Sisteme inteligente de conducere În robotica mobilă

of 12
-
Upload
andrei-marian-sorin -
Category
Documents
-
view
203 -
download
0
Transcript of Sisteme inteligente de conducere În robotica mobilă
CURS2 Sistemeinteligentedeconducere nroboticamobil 1.Introducere Roboiimobiliautonomiconstituieudomeniudecercetarefascinant,motivelecare impunaceastobservaiefindmultiple.nprimulrnd,transformareaunuirobotmobildintun"calculator"peroi,capabildoars"simt"anumiteproprietialemediuluinconjurtor prinintermediulsistemuluipropriudesenzori,nt-un"agentinteligent",capabilsidentifce caracteristici,sdetectezetiparedeinformaieiregulariti,snveedinexperien,sse auto-localizeze,sconstuiaschriisnavighezepebazaacestora,necesitaplicarea simultanamaimultordisciplinedecercetare.Dinacestpunctdevedere,roboticamobil tindesinversezetendineletiinifcectreospecializaredincencemaipronunatictre combinareactmaimultordiscipline. ncercareadeaconstiastfeldesistemeartifcialecu"inteligen"ncorporat benefciazderezultateimportantedindomeniulinteligeneiartifciale,dintrecareputem enumera: Reprezentareacunotinelor(engl.Knowledgerepresentation).Domeniual inteligeneiartifcialecareajutlaobinereaunuimodelinterallumiiasociattaskului pecarelexecutrobotul.Sefolosescstucturidedateialgoritmispecifcipentu reprezentareacaracteristicilorobiectelordinmediu; nelegerealimbajuluinatural.Limbajulnaturalseschimbcuofecvendestulde mare,astfelnctsimplarecunoatereacuvintelornumaiestesuficientpentu nelegereasensuluireal al unui text prelucrat; nvarea(engl.Learing).nmodideal,unrobotarputeanvataskurilepecarele aredendeplinitprinsimplarepetareaaciunilorsimilareexecutatedeunoperator uman; Planifcareisoluionaredeprobleme(engl.Planningandproblemsolving). Inteligenaesten modinerentasociatabilitiideaplanifcaaciunilenecesarepentru andepliniunanumitobiectiv,precumiabilitiidearezolvaproblemeapruten cazulnefcionriiacestorplaurideaciune; Inferen(engl.lnference).Prininferen,esteposibilcompletareainformaieicare lipsetepentru soluionarea unei anumite probleme; Cutare(engl.Search).ntermeniiinteligeneiartifciale,princutaresenelege examinareaefcientauneireprezentriacunotinelorspecifcuneianumite probleme(adiccutaentr-un"spaiu de cutare"),nscopuldeterminiiuneisoluii; Vedere(engl.Vision).Prinrealizareasistemelordevedereartifcialaciunilerobotului mobilpotdevenimaiprecisei maicomplexe. CURS2 Pedealtparte,roboiimobiliautonomireprezintnviziuneanoastractualceamai apropiataproximarea"agenilorinteligeni",visuldesecolealoamenilordetiin.De secole,oameniiaufostinteresaideconstruirea. unormainicaresimitefinelebiologice. ncepndcurealizrilemecanicealevechilororologiiipnlaageniisofareiagenii fziciactuali,cutarearspunsuluilaeterantebare"Ceesteviaa?"aconstituitntodeauna unmotivdeimpulsionareacercetrilortiinifce.nprezent,pentuainteracionacumediul nconjurtor,astfeldesisteme inteligenteanticipeazrezultatulpropriiloraciuniipredicteaz comportamentulaltorobiecte.Aceaststrnsconexiunentrepercepieiaciunemotiveaz investigareacomportriiinteligenteprinintermediulroboilormobili.Nesitmaicila interseciatiinelorcognitive,psihologieiiinteligeneiartifciale.Dinacestpunctdevedere, roboiimobilicareopereaznmodautonomoferoexcelentsoluiedetestareaipotezelor referitoarelacomportarea inteligent,perceplie icunoatere. omarepartearoboilorutilizaiastzinindustiesuntdetipmanipulator(denumii i roboideasamblare),careopereaznt-unspaiumrginitinusepotmica.Spredeosebire de acetia,roboiimobilii pot schimbalocaiaprin locomoie. nsensullargaldefniiei,unrobotmobilesteunsistemdetimp-realintegat(engl. embeddedreal-timesystem),carearesenzoripentupercepiamediului,elementedeexecuie pentruexecuiaaciunilorasupramediuluiiun sistemdeconducerepentrumapareapercepiei naciune[Li,1999]. Percepia,aciuneaiaplicaianteelesuntceleteiaspectemajorecare defmesc unrobotmobil.n fnciede moduldeorganizareaacestortreiaspecte fncionale,se poate consideracrobotulmobil are un gradmai mare saumairedusde autonomie. Celmaicunoscuttipderobotmobilestevehicululghidatautomat(engl.AGV-AutomatedGuidedVehicle).' AGV-urile,utilizatepescarlargnindustriepentrutransportul materialelor,sepotdeplasaprinmijloaceproprii,taseulparcursdeacesteafindnmodtipic pre-progamat.Deoareceastfeldevehiculemobileopereaznmediipre-progamate,elesunt infexibile i"fagile"n operare,orice modifcareneprevzutataseului(deexemplu,obiecte afatepecaleaderulare)putndconduce laocompromiterea ntregii misiuni. Alterativaoreprezintconstruireaunorroboimobilicuautonomienmicare. Autonomiasetraduceprinabilitatearobotluimobildeasedeplasanmediulnconjurtor pentrandeplinidiferitetaskri,prinabilitateadeaseadaptamodifcrilordinmediu,dea nvadinexperienidea-imodifcanmodcorespunztorcomportamentul(adicmodul deaaciona),precumideaaveaabilitateadea-iconstuireprezentriinterealelumii nconjurtoarecarespoatfutilizatepentruprocesedeluarededecizie(deexemplu,pentru navigaie).Acestecaracteristicipermitutilizareaacestorstcturinaplicaiispecifce,dintre carepotfamintiteoperaiunidetansport,explorare,supraveghere,orientare,inspectare, evoluienmediiinaccesibilesauostileoperatoruluiuman(deexemplu,roboiisubacvatici, vehiculeledeexplorare planetar,sau roboiicare opereaz nmediicontaminate),etc. Din punctdevederealaspectelormenionateanterior,unrobot"inteligent"este ostructurmecaniccarepoatejunclionanmodautonom[Murphy,2000].Oricumamdefni "inteligena",defniiaestestrictlegatdecomportamentuluman.Cuvntul"inteligent"din defniiademaisusimplicfaptulcsedoreteobinereauneiasemnricuinteligena demonstratdectrecreaturilevii,n particulardectrefineleumane."Inteligena"esteacea 2 CURS2 proprietateasistemuluicareemergeatuncicndprocedurilespecifcede localizare aateniei, decutarecombinatorialidegeneralizaresuntaplicateuneianumiteinformaii,nscopul obineriiunoranumiterezultate[Dumitrache,2000].ncazulparticularalroboticiimobile, acesteteiconceptesetransformn mecanismeledepercepie,procesate de date i generare de comportamente (fgura1). Perceptie Procesaredate / Memorie Generare comportamente Figura1Triunghiulrobotmobil - task- mediu Evoluiarobotuluimobilestedefnitdecomportareaacestuiant-unmediuspecifc, lundnconsideraretaskuldorit.Doadescriereasimultaarobotuluimobil,ataskuluiia mediuluidefmetecompletagentul(tiunghiulrobotmobil- tsk- mediu).Cndunrobot mobilexecutoaciune,elinteracioneazcumediulnconjurtordeoareceestesituatnacel mediu,findparteintegant aacestuia.Prinaciune,elschimbanumite elementedin mediu i totodatischimbmoduldepercepieasupralumii(deexemplu,semutnaltpunctde observaie).Acestnoumoddepercepieesteutilizatpentrovarietatedefncii,acestea incluzndactiviticognitive(spreexemplu,planifcareaurmtoareiaciuni)sauactiviti reactive. 2Funciileunuirobot mobil Dinpunctdevederefncionalunrobotmobilmobilesteformatdinurmtoareletei module fncionale(fgura2): modulul desenzori ae roluldeaestimaviteza ipoziiarobotuluimobil; modululdeorientareestegeneratoruldereferinpentorientarearobotlui mobilnspaiu; modululdeconducereestesubsistemulcaregenereazmrimiledecomand pentruelementeledeexecuiepebazadatelorfizatedemodululdeorientare (compensare / reglare la nivelul debaz). 3 -------"High Level Control" "LowLevel Control" Dinamicarobot mobil Figua2Defnireamodulelorfncionalealeunuirobotmobil CURS2 Corespunztormodulelorfncionalepotfdefniteurmtoarelefnciiesenialeale unui robotmobil: Funcadenavgae.Aeurmtoarelesubfncii Reprezentareaspaliuluidelucru.Pentaasiguraomicaeacolisiunitr-un mediusupusunorconstngerigeometicedemediurobotlmobilarenevoiede informaiereferitoarelazonasaoperaionalimprejurimileacesteia.nplusfa deohartamediului obinutcu ajutorulunorinformaiiprimitedelacamerevideo extere,sistemuldesenzoriairobotuluimobilartrebuispermitrobotluis-i actualizezeinformaiadespremediu nmoddinamic,ntimpuloperii; Evitareaobstacolelor.Caacteristicilemediuluincojurtorcareevolueaz robotulmobil potfdetectateprinintermediulscaner-elor,senzorilor(desuprafa, volum,form)cuultasunetesaucameredeluatvederi,caefnizeazinformaie referitoareladistan,contui,precum ila prezena sauabsenaobstacolelor; Funcliadelocalizare.Unvehiculautonomnecesit,datoriterorilordemsur,o reactalizarepermanentainformaieidesprepoziiacurentarobotluinraport cuanumiterepereextere(atifcialesaunaturale).nmodnormal,suntutilizate tehnicisimplecadead-reckoningnscopulmsurriitaiectorieiparcursederobotul mobil; Planicareamicrii.Funciade planifcaeamicriipresupunedeterminaeaunei taiectoriiidealeintepoziiileiniialifnal,ncoordonate,vitezeitimp. Trebuiesianconsiderareconstrngeriicondiiidelimitare,cadeexemplu, resticiidemicarenanumitezone,limitarentimpdemicae,etc.ntimpul deplasriirobotuluimobil,taiectoriaplanifcatpoatefmodifcat,detaliatsau actalizatpemsurceinformaiiledelasistemuldesenorifizeaznoidetalii despremodulncaeestendeplinittaskl; 4 CURS2 Controlulmicrii.Aceastfncieasigurdeplasareacorespunztoareaagentului mecatronicde-alungul uneitaiectoriidorite. Funciadeplanifcaredetaskuri.Executaeaautomataunortaskuicomplexe necesitprezenaunuimoduldeplaifcaedetaskuri,lanivelulciatasklgeneral spoatfdescompusnsub-taskuricepotfdirectexecutatelanivelulmoduluide planifcareamicrii. Funciadeinteraciuneicomunicare.Prinintermediulinterfeelorom-mainpotf implementatecanaledecomunicaieprincaecomandapoatef!cutprinvoce,prin intermediulunuidispozitivdeintae(deexemplukeyboard)saueventual,pringesturi. 3Tipurideroboimobili Cinematicarobotuluimobilestedefnitdenumul,tipuliaranjamentulroilor platformeimobile.Aceasteapotfcuacionare saufacionare.Combinaiileiaranjamentul acestordiferitetipurideroidetermintipulmodeluluicinematicalrobotuluimobil.Roboii mobilipotfechipaicutipuridiferitederoi: roiconvenionale.Acesteroipotfne-orientabile,centateorientabilesauorientabile ne-centate; roti cuenile; roisferice; roi"Maxwheel". Principaleletipuride roboicuroiconvenionalesunturmtoaele: roboicuroine-orientabile(fgura3) roboicuroidifereniale; robotldetip"ticiclu"; robotuldetip"autotuism". roboicaeposeddoarroiorientabile(fgura4) robotulcuoroatcentrat orientabilidouroiorientabilene-centrate; robotulcunroicentrateorientabile; robotulcuroiorientabilene-centate. ndescrierearoboilormobiliechipaicu roiconvenionale,vorfluateconsiderae urmtoaeleipoteze careconduclaunsetdeconstngeri cinematice(demicae)specifce: roileconvenionalestroiideale(contactuldinteroatiplatformapecareaceasta ruleazestereduslaun singurpunctnplan); contactultreroatipmntsatisfacecondiiaderotaiepurIaralunecare(viteza punctuluidecontactestezero). 5
-
/ y, D D y, .^"
_
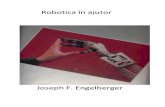
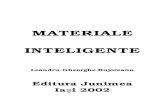
'.^Iiura3Rcbcicurcnc-cricntabilc. a)rcbctulcurciditcrcnialc,b)rcbctuldctpucicluc)rcbctuldctipautcturism6 CUS 2 x, \ --. L m CURS 2 Yr D D Yr ~.'CIR .~
-I / q2 / Xr Yr -.. -. D Xr D ) Roti diferentialeRotilibere Roti centateorientabileRoti orientabilene-centrate Figura4Roboicuroiorientabile.a)robotul cuoroat centatorientabilidou roiorientabilene-centrate,b) robotulcu n roi centrateorientabile, c)robotul cu roi orientabile ne-centate 7 .r CURS 2 Constngerilecinematiceimpunresticiiasupraderivatelorcomponentelorvectorului postarobotuluimobil,= (x,y,e),unde(x,y)suntcoordonateleluiP(mijloculuiaxeice uneteceledouroidinspate,vezifgura5),iaeE [O,27)esteunghiulderotaietecele dou sisteme de coordonate (cel fx(xoOoYo) i cel ataat robotului(XrPYr)). Yo .. " e\ Y ........._-------------------y-00 x Figura 5Defnirea poziiei robotului n spaiu_ Cazul robotului mobil de tip ticiclu Xo Studiulproprietilordemobilitateimanevabilitatealeroboilormobiliserealizeaz n fncie de numul de gade de mobilitate i numul de gade de manevabilitate (Betoue, 1995): sedefnete8.,graduldemobilitatealrobotuluimobilcafindnumuldedeplasi elementaeliniareindependentealevehicululuimobil.Unrobotmobilcumobilitate deplin aeOm = 3; sedefnete8,graduldemanevrabilitatealrobotuluimobilcafindnumrulderoi orientabile,ce pot f orientate independent astfel nct s existe un centu instantaneu de rotaie (CIR). Pentr fezabilitate tehnic sunt impuse urmtoarele condiii: gradul demobilitate a.va satisface inegalitatea(Campion,1996): 1 Ss. S3 (pentru8.= 1este posibil doar o singur micae). graduldemanevabilitate va satisface inegalitatea: (pentuS. = 2,dacrobotul este echipat cu maimultde douroiorientabile,micaea acestora tebuiecoordonatastfelnctsfegarantatexistenaunuicentuinstantaneuderotaiela 8 ....... CURS2 fecaemomentdetimp).Pentrexistenaunuicentruinstantaneuderotaietebuiendeplinit oa teia condiie: nfnciedeperechea(,6)existcincitipuigenericederoboimobili(Campion, 1996) cares satisfacinegalitileaterioare: Tabelul1Celecincitipuriposibilederoboimobili Deexemplu,robotulmobil detip ticiclu (fgura5) esteunrobotdetipul(1, 1), adic are ungrad demobilitatei ugrad demanevabilitate. Pentexemplifcareseconsidercastdiudecazrobotulmobildetipticiclu(fgura 13).Robotulmobildetipticicluesteunvehiculautonomdetip(1,1)(adicareungadde mobilitate,Om =1,iungraddemanevabilitate,Os =1).Robotulmobilde tipticicluaedou roifxene-orientabile(roiledinspate)ioroatcentatorientabil.Acesttipderoboteste descrisdeurmtoriiparameti(fgura14): A,centulroiiorientabil / fx; P,mijloculdistaneidinteroile cuplatedinspate; poziiapunctuluiAnsistemuldeaxedecoordonateataatvehicululuimobilvaf specifcatcoordonatepolarededistana PA =1 iunghiul0; orientareaplanuluiroiifa de PA estespecifcatprinunghiul