑
∑ ∑=
=
=
=
=
=
=
=
''
'
'1 1
'
1 1'
OOFOOFM
FOOFMFM
Oni
i
ni
iiiO
ni
i
ni
iiiOiOO
(2.13)
În general 'OO MM ≠ fapt care arată că momentul rezultant al unui sistem de vectori este în general un vector legat deoarece se modifică la schimbarea polului după legea dată de relația (2.11). Momentul rezultant nu se schimbă la schimbarea polului în următoarele două situaţii:
a) când vectorul 'OO este paralel cu vectorul rezultant; b) când vectorul rezultant 0=R . În această situaţie, 'OO MM = oricare ar fi polul O',
ceea ce însemnă că, la sistemele care au vectorul rezultant nul, vectorul moment rezultant este invariant la schimbarea polului, deci este un vector liber.
Dacă într-un pol O torsorul unui sistem (S) este nul, atunci el este nul în orice pol.
( ) ( ) 0,00,0 ' =⇒= STST OO oricare ar fi 'O . (2.14)
Această proprietate este o consecinţă imediată a proprietăţii anterioare.
Produsul scalar dintre componentele torsorului este un invariant la schimbarea polului:
'OO MRMR ⋅=⋅ oricare ar fi polul 'O . (2.15)
Această proprietate se demonstrează pe baza relaţiei (2.11):
( ) ( ) ''' '' OOOO OOOO MRRRMRRMRMR ⋅=×+⋅=×+=⋅ (2.16)
deoarece produsul mixt ( ) 0' =×RR OO .
Expresia analitică a acestui produs scalar, atunci când vectorii sunt exprimaţi în raport cu un reper ( )kjiOR ,,, , este:
zzyyxxO MRMRMRMR ++=⋅ . (2.17)
El se mai numeşte trinom invariant sau scalarul torsorului şi joacă un rol important în problemele de reducere a sistemelor de vectori alunecători.
Proiecția vectorului moment rezultant, notat RM , pe direcția vectorului rezultant 0≠R este aceeași în orice punct din spațiu, deci este invariantă la schimbarea polului (fig. 2.1).
Fie u versorul vectorului rezultant R , adică:
R
R=u . (2.18)

MECANICĂ*N* NB.02.Reducerea sistemelor de forțe
- 17 -
Mărimea algebrică a proiecţiei vectorului moment rezultant pe direcţia lui R se calculează
înmulţind scalar vectorul moment rezultant cu versorul lui R :
R
RMMM
⋅=⋅= O
OR u , (2.19)
iar vectorul proiecţie se obţine înmulţind mărimea algebrică a proiecţiei cu versorul direcţiei pe care se face proiecţia, adică tot u :
RR
RM
R
R
R
RM
R
RMM ⋅
⋅=⋅
⋅=⋅
⋅= 2
OOOR u . (2.20)
Deoarece produsul RM ⋅O şi vectorul rezultant R sunt invarianţi la schimbarea polului, rezultă că
vectorul RM este şi el invariant la schimbarea polului.
Torsorul unui sistem format din doi vectori alunecători sau legați care au aceeaşi mărime, aceeaşi dreaptă suport şi sensuri opuse este nul în orice pol (fig. 2.2). Acest sistem se mai numeşte sistem de vectori direct opuşi.
O A2
A1
2F
1F
Fig. 2.2. Sistem de vectori direct opuși
'OM
OM
'O
O
RM
RM
u
R
1OM
RM O1
Fig. 2.1. Proiecția vectorului moment rezultant pe direcția
vectorului rezultant

MECANICĂ*N* NB.02.Reducerea sistemelor de forțe
- 18 -
Fie sistemul ( ) 21, FFS = care îndeplineşte condiţiile din enunţ. Se consideră un pol O pe dreapta suport (fig. 2.2). Componentele torsorului sunt:
( ) ( ) 0
,0
21
21
=+=
=+=
FF
FF
OOO MMM
R (2.21)
Vectorul moment rezultant este nul deoarece suportul vectorilor trece prin pol. Rezultă că torsorul este nul în polul O şi, prin urmare, conform proprietăţii numărul cinci, este nul în orice pol.
Observaţie: În cazul în care asupra unui punct material acţionează un sistem de vectori direct opuși, el nu are nici un efect asupra mișcării sau echilibrului acelui punct. Dacă fiecare dintre cele două forțe ale unui astfel de sistem acționează asupra câte unui punct material, atunci ele imprimă mișcări celor două puncte materiale, deși torsorul sistemului este nul.
În cazul în care două forţe care formează un sistem de vectori direct opuși acționează asupra unui solid rigid, s-a constatat că aceste forţe nu au nici un efect mecanic asupra corpului, adică dacă solidul rigid era în repaus sau în mişcare, adăugarea sau suprimarea unui astfel de sistem de forţe nu modifică starea de repaus sau modul de mişcare ale corpului. Pe baza acestei ipoteze se poate arăta că forţele care acţionează asupra unui solid rigid sunt vectori alunecători, ipoteza de rigiditate fiind esenţială. Pentru a demonstra acest lucru, considerăm un solid rigid asupra căruia acţionează o forţă F aplicată într-un punct A (fig. 2.3,a). Se aplică într-un punct oarecare B de pe suportul lui F un sistem FF −, , operaţie care, conform ipotezei, nu are nici un efect asupra rigidului (fig. 2.3,b). Se
suprimă apoi sistemul format din vectorul F din A şi vectorul F− din B, operaţie care nici ea, conform ipotezei, nu are vreun efect asupra rigidului (fig. 2.3,c). Rezultă că forţa F aplicată în punctul B are acelaşi efect ca şi forţa F aplicată în punctul A. Rezultă faptul că forţele care
A
F
A
B
F−
F
F B
F
Fig. 2.3. Forța ca vector alunecător
a b c

MECANICĂ*N* NB.02.Reducerea sistemelor de forțe
- 19 -
acţionează asupra unui solid rigid pot fi reprezentate prin vectori alunecători. Această remarcă se aplică şi în cazul sistemelor solidificate de solide rigide.
NB.02.2. Teorema lui Varignon
Un caz particular important este acela al unui sistem de vectori concurenţi format fie din vectori legaţi aplicaţi în acelaşi punct A, fie din vectori alunecători cu suporturile concurente într-un punct A (fig. 2.4). Pentru un astfel de sistem, torsorul într-un pol O este:
( )
=
=
∑
∑=
=
=
=
.
,
1
1ni
iiOO
ni
ii
FM
F
M
R
(2.22)
În condiţiile acestui caz particular, vectorul moment rezultant capătă forma:
( ) ( )RRM Oni
ii
ni
ii
ni
iiOO MrFrFrFM =×=×=×== ∑∑∑
=
=
=
=
=
= 111 (2.23)
rezultat care poartă denumirea de teorema lui Varignon şi care se enunţă astfel: vectorul moment
rezultant, calculat în raport cu un pol O, al unui sistem de vectori legaţi, concurenţi într-un punct
A, sau al unui sistem de vectori alunecători cu suporturile concurente într-un punct A, este egal cu
momentul faţă de polul O al vectorului rezultant, aplicat în acelaşi punct A, sau respectiv cu
suportul trecând prin punctul A:
( ) RRM ×== OAM OO (2.24)
Observaţii:
a) Pentru un astfel de sistem de vectori, rezultă că scalarul torsorului este nul:
0=⋅RM O , (2.25)
1F 2F R
nF A
r
O O
A
1F 2F
nF
R r
Fig. 2.4. a) Sistem de vectori aplicați într-un punct; b) Sistem de vectori cu
suporturile concurente într-un punct
a b

MECANICĂ*N* NB.02.Reducerea sistemelor de forțe
- 20 -
chiar dacă 0≠OM și 0≠R , deoarece OM este perpendicular pe R .
Dacă un astfel de sistem acționează asupra unui punct material A, atunci vectorii sistemului se pot
compune după regula paralelogramului, obținându-se un vector rezultant ∑=
==
ni
iiF
1R , aplicat în
punctul A și numit rezultantă deoarece are același efect asupra punctului ca și sistemul inițial. Teorema lui Varignon se poate enunța acum astfel: vectorul moment rezultant față de un pol O al unui sistem de vectori concurenți într-un punct A este egal cu momentul rezultantei calculat în raport cu același pol O și aplicată în punctul A.
NB.02.3. Axa centrală a unui sistem de vectori alunecători
Fie ( ) nFFFS ,...,, 21= un sistem de vectori alunecători, având într-un pol O torsorul
OOT MR ,= cu 0≠R . Aşa cum s-a arătat în cadrul proprietăţii numărul şapte a torsorului,
vectorul moment rezultant R şi produsul scalar RM ⋅O sunt invarianţi la schimbarea polului. Primul este un invariant vectorial:
R=1I , (2.26)
iar al doilea este un invariant scalar:
RM ⋅= OI2 . (2.27)
Dacă se descompune vectorul moment rezultant după o direcţie coliniară cu R , componentă care se
notează cu RM , şi după o direcţie normală pe direcţia lui R , componentă care se notează cu OnM (fig. 2.5 ), rezultă:
OnRO MMM += cu ROnRO MMMM ≥+= 22 . (2.28)
OM
OnM RM
R R
RM O
0P
Fig. 2.5. Axa centrală a unui sistem de vectori alunecători
r
0Pr P

MECANICĂ*N* NB.02.Reducerea sistemelor de forțe
- 21 -
Deoarece componenta RM este invariantă la schimbarea polului iar vectorul moment rezultant se
modifică la schimbarea polului, conform (2.11), rezultă că numai componenta normală OnM se modifică la schimbarea polului. Se poate pune deci problema de a găsi puncte P din spaţiu în care, dacă sunt luate ca pol, componentele torsorului să fie coliniare, adică componenta normală să se anuleze ( 0=PnM ), iar vectorul moment rezultant să fie egal numai cu componenta paralelă cu
direcţia lui R , RP MM = (fig. 2.5).
În aceste puncte, dacă există, vectorul moment rezultant PM are valoarea minimă, motiv pentru care torsorul sistemului în polul P, TP(S), se mai numeşte şi torsorul minimal. Deci:
( ) ( ) minmin ,MR== STST P , (2.29)
unde:
121
22min I
I
IOR ⋅=
⋅== R
R
RMMM , (2.30)
având mărimea algebrică:
1
2IIO =
⋅
R
RM . (2.31)
Conform proprietăţii numărul patru, dacă există un punct P în care să aibă loc cele arătate mai sus, atunci există o infinitate de astfel de puncte situate pe o dreaptă paralelă cu R şi care trece prin P.
Pentru astfel de puncte P, se poate scrie relaţia:
RMM ×−= OPOP . (2.32)
Se amplifică egalitatea înmulţind vectorial la stânga cu R :
( )RMRMR ×−×=× OPOP . (2.33)
Deoarece R şi PM sunt coliniare, produsul vectorial este zero şi rezultă:
( ) 0=××−× RRMR OPO , (2.34)
de unde:
( )RRRMR OPOPO ⋅−=× 2 . (2.35)
Se poate acum exprima vectorul de poziție al punctului P:
RR
R
R
MR22OPOP O ⋅
+×
= . (2.36)
Notând:

MECANICĂ*N* NB.02.Reducerea sistemelor de forțe
- 22 -
rOP = , λ=⋅2R
R OP și 02 P
O r=×
R
MR , (2.37)
în care λ este un parametru real, relația (2.36) devine:
RR
MRR λλ +
×=+= 20
OPrr . (2.38)
care reprezintă ecuaţia vectorială a unei drepte ce trece prin punctul P0 determinat de vectorul de poziţie
0Pr şi care este paralelă cu R . Această dreaptă se numeşte axa centrală a sistemului (S) de
vectori alunecători. Ea poate fi definită ca locul geometric al punctelor P din spaţiu în care, dacă sunt luate ca poli, vectorul rezultant şi vectorul moment rezultant sunt coliniari iar torsorul este minimal.
Coordonatele punctului P0 prin care trece axa centrală sunt obţinute din expresia analitică a relaţiei (2.38):
zyx
zyxPPP
kjikzjyix
MMM
RRRR 2
1000
=++ . (2.39)
Ecuația parametrică a axei centrale în raport cu un reper cartezian ( )kjiOR ,,, este:
xPxx Rλ+=0
; yPyy Rλ+=0
; zPzz Rλ+=0
. (2.40)
Ecuațiile canonice ale axei centrale se deduc din relațiile anterioare și au forma:
z
P
y
P
x
P zzyyxxRRR
000−
=−
=−
. (2.41)
Observaţii:
a) În cazul în care un sistem de vectori alunecători are vectorul rezultant nul, 0=R , noţiunea de axă centrală nu are sens.
În cazul sistemelor de vectori alunecători la care 0≠R dar 0=⋅ OMR , rezultă că
0min == RMM , ceea ce face ca noţiunea de paralelism între vectorii R şi 0min =M să nu aibă sens. Axa centrală este atunci definită ca locul geometric al punctelor P din spaţiu în care, atunci când sunt luate ca poli, vectorul moment rezultant este nul, adică 0,min R=T .
O altă formă a ecuaţiilor axei centrale se poate obţine din relaţia de coliniaritate dintre momentul rezultant PM şi vectorul rezultant R scrisă sub forma:
RM λ=P , (2.42)
în care λ este un parametru real. Notând cu ,,, zyx coordonatele punctului P şi înlocuind (2.42)
în (2.32) se obţine:

MECANICĂ*N* NB.02.Reducerea sistemelor de forțe
- 23 -
( ) ( ) ( )
z
xyOz
y
zxOy
x
yzOx yxxzzyR
RRM
R
RRM
R
RRM −−=
−−=
−−, (2.43)
care este o altă formă a ecuației axei centrale.
Vectorul de poziție 0Pr al punctului P0 dat de (2.37) este perpendicular pe axa centrală, iar modulul
său este chiar distanța de la polul O la axa centrală.
Din relaţia de definiţie (2.37) a lui 0Pr , rezultă că acest vector este perpendicular pe vectorul R
care, la rândul său, este paralel cu axa centrală. Rezultă că 0Pr este perpendicular pe axa centrală,
iar modulul său este lungimea perpendicularei construită din polul O pe această axă (fig. 2.5).
Poziția axei centrale a unui sistem de vectori alunecători este independentă de pol.
Presupunem că la schimbarea polului din O în O', axa centrală îşi modifică poziţia (fig. 2.6). În cazul schimbării polului, vectorul
0Pr este dat de
( ) ( )
( )R
R
RR
R
R
R
MR
R
RR
R
MR
R
RMR
R
MR
µ++=⋅
−+×
=
=××
+×
=×+×
=×
=
'''
''
*0
0
22
2
2'
22'
2'
2
OOrOOOO
OOOOr
PO
OOOP
, (2.44)
în care 2'
*0 R
MR OPr
×= este vectorul de poziție al unui punct de pe axa centrală corespunzătoare
polului 'O , fiind perpendicular pe aceasta, iar µ este un parametru real. Din figura (2.6) se deduce relația vectorială:
0*0*
00' PPrOOr PP ++= . (2.45)
*0P
P0
0Pr
*0Pr
'O
O
Fig. 2.6. Axa centrală nu depinde de pol
R

MECANICĂ*N* NB.02.Reducerea sistemelor de forțe
- 24 -
Comparând relaţiile (2.44) cu (2.45), rezultă egalitatea:
Rµ=0*0 PP . (2.46)
Această relaţie arată că vectorul 0*0 PP trebuie să fie paralel cu vectorul R şi să treacă prin punctul
0P aparţinând axei centrale corespunzătoare polului O, deci singura posibilitate este ca 0*0 PP să fie
coliniar cu această axă centrală. ceea ce arată că cele două axe centrale coincid.
Formulele (1.31), din capitolul NA.01., și (2.38) se aseamănă foarte mult ca aspect, numai că, în cazul suportului unui vector alunecător, momentul care intervine este momentul vectorului, iar în cazul axei centrale vectorul moment rezultant nu este, în general, momentul vectorului rezultant.
NB.02.4. Echivalența sistemelor de vectori alunecători. Operații elementare de echivalență. Teorema de echivalență
Fie ( ) nFFFS ,...,, 21= un sistem de vectori alunecători; de exemplu un sistem de forţe care acţionează asupra unui solid rigid.
Se constată că există anumite operaţii numite operaţii elementare de echivalenţă care, efectuate asupra vectorilor sistemului (S), nu-i modifică torsorul calculat într-un pol O. Aceste operaţii sunt:
a) Alunecarea unui vector pe suportul său. Faptul că această operație nu modifică torsorul rezultă din definiția momentului unui vector alunecător.
b) Înlocuirea a doi vectori concurenți cu rezultanta lor prin punctul de concurență sau înlocuirea unui vector cu componentele sale după două direcții concurente într-un punct de pe suportul acelui vector. Nemodificarea torsorului prin această operaţie rezultă din teorema lui Varignon şi din principiul paralelogramului.
Adăugarea la sistemul (S) sau suprimarea din sistemul (S) de perechi de vectori coliniari, egali în modul și de sensuri contrare (sistem de vectori direct opuși). Faptul că torsorul nu se modifică prin această operație rezultă din aceea că torsorul unui sistem de vectori direct opuși este nul în orice pol.
Definiţie. Două sisteme de vectori alunecători (S1) şi (S2) se numesc echivalente dacă se
obţin unul din altul prin operaţii elementare de echivalenţă. Se notează (S1) ~ (S2).
Observaţii:
a) Prin aplicarea numai a primei operaţii elementare de echivalenţă se obţine acelaşi sistem de vectori.
b) Dacă (S1) este un sistem de forţe care acţionează asupra unui solid rigid iar (S2) este un sistem echivalent cu el, atunci cele două sisteme au acelaşi efect. Acest lucru este justificat de faptul că nici una dintre operaţiile elementare de echivalenţă nu modifică efectul unui sistem de forţe ce acţionează asupra unui solid rigid.
c) Toate sistemele echivalente formează o clasă de echivalenţă.

MECANICĂ*N* NB.02.Reducerea sistemelor de forțe
- 25 -
O relaţie de echivalenţă este caracterizată de următoarele trei proprietăţi:
a) reflexivitate: (S) ~ (S); b) simetrie: dacă (S1) ~ (S2) atunci (S2) ~ (S1); c) tranzitivitate: dacă (S1) ~ (S2) şi (S2) ~ (S3), atunci: (S1) ~ (S3).
În general, sistemele de forţe care acţionează asupra unui solid rigid conţin multe elemente şi efectul lor este greu de apreciat. De aceea, se pune problema înlocuirii unui sistem de forţe ( ) nFFFS ,...,, 21= cu cel mai simplu sistem echivalent, care să aibă acelaşi efect asupra solidului rigid. În vederea rezolvării acestei probleme, se demonstrează teorema care urmează.
Orice sistem ( ) nFFFS ,...,, 211 = de vectori alunecători se poate transforma, numai prin operaţii elementare de echivalenţă, într-un sistem (S2), echivalent cu el, format numai din doi vectori, ( ) 212 ,VVS = .
Teorema afirmă deci că orice sistem de vectori alunecători este echivalent cu un sistem format doar din doi vectori.
Pentru demonstrarea teoremei se consideră pentru fiecare vector alunecător din sistemul
( ) nFFFS ,...,, 211 = câte un punct de aplicație de pe suport și se notează cu Ai (i=1, 2…n)
punctul de aplicație corespunzător vectorului iF (i=1, 2…n). Se consideră de asemenea trei puncte
O1, O2 , O3 necoliniare alese arbitrar în spațiu. Se unesc cele trei puncte cu fiecare punct de
aplicație Ai (i=1, 2…n) și rezultă astfel, în fiecare punct, trei direcții concurente O1Ai, O2Ai și O3Ai.
Fig. 2.7. Obținerea sistemului format din doi vectori
O1
1R 2R
3R (Δ)
(P1) (P2)
O2
O3
O
02R
02R
03R
03R
12R
12R
13R
13R

MECANICĂ*N* NB.02.Reducerea sistemelor de forțe
- 26 -
Fiecare vector iF (i=1, 2…n) se descompune după aceste trei direcții, rezultând componentele
21, ii FF și 3iF , adică 321 iiii FFFF ++= (i=1, 2…n). Fiecare dintre cele trei componente
alunecă pe direcțiile dreptelor suport O1Ai, O2Ai și O3Ai , până ce ajung cu originea în punctele O1,
O2 și respectiv O3. După aplicarea procedurii tuturor vectorilor sistemului (S1), în punctul O1 vor fi
toate componentele 1iF , în punctul O2 vor fi toate componentele 2iF , iar în punctul O3 vor fi toate
componentele 3iF (i=1, 2…n). Prin compunerea fiecăruia dintre aceste trei sisteme de vectori
concurenți se obține în punctul O1 vectorul ∑=
==
ni
iiFR
111 , în punctul O2 vectorul ∑
=
==
ni
iiFR
122 , iar
în punctul O3 vectorul ∑=
==
ni
iiFR
133 . Sistemul inițial (S1) este echivalent cu sistemul
321* ,,)( RRRS = format din cei trei vectori, deoarece sistemul (S*) a fost obținut din sistemul
(S1) prin operații elementare de echivalență.
Se consideră acum două plane și anume, un plan (P1) determinat de dreapta suport a vectorului 2R
și de punctul O1 și un plan (P2) determinat de dreapta suport a vectorului 3R și de punctul O1 (fig. 2.7). Cele două plane se intersectează după o dreaptă (Δ), ce conține punctul O1 și pe care se mai consideră un alt punct arbitrar O. Se descompune vectorul 2R după direcțiile O2O și O2O1 în
componentele 02R și 1
2R , care alunecă apoi în punctele de aplicație O și respectiv O1. Se
descompune apoi și vectorul 3R după direcțiile O3O și O3O1 în componentele 03R și 1
3R care alunecă apoi în punctele de aplicație O și respectiv O1. În punctul O sunt acum vectorii concurenți
02R și 0
3R , care se compun și rezultă vectorul 03
021 RRV += . În punctul O1 sunt vectorii concurenți
12R , 1
3R și 1R , care se compun și rezultă vectorul 113
122 RRRV ++= . S-a obținut astfel sistemul
( ) 212 ,VVS = , format din vectorul 1V aplicat în punctul O și vectorul 2V , aplicat în punctul O1. Sistemul (S2) este echivalent cu sistemul (S*), deoarece a fost obținut din acesta prin operații elementare de echivalență. Prin tranzitivitate rezultă că sistemul (S2) este echivalent cu sistemul inițial (S1).
În vederea demonstrării în continuare a teoremei de echivalență, se va prezenta mai întâi următoare lemă.
Un sistem (S) de vectori alunecători, care are într-un pol torsorul nul, poate fi suprimat prin operaţii elementare de echivalenţă.
Pentru demonstrarea lemei, se consideră un sistem ( ) nFFFS ,...,, 21= de vectori alunecători, având torsorul nul într-un pol O:
( )∑=
===
ni
iiF
10R , ( ) 0
1== ∑
=
=i
ni
iOO FMM . (2.47)

MECANICĂ*N* NB.02.Reducerea sistemelor de forțe
- 27 -
Teorema anterioară afirmă că acest sistem este echivalent cu un sistem simplu ( ) 21,* VVS = , format numai din doi vectori, care are acelaşi torsor în polul O:
( ) ( )
=+=
=+=
0
,0
21
21
VMVM
VV
OOOM
R (2.48)
Din prima relaţie rezultă că 21 VV −= , deci cei doi vectori sunt egali ca mărime, paraleli şi de
sensuri opuse. Cea de a doua relaţie arată că ( ) ( )21 VMVM OO −= , adică faptul că cei doi vectori au acelaşi suport. Rezultă că sistemul (S*) este format din doi vectori direct opuşi şi, conform celei de a treia operaţii elementare de echivalenţă, el poate fi suprimat, obţinându-se un sistem echivalent fără nici un vector, ceea ce demonstrează lema.
Acum se poate demonstra teorema de echivalenţă care urmează.
Două sisteme de vectori alunecători (S1) şi (S2) sunt echivalente, dacă şi numai dacă, ele au acelaşi torsor într-un pol arbitrar.
Presupunem că cele două sisteme au acelaşi torsor, într-un pol arbitrar O, adică:
( ) ( )21 STST OO = . (2.49)
Se consideră un nou sistem (S*) format din vectorii sistemului (S1), vectorii sistemului (S2) şi vectorii sistemului (-S2). Sistemul (S*) este echivalent cu sistemul (S1) deoarece a fost obţinut din acesta, prin aplicarea operaţiei elementare de echivalenţă numărul trei:
( ) ( )*~1 SS . (2.50)
Pe de altă parte, torsorul sistemului format din vectorii sistemului (S1) şi vectorii sistemului (-S2) este nul:
( ) ( )[ ] ( ) ( ) ( ) ( ) 0212121 =−=−+=−+ STSTSTSTSST OOOOO , (2.51)
deci, conform lemei, poate fi suprimat din (S*). Prin urmare, în sistemul (S*) rămân vectorii sistemului (S2), deci:
( ) ( )2~* SS . (2.52)
Din (2.50) şi (2.52), prin tranzitivitate, rezultă:
( ) ( )21 ~ SS . (2.53)
Reciproc, dacă sistemul (S1) este echivalent cu sistemul (S2), atunci înseamnă că sistemele s-au obţinut unul din altul prin aplicarea operaţiilor elementare de echivalenţă care, aşa cum s-a arătat, nu modifică torsorul. Rezultă că ele au acelaşi torsor.
NB.02.5. Sisteme simple de vectori alunecători
Având în vedere că orice sistem de vectori alunecători poate fi transformat într-un sistem echivalent format numai din doi vectori, s-a constatat că aceste sisteme simple pot fi numai de patru tipuri, și vor fi prezentate în continuare. Pentru a putea preciza cu care dintre ele este echivalent un sistem dat de vectori alunecători, trebuie să se precizeze, în fiecare caz, poziția față de zero a vectorului

MECANICĂ*N* NB.02.Reducerea sistemelor de forțe
- 28 -
rezultant, a vectorului moment rezultant și a scalarului torsorului. Cele trei mărimi poartă numele de caracteristicile sistemului.
I. Sistemul echivalent cu zero
Acest sistem simplu este format din doi vectori alunecători direct opuși (fig. 2.8). Caracteristicile acestui sistem în orice pol sunt:
0=R , 0=OM , 0=⋅ OMR . (2.54)
Sistemul este numit echivalent cu zero deoarece are toate caracteristicile zero, iar el poate fi adăugat sau suprimat prin operația elementară de echivalență numărul trei. Deoarece 0=R , nu se pune problema axei centrale.
II. Cuplu de vectori
Acest sistem simplu este format din doi vectori situați pe suporturi paralele distincte, sunt egali în modul, au sensuri contrare și se notează cu ( )FF −, (fig. 2.9). Planul (P) determinat de suporturile celor doi vectori se numește planul cuplului, iar distanța dintre dreptele suport se numește brațul cuplului. Deoarece 0=R , momentul rezultant are aceeași valoare în orice pol, deci este vector
liber, și este denumit momentul cuplului, fiind notat cupM . El se poate calcula în orice pol particular, de exemplu în A:
( ) ( ) 021 ≠×=+== FABFMFMM AAAcup M . (2.55)
Momentul cuplului este un vector liber, perpendicular pe planul cuplului, sensul este obținut folosind regula burghiului drept, iar modulul este:
cupM
A
FF −=2
b B
FF =1
(P)
Fig. 2.9. Sistem simplu cuplu de vectori
A
B
F
F
Fig. 2.8. Sistem simplu echivalent cu zero

MECANICĂ*N* NB.02.Reducerea sistemelor de forțe
- 29 -
( ) FbFMM Acup == 1 . (2.56)
Caracteristicile unui cuplu, în orice pol O, sunt:
0=R , 0≠= cupO MM , 0=⋅ OMR . (2.57)
Deoarece vectorul rezultant este nul, nu se pune problema axei centrale.
Prin urmare, un cuplu este caracterizat numai de vectorul moment al cuplului, care este un vector liber.
Pe baza teoremei de echivalență, se poate deduce că două cupluri sunt echivalente dacă au același moment, întrucât vectorul rezultant este nul. Un cuplu ( )FF −, cu brațul b este echivalent cu un
cuplu ( )**, FF − cu brațul b*, dacă *cupcup MM = . Aceasta înseamnă că cele două cupluri trebuie
să fie situate în același plan, sau în plane paralele, trebuie să fie la fel orientate și să aibă același
modul ( )** bFbF ⋅=⋅ (fig. 2.10).
Observații:
a) Dacă avem un sistem de n cupluri situate în plane oarecare (P1), (P2), …, (Pn) și având momentele 1cupM , 2cupM , …, ncupM , vectorul rezultant al sistemului este nul, iar vectorul moment rezultant al sistemului este egal cu suma momentelor cuplurilor:
0=R , ∑=
==+++=
ni
iicupncupcupcupO MMMM
121 ...M . (2.58)
Dacă 0=OM , sistemul este echivalent cu zero, iar dacă 0≠OM , sistemul este echivalent cu un cuplu.
cupM
cupM
b*
*F
*F−
b F−
F
Fig. 2.10. Cupluri echivalente

MECANICĂ*N* NB.02.Reducerea sistemelor de forțe
- 30 -
În unele situaţii, momentul cuplului se reprezintă sub forma unei săgeţi circulare situate în planul (P) (fig. 2.11). Sensul ei coincide cu sensul de rotaţie al cuplului, putându-se deduce, cu regula burghiului drept, direcţia şi sensul vectorului moment. Modulul trebuie precizat în datele problemei.
III. Sistemul echivalent cu un vector unic
Acest sistem simplu este format din doi vectori cu suporturile concurente într-un punct A (fig. 2.12).
Fie sistemul ( ) 21, FFS = un astfel de sistem, cu suporturile vectorilor concurente în punctul A. Aplicând operaţia elementară de echivalenţă numărul doi, se înlocuieşte sistemul (S) cu sistemul echivalent format dintr-un singur vector 021 ≠+= FFR , având suportul trecând prin punctul de concurenţă A. Acest vector rezultant se mai numeşte rezultanta sistemului. Vectorul moment rezultant în polul O se calculează aplicând teorema lui Varignon:
( ) RRM ×== OAM OO . (2.59)
Din cele de mai sus, rezultă că sistemul este echivalent cu un vector unic şi anume rezultanta sistemului cu suportul trecând prin punctul de concurenţă. Caracteristicile sistemului sunt:
( )
0
, lui suportului O dacă 0 b)
, lui suportului O dacă 0 a) :cazurilecu
,0
=⋅
∉≠
∈==
≠
O
O
OOO M
MR
RM
RMRM
R
(2.60)
Trinomul invariant este nul, deoarece este dat de un produs mixt conţinând doi vectori identici:
(P)
Mcup
Fig. 2.11. Simbol utilizat pentru cuplu de vectori
O
A
1F
2F
R
Fig. 2.12. Sistem simplu format din doi
vectori cu suporturile concurente

MECANICĂ*N* NB.02.Reducerea sistemelor de forțe
- 31 -
( ) 0=×⋅=⋅ RRMR OAO . (2.61)
Deoarece 0≠R şi 0=⋅ OMR , se pune problema axei centrale ca loc geometric al punctelor în care, dacă sunt luate ca pol, vectorul moment rezultant este nul. Cum momentul rezultant este nul numai în poli aparţinând suportului vectorului rezultant (2.60), rezultă că axa centrală este chiar suportul lui R .
În concluzie, sistemul este echivalent cu un vector unic 0≠R numit rezultantă, situat pe axa centrală care coincide cu suportul acestui vector unic.
IV. Sistemul echivalent cu un vector şi un cuplu
Acest sistem este format din doi vectori 1F şi 2F având suporturile două drepte oarecare în spaţiu (fig. 2.13.). El mai este denumit şi torsor propriu-zis sau torsor veritabil. Pentru a-i stabili caracteristicile într-un pol oarecare O, se calculează mai întâi aceste caracteristici în polul O1 situat pe suportul lui 1F . În acest pol, componentele torsorului sunt:
( ) ( )
( ) ( ) ( ) ( )( )
≠×⋅=
=×⋅+×⋅=×⋅+=⋅
≠×=+=
≠+=
0
,0
,0
211
2122112121
2121
21
1
111
FBOF
FBOFFBOFFBOFF
FBOFMFM
FF
O
OOO
MR
M
R
(2.62)
Vectorul rezultant R nu poate fi nul, deoarece aceasta ar însemna ca cei doi vectori să fie egali şi de sens opus cu acelaşi suport, sau cu suporturile paralele, ceea ce ar contrazice ipoteza.
Vectorul moment rezultant în polul O1 nu poate fi nul, pentru că ar însemna ca BO1 să fie coliniar
cu 2F , adică suportul lui 2F să se intersecteze cu al lui 1F , ceea ce iarăşi contrazice ipoteza. Să arătăm că momentul rezultant este nenul în orice alt pol O. Presupunem că există un pol O în care
0=OM . Aplicând relaţia (2.11), se obţine:
1F
A
O1
P minM
R
B 2F
Fig. 2.13. Sistem simplu format din doi vectori cu
suporturile oarecari în spațiu
Axa centrală

MECANICĂ*N* NB.02.Reducerea sistemelor de forțe
- 32 -
RRMM ×=×+= OOOOOO 111 , (2.63)
care arată că 1OM trebuie să fie perpendicular pe R , fapt contrazis de (2.62) care arată că
01 ≠⋅ OMR .
Produsul scalar 1OMR ⋅ nu poate fi nul în polul O1, deoarece aceasta ar însemna ca vectorii 1F ,
2F şi BO1 să fie coplanari, ceea ce contrazice ipoteza. Pe de altă parte, acest produs este invariant la schimbarea polului, deci va fi nenul în orice pol.
Putem acum afirma că, în orice pol O, caracteristicile acestui sistem sunt:
0≠R , 0≠OM , 0≠⋅ OMR (2.64)
Deoarece 0≠R şi 0≠⋅ OMR se poate pune problema axei centrale în punctele căreia, atunci când sunt luate drept poli, torsorul este minimal iar vectorul moment rezultant este coliniar cu vectorul rezultant. Într-un punct oarecare P al axei centrale, avem:
0≠R , RR
MRMMM 2min
ORP
⋅=== și 0min =×MR . (2.65)
Momentul minim RMM =min este invariant la schimbarea polului şi se comportă ca momentul unui cuplu.
În concluzie, acest sistem simplu este echivalent, în punctele axei centrale, cu vectorul R , aplicat
pe axa centrală şi cu un cuplu de moment egal cu momentul minim, minM , situat pe axa centrală (fig. 2.14.), adică planul acestui cuplu este normal la axa centrală, iar vectorii v şi v− ai cuplului satisfac relaţia:
minM=⋅bv . (2.66)
Sensul momentului cuplului coincide cu sensul lui minM .
Oricare alt sistem simplu format din doi vectori alunecători se poate transforma, prin operaţii elementare de echivalenţă, în unul dintre cele patru sisteme simple prezentate mai sus. De exemplu,
axa
cent
rală
R
minM
v−
b v
Fig. 2.14 Sistem echivalent cu un vector și un cuplu

MECANICĂ*N* NB.02.Reducerea sistemelor de forțe
- 33 -
sistemului din fig. 2.15. format din doi vectori 1F şi 2F paraleli, de acelaşi sens şi de module diferite, prin aplicarea celei de a doua operații de echivalență, i se adăugă unui sistem de vectori direct opuși F și F− , și acesta se transformă într-un sistem echivalent de doi vectori concurenţi ( )21,VV .
NB.02.6. Cazurile de reducere a sistemelor de vectori alunecători
Prin reducerea unui sistem de vectori alunecători ( ) nFFFS ,...,, 21= se înţelege înlocuirea acestuia cu unul din cele patru sisteme simple de vectori cu care este echivalent.
Calculând torsorul sistemului (S) într-un pol O, ( ) OO ST MR ,= , precum şi scalarul torsorului
OMR ⋅ , pot fi întâlnite următoarele cazuri de reducere, în funcţie de valorile găsite:
I. 0=R , 0=OM , 0=⋅ OMR , caz în care sistemul (S) este echivalent cu zero. Nu se pune problema axei centrale.
II. 0=R , 0≠OM , 0=⋅ OMR , caz în care sistemul (S) este echivalent cu un cuplu cu:
Ocup MM = . (2.67)
Nu se pune problema axei centrale. Vectorul moment rezultant este vector liber.
III. 0≠R , 0=OM sau 0≠OM , 0=⋅ OMR , caz în care sistemul (S) este echivalent
cu un vector unic R=V , situat pe axa centrală care coincide cu suportul acestui vector unic și este definită ca locul geometric al punctelor P din spaţiu în care, atunci când sunt luate ca poli, vectorul moment rezultant este nul.
Când 0=OM , cele două drepte coliniare, axa centrală şi suportul lui R , trec prin polul O (fig.
2.16,a.), iar când 0≠OM , ele nu trec prin polul O (fig. 2.16,b.). Aşa cum rezultă din cazul trei al sistemelor simple de vectori, în care se încadrează sistemul acum, vectorul moment rezultant este momentul vectorului rezultant:
( )RRM OO Mr =×= , (2.68)
F− F
1F 1V
2F 2V
Fig. 2.15. Sistem de doi vectori paraleli și cu module diferite

MECANICĂ*N* NB.02.Reducerea sistemelor de forțe
- 34 -
prin urmare, datorită echivalenţei, se poate extinde teorema lui Varignon la un grad mai mare de generalitate, după cum se prezintă în continuare.
Fig. 2.16. Cele două situații posibile în cazul reducerii
la un sistem echivalent cu un vector unic
Momentul rezultant în polul O al unui sistem (S) de vectori alunecători, care se reduce la un vector unic, este egal cu momentul calculat în polul O al vectorului unic cu care este echivalent sistemul dat, situat pe axa centrală.
IV. 0≠R , 0≠OM , 0≠⋅ OMR , caz în care sistemul (S) este echivalent, într-un punct
P al axei centrale, cu un vector R=V situat pe axa centrală şi cu un cuplu de moment
cupR MMM ==min , având direcţia axei centrale (deci planul său este normal la axa centrală), iar
vectorii cuplului ( v și v− ) cu momentul cupM satisfac relația (2.66) (fig. 2.17.).
R R=V
OM α RM RM
v− v
P
axa
cent
rală
Fig. 2.17. Sistem care se reduce la un vector și un cuplu
O
axa
centrală
axa
centrală
R=V
O
R=V OM
O
r
a b

MECANICĂ*N* NB.02.Reducerea sistemelor de forțe
- 35 -
NB.02.7. Reducerea sistemelor particulare de vectori alunecători
În cele ce urmează, vor fi prezentate cazurile posibile de reducere ale unor sisteme particulare de vectori.
Reducerea sistemelor de vectori concurenți
Fie un sistem de n vectori concurenţi (fig. 2.4), pentru care a fost demonstrată teorema lui Varignon. Sunt posibile două cazuri de reducere:
I. 0=R , 0=OM , 0=⋅ OMR , adică sistemul este echivalent cu zero.
II. 0≠R , 0=OM sau 0≠OM , 0=⋅ OMR adică sistemul este echivalent cu un vector unic trecând prin punctul de concurență. Acest rezultat se putea deduce și prin aplicarea celei de a treia operații elementare de echivalență.
Reducerea sistemelor de vectori coplanari
Se consideră un sistem de vectori alunecători ( ) nFFFS ,...,, 21= situaţi toţi într-un plan (P). Fără
a restrânge generalitatea, se alege ca plan (P), planul xOy al unui reper R (O, i , j , k ). Vectorii fiind coplanari, toate momentele sunt orientate perpendicular pe planul xOy , deci au direcţia axei Oz . Rezultă că şi vectorul moment rezultant va avea aceeaşi orientare. Vectorii nu pot avea
componentă după axa Oz . Un vector iF (i = 1, 2, ..., n) are expresia analitică şi momentul în polul O de forma:
( ) n. ..., 2, 1,i =⋅±==
+=
,
,
kFbkMFM
jFiFF
iiiziO
iyixi (2.69)
Torsorul sistemului este:
( )∑ ∑
∑∑∑=
=
=
=
=
=
=
=
=
=
=
==
+=
+
==
ni
iz
ni
iiziOO
yxni
iiy
ni
iix
ni
ii
kkMFM
jijFiFF
1 1
111
.
,
MM
RRR
(2.70)
Deoarece 0=⋅ OMR , sunt posibile doar primele trei cazuri de reducere:
I. 0=R , 0=OM , 0=⋅ OMR , sistemul este echivalent cu zero.
II. 0=R , 0≠OM , 0=⋅ OMR , sistemul este echivalent cu un cuplu, cu
OcupM M= .
III. 0≠R , 0=OM sau 0≠OM , 0=⋅ OMR , sistemul este echivalent cu un vector
unic, cu suportul coincizând cu axa centrală. Se aplică teorema lui Varignon iar 0min =M . Ecuația

MECANICĂ*N* NB.02.Reducerea sistemelor de forțe
- 36 -
axei centrale este identică cu ecuația suportului vectorului R situat în planul xOy și având
momentul ( ) kM zOO MMR == :
zxy yx MRR =− (2.71)
Dacă vectorul moment rezultant este nul, atunci axa centrală trece prin polul O.
Reducerea sistemelor de vectori paraleli
Se consideră o direcţie de versor u şi un sistem ( ) nFFFS ,...,, 21= de vectori paraleli cu versorul u şi fie O un pol (fig. 2.18.). Vectorii fiind paraleli cu versorul u , au loc relaţiile:
uFuFF iii~=±= , (2.72)
( ) uFruFrFrFM iiiiiiiO ×=×=×= ~~ , i = 1, 2,..., n,
în care mărimea algebrică a vectorului iF a fost notată cu iF~ . Ea este pozitivă când iF şi u au acelaşi sens şi negativă în caz contrar.
Torsorul sistemului este:
( ) ( )∑ ∑∑
∑∑∑=
=
=
=
=
=
=
=
=
=
=
=
×
=×==
=
==
ni
i
ni
iiiii
ni
iiOO
ni
ii
ni
ii
ni
ii
uFruFrFM
uFuFF
1 11
111
.~~
,~~
M
R
(2.73)
nF 1F
iF
z
x
y
An
A1
A2
Ai
O
u
ir
Fig. 2.18. Sistem de vectori paraleli
2F

MECANICĂ*N* NB.02.Reducerea sistemelor de forțe
- 37 -
Din expresiile de mai sus se observă că vectorul rezultant este paralel cu vectorii sistemului iar vectorul moment rezultant este perpendicular pe aceştia, ceea ce implică anularea scalarului torsorului:
×
⋅
=⋅ ∑∑
=
=
=
=uFruF
ni
iii
ni
iiO
11
~~MR . (2.74)
Datorită faptului că produsul scalar 0=⋅ OMR , cazurile de reducere ale sistemelor de vectori paraleli sunt aceleaşi cu cazurile de reducere ale sistemelor de vectori coplanari, adică primele trei cazuri:
I. 0=R , 0=OM , 0=⋅ OMR , sistem echivalent cu zero.
II. 0=R , 0≠OM , 0=⋅ OMR , sistem echivalent cu un cuplu.
III. 0≠R , 0=OM sau 0≠OM , 0=⋅ OMR , sistem echivalent cu un vector unic cu
suportul trecând prin polul O dacă 0=OM și netrecând prin polul O dacă 0≠OM .
Problema axei centrale se pune numai în cazul trei de reducere, când se aplică teorema lui Varignon:
Or MR =× , (2.75)
unde r este vectorul de poziţie al unui punct de pe axa centrală. Înlocuind (2.73) în (2.75) se obţine
uFruFrni
iii
ni
ii ×
=
× ∑∑
=
=
=
= 11
~~ , (2.76)
de unde:
0~~
11=×
−×
∑∑=
=
=
=uFruFr
ni
iii
ni
ii . (2.77)
Scoțând în factor comun versorul u rezultă:
0~~
11=×
−
∑∑=
=
=
=uFrFr
ni
iii
ni
ii . (2.78)
Ultima relaţie arată că vectorul din paranteza pătrată şi versorul u sunt coliniari, ceea ce se scrie:
uFrFrni
iii
ni
ii µ=−
∑∑=
=
=
= 11
~~ , (2.79)
în care µ este un parametru real.
Din (2.79) se obţine vectorul necunoscut r :

MECANICĂ*N* NB.02.Reducerea sistemelor de forțe
- 38 -
uF
Frr ni
ii
ni
iii
λ+=
∑
∑=
=
=
=
1
1
~
~
, (2.80)
în care s-a notat
∑=
=
= ni
iiF
1
~
µλ un alt parametru real.
Ecuaţia (2.80) este tocmai ecuaţia axei centrale. Ea trece printr-un punct notat cu C, având vectorul de poziţie:
∑
∑=
=
=
== ni
ii
ni
iii
CF
Frr
1
1
~
~
(2.81)
şi are direcţia comună a vectorilor paraleli.
Punctul C, definit de (2.81), se numeşte centrul sistemului de vectori paraleli. Ecuaţia vectorială a axei centrale devine:
urr C λ+= . (2.82)
Observaţie:
Ecuaţia axei centrale scrisă sub forma (2.38) conţine vectorul de poziţie 0Pr al punctului P0 al axei
care este piciorul perpendicularei construită din polul O pe axa centrală. În ecuaţia axei centrale scrisă sub forma (2.82) apare vectorul de poziţie al unui punct C aparţinând axei centrale, numit centrul sistemului de vectori paraleli, și care nu mai este piciorul perpendicularei construită din O pe axa centrală. Se va vedea în continuare că acest punct are o serie de proprietăţi utile şi va juca un rol important în studierea sistemelor de vectori paraleli. Pentru determinarea lui trebuie utilizate coordonatele punctelor de aplicaţie ale vectorilor sistemului, poziţia punctului C pe axa centrală depinzând de alegerea acestor puncte.
În continuare sunt prezentate unele proprietăţi ale centrului unui sistem de vectori paraleli.
a) Dacă într-un sistem de vectori paraleli, vectorii își mențin punctele de aplicație și scalarii, dar își schimbă orientarea, rămânând paraleli între ei printr-o rotație în același sens și cu același unghi, atunci axa centrală trece tot timpul prin centrul sistemului de vectori paraleli.
Pentru a demonstra această proprietate, se consideră o nouă direcţie a vectorilor, dată de un versor *u rezultată prin rotirea vectorilor sistemului. Noua axă centrală are ecuaţia:
*urr C λ+= , (2.83)
care arată că punctul C rămâne neschimbat.

MECANICĂ*N* NB.02.Reducerea sistemelor de forțe
- 39 -
Coordonatele punctului C faţă de un reper ( )kjiOR ,,, sunt:
∑
∑=
=
=
== ni
ii
ni
iii
CF
Fxx
1
1
~
~
,
∑
∑=
=
=
== ni
ii
ni
iii
CF
Fyy
1
1
~
~
,
∑
∑=
=
=
== ni
ii
ni
iii
CF
Fzz
1
1
~
~
, (2.84)
în care ( )ii zy ,,ix reprezintă coordonatele punctului Ai de pe suportul lui iF (i = l, 2,…, n).
Centrul sistemului de vectori paraleli nu se schimbă dacă toţi vectorii sistemului se amplifică în acelaşi raport k.
Presupunând că în urma amplificării cu acelaşi raport k a vectorilor sistemului, centrul acestuia se schimbă din C în C*, se poate scrie:
( )
( )Cni
ii
ni
iii
ni
ii
ni
iii
C r
Fk
Frk
Fk
Fkrr =
==
∑
∑
∑
∑=
=
=
==
=
=
=
1
1
1
1*
~
~
~
~
, (2.85)
ceea ce arată că C* coincide cu C.
Centrul sistemului de vectori paraleli nu depinde de sistemul de referinţă, el fiind un element intrinsec al sistemului de vectori.
Pentru a demonstra acest lucru, se presupune că, faţă de un nou reper
''''' ,,, kjiOR , centrul
sistemului de vectori paraleli se află într-un alt punct C*, având vectorul de poziţie
∑
∑=
=
=
== ni
ii
ni
iii
CF
Frr
1
1
~
~'' * (2.86)
unde *'' * COr C = și ii AOr '' = (fig. 2.19.). Deoarece:
ii rOOr ''+= (2.87)
vectorul de poziţie al punctului C capătă forma:
( )
∑
∑
∑
∑∑
∑
∑
∑
∑=
=
=
==
=
=
=
=
==
=
=
==
=
=
= +=
+
=
+
== ni
ii
ni
iii
ni
ii
ni
iii
ni
ii
ni
ii
ni
iii
ni
ii
ni
iii
CF
FrOO
F
FrFOO
F
FrOO
F
Frr
1
1
1
11
1
1
1
1
~
~''
~
~'~'
~
~''
~
~
, (2.88)

MECANICĂ*N* NB.02.Reducerea sistemelor de forțe
- 40 -
adică:
*'' CC rOOr += . (2.89)
Din fig. 2.19. rezultă relaţia:
CCrOOrr COC *'' *' +++= . (2.90)
Comparând (2.89) cu (2.90), se deduce că singura posibilitate ca cele două relaţii să exprime acelaşi vector este ca 0* =CC , adică C şi C* să coincidă.
NB.02.8. Aplicaţii
a) Centrul unui sistem de doi vectori paraleli
Fie doi vectori paraleli 1F şi 2F aplicaţi în punctele ( )1111 ,, zyxA şi respectiv ( )2222 ,, zyxA . Vectorii pot avea același sens (fig. 2.20,a.), sau sensuri opuse (fig. 2.20,b.). Centrul acestui sistem de vectori paraleli are coordonatele:
21
2211 ~~~~
FFFxFxxC +
+= ,
21
2211 ~~~~
FFFyFyyC +
+= ,
21
2211 ~~~~
FFFzFzzC +
+= . (2.91)
Dacă se notează kFF
=2
1~~
, unde 0>k dacă 1F şi 2F au acelaşi sens, şi 0<k , dacă aceşti vectori
au sensuri opuse, expresiile coordonatelor centrului C al sistemului devin:
kkxxxC +
+=
121 ,
kkyyyC +
+=
121 ,
kkzzzC +
+=
121 . (2.92)
Sub această formă se recunosc coordonatele unui punct care împarte segmentul A1A2 în raportul k, adică în raport invers proporţional cu scalarii vectorilor. În cazul în care 0>k , punctul C se găseşte între punctele A1 şi A2 (fig. 2.20,a.), iar în cazul în care 0<k , punctul C se află în exteriorul segmentului A1A2, de partea vectorului mai mare (fig. 2.20,b.).
C
C*
'O O
Cr
*'Cr Ai
ir 'ir
'Or
Fig. 2.19. Calculul poziției centrului de
vectori paraleli

MECANICĂ*N* NB.02.Reducerea sistemelor de forțe
- 41 -
Acest rezultat se poate obţine folosind definiţia vectorială a centrului dată de relaţia (2.81), pe care o scriem în raport cu un pol O1, ce coincide cu centrul C al sistemului:
21
22111 ~~
~~0
FFFCAFCACO
++
== . (2.93)
Rezultă că:
21
21 ~
~CA
FFCA −= , (2.94)
de unde:
21 CAkCA −= (2.95)
și
1
2
2
1~
~
F
F
CA
CA= . (2.96)
Relaţia (2.95) arată că vectorii 1CA şi 2CA sunt coliniari, deci C se află pe dreapta determinată de
punctele A1 şi A2, au sensuri contrare dacă 1F şi 2F au acelaşi sens, adică C se află în interiorul
segmentului A1A2 şi au acelaşi sens dacă 1F şi 2F au sensuri opuse, adică C se află în exteriorul segmentului A1A2. Relaţia (2.96) demonstrează că punctul C împarte segmentul A1A2 în raport invers proporţional cu modulii vectorilor.
Centrul de greutate (centrul de masă) al unui sistem de puncte materiale
Se consideră un sistem (S) de puncte materiale ( )niAi ,...,2,1= , având masele ( )nimi ,...,2,1= şi
vectorii de poziţie ( )niri ,...,2,1= faţă de un reper ( )kjiOR ,,, . Asupra punctelor sistemului (S)
acţionează numai forţele de greutate ( )nigmG ii ,...,2,1== care formează, printr-o bună
z z
x x
y y O
1F
A1
A2
A2
A1
R
C
2F
1F
2F R
C
a b
Fig. 2.20. Centrul sistemului format din doi vectori paraleli
O

MECANICĂ*N* NB.02.Reducerea sistemelor de forțe
- 42 -
aproximare, un sistem de forţe paralele orientate în acelaşi sens şi fie u versorul direcţiei comune a acestor forţe, având același sens cu sensul acestora. Cu g se notează acceleraţia gravitaţională,
considerată constantă. Mărimea algebrică a greutăţii iG este în aceste condiţii:
gmGG iii ==~ . (2.97)
Centrul acestui sistem de vectori paraleli este:
∑
∑
∑
∑=
=
=
==
=
=
= === ni
ii
ni
iii
ni
ii
ni
iii
CG
Gr
G
GrOCr
1
1
1
1~
~
. (2.98)
Punctul C astfel determinat se numeşte centrul de greutate al sistemului de forţe paralele nGGG ,...,, 21 . Acest sistem este echivalent cu o forţă unică:
∑∑=
=
=
==
=
ni
ii
ni
ii gmuGG
11, (2.99)
numită greutate totală a sistemului aplicată în centrul de greutate al acestuia. Greutatea totală a sistemului trebuie aplicată în centrul de greutate al său şi nu într-un punct oarecare al axei centrale (cum ar fi în cazul unui sistem oarecare de vectori alunecători), pentru a modela corect realitatea fizică. Este vorba de faptul că, dacă rotim sistemul de puncte materiale păstrându-i configurația, centrul de greutate nu se modifică, deoarece centrul unui sistem de vectori paraleli nu se modifică dacă rotim vectorii cu același unghi și în același sens. De asemenea, dacă masele punctelor se amplifică cu aceeași constantă, atunci centrul de greutate rămâne același, ceea ce este, inginerește vorbind, ca și cum sistemul de puncte și-ar păstra configurația, dar punctele ar fi făcute din alt material.
Definind masa sistemului ca fiind suma maselor punctelor
∑=
==
ni
iimM
1, i = l, 2, ..., n, (2.100)
relaţia (2.98) se mai scrie
( )
M
rm
m
rm
gm
gmrr
ni
iii
ni
ii
ni
iii
ni
ii
ni
iii
C
∑
∑
∑
∑
∑=
==
=
=
==
=
=
= === 1
1
1
1
1 . (2.101)
Punctul C, definit de (2.101) se numeşte centrul de masă al sistemului de puncte materiale iA de
mase ( )nimi ,...,2,1= .

MECANICĂ*N* NB.02.Reducerea sistemelor de forțe
- 43 -
Noţiunea de centru de masă este mult mai generală. Poziţia centrului de masă nu depinde de intensitatea acceleraţiei gravitaţionale g a globului terestru, acest punct existând și în lipsa vreunui câmp gravitațional. S-a convenit să se considere că centrul de greutate coincide cu centrul de masă.
Reducerea unui sistem de forțe coplanare distribuite continuu și perpendicular pe un segment de dreaptă AB
Fie un sistem de forţe distribuite continuu şi perpendicular pe un segment de dreaptă abAB −= , considerat a face parte din axa Ox a unui reper (fig. 2.21.). Se notează cu ( )xq [N/m] forţa pe unitatea de lungime care acţionează în punctul de abscisă x.
Acest tip de sisteme de forţe se utilizează pentru modelarea acţiunii unor forţe cu distribuţie continuă cum ar fi cele datorate acţiunii apei, zăpezii, vântului sau chiar interacţiunii directe între două rigide.
Sistemul de vectori paraleli este echivalent cu un vector unic Q=R trecând prin centrul sistemului de vectori paraleli. Vectorul unic se calculează folosind operaţia de integrare:
( )∫−=b
adxxqjQ . (2.102)
Se observă că punctul ( )( )xqyxM =, se află pe o curbă de ecuaţie ( )xqy = . Pe baza semnificaţiei
geometrice a integralei definite, se poate concluziona că mărimea vectorului Q este tocmai mărimea ariei mărginită de 0,, === ybxax şi ( )xqy = :
( )∫ ==b
aAdxxqQ , jQQ −= . (2.103)
Centrul sistemului de forţe paralele are ordonata nulă, deoarece toate punctele de aplicaţie ale vectorilor sistemului se află pe axa Ox , iar abscisa acestuia este:
y
O A(a,0) xC
x
Q M(x,q(x))
q(x)
B(b,0)
Fig. 2.21. Sistem de forțe distribuite continuu și perpendicular
pe un segment de dreaptă.
C x

MECANICĂ*N* NB.02.Reducerea sistemelor de forțe
- 44 -
( )
( )
( )
Q
dxxq
dxxq
dxxxq
x
b
ab
a
b
aC
∫
∫
∫== . (2.104)
Momentul rezultant în polul O al sistemului se calculează cu relația (pentru cazul din fig. 2.21.):
( )∫−=⋅−=b
aCO dxxxqkkQxM . (2.105)
În cazul particular al sarcinii continuu distribuite de intensitate constantă (fig. 2.22,a.),
=0q constant pe o distanţă l , modulul vectorului rezultant este: lqQ 0= , iar centrul sistemului se
află la jumătatea distanței l . Dacă sarcina este distribuită sub formă triunghiulară, având intensitatea maximă 0q (fig. 2.22,b.) și acționează pe o lungime l , atunci modulul vectorului
rezultant este 20lq
Q = , iar centrul sistemului este situat la 32l de vârful triunghiului şi la
3l de
baza lui.
Se poate arăta că vectorul rezultant trece întotdeauna prin centrul de masă al suprafeţei a cărei arie este modulul acestui vector.
Determinarea expresiei analitice a unui vector alunecător atunci când se cunosc coordonatele a două puncte de pe suport şi modulul vectorului (metoda versorului)
Fie F un vector alunecător, având modulul F cunoscut. Fie un reper ( )kjiOR ,,, față de care
sunt cunoscute coordonatele ( )AAA zyx ,, și ( )BBB zyx ,, a două puncte A și B, situate pe suportul
vectorului F (fig. 2.23.). Se notează cu u versorul vectorului F , adică:
FFu = . (2.106)
Q qO
C
2l
2l
a
Q qO
C
32l
3l
b
Fig. 2.22. Reducerea sarcinilor distribuite continuu

MECANICĂ*N* NB.02.Reducerea sistemelor de forțe
- 45 -
Se consideră vectorul AB coliniar și de același sens cu F , prin urmare AB are tot versorul u :
ABABu = . (2.107)
Dacă exprimăm F din relaţia (2.106) în funcţie de u şi pe u îl înlocuim cu expresia (2.107), se obţine:
ABABFuFF ⋅=⋅= . (2.108)
Pe de altă parte, conform figurii 2.23:
( ) ( ) ( )kxzjyyixxrrAB ABABABAB −+−+−=−= , (2.109)
expresie care, utilizată în (1.144), ne furnizează formula cu care se determină expresia analitică a vectorului F :
( ) ( ) ( )( ) ( ) ( )222
ABABAB
ABABAB
xzyyxx
kxzjyyixxFF−+−+−
−+−+−⋅= . (2.110)
Această metodă de determinare a expresiei analitice se mai numește și metoda versorului.
NB.02.9. Exemplu numeric
Se consideră sistemul de vectori alunecători coplanari din figura 2.24., la care se cunosc 21 =F ,
42 =F , 43 =F , 3=M , 1=OA , 2=OB , 1=OC , 23
=CD în care M este momentul unui
cuplu. Se cere:
a) să se calculeze torsorul în polul O, să se precizeze sistemul simplu echivalent și să se calculeze ecuația axei centrale dacă este cazul;
z
O
x
y
Br
B(xB,yB,zB)
1F
A(xA,yA,zA)
Ar
Fig. 2.23. Determinarea expresiei analitice a vectorului
cu metoda versorului

MECANICĂ*N* NB.02.Reducerea sistemelor de forțe
- 46 -
b) să se determine mărimea unui vector 4F aplicat în punctul B, paralel cu axa Ox și la fel orientat, care, adăugat sistemului, să-l transforme într-un sistem de vectori a cărui axă centrală să treacă prin punctul E(0,1);
c) să se determine un vector alunecător V astfel încât sistemul MVFFF ,,,, 321 să fie echivalent cu zero;
d) să se determine un vector alunecător F astfel încât sistemul MVFFF ,,,, 321 să fie
echivalent cu un cuplu de mărime algebrică 2~ −=CM .
a) Pentru a calcula torsorul sistemului MFFF ,,, 321 trebuie mai întâi calculate expresiile
analitice ale vectorilor și ale momentelor lor. Vectorul 1F este paralel cu axa Ox deci nu are componentă după axa Ox:
iiFF 211 =+= .
Vectorul 2F se descompune după regula paralelogramului:
jijijFiFjFiFF yx 322234
21430cos30sin 22222 +−=⋅+−=°+°−=+= .
Analog se procedează cu vectorul 3F :
O
A 1F
B
y
2F
°30
C
3F
D
°30
M
x
Fig. 2.24. Reprezentarea sistemul de vectori alunecători coplanari

MECANICĂ*N* NB.02.Reducerea sistemelor de forțe
- 47 -
jijijFiFF 322234
21430cos30sin 333 +=⋅+=°+°= .
Momentul vectorului 1F se calculează folosind braţul OA al acestuia şi regula burghiului drept:
( ) kkkFOAFM O 22111 =⋅=⋅+= .
Se desenează braţul vectorului 2F care este lungimea perpendicularei OB1 coborâtă din O pe
suportul lui 2F . Din triunghiul dreptunghic OB1B în care unghiul din B are 30°, rezultă:
121230sin12 =⋅=°== OBOBb .
Momentul vectorului 2F este:
( ) kkkFbFM O 441222 =⋅=⋅+= .
Pentru a calcula mai simplu momentul vectorului 3F , se recurge la teorema lui Varignon, pe baza
căreia rezultă că momentul vectorului 3F este egal cu suma momentelor componentelor sale. Braţul fiecărei componente este foarte uşor de determinat, lungimea fiecăruia fiind egală cu modulul câte unei coordonate a punctului D:
( ) ( ) ( )
kkkkFOCkFCD
kFxkFyFMFMFM
yx
yDxDyOxOO
3321223
33
33333
−=⋅=⋅=⋅−⋅=
=⋅−⋅+=+=
Observaţii:
1. Modulele componentelor vectorilor se preiau din expresia analitică a acestora. Nu trebuie să se confunde mărimea algebrică a componentelor cu modulul lor. Nu există nicio legătură între semnul componentelor, care, de fapt, nu intervine în calculul momentului, şi semnul momentului acestora.
2. Momentul se poate calcula și cu ajutorul determinantului, de exemplu, pentru vectorul 3F
aplicat în punctul
−−
23,1D , avem:
( ) k
kji
FFyx
kjiFrFM
yx
DDDO 3
0322
0231
00
33
33 −=−−==×= .

MECANICĂ*N* NB.02.Reducerea sistemelor de forțe
- 48 -
Din sistem mai face parte şi un cuplu M situat în planul xOy şi având sens pozitiv:
kkMM 3=+= .
Acum se poate calcula torsorul sistemului în polul O:
( ) ( ) ( ) ( )
=+++=
+=++==
.6
,342
321
321
kMFMFMFM
jiFFFST
OOOOO
M
R
Deoarece 0≠R , 0≠OM şi 0=⋅ OMR , rezultă că sistemul este echivalent cu un vector unic situat pe axa centrală şi netrecând prin pol. Ecuaţia axei centrale este:
( ) 6234 =⋅−⋅ yx ,
sau încă:
332 =− yx .
şi este reprezentată în figura 2.25.
O
A 1F
B
y
2F yF 2
xF 2
°30
b2 C
3F
xF 3
yF 3
D
°30
axa
cent
rală
R
B1 M
x
Fig. 2.25. Axa centrală şi rezultanta sistemului de vectori

MECANICĂ*N* NB.02.Reducerea sistemelor de forțe
- 49 -
b) Vectorul 4F , fiind paralel cu axa Ox și orientat spre sensul pozitiv al ei, este de forma
iFF 44 = . De asemenea, punctul de aplicaţie fiind B, momentul lui 4F este
( ) kFFM O 44 2−= . Torsorul în polul O al sistemului MFFFF ,,,, 4321 , ale cărui
componente le notăm cu 'R și 'OM este:
( )( ) ( )kFFM
jiFF
OO 44
44
26
,0342
−=+=
≠++=+=
MM
RR
'O
'
Ecuaţia axei centrale este:
( ) 44 26234 FFyx −=+⋅−⋅ .
Deoarece se cere ca ea să treacă prin punctul ( )1,0E , rezultă că aceste coordonate trebuie să satisfacă ecuaţia axei centrale, rezultând ecuaţia:
O
A 1F
B
y
2F yF 2
xF 2
°30
C
3F
xF 3
yF 3
D
°30
M
x
Fig. 2.26. Reprezentarea sistemului inițial împreună cu vectorul 4F
4F E

MECANICĂ*N* NB.02.Reducerea sistemelor de forțe
- 50 -
( ) 44 2621340 FF −=+⋅−⋅ .
Necunoscuta 4F are valoare 8 deci iF 84 = (fig. 2.26.).
c) Pentru a afla vectorul V vom începe prin a nota vectorul rezultant şi vectorul moment rezultant
în polul O al sistemului MVFFF ,,,, 321 cu ( )1R şi ( )1
OM . Torsorul acestui sistem trebuie să
fie nul, deci avem:
( )
( ) ( ) ( )
−=
−=⇒
=+=
=+=
OOOOOVM
V
VM
V
M
R
MM
RR
0
01
1
Rezultă că vectorul V este egal şi de sens opus cu R şi este situat pe axa centrală a sistemului iniţial (fig. 2.27.).
O
A 1F
B
y
2F yF 2
xF 2
°30
C
3F
xF 3
yF 3
D
°30
axa
cent
rală
R
M
x
V
Fig. 2.27. Reprezentarea sistemului inițial împreună cu vectorul V

MECANICĂ*N* NB.02.Reducerea sistemelor de forțe
- 51 -
Pentru a determina vectorul F se notează componentele torsorului sistemului MFFFF ,,,, 321
cu ( )2R şi ( )2
OM . Pentru ca acest sistem să fie echivalent cu un cuplu cu expresia analitică
kM C 2−= trebuie ca:
( )
( ) ( ) .2
,02
2
kMFM
F
COOO −==+=
=+=
MM
RR.
De aici rezultă:
( ) kkkMFM
jiF
OCO 862
,342
−=−−=−=
−−=−=
M
R
Ecuaţia suportului vectorului F este:
8234 −=+− yx ,
sau încă:
O
A 1F
B
y
2F yF 2
xF 2
°30
C
3F
xF 3
yF 3
D
°30
M
x
F
H
G
Fig. 2.28. Vectorul F reprezentat pe suportul său

MECANICĂ*N* NB.02.Reducerea sistemelor de forțe
- 52 -
432 −=+− yx .
Pentru a reprezenta suportul lui F (fig. 2.28.) se face intersecţia cu axele:
( )
⇒=⇒=
⇒−=⇒=
0,3
23
20
4,040
Hxy
Gyx

MECANICĂ*N* NB.03.Statica solidului rigid liber
- 53 -
Capitolul NB.03. Statica solidului rigid liber
Cuvinte-cheie Rigid liber, Vectorul de poziție, Parametri de poziție,Parametri de orientare
Vector de orientare, Matrice coloană, Matrice de rotație, Conceptul de situare, Unghiurile lui Euler, Ecuațiile de echilibru
NB.03.1. Studiul geometric sub formă matriceală. Parametri de poziţie şi orientare
În cadrul modelării matematice a sistemelor mecanice, considerate ca sisteme de corpuri rigide, pentru început se vor analiza parametrii geometrici, reprezentând poziţia şi orientarea solidului rigid luat în studiu. Conform cu [N07] - [N39], se introduce termenul de situare, cu rolul de a înlocui cei doi termeni referitori la poziţia şi orientarea unui solid rigid.
Pentru a studia conceptul de situare, se ia în studiu un solid rigid, prezentat în formă simbolică, conform cu Fig. 3.1. Modelarea geometrică a corpului considerat, se realizează utilizând două sisteme de referinţă, unul fix, simbolizat
0 0 0 0O x y z , de asemenea notat 0 , cu originea într-un punct
arbitrar 0O , de versori , , i j k şi unul mobil Oxyz sau S ataşat solidului rigid, cu originea într-un punct arbitrar O . În acelaşi punct arbitrar O , se consideră un alt sistem de referinţă, notat Ox y z′ ′ ′ având aceeaşi orientare cu sistemul 0 . Conform Fig. 3.1, vectorul de poziţie al originii sistemului S în raport cu sistemul fix 0 se exprimă prin
următoarea relaţie vectorială:
( )0 0 0 0 0 0 0 0 0 0 0Tr O O x y z x i y j z k= = = ⋅ + ⋅ + ⋅ . (3.1)
Se ia în considerare un al doilea punct aparţinând rigidului P O≠ , oricare ar fi starea rigidului. Poziţia punctului P este exprimată faţă de sistemul fix O cu originea în 0O , prin:
( )0 0 0 0T
P P P P P P Pr O P x y z x i y j z k= = = ⋅ + ⋅ + ⋅ . (3.2)
Vectorul OP se exprimă în raport cu sistemul O prin următoarea ecuaţie vectorială:
( ) 0 0 0Tr OP x y z x i y j z k= = = ⋅ + ⋅ + ⋅ , (3.3)
iar faţă de sistemul de referinţă mobil S , cu originea în punctul O prin următoarea relaţie:
( ) ( )TS S TS S S S S S Sr OP x y z x y z x i y i z i= = = = ⋅ + ⋅ + ⋅ ; (3.4)
Fig.3.1
x
yz
OxyzO x y z′ ′ ′ ′
0x
0y
Pr
0 0 0 0O x y z
0z
S r
P
0r
i j
k
y ′
z′
x′O
0O

MECANICĂ*N* NB.03.Statica solidului rigid liber
- 54 -
Conform aceleiaşi Fig.3.1, vectorul de poziţie pr , poate fi rescris sub forma:
0pr r r= + . (3.5)
Pe baza consideraţiilor anterioare, pentru a defini conceptul de situare, se consideră sistemele Ox y z′ ′ ′ ,
ataşat solidului rigid, precum şi 0 , considerat fix, ambele în stare iniţială, cele două sisteme având
aceeaşi origine şi orientare. Pentru aducerea sistemului Ox y z′ ′ ′ într-o stare finală faţă de sistemul fix
0 , se aplică două transformări compuse: o translaţie rezultantă pentru poziţie, urmată de o rotaţie
rezultantă pentru orientare. Pentru început, se aplică o translaţie rezultantă a sistemului mobil din starea iniţială într-o stare finală, menţinând orientarea faţă de sistemul 0 . Din punct de vedere
mecanic, această transformare se realizează prin intermediul vectorului de poziţie 0r , definit cu expresia (3.1), care conţine cei trei parametri independenţi. Aceşti parametri sunt trei deplasări liniare, în lungul axelor sistemului 0 , dar în acelaşi timp, aceştia exprimă şi poziţia sistemului Ox y z′ ′ ′ în
raport cu sistemul 0 , adică gradele de libertate ale poziţiei sistemului. Pentru a determina orientarea
finală a sistemului mobil Oxyz , se aplică cea de a doua transformare compusă şi anume, rotaţia rezultantă. Această rotaţie poate fi efectuată atât în jurul axelor fixe cât şi în jurul axelor mobile sau în jurul unei axe arbitrare (rotaţie generalizată, conform teoremei deplasărilor finite a lui Euler). Astfel, se introduc următoarele notaţii: , ,x y z∆ = reprezentând cele trei axe ale unui sistem de referinţă
triortogonal şi drept orientat, de versori , ,u i j k= ; respectiv , ,δ α β γ∆ ∆ ∆ ∆= prin care se definesc
unghiurile dintre versorii u ai sistemul mobil şi versorii sistemului fix. Se ştie că versorii axelor împreună cu componentele lor, numite cosinusuri directoare, dau orientarea fiecărei axe a sistemului mobil în raport cu sistemul 0 , rezultând următoarea relaţie:
0
0
0
coscoscos
TSx
TSx
TSx Sx
u i
u u j
u k
α α αβ β βγ γ γ
∆
∆
∆
⋅ = = = = ⋅ ⋅
(3.6)
Observaţie: Pe parcursul prezentului capitol, se vor utiliza următoarele notaţii pentru funcţiile trigonometrice sinus şi cosinus: cos cϕ ϕ= , şi sin sϕ ϕ= .
Substituind , ,u i j k= în (3.6), se obţin următoarele expresii pentru versorii axelor sistemului de referinţă mobil:
0
0
0
00
0
γ β β γ γ βα αβ γ α β γ α α γγ γβ α α β β α
⋅ − ⋅ − ⋅ = = ⋅ = × = − ⋅ = ⋅ − ⋅ − ⋅ − ⋅ ⋅
Tsy sy sy sz sy sz
Tsy sy sy sz sy sz
TSx szsy sy sy sz sy sz
i i
i i j j k
i k
(3.7)

MECANICĂ*N* NB.03.Statica solidului rigid liber
- 55 -
0
0
0
00
0
α γ β α β γ γ ββ γ α β γ α α γγ β α γ α β β α
⋅ − ⋅ − ⋅ = = ⋅ = × = − ⋅ = ⋅ − ⋅ − ⋅ − ⋅ ⋅
Tsz sz sz sx sz sx
Tsz sz sz sx sz sx
T sz sz sz sx sz sxSy sx
j i
j j j k i
j k
(3.8)
0
0
0
00
0
β γ γ βα γ β αβ γ α β γ α α γγ β α γ α β β α
⋅ ⋅ − ⋅− = = ⋅ = × = − ⋅ = ⋅ − ⋅ − ⋅ − ⋅ ⋅
Tsx sy sx sysx sx
Tsx sx sx sy sx sy
T sx sxSy sy sx sy sx sy
k i
k k j i j
k k
(3.9)
Pentru a evidenţia rotaţia sistemului mobil S faţă de cel fix 0 , se presupune că sistemele luate în
studiu au origine comună: 0O O= şi 0 0r = . Astfel, poziţia punctului P în raport cu sistemul mobil,
este exprimată prin: TS s s sr x y z = . Poziţia punctului P în raport cu sistemul fix este:
[ ]TP P P Pr x y z= .Vectorul S r , proiectat pe axele sistemului fix, este:
( ) ( ) ( )( ) ( ) ( )( ) ( ) ( )
0 0 00
0 0 0 0
0 0 0 0
s T s T s TS Tp
S T s T s T s TP p
S T s T s T s Tp
x i i y j i z k ir ixr y r j x i j y j j z k j
z r k x i k y j k z k k
⋅ ⋅ + ⋅ ⋅ + ⋅ ⋅ ⋅ = = ⋅ = ⋅ ⋅ + ⋅ ⋅ + ⋅ ⋅ ⋅ ⋅ ⋅ + ⋅ ⋅ + ⋅ ⋅
(3.10)
În expresia (3.10), sunt incluse cosinusurile directoare definite cu relaţiile (3.7)- (3.9). Prin introducerea lor într-o matrice pătrată, expresia (3.10) se transformă în identitatea matriceală:
S Sp
S SP p
S SSx Sy Szp
x xxr y y i j k y
z z z
α α αβ β βγ γ γ
= = ⋅ = ⋅
(3.11)
Matricea ( )3 3× din (3.11), ale cărei componente sunt cosinusurile directoare, ce exprimă orientarea
fiecărei axe a sistemului mobil S faţă de cel fix 0 , se numeşte matrice de rotaţie (orientare)
rezultantă:
[ ]( ) ( ) ( )
0
3 1 3 13 1S
Sx Sy Szx y z
c c cR i j k c c c
c c c
α α α α α αβ β β β β β
γ γ γγ γ γ× ××
= = =
(3.12)
Ţinând seama de (3.7)- (3.10), matricea de orientare (3.12), se rescrie ca rezultat al următorului produs matriceal:

MECANICĂ*N* NB.03.Statica solidului rigid liber
- 56 -
[ ]0 000
00 0 0 0
0 0 0 0
T TTT
T T T TS
T T T T
j i k ii ii
R j i j k i j j j k j
k i k j k k k
⋅ ⋅⋅ = ⋅ = ⋅ ⋅ ⋅ ⋅ ⋅ ⋅
(3.13)
Între cele nouă cosinusuri directoare există şase relaţii matematice de legătură:
; ;; 1; 0; ;
; ;ij ik ij ik ij ik jk jkj x y z
j k j kk x y z
α α β β γ γ δ δ = ⋅ + ⋅ + ⋅ = = = ≠
= (3.14)
Cele şase relaţii (3.14) pot fi exprimate şi în formă matriceală, astfel:
3
1 0 00 1 00 0 1
i i i j i kij i j k j i j j j k Ik k i k j k k
⋅ ⋅ ⋅ ⋅ = ⋅ ⋅ ⋅ = = ⋅ ⋅ ⋅
(3.15)
unde 3I reprezintă matricea unitate de dimensiuni ( )3 3× .
Din relaţiile (3.14) sau (3.15), rezultă că orientarea sistemului mobil în raport cu sistemul fix se caracterizează prin maximum trei parametri independenţi, reprezentând setul de unghiuri de orientare. Aceste unghiuri sunt componentele vectorului de orientare, definit prin expresia:
( )
[ ] 3 1
; ; ; ; ; ; ; ;TA B C A x y z B y z x C z x yα β γ
×Ω = = = = (3.16)
unde , , ; , , ; , ,A x y z B y z x C z x y= = = reprezintă axele sistemului mobil S în jurul căruia se
realizează rotaţia. Aşadar, orientarea oricărui sistem în raport cu un altul presupus fix sau relativ fix se poate determină pe baza setului de unghiuri de orientare, ale căror valori şi axe de rotaţie se aleg pe baza unui algoritm, conform cu [N07] -
În concluzie, conform conceptului de situare, numărul maxim de parametri geometrici ce caracterizează poziţia şi orientarea unui sistem mobil în raport cu un sistem fix este egal cu şase. Aceşti parametri pot fi incluşi într-o matrice coloană, simbolizată X de dimensiuni ( )6 1× , având
următoarea exprimare:
( )
[ ]
[ ]
0 0 0 0
6 1........... .....................................................
T
TA B C
r x y zX
α β γ×
= = Ω
(3.17)
unde, primele trei coloane reprezintă poziţia, iar ultimele trei exprimă orientarea unui sistem de referinţă mobil S ataşat unui solid rigid, în raport cu un alt sistem de referinţă fix 0 .
Cunoscând poziţia vectorului S r ale cărui componente sunt descrise de (4.4), matricea de orientare
[ ]0S R , definită de (3.12) şi vectorul coloană al coordonatelor operaţionale X conform cu (3.17), şi

MECANICĂ*N* NB.03.Statica solidului rigid liber
- 57 -
presupunând că 0O O≠ , iar 0 0r ≠ , poziţia punctului P în raport cu sistemul 0 , caracterizat prin
vectorul de poziţie Pr , se determină sub forma următoare:
[ ]0 SSr R r= ⋅ (3.18)
[ ]00 0
SP Sr r r r R r= + = + ⋅ (3.19)
Matricea de transfer (3.19) include cele două transformări rezultante ce caracterizează poziţia şi
orientarea: translaţia rezultantă cu vectorul de poziţie 0r şi rotaţia rezultantă [ ]0S R
.
Se introduc notaţiile: 0; , ,V r F M= 0; ,S S S SV r F M= (3.20)
adică vectorul ( )S V devine unul din elementele mulţimii (vector de poziţie, vector forţă sau vector moment al unui sistem de forţe). Drept urmare, expresia (3.20) se generalizează, astfel:
[ ]0 SSV R V= ⋅ ; [ ]0S T
SV R V= ⋅ (3.21)
unde ( )S V reprezintă vectorul V cu proiecţii pe sistemul fix respectiv mobil.
NB.03.2. Matricele de rotaţie simplă
Aspectele tratate în secţiunea anterioară arată existenţa setului de trei unghiuri de orientare independente, a căror aplicare se face după axele sistemului de referinţă fix sau mobil. Ca urmare, se introduce noţiunea de matrice de rotaţie simplă. În continuare, vor fi demonstrate expresiile de definiţie ale matricelor de rotaţie simplă în jurul axelor ; ;x y z∆ = . În studiul geometric se consideră
două sisteme 0 considerat fix şi S mobil, având aceeaşi origine: 0O O= . La momentul iniţial, cele
două sisteme sunt suprapuse. Pentru a explica transformările de rotaţie, exemplificate în Fig.3.2-Fig.3.4, se fac următoarele notaţii:
( ) ( ) ( )ˆˆ ˆˆ ; ; ; Tu i j k u i u j u k = = ∠ ∠ ∠ (3.22)
unde u reprezintă unghiul dintre axa de versor u şi versorii axelor
aparţinând sistemului fix 0 , incluzând atât unghiurile cât şi
cosinusurile directoare.
În Fig.3.2, starea finală a sistemului S s-a obţinut în urma unei
rotaţii în jurul axei 0x cu un unghi xα . Se observă că axa x rămâne
coliniară/identică cu 0x , celelalte două axe fiind rotite cu unghiul xα
în planul fix 0 0x = . Ca urmare, noua stare a sistemului mobil S ,
în raport cu 0 , va fi descrisă prin intermediul următoarelor Fig.3.2
xα
xα
xxo ≡
oz
oy
iio ≡
ok
oj
z
k
y
OO ≡0xα
j

MECANICĂ*N* NB.03.Statica solidului rigid liber
- 58 -
unghiuri şi cosinusuri directoare ale versorilor axelor sistemului mobil:
0 1 2 0 2 0
ˆˆ ˆ2 ; 0 ; ; ; 2 ;2 0 2
x x x x
x x x x
i i j j c k k ss c
π ππ α α π α απ π α α α α
= = = = = + = − −
(3.23)
Înlocuind versorii şi cosinusurile directoare (3.23) în (3.12), matricea de rotaţie rezultată este:
[ ] ( )01 0 0
, 00
x x xSx xSx Sy Sz
R R x c ss c
α α αα β β β α α
γ γ γ α α
= = = −
(3.24)
Noua expresie obţinută defineşte matricea de rotaţie simplă în jurul axei x cu unghiul xα .
În continuare, luând în considerare aspectele prezentate în Fig.3.3, va fi definită matricea de rotaţie în jurul axei y . În acest caz axa de rotaţie este 0y y= . Aplicând o rotaţie simplă cu unghiul yβ , se
observă că axa y își menţine orientarea axei fixe 0y , celelalte două axe se vor roti în planul fix
0 0y = cu unghiul yβ . Noua stare a axelor sistemului S , în raport cu sistemul fix 0 este:
22 0
ˆˆ ˆ2 ; 0 ; 0 ; 1 ; 2 ; 02 2 0
y y y y
y y y y
c si i j j k k
s c
β β π β βππ π
π β β π β β
− = = = = = = + −
(3.25)
Versorii şi cosinusurile directoare exprimaţi în (3.25) se substituie în (3.12), astfel că matricea de rotaţie este de forma următoare:
[ ] ( )00
, 0 1 00
y y
ySy ySx Sy Sz
c sR R y
s c
β βα α αβ β β β
γ γ γ β β
= = = −
(3.26)
Fig.3.3
0x
jj ≡0
yy ≡0
0k0z
k
0i
i
z
yβ
yβ
yβ
OO ≡0
x 0x
j
0y
0i
izγ
OO ≡0
X
0j
kk ≡0zz ≡0
zγ
zγy
Fig.3.4

MECANICĂ*N* NB.03.Statica solidului rigid liber
- 59 -
Aşadar, dacă axa de rotaţie este y , orientarea dintre sistemele 0 şi S va fi exprimată cu relaţia
(3.26). Această relaţie caracterizează matricea de rotaţie simplă în jurul axei y cu unghiul yβ .
Pentru a demonstra expresia matricei de orientare în jurul axei z se va porni din nou de la cele două sisteme S mobil şi 0 fix, reprezentate în Fig. 3.4. Prin aplicarea unei rotaţii în jurul axei 0z cu
unghiul zγ , axa z are aceeaşi orientare ca şi axa fixă 0z , dar axele x şi y vor fi rotite în planul fix:
0 0z = . Noua orientare a axelor sistemului i , în raport cu sistemul 0 este:
2 2 0ˆˆ ˆ2 ; ; ; ; 2 ; 0
2 0 2 0 0 1
z z z z
z z z z
c si i s j j c k k
γ γ π γ γ ππ γ γ γ γ ππ π
+ − = − = = = = =
(3.27)
Substituind versorii şi cosinusurile directoare (3.27) în (3.12), rezultă matricea de rotaţie:
[ ] ( )00
, 00 0 1
z z
z z zS
Sx Sy Sz
c sR R z s c
α α α γ γγ β β β γ γ
γ γ γ
− = = =
(3.28)
Expresia anterioară reprezintă matricea de rotaţie simplă în jurul axei z .
Determinantul asociat oricărei matrice de rotaţie (4.12) este întotdeauna identic cu:
[ ] 0 2 2 2 2 2 2 2 2 2 1Sx Sy Sz Sx Sy Sz Sx Sy SzSDet R α α α β β β γ γ γ= + + = + + = + + = . (3.29)
Astfel, toate matricele de orientare, definite în acest paragraf sunt ortogonale şi unitare. Din (3.29) rezultă că inversa matricei de rotaţie este întotdeauna egală cu transpusa ei, adică:
[ ][ ]
0 1
0
TSx Sx SxSx Sx Sx
SSy Sy Sy Sy Sy SyT
S Sx Sy Sz Sz Sz Sz Sz Sz Sz
R
R
α β γα α α α β γβ β β α β γ α β γγ γ γ α β γ α β γ
− = = =
. (3.30)
Pentru a ilustra proprietatea (3.30), vor fi prezentate în cele ce urmează, expresiile pentru inversele matricelor de rotaţie în jurul axelor ; ;x y z∆ = , definite cu (3.24), (3.26) şi(3.28):
[ ][ ]
( ) [ ]
0 1 1
0
1 0 0;00
Sx Sx Sx
Sy Sy Sy
Sz Sz Sz
xSx xT T
S x x
R R xc s
R x y z s c
α β γα
α β γ α αα αα β γ
− − = = = −
; (3.31)

MECANICĂ*N* NB.03.Statica solidului rigid liber
- 60 -
[ ][ ]
( ) [ ]
10 1
0
0;
0 1 00
Sx Sx Sx
Sy Sy Sy
Sz Sz Sz
y yyS
T TS i i i y y
c sR R y
R x y z s c
α β γ β ββ
α β γβ βα β γ
−− − = = =
; (3.32)
[ ] [ ] ( ) [ ]
10 1 0
0;0
0 0 1
Sx Sx Sx
Sy Sy Sy
Sz Sz Sz
z zT z
z zS S T
c sR zR R s c
x y z
α β γ γ γγα β γ γ γ
α β γ
−−
= = = = −
. (3.33)
[ ] [ ] [ ] [ ] 0 0 0 03
1 0 00 1 00 0 1
T TS S S SR R R R I
⋅ ≡ ⋅ ≡ =
(3.34)
Ultima expresie (3.34) arată că produsul matriceal dintre matricea de rotaţie şi transpusa ei este întotdeauna matricea unitate.
Unghiurile lui Euler. Matricea de rotație rezultantă
În conformitate cu NB.03.1, orientarea spaţială a unui corp simbolizat ( )S cu o formă geometrică oarecare, față de un sistem de referință se caracterizează printr-un set de trei unghiuri de orientare, incluse în vectorul de orientare Ω , definit prin expresia (3.16). Prin combinarea celor trei rotaţii simple, componente ale vectorului Ω , se deduc cele douăsprezece seturi de unghiuri independente, oricare dintre acestea aducând corpul în orientarea finală. Conform cu [N07] se arată că indiferent de setul ales, corpul este adus în aceeaşi stare de orientare finală. (a se vedea Tabelul 3.1).
(Tabelul 3.1) Ordinul de rotaţie Tipul matricei de orientare
Prima axă (A)
A doua axă (B)
A treia axă (C)
Axe fixe ( )A B CR γ β α− −
Axe mobile ( )A B CR α β γ− −
x
y z ( )x y zR γ β α− − ( )x y zR α β γ− −
x ( )x y xR γ β α− − ( )x y xR α β γ− −
z x ( )x z xR γ β α− − ( )x z xR α β γ− −
y ( )x z yR γ β α− − ( )x z yR α β γ− −
y
z x ( )y z xR γ β α− − ( )y z xR α β γ− −
y ( )y z yR γ β α− − ( )y z yR α β γ− −
x y ( )y x yR γ β α− − ( )y x yR α β γ− −
z ( )y x zR γ β α− − ( )y x zR α β γ− −
z x y ( )z x yR γ β α− − ( )z x yR α β γ− −
z ( )z x zR γ β α− − ( )z x zR α β γ− −

MECANICĂ*N* NB.03.Statica solidului rigid liber
- 61 -
Ordinul de rotaţie Tipul matricei de orientare
y z ( )z y zR γ β α− − ( )z y zR α β γ− −
x ( )z y xR γ β α− − ( )z y xR α β γ− −
În tabelul de mai sus, cele douăsprezece matrice de rotaţie exprimă aceeaşi orientare a sistemului S faţă de 0 , identice cu matricea rezultantă (3.12). Fiecare matrice este o funcţie de trei parametri
independenţi, aparţinând vectorului de orientare (3.16). Dintre cele douăsprezece seturi de unghiuri, în mecanica solidului, se utilizează în general un singur set de forma ( )z x zR α β γ− − , reprezentând
rotaţii în jurul axelor sistemului de referinţă mobil. Cele trei unghiuri se notează ; ;z x zα ψ β θ γ ϕ= = = și sunt denumite unghi de precesie ( )ψ , unghi de nutaţie ( )θ și respectiv
unghi de rotaţie proprie ( )ϕ . Pe baza acestor notaţii, vectorul de orientare Ω se poate rescrie sub forma:
( ) ( )T Tz x zα β γ ψ θ ϕΩ = = (3.35)
reprezentând setul de unghiuri Euler, a cărui analiză se face în cele ce urmează.
În Fig.3.5 se consideră un rigid ( )S , al cărui studiu se realizează în raport cu două sisteme de referinţă,
cu aceeaşi origine 0O O′ ≡ . Sistemul notat cu 0′ păstrează aceeaşi orientare cu sistemul fix,
precum şi S sistem mobil, invariabil legat de rigidul ( )S . Totodată se consideră un punct
P ,aparţinând corpului ( )S , definit într-un studiu anterior prin relaţia (3.19). Oricare ar fi starea
sistemului mobil S , proiecţia punctului P pe sistemul mobil rămâne neschimbată şi se notează cu
Fig.3.5
αβγ
= Sy
j
αβγ
= Sy
k
0z′
0y ′
x
ψ
y
ϕ
P
( )S
N
0x
0y
0z
θ
0O
O
θ
ϕ ψ
αβγ
= Sy
jz
0x′
SPr
n

MECANICĂ*N* NB.03.Statica solidului rigid liber
- 62 -
SPr , ceea ce înseamnă că între sistemul S și punctul P este o legătură rigidă. De asemenea, se
presupune că se cunosc cele trei unghiuri de orientare, exprimate prin (3.35), cât şi vectorul de poziţie S
Pr , exprimat prin următoarea relaţie matriceală:
( )TS S S SP P P Pr x y z= (3.36)
Pe baza acestor considerente, se cere determinarea poziţiei finale a punctului P în raport cu sistemul 0′ . În starea iniţială Fig.3.5, sistemul mobil S este coliniar şi suprapus cu sistemul fix 0′ ,
matricea de rotaţie fiind echivalentă cu:
[ ]03 0
1 0 00 1 0 , 00 0 1
S R I iar r ≡ = =
(3.37)
Totodată, S r este un invariant oricare ar fi starea sistemului S , astfel că punctul P este caracterizat
prin 0
SPr r≡ . Astfel, starea iniţială se caracterizează prin următoarele:
( )
[ ]0
0
00
3
0 ′≡
= ⋅ = ⋅
S SP P PS
S
P
r R r I r
(3.38)
Se realizează o rotaţie cu unghiul ψ în jurul axei 0z′ . În urma rotaţiei, sistemul mobil ajunge din starea
iniţială ( ) 0S în 1S , iar punctul din poziţia 0P în 1P . Ţinând seama de expresia (3.19), rezultă:
[ ] ( )11 11
0 ,ψ= ⋅ = ⋅S SP P PSr R r R z r (3.39)
În expresia anterioară, 11
SSP Pr r= , iar
1
1 1
1
00
0 0 1
ψ ψψ ψ
− = = ⋅
SPP
SP P P
SP P
xx c sr y s c y
z z
(3.40)
Astfel, această transformare a sistemului este caracterizată prin următoarele:
( ) ( )
10
01;
0 1
0ψ
′≡ → =
R z
S PP P
S SP P
rr r
(3.41)

MECANICĂ*N* NB.03.Statica solidului rigid liber
- 63 -
Axa 1 2x xO O= reprezintă intersecţia dintre planele 0z = si 0 0z′ = și poartă denumirea de axa (linia)
nodurilor, simbolizată ON , de versor n .
Întrucât rotaţia cu unghiul de nutaţie θ are loc între stările 1S si 2S , ale aceluiaşi sistem de referinţă
mobil, mai întâi se va stabili 12
SPr , adică proiecţia vectorului Pr pe axele sistemului 1S , iar apoi
cunoscând rotaţia cu unghiul ψ se va determina proiecţia vectorului 2Pr pe axele sistemului fix 0′ .
Aşadar, rezultă:
[ ] ( ) ( )11 2 22 2 22
, ,θ θ= ⋅ = ⋅ = ⋅SS S S SP P P PSr R r R x r R x r (3.42)
12
1 12 2
12
1 0 000
θ θθ θ
= = − ⋅
S SP PS S S
P P PSS PP
x x
r y c s ys c zz
(3.43)
( ) 12 2
; SP Pr R z rψ= ⋅ (3.44)
( ) ( )2
2
2 2
2
; ;
0 1 0 00 0
0 0 1 0
ψ θ
ψ ψψ ψ θ θ
θ θ
= ⋅ ⋅
− = = ⋅ − ⋅
SP P
SPP
SP P P
SP P
r R z R x r
xx c sr y s c c s y
s cz z
(3.45)
Astfel, conform consideraţiilor anterioare, această transformare este sintetizată prin următoarele:
( )
11 2 2
1 2;1 2
R x
SP P P
S SP Pr r r
θ →
→
(3.46)
A treia rotaţie are loc, în jurul axei z , cu unghiul ϕ , în urma căruia 2P şi sistemul mobil ajung în
starea finală 3P , respectiv 3S S≡ . Poziţia punctului 3P pe sistemul 0′ este rezultatul
următoarelor transformări matriceale:
[ ] ( ) ( )2 323 33
, ,ϕ ϕ= ⋅ ⋅ = ⋅S SS SP P PSr R R z r R z r (3.47)
23
2 23 3
23
00
0 0 1
ϕ ϕϕ ϕ
− = = ⋅
S SP PS S S
P P PSS PP
x xc sr y s c y
zz
(3.48)

MECANICĂ*N* NB.03.Statica solidului rigid liber
- 64 -
( ) ( )
( ) ( ) ( )
23
; ;
, , ,
ψ θ
ψ θ ϕ
= ⋅ ⋅
= ⋅ ⋅ ⋅
SP P
SP P
r R z R x r
r R z R x R z r (3.49)
Astfel, transformarea este caracterizată prin următoarele:
( )
1 2 12 2 3 3 3
2 3;2 3
ϕ = → =
→ → → =
R z
S S SP P P P P P
S S SP P P
r r r r r r
(3.50)
Conform aspectelor prezentate anterior, poziţia finală a punctului P , este dată de cele trei rotaţii independente ( ), ,ψ θ ϕ . Relaţia (3.50) caracterizează două aspecte geometrice, pe de o parte poziţia
finală a unui punct oarecare al unui rigid, iar pe de altă parte matricea de rotaţie rezultantă. Astfel, ţinând seama de (3.50), expresia definită prin (3.19) prezintă o nouă formă de exprimare, în conformitate cu:
[ ]0 ( ) ( ; ) ( ; ) ( ; )S R R R z R x R zψ θ ϕ ψ θ ϕ= − − = ⋅ ⋅ (3.51)
care arată că orientarea rezultantă, din punct de vedere matematic, reprezintă produsul rotaţiilor simple
în ordinea directă a executării lor. Înlocuind în (3.51), matricele de rotaţie simplă, se determină
matricea de rotaţie rezultantă, datorată celor trei unghiuri ale lui Euler:
( )0 1 0 0 0
; , 0 0 00 0 1 0 0 0 1
ψ ψ ϕ ϕψ θ ϕ ψ ψ θ θ ϕ ϕ
θ θ
− − = ⋅ − ⋅
c s c sR s c c s s c
s c (3.52)
( ); ;s c s c c s c c c s s s
R c c s s c c c c s s c ss s s c c
ψ θ ϕ ψ ϕ ψ θ ϕ ψ ϕ ψ θψ θ ϕ ϕ θ ϕ ψ ϕ ψ θ ϕ ψ ϕ ψ θ
θ ϕ θ ϕ θ
− ⋅ ⋅ + ⋅ − ⋅ ⋅ − ⋅ = ⋅ ⋅ − ⋅ ⋅ ⋅ − ⋅ − ⋅
⋅ ⋅
(3.53)
Expresia (3.53) arată aşadar că orientarea rezultantă este funcţie, în exclusivitate, de cele trei unghiuri independente.
NB.03.3. Statica rigidului liber. Ecuaţiile de echilibru
Un rigid se consideră liber atunci când, din punct de vedere geometric, poate ocupa orice poziţie şi orientare în spaţiu euclidian cu trei dimensiuni, stare determinată de către sistemul de forţe active. În Fig.3.6, se consideră un sistem de referinţă fix, notat 0 0 0 0O x y z , precum şi un solid rigid, cu o formă
geometrică oarecare, simbolizat ( )S . Rigidul are ataşat un sistem de referinţă mobil Oxyz , legat
invariabil de ( )S cu originea într-un punct arbitrar, simbolizat O , orientarea axelor sistemului mobil,
fiind definită prin versorii , , i j k . În acelaşi punct O , este reprezentat, un alt sistem de referinţă, având
aceeaşi orientare cu O , simbolizat prin O x y z ′ ′ ′ ′ .

MECANICĂ*N* NB.03.Statica solidului rigid liber
- 65 -
Asupra sistemului, acţionează un sistem de forţe exterioare iF , cu o distribuţie spaţială (punct de aplicaţie, modul şi orientare) bine cunoscută, exprimată în raport cu sistemul de mobil, conform cu expresiile următoare:
( )
( )
( )
( )
; ; ; 1
Six i i
S Si iy i i i i i i
S i iiz
F c xF F F u u c r y i n
c zF
αβγ
= = ⋅ = = = →
(3.54)
Observaţie: Ținând seama de (3.21), distribuţia spaţială a forţelor iF , se poate exprima şi în raport cu sistemul de referință fix.
Reducând sistemul de forţe active în raport cu sistemul fix 0 , se obţine torsorul de reducere,
simbolizat prin 0τ , de forma:
( )
( )1 1
0
01 1
( )
τ = =
= =
= ⋅ = − − = − − − − − − − − − = × = ⋅ ×
∑ ∑
∑ ∑
n nx y z i i i
i in n
x y z i i i i ii i
R R R F F uR
M M M M r F F r u
(3.55)
Pe baza relaţiilor anterioare, momentul rezultant este definit prin:
01 1 1
0( ) 0
0
i i in n ni i i i i i i i i i
i i i i i i
z y cM r F u F r u F z x c
y x c
αβγ= = =
− = × ⋅ = ⋅ × = ⋅ − ⋅ −
∑ ∑ ∑ (3.56)
La schimbarea polului de reducere al forţelor din punctul O în 0O , vectorul R rămâne invariant, iar momentul rezultant al forţelor devine echivalent cu relaţia:
0 0 0M M r R′ = + × (3.57)
Fig.3.6 0i
( )S
0j
0k0z
0y
0x
O
x
x′
y
y ′
zz′
i
jk
0rO O′≡
S
1AiA
nA
1rir
nrnF
iF1F
S r
P
Pr
0O
ir ′

MECANICĂ*N* NB.03.Statica solidului rigid liber
- 66 -
Dacă în raport cu O torsorul este echivalent mecanic cu zero, adică 00, 0,R M= = rezultă că în raport cu orice alt punct din spaţiu torsorul de reducere este nul, adică:
0 00 0M τ′ = ⇒ = (3.58)
Ţinând seama de relaţiile anterioare, condiţia necesară şi suficientă ca rigidul să rămână în echilibru este ca torsorul de reducere al forţelor active să fie nul, aşadar rezultă:
( )01 1 1 1
0 ; 0n n n n
i i i i i i i ii i i i
R F F u M r F F r u= = = =
= = ⋅ = = × = × =∑ ∑ ∑ ∑ (3.59)
Sistemul de relaţii (3.59) este echivalent cu un sistem de şase ecuaţii scalare, ce poate fi descris prin următoarele expresii:
( ) ( )
( ) ( )
( )
1 1
1 1
1 1
1 1
1 1
1
0
0
0
0
0
α
β
γ
γ β
α γ
β
= =
= =
= =
= =
= =
=
= = ⋅ =
= = ⋅ =
= = ⋅ =
= ⋅ − ⋅ = ⋅ ⋅ − ⋅ =
= ⋅ − ⋅ = ⋅ ⋅ − ⋅ =
= ⋅ − ⋅ = ⋅ ⋅ − ⋅
∑ ∑
∑ ∑
∑ ∑
∑ ∑
∑ ∑
∑
n nx ix i i
i in n
y iy i ii in n
z iz i ii i
n nx i iz i iy i i i i i
i in n
y i ix i iz i i i i ii in
z i iy i ix i i i ii
R F F c
R F F c
R F F c
M y F z F F y c z c
M z F x F F z c x c
M x F y F F x c y( )1
0α=
=∑n
ii
c
(3.60)
Sistemul (3.60) format din şase ecuaţii scalare de echilibru este static determinat, necunoscutele acestuia fiind parametrii independenţi (gradele de libertate) care definesc situarea, adică poziţia şi orientarea rigidului în raport cu sistemul fix. În Fig.3.7 sunt prezentate cele şase mobilităţi simple, corespunzătoare gradelor de libertate ale rigidului liber.
NB.03.4. Observaţii asupra echilibrului rigidului liber
Ţinând seama de parametrii de poziţie şi orientare stabiliţi în paragraful NB.03.2, ecuaţiile de echilibru ale unui rigidului liber, conform cu relaţiile (3.59) se pot scrie astfel:
0x
0y
0z
yω
xω
zω
yv
xv
zv
0O 0
Fig. 3.7

MECANICĂ*N* NB.03.Statica solidului rigid liber
- 67 -
[ ] ( ) [ ]( )
( ) [ ] [ ] [ ]( )
03
3 11 1 1 1
0 00 0 3
3 11 1 1
0
0 01 0
0
0
( )
ψ θ ϕ
ψ θ ϕ
×= = = =
×= = =
=
= = = ⋅ = ⋅ = − − ⋅ ⋅ =
′ ′ ′= = × = ⋅ × = ⋅ + ⋅ × ⋅ =
′ = ⋅ + − − ⋅
∑ ∑ ∑ ∑
∑ ∑ ∑
∑
x n n n nS S
y i i i i i iSi i i i
z
x n n nS S
y i i i i i i i iS Si i i
z
nS
ii
RR R F F u R F R F u
R
MM M r F F r u F r R r R u
M
xM F y R
z[ ]( )
33 1
( ) 0α
ψ θ ϕ βγ ×
× − − ⋅ =
i
i i
i
cr R c
c
(3.61)
Relaţiile matriceale (3.61) care exprimă ecuaţiile de echilibru ale unui rigidului liber, evidenţiază existenţa celor șase parametri independenţi (grade de libertate), care definesc în mod univoc poziţia şi orientarea în echilibru a unui rigid liber.
NB.03.5. Ecuaţiile de echilibru în cazul plăcilor
Asupra unui rigid acţionează un sistem de forţe exterioare cu o distribuţie particulară, astfel încât trei puncte necoliniare ale rigidului (conform Fig.3.8, punctele , ,O A B ) rămân pe toată durata acţiunii forţelor în acelaşi plan.
Dacă acest plan este paralel cu planul 0 .z cst= , atunci intersecţia rigidului cu acest plan, va da naştere unei suprafeţe ( )∑ , asupra căreia
acţionează forţele exterioare şi coplanare , 1 .iF i n= → În aceste condiţii, datele de intrare
ale problemei sunt:
( ) ( ) 0 ; 0 ; 1α β= ⋅ = ⋅ = = →S T S TS S Si i i i i i i i iF F u F c c r x y i n (3.62)
Necunoscutele sunt parametrii independenţi ai plăcii ( )∑ care exprimă poziţia şi orientarea de
echilibru, reprezentaţi prin:
Fig.3.8
O
0O
0zz ′≡ϕ
0r
( )S
0y ′
0x′
0zir
nFy
1AnA
iAiF
1F
A
( )∑
0y
0x
xϕ
ϕ
iS r
i
k
j
B•
•
•

MECANICĂ*N* NB.03.Statica solidului rigid liber
- 68 -
( )
( )0 0 0 0 .
0 0
T
T
r x y z cstX
ϕ
= = = Ω
; (3.63)
Aşadar, în cazul plăcilor solicitate de forţe coplanare, numărul gradelor de libertate se reduce la trei. În ecuaţiile scalare de echilibru (3.61) se introduc următoarele particularităţi:
( )0
0
( , ) ( , ) ; 0
;
( , ) ;
TS S Si i i i i i i
Si i i
Si i
F R z F F R z u unde u c c
F F u
r r R z r
ϕ ϕ α β
ϕ
= ⋅ = ⋅ ⋅ = = ⋅ = + ⋅
(3.64)
[ ]
00
0
0 0τ
= =
Tx y
Tz
R RR
M M ; (3.65)
Ca urmare, ecuaţiile scalare de echilibru în cazul plăcilor devin:
0; 0; 0x y zR R M= = = (3.66)
[ ] ( ) ( ) [ ]( )
( ) [ ] [ ] [ ]( )
03
3 11 1 1 1 1
0 00 0 3
3 11 1 1
0
0 01
, , 000
00 0
Sx in n n n n
S Sy i i i i i i i iS
i i i i i
n n nS S
i i i i i i i iS Si i iz
ni
i
R cR R F F u R F R z F u R z F c
M r F F r u F r R r R uM
xM F y
αϕ ϕ β
×= = = = =
×= = =
=
= = = ⋅ = ⋅ = ⋅ ⋅ = ⋅ ⋅ =
= = × = ⋅ × = ⋅ + ⋅ × ⋅ =
= ⋅
∑ ∑ ∑ ∑ ∑
∑ ∑ ∑
∑ [ ]( )
33 10
( , ) ( , ) 0.
S Si iR z r R z u
z cstϕ ϕ
×
+ ⋅ × ⋅ = =
(3.67)
În relaţia anterioară, termenii componenţi sunt:
0
0 0
0
0( , ) 0
. 0 0 1 0
Si i
Si i i i
i
x x c s xr r R z r y y s c y
z z cst
ϕ ϕϕ ϕ ϕ
− = + ⋅ ≡ = + ⋅ =
, de unde rezultă:
0
0
0
..
S Si i i
S Si i i
i
x x x c y s
y y y s y cz z cst
ϕ ϕ
ϕ ϕ
= + ⋅ − ⋅ = + ⋅ + ⋅ = =
(3.68)
0
( , ) 00 0 0 1 0
Si i
Si i i i
c c s cu c R z u s c c
α ϕ ϕ αβ ϕ ϕ ϕ β
− = = ⋅ = ⋅
, de unde .S S
i i iS S
i i i
c c c c s
c c s c c
α α ϕ β ϕ
β α ϕ β ϕ
= ⋅ − ⋅
= ⋅ + ⋅ (3.69)

MECANICĂ*N* NB.03.Statica solidului rigid liber
- 69 -
Ţinând seama de expresiile anterioare, relaţiile (3.67) se pot scrie după cum urmează:
( )
( )
( ) ( )( ) ( )
1
1
01
0
;
;
.
α ϕ β ϕ
α ϕ β ϕ
ϕ ϕ α ϕ β ϕ
ϕ ϕ α ϕ β ϕ
=
=
=
= ⋅ ⋅ − ⋅
= ⋅ ⋅ + ⋅
= ⋅ + ⋅ − ⋅ ⋅ ⋅ + ⋅ −
− + ⋅ + ⋅ ⋅ ⋅ − ⋅
∑
∑
∑
nS S
x i i iin
S Sy i i i
in
S S S Sz i i i i i
iS S S S
i i i i
R F c c c s
R F c s c c
M F x x c y s c s c c
y y s y c c c c s
(3.70)
Observaţii: În cazul în care rigidul S este acţionat de un sistem de forţe coplanare, atunci
mobilităţile simple (gradele de libertate) se reduc conform cu (3.70) la două translaţii în planul forţelor, şi la o rotaţie în jurul celei de a treia axe. Astfel, spre exemplu, axa Oz fiind perpendiculară pe planul z 0= , rezultă translaţiile în lungul axelor Ox, respectiv Oy şi rotaţia în jurul axei Oz (are trei grade de libertate, adică ( )0 0, ,x y ϕ ).

MECANICĂ*N* NB.04.Statica solidului rigid cu legături
‐ 70 ‐
Capitolul NB.04. Statica solidului rigid cu legături
Cuvinte-cheie Axioma legăturilor, Legături fara frecare, Reazemul simplu, Articulație sferică, Articulația cilindrică,
Încastrarea, Legături cu frecare, Autofixare și autoblocare, Cupla prismatică cu/fară joc, Frecarea de rostogolire, Frecarea de pivotare, Frecarea în cuplele de rotație
NB.04.1. Echilibrul rigidului supus legăturilor
Legăturile trebuie tratate sub două aspecte: geometric care evidenţiază o reducere a numărului gradelor de libertate şi aspectul fizic evidenţiat prin axioma legăturilor, conform căreia orice legătură este suprimată şi înlocuită cu o forţă sau cu un sistem de forţe numite forţe de legătură (reacţiune), care acţionând asupra corpului produc acelaşi efect mecanic ca şi legătura însăşi. Din punct de vedere al proprietăţilor fizice, există legături ideale, în cazul cărora frecările sunt neglijate şi legături cu frecare, care sunt legăturile reale.
Echilibrul rigidului supus legăturilor fără frecare
Pentru a pune în evidenţă ecuaţiile de echilibru ale rigidului supus legăturilor fără frecare, se ia în
studiu un rigid S cu o formă geometrică oarecare, reprezentat în Fig. 4.1, precum şi sistemele de
referinţă 0 , considerat fix, 0 , cu aceeaşi orientare precum 0 , dar aplicat în punctul O al
rigidului şi S considerat mobil, invariabil legat de rigid. Rigidul se consideră liber în spaţiul
cartezian, astfel că posedă şase grade de libertate, adică şase parametri independenţi, reprezentaţi de relaţia (3.17) din capitolul NB.03. Asupra rigidului acţionează un sistem de forţe exterioare (active), cu
o distribuţie spaţială cunoscută în raport cu sistemul S (vezi relaţia (3.62)), torsorul de reducere în
raport cu polul O fiind dat prin (0.1). Conform aceleiaşi Fig. 4.1, asupra rigidului S se aplică
legătura fizică 1S , astfel că zona de contact dintre cele două corpuri este o suprafaţă oarecare în jurul
punctului O .
Fig.4.1
O
S
0y
z 0z
0x
y
f
1S

MECANICĂ*N* NB.04.Statica solidului rigid cu legături
‐ 71 ‐
Pentru a studia echilibrul rigidului, se aplică axioma legăturilor, conform căreia asupra corpului luat în consideraţie va acţiona alături de forţele active şi un sistem al forţelor de legătură, echivalent cu un
torsor al forţelor de legătură L , exprimat pentru cazul general al legăturii:
L L L
TL
LT
Lx y z
H V WR
M M M M
. (4.1)
În funcţie de forma geometrică a suprafeţei de contact dintre cele două corpuri S şi 1S (vezi
Fig.4.1) se disting următoarele tipuri de legături fizice fără frecare: simpla rezemare într-un punct (reazemul simplu), articulaţia sferică, articulaţia cilindrică, încastrarea. În cele ce urmează, se vor analiza sub aspect static tipurile de legături prezentate anterior.
Reazemul simplu. Daca zona de contact dintre cele două corpuri S şi 1S se reduce din punct de
vedere geometric la punctul teoretic O , atunci legătura aplicată asupra corpului S , reprezintă o
simplă rezemare, într-un punct, legătura fiind denumită reazem simplu (vezi Fig. 4.2.a). În punctul O al
corpului S se fixează un sistem de referinţă cu particularitatea ca f
kf
, adică axa zO este
normala la suprafaţa de contact in punctul O . Conform Fig. 4.2.b, din cele şase grade de libertate ale rigidului liber, definite prin (3.17), unul este suprimat, translaţia după normala la suprafaţa de contact dintre cele două corpuri.
Astfel, rigidul S , conform cu (3.17), va avea cinci grade de libertate, exprimate prin
.a .b .c
Fig.4.2
f
1S
z
xx
0x
xv
0O 0y
z
y
0r1F
iF
S N
x
y
z
N
zR
OOyv
yv
xv
x
y
z
O
nF
0z
fk
f

MECANICĂ*N* NB.04.Statica solidului rigid cu legături
‐ 72 ‐
0 0 0 0 .
T
T
r x y z cstX (4.2)
Aplicând axioma legăturilor, relaţiile (4.1) se particularizează, astfel ca torsorul forţelor de legătura, se va rescrie:
0 0
0 0 0
TL
L TL
R N
M (4.3)
Ca urmare, ecuaţiile scalare de echilibru pentru rigidul S , devin echivalente cu:
33 11
0
0 0 33 11
0
0
0 0
0
Sx in
L y i ii iz
Sx in
Sy i i i
i iz
R c
R R R R F c
c NR NM x c
M M F y R r R c
czM
(4.4)
Conform ecuaţiilor (4.4), s-a obţinut un sistem static determinat, format din şase ecuaţii scalare, caracterizate de şase necunoscute: cinci parametri caracterizează poziţia de echilibru, iar al şasea reprezintă modulul reacţiunii normale.
Observaţie: Ţinând seama că 0 0M , condiţia necesară şi suficientă ca rigidul S să fie în
echilibru static, este ca sistemul de forţe exterioare să fie echivalent cu o rezultantă unică, al cărei suport reprezintă normala dusă prin punctul de reazem O . În aplicaţii, acest tip de legătură este reprezentat conform Fig. 4.2.c.
Fig.4.3
.a .c.b
H
x
y
z
zR
OxR
yRV
W
O
H
V
W
1S
y
z
xx
z
y
1F
iF
nF
S
O
z
y
x

MECANICĂ*N* NB.04.Statica solidului rigid cu legături
‐ 73 ‐
Articulaţia sferică. Dacă rigidul S din Fig.4.3.a este caracterizat prin punctul O fixat permanent în
spaţiu, atunci acest tip de legătură se numeşte articulaţie sferică. Din cele şase grade de libertate ale rigidului liber, articulaţia sferică suprimă trei grade de libertate: translaţiile simple după cele trei axe
0 0 0x ,y ,z din relaţiile(3.61), deci 0x y zv v v . Legătura permite trei rotaţii simple cu unghiurile
T , adică rigidul posedă trei grade de libertate.
Legătura se înlocuieşte cu un sistem al forţelor de legătură, care se reduc în raport cu polul O . În acest caz, torsorul forţelor de legătură exterioare, se exprimă în conformitate cu:
0 0 0
TL
LT
L
H V WR
M (4.5)
Ţinând seama de expresia (4.5), precum şi de Fig.4.3.b, ecuaţiile scalare de echilibru pe sistemul 0 ,
se scriu în formă particularizată astfel:
33 11
0 33 11
0
0
Sx in
L y i ii iz
Sx in
Sy i i i
i iz
R H Hc
R R R V R F c V
c WR W
M c
M M F R r c
cM
(4.6)
Sistemul (4.6) este static determinat, fiind alcătuit din şase ecuaţii scalare de echilibru şi şase
necunoscute, din care trei T caracterizează orientarea rigidului, iar celelalte trei
H V W sunt componentele forţei de legătură rezultante, care conduc la determinarea modulului şi orientării acesteia. În aplicaţii, articulaţia sferică este simbolizată conform Fig.4.3.c.
H
VO
S0xx
y
z
nF
iF
1F
O
Fig.4.4
.a .c.b
x
y
z
O
xR
yR
H
V
z
0z
0y
z

MECANICĂ*N* NB.04.Statica solidului rigid cu legături
‐ 74 ‐
Articulaţia cilindrică. Acest tip de legătură, se caracterizează prin faptul că punctul O este permanent
fixat într-un anumit plan. Rigidul S face parte din categoria plăcilor, care în absenţa restricţiilor
parametrice posedă trei grade de libertate conform cu (3.65), adică 0 0, ,x y . Conform Fig.4.4.a sau
Fig.4.4.b, punctul O este fixat, în planul 0z . Astfel placa S posedă un singur grad de libertate,
concretizat prin unghiul .
Presupunând că asupra plăcii acţionează forţele active iF conţinute în planul plăcii, sistemul de forţe
se reduce în raport cu acest punct la un torsor al forţelor active, rescrise astfel:
0
0
0
0 0 0
Tx y
T
R R R
M (4.7)
Echivalentul mecanic al legăturilor suprimate este torsorul forţelor de legătură:
0
0 0 0
TL
LTL
R H V
M
; (4.8)
În acest caz, ecuaţiile scalare de echilibru sunt exprimate prin:
32 11
32 11
0
;
0
Snx i
L iy ii
S Sni i
z ii i ii
R H cc s HR R F
R V cs c V
x cc sM F
y cs c
(4.9)
Necunoscutele sistemului de ecuaţii (4.9) sunt unghiul , care se determină din condiţia de echilibru
(vezi relaţiile (3.64)), şi componentele forţei de legătură rezultante H şi V . Simbolizarea utilizată în aplicaţii, pentru acest tip de legătură, este prezentată în Fig.4.4.c.
Încastrarea. În cazul în care între rigidele S şi 1S , prezentate în Fig.4.5.a, contactul se realizează
într-o infinitate de puncte, pe mai multe suprafeţe de contact, atunci legătura fizică 1S suprimă
rigidului S toate cele şase grade de libertate, legătura fiind denumită încastrare. Aşadar, un corp
încastrat posedă zero grade de libertate, deci 0x y zv v v şi 0x y z .
Se presupune că asupra rigidului acţionează forţele active 1iF i n . Aplicând axioma legăturilor,
cele două sisteme de forţe se reduc în polul O , formând un torsor al forţelor active, precum şi un torsor al forţelor de legătură, conform cu Fig.4.5.b, exprimat astfel:

MECANICĂ*N* NB.04.Statica solidului rigid cu legături
‐ 75 ‐
TL
LTL
xL yL zL
R H V W
MM M M
. (4.10)
Ecuaţiile scalare pentru echilibrul rigidului devin:
00
0 ; 0 .
0 0
L
L
L
x xx
y y y
z z z
M MR H
R V M M
R W M M
(4.11)
Ţinând seama de faptul că necunoscutele sistemului de ecuaţii (4.11) sunt , , , , ,L L Lx y zH V W M M M ,
reprezentând componentele torsorului forţelor de legătură, sistemul este static determinat. Acest tip de legătură se numeşte încastrare spaţială, iar în aplicaţii, este reprezentată conform Fig.4.6.a.
Observaţii: Dacă rigidul este o placă încastrată, denumirea legăturii este încastrare plană, iar ecuaţiile scalare de echilibru sunt următoarele:
iF
nF
1F
O
x
y
z
S 1S
x
y
z
O
zR
yR
xRW
H
zM
xMyM
yLM
xLM
zLM
V
Fig. 4.5 .a .b
Fig. 4.6 .a .b
O
W
V
O
yLM
zLM
xLM
W
VH

MECANICĂ*N* NB.04.Statica solidului rigid cu legături
‐ 76 ‐
0
0
0L
x
y
z z
R H
R V
M M
(4.12)
Relaţiile (4.12), sunt valabile doar în ipoteza în care placa este situată în planul .z cst Acest tip de legătură este reprezentată în aplicaţii, conform Fig.4.6.b.
NB.04.2. Statica rigidului supus legăturilor cu frecare
Pentru a studia aspectul general al legăturii cu frecare, se consideră un rigid S , cu o formă
geometrică oarecare aflat în contact permanent cu un alt rigid notat 1S , (vezi Fig.4.7.a). Corpul
1S reprezintă o legătură fizică aplicata corpului S . Contactul între cele două corpuri S şi 1S se
realizează într-o infinitate de puncte ale unei suprafeţei de contact. Se consideră că asupra rigidului
S acţionează un sistem de forţe exterioare , 1 iF i n , iar fiecare 1jM j al suprafeţei de
contact reprezintă o simplă rezemare cu frecare de alunecare, având coeficientul de frecare j .
Aplicând axioma legăturilor pentru fiecare punct jM , se obţine un sistem al forţelor de legătură,
constituit din reacţiunile normale jn şi forţele de frecare de alunecare jt .
Astfel, rigidul S devine liber, asupra lui acţionând două sisteme de forţe, unul activ şi unul al forţei
de legătură. Acestea se reduc în raport cu punctul teoretic al suprafeţei de contact, obţinându-se un torsor de reducere al forţelor active şi respectiv un torsor al forţelor de legătură de forma:
00
;
R
M ;
LL
L
R
M (4.13)
Conform cu Fig.4.7.b, în planul tangent la suprafaţa de contact în punctul O se consideră două direcţii
1 şi 2 , în aşa fel încât 1 , 2 şi să fie perpendiculare între ele, formând un triedru drept orientat.
LR
.a .bFig. 4.7
LM
0M
pM
rM
tM
nM
2 nR
tR
R
N
T O1jM
1F
S
1S
1A
iF
nFiA
nA
O
1
;j j
j j j
n t
t nj

MECANICĂ*N* NB.04.Statica solidului rigid cu legături
‐ 77 ‐
În raport cu aceste axe, ţinând cont şi de relaţiile (4.13), componentele celor doi torsori sunt date prin următoarele relaţii:
0
0
;
n t
n t
R RR
M M M
;
L
L
L p r
N TR
M M M (4.14)
Condiţia necesară şi suficientă pentru ca rigidul să rămână în stare de echilibru este reprezentată prin
ecuaţiile vectoriale: 0
0
0
L
L
R R
M M (4.15)
Prin explicitare, expresiile (4.15) se transformă în următoarele:
00
;0 0
n pn
t t r
M MR N
R T M M (4.16)
Ecuaţiile vectoriale de echilibru ale rigidului supus legăturilor cu frecare, au semnificaţiile:
Componenta nR a rezultantei forţelor active tinde să deplaseze rigidul S după normala la
suprafaţa de contact, opunându-i-se reacţiunea normală N ;
Componenta forţelor active tR , tinde să deplaseze rigidul S prin translaţie după axa 1 .
Acestei acţiuni se opune o forţă de rezistenţă T (forţa de frecare de alunecare);
Componenta nM a vectorului moment rezultant 0M al forţelor active tinde să imprime
rigidului S o rotaţie în jurul normalei , rotaţie numită pivotare, căruia i se opune pM , numit
moment al frecării de pivotare;
Componenta tM tinde să rotească rigidul după axa 2 1 , mişcare numită rostogolire,
opunându-i-se momentul rezistent rM , numit moment al frecării de rostogolire.
NB.04.3. Fenomenul de autofixare şi autoblocare
Pentru a evidenţia frecarea de alunecare, se ia în studiu un corp
prismatic de greutate G situat pe un plan aspru, având coeficientul de
frecare de alunecare înclinat sub
unghiul faţă de orizontală, (a se
vedea Fig.4.8). Studiul presupune determinarea domeniului de variaţie al forţei motoare cu orientare
orizontală F , astfel încât rigidul să rămână în repaus. Aplicând axioma legăturilor, se introduc forţele
de legătură N şi T , şi se constată că rigidul prezintă două tendinţe de deplasare.
Tendinţa rigidului de alunecare în jos (Fig.4.8.a), caz în care ecuaţiile scalare de echilibru sunt următoarele:
.a .b
G G
xxy y
FF
T
T NN
Fig.4.8

MECANICĂ*N* NB.04.Statica solidului rigid cu legături
‐ 78 ‐
0
0
T F c G s
N F s G c
T N
(4.17)
Efectuând calculele, se obţine expresia: F c G s F s G c , de unde rezultă:
s c
F Gc s
(4.18)
Limita inferioară a modulului forţei F devine nulă pentru următoarea valoare a lui :
0s c , adică tg (4.19)
Pentru tg , modulul valorii forţei F este negativ sau nul, ceea ce demonstrează că punctul
material luat în studiu rămâne în echilibru. Acest fenomen este cunoscut sub denumirea de denumit fenomen de autofixare.
Tendinţa de alunecare în sus (Fig.4.8.b), este reprezentată prin ecuaţiile:
0
0
T F c G s
N F s G c
T N
(4.20)
Efectuând, calculele rezultă următoarea relaţie pentru forţa F :
s c
F Gc s
(4.21)
Limita superioară a modulului forţei F devine infinită pentru:
0c s , adică 1tg (4.22)
În cazul în care 1
tg
, atunci nu există o limită superioară dincolo de care punctul material să
alunece în sens ascendent. Deci, oricât de mare este forţa F , punctul material rămâne în repaus. Fenomenul este denumit autoblocare. Astfel, ţinând seama de relaţiile (4.18) şi (4.21), domeniul de
variaţie al forţei F este:
s c s c
G F Gc s c s
(4.23)
Aşadar, în cazul legăturii cu frecare de alunecare, dacă forţa motoare este nulă atunci fenomenul fizic creat este denumit autofixare, iar în cazul în care forţa tinde spre infinit, fenomenul fizic se numeşte autoblocare.

MECANICĂ*N* NB.04.Statica solidului rigid cu legături
‐ 79 ‐
NB.04.4. Influenţa frecării de alunecare în cuplele prismatice
Pentru studiul frecării în cazul corpurilor aflate în mişcarea de translaţie, se ia în studiu o cuplă prismatică (Fig.4.9 sau Fig.4.10) formată din tija 1 de dimensiune d , care se deplasează în interiorul
unui ghidaj fix 2 , caracterizat prin dimensiunile l şi d . Contactul între părţile componente ale
cuplei, este cu frecare de alunecare, caracterizat de coeficientul de frecare . Asupra tijei acţionează
forţa motoare P cu punctul de aplicaţie în O , definit prin ,x y , orientată sub un unghi faţă de axa
Oy . Pe axa de simetrie a cuplei acţionează o forţă tehnologică Q . Se pune problema determinării
forţei P din condiţiile de echilibru, precum şi condiţiile de apariţie, respectiv evitare a fenomenului de autoblocare în cuplele prismatice. În funcţie de gradul de uzură, în cele ce urmează se vor trata două tipuri de cuple prismatice, cupla prismatică cu joc (Fig.4.9) şi cupla prismatică fără joc (vezi Fig.4.10).
Cupla prismatică cu joc (vezi Fig.4.9). Datorită jocului care se creează în interiorul ghidajului, contactul dintre cele două părţi componente, se reduce la două puncte, dispuse simetric, notate cu
A şi respectiv B . Fiecare dintre cele două
puncte au rolul unui reazem simplu, cu frecare de alunecare. Pentru studiul echilibrului se va aplica axioma legăturilor. Astfel, se înlocuiesc legăturile
fizice din punctele A şi B cu reacţiunile (forţele de legătură), notate ;A AN T , respectiv
;B BN T . Pentru scrierea ecuaţiilor scalare de echilibru, se utilizează sistemele de referinţă cu
originea în punctele A şi B , se ţine seama de faptul că toate forţele au o distribuţie coplanară,
precum şi de faptul că N sau T nu se cunosc, ceea ce conduce la scrierea a trei ecuaţii scalare de echilibru, după cum urmează:
0;
0;2 2
0;2 2
; ;
A B
A A
B B
A A B B
P c Q T T
d dP x c P y l s Q N l T d
d dP x c P y s Q N l T d
T N T N
(4.24)
Sistemul de ecuaţii prezentat, corespunde echilibrului la limita frecării de alunecare în cuplele
prismatice cu joc. Pentru determinarea forţei P , se înlocuiesc condiţiile frecării de alunecare în prima
relaţie, după care se explicitează AN şi BN , rezultând:
Fig.4.9
A
B
QBy
1
2
x
l
x
P
y
y
Bx
d BT
AxAy
AT
AN
BN
O

MECANICĂ*N* NB.04.Statica solidului rigid cu legături
‐ 80 ‐
2 2
2 2
A
B
d dP x c P y l s Q
Nl d
d dP x c P y s Q
Nl d
. (4.25)
Întrucât coeficientul este subunitar, iar d l , rezultă că termenul d l , de unde l d l .
Astfel, înlocuind AN şi BN din (4.25) în prima relaţie din (4.24), rezultă expresia forţei motoare în
cuplele prismatice cu joc, stabilită din condiţiile de echilibru la limita frecării de alunecare:
2 2
1
QP
x yc c s
l l
(4.26)
În cazul în care numitorul relaţiei (4.26) este nul, ceea ce conduce la tinderea valorii forţei motoare
P spre infinit, apare fenomenul de autoblocare a tijei. Prin aplicarea unor transformări se deduce următoarea relaţie :
2 2
1 1 0y
x c sl l
(4.27)
Ţinând seama de expresia (4.27), se obţine condiţia de autoblocare, exprimată prin relaţia:
21
21
critic
xltg
yl
(4.28)
În relaţia anterioară, critic reprezintă unghiul critic de înclinare al forţei motoare P , la care apare
fenomenul de autoblocare în cazul cuplelor prismatice cu joc. O soluţie particulară este prezentata, conform relaţiei următoare :
2
0, pentru 1 02critic
lx x
l
(4.29)
Observaţie: Pentru a evita fenomenul de autoblocare se impun următoarele condiţii:
, .2critic
lx
(4.30)
Cupla prismatică fără joc. Întrucât cupla luată în studiu conform Fig.4.10 este nerodată (fără uzură sau joc), zona de contact devine o dreaptă A A , respectiv B B , de lungime / 2l , la care se admite că presiunea normală de contact este uniform repartizată.

MECANICĂ*N* NB.04.Statica solidului rigid cu legături
‐ 81 ‐
Prin aplicarea axiomei legăturii în punctele A şi B situate la / 4l de A , şi respectiv la
/ 4l de B se introduc reacţiunile normale
rezultante ,A BN N , şi forţele de frecare de
alunecare ,A BT T . Ecuaţiile scalare de
echilibru pentru cupelele prismatice fără joc devin echivalente cu următoarele:
0
30
2 4 2 2
02 4 2 2
;
A B
A A
B B
A A B B
Pc Q T T
d l d lP x c P y s Q T d N
d l d lP x c P y s Q T d N
T N T N
(4.31)
Similar cazului anterior, se înlocuieşte AT şi BT din ultima în prima relaţie (4.31), după care se
explicitează AN şi BN din celelalte două, în final rezultând:
2 2
2 1
QP
x yc c s
l l
(4.32)
Fenomenul de autoblocare a tijei apare atunci când valoarea forţei motoare P , adică expresia de la numitor, din relaţia anterioară, devine zero:
1 2 1 2
02 2
c sxl l
, (4.33)
Prin aplicarea unor transformări, rezultă:
1 22
21
critic
xltgyl
; (4.34)
unde notaţia critic , reprezintă unghiul critic de inclinare a forţei motoare P la care apare fenomenul
de autoblocare în cazul cuplelor prismatice cu joc. Ţinând seama de faptul că critic , se
determină condiţia geometrică pentru evitarea fenomenului de autoblocare în cazul cuplelor prismatice cu joc:
Fig.4.10
Q
B
B
1
2
xx
P
y
y
d
BT
A
4l
AT
AN
BN
O
2l
A

MECANICĂ*N* NB.04.Statica solidului rigid cu legături
‐ 82 ‐
;4 critic critic
lx
(4.35)
Observaţie: Se constată că parametrii geometrici necesari evitării fenomenului de autoblocare sunt mai mici în cazul cuplelor prismatice fără joc, faţă de cuplele prismatice cu joc.
NB.04.5. Frecarea de rostogolire
Prin rostogolire se înţelege rotaţia unui rigid în jurul axe din planul tangent la suprafaţa de contact, axa fiind normală pe planul central de inerţie. Frecarea de rostogolire se pune în evidenţă printr-un moment
rezistent, numit momentul frecării de rostogolire, notat cu rM . Se pune problema determinării condiţiilor necesare pentru ca un corp sa fie în echilibru sub şi la limita frecării de rostogolire. În acest
sens se ia în studiu un disc circular drept, având raza R şi greutatea G , situat pe o cale de rulare
orizontală , contactul fiind cu frecare de
alunecare, caracterizat prin coeficientul de frecare
. Dacă asupra discului acţionează o forţă motoare,
notată cu F , atunci discul are rolul unei roţi trase, iar în situaţia când asupra discului acţionează un moment motor şi o forţă de tracţiune, rezultă roata motoare.
Cazul roţii trase pe o suprafaţă plană, respectiv pe o suprafaţă înclinată.
Conform Fig.4.11.a, datorită acţiunii forţei F , discul are pe de o parte tendinţa de alunecare pe calea de rulare, efectuând astfel o mişcare de translaţie, iar pe de alta parte tendinţa de rostogolire în jurul axei Oz . Pentru studiul echilibrului, se aplică axioma legăturilor, astfel că legătura punctiformă din punctul
A se înlocuieşte cu reacţiunea normală N ,
respectiv cu forţa de frecare de alunecare T . Ca urmare, se obţin ecuaţiile scalare de echilibru:
0; 0; 0;F T N G F R T N (4.36)
Înlocuind T din prima condiţie şi N din a doua în a patra din (4.36), rezultă:
F G (4.37)
Relaţia (4.37) reprezintă condiţia necesară pentru a realiza echilibrul sub şi respectiv la limita frecării de alunecare. Condiţia a treia din (4.36) este imposibilă din punct de vedere fizic, adică 0RF , fiind un moment dat de o forţă motoare ce imprimă discului o mişcare de rostogolire, astfel că axioma legăturilor a fost aplicată în mod eronat.
Conform Fig.4.11.b, zona de contact dintre discul circular şi calea de rulare nu este un punct ci o suprafaţă care înregistrează deformările pe direcţia de mişcare, şi în care există o concentraţie masivă
Fig.4.11
;j jn F
N
N
N
A
A
rM
A
N
G
G G
F
F F
F
N
T
T
RR
R R
x x
x x
y
y
y
y
O
OO
l
.a .b
.c .d
G O

MECANICĂ*N* NB.04.Statica solidului rigid cu legături
‐ 83 ‐
de forţe de legătură înspre direcţia de înaintare a rotii. Astfel, în fiecare punct al suprafeţei de contact
există o reacţiune normală punctiformă, notată jn , precum şi o forţă punctiformă jF , unde 1j .
În Fig.4.11.c, se aplică axioma legăturilor. Ca urmare legătura din punctul A este substituită cu
reacţiunea normală N , la o distanţă l , cu scopul anihilării efectului forţei motoare. Tot în A , pe
direcţia axei Ay , se introduc forţele egale şi de sens contrar, N şi N , astfel încât noul sistem de forţe
produce acelaşi efect mecanic (vezi Fig.4.11.d), adică se constituie într-un cuplu de forţe de forma:
rM N l , (4.38)
unde, rM reprezintă momentul frecării de rostogolire.
Ecuaţiile scalare de echilibru ale roţii trase, în acest caz, se modifică astfel:
0; 0; 0;F T N G N l F R T N ; (4.39)
Înlocuind N şi T din primele două ecuaţii, în ultima condiţie din relaţiile (4.39), rezultă relaţia (4.38). Conform ecuaţiei a treia de momente din (4.39), rezultă:
N l F R ; l R (4.40)
Conform cu (4.40), rezultă că distanţa l este limitată superior, iar valoarea ei maximă, care reprezintă coeficientul frecării de rostogolire, se notează:
s R (4.41)
Ţinând seama de relaţiile anterioare, se deduce condiţia necesară şi suficientă ca discul să fie în echilibru sub sau la limita frecării de rostogolire, adică:
rM s N (4.42)
Observaţie: Se constată că în cazul frecării de rostogolire, pentru ca un rigid să fie în echilibru intervin două condiţii: cu referire la frecarea de alunecare (4.38); şi tendinţa de rostogolire a rigidului (4.42).
Se consideră acelaşi disc circular drept, conform Fig.4.12 având
raza R şi greutatea G , situat pe un plan înclinat cu unghiul ,
contactul fiind cu frecare de alunecare, caracterizat prin
coeficientul de frecare . Asupra discului acţionează forţa
motoare F după direcţia planului inclinat. Ca şi în studiul precedent, se aplică axioma legăturilor, astfel că în punctul A
se introduc echivalenţele mecanice: reacţiunea normală N , forţa
de frecare la alunecare T şi respectiv momentul frecării de rostogolire rM . Ecuaţiile scalare de
echilibru devin:
Fig.4.12
F
O
G
T
R
N
x
y
rM
,s
A

MECANICĂ*N* NB.04.Statica solidului rigid cu legături
‐ 84 ‐
0
0;
0
;r
r
F G s T
N G c
F R G R s M
T N M s N
(4.43)
Înlocuind N , T şi rM din primele trei ecuaţii, în condiţiile din relaţiile (4.43), rezultă condiţia
pentru forţa motoare, pentru ca roata trasă să fie în echilibru pe planul înclinat:
,
s sF s c G dacă
R R (4.44)
, s
F G s c dacăR
(4.45)
Cazul roţii motoare pe o suprafaţă plană, respectiv pe o suprafaţă înclinată
Asupra discului din Fig. 4.13, acţionează pe de o parte
momentul motor notat mM , care tinde să imprime o
mişcare de rostogolire, iar pe de altă parte forţa de
tracţiune F , care imprimă rigidului o mişcare de translaţie. Similar studiului echilibrului în cazul roţii trase pe o suprafaţă plană, legătura punctiformă din
punctul A se înlocuieşte cu reacţiunea normală N ,
forţa de frecare la alunecare T şi respectiv momentul
frecării de rostogolire rM (Fig. 4.13).
Ţinând seama de consideraţiile anterioare, ecuaţiile scalare de echilibru în cazul roţii motoare pe o suprafaţă plană devin:
0;
0;
0
;r m
r
T F
N G
M F R M
T N M s N
(4.46)
Înlocuind T şi N în condiţia a patra, iar rM din ecuaţia trei în ultima condiţie a sistemului (4.46), se
obţine condiţia de echilibru la rostogolire, astfel : mM F R s G (4.47)
Ţinând seama de (4.37) şi (4.47), rezultă condiţiile de rostogolire pură fără alunecare:
; mF G M F R s G precum şi condiţiile de patinare ; mF G M F R s G în
cazul roţilor motoare.
Fig.4.13
F
O
G
T
R
N
x
y
mM
rM
A

MECANICĂ*N* NB.04.Statica solidului rigid cu legături
‐ 85 ‐
Studiul frecării de rostogolire în cazul roţii motoare pe o suprafaţă înclinată. Se consideră în Fig.4.14 un disc cu
raza R şi greutatea G , situat pe un plan inclinat cu
unghiul , contactul fiind cu frecare de alunecare,
caracterizat prin coeficientul de frecare . Asupra
discului acţionează un moment motor mM precum şi o
forţă de tracţiune F după direcţia planului înclinat. Prin aplicarea axiomei legăturilor, se înlocuiesc în punctul
A reacţiunea normală N , forţa de frecare la alunecare
T şi respectiv momentul frecării de rostogolire rM ,
astfel că ecuaţiile de echilibru se scriu după cum urmează:
0;
0;
0
;
r m
r
T F G s
N G c
M M G R s F R
T N M s N
(4.48)
Similar cazurilor anterioare, rezultă următoarele condiţii de echilibru:
F G c s , respectiv F G s
G c
(4.49)
Ţinând seama de expresiile determinate anterior, (4.49), momentul motor minim la care devine posibilă tracţiunea sau remorcarea este:
1mM F G Rs c
R
.
NB.04.6. Frecarea de pivotare
Pentru a evidenţia fenomenul fizic reprezentat prin frecarea de pivotare, se consideră, conform Fig.4.15 un
ax vertical 1 , numit pivot, a cărui secţiune în zona de
contact cu lagărul cilindric fix 2 este o suprafaţă de
formă inelară de raze ,r R conform Fig.4.15.
Contactul între pivotul 1 şi lagărul cilindric 2 se
realizează într-o infinitate de puncte, în fiecare punct
legătura este cu frecare de alunecare , iar forţele de
legătură sunt distribuite uniform, pe o suprafaţă inelară numită suprafaţă de pivotare.
Fig.4.14
FO
G
T
R
N
x
y
rM
,s
A
mM
Fig.4.15
R
nR
r
nM
2
1
Td
d
d
pM
rM
Ndp
t
O
dA

MECANICĂ*N* NB.04.Statica solidului rigid cu legături
‐ 86 ‐
Se admite, conform cu cele afirmate anterior, că în fiecare punct există atât o reacţiunea normală pe unitatea de suprafaţă, notată p , care se menţine aceeaşi în toate punctele; cât şi o forţă de frecare de
alunecare, t care îndeplineşte condiţia t p . Asupra pivotului acţionează un sistem de forţe active
, 1iF i n a căror rezultantă este echivalentă cu nR , care tinde să deplaseze pivotul după normala la
suprafaţa de contact, dar se opune reacţiunea normală N . Momentul rezultant al forţelor active nM
tinde să imprime pivotului o mişcare de rotaţie, numită pivotare, acestuia i se opune pM , numit
momentul frecării de pivotare. Prin aplicarea axiomei legăturilor, condiţiile de echilibru sunt:
0; 0n n pR N M M (4.50)
În Fig.4.15, se pune în evidenţă forţa de legătură prin separarea unei suprafeţe elementare dA din
suprafaţa de contact delimitată de coordonatele polare , :
dA d d (4.51)
Având în vedere că pe suprafaţa elementară dA există o infinitate de reacţiuni normale p , rezultanta
acestora devine:
dN p dA p d d (4.52)
Reacţiunii normale elementare, îi corespunde forţa de frecare de alunecare elementară:
dT dN p d d (4.53)
Pe baza expresiei definite cu (4.52), reacţiunea normală pe suprafaţa de contact este:
2 2
2 2
0
22
RRr
r
N dN p d d p p R r (4.54)
Având în vedere că în (4.54), termenul 2 2R r reprezintă aria suprafeţei inelare de contact,
conform cu prima relaţie din (4.50), rezultă:
2 2 2 2
nRNp
R r R r
(4.55)
Momentul elementar al frecării de pivotare, este produs de forţa de frecare de alunecare elementară:
2pdM dT p d d (4.56)
Având în vedere relaţia (4.56), momentul rezultant al frecării de pivotare între pivotul 1 şi lagărul
cilindric 2 este de forma următoare:

MECANICĂ*N* NB.04.Statica solidului rigid cu legături
‐ 87 ‐
2
2 3 3
0
2
3
R
p pr
M dM p d d p R r
(4.57)
Înlocuind termenul p cu relaţia (4.54), expresia anterioară (4.57) devine:
3 3
2 22
3pR r
M NR r
, unde:
3 3
2 22
3pR r
sR r
, (4.58)
Termenul ps se numeşte coeficient al frecării de pivotare şi depinde de forma geometrică a suprafeţei
de contact. Ţinând cont de coeficientul frecării de pivotare relaţia (4.58) se poate rescrie după cum urmează:
p pM s N , (4.59)
reprezentând condiţia mecanică şi suficientă de echilibru în cazul frecării de pivotare.
NB.04.7. Frecarea în cuplele de rotaţie
Pentru studiul frecărilor în cuplele de rotaţie se analizează cazul unui fus cilindric mobil situat în interiorul unui lagăr radial fix. În funcţie de natura contactului dintre fus şi lagăr se disting două tipuri: cupla de rotaţie cu joc şi cupla de rotaţie fără joc (nerodată).
Cupla de rotaţie fără joc(nerodată). Zona de contact între fus şi lagăr este o suprafaţă semicilindrică, (vezi Fig. 4.16)
opusă rezultantei forţelor active R .
Presiunea de contact p este uniform
distribuită pe toată suprafaţa de contact. Contactul punctiform se realizează cu
frecare de alunecare, caracterizat prin coeficientul . Pentru a pune în evidenţă efectul mecanic, se
separă o suprafaţă elementară dA din suprafaţa de contact delimitată de coordonatele polare ,r , astfel
încât:
dA r l d , (4.60)
unde l reprezintă grosimea suprafeţei cilindrice de contact. Pe suprafaţa elementară dA se dezvoltă o
reacţiune normală elementară dN şi corespunzătoare acesteia o forţă de frecare elementară dT .
Fig.4.16
A B
Nd
dA
TdoM
r
fM
R d
O
dr
p
l

MECANICĂ*N* NB.04.Statica solidului rigid cu legături
‐ 88 ‐
Conform Fig.4.16, se proiectează dN şi dT pe direcţia rezultantei R . Din condiţia de echilibru a forţelor rezultă:
2 2
2 2
R dN c dT s (4.61)
Având în vedere că pe suprafaţa dA există o infinitate de reacţiuni normale punctiforme p , reacţiunea
normală elementară devine echivalentă cu:
dN p dA p r l d (4.62)
Forţa de frecare de alunecare elementară este exprimată prin relaţia:
dT dN p r l d (4.63)
Substituind (4.63) şi (4.62) în (4.61), se va obţine următoarea relaţie:
2 2
2 2
R p r l c d p r l s d (4.64)
Ţinând seama de faptul că: 2 2
2 2
2 ; 0
c d s d , relaţia (4.64) devine:
2R p r l (4.65)
Datorită acţiunii lui dT pe suprafaţa elementară dA , se va genera un moment rezistent al frecării:
fdM r dT (4.66)
Conform cu (4.66), pe toată suprafaţa de contact, momentul rezistent al frecării este:
2fM r p r r R (4.67)
Substituind în (4.67) 02 , numit coeficient al frecării din cupla de rotaţie fără joc, atunci
relaţia anterioară devine: 0fM r R , (4.68)
şi caracterizează condiţia de echilibru în cazul cuplelor de rotaţie fără joc.
Cupla de rotaţie cu joc. În acest caz, conform cu Fig. 4.17 contact dintre fus şi lagăr este cu joc,
contactul fiind caracterizat de coeficientul de frecare . Asupra fusului mobil acţionează un sistem
de forţe exterioare active, care se reduce la o rezultantă R , orientată după normala principală a fusului
şi un moment rezultant 0M orientat după axa de rotaţie a fusului. Presiunea de contact p este
neuniform distribuită pe suprafaţa de contact, valoarea maximă fiind pe direcţia normalei principale a fusului. Pentru studiul efectului mecanic, se separă o suprafaţă elementară dA (vezi formula (4.60)).

MECANICĂ*N* NB.04.Statica solidului rigid cu legături
‐ 89 ‐
Ţinând seama de faptul că pe suprafaţa dA există o infinitate de reacţiuni normale punctiforme p , reacţiunea normală
elementară dN şi corespunzătoare acesteia,
forţa de frecare elementară dT devin:
0
0
dN p c dA
p r l c d (4.69)
0
0
dT dN p c dA
p r l c d(4.70)
Reacţiunea normală elementară dN
respectiv forţa de frecare elementară dT ,
proiectate pe direcţia rezultantei R , determină condiţia de echilibru a forţelor:
2 2
2 2
R dN c dT s , (4.71)
Substituind (4.69) şi (4.70) în relaţia (4.71), se va obţine următoarea expresie:
2 2
20 0
2 2
R p r l c d p r l s c d (4.72)
02R p r l
(4.73)
Forţa de frecare elementară dT pe suprafaţa elementară dA , generează un moment rezistent al frecării, de forma, fdM r dT , care pe întreaga suprafaţă de contact, este:
2
0 02
2
fM r dT r p r c d r p r (4.74)
Dar, ţinând seama de relaţia (4.73), expresia momentului rezistent devine:
4
fM r R
(4.75)
Substituind în (4.75) 04
, numit coeficient al frecării din cupla de rotaţie cu joc, atunci relaţia
anterioară devine:
0 0M r R , (4.76)
şi caracterizează condiţia de echilibru în cazul cuplelor de rotaţie cu joc.
Fig.4.17
A B
Nd
dA
TdoM
r
fM
Rd
O
dr
p
l

MECANICĂ*N* NB.05.Statica sistemelor materiale
- 90 -
Capitolul NB.05. Statica sistemelor materiale
Cuvinte-cheie Forţe interioare, Forţe exterioare, Principiul acţiunii şi reacţiunii, Teorema solidificării,
Teorema echilibrului părţilor, Metoda izolării corpurilor, Sisteme de bare articulate, Noduri, Bara supusă la întindere, Bara supusă la compresiune, Sisteme de bare static determinate,
Metoda izolării nodurilor, Metoda secţiunilor (Ritter)
NB.05.1. Sisteme de puncte materiale
Forţe interioare şi forţe exterioare
Două sau mai multe corpuri care interacţionează alcătuiesc un sistem. Forţele care se exercită între două corpuri ale sistemului se numesc forţe interioare iar forţele care se exercită asupra corpurilor ce alcătuiesc sistemul ca rezultat al acţiunii altor corpuri din afara sistemului se numesc forţe exterioare.
Forţele interioare sunt două câte două egale în modul şi direct opuse, în virtutea principiului acţiunii şi reacţiunii. Astfel, în cazul unui sistem de corpuri de dimensiuni neglijabile în raport cu distanţele între ele, respectiv în cazul unui sistem de puncte materiale, dacă punctul material iA acţionează
asupra punctului material jA cu forţa ijF atunci şi punctul material jA acţionează asupra punctului
material iA cu o forţa jiF
egală în modul cu ijF şi direct opusă acesteia (figura 5.1).
Fig. 5.1
Vectorial, acest principiu se exprimă prin egalităţile:
0=+ jiij FF ; 0=×+× jijiji FrFr (5.1)
în care ir şi jr sunt vectorii de poziţie ai punctelor iA şi jA în raport cu punctul fix arbitrar O
conform principiului acţiunii si reacţiunii.
Prima egalitate din relaţia (5.1) exprimă proprietatea că forţele ijF şi jiF au modulele egale, aceeaşi
direcţie şi sensuri opuse iar cea de-a doua că forţele interioare au acelaşi suport.
Observaţie: Egalităţile (5.1) pot fi interpretate ca exprimând proprietatea că atât vectorul rezultant cât şi vectorul moment rezultant al forţelor ijF si jiF faţă de punctul fix O sunt ambii nuli. Este
Aj
Ai
O
ir
jr
ijF
jiF

MECANICĂ*N* NB.05.Statica sistemelor materiale
- 91 -
greşit însă să se tragă aici concluzia că aceste forţe sunt în echilibru deoarece ele sunt aplicate asupra a două puncte materiale diferite ( iA si jA ).
Noţiunea de sistem de corpuri este convenţională.
Observaţie: Se poate considera, de exemplu, că Soarele împreună a cu planetele şi cu sateliţii acestora formează un sistem de corpuri, sistemul nostru solar. Dacă din acest sistem ne interesează doar Soarele, Pământul şi Luna, putem considera că aceste trei corpuri formează, la rândul lor, un sistem. Rezultă de aici că şi noţiunile de „forţă interioară” şi de „forţă exterioară” sunt relative. În sistemul format de Soare, Pământ şi Lună forţa de atracţie exercitată de planeta Marte asupra Pământului este o forţă exterioară deoarece este cauzată de un corp exterior acestui sistem. Aceeaşi forţă este însă „interioară” pentru întreg sistemul solar deoarece se exercită între două corpuri ale aceluiaşi sistem.
Dacă asupra unui sistem de corpuri nu se exercită forţe exterioare, se spune că sistemul este izolat.
Echilibrul sistemelor de puncte materiale
Se consideră un sistem de n corpuri care interacţionează mecanic (fig. 5.2). Forţele ce acţionează asupra unui punct material iA din sistem sunt:
a) forţa exterioară iF care poate fi considerată ca rezultanta forţelor exterioare;
b) forţele interioare ijF (unde j = 1, 2, ..., n si i ≠ j).
Fig. 5.2
Se precizează că 0=iiF . Conform principiului acţiunii şi reacţiunii, forţele interioare sunt două câte două egale şi de sens opus, adică
A3
12F
Ai
An
A1
A2 21F
13F
iF1
1nF
nF1
2nF3nF
2iF 1iF
inF
niF
3iF
iF3
nF2
32F
31F
23F
nF3
iF2
2F
1F
iF
nF
3F

MECANICĂ*N* NB.05.Statica sistemelor materiale
- 92 -
jiij FF −= (5.2)
de unde se obţine
0=+ jiij FF . (5.3)
Momentul unei perechi de forţe interioare, cu care se interacţionează punctele materiale iA şi jA ,
ţinând seama de relaţia (5.2) este:
( ) ( ) 0=×=×−=−×+×=×+× ijijijjiijjijijijiji FAAFrrFrFrFrFr . (5.4)
Generalizând relaţiile (5.3) şi (5.4) pentru toate punctele din sistem se obţin relaţiile:
=×
=
∑∑
∑∑
= =
= =
n
i
n
jiji
n
i
n
jij
Fr
F
1 1
1 1
0
0, (5.5)
care arată că rezultanta forţelor interioare precum şi momentul acestor forţe în raport cu un punct fix sunt nule.
Prin definiţie, un sistem de puncte materiale este în echilibru dacă fiecare punct din sistem se află în echilibru şi reciproc.
Condiţia necesară şi suficientă ca un punct iA din sistem să fie în echilibru este ca rezultanta forţelor care îl acţionează să fie nulă, respectiv
01
=+∑=
n
jiji FF . (5.6)
Condiţiile necesare şi suficiente ca întreg sistemul de puncte studiat să fie în echilibru se obţin scriind ecuaţiile de tipul (5.6) pentru toate punctele (i = 1, 2, …, n).
În vederea eliminării din calcule a forţelor interioare se foloseşte teorema solidificării. Pentru a demonstra această teoremă se însumează ecuaţiile (5.6) scrise pentru toate punctele obţinându-se:
∑∑∑= ==
=+n
i
n
jij
n
ii FF
1 110 . (5.7)
În continuare, se înmulţeşte vectorial relaţia (5.6) cu vectorul de poziţie ir şi însumând pentru toate punctele materiale rezultă
∑∑∑= ==
=×+×n
i
n
jiji
n
iii FrFr
1 110 . (5.8)
Introducând în relaţiile (5.7) şi (5.8) rezultatele (5.5) se obţine teorema solidificării

MECANICĂ*N* NB.05.Statica sistemelor materiale
- 93 -
=×
=
∑
∑
=
=
,0
0
1
1n
iii
n
ii
Fr
F (5.9)
adică suma forţelor exterioare şi cea a momentelor forţelor exterioare faţă de un punct fix O sunt nule (respectiv, torsorul forţelor exterioare în raport cu un punct fix arbitrar O este nul), relaţii ce reprezintă condiţiile de echilibru pentru un sistem de puncte materiale.
Se poate demonstra că relaţiile anterioare sunt valabile pentru un sistem material oarecare (puncte materiale sau rigide). Ele reprezintă pentru un sistem material deformabil condiţiile necesare dar nu şi suficiente, iar pentru un sistem material nedeformabil (rigid) condiţiile necesare şi suficiente, deoarece reprezintă ecuaţiile de echilibru pentru un corp rigid.
NB.05.2. Sisteme de corpuri rigide
Teorema solidificării
Teorema solidificării demonstrează că, dacă un sistem (deformabil) de corpuri rigide, liber sau supus la legături exterioare, se află în echilibru sub acţiunea unui sistem de forţe direct aplicate, conform relatiilor (5.9), rămâne în echilibru sub acţiunea acestor forţe şi în cazul în care ar deveni rigid (nedeformabil), păstrându-se legăturile exterioare iniţiale. Pe baza acestei teoreme, se consideră întreg sistemul de corpuri, ca şi cum ar fi un singur corp rigid în echilibru, sub acţiunea forţelor direct aplicate şi a reacţiunilor din legăturile exterioare.
În acest fel, se pot scrie şase ecuaţii de echilibru în spaţiu şi trei ecuaţii de echilibru în plan considerându-se astfel sistemul solidificat.
Teorema echilibrului părţilor
Dacă dintr-un sistem de puncte (sau de corpuri) materiale acţionat de un sistem de forţe în echilibru, se izolează o parte (un subsistem), ea este în echilibru sub actiunea forţelor ce acţionează asupra punctelor materiale ce o alcătuiesc.
Într-adevăr, aceasta revine la a lua în consideraţie numai o parte dintre ecuaţiile (5.7) şi anume acelea care exprimă condiţiile de echilibru pentru punctele materiale ce alcătuiesc subsistemul izolat. Aceste ecuaţii sunt evident satisfăcute, dacă întregul sistem (5.7) este satisfăcut.
Cu alte cuvinte, teorema echilibrului părţilor demonstrează că, dacă un sistem (deformabil) de corpuri rigide, liber sau supus la legături exterioare, se află în echilibru, atunci o parte oarecare din sistemul de corpuri dat, considerată ca un rigid (nedeformabil), este, de asemenea, în echilibru sub acţiunea forţelor date şi de legătură exterioară care acţionează asupra acestei părţi.
Teorema echilibrului părţilor este de obicei folosită pentru determinarea mai comodă a unor necunoscute sau pentru verificări.
Observaţie: Ecuaţiile de echilibru obţinute prin aplicarea teoremelor solidificării şi echilibrului părţilor sunt combinaţii liniare ale ecuatiilor de echilibru obţinute prin aplicarea metodei izolării

MECANICĂ*N* NB.05.Statica sistemelor materiale
- 94 -
corpurilor. Numărul total de ecuaţii de echilibru independente pentru un sistem de n corpuri este 6n pentru sistemele spaţiale şi 3n pentru sistemele plane.
Dacă în rezolvarea anumitor probleme, ecuaţiile de echilibru nu sunt suficiente, atunci este necesar să se scrie relaţii suplimentare, independente, de natură geometrică sau relaţii care definesc mărimea forţelor si a momentelor de frecare. Dacă şi în această situaţie numărul necunoscutelor este superior numărului ecuaţiilor, sistemul se numeşte static nedeterminat. Numărul necunoscutelor care depăşeşte numărul ecuaţiilor reprezintă rangul (ordinul) de nedeterminare al problemei.
Observaţie: De obicei, ecuaţiile obţinute în studiul echilibrului unui sistem de corpuri sunt liniare şi în consecinţă se poate aplica teorema lui Kronecker – Capelli din algebră: condiţia necesară şi suficientă ca un sistem de ecuaţii liniare să fie compatibil este ca rangul matricei coeficienţilor să fie egal cu rangul matricei prelungită (extinsă) a sistemului. Se ştie că matricea prelungită (extinsă) se obţine adăugând coloana termenilor liberi la matricea coeficienţilor. Daca r este rangul matricei prelungite a sistemului şi n numărul de necunoscute, din cele de mai sus rezultă că r = n reprezintă condiţia ca sistemul de corpuri să fie static determinat (sistemul de ecuaţii să fie compatibil determinat), dacă nu există condiţii suplimentare.
Metode pentru studiul echilibrului sistemelor de corpuri
Metoda izolării corpurilor
Metoda izolării (separării) corpurilor este o metodă generală utilizată în studiul echilibrului sistemelor. Dacă sistemul de corpuri studiat este în echilibru, fiecare corp din sistem este în echilibru şi se poate studia echilibrul fiecăruia dintre acestea separat. Necunoscutele care apar în cazul aplicării metodei izolării corpurilor sunt:
a) valorile parametrilor geometrici independenţi (coordonate, unghiuri), care determină poziţia de echilibru a corpurilor;
b) reacţiunile legăturilor exterioare la care este supus sistemul, numite forţe de legătură (reacţiuni) exterioare;
c) acţiunile reciproce ale corpurilor din sistem, numite forţe de legătură (reacţiuni) interioare.
Uneori, pentru evitarea calculului forţelor de legătura interioare, se aplică teorema solidificării sau metoda echilibrului părţilor, prezentate anterior.
Aplicaţie:
Se consideră două sfere, fiecare de rază r şi greutate G plasate într-un tub de rază R, care este aşezat pe un plan orizontal. Se cere să se calculeze greutatea minimă Q a tubului pentru ca acesta să nu se răstoarne în jurul punctului A.
Rezolvare: Pentru rezolvarea problemei sunt necesare scrierea câtorva relaţii geometrice:
( ) ( ),2222222 RrRrRrEFEOFO −=−−=−=
de unde rezultă condiţia Rr >2 .

MECANICĂ*N* NB.05.Statica sistemelor materiale
- 95 -
B
A
O1
O2
C G
G
Q D
E
F
r 2(R-r) r
α
Fig. 5.3, a
B
A
O1
O2
C G
G
Q D
E
F
r 2(R-r) r
α
Fig. 5.3, a
( ),
2sin
2
2r
RrREOFO −==α
.cos2 r
rREO
EF −==α
Se aplică metoda izolării în cazul echilibrului la limită. Pentru cilindru se obţine (fig. 5.3,b)
( ) (a) 0 0 =−=∑ CBx NNF ( ) )b( 0 0 =−=∑ QNF Ay
( ) ( )( ) 022 0 =−+⋅−⋅+⋅=∑ RrRrNrNRQM BCA (c)
de unde rezultă:
( )(d)
22 ;
RrRRQNNQN CBA−
⋅===
Pentru bila inferioară se obţine (fig. 5.3,c)
( )( ) (f) .0sin 0
)e( 0cos 0=−−=
=−=
∑∑
GNNFNNF
EDy
ECx
αα
Pentru bila superioară se obţine (fig. 5.3,d)
( )( ) (h) .0sin 0
(g) 0cos 0=−=
=−=
∑∑
GNFNNF
Ey
BEx
αα
de unde rezultă
( )RrRrGGN E−⋅
⋅==
2sinα
C Q
B
A
NC
NB
NA
O1 C
NC
E
G
D ND
NE
O1 C
NC
E
G
D ND
NE
Fig. 5.3, b Fig. 5.3, c Fig. 5.3, d

MECANICĂ*N* NB.05.Statica sistemelor materiale
- 96 -
O1 C
NC G
D ND
O2 B
G
NB
E
Fig. 5.3, e
A
O1
G
G Q
E
O2
D
NA ND
Fig. 5.3, f
( )( )RrR
rRGNNN ECB−⋅−⋅
=⋅==2
cosα
şi ţinând seama de relaţia (d) se obţine: ( ) .2min G
RrRQ ⋅
−⋅=
Se observă că sistemul de ecuaţii (a) ... (h) este un sistem de şapte ecuaţii cu şase necunoscute. Aceste ecuaţii nu sunt toate independente, deoarece ecuaţiile (e) şi (g) conduc la relaţia (a). În concluzie numai 6 ecuaţii sunt independente.
Aplicând metoda echilibrului părţilor pentru cele două bile (fig. 5.3,e), se poate scrie
( )( ) (j) .02 0
(i) 0 0=−=
=−=
∑∑
GNFNNF
By
BCx
Deoarece ecuaţia (i) este suma ecuaţiilor (e) şi (g), iar ecuaţia (j) este suma ecuaţiilor (f) şi (h), ecuaţiile (j) şi (i) nu sunt independente faţă de precedentele.
Aplicând metoda solidificării se obţine (fig. 4.3,f):
( )( ) (l) .02 0
(k) 00 0=−−+=
==
∑∑
QGNNFF
ADy
x
Se vede că ecuaţia (k) este suma ecuaţiilor (a), (e) şi (g), iar ecuaţia (l) este suma ecuaţiilor (b), (f) şi (h). Deci, nici ecuaţiile (k) şi (l) nu sunt independente faţă de cele obţinute prin aplicarea metodei izolării corpurilor.

MECANICĂ*N* NB.05.Statica sistemelor materiale
- 97 -
NB.05.3. Sisteme de bare articulate
Consideraţii generale
Sistemele de bare articulate sunt utilizate în tehnică la grinzile podurilor metalice (fig. 5.4, a), la podurile rulante, la macarale (fig. 5.4, b), la stâlpii metalici ce susţin cablurile electrice (fig. 5.4, c), la formele ce susţin acoperişurile clădirilor (fig. 5.4, d), etc.
a) b)
c) d)
e)
Fig. 5.4

MECANICĂ*N* NB.05.Statica sistemelor materiale
- 98 -
În studiul acestor sisteme de bare se fac următoarele ipoteze simplificatoare:
a) Barele sunt articulate în noduri. În cazul unei grinzi metalice, diferitele bare ale căror axe concură la un nod se prind de o placă metalică denumită guşeu, prin intermediul niturilor (fig. 5.4, e) sau prin sudură. Această îmbinare împiedică parţial rotaţia liberă a barelor, încât barele nu sunt de fapt articulate la noduri. Ca urmare, la extremităţile lor apar cupluri care se opun rotirii, însă calculele exacte au arătat că în majoritatea cazurilor de grinzi cu zăbrele întalnite în practică, momentele acestor cupluri sunt relativ mici şi pot fi neglijate. În consecinţă, barele unei grinzi cu zăbrele pot fi considerate într-o primă aproximaţie articulate în noduri.
b) Forţele exterioare sunt aplicate la noduri. În tehnică se iau diverse măsuri constructive astfel că forţele exterioare să fie aplicate, pe cât posibil, la noduri, aşa cum se observă în unele exemple din figura 5.4. Există însă forţe exterioare care nu sunt aplicate în noduri, cum este, de exemplu, greutatea.
Considerând barele rigide, greutatea proprie a fiecăreia poate fi inlocuită cu două forţe verticale echivalente, aplicate în nodurile de la extremitatea barei. Această înlocuire este justificată şi în cazul în care barele sunt deformabile, deoarece, aşa cum se poate arăta printr-un calcul exact, efectul de încovoiere al unei asemenea bare datorat greutăţii proprii este neglijabil.
a) b)
Fig. 5.5
Cele două ipoteze simplificatoare menţionate duc la concluzia că forţele interioare (eforturile) dintr-o bară a unui sistem articulat, în cazul când există, nu pot fi decât eforturi axiale de întindere sau de compresiune. Dacă se izolează o bară a unui astfel de sistem, acţionată de două forţe aplicate la extremităţile ei, este necesar şi suficient pentru echilibru ca aceste forţe să fie egale în modul şi direct opuse. Pot fi întâlnite situaţiile: bara este supusă la întindere, ca în figura 5.5,a, bara este supusă la compresiune, reprezentată în figura 5.5,b şi cazul când bara este nesolicitată.
În paragrafele următoare vor fi expuse principalele metode de determinare a acestor eforturi. Se va considera cazul sistemelor articulate plane (nodurile sunt într-un plan în care sunt conţinute şi forţele aplicate).

MECANICĂ*N* NB.05.Statica sistemelor materiale
- 99 -
NB.05.4. Sisteme de bare static determinate
Pentru a se putea determina eforturile într-un sistem plan de bare articulate, este necesar ca numărul ecuaţiilor să fie egal cu numărul necunoscutelor. Deoarece la fiecare nod se pot scrie două ecuaţii de proiecţii, numărul total de ecuaţii va fi 2n, unde n este numărul nodurilor. În ceea ce priveşte necunoscutele, ele vor fi eforturile din bare şi reacţiunile din reazeme. Dacă se notează cu b numărul de bare, cu s numărul de reazeme simple şi cu a numărul de articulaţii, atunci, ţinând seama că în fiecare bară există câte o necunoscută (scalarul efortului din acea bară), în fiecare reazem simplu există o necunoscută (scalarul reacţiunii normale), iar în fiecare articulaţie câte două necunoscute (proiecţiile pe cele două axe ale reacţiunii), numărul total de necunoscute va fi
asb 2++ .
Astfel, pentru ca un sistem plan de bare articulate să fie static determinat este necesar ca:
asbn 22 ++= (5.10)
De obicei, un asemenea sistem are un reazem simplu şi o articulaţie. În acest caz relaţia (5.10) devine:
32 += bn . (5.11)
a) b) c)
Fig. 5.6
Observaţii şi exemple: Condiţia (5.10) este doar necesară, dar nu şi suficientă. Astfel, sistemul din exemplul prezentat în figura 5.6, a, având 5 bare, 4 noduri, o articulaţie şi un reazem simplu, îndeplineşte condiţia (5.10) deoarece
8121542 =⋅++=⋅
şi este static determinat, aşa cum se poate dovedi aplicând efectiv metoda izolării nodurilor (prezentată în capitolul următor).
Sistemul din figura 5.6,b care are 6 bare, 4 noduri, o articulaţie şi un reazem simplu, nu îndeplineşte condiţia (5.10):
;8422 =⋅=n 912162 =⋅++=++ asb , deci
asbn 22 ++< .
Numărul de ecuaţii fiind mai mic decât numărul de necunoscute, sistemul este static nedeterminat.

MECANICĂ*N* NB.05.Statica sistemelor materiale
- 100 -
Exemplul de sistem prezentat în figura 5.6,c care are 3 bare, 4 noduri şi două articulaţii, nu îndeplineşte condiţia (5.10):
;8422 =⋅=n 722032 =⋅++=++ asb , deci
asbn 22 ++> .
Numărul de ecuaţii fiind mai mare decât numărul de necunoscute, sistemul este un mecanism (mecanism patrulater) care nu poate rămâne în repaus decât pentru anumite sisteme de forţe. Condiţia (5.10) nu este însă şi suficientă.
Fig. 5.7
Un ultim exemplu prezentat este sistemul din figura 5.7, sistem ce conţine 9 bare, 6 noduri, o articulaţie şi un reazem simplu. Condiţia (5.10) este indeplinită
1221962 =++=⋅
dar sistemul nu este static determinat, deoarece cele trei bare superioare alcătuiesc un mecanism, iar cele 6 bare inferioare un sistem static nedeterminat.
NB.05.5. Metode pentru determinarea eforturilor din bare
Metoda izolării nodurilor
Această metodă se bazează pe teorema echilibrului părţilor, considerând ca „parte” a sistemului un nod, care, dacă este izolat, poate fi considerat ca un punct material, acţionat de forţe concurente (eforturile din bare şi forţele exterioare).
Pentru echilibrul unui asemenea punct, în plan, se pot scrie două ecuaţii de proiecţii. Dacă nodul ar avea numai două necunoscute (eforturi sau reacţiuni) ele ar putea fi determinate cu ajutorul acestor ecuaţii şi s-ar putea astfel trece la un alt nod.
Rezultă deci că în metoda izolării nodurilor se poate folosi procedeul următor: se alege un nod în care nu avem decât două necunoscute, se izolează nodul respectiv, se scriu ecuaţiile de echilibru şi se determină necunoscutele. Se trece apoi la un alt nod cu două necunoscute şi aşa mai departe, până se determină eforturile în toate barele sistemului.

MECANICĂ*N* NB.05.Statica sistemelor materiale
- 101 -
1
2 4
5 3
P
P P
a
a
a
a
a
a
a
a)
H1
P
P P
V1 V5 b)
S13
S12
1 60°
V1 c)
2
S24
P
60° 60°
S23 S21 d)
Fig. 5.8
Aplicaţie:
Să se determine eforturile în barele grinzii cu zăbrele din figura 5.8, a.
Rezolvare:
Se observă că în nici unul dintre nodurile acestei grinzi nu sunt mai putin de trei necunoscute: în nodul 1 sunt patru necunoscute, eforturile S12 şi S13 şi cele două componente ale reacţiunii din articulaţie; în nodurile 2 şi 4 sunt câte 3 necunoscute; în nodul 3 sunt patru necunoscute, iar în nodul 5 sunt trei necunoscute (eforturile S45, S35 şi reacţiunea verticală din reazemul simplu).
Este necesar să se aplice să se aplice în prealabil teorema solidificării (fig. 5.8,b). Ecuaţiile de echilibru (proiecţii pe două axe şi momente în raport cu articulaţia 5) vor fi:
.0222
3;03 ;0
1
511
=⋅−⋅+⋅+⋅
=−+=
aVaPaPaP
PVVH
Se deduc .2
3 ;0 511PVVH === Există acum două
noduri la care sunt numai două necunoscute: 1 şi 5. Se poate începe cu oricare dintre ele. De exemplu, vom începe cu nodul 1 (fig, 5.8,c). Ecuaţiile de proiectii sunt:
.02
360sin ;060cos 121213 =+⋅=⋅+PSSS
conduc la soluţiile: .23;3 1312 PSPS =−=
Trecând la nodul 2 (fig, 5.8,d), ecuaţiile de proiecţie sunt:
.060sin60sin3
;060cos60cos3
23
2423
=⋅−−⋅
=+⋅+⋅
SPP
SSP
conduc la soluţiile: .3
2;3 2423
PSPS −==
În continuare se poate trece fie la nodul 3, fie la nodul 4, căci ambele au numai două necunoscute. Trecând, de exemplu, la nodul 3 (fig. 5.8, e), ecuaţiile de echilibru sunt:

MECANICĂ*N* NB.05.Statica sistemelor materiale
- 102 -
3
P
S35 S31
S34 S32
60° 60°
60°
e)
P
S43
S42
S45 60° 60°
4
f)
V5
5 S53
S54
g)
Fig. 5.8
.060sin60sin3
;060cos60cos32
3
34
3435
=−⋅+⋅
=⋅++⋅−−
PSP
SSPP
conduc la soluţiile: .2
3;3 3534
PSPS ==
Nodurile 4 şi 5 au acum numai o singură necunoscută. Trecând la unul dintre ele, de exemplu la nodul 4 (fig. 5.8,f), ecuaţiile de echilibru sunt:
.060sin60sin3
;060cos60cos33
2
45
45
=−⋅−⋅−
=⋅+⋅−
PSP
SPP
constituie un sistem de două ecuaţii cu o singură necunoscută: S45. Se determină, spre exemplu, din prima ecuaţie: 345 PS −= . Ducând această valoare în a doua ecuaţie, se observă că se verifică identic, deci ea constituie o ecuaţie de verificare.
La ultimul nod al grinzii, (5), toate forţele sunt acum cunoscute. Cele două ecuaţii de proiecţie (fig. 5.8,g) sunt:
.060sin32
3
;060cos32
3
=⋅−
=⋅+−
PP
PP
sunt amândouă identic satisfăcute. Ele constituie alte două ecuaţii de verificare. În total există, deci, trei ecuaţii de verificare. Existenţa acestora se explică prin faptul că s-a folosit iniţial teorema solidificării , cu care prilej s-au scris trei ecuaţii de echilibru pentru întreg sistemul, considerat ca un rigid.
Este posibil ca în unele cazuri să nu existe nici un nod în care să nu fie decât două necunoscute. În această situaţie, se aplică în prealabil teorema solidificării şi se determină astfel reacţiunile, după care este în general posibil să se găsească noduri cu numai două necunoscute.
În alte cazuri, chiar dacă există un nod cu numai două necunoscute, este mai avanatajos să se utilizeze acest procedeu (aplicarea teoremei solidificării pentru determinareaa reacţiunilor), ultimele trei ecuaţii obţinute apoi din izolarea nodurilor, rămânând ecuaţii de verificare.
Există sisteme plane articulate la care chiar după ce s-au determinat reacţiunile nu se pot găsi noduri cu numai două necunoscute. În acest caz se presupune efortul într-una din bare cunoscut. Eliminând

MECANICĂ*N* NB.05.Statica sistemelor materiale
- 103 -
această bară şi înlocuind-o cu perechea de eforturi axiale corespunzătoare S, se obţine o grindă cu zăbrele, la care, în general, există noduri cu numai două necunoscute. Se poate aplica metoda izolării nodurilor, exprimând eforturile din celelalte bare în funcţie de efortul S presupus cunoscut. Dacă sistemul articulat este static determinat, atunci se ajunge la un nod în care una dintre ecuaţiile de echilibru permite determinarea acestui efort.
Metoda izolării nodurilor are dezavantajul că, atunci când dorim să determinăm efortul într-o anumită bară, suntem nevoiţi să determinăm, trecând din nod în nod, eforturile într-o serie de bare chiar dacă aceste eforturi nu interesează în problemă. În plus există dezavantajul că prin aceste calcule, se pot introduce erori care se transmit şi astfel nu există în general certitudinea asupra exactităţii valorii efortului găsit. Metoda izolării nodurilor este indicată când se cer determinate toate eforturile din bare.
Metoda secţiunilor (Ritter)
Atunci când interesează efortul într-o singură bară, se poate folosi metoda secţiunilor (metoda Ritter) care permite determinarea acestui efort prin scrierea unei singure ecuaţii.
Această metodă reprezintă aplicarea teoremei echilibrului părţilor la studiul grinzilor cu zăbrele. Pentru aceasta se secţionează grinda în două părţi şi se studiază echilibrul uneia dintre ele ca un rigid în plan. În locul barelor secţionate, presupunând că sunt supuse la intindere, se introduc forţele respective, care sunt necunoscute. Aşa după cum s-a arătat, se pot scrie trei ecuaţii de echilibru. În consecinţă se va urmări să se secţioneze cel mult trei bare în care nu se cunosc forţele. Se recomandă să nu se izoleze un singur nod, iar barele secţionate să nu fie toate paralele între ele.
Prin secţionarea completă se înţelege o secţionare prin care grinda se desface în două părţi distincte. În baza teoremei echilibrului părţilor, fiecare din cele două părţi este în echilibru sub acţiunea forţelor date, a forţelor de legătură şi a forţelor interioare (eforturile din barele secţionate).
Pentru simplificarea calculelor, în vederea obţinerii unor ecuaţii cu o singură necunoscută, se scrie ecuaţia de momente în raport cu punctul unde sunt concurente celelalte două bare secţionate. Dacă aceste două bare sunt paralele se scrie o ecuaţie de proiecţie pe axa perpendiculară pe cele două bare paralele.
Se recomandă ca metoda secţiunilor să se aplice după ce s-au calculat reacţiunile exterioare.

MECANICĂ*N* NB.06.Statica firelor
- 104 -
Capitolul NB.06. Statica firelor
Cuvinte-cheie fire, flexibile, inextensibile, triedrul Frenet, formula Euler
pentru frecarea firelor, ecuaţia lănţişorului, maşini de ridicat
NB.06.1. Introducere. Ipotezele modelului mecanic
Din cele mai vechi timpuri oamenii au utilizat pentru diferite scopuri şi aplicaţii cabluri, frânghii şi lanţuri. În construcţia de maşini se utilizează curele şi lanţuri pentru transmisiile mecanice, cabluri pentru telecabine, sau transmiterea la distanţă a energiei electrice etc. Prezintă interes determinarea tensiunii în cabluri pentru a le dimensiona corect, sau a formei de repaus a cablurilor lungi pentru motive de siguranţă în exploatare. Deşi tehnic diferite, cablurile, curelele sau lanţurile, vor fi tratate unitar din punct de vedere mecanic, sub numele de fire. Exemplele precedente, alese dintre multe altele, justifică interesul studierii echilibrului firelor.
Din punct de vedere al modelului mecanic, toate exemplele precedente prezintă dimensiuni transversale neglijabile faţă de lungimea lor. Prin urmare firele vor fi considerate în continuare ca linii materiale perfect flexibile şi inextensibile.
Prima caracteristică presupune că firul nu opune nici o rezistenţă la flexiune, adică la orice modificări ale razei sale de curbură. Inextensibil este firul care nu prezintă modificări de lungime indiferent de mărimea forţelor de întindere aplicate. Cele două caracteristici ale firului ideal permit o analogie cu un sistem de tije de lungime elementare, articulate una după alta, iar numărul lor tinde la infinit dacă lungimile tind spre zero.
Pentru anumite aplicaţii, în care proprietăţi neglijate prin modelul propus, pot avea o influenţă care nu se poate neglija, se vor aduce corecţii de model, precum rigiditatea la încovoiere a firului sau alungirea acestuia.
NB.06.2. Ecuaţiile de echilibru ale firelor perfect flexibile şi inextensibile
Un fir este descris matematic în cazul cel mai general, ca o curbă în spaţiu (Γ), care poate fi descrisă prin indicarea ecuaţiilor sale parametrice:
( )( )( )( )
;x sy s s Iz s
Γ ∈ ⊂ℜ
(6.1)
S-a considerat a fi s un parametru scalar real, care din punct de vedere practic, poate reprezenta lungimea arcului de curbă (Γ), pornind de la un punct Oc ales ca origine pe acea curbă (Fig. 1a).
Fie A un punct arbitrar pe curba (Γ), definit prin vectorul de poziţie ( , , )r x y z , sau prin coordonata curbilinie (arcul de curbă) s , măsurat de la punctul Oc, ales ca origine pe curbă (Fig. 6.1a). Un punct B, infinit apropiat de A şi situat pe aceeaşi curbă, are vectorul de poziţie r dr+ . Vectorul AB

MECANICĂ*N* NB.06.Statica firelor
- 105 -
astfel construit, are direcţia tangentei în A la curba ( Γ ), iar lungimea arcului AB este ds, egală în modul cu dr , lungimea infinit mică a coardei AB. Dacă se notează τ versorul tangentei în A la curba (Γ), rezultă:
dr dsτ= . (6.2)
Fig. 6.1.Poziţionarea arcului elementar (a) şi versori tangenţi la capetele arcului elementar (b).
Versorul τ al tangentei în A şi punctul arbitrar B infinit apropiat de A, definesc un plan (Π) numit plan osculator. Normalele situate în planul (Π), duse prin A şi respectiv B, la curba (Γ ) se intersectează într-un punct C, cu excepţia cazului în care (Γ ) este o dreaptă. Considerând arcul elementar ds ca fiind un arc de cerc, atunci segmentele CA şi CB reprezintă raza cercului respectiv şi corespunde razei locale de curbură a curbei (Γ ) care se notează ρ. Pe direcţia AC se consideră versorul ν , numit versorul normalei principale. Se defineşte prin relaţia
β τ ν= × , (6.3)
al treilea versor perpendicular pe primii doi, numit versorul binormalei. Sistemul de axe având versorii , ,τ ν β se numeşte triedrul Frénet sau sistemul de coordonate intrinseci.
După cum se observă în Fig. 6.1b, versorul tangentei îşi modifică orientarea de la un punct la altul infinit apropiat şi se poate demonstra relaţia:
1ddsτ ν
ρ= . (6.4)
x
O y
z
(Γ)
Oc s
ds
ρ
a)
A B
C
_ r _ _
r +dr
ρ
d dsdsτ
b)
dθ
dθ
C
A B
_ ν(s) _
ν(s+ds)
_ τ(s)
_ τ(s+ds)
_ τ(s)
_ τ(s)

MECANICĂ*N* NB.06.Statica firelor
- 106 -
NB.06.3. Ecuaţiile de echilibrul ale firului în triedrul Frénet
Se consideră că sub acţiunea unei forţe distribuite pe unitatea de lungime p , un fir se află în echilibru sub forma unei curbe ( Γ ).
Fig. 6.2. Forţele aplicate pe elementul de fir
Se izolează o porţiune din fir notată AB (Fig. 6.2), de lungime ds, acţionată de forţele ( )T s− în
punctul A, de coordonată curbilinie s şi de ( ) dTT s dsds
+ în punctul B. S-a considerat pozitivă
tensiunea în sensul creşterii coordonatei s, iar tensiunea în fir se presupune că este o funcţie numai de poziţia punctului pe curba ( Γ ).
Echilibrul porţiunii considerate implică o ecuaţie vectorială de echilibru pentru forţe şi una pentru momente. Ecuaţia de echilibru pentru forţe se scrie pentru arcul elementar AB astfel:
( ) ( ) 0dTT s T s ds pdsds
− + + + = (6.5)
din care, raportând la lungimea arcului ds arbitrară, rezultă o primă ecuaţie pentru echilibrul firelor:
0dT pds
+ = . (6.6)
Ecuaţia vectorială de echilibru pentru momente se poate scrie în raport cu mijlocul D al segmentului AB. În aceste condiţii punctul D coincide cu mijlocul arcului AB, punct în care se poate considera că se aplică forţa elementară pds , care astfel nu contribuie la ecuaţia de momente:
( ) 0dTDA T DB T dsds
× − + × + =
. (6.7)
Având în vedere că prin alegerea punctului D la mijlocul arcului infinitezimal
x
O y
z
A B T−
dTT dsds
+
_ p ds
D

MECANICĂ*N* NB.06.Statica firelor
- 107 -
2dsDA DB τ= − = − (6.8)
relaţia precedentă se scrie:
2 02
dT dTDB T DB ds T ds dsds ds
τ τ× + × = × + × = (6.9)
Al doilea termen este infinit mic de ordinul al doilea şi poate fi neglijat. Rezultă prin urmare coliniaritatea între versorul tangent şi tensiunea în fir T . Această proprietate se poate scrie:
T Tτ= (6.10)
Această proprietate se poate înlocui în ecuaţia (6), care devine astfel:
( ) 0d dT dT p T pds ds ds
ττ τ+ = + + = (6.11)
Folosind relaţia (6.4) pentru derivata versorului tangent, se obţine ecuaţia diferenţială de echilibru a elementului de fir, supus acţiunii unei forţe distribuite t np p p pβτ ν β= + + :
0dT T pds
τ νρ
+ + = (6.12)
sau proiectând ecuaţia (6.12) pe axele sistemului de axe Frénet:
0;
0;
0
t
n
dT pdsT p
pβ
ρ
+ =
+ =
=
(6.13)
se obţine un sistem de ecuaţii de echilibru pentru elementul de fir perfect flexibil şi inextensibil.
A treia ecuaţie din sistemul precedent (pβ = 0) indică faptul că firul se poziţionează astfel încât în orice punct al său forţa aplicată să se proiecteze numai pe direcţia tangentei şi a normalei principale, direcţii care definesc planul osculator.
NB.06.4. Ecuaţiile de echilibru ale firului în triedrul cartezian
Din relaţia (6.2) rezultă proiecţiile versorului tangent pe direcţiile unui sistem cartezian Oxyz, sub forma
dr dx dy dzi j kds ds ds ds
τ = = + + . (6.14)
Prin înlocuirea acestei expresii în ecuaţia generală de echilibru (6.12) şi descompunând forţa distribuită pe direcţiile triedrului cartezian sub forma x y zp p i p j p k= + + , rezultă ecuaţiile de
echilibru pe direcţiile unui sistem de axe cartezian:

MECANICĂ*N* NB.06.Statica firelor
- 108 -
0;
0;
0.
x
y
z
d dxT pds dsd dyT pds dsd dzT pds ds
+ = + = + =
(6.15)
NB.06.5. Cazuri particulare de fire perfect flexibile şi inextensibile
Firul neacţionat de forţe distribuite
Dacă firul nu este acţionat de forţe distribuite (px= py= py =0), din ecuaţiile (5.15) rezultă:
0;
0.
dTdsTρ
=
= (6.16)
Din prima relaţie rezultă că pe porţiunile libere, tensiunea în fir T=C, unde C este o constantă care se va determina din condiţiile la limite, care sunt capetele porţiunii studiate. Din a doua relaţie rezultă că pentru o tensiune finită, nenulă, raza de curbură tinde la infinit. Rezultă că dacă forţele distribuite sunt neglijabile, firul se poziţionează în linie dreaptă indiferent de poziţia punctelor de capăt ale porţiunii respective. Dacă firul este şi netensionat, tot din a doua relaţie rezultă că raza de curbură este arbitrară, adică firul va fi în echilibru în orice poziţie. Ca exemplu se poate da cazul unui fir netensionat, aflat în imponderabilitate.
Firul acţionat de forţe distribuite normale
Dacă firul este acţionat numai de forţe distribuite normale, se înlocuiesc în relaţiile (6.13)0; 0t np p pβ= = ≠ şi rezultă
0;
0.n
dTdsT pρ
=
+ = (6.17)
Ca şi în cazul precedent, se constată din prima ecuaţie că tensiunea în fir este constantă în lungul firului. Din a doua ecuaţie, pentru o valoare determinată a tensiunii, se poate calcula forţa distribuită normală, care creşte cu scăderea razei de curbură.
Firul acţionat de forţe distribuite tangenţiale
Dacă firul este acţionat numai de forţe distribuite tangenţiale ( 0; 0t np p pβ≠ = = ), se înlocuiesc
aceste componente în relaţiile (6.13) şi rezultă:

MECANICĂ*N* NB.06.Statica firelor
- 109 -
0;
0.
tdT pdsTρ
+ =
= (6.18)
Din prima ecuaţie se poate determina tensiunea într-un punct al firului aflat la distanţa l de capătul liber:
0
l
tT p ds= −∫ (6.19)
iar din a doua ecuaţie rezultă că firul este în echilibru în linie dreaptă.
Exemplu. Un fir omogen greu, fixat la un capăt şi liber la celălalt, se va dispune la echilibru pe verticală, iar tensiunea în fir creşte liniar de la capătul liber spre cel fix: ( ) tT x p x= .
Frecarea firelor
Se consideră un fir de greutate neglijabilă, trecut peste o suprafaţă cilindrică, aspră şi fixă (Fig. 6.3). Se consideră că generatoarele cilindrilor sunt orizontale. Se consideră cunoscut coeficientul de frecare de alunecare uscată μ pentru cuplul de materiale fir-suprafaţă. Faptul că suprafeţele menţionate sunt fixe, este indicat pe figură prin triunghiuri echilaterale care sunt ataşate la un referenţial fix, indicat prin haşuri. Dacă între punctele extreme de tangenţă dintre fir si suprafaţă, aceasta are schimbări de semn ale curburii, pot să apară mai multe arce de curbă de contact între fir şi suprafaţă.
Fig. 6.3. Fir trecut peste o suprafeţe cilindrice aspre oarecare (a) si circular cilindrică (b)
Contactul cu suprafaţa se manifestă prin apariţia unei forţe normale distribuite pn şi apariţia unei forţe tangenţiale distribuite pt , produsă ca urmare a frecării :
a) a) b)
_ T
_ T
_ T
_ T0
_ T0
_ T0

MECANICĂ*N* NB.06.Statica firelor
- 110 -
0;
0.
t
n
dT pdsT pρ
+ =
+ = (6.20)
Fig. 6.4 Echilibrul cu frecare al unui arc infinitezimal de fir
Dacă se înmulţesc ambele ecuaţii cu lungimea elementară ds a firului, se obţin forţele elementare normală şi de frecare, între care există relaţia de inegalitate ( )t np ds p dsµ≤ studiată la legile
frecării uscate. Prin urmare ecuaţiile (6.20) înlocuite în inegalitatea precedentă conduc la:
dT Tds
µρ
≤ . (6.21)
Se constată că tensiunea în firul aflat în contact cu suprafaţa aspră depinde de raza de curbură locală a firului şi de coeficientul de frecare. Dacă se presupune că suprafaţa este cilindrică de rază ρ=R, atunci între lungimea elementară ds a firului şi unghiul la centru dθ corespunzător acestei porţiuni există relaţia ds Rdθ= , cu care inegalitatea (6.21) devine:
dT dT
µ θ≤ . (6.22)
Prin integrare între limitele θ=0 la care tensiunea în fir se consideră a fi T0 şi o valoare arbitrară θ la care tensiunea este T, se obţine:
0ln lnT T µθ− ≤ , (6.23)
sau
0
T eT
µθ≤ . (6.24)
Se constată că la echilibru, tensiunea T aplicată în sensul tendinţei de alunecare este mai mare decât T0 aplicată în sens contrar. Pe de altă parte, se constată că raza cilindrului circular nu intervine in inegalitatea (6.24), datorită ipotezei de fir perfect flexibil. În cazul în care ambele sensuri de mişcare sunt posibile, relaţia (6.24) se scrie
pn
pt
dTT dsds
+
T

MECANICĂ*N* NB.06.Statica firelor
- 111 -
0 0T e T T eµθ µθ− ≤ ≤ , (6.25)\
formă sub care este cunoscută ca formula Euler pentru forţele de frecare în fire.
Exemplu.
O greutate G=1000 N este echilibrată de o forţă F aplicată la capătul liber al unui fir. Firul este trecut sau înfăşurat peste un cilindru fix, faţă de care are un coeficient de frecare de alunecare μ=0,3. Care sunt limitele minimă şi maximă ale forţei F pentru echilibru, în două situaţii:
a) Unghiul de înfăşurare este θ=π (fir trecut peste cilindru).
b) Unghiul de înfăşurare este θ=3π .
Fig. 6.5. Fir cu frecare pe un cilindru fix.
Soluţie
Prin înlocuire în relaţia (5.25), rezultă:
a) min 389,7F Ge Nµπ−= = ; max 2566,3F Ge Nµπ= =
b) 3min 59,2F Ge Nµπ−= = ; 3
max 16902,0F Ge Nµπ= =
Se constată că pentru a nu lăsa greutatea să coboare, forţa minimă necesară la echilibru este aproximativ o treime din greutate pentru o simplă trecere a firului peste un cilindru (μ=0,3). Dacă firul se înfăşoară o dată peste cilindru, forţa necesară scade la 6% din greutate. În sens invers insă, dacă se doreşte ridicarea greutăţii cu ajutorul firului trecut peste cilindru, în primul caz este necesară o forţă de cel puţin 2,5 ori mai mare decât greutatea, iar în al doilea caz aceasta este de aproximativ 17 ori mai mare. Tehnica de a produce tensiuni mari în fire ca urmare a înfăşurării acestora în jurul unor cilindri bine fixaţi, este folosită curent la legarea navelor în porturi.
Firul acţionat de greutatea proprie. Ecuaţia lănţişorului
Pentru determinarea formei la echilibru a firului supus acţiunii greutăţii proprii, se izolează o porţiune de fir de lungime ds (Fig. 6.6), acţionată de forţele ( )T s− la un capăt de coordonată
curbilinie s şi ( ) dTT s dsds
+ la celălalt capăt, precum şi de forţa elementară pds , provenind din
forţa distribuită pe unitatea de lungime dmp gds
= .
_ G
_ F
μ

MECANICĂ*N* NB.06.Statica firelor
- 112 -
Fig. 6.6. Elementul de fir acţionat de greutatea proprie.
Ecuaţiile de echilibru (6.13) se scriu, ţinând cont de semnele proiecţiilor forţei elementare pe axele sistemului de coordonate intrinseci ( )sin , cosp p pθ θ− − , astfel :
sin ;
cos .
dT pdsT p
θ
θρ
=
= (6.26)
Legătura între unghiul tangentei la curba y(x) cu axa Ox şi ecuaţia y(x), este dată de relaţia ( )y x tgθ′ = , iar raza de curbură a unei curbe plane este cunoscută din geometria analitică :
( )
32 21 y
yρ
′+=
′′. (6.27)
Pentru arcul elementar sindy ds θ= , relaţie care înlocuită în prima ecuaţie din (6.26) conduce la:
dT dypds ds
= . (6.28)
Prin integrare în lungul unui arc de lungime s arbitrară, rezultă
0T py C= + (6.29)
sau
( )T p y a= + , (6.30)
în care semnificaţia constantelor C0 sau a se va preciza ulterior.
În a doua ecuaţie din (6.26) se înlocuiesc expresiile tensiunii în fir (6.30), ale razei de curbură (6.27)
precum şi expresia ( ) ( )1 12 22cos 1 1tg yθ θ
− −′= + = + , cu care se obţine:
x O
y
_ p ds
θ ds
dx dy
dTT dsds
+
T−

MECANICĂ*N* NB.06.Statica firelor
- 113 -
( )
( ) ( )3 1
22 22 11
p y a y p
yy
′′+=
′′ ++ (6.31)
După simplificări evidente, se obţine ecuaţia diferenţială a formei firului:
21
1y
y ay′′
=+′+
. (6.32)
Pentru integrare, se amplifică prin 2y′şi se obţine:
( ) ( )22 21ln 1 ln lny y a C′+ = + + , (6.33)
în care C1 este o nouă constantă de integrare. Rezultă imediat :
( )221 1y C y a′ = + − (6.34)
Dacă se face substituţia ( )1C y a chu+ = , ecuaţia precedentă devine:
2
1 1
shu du dxC ch u
=−
(6.35)
După simplificarea evidentă şi integrare, aceasta conduce la:
1 2u C x C= + , (6.36)
în care C2 este o nouă constantă de integrare. Revenind la substituţia ( )1C y a chu+ = , se obţine
( )1 21
1y ch C x C aC
= + − . (6.37)
Fig. 6.7. Raportarea firului greu la un sistem de axe cu originea in punctul de minim.
Sub această formă, ecuaţia curbei descrisă de firul greu este mai greu de utilizat datorită constantelor de integrare C1 şi C2. Dacă originea sistemului de axe se alege în punctul de minim al curbei (Fig. 6.7), rezultă următoarele condiţii la limită pentru x = 0 : y = 0 şi y’= 0, cu care se pot determina constantele de integrare C1 şi C2 astfel:
O
A
B
x
y

MECANICĂ*N* NB.06.Statica firelor
- 114 -
1
2
10 0 ;
0 .
ch aCshC
= −
= (6.38)
Rezultă din aceste ecuaţii: C1 =1/a şi C2 = 0 , cu care ecuaţia (6.37) devine:
xy ach aa
= −
. (6.39)
Pentru tensiunea în fir (6.30), rezultă următoarea expresie:
xT p a cha
= (6.40)
O formă încă mai uşor de reţinut pentru forma firului greu (6.39) se obţine dacă sistemul de axe se translatează cu distanţa a mai jos (Fig. 6.8), astfel că în noile coordonate xOya , ya = y+a, adică
axy acha
=
(6.41)
Ecuaţia de echilibru sub această formă, este cunoscută sub numele de ecuaţia lănţişorului datorită analogiei dintre firul perfect flexibil şi lănţişorul format din zale mici articulate.
Fig. 6.8. Raportarea firului greu la un sistem de axe decalat cu „a” faţă de punctul de minim.
De reţinut că parametrul a nu trebuie confundat cu distanţa dintre punctul de cotă minimă a firului şi sol.
Din ultimele două ecuaţii se poate deduce:
aT py= , (6.42)
ceea ce arată că tensiunea în fir nu depinde decât de cota ya , valoarea minimă a tensiunii fiind la y = 0 (sau echivalent ya = a), poziţie în care firul are tangenta orizontală, iar această valoare a tensiunii se notează
H p a= . (6.43)
ya
O
A
B
C M
a s
x

MECANICĂ*N* NB.06.Statica firelor
- 115 -
Se poate demonstra că această valoare a tensiunii coincide cu componenta orizontală a tensiunii, care este aceeaşi în orice punct al firului:
2 2 2
cos1 1
1
xp achT T aH T patg y xsh
a
θθ
= = = = =′+ + +
. (6.44)
Lungimea unui arc de „lănţişor” măsurat de la punctul de minim, până la un punct A, de abscisă x>0, se scrie
2
0 01
x x
OA
x xs ds y dx ch dx a sha a
′= = + = =∫ ∫ ∫ . (6.45)
În general, pentru lungimea unei porţiuni a firul între poziţiile x1 < x2 , se poate scrie:
2 112
x xs a sh sha a
= −
. (6.46)
În cazul în care cele două extremităţi A şi B ale firului se găsesc la aceeaşi înălţime şi se cunoaşte lungimea L a firului precum şi distanţa d măsurată pe orizontală, dintre punctele A şi B, se poate stabili o relaţie simplă între lungimea firului şi parametrul a:
22dL a sha
= (6.47)
Firul puternic întins acţionat de greutatea proprie
În general în tehnică se folosesc fire puternic întinse pentru a se obţine săgeţi mici şi prin urmare fire mai scurte şi stâlpi de înălţime mai redusă. Se pune problema determinării unor relaţii care să nu mai facă apel la funcţii hiperbolice. Săgeata unui fir cu extremităţile la aceeaşi cotă este definită ca distanţa maximă între fir şi linia extremităţilor şi se notează uzual cu f (Fig. 6.9).
Fig. 6.9. Fir puternic întins între două puncte de aceeaşi înălţime
Dacă din dezvoltarea în serie a cosinusului hiperbolic se reţin numai primii doi termeni, forma liberă a firului din (6.39) devine:
O
A
B
d
x
f
y

MECANICĂ*N* NB.06.Statica firelor
- 116 -
2
2xya
≅ , (6.48)
în care sistemul de axe are originea în punctul de minim al firului. Săgeata se poate exprima ca fiind cota relativă a unei extremităţi a firului faţă de punctul de minim (x=d/2 → y=f). Rezultă parametrul curbei
2
8da
f≅ . (6.49)
Lungimea firului se poate aproxima din dezvoltarea trunchiată, reţinând numai doi termeni, a sinusului hiperbolic în (6.47):
3 2
28324
d fL d dda
≅ + = + . (6.50)
Tensiunea în fir se aproximează folosind aceleaşi dezvoltări:
2
212xT pa paa
≅ + ≅
(6.51)
adică variază atât de puţin în lungul firului, încât se poate considera a fi constantă.
NB.06.6. Rigiditatea firelor
Una dintre ipotezele de bază utilizată în studiul firelor este cea de flexibilitate perfectă. Această ipoteză a fost enunţată chiar la începutul capitolului. Sunt situaţii în care se doreşte o analiză mai detaliată a funcţionării unor maşini care au în compunere curele, sau cabluri. In aceste cazuri ipoteza de flexibilitate perfectă este departe de realitate. In realitate ar trebui scrise ecuaţii de echilibru pentru bare elastice cu deplasări mari. O asemenea abordare depăşeşte cu mult cadrul mecanicii clasice a corpurilor nedeformabile şi nu va fi dezvoltată in acest curs.
O soluţie practică, prin care acest efect să poată fi inclus într-un model de fir perfect flexibil, ar fi să se corecteze ecuaţiile de echilibru cu termeni care ţin cont de rigiditatea firului.
In acest sens, un fir cu rigiditate finită, obligat să urmărească conturul unui cilindru drept arbitrar, nu va fi tangent la cilindru în punctul dat de paralela la porţiunea liberă a firului, ci în alte puncte învecinate.
Cu referire la Fig. 6.10.a, se poate considera că un fir cu rigiditate nenulă, iniţial necurbat, aşezat peste un cilindru drept oarecare, cu generatoarele orizontale şi aflat în repaus, va avea două puncte extreme de contact care nu sunt date de tangentele verticale marcate cu linii întrerupte. În realitate, punctele de tangenţă sunt ambele în interiorul conturului delimitat de tangentele verticale.

MECANICĂ*N* NB.06.Statica firelor
- 117 -
Fig. 6.10 Fir cu rigiditate nenulă trecut peste cilindri orizontali
Situaţia diferă însă în cazul scripeţilor aflaţi în mişcare uniformă, aşa cum este cazul majorităţii maşinilor utilizate în practică. Din punct de vedere mecanic, scripetele aflat în repaus sau în mişcare de rotaţie uniformă fără frecare sunt echivalente, dacă nu se ţine cont de prezenţa firului cu rigiditate nenulă. Se poate considera că la distanţe mari de scripete, porţiunile libere de fir sunt cu bună verticale. Porţiunea care se înfăşoară, trebuie să treacă de la forma liniară la forma circulară, ceea ce realizează pe o anumită distanţă şi face ca firul să fie decalat spre exterior cu o distanţă e2 faţă de tangenta verticală la scripete. Lucrurile se petrec în sens invers pe porţiunea de desfăşurare de pe scripete. Trecerea de la forma circulară la cea liniară, se petrece pe o anumită distanţă, ceea ce face ca porţiunea liberă din partea dreaptă să fie decalată cu distanţa e2 către interior.
Dacă aceste distanţe (notate e1 şi e2) pot fi determinate, atunci în scrierea ecuaţiei de echilibru pentru momentele forţelor, se va ţine cont de modificarea braţelor forţelor cu aceste distanţe. Pentru scripetele prezentat, va rezulta T > G pentru mişcarea uniformă.
NB.06.7. Maşini de ridicat
Firele au fost utilizate din cele mai vechi timpuri la ridicarea unor greutăţi, folosindu-se diverse dispozitive şi maşini simple care au în compunere şi scripeţi. Trecerea unui fir prin canalul practicat pe circumferinţa roţilor, numite în acest caz scripeţi, se va presupune că este o legătură ideală. În acest tip de legături se consideră că apar numai forţe normale între fir şi scripete, iar firul nu alunecă faţă de scripete. În aceste condiţii, pentru studiul static, în care se urmăresc condiţiile de echilibru, aşa cum a fost demonstrat într-un paragraf precedent, tensiunea în fir este aceeaşi pe toată lungimea sa. În studiul dinamicii maşinilor, se va demonstra că această concluzie nu mai este valabilă în cazul mişcărilor accelerate.
Pentru maşinile de ridicat, de tipul macaralelor, dar şi al ascensoarelor şi al altor tipuri de instalaţii, este util studiul echilibrului în special pentru funcţionarea “la regim nominal” în care mişcările se realizează cu viteză constantă. Studiul echilibrului şi al mişcărilor uniforme sunt echivalente în primă aproximaţie, în care nu se ţine cont de rigiditatea firelor. Din acest motiv, se prezintă scripetele fix şi cel mobil, care intră în componenţa tuturor maşinilor de ridicat, precum şi maşini simple care utilizează asemenea scripeţi.
a) b) _ T
_ T0 e2
e1
R
_ G
_ T
r0
e2
e1

MECANICĂ*N* NB.06.Statica firelor
- 118 -
a) Scripetele fix.
Forţa necesară echilibrării greutăţii G (Fig. 6.11) se determină din ecuaţia de momente scrisă în raport cu articulaţia scripetelui: 0GR FR− = , din care F = G. Prin urmare, nu se obţin avantaje din punct de vedere al forţei, însă schimbarea sensului de acţiune a acesteia poate fi utilă în anumite situaţii.
O modelare mai corectă trebuie să ţină seama de frecarea din articulaţia scripetelui, care introduce un moment rezistent şi eventual de rigiditatea firului, care nu mai rămâne tangent în puncte diametral opuse şi prin aceasta modifică braţele forţelor.
Consecinţa este că forţa necesară punerii în mişcare a greutăţii este mai mare în cazul tendinţei de mişcare în sus şi mai mică decât greutatea, în cazul tendinţei de mişcare în jos. Echilibrarea greutăţii
se face pentru 1G F Gηη
< < în care η este un coeficient subunitar, care ţine cont de factorii
menţionaţi.
b) Scripetele mobil.
Forţa necesară echilibrării greutăţii G (Fig. 6.12), se determină din ecuaţia de proiecţii pe verticală pentru scripetele mobil. Prin izolarea acestuia, se constată că în cele două porţiuni de fir este aceeaşi
tensiune T care echilibrează greutatea G, deci T = G/2.
Aşa cum s-a mai arătat, pe toată lungimea firului există o singură valoare a tensiunii şi anume T=F forţa aplicată capătului său liber. Prin urmare, F = G/2, adică este necesară o forţă egală cu numai jumătate din greutatea G, în cazul ideal. Şi în acest caz o modelare mai corectă trebuie să ţină seama de frecarea din articulaţiile scripeţilor şi eventual de rigiditatea firului.
Fig. 6.11. Scripetele mobil
Consecinţa este că forţa necesară punerii în mişcare a greutăţii este mai mare decât cea calculată mai sus, în cazul tendinţei de mişcare în sus a greutăţii, dar mai mică decât G/2, în cazul tendinţei de mişcare în jos a acesteia.
c) Palanul.
Palanul este format din două piese în care sunt articulaţi acelaşi număr de scripeţi (în Fig. 6.13 au fost reprezentaţi câte doi scripeţi). Un singur fir este trecut succesiv peste scripeţi de pe cele două piese de legătură. O piesă este fixă, iar de cealaltă se prinde greutatea de ridicat. Uzual distanţa dintre piese este mare, astfel că firele se pot considera aproximativ verticale.
R
_ G
_ F
Fig. 6.11. Scripetele fix
_ G
R
_ F
r

MECANICĂ*N* NB.06.Statica firelor
- 119 -
După cum s-a mai arătat, tensiunea în fir este aceeaşi în lungul său la echilibru, în ipotezele date. Echilibrul pe verticală al piesei inferioare conduce la 4T = G, în cazul figurat. În general, dacă pe o
piesă se articulează n scripeţi, 2GTn
= , unde T=F. Prin urmare forţa necesară echilibrării greutăţii
scade prin creşterea numărului de scripeţi.
Fig. 6.12. Palanul Fig. 6.13. Palanul exponenţial
O modelare mai realistă, ţinând cont de frecări şi rigiditatea firelor, arată că forţa necesară echilibrării este mai mare decât cea calculată mai sus, în cazul tendinţei de ridicare a greutăţii G şi mai mică, în cazul contrar.
d) . Palanul exponenţial
Palanul exponenţial (Fig. 6.14) utilizează n scripeţi mobili şi n fire, având fiecare un capăt prins de un acelaşi corp, fix în acest caz. Firul acţionat de forţa F are evident tensiunea T1=F. Dacă se izolează primul scripete mobil, euaţia de echilibru pe verticală impune ca în firul prins de articulaţia sa, să apară o tensiune T2=2T1. Reluând procedura pentru al doilea scripete mobil, G=2 T2 = 4 T1.
Pentru palanul exponenţial din figură, 24 2G GF = = . Generalizarea pentru n scripeţi mobili este
evidentă: 2nGF = , motiv pentru care poartă numele de palan exponenţial. Remarcile privind o mai
realistă modelare rămân valabile şi în acest caz.
e) Macaraua diferenţială.
Această maşină simplă (Fig. 6.15) este formată dintr-un troliu (ansamblu de doi scripeţi care sunt solidarizaţi şi au o articulaţie comună) având razele R şi r. Un singur fir este trecut peste troliu şi
prin canalul unui scripete mobil, care pentru simplificarea calculelor are raza 2
R r+ , astfel ca firele
care le unesc să fie verticale. Firul are şi o porţiune liberă. Tensiunea în aceste fire este evident T=G/2. Ecuaţia de momente pentru troliu se scrie:
_ G
R
_ F
_ F
_ G

MECANICĂ*N* NB.06.Statica firelor
- 120 -
0FR Tr TR+ − = . Rezultă ( )2
G R rF
R−
= . Dacă troliul
are raze apropiate, forţa necesară pentru echilibru poate fi mult mai mică decât greutatea G.
Fig. 6.14. Macaraua diferenţială.
_ G
R
_ F
r

MECANICĂ*N* NB.07. Autoevaluare
‐ 121 ‐
Capitolul NB.07. Autoevaluare
Capitol NB.02. Reducerea sistemelor de forțe
Exerciţii/ probleme rezolvate 1. Se consideră un paralelipiped de dimensiuni 2OA , 4OC și 2OH supus acțiunii unui
sistem de solicitări MFFFS ,,, 321 cu 21 F , 522 F , 263 F , 8M , unde M este
un cuplu situat în planul xOy (fig. 7.1.). Cunoscând că OP=PA și BQ=QE, se cere:
a) Să se calculeze torsorul sistemului în polul O, torsorul minimal și să se precizeze sistemul simplu cu care este echivalent. Dacă este cazul, să se calculeze ecuația axei centrale.
b) Să se determine un cuplu paralel cu axa Oy care, adăugat sistemului, să-l transforme într-un sistem echivalent cu un vector unic și să se scrie ecuația axei centrale.
c) Să se determine un vector alunecător care, adăugat sistemului de la punctul a), să-l transforme într-un sistem echivalent cu zero. Aceeași problemă pentru sistemul rezultat la punctul b).
d) Să se determine un vector alunecător care, adăugat sistemului de la punctul a), să-l
transforme într-un sistem echivalent cu un cuplu kM C 18 și apoi cu un cuplu egal cu
momentul minim minM .
Rezolvare:
a) Pentru a determina torsorul sistemului în polul O se calculează mai întâi expresiile analitice ale
vectorilor și ale momentelor lor. Vectorul 1F este paralel cu axa Oy și de sens opus cu ea, deci are
expresia analitică:
.21 jF
Pentru a determina expresiile analitice ale vectorilor 2F şi 3F vom folosi metoda versorului. Se
determină coordonatele a două puncte de pe suportul fiecărui vector și rezultă: G(0,4,2), D(2,0,2),
P(1,0,0), Q(2,4,l). Expresia analitică a vectorului 2F este:
.4252
4252
224002
22400252
222
222222
jijikji
zzyyxx
kzzjyyixxF
GD
GDFF
GDGDGD
GDGDGD
Analog, pentru 3F se obține:

MECANICĂ*N* NB.07. Autoevaluare
‐ 122 ‐
.28223
426
1161
1412633 kji
kjikji
PQ
PQFF
Momentele în polul O ale vectorilor 1F , 2F și 3F sunt:
,4
020
20011 i
kji
FrFM HO
,848
042
20222 kji
kji
FrFM DO
.82
282
00133 kj
kji
FrFM PO
Cuplul M fiind situat în planul xOy, are direcţia axei Oz şi, folosind regula burghiului drept, atunci când se roteşte în sensul indicat de săgeata curbilinie, se obţine semnul minus, burghiul drept înaintând spre sensul negativ al axei Oz. Rezultă:
.8kM
Torsorul sistemului în polul O este:
z
y
x
H
A
B
C
D
O
E
G1F
2F
3F
P
Q
M
Fig. 7.1. Reprezentarea sistemului de solicitări

MECANICĂ*N* NB.07. Autoevaluare
‐ 123 ‐
.8212
,224
321
321
kjiMFMFMFM
kjiFFFST
OOOOO
M
R
Deoarece 0368222124 OMR , rezultă: 0R , 0OM și 0 OMR , deci
sistemul este echivalent cu un vector și un cuplu (cazul al patrulea de reducere).
Torsorul minimal este:
.33622424
36
,224
2minmin
kjikji
kji
ST O RR
MRM
R
Observații:
1. Pe baza cazurilor de anulare a momentului axial și a faptului că cele trei componente ale momentului unui vector sunt tocmai momentele axiale ale vectorului în raport cu axele reperului, se poate preciza în anumite situații, fără calcul, dacă o componentă a momentului
unui vector este nulă. De exemplu, momentul vectorului 1F nu are componentă după axa
Oy deoarece este paralel cu ea şi nu are componentă după axa Oz deoarece o intersectează. Reciproc, dacă momentul unui vector nu are componentă după o axă, înseamnă că vectorul fie intersectează axa, fie este paralel cu ea, fie este coliniar cu ea.
2. Momentul unui vector alunecător se calculează folosind vectorul de poziție al unui punct oarecare de pe suportul său, de regulă preferându-se, pentru a simplifica calculele, un punct
care are cât mai mult coordonate nule. De exemplu, momentul vectorului 2F se poate
calcula folosind şi punctul G(0,4,2).
.848
042
24022 kji
kji
FrFM GO
3. Un cuplu de vectori care face parte dintr-un sistem nu afectează vectorul rezultant al sistemului întrucât suma vectorilor ce-l formează este nulă. Momentul cuplului se adună însă împreună cu momentele celorlalţi vectori pentru a obţine vectorul moment rezultant al sistemului.
Pentru a scrie ecuaţia axei centrale a sistemului, se calculează mai întâi produsul:
kji
kji
O 165620
8212
224
MR
şi modulul vectorului rezultant:
24224 222 R .
Introducând datele de mai sus în ecuaţia vectorială a axei centrale (1.75), se obţine:

MECANICĂ*N* NB.07. Autoevaluare
‐ 124 ‐
kjikji
kzjyix 22424
165620
,
în care (x,y,z) sunt coordonatele unui punct curent al axei iar este un parametru scalar. Din relaţia anterioară rezultă ecuaţiile parametrice ale axei centrale:
424
20x ,
224
56y ,
224
16z ,
de unde, egalând valorile lui din fiecare ecuaţie, se obţin ecuaţiile canonice ale axei centrale:
23
2
23
7
46
5
zyx
,
care reprezintă o dreaptă având direcţia lui R şi trecând prin punctul de coordonate
3
2,
3
7,
6
5.
b) Se consideră torsorul în polul O al unui nou sistem 1S format din vectorii sistemului inițial la
care se adaugă un cuplu 1M . Componentele torsorului noului sistem sunt:
11
1
1,
MST
OO
OMM
RR
Cuplul 1M fiind paralel cu axa Oy, este de forma jmjMM 11 , unde m este mărimea
algebrică a cuplului. Rezultă că:
.8212
,2241
1
1kjmi
kjiST
O
OM
R
Pentru ca sistemul 1S să fie echivalent cu un vector unic, trebuie ca
011 OMR , adică:
08222124 m ,
de unde:
18m ,
adică:
jM 18 .
Torsorul sistemului 1S este:

MECANICĂ*N* NB.07. Autoevaluare
‐ 125 ‐
.81612
,2241
1
1kji
kjiST
O
OM
R
iar axa centrală are ecuațiile parametrice:
424
16x ,
224
56y ,
224
88z .
Ecuațiile canonice ale axei centrale sunt:
23
11
23
7
43
2
zyx
.
c) Notăm cu 2
R și 2OM componentele torsorului sistemului 2S obținut din S prin adăugarea
unui vector F astfel încât sistemul 2S să fie echivalent cu zero. Avem:
.0
,02
2
2FM
FST
OOO
OMM
RR
Din condițiile de mai sus, rezultă:
.8212
,224
kjiFM
kjiF
OO
M
R
Dar, conform proprietăţii a doua a momentului polar, trebuie să fie îndeplinită obligatoriu condiţia
0 FMF O , ori, în acest caz: 036 FMF O . Acest lucru arată că problema propusă nu
are soluţie.
Aceași problemă rezolvată în cazul sistemului 1S având torsorul calculat la punctul b, presupune
adăugarea la sistemul 1S a unui vector V astfel încât să se obțină un sistem cu torsorul nul.
Sistemul 1S împreună cu vectorul V formează un sistem (S3) având componentele torsorului în
polul O, 3
R şi 3OM , care trebuie să îndeplinească condiţiile:
.0
,013
13
3VM
VST
OOO
OMM
RR
Analog ca în situaţia anterioară, se obţine:

MECANICĂ*N* NB.07. Autoevaluare
‐ 126 ‐
.81612
,2241
1
kjiVM
kjiV
OO M
R
De această dată 0 VMV O , deci soluţia problemei este vectorul alunecător V având ca suport
dreapta de ecuaţie:
1
21
111
21
11
2R
R
MRR
R
MR
OOO V
V
VMVr ,
care este tocmai ecuaţia axei centrale a sistemului 1S . Prin urmare, vectorul V este egal cu 1
R
şi de sens opus iar suportul său coincide cu axa centrală a sistemului.
Observaţie:
Atunci când se obţine, ca soluţie a unei probleme, expresia analitică a unui vector şi expresia analitică a momentului său, întotdeauna trebuie să se verifice dacă cei doi vectori sunt perpendiculari, adică dacă produsul lor scalar este nul. Dacă această condiţie nu este îndeplinită, problema nu are soluţie.
d) Rezolvarea acestui punct se abordează la fel cu cele de mai sus, în sensul că se consideră un nou
sistem, notat (S4), format din vectorii sistemului S la care se adaugă un vector notat 1V , operaţie
care să conducă la situaţia ca (S4) să fie echivalent cu un cuplu având expresia kM C 18 adică să fie îndeplinite condiţiile:
.
,0
14
14
4COOO
OMVM
VST
MM
RR
Rezultă că:
kjiV 2241 R ,
kjikjikMVM OCO 262128212181 M .
Cum relaţia 011 VMV O se verifică, rezultă că la sistemul S se adaugă un vector
kjiV 2241 având suportul dat de ecuaţia vectorială:
12
1
11 VV
VMVr O .
Ecuaţiile parametrice ale suportului se obţin din relaţia anterioară scrisă sub formă analitică:
kjikji
kzjyix 22424
1612856
şi sunt:

MECANICĂ*N* NB.07. Autoevaluare
‐ 127 ‐
43
7x , 2
3
16y , 2
3
2z .
Ecuaţiile canonice ale suportului sunt:
23
2
23
16
43
7
zyx
.
Se observă că dreapta suport a vectorului 1V este paralelă cu axa centrală, dar nu coincide cu
aceasta.
Pentru a determina un vector 2V care adăugat sistemului iniţial să-1 transforme într-un sistem (S5)
care să aibă torsorul egal cu torsorul minimal al sistemului S , se procedează ca mai înainte, numai
că momentul cuplului va fi kji 336min M . Rezultă condiţiile:
kjiVM
VST
OOO
O336
0
25
25
5MM
RR
de unde:
kjiV 2242 R ,
kjiMVM OO 116min2 M .
Şi în acest caz se verifică relaţia 022 VMV O , deci vectorul alunecător 2V cu suportul:
22
2
22 VV
VMVr O ,
este soluţia problemei. După efectuarea calculelor se obţine exact euaţia axei centrale.
Generalizare: Pentru a obţine dintr-un sistem S de vectori alunecători un sistem 1S echivalent
cu un cuplu egal cu momentul minim al
sistemului iniţial, se adaugă sistemului S un vector
opus cu vectorul său rezultant şi având ca suport
axa centrală a sistemului S .
2. Se consideră o prismă triunghiulară de dimensiuni aOA 2 , aOB 3 şi aOC 4 supus acţiunii unui sistem de solicitări 4321 ,,, MFFFS cu PF 51 ,
292 PF , PF 23 , 1334 aPM . Se cer să se
calculeze:
a) torsorul de reducere în punctul O O .
z
Ax
y
B O
E C
D
1F
2F
3F
4M
Fig. 7.2.

MECANICĂ*N* NB.07. Autoevaluare
‐ 128 ‐
b) cu ce este echivalent sistemul? c) expresia vectorială a momentului minim. d) ecuaţiile axei centrale.
e) torsorul de reducere în punctul E E .
Rezolvare: (1p oficiu)
Pentru a determina expresiile analitice ale vectorilor vom folosi metoda versorului. Se determină coordonatele a două puncte de pe suportul fiecărui vector astfel:
A(2a,0,0), B(0,3a,0), C(0,0,4a), D(2a,0,4a), E(0,3a,4a). (0,5 puncte)
Expresiile analitice ale vectorilor sunt:
kPjPaa
kajaiP
zzyyxx
kzzjyyixxF
BC
CBFuFF
BCBCBC
BCBCBCBC
43043000
0430005
222
2221111
(0,5 puncte)
kjiPaaa
kajaiaP
zzyyxx
kzzjyyixxF
EA
AEFuFF
EAEAEA
EAEAEAEA
432403002
40300229
222
2222222
(0,5 puncte)
iPaaa
kaajiaP
zzyyxx
kzzjyyixxF
CD
DCFuFF
CDCDCD
CDCDCDCD
2440002
4400022
222
2223333
(0,5 puncte
jaPiaPaaaa
kaajaiaaP
zzyyxx
kzzjyyixxM
ED
DEMuMM
EDEDED
EDEDEDED
96443002
443002133
222
2224444
(0,5 puncte)
Expresiile analitice ale momentelor forţelor date în raport cu punctul O sunt:
iapkP
jP
ai
PP
a
PP
a
kji
FCOFBOFrFM O
1230
001
40
401
43
401
430
400
432
11111
(0,5 puncte)

MECANICĂ*N* NB.07. Autoevaluare
‐ 129 ‐
kaPjapkPP
aj
PP
ai
PP
PPP
a
kji
FAOFrFM O
6832
021
42
021
43
001
432
002
432
2222
(0,5 puncte)
japkP
jP
ai
a
P
a
kji
FCOFrFM O
802
001
02
401
00
401
002
400
432
3333
(0,5 puncte)
Centralizând rezultatele obţinute într-un tabel avem:
Forţa ixF iyF izF iOxM iOyM iOzM
1F 0 -3P 4P 12aP 0 0
2F 2P -3P -4P 0 8aP -6aP
3F 2P 0 0 0 8aP 0
4M 0 0 0 6aP -9aP 0
Σ 4P -6P 0 18aP 7aP -6aP
Expresia torsorului de reducere a sistemului de forţe oarecare în punctul O este:
kaPjaPiaPM
jPiPR
O
O6718
64: (0,5 puncte)
Analizând expresia torsorului de reducere se observă că 0R şi 0OM . Se calculează expresia
trinomului invariant:
0306076184 2 aPaPaPPaPPMRMRMRMR OzzOyyOxxO
şi în acest caz sistemul de forţe dat este echivalent cu un torsor minimal situat pe axa centrală.
Pentru precizarea cazului de echivalenta se acorda 1 punct.
Se determina torsorul minimal:
)32(13
15
132
64
132
30
64
: 2
min
minjia
P
jPiP
P
aP
R
R
R
MRM
jPiPR
O (1 punct)
Expresiile generale ale ecuaţiilor axei centrale sunt:

MECANICĂ*N* NB.07. Autoevaluare
‐ 130 ‐
z
xyOz
y
zxOy
x
yzOx
R
RyRxM
R
RxRzM
R
RzRyM
(0,5 puncte)
Înlocuind cu valorile obţinute anterior rezultă:
0
4)6(6
6
047
4
6018 PyPxaP
P
xPzaP
P
PzyaP
Egalând rapoartele se obţine:
0233
472)618(3
)466(40)31(
)47(4)618(6)21(
yxa
zaza
PyPxaPP
PzaPPPzaPP
ayx
aaz
ayx
az
ayx
zaza
32313
34
26
68
323
6826
323
8141854. (1 punct)
Ecuaţiile determinate anterior (ecuaţiile axei centrale) reprezintă ecuaţiile a două plane, intersecţia
acestora fiind dreapta numita axă centrală.
Expresia torsorului de reducere a sistemului de forţe oarecare în punctul E este:
kaPjaPiaPkaPjaPiaPkaPjaPiaP
PP
aa
kji
kaPjaPiaPREOMM
jPiPR
OEE
696121624)6718(
064
430)6718(
64
:
Exerciţii/ probleme propuse 1. Se consideră un paralelipiped de dimensiuni aOA 3 , aOC 4 şi aOD 12 supus acţiunii
unui sistem de solicitări 54321 ,,,, MMFFFS cu
PF 261 , PF 102 , PF 33 , aPM 154 ,
aPM 75 . Se cer să se calculeze:
a) torsorul de reducere în punctul O O .
b) cu ce este echivalent sistemul? c) expresia vectorială a momentului minim. d) ecuaţiile axei centrale.
e) torsorul de reducere în punctul G G .
Răspunsuri:
Expresia torsorului de reducere a sistemului de forţe
oarecare în punctul O este:
kaPjaPiaPM
kPiPR
O
O31489
249:
3a 4a
12a1F
2F
3F1M
2M
z
x
y O
A B
G E
D H
C
Fig. 7.3.

MECANICĂ*N* NB.07. Autoevaluare
‐ 131 ‐
Analizând expresia torsorului de reducere se observă că 0R şi 0OM . Se calculează expresia
trinomului invariant:
08253124)48(0)9(9 2 aPaPPaPaPPMRMRMRMR OzzOyyOxxO
şi în acest caz sistemul de forţe dat este echivalent cu un torsor minimal situat pe axa centrală.
)249(219
275
733
249
733
825
249
: 2
min
minkPiPa
P
kPiP
P
aP
R
R
R
MRM
kPiPR
O
Expresiile ecuaţiilor axei centrale sunt:
P
PyxaPPxPzaP
P
zPyaP
24
9031
0
24948
9
0249
Expresia torsorului de reducere a sistemului de forţe oarecare în punctul G este:
kaPjaPiaPkaPjaPiaPkaPjaPiaP
PP
aaa
kji
kaPjaPiaPRGOMM
kPiPR
OGG
584105363696)31489(
2409
1243)31489(
249
:
2. Se consideră o piramidă având baza un pătrat de latură 2a şi înălţimea 2a supus acţiunii unui
sistem de solicitări 7654321 ,,,,,, MFFFFFFS cu PF 41 , PF 62 , PF 23 , PF 34 ,
PF 25 , PF 66 , 247 aPM . Se cer să se
calculeze:
a) torsorul de reducere în punctul O O .
b) cu ce este echivalent sistemul? c) expresia vectorială a momentului minim. d) ecuaţiile axei centrale.
e) torsorul de reducere în punctul D D .
Răspunsuri:
Expresia torsorului de reducere a sistemului de forţe
oarecare în punctul O este:
kaPjaPM
kPiPR
O
O924
63:
Analizând expresia torsorului de reducere se observă că 0R şi 0OM . Se calculează expresia
trinomului invariant:
3F
z
2a
1F1M
B
A
4FO
C
E
D
2a
2a
x
y
2F 5F
6F
Fig. 7.4.

MECANICĂ*N* NB.07. Autoevaluare
‐ 132 ‐
05496)24(003 2 aPaPPaPPMRMRMRMR OzzOyyOxxO
şi în acest caz sistemul de forţe dat este echivalent cu un torsor minimal situat pe axa centrală.
)63(5
6
45
63
45
54
63
: 2
min
minkPiPa
P
kPiP
P
aP
R
R
R
MRM
kPiPR
O
Expresiile ecuaţiilor axei centrale sunt:
P
PyxaPPxPzaP
P
zPy
6
309
0
6324
3
060
Expresia torsorului de reducere a sistemului de forţe oarecare în punctul D este:
kaPjaPiaPkaPjaPiaPkaPjaP
PP
aa
kji
kaPjaPRDOMM
kPiPR
ODD
12)624(6366)924(
603
0)924(
63
:
3. Se consideră corpul din figură cu următoarele dimensiuni: lba , lc , ld 2 , le ,
2lANf . El este supus acţiunii unui sistem de
solicitări 654321 ,,,,, MMFFFFS cu 1141 PF ,
622 PF , 223 PF , PF 44 , 1025 PlM ,
PlM 26 . Se cer să se calculeze:
a) torsorul de reducere în punctul O O .
b) cu ce este echivalent sistemul? c) expresia vectorială a momentului minim. d) ecuaţiile axei centrale.
e) torsorul de reducere în punctul N N .
Răspunsuri:
Expresia torsorului de reducere a sistemului de forţe
oarecare în punctul O este:
jlPM
kPiPR
O
O4
88:
Analizând expresia torsorului de reducere se observă că 0R şi 0OM . Se calculează expresia
trinomului invariant:
008)4(008 PlPPMRMRMRMR OzzOyyOxxO
4F
1F
3F
z
x
y
A B
G E
D
H
C
I
K
L
a
b
c
ed
d
e
J
N
f
a
O
2M
1M
2F
Fig. 7.5.

MECANICĂ*N* NB.07. Autoevaluare
‐ 133 ‐
şi în acest caz sistemul de forţe dat este echivalent cu o rezultantă unică, aplicată într-un punct
oarecare al axei centrale şi care nu trece prin punctul O de reducere.
028
88
28
0
88
:min
min
P
kPiP
PR
R
R
MRM
kPiPR
O
Expresiile ecuaţiilor axei centrale sunt:
P
PyxPxPzlP
P
zPy
8
800
0
884
8
080
Expresia torsorului de reducere a sistemului de forţe oarecare în punctul N este:
04)4(
808
20)4(
88
:
jlPjlP
PP
ll
kji
jlPRNOMM
kPiPR
ONN
Capitol NB.04. Statica solidului rigid cu legături
Exerciţii/ probleme rezolvate Equation Chapter 1 Section 1
1. O placă omogenă de forma şi dimensiunile din figură şi de greutate P se află în poziţia de echilibru, fiind legată de un arc în punctul A si articulată în O . În această poziţie, dreapta OA este
orizontală iar arcul AB este vertical, cu constanta de elasticitate k şi distanţa AB h . Se cere să se determine lungimea arcului nedeformat necesară pentru ca placa să fie în echilibru în poziţia indicată şi forţa de legătură din articulaţia cilindrică O .
Rezolvare:
Conform Fig. 7.6, se poate observa că forţa elastică din arc poate fi exprimată cu relaţia:
e 0F k h h (1)
unde h reprezintă lungimea arcului în poziţia de echilibru, iar 0h lungimea arcului nedeformat.
Lungimea arcului (nedeformat) necesară pentru a menţine placa în poziţie de echilibru, se determină din ecuaţiile scalare de echilibru:
Fig. 7.7.
a2
h
h0
A
a2 a3
PCx
OH
OV
x
y
O
ha2
A
B
h0
a3
a2
a
O
Fig. 7.6.

MECANICĂ*N* NB.07. Autoevaluare
‐ 134 ‐
O
O 0
0 C
H 0
V G k h h 0
k h h 5 a P x 0
(2)
Se observă că în sistemul (2) numărul necunoscutelor este mai mare decât cel al ecuaţiilor. Necunoscuta Cx (coordonata centrului maselor pentru placa din figură), se poate determina pe baza
momentelor statice. Astfel, placa este împărţită în trei elemente: un triunghi dreptunghic (pentru care se cunosc dimensiunile celor două catete - 3 a respectiv 2 a ) la care se adaugă un sector circular de rază 2 a (un sfert dintr-un cerc de rază 2 a ) iar din cele două se decupează un semicerc de rază a (vezi Fig. 7.7). Pentru fiecare element se determină poziţia centrului de masă şi aria corespunzătoare. Poziţia centrului maselor pentru întreaga placă se determină în final utilizând relaţia de mai jos:
C 1 C 2 C 31 2 3C
1 2 3
x A x A x Ax
A A A
(3)
În expresia (3), prezentată mai sus, ,C C1 2x x respectiv C3
x sunt coordonatele centrelor de masă
pentru cele trei elemente (triunghi, sector circular de rază 2 a şi semicercul de rază a ) iar ,1 2A A şi
3A reprezintă ariile acestora. Astfel, (3) devine:
22 2
C
2 8 a a3 a 3 a 3 a a 3 a
52 a 93 3 2x6 3 6
(4)
În continuare, considerând Cx cunoscut, se determină lungimea 0h a arcului nedeformat, utilizând
ultima ecuaţie a sistemului (2), rezultatul fiind următorul:
C0 C 0
xk h h 5 a P x h h P
5 a k
(5)
Expresia (5) se înlocuieşte în cea de-a doua ecuaţie a sistemului (2), rezultând OV :
CO
xV G P
5 a
(6)
În concluzie, lungimea arcului nedeformat necesară menţinerii poziţiei de echilibru a sistemului mecanic prezentat în Fig. 7.7 este dată de relaţia (5), unde Cx a fost determinat anterior cu expresia
(4). De asemenea, forţele de legătură din articulaţia cilindrică se determină astfel:
; CO O
xH 0 V G P
5 a
(7)
unde OH şi OV reprezintă reacţiunea orizontală respectiv reacţiunea verticală din cupla cilindrică notată cu O .
Exerciţii/ probleme propuse spre rezolvare

MECANICĂ*N* NB.07. Autoevaluare
‐ 135 ‐
1. O bară AB omogenă, de greutate G şi lungime 2 l se reazemă cu frecare în punctul B pe un plan orizontal, iar în punctul E pe o suprafaţă cilindrică cu raza r (vezi Fig.7.8). Coeficientul de frecare în punctele de rezemare B şi E este . Să se determine unghiul pe care-l face bara cu
orizontala în poziţia de echilibru.
Raspuns: 21
rs
l
2. Placa dreptunghiulară omogenă de greutate G , având laturile AB a şi BC b este articulată în B şi simplu rezemată în A pe planul vertical neted EF (Fig.7.9). În punctul C este aplicată o forţă verticală P . Să se determine valoarea minimă a forţei P pentru care A se reazemă de perete. Pentru valori mai mari decât valoarea minimă a forţei P să se determine reacţiunile din reazeme.
Raspuns: 1
2
Ab b
N P G tga a
; B AH N ;
BV G P
Întrebări/ chestiuni recapitulative
- Cum se stabilesc parametrii de pozitie si orientare ai unui corp?
- Cum se stabilesc matricele de rotatie simple si matricele de rotatie rezultanta (ca functii matriceale de unghiurile lui Euler)?
- Stabilirea ecuatiilor de echilibru in cazul rigidului liber (corp volumic si placa).
-Semnificatia geometrica si fizica a legaturii fara/cu frecare aplicate unui corp rigid.
- Care sunt legaturile fara frecare aplicate unui corp rigid?
- Influenta frecarii de alunecare, rostogolire si pivotare asupra echilibrului unui corp rigid.
- Influenta frecarii in cuplele de rotatie.
a
A C
F
E
B
D
GP
b
Fig. 7.9.
GB
BN
BT
r
O
x
y
EN
ETC
2 l
Fig. 7.8.

MECANICĂ*N* NB.07. Autoevaluare
‐ 136 ‐
Capitol NB.05. Statica sistemelor materiale
Exerciţii/ probleme rezolvate Equation Chapter 1 Section 1
1. Se consideră sistemul mecanic din figura 7.10. Distanţa d corespunde cazului în care resortul de constantă elastică k este nedeformat. Să se determine poziţia de echilibru (dată prin unghiul
sau distanţa x ) şi forţele de legătură.
Rezolvare:
1 p (oficiu)
1 p (separarea corpurilor)
În rezolvarea problemei se aplică metoda separării corpurilor. Pentru început se consideră bara OA , pentru care se rup legăturile din O şi B . Forţele de legătură şi forţele active care acţionează asupra barei sunt reprezentate în Fig. 7.7. Pe baza acestei figuri se pot scrie ecuaţiile scalare de echilibru şi ecuaţia de momente ce caracterizează bara OA , după cum se observă din sistemul prezentat mai jos:
( )
( )
( )
O B
O B
B
H N s 0 1
V P N c 0 2
d xN P l c 0 3
c
(2p)
Tot din Fig. 7.11 se poate observa că ecuaţia (3) mai poate fi exprimată în forma:
Bh
N P l c 0s
(4)
Fig. 7.10.
A
P
G
C k
Bl2
O
d x
h
BN
hP
l2
A
B
O
x
y
OV OH
d x
Fig. 7.11.
x
y
C
G
eF
k
BN
h
T N
x
Fig. 7.12.

MECANICĂ*N* NB.07. Autoevaluare
‐ 137 ‐
De asemenea, d x
ctgh
de unde rezultă că:
x h ctg d (5)
Se presupune că unghiul . . este cunoscut, de unde rezultă condiţia (5).
Se poate observa că sistemul de trei ecuaţii prezentat mai sus nu este suficient pentru a determina
cele patru necunoscute şi anume: , , ,O O BH V N x .
Pentru a putea rezolva sistemul de ecuaţii este necesară determinarea a cel puţin unei ecuaţii. Astfel, se consideră cel de-al doilea corp (prisma) asupra căreia se aplică la fel ca şi în primul caz, metoda separării corpurilor. Se desfac toate legăturile, forţele care acţionează asupra prismei fiind reprezentate în Fig. 7.12. Pe baza acestei figuri se scriu ecuaţiile scalare de echilibru ce caracterizează corpul 2:
0 (6)0 (7)
(8)
B
B
N s T k xN c G N
T N (2p)
Din ecuaţia (7) se separă reacţiunea normală N (manifestată din partea planului orizontal asupra prismei), iar expresia rezultată se înlocuieşte în (8) obţinându-se:
BN N c G (9)
BT N c G (10)
Expresia (10) se înlocuieşte în relaţia (6) de unde rezultă reacţiunea BN , astfel:
0 BN G k h ctg ds c
De unde rezultă în final expresia reacţiunii normale din punctul B, astfel:
B
G k h ctg dN
s c (12) (1p)
Egalând expresia (12) cu (4), rezultă:
G k h ctg d P lc s
hs c (13) (1p)
Valoarea unghiului se obţine rezolvând ecuaţia trigonometrică (13). În continuare, considerând unghiul cunoscut, se pot determina acum şi celelalte necunoscute, în acest scop utilizându-se sistemul ecuaţiilor scalare de echilibru ce caracterizează fiecare dintre cele două corpuri. Astfel,
reacţiunea normală BN se poate exprima cu relația (12), după cu este prezentat mai jos:
B
G k h ctg dN
s c
Înlocuind (12) în prima şi a doua ecuaţie scalară de echilibru notate cu (1) respectiv (2), rezultă expresiile reacţiunii orizontale şi verticale din punctul O în forma de mai jos:

MECANICĂ*N* NB.07. Autoevaluare
‐ 138 ‐
1
1
O B
O B
G G h ctg dH N s
ctgG G h ctg d
V P N c Pctg ctg
(14) (1p)
Reacţiunea normală N şi forţa de frecare T se determină din ecuaţiile (9) şi (10) în care se
înlocuieşte BN cu expresia determinată la (12), rezultatul fiind următorul:
1
1
B
G G ctgh ctg d ctgN N c G N
ctg ctg (15) (0,5p)
1
1
G G ctgh ctg d ctgT N
ctg ctg (16) (0,5p)
2. Sistemul de bare din figura 7.9, situat în plan vertical este format din 2 bare omogene 2 OA l şi DE l de greutăţi 2 G respectiv G . Bara OA este articulată în punctul O iar la capătul A acţionează forţa orizontală P . Bara DE este articulată în E OE EA de bara OA , iar în D de
o culisă cu greutatea Q , care se poate deplasa fără frecare pe o tijă aşezată pe verticala articulaţiei
O . De culisă mai este legat un arc elastic cu constanta k , care este nedeformat în poziţia sistemului
cu 0 . Ştiind că forţa din arc este proporțională cu deformaţia arcului F k y , se cere să se
determine ecuaţia pentru calculului unghiului , care corespunde poziţiei de echilibru a sistemului mecanic din figura alăturată precum şi forţele de legătură în poziţia de echilibru presupunând că unghiul este cunoscut.
Rezolvare:
Din Fig. 7.13 se poate observa că în situaţia în care arcul este
nedeformat mai precis în situaţia în care unghiul 0 , 0 2 D O l .
Prin acţiunea forţei P asupra barei OA , arcul va fi deformat iar între axa verticală şi bară apare un unghi . Astfel, deformaţia arcului, notată cu y este:
2 2 2 1 y l l c l c (1)
Cunoscând faptul că forţa din arc este proporţională cu deformaţia
arcului F k y , pe baza relaţiei (1) va rezulta că forţa elastică poate
fi scrisă:
2 1 eF k y k l c (2)
Pe baza Fig. 7.14-7.15 unde sunt reprezentate forţele care acţionează asupra sistemului mecanic, se pot scrie ecuaţiile scalare de echilibru, astfel:
P
E
l
G2
Q
G
O
kD
D0
Fig. 7.13.

MECANICĂ*N* NB.07. Autoevaluare
‐ 139 ‐
0
2 3 01
2 2 02
O D
O
D
H P NV Q k l Gc
lP l c G l s G s N l c
(3)
unde OH respectiv OV reprezintă reacţiunea în plan orizontal respectiv reacţiunea în plan vertical
cu care se înlocuieşte legătura din O iar DN reacţiunea normală din D . Se aplică axioma
legăturilor, sistemul ecuaţiilor de echilibru pentru bara DE , conform Fig. 7.10 , fiind următorul:
02 1 0
2 012
E D
E
D
H NV G k l c
lG s k l l s N l cc
(4)
unde EH respectiv EV reprezintă reacţiunea în plan orizontal respectiv reacţiunea în plan vertical
cu care se înlocuieşte legătura din E iar DN reacţiunea normală din D .
Se mai aplică încă o dată axioma legăturilor , suprimând de aceasta dată legătura din cupla D şi înlocuind-o cu forţele de legătură corespunzătoare, DH respectiv DV . Astfel, conform Fig. 7.15,
sistemul ecuaţiilor de echilibru va fi următorul:
0, 0 E D E DH H V G N (4*)
Din cea de-a treia ecuaţie a sistemului (4) se explicitează DN , rezultând expresia:
22 12
Dl
G s k l s N l cc (5)
Similar, utilizând cea de-a treia ecuaţie a sistemului (3) se determină DN l c , astfel:
P
E
G2
G
O
D
D0
lQ
DN eF
OH
OV
x
y
Fig. 7.14
EG
D
l
DN
eF
x
y
EHEV
DH
DV
D
EG EH
EV
Fig. 7.15

MECANICĂ*N* NB.07. Autoevaluare
‐ 140 ‐
2 22
Dl
P l c G l s G s N l c (6)
Se egalează expresiile (5) şi (6), în final rezultând o ecuaţie care prin rezolvare conduce la determinarea unghiului necesar pentru echilibrul sistemului:
0 P c s k l s cG k l (7)
Aplicând o serie de transformări trigonometrice asupra expresiei (7), va rezulta în final:
21
tgtg k l PG k l
tg; 21 k l tgP tgtg k l G
2 2 222 2 21 2 k l tgtg P tg P tgk l G k l G (8)
Expresia (8), obţinută anterior reprezintă o ecuaţie trigonometrică cu necunoscuta tg care prin
rezolvare va conduce în final la determinarea unghiului de echilibru .
În continuare, considerând unghiul cunoscut, forţele de legătură se determină astfel:
Pentru început se poate observa că reacţiunea normală din punctul D poate fi determinată cu relaţia (5) care prin transformări va conduce la:
2 12
DG
N tgk l c (9)
Înlocuind expresia (9) în prima ecuaţie a sistemului (4), va rezulta valoarea reacţiunii orizontale din punctul E , în forma prezentată mai jos:
2 12
E DG
H N tgk l c (10)
Din cea de-a doua ecuaţie a aceluiaşi sistem (4) se determină reacţiunea verticală EV :
2 1 EV G k l c (11)
Valoarea reacţiunii orizontale din punctul D , notată cu DH se determină din prima ecuaţie a
sistemului (4), de unde după efectuarea înlocuirilor necesare, rezultă:
2 12
D E DG
H H N tgk l c (12)
Reacţiunea orizontală şi verticală din punctul O se determină din prima şi din cea de-a doua ecuaţie
a sistemului (3), astfel: reacţiunea orizontală OH se obţine înlocuind expresia (9) în prima ecuaţie a
sistemului menţionat iar reacţiunea verticală OV rezultă din cea de-a doua ecuaţie a aceluiaşi sistem,
după cum se poate observa din ecuaţiile prezentate mai jos.

MECANICĂ*N* NB.07. Autoevaluare
‐ 141 ‐
2 12
2 31
O D
O
GH N P tg Pk l c
V Q k l Gc
(13)
3. Se consideră sistemul de corpuri din figura 7.16 la care se cunosc greutăţile G şi Q , razele 1R şi
2R , distanţele a şi b , coeficientul de frecare de alunecare dintre sabot şi disc, precum şi unghiul
. Să se determine ecuaţiile de echilibru ale sistemului mecanic din figură precum şi forţa minimă P necesară pentru a menţine sistemul în echilibru.
Rezolvare:
În rezolvarea problemei se va aplica metoda separării corpurilor. Se rup legăturile dintre cele trei corpuri şi se înlocuiesc cu forţele de legătură. Forţele active şi de legătură care acţionează asupra fiecărui corp sunt reprezentate în figurile 7.17, 7.18, 7.19 şi 7.20. Pe baza acestor figuri se pot scrie ecuaţiile scalare de echilibru ale sistemului mecanic.
Ecuaţiile scalare de echilibru pentru primul corp (sabotul), (vezi Fig. 7.13), sunt:
00
0
A B
A B
P NN N T
N N ba bT N
(1)
Ecuaţiile scalare de echilibru pentru al doilea corp (discul) conform Fig. 7.18, sunt:
P
A B
AN
TBN
N x
y
Fig. 7.17.
P
a b
A B
O1
O2
2R1R
2R
G
Q
2Q
G2
a2
C
Fig. 7.16.

MECANICĂ*N* NB.07. Autoevaluare
‐ 142 ‐
1 2
00
0
O
O
H S c NV S s T GT R S R
(2)
Ecuaţiile scalare de echilibru pentru cel de-al treilea corp (scripete), Fig. 7.19, sunt:
2
2
22
0
30
20
O
O
H S c
V Q S s
RQ S
(3)
Ecuaţiile scalare de echilibru pentru cel de-al patrulea corp (bara), Fig. 7.20, sunt:
02 0
2 2 0
C O
C O
O O
H HV G V
G a V a M (4)
În continuare se determină necunoscutele (forţele de legătură). Astfel, din cea de-a treia ecuaţie a sistemului (3) rezultă că tensiunea din fir, notată cu S : S Q (5)
Cunoscând tensiunea din fir S tot din sistemul (3), utilizând prima şi a doua ecuaţie se determină
OH şi OV , astfel:
2
3 32 2
OV Q Q s Q s (5)
2 OH S c Q c (6)
OV2
OH2
Q
x
y
Q12
S
R2
Fig. 7.19.
Q
T
N x
y
G
R1R2
OH
OV
O
S
Fig. 7.18.
x
y
G2
OH
OV
CH
CV
a2
Fig. 7.20.

MECANICĂ*N* NB.07. Autoevaluare
‐ 143 ‐
Forţa de frecare care apare la contactul dintre tambur şi disc (fig. 7.18) se determină astfel:
21 2
1
0; R
T R S R T QR
(7)
Din cea de-a patra ecuaţie a sistemului (1) se determină expresia:
2
1
;
RT Q
T N NR
(8)
Reacţiunile orizontală şi verticală OH respectiv OV (vezi fig.) rezultă înlocuind expresiile (5), (7)
respectiv (8) în primele două ecuaţii ale sistemului (2), astfel:
2
1
2
1
0
0
O O
O O
RcH S c N H QS c N
RR
sV S s T G V T G S s G QR
(9)
Din primele două ecuaţii ale sistemului (4) se obţin CH şi CV şi din cea de-a treia, OM :
1 2
2 1
2
1
; 3
22 2 2
C O C
O O
R Rc sH H Q V G Q
R RR
G Q sM G a V a aR
(10)
Reacţiunile normale AN respectiv BN se obţin din sistemul (1), astfel: în a doua ecuaţie a
sistemului se înlocuieşte forţa de frecare T cu expresia (7), rezultând un sistem de două ecuaţii în
necunoscutele AN şi BN care prin rezolvare conduce la:
22
11
2
1
0
AB A
BB A
R bN QR
N N Q R aR R a bN QN b N a b
R a
(11)
Din prima ecuaţie a sistemului (1) se observă că forţa minimă necesară pentru ca sistemul să rămână în echilibru este:
1
2
R
P N QR
(12)
Capitol NB.06. Statica firelor
Exerciții/ probleme rezolvate

MECANICĂ*N* NB.07. Autoevaluare
‐ 144 ‐
1. Un cablu de oţel (=7800 Kg/m3) de secţiune transversală A=1cm2 este întins între doi stâlpi distanţaţi cu d =100 m , punctele de prindere fiind la aceeaşi înălţime. Se consideră lungimea firului L=100,1 m, adică un fir puternic întins.
Să se determine:
a) săgeata şi parametrul a al firului (4 pct.)
b) forţa distribuită (2 pct.)
c) tensiunea maximă în fir folosind formula exactă (2 pct.) şi
d) formula aproximativă pentru firul puternic întins (2 pct.).
Rezolvare:
a) (4 pct.) Din ecuaţia (6.50) rezultă săgeata, iar din (6.49) rezultă parametrul a al lănţişorului:
3 3 0,1 1001,936
8 8
L d df m
;
2 2100645,66
8 8 1,936
da m
f
b) (2 pct.) Forţa distribuită este 47800 9.81 10 7.65N/mp gA
c) (2 pct.) Tensiunea în fir este, cu formula exactă (6.40):
4952,952
dT pach
a N
d) (2 pct.) iar cu formula aproximativă (6.51)
4940.46 NT pa
2. Să se determine raza de curbură a unui fir greu în punctul său de cotă minimă.
Rezolvare:
3
2 22
1 y xach
y a
; iar pentru 0x a , adică raza de curbură în punctul de cotă
minimă este chiar parametrul lănţişorului.
3. Să se determine forţa F necesară pentru echilibrarea greutăţii G , dacă se ţine seama de rigiditatea firelor (date e1 şi e2) precum şi de frecarea din articulaţie (date: raza arborelui r0 şi coeficientul de frecare al articulaţiei 0 ).
Observaţie: e1 şi e2 sunt în general mici iar măsurarea lor este dificilă, depinzând de forţele aplicate, caracteristicile firului, viteza de ridicare şi temperatura ambiantă.

MECANICĂ*N* NB.07. Autoevaluare
‐ 145 ‐
Rezolvare:
În Error! Reference source not found.21 este reprezentat cazul
tendinţei de ridicare a greutăţii G . Datorită rigidităţii firului, care tinde să se desfăşoare pe porţiunea acţionată de forţa F, acesta tinde către verticală la o distanţă notată e1 , măsurată de la verticala punctului ideal de tangenţă. Analog, la înfăşurare este necesară o distanţă notată e2 pentru trecerea de la forma liniară la cea de arc de cerc. Ecuaţia de momente în raport cu articulaţia se scrie
Fig. 7.21. Scripete cu frecare şi fir cu rigiditate
1 2 0 0 0F R e G R e r F G , din care
2 0 0
1 0 0
R e rF G G
R e r
, adică forţa necesară echilibrării este mai mare decât greutatea,
cum s-a obţinut în cazul ideal.
În cazul tendinţei de mişcare opuse, ecuaţia de momente se scrie:
1 2 0 0 0G R e F R e r F G , din care 1 0 0
2 0 0
R e rF G G
R e r
.
Prin urmare frecarea din articulaţie şi rigiditatea firelor reduc forţa necesară echilibrării
greutăţii în acest caz. Dacă se notează1 0 0
2 0 01
R e r
R e r
, rezultă condiţia de echilibru
1G F G
Exerciții / probleme propuse spre rezolvare
1. Un cablu perfect flexibil AOB de lungime l şi greutate pe unitatea de lungime p, este legat în B de un balon care acţionat de forţe verticale şi orizontale. Porţiunea AO a cablului este pe sol şi are un coeficient de frecare de alunecare uscată μ. Tangenta în B la cablu face un unghi β cu orizontala (Fig. 7.). Se cer:
a) Tensiunea TB la capătul B al firului, precum şi componenta orizontală H a tensiunii;
b) Lungimea x0 a porţiunii AO aflate pe sol şi înălţimea h a porţiunii aflate în aer.
R
_
G
_
F
r0
e2
e1

MECANICĂ*N* NB.07. Autoevaluare
‐ 146 ‐
Fig. 7.22 Un balon legat cu un fir greu
Răspuns:
.
sincos
cos1;
tan1
;tan1
;sinsco
0 lhl
x
plH
plTB
2. Două corpuri de greutate G şi respectiv P = 1000 G se află în echilibru ca in Fig. 7. pentru un coeficient de frecare de alunecare μ=0,1. Să se determine numărul minim n de înfăşurări ale cablului în jurul cilindrului fix, necesare pentru echilibru.
Indicaţie: n=0 corespunde la un unghi de înfăşurare 2 , n=1 corespunde la 5 2 , etc.
Fig. 7.23. Un fir trecut peste un cilindru fix
Răspuns:
69.078rad si rezultă 11n
3. Un cablu liber, puternic întins între două puncte de fixare are o formă de echilibru aproximabilă printr-o parabolă. Distanţa dintre punctele de fixare, aflate la aceeaşi înălţime, este l, iar săgeata este f0. Între acelaşi puncte, se prinde un fir mai lung cu o fracţiune KL din lungimea sa din primul caz. Exemplu numeric: l=10 m; f0 =0,1m; KL=1%.
Să se determine:
a) Lungimea L0 a cablului în primul caz.
b) Relaţia dintre lungimea cablului şi săgeată în al doilea caz.
hB
OA

MECANICĂ*N* NB.07. Autoevaluare
‐ 147 ‐
b) Fracţiunea KF cu care creşte săgeata cablului în aceste condiţii, faţă de situaţia iniţială şi săgeata firului in noile condiţii.
Răspuns:
a) 2
00
8 8 0.0110 10.0027
3 3 10
fL l m
l
b) 220
08 1
13
FL
f KL K l
l
c) 2
20
3 3 1001 1 1 1 0,01 1 1 5,2 520%
8 8 0,01F Ll
K Kf
, adică săgeata devine
0 1 0,1 1 5,2 0,62Ff f K m
Întrebări/ chestiuni recapitulative
1) Ecuaţia lănţişorului ax
y acha
este cunoscută, iar capetele firului sunt la acelaşi nivel. Se
poate calcula din această formulă distanţa minimă dintre firul greu aflat la echilibru şi sol?
Raspuns : Nu. Distanţa de la punctul de minim si sol depinde de înălţimea la care se află punctele de prindere, valoare care nu este indicată
2) Propuneţi o metodă de calcul a distanţei h minime între un fir de înaltă tensiune şi sol, dacă firul are lungimea L, forţa distribuită p şi este prins între doi stâlpi de înălţime dată H. Stâlpii sunt fixaţi vertical, pe un plan înclinat de unghi α, la o distanţă D între punctele de fixare (Fig. 4).
Indicaţie : Din ecuaţia transcendentă cos2
2
DL a sh
a
se determină numeric parametrul a.
Cotele punctelor A şi B se scriu ;A BA B
x xy ach y ach
a a
. Împreună cu relaţiile
cosB Ax x D şi sinB Ay y D , se obţine un sistem de ecuaţii transcendente, din care se
pot obţine poziţiile xA şi xB şi astfel originea sistemului de axe, aflat la xA pe orizontală de primul stâlp şi la cota a sub punctul firului având cota minimă.

MECANICĂ*N* NB.07. Autoevaluare
‐ 148 ‐
Fig. 7.24. Un fir prins între doi stâlpi identici aflaţi pe un plan înclinat
Direcţia tangentă la fir este dată de x
y sha
iar în punctul aflat la distanţa minimă de planul
înclinat, panta firului este egală cu panta planului înclinat: tanhxsh
a
, din care se determină
xh. Rezultă imediat cota acestui punct hh
xy ach
a
, iar în acelaşi sistem de axe, punctul de fixare
al primului stâlp are cota Af Ay y H . Rezultă că un punct de pe planul înclinat are cota
tanAf Ay y x x . In cazul punctului de pe planul înclinat, aflat sub punctul de pe fir cel mai
apropiat de planul înclinat, cota este tanhf Af Ay y x x . Se obţine diferenţa de cote între
punctul de pe fir si de pe plan h hfh y y . Distanţa cerută este proiecţia pe normala la plan a
acestei diferenţe de cote: cosh h .
α
D
h
H
A
B
xB x
y
O xA

MECANICĂ*N* NB. STATICĂ
‐ 149 ‐
Bibliografie
[A01] Atanasiu M., Mecanica, Editura didactică și pedagogică, București, 1973.
[B01] Bălan, Şt., Complemente de mecanică teoretică, Editura Didactică şi Pedagogică, Bucureşti, 1979.
[B02] Beer F. P., Russell J. E., Clausen W. E., Vector Mechanics for Engineers. Statics, 8th edition, McGraw Hill, New York, 2007.
[B03] Bolcu, D., Rizescu, S., Mecanica – Vol. I, Editura Didactică şi Pedagogică, Bucureşti, 2009
[B04] Bolcu, D., Marin, M., Mecanică, Editura Universitaria, Craiova, 2003.
[B05] Bratu, P., Mecanică teoretică, Editura Impuls, ISBN 973-8132-57-6, Bucureşti, 2006.
[C01] Constantinescu I., Bolog C., Mecanică, Editura didactică și pedagogică, București, 1978.
[E01]Enescu N., Carp-Ciocârdia D. C., Predoi M.V., Savu M. – Mecanica pentru ingineri din profilul electric, Editura MATRIX-ROM, Bucureşti, 2000
[G01] Gross. D, Hauger W., Schröder J., Wall W. A., Rajapakse N., Engineering Mechanics 1. Statics, Springer – Verlag Berlin Heidelberg, 2009.
[H01] Hagedorn, P., Technische Mechanik. Vol I-III Verlag H , Deutsche Frankfurt am Main, 1989-1990.
[H02] Hangan S., Slătinenu I., Mecanică, Editura didactică și pedagogică, București, 1983.
[H03] Higdon, A., Stiles, W., Davis, A., Evces, Ch., Engineering Mechanics. Prentice Hall Inc. Englewood Cliffs, New Jersey, 1976.
[H04] Hibbeler R. C., Engineering mechanics. Statics, 11th edition, Pearson Prentice Hall, New Jersey, 2007.
[I01] Iacob, C., Mecanica teoretica, Ed. Didactică şi Pedagogică, Bucureşti, 1980.
[I02] Ibănescu R., Rusu E., Mecanică. Statică, Editura Cermi, Iași, 1997.
[I03] Ispas, V., Negrean, I., s.a. Mecanică, Ed. Dacia, ISBN 973-35-06-97-4, Cluj-Napoca, 1997.
[K01] Kittel C., Knight W. D., Ruderman M. A., Cursul de fizică Berkley, vol I, Mecanică, Editura didactică și pedagogică, București, 1981.
[M01] Mangeron D., Irimiciuc N., Mecanica rigidelor cu aplicații în inginerie. Mecanica rigidului, Editura tehnică, București, 1978.
[M02] Mc.Gill, D., King, W., Engineering Mechanics; Statics and an Introduction to Dynamics, P.W.S. Engineering, Boston, 1985.
[M03] Meriam J. L., Kraige L. G., Engineering Mechanics. Statics, 6th edition, John Wiley &Sons, New Jersey, 2007.
[M04] Morin D., Introductory Classical mechanics With Problems and Solutions, Cambridge University Press, 2008.

MECANICĂ*N* NB. STATICĂ
‐ 150 ‐
[N01] Negrean, I., Mecanică Avansată în Robotică, Ed. UT PRESS, ISBN 978-973-662-420-9, Cluj-Napoca, 2008.
[N02] Negrean, I., Mecanică. Teorie şi Aplicaţii, Ed. UT PRESS, ISBN 978-973-662-523-7, Cluj-Napoca, 2012.
[N03] Newton, I., Principiile matematice ale filosofiei naturale (transl. from English) Ed. Academiei R.P.R. 1956
[N04] Nita, M.,M.,Curs de mecanica teoretica, Academia militara, Bucuresti, 1972.
[O01] Onicescu, O., Mecanica, Ed. Didactică şi Pedagogică, Bucureşti, 1969.
[P01] Posea, N., ş.a., Mecanică aplicată pentru ingineri, Editura Tehnică, Bucureşti, 1984.
[P02] Pytel A., Kinsalaas J., Engineering Mechanics. Statics, 3th edition, Cengage Learning, Canada, 2010.
[R01] Rădoi M., Deciu E., Mecanica, Editura didactică și pedagogică, București, 1977.
[R02] Ripianu A., Popescu P., Bălan B., Mecanică tehnică, Editura didactică și pedagogică, București, 1982.
[R03] Roy, M., Mécanique. Corps rigides. Dunod Paris, 1965.
[R04] Ruina A., Pratap R., Introduction to Statics and Dynamics, Oxford University Press, 2011.
[S01] Silaș G., Groșanu I., Mecanica, Editura didactică și pedagogică, București, 1981.
[S02] Staicu Șt., Introducere în mecanica teoretică, Editura ștințifică și enciclopedică, București, 1983.
[S03] Staicu Șt., Mecanică teoretică, Editura didactică și pedagogică, București, 1998.
[S04] Stoenescu, A., Silaş, Gh., Mecanica teoretica. ed. III, Ed. Didactică şi Pedagogică, Bucureşti, 1969.
[S05] Stroe I., Mecanica. Statica, Teorie si probleme, IPB, 1991.
[S06] Stroe I., Buracu V., Carp-Ciocardia C.D., Motomancea A., Iliescu V., Alecu A., D.Caruntu, Voiculescu L., Dragomirescu C., Boiangiu M., D.Deleanu, Probleme de statică pentru studenţii din învăţământul superior tehnic, Editura Printech, Bucureşti, 2000 (reeditare).
[T01] Teodorescu P. P., Sisteme mecanice. Modele clasice, vol. 1, Editura tehnică, București, 1984.
[T02] Tocaci E., Mecanica, Editura didactică și pedagogică, București, 1985.
[V01] Voinea, R.,P., Stroe, I.,V., Predoi, M.,V., Technical Mechanics, Geometry Balkan Press, Bucharest, 1996.
[V02] Voinea, R.,P., Stroe, I.,V., Predoi, M.,V., Technical Mechanics, Editura Politehnica Press, Bucuresti, 2010, reeditare in 2012.
[V03] Voinea R., Voiculescu D., Ceaușu V., Mecanica, Editura didactică și pedagogică, București, 1983.
[V04] Voinea R., Voiculescu D., Simion F. P., Introducere în mecanica rigidului cu aplicații în inginerie, Editura Academiei Republicii Socialiste România, București, 1989.