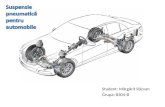
sistemul de directie cu cremaliera si suspensie McPherson
35
SISTEMUL DE DIRECTIE SI DE SUSPENSIE Operatia de orientare a vehiculului pe traiectoria dorita se numeste virare. Se executa prin intermediul unui sistem mecanic complex denumit sistem de directie. Acesta cuprinde volanul, coloana volanului, casete de directie, si mecanismul de directie. Uneori intre caseta de directie si mecanismul de directie se interpune un mecanism de actionare. Indiferent daca automobilul parcurge o traiectorie pe calea sa de rulare sau este supus unor comenzi de parcare / stationare, rotile directoare (cele din fata) sunt bracate, adica rotite in jurul unor pivoti. Cum traiectoriile pe care le parcurge fiecare din cele doua roti directoare nu sunt identice, bracarile lor trebuie corelate astfel incat sa se asigure conditia virarii corecte.
-
Upload
flinstonero -
Category
Documents
-
view
1.788 -
download
22
Transcript of sistemul de directie cu cremaliera si suspensie McPherson

SISTEMUL DE DIRECTIE SI DE SUSPENSIE
Operatia de orientare a vehiculului pe traiectoria dorita se numeste virare. Se executa prin intermediul unui sistem mecanic complex denumit sistem de directie. Acesta cuprinde volanul, coloana volanului, casete de directie, si mecanismul de directie. Uneori intre caseta de directie si mecanismul de directie se interpune un mecanism de actionare.
Indiferent daca automobilul parcurge o traiectorie pe calea sa de rulare sau este supus unor comenzi de parcare / stationare, rotile directoare (cele din fata) sunt bracate, adica rotite in jurul unor pivoti. Cum traiectoriile pe care le parcurge fiecare din cele doua roti directoare nu sunt identice, bracarile lor trebuie corelate astfel incat sa se asigure conditia virarii corecte.
[2]

Bineinteles ca directionarea autovehiculului trebuie sa fie sigura si comoda, stabilitatea autovehiculului pe directia de mers fiind o conditie esentiala pentru siguranta circulatiei. In principiu, sistemul de directie trebuie sa asigure o transmisie sigura si usoara de la volan la roti, transmisibilitate inversa de la calea de rulare la volan (pentru “simtul drumului”), stabilitatea rotii pe directia de mers, revenirea directiei la mersul rectiliniu, independenta fata de dezbaterea suspensiei sau oscilatiile caroseriei, uzuri reduse la pneuri, durabilitate ridicata, intretinere usoara, confort si siguranta in conducere.

Roata autovehiculului este de asemenea supusa dezbaterii pe verticala la trecerea peste neregularitatile caii de rulare. Pentru aceasta, intre roata si caroserie se intrerpune un sistem de suspensie, compus din mecanism : mecanism de suspensie, elemente elastice si de amortizare – de tip arcuri, tampoane, amortizoare, bara stabilizatoare. Mecanismul de suspensie este un mecanism plan/spatial cu bare articulate. Comanda acestui mecanism provine de la calea de rulare, el avand rolul de a asigura deplasarea pe verticala a rotii in timpul rularii autovehiculului. Prin acest mecanism se asigura atenuarea impactului roti / sol, amortizarea vibratiilor, asigurarea miscarilor oscilatorii ale caroseriei (ruliu, tangaj, deplasari verticale s.a.), preluarea fortelor de rulare. Miscarile (deplasarile) elementelor mecanismului de suspensie nu trebuie sa duca insa la modificari ale unor parametri caracteristici ai sistemului, precum : caderea rotii, paralelismul rotilor, ecartamentul, fuga. Prin acest sistem se transmit / preiau toate fortele de la contactul pneu – cale de rulare, el fiind in acelasi timp hotarator pentru asigurarea confortului automobilului.
Mecanismul de suspensie din figura este de tip culisa M 0 M N0, denumit si suspensie Mc Pherson , la care amortizorul face parte integranta din mecanism. Linia M N 0 formeaza pivotul

in jurul caruia se bracheaza roata directoare, 1 fiind bratul de suspensie, 2 – portfuzeta (inclusiv cilindru amortizor), 3 – tija amortizorului. Articulatia amortizorului la caroserie in cazul suspensiei Mc Pherson trebuie sa permita in primul rand rotatie in jurul axei sale (montata pe rulmenti), dar in acelasi timp, trebuie sa permita toate rotatiile, jucand rol de articulatie sferica.
Prin mecanism articulat de ghidare se intelege acel mecanism care conduce si pozitioneaza un anumit corp in plan sau spatiu conform unei functii impuse. Aceasta se efectueaza, de regula, prin puncte apartinand corpului ghidat, element denumit in general biela a mecanismului articulat. Ansamblul format din suspensie fata si directie se numeste si mecanism de ghidare roti / punti directoare, iar ansamblul “suspensie spate” se numeste mecanism de ghidare roti / punti nedirectoare. Articulatiile M 0si N0 sunt la sasiu. In constructie intra de asemenea elemente clasice (arcuri) si de amortizare. Dispunerea acestor mecanisme se face in planul transversal – vertical al autovehiculului (planul yz). Articulatiile M si N sunt sunt

sferice chiar pentru varianta plana, astfel ca portfuzeta 2 sa se poata roti in jurul liniei MN (respectiv M N 0 la suspensia Mc Pherson) a pivotului (adica sa se poata executa miscarea de bracare a rotilor in viraj). Se face precizarea ca pivotul este materializat prin linia MN (respectiv M N 0) a articulatiilor sferice, astfel ca se mai numeste si “pivot fals”. La suspensia cu culisa amortizorul este inglobat in mecanism (formand culisa). In figura avem un mecanism de suspensie cu culisa in varianta cu amortizor centric.
Punctele A si C corespund articulatiilor A-C precizate la mecanismele de directie, iar K este contactul pneu-cale de rulare. Denumiri specifice: 1 – brat inferior, 2 – portfuzeta, sau A0 T−¿fuzeta, M N 0 - pivot, 3 – brat superior (respectiv tija amortizorului la mecanismul cu culisa). De obicei in articulatiile M 0 si N0se prevad flexiblocuri pentru izolatie fonica si amortizari. Mecanismul pentru roata din dreapta este simetric fata de planul longitudinal – vertical al autovehiculului in raport cu mecanismul din stanga (cel din figura). Mobilitatea acestor mecanisme este 2, o mobilitate corespunzand actionarii de la calea de rulare (ΔZK ¿ si alta ramane disponibila pentru bracarea rotii in jurul pivotului MN:
M=∑f i−S=8−6=2 ,
unde ∑f i−¿ suma mobilitatii cuplelor cinematice, S – spatialitatea cinematica a mecanismului (S=6 pentru mecanismele spatiale generale).

Mecanism de ghidare cu suspensie Mcpherson si directie cu cremaliera incluzand transmisia la roti
Mecanismul are 3 grade de mobilitate activa si doua pasiveM¿ Σ f i−KS=29−4∗6=¿3+2c3=8 ,c1=5
Σ f i=3∗8+5
K=4 , S=6, actionarea se face prin parametrii Sc , ZKS , ZKD (mobilitatile pasive fiind ale barelor 4 si 4 ').
La rotile nedirectoare mecanismul de suspensie reprezinta si mecanismul de ghidare. Ghidarea independenta a rotilor din spate ale automobilelor se realizeaza prin mecanism de suspensie pentru fiecare roata. Se asigura urmatoarele avantaje: spatiul blocat mai redus, greutatea masei nesuspendate mai redusa, neinfluentarea reciproca a rotilor, confort sporit. Dezavantaje pot fi: modificarea caderii rotilor.
Mecanismul de ghidare al rotii trebuie sa asigure deplasarea pe verticala a rotii, concomitent cu preluarea fortelor si transmiterea acestora la caroserie si asigurarea unui

centru de ruliu corespunzator. Mobilitatea mecanismului de ghidare a rotilor trebuie sa fie M=1.Definirea geometrica a mecanismelor de ghidare a rotilor auto
Mecanismele de ghidare a rotilor auto sunt dispuse pe un sasiu mobil. Studiul cinematic si static se efectueaza considerand caroseria fixa si solul mobil. Studiul cinematic si static se efectueaza considerand caroseria fixa si solul mobil – cu dezbatere de la sol pe verticala, in timp ce in studiul dinamic caroseria se considera in miscare. Aceasta presupune sisteme de referinta generale ale caii de rulare, ale caroseriei (sasiului) si ale fiecarui element separat.Sisteme de axe de coordonate in care se definesc mecanismele
Se va considera un sistem de axe de coordonate general legat de sol, sistemul triortogonal drept O0 X0 Y 0 Z0(fig. 1), (X 0Y 0) fiind planul caii de rulare ale carui axe:
X 0 este in lungul caii de rulare, in sens invers directiei de mers, Z0 este verticala, perpendiculara pe calea de rulare si cu sens in sus. Y 0 este transversala pe calea de rulare, cu sens spre dreapta directiei de mers,

Originea O0 a sistemului nu are importanta unde este aleasa.Un al doilea sistem de axe de coordonate generaleste legat de sol, sistemul triortogonal
drept OXYZ (fig. 2), ale carui axe sunt orientate asemanator sistemului atasat solului, adica X este axa longitudinala a autovehiculului cu sens inspre spate, Y – axa transversala cu sens spre dreapta si Z – axa verticala cu sens in sus. Pentru analiza cinematica si statica a mecanismelor de ghidare, sistemul OXYZ se considera fix (caroseria fixa), miscarea elementelor raportandu-se la acest sistem. Introducerea miscarii de dezbatere a rotii se face de la punctul K de contact pneu – cale de rulare, ca atare sistemul O0 X0 Y 0 Z0 se poate considera translatant dupa axa Z0 . Este posibil ca ambele roti ale unei punti sa fie dezbatute egal ZK S
=ZKd¿s – stanga, d – dreapta)
sau inegal. Originea O a sistemului se alege in plan longitudinal – vertical al automibulului, sistemul OXYZ fiind de fapt sistemul tehnologic al autovehiculului. In acest sistem se definesc punctele de prindere ale mecanismului de ghidare pe autovehicul.
Elementele cinematice ale mecanismelor au sistemele lor proprii Oi X iY i Zi , sisteme in care se defineste geometria acestora:
Aceste sisteme sunt fixe fata de elementele respective, dar mobile fata de sistemul OXYZ al autovehiculului. Sa presupunem elementul i (fig. 3) avand o cupla sferica si una de rotatie: axa X i se va lua in lungul axei articulatiei, iar axa Y i dupa perpendiculara coborata din centrul sferei pe axa de rotatie. Planul (X i Y i ¿ poate fi considerat ca planul elementului, iar axa Zi perpendiculara pe acesta, conform sistemului triortogonal drept.
Daca elementul este articulat la caroserie, una din axe X i , Y i , Z i va fi pozitionata prin doua unghiuri fata de axa corespunzatoare X, Y, respectiv Z a caroseriei.
De exemplu axa X i face unghiurile Ψ si ν fata de axa X (fig. 4). Se poate considera ca sistemul X i Y i Z i s-a obtinut din XYZ printr-o rotatie cu unghiul Ψ in jurul lui Z si o rotatie in jurul noii axe Y i cu unghiul ν; sistemul obtinut este X i Y i Z iorientat fata de XYZ.
In general, o axa in spatiu poate astfel fi orientata prin unghiurile Ψ si ν fata de axa X (fig. 5), sau perechea de unghiuri ν si λ fata de axa Z (fig. 6), sau perechea de unghiuri Ψ si λ fata de axa Y (fig. 7). Bineinteles, la definirea concreta a unei axe se foloseste doar una din aceste perechi de unghiuri.Definirea geometrica a bratelor si portfuzetei
Bratele inferior 1 si superior 3 din fig. 1 se definesc in sistemele M 0 X1Y 1 Z1 , respectiv N0 X3 Y 3 Z3 ,unde centrele M 0 si N0 corespund perpendiculalelor coborate din centrele articulatiilor sferice M, respectiv N pe axele de rotatie X1 respectiv X3. Luand ca exemplu bratul inferior al suspensiei, parametrii de definire ai acestuia sunt X M 0
' (M 0), X M 0
} ( {M} rsub {0} )¿ ¿, Y M (M 0 ).
Parametrul μ1 indica inclinarea carcasei articulatiei sferice. Bratul superior al suspensiei prezentat in fig. 2 este definit de parametrii X N0
' (N0 ),X N0
} ( {N} rsub {0} )} , {Y} rsub {N( {N} rsub {0} )} = {l} rsub {3} , ¿ ¿respectiv μ3 care indica inclinarea articulatiei sferice. Coordonatele articulatiei L de prindere a amortizorului

in N0 X3 Y 3 Z3 vor fi: X L(N 0),Y L (N 0) , ZL( N0)
. Portfuzeta este prezentata in fig. 3. Unghiurile εM , εN , εC pozitioneaza axele bolturilor in planul (Y 2 Z2) - fata de axa Z2 .
Definirea geometrica a mecanismelor de suspensie cu culisa (McPherson)In fig. 1 se da schema generala a mecanismului de suspensie McPherson. Bratul superior
este inlocuit de tija amortizorului. Portfuzeta include cilindrul amortizorului. In sistemul

F X2Y 2 Z2 ,se definesc pozitiile articulatiilor C si M, respectiv pozitia cilindrului amortizor (fig. 2). Sunt necesare, ca atare, coordonatele X M (F) , Y M (F ) , ZM (F ) ,X C(F ) ,Y C(F ) , ZC ( F ) ,si unghiurile de pozitionare in spatiu ale bolturilor cu cap sferic: εM , λM , εC , λC . Axa cilindrului este pozitionata de catre un punct N de pe ea si de unghiurile de inclinare ale acesteia: X N (F ) ,Y N (F ), ZN (F ) , εN , λN
.
Definirea geometrica a mecanismelor de directie
Solutia semiconstructiva a unui mecanism de directie este prezentat in figura impreuna cu sistemul de axe general OXYZ si particulare X i , Y i , Z i.

Levierul de fuzeta AC este definit in sistemul fuzetei FX2 Y 2 Z2 prin coordonatele XC (F ) ,Y C (F ) , ZC(F ) . Punctul A este piciorul perpendicularei coborate din C pe directia MN a pivotului. Bara de directie 4 este definita de lungimea L4=CE.Bieleta de directie are articulatia din E realizata cu o articulatie cilindrica cu flexibloc, jucand rol de articulatie sferica cu centrul la mijlocul axului. Ca atare directia CE nu coincide cu axa Y 4.Fata de planul (X 4 Y 4) planul carcasei sferice din C este inclinat cu unghiul η4. Cremaliera 5 este definita geometric de lungimea sa, ca distanta intre articulatia l5=E E' .
Sistematizarea parametrilor geometrici de definire a mecanismelor de ghidare a rotilor directoare
La suspensia cu culisa si directia cu cremaliera coordonatele articulatiilor la caroserie (in OXYZ):
X M 0' ,Y M 0
' , ZM 0' , X M 0
}} , {Y} rsub {{M} rsub {0} rsup { ZM 0}} {, X} rsub {{N} rsub {0}} , {Y} rsub {{N} rsub {0}} , {Z} rsub {{N} rsub {0}} , {X} rsub {{G} rsub {0}} , {Y} rsub {{G} rsub {0}} , {Z} rsub {{G} rsub {0}} ¿¿
geometria bratului de suspensie (in sistemul M 0 X1Y 1 Z1): l1 ,X M 0' (M¿¿ 0) , XM
0} ( {M} rsub {0} )} ¿ ¿¿
geometria portfuzetei pentru punctele M si C lungimile barei si cremalierei de directie: l4 , l5;
unghiurile de pozitie ale bolturilor de rotula (in F X2Y 2 Z2): pentru M si C (εM , λM , εC , λC
); unghiul planului carcasei din M: μ1; unghiul axei amortizorului: εN ;
curse limita: lamin , lamax , Sc max;

dimensiuni generale: Ea, Aa , rr
Definirea geometrica a mecanismelor de ghidare a puntilor spatePentru definirea geometrica a mecanismelor de ghidare a puntilor se vor considera doua
sisteme de referinta, unul atasat corpului ghidat (puntea ), celalalt atasat bazei mecanismului (caroseria). Sistemul OXYZ al caroseriei a fost anterior definit.
Sistemul puntii, notat P X p Y p Z p, care este si sistem tehnologic, are originea P in centrul puntii, axa Y p este axa centrelor celor doua roti – pozitiva spre dreapta, X p este axa transversala a puntii – pozitiva in sensul invers directiei de deplasare auto, iar axa Zp rezultata vertical – pozitiva in sus, conform sistemului triortogonal drept.
Se face precizarea ca pentru pozitia neutra a mecanismului (automobil in repaus), sistemul de referinta al puntii coincide, de regula, cu cel al caroseriei (respectiv al solului).
In conformitate cu cele precizate si tinand cont de faptul ca ghidarea puntii se face prin conducerea unui numar de puncte ale sale pe curbe / suprafete cu focare la caroserie, modelul geometric al mecanismelor de ghidare a puntii auto se defineste prin urmatorii parametri:
X Mos ,d , Y Mos, d , ZMos, d , X Nos ,d , Y Nos ,d , ZNos, d , XNo ,Y o , Zo ,X ¿ ,Y ¿ , Z¿ , ZMoi
coordonatele articulatiilor barelor mecanismului la caroserie, in sistemul tehnologic OXYZ atasat caroseriei;
X Ms ,d (P ) ,Y Ms , d( P) , ZMs , d (P) , X Ns, d( P) ,Y Ns, d (P) , Z Ns, d (P) , XN ( P) ,Y N (P ), ZN (P) , XT (P ) ,Y T (P ) , ZT (P), coordonatele articulatiilor barelor mecanismului la punte, in sistemul tehnologic P X p Y p Z p atasat puntii;

li - lungimile barelor mecanismului (distantele dintre articulatii); rr , Ea - raza rotii si ecartamentul automobilului.
In figura sunt precizati parametrii specifici pentru mecansismul de ghidare a puntii.
Definirea geometrica a mecanismelor de ghidare a mecanismelor de ghidare a rotilor spateMecanismele de ghidare a rotilor nedirectoare spate sunt mecanisme spatiale bicontur,
ce vor fi definite din punct de vedere geometric similar cu mecanismele de ghidare a puntilor, considerand ca sistem de bazasistemul OXYZ al caroseriei.
Pentru corpul ghidat (portfuzeta) se va considera sistemul tehnologic propriu, notat F X5Y 5 Z5, la care originea F este intersectia planului tehnologic al portfuzetei cu axa acesteia, planul (F X5Y 5) contine cupla M 1 ,iar axa X5 va rezulta conform sistemului drept
Modelul geometric al mecanismelor de ghidare a rotilor nedirectoare spate se defineste prin urmatorii parametri:
X Moi , Y Moi , ZMoi – coordonatele articulatiilor M oi ale barelor mecanismului lacaroserie, in sistemul tehnologic OXYZ al caroseriei;
X Mi( F) , YMi (F ) , ZMi (F ) - coordonatele articulatiilor M iale barelor mecanismului laportfuzeta, in sistemul tehnologic F X pY p Zp atasat portfuzetei;
li=|M oi M i| – lungimile barelor mecanismului de ghidare (distantele dintre articulatii);
rr , Ea - raza statica a rotii si ecartamentul automobilului
Functiile cinematice caracteristice mecanismelor de ghidare a rotilor (puntilor automobilului).Mecanismele de ghidare trebuie sa indeplineasca o multitudine de cerinte constructive,
tehnologice, statico-cinematice, dinamice, trebuie sa realizeze o serie de functii cinematice. Roata/puntea masinii este amplasata in mecanism pe pozitie de element intermediar (biela) avand miscare spatiala generala. Unele dintre aceste miscari sunt dorite si se impune sa fie

realizate dupa anumite functii, altele sunt nedorite si se impune sa fie minimizate. Astfel roata la trecerea peste neregularitatile caii de rulare este dezbatuta pe verticala, parametrul ΔZK putandu-se considera ca variabila cinematica de intrare.
In sistemul central fix OXYZ, pivotul MN al rotii este pozitionat prin unghiurile α si β α=unghi de inclinare transversala (fata de verticala Z), impus pentru micsorarea bratului d p al fortelor din punctul K (d p=deport)β=unghi de fuga (inclinare longitudinala fata de axa Z), impus pentru redresarea directiei (stabilizare pe directia de mers).
La dezbaterea rotii prin ΔZK apar evident variatii ale acestor unghiuri, deci functiile α(ΔZK) si β(ΔZK ¿. Variatiile unghiurilor pivotului Δα si Δβ, intre valorile curente α si β si valorile initiale de referinta α 0 si β0, adica diferentele Δα=α−α 0 si Δβ=β−β0 trebuie mentinute in limitele admise la dezbaterea suspensiei intre pozitiile limita inferioara (detenta) si superioara (soc). De asemenea, in sistemul OXYZ, fuzeta TA0 a rotii este pozitionata prin unghiurile γsi δ . γ=unghi de cadere fata de axa Y in plan vertical, impus pentru reducerea valorii deportului d p
δ=unghi de convergenta/divergenta a rotii fata de axa Y in plan orizontal (X,Y), impus pentru reducerea tendintei de inchidere /deschidere a rotilor in timpul rularii (mentinerii paralelismului rotilor din stanga/dreapta).
La dezbaterea ΔZK a rotii apar evident modificari ale valorilor initiale γ 0si δ 0 ale acestora deci se descriu functiile γ (ΔZK )si δ ( ΔZK ) . Variatiile ungiurilor fuzetei Δγsi Δδ, ca diferenta intre valoarea curenta si cea initiala, Δγ = γ -γ 0 si Δδ = δ - δ 0, trebuie mentinute in limite admise la dezbaterea ± ΔZk maxa suspensiei. Unghiurile influenteaza uzura pneurilor si a pivotilor, momentele incovoietoare la fuzeta si pivoti, roata in pozitie stabila de mers rectiliniu, orientarea (bracarea) rotilor, lucrul pneurilor pe calea de rulare sub un unghi convenabil, stabilitatea

mersului autovehiculului. Unghiurile de dezbatere ale bratelor de suspensie φ1(ΔZK) si φ3(ΔZK). Functiile α (ΔZK), β (ΔZK), γ (ΔZ K), δ (ΔZK), d p(ΔZ K), φ1 (ΔZ K ) , φ3(ΔZ K), ΔEa(ΔZ K) sunt functii cinematice in mecanismul de suspensie al rotilor automobilului. Variatia de ecartament ΔEa la dezbaterea suspensiei ΔZK este de asemenea o functie importanta, privind uzura pneurilor. Variatiile unghiului de cadere Δγ, variatiile unghiului de convergenta Δδ si variatiile deportului Δd p sunt variatii cauzatoare de uzuri la pneuri, vibratii in sistem, instabilitatea mersului, disconfort la conducere. Pe langa aceste functii, prin actionarea de la volan, roata se roteste in jurul pivotului cu unghiurile de bracare θe ,i . La actionarea cuφv a volanului apar functiile de bracare θe la roata din interiorul curbei traseului parcurs: θe ¿) si θi ¿). Corelarea pozitionarii celor doua roti drectoare va da legea de bracare asigurata de mecanism: θi(θe)Fata de conditia virarii corecte a vehiculului θ¿(θe):ctgθe- ctgθ¿ = Ba
K Aa
Legea de bracare a mecanismului, la un unghi curent θe, se indeparteaza cu o diferenta Δθi - denumita eroare de directie: Δθi = θi - θ¿
Aa = ampatamentul autovehiculului (distanta dintre punti) Ba = distanta dintre pivotii autovehiculului (stanga / dreapta)K = 0,2...0,25 – coeficientul de deriva transversala a pneurilor elastice. Se face precizarea ca la dezbaterea suspensiei, prin modificarea pozitiei pivotului MN apare o bracare in directie, cu efect daunator (provocator al fenomenului de “shimmy”). Functia de bracare indusa (φb este acelasi lucru cu variatia Δδ) , este: φb ( ΔZ K ) ,Δδ = φb ,φb ( ΔZK ) = Δδ. Bracarea indusa se impune a fi minimizata, adica φb→0De asemenea, la bracarea si dezbaterea rotilor este importanta marimea unghiului de presiune β pr ,in special valorile la bracarea si dezbaterea maxima, unghiul β pr trebuind mentinut sub o valoare admisibila: β pr(θe, ΔZK)<βa.Mecanismul de ghidare a rotii directoare este un mecanism complex cinematic, cu trei parametri variabili independenti: ΔZKs– dezbaterea la roata din stanga
ΔZKd - dezbatere la roata din dreapta ,φv – actionarea la volan.

Se poate face insa departajarea acestor parametri astfel ca functiile sa depinda de o singura variabila independenta, respectiv: Δγ(ΔZKs¿, Δβ(ΔZKs¿, Δδ(ΔZKs¿, ΔEa(ΔZK ¿, Δγ(ΔZKs¿, Δφb(ΔZKs¿ si Δθi(φv ). Functiile de pozitie pentru mecanismele de suspensie cu culisa (McPherson)Luand un punct caracteristic H pe cilindrul amortizor, lungimea amortizorului l4=N0 Heste variabila independenta, functiile de pozitie necesare calculandu-se in ordinea: φ1 (la ) , α (la ) , β ( la ) , γ (la ) , δ (la ) , Ea (la ) , d p (la ) .Coordonatele articulatiei M se deduc folosind punctele M 0' , M 0
¿ si N0, in care distanta N0 Meste data de relatia M N 0=√e2+( f+ la)2, e=M H b, f=H H b fiind parametri geometrici constanti.
φ1=¿arcsinZM−ZM 0
l1 cos ν01'
α=arctgY N0
−YM
Z N0−ZM
, Δα=α−α 0
β=arctgXN 0
−X M
ZN 0−Z M
, Δ β=β−β0

γ=arctgZF−ZT
Y F−Y T, Δ γ=γ−γ0
Ea
2=Y K=Y T +r sin γ ' cos δ, γ '=arc ( tan γ cos δ ) , Δ Ea=Y K−Y K
0
d p=√(X P−XK )2+(Y P−Y K )
2, Δ dP=dP−dP0
cu X P=XM+ZK−ZM
Z N0−ZM
(X N0−X M ) ,Y P=Y M+
ZK−ZM
ZN 0−ZM
(Y N 0−Y M ) ,
X K=XT−rr sin γ ' cos δCoordonatele originii F in sistemul fix OXYZ si ale centrului T al rotii se determina asemanator determinarilor din patrulaterul de suspensie, facand legatura cu punctele M, H si N0 si considerand unghiul de convergenta δ 0.Unghiul de convergenta/divergenta δ curent se dtermina dupa cunoastereacoordonatelor artculatiei C, ca urmare a pozitiei fixe a articulatiei E. δ=arctg
XT−XF
Y F−Y T, Δ δ=δ−δ 0. Expresia poate fi folosita si pentru calculul unghiului de bracare, in care insa articulatia E se afla intr-o pozitie curenta conform actionarii de la volan.Mecanismele de ghidare cu suspensie McPherson realizeaza ghidarea rotii prin conducerea a trei puncte pe sfere si a unei drepte printr-un punct fix – mecanism de tip SSSSCS SS.

la[mm] α β γ δ φb d p(mm) Y K (mm)363 14° 28' 2° 48' −0 ° 17' 0 ° 7' 0 ° 7' 22,7 685383 14 ° 24' 2° 31' −0 ° 38' 0° 3' 0 ° 3' 20,8 693403 14 ° 02' 2 °20 ' −0 ° 39' 0 ° 4 ' 0 ° 3' 19,3 697423 13 °26 ' 2 °12' −0 ° 22' 0 ° 4 ' 0° 3' 18,1 697463 12° 35' 2 °08 ' 0 ° 09' 0 ° 2' 0 ° 3' -17,1 692493 11° 31' 2 °07 ' 0° 56' −0 ° 1' 0 ° 1' -16,2 684533 10° 12' 2° 10' 2 °0 ' −0 ° 10' −0 ° 6' -15,6 671
S5[mm] La sarcina La ruliu maximθe θi Δθ i β pr .i θe θi Δθ i β pr .i0 0° 0° 0° 18 ° 48' −0 ° 04' −0 ° 14' -0° 09' 28 °28 '10 59' 5 ° 03' −0 ° 08' 21 °28' 4 °30' 4 °59' 0 ° 19' 30 °28 '20 58' 10 °12' −0 ° 34' 25 °10 ' 9 ° 04' 10 °19 ' 0 ° 35' 33 °22'30 58' 15 °31' −1 °19' 29 ° 45' 13 °39 ' 15 °51' 0 ° 39' 37 ° 10'40 01' 21 °06 ' −2 °19' 35 °10 ' 18 °15 ' 21 ° 41' 0 ° 37' 41 ° 54'50 09' 27 ° 04' −3 °29 ' 41 ° 28' 22 °55' 28° 0 ° 35' 47 ° 42'60 24 ' 33 ° 41' −4 °34 ' 48 ° 55' 27 ° 40' 35 °7 ' 0 ° 54' 54 ° 55'70 09' 38 °57 ' −1 °59' 55 ° 09' 31 °02' 40 ° 58' 1 ° 44' 61 °16 '

Considerand sistemul tehnologic F X2Y 2 Z2 caracteristic portfuzetei, ales astfel incat axa FY 2 sa fie axa portfuzetei, planul FY 2 Z2 sa contina punctul M ', iar axa F X2 sa determine impreuna cu celelalte doua axe un sistem triortogonal drept, si notand cu P2, respectiv P3, proiectiile punctului M ' pe axele acestui sistem, cinematica in spatiu a portfuzetei este definita prin punctele G (centrul rotii), P2 si P3. Punctele G, P2 si P3 , de pozitie invarianta in sistemul F X2Y 2 Z2 al portfuzetei sunt caracterizate in sistemul tehnologic OXYZ al caroseriei prin coordonatele: XG ,Y Y , ZG, X P2
,Y P2, ZP 2
, X P3,Y P3
, ZP3.ConsiderandZGca parametru independent (mecanismul din figura are mobilitatea M=1), cinematica portfuzetei relativ la caroserie este complet determinata de celelalte 8 coordonate, a caror determinare se face prin scrierea ecuatiilor de legatura intre cele 3 puncte (G, P2 , P3) si a ecuatiilor suprafetelor de ghidare a punctelor M ' , M } , C si a dreptei ¿ (axa amortizorului). Se porneste de la o pozitie de referinta a mecanismului (de regula pozitia corespunzatoare automobilului in repaus), modificand cu valori discrete ΔZG variabila independenta ZG si considerand pentru fiecare noua pozitie, ca solutie initiala a sistemului, pozitia anterioara cunoscuta a mecanismului.Studiul cinematic al mecanismului se efectueaza in sistemul fix OXYZ al caroseriei,interesand unghiurile de pozitie ale axei fuzetei (unghiul de cadere γ , unghiul de convergenta/divergenta δ , modificarile de ecartament si ampatament, pozitia fata de caroserie a axei instantanee de rotatie a portfuzetei rotii si a centrului de oscilatie - fuzeta caroserie). Matricea de trecere de la sistemul F X2Y 2 Z2 al portfuzetei la sistemul fix este data de
M 20=[(Y P2
−Y F ) (ZP3−Z F )−(ZP2
−ZF )(Y P3−Y F)
F P2∗F P3
XP2−XG
GP2
X F−XP3
F P3
( XP 2−X F ) (ZP2
−Z F )−(X P2−XF )(ZP3
−ZF)
F P2∗F P3
Y P2−Y G
GP2
Y F−Y P3
F P3
(X P2−XF ) (Y P3
−Y F )−(X P3−XF )(Y P2
−Y F)
F P2∗F P3
ZP2−ZG
GP2
Z F−ZP3
F P3
]cu X F , Y F , ZF obtinute din:

{ XF−XG
X P2−XG
=Y F−Y G
Y P2−Y G
=ZF−ZG
ZP2−ZG
(X F−X P3) (X P2
−X G )+(Y F−Y P3) (Y P2
−Y G )+(Z F−ZP3) (ZP 2
−ZG )=0Coordonatele unui punct oarecare A al portfuzetei se calculeaza cu[X A
Y A
Z A]=[XF
Y F
ZF]+M 20 [X A (F )
Y A (F )
Z A (F )]( F)in care punctul A poate fi oricare din punctele M ' , M } , H, C¿Functiile implicite care contin cele opt cunoscute (Y Y , ZG,
X P2,Y P2
, ZP 2, X P3
,Y P3, ZP3
) sunt:(X ¿¿P2−XG)
2¿+(Y P2−Y G)
2+(ZP2−ZG)
2−G P22=0
( XP3−XG )2+(Y P3
−Y G )2+(ZP3−ZG )2−GP3
2=0
( XP3−X P2 )
2+(Y P3−Y P2 )
2+(ZP3−Z P2 )
2-P3 P22=0
( XM '−XM 0' )2+(Y M '−Y M 0
' )2+(ZM'−ZM 0' )2-l1
' 2=0( XM }} - {X} rsub {{M} rsub {0} rsup { )2+(Y M }} - {Y} rsub {{M} rsub {0} rsup {)2+(ZM }} - {Z} rsub {{M} rsub {0} rsup { )2-l3
' 2=0(X N0
−X H)Y Δ+(Y N0−Y H ) X Δ=0
(Y N0−Y H ) ZΔ-(ZN 0
−ZH )Y Δ=0
(X C−X E)2+(Y C−Y E)
2(ZC−Z E)2-l4
2=0 ,in care X Δ ,Y Δ , Z Δsunt componente, in sistemul fix, ale vectorului axei amortizorului si sunt date de:|XΔ
Y Δ
ZΔ|=M 20|cosε Δ
' sin λ Δ
sin ε Δ'
cos εΔ' cos λΔ
|Unghiurile curente ale fuzetei, in sistemul fix OXYZ, se calculeaza cu relatiile:{γ=arctg
ZP2−ZG
Y P2−Y G
δ=arctgXG−X P2
Y P2−Y GPozitia curenta a punctului K de contact roata-sol se va determina pe bazasistemului de ecuatii de mai jos:
¿(ZK−ZG¿=0

In determinarea axei instantanee de rotatie fuzeta-caroserie si a centrului de oscilatie sunt necesare vitezele liniare reduse ale celor trei puncte G, P2 , P3 . In functie de pozitia si viteza celor 3 puncte, se determina pozitia axei instantanee de rotatie (printr-un punct si cosinusii directori) si a centrului de oscilatie.Functiile de miscare pentru mecanismul de directie cu cremalieraMecanismul de directie cu cremaliera este actionat prin pinion la cremaliera, parametrul variabil independent fiind deplasarea S5 a cremalierei. Pentru varianta de mecanism posterior, la deplasarea cremalierei spre stanga cu S5 ,roata din stanga se bracheaza cu θe- spre exteriorul curbei si cea din dreapta cu θi - spre interiorul curbei de rulare.In sistemul pivotilor X2 s ,d , Y 2 s , d , Z2 s ,d (obtinut din XYZ prin rotatiile cu unghiurile αsi β), levierele de fuzeta AC, respectiv BD sunt pozitionate fata de axa X2 s ,d cu unghiul φ0 la mersul rectiliniu al autovehiculului, respectiv unghiul {φ} rsub {0} ± {θ} rsub {i,e} la mersul in viraj (fig 4.11,a). Ca atare, la levierul din stanga, unghiul de pozitie este (fig 4.11,b)
θ s=φ0−θe=∢(X2 s , AC )iar la levierul din dreapta θd=φ0+θi=∢(X2d , BD)axa X2 s∥X 2d facand unghiul β cu axa X (fig 4.11,c)In fig 4.11,b se da imaginea plana a mecanismului, planul de reprezentare fiind cel orizontal (apropiat de planul XY). Se face precizarea ca punctele A si B corespund cu piciorul perpendicularei coborate din C, respectiv D pe axa Z2 a pivotului.
Relatiile de calcul ale unghiurilor de bracare sunt:tg θ s=Y C−Y A
X A−XC, θe=φ0−θ s ,
tg θd=Y B−Y D
XB−X D, θi=θd−φ0 ,Rezulta θi (θe ) ,in care Y B=-Y A, X B=X A .Coordonatele XC , Y C , XD , Y Dvariaza cu cursa S5 a cremalierei. Unghiul φ0 rezulta tot din relatiile referitoare la mersul rectliniu, adica la cursa S5 a cremalierei. Legea de bracare va fi data de functia θi (θe ).Stabilirea coordonatelor lui C si D se face functie de punctele M S , NSsi E, respectiv M d , Ndsi E', variabila independenta S5 intrand in coordonatele
Y E=Y E0+S5 , Y E '=Y E' 0−S5. De asemenea, X E=X E'=XG , Z E=ZE '=XG (s-a notat E0 si E '0 pozitiile lui E si E' la mersul rectiliniu, adica la S5=0¿ .

Coordonatele fixe ale lui A, respectiv B se determina pe baza schemei portfuzetei. Pentru cazul in care linia pivotului intersecteaza axa fuzetei (X M ( F )≡ XN (F )=0¿ , proiectia lui C pe planul (X2 Z2 ¿ este CP, atunci:a≡ AC=√ACP
2 +X C (F )2 .Cum
A0 CP=√(Y C (F )−Y A0 ( F ) )2+ZC ( F )2 , tgχ1=
ZC ( F )
Y C ( F )−Y A 0 (F )rezultaACP=√(Y C (F )−Y A0 ( F ) )2+ZC ( F )
2 *sin( χ−¿ χ1) ,¿cutgχ=
ZN (F )
Y N (F )−Y A 0(F )Ca atare se obtin valorile coordonatelor:

ZA ( F)=ZC (F )+ACP∗cos χ ,
Y A (F )=Y C (F )−ACP∗sin χ
X A ( F)=0.
Trecerea de la sistemul X2 Y 2 Z2 la sistemul central XYZ se face printr-o rotatie cuunghiul γ in jurul lui X si rotatie cu β in jurul lui Y 2 ,matricelede rotatie fiind M γ=|1 0 0
0 cos γ −sin γ0 sin γ cosγ |, M β=| cos β 0 sin β
0 1 0−sin β 0 cos β|.In acest fel coordonatele lui A in sistemul XYZ vor fi:
|X A
Y A
Z A|=M γ ∙M β|X A ( F)
Y A (F )
ZA ( F)|, Y B=−Y A , ZB=Z A , XB=X A
La mersul rectiliniu, unghiurile de bracare sunt θe=θ i=0 , pozitia levierului defuzeta fiind marcata de unghiul φ0. Legea de bracare a mecanismului de directie θi (θe ), se stabileste pentru vehicul sub sarcina, deci cu amortizor de lungimela0sau dezbatere ΔZK=0 ,adica pentru punctele M si N fixe.
Conditia virarii corecte a autovehiculului, adica asigurarea unui centru unic de virajpentru toate rotile, cunoscuta sub numele de conditia Ackermann, este data de relatia, este data de relatia:ctgθe−ctgθ¿=Ba
Aa
, sau ctgθe−ctgθ¿=Ba
K Aa
, K=1,2,...1,25.

Aceasta indica dependenta necesara teoretic dintre unghiurile de bracare ale rotilor θ¿ (θe ). Bareprezinta distanta dintre pivoti la nivelul axei rotii, Ba=2|Y A 0|, Aareprezinta distanta dintre puntile autovehiculului (ampatament) si K este coeficient de deriva a pneurilor (elasticitate transversala). Ca atare se evalueaza eroarea de directie, ca diferenta dintre unghiul θi realizat de mecanism si θ¿ teoretic necesar:
Δθ i=θi−θ¿
CoordonataY A0se poate calcula cu relatiaY A 0
=Y M+ nl2
(Y N−Y M ) , l2=MN,n=M A0=√√(YM ( F )−Y A 0 ( F ))2+ZM ( F )
2 ,
In cazul ca dorim sa folosim pentru bracarea in viraj aceleasi relatii ca pentrubracarea indusa, se vor determina coordonatele punctelor T si F utilizand coordonatele articulatiilor C, M si N. In acest caz unghiul de bracare se deduce prin relatiile: θe ,i=δ−δ 0
δ=arctgXT−XF
Y T−Y F
Un alt parametru cinematic important este unghiul de presiune in mecanismul dedirectie β pr ,care ar trebui controlat nu numai la bracarile maxime, ci si la dezbaterile maxime (soc, detenta). Unghiul de presiune se defineste ca unghi intre directia fortei si directia vitezei punctului de aplicatie a fortei. Evident, pentru un efect de actiune mare al fortei, unghiul de presiune trebuie sa fie cat mai mic, la valori prea mari ale unghiului de presiune aparand chiar fenomenul de blocare a miscarii. In Mecanismul de directie, locul cel mai defavorabil pentru transmiterea fortei este articulatia C, respectiv D, la actionarea portfuzetei. Unghiul de presiune β pr in articulatia din figura este dat de linia bielei 4 (directia fortei F42¿ si linia perpendicularei pe planul (CMN) – (directia vitezei νc): β pr=∢ (νc ,EC ).Ca atare acest unghi este dat de relatia:β pr=arccos
νc ⋅EC
νc ⋅ l4
,
β pr=arccosV X (XC−X E )+V Y (Y C−Y E )+V Z (ZC−ZE)
l4 √V X2 +V Y
2 +V Z2

in careV X=|Y C−Y A ZC−Z A
Y N−YM Z N−ZM|
V Y=|XC−X A ZC−Z A
XN−X M ZN−ZM|
V Y=|XC−X A Y C−Y A
XN−X M Y N−YM|
X A=X M+m ( XN−X M )
l2
, Y A=Y M+m (Y N−Y M )
l2
, ZA=ZM+m (ZN−ZM )
l2
,
m=AM=√M C2−a2 , a=ACFunctiaβ pr (S5 ,la )da valorile unghiului de presiune.
Capacitatea unghiulara a articulatiilor sferice din mecanismele de ghidare ale rotilor directoareLa dezbaterea suspensiei si bracarea rotilor, bolturile cu cap sferic descriu fata de carcasa articulatiilor o miscare care trebuie evaluata din motive constructive si dimensionale. Spatiul descris de boltul cu “nuca” fata de carcasa indica marimea, forma si modul de dispunere a fantei in carcasa.Miscarea relativa din cuplele sferice, dintre boltul cu “nuca” si calota sferica, se defineste prin doua unghiuri: unghiul σ dintre axa tijei rotulei si normala la planul carcasei rotulei, unghiul τ dintre proiectia axei tijei pe planul carcasei si o directiecaracteristica pe

acest plan.Unghiul σ da marimea departarii tijei fata de normala, iar unghiul τ pozitia acesteidepartari. Prin aceasta se caracterizeaza “capacitatea unghiulara” a articulatiei.Pentru articulatia M a bratului inferior apar unghiurile ψ01 , ν01 , φ1 , μ1 , η1 respectiv γ , δ si β, matricele de rotatie fiindM 10=(cosψ01 −sin ψ01 0
sin ψ01 cosψ01 00 0 1), M 21=( cosν01
' 0 sin ν01'
0 1 0−sin ν01
' 0 cos ν01' ),
M 32=(1 0 00 cos φ1 −sin φ1
0 sin φ1 cos φ1), M 43=(1 0 0
0 cos μ1 −sin μ1
0 sin μ1 cos μ1),
M 54=( cosη1 0 sin η1
0 1 0−sin η1 0 cos η1
) ,astfel ca componentele vectorului n1 in OXYZ sunt
(n1)0=M 10⋅M 21 ∙M 32⋅M 43 ⋅M 54(001).
Pentru articulatia C, unghiul σ c este dat de relatia σ c=90°+μ4−∢ (uc , C⃑E ) , in care (uc ¿=T 10 ∙ T 21 ∙T 32(001), cu T 10 dat de rotatiile succesive cu unghiurile β ,α , δ ale portfuzetei, iar
T 21=(1 0 00 cos εc −sin εc
0 sin εc cos εc), T 32=( cos λc 0 sin λc
0 1 0−sin λc 0 cos λc
).Bieleta, avand doua articulatii sferice, are unghiul τ c=0
ArticulatieM, C, E la=353 ( soc )[mm] la=353 ( soc )[mm]S5=−67[mm] S5=+67[mm] S5=+67[mm] S5=−67[mm]
σ M
τ M
24 ° 04 '
150 °54 '19 °35 '
−167 ° 28'16 ° 49'
−17 ° 05'−17 ° 31'
36 ° 42'
σ C
τC
-8° 19'0 −16 ° 56'0 13 °54 '0 21 °38'0σ E
τ E
14 ° 44 '
123 °10 '19 °12'
108 °51'16 ° 39'
−115° 20'22 °18'-117° 25'

BIBLIOGRAFIE[1] = Manual Dacia Solenza (Groupe Renault).[2] = Petre A., Visa I., - Modelarea structural – cinematica a mecanismelor de ghidare ale rotilor autovehiculelor rutiere. Editura Lux Libris, Universitatea Transilvania Brasov.